projet methode numerique_(meng try)
TRANSCRIPT
Institut National des Sciences Appliquée de Rennes
Département Génie Civil & Urbain
Master en Génie Civil et Mécanique
Projet De La Méthode Numérique
Professeurs : Adinel GAVRUS, Franck LOMINE, Fabrice BERNARD
Préparer par étudiant :
MENG Try
Année Scolaire : 2016-2017
1
Projet Méthodes Numériques
Etudes Numériques et Méthodes d’Analyse
Optimale d’une Structure Réduite de la Tour Eiffel
Master 2R MGC - UE3a
A. GAVRUS, F. LOMINE, F. BERNARD
Dans le cadre du projet de l’UE3a du master 2 MGC, on se propose de modéliser une structure simple
au moyen de deux logiciels mettant en œuvre des méthodes numériques puis de résoudre un
problème d’optimisation sur cette même structure par les méthodes vues en cours.
Ce travail est à réaliser par binôme. A l’issue de celui-ci, il vous est demandé de rédiger un rapport, de
20 pages maximum, présentant l’ensemble du travail effectué. Ce rapport est à rendre au secrétariat
du département GMA (bâtiment 11) avant le 20/01/2013.
On propose d’étudier d’un point de vue numérique et optimal une structure inspirée de la tour Eiffel
(voir Figure 1). L’objectif n’est pas de modéliser le comportement de la structure réelle qu’est la tour
Eiffel mais plutôt celui d’une structure volumique équivalente, de même forme et de dimensions
similaires (voir Figure 2), puis celle d’une structure réduite en treillis.
Figure 1 : Schéma de la tour Eiffel (d'après Wikipédia)
Figure 2 : Schéma de la structure massive équivalente (les sections seront considérées de forme carrée)
1
Tableau des Matière
Tableau des Matière ........................................................................................................................ 1
I. INDROUCTION ................................................................................................................... 2
II. BUT ...................................................................................................................................... 2
III. ÉTUDE PAR MÉTHODE NUMÉRIQUE ......................................................................... 2
a. Équation différentielle d’équilibre mécanique ................................................................. 2
b. Analyse des fonction et optimiser .................................................................................... 3
c. Principe d’optimisation topologique ................................................................................. 5
d. Vérifier les coordonnées géométriques des nœuds .......................................................... 7
e. Algorithme numérique ...................................................................................................... 7
IV. TAVAIL NUMÉRIQUE ................................................................................................... 10
a. Indiquer les conditions aux limites ................................................................................. 10
b. Modèliser dans le Cast3M: ............................................................................................. 10
c. Modéliser dans l’Abaqus ................................................................................................ 11
d. Comparer les solutions numérique ................................................................................. 12
V. Optimisation par OPTPAR ................................................................................................. 13
a. Optimisation section minimal ......................................................................................... 13
b. Optimisation les coordonnées H ..................................................................................... 14
c. Déterminer la matrice sensibilité .................................................................................... 14
VI. Conclusion ........................................................................................................................ 15
ANNEXE : ..................................................................................................................................... 16
I. Programmer algorithme numérique ..................................................................................... 16
II. Ficher cast3M ..................................................................................................................... 17
III. Ficher optimiser par OPTPAR (optimiser la section minimal) ........................................ 18
IV. Ficher Optimiser par OPTPAR (optimiser les coordonnées géométrique) ....................... 21

2
I. INDROUCTION
La méthode numérique est une discipline des mathématiques, grâce à la développement du
l’ordinateur, la méthode numérique permette de résoudre les problème compliqué dans la
domaine d’ingénieur comme le calcul des éléments finie, optimiser pour obtenir une bonne
résultat plus économiser et efficace. Dans ce projet, optimisation par le logiciel OPTPAR a été
introduit, avec l’analyse inverse, on utilise la donnée expérimentale et après on varie le variable
pour obtenir la valeur de donnée expérimental avec le petit erreur.
II. BUT
Le but de ce projet est pour étudier numérique et méthodes d’analyse optimale d’une structure
réduite de la Tour Eiffel. En utilisant logiciel Abaqus et Cast3M, on compare les résultats
(contrainte ; effort normal), ensuite on continue de optimiser la section et le coordonnée pour
limiter les contrainte dans chaque barres.
III. ÉTUDE PAR MÉTHODE NUMÉRIQUE
a. Équation différentielle d’équilibre mécanique
Hypothèse : en considérant Tour Eiffel est une structure volumique virtuelle,
H – hauteur
L(z)- largeur varie selon l’hauteur
A(z)- section carrée à l’altitude z
𝜎𝑛 = 𝜎𝑧(𝐻) contraine est constante dans toute section.
Somme des sollicitations sur une tranche :
𝜎𝑛. 𝐴 − 𝛾𝑎. 𝐴. 𝑑𝑧 = 𝜎𝑛. (𝐴 + 𝑑𝐴) −𝛾𝑎. 𝐴. 𝑑𝑧 = 𝜎𝑛. 𝑑𝐴

3
∫𝑑𝐴
𝐴= ∫−
𝛾𝑎𝜎𝑛
𝑑𝑧
𝑙𝑛A = −𝛾𝑎𝜎𝑛
. 𝑧 + 𝐶
𝐴(𝑧) = 𝐶. exp(−𝛾𝑎𝜎𝑛
. 𝑧)
On sait que au niveau de z=0, A(z=0)=L2 et L=120 m
𝐴(𝑧 = 0) = 𝐶. exp (−𝛾𝑎𝜎𝑛
. 0) = 𝐿2
𝐶 = 𝐿2
Enfin, on a
𝐴(𝑧) = 𝐿2. 𝑒𝑥𝑝 (−𝛾𝑎𝜎𝑛
. 𝑧)
𝐿(𝑧) = √A = ±𝐿. 𝑒𝑥𝑝 (−𝛾𝑎2𝜎𝑛
. 𝑧)
b. Analyse des fonction et optimiser
La condition nécessaire et suffisante pour avoir une structure d’égale résistance :
𝑑𝜎𝑧𝑑𝑧
= 0
∭(𝑑𝜎𝑧𝑑𝑧
)2
𝑑𝑉𝑜𝑙 =∫ (𝑑𝜎𝑧𝑑𝑧
)2
𝐴(𝑧)𝑑𝑧𝐻
0
Déterminer contrainte est constante
𝜎𝑧 =𝑃(𝑧)
𝐴(𝑧)=𝜎𝑛. 𝐴(𝐻) + ∫ 𝛾𝑎. 𝐴(𝑧)𝑑𝑧
𝐻
𝑧
𝐴(𝑧)
𝜎𝑧 =𝜎𝑛. 𝐿
2. 𝑒𝑥𝑝 (−𝛾𝑎𝜎𝑛
. 𝐻) + ∫ 𝛾𝑎. 𝐿2. 𝑒𝑥𝑝 (−
𝛾𝑎𝜎𝑛
. 𝑧) 𝑑𝑧𝐻
𝑧
𝐿2. 𝑒𝑥𝑝 (−𝛾𝑎𝜎𝑛
. 𝑧)
𝜎𝑧 = 𝜎𝑛. 𝑒𝑥𝑝 [𝛾𝑎𝜎𝑛
(𝑧 − 𝐻)] + 𝛾𝑎. 𝑒𝑥𝑝 (𝛾𝑎𝜎𝑛
. 𝑧) . [−𝜎𝑛𝛾𝑎
. exp(−𝛾𝑎𝜎𝑛
. 𝑧)]𝐻𝑧
𝜎𝑧 = 𝜎𝑛. 𝑒𝑥𝑝 [𝛾𝑎𝜎𝑛
(𝑧 − 𝐻)] − 𝜎𝑛. 𝑒𝑥𝑝 (𝛾𝑎𝜎𝑛
. 𝑧) . [exp (−𝛾𝑎𝜎𝑛
Z) − 𝑒𝑥𝑝 (−𝛾𝑎𝜎𝑛
𝑍)]
𝜎𝑧 = 𝜎𝑛. 𝑒𝑥𝑝 [𝛾𝑎𝜎𝑛
(𝑧 − 𝐻)] − 𝜎𝑛. 𝑒𝑥𝑝 [𝛾𝑎𝜎𝑛
. (𝑧 − 𝐻)] + 𝜎𝑛
𝜎𝑧 = 𝜎𝑛 = 𝑐𝑡𝑒
𝑑𝑜𝑛𝑐𝑑𝜎𝑧𝑑𝑧
= 0
La contrainte n’a pas changer à cause de ‘z’.
Le minimum global d’une fonction
∭(𝑑𝜎𝑧𝑑𝑧
)2
𝑑𝑉𝑜𝑙 =∫ (𝑑𝜎𝑧𝑑𝑧
)2
𝐴(𝑧)𝑑𝑧𝐻
0

