automatique -...
TRANSCRIPT
Introduction
Notion de système
Système
Etymologiquement : ensemble organisé
Système et Automatique
Procédé de nature quelconque : électrique, mécanique,chimique, économique, . . . d’entrée u et de sortie y
Système et temps
Système à temps continuu(t) et y(t) fonctions d’une variable continue t
Système à temps discretu(k) et y(k) fonctions d’une variable discrète k
Introduction
Notion de système
Système
Etymologiquement : ensemble organisé
Système et Automatique
Procédé de nature quelconque : électrique, mécanique,chimique, économique, . . . d’entrée u et de sortie y
Système et temps
Système à temps continuu(t) et y(t) fonctions d’une variable continue t
Système à temps discretu(k) et y(k) fonctions d’une variable discrète k
Introduction
Notion de système
Système
Etymologiquement : ensemble organisé
Système et Automatique
Procédé de nature quelconque : électrique, mécanique,chimique, économique, . . . d’entrée u et de sortie y
Système et temps
Système à temps continuu(t) et y(t) fonctions d’une variable continue t
Système à temps discretu(k) et y(k) fonctions d’une variable discrète k
Introduction
Hypothèses et objectifs du cours (1)
Systèmes considérés
Classe restreinte de systèmes réels :
mono-entrée mono-sortie linéaires invariants
Modélisation
Cas continu Cas discret
Equation différentielle Equation aux différenceslinéaire à coef. constants linéaire à coef. constants
Introduction
Hypothèses et objectifs du cours (1)
Systèmes considérés
Classe restreinte de systèmes réels :
mono-entrée mono-sortie linéaires invariants
Modélisation
Cas continu Cas discret
Equation différentielle Equation aux différenceslinéaire à coef. constants linéaire à coef. constants
Introduction
Hypothèses et objectifs du cours (1)
Systèmes considérés
Classe restreinte de systèmes réels :
mono-entrée mono-sortie linéaires invariants
Modélisation
Cas continu Cas discret
Equation différentielle Equation aux différenceslinéaire à coef. constants linéaire à coef. constants
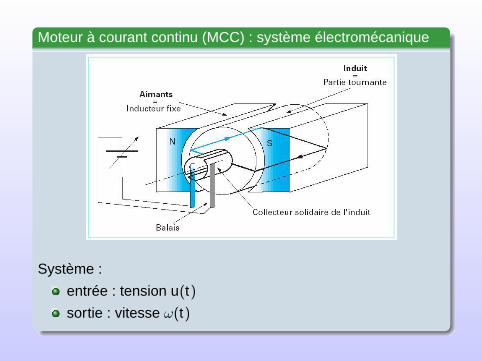
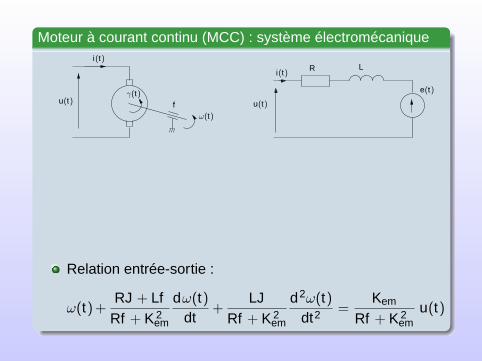
Moteur à courant continu (MCC) : système électromécanique
Système :
entrée : tension u(t)
sortie : vitesse ω(t)
Moteur à courant continu (MCC) : système électromécanique
e(t)
R Li(t)
u(t)fω(t)
γ(t)
i(t)
u(t)
Relation entrée-sortie :
ω(t)+RJ + Lf
Rf + K 2em
dω(t)dt
+LJ
Rf + K 2em
d2ω(t)dt2 =
Kem
Rf + K 2em
u(t)
Introduction
Hypothèses et objectifs du cours (2)
Dans ce cours. . .
Systèmes linéaires ou linéarisés autour d’un point defonctionnement.
Moteur à courant continu
L’équation différentielle du modèle n’est plus valable présenced’hystérésis ou de saturation du circuit magnétique : étudedans la plage de fonctionnement linéaire spécifiée par leconstructeur.
Introduction
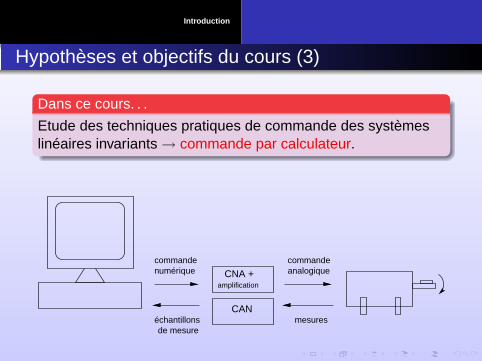
Hypothèses et objectifs du cours (3)
Dans ce cours. . .
Etude des techniques pratiques de commande des systèmeslinéaires invariants→ commande par calculateur.
CAN
amplificationCNA +numérique
commande
de mesureéchantillons
analogiquecommande
mesures
Systèmes à temps continuSystèmes asservis à temps continu
Première partie I
Systèmes et asservissements à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
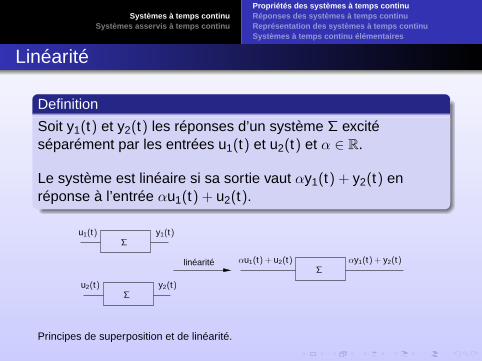
Linéarité
Definition
Soit y1(t) et y2(t) les réponses d’un système Σ excitéséparément par les entrées u1(t) et u2(t) et α ∈ R.
Le système est linéaire si sa sortie vaut αy1(t) + y2(t) enréponse à l’entrée αu1(t) + u2(t).
y1(t)
y2(t)u2(t)
u1(t)
Σ
Σ
αu1(t) + u2(t) αy1(t) + y2(t)Σ
linéarité
Principes de superposition et de linéarité.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Invariance
Definition
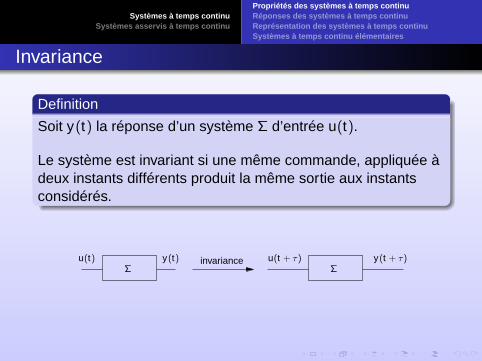
Soit y(t) la réponse d’un système Σ d’entrée u(t).
Le système est invariant si une même commande, appliquée àdeux instants différents produit la même sortie aux instantsconsidérés.
Σu(t) y(t)
Σu(t + τ)invariance y(t + τ)
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Principe de causalité
Definition
Un signal f (t) à temps continu est causal si f (t) = 0, ∀t < 0.
Definition
Soit y(t) la réponse d’un système d’entrée u(t).
Le système est causal si, ∀t < 0, u(t) = 0⇒ y(t) = 0.
La réponse du système ne précède pas son excitation. Tout système physiquement
réalisable est causal.
Hypothèse
Tous les signaux et systèmes étudiés sont causaux.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Linéarité et invariance
Propriété
Un système à temps continu à la fois linéaire et invariant estdécrit par une équation différentielle linéaire à coefficientsconstants.
Notationsn∑
i=c
aid iy(t)
dt i =m∑
i=0
bid iu(t)
dt i
ai et bi ∈ R tel que ac , an, b0 et bm 6= 0n, m ∈ N tel que m 6 n pour un système causaln : ordre du système, c 6 n : classe du systèmey(t) : n CI pour y et m CI pour u
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Linéarité et invariance
Propriété
Un système à temps continu à la fois linéaire et invariant estdécrit par une équation différentielle linéaire à coefficientsconstants.
Notationsn∑
i=c
aid iy(t)
dt i =m∑
i=0
bid iu(t)
dt i
ai et bi ∈ R tel que ac , an, b0 et bm 6= 0
n, m ∈ N tel que m 6 n pour un système causaln : ordre du système, c 6 n : classe du systèmey(t) : n CI pour y et m CI pour u
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Linéarité et invariance
Propriété
Un système à temps continu à la fois linéaire et invariant estdécrit par une équation différentielle linéaire à coefficientsconstants.
Notationsn∑
i=c
aid iy(t)
dt i =m∑
i=0
bid iu(t)
dt i
ai et bi ∈ R tel que ac , an, b0 et bm 6= 0n, m ∈ N tel que m 6 n pour un système causal
n : ordre du système, c 6 n : classe du systèmey(t) : n CI pour y et m CI pour u
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Linéarité et invariance
Propriété
Un système à temps continu à la fois linéaire et invariant estdécrit par une équation différentielle linéaire à coefficientsconstants.
Notationsn∑
i=c
aid iy(t)
dt i =m∑
i=0
bid iu(t)
dt i
ai et bi ∈ R tel que ac , an, b0 et bm 6= 0n, m ∈ N tel que m 6 n pour un système causaln : ordre du système, c 6 n : classe du système
y(t) : n CI pour y et m CI pour u
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Linéarité et invariance
Propriété
Un système à temps continu à la fois linéaire et invariant estdécrit par une équation différentielle linéaire à coefficientsconstants.
Notationsn∑
i=c
aid iy(t)
dt i =m∑
i=0
bid iu(t)
dt i
ai et bi ∈ R tel que ac , an, b0 et bm 6= 0n, m ∈ N tel que m 6 n pour un système causaln : ordre du système, c 6 n : classe du systèmey(t) : n CI pour y et m CI pour u
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Formulation générale
Définition
La réponse d’un système linéaire invariant d’entrée u(t) et desortie y(t) peut s’écrire sous la forme :
y(t) = g(t) ∗ u(t)
où g(t) est appelée réponse impulsionnelle du système et où ∗désigne le produit de convolution défini par :
g(t) ∗ u(t) =
∫ +∞
−∞g(τ)u(t − τ)dτ.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Formulation générale
Définition
La réponse d’un système linéaire invariant d’entrée u(t) et desortie y(t) peut s’écrire sous la forme :
y(t) = g(t) ∗ u(t)
où g(t) est appelée réponse impulsionnelle du système et où ∗désigne le produit de convolution défini par :
causalité → g(t) ∗ u(t) =
∫ t
0g(τ)u(t − τ)dτ.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Réponse impulsionnelle
Propriété
La réponse impulsionnelle d’un système représente sa réponseà une impulsion de Dirac.
En effet :y(t) = g(t) ∗ δ(t)
et, par définition de l’impulsion de Dirac :
y(t) =
∫ t
0g(τ)δ(t − τ)dτ = g(t).
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
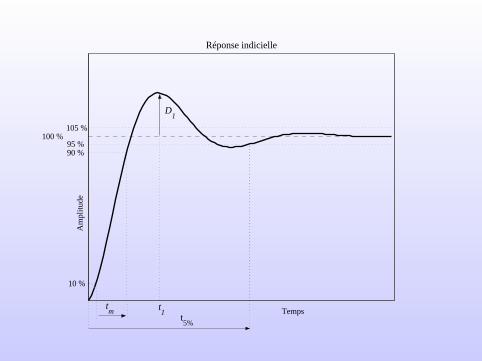
Réponse indicielle
Définition
On appelle réponse indicielle d’un système sa réponse à unéchelon unité :
U(t) =
0, si t < 0,
1, si t > 0.
Cette réponse vaut :
y(t) = g(t) ∗ U(t) =
∫ t
0g(τ) U(t − τ)dτ =
∫ t
0g(τ)dτ.
La réponse indicielle d’un système est souvent utilisée pour lecaractériser (identification).
Temps
Am
plit
ud
e
Réponse indicielle
100 % 95 %
105 %
90 %
10 %
t5%
tm t
1
D1
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : définition
Définition
Soit f (t) un signal à temps continu, prenant la valeur f (t) àl’instant t . La transformée de Laplace de f (t) est définie par :
F (s) = Lf (t) =
∫ +∞
0f (t)e−stdt .
Propriété
Soit s = σ + jω. La transformée de Laplace est généralementdéfinie sur un demi-plan complexe pour lequel σ ∈ ]σ0, +∞[.La valeur σ0 définissant la limite de convergence est appeléeabscisse de convergence de la transformée.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : calcul
Tables de transformées
Autant que possible, on utilise des tables de transforméespré-calculées :
δ(t) → 1U(t) → 1
s. . .
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : calcul
Tables de transformées
Autant que possible on utilise des tables de transforméespré-calculées.
Exemple de calcul (complet et rigoureux)
Calcul de la transformée de Laplace de f (t) = e−at U(t).
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Linéarité : Lf (t) + αg(t) = F (s) + αG(s), ∀α ∈ R
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Changement d’échelle : L
f( t
α
)= αF (αs), ∀α ∈ R
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Retard : Lf (t − τ) = e−τsF (s), ∀τ ∈ R
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Dérivation en t : L
df (t)dt
= sF (s)− f (0)
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Dérivation en s : dF (s)ds = L−tf (t)
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Intégration : L∫ t
0 f (τ)dτ
= F (s)s
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Théorème de la valeur initiale : limt→0 f (t) = lims→+∞ sF (s)
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Théorème de la valeur finale : limt→∞ f (t) = lims→0 sF (s)
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Produit de convolution : Lf (t) ∗ g(t) = F (s) G(s)
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : propriétés
Notations
Soit deux signaux f (t) et g(t) de transformées de Laplacerespectives F (s) et G(s).
Propriétés
Produit : Lf (t) g(t) = 12πj F (s) ∗G(s)
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : inversion
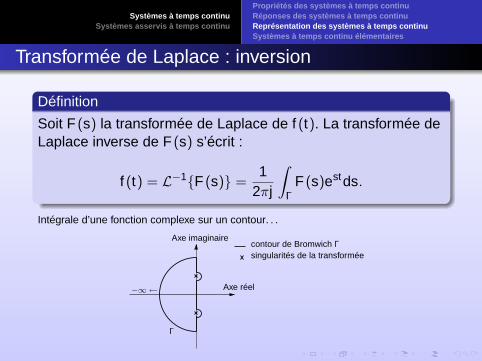
Définition
Soit F (s) la transformée de Laplace de f (t). La transformée deLaplace inverse de F (s) s’écrit :
f (t) = L−1F (s) =1
2πj
∫Γ
F (s)estds.
Intégrale d’une fonction complexe sur un contour. . .
singularités de la transformée
−∞←
Γ
contour de Bromwich Γ
Axe réel
Axe imaginaire
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : intérêt
Réécriture du modèle du système
Pour les systèmes linéaires à temps continu : possibilité detransformer les équations différentielles décrivant l’évolutiondynamique du système en équations algébriques en s.
Relation entrée-sortie du MCC
Variable t :
ω(t) +RJ + Lf
Rf + K 2em
dω(t)dt
+LJ
Rf + K 2em
d2ω(t)dt2 =
Kem
Rf + K 2em
u(t),
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : intérêt
Réécriture du modèle du système
Pour les systèmes linéaires à temps continu : possibilité detransformer les équations différentielles décrivant l’évolutiondynamique du système en équations algébriques en s.
Relation entrée-sortie du MCC
Variable s :
Ω(s) +RJ + Lf
Rf + K 2em
sΩ(s) +LJ
Rf + K 2em
s2Ω(s) =Kem
Rf + K 2em
U(s),
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Transformée de Laplace : intérêt
Réécriture du modèle du système
Pour les systèmes linéaires à temps continu : possibilité detransformer les équations différentielles décrivant l’évolutiondynamique du système en équations algébriques en s.
Relation entrée-sortie du MCC
Variable s :(1 +
RJ + LfRf + K 2
ems +
LJRf + K 2
ems2)
Ω(s) =Kem
Rf + K 2em
U(s),
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Fonction de transfert : définition
Soit un système linéaire invariant d’entrée u(t) et de sortie y(t).Réponse temporelle du système :
y(t) = g(t) ∗ u(t).
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Fonction de transfert : définition
Soit un système linéaire invariant d’entrée u(t) et de sortie y(t).En appliquant la transformée de Laplace :
Y (s) = G(s)U(s).
Définition
On appelle fonction de transfert du système la transformée deLaplace G(s) de la réponse impulsionnelle :
G(s) =Y (s)
U(s).
Le terme synonyme transmittance est souvent utilisé.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Fonction de transfert : propriétés (1)
Forme de la fonction de transfert
Dans le cas des systèmes linéaires invariants sans retard lafonction de transfert prend la forme d’une fraction rationnelle :
G(s) =N(s)
D(s)=
∑mi=0 bisi∑ni=c aisi
Caractéristiques :
racines de N(s) : m zéros
racines de D(s) : n pôles
zéros et les pôles ∈ C
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Fonction de transfert : propriétés (1)
Forme de la fonction de transfert
Dans le cas des systèmes linéaires invariants sans retard lafonction de transfert prend la forme d’une fraction rationnelle :
G(s) =b0 + b1s + . . . bmsm
ac + ac+1s + . . . ansn
Caractéristiques :
racines de N(s) : m zéros
racines de D(s) : n pôles
zéros et les pôles ∈ CK = b0
ac: gain statique
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Fonction de transfert : propriétés (1)
Forme de la fonction de transfert
Dans le cas des systèmes linéaires invariants sans retard lafonction de transfert prend la forme d’une fraction rationnelle :
G(s) =bm
an
∏mi=1 (s − zi)∏ni=1 (s − pi)
Caractéristiques :
racines de N(s) : m zéros
racines de D(s) : n pôles
zéros et les pôles ∈ Cbman
: coefficient de gain
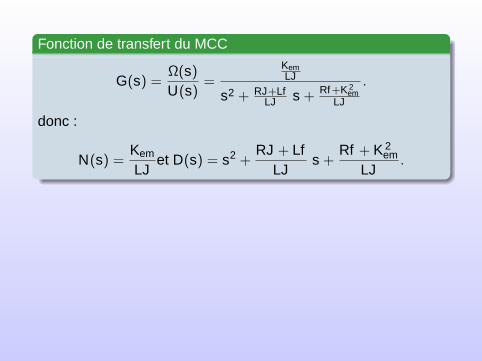
Fonction de transfert du MCC
G(s) =Ω(s)
U(s)=
KemLJ
s2 + RJ+LfLJ s + Rf+K 2
emLJ
.
donc :
N(s) =Kem
LJet D(s) = s2 +
RJ + LfLJ
s +Rf + K 2
em
LJ.
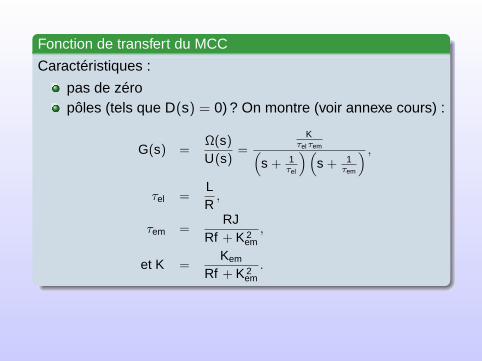
Fonction de transfert du MCC
Caractéristiques :
pas de zéropôles (tels que D(s) = 0) ? On montre (voir annexe cours) :
G(s) =Ω(s)
U(s)=
Kτelτem(
s + 1τel
)(s + 1
τem
) ,
τel =LR
,
τem =RJ
Rf + K 2em
,
et K =Kem
Rf + K 2em
.
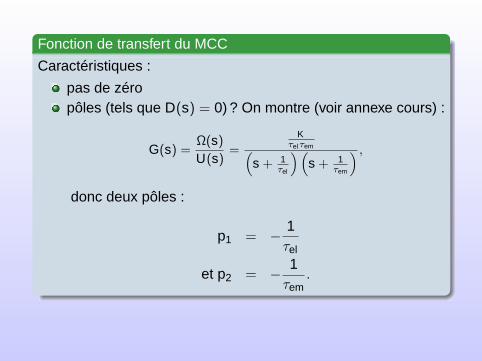
Fonction de transfert du MCC
Caractéristiques :
pas de zéropôles (tels que D(s) = 0) ? On montre (voir annexe cours) :
G(s) =Ω(s)
U(s)=
Kτelτem(
s + 1τel
)(s + 1
τem
) ,
donc deux pôles :
p1 = − 1τel
et p2 = − 1τem
.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Analyse harmonique
Définition
On se place dans le cas d’un système linéaire invariant defonction de transfert G(s), en régime permanent sinusoïdal depulsation ω. On appelle G(s = jω) réponse harmonique.
Propriété
La réponse du système à une entrée sinusoïdale A sin ωt est :
y(t) = A |G(jω)| sin (ωt + ArgG(jω)) .
