blpc 162 pp 3-12 degny
TRANSCRIPT

7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 1/10
Calcul des efforts et
dépl cements
dans
les
groupes
de
pieux:
le programme Goupil
Eric DEGNY Jean-Claude ROMAGNY
Ingénieur TPE Technicien supérieur
Docteur-ingénieur
Section des fondations
Division Géotechnlque
-
Mécanique des sols
Laboratoire central
des
Ponts
et
Chaussées
R On présente ici l'analyse théorique et les possibilités du programme Goupil de calcul de la réponse
Ê d'un groupe de pieux soumis à des sollicitations tridimensionnelles en un point de son chevêtre et à
S des
déplacements
de sol de direction quelconque. Les pieux sont
supposés liés
par un
chevêtre
U
rigide.
M , .
g La méthode utilisée est fondée sur les équations générales de la RDM issues de l'équilibre d'un
tronçon infinitésimal
de pieu soumis en chacune de ses
extrémités
à un torseur de force,
appelé
torseur des efforts de la résistance des matériaux, ainsi qu'à des chargements répartis sur sa lon
gueur. Ces équations
sont
simplifiées au cas de faible courbure.
La
généralisation
au cas tridimensionnel de la notion de matrice-transfert et de vecteur
d'état
permet
de définir la notion d'éléments de rigidité en tête de chaque pieu et conduit alors au calcul de la ré
ponse au centre du chevêtre par la résolution d'un système de dimension 6X6, cela quelle que
soit
la complexité du groupe de pieux considéré. L'algorithme général du programme est donné.
La notion de chargement de « courte durée » s'ajoutant à un chargement « permanent » est étudiée.
L'analyse théorique décrite est valable dans le cas général d'un comportement non linéaire du sol.
Un
exemple de calcul d'un groupe de pieux
sous
sollicitation permanente est
présenté
afin de mon
trer les possibilités du programme et d'expliquer les différents résultats fournis par le calcul.
MOTS CLÉS : 42 • Groupe de
pieux
•
Programme
de calcul - Calcul - Comportement • Charge -
Axial - Latéral
•
Déplacement • Sous-sol • /Goupil.
Les
recherches
théoriques
et
expérimentales
sur
ouvrages
de
grandeur
réelle, entreprises dans les
Laboratoires des Ponts et Chaussées pa r Baguelin
et
al.
[1], [2],
Bustamante
et Gianeselli [5] et Frank [10]
ont permis de
proposer
des méthodes de calcul des
pieux isolés pour
les
sollicitations axiales
et
latérales.
Pour le calcul d'un pieu sous sollicitations latérales
diverses, la notion de
courbes
de réaction, extension
du modèle de Winkler, appliquée au déplacement
relatif sol-pieu, permet de prendre en
compte
l'action
de poussées parasites de sol sur le pieu. Un
programme
de calcul numérique, P I L A T E , a été
développé à partir de cette analyse [10]. Le calcul
des paramètres nécessaires à partir du module
pressiométrique Ménard a été décrit par Baguelin
et al. [2], Frank [10] ainsi que dans le projet de
fascicule 62 [14].
Pour le calcul du tassement d'un pieu, on se sert,
comme
dans
le cas des
sollicitations latérales,
de
relations liant l'enfoncement du pieu, d'une part au
frottement
latéral mobilisé le long du pieu, et
d'autre
part à l'effort en
pointe
du pieu. L'analyse théorique
développée
par
Frank
et
Zhao
[12] et
Frank
[10] a
été reprise dans le programme de calcul numérique
P I V E R [11]. Pour la détermination des paramètres
nécessaires et le calcul de la capacité portante ultime
à partir des essais pressiométriques et pénétromé-
triques,
on se
référera
à
Bustamante
et
Gianeselli
[5],
à
Bustamante
et al. [6] et aux règles S É T R A - L C P C [15].
L e
calcul
de la
réponse
d'un
groupe
de
pieux soumis
à
des
déplacements
de sol de
direction quelconque
et, en un point de son chevêtre, à des sollicitations
tridimensionnelles, ne
peut
pas, en général, se
ramener d'une
manière simple au problème d'un
pieu isolé sollicité soit axialement soit latéral emen t.
L e fait que les pieux sont reliés en tête par un
chevêtre implique que la répartition des efforts en
tête de chacun des pieux est a priori inconnue. A
cet effet, que l'on peut qualifier de structurel, s'ajoute
un effet géotechnique appelé effet de
groupe
: les
pieux sont en interaction par le biais des déplacements
et des contraintes qu'ils génèrent dans le sol.
Ces problèmes font partie
des
actions
de
recherches
actuelles
des
Laboratoires
des
Ponts
et
Chaussées.
Des essais
de chargements
horizontaux statiques
et
cycliques
ont été
réalisés
sur un
groupe
de six
pieux
3
Bul.
liaison labo P. et Ch - 1S2 - JuS.-août 1989 - Réf. 3405
7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 2/10
sur le site de P l a n c o ë t [13] et, afin de mieux
comprendre l'importance des d i f fé re n ts m éc an i sm e s
intervenant dans le comportement d'un groupe de
pieux, un programme de ca lcu l , G O U P I L
,
a été
d é v e l o p p é [3, 7, 8].
L'analyse
théor ique u t i l i s ée
dans le programme
G O U P I L
est l'extension au cas des groupes de pieux
des analyses des programmes P I V E R et P I L A T E Tant
pour la compression (efforts axiaux) que pour la
flexion (efforts l a t é r a u x ) , l'interaction sol-pieu est
r e p r é s e n t é e par des lois de r é a c t i o n non l inéa i re s ,
fonction
du dép lace m e nt re la t i f
sol-pieu.
On notera
que la prise en compte du dép lace m e nt re la t i f sol-
pieu,
dans le cas du comportement ax ia l , permet
de calculer la
mobilisation
des frottements négat ifs
é v e n t u e l s . Dans le sol on nég l ige les contraintes de
cisaillement
dues à la torsion du pieu.
L e
programme
G O U P I L
ne comprend pas
volontai
rement de l oi « d'effet de groupe »,
afin
de pouvoir
é t u d i e r , dans le cadre de la recherche, différentes
m é t h o d e s de m o d é l i s a t i o n de cet effet. Cependant,
i l est possible d'en tenir compte lors de la vérif icat ion
d'une fondation sur pieux, soit par d é p l a c e m e n t de
sol , soit par p o n d é r a t i o n des lois de r é a c t i o n de sol
au moyen de coefficients de r é d u c t i o n forfaitaire
(voir Bourges et Frank [4] et le projet de fascicule
62 [14] pour la d é t e r m i n a t i o n de ces coefficients).
L e programme G O U P I L permet aussi de prendre en
compte des actions de courte d u r é e s'ajoutant à des
sollicitations
permanentes, c o n f o r m é m e n t aux règles
de vérif icat ion aux é t a t s limites des fonctions des
ouvrages de
gén ie
c ivi l
e x p o s é e s
dans le projet de
fascicule
62 [14], m ê m e dans le cas où le compor
tement du sol est non l inéa i re . En effet, dans ce
cas, on ne peut plus app liquer le principe de
superposition de l 'é las t ic i té ; la m é t h o d e e m p l o y é e
dans G O U P I L est alors une r é s o l u t i o n i n c r é m e n t a l e .
A p r è s
avoir
r a p p e l é les h y p o t h è s e s m é c a n i q u e s et
les pos s ib i l i t é s du programme au niveau de la
description g é o m é t r i q u e et g é o t e c h n i q u e du p r o b l è m e ,
la
structure et la m é t h o d e de r é s o l u t i o n sont
p r é s e n t é e s dans le cas d'une sol l ic i ta t ion permanente
et dans le cas d'une sol l ic i ta t ion de courte d u r é e .
