sky-sailor exploiting thermals - la.epfl.ch · résponsable du projet : prof. d.bonvin jannick...
TRANSCRIPT
Projet de Semestre1er Semestre Master 06/07
Sky-sailor : exploiting thermals
Assistant : Sébastien GrosRésponsable du Projet : Prof. D.Bonvin
Jannick Fenner

TABLE DES MATIÈRES 2
Table des matières1 Introduction 3
1.1 Le SkySailor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Buts du projet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Données . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Description du modèle Simulink 42.1 Structure générale du modèle . . . . . . . . . . . . . . . . . . . . . . 42.2 Structure de la comande . . . . . . . . . . . . . . . . . . . . . . . . . 4
3 Modélisation d’une thermique 53.1 Premier modèle d’une thermique . . . . . . . . . . . . . . . . . . . . 53.2 Deuxième modèle plus sophistiqhé d’une thermique . . . . . . . . . . 6
4 Adaptation du régulateur LLC aux nouvelles spécifications 74.1 Description du LLC existant . . . . . . . . . . . . . . . . . . . . . . . 74.2 Adaptations pour l’exploitation d’une thermique . . . . . . . . . . . 9
5 Stratégie "Widen on surge" 115.1 Description de la stratégie . . . . . . . . . . . . . . . . . . . . . . . . 115.2 Structure de commande . . . . . . . . . . . . . . . . . . . . . . . . . 115.3 Synthèse du régulateur "Widen On Surge" . . . . . . . . . . . . . . . 115.4 Développement du switch entre les modes standard et thermic . . . 125.5 Implémentation du régulateur dans le modèle Simulink . . . . . . . . 145.6 Simulation avec le régulateur "Widen On Surge" finale . . . . . . . . 145.7 Commentaires sur le régulateur TC1 qui implémente "Widen on Surge" 15
6 Stratégie "Thermal Tracking by Radius Control" 166.1 Description de la stratégie . . . . . . . . . . . . . . . . . . . . . . . . 166.2 Synthèse du régulateur "Radius Control" . . . . . . . . . . . . . . . 166.3 Filtre à l’entrée du régulateur LLC . . . . . . . . . . . . . . . . . . . 206.4 Implématation du régulateur "Radius Control" . . . . . . . . . . . . 216.5 Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246.6 Commentaires sur l’implémentation du régulateur "Radius Control" 32
7 Conclusion 337.1 Modélisation d’une thermique . . . . . . . . . . . . . . . . . . . . . . 337.2 Régulateur "Widen On Surge" . . . . . . . . . . . . . . . . . . . . . 337.3 Régulateur "Radius Control" . . . . . . . . . . . . . . . . . . . . . . 337.4 Perspectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
8 Remerciments 35

1 INTRODUCTION 3
1 Introduction
1.1 Le SkySailorLe SkySailor est un avion ultra-léger motorisé qui était développé par l’"Autonomoussystème Lab" de l’EPFL. Le but de ce planeur est d’effectuer des vols continus nuitet jour. L’avion est équipé par un moteur électrique qui est alimenté par une bat-terie, laquelle est chargée par des cellules solaires qui sont montées sur la surfacesupérieure des ailes de l’avion.Pour donner maximiser le temps d’autonomie énergétique deux approches sont pos-sibles :
1. Diminuer la consommation d’énergie pendant le vol, en optimisant la com-mande
2. Exploiter des sources autres que l’énergie solaire, car celle-ci est déjà utilisée,par exemple les thermique qu’on peut observer pendant des jours chauds, etqui transfèrent de grandes quantités d’énergie. Une exploitation de ces der-nières permettrait à l’avion de gagner de l’énergie potentielle sans consomma-tion d’énergie électrique supplémentaire.
La deuxième approche est le sujet de ce projet.
1.2 Buts du projetLe but principal du projet est de permettre à l’avion d’augmenter son temps d’auto-nomie énergétique en exploitant des thermiques. Pour atteindre ceci, il faut réaliserles trois étapes suivantes:
1. Développer un modèle grossier d’une thermique2. Développer une stratégie pour exploiter des thermiques3. Développer un régulateur à partir de cette stratégie
1.3 DonnéesLa base de ce projet est le travail de diplôme d’Andrea Mattio [2] qui a été effectuédurant le semestre d’hiver de l’année 2006. Ce projet était réalisé en collaborationentre le "Autonomous Systems Laboratory, ASL" de l’EPFL et du "Politecnico diTorino". Un modèle Simulink du SkySailor pour la simulation a été crée et ensuite un"autopilote" qui permet à l’avion de voler sur une trajectoire circulaire autour d’uncentre fixée à une altitude et à une vitesse plus ou moins constante été développé.Ce modèle est décrit plus précisément dans le paragraphe 2.

2 DESCRIPTION DU MODÈLE SIMULINK 4
2 Description du modèle SimulinkLe modèle Simulink fournit est un modèle très complet, dans lequel tous les élémentsde l’avion comme par exemple tout le groupe d’entrainement qui contient le moteurélectrique à courant continue, l’engrenage et l’hélice sont modélisées, . De noubreusescontraintes comme un bruits de mesures étaient introduites. Finalement le modèlemontre un comportement qui est très similaire au modèle réel, ce qu’ont montrésdes tests en vol.
2.1 Structure générale du modèleLa structure générale du modèle est la suivante. La partie en bleue de la figure1 contient tous les éléments de la modélisation de l’avion. Ce sont le calcule desforces et des moments qui agissent sur l’avion, le calcule des états du système parles équations de Lagrange et les éléments qui décrivent l’environnement comme lagénération du vent. La partie orange contient tous les éléments de contrôle qui vontêtre décrits plus tard.
Fig. 1 – Structure générale du modèle Simulink
2.2 Structure de la comandeLa contrôle du SkySailor consiste en deux régulateurs différents : un régulateurLLC (Low Level Control) et un régulateur HLC ( High Level Control). lesquels sontmontés en cascade, ce qui est illustré dans la figure 2.
Le régulateur LLC, qui est pour des raisons de robustesse et de simplicité un régu-lateur LQR (Linear Quadratic Regulator), est responsable pour
– garder la stabilité globale du système– garder une vitesse constante– garder une altitude constante– suivre la consigne sur le roulis donné par l’HLC– garder la stabilité du système en présence de vent– minimiser la consommation d’énergie– minimiser la sollicitation des servomoteurs
Le régulateur HLC est responsable pour
– Planifier une trajectoire– Suivre cette trajectoire en donnant un consigne sur le roulis au LLC
3 MODÉLISATION D’UNE THERMIQUE 5
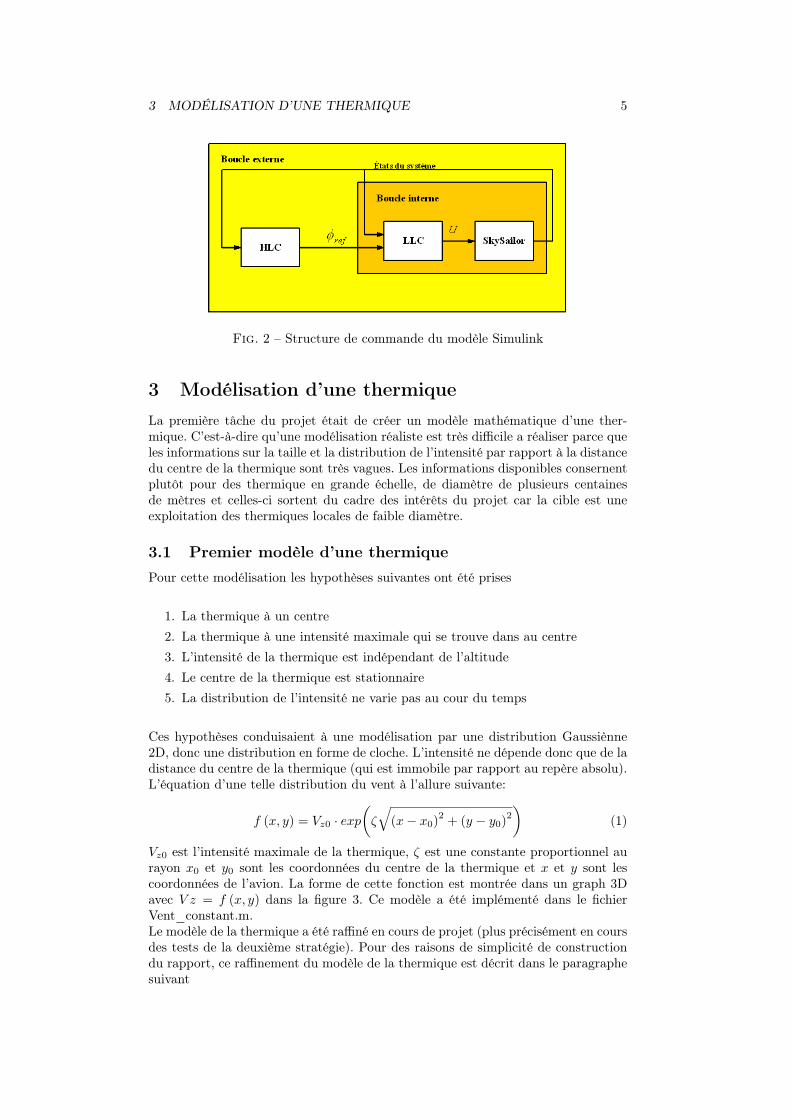
Fig. 2 – Structure de commande du modèle Simulink
3 Modélisation d’une thermiqueLa première tâche du projet était de créer un modèle mathématique d’une ther-mique. C’est-à-dire qu’une modélisation réaliste est très difficile a réaliser parce queles informations sur la taille et la distribution de l’intensité par rapport à la distancedu centre de la thermique sont très vagues. Les informations disponibles consernentplutôt pour des thermique en grande échelle, de diamètre de plusieurs centainesde mètres et celles-ci sortent du cadre des intérêts du projet car la cible est uneexploitation des thermiques locales de faible diamètre.
3.1 Premier modèle d’une thermiquePour cette modélisation les hypothèses suivantes ont été prises
1. La thermique à un centre2. La thermique à une intensité maximale qui se trouve dans au centre3. L’intensité de la thermique est indépendant de l’altitude4. Le centre de la thermique est stationnaire5. La distribution de l’intensité ne varie pas au cour du temps
Ces hypothèses conduisaient à une modélisation par une distribution Gaussiènne2D, donc une distribution en forme de cloche. L’intensité ne dépende donc que de ladistance du centre de la thermique (qui est immobile par rapport au repère absolu).L’équation d’une telle distribution du vent à l’allure suivante:
f (x, y) = Vz0 · exp(ζ
√(x− x0)
2 + (y − y0)2
)(1)
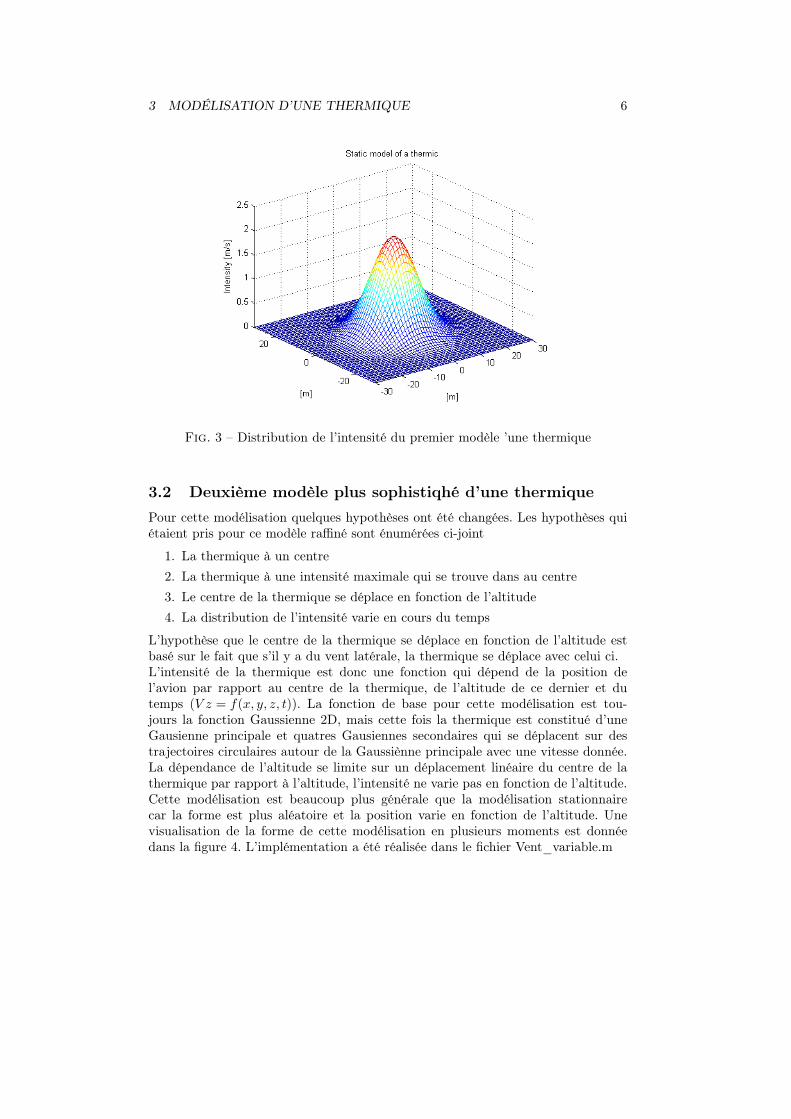
Vz0 est l’intensité maximale de la thermique, ζ est une constante proportionnel aurayon x0 et y0 sont les coordonnées du centre de la thermique et x et y sont lescoordonnées de l’avion. La forme de cette fonction est montrée dans un graph 3Davec V z = f (x, y) dans la figure 3. Ce modèle a été implémenté dans le fichierVent_constant.m.Le modèle de la thermique a été raffiné en cours de projet (plus précisément en coursdes tests de la deuxième stratégie). Pour des raisons de simplicité de constructiondu rapport, ce raffinement du modèle de la thermique est décrit dans le paragraphesuivant
3 MODÉLISATION D’UNE THERMIQUE 6
Fig. 3 – Distribution de l’intensité du premier modèle ’une thermique
3.2 Deuxième modèle plus sophistiqhé d’une thermiquePour cette modélisation quelques hypothèses ont été changées. Les hypothèses quiétaient pris pour ce modèle raffiné sont énumérées ci-joint
1. La thermique à un centre2. La thermique à une intensité maximale qui se trouve dans au centre3. Le centre de la thermique se déplace en fonction de l’altitude4. La distribution de l’intensité varie en cours du temps
L’hypothèse que le centre de la thermique se déplace en fonction de l’altitude estbasé sur le fait que s’il y a du vent latérale, la thermique se déplace avec celui ci.L’intensité de la thermique est donc une fonction qui dépend de la position del’avion par rapport au centre de la thermique, de l’altitude de ce dernier et dutemps (V z = f(x, y, z, t)). La fonction de base pour cette modélisation est tou-jours la fonction Gaussienne 2D, mais cette fois la thermique est constitué d’uneGausienne principale et quatres Gausiennes secondaires qui se déplacent sur destrajectoires circulaires autour de la Gaussiènne principale avec une vitesse donnée.La dépendance de l’altitude se limite sur un déplacement linéaire du centre de lathermique par rapport à l’altitude, l’intensité ne varie pas en fonction de l’altitude.Cette modélisation est beaucoup plus générale que la modélisation stationnairecar la forme est plus aléatoire et la position varie en fonction de l’altitude. Unevisualisation de la forme de cette modélisation en plusieurs moments est donnéedans la figure 4. L’implémentation a été réalisée dans le fichier Vent_variable.m

