projet d’ingénierie simultanée - la.epfl.ch · projet d’ingénierie simultanée stratégie de...
TRANSCRIPT

Projet d’ingénierie simultanée Stratégie de Babyfoot, vision des adversaires
Résumé – Dans ce rapport, nous décrivons notre démarche dans la conception d’un système
permettant de mesurer la disposition des joueurs adverses sur une table de Babyfoot.
Réalisé par Paul-Arthur DREYFUS, Son PHAM-BA
Supervisé par Christophe SALZMANN, Milan KORDA
École Polytechnique Fédérale de Lausanne Semestre du printemps 2015
Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 1
Paul-Arthur DREYFUS, Son PHAM-BA
Table des matières
1. Introduction ......................................................................................................................................... 2
2. État de l’art ........................................................................................................................................... 2
3. Cahier des charges ............................................................................................................................... 3
4. Description des idées .......................................................................................................................... 3
4.1. Spirale et capteurs de distance ............................................................................................................ 3
4.2. Caméra ................................................................................................................................................. 3
4.3. Magnétisme ......................................................................................................................................... 4
4.4. Codage sur la canne ............................................................................................................................. 4
4.5. Ondes radio .......................................................................................................................................... 4
4.6. Capteur de distance Terabee ............................................................................................................... 4
5. Évaluation des solutions ...................................................................................................................... 5
6. Présentation de la solution ................................................................................................................. 6
6.1. Description ........................................................................................................................................... 6
6.1.1. Capteurs de distance .................................................................................................................................. 6
6.1.2. Acquisition des données ............................................................................................................................. 6
6.1.3. Positionnement des capteurs ..................................................................................................................... 7
6.1.4. Spirale ......................................................................................................................................................... 7
6.2. Assemblage .......................................................................................................................................... 8
6.2.1. Liste des pièces ........................................................................................................................................... 8
6.2.2. Mise en plan ............................................................................................................................................... 8
6.2.3. Fabrication .................................................................................................................................................. 8
6.2.4. Montage ..................................................................................................................................................... 8
6.3. Traitement des données ...................................................................................................................... 8
7. Réalisation ............................................................................................................................................ 9
7.1. Montage .............................................................................................................................................. 9
7.2. Résultats ............................................................................................................................................ 11
8. Continuation ...................................................................................................................................... 14
8.1. Montage ............................................................................................................................................ 14
8.2. Capteurs ............................................................................................................................................. 14
8.3. Traitement des données .................................................................................................................... 14
9. Conclusion .......................................................................................................................................... 15
Bibliographie .............................................................................................................................................. 16
Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 2
Paul-Arthur DREYFUS, Son PHAM-BA
1. Introduction
Dans le cadre du projet d'ingénierie simultanée au laboratoire d'automatique de l'EPFL, une équipe d'étudiants ont repris en main l'ancien projet de stratégie sur un Babyfoot. Ce projet consiste en l'automatisation de l’un des côtés du Babyfoot pour permettre à une personne d'y jouer seul. À terme, ce projet pourra par exemple être commercialisé à des joueurs professionnels ou dans de grandes salles de jeu, pouvant attirer les bons joueurs qui voudront affronter la machine. Ce sera aussi un bon moyen de mettre en avant la Laboratoire d’Automatique lors des journées portes ouvertes de l’EPFL.
Le développement de ce projet a été séparé en plusieurs parties, qui ont toutes été faites par un binôme : la stratégie, le contrôle, la vision de la balle et la vision des adversaires. Dans ce rapport, nous allons décrire le développement de la vision des joueurs adverses.
2. État de l’art
Nous ne sommes pas les premiers à s'être penchés sur ce problème. En effet l'Université
Technologique de Munich a déjà publié un papier décrivant la réalisation de l’exact même projet [1].