4
𝜎𝑧 =𝑃(𝑧)
𝐴(𝑧)=≫ (
𝑑𝜎𝑧𝑑𝑧
)2
= (𝑃′𝐴 − 𝐴′𝑃
𝐴2)
2
Φ(𝐴) = ∫ (𝑑𝜎𝑧𝑑𝑧
)2
𝐴(𝑧)𝑑𝑧𝐻
0
= ∫ [𝛾𝑎2 + 2𝛾𝑎.
𝐴′
𝐴. 𝜎𝑛 + (
𝐴′
𝐴𝜎𝑛)
2
]𝐻
0
. 𝐴𝑑𝑧
Fonction optimiser :
Min Φ(𝑉) = ∫ 𝐹(𝑥, 𝑉, 𝑉′)𝑑𝑥𝐷
Dans notre cas
𝐹(𝑍, 𝐴, 𝐴′) = 𝛾𝑎2𝐴 + 2𝛾𝑎. 𝐴′. 𝜎𝑛 +
(𝐴′)2
𝐴𝜎𝑛
2
Avec :
𝐹𝐴 =𝑑𝐹(𝐴, 𝐴′)
𝑑𝐴= 𝛾𝑎
2 − (𝐴′
𝐴𝜎𝑛)
2
𝐹𝐴′ =𝑑𝐹(𝐴, 𝐴′)
𝑑𝐴′= 2𝛾𝑎𝜎𝑛 + (
2𝐴′
𝐴𝜎𝑛
2)
Mimisation de fonction Φ(𝐴)
𝐹𝐴 −𝜕
𝜕𝑧𝐹𝐴′ = 0
𝛾𝑎2 − (
𝐴′
𝐴)
2
. 𝜎𝑛2 − 2𝜎𝑛
2.𝐴"𝐴 − 𝐴′
2
𝐴2= 0(1)
On pose :
𝑦 =𝐴′
𝐴=≫ 𝑦′ =
𝐴"𝐴 − 𝐴′2
𝐴2
(1) =≫ 𝛾𝑎2 − 𝑦2𝜎𝑛
2 − 2𝜎𝑛2𝑦′ = 0
(𝛾𝑎𝜎𝑛)2
− 𝑦2 − 2𝑦′ = 0
pour résoudre l’équation différentiel, on pose b = γa / σn ;
2.𝑑𝑦
𝑏2 − 𝑦2= 𝑑𝑧
2
(𝑏 − 𝑦)(𝑏 + 𝑦)𝑑𝑦 = 𝑑𝑧
1
𝑏(
1
𝑏 − 𝑦+
1
𝑏 + 𝑦)𝑑𝑦 = 𝑑𝑧
1
𝑏. ln (
𝑏 + 𝑦
𝑏 − 𝑦) = 𝑧 + 𝑐1
𝑦 =𝑏[exp(𝑏𝑧 + 𝑐1) − 1]
1 + exp(𝑏𝑧 + 𝑐1)
𝐴′
𝐴=𝑏[𝑐1exp(𝑏𝑧) − 1]
1 + 𝑐1exp(𝑏𝑧)
𝑑𝐴
𝐴=𝑏[𝑐1exp(𝑏𝑧) − 1]
1 + 𝑐1exp(𝑏𝑧)𝑑𝑧

5
𝑑A
𝐴= 𝑏 [
𝑐1exp(𝑏𝑧)
1 + 𝑐1exp(𝑏𝑧)−
1
1 + 𝑐1exp(𝑏𝑧)] 𝑑𝑧
𝑙𝑛𝐴 = 𝑏 [1
𝑏∫
𝑏 𝑐1exp(𝑏𝑧)
1 + 𝑐1exp(𝑏𝑧)𝑑𝑧 − ∫
𝑑𝑧
1 + 𝑐1exp(𝑏𝑧)]
𝑙𝑛𝐴 = [ln(1 + 𝑐1exp(𝑏𝑧)) − 𝑏∫𝑑𝑧
1 + 𝑐1exp(𝑏𝑧)]
On pose : u = exp(bz)
du = b.exp(bz)dz = b.u.dz
𝑙𝑛𝐴 = [ln(1 + 𝑐1𝑢) − 𝑏∫𝑑𝑢
𝑏. 𝑢(1 + 𝑐1u)]
𝑙𝑛𝐴 = [ln(1 + 𝑐1𝑢) − ∫(1
𝑢−
𝑐11 + 𝑐1𝑢
)𝑑𝑢]
𝑙𝑛𝐴 = [ln(1 + 𝑐1𝑢) − (ln(𝑢) − ln(1 + 𝑐1𝑢)) + ln(𝑐2)]
𝑙𝑛𝐴 = 𝑙𝑛 ((1 + 𝑐1𝑢)
2
𝑢. 𝑐2)
𝐴 = 𝑐2.[1 + 𝑐1 exp(𝑏𝑧)]
2
exp(𝑏𝑧)
Condition aux limites : A(z=0) = L2
A(z=∞) = 0
lim𝑧→∞
𝑐2.[1 + 𝑐1 exp(𝑏𝑧)]
2
exp(𝑏𝑧)= 0
𝑐1 = lim𝑧→∞
−1
exp(𝑏𝑧)= 0
𝐴(𝑧 = 0) = 𝐿2 = 𝑐2.1
exp(𝑏. 0)=≫ 𝑐2 = 𝐿2
donc :
𝐴(𝑧) = 𝐿2. exp(−𝛾𝑎𝜎𝑛
𝑧)
𝐿(𝑧) = ±𝐿. exp(−𝛾𝑎2𝜎𝑛
𝑧)
c. Principe d’optimisation topologique
À partir de la forme initiale, section A constante et hauteur H :
𝑁(𝑧) = 𝐴. 𝛾𝑎(𝐻 − 𝑍) le diagramme normal a nous montre que au niveau
de H, l’effort normal N=0, c’est à dire on peut
réduire la section A selon l’axe Z.
N(z)

6
On va changer la forme de la structure à la section variable selon l’axe z :
Section initiale à z=0, A= L2
𝑁 =1
3𝛾𝑎(𝐻𝐿
2 + 𝑍𝐿2 + 𝑍𝐿√𝐴(𝑧) + 𝑍. 𝐴(𝑧))
il faut que la contrainte résistance égale à contrainte action pour
toute niveau:
𝜎𝑛 =𝑁
𝐴= 𝑐𝑡𝑒
𝜎𝑛 =𝛾𝑎
3. 𝐴(𝑧)(𝐻𝐿2 + 𝑍𝐿2 + 𝑍𝐿√𝐴(𝑧) + 𝑍. 𝐴(𝑧))
(3𝜎𝑛𝛾𝑎
− 𝑍)𝐴(𝑧) = (𝐻𝐿2 + 𝑍𝐿2 + 𝑍𝐿√𝐴(𝑧))
[(3𝜎𝑛𝛾𝑎
− 𝑍)𝐴(𝑧) − 𝐻𝐿2 − 𝑍𝐿2]2
= (𝑍𝐿√𝐴(𝑧))2
(3𝜎𝑛𝛾𝑎
− 𝑧)2
𝐴2(𝑧) + (𝐻 + 𝑍)2𝐿4 − 2𝐿2(𝐻 + 𝑍) (3𝜎𝑛𝛾𝑎
− 𝑍)𝐴(𝑧) = (𝐿𝑍)2𝐴(𝑧)
(3𝜎𝑛𝛾𝑎
− 𝑧)2
𝐴2(𝑧) − 𝐴(𝑧) [2𝐿2(𝐻 + 𝑍) (3𝜎𝑛𝛾𝑎
− 𝑍) + 𝑍2𝐿2] + 𝐿4(𝐻 + 𝑍)2 = 0
𝑎𝐴2(𝑧) − 𝑏𝐴(𝑧) + 𝑐 = 0
Avec :
𝑎 = (3𝜎𝑛𝛾𝑎
− 𝑧)2
; 𝑏 = − [2𝐿2(𝐻 + 𝑍) (3𝜎𝑛𝛾𝑎
− 𝑍) + 𝑍2𝐿2] ; 𝑐 = 𝐿4(𝐻 + 𝑍)2
Après résoudre cette équation, on obtenu :
𝐴(𝑧) =[2𝐿2(𝐻 + 𝑍) (
3𝜎𝑛𝛾𝑎
− 𝑍) + 𝑍2𝐿2] + 𝐿2𝑍√𝑍2 + 4(𝐻 + 𝑍) (3𝜎𝑛𝛾𝑎
− 𝑍)
2 (3𝜎𝑛𝛾𝑎
− 𝑍)2
travail numérique, Z=0 ; σn = 6Mpa ; γa = 7.8E3x9.81 ; H=300 ; L=120 :
𝐴(𝑧 = 0) =1202 × 300
3 × 6𝐸67.8𝐸3 ∗ 9.81
= 18364.32𝑚2