4 ADAPTATION DU RÉGULATEUR LLC AUX NOUVELLES SPÉCIFICATIONS7
Fig. 4 – Distribution de l’intensité de la thermique en cours du temps emtre 5 et20 [s] avec un pas de temps de 5 [s]
4 Adaptation du régulateur LLC aux nouvelles spé-cifications
4.1 Description du LLC existantLe régulateur choisi pour le LLC est un régulateur LQR (Linear Quadratic Regula-tor) qui est base sur une technique de commande d’état optimale 1 pour un systèmelinéaire ou linéarisé et qui peut être décrit par une équation du type :
x(t) = Ax(t) +Bu(t) (2)
Car le système SkySailor n’est pas linéaire il faut d’abord le linéariser. Cette linéari-sation consiste de une recherche d’un point de fonctionnement et ensuite des calculsdes matrices A et B. 2. A partir de ces matrices on peut développer une matricestatique K pour générer l’input du système selon l’équation
u(t) = −Kx(t) (3)
La matrice K est calculée à partir des matrices A et B et les matrices de pondérations(Q pour les états et R et pour les entrées du système) par la commande Matlablqrd(A,B,Q,R,h) où h est le temps d’échantillonnage qui est 0.04[s]. Lorsqu’il n’existepas d’algorithme analytique pour le choix des paramètres des deux matrices Q etR, étaient cherchée par en les ajustants en cours des nombreux simulations.Initialement le régulateur LLC était sensé de garder l’avion dans un état stablequi est définit par l’altitude, la vitesse et un roulis phi donné, permet à l’avion derester dans une trajectoire circulaire, s’il n’y a pas de perturbations comme parexemple de vent. Pour parvenir aux perturbations qui font que l’avion abandonne
1plus de détails sur ce sujet peuvent être trouvés dans le livre Optimal Control Linear Quadra-ticMethods [1]
2La démarche de ceci est décrite dans le rapport de monsieur Mattio [2]

4 ADAPTATION DU RÉGULATEUR LLC AUX NOUVELLES SPÉCIFICATIONS8
la trajectoire voulue, un régulateur HLC (High Level Control) était introduit. Cerégulateur PID impose une consigne sur le roulis à partir des mesures de la position,de la vitesse et des du cap. Pour garantir un fonctionnement du système pendantune longue période de vol un régulateur LLC très "mou" était choisi pour éviter desfortes sollicitations sur les servomoteurs qui impliquent une consommation d’énergieélectrique élevée et une usure des moteurs.Les états qui sont contrôlés avec ce régulateur sont les suivants:
[zE , φ, θ, xe, ye, ˙zE , φ, θ)
](4)
zE : altitude en [m]φ : roulis en [◦]θ : pitch en [◦]xe : vitesse selon x dans le repère de l’avion en
[ms
]ye : glissement dans la direction y dans le repère de l’avion en
[ms
]˙zE : vitesse selon z dans le repère absolut en
[ms
]φ : vitesse de rotation autour de l’axe x dans le repaire de l’avion en
[degs
]θ : vitesse de rotation autour de l’axe y dans le repaire de l’aivonen en
[degs
]Comme toutes les vitesses xE , yE et zE sont initialement calculées dans le repèreabsolu, il faut trouver une matrice de transformation de cordonnées Γ pour pouvoirles controller dans le repère de l’avion.Les angles et les axes sont indiqués dans la figure 5
Fig. 5 – Angles et axes dans le repère de l’avion
Les entrées du système sont les suivantes :
u1 = uail
u2 = uvtaill
u3 = uvtailr
u4 = umoteur