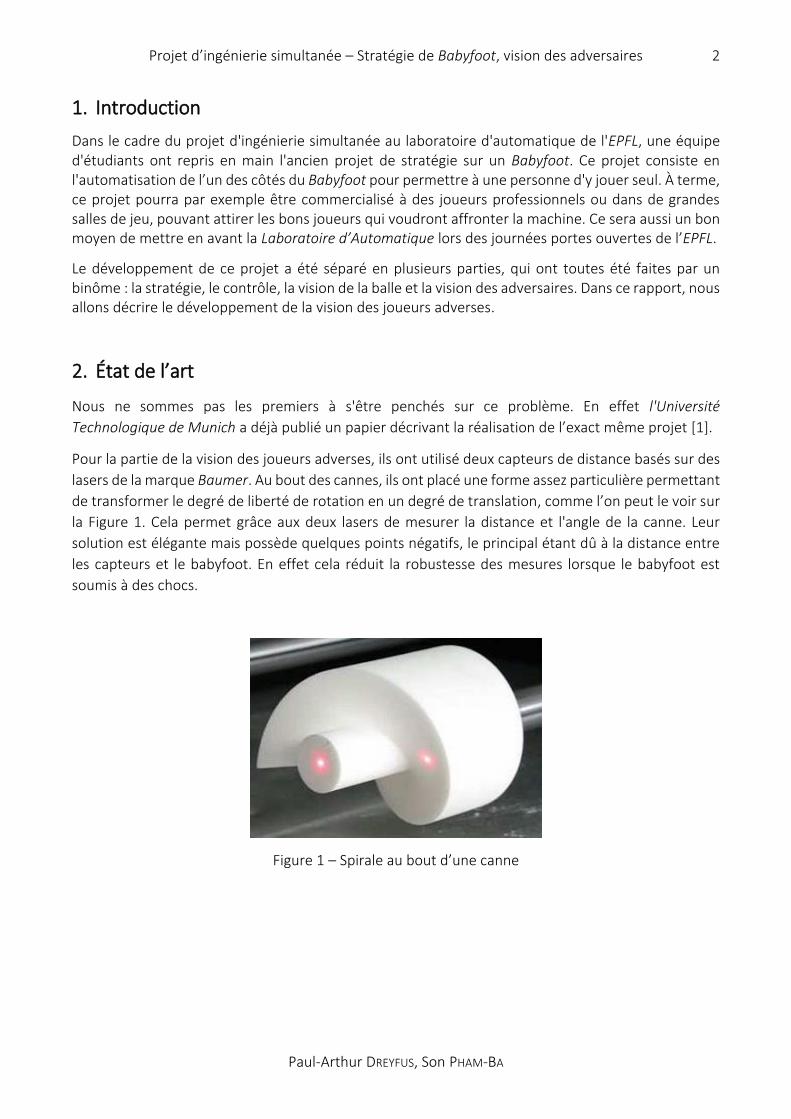
Pour la partie de la vision des joueurs adverses, ils ont utilisé deux capteurs de distance basés sur des
lasers de la marque Baumer. Au bout des cannes, ils ont placé une forme assez particulière permettant
de transformer le degré de liberté de rotation en un degré de translation, comme l’on peut le voir sur
la Figure 1. Cela permet grâce aux deux lasers de mesurer la distance et l'angle de la canne. Leur
solution est élégante mais possède quelques points négatifs, le principal étant dû à la distance entre
les capteurs et le babyfoot. En effet cela réduit la robustesse des mesures lorsque le babyfoot est
soumis à des chocs.
Figure 1 – Spirale au bout d’une canne
Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 3
Paul-Arthur DREYFUS, Son PHAM-BA
3. Cahier des charges
Nous avons identifié les fonctions principales (FP) et les fonctions contraintes (FC) du mécanisme à
concevoir. L’aptitude du système à satisfaire une fonction donnée est évaluée selon des critères et
quantifiée par des valeurs lorsque cela est possible.
Tableau 1 - Cahier des charges
Type Description Critères Valeurs
FP1 Détecter la position linéaire et l'angle
d'une canne
Fréquence des mesures Supérieure à 300Hz
Précision des mesures Inférieure à 1mm
FP2 Transmettre les données - -
FC1 Robustesse Résistance aux chocs Déviation faible
FC2 Distance de mesure du capteur Borne inférieure Le plus proche de 0
Borne supérieure Supérieur à 200 mm
FC3 Inertie ou frottement rajoutés - Plus faible possible
4. Description des idées
Afin de satisfaire au cahier des charges, nous avons eu plusieurs idées concernant la mesure des
positions linéaire et angulaire des cannes.
4.1. Spirale et capteurs de distance
La première idée est basée sur la solution déjà fonctionnelle développée par l'Université
Technologique de Munich, décrite plus haut dans l'état de l'art. Quelques idées de modifications ont
quand même émergé. Les capteurs ne sont plus éloignés du babyfoot mais collés dessus, permettant
d'augmenter la robustesse. La spirale est donc conçue à l'envers de celle montrée sur la Figure 1 et
est mise sur une rallonge encastrée dans la canne. Cette rallonge permet de se placer à portée des
capteurs laser, qui ne peuvent mesurer qu’à partir d’une distance minimale.
