statique ds n°5 - pcsi 1 poincarthomas.raulin.pagesperso-orange.fr/dmds/ds5-mpsi-11.pdf ·...
TRANSCRIPT
Statique DS
Lycée Henri Poincaré Page 1 sur 11
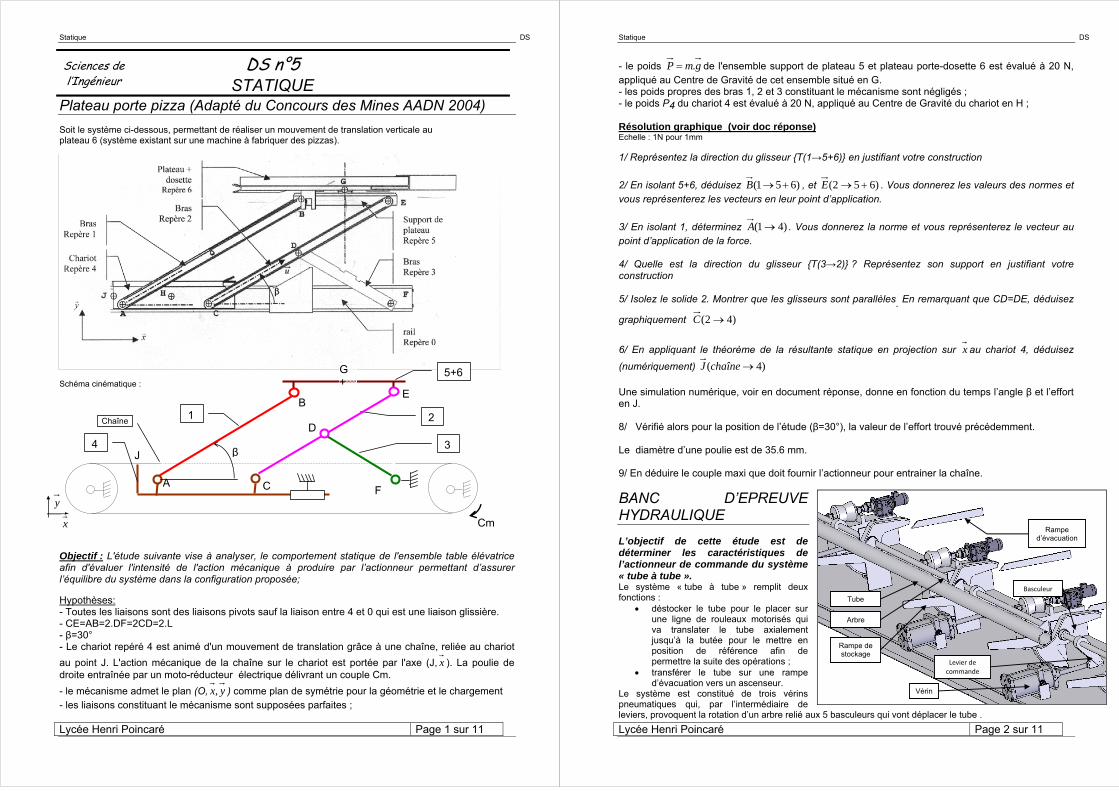
Plateau porte pizza (Adapté du Concours des Mines AADN 2004) Soit le système ci-dessous, permettant de réaliser un mouvement de translation verticale au plateau 6 (système existant sur une machine à fabriquer des pizzas).
Schéma cinématique : Objectif : L'étude suivante vise à analyser, le comportement statique de l'ensemble table élévatrice afin d'évaluer l'intensité de l'action mécanique à produire par l’actionneur permettant d’assurer l’équilibre du système dans la configuration proposée; Hypothèses: - Toutes les liaisons sont des liaisons pivots sauf la liaison entre 4 et 0 qui est une liaison glissière. - CE=AB=2.DF=2CD=2.L - β=30° - Le chariot repéré 4 est animé d'un mouvement de translation grâce à une chaîne, reliée au chariot
au point J. L'action mécanique de la chaîne sur le chariot est portée par l'axe (J, x ). La poulie de droite entraînée par un moto-réducteur électrique délivrant un couple Cm.
