sciences, technologie et société niveau 4 2016-2017...
TRANSCRIPT

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
1
E.P.I.4ème
RobotUnoEvoThème:Sciences,technologieetsociété Niveau4ème2016-2017Sujet:RobotiqueIntituléduprojet:ProgrammerunrobotautonomeMatièresconcernées:mathématiques,technologie,physique,anglaisPLAN:
1. Présentationdurobot2. Présentationduprojet3. SimulationsdurobotsurScratch4. Priseenmaindurobotetprogrammationdesparcours5. Testsetrésultatsobtenuslorsdel’exercicefinal6. Monopinionpersonnellesurleprojetetlesdifficultésrencontrées

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
2
1. PrésentationdurobotVoicilerobotUnoEvo.
Lerobotestévolutif,onpeutluiajouterplusieursoptions(suiveurdeligne,capteursultrasons,affichageLCD,étagesupplémentaire…)

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
3

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
4
2. PrésentationduprojetLesélèvestravaillentenbinôme.Quatrerobotssontàdispositionenclasse.Quelssontlesobjectifsduprojet?LerobotestmontémaisildoitêtreprogramméaveclelogicielScratchet/ouArdublock.
Lerobotdoitêtretotalementautonome.
Ilauratroisparcoursàeffectuer,dansunminimumdetemps:
• unparcoursdesuivideligne,
• unparcoursavecdétectiond’obstacles,
• unparcoursavecfranchissementd’obstacles.
Lesgrandesétapesdanslaréalisationdeceprojet:
• PriseenmaindulogicielScratchsurdesapplicationsvariées(voirenannexe).
• SimulationsdesdifférentsparcourssurScratchavecvalidationdesalgorithmes.
• Premièresmanipulationsdurobot(connecter,faireavancer/reculer/tourner).
• Testsdeprogrammationeffectuéssurlerobot.
• Validationdesparcoursetcompétitionentrelesgroupesauseind’unévènement
organiséaucollège.
Quellescompétencesmathématiquessontmisesenjeu?
• Chercher:manipuler,expérimenter,tester,décomposerunproblèmeensous-problèmes.
• Modéliser:comprendreetutiliserunesimulation,résoudreunproblèmede
proportionnalité.
• Représenter:utiliserdessituationsspatiales(figuresgéométriques).
• Raisonner:menercollectivementuntravail,résoudreunproblèmeimpliquantdesgrandeursvariées,utiliserunraisonnementlogique.
• Calculer:calculeravecdesentiersrelatifsetdesnombresdécimaux,contrôlerses
résultats,calculerenutilisantlelangagealgébrique.
• Communiquer:expliqueràl’oraletàl’écritsadémarcheetsonalgorithme,argumenterdansl’échange.

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
5
3. SimulationsdurobotsurScratch
a) Parcoursn°1:lesuivideligneObjectif:écrireunalgorithmesurScratchpermettantaurobotdesuivre,defaçonautonome,
unelignenoiretracéepréalablementdefaçonquelconque.Lerobotdevras’arrêteràlaligne
d’arrivéerouge.
Comment?
Lerobotdevrautiliserdeuxcapteurs(vertetbleu)poursuivrelatrajectoirenoire.
Principegénéral:
Exempled’algorithme:

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
6
Algorithmeamélioréenprenantencomptetouslescaspossibles:
Connaissancesetcompétencesmathématiques:
• Utiliserunraisonnementlogique(Si….Alors….Sinon….)
• Manipulerdesgrandeursvariées(angles/vitesse)
MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
7
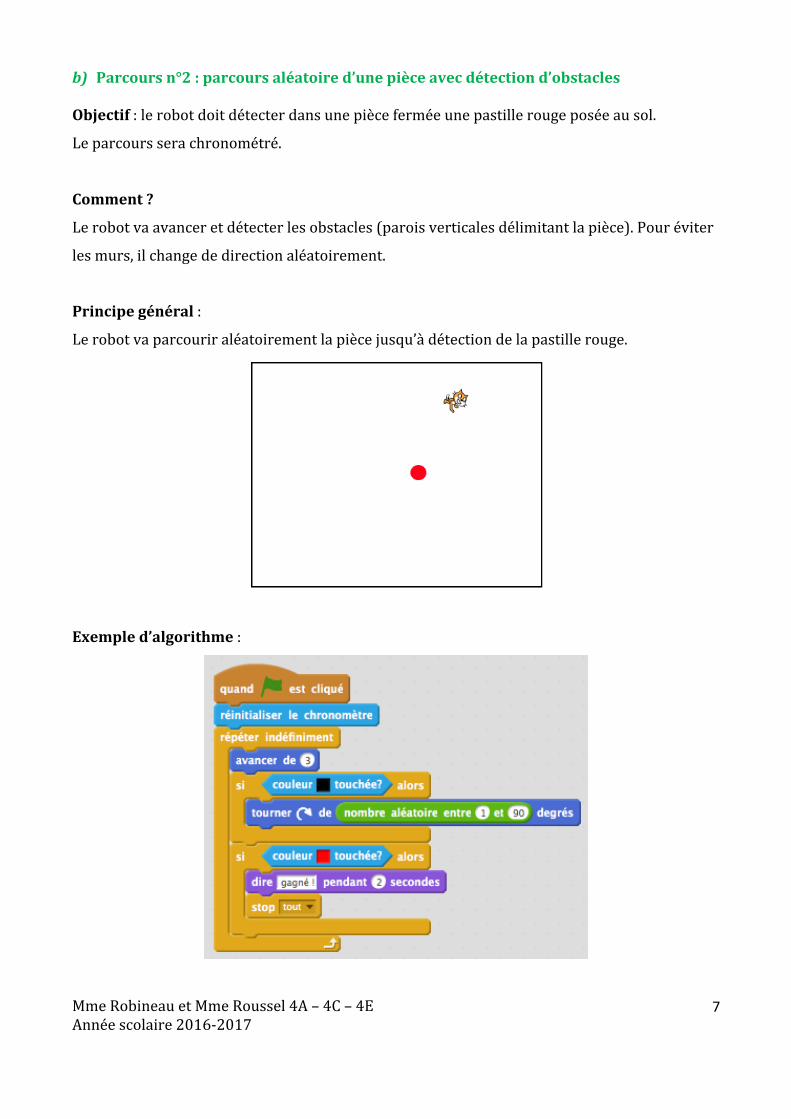
b) Parcoursn°2:parcoursaléatoired’unepièceavecdétectiond’obstaclesObjectif:lerobotdoitdétecterdansunepièceferméeunepastillerougeposéeausol.
Leparcoursserachronométré.
Comment?
Lerobotvaavanceretdétecterlesobstacles(paroisverticalesdélimitantlapièce).Pouréviter
lesmurs,ilchangededirectionaléatoirement.
Principegénéral:
Lerobotvaparcouriraléatoirementlapiècejusqu’àdétectiondelapastillerouge.
Exempled’algorithme:

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
8
4. Priseenmaindurobotetprogrammationa) Connecter,utiliserleswitch,allumerlaLEDLaprogrammationdurobotsefaitsurArdublock.Lerobotestconnectéàl’ordinateurparcâbleUSB,onchargeleprogrammedanslerobot(«téléverserversl’arduino»)puisonpeutdébrancherlecâble.Lerobotestalorsautonome.Lesconnexionsentrelescapteurs/actionneursetlacarteArduinosontpréciséesenannexe4.Voicinotrepremierprogrammepermettantd’utiliserleswitchpourallumer/éteindrelaLED:
SecondprogrammepourfaireclignoterlaLED:

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
9
b) ProgrammerlesdéplacementsdurobotNousavonsensuitecréédessous-programmespourprogrammerlesdéplacementsdurobot:avancer/reculer/tourneràdroite/tourneràgauche/s’arrêter(cfficheélèveenannexe5).
Principegénéral:
• Pouravancerdroit:lesdeuxmoteursdoiventtournerensensinverseaveclamême
vitesse.
• Pourreculer:lesensderotationdesdeuxmoteursdoitêtreinversé.
• Pours’arrêter:lavitessedesdeuxmoteursestmiseà0.
• Pourtourneràdroite:lavitessedumoteurdroitdoitêtrelargementinférieureàcelle
dumoteurgauche.
• Pourtourneràgauche:lavitessedumoteurgauchedoitêtrelargementinférieureà
celledumoteurdroit.