4.2. Caméra
La partie de détection de la balle utilisant déjà une caméra, une des idées fut d'aussi en utiliser une
pour détecter les cannes. Pour optimiser la vision du déplacement linéaire et pour pouvoir détecter la
rotation, une marque est apposée à canne (Figure 2). Cette marque comprend deux anneaux de tailles
fixes permettant d'avoir une cible à fixer par la camera et permettant un calibrage automatique à
chaque prise de mesure, la distance entre les anneaux étant connue. A côté de ces anneaux se trouve
un triangle qui fait le tour de la canne et qui permet en regardant une ligne de pixel de la camera de
mesurer une rotation.

Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 4
Paul-Arthur DREYFUS, Son PHAM-BA
Figure 2 - Marque et vision de la caméra
4.3. Magnétisme
Une autre idée fut de mettre des aimants dans la canne et de détecter une variation de champ
magnétique avec par exemple une bobine autour de la canne. Le majeur problème étant l'obligation
du calibrage des capteurs à chaque redémarrage. L'inertie rajouté par les aimant n'est pas non plus
négligeable, tout comme leurs interactions avec les roulements à billes.
4.4. Codage sur la canne
Une solution aurait été de graver toute la canne avec un codage du type « code de Gray » lu en sortie
par une petite caméra. Ce codage, une fois traité, aurait indiqué l'emplacement absolu de la canne. Le
problème vient cette fois de la dégradation de ces gravures due à leur interaction avec les roulements
à billes.
4.5. Ondes radio
Nous avons aussi envisagé de mettre des émetteurs d'ondes radio dans les cannes du babyfoot : deux
par cannes à la même distance et opposés dans la largeur, tous à des fréquences différentes, pour
pouvoir ensuite les triangulariser. Connaissant leurs positions absolues en 3D, on aurait pu savoir la
position et l'angle de chaque barre.
Le problème de cette idée est la précision de la triangularisation des émetteurs, la meilleure étant à
5mm, bien au-dessus des spécifications de cahier des charges.
4.6. Capteur de distance Terabee
La dernière solution à avoir été envisagée fut l'utilisation des capteurs Terabee préalablement achetés
par le labo [2]. Ce sont des capteurs de distance utilisés pour les drones, assez précis pour cette
utilisation mais surtout beaucoup moins chers que des capteurs laser. Ils auraient seulement pu
remplacer les lasers de la première solution (Section 4.1). Plusieurs tests ont été faits avec ces capteurs
débouchant sur une précision maximum de l'ordre de 5mm, bien trop faible pour notre utilisation. Des
tests ont montré que même un traitement des données reçues ne permettait pas de réduire l’erreur
en dessous de 2mm.

Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 5
Paul-Arthur DREYFUS, Son PHAM-BA
5. Évaluation des solutions
Après avoir listé les idées les plus pertinentes, nous les comparons aux exigences du cahier des charges
(Tableau 1) dans le Tableau 2 afin de choisir celle qui satisfait le plus de critères. La fonction FP2
(transmission des données) n’est pas testée car elle constitue un traitement en aval des données
reçues.
Tableau 2 - Évaluation des solutions
En vert : contrainte satisfaite, en orange : admissible, en rouge : contrainte violée.
Type Contraintes Spirale Camera Magnétique Codage Onde radio Terabee
FP1 > 300Hz 1000Hz ~200Hz - - - ~200Hz
< 1mm 0.5mm ~1cm - - ~1cm ~1cm
FC1 Faible Supposée
faible
Quasiment
nulle Faible Moyenne Nul
Supposée
faible
FC2 Près de 0 100mm 0 50mm 50mm 0 200mm
> 200mm 600mm Ok Ok Ok Ok 14m
FC3 Faible Supposée
moyenne 0 Grande
Frottement
important
Quasiment
nulle
Supposée
faible
La solution de la spirale et capteurs de distance est celle qui répond le mieux à la fonction principale,
bien que la solution des ondes radio soit meilleure au niveau des contraintes. Les critères de la fonction
principale étant plus importants, c’est la solution de la spirale et capteurs de distance qui est choisie.
Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 6
Paul-Arthur DREYFUS, Son PHAM-BA
6. Présentation de la solution
6.1. Description
Les personnages sont contrôlés par des cannes. Chaque canne possède deux degrés de liberté : un en
translation et un en rotation. La rotation est convertie translation à l’aide d’une spirale Les deux
translations sont ensuite lues par des capteurs de distance.
