synthèse de la commande d'un système téléoperé d...
TRANSCRIPT

Mémoire du projet de fin d'études
Synthèse de la commande d'un système téléoperéd'interactions robot-tissu en utilisant l'approche
IQC
Auteur :
Jorge Ivan Ayala Cuevas
Tuteurs Laboratoire :
Hassan Omran
Bernard Bayle
Tuteur Académique INSA :
Sylvain Durand
Institut National des Sciences Appliquées de Strasbourg
Diplôme d'ingénieur - Spécialité en Génie Électrique - Option Systèmes
Télécom Physique Strasbourg
Master en Imagerie, Robotique et Ingénierie pour le VivantParcours Automatique et Robotique
ICube (UMR 7357) - Laboratoire des sciences de l'ingénieur, del'informatique et de l'imagerie
Équipe Automatique, Vision et Robotique (AVR)
28 août 2017
ICube / INSA Strasbourg / TP Strasbourg
Fiche d'objectives
1. Maîtrise des outils de synthèse de correcteurs et d'analyse de robustesse basés sur les inégalitésmatricielles linéaires (LMI) et les contraintes intégrales quadratiques (IQC).
2. Modélisation et identi�cation du système de téléopération bilatérale.
3. Développement d'un algorithme de synthèse de correcteurs basé sur une approche d'optimisationLMI qui permet de traiter le compromis entre la stabilité, les performances et la robustesse dusystème asservi.
4. Développement d'un algorithme d'analyse de robustesse basé sur l'approche IQC a�n d'évaluer lastabilité et les performances du système devant les possibles incertitudes du système.
5. Synthèse d'une structure de commande pour le système de téléopération à travers les méthodesdéveloppés.
6. Analyse de robustesse complet et simulation du système de téléopération asservi par la commandesynthétisée.
7. Évaluation expérimentale des méthodes développés et de la structure commande proposée sur undispositif expérimental de téléopération.
8. Évaluation des résultats obtenus et proposition des voies d'amélioration pour des futurs projets baséssur cette approche.
1

ICube / INSA Strasbourg / TP Strasbourg
Synthèse de la commande d'un système téléoperé d'interactions robot-tissu en utilisantl'approche IQC
Résumé Les systèmes de téléopération bilatérale permettentà un opérateur humain de manipuler un environnement à dis-tance en lui donnant la sensation d'être en contact direct aveclui. La commande de ce type des systèmes a porté des problé-matiques très dé�antes historiquement à cause des variations deparamètres de l'humain et de l'environnement et du fort com-promis entre les performances et la stabilité. Pour traiter cesproblèmes, nous développons un modèle paramétrique du sys-tème de téléopération. Ensuite nous présentons une méthode desynthèse de correcteurs basés sur l'optimisation par LMI qui per-met de traiter directement le compromis entre les performanceset la robustesse. Un test d'analyse de robustesse à travers la ca-ractérisation d'incertitudes par IQC est aussi présenté. Puis nousproposons deux architectures pour la commande du système. Lesdeux propositions sont évaluées par analyse, simulation et expé-rimentation et les résultats observés sont discutés.
Control design for a teleoperated tool-tissues interactions system using IQC approach
Abstract Bilateral teleoperation systems allow a human ope-rator to manipulate a remote environment by giving him thesensation of being in direct contact with it. The control of thesekind of systems has presented very challenging problems histo-rically due to variations in human and environment parametersand the high trade-o� between performance and stability. To dealwith these problems, we develop a parametric model of the teleo-peration system. Then we present a contol design method basedon LMI optimization which allow to treat directly the trade-o� between performances and robustness. A test of robustnessanalysis through the characterization of uncertainties by IQC isalso presented. Then we propose two architectures for the systemcontrol . The two proposals are evaluated by analysis, simulationand experimentation and the observed results are discussed.
2

Table des matières
1 Contexte du projet 81.1 Présentation du laboratoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1.1 ICube Laboratoire des sciences de l'ingénieur, de l'informatique et de l'imagerie . . 81.1.2 L'équipe Automatique, Vision et Robotique (AVR). . . . . . . . . . . . . . . . . . . 9
1.2 Présentation du sujet et objectifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Cadre théorique et état de l'art 122.1 Les systèmes robotiques téléopérés : Présentation et terminologie . . . . . . . . . . . . . . . 122.2 La téléopération bilatérale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3 Problématiques dans la commande des systèmes de téléopération bilatérale . . . . . . . . . . 132.4 Approches classiques de modélisation et commande . . . . . . . . . . . . . . . . . . . . . . . 14
2.4.1 Modèle du Quadripôle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.4.2 Analyse de stabilité basée sur la passivité . . . . . . . . . . . . . . . . . . . . . . . . 142.4.3 La commande robuste pour la téléopération bilatérale . . . . . . . . . . . . . . . . . 15
2.5 L'approche des Contraintes Intégrales Quadratiques (IQC) . . . . . . . . . . . . . . . . . . . 162.5.1 Les Contraintes Intégrales Quadratiques . . . . . . . . . . . . . . . . . . . . . . . . . 162.5.2 Approche IQC dans la téléopération bilatérale . . . . . . . . . . . . . . . . . . . . . . 17
3 Modélisation du système 183.1 Modèle dynamique du système de téléopération . . . . . . . . . . . . . . . . . . . . . . . . . 183.2 Représentation d'état du système nominal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2.1 Dé�nition des états et des signaux d'entrée-sortie. . . . . . . . . . . . . . . . . . . . . 193.2.2 Les perturbations et le canal de performance . . . . . . . . . . . . . . . . . . . . . . 203.2.3 Mise en forme des équations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Synthèse de la commande 224.1 Formalisation des spéci�cations de performance . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.1 Caractérisation et pondération des signaux . . . . . . . . . . . . . . . . . . . . . . . 224.1.2 Construction de pondérations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.1.3 Pondérations de performances du système de téléopération . . . . . . . . . . . . . . . 244.1.4 Système pondéré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2 Problème de synthèse H∞ standard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.3 Résolution par LMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.1 Stabilité au sens de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.3.2 Théorie de la dissipativité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.3.3 IQC et les performances quadratiques . . . . . . . . . . . . . . . . . . . . . . . . . . 284.3.4 Gain d'énergie bornée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.3.5 Lemme de Kalman-Yakubovich-Popov (KYP) . . . . . . . . . . . . . . . . . . . . . . 294.3.6 Lemme Borné Réel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.3.7 Linéarisation du problème de synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . 304.3.8 Problème d'optimisation LMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.3.9 Construction du correcteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.4 Architectures de commande proposées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.4.1 Architecture avec un seul correcteur à trois canaux . . . . . . . . . . . . . . . . . . . 334.4.2 Architecture avec deux correcteurs : un et deux canaux . . . . . . . . . . . . . . . . . 34
3
TABLE DES MATIÈRES ICube / INSA Strasbourg / TP Strasbourg
4.5 Résultats de simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.5.1 Commande à un correcteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.5.2 Commande à deux correcteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.5.3 Conclusions préliminaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5 Analyse de robustesse 395.1 Sources d'incertitude considérées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.2 Représentation linéaire fractionnaire du système incertain . . . . . . . . . . . . . . . . . . . 405.3 Analyse de robustesse à travers les IQC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.3.1 Caractérisation des incertitudes à travers IQC . . . . . . . . . . . . . . . . . . . . . . 425.3.2 Analyse de robustesse par LMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.4 Test d'analyse réalisés et résultats obtenus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.4.1 Commande à un correcteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445.4.2 Commande à deux correcteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6 Évaluation expérimentale 476.1 Le dispositif expérimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.1.1 Les dispositif maître et esclave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.1.2 Interface matériel-ordinateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.1.3 Le système de programmation et d'exécution temps-réel . . . . . . . . . . . . . . . . 48
6.2 Identi�cation de paramètres du modèle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496.3 Implémentation de la commande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.3.1 Commande à un correcteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.3.2 Commande à deux correcteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
7 Conclusions et perspectives du projet 54
A Tutoriel d'utilisation Twincat 3/ Simulink 57A.1 Création du projet sur Twincat 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
A.1.1 Con�guration initiale Simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57A.2 Connections entre les deux logiciels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
A.2.1 Sut Twincat 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58A.2.2 Sur Simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
B Documentation technique des éléments du dispositif expérimental 59B.1 Moteur Brushless . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59B.2 Variateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59B.3 Modules Beckho� . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4
Notation et acronymes utilisée
Sn Ensemble des toutes les matrices symétriques de dimension n× nHn Ensemble des toutes les matrices Hermitiennes de dimension n× nA ≺ 0(� 0) Matrice A est dé�nie négative (positive)A 4 0(< 0) Matrice A est dé�nie semi-négative (semi-positive)f Transformée de Fourier de f‖A‖p Norme p de AL•2 Sous-espace des fonctions vectorielles de carré intégrable localement et à énergie �nie,
(e.g.∫ T
0 x(t)tx(t)dt <∞ ∀T > 0)(RL•×•∞ ) Sous-espace de toutes les matrices de transfert réelles, rationnelles et propres
sans pôles sur l'axe imaginaireRH∞(RH•×•∞ ) Sous-espace de toutes les fonctions (matrices) de transfert réelles, rationnelles et propres,
avec tous ses pôles dans le semi-plan réel négativeIQC Contrainte intégrale quadratiqueLTI Linéaire et invariant dans le tempsLPV Linéaire à paramètres variantsSISO Une seule entrée et une seule sortieMIMO Multi-entrée et multi-sortieLMI Inégalité matricielle linéaireFDI Inégalité dans le domaine fréquentielle
5

Table des �gures
1.1 Site de Télécom-Physique Strasbourg (direction de ICube). . . . . . . . . . . . . . . . . . . 9
1.2 Organisation de l'Cube . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Départements et équipes de recherche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.4 Procédure percutanée guidée par tomodensitométrie [1] . . . . . . . . . . . . . . . . . . . . . 11
2.1 Système robotique téléopéré [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Téléopération bilatérale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Représentation sous forme de Quadripôle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4 Système dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Schéma du système Esclave - Environnement . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Schéma du système Opérateur - Maître . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1 Système nominal pondéré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2 Système en bouclé fermée P0 ? K . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3 Représentation de la dissipassivité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4 Commande à trois canaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.5 Commande à deux correcteurs - 1 et 2 cannaux . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.6 Modèle de Simulation de l'humain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.7 Pondérations du cannal de performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.8 Simulation de la commande à un correcteur avec ke nominal . . . . . . . . . . . . . . . . . . 36
4.9 Simulation de la commande à un correcteur avec plusieurs ke . . . . . . . . . . . . . . . . . 37
4.10 Simulation de la commande à deux correcteurs avec ke nominal . . . . . . . . . . . . . . . . 38
4.11 Simulation de la commande à deux correcteurs avec plusieurs ke . . . . . . . . . . . . . . . . 38
5.1 Insertion d'aiguille . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.2 Représentation linéaire fractionnaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.3 Analyse de robustesse pour kh incertain et variant dans le temps de manière arbitrairementrapide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.4 Analyse de robustesse pour ke incertain et variant dans le temps de manière arbitrairementrapide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.5 Analyse de robustesse pour kh et ke incertains et variants dans le temps de manière arbitrai-rement rapide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.6 Analyse de robustesse pour ke incertain et invariant dans le temps . . . . . . . . . . . . . . 45
6