7
d. Vérifier les coordonnées géométriques des nœuds
A partir de l’équation L(z) qu’on a déjà montrer dans le partie précédent, on va commence
de vérifier les coordonnées :
A[ L(z=0)/2 ; 0] = A(-60 ; 0)
D[ L(z=0)/2 ; 0] = D(60 ; 0)
B[ L(z=0)/6 ; 0] = B(-20 ; 0)
C[ L(z=0)/6 ; 0] = C(20 ; 0)
𝐿(𝑧 = 0)
2= ±
120. exp(−𝛾𝑎2𝜎𝑛
. 0)
2= ±60
E[ L(z=100)/2 ; 100] = E(31.71 ; 100)
F[ 0 ; 100]
G[ L(z=100)/2 ; 100] = G(31.71 ; 100)
𝐿(𝑧 = 100)
2= ±
120. exp(−7.8𝐸3𝑥9.81
2𝑥6𝐸6. 100)
2= ±31.71
H[ 0 ; 150]
I[ L(z=200)/2 ; 200] = I(-16.76 ; 200)
J[ L(z=200)/2 ; 200] = J(16.76 ; 200)
K[ L(z=300)/2 ; 300] = K(-8.86 ; 300)
L[ L(z=300)/2 ; 300] = L(8.86 ; 300)
Donc, touts les coordonnés sont vérifié.
e. Algorithme numérique
Technique des différences finies : 𝑑𝑓(𝑧)
𝑑𝑧=𝑓(𝑧 + ℎ) − 𝑓(𝑧)
ℎ
On a :
𝐴(𝑧) = 𝐿2. exp(−𝛾𝑎𝜎𝑛
𝑧)
𝑑𝐴(𝑧)
𝑑𝑧= −
𝛾𝑎𝜎𝑛
. 𝐿2exp(−𝛾𝑎𝜎𝑛
𝑧)
𝑑𝐴(𝑧)
𝑑𝑧= −
𝛾𝑎𝜎𝑛
. 𝐴(1)
𝑑𝐴(𝑧)
𝑑𝑧=𝐴(𝑧 + ℎ) − 𝐴(𝑧)
ℎ(2)
Par équation (1) et (2), on a : 𝐴(𝑧 + ℎ) − 𝐴(𝑧)
ℎ= −
𝛾𝑎𝜎𝑛
. 𝐴
𝐴(𝑧 + ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ) . 𝐴(𝑧)
donc, la précision de résultat est grâce à l’hauteur de chaque tranche, si on divise plusieurs
tranche, c’est à dire on obtient plus petit de ‘h’. La technique des différences finies va vérifier
quand h tend vers à 0.

8
Pour notre cas :
H- la hauteur fix
n- le nombre de tranche
h- l’hauteur de chaque tranche
A(z=0) = L2
Le développement algorithme numérique:
𝐴(ℎ) = 𝐴((𝑧 = 0) + ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ) . 𝐴(𝑧 = 0)
𝐴(2ℎ) = 𝐴((𝑧 = ℎ) + ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ) . 𝐴(𝑧 = ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ)2
. 𝐴(𝑧 = 0)
𝐴(3ℎ) = 𝐴((𝑧 = 2ℎ) + ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ) . 𝐴(𝑧 = 2ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ)3
. 𝐴(𝑧 = 0)
.
.
.
𝐴(𝑛ℎ) = 𝐴((𝑧 = (𝑛 − 1)ℎ) + ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ) . 𝐴(𝑧) = (𝑛 − 1)ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ)𝑛
. 𝐴(𝑧 = 0)
et on sait que : h = z/n =>> n = z/h
𝐴(𝑧 = 𝑛ℎ) = (1 −𝛾𝑎𝜎𝑛
. ℎ)𝑧/ℎ
. 𝐴(𝑧 = 0)(3)
Avec l’équation (3), on va programmer l’algorithme numérique dans le logiciel Matlab et
Cast3M, ensuite on vérifier les résultats de ces logiciels avec l’équation différentielle dans la
partie ‘a’. La précision de résultat est dépendre à la nombre de tranche, si on divise plusieurs, le
résultat va plus préciser.
On choisit :
Matlab : H = 100m, n = 10000, γ = ρ.g=7800x9.81 Kn/m3, σ = 6 Mpa
Cast3M : H = 100m, n = 100, γ = ρ.g=7800x9.81 Kn/m3, σ = 6 Mpa
On souhaite déterminer les différences précision entre n=10000 et n=100.
Pour le logiciel Cast3M, on utilise l’opérateur REPETER, pour programmer l’algorithme
numérique. Voire le code de Cast3M et Matlab dans l’Annexe I.

9
Figure 2 : Le graphique de forme Tour Eiffel par Matlab
Résultat entre équation différentielle ; Matlab ; Cast3M :
Analytique Cast3Mn=100 Matlabn=10000 306.27
300 8.8587 8.7503 8.8576 343.78
290 9.4419 9.2707 9.4408 390.86
280 10.0636 9.8851 10.0625 444.39
270 10.7262 10.5403 10.725 505.25
260 11.4324 11.2389 11.4312 574.44
250 12.1852 11.9837 12.1839 653.11
240 12.9875 12.778 12.9862 742.55
230 13.8426 13.6249 13.8413 844.25
220 14.7540 14.528 14.7527 959.87
210 15.7254 15.4909 15.7241 1091.3
200 16.7608 16.5174 16.7595 1240.8
190 17.8644 17.6125 17.863 1410.7
180 19.0406 18.7796 19.0392 1603.9
170 20.2943 20.0244 20.2929 1823.6
160 21.6305 21.3518 21.6291 2073.3
150 23.0547 22.7668 23.0533 2357.2
140 24.5727 24.2755 24.5713 2680.1
130 26.1906 25.8848 26.1892 3047.1
120 27.9150 27.6003 27.9136 3464.4
110 29.7530 29.4296 29.7517 3938.9
100 31.7120 31.3803 31.7107 4478.3
90 33.8000 33.4601 33.7987 5091.6
80 36.0254 35.6777 36.0242 5788.9
70 38.3974 38.0424 38.3963 6581.7
60 40.9255 40.5638 40.9246 7483.1
50 43.6202 43.2525 43.6193 8507.9
40 46.4922 46.1191 46.4914 9673
30 49.5533 49.1757 49.5527 10998
20 52.8160 52.4357 52.8156 12504
10 56.2935 55.9106 56.2933 14400
0 60.0000 60 60
L(m)H(m)
Analytique Cast3Mn=100 Matlabn=10000 306.27
300 8.8587 8.7503 8.8576 343.78
290 9.4419 9.2707 9.4408 390.86
280 10.0636 9.8851 10.0625 444.39
270 10.7262 10.5403 10.725 505.25
260 11.4324 11.2389 11.4312 574.44
250 12.1852 11.9837 12.1839 653.11
240 12.9875 12.778 12.9862 742.55
230 13.8426 13.6249 13.8413 844.25
220 14.7540 14.528 14.7527 959.87
210 15.7254 15.4909 15.7241 1091.3
200 16.7608 16.5174 16.7595 1240.8
190 17.8644 17.6125 17.863 1410.7
180 19.0406 18.7796 19.0392 1603.9
170 20.2943 20.0244 20.2929 1823.6
160 21.6305 21.3518 21.6291 2073.3
150 23.0547 22.7668 23.0533 2357.2
140 24.5727 24.2755 24.5713 2680.1
130 26.1906 25.8848 26.1892 3047.1
120 27.9150 27.6003 27.9136 3464.4
110 29.7530 29.4296 29.7517 3938.9
100 31.7120 31.3803 31.7107 4478.3
90 33.8000 33.4601 33.7987 5091.6
80 36.0254 35.6777 36.0242 5788.9
70 38.3974 38.0424 38.3963 6581.7
60 40.9255 40.5638 40.9246 7483.1
50 43.6202 43.2525 43.6193 8507.9
40 46.4922 46.1191 46.4914 9673
30 49.5533 49.1757 49.5527 10998
20 52.8160 52.4357 52.8156 12504
10 56.2935 55.9106 56.2933 14400
0 60.0000 60 60
L(m)H(m)

