les documents utiles à la résolution sont rassemblés ci ... · Étienne samain ingénieur cnrs,...
TRANSCRIPT
LA TELEMETRIE LASER
« Déterminer le champ de gravité de la Terre, mesurer le niveau des océans et des glaciers, suivre la tectonique des plaques, étalonner les instruments spatiaux, étudier la Lune et les planètes, et même tester la physique fondamentale, toutes ces tâches nécessitent des mesures précises de distance, qui se font par télémétrie laser (…) En pratique, on mesure le temps de vol d’une impulsion lumineuse entre une station au sol et une cible placée sur le satellite dont on veut déterminer la distance. La station est constituée d’un laser pulsé, d’un dispositif de détection et de datation, et d’un télescope. Le laser émet des impulsions lumineuses très brèves (20 picosecondes), d’une puissance instantanée fantastique. La plupart d’entre eux émettent une impulsion tous les dixièmes de seconde, soit une cadence de tir de 10 hertz, mais certaines atteignent des cadences de tir de quelques kilohertz. La date de départ de l’impulsion est déterminée avec précision. La cible, équipée d’un réflecteur, renvoie le faisceau en direction de la station, laquelle détecte et date le faisceau de retour. La distance est déduite des différences entre les dates de départ et de retour des impulsions émises par la station et réfléchies par la cible. »
D’après Pour la Science, dossier n°53, octobre-décembre 2006, Arpenter l’espace à l’aide de lasers, Étienne SAMAIN ingénieur CNRS, Observatoire de la Côte d’Azur.
L’exercice aborde quelques problématiques en lien avec le travail réalisé par les ingénieurs et chercheurs de l’Observatoire de la Côte d’Azur (OCA), situé sur le plateau de Calern, près de Grasse dans les Alpes-Maritimes. Les documents utiles à la résolution sont rassemblés ci-dessous :
Document 1
Le laser utilisé à l’OCA est un laser à Nd :YAG, constitué de cristaux de Grenat
artificiels d’Yttrium et d’Aluminium (Y33+Al5
3+O122) dopés par des ions Néodyme.
L’inversion de population, réalisée par pompage optique, concerne ces derniers ions. Ce laser émet une radiation lumineuse de longueur d’onde 1064 nm. Mais un dispositif permet de doubler la fréquence, de sorte qu’il émet à la sortie du télescope, une
radiation de longueur d’onde = 532 nm dans le vide. La fréquence d’une radiation
lumineuse et sa longueur d’onde étant liées par la relation c où c, est la célérité de la lumière. Un tir laser émet une centaine d’impulsions pendant une dizaine de secondes, chacune durant 20 ps. Chaque impulsion émet une énergie E = 200 mJ.
Document 2
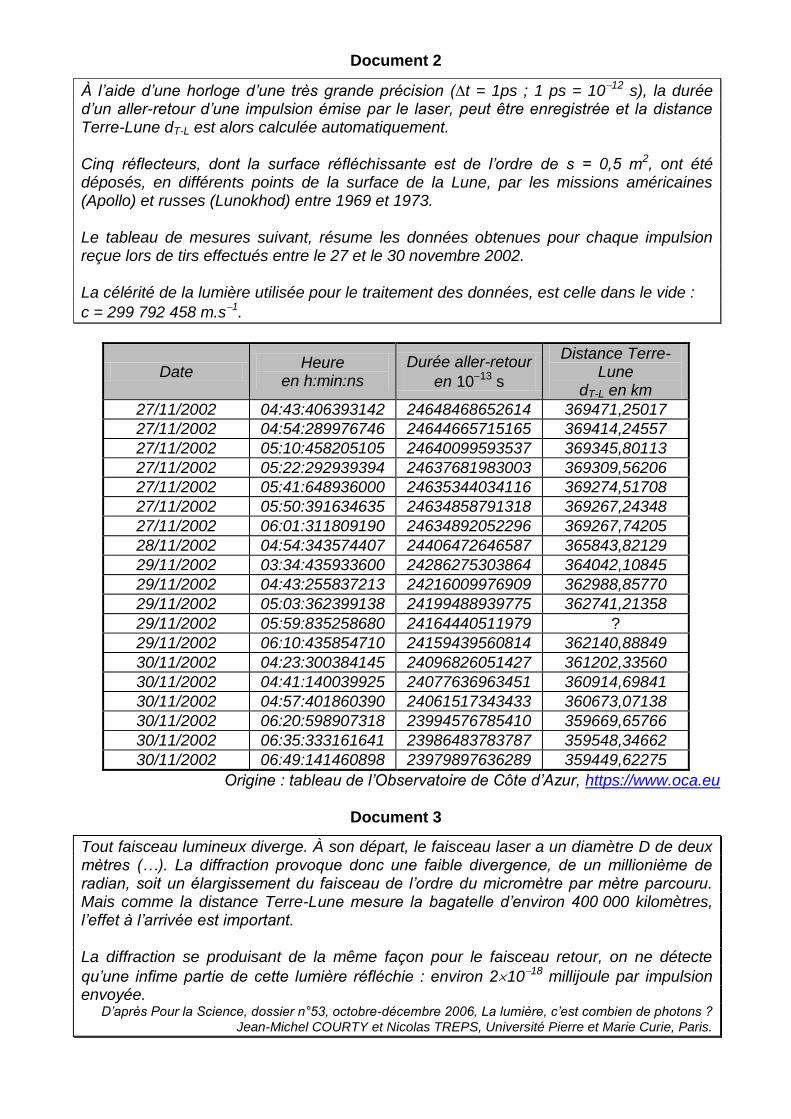
À l’aide d’une horloge d’une très grande précision (t = 1ps ; 1 ps = 1012 s), la durée d’un aller-retour d’une impulsion émise par le laser, peut être enregistrée et la distance Terre-Lune dT-L est alors calculée automatiquement. Cinq réflecteurs, dont la surface réfléchissante est de l’ordre de s = 0,5 m2, ont été déposés, en différents points de la surface de la Lune, par les missions américaines (Apollo) et russes (Lunokhod) entre 1969 et 1973. Le tableau de mesures suivant, résume les données obtenues pour chaque impulsion reçue lors de tirs effectués entre le 27 et le 30 novembre 2002. La célérité de la lumière utilisée pour le traitement des données, est celle dans le vide :
c = 299 792 458 m.s1.
Date Heure
en h:min:ns
Durée aller-retour
en 1013 s
Distance Terre- Lune
dT-L en km
27/11/2002 04:43:406393142 24648468652614 369471,25017
27/11/2002 04:54:289976746 24644665715165 369414,24557
27/11/2002 05:10:458205105 24640099593537 369345,80113
27/11/2002 05:22:292939394 24637681983003 369309,56206
27/11/2002 05:41:648936000 24635344034116 369274,51708
27/11/2002 05:50:391634635 24634858791318 369267,24348
27/11/2002 06:01:311809190 24634892052296 369267,74205
28/11/2002 04:54:343574407 24406472646587 365843,82129
29/11/2002 03:34:435933600 24286275303864 364042,10845
29/11/2002 04:43:255837213 24216009976909 362988,85770
29/11/2002 05:03:362399138 24199488939775 362741,21358
29/11/2002 05:59:835258680 24164440511979 ?
29/11/2002 06:10:435854710 24159439560814 362140,88849
30/11/2002 04:23:300384145 24096826051427 361202,33560
30/11/2002 04:41:140039925 24077636963451 360914,69841
30/11/2002 04:57:401860390 24061517343433 360673,07138
30/11/2002 06:20:598907318 23994576785410 359669,65766
30/11/2002 06:35:333161641 23986483783787 359548,34662
30/11/2002 06:49:141460898 23979897636289 359449,62275
Origine : tableau de l’Observatoire de Côte d’Azur, https://www.oca.eu
Document 3
Tout faisceau lumineux diverge. À son départ, le faisceau laser a un diamètre D de deux mètres (…). La diffraction provoque donc une faible divergence, de un millionième de radian, soit un élargissement du faisceau de l’ordre du micromètre par mètre parcouru. Mais comme la distance Terre-Lune mesure la bagatelle d’environ 400 000 kilomètres, l’effet à l’arrivée est important. La diffraction se produisant de la même façon pour le faisceau retour, on ne détecte
qu’une infime partie de cette lumière réfléchie : environ 21018 millijoule par impulsion envoyée.
