tracer l’avenir - navcanada.ca · aperçu les progrès en matière de pbn ont permis de changer...
TRANSCRIPT

TRACERL’AVENIRPlan du système de navigation aérienneSEPTEMBRE 2015
TABLE DES MATIÈRESAVANT-PROPOS 1
INTRODUCTION 1
1 NAVIGATION FONDÉE SUR LES PERFORMANCES (PBN) 3
2 COMMUNICATIONS 7
3 SURVEILLANCE 11
4 GESTION DE LA CIRCULATION AÉRIENNE (ATM) 15
5 GESTION DE L’INFORMATION AÉRONAUTIQUE (AIM) 19
6 MÉTÉOROLOGIE À L’AVIATION 23
ANNEXE A : TABLEAU DES MISES À NIVEAU PAR BLOCS DU SYSTÈME DE L’AVIATION DE L’OACI 26
À PROPOS DE NAV CANADANAV CANADA est la société sans capital-actions du
secteur privé qui possède et exploite le système de
navigation aérienne civile du Canada. Elle coordonne
le mouvement efficace et sécuritaire des aéronefs
dans l’espace aérien intérieur et dans l’espace aérien
international sous contrôle canadien. Elle assure les
services suivants : contrôle de la circulation aérienne,
information de vol, exposés météorologiques, services
d’information aéronautique, services consultatifs
d’aéroport et aides électroniques à la navigation.

AVANT-PROPOSJe suis heureux de vous présenter une mise à jour des plans à venir de NAV CANADA dans le cadre de l’élaboration du SNA. Tracer l’avenir : Plan du système de navigation aérienne décrit les principales initiatives technologiques qui amélioreront nos services et offriront une valeur ajoutée à nos clients.
Un grand nombre de ces activités seront révolutionnaires et contribueront à améliorer
de manière importante la sécurité, l’efficacité et la fiabilité.
Ces activités ont souvent lieu dans un contexte global qui bénéficie de la décision d’un nombre croissant de fournisseurs de services de navigation aérienne, groupes de clients et autres parties prenantes de l’industrie de participer, pour des raisons stratégiques, à un processus de changement, à la mise en œuvre de nouvelles technologies ou à l’amélioration des procédures. Il n’y a aucune formule unique pour déterminer le moment idéal d’effectuer des changements; le but de NAV CANADA est d’effectuer des changements en temps opportun, le tout conformément aux normes de l’industrie et tout en demeurant à l’avant-garde dans les secteurs clés où les clients manifestent des besoins.
En conséquence, les activités prévues dans le présent document visent à donner suite aux activités mondiales d’harmonisation de l’Organisation de l’aviation civile internationale (OACI) par le biais des mises à niveau par blocs du système de l’aviation (ASBU) de l’OACI.
Aucune de ces initiatives ne serait possible sans la rétroaction et la collaboration de nos clients et des autres parties concernées d’importance. Comme à l’habitude, nous nous réjouissons à l’idée d’atteindre de nouveaux objectifs avec vous et pour vous.
John W. CrichtonPrésident et chef de la direction
INTRODUCTIONLe Plan du système de navigation aérienne (SNA) décrit les initiatives à court et moyen terme de NAV CANADA visant à répondre aux besoins de ses clients. Il fournit un aperçu permettant d’ouvrir une discussion entre les clients, le personnel de NAV CANADA et d’autres parties concernées afin de déterminer la voie la plus fructueuse pour l’avenir du SNA. NAV CANADA continuera de communiquer et de collaborer avec ses clients par l’entremise du présent Plan et d’autres documents, tel Trajet direct, ou de sites Web comme À bord.
StructureLe Plan du SNA est organisé comme suit :
• Navigation fondée sur les performances (PBN)
• Communications• Surveillance• Gestion de la circulation
aérienne (ATM)• Gestion de l’information
aéronautique (AIM)• Météorologie à l’aviation
Échéanciers Le contenu de chaque partie est présenté selon deux échéanciers en années civiles :
• Court terme 2015-2017• Moyen terme 2018-2022
ContenuLe contenu de chaque partie est étoffé de compléments d’information placés dans des boîtes de texte, d’une illustration
du déroulement des opérations – avec boîtes de légende – illustrant les principaux jalons et d’un tableau d’acronymes.
Harmonisation avec les ASBU de l’OACI Les initiatives du Plan du SNA de NAV CANADA sont synchronisées avec les ASBU de l’OACI. Cette synchronisation permet d’arrimer les efforts de modernisation de NAV CANADA aux activités d’harmonisation mondiale de l’OACI. Dans les tableaux d'échéancier, les initiatives de NAV CANADA (indiquées dans chaque boîte de légende) sont liées, le cas échéant, au tableau des ASBU de l’OACI, qui fait l’objet de l’annexe A (par exemple, B0-FRTO correspond au bloc 0 [B0] ayant comme fil d'intérêt Opérations sur routes libres [FRTO]).
Calendrier de mise à jourLe Plan du SNA sera actualisé tous les trois ans, soit au rythme de l’échéancier à court terme.
Questions et commentairesPour transmettre vos commentaires ou pour obtenir de plus amples renseignements sur le Plan du SNA, veuillez communiquer avec le service à la clientèle de NAV CANADA, à [email protected] ou au 1-800-876-4693.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
1

2
TRACER L’AVENIR
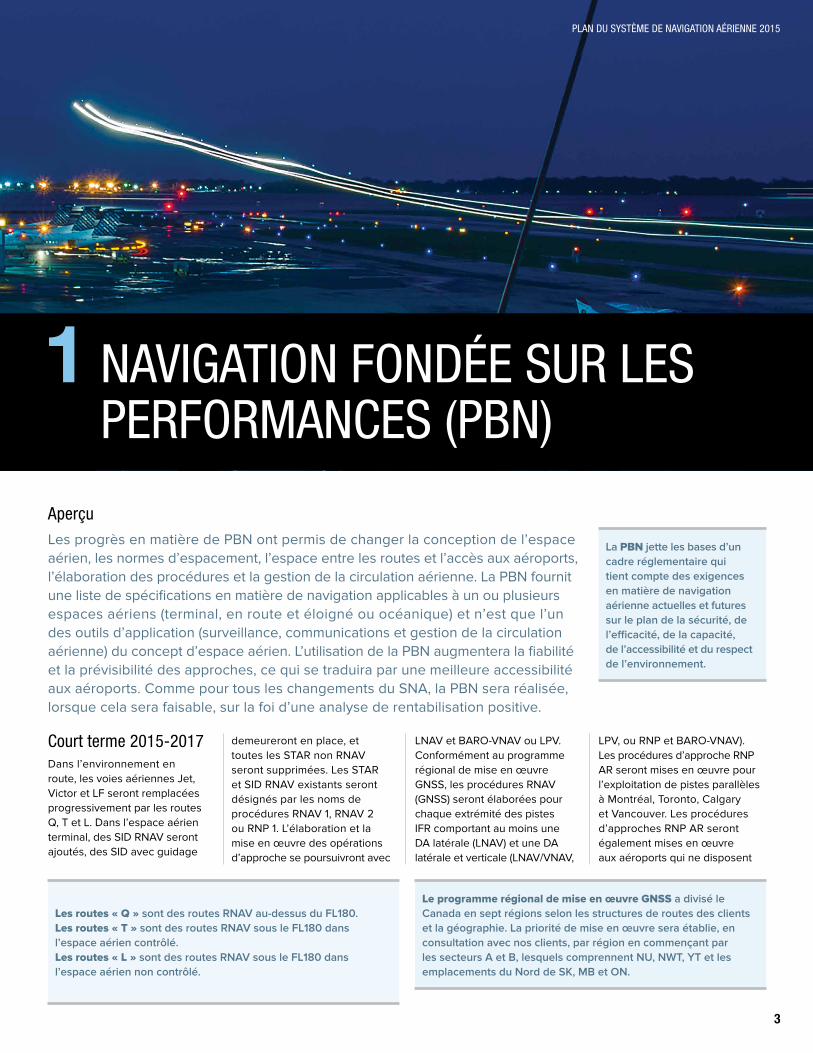
AperçuLes progrès en matière de PBN ont permis de changer la conception de l’espace aérien, les normes d’espacement, l’espace entre les routes et l’accès aux aéroports, l’élaboration des procédures et la gestion de la circulation aérienne. La PBN fournit une liste de spécifications en matière de navigation applicables à un ou plusieurs espaces aériens (terminal, en route et éloigné ou océanique) et n’est que l’un des outils d’application (surveillance, communications et gestion de la circulation aérienne) du concept d’espace aérien. L’utilisation de la PBN augmentera la fiabilité et la prévisibilité des approches, ce qui se traduira par une meilleure accessibilité aux aéroports. Comme pour tous les changements du SNA, la PBN sera réalisée, lorsque cela sera faisable, sur la foi d’une analyse de rentabilisation positive.
Court terme 2015-2017Dans l’environnement en route, les voies aériennes Jet, Victor et LF seront remplacées progressivement par les routes Q, T et L. Dans l’espace aérien terminal, des SID RNAV seront ajoutés, des SID avec guidage
demeureront en place, et toutes les STAR non RNAV seront supprimées. Les STAR et SID RNAV existants seront désignés par les noms de procédures RNAV 1, RNAV 2 ou RNP 1. L’élaboration et la mise en œuvre des opérations d’approche se poursuivront avec
LNAV et BARO-VNAV ou LPV. Conformément au programme régional de mise en œuvre GNSS, les procédures RNAV (GNSS) seront élaborées pour chaque extrémité des pistes IFR comportant au moins une DA latérale (LNAV) et une DA latérale et verticale (LNAV/VNAV,
LPV, ou RNP et BARO-VNAV). Les procédures d’approche RNP AR seront mises en œuvre pour l’exploitation de pistes parallèles à Montréal, Toronto, Calgary et Vancouver. Les procédures d’approches RNP AR seront également mises en œuvre aux aéroports qui ne disposent
1 NAVIGATION FONDÉE SUR LES PERFORMANCES (PBN)
La PBN jette les bases d’un cadre réglementaire qui tient compte des exigences en matière de navigation aérienne actuelles et futures sur le plan de la sécurité, de l’efficacité, de la capacité, de l’accessibilité et du respect de l’environnement.
Les routes « Q » sont des routes RNAV au-dessus du FL180. Les routes « T » sont des routes RNAV sous le FL180 dans l’espace aérien contrôlé. Les routes « L » sont des routes RNAV sous le FL180 dans l’espace aérien non contrôlé.
Le programme régional de mise en œuvre GNSS a divisé le Canada en sept régions selon les structures de routes des clients et la géographie. La priorité de mise en œuvre sera établie, en consultation avec nos clients, par région en commençant par les secteurs A et B, lesquels comprennent NU, NWT, YT et les emplacements du Nord de SK, MB et ON.
3
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
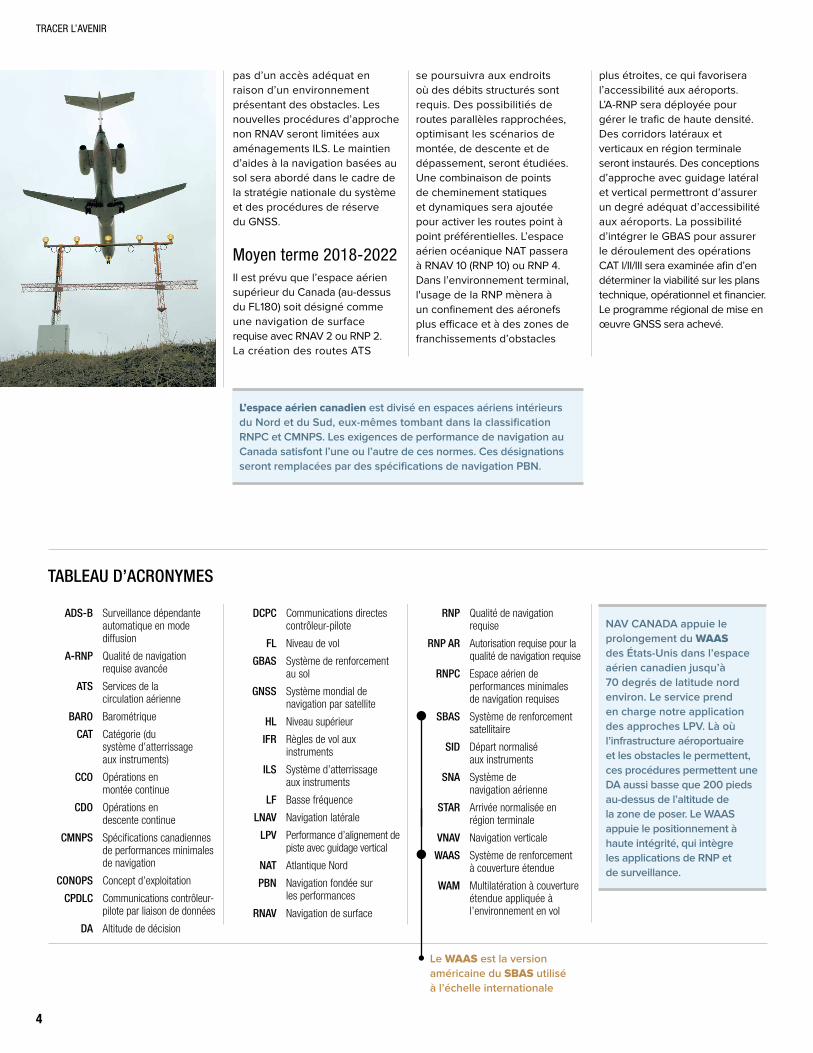
pas d’un accès adéquat en raison d’un environnement présentant des obstacles. Les nouvelles procédures d’approche non RNAV seront limitées aux aménagements ILS. Le maintien d’aides à la navigation basées au sol sera abordé dans le cadre de la stratégie nationale du système et des procédures de réserve du GNSS.
Moyen terme 2018-2022Il est prévu que l’espace aérien supérieur du Canada (au-dessus du FL180) soit désigné comme une navigation de surface requise avec RNAV 2 ou RNP 2. La création des routes ATS
se poursuivra aux endroits où des débits structurés sont requis. Des possibilitiés de routes parallèles rapprochées, optimisant les scénarios de montée, de descente et de dépassement, seront étudiées. Une combinaison de points de cheminement statiques et dynamiques sera ajoutée pour activer les routes point à point préférentielles. L’espace aérien océanique NAT passera à RNAV 10 (RNP 10) ou RNP 4. Dans l’environnement terminal, l'usage de la RNP mènera à un confinement des aéronefs plus efficace et à des zones de franchissements d’obstacles
plus étroites, ce qui favorisera l’accessibilité aux aéroports. L’A-RNP sera déployée pour gérer le trafic de haute densité. Des corridors latéraux et verticaux en région terminale seront instaurés. Des conceptions d’approche avec guidage latéral et vertical permettront d’assurer un degré adéquat d’accessibilité aux aéroports. La possibilité d’intégrer le GBAS pour assurer le déroulement des opérations CAT I/II/III sera examinée afin d’en déterminer la viabilité sur les plans technique, opérationnel et financier. Le programme régional de mise en œuvre GNSS sera achevé.
L’espace aérien canadien est divisé en espaces aériens intérieurs du Nord et du Sud, eux-mêmes tombant dans la classification RNPC et CMNPS. Les exigences de performance de navigation au Canada satisfont l’une ou l’autre de ces normes. Ces désignations seront remplacées par des spécifications de navigation PBN.
TABLEAU D’ACRONYMES
ADS-B Surveillance dépendante automatique en mode diffusion
A-RNP Qualité de navigation requise avancée
ATS Services de la circulation aérienne
BARO Barométrique
CAT Catégorie (du système d’atterrissage aux instruments)
CCO Opérations en montée continue
CDO Opérations en descente continue
CMNPS Spécifications canadiennes de performances minimales de navigation
CONOPS Concept d’exploitation
CPDLC Communications contrôleur-pilote par liaison de données
DA Altitude de décision
DCPC Communications directes contrôleur-pilote
FL Niveau de vol
GBAS Système de renforcement au sol
GNSS Système mondial de navigation par satellite
HL Niveau supérieur
IFR Règles de vol aux instruments
ILS Système d’atterrissage aux instruments
LF Basse fréquence
LNAV Navigation latérale
LPV Performance d’alignement de piste avec guidage vertical
NAT Atlantique Nord
PBN Navigation fondée sur les performances
RNAV Navigation de surface
RNP Qualité de navigation requise
RNP AR Autorisation requise pour la qualité de navigation requise
RNPC Espace aérien de performances minimales de navigation requises
SBAS Système de renforcement satellitaire
SID Départ normalisé aux instruments
SNA Système de navigation aérienne
STAR Arrivée normalisée en région terminale
VNAV Navigation verticale
WAAS Système de renforcement à couverture étendue
WAM Multilatération à couverture étendue appliquée à l’environnement en vol
NAV CANADA appuie le prolongement du WAAS des États-Unis dans l’espace aérien canadien jusqu’à 70 degrés de latitude nord environ. Le service prend en charge notre application des approches LPV. Là où l’infrastructure aéroportuaire et les obstacles le permettent, ces procédures permettent une DA aussi basse que 200 pieds au-dessus de l’altitude de la zone de poser. Le WAAS appuie le positionnement à haute intégrité, qui intègre les applications de RNP et de surveillance.
Le WAAS est la version américaine du SBAS utilisé à l’échelle internationale
TRACER L’AVENIR
4

