planification des chaînes logistiques - laas-cnrs · 3 etat de l’art pilotage modèle outil...
TRANSCRIPT

1
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Planification des chaînes logistiques :Planification des chaînes logistiques :modélisation du système décisionnel modélisation du système décisionnel
et performanceet performance
Soutenance de thèse de
Julien FRANCOISIngénieur ENSEEIHT (Génie électrique et automatique)
Thèse co-dirigée IMS-LAPS / LAAS-MOGISA
Directeur de thèse : Jean-Paul BOURRIERES
Co-Directeur de thèse : Gérard FONTAN
Co-Directeur de thèse : Jean-Christophe DESCHAMPS
17 Décembre 2007
Ecole doctorale des Sciences Physiques et de l’Ingénieur
2
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
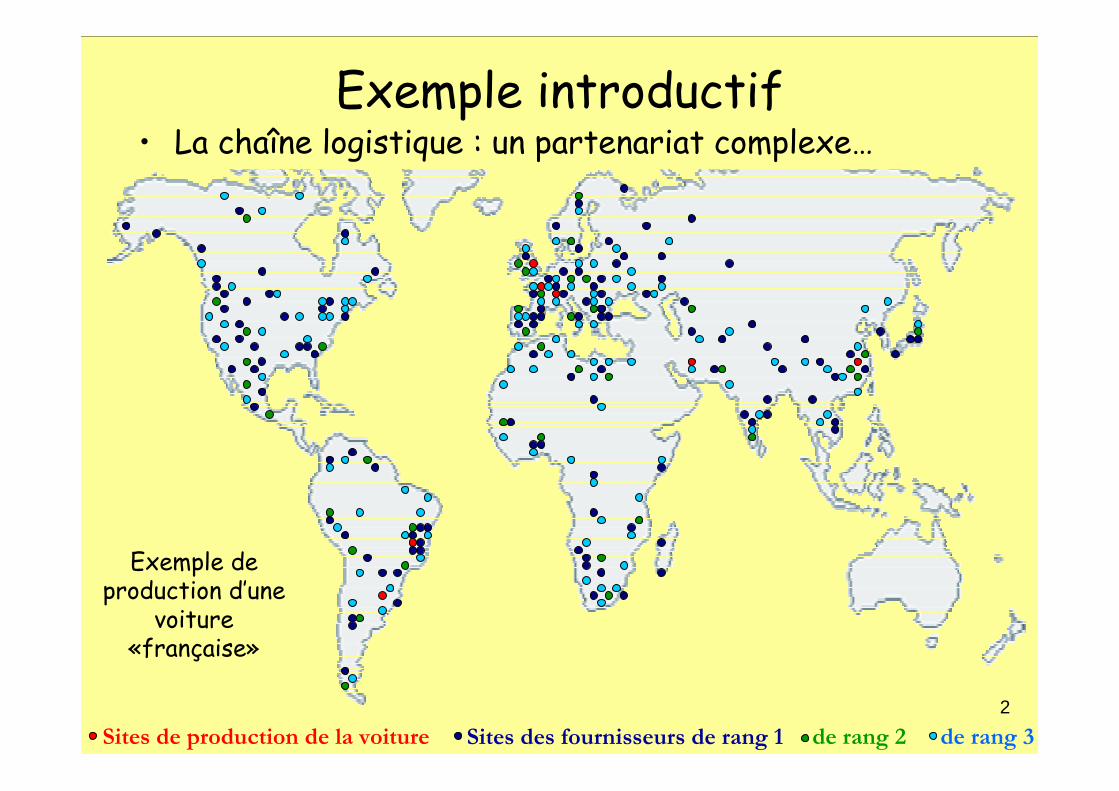
Sites de production de la voiture Sites des fournisseurs de rang 1 de rang 2 de rang 3
Exemple de production d’une
voiture «française»
Exemple introductif• La chaîne logistique : un partenariat complexe…
3
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
• Principaux enjeux de la chaîne logistique :– minimiser les coûts d’exploitation– assurer le niveau de service requis par le client– allouer efficacement les activités sur les acteurs de production,
distribution, transport– partager les risques et les profits
�Améliorer la compétitivité industrielle
• Quelques verrous à la coordination des acteurs :– Informations réparties et Partage d’informations difficile– Désynchronisation des processus– …
Définitions

4
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
• Gestion de la chaîne logistique(Supply Chain Management - SCM)
– Approche intégrative pour piloter le flux physique
• Entre tous les intervenants de la chaîne logistique (MP � PF)• Afin de produire et distribuer en quantité conforme
au bon endroit au bon moment
– Une des fonctions clés : planification
(Jones et Riley, 85 - Berry et al., 94 - Thomas et Griffin, 96 - Tan et al., 98 -Simchi-Levi et al., 00 - Geunes et Chang, 01 - Rota-Franz et al., 01 - Dominguez et Lashkari, 04)
Définitions
(Christopher, 92 - Lee et Billington, 93 - La Londe et Masters, 94 - Ganeshan et al, 95 -Tayur et al, 99 - Rota-Franz, 98 - Stadlter et Kilger, 00 - Mentzer et al, 01 - Génin, 03 –
Lummus et Vokurka, 04)
5
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Client 22
Client 21
Client 23
Fournisseur 22
Fournisseur 21
Fournisseur 23
Fournisseur 2
Fournisseur 1
Fournisseur 3
Matières prem
ières
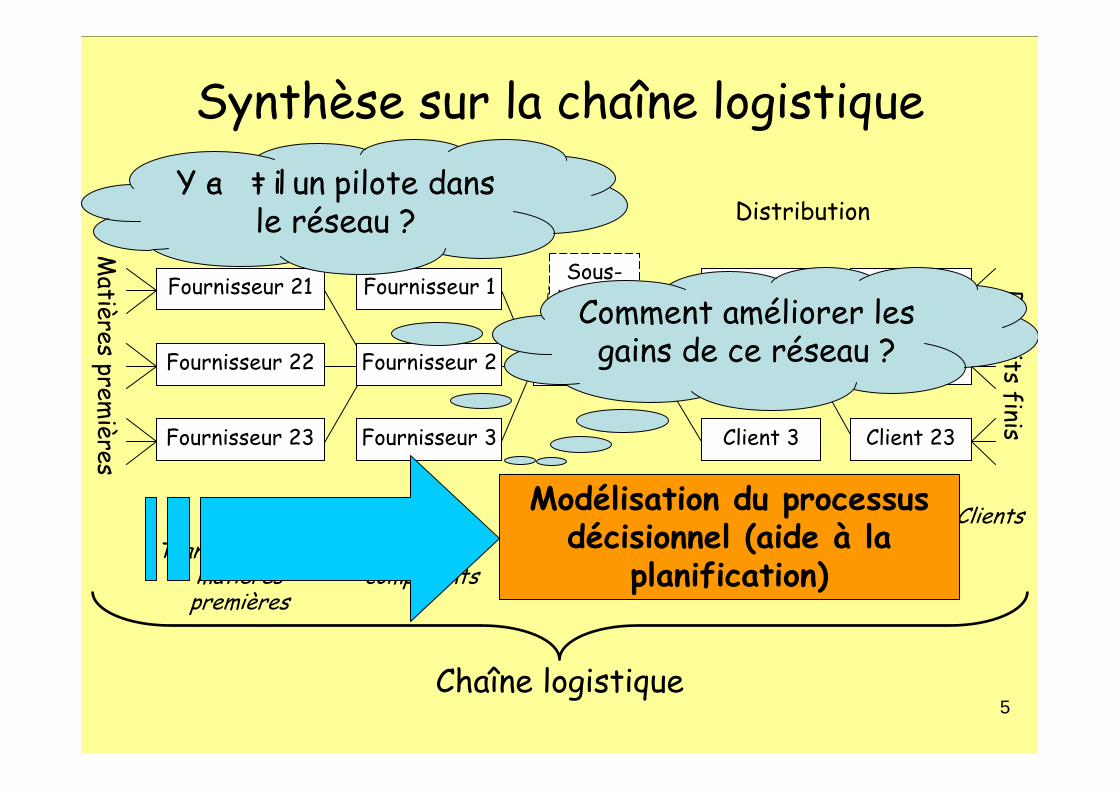
Chaîne logistique
Production Distribution
Entreprise Client 2
Client 1
Client 3
Produits finis
Rang 1Détaillants
Rang 2Grossistes
Rang 3Fabricants de produits finis
Rang 4Fabricants composants
Rang 5Transformations
matières premières
Sous-traitant
Clients
Synthèse sur la chaîne logistiqueY a- t- il un pilote dans
le réseau ?
Comment améliorer les gains de ce réseau ?
Modélisation du processus décisionnel (aide à la
planification)
6
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
• Améliorer le processus décisionnel (planification) en comparant les performances des alternatives de pilotage de la chaîne logistique.