10
IV. TAVAIL NUMÉRIQUE
a. Indiquer les conditions aux limites
Stabilité interne pour la structure en treillis :
m – nombre des éléments
j – nombre des nœuds
r - nombre de réaction
𝑚 < 2𝑗 − 3(𝑙𝑒𝑡𝑟𝑒𝑖𝑙𝑙𝑖𝑠𝑒𝑠𝑡𝑖𝑛𝑠𝑡𝑎𝑏𝑖𝑙𝑖é𝑖𝑛𝑡𝑒𝑟𝑛𝑒) 𝑚 > 2𝑗 − 3(𝑙𝑒𝑡𝑟𝑒𝑖𝑙𝑙𝑖𝑠𝑒𝑠𝑡𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑡é𝑖𝑛𝑡𝑒𝑟𝑛𝑒)
Type de la structure :
𝑚+ 𝑟 < 2𝑗𝑖𝑛𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑡é𝑑𝑒𝑙𝑎𝑠𝑡𝑟𝑢𝑐𝑡𝑢𝑟𝑒
𝑚+ 𝑟 = 2𝑗𝑠𝑡𝑟𝑢𝑐𝑡𝑢𝑟𝑒𝑖𝑠𝑜𝑠𝑡𝑎𝑡𝑖𝑞𝑢𝑒
𝑚+ 𝑟 > 2𝑗𝑠𝑡𝑟𝑢𝑐𝑡𝑢𝑟𝑒ℎ𝑦𝑝𝑒𝑟𝑠𝑡𝑎𝑡𝑖𝑞𝑢𝑒
Dans notre cas : m = 23, j = 12
𝑚 > 2𝑗 − 3 =≫ 23 > 21(𝑙𝑒𝑡𝑟𝑒𝑖𝑙𝑙𝑖𝑠𝑒𝑠𝑡𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑡é𝑖𝑛𝑡𝑒𝑟𝑛𝑒) 𝑚 + 𝑟 = 2𝑗 =≫ 𝑟 = 1𝑐′𝑒𝑠𝑡𝑖𝑚𝑝𝑜𝑠𝑠𝑖𝑏𝑙𝑒𝑑′𝑎𝑣𝑜𝑖𝑟𝑢𝑛𝑒𝑟é𝑎𝑐𝑡𝑖𝑜𝑛
Il faut bloquer les point A ; B ; C ; D en deux direction (x et z) pour assurer le déplacement de la
structure en deux direction, enfin la type de la structure va changer au structure hyperstatique. En
2D, la réactions r = 2x4=8 ; m=23 ; j=12
𝑚 + 𝑟 > 2𝑗 =≫ 31 > 24𝑠𝑡𝑟𝑢𝑐𝑡𝑢𝑟eℎ𝑦𝑝𝑒𝑟𝑠𝑡𝑎𝑡𝑖𝑞𝑢𝑒
Discussion l’intersection entre barre IL et barre KJ
m = 25 ; j = 13
𝑚 + 𝑟 = 2𝑗 =≫ 𝑟 = 1𝑐′𝑒𝑠𝑡𝑖𝑚𝑝𝑜𝑠𝑠𝑖𝑏𝑙𝑒𝑑′𝑎𝑣𝑜𝑖𝑟𝑢𝑛𝑒𝑟é𝑎𝑐𝑡𝑖𝑜𝑛
Donc, l’intersection entre le IL et KJ ne change pas la type de la structure.
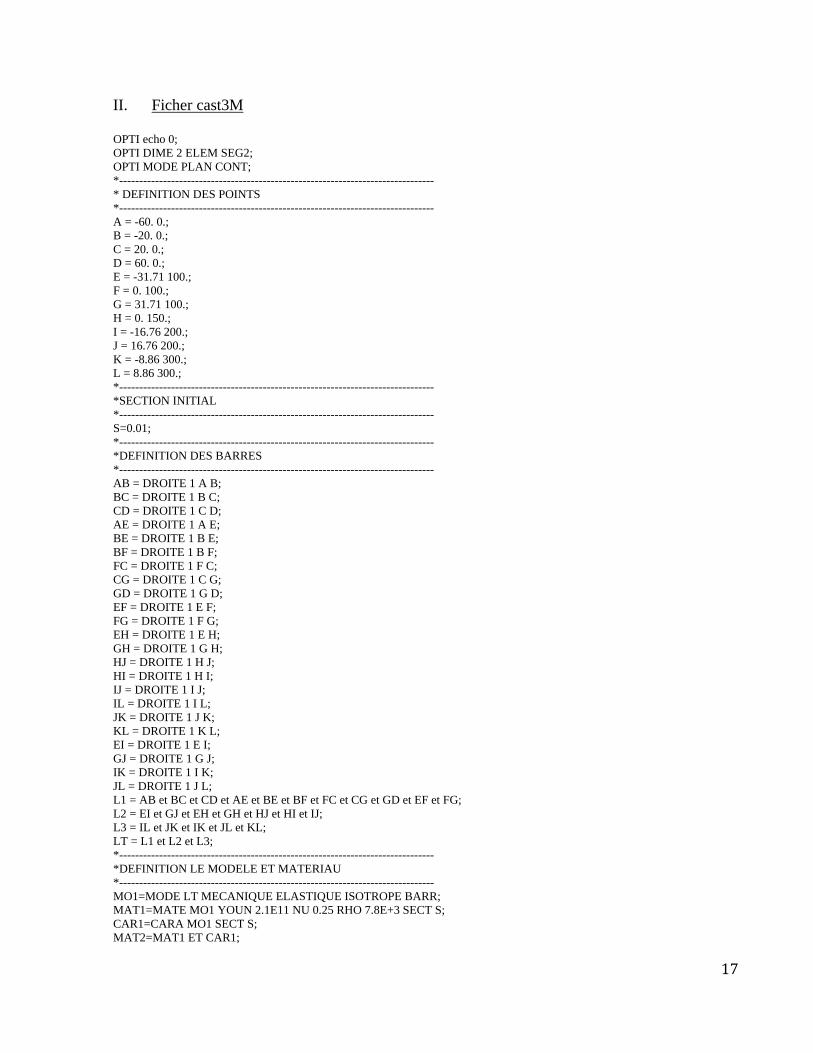
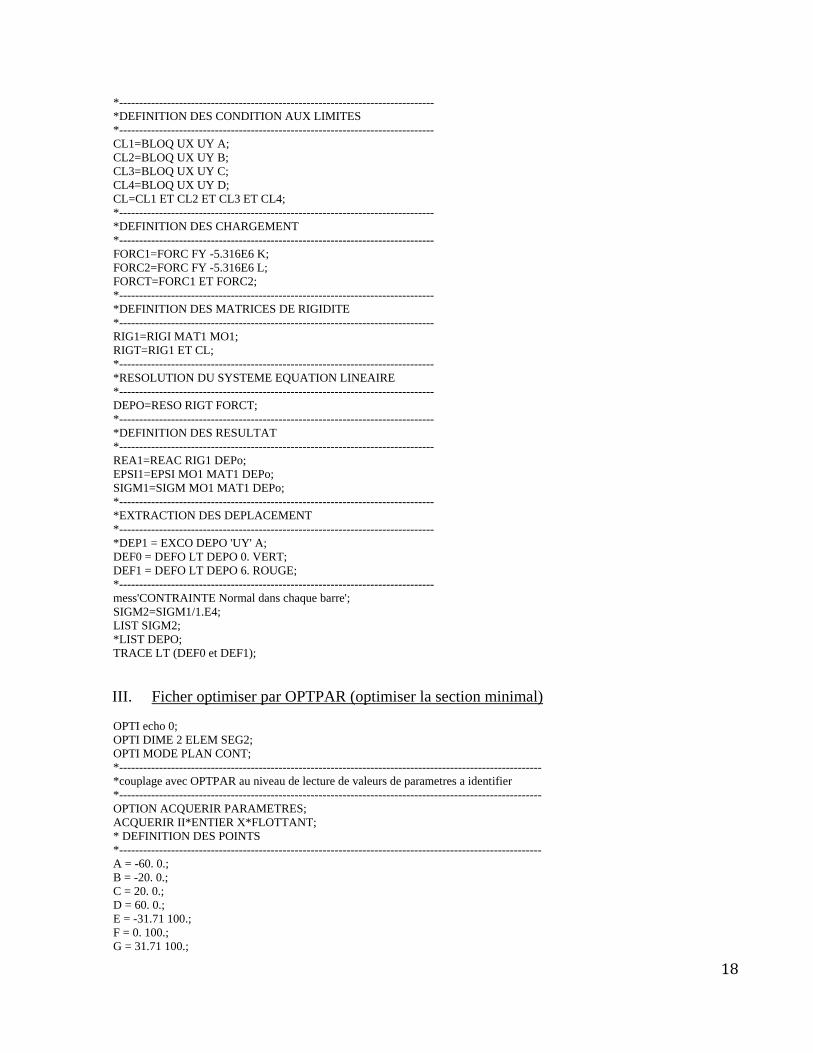
b. Modèliser dans le Cast3M:
Pour réaliser les calcule de la structure dans cast3M, d’abord il faut créer le ficher en donnant les
définitions de géométrique (point, droite) ; définition de matériau (module young, section, poids
volumique) ; zone maillage ; intensité du chargement ; condition aux limites ; créer le matrice de
rigidité, enfin extraction les efforts ; contraintes ; déplacement de la structure. La ficher de
cast3M est donnée dans l’annexe II.
𝐸𝑎 = 210𝐺𝑝𝑎; 𝜐 = 0.25; 𝜎𝑛 = 6𝑀𝑝𝑎; 𝑠 = 0.01𝑚2
Le charge que on applique dans cast3M est le charge pointuelle sur le nœud K et L:
𝑃 =(6 × 8.86 × 2 × √0.01. 106)
2= 5.316 × 106𝑁
11
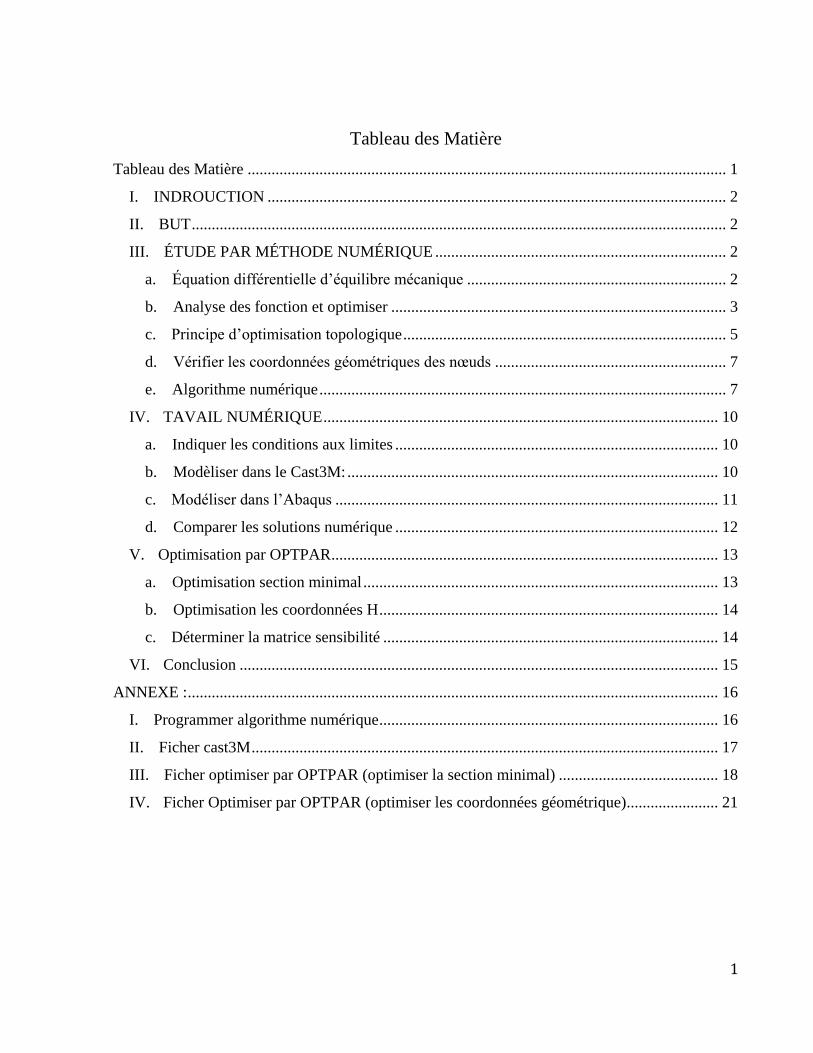
Déformation de Tour Eiffel par cast3M
Figure 4. le déplacement des barres par cast3M