D’après Pour la Science, dossier n°53, octobre-décembre 2006, La lumière, c’est combien de photons ? Jean-Michel COURTY et Nicolas TREPS, Université Pierre et Marie Curie, Paris.
À l’aide de vos connaissances et des documents fournis, rédiger des réponses argumentées aux situations suivantes. 1. À propos du laser.
1.1. Montrer en utilisant la relation c que doubler la fréquence permet de diviser par deux la longueur d’onde émise initialement par le laser.
1.2.
1.2.1. Indiquer une propriété particulière du laser pulsé.
1.2.2. Justifier l’affirmation d’Étienne SAMAIN : le laser émet des impulsions de puissance instantanée fantastique.
Données : La puissance p d’une impulsion est reliée à l’énergie E émise pendant
la durée t d’une impulsion : E
pt
1.3. Estimer le nombre de photons émis à chaque impulsion en direction de la Lune.
L’utilisation des valeurs numériques des grandeurs mises en jeu pour ce calcul n’est pas nécessaire ; une estimation à l’aide des ordres de grandeur de celles-ci sera privilégiée. Données : L’énergie d’un photon est donnée par la relation :
ce h
où est la longueur d’onde de la radiation, c la célérité de la lumière dans
le vide et h la constante de Planck (h 6,631034 J.s).
1.4. 1.4.1. À partir des informations fournies dans le document 3, calculer le rayon de la
tache lumineuse obtenue sur la Lune. Il est conseillé de schématiser la situation.
1.4.2. Commenter les propos de Jean-Michel COURTY et Nicolas TREPS, quand ils
écrivent que même si le faisceau émis possède une faible divergence, l’effet sur la Lune est important, en comparant le diamètre de la tache obtenue sur la Lune au diamètre initial D du faisceau laser.
2. À propos de la mesure de la distance Terre-Lune.
2.1. 2.1.1. Par quel calcul sont obtenues les distances Terre-Lune de la dernière colonne
du tableau ? Expliciter celui manquant dans le tableau de mesures, puis calculer sa valeur, en se contentant de la précision de la calculatrice.
2.1.2. D’après le nombre de chiffres significatifs fournis par l’OCA dans ses fichiers de données, avec quelle précision la distance Terre-Lune est-elle mesurée actuellement ?
2.1.3. À votre avis, quel type d’horloge peut permettre d’atteindre une telle précision sur les durées de parcours des impulsions ?
2.2. Proposer deux hypothèses à considérer pour tenter d’expliquer les écarts observés sur la mesure de la distance Terre-Lune.
LES ONDES AU SERVICE DE LA VOITURE DU FUTUR
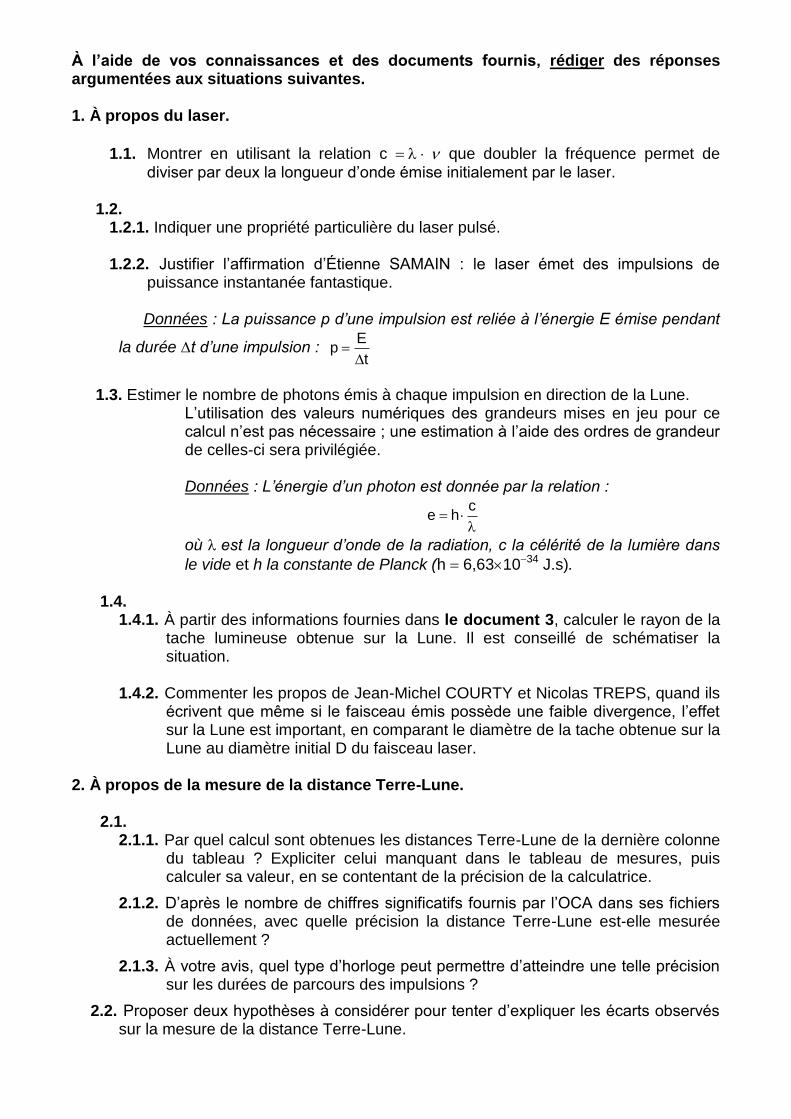
« Sans les mains ! C'est de cette manière que vous pourrez, peut-être très bientôt, conduire votre prochaine voiture... ». Cette phrase évoque ici la voiture autonome dont la commercialisation sera lancée aux alentours de 2020.
Cette voiture « se conduira seule », car elle aura une perception globale de son environnement grâce à la contribution de plusieurs capteurs : télémètre laser à balayage (LIDAR*), caméra, capteurs à infrarouge, radars, capteurs laser, capteurs à ultrasons, antenne GPS ... *LlDAR = Light Detection And Ranging
Un odomètre mesure la distance parcourue par la voiture. L'objectif de cet exercice est d'étudier quelques capteurs présents dans une voiture autonome.
Principe de fonctionnement des capteurs
Les radars, capteurs ultrasonores et lasers sont tous constitués d'un émetteur qui génère une onde pouvant se réfléchir sur un obstacle et d'un capteur qui détecte l'onde réfléchie. Le capteur permet de mesurer la durée entre l'émission et la réception de l'onde après réflexion sur l'obstacle.
Le radar utilise des ondes radio. Le sonar utilise des ultrasons tandis que le laser d'un LIDAR émet des impulsions allant de l'ultra-violet à l'infrarouge.