• Sous- objectifs :– Identifier des architectures de pilotage typiques et les échanges d’information entre les différents acteurs
– Elaborer un modèle de planification des activités de production
– Comparer les performances des architectures de pilotage en simulant les décisions suivant divers scénarios
Objectifs de thèse

7
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
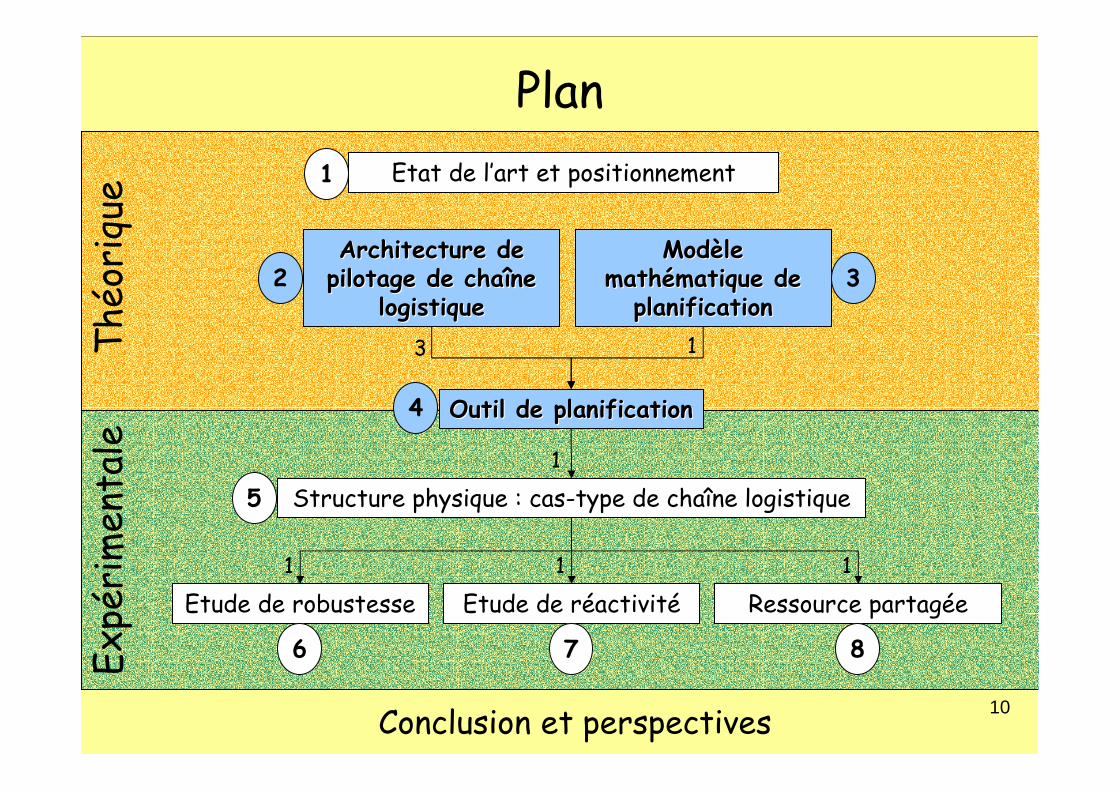
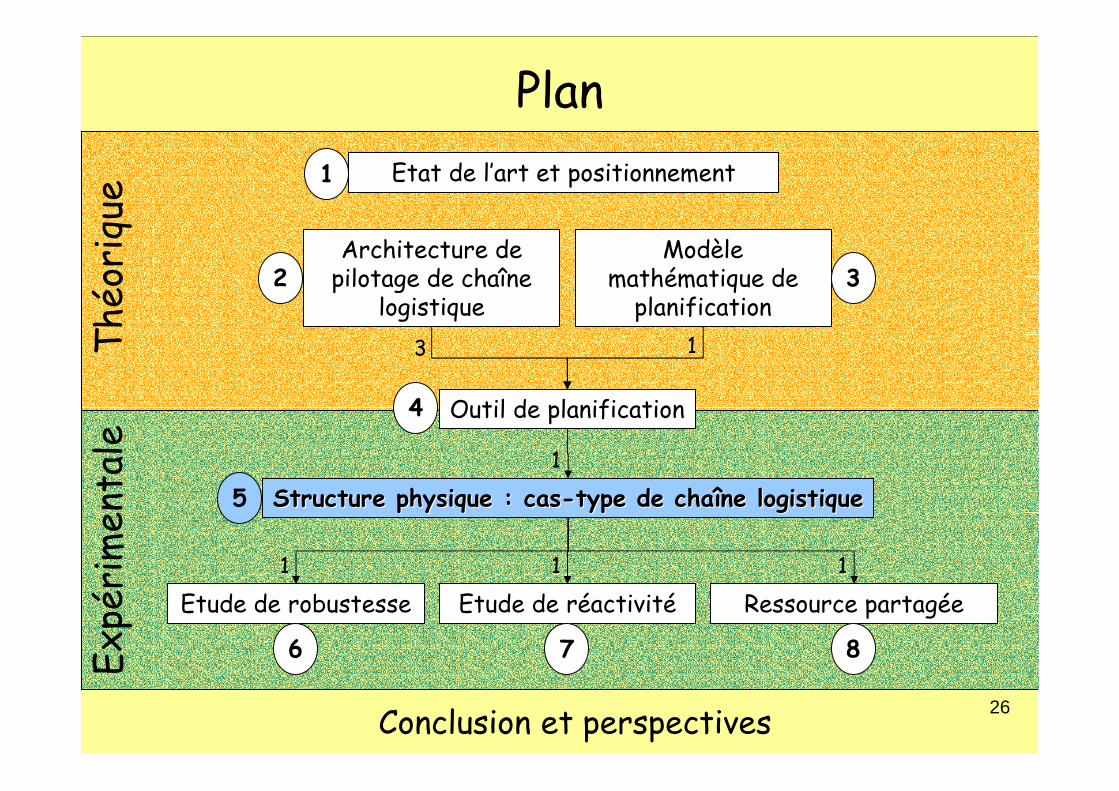
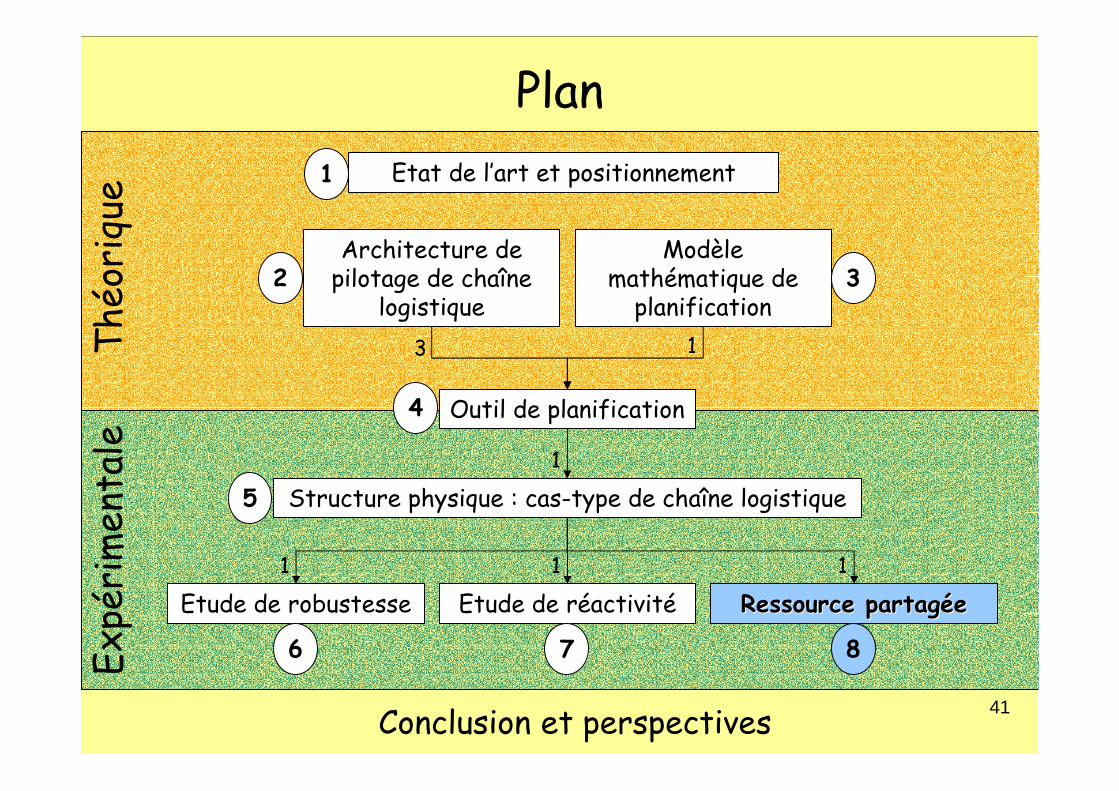
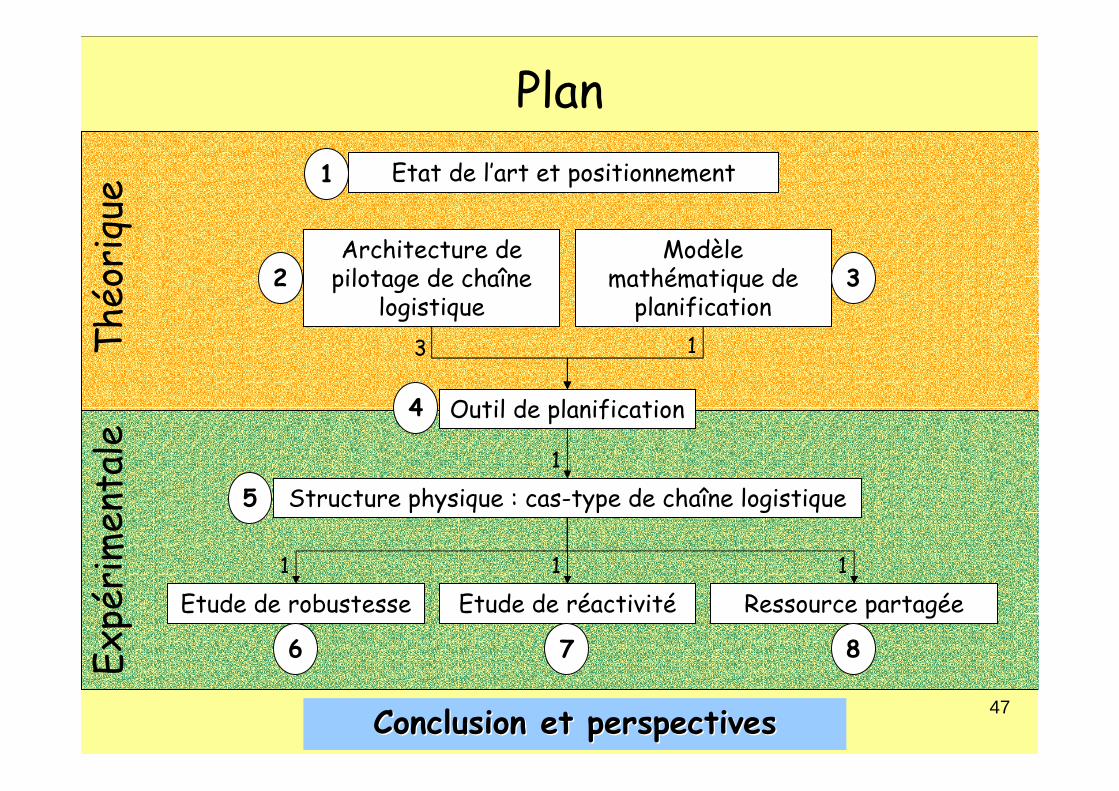
Plan
Conclusion et perspectives
Outil de planification
Modèle mathématique de planification
Architecture de pilotage de chaîne
logistique
Structure physique : cas-type de chaîne logistique
Ressource partagéeEtude de réactivitéEtude de robustesse
2 3
4
5
6 7 8
3
1
1
1 1 1
Théorique
Expérimentale
1 Etat de l’art et positionnement
8
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
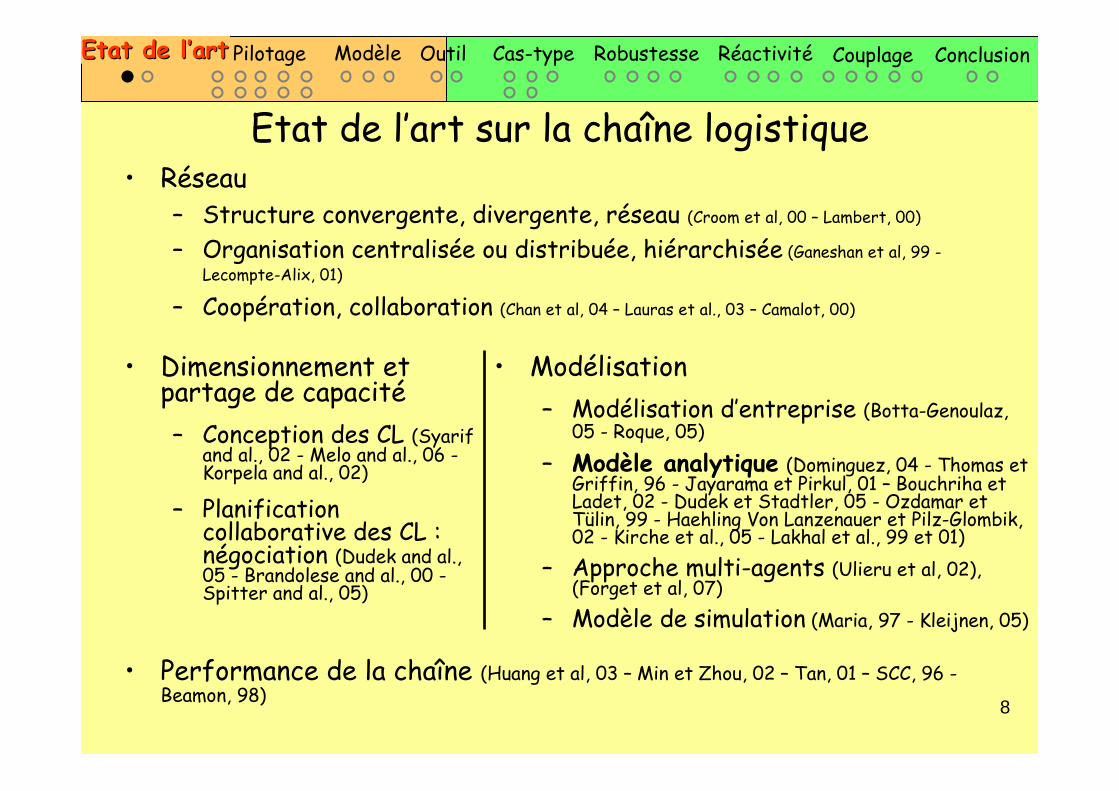
• Performance de la chaîne (Huang et al, 03 – Min et Zhou, 02 – Tan, 01 – SCC, 96 -Beamon, 98)
Etat de l’art sur la chaîne logistique
Etat de l’artEtat de l’art
• Réseau– Structure convergente, divergente, réseau (Croom et al, 00 – Lambert, 00)
– Organisation centralisée ou distribuée, hiérarchisée (Ganeshan et al, 99 -Lecompte-Alix, 01)
– Coopération, collaboration (Chan et al, 04 – Lauras et al., 03 – Camalot, 00)
• Modélisation– Modélisation d’entreprise (Botta-Genoulaz,
05 - Roque, 05)
– Modèle analytique (Dominguez, 04 - Thomas et Griffin, 96 - Jayarama et Pirkul, 01 – Bouchriha et Ladet, 02 - Dudek et Stadtler, 05 - Ozdamar et Tülin, 99 - Haehling Von Lanzenauer et Pilz-Glombik, 02 - Kirche et al., 05 - Lakhal et al., 99 et 01)
– Approche multi-agents (Ulieru et al, 02), (Forget et al, 07)
– Modèle de simulation (Maria, 97 - Kleijnen, 05)
• Dimensionnement et partage de capacité– Conception des CL (Syarif
and al., 02 - Melo and al., 06 -Korpela and al., 02)
– Planification collaborative des CL : négociation (Dudek and al., 05 - Brandolese and al., 00 -Spitter and al., 05)

9
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
• Hypothèses de travail :– Approche intégrée : Approvisionnement / Production + Distribution
– Production à la commande
– Prise en compte des transports (durée, capacité)
– Approche déterministe
– Pas d’agrégation de données
Positionnement des travaux
Etat de l’artEtat de l’art
10
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Plan
Conclusion et perspectives
Outil de planificationOutil de planification
Modèle Modèle mathématique de mathématique de planificationplanification
Architecture de Architecture de pilotage de chaîne pilotage de chaîne
logistiquelogistique
Structure physique : cas-type de chaîne logistique
Ressource partagéeEtude de réactivitéEtude de robustesse
2 3
4
5
6 7 8
3