c. Modéliser dans l’Abaqus
Pour réaliser la structure treillis dans Abaqus, il faut tout d’abord donner les points et connecter
ces points par droite, après on fournir les propriétés des matériaux. Il faut faire une attention
quand on maillage la structure, l’Abaqus va intersection les barres IL et KJ, mais en fait les deux
barres n’est pas intersection, donc il faut éliminer le nœud qui a automatiquement créé dans le
ficher *.inp quand on maillage la structure.
Le nœud numéro 4 a été éliminé et il faut aussi
modifier les numéros et coordonnées dans les
barres.
Barre
type
cast3M
N (MN) sigma N
(Mpa)
AB 0 0
BC 0 0
CD 0 0
AE -2.715 -271.5
BE -2.718 -271.8
BF 6.095E-16 6.095E-14
FC -6.095E-16 -6.095E-14
CG -2.718 -271.8
GD -2.715 -271.5
EF 1.417 141.7
FG 1.417 141.7
EH -2.505 -250.05
GH -2.505 -250.05
HJ -2.233 -223.3
HI -2.233 -223.3
IJ 1.099 109.9
IL -2.602 -260.2
JK -2.602 -260.2
KL 0.4255 42.55
EI -3.231 -323.1
GJ -3.231 -323.1
IK -2.801 -280.1
JL -2.801 -280.1
A B C D
E F G
H
I J
K L
12
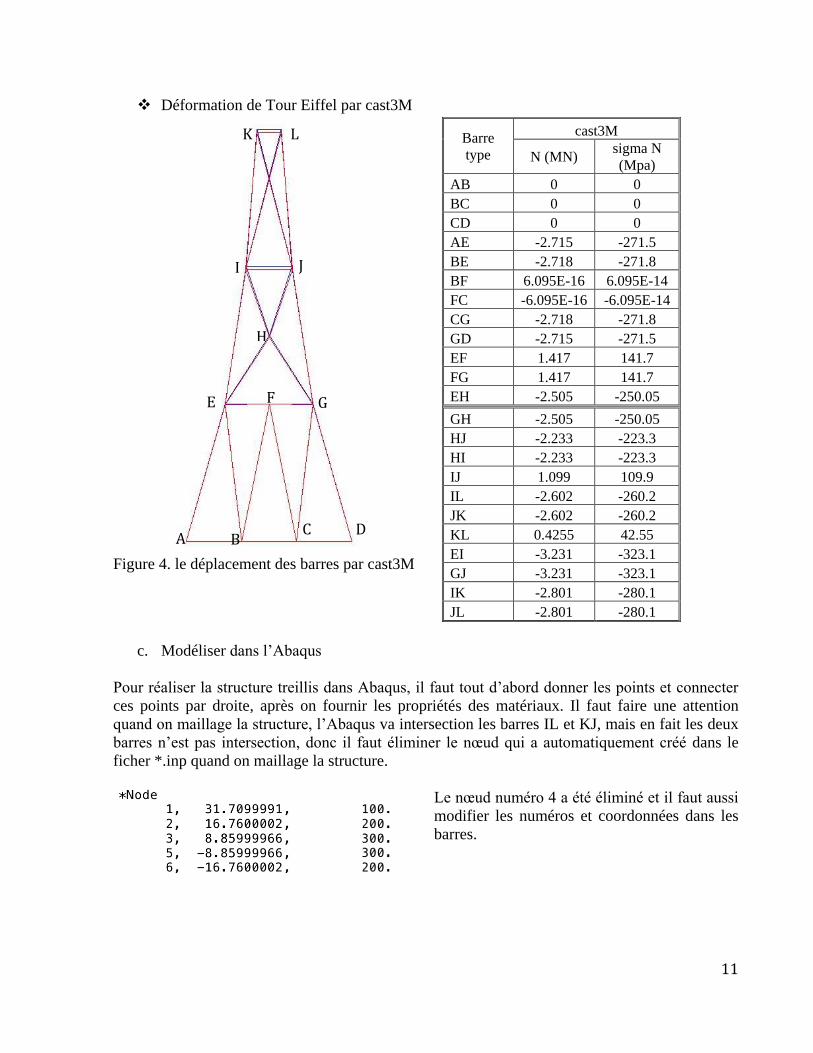
Les résultat de contrainte et effort normal
Déformation de la Tour Eiffel par Abaqus :
Figure5. le déplacement des barres par abaqus
d. Comparer les solutions numérique
Pour vraiment comparer les résultats entre Cast3M et Abaqus, il faut donnée les même conditions
comme :
Les propriétés matériaux ;
Chargement pointuelle ;
Condition aux limites ;
Les maillages
barre abaqus
N (MN) sigma N (Mpa)
AB 9.64E-45 9.64E-43
BC -1.66E-29 -1.66E-27
CD 1.66E-29 1.66E-27
AE -2.72E+00 -2.72E+02
BE -2.72E+00 -2.72E+02
BF 3.62E-16 3.62E-14
FC -3.62E-16 -3.62E-14
CG -2.72E+00 -2.72E+02
GD -2.72E+00 -2.72E+02
EF 1.40E+00 1.40E+02
FG 1.40E+00 1.40E+02
EH -2.51E+00 -2.51E+02
barre abaqus
N (MN)
sigma N
(Mpa)
GH -2.51E+00 -2.51E+02
HJ -2.23E+00 -2.23E+02
HI -2.23E+00 -2.23E+02
IJ 1.10E+00 1.10E+02
IL -2.60E+00 -2.60E+02
JK -2.60E+00 -2.60E+02
KL 4.26E-01 4.26E+01
EI -3.23E+00 -3.23E+02
GJ -3.23E+00 -3.23E+02
IK -2.80E+00 -2.80E+02
JL -2.80E+00 -2.80E+02

