cours de mécanique des milieux déformables
TRANSCRIPT
ENSM-SE MMD - CPMI 2011-2012 1
Cycle Préparatoire Médecin-Ingénieur 2011-2012
Cours de mécanique des milieux déformables
Pierre Badel Ecole des Mines Saint Etienne
Les bases essentielles de mécanique des milieux déformables
Mécanique des milieux continus
Mécanique des solides déformables, Elasticité
Mécanique des fluides parfaits et visqueux
ENSM-SE MMD - CPMI 2011-2012 2
Introduction
Limites du modèle indéformable…
Notion déjà vue et comprise en RDM
Vérification / Dimensionnement de pièces déformables…
Ne plus se limiter au cas de la RDM
Evaluer contraintes, déformations dans un cadre plus général
Applications classiques aux solides et aux fluides
Selon l’application, on préfère adopter des formalismes adaptés mais les équations de base
sont les mêmes…
Découvrir la mécanique de l’ingénieur
Connaître les concepts fondamentaux
La physique, les formalismes et les équations de la mécanique des milieux déformables
Applications aux solides élastiques et aux fluides
Résoudre des problèmes simples
Mécanique des milieux déformables
Objectifs
ENSM-SE MMD - CPMI 2011-2012 3
Ch. 1 – Préliminaires – Formalisme mathématique
Ch. 2 – Introduction à la MMD avec un problème 1D
Ch. 3 – Cinématique des milieux continus
Ch. 4 – Contraintes
Ch. 5 – Equations de conservation
Ch. 6 – SOLIDES : élasticité linéaire
Ch. 7 – FLUIDES non visqueux
Ch. 8 – FLUIDES visqueux
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 4
Ch. 1 – Préliminaires – Formalisme mathématique
1 - Applications linéaires
2 - Notation matricielle
3 - Notation indicielle
4 - Calcul différentiel
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 5
Application linéaire de R3 dans R3
Image d’un vecteur par l’application linéaire A :
On peut représenter les applications linéaires sous forme de matrice
Attention, la forme de la matrice dépend de la base d’expression
On introduira la trace et le déterminant : tr(A) et det(A)
L’application transposée AT est définie par :
La composition de deux applications A et B est notée A o B :
On définit les parties symétrique et antisymétrique de A :
Ch. 1 Préliminaires maths 1 – Applications linéaires
Aa A.a (notation à ne pas confondre avec le produit scalaire)
Définitions
,T3a b R b. A .a = a. A.b
S T A T1 1A = A+A et A = A-A
2 2
.3a R A B .a = A. B.a parfois noté AB
T A
T S
A symétrique A=A A 0
A anti-symétrique A=-A A 0
ENSM-SE MMD - CPMI 2011-2012 6
Définitions
Base orthonormée :
Représentation des vecteurs et applications linéaires en notation matricielle :
Produit scalaire
Ch. 1 Préliminaires maths 2 – Notation matricielle
1 2 3e , e , e .i j
1 si i=je e
0 si i j
1e
2e
3e
11 12 13 11 1i
21 22 23 1 21 i 2i
31 32 33 31 3i
a a a a a
A repr. par a a a où A.e a ; A.e a
a a a a a
...
1 11 12 13 1
2 21 22 23 2
3 31 32 33 3
c a a a b
c = A.b repr. par c a a a b
c a a a b
...
T
1 1 1 2 3 1
2 2 2
3 3 3
a b a a a b
a.b a b = b
a b b
11 21 31
T
12 22 32
13 23 33
a a a
A repr. par a a a
a a a
ENSM-SE MMD - CPMI 2011-2012 7
Convention de sommation (convention d’Einstein)
Dans une expression, chaque fois qu’un indice est répété, il convient de faire varier cet indice de 1 à 3 et de faire la somme.
Ecriture d’un vecteur :
Si :
L’indice j est « muet ». On aurait pu écrire aikbk.
L’indice i est « libre ». Pour chaque membre de l’égalité, on doit avoir les mêmes indices libres.
Ch. 1 Préliminaires maths 3 – Notation indicielle
3
1
i i i ia a e a ei
c = A.b 1 11 1 12 2 13 3
2 21 1 22 2 23 3 i ij j
3 31 1 32 2 33 3
c a b a b a b
c a b a b a b c = a b
c a b a b a b
ENSM-SE MMD - CPMI 2011-2012 8
Symbole de Kronecker
Ch. 1 Préliminaires maths 3 – Notation indicielle
Symbole de Kronecker :
Ainsi, la matrice identité s’écrit :
En particulier, pour les vecteurs de la base (ei) :
Ecriture d’un produit scalaire :
Composition de deux applications linéaires (produit des matrices respectives) :
. i i j j i j i j
i j ij i i
ab a e .b e ab e .e
ab δ ab
1
1
1
11 12 13
21 22 23 ij
31 32 33
δ δ δ
I δ δ δ = δ
δ δ δ
ij
1 si i = jδ =
0 si i ≠ j
.i j ije e δ
ijik jkC = A B ; C = A B
ENSM-SE MMD - CPMI 2011-2012 9
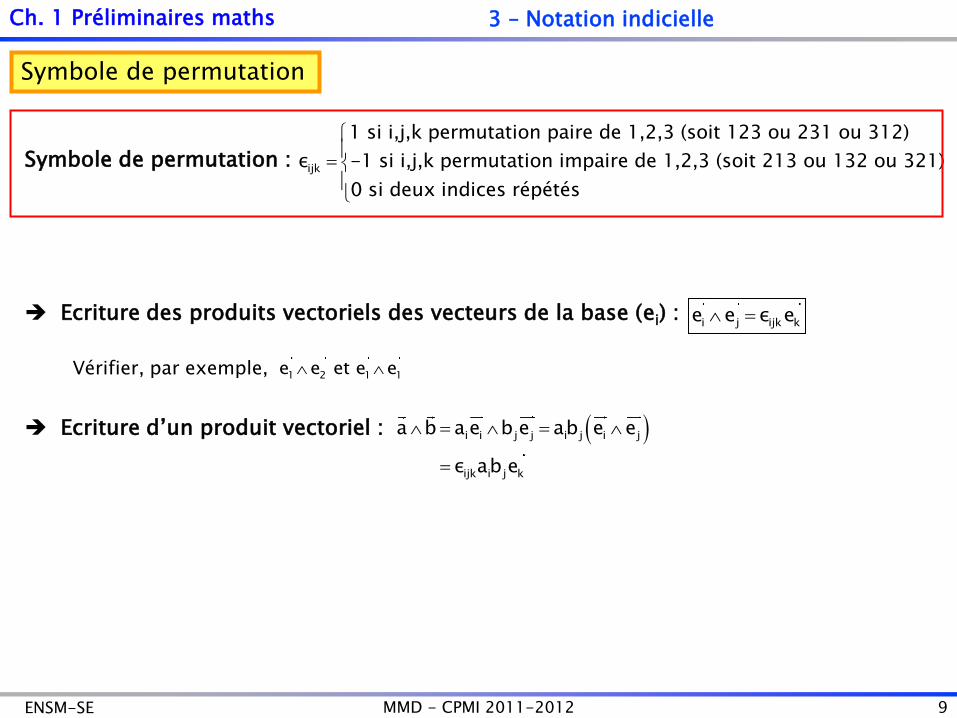
Symbole de permutation
Ch. 1 Préliminaires maths 3 – Notation indicielle
Symbole de permutation :
Ecriture des produits vectoriels des vecteurs de la base (ei) :
Vérifier, par exemple,
Ecriture d’un produit vectoriel :
i i j j i j i j
i jijk k
a b a e b e ab e e
ε ab e
ijk
1 si i,j,k permutation paire de 1,2,3 (soit 123 ou 231 ou 312)
ε -1 si i,j,k permutation impaire de 1,2,3 (soit 213 ou 132 ou 321)
0 si deux indices répétés
i j ijk ke e ε e
1 2 1 1e e et e e
ENSM-SE MMD - CPMI 2011-2012 10
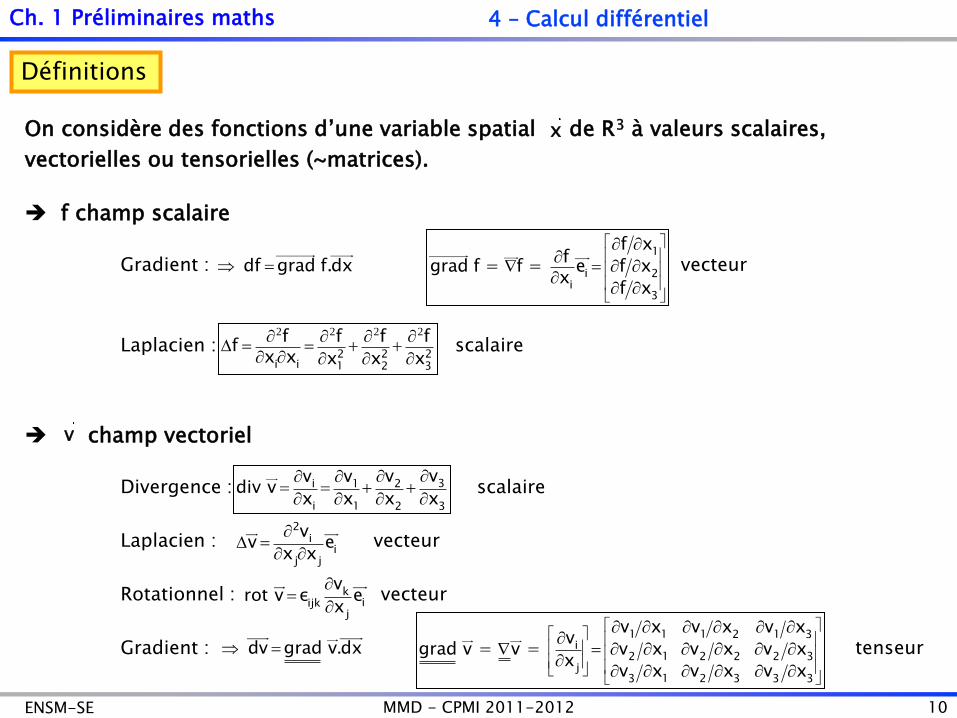
Définitions
On considère des fonctions d’une variable spatial de R3 à valeurs scalaires,
vectorielles ou tensorielles (~matrices).
f champ scalaire
Gradient : vecteur
Laplacien : scalaire
champ vectoriel
Divergence : scalaire
Laplacien : vecteur
Rotationnel : vecteur
Gradient : tenseur
Ch. 1 Préliminaires maths 4 – Calcul différentiel
df grad f.dx 1
i 2i
3
f xf
grad f = f = e f xx
f x
x
2 2 2 2
2 2 2i i 1 2 3
f f f ff
x x x x x
v
3i 1 2
i 1 2 3
vvv vdiv v
x x x x
2i
ij j
vv e
x x
kiijk
j
vrot v ε e
x
dv grad v.dx 1 1 1 12 3
i12 2 2 2 3
j13 2 3 3 3
v x v x v xv
grad v = v = v x v x v xx
v x v x v x
ENSM-SE MMD - CPMI 2011-2012 11
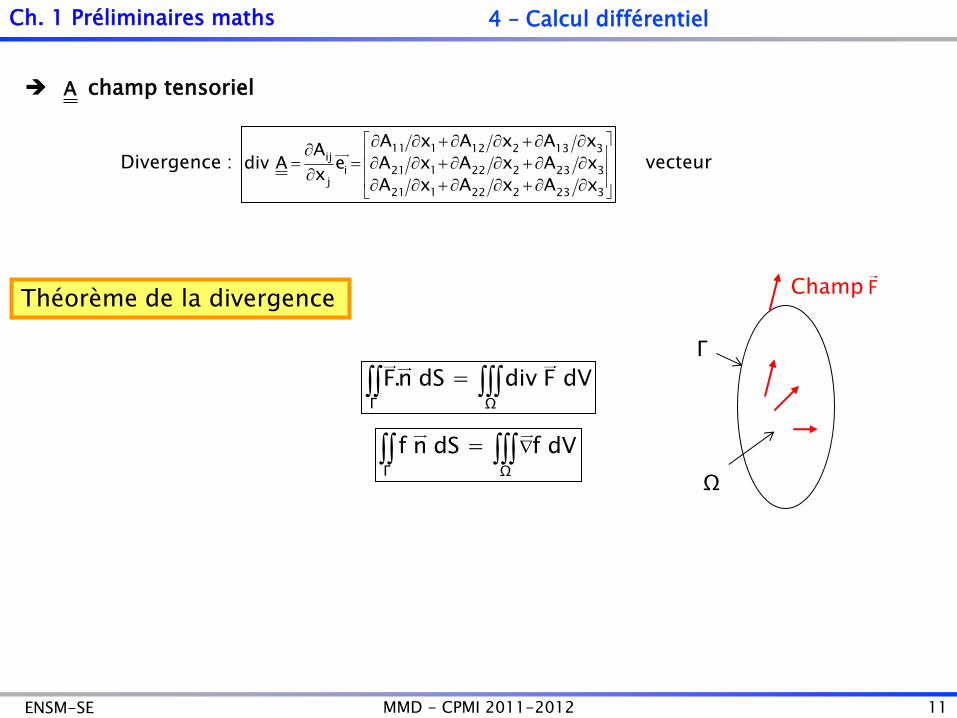
champ tensoriel
Divergence : vecteur
Ch. 1 Préliminaires maths 4 – Calcul différentiel
A
Γ Ω
F.n dS = div F dV
Théorème de la divergence
11 1 12 2 13 3ij
i 121 22 2 23 3j
121 22 2 23 3
A x A x A xA
div A e A x A x A xx
A x A x A x
Ω
Γ
Champ F
Γ Ω
f n dS = f dV
ENSM-SE MMD - CPMI 2011-2012 12
Ch. 2 – Introduction à la MMD avec un problème 1D
masses + ressorts
1 – Approche discrète
2 - Approche continue
3 – Loi de comportement de la chaîne
4 – Conservation de la masse
5 – Equation de la dynamique
6 – Chaîne d’amortisseurs visqueux
7 – Bilan comparatif
8 – Conclusion : quelle différence entre solides et fluides
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 13
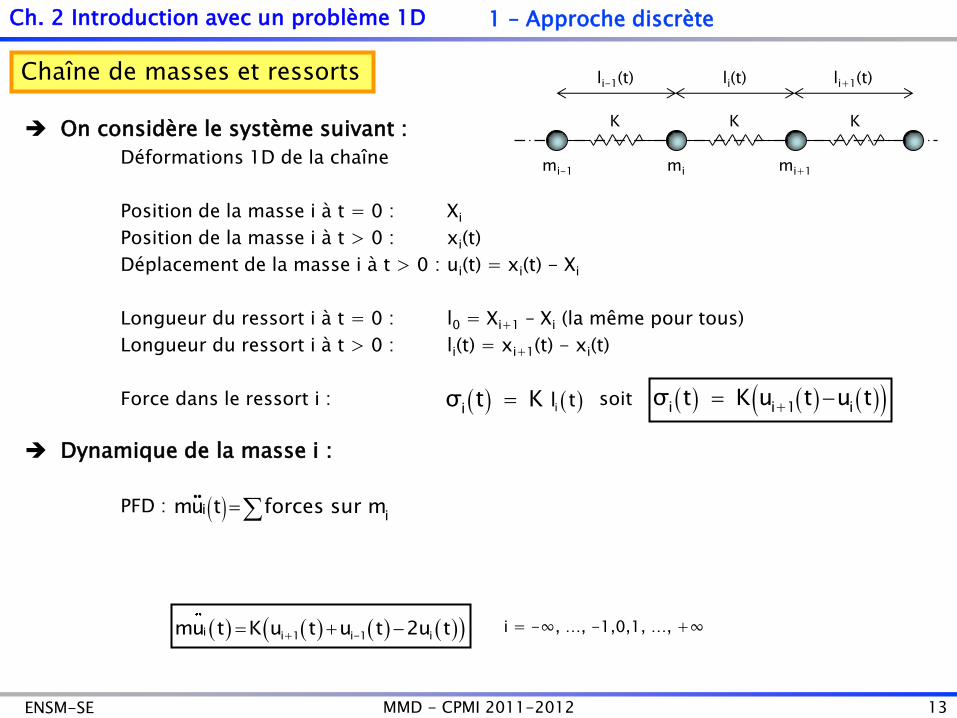
On considère le système suivant :
Déformations 1D de la chaîne
Position de la masse i à t = 0 : Xi
Position de la masse i à t > 0 : xi(t) Déplacement de la masse i à t > 0 : ui(t) = xi(t) - Xi
Longueur du ressort i à t = 0 : l0 = Xi+1 – Xi (la même pour tous)
Longueur du ressort i à t > 0 : li(t) = xi+1(t) - xi(t)
Force dans le ressort i : soit
Dynamique de la masse i :
PFD :
i = -∞, …, -1,0,1, …, +∞
Chaîne de masses et ressorts
Ch. 2 Introduction avec un problème 1D 1 – Approche discrète
K K K
mi-1 mi mi+1
li-1(t) li(t) li+1(t)
i imu t forces sur m
i i+1 i-1 imu t K u t u t 2u t
i i+1 i σ t K u t u t ii l tσ t K
ENSM-SE MMD - CPMI 2011-2012 14
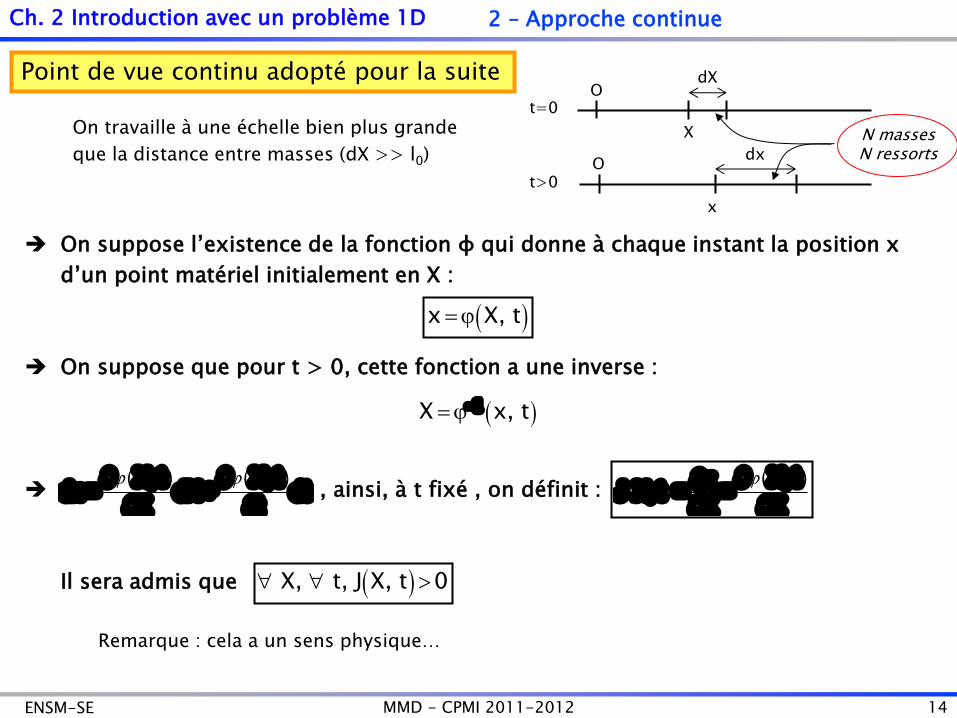
Point de vue continu adopté pour la suite
On travaille à une échelle bien plus grande
que la distance entre masses (dX >> l0)
On suppose l’existence de la fonction φ qui donne à chaque instant la position x
d’un point matériel initialement en X :
On suppose que pour t > 0, cette fonction a une inverse :
, ainsi, à t fixé , on définit :
Il sera admis que
Remarque : cela a un sens physique…
2 – Approche continue Ch. 2 Introduction avec un problème 1D
t>0 O
x
dx
t=0 O
X
dX
N masses N ressorts
x X, t
X x, t
∂ X, t ∂ X, tdx = dX + dt
∂X ∂t
∂ X, t∂xJ X, t = =
∂X ∂X
X, t, J X, t 0
ENSM-SE MMD - CPMI 2011-2012 15
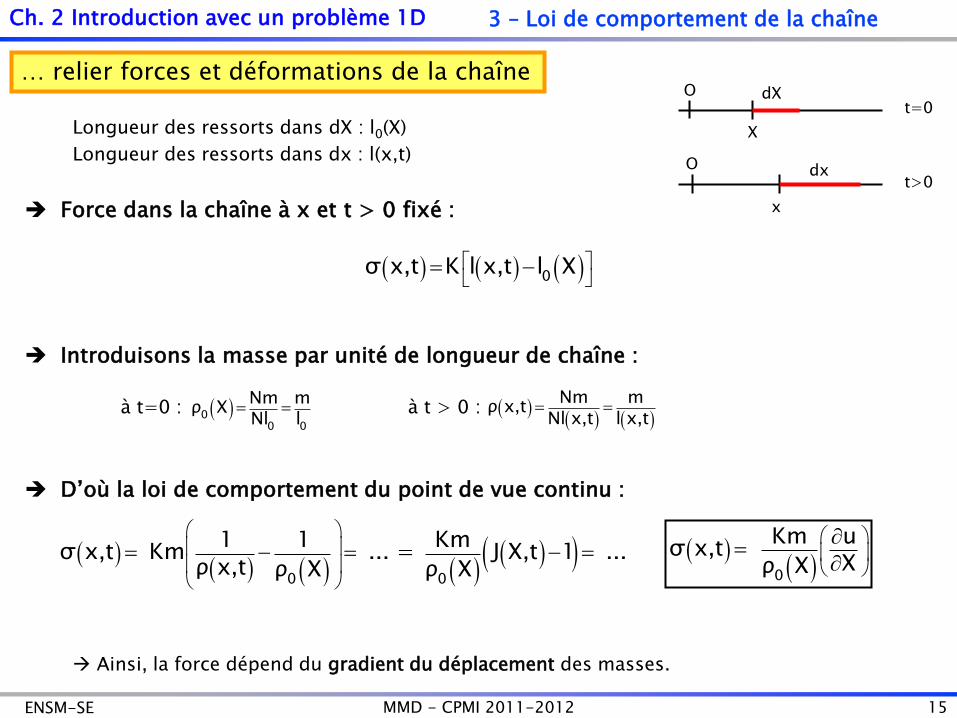
… relier forces et déformations de la chaîne
Longueur des ressorts dans dX : l0(X) Longueur des ressorts dans dx : l(x,t)
Force dans la chaîne à x et t > 0 fixé :
Introduisons la masse par unité de longueur de chaîne :
à t=0 : à t > 0 :
D’où la loi de comportement du point de vue continu :
Ainsi, la force dépend du gradient du déplacement des masses.