PBN
GBAS
SBAS
NAVAID conventionnelles
2015 2016 2017 2018 2019 2020 2021 2022
STAR et SID RNAV désignés RNAV 1
ou RNAV 2B0-APTA*B0-CDO*B0-CCO*
Mise en œuvre des procédures d’approche RNAV AR pour l’exploitation de pistes parallèles B0-APTA*B0-CDO*
Transition auxroutes Q, T et L
B0-FRTO*
Élaboration des procédures RNAV
(GNSS) pour chaque extrémité des pistes IFR
B0-APTA*B0-CDO*
Mener des évaluations
du GBASB0-ATPA*
Amélioration de l’accessibilité aux
aéroports au moyen de la PBN et du SBAS
B0-ATPA*
Élaboration d’un CONOPS pour une panne GNSS à l’échelle du système
Espace aérien supérieur où la navigation de surface est requise B0-FRTO*
Ajout de routes parallèles rapprochées pour améliorer les scénarios de montée, de descente ou de dépassement en routeB0-OPFL*
Ajout de corridors latéraux
en région terminale B0-FRTO*B0-OPFL*
Ajout de corridors latéraux en région terminaleB0-FRTO*B0-OPFL*
Maintien des aides à la navigation au sol fondé sur la
stratégie nationale du système de réserve du GNSS
B0-APTA*
Introduction des points de cheminement statiques et dynamiques pour activer les routes préférentielles
point à point B0-FRTO*B0-OPFL*
Déploiement du GBAS pour assurer les opérations CAT I/II/III le cas échéantB0-ATPA*
SID RNAV supplémentaires et STAR non RNAV supprimées
B0-APTA*B0-CDO*B0-CCO*
COURT TERME MOYEN TERME
Boîte à outilsde la PBN
RNPRNAV
LPVVNAVLNAVGBASSBASCDOCCOSIDS
STARS
ÉCHÉANCIER – PBN
Nota : *Voir l’explication de l’harmonisation avec les mises à niveau par blocs du système de l’aviation (ASBU) de l’OACI à la page 1.
La mise en œuvre de la PBN s’articulera autour de priorités tenant compte de la réglementation courante et future ainsi que des besoins et capacités des clients. Le système devra être entièrement en mesure de gérer les opérations aériennes, et sa mise en œuvre intègrera donc les avancées en matière de communications
(DCPC, CPDLC), de surveillance (ADS-B sol et satellitaire, WAM) et de gestion de la circulation aérienne. Les projets de mise en œuvre de la PBN devront satisfaire aux exigences des parties concernées et s’appuyer sur une analyse de rentabilisation convaincante.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
5

TRACER L’AVENIR
6

AperçuLes communications sont une composante importante des initiatives prises en matière de navigation, de surveillance et d’ATM. La liaison de données sera de plus en plus utilisée : elle offre l’avantage de la haute vitesse, de l’intégrité élevée du transfert de données, de l’allègement des fréquences et de la grande intelligibilité des messages. Toutefois, les communications vocales resteront un moyen efficace d’assurer les DCPC. L’utilisation des ensembles de messages CPDLC sera étendue.
Court terme 2015-2017Le remplacement de radios VHF se poursuivra jusqu’à son achèvement. Les communications par satellite (SATCOM) vocales seront davantage utilisées grâce à l’identification des aéronefs dotés de cet équipement en vue de communiquer avec eux par SATCOM. Les liaisons AFTN internationales devraient être migrées vers l’environnement IP au moyen du protocole AMHS; des ententes avec les partenaires internationaux pour la migration vers l’AMHS font l’objet de discussions. L’AFTN n’apportera aucun changement aux services de données IP intérieurs. L’AFTN série (protocole de communication) sera mis hors service pour le marché intérieur en 2015, ce qui
signifie que les clients ne pourront plus utiliser leur ancien logiciel AFTN série et devront recourir au logiciel AFTN IP pour continuer d’obtenir le service AFTN de NAV CANADA. L’ADS-C sera mise en œuvre dans les aménagements intérieurs. Cette mise en œuvre comprend une amélioration du CAATS pour recevoir le compte rendu de position aux points de cheminement (WPR) de l’ADS-C par une liaison de données de l’ACARS
plutôt que de l’AFTN. L’ADS-C servira à augmenter les comptes rendus périodiques prévus aux contrats, et à réduire ainsi l’espacement. Les AIDC feront l’objet de nouveaux travaux de développement dans le CAATS pour faciliter les communications et la coordination avec la FAA. La North Atlantic Common Co-ordination (NATCC) est une forme d’AIDC utilisée dans la FIR de Gander. Tous les fournisseurs
de services de navigation aérienne adjacents à l’espace aérien de Gander sont dotés de la NATCC. Les améliorations du GAATS+ et de la NATCC qui, en plus de l’estimation initiale, comprenaient de multiples modifications aux estimations et à la fonction d’approbation par voie électronique du fournisseur de services de navigation aérienne, ont été mises en œuvre en 2014.
2 COMMUNICATIONS
Le programme de remplacement sur huit ans des radios VHF de NAV CANADA arrivera à terme en 2016. Plus de 2 000 paires de radios VHF, entièrement compatibles avec les formats actuels et prévus de messages vocaux et textuels analogiques et numériques, seront installées à près de 320 emplacements au pays. Toutes les radios seront conformes aux futures normes internationales, qu’il s’agisse des communications VDL numériques ou de l’espacement des fréquences de 8,33 kHz. Elles seront réglées pour l’espacement de fréquences de 25 kHz, qui correspond aux attributions actuelles de fréquences au Canada et aux États-Unis.
L’AMHS est un système moderne de messagerie électronique servant au transfert et à la remise de données sol-sol – tels les plans de vol, les NOTAM et l’information météorologique – entre acteurs du contrôle de la circulation aérienne mondial.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
7
ADS-C
AFTN
AIDC/NATCC
AMHS
CPDLC
Comm. voc. HF
PDC
Comm. voc. SATCOM
VDL
Comm. voc. VHF
Remplacement des WPR de l’AFTN par l’ADS-C à
l’ACC d’EG et mise à niveau à l’ACC de VR
B0-NOPS*
Mise en œuvre des AIDC à Vancouver/Oakland
B0-FICE*
Poursuite du service AFTN IP intérieur B0-FICE*
Mise en œuvre des améliorations
de la NATCCB0-FICE*
Les clients doivent utiliser le logiciel AFTN IP pour obtenir
des services AFTN de NAV CANADA
B1-SWIM*
Utilisation accrue des AIDC pour la coordination électronique avec la FAA B0-FICE*
Accroissement de l’utilisation de la VDLB0-TBO*
Messages de route entière et messages DCL CPDLCB0-TBO*
Nouveaux ensembles de messages RTCA pour les CPDLCB0-TBO*
Communications vocales HF toujours
accessibles B0-TBO*
PDC accessibles par CPDLCB0-TBO*
Mise en œuvre des PDC aux aéroports principauxB0-TBO*
Mise hors service du protocole des communications
intérieures de l’AFTNB0-FICE*
Poursuite du programme de remplacement des radios VHF
Achèvement du remplacement des radios VHF
Mise en œuvre des règles de gestion selon la
réception des plans de volB0-FICE*
Communications vocales SATCOM utilisées à
l’extérieur de la couverture VHF basée au sol
Accroissement de l’utilisation d’un espacement de
fréquences de 8,33 kHz
Mise en œuvre de l’AMHS
B0-FICE*
COURT TERME MOYEN TERME
2015 2016 2017 2018 2019 2020 2021 2022
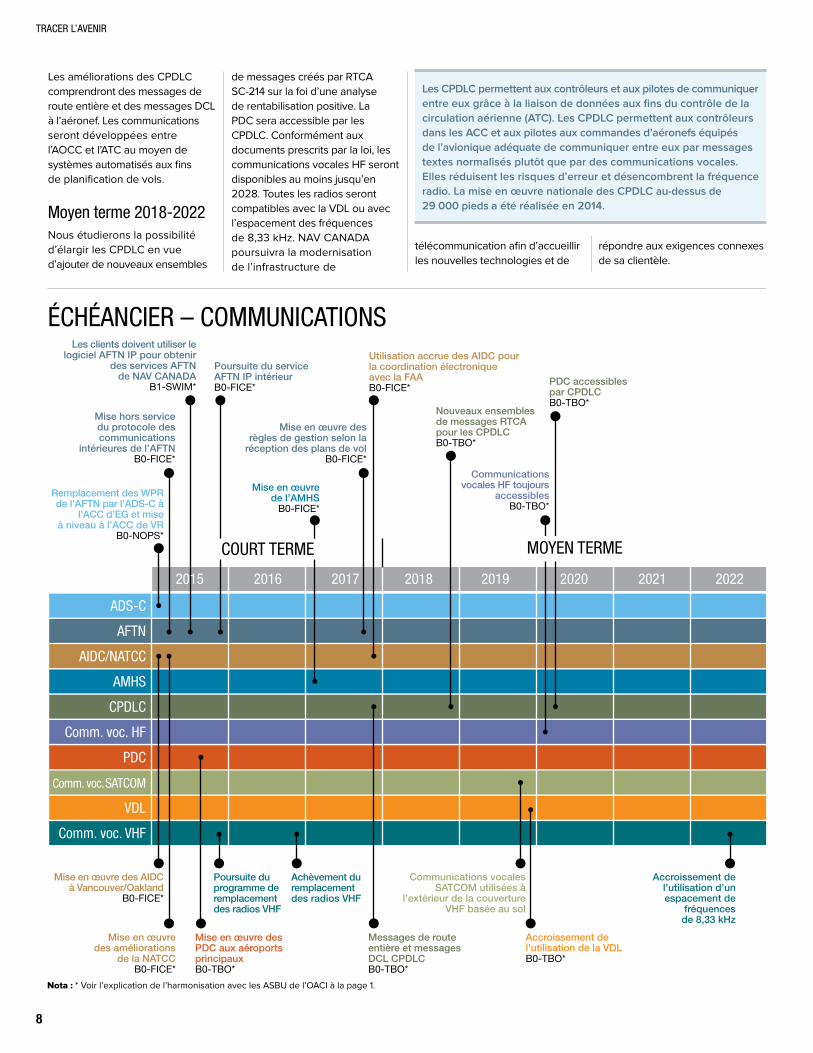
Les améliorations des CPDLC comprendront des messages de route entière et des messages DCL à l’aéronef. Les communications seront développées entre l’AOCC et l’ATC au moyen de systèmes automatisés aux fins de planification de vols.
Moyen terme 2018-2022Nous étudierons la possibilité d’élargir les CPDLC en vue d’ajouter de nouveaux ensembles
de messages créés par RTCA SC-214 sur la foi d’une analyse de rentabilisation positive. La PDC sera accessible par les CPDLC. Conformément aux documents prescrits par la loi, les communications vocales HF seront disponibles au moins jusqu’en 2028. Toutes les radios seront compatibles avec la VDL ou avec l’espacement des fréquences de 8,33 kHz. NAV CANADA poursuivra la modernisation de l’infrastructure de
télécommunication afin d’accueillir les nouvelles technologies et de
répondre aux exigences connexes de sa clientèle.
Les CPDLC permettent aux contrôleurs et aux pilotes de communiquer entre eux grâce à la liaison de données aux fins du contrôle de la circulation aérienne (ATC). Les CPDLC permettent aux contrôleurs dans les ACC et aux pilotes aux commandes d’aéronefs équipés de l’avionique adéquate de communiquer entre eux par messages textes normalisés plutôt que par des communications vocales. Elles réduisent les risques d’erreur et désencombrent la fréquence radio. La mise en œuvre nationale des CPDLC au-dessus de 29 000 pieds a été réalisée en 2014.
ÉCHÉANCIER – COMMUNICATIONS
Nota : * Voir l’explication de l’harmonisation avec les ASBU de l’OACI à la page 1.
TRACER L’AVENIR
8
TABLEAU D’ACRONYMES
ACARS Système embarqué de communications, d’adressage et de compte rendu
ACC Centre de contrôle régional
ADS-C Surveillance dépendante automatique en mode contrat
AFTN Réseau du service fixe des télécommunications aéronautiques
AIDC Communications de données entre installations ATS
AMHS Système de messagerie des services de la circulation aérienne
ANSP Fournisseur de services de navigation aérienne
AOCC Centre de contrôle des opérations du transporteur aérien
ATC Contrôle de la circulation aérienne
ATM Gestion de la circulation aérienne
CAATS Système canadien automatisé de la circulation aérienne
CPDLC Communications contrôleur-pilote par liaison de données
DCL Autorisation de départ
DCPC Communications directes contrôleur-pilote
FAA Federal Aviation Administration (États-Unis)
FIR Région d’information de vol
GAATS Système automatisé du contrôle de la circulation aérienne de Gander
HF Haute fréquence
IP Protocole IP
NATCC North Atlantic Common Co-ordination
NOTAM Avis aux aviateurs (pilotes)
PDC Autorisation pré-départ
RTCA SC Radio Technical Commission for Aeronautics – Comité spécial
SATCOM Communications par satellite
VDL Liaison de données très haute fréquence
VHF Très haute fréquence
WPR Compte rendu de position aux points de cheminement
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
99