TABLE DES FIGURES ICube / INSA Strasbourg / TP Strasbourg
5.7 Analyse de robustesse pour kh incertain et variant dans le temps de manière arbitrairementrapide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.8 Analyse de robustesse pour ke incertain et variant dans le temps de manière arbitrairementrapide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.9 Analyse de robustesse pour kh et ke incertains et variants dans le temps de manière arbitrai-rement rapide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.1 Schéma du dispositif maître . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.2 Schéma de l'interface matériel-ordinateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.3 Comparaison entre sortie mesurée et sortie du modèle identi�é . . . . . . . . . . . . . . . . . 50
6.4 Dispositif de téléopération expérimental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.5 Architecture à un correcteur, essai pratique de suivi de position avec ke = 50N/m . . . . . 51
6.6 Architecture à un correcteur, essai pratique de suivi de position avec ke = 150N/m . . . . . 52
6.7 Architecture à deux correcteurs, essai pratique de suivi de position avec ke = 50N/m . . . . 53
6.8 Architecture à deux correcteurs, essai pratique de suivi de position avec ke = 150N/m . . . 53
7
Chapitre 1
Contexte du projet
1.1 Présentation du laboratoire
1.1.1 ICube Laboratoire des sciences de l'ingénieur, de l'informatique et de l'imagerie
Crée en 2013 et situé à Strasbourg, ICube est une unité mixte de recherche sous la tutelle de l'Universitéde Strasbourg, du CNRS, de l'ENGEES et de l'INSA de Strasbourg. Il est localisé en six di�érents sitesautour de l'eurométropole :
� Télécom-Physique Strasbourg (direction du laboratoire).� IRCAD à l'Hôpital Civil.� Institut de Physique Biologique à l'Hôpital Civil.� Campus de Cronenbourg.� Site de la rue Boussingault.� INSA de Strasbourg
Avec près de 580 membres, il est une force de recherche majeure du site de Strasbourg. Fédéré parl'imagerie, ICube a comme champs d'application privilégiés l'ingénierie pour la santé, l'environnement et ledéveloppement durable.
Les chercheurs du laboratoire ont connu un succès remarquable aux appels à projets du programme� Investissements d'avenir �. Le laboratoire ICube est aussi membre de trois laboratoires d'excellence(Labex)-IRMIA, CAMI et G-Eau-Thermie - en informatique théorique, robotique médicale et géothermieprofonde ; partenaire scienti�que principal de l'Institut Hospitalo-Universitaire (IHU) - Institut de chirurgiemini-invasive guidée par l'imagerie ; et participe à deux Instituts d'Excellence sur les Énergies Décarbonées(IEED) dans le domaine du photovoltaïque (IPVF et INES2).
Le projet scienti�que du laboratoire s'articule autour de cinq programmes de recherche transversaux :
� Imagerie et robotique médicales et chirurgicales.� Environnement et développement durable.� Calcul scienti�que.� Imagerie physique et systèmes.� Ingénierie des matériaux pour l'énergie et l'environnement.
Icube a fédéré autour de ses activités un réseau de partenaires industriels forts avec plus d'une centained'entreprises nationales et internationales. Dans le cadre de son partenariat privilégié avec Télécom-PhysiqueStrasbourg, école associée à l'Institut Mines-Télécom, le laboratoire ICube est membre de l'institut CarnotTélécom et Société numérique.
ICube est fortement impliqué dans les pôles de compétitivité Alsace Biovalley, Energivie, Hydreos etVéhicule du futur en étant partenaire de nombreux projets collaboratifs. Le laboratoire entretient surStrasbourg des relations avec le Service Régional de Traitement d'Image et de Télédétection (SERTIT)
8
CHAPITRE 1. CONTEXTE DU PROJET ICube / INSA Strasbourg / TP Strasbourg
et le centre de ressource technologique IREPA LASER. Dans le domaine du numérique, l'ICube hébergeune équipe-projet INRIA (CAMUS) et participe au programme � Futur et Ruptures � de l'Institut Mines-Télécom.
Figure 1.1 � Site de Télécom-Physique Strasbourg (direction de ICube).
Organisation du laboratoire iCube
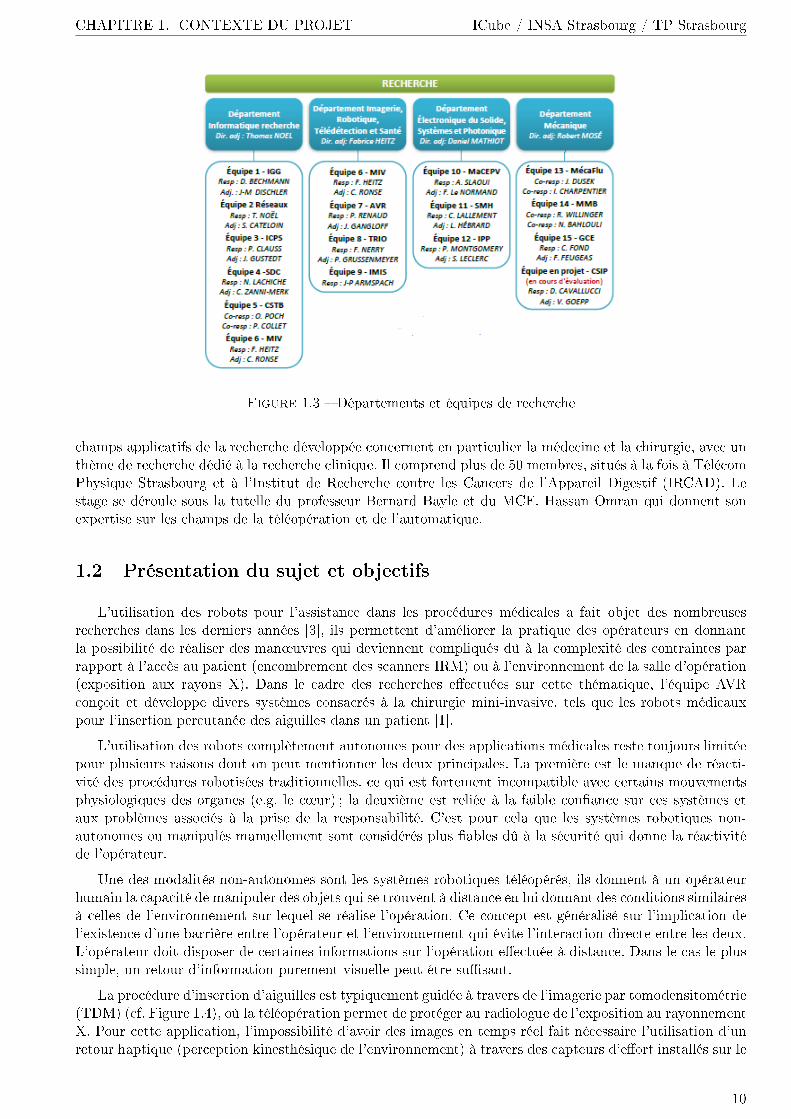
Il est actuellement sous la direction de Michel de Mathelin qui est supporté par une unité de secrétariatde direction et d'aide au pilotage. Il compte avec cinq services centraux : le pôle administratif et �nancier , leservice d'informatique, le service de ressources humaines, logistique et sécurité, le service de Communicationet le référent qualité (�gure 1.2).
Figure 1.2 � Organisation de l'Cube
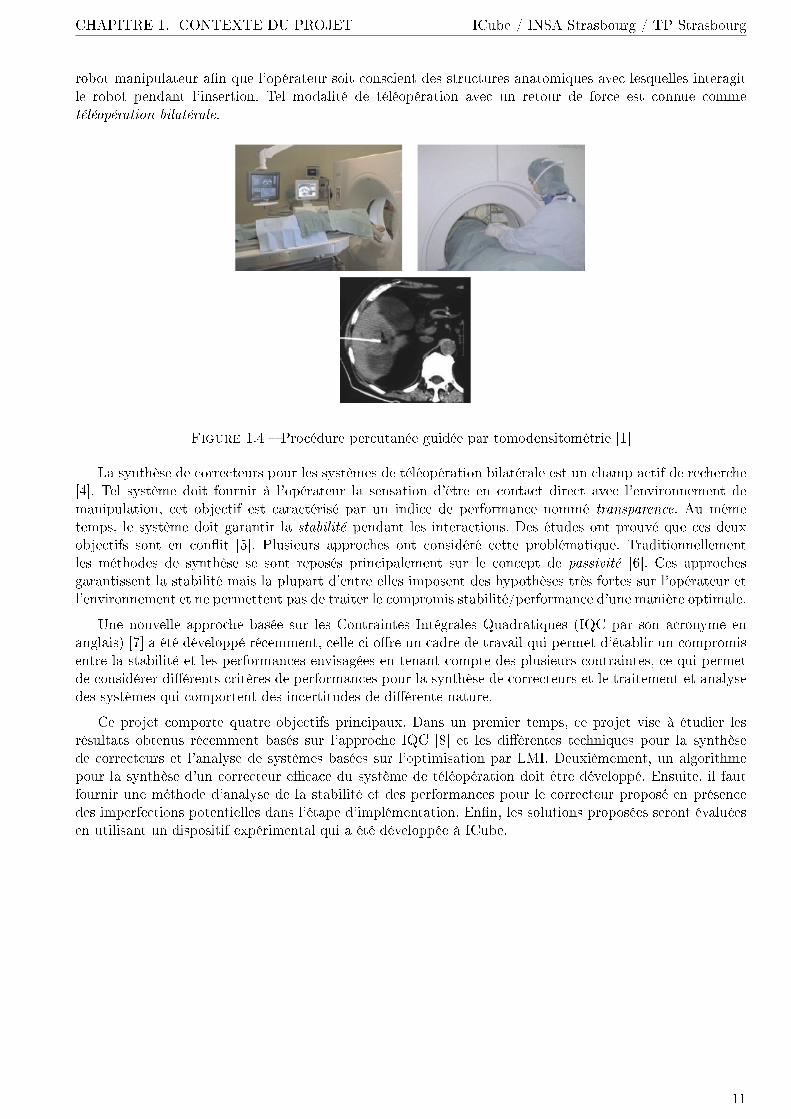
Concernant la recherche, le laboratoire est organisé en quatre départements et 15 équipes de recherche(�gure 1.3 qui pilotent les di�érentes plates-formes matérielles et logicielles qui servent de support auxrecherches du laboratoire mais aussi aux activités de valorisation et peuvent répondre à des demandes deprestations de service.
1.1.2 L'équipe Automatique, Vision et Robotique (AVR).
Ce projet se réalise au sein de l'équipe AVR qui fait partie du Département Imagerie, Robotique,Télédétection et Santé (D-IRTS). L'équipe conçoit et évalue de nouvelles solutions robotiques avec deschamps d'expertise allant de la conception mécatronique, la commande à la vision par ordinateur. Les
9
CHAPITRE 1. CONTEXTE DU PROJET ICube / INSA Strasbourg / TP Strasbourg
Figure 1.3 � Départements et équipes de recherche
champs applicatifs de la recherche développée concernent en particulier la médecine et la chirurgie, avec unthème de recherche dédié à la recherche clinique. Il comprend plus de 50 membres, situés à la fois à TélécomPhysique Strasbourg et à l'Institut de Recherche contre les Cancers de l'Appareil Digestif (IRCAD). Lestage se déroule sous la tutelle du professeur Bernard Bayle et du MCF. Hassan Omran qui donnent sonexpertise sur les champs de la téléopération et de l'automatique.
1.2 Présentation du sujet et objectifs
L'utilisation des robots pour l'assistance dans les procédures médicales a fait objet des nombreusesrecherches dans les derniers années [3], ils permettent d'améliorer la pratique des opérateurs en donnantla possibilité de réaliser des man÷uvres qui deviennent compliqués dû à la complexité des contraintes parrapport à l'accès au patient (encombrement des scanners IRM) ou à l'environnement de la salle d'opération(exposition aux rayons X). Dans le cadre des recherches e�ectuées sur cette thématique, l'équipe AVRconçoit et développe divers systèmes consacrés à la chirurgie mini-invasive, tels que les robots médicauxpour l'insertion percutanée des aiguilles dans un patient [1].
L'utilisation des robots complètement autonomes pour des applications médicales reste toujours limitéepour plusieurs raisons dont on peut mentionner les deux principales. La première est le manque de réacti-vité des procédures robotisées traditionnelles, ce qui est fortement incompatible avec certains mouvementsphysiologiques des organes (e.g. le c÷ur) ; la deuxième est reliée à la faible con�ance sur ces systèmes etaux problèmes associés à la prise de la responsabilité. C'est pour cela que les systèmes robotiques non-autonomes ou manipulés manuellement sont considérés plus �ables dû à la sécurité qui donne la réactivitéde l'opérateur.
Une des modalités non-autonomes sont les systèmes robotiques téléopérés, ils donnent à un opérateurhumain la capacité de manipuler des objets qui se trouvent à distance en lui donnant des conditions similairesà celles de l'environnement sur lequel se réalise l'opération. Ce concept est généralisé sur l'implication del'existence d'une barrière entre l'opérateur et l'environnement qui évite l'interaction directe entre les deux.L'opérateur doit disposer de certaines informations sur l'opération e�ectuée à distance. Dans le cas le plussimple, un retour d'information purement visuelle peut être su�sant.
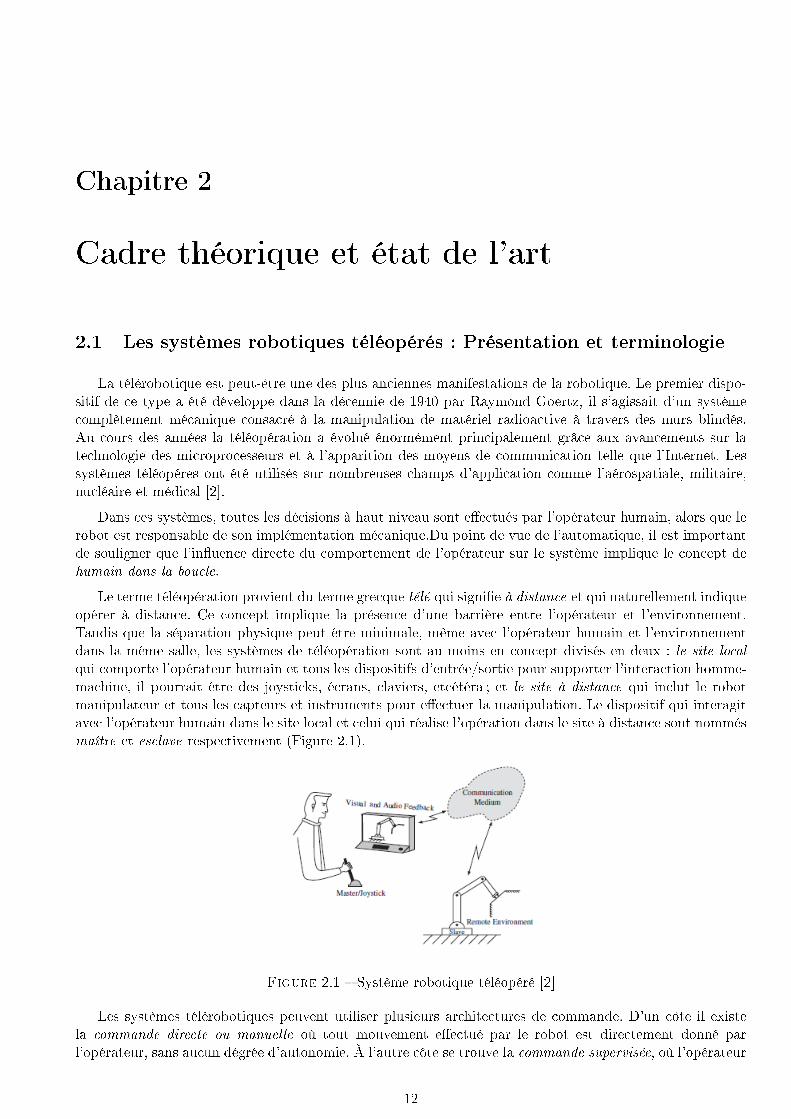
La procédure d'insertion d'aiguilles est typiquement guidée à travers de l'imagerie par tomodensitométrie(TDM) (cf. Figure 1.4), où la téléopération permet de protéger au radiologue de l'exposition au rayonnementX. Pour cette application, l'impossibilité d'avoir des images en temps réel fait nécessaire l'utilisation d'unretour haptique (perception kinesthésique de l'environnement) à travers des capteurs d'e�ort installés sur le
10
CHAPITRE 1. CONTEXTE DU PROJET ICube / INSA Strasbourg / TP Strasbourg
robot manipulateur a�n que l'opérateur soit conscient des structures anatomiques avec lesquelles interagitle robot pendant l'insertion. Tel modalité de téléopération avec un retour de force est connue commetéléopération bilatérale.
Figure 1.4 � Procédure percutanée guidée par tomodensitométrie [1]
La synthèse de correcteurs pour les systèmes de téléopération bilatérale est un champ actif de recherche[4]. Tel système doit fournir à l'opérateur la sensation d'être en contact direct avec l'environnement demanipulation, cet objectif est caractérisé par un indice de performance nommé transparence. Au mêmetemps, le système doit garantir la stabilité pendant les interactions. Des études ont prouvé que ces deuxobjectifs sont en con�it [5]. Plusieurs approches ont considéré cette problématique. Traditionnellementles méthodes de synthèse se sont reposés principalement sur le concept de passivité [6]. Ces approchesgarantissent la stabilité mais la plupart d'entre elles imposent des hypothèses très fortes sur l'opérateur etl'environnement et ne permettent pas de traiter le compromis stabilité/performance d'une manière optimale.
Une nouvelle approche basée sur les Contraintes Intégrales Quadratiques (IQC par son acronyme enanglais) [7] a été développé récemment, celle-ci o�re un cadre de travail qui permet d'établir un compromisentre la stabilité et les performances envisagées en tenant compte des plusieurs contraintes, ce qui permetde considérer di�érents critères de performances pour la synthèse de correcteurs et le traitement et analysedes systèmes qui comportent des incertitudes de di�érente nature.
Ce projet comporte quatre objectifs principaux. Dans un premier temps, ce projet vise à étudier lesrésultats obtenus récemment basés sur l'approche IQC [8] et les di�érentes techniques pour la synthèsede correcteurs et l'analyse de systèmes basées sur l'optimisation par LMI. Deuxièmement, un algorithmepour la synthèse d'un correcteur e�cace du système de téléopération doit être développé. Ensuite, il fautfournir une méthode d'analyse de la stabilité et des performances pour le correcteur proposé en présencedes imperfections potentielles dans l'étape d'implémentation. En�n, les solutions proposées seront évaluéesen utilisant un dispositif expérimental qui a été développée à ICube.
11
Chapitre 2
Cadre théorique et état de l'art
2.1 Les systèmes robotiques téléopérés : Présentation et terminologie
La télérobotique est peut-être une des plus anciennes manifestations de la robotique. Le premier dispo-sitif de ce type a été développe dans la décennie de 1940 par Raymond Goertz, il s'agissait d'un systèmecomplètement mécanique consacré à la manipulation de matériel radioactive à travers des murs blindés.Au cours des années la téléopération a évolué énormément principalement grâce aux avancements sur latechnologie des microprocesseurs et à l'apparition des moyens de communication telle que l'Internet. Lessystèmes téléopéres ont été utilisés sur nombreuses champs d'application comme l'aérospatiale, militaire,nucléaire et médical [2].
Dans ces systèmes, toutes les décisions à haut niveau sont e�ectués par l'opérateur humain, alors que lerobot est responsable de son implémentation mécanique.Du point de vue de l'automatique, il est importantde souligner que l'in�uence directe du comportement de l'opérateur sur le système implique le concept dehumain dans la boucle.
Le terme téléopération provient du terme grecque télé qui signi�e à distance et qui naturellement indiqueopérer à distance. Ce concept implique la présence d'une barrière entre l'opérateur et l'environnement.Tandis que la séparation physique peut être minimale, même avec l'opérateur humain et l'environnementdans la même salle, les systèmes de téléopération sont au moins en concept divisés en deux : le site localqui comporte l'opérateur humain et tous les dispositifs d'entrée/sortie pour supporter l'interaction homme-machine, il pourrait être des joysticks, écrans, claviers, etcétéra ; et le site à distance qui inclut le robotmanipulateur et tous les capteurs et instruments pour e�ectuer la manipulation. Le dispositif qui interagitavec l'opérateur humain dans le site local et celui qui réalise l'opération dans le site à distance sont nommésmaître et esclave respectivement (Figure 2.1).
Figure 2.1 � Système robotique téléopéré [2]
Les systèmes télérobotiques peuvent utiliser plusieurs architectures de commande. D'un côte il existela commande directe ou manuelle où tout mouvement e�ectué par le robot est directement donné parl'opérateur, sans aucun dégrée d'autonomie. À l'autre côte se trouve la commande supervisée, où l'opérateur
12
CHAPITRE 2. CADRE THÉORIQUE ET ÉTAT DE L'ART ICube / INSA Strasbourg / TP Strasbourg
indique une certaine tâche à réaliser, et l'esclave a l'autonomie et un certain dégrée d'intelligence pourinterpréter et compléter les sous-tâches nécessaires. Entre ces deux extrémités se trouve toute une variétédes architectures à commande partagée qui représentent la plupart des systèmes utilisés en pratique.
En général et pour n'importe quelle type d'architecture de commande utilisée. La reproduction pré-cise des mouvements réalisés par l'opérateur et la téléprésence sont les objectifs ultimes des systèmes detéléopération. Cette dernière cherche à donner à l'utilisateur la capacité de percevoir l'environnement demanipulation comme s'il existerait une interaction directe. Pour cela, l'opérateur humain doit être fournid'un retour d'information su�sant qui lui permet d'avoir la sensation de présence dans le site à distance. Lesystème peut combiner des retours visuels, sonores et/ou haptiques en fonction de l'application envisagée.Ce travail abordera la modalité de retour de force connue comme téléopération bilatérale.
2.2 La téléopération bilatérale
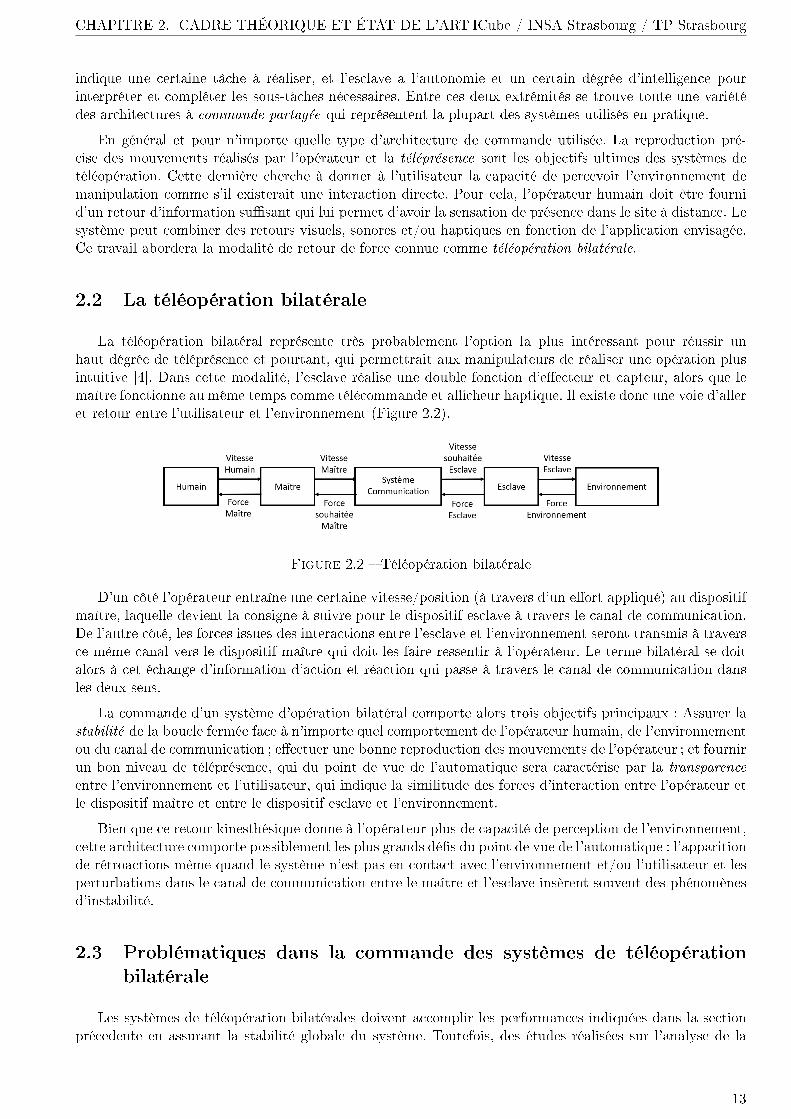
La téléopération bilatéral représente très probablement l'option la plus intéressant pour réussir unhaut dégrée de téléprésence et pourtant, qui permettrait aux manipulateurs de réaliser une opération plusintuitive [4]. Dans cette modalité, l'esclave réalise une double fonction d'e�ecteur et capteur, alors que lemaître fonctionne au même temps comme télécommande et a�cheur haptique. Il existe donc une voie d'alleret retour entre l'utilisateur et l'environnement (Figure 2.2).
Figure 2.2 � Téléopération bilatérale
D'un côté l'opérateur entraîne une certaine vitesse/position (à travers d'un e�ort appliqué) au dispositifmaître, laquelle devient la consigne à suivre pour le dispositif esclave à travers le canal de communication.De l'autre côté, les forces issues des interactions entre l'esclave et l'environnement seront transmis à traversce même canal vers le dispositif maître qui doit les faire ressentir à l'opérateur. Le terme bilatéral se doitalors à cet échange d'information d'action et réaction qui passe à travers le canal de communication dansles deux sens.
La commande d'un système d'opération bilatéral comporte alors trois objectifs principaux : Assurer lastabilité de la boucle fermée face à n'importe quel comportement de l'opérateur humain, de l'environnementou du canal de communication ; e�ectuer une bonne reproduction des mouvements de l'opérateur ; et fournirun bon niveau de téléprésence, qui du point de vue de l'automatique sera caractérise par la transparenceentre l'environnement et l'utilisateur, qui indique la similitude des forces d'interaction entre l'opérateur etle dispositif maître et entre le dispositif esclave et l'environnement.
Bien que ce retour kinesthésique donne à l'opérateur plus de capacité de perception de l'environnement,cette architecture comporte possiblement les plus grands dé�s du point de vue de l'automatique : l'apparitionde rétroactions même quand le système n'est pas en contact avec l'environnement et/ou l'utilisateur et lesperturbations dans le canal de communication entre le maître et l'esclave insèrent souvent des phénomènesd'instabilité.
2.3 Problématiques dans la commande des systèmes de téléopérationbilatérale
Les systèmes de téléopération bilatérales doivent accomplir les performances indiquées dans la sectionprécedente en assurant la stabilité globale du système. Toutefois, des études réalisées sur l'analyse de la
13
CHAPITRE 2. CADRE THÉORIQUE ET ÉTAT DE L'ART ICube / INSA Strasbourg / TP Strasbourg
stabilité et de la transparence ont montré que ces deux objectifs sont en con�it [5],[9]. Il existe donc uncompromis inhérent et inévitable entre la stabilité et la performance.
Un autre problème lié à la modélisation l'opérateur humain et ses interactions avec le dispositif, celaest encore plus compliqué dû à l'incertitude de son comportement et des conditions et l'environnement demanipulation. D'un côté, on cherche normalement à réaliser des opérations sur des environnements qui sontrelativement connus mais qui subissent des variations de conditions au cours de l'opération (passer du videau contact avec le tissu). De l'autre côté, la dynamique du bras humain est aussi variable et dépend de laposture, du niveau d'activation du muscle, de la fatigue, etc.
Outre, la communication entre maître et esclave se réalisé à travers de plusieurs moyens avec ou sans �l. Àtravers des années, l'utilisation des réseaux informatiques est devenue le principal moyen de communicationpour la téléopération grâce à la grande accessibilité de cette technologie. Malheureusement, les moyensde communications contribuent substantiellement à la complexité de ces systèmes à cause des e�ets nondéterministes introduises tels que les retards de transmission, distorsion, et pertes d'information. Ces e�etspeuvent déstabiliser le système très facilement [4].
Le développement des méthodes pour l'analyse des systèmes de téléopération et pour la synthèses decorrecteurs qui puissent améliorer les performance obtenues traditionnellement en garantissant la stabilitédevant n'importe quelle condition d'opération et en présence des possibles sources d'incertitude est un desproblèmes actifs dans la recherche sur la commande des systèmes téléopérés.
2.4 Approches classiques de modélisation et commande
2.4.1 Modèle du Quadripôle
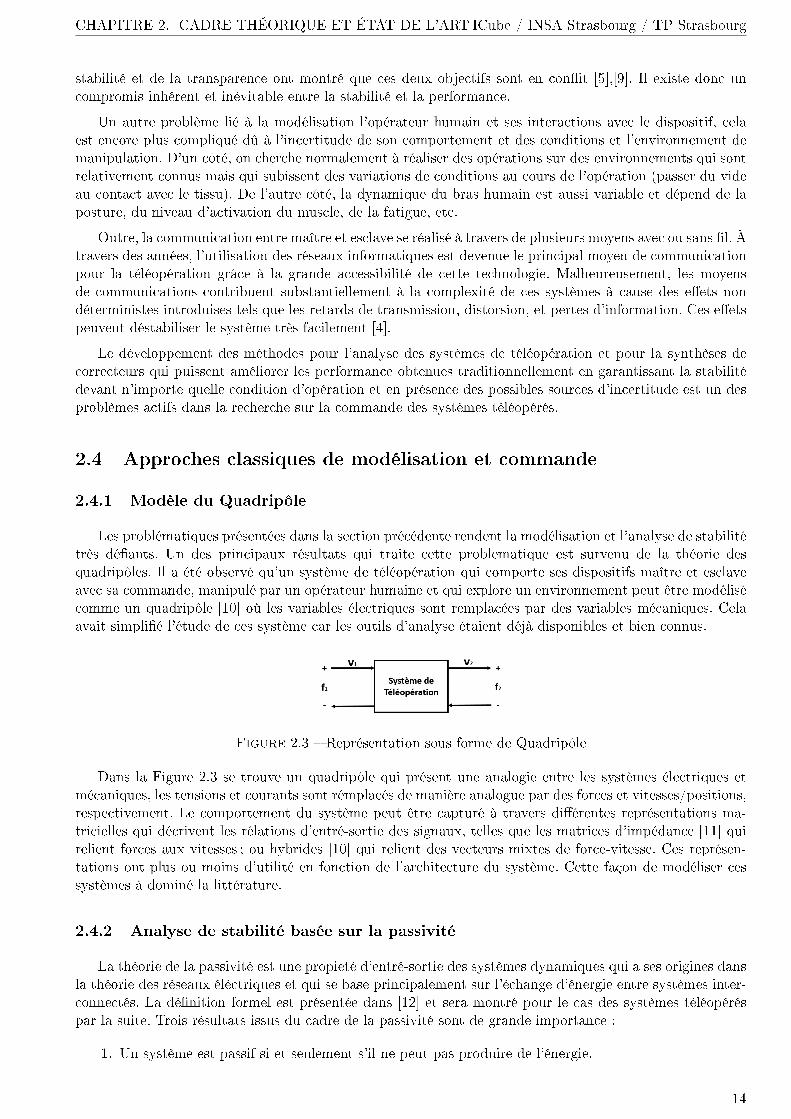
Les problématiques présentées dans la section précédente rendent la modélisation et l'analyse de stabilitétrès dé�ants. Un des principaux résultats qui traite cette problematique est survenu de la théorie desquadripôles. Il a été observé qu'un système de téléopération qui comporte ses dispositifs maître et esclaveavec sa commande, manipulé par un opérateur humaine et qui explore un environnement peut être modélisécomme un quadripôle [10] où les variables électriques sont remplacées par des variables mécaniques. Celaavait simpli�é l'étude de ces système car les outils d'analyse étaient déjà disponibles et bien connus.
Figure 2.3 � Représentation sous forme de Quadripôle
Dans la Figure 2.3 se trouve un quadripôle qui présent une analogie entre les systèmes électriques etmécaniques, les tensions et courants sont rémplacés de manière analogue par des forces et vitesses/positions,respectivement. Le comportement du système peut être capturé à travers di�érentes représentations ma-tricielles qui décrivent les rélations d'entré-sortie des signaux, telles que les matrices d'impédance [11] quirelient forces aux vitesses ; ou hybrides [10] qui relient des vecteurs mixtes de force-vitesse. Ces représen-tations ont plus ou moins d'utilité en fonction de l'architecture du système. Cette façon de modéliser cessystèmes à dominé la littérature.
2.4.2 Analyse de stabilité basée sur la passivité
La théorie de la passivité est une propieté d'entré-sortie des systèmes dynamiques qui a ses origines dansla théorie des réseaux éléctriques et qui se base principalement sur l'échange d'énergie entre systèmes inter-connectés. La dé�nition formel est présentée dans [12] et sera montré pour le cas des systèmes téléopéréspar la suite. Trois résultats issus du cadre de la passivité sont de grande importance :
1. Un système est passif si et seulement s'il ne peut pas produire de l'énergie.
14
CHAPITRE 2. CADRE THÉORIQUE ET ÉTAT DE L'ART ICube / INSA Strasbourg / TP Strasbourg
2. Deux systèmes passifs peuvent être combinés pour former un nouveau système passif.
3. La connexion de rétroaction de deux systèmes passifs est passif.
4. Un système passif est stable.
Une condition su�sante pour la stabilité est réduit à l'évaluation de la passivité de chacun des qua-dripôles du système de téléopération de la �gure 2.2. Les dispositifs maître et esclave sont des élémentsmécaniques et pourtant passifs. En général, il est aussi supposé que l'esclave interagisse seulement avec desenvironnements passifs, c'est-à-dire, qu'il n'existe aucun e�ort applique sur le système depuis l'environne-ment. Sans considérer l'opérateur, la stabilité peut alors être assurée sans besoin d'un modèle explicit del'environnement. En ce qui concerne le opérateur humain, il est généralement modélisé comme un systèmemécanique qui applique un e�ort souvent négligeable (F ≈ 0).
Traditionnellement, l'hypothèse de la passivité est devenue une exigence pour e�ectuer l'analyse dessystèmes de téléopération. Grâce au théorème de la stabilité absolue de Llewelyn [13], [14] il a été possiblede développer un test pour garantir la stabilité qui évite la modélisation explicite de l'environnement etde l'opérateur en véri�ant tout simplement que les interconnexions du système téléopéré soient passives.L'étude des autres phénomènes tels que les retards [15], [16], l'échantillonnage [17], la transmission desdonnées discrets [18] est resté dans le cadre du modèle de quadripôle et de l'hypothèse de la passivité.Autres recherches ont été menés pour dériver des méthodes de passi�cation des interactions non passifs [19]dans lesquelles la passivité des quadripôles est surveillée et régulée.
Bien que la passivité est devenue un critère très utile, la convenance de la simpli�cation du problèmea comme conséquence l'imposition des contraintes très fortes pour assurer la stabilité, résultant dans unedégradation de la performance. La passivité fourni seulement une condition su�sant mais pas nécessaire pourassurer la stabilité, par conséquence, ans ces tests le système est évalué devant un ensemble d'incertitudes quiest souvent beaucoup plus large que celui qui peut arriver dans le système physique réel où les incertitudessont en réalité bornées.
Plusieurs méthodologies ont été proposées a�n de réduire les excésives précautions dans l'analyse destabilité et pour la synthèse de correcteurs. Dans [20], [21] les auteurs ont proposé des tests de stabilité enlimitant la dynamique de l'environnement à un ensemble borné. Bien que cet approche est moins contrai-gnant, elle s'appuie toujours sur l'hypothèse de la passivité et les incertitudes traitées doivent être linéaireset invariants dans le temps (LTI), ce qui ne corresponde pas à la nature variable de la dynamique del'environnement et de l'opérateur.
2.4.3 La commande robuste pour la téléopération bilatérale
Depuis son apparition à la �n de la décennie de 1970, la commande robuste a été porteuse d'un grandsuccès et une acceptation rapide pour l'étude des systèmes dynamiques qui font face aux incertitudescar elle permet son traitement de manière explicite. Il existe plusieurs sources d'incertitudes tels que lechangement des conditions d'opération (perturbations), la variation des paramètres internes ou des e�etsnon modélisés ou négligés pour simpli�cation. L'analyse de robustesse en stabilité consiste à évaluer si lesystème demeure stable devant les variations des conditions d'opération. Un système est dit robuste enperformance s'il maintient les performances attendues pour ces variations. D'autre part, Ll problème desynthèse d'une commande robuste consiste à trouver un correcteur qui puisse assurer la stabilité et lesperformance spéci�es devant toutes les possibles conditions d'opération et variations de paramètres [22],[23].
Le cadre de la commande robuste semblait alors très approprié pour faire face aux problématiquestrouvés historiquement dans la téléopération bilatérale. Dans [24], [25] les auteurs ont traité la synthèse descorrecteurs en utilisant l'approche de la valeur singulière structurée (SSV) (µ-synthèse) où les opérateurspassifs considérées dans l'approche basée sur la passivité sont transformés en incertitudes à norme bornée,ce qui permettait de les traiter directement. Parallèlement, le modèle du quadirpôle est remplacé par unmodèle qui prendre en compte explicitement l'humain et l'environnement et ses incertitudes. Bien que cesapproches o�rent un cadre intéressant pour l'étude des systèmes téléopérés , les outils SSV sont compatiblesseulement avec des incertitudes du type LTI, cet approche ne permet pas alors de considérer les paramètres àvariations arbitrairement rapides qui sont plus proches des conditions réelles des systèmes de téléopération.
15