13
Selon le tableau de résultat, on trouve que les résultat a obtenu par cast3M et Abaqus ont la
même. Mais il faut respecter le même matériau ; propriété ; chargement ; maillage et condition
aux limites.
V. Optimisation par OPTPAR
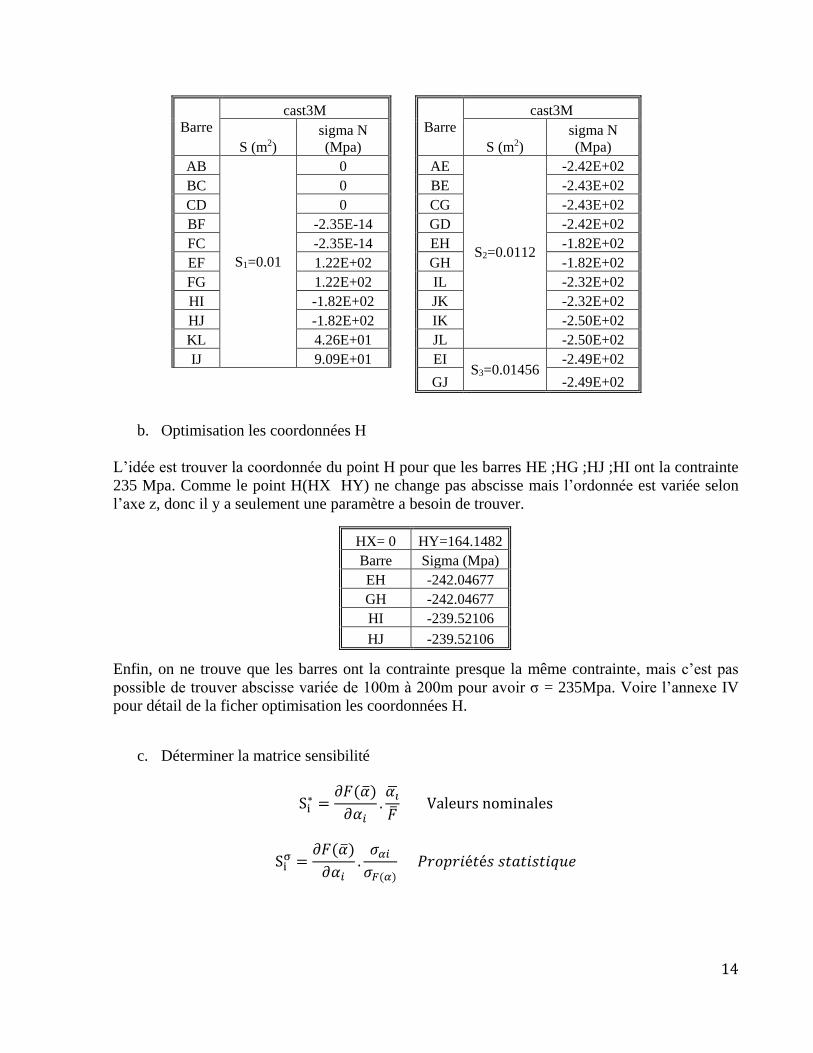
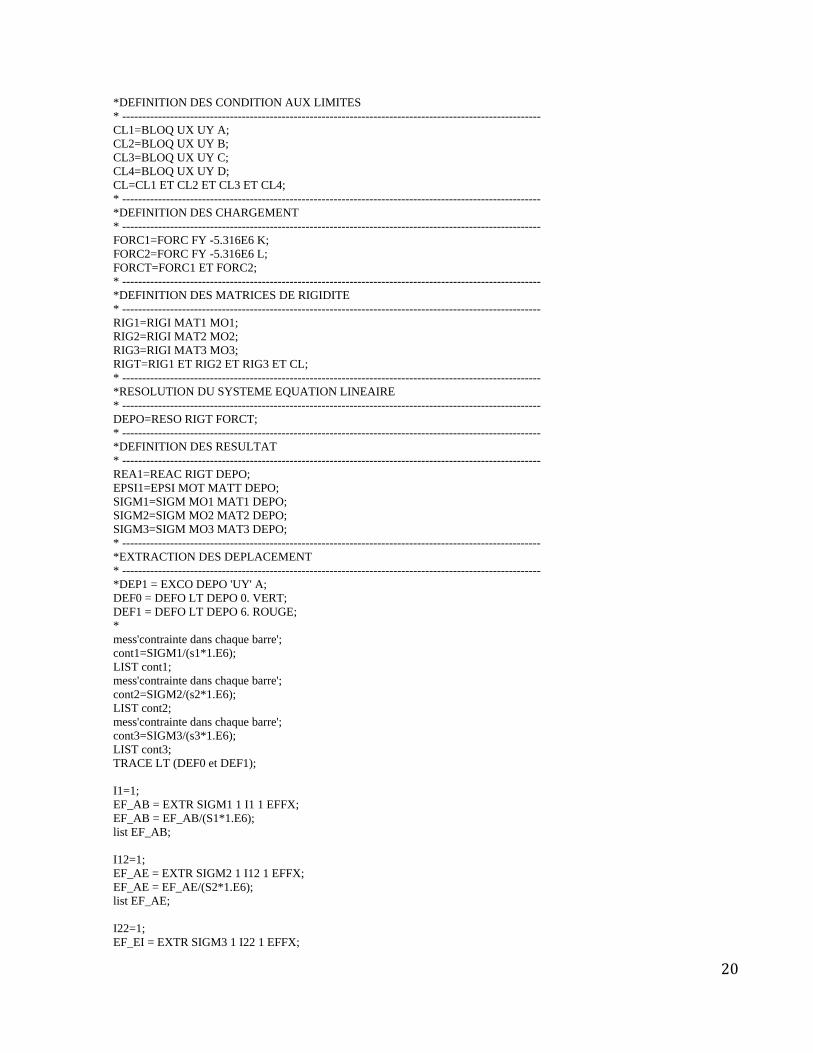
a. Optimisation section minimal
L’idée est trouver la section minimale pour que toutes les barres ont la contrainte maximum
égale à 250 Mpa. Par le tableau de résultat, on observe qu’il y a 12 barres avoir la contrainte plus
que 250 Mpa (AE ; BE ;CG ;GD ;EH ;GH ;IL ;JK ;IK ;JL ;EI ;GJ) et parmi lesquelles les barres
EI et GJ ont la contrainte plus grand. Pour mieux optimiser, on va diviser la section en 3 types :
S1=0.01 m2 : AB ;BC ;CD ;BF ;FC ;EF ;FG ;HI ;HJ ;KL ;IJ (σ < 250 Mpa)
S2=X : AE ; BE ;CG ;GD ;EH ;GH ;IL ;JK ;IK ;JL ;EI ;GJ
S3=Y : EI ;GJ
Il faut trouver X et Y pour que la contrainte maximal égale à 250 Mpa. Premièrement, on va
optimiser S2 pour σ ≤ 250 Mpa, et après on cherche S3 pour que la contrainte de barre EI ; GJ est
moins que 250 Mpa. Voir annexe III pour la ficher optimiser la section minimal.
Barre cast3M abaqus
N (MN) sigma N (Mpa) N (MN) sigma N (Mpa)
AB 0 0 0.00E+00 9.64E-43
BC 0 0 0.00E+00 -1.66E-27
CD 0 0 0.00E+00 1.66E-27
AE -2.715 -271.5 -2.72E+00 -2.72E+02
BE -2.718 -271.8 -2.72E+00 -2.72E+02
BF 0 0 0.00E+00 3.62E-14
FC 0 0 0.00E+00 -3.62E-14
CG -2.718 -271.8 -2.72E+00 -2.72E+02
GD -2.715 -271.5 -2.72E+00 -2.72E+02
EF 1.417 141.7 1.40E+00 1.40E+02
FG 1.417 141.7 1.40E+00 1.40E+02
EH -2.505 -250.5 -2.51E+00 -2.51E+02
GH -2.505 -250.5 -2.51E+00 -2.51E+02
HJ -2.233 -223.3 -2.23E+00 -2.23E+02
HI -2.233 -223.3 -2.23E+00 -2.23E+02
IJ 1.099 109.9 1.10E+00 1.10E+02
IL -2.602 -260.2 -2.60E+00 -2.60E+02
JK -2.602 -260.2 -2.60E+00 -2.60E+02
KL 0.426 42.6 4.26E-01 4.26E+01
EI -3.231 -323.1 -3.23E+00 -3.23E+02
GJ -3.231 -323.1 -3.23E+00 -3.23E+02
IK -2.801 -280.1 -2.80E+00 -2.80E+02
JL -2.801 -280.1 -2.80E+00 -2.80E+02
14
b. Optimisation les coordonnées H
L’idée est trouver la coordonnée du point H pour que les barres HE ;HG ;HJ ;HI ont la contrainte
235 Mpa. Comme le point H(HX HY) ne change pas abscisse mais l’ordonnée est variée selon
l’axe z, donc il y a seulement une paramètre a besoin de trouver.
Enfin, on ne trouve que les barres ont la contrainte presque la même contrainte, mais c’est pas
possible de trouver abscisse variée de 100m à 200m pour avoir σ = 235Mpa. Voire l’annexe IV
pour détail de la ficher optimisation les coordonnées H.
c. Déterminer la matrice sensibilité
Si∗ =
𝜕𝐹(�̅�)
𝜕𝛼𝑖.𝛼�̅��̅�Valeursnominales
Siσ =
𝜕𝐹(�̅�)
𝜕𝛼𝑖.𝜎𝛼𝑖𝜎𝐹(𝛼)
𝑃𝑟𝑜𝑝𝑟𝑖é𝑡é𝑠𝑠𝑡𝑎𝑡𝑖𝑠𝑡𝑖𝑞𝑢𝑒
Barre
cast3M
S (m2)
sigma N
(Mpa)
AB
S1=0.01
0
BC 0
CD 0
BF -2.35E-14
FC -2.35E-14
EF 1.22E+02
FG 1.22E+02
HI -1.82E+02
HJ -1.82E+02
KL 4.26E+01
IJ 9.09E+01
Barre
cast3M
S (m2)
sigma N
(Mpa)
AE
S2=0.0112
-2.42E+02
BE -2.43E+02
CG -2.43E+02
GD -2.42E+02
EH -1.82E+02
GH -1.82E+02
IL -2.32E+02
JK -2.32E+02
IK -2.50E+02
JL -2.50E+02
EI S3=0.01456
-2.49E+02
GJ -2.49E+02
HX= 0 HY=164.1482
Barre Sigma (Mpa)
EH -242.04677
GH -242.04677
HI -239.52106
HJ -239.52106

