module des sciences appliquÉes - …bibliotheque.uqat.ca/documents/rapportsa/83.pdf · ii.2.7....
TRANSCRIPT
MODULE DES SCIENCES APPLIQUÉES
Machine synchrone/asynchrone
PROJET DE FIN D’ETUDE EN INGÉNIERIE DANS LE CADRE DU
PROGRAMME EN GÉNIE ÉLECTROMÉCANIQUE
Présenté par : Mouad Oubidar
Sedik Bendaoud
Superviseur: Fouad Slaoui-hasnaoui, professeur (UQAT), Ph. D., ing
Représentant industriel : Mario Bussières, Directeur général (Bussières électrique).
30 Avril 2010
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud ii
REMERCIEMENTS
Ce rapport de projet se veut le portrait d‟un travail assidu et régulier de ses auteurs durant
toute la session d‟hiver. Aussi cette réalisation se doit à l‟ensemble de la formation
acquise durant le cheminement universitaire. Les fruits de ce travail ont apporté une
grande fierté à l‟équipe, ainsi qu‟une expérience considérable dans le monde des
machines électriques. La réalisation d‟un projet d‟une telle envergure doit ses résultats à
plusieurs intervenants; l‟équipe tient à présenter ses remerciements envers ces personnes,
qui ont apporté un soutien remarquable à ce projet.
Les remerciements sont d‟abord destinés aux parents des étudiants. Les étudiants sont en
effet les fruits de leur éducation et orientation. Malgré les distances qui les séparent d‟eux,
les parents ont su apporter un grand soutien autant moral que pédagogique dans la
réalisation de ce projet.
Un grand merci au professeur superviseur Monsieur Fouad Slaoui-Hassnaoui qui a fait
part tout au long du projet de son expertise, son talent et ses larges connaissances dans le
domaine électrique. Ce qui pour l‟équipe a été très instructif.
Les remerciements vont aussi au représentant industriel Monsieur Mario bussières
directeur général de Bussières électrique pour avoir confié ce projet aux étudiants et de
les avoirs orienté durant sa réalisation.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud iii
RÉSUMÉ
L‟entreprise Bussières électrique Inc. se spécialise dans la réparation et la maintenance
dans plusieurs domaines électrique, selon les exigences et les applications de chaque
client. Aussi l‟entreprise investit sur la recherche et le développement dans ce domaine,
en mettant l‟accent sur le monde des moteurs électriques.
Le projet d‟étude en ingénierie présenté par cette entreprise entre dans le cadre de la
formation de L‟UQAT, et plus précisément au département de génie électromécanique.
Le but de ce projet est de faire une étude bibliographique sur les machines asynchrones
et de faire une étude comparative entre les machines synchrones et asynchrones.
Des recherches documentaires et commerciales ont été effectuées afin de trouver les
informations nécessaires à cette étude. En ce qui concerne la documentation, la recherche
fut basée sur plusieurs publications, des revues scientifiques ainsi que sites internet
proposant des articles de nouvelle technologie.
Au cours du projet, trois travaux essentiels ont été abordés. Premièrement, une étude
bibliographique sur la machine asynchrone a été élaborée grâce à divers références.
Deuxièmement, une étude comparative entre les machines synchrones et asynchrones
incluant l‟analyse de leurs fonctionnements, leurs constitutions, ainsi que leurs avantages
et inconvénients. Et finalement, différentes configurations de fonctionnement en mode
autonome pour la machine asynchrone ont été proposées.
Afin de vérifier les configurations proposées, des simulations ont été réalisés. L‟étude
comparative ainsi-que les résultats ont été discutés en profondeur et confirmés par le
client.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud iv
ABSTRACT
The firm specializes in repairing and service in several domains electrical, according to
requirements and applications of every customer. Also the firm bets on research and
development in this domain, by putting the emphasis on the world of the electrical motors.
The plan of study in engineering introduced by this firm enters as part of the training of
UQAT, and more precisely to the department of electromechanical genius.
The purpose of this plan is to make a bibliographic study on the asynchronous machines
and to make a comparative study between synchronous and asynchronous machine.
Documentary and commercial researches were performed to find information necessary
for this study. As regards material, research was based on several publications, of
scientific magazines as well as Internet sites offering articles of new technology.
In the course of plan, three essential jobs were approached. Firstly, a comparative study
on the synchronous and asynchronous machines, the analysis of their functioning, their
constitutions as well as their advantages and disadvantages were approached; secondly, a
bibliographic study on the asynchronous machine was to work out thanks to
miscellaneous classify; and thirdly, different shapes of functioning in autonomous mode
for the asynchronous machine being offered.
To prove offered shapes, simulation being accomplished. Comparative study and the
results were discussed in depth and confirmed by the customer.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud v
Sommaire
REMERCIEMENTS ........................................................................................................ ii
RÉSUMÉ .......................................................................................................................... iii
ABSTRACT ...................................................................................................................... iv
Chapitre I : Études des besoins et mandat ..................................................................... 1
I.1. Introduction .......................................................................................................... 1
I.2. Description de l‟entreprise ................................................................................... 2
I.3. Mission de l‟entreprise ......................................................................................... 2
I.4. La problématique.................................................................................................. 2
I.5. Description du mandat ......................................................................................... 3
Chapitre II : Cadre théorique .......................................................................................... 4
II.1. Étude bibliographique .......................................................................................... 4
II.2. Machine synchrone .............................................................................................. 5
II.2.1. Définition ...................................................................................................... 5
II.2.2. Mise en équation ........................................................................................... 6
II.2.3. Expression du couple .................................................................................... 8
II.2.4. Fonctionnement dans les quatre quadrants ................................................... 8
II.2.5. Machine synchrone à pôles saillants ............................................................. 9
II.2.6. Référentiels de Park de la machine synchrone ........................................... 11
II.2.7. Utilisation d‟une machine synchrone en alternateur ................................... 12
II.3. Machine asynchrone ........................................................................................... 13
II.3. 1. Principaux domaines d‟utilisation de la machine asynchrone ................ 13
II.3. 2. Principe de fonctionnement:.................................................................... 14
II.3. 3. Construction ............................................................................................ 18
II.3. 4. Constitution ............................................................................................. 19
II.4. Comparaison machine synchrone/ asynchrone : ................................................ 21
Chapitre III : Mise en œuvre du mandat ...................................................................... 24
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud vi
III. 1. Machine asynchrone monophasé auto-excité et auto-régularisé en utilisant une
machine triphasée.......................................................................................................... 24
III.1. 1. Circuit de connexion du (MAAEAR) ..................................................... 25
III.1. 2. Analyse de l‟état permanent .................................................................... 26
III.1. 3. Procédure de la solution : ........................................................................ 28
III.1. 4. Effet de la compensation ......................................................................... 29
III.1. 5. Simulation sur Matlab : ........................................................................... 30
III.1. 6. Résultats et discussion :........................................................................... 31
III. 2. Modélisation de la machine asynchrone auto-excitée avec contrôleur .......... 32
II.2.8. Équations générales de la machine ............................................................. 33
II.2.9. Les différents référentiels de Park de la machine asynchrone ................... 36
II.2.10. Modélisation de la machine asynchrone par représentation d‟état ......... 39
III.2.3. 1. La machine asynchrone auto-excitée ................................................... 43
III.2.3. 2. Modèle global ...................................................................................... 43
III.2.3. 3. Autoamorçage ...................................................................................... 46
III.2.3. 4. Comportement de la génératrice lors de la connexion au réseau ........ 47
III. 3. Résultats expérimentaux ............................................................................. 48
III. 4. Sécurité et défauts liés à la machine synchrone ............................................. 50
III. 5. Intérêt économique de ce projet .................................................................. 59
III. 6. Étude économique ....................................................................................... 60
Conclusion .................................................................................................................... 64
Recommandation .......................................................................................................... 65
References ..................................................................................................................... 66
ANNEXE A .................................................................................................................. 69
ANNEXE B .................................................................................................................. 72
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud vii
Liste des figures
Figure 1:Rotor à pôles lisses et rotor à pôles saillants ........................................................ 6
Figure 2:Circuit équivalent machine synchrone ................................................................. 7
Figure 3: Diagramme de Behn-Eschenbourg ...................................................................... 7
Figure 4: Diagramme de Behn-eschenbourg avec les champs ........................................... 8
Figure 5: Les quatre quadrants de fonctionnement ............................................................. 9
Figure 6 : Alternateur bipolaire à pôles saillants .............................................................. 10
Figure 7 : machine synchrone dans le repère de Park ....................................................... 11
Figure 8 : Circuits électriques de la machine synchrone triphasée dans l'axe d-q en mode
génératrice ......................................................................................................................... 11
Figure 9 : Phaseurs de courants et de tensions .................................................................. 12
Figure 10: Machine synchrone 100 mW ........................................................................... 13
Figure 11: Déplacement du champ magnétique ................................................................ 14
Figure 12: Interaction rotor stator ..................................................................................... 17
Figure 13: Machine asynchrone ........................................................................................ 19
Figure 14: Stator d‟une machine asynchrone basse tension ............................................. 20
Figure 15: Rotor à cage d'écureuil .................................................................................... 21
Figure 16: Rotor bobiné .................................................................................................... 21
Figure 17: Circuit de connexion de la MAAEAR ............................................................ 25
Figure 18: Variation de la reactance [14] ......................................................................... 29
Figure 19: Circuit simulink ............................................................................................... 30
Figure 20: Courbe de tension et du courant ...................................................................... 31
Figure 21: L‟enroulement d‟une machine asynchrone à simple cage ............................... 33
Figure 22: Machine asynchrone au repère de Park ........................................................... 36
Figure 23: Courbe équivalente de saturation .................................................................... 42
Figure 24: Schéma synoptique .......................................................................................... 44
Figure 25: Diagramme d'un régulateur PI branche série .................................................. 45
Figure 26: Phénomène d'autoamorçage ............................................................................ 46
Figure 27: Tension de phase ............................................................................................. 47
Figure 28: Courant de phase ............................................................................................. 47
Figure 29: Courbe de saturation ........................................................................................ 49
Figure 30: Tension triphasé statorique .............................................................................. 49
Figure 31: Répartition des différentes pannes. ................................................................. 50
Figure 32: Sources de défaults de la machine asynchrone à cage .................................... 52
Figure 33: Principaux défauts de la machine asynchrone ................................................. 53
Figure 34: Types de défaults dans les enroulements à billes ............................................ 54
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud viii
Figure 35: Dissymétrie de l'entrefer .................................................................................. 56
Figure 36: Excentricité statique/ dynamique .................................................................... 56
Figure 37: Rupture d'une barre et d'un anneau de court circuit ........................................ 58
Figure 38: Rupture réelle des barres rotoriques ................................................................ 59
Liste des tableaux
Tableau 1: Rotor bobiné et le rotor à cage d'écureuil ....................................................... 21
Tableau 2: Comparaison entre les deux machines ............................................................ 21
Tableau 3: Flux en coordonnées de Park .......................................................................... 37
Tableau 4: Tension en cooordonnées ................................................................................ 38
Tableau 5: Liste de coûts .................................................................................................. 60
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 1
Chapitre I : Études des besoins et mandat
I.1. Introduction
Le présent sert à introduire le projet de fin d‟étude réalisé par l‟équipe. Proposé par une
entreprise de région soit Bussières électrique, le sujet d‟étude consiste à faire une étude
analytique sur les machines électriques synchrones/asynchrones, entre autres, de faire une
analyse sur la constitution des deux machines, leurs principes et leurs modes de
fonctionnement, ainsi que les différents modèles de régulation proposés à la machine
asynchrone. Présentement l‟entreprise travaille sur une machine asynchrone pour
l‟amener à un fonctionnement qui offre les avantages de la machine synchrone soit une
machine asynchrone autonome. Pour des raisons de confidentialité, l‟entreprise n‟a pas
impliqué les étudiants sur l‟invention directement. Cependant, se situer par rapport au
marché actuel est une préoccupation majeure de toutes les entreprises, et c‟est dans ce
même but que le client à confier son projet. Pour son application, créer une certaine
banque de données concernant les machines est une référence de taille pour ces travaux
d‟innovation. Après une recherche bibliographique ainsi qu‟une étude analytique sur les
machines, la première recherche a permis à l‟équipe de ressortir une comparaison entre
les deux machines. L‟étude bibliographique quant à elle a permis de rappeler les
différentes méthodes de régulations existantes pour la machine asynchrone. Deux
méthodes de régulations ont été reproduites dans ce rapport soit la machine asynchrone
auto-excitée autorégularisée et la machine asynchrone auto-excitée avec contrôleur de
vitesse. Étant donné que la première méthode est passive et que la deuxième est une
méthode active, cela donne une idée globale sur les méthodes de régulations actuelles. Ce
rapport résume les principales étapes suivies lors de la réalisation de ce projet soit le
cadre théorique, la mise en œuvre du mandat, les consignes de sécurité, et enfin une
conclusion, suivie des recommandations.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 2
I.2. Description de l’entreprise
L‟entreprise Bussières électrique inc. est une entreprise familiale fondée en 1970. Situer à
Malartic l‟entreprise a connu ses débuts dans le domaine de l‟électromécanique. Active
dans la réparation électrique, elle se fait une place considérable dans le marché en région.
30 ans après sa création, Monsieur Mario Bussières prend la relève de son père et devient
à la tête de l‟entreprise. Tout de suite après son arrivée M. Mario redirige l‟entreprise
dans de nouvelles applications. L‟entreprise est orientée dans l‟innovation et la recherche.
La compagnie connait présentement une période de réflexion, plusieurs projets sont en
attente. Des brevets d‟inventions sont en cours de confirmation auprès des bureaux
responsables. Il est sur que dans le monde de la recherche, l‟investissement du temps est
un facteur essentiel. L‟entreprise Bussières électrique s‟investit donc dans un domaine
prometteur qui va définitivement produire des résultats importants.
I.3. Mission de l’entreprise
La mission de Bussières électrique est d‟offrir une très haute qualité de produits dans le
secteur électrique qui répondent à la demande de sa clientèle. L‟entreprise réalise
continuellement des recherches et essais dans ses laboratoires pour réaliser de nouveaux
produits, ceci lui permettra de devenir un leader dans le marché.
I.4. La problématique
Bussières électrique est une entreprise de recherche et d‟innovation dans le domaine
électrique. Présentement l‟industrie travaille sur un projet innovateur. Une génératrice
électrique à usage personnel fournit une certaine tension avec une fréquence donnée.
Cependant, ces deux paramètres sont fixés à une charge donnée. En d‟autres mots,
présentement une génératrice qui alimente une charge variable ne peut pas garder une
tension et une fréquence constante sans l‟ajout d‟un dispositif de contrôle. L‟idée de notre
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 3
client est de modifier la conception de la génératrice pour lui permettre de garder la
même tension à la même fréquence, peu importe la charge supportée. Ce système serait
aussi fonctionnel quelque soit l‟organe d‟entrainement soit hydraulique, moteur à gaz, ou
encore une éolienne. Le prototype n‟ayant pas encore été finalisé; le client a donc besoin
de pousser ses études et de faire une étude comparative entre la génératrice synchrone et
la génératrice asynchrone. Cette étude permettra au client de faire des ajustements sur son
invention. Ses façons de faire restent jusqu'à présent confidentielles.
I.5. Description du mandat
La problématique nous donne une idée générale sur l‟objectif de Bussières électrique, ses
besoins ainsi que ses contraintes. Notre mandat comporte :
Étude bibliographique sur la machine asynchrone.
Étude analytique sur la machine synchrone/asynchrone.
Comparaison entre les deux machines.
Étude des régulations de la machine asynchrone.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 4
Chapitre II : Cadre théorique
II.1. Étude bibliographique
L‟étude bibliographique présente une partie du mandat, elle est très importante pour le
client qui aimerait savoir ce qui s‟est passé au niveau des recherches depuis l‟apparition
de la machine asynchrone.
La machine asynchrone a vu son premier jour en 1887 par Nicolas Tesla, à l‟année
suivante Ferraris Galileo développa la théorie des machines tournantes, l‟année d‟après a
connu la construction du premier moteur à cage d‟écureuil par Michail Ossipowitsch et
Doliwo-Dobrowolski. En 1912, Paul Boucherot découvrit le rotor à encoches profondes
et le stator à double cages afin de résoudre le problème d‟appel de courant et celui du
couple de démarrage. À cette époque, la génératrice asynchrone ou généralement la
machine asynchrone était rarement utilisée, car la faiblesse de cette dernière est son auto-
excitation, l‟amorçage de la génératrice nécessite de l‟énergie réactive. Deux méthodes
seulement peuvent fournir cette énergie, soit la technique passive qui se base sur un banc
de capacités, ou la technique active qui nécessite la présence d‟un dispositif (circuit
électronique de puissance) pour contrôler la génératrice.
Pour la première méthode, elle a été développée par plusieurs chercheurs; en 1935 Basset
[1] avait travaillé sur les capacités d‟excitation des génératrices asynchrone, quatre ans
après Wagner [2] a continué sur le même travail, mais malgré ça, la génératrice
asynchrone restait un produit non commercialisé jusqu‟aux années cinquante.
La méthode de contrôle active a vu son jour grâce à l‟avènement de l‟électronique de
puissance. Cette méthode permet de régulariser la tension et ainsi que la fréquence, après
cet événement la machine asynchrone a envahi plusieurs domaines (transport,
industrie…). De nombreuses recherches ont été orientées sur la régulation de la machine
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 5
et sur les phénomènes d‟auto-excitation. Les vingt dernières années présentent une
explosion au niveau de cette recherche, une centaine d‟articles et de recherches ont été
publiés durant cette période. Tout le monde sait maintenant que l‟utilisation de la
technique passive (bancs de condensateurs) donne la solution la plus économique et offre
plusieurs configurations «simple shunt», ou «série shunt», ces différentes configurations
ont été développées par Shridhar en 1993 [3] et Wang en 1997 [4] afin d‟améliorer la
régulation de la tension aux bornes de la charge et de garder une fréquence stable. À
noter aussi qu‟il y a deux travaux de maitrise qui ont été dirigés par René Wamkeue à
l‟Université du Québec en Abitibi-Témiscamingue qui rassemblent partiellement
plusieurs sujets reliés à la machine asynchrone. Le premier travail est réalisé par Songia
Luca en 2004 [5,6] qui a modélisé et optimisé les paramètres d‟opération et régulation en
tension par flux orienté de la génératrice asynchrone triphasée. Le deuxième travail est
réalisé par Christian Joliette en 2007 qui a étudié le développement des modèles d‟essais
et application à l‟identification des machines synchrones et asynchrones [7]. Dans la
pratique, la conception des machines électriques demande une étude approfondie sur les
défaillances des machines électriques, plusieurs recherches et études ont été produites
dans ce sens, les auteurs sont cités dans les références de ce travail.
II.2. Machine synchrone
II.2.1. Définition
Toute machine électrique dont laquelle la vitesse de rotation du rotor est égale à la vitesse
de rotation du champ tournant est appelé machine synchrone. Pour l‟obtention d‟un tel
fonctionnement, le champ magnétique rotorique doit être généré soit par des aimants, soit
par un circuit d‟excitation. Cela dit, qu‟en mode permanent la position du champ
magnétique rotorique est alors fixe par rapport au rotor, ceci impose une vitesse de
rotation identique entre le rotor et le champ tournant statorique.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 6
Deux modes de fonctionnement sont à distinguer pour les machines synchrones. En mode
génératrice, elle produit un courant électrique dont la fréquence est déterminée par la
vitesse de rotation du rotor. En mode moteur elle consomme un courant électrique pour
faire tourner le rotor à une vitesse déterminé par la fréquence du courant.
Les grandeurs des machines varient de quelques Watts pour les petits moteurs à plusieurs
centaines de mégawatts pour les alternateurs de grande puissance. Par ailleurs, la
structure de ces machines reste très semblable. Deux parties sont à distinguer, le stator est
constitué d‟enroulements triphasés qui par interaction avec le champ magnétique
rotorique crée un couple électromécanique, le rotor quant à lui est responsable de générer
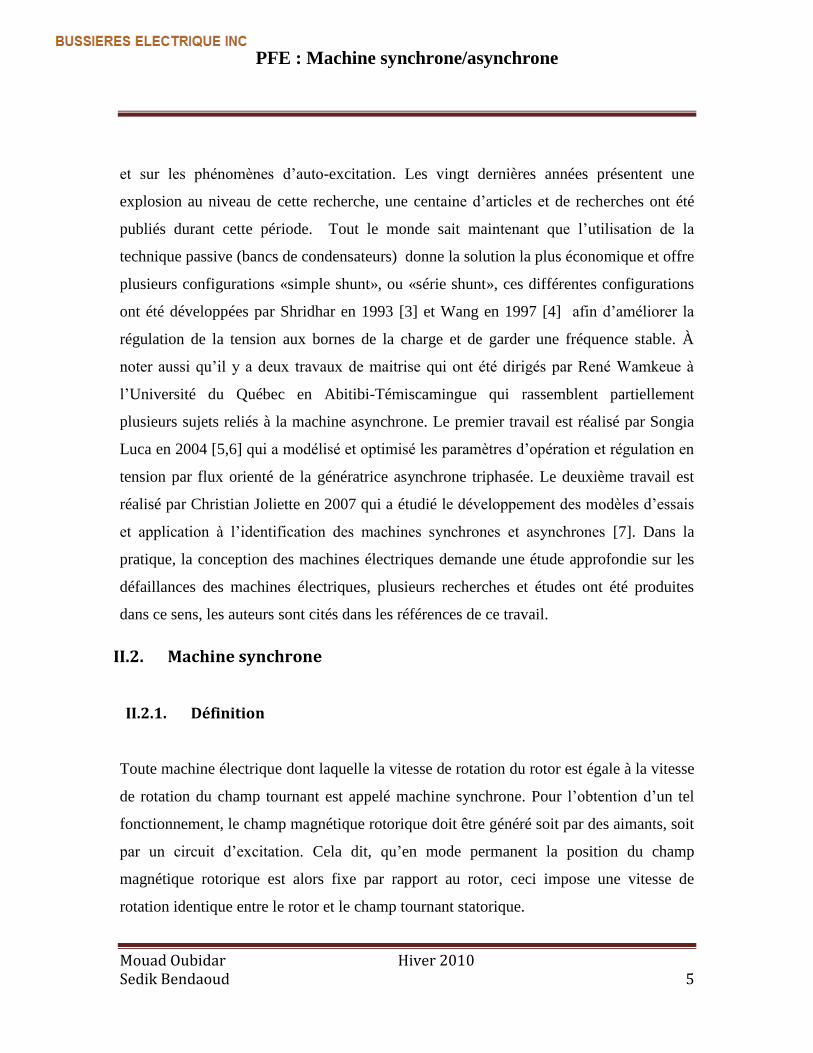
le champ d‟induction. Il existe trois sortes de rotor, les rotors bobinés à pôles lisses, les
rotors bobinés à pôles saillants (Figure 1), et finalement les rotors à aimant.
Figure 1:Rotor à pôles lisses et rotor à pôles saillants
II.2.2. Mise en équation
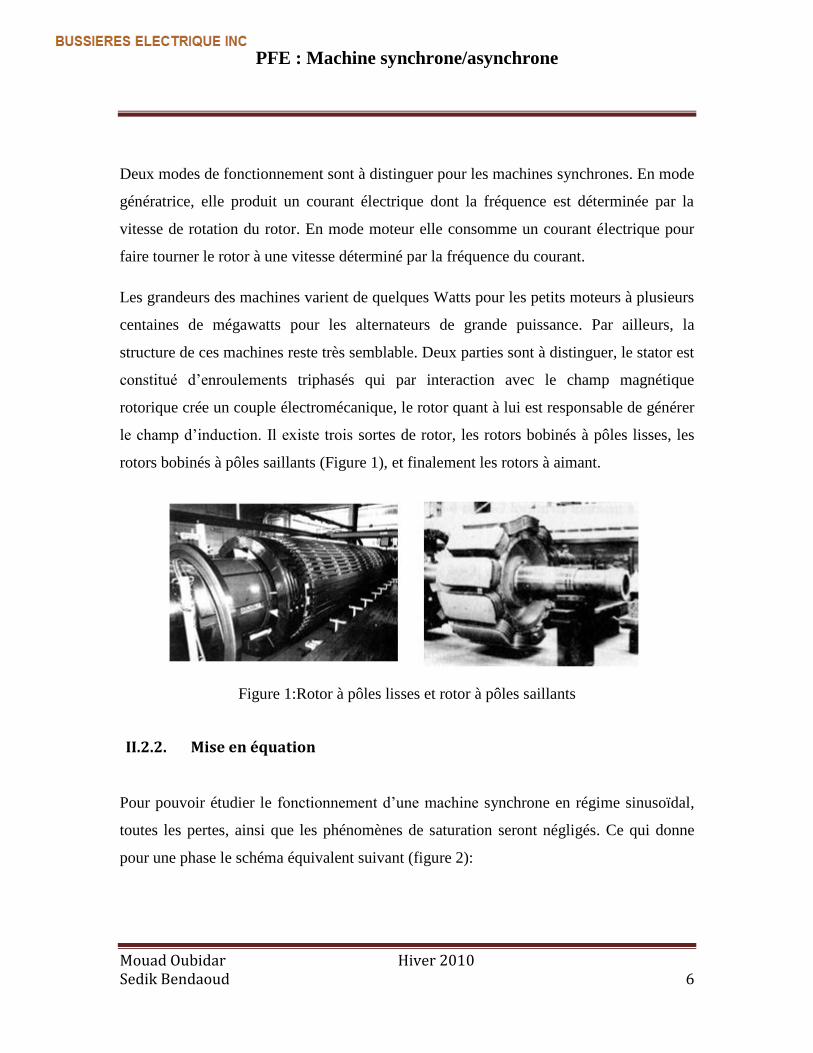
Pour pouvoir étudier le fonctionnement d‟une machine synchrone en régime sinusoïdal,
toutes les pertes, ainsi que les phénomènes de saturation seront négligés. Ce qui donne
pour une phase le schéma équivalent suivant (figure 2):
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 7
Figure 2:Circuit équivalent machine synchrone
À noter :
𝜔𝑠 : La vitesse du champ tournant.
L : Inductance cyclique de la machine.
E(t) : La f.e.m. crée par le champ magnétique rotorique dans une phase de la machine.
E : La valeur efficace de e(t).
Le déphasage entre V et I.
Ф : Le déphasage entre E et I.
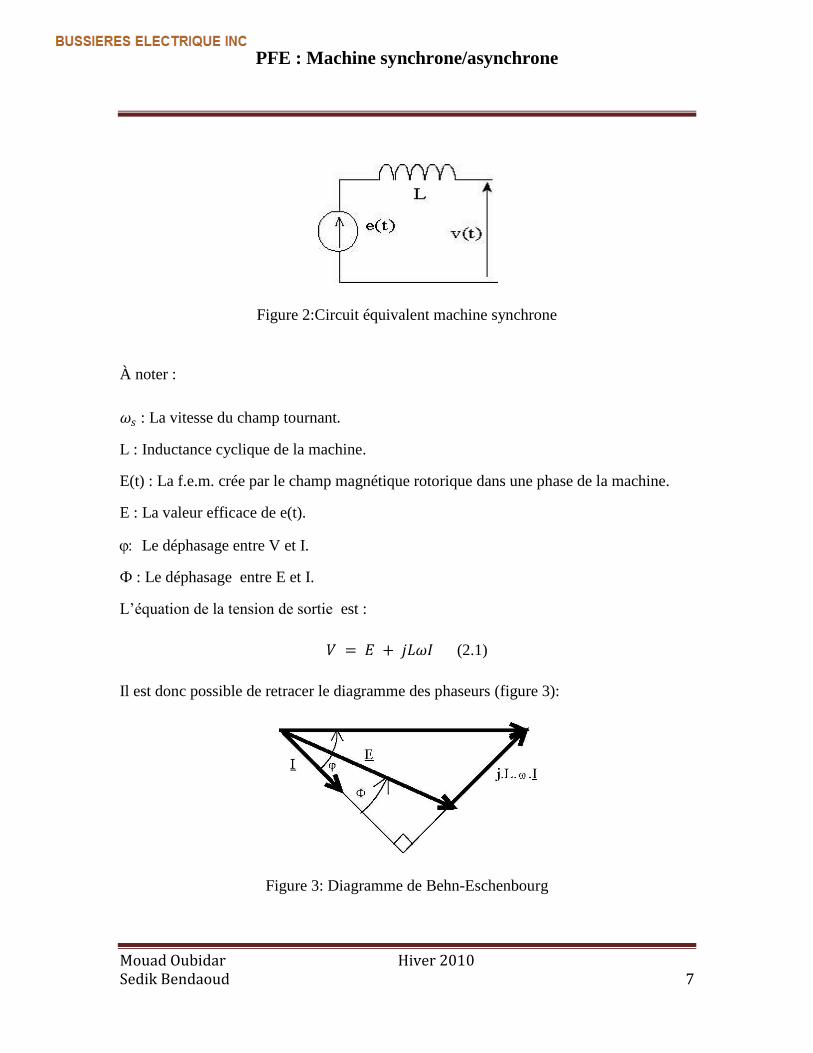
L‟équation de la tension de sortie est :
𝑉 = 𝐸 + 𝑗𝐿𝜔𝐼 (2.1)
Il est donc possible de retracer le diagramme des phaseurs (figure 3):
Figure 3: Diagramme de Behn-Eschenbourg

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 8
Si on veut tracer sur ce même diagramme l‟image des champs statorique et rotorique, il
suffit de mettre en phase le courant avec le champ statorique et de mettre le champ
rotorique en retard par rapport au courant de 𝜋
2− Ф.
Figure 4: Diagramme de Behn-eschenbourg avec les champs
II.2.3. Expression du couple
Il est possible d‟établir une première expression du couple en réalisant un bilan des
puissances au niveau de la machine. En négligent toutes les pertes l‟équation de la
puissance (2.2) s‟écrit tel-que :
𝑃é𝑙𝑒𝑐𝑡𝑟𝑖𝑞𝑢𝑒 = 𝑃𝑚é𝑐𝑎𝑛𝑖𝑞𝑢𝑒 (2.2)
La f.e.m E s‟écrit sous la forme de :
𝑒 𝑡 = 𝑛𝑠 ∗𝑑Ф𝑟
𝑑𝑡
𝐶. 𝜔𝑠 = 3𝐸𝐼𝑐𝑜𝑠 (𝜙) (2.3)
Le couple est donc proportionnel à l‟angle de déphasage. Pour le contrôle du couple il
faudrait passer par le contrôle d‟angle.
II.2.4. Fonctionnement dans les quatre quadrants
Une des particularités de la machine synchrone est sa capacité à fonctionner dans les
quatre quadrants électriques. Il est en effet possible de rendre à volonté la machine

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 9
inductive ou capacitive, que ce soit en fonctionnement moteur ou générateur. Il suffit
pour cela de jouer sur l‟amplitude de E, c'est-à-dire sur le courant d‟excitation rotorique.
On obtient alors les diagrammes de Behn-Eschenbourg suivants (Figure 5) :
Figure 5: Les quatre quadrants de fonctionnement
Il est possible de constater que lors d‟un fonctionnement capacitif, la f.e.m. E est
supérieure à la tension d‟alimentation, on dit que la machine est surexcitée. Lors d‟un
fonctionnement inductif, la f.e.m. E est inférieure à la tension d‟alimentation, on dit que
la machine est sous-excitée.
II.2.5. Machine synchrone à pôles saillants
La machine synchrone triphasée comprend un stator et un rotor portant tous deux des
enroulements. L‟enroulement statorique comporte 3 phases identiques décalées entre
elles dans l‟espace d‟un angle électrique égal à 2π/3 (a, b et c).