3 – Loi de comportement de la chaîne Ch. 2 Introduction avec un problème 1D
t>0 O
x
dx
t=0 O
X
dX
0σ x,t K l x,t l X
00 0
Nm mρ X
Nl l
Nm m
ρ x,tNl x,t l x,t
0 0
1 1 Kmσ x,t Km ... = J X,t 1 ...
ρ x,t ρ X ρ X
0
Km uσ x,t
Xρ X
ENSM-SE MMD - CPMI 2011-2012 16
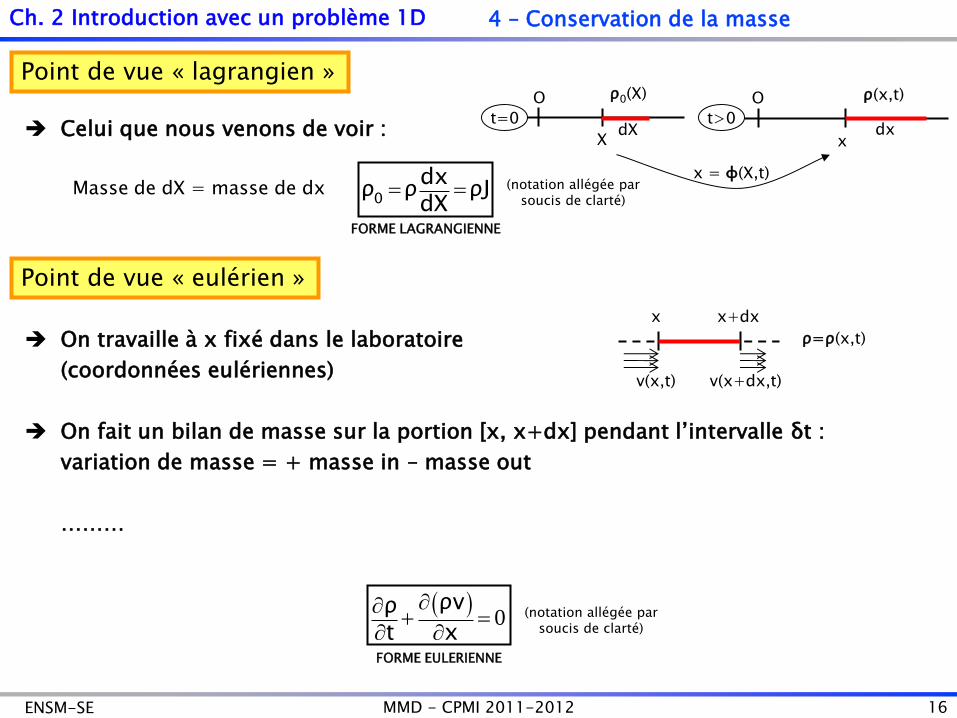
Celui que nous venons de voir :
Masse de dX = masse de dx
On travaille à x fixé dans le laboratoire
(coordonnées eulériennes)
On fait un bilan de masse sur la portion [x, x+dx] pendant l’intervalle δt :
variation de masse = + masse in – masse out
………
Point de vue « lagrangien »
4 – Conservation de la masse Ch. 2 Introduction avec un problème 1D
0
dxρ ρ ρJ
dX
O
x dx
O
X dX
x = φ(X,t)
ρ0(X) ρ(x,t)
t=0 t>0
(notation allégée par soucis de clarté)
Point de vue « eulérien »
x x+dx
ρ=ρ(x,t)
v(x,t) v(x+dx,t)
0
ρvρt x
(notation allégée par
soucis de clarté)
FORME LAGRANGIENNE
FORME EULERIENNE
ENSM-SE MMD - CPMI 2011-2012 17
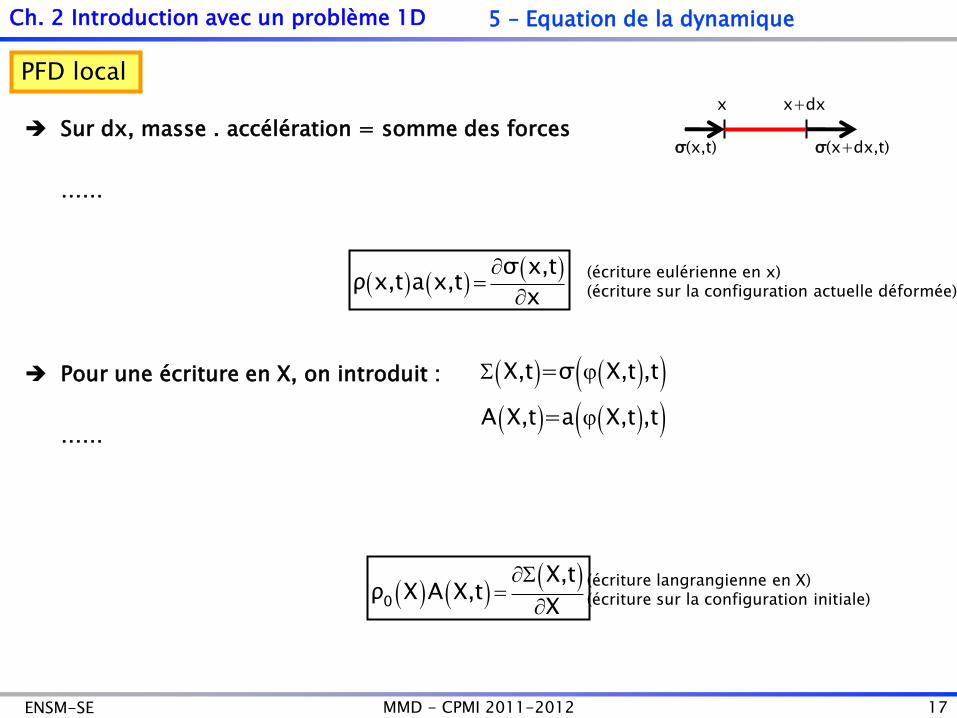
PFD local
Sur dx, masse . accélération = somme des forces
……
Pour une écriture en X, on introduit :
……
Ch. 2 Introduction avec un problème 1D 5 – Equation de la dynamique
x x+dx
σ(x,t) σ(x+dx,t)
σ x,t
ρ x,t a x,tx
(écriture eulérienne en x) (écriture sur la configuration actuelle déformée)
X,t =σ X,t ,t
A X,t =a X,t ,t
0
X,tρ X A X,t
X
(écriture langrangienne en X) (écriture sur la configuration initiale)
ENSM-SE MMD - CPMI 2011-2012 18
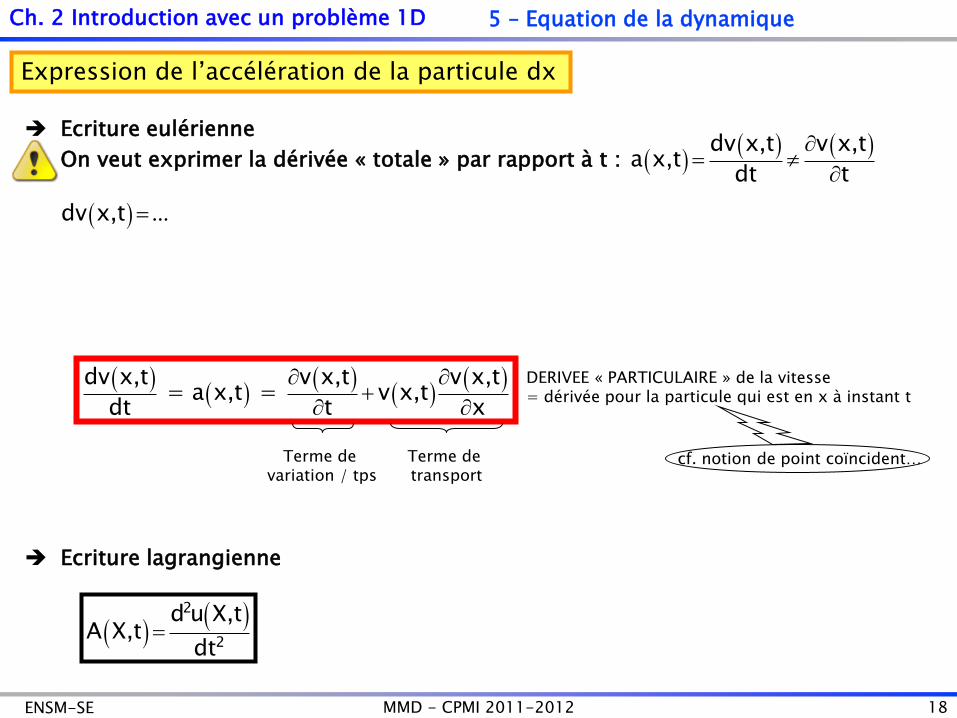
Ecriture eulérienne
On veut exprimer la dérivée « totale » par rapport à t :
Ecriture lagrangienne
Expression de l’accélération de la particule dx
Ch. 2 Introduction avec un problème 1D 5 – Equation de la dynamique
dv x,t v x,t
a x,ttdt
...dv x,t
dv x,t v x,t v x,t = a x,t = v x,t
t xdt
DERIVEE « PARTICULAIRE » de la vitesse = dérivée pour la particule qui est en x à instant t
cf. notion de point coïncident… Terme de variation / tps
Terme de transport
2
2
d u X,tA X,t
dt
ENSM-SE MMD - CPMI 2011-2012 19
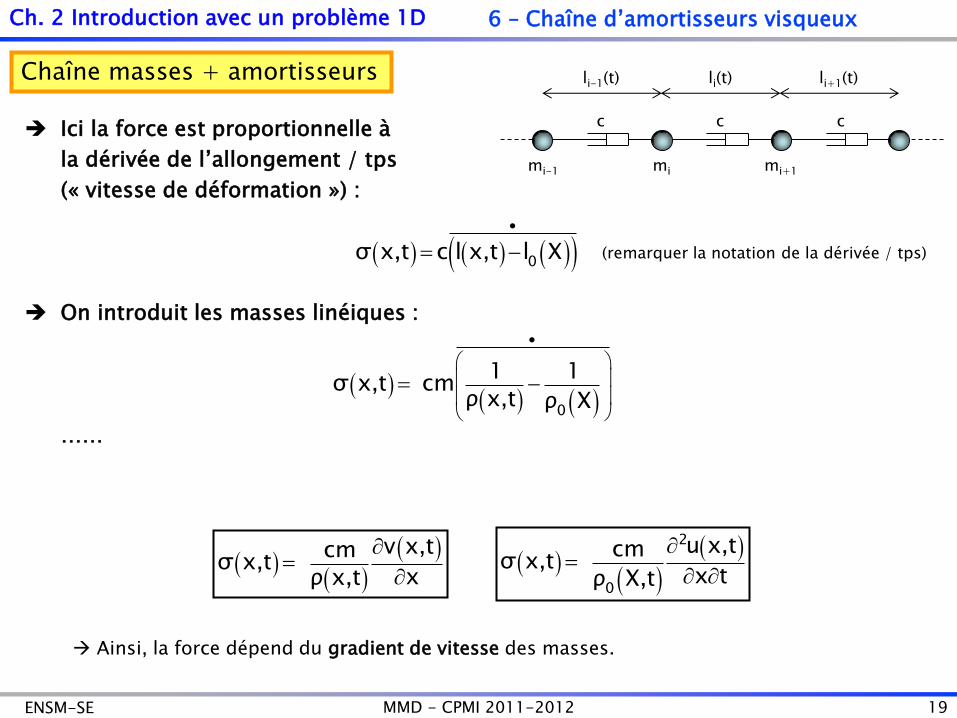
Chaîne masses + amortisseurs
Ici la force est proportionnelle à
la dérivée de l’allongement / tps
(« vitesse de déformation ») :
On introduit les masses linéiques :
……
Ainsi, la force dépend du gradient de vitesse des masses.