4 ADAPTATION DU RÉGULATEUR LLC AUX NOUVELLES SPÉCIFICATIONS9
uail : consigne pour les ailerons (uaill = −uailr ) en [◦]uvtaill : consigne pour l’empennage en V gauche en [◦]uvtailr : consigne pour l’empennage en V droite en [◦]umoteur : consigne pour la tension pour le moteur en [V ]
3
4.2 Adaptations pour l’exploitation d’une thermiquePour une exploitation efficace d’une thermique il faut adapter ce régulateur auxnouveaux besoins. Les changements principaux sont
– L’altitude zE n’est plus controlée– La vitesse de montée zE n’est plus controlée– La consigne pour la tension aux bornes du moteur umoteur n’est plus contrôlée, car
le moteur est éteint au moment ou le TC est active pour épargner un maximumd’énergie
– Augmenter l’agressivité du régulateur en changeant les paramètres de pondéra-tion dans la matrice Q
Les nouveaux états controllés sont donc[φ, θ, xe, ye, φ, θ
](5)
et comme le moteur est éteint pendent l’exploitation les nouvelles entrées du systèmesont
[uail, uvtaill , uvtailr ] (6)
Pour calculer les matrices A et B il faut d’abord calculer un nouveau point de fonc-tionnement par la méthode mentionnée plus haut. La recherche à donné les valeurssuivantes :
φ = 32.8455 [◦]θ = -3.7162 [◦]xe = 8.5 [m/s]uail = 1.1404 [◦]uvtaill = 1.0763 [◦]uvtailr = -1.4244 [◦]
Tous les autres états sont égaux à zéro dans le point de fonctionnement.Avant de pouvoir calculer la nouvelle matrice K il faut trouver une matrice de trans-formation de coordonnées Γ qui réponde aux spécifications données. Celle ci prennela forme suivante :
3La méthode pour trouver un point de fonctionnement et les matrices Γ, A, B, Q et R estdécrite dans le rapport de A.Mattio [2]
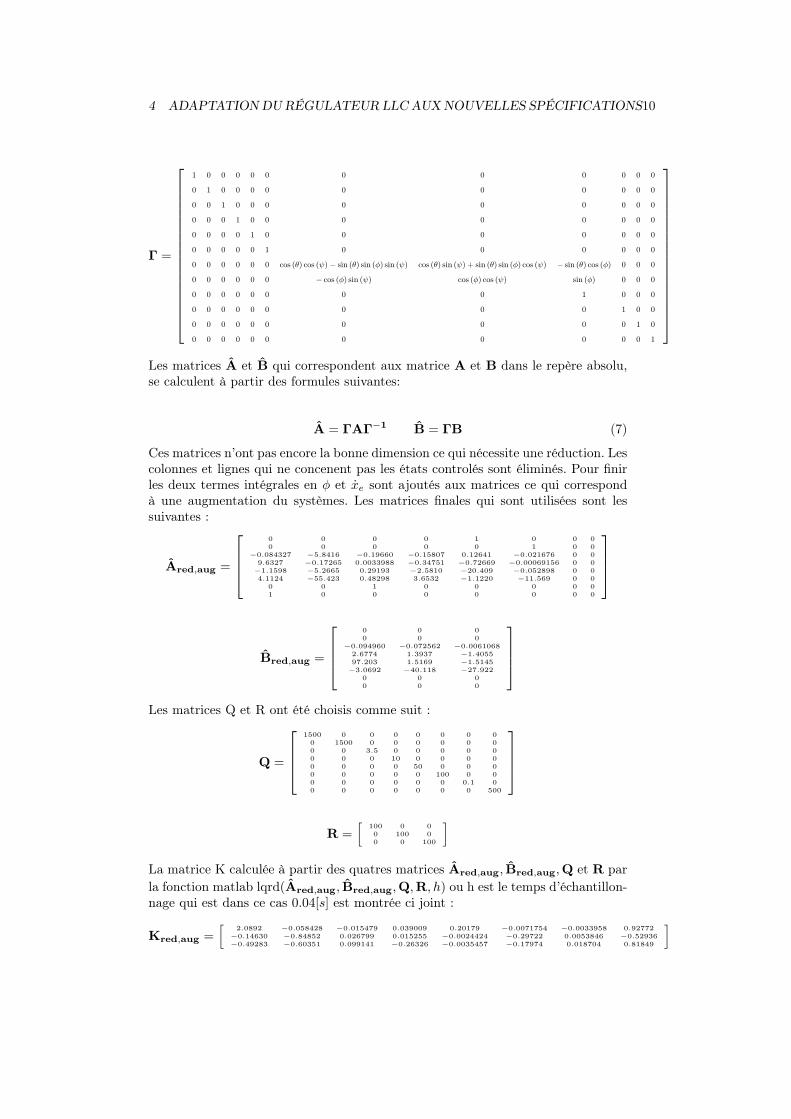
4 ADAPTATION DU RÉGULATEUR LLC AUX NOUVELLES SPÉCIFICATIONS10
Γ =
1 0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 cos (θ) cos (ψ)− sin (θ) sin (φ) sin (ψ) cos (θ) sin (ψ) + sin (θ) sin (φ) cos (ψ) − sin (θ) cos (φ) 0 0 0
0 0 0 0 0 0 − cos (φ) sin (ψ) cos (φ) cos (ψ) sin (φ) 0 0 0
0 0 0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0 0 1
Les matrices A et B qui correspondent aux matrice A et B dans le repère absolu,se calculent à partir des formules suivantes:
A = ΓAΓ−1 B = ΓB (7)
Ces matrices n’ont pas encore la bonne dimension ce qui nécessite une réduction. Lescolonnes et lignes qui ne concenent pas les états controlés sont éliminés. Pour finirles deux termes intégrales en φ et xe sont ajoutés aux matrices ce qui correspondà une augmentation du systèmes. Les matrices finales qui sont utilisées sont lessuivantes :
Ared,aug =
0 0 0 0 1 0 0 00 0 0 0 0 1 0 0
−0.084327 −5.8416 −0.19660 −0.15807 0.12641 −0.021676 0 09.6327 −0.17265 0.0033988 −0.34751 −0.72669 −0.00069156 0 0−1.1598 −5.2665 0.29193 −2.5810 −20.409 −0.052898 0 04.1124 −55.423 0.48298 3.6532 −1.1220 −11.569 0 0
0 0 1 0 0 0 0 01 0 0 0 0 0 0 0
Bred,aug =
0 0 00 0 0
−0.094960 −0.072562 −0.00610682.6774 1.3937 −1.405597.203 1.5169 −1.5145−3.0692 −40.118 −27.922
0 0 00 0 0
Les matrices Q et R ont été choisis comme suit :
Q =
1500 0 0 0 0 0 0 0
0 1500 0 0 0 0 0 00 0 3.5 0 0 0 0 00 0 0 10 0 0 0 00 0 0 0 50 0 0 00 0 0 0 0 100 0 00 0 0 0 0 0 0.1 00 0 0 0 0 0 0 500
R =[
100 0 00 100 00 0 100
]La matrice K calculée à partir des quatres matrices Ared,aug, Bred,aug,Q et R parla fonction matlab lqrd(Ared,aug, Bred,aug,Q,R, h) ou h est le temps d’échantillon-nage qui est dans ce cas 0.04[s] est montrée ci joint :
Kred,aug =[
2.0892 −0.058428 −0.015479 0.039009 0.20179 −0.0071754 −0.0033958 0.92772−0.14630 −0.84852 0.026799 0.015255 −0.0024424 −0.29722 0.0053846 −0.52936−0.49283 −0.60351 0.099141 −0.26326 −0.0035457 −0.17974 0.018704 0.81849
]
5 STRATÉGIE "WIDEN ON SURGE" 11
5 Stratégie "Widen on surge"
5.1 Description de la stratégieComme le titre le dit, cette stratégie est basé sur le principe " widen on surge ", quiest souvent utilisé par des pilotes des planeurs et quelle est proposé dans beaucoupde livres qui sont consacré au sujet des stratégies de vols heuristiques.
L’idée principale est d’ajuster le roulis en fonction de la variation de la vitesse demontée qui est mesuré par un variomètre. Quand le pilote ressenti une variation dela vitesse de montée ou en autres mots une accélération verticale (soit positive ounégative) il impose un virage (le sens est normalement aléatoire, mais les piloteschoisissent en 95% des cas toujours le même). Quand maintenant la vitesse demontée continue à augmenter il diminue l’angle du roulis pour ouvrir la cercle etensuite quand elle diminue, il resserre pour centrer la trajectoire autour du centrede la thermique. Evidemment ceci ne marche que dans le cas ou le pilot à choisile bon sens, sinon il va abandonner la thermique. Le but est donc de trouver unroulis pour lequel la vitesse de montée soit plus ou moins stable ce qui implique unetrajectoire circulaire autour du centre de la thermique.
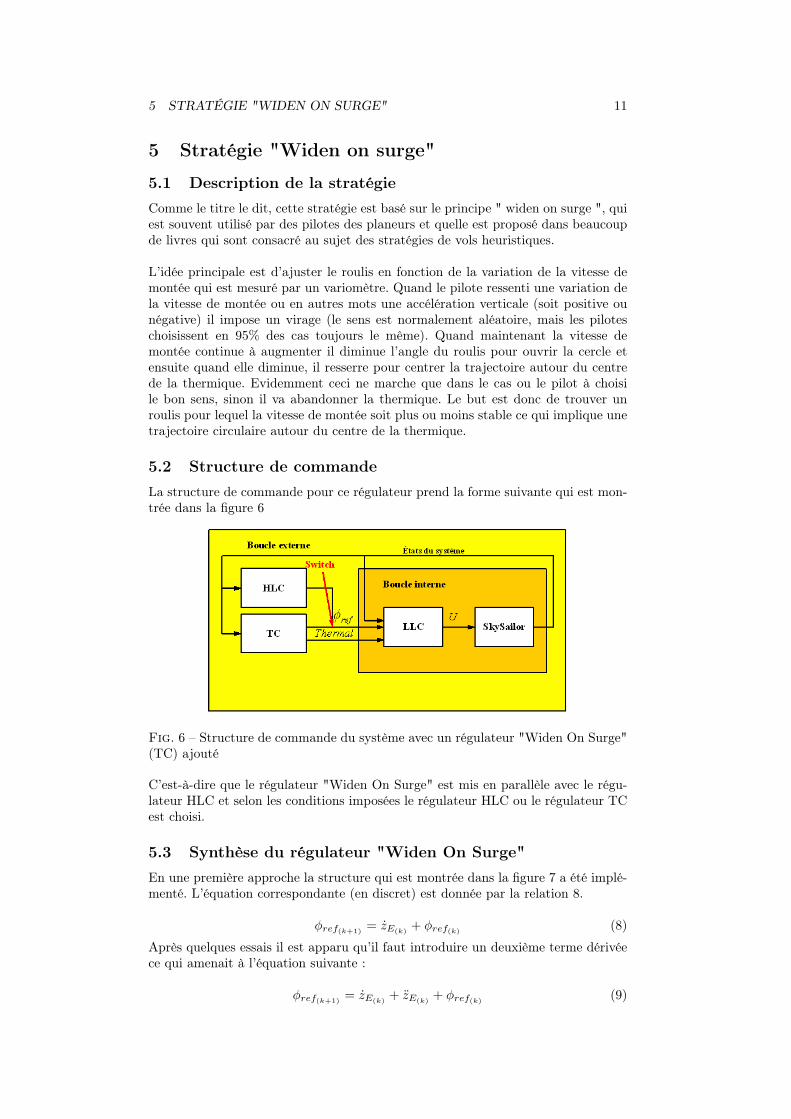
5.2 Structure de commandeLa structure de commande pour ce régulateur prend la forme suivante qui est mon-trée dans la figure 6
Fig. 6 – Structure de commande du système avec un régulateur "Widen On Surge"(TC) ajouté
C’est-à-dire que le régulateur "Widen On Surge" est mis en parallèle avec le régu-lateur HLC et selon les conditions imposées le régulateur HLC ou le régulateur TCest choisi.
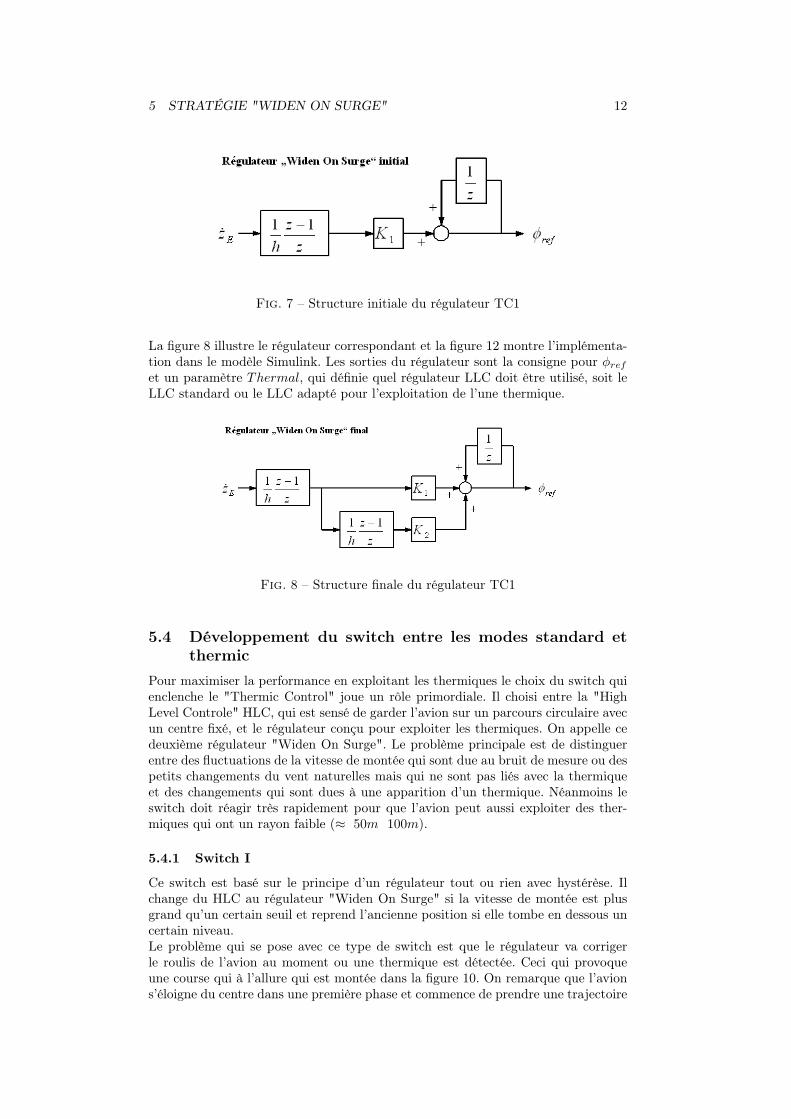
5.3 Synthèse du régulateur "Widen On Surge"En une première approche la structure qui est montrée dans la figure 7 a été implé-menté. L’équation correspondante (en discret) est donnée par la relation 8.
φref(k+1) = zE(k) + φref(k) (8)
Après quelques essais il est apparu qu’il faut introduire un deuxième terme dérivéece qui amenait à l’équation suivante :
φref(k+1) = zE(k) + zE(k) + φref(k) (9)
5 STRATÉGIE "WIDEN ON SURGE" 12
Fig. 7 – Structure initiale du régulateur TC1
La figure 8 illustre le régulateur correspondant et la figure 12 montre l’implémenta-tion dans le modèle Simulink. Les sorties du régulateur sont la consigne pour φref
et un paramètre Thermal, qui définie quel régulateur LLC doit être utilisé, soit leLLC standard ou le LLC adapté pour l’exploitation de l’une thermique.
Fig. 8 – Structure finale du régulateur TC1
5.4 Développement du switch entre les modes standard etthermic
Pour maximiser la performance en exploitant les thermiques le choix du switch quienclenche le "Thermic Control" joue un rôle primordiale. Il choisi entre la "HighLevel Controle" HLC, qui est sensé de garder l’avion sur un parcours circulaire avecun centre fixé, et le régulateur conçu pour exploiter les thermiques. On appelle cedeuxième régulateur "Widen On Surge". Le problème principale est de distinguerentre des fluctuations de la vitesse de montée qui sont due au bruit de mesure ou despetits changements du vent naturelles mais qui ne sont pas liés avec la thermiqueet des changements qui sont dues à une apparition d’un thermique. Néanmoins leswitch doit réagir très rapidement pour que l’avion peut aussi exploiter des ther-miques qui ont un rayon faible (≈ 50m 100m).
5.4.1 Switch I
Ce switch est basé sur le principe d’un régulateur tout ou rien avec hystérèse. Ilchange du HLC au régulateur "Widen On Surge" si la vitesse de montée est plusgrand qu’un certain seuil et reprend l’ancienne position si elle tombe en dessous uncertain niveau.Le problème qui se pose avec ce type de switch est que le régulateur va corrigerle roulis de l’avion au moment ou une thermique est détectée. Ceci qui provoqueune course qui à l’allure qui est montée dans la figure 10. On remarque que l’avions’éloigne du centre dans une première phase et commence de prendre une trajectoire