10
TRACER L’AVENIR

AperçuLa technologie actuelle de surveillance comprend le radar primaire et secondaire, le radar de surveillance des mouvements de surface, le système de surveillance dépendante automatique en mode diffusion basé au sol, la multilatération, les capteurs vidéo, ainsi que les systèmes de traitement connexe de fusion de la surveillance. NAV CANADA, en collaboration avec d’autres fournisseurs de services de navigation aérienne et les parties prenantes, poursuit le développement de l’ADS-B satellitaire par l’entremise d’une entreprise nommée « Aireon » en vue d’intégrer des récepteurs ADS-B à la constellation de 66 satellites en orbite basse terrestre (LEO) interreliés NEXT d’Iridium pour offrir un service de surveillance mondiale. L’ADS-B satellitaire appuie l’ATM à l’échelle mondiale par l’échange d’information et les processus collaboratifs découlant d’une conscience situationnelle (p. ex. SWIM) et d’une interopérabilité améliorées. La surveillance satellitaire offrira un environnement opérationnel souple centré sur l’exploitant aérien dans l’espace aérien océanique, éloigné et polaire, améliorera la sécurité et accélérera l’harmonisation au sein de l’aviation.
Court terme 2015-2017NAV CANADA étendra la surveillance dans l’Atlantique Nord au moyen de l’ADS-B satellitaire. Les satellites devraient être lancés de la fin 2015 jusqu’au milieu de l’année 2017. L’utilisation opérationnelle des données de l’ADS-B satellitaire en 2017 évoluera, dans une approche par étape, jusqu’à l’obtention d’un espacement de surveillance de 15 milles marins d’ici 2018. L’équipement de radar de surveillance terminal
(TSR) sera mis à niveau dans cinq emplacements majeurs entre 2015 et 2020, soit Toronto, Vancouver, Calgary, Montréal et Hamilton. Les systèmes de traitement des données de surveillance feront appel à la fusion des données dans le cadre de programmes régionaux (fusion
des données de vol). La fusion permet de combiner des données provenant de sources multiples, de sorte que l’information traitée et mise à profit pour la prestation de services de navigation aérienne soit précise, cohérente et opportune. La fusion se fait de différentes façons. On
s’en sert entre autres dans les systèmes d’affichage ATC. En ce qui concerne l’A-SMGCS et les systèmes de fusion de la surveillance, les données de surveillance, y compris les données dérivées des aéronefs, l’information basée au sol et les alertes de sécurité, sont
L’A-SMGCS (Système avancé de guidage et de contrôle de la circulation de surface) est constitué de plusieurs capteurs combinés (fusionnés) pour offrir une cible plus fiable/précise. Les capteurs qui peuvent être combinés pour composer ce système sont l’ASDE, la MLAT, les caméras, VeeLo et tout autre capteur pouvant être utilisé pour détecter une cible et ainsi contribuer à l’ensemble du système.
Les aéronefs équipés de l’ADS-B transmettent automatiquement leur position dérivée du GNSS par liaison de données. Ces messages peuvent être reçus par les stations au sol ou les satellites et acheminés aux aménagements ATC pour servir à l’ATM. Les messages ADS-B contiennent une grande quantité d’information, dont la position, l’altitude, la vitesse et la trajectoire des aéronefs.
3 SURVEILLANCE
11
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015