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 10
Figure 6 : Alternateur bipolaire à pôles saillants
Mise en équation
Les équations de tensions sont mises sous forme matricielle
[𝑢]𝑎𝑏𝑐 = [𝑅𝑠][𝑖]𝑎𝑏𝑐 + 𝑑𝛹𝑎𝑏𝑐
𝑑𝑡 (2.4)
Pour le rotor
𝑢𝑓 = 𝑅𝑓 𝑖𝑓 +𝑑𝛹𝑓
𝑑𝑡(2.5)
Le flux sous forme matricielle
[𝛹]𝑎𝑏𝑐 = [𝐿𝑠][𝑖]𝑎𝑏𝑐 + 𝐿𝑠𝑟 𝑖𝑓(2.6)
[𝛹]𝑓 = [𝐿𝑠𝑟 ]′[𝑖]𝑎𝑏𝑐 + 𝐿𝑠𝑟𝑓(2.7)
Le couple électromagnétique s'écrit donc sous la forme
𝑇𝑒 = 𝑝 𝑑𝛹𝑎𝑏𝑐
𝑑𝜃𝑖𝑎𝑏𝑐 +
𝑑𝛹𝑓
𝑑𝜃Î𝐹 (2.8)
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 11
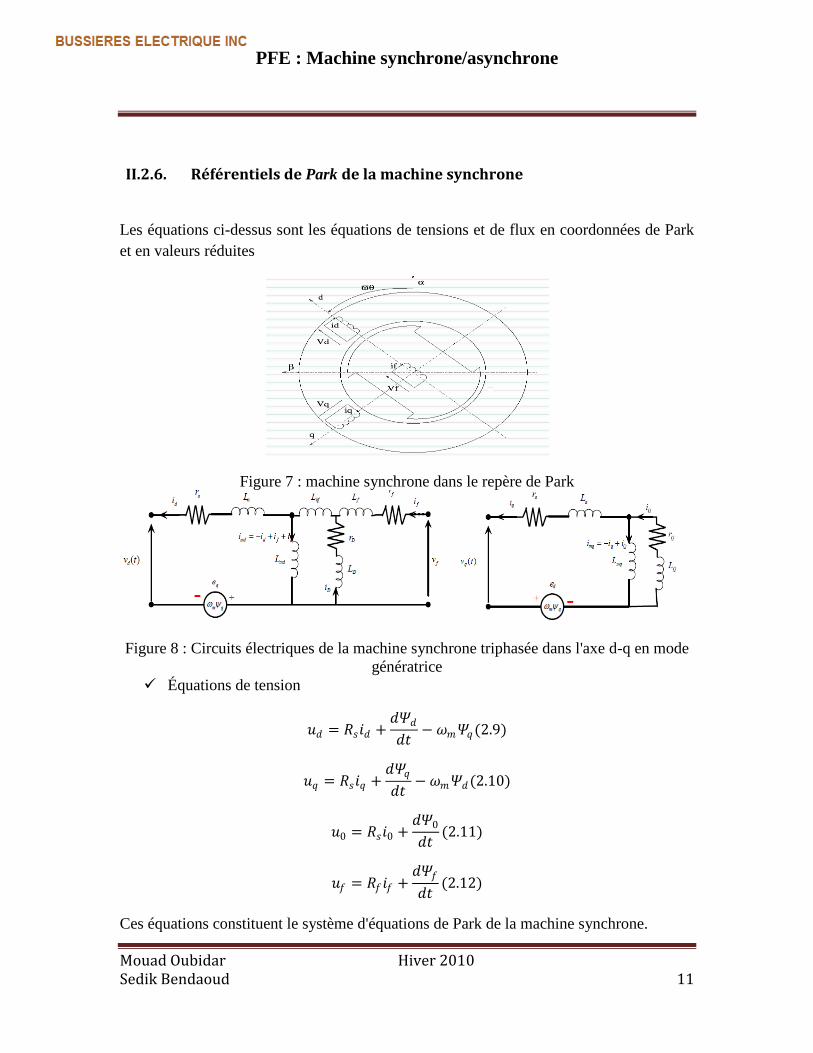
II.2.6. Référentiels de Park de la machine synchrone
Les équations ci-dessus sont les équations de tensions et de flux en coordonnées de Park
et en valeurs réduites
Figure 7 : machine synchrone dans le repère de Park
Figure 8 : Circuits électriques de la machine synchrone triphasée dans l'axe d-q en mode
génératrice
Équations de tension
𝑢𝑑 = 𝑅𝑠𝑖𝑑 +𝑑𝛹𝑑
𝑑𝑡− 𝜔𝑚𝛹𝑞(2.9)
𝑢𝑞 = 𝑅𝑠𝑖𝑞 +𝑑𝛹𝑞
𝑑𝑡− 𝜔𝑚𝛹𝑑(2.10)
𝑢0 = 𝑅𝑠𝑖0 +𝑑𝛹0
𝑑𝑡(2.11)
𝑢𝑓 = 𝑅𝑓 𝑖𝑓 +𝑑𝛹𝑓
𝑑𝑡(2.12)
Ces équations constituent le système d'équations de Park de la machine synchrone.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 12
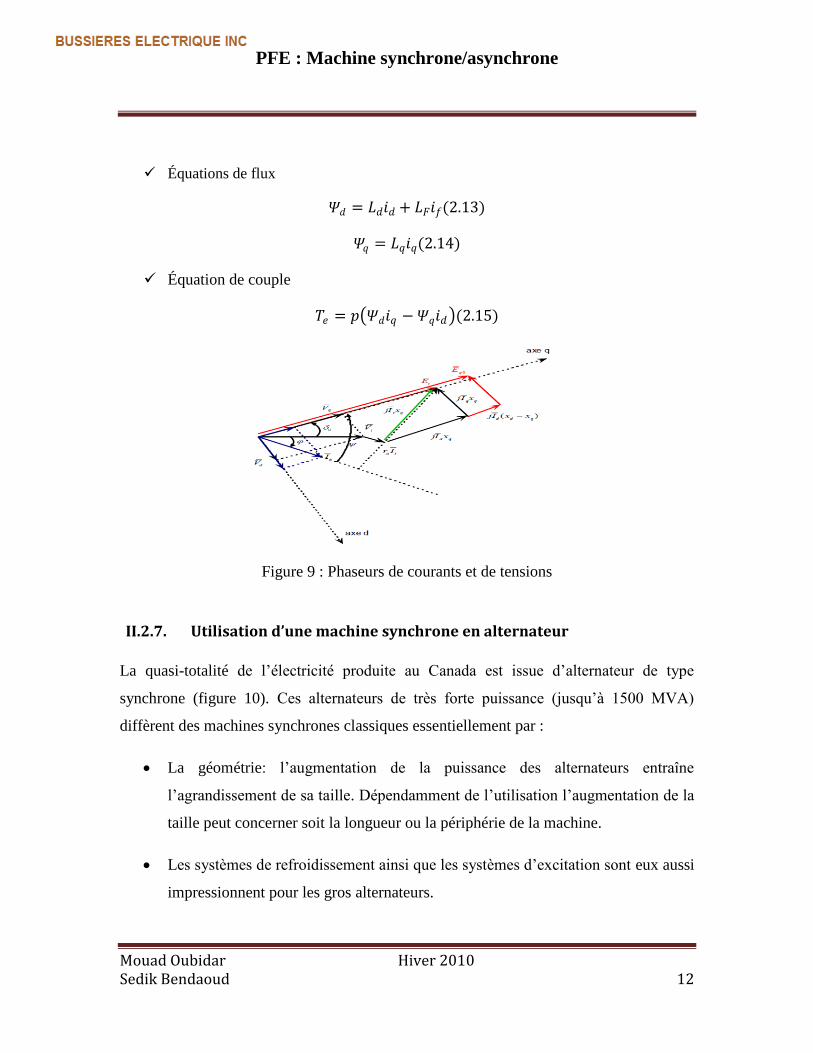
Équations de flux
𝛹𝑑 = 𝐿𝑑𝑖𝑑 + 𝐿𝐹𝑖𝑓(2.13)
𝛹𝑞 = 𝐿𝑞𝑖𝑞(2.14)
Équation de couple
𝑇𝑒 = 𝑝 𝛹𝑑𝑖𝑞 − 𝛹𝑞𝑖𝑑 (2.15)
Figure 9 : Phaseurs de courants et de tensions
II.2.7. Utilisation d’une machine synchrone en alternateur
La quasi-totalité de l‟électricité produite au Canada est issue d‟alternateur de type
synchrone (figure 10). Ces alternateurs de très forte puissance (jusqu‟à 1500 MVA)
diffèrent des machines synchrones classiques essentiellement par :
La géométrie: l‟augmentation de la puissance des alternateurs entraîne
l‟agrandissement de sa taille. Dépendamment de l‟utilisation l‟augmentation de la
taille peut concerner soit la longueur ou la périphérie de la machine.
Les systèmes de refroidissement ainsi que les systèmes d‟excitation sont eux aussi
impressionnent pour les gros alternateurs.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 13
Figure 10: Machine synchrone 100 mW
II.3. Machine asynchrone
La machine asynchrone est une machine à courant alternatif qui ne possède pas de
connexion entre le stator et le rotor. Le terme asynchrone provient du fait que la vitesse
du rotor est différente de la pulsation des courants du stator.
II.3. 1. Principaux domaines d’utilisation de la machine asynchrone
La machine asynchrone est très utilisée dans les applications industrielles, car de par sa
conception, son cout est relativement moindre à celui des autres machines, sa robustesse
au niveau électromagnétique est grande, et une bonne standardisation existe entre les
différents fabricants. Cependant, la simplicité de conception de cette machine cache une
complexité fonctionnelle assez importante.
La machine asynchrone a longtemps été fortement concurrencée par la machine
synchrone dans les domaines de forte puissance, jusqu'à l'avènement de l'électronique de
puissance. On la retrouve aujourd'hui dans de nombreuses applications, notamment dans
le transport (métro, trains, propulsion des navires), dans l'industrie (machines-outils),
dans l'électroménager. Elle était à l'origine uniquement utilisée en moteur, mais toujours
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 14
grâce à l'électronique de puissance, elle est de plus en plus souvent utilisée en
génératrice; c'est par exemple le cas des éoliennes.
II.3. 2. Principe de fonctionnement:
Pour appréhender le fonctionnement de la machine asynchrone, on considère l‟expérience
du flux coupé en fonctionnement générateur que l‟on modifie de la façon suivante, cette
fois les conducteurs de longueur l sont fixés entre eux et court-circuités par des barres
conductrices extrêmes formant ainsi un rail [8].
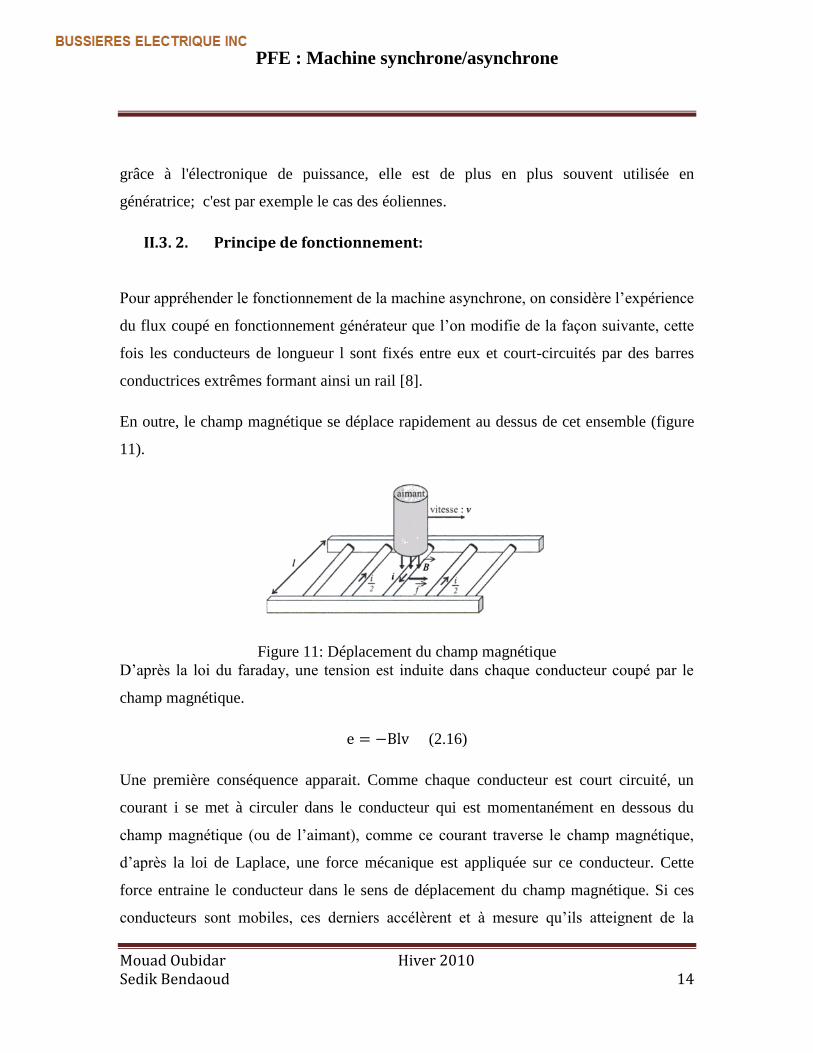
En outre, le champ magnétique se déplace rapidement au dessus de cet ensemble (figure
11).
Figure 11: Déplacement du champ magnétique
D‟après la loi du faraday, une tension est induite dans chaque conducteur coupé par le
champ magnétique.
e = −Blv (2.16)
Une première conséquence apparait. Comme chaque conducteur est court circuité, un
courant i se met à circuler dans le conducteur qui est momentanément en dessous du
champ magnétique (ou de l‟aimant), comme ce courant traverse le champ magnétique,
d‟après la loi de Laplace, une force mécanique est appliquée sur ce conducteur. Cette
force entraine le conducteur dans le sens de déplacement du champ magnétique. Si ces
conducteurs sont mobiles, ces derniers accélèrent et à mesure qu‟ils atteignent de la
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 15
vitesse, la vitesse à laquelle le champ magnétique est coupé par ces conducteurs ralentit
et la tension induite diminue, de même que le courant i. Cet effet de la loi de Lenz a pour
conséquence de diminuer la force de la place. Ainsi si les conducteurs se déplaçaient à la
même vitesse que le champ magnétique, la tension induite, le courant i et la force
s‟annuleraient. La vitesse du rotor est donc légèrement inferieure à la vitesse du champ
magnétique.
Dans une machine asynchrone à cage, le rail dans l‟exemple présenté à la figure 7 en
dessus est recourbé pour former la cage d‟écureuil et le déplacement du champ
magnétique devient un champ tournant créé par trois bobines/enroulements au stator. Les
bobinages au stator sont alimentés par un système triphasé de courant de même pulsation
et engendrent des flux statoriques. De part le théorème de Ferraris [9], un champ
magnétique tournant est créé dans l‟entrefer (et se reboucle dans la carcasse du rotor et du
stator). Sa vitesse encore appelée la vitesse du synchronisme est égale à la pulsation du
système triphasé équilibré de courants qui parcourent ces enroulements, pour le stator de
la machine asynchrone étudiée, le champ magnétique généré par le stator tourne de un
tour par période des grandeurs électriques; dans le cas où le stator serait composé d‟un
nombre de paire de pôle par phase quelconque (p), la vitesse de synchronisme serait
donc Ωs = ωs/p.
Comme expliqué précédemment, la vitesse de l‟arbre de la machine est inferieure à la
vitesse de synchronise en régime établi,Ω ≠ Ωs les conducteurs du rotor sont alors
soumis à un champ magnétique variable qui tourne par rapport à eux-mêmes à la vitesse
relativeΩr = Ωs − Ω.
Il en résulte l‟induction de f.é.m. dans ces conducteurs de pulsation ωr = pΩr
Les enroulements au stator étant en circuit fermé sur eux-mêmes pour les machines à
cage, les f.é.m. induites vont donner naissance dans le circuit rotorique fermé à des
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 16
courants rotoriques de même pulsation. Ces courants créent à leur tour un champ
magnétique rotorique qui tourne par rapport au rotor à la vitesse Ωr = ωr/p
Étant donné que le rotor tourne à la vitesseΩr , la vitesse du champ magnétique par
rapport au stator est Ω + Ωr = Ωs
Le champ magnétique généré par les enroulements du rotor et le champ magnétique
généré par les enroulements du stator tournent donc à la même vitesse du synchronisme
et s‟associent pour créer « un champ magnétique résultant » dans l‟entrefer. Ainsi, les
phénomènes physiques engendrés par le circuit stratorique, y compris ceux induits par le
circuit rotorique vont générer des grandeurs électriques au niveau du circuit statorique à
la pulsationωs . Les grandeurs électriques propres au circuit rotorique seront toutes à la
pulsation ωr .
Différentes caractéristiques de la machine asynchrone
Les courants alternatifs dans le stator créent un champ magnétique B1 tournant à
la pulsation de synchronisme :
Ωs =ω
p (2.17)
Ωs : vitesse synchrone de rotation du champ tournant en rad/s
ω : Pulsation des courants alternatifs en rad/s ω = 2πf (2.18)
p : nombre de paires de pôles.

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 17
Figure 12: Interaction rotor stator
Le rotor n‟est relié à aucune alimentation. Il tourne à la vitesse de rotation Ω
Des courants induits circulent dans le rotor.
L‟entrefer est l‟espace entre le stator et le rotor.
Glissement
Le rotor tourne à la vitesse Ω plus petite que la vitesse de synchronismeΩs .
On dit que le rotor glisse par rapport au champ tournant.
Ce glissement g va dépendre de la charge.
g =ns−n
ns=
Ωs−Ω
Ωs (2.19)
𝑛𝑠 : vitesse de rotation de synchronisme du champ tournant (tr/s).

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 18
𝑛 : vitesse de rotation du rotor (trs/s).
Ωs = 2πns et Ω = 2πn
II.3. 3. Construction
La machine asynchrone comporte une partie fixe constituée d‟une carcasse à l‟intérieur
de laquelle sont logés le circuit magnétique et le bobinage du stator d‟une part, et une
partie mobile appelée rotor d‟autre part.
La carcasse nervurée à ailettes longitudinales est un monobloc en fonte ou en acier.
Sur chaque moteur est fixé coté opposé à l‟accouplement un capot en tôle d‟acier ou
alliage d‟aluminium ou polyester thermodurcissable armé de fibres de verres, à
l‟intérieur duquel se trouve le ventilateur monté sur l‟arbre.
Aspiré à travers le grillage du capot par le ventilateur, à ailettes droites permettant un
fonctionnement correct dans les deux sens de rotation, l‟air de refroidissement est pulsé le
long des ailettes de la carcasse.
Les circuits magnétiques sont fabriqués avec de la tôle magnétique au silicium, à faibles
pertes (par exemple : 1.7 W/kg, à un Tesla et à 60Hz) et isolée double face; elle est
découpée à la presse, encochée puis simplifiée. [8]
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 19
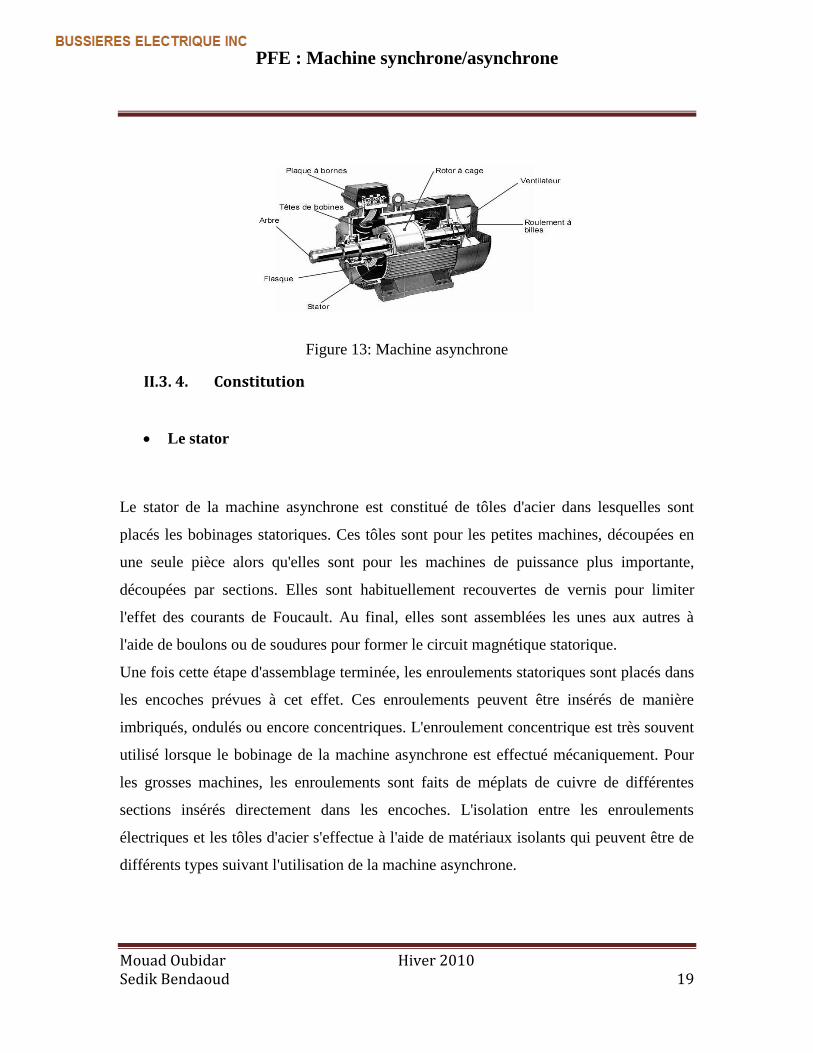
Figure 13: Machine asynchrone
II.3. 4. Constitution
Le stator
Le stator de la machine asynchrone est constitué de tôles d'acier dans lesquelles sont
placés les bobinages statoriques. Ces tôles sont pour les petites machines, découpées en
une seule pièce alors qu'elles sont pour les machines de puissance plus importante,
découpées par sections. Elles sont habituellement recouvertes de vernis pour limiter
l'effet des courants de Foucault. Au final, elles sont assemblées les unes aux autres à
l'aide de boulons ou de soudures pour former le circuit magnétique statorique.
Une fois cette étape d'assemblage terminée, les enroulements statoriques sont placés dans
les encoches prévues à cet effet. Ces enroulements peuvent être insérés de manière
imbriqués, ondulés ou encore concentriques. L'enroulement concentrique est très souvent
utilisé lorsque le bobinage de la machine asynchrone est effectué mécaniquement. Pour
les grosses machines, les enroulements sont faits de méplats de cuivre de différentes
sections insérés directement dans les encoches. L'isolation entre les enroulements
électriques et les tôles d'acier s'effectue à l'aide de matériaux isolants qui peuvent être de
différents types suivant l'utilisation de la machine asynchrone.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 20
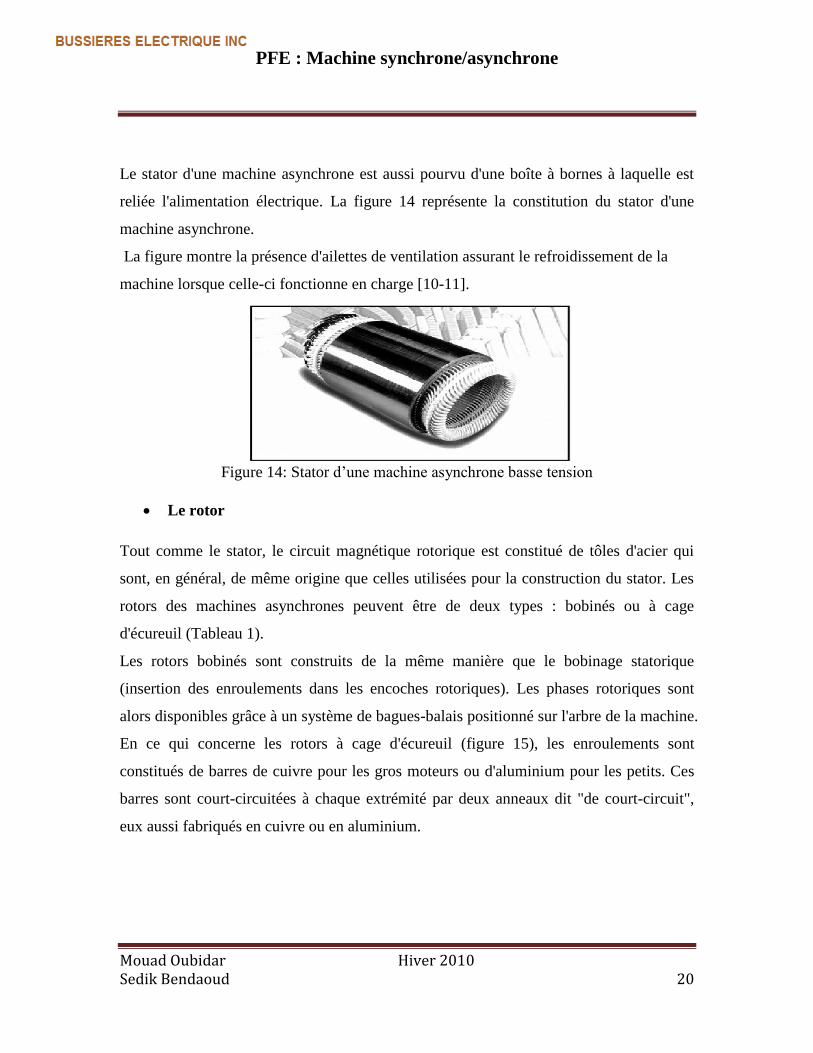
Le stator d'une machine asynchrone est aussi pourvu d'une boîte à bornes à laquelle est
reliée l'alimentation électrique. La figure 14 représente la constitution du stator d'une
machine asynchrone.
La figure montre la présence d'ailettes de ventilation assurant le refroidissement de la
machine lorsque celle-ci fonctionne en charge [10-11].
Figure 14: Stator d‟une machine asynchrone basse tension
Le rotor
Tout comme le stator, le circuit magnétique rotorique est constitué de tôles d'acier qui
sont, en général, de même origine que celles utilisées pour la construction du stator. Les
rotors des machines asynchrones peuvent être de deux types : bobinés ou à cage
d'écureuil (Tableau 1).
Les rotors bobinés sont construits de la même manière que le bobinage statorique
(insertion des enroulements dans les encoches rotoriques). Les phases rotoriques sont
alors disponibles grâce à un système de bagues-balais positionné sur l'arbre de la machine.
En ce qui concerne les rotors à cage d'écureuil (figure 15), les enroulements sont
constitués de barres de cuivre pour les gros moteurs ou d'aluminium pour les petits. Ces
barres sont court-circuitées à chaque extrémité par deux anneaux dit "de court-circuit",
eux aussi fabriqués en cuivre ou en aluminium.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 21
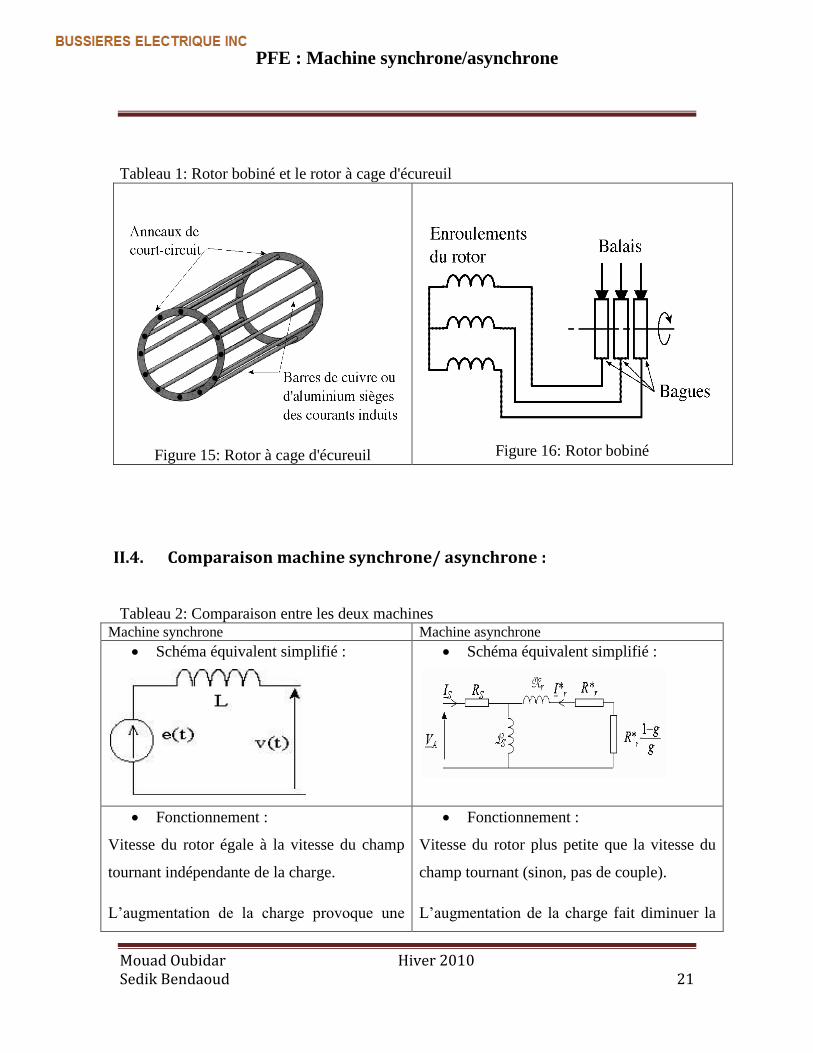
Tableau 1: Rotor bobiné et le rotor à cage d'écureuil
Figure 15: Rotor à cage d'écureuil
Figure 16: Rotor bobiné
II.4. Comparaison machine synchrone/ asynchrone :
Tableau 2: Comparaison entre les deux machines Machine synchrone Machine asynchrone
Schéma équivalent simplifié :
Schéma équivalent simplifié :
Fonctionnement :
Vitesse du rotor égale à la vitesse du champ
tournant indépendante de la charge.
L‟augmentation de la charge provoque une
Fonctionnement :
Vitesse du rotor plus petite que la vitesse du
champ tournant (sinon, pas de couple).
L‟augmentation de la charge fait diminuer la