- le mécanisme admet le plan (O, yx, ) comme plan de symétrie pour la géométrie et le chargement - les liaisons constituant le mécanisme sont supposées parfaites ;
Sciences de l’Ingénieur
DS n°5
STATIQUE
Impossible d'afficher l'image. Votre ordinateur manque peut-être de mémoire pour ouvrir l'image ou l'image est endommagée. Redémarrez l'ordinateur, puis ouvrez à nouveau le fichier. Si le x rouge est toujours affiché, vous devrez peut-être supprimer l'image avant de la réinsérer.
x
y
B E
5+6
2
3
1
A C
D
F
J 4
β
G +
Chaîne
Cm
Statique DS
Lycée Henri Poincaré Page 2 sur 11
- le poids gmP .= de l'ensemble support de plateau 5 et plateau porte-dosette 6 est évalué à 20 N, appliqué au Centre de Gravité de cet ensemble situé en G. - les poids propres des bras 1, 2 et 3 constituant le mécanisme sont négligés ; - le poids P4 du chariot 4 est évalué à 20 N, appliqué au Centre de Gravité du chariot en H ; Résolution graphique (voir doc réponse) Echelle : 1N pour 1mm 1/ Représentez la direction du glisseur {T(1→5+6)} en justifiant votre construction
2/ En isolant 5+6, déduisez )651( +→B , et )652( +→E . Vous donnerez les valeurs des normes et vous représenterez les vecteurs en leur point d’application.
3/ En isolant 1, déterminez )41( →A . Vous donnerez la norme et vous représenterez le vecteur au point d’application de la force. 4/ Quelle est la direction du glisseur {T(3→2)} ? Représentez son support en justifiant votre construction 5/ Isolez le solide 2. Montrer que les glisseurs sont parallèles. En remarquant que CD=DE, déduisez
graphiquement )42( →C
6/ En appliquant le théorème de la résultante statique en projection sur x au chariot 4, déduisez
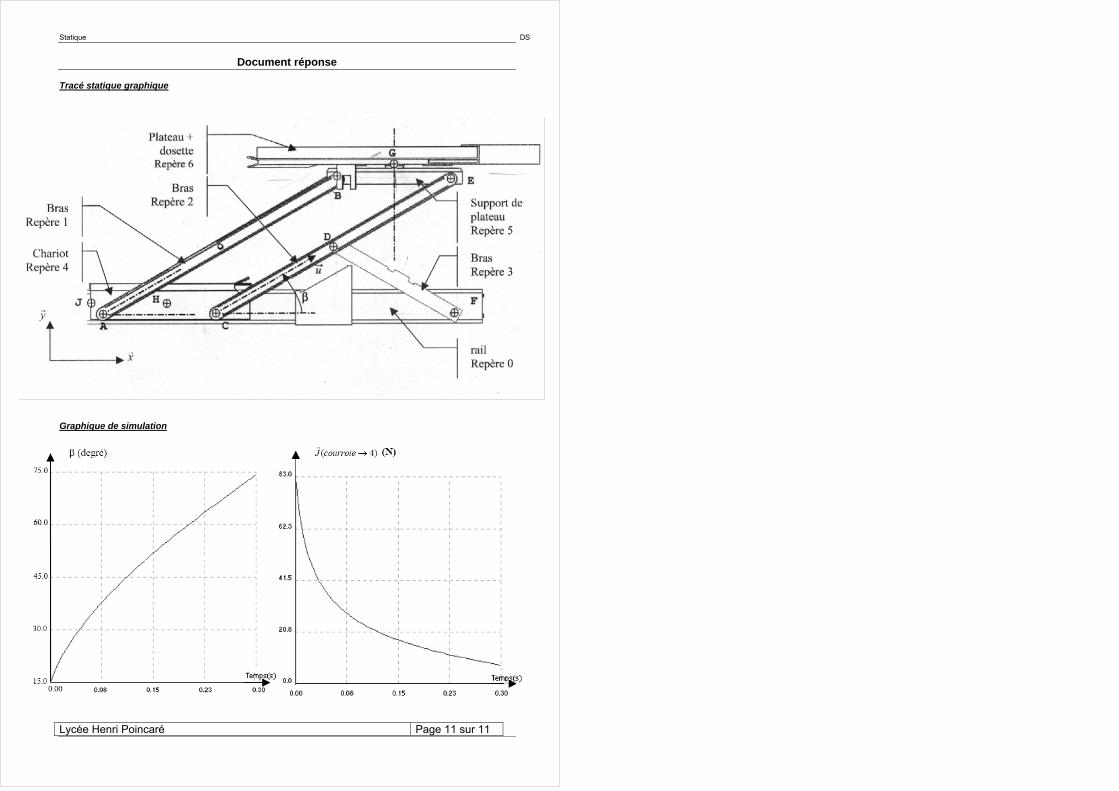
(numériquement) )4( →chaîneJ Une simulation numérique, voir en document réponse, donne en fonction du temps l’angle β et l’effort en J. 8/ Vérifié alors pour la position de l’étude (β=30°), la valeur de l’effort trouvé précédemment. Le diamètre d’une poulie est de 35.6 mm. 9/ En déduire le couple maxi que doit fournir l’actionneur pour entrainer la chaîne.
BANC D’EPREUVE HYDRAULIQUE L’objectif de cette étude est de déterminer les caractéristiques de l’actionneur de commande du système « tube à tube ». Le système « tube à tube » remplit deux fonctions :
• déstocker le tube pour le placer sur une ligne de rouleaux motorisés qui va translater le tube axialement jusqu’à la butée pour le mettre en position de référence afin de permettre la suite des opérations ;