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
10
c) Contrôlerlavitessedurobot//nonfaitConnaissancesetcompétencesmathématiques:
• Utiliserunesituationdeproportionnalité.• Relationentrevitessemoyenne,distanceettemps.
d) Tournerd’unquartdetouroud’undemi-tour//nonfaitConnaissancesetcompétencesmathématiques:
• Représenterunesituationpardesfiguresgéométriques(cercle).• Utiliseretcalculerlepérimètred’uncercle.
e) Utiliserlescapteurs(suiveurdeligneetcapteurultrasons)(Voirficheélèveenannexe6)Utilisationdescapteurssuiveursdeligne:
Lerobotestéquipédedeuxcapteurssuiveursdeligne(gaucheetdroit).
Lecapteurenvoiel’informationVRAIquandildétectelacouleurnoire,FAUXsinon.
Utilisationducapteurultrasons:
Lecapteurultrasonsenvoieladistance(encm)del’obstaclequiestdevantlui.
Pourtestercecapteur,nousavonsprogrammélesdéplacementsdurobotenfonctiondela
distancedel’obstaclecommel’expliqueleschémaci-dessous:

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
11
f) Rédigerettesterunalgorithmepourréaliserleparcoursn°1
g) Rédigerettesterunalgorithmepourréaliserleparcoursn°2

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
12
5. Testsetrésultatsobtenus

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
13
6. Monopinionpersonnellesurleprojetetlesdifficultés
Ai-jeaiméleprojet?
Pourquoil’avoirchoisipourmonoral?
Quellesdifficultésai-jerencontrées?
Celam’a-t-ildonnéenviederéaliserd’autresjeux,d’autresprogrammes…parmoi-même?
Leprojetm’a-t-ildonnéunaperçudumétierdeprogrammateur,deconcepteurdejeuxvidéo
etd’ingénieureninformatique?

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
14
ANNEXE1PremièreinitiationàScratch:tracésdefiguresgéométriques
Objectifs:
• Construireunscriptquirépondàunévènement.
• Programmerdesscriptssedéroulantenparallèle.
• Faireappelàunsous-programme.
PARTIEA:
1. Enutilisantlescommandes
traceruncarrédecôté100.
2. Ajouterunecommandepermettantdes'orienteraléatoirementavantdetracerlecarré.
3. Insérerlacommande .
4. Ajouterunbloc>Créerunblocnommé"Traceruncarré".
5. Remplacerlacommande parlacommande .PARTIEB:
1. Créerunnouveaulutin.2. Programmerunscriptquiluipermetdetraceruntriangleéquilatéraldecôté150.3. Créerunblocnommé"Traceruntriangleéquilatéral".
4. Cliquersur pourexécuterenparallèlelesdifférentsscriptsdesdeuxlutins.

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
15
PARTIEC:
1. Ajouterlescriptsuivant:
2. Pourchaquelutin,construireunscriptpermettantderéaliserdescarrés(oudestriangles)depositions,decouleursetd'orientationsdifférentes.Pourcela,vous
utiliserezlescommandessuivantes:
SOLUTIONS:
MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
16
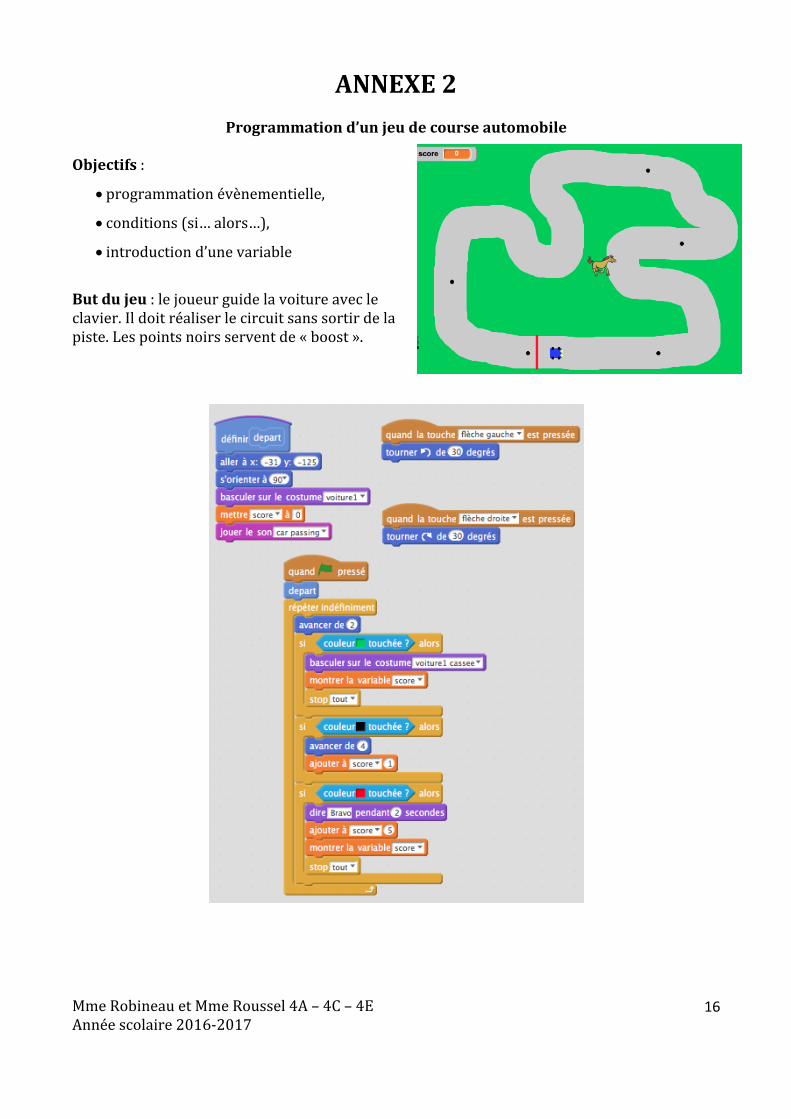
ANNEXE2
Programmationd’unjeudecourseautomobile
Objectifs:
• programmationévènementielle,
• conditions(si…alors…),
• introductiond’unevariable
Butdujeu:lejoueurguidelavoitureavecleclavier.Ildoitréaliserlecircuitsanssortirdelapiste.Lespointsnoirsserventde«boost».