CHAPITRE 2. CADRE THÉORIQUE ET ÉTAT DE L'ART ICube / INSA Strasbourg / TP Strasbourg
Les limitations des méthodes de synthèse de correcteur pour modèles complexes et d'analyse pour traiterune majeure variété des classes d'incertitudes ont diminué l'intérêt sur cette ligne de recherche devant lestechniques traditionnelles basées sur la passivité.
Dans les dernières années, des nouvelles outils qui permettent de considérer plusieurs critères de per-formance, ainsi des analyses de robustesse devant une variété plus large des classes d'incertitudes ont étédéveloppées. Un résultat important est le théorème basé sur les Contraintes Intégrales Quadratiques (IQC)présenté dans [7], cette méthode uni�e un grand nombre des résultats classiques issus de la commande ro-buste et des approches basées su la passivité pour traiter explicitement le compromis stabilité-performanceà travers la caractérisation des di�érents critères de performance. D'autre côté elle permet aussi de captu-rer les propriétés principales des incertitudes variants dans le temps et même des certaines non-linéarités,tout cela en reformulant les conditions de stabilité et de performance sous forme des inégalités matricielleslinéaires (LMI). Cet approche permet alors de développer des tests d'analyse de robustesse moins contrai-gnants, qui utilisent des modèles plus structurés pour l'opérateur et pour l'environnement et qui peuventprendre compte des di�érentes sources d'incertitude telles que les variations rapides de paramètres ou lesretards du canal de communication.
2.5 L'approche des Contraintes Intégrales Quadratiques (IQC)
2.5.1 Les Contraintes Intégrales Quadratiques
Le contraintes intégrales quadratiques (IQC) ont permis d'uni�er beaucoup des résultats classiquesavec ceux de la commande robuste. Son utilisation a été facilitée grâce aux méthodes développées dansl'optimisation semi-dé�nie à travers des inégalités matricielles linéaires (LMI)[26] et les méthodes dérivéespour les problèmes d'analyse des systèmes et de synthèse de correcteurs [27], [28]. Les IQC permettentd'analyser la robustesse en stabilité devant une large variété des classes d'incertitudes et aussi d'étudierles critères de performance des systèmes à partir des techniques qui reviennent à la théorie générale dela dissipativité. Le terme IQC est utilisé pour une inégalité qui décrit des contraintes sur les relationsd'entrée-sortie et le �ux d'énergie d'un système ou opérateur causal (�gure 2.4).
Figure 2.4 � Système dynamique
Les contraintes ont la forme d'une intégral quadratique et pondérée par un opérateur Hermitien nomméemultiplicateur. L'expression de la IQC pour le système de la �gure 2.4 dé�nie comme :
∫ ∞−∞
[u(iω)y(iω)
]∗Π(iω)
[u(iω)y(iω)
]dω ≥ 0 (2.1)
où Π peut être toute fonction Hermitien bornée et rationnel (Π = Π∗ ∈ RL(np+nq)×(np+nq)∞ ). Il est
possible de trouver l'équivalent temporel en utilisant le théorème de Parseval sur l'inégalité 2.1 commesuit :
I(Π, p, q) :=
∫ ∞−∞
[uy
]∗Π
[uy
]dt ≥ 0 (2.2)
Bien que cette technique peut être utilisée pour prouver des théorèmes générales, elle devient pluspuissante lors qu'elle est utilisée pour dériver des algorithmes d'optimisation pour garantir la stabilité et larobustesse des systèmes en boucle fermée qui attentent certaines spéci�cations de performance. IQC peutêtre utile depuis deux perspectives, d'un côté elle permet de dé�nir un critère de performance (présentédans le chapitre 4), et d'autre part, elle est utile pour la caractérisation d'incertitudes (chapitre 5). Dans
16
CHAPITRE 2. CADRE THÉORIQUE ET ÉTAT DE L'ART ICube / INSA Strasbourg / TP Strasbourg
les deux cas, établir les contraintes sous cette forme nous permettra d'amener les problèmes de synthèse dela commande et d'analyse de robustesse au cadre de l'optimisation convexe.
Plusieurs critères stabilité issues de la commande robuste ou des autres approches classiques, notammentle théorème du petit gain (utilisé dans le µ-analyse) et la conditions de passivité, sont formulés sous la formed'une théorème général de la stabilité dans [29]. Des nombreuses classes d'IQC qui peuvent être utiles pourimposer di�érents critères de performance ou pour caractériser di�érents incertitudes et non-linéarités estprésenté dans [30].
2.5.2 Approche IQC dans la téléopération bilatérale
Quelques travails commencent à traiter les problèmes d'analyse et synthèse dans la téléopération bila-térale en considérant les outils de l'approche IQC. Le potentiel du cadre IQC est présenté dans [29] où lesauteurs traitent tous les résultats classiques d'analyse de stabilité basés sur les quadripôles et ils les ont étéreformulés en termes des contraintes quadratiques. Cette uni�cation des résultats montre qu'il es possibled'étendre l'analyse de stabilité aux cas qui sont exclus par les hypothèses des outils classiques.
La synthèse de correcteurs pour un système de téléopération bilatérale est traité dans [31]. Ici l'approchebasé sur un modèle mécanique masse-amortisseur-ressort est repris pour les systèmes opérateur-maîtreet esclave-environnement, ce modèle comporte des paramètres incertains qui varient dans le temps, cesincertitudes sont bornées et peuvent varier de manière in�niment rapide a�n de représenter les changementbrusques de l'environnement qui peuvent être trouvés dans la téléopération bilatérale. La synthèse ducorrecteur se réalise à travers la technique d'itérations synthèse-analyse IQC. Les performances obtenus sontprésentés en simulation et comparés avec les résultats des approches classiques, on trouve une améliorationdu niveau de transparence.
La suite du travail des auteurs est présenté dans [8], il s'agit de l'implémentation expérimentale descorrecteurs synthétisés à travers l'approche IQC sur un dispositif de téléopération bilatérale à un degré deliberté. Un autre aspect important de ce travail est la présentation de l'étape d'identi�cation de l'opérateurdans laquelle des tests ont été réalisés sur di�érents personnes qui interagissaient avec le système a�nd'obtenir un modèle de l'opérateur plus �dèle basé sur des données expérimentales. Des résultats desperformances obtenus, de comparaissions avec de correcteurs obtenus par des autres approches et desrésultats des tests de transparence en considérant di�érentes rigidités de l'environnement.
L'approche IQC semble alors très prometteuse pour synthétiser de correcteurs qui permettent l'amélio-ration de performances en gardant la stabilité. Des autres sources d'incertitude présentes dans la téléopé-ration bilatérale telles que les retards ou l'échantillonnage peuvent être traités dans le cadre de l'analyseIQC. Autre aspect important est l'utilisation des méthodes d'analyse et synthèse basées sur modèle, celaouvre la possibilité de dériver des modèles pour l'opérateur et l'environnement qui soient plus complexes etplus �dèles.
Si bien les IQC se sont révélés être un outil puissant principalement pour l'analyse de robustesse dessystèmes incertains et non-linéaires, ils peuvent aussi être utiles pour la synthèse de correcteurs des systèmesincertains, même si cela resté limitée car il n'existe pas encore une méthode qui permet de transformer leproblème de synthèse-analyse simultanée dans un problème d'optimisation convexe.
Dans [32] se commencent à établir certains conditions et se propose l'utilisation des multiplicateursdynamiques pour réduire les contraintes dans le problème de synthèse-analyse, mais aucun résultat systé-matique pour le problème de synthèse est proposé. Dans [33] les auteurs proposent d'adresser le problèmesur le domaine fréquentielle en établissant une grille �nie des fréquences distribués et prouver si certainesLMI sont faisables. Une méthode analogue à la D-K Scaling de la µ-synthèse est proposée dans [34], il s'agitd'une méthode itérative entre la synthèse d'un correcteur H∞ en �xant les multiplicateurs, et la recherchedes multiplicateurs en �xant le correcteur.
17
Chapitre 3
Modélisation du système
3.1 Modèle dynamique du système de téléopération
Dans cette section on s'intéresse à modéliser le système de téléopération en utilisant une approche baséesur un modèle mécanique linéaire de deuxième ordre pour les di�érentes éléments qui conforment le systèmeet qui seront étudiés par la suite : l'opérateur, le dispositif maître, le dispositif esclave et l'environnement.
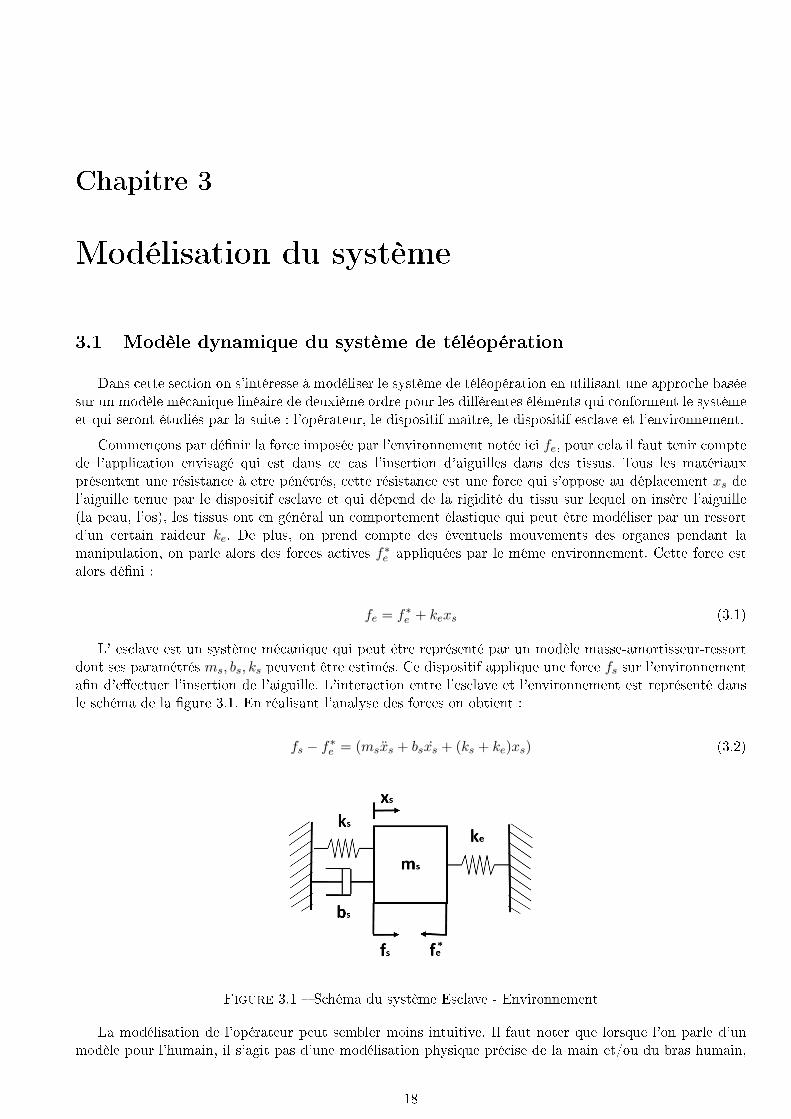
Commençons par dé�nir la force imposée par l'environnement notée ici fe, pour cela il faut tenir comptede l'application envisagé qui est dans ce cas l'insertion d'aiguilles dans des tissus. Tous les matériauxprésentent une résistance à être pénétrés, cette résistance est une force qui s'oppose au déplacement xs del'aiguille tenue par le dispositif esclave et qui dépend de la rigidité du tissu sur lequel on insère l'aiguille(la peau, l'os), les tissus ont en général un comportement élastique qui peut être modéliser par un ressortd'un certain raideur ke. De plus, on prend compte des éventuels mouvements des organes pendant lamanipulation, on parle alors des forces actives f∗e appliquées par le même environnement. Cette force estalors dé�ni :
fe = f∗e + kexs (3.1)
L' esclave est un système mécanique qui peut être représenté par un modèle masse-amortisseur-ressortdont ses paramétrés ms, bs, ks peuvent être estimés. Ce dispositif applique une force fs sur l'environnementa�n d'e�ectuer l'insertion de l'aiguille. L'interaction entre l'esclave et l'environnement est représenté dansle schéma de la �gure 3.1. En réalisant l'analyse des forces on obtient :
fs − f∗e = (msxs + bsxs + (ks + ke)xs) (3.2)
Figure 3.1 � Schéma du système Esclave - Environnement
La modélisation de l'opérateur peut sembler moins intuitive. Il faut noter que lorsque l'on parle d'unmodèle pour l'humain, il s'agit pas d'une modélisation physique précise de la main et/ou du bras humain,
18
CHAPITRE 3. MODÉLISATION DU SYSTÈME ICube / INSA Strasbourg / TP Strasbourg
ce qui est très compliqué ou presque impossible d'obtenir. Au lieu de cela, on cherche à dériver un modèlequi représente les caractéristiques essentielles du comportement humain pendant son interaction avec ledispositif et qui reste valable pour les di�érents utilisateurs possibles.
En considérant le type d'interaction entre l'humain et le dispositif maître, l'opérateur peut être supposéaussi comme un système mécanique dont ses paramètres mm, bm, km doivent être obtenus à travers des tech-niques d'identi�cation. Les paramètres qui restent plus ou moins constants pour des di�érents individus etdes di�érents conditions d'opération permettront d'établir le modèle nominal, alors que les variations parmiles di�érents tests réalisés serviront pour établir les incertitudes sur certains paramètres et représenterontles variations du comportement telles que la perception, la precision ou la réactivité de l'individu ou entredi�érents individus.
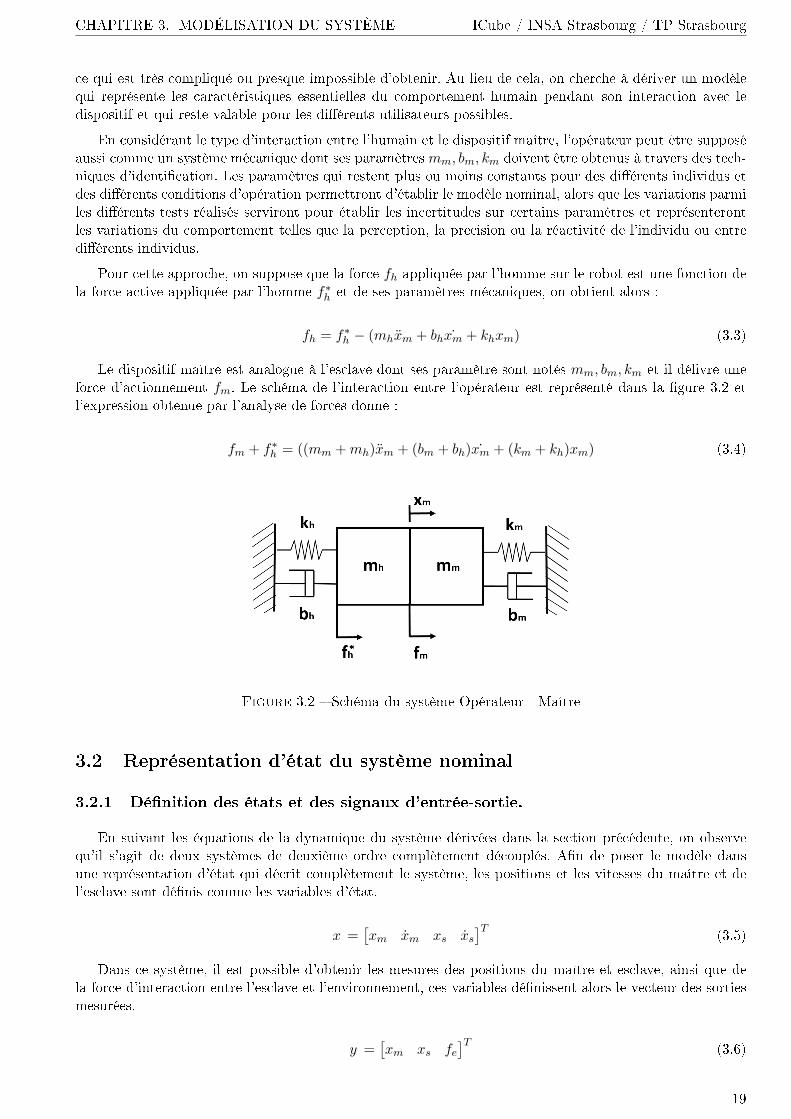
Pour cette approche, on suppose que la force fh appliquée par l'homme sur le robot est une fonction dela force active appliquée par l'homme f∗h et de ses paramètres mécaniques, on obtient alors :
fh = f∗h − (mhxm + bh ˙xm + khxm) (3.3)
Le dispositif maître est analogue à l'esclave dont ses paramètre sont notés mm, bm, km et il délivre uneforce d'actionnement fm. Le schéma de l'interaction entre l'opérateur est représenté dans la �gure 3.2 etl'expression obtenue par l'analyse de forces donne :
fm + f∗h = ((mm +mh)xm + (bm + bh) ˙xm + (km + kh)xm) (3.4)
Figure 3.2 � Schéma du système Opérateur - Maître
3.2 Représentation d'état du système nominal
3.2.1 Dé�nition des états et des signaux d'entrée-sortie.
En suivant les équations de la dynamique du système dérivées dans la section précédente, on observequ'il s'agit de deux systèmes de deuxième ordre complètement découplés. A�n de poser le modèle dansune représentation d'état qui décrit complètement le système, les positions et les vitesses du maître et del'esclave sont dé�nis comme les variables d'état.
x =[xm xm xs xs
]T(3.5)
Dans ce système, il est possible d'obtenir les mesures des positions du maître et esclave, ainsi que dela force d'interaction entre l'esclave et l'environnement, ces variables dé�nissent alors le vecteur des sortiesmesurées.
y =[xm xs fe
]T(3.6)
19

CHAPITRE 3. MODÉLISATION DU SYSTÈME ICube / INSA Strasbourg / TP Strasbourg
En�n, les entrées de commande seront les forces d'actionnement des dispositifs maître et esclave. fm etfs.
u =[fm fs
]T(3.7)
3.2.2 Les perturbations et le canal de performance
Il est dé�ni au même temps un vecteur des signaux exogènes w (perturbations ou signaux externesappliquées) qui comporte les forces actives de l'opérateur et de l'environnement.
w =[f∗h f∗e
]T(3.8)
Le vecteur des signaux de performance sera dé�ni à partir des objectives envisagés, il s'agit d'uneformalisation mathématique du cahier de charges en dé�nissant les signaux qui représentent les spéci�cationsde performance du système, dans le cas courant on vise à obtenir un bon niveau de transparence et unbon suivi de position. De cette façon les signaux de performance sont l'erreur entre les forces issues desinteractions homme-maître et esclave-environnement, ainsi que l'erreur entre les positions du maître et del'esclave. La commande modérée des forces d'actionnement est aussi prise en compte comme critère deperformance a�n de ne pas obtenir un correcteur avec des gains trop élevées (voir irréalistes) ou de lasurexcitation des actionneurs dans les hautes fréquences, ce qui peut les endommager.
z =[(fh − fe) (xm − xs) fm fs
]T(3.9)
3.2.3 Mise en forme des équations
Après avoir dé�ni les états et les di�érents signaux d'entrée et sortie du système, l'étape suivante consisteà poser les équations en fonction des variables dé�nies, c'est-à-dire, x, z et y en fonction de x,w et u.
La première expression présenté est celle de la dérivée par rapport au temps du vecteur d'état x =[xm xm xs xs] :
xmxmxsxs
=
0 1 0 0
− km+khmh+mm
− bh+bmmh+mm
0 0
0 0 0 1
0 0 −ks+kems
− bsms
xmxmxsxs
+
0 01
mh+mm0
0 00 − 1
ms
[f∗hf∗e]
+
0 01
mh+mm0
0 00 1
ms
[fmfs]
(3.10)
Ensuite, il sont établit les équations des signaux qui représentent les critères de performance z :
fh − fexm − xsfmfs
=
−khmm−kmmh
mh+mm− bhmm−bmmh
mh+mm−ke 0
1 0 −1 00 0 0 00 0 0 0
xmxmxsxs
+
mm
mh+mm−1
0 00 00 0
[f∗hf∗e]
+
− mhmh+mm
0
0 01 00 1
[fmfs] (3.11)
Et en�n les équations des signaux de sortie mesurées y donnent :
20

CHAPITRE 3. MODÉLISATION DU SYSTÈME ICube / INSA Strasbourg / TP Strasbourg
xmxsfe
=
1 0 0 00 0 1 00 0 ke 0
xmxmxsxs
+
0 00 00 1
[f∗hf∗e
]+
0 00 00 0
[fmfs
](3.12)
À partir des expressions obtenues, le système nominal G est exprimé sous la représentation d'étatsuivante :
xzy
=
AG BG1 BG2
CG1 DG11 DG12
CG2 DG21 DG22
xwu
(3.13)
L'utilisation de cette type de représentation est nécessaire lors de l'étape de synthèse. Cette repré-sentation est considéré pour une architecture de commande avec un seul correcteur centralisé, des autresreprésentations sont aussi possibles en fonction de l'architecture du système considérée, mais dans tous lescas, la dé�nition des signaux et états reste la même.
21
Chapitre 4
Synthèse de la commande
Dans ce chapitre nous présenterons la démarche générale utilisée pour e�ectuer la synthèse d'un correc-teur robuste. Le critère de performance utilisé est basé sur la méthode de synthèse H∞, on commenceraalors pour réaliser une formalisation des spéci�cations de performance à travers de pondérations sur laréponse fréquentielle des signaux de performance. Pour résoudre le problème de trouver un correcteur quistabilise le système et atteint les spéci�cations de performance imposés, on amènera le problème au cadrede l'optimisation convexe à travers des inégalités matricielles linéaires (LMI). En suivant l'approche LMI,on présentera l'utilité des contraintes intégrales quadratiques (IQC) pour représenter une large variété descritères de performance.
La méthode présentée sera ensuite utilisée pour la synthèse de deux di�érentes architectures de com-mande proposées pour un système de téléopération bilatérale. On montrera les caractéristiques principalesde chacune et on donnera une description de sa conception. En�n, l'évaluation des deux architectures decommande en simulation, les résultats et les conclusions obtenues seront présentées à la �n de ce chapitre.
4.1 Formalisation des spéci�cations de performance
4.1.1 Caractérisation et pondération des signaux
Dans le chapitre précédent on a traduit les objectifs de performance du cahier de charge en signaux quireprésentent ces objectifs. Lorsque l'on a dé�ni les signaux de performance, la question se pose maintenantsur comment imposer à ces signaux des spéci�cations de performance désirés.
Pour cela il faut s'appuyer sur des notions de l'automatique fréquentielle qui rélient les caractéristiquesde la réponse fréquentielle d'un système avec sa stabilité et sa réponse temporelle. En suivant cette idée, oncherche à caractériser des ensembles des signaux qui respectent des contraintes imposées à partir des alluresfréquentielles désirées [35]. Pour ce faire, il est nécessaire d'imposer des �ltres de pondération (gabaritsfréquentielles) sur les signaux qui établissent des bornes supérieures sur son gain.
On dé�nit alors un ensemble W de signaux d'entrée exogènes (perturbations, références et signauxexternes) w bornés par un �ltre de pondération Vw(jω) et un ensemble Z de signaux de performance zbornés par une fonction de transfert 1
Wz(jω)tels que :
W = {w tel que |w(jω)| ≤ |Vw(jω)|} ∀ω (4.1)
Z =
{z tel que |z(jω)| ≤ 1
|Wz(jω)|
}∀ω (4.2)
Considérons maintenant la fonction transfert Tw→z(jω) qui relie le signal d'entrée w à la sortie z. Lecritère de performance sera alors que pour toute signal d'entrée w(jω) qui appartient à l'ensemble W etpour toutes les fréquences, le module de la signal de sortie z(jω) est inférieure ou égal au borne supérieureimposé par la pondération 1
|Wz(jω)| , cela s'écrit :
22

CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
∀w(jω) ∈ W, |z(jω| ∈ Z |z(jω| ≤ 1
|Wz(jω)|∀ω (4.3)
ce qui est équivalent à :
∀w(jω) ∈ W, |Tw→z(jω)w(jω)| ≤ 1
|Wz(jω)|∀ω (4.4)
Si on considère le cas le plus critique ou le signal d'entré w(jω) atteint le borne supérieure imposée parla pondération Vw(jω), la contrainte sera respecté si :
|Tw→z(jω)Vw(jω)| ≤ 1
|Wz(jω)|∀ω (4.5)
d'où on obtient une contrainte directe sur la fonction transfert Tw→z(jω) pondérée qui permettra d'éta-blir un test de véri�cation des spéci�cations de performance :
|Wz(jω)Tw→z(jω)Vw(jω)| ≤ 1 ∀ω (4.6)
En général on s'intéresse plutôt à imposer un gabarit fréquentielle sur la signal de performance carc'est l'allure de ce signal qui permettra d'établir un lien avec les notions de performances dans le domainetemporel. Les pondérations sur les entrées sont souvent des simples gain statiques qui ont pour but depénaliser plus ou moins certains signaux d'entrée par rapport aux autres, on peut alors sans perte degénéralité, d'établir un seul �ltre Wz(jω) = Wz(jω)Vw(jω) à la sortie du canal de performance.
Dans le cas des système SISO (une entrée et une sortie) le gain d'un système est dé�nie par le rapportentre l'amplitude du signal de sortie et celle du signal d'entrée à une pulsation ω, ce gain est unique etpourtant deux signaux d'entrée pas identiques mais de même amplitude, donneront deux signaux de mêmeamplitude à la sortie. Ceci n'est pas le cas des systèmes MIMO (multi-entrée, multi-sortie) où le systèmen'est plus dé�ni par une relation unique d'entrée sortie, deux signaux pas identiques mais de même amplitudequi passent par un système MIMO n'auront pas forcement deux signaux de même amplitude à la sortie.Il faut alors redé�nir ce concept de telle forme que l'on ait une généralisation du concept de gain pour lessystèmes MIMO. Pour cela on s'appuie sur la norme H∞ qui est dé�nie comme suit :
‖H‖∞ = σ(H) (4.7)
où σ exprime la valeur singulière maximale de la matrice H, cela peut être interprété comme la majeureampli�cation possible d'un signa qui passe pour tel système. Par suite, on étendre le critère de performancepour le cas d'un système multi-entrée et multi-sortie. Soit le système dynamique à plusieurs entrées etplusieurs sorties G(jω) et les blocs de pondération V (jω) et W (jω). Les critères de performance serontvéri�és si :
∀ω, ‖W (jω)G(jω)‖∞ ≤ 1 (4.8)
4.1.2 Construction de pondérations
La pondération imposée à un signal de performance est déterminée en fonction de l'objective visé :minimisation de l'erreur de suivi, rejet de perturbation, rejet du bruit ou commande modérée, ainsi quedes niveaux de performance souhaités : erreur statique, rapidité de la réponse, marges de robustesse. Dansnotre cas, cela revient à choisir les coe�cients d'une pondération de la forme :
W (p) =W∞
√|W 2
0 − 1|p+W0 ωWc
√|W 2∞ − 1|√
|W 20 − 1|p+W0 ωWc
√|W 2∞ − 1|
(4.9)
23
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
où W0 = |W (0)|, W∞ = limω→∞|W (jω)| et ωWc est la pulsation de coupure de la fonction de pondé-ration [35].
Un bon suivi est caractérise par une erreur statique faible et une réponse rapide, tout cela en donnant unmarge de stabilité su�sant devant les possibles incertitudes du système. Si on considère l'allure fréquentielled'un signal d'erreur, l'interprétation de celle-ci est la suivante :
� Par le théorème de la valeur �nale, on sait que 1W (0) permet de contraindre l'erreur statique.
� La rapidité de la réponse temporelle est relié à la bande passante qui est déterminée par ωWc.� D'après le critère de Nyquist, 1
G∞impose une borne supérieure sur la marge de module qui est liée
à la robustesse en stabilité du système.
Dans le cas des signaux de commande, il est nécessaire de limiter l'énergie fournie au système. Pourcela, 1
W doit imposer une fonction de transfert passe-bas, avec une pulsation de coupure qui permet uneopération performante dans la plage des fréquences d'opération mais qui atténue dans les hautes fréquencespour éviter propagation du bruit et la surexcitation des actionneurs.
4.1.3 Pondérations de performances du système de téléopération
Suivi de position
La performance du suivi de position est traduit par l'erreur existant entre les positions des dispositifsmaître et esclave (xm − xs). On souhaite que cette valeur soit minimale pendant les man÷uvres réaliséespar l'opérateur. Par contre, il n'est pas désiré de forcer les actionneur dans la plage de fréquences au-delàdes dynamiques atteignables par l'humain. On établit alors un gabarit qui impose une forte atténuationde l'erreur dans l'intervalle de fréquences d'opération et qui relaxe cette atténuation lorsque les fréquencessoient su�samment supérieures à la bande passante du système de téléopération.
Transparence
De façon analogue au suivi de position, la transparence est traduit par l'erreur existant entre le forcesd'interaction (fh−fe), on souhaite alors d'atténuer le mieux possible cette erreur dans les basses fréquenceset relaxer l'atténuation dans les hautes fréquences. Cependant, il existe un compromis délicat entre latransparence et la stabilité du système, une transparence parfaite traduit par des très fortes contraintes surl'erreur des forces peut rendre le système instable. Pour cette raison, le gabarit proposé pour cet objectiveest similaire à celui du suivi de position, sauf qu'il impose une atténuation plus faible dans les bassesfréquences.
Commande modérée
Comme dernier objective, on a besoin d'établir de contraintes sur les signaux de commande a�n delimiter les forces d'actionnement fm et fs. On a d'intérêt surtout à atténuer les signaux de commande dansles hautes fréquences a�n d'éviter des phénomènes de saturation, la propagation du bruit de mesure etl'excitation de dynamiques cachées.
4.1.4 Système pondéré
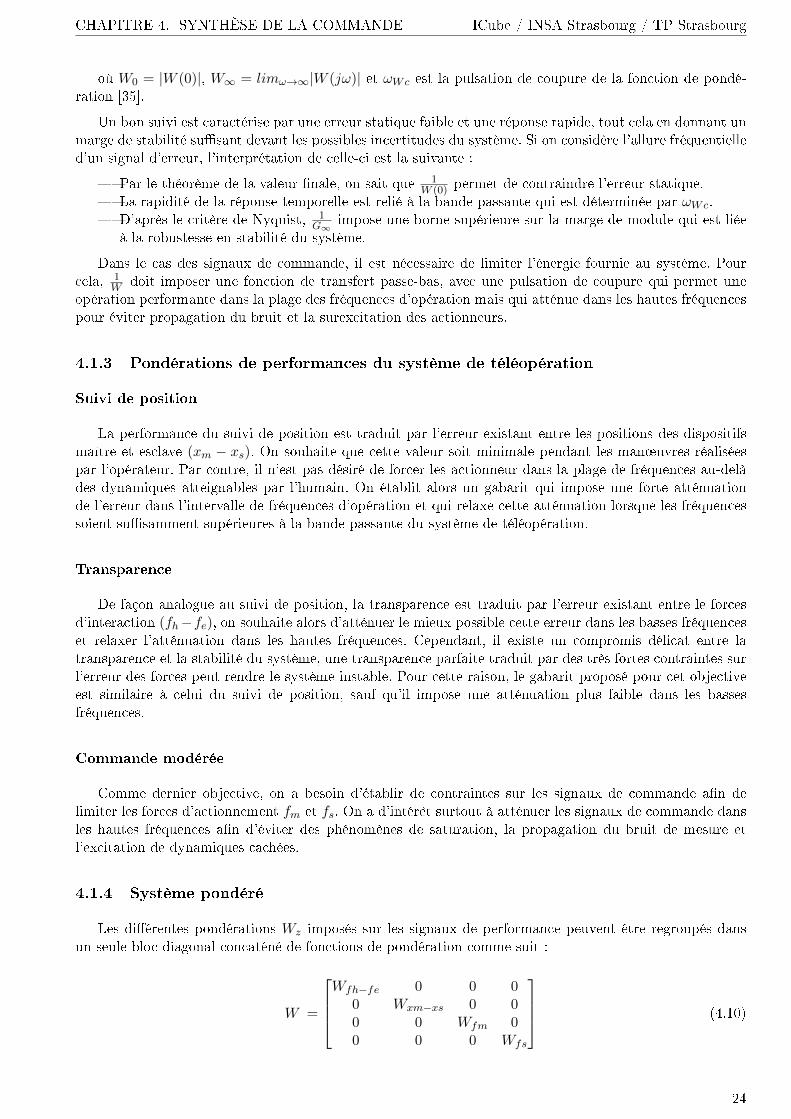
Les di�érentes pondérations Wz imposés sur les signaux de performance peuvent être regroupés dansun seule bloc diagonal concaténé de fonctions de pondération comme suit :
W =
Wfh−fe 0 0 0
0 Wxm−xs 0 00 0 Wfm 00 0 0 Wfs
(4.10)
24
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
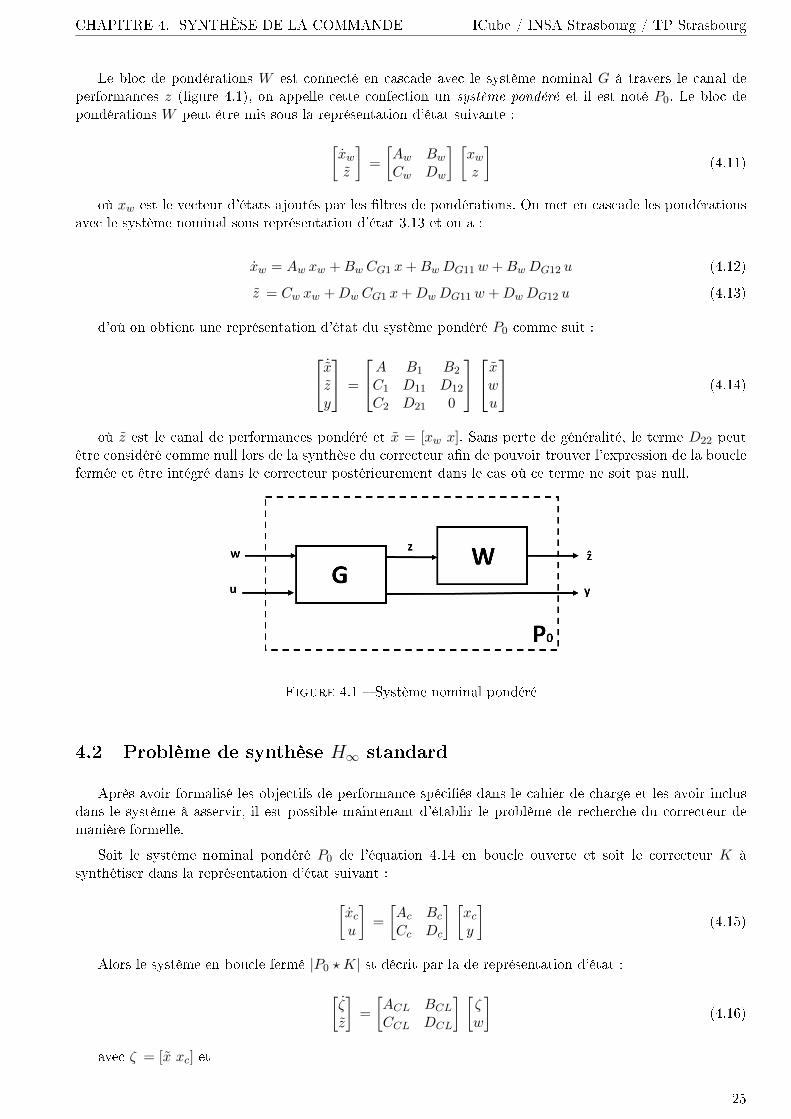
Le bloc de pondérations W est connecté en cascade avec le système nominal G à travers le canal deperformances z (�gure 4.1), on appelle cette confection un système pondéré et il est noté P0. Le bloc depondérations W peut être mis sous la représentation d'état suivante :
[xwz
]=
[Aw BwCw Dw
] [xwz
](4.11)
où xw est le vecteur d'états ajoutés par les �ltres de pondérations. On met en cascade les pondérationsavec le système nominal sous représentation d'état 3.13 et on a :
xw = Aw xw +Bw CG1 x+BwDG11w +BwDG12 u (4.12)
z = Cw xw +Dw CG1 x+DwDG11w +DwDG12 u (4.13)
d'où on obtient une représentation d'état du système pondéré P0 comme suit :
˙xzy
=
A B1 B2
C1 D11 D12
C2 D21 0
xwu
(4.14)
où z est le canal de performances pondéré et x = [xw x]. Sans perte de généralité, le terme D22 peutêtre considéré comme null lors de la synthèse du correcteur a�n de pouvoir trouver l'expression de la bouclefermée et être intégré dans le correcteur postérieurement dans le cas où ce terme ne soit pas null.
Figure 4.1 � Système nominal pondéré
4.2 Problème de synthèse H∞ standard
Après avoir formalisé les objectifs de performance spéci�és dans le cahier de charge et les avoir inclusdans le système à asservir, il est possible maintenant d'établir le problème de recherche du correcteur demanière formelle.
Soit le système nominal pondéré P0 de l'équation 4.14 en boucle ouverte et soit le correcteur K àsynthétiser dans la représentation d'état suivant :
[xcu
]=
[Ac BcCc Dc
] [xcy
](4.15)
Alors le système en boucle fermé |P0 ? K| st décrit par la de représentation d'état :
[ζz
]=
[ACL BCLCCL DCL
] [ζw
](4.16)
avec ζ = [x xc] et
25
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
ACL =
[A+BDcC BCc
BcC Ac
](4.17)
BCL =
[B1 +BDcD21
BcD21
](4.18)
CCL =[C1 +D12DcC D12Cc
](4.19)
DCL =[D1 +D12DcD21
](4.20)
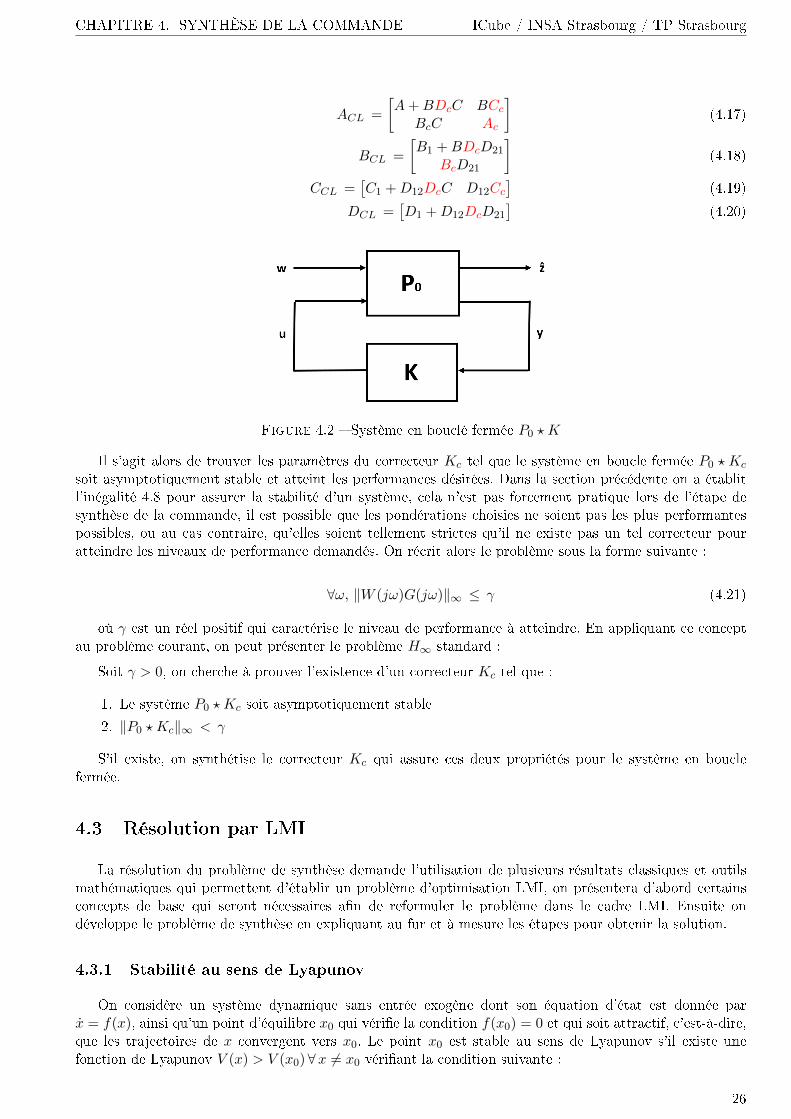
Figure 4.2 � Système en bouclé fermée P0 ? K
Il s'agit alors de trouver les paramètres du correcteur Kc tel que le système en boucle fermée P0 ? Kc
soit asymptotiquement stable et atteint les performances désirées. Dans la section précédente on a établitl'inégalité 4.8 pour assurer la stabilité d'un système, cela n'est pas forcement pratique lors de l'étape desynthèse de la commande, il est possible que les pondérations choisies ne soient pas les plus performantespossibles, ou au cas contraire, qu'elles soient tellement strictes qu'il ne existe pas un tel correcteur pouratteindre les niveaux de performance demandés. On récrit alors le problème sous la forme suivante :
∀ω, ‖W (jω)G(jω)‖∞ ≤ γ (4.21)
où γ est un réel positif qui caractérise le niveau de performance à atteindre. En appliquant ce conceptau problème courant, on peut présenter le problème H∞ standard :
Soit γ > 0, on cherche à prouver l'existence d'un correcteur Kc tel que :
1. Le système P0 ? Kc soit asymptotiquement stable
2. ‖P0 ? Kc‖∞ < γ
S'il existe, on synthétise le correcteur Kc qui assure ces deux propriétés pour le système en bouclefermée.
4.3 Résolution par LMI
La résolution du problème de synthèse demande l'utilisation de plusieurs résultats classiques et outilsmathématiques qui permettent d'établir un problème d'optimisation LMI, on présentera d'abord certainsconcepts de base qui seront nécessaires a�n de reformuler le problème dans le cadre LMI. Ensuite ondéveloppe le problème de synthèse en expliquant au fur et à mesure les étapes pour obtenir la solution.
4.3.1 Stabilité au sens de Lyapunov
On considère un système dynamique sans entrée exogène dont son équation d'état est donnée parx = f(x), ainsi qu'un point d'équilibre x0 qui véri�e la condition f(x0) = 0 et qui soit attractif, c'est-à-dire,que les trajectoires de x convergent vers x0. Le point x0 est stable au sens de Lyapunov s'il existe unefonction de Lyapunov V (x) > V (x0) ∀x 6= x0 véri�ant la condition suivante :
26

CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
d
dt(V (x)) < 0 pour x 6= x0 (4.22)
Cela indique que pour toute condition initiale di�érente de x0, l'énergie interne du système va décroîtrejusqu'à attendre son minimum qui correspond à x0. Une classe candidate souvent considérée comme fonctionde Lyapunov sont les fonctions quadratiques V (x) = (x− x0)TQ(x− x0) avec Q = QT > 0, dans ce cas onparle de stabilité quadratique.
Si on considère un système linéaire où x = Ax. Le point d'équilibre à prendre est nécessairement x = 0.La fonction de Lyapunov quadratique devient alors V (x) = xTQx avec Q = QT > 0 et sa dérivée parrapport au temps :
d
dt(V (x)) = xTQx+ xTQx
= xT (ATQ+QA)x < 0(4.23)
pour x 6= x0. Dans le cas des systèmes LTI, la stabilité quadratique au sens de Lyapunov est équivalenteà la stabilité classique au sens de systèmes linéaires. On peut donc établir :
Le système LTI x = Ax est stable si et seulement s'il existe une matrice dé�nie positive Q véri�antle système de LMI suivant :
Q � 0 (4.24)
ATQ+QA ≺ 0 (4.25)
4.3.2 Théorie de la dissipativité
Considérons le système non-linéaire avec une entrée w et une sortie sortie z dont son équation d'étatest donnée par x = f(x,w) et son équation de sortie par y = g(x,w). Ce système est dit dissipative parrapport à une fonction d'alimentation S(u, y) s'il existe une fonction d'énergie V (x) telle que l'équationde dissipation
V (x(t2)) < V (x(t1)) +
∫ t2
t1
S(w, z) dt (4.26)
soit véri�é pour toutes les trajectoires et pour tout t1 ≤ t2
Il s'agit d'une généralisation de la loi de conservation de l'énergie : L'énergie V (x(t1)) stockée dansle système à l'instant t1 plus l'énergie fournie
∫ t2t1S(w, z) dt dans l'intervalle [t1, t2] est forcement égal ou
supérieure à l'énergie V (x(t2)) à l'instant t2 (�gure .
Figure 4.3 � Représentation de la dissipassivité
27

CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
De plus, si V (x) est dérivable, l'inégalité de dissipation est équivalent à :
∂x(V (x)) f(x,w) < S(u, y) (4.27)
4.3.3 IQC et les performances quadratiques
Dans le cas des systèmes linéaires avec x = Ax+Bw et z = Cx+Dw, il est possible de décrire l'énergiefournie par une fonction d'alimentation à travers d'une IQC :
∫ ∞0
[w(t)z(t)
]TPp
[w(t)z(t)
]< 0 (4.28)
ou Pp est une matrice symétrique qui décrit les relations entrée-sortie de cette fonction d'alimentation.si l'entrée w représente les signaux exogènes et z les signaux de performance, la matrice Pp représente enfait une contrainte sur le canal de performance, on parle alors d'une fonction de performance quadratique.
Considérons maintenant une fonction de Lyapunov quadratique V (x) = xTQx et la fonction d'alimen-tation décrite par l'IQC 4.28, si on applique la dérivée de l'inégalité de dissipation 4.27 on obtient
xTQx+ xTQx <
[wz
]TPp
[wz
]⇔ (Ax+Bu)TQx+ xTQ(Ax+Bu) <
[wz
]TPp
[wz
]⇔[xw
]T [ATQ+QA QB
BTQ 0
] [xw
]<
[wz
]TPp
[wz
]⇔[xw
]T [I 0A B
]T [0 QQ 0
] [I 0A B
] [xw
]<
[wz
]T [0 IC D
]TPp
[0 IC D
] [wz
](4.29)
On peut alors formuler la dissipativité d'un système linéaire comme suit :
Un système LTI est dit dissipatif par rapport à une fonction d'alimentation qui caractérise unperformance quadratique s'il existe une matrice Q = QT véri�ant le système de LMI suivant :
Q � 0 (4.30)[I 0A B
]T [0 QQ 0
] [I 0A B
]≺[
0 IC D
]TPp
[0 IC D
](4.31)
4.3.4 Gain d'énergie bornée
Soit T (jω) = z(jω)w(jω) la fonction de transfert d'un système. Le gain d'énergie du système sera �ni est
inférieure à un scalaire γ pour tout signal d'entrée w(jω) à énergie �nie si :
∫ ∞−∞
z(jω)∗z(jω)dω < γ2
∫ ∞−∞
w(jω)∗w(jω)dω (4.32)
Cette inégalité peut être reformulée sous la forme d'une IQC :
∫ ∞−∞
[w(jω)z(jω)
]∗ [−γ2I 00 I
] [w(jω)z(jω)
]dω (4.33)
28
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
Avec z(jω = T (jω)w(jω) :
∫ ∞−∞
w(jω)∗[
IT (jω)
]∗ [−γ2I 00 I
] [I
T (jω)
]w(jω) < 0 (4.34)
d'où on obtient l'inégalité dans le domaine fréquentiel (FDI) suivante :
[I
T (jω)
]∗ [−γ2I 00 I
] [I
T (jω)
]≺ 0 ∀ω (4.35)
Cette FDI est équivalente à T (jω)∗T (jω) < γ2I qui implique σ(T (jω)) < γ qui revient à la dé�nitionde la norme H∞ : ‖T‖∞ < γ pour toutes les valeurs de ω.
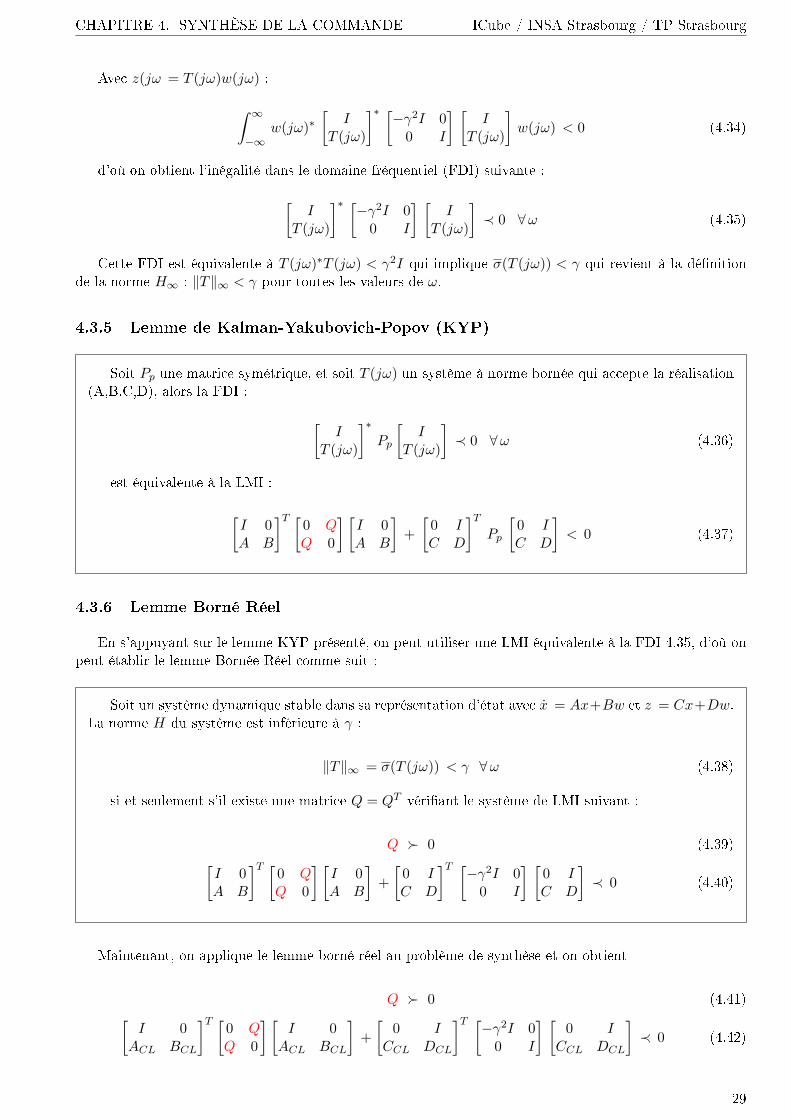
4.3.5 Lemme de Kalman-Yakubovich-Popov (KYP)
Soit Pp une matrice symétrique, et soit T (jω) un système à norme bornée qui accepte la réalisation(A,B,C,D), alors la FDI :
[I
T (jω)
]∗Pp
[I
T (jω)
]≺ 0 ∀ω (4.36)
est équivalente à la LMI :
[I 0A B
]T [0 QQ 0
] [I 0A B
]+
[0 IC D
]TPp
[0 IC D
]< 0 (4.37)
4.3.6 Lemme Borné Réel
En s'appuyant sur le lemme KYP présenté, on peut utiliser une LMI équivalente à la FDI 4.35, d'où onpeut établir le lemme Bornée Réel comme suit :
Soit un système dynamique stable dans sa représentation d'état avec x = Ax+Bw et z = Cx+Dw.La norme H du système est inférieure à γ :
‖T‖∞ = σ(T (jω)) < γ ∀ω (4.38)
si et seulement s'il existe une matrice Q = QT véri�ant le système de LMI suivant :
Q � 0 (4.39)[I 0A B
]T [0 QQ 0
] [I 0A B
]+
[0 IC D
]T [−γ2I 00 I
] [0 IC D
]≺ 0 (4.40)
Maintenant, on applique le lemme borné réel au problème de synthèse et on obtient
Q � 0 (4.41)[I 0
ACL BCL
]T [0 QQ 0
] [I 0
ACL BCL
]+
[0 I
CCL DCL
]T [−γ2I 00 I
] [0 I
CCL DCL
]≺ 0 (4.42)
29

CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
où on trouve que Q et les blocs dépendant des paramètres du correcteur sont multipliés entre eux, cequi donne une inégalité matricielle non linéaire que à priori n'est pas possible de résoudre, il faudra alorss'appuyer sur plusieurs changements de variables et transformations a�n de rendre linéaire cette inégalité[27], [36].
4.3.7 Linéarisation du problème de synthèse
Partition
D'abord, on réalise la partition de la matrice Q et de son inverse comme suit :
Q =
[S MMT U
](4.43)
Q−1 =
[R NNT V
](4.44)
Cela implique :
QQ−1 =
[R MMT U
] [S NNT V
]=
[SR+MNT SN +MVMTR+ UNT MTN + UV
]=
[I 00 I
](4.45)
d'où on obtient la condition :
MNT = I − SR (4.46)
Dès que I − SR est inversible, M et N ont un rang ligne plein [36] , cette propriété a une importancedouble, d'abord elle permet la réalisation d'une transformation congruente qui sera présentée par la suite,et deuxièmement, elle sera utile lors de la construction �nale du correcteur.
Transformation congruente
Étant donnée une matrice Hermitien A et une matrice T de rang colonne plein, alors inversible, sion applique une transformation congruente sur A : A→ T ∗AT , alors :
A ≺ 0 ⇔ T ∗AT ≺ 0 (4.47)
Il est possible maintenant d'établir et véri�er l'identité suivante :
QΠ2 = Π1 avec
Π1 =
[I S0 MT
]Π2 =
[R INT 0
] (4.48)
Étant donné que M et N sont de rang ligne plein, Π2 est de rang colonne plein. Il est possible doncd'e�ectuer une transformation congruente sur Q en multipliant à gauche par ΠT
2 et à droite par Π2, ce quidonne comme résultat :
30

CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
X(v) = ΠT2 QΠ2 =
[R II S
](4.49)
Avec R et S étant des matrices symétriques carrées. De façon similaire, il est possible de réaliser latransformation congruente suivante :
[Π2 00 I
]T [[ATQ+QA QBBTQ 0
]+
[0 IC D
]T [−γ2I 00 I
] [0 IC D
]] [Π2 00 I
]≺ 0 (4.50)
d'où on obtient :
[I 0
ΠT2 (ATQ)Π2 ΠT
2 QB
]T [0 II 0
] [I 0
ΠT2 (ATQ)Π2 ΠT
2 QB
]+
[0 ICΠ2 D
]T [−γ2I 00 I
] [0 ICΠ2 D
]≺ 0
(4.51)
En développant les éléments de l'expression précédente en termes des variables du système étendu PO ,des variables introduits R,S et des paramètres du correcteur Ac, Bc, Cc et Dc on trouve :
ΠT2 (ATQ)Π2 =
[AR+B2(CcN
T +DcC2R) A+B2DcC2
SAR+MAcNT +MBcC2R+ SB2CcN
T + SB2DcC2R SA+ (MBc + SB2Dc)C2
](4.52)
ΠT2 QB =
[B1 +B2DcD21
SB1 + (MBc + SB2Dc)D21
](4.53)
CΠ2 =[C1R+D12(CcN
T +DcC2R) C1 +D12DcC2
](4.54)
Changement de variable
La prochaine étape consiste à réaliser un changement de variables qui permet de regrouper plusieurstermes de la transformation avant e�ectuée et d'établir des relations linéaires entre les variables. On introduitalors les variables :
[Ak BkCk Dk
]=
[SAR+MAcN
T +MBcC2R+ SB2CcNT + SB2DcC2R MBc + SB2Dc
CcNT +DcC2R Dc
](4.55)
Ce changement de variable permet alors de récrire :
A(v) = ΠT2 (ATQ)Π2 =
[AR+B2Ck A+B2DkC2
Ak SA+BkC2
](4.56)
B(v) = ΠT2 QB =
[B1 +B2DkD21
SB1 +BkD21
](4.57)
C(v) = CY =[C1R+D12Ck C1 +D12DkC2
](4.58)
D(v) = D =[D1 +D12DkD21
](4.59)
Ces transformations et changements de variable on permit de reformuler le problème de sorte qu'ilcomporte une dépendance linéaire des variables du vecteur de solution v = [R,S,Ak, Bk, CkDk]
31
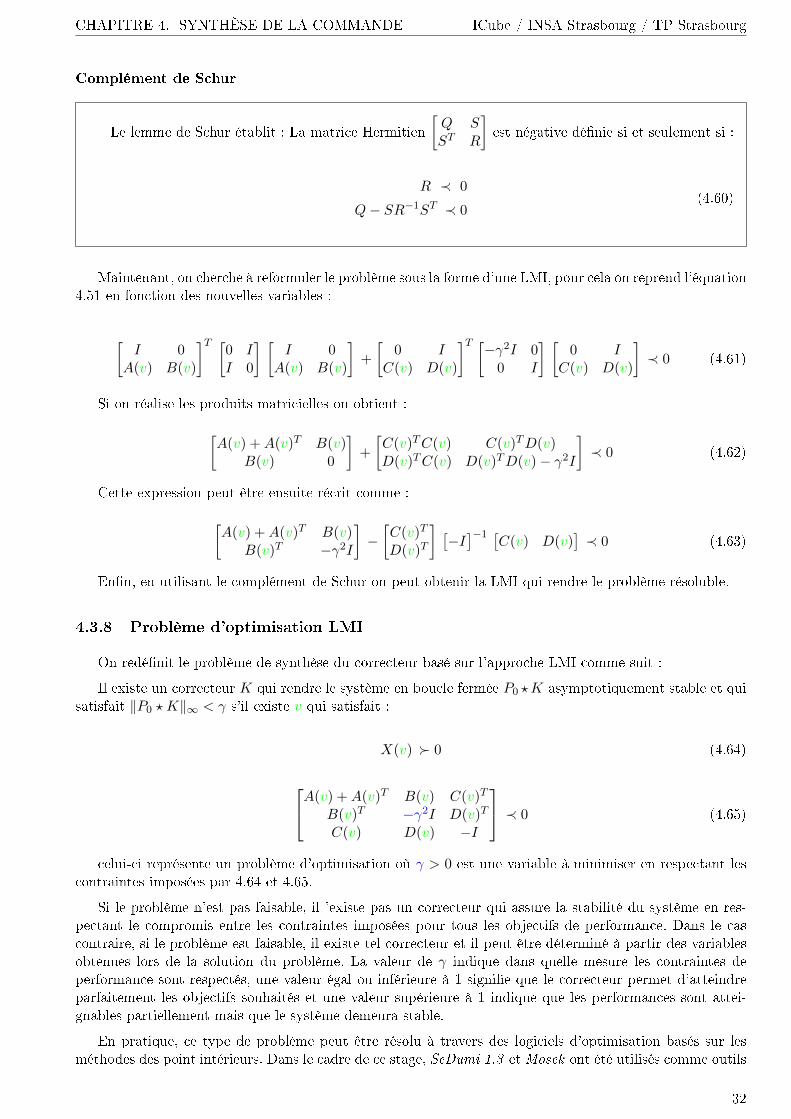
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
Complément de Schur
Le lemme de Schur établit : La matrice Hermitien[Q SST R
]est négative dé�nie si et seulement si :
R ≺ 0
Q− SR−1ST ≺ 0(4.60)
Maintenant, on cherche à reformuler le problème sous la forme d'une LMI, pour cela on reprend l'équation4.51 en fonction des nouvelles variables :
[I 0
A(v) B(v)
]T [0 II 0
] [I 0
A(v) B(v)
]+
[0 I
C(v) D(v)
]T [−γ2I 00 I
] [0 I
C(v) D(v)
]≺ 0 (4.61)
Si on réalise les produits matricielles on obtient :
[A(v) +A(v)T B(v)
B(v) 0
]+
[C(v)TC(v) C(v)TD(v)D(v)TC(v) D(v)TD(v)− γ2I
]≺ 0 (4.62)
Cette expression peut être ensuite récrit comme :
[A(v) +A(v)T B(v)
B(v)T −γ2I
]−[C(v)T
D(v)T
] [−I]−1 [
C(v) D(v)]≺ 0 (4.63)
En�n, en utilisant le complément de Schur on peut obtenir la LMI qui rendre le problème résoluble.
4.3.8 Problème d'optimisation LMI
On redé�nit le problème de synthèse du correcteur basé sur l'approche LMI comme suit :
Il existe un correcteur K qui rendre le système en boucle fermée P0 ?K asymptotiquement stable et quisatisfait ‖P0 ? K‖∞ < γ s'il existe v qui satisfait :
X(v) � 0 (4.64)
A(v) +A(v)T B(v) C(v)T
B(v)T −γ2I D(v)T
C(v) D(v) −I
≺ 0 (4.65)
celui-ci représente un problème d'optimisation où γ > 0 est une variable à minimiser en respectant lescontraintes imposées par 4.64 et 4.65.
Si le problème n'est pas faisable, il 'existe pas un correcteur qui assure la stabilité du système en res-pectant le compromis entre les contraintes imposées pour tous les objectifs de performance. Dans le cascontraire, si le problème est faisable, il existe tel correcteur et il peut être déterminé à partir des variablesobtenues lors de la solution du problème. La valeur de γ indique dans quelle mesure les contraintes deperformance sont respectés, une valeur égal ou inférieure à 1 signi�e que le correcteur permet d'atteindreparfaitement les objectifs souhaités et une valeur supérieure à 1 indique que les performances sont attei-gnables partiellement mais que le système demeura stable.
En pratique, ce type de problème peut être résolu à travers des logiciels d'optimisation basés sur lesméthodes des point intérieurs. Dans le cadre de ce stage, SeDumi 1.3 et Mosek ont été utilisés comme outils
32

CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
de solution et Yalmip comme interface de syntaxe qui permet implémenter l'algorithme en s'appuyant surMatlab [37].
4.3.9 Construction du correcteur
Dans le cas où le problème d'optimisation a une solution, les valeurs des variables du vecteur de solutionv sont obtenus et la question se pose maintenant sur comment obtenir le correcteur à implémenter à partirde ces variables.
La LMI 4.64 permet d'assurer que I−SR est inversible, a�n de respecter la contrainte I−SR = M NT
il faut que M et N soient aussi carrées et inversibles. Sans perte de généralité, une possibilité simple etévidente est de choisir M = ST et N = S−1 −R, de cette manière elles satisfont les conditions d'avoir unrang ligne pleine et d'être carrées et inversibles.
Avec M et N dé�nies, la matrice de Lyapunov Q est obtenue à partir de l'identité 4.48 comme suit :
Q = ΠT2 Π1 (4.66)
Concernant les paramètres du correcteur, ils sont déterminés en suivant le chemin inverse du changementde variable e�ectué précédemment dans l'ordre suivant :
Dc = Dk
Cc = (Ck −DcC2R) (NT )−1
Bc = M−1 (Bk − SB2Dc)
Ac = M−1 (Ak − SAR−MBcC2R− SB2CcNT − SB2DcC2R) (NT )−1
(4.67)
Cette approche de linéarisation donne des conditions su�santes et nécessaires pour assurer l'existencecorrecteur et trouver ses paramètres si et seulement si le problème d'optimisation est faisable.
4.4 Architectures de commande proposées
4.4.1 Architecture avec un seul correcteur à trois canaux
La dénomination des architectures à n canaux provient de la théorie de la commande de systèmesde téléopération basée sur les quadripôles, bien que l'approche présentée ici est n'est pas cimenté sur lesmêmes concepts, ce terme semble encore approprié pour établir une classi�cation des di�érentes possibilitésd'architectures de commande.
De manière générale, dans un système de téléopération bilatérale il existent quatre signaux qui sontéchangés et commandées tous le temps : les positions (ou vitesses) des dispositifs maître xm et esclave xset les forces d'interaction opérateur-maître fh et esclave-environnement fe. Le nombre des canaux d'uncorrecteur indique le nombre des signaux d'échange qui passent et sont traités à travers lui. En utilisant ceterme, on peut observer que la première architecture de commande proposée (�gure 4.4) consiste d'un seulcorrecteur centralisé à trois canaux (les signaux xm, xs et fe sont régulées par lui).
Cette architecture a eté présenté dans [8]. La grande avantage de cette type de commande est que ladémarche pour la synthèse de la commande devient relativement simple car il su�t d'établir correctementla représentation d'état du modèle humain-maître-esclave-environnement et à partir des signaux des per-formance dé�nies, il faut juste trouver un bon compromis entre les quatre objectifs de performance pourtrouver un γ minimale en gardant la stabilité et des performances acceptables.
D'autre part, il a été observé que cette architecture pourrait avoir certains inconvénients pratiques. Si onconsidère le suivi de position qui est caractérise comme l'erreur entre la position de deux dispositifs xm−xs.Alors le correcteur fournira les forces de commande nécessaires sur l'esclave et le maître pour arriver à une
33
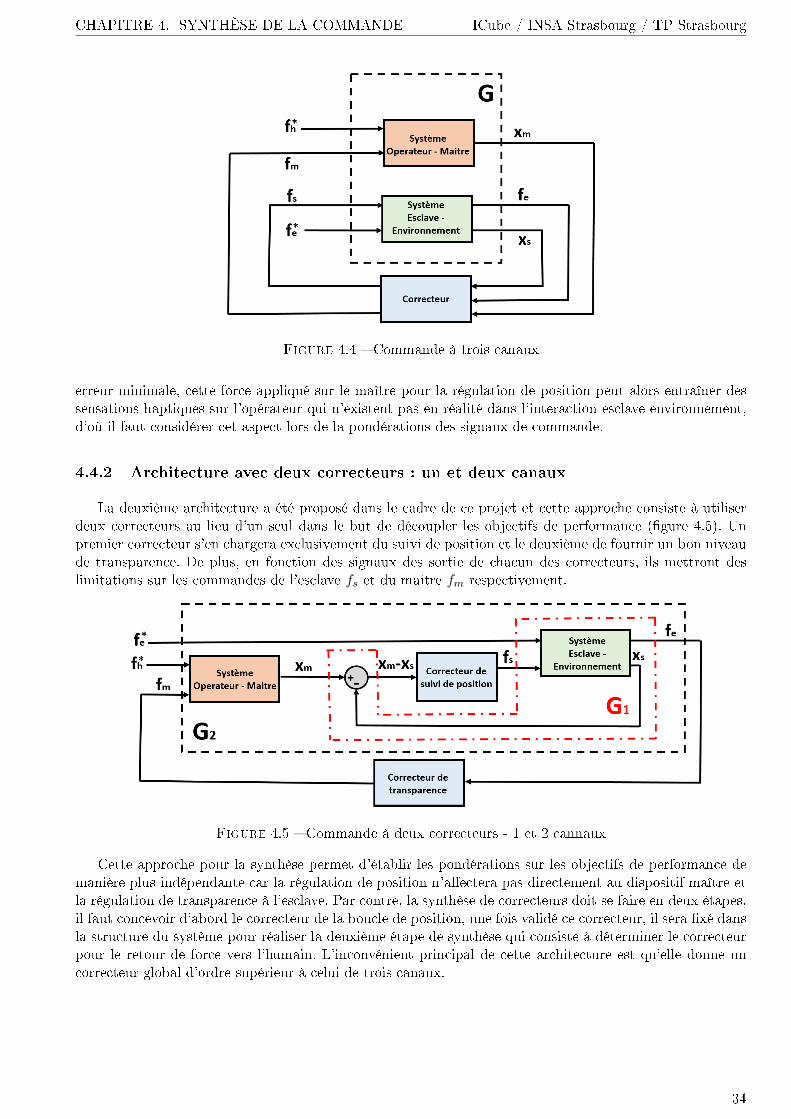
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
Figure 4.4 � Commande à trois canaux
erreur minimale, cette force appliqué sur le maître pour la régulation de position peut alors entraîner dessensations haptiques sur l'opérateur qui n'existent pas en réalité dans l'interaction esclave-environnement,d'où il faut considérer cet aspect lors de la pondérations des signaux de commande.
4.4.2 Architecture avec deux correcteurs : un et deux canaux
La deuxième architecture a été proposé dans le cadre de ce projet et cette approche consiste à utiliserdeux correcteurs au lieu d'un seul dans le but de découpler les objectifs de performance (�gure 4.5). Unpremier correcteur s'en chargera exclusivement du suivi de position et le deuxième de fournir un bon niveaude transparence. De plus, en fonction des signaux des sortie de chacun des correcteurs, ils mettront deslimitations sur les commandes de l'esclave fs et du maître fm respectivement.
Figure 4.5 � Commande à deux correcteurs - 1 et 2 cannaux
Cette approche pour la synthèse permet d'établir les pondérations sur les objectifs de performance demanière plus indépendante car la régulation de position n'a�ectera pas directement au dispositif maître etla régulation de transparence à l'esclave. Par contre, la synthèse de correcteurs doit se faire en deux étapes,il faut concevoir d'abord le correcteur de la boucle de position, une fois validé ce correcteur, il sera �xé dansla structure du système pour réaliser la deuxième étape de synthèse qui consiste à déterminer le correcteurpour le retour de force vers l'humain. L'inconvénient principal de cette architecture est qu'elle donne uncorrecteur global d'ordre supérieur à celui de trois canaux.
34
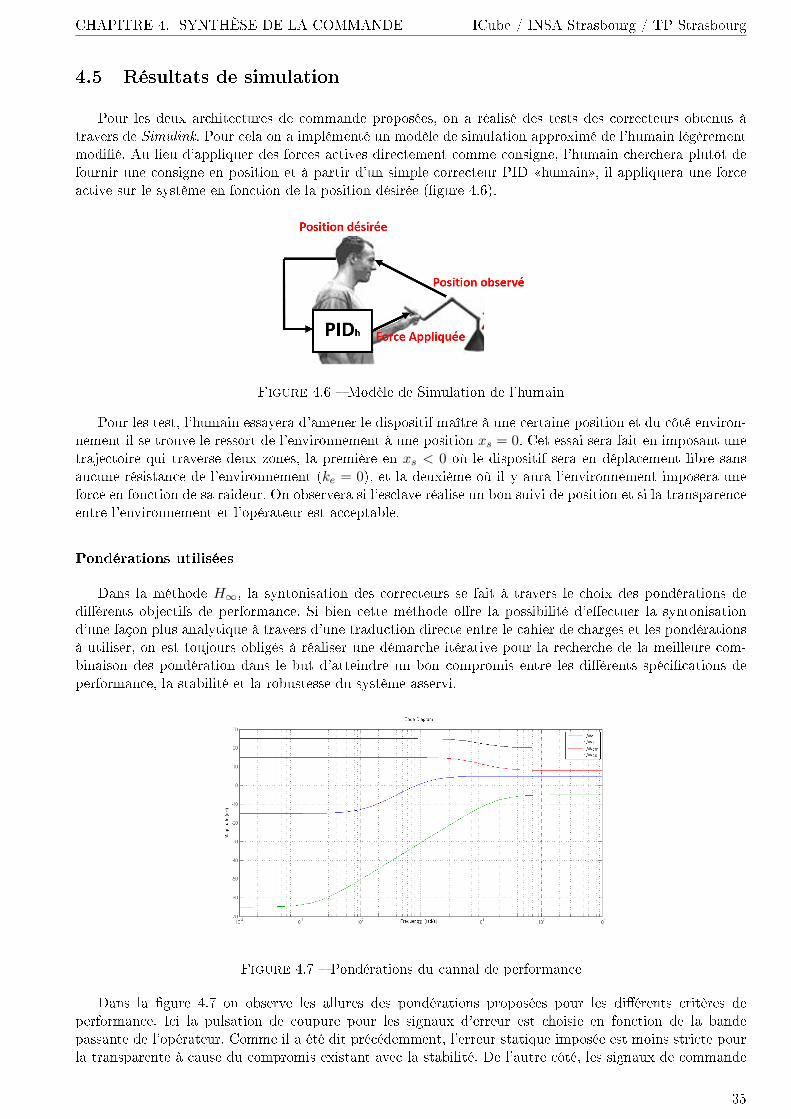
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
4.5 Résultats de simulation
Pour les deux architectures de commande proposées, on a réalisé des tests des correcteurs obtenus àtravers de Simulink. Pour cela on a implémenté un modèle de simulation approximé de l'humain légèrementmodi�é. Au lieu d'appliquer des forces actives directement comme consigne, l'humain cherchera plutôt defournir une consigne en position et à partir d'un simple correcteur PID �humain�, il appliquera une forceactive sur le système en fonction de la position désirée (�gure 4.6).
Figure 4.6 � Modèle de Simulation de l'humain
Pour les test, l'humain essayera d'amener le dispositif maître à une certaine position et du côté environ-nement il se trouve le ressort de l'environnement à une position xs = 0. Cet essai sera fait en imposant unetrajectoire qui traverse deux zones, la première en xs < 0 où le dispositif sera en déplacement libre sansaucune résistance de l'environnement (ke = 0), et la deuxième où il y aura l'environnement imposera uneforce en fonction de sa raideur. On observera si l'esclave réalise un bon suivi de position et si la transparenceentre l'environnement et l'opérateur est acceptable.
Pondérations utilisées
Dans la méthode H∞, la syntonisation des correcteurs se fait à travers le choix des pondérations dedi�érents objectifs de performance. Si bien cette méthode o�re la possibilité d'e�ectuer la syntonisationd'une façon plus analytique à travers d'une traduction directe entre le cahier de charges et les pondérationsà utiliser, on est toujours obligés à réaliser une démarche itérative pour la recherche de la meilleure com-binaison des pondération dans le but d'atteindre un bon compromis entre les di�érents spéci�cations deperformance, la stabilité et la robustesse du système asservi.
Figure 4.7 � Pondérations du cannal de performance
Dans la �gure 4.7 on observe les allures des pondérations proposées pour les di�érents critères deperformance. Ici la pulsation de coupure pour les signaux d'erreur est choisie en fonction de la bandepassante de l'opérateur. Comme il a été dit précédemment, l'erreur statique imposée est moins stricte pourla transparente à cause du compromis existant avec la stabilité. De l'autre côté, les signaux de commande
35
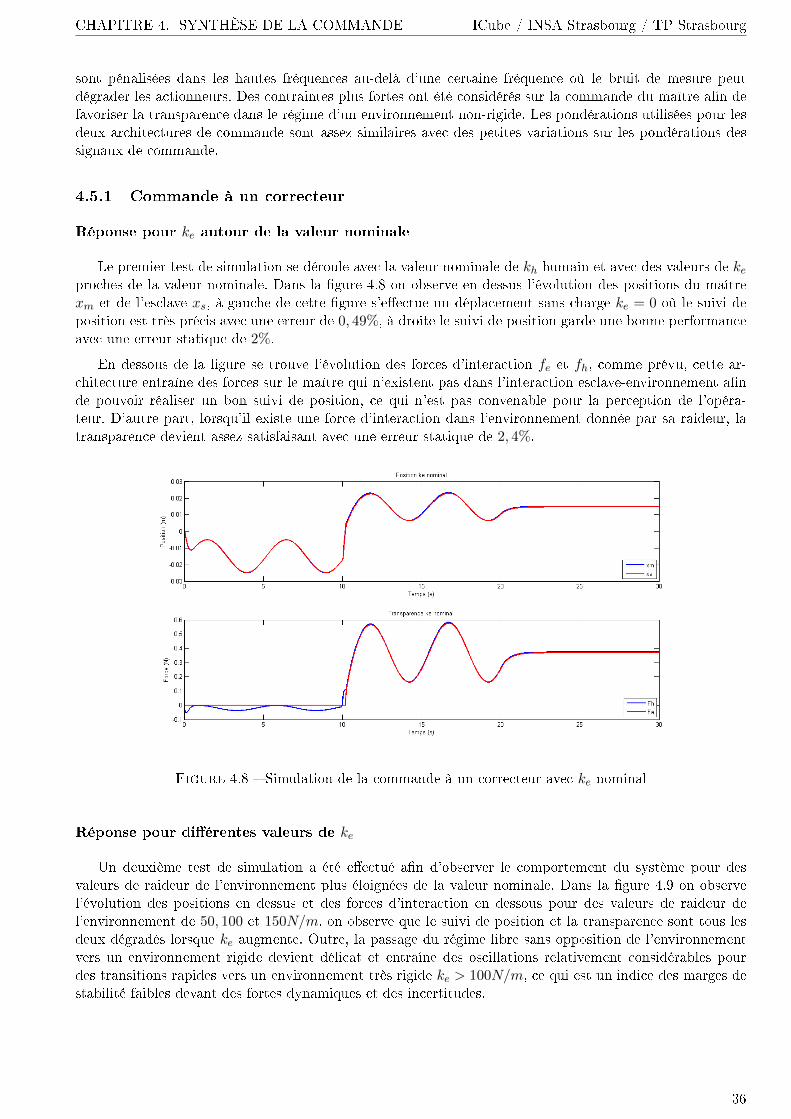
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
sont pénalisées dans les hautes fréquences au-delà d'une certaine fréquence où le bruit de mesure peutdégrader les actionneurs. Des contraintes plus fortes ont été considérés sur la commande du maître a�n defavoriser la transparence dans le régime d'un environnement non-rigide. Les pondérations utilisées pour lesdeux architectures de commande sont assez similaires avec des petites variations sur les pondérations dessignaux de commande.
4.5.1 Commande à un correcteur
Réponse pour ke autour de la valeur nominale
Le premier test de simulation se déroule avec la valeur nominale de kh humain et avec des valeurs de keproches de la valeur nominale. Dans la �gure 4.8 on observe en dessus l'évolution des positions du maîtrexm et de l'esclave xs, à gauche de cette �gure s'e�ectue un déplacement sans charge ke = 0 où le suivi deposition est très précis avec une erreur de 0, 49%, à droite le suivi de position garde une bonne performanceavec une erreur statique de 2%.
En dessous de la �gure se trouve l'évolution des forces d'interaction fe et fh, comme prévu, cette ar-chitecture entraîne des forces sur le maître qui n'existent pas dans l'interaction esclave-environnement a�nde pouvoir réaliser un bon suivi de position, ce qui n'est pas convenable pour la perception de l'opéra-teur. D'autre part, lorsqu'il existe une force d'interaction dans l'environnement donnée par sa raideur, latransparence devient assez satisfaisant avec une erreur statique de 2, 4%.
Figure 4.8 � Simulation de la commande à un correcteur avec ke nominal
Réponse pour di�érentes valeurs de ke
Un deuxième test de simulation a été e�ectué a�n d'observer le comportement du système pour desvaleurs de raideur de l'environnement plus éloignées de la valeur nominale. Dans la �gure 4.9 on observel'évolution des positions en dessus et des forces d'interaction en dessous pour des valeurs de raideur del'environnement de 50, 100 et 150N/m, on observe que le suivi de position et la transparence sont tous lesdeux dégradés lorsque ke augmente. Outre, la passage du régime libre sans opposition de l'environnementvers un environnement rigide devient délicat et entraîne des oscillations relativement considérables pourdes transitions rapides vers un environnement très rigide ke > 100N/m, ce qui est un indice des marges destabilité faibles devant des fortes dynamiques et des incertitudes.
36
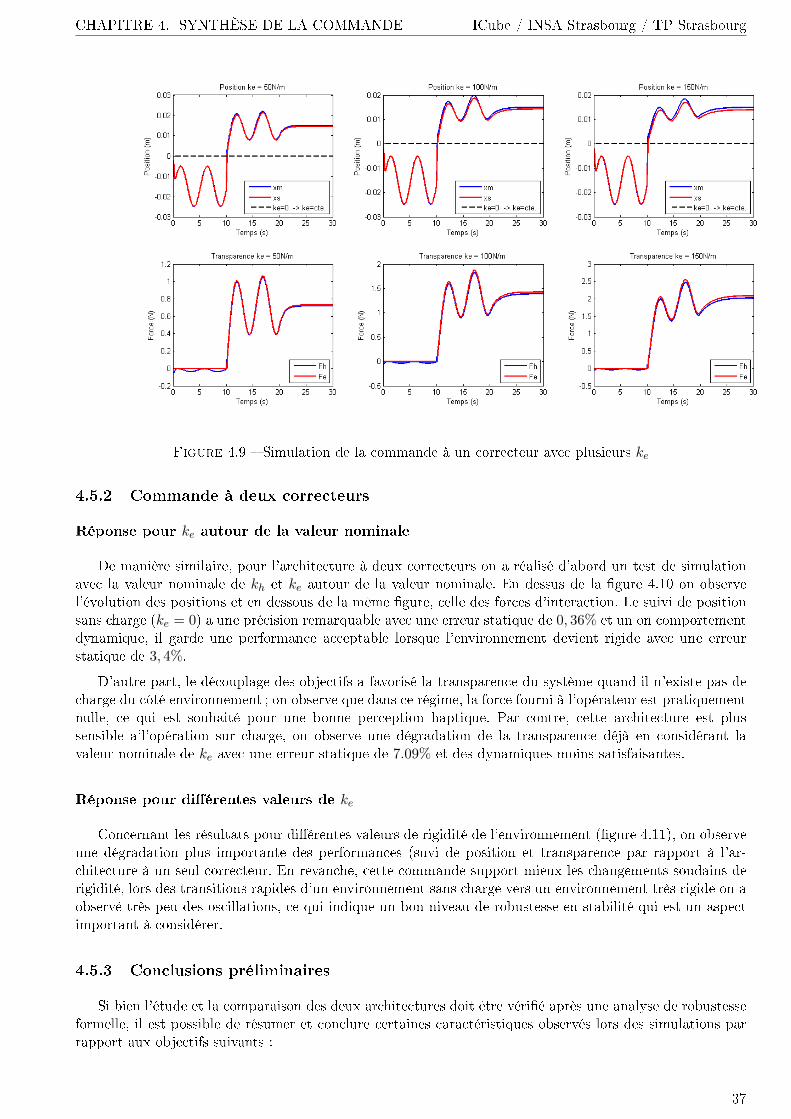
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
Figure 4.9 � Simulation de la commande à un correcteur avec plusieurs ke
4.5.2 Commande à deux correcteurs
Réponse pour ke autour de la valeur nominale
De manière similaire, pour l'architecture à deux correcteurs on a réalisé d'abord un test de simulationavec la valeur nominale de kh et ke autour de la valeur nominale. En dessus de la �gure 4.10 on observel'évolution des positions et en dessous de la même �gure, celle des forces d'interaction. Le suivi de positionsans charge (ke = 0) a une précision remarquable avec une erreur statique de 0, 36% et un on comportementdynamique, il garde une performance acceptable lorsque l'environnement devient rigide avec une erreurstatique de 3, 4%.
D'autre part, le découplage des objectifs a favorisé la transparence du système quand il n'existe pas decharge du côté environnement ; on observe que dans ce régime, la force fourni à l'opérateur est pratiquementnulle, ce qui est souhaité pour une bonne perception haptique. Par contre, cette architecture est plussensible a`l'opération sur charge, on observe une dégradation de la transparence déjà en considérant lavaleur nominale de ke avec une erreur statique de 7.09% et des dynamiques moins satisfaisantes.
Réponse pour di�érentes valeurs de ke
Concernant les résultats pour di�érentes valeurs de rigidité de l'environnement (�gure 4.11), on observeune dégradation plus importante des performances (suvi de position et transparence par rapport à l'ar-chitecture à un seul correcteur. En revanche, cette commande support mieux les changements soudains derigidité, lors des transitions rapides d'un environnement sans charge vers un environnement très rigide on aobservé très peu des oscillations, ce qui indique un bon niveau de robustesse en stabilité qui est un aspectimportant à considérer.
4.5.3 Conclusions préliminaires
Si bien l'étude et la comparaison des deux architectures doit être véri�é après une analyse de robustesseformelle, il est possible de résumer et conclure certaines caractéristiques observés lors des simulations parrapport aux objectifs suivants :
37
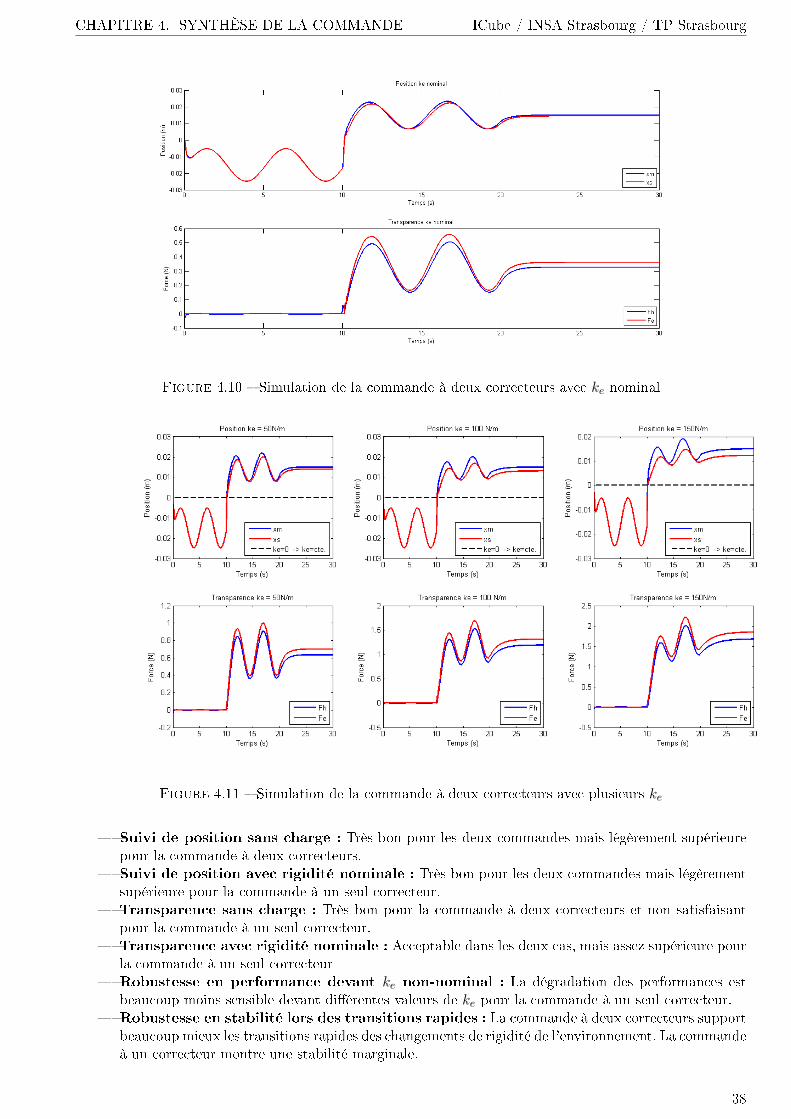
CHAPITRE 4. SYNTHÈSE DE LA COMMANDE ICube / INSA Strasbourg / TP Strasbourg
Figure 4.10 � Simulation de la commande à deux correcteurs avec ke nominal
Figure 4.11 � Simulation de la commande à deux correcteurs avec plusieurs ke
� Suivi de position sans charge : Très bon pour les deux commandes mais légèrement supérieurepour la commande à deux correcteurs.
� Suivi de position avec rigidité nominale : Très bon pour les deux commandes mais légèrementsupérieure pour la commande à un seul correcteur.
� Transparence sans charge : Très bon pour la commande à deux correcteurs et non satisfaisantpour la commande à un seul correcteur.
� Transparence avec rigidité nominale : Acceptable dans les deux cas, mais assez supérieure pourla commande à un seul correcteur
� Robustesse en performance devant ke non-nominal : La dégradation des performances estbeaucoup moins sensible devant di�érentes valeurs de ke pour la commande à un seul correcteur.
� Robustesse en stabilité lors des transitions rapides : La commande à deux correcteurs supportbeaucoup mieux les transitions rapides des changements de rigidité de l'environnement. La commandeà un correcteur montre une stabilité marginale.
38
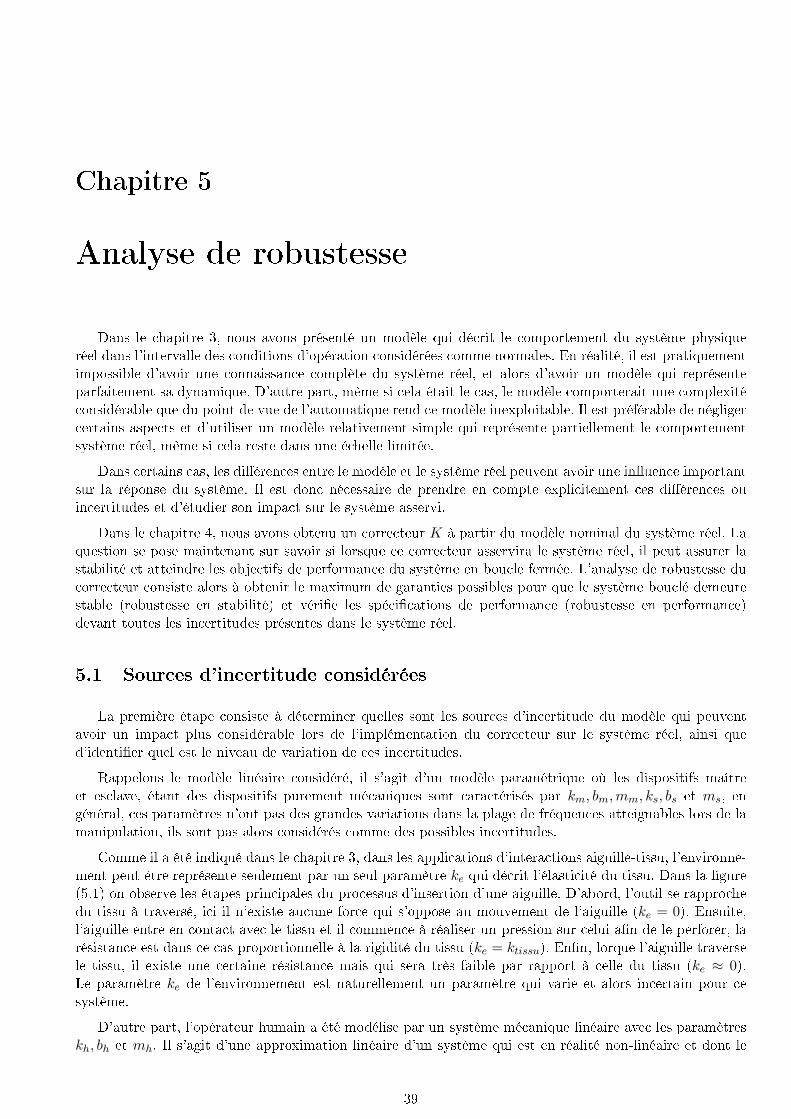
Chapitre 5
Analyse de robustesse
Dans le chapitre 3, nous avons présenté un modèle qui décrit le comportement du système physiqueréel dans l'intervalle des conditions d'opération considérées comme normales. En réalité, il est pratiquementimpossible d'avoir une connaissance complète du système réel, et alors d'avoir un modèle qui représenteparfaitement sa dynamique. D'autre part, même si cela était le cas, le modèle comporterait une complexitéconsidérable que du point de vue de l'automatique rend ce modèle inexploitable. Il est préférable de négligercertains aspects et d'utiliser un modèle relativement simple qui représente partiellement le comportementsystème réel, même si cela reste dans une échelle limitée.
Dans certains cas, les di�érences entre le modèle et le système réel peuvent avoir une in�uence importantsur la réponse du système. Il est donc nécessaire de prendre en compte explicitement ces di�érences ouincertitudes et d'étudier son impact sur le système asservi.
Dans le chapitre 4, nous avons obtenu un correcteur K à partir du modèle nominal du système réel. Laquestion se pose maintenant sur savoir si lorsque ce correcteur asservira le système réel, il peut assurer lastabilité et atteindre les objectifs de performance du système en boucle fermée. L'analyse de robustesse ducorrecteur consiste alors à obtenir le maximum de garanties possibles pour que le système bouclé demeurestable (robustesse en stabilité) et véri�e les spéci�cations de performance (robustesse en performance)devant toutes les incertitudes présentes dans le système réel.
5.1 Sources d'incertitude considérées
La première étape consiste à déterminer quelles sont les sources d'incertitude du modèle qui peuventavoir un impact plus considérable lors de l'implémentation du correcteur sur le système réel, ainsi qued'identi�er quel est le niveau de variation de ces incertitudes.
Rappelons le modèle linéaire considéré, il s'agit d'un modèle paramétrique où les dispositifs maîtreet esclave, étant des dispositifs purement mécaniques sont caractérisés par km, bm,mm, ks, bs et ms, engénéral, ces paramètres n'ont pas des grandes variations dans la plage de fréquences atteignables lors de lamanipulation, ils sont pas alors considérés comme des possibles incertitudes.
Comme il a été indiqué dans le chapitre 3, dans les applications d'interactions aiguille-tissu, l'environne-ment peut être représente seulement par un seul paramètre ke qui décrit l'élasticité du tissu. Dans la �gure(5.1) on observe les étapes principales du processus d'insertion d'une aiguille. D'abord, l'outil se rapprochedu tissu à traversé, ici il n'existe aucune force qui s'oppose au mouvement de l'aiguille (ke = 0). Ensuite,l'aiguille entre en contact avec le tissu et il commence à réaliser un pression sur celui a�n de le perforer, larésistance est dans ce cas proportionnelle à la rigidité du tissu (ke = ktissu). En�n, lorque l'aiguille traversele tissu, il existe une certaine résistance mais qui sera très faible par rapport à celle du tissu (ke ≈ 0).Le paramètre ke de l'environnement est naturellement un paramètre qui varie et alors incertain pour cesystème.
D'autre part, l'opérateur humain a été modélise par un système mécanique linéaire avec les paramètreskh, bh et mh. Il s'agit d'une approximation linéaire d'un système qui est en réalité non-linéaire et dont le
39