• transférer le tube sur une rampe d’évacuation vers un ascenseur.
Le système est constitué de trois vérins pneumatiques qui, par l’intermédiaire de leviers, provoquent la rotation d’un arbre relié aux 5 basculeurs qui vont déplacer le tube .
Vérin
Basculeur
Levier de commande
Arbre
Tube
Rampe d’évacuation
Rampe de stockage

Statique DS
Lycée Henri Poincaré Page 3 sur 11
Lors des différentes phases de travail du « tube à tube », il se produit un transfert du poids du tube sur le basculeur et les différents éléments de soutien du tube. Les schémas ci dessous représentent les quatre phases de ce transfert de charge.
Position I : début de la prise en charge du tube par le basculeur sur la rampe de stockage. Position II : le tube est déposé sur les galets moteurs. Position III : début d’évacuation du tube vers la rampe d’évacuation. Position IV : fin d’évacuation, le tube va quitter le basculeur pour la rampe d’évacuation.
Modèle d’étude
Le schéma cinématique proposé pour l’étude est donné page suivante. On y retrouve : • le bâti 0, • le corps de vérin 3, • la tige de vérin 2, • le basculeur 1 composé du levier de commande, de l’arbre et du basculeur.
Un repère Ri est attaché à chacun des solides Si. La position du basculeur 1 par rapport au bâti 0 est définie par l’angle θ , . La position de la tige de vérin 2 par rapport au bâti 0 est définie par l’angle ϕ , . Durant la phase de déstockage, la position θ du basculeur varie de +35° à -35°. Le vérin part d’une position horizontale (le point A est en A0), pour arriver de nouveau à l’horizontal en fin de déstockage (le point A est alors en A1).
Détermination des sections
Les hypothèses de répartition de charges uniformes sur tous les éléments permettent de ramener l’étude à un problème plan constitué d’un seul vérin et d’un seul basculeur recevant un tiers du poids total du tube. Les figures pages suivantes représentent les deux positions donnant les charges maximales appliquées à la tige de vérin dans les deux sens de déplacement. Elles correspondent aux positions I et IV. Dans ces deux cas, les pièces 1, 2 et 3 ont la même position (fin de course tige de vérin sortie), seule la position du tube sur le basculeur est différente. Cette situation correspond à la position extrême du basculeur : 35°.