L a mise en œ u v r e du programme est i l lus t rée par
le calcul
de la
r é p o n s e
d'un groupe de pieux soumis
à une sol l ic i ta t ion permanente tridimensionnelle au
centre du c h e v ê t r e et à un d é p l a c e m e n t libre de sol.
H Y P O T H È S E S ET P O S S I B I L I T É S
D U P R O G R A M M E
D E
C A L C U L
H y p o t h è s e s m é c a n i q u e s
L'approche m é c a n i q u e est celle de la rés i s t ance des
m a t é r i a u x pour des poutres de faible courbure [3, 8].
E n
c o n s é q u e n c e ,
il y a
d é c o u p l a g e
entre
les
différents
types de sollicitations é lém e nta i re s ( f le x ion, compres
s ion , torsion). Par suite, les effets du second ordre
tels que l'influence de la compression sur la r é p o n s e
en flexion ne sont pas pris en compte .
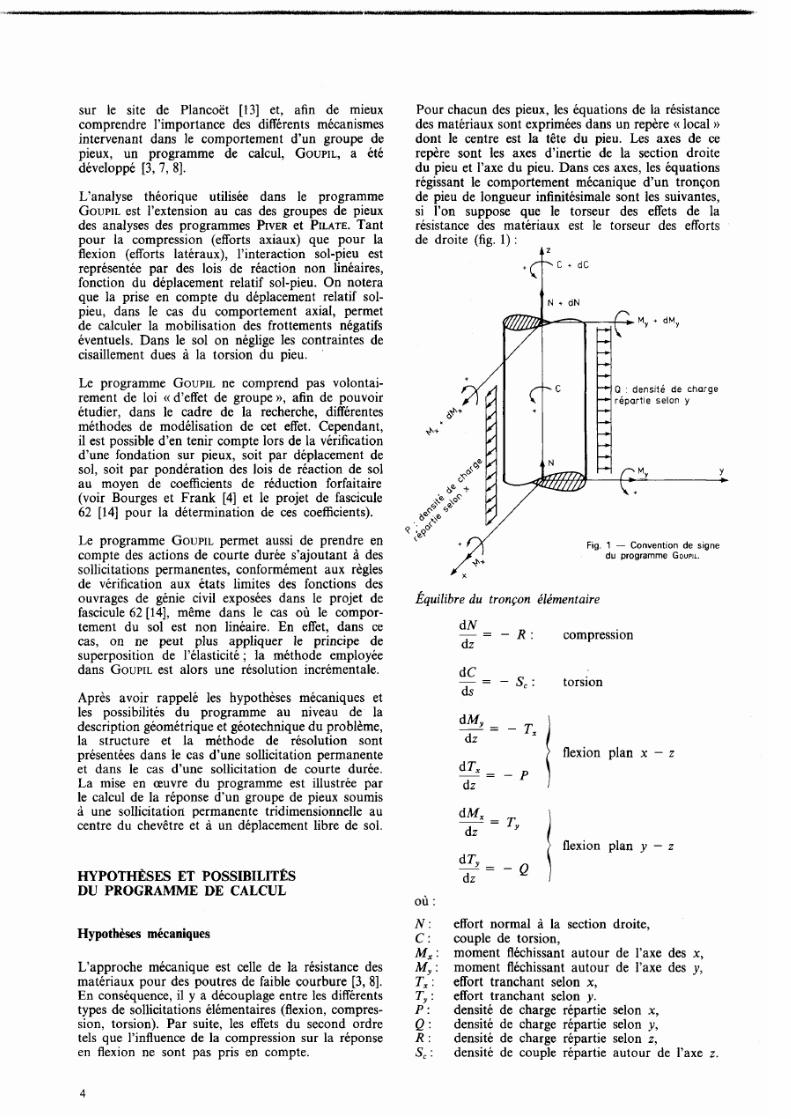
Pour
chacun des pieux, les é q u a t i o n s de la rés i s t ance
des m a t é r i a u x sont e x p r i m é e s dans un r e p è r e « loca l »
dont le centre est la tê te du pieu. Les axes de ce
r e p è r e sont les axes d'inertie de la section droite
d u pieu et l'axe du pieu. Dans ces axes, les é q u a t i o n s
rég i s san t le comportement m é c a n i q u e d'un t r o n ç o n
de pieu de longueur
in f in i t é s im a le
sont les suivantes,
si
l'on suppose que le torseur des effets de la
ré s i s t ance des m a t é r i a u x est le torseur des efforts
de droite (fig. 1) :
dM
v
Q : densité de charge
répartie selon
y
Fig. 1 — Convention de signe
du programme
G OU PIL.
Équilibre
du
tronçon élémentaire
—
R
: compression
dN
~dz
= - s
c
dC
ds
dM
y
dz
dT;
dz
dM
x
dz
torsion
f lexion plan x — z
flexion
plan
y — z
o u :
N
:
C:
M
x
effort normal à la section droite,
couple
de torsion,
moment fléchissant autour de l'axe des x,
moment fléchissant autour de l'axe des y,
effort tranchant selon x,
effort
tranchant selon
y.
d e n s i t é de charge r é p a r t i e selon x,
de ns i t é de charge r é p a r t i e selon y,
d e n s i t é de charge r é p a r t i e selon z,
d e n s i t é de couple r é p a r t i e autour de l'axe z.
4

7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 3/10
Comportement élastique
o ù
/ ,
g, h
sont les trois composantes du
d é p l a c e m e n t
libre de sol .
dw _ N(z)
dz ~ ~ES~
d 9
z
_ C(z)
compression
dz
GK
torsion
M „ = EL
de,
dz
d
2
u
£ 7
V
-T
:
flexion
plan x — z
dz
d 0
x
d
2
u
M ,
= £ 4 —— = £7
X
— T :
flexion
plan
y - z
dz
dz
o u :
u
:
i :
w :
flèche dans la direction x,
flèche dans la direction y,
allongement de la fibre neutre,
6,:
rotation
l'axe
x,
de
la
section droite autour de
6,:
rotation
l'axe
y,
de
la section droite
autour
de
9
Z
:
rotation de la section droite autour de
l'axe z,
E : module d'Young,
v :
coefficient
de
Poisson,
G :
module
de
cisaillement
E/2(l + v)
S
: section droite
K:
inertie
de
torsion
de la
section droite,
I
x
: inertie autour de l'axe des x,
I
y
: inertie autour de l'axe des y,
Équations différentielles
de la
ligne
élastique
E n
d é r i v a n t les é q u a t i o n s de comportement et en
les combinant aux é q u a t i o n s d ' é q u i l i b r e , on obtient,
pour chacune des sollicitations é l é m e n t a i r e s , les
équa t ions d i f fé re n t i e l l e s rég i s san t le comportement
de
la
ligne
é l a s t i q u e :
d
2
w
ES-^-j + R = 0 : compression
d
2
9
z
GK
—r-
+ S
c
= 0 :
torsion
d z
2
EL
l z
4
d^;
d z
4
flexion
x
—
z
(2 = 0 : flexion y — z
S c h é m a t i s a t i o n
des lois de
réaction
du sol
et
pondé r ation
Loi de
réaction
O n
suppose que les
de ns i t é s
de charge
r é p a r t i e P,
Q
et
R
sont des fonctions du
d é p l a c e m e n t
relatif
sol-pieu
:
P=fi(f-u)
Q=f»(g-v)
R=f
3
(h - w)
Actuellement, on suppose que la de ns i t é de couple
r é p a r t i e S
c
est nulle ; par suite, on néglige la reprise
des efforts par cisaillement du sol dus à la torsion
du
pieu.