5 STRATÉGIE "WIDEN ON SURGE" 13
plus ou moins circulaire dans une deuxième phase. Ce phénomène est due au fait queselon notre stratégie "widen on surge" qui est expliqué dans la section 5.1 l’aviondiminue l’angle du roulis si la vitesse de montée augmente, et vis versa.
5.4.2 Switch II
Ce switch fonctionne d’une manière bien différente que celui décrit précédemment.La stratégie est cette fois de changer le régulateur au moment où la vitesse de montéeavait atteint son maximum. Cette approche permette d’éviter que le régulateurimpose une consigne sur le roulis dans le mauvais sens ce qui aboutissait au faitque le régulateur introduit un virage qui conduit à un éloignement du centre dela thermique. La condition de changement est dans ce cas une vitesse de montéequi est plus grande qu’une certaine valeur et que l’accélération est égale à zéro. Lafigure 9 montre le développement de la vitesse et l’accélération de montée en coursd’un passage droite à travers d’une thermique. C’est-à-dire qu’un seuil faiblemetnnégatif de l’accélération verticale est préférable pour éviter que des perturbationsdues au bruit de mesure et des variations naturelles peuvent causer un changementdu régulateur non voulu.
Fig. 9 – Développement de la vitesse de montée et de sa variation en cours d’unpassage droit à travers d’un thermique
Fig. 10 – Trajectoire du Sky-Sailor en utilisant le switch I
Fig. 11 – Trajectoire du Sky-Sailor en utilisant le switch II
5 STRATÉGIE "WIDEN ON SURGE" 14
Paramètre ValeurFiltre à l’entrée 0.025
1−0.975z−1
Filtre sur la première dérivée 0.051−0.95z−1
Filtre sur la deuxième dérivée 0.051−0.95z−1
Filtre de garde à l’entrée de la boucle interne 0.11−0.9z−1
K1 0.0036K2 0.0308Saturation première dérivée ±0.0055Saturation deuxième dérivée ±0.0175Saturation φref ±45◦
Tab. 1 – Choix des paramètres finales pour le régulateur "Widen On Surge"
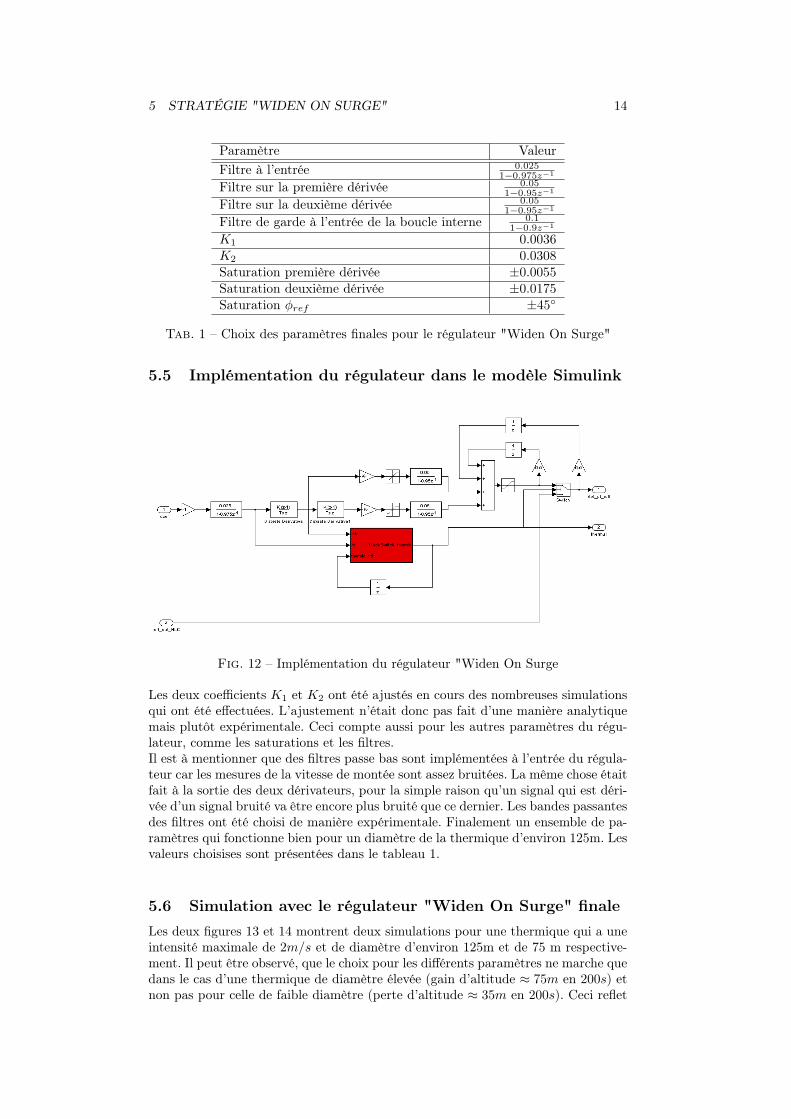
5.5 Implémentation du régulateur dans le modèle Simulink
Fig. 12 – Implémentation du régulateur "Widen On Surge
Les deux coefficients K1 et K2 ont été ajustés en cours des nombreuses simulationsqui ont été effectuées. L’ajustement n’était donc pas fait d’une manière analytiquemais plutôt expérimentale. Ceci compte aussi pour les autres paramètres du régu-lateur, comme les saturations et les filtres.Il est à mentionner que des filtres passe bas sont implémentées à l’entrée du régula-teur car les mesures de la vitesse de montée sont assez bruitées. La même chose étaitfait à la sortie des deux dérivateurs, pour la simple raison qu’un signal qui est déri-vée d’un signal bruité va être encore plus bruité que ce dernier. Les bandes passantesdes filtres ont été choisi de manière expérimentale. Finalement un ensemble de pa-ramètres qui fonctionne bien pour un diamètre de la thermique d’environ 125m. Lesvaleurs choisises sont présentées dans le tableau 1.
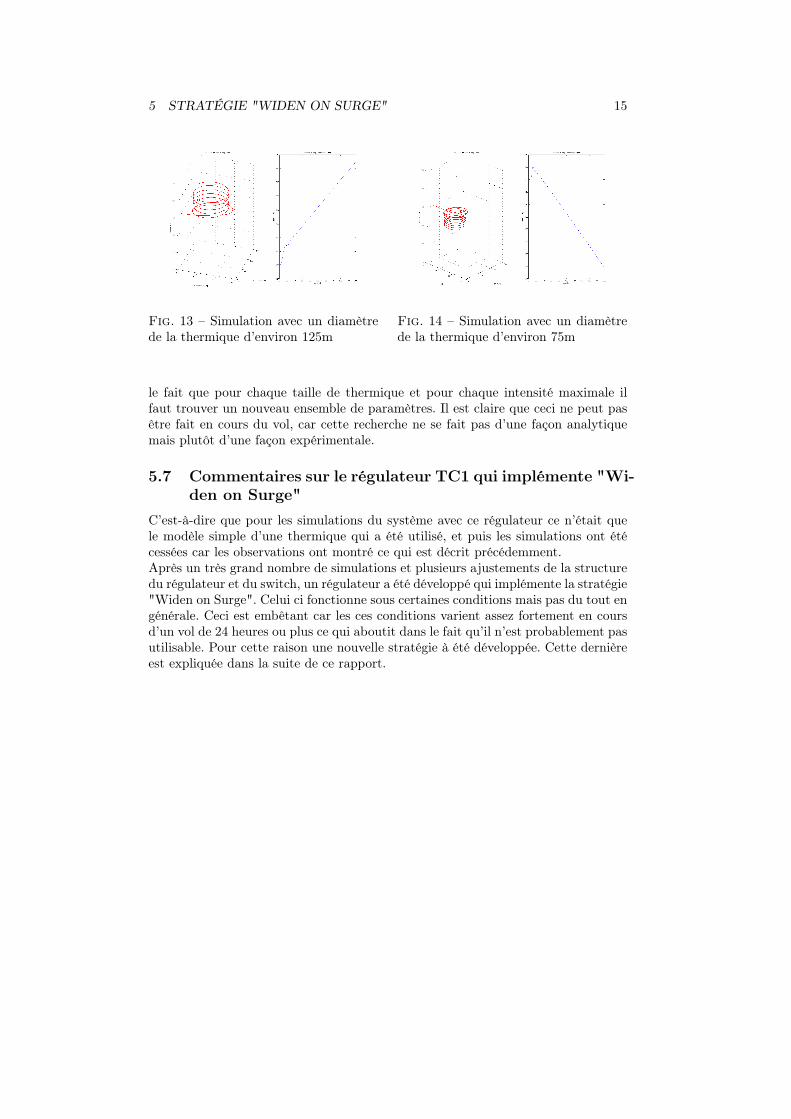
5.6 Simulation avec le régulateur "Widen On Surge" finaleLes deux figures 13 et 14 montrent deux simulations pour une thermique qui a uneintensité maximale de 2m/s et de diamètre d’environ 125m et de 75 m respective-ment. Il peut être observé, que le choix pour les différents paramètres ne marche quedans le cas d’une thermique de diamètre élevée (gain d’altitude ≈ 75m en 200s) etnon pas pour celle de faible diamètre (perte d’altitude ≈ 35m en 200s). Ceci reflet
5 STRATÉGIE "WIDEN ON SURGE" 15
Fig. 13 – Simulation avec un diamètrede la thermique d’environ 125m
Fig. 14 – Simulation avec un diamètrede la thermique d’environ 75m
le fait que pour chaque taille de thermique et pour chaque intensité maximale ilfaut trouver un nouveau ensemble de paramètres. Il est claire que ceci ne peut pasêtre fait en cours du vol, car cette recherche ne se fait pas d’une façon analytiquemais plutôt d’une façon expérimentale.
5.7 Commentaires sur le régulateur TC1 qui implémente "Wi-den on Surge"
C’est-à-dire que pour les simulations du système avec ce régulateur ce n’était quele modèle simple d’une thermique qui a été utilisé, et puis les simulations ont étécessées car les observations ont montré ce qui est décrit précédemment.Après un très grand nombre de simulations et plusieurs ajustements de la structuredu régulateur et du switch, un régulateur a été développé qui implémente la stratégie"Widen on Surge". Celui ci fonctionne sous certaines conditions mais pas du tout engénérale. Ceci est embêtant car les ces conditions varient assez fortement en coursd’un vol de 24 heures ou plus ce qui aboutit dans le fait qu’il n’est probablement pasutilisable. Pour cette raison une nouvelle stratégie à été développée. Cette dernièreest expliquée dans la suite de ce rapport.

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 16
6 Stratégie "Thermal Tracking by Radius Control"
6.1 Description de la stratégieL’idée de base est de faire une estimation de la position du centre de la thermiqueet ensuite d’ajuster le rayon de courbure de la trajectoire pour que cette dernièredécrite une cercle centrée dans le centre estimé. L’estimation se fait à partir d’unesorte de carte de la répartition de l’intensité de la thermique laquelle est crée enenregistrant un certain nombre k de mesures de la vitesse de montée V zk auxpositions (xk, yk). Une telle carte est montrée dans la figure 15, chaque petite cerclecorresponde à une mesure et la couleur indique la vitesse de montée en ce point là.
Fig. 15 – Exemple d’une carte des mesures de la vitesse de montée V zk en fonctionde la position (xk, yk)
6.2 Synthèse du régulateur "Radius Control"La synthèse du régulateur consiste de quatre parties.– Développement d’un simple modèle dynamique qui décrit le processus de l’ex-
ploitation d’une thermique– Développement d’un estimateur de la position du centre de la thermique– Développement du régulateur qui contrôle le rayon de courbure de la trajectoire– Concevoir un filtre de garde à l’entrée du régulateur LLC– Implementation du réglateur dans le modèle Simulink
6.2.1 Développement d’un système dynamique du processus de l’ex-ploitation d’une thermique
Considérons l’avion comme un véhicule qui se déplace avec une vitesse constante xe
sur une trajectoire circulaire autour du centre estimé de la thermique et qu’il estcontrôlé par une consigne pour φ. Le centre de la thermique est placé dans l’originedu référentiel. Tout ceci est illustré dans la figure 16. De cette figure on peut tirerles deux premières équations du système
xE = xe · sinψyE = −xe · cosψ