Les hypothèses sont les suivantes : • les accélérations sont suffisamment faibles pour traiter le problème en statique, • la répartition uniforme des charges permet de faire l’étude dans le plan des figures,
• le poids total du tube se réparti sur les 3 vérins, on prendra donc la contribution
du poids pour l’étude d’équilibre du système, appliquée en G. Le poids des autres pièces est négligé,
Rampe d’évacuation
Rampe de stockage
Position I Position II
Position III Position IV
Position I
Statique DS
Lycée Henri Poincaré Page 4 sur 11
• on se place dans la situation la plus défavorable, le poids du tube est entièrement supporté par le basculeur,
• les liaisons sont supposées sans frottement.
Question 1 En précisant clairement les systèmes isolés, exprimer l’effort appliqué par la tige de vérin 2 sur le basculeur 1 en fonction de R . , et des coordonnées de G ( et ). Le calculer pour chacune des deux positions étudiées. (idée isoler (2+3)=> direction de l’effort de 2->1, isoler 1 trouver relation entre P le poids et effort de 2->1). La pression d’alimentation du vérin est de 3 bars. Le type de vérin choisi est donné ci après. On prendra :
1 2 Question 2 Déterminer les sections minimales des chambres de poussée et de tirage, notées respectivement S1 et S2, pour obtenir l’effort nécessaire.
Choix d’un vérin
Question 3 En fonction des résultats précédents, choisir un vérin dans le tableau ci dessous répondant à l’application demandée.
35° ; 0°
1
2
3
A
O
B
GA
Figure 2 Rentrée du vérin
θ0
Sortie du vérin
1
2
3
A
O
B
GB
Figure 3
θ0
35° ; 0°
Statique DS
Lycée Henri Poincaré Page 5 sur 11
Etiqueteuse
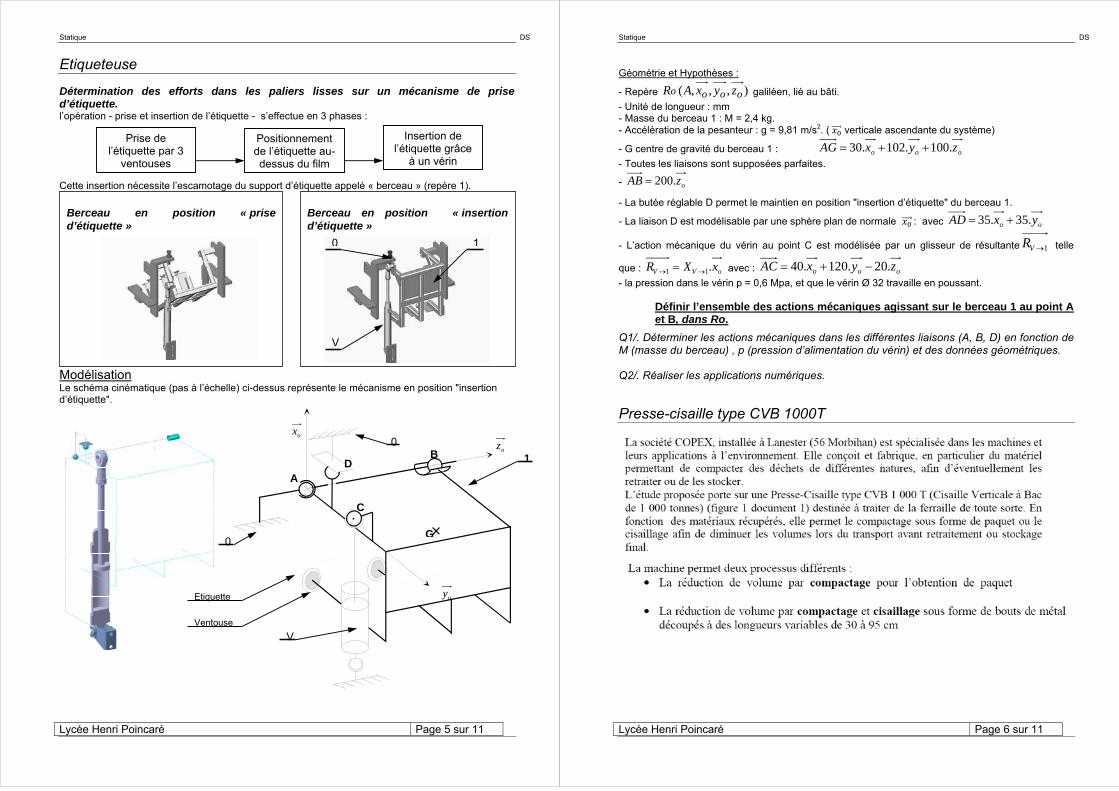