Dans le programme
G O U P I L
, les fonctions / , sont
prises
l inéa i re s
par morceaux :
/,(4> =
a{ + b\-\
avec
:
Fig.
2 — Courbe de réaction.
Ave c ces h y p o t h è s e s , on montre que les é q u a t i o n s
différent ie l les régissant le comportement pour chacune
des sollicitations
é l é m e n t a i r e s
ont une
solution
explicite.
Pondération
Chacune
des
courbes
de réac t ion de sol peut être
p o n d é r é e s
par un couple de coefficients suivant la
relation :
(pond2-p) = F [pondl • (/ - u)]
G é o m é t ri e
des pieux
L a
disposition
g é o m é t r i q u e des
pieux
dans
l'espace
peut
ê t re
quelconque. En particulier, les inclinaisons
et les longueurs peuvent être différentes pour chacun
des pieux.
Conditions aux limites en
tête
et en pointe
des pieux
Conditions en
tête
Trois conditions de l ia ison des pieux au che vê t re
sont
possibles
:
—
pieu
e n c a s t r é au che vê t re ,
—
pieu libre en rotation (moment d'encastrement
nul) ,
5
7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 4/10
— l ia i son é la s t ique
en rotation (moment d'encastre
ment proportionnel à la rotation relative Q, entre
le
pieu
et le c h e v ê t r e ) ,
Mi = —, i = x, y, z ;
/
i
f est la flexibilité en rotation autour de l'axe i.
Conditions en
pointe
E n pointe du pieu, i l est possible d'imposer quatre
types de conditions aux limites :
—
encastrement
:
1
les six
composantes
du
torseur
des
d é p l a c e m e n t s
sont nulles ;
—
libre
: les six
composantes
du
torseur
des
efforts
sont nulles ;
— ar t i cu lé : les trois composantes de moment du
torseur des efforts et les trois composantes de
d é p l a c e m e n t
du
torseur
des
d é p l a c e m e n t s
sont nulles
;
—
courbe de
r é a c t i o n
liant la composante du torseur
des efforts à la composante correspondante du
torseur des
d é p l a c e m e n t s .
L es
courbes de
r é a c t i o n
en pointe sont
définies
de
façon
analogue aux courbes de
r é a c t i o n
de sol
(fonction
l inéa i re
par morceaux).
Principe de résolution
L e principe de
r é s o l u t i o n
du
p r o b l è m e g é n é r a l
est
b a s é sur la
solution
analytique de l ' é q u a t i o n
différent ie l le
pour chacune des sollicitations
é l é m e n
taires, g r â c e à une double d i s c ré t i s a t ion : d'une part
une
d i s c r é t i s a t i o n
physique en segments et couches,
et d'autre part une d i s c r é t i s a t i o n n u m é r i q u e en
t r o n ç o n s ,
où les
c a r a c t é r i s t i q u e s m é c a n i q u e s
des
pieux et les p a r a m è t r e s g é o t e c h n iq u e s sont constants
dans chacune des couches et chacun des
t r o n ç o n s .
D is crét is at ion
physique
Caractéristiques mécaniques des pieux
Chaque pieu
est
d i s c ré t i s é
en
segment
de
pieu,
où
l e s c a r a c t é r i s t i q u e s m é c a n i q u e s et g é o m é t r i q u e s
sont
constantes. Chaque
pieu
dispose de sa propre
disc ré t i s a t ion .
Loi de réaction de sol
Pour chacune des sollicitations
é lém e nta i re s ( f le x ion ,
compression), on d i s c ré t i s é le sol en
couches
d ' é p a i s s e u r d é s i r é e ,
auxquelles on affecte des
lois
de
réac t ion l inéa i re s par
morceaux
définies au p r é a l a b l e
lors de
l ' e x é c u t i o n
du programme. Comme pour les
pieux, chaque
so l l i c i t a t ion é lém e nta i re a sa
propre
disc ré t i s a t ion .
Zone
de pondération
On dé f in i t
des ensembles de coefficients de
p o n d é
ration pour chacune des sollicitations
é l é m e n t a i r e s .
P u i s ,
pour chacun des pieux, on
déc r i t
des zones
de p o n d é r a t i o n auxquelles on affecte les coefficients
de
p o n d é r a t i o n s o u h a i t é s .
Prise en
compte
de la déformée du sol
L a
d é f o r m é e
du so l est
as s im i lée
à un
p o l y n ô m e
de
d e g r é
3. On
défini t
un ensemble de
p o l y n ô m e s ,
puis pour chacun des pieux on affecte une dé form ée
de sol pour chacune des zones de sol à
d é p l a c e m e n t
libre
définies pour le
pieu
cons idé ré .
Discrétisation numérique
et processus
itératif
U n e d i s c r ét i sa t i o n n u m é r i q u e
en
t r o n ç o n s
de pieux
d'une longueur maximale
fixée
est
effectuée
en
c o m p a t i b i l i t é
avec
les d i f fére n te s d i s c ré t i s a t ions
phy
siques
p r é c é d e m m e n t d é c r i t e s .
Pour une section d o n n é e d'un
pieu
et pour chacune
des sollicitations
é l é m e n t a i r e s ,
la branche
l inéa i re
de
la courbe de
r é a c t i o n c o n s i d é r é e
sur laquelle se situe
le point d ' é q u i l i b r e n'est d é t e r m i n é e que si l'o n
c o n n a î t
le
d é p l a c e m e n t
relatif
sol-pieu.
Les carac
t é r i s t i q u e s m é c a n i q u e s
et
g é o t e c h n i q u e s é t a n t
sup
p o s é e s
constantes
le long d'un t r o n ç o n , on d é t e r m i n e
la branche
l inéa i re
en
fonction
du
d é p l a c e m e n t
relatif moyen du haut et du bas du
t r o n ç o n
et on
p r o c è d e par i t é r a t i o n s . On d é t e r m i n e les c a r a c t é r i s
tiques m é c a n i q u e s tangentes ou sécan te s pour cette
branche et on calcule le
d é p l a c e m e n t
relatif et la
r é a c t i o n du sol en
haut
et en bas du t r o n ç o n . C e l a
donne de nouvelles c a r a c t é r i s t i q u e s m é c a n i q u e s et
permet de calculer de nouveaux
d é p l a c e m e n t s
relatifs.
O n
dit que le processus a
c o n v e r g é
si le point
correspondant à la moyenne, en haut et en bas du
t r o n ç o n ,
des
r é a c t i o n s
de sol d'une part et des
d é p l a c e m e n t s
relatifs sol-pieux d'autre part, pour
chaque
so l l i c i t a t ion é lém e nta i re , se
situe
sur la
courbe
de
r é a c t i o n
correspondante moyennant une certaine
t o l é r a n c e .
L e
processus
de
convergence dans
le cas de
courbes
de
mobilisation
des efforts en pointe est similaire à
ce lui
des courbes de
r é a c t i o n .
On se donne en
pointe,
pour chacune des directions o ù sont
définies
des courbes
de
mobilisation,
une
branche
l inéa i re
compatible avec un
d é p l a c e m e n t
relatif
sol-pieu
p r é c é d e m m e n t c a l c u l é .
On
d é t e r m i n e
alors des
c a r a c t é r i s t i q u e s m é c a n i q u e s
tangentes
ou sécan te s
q u i
vont permettre de
d é t e r m i n e r
un nouveau
d é p l a c e m e n t
relatif sol-pieu et donc de nouvelles
c a r a c t é r i s t i q u e s m é c a n i q u e s . On dit que le
processus
i téra t i f a c o n v e r g é si le point d ' é q u i l i b r e effort-
d é p l a c e m e n t
relatif est sur la courbe de
mobilisation
moyennant aussi
une
certaine
t o l é r a n c e .