1
1
1 1 1
Théorique
Expérimentale1 Etat de l’art et positionnement
11
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
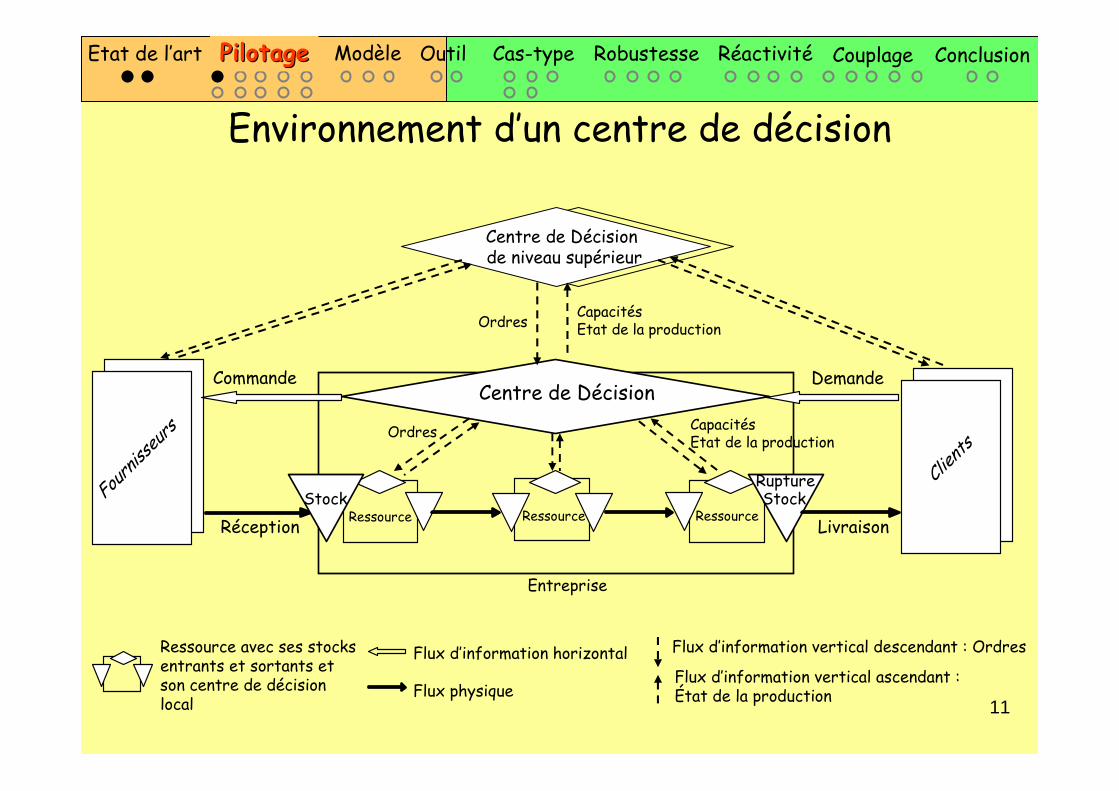
Environnement d’un centre de décision
Ressource
Centre de Décision
Fournisseurs
Commande
Réception Livraison
Demande
CapacitésEtat de la productionOrdres
Centre de Décision de niveau supérieur
StockRupture
Ressource avec ses stocks entrants et sortants et son centre de décision local
Flux physique
Flux d’information horizontalFlux d’information vertical ascendant : État de la production
Flux d’information vertical descendant : Ordres
StockRessource Ressource
Entreprise
PilotagePilotage
Clients
Ordres CapacitésEtat de la production

12
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
CD1,3
Référencement des centres de décision
Niveau décisionnel
Rang des acteurs
Activité physique Flux Physique
Client
Largeur des activités en parallèle
n
CD1,2 CD1,5 CD1,7
CD2,1 CD2,3
CD3,1
CD1,1 CD1,4 CD1,6
CD2,2CDn,s
PilotagePilotage
13
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Les différents pilotages
• Pilotage distribué– Entreprises indépendantes– Se rapproche des cas industriels
• Pilotage centralisé– Optimisation globale du réseau
• Pilotage mixte– Coordination et synchronisation partielle des entreprises
PilotagePilotage

14
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Pilotage distribué
CD1,2
CD1,1
CD1,4 CD1,7
CD1,5
CD1,3 CD1,6
Client1
Client2
• Propagation de l’information : délai• Pas de coordination globale de la chaîne
Flux d’information client-fournisseurEntreprise
Client Flux physique
Centre de décision
PilotagePilotage
15
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
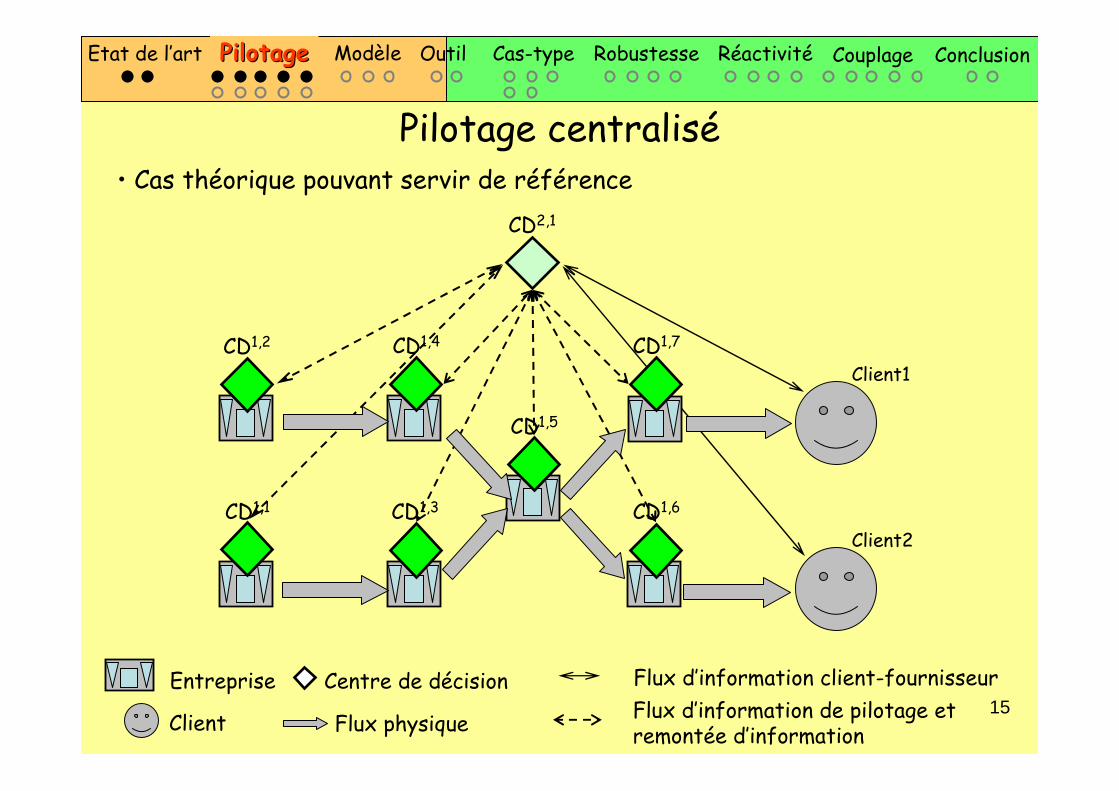
Pilotage centralisé
Flux d’information de pilotage et remontée d’information
Flux d’information client-fournisseur
CD2,1
CD1,2
CD1,1
CD1,4 CD1,7
CD1,5
CD1,3 CD1,6
Client1
Client2
• Cas théorique pouvant servir de référence
Entreprise
Client Flux physique
Centre de décision
PilotagePilotage

16
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Pilotage mixte
CD2,3
CD1,2
CD1,1
CD1,4
CD1,7
CD1,5
CD1,3
CD1,6
CD2,1
CD2,2
Client1
Client2
• Globalisation et meilleur partage de l’information
Flux d’information de pilotage et remontée d’information
Flux d’information client-fournisseurEntreprise
Client Flux physique
Centre de décision
PilotagePilotage
17
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
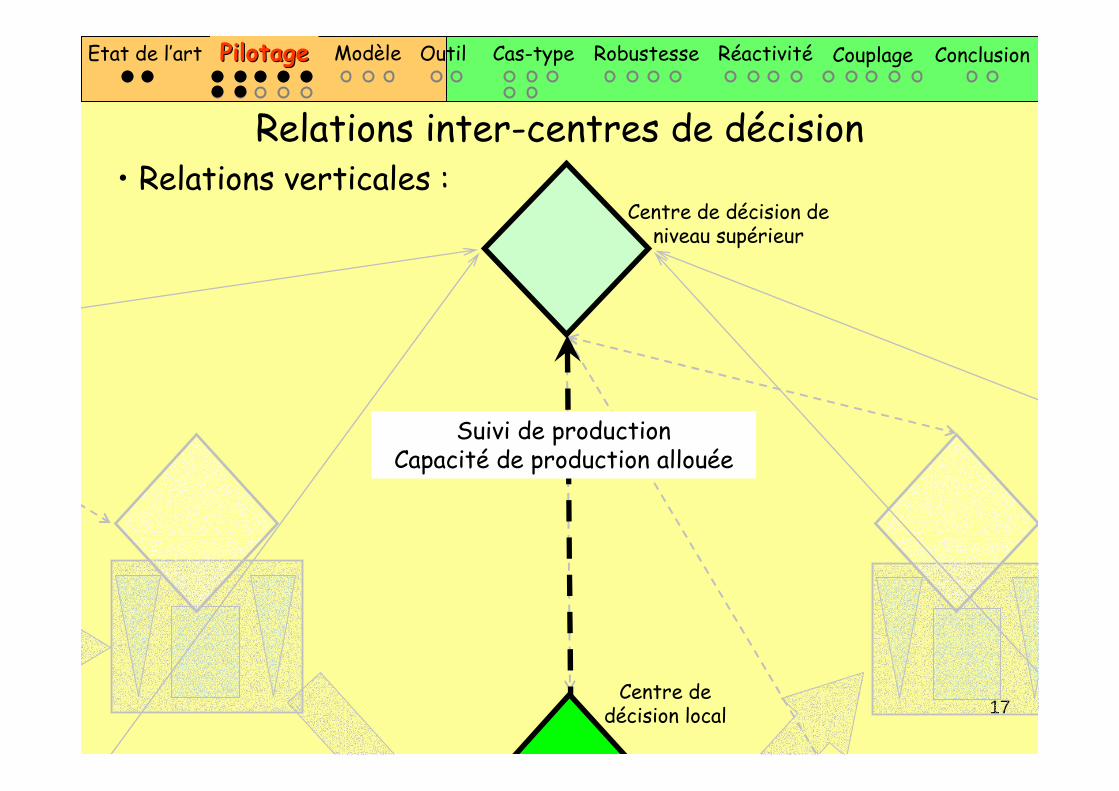
• Relations verticales :Centre de décision de
niveau supérieur
Relations inter-centres de décision
Centre de décision local
Suivi de production Capacité de production allouée
PilotagePilotage

18
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Plan d’approvisionnement
Plan de production
Plan de livraison
• Relations verticales :Relations inter-centres de décision