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
17
ANNEXE3
Parcourirunlabyrinthedefaçonautonome
Objectifn°1:lelutindoittrouver,defaçonautonome,uncheminluipermettantd’atteindrela
ligned’arrivéerougesansfranchirlesobstaclesplacésaléatoirement.
Objectifn°2:lelutindoitcontournerlesobstaclesrencontréssuccessivementparlagaucheet
parladroite.
Comment?
Onutiliseunevariablededirectionpermettantaulutindemémoriserlafaçondontila
contournél’obstacleprécédemmentfranchi.
Principegénéral:
Lelutinavance.S’iltoucheunobstacle,ilsedéplacesurladroite(ousurlagauche)tantque
l’obstacleesttoujoursdevantlui.

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
18
Exemple(s)d’algorithme:
Algorithmesrépondantàl’objectifn°1
(Contournementparladroite) (Contournementparlagauche)
Algorithmeplusperformantrépondantàl’objectifn°2
MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
19
Connaissancesetcompétencesmathématiquesutilisées:
• Serepérerdansleplan(abscissesetordonnées)
• Utiliserunraisonnementlogique(Si…alors…/Tantque…/évènementcontraire)
• Utiliserunevariable(pourmémoriserunétatpassé)
• Utiliserdesentiersrelatifspoursedéplacerdansunrepère
• Calculerenutilisantlelangagealgébrique
• Multiplierdesnombresrelatifs
MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
20
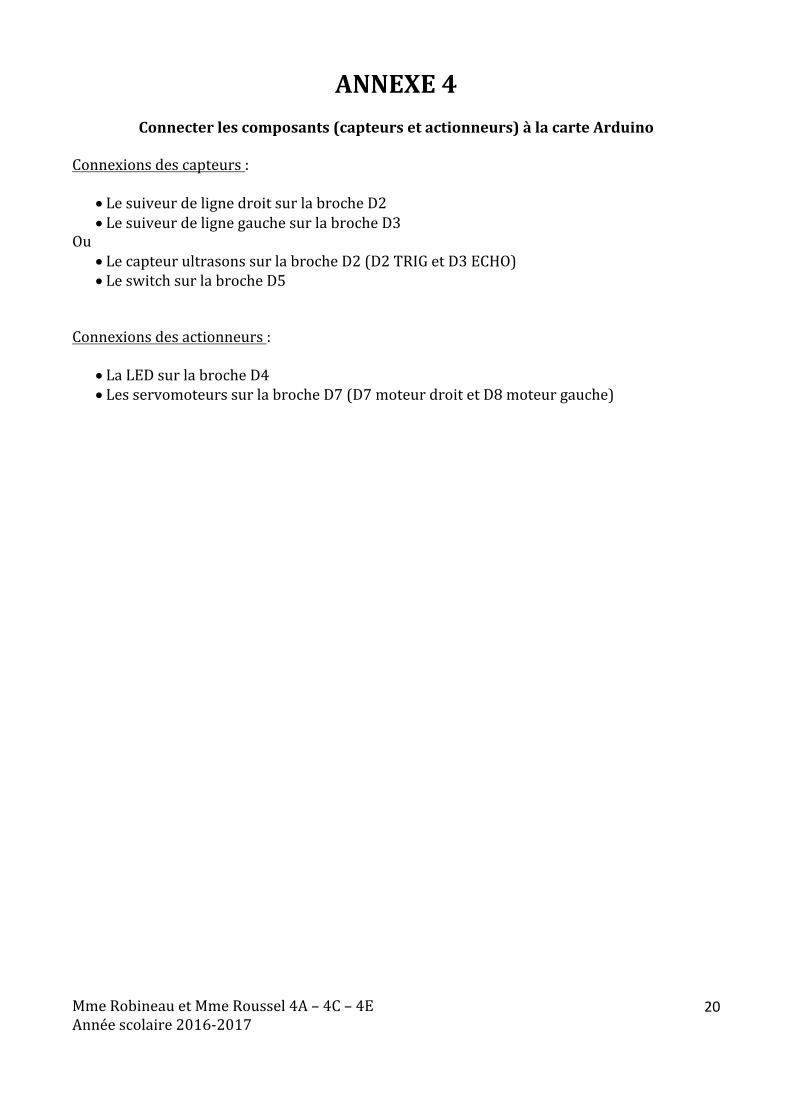
ANNEXE4
Connecterlescomposants(capteursetactionneurs)àlacarteArduino
Connexionsdescapteurs:
• LesuiveurdelignedroitsurlabrocheD2• LesuiveurdelignegauchesurlabrocheD3
Ou• LecapteurultrasonssurlabrocheD2(D2TRIGetD3ECHO)• LeswitchsurlabrocheD5
Connexionsdesactionneurs:
• LaLEDsurlabrocheD4• LesservomoteurssurlabrocheD7(D7moteurdroitetD8moteurgauche)