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 22
variation du déphasage entre le rotor et le
champ tournant.
Le rotor est constitué d‟aimants permanents
ou d‟électroaimant. Dans le deuxième cas, on
doit fournir un courant d‟excitation au rotor.
vitesse. (plus de glissement, ceci dit plus la
variation du flux est grande et plus le courant
dans le rotor et le couple sont grand.
Le rotor est constitué de bobinage en court-
circuit (exemple : cage d‟écureuil). Certains
gros moteurs ont la possibilité d‟ajouter des
résistances en série pour diminuer le courant
dans le rotor donc le courant d‟alimentation «
moteur à bagues »
Avantage :
Bon rendement (0.985 pour gros alternateurs).
Facteur de puissance réglable en fonction du
courant d‟excitation.
Avantage :
Bonne standardisation entre les fabricants.
Démarrage en direct sur le réseau (grand
couple de démarrage).
Robuste, peu d‟entretiens.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 23
Inconvénients :
Pour les moyens/gros moteurs
(électroaimant), demande un entretien des
bagues.
Si on demande trop de couple à un moteur
synchrone, il décroche. Le couple chute alors
à zéro.
Ne permet pas un démarrage en direct sur le
réseau sauf pour les moteurs auto-synchrones
hybrides, ils possèdent une cage d‟écureuil
qui permet d‟atteindre la vitesse synchrone à
vide.
Inconvénients :
La vitesse dépend de la charge.
Pour les moteurs de moyenne et grande
puissance, le temps de démarrage est long
(inertie), il faut gérer la pointe de courant de
démarrage égale 6 à 8 fois le courant
nominal.
Le cos φ à vide est très faible (non réglable)
rendement moins bon (0.9 pour gros moteurs)
Secteur d‟utilisation :
- Production d‟énergie (alternateur à
bon rendement)
- Application nécessitant une vitesse
stable en fonction de la charge
- Moteur pas à pas
- Moteur brushless
Secteur d‟utilisation :
- Le grand standard industriel
- Entraînements divers
- Parfois utilisé comme génératrice dans
les éoliennes.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 24
Chapitre III : Mise en œuvre du mandat
III. 1. Machine asynchrone monophasé auto-excité et auto-
régularisé en utilisant une machine triphasée.
La présente analyse décrit le fonctionnement d'un générateur monophasé asynchrone
auto-excité autorégulé qui utilise une machine triphasée. Les équations des paramètres
sont dérivées utilisant la méthode des composantes symétriques tandis que la méthode de
recherche du modèle de Hooke et de Jeevs est employée pour la détermination des
variables de la machine. Les avantages du générateur incluent la configuration simple du
circuit, une légère régulation de tension, un bon équilibre de phase, et un bon rendement
de puissance. Avec un choix approprié de capacités série et shunt, une condition de
fonctionnement presque équilibrée peut être obtenue pour une certaine charge. L‟analyse
théorique est validée par des simulations.
L‟exploitation étendue de ressources d'énergie renouvelable et du développement de
systèmes de puissance autonomes a causé l'utilisation populaire des générateurs
asynchrones auto-excités (MAAE). Étant donné que beaucoup de systèmes de puissance
autonomes fournissent à des charges monophasées, les générateurs asynchrones de phase
simple doivent être utilisés. Les moteurs asynchrones de phase simple peuvent
fonctionner comme (MAAE), mais en général ils sont limités à des puissances
relativement petites. Pour les estimations de puissance au-dessus de 5 kW, les machines
de trois phases sont à plus faible coût et sont plus disponibles, ce qui amène une tendance
récente d‟employer des machines triphasées pour une phase simple d'application en
MAAE. Al-bahrani et Malik [12] ont analysé ce mode d'action monophasé d'un
générateur asynchrone de trois phases dans lequel la capacité d'excitation et la charge ont
été raccordées en parallèle. Cependant, seulement deux phases du générateur connecté en
étoile étaient impliquées dans le processus de conversion d'énergie, l'utilisation sinueuse
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 25
était pauvre, et les phases de la machine étaient sévèrement déséquilibrées. Plus
récemment, Fukami [13] a étudié un générateur asynchrone autorégulé auto-excité de
phase simple, en utilisant une machine triphasée. Par l'inclusion des capacités de
compensation en série, la régulation du voltage a été améliorée. Cependant, le
déséquilibre de phase était de nouveau un problème, et seulement une puissance de sortie
de 1 kW a été obtenue pour une machine estimée à 2.2 kW. Auparavant, Chan [14] a
analysé l'opération d'un générateur d'induction triphasé auto-excité avec une simple
capacité et alimentant une charge monophasée. L‟enquête a montré que la meilleure
performance du générateur a été obtenue en utilisant la connexion Steinmetz qui inclut
une capacité shunt, avec une capacité d'excitation raccordée en série avec la charge. Ici,
la compensation de la capacité série est incorporée dans cette configuration pour donner
un générateur monophasé auto-excité auto-régularisé (MAAEAR) avec une régulation de
la tension réduite et une puissance de sortie plus élevée. L‟analyse théorique sera vérifiée
par des simulations.
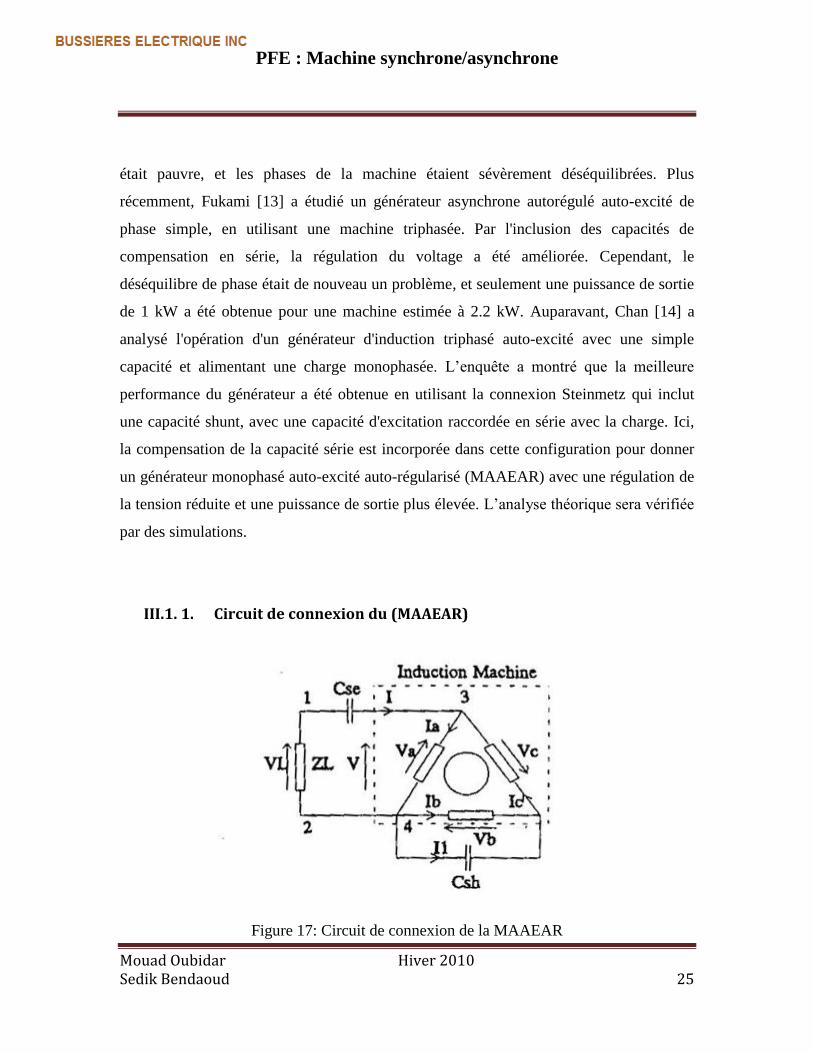
III.1. 1. Circuit de connexion du (MAAEAR)
Figure 17: Circuit de connexion de la MAAEAR

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 26
La figue 17 montre la connexion de circuit de la phase simple (MAAEAR) basée sur la
connexion Steinmetz. La charge monophasée est raccordée en parallèle avec la phase A
(la phase de référence), pendant que la capacité d'excitation Csh (capacité shunt) est
raccordée en parallèle avec la phase B (la phase langing). En plus de l'établissement de
puissance réactive pour le soutien de l'auto-excitation. Csh agit aussi comme une phase de
balance. La capacité de compensation Cse (capacité serie) est en série avec la charge et
fournit de la puissance réactive supplémentaire quand le courant de charge augmente.
Pour faciliter l'analyse, tous les voltages et les paramètres du circuit équivalents ont été
représenté à la fréquence (estimée) de la base fbase en utilisant les paramètres suivants :
1. La fréquence a définit par unité de mesure :
a = (fréquence actuelle)/ (fréquence de base)
2. La vitesse b définit par unité de mesure :
b = (vitesse du rotor actuelle) / (vitesse synchrone correspondante à la
fréquence de base)
III.1. 2. Analyse de l’état permanent
En se référent à la figure 17 et en adoptant la convention moteur pour la direction des
courants, les équations suivantes peuvent être écrite [14]:
𝑉 = 𝑉𝑎 (3.1)
𝑉𝑎 + 𝑉𝑏 + 𝑉𝑐 = 0 (3.2)
I1 = 𝑉𝑏𝑌𝑠 = 𝐼𝑐 – 𝐼𝑏 (3.3)
𝐼 = 𝐼𝑎 – 𝐼𝑐 (3.4)
En (3.3), Ysh est l‟admittance shunt de la capacité d‟excitation donné par:

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 27
𝑌𝑠 = 1/𝑧𝑠 = 𝑗2𝜋𝑓𝑏𝑎𝑠𝑒 𝐶𝑠𝑎2 (3.5)
La solution pour les équations en utilisant l'analyse des composantes symétrique donne
les séquences de tension positifs et ceux d'ordre négatifs:
𝑉𝑃 = 3 ∗ 𝑉 ∗𝑌𝑛 +
𝐸𝑗𝜋 /6
3∗𝑌𝑆
𝑌𝑠+𝑌𝑝 +𝑌𝑛 (3.6)
𝑉𝑛 = 3 ∗ 𝑉 ∗𝑌𝑛 +
𝐸−𝑗𝜋 /6
3∗𝑌𝑆
𝑌𝑠+𝑌𝑝 +𝑌𝑛 (3.7)
L‟impédance de sortie du générateur asynchrone à travers les équations 3 et 4 peut être
exprimée comme :
𝑍𝑖𝑛 = 𝑍𝑝𝑍𝑛 +𝑍𝑃𝑍𝑠+𝑍𝑛𝑍𝑠
3𝑍𝑠+𝑍𝑃+𝑍𝑛 (3.8)
Les détails sur l'impédance d'ordre positive Zp et l'impédance d'ordre négative Zn sont
donnés dans Annexe A.
Pour l‟accumulation de tension, la somme d'impédances dans la boucle 1234 doit être
égale à zéro (3.9).
𝑍𝑖𝑛 + 𝑍𝐿 + 𝑍𝑠𝑒 = 0 (3.9)
Avec
𝑍𝐿 =𝑅𝐿
𝑎+ 𝐽𝑋𝐿 (3.10)
Et
Zse =1
j2πfbase Cse a2 (3.11)
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 28
Pour une condition d'utilisation donnée, (3.9) peut être résolu pour l‟obtention de la
fréquence par-unité et de la réactance magnétique Xm. Les performances du générateur
peuvent alors être calculées en utilisant (3.1)-(3.7) ainsi que les équations des
composantes symétriques et la courbe de magnétisation de la machine d'induction.
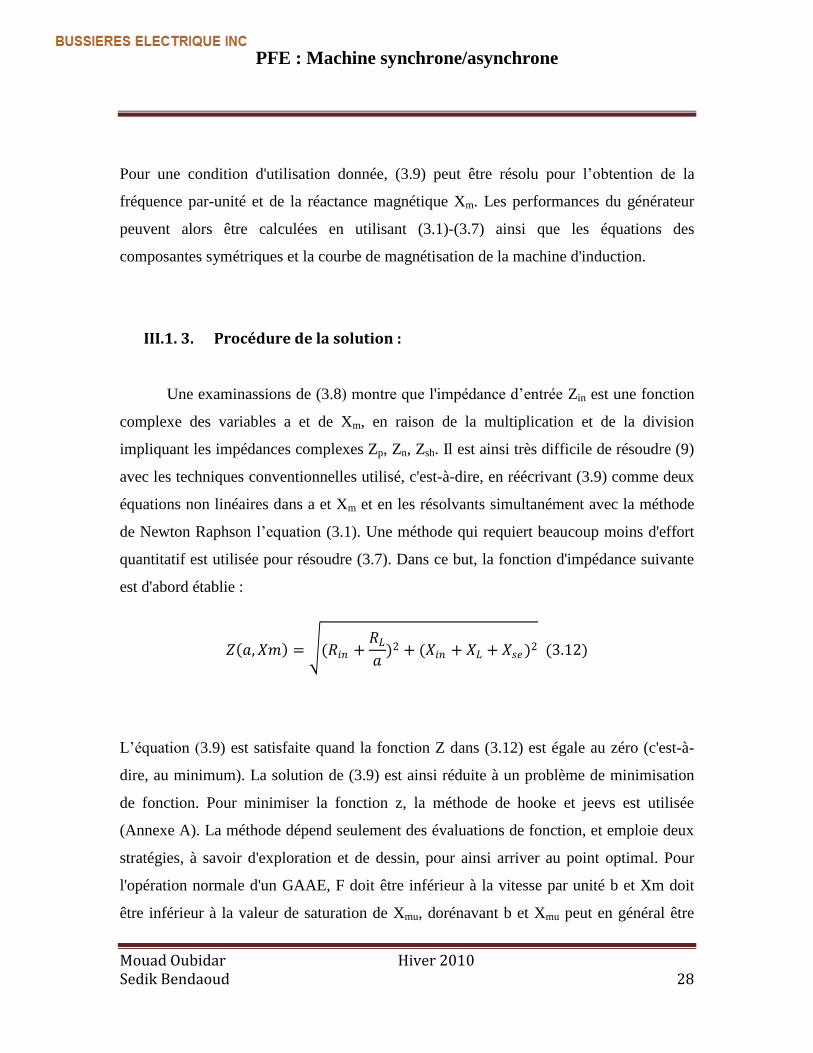
III.1. 3. Procédure de la solution :
Une examinassions de (3.8) montre que l'impédance d‟entrée Zin est une fonction
complexe des variables a et de Xm, en raison de la multiplication et de la division
impliquant les impédances complexes Zp, Zn, Zsh. Il est ainsi très difficile de résoudre (9)
avec les techniques conventionnelles utilisé, c'est-à-dire, en réécrivant (3.9) comme deux
équations non linéaires dans a et Xm et en les résolvants simultanément avec la méthode
de Newton Raphson l‟equation (3.1). Une méthode qui requiert beaucoup moins d'effort
quantitatif est utilisée pour résoudre (3.7). Dans ce but, la fonction d'impédance suivante
est d'abord établie :
𝑍 𝑎, 𝑋𝑚 = (𝑅𝑖𝑛 +𝑅𝐿
𝑎)2 + (𝑋𝑖𝑛 + 𝑋𝐿 + 𝑋𝑠𝑒)2 (3.12)
L‟équation (3.9) est satisfaite quand la fonction Z dans (3.12) est égale au zéro (c'est-à-
dire, au minimum). La solution de (3.9) est ainsi réduite à un problème de minimisation
de fonction. Pour minimiser la fonction z, la méthode de hooke et jeevs est utilisée
(Annexe A). La méthode dépend seulement des évaluations de fonction, et emploie deux
stratégies, à savoir d'exploration et de dessin, pour ainsi arriver au point optimal. Pour
l'opération normale d'un GAAE, F doit être inférieur à la vitesse par unité b et Xm doit
être inférieur à la valeur de saturation de Xmu, dorénavant b et Xmu peut en général être
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 29
choisi comme les estimations initiales de a et de Xm respectivement, pour commencer la
procédure de recherche. Mais quand l'impédance de charge est petite, il peut être
nécessaire d'utiliser de plus petites valeurs initiales, comme 0.95 b, pour réduire le
nombre d'évaluations de fonction.
Une capacité d'excitation de 125 µF et une capacité de compensation série de 370 µF sont
utilisées. La vitesse par unité et le facteur de puissance de la charge sont tous les deux
égaux à l'unité.
III.1. 4. Effet de la compensation
En choisissant la valeur de la capacité de compensation série Cse, il faudrait considérer la
tension à travers Cse ainsi que la quantité de puissance réactive disponible. Une grande
valeur de Cse implique une petite tension en ses bornes, mais la puissance réactive est
aussi petite. D‟autre part, une petite valeur de Cse implique une plus grande tension mais
fournit plus de puissance réactive à la compensation.
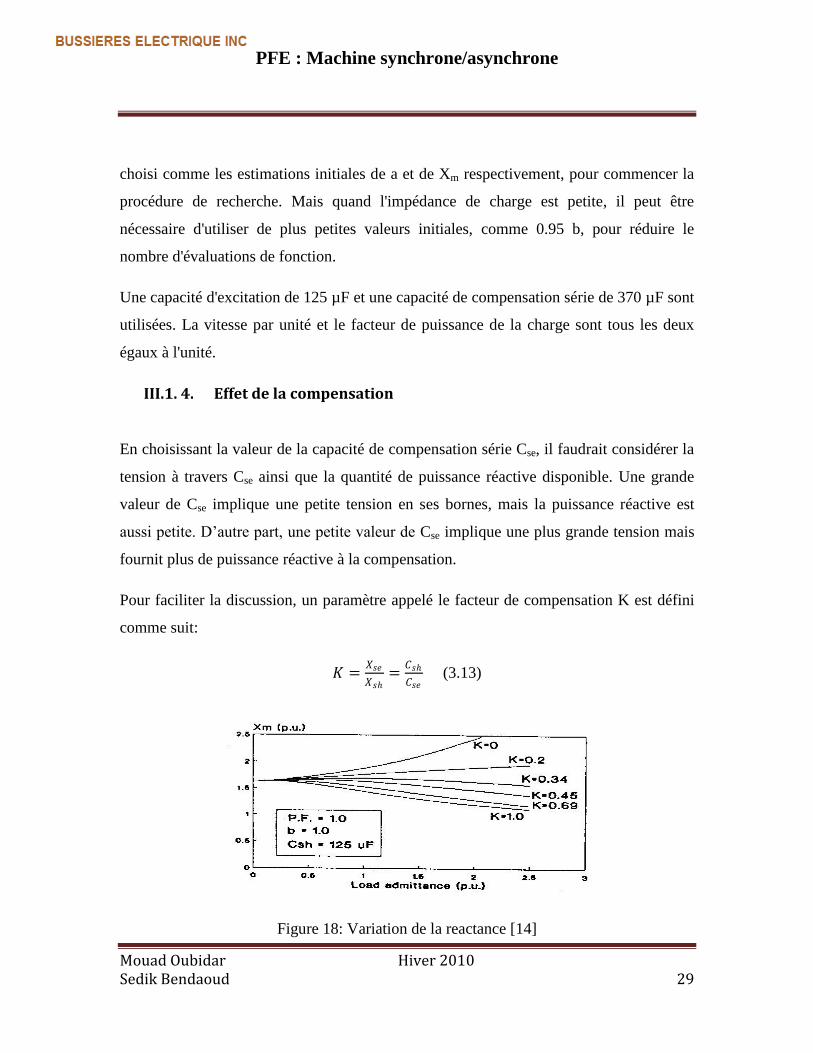
Pour faciliter la discussion, un paramètre appelé le facteur de compensation K est défini
comme suit:
𝐾 =𝑋𝑠𝑒
𝑋𝑠=
𝐶𝑠
𝐶𝑠𝑒 (3.13)
Figure 18: Variation de la reactance [14]
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 30
Xse et Xsh sont les réactances de la capacité de compensation série et de la capacité
d'excitation de shunt, respectivement. La figure 18 montre la variation calculée de la
réactance de magnétisation Xm, avec l'admittance Y de charge pour différentes valeurs de
K.
À K=0.34, X demeure substantiellement constante sur la gamme pratique de l'admittance
de charge. Le niveau de saturation de la machine varie légèrement avec la charge. Aussi
les meilleures caractéristiques de régulation de tension sont obtenues quand K est entre
0.34 et 0.45.
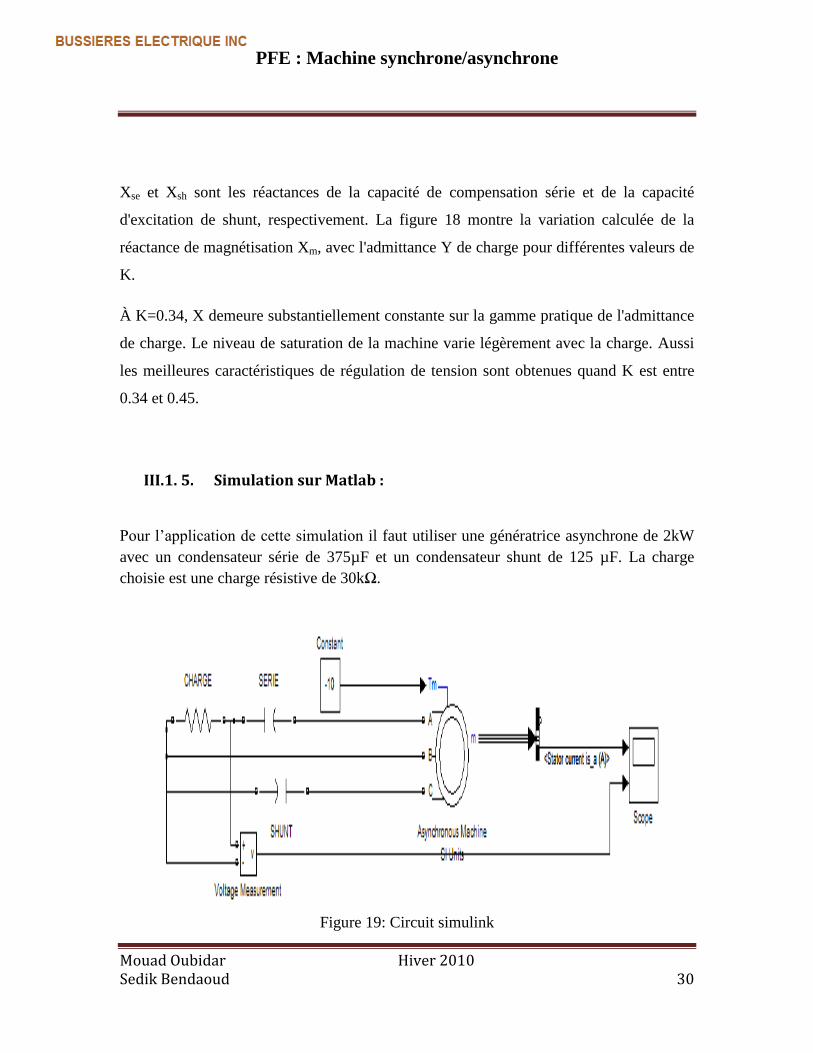
III.1. 5. Simulation sur Matlab :
Pour l‟application de cette simulation il faut utiliser une génératrice asynchrone de 2kW
avec un condensateur série de 375µF et un condensateur shunt de 125 µF. La charge
choisie est une charge résistive de 30kΩ.
Figure 19: Circuit simulink
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 31
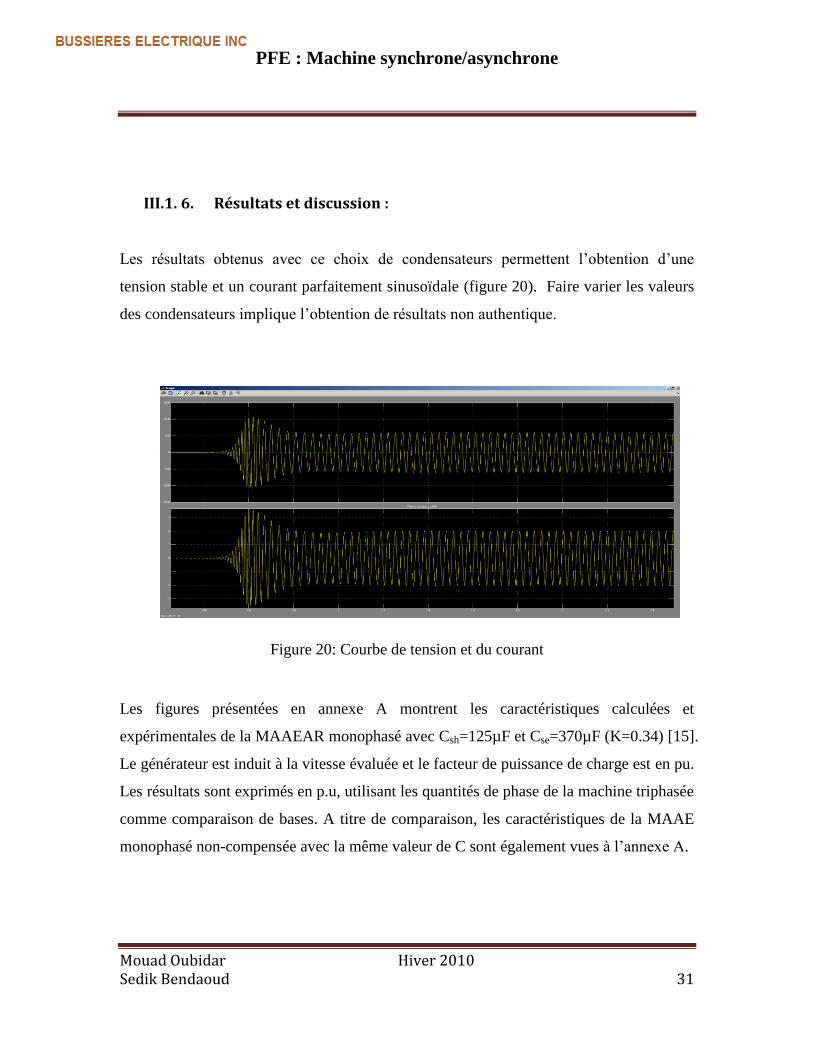
III.1. 6. Résultats et discussion :
Les résultats obtenus avec ce choix de condensateurs permettent l‟obtention d‟une
tension stable et un courant parfaitement sinusoïdale (figure 20). Faire varier les valeurs
des condensateurs implique l‟obtention de résultats non authentique.
Figure 20: Courbe de tension et du courant
Les figures présentées en annexe A montrent les caractéristiques calculées et
expérimentales de la MAAEAR monophasé avec Csh=125µF et Cse=370µF (K=0.34) [15].
Le générateur est induit à la vitesse évaluée et le facteur de puissance de charge est en pu.
Les résultats sont exprimés en p.u, utilisant les quantités de phase de la machine triphasée
comme comparaison de bases. A titre de comparaison, les caractéristiques de la MAAE
monophasé non-compensée avec la même valeur de C sont également vues à l‟annexe A.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 32
Comparer à la MAAE, la MAAEAR peut fournir un résultat de puissance étendu. À un
courant de charge de 1.8 pu, le rendement de puissance est de 1.6 pu. Pour la MAAE
non-compensée, le rendement de puissance maximum est seulement de 0.85 p.u [15].
En ce qui concerne les rendements de la MAAEAR et de la MAAE. Avec un facteur de
compensation de 0.34, le rendement maximum calculé est de 0.78 pour un courant de
charge de 1.6pu, pendant que le rendement expérimental est de 0.81. Avec la MAAE non
compensé, le rendement maximum calculé est de 0.78 alors que l'efficacité expérimentale
est de 0.77. L‟efficacité de la MAAEAR est ainsi très légèrement plus haute que celle de
la MAAE non-compensée.
Pour ce qui est des courants et tensions de phase de la MAAEAR. Les résultats
confirment que la balance de phase est satisfaisante quand le courant de charge est plus
grand de 1.0 p.u. À un courant de charge de 1.6 p.u, les tensions de phase sont quasiment
égales.
III. 2. Modélisation de la machine asynchrone auto-excitée avec
contrôleur
À la présente section, les équations mécaniques et électriques de la machine asynchrone à
cage en se basant sur le modèle de Park sont présentées [9]. Ces équations doivent être
utiles pour représenter la machine à simple cage. Pour ce faire un modèle de machine à
circuits rotoriques ajustables est proposé [16]. La saturation magnétique doit être prise en
considération dans ce modèle
Hypothèses de simplification :
Le flux magnétique au début est non-saturé pour permettre d‟exprimer les flux
comme fonctions linéaires des courants
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 33
Le circuit magnétique est proposé feuilleté. Le phénomène d‟hystérésis et les
courants de Foucault sont négligés
Les effets thermiques sont négligés
Les frottements sont négligés
Le fonctionnement de la machine est considéré en régime équilibré
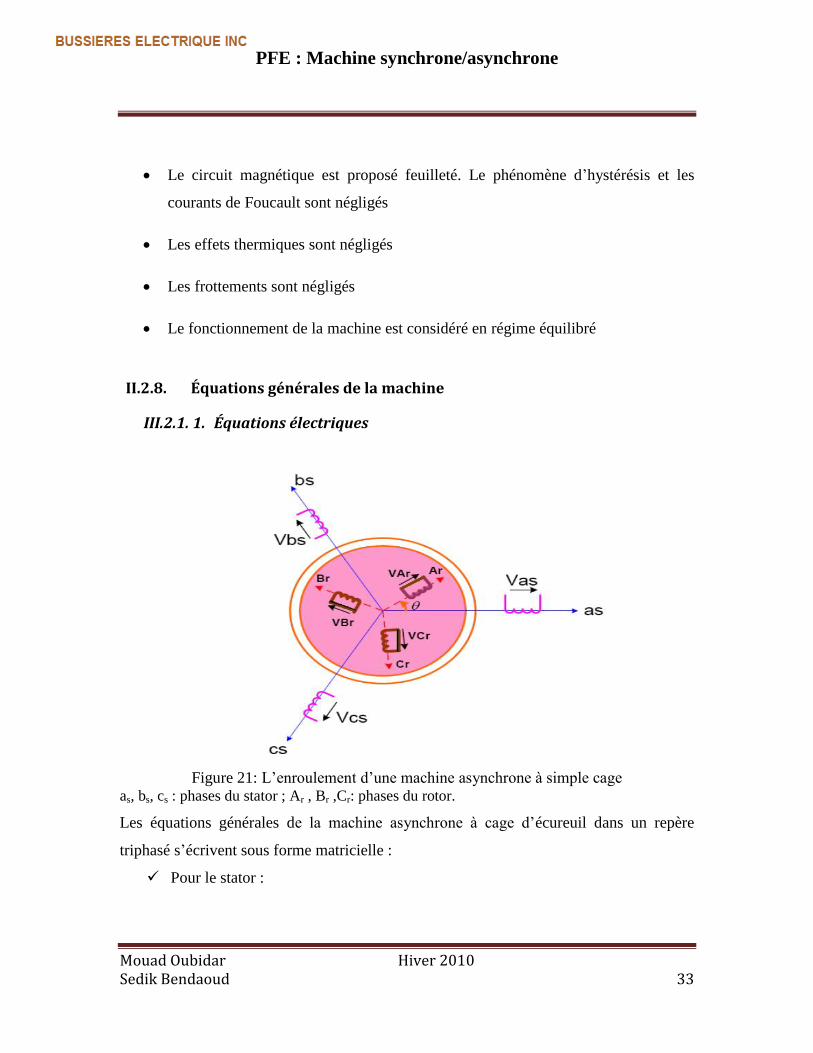
II.2.8. Équations générales de la machine
III.2.1. 1. Équations électriques
Figure 21: L‟enroulement d‟une machine asynchrone à simple cage as, bs, cs : phases du stator ; Ar , Br ,Cr: phases du rotor.
Les équations générales de la machine asynchrone à cage d‟écureuil dans un repère
triphasé s‟écrivent sous forme matricielle :
Pour le stator :