15
======= ITERATION ======= 4
STAGNATION APRES 4 ITERATIONS
PAS D'AMELIORATION POSSIBLE
PARAMETRES
ALPHA( 1 )= 164.148214
EXP CAL
-235.000000 -242.046776
-235.000000 -242.046776
-235.000000 -239.521060
-235.000000 -239.521060
FONCTION COST = 2.519225047688914E-002
VI. Conclusion
Après avoir terminé ce projet, il me donne les connaissances pour réaliser le ficher de calcule par
cast3M comme les étapes pour crée ce ficher (géométrique; maillage; matériau; chargement ;
condition au limite…), d’autre part, j’ai aussi compris la comparaison les résultats entre cast3M
et Abaqus. En fait, ces logiciels sont nouveaux pour moi, la pratique dans ce projet et les aider
des professeurs sont les bases fondamentaux pour faire les calcules et recherches plus compliqué
à l’avenir.

16
ANNEXE :
I. Programmer algorithme numérique
Matlab:
Cast3M :
17
II. Ficher cast3M
OPTI echo 0;
OPTI DIME 2 ELEM SEG2;
OPTI MODE PLAN CONT;
*-------------------------------------------------------------------------------
* DEFINITION DES POINTS
*-------------------------------------------------------------------------------
A = -60. 0.;
B = -20. 0.;
C = 20. 0.;
D = 60. 0.;
E = -31.71 100.;
F = 0. 100.;
G = 31.71 100.;
H = 0. 150.;
I = -16.76 200.;
J = 16.76 200.;
K = -8.86 300.;
L = 8.86 300.;
*-------------------------------------------------------------------------------
*SECTION INITIAL
*-------------------------------------------------------------------------------
S=0.01;
*-------------------------------------------------------------------------------
*DEFINITION DES BARRES
*-------------------------------------------------------------------------------
AB = DROITE 1 A B;
BC = DROITE 1 B C;
CD = DROITE 1 C D;
AE = DROITE 1 A E;
BE = DROITE 1 B E;
BF = DROITE 1 B F;
FC = DROITE 1 F C;
CG = DROITE 1 C G;
GD = DROITE 1 G D;
EF = DROITE 1 E F;
FG = DROITE 1 F G;
EH = DROITE 1 E H;
GH = DROITE 1 G H;
HJ = DROITE 1 H J;
HI = DROITE 1 H I;
IJ = DROITE 1 I J;
IL = DROITE 1 I L;
JK = DROITE 1 J K;
KL = DROITE 1 K L;
EI = DROITE 1 E I;
GJ = DROITE 1 G J;
IK = DROITE 1 I K;
JL = DROITE 1 J L;
L1 = AB et BC et CD et AE et BE et BF et FC et CG et GD et EF et FG;
L2 = EI et GJ et EH et GH et HJ et HI et IJ;
L3 = IL et JK et IK et JL et KL;
LT = L1 et L2 et L3;
*-------------------------------------------------------------------------------
*DEFINITION LE MODELE ET MATERIAU
*-------------------------------------------------------------------------------
MO1=MODE LT MECANIQUE ELASTIQUE ISOTROPE BARR;
MAT1=MATE MO1 YOUN 2.1E11 NU 0.25 RHO 7.8E+3 SECT S;
CAR1=CARA MO1 SECT S;
MAT2=MAT1 ET CAR1;
18
*-------------------------------------------------------------------------------
*DEFINITION DES CONDITION AUX LIMITES
*-------------------------------------------------------------------------------
CL1=BLOQ UX UY A;
CL2=BLOQ UX UY B;
CL3=BLOQ UX UY C;
CL4=BLOQ UX UY D;
CL=CL1 ET CL2 ET CL3 ET CL4;
*-------------------------------------------------------------------------------
*DEFINITION DES CHARGEMENT
*-------------------------------------------------------------------------------
FORC1=FORC FY -5.316E6 K;
FORC2=FORC FY -5.316E6 L;
FORCT=FORC1 ET FORC2;
*-------------------------------------------------------------------------------
*DEFINITION DES MATRICES DE RIGIDITE
*-------------------------------------------------------------------------------
RIG1=RIGI MAT1 MO1;
RIGT=RIG1 ET CL;
*-------------------------------------------------------------------------------
*RESOLUTION DU SYSTEME EQUATION LINEAIRE
*-------------------------------------------------------------------------------
DEPO=RESO RIGT FORCT;
*-------------------------------------------------------------------------------
*DEFINITION DES RESULTAT
*-------------------------------------------------------------------------------
REA1=REAC RIG1 DEPo;
EPSI1=EPSI MO1 MAT1 DEPo;
SIGM1=SIGM MO1 MAT1 DEPo;
*-------------------------------------------------------------------------------
*EXTRACTION DES DEPLACEMENT
*-------------------------------------------------------------------------------
*DEP1 = EXCO DEPO 'UY' A;
DEF0 = DEFO LT DEPO 0. VERT;
DEF1 = DEFO LT DEPO 6. ROUGE;
*-------------------------------------------------------------------------------
mess'CONTRAINTE Normal dans chaque barre';
SIGM2=SIGM1/1.E4;
LIST SIGM2;
*LIST DEPO;
TRACE LT (DEF0 et DEF1);
III. Ficher optimiser par OPTPAR (optimiser la section minimal)
OPTI echo 0;
OPTI DIME 2 ELEM SEG2;
OPTI MODE PLAN CONT;
*----------------------------------------------------------------------------------------------------------
*couplage avec OPTPAR au niveau de lecture de valeurs de parametres a identifier
*----------------------------------------------------------------------------------------------------------
OPTION ACQUERIR PARAMETRES;
ACQUERIR II*ENTIER X*FLOTTANT;
* DEFINITION DES POINTS
*----------------------------------------------------------------------------------------------------------
A = -60. 0.;
B = -20. 0.;
C = 20. 0.;
D = 60. 0.;
E = -31.71 100.;
F = 0. 100.;
G = 31.71 100.;

19
H = 0. 150.;
I = -16.76 200.;
J = 16.76 200.;
K = -8.86 300.;
L = 8.86 300.;
*---------------------------------------------------------------------------------------------------------
*SECTION INITILAL;
*----------------------------------------------------------------------------------------------------------
S1=0.01;
*S2=0.01;
*S3=0.01;
*---------------------------------------------------------------------------------------------------------
*SECTION OPTIMISER;
*---------------------------------------------------------------------------------------------------------
S2=X;
S3=S2;
*---------------------------------------------------------------------------------------------------------
*DEFINITION DES BARRES
*----------------------------------------------------------------------------------------------------------
AB = DROITE 1 A B;
BC = DROITE 1 B C;
CD = DROITE 1 C D;
AE = DROITE 1 A E;
BE = DROITE 1 B E;
BF = DROITE 1 B F;
FC = DROITE 1 F C;
CG = DROITE 1 C G;
GD = DROITE 1 G D;
EF = DROITE 1 E F;
FG = DROITE 1 F G;
EH = DROITE 1 E H;
GH = DROITE 1 G H;
HJ = DROITE 1 H J;
HI = DROITE 1 H I;
IJ = DROITE 1 I J;
IL = DROITE 1 I L;
JK = DROITE 1 J K;
KL = DROITE 1 K L;
EI = DROITE 1 E I;
GJ = DROITE 1 G J;
IK = DROITE 1 I K;
JL = DROITE 1 J L;
*---------------------------------------------------------------------------------------------------------
*ZONE MAILLAGE;
*---------------------------------------------------------------------------------------------------------
L1 = AB et BC et CD et BF et FC et EF et FG et HI et HJ et KL et IJ;
L2 = AE et BE et CG et GD et EH et GH et IL et JK et IK et JL;
L3 = EI et GJ;
LT = L1 et L2 et L3;
*---------------------------------------------------------------------------------------------------------
*DEFINITION LE MODELE ET MATERIAU
*----------------------------------------------------------------------------------------------------------
MO1=MODE L1 MECANIQUE ELASTIQUE ISOTROPE BARR;
MO2=MODE L2 MECANIQUE ELASTIQUE ISOTROPE BARR;
MO3=MODE L3 MECANIQUE ELASTIQUE ISOTROPE BARR;
MOT=MO1 ET MO2 ET MO3;
MAT1=MATE MO1 YOUN 2.1E11 NU 0.25 RHO 7.8E+3 SECT S1;
MAT2=MATE MO2 YOUN 2.1E11 NU 0.25 RHO 7.8E+3 SECT S2;
MAT3=MATE MO3 YOUN 2.1E11 NU 0.25 RHO 7.8E+3 SECT S3;
MATT=MAT1 ET MAT2 ET MAT3;
* ---------------------------------------------------------------------------------------------------------
20
*DEFINITION DES CONDITION AUX LIMITES
* ---------------------------------------------------------------------------------------------------------
CL1=BLOQ UX UY A;
CL2=BLOQ UX UY B;
CL3=BLOQ UX UY C;
CL4=BLOQ UX UY D;
CL=CL1 ET CL2 ET CL3 ET CL4;
* ---------------------------------------------------------------------------------------------------------
*DEFINITION DES CHARGEMENT
* ---------------------------------------------------------------------------------------------------------
FORC1=FORC FY -5.316E6 K;
FORC2=FORC FY -5.316E6 L;
FORCT=FORC1 ET FORC2;
* ---------------------------------------------------------------------------------------------------------
*DEFINITION DES MATRICES DE RIGIDITE
* ---------------------------------------------------------------------------------------------------------
RIG1=RIGI MAT1 MO1;
RIG2=RIGI MAT2 MO2;
RIG3=RIGI MAT3 MO3;
RIGT=RIG1 ET RIG2 ET RIG3 ET CL;
* ---------------------------------------------------------------------------------------------------------
*RESOLUTION DU SYSTEME EQUATION LINEAIRE
* ---------------------------------------------------------------------------------------------------------
DEPO=RESO RIGT FORCT;
* ---------------------------------------------------------------------------------------------------------
*DEFINITION DES RESULTAT
* ---------------------------------------------------------------------------------------------------------
REA1=REAC RIGT DEPO;
EPSI1=EPSI MOT MATT DEPO;
SIGM1=SIGM MO1 MAT1 DEPO;
SIGM2=SIGM MO2 MAT2 DEPO;
SIGM3=SIGM MO3 MAT3 DEPO;
* ---------------------------------------------------------------------------------------------------------
*EXTRACTION DES DEPLACEMENT
* ---------------------------------------------------------------------------------------------------------
*DEP1 = EXCO DEPO 'UY' A;
DEF0 = DEFO LT DEPO 0. VERT;
DEF1 = DEFO LT DEPO 6. ROUGE;
*
mess'contrainte dans chaque barre';
cont1=SIGM1/(s1*1.E6);
LIST cont1;
mess'contrainte dans chaque barre';
cont2=SIGM2/(s2*1.E6);
LIST cont2;
mess'contrainte dans chaque barre';
cont3=SIGM3/(s3*1.E6);
LIST cont3;
TRACE LT (DEF0 et DEF1);
I1=1;
EF_AB = EXTR SIGM1 1 I1 1 EFFX;
EF_AB = EF_AB/(S1*1.E6);
list EF_AB;
I12=1;
EF_AE = EXTR SIGM2 1 I12 1 EFFX;
EF_AE = EF_AE/(S2*1.E6);
list EF_AE;
I22=1;
EF_EI = EXTR SIGM3 1 I22 1 EFFX;