CHAPITRE 5. ANALYSE DE ROBUSTESSE ICube / INSA Strasbourg / TP Strasbourg
Figure 5.1 � Insertion d'aiguille
sens physique de ses paramétrés n'est pas évidente. L'obtention des paramètres du modèle humain doit sefaire à travers un processus d'identi�cation qui sera présenté dans le chapitre suivant.
Lors des expériences réalisées dans l'identi�cation, on a trouvé que le paramètre kh est celui qui subiles variations les plus importantes pendant les manipulations et que cette variation est relié à la postureadoptée par l'opérateur et à la façon dans laquelle il saisit le dispositif maître, ce qui est conforme auxrésultats obtenus par d'autres auteurs [8], [38].
On réalisera l'étude de robustesse en considérant les paramètres incertains ke et kh. Toutes les valeurspossibles de ces paramètres sont contenus dans un certain ensemble borné par les valeurs minimales etmaximales qu'ils peuvent prendre :
kh ∈[kh, kh
]ke ∈
[ke, ke
] (5.1)
5.2 Représentation linéaire fractionnaire du système incertain
Une représentation linéaire fractionnaire (LFR) est l'interconnexion d'un système LTI avec un opérateurnoté ∆ qui dépend des paramètres incertains (5.2). Ici, H représente le système en bouclé fermée P0 ? Koù P0 est le système nominal étendu et K le correcteur qui asservi le système. Tout système linéaire àparamètres variants (LPV) peut être mis sous forme LFR qui fait sortir explicitement toutes les incertitudesparamétriques du système et les regroupe dans le bloc ∆. Cette représentation permettra de mettre en placeles techniques utilisées pour analyser la robustesse du système.
Figure 5.2 � Représentation linéaire fractionnaire
D'après la section précédente, le bloc ∆ sera conformé comme :
∆ =
[kh 00 ke
](5.2)
où kh ∈ [kh, kh] et ke ∈ [ke, ke] sont les paramètres incertains bornés. A�n de simpli�er l'étape d'analysede robustesse, les paramètres du bloc d'incertitude ∆ sont transformées en incertitudes δh et δe normaliséscomme suit :
40

CHAPITRE 5. ANALYSE DE ROBUSTESSE ICube / INSA Strasbourg / TP Strasbourg
ki = kinom(1 + αiriδi) (5.3)
où i dénote l'indice pour l'opérateur ou l'environnement, kinom est la valeur nominale du paramètreincertain, ri = (kimax − kimin)/(kimax + kimin) est l'incertitude relative du paramètre, δi ∈ [−1, 1] estl'incertitude paramétrique normalisée, et αi et un réel quelconque avec une valeur absolue inférieure ou égalà 1. Cette forme permet d'explorer le niveau d'incertitude depuis la valeur nominale vers les bornes d'unefaçon symétrique en balayant αi de 0 à 1. L'incertitude de paramètres sera alors représentée par un paramètrenominal kinom qui sera intégré dans le modèle d'état (celui utilisé lors de la synthèse du correcteur), et parles signaux q et p échangés entre le système nominal et le bloque d'incertitudes normalisé ∆ :
∆ =
[δh 00 δe
](5.4)
Étant dé�ni le bloc d'incertitudes, il faut maintenant modi�er le modèle du système en ajoutant lessignaux du canal d'incertitude p et q et son in�uence sur le système. L'e�et des paramètres est d'entraînerune force qui sera proportionnel aux positions xm et xs, q est alors dé�nie comme :
q =
[1 0 0 00 0 1 0
] xmxmxsxs
(5.5)
Et par conséquence le signal p est :
p =
[δh xmδe xs
](5.6)
Ensuite, avec la dé�nition des signaux d'incertitude et en reprenant le modèle du système, les expressionspour la représentation d'état du système téléopéré se récrivent :
xmxmxsxs
=
0 1 0 0
−km+khnommh+mm
− bh+bmmh+mm
0 0
0 0 0 1
0 0 −ks+kenomms
− bs+bems
xmxmxsxs
+
0 01
mh+mm0
0 00 − 1
ms
[f∗hf∗e]
+
0 01
mh+mm0
0 00 1
ms
[fmfs]
+
0 0
−khnom αh rhmh+mm
0
0 0
0 −kenom αe rems
[δh xmδe xs
] (5.7)
fh − fexm − xsfmfs
=
−khnommm−kmmh
mh+mm− bhmm−bmmh
mh+mm−kenom 0
1 0 −1 00 0 0 00 0 0 0
xmxmxsxs
+
mm
mh+mm−1
0 00 00 0
w
+
− mhmh+mm
0
0 01 00 1
u+
−mm khnom αh rh
mh+mm−kenom αe re
0 00 00 0
p(5.8)
xmxsfe
=
1 0 0 00 0 1 00 0 kenom 0
xmxmxsxs
+
0 00 00 1
w +
0 00 00 0
u+
0 kenom αe re0 00 0
p (5.9)
41

CHAPITRE 5. ANALYSE DE ROBUSTESSE ICube / INSA Strasbourg / TP Strasbourg
qui est une version étendue du modèle nominal, cela permet alors d'établir la représentation suivante :
xzyq
=
At Bt1 Bt2 Bt3Ct1 Dt11 Dt12 Dt13
Ct2 Dt21 Dt22 Dt23
C3 D31 D32 D33
xwup
(5.10)
En suivant la même démarche que dans l'étape de synthèse, on ajoute le bloc de pondérations W pourobtenir le système P∆ et en fermant la boucle avec le correcteur K on obtient le système H qui a lareprésentation suivante :
ζzq
=
Acl Bcl B∆cl
Ccl Dcl D∆cl
C3 D31 D33
ζwp
(5.11)
La représentation linéaire fractionnaire de la �gure 5.2 utilisée pour l'analyse de robustesse est composéealors par le bloc d'incertitudes normalisées ∆ et le système étendu H.
5.3 Analyse de robustesse à travers les IQC
5.3.1 Caractérisation des incertitudes à travers IQC
A�n d'établir un test quanti�able de la robustesse du système, il est nécessaire de capturer des informa-tions sur l'ensemble d'incertitudes du système. Les propriétés des incertitudes peuvent être exprimées demanière appropriée comme des contraintes intégrales quadratiques (IQC) sur ses signaux d'entrée et sortie(q et p respectivement).
Considérons maintenant une des incertitudes normalisées δi présentées dans la section précédente. Ilfaut d'abord établir le type d'incertitude présente dans le système. Il s'agit de :
� Une incertitude paramétrique : représente la variation d'un paramètre du modèle.� Variant dans le temps de façon arbitrairement rapide : par exemple, le moment où l'aiguille fait
contact avec le tissu, il existe un changement soudain de la rigidité de l'environnement.� Incertitude bornée : la paramètre varie seulement dans une certaine intervalle.
On considère δ comme l'ensemble de toutes les valeurs possibles qui peut prendre l'incertitude, de tellesorte que pour toute αi ∈ [0, 1] et δ(t), il est véri�é que αiδi(t) ∈ δ, avec αi étant une borne sur le niveaud'incertitude dans le système où αi = 0 impose les conditions nominales de fonctionnement et |αi| = 1indique l'incertitude maximale. Cela indique αiδi(t) peut varier dans le temps entre 0 et αi, de cette façonon obtient la contrainte :
|δi(t)| ≤ |αi| (5.12)
Alors, devant un signal d'entrée q(t), l'énergie du système sera bornée par :
∫ ∞0
δi(t)2 ‖q(t)‖ dt ≤
∫ ∞0
α2i ‖q(t)‖ dt (5.13)
Sans perte de généralité, on peut introduire une constante de pondération Pi ≥ 0 à gauche et à droitede l'expression.
∫ ∞0
δi(t)2 ‖q(t)‖Pi dt ≤
∫ ∞0
α2i ‖q(t)‖Pi dt (5.14)
En passant tous les termes d'un côté de l'expression de telle sorte que l'inégalité soit positive :
42