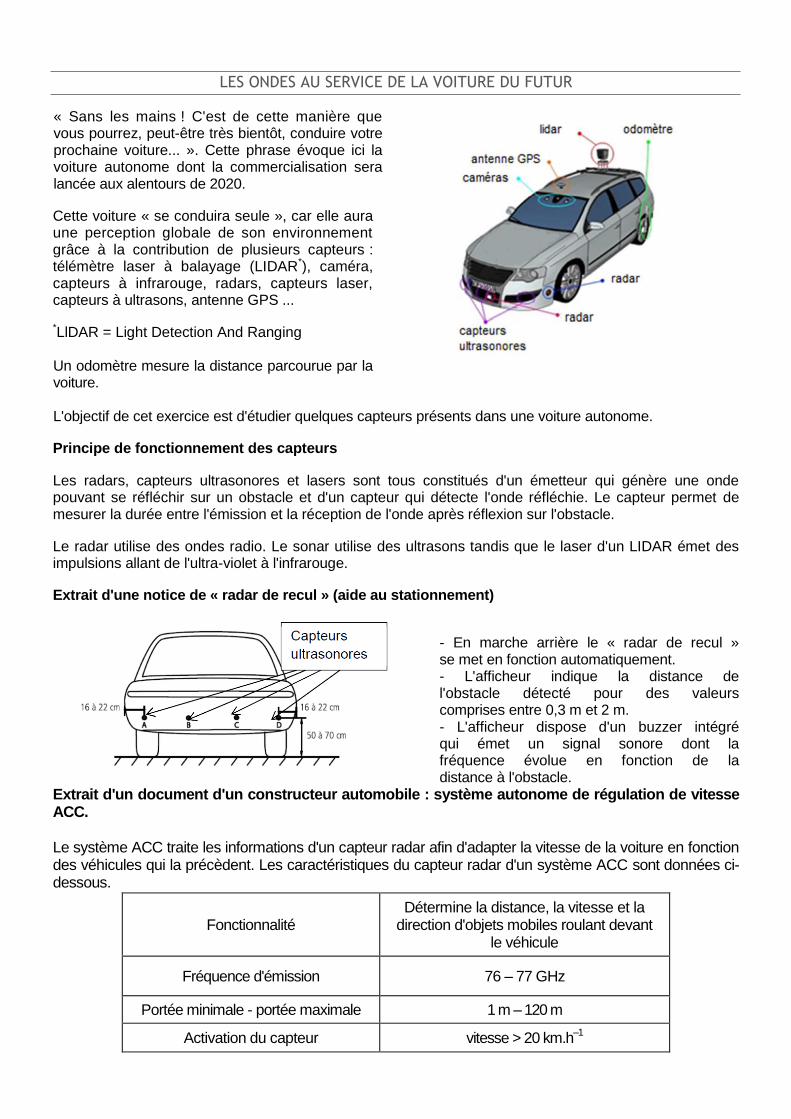
Extrait d'une notice de « radar de recul » (aide au stationnement)
- En marche arrière le « radar de recul » se met en fonction automatiquement. - L'afficheur indique la distance de l'obstacle détecté pour des valeurs comprises entre 0,3 m et 2 m. - L'afficheur dispose d'un buzzer intégré qui émet un signal sonore dont la fréquence évolue en fonction de la distance à l'obstacle.
Extrait d'un document d'un constructeur automobile : système autonome de régulation de vitesse ACC. Le système ACC traite les informations d'un capteur radar afin d'adapter la vitesse de la voiture en fonction des véhicules qui la précèdent. Les caractéristiques du capteur radar d'un système ACC sont données ci-dessous.
Fonctionnalité
Détermine la distance, la vitesse et la direction d'objets mobiles roulant devant
le véhicule
Fréquence d'émission 76 – 77 GHz
Portée minimale - portée maximale 1 m – 120 m
Activation du capteur vitesse > 20 km.h–1
Données : - célérité du son dans l'air à 20 °C : v = 343 m.s
–1 ;
- célérité de la lumière dans le vide ou dans l'air : c = 3,0108 m.s
–1.
1. Propriétés de quelques capteurs présents dans la voiture autonome
1.1. Compléter le tableau de l'annexe à rendre avec la copie en précisant pour chaque capteur le type d'ondes utilisées. 1.2. À l'aide du tableau ci-dessous, déterminer le nom de la bande d'ondes radio utilisées par le capteur radar de l'ACC. Justifier votre réponse à l'aide d'un calcul.
Nom de bande d'ondes radio
Longueurs d'onde dans le vide
HF 10 m – 100 m
L 15 cm – 30 cm
W 2,7 mm - 4,0 mm
1.3. La vitesse relative (différence de vitesse) entre la voiture équipée du système ACC et un objet peut être calculée par le biais de l'effet Doppler. Recopier en les complétant les deux phrases suivantes :
Si l'objet se rapproche de l'émetteur, la fréquence de l'onde réfléchie ………………………..
Si l'objet s'éloigne de l'émetteur, la fréquence de l'onde réfléchie …………………………..
2. Plage de détection d'un obstacle pour le « radar de recul »
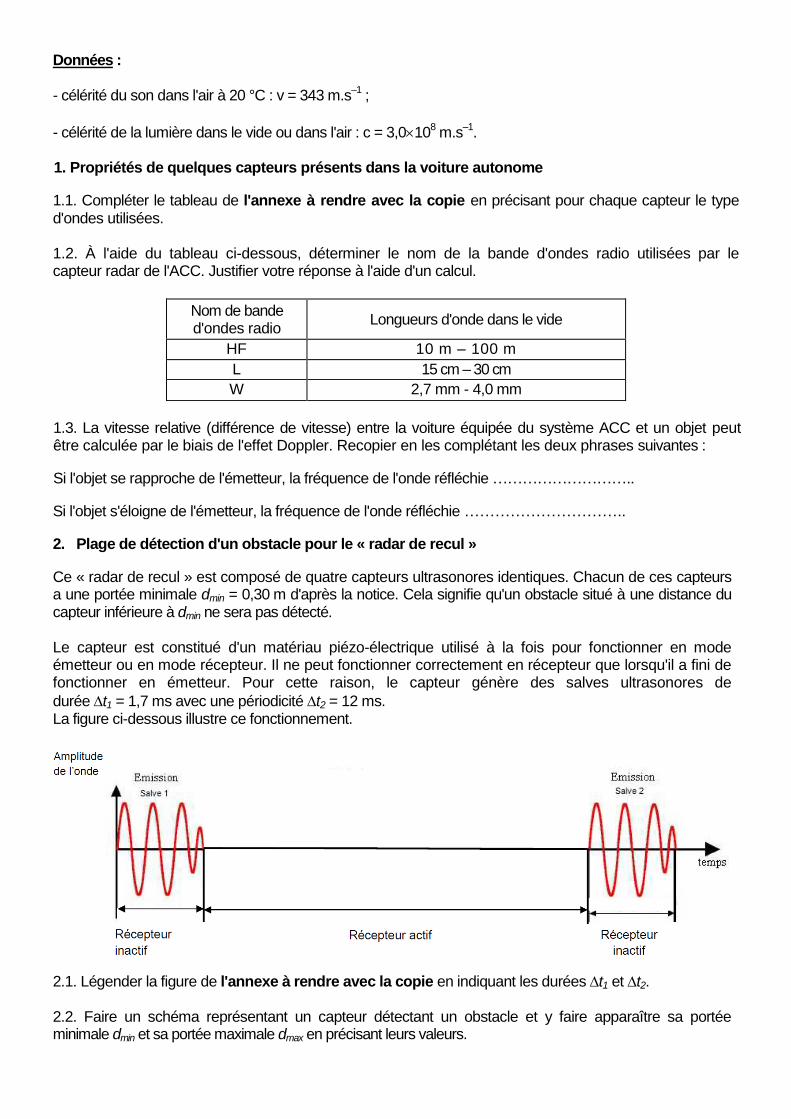
Ce « radar de recul » est composé de quatre capteurs ultrasonores identiques. Chacun de ces capteurs a une portée minimale dmin = 0,30 m d'après la notice. Cela signifie qu'un obstacle situé à une distance du capteur inférieure à dmin ne sera pas détecté. Le capteur est constitué d'un matériau piézo-électrique utilisé à la fois pour fonctionner en mode émetteur ou en mode récepteur. Il ne peut fonctionner correctement en récepteur que lorsqu'il a fini de fonctionner en émetteur. Pour cette raison, le capteur génère des salves ultrasonores de
durée t1 = 1,7 ms avec une périodicité t2 = 12 ms. La figure ci-dessous illustre ce fonctionnement.
2.1. Légender la figure de l'annexe à rendre avec la copie en indiquant les durées t1 et t2. 2.2. Faire un schéma représentant un capteur détectant un obstacle et y faire apparaître sa portée minimale dmin et sa portée maximale dmax en précisant leurs valeurs.