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 34
𝑢𝑎 = 𝑅𝑎 𝑖𝑎 + 𝑑𝜑𝑎
𝑑𝑡 (3.14)
𝑢𝑏 = 𝑅𝑎 𝑖𝑏 + 𝑑𝜑𝑏
𝑑𝑡 (3.15)
𝑢𝑏 = 𝑅𝑎 𝑖𝑐 + 𝑑𝜑𝑐
𝑑𝑡 (3.16)
Pour le rotor :
𝑅𝐴𝑖𝐴 + 𝑑𝜑𝐴
𝑑𝑡= 0 (3.17)
𝑅𝐴𝑖𝐵 + 𝑑𝜑𝐵
𝑑𝑡= 0 (3.18)
𝑅𝐴𝑖𝐴 + 𝑑𝜑𝐶
𝑑𝑡= 0 (3.19)
𝑢𝑎 , 𝑢𝑏 , 𝑢𝑐 ∶ Tensions instantanées aux bornes de l’enroulement statorique en [V]
𝑖𝑎 , 𝑖𝑏 , 𝑖𝑐 : Courants instantanés dans les phases de l’enroulement statorique en [A]
𝑖𝐴 , 𝑖𝐵 , 𝑖𝐶: Courants instantanés dans la phase de l’enroulement rotorique en [A]
𝑅𝑎 , 𝑅𝐴: Résistances rotoriques et statoriques en [Ω]
𝜑𝑎 , 𝜑𝑏 ,𝜑𝑐 : Flux totalisés traversant l’enroulement statorique en [Wb]
𝜑𝐴 , 𝜑𝐵 , 𝜑𝐶: Flux totalisés traversant les enroulements rotoriques en Wb
[𝜑𝑎𝑏𝑐 ] = 𝐿𝑠 𝐼𝑎𝑏𝑐 + 𝐿𝑠𝑟 + [𝐼𝐴𝐵𝐶 ] (3.20)
[𝜑𝐴𝐵𝐶 ] = 𝐿𝑠𝑟 𝐼𝑎𝑏𝑐 + 𝐿𝑟 + [𝐼𝐴𝐵𝐶 ] (3.21)
Avec :

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 35
𝐿𝑠 = 𝐿𝑎𝑎 𝐿𝑎𝑏 𝐿𝑎𝑐
𝐿𝑏𝑎 𝐿𝑏𝑏 𝐿𝑏𝑐
𝐿𝑐𝑎 𝐿𝑎𝑏 𝐿𝑐𝑐
(3.22)
𝐿𝑟 =
𝐿𝐴𝐴 𝐿𝐴𝐵 𝐿𝐴𝐶
𝐿𝐵𝐴 𝐿𝐵𝐵 𝐿𝐵𝐶
𝐿𝐶𝐴 𝐿𝐴𝐵 𝐿𝐶𝐶
(3.23)
𝐿𝑠𝑟 = 𝐿𝑠𝑟𝑚𝑎𝑥
cos(𝜃) cos(𝜃 +
2𝜋
3) cos(𝜃 −
2𝜋
3)
cos(𝜃 −2𝜋
3) cos(𝜃) cos(𝜃 +
2𝜋
3)
cos(𝜃 +2𝜋
3) cos(𝜃 −
2𝜋
3) cos(𝜃)
(3.24)
III.2.1. 2. Équations mécaniques
L‟équation mécanique correspond à l‟équation de [17].
𝐽𝑑𝛺
𝑑𝑡= 𝑇𝑒 − 𝐷𝛺 − 𝑇𝑚 (3.25)
Avec :
𝑤 = 𝑃𝑝𝛺𝑚 (3.26)
J : Moment d‟inertie totale des masses tournantes en [Kg m2]
Ωm : Vitesse angulaire du rotor en [s-1]
Te : Couple électromagnétique en [Nm]
D : Coefficient de frottement visqueux en [Nm s]
Tm Couple de charge en [Nm]
ω : Pulsation mécanique du rotor en [s-1]
pp : Paires de pôles
Ce système d‟équations différentielles obtenu est à coefficient non-constant à cause de sa
dépendance de l‟angle électrique θ. Pour mieux représenter le comportement d‟une machine
asynchrone, il est nécessaire de faire appel à un modèle précis et suffisamment simple. Le
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 36
modèle diphasé (d, q) donné par la transformation de Park est alors utilisé [17]. Le nouveau
modèle est obtenu en multipliant les équations des flux et des tensions par la matrice de Park
qui s‟exprime par :
𝑓𝑑𝑓𝑞𝑓0
=2
3
cos 𝜃 cos 𝜃 −
2𝜋
3 cos 𝜃 +
2𝜋
3
− sin 𝜃 − sin 𝜃 −2𝜋
3 − sin 𝜃 +
2𝜋
3
1
2
1
2
1
2
𝑓𝑎𝑓𝑏𝑓𝑐
(3.27)
𝑓: 𝑇𝑒𝑛𝑠𝑖𝑜𝑛, 𝑐𝑜𝑢𝑟𝑎𝑛𝑡 𝑜𝑢 𝑓𝑙𝑢𝑥
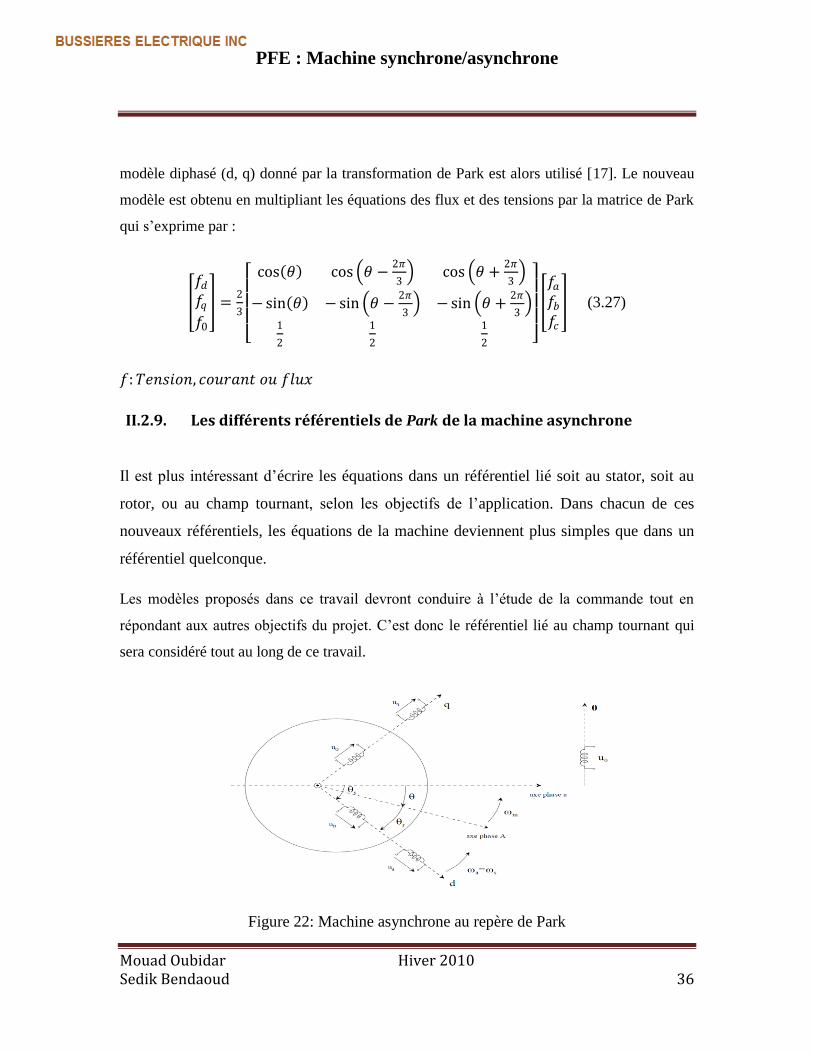
II.2.9. Les différents référentiels de Park de la machine asynchrone
Il est plus intéressant d‟écrire les équations dans un référentiel lié soit au stator, soit au
rotor, ou au champ tournant, selon les objectifs de l‟application. Dans chacun de ces
nouveaux référentiels, les équations de la machine deviennent plus simples que dans un
référentiel quelconque.
Les modèles proposés dans ce travail devront conduire à l‟étude de la commande tout en
répondant aux autres objectifs du projet. C‟est donc le référentiel lié au champ tournant qui
sera considéré tout au long de ce travail.
Figure 22: Machine asynchrone au repère de Park

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 37
uQ, uD Tensions de Park des enroulements rotoriques en [V]
uq, ud Tensions de Park des enroulements statoriques en [V]
u0 Tension homopolaire du stator en [V]
𝜃𝑠 Angle électrique entre l‟axe magnétique de la phase a et l‟axe d en [rad]
𝜃𝑟 Angle électrique entre l‟axe magnétique de la phase A et l‟axe d en [rad]
𝜔𝑎 Pulsation électrique du réferentiel de Park en [s-1]
Donc en passant au référentiel de Park on exprime juste après les équations de flux, de
tensions et les équations mécaniques en valeurs réduites [16].
III.2.2. 1. Les équations de flux en coordonnées de Park
Tableau 3: Flux en coordonnées de Park
Flux en coordonnées de Park Flux en valeurs réduites
𝛹𝑑 = 𝐿𝑎 𝑖𝑑 + 𝐿𝑚𝑑 𝑖𝐷 𝛹𝑑 = 𝐿𝑎 𝑖𝑑 + 𝐿𝑚 𝑖𝐷
𝛹𝑞 = 𝐿𝑎 𝑖𝑞 + 𝐿𝑚𝑞 𝑖𝑄 𝛹𝑞 = 𝐿𝑎 𝑖𝑞 + 𝐿𝑚 𝑖𝑄
𝛹0 = 𝐿0𝑖0 𝛹0 = 𝐿0𝑖0
𝛹𝐷 = 𝐿𝐴𝑖𝐷 + 𝐿𝑚𝑞 𝑖𝑑 𝛹𝐷 = 𝐿𝐴𝑖𝐷 + 𝐿𝑚 𝑖𝑑
𝛹𝑄 = 𝐿𝐴𝑖𝑄 + 𝐿𝑚𝑞 𝑖𝑑 𝛹𝑄 = 𝐿𝐴𝑖𝑄 + 𝐿𝑞 𝑖𝑑
Les termes La et LA désignent les inductances cycliques statoriques et rotoriques
respectivement. L0 représente l‟inductance homopolaire statorique et Lm est l‟inductance
mutuelle cyclique entre rotor et stator. À noter que, les inductances présentes dans ces
équations sont maintenant indépendantes de l‟angle électrique θ.

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 38
III.2.2. 2. Les équations de tensions en coordonnées de Park :
Tableau 4: Tension en cooordonnées
Tensions en coordonnées de Park Tensions en valeurs réduites
𝑢𝑑 = 𝑅𝑎 𝑖𝑑 +𝑑𝛹𝑑
𝑑𝑡− 𝜔𝑎𝛹𝑞 𝑢𝑑 = 𝑟𝑎 𝑖𝑑 +
1
𝜔𝑛
𝑑𝛹𝑑
𝑑𝑡− 𝜔𝑎𝛹𝑞
𝑢𝑞 = 𝑅𝑎 𝑖𝑞 +𝑑𝛹𝑞
𝑑𝑡− 𝜔𝑎𝛹𝑑 𝑢𝑞 = 𝑟𝑎 𝑖𝑞 +
1
𝜔𝑛
𝑑𝛹𝑞
𝑑𝑡− 𝜔𝑎𝛹𝑑
𝑢0 = 𝑅0𝑖0 +𝑑𝛹0
𝑑𝑡 𝑢0 = 𝑟0𝑖0 +
1
𝜔𝑛
𝑑𝛹0
𝑑𝑡
𝑢𝐷 = 0 = 𝑅𝐴𝑖𝐷 +𝑑𝛹𝐷
𝑑𝑡− (𝜔𝑎 − 𝜔𝑚)𝛹𝑄 𝑢𝐷 = 0 = 𝑟𝑖𝐷 +
1
𝜔𝑛
𝑑𝛹𝐷
𝑑𝑡− (𝜔𝑎
− 𝜔𝑚)𝛹𝑄
𝑢𝑄 = 0 = 𝑅𝐴𝑖𝑄 +𝑑𝛹𝑄
𝑑𝑡− (𝜔𝑎 − 𝜔𝑚)𝛹𝐷 𝑢𝑄 = 0 = 𝑟𝐴𝑖𝑄 +
1
𝜔𝑛
𝑑𝛹𝑄
𝑑𝑡− (𝜔𝑎
− 𝜔𝑚)𝛹𝐷
III.2.2. 3. Les équations mécaniques : en coordonnées de Park :
L‟équation mécanique (3.25) n‟est pas touché par la transformée de Park qui est une
transformation d‟enroulement. Le couple électromagnétique par contre, qui s‟exprimer à
partir des grandeurs électriques est défini par la relation suivante [17] :
𝑇𝑒 =3
2𝑝𝑝(𝑖𝑞𝛹𝑞 − 𝑖𝑑𝛹𝑑) (3.28)
𝑑
𝑑𝑡 𝜔𝑚 =
1
2𝐻[¸ 𝑡𝑒 − 𝑡𝑚 − 𝐷𝜔𝑚 ] (3.29)
H est la constante d‟inertie qui se calcule comme suit :
𝐻 =1
2
𝐽𝛺𝑟𝑒𝑓2
𝑆𝑟𝑒𝑓 (3.30)
Et avec le couple électromagnétique qui devient :
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 39
𝑡𝑒 = (𝛹𝑑 𝑖𝑞 − 𝛹𝑑 𝑖𝑑) (3.31)
II.2.10. Modélisation de la machine asynchrone par représentation d’état
La représentation d‟état est une vision élargie de la théorie des systèmes reposant sur le
concept d‟énergie. L‟évolution du comportement d‟un système dépend non seulement des
sollicitations extérieures, mais aussi de son état énergétique. En fait, cet état énergétique
constitue une mémoire représentée par des variables qui sont alors des facteurs d‟énergie
potentielle ou cinétique, exemples : la tension dans une capacité, un courant dans une
inductance ou la vitesse angulaire d‟un moteur. [9]
Équation d’état
La forme standard d‟une équation d‟état est donée par :
𝑋 = 𝐴𝑋 + 𝐵𝑈
Et l‟équation d‟observation est donnée par :
𝑌 = 𝐶𝑋 + 𝐷𝑈
Avec :
𝑋 Vecteur des variables d‟état du modèle
𝑈 Vecteur des entrées de commande
𝑌 Vecteur de variables de sortie du modèle
𝑠𝑜𝑖𝑡 𝑛 le nombre des variables d‟état, m le nombre des variables d‟entrée et s le nombre
des variables de sortie :
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 40
𝐴 Matrice d‟état d‟ordre 𝑛 × 𝑛
B Matrice de commande d‟état d‟ordre n×m
C Matrice de sortie ou d‟observation d‟ordre s×n
D Matrice de commande de sortie d‟ordre s×m
Dans cette section, les résultats de [6] représentent le modèle d‟état d‟une machine
asynchrone commandée en tension ou en courant. Dans cette étude, le modèle de
commande en tension sera considéré. Et la variable d‟état sera présentée par le flux afin
d‟implanter la saturation magnétique.
Prise en considération de la saturation
Dans la plupart des cas le modèle linéaire de la machine asynchrone est suffisant pour
obtenir des bons résultats dans l‟analyse des régimes transitoires (démarrage...). Ce
modèle considère que l‟inductance magnétisante est constante, ce qui n‟est pas tout à fait
vrai, car le matériau magnétique utilisé pour la fabrication n‟est pas parfaitement linéaire.
Cependant dans certaines utilisations de la machine asynchrone (alimentation avec
onduleur, génératrice auto-excitée, éoliennes), il est très indispensable de tenir compte de
l‟effet de la saturation du circuit magnétique et donc de la variation de l‟inductance de
magnétisation.
Modèle croisé à facteur de saturation Kψ
La première hypothèse qui peut être émise est que seuls les flux mutuels sont sujets à la
saturation du circuit magnétique du fait que les lignes de champ des flux de fuite se referment
dans l‟air. Deuxièmement, la notion de saturation croisée est introduite, elle se traduit par le
fait que dans le circuit magnétique, les flux ψd et ψq participent tous les deux à la saturation.
La saturation magnétique en un point de fonctionnement (en régime permanent ou en régime
dynamique) est prise en compte en modifiant le niveau de magnétisation de la réactance de
magnétisation xm, alors traversée par les courants de magnétisation [18], [19], [20].

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 41
𝑖𝑚𝑑 = 𝑖𝑑 + 𝑖𝐷1 + 𝑖𝐷2 + ⋯𝑖𝐷𝑛 (3.32)
𝑖𝑚𝑞 = 𝑖𝑞 + 𝑖𝑄1 + 𝑖𝑄2 + ⋯𝑖𝑄𝑛 (3.33)
Les flux magnétiques seront donc :
𝜓𝑚𝑑 = 𝑥𝑚 𝑖𝑚𝑑 (3.34)
𝜓𝑚𝑞 = 𝑥𝑚 𝑖𝑚𝑞 (3.35)
L‟effet de la saturation consiste à substituer aux courants et aux flux précédents le
courant et le flux définis par :
𝑖𝑚 = 𝑖𝑚𝑑2 + 𝑖𝑚𝑞
2 (3.36)
𝜓𝑚 = 𝜓𝑚𝑑2 + 𝜓𝑚𝑞
2 (3.37)
La réactance saturée devient:
𝑥𝑚 = 𝐾𝜓(𝜓𝑚 )𝑥𝑚0 (3.38)
Avec :
𝐾𝜓 𝜓𝑚 =𝜓𝑚
𝑥𝑚 0 𝑖𝑚 (3.39)
Pour la machine saturée, en charge comme à vide, si la caractéristique à vide 𝑢𝑡 = 𝑓𝑖(𝑡)
est connue, les rapports de saturation à vide et en charge sont les mêmes, d‟où
l‟égalité (3.40).
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 42
𝐾𝜓 𝜓𝑚 =𝜓𝑚
𝑥𝑚 0 𝑖𝑚=
𝜓𝑚 ,𝑣𝑖𝑑𝑒
𝑥𝑚 0 𝑖𝑡 ,𝑣𝑖𝑑𝑒=
𝑢𝑡
𝑥𝑚 0𝑖𝑡 (3.40)
Figure 23: Courbe équivalente de saturation
Donc après l‟établissement du modèle de saturation le modèle de la machine asynchrone avec
la prise en charge de l‟effet de saturation devient (3.41)
𝑑
𝑑𝑡
𝜓𝑠
𝜓𝑟
𝜔𝑚
= 𝑎𝜓
𝑢 02𝑛+3,1
1
2𝐻𝜓𝑇𝐺𝜓 −
𝐷
2𝐻
𝜓𝑠
𝜓𝑟
𝜔𝑚
+ 𝑏𝜓
𝑢 02𝑛+3,1
01,2𝑛+3 −1
2𝐻
𝑢𝑠
𝑢𝑟
𝑡𝑚 (3.41)
𝑎𝜓𝑢 = 𝑋𝑎𝑖
𝑢𝑋−1 (3.42)
Avec :
𝑎𝑖𝑢 = −𝜔𝑛𝑋𝑚
−1(𝑅𝑚 + Ω𝑋𝑚 ) (3.43)
𝑏𝜓𝑢 = 𝑋𝑏𝑖
𝑢 (3.43)