S T R U C T U R E ET M É T H O D E DE R É S O L U T I O N
L e principe de
r é s o l u t i o n e x p o s é
est
f o n d é
sur une
g é n é r a l i s a t i o n à une sol l ic i ta t ion
tridimensionnelle,
de la notion de matrice de transfert et de vecteur
d 'é ta t .
6

7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 5/10
Vecteur
d'état
On appelle vecteur d'état en une section droite du
pieu, le vecteur :
D
1
où
D
est le vecteur torseur des déplacements,
constitué
du vecteur
déplacement
et du vecteur
rotation 0 ;
D
est donc un vecteur de dimension 6,
U '
u
V
w
0*
0 0,
0
Z
.
D =
et
E
est le vecteur torseur des efforts de la
résistance
des matériaux défini comme le torseur de droite,
torseur des actions de la partie droite sur la partie
gauche, ou encore des actions du haut sur le bas
sur la figure 1 ; E est aussi un vecteur de dimension
6
constitué
du vecteur effort tranchant
F
et du
vecteur moment fléchissant M
:
E =
F
x
F
F
M
x
M My
M
z
V
est un vecteur de dimension 13. La
treizième
composante, toujours égale à 1, est appelée compo
sante
d homogéné ité.
Matrice-transfert
On appelle matrice-transfert d'un tronçon de pieu
sollicité à la flexion, à la compression et à la
torsion, la matrice
T
liant les vecteurs
d'état
de
chacune des deux extrémités :
P
1
T
n
T
12
oc
E
1
=
Tu T
22
P
•
E
B
_
1 _
_ 0 0 1_ _ 1 _
V
1
= TV
a
L a
matrice-transfert
T
est de dimension 13 x 13.
L a dimension de chacune des sous-matrices T
t
7)
est 6 x 6 . La
treizième
colonne,
formée
des sous-
vecteurs a et P, de dimension 6, correspond
notamment aux chargements extérieurs du tronçon
de pieu. Les composantes de
T
sont construites à
partir des solutions analytiques de chacune des
sollicitations
élémentaires.
De même, on peut construire la matrice-transfert
de la
liaison
liant la
tête
du pieu au
chevêtre.
Si
le pieu a une inertie variable ou un chargement
réparti variable, on le divise en tronçons de
caractéristiques
constantes. Pour chacun de ces
tronçons, i l existe une matrice-transfert liant le
vecteur
d'état
en chacune de ses deux
extrémités
:
tronçon 1 : V
x
= 7\ V
0
(liaison pieu-chevêtre)
tronçon
2 :
V
2
= T
2
V
1
t r o n ç o n ; : V¡ = T¡ V
¡
.
l
tronçon n : V
n
= T
n
V
n
.
l
De façon évidente, on obtient :
Tj.
L a matrice-transfert du pieu est le produit des
matrices-transferts de chacun des
tronçons
qui la
composent. Ce résultat constitue l intérêt premier de
cette
méthode de calcul.
Prise
en
compte
des
conditions
aux
limites.
Éléments de rigidité en tête d'un
pieu
Les
conditions aux limites
envisagées
en pointe d'un
pieu peuvent s'exprimer sous la forme de la relation
linéaire suivante :
A-E
+ B-D
x
= C
où A et B sont des matrices 6 x 6 et C est un
vecteur de dimension 6.
Par
exemple, l'encaissement en pointe est
réalisé
par
les conditions : A matrice nulle, B matrice unité, C
vecteur nul et le pieu libre en pointe par :
A
matrice
unité, B
matrice nulle et
C
vecteur nul.
On montre que, moyennant ces hypothèses, en tête
du
pieu le torseur des efforts s'exprime
linéairement
en fonction du torseur des déplacements :
E = R-D + G,
R
et
G étant
respectivement la matrice de
rigidité
(dimension 6 x 6) et le vecteur de rigidité (dimen
sion 6) en tête du pieu.
Les éléments
de
rigidité
au centre du
chevêtre
sont
alors la somme des différents éléments de rigidité
de chacun des pieux,
exprimés
au centre du
chevêtre.
L e système à résoudre pour déterminer les compo
santes
de
déplacements
et d'efforts inconnues au
centre du chevêtre est d'ordre 6. Une fois déterminées
les composantes inconnues des torseurs de dépla
cement et d'effort au centre du
chevêtre,
on calcule
les résultats intermédiaires (efforts et déplacements),
en
chacun des niveaux de
discrétisation
de tous les
pieux.
Algorithme
L
'algorithme de
calcul
du programme G O U P I L
présente les trois étapes suivantes :
7

7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 6/10
Étape
1,
d é t e r m i n a t i o n
des
é l é m e n t s
de
r ig id i t é
pour
chaque
pieu
:
— ca lcu l
des matrices-transferts pour chaque
t r o n ç o n
é l é m e n t a i r e ,
— ca lcu l de la matrice-transfert totale du
pieu,
— ca lcu l
des
é l é m e n t s
de
r ig id i t é
(R et G) en
tê te
du
pieu,
l i a i son non comprise.
Étape
2,
r é s o l u t i o n
au centre du
c h e v ê t r e
:
—
pour chaque pieu, prise en compte de la
l ia ison
au che vê t re ,
— d é t e r m i n a t i o n
des
é l é m e n t s
de
r ig id i t é
au centre
du che vê t re ,
— r é s o l u t i o n du vecteur d ' é t a t au centre du che vê t re
(D, E),
— ca lcu l du vecteur d ' é t a t en tê te de chaque
pieu.
Étape
3,
r é s u l t a t s i n t e r m é d i a i r e s
pour chaque pieu :
— ca lcu l
du vecteur
d ' é t a t
en bas de chaque
t r o n ç o n
constituant le pieu, et des
r é a c t i o n s
de sol
*c r i t è re
1
de convergence sur les courbes de
r é a c t i o n
de sol,
— ca lcu l
du vecteur
d ' é t a t
en pointe du
pieu
*cr i t è re
2 de convergence sur les courbes de
r é a c t i o n
en
pointe.
Test
: Si (c r i t è re 1 et c r i t è re 2) = « vra i » : a r r ê t du
calcul ,
«
faux » : retour à
l ' é t a p e
1.
Fig.
3 — Loi de comportement du pieu.
On vo i t alors que l'on peut superposer, au niveau
d u m a t é r i a u
constituant le pieu, le comportement
sous
sol l ic i ta t ion
« permanente » et le comportement
sous
sol l ic i ta t ion
« de courte
d u r é e
». En
c o n s é q u e n c e ,
l ' é q u a t i o n
de comportement sous
sol l ic i ta t ion
de
courte
d u r é e
peut
s 'écrire
pour chacune des
sol l ic i
tations
é l é m e n t a i r e s
:
compression
dvv^
ds
N
c
_
E'-S'
E
c
, module d ' Y o u n g sous so l l i c i t a t ion de courte
d u r é e ,
torsion :
d6z
c
~ds~ G-K'
Sollicitations
de
courte
durée
Dans
les paragraphes
p r é c é d e n t s
ont été
d é t e r m i n é s
les é léments permettant d'effectuer le calcul de la
r é p o n s e
d'un groupe sous une
so l l i c i ta t ion do nn ée
(« permanente »). A cette so l l i c i t a tion , on veut ajouter
une
so l l i c i t a t ion
qui va produire un
i n c r é m e n t
de
r é p o n s e « de courte d u r é e ».