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 17
ou xE et yE sont les vitesses selon x et y respectivement dans le repère absolu et ψest le cap.Une troisième équation peut être tiré de la figure 17 en faisant les calcules suivants:∑
~F = ~Fgravit + ~Fcentrifuge + ~Fportance = 0 (10)
ou
~Fcentrifuge = MRψ · ~er = Mψxe · ~er (11)
~Fgravité = −Mg · ~ez (12)
~Fportance = −Fportance · sinφ · ~er + Fportance · cosφ · ~ez (13)
Ces relations amènent aux équations suivantes selon les directions r et z
selon ~ez : Fportance · sinφ−Mg = 0 =⇒ Fportance = Mgsin φ
selon ~er : −Fportance · cosφ+Mψxe = 0 =⇒ Mψxe = Mgsin φ
et finalementψ =
g
xe· tanφ (14)
La quatrième équation sort du fait que l’avion est contrôlé sur la première dérivéedu roulis φ. Le système peut donc être décrit par le système d’équations suivant :
xE = xe · sinψ (15)yE = −xe · cosψ (16)
ψ =g
xe· tanφ (17)
φ = u (18)
On voit immédiatement que le système à commander est un système non-linéairecar ils apparaissent les foncions trigonométriques sin, cos et tan
Fig. 16 – Schéma du système dans leplan xy
Fig. 17 – Schéma du système dans leplan perpendiculaire à la vitesse xe

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 18
6.2.2 Développement de l’estimateur pour la position du centre de lathermique
L’estimateur pour le centre de la thermique joue un rôle très important pour cerégulateur. Il y a deux aspects principaux qui doivent être pris en compte pourcette estimation.
1. L’influence d’une seule mesure ne doit pas être trop grande pour éviter quel’estimation varie trop fortement d’une mesure à l’autre pour éviter que lerayon de courbure doit être ajusté trop fortement d’un moment à l’autre
2. L’estimation doit être suffisament actuelle pour qu’elle arrive de suivre desdéplacements du centre de la thermique
Estimateur I Cet estimateur applique la méthode des moindres carrées pourcalculer une estimation du centre de la thermique. Supposons que la distributionde l’intensité de la thermique suit un fonction quadratique de la position (x, y) quiest symétrique en x ety dont l’équation est la suivante:
Vz(x, y) = a · x+ b · y + c+Hx · x2 +Hx · y2 (19)
L’ensemble des paramètres θ = [a, b, c,Hx] doit donc être ajustés pour que la fonc-tion 19 approxime le mieux les mesures qui sont à disposition. Ceci peut être décritpar l’équation suivante:
θ = argminθJ =
12
∑k
(Vz(xk, yk)− V k
z (xk, yk))2
(20)
(xk, yk) sont les positions de l’avion mesurée par GPS et V kz les vitesses de montée
mesurées par le variomètre en ces positions. Le set des paramètres θ peut être calculépar la méthode des moindres carrées car
Vz(xk, k) =[xk yk 1 x2
k y2k
]·
abcHx
(21)
La fonction J peut être minimisée en résolvant l’équation
θ =
x1 y1 1 x21 y2
1...xN yN 1 x2
N y2N
†
·
V 1z...V N
z
(22)
ou M† est la matrice pseudo-inverse de M et N le nombre de mesures qui sont prisen compte. L’extremum de la fonction 19 se trouve donc à l’endroit ou le gradientest nul.
∇Vz(x, y) =[a+ 2Hxxb+ 2Hxx
](23)
Le centre estimé de la thermique se trouve au point
x0 = − a
2Hx
y0 = − b
2Hx

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 19
Les simulations ont montrées que cette estimation est fortement bruité si les va-leurs pour Hx deviennent faibles. Pour cette raison une deuxième approche étaitdéveloppée.
Estimateur II L’estimation avec cet estimateur est calculée comme un centre degravité. Les calcules pour cette estimation sont plus simples que ceux pour l’estima-teur I, car aucune matrice pseudo-inverse ne doit être calculée. Les relations pourle calcule de x0 et y0 sont données par les relations suivantes :
x0 =∑
N V kz · xk∑
N V kz
(24)
x0 =∑
N V kz · yk∑
N V kz
(25)
Les estimations trouvées par cette méthode ont été bien meilleures que celles avecl’estimateur I décrit précédemment. Cet estimateur était finalement implémentédans le système.
6.2.3 Développement du régulateur "Radius Control"
Le but de ce contrôleur est de pousser le système décrit par les équations (15) -(18) de tourner autour le centre estimé par l’estimateur. Ceci peut être atteint endéfinissant la sortie R comme suivant:
R =√
(x− x0)2 + (y − y0)2 (26)
Comme l’entrée du système u = φ n’apparaisse pas dans cette équation on la dérivejusqu’à φ apparaisse.
R =xe
R[(x− x0) cosψ − (y − y0) sinψ] (27)
R =1R
[x2
e − g tanφ [(x− x0) sinψ + (y − y0) cosψ]− r2]
(28)
R(3) = −3RRR
− g2
x2e
tanφ2R︸ ︷︷ ︸a
−u g
R cosφ2[(x− x0) sinψ + (y − y0) cosψ]︸ ︷︷ ︸
b
(29)
(30)
On peut observer que dans l’équation 29 l’entrée du système apparaisse (indiqué enrouge). La dynamique de ce système qui est en faite une chaine d’intégrateurs, peutêtre décrit par le système d’équations linéaires suivant:
x1 = R x1 = R = x2
x2 = R =⇒ x2 = R = x3
x3 = R x3 = R(3) = w
De ces équations les matrices A et B du système x = Ax + bu peuvent être tirées.
A =
0 1 00 0 10 0 0
B =
000