Ch. 2 Introduction avec un problème 1D 6 – Chaîne d’amortisseurs visqueux
c c c
mi-1 mi mi+1
li-1(t) li(t) li+1(t)
0σ x,t c l x,t l X
0
1 1σ x,t cm
ρ x,t ρ X
(remarquer la notation de la dérivée / tps)
v x,tcmσ x,t
xρ x,t
2
0
u x,tcmσ x,t
x tρ X,t
ENSM-SE
0
0
Km uσ x,t
Xρ X
Km uX,t
Xρ X
2
0
v x,tcmσ x,t
xρ x,t
u x,tcmΣ x,t
x tρ X,t
MMD - CPMI 2011-2012 20
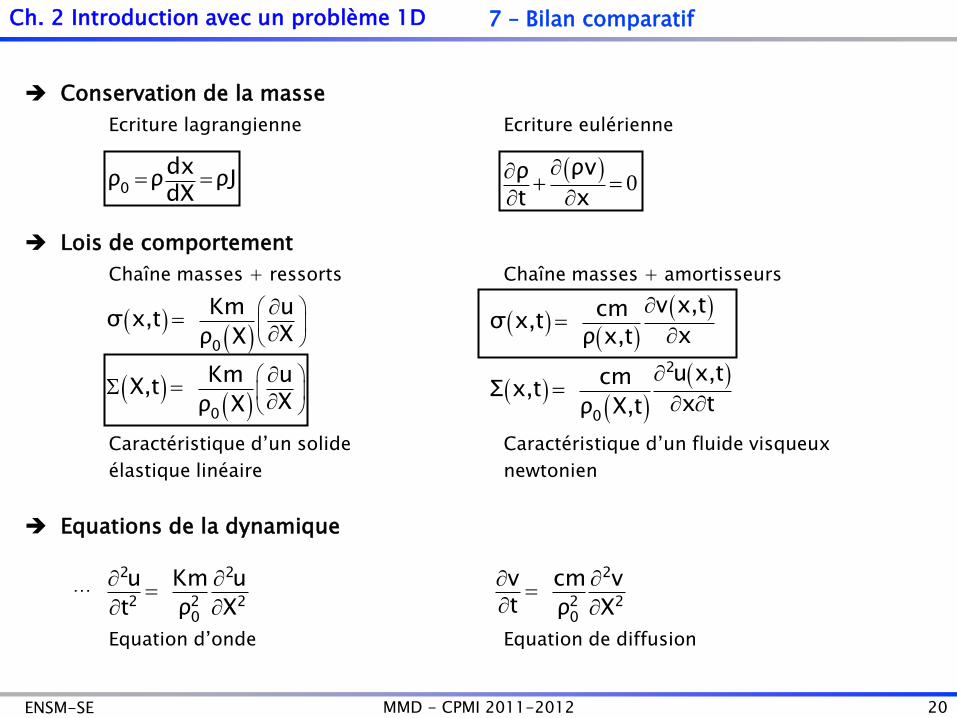
Conservation de la masse
Ecriture lagrangienne Ecriture eulérienne
Lois de comportement
Chaîne masses + ressorts Chaîne masses + amortisseurs
Caractéristique d’un solide Caractéristique d’un fluide visqueux
élastique linéaire newtonien
Equations de la dynamique
…
Equation d’onde Equation de diffusion
Ch. 2 Introduction avec un problème 1D 7 – Bilan comparatif
0
dxρ ρ ρJ
dX
0ρvρ
t x
2 2
2 2 20
u Km u
t ρ X
2
2 20
v cm v
t ρ X
ENSM-SE MMD - CPMI 2011-2012 21
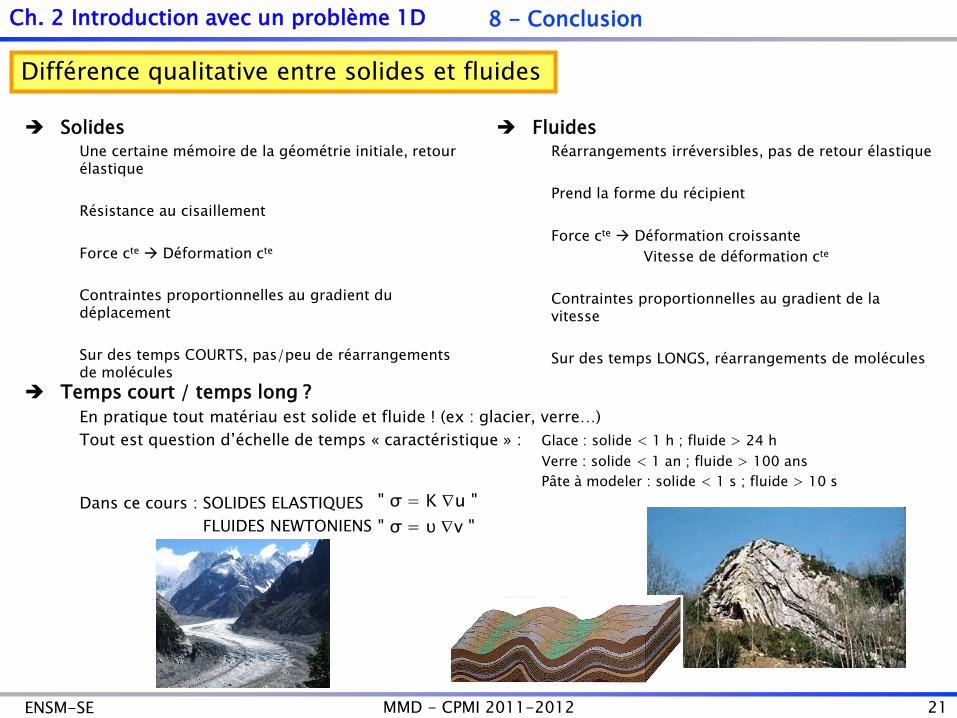
Différence qualitative entre solides et fluides
Solides Une certaine mémoire de la géométrie initiale, retour élastique
Résistance au cisaillement
Force cte Déformation cte
Contraintes proportionnelles au gradient du déplacement
Sur des temps COURTS, pas/peu de réarrangements de molécules
Fluides Réarrangements irréversibles, pas de retour élastique
Prend la forme du récipient
Force cte Déformation croissante
Vitesse de déformation cte
Contraintes proportionnelles au gradient de la vitesse
Sur des temps LONGS, réarrangements de molécules
Ch. 2 Introduction avec un problème 1D 8 - Conclusion
Temps court / temps long ?
En pratique tout matériau est solide et fluide ! (ex : glacier, verre…)
Tout est question d’échelle de temps « caractéristique » : Glace : solide < 1 h ; fluide > 24 h
Verre : solide < 1 an ; fluide > 100 ans
Pâte à modeler : solide < 1 s ; fluide > 10 s
Dans ce cours : SOLIDES ELASTIQUES
FLUIDES NEWTONIENS
" σ = K u "
" σ = υ v "
ENSM-SE MMD - CPMI 2011-2012 22
Ch. 3 – Cinématique et déformation des milieux continus
1 – Introduction : qu’est ce qu’un milieu continu
2 – Rappel du cas 1D
3 – Variable lagrangienne / fonction placement / déplacement
4 - Variable eulérienne / dérivée matérielle ou particulaire
5 – Déformations
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 23
Qu’est ce qu’un milieu continu (MC) ?
Milieu continu = modélisation physique macroscopique
Issue de l’expérience
… notion d’échelle des phénomènes étudiés
Applications : fluides et solides avec des écritures/formalismes adaptés.
Qu’est ce que le modèle mathématique du MC ?
• Un système = un volume constitué de particules (un ensemble de particules)
• Pour la compréhension, on assimile chaque point du système à une particule.
• On appelle configuration du MC à l’instant t l’ensemble des positions des points du MC.
• Continuité :
Des particules initialement voisines restent voisines au cours de l’évolution du MC.
Ch. 3 Cinématique des MC 1 – Introduction
ENSM-SE MMD - CPMI 2011-2012 24
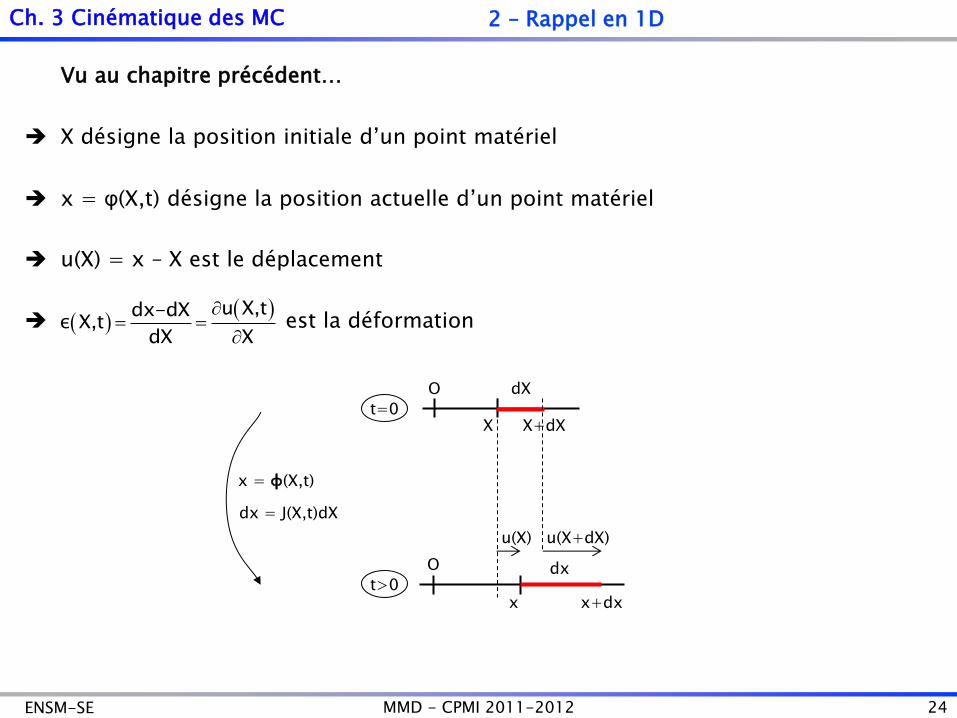
Vu au chapitre précédent…
X désigne la position initiale d’un point matériel
x = φ(X,t) désigne la position actuelle d’un point matériel
u(X) = x – X est le déplacement
est la déformation
2 – Rappel en 1D Ch. 3 Cinématique des MC
u X,tdx-dX
ε X,tdX X
x = φ(X,t)
O
X
dX
t=0
O
x
dx t>0
u(X)
dx = J(X,t)dX
X+dX
x+dx
u(X+dX)
ENSM-SE MMD - CPMI 2011-2012 25
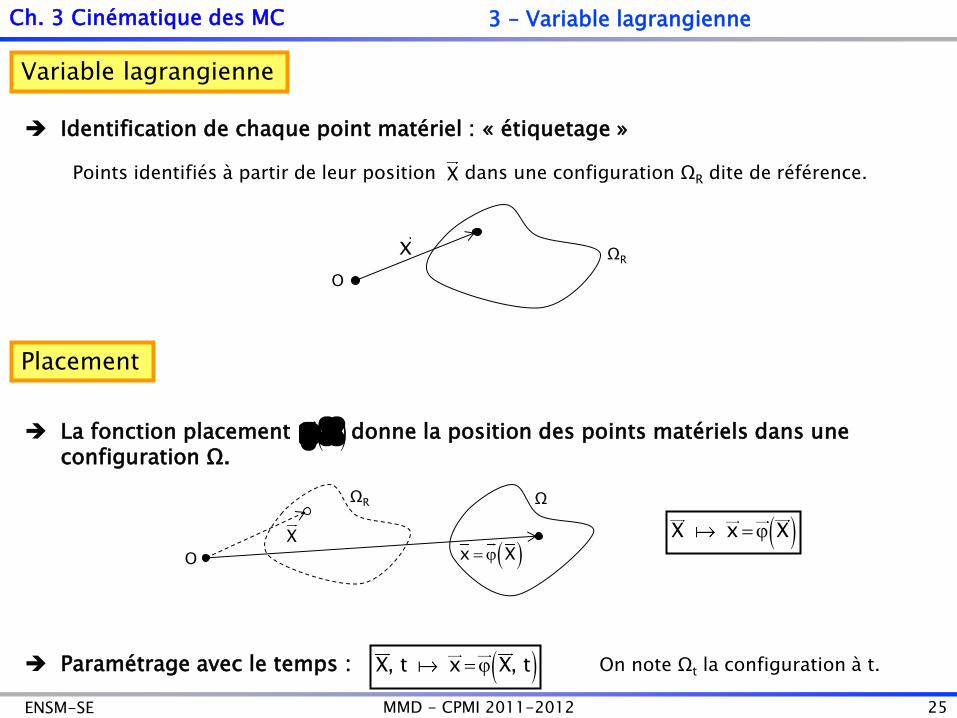
Variable lagrangienne
Identification de chaque point matériel : « étiquetage »
Points identifiés à partir de leur position dans une configuration ΩR dite de référence.
La fonction placement donne la position des points matériels dans une configuration Ω.
Paramétrage avec le temps : On note Ωt la configuration à t.
3 – Variable lagrangienne Ch. 3 Cinématique des MC
X
O
X ΩR
Placement
X
O
X
ΩR
x X
Ω
X x X
X, t x X, t
ENSM-SE MMD - CPMI 2011-2012 26
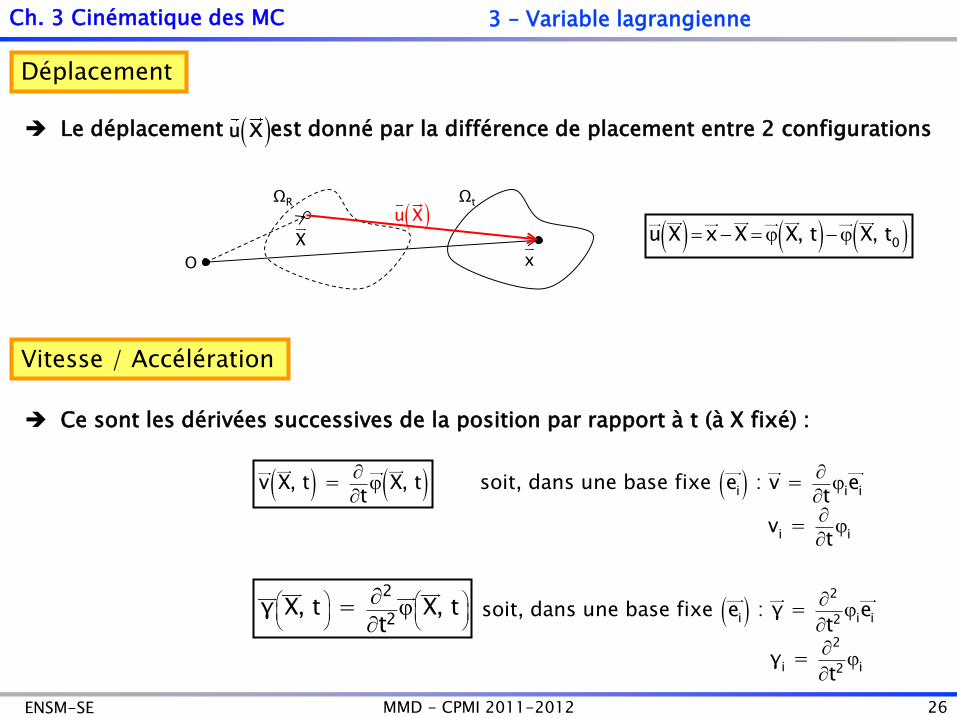
Déplacement
Le déplacement est donné par la différence de placement entre 2 configurations
Ce sont les dérivées successives de la position par rapport à t (à X fixé) :
3 – Variable lagrangienne Ch. 3 Cinématique des MC
Vitesse / Accélération
u X
O
X
ΩR
x
Ωt
u X
0u X x X X, t X, t
v X, t = X, tt
2
2γ X, t = X, t
t
i i isoit, dans une base fixe e : v = et
i iv = t
2
i i i2soit, dans une base fixe e : γ = e
t
2
i i2γ =
t
ENSM-SE MMD - CPMI 2011-2012 27
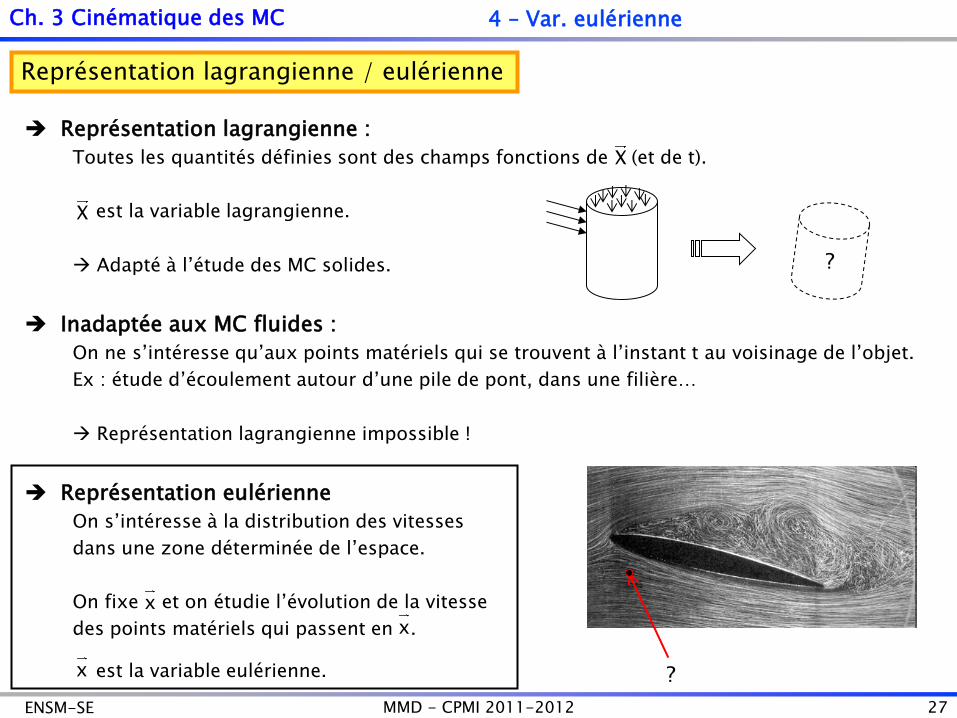
Représentation lagrangienne / eulérienne
Représentation lagrangienne :
Toutes les quantités définies sont des champs fonctions de (et de t).
est la variable lagrangienne.
Adapté à l’étude des MC solides.
Inadaptée aux MC fluides :
On ne s’intéresse qu’aux points matériels qui se trouvent à l’instant t au voisinage de l’objet.
Ex : étude d’écoulement autour d’une pile de pont, dans une filière…
Représentation lagrangienne impossible !
Représentation eulérienne
On s’intéresse à la distribution des vitesses
dans une zone déterminée de l’espace.
On fixe et on étudie l’évolution de la vitesse
des points matériels qui passent en .
est la variable eulérienne.
4 – Var. eulérienne Ch. 3 Cinématique des MC
X
X
?
?
x
x
x
ENSM-SE MMD - CPMI 2011-2012 28
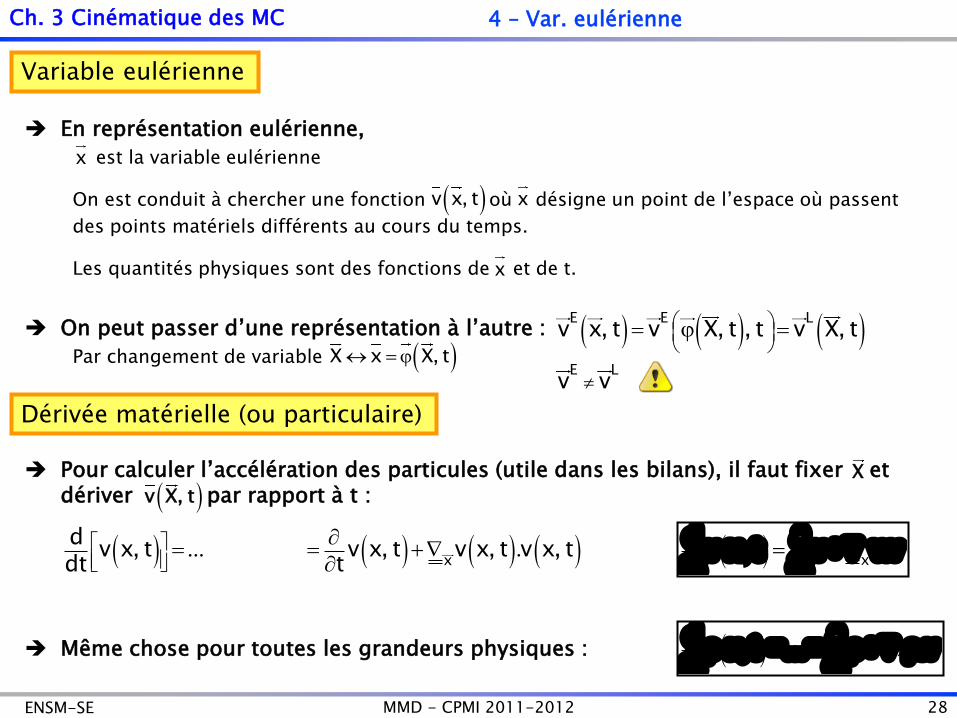
Variable eulérienne
4 – Var. eulérienne Ch. 3 Cinématique des MC
En représentation eulérienne,
est la variable eulérienne
On est conduit à chercher une fonction où désigne un point de l’espace où passent
des points matériels différents au cours du temps.
Les quantités physiques sont des fonctions de et de t.