Centre de décision local
Centre de décision de niveau supérieur
PilotagePilotage
19
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
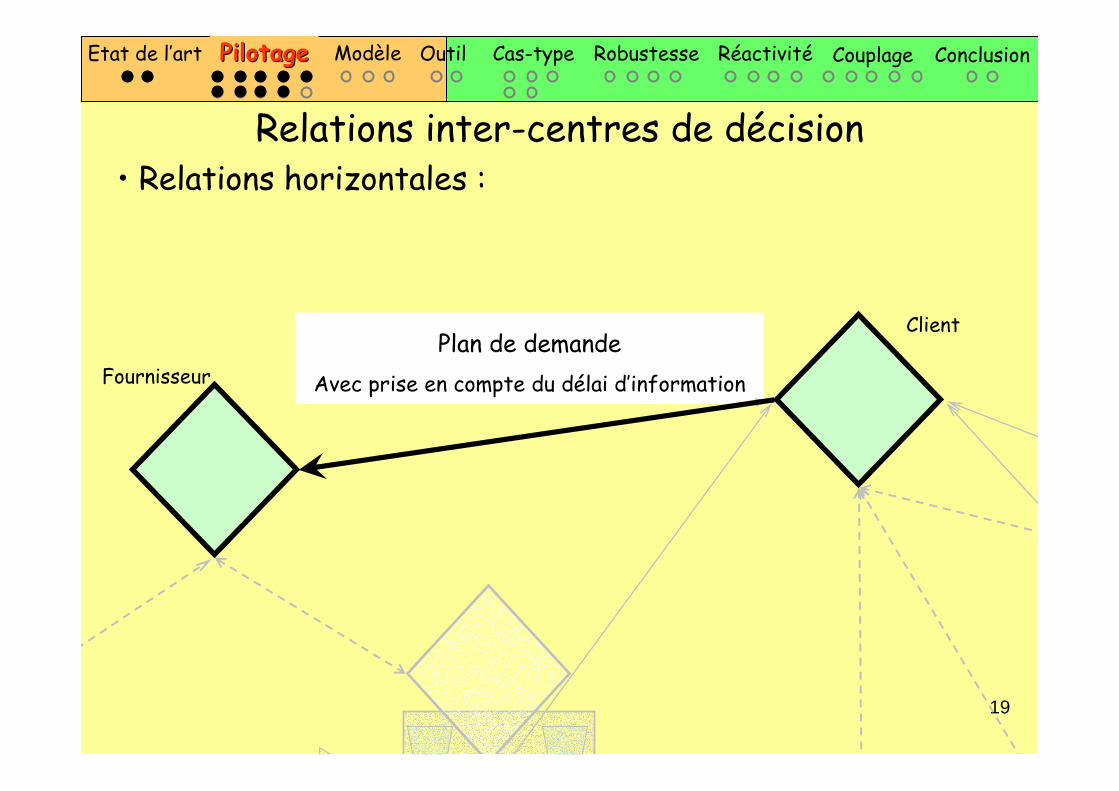
• Relations horizontales :
Client
Fournisseur
Relations inter-centres de décision
Plan de demandeAvec prise en compte du délai d’information
PilotagePilotage
20
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
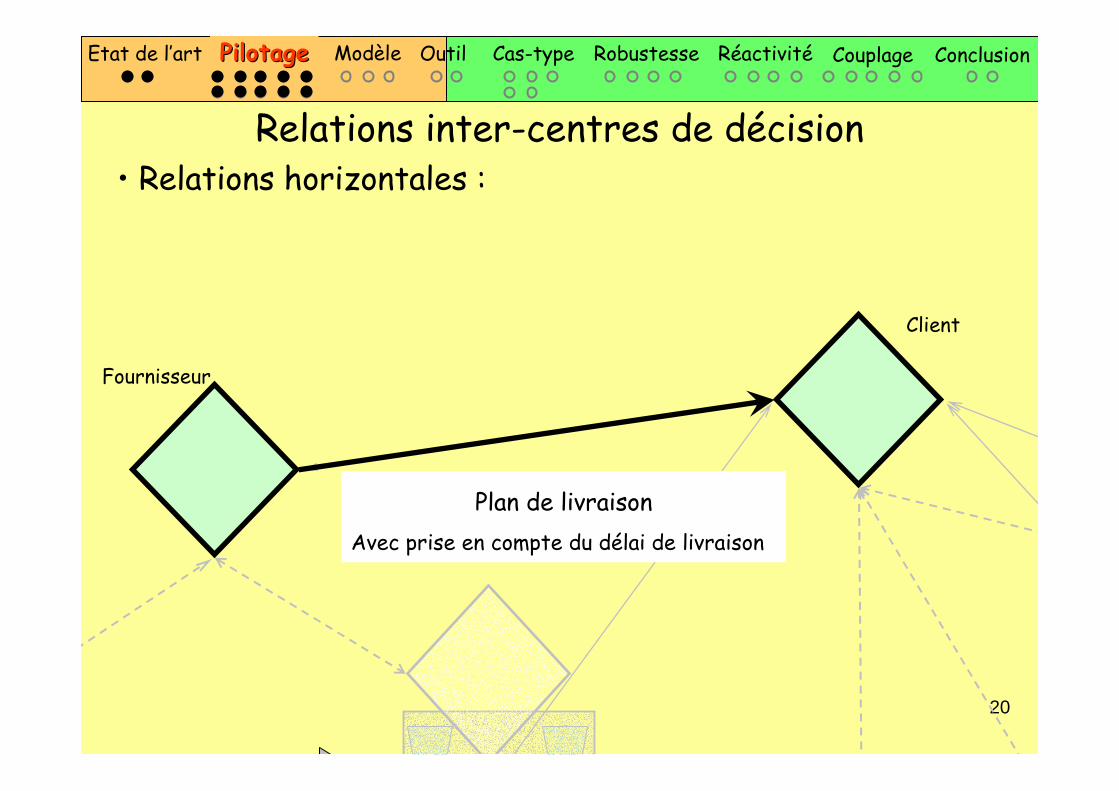
• Relations horizontales :
Client
Fournisseur
Relations inter-centres de décision
Plan de livraisonAvec prise en compte du délai de livraison
PilotagePilotage
21
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Modèle générique de planification
• Développement d’un modèle analytique– Linéaire en nombre réel– Dédié à l’optimisation de la planification d’un centre de décision
• Modèle générique, car :– Basé sur des invariants de planification– Déployé dans tout centre de décision CDn,s
• Hypothèses de modélisation :– Approche synchrone (couple horizon / période identique)– Fournisseurs de rang n idéaux– Délais et coûts constants dans le temps– Hiérarchisation décisionnelle, sans agrégation
ModèleModèle
22
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Mise en équations du modèle• Critère
– Maximisation du gain• Contraintes
– Evolution des stocks pour les composants et les produits– Evolution des ruptures pour les produits finis
– Contraintes de capacité pour la production, le stockage et le transport
– Contrainte de transport pour les produits intermédiaires– Contrainte de non négativité des variables
– Initialisation des variables
ModèleModèle
23
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
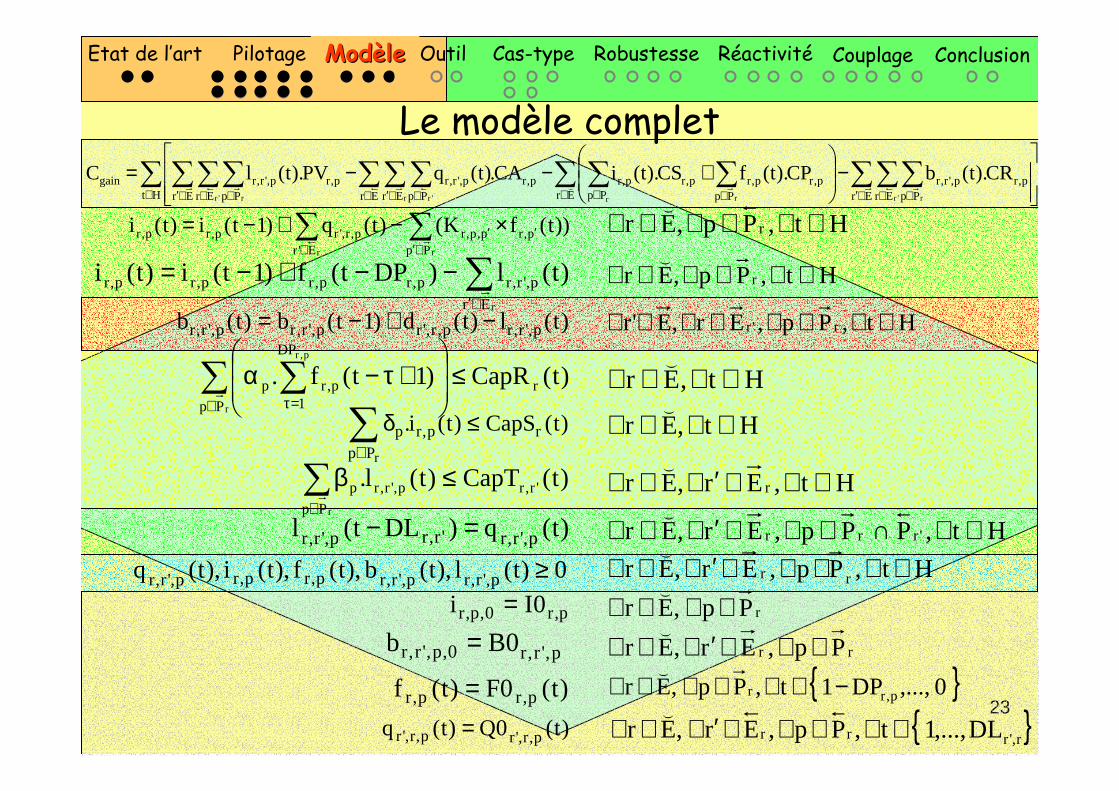
Le modèle complet
∑∈′
−−+−=rEr
p,'r,rp,rp,rp,rp,r )t(l)DPt(f)1t(i)t(i Ht,Pp,Er r ∈∀∈∀∈∀(
∑∑∈′
′′∈
×−+−=rr Pp
p,rp,p,rE'r
p,r,'rp,rp,r ))t(fK()t(q)1t(i)t(i Ht,Pp,Er r ∈∀∈∀∈∀(
)t(l)t(d)1t(b)t(b p,'r,rp,r,'rp,'r,rp,'r,r −+−= Ht,Pp,Er,E'r r'r ∈∀∈∀∈∀∈∀
)t(CapR)1t(f. r
Pp
DP
1p,rp
r
p,r
≤
+τ−α∑ ∑
∈ =τHt,Er ∈∀∈∀
(
∑∈
≤δrPp
rp,rp )t(CapS)t(i. Ht,Er ∈∀∈∀(
)t(CapT)t(l. 'r,r
Pp
p,'r,rp
r
≤β∑∈
Ht,Er,Er r ∈∀∈′∀∈∀(
)t(q)DLt(l p,'r,r'r,rp,'r,r =− Ht,PPp,Er,Er 'rrr ∈∀∩∈∀∈′∀∈∀(
0)t(l),t(b),t(f),t(i),t(q p,'r,rp,'r,rp,rp,rp,'r,r ≥ Ht,Pp,Er,Er rr ∈∀∈∀∈′∀∈∀(
p,r0,p,r 0Ii = rPp,Er ∈∀∈∀(
p,'r,r0,p,'r,r 0Bb = rr Pp,Er,Er ∈∀∈′∀∈∀(
)t(0F)t(f p,rp,r = { }0,...,DP1t,Pp,Er p,rr −∈∀∈∀∈∀(
)t(0Q)t(q p,r,'rp,r,'r = { }r,'rrr DL,...,1t,Pp,Er,Er ∈∀∈∀∈′∀∈∀(
∑ ∑∑∑∑ ∑ ∑∑∑∑∑∑∑∈ ∈′ ∈ ∈∈ ∈ ∈∈ ∈′ ∈∈′ ∈ ∈
−
+−−=
Ht Er Er Ppp,rp,'r,r
Er Pp Ppp,rp,rp,rp,rp,r
Er Er Ppp,'r,r
Er Er Ppp,rp,'r,rgain
'r rr rr 'r'r r
CR).t(bCP).t(fCS).t(iCA.)t(qPV).t(lC(
ModèleModèle
24
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
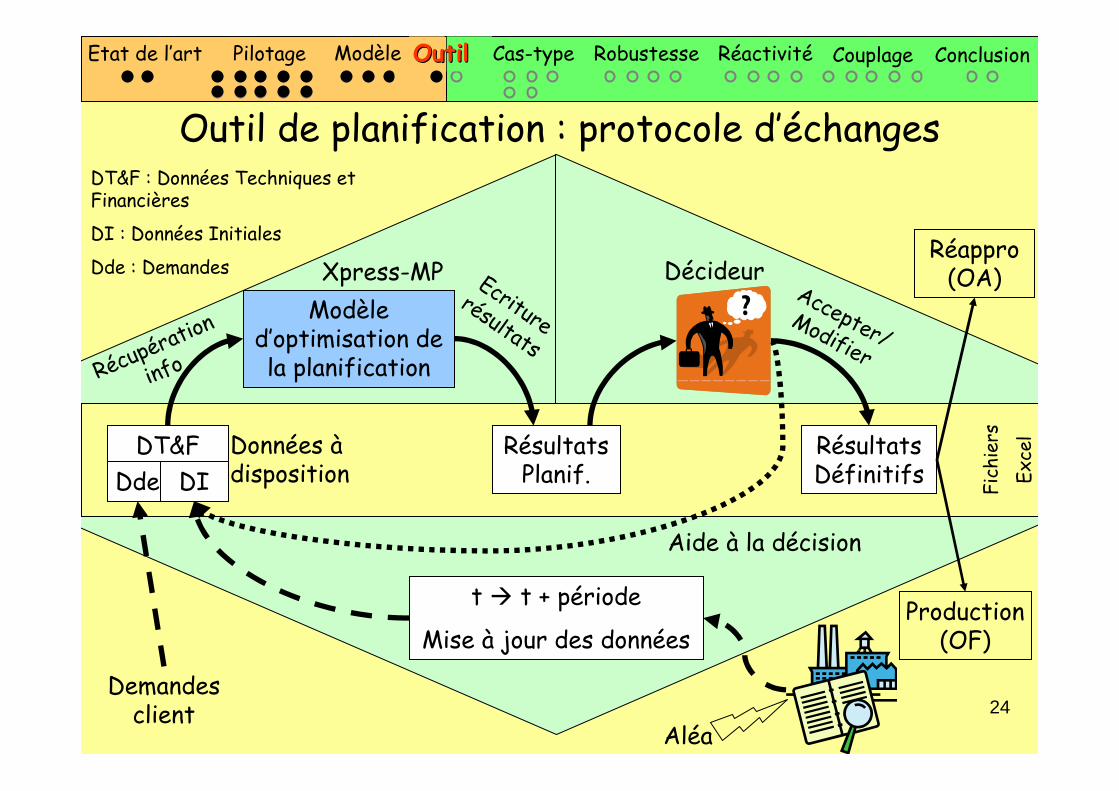
Outil de planification : protocole d’échanges
DT&F Résultats Planif.