ADS-Bsatellitaire
TSR/PSR/ISSR
RAAS
MLAT/WAM
ASDE
Fusion
Élaboration et validation des procédures
B0-OPFL*B0-ASUR*
Début de la modernisation des systèmes TSR à cinq emplacements principaux
Évaluation desdifférents capteurs pour
la surveillance des mouvements de surface
B1-RATS*B0-SURF*
Formation sur lafusion et évaluation opérationnelleB0-SURF*
Mise à niveau de l’équipement de l’ASDEB0-SURF*
Déploiement des mises à niveau concernant la
fusion des données terminales/en route
B0-SURF*
Ajout de �lets de sécurité – fusionB0-SURF*
Poursuite de la mise en œuvre des projets d’élargissement de la WAM selon une stratégie étayée par une analyse de rentabilisationB0-ASUR*
Élargissement de la couverture de surveillance des mouvements
de surface avec la MLAT à Vancouver
B0-SURF*
Amélioration du RAAS au
moyen de nouvelles
technologiesB1-RATS*
Harmonisation avec les autres fournisseurs
de services de navigation aérienne
B0-OPFL*B0-ASUR*
2015 2016 2017 2018 2019 2020 2021 2022
Intégration – fusion porte-à-porte et capacités nationales B0-SURF*
Intégration – fusion porte-à-porte
(surface/air) B0-SURF*
Augmentation de l’ASDE avec MLAT/vidéo
B0-SURF*
Validation des systèmes B0-OPFL*B0-ASUR*
Lancement initialdes satellites
B0-OPFL*B0-ASUR*
Déploiement de la constellation de satellites de deuxième génération d’Iridium avec récepteurs ADS-BB0-OPFL*B0-ASUR*
Mise en œuvre de l’ADS-B satellitaire dans le NATB0-OPFL*B0-ASUR*B1-FRTO*
Études aéronautiques PSR terminées à trois emplacements
Évaluation du remplacement possible
des ISSR par l’ADS-BB0-ASUR*
Surveillance de la performance du
système en matière de sécurité
B0-OPFL*B0-ASUR*
MOYEN TERMECOURT TERME
combinées pour améliorer les services de gestion de la circulation aéroportuaire et porte-à-porte respectivement.
Moyen terme 2018-2022Le RAAS sera amélioré grâce à l’intégration de la technologie vidéo à la fois visuelle et thermique. La sélection d’emplacements est en cours pour des essais de validation de principe dans le but de valider
les exigences en matière de technologie, de procédures, d’approbation réglementaire et de formation. Des essais sont en cours à Sudbury et à London sur l’utilisation de la fusion et de la vidéo pour la surveillance des mouvements de surface dans l’environnement RAAS. Des études aéronautiques sur la nécessité d’utiliser un PSR seront réalisées pour Regina, Sault Ste. Marie et North Bay. Le déploiement
de la WAM et des systèmes d’aéroport MLAT servira à étendre la couverture de surveillance dans le Sud du Canada à des endroits particuliers pour améliorer les opérations. L’élargissement de l’utilisation de la fusion pour inclure la technologie de surveillance des mouvements de surface procurera des capacités de porte-à-porte, centrales et nationales, comme la possibilité de définir l’espace aérien terminal et
inférieur, l’obtention de données DAP supplémentaires (p. ex. RA du TCAS) et l’intégration de l’ADS-B satellitaire. Les alertes de conflit lors de la surveillance des niveaux de vol inférieurs et des chemins d’approche feront partie des mises à niveau en matière de sécurité. La possibilité de remplacer les systèmes ASDE existants et d’assurer la surveillance au sol aux nouveaux aéroports grâce à un système combinant l’ADS-B
ÉCHÉANCIER – SURVEILLANCE
Nota : *Voir l’explication de l’harmonisation avec les ASBU de l’OACI à la page 1.
TRACER L’AVENIR
12
et la MLAT sera examinée. La surveillance de l’application ADS-B réception se poursuivra.
L’évaluation du radar et de la WAM est envisagée pour
une conversion à l’ADS-B, si l’équipement ADS-B des clients le permet. L’ADS-B satellitaire offrira une solution viable pour le radar et la WAM.
ADS-B Surveillance dépendante automatique en mode diffusion
ASDE Radar de surveillance des mouvements de surface
A-SMGCS Système avancé de guidage et de contrôle de la circulation de surface
ATC Contrôle de la circulation aérienne
ATM Gestion de la circulation aérienne
DAP Paramètre d’aéronef transféré par liaison descendante
GNSS Système mondial de navigation par satellite
ISSR Radar secondaire de surveillance autonome (l’ISSR est un emplacement doté de SSR et non de PSR)
LEO Orbite basse terrestre
MLAT Multilatération appliquée à l’environnement de surface de l’aéroport
NAT Atlantique Nord
NEXT Constellation de satellites de deuxième génération d’Iridium
PSR Radar primaire de surveillance
RAAS Service consultatif télécommandé d’aérodrome
SNA Système de navigation aérienne
SSR Radar secondaire de surveillance
TCAS RA Système d’avertissement de trafic et d’évitement d’abordage – avis de résolution
TSR Radar de surveillance terminal
VeeLo Système de télématique routière
WAM Multilatération à couverture étendue appliquée à l’environnement en vol
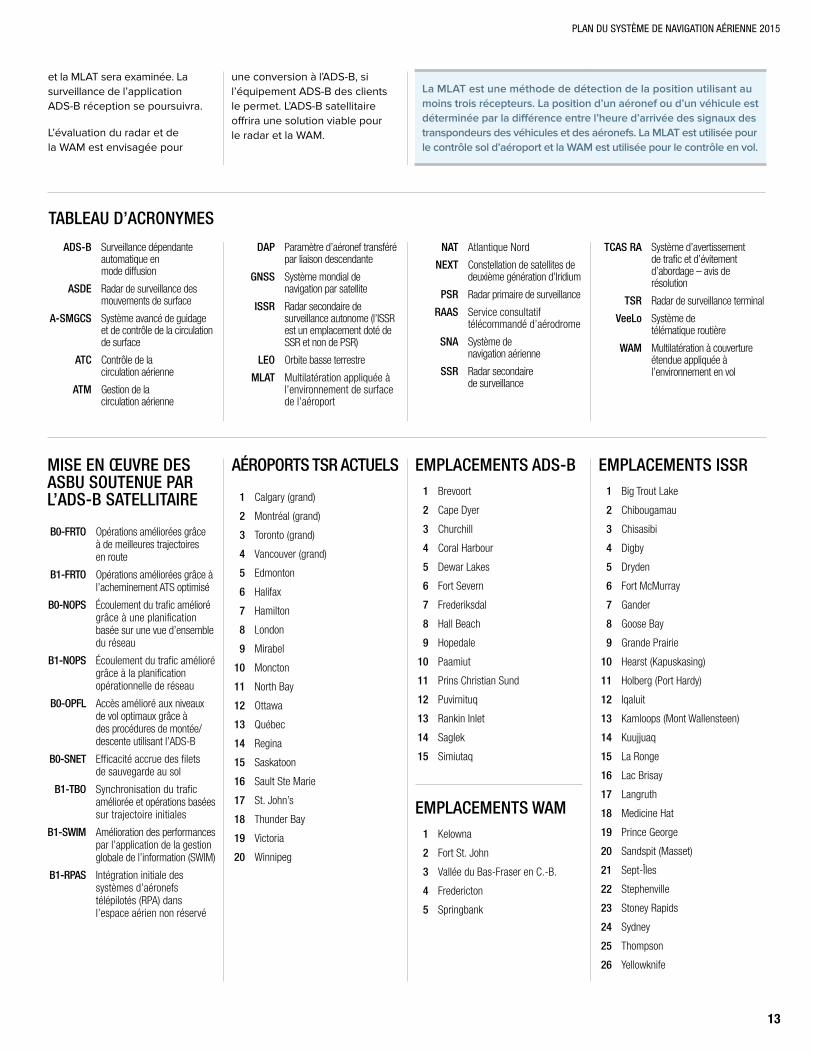
MISE EN ŒUVRE DES ASBU SOUTENUE PAR L’ADS-B SATELLITAIRE
B0-FRTO Opérations améliorées grâce à de meilleures trajectoires en route
B1-FRTO Opérations améliorées grâce à l’acheminement ATS optimisé
B0-NOPS Écoulement du trafic amélioré grâce à une planification basée sur une vue d’ensemble du réseau
B1-NOPS Écoulement du trafic amélioré grâce à la planification opérationnelle de réseau
B0-OPFL Accès amélioré aux niveaux de vol optimaux grâce à des procédures de montée/descente utilisant l’ADS-B
B0-SNET Efficacité accrue des filets de sauvegarde au sol
B1-TBO Synchronisation du trafic améliorée et opérations basées sur trajectoire initiales
B1-SWIM Amélioration des performances par l’application de la gestion globale de l’information (SWIM)
B1-RPAS Intégration initiale des systèmes d’aéronefs télépilotés (RPA) dans l’espace aérien non réservé
AÉROPORTS TSR ACTUELS
1 Calgary (grand)
2 Montréal (grand)
3 Toronto (grand)
4 Vancouver (grand)
5 Edmonton
6 Halifax
7 Hamilton
8 London
9 Mirabel
10 Moncton
11 North Bay
12 Ottawa
13 Québec
14 Regina
15 Saskatoon
16 Sault Ste Marie
17 St. John’s
18 Thunder Bay
19 Victoria
20 Winnipeg
EMPLACEMENTS ADS-B 1 Brevoort
2 Cape Dyer
3 Churchill
4 Coral Harbour
5 Dewar Lakes
6 Fort Severn
7 Frederiksdal
8 Hall Beach
9 Hopedale
10 Paamiut
11 Prins Christian Sund
12 Puvirnituq
13 Rankin Inlet
14 Saglek
15 Simiutaq
EMPLACEMENTS WAM 1 Kelowna
2 Fort St. John
3 Vallée du Bas-Fraser en C.-B.
4 Fredericton
5 Springbank
EMPLACEMENTS ISSR 1 Big Trout Lake
2 Chibougamau
3 Chisasibi
4 Digby
5 Dryden
6 Fort McMurray
7 Gander
8 Goose Bay
9 Grande Prairie
10 Hearst (Kapuskasing)
11 Holberg (Port Hardy)
12 Iqaluit
13 Kamloops (Mont Wallensteen)
14 Kuujjuaq
15 La Ronge
16 Lac Brisay
17 Langruth
18 Medicine Hat
19 Prince George
20 Sandspit (Masset)
21 Sept-Îles
22 Stephenville
23 Stoney Rapids
24 Sydney
25 Thompson
26 Yellowknife
TABLEAU D’ACRONYMES
La MLAT est une méthode de détection de la position utilisant au moins trois récepteurs. La position d’un aéronef ou d’un véhicule est déterminée par la différence entre l’heure d’arrivée des signaux des transpondeurs des véhicules et des aéronefs. La MLAT est utilisée pour le contrôle sol d’aéroport et la WAM est utilisée pour le contrôle en vol.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
13

14
TRACER L’AVENIR
Aperçu L’ATM, la gestion intégrée de la circulation aérienne et de l’espace aérien, continuera d’être assurée de manière sécuritaire, rentable et efficace pour répondre aux besoins courants et futurs des clients. Le système ATM doit fournir des services collaboratifs et uniformes intégrant les communications, la navigation et la surveillance dans un environnement systémique qui produit et traite l’information à l’aide de la technologie. Les systèmes seront progressivement mis à niveau pour permettre la croissance des services fondés sur les performances.
Court terme 2015-2017L’intégration des fonctions de données météorologiques et de plans de vol au CFPS se déroulera en 2016, ce qui permettra de fournir des exposés au pilote géoréférencés en ligne. La technologie ESB (Enterprise Service Bus) pour
un vol compatible de deuxième génération et SESAR, les données météorologiques, les NOTAM et l’échange des données aéronautiques entre les systèmes internes et les systèmes d’un tiers pour prendre en charge l’architecture SWIM sera mise en œuvre. En 2017, la fonction d’échange de données qui utilise
le FIXM fera l’objet d’un projet pilote. Le projet de mise à niveau de la technologie FSS sera réalisé en 2015. L’interface d’échange de données compatible avec le format de l’OACI, WXXM, pour le partage de données météorologiques entre le CFPS et les systèmes internes et de
tiers sera mise en œuvre en 2017. L’acquisition et la mise en œuvre du système AMAN seront réalisées en 2017. La coordination en ligne avec les AOCC sera établie. La mise en œuvre de la phase 1 du RLatSM aura lieu en 2015. Sur la foi d’une analyse de rentabilisation, la
4 GESTION DE LA CIRCULATION AÉRIENNE (ATM)
Une feuille de route sera générée pour la phase suivante d’élaboration et le déploiement de la future technologie ATM qui :
• comporte une conception de système robuste et souple;• établit les normes de référence pour une adaptation basée
sur les thèmes;• intègre la sécurité, l’efficacité et les facteurs humains dans
une IHM conviviale;• offre une technologie qui améliorera la prestation des
services aux clients; et• étudie et facilite de futures initiatives à l’échelle de l’industrie
ou propres à NAV CANADA.
La phase 2 du RLatSM réduira l’empreinte géographique de l’OTS d’une moyenne de 5 degrés de latitude (valeur nominale de 240 NM) à 3 degrés (valeur nominale de 120 NM), ce qui augmentera l’espace aérien pour les routes aléatoires.
Le projet de mise à niveau de la technologie FSS donnera lieu au déploiement d’une suite IIDS normalisée, à la communication en réseau et à une adaptation commune pour les 57 FSS, y compris l’EXCDS, l’OIDS et le NARDS. Le projet prévoit également la coordination du déploiement du HWOS et de l’ADMS/ACS dans les FSS pour remplacer le MIDS.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
15
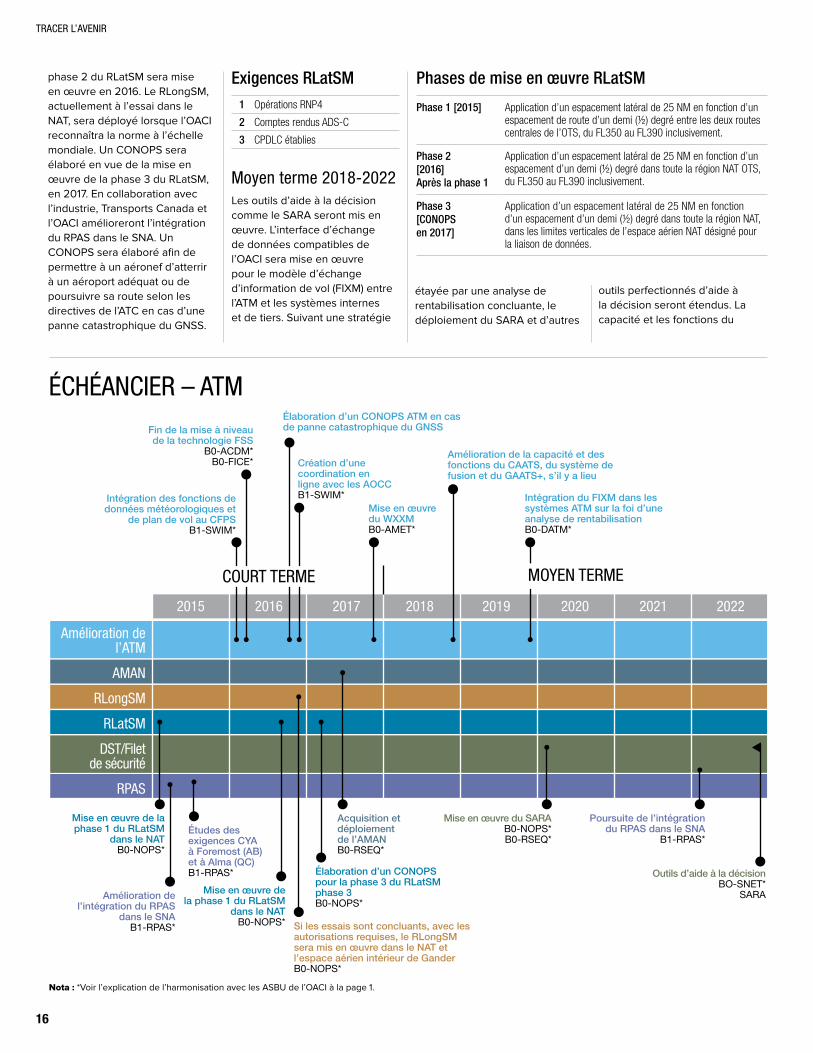
Amélioration de l’ATM
AMAN
RLongSM
RLatSM
DST/Filetde sécurité
RPAS
Intégration des fonctions de données météorologiques et
de plan de vol au CFPS B1-SWIM*
Élaboration d’un CONOPS ATM en cas de panne catastrophique du GNSS
Création d’une coordination en ligne avec les AOCC B1-SWIM*
Fin de la mise à niveau de la technologie FSS
B0-ACDM*B0-FICE*
Mise en œuvre de la phase 1 du RLatSM
dans le NAT B0-NOPS*
Amélioration de l’intégration du RPAS
dans le SNA B1-RPAS*
Études des exigences CYA à Foremost (AB) et à Alma (QC)B1-RPAS*
Mise en œuvre du WXXMB0-AMET*
Amélioration de la capacité et des fonctions du CAATS, du système de fusion et du GAATS+, s’il y a lieu
Intégration du FIXM dans les systèmes ATM sur la foi d’une analyse de rentabilisation B0-DATM*
Mise en œuvre de la phase 1 du RLatSM
dans le NAT B0-NOPS* Si les essais sont concluants, avec les
autorisations requises, le RLongSM sera mis en œuvre dans le NAT et l’espace aérien intérieur de Gander B0-NOPS*
Élaboration d’un CONOPS pour la phase 3 du RLatSM phase 3B0-NOPS*
Acquisition et déploiement de l’AMANB0-RSEQ*
Mise en œuvre du SARA B0-NOPS*B0-RSEQ*
Poursuite de l’intégration du RPAS dans le SNA
B1-RPAS*
Outils d’aide à la décisionBO-SNET*
SARA
COURT TERME MOYEN TERME
2015 2016 2017 2018 2019 2020 2021 2022
phase 2 du RLatSM sera mise en œuvre en 2016. Le RLongSM, actuellement à l’essai dans le NAT, sera déployé lorsque l’OACI reconnaîtra la norme à l’échelle mondiale. Un CONOPS sera élaboré en vue de la mise en œuvre de la phase 3 du RLatSM, en 2017. En collaboration avec l’industrie, Transports Canada et l’OACI amélioreront l’intégration du RPAS dans le SNA. Un CONOPS sera élaboré afin de permettre à un aéronef d’atterrir à un aéroport adéquat ou de poursuivre sa route selon les directives de l’ATC en cas d’une panne catastrophique du GNSS.
Moyen terme 2018-2022Les outils d’aide à la décision comme le SARA seront mis en œuvre. L’interface d’échange de données compatibles de l’OACI sera mise en œuvre pour le modèle d’échange d’information de vol (FIXM) entre l’ATM et les systèmes internes et de tiers. Suivant une stratégie
étayée par une analyse de rentabilisation concluante, le déploiement du SARA et d’autres
outils perfectionnés d’aide à la décision seront étendus. La capacité et les fonctions du
Phases de mise en œuvre RLatSM
Phase 1 [2015] Application d’un espacement latéral de 25 NM en fonction d’un espacement de route d’un demi (½) degré entre les deux routes centrales de l’OTS, du FL350 au FL390 inclusivement.
Phase 2 [2016] Après la phase 1
Application d’un espacement latéral de 25 NM en fonction d’un espacement d’un demi (½) degré dans toute la région NAT OTS, du FL350 au FL390 inclusivement.
Phase 3 [CONOPS en 2017]
Application d’un espacement latéral de 25 NM en fonction d’un espacement d’un demi (½) degré dans toute la région NAT, dans les limites verticales de l’espace aérien NAT désigné pour la liaison de données.
ÉCHÉANCIER – ATM
Exigences RLatSM1 Opérations RNP4
2 Comptes rendus ADS-C
3 CPDLC établies
Nota : *Voir l’explication de l’harmonisation avec les ASBU de l’OACI à la page 1.
TRACER L’AVENIR
16