On peut passer d’une représentation à l’autre :
Par changement de variable
Pour calculer l’accélération des particules (utile dans les bilans), il faut fixer et dériver par rapport à t :
Même chose pour toutes les grandeurs physiques :
Dérivée matérielle (ou particulaire)
x
v x, t
x
x
E E L
v x, t v X, t , t v X, t
X x X, t
X
v X, t
... .
x
dv x, t v x, t v x, t v x, t
tdt
xd ∂
ρ x, t = ...= ρ + ∇ ρ.vdt ∂t
x
d ∂v v + ∇ v.v
dt ∂tx, t
E L
v v
ENSM-SE MMD - CPMI 2011-2012 29
Bilan
4 – Var. eulérienne Ch. 3 Cinématique des MC
En MMC, les positions et les vitesses sont données par des fonctions (des champs).
Il existe deux représentations des champs : lagrangienne et eulérienne
• Lagrangienne :
identifie les points matériels → on travaille à partir de
• Eulérienne :
est un point de l’espace où passent différents points matériels
→ on travaille à partir de
• Lagrangien ↔ eulérien par changement de variable :
En eulérien, une spécificité importante est celle de la dérivée matérielle
x X, t
X X
x
v x, t
ENSM-SE MMD - CPMI 2011-2012 30
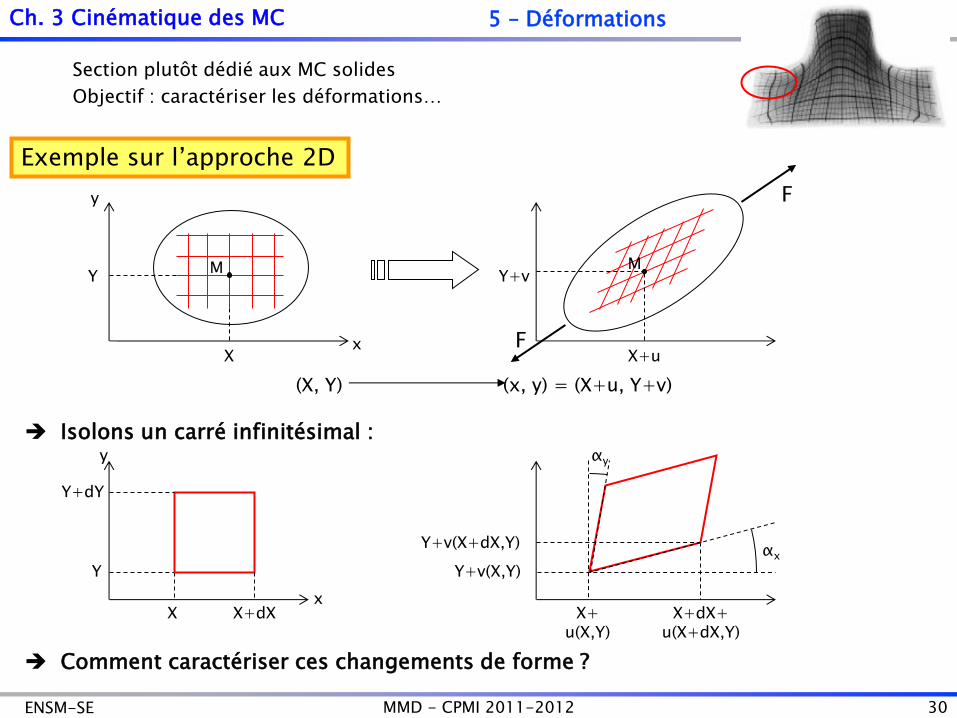
Section plutôt dédié aux MC solides
Objectif : caractériser les déformations…
Isolons un carré infinitésimal :
Comment caractériser ces changements de forme ?
Exemple sur l’approche 2D
5 – Déformations Ch. 3 Cinématique des MC
(X, Y) (x, y) = (X+u, Y+v)
M
F
F
X+u
Y+v M
X
Y
x
y
X
y
x
Y
X+dX
Y+dY
X+ u(X,Y)
X+dX+ u(X+dX,Y)
Y+v(X,Y)
Y+v(X+dX,Y) αx
αy
ENSM-SE MMD - CPMI 2011-2012 31
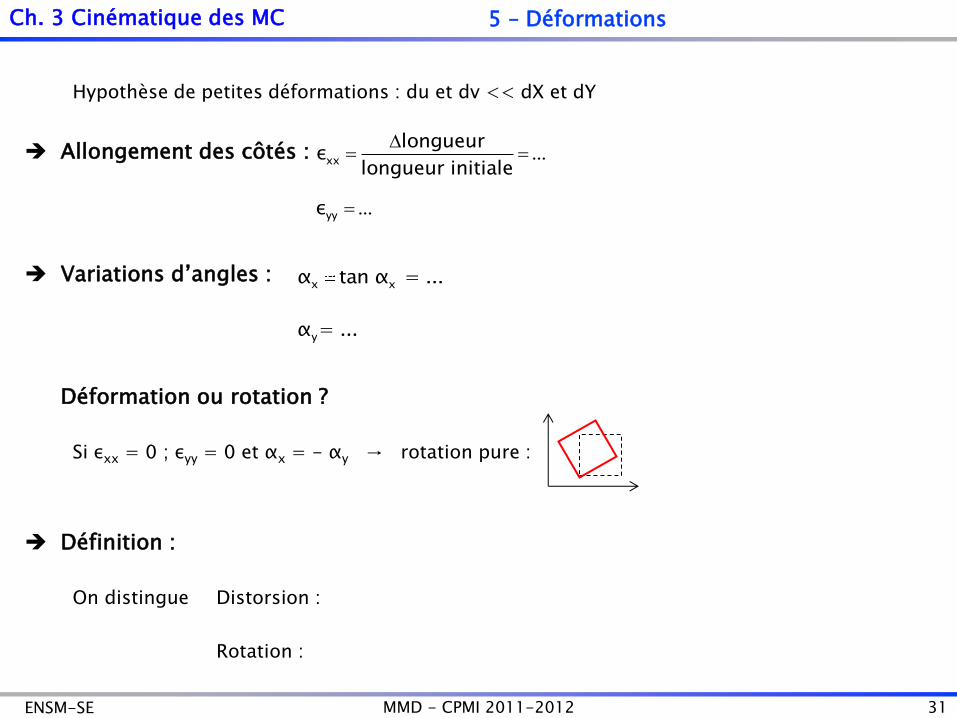
5 – Déformations Ch. 3 Cinématique des MC
Hypothèse de petites déformations : du et dv << dX et dY
Allongement des côtés :
Variations d’angles :
Déformation ou rotation ?
Si εxx = 0 ; εyy = 0 et αx = - αy → rotation pure :
Définition :
On distingue Distorsion :
Rotation :
...xx
longueurε
longueur initiale
...yyε
x xα tan α = ...
yα = ...
ENSM-SE MMD - CPMI 2011-2012 32
5 – Déformations Ch. 3 Cinématique des MC
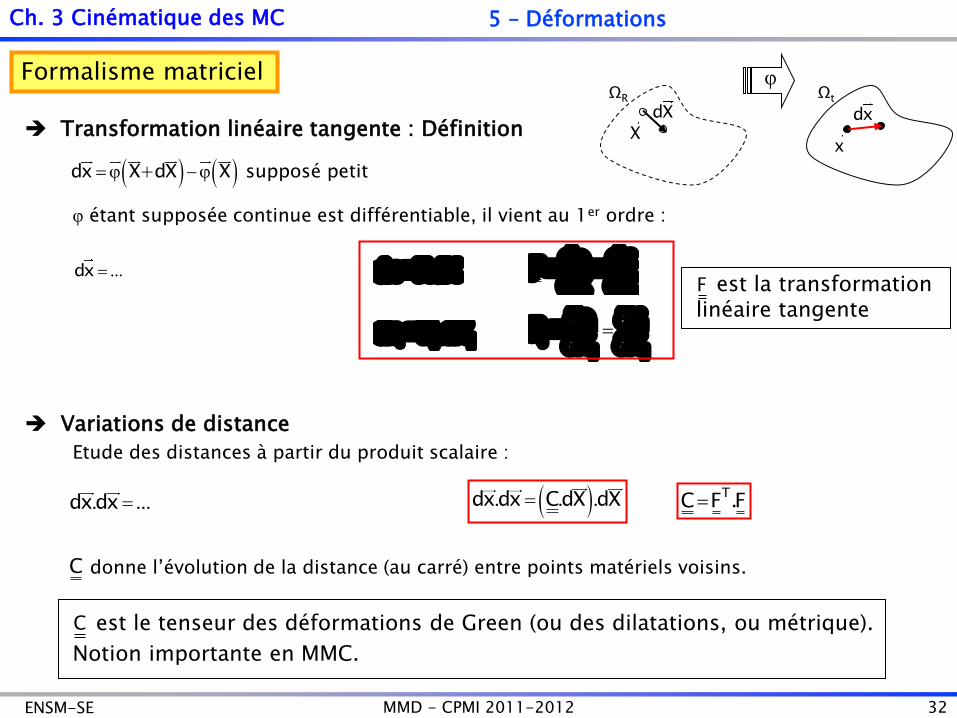
Formalisme matriciel
Transformation linéaire tangente : Définition
φ étant supposée continue est différentiable, il vient au 1er ordre :
Variations de distance
Etude des distances à partir du produit scalaire :
donne l’évolution de la distance (au carré) entre points matériels voisins.
est le tenseur des déformations de Green (ou des dilatations, ou métrique).
Notion importante en MMC.
dx X+dX X supposé petit
...dx dx =F.dX
i ij jdx =F .dX i i
ijj j
F =X X
x
est la transformation linéaire tangente
. ...dxdx . . .dxdx CdX dX
d dxF = =
dX dX
TC F .F
C
C
F
φ
dXΩR
dx
Ωt
Xx
ENSM-SE MMD - CPMI 2011-2012 33
5 – Déformations Ch. 3 Cinématique des MC
Formalisme matriciel
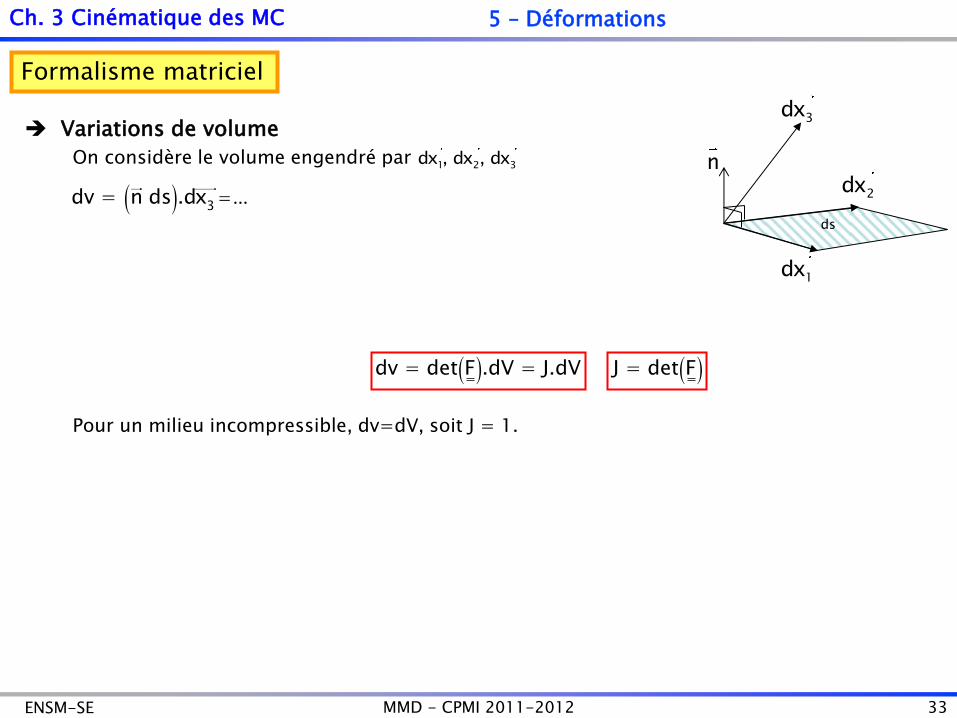
Variations de volume
On considère le volume engendré par
Pour un milieu incompressible, dv=dV, soit J = 1.
1 2 3dx , dx , dx
...3dv = n ds .dx
dv = det F .dV = J.dV J = det F
3dx
2dx
1dx
n
ds
ENSM-SE MMD - CPMI 2011-2012 34
5 – Déformations Ch. 3 Cinématique des MC
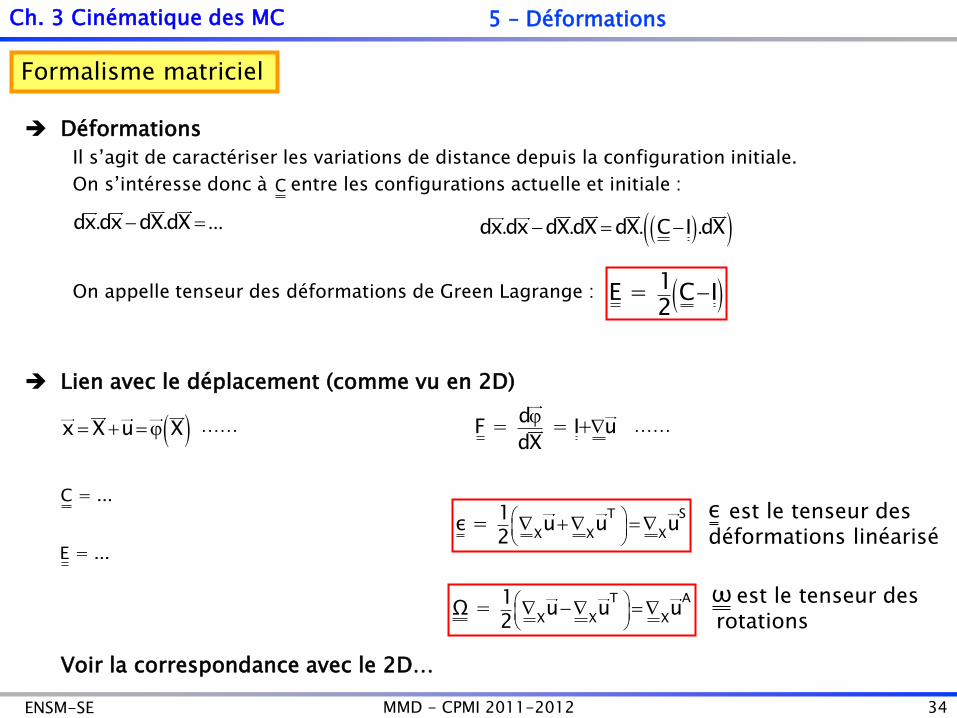
Formalisme matriciel
Déformations
Il s’agit de caractériser les variations de distance depuis la configuration initiale.
On s’intéresse donc à entre les configurations actuelle et initiale :
On appelle tenseur des déformations de Green Lagrange :
Lien avec le déplacement (comme vu en 2D)
…… ……
Voir la correspondance avec le 2D…
C
. . . .dxdx dXdX dX C I dX . . ...dxdx dXdX
1E = C I2
x X u X d
F = = I+ udX
E = ...
T S
X X X
1ε = u u u
2
est le tenseur des déformations linéarisé
ε
T A
X X X
1Ω = u u u
2
est le tenseur des rotations
ω
C = ...