Loi de comportement du
pieu
Sous
l'effet de la
sol l ic i ta t ion
permanente seule, en
un point quelconque du
pieu,
l ' équ i l ib re se situe au
point 0' (rj
p
, e
p
), sur la figure 3 et la lo i de
comportement est
l inéa i re
et de module E
p
. On
suppose que, sous l'effet de la
sol l ic i ta t ion
« de
courte
d u r é e
», la lo i de comportement
a p r è s
le
point 0' est
l inéa i re
mais de module E
c
au
l ieu
de
E . L 'éq u i l ib re f inal
(r j
r
, e
7
) correspond aux relations
suivantes :
o-
T
=/ (e
î
) = E -e
p
+ E
c
(e
T
- s ).
Si l'on pose :
alors
:
a
c
= E
c
• e
c
,
G, inertie de tors ion sous
sol l ic i ta t ion
de courte
d u r é e ,
flexion
d 0
c
ds
pour
la
flexion
dans les plans
x —
z ou y
—
z
Équations d équilibre d'un tronçon sous sollicitation
de courte
durée
L e s é q u a t i o n s d ' é q u i l i b r e
de la
rés i s t ance
des
m a t é r i a u x
ne font pas intervenir de loi de compor
tement ; elles sont donc
vérifiées
lorsqu'on ajoute à
la
sol l ic i ta t ion
« permanente » la
sol l ic i ta t ion
de
«
courte
d u r é e
». On examine le cas de la
flexion
dans le plan
x
- z ; les
r é s u l t a t s
obtenus
g é n é r a l i s e n t aux autres types de sol l ic i ta t ions .
Le s équa t ions d 'équ i l ib re s ' éc r ive n t
:
dT
x
se
dz
dM
y
dz
+ P = 0
+ T=0
o ù
T
x
, M
y
, P
r e p r é s e n t e n t ,
respectivement, l'effort
tranchant et le moment
fléchissant
et la
r é a c t i o n
du
sol
dus à la somme des
sollicitations
« permanente »
et « de courte
d u r é e
».
8
7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 7/10
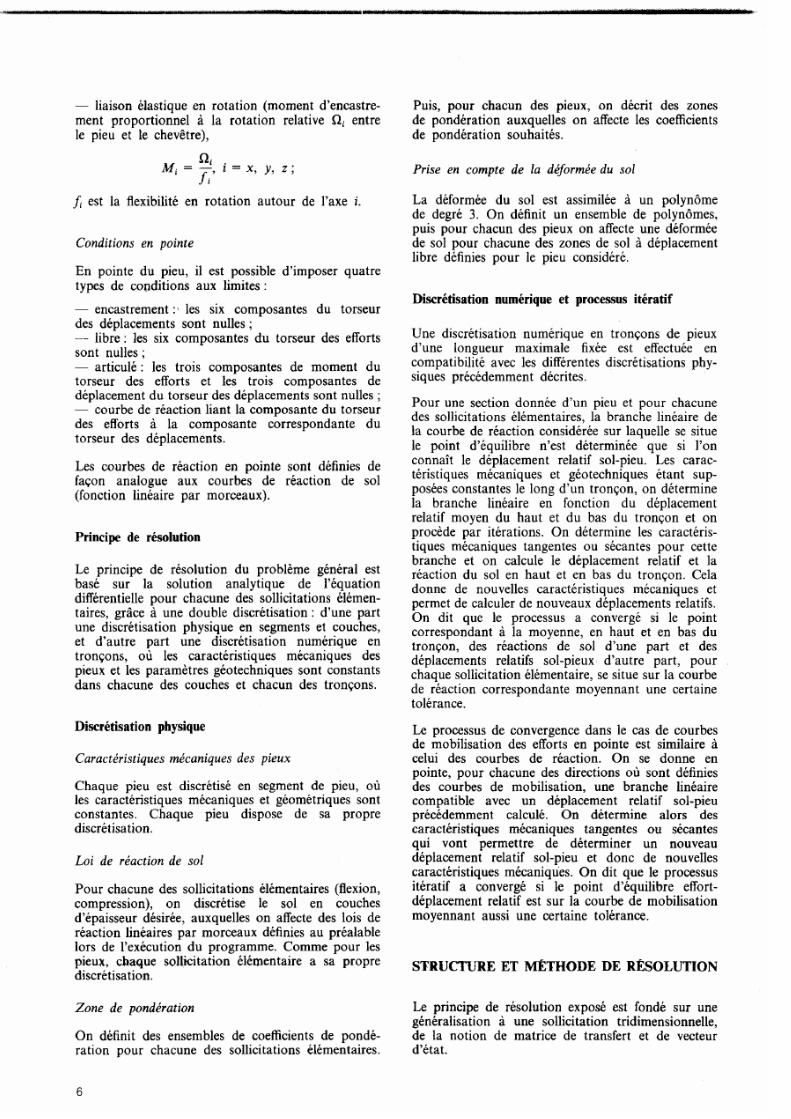
Courbe permanente
Point d'équilibre sous sollicitation
e
courte durée
Courbe e courte durée
\ ^ (t-u)
c
déplacement relatif de courte durée
] Point d'équilibre sous so llic itation perman ente
(f-u)
p
f-u déplacement relatif
Déplacement relatif
permanent
Fig.
4
—C omportement sous sollicitation permanente
et
e
courte durée.
O n
peut
éc r i re :
T
x
= + T
x
M
x
= M
p
x
+ M
x
P = P + P
c
o ù l'indice s u p é r i e u r
p
r e p r é s e n t e la solution sous
la
sol l ic i ta t ion permanente, l'indice s u p é r i e u r e
c
r e p r é s e n t a n t l ' i n c r é m e n t à ajouter dû à la sol l ic i ta t ion
de courte d u r é e . La loi de comportement du pieu
s 'écri t :
T
d
2
u
p
l y
dz
2 h
d
2
u
c
dz
2
o ù
u
p
est la solution de la ligne é la s t ique sous
sol l ic i ta t ion « permanente » et u ° l ' i n c r é m e n t à ajouter
d û
à la
sol l ic i ta t ion
« de courte
d u r é e
».
En
tenant
compte des é q u a t i o n s d ' é q u i l i b r e , u et u
c
vérifient
l 'équat ion différent ie l le :
E
P
L
d V
d z
4
0
+ P
p
+ E
c
-L
d V
' d z
4
+ P
c
= 0
L a
somme des deux premiers termes est nulle
puisque u est la solution de l 'éq ua t io n différentie l le
due à la charge permanente seule. L ' i n c r é m e n t de
la
ligne
é l a s t i q u e dû à la sol l ic i ta t ion «
de courte
d u r é e » vérifie donc l 'équat ion différent ie l le :
E
c
-L
d V
' dz
4
+
P
c
= 0
O n remarque donc que le ca lcu l de la r é p o n s e de
la
sol l ic i ta t ion sous courte d u r é e peut employer le
m ê m e algorithme que ce lui du calcul de la r é p o n s e
sous sol l ic i ta t ion permanente, mais à condition de
c o n s i d é r e r les c a r a c t é r i s t iq u e s m é c a n i q u e s et g é o
techniques vis -à-vis du comportement de courte
d u r é e .
L a l i n é a r i s a t i o n de la courbe de r é a c t i o n de sol
« de courte d u r é e » est re prése n tée dans la figure 4.
Pour l inéa r i s e r P
c
en r e p r é s e n t a t i o n s é c a n t e ou
tangente, il faut exprimer cette l inéa r i s a t ion par
rapport au r e p è r e d'origine 0 , point d 'équ i l ib re
obtenu sous la sol l ic i ta t ion permanente.
MISE
EN ΠU V R E
DU
P R O G R A M M E
Le
programme G O U P I L est
écrit
en
F O R T R A N
77 et
est i m p l a n t é sur l'ordinateur du centre de calcul
informatique de P I N R E T S
.
Des versions pour micro
ordinateur compatible P C et station de travail sont
en
cours
de d é v e l o p p e m e n t .