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 20
A partir de ces matrices et les matrices de pondération Q et R un régulateur d’étatLQR peut être calculé qui permet de pousser le rayon R vers un rayon de référence.
Q =
1 0 00 1 00 0 1
R =[
100]
⇒ K = lqrd [A,B,Q,R, h]
h est de nouveau le temps d’échantillonnage. Celui est égale à 1 [s] car les mesuresdu GPS ne sont disponibles qu’une fois par seconde et le régulateur ne peut pasfonctionner plus rapidement que les mesures arrives. La loi de commande prennedonc la forme
w = R(3) = −K ·
R−Rref
R
R
(31)
Pour arriver de w à u = φ il suffit d’appliquer la relation
u = −w − a
b=
K ·
R−Rref
R
R
b
(32)
La matrice calculée pour K est la suivante
K =
0.0622500.313760.75962
(33)
La dernière tâche consiste de transformer la consigne en φ dans une consigne sur leroulis φref car le régulateur LLC est sensée de suivre une consigne sur ce dernier etnon pas sur φ. Ceci était fait en approximant le système par un système du premierordre qui à une fonction de transfert du type:
G(s) =φ
φref=
1τs+ 1
(34)
Retour dans le domaine temporelle la relation 34 se transforme dans la relation 35qui est finalement implémentée.
φref = φτ + φ = uτ + φ (35)
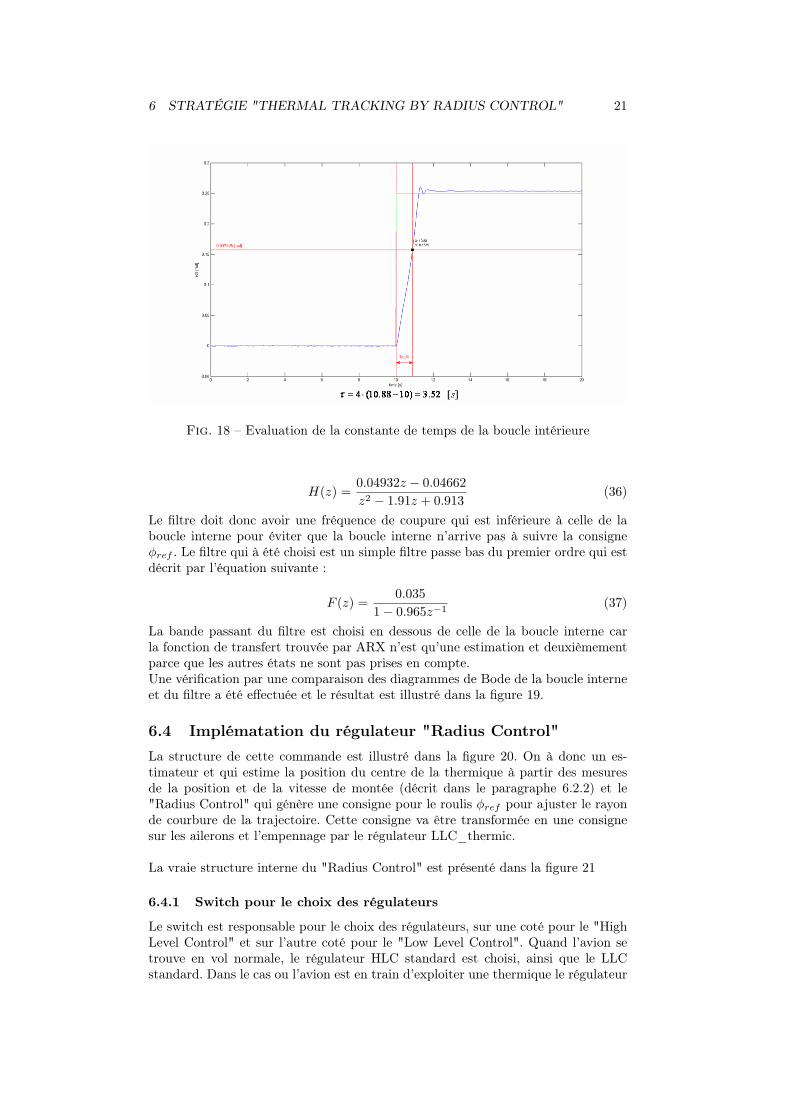
τ est la constante de temps de la boucle interne (voir figure 2). Cette dernièreest calculé à partir de la réponse indicielle qui est trouvée expérimentalement enappliquent un saut d’unité sur la boucle interne. Ceci est illustré dans la figure 18.
6.3 Filtre à l’entrée du régulateur LLCComme le régulateur TC n’ajuste la consigne qu’une fois par seconde la consignese comporte comme un suite de sauts d’unité qui ne peuvent pas être suivi parle régulateur LLC. Pour parvenir à cet effet il faut installer un filtre passe bas àl’entrée du régulateur LLC. Pour pouvoir concevoir de ce filtre il faut connaitre labande passante de la boucle interne qui contienne le régulateur LLC et le modèlede l’avion lui même. Pour ceci une identification à était effectuée par la fonctionmatlab ARC. Cette analyse à fournit la fonction de transfert suivante:
6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 21
Fig. 18 – Evaluation de la constante de temps de la boucle intérieure
H(z) =0.04932z − 0.04662z2 − 1.91z + 0.913
(36)
Le filtre doit donc avoir une fréquence de coupure qui est inférieure à celle de laboucle interne pour éviter que la boucle interne n’arrive pas à suivre la consigneφref . Le filtre qui à été choisi est un simple filtre passe bas du premier ordre qui estdécrit par l’équation suivante :
F (z) =0.035
1− 0.965z−1(37)
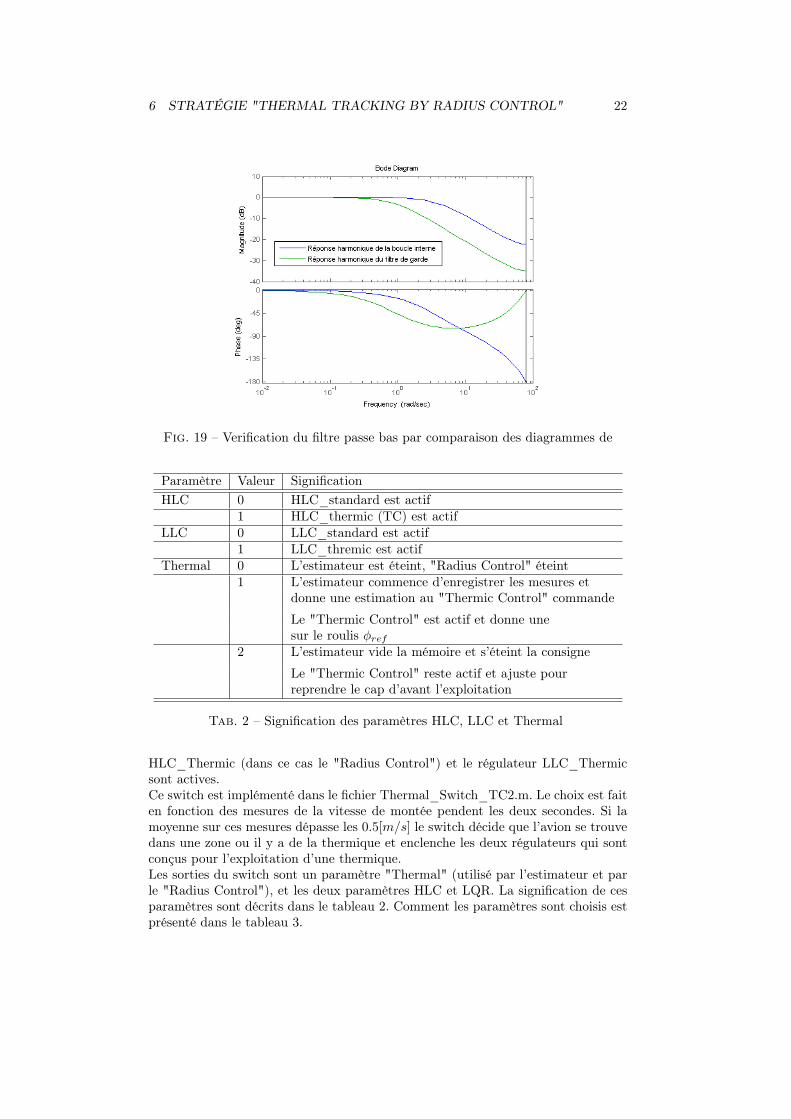
La bande passant du filtre est choisi en dessous de celle de la boucle interne carla fonction de transfert trouvée par ARX n’est qu’une estimation et deuxièmementparce que les autres états ne sont pas prises en compte.Une vérification par une comparaison des diagrammes de Bode de la boucle interneet du filtre a été effectuée et le résultat est illustré dans la figure 19.
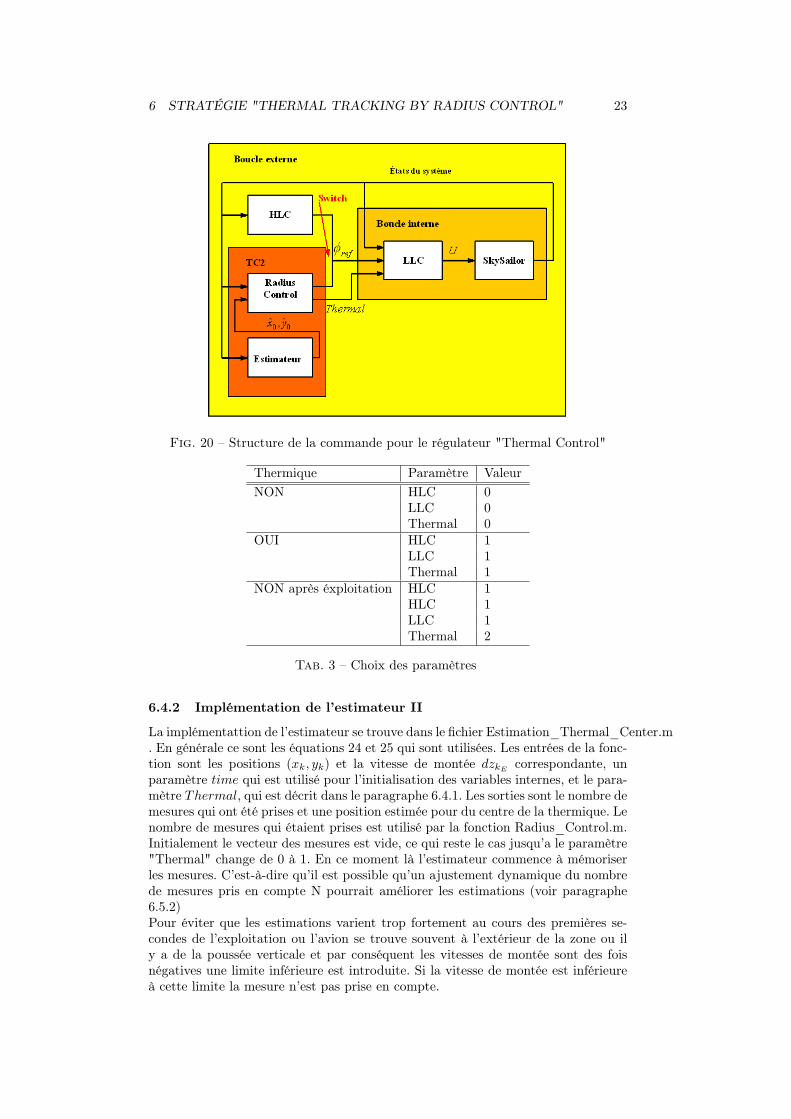
6.4 Implématation du régulateur "Radius Control"La structure de cette commande est illustré dans la figure 20. On à donc un es-timateur et qui estime la position du centre de la thermique à partir des mesuresde la position et de la vitesse de montée (décrit dans le paragraphe 6.2.2) et le"Radius Control" qui génère une consigne pour le roulis φref pour ajuster le rayonde courbure de la trajectoire. Cette consigne va être transformée en une consignesur les ailerons et l’empennage par le régulateur LLC_thermic.
La vraie structure interne du "Radius Control" est présenté dans la figure 21
6.4.1 Switch pour le choix des régulateurs
Le switch est responsable pour le choix des régulateurs, sur une coté pour le "HighLevel Control" et sur l’autre coté pour le "Low Level Control". Quand l’avion setrouve en vol normale, le régulateur HLC standard est choisi, ainsi que le LLCstandard. Dans le cas ou l’avion est en train d’exploiter une thermique le régulateur
6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 22
Fig. 19 – Verification du filtre passe bas par comparaison des diagrammes de
Paramètre Valeur SignificationHLC 0 HLC_standard est actif
1 HLC_thermic (TC) est actifLLC 0 LLC_standard est actif
1 LLC_thremic est actifThermal 0 L’estimateur est éteint, "Radius Control" éteint
1 L’estimateur commence d’enregistrer les mesures etdonne une estimation au "Thermic Control" commande
Le "Thermic Control" est actif et donne unesur le roulis φref
2 L’estimateur vide la mémoire et s’éteint la consigne
Le "Thermic Control" reste actif et ajuste pourreprendre le cap d’avant l’exploitation
Tab. 2 – Signification des paramètres HLC, LLC et Thermal
HLC_Thermic (dans ce cas le "Radius Control") et le régulateur LLC_Thermicsont actives.Ce switch est implémenté dans le fichier Thermal_Switch_TC2.m. Le choix est faiten fonction des mesures de la vitesse de montée pendent les deux secondes. Si lamoyenne sur ces mesures dépasse les 0.5[m/s] le switch décide que l’avion se trouvedans une zone ou il y a de la thermique et enclenche les deux régulateurs qui sontconçus pour l’exploitation d’une thermique.Les sorties du switch sont un paramètre "Thermal" (utilisé par l’estimateur et parle "Radius Control"), et les deux paramètres HLC et LQR. La signification de cesparamètres sont décrits dans le tableau 2. Comment les paramètres sont choisis estprésenté dans le tableau 3.
6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 23
Fig. 20 – Structure de la commande pour le régulateur "Thermal Control"
Thermique Paramètre ValeurNON HLC 0
LLC 0Thermal 0
OUI HLC 1LLC 1Thermal 1
NON après éxploitation HLC 1HLC 1LLC 1Thermal 2
Tab. 3 – Choix des paramètres
6.4.2 Implémentation de l’estimateur II
La implémentattion de l’estimateur se trouve dans le fichier Estimation_Thermal_Center.m. En générale ce sont les équations 24 et 25 qui sont utilisées. Les entrées de la fonc-tion sont les positions (xk, yk) et la vitesse de montée dzkE
correspondante, unparamètre time qui est utilisé pour l’initialisation des variables internes, et le para-mètre Thermal, qui est décrit dans le paragraphe 6.4.1. Les sorties sont le nombre demesures qui ont été prises et une position estimée pour du centre de la thermique. Lenombre de mesures qui étaient prises est utilisé par la fonction Radius_Control.m.Initialement le vecteur des mesures est vide, ce qui reste le cas jusqu’a le paramètre"Thermal" change de 0 à 1. En ce moment là l’estimateur commence à mémoriserles mesures. C’est-à-dire qu’il est possible qu’un ajustement dynamique du nombrede mesures pris en compte N pourrait améliorer les estimations (voir paragraphe6.5.2)Pour éviter que les estimations varient trop fortement au cours des premières se-condes de l’exploitation ou l’avion se trouve souvent à l’extérieur de la zone ou ily a de la poussée verticale et par conséquent les vitesses de montée sont des foisnégatives une limite inférieure est introduite. Si la vitesse de montée est inférieureà cette limite la mesure n’est pas prise en compte.
6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 24
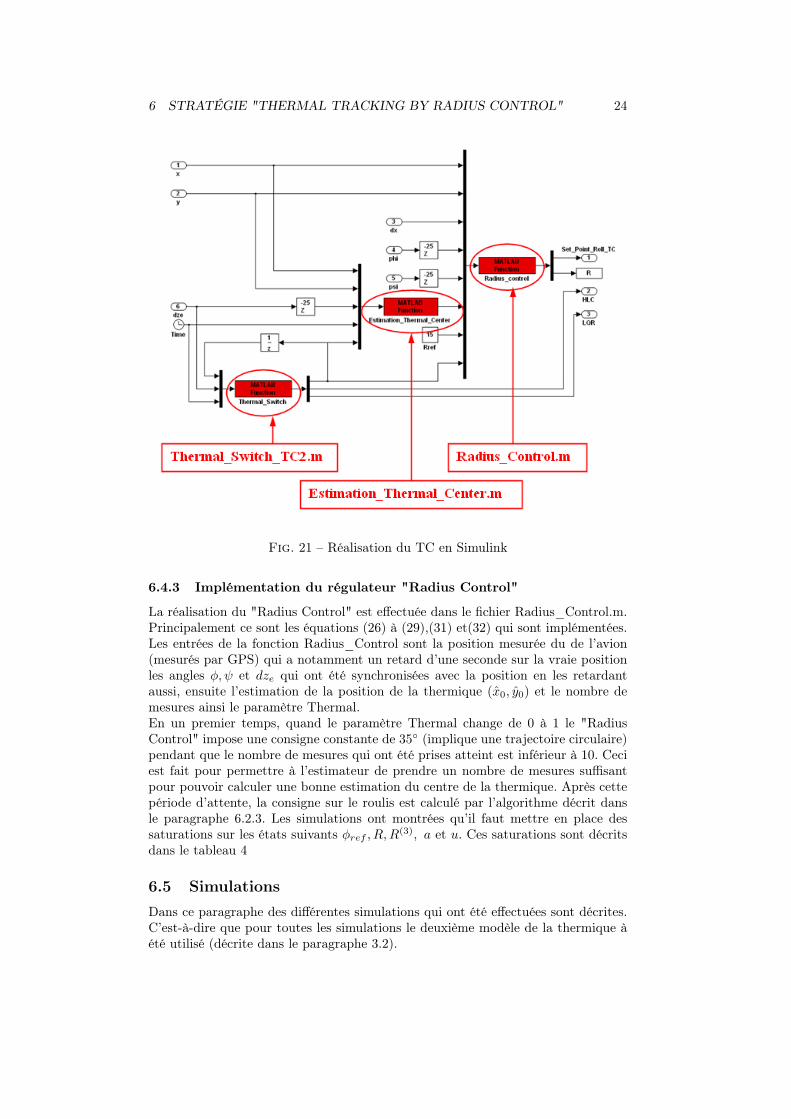
Fig. 21 – Réalisation du TC en Simulink
6.4.3 Implémentation du régulateur "Radius Control"
La réalisation du "Radius Control" est effectuée dans le fichier Radius_Control.m.Principalement ce sont les équations (26) à (29),(31) et(32) qui sont implémentées.Les entrées de la fonction Radius_Control sont la position mesurée du de l’avion(mesurés par GPS) qui a notamment un retard d’une seconde sur la vraie positionles angles φ, ψ et dze qui ont été synchronisées avec la position en les retardantaussi, ensuite l’estimation de la position de la thermique (x0, y0) et le nombre demesures ainsi le paramètre Thermal.En un premier temps, quand le paramètre Thermal change de 0 à 1 le "RadiusControl" impose une consigne constante de 35◦ (implique une trajectoire circulaire)pendant que le nombre de mesures qui ont été prises atteint est inférieur à 10. Ceciest fait pour permettre à l’estimateur de prendre un nombre de mesures suffisantpour pouvoir calculer une bonne estimation du centre de la thermique. Après cettepériode d’attente, la consigne sur le roulis est calculé par l’algorithme décrit dansle paragraphe 6.2.3. Les simulations ont montrées qu’il faut mettre en place dessaturations sur les états suivants φref , R,R
(3), a et u. Ces saturations sont décritsdans le tableau 4
6.5 SimulationsDans ce paragraphe des différentes simulations qui ont été effectuées sont décrites.C’est-à-dire que pour toutes les simulations le deuxième modèle de la thermique àété utilisé (décrite dans le paragraphe 3.2).
6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 25
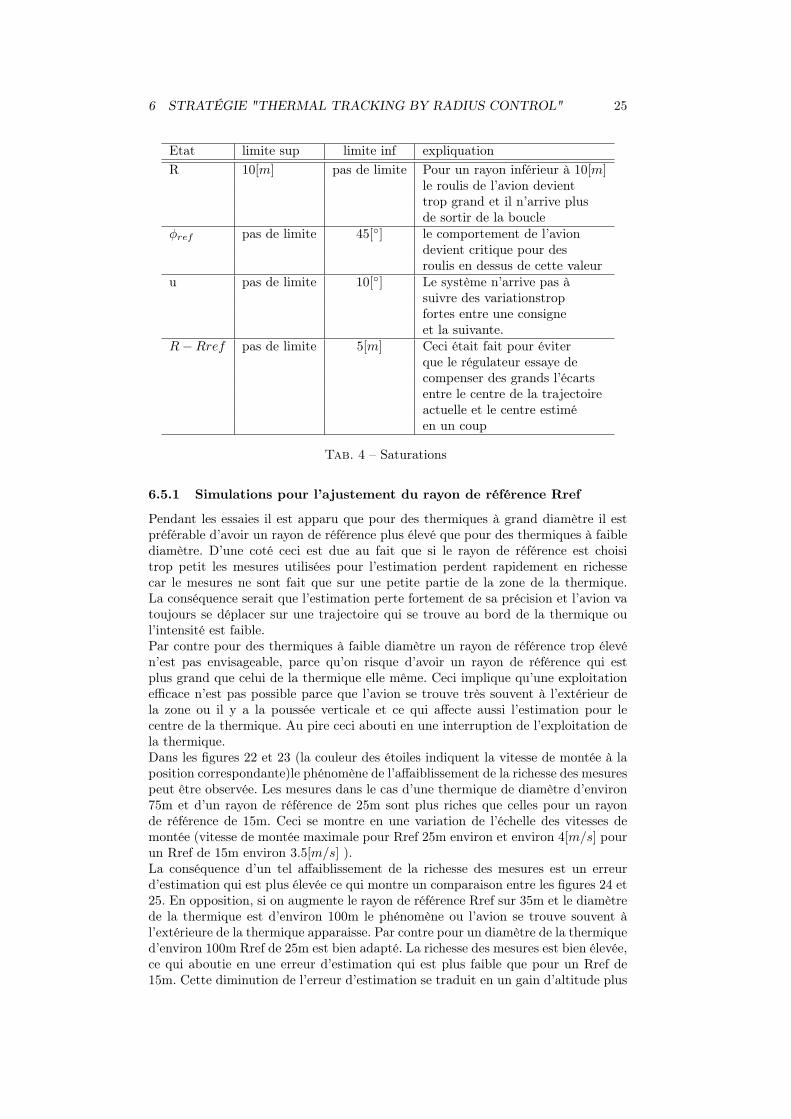
Etat limite sup limite inf expliquationR 10[m] pas de limite Pour un rayon inférieur à 10[m]
le roulis de l’avion devienttrop grand et il n’arrive plusde sortir de la boucle
φref pas de limite 45[◦] le comportement de l’aviondevient critique pour desroulis en dessus de cette valeur
u pas de limite 10[◦] Le système n’arrive pas àsuivre des variationstropfortes entre une consigneet la suivante.
R−Rref pas de limite 5[m] Ceci était fait pour éviterque le régulateur essaye decompenser des grands l’écartsentre le centre de la trajectoireactuelle et le centre estiméen un coup
Tab. 4 – Saturations
6.5.1 Simulations pour l’ajustement du rayon de référence Rref
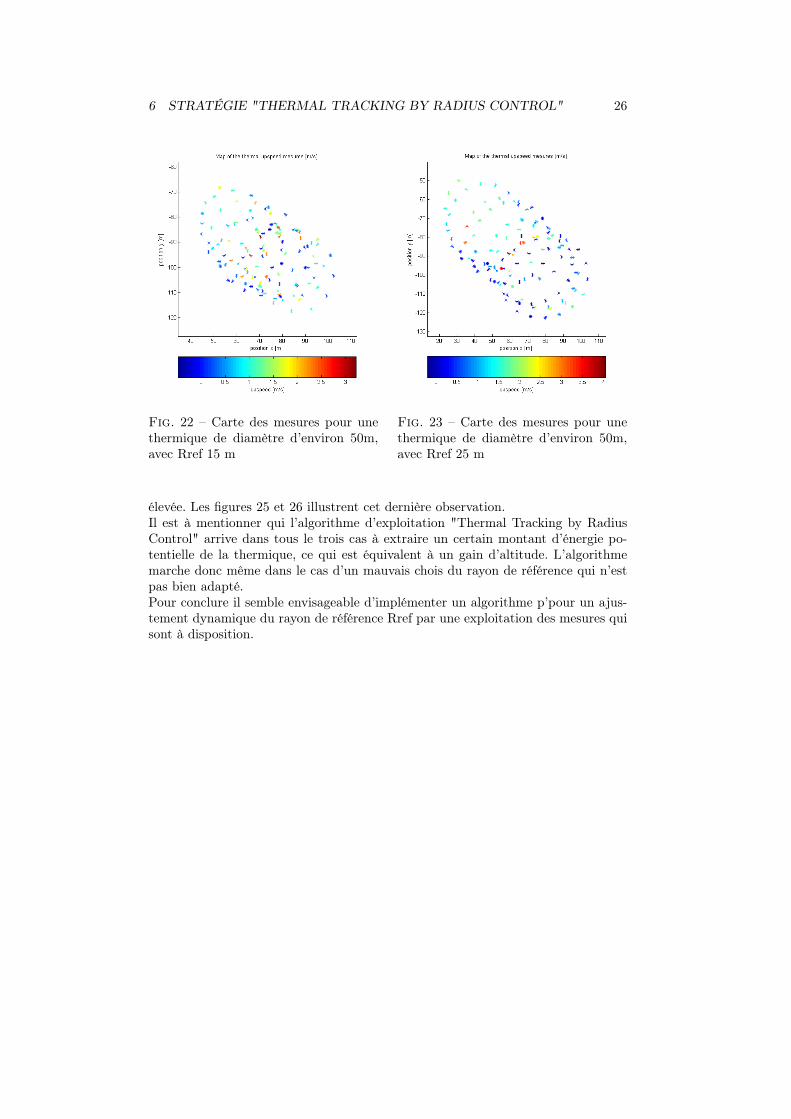
Pendant les essaies il est apparu que pour des thermiques à grand diamètre il estpréférable d’avoir un rayon de référence plus élevé que pour des thermiques à faiblediamètre. D’une coté ceci est due au fait que si le rayon de référence est choisitrop petit les mesures utilisées pour l’estimation perdent rapidement en richessecar le mesures ne sont fait que sur une petite partie de la zone de la thermique.La conséquence serait que l’estimation perte fortement de sa précision et l’avion vatoujours se déplacer sur une trajectoire qui se trouve au bord de la thermique oul’intensité est faible.Par contre pour des thermiques à faible diamètre un rayon de référence trop élevén’est pas envisageable, parce qu’on risque d’avoir un rayon de référence qui estplus grand que celui de la thermique elle même. Ceci implique qu’une exploitationefficace n’est pas possible parce que l’avion se trouve très souvent à l’extérieur dela zone ou il y a la poussée verticale et ce qui affecte aussi l’estimation pour lecentre de la thermique. Au pire ceci abouti en une interruption de l’exploitation dela thermique.Dans les figures 22 et 23 (la couleur des étoiles indiquent la vitesse de montée à laposition correspondante)le phénomène de l’affaiblissement de la richesse des mesurespeut être observée. Les mesures dans le cas d’une thermique de diamètre d’environ75m et d’un rayon de référence de 25m sont plus riches que celles pour un rayonde référence de 15m. Ceci se montre en une variation de l’échelle des vitesses demontée (vitesse de montée maximale pour Rref 25m environ et environ 4[m/s] pourun Rref de 15m environ 3.5[m/s] ).La conséquence d’un tel affaiblissement de la richesse des mesures est un erreurd’estimation qui est plus élevée ce qui montre un comparaison entre les figures 24 et25. En opposition, si on augmente le rayon de référence Rref sur 35m et le diamètrede la thermique est d’environ 100m le phénomène ou l’avion se trouve souvent àl’extérieure de la thermique apparaisse. Par contre pour un diamètre de la thermiqued’environ 100m Rref de 25m est bien adapté. La richesse des mesures est bien élevée,ce qui aboutie en une erreur d’estimation qui est plus faible que pour un Rref de15m. Cette diminution de l’erreur d’estimation se traduit en un gain d’altitude plus
6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 26
Fig. 22 – Carte des mesures pour unethermique de diamètre d’environ 50m,avec Rref 15 m
Fig. 23 – Carte des mesures pour unethermique de diamètre d’environ 50m,avec Rref 25 m
élevée. Les figures 25 et 26 illustrent cet dernière observation.Il est à mentionner qui l’algorithme d’exploitation "Thermal Tracking by RadiusControl" arrive dans tous le trois cas à extraire un certain montant d’énergie po-tentielle de la thermique, ce qui est équivalent à un gain d’altitude. L’algorithmemarche donc même dans le cas d’un mauvais chois du rayon de référence qui n’estpas bien adapté.Pour conclure il semble envisageable d’implémenter un algorithme p’pour un ajus-tement dynamique du rayon de référence Rref par une exploitation des mesures quisont à disposition.