ENSM-SE
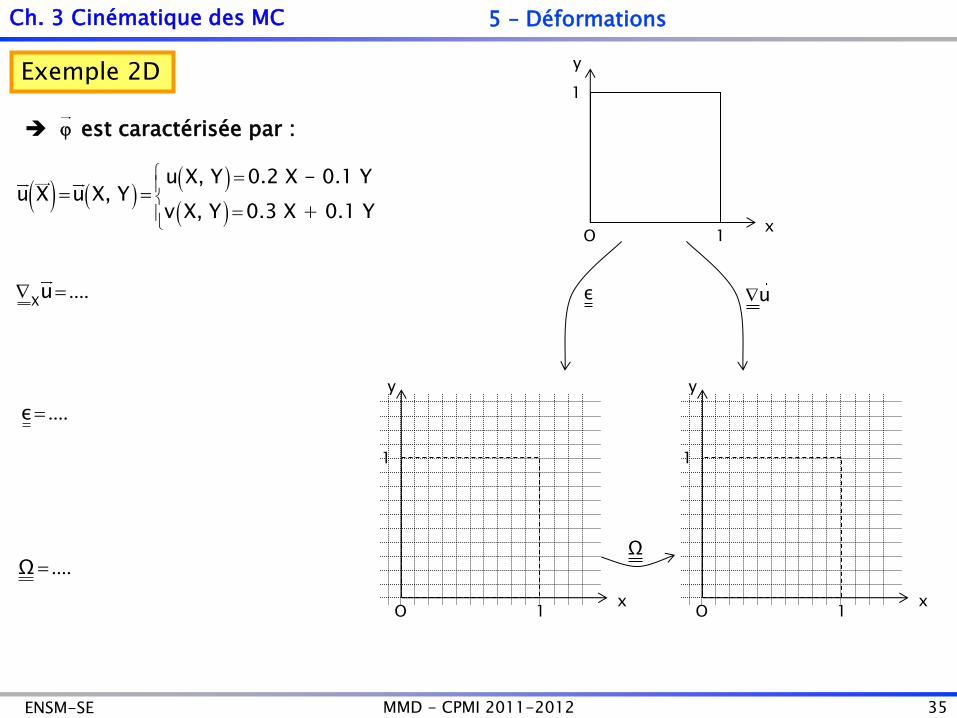
est caractérisée par :
MMD - CPMI 2011-2012 35
Exemple 2D
5 – Déformations Ch. 3 Cinématique des MC
u X, Y 0.2 X - 0.1 Yu X u X, Y
v X, Y 0.3 X + 0.1 Y
....Xu
....ε
....Ω
x
y
1 O
1
u
x
y
1 O
1
x
y
1 O
1
Ω
ε
ENSM-SE MMD - CPMI 2011-2012 36
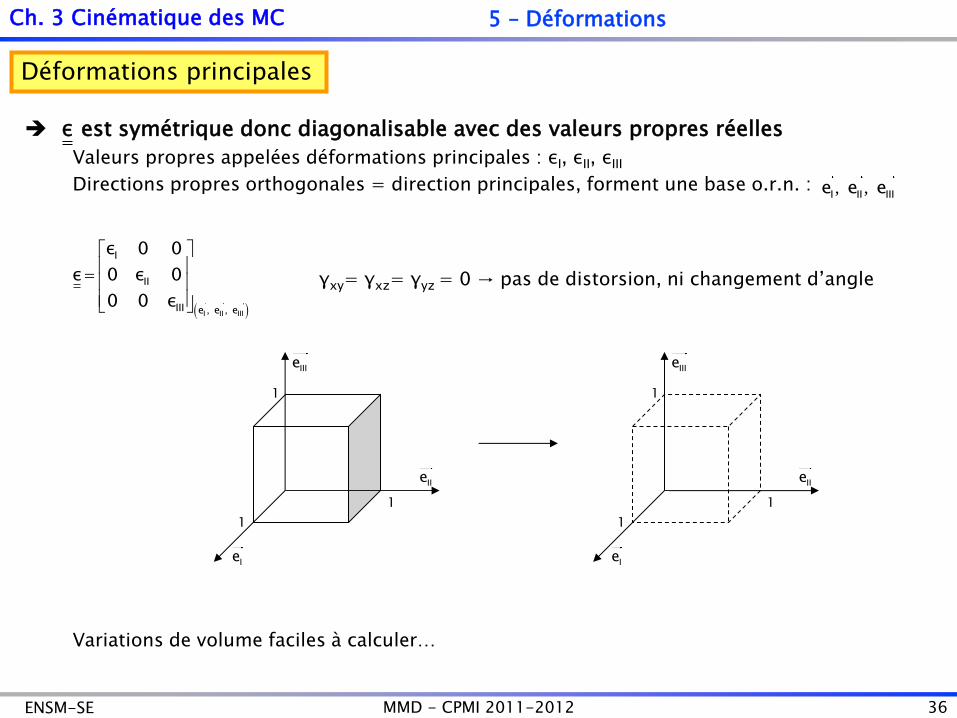
est symétrique donc diagonalisable avec des valeurs propres réelles
Valeurs propres appelées déformations principales : εI, εII, εIII
Directions propres orthogonales = direction principales, forment une base o.r.n. :
Variations de volume faciles à calculer…
5 – Déformations Ch. 3 Cinématique des MC
Déformations principales
ε
, ,I II IIIe e e
, ,I II III
I
II
III e e e
ε 0 0
ε 0 ε 0
0 0 ε
γxy= γxz= γyz = 0 → pas de distorsion, ni changement d’angle
1
1
1
IIe
IIIe
Ie
1
1
1
IIe
IIIe
Ie
ENSM-SE MMD - CPMI 2011-2012 37
Ch. 4 – Contraintes
1 – Rappel sur le vecteur contrainte
2 – Matrice des contraintes (ou tenseur)
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 38
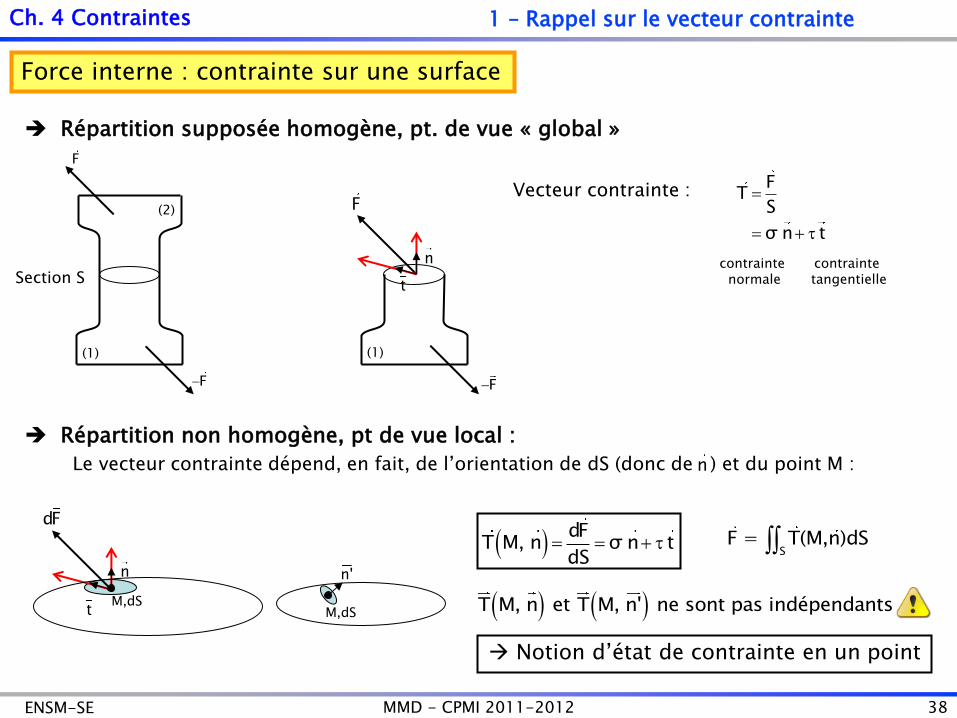
Répartition supposée homogène, pt. de vue « global »
Répartition non homogène, pt de vue local :
Le vecteur contrainte dépend, en fait, de l’orientation de dS (donc de ) et du point M :
Force interne : contrainte sur une surface
Ch. 4 Contraintes 1 – Rappel sur le vecteur contrainte
(2)
(1)
F
F
Section S
FT
S
σ n t
Vecteur contrainte :
contrainte normale
contrainte tangentielle
n
dF
T M, n σ n tdS
T M, n et T M, n' ne sont pas indépendants
Notion d’état de contrainte en un point
F
(1)
n
t
F
n
t
dF
M,dS M,dS
n'
SF = T(M,n)dS
ENSM-SE MMD - CPMI 2011-2012 39
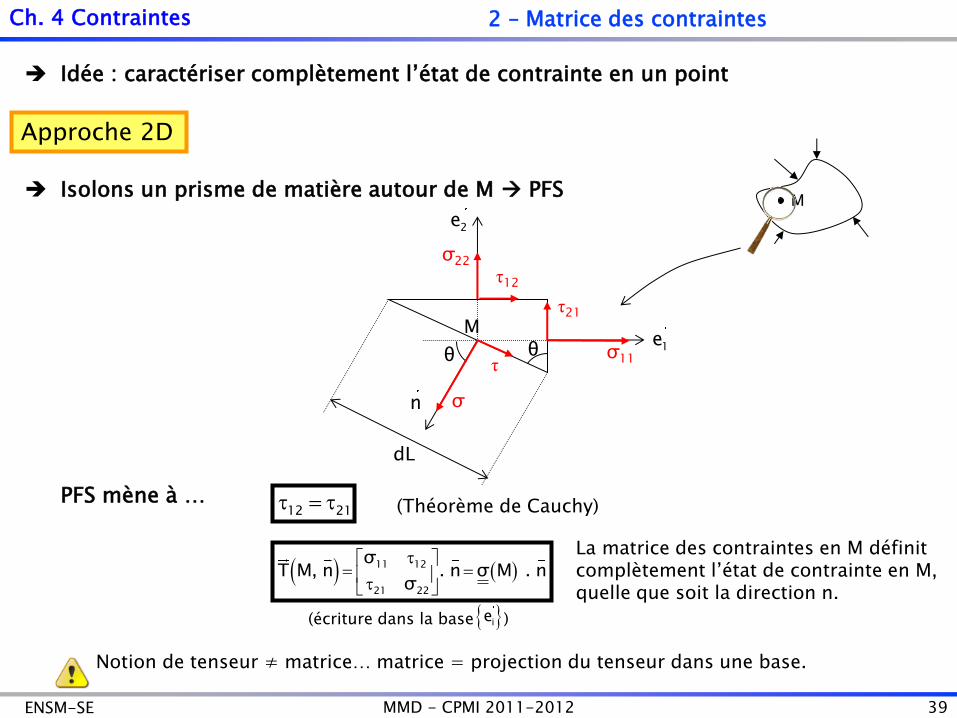
Approche 2D
Idée : caractériser complètement l’état de contrainte en un point
Isolons un prisme de matière autour de M PFS
PFS mène à …
Notion de tenseur ≠ matrice… matrice = projection du tenseur dans une base.
2 – Matrice des contraintes Ch. 4 Contraintes
M
12 21
11 12
21 22
σT M, n . n σ M . n
σ
La matrice des contraintes en M définit complètement l’état de contrainte en M, quelle que soit la direction n.
(écriture dans la base ) ie
(Théorème de Cauchy)
1e
2e
n
θ θ
σ22
σ11
τ21
τ12
σ
τ
dL
M
ENSM-SE MMD - CPMI 2011-2012 40
2 – Matrice des contraintes Ch. 4 Contraintes
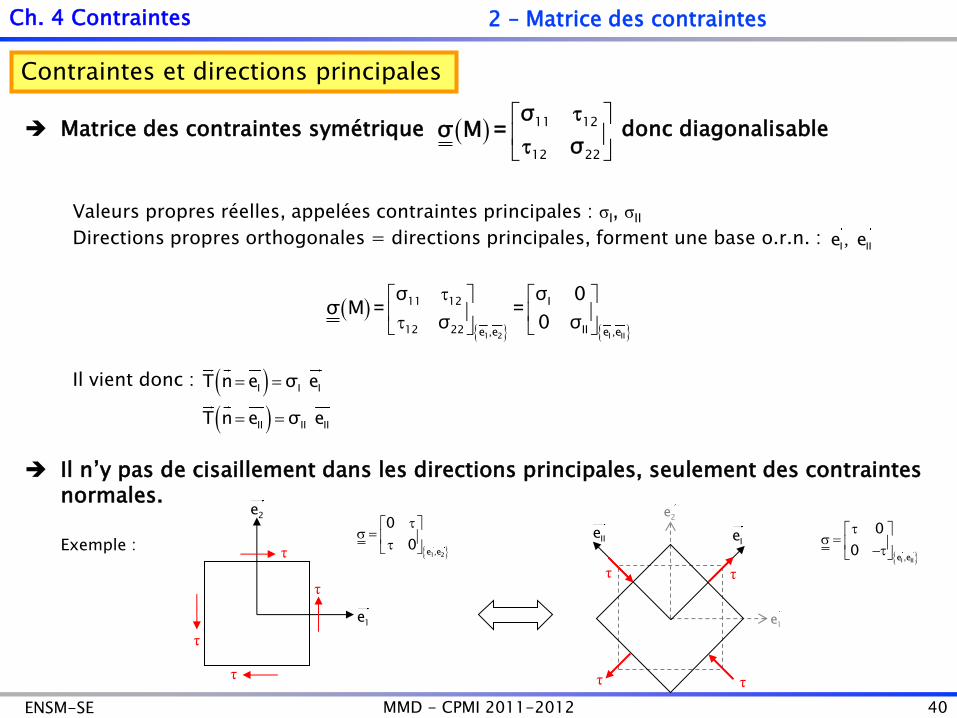
Matrice des contraintes symétrique donc diagonalisable
Valeurs propres réelles, appelées contraintes principales : σI, σII
Directions propres orthogonales = directions principales, forment une base o.r.n. :
Il vient donc :
Il n’y pas de cisaillement dans les directions principales, seulement des contraintes normales.
Exemple :
Contraintes et directions principales
11 12
12 22
σ=
σ
σ M
, ,1 2 I II
11 12 I
12 22 IIe e e e
0σ M
0
σ σ= =
σ σ
,I IIe e
I I I
II II II
T n e σ e
T n e σ e
,1 2e e
0
0
1e
2e
τ
τ
τ
τ
,I IIe e
0
0
1e
2e
τ τ
τ τ
IeIIe
ENSM-SE MMD - CPMI 2011-2012 41
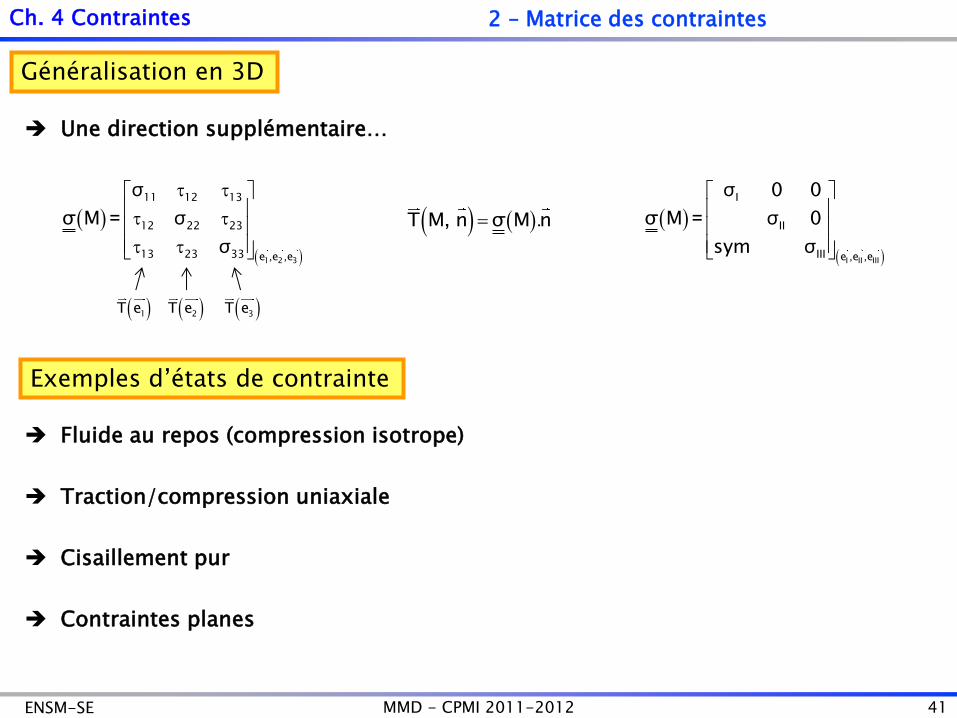
Généralisation en 3D
Une direction supplémentaire…
Fluide au repos (compression isotrope)
Traction/compression uniaxiale
Cisaillement pur
Contraintes planes
2 – Matrice des contraintes Ch. 4 Contraintes
, ,1 2 3
11 12 13
12 22 23
13 23 33 e e e
σ M
σ
= σ
σ
1T e 2T e 3T e
T M, n σ M n .
, ,I II III
I
II
III e e e
0 0
σ M 0
sym
σ
= σ
σ
Exemples d’états de contrainte
ENSM-SE MMD - CPMI 2011-2012 42
Ch. 5 – Equations de conservation
1 – Conservation de la masse
2 – Conservation de la quantité de mouvement (= PFD)
3 – Exemples
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 43
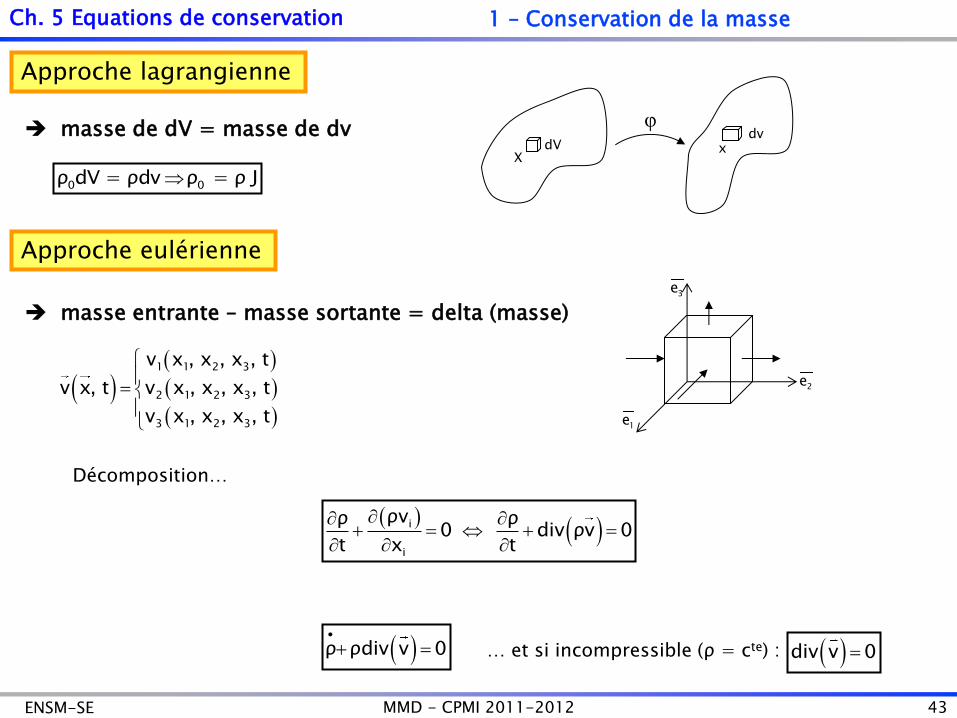
Approche lagrangienne
masse de dV = masse de dv
masse entrante – masse sortante = delta (masse)
Décomposition…
Ch. 5 Equations de conservation 1 – Conservation de la masse
φ dV
X
dv x
0 0ρ dV = ρdv ρ = ρ J
Approche eulérienne
1 1 2 3
2 1 2 3
3 1 2 3
v x , x , x , t
v x, t v x , x , x , t
v x , x , x , t
2e
1e
3e
i
i
ρvρ ρ0 div ρv 0
t x t
ρ ρdiv v 0
div v 0… et si incompressible (ρ = cte) :
ENSM-SE MMD - CPMI 2011-2012 44
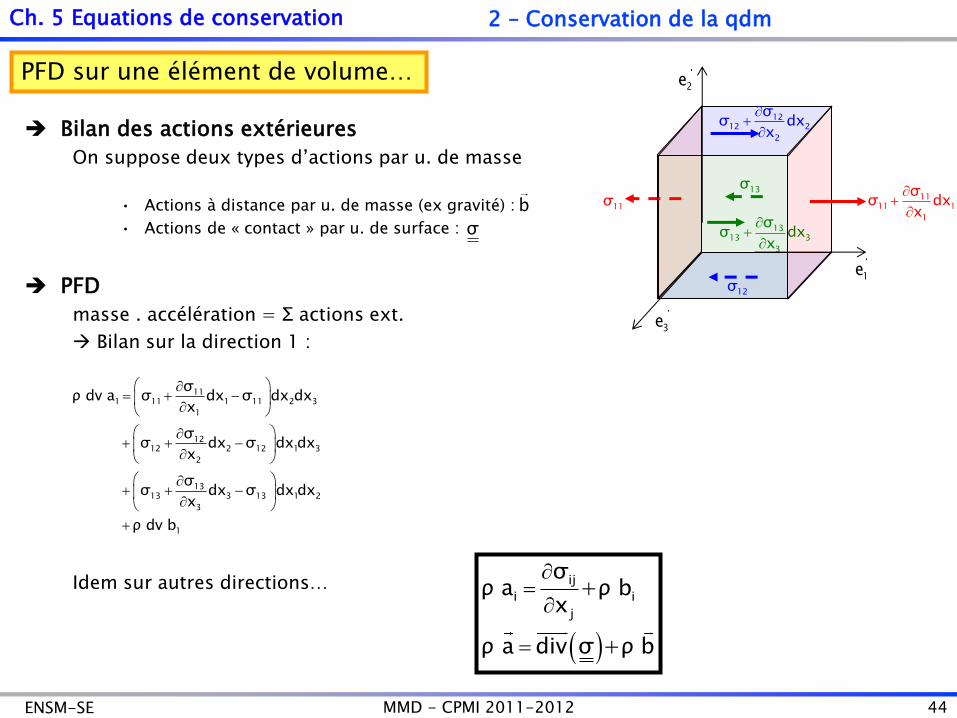
Bilan des actions extérieures
On suppose deux types d’actions par u. de masse
• Actions à distance par u. de masse (ex gravité) :
• Actions de « contact » par u. de surface :
PFD
masse . accélération = Σ actions ext.