TABLEAU D’ACRONYMES
CAATS, du système du fusion et du GAATS+ seront augmentées, s’il y a lieu. De concert avec le projet NextGen et le SESAR, le concept d’information sur les vols et les débits de trafic pour l’environnement collaboratif
(FF-ICE) sera étudié et appliqué quand les avancées en matière d’interopérabilité, de rendement et de capacité pourront être efficacement mises en œuvre. L’intégration du RPAS dans le SNA se poursuivra. Une plateforme d’exploitation commune pour le CAATS et le GAATS sera créée.
Les optimisations d’espacement et les améliorations parallèles du filet de sécurité (p. ex. alerte de conflit à court terme de la région terminale (STCA), conformité air-sol) seront réalisées lors du déploiement
graduel des technologies de fusion de données.
Il est possible que les progrès de la gestion du débit de la circulation aérienne (ATFM), incluant le routage ATS dynamique, la gestion du débit à l’échelle du système et la gestion des intervalles, entraîne un équilibrage de la capacité et
de la demande. Si une analyse de rentabilisation l’appuie, la phase 3 du RLatSM sera mise en œuvre dans le NAT. L’application du concept FF-ICE se poursuivra.
ADMS Système de gestion des données aéronautiques
ADS-C Surveillance dépendante automatique en mode contrat
AMAN Gestion des arrivées
AOCC Centre de contrôle des opérations du transporteur aérien
ATC Contrôle de la circulation aérienne
ATFM Gestion du débit de la circulation aérienne
CAATS Système canadien automatisé de la circulation aérienne
CFPS Système de planification de vol en collaboration
CONOPS Concept d’exploitation
CPDLC Communications contrôleur-pilote par liaison de données
CYA Espace aérien à service consultatif de classe F
DMAN Gestion des départs
DST Outils d’aide à la décision (et fonctions de filets de sécurité)
EXCDS Système d’affichage amélioré
FF-ICE Information sur les vols et les débits de trafic pour l’environnement collaboratif
FIXM Modèle d’échange d’information de vol
FSS Station d’information de vol
GAATS+ Système automatisé du contrôle de la circulation aérienne de Gander Plus
GNSS Système mondial de navigation par satellite
HWOS Système d’observations météorologiques humaines
IHM Interface homme-machine
IIDS Système intégré d’affichage de l’information
MIDS Système d’affichage à fonctions multiples
NARDS Système auxiliaire d’affichage radar de NAV CANADA
NAT Atlantique Nord
NextGen Système de transport aérien de la prochaine génération
NOTAM Avis aux aviateurs
OACI Organisation de l’aviation civile internationale
OIDS Système d’affichage de l’information opérationnelle
OTS Système de routes organisées
RLatSM Minimum réduit d’espacement latéral
RLongSM Minimum réduit d’espacement longitudinal
RNP Qualité de navigation requise
RPAS Système d’aéronef télépiloté
SARA Système-conseil de vitesse et de route
SESAR Programme de recherche ATM dans le cadre du Ciel unique européen
SNA Système de navigation aérienne
STCA Alerte de conflit à court terme
SWIM Gestion de l’information à l’échelle du système
WXXM Modèle d’échange d’information météorologique
Le SARA fournit le service consultatif de vitesse et de route pour assurer le passage d’un aéronef au repère de minutage à l’heure fournie par un système de séquencement des arrivées.
Les progrès technologiques des systèmes embarqués et des systèmes au sol ont permis l’élaboration de normes d’espacement réduites. NAV CANADA continuera d’explorer et d’adopter des normes d’espacement améliorées, s’il y a lieu.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
17

18
TRACER L’AVENIR
AperçuL’AIM désigne la gestion intégrée des services d’information aéronautique par la communication et l’échange de données aéronautiques numériques de qualité qui assurent la circulation des renseignements nécessaires à la sécurité, à la régularité et à l’efficacité de la navigation aérienne internationale. NAV CANADA met à la disposition de ses clients des données normalisées pouvant être utilisées par des fonctions d’affichage, comme produits conformes aux exigences des clients. Des publications électroniques sont désormais téléchargeables depuis le site de commerce électronique de NAV CANADA et sur des appareils électroniques portatifs.
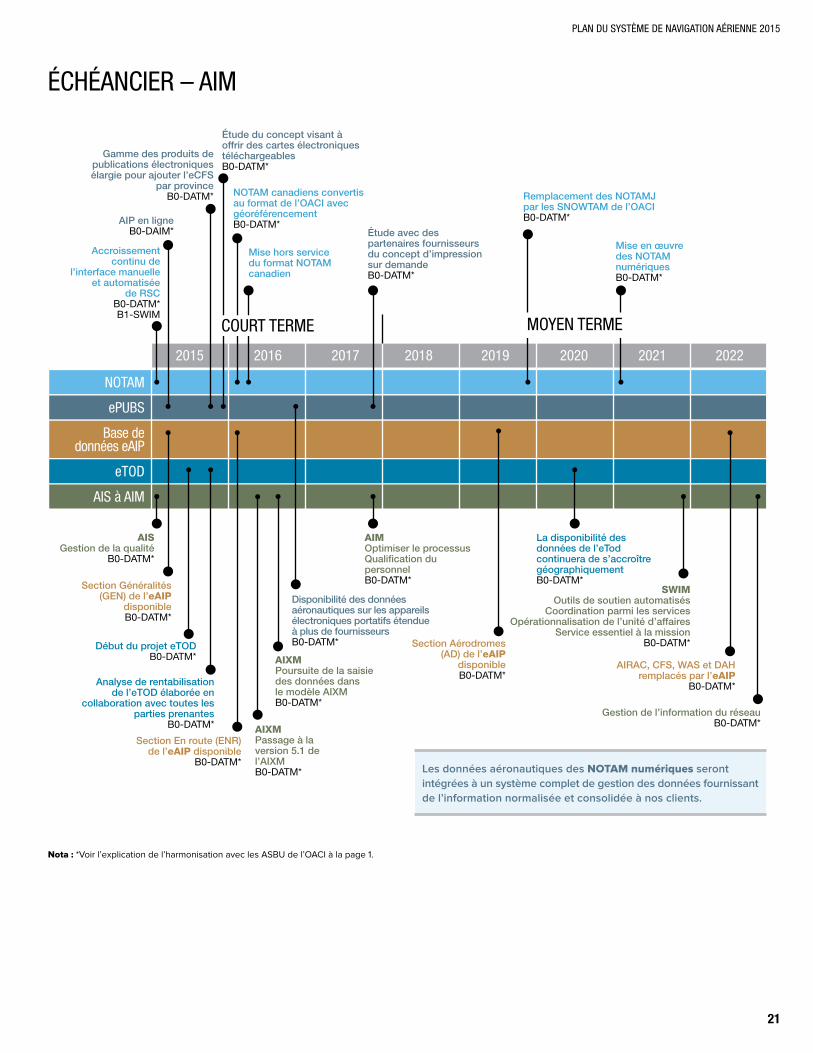
Court terme 2015-2017Le contenu que doit comprendre, selon l’OACI, la publication d’information aéronautique (AIP), incluant les modifications, suppléments et circulaires, sera publié dans un format électronique structuré appelé « eAIP ». Les NOTAM canadiens seront convertis au format et à la norme de l’OACI, et incluront le géoréférencement et le groupement en séries pour une facilité d’utilisation accrue dans les systèmes de comptes rendus des pilotes. Fondés sur la réussite des comptes rendus RSC, les NOTAM seront transmis en ligne et automatiquement.
Les données des NOTAM seront distribuées aux systèmes internes et externes, y compris l’EAD. Des comptes rendus automatiques de mesure du frottement sur piste et une interface de saisie manuelle et automatique des comptes rendus RSC seront ajoutés afin de couvrir plus d’aéroports. La version électronique du
Supplément de vol – Canada (eCFS) sera disponible par province. La ligne de produits des publications électroniques et les ententes afférentes avec les fournisseurs pour la réception de données aéronautiques au Canada sur des appareils électroniques portatifs seront améliorées. Le concept visant à offrir des cartes électroniques téléchargeables permettant d’améliorer les fonctions de recherche et de présentation sera étudié. Le groupe Publications aéronautiques examinera la faisabilité d’une distribution en format électronique seulement, mais offrira aux fournisseurs qui en font la demande la possibilité d’obtenir des versions imprimées. Une procédure de soumission par voie électronique de l’information et des données aéronautiques sera mise en œuvre. Le processus
d’évaluation de l’impact des obstacles artificiels sera automatisé.
5 GESTION DE L’INFORMATION AÉRONAUTIQUE (AIM)
PRODUITS AÉRONAU-TIQUES ÉLECTRONIQUES ACTUELS
CD ePUB (référence seulement)
CD RCAP
eCFS
eCAP
eRCAP
eWAS
LA PROCÉDURE DE SOUMISSION PAR VOIE ÉLECTRONIQUE COMPREND
les changements d’aérodromes
les données de levé
les propositions et les évaluations d’obstacles
les demandes de procédures aux instruments
les changements d’infrastructure
les changements de communications
les changements des voies aériennes et de l’espace aérien
les changements des aides à la navigation
L’eAIP remplacera les publications AIRAC et AIP imprimées.
19
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015