E n t r é e
des
données
L ' e n t r é e des d o n n é e s s'effectue au moyen du logicie l
de construction d un jeu de d o n n é e s E D I P P R. Ce
logic ie l
permet,
à
partir
d un fichier
« mode d'em
p lo i
», de construire de façon interactive le jeu de
d o n n é e s en r é p o n d a n t aux questions p o s é e s . Il a
été ainsi possible de rédu i re l ' e n t rée des d o n n é e s en
ne demandant que les don née s néce s sa i re s au calcul
e nv i sagé .
D e f aç o n g é n é r a l e , les d o n n é e s
sont
classées en six
groupes :
— groupe 1 : d o n n é e s g é n é r a le s au calcul ,
— groupe 2 : d o n n é e s relatives aux sols,
— groupe 3 : d o n n é e s relatives aux pieux,
—
groupe
4
: sollicitations
a p p l i q u é e s au che vê t re ,
— groupe 5 : d é p l a c e m e n t
libre
de sol,
— groupe 6 : coefficients de p o n d é r a t i o n .
Sortie des
résultats
Seuls
les résu l t a t s in té re s san t le ca lcu l e nv i sagé sont
fournis. De façon géné ra le , les
sorties sont
classées
en trois groupes :
— rappel des d o n n é e s constantes,
— r é s u l t a t s globaux relatifs au che vê t re ,
— résu l t a t s dé ta i l l é s par pieu.
Exemple
L'exemple
est insp i ré de ce lui du programme PSH 1
de la pièce 5 bis du document F O N D 72. Il s'agit
de calculer la r é p o n s e d un groupe de pieux soumis
à
un
chargement permanent
c o m p o s é
d'une
sol l ic i
tation
tridimensionnelle
au
centre
de son che vê t re
et à des poussée s l a té ra le s de sol. La descrip
tion
g é o m é t r i q u e du groupe est p r é s e n t é e sur la
figure 5.
9
7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 8/10
2.4m
1
I
2.4m
L
3.60m
1
2m
2,4m
2m
2m
r
y
T
9m 3
z
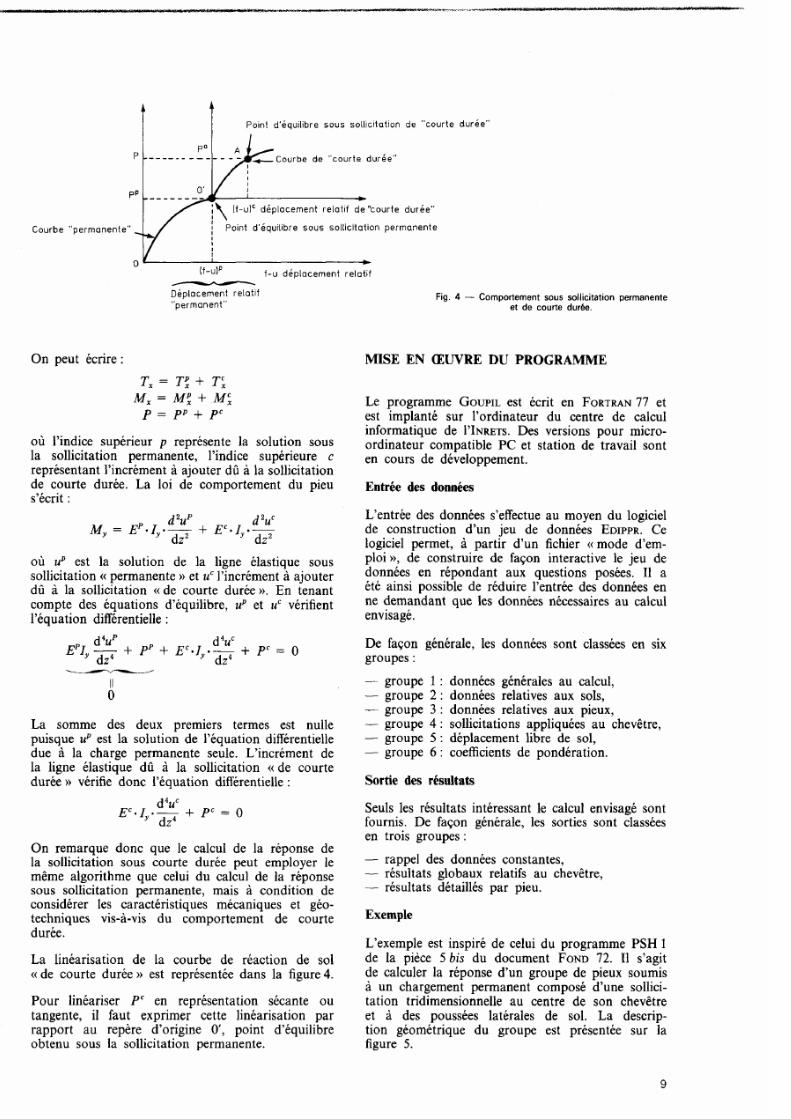
Fig.
5
— Description du groupe.
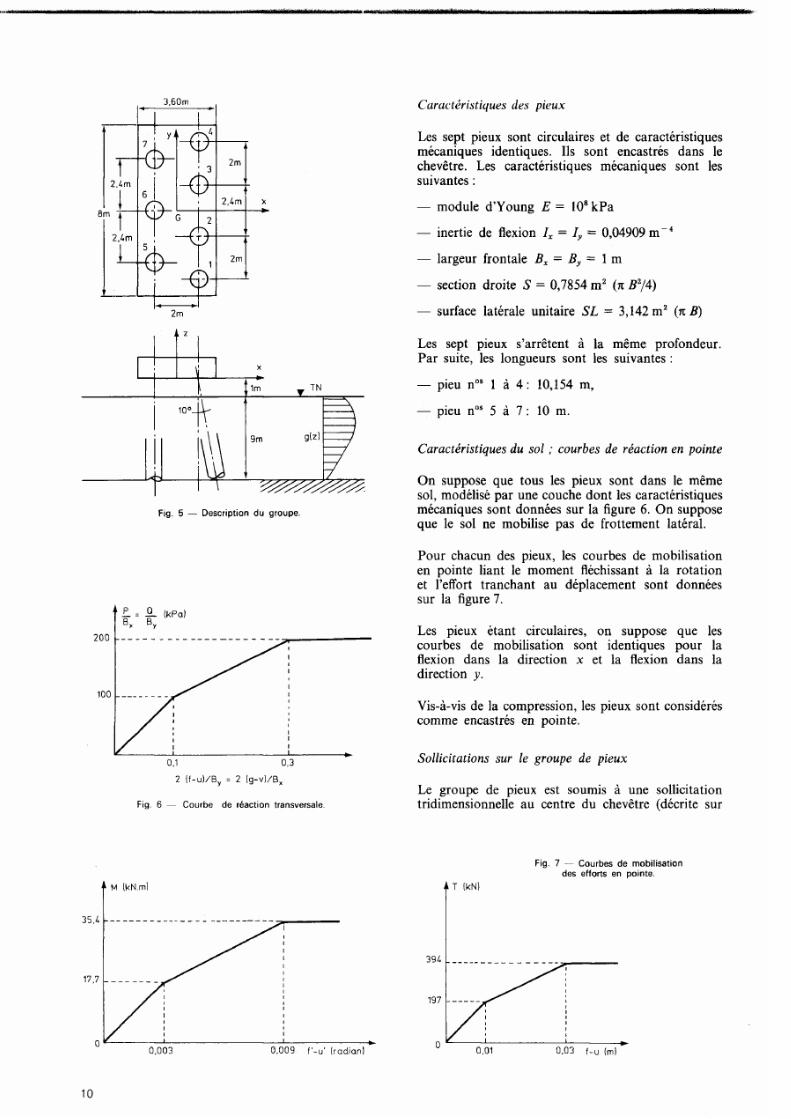
L
- o. (KPO)
200
100
0,1 0,3
2 |f -u)/B
y
= 2 lg-v)/B„
Fig.