Bilan sur la direction 1 :
Idem sur autres directions…
PFD sur une élément de volume…
2 – Conservation de la qdm Ch. 5 Equations de conservation
12σ
1212 2
2
σσ dx
x
1313 3
3
σσ dx
x
13σ
1e
3e
2e
1111 1
1
σσ dx
x
11σb
σ
111 11 1 11 2 3
1
1212 2 12 1 3
2
1313 3 13 1 2
3
1
σρ dv a σ dx σ dx dx
x
σ σ dx σ dx dx
x
σ σ dx σ dx dx
x
ρ dv b
ij
i i
j
σρ a +ρ b
x
ρ a div σ +ρ b
ENSM-SE
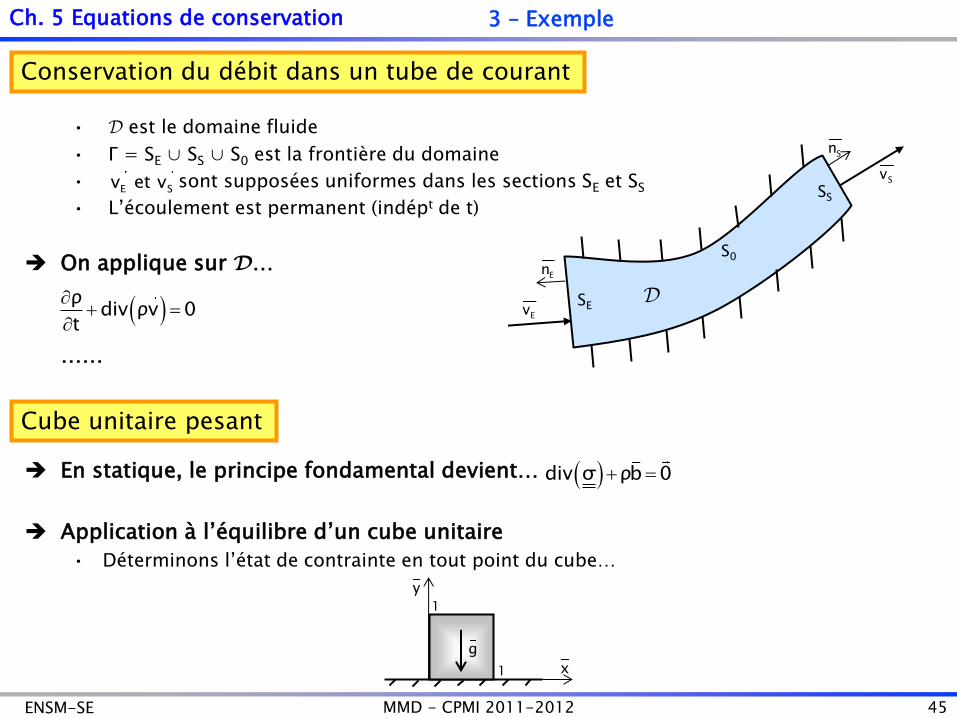
• D est le domaine fluide
• Γ = SE ∪ SS ∪ S0 est la frontière du domaine
• sont supposées uniformes dans les sections SE et SS
• L’écoulement est permanent (indépt de t)
On applique sur D…
……
En statique, le principe fondamental devient…
Application à l’équilibre d’un cube unitaire
• Déterminons l’état de contrainte en tout point du cube…
MMD - CPMI 2011-2012 45
Conservation du débit dans un tube de courant
3 – Exemple Ch. 5 Equations de conservation
Ev
Sv
Sn
En
SE
S0
SS
D
E Sv et v
ρ
div ρv 0t
Cube unitaire pesant
div σ ρb 0
x
y
g
1
1
ENSM-SE MMD - CPMI 2011-2012 46
Ch. 6 – Elasticité linéaire ( solides)
1 – Rappel du cas 1D
2 – Loi de Hooke / Cas 3D
/ Coefficients de Lamé
/ Notation vectorielle
3 – Exemples de problèmes simples en élasticité
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 47
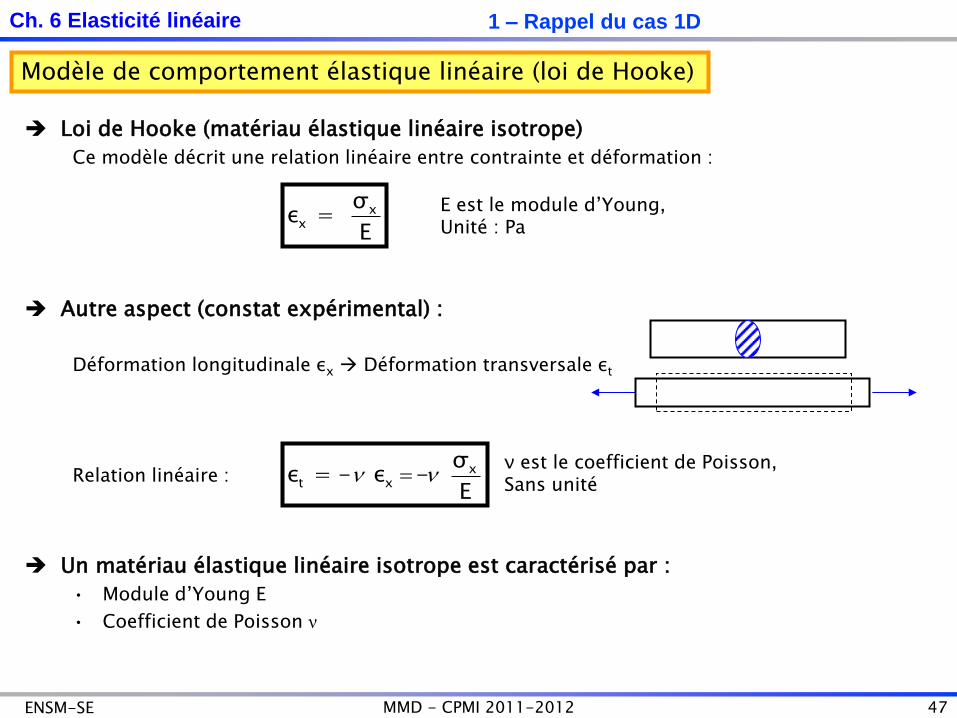
Modèle de comportement élastique linéaire (loi de Hooke)
Loi de Hooke (matériau élastique linéaire isotrope)
Ce modèle décrit une relation linéaire entre contrainte et déformation :
Autre aspect (constat expérimental) :
Déformation longitudinale εx Déformation transversale εt
Relation linéaire :
Un matériau élastique linéaire isotrope est caractérisé par :
• Module d’Young E
• Coefficient de Poisson ν
Ch. 6 Elasticité linéaire 1 – Rappel du cas 1D
xx
σε =
E
E est le module d’Young, Unité : Pa
ν est le coefficient de Poisson, Sans unité
xt x
σε = - ε -
E
ENSM-SE MMD - CPMI 2011-2012 48
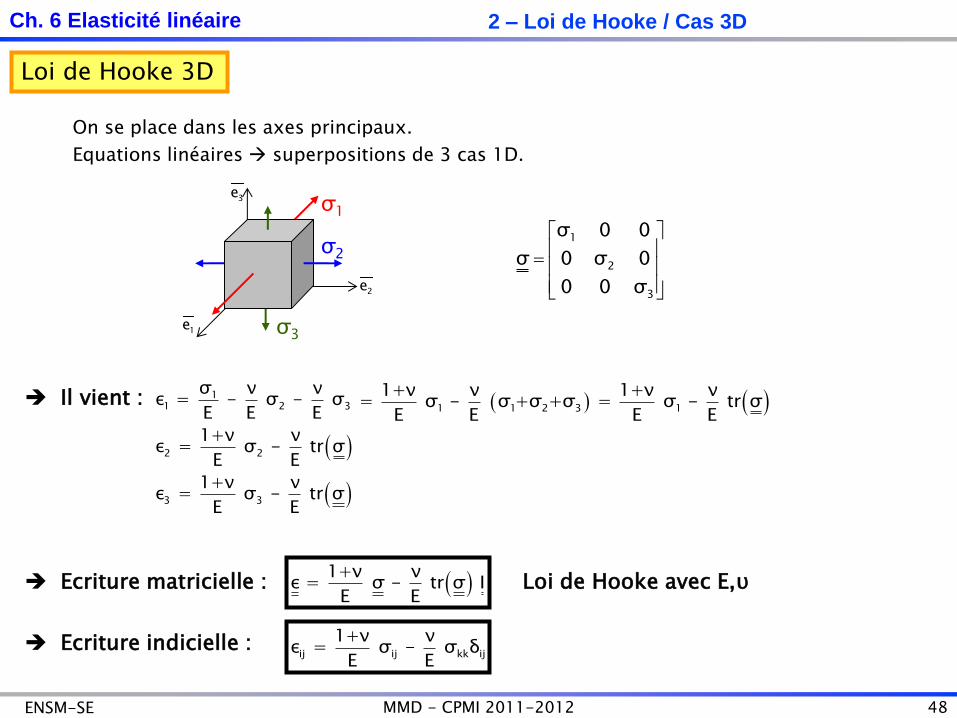
Loi de Hooke 3D
On se place dans les axes principaux.
Equations linéaires superpositions de 3 cas 1D.
Il vient :
Ecriture matricielle :
Ecriture indicielle :
2 – Loi de Hooke / Cas 3D Ch. 6 Elasticité linéaire
1
2
3
σ 0 0
σ 0 σ 0
0 0 σ
2e
1e
3eσ1
σ2
σ3
11 2 3
2 2
3 3
σ ν νε = - σ - σ
E E E
1+ν νε = σ - tr σ
E E
1+ν νε = σ - tr σ
E E
1 1 2 3 1
1+ν ν 1+ν ν = σ - σ +σ +σ = σ - tr σ
E E E E
1+ν ν
ε = σ - tr σ IE E
ij ij ijkk
1+ν νε = σ - σ δ
E E
Loi de Hooke avec E,υ
ENSM-SE MMD - CPMI 2011-2012 49
Loi de Hooke 3D : remarques
2 – Loi de Hooke / Cas 3D Ch. 6 Elasticité linéaire
Loi de comportement 3D des solides élastiques isotropes
Démontrée dans les axes principaux mais rien n’empêche de changer de base
Valable dans n’importe quelle base
2 paramètres E, υ suffisent : comme en 1D, un essai de traction simple suffisant.
Correspond à un grand nombre de problèmes courants : un grande majorité des solides sont élastiques à faible contrainte.
Si contrainte > limite élastique loi de Hooke fausse.
Il existe des solides anisotropes (ex : bois) : E, υ dépendent de la direction.
Ce que l’on va voir sous une autre approche, plus générale…
ENSM-SE MMD - CPMI 2011-2012 50
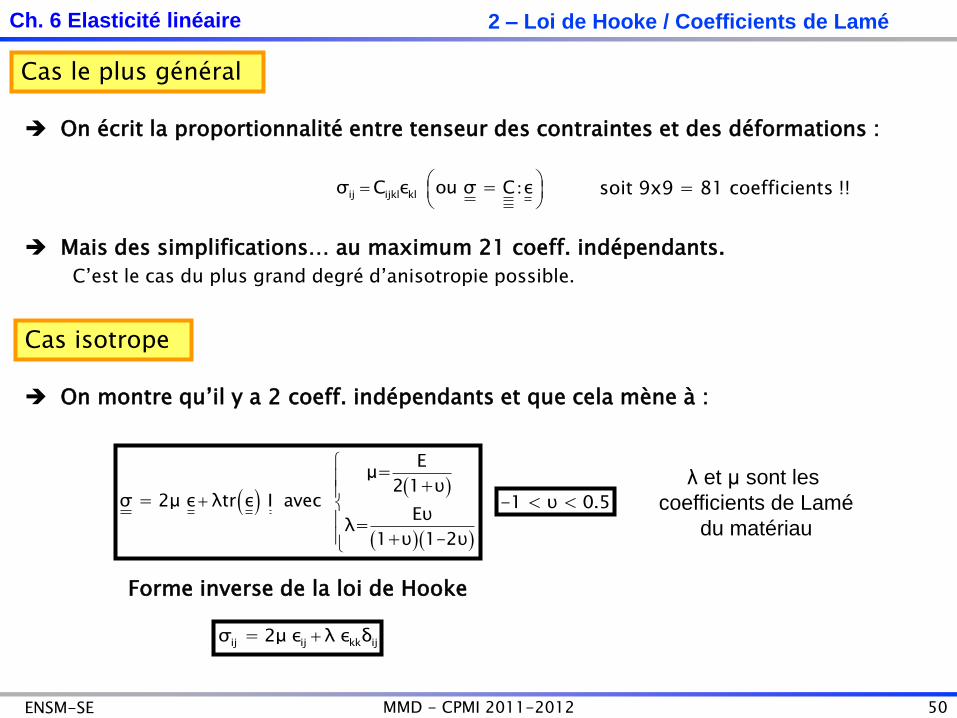
Cas le plus général
On écrit la proportionnalité entre tenseur des contraintes et des déformations :
soit 9x9 = 81 coefficients !!
Mais des simplifications… au maximum 21 coeff. indépendants.
C’est le cas du plus grand degré d’anisotropie possible.
On montre qu’il y a 2 coeff. indépendants et que cela mène à :
2 – Loi de Hooke / Coefficients de Lamé Ch. 6 Elasticité linéaire
:ij ijkl klσ C ε ou σ = C ε
Cas isotrope
Eμ=
2 1+υσ = 2μ ε λtr ε I avec
Eυλ=
1+υ 1-2υ
-1 < υ < 0.5
λ et μ sont les
coefficients de Lamé
du matériau
Forme inverse de la loi de Hooke
ij ij ijkkσ = 2μ ε λ ε δ
ENSM-SE MMD - CPMI 2011-2012 51
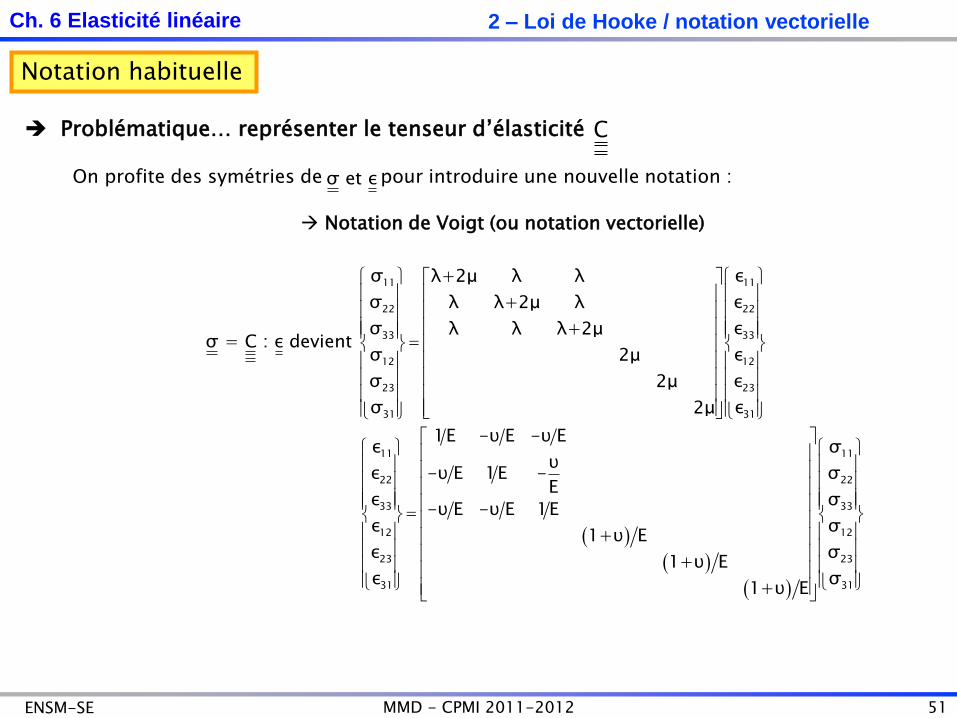
2 – Loi de Hooke / notation vectorielle Ch. 6 Elasticité linéaire
Problématique… représenter le tenseur d’élasticité
On profite des symétries de pour introduire une nouvelle notation :
Notation de Voigt (ou notation vectorielle)
Notation habituelle
C
σ et ε
11 11
22 22
33 33
12 12
23 23
31 31
σ ελ+2μ λ λ
σ ελ λ+2μ λ
σ ελ λ λ+2μσ = C : ε devient
σ ε2μ
σ ε2μ
σ ε2μ
11 11
22 22
33 33
12 12
23 23
31 31
1E -υ E -υ Eε σ
υε σ-υ E 1E -
Eε σ
-υ E -υ E 1Eε σ
1+υ Eε σ
1+υ Eε σ
1+υ E
ENSM-SE MMD - CPMI 2011-2012 52
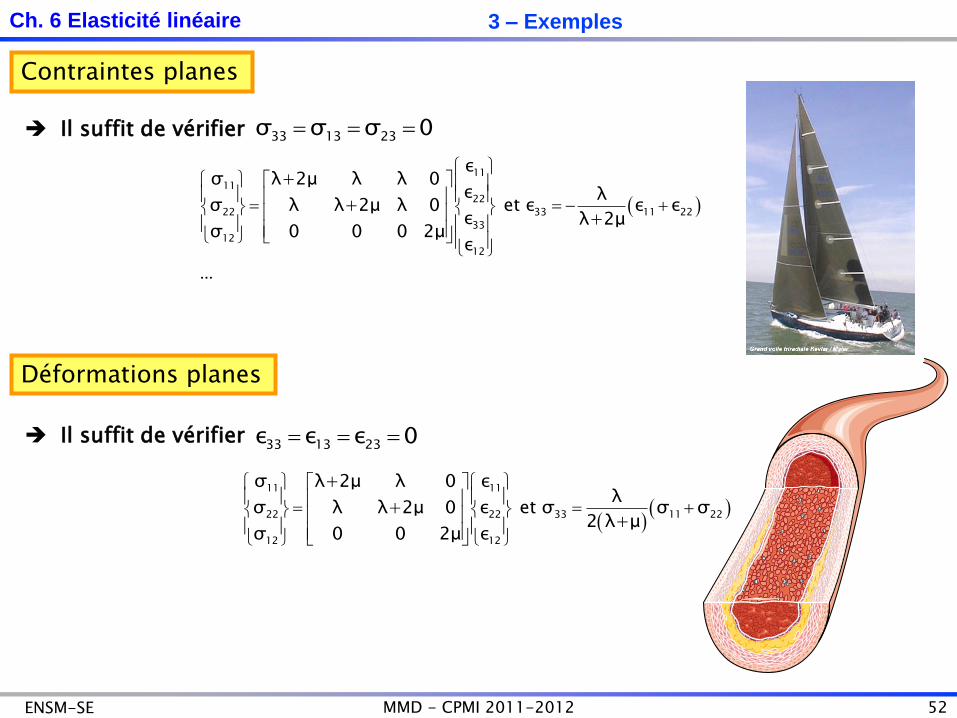
Il suffit de vérifier
Il suffit de vérifier
Ch. 6 Elasticité linéaire
Contraintes planes
...