Moyen terme 2018-2022Les NOTAMJ feront place au format SNOWTAM de l’OACI. Le format numérique remplacera le format texte à structure libre actuel. L’élaboration des exigences des clients liées aux eTOD et l’analyse de rentabilisation associée se poursuivent en collaboration avec les clients. La disponibilité des eTOD continuera de s’accroître.
L’AIM de NAV CANADA fournira aux systèmes qui en ont besoin de l’information aéronautique actualisée et de haute qualité sous forme de données numériques provenant de bases de données structurées et de systèmes d’information géographique, ce qui permettra d’améliorer les fonctions de recherche et de présentation.
AVANTAGES DES SNOWTAM DE L’OACI
Conçus en fonction des données
Utilisation de la norme de l’OACI assurant une reconnaissance mondiale
Comptes rendus faits par tiers de piste
Expire après 24 h, par définition
APPLICATIONS DES eTOD
Production de cartes aéronautiques
Conception de procédures aux instruments
Systèmes d’avertissement d’altitude minimale de sécurité
Dispositifs avertisseurs de proximité du sol
Procédures d’urgence
Systèmes avancés de guidage et de contrôle des mouvements de surface
Surveillance de la trajectoire d’approche
Coordination automatisée air-sol (opérations basées sur les trajectoires)
L’automatisation du processus d’évaluation de l’utilisation de terrains, qui détermine l’impact des obstacles artificiels telles les éoliennes sur l’aviation, améliorera la sécurité en vol.
Les ajouts, suppressions et modifications apportés aux publications aéronautiques sont publiés conformément à la procédure AIRAC, qui informe les utilisateurs à l’avance des changements d’après une série établie de dates d’entrée en vigueur communes.
TABLEAU D’ACRONYMES SÉRIES DE NOTAM
AIRAC Régularisation et contrôle de la diffusion des renseignements aéronautiques
DAH Manuel des espaces aériens désignés
EAD Base de données aéronautiques (AIS) européenne
eAIP Publication d’information aéronautique électronique
eCAP Canada Air Pilot électronique
eCFS Supplément de vol – Canada électronique
ePUB Publications électroniques
eRCAP Canada Air Pilot restreint électronique
eTOD Données électroniques de terrain et d’obstacles
eWAS Supplément hydroaérodromes électronique
PED Appareil électronique portatif
NOTAM NOTAM en format de l’OACI (avis aux aviateurs)
RSC État de la surface de la piste
SNOWTAM NOTAM d’une série spéciale signalant la présence de neige, glace, ou neige fondante sur les aires de mouvement
A Aérodrome/aire de mouvement ou d’atterrissage
B Services et aménagements ATC
C Espace aérien à usage spécial
D Obstacle
E Espace aérien
G GNSS
H Corrections de cartes
J Avis spéciaux
M Sécurité des vols militaires
N NAVAID
O Autre information aéronautique
P Procédural
S SNOWTAM
V ASHTAM
W Corrections de bases de données
Y Test
Z Voie aérienne
Les NOTAMJ sont des NOTAM canadiens de série spéciale contenant de l’information sur l’état de la surface des pistes et le coefficient de freinage exprimée selon des critères publiés.
TRACER L’AVENIR
20
NOTAM
ePUBS
Base dedonnées eAIP
eTOD
AIS à AIM
Accroissement continu de
l’interface manuelle et automatisée
de RSC B0-DATM*B1-SWIM
Section Généralités (GEN) de l’eAIP
disponible B0-DATM*
AISGestion de la qualité
B0-DATM*
Gestion de l’information du réseauB0-DATM*
Début du projet eTODB0-DATM*
Analyse de rentabilisation de l’eTOD élaborée en
collaboration avec toutes les parties prenantes
B0-DATM*
Section En route (ENR)de l’eAIP disponible
B0-DATM*
AIRAC, CFS, WAS et DAH remplacés par l’eAIP
B0-DATM*
NOTAM canadiens convertis au format de l’OACI avec géoréférencementB0-DATM*
Mise hors service du format NOTAM canadien
Disponibilité des données aéronautiques sur les appareils électroniques portatifs étendue à plus de fournisseurs B0-DATM*
AIMOptimiser le processus Quali�cation du personnelB0-DATM*
Section Aérodromes (AD) de l’eAIP
disponible B0-DATM*
La disponibilité des données de l’eTod continuera de s’accroître géographiquement B0-DATM*
SWIMOutils de soutien automatisés
Coordination parmi les services Opérationnalisation de l’unité d’affaires
Service essentiel à la missionB0-DATM*
AIXMPoursuite de la saisie des données dans le modèle AIXM B0-DATM*
AIXMPassage à la version 5.1 de l’AIXMB0-DATM*
Étude du concept visant à offrir des cartes électroniques téléchargeablesB0-DATM*
Gamme des produits de publications électroniques élargie pour ajouter l’eCFS
par province B0-DATM*
AIP en ligne B0-DAIM*
Remplacement des NOTAMJ par les SNOWTAM de l’OACIB0-DATM*
Mise en œuvre des NOTAM numériques B0-DATM*
Étude avec des partenaires fournisseurs du concept d’impression sur demandeB0-DATM*
COURT TERME MOYEN TERME
2015 2016 2017 2018 2019 2020 2021 2022
ÉCHÉANCIER – AIM
Nota : *Voir l’explication de l’harmonisation avec les ASBU de l’OACI à la page 1.
Les données aéronautiques des NOTAM numériques seront intégrées à un système complet de gestion des données fournissant de l’information normalisée et consolidée à nos clients.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
21

22
TRACER L’AVENIR
AperçuNAV CANADA fournit des services météorologiques à l’aviation en diffusant des rapports et prévisions préparés principalement par le Service météorologique du Canada. Le site Web de météorologie à l’aviation de NAV CANADA est l’un des moyens d’accéder à ces produits. Des efforts continuent d’être déployés pour sensibiliser les pilotes aux services météorologiques en route et avant vol, comme les caméras météo numériques, qui sont disponibles partout dans le Nord et dans les zones de service éloignées en ligne ou en contactant le FIC local.
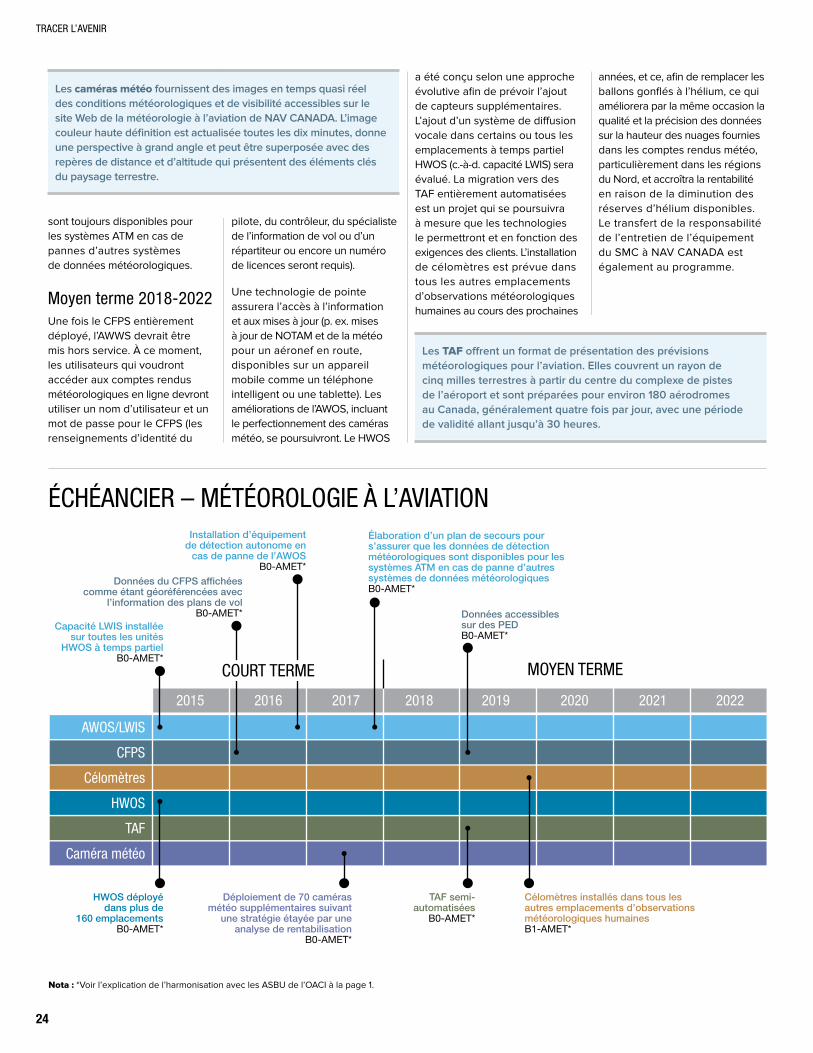
Court terme 2015-2017Les données du CFPS seront affichées en tant que données géoréférencées permettant aux utilisateurs de disposer de tous les renseignements pour prendre des décisions concernant leur route
de vol. Le déploiement initial du CFPS permettant aux utilisateurs externes de déposer, d’annuler, de retarder ou de modifier les plans de vol est terminé. Les éléments météorologiques seront ajoutés progressivement à mesure que le CFPS continuera
d’évoluer au cours des deux prochaines années. Le HWOS sera mis en œuvre à tous les emplacements d’observations météorologiques humaines (plus de 160); y compris les aménagements de NAV CANADA employant du personnel à temps partiel (p. ex. CWO, FIC, FSS et TWR). Le système de production des prévisions météorologiques évoluera pour intégrer des prévisions d’aérodrome (TAF) semi-automatisées d’ici la fin de 2016. Les caméras météo fournissent des images des conditions actuelles à plus de
150 emplacements au Canada, dont 146 sont accessibles au moyen de l’AWWS. Ce service sera étendu à 70 autres emplacements d’ici 2017. Un plan de secours sera élaboré pour les fonctions de l’AWOS et il sera axé sur deux stratégies principales : un accès direct à l’équipement de détection autonome en cas d’une panne de l’AWOS et l’installation d’un système de secours pour assurer la diffusion de données de détection ou d’observations météorologiques; et l’assurance que les données de détection météorologiques
6 MÉTÉOROLOGIE À L’AVIATION
L’AWWS est remplacé par le CFPS, qui sera conçu pour fournir de l’information météorologique, des NOTAM, des données aéronautiques et de caméras météo et de l’information sur les plans de vol aux clients internes et externes. Les spécialistes de l’information de vol, les contrôleurs, les pilotes et les répartiteurs vont consulter, utiliser et partager les mêmes informations météorologiques et données de plans de vol, ce qui favorisera la collaboration entre toutes les parties prenantes.
Dans les unités à temps partiel, le HWOS transmettra bientôt les mêmes données que celles recueillies par un LWIS (soit le vent, les données altimétriques, la température et le point de rosée) directement aux systèmes de NAV CANADA, comme le site Web de météorologie de NAV CANADA, ainsi que les données utilisées par les FIC et les ACC en émettant chaque heure un message automatisé de type LWIS durant les heures de fermeture.
23
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
AWOS/LWIS
CFPS
Célomètres
HWOS
TAF
Caméra météo
Capacité LWIS installée sur toutes les unités
HWOS à temps partiel B0-AMET*
HWOS déployé dans plus de
160 emplacements B0-AMET*
Déploiement de 70 caméras météo supplémentaires suivant
une stratégie étayée par une analyse de rentabilisation
B0-AMET*
Données du CFPS af�chées comme étant géoréférencées avec
l’information des plans de vol B0-AMET*
Installation d’équipement de détection autonome en
cas de panne de l’AWOS B0-AMET*
Élaboration d’un plan de secours pour s’assurer que les données de détection météorologiques sont disponibles pour les systèmes ATM en cas de panne d’autres systèmes de données météorologiquesB0-AMET*
Données accessibles sur des PED B0-AMET*
TAF semi-automatisées
B0-AMET*
Célomètres installés dans tous les autres emplacements d’observations météorologiques humainesB1-AMET*
COURT TERME MOYEN TERME
2015 2016 2017 2018 2019 2020 2021 2022
sont toujours disponibles pour les systèmes ATM en cas de pannes d’autres systèmes de données météorologiques.
Moyen terme 2018-2022Une fois le CFPS entièrement déployé, l’AWWS devrait être mis hors service. À ce moment, les utilisateurs qui voudront accéder aux comptes rendus météorologiques en ligne devront utiliser un nom d’utilisateur et un mot de passe pour le CFPS (les renseignements d’identité du
pilote, du contrôleur, du spécialiste de l’information de vol ou d’un répartiteur ou encore un numéro de licences seront requis).
Une technologie de pointe assurera l’accès à l’information et aux mises à jour (p. ex. mises à jour de NOTAM et de la météo pour un aéronef en route, disponibles sur un appareil mobile comme un téléphone intelligent ou une tablette). Les améliorations de l’AWOS, incluant le perfectionnement des caméras météo, se poursuivront. Le HWOS
a été conçu selon une approche évolutive afin de prévoir l’ajout de capteurs supplémentaires. L’ajout d’un système de diffusion vocale dans certains ou tous les emplacements à temps partiel HWOS (c.-à-d. capacité LWIS) sera évalué. La migration vers des TAF entièrement automatisées est un projet qui se poursuivra à mesure que les technologies le permettront et en fonction des exigences des clients. L’installation de célomètres est prévue dans tous les autres emplacements d’observations météorologiques humaines au cours des prochaines
années, et ce, afin de remplacer les ballons gonflés à l’hélium, ce qui améliorera par la même occasion la qualité et la précision des données sur la hauteur des nuages fournies dans les comptes rendus météo, particulièrement dans les régions du Nord, et accroîtra la rentabilité en raison de la diminution des réserves d’hélium disponibles. Le transfert de la responsabilité de l’entretien de l’équipement du SMC à NAV CANADA est également au programme.
Les caméras météo fournissent des images en temps quasi réel des conditions météorologiques et de visibilité accessibles sur le site Web de la météorologie à l’aviation de NAV CANADA. L’image couleur haute définition est actualisée toutes les dix minutes, donne une perspective à grand angle et peut être superposée avec des repères de distance et d’altitude qui présentent des éléments clés du paysage terrestre.
Les TAF offrent un format de présentation des prévisions météorologiques pour l’aviation. Elles couvrent un rayon de cinq milles terrestres à partir du centre du complexe de pistes de l’aéroport et sont préparées pour environ 180 aérodromes au Canada, généralement quatre fois par jour, avec une période de validité allant jusqu’à 30 heures.
ÉCHÉANCIER – MÉTÉOROLOGIE À L’AVIATION
Nota : *Voir l’explication de l’harmonisation avec les ASBU de l’OACI à la page 1.
TRACER L’AVENIR
24
TABLEAU D’ACRONYMES
ACC Centre de contrôle régional
AWOS Système automatisé d’observations météorologiques
AWWS Site Web de la météorologie à l’aviation
Caméra météo
Caméra météo numérique
CFPS Système de planification de vol en collaboration
CWO Bureau météorologique à contrat
FIC Centre d’information de vol
FSS Spécialiste de l’information de vol
HWOS Système d’observations météorologiques humaines
LWIS Système d’information météorologique limitée
NOTAM Avis aux aviateurs
PED Appareil électronique portatif
SMC Service météorologique du Canada
TAF Prévision d’aérodrome
TWR Tour
À propos de l’ASBUUne mise à niveau par blocs du système de l’aviation (ASBU) désigne un ensemble d’améliorations pouvant être mises en œuvre à l’échelle mondiale pour renforcer la performance du système ATM. Un bloc se compose de modules représentant une amélioration précise associée à un avantage de performance. Les modules sont groupés par blocs en fonction de leur date de disponibilité aux fins d’un déploiement, comme suit :
Bloc 0 : disponible immédiatement
Bloc 1 : disponible pour un déploiement mondial à partir de 2018
Bloc 2 : disponible pour un déploiement mondial à partir de 2023
Bloc 3 : disponible pour un déploiement mondial à partir de 2028 et au-delà
Il faut insister sur le fait que la période prévue de disponibilité d’un bloc n’est pas la même que celle de sa mise en œuvre. Par exemple, le bloc 0 devrait être disponible en 2013, mais sa mise en œuvre devrait se dérouler de 2013 à 2018. Ce principe s’applique à tous les blocs.
On qualifie de fil d’intérêt toute série de modules interdépendants compris dans des blocs consécutifs. Les acronymes pertinents sont fournis dans le tableau suivant.
ACAS Systèmes anticollision embarqués
ACDM Prise de décision en collaboration aux aéroports
AMET Information météorologique avancée
APTA Accessibilité des aéroports
ASEP Espacement par l'équipage de conduite
ASUR Surveillance alternative
CCO Opérations en montée continue
CDO Opérations en descente continue
DATM Gestion numérique des renseignements aéronautiques
FICE FF/ICE
FRTO Opérations sur routes libres
NOPS Opérations de réseau
OPFL Niveaux de vol optimaux
RATS Services de la circulation aérienne à distance
RPAS Systèmes d’aéronefs télépilotés
RSEQ Séquencement sur piste
SNET Filets de sauvegarde
SURF Opérations à la surface
SWIM Gestion globale de l’information
TBO Opérations basées sur trajectoire
WAKE Espacement en fonction de la turbulence de sillage
Les modules sont désignés par un numéro de bloc et un acronyme comme le montre la figure ci-dessous.
Module B0-APTA
Numéro de bloc = B0
Acronyme du fil d’intérêt = APTA
Jordan Tan / Shutterstock.com
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
25