6 — Courbe de réaction transversale.
Caractéristiques des pieux
L es
sept
pieux sont circulaires et de c a r a c t é r i s t i q u e s
m é c a n i q u e s identiques. Ils sont e n c a s t r é s dans le
c h e v ê t r e . Les c a r a c t é r i s t i q u e s m é c a n i q u e s sont les
suivantes :
—
module
d ' Y o u n g
E = 10 kPa
— inertie de flexion
I
x
= I
y
=
0,04909 m
- 4
— largeur frontale
B
x
= B
y
= 1 m
— section droite
S
= 0,7854 m
2
k B
2
/4)
— surface la té ra le unitaire SL = 3,142 m
2
(n B)
L es
sept
pieux s ' a r r ê t e n t à la m ê m e profondeur.
P a r suite, les longueurs sont les suivantes :
—
pieu n
o s
1 à 4: 10,154 m,
— pieu n
o s
5 à 7 : 10 m.
Caractéristiques
du sol ; courbes de
réaction
en pointe
O n suppose que tous les pieux sont dans le m ê m e
so l , m odé l i s é par une couche dont les c a r a c t é r i s t i q u e s
m é c a n i q u e s sont d o n n é e s sur la figure 6. On suppose
que le sol ne mobilise pas de frottement la té ra l .
Pour chacun des pieux, les courbes de mobili sat ion
en pointe liant le moment fléchissant à la rotation
et l'effort tranchant au
d é p l a c e m e n t
sont
d o n n é e s
sur la figure 7.
L es
pieux
é t a n t
circulaires, on suppose que les
courbes de mobili sation sont identiques pour la
flexion dans la direction
x
et la flexion dans la
direction y.
Vis -à -v i s de la compression, les pieux sont c o n s i d é r é s
comme
e n c a s t r é s
en pointe.
Sollicitations sur le groupe de
pieux
L e
groupe de pieux est soumis à une
sol l ic i ta t ion
tridimensionnelle
au centre du che vê t re (déc r i t e sur
10
7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 9/10
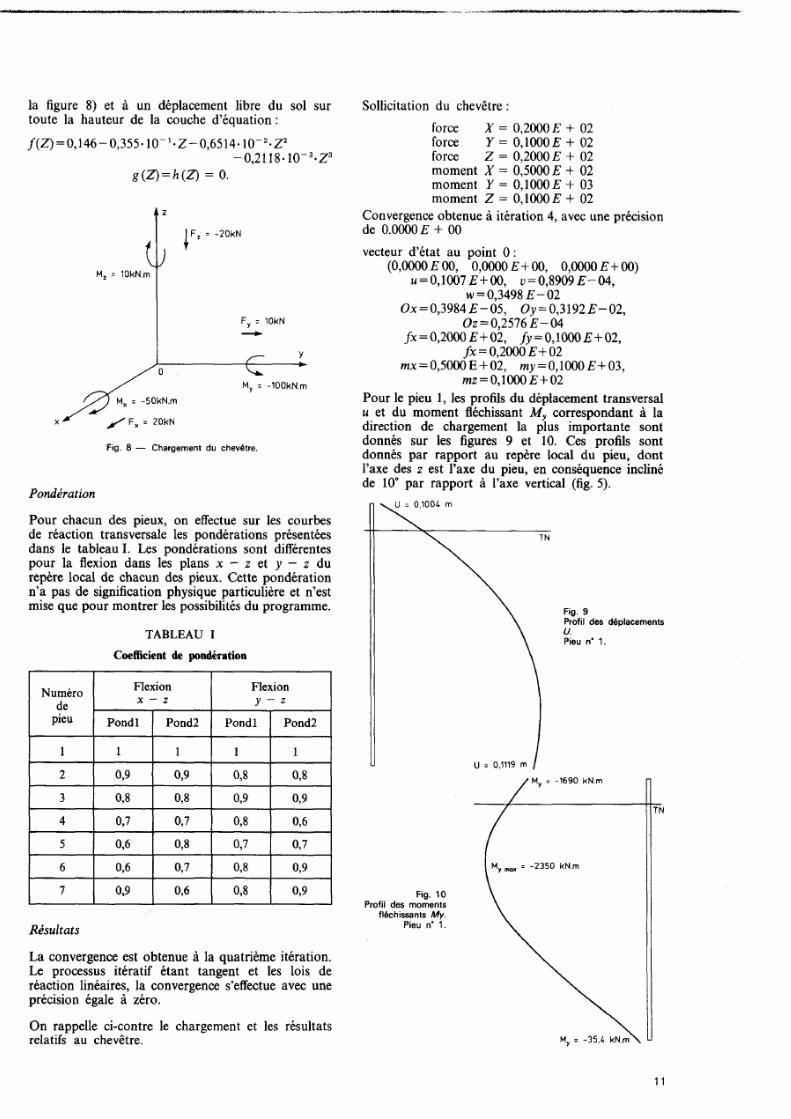
la
figure 8) et à un d é p l a c e m e n t libre du sol sur
toute
la hauteur de la couche d ' é q u a t i o n :
/ ( Z ) = 0,146-0,355-10-
1
-Z-0,6514-10
- 2
-Z
2
-0,2118-10
3
-Z
3
g(Z) = h(Z) = 0.
0
M,
=
10kN.m
-20kN
F
y
= lO kN
+ 3
M„ = -50kN.m
F „ 20kN
Fig.
8
— Chargement du chevêtre.
Pondération
Pour
chacun des pieux, on effectue sur les courbes
de r é a c t i o n transversale les p o n d é r a t i o n s p r é s e n t é e s
dans le tableau I. Les p o n d é r a t i o n s sont différentes
pour la flexion dans les plans
x - z
et
y - z
du
re pè re loca l de chacun des pieux. Cette p o n d é r a t i o n
n 'a
pas de
signification
physique
pa r t i cu l i è re
et
n'est
mise
que pour montrer les po s s ib i l i té s du programme.
T A B L E A U
I
Coefficient de pondération
Num éro
Flexion Flexion
de
x -
-
z y -
-
z
pieu
P ondi
Pond2 P ondi Pond2
1
1
1
1 1
2 0,9
0,9
0,8 0,8
3 0,8 0,8
0,9
0,9
4 0,7 0,7
0,8
0,6
5 0,6 0,8 0,7
0,7
6
0,6
0,7 0,8
0,9
7 0,9 0,6 0,8
0,9
Résultats
L a convergence est obtenue à la q u a t r i è m e i t é r a t i o n .
L e processus i t é ra t i f é t an t tangent et les lois de
réac t ion l inéa i re s ,
la convergence s'effectue avec une
préc i s ion éga le à zé ro .
O n rappelle ci-contre le chargement et les résu l t a t s
relatifs
au che vê t re .