Résultats Définitifs
Production (OF)
Réappro(OA)
Récupéra
tion
info
Xpress-MP Ecriture résultats
DécideurAccepter/Modifier
Modèle d’optimisation de la planification
Demandes client
Dde DIDonnées àdisposition
t � t + période
Mise à jour des données
Aléa
DT&F : Données Techniques et Financières
DI : Données Initiales
Dde : Demandes
Aide à la décision
Fichiers
Excel
OutilOutil
25
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
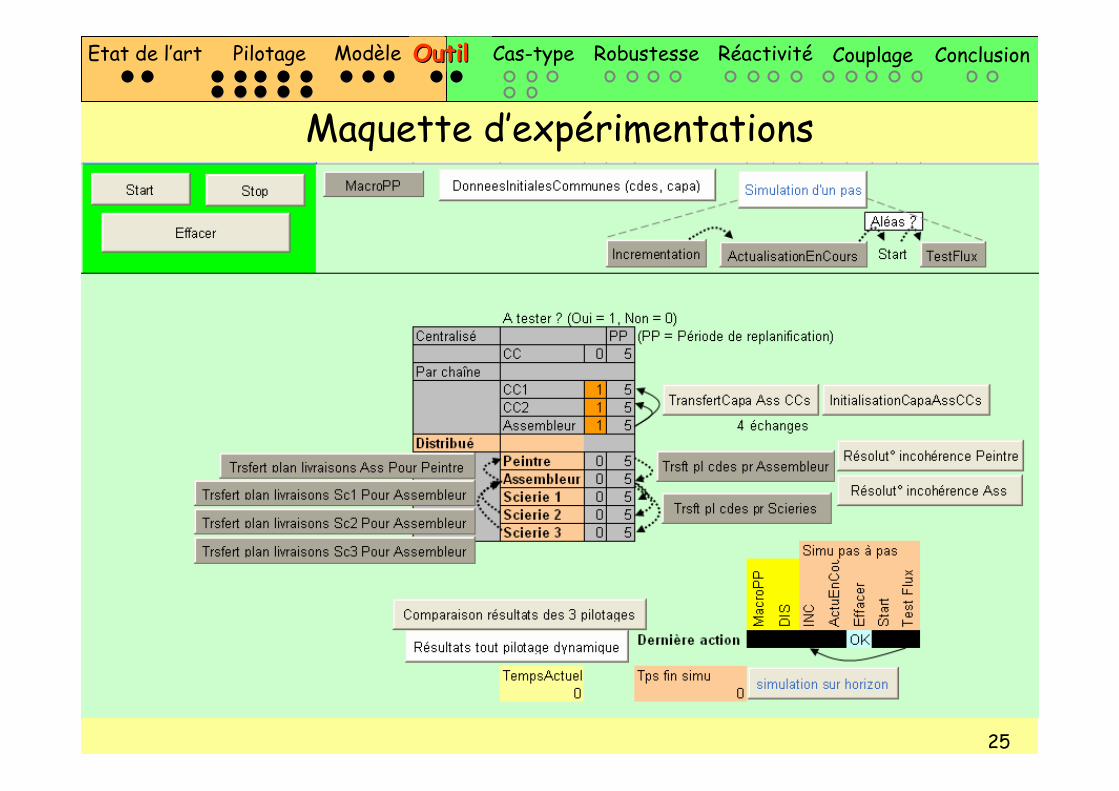
Maquette d’expérimentations
25
OutilOutil
26
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Plan
Conclusion et perspectives
Outil de planification
Modèle mathématique de planification
Architecture de pilotage de chaîne
logistique
Structure physique : casStructure physique : cas--type de chaîne logistiquetype de chaîne logistique
Ressource partagéeEtude de réactivitéEtude de robustesse
2 3
4
5
6 7 8
3
1
1
1 1 1
Théorique
Expérimentale1 Etat de l’art et positionnement
27
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
• Basé sur la littérature et des entretiens industriels
• Industries :– 3 Entreprises du secteur aéronautique– 1 Entreprise de systèmes de conditionnement d’air– 1 Entreprise de l’industrie du semi-conducteur
• Caractéristiques essentielles :– Grandes entreprises : donneurs d’ordres ou fournisseurs– Réseau de distribution limité– Chaînes logistiques et produits complexes– Fabrication petite et moyenne séries à la commande
Cas-type de chaîne logistique
CasCas--typetype
28
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
• Peu mention de la gestion globale de la chaîne– Ensemble de relations client – fournisseur– Difficultés à prendre en compte tous les acteurs : vision limitée au rang n- 1
• Néanmoins favorisation du partage d’information – Outils informatiques (accès portails, EDI…)– Plans d’approvisionnement, niveau de stock, …
Constats sur le pilotage de la chaîne
CasCas--typetype
29
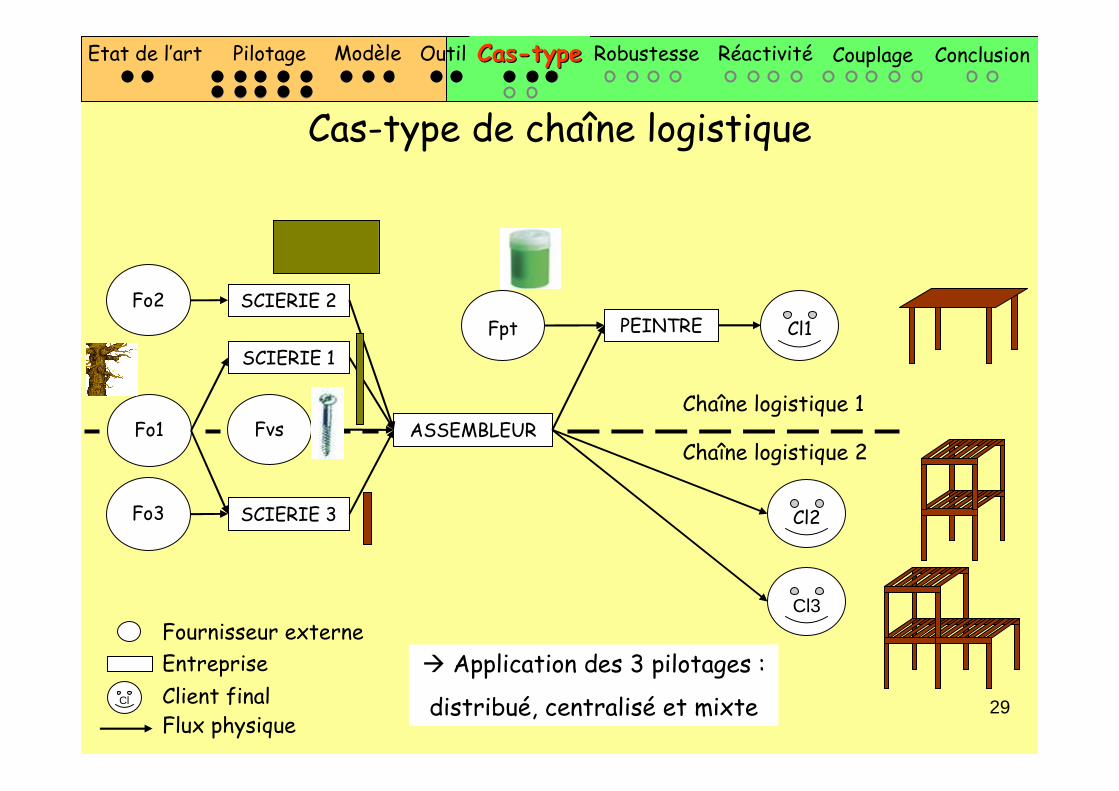
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Fo2
ASSEMBLEUR
Cl2
Fvs
Fo3
Fo1
Cl1
Cl3
PEINTREFpt
Chaîne logistique 1
SCIERIE 2
SCIERIE 1
SCIERIE 3
Chaîne logistique 2
Fournisseur externeEntreprise
Cl Client finalFlux physique
Cas-type de chaîne logistique
� Application des 3 pilotages :
distribué, centralisé et mixte
CasCas--typetype
30
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
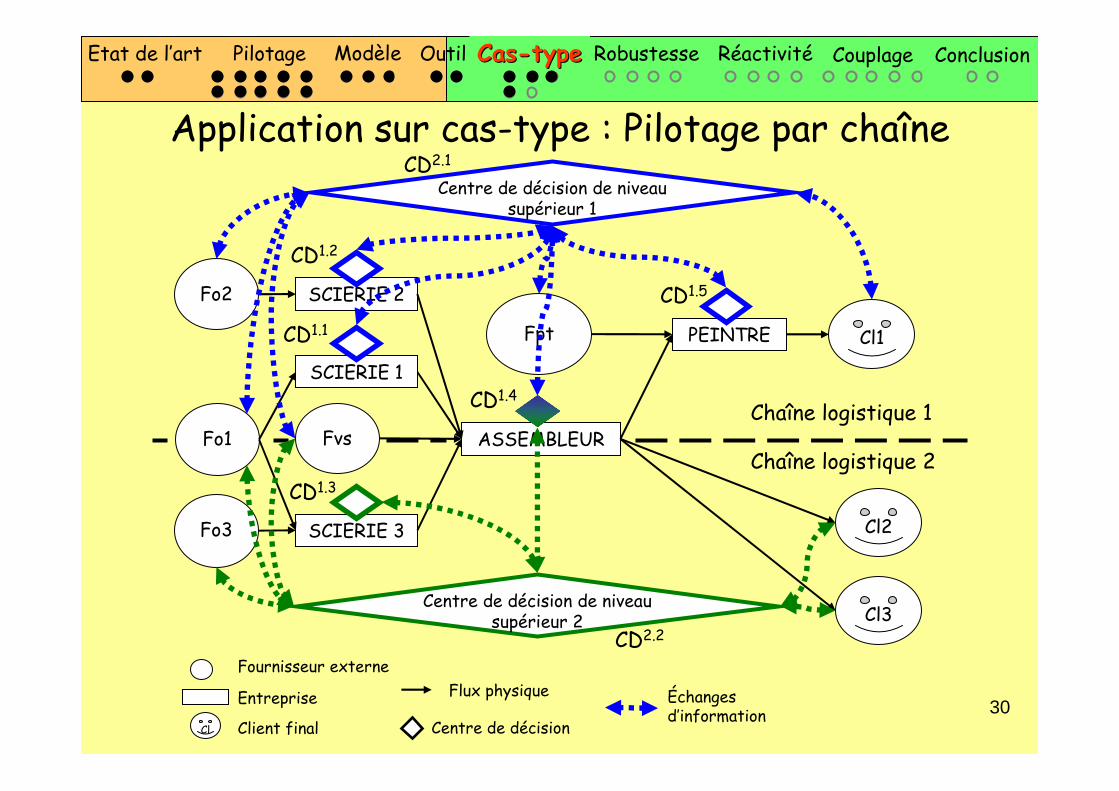
Application sur cas-type : Pilotage par chaîne
Fournisseur externe
Entreprise
Cl Client final
Flux physique
Centre de décision
Échanges d’information
Fo2
ASSEMBLEUR
Cl2
Fvs
Fo3
Fo1
Cl1
Cl3
PEINTREFpt
Chaîne logistique 1
SCIERIE 2
SCIERIE 1
SCIERIE 3
Chaîne logistique 2
Centre de décision de niveau supérieur 1
Centre de décision de niveau supérieur 2
CD1.2
CD1.1
CD1.3
CD1.4
CD1.5
CD2.1
CD2.2
CasCas--typetype
31
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
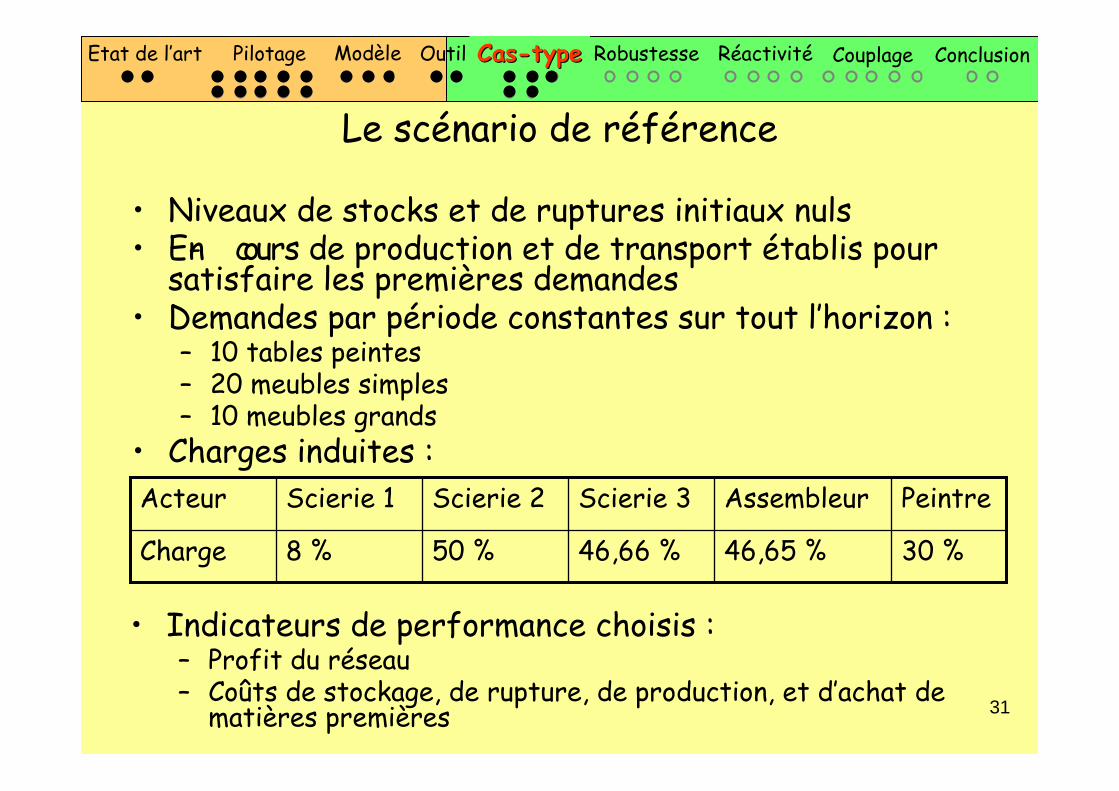
• Niveaux de stocks et de ruptures initiaux nuls• En- cours de production et de transport établis pour satisfaire les premières demandes
• Demandes par période constantes sur tout l’horizon :– 10 tables peintes– 20 meubles simples– 10 meubles grands
• Charges induites :
Charge
Acteur
30 %46,65 %46,66 %50 %8 %
PeintreAssembleurScierie 3Scierie 2Scierie 1
Le scénario de référence
• Indicateurs de performance choisis :– Profit du réseau– Coûts de stockage, de rupture, de production, et d’achat de matières premières
CasCas--typetype

32
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Plan