11
11
22
22 33 11 22
33
12
12
εσ λ+2μ λ λ 0
ε λσ λ λ+2μ λ 0 et ε ε ε
ε λ+2μσ 0 0 0 2μ
ε
33 13 23σ σ σ 0
Déformations planes
33 13 23ε ε ε 0
11 11
22 22 33 11 22
12 12
σ λ+2μ λ 0 ελ
σ λ λ+2μ 0 ε et σ σ σ2 λ+μ
σ 0 0 2μ ε
3 – Exemples
ENSM-SE MMD - CPMI 2011-2012 53
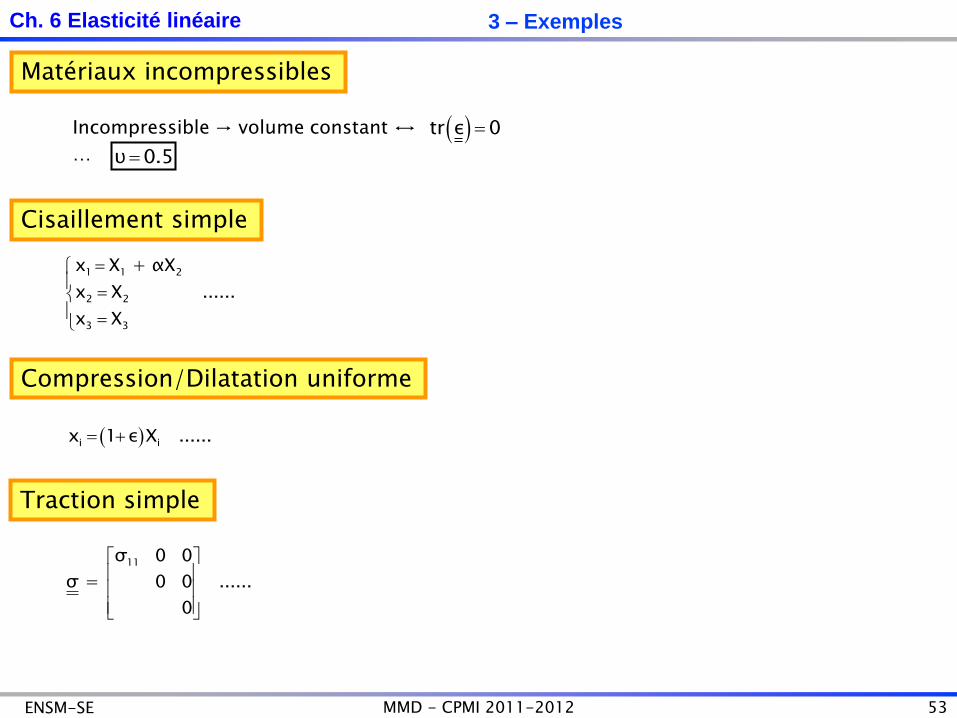
Matériaux incompressibles
Incompressible → volume constant ↔
…
3 – Exemples Ch. 6 Elasticité linéaire
tr ε 0
υ 0.5
Cisaillement simple
Compression/Dilatation uniforme
Traction simple
1 1 2
2 2
3 3
x X + αX
x X ......
x X
i ix 1 ε X ......
11σ 0 0
σ = 0 0 ......
0
ENSM-SE MMD - CPMI 2011-2012 54
Ch. 7 – Fluides non visqueux
1 – Conservation de la masse / incompressibilité
2 – Dynamique d’un fluide non visqueux : équation d’Euler
3 – Relation de Bernoulli
4 – Bilan de qdm sur un domaine
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 55
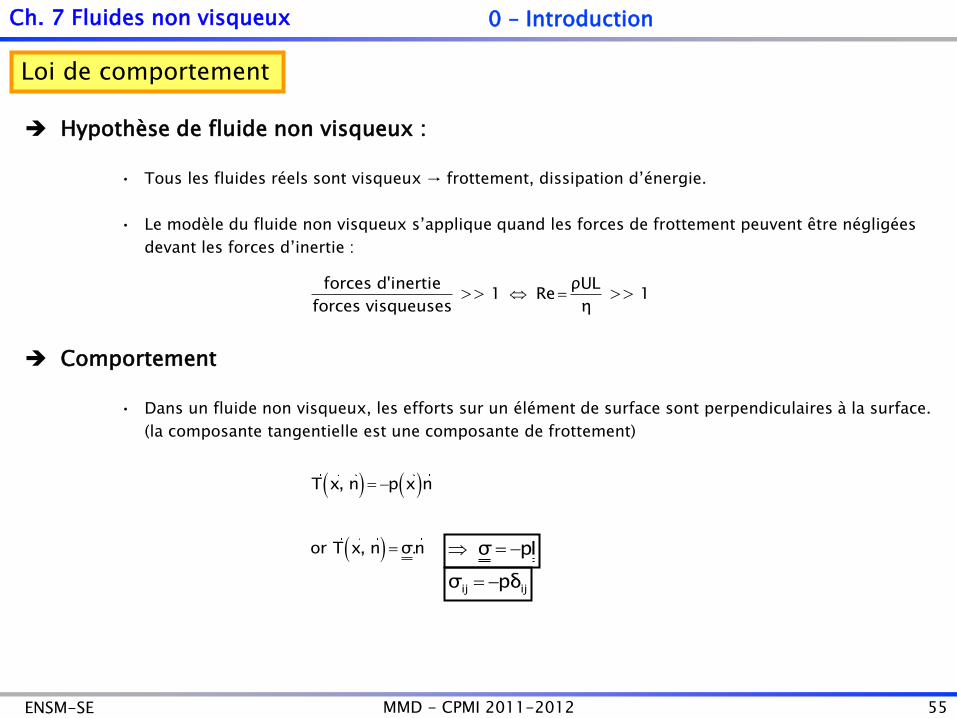
Loi de comportement
Hypothèse de fluide non visqueux :
• Tous les fluides réels sont visqueux → frottement, dissipation d’énergie.
• Le modèle du fluide non visqueux s’applique quand les forces de frottement peuvent être négligées
devant les forces d’inertie :
Comportement
• Dans un fluide non visqueux, les efforts sur un élément de surface sont perpendiculaires à la surface.
(la composante tangentielle est une composante de frottement)
Ch. 7 Fluides non visqueux 0 – Introduction
T x, n p x n
forces d'inertie ρUL >> 1 Re >> 1
forces visqueuses η
.or T x, n σn σ pI
ij ijσ pδ
ENSM-SE MMD - CPMI 2011-2012 56
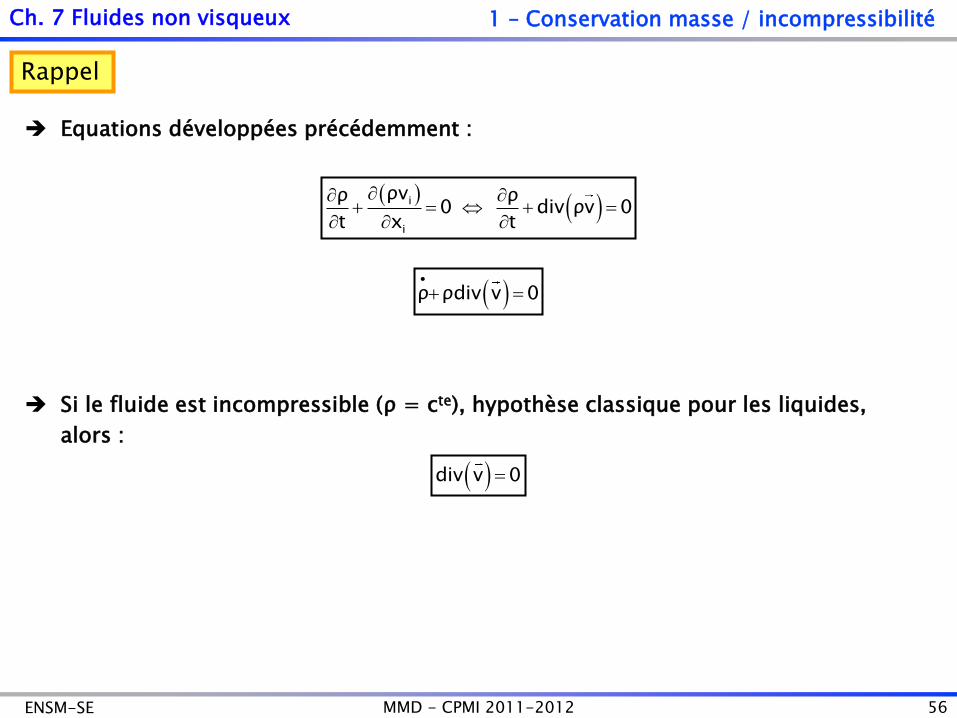
Rappel
Equations développées précédemment :
Si le fluide est incompressible (ρ = cte), hypothèse classique pour les liquides,
alors :
Ch. 7 Fluides non visqueux 1 – Conservation masse / incompressibilité
i
i
ρvρ ρ0 div ρv 0
t x t
ρ ρdiv v 0
div v 0
ENSM-SE MMD - CPMI 2011-2012 57
= Loi LOCALE de la dynamique
On réécrit la conservation de qdm pour un volume élémentaire de fluide :
Autres écritures :
Démonstration possible en écrivant l’équilibre d’un cube fluide soumis à …
… soit, dans le champ de pesanteur…
2 – Equation d’Euler Ch. 7 Fluides non visqueux
ij
i i
j
σρ a +ρ b ... devient...
x
i i
i
pρ a +ρ b
x
i i
i
pρ v +ρ b
x
.
ρ v p + ρ b
vρ v v p + ρ b
t
b
Rappel : action par u. de volume b
Equation d’Euler pour les fluides non visqueux
Cas de l’hydrostatique
p + ρ b 0
tep + ρgz = c
ENSM-SE MMD - CPMI 2011-2012 58
Equation qui traduit la conservation de l’énergie dans un fluide non visqueux
Point de départ …
……
Fluide incompressible et homogène
Ecoulement stationaire
Sur une ligne de courant
(donc l’écoulement est aussi irrotationnel)
3 – Relation de Bernoulli Ch. 7 Fluides non visqueux
ρ v p + ρ g
Hypothèses du développement
Relation de Bernoulli
teρ c
. 0
t
2 te1ρv p + ρgz c
2
ENSM-SE MMD - CPMI 2011-2012 59
3 – Relation de Bernoulli Ch. 7 Fluides non visqueux
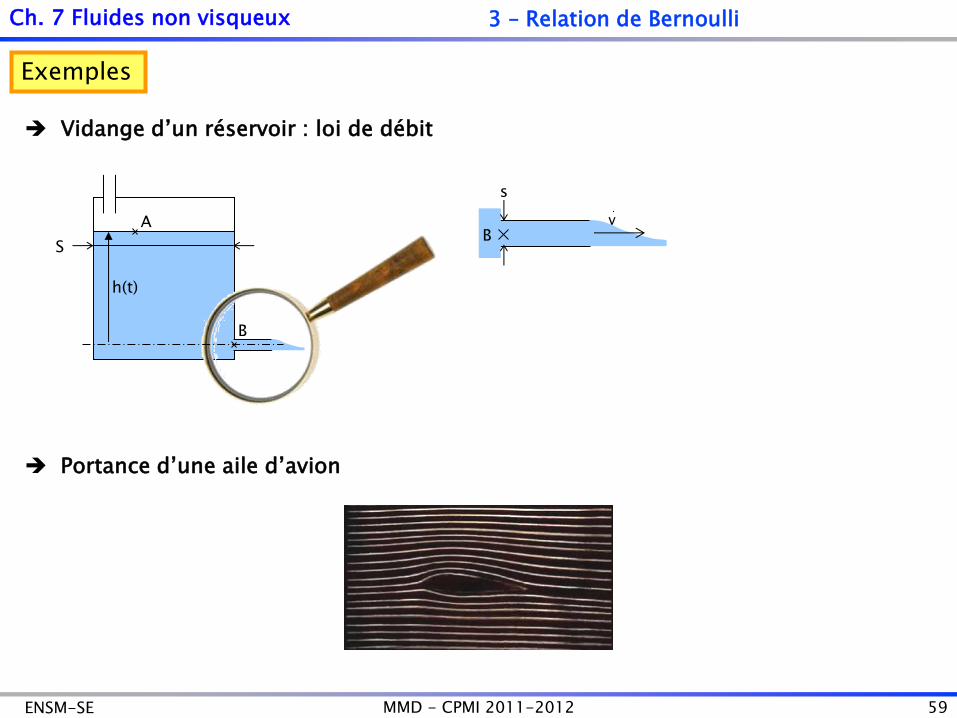
Exemples
Vidange d’un réservoir : loi de débit
Portance d’une aile d’avion
B
A B
s
v
S
h(t)
ENSM-SE MMD - CPMI 2011-2012 60
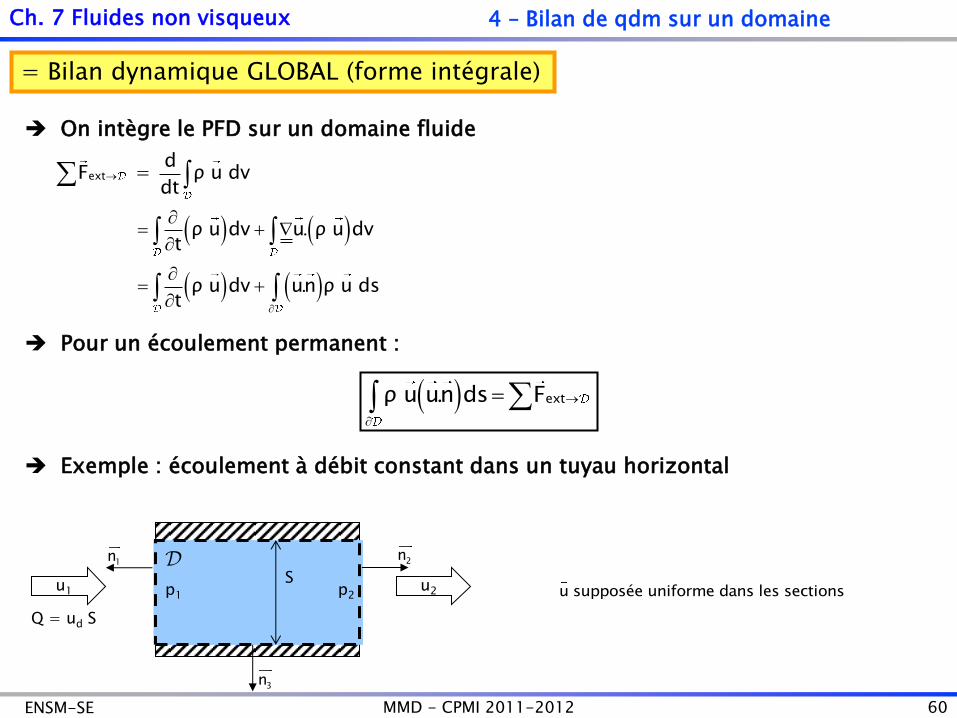
= Bilan dynamique GLOBAL (forme intégrale)
On intègre le PFD sur un domaine fluide
Pour un écoulement permanent :
Exemple : écoulement à débit constant dans un tuyau horizontal
4 – Bilan de qdm sur un domaine Ch. 7 Fluides non visqueux
.
.
extd
F = ρ u dvdt
ρ u dv u ρ u dvt
ρ u dv un ρ u dst
. extρ u un ds F
1n 2n
3n
u1
Q = ud S
u2
D S
u supposée uniforme dans les sectionsp2 p1
ENSM-SE MMD - CPMI 2011-2012 61
Ch. 8 – Fluides visqueux
1 – Rhéologie des fluides
2 – Equations de Navier Stokes
3 – Conditions aux limites
4 – Exemples de calcul d’écoulement
5 – Adimensionnalisation des éq de NS / Reynolds ?