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
21
ANNEXE5Utiliserlesservomoteurs
LesservomoteursdoiventêtrebranchésenD7(D7moteurdroitetD8moteurgauche).CréerunnouveaudocumentsurArdublock.Lenommer«deplacements».PARTIE1:Avancer
1. Ecrireunsous-programme«avancer»permettantaurobotd’avanceràlavitesse1000.2. Ecrireunsous-programme«arret»permettantaurobotdes’arrêter.3. Ecrireunprogrammepermettantaurobotd’avancerlorsqueleswitchestactionnéet
des’arrêtersinon.
Testerpuisrecopiervotreprogramme.
PARTIE2:Reculer
1. Ecrireunsous-programme«reculer»permettantaurobotdereculeràlavitesse1000.2. Ecrireunprogrammepermettantaurobotdereculerlorsqueleswitchestactionnéet
des’arrêtersinon.
Testerpuisrecopiervotreprogramme.
PARTIE3:Tourneràdroite
1. Ecrireunsous-programme«droite»permettantaurobotdetourneràdroite.2. Ecrireunprogrammepermettantaurobotdetourneràdroitependant4secondes.
Testerpuisrecopiervotreprogramme.
PARTIE4:Tourneràgauche
1. Ecrireunsous-programme«gauche»permettantaurobotdetourneràgauche.2. Ecrireunprogrammepermettantaurobotdetourneràgauchependant4secondes.
Testerpuisrecopiervotreprogramme.

MmeRobineauetMmeRoussel4A–4C–4EAnnéescolaire2016-2017
22
ANNEXE6Utiliserlescapteurs
PARTIEA:lescapteurssuiveursdeligneLescapteurssuiveursdelignedoiventêtrebranchésenD2etD3.LaLEDestconnectéeenD4.CréerunnouveaudocumentsurArdublock.Lenommer«testcapteursuiveur».Consigne:écrireunalgorithmepermettantàlaLEDdes’allumerlorsquelerobotestposésurunelignenoire(etdes’éteindresinon).Testerpuisrecopiervotreprogramme.Sauvegardervotretravail.PARTIEB:lecapteurultrasonsLecapteurultrasonsdoitêtrebranchéenD2.LesservomoteursdoiventêtrebranchésenD7(D7moteurdroitetD8moteurgauche).Ouvrirledocument«deplacements»etl’enregistrersousunautrenom«testultrasons».Effacerleprogrammeprincipalennegardantquelessous-programmes.Consigne:écrireunalgorithmepermettantaurobot:
• d’avancersil’obstacleestàplusde25cm,• dereculersil’obstacleestàmoinsde15cm,• detourneràdroitesil’obstacleestentre15et20cm,• detourneràgauchesil’obstacleestentre20et25cm.
Placervotrerobotàdiversesdistancesd’unobstacleettesterplusieursfoisvotreprogramme.Recopiervotreprogramme.