6.1.1. Capteurs de distance
Chaque canne peut être déplacée de 400mm au maximum. En prévoyant une marge de 100mm dus à
la rotation transformée en translation, nous avons besoin d’un capteur possédant une portée de
500mm.
Nous avons trouvé chez WayCon le capteur LAS-T5-500 [3] possédant une portée de 100mm à 600mm,
une résolution entre 0.015mm et 0.67mm, un temps de réponse inférieur à 0.9ms (environ 1100Hz)
et retournant une sortie analogique située entre 0V et 10V. Il doit être alimenté avec une tension de
12V à 28V avec un courant maximal de 100mA. L’angle d’incidence du laser avec la surface dont on
désire mesurer la distance doit être inférieur à 30°.
Ces capteurs possèdent cinq pattes. Sur le câble fourni par le constructeur, les fils reliés aux pattes les
plus importantes sont donnés dans le Tableau 3. Les autres fonctions peuvent être trouvées dans le
document [3] à la page 5.
Tableau 3 - Connection électrique du LAS-T5-500
Patte Couleur du câble Fonction
1 Marron Alimentation V + 2 Blanc Sortie 0…10 3 Bleu Terre GND
6.1.2. Acquisition des données
Les câbles de terre et de sortie des capteurs sont connectés à un boîtier myRIO de National
Instruments afin de pouvoir manipuler les données avec LabVIEW. Une alimentation externe de 12V
doit être utilisée pour tous les capteurs. Le document [4] nous apprend que le boîtier possède huit
entrées analogiques de 0V à +5V et deux autres entrées analogiques de -15V à +15V. Étant donné qu’il
y a quatre cannes à scruter avec deux capteurs par canne et que chaque capteur envoie un signal de
0V à +10V, deux options sont disponibles : on peut utiliser soit les entrées de +5V, soit les entrées de
-15V/+15V.
Dans le cas des entrées de +5V, il faut utiliser des diviseurs de tension pour passer les sorties des
capteurs de 10V à 5V, comme montré sur la Figure 3. Les résistances doivent être identiques et valoir
au minimum 100Ω. Un tel montage pourra être fait sur une breadboard. Un seul boîtier est alors
nécessaire et les connections se font sur les Expansion Ports A et B aux ports :
6 (AGND) pour la terre de quatre capteurs

Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 7
Paul-Arthur DREYFUS, Son PHAM-BA
3 (AI0) pour la sortie d’un capteur
5 (AI1) pour la sortie d’un deuxième capteur
7 (AI2) pour la sortie d’un troisième capteur
9 (AI3) pour la sortie d’un quatrième capteur.
Figure 3 – Diviseur de tension
Dans le cas des entrées de -15V/+15V, quatre boîtiers sont nécessaires au total. Les connections se
font sur le Mini System Port Connector C aux ports :
1 (+15 V) pour l’alimentation de deux capteurs
3 ou 6 (AGND) pour la terre de deux capteurs
7 (AI0+) pour la sortie d’un capteur
9 (AI1+) pour la sortie de l’autre capteur.
6.1.3. Positionnement des capteurs
Un support est conçu pour soutenir deux capteurs par canne le plus près possible de la table de
Babyfoot, sachant que les câbles à l’arrière des capteurs sortent parallèlement aux faisceaux laser. Les
cannes doivent être rallongées afin que leur spirale se trouve toujours dans la portée admissible des
capteurs.
6.1.4. Spirale
La spirale est conçue pour profiter de l’angle d’incidence maximum de 30° avec le laser et ainsi obtenir
la plus grande précision possible. L’équilibre axial est aussi recherché.
La partie « stratégie » du projet a décidé qu’il n’était pas nécessaire de connaître l’orientation des
cannes lorsque les personnages ne peuvent pas toucher la balle. La partie pentue de la spirale
n’occupe donc qu’un secteur de -60° à +60°, partie sur laquelle l’orientation peut alors être mesurée.
Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 8
Paul-Arthur DREYFUS, Son PHAM-BA
6.2. Assemblage
6.2.1. Liste des pièces
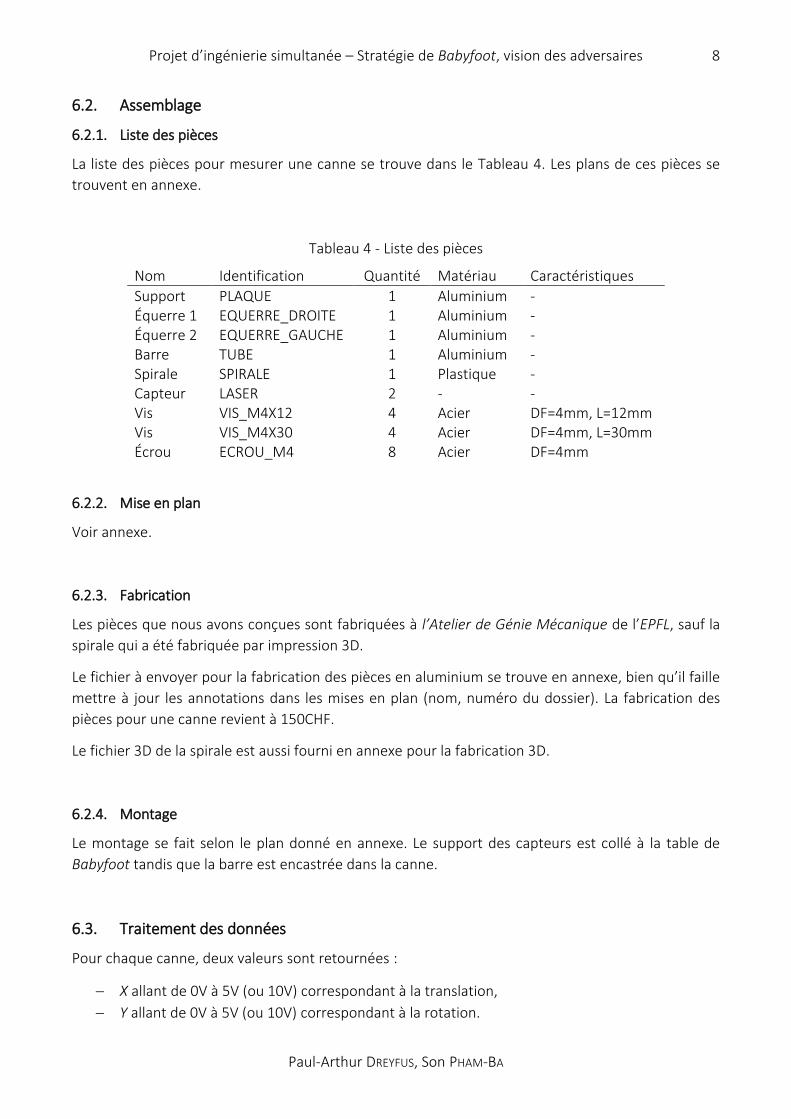
La liste des pièces pour mesurer une canne se trouve dans le Tableau 4. Les plans de ces pièces se
trouvent en annexe.
Tableau 4 - Liste des pièces
Nom Identification Quantité Matériau Caractéristiques
Support PLAQUE 1 Aluminium - Équerre 1 EQUERRE_DROITE 1 Aluminium - Équerre 2 EQUERRE_GAUCHE 1 Aluminium - Barre TUBE 1 Aluminium - Spirale SPIRALE 1 Plastique - Capteur LASER 2 - - Vis VIS_M4X12 4 Acier DF=4mm, L=12mm Vis VIS_M4X30 4 Acier DF=4mm, L=30mm Écrou ECROU_M4 8 Acier DF=4mm
6.2.2. Mise en plan
Voir annexe.
6.2.3. Fabrication
Les pièces que nous avons conçues sont fabriquées à l’Atelier de Génie Mécanique de l’EPFL, sauf la
spirale qui a été fabriquée par impression 3D.
Le fichier à envoyer pour la fabrication des pièces en aluminium se trouve en annexe, bien qu’il faille
mettre à jour les annotations dans les mises en plan (nom, numéro du dossier). La fabrication des
pièces pour une canne revient à 150CHF.
Le fichier 3D de la spirale est aussi fourni en annexe pour la fabrication 3D.
6.2.4. Montage
Le montage se fait selon le plan donné en annexe. Le support des capteurs est collé à la table de
Babyfoot tandis que la barre est encastrée dans la canne.
6.3. Traitement des données
Pour chaque canne, deux valeurs sont retournées :
X allant de 0V à 5V (ou 10V) correspondant à la translation,
Y allant de 0V à 5V (ou 10V) correspondant à la rotation.

Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 9
Paul-Arthur DREYFUS, Son PHAM-BA
La distance de translation en millimètres est alors donnée par
T = aX + b (1)
où a [mm/V] et b [mm] sont des constantes à déterminer expérimentalement.
L’angle de rotation en degrés est donné par
R = 4 × ((aY + b) - T) - 60 (2)
Lorsque R < -(60 + ε) ou R > 60 + ε, ε [°] étant un nombre petit à déterminer expérimentalement, on
retourne une valeur de 180° pour indiquer que les personnages ne peuvent pas atteindre la balle.