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 27
Fig. 24 – Résultats d’une simulation avec �thermic ≈ 75m et Rref = 15m
6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 28
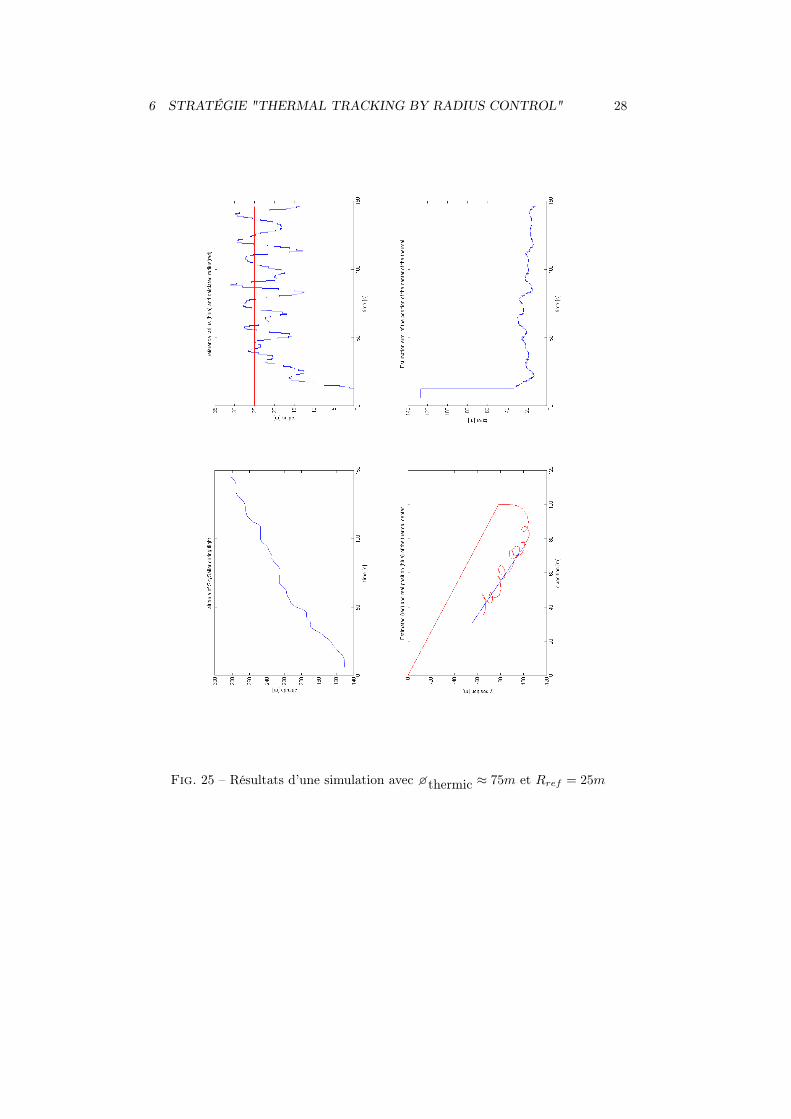
Fig. 25 – Résultats d’une simulation avec �thermic ≈ 75m et Rref = 25m