Analyse harmonique : étude de la fonction G(jω) :
comportement fréquentiel du système (signal périodique)
diagrammes mettant en correspondance module et argument
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Diagrammes harmoniques (1)
Diagramme de Bode
Le diagramme de Bode est constitué de deux courbes :
module en décibels (dB) :
GdB(ω) = 20 log10 |G(jω)|
argument, généralement exprimée en degrés (deg) :
ϕ(ω) = ArgG(jω)
On utilise traditionnellement les termes de gain et de phase, plutôt que les termes
modules et argument.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Diagrammes harmoniques (2)
Intérêt du diagramme de Bode
Module d’un produit de nombres complexes = produit deleurs modules.Par conséquent : module en dB d’un produit de nombrescomplexes = somme de leurs modules en dB (propriété dulogarithme) :
20 log10 |G1(jω)G2(jω)| = 20 log10 |G1(jω)|+ 20 log10 |G2(jω)|,= G1dB
(jω) + G2dB(jω).
Argument d’un produit de nombres complexes = sommedes arguments :
ArgG1(jω)G2(jω) = ArgG1(jω) + ArgG2(jω).
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Diagrammes harmoniques (3)
Diagramme de Nyquist
Le diagramme de Nyquist est le lieu de G(jω) dans le plancomplexe, lorsque ω varie de −∞ à +∞.
Remarque
Ce diagramme est orienté selon les ω croissants. En généralon choisi l’échelle du diagramme de Nyquist de sorte que lepoint complexe d’abscisse −1, dit point critique apparaisse etpuisse être situé par rapport au lieu de G(jω).
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
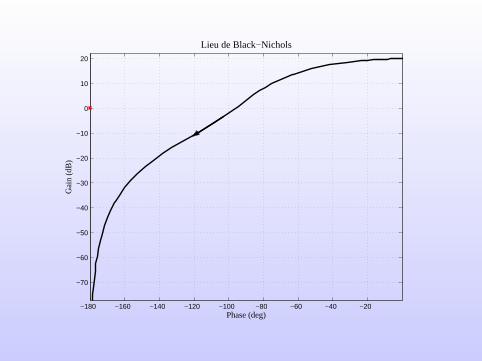
Diagrammes harmoniques (4)
Lieu de Black-Nichols
Le lieu de Black-Nichols est le lieu orienté des points decoordonnées (ϕ(ω), GdB(ω)) lorsque ω varie de −∞ à +∞. Ontache aussi de faire apparaître le point critique de coordonnées(−180, 0) sur ce lieu.
Remarque
Ce diagramme est orienté selon les ω croissants. En généralon choisi l’échelle du diagramme de Nyquist de sorte que lepoint complexe d’abscisse −1, dit point critique apparaisse etpuisse être situé par rapport au lieu de G(jω).
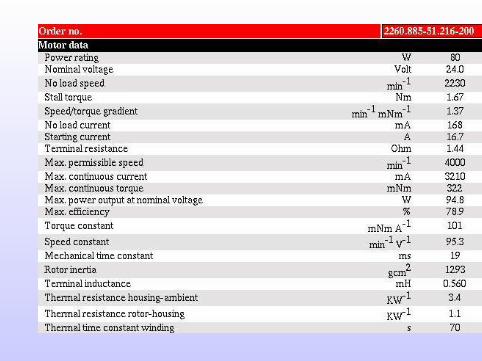
Moteur à courant continu Maxon F2260, bobinage 885
Calculer la valeur numérique des paramètres du modèle :
G(s) =Ω(s)
U(s)=
Kτelτem(
s + 1τel
)(s + 1
τem
) ,
τel =LR
,
τem =RJ
Rf + K 2em
,
et K =Kem
Rf + K 2em
.
d’après la (nouvelle) documentation.
Etablir les diagrammes harmoniques.
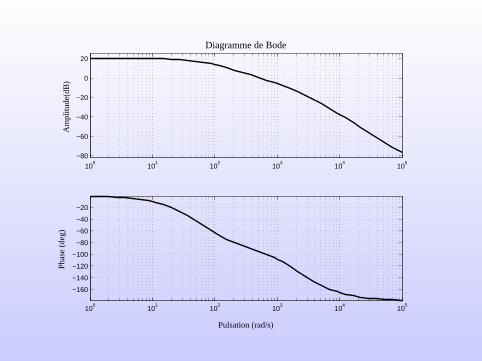
100
101
102
103
104
105
−80
−60
−40
−20
0
20A
mpl
itude
(dB
)
Diagramme de Bode
100
101
102
103
104
105
−160
−140
−120
−100
−80
−60
−40
−20
Pulsation (rad/s)
Phas
e (d
eg)
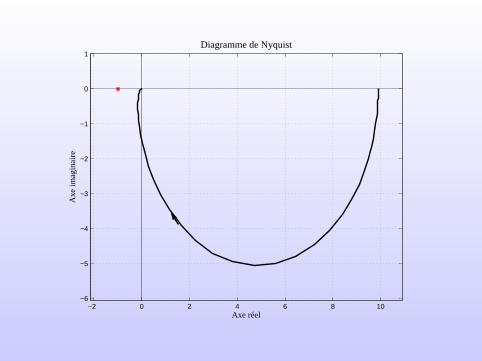
−2 0 2 4 6 8 10−6
−5
−4
−3
−2
−1
0
1
Axe réel
Axe
imag
inai
re
Diagramme de Nyquist
−180 −160 −140 −120 −100 −80 −60 −40 −20
−70
−60
−50
−40
−30
−20
−10
0
10
20
Phase (deg)
Gai
n (d
B)
Lieu de Black−Nichols
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du premier ordre (1)
Définition
Un système linéaire invariant à temps continu d’ordre un estdécrit par une équation différentielle d’ordre un à coefficientsconstants reliant son entrée u(t) et sa sortie y(t) :
y(t) + τdy(t)
dt= Ku(t)
où τ et K sont des constantes réelles non nulles ; τ est laconstante de temps du système et K son gain statique.
La réponse indicielle est y(t) = α + βe−tτ avec α et β deux
constantes réelles dépendant des CI.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du premier ordre (2)
Détermination des paramètres de :
y(t) = α + βe−tτ .
terme constant : régime permanent de la sortie
une partie variable : régime transitoire
cas τ > 0 : stable
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du premier ordre (2)
Détermination des paramètres de :
y(t) = α + βe−tτ .
terme constant : régime permanent de la sortie
une partie variable : régime transitoire
cas τ > 0 : stable
A l’instant t = 0 :y(0) = α + β.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du premier ordre (2)
Détermination des paramètres de :
y(t) = α + βe−tτ .
terme constant : régime permanent de la sortie
une partie variable : régime transitoire
cas τ > 0 : stable
Quand t →∞, dy(t)dt = 0 :
limt→∞
y(t) = K ,
et limt→∞
y(t) = α.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du premier ordre (2)
Détermination des paramètres de :
y(t) = α + βe−tτ .
terme constant : régime permanent de la sortie
une partie variable : régime transitoire
cas τ > 0 : stable
soit les paramètres :
α = K ,
β = y(0)− K .
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du premier ordre (2)
Détermination des paramètres de :
y(t) = α + βe−tτ .
terme constant : régime permanent de la sortie
une partie variable : régime transitoire
cas τ > 0 : stable
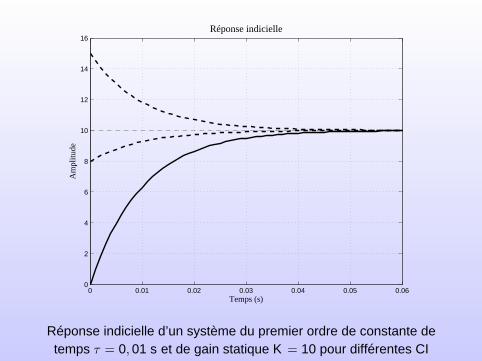
Finalement :
y(t) = K (1− e−tτ ) + y(0)e−
tτ .
0 0.01 0.02 0.03 0.04 0.05 0.060
2
4
6
8
10
12
14
16
Temps (s)
Am
plitu
de
Réponse indicielle
Réponse indicielle d’un système du premier ordre de constante detemps τ = 0, 01 s et de gain statique K = 10 pour différentes CI
Temps
Am
plitu
de
Réponse indicielle100 %
63 %
95 %
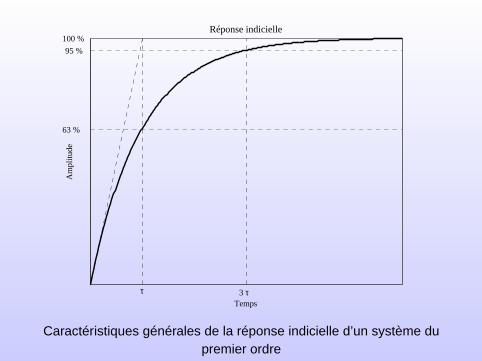
τ 3 τ
Caractéristiques générales de la réponse indicielle d’un système dupremier ordre
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du premier ordre (3)
Fonction de transfert
La fonction de transfert d’un système du premier ordre estdonc :
G(s) =Y (s)
U(s)=
K1 + τs
.
Réponse harmonique
La réponse harmonique associée est :
G(jω) =K
1 + jτω.
Description de la réponse harmonique :
étude du comportement asymptotique du régime permanent sinusoïdal
extrapolation par des valeurs choisies
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du premier ordre (4)
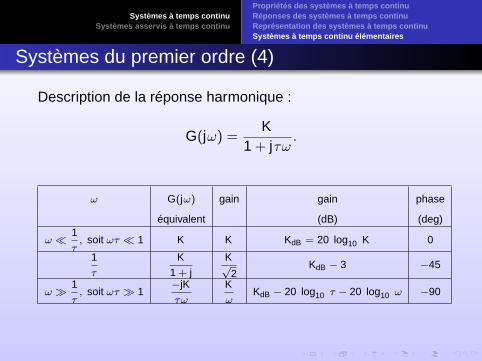
Description de la réponse harmonique :
G(jω) =K
1 + jτω.
ω G(jω) gain gain phase
équivalent (dB) (deg)
ω 1
τ, soit ωτ 1 K K KdB = 20 log10 K 0
1
τ
K
1 + j
K√
2KdB − 3 −45
ω 1
τ, soit ωτ 1
−jK
τω
K
ωKdB − 20 log10 τ − 20 log10 ω −90
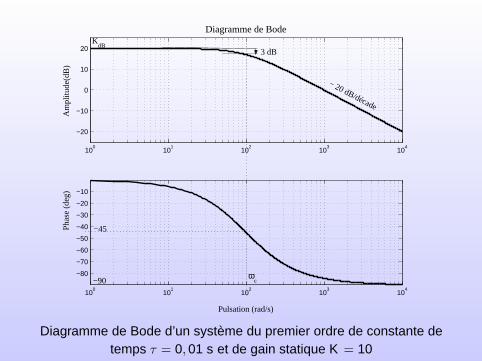
100
101
102
103
104
−20
−10
0
10
20
Am
plitu
de(d
B)
Diagramme de Bode
100
101
102
103
104
−80
−70
−60
−50
−40
−30
−20
−10
Pulsation (rad/s)
Pha
se (
deg)
ωc
KdB
3 dB
−45
−90
− 20 dB/décade
Diagramme de Bode d’un système du premier ordre de constante detemps τ = 0, 01 s et de gain statique K = 10
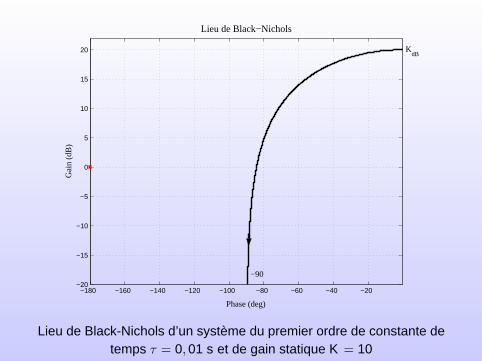
−180 −160 −140 −120 −100 −80 −60 −40 −20−20
−15
−10
−5
0
5
10
15
20
Phase (deg)
Gai
n (d
B)
Lieu de Black−Nichols
−90
KdB
Lieu de Black-Nichols d’un système du premier ordre de constante detemps τ = 0, 01 s et de gain statique K = 10
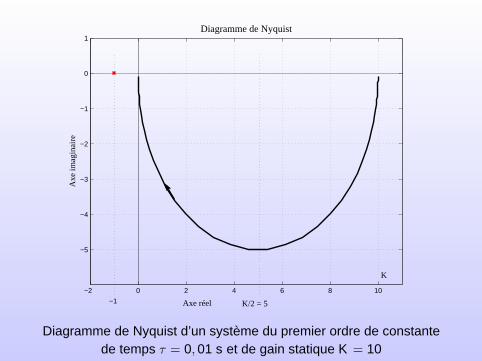
−2 0 2 4 6 8 10
−5
−4
−3
−2
−1
0
1
Axe réel
Axe
imag
inai
re
Diagramme de Nyquist
K
K/2 = 5 −1
Diagramme de Nyquist d’un système du premier ordre de constantede temps τ = 0, 01 s et de gain statique K = 10
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du second ordre (1)
Définition
Un système linéaire invariant à temps continu d’ordre deux estdécrit par une équation différentielle d’ordre deux à coefficientsconstants reliant son entrée u(t) et sa sortie y(t). On considèredes systèmes dont l’équation différentielle se met sous la formecanonique :
ω2n y(t) + 2ξωn
dy(t)dt
+d2y(t)
dt2 = Kω2n u(t),
où ξ et K sont des constantes réelles strictement positives etωn une constante réelle non nulle ; ξ : coefficientd’amortissement, ωn : pulsation naturelle et K : gain statique.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du second ordre (2)
Réponse indicielle fonction de la valeur de ξ :α + βe−ξωnt sin(
√1− ξ2 ωnt + ϕ), si 0 < ξ < 1,
α + (β + γt)e−ξωnt , si ξ = 1,
α + βe−(ξ+√
ξ2−1)ωnt + γe−(ξ+√
ξ2−1)ωnt , si ξ > 1,
avec α, β, γ ∈ R dépendant des CI.
ξ > 1 : aucune oscillation
ξ < 1 : pseudo-oscillations i. e. oscillations de pulsationfixe ωp =
√1− ξ2 ωn, dont l’amplitude décroît
exponentiellement vers zéro. On appelle ωp
pseudo-pulsation ou pulsation amortie.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du second ordre (2)
Réponse indicielle fonction de la valeur de ξ :α + βe−ξωnt sin(
√1− ξ2 ωnt + ϕ), si 0 < ξ < 1,
α + (β + γt)e−ξωnt , si ξ = 1,
α + βe−(ξ+√
ξ2−1)ωnt + γe−(ξ+√
ξ2−1)ωnt , si ξ > 1,
avec α, β, γ ∈ R dépendant des CI.
ξ > 1 : aucune oscillation
ξ < 1 : pseudo-oscillations i. e. oscillations de pulsationfixe ωp =
√1− ξ2 ωn, dont l’amplitude décroît
exponentiellement vers zéro. On appelle ωp
pseudo-pulsation ou pulsation amortie.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du second ordre (2)
Réponse indicielle fonction de la valeur de ξ :α + βe−ξωnt sin(
√1− ξ2 ωnt + ϕ), si 0 < ξ < 1,
α + (β + γt)e−ξωnt , si ξ = 1,
α + βe−(ξ+√
ξ2−1)ωnt + γe−(ξ+√
ξ2−1)ωnt , si ξ > 1,
avec α, β, γ ∈ R dépendant des CI.
ξ > 1 : aucune oscillation
ξ < 1 : pseudo-oscillations i. e. oscillations de pulsationfixe ωp =
√1− ξ2 ωn, dont l’amplitude décroît
exponentiellement vers zéro. On appelle ωp
pseudo-pulsation ou pulsation amortie.
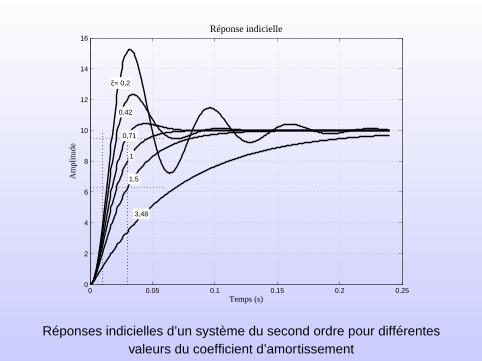
0 0.05 0.1 0.15 0.2 0.250
2
4
6
8
10
12
14
16
Temps (s)
Am
plitu
de
Réponse indicielle
3,48
1,5
1
0,71
0,42
ξ= 0,2
Réponses indicielles d’un système du second ordre pour différentesvaleurs du coefficient d’amortissement
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du second ordre (3)
Temps de réponse
Pas de loi simple : abaques ou simulation.
Approximation:
deux pôles réels, associés à deux constantes de temps(τ1 > τ2)
t5% ' 3τ1
deux pôles complexes : la réponse indicielle est compriseà l’intérieur d’une enveloppe exponentielle connue : e−ξωnt .
t5 % <3
ξωn
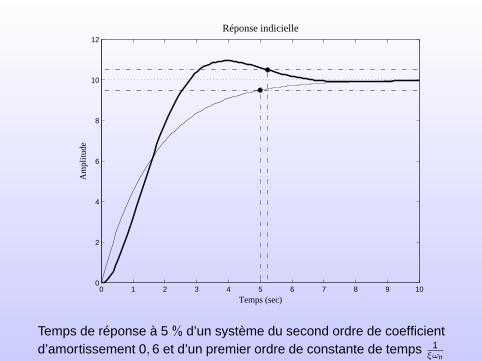
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
Réponse indicielle
Temps (sec)
Am
plitu
de
Temps de réponse à 5 % d’un système du second ordre de coefficientd’amortissement 0, 6 et d’un premier ordre de constante de temps 1
ξωn
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du second ordre (4)
Premier dépassement (cas pseudo-oscillant)
Formes analytiques :
t1 =2π√
1− ξ2 ωn, D1 = e
− ξπ√1−ξ2 .
Compromis optimal amortissement-rapidité est obtenu pour :
ξ =
√2
2' 0, 7
→ D1% = 5 % de la valeur finale et donc t1 = t5 %.
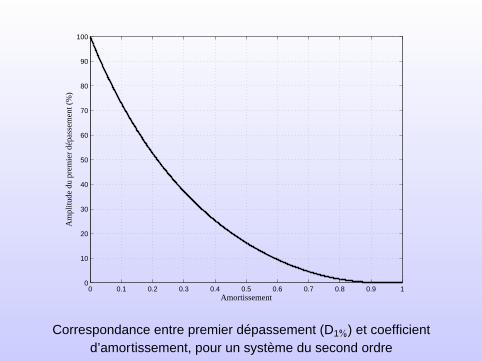
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100
Amortissement
Am
plitu
de d
u pr
emie
r dé
pass
emen
t (%
)
Correspondance entre premier dépassement (D1%) et coefficientd’amortissement, pour un système du second ordre
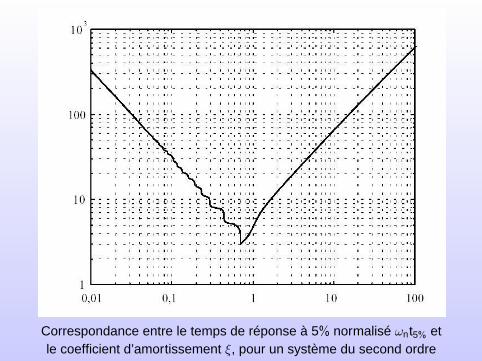
Correspondance entre le temps de réponse à 5% normalisé ωnt5% etle coefficient d’amortissement ξ, pour un système du second ordre
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du second ordre (5)
Fonction de transfert
La fonction de transfert du système du second ordre est :
G(s) =Y (s)
U(s)=
Kω2n
ω2n + 2ξωns + s2
.
Pôles = solutions de ω2n + 2ξωns + s2 = 0 :
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Systèmes du second ordre (5)
Fonction de transfert
La fonction de transfert du système du second ordre est :
G(s) =Y (s)
U(s)=
Kω2n
ω2n + 2ξωns + s2
.
Pôles = solutions de ω2n + 2ξωns + s2 = 0 :
p1,2 = −(ξ ± j√
1− ξ2)ωn si 0 < ξ 6 1
et p1,2 = −(ξ ±√
ξ2 − 1)ωn si ξ > 1.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
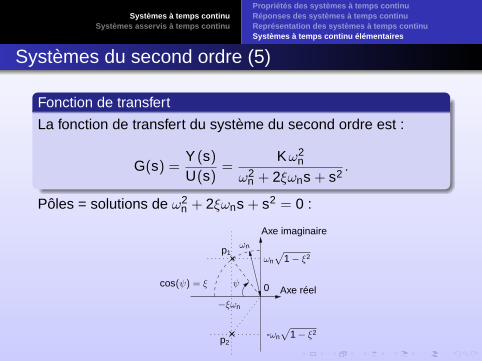
Systèmes du second ordre (5)
Fonction de transfert
La fonction de transfert du système du second ordre est :
G(s) =Y (s)
U(s)=
Kω2n
ω2n + 2ξωns + s2
.