Le traitement des données est fait sur LabVIEW avec myRIO installé.
7. Réalisation
7.1. Montage
Au terme du semestre, nous avons reçu quatre capteurs laser, un ensemble de pièces pour mesurer
une canne et un boîtier myRIO.
Nous avons donc monté un dispositif pour la canne des défenseurs. Nous avons choisi d’utiliser les
entrées de +5V (A/AI0 et A/AI1) sur le boîtier myRIO et avons donc fabriqué deux diviseurs de tension.
Figure 4 – Diviseurs de tension

Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 10
Paul-Arthur DREYFUS, Son PHAM-BA
Figure 5 – Connexions au boîtier myRIO
Figure 6 – Montage électronique
Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 11
Paul-Arthur DREYFUS, Son PHAM-BA
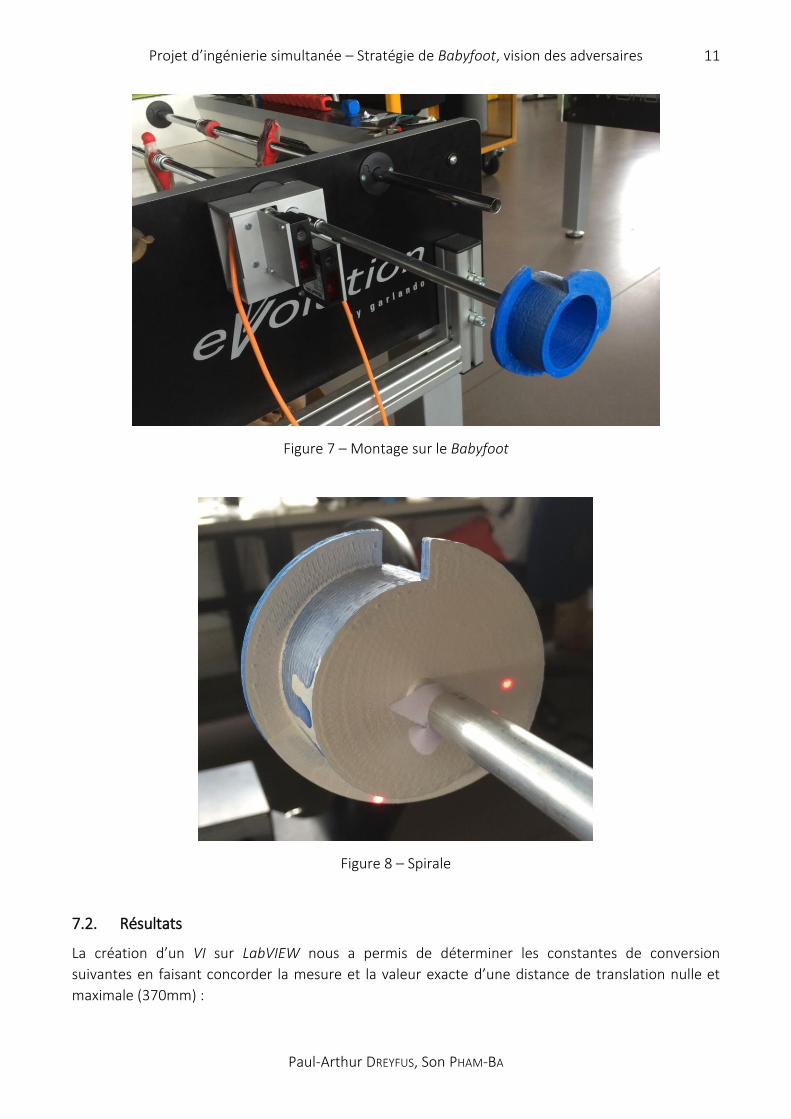
Figure 7 – Montage sur le Babyfoot
Figure 8 – Spirale
7.2. Résultats
La création d’un VI sur LabVIEW nous a permis de déterminer les constantes de conversion
suivantes en faisant concorder la mesure et la valeur exacte d’une distance de translation nulle et
maximale (370mm) :

Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 12
Paul-Arthur DREYFUS, Son PHAM-BA
a = 314mm/V,
b = -179mm,
ε = 7°.
Le VI se trouve en annexe.
Nous avons constaté que la couleur bleue de la spirale faussait les mesures aux plus grandes distances.
Nous avons donc appliqué de la peinture blanche sur les surfaces vues par les capteurs.