2.3. Vérifier que pour la distance dmin entre le capteur et l'obstacle, la durée entre l'émission et la
réception est égale à t1.
2.4. Si la durée que met l'onde émise pour revenir au capteur est inférieure à t1, pourquoi le capteur ne peut-il pas détecter l'obstacle de manière satisfaisante ? Justifier la réponse. 2.5. Quelle caractéristique du signal de l'émission doit-on alors modifier pour que le capteur puisse détecter un obstacle situé à une distance inférieure à dmin ? Justifier votre réponse. 2.6. Montrer que la valeur de la portée maximale de ce capteur est liée essentiellement à une des caractéristiques du signal émis. 3. Les radars, les capteurs ultrasonores et les capteurs lasers permettent avec des similitudes dans leur principe de fonctionnement de détecter un obstacle. Pourquoi ne pas utiliser alors un seul de ces trois types de capteurs dans un projet de voiture autonome ?
On rédigera une réponse argumentée en s'appuyant sur des informations tirées des différents documents utilisés, y compris le tableau de l'annexe.

ANNEXE À RENDRE AVEC LA COPIE
Exercice III
Tableau à compléter
Capteur Type d'onde utilisée par le capteur : mécanique /
électromagnétique
Points forts Points faibles
Radar …………………….
Longue portée, robustesse face aux conditions
météorologiques, bonne performance de détection.
Pollution électromagnétique, coût relativement élevé,
encombrement, interférences électromagnétiques.
Capteurs à
ultrasons
……………………. Réalisation simple, coût abordable traitement simple des données.
Précision de détection sujette à la température, sensibilité
aux conditions météorologiques.
Capteur laser
(LIDAR) …………………….
Longue portée, grande précision, bonne résolution, coût
accessible.
Dérèglements fréquents, grande sensibilité aux
conditions météorologiques,
interférences.
Fonctionnement de l'émetteur du radar de recul
NETTOYAGE EN ARCHEOLOGIE
Les parties 1. et 2. sont totalement indépendantes (seule la partie 1 sera traitée dans ce module) Partie 1 : Les ultrasons au service du nettoyage On trouve dans le commerce des appareils de nettoyage utilisant les ultrasons. Le document 1 décrit la première page de la notice d’un exemple d’appareil de ce type. 1. Étude des ultrasons Données : - célérité des ultrasons dans l’air : v = 340 m.s−1 à 25 °C.
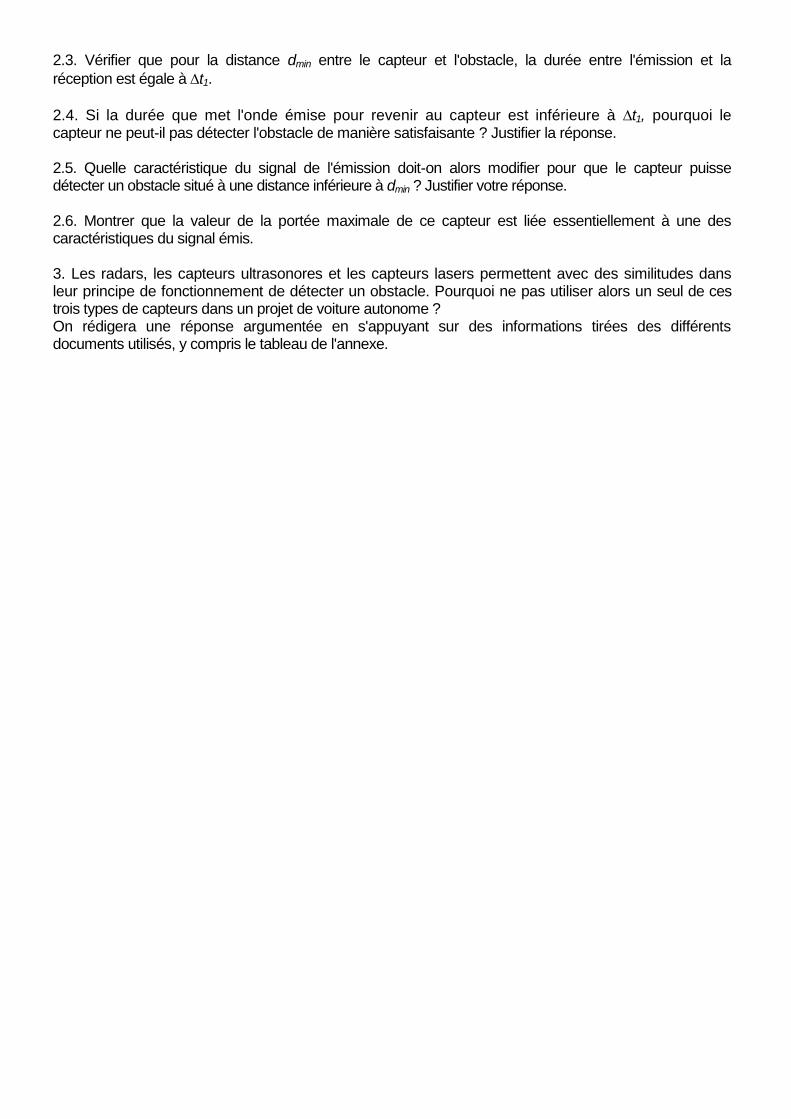
- célérité des ultrasons dans l’eau : v’ = 1500 m.s−1. On souhaite étudier les ultrasons émis par l’appareil décrit dans le document 1. Pour cela, on isole l’émetteur E à ultrasons de cet appareil et on visualise le signal émis à l’aide d’un capteur relié à la voie 1 d’un oscilloscope. Les mesures sont faites dans l’air à la température de 20 °C. On obtient le signal uE suivant :
1.1. Déterminer la période T du signal représenté sur la figure 1. Expliquer la méthode.
1.2. En déduire la fréquence f des ultrasons. Comparer avec la valeur de référence.
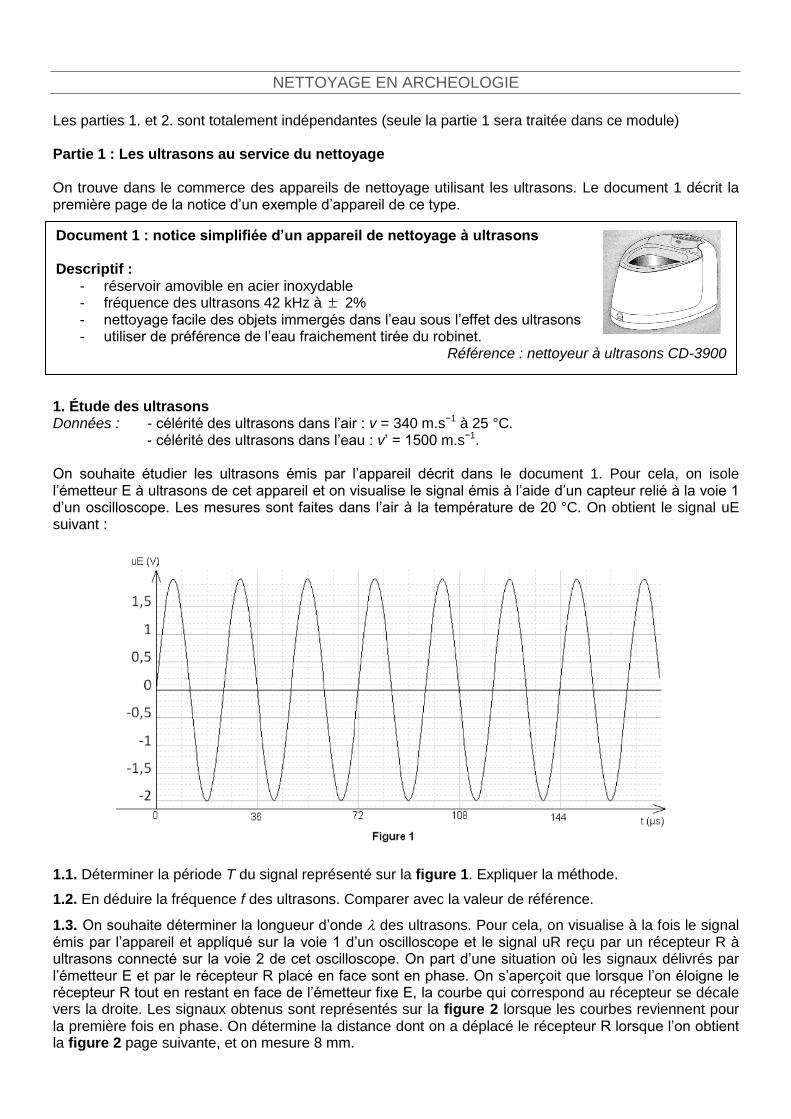
1.3. On souhaite déterminer la longueur d’onde des ultrasons. Pour cela, on visualise à la fois le signal émis par l’appareil et appliqué sur la voie 1 d’un oscilloscope et le signal uR reçu par un récepteur R à ultrasons connecté sur la voie 2 de cet oscilloscope. On part d’une situation où les signaux délivrés par l’émetteur E et par le récepteur R placé en face sont en phase. On s’aperçoit que lorsque l’on éloigne le récepteur R tout en restant en face de l’émetteur fixe E, la courbe qui correspond au récepteur se décale vers la droite. Les signaux obtenus sont représentés sur la figure 2 lorsque les courbes reviennent pour la première fois en phase. On détermine la distance dont on a déplacé le récepteur R lorsque l’on obtient la figure 2 page suivante, et on mesure 8 mm.