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 29
Fig. 26 – Résultats d’une simulation avec �thermic ≈ 75m et Rref = 35m
6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 30
6.5.2 Simulations pour l’ajustement du nombre de mesures prises encompte
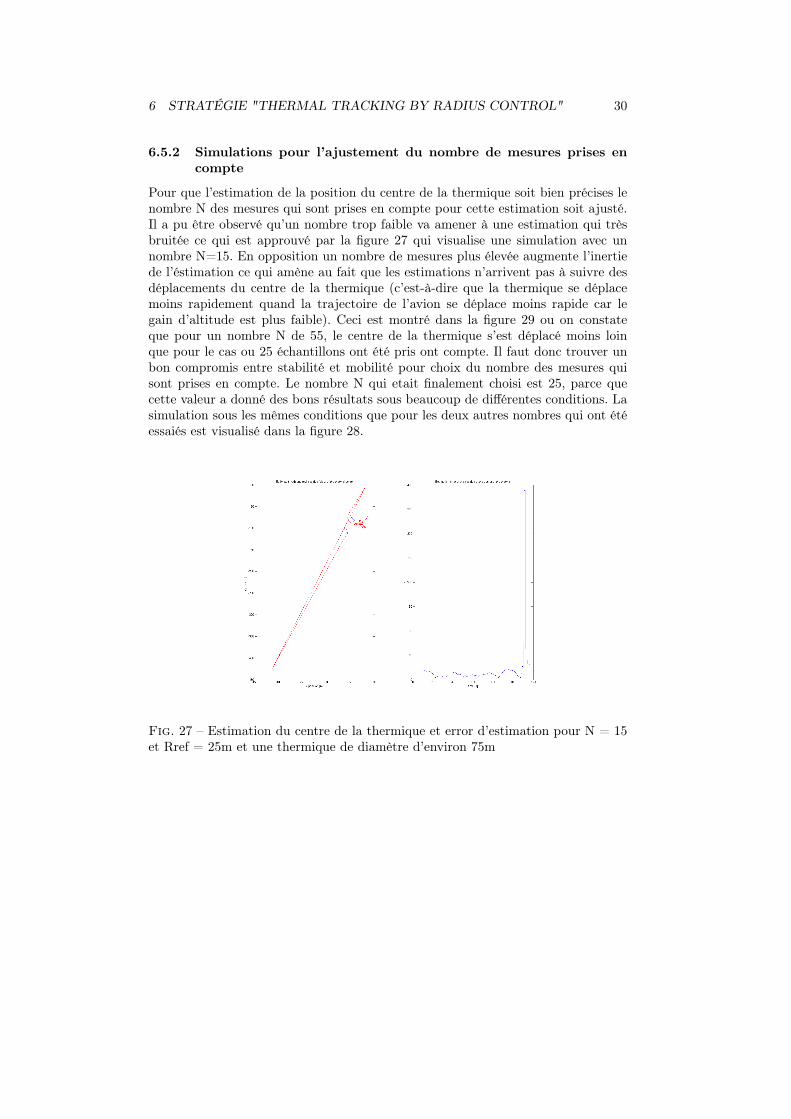
Pour que l’estimation de la position du centre de la thermique soit bien précises lenombre N des mesures qui sont prises en compte pour cette estimation soit ajusté.Il a pu être observé qu’un nombre trop faible va amener à une estimation qui trèsbruitée ce qui est approuvé par la figure 27 qui visualise une simulation avec unnombre N=15. En opposition un nombre de mesures plus élevée augmente l’inertiede l’éstimation ce qui amène au fait que les estimations n’arrivent pas à suivre desdéplacements du centre de la thermique (c’est-à-dire que la thermique se déplacemoins rapidement quand la trajectoire de l’avion se déplace moins rapide car legain d’altitude est plus faible). Ceci est montré dans la figure 29 ou on constateque pour un nombre N de 55, le centre de la thermique s’est déplacé moins loinque pour le cas ou 25 échantillons ont été pris ont compte. Il faut donc trouver unbon compromis entre stabilité et mobilité pour choix du nombre des mesures quisont prises en compte. Le nombre N qui etait finalement choisi est 25, parce quecette valeur a donné des bons résultats sous beaucoup de différentes conditions. Lasimulation sous les mêmes conditions que pour les deux autres nombres qui ont étéessaiés est visualisé dans la figure 28.
Fig. 27 – Estimation du centre de la thermique et error d’estimation pour N = 15et Rref = 25m et une thermique de diamètre d’environ 75m

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 31
Fig. 28 – Estimation du centre de la thermique et error d’estimation pour N=25 etRref = 25m et une thermique de diamètre d’environ 75m
Fig. 29 – Estimation du centre de la thermique et error d’estimation pour N = 35et Rref = 25m et une thermique de diamètre d’environ 75m

6 STRATÉGIE "THERMAL TRACKING BY RADIUS CONTROL" 32
Paramètre ValeurRref 25mNb_mesures 25
Tab. 5 – Choix des paramètres finales pour le régulateur "Radius Control"
On peut conclure qu’il peut être utile d’ajuster cette valeur d’une manière dyna-mique en foncion des informations sur la taille et la vitesse de déplacement de lathermique qui peuvent être tirée des mesures qui ont été prises en cours du vol.L’ajustement des deux paramètres Rref et le nombre N des mesures qui sont prisesen compte devraient être liés, car pour un rayon de référence plus grand plus demesures peuvent être prises en cours d’un tour entier que pour un Rref plus faible.Comme il est préférable d’avoir des mesures sur au moins un tours entier aoutourdu centre estimé pour avoir une bonne estimation le nombre des mesures qui sontprises en compte pour cette estimation doit être plus élevé pour un grand Rref quepour un Rref faible.
6.5.3 Choix finale des paramètres
Les paramètres qui ont été choisis après les l’analyse des nombreuses simulationsassurent un fonctionnement pour une bonne plage de différents condition (dia-mètre de la thermique entre 50 et 150 m, vitesse de déplacement entre 0 et 1[mdedplacement/mgagnenaltitude]. Ces paramètres sont données dans le tableau 5
6.6 Commentaires sur l’implémentation du régulateur "Ra-dius Control"
Pour toutes les simulations qui ont été effectuées le modèle d’une thermique dy-namique (voir 3.2) était utilisé et en générale il était à observer que le régulateurtravaille d’une façon très stable et efficace. Ceci peut être imputé au fait que cerégulateur était développé par une analyse d’un système dynamique qui décrit ap-proximativement le processus de l’exploitation d’une thermique et que la dynamiquede la boucle interne était prise en compte. Un autre point fort de ce régulateur estqu’il fonctionne sous des conditions très variables, sans qu’un ajustement des para-mètres soit absolument nécessaire. Quand même une optimisation peut être trouvéeen ajustant les paramètres formes différentes formes et tailles des thermiques, parune exploitation des mesures qui sont faites en cours du vol.

7 CONCLUSION 33
7 ConclusionLe projet était fort intéressant et il m’a fait beaucoup de plaisir de travailler audessus. Ce projet m’a donné la possibilité de voire le domaine de l’aéronautique d’unautre point de vue qu’en habitude, en effet du point de vue automatique. Commependent les cours on apprend les outils pour développer des solutions pour desproblèmes c’était une bonne occasion de les utiliser. Ensuite j’ai fait la connaissanceavec le logiciel Simulink ce qui est très précieux pour le futur.
7.1 Modélisation d’une thermiqueIl est très difficile de modéliser un thermique d’une façon réaliste. Après avoir créeun modèle simple d’une thermique qui n’est pas très réaliste nous avons continuesde développé un modèle dynamique qui est beaucoup plus générale et qui est dy-namique ce qui est normalement le cas en réalité. Ce modèle a été utilisée au coursdes simulations avec le régulateur "Radius Control" ce qui a permi de développerun régulateur qui fonctionne très bien.
7.2 Régulateur "Widen On Surge"Ce régulateur était développé sur la base d’une stratégie qui est wouvent utilisé dansle domaine de l’aviation et qui marche bien en générale. Il s’est montré en coursdu développement du régulateur que cette stratégie ne fonctionne que pour desconditions bien définies. Comme le développement de l’algorithme de commanden’est pas très analytique et qu’on ne prend pas en compte de la dynamique duprocessus de l’exploitation d’une thermique soi même il est difficile à prédire laréaction du système sur un changement des paramètres. Il n’est donc pas possiblede trouver un ensemble de paramètres en une manière analytique, qui marche engénérale, ce qui rend difficile la recherche d’un tel ensemble. Il a aussi apparu qu’unensemble de paramètres ne marche que pour une petite plage de conditions commel’intensité de la thermique, de la taille de cette dernière, etc. Finalement on peutconclure qu’il n’est pas possible d’implémenter sans autre la stratégie "Widen onSurge" dans un système automatique autonome comme les SkySailor.
7.3 Régulateur "Radius Control"L’algorithme de base à partir duquel le régulateur était crée se base sur l’algorithme"extremum seek", qui est un algorithme d’optimisation. L’idée de base était d’ap-proximer la position du centre de la thermique par un éstimteur et ensuite de forcerle système de tourner autour de ce dernier en ajustant le rayon de courbure de latrajectoire. Le rayon de coubure est ajusté en imposant une consigne pour le roulis.Cet algorithme était implémenté avec du succès. Comme cette approche est basé surune analyse du processus de l’exploitation d’une thermique et qu’il prend en comptede la dynamique du système l’ajustage des paramètres du régulateur est beaucoupplus intuitive. Les nombreuses simulations ont montrées que ce régulateur marchesous presque tous les conditions qui ont été imposées.
7.4 PerspectivesUne modélisation plus réaliste d’une thermique et une analyse du fonctionnementen face d’un tel modèle pouvait être très intéressant pour évaluer si le régulateur"Radius Control" marche aussi sous des conditions réelles. Des améliorations durégulateur "Radius Control" en introduisant des algorithmes d’ajustement dyna-mique des paramètres Rref et N pouvait augmenter la stabilité et l’éfficacité du

7 CONCLUSION 34
système. Le régulateur LLC qui est notamment conçu pour des faibles variationsdu roulis autour du point de fonctionnement pourrait être adapté pour avoir unmeilleur comportement pour angles élevés.

8 REMERCIMENTS 35
8 RemercimentsJ’aimerais de remercier mon Assistant Sébastien Gros qui m’a beaucoup aidé pour laréalisation projet avec une grande disponibilité et une compétence impressionnantedans le domaine de la commande des systèmes multivariables et de l’aéronautique.Il s’est pris beaucoup de temps pour répondre à mes nombreuses questions ce quime permettait de trouver des solutions pour des problèmes qui apparaissent en courde ce projet. Ensuite j’aimerais de remercier mes chers collègues Anthony Claudeet Maxime Pepinster pour leur support morale pendant les nombreux soirées detravaille.
Lausanne, le 15 février 2007Jannick Fenner

RÉFÉRENCES 36
Références[1] John B.Moore Brian D.O Anderson. Optimal Control Linear QuadraticMethods.
Prentice hall International editions.[2] Andrea Mattio. Modelling and control of the uav sky-sailor, June 2006.