La comparaison des distances de translation mesurée et exacte nous donne les résultats de la Figure
9.
Figure 9 – Comparaison des distances
L’écart est donné par la différence entre la valeur exacte et la valeur moyenne mesurée sur vingt échantillons.
Le bruit est donné par la moyenne de la valeur absolue de l’erreur entre la mesure et la valeur moyenne.
On constate que le bruit ne dépasse pas les 0.25mm, ce qui semble suffisant pour notre utilisation.
Étant donné que la tension de sortie des capteurs ne dépasse pas les 1.8V dans cette plage
d’utilisation, on peut envisager de retirer les diviseurs de tension pour gagner en précision si le bruit
est dû au boîtier myRIO. On peut vérifier que le bruit n’est pas dû à l’état de surface de la spirale en
faisant une mesure sur un objet blanc lisse.
L’écart ayant un comportement étrange après 300mm, on raffine les mesures avec cinquante
échantillons pour obtenir la Figure 10.
-1,5
-1
-0,5
0
0,5
1
0 50 100 150 200 250 300 350 400
Distance exacte
écart [mm]
bruit [mm]

Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 13
Paul-Arthur DREYFUS, Son PHAM-BA
Figure 10 – Comparaison des distances raffinée
On constate que l’écart atteint les 1.4mm, ce qui est bien en accord avec la Figure 11 pour une distance
de 500mm, écart maximal réel entre le capteur et la spirale.
Figure 11 – Erreur de linéarité du LAS-T5-500 selon [3]
C’est la courbe la plus foncée qui correspond au capteur que l’on utilise.
Le fait que l’écart n’oscille pas autour d’une valeur nulle peut aussi s’expliquer par un mauvais choix
des paramètres a et b.
Le fait que l’angle soit déterminé par le même type de mesure que pour la distance nous fait supposer
que le bruit aura un maximum de 1° d’après (2), ce qui est bien vérifié par les mesures.
-1,6
-1,4
-1,2
-1
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
295 305 315 325 335 345 355 365 375
Distance exacte
écart [mm]
bruit [mm]

Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 14
Paul-Arthur DREYFUS, Son PHAM-BA
8. Continuation
Les résultats que nous avons obtenus sont à la hauteur de nos espérances. Il reste néanmoins quelques
points qu’il est possible d’améliorer avant de dupliquer le montage pour les autres cannes.
8.1. Montage
Ne connaissant pas la taille des câbles des capteurs, nous avons sous-estimé la taille du support des
capteurs, les câbles s’en trouvent alors pliés. Il sera plus élégant d’élargir cet espace, en faisant
attention au fait que la matière brute dans laquelle devra être usiné le nouveau support soit
disponible.
Les trous carrés par lesquels passent les câbles ne sont pas bien positionnés (excentrés), cela pourra
être corrigé.
Le trou par lequel passe la canne a été dimensionné avec un grand jeu, mais celui-ci n’est pas suffisant
et la canne frappe parfois le support lorsqu'on applique un effort particulier. Ce trou pourra donc aussi
être agrandi.
La barre de rallonge de la canne a une longueur lui permettant de s’adapter à toutes les cannes.
Cependant, chaque canne a une longueur de déplacement différente. La longueur de la rallonge
pourra donc être adaptée afin de profiter de la meilleure plage des capteurs.
8.2. Capteurs
Les capteurs possèdent une fonction Teach-in qui permet de restreindre la portée de mesure au profit
d’une meilleure précision. Cette fonction n’a pas été utilisée lors de nos tests et devra être
approfondie. Il faudra contacter les fabricants pour plus de détails.
Le diviseur de tension a été jugé inutile dans la plage d’utilisation des capteurs, il pourra être retiré.
8.3. Traitement des données
Les paramètres a, b et ε ont été choisis manuellement. Il sera utile de créer une fonction de calibration
automatique dans le VI.
Le fait que l’angle soit mis à 180° lorsqu’il dépasse une certaine valeur provoque des oscillations à
cause du bruit. On pourra programmer une hystérèse dans le VI.
Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 15
Paul-Arthur DREYFUS, Son PHAM-BA
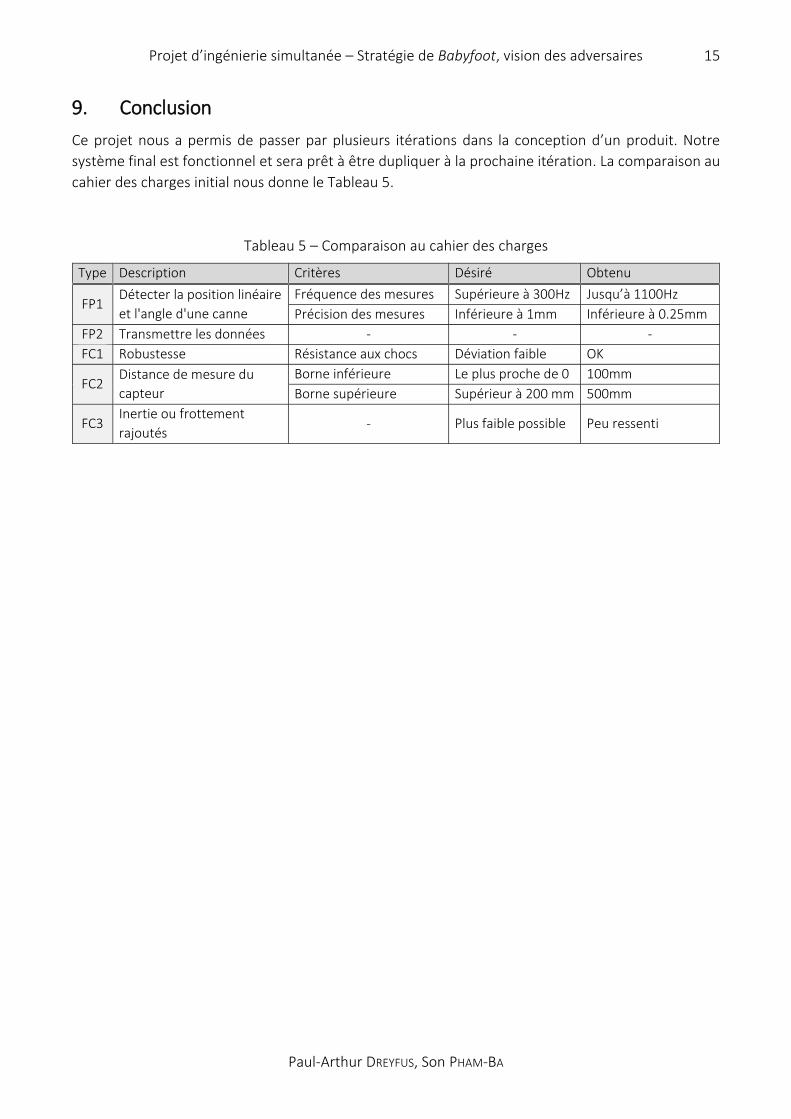
9. Conclusion
Ce projet nous a permis de passer par plusieurs itérations dans la conception d’un produit. Notre
système final est fonctionnel et sera prêt à être dupliquer à la prochaine itération. La comparaison au
cahier des charges initial nous donne le Tableau 5.
Tableau 5 – Comparaison au cahier des charges
Type Description Critères Désiré Obtenu
FP1 Détecter la position linéaire
et l'angle d'une canne
Fréquence des mesures Supérieure à 300Hz Jusqu’à 1100Hz
Précision des mesures Inférieure à 1mm Inférieure à 0.25mm
FP2 Transmettre les données - - -
FC1 Robustesse Résistance aux chocs Déviation faible OK
FC2 Distance de mesure du
capteur
Borne inférieure Le plus proche de 0 100mm
Borne supérieure Supérieur à 200 mm 500mm
FC3 Inertie ou frottement
rajoutés - Plus faible possible Peu ressenti
Projet d’ingénierie simultanée – Stratégie de Babyfoot, vision des adversaires 16
Paul-Arthur DREYFUS, Son PHAM-BA
Bibliographie
[1] Hochschule München, «Projekt Computerkicker,» 2011. [En ligne]. Available:
http://kicker.ee.hm.edu/wiki/index.php/Hauptseite. [Accès le 17 mai 2015].
[2] TeraRanger, «The best distance sensor for drones and robotics,» 2015. [En ligne]. Available:
http://www.teraranger.com/product/teraranger-one-distance-sensor-for-drones-and-robotics/.
[Accès le 17 mai 2015].
[3] WayCon, «Analog Laser Displacement Transducer,» 12 octobre 2014. [En ligne]. Available:
http://www.waycon.biz/fileadmin/waycon/dateien/products/laser_sensors/Laser_Displacemen
t_LAS.pdf. [Accès le 17 mai 2015].
[4] National instruments, «User Guide and specifications, NI myRIO-1900,» août 2013. [En ligne].
Available: http://www.ni.com/pdf/manuals/376047a.pdf. [Accès le 17 mai 2015].