ANNEXE A : MISES À NIVEAU PAR BLOCS DU SYSTÈME DE L’AVIATIONDomaine d’amélioration des performances 1 : Opérations aéroportuaires
Bloc 0 (maintenant) Bloc 1 (2018) Bloc 2 (2023) Bloc 3 (2028 et au-delà)
Accessibilité des aéroports – APTA
B0-APTAOptimisation des procédures d’approche, notamment par le guidage verticalPremière étape de la mise en œuvre universelle d’approches fondées sur le GNSS.
B1-APTAAccessibilité des aéroports optimiséePoursuite de la mise en œuvre universelle d’approches fondées sur le GNSS.
Espacement en fonction de la turbulence de sillage – WAKE
B0-WAKEDébit des pistes accru grâce à l’application de mesures optimisées d'espacement en fonction de la turbulence de sillageAugmentation du débit des pistes de départ et d’arrivée par la révision des procédures et des minimums d'espacement en fonction de la turbulence de sillage de l'OACI.
B1-WAKEDébit des pistes accru grâce à l’application de mesures dynamiques d'espacement en fonction de la turbulence de sillageAugmentation du débit des pistes de départ et d’arrivée par la gestion dynamique des minimums d'espacement en fonction de la turbulence de sillage, fondée sur l’identification en temps réel des dangers liés à la turbulence de sillage.
B2-WAKEMesures avancées d'espacement en fonction de la turbulence de sillage (basées sur le temps) Application de minimums de temps pour l'espacement des aéronefs en fonction de la turbulence de sillage; modification des procédures des fournisseurs de services de navigation aérienne pour l’application des minimums d'espacement.
Séquencement sur piste – RSEQ
B0-RSEQÉcoulement du trafic amélioré grâce au séquencement (AMAN/DMAN) Séquencement des arrivées et des départs par régulation temporelle.
B1-RSEQOpérations aéroportuaires améliorées grâce à la gestion des départs, des mouvements de surface et des arrivéesLe minutage élargi des arrivées et l’intégration de la gestion des mouvements de surface avec séquencement des départs permettent une meilleure gestion des pistes et améliorent la performance des aéroports et l’efficacité des vols.
B2-RSEQAMAN/DMAN liéesLa synchronisation AMAN/DMAN favorisera des opérations en route et en région terminale plus souples et plus efficaces.
B3-RSEQAMAN/DMAN/SMAN intégréesGestion de réseau totalement synchronisée entre les aéroports de départ et les aéroports d’arrivée pour tous les aéronefs dans le système de la circulation aérienne, à tout moment.
Opérations à la surface – SURF
B0-SURFSécurité et efficacité des opérations à la surface (A-SMGCS niveaux 1-2)Surveillance de la surface des aéroports pour les fournisseurs de services de navigation aérienne.
B1-SURFSécurité et efficacité renforcées des opérations à la surface — SURF, SURF-IA et systèmes de vision améliorée (EVS)Surveillance de la surface des aéroports pour les fournisseurs de services de navigation aérienne et équipages de conduite avec logique de sécurité, affichage de cartes défilantes et systèmes de visualisation pour la circulation au sol.
B2-SURFAcheminement à la surface et avantages du point de vue de la sécurité optimisés (A-SMGCS niveaux 3-4 et SVS)Évolution de l’acheminement et du guidage de la circulation au sol vers l’acheminement basé sur la surveillance sol/poste de pilotage et la communication des autorisations et de l’information par liaison de données. Systèmes de vision synthétique (SVS) dans le poste de pilotage.
Prise de décision en collaboration aux aéroports – ACDM
B0-ACDMOpérations aéroportuaires améliorées grâce à la prise de décisions en collaboration (CDM) – aéroports Amélioration de l’exploitation des aéroports par le travail en collaboration des partenaires opérationnels.
B1-ACDMOpérations aéroportuaires optimisées grâce à la CDM – aéroportsAmélioration de l’exploitation des aéroports par le travail en collaboration des partenaires opérationnels.
Services de la circulation aérienne à distance – RATS
B1-RATSContrôle d’aérodrome géré à distanceTour de contrôle d’aérodrome commandée à distance; fourniture à distance de services ATS aux aérodromes au moyen de systèmes et d’outils de visualisation.
TRACER L’AVENIR
26
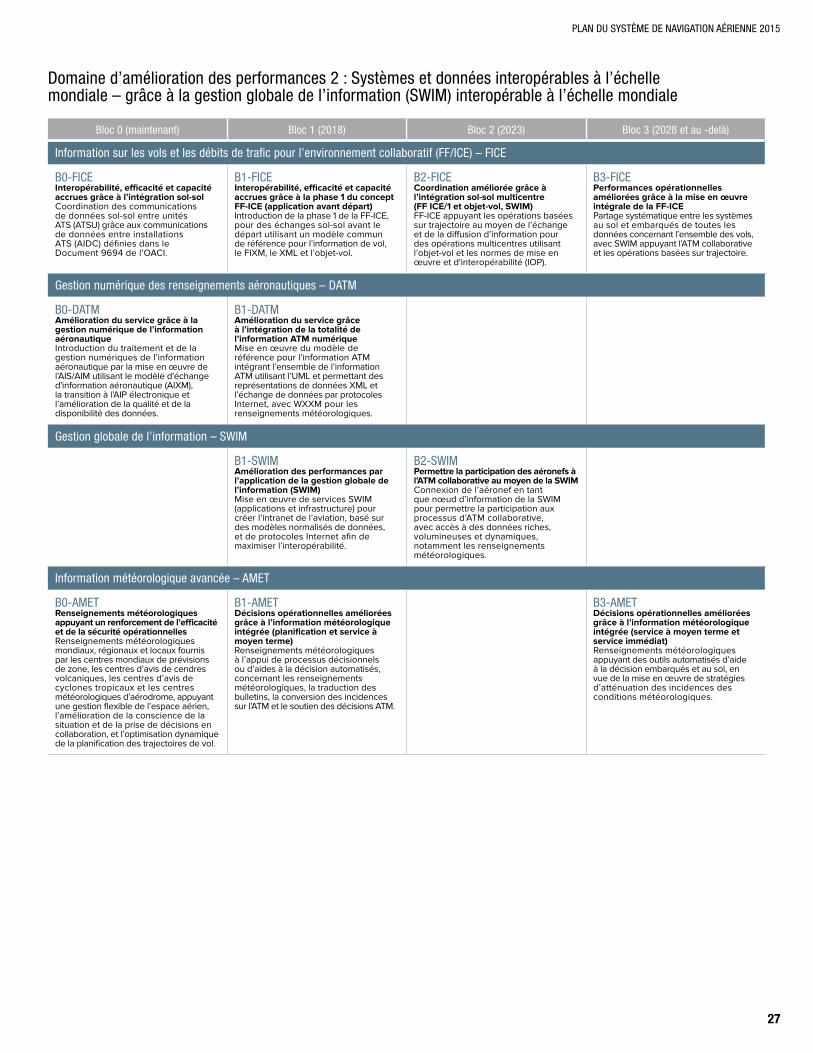
Domaine d’amélioration des performances 2 : Systèmes et données interopérables à l’échelle mondiale – grâce à la gestion globale de l’information (SWIM) interopérable à l’échelle mondiale
Bloc 0 (maintenant) Bloc 1 (2018) Bloc 2 (2023) Bloc 3 (2028 et au -delà)
Information sur les vols et les débits de trafic pour l’environnement collaboratif (FF/ICE) – FICE
B0-FICEInteropérabilité, efficacité et capacitéaccrues grâce à l’intégration sol-solCoordination des communications de données sol-sol entre unités ATS (ATSU) grâce aux communications de données entre installations ATS (AIDC) définies dans le Document 9694 de l’OACI.
B1-FICEInteropérabilité, efficacité et capacitéaccrues grâce à la phase 1 du concept FF-ICE (application avant départ)Introduction de la phase 1 de la FF-ICE, pour des échanges sol-sol avant le départ utilisant un modèle commun de référence pour l’information de vol, le FIXM, le XML et l’objet-vol.
B2-FICECoordination améliorée grâce à l’intégration sol-sol multicentre (FF ICE/1 et objet-vol, SWIM)FF-ICE appuyant les opérations basées sur trajectoire au moyen de l’échange et de la diffusion d’information pour des opérations multicentres utilisant l’objet-vol et les normes de mise en œuvre et d'interopérabilité (IOP).
B3-FICEPerformances opérationnelles améliorées grâce à la mise en œuvre intégrale de la FF-ICEPartage systématique entre les systèmes au sol et embarqués de toutes les données concernant l’ensemble des vols, avec SWIM appuyant l’ATM collaborative et les opérations basées sur trajectoire.
Gestion numérique des renseignements aéronautiques – DATM
B0-DATMAmélioration du service grâce à la gestion numérique de l’information aéronautique Introduction du traitement et de la gestion numériques de l’information aéronautique par la mise en œuvre de l’AIS/AIM utilisant le modèle d'échange d'information aéronautique (AIXM), la transition à l’AIP électronique et l’amélioration de la qualité et de la disponibilité des données.
B1-DATMAmélioration du service grâce à l’intégration de la totalité de l’information ATM numériqueMise en œuvre du modèle de référence pour l’information ATM intégrant l’ensemble de l’information ATM utilisant l’UML et permettant des représentations de données XML et l’échange de données par protocoles Internet, avec WXXM pour les renseignements météorologiques.
Gestion globale de l’information – SWIM
B1-SWIMAmélioration des performances par l’application de la gestion globale de l’information (SWIM)Mise en œuvre de services SWIM (applications et infrastructure) pour créer l’intranet de l’aviation, basé sur des modèles normalisés de données, et de protocoles Internet afin de maximiser l’interopérabilité.
B2-SWIMPermettre la participation des aéronefs à l’ATM collaborative au moyen de la SWIMConnexion de l’aéronef en tant que nœud d’information de la SWIM pour permettre la participation aux processus d’ATM collaborative, avec accès à des données riches, volumineuses et dynamiques, notamment les renseignements météorologiques.
Information météorologique avancée – AMET
B0-AMETRenseignements météorologiques appuyant un renforcement de l’efficacité et de la sécurité opérationnelles Renseignements météorologiques mondiaux, régionaux et locaux fournis par les centres mondiaux de prévisions de zone, les centres d’avis de cendres volcaniques, les centres d’avis de cyclones tropicaux et les centres météorologiques d’aérodrome, appuyant une gestion flexible de l’espace aérien, l’amélioration de la conscience de la situation et de la prise de décisions en collaboration, et l’optimisation dynamique de la planification des trajectoires de vol.
B1-AMETDécisions opérationnelles améliorées grâce à l’information météorologique intégrée (planification et service à moyen terme)Renseignements météorologiques à l’appui de processus décisionnels ou d’aides à la décision automatisés, concernant les renseignements météorologiques, la traduction des bulletins, la conversion des incidences sur l’ATM et le soutien des décisions ATM.
B3-AMETDécisions opérationnelles améliorées grâce à l’information météorologique intégrée (service à moyen terme et service immédiat)Renseignements météorologiques appuyant des outils automatisés d’aide à la décision embarqués et au sol, en vue de la mise en œuvre de stratégies d’atténuation des incidences des conditions météorologiques.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
27