Document 1 : notice simplifiée d’un appareil de nettoyage à ultrasons Descriptif :
- réservoir amovible en acier inoxydable - fréquence des ultrasons 42 kHz à 2% - nettoyage facile des objets immergés dans l’eau sous l’effet des ultrasons - utiliser de préférence de l’eau fraichement tirée du robinet.
Référence : nettoyeur à ultrasons CD-3900
1.3.1. Définir la valeur de la longueur d’onde
1.3.2. Déterminer la longueur d’onde à partir de l’expérience précédente. Que peut-on faire pour augmenter la précision de la mesure ?
1.3.3. Calculer la célérité v des ondes ultrasonores dans l’air. Expliquer un écart éventuel avec la valeur attendue.
1.4. En utilisation normale de l’appareil, la longueur d'onde des ultrasons est différente de la valeur obtenue à la question 1.3.2. et vaut 4 cm. Expliquer cette différence. 2. Étude du nettoyage 2.1. Les ondes ultrasonores sont-elles des ondes mécaniques ?
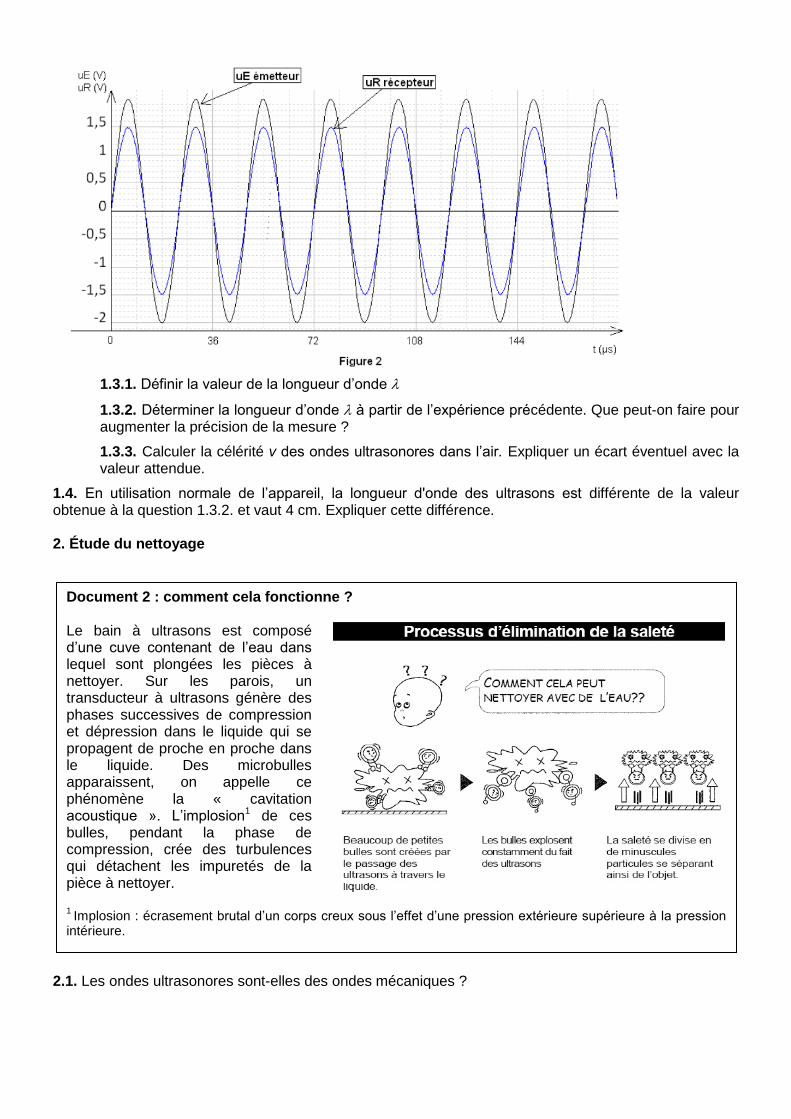
Document 2 : comment cela fonctionne ? Le bain à ultrasons est composé d’une cuve contenant de l’eau dans lequel sont plongées les pièces à nettoyer. Sur les parois, un transducteur à ultrasons génère des phases successives de compression et dépression dans le liquide qui se propagent de proche en proche dans le liquide. Des microbulles apparaissent, on appelle ce phénomène la « cavitation acoustique ». L’implosion1 de ces bulles, pendant la phase de compression, crée des turbulences qui détachent les impuretés de la pièce à nettoyer. 1 Implosion : écrasement brutal d’un corps creux sous l’effet d’une pression extérieure supérieure à la pression
intérieure.
2.2. Choisir parmi les grandeurs suivantes celle qui permet de différencier les ondes ultrasonores et les ondes sonores. Niveau d’intensité sonore - timbre - fréquence - vitesse de propagation dans le même milieu à la même température.
PROPAGATION LE LONG D’UNE CORDE
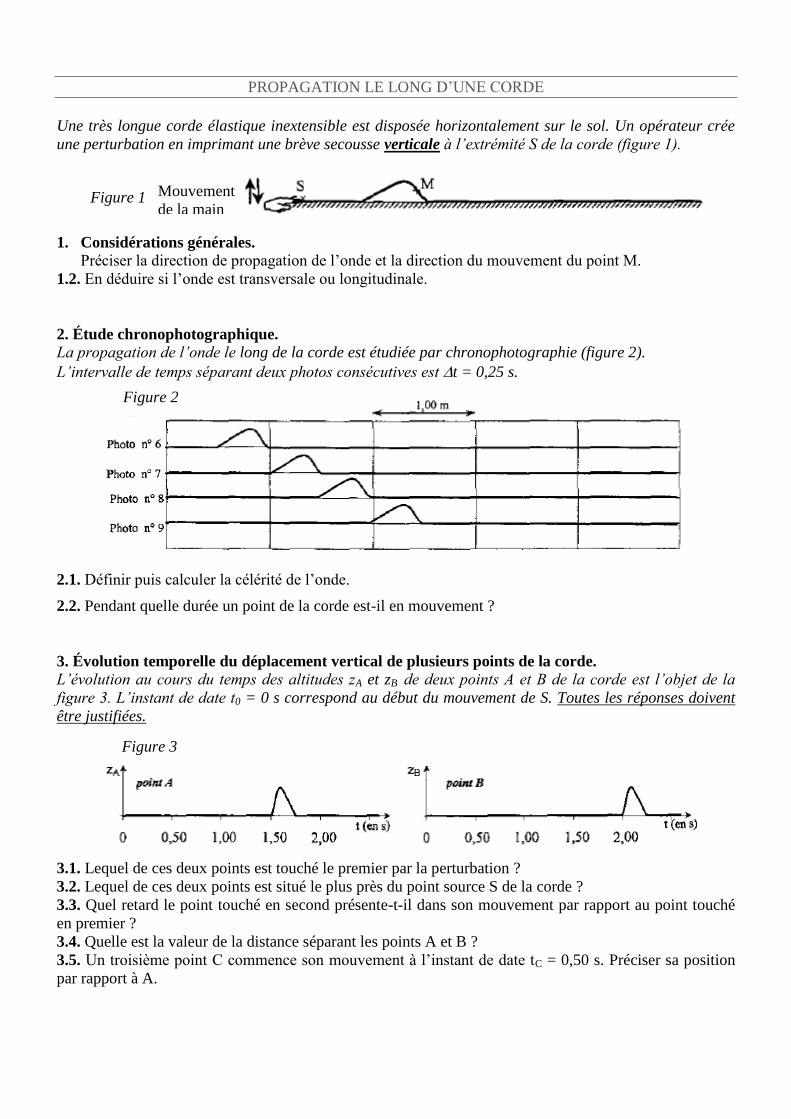
Une très longue corde élastique inextensible est disposée horizontalement sur le sol. Un opérateur crée
une perturbation en imprimant une brève secousse verticale à l’extrémité S de la corde (figure 1).