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 43
𝑏𝑖𝑢 = 𝜔𝑛𝑋𝑚
−1 (3.44)
𝑅𝑚 = 𝑅𝑠 03,2𝑛
02𝑛 ,3𝑇 𝑅𝑟
Et 𝑋𝑚 = 𝑋𝑠 𝑋𝑠𝑟
𝑋𝑠𝑟𝑇 𝑋𝑟
𝐷 Coefficient de frottement visqueux en [Nm s]
III.2.3. 1. La machine asynchrone auto-excitée
Dans le cas d‟absence du réseau pilote, il est possible d‟utiliser des condensateurs pour
exciter la génératrice asynchrone, la machine est dans ce cas dite génératrice asynchrone
auto-éxcité, l‟amorçage et la protection contre les surtensions de résonance nécessitent
une étude très soignée de l‟installation.
Seul un dispositif basé sur une machine asynchrone auto-excitée par des capacités
directement connectées sur une charge permet d'obtenir un fonctionnement purement
autonome. Le phénomène d'auto-excitation est en revanche difficile à maîtriser, car les
variations de charge influencent directement sur les valeurs de la tension et la fréquence
délivrées. Afin de déterminer les performances et les limites de fonctionnement de ce
dispositif, un modèle de la machine dans un repère diphasé a été établi dans la section
précédente. Le modèle de la charge et des capacités d'auto-excitation (équilibrés) est
également établi de façon complémentaire indépendante du modèle de la machine. Des
simulations sont alors effectuées.
III.2.3. 2. Modèle global
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 44
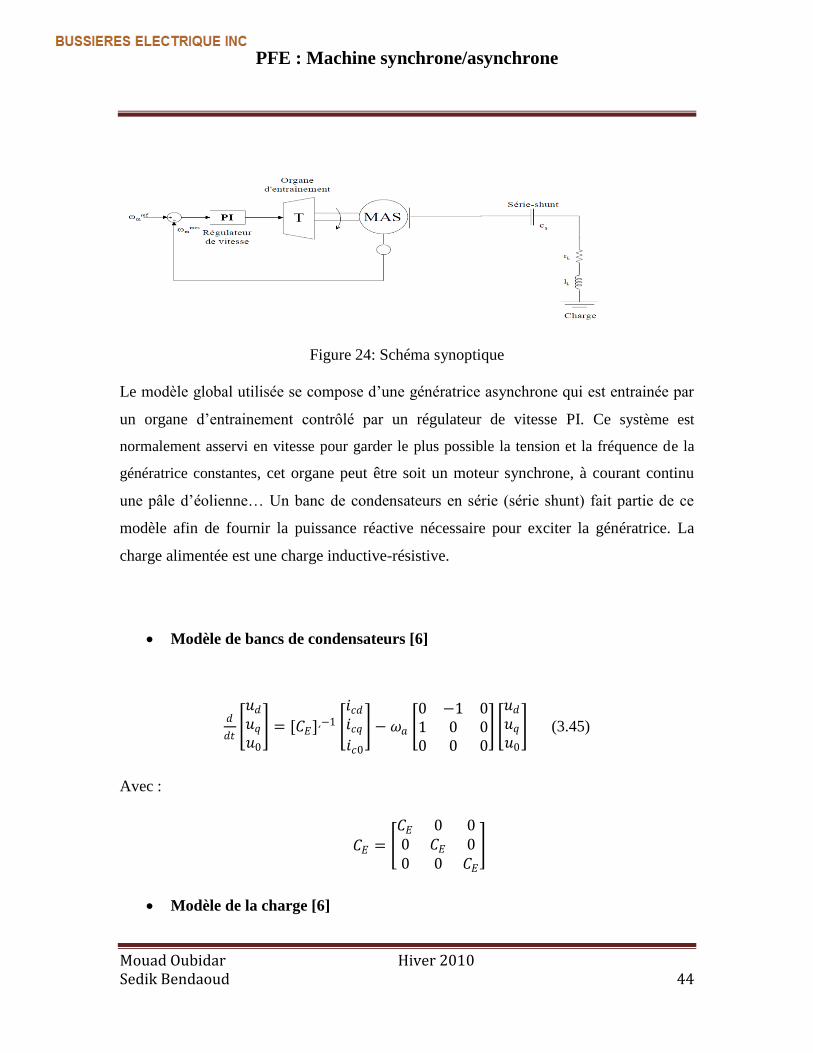
Figure 24: Schéma synoptique
Le modèle global utilisée se compose d‟une génératrice asynchrone qui est entrainée par
un organe d‟entrainement contrôlé par un régulateur de vitesse PI. Ce système est
normalement asservi en vitesse pour garder le plus possible la tension et la fréquence de la
génératrice constantes, cet organe peut être soit un moteur synchrone, à courant continu
une pâle d‟éolienne… Un banc de condensateurs en série (série shunt) fait partie de ce
modèle afin de fournir la puissance réactive nécessaire pour exciter la génératrice. La
charge alimentée est une charge inductive-résistive.
Modèle de bancs de condensateurs [6]
𝑑
𝑑𝑡
𝑢𝑑
𝑢𝑞
𝑢0
= [𝐶𝐸]¸−1
𝑖𝑐𝑑𝑖𝑐𝑞𝑖𝑐0
− 𝜔𝑎 0 −1 01 0 00 0 0
𝑢𝑑
𝑢𝑞
𝑢0
(3.45)
Avec :
𝐶𝐸 = 𝐶𝐸 0 00 𝐶𝐸 00 0 𝐶𝐸
Modèle de la charge [6]
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 45
𝑑
𝑑𝑡
𝑖𝐿𝑑𝑖𝐿𝑞𝑖𝐿0
= 𝑅𝐿 𝐿𝐿 −1 + 𝜔𝑎
0 −1 01 0 00 0 0
𝑖𝐿𝑑𝑖𝐿𝑞𝑖𝐿0
+ 𝐿𝐿 −1
𝑢𝑑
𝑢𝑞
𝑢0
(3.46)
Avec :
𝑅𝐿 =
𝑟𝐿 0 00 𝑟𝐿 00 0 𝑟𝐿
𝑒𝑡 𝐿𝐿 =
𝑙𝐿 0 00 𝑙𝐿 00 0 𝑙𝐿
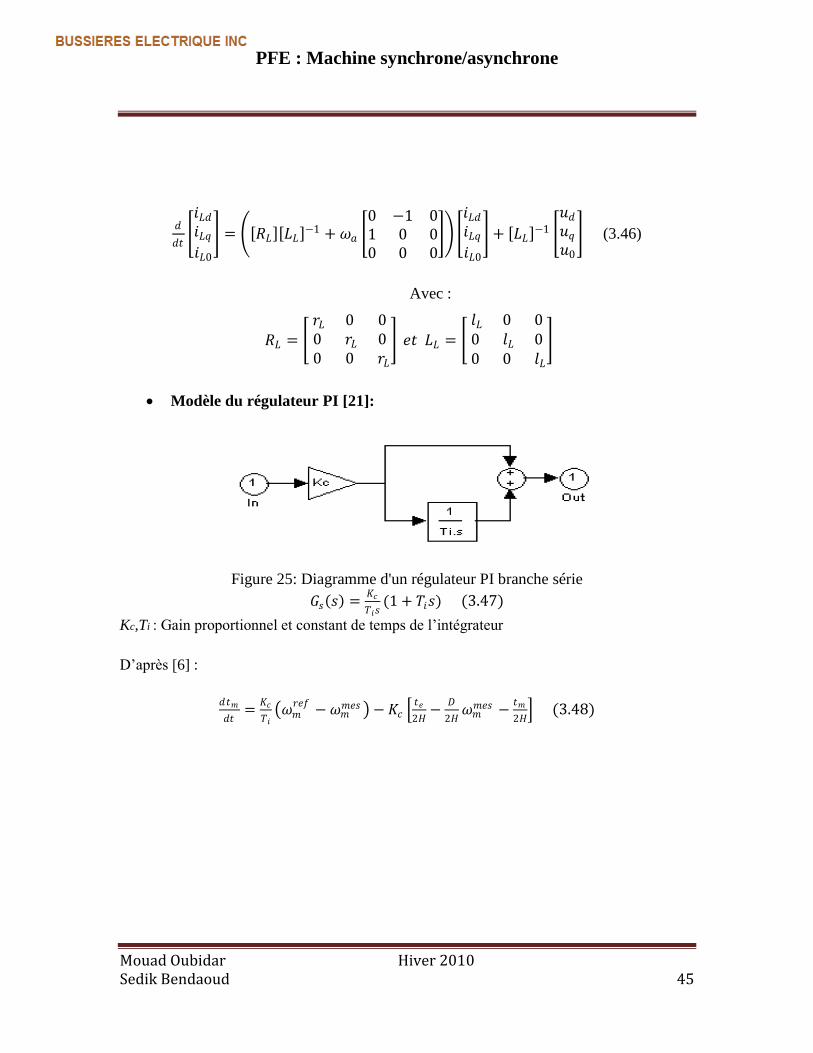
Modèle du régulateur PI [21]:
Figure 25: Diagramme d'un régulateur PI branche série
𝐺𝑠 𝑠 =𝐾𝑐
𝑇𝑖𝑠(1 + 𝑇𝑖𝑠) (3.47)
Kc,Ti : Gain proportionnel et constant de temps de l‟intégrateur
D‟après [6] :
𝑑𝑡𝑚
𝑑𝑡=
𝐾𝑐
𝑇𝑖 𝜔𝑚
𝑟𝑒𝑓− 𝜔𝑚
𝑚𝑒𝑠 − 𝐾𝑐 𝑡𝑒
2𝐻−
𝐷
2𝐻𝜔𝑚
𝑚𝑒𝑠 −𝑡𝑚
2𝐻 (3.48)
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 46
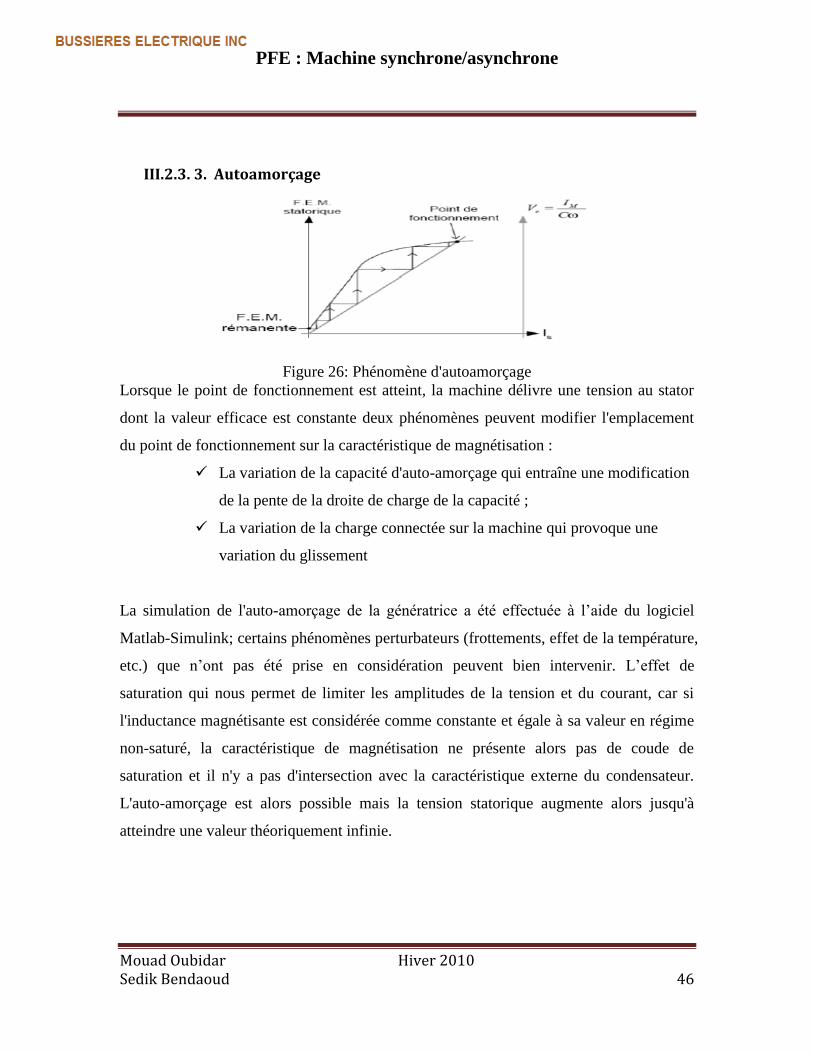
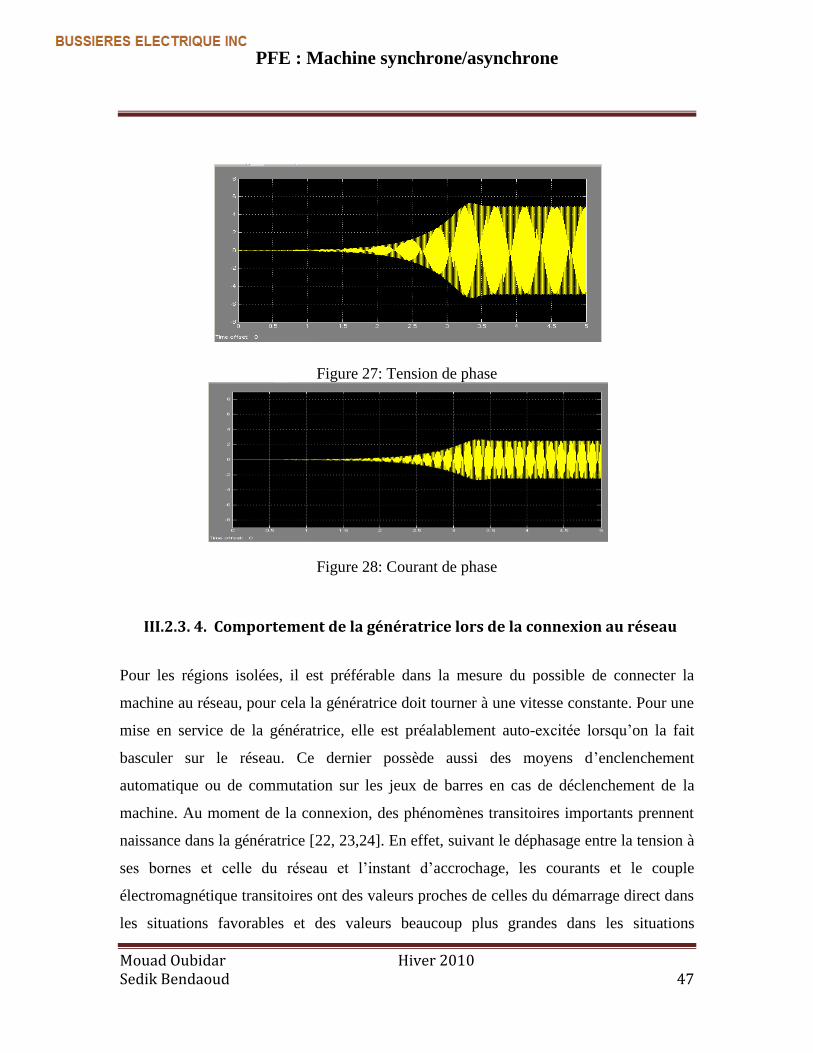
III.2.3. 3. Autoamorçage
Figure 26: Phénomène d'autoamorçage
Lorsque le point de fonctionnement est atteint, la machine délivre une tension au stator
dont la valeur efficace est constante deux phénomènes peuvent modifier l'emplacement
du point de fonctionnement sur la caractéristique de magnétisation :
La variation de la capacité d'auto-amorçage qui entraîne une modification
de la pente de la droite de charge de la capacité ;
La variation de la charge connectée sur la machine qui provoque une
variation du glissement
La simulation de l'auto-amorçage de la génératrice a été effectuée à l‟aide du logiciel
Matlab-Simulink; certains phénomènes perturbateurs (frottements, effet de la température,
etc.) que n‟ont pas été prise en considération peuvent bien intervenir. L‟effet de
saturation qui nous permet de limiter les amplitudes de la tension et du courant, car si
l'inductance magnétisante est considérée comme constante et égale à sa valeur en régime
non-saturé, la caractéristique de magnétisation ne présente alors pas de coude de
saturation et il n'y a pas d'intersection avec la caractéristique externe du condensateur.
L'auto-amorçage est alors possible mais la tension statorique augmente alors jusqu'à
atteindre une valeur théoriquement infinie.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 47
Figure 27: Tension de phase
Figure 28: Courant de phase
III.2.3. 4. Comportement de la génératrice lors de la connexion au réseau
Pour les régions isolées, il est préférable dans la mesure du possible de connecter la
machine au réseau, pour cela la génératrice doit tourner à une vitesse constante. Pour une
mise en service de la génératrice, elle est préalablement auto-excitée lorsqu‟on la fait
basculer sur le réseau. Ce dernier possède aussi des moyens d‟enclenchement
automatique ou de commutation sur les jeux de barres en cas de déclenchement de la
machine. Au moment de la connexion, des phénomènes transitoires importants prennent
naissance dans la génératrice [22, 23,24]. En effet, suivant le déphasage entre la tension à
ses bornes et celle du réseau et l‟instant d‟accrochage, les courants et le couple
électromagnétique transitoires ont des valeurs proches de celles du démarrage direct dans
les situations favorables et des valeurs beaucoup plus grandes dans les situations