Conclusion et perspectives
Outil de planification
Modèle mathématique de planification
Architecture de pilotage de chaîne
logistique
Structure physique : cas-type de chaîne logistique
Ressource partagéeEtude de réactivitéEtude de réactivitéEtude de robustesseEtude de robustesse
2 3
4
5
6 7 8
3
1
1
1 1 1
Théorique
Expérimentale1 Etat de l’art et positionnement
33
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Définitions
• Robustesse : – Aptitude d’une solution de planification à ne pas être trop sensible aux incertitudes sur certaines données, telles que la capacité, la demande,…
– Planification statique (horizon fixe)– Plus de 170 expérimentations
• Réactivité : – Aptitude à utiliser la flexibilité décisionnelle face à l’apparition d’un aléa de fonctionnement ou aux sollicitations non prévisibles de l’environnement
– Planification dynamique (horizon glissant)– Environ 160 expérimentations
Robustesse RéactivitéRobustesse Réactivité

34
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Coûtrupture
Demande
Appro./ Transport
Capaproduction
Délaiinformat°
Scénariode référence
Coûtstockage
Coûtrupture
Demande
Appro./ Transport
Capaproduction
Délaiinformat°
Scénariode référence
Coûtstockage
Méthodologie
RobustesseRobustesse
35
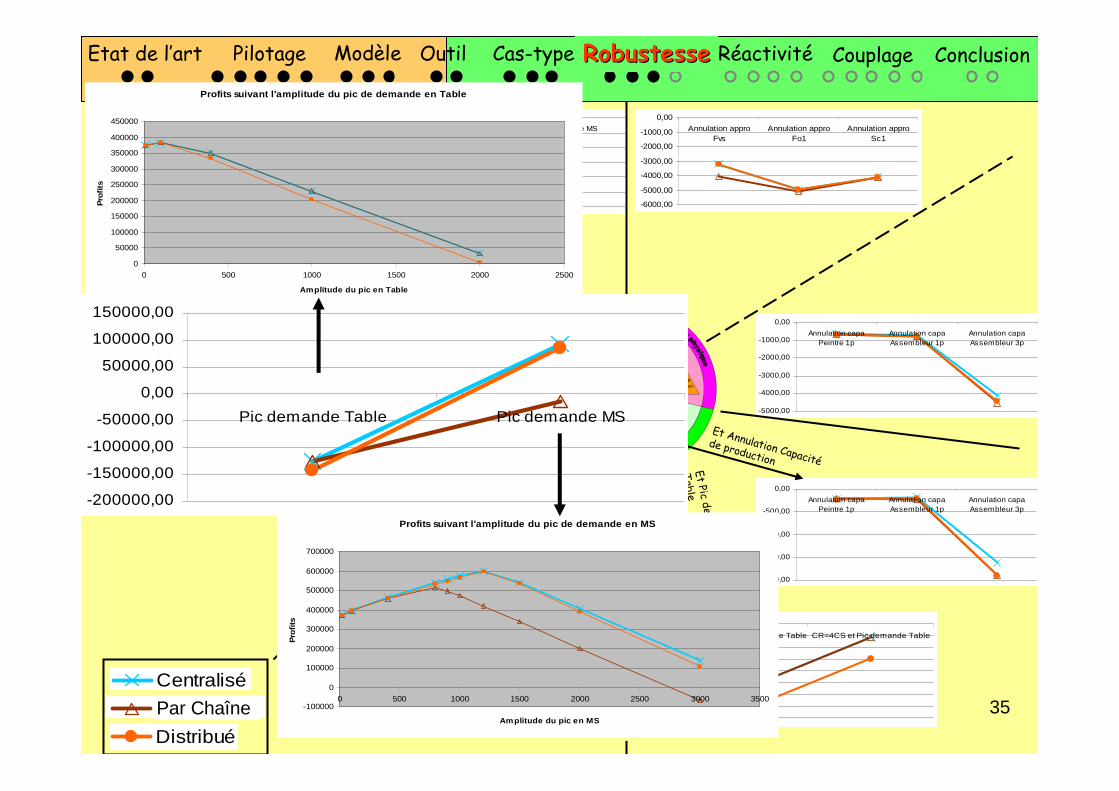
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
-80000,00
-70000,00
-60000,00
-50000,00
-40000,00
-30000,00
-20000,00
-10000,00
0,00
CR=10CS et Pic demande Table CR=4CS et Pic demande Table
Coûtrupture
Demande
Appro./ Transport
Capacité production
Délaiinformation
Scénario de référence
Coûtstockage
Et Pic demande
TableEt Annulation Capacité
de production-200000,00
-150000,00
-100000,00
-50000,00
0,00
50000,00
100000,00
150000,00
Pic demande Table Pic demande MS
-6000,00
-5000,00
-4000,00
-3000,00
-2000,00
-1000,00
0,00
Annulation approFvs
Annulation approFo1
Annulation approSc1
-5000,00
-4000,00
-3000,00
-2000,00
-1000,00
0,00
Annulation capaPeintre 1p
Annulation capaAssembleur 1p
Annulation capaAssembleur 3p
-2000,00
-1500,00
-1000,00
-500,00
0,00
Annulation capaPeintre 1p
Annulation capaAssembleur 1p
Annulation capaAssembleur 3p
-150000,00
-145000,00
-140000,00
-135000,00
-130000,00
-125000,00
-120000,00
-115000,00
CS modifié pour préférencechez client et Pic demande
Table
CS modifié pour préférencechez fournisseur et Pic
demande Table
-60000,00
-50000,00
-40000,00
-30000,00
-20000,00
-10000,00
0,00
Pic demande Table Pic demande MS
Distribué
Par Chaine
Centralisé
Par Chaîne
-200000,00
-150000,00
-100000,00
-50000,00
0,00
50000,00
100000,00
150000,00
Pic demande Table Pic demande MS
Profits suivant l'amplitude du pic de demande en MS
-100000
0
100000
200000
300000
400000
500000
600000
700000
0 500 1000 1500 2000 2500 3000 3500
Amplitude du pic en MS
Pro
fits
Profits suivant l'amplitude du pic de demande en Ta ble
0
50000
100000
150000
200000
250000
300000
350000
400000
450000
0 500 1000 1500 2000 2500
Amplitude du pic en Table
Pro
fits
RobustesseRobustesse

36
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Résultat : synthèse sur la robustesse
• Notation qualitative du degré de robustesse :– Solution …
• pas du tout (1)• peu (2)• moyennement (3)• assez (4)• très (5)
Centralisé Par Chaîne Distribué TotalAppro 2 1 2 5Capacité production 2 2 2 6Coût rupture 3 4 4 11Coût stockage 3 3 1 7Demande 2 2 1 5Délai information 5 5 2 12
Total 17 17 12
robuste par rapport à la variation des paramètres considérés
RobustesseRobustesse