CHAPITRE 5. ANALYSE DE ROBUSTESSE ICube / INSA Strasbourg / TP Strasbourg
∫ ∞0
(α2i − δi(t)2) q(t)TPi q(t) dt ≥ 0 (5.15)
On rappelle que p(t) = δi(t) q(t), d'où on obtient :
∫ ∞0
(q(t)T α2i Pi q(t)− p(t)T Pi p(t)) dt ≥ 0 (5.16)
qui peut être exprimé sous forme matricielle comme suit :
∫ ∞0
[p(t)q(t)
]T [−Pi 00 α2
iPi
] [p(t)q(t)
]≥ 0 (5.17)
qui est en fait l'IQC qui caractérise le type d'incertitude décrit auparavant. Dans le cas du systèmeétudié, on compte deux incertitudes paramétriques δh et δe. Dans ce cas, il est possible de conformer un seulmultiplicateur qui considère le niveaux de 'incertitude des di�érentes paramètres de manière indépendante :
P =
−Ph 0 0 0
0 −Pe 0 00 0 α2
hPh 00 0 0 α2
ePe
(5.18)
alors l'IQC 5.17 sera véri�ée pour toute matrice matrice P symétrique, où Ph et Pe sont strictementpositives. On a maintenant tous les éléments nécessaire pour développer un test de robustesse.
5.3.2 Analyse de robustesse par LMI
Soit P la famille des matrices qui véri�ent 5.17, alors le système en bouclé fermée H représenté par 5.11sera robuste en stabilité et en performance (imposés par γ), s'il existent une matrices symétrique X et unematrice P avec Pi > 0 qui satisfont les LMI :
X � 0 (5.19)
[I 0 0Acl Bcl B∆cl
]T [0 QQ 0
] [I 0 0Acl Bcl B∆cl
]+
[0 I 0C3 D31 D33
]TP
[0 I 0C3 D31 D33
]+
[0 0 ICcl Dcl D∆cl
]T [−γ2I 00 I
] [0 0 ICcl Dcl D∆cl
]≺ 0
(5.20)
pour tout αiδi(t) ∈ δ. Il est facile à observer que le cas où αi = 0, revient à la LMI présenté lors de lasynthèse du correcteur pour le système nominal. La preuve générale de ce test de robustesse est montréedans ??.
5.4 Test d'analyse réalisés et résultats obtenus
Quatre tests d'analyse de robustesse se sont réalisées sur les deux architectures de commande étudiées,les trois premiers considèrent des paramètres incertains et variants dans le temps de manière arbitrairementrapide, et un quatrième qui considère ke incertain mais invariant dans le temps. Comme indiqué précé-demment, l'analyse se réalise en balayant αi depuis la valeurs nominale du paramètre vers les valeurs duparamètre où l'incertitude est maximale, γ sera l'indicateur des performances atteignables dans chaqueniveau d'incertitude et l'inexistence de γ implique que le test est infaisable et donc le système instable dansces conditions.
43
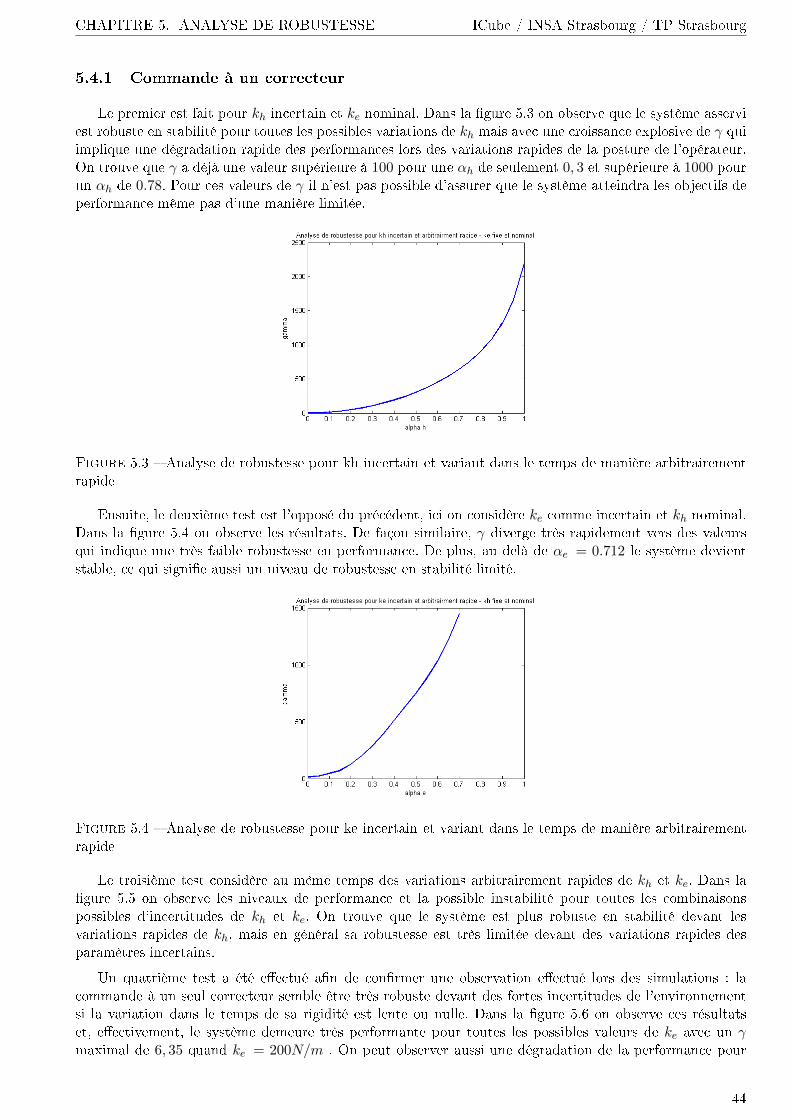
CHAPITRE 5. ANALYSE DE ROBUSTESSE ICube / INSA Strasbourg / TP Strasbourg
5.4.1 Commande à un correcteur
Le premier est fait pour kh incertain et ke nominal. Dans la �gure 5.3 on observe que le système asserviest robuste en stabilité pour toutes les possibles variations de kh mais avec une croissance explosive de γ quiimplique une dégradation rapide des performances lors des variations rapides de la posture de l'opérateur.On trouve que γ a déjà une valeur supérieure à 100 pour une αh de seulement 0, 3 et supérieure à 1000 pourun αh de 0.78. Pour ces valeurs de γ il n'est pas possible d'assurer que le système atteindra les objectifs deperformance même pas d'une manière limitée.
Figure 5.3 � Analyse de robustesse pour kh incertain et variant dans le temps de manière arbitrairementrapide
Ensuite, le deuxième test est l'opposé du précédent, ici on considère ke comme incertain et kh nominal.Dans la �gure 5.4 on observe les résultats. De façon similaire, γ diverge très rapidement vers des valeursqui indique une très faible robustesse en performance. De plus, au delà de αe = 0.712 le système devientstable, ce qui signi�e aussi un niveau de robustesse en stabilité limité.
Figure 5.4 � Analyse de robustesse pour ke incertain et variant dans le temps de manière arbitrairementrapide
Le troisième test considère au même temps des variations arbitrairement rapides de kh et ke. Dans la�gure 5.5 on observe les niveaux de performance et la possible instabilité pour toutes les combinaisonspossibles d'incertitudes de kh et ke. On trouve que le système est plus robuste en stabilité devant lesvariations rapides de kh, mais en général sa robustesse est très limitée devant des variations rapides desparamètres incertains.
Un quatrième test a été e�ectué a�n de con�rmer une observation e�ectué lors des simulations : lacommande à un seul correcteur semble être très robuste devant des fortes incertitudes de l'environnementsi la variation dans le temps de sa rigidité est lente ou nulle. Dans la �gure 5.6 on observe ces résultatset, e�ectivement, le système demeure très performante pour toutes les possibles valeurs de ke avec un γmaximal de 6, 35 quand ke = 200N/m . On peut observer aussi une dégradation de la performance pour
44
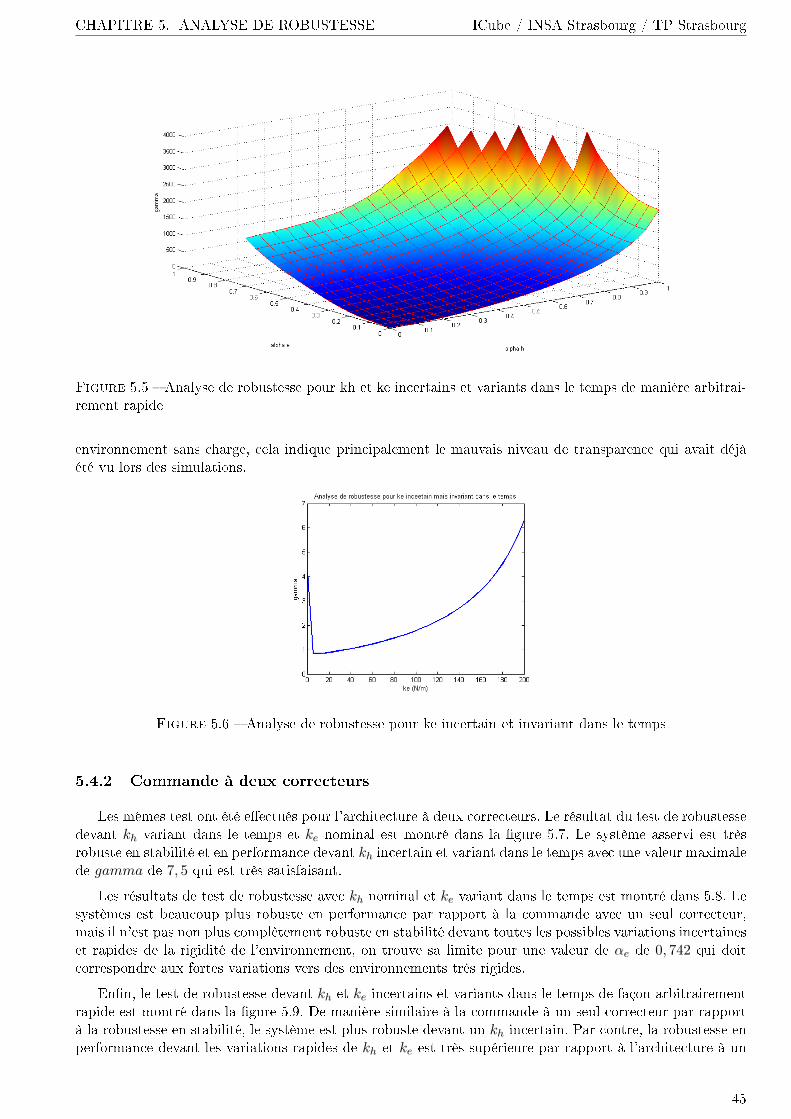
CHAPITRE 5. ANALYSE DE ROBUSTESSE ICube / INSA Strasbourg / TP Strasbourg
Figure 5.5 � Analyse de robustesse pour kh et ke incertains et variants dans le temps de manière arbitrai-rement rapide
environnement sans charge, cela indique principalement le mauvais niveau de transparence qui avait déjàété vu lors des simulations.
Figure 5.6 � Analyse de robustesse pour ke incertain et invariant dans le temps
5.4.2 Commande à deux correcteurs
Les mêmes test ont été e�ectués pour l'architecture à deux correcteurs. Le résultat du test de robustessedevant kh variant dans le temps et ke nominal est montré dans la �gure 5.7. Le système asservi est trèsrobuste en stabilité et en performance devant kh incertain et variant dans le temps avec une valeur maximalede gamma de 7, 5 qui est très satisfaisant.
Les résultats de test de robustesse avec kh nominal et ke variant dans le temps est montré dans 5.8. Lesystèmes est beaucoup plus robuste en performance par rapport à la commande avec un seul correcteur,mais il n'est pas non plus complètement robuste en stabilité devant toutes les possibles variations incertaineset rapides de la rigidité de l'environnement, on trouve sa limite pour une valeur de αe de 0, 742 qui doitcorrespondre aux fortes variations vers des environnements très rigides.
En�n, le test de robustesse devant kh et ke incertains et variants dans le temps de façon arbitrairementrapide est montré dans la �gure 5.9. De manière similaire à la commande à un seul correcteur par rapportà la robustesse en stabilité, le système est plus robuste devant un kh incertain. Par contre, la robustesse enperformance devant les variations rapides de kh et ke est très supérieure par rapport à l'architecture à un
45
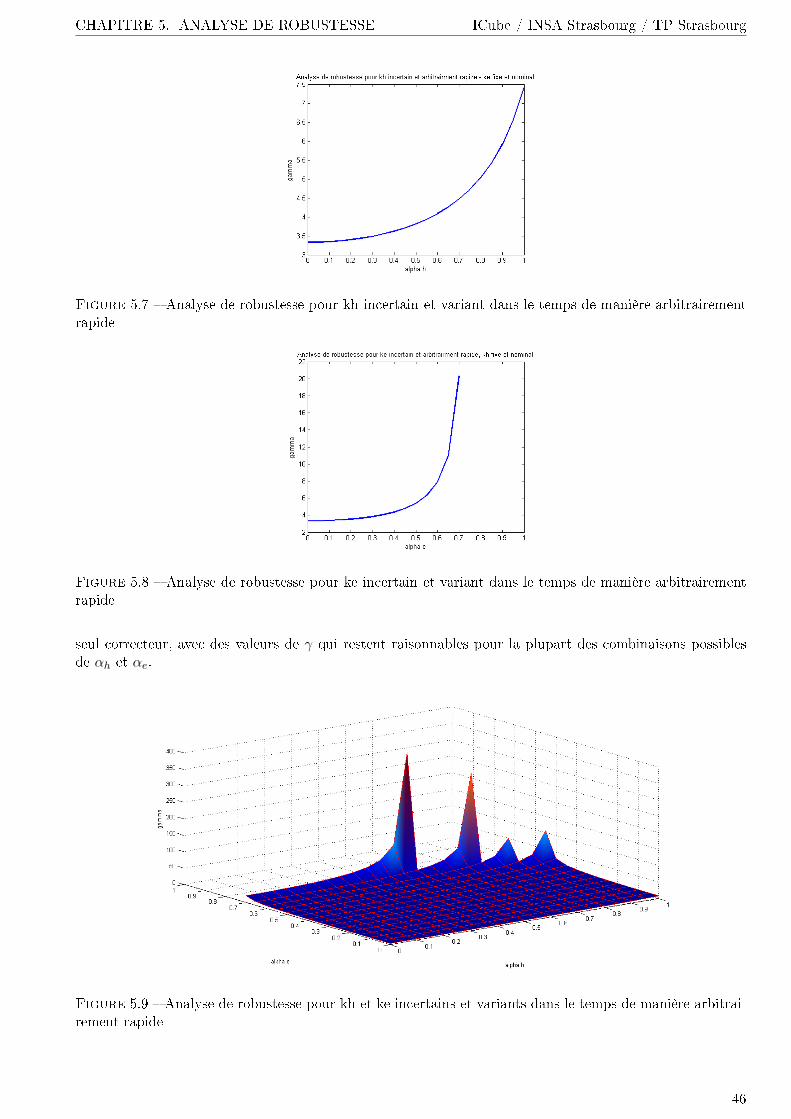
CHAPITRE 5. ANALYSE DE ROBUSTESSE ICube / INSA Strasbourg / TP Strasbourg
Figure 5.7 � Analyse de robustesse pour kh incertain et variant dans le temps de manière arbitrairementrapide
Figure 5.8 � Analyse de robustesse pour ke incertain et variant dans le temps de manière arbitrairementrapide
seul correcteur, avec des valeurs de γ qui restent raisonnables pour la plupart des combinaisons possiblesde αh et αe.
Figure 5.9 � Analyse de robustesse pour kh et ke incertains et variants dans le temps de manière arbitrai-rement rapide
46
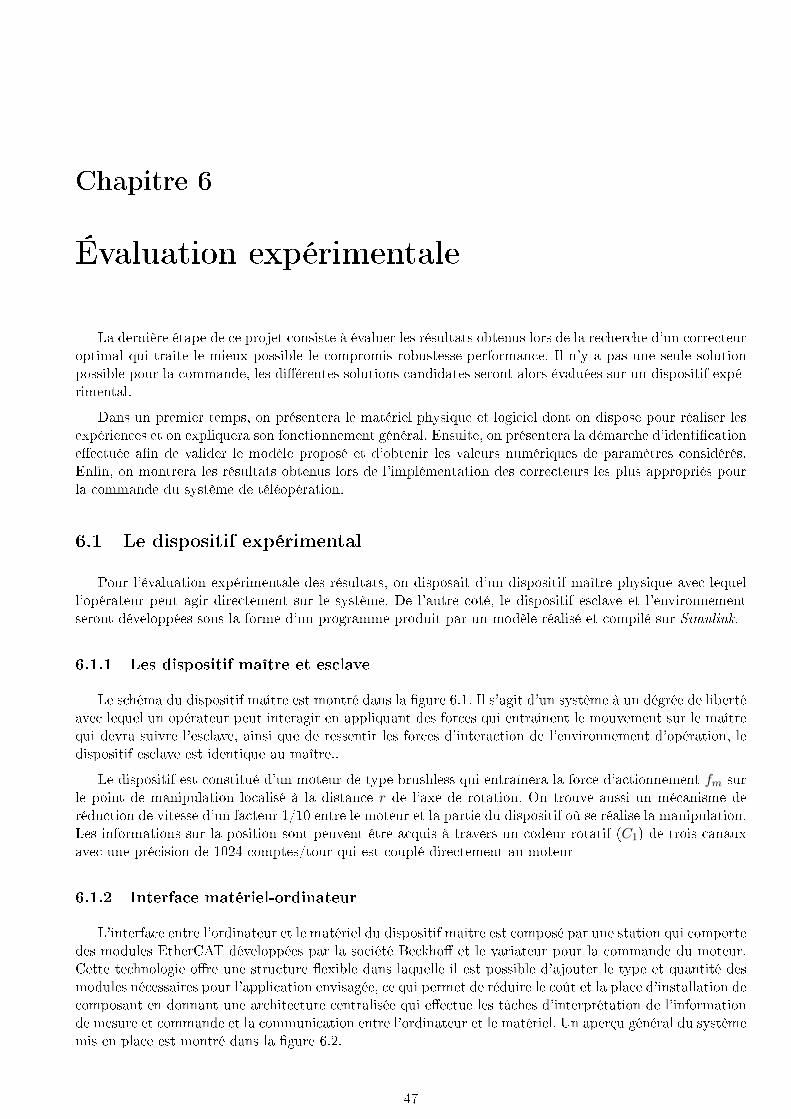
Chapitre 6
Évaluation expérimentale
La dernière étape de ce projet consiste à évaluer les résultats obtenus lors de la recherche d'un correcteuroptimal qui traite le mieux possible le compromis robustesse-performance. Il n'y a pas une seule solutionpossible pour la commande, les di�érentes solutions candidates seront alors évaluées sur un dispositif expé-rimental.
Dans un premier temps, on présentera le matériel physique et logiciel dont on dispose pour réaliser lesexpériences et on expliquera son fonctionnement général. Ensuite, on présentera la démarche d'identi�catione�ectuée a�n de valider le modèle proposé et d'obtenir les valeurs numériques de paramètres considérés.En�n, on montrera les résultats obtenus lors de l'implémentation des correcteurs les plus appropriés pourla commande du système de téléopération.
6.1 Le dispositif expérimental
Pour l'évaluation expérimentale des résultats, on disposait d'un dispositif maître physique avec lequell'opérateur peut agir directement sur le système. De l'autre côté, le dispositif esclave et l'environnementseront développées sous la forme d'un programme produit par un modèle réalisé et compilé sur Simulink.
6.1.1 Les dispositif maître et esclave
Le schéma du dispositif maître est montré dans la �gure 6.1. Il s'agit d'un système à un dégrée de libertéavec lequel un opérateur peut interagir en appliquant des forces qui entraînent le mouvement sur le maîtrequi devra suivre l'esclave, ainsi que de ressentir les forces d'interaction de l'environnement d'opération, ledispositif esclave est identique au maître..
Le dispositif est constitué d'un moteur de type brushless qui entraînera la force d'actionnement fm surle point de manipulation localisé à la distance r de l'axe de rotation. On trouve aussi un mécanisme deréduction de vitesse d'un facteur 1/10 entre le moteur et la partie du dispositif où se réalise la manipulation.Les informations sur la position sont peuvent être acquis à travers un codeur rotatif (C1) de trois canauxavec une précision de 1024 comptes/tour qui est couplé directement au moteur-
6.1.2 Interface matériel-ordinateur
L'interface entre l'ordinateur et le matériel du dispositif maître est composé par une station qui comportedes modules EtherCAT développées par la société Beckho� et le variateur pour la commande du moteur.Cette technologie o�re une structure �exible dans laquelle il est possible d'ajouter le type et quantité desmodules nécessaires pour l'application envisagée, ce qui permet de réduire le coût et la place d'installation decomposant en donnant une architecture centralisée qui e�ectue les tâches d'interprétation de l'informationde mesure et commande et la communication entre l'ordinateur et le matériel. Un aperçu général du systèmemis en place est montré dans la �gure 6.2.
47
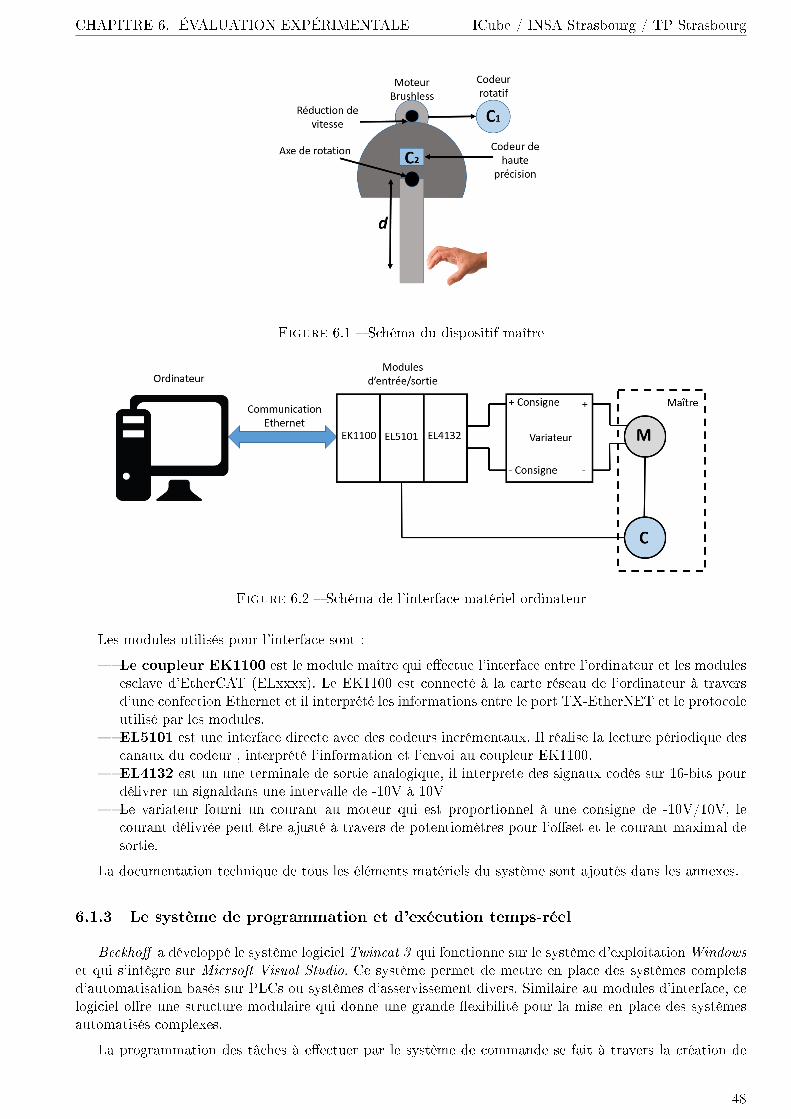
CHAPITRE 6. ÉVALUATION EXPÉRIMENTALE ICube / INSA Strasbourg / TP Strasbourg
Figure 6.1 � Schéma du dispositif maître
Figure 6.2 � Schéma de l'interface matériel-ordinateur
Les modules utilisés pour l'interface sont :
� Le coupleur EK1100 est le module maître qui e�ectue l'interface entre l'ordinateur et les modulesesclave d'EtherCAT (ELxxxx). Le EK1100 est connecté à la carte réseau de l'ordinateur à traversd'une confection Ethernet et il interprété les informations entre le port TX-EtherNET et le protocoleutilisé par les modules.
� EL5101 est une interface directe avec des codeurs incrémentaux. Il réalise la lecture périodique descanaux du codeur , interprété l'information et l'envoi au coupleur EK1100.
� EL4132 est un une terminale de sortie analogique, il interprete des signaux codés sur 16-bits pourdélivrer un signaldans une intervalle de -10V à 10V
� Le variateur fourni un courant au moteur qui est proportionnel à une consigne de -10V/10V, lecourant délivrée peut être ajusté à travers de potentiomètres pour l'o�set et le courant maximal desortie.
La documentation technique de tous les éléments matériels du système sont ajoutés dans les annexes.
6.1.3 Le système de programmation et d'exécution temps-réel
Beckho� a développé le système logiciel Twincat 3 qui fonctionne sur le système d'exploitationWindowset qui s'intègre sur Micrsoft Visual Studio. Ce système permet de mettre en place des systèmes completsd'automatisation basés sur PLCs ou systèmes d'asservissement divers. Similaire au modules d'interface, celogiciel o�re une structure modulaire qui donne une grande �exibilité pour la mise en place des systèmesautomatisés complexes.
La programmation des tâches à e�ectuer par le système de commande se fait à travers la création de
48
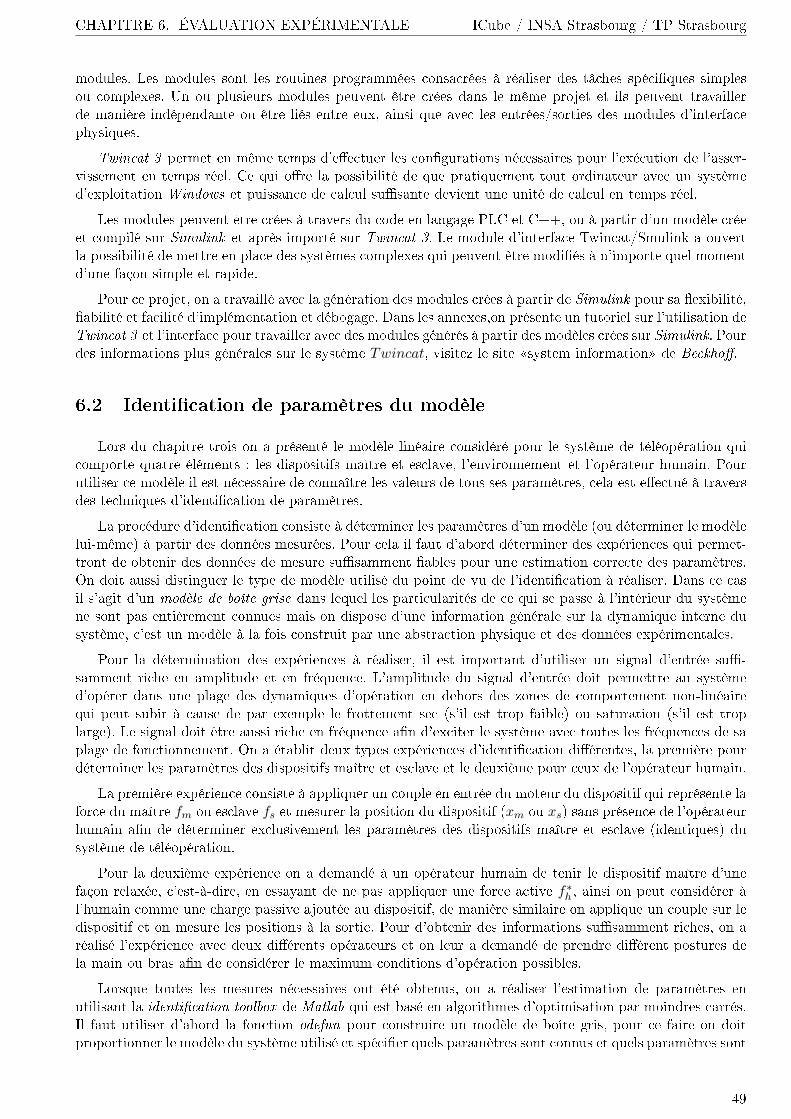
CHAPITRE 6. ÉVALUATION EXPÉRIMENTALE ICube / INSA Strasbourg / TP Strasbourg
modules. Les modules sont les routines programmées consacrées à réaliser des tâches spéci�ques simplesou complexes. Un ou plusieurs modules peuvent être crées dans le même projet et ils peuvent travaillerde manière indépendante ou être liés entre eux, ainsi que avec les entrées/sorties des modules d'interfacephysiques.
Twincat 3 permet en même temps d'e�ectuer les con�gurations nécessaires pour l'exécution de l'asser-vissement en temps réel. Ce qui o�re la possibilité de que pratiquement tout ordinateur avec un systèmed'exploitation Windows et puissance de calcul su�sante devient une unité de calcul en temps réel.
Les modules peuvent être crées à travers du code en langage PLC et C++, ou à partir d'un modèle créeet compilé sur Simulink et après importé sur Twincat 3. Le module d'interface Twincat/Smulink a ouvertla possibilité de mettre en place des systèmes complexes qui peuvent être modi�és à n'importe quel momentd'une façon simple et rapide.
Pour ce projet, on a travaillé avec la génération des modules crées à partir de Simulink pour sa �exibilité,�abilité et facilité d'implémentation et débogage. Dans les annexes,on présente un tutoriel sur l'utilisation deTwincat 3 et l'interface pour travailler avec des modules générés à partir des modèles crées sur Simulink. Pourdes informations plus générales sur le système Twincat, visitez le site �system information� de Beckho�.
6.2 Identi�cation de paramètres du modèle
Lors du chapitre trois on a présenté le modèle linéaire considéré pour le système de téléopération quicomporte quatre éléments : les dispositifs maître et esclave, l'environnement et l'opérateur humain. Pourutiliser ce modèle il est nécessaire de connaître les valeurs de tous ses paramètres, cela est e�ectué à traversdes techniques d'identi�cation de paramètres.
La procédure d'identi�cation consiste à déterminer les paramètres d'un modèle (ou déterminer le modèlelui-même) à partir des données mesurées. Pour cela il faut d'abord déterminer des expériences qui permet-tront de obtenir des données de mesure su�samment �ables pour une estimation correcte des paramètres.On doit aussi distinguer le type de modèle utilisé du point de vu de l'identi�cation à réaliser. Dans ce casil s'agit d'un modèle de boîte grise dans lequel les particularités de ce qui se passe à l'intérieur du systèmene sont pas entièrement connues mais on dispose d'une information générale sur la dynamique interne dusystème, c'est un modèle à la fois construit par une abstraction physique et des données expérimentales.
Pour la détermination des expériences à réaliser, il est important d'utiliser un signal d'entrée su�-samment riche en amplitude et en fréquence. L'amplitude du signal d'entrée doit permettre au systèmed'opérer dans une plage des dynamiques d'opération en dehors des zones de comportement non-linéairequi peut subir à cause de par exemple le frottement sec (s'il est trop faible) ou saturation (s'il est troplarge). Le signal doit être aussi riche en fréquence a�n d'exciter le système avec toutes les fréquences de saplage de fonctionnement. On a établit deux types expériences d'identi�cation di�érentes, la première pourdéterminer les paramètres des dispositifs maître et esclave et le deuxième pour ceux de l'opérateur humain.
La première expérience consiste à appliquer un couple en entrée du moteur du dispositif qui représente laforce du maître fm ou esclave fs et mesurer la position du dispositif (xm ou xs) sans présence de l'opérateurhumain a�n de déterminer exclusivement les paramètres des dispositifs maître et esclave (identiques) dusystème de téléopération.
Pour la deuxième expérience on a demandé à un opérateur humain de tenir le dispositif maître d'unefaçon relaxée, c'est-à-dire, en essayant de ne pas appliquer une force active f∗h , ainsi on peut considérer àl'humain comme une charge passive ajoutée au dispositif, de manière similaire on applique un couple sur ledispositif et on mesure les positions à la sortie. Pour d'obtenir des informations su�samment riches, on aréalisé l'expérience avec deux di�érents opérateurs et on leur a demandé de prendre di�érent postures dela main ou bras a�n de considérer le maximum conditions d'opération possibles.
Lorsque toutes les mesures nécessaires ont été obtenus, on a réaliser l'estimation de paramètres enutilisant la identi�cation toolbox de Matlab qui est basé en algorithmes d'optimisation par moindres carrés.Il faut utiliser d'abord la fonction odefun pour construire un modèle de boîte gris, pour ce faire on doitproportionner le modèle du système utilisé et spéci�er quels paramètres sont connus et quels paramètres sont
49
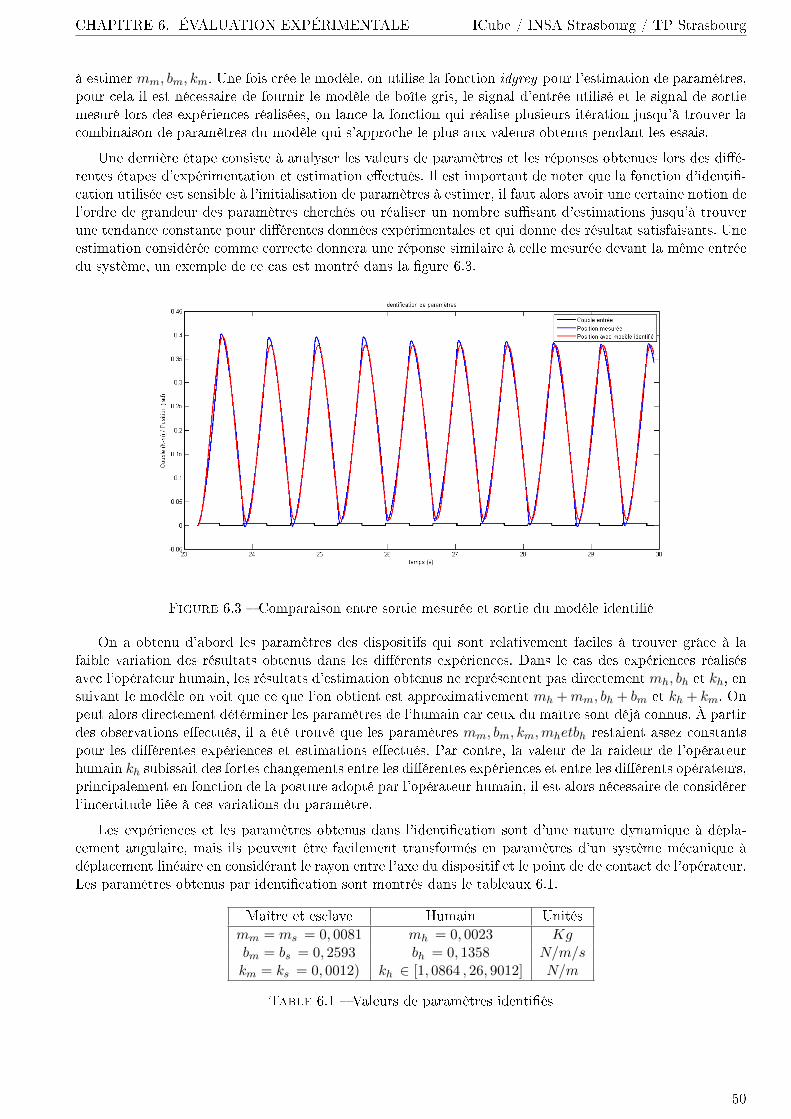
CHAPITRE 6. ÉVALUATION EXPÉRIMENTALE ICube / INSA Strasbourg / TP Strasbourg
à estimer mm, bm, km. Une fois crée le modèle, on utilise la fonction idgrey pour l'estimation de paramètres,pour cela il est nécessaire de fournir le modèle de boîte gris, le signal d'entrée utilisé et le signal de sortiemesuré lors des expériences réalisées, on lance la fonction qui réalise plusieurs itération jusqu'à trouver lacombinaison de paramètres du modèle qui s'approche le plus aux valeurs obtenus pendant les essais.
Une dernière étape consiste à analyser les valeurs de paramètres et les réponses obtenues lors des di�é-rentes étapes d'expérimentation et estimation e�ectués. Il est important de noter que la fonction d'identi�-cation utilisée est sensible à l'initialisation de paramètres à estimer, il faut alors avoir une certaine notion del'ordre de grandeur des paramètres cherchés ou réaliser un nombre su�sant d'estimations jusqu'à trouverune tendance constante pour di�érentes données expérimentales et qui donne des résultat satisfaisants. Uneestimation considérée comme correcte donnera une réponse similaire à celle mesurée devant la même entréedu système, un exemple de ce cas est montré dans la �gure 6.3.
Figure 6.3 � Comparaison entre sortie mesurée et sortie du modèle identi�é