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 48
défavorables. La machine subit alors des chocs et devra donc être dimensionnée en
conséquence.
III. 3. Résultats expérimentaux
Les essais réaliser au laboratoire regroupe trois principales configurations soit, l‟essai à
vide qui a permis de calculer𝑅𝑓𝑒𝑒𝑡 𝑋𝑚 . L‟essai en court circuit quant à lui a permis
d‟obtenir la résistance au stator. En utilisant la valeur 𝑑𝑒 𝑋𝑚 , les étudiants ont pu calculer
la valeur minimale des condensateurs nécessaires à l‟amorçage de la machine.
La machine asynchrone à cage d‟écureuil utilisée dans les essais est la suivante :
P = 2kW
1775 tr/min
Volts, CA 120/208
AMP, CA 15.2/8.8
Phases 3
F=60Hz
FP 0.77
L‟essai à vide:
V1 (V) V2 (V) V3 (V) I1 (A) I2 (A) I3 (A) P (W) Q (VAR) S(VA) 123,41 122,56 122,99 4,87 4,71 4,92 86,94 574,37 604,63
On en déduit:
𝑅𝑓𝑒 =0.97 ∗ 𝑉𝜙
𝑃=
0.97 ∗ 123
87.02= 163.56 Ω
cos 𝜙 =𝑃
0.97 ∗ 𝐼 ∗ 𝑉𝜙=
87.02
0.97 ∗ 4.85 ∗ 123= 0.15
𝜙 = 81.350
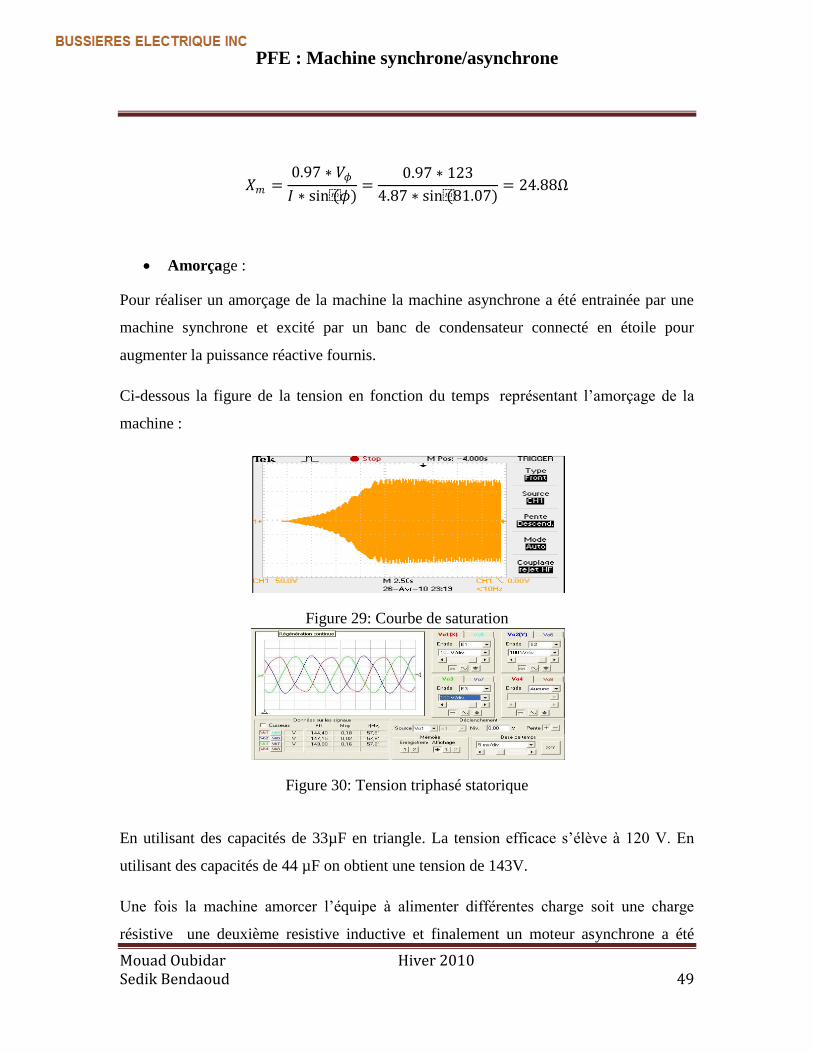
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 49
𝑋𝑚 =0.97 ∗ 𝑉𝜙
𝐼 ∗ sin(𝜙)=
0.97 ∗ 123
4.87 ∗ sin(81.07)= 24.88Ω
Amorçage :
Pour réaliser un amorçage de la machine la machine asynchrone a été entrainée par une
machine synchrone et excité par un banc de condensateur connecté en étoile pour
augmenter la puissance réactive fournis.
Ci-dessous la figure de la tension en fonction du temps représentant l‟amorçage de la
machine :
Figure 29: Courbe de saturation
Figure 30: Tension triphasé statorique
En utilisant des capacités de 33µF en triangle. La tension efficace s‟élève à 120 V. En
utilisant des capacités de 44 µF on obtient une tension de 143V.
Une fois la machine amorcer l‟équipe à alimenter différentes charge soit une charge
résistive une deuxième resistive inductive et finalement un moteur asynchrone a été
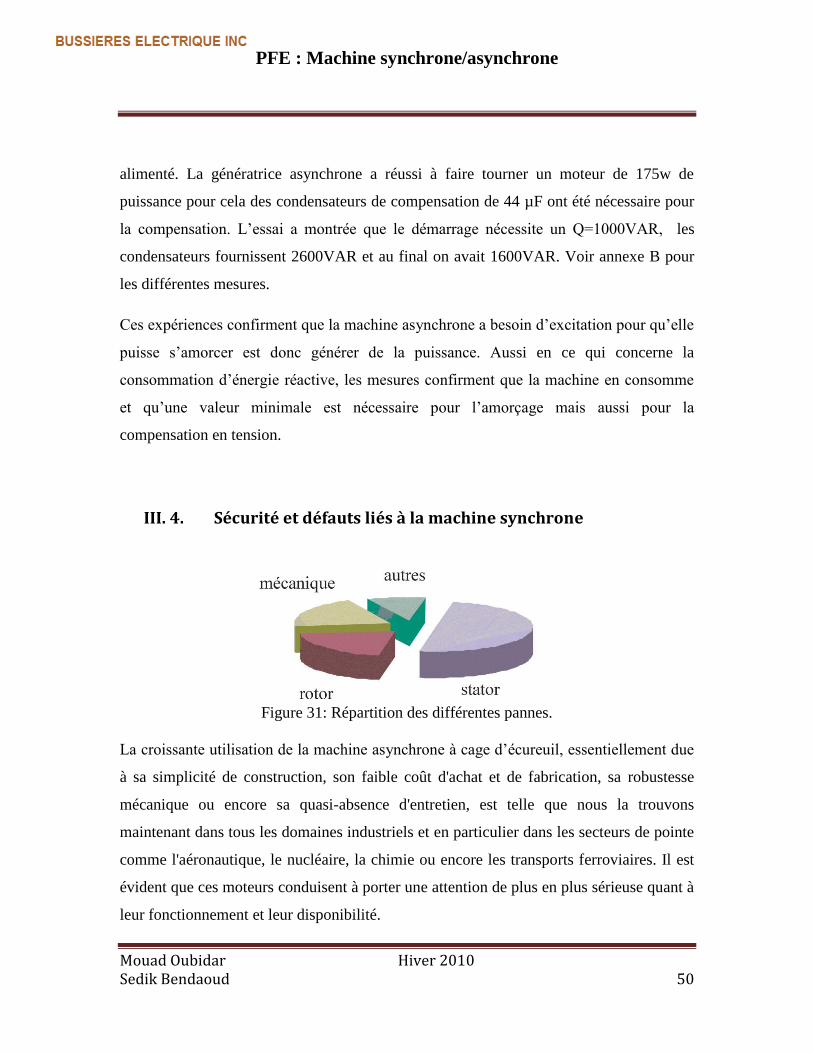
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 50
alimenté. La génératrice asynchrone a réussi à faire tourner un moteur de 175w de
puissance pour cela des condensateurs de compensation de 44 µF ont été nécessaire pour
la compensation. L‟essai a montrée que le démarrage nécessite un Q=1000VAR, les
condensateurs fournissent 2600VAR et au final on avait 1600VAR. Voir annexe B pour
les différentes mesures.
Ces expériences confirment que la machine asynchrone a besoin d‟excitation pour qu‟elle
puisse s‟amorcer est donc générer de la puissance. Aussi en ce qui concerne la
consommation d‟énergie réactive, les mesures confirment que la machine en consomme
et qu‟une valeur minimale est nécessaire pour l‟amorçage mais aussi pour la
compensation en tension.
III. 4. Sécurité et défauts liés à la machine synchrone
Figure 31: Répartition des différentes pannes.
La croissante utilisation de la machine asynchrone à cage d‟écureuil, essentiellement due
à sa simplicité de construction, son faible coût d'achat et de fabrication, sa robustesse
mécanique ou encore sa quasi-absence d'entretien, est telle que nous la trouvons
maintenant dans tous les domaines industriels et en particulier dans les secteurs de pointe
comme l'aéronautique, le nucléaire, la chimie ou encore les transports ferroviaires. Il est
évident que ces moteurs conduisent à porter une attention de plus en plus sérieuse quant à
leur fonctionnement et leur disponibilité.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 51
En effet, l'apparition d'un défaut conduit le plus souvent à un arrêt irrémédiable de la
machine asynchrone entraînant, en conséquence, un coût de réparation non négligeable
pour l'entreprise (cas des machines de forte puissance) sans oublier la perte de production
occasionnée. Dans le domaine nucléaire, par exemple, il est indispensable d'assurer la
sécurité des personnes et du matériel car aucun système, qu'il soit simple ou complexe,
n'est à l'abri d'un dysfonctionnement.
La machine asynchrone est considérée comme robuste et également défaillante dans le
cas de son emploi de langue durée et dans des conditions dures. Il est important que les
mesures soient prises pour diagnostiquer l'état de la machine au fur et à mesure qu'elle
entre dans le mode de défauts. Il est donc nécessaire de faire un contrôle continu, en ligne
ou hors ligne, des variables de la machine. Les raisons derrière les défauts dans les
machines électriques ont leur origine dans la conception, la tolérance de fabrication,
l'installation, l'environnement de fonctionnement, la nature de la charge et le programme
de la maintenance.
Le moteur asynchrone, comme n'importe quelle autre machine électrique tournante, est
soumis aux forces électromagnétiques et mécaniques. La conception du moteur est telle
que l'interaction entre ces forces dans des conditions normales mène à un fonctionnement
stable avec un bruit et des vibrations minimums. Quand le défaut a lieu, l'équilibre entre
ces forces est perdu, aboutissant à un autre perfectionnement du défaut. Les défauts du
moteur asynchrone peuvent être classés par catégorie dans deux types : mécanique et
électrique. Les sources des défauts du moteur peuvent être internes, externes ou dues à
l'environnement, comme présenté à la figure 32. Les défauts internes peuvent être
classifiés concernant leurs origines, c'est-à-dire électriques et mécaniques.
Habituellement, d'autres types de défauts de roulement et de refroidissement se
rapportent aux défauts de rotor parce qu'ils appartiennent aux pièces mobiles. La Figure
33 présente l'arbre de défaut de la machine asynchrone où les défauts sont classifiés selon
leur emplacement : rotor et stator
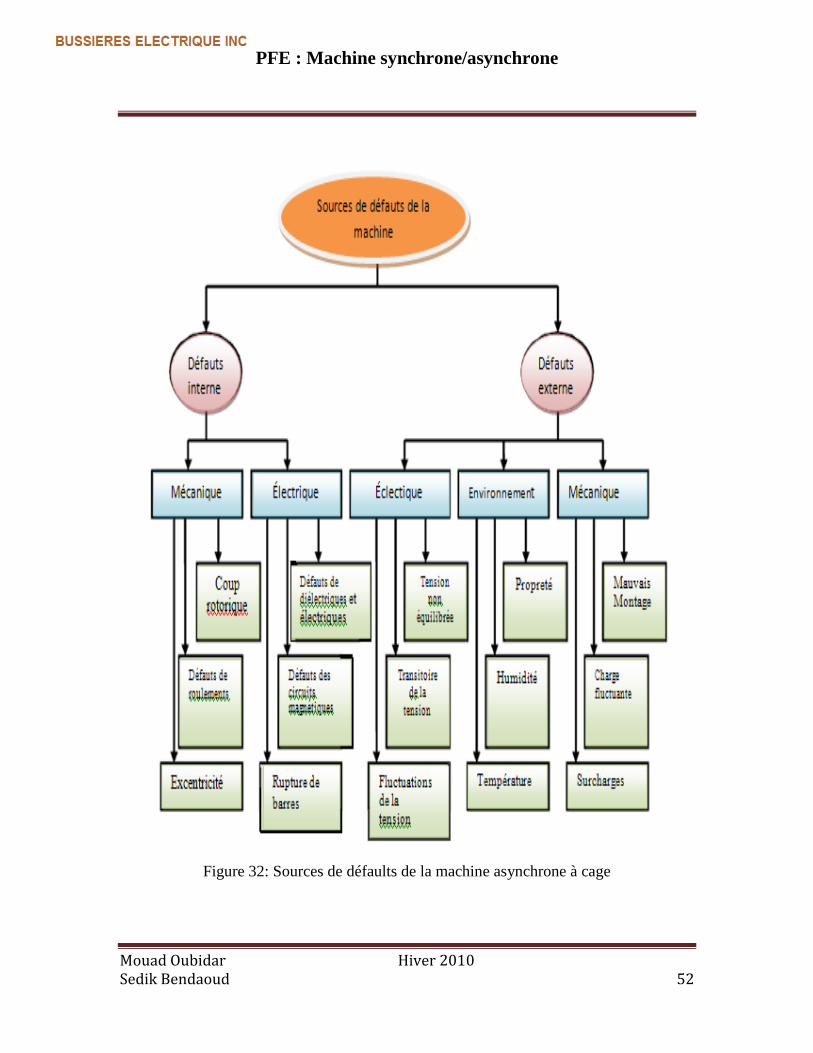
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 52
Figure 32: Sources de défaults de la machine asynchrone à cage
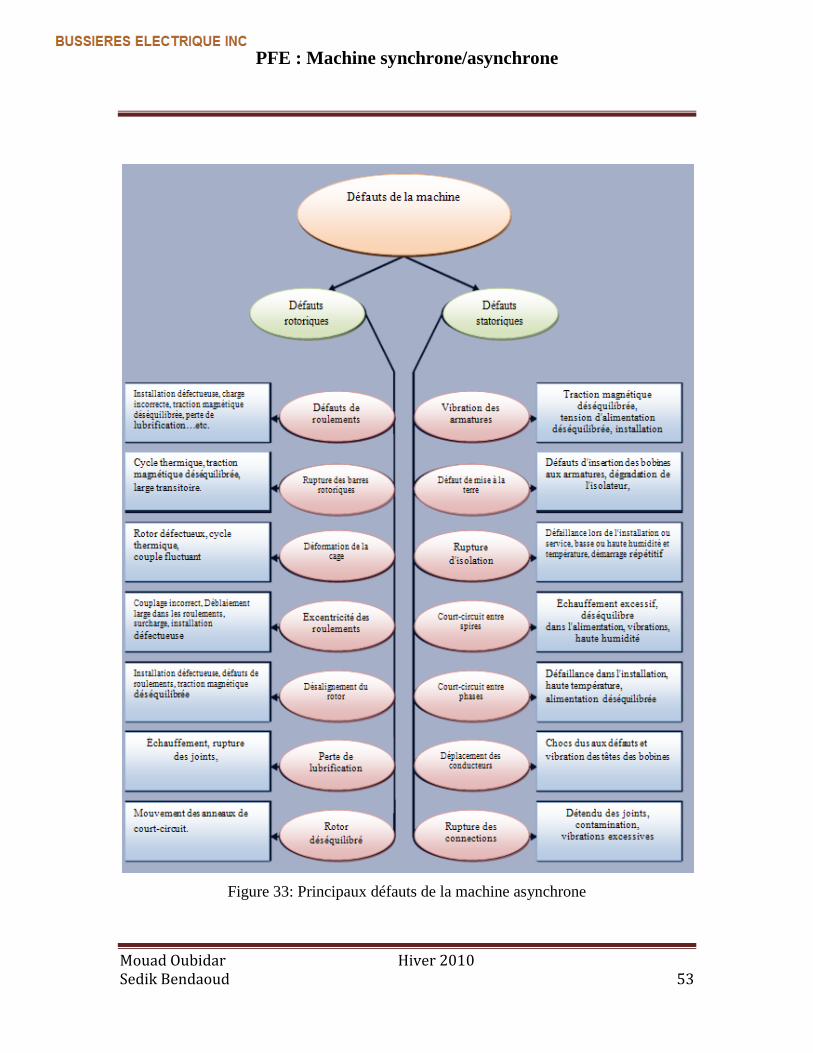
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 53
Figure 33: Principaux défauts de la machine asynchrone
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 54
D'après les deux organigrammes ci-dessus, on peut classer les défauts majeurs qui
peuvent apparaître dans la machine asynchrone à cage d'écureuil en deux catégories.
DEFAILLANCES D'ORDRE MECANIQUE
L es défaillances d'ordre mécanique sont, en général, les plus souvent rencontrées parmi
tous les défauts que compte la machine asynchrone. Ces défauts peuvent apparaître au
niveau des roulements à billes, des flasques ou encore de l'arbre moteur. On énumérera
par la suite certains de ces défauts.
Défaillances des roulements
Les roulements à billes jouent un rôle très important dans le fonctionnement de tout type
de machines électriques. Les défauts de roulements peuvent être causés par un mauvais
choix de matériau à l'étape de fabrication. Les problèmes de rotation au sein de la culasse
du roulement, causés par un roulement abîmé, écaillé ou fissuré, peuvent créer des
perturbations dans la machine. Nous savons que des courants électriques circulent au
niveau des roulements d'une machine asynchrone ce qui, pour des vitesses importantes,
peut provoquer la détérioration de ces derniers. L‟huile de graissage, qui permet la
lubrification et la bonne rotation des roulements peut, dans certaines applications, se
rigidifier et causer une résistance à la rotation. L'analyse vibratoire de la machine ou
l'analyse harmonique des courants statoriques permet de détecter ce type de défaillances
Figure 34: Types de défaults dans les enroulements à billes
Défaillances du flasque
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 55
Les défauts créés par les flasques de la machine asynchrone sont le plus généralement
causés à l'étape de fabrication. En effet, un mauvais positionnement des flasques
provoque un désalignement des roulements à billes, ce qui induit une excentricité au
niveau de l'arbre de la machine. Il est possible de détecter ce type de défaillance par une
analyse vibratoire ou une analyse harmonique des courants absorbés par la machine.
Défaillances de l'arbre
L‟arbre de la machine peut laisser apparaître une fissure due à l'utilisation d'un mauvais
matériau lors de sa construction. A court ou long terme, cette fissure peut mener à une
fracture nette de l'arbre provoquant ainsi un arrêt immédiat de la machine asynchrone.
Les milieux corrosifs peuvent aussi affaiblir la robustesse de l'arbre de la machine. Par
exemple, l'humidité peut provoquer des microfissures et conduire à une destruction
complète de la machine. Une excentricité statique, dynamique ou mixte peut induire des
efforts considérables sur l'arbre moteur, amenant ainsi à une fatigue supplémentaire. Une
analyse vibratoire, une analyse par ultrason, une analyse fréquentielle des courants
absorbés ou simplement une analyse visuelle de l'arbre de la machine permet de détecter
ce type de défaillance [11].
Défauts d’excentricité
Ceux-ci provoquent la variation de l'entrefer dans le moteur, la répartition non homogène
des courants dans le rotor et le déséquilibre des courants statoriques. Le déséquilibre des
efforts sur les barres génère un couple global non constant. Quand l‟excentricité devient
grande, les forces radiales résultantes crées par le stator avec la bande du frottement du
rotor provoquent des dommages du stator et du rotor.
La géométrie du rotor peut présenter des dissymétries d‟ordre naturel. Celles-ci relèvent
de trois catégories d‟excentricité de l‟entrefer à savoir :
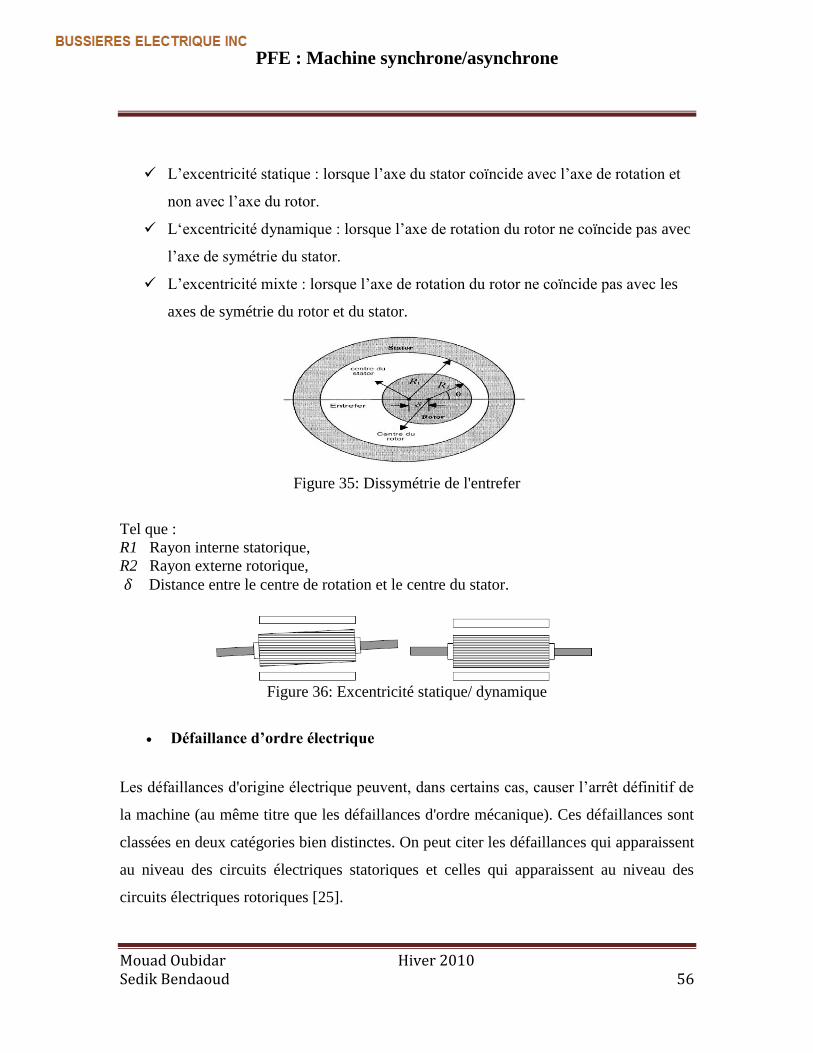
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 56
L‟excentricité statique : lorsque l‟axe du stator coïncide avec l‟axe de rotation et
non avec l‟axe du rotor.
L„excentricité dynamique : lorsque l‟axe de rotation du rotor ne coïncide pas avec
l‟axe de symétrie du stator.
L‟excentricité mixte : lorsque l‟axe de rotation du rotor ne coïncide pas avec les
axes de symétrie du rotor et du stator.
Figure 35: Dissymétrie de l'entrefer
Tel que :
R1 Rayon interne statorique,
R2 Rayon externe rotorique,
𝛿 Distance entre le centre de rotation et le centre du stator.
Figure 36: Excentricité statique/ dynamique
Défaillance d’ordre électrique
Les défaillances d'origine électrique peuvent, dans certains cas, causer l‟arrêt définitif de
la machine (au même titre que les défaillances d'ordre mécanique). Ces défaillances sont
classées en deux catégories bien distinctes. On peut citer les défaillances qui apparaissent
au niveau des circuits électriques statoriques et celles qui apparaissent au niveau des
circuits électriques rotoriques [25].
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 57
Défaillances des circuits électriques statoriques
L‟apparition d'un défaut au niveau des circuits électriques statoriques de la machine
asynchrone peut avoir des origines diverses. Nous pouvons citer, par exemple, les défauts
de type court-circuit inter-spires qui apparaissent à l'intérieur des encoches statoriques.
Ce type de défaut peut être causé par une dégradation des isolants des spires du bobinage
statorique.
On trouve également les courts-circuits apparaissant entre une phase et le neutre, entre
une phase et la carcasse métallique de la machine ou encore entre deux phases statoriques.
Ces défauts ont le plus souvent une origine mécanique. En effet, des vibrations
excessives peuvent mener à un desserrement des boulons de la plaque à bornes de la
machine créant ainsi le court-circuit. Une cosse mal serrée à la jonction du câble
d'alimentation et des bornes de la machine peut être à l'origine d'une ouverture de phase.
Le défaut le plus couramment rencontré reste encore la fusion d'un fusible de protection.
Ces défauts peuvent être détectés par une analyse harmonique des courants absorbés par
la machine.
Défaillances des circuits électriques rotoriques
Deux types de défaillances peuvent apparaître au rotor d'une machine asynchrone à cage
d'écureuil. La cage étant composée de barres et d'anneaux de court-circuit d'aluminium ou
de cuivre, une rupture partielle ou totale d'un de ces composants peut être considérée
comme un défaut électrique rotorique. L'apparition de ce type de défaut peut être
d'origine diverse. En effet, la rupture d'une barre ou d'un segment d'anneau de court-
circuit peut être due à plusieurs phénomènes qui sont souvent indépendants les uns des
autres. On peut citer par exemple une mauvaise utilisation de la machine asynchrone
(charge trop importante) ou encore l'environnement hostile dans lequel elle fonctionne.
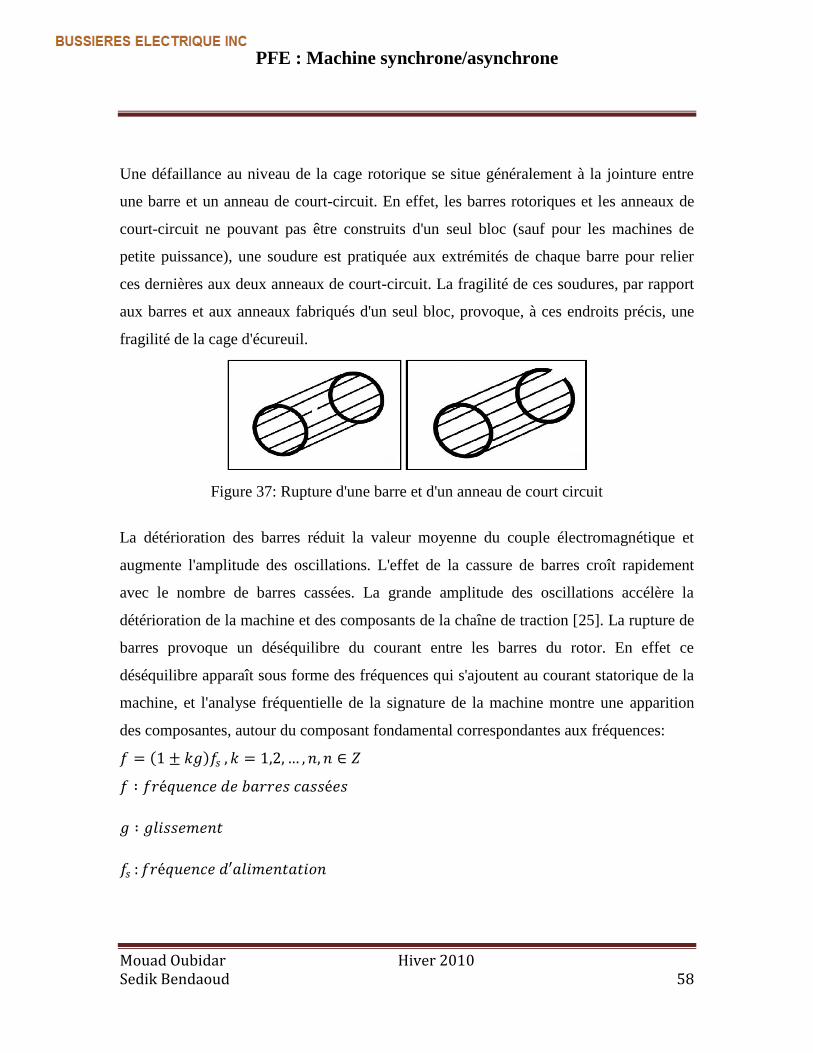
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 58
Une défaillance au niveau de la cage rotorique se situe généralement à la jointure entre
une barre et un anneau de court-circuit. En effet, les barres rotoriques et les anneaux de
court-circuit ne pouvant pas être construits d'un seul bloc (sauf pour les machines de
petite puissance), une soudure est pratiquée aux extrémités de chaque barre pour relier
ces dernières aux deux anneaux de court-circuit. La fragilité de ces soudures, par rapport
aux barres et aux anneaux fabriqués d'un seul bloc, provoque, à ces endroits précis, une
fragilité de la cage d'écureuil.
Figure 37: Rupture d'une barre et d'un anneau de court circuit
La détérioration des barres réduit la valeur moyenne du couple électromagnétique et
augmente l'amplitude des oscillations. L'effet de la cassure de barres croît rapidement
avec le nombre de barres cassées. La grande amplitude des oscillations accélère la
détérioration de la machine et des composants de la chaîne de traction [25]. La rupture de
barres provoque un déséquilibre du courant entre les barres du rotor. En effet ce
déséquilibre apparaît sous forme des fréquences qui s'ajoutent au courant statorique de la
machine, et l'analyse fréquentielle de la signature de la machine montre une apparition
des composantes, autour du composant fondamental correspondantes aux fréquences:
𝑓 = 1 ± 𝑘𝑔 𝑓𝑠 , 𝑘 = 1,2, … , 𝑛, 𝑛 ∈ 𝑍
𝑓 ∶ 𝑓𝑟é𝑞𝑢𝑒𝑛𝑐𝑒 𝑑𝑒 𝑏𝑎𝑟𝑟𝑒𝑠 𝑐𝑎𝑠𝑠é𝑒𝑠
𝑔 ∶ 𝑔𝑙𝑖𝑠𝑠𝑒𝑚𝑒𝑛𝑡
𝑓𝑠 : 𝑓𝑟é𝑞𝑢𝑒𝑛𝑐𝑒 𝑑′𝑎𝑙𝑖𝑚𝑒𝑛𝑡𝑎𝑡𝑖𝑜𝑛
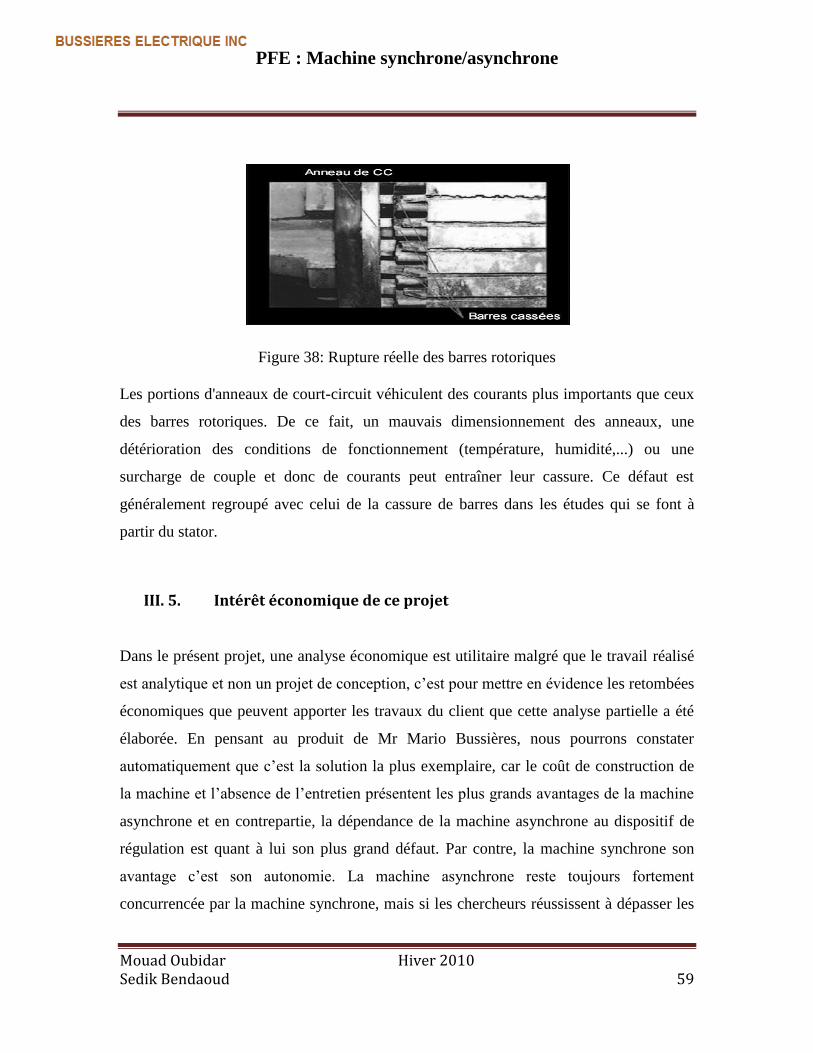
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 59
Figure 38: Rupture réelle des barres rotoriques
Les portions d'anneaux de court-circuit véhiculent des courants plus importants que ceux
des barres rotoriques. De ce fait, un mauvais dimensionnement des anneaux, une
détérioration des conditions de fonctionnement (température, humidité,...) ou une
surcharge de couple et donc de courants peut entraîner leur cassure. Ce défaut est
généralement regroupé avec celui de la cassure de barres dans les études qui se font à
partir du stator.
III. 5. Intérêt économique de ce projet
Dans le présent projet, une analyse économique est utilitaire malgré que le travail réalisé
est analytique et non un projet de conception, c‟est pour mettre en évidence les retombées
économiques que peuvent apporter les travaux du client que cette analyse partielle a été
élaborée. En pensant au produit de Mr Mario Bussières, nous pourrons constater
automatiquement que c‟est la solution la plus exemplaire, car le coût de construction de
la machine et l‟absence de l‟entretien présentent les plus grands avantages de la machine
asynchrone et en contrepartie, la dépendance de la machine asynchrone au dispositif de
régulation est quant à lui son plus grand défaut. Par contre, la machine synchrone son
avantage c‟est son autonomie. La machine asynchrone reste toujours fortement
concurrencée par la machine synchrone, mais si les chercheurs réussissent à dépasser les
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 60
problèmes d‟autonomie de la machine asynchrone, cette dernière connaitra un grand
succès.
À titre indicatif les cotations ci-dessus. Pour une machine qui requiert 50 HP de
puissance continue, pour alimenter une usine avec les caractéristiques suivantes (575V,
60Hz, 3hp).
Tableau 5: Liste de coûts
Détail de la machine Coûts
Machine asynchrone (50hp) 1250$
Machine asynchrone + drive(50hp) +installation 3000$
Machine synchrone (50hp) 1885$
Machine synchrone (50hp) + Entretien (2 ans)+ installation 2600$
Les valeurs ci-dessus montrent que dans certaines applications, il n‟est pas utile d‟utiliser
la machine asynchrone ce qui approuve ce qui est dit auparavant. Si on considère qu‟on
pourrait utiliser la machine asynchrone un jour sans la nécessité du drive, son prix de
revient deviendrait nettement plus bon marché que la machine synchrone.
III. 6. Étude économique
Afin de mieux comprendre l‟intérêt économique de la génératrice asynchrone autonome,
nous allons calculer la valeur actuelle nette qui permet de diagnostiquer la rentabilité
d‟un projet futur. Nous considérons que le futur projet de Bussières électrique est de
commercialiser des génératrices asynchrones autonomes, on suppose un seul type de
génératrice qui est de 5KW, son coût est de 3000$, sachant que l‟ancienne génératrice
nécessite un contrôleur, sont prix est 4500$.
On distingue deux situations différentes
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 61
La situation actuelle
Vente de machines asynchrones de 5KW avec contrôleur
Hypothèses : L‟entreprise vent 200 machines asynchrone annuellement à un prix de
4500$
Ventes : 900000$
On estime que le Bénéfice nette avant impôt est 10% pour ce type de machines
BNAI : 90000$
Situation désirée
Vente des machines autonomes
Hypothèse : l‟entreprise doublera la production soit 400 machine annuellement à un pris
de 3000$
Ventes : 1, 200,000$
On estime que le Bénéfice nette avant impôt est de 15%
BNAI : 180000$
D‟après le centre québécois de formation en fiscalité, le taux d‟imposition marginal est de
30.9%
Le propriétaire de Bussières électrique décide d‟investir 1, 000,000$ dans ce projet sur
une durée de 5 ans , une mise de fonds additionnelle de $100 000 est requise dès le début
pour faire l‟installation de l‟équipement et la formation du personnel. Il est prévu de
récupérer la mise de fonds à la fin du projet. On suppose que les flux monétaires seront
constants pour la durée du projet. On suppose aussi qu‟il n‟y a pas d‟entretien sur
l‟équipement, la classe ferme à la fin du projet. Le cout en capital est le risque spécifique

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 62
du projet est de 13.5%. Le taux d‟amortissement fiscal maximum sur le solde dégressif
pour le nouvel équipement est de 30%. On suppose qu‟il n‟y a pas d‟entrée de fond
perdue durant le projet Pas d'EFP pendant le projet.
Calcul de la VAN
𝑛𝑎 = 5
𝑚 = 𝑣 = 1
𝑛 = 𝑛𝑎. 𝑚 = 5
𝑟 =𝑖
𝑚= 13.5%
𝑑 = 0.3
𝑇 = 30.9%
Étape 1 : Mise de fonds initiale (-)
M=1, 000,000+100,000 = 1, 100, 000,$
Étape 2 : Recette nette après impôt (+)
𝑅𝑡−𝐷𝑡 (1−𝑇)
(1+𝑟)𝑡51 =304405+268198+236298+208192+183429= 1,200,522$
Étape 3 : Économie d‟impôt liée à l‟amortissement fiscal (+)
𝐶.𝑑 .𝑇(1+0.50𝑟)
𝑟+𝑑 (1+𝑟) = 200,429$
Étape 4 : non applicable (pas de prévision sur l‟économie durant le projet)
Étape 5 : non applicable (les sorties de fonds au cours du projet sont nulles)
L‟étape 6 ne s‟applique pas car EFP = 0 et aussi l‟étape 7, PV=0
Étape 8 : Pertes d‟économie d‟impôt liée à l‟amortissement fiscal
𝑆𝑆𝐶 .𝑑. 𝑇
𝑟 + 𝑑 (1 + 𝑟)𝑛

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 63
𝑆𝑆𝐶 = 𝐶 1 −𝑑
2 1 − 𝑑 = 34,000$
𝑆𝑆𝐶 .𝑑 .𝑇
𝑟+𝑑 (1+𝑟)𝑛=2317$
Étape 9 : récupération de fonds de roulement (+)
𝑅 =𝐹𝑅
(1 + 𝑟)𝑛= 53090.9$
Les étapes 10, 11, 12 ne s‟appliqueront pas à cause que PV=FNACC
𝑉𝐴𝑁 = é𝑡𝑎𝑝𝑒𝑠 = 351,724$
Le calcul de la VAN nous confirme la rentabilité de ce projet.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 64
Conclusion
Ce projet avait comme mandat de faire une étude analytique sur les machines synchrones/
asynchrones afin de tirer une comparaison entre les deux en mettant l‟accent sur les
machines asynchrones. Après diverses discussions avec le professeur et en collaboration
avec le représentant industriel. Le déroulement de ce projet s‟est focalisé sur trois points.
Premièrement, une analyse bibliographique sur la machine asynchrone a été réalisée. Le
but de cette analyse a été de pouvoir situer la machine asynchrone et son développement.
Entre outre de pouvoir savoir qu‟est ce que la machine asynchrone a connu en termes de
conception, mais surtout en mode de régulation, car il est clair que le plus gros problème
de la machine asynchrone reste son autonomie.
Deuxièmement, l‟étude sur les principes, la constitution ainsi que les modes de
fonctionnements des deux machines a amené les étudiants à pourvoir dressé une
comparaison. Cette dernière comprend les avantages, les inconvénients, le
fonctionnement et les domaines d‟utilisation de chacune des machines.
Finalement, ce rapport touche la régulation des machines asynchrone. Les deux
principales méthodes de régulations ont été présentées. La première étant une méthode
passive en utilisant des condensateurs série et shunt, et la deuxième régulation active
utilise un contrôleur pi pour contrôler la vitesse du rotor avec un condensateur serie pour
l‟excitation de la machine.Dans la formation en génie électromécanique, le cours de
machine électrique n‟est pas vu dans toutes les orientations proposées à l‟UQAT entre
autres pour ceux qui se spécialisent dans le domaine électrique.
Cependant, dans ce projet, les étudiants ont eux la chance de voir les machines en
profondeur. C‟est dans cette optique que l‟apprentissage de nouvelles connaissances
grâce à la cueillette d‟informations a été un point magistral durant la réalisation de ce
projet. Cela a apporté plusieurs nouvelles notions à l‟équipe.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 65
Recommandation
Après le travail réalisé par l‟équipe. Sois l‟étude bibliographique, l‟étude analytique et les
différentes méthodes de régulation étudiées. Il est clair que la machine asynchrone
pourrait remplacer la machine synchrone dans différents domaines. Cela dit,
présentement la machine asynchrone à elle seule n‟est pas parfaitement autonome. Elle a
besoin de contrôleur actif ou passif tous les deux une pièce à part de la machine.
Plusieurs chercheurs et professeurs ont travaillé sur la machine asynchrone, mais jusqu'à
présent personne ne présente des moyens de régulations sans l‟ajout incontournable
d‟élément extérieur. L‟équipe propose que la modification de la machine asynchrone,
entre autres sa conception, à voir peut-être son bobinage pourrait amener les machines
asynchrones à un mode parfaitement autonome.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 66
References
[1] (Basset, 1935), Basset E.D., Potter F.M., «Capacitive Excitation of Induction
generators», Electrical Engineering, 1935.
[2] Wagner C. F. (1939), Self Excitation of Induction Motors, AIEE Transaction
[3] Shridhar L., Singh Bhim, Jha C. S. (1993), A Step Torwars in the Characteristic of self
Excited Induction Generator, IEEE Transaction of Energy Conversion, Vol. 8, N. 1
[4] Wang Li, Su Jian-Yi (1997), Effect of Lung-Shunt and Short-Shunt Connection on
Voltage Variation of a Self-Excited Induction Generator, IEEE Transaction of Energy
Conversion,
Vol. 12, N. 4
[5] R. Wamkeue, L. Songia, M. Lakehal, P. Viarouge „„State Modelling of Self-excited
Induction Generator for Wind Power Applications,‟‟ WIND ENERGY, Vol. 9, Issue 6,
pages 499-520, June 2006
[6] Songia 2004, Modélisation, optimisation des paramètres d‟opération et régulation en
tension par flux orienté de la génératrice à induction triphasé
[7] C. Joliette 2007, Développement des modèles d‟essais et application à l‟identification des
machines synchrones et asynchrones tripasées
[8] BENOIT ROBYNS, BRUNO FRANÇOIS, PHILIPPE DEGOBERT, JEAN-PAUL
HAUTIER (2007) Commande vectorielle de la machine asynchrone : désensibilisation et
optimisation par la logique floue
[9] Caron et Hautier, Caron, J. P. et Hautier, J.P. «Modélisation et commande de la
machine asynchrone » 1995
[10] I. Boldea, S. A. Nasar. « The Induction Machine Handbook », CRC Press LLC,
Chapter 1, 2002.
[11] G. Didier. « Modélisation et Diagnostic de la Machine Asynchrone en présence de
Défaillances », Thèse de Doctorat en Génie Electrique, Université Henri Poincaré, Nancy
I. Oct 2004.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 67
[13] Malik N.H., Al-Bahrani A.H. (1990), Influence of the Terminal Capacitor on the
Performance Characteristics of a Self-Excited Induction Generator, IEE Procedings, Vol.137,
Pt. C, N. 2
[14] T.Fukami, [15] Y.Kaburaki, S.Kawahara, and T.Miyamoto, “Performance analysis of a
self-regulated self excited single-phase induction generator using a three-phase machine,” in
1997 IEEE International Electric Machines and Drives Conference Record, Milwaukee, WI,
USA, May 18-21, 1997, pp. TD2-3.1-TD2-3.3.
[15] T.F.Chan, “Performance analysis of a three-phase induction generator self-excited with a
single capacitance self excited single-phase,” in IEEE Transactions on Energy Conversion,
Paper no. PE-028-EC-0-10-1997
[16] Wamkeue René (1999), Generalized Models of Induction Motors and Generator Having
Muliple Rotor Circuit, Publication IEEE
[17] (Chatelain, 1983), Châtelain, J. «Machines électriques, Traité d‟électricité Volume
X», Presses polytechniques romandes, lausanne, 1983
[18] Levi E. (1995), A Unified Approach to Main Flux Saturation Modellings in D-Q Axis
Models of Inductions Machines, IEEE Transaction of Energy Conversion, Vol. 10, N. 3
[19] Levi E. (1996), Main Flux Saturation Modelling In Double Cage And Deep-Bar
Induction Machine , IEEE Transaction of Energy Conversion, Vol. 11, N. 2
[20] Wamkeue René (2000), Numerical Modeling and Simulation of Saturated Unbalanced
Electromechanical Transient of Self-Excited Induction Generator,Publication IEEE
[21] André Pomerleau, La commande de procédés industriels, Éditions Hermes, Paris,
367 p., 1997. (avec la collaboration d'A. Desbiens et É. Poulin)
[22] D. Kairous, S. Mekhtoub, R. Ibtiouen, O. Touhami, Modèle d‟un générateur asynchrone
auto-amorcé lors d‟un retour réseau, Algerian Journal of Technology,P49-55, ENP,2005.
[23] Luigi Piegari', Member. IEEE, Renato Rizzo, Member, IEEE, Study of saturation
phenomena on asynchronous generators used in wind farms, Electrical Engineering
Department, University of Naples "Federico II", Via Claudio 21, Naples, Italy.
[24] T. Khaldi, Retour réseau sur un autoamorçage accidentel de la machine asynchrone,
thèse de Magister, ENP, Alger, 1999.

PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 68
[25] T. Boumegoura. « Recherche de Signature Electromagnétique des Défauts dans une
Machine Asynchrone et Synthèse d‟Observateurs en Vue du Diagnostic », Thèse de
Doctorat, Ecole doctorale Electronique, Electrotechnique, Automatique de Lyon, mars
2001.
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 69
ANNEXE A
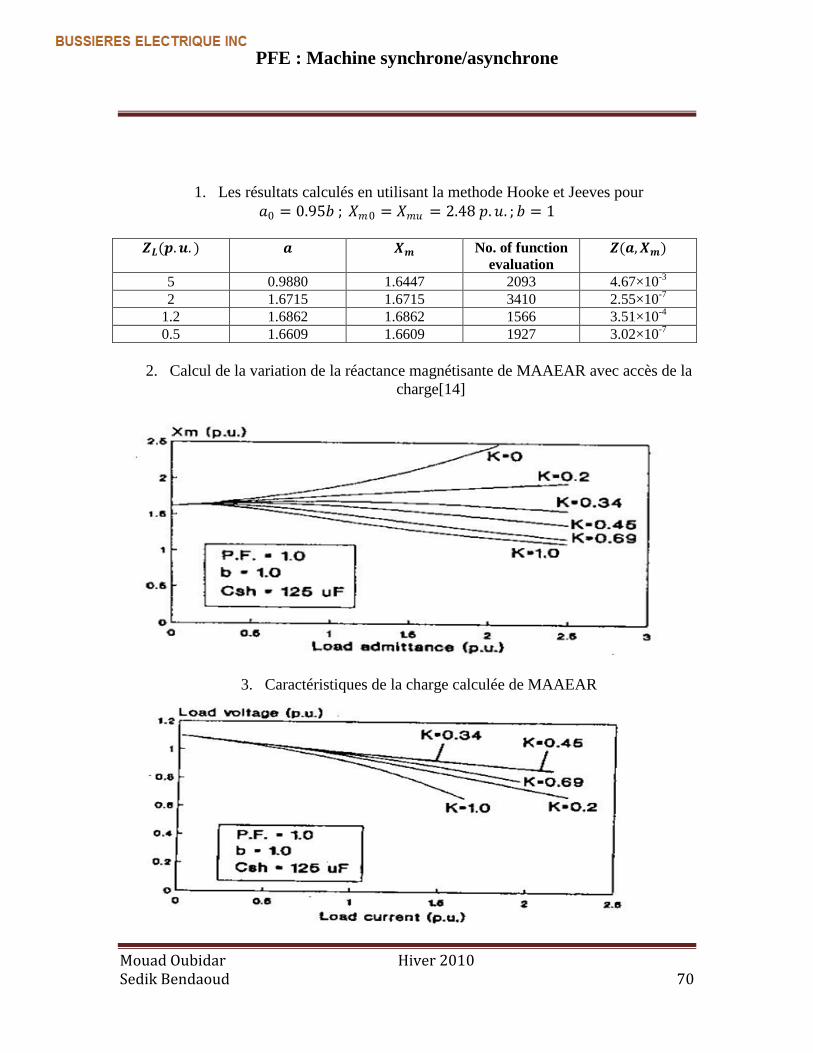
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 70
1. Les résultats calculés en utilisant la methode Hooke et Jeeves pour
𝑎0 = 0.95𝑏 ; 𝑋𝑚0 = 𝑋𝑚𝑢 = 2.48 𝑝. 𝑢. ; 𝑏 = 1
𝒁𝑳(𝒑.𝒖. ) 𝒂 𝑿𝒎 No. of function
evaluation
𝒁(𝒂, 𝑿𝒎)
5 0.9880 1.6447 2093 4.67×10-3
2 1.6715 1.6715 3410 2.55×10-7
1.2 1.6862 1.6862 1566 3.51×10-4
0.5 1.6609 1.6609 1927 3.02×10-7
2. Calcul de la variation de la réactance magnétisante de MAAEAR avec accès de la
charge[14]
3. Caractéristiques de la charge calculée de MAAEAR
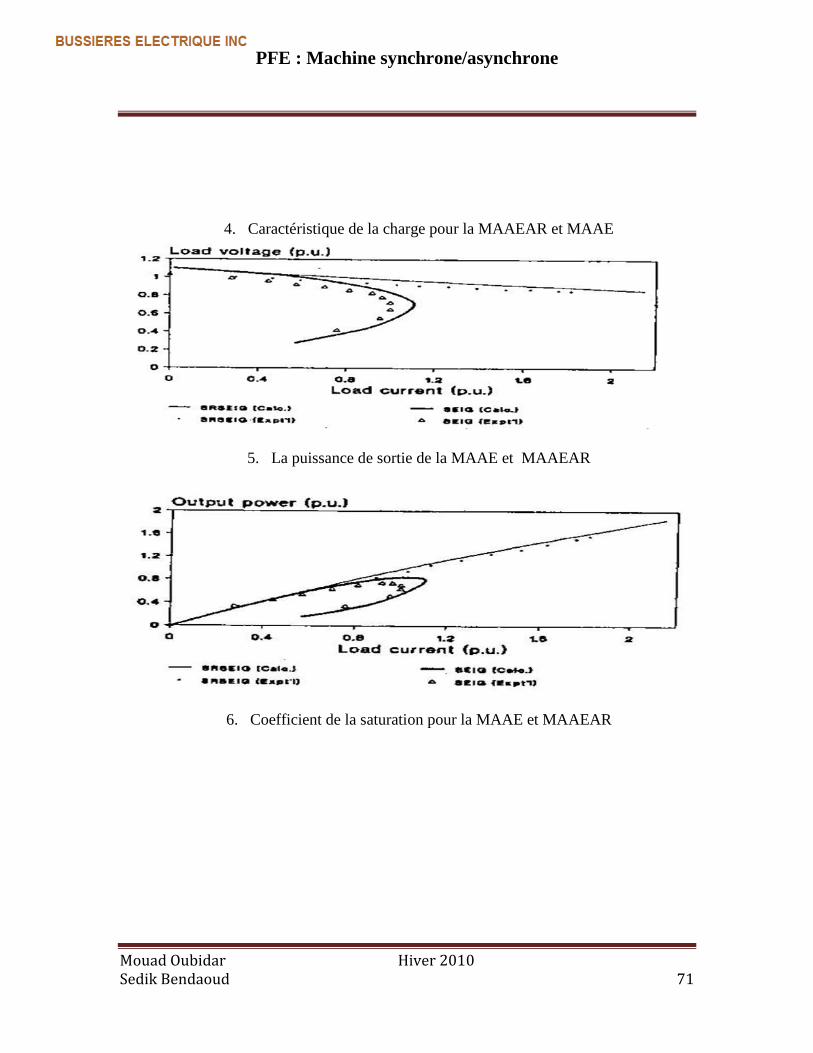
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 71
4. Caractéristique de la charge pour la MAAEAR et MAAE
5. La puissance de sortie de la MAAE et MAAEAR
6. Coefficient de la saturation pour la MAAE et MAAEAR
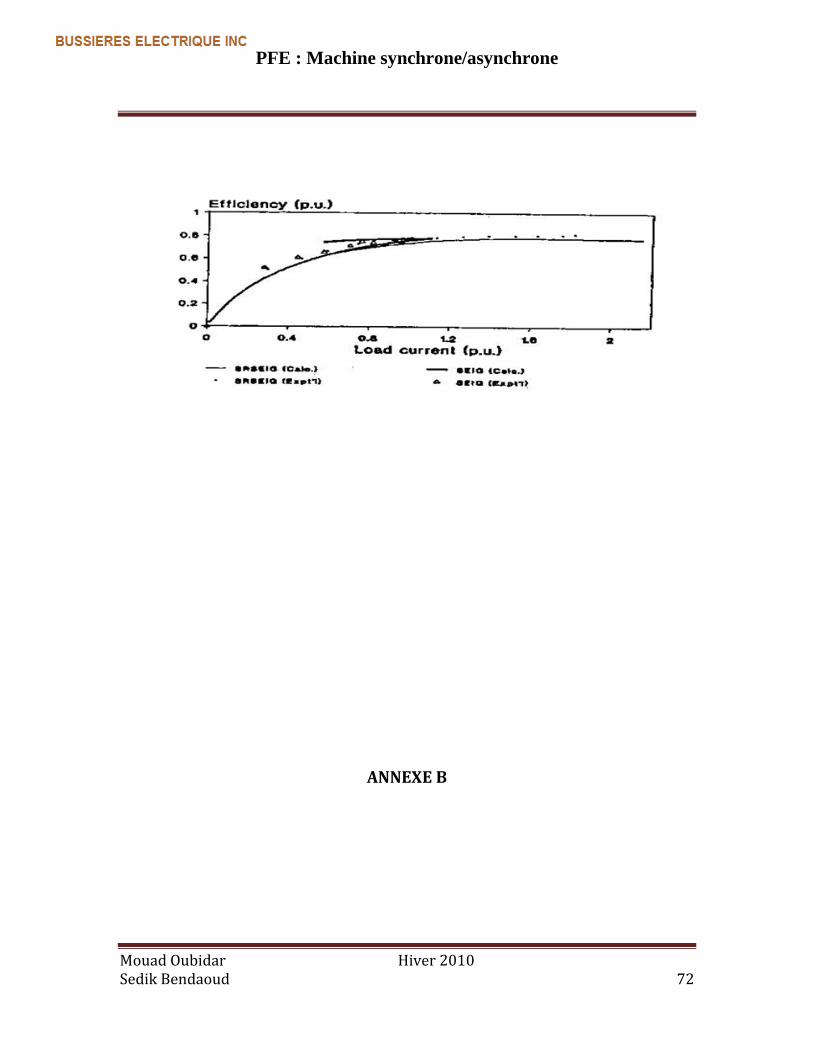
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 72
ANNEXE B
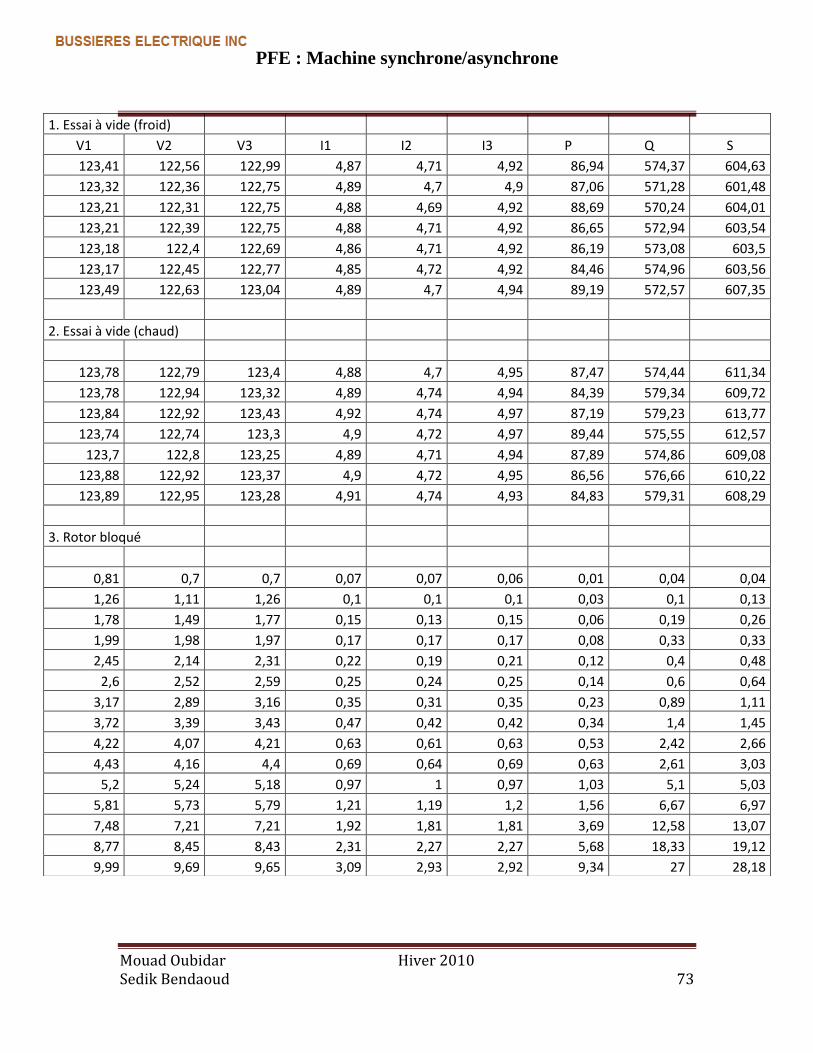
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 73
1. Essai à vide (froid) V1 V2 V3 I1 I2 I3 P Q S
123,41 122,56 122,99 4,87 4,71 4,92 86,94 574,37 604,63
123,32 122,36 122,75 4,89 4,7 4,9 87,06 571,28 601,48
123,21 122,31 122,75 4,88 4,69 4,92 88,69 570,24 604,01
123,21 122,39 122,75 4,88 4,71 4,92 86,65 572,94 603,54
123,18 122,4 122,69 4,86 4,71 4,92 86,19 573,08 603,5
123,17 122,45 122,77 4,85 4,72 4,92 84,46 574,96 603,56
123,49 122,63 123,04 4,89 4,7 4,94 89,19 572,57 607,35
2. Essai à vide (chaud)
123,78 122,79 123,4 4,88 4,7 4,95 87,47 574,44 611,34
123,78 122,94 123,32 4,89 4,74 4,94 84,39 579,34 609,72
123,84 122,92 123,43 4,92 4,74 4,97 87,19 579,23 613,77
123,74 122,74 123,3 4,9 4,72 4,97 89,44 575,55 612,57
123,7 122,8 123,25 4,89 4,71 4,94 87,89 574,86 609,08
123,88 122,92 123,37 4,9 4,72 4,95 86,56 576,66 610,22
123,89 122,95 123,28 4,91 4,74 4,93 84,83 579,31 608,29
3. Rotor bloqué
0,81 0,7 0,7 0,07 0,07 0,06 0,01 0,04 0,04
1,26 1,11 1,26 0,1 0,1 0,1 0,03 0,1 0,13
1,78 1,49 1,77 0,15 0,13 0,15 0,06 0,19 0,26
1,99 1,98 1,97 0,17 0,17 0,17 0,08 0,33 0,33
2,45 2,14 2,31 0,22 0,19 0,21 0,12 0,4 0,48
2,6 2,52 2,59 0,25 0,24 0,25 0,14 0,6 0,64
3,17 2,89 3,16 0,35 0,31 0,35 0,23 0,89 1,11
3,72 3,39 3,43 0,47 0,42 0,42 0,34 1,4 1,45
4,22 4,07 4,21 0,63 0,61 0,63 0,53 2,42 2,66
4,43 4,16 4,4 0,69 0,64 0,69 0,63 2,61 3,03
5,2 5,24 5,18 0,97 1 0,97 1,03 5,1 5,03
5,81 5,73 5,79 1,21 1,19 1,2 1,56 6,67 6,97
7,48 7,21 7,21 1,92 1,81 1,81 3,69 12,58 13,07
8,77 8,45 8,43 2,31 2,27 2,27 5,68 18,33 19,12
9,99 9,69 9,65 3,09 2,93 2,92 9,34 27 28,18
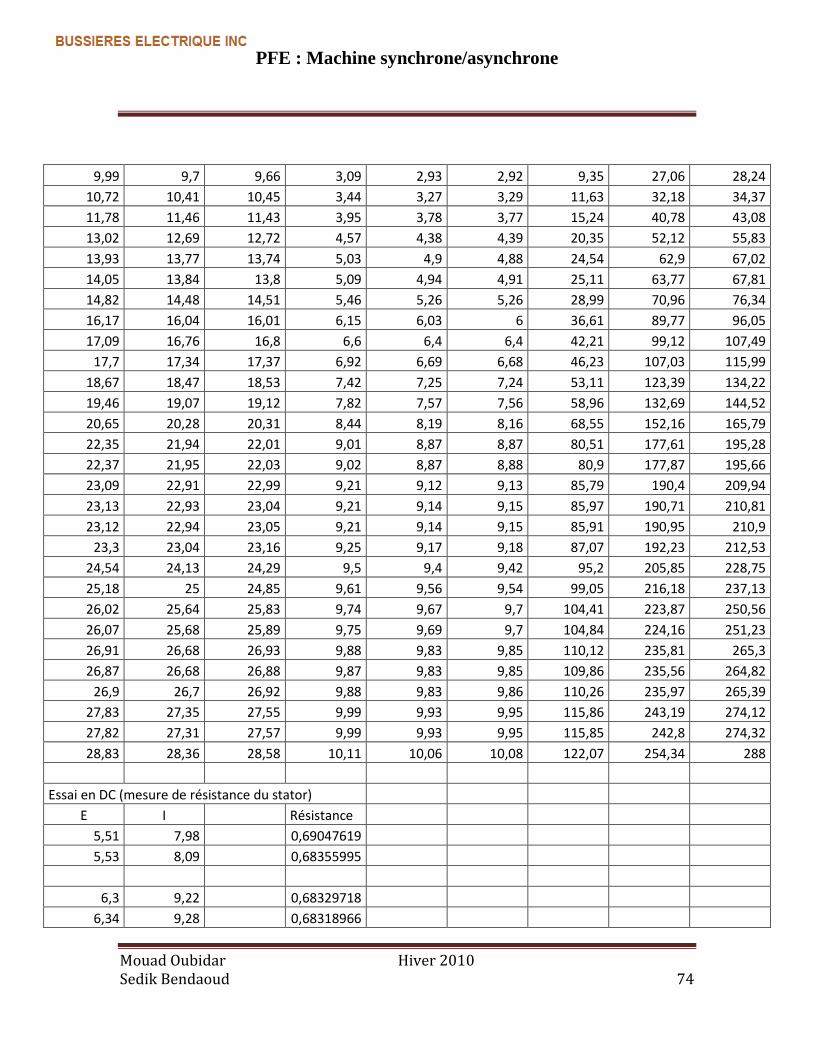
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 74
9,99 9,7 9,66 3,09 2,93 2,92 9,35 27,06 28,24
10,72 10,41 10,45 3,44 3,27 3,29 11,63 32,18 34,37
11,78 11,46 11,43 3,95 3,78 3,77 15,24 40,78 43,08
13,02 12,69 12,72 4,57 4,38 4,39 20,35 52,12 55,83
13,93 13,77 13,74 5,03 4,9 4,88 24,54 62,9 67,02
14,05 13,84 13,8 5,09 4,94 4,91 25,11 63,77 67,81
14,82 14,48 14,51 5,46 5,26 5,26 28,99 70,96 76,34
16,17 16,04 16,01 6,15 6,03 6 36,61 89,77 96,05
17,09 16,76 16,8 6,6 6,4 6,4 42,21 99,12 107,49
17,7 17,34 17,37 6,92 6,69 6,68 46,23 107,03 115,99
18,67 18,47 18,53 7,42 7,25 7,24 53,11 123,39 134,22
19,46 19,07 19,12 7,82 7,57 7,56 58,96 132,69 144,52
20,65 20,28 20,31 8,44 8,19 8,16 68,55 152,16 165,79
22,35 21,94 22,01 9,01 8,87 8,87 80,51 177,61 195,28
22,37 21,95 22,03 9,02 8,87 8,88 80,9 177,87 195,66
23,09 22,91 22,99 9,21 9,12 9,13 85,79 190,4 209,94
23,13 22,93 23,04 9,21 9,14 9,15 85,97 190,71 210,81
23,12 22,94 23,05 9,21 9,14 9,15 85,91 190,95 210,9
23,3 23,04 23,16 9,25 9,17 9,18 87,07 192,23 212,53
24,54 24,13 24,29 9,5 9,4 9,42 95,2 205,85 228,75
25,18 25 24,85 9,61 9,56 9,54 99,05 216,18 237,13
26,02 25,64 25,83 9,74 9,67 9,7 104,41 223,87 250,56
26,07 25,68 25,89 9,75 9,69 9,7 104,84 224,16 251,23
26,91 26,68 26,93 9,88 9,83 9,85 110,12 235,81 265,3
26,87 26,68 26,88 9,87 9,83 9,85 109,86 235,56 264,82
26,9 26,7 26,92 9,88 9,83 9,86 110,26 235,97 265,39
27,83 27,35 27,55 9,99 9,93 9,95 115,86 243,19 274,12
27,82 27,31 27,57 9,99 9,93 9,95 115,85 242,8 274,32
28,83 28,36 28,58 10,11 10,06 10,08 122,07 254,34 288
Essai en DC (mesure de résistance du stator) E I
Résistance
5,51 7,98
0,69047619 5,53 8,09
0,68355995
6,3 9,22
0,68329718 6,34 9,28
0,68318966
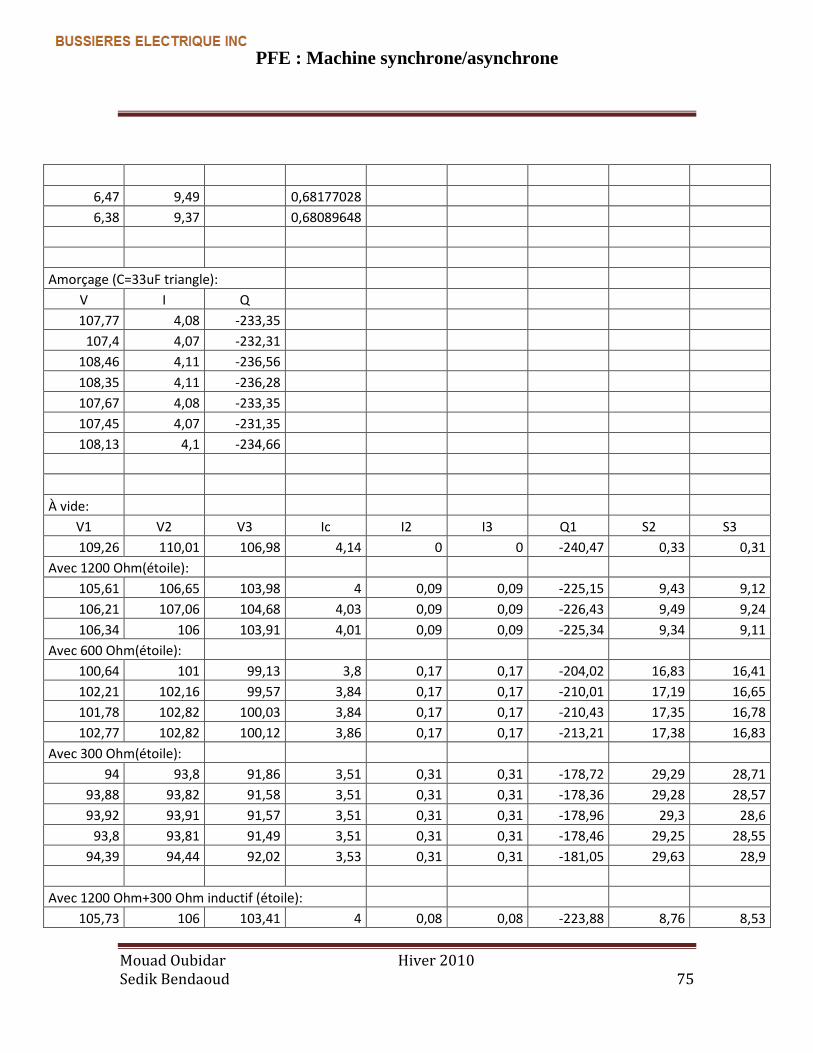
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 75
6,47 9,49
0,68177028 6,38 9,37
0,68089648
Amorçage (C=33uF triangle): V I Q 107,77 4,08 -233,35 107,4 4,07 -232,31 108,46 4,11 -236,56 108,35 4,11 -236,28 107,67 4,08 -233,35 107,45 4,07 -231,35 108,13 4,1 -234,66
À vide: V1 V2 V3 Ic I2 I3 Q1 S2 S3
109,26 110,01 106,98 4,14 0 0 -240,47 0,33 0,31
Avec 1200 Ohm(étoile): 105,61 106,65 103,98 4 0,09 0,09 -225,15 9,43 9,12
106,21 107,06 104,68 4,03 0,09 0,09 -226,43 9,49 9,24
106,34 106 103,91 4,01 0,09 0,09 -225,34 9,34 9,11
Avec 600 Ohm(étoile): 100,64 101 99,13 3,8 0,17 0,17 -204,02 16,83 16,41
102,21 102,16 99,57 3,84 0,17 0,17 -210,01 17,19 16,65
101,78 102,82 100,03 3,84 0,17 0,17 -210,43 17,35 16,78
102,77 102,82 100,12 3,86 0,17 0,17 -213,21 17,38 16,83
Avec 300 Ohm(étoile): 94 93,8 91,86 3,51 0,31 0,31 -178,72 29,29 28,71
93,88 93,82 91,58 3,51 0,31 0,31 -178,36 29,28 28,57
93,92 93,91 91,57 3,51 0,31 0,31 -178,96 29,3 28,6
93,8 93,81 91,49 3,51 0,31 0,31 -178,46 29,25 28,55
94,39 94,44 92,02 3,53 0,31 0,31 -181,05 29,63 28,9
Avec 1200 Ohm+300 Ohm inductif (étoile): 105,73 106 103,41 4 0,08 0,08 -223,88 8,76 8,53
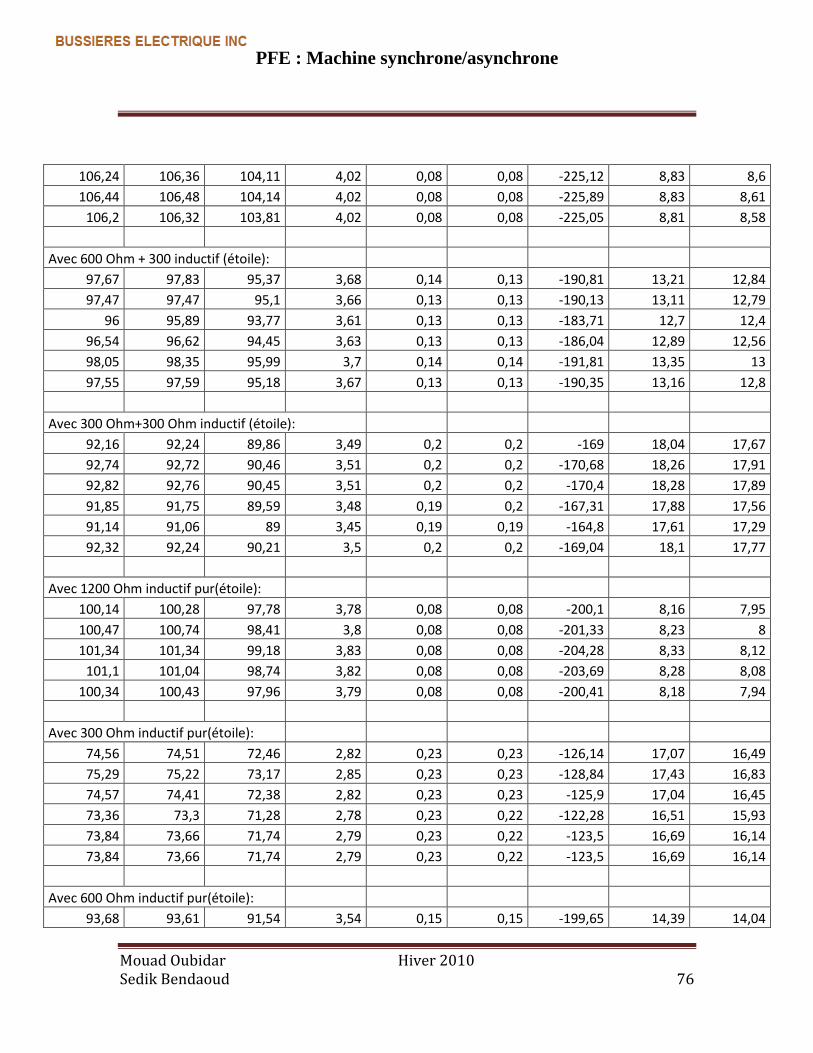
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 76
106,24 106,36 104,11 4,02 0,08 0,08 -225,12 8,83 8,6
106,44 106,48 104,14 4,02 0,08 0,08 -225,89 8,83 8,61
106,2 106,32 103,81 4,02 0,08 0,08 -225,05 8,81 8,58
Avec 600 Ohm + 300 inductif (étoile): 97,67 97,83 95,37 3,68 0,14 0,13 -190,81 13,21 12,84
97,47 97,47 95,1 3,66 0,13 0,13 -190,13 13,11 12,79
96 95,89 93,77 3,61 0,13 0,13 -183,71 12,7 12,4
96,54 96,62 94,45 3,63 0,13 0,13 -186,04 12,89 12,56
98,05 98,35 95,99 3,7 0,14 0,14 -191,81 13,35 13