37
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Les différents scénarios pour la réactivité
160 expérimentations avec augmentation de la demande en fonction :
• du type d’aléa – Panne de machine– Retard d’approvisionnement
• de la période de replanification– Conditionne le délai de réaction
• du degré d’autonomie des centres locaux
• du degré de collaboration en pilotage distribué– Suivi de livraison– Transmission du plan de livraison
RéactivitéRéactivité
38
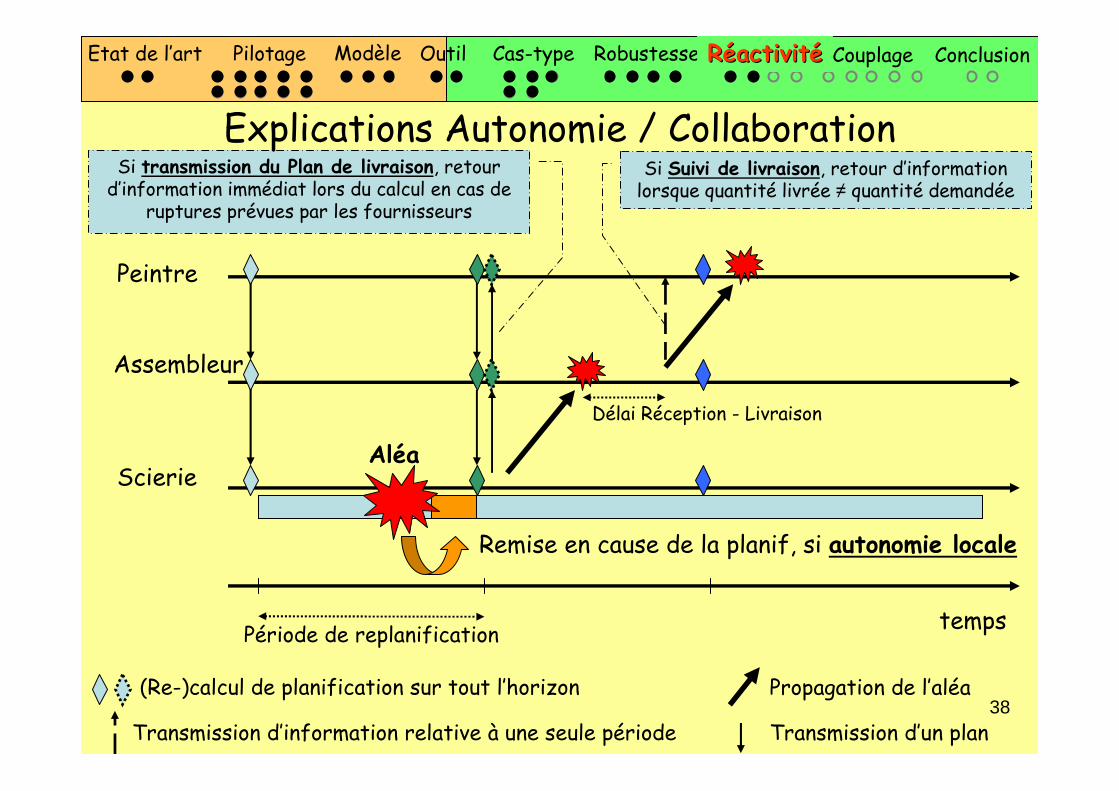
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
(Re-)calcul de planification sur tout l’horizon
Peintre
Assembleur
Transmission d’un plan
tempsPériode de replanification
ScierieAléa
Remise en cause de la planif, si autonomie locale
Propagation de l’aléa
Délai Réception - Livraison
Si Suivi de livraison, retour d’information lorsque quantité livrée ≠ quantité demandée
Si transmission du Plan de livraison, retour d’information immédiat lors du calcul en cas de
ruptures prévues par les fournisseurs
Transmission d’information relative à une seule période
Explications Autonomie / Collaboration
RéactivitéRéactivité

39
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Résultat : synthèse sur la réactivité
• Impact du degré de collaboration et d’autonomie
0,00
1000,00
2000,00
3000,00
4000,00
5000,00
6000,00
7000,00
_._._ _.P._ S._._ S.P._ _._.A _.P.A S._.A S.P.A
Degré de collaboration et autonomie
Per
tes
prof
it pa
r rap
port
au ré
fére
ntie
l
Centralisé Par chaîne Distribué
S : Suivi de livraison
P : Transmission du plan de livraison
A : Autonomie locale
RéactivitéRéactivité
40
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
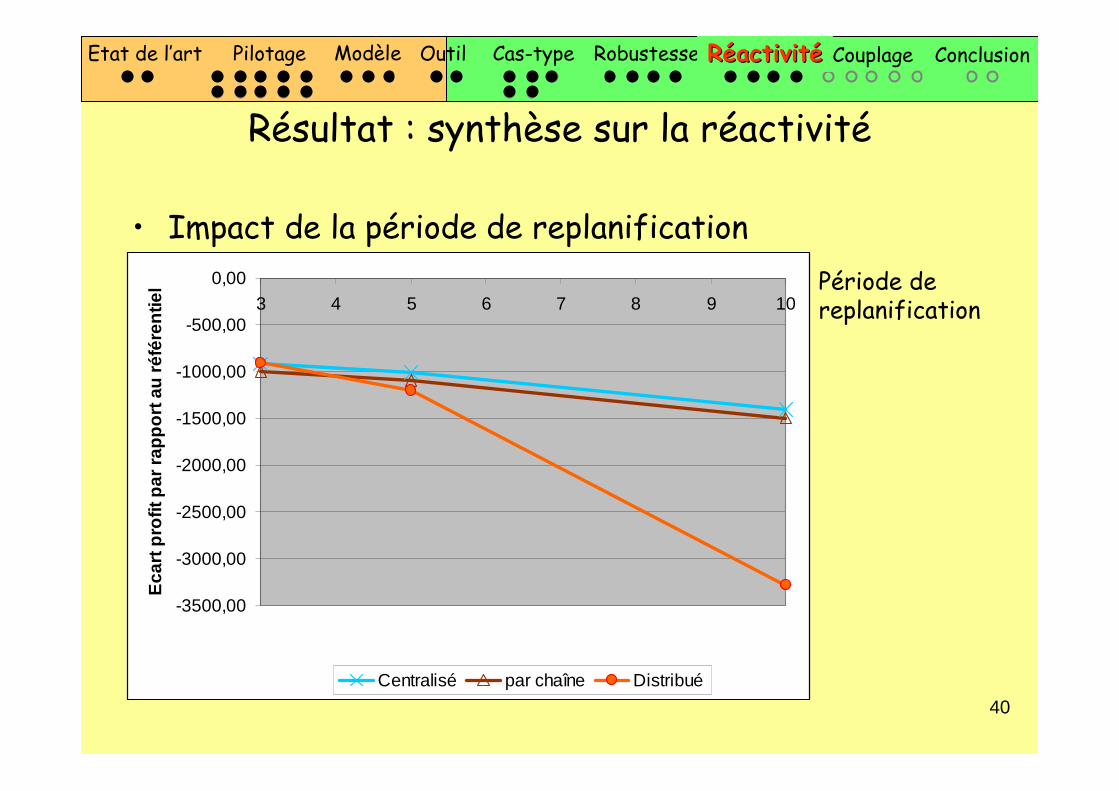
Résultat : synthèse sur la réactivité
• Impact de la période de replanificationPériode de replanification
-3500,00
-3000,00
-2500,00
-2000,00
-1500,00
-1000,00
-500,00
0,003 4 5 6 7 8 9 10
PP
Eca
rt pr
ofit
par r
appo
rt au
réfé
rent
iel
Centralisé par chaîne Distribué
RéactivitéRéactivité
41
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Plan
Conclusion et perspectives
Outil de planification
Modèle mathématique de planification
Architecture de pilotage de chaîne
logistique
Structure physique : cas-type de chaîne logistique
Ressource partagéeRessource partagéeEtude de réactivitéEtude de robustesse
2 3
4
5
6 7 8
3
1
1
1 1 1
Théorique
Expérimentale1 Etat de l’art et positionnement
42
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
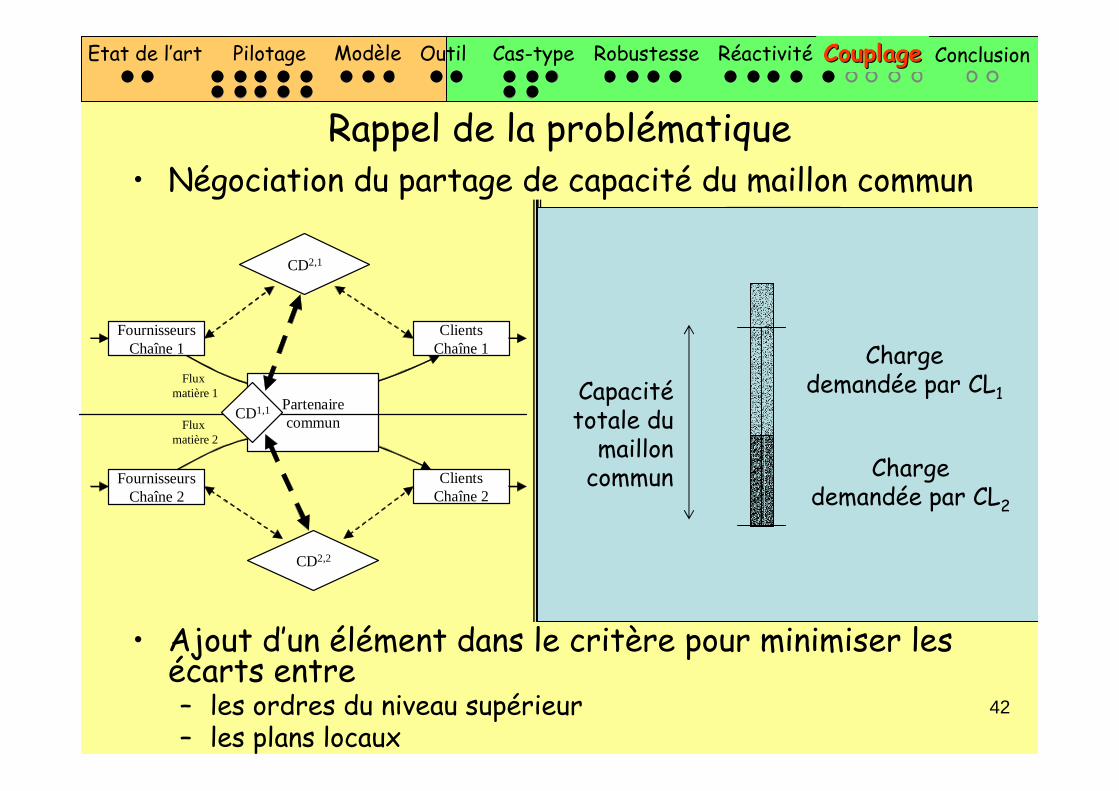
Rappel de la problématique• Négociation du partage de capacité du maillon commun
CouplageCouplage
FournisseursChaîne 1
FournisseursChaîne 2
ClientsChaîne 1
ClientsChaîne 2
Partenairecommun
Flux matière 1
Flux matière 2
CD1,1
CD2,1
CD2,2
CD2,1 : Planifie CD2,2 : Planifie
CD1,1 : Réserve
0 : capacités pré-réservées
CD1,1 : Analyse
2 : proposition d’OF sur H
CD2,1 : Replanifie CD2,2 : Replanifie
CD1,1 : Décision
3 : refus et envoi d’un nouveau plan
2’ : nouvelle proposition d’OF sur H
2’ : nouvelle proposition d’OF sur H 3’ : accord
avec CD2,13’ : accord avec CD2,2
1 : demandesclients
1 : demandesclients
• Ajout d’un élément dans le critère pour minimiser les écarts entre – les ordres du niveau supérieur – les plans locaux
Capacitétotale du maillon commun
Chargedemandée par CL1
Chargedemandée par CL2
43
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
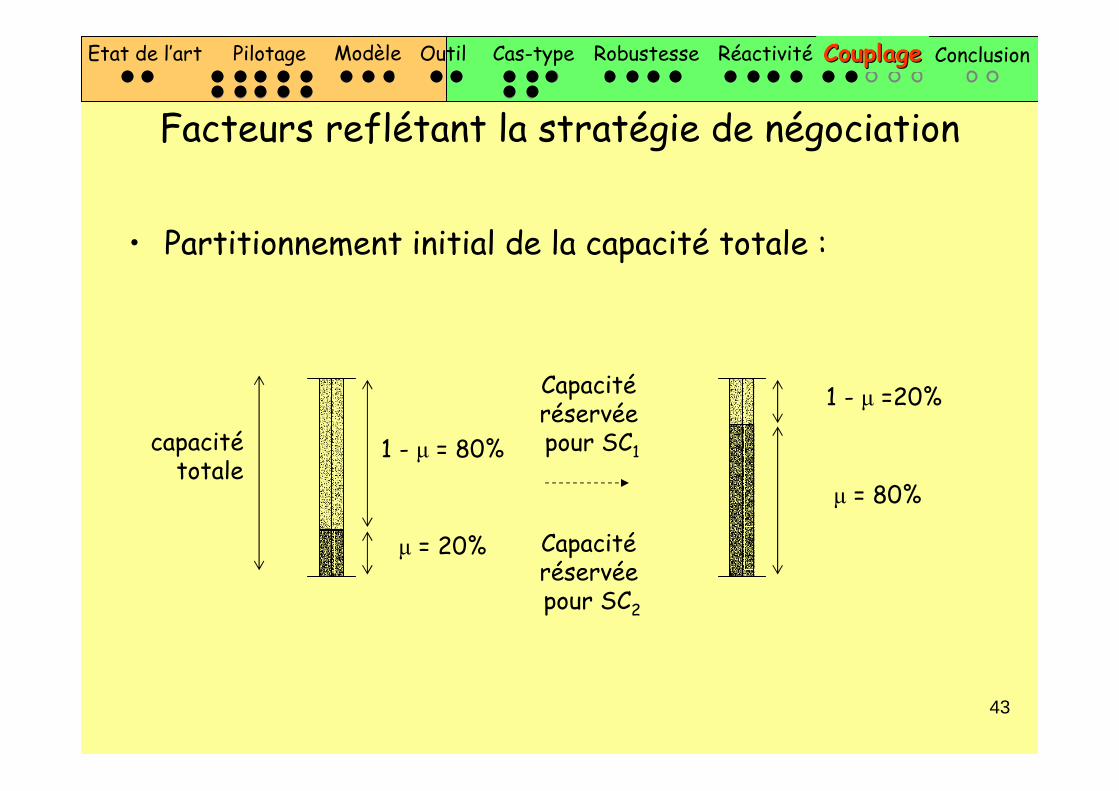
capacitétotale
• Partitionnement initial de la capacité totale :