Pôles = solutions de ω2n + 2ξωns + s2 = 0 :
0
ωn
√1− ξ2
-ωn
√1− ξ2
Axe réel
Axe imaginaire
p2
p1
−ξωn
cos(ψ) = ξ
ωn
ψ
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
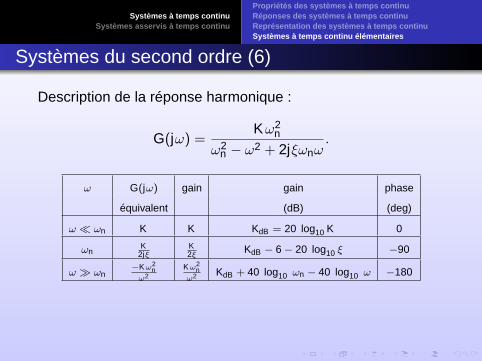
Systèmes du second ordre (6)
Description de la réponse harmonique :
G(jω) =Kω2
n
ω2n − ω2 + 2jξωnω
.
ω G(jω) gain gain phase
équivalent (dB) (deg)
ω ωn K K KdB = 20 log10 K 0
ωnK
2jξK2ξ
KdB − 6− 20 log10 ξ −90
ω ωn−Kω2
nω2
Kω2n
ω2 KdB + 40 log10 ωn − 40 log10 ω −180
100
101
102
103
104
−60
−40
−20
0
20
Am
plitu
de(d
B)
Diagramme de Bode
100
101
102
103
104
−160
−140
−120
−100
−80
−60
−40
−20
Pulsation (rad/s)
Pha
se (
deg)
ξ= 0,20,42
0,711
1,53,48
ωc
−90
−180
KdB
− 40 dB/décade
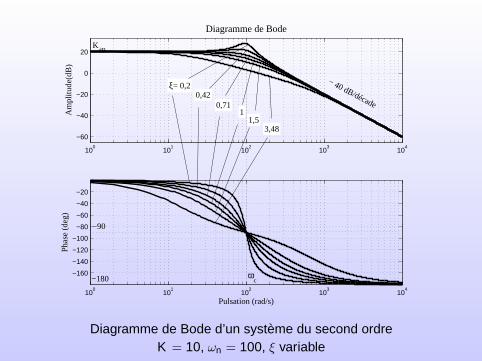
Diagramme de Bode d’un système du second ordreK = 10, ωn = 100, ξ variable
−180 −160 −140 −120 −100 −80 −60 −40 −20
−50
−40
−30
−20
−10
0
10
20
30
Phase (deg)
Gai
n (d
B)
Lieu de Black−Nichols
3,48
1
0,42
0,71
ξ= 0,2
1,5
KdB
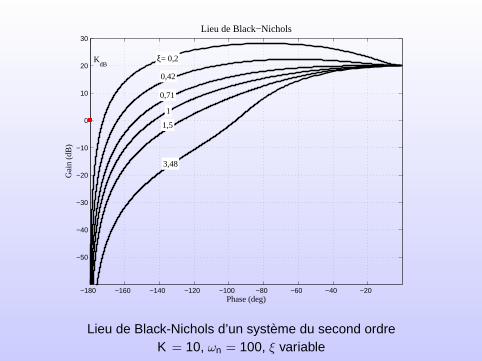
Lieu de Black-Nichols d’un système du second ordreK = 10, ωn = 100, ξ variable
−10 −5 0 5 10 15
−25
−20
−15
−10
−5
0
Axe réel
Axe
imag
inai
re
Diagramme de Nyquist
3,481,510,710,42
ξ= 0,2
K=
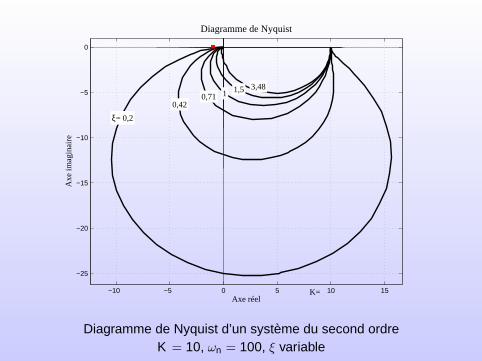
Diagramme de Nyquist d’un système du second ordreK = 10, ωn = 100, ξ variable
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
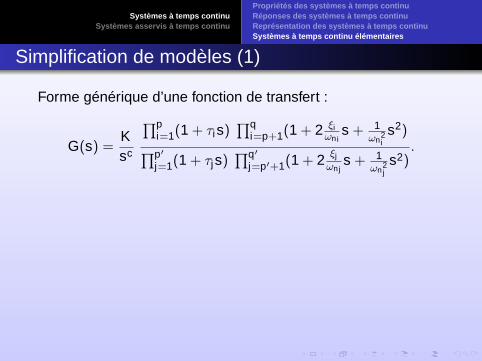
Simplification de modèles (1)
Forme générique d’une fonction de transfert :
G(s) =Ksc
∏pi=1(1 + τis)
∏qi=p+1(1 + 2 ξi
ωnis + 1
ωn2is2)∏p′
j=1(1 + τjs)∏q′
j=p′+1(1 + 2 ξjωnj
s + 1ωn
2js2)
.
Termes du premier ordre : pôles et zéros réels
Termes du second ordre : pôles et zéros complexesconjugués
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
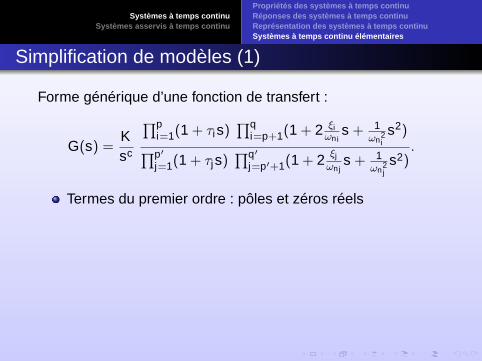
Simplification de modèles (1)
Forme générique d’une fonction de transfert :
G(s) =Ksc
∏pi=1(1 + τis)
∏qi=p+1(1 + 2 ξi
ωnis + 1
ωn2is2)∏p′
j=1(1 + τjs)∏q′
j=p′+1(1 + 2 ξjωnj
s + 1ωn
2js2)
.
Termes du premier ordre : pôles et zéros réels
Termes du second ordre : pôles et zéros complexesconjugués
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
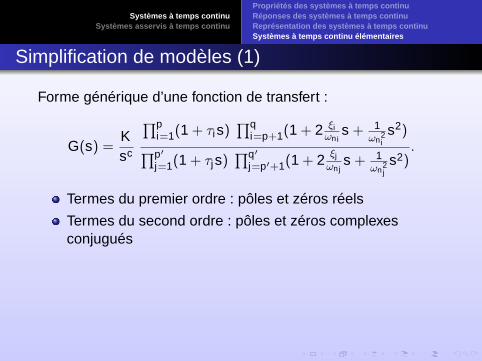
Simplification de modèles (1)
Forme générique d’une fonction de transfert :
G(s) =Ksc
∏pi=1(1 + τis)
∏qi=p+1(1 + 2 ξi
ωnis + 1
ωn2is2)∏p′
j=1(1 + τjs)∏q′
j=p′+1(1 + 2 ξjωnj
s + 1ωn
2js2)
.
Termes du premier ordre : pôles et zéros réels
Termes du second ordre : pôles et zéros complexesconjugués
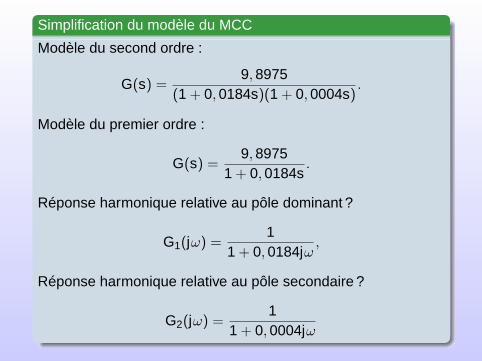
Simplification du modèle du MCC
Modèle du second ordre :
G(s) =9, 8975
(1 + 0, 0184s)(1 + 0, 0004s).
Modèle du premier ordre :
G(s) =9, 8975
1 + 0, 0184s.
Réponse harmonique relative au pôle dominant ?
G1(jω) =1
1 + 0, 0184jω,
Réponse harmonique relative au pôle secondaire ?
G2(jω) =1
1 + 0, 0004jω
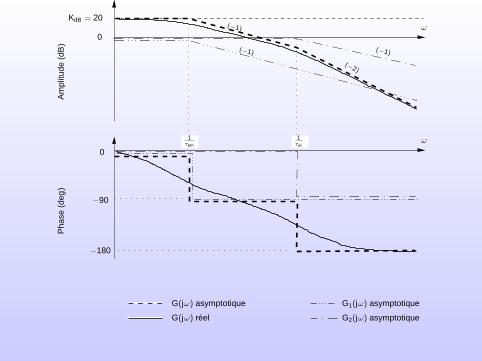
G(jω) asymptotique
G(jω) réel
0
KdB = 20
0
−180
ω
ω
G1(jω) asymptotique
G2(jω) asymptotique
Am
plitu
de(d
B)
−90
Pha
se(d
eg)
(−1)(−1)
(−1)
(−2)
1τel
1τem
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Simplification de modèles (2)
Règles générales : pôles réels
Lorsque deux pôles sont suffisamment distincts le pôle le plusprès de l’axe des imaginaires, c’est-à-dire le plus petit en valeurabsolue, associé à la constante de temps la plus lente, estprépondérant.
Si l’on doit faire une approximation pour simplifier l’étude d’unsystème, dont le modèle est d’ordre élevé, on négligera doncles pôles les plus rapides.
Si les pôles sont proches, il peut devenir plus hasardeuxd’effectuer une telle simplification.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Simplification de modèles (2)
Règles générales : pôles complexes conjugués
On pourra, de même considérer que la dynamique liée à unepaire de pôles complexes conjugués est négligeable devantcelle liée à un pôle simple ou à une autre paire de pôlescomplexes conjugués si la pulsation naturelle associée à cettepaire est grande devant la pulsation naturelle de l’autre paire,ou devant la pulsation associée au pôle simple.
Systèmes à temps continuSystèmes asservis à temps continu
Propriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
Simplification de modèles (2)
Règles générales : zéros
Cas similaire : on simplifiera les zéros entre eux de la mêmemanière.
En revanche, on procédera avec prudence pour ce qui est denégliger un zéro prépondérant au vu de la valeur des pôles.
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu

Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Notion de système asservi (1)
A la douche . . .
Douche à un bouton. . .
Après la douche brûlante, la douche à deux robinets. . .
. . . enfin, un thermostat et c’est réglé !
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Notion de système asservi (1)
A la douche . . .
Douche à un bouton. . .
Après la douche brûlante, la douche à deux robinets. . .
. . . enfin, un thermostat et c’est réglé !
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Notion de système asservi (1)
A la douche . . .
Douche à un bouton. . .
Après la douche brûlante, la douche à deux robinets. . .
. . . enfin, un thermostat et c’est réglé !
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Notion de système asservi (2)
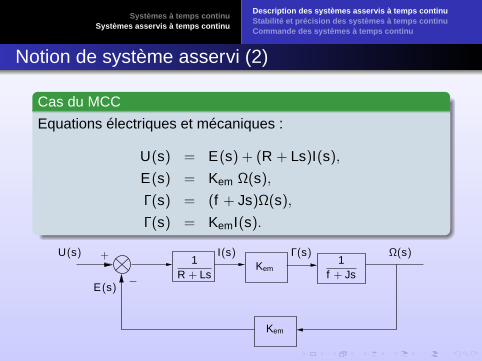
Cas du MCC
Equations électriques et mécaniques :
U(s) = E(s) + (R + Ls)I(s),
E(s) = Kem Ω(s),
Γ(s) = (f + Js)Ω(s),
Γ(s) = KemI(s).
I(s) Γ(s) Ω(s)+
−
U(s)
E(s)
Kem
Kem
1f + Js
1R + Ls
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Notion de système asservi (3)
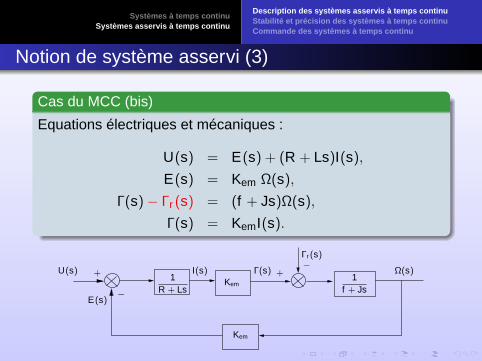
Cas du MCC (bis)
Equations électriques et mécaniques :
U(s) = E(s) + (R + Ls)I(s),
E(s) = Kem Ω(s),
Γ(s)− Γr (s) = (f + Js)Ω(s),
Γ(s) = KemI(s).
+
−
−Γr (s)
I(s) Γ(s)U(s)
E(s)
Ω(s)+
Kem
Kem1
f + Js1
R + Ls
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
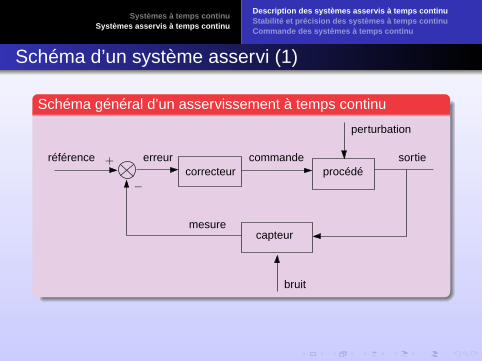
Schéma d’un système asservi (1)
Schéma général d’un asservissement à temps continu
+
−
erreur commandeprocédé
perturbation
correcteur
capteur
référence
bruit
sortie
mesure
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
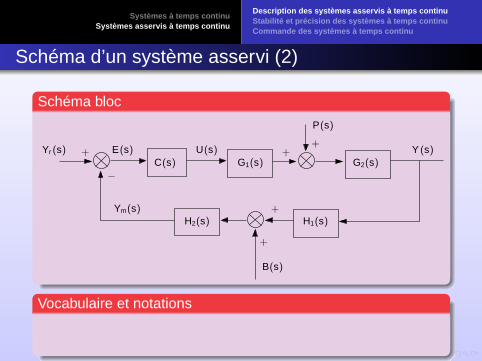
Schéma d’un système asservi (2)
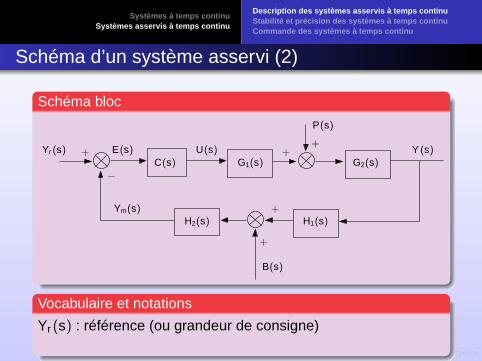
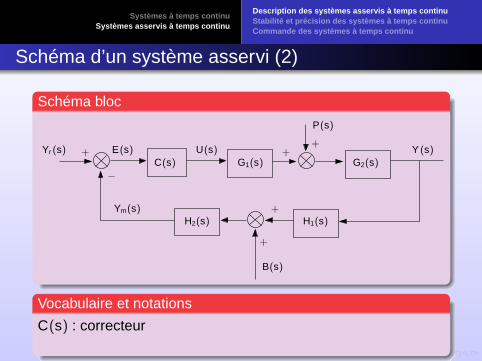
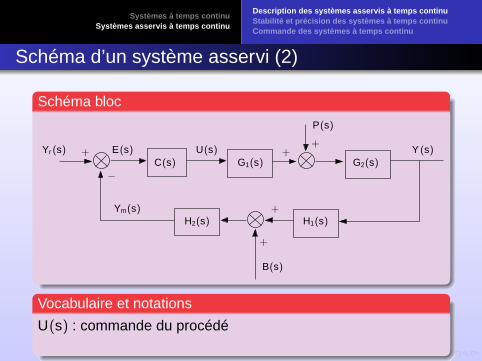
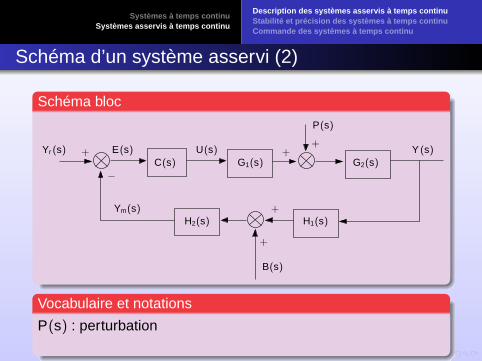
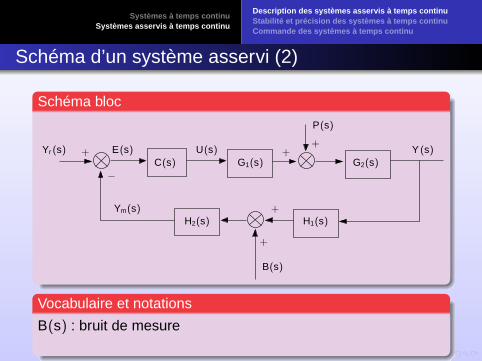
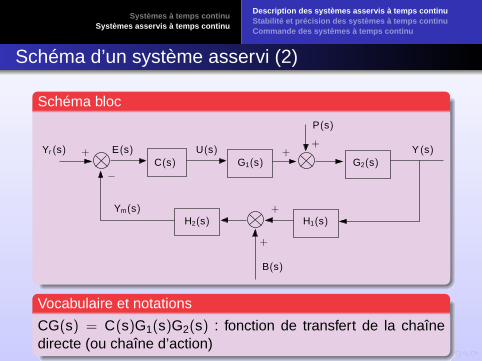
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
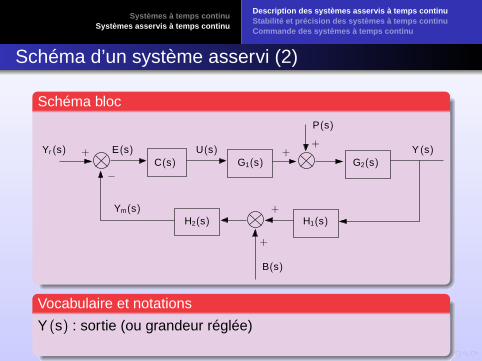
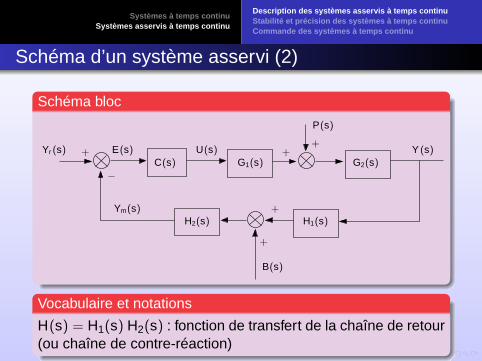
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
Yr (s) : référence (ou grandeur de consigne)
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
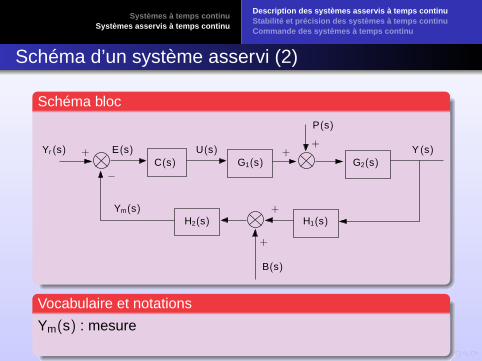
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
Y (s) : sortie (ou grandeur réglée)
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
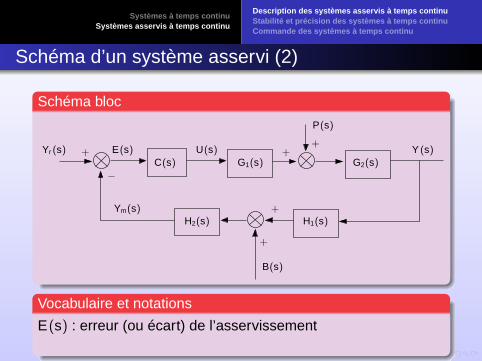
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
Ym(s) : mesure
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
E(s) : erreur (ou écart) de l’asservissement
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
C(s) : correcteur
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
U(s) : commande du procédé
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
P(s) : perturbation
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
B(s) : bruit de mesure
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
CG(s) = C(s)G1(s)G2(s) : fonction de transfert de la chaînedirecte (ou chaîne d’action)
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Schéma d’un système asservi (2)
Schéma bloc
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Vocabulaire et notations
H(s) = H1(s) H2(s) : fonction de transfert de la chaîne de retour(ou chaîne de contre-réaction)
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
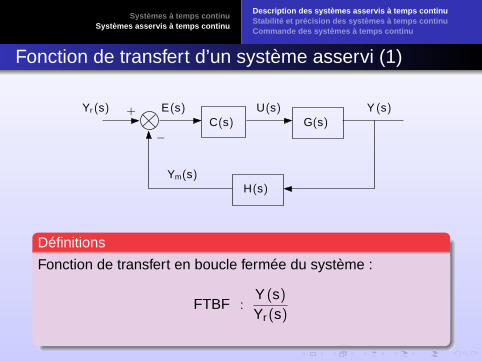
Fonction de transfert d’un système asservi (1)
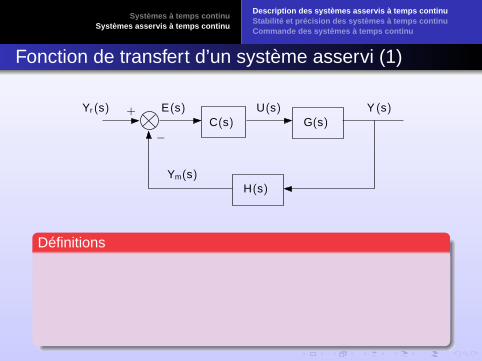
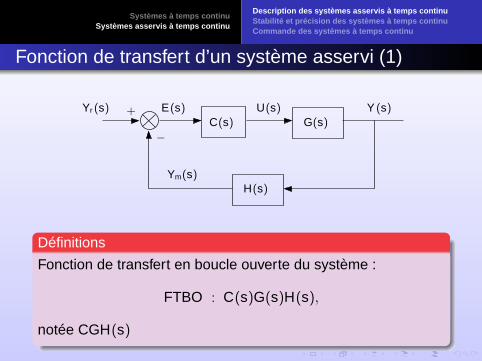
H(s)
+
−
Yr (s) E(s) U(s)
C(s) G(s)
Y (s)
Ym(s)
Définitions
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Fonction de transfert d’un système asservi (1)
H(s)
+
−
Yr (s) E(s) U(s)
C(s) G(s)
Y (s)
Ym(s)
Définitions
Fonction de transfert en boucle ouverte du système :
FTBO : C(s)G(s)H(s),
notée CGH(s)
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Fonction de transfert d’un système asservi (1)
H(s)
+
−
Yr (s) E(s) U(s)
C(s) G(s)
Y (s)
Ym(s)
Définitions
Fonction de transfert en boucle fermée du système :
FTBF :Y (s)
Yr (s)
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
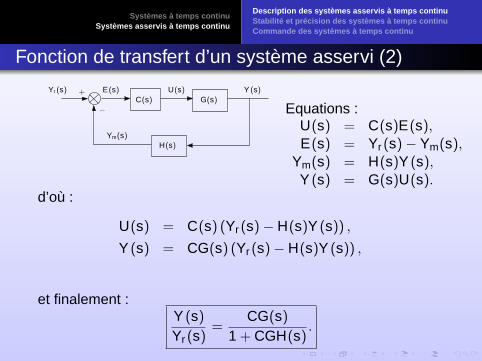
Fonction de transfert d’un système asservi (2)
H(s)
+
−
Yr (s) E(s) U(s)
C(s) G(s)
Y (s)
Ym(s)
Equations :U(s) = C(s)E(s),E(s) = Yr (s)− Ym(s),
Ym(s) = H(s)Y (s),Y (s) = G(s)U(s).
d’où :
U(s) = C(s) (Yr (s)− H(s)Y (s)) ,
Y (s) = CG(s) (Yr (s)− H(s)Y (s)) ,
et finalement :Y (s)
Yr (s)=
CG(s)
1 + CGH(s).
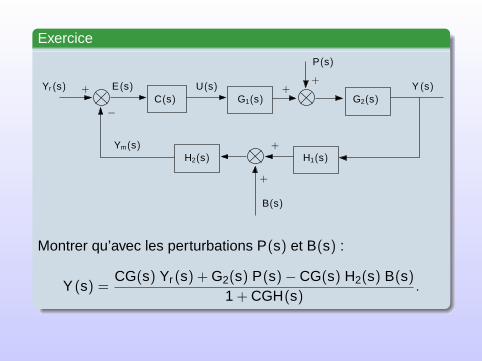
Exercice
+
−
Yr (s) E(s) Y (s)
B(s)
+U(s)
G1(s) G2(s)
+
+
P(s)
C(s)
Ym(s)H1(s)H2(s)
+
Montrer qu’avec les perturbations P(s) et B(s) :
Y (s) =CG(s) Yr (s) + G2(s) P(s)− CG(s) H2(s) B(s)
1 + CGH(s).
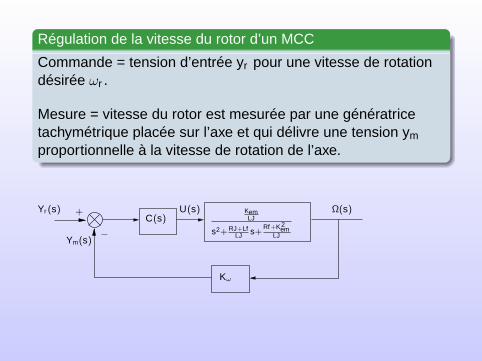
Régulation de la vitesse du rotor d’un MCC
Commande = tension d’entrée yr pour une vitesse de rotationdésirée ωr .
Mesure = vitesse du rotor est mesurée par une génératricetachymétrique placée sur l’axe et qui délivre une tension ym
proportionnelle à la vitesse de rotation de l’axe.
Régulation de la vitesse du rotor d’un MCC
Commande = tension d’entrée yr pour une vitesse de rotationdésirée ωr .
Mesure = vitesse du rotor est mesurée par une génératricetachymétrique placée sur l’axe et qui délivre une tension ym
proportionnelle à la vitesse de rotation de l’axe.
Ω(s)+
−C(s)
Yr (s) U(s)
Kω
KemLJ
s2+ RJ+LfLJ s+
Rf+K 2em
LJYm(s)
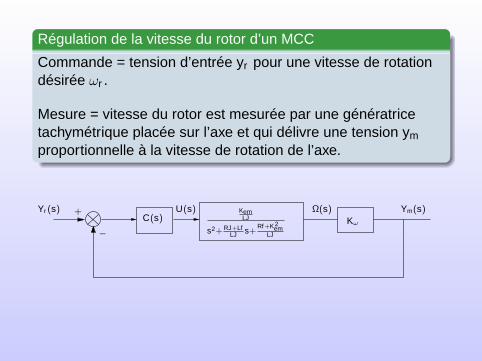
Régulation de la vitesse du rotor d’un MCC
Commande = tension d’entrée yr pour une vitesse de rotationdésirée ωr .
Mesure = vitesse du rotor est mesurée par une génératricetachymétrique placée sur l’axe et qui délivre une tension ym
proportionnelle à la vitesse de rotation de l’axe.
+
−C(s)
Yr (s)
Kω
U(s) Ω(s)KemLJ
s2+ RJ+LfLJ s+
Rf+K 2em
LJ
Ym(s)
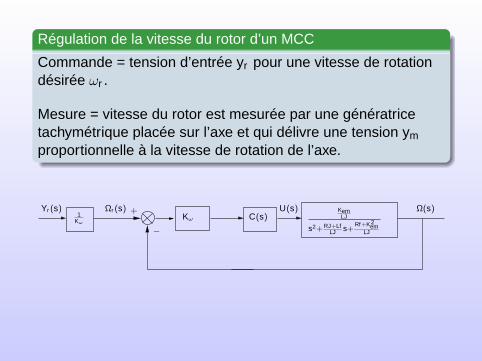
Régulation de la vitesse du rotor d’un MCC
Commande = tension d’entrée yr pour une vitesse de rotationdésirée ωr .
Mesure = vitesse du rotor est mesurée par une génératricetachymétrique placée sur l’axe et qui délivre une tension ym
proportionnelle à la vitesse de rotation de l’axe.
Kω
Ω(s)C(s)
U(s)+
−
Yr (s)1
Kω
Ωr (s) KemLJ
s2+ RJ+LfLJ s+
Rf+K 2em
LJ
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
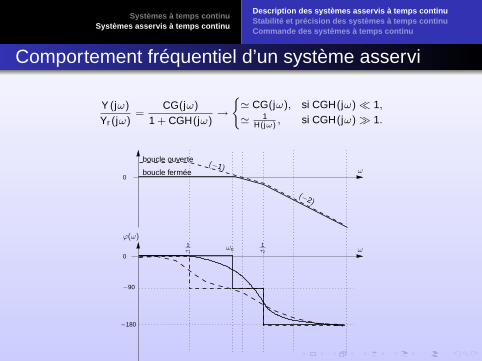
Comportement fréquentiel d’un système asservi
Y (jω)
Yr (jω)=
CG(jω)
1 + CGH(jω)→
(' CG(jω), si CGH(jω) 1,
' 1H(jω)
, si CGH(jω) 1.
−180
−90
(−1)
(−2)
1τ1
ωc1τ2
ϕ(ω)
0
0
ω
ω
boucle fermée
boucle ouverte
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Stabilité
Première définition
De manière naturelle : on dira qu’un système est stable si,écarté de sa position d’équilibre, il y revient.
Seconde définition
Un système est stable si toute entrée bornée produit une sortiebornée. Cette définition caractérise la stabilité entréebornée-sortie bornée
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères algébriques de stabilité (1)
Théorème
Un système linéaire invariant à temps continu est stable si tousses pôles sont à partie réelle strictement négative.
Ce théorème est valable pour tout système, qu’il soit en boucleouverte ou fermée. Pour un système d’ordre élevé, il fautgénéralement recourir à une résolution numérique pourdéterminer les pôles du système.
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères algébriques de stabilité (1)
Théorème
Un système linéaire invariant à temps continu est stable si tousses pôles sont à partie réelle strictement négative.
Ce théorème est valable pour tout système, qu’il soit en boucleouverte ou fermée. Pour un système d’ordre élevé, il fautgénéralement recourir à une résolution numérique pourdéterminer les pôles du système.
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
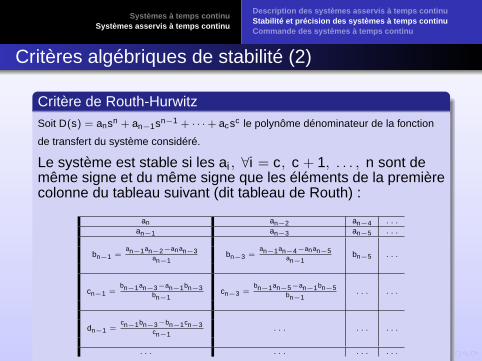
Critères algébriques de stabilité (2)
Critère de Routh-HurwitzSoit D(s) = ansn + an−1sn−1 + · · ·+ acsc le polynôme dénominateur de la fonction
de transfert du système considéré.
Le système est stable si les ai , ∀i = c, c + 1, . . . , n sont demême signe et du même signe que les éléments de la premièrecolonne du tableau suivant (dit tableau de Routh) :
an an−2 an−4 . . .
an−1 an−3 an−5 . . .
bn−1 =an−1an−2−anan−3
an−1bn−3 =
an−1an−4−anan−5an−1
bn−5 . . .
cn−1 =bn−1an−3−an−1bn−3
bn−1cn−3 =
bn−1an−5−an−1bn−5bn−1
. . . . . .
dn−1 =cn−1bn−3−bn−1cn−3
cn−1. . . . . . . . .
. . . . . . . . . . . .
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères géométriques de stabilité (1)
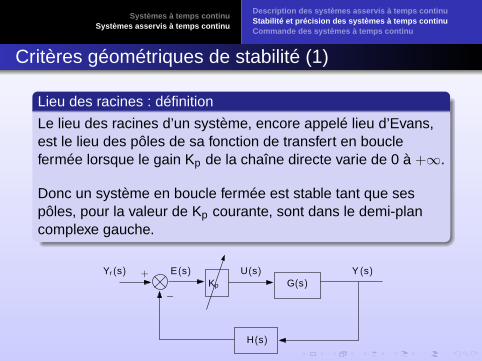
Lieu des racines : définition
Le lieu des racines d’un système, encore appelé lieu d’Evans,est le lieu des pôles de sa fonction de transfert en bouclefermée lorsque le gain Kp de la chaîne directe varie de 0 à +∞.
Donc un système en boucle fermée est stable tant que sespôles, pour la valeur de Kp courante, sont dans le demi-plancomplexe gauche.
+
−
Yr (s) E(s) Y (s)
G(s)
U(s)
H(s)
Kp
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères géométriques de stabilité (2)
Lieu des racines : construction
Soit m le degré du numérateur de la FTBO du système et n sonordre. Soit N(s) le numérateur de la FTBO du système et D(s)son dénominateur. Les propriétés suivante du lieu des racines,permettent sa construction :
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères géométriques de stabilité (2)
Lieu des racines : construction
Soit m le degré du numérateur de la FTBO du système et n sonordre. Soit N(s) le numérateur de la FTBO du système et D(s)son dénominateur. Les propriétés suivante du lieu des racines,permettent sa construction :
Règle n. 1 : Symétrie par rapport à l’axe réel ;
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères géométriques de stabilité (2)
Lieu des racines : construction
Soit m le degré du numérateur de la FTBO du système et n sonordre. Soit N(s) le numérateur de la FTBO du système et D(s)son dénominateur. Les propriétés suivante du lieu des racines,permettent sa construction :
Règle n. 2 : n branches ;
n points de départ, pour Kp = 0, confondus avec les pôlesde la FTBO ;
m points d’arrivée, pour Kp = +∞, confondus avec leszéros de la FTBO.
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères géométriques de stabilité (2)
Lieu des racines : construction
Soit m le degré du numérateur de la FTBO du système et n sonordre. Soit N(s) le numérateur de la FTBO du système et D(s)son dénominateur. Les propriétés suivante du lieu des racines,permettent sa construction :
Règle n. 3 : n −m branches infinies :
ces branches donnent n −m asymptotes faisant desangles βλ = 2λ+1
n−m π, avec λ = 0, 1 . . . , n −m − 1 avecl’horizontale ;
intersection des asymptotes avec l’axe réel au point
d’affixe δ =Pn
i=1 pi−Pm
i=1 zin−m .
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères géométriques de stabilité (2)
Lieu des racines : construction
Soit m le degré du numérateur de la FTBO du système et n sonordre. Soit N(s) le numérateur de la FTBO du système et D(s)son dénominateur. Les propriétés suivante du lieu des racines,permettent sa construction :
Règle n. 4 : Branches du lieu appartenant à l’axe réel : un pointd’affixe réelle appartient au lieu si le nombre de pôles et zérosréels de la FTBO situés à sa droite est impair ;
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères géométriques de stabilité (2)
Lieu des racines : construction
Soit m le degré du numérateur de la FTBO du système et n sonordre. Soit N(s) le numérateur de la FTBO du système et D(s)son dénominateur. Les propriétés suivante du lieu des racines,permettent sa construction :
Règle n. 5 : Intersections du lieu avec l’axe réel : un point d’affixeréelle x est un point potentiel de séparation si :
1N(s)
dN(s)
ds
∣∣∣∣s=x
=1
D(s)
dD(s)
ds
∣∣∣∣s=x
.
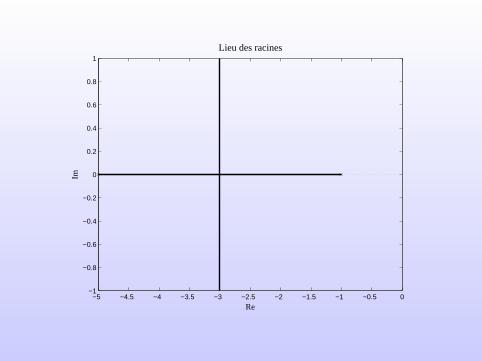
Lieu des racines d’un système du 2nd ordre, en boucle fermé
On s’intéresse au lieu des racines du procédé de fonction detransfert :
G2(s) =1
(s − p1)(s − p2)
en boucle fermée, le retour étant unitaire.
−5 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Lieu des racines
Re
Im
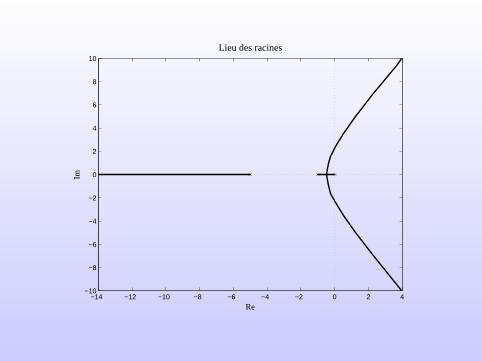
Lieu des racines d’un système du 3ème ordre, en boucle fermé
On s’intéresse au lieu des racines du procédé de fonction detransfert :
G3(s) =1
s(s − p1)(s − p2)
en boucle fermée, le retour étant unitaire.
−14 −12 −10 −8 −6 −4 −2 0 2 4−10
−8
−6
−4
−2
0
2
4
6
8
10
Lieu des racines
Re
Im
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Critères géométriques de stabilité (3)
Marges de stabilité
On définit la marge de phase par :
Mφ = 180 + ArgCGH(jωc),
où ωc est telle que |CGH(jωc)|dB = 0 dB et la marge de gainpar :
MG = −|CGH(jωπ)|dB
où ωπ est tel que ArgCGH(jωπ) = −180.
Théorème
Le système est stable en boucle fermée si la marge de phase(ou la marge de gain) du système en boucle ouverte estpositive.
Etude d’un casOn s’intéresse à un procédé de fonction de transfert :
F1(s) =5000
s3 + 61s2 + 560s + 500.
1 Calculer les pôles du système en boucle ouverte. Le système est-il stable ?2 Appliquer le critère de Routh-Hurwitz pour résoudre le même problème.3 Reprendre les deux questions précédentes pour le système en boucle fermé,
avec retour unitaire.4 Déterminer maintenant le lieu des racines du système.5 Quelle est l’influence d’un zéro ? Pour cela ajouter un zéro, de sorte que le
système ait pour fonction de transfert :
F2(s) = 50000, 2s + 1
s3 + 61s2 + 560s + 500.
6 Déterminer les marges de stabilité du système.
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Précision (1)
Précision statique
La précision statique du système est caractérisée par l’erreuren régime permanent en réponse à un échelon.
Cette erreur est appelée erreur statique (ou erreur de position).D’après le théorème de la valeur finale :
ε∞ = limt→+∞
ε(t) = lims→0
sE(s).
Précision dynamique
On parlera de précision dynamique dès que l’entrée dusystème évolue de manière continue dans le temps : parexemple on désigne par erreur de vitesse la valeur de l’erreurquand l’entrée du système est une rampe.
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Précision (2)
On suppose donc que le système asservi considéré est sansperturbation de modèle ou de mesure. L’expression de l’erreurest :
E(s) = Yr (s)− H(s)Y (s),
et donc :
E(s) = Yr (s)− CGH(s)Yr (s)
1 + CGH(s).
Finalement :
E(s) =Yr (s)
1 + CGH(s).
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Précision (3)
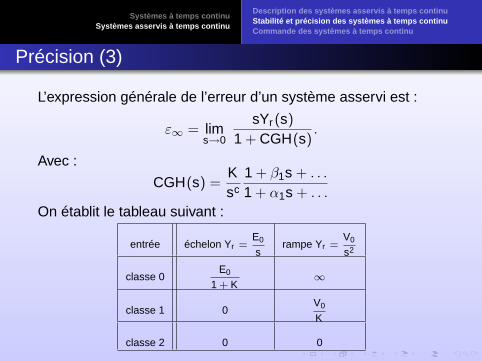
L’expression générale de l’erreur d’un système asservi est :
ε∞ = lims→0
sYr (s)
1 + CGH(s).
Avec :
CGH(s) =Ksc
1 + β1s + . . .
1 + α1s + . . .
On établit le tableau suivant :
entrée échelon Yr =E0
srampe Yr =
V0
s2
classe 0E0
1 + K∞
classe 1 0V0
K
classe 2 0 0
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
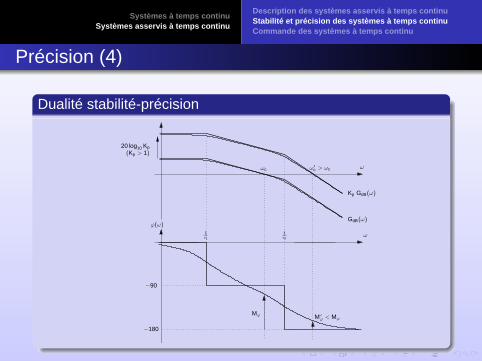
Précision (4)
Dualité stabilité-précision
20 log10 Kp
ωc ω′c > ωc ω
(Kp > 1)
GdB(ω)
Kp GdB(ω)
ϕ(ω)
−90
−180
ω
Mϕ M ′ϕ < Mϕ
1τ2
1τ1
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Plan
1 Systèmes à temps continuPropriétés des systèmes à temps continuRéponses des systèmes à temps continuReprésentation des systèmes à temps continuSystèmes à temps continu élémentaires
2 Systèmes asservis à temps continuDescription des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Commande : généralités (1)
Problème posé ?
La commande u(t) d’un système à temps continu peut êtremodifiée en asservissant ce système à l’aide d’un correcteur.
Les paramètres de réglages sont :la forme du correcteur :
sérieboucle interneretour d’étatetc.
les paramètres du correcteur :réglage des actions proportionnelle, intégrale et dérivéeréglage d’un correcteur par retour d’état
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Commande : généralités (2)
Cahier des charges
Problème posé sous forme d’un cahier des charges (faisable) =ensemble de contraintes à satisfaire
Exemples :
dépassement maximal
précision statique ou dynamique
temps de réponse
bande passante
etc.
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Commande : généralités (3)
Caractéristiques classiques d’un bon asservissement
Stabilité :
système stable
amortissement maîtrisé
Mϕ ' 50 à 70 deg
ξ ' 0, 5 à 0, 8
Précision : selon la classe ou le gain du système (le caséchéant ajout d’une ou plusieurs intégrations)
Rapidité : rapidité et bande passante sont liées (pulsation decoupure élevée, système rapide)
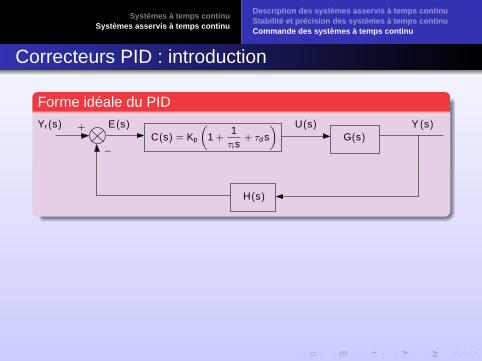
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Correcteurs PID : introduction
Forme idéale du PID
+
−
Yr (s) E(s) Y (s)
G(s)
U(s)
H(s)
C(s) = Kp
„1 +
1τis
+ τd s«
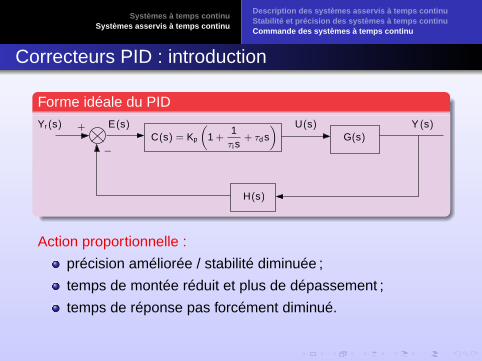
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Correcteurs PID : introduction
Forme idéale du PID
+
−
Yr (s) E(s) Y (s)
G(s)
U(s)
H(s)
C(s) = Kp
„1 +
1τis
+ τd s«
Action proportionnelle :
précision améliorée / stabilité diminuée ;
temps de montée réduit et plus de dépassement ;
temps de réponse pas forcément diminué.
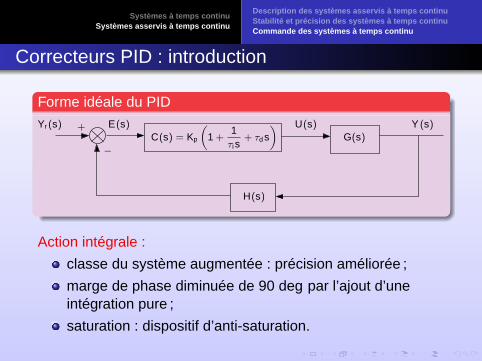
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Correcteurs PID : introduction
Forme idéale du PID
+
−
Yr (s) E(s) Y (s)
G(s)
U(s)
H(s)
C(s) = Kp
„1 +
1τis
+ τd s«
Action intégrale :
classe du système augmentée : précision améliorée ;
marge de phase diminuée de 90 deg par l’ajout d’uneintégration pure ;
saturation : dispositif d’anti-saturation.
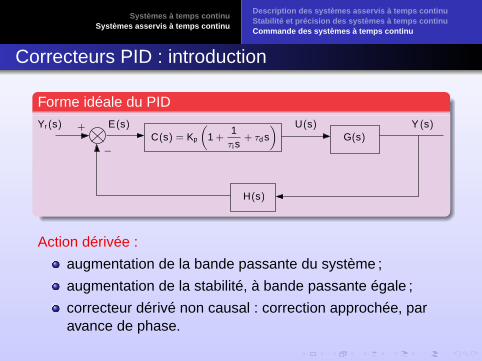
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Correcteurs PID : introduction
Forme idéale du PID
+
−
Yr (s) E(s) Y (s)
G(s)
U(s)
H(s)
C(s) = Kp
„1 +
1τis
+ τd s«
Action dérivée :
augmentation de la bande passante du système ;
augmentation de la stabilité, à bande passante égale ;
correcteur dérivé non causal : correction approchée, paravance de phase.
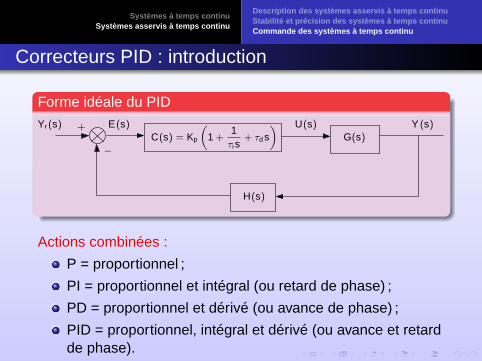
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Correcteurs PID : introduction
Forme idéale du PID
+
−
Yr (s) E(s) Y (s)
G(s)
U(s)
H(s)
C(s) = Kp
„1 +
1τis
+ τd s«
Actions combinées :
P = proportionnel ;
PI = proportionnel et intégral (ou retard de phase) ;
PD = proportionnel et dérivé (ou avance de phase) ;
PID = proportionnel, intégral et dérivé (ou avance et retardde phase).
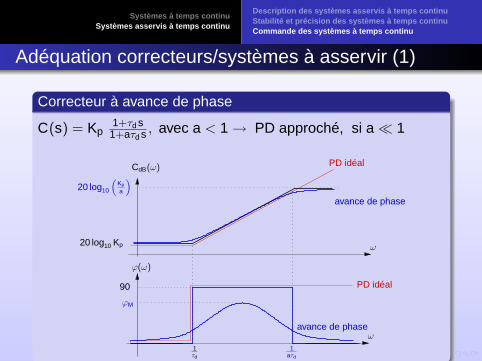
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Adéquation correcteurs/systèmes à asservir (1)
Correcteur à avance de phase
C(s) = Kp1+τd s
1+aτd s , avec a < 1→ PD approché, si a 1
ω
CdB(ω) PD idéal
PD idéal
1τd
ω
avance de phase
20 log10 Kp
ϕM
90
avance de phase
20 log10
(Kp
a
)
1aτd
ϕ(ω)
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Adéquation correcteurs/systèmes à asservir (2)
Correcteur à avance de phase : intérêt
L’intérêt de ce type de correcteur est d’ajouter de la phase ausystème en boucle ouverte, dans une certaine bande defréquence. Ceci peut permettre, sous certaines conditions, derendre le système stable ou d’augmenter sa marge de phase.Pour cette raison le correcteur à avance de phase se prête bienà la correction des systèmes peu stables, comme les systèmesde classe supérieure ou égale à un.
Avance de phase maximale telle que :
sin ϕM =1− a1 + a
à ωM =1√aτd
.
a = 0, 1→ ϕM = 54, 9 deg
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Adéquation correcteurs/systèmes à asservir (3)
Correcteur PI
C(s) = Kp
(1 +
1τis
)=
Kp(1 + τis)
τis.
Intérêt
Ce correcteur possède une intégration. Il convient donc bienlorsque l’on souhaite annuler l’erreur statique d’un système declasse 0. Contrairement au correcteur PD, le PI est tout à faitréalisable physiquement ; c’est d’ailleurs le correcteur le plusutilisé. En revanche, du fait de son action intégrale il présentel’inconvénient de saturer éventuellement l’entrée du système. Ilfaut alors l’associer à un dispositif anti-saturation, constitué leplus souvent d’un simple écréteur.
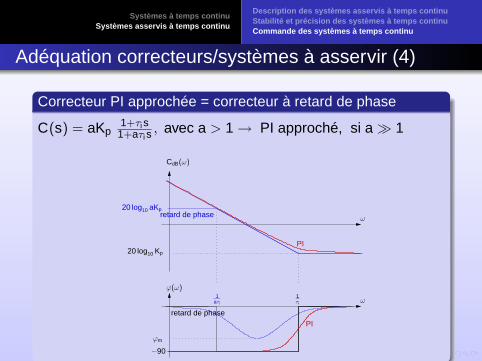
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Adéquation correcteurs/systèmes à asservir (4)
Correcteur PI approchée = correcteur à retard de phase
C(s) = aKp1+τi s
1+aτi s, avec a > 1→ PI approché, si a 1
ω
ω
CdB(ω)
ϕ(ω)
PI
PI
ϕm
−90
20 log10 Kp
20 log10 aKp
1τi
1aτi
retard de phase
retard de phase
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Adéquation correcteurs/systèmes à asservir (3)
Correcteur à avance et retard de phase (et correcteur PID)
C(s) = bKp1 + τds
1 + aτds1 + τis
1 + bτis,
avec a < 1 et b > 1.
Intérêt
Ce correcteur est bien évidemment plus général que lescorrecteurs précédents. Il a vocation à corriger des systèmesplus délicats à régler. Il n’est cependant pas nécessaired’utiliser ce type de correcteur si le cahier des charges peutêtre rempli par un des correcteurs précédemment évoqués. Enextrapolant ce qui a été vu pour les correcteurs avance etretard de phase, on conçoit que ce correcteur approche lecorrecteur PID idéal.
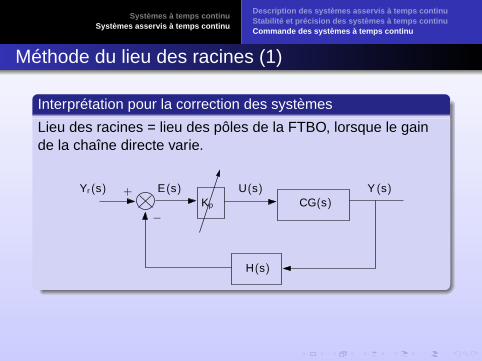
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Méthode du lieu des racines (1)
Interprétation pour la correction des systèmes
Lieu des racines = lieu des pôles de la FTBO, lorsque le gainde la chaîne directe varie.
+
−
Yr (s) E(s) Y (s)U(s)
H(s)
Kp CG(s)
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Méthode du lieu des racines (2)
Synthèse par placement de pôles et zéros
Problème de synthèse = obtention des pôles et zéros conférantau système le comportement dynamique souhaité,généralement de type second ordre :
choix de pôles et zéros compensant les pôles présentsdans la FTBO ;
choix de pôles et zéros imposant la nouvelle dynamique dusystème ;
réglage du gain.
Utilisation des courbes caractéristiques pour un système d’ordre deuxpseudo-oscillant :
courbes de même amortissement (demi-droites partant de l’origine) ;
courbes de même temps de réponse (verticales) ;et
courbes de même bande passante (demi-cercles centrés sur l’origine).
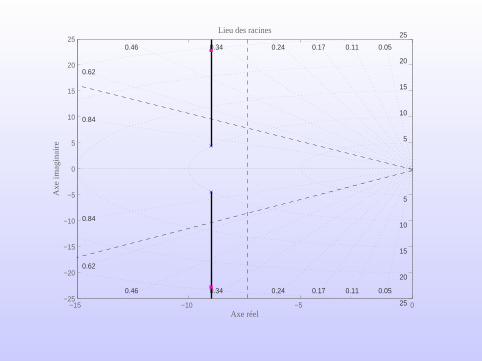
−15 −10 −5 0−25
−20
−15
−10
−5
0
5
10
15
20
250.050.110.170.240.340.46
0.62
0.84
0.050.110.170.240.340.46
0.62
0.84
5
10
15
20
25
5
10
15
20
25
Lieu des racines
Axe réel
Axe
ima
gin
aire
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Méthode du lieu des racines (3)
Attention !
Tous les systèmes ne peuvent pas nécessairement être trans-formés en système du second ordre.
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Méthode du lieu des racines (3)
Attention !
Certaines compensations doivent être évitées : on ne compen-sera jamais un pôle à partie réelle positive :
s − (pi + ∆pi)
s − pi= 1− ∆pi
s − pi.
Première synthèse
F1(s) =5000
s3 + 61s2 + 560s + 500.
Cahier des charges : amortissement de 0, 7 et temps deréponse t5% < 0, 2s.
A la main
Tracer le lieu des racines et effectuer une correctionproportionnelle.
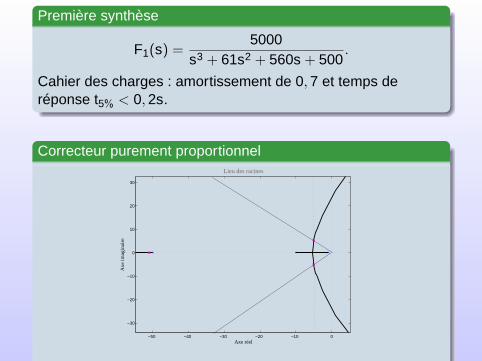
Première synthèse
F1(s) =5000
s3 + 61s2 + 560s + 500.
Cahier des charges : amortissement de 0, 7 et temps deréponse t5% < 0, 2s.
Correcteur purement proportionnel
−50 −40 −30 −20 −10 0
−30
−20
−10
0
10
20
30
Lieu des racines
Axe réel
Axe
imag
inai
re
On obtient alors un gain Kp = 0, 41, mais t5% = 0, 44 s.
Première synthèse
F1(s) =5000
s3 + 61s2 + 560s + 500.
Cahier des charges : amortissement de 0, 7 et temps deréponse t5% < 0, 2s.
A la main
Tracer le lieu des racines et effectuer une correctionproportionnelle et dérivée.
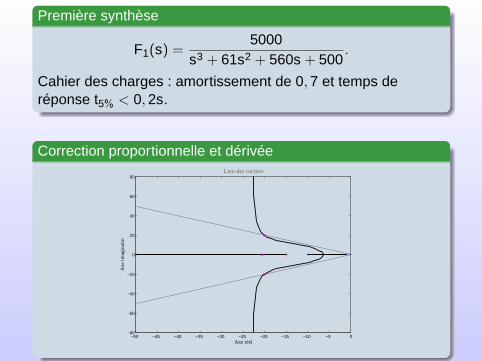
Première synthèse
F1(s) =5000
s3 + 61s2 + 560s + 500.
Cahier des charges : amortissement de 0, 7 et temps deréponse t5% < 0, 2s.
Correction proportionnelle et dérivée
−50 −45 −40 −35 −30 −25 −20 −15 −10 −5 0−80
−60
−40
−20
0
20
40
60
80Lieu des racines
Axe réel
Axe
imag
inai
re
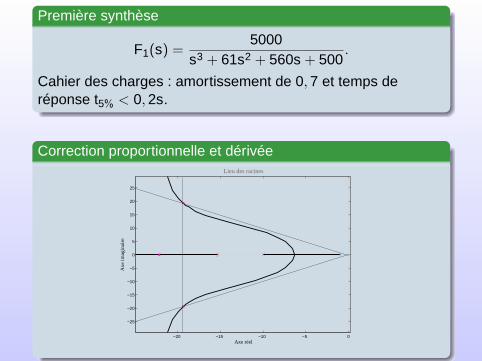
Première synthèse
F1(s) =5000
s3 + 61s2 + 560s + 500.
Cahier des charges : amortissement de 0, 7 et temps deréponse t5% < 0, 2s.
Correction proportionnelle et dérivée
−20 −15 −10 −5 0
−25
−20
−15
−10
−5
0
5
10
15
20
25
Lieu des racines
Axe réel
Axe
imag
inai
re
Première synthèse
F1(s) =5000
s3 + 61s2 + 560s + 500.
Cahier des charges : amortissement de 0, 7 et temps deréponse t5% < 0, 2s.
A la main
Tracer le lieu des racines et ajouter une paire pôle-zéro deplus ?!
Première synthèse
F1(s) =5000
s3 + 61s2 + 560s + 500.
Cahier des charges : amortissement de 0, 7 et temps deréponse t5% < 0, 2s.
A la main ? ?
Tracer le lieu des racines et ajouter une paire pôle-zéro de plus
. . .et si on utilisait Matlab. . .
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Méthodes harmoniques : correction PI
Correction PI
Réglage d’un correcteur PI :
C(s) = Kp
(1 +
1τis
)=
Kp(1 + τis)
τis.
en utilisant le diagramme de Bode.
Hypothèse
Système de classe zéro avec deux pôles réels, associés auxconstantes de temps τ1 et τ2, τ1 τ2.
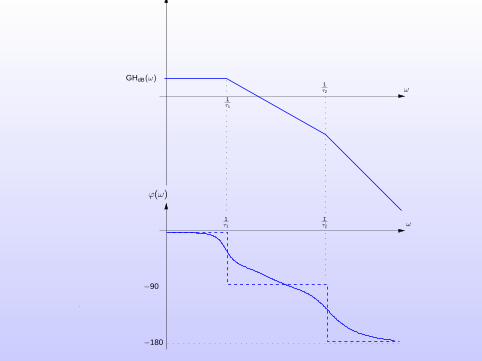
ω
ϕ(ω)
−90
−180
1τ1
1τ2
GHdB(ω)1τ2
ω
1τ1
.
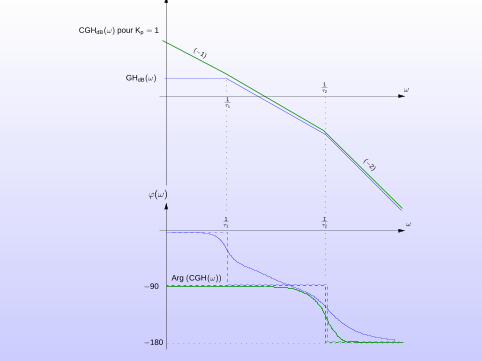
ω
ϕ(ω)
−90
−180
1τ1
1τ2
GHdB(ω)1τ2
ω
CGHdB(ω) pour Kp = 1
Arg (CGH(ω))
1τ1
(−1)
(−2)
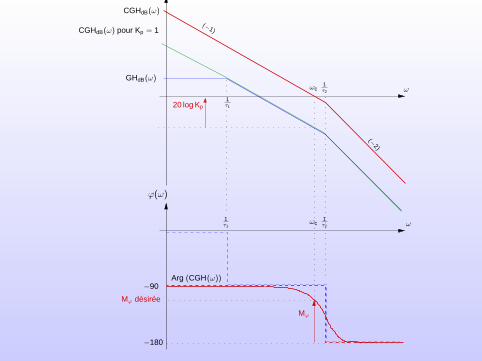
ωωc
ϕ(ω)
−90
−180
Mϕ
1τ1
1τ2
ωc
CGHdB(ω)
GHdB(ω)1τ2
(−1)
ω
CGHdB(ω) pour Kp = 1
20 log Kp
Arg (CGH(ω))
1τ1
Mϕ désirée
(−2)
Synthèse de correcteur PI
G(s) =1
(s + 1)(s + 5)
Cahier des charges :
erreur statique nulleréglage de la stabilité
premier cas : marge de phase de 45 degdeuxième cas : coefficient d’amortissement de 0, 7
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Méthodes harmoniques : correction à avance dephase
Correction à avance de phase
Réglage d’un correcteur PD approché :
C(s) = Kp1 + τds
1 + aτds
en utilisant le diagramme de Bode.
Hypothèse
Système est de classe 1 avec un pôle réel, associé à laconstante de temps τ1.
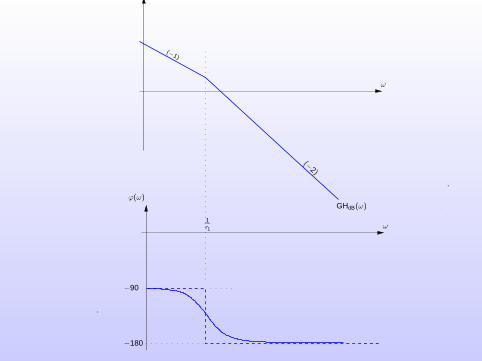
ω
(−1)
ϕ(ω)
−90
−180
ω
.
.
(−2)
GHdB(ω)
1τ1
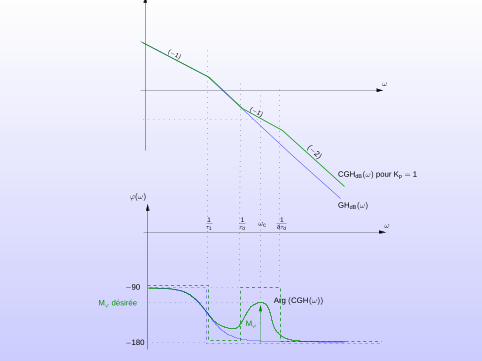
ω
(−1)
(−1)
ϕ(ω)
−90
−180
ω
Mϕ
Mϕ désirée Arg (CGH(ω))
(−2)
CGHdB(ω) pour Kp = 1
GHdB(ω)
1τ1
1τd
ωc1
aτd
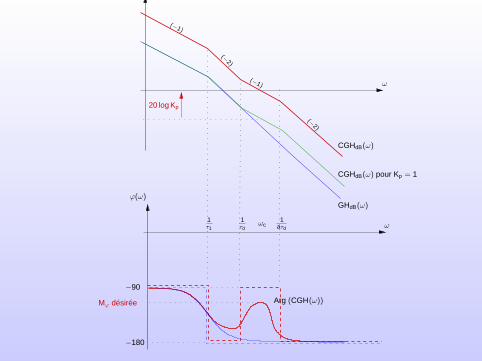
ω(−1)
(−1)
ϕ(ω)
−90
−180
CGHdB(ω)
ω
20 log Kp
Mϕ désirée Arg (CGH(ω))
(−2)
(−2)
CGHdB(ω) pour Kp = 1
GHdB(ω)
1τ1
1τd
ωc1
aτd
Synthèse de correcteur à avance de phase
G(s) =150
s(s + 5)
Cahier des charges :
erreur statique nulle
marge de phase de 60 deg
bande passante 10 rad/s
Systèmes à temps continuSystèmes asservis à temps continu
Description des systèmes asservis à temps continuStabilité et précision des systèmes à temps continuCommande des systèmes à temps continu
Autres méthodes
Méthodes de Ziegler-Nichols
Essais :
identification de la réponse indicielle ;
identification du régime critique ;
Synthèse sous forme de tableaux.
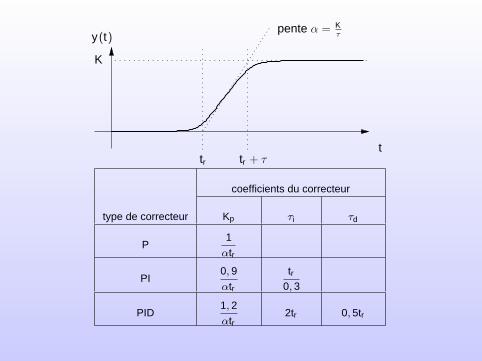
t
K
y(t)
tr + τ
pente α = Kτ
tr
coefficients du correcteur
type de correcteur Kp τi τd
P1
αtr
PI0, 9
αtr
tr0, 3
PID1, 2
αtr2tr 0, 5tr
Systèmes à temps discretAsservissements à temps discret
Deuxième partie II
Systèmes et asservissements à temps discret
Systèmes à temps discretAsservissements à temps discret
Plan
3 Systèmes à temps discretSignaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
4 Asservissements à temps discretNotion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Plan
3 Systèmes à temps discretSignaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
4 Asservissements à temps discretNotion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Plan
3 Systèmes à temps discretSignaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
4 Asservissements à temps discretNotion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Signaux à temps discret
Définition
Un signal à temps discret est une suite ordonnée de valeursnumériques réelles, complexes, scalaires ou vectorielles. Onnote f (k) la valeur du signal à l’instant k (k -ème valeur dusignal).
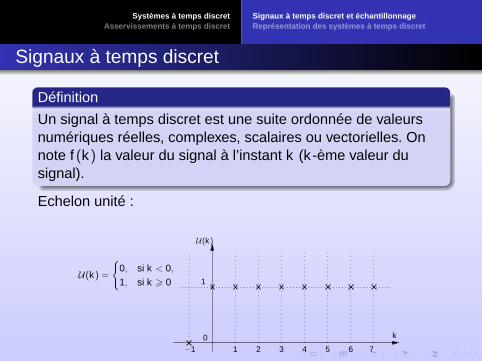
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Signaux à temps discret
Définition
Un signal à temps discret est une suite ordonnée de valeursnumériques réelles, complexes, scalaires ou vectorielles. Onnote f (k) la valeur du signal à l’instant k (k -ème valeur dusignal).
Echelon unité :
1−1 2 3 4 5 6
U(k)
07
k
U(k) =
0, si k < 0,1, si k > 0 1
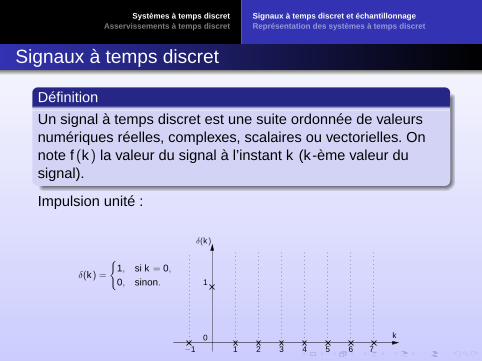
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Signaux à temps discret
Définition
Un signal à temps discret est une suite ordonnée de valeursnumériques réelles, complexes, scalaires ou vectorielles. Onnote f (k) la valeur du signal à l’instant k (k -ème valeur dusignal).
Impulsion unité :
1−1 2 3 4 5 60
1
7
k
δ(k) =
1, si k = 0,0, sinon.
δ(k)

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Echantillonnage idéal
Définition
On appelle signal échantillonné idéal le signal à temps continu :
f ∗(t) =+∞∑
k=−∞f (kTe)δ(t − kTe)
où δ(t) représente l’impulsion de Dirac.
Autrement dit :
f∗(t) =+∞X
k=−∞f (t)δ(t − kTe) = f (t)
+∞Xk=−∞
δ(t − kTe)
donc f∗(t) peigne d’impulsions de Dirac δTe (t) =P+∞
k=−∞ δ(t − kTe), de période Te,
modulé en amplitude par f (t).
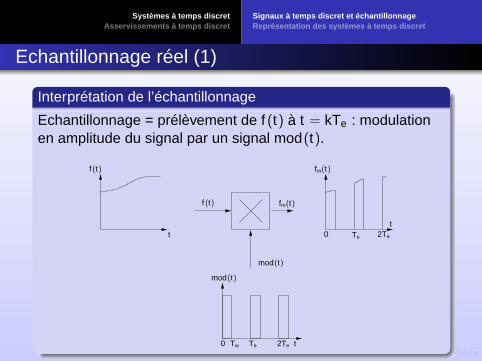
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Echantillonnage réel (1)
Interprétation de l’échantillonnage
Echantillonnage = prélèvement de f (t) à t = kTe : modulationen amplitude du signal par un signal mod(t).
tTw
0t
f (t)
f (t)
0
t
mod(t)
mod(t)
fm(t)
fm(t)
Te 2Te
Te 2Te
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Echantillonnage réel (2)
Pour Tw petit :
fm(t) = f (t) mod(t)
= f (t)+∞∑
k=−∞U(t − kTe)− U(t − kTe − Tw ),
=+∞∑
k=−∞f (kTe) (U(t − kTe)− U(t − kTe − Tw )) ,
= Tw
+∞∑k=−∞
f (kTe)δ(t − kTe) = Tw f ∗(t).
Le signal échantillonné idéal f ∗(t) a donc les mêmes propriétésspectrales (même forme des transformées de Laplace) que lesignal fm(t) issu d’un échantillonnage réel (ou réaliste) de f (t).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Echantillonnage réel (2)
Pour Tw petit :
fm(t) = f (t) mod(t)
= f (t)+∞∑
k=−∞U(t − kTe)− U(t − kTe − Tw ),
=+∞∑
k=−∞f (kTe) (U(t − kTe)− U(t − kTe − Tw )) ,
= Tw
+∞∑k=−∞
f (kTe)δ(t − kTe) = Tw f ∗(t).
Le signal échantillonné idéal f ∗(t) a donc les mêmes propriétésspectrales (même forme des transformées de Laplace) que lesignal fm(t) issu d’un échantillonnage réel (ou réaliste) de f (t).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Echantillonnage réel (2)
Pour Tw petit :
fm(t) = f (t) mod(t)
= f (t)+∞∑
k=−∞U(t − kTe)− U(t − kTe − Tw ),
=+∞∑
k=−∞f (kTe) (U(t − kTe)− U(t − kTe − Tw )) ,
= Tw
+∞∑k=−∞
f (kTe)δ(t − kTe) = Tw f ∗(t).
Le signal échantillonné idéal f ∗(t) a donc les mêmes propriétésspectrales (même forme des transformées de Laplace) que lesignal fm(t) issu d’un échantillonnage réel (ou réaliste) de f (t).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Echantillonnage réel (2)
Pour Tw petit :
fm(t) = f (t) mod(t)
= f (t)+∞∑
k=−∞U(t − kTe)− U(t − kTe − Tw ),
=+∞∑
k=−∞f (kTe) (U(t − kTe)− U(t − kTe − Tw )) ,
= Tw
+∞∑k=−∞
f (kTe)δ(t − kTe)
= Tw f ∗(t).
Le signal échantillonné idéal f ∗(t) a donc les mêmes propriétésspectrales (même forme des transformées de Laplace) que lesignal fm(t) issu d’un échantillonnage réel (ou réaliste) de f (t).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Echantillonnage réel (2)
Pour Tw petit :
fm(t) = f (t) mod(t)
= f (t)+∞∑
k=−∞U(t − kTe)− U(t − kTe − Tw ),
=+∞∑
k=−∞f (kTe) (U(t − kTe)− U(t − kTe − Tw )) ,
= Tw
+∞∑k=−∞
f (kTe)δ(t − kTe) = Tw f ∗(t).
Le signal échantillonné idéal f ∗(t) a donc les mêmes propriétésspectrales (même forme des transformées de Laplace) que lesignal fm(t) issu d’un échantillonnage réel (ou réaliste) de f (t).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Echantillonnage réel (2)
Pour Tw petit :
fm(t) = f (t) mod(t)
= f (t)+∞∑
k=−∞U(t − kTe)− U(t − kTe − Tw ),
=+∞∑
k=−∞f (kTe) (U(t − kTe)− U(t − kTe − Tw )) ,
= Tw
+∞∑k=−∞
f (kTe)δ(t − kTe) = Tw f ∗(t).
Le signal échantillonné idéal f ∗(t) a donc les mêmes propriétésspectrales (même forme des transformées de Laplace) que lesignal fm(t) issu d’un échantillonnage réel (ou réaliste) de f (t).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (1)
Première expression :
F ∗(s) =
∫ +∞
0f ∗(t)e−stdt ,
=
∫ +∞
0
(+∞∑
k=−∞f (kTe)δ(t − kTe)
)e−stdt ,
=+∞∑
k=−∞f (kTe)
(∫ +∞
0δ(t − kTe)e−stdt
).
On obtient finalement :
F ∗(s) =+∞∑
k=−∞f (kTe)e−kTes.

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (1)
Première expression :
F ∗(s) =
∫ +∞
0f ∗(t)e−stdt ,
=
∫ +∞
0
(+∞∑
k=−∞f (kTe)δ(t − kTe)
)e−stdt ,
=+∞∑
k=−∞f (kTe)
(∫ +∞
0δ(t − kTe)e−stdt
).
On obtient finalement :
F ∗(s) =+∞∑
k=−∞f (kTe)e−kTes.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (1)
Première expression :
F ∗(s) =
∫ +∞
0f ∗(t)e−stdt ,
=
∫ +∞
0
(+∞∑
k=−∞f (kTe)δ(t − kTe)
)e−stdt ,
=+∞∑
k=−∞f (kTe)
(∫ +∞
0δ(t − kTe)e−stdt
).
On obtient finalement :
F ∗(s) =+∞∑
k=−∞f (kTe)e−kTes.
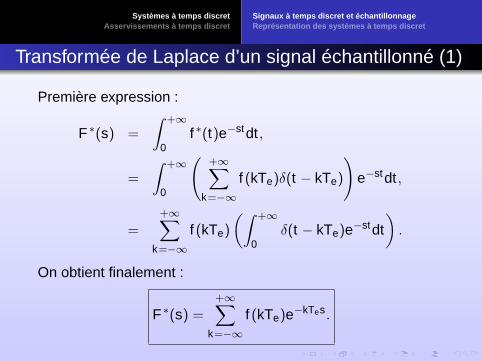
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (1)
Première expression :
F ∗(s) =
∫ +∞
0f ∗(t)e−stdt ,
=
∫ +∞
0
(+∞∑
k=−∞f (kTe)δ(t − kTe)
)e−stdt ,
=+∞∑
k=−∞f (kTe)
(∫ +∞
0δ(t − kTe)e−stdt
).
On obtient finalement :
F ∗(s) =+∞∑
k=−∞f (kTe)e−kTes.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (2)
Deuxième expression :
f ∗(t) = f (t)δTe(t),
avec δTe(t) =+∞∑
k=−∞cke
2πktTe ,
où ck =1Te
∫ Te2
− Te2
δTe(t)e−2jπkt
Te dt =1Te
.
donc f ∗(t) = f (t)+∞∑
k=−∞
1Te
e2jπkt
Te ,
=1Te
+∞∑k=−∞
f (t)e2jπkt
Te

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (2)
Deuxième expression :
f ∗(t) = f (t)δTe(t),
avec δTe(t) =+∞∑
k=−∞cke
2πktTe ,
où ck =1Te
∫ Te2
− Te2
δTe(t)e−2jπkt
Te dt =1Te
.
donc f ∗(t) = f (t)+∞∑
k=−∞
1Te
e2jπkt
Te ,
=1Te
+∞∑k=−∞
f (t)e2jπkt
Te
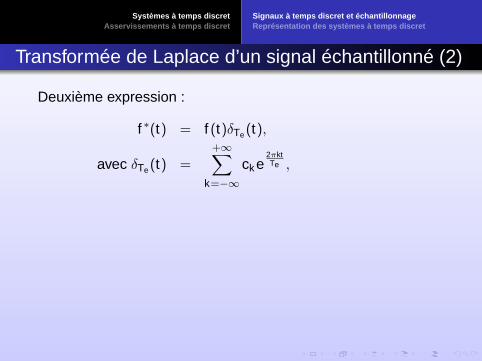
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (2)
Deuxième expression :
f ∗(t) = f (t)δTe(t),
avec δTe(t) =+∞∑
k=−∞cke
2πktTe ,
où ck =1Te
∫ Te2
− Te2
δTe(t)e−2jπkt
Te dt =1Te
.
donc f ∗(t) = f (t)+∞∑
k=−∞
1Te
e2jπkt
Te ,
=1Te
+∞∑k=−∞
f (t)e2jπkt
Te
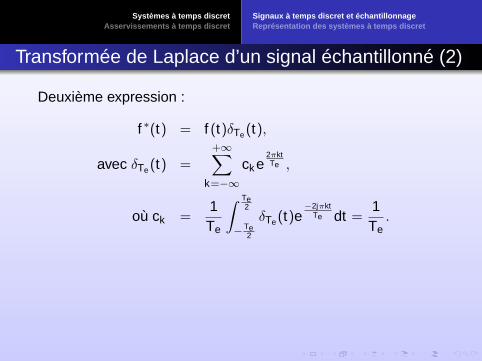
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (2)
Deuxième expression :
f ∗(t) = f (t)δTe(t),
avec δTe(t) =+∞∑
k=−∞cke
2πktTe ,
où ck =1Te
∫ Te2
− Te2
δTe(t)e−2jπkt
Te dt =1Te
.
donc f ∗(t) = f (t)+∞∑
k=−∞
1Te
e2jπkt
Te ,
=1Te
+∞∑k=−∞
f (t)e2jπkt
Te
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (2)
Deuxième expression :
f ∗(t) = f (t)δTe(t),
avec δTe(t) =+∞∑
k=−∞cke
2πktTe ,
où ck =1Te
∫ Te2
− Te2
δTe(t)e−2jπkt
Te dt =1Te
.
donc f ∗(t) = f (t)+∞∑
k=−∞
1Te
e2jπkt
Te ,
=1Te
+∞∑k=−∞
f (t)e2jπkt
Te
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (2)
Deuxième expression :
f ∗(t) = f (t)δTe(t),
avec δTe(t) =+∞∑
k=−∞cke
2πktTe ,
où ck =1Te
∫ Te2
− Te2
δTe(t)e−2jπkt
Te dt =1Te
.
donc f ∗(t) = f (t)+∞∑
k=−∞
1Te
e2jπkt
Te ,
=1Te
+∞∑k=−∞
f (t)e2jπkt
Te

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (3)
On en déduit :
F ∗(s) =
∫ +∞
0
(1Te
+∞∑k=−∞
f (t)e2jπkt
Te
)e−stdt ,
=1Te
+∞∑k=−∞
(∫ +∞
0f (t)e−(s− 2jπk
Te)tdt)
,
soit finalement :
F ∗(s) =1Te
+∞∑k=−∞
F(
s − 2jπkTe
).

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (3)
On en déduit :
F ∗(s) =
∫ +∞
0
(1Te
+∞∑k=−∞
f (t)e2jπkt
Te
)e−stdt ,
=1Te
+∞∑k=−∞
(∫ +∞
0f (t)e−(s− 2jπk
Te)tdt)
,
soit finalement :
F ∗(s) =1Te
+∞∑k=−∞
F(
s − 2jπkTe
).

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée de Laplace d’un signal échantillonné (3)
On en déduit :
F ∗(s) =
∫ +∞
0
(1Te
+∞∑k=−∞
f (t)e2jπkt
Te
)e−stdt ,
=1Te
+∞∑k=−∞
(∫ +∞
0f (t)e−(s− 2jπk
Te)tdt)
,
soit finalement :
F ∗(s) =1Te
+∞∑k=−∞
F(
s − 2jπkTe
).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Analyse spectrale de l’échantillonnage (1)
Définition
La transformée de Fourier d’un signal causal f (t) est :
F (jω) = Ff (t) =
∫ +∞
0f (t)e−jωtdt .
C’est un cas particulier de la transformée de Laplace. Lemodule de la transformée de Fourier d’un signal est appeléspectre de ce signal (d’où l’analyse spectrale)
Propriété
La transformée de Fourier inverse vaut :
f (t) = F−1F (jω) =1
2π
∫ +∞
−∞F (jω)ejωtdt .
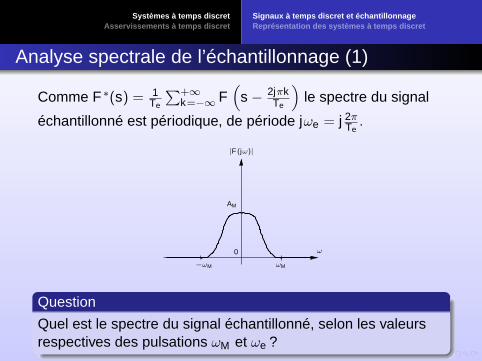
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Analyse spectrale de l’échantillonnage (1)
Comme F ∗(s) = 1Te
∑+∞k=−∞ F
(s − 2jπk
Te
)le spectre du signal
échantillonné est périodique, de période jωe = j 2πTe
.
ω
ωM−ωM
0
|F (jω)|
AM
Question
Quel est le spectre du signal échantillonné, selon les valeursrespectives des pulsations ωM et ωe ?
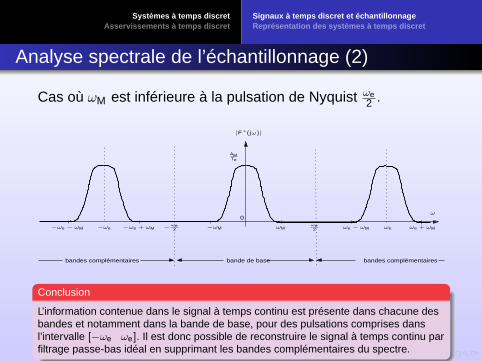
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Analyse spectrale de l’échantillonnage (2)
Cas où ωM est inférieure à la pulsation de Nyquist ωe2 .
−ωe2 ωM−ωM
0
ωe − ωM ωe + ωMωe2−ωe + ωM−ωe−ωe − ωM ωe
bande de base bandes complémentairesbandes complémentaires
ω
AMTe
|F∗(jω)|
Conclusion
L’information contenue dans le signal à temps continu est présente dans chacune desbandes et notamment dans la bande de base, pour des pulsations comprises dansl’intervalle [−ωe ωe]. Il est donc possible de reconstruire le signal à temps continu parfiltrage passe-bas idéal en supprimant les bandes complémentaires du spectre.
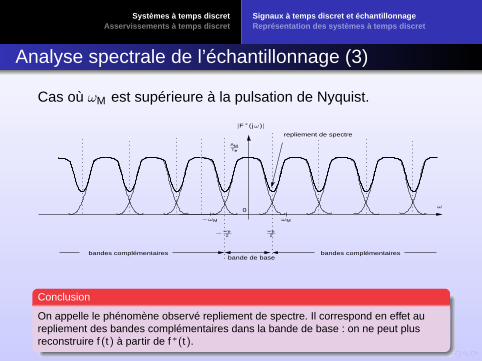
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Analyse spectrale de l’échantillonnage (3)
Cas où ωM est supérieure à la pulsation de Nyquist.
0
bande de basebandes complémentaires bandes complémentaires
ωM
ω
AMTe
ωe2−ωe
2
repliement de spectre
|F∗(jω)|
−ωM
Conclusion
On appelle le phénomène observé repliement de spectre. Il correspond en effet aurepliement des bandes complémentaires dans la bande de base : on ne peut plusreconstruire f (t) à partir de f∗(t).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Analyse spectrale de l’échantillonnage (3)
Théorème de Shannon
Pour pouvoir reconstituer sans perte d’information un signal àtemps continu à partir d’échantillons de période Te de cesignal, il faut que la fréquence d’échantillonnage fe = 1
Tesoit au
moins égale au double de la fréquence maximale contenuedans le spectre de ce signal.
Filtrage anti-repliement
Si, la fréquence d’échantillonnage étant fixée, le signalcomporte des composantes spectrales à des fréquencessupérieures à la fréquence de Nyquist, il faut que le signalanalogique soit filtré avant échantillonnage de manière àassurer un repliement négligeable. Un tel filtre passe-basanalogique est appelé filtre anti-repliement.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Analyse spectrale de l’échantillonnage (3)
Théorème de Shannon
Pour pouvoir reconstituer sans perte d’information un signal àtemps continu à partir d’échantillons de période Te de cesignal, il faut que la fréquence d’échantillonnage fe = 1
Tesoit au
moins égale au double de la fréquence maximale contenuedans le spectre de ce signal.
Filtrage anti-repliement
Si, la fréquence d’échantillonnage étant fixée, le signalcomporte des composantes spectrales à des fréquencessupérieures à la fréquence de Nyquist, il faut que le signalanalogique soit filtré avant échantillonnage de manière àassurer un repliement négligeable. Un tel filtre passe-basanalogique est appelé filtre anti-repliement.
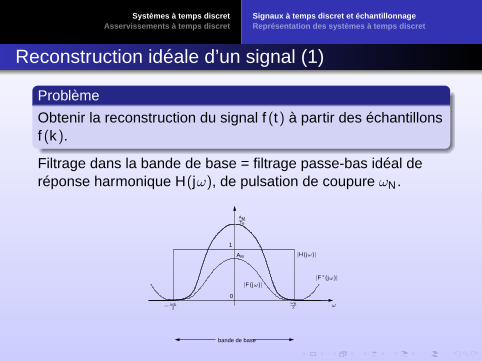
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (1)
Problème
Obtenir la reconstruction du signal f (t) à partir des échantillonsf (k).
Filtrage dans la bande de base = filtrage passe-bas idéal deréponse harmonique H(jω), de pulsation de coupure ωN .
−ωe2
ωe2
0
bande de base
|H(jω)|
|F∗(jω)|
AMTe
AM
ω
1
|F (jω)|
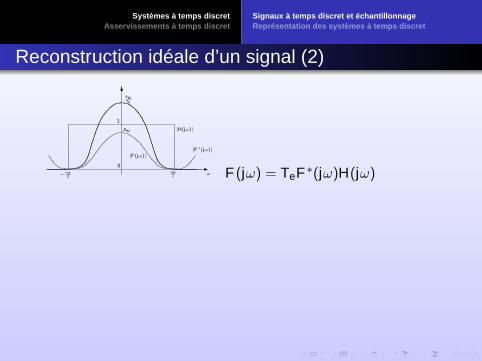
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (2)
−ωe2
ωe2
0
|H(jω)|
|F∗(jω)|
AMTe
AM
ω
1
|F (jω)|
F (jω) = TeF ∗(jω)H(jω)
d’où : f (t) = F−1F (jω) = F−1TeF ∗(jω)H(jω),
=Te
2π
∫ +∞
−∞F ∗(jω)H(jω)ejωtdω,
=Te
2π
∫ ωe2
−ωe2
F ∗(jω)ejωtdω,
=Te
2π
∫ πTe
− πTe
(+∞∑
k=−∞f (kTe)e−jωkTe
)ejωtdω.
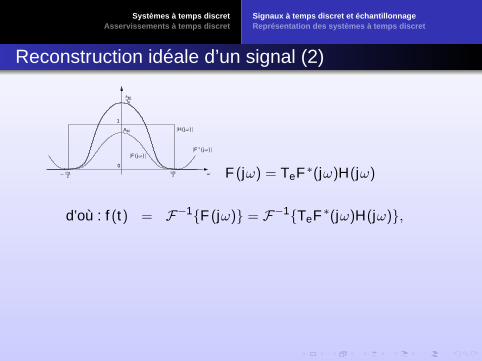
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (2)
−ωe2
ωe2
0
|H(jω)|
|F∗(jω)|
AMTe
AM
ω
1
|F (jω)|
F (jω) = TeF ∗(jω)H(jω)
d’où : f (t) = F−1F (jω) = F−1TeF ∗(jω)H(jω),
=Te
2π
∫ +∞
−∞F ∗(jω)H(jω)ejωtdω,
=Te
2π
∫ ωe2
−ωe2
F ∗(jω)ejωtdω,
=Te
2π
∫ πTe
− πTe
(+∞∑
k=−∞f (kTe)e−jωkTe
)ejωtdω.
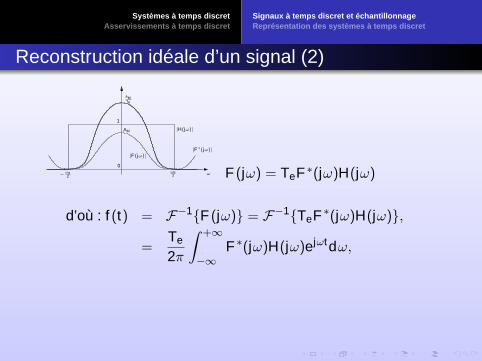
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (2)
−ωe2
ωe2
0
|H(jω)|
|F∗(jω)|
AMTe
AM
ω
1
|F (jω)|
F (jω) = TeF ∗(jω)H(jω)
d’où : f (t) = F−1F (jω) = F−1TeF ∗(jω)H(jω),
=Te
2π
∫ +∞
−∞F ∗(jω)H(jω)ejωtdω,
=Te
2π
∫ ωe2
−ωe2
F ∗(jω)ejωtdω,
=Te
2π
∫ πTe
− πTe
(+∞∑
k=−∞f (kTe)e−jωkTe
)ejωtdω.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (2)
−ωe2
ωe2
0
|H(jω)|
|F∗(jω)|
AMTe
AM
ω
1
|F (jω)|
F (jω) = TeF ∗(jω)H(jω)
d’où : f (t) = F−1F (jω) = F−1TeF ∗(jω)H(jω),
=Te
2π
∫ +∞
−∞F ∗(jω)H(jω)ejωtdω,
=Te
2π
∫ ωe2
−ωe2
F ∗(jω)ejωtdω,
=Te
2π
∫ πTe
− πTe
(+∞∑
k=−∞f (kTe)e−jωkTe
)ejωtdω.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (2)
−ωe2
ωe2
0
|H(jω)|
|F∗(jω)|
AMTe
AM
ω
1
|F (jω)|
F (jω) = TeF ∗(jω)H(jω)
d’où : f (t) = F−1F (jω) = F−1TeF ∗(jω)H(jω),
=Te
2π
∫ +∞
−∞F ∗(jω)H(jω)ejωtdω,
=Te
2π
∫ ωe2
−ωe2
F ∗(jω)ejωtdω,
=Te
2π
∫ πTe
− πTe
(+∞∑
k=−∞f (kTe)e−jωkTe
)ejωtdω.

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (3)
f (t) =Te
2π
+∞∑k=−∞
(f (kTe)
∫ πTe
− πTe
ejω(t−kTe)dω
),
=Te
2π
+∞∑k=−∞
f (kTe)
[ejω(t−kTe)
j(t − kTe)
]ω= πTe
ω=− πTe
,
=Te
2π
+∞∑k=−∞
f (kTe)ej π
Te(t−kTe) − e−j π
Te(t−kTe)
j(t − kTe),
=Te
2π
+∞∑k=−∞
f (kTe)2 sin π
Te(t − kTe)
t − kTe,
=+∞∑
k=−∞f (kTe)
sin πTe
(t − kTe)πTe
(t − kTe).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (3)
f (t) =Te
2π
+∞∑k=−∞
(f (kTe)
∫ πTe
− πTe
ejω(t−kTe)dω
),
=Te
2π
+∞∑k=−∞
f (kTe)
[ejω(t−kTe)
j(t − kTe)
]ω= πTe
ω=− πTe
,
=Te
2π
+∞∑k=−∞
f (kTe)ej π
Te(t−kTe) − e−j π
Te(t−kTe)
j(t − kTe),
=Te
2π
+∞∑k=−∞
f (kTe)2 sin π
Te(t − kTe)
t − kTe,
=+∞∑
k=−∞f (kTe)
sin πTe
(t − kTe)πTe
(t − kTe).

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (3)
f (t) =Te
2π
+∞∑k=−∞
(f (kTe)
∫ πTe
− πTe
ejω(t−kTe)dω
),
=Te
2π
+∞∑k=−∞
f (kTe)
[ejω(t−kTe)
j(t − kTe)
]ω= πTe
ω=− πTe
,
=Te
2π
+∞∑k=−∞
f (kTe)ej π
Te(t−kTe) − e−j π
Te(t−kTe)
j(t − kTe),
=Te
2π
+∞∑k=−∞
f (kTe)2 sin π
Te(t − kTe)
t − kTe,
=+∞∑
k=−∞f (kTe)
sin πTe
(t − kTe)πTe
(t − kTe).

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (3)
f (t) =Te
2π
+∞∑k=−∞
(f (kTe)
∫ πTe
− πTe
ejω(t−kTe)dω
),
=Te
2π
+∞∑k=−∞
f (kTe)
[ejω(t−kTe)
j(t − kTe)
]ω= πTe
ω=− πTe
,
=Te
2π
+∞∑k=−∞
f (kTe)ej π
Te(t−kTe) − e−j π
Te(t−kTe)
j(t − kTe),
=Te
2π
+∞∑k=−∞
f (kTe)2 sin π
Te(t − kTe)
t − kTe,
=+∞∑
k=−∞f (kTe)
sin πTe
(t − kTe)πTe
(t − kTe).

Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (3)
f (t) =Te
2π
+∞∑k=−∞
(f (kTe)
∫ πTe
− πTe
ejω(t−kTe)dω
),
=Te
2π
+∞∑k=−∞
f (kTe)
[ejω(t−kTe)
j(t − kTe)
]ω= πTe
ω=− πTe
,
=Te
2π
+∞∑k=−∞
f (kTe)ej π
Te(t−kTe) − e−j π
Te(t−kTe)
j(t − kTe),
=Te
2π
+∞∑k=−∞
f (kTe)2 sin π
Te(t − kTe)
t − kTe,
=+∞∑
k=−∞f (kTe)
sin πTe
(t − kTe)πTe
(t − kTe).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction idéale d’un signal (4)
Soit finalement :
f (t) =+∞∑
k=−∞f (kTe)sinc
(t − kTe
Te
)
avec sincx = sin πxπx .
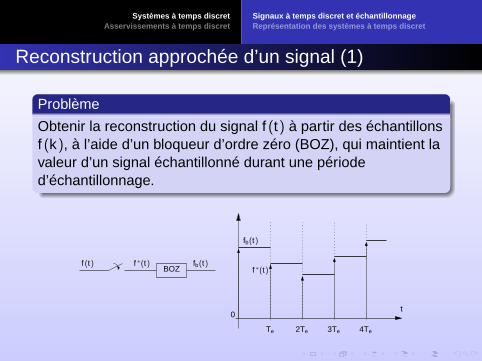
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (1)
Problème
Obtenir la reconstruction du signal f (t) à partir des échantillonsf (k), à l’aide d’un bloqueur d’ordre zéro (BOZ), qui maintient lavaleur d’un signal échantillonné durant une périoded’échantillonnage.
t
Te 2Te 3Te 4Te
fb(t)
f ∗(t)
0
fb(t)f (t)BOZ
f ∗(t)
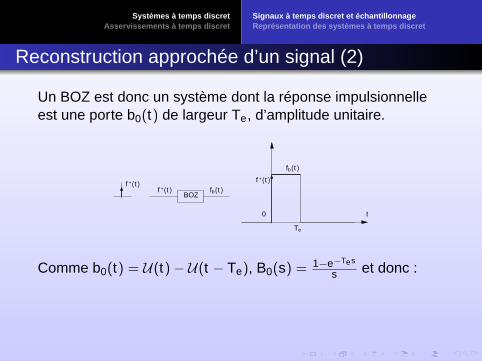
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (2)
Un BOZ est donc un système dont la réponse impulsionnelleest une porte b0(t) de largeur Te, d’amplitude unitaire.
Te
0 t
fb(t)
f ∗(t)fb(t)BOZ
f ∗(t)f ∗(t)
Comme b0(t) = U(t)− U(t − Te), B0(s) = 1−e−Tes
s et donc :
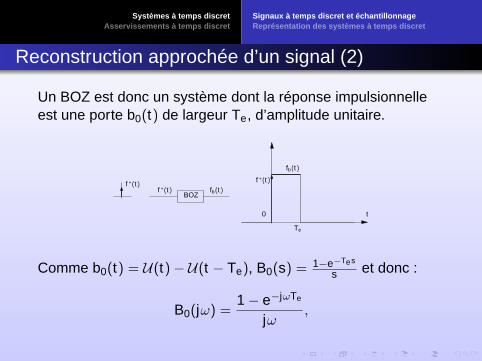
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (2)
Un BOZ est donc un système dont la réponse impulsionnelleest une porte b0(t) de largeur Te, d’amplitude unitaire.
Te
0 t
fb(t)
f ∗(t)fb(t)BOZ
f ∗(t)f ∗(t)
Comme b0(t) = U(t)− U(t − Te), B0(s) = 1−e−Tes
s et donc :
B0(jω) =1− e−jωTe
jω,
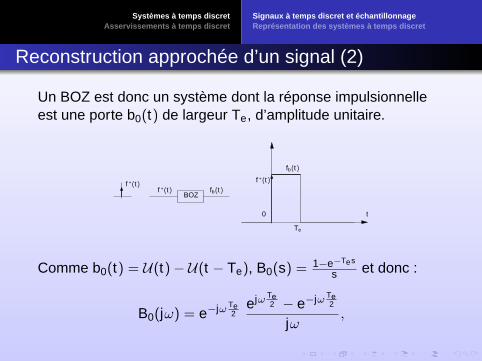
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (2)
Un BOZ est donc un système dont la réponse impulsionnelleest une porte b0(t) de largeur Te, d’amplitude unitaire.
Te
0 t
fb(t)
f ∗(t)fb(t)BOZ
f ∗(t)f ∗(t)
Comme b0(t) = U(t)− U(t − Te), B0(s) = 1−e−Tes
s et donc :
B0(jω) = e−jω Te2
ejω Te2 − e−jω Te
2
jω,
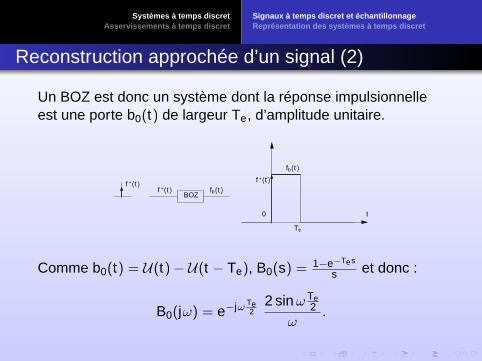
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (2)
Un BOZ est donc un système dont la réponse impulsionnelleest une porte b0(t) de largeur Te, d’amplitude unitaire.
Te
0 t
fb(t)
f ∗(t)fb(t)BOZ
f ∗(t)f ∗(t)
Comme b0(t) = U(t)− U(t − Te), B0(s) = 1−e−Tes
s et donc :
B0(jω) = e−jω Te2
2 sin ω Te2
ω.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (3)
Suite au blocage d’ordre 0 et au filtrage passe-bas idéal, on a :
Fb(jω) = B0(jω)F ∗(jω),
=1Te
B0(jω)F (jω),
= e−j(ωTe2 )
sin(
ωTe2
)(
ωTe2
) F (jω).
Comme ωTe2 = π ω
ωe:
Fb(jω) = e−j ωTe2 sinc
(ω
ωe
)F (jω).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (3)
Suite au blocage d’ordre 0 et au filtrage passe-bas idéal, on a :
Fb(jω) = B0(jω)F ∗(jω),
=1Te
B0(jω)F (jω),
= e−j(ωTe2 )
sin(
ωTe2
)(
ωTe2
) F (jω).
Comme ωTe2 = π ω
ωe:
Fb(jω) = e−j ωTe2 sinc
(ω
ωe
)F (jω).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (3)
Suite au blocage d’ordre 0 et au filtrage passe-bas idéal, on a :
Fb(jω) = B0(jω)F ∗(jω),
=1Te
B0(jω)F (jω),
= e−j(ωTe2 )
sin(
ωTe2
)(
ωTe2
) F (jω).
Comme ωTe2 = π ω
ωe:
Fb(jω) = e−j ωTe2 sinc
(ω
ωe
)F (jω).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (3)
Suite au blocage d’ordre 0 et au filtrage passe-bas idéal, on a :
Fb(jω) = B0(jω)F ∗(jω),
=1Te
B0(jω)F (jω),
= e−j(ωTe2 )
sin(
ωTe2
)(
ωTe2
) F (jω).
Comme ωTe2 = π ω
ωe:
Fb(jω) = e−j ωTe2 sinc
(ω
ωe
)F (jω).
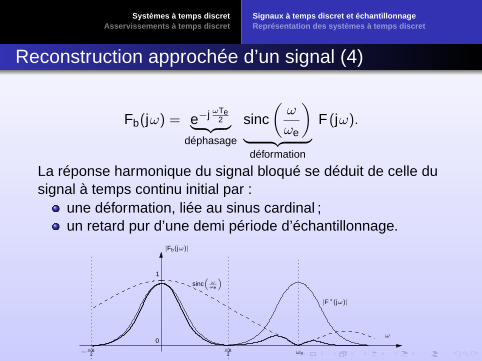
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Reconstruction approchée d’un signal (4)
Fb(jω) = e−j ωTe2︸ ︷︷ ︸
déphasage
sinc(
ω
ωe
)︸ ︷︷ ︸
déformation
F (jω).
La réponse harmonique du signal bloqué se déduit de celle dusignal à temps continu initial par :
une déformation, liée au sinus cardinal ;un retard pur d’une demi période d’échantillonnage.
−ωe2
ω0
ωe
bande de base bandes complémentaires
ωe2
1
|Fb(jω)|
sinc“
ωωe
”|F∗(jω)|
Les lobes additionnels apparaissant au delà de la pulsation deNyquist peuvent éventuellement être filtrés par un filtrepasse-bas.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z
Définition
La transformée en z d’un signal à temps discret f (k) est définiepar :
F (z) = Zf (k) =k=+∞∑
k=0
f (k)z−k .
On remarque que : F∗“
s = lnzTe
”=
P+∞k=0 f (k)z−k = F (z).
Propriété
La transformée en z est une fonction de la variable complexe z,généralement définie sur une zone du plan complexe pourlaquelle |z| > R0. La valeur R0 définissant la limite deconvergence est appelée rayon de convergence.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : calcul
Tables de transformées
Autant que possible, on utilise des tables de transforméespré-calculées :
δ(k) → 1U(k) → z
z−1. . .
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : calcul
Tables de transformées
Autant que possible on utilise des tables de transforméespré-calculées.
Exemple de calcul (complet et rigoureux)
Calcul de la transformée en z de f (k) = e−akTe U(k).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : propriétés
Notations
Les propriétés énoncées sont valables dans le cas général dessignaux à temps discret. Soit deux signaux à temps discret f (k)et g(k), de transformées en z respectives F (z) et G(z).
Propriétés
Linéarité : Zf (k) + αg(k) = F (z) + αG(z), ∀α ∈ R
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : propriétés
Notations
Les propriétés énoncées sont valables dans le cas général dessignaux à temps discret. Soit deux signaux à temps discret f (k)et g(k), de transformées en z respectives F (z) et G(z).
Propriétés
Changement d’échelle : Zαk f (k) = F( z
α
), ∀α ∈ R
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : propriétés
Notations
Les propriétés énoncées sont valables dans le cas général dessignaux à temps discret. Soit deux signaux à temps discret f (k)et g(k), de transformées en z respectives F (z) et G(z).
Propriétés
Retard : Zf (k − n) = z−nF (z), ∀n ∈ N
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : propriétés
Notations
Les propriétés énoncées sont valables dans le cas général dessignaux à temps discret. Soit deux signaux à temps discret f (k)et g(k), de transformées en z respectives F (z) et G(z).
Propriétés
Avance : Zf (k + n) = zn(
F (z)−∑k=n−1
k=0 f (k) z−k)
, ∀n ∈ N
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : propriétés
Notations
Les propriétés énoncées sont valables dans le cas général dessignaux à temps discret. Soit deux signaux à temps discret f (k)et g(k), de transformées en z respectives F (z) et G(z).
Propriétés
Multiplication par une rampe : Zkf (k) = −z dF (z)dz
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : propriétés
Notations
Les propriétés énoncées sont valables dans le cas général dessignaux à temps discret. Soit deux signaux à temps discret f (k)et g(k), de transformées en z respectives F (z) et G(z).
Propriétés
Th. de la valeur initiale : limk→0 f (k) = limz→+∞ F (z)
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : propriétés
Notations
Les propriétés énoncées sont valables dans le cas général dessignaux à temps discret. Soit deux signaux à temps discret f (k)et g(k), de transformées en z respectives F (z) et G(z).
Propriétés
Th. de la valeur finale : limk→∞ f (k) = limz→1(1− z−1)F (z)
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z : propriétés
Notations
Les propriétés énoncées sont valables dans le cas général dessignaux à temps discret. Soit deux signaux à temps discret f (k)et g(k), de transformées en z respectives F (z) et G(z).
Propriétés
Convolution : Zf (k)∗g(k) =∑n=+∞
n=−∞ f (k)g(n−k) = F (z)G(z)
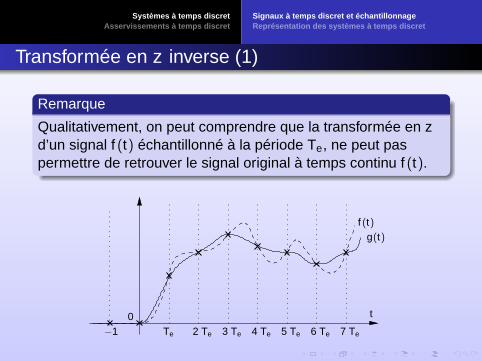
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z inverse (1)
Remarque
Qualitativement, on peut comprendre que la transformée en zd’un signal f (t) échantillonné à la période Te, ne peut paspermettre de retrouver le signal original à temps continu f (t).
07 Te
t
−1 Te 2 Te 3 Te 4 Te 5 Te 6 Te
f (t)g(t)
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z inverse (2)
Calcul
En pratique (dans l’ordre croissant de difficulté) :
tables de transformées ;
décomposition en éléments simples, puis tables detransformées ;
division selon les puissances croissantes de z−1 ;
formule d’inversion.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z inverse (3)
Calcul : décomposition en éléments simples
Transformée en z sous la forme :
F (z) =N(z)
D(z)=
n∑i=1
Aiz
z − ci.
Alors :
f (k) =n∑
i=1
Aicki U(k).
Exemple
Calcul de la transformée en z inverse de :
F (z) =z
z2 − (c + d)z + cd.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z inverse (4)
Calcul : division selon les puissances croissantes
Transformée en z sous la forme :
F (z) =N(z)
D(z)=
∑mi=0 biz−i∑ni=0 aiz−i
.
La division selon les puissances croissantes de z−1 de N(z)par D(z) donne :
F (z) = c0 + c1z−1 + c2z−2 + . . .
Alors :
f (k) = c0δ(k) + c1δ(k − 1) + c2δ(k − 2) + . . .
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z inverse (5)
Calcul : division selon les puissances croissantes
f (k) = c0δ(k) + c1δ(k − 1) + c2δ(k − 2) + . . . conduit auxvaleurs :
f (0) = c0,
f (1) = c1,
. . .
Exemple
Calcul de la transformée en z inverse de :
F (z) =−z + z2
2 + 3z + z2 .
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Transformée en z inverse (6)
Calcul : formule d’inversion
La transformée en z inverse de la transformée F (z) s’écrit :
f (k) = Z−1F (z) =1
2πj
∫Γ
F (z)zk−1dz,
où Γ est un contour fermé du plan complexe contenant toutesles singularités de F (z).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Résolution d’équations aux différences (1)
Soit l’équation aux différences :a0f (k) + a1f (k + 1) + · · ·+ anf (k + n) = b0g(k) + b1g(k + 1) + · · ·+ bmg(k + m).
Comme :
Zf (k) = F (z),
Zf (k + 1) = zF (z)− zf (0),
Zf (k + 2) = z2F (z)− z2f (0)− zf (1),
. . .
et de même Zg(k) = G(z),
Zg(k + 1) = zG(z)− zg(0),
Zg(k + 2) = z2G(z)− z2g(0)− zg(1),
. . .
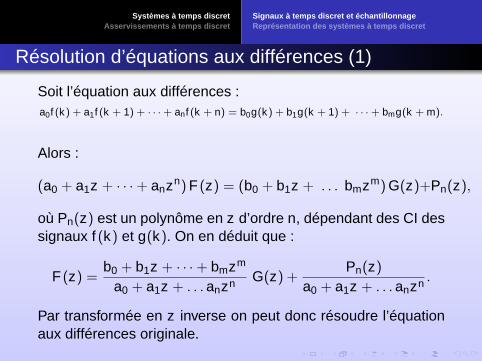
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Résolution d’équations aux différences (1)
Soit l’équation aux différences :a0f (k) + a1f (k + 1) + · · ·+ anf (k + n) = b0g(k) + b1g(k + 1) + · · ·+ bmg(k + m).
Alors :
(a0 + a1z + · · ·+ anzn) F (z) = (b0 + b1z + . . . bmzm) G(z)+Pn(z),
où Pn(z) est un polynôme en z d’ordre n, dépendant des CI dessignaux f (k) et g(k). On en déduit que :
F (z) =b0 + b1z + · · ·+ bmzm
a0 + a1z + . . . anzn G(z) +Pn(z)
a0 + a1z + . . . anzn .
Par transformée en z inverse on peut donc résoudre l’équationaux différences originale.
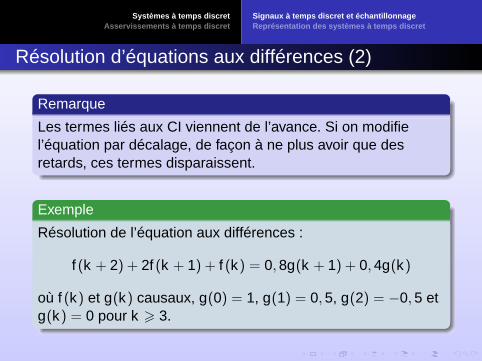
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Résolution d’équations aux différences (2)
Remarque
Les termes liés aux CI viennent de l’avance. Si on modifiel’équation par décalage, de façon à ne plus avoir que desretards, ces termes disparaissent.
Exemple
Résolution de l’équation aux différences :
f (k + 2) + 2f (k + 1) + f (k) = 0, 8g(k + 1) + 0, 4g(k)
où f (k) et g(k) causaux, g(0) = 1, g(1) = 0, 5, g(2) = −0, 5 etg(k) = 0 pour k > 3.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Plan
3 Systèmes à temps discretSignaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
4 Asservissements à temps discretNotion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
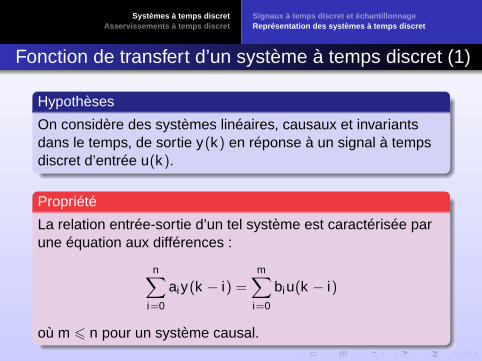
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système à temps discret (1)
Hypothèses
On considère des systèmes linéaires, causaux et invariantsdans le temps, de sortie y(k) en réponse à un signal à tempsdiscret d’entrée u(k).
Propriété
La relation entrée-sortie d’un tel système est caractérisée parune équation aux différences :
n∑i=0
aiy(k − i) =m∑
i=0
biu(k − i)
où m 6 n pour un système causal.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système à temps discret (1)
Hypothèses
On considère des systèmes linéaires, causaux et invariantsdans le temps, de sortie y(k) en réponse à un signal à tempsdiscret d’entrée u(k).
Cette relation s’écrit encore, sous forme développée :
a0y(k) + a1y(k − 1) + · · ·+ any(k − n) = b0u(k) + b1u(k − 1) + · · ·+ bmu(k −m).
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système à temps discret (2)
n∑i=0
aiy(k − i) =m∑
i=0
biu(k − i)
Définition
On appelle fonction de transfert de ce système à temps discret(ou transmittance discrète) la fraction rationnelle :
G(z) =Y (z)
U(z).
D’après ce qui précède, elle prend donc la forme :
G(z) =N(z)
D(z)=
∑mi=0 biz−i∑ni=0 aiz−i
.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système à temps discret (2)
(n∑
i=0
aiz−i
)Y (z) =
(m∑
i=0
biz−i
)U(z).
Définition
On appelle fonction de transfert de ce système à temps discret(ou transmittance discrète) la fraction rationnelle :
G(z) =Y (z)
U(z).
D’après ce qui précède, elle prend donc la forme :
G(z) =N(z)
D(z)=
∑mi=0 biz−i∑ni=0 aiz−i
.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système à temps discret (2)
(n∑
i=0
aiz−i
)Y (z) =
(m∑
i=0
biz−i
)U(z).
Définition
On appelle fonction de transfert de ce système à temps discret(ou transmittance discrète) la fraction rationnelle :
G(z) =Y (z)
U(z).
D’après ce qui précède, elle prend donc la forme :
G(z) =N(z)
D(z)=
∑mi=0 biz−i∑ni=0 aiz−i
.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système à temps discret (3)
Propriété
La fonction de transfert à temps discret est la transformée en zde la réponse du système à une impulsion unité discrète(Zδ(k) = 1, donc Y (z) = G(z) et y(k) = g(k)).
Ceci établit une certaine analogie avec les signaux à tempscontinu qui peut même être menée plus loin. On montre eneffet que :
y(k) = g(k) ∗ u(k) =n=+∞∑n=−∞
g(n)u(k − n),
=n=+∞∑
n=k
g(n)u(k − n).
pour un système causal.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système à temps discret (4)
Exemple
Soit le signal à temps discret f (k), de transformée en z :
F (z) =10z + 5
z2 − 1, 2z + 0, 2.
A la lumière de ce qui précède, calculer f (k).
Il s’agit bien évidemment d’un exercice de compréhension, laméthode la plus naturelle étant ici de factoriser (deux pôlesévidents !) et décomposer en éléments simples F (z) oud’effectuer la division selon les puissances croissantes de z−1.
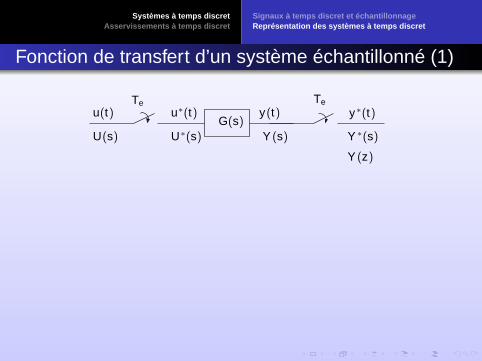
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (1)
u(t) y(t)Te Te
U(s)
G(s)
Y (s)
Y (z)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
Y ∗(s) = (G(s)U∗(s))∗ ,
=1Te
+∞∑k=−∞
Y(
s − 2jπkTe
),
=1Te
+∞∑k=−∞
G(
s − 2jπkTe
)U∗(
s − 2πkTe
),
=
(1Te
+∞∑k=−∞
G(
s − 2jπkTe
))U∗(s).
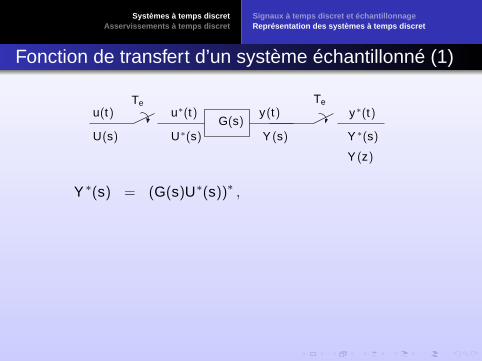
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (1)
u(t) y(t)Te Te
U(s)
G(s)
Y (s)
Y (z)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
Y ∗(s) = (G(s)U∗(s))∗ ,
=1Te
+∞∑k=−∞
Y(
s − 2jπkTe
),
=1Te
+∞∑k=−∞
G(
s − 2jπkTe
)U∗(
s − 2πkTe
),
=
(1Te
+∞∑k=−∞
G(
s − 2jπkTe
))U∗(s).
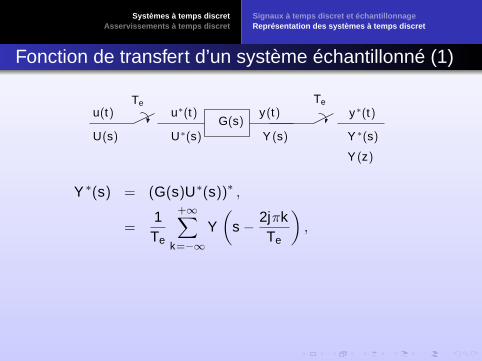
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (1)
u(t) y(t)Te Te
U(s)
G(s)
Y (s)
Y (z)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
Y ∗(s) = (G(s)U∗(s))∗ ,
=1Te
+∞∑k=−∞
Y(
s − 2jπkTe
),
=1Te
+∞∑k=−∞
G(
s − 2jπkTe
)U∗(
s − 2πkTe
),
=
(1Te
+∞∑k=−∞
G(
s − 2jπkTe
))U∗(s).
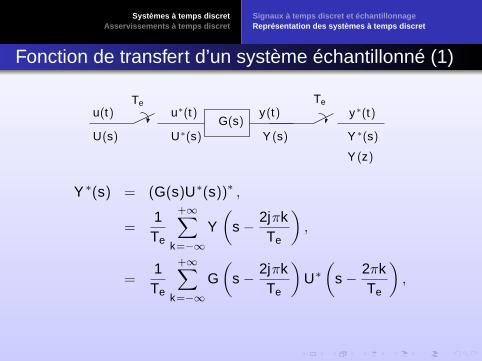
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (1)
u(t) y(t)Te Te
U(s)
G(s)
Y (s)
Y (z)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
Y ∗(s) = (G(s)U∗(s))∗ ,
=1Te
+∞∑k=−∞
Y(
s − 2jπkTe
),
=1Te
+∞∑k=−∞
G(
s − 2jπkTe
)U∗(
s − 2πkTe
),
=
(1Te
+∞∑k=−∞
G(
s − 2jπkTe
))U∗(s).
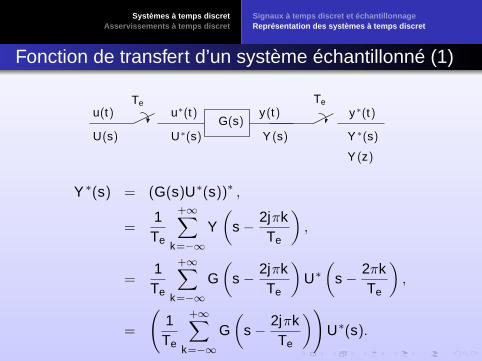
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (1)
u(t) y(t)Te Te
U(s)
G(s)
Y (s)
Y (z)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
Y ∗(s) = (G(s)U∗(s))∗ ,
=1Te
+∞∑k=−∞
Y(
s − 2jπkTe
),
=1Te
+∞∑k=−∞
G(
s − 2jπkTe
)U∗(
s − 2πkTe
),
=
(1Te
+∞∑k=−∞
G(
s − 2jπkTe
))U∗(s).
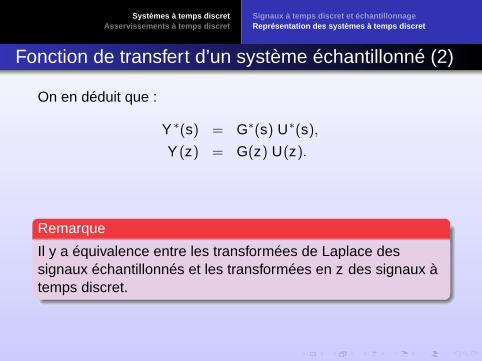
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (2)
On en déduit que :
Y ∗(s) = G∗(s) U∗(s),
Y (z) = G(z) U(z).
Remarque
Il y a équivalence entre les transformées de Laplace dessignaux échantillonnés et les transformées en z des signaux àtemps discret.
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (2)
On en déduit que :
Y ∗(s) = G∗(s) U∗(s),
Y (z) = G(z) U(z).
Définition
La fonction de transfert à temps discret du système est donc :
G(z) =Y (z)
U(z).
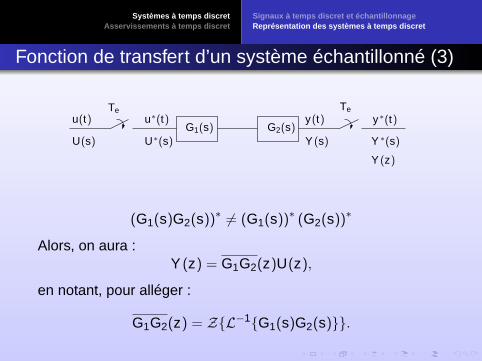
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (3)
u(t)Te
U(s)G1(s) G2(s)
Te
Y (z)
y(t)
Y (s)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
(G1(s)G2(s))∗ 6= (G1(s))∗ (G2(s))∗
Alors, on aura :Y (z) = G1G2(z)U(z),
en notant, pour alléger :
G1G2(z) = ZL−1G1(s)G2(s).
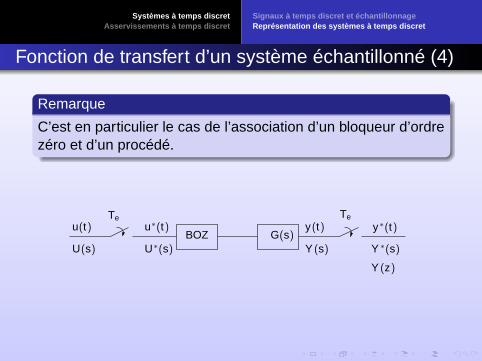
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (4)
Remarque
C’est en particulier le cas de l’association d’un bloqueur d’ordrezéro et d’un procédé.
u(t)Te
U(s)
Te
Y (z)
y(t)
Y (s)BOZ G(s)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Fonction de transfert d’un système échantillonné (5)
Comme :Y (s)
U∗(s)=
(1− e−Tes
s
)G(s).
on a :Y (z)
U(z)= Z
L−1
(1− e−Tes
s
)G(s)
,
= ZgI(t)− gI(t − Te),
où gI(t) = L−1G(s)
s
. Par conséquent :
Y (z)
U(z)= (1− z−1)ZgI(t),
etY (z)
U(z)= (1− z−1)Z
G(s)
s
.
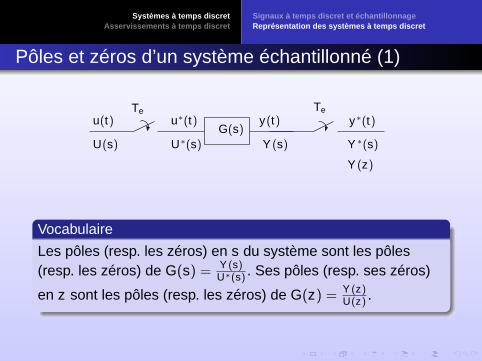
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Pôles et zéros d’un système échantillonné (1)
u(t) y(t)Te Te
U(s)
G(s)
Y (s)
Y (z)
u∗(t)
U∗(s)
y∗(t)
Y ∗(s)
Vocabulaire
Les pôles