97,55 97,59 95,18 3,67 0,13 0,13 -190,35 13,16 12,8
Avec 300 Ohm+300 Ohm inductif (étoile): 92,16 92,24 89,86 3,49 0,2 0,2 -169 18,04 17,67
92,74 92,72 90,46 3,51 0,2 0,2 -170,68 18,26 17,91
92,82 92,76 90,45 3,51 0,2 0,2 -170,4 18,28 17,89
91,85 91,75 89,59 3,48 0,19 0,2 -167,31 17,88 17,56
91,14 91,06 89 3,45 0,19 0,19 -164,8 17,61 17,29
92,32 92,24 90,21 3,5 0,2 0,2 -169,04 18,1 17,77
Avec 1200 Ohm inductif pur(étoile): 100,14 100,28 97,78 3,78 0,08 0,08 -200,1 8,16 7,95
100,47 100,74 98,41 3,8 0,08 0,08 -201,33 8,23 8
101,34 101,34 99,18 3,83 0,08 0,08 -204,28 8,33 8,12
101,1 101,04 98,74 3,82 0,08 0,08 -203,69 8,28 8,08
100,34 100,43 97,96 3,79 0,08 0,08 -200,41 8,18 7,94
Avec 300 Ohm inductif pur(étoile): 74,56 74,51 72,46 2,82 0,23 0,23 -126,14 17,07 16,49
75,29 75,22 73,17 2,85 0,23 0,23 -128,84 17,43 16,83
74,57 74,41 72,38 2,82 0,23 0,23 -125,9 17,04 16,45
73,36 73,3 71,28 2,78 0,23 0,22 -122,28 16,51 15,93
73,84 73,66 71,74 2,79 0,23 0,22 -123,5 16,69 16,14
73,84 73,66 71,74 2,79 0,23 0,22 -123,5 16,69 16,14
Avec 600 Ohm inductif pur(étoile): 93,68 93,61 91,54 3,54 0,15 0,15 -199,65 14,39 14,04
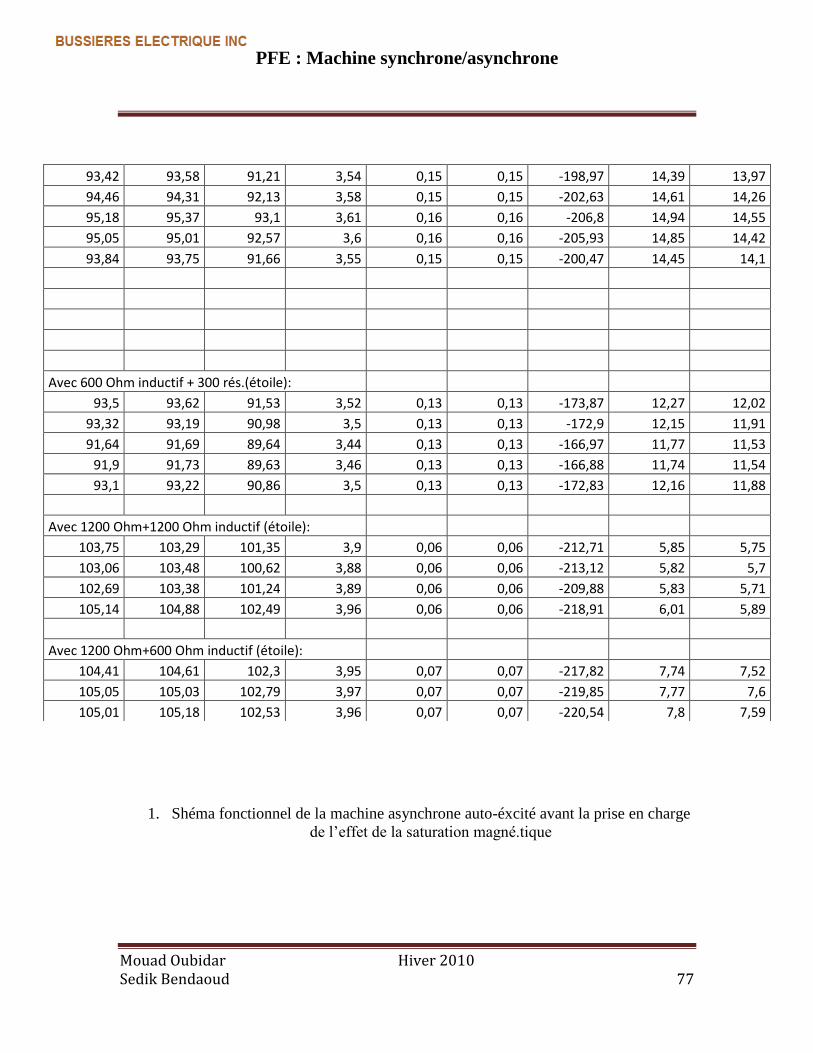
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 77
1. Shéma fonctionnel de la machine asynchrone auto-éxcité avant la prise en charge
de l‟effet de la saturation magné.tique
93,42 93,58 91,21 3,54 0,15 0,15 -198,97 14,39 13,97
94,46 94,31 92,13 3,58 0,15 0,15 -202,63 14,61 14,26
95,18 95,37 93,1 3,61 0,16 0,16 -206,8 14,94 14,55
95,05 95,01 92,57 3,6 0,16 0,16 -205,93 14,85 14,42
93,84 93,75 91,66 3,55 0,15 0,15 -200,47 14,45 14,1
Avec 600 Ohm inductif + 300 rés.(étoile): 93,5 93,62 91,53 3,52 0,13 0,13 -173,87 12,27 12,02
93,32 93,19 90,98 3,5 0,13 0,13 -172,9 12,15 11,91
91,64 91,69 89,64 3,44 0,13 0,13 -166,97 11,77 11,53
91,9 91,73 89,63 3,46 0,13 0,13 -166,88 11,74 11,54
93,1 93,22 90,86 3,5 0,13 0,13 -172,83 12,16 11,88
Avec 1200 Ohm+1200 Ohm inductif (étoile): 103,75 103,29 101,35 3,9 0,06 0,06 -212,71 5,85 5,75
103,06 103,48 100,62 3,88 0,06 0,06 -213,12 5,82 5,7
102,69 103,38 101,24 3,89 0,06 0,06 -209,88 5,83 5,71
105,14 104,88 102,49 3,96 0,06 0,06 -218,91 6,01 5,89
Avec 1200 Ohm+600 Ohm inductif (étoile): 104,41 104,61 102,3 3,95 0,07 0,07 -217,82 7,74 7,52
105,05 105,03 102,79 3,97 0,07 0,07 -219,85 7,77 7,6
105,01 105,18 102,53 3,96 0,07 0,07 -220,54 7,8 7,59
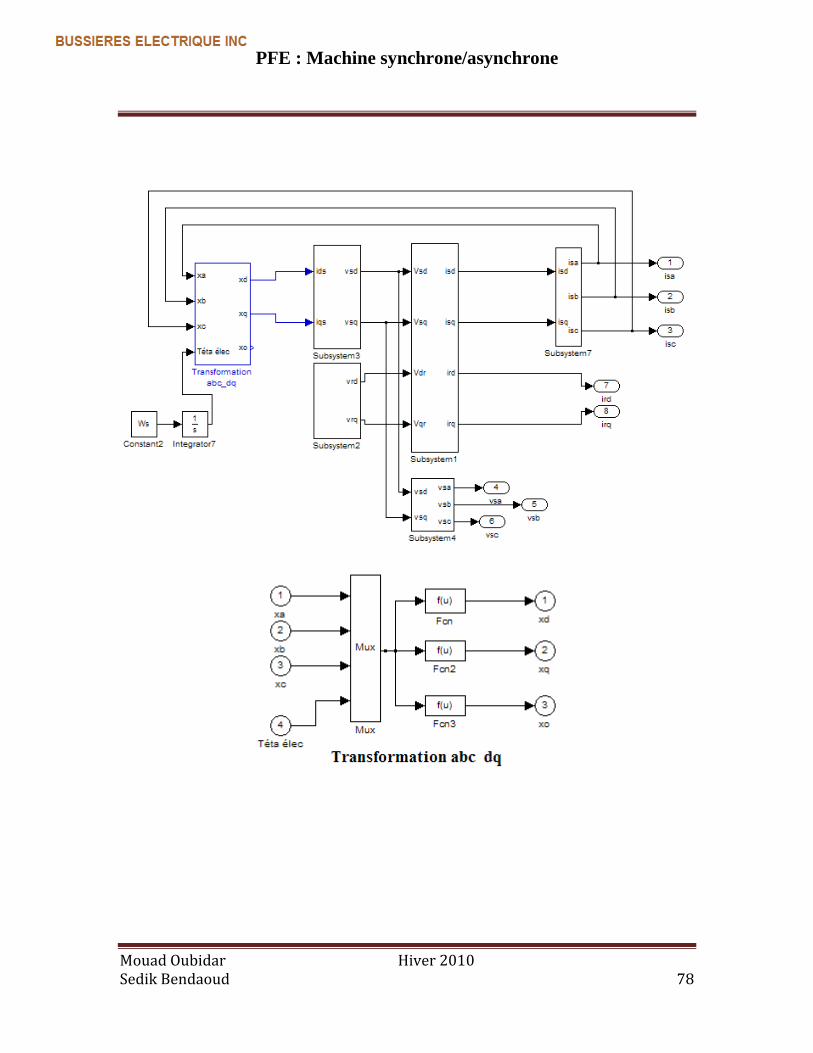
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 78
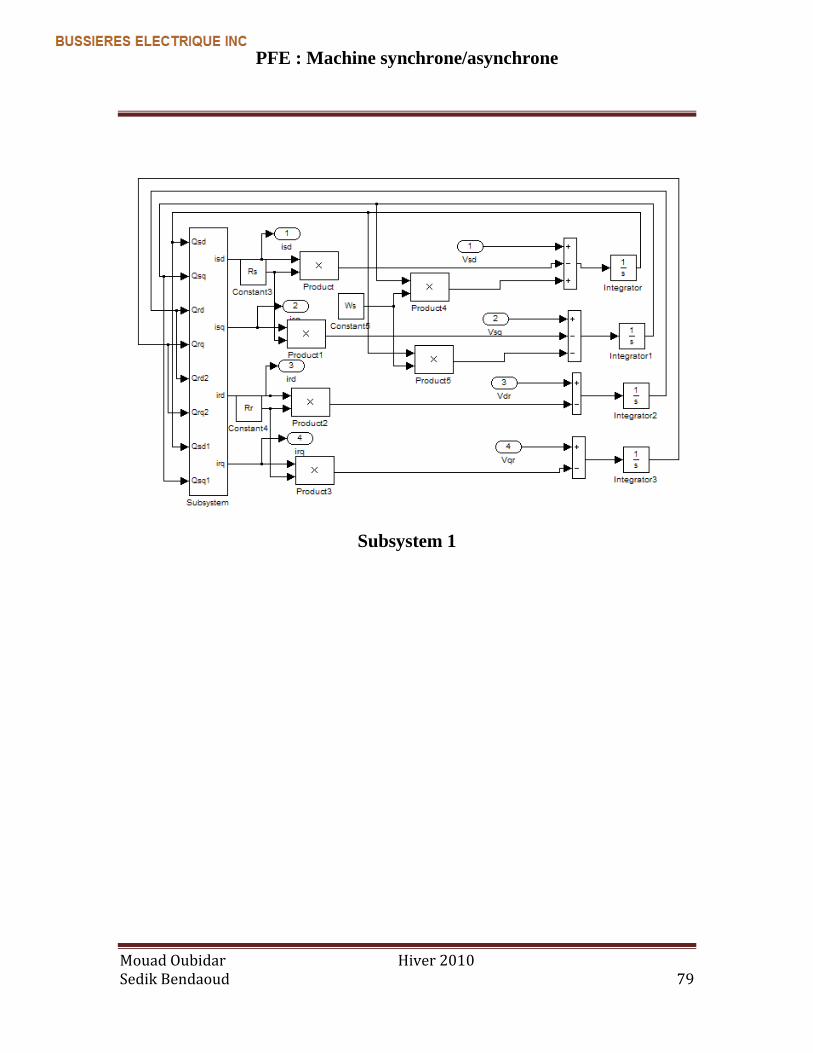
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 79
Subsystem 1
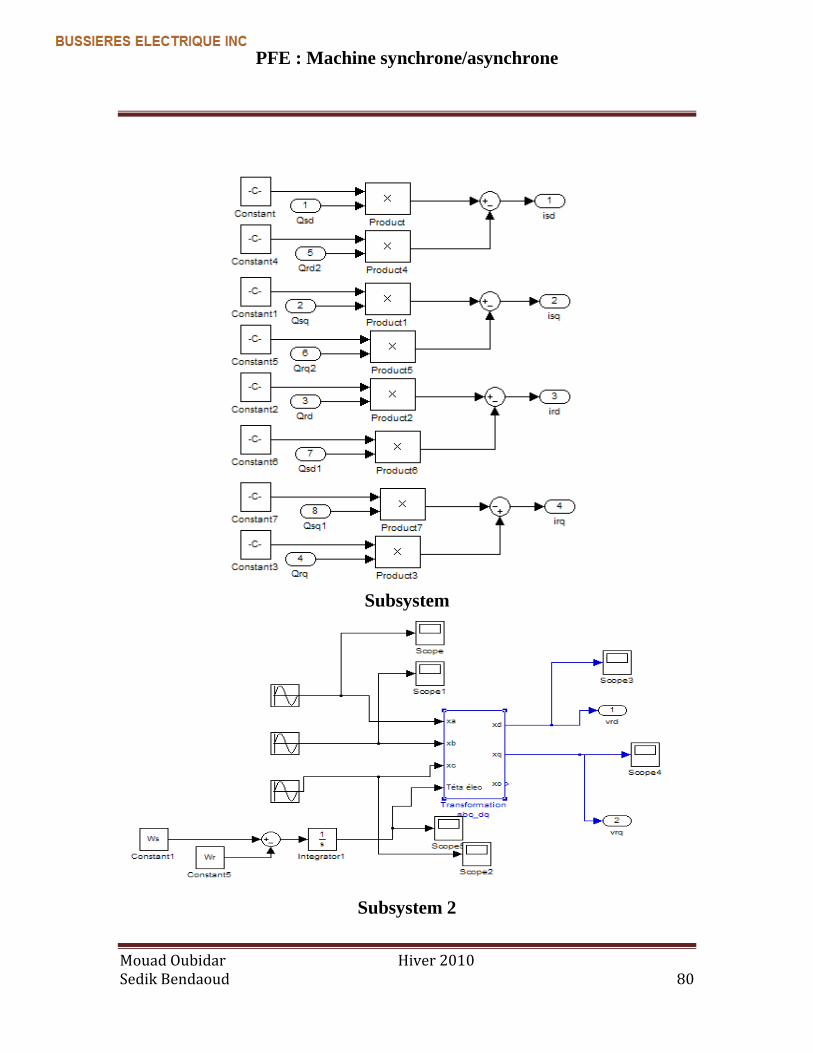
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 80
Subsystem
Subsystem 2
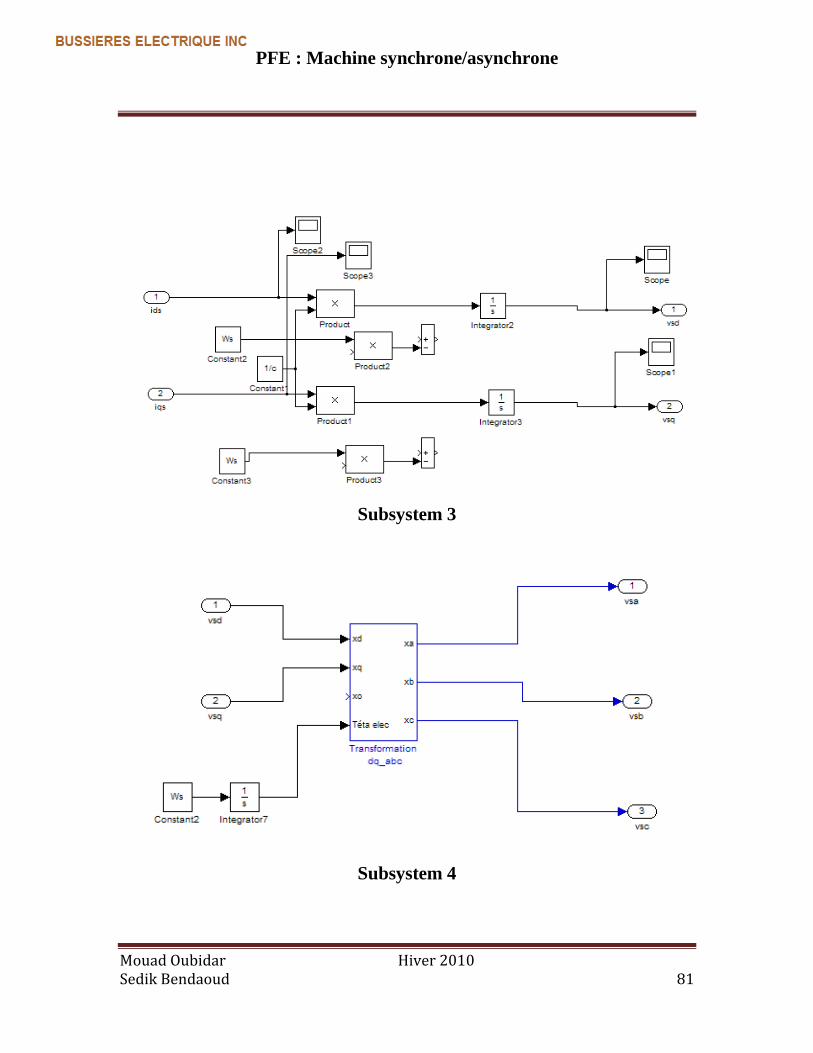
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 81
Subsystem 3
Subsystem 4
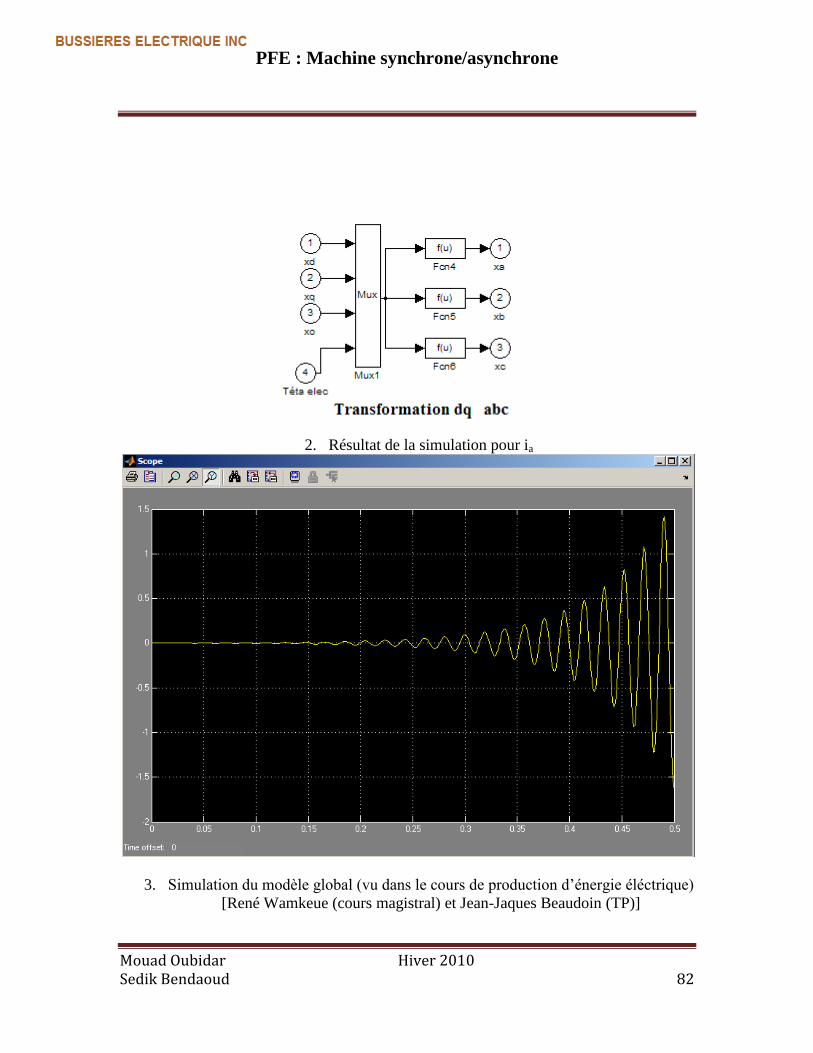
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 82
2. Résultat de la simulation pour ia
3. Simulation du modèle global (vu dans le cours de production d‟énergie éléctrique)
[René Wamkeue (cours magistral) et Jean-Jaques Beaudoin (TP)]
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 83
clear all; format long e;
global ws wm wn X R M Xsr np ci global xc F global xm global rl xl
% charge R-L rl = 1.60; xl = 1.20;
% Initialisation de La charge RL zlo=2; pf=0.8;
rl = zlo*pf; xl = sqrt(zlo^2-rl^2);
% Condensateur d'excitation xc = 1.586796654327108e+000; xc = 1.474018550417642e+000; xc = 1.618611031673613e+000;
% Rapport de la fréquence électrique sur 60 herts F = 9.696467050627070e-001; F= 9.688218177822980e-001; F = 9.591835991576974e-001;
% Définition des paramètres du moteur asynchrone ra = 0.1228; % résistance stratorique rh = ra; % résistance homopolaire rA = 0.0943; % résistance de l'amortisseur xa = 0.2196; % réactance de fuite stratorique xh = xa; % réactance homopolaire xm = 7.3868; % réactance mutuelle xA = xa; % réactance de fuite de l'amortisseur
f = 60*F; % fréquence wn = 2*pi*60; % pulsation électrique de base n = 1; % nombre d'armotisseur np = 1; % 1 paires de pôle
wm = 1; % vitesse du rotor initiale (en pu) g = (F-wm)/F; % glissement initiale (en pu)
% Le référentielle se trouve avec le champ tournant
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 84
ws = F; % vitesse de synchronisation (en pu) wg = ws-wm; % vitesse de glissement (en pu)
% Inductance stratorique xd = xm+xa; % Inductance stratorique xD = xm+xA; % Matrice des résistance du stator Rs = diag([ra ra rh]); % Matrice des résistance du rotor Rr = diag([rA rA]); % Matrice des résistances du stator et rotor R = blkdiag(-Rs,Rr); % Matrice des réactances du stator Xs = diag([xd xd xh]); % Matrice d'inductance mutuelle entre le stator et le rotor Xsr = xm*[1 0;0 1;0 0];
% Matrice des réactances du rotor Xr = [xD 0;0 xD];
% Matrice complète des réactances X = [-Xs Xsr;-Xsr' Xr];
% Matrice M M = ws*[0 -1 0;1 0 0;0 0 0]; omega = wg*[0 -1;1 0]; W_ = [M zeros(3,2);zeros(2,3) omega];
% matrices d'états pour les équations électriques ai = -wn*X^-1*(R+W_*X);
bi = wn*X^-1;
ci = eye(5,5);
di = zeros(5,5);
% calcule de conditions initiales global theta_0 theta_0 = 0; u_t_0 = 0.01; u_d_0 = u_t_0*cos(theta_0); u_q_0 = u_t_0*sin(theta_0); u_h_0 = 0; u_D_0 = 0; u_Q_0 = 0;
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 85
U_0 = [u_d_0 u_q_0 u_h_0 u_D_0 u_Q_0]'; I_0 = -ai^-1*bi*U_0;
Il_0 = [0 0 0];
init = [I_0' u_d_0 u_q_0 u_h_0 Il_0]';
% Matrice du condo d'excitation xcX_1 = xc*eye(5); xcX_1 = xcX_1(1:3,:); P = ws*[0 -1 0;1 0 0;0 0 0]; Bc2 = -wn*xc*eye(3,3); Bc1 = wn*xcX_1; Ac =-wn*P;
% Matrice de la load RL Al = -wn*(xl^-1*rl*eye(3,3)+P); Bl1 = wn*xl^-1*eye(3,3);
% Matrices d'états Ai_1 = [ai bi(1:5,1:3) zeros(5,3)]; Ai_2 = [Bc1 Ac Bc2]; Ai_3 = [zeros(3,5) Bl1 Al];
Ai = [Ai_1;Ai_2;Ai_3];
Bi = [zeros(11,1)']';
Ci = [eye(5) zeros(5,6);zeros(6,5),eye(6)];
Di = zeros(11,1);
global A_ B_ C_ D_ A_ = Ai; B_ = Bi; C_ = Ci; D_ = Di;
global poly_s poly_s = [-0.1014 -1.2241 1.6349 -0.7836 0.1566 0.9905];
La saturation magnétique
function [ kpsi ] = saturation_cj( in )
id = in(1); iq = in(2); ih = in(3);
PFE : Machine synchrone/asynchrone
Mouad Oubidar Hiver 2010 Sedik Bendaoud 86
iD = in(4); iQ = in(5);
Im = sqrt((-id+iD)^2+(-iq+iQ)^2);
% Besoin des coefficient du polynome global poly_s
% % Calcule le facteur de saturation % k=polyval(poly_s,Im);
k = max(0,k);
% retourne le facteur de saturation kpsi = k;