Capacitéréservée pour SC1
Capacitéréservée pour SC2
1 - µ = 80%
µ = 20%
1 - µ =20%
µ = 80%
Facteurs reflétant la stratégie de négociation
CouplageCouplage
44
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
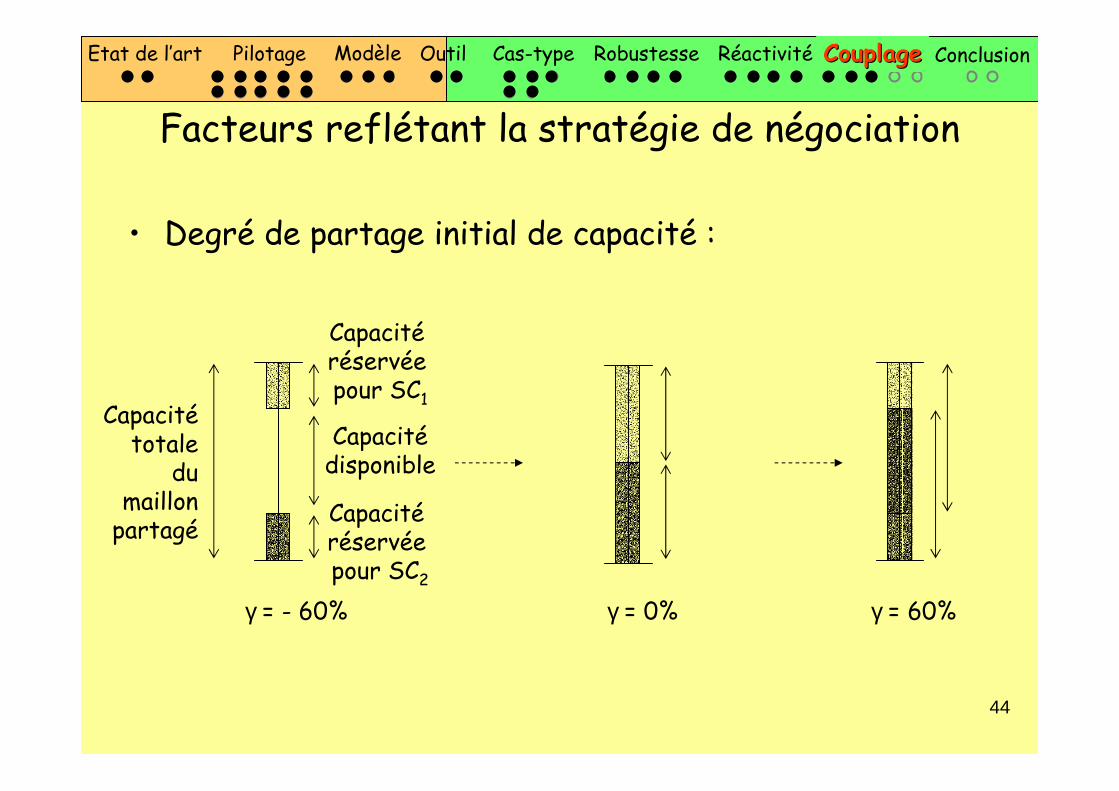
Capacité totale
du maillon partagé
Capacité disponible
γ = - 60% γ = 60%
• Degré de partage initial de capacité :
Capacité réservée pour SC1
Capacité réservée pour SC2
γ = 0%
Facteurs reflétant la stratégie de négociation
CouplageCouplage
45
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
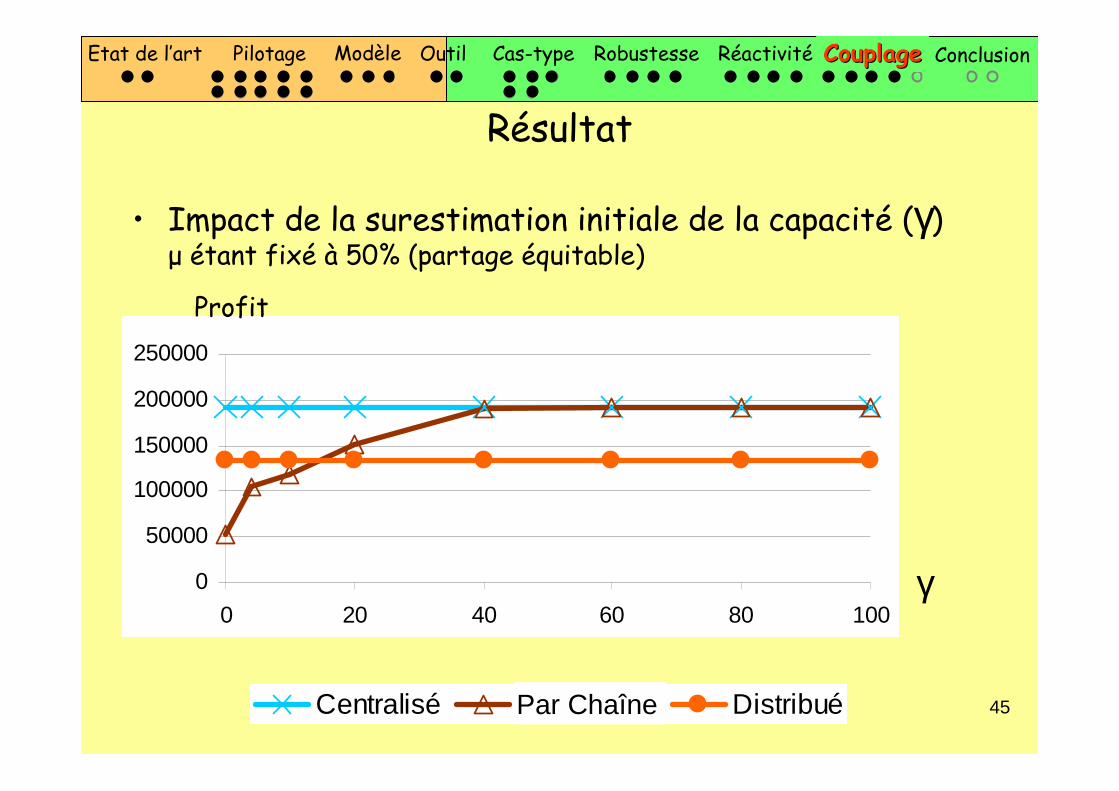
Résultat
• Impact de la surestimation initiale de la capacité (γ)µ étant fixé à 50% (partage équitable)
γ0
50000
100000
150000
200000
250000
0 20 40 60 80 100
Profit
Centralisé Par Chaine DistribuéPar Chaîne
CouplageCouplage

46
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Non convergence du processus de négociation
• Autres expérimentations avec modification des poids du nouvel élément du critère.– Si poids importants pour nouvel élément, alors le processus converge « naturellement »
– Sinon, risque de non convergence (nombre d’échanges important voir infini)
• Mécanismes d’aide à la convergence :– Transmission des plans de capacité en redistribuant de moins en moins la capacité résiduelle
– Augmentation progressive des poids du critère
CouplageCouplage
47
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Plan
Conclusion et perspectivesConclusion et perspectives
Outil de planification
Modèle mathématique de planification
Architecture de pilotage de chaîne
logistique
Structure physique : cas-type de chaîne logistique
Ressource partagéeEtude de réactivitéEtude de robustesse
2 3
4
5
6 7 8
3
1
1
1 1 1
Théorique
Expérimentale1 Etat de l’art et positionnement
48
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Conclusion
• Elaboration d’un outil générique d’aide à la planification des réseaux logistiques couplant :– Un modèle mathématique de résolution rapide (Xpress-MP)– Un tableur (Excel) servant d’interface avec le décideur
• Etude du partage d’information et de décision dans la chaîne et son impact sur la performance (pilotage distribué, centralisé, mixte)
• Caractérisation d’un processus de négociation
• Pour tout cas d’étude, analyse de performances :– Robustesse – Réactivité– Partage de capacité
ConclusionConclusion
49
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Perspectives
ConclusionConclusion
• Extension du modèle de planification :– Ajout de nouvelles contraintes (Production par lot, rebuts, stock de sécurité…)
– Prise en compte de sous-traitants – Agrégation des données– Renégociation des plans de livraison– Désynchronisation des décisions
• Exploitation de l’outil– Couplage avec un simulateur du système physique– Développement de nouvelles stratégies de négociation – Poursuite de l’étude des chaînes couplées (N centres, HG)
• …

50
Modèle Outil Cas-type Robustesse Réactivité Couplage ConclusionPilotageEtat de l’art
Planification des chaînes logistiques :Planification des chaînes logistiques :modélisation du système décisionnel modélisation du système décisionnel
et performanceet performance
Soutenance de thèse de
Julien FRANCOISIngénieur ENSEEIHT (Génie électrique et automatique)
17 Décembre 2007
Ecole doctorale des Sciences Physiques et de l’Ingénieur
Thèse co-dirigée IMS-LAPS / LAAS
Directeur de thèse : Jean-Paul BOURRIERES
Co-Directeur de thèse : Gérard FONTAN
Co-Directeur de thèse : Jean-Christophe DESCHAMPS