1. Considérations générales. Préciser la direction de propagation de l’onde et la direction du mouvement du point M.
1.2. En déduire si l’onde est transversale ou longitudinale.
2. Étude chronophotographique.
La propagation de l’onde le long de la corde est étudiée par chronophotographie (figure 2).
L’intervalle de temps séparant deux photos consécutives est t = 0,25 s.
2.1. Définir puis calculer la célérité de l’onde.
2.2. Pendant quelle durée un point de la corde est-il en mouvement ?
3. Évolution temporelle du déplacement vertical de plusieurs points de la corde.
L’évolution au cours du temps des altitudes zA et zB de deux points A et B de la corde est l’objet de la
figure 3. L’instant de date t0 = 0 s correspond au début du mouvement de S. Toutes les réponses doivent
être justifiées.
3.1. Lequel de ces deux points est touché le premier par la perturbation ?
3.2. Lequel de ces deux points est situé le plus près du point source S de la corde ?
3.3. Quel retard le point touché en second présente-t-il dans son mouvement par rapport au point touché
en premier ?
3.4. Quelle est la valeur de la distance séparant les points A et B ?
3.5. Un troisième point C commence son mouvement à l’instant de date tC = 0,50 s. Préciser sa position
par rapport à A.
Figure 1 Mouvement
de la main
Figure 2
Figure 3

Représenter sur un schéma la position des points A, B et C (échelle 2 cm pour 1 m) par rapport au point
source S.
4. Influence de quelques paramètres sur la célérité de l’onde.
Les courbes ci-dessous (figures 4, 5 et 6) donnent l’évolution au cours du temps du déplacement vertical
d’un point K d’une corde situé à la distance fixe d = SK du point source S ; l’instant de date t0 = 0 s
correspond au début du mouvement de S ; les conditions expérimentales sont précisées pour chaque
expérience.
Toutes les réponses doivent être justifiées en utilisant les représentations graphiques.
On étudie successivement l'influence de :
- la forme de la perturbation ;
- la tension de la corde ;
- la nature de la corde.
4.1. Influence de la forme de la perturbation.
La même corde est utilisée : sa tension est la même dans les deux expériences.
La forme de la perturbation modifie-t-elle la célérité ?
4.2. Influence de la tension de la corde
La même corde est utilisée ; lors de l’expérience 2-a, sa tension est plus faible que lors de
l’expérience 2-b.
La tension de la corde modifie-t-elle la célérité et si oui, dans quel sens ?
4.3. Influence de la nature de la corde.
Rappel : la masse linéique est la masse par unité de longueur ; pour une corde de masse M et de
longueur L, on a donc : = L
M
La tension est la même dans les deux expériences ; la masse linéique de la corde utilisée pour
l’expérience 3-a est plus faible que celle de la corde utilisée pour l’expérience 3-b.
La masse linéique de la corde modifie-t-elle la célérité et si oui, dans quel sens ?
fig. 4
fig. 5
fig. 6
SATELLITES DE TELEDETECTION PASSIVE
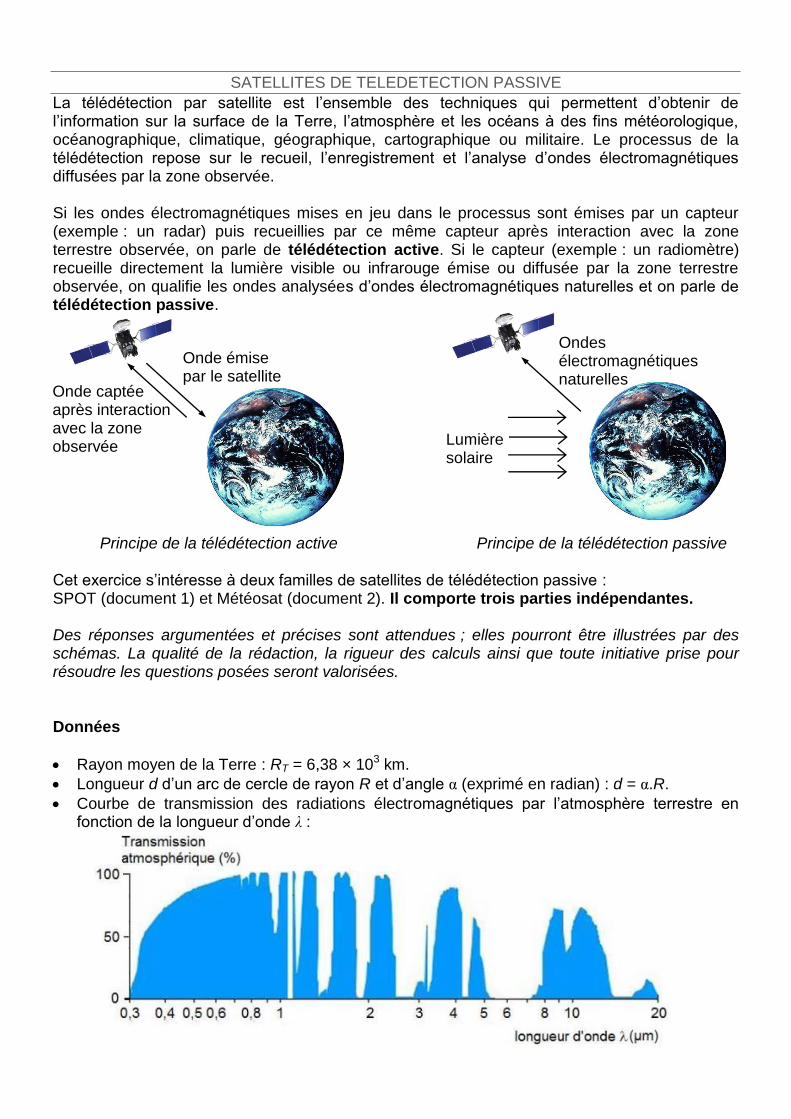
La télédétection par satellite est l’ensemble des techniques qui permettent d’obtenir de l’information sur la surface de la Terre, l’atmosphère et les océans à des fins météorologique, océanographique, climatique, géographique, cartographique ou militaire. Le processus de la télédétection repose sur le recueil, l’enregistrement et l’analyse d’ondes électromagnétiques diffusées par la zone observée. Si les ondes électromagnétiques mises en jeu dans le processus sont émises par un capteur (exemple : un radar) puis recueillies par ce même capteur après interaction avec la zone terrestre observée, on parle de télédétection active. Si le capteur (exemple : un radiomètre) recueille directement la lumière visible ou infrarouge émise ou diffusée par la zone terrestre observée, on qualifie les ondes analysées d’ondes électromagnétiques naturelles et on parle de télédétection passive.