Sol l ic i ta t ion du che vê t re :
force
X =
0,2000 £ + 02
force
Y
= 0,1000
E +
02
force Z = 0,2000 E + 02
moment X = 0,5000 £ + 02
moment
Y
= 0,1000
E
+ 03
moment Z = 0,1000 £ + 02
Convergence obtenue à i t é r a t i o n 4, avec une préc i s ion
de 0.0000
E
+ 00
vecteur d ' é t a t au point 0 :
(0,0000 £ 00, 0,0000 £ + 0 0 , 0,0000 £ + 0 0 )
«
= 0,1007
£ + 0 0 , v =
0,8909 £ - 0 4 ,
w = 0,3498 £ - 0 2
Ox =
0,3984 £ - 0 5 , 0y = O , 3 1 9 2 £ - O 2 ,
0 z = 0,2576 £ - 0 4
fx = 0,2000 £ + 0 2 , /y = 0 , 1 0 0 0 £ + 0 2 ,
fx =
0,2000 £ + 0 2
m x —
0,5000 E + 02, my = 0,1000
£ + 0 3 ,
mz = 0 , 1 0 0 0 £ + 0 2
Pour le pieu 1, les
profils
du
d é p l a c e m e n t
transversal
u et du moment fléchissant
M
y
correspondant à la
direction de chargement la plus importante sont
d o n n é s sur les figures 9 et 10. Ces profils sont
d o n n é s par rapport au re pè re loca l du pieu, dont
l'axe des z est l'axe du pieu, en conséque nce inc l iné
de 10° par rapport à l'axe
vertical
(fig. 5).
U = 0,1004 m
Fig. 9
Profil
des
déplacements
U.
Pieu
n* 1.
-1690 kN.m
-2350 kN.m
Fig, 10
Profil
des
moments
fléchissants My.
Pieu
n° 1.
M
a
= -35.4 kN.m
TN
11
7/23/2019 BLPC 162 Pp 3-12 Degny
http://slidepdf.com/reader/full/blpc-162-pp-3-12-degny 10/10
L a mise
au
point
du
programme G O U P I L
est une
é t a p e importante pour l ' é t u d e
et
l ' i n t e r p r é t a t i o n des
essais
de
groupes
de
pieux. C e c i devrait conduire
à
la
formulation dans
le
programme
de
relations
prenant en compte l'effet de groupe.
Dans la pratique courante, c ' e s t -à -d i re le dimen-
sionnement et la v é r i f i ca t ion de fondations sur pieux,
le programme G O U P I L n'est
pas un
ou t i l
de
p r é d i m e n s i o n n e m e n t . Cette phase p r é a l a b l e
du
di-
mensionnement
néce s s i t e
une
réflexion
où
la
connais
sance et l ' e xpé r ie nce du géo te chn ic ie n sont indispen
sables. L ' i n t é r ê t de G O U P IL se situe dans les phases
de vérif icat ion des différentes solutions et dans leur
optimisation.
Son domaine d'application couvre aussi
bien les
fondations
sur
pieux d'ouvrages tels
que
les b â t i m e n t s
et
les ouvrages
d'art,
que les fondations
d'ouvrages maritimes
:
quais, ducs d'albe...
L a pos s ib i l i t é d'ajouter à un chargement permanent
un chargement de courte d u r é e , et d'obtenir la
r é p o n s e d un groupe
de
pieux m ê m e dans
le
cas où
le comportement
du
sol
est
non l inéa i re , permet
la
vérif icat ion rigoureuse
du
dimensionnement
des
fondations
sur
pieux,
c o n f o r m é m e n t
aux
règles
des
éta ts l imites .
Afin
que
G O U P IL puisse être ut i l isé plus a i s é m e n t ,
l'effort est
actuellement
mis sur
l ' é l a b o r a t i o n
de
p r é p r o c e s s e u r s d ' e n t r é e , notamment pour
la
d é t e r
mination
des courbes
de
r é a c t i o n
à
partir des essais
p r e s s i o m é t r i q u e s ,
et de
postprocesseurs graphiques
éc r i t s
en
G K S .
Si
un
ca lcu l G O U P I L peut ê t re e nv i sagé
sur un
compatible PC AT
(l'exemple prése n té néce s s i te
5 minutes
de
temps
de ca lcu l sur un
Logabax
P
1800
é q u i p é
d'un
coprocesseur a r i t h m é t i q u e ) , l'univers de
préd i l e c t ion
pour
le
programme
G O U P I L
est
celui
des stations de t rava i l , dont la puissance de calcul
et
de
traitement graphique permet d'envisager
la
conception
ass is tée
par
ordinateur d'une fondation
sur pieux.
R É F É R E N C E S B I B L I O G R A P H I Q U E S
[1] BAGUELIN F.,FRANK R., G U É G A N Y. 1976), Calcul
sur ordinateur
des pieux
sollicités horizontalement
ou
subissant des poussées
parasites,
Bull, liaison Labo.
P. et Ch.
84,
juil.-août,
pp.
113-120.
[2] B AGUE L IN F.,JÉZÉQUEL
J.-F., SHIELDS D.-H.
1976),
The
pressuremeter
and
foundation engineering, Trans.
Tech.
Publications, Clausthal, RFA, 617
p.
[3] BANGRATZ
J.-L.
1982),
Calcul élastique non linéaire
d'un groupe de pieux, CR
rech.
du LR de
l'Est-
parisien,
févr.
[4] BOURGES
F.,
FRANK
R. 1989),
Fondations profondes,
Les techniques de
l'ingénieur,
réf. C 248-249.
[5]
BUSTAMANTE
M.,
GIANESELLI
L. 1981),
Prévision
de
la capacité portante des
pieux
isolés sous charge
verticale,
règles pressiométriques et pénétrométriques,
Bull,
liaison
Labo. P. et Ch. 113, mai-juin, pp.
83-
108.
[6] BUSTAMANTE M.,FRANK R., GIANESELLI L. 1989),
Prévision de la courbe de chargement des fondations
profondes isolées, XII
e
Congr. Inter. de M écanique
des
Sols
et des Travaux de Fondations, août,
Ro
de Janeiro, Brésil.
[7] D E G N Y E. 1987), Calcul
des groupes
de pieux,
notice
d utilisation
du
programme Goupil,
Rapp.
de la Division
G éotechnique M écanique
des
sols,
mai.
[8]
D E G N Y
E. 1988), Calcul
des groupes
de
pieux,
notice
théorique
du
programme Goupil,
Rapp.
de la
Division
G éotechnique M écanique
des
sols, déc.
[9] F O N D
72-Additif
1976), pièce 5 bis 2
: Fondations
courantes d ouvrages, programme
de
calcul PSH
1
LCPC-SÉTRA, ministère
de
l Aménagement
du territoire,
de
l Équipement,
du
Logement et
du
Tourisme,
oct.
[10] FRANK R. (1984), Études théoriques de fondations
profondes et d'essais en
place
par
autoforage
dans
les Lpcet résultats pratiques (1972-1983), Rapp.
rech.
Lpc
128, juin, 95
p.
[11]
FRANK R. (1989), Les méthodes et modèles de
calcul
des déformations des sols mous et leurs vérifications
expérimentale, Symposium franco-soviétique, Moscou,
avr.,
pp. 105-114.
[12] FRANK R.,ZHAO S.-R.
(1982),
Estimation par les
paramètres pressiométriques
de
l'enfoncement
sous
charge
axiale de pieux
forés
dans des
sols
fins, Bull,
liaison Labo. P. et
Ch. 119, mai-juin,
pp.
17-24.
[13] JÉZ ÉQ UE L J. - F . (1984), Groupes
de six pieux
à Plancoët
1983, CR rech.
du
L R
de
Saint-Brieuc.
[14] Projet de fascicule 62, titre
V
: règles techniques de
conception et de
calcul
des fondations des
ouvrages
de
génie
civil, Cahier
des Clauses Techniques G é n é
rales.
[15]
SÉTRA-LCPC (1985),
Règles
de justification des
fondations
sur pieux
à
partir des essais
pressiométriques, ministère
de l'Urbanisme,
du Logement et des
Transports,
Direction
des
Routes,
oct.
[16]
R OM AGNY
J.-C.
(1988), Mode
d emploi de la Bibliothèque
PROFOND, Rapp.
de la
Division G éotechnique M éca
nique des
sols.