Détermination des efforts dans les paliers lisses sur un mécanisme de prise d’étiquette. l’opération - prise et insertion de l’étiquette - s’effectue en 3 phases : Cette insertion nécessite l’escamotage du support d’étiquette appelé « berceau » (repère 1).
Modélisation Le schéma cinématique (pas à l’échelle) ci-dessus représente le mécanisme en position "insertion d’étiquette".
Berceau en position « prise d’étiquette »
Berceau en position « insertion d’étiquette »
0
V
1
Prise de l’étiquette par 3
ventouses
Positionnement de l’étiquette au-dessus du film
Insertion de l’étiquette grâce
à un vérin
G
ox
oy
oz
A
B
C
D 1
V
0
0
Etiquette
Ventouse
Statique DS
Lycée Henri Poincaré Page 6 sur 11
Géométrie et Hypothèses :
- Repère ),,,( oooo zyxAR galiléen, lié au bâti.
- Unité de longueur : mm - Masse du berceau 1 : M = 2,4 kg. - Accélération de la pesanteur : g = 9,81 m/s2. ( verticale ascendante du système)
- G centre de gravité du berceau 1 : ooo zyxAG .100.102.30 ++=
- Toutes les liaisons sont supposées parfaites.
- ozAB .200=
- La butée réglable D permet le maintien en position "insertion d’étiquette" du berceau 1.
- La liaison D est modélisable par une sphère plan de normale : avec oo yxAD .35.35 +=
- L’action mécanique du vérin au point C est modélisée par un glisseur de résultante 1→VR telle
que : oVV xXR .11 →→ = avec : ooo zyxAC .20.120.40 −+=
- la pression dans le vérin p = 0,6 Mpa, et que le vérin Ø 32 travaille en poussant.
Définir l’ensemble des actions mécaniques agissant sur le berceau 1 au point A et B, dans Ro.
Q1/. Déterminer les actions mécaniques dans les différentes liaisons (A, B, D) en fonction de M (masse du berceau) , p (pression d’alimentation du vérin) et des données géométriques. Q2/. Réaliser les applications numériques.