Principe de la télédétection active Principe de la télédétection passive Cet exercice s’intéresse à deux familles de satellites de télédétection passive : SPOT (document 1) et Météosat (document 2). Il comporte trois parties indépendantes. Des réponses argumentées et précises sont attendues ; elles pourront être illustrées par des schémas. La qualité de la rédaction, la rigueur des calculs ainsi que toute initiative prise pour résoudre les questions posées seront valorisées. Données
Rayon moyen de la Terre : RT = 6,38 × 103 km.
Longueur d d’un arc de cercle de rayon R et d’angle α (exprimé en radian) : d = α.R.
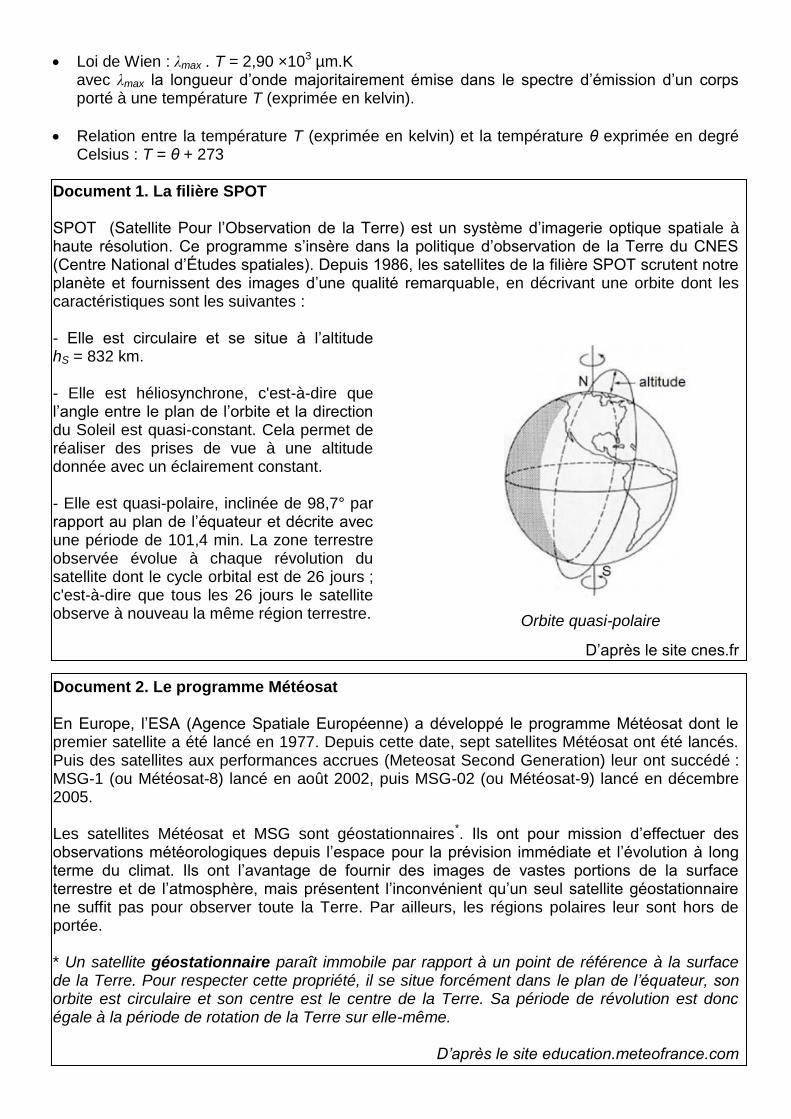
Courbe de transmission des radiations électromagnétiques par l’atmosphère terrestre en fonction de la longueur d’onde λ :
Onde émise par le satellite
Onde captée après interaction avec la zone observée
Ondes électromagnétiques naturelles
Lumière solaire
Loi de Wien : λmax . T = 2,90 ×103 µm.K avec λmax la longueur d’onde majoritairement émise dans le spectre d’émission d’un corps porté à une température T (exprimée en kelvin).
Relation entre la température T (exprimée en kelvin) et la température θ exprimée en degré Celsius : T = θ + 273
Document 1. La filière SPOT SPOT (Satellite Pour l’Observation de la Terre) est un système d’imagerie optique spatiale à haute résolution. Ce programme s’insère dans la politique d’observation de la Terre du CNES (Centre National d’Études spatiales). Depuis 1986, les satellites de la filière SPOT scrutent notre planète et fournissent des images d’une qualité remarquable, en décrivant une orbite dont les caractéristiques sont les suivantes : - Elle est circulaire et se situe à l’altitude hS = 832 km. - Elle est héliosynchrone, c'est-à-dire que l’angle entre le plan de l’orbite et la direction du Soleil est quasi-constant. Cela permet de réaliser des prises de vue à une altitude donnée avec un éclairement constant. - Elle est quasi-polaire, inclinée de 98,7° par rapport au plan de l’équateur et décrite avec une période de 101,4 min. La zone terrestre observée évolue à chaque révolution du satellite dont le cycle orbital est de 26 jours ; c'est-à-dire que tous les 26 jours le satellite observe à nouveau la même région terrestre.
D’après le site cnes.fr
Document 2. Le programme Météosat En Europe, l’ESA (Agence Spatiale Européenne) a développé le programme Météosat dont le premier satellite a été lancé en 1977. Depuis cette date, sept satellites Météosat ont été lancés. Puis des satellites aux performances accrues (Meteosat Second Generation) leur ont succédé : MSG-1 (ou Météosat-8) lancé en août 2002, puis MSG-02 (ou Météosat-9) lancé en décembre 2005. Les satellites Météosat et MSG sont géostationnaires*. Ils ont pour mission d’effectuer des observations météorologiques depuis l’espace pour la prévision immédiate et l’évolution à long terme du climat. Ils ont l’avantage de fournir des images de vastes portions de la surface terrestre et de l’atmosphère, mais présentent l’inconvénient qu’un seul satellite géostationnaire ne suffit pas pour observer toute la Terre. Par ailleurs, les régions polaires leur sont hors de portée. * Un satellite géostationnaire paraît immobile par rapport à un point de référence à la surface de la Terre. Pour respecter cette propriété, il se situe forcément dans le plan de l’équateur, son orbite est circulaire et son centre est le centre de la Terre. Sa période de révolution est donc égale à la période de rotation de la Terre sur elle-même.
D’après le site education.meteofrance.com
Orbite quasi-polaire
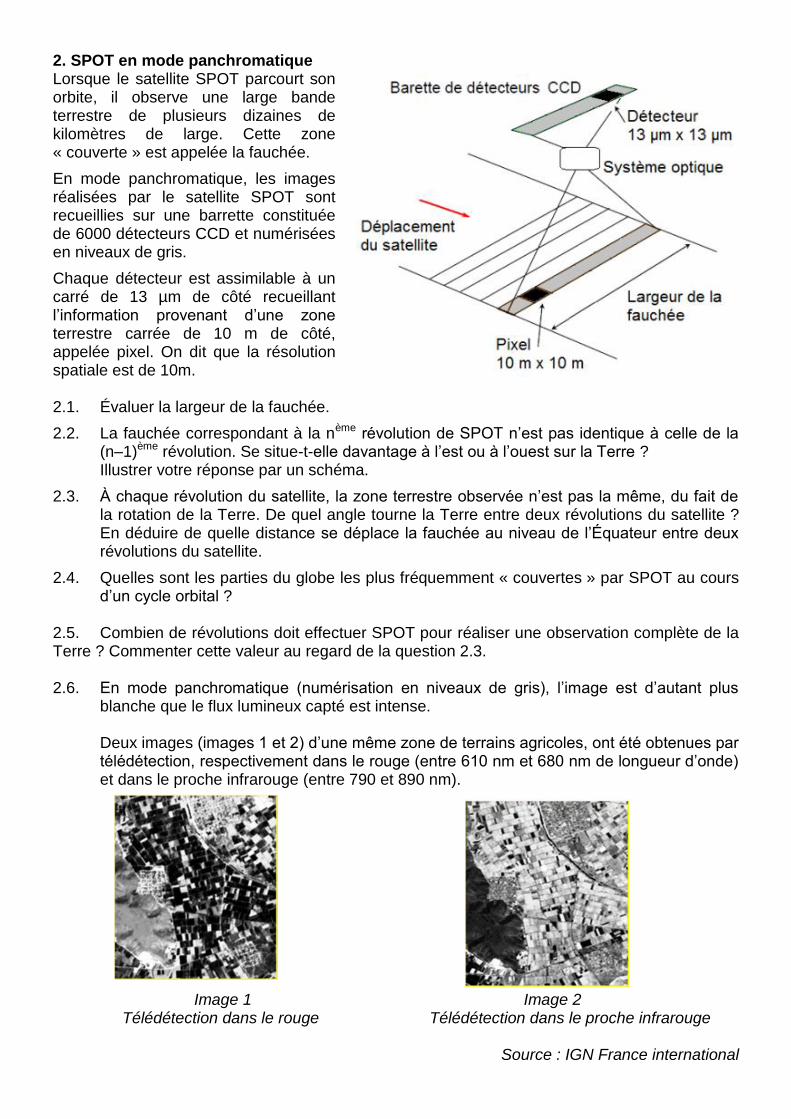
2. SPOT en mode panchromatique Lorsque le satellite SPOT parcourt son orbite, il observe une large bande terrestre de plusieurs dizaines de kilomètres de large. Cette zone « couverte » est appelée la fauchée.