Domaine d’amélioration des performances 3 : Capacité optimale et vols flexibles – grâce à une ATM collaborative à l’échelle mondiale
Bloc 0 (maintenant) Bloc 1 (2018) Bloc 2 (2023) Bloc 3 (2028 et au-delà)
Opérations sur routes libres – FRTO
B0-FRTOOpérations améliorées grâce à de meilleures trajectoires en routePermettre l’utilisation d’espace aérien qui serait autrement exclu (espace aérien militaire) et des routes flexibles adaptées à des profils de circulation donnés. Le nombre de routes possibles sera ainsi augmenté, ce qui réduira l’encombrement sur les routes principales et aux points d’intersection de grande activité, diminuant ainsi la durée des vols et la consommation de carburant.
B1-FRTOOpérations améliorées grâce à l’acheminement ATS optimiséIntroduction du libre choix des routes dans des espaces aériens déterminés, dans les cas où le plan de vol n’est pas défini sous forme de segments d’un réseau ou système de routes publié, afin de faciliter l’adoption du profil privilégié par les usagers.
Opérations de réseau – NOPS
B0-NOPSÉcoulement du trafic amélioré grâce à une planification basée sur une vue d’ensemble du réseauMesures d’ATFM collaborative pour réguler les courants en pointe, portant sur les créneaux de départ, la gestion du débit d’admission dans une portion donnée d’espace aérien pour le trafic suivant un certain axe, l’heure demandée d’arrivée à un point de cheminement ou à la limite d’une FIR/d’un secteur, l’espacement en milles dans le sillage pour régulariser le débit le long de certains axes, et le changement de route pour éviter des zones saturées.
B1-NOPSÉcoulement du trafic amélioré grâce à la planification opérationnelle de réseauTechniques d’ATFM qui intègrent la gestion de l’espace aérien et des courants de trafic, y compris les processus de priorisation initiale par les usagers pour définir de manière collaborative des solutions ATFM qui tiennent compte des priorités commerciales/opérationnelles.
B2-NOPSParticipation accrue des usagers à l’utilisation dynamique du réseauIntroduction d’applications de prise de décision en collaboration (CDM) appuyées par la SWIM, qui permettent aux usagers de l’espace aérien de gérer la concurrence et la priorisation de solutions ATFM complexes lorsque le réseau ou ses nœuds (aéroports, secteurs) n’offrent plus une capacité répondant aux exigences des usagers.
B3-NOPSGestion de la complexité de la circulationIntroduction de la gestion de la complexité pour faire face aux événements et phénomènes qui influent sur les courants de trafic en raison de limitations physiques, d’impératifs économiques ou d’événements ou conditions particuliers, par l’exploitation de l’information plus précise et plus riche de l’ATM basée sur la SWIM.
Surveillance alternative – ASUR
B0-ASURFonctionnalité initiale de surveillance au solUne surveillance au sol appuyée par l’ADS-B ÉMISSION et/ou la multilatération à couverture étendue améliorera la sécurité, la recherche et le sauvetage ainsi que la capacité grâce à des réductions espacement. Cette fonctionnalité sera intégrée dans divers services ATM (information de trafic, recherche et sauvetage, espacement, etc.).
Espacement par l’equipage de conduite – ASEP
B0-ASEPConscience de la situation du trafic aérien (ATSA)Deux applications ATSA qui amélioreront la sécurité et l’efficacité en donnant aux pilotes les moyens de procéder à une acquisition visuelle plus rapide des cibles :• AIRB (conscience accrue de la
situation du trafic au cours du vol).• VSA (espacement visuel amélioré
en approche).
B1-ASEPCapacité et efficacité accrues grâceà la gestion des intervallesLa gestion des intervalles (IM) améliore la gestion des débits de trafic et de l’espacement des aéronefs. Une gestion précise des intervalles entre les aéronefs qui suivent des trajectoires communes ou convergentes maximise la capacité de l’espace aérien tout en réduisant la charge de travail de l’ATC et la consommation de carburant.
B2-ASEPEspacement par l’équipage de conduite (ASEP)Création d’avantages opérationnels par la délégation temporaire à l’équipage de conduite de la responsabilité de l’espacement par rapport à des aéronefs désignés dotés de l’équipement approprié, ce qui réduit la nécessité de messages de résolution de conflit tout en allégeant la charge de travail de l’ATC et permettant des profils de vol plus efficaces.
Niveaux de vol optimaux – OPFL
B0-OPFLAccès amélioré aux niveaux de vol optimaux grâce à des procédures de montée/descente utilisant l’ADS-BPour empêcher les aéronefs de rester « piégés » pendant de longues périodes à des altitudes non optimales du point de vue de la consommation de carburant. Principaux avantages de la procédure « dans le sillage » (ITP) : importantes économies de carburant et emport de charges marchandes plus élevées.
TRACER L’AVENIR
28

Bloc 0 (maintenant) Bloc 1 (2018) Bloc 2 (2023) Bloc 3 (2028 et au-delà)
Systèmes anticollision embarqués – ACAS
B0-ACASAmélioration des systèmes anticollision embarquésApporter des améliorations à court terme aux systèmes anticollision embarqués (ACAS) existants afin de réduire le nombre d’alertes intempestives tout en maintenant les niveaux de sécurité actuels. Cela réduira les écarts par rapport aux trajectoires et augmentera la sécurité en cas de perte d’espacement.
B2-ACASNouveau système anticollisionMise en œuvre d’un système anticollision embarqué (ACAS) adapté à des opérations basées sur trajectoire, avec fonction de surveillance améliorée appuyée par l’ADS-B visant à réduire le nombre d’alertes intempestives et les écarts par rapport à la trajectoire. Le nouveau système permettra des opérations et des procédures plus efficaces tout en respectant les règlements de sécurité.
Filets de sauvegarde – SNET
B0-SNETEfficacité accrue des filets de sauvegarde au solCe module apporte des améliorations d’efficacité aux filets de sauvegarde au sol qui aident le contrôleur de la circulation aérienne et génèrent en temps opportun des alertes de risque accru pour la sécurité des vols (alertes de conflit à court terme, avertissements de proximité, avertissements d’altitude minimale de sécurité, etc.).
B1-SNET Filets de sauvegarde au sol pour l’approcheCe module renforce la sécurité apportée par le module précédent en réduisant le risque d’accident par impact sans perte de contrôle en approche finale grâce à l’utilisation de la surveillance de la trajectoire d’approche (APM).
Domaine d’amélioration de la performance 4 : Trajectoires de vol efficaces – grâce aux opérations basées sur trajectoire
Bloc 0 (maintenant) Bloc 1 (2018) Bloc 2 (2023) Bloc 3 (2028 et au-delà)
Opérations en descente continue – CDO
B0-CDOFlexibilité et efficacité améliorées dans les profils de descente (CDO)Application de procédures d’espace aérien et d’arrivée basées sur les performances, qui permettent aux aéronefs de suivre leur profil optimal compte tenu de la complexité de l’espace aérien et de la circulation grâce à des opérations en descente continue (CDO).
B1-CDOFlexibilité et efficacité améliorées dans les profils de descente (CDO) grâce à la VNAVApplication de procédures d’espace aérien et d’arrivée basées sur les performances, qui permettent aux aéronefs de suivre leur profil optimal compte tenu de la complexité de l’espace aérien et de la circulation grâce à des descentes à profil optimisé (OPD).
B2-CDOFlexibilité et efficacité améliorées dans les profils de descente — Descentes continues (CDO) utilisant la VNAV, la vitesse requise et l’heure d’arrivéeApplication de procédures d’espace aérien et d’arrivée basées sur les performances qui optimisent le profil de vol compte tenu de la complexité de l’espace aérien et de la circulation, y compris les descentes à profil optimisé (OPD), appuyées par des opérations basées sur trajectoire et l’autoespacement.
Opérations basées sur trajectoire – TBO
B0-TBOSécurité et efficacité améliorées grâce à l’application initiale de liaisons de données en route Mise en œuvre d’un premier ensemble d’applications de liaison de données pour la surveillance et les communications dans le contrôle de la circulation aérienne (ATC).
B1-TBOSynchronisation du trafic améliorée etopérations basées sur trajectoire initialesAmélioration de la synchronisation des courants de trafic aux points de convergence en route et optimisation des séquences d’approche par l’utilisation de la fonctionnalité 4DTRAD et d’applications aéroportuaires, p. ex. D-TAXI, via l’échange air-sol de données d’aéronef relatives à une heure d’arrivée contrôlée (CTA) unique.
B3-TBOOpérations basées sur trajectoireentièrement 4DMise en œuvre de trajectoires précises à quatre dimensions, utilisées par tous les usagers du système de l’aviation aux points essentiels du système, ce qui fournit des informations cohérentes et à jour à l’échelle du système, qui sont intégrées dans des outils facilitant les décisions en matière d’ATM mondiale.
Opérations en montée continue – CCO
B0-CCOFlexibilité et efficacité améliorées dans les profils de départ — Montées continues (CCO)Application de procédures de départ permettant aux aéronefs de suivre un profil optimisé compte tenu de la complexité de l’espace aérien et de la circulation grâce à des opérations en montée continue (CCO).
Systèmes d’aéronefs télépilotés – RPAS
B1-RPASIntégration initiale des systèmes d’aéronefs télépilotés (RPA) dans l’espace aérien non réservéMise en œuvre de procédures de base pour l’exploitation des RPA en espace aérien non réservé, y compris des procédures de détection et d’évitement.
B2-RPASIntégration des RPA dans la circulationApplication de procédures d’exploitation spécialisées prévoyant les cas de défaillance de la liaison (y compris code transpondeur unique), avec technologie améliorée de détection et d’évitement.
B3-RPASGestion transparente des RPAExploitation des RPA à la surface des aérodromes et dans l’espace aérien non réservé comme tout autre aéronef.
PLAN DU SYSTÈME DE NAVIGATION AÉRIENNE 2015
29