21
EF_EI = EF_EI/(S3*1.E6);
list EF_EI;
*---------------------------------------------------------------------------------------------------------
*couplage avec OPTPAR au niveau de l'ecriture de valeurs des observables
*---------------------------------------------------------------------------------------------------------
CC1 = CHAINE FORMAT '(1PE20.8)'1. EF_AB;
CC4 = CHAINE FORMAT '(1PE20.8)'4. EF_AE;
CC12 = CHAINE FORMAT '(1PE20.8)'12. EF_EI;
DEBPROC @stock FICHEXT*'MOT';
ii = vale impr;
OPTI IMPR 10 IMPR FICHEXT;
MESSAGE CC1;
MESSAGE CC4;
MESSAGE CC12;
OPTI IMPR II;
FINPROC;
@stock OBSERVABLES
Fin;
Fin;
IV. Ficher Optimiser par OPTPAR (optimiser les coordonnées géométrique) OPTI echo 1;
OPTI DIME 2 ELEM SEG2;
OPTI MODE PLAN CONT;
*---------------------------------------------------------------------------------------------------
*couplage avec OPTPAR au niveau de lecture de valeurs de parametres a identifier
*---------------------------------------------------------------------------------------------------
OPTION ACQUERIR PARAMETRES;
ACQUERIR II*ENTIER HX*FLOTTANT HZ*FLOTTANT;
* DEFINITION DES POINTS
*------------------------------------
A = -60. 0.;
B = -20. 0.;
C = 20. 0.;
D = 60. 0.;
E = -31.71 100.;
F = 0. 100.;
G = 31.71 100.;
*H = 0 164.148214;
I = -16.76 200.;
J = 16.76 200.;
K = -8.86 300.;
L = 8.86 300.;
H = HX HZ;
*------------------------------------
*DEFINITION DES BARRES
*-------------------------------------
AB = DROITE 1 A B;
BC = DROITE 1 B C;
CD = DROITE 1 C D;
AE = DROITE 1 A E;
BE = DROITE 1 B E;
BF = DROITE 1 B F;
FC = DROITE 1 F C;
CG = DROITE 1 C G;
GD = DROITE 1 G D;
EF = DROITE 1 E F;
FG = DROITE 1 F G;
EH = DROITE 1 E H;
GH = DROITE 1 G H;
HJ = DROITE 1 H J;
HI = DROITE 1 H I;

IJ = DROITE 1 I J;
IL = DROITE 1 I L;
JK = DROITE 1 J K;
KL = DROITE 1 K L;
EI = DROITE 1 E I;
GJ = DROITE 1 G J;
IK = DROITE 1 I K;
JL = DROITE 1 J L;
L1 = AB et BC et CD et AE et BE et BF et FC et CG et GD et EF
et FG;
L2 = EI et GJ et EH et GH et HJ et HI et IJ;
L3 = IL et JK et IK et JL et KL;
LT = L1 et L2 et L3;
*---------------------------------------------------------
*DEFINITION LE MODELE ET MATERIAU
*---------------------------------------------------------
MO1=MODE LT MECANIQUE ELASTIQUE ISOTROPE
BARR;
MAT1=MATE MO1 YOUN 2.1E11 NU 0.25 RHO 7.8E+3 SECT
0.01;
CAR1=CARA MO1 SECT 0.01;
MAT2=MAT1 ET CAR1;
*---------------------------------------------------------------
*DEFINITION DES CONDITION AUX LIMITES
*---------------------------------------------------------------
CL1=BLOQ UX UY A;
CL2=BLOQ UX UY B;
CL3=BLOQ UX UY C;
CL4=BLOQ UX UY D;
CL=CL1 ET CL2 ET CL3 ET CL4;
*-----------------------------------------------
*DEFINITION DES CHARGEMENT
*-----------------------------------------------
FORC1=FORC FY -5.316E6 K;
FORC2=FORC FY -5.316E6 L;
FORCT=FORC1 ET FORC2;
*-----------------------------------------------------------
*DEFINITION DES MATRICES DE RIGIDITE
*-----------------------------------------------------------
RIG1=RIGI MAT1 MO1;
RIGT=RIG1 ET CL;
*----------------------------------------------------------------------
*RESOLUTION DU SYSTEME EQUATION LINEAIRE
*----------------------------------------------------------------------
DEPO=RESO RIGT FORCT;
*------------------------------------------
*DEFINITION DES RESULTAT
*------------------------------------------
REA1=REAC RIG1 DEPo;
EPSI1=EPSI MO1 MAT1 DEPo;
SIGM1=SIGM MO1 MAT1 DEPo;
*---------------------------------------------------
*EXTRACTION DES DEPLACEMENT
*---------------------------------------------------
*DEP1 = EXCO DEPO 'UY' A;
DEF0 = DEFO LT DEPO 0. VERT;
DEF1 = DEFO LT DEPO 1. ROUGE;
*
mess'Efforts Normal dans chaque barre';
*LIST SIGM1;
IA=14;
EF1 = EXTR SIGM1 1 IA 1 EFFX;
EF1 = EF1/1.E4;
IB=15;
EF2 = EXTR SIGM1 1 IB 1 EFFX;
EF2 = EF2/1.E4;
IC=16;
EF3 = EXTR SIGM1 1 IC 1 EFFX;
EF3 = EF3/1.E4;
ID=17;
EF4 = EXTR SIGM1 1 ID 1 EFFX;
EF4 = EF4/1.E4;
IT=EF1 et EF2 et EF3 et EF4;
IT=IT;
list IT;
*TRACE LT (DEF0 et DEF1);
*-----------------------------------------------------------------------
*couplage avec OPTPAR au niveau de l'ecriture de valeurs des
observables
*-----------------------------------------------------------------------
CC1 = CHAINE FORMAT '(4PE20.8)'1. EF1;
CC2 = CHAINE FORMAT '(4PE20.8)'2. EF2;
CC3 = CHAINE FORMAT '(4PE20.8)'3. EF3;
CC4 = CHAINE FORMAT '(4PE20.8)'4. EF4;
DEBPROC @stock FICHEXT*'MOT';
ii = vale impr;
OPTI IMPR 10 IMPR FICHEXT;
MESSAGE CC1;
MESSAGE CC2;
MESSAGE CC3;
MESSAGE CC4;
OPTI IMPR II;
FINPROC;
@stock OBSERVABLES
Fin;
Fin;