En mode panchromatique, les images réalisées par le satellite SPOT sont recueillies sur une barrette constituée de 6000 détecteurs CCD et numérisées en niveaux de gris.
Chaque détecteur est assimilable à un carré de 13 µm de côté recueillant l’information provenant d’une zone terrestre carrée de 10 m de côté, appelée pixel. On dit que la résolution spatiale est de 10m. 2.1. Évaluer la largeur de la fauchée.
2.2. La fauchée correspondant à la nème révolution de SPOT n’est pas identique à celle de la (n–1)ème révolution. Se situe-t-elle davantage à l’est ou à l’ouest sur la Terre ?
Illustrer votre réponse par un schéma.
2.3. À chaque révolution du satellite, la zone terrestre observée n’est pas la même, du fait de la rotation de la Terre. De quel angle tourne la Terre entre deux révolutions du satellite ? En déduire de quelle distance se déplace la fauchée au niveau de l’Équateur entre deux révolutions du satellite.
2.4. Quelles sont les parties du globe les plus fréquemment « couvertes » par SPOT au cours d’un cycle orbital ?
2.5. Combien de révolutions doit effectuer SPOT pour réaliser une observation complète de la Terre ? Commenter cette valeur au regard de la question 2.3. 2.6. En mode panchromatique (numérisation en niveaux de gris), l’image est d’autant plus
blanche que le flux lumineux capté est intense. Deux images (images 1 et 2) d’une même zone de terrains agricoles, ont été obtenues par
télédétection, respectivement dans le rouge (entre 610 nm et 680 nm de longueur d’onde) et dans le proche infrarouge (entre 790 et 890 nm).
Image 1 Image 2 Télédétection dans le rouge Télédétection dans le proche infrarouge
Source : IGN France international
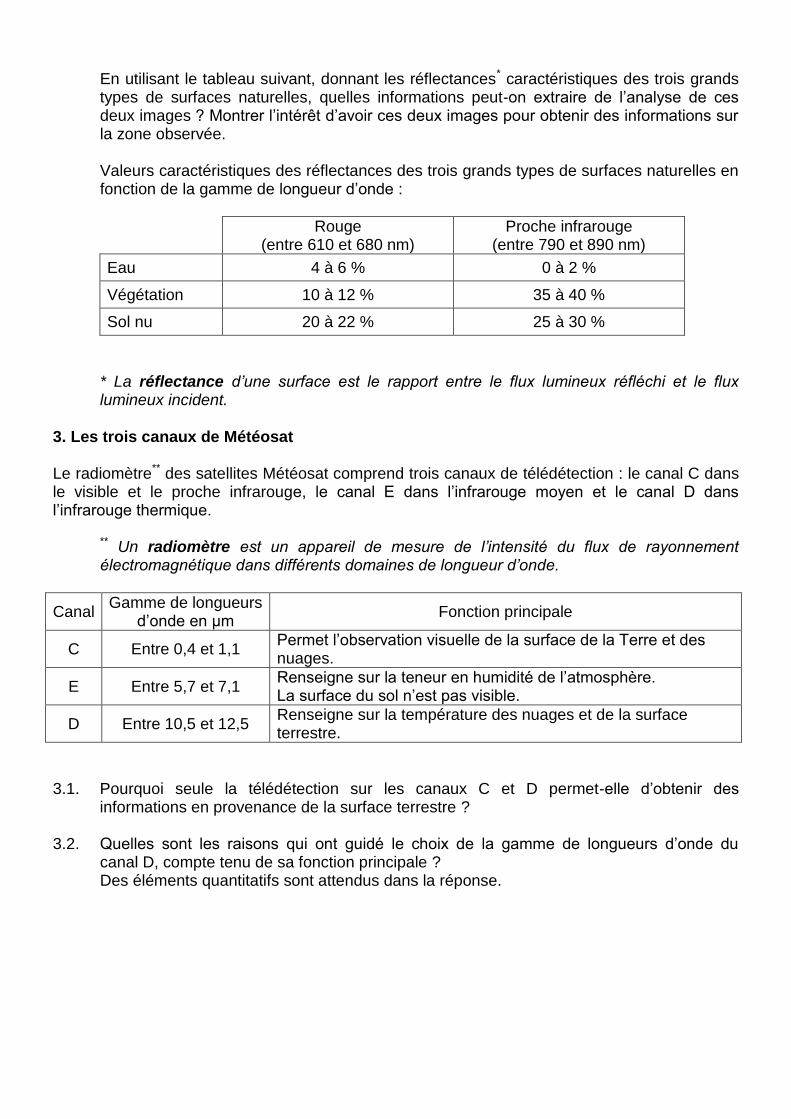
En utilisant le tableau suivant, donnant les réflectances* caractéristiques des trois grands
types de surfaces naturelles, quelles informations peut-on extraire de l’analyse de ces deux images ? Montrer l’intérêt d’avoir ces deux images pour obtenir des informations sur la zone observée.
Valeurs caractéristiques des réflectances des trois grands types de surfaces naturelles en
fonction de la gamme de longueur d’onde :
Rouge (entre 610 et 680 nm)
Proche infrarouge (entre 790 et 890 nm)
Eau 4 à 6 % 0 à 2 %
Végétation 10 à 12 % 35 à 40 %
Sol nu 20 à 22 % 25 à 30 %
* La réflectance d’une surface est le rapport entre le flux lumineux réfléchi et le flux
lumineux incident. 3. Les trois canaux de Météosat Le radiomètre** des satellites Météosat comprend trois canaux de télédétection : le canal C dans le visible et le proche infrarouge, le canal E dans l’infrarouge moyen et le canal D dans l’infrarouge thermique. ** Un radiomètre est un appareil de mesure de l’intensité du flux de rayonnement électromagnétique dans différents domaines de longueur d’onde.
Canal Gamme de longueurs
d’onde en µm Fonction principale
C Entre 0,4 et 1,1 Permet l’observation visuelle de la surface de la Terre et des nuages.
E Entre 5,7 et 7,1 Renseigne sur la teneur en humidité de l’atmosphère. La surface du sol n’est pas visible.
D Entre 10,5 et 12,5 Renseigne sur la température des nuages et de la surface terrestre.
3.1. Pourquoi seule la télédétection sur les canaux C et D permet-elle d’obtenir des
informations en provenance de la surface terrestre ? 3.2. Quelles sont les raisons qui ont guidé le choix de la gamme de longueurs d’onde du canal D, compte tenu de sa fonction principale ? Des éléments quantitatifs sont attendus dans la réponse.