Presse-cisaille type CVB 1000T
Statique DS
Lycée Henri Poincaré Page 7 sur 11
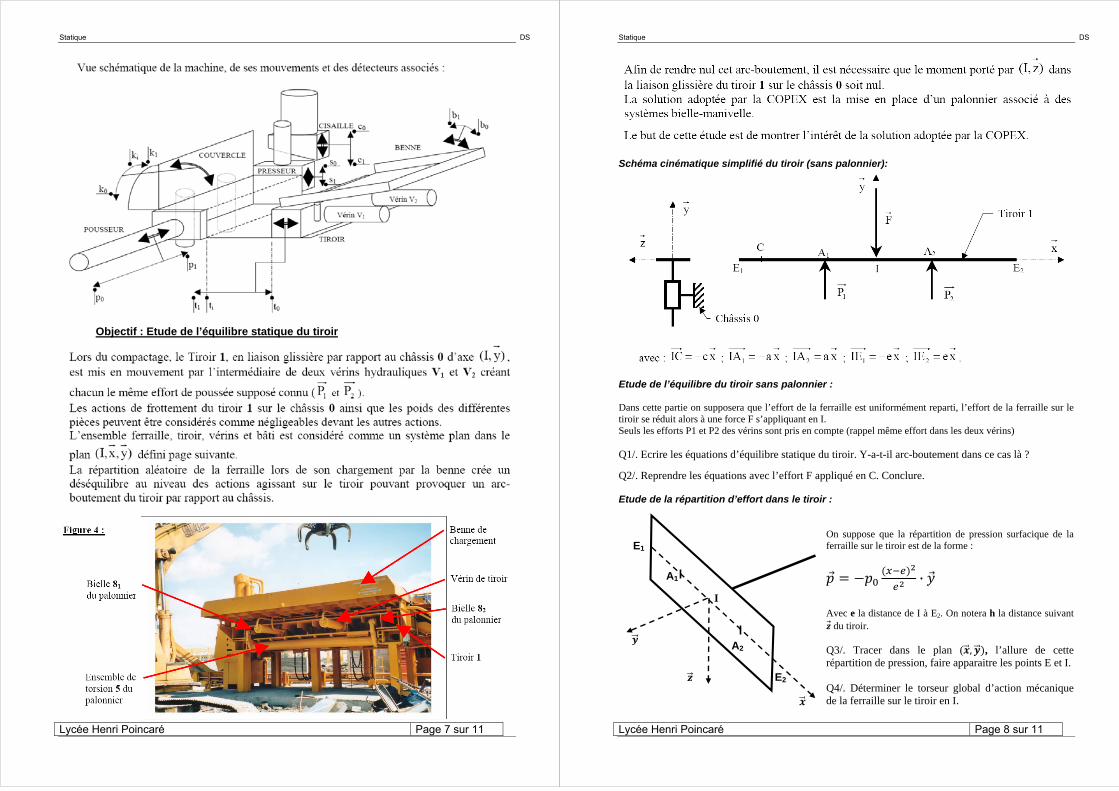
Objectif : Etude de l’équilibre statique du tiroir
Statique DS
Lycée Henri Poincaré Page 8 sur 11
Schéma cinématique simplifié du tiroir (sans palonnier):
Etude de l’équilibre du tiroir sans palonnier : Dans cette partie on supposera que l’effort de la ferraille est uniformément reparti, l’effort de la ferraille sur le tiroir se réduit alors à une force F s’appliquant en I. Seuls les efforts P1 et P2 des vérins sont pris en compte (rappel même effort dans les deux vérins) Q1/. Ecrire les équations d’équilibre statique du tiroir. Y-a-t-il arc-boutement dans ce cas là ?
Q2/. Reprendre les équations avec l’effort F appliqué en C. Conclure. Etude de la répartition d’effort dans le tiroir :
On suppose que la répartition de pression surfacique de la ferraille sur le tiroir est de la forme :
·
Avec e la distance de I à E2. On notera h la distance suivant du tiroir.
Q3/. Tracer dans le plan ( , , l’allure de cette répartition de pression, faire apparaitre les points E et I. Q4/. Déterminer le torseur global d’action mécanique de la ferraille sur le tiroir en I.