Mécanique des milieux déformables
ENSM-SE MMD - CPMI 2011-2012 62
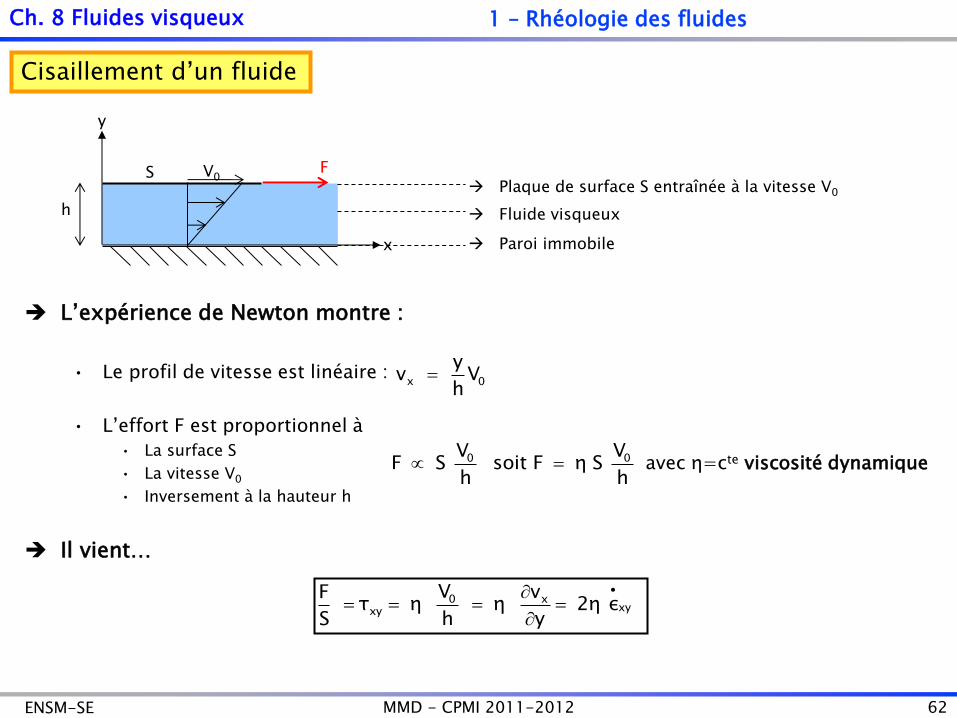
Cisaillement d’un fluide
L’expérience de Newton montre :
• Le profil de vitesse est linéaire :
• L’effort F est proportionnel à
• La surface S
• La vitesse V0
• Inversement à la hauteur h
Il vient…
Ch. 8 Fluides visqueux 1 – Rhéologie des fluides
F S V0
x
y
h
Plaque de surface S entraînée à la vitesse V0
Paroi immobile
x 0
yv V
h
0VF S
h 0V
soit F η S h
avec η=cte viscosité dynamique
0 xxyxy
V vF τ η η 2η ε
S h y
Fluide visqueux
ENSM-SE MMD - CPMI 2011-2012 63
Ch. 8 Fluides visqueux 1 – Rhéologie des fluides
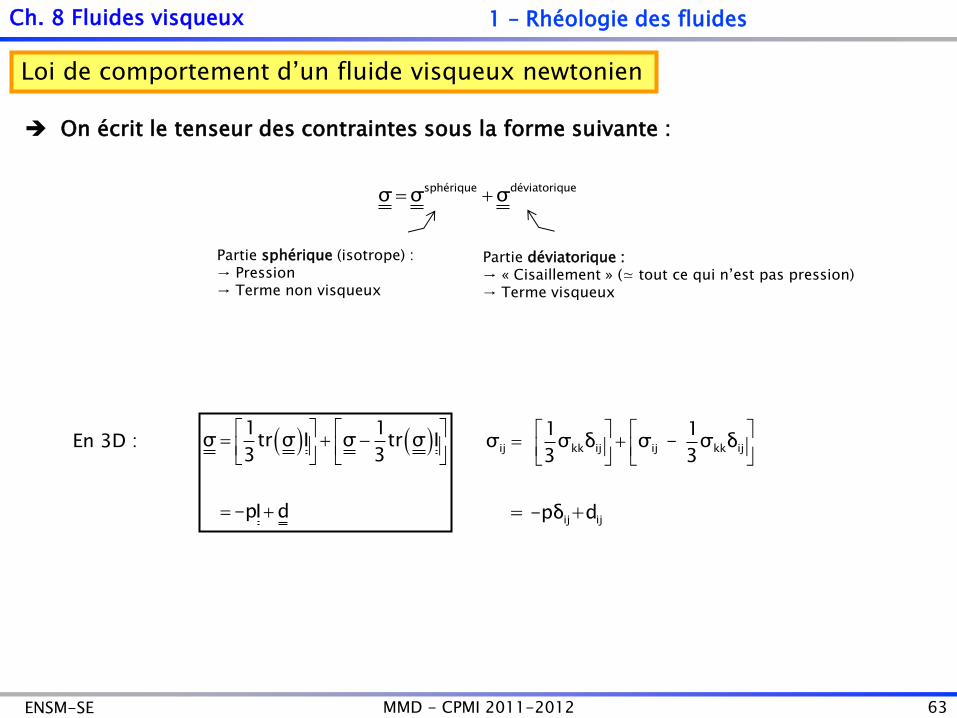
On écrit le tenseur des contraintes sous la forme suivante :
En 3D :
Loi de comportement d’un fluide visqueux newtonien
sphérique déviatoriqueσ σ σ
Partie sphérique (isotrope) : → Pression → Terme non visqueux
Partie déviatorique : → « Cisaillement » (≃ tout ce qui n’est pas pression) → Terme visqueux
ij ij ij ijkk kk
ij ij
1 1σ σ δ σ - σ δ
3 3
= -pδ +d
1 1σ tr σ I σ tr σ I
3 3
-pI d
ENSM-SE MMD - CPMI 2011-2012 64
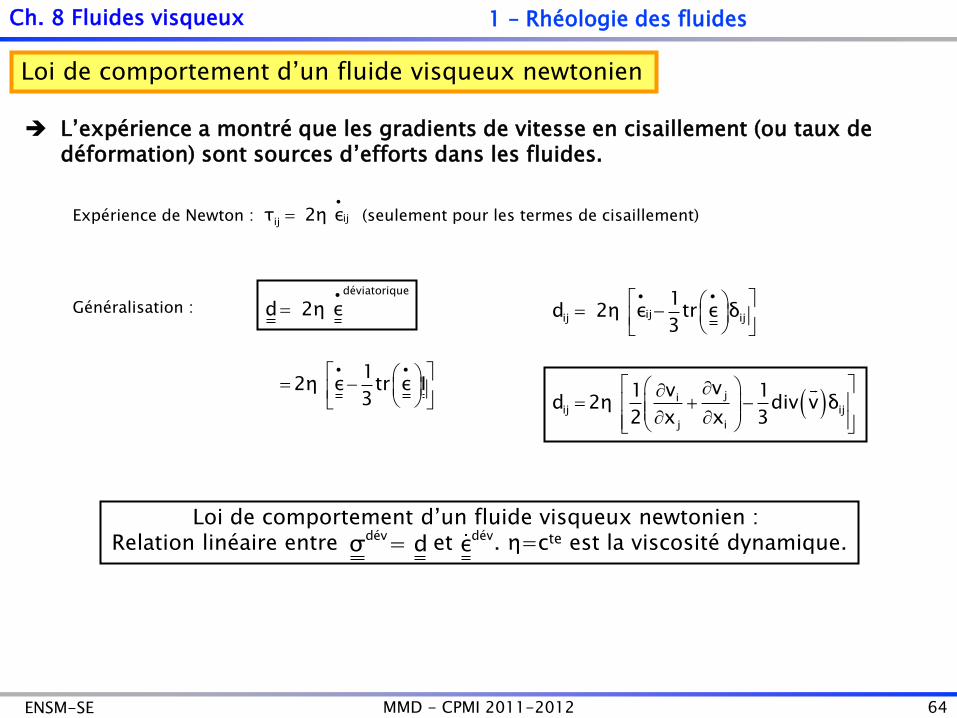
Ch. 8 Fluides visqueux 1 – Rhéologie des fluides
L’expérience a montré que les gradients de vitesse en cisaillement (ou taux de déformation) sont sources d’efforts dans les fluides.
Expérience de Newton : (seulement pour les termes de cisaillement)
Généralisation :
Loi de comportement d’un fluide visqueux newtonien
ijijτ 2η ε
déviatorique
d 2η ε
12η ε tr ε I
3
Loi de comportement d’un fluide visqueux newtonien : Relation linéaire entre et . η=cte est la viscosité dynamique. dév
σ = ddév
ε
ijij ij
jiij ij
j i
1d 2η ε tr ε δ
3
vv1 1d 2η div v δ
2 x x 3
ENSM-SE MMD - CPMI 2011-2012 65
Ch. 8 Fluides visqueux 1 – Rhéologie des fluides
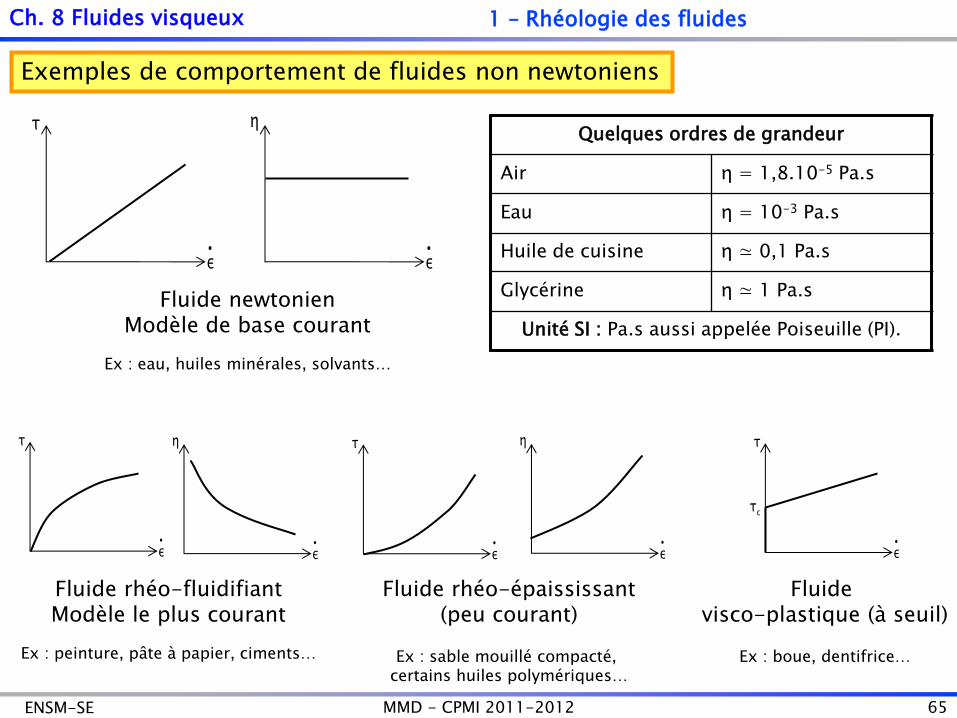
Exemples de comportement de fluides non newtoniens
Fluide newtonien Modèle de base courant
Ex : eau, huiles minérales, solvants…
ε
τ
ε
η
Fluide rhéo-fluidifiant Modèle le plus courant
Ex : peinture, pâte à papier, ciments…
ε
τ
ε
η
Fluide rhéo-épaississant (peu courant)
Ex : sable mouillé compacté,
certains huiles polymériques…
ε
τ
ε
η
Fluide visco-plastique (à seuil)
Ex : boue, dentifrice…
ε
τ
cτ
Quelques ordres de grandeur
Air η = 1,8.10-5 Pa.s
Eau η = 10-3 Pa.s
Huile de cuisine η ≃ 0,1 Pa.s
Glycérine η ≃ 1 Pa.s
Unité SI : Pa.s aussi appelée Poiseuille (PI).
ENSM-SE MMD - CPMI 2011-2012 66
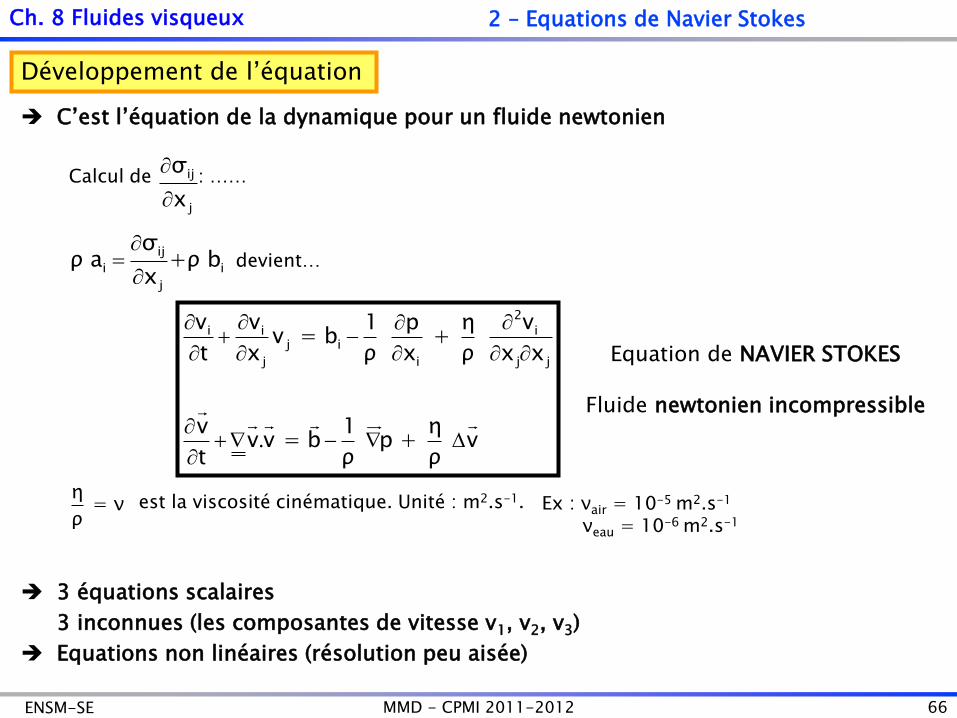
C’est l’équation de la dynamique pour un fluide newtonien
Calcul de : ……
devient…
est la viscosité cinématique. Unité : m2.s-1.
3 équations scalaires
3 inconnues (les composantes de vitesse v1, v2, v3)
Equations non linéaires (résolution peu aisée)
2 – Equations de Navier Stokes Ch. 8 Fluides visqueux
ij
i i
j
σρ a +ρ b
x
ij
j
σ
x
.
2i i i
j i
j i j j
v v v1 p ηv = b +
t x ρ x ρ x x
v 1 ηv v = b p + v
t ρ ρ
η = ν
ρ
Equation de NAVIER STOKES
Fluide newtonien incompressible
Ex : νair = 10-5 m2.s-1
νeau = 10-6 m2.s-1
Développement de l’équation
ENSM-SE MMD - CPMI 2011-2012 67
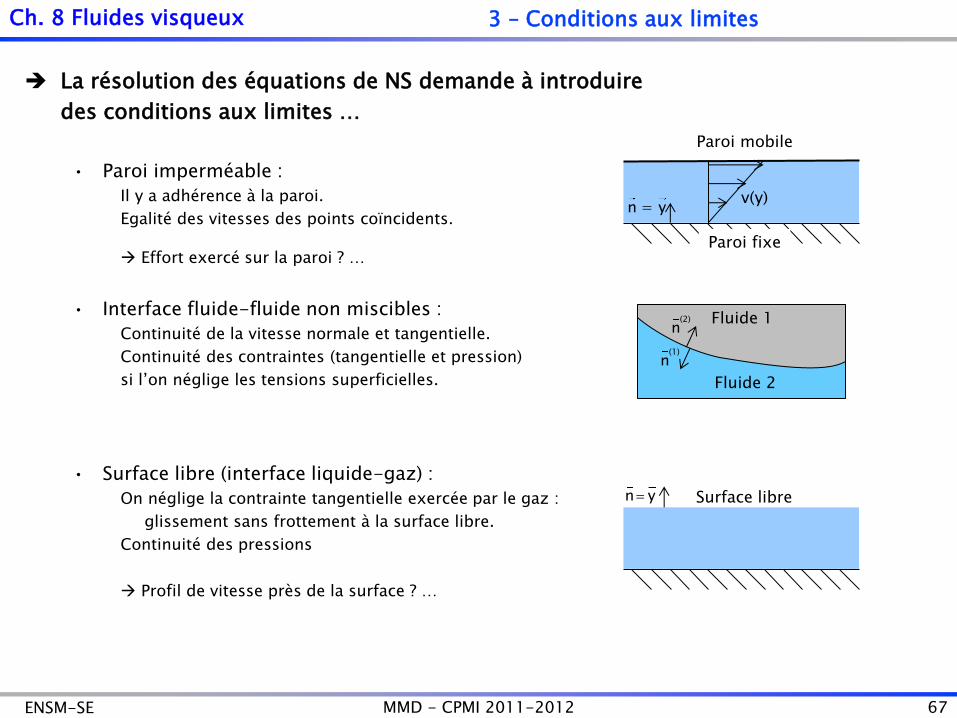
La résolution des équations de NS demande à introduire
des conditions aux limites …
• Paroi imperméable :
Il y a adhérence à la paroi.
Egalité des vitesses des points coïncidents.
Effort exercé sur la paroi ? …
• Interface fluide-fluide non miscibles :
Continuité de la vitesse normale et tangentielle.
Continuité des contraintes (tangentielle et pression)
si l’on néglige les tensions superficielles.
• Surface libre (interface liquide-gaz) :
On néglige la contrainte tangentielle exercée par le gaz :
glissement sans frottement à la surface libre.
Continuité des pressions
Profil de vitesse près de la surface ? …
3 – Conditions aux limites Ch. 8 Fluides visqueux
Paroi mobile
Paroi fixe
n = yv(y)
Fluide 1
Fluide 2
(1)
n
(2)
n
Surface libre n y
ENSM-SE MMD - CPMI 2011-2012 68
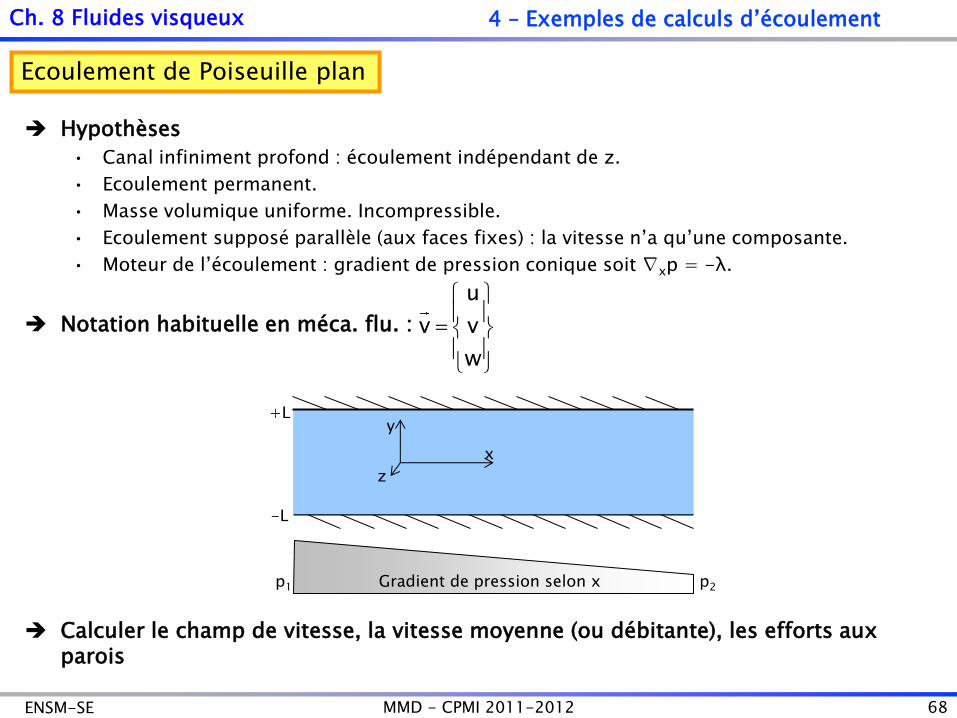
Ecoulement de Poiseuille plan
4 – Exemples de calculs d’écoulement Ch. 8 Fluides visqueux
Hypothèses
• Canal infiniment profond : écoulement indépendant de z.
• Ecoulement permanent.
• Masse volumique uniforme. Incompressible.
• Ecoulement supposé parallèle (aux faces fixes) : la vitesse n’a qu’une composante.
• Moteur de l’écoulement : gradient de pression conique soit ∇xp = -λ.
Notation habituelle en méca. flu. :
Calculer le champ de vitesse, la vitesse moyenne (ou débitante), les efforts aux parois
u
v v
w
y
x
z
+L
-L
p1 p2 Gradient de pression selon x