On a obtenu d'abord les paramètres des dispositifs qui sont relativement faciles à trouver grâce à lafaible variation des résultats obtenus dans les di�érents expériences. Dans le cas des expériences réalisésavec l'opérateur humain, les résultats d'estimation obtenus ne représentent pas directement mh, bh et kh, ensuivant le modèle on voit que ce que l'on obtient est approximativement mh +mm, bh + bm et kh + km. Onpeut alors directement détérminer les paramètres de l'humain car ceux du maître sont déjà connus. À partirdes observations e�ectués, il a été trouvé que les paramètres mm, bm, km,mhetbh restaient assez constantspour les di�érentes expériences et estimations e�ectués. Par contre, la valeur de la raideur de l'opérateurhumain kh subissait des fortes changements entre les di�érentes expériences et entre les di�érents opérateurs,principalement en fonction de la posture adopté par l'opérateur humain, il est alors nécessaire de considérerl'incertitude liée à ces variations du paramètre.
Les expériences et les paramètres obtenus dans l'identi�cation sont d'une nature dynamique à dépla-cement angulaire, mais ils peuvent être facilement transformés en paramètres d'un système mécanique àdéplacement linéaire en considérant le rayon entre l'axe du dispositif et le point de de contact de l'opérateur.Les paramètres obtenus par identi�cation sont montrés dans le tableaux 6.1.
Maître et esclave Humain Unitésmm = ms = 0, 0081 mh = 0, 0023 Kgbm = bs = 0, 2593 bh = 0, 1358 N/m/skm = ks = 0, 0012) kh ∈ [1, 0864 , 26, 9012] N/m
Table 6.1 � Valeurs de paramètres identi�és
50
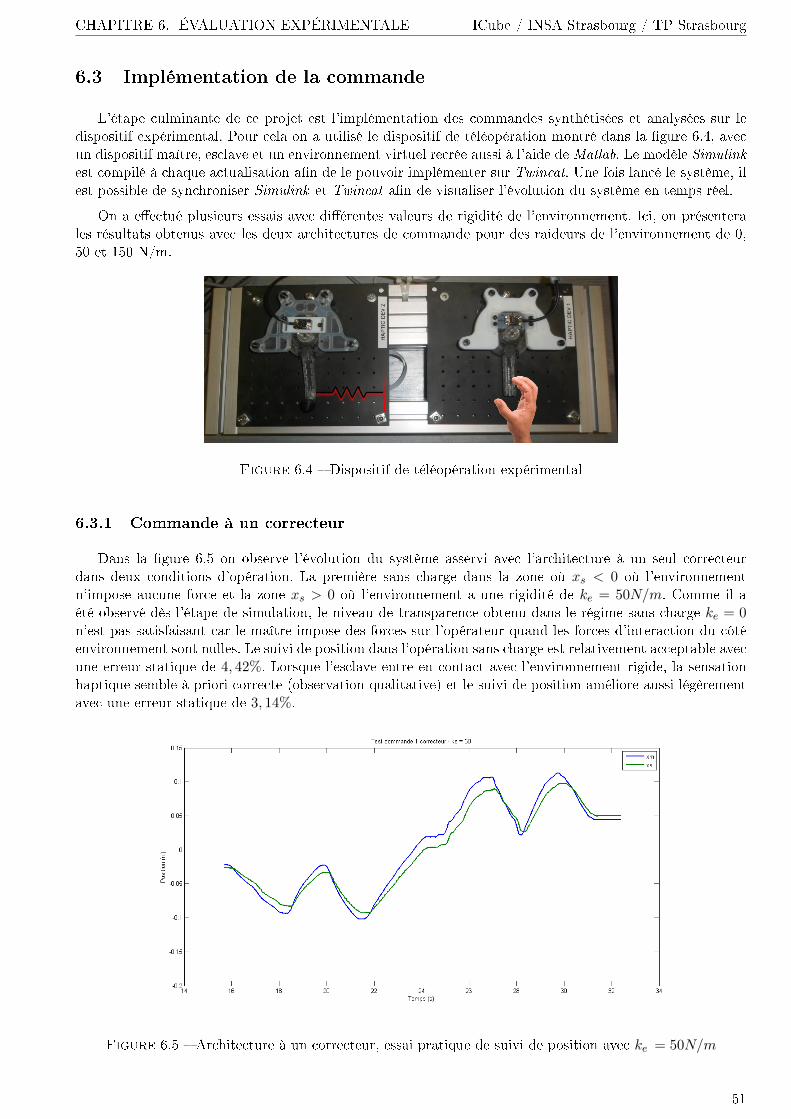
CHAPITRE 6. ÉVALUATION EXPÉRIMENTALE ICube / INSA Strasbourg / TP Strasbourg
6.3 Implémentation de la commande
L'étape culminante de ce projet est l'implémentation des commandes synthétisées et analysées sur ledispositif expérimental. Pour cela on a utilisé le dispositif de téléopération montré dans la �gure 6.4, avecun dispositif maître, esclave et un environnement virtuel recrée aussi à l'aide de Matlab. Le modèle Simulinkest compilé à chaque actualisation a�n de le pouvoir implémenter sur Twincat. Une fois lancé le système, ilest possible de synchroniser Simulink et Twincat a�n de visualiser l'évolution du système en temps réel.
On a e�ectué plusieurs essais avec di�érentes valeurs de rigidité de l'environnement. Ici, on présenterales résultats obtenus avec les deux architectures de commande pour des raideurs de l'environnement de 0,50 et 150 N/m.
Figure 6.4 � Dispositif de téléopération expérimental
6.3.1 Commande à un correcteur
Dans la �gure 6.5 on observe l'évolution du système asservi avec l'architecture à un seul correcteurdans deux conditions d'opération. La première sans charge dans la zone où xs < 0 où l'environnementn'impose aucune force et la zone xs > 0 où l'environnement a une rigidité de ke = 50N/m. Comme il aété observé dès l'étape de simulation, le niveau de transparence obtenu dans le régime sans charge ke = 0n'est pas satisfaisant car le maître impose des forces sur l'opérateur quand les forces d'interaction du côtéenvironnement sont nulles. Le suivi de position dans l'opération sans charge est relativement acceptable avecune erreur statique de 4, 42%. Lorsque l'esclave entre en contact avec l'environnement rigide, la sensationhaptique semble à priori correcte (observation qualitative) et le suivi de position améliore aussi légèrementavec une erreur statique de 3, 14%.
Figure 6.5 � Architecture à un correcteur, essai pratique de suivi de position avec ke = 50N/m
51
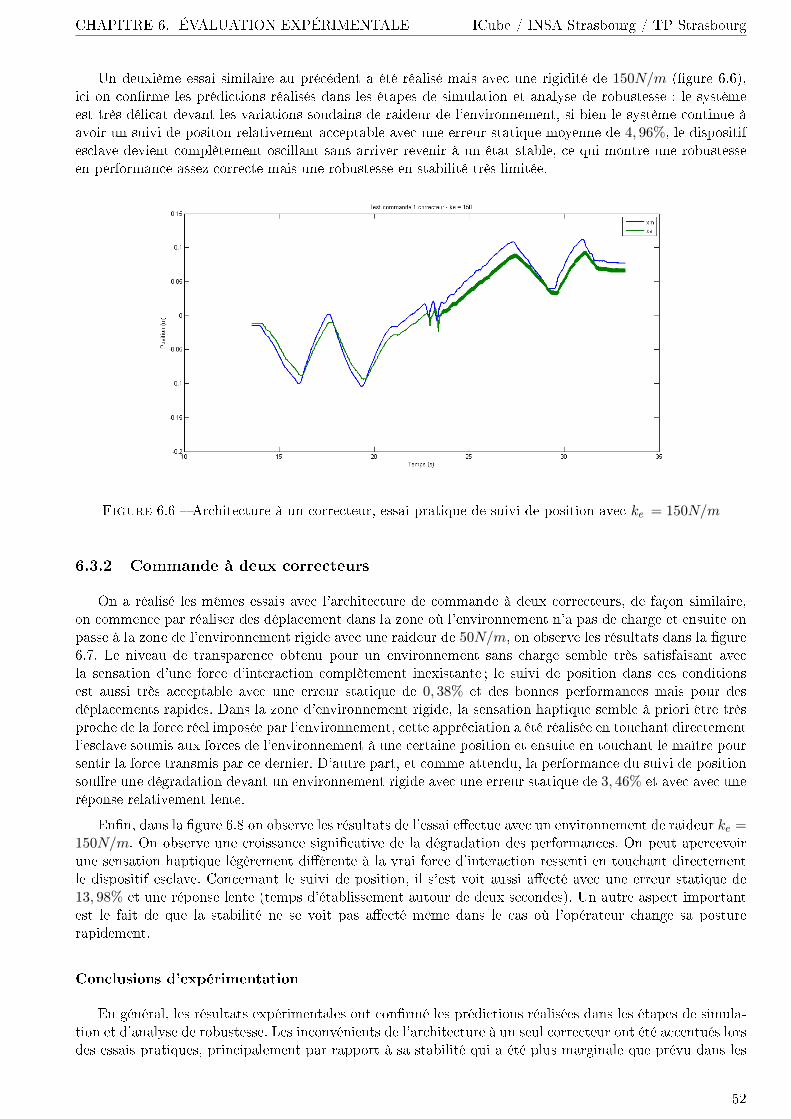
CHAPITRE 6. ÉVALUATION EXPÉRIMENTALE ICube / INSA Strasbourg / TP Strasbourg
Un deuxième essai similaire au précédent a été réalisé mais avec une rigidité de 150N/m (�gure 6.6),ici on con�rme les prédictions réalisés dans les étapes de simulation et analyse de robustesse : le systèmeest très délicat devant les variations soudains de raideur de l'environnement, si bien le système continue àavoir un suivi de positon relativement acceptable avec une erreur statique moyenne de 4, 96%, le dispositifesclave devient complètement oscillant sans arriver revenir à un état stable, ce qui montre une robustesseen performance assez correcte mais une robustesse en stabilité très limitée.
Figure 6.6 � Architecture à un correcteur, essai pratique de suivi de position avec ke = 150N/m
6.3.2 Commande à deux correcteurs
On a réalisé les mêmes essais avec l'architecture de commande à deux correcteurs, de façon similaire,on commence par réaliser des déplacement dans la zone où l'environnement n'a pas de charge et ensuite onpasse à la zone de l'environnement rigide avec une raideur de 50N/m, on observe les résultats dans la �gure6.7. Le niveau de transparence obtenu pour un environnement sans charge semble très satisfaisant avecla sensation d'une force d'interaction complètement inexistante ; le suivi de position dans ces conditionsest aussi très acceptable avec une erreur statique de 0, 38% et des bonnes performances mais pour desdéplacements rapides. Dans la zone d'environnement rigide, la sensation haptique semble à priori être trèsproche de la force réel imposée par l'environnement, cette appréciation a été réalisée en touchant directementl'esclave soumis aux forces de l'environnement à une certaine position et ensuite en touchant le maître poursentir la force transmis par ce dernier. D'autre part, et comme attendu, la performance du suivi de positionsou�re une dégradation devant un environnement rigide avec une erreur statique de 3, 46% et avec avec uneréponse relativement lente.
En�n, dans la �gure 6.8 on observe les résultats de l'essai e�ectue avec un environnement de raideur ke =150N/m. On observe une croissance signi�cative de la dégradation des performances. On peut apercevoirune sensation haptique légèrement di�érente à la vrai force d'interaction ressenti en touchant directementle dispositif esclave. Concernant le suivi de position, il s'est voit aussi a�ecté avec une erreur statique de13, 98% et une réponse lente (temps d'établissement autour de deux secondes). Un autre aspect importantest le fait de que la stabilité ne se voit pas a�ecté même dans le cas où l'opérateur change sa posturerapidement.
Conclusions d'expérimentation
En général, les résultats expérimentales ont con�rmé les prédictions réalisées dans les étapes de simula-tion et d'analyse de robustesse. Les inconvénients de l'architecture à un seul correcteur ont été accentués lorsdes essais pratiques, principalement par rapport à sa stabilité qui a été plus marginale que prévu dans les
52
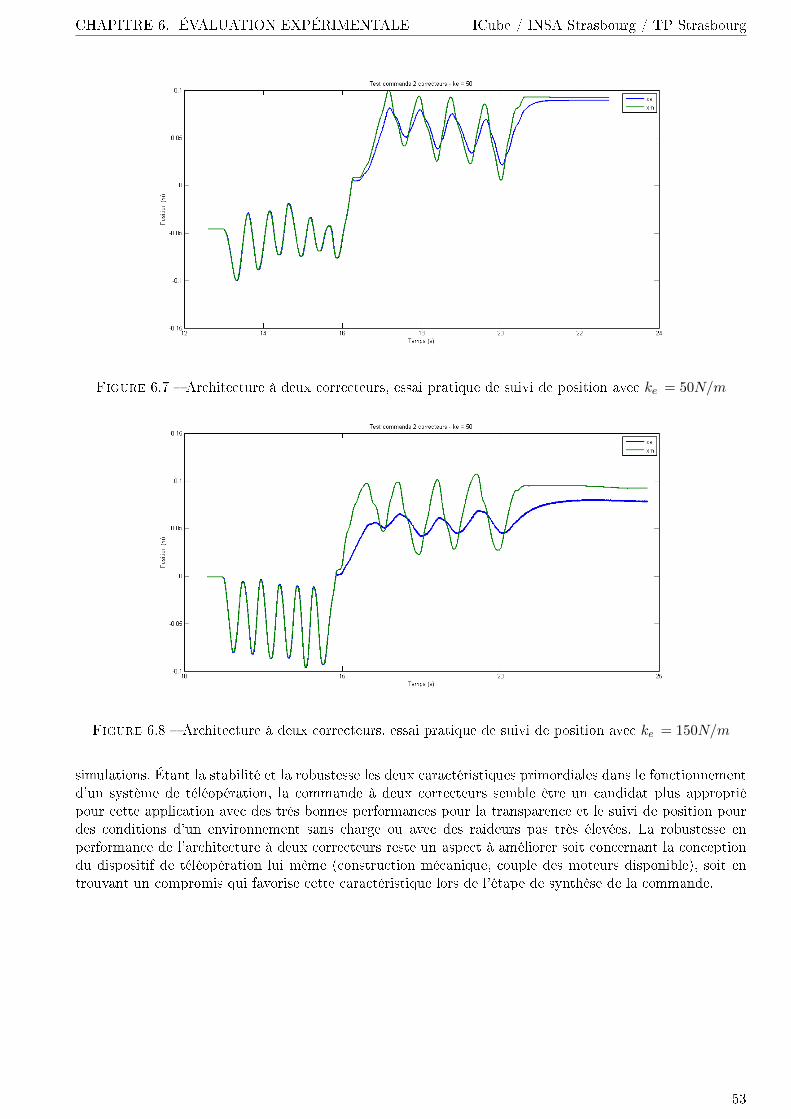
CHAPITRE 6. ÉVALUATION EXPÉRIMENTALE ICube / INSA Strasbourg / TP Strasbourg
Figure 6.7 � Architecture à deux correcteurs, essai pratique de suivi de position avec ke = 50N/m
Figure 6.8 � Architecture à deux correcteurs, essai pratique de suivi de position avec ke = 150N/m
simulations. Étant la stabilité et la robustesse les deux caractéristiques primordiales dans le fonctionnementd'un système de téléopération, la commande à deux correcteurs semble être un candidat plus appropriépour cette application avec des très bonnes performances pour la transparence et le suivi de position pourdes conditions d'un environnement sans charge ou avec des raideurs pas très élevées. La robustesse enperformance de l'architecture à deux correcteurs reste un aspect à améliorer soit concernant la conceptiondu dispositif de téléopération lui même (construction mécanique, couple des moteurs disponible), soit entrouvant un compromis qui favorise cette caractéristique lors de l'étape de synthèse de la commande.
53
Chapitre 7
Conclusions et perspectives du projet
La téléopération bilatérale est parmi les possibilités les plus prometteuses pour la collaboration dessystèmes robotiques dans nombreuses procédures médicales dont l'insertion d'aiguilles dans des tissus. Faceaux problématiques trouvées pour la commande de ce type de systèmes et aux limitations de la plupart desapproches de synthèse et d'analyse classiques, nous avons étudié des approches pour la synthèse de correc-teurs et l'analyse de robustesse basées sur les inégalités matricielles linéaires et les contraintes intégralesquadratiques qui permettent de traiter explicitement le compromis entre la stabilité, les performances et larobustesse des systèmes de téléopération.
Dans le cadre de ce stage, nous avons d'abord développé une méthode systématique pour la synthèsede la commande d'un système de télópération bilatérale. Cette approche utilise un modèle paramétriquede l'opérateur humain et de l'environnement. En tenant compte de l'application envisagée, l'environnementa été représenté par un simple ressort de raideur variable. Le modèle de l'humain a été modélise commeun système linéaire mécanique dont ses paramètres ont été déterminés expérimentalement à travers destechniques d'identi�cation. La méthode proposée comporte plusieurs avantages pour la démarche de la syn-thèse de correcteurs : les di�érentes spéci�cations du cahier de charges sont traduits directement contraintesfréquentielles sur les signaux de sortie du système. Le problème de synthèse H∞ est transformé dans un pro-blème d'optimisation convexe basé sur des LMI, ce qui augment considérablement la possibilité de trouverun correcteur optimal. La syntonisation de correcteurs qui o�rent le meilleure compromis ente les di�érentsobjectifs de performance, la stabilité et la robustesse devient plus intuitive.
Dans un deuxième temps, on a présenté une autre méthode pour l'analyse de robustesse du systèmede teléopération asservi. Nous avons utilisé les IQC pour extraire les propriétés principales des incertitudesconsidérés, ici nous avons traité des incertitudes bornées et variants ans le temps de façon arbitrairementrapide. L'analyse de robustesse est aussi mis sous la forme d'un problème d'optimisation convexe.
La méthodes de synthèse développés ont été utilisées pour la synthèse de la commande du système detéléopération. Pour cela nous avons proposé deux architectures de commande di�érentes. La motivation dela deuxième architecture est de découpler les objectifs de performance de transparence et suivi de positionet les commandes du maître et d'esclave. Le deux architectures ont été évalués par l'algorithme d'analysede robustesse développé, par simulation et sur un dispositif expérimental disponible au laboratoire. Il aété trouvé que la première architecture avait des pauvres performance concernant la transparence pour desenvironnements non-rigides et une robustesse en stabilité très limitée. La deuxième architecture a montrédes bons niveaux de transparence et suivi de position et sa robustesse en stabilité était satisfaisant. Enrevanche, la robustesse en performance reste un aspect à améliorer dans le futur.
La très récente apparition de ces approches dans la téléopération bilatérale donne des nombreusespossibilités pour des projets à l'avenir sur plusieurs aspects tels que la modélisation et l'identi�cation del'opérateur humain, l'étude des incertitudes et non-linéarités pour l'analyse de robustesse, le développementd'une méthode de synthèse-analyse simultanée basé sur LMI, l'exploration des nouvelles architectures decommande et l'évaluation expérimental sur un dispositif qui comporte un capteur d'e�ort.
54
Bibliographie
[1] O. Piccin, L. Barbé, B. Bayle, M. de Mathelin, and A. Gangi. A Force Feedback TeleoperatedNeedle Insertion Device for Percutaneous Procedures. The International Journal of Robotics Research,28(9) :1154�1168, September 2009.
[2] Günter Niemeyer, Carsten Preusche, Stefano Stramigioli, and Dongjun Lee. Telerobotics. In BrunoSiciliano and Oussama Khatib, editors, Springer Handbook of Robotics, pages 1085�1108. SpringerInternational Publishing, 2016. DOI : 10.1007/978-3-319-32552-1_43.
[3] B. Bayle, M. Joinié-Maurin, L. Barbé, J. Ganglo�, and M. de Mathelin. Robot Interaction Controlin Medicine and Surgery : Original Results and Open Problems. In Marc Garbey, Barbara Lee Bass,Scott Berceli, Christophe Collet, and Pietro Cerveri, editors, Computational Surgery and Dual Training,pages 169�191. Springer New York, 2014. DOI : 10.1007/978-1-4614-8648-0_11.
[4] Peter F. Hokayem and Mark W. Spong. Bilateral teleoperation : An historical survey. Automatica,42(12) :2035�2057, December 2006.
[5] D. A. Lawrence. Stability and transparency in bilateral teleoperation. IEEE Transactions on Roboticsand Automation, 9(5) :624�637, October 1993.
[6] Jee-Hwan Ryu, Dong-Soo Kwon, and B. Hannaford. Stability guaranteed control : time domain pas-sivity approach. IEEE Transactions on Control Systems Technology, 12(6) :860�868, November 2004.
[7] A. Megretski and A. Rantzer. System analysis via integral quadratic constraints. IEEE Transactionson Automatic Control, 42(6) :819�830, June 1997.
[8] C. A. López Martínez, � Polat, R. v d Molengraft, and M. Steinbuch. Robust High Performance Bila-teral Teleoperation Under Bounded Time-Varying Dynamics. IEEE Transactions on Control SystemsTechnology, 23(1) :206�218, January 2015.
[9] B. Hannaford. Stability and performance tradeo�s in bi-lateral telemanipulation. In 1989 InternationalConference on Robotics and Automation Proceedings, pages 1764�1767 vol.3, May 1989.
[10] B. Hannaford. A design framework for teleoperators with kinesthetic feedback. IEEE Transactions onRobotics and Automation, 5(4) :426�434, August 1989.
[11] G. J. Raju, G. C. Verghese, and T. B. Sheridan. Design issues in 2-port network models of bilateralremote manipulation. In 1989 International Conference on Robotics and Automation Proceedings, pages1316�1321 vol.3, May 1989.
[12] Charles A Desoer and Mathukumalli Vidyasagar. Feedback systems : input-output properties. SIAM,2009.
[13] Richard J Adams and Blake Hannaford. Stable haptic interaction with virtual environments. IEEETransactions on robotics and Automation, 15(3) :465�474, 1999.
[14] Keyvan Hashtrudi-Zaad and SE Salcudean. Analysis and evaluation of stability and performancerobustness for teleoperation control architectures. In Robotics and Automation, 2000. Proceedings.ICRA'00. IEEE International Conference on, volume 4, pages 3107�3113. IEEE, 2000.
[15] R. J. Anderson and M. W. Spong. Bilateral control of teleoperators with time delay. IEEE Transactionson Automatic Control, 34(5) :494�501, May 1989.
[16] G. Niemeyer and J. J. E. Slotine. Stable adaptive teleoperation. IEEE Journal of Oceanic Engineering,16(1) :152�162, January 1991.
[17] S. Stramigioli, C. Secchi, A. J. van der Schaft, and C. Fantuzzi. A novel theory for sampled datasystem passivity. In IEEE/RSJ International Conference on Intelligent Robots and Systems, volume 2,pages 1936�1941 vol.2, 2002.
55
BIBLIOGRAPHIE ICube / INSA Strasbourg / TP Strasbourg
[18] K. Kosuge and H. Murayama. Bilateral feedback control of telemanipulator via computer networkin discrete time domain. In Proceedings of International Conference on Robotics and Automation,volume 3, pages 2219�2224 vol.3, April 1997.
[19] Jee-Hwan Ryu, Dong-Soo Kwon, and B. Hannaford. Stable teleoperation with time-domain passivitycontrol. IEEE Transactions on Robotics and Automation, 20(2) :365�373, April 2004.
[20] A. Haddadi and K. Hashtrudi-Zaad. Bounded-Impedance Absolute Stability of Bilateral TeleoperationControl Systems. IEEE Transactions on Haptics, 3(1) :15�27, January 2010.
[21] B. Willaert, B. Corteville, D. Reynaerts, H. Van Brussel, and E. B. Vander Poorten. Bounded environ-ment passivity of the classical Position-Force teleoperation controller. In 2009 IEEE/RSJ InternationalConference on Intelligent Robots and Systems, pages 4622�4628, October 2009.
[22] Kemin Zhou, John Comstock Doyle, Keith Glover, et al. Robust and optimal control, volume 40.Prentice hall New Jersey, 1996.
[23] Sigurd Skogestad and Ian Postlethwaite. Multivariable feedback control : analysis and design, volume 2.Wiley New York, 2007.
[24] J. E. Colgate. Robust impedance shaping telemanipulation. IEEE Transactions on Robotics andAutomation, 9(4) :374�384, August 1993.
[25] G. M. H. Leung, B. A. Francis, and J. Apkarian. Bilateral controller for teleoperators with time delayvia mu-synthesis. IEEE Transactions on Robotics and Automation, 11(1) :105�116, February 1995.
[26] Jeremy G. VanAntwerp and Richard D. Braatz. A tutorial on linear and bilinear matrix inequalities.Journal of Process Control, 10(4) :363�385, August 2000.
[27] Carsten Scherer and Siep Weiland. Linear matrix inequalities in control. Lecture Notes, Dutch Institutefor Systems and Control, Delft, The Netherlands, 3, 2000.
[28] Stephen Boyd, Laurent El Ghaoui, Eric Feron, and Venkataramanan Balakrishnan. Linear matrixinequalities in system and control theory. SIAM, 1994.
[29] � Polat and C. W. Scherer. Stability Analysis for Bilateral Teleoperation : An IQC Formulation. IEEETransactions on Robotics, 28(6) :1294�1308, December 2012.
[30] Joost Veenman, Carsten W. Scherer, and Hakan Köro§lu. Robust stability and performance analysisbased on integral quadratic constraints. European Journal of Control, 31 :1�32, September 2016.
[31] C. A. L. Martinez, R. van de Molengraft, and M. Steinbuch. Robust performance control designfor bilateral teleoperation under time-varying bounded operator and environment dynamics. In 2012American Control Conference (ACC), pages 3465�3470, June 2012.
[32] R. D'Andrea. Convex and �nite-dimensional conditions for controller synthesis with dynamic integralconstraints. IEEE Transactions on Automatic Control, 46(2) :222�234, February 2001.
[33] Pierre Apkarian and Dominikus Noll. IQC analysis and synthesis via nonsmooth optimization. Systems& Control Letters, 55(12) :971�981, December 2006.
[34] Joost Veenman and Carsten W. Scherer. A synthesis framework for robust gain-scheduling controllers.Automatica, 50(11) :2799�2812, November 2014.
[35] Gérard Scorletti and Vincent Fromion. Automatique fréquentielle avancée. DEA, Ecole Centrale deLyon, France, 2009.
[36] M. Chilali and P. Gahinet. H-in�nity design with pole placement constraints : an LMI approach. IEEETransactions on Automatic Control, 41(3) :358�367, March 1996.
[37] Johan Lofberg. Yalmip : A toolbox for modeling and optimization in matlab. In Computer AidedControl Systems Design, 2004 IEEE International Symposium on, pages 284�289. IEEE, 2004.
[38] L. Barbe, B. Bayle, E. Laroche, and M. de Mathelin. User adapted control of force feedback teleopera-tors : Evaluation and robustness analysis. In 2008 IEEE/RSJ International Conference on IntelligentRobots and Systems, pages 418�423, September 2008.
56