E1
E2
I
A1
A2
Statique DS
Lycée Henri Poincaré Page 9 sur 11
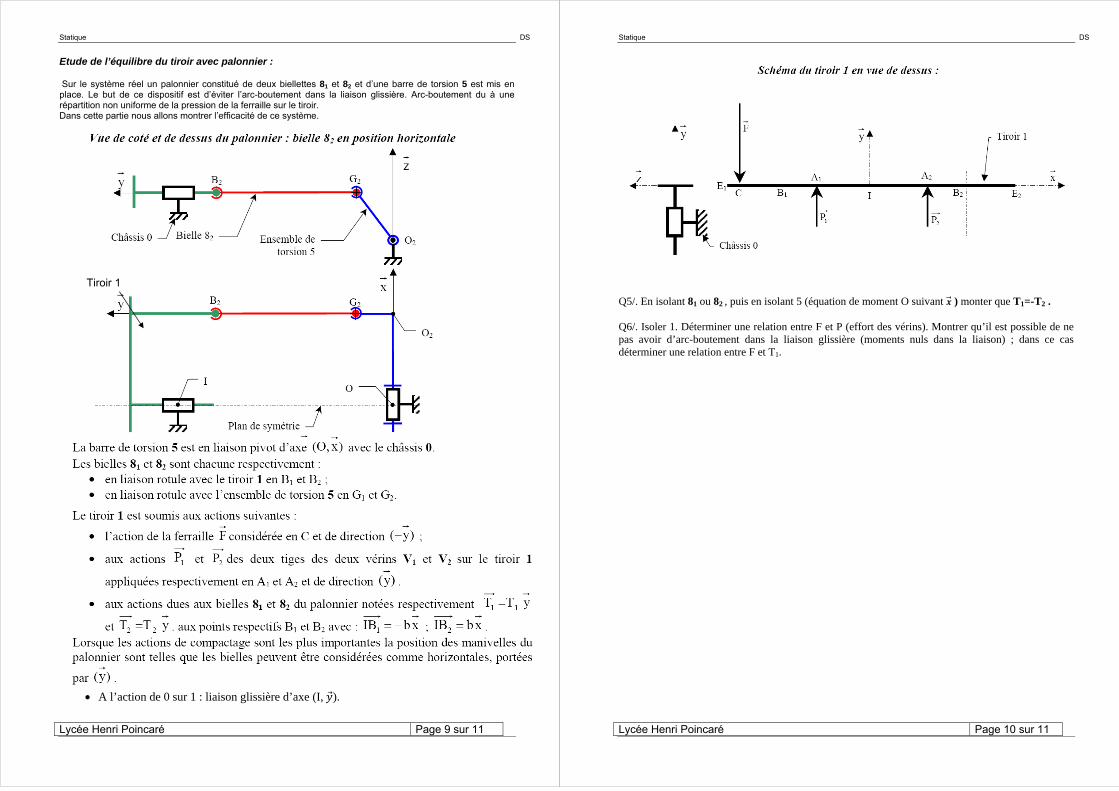
Etude de l’équilibre du tiroir avec palonnier : Sur le système réel un palonnier constitué de deux biellettes 81 et 82 et d’une barre de torsion 5 est mis en place. Le but de ce dispositif est d’éviter l’arc-boutement dans la liaison glissière. Arc-boutement du à une répartition non uniforme de la pression de la ferraille sur le tiroir. Dans cette partie nous allons montrer l’efficacité de ce système.
• A l’action de 0 sur 1 : liaison glissière d’axe (I, ).
Tiroir 1
Statique DS
Lycée Henri Poincaré Page 10 sur 11
Q5/. En isolant 81 ou 82 , puis en isolant 5 (équation de moment O suivant ) monter que T1=-T2 . Q6/. Isoler 1. Déterminer une relation entre F et P (effort des vérins). Montrer qu’il est possible de ne pas avoir d’arc-boutement dans la liaison glissière (moments nuls dans la liaison) ; dans ce cas déterminer une relation entre F et T1.
Statique DS
Lycée Henri Poincaré Page 11 sur 11
Document réponse
Tracé statique graphique
Graphique de simulation
Impossible d'afficher l'image. Votre ordinateur manque peut-être de mémoire pour ouvrir l'image ou l'image est endommagée. Redémarrez l'ordinateur, puis ouvrez à nouveau le fichier. Si le x rouge est toujours affiché, vous devrez peut-être supprimer l'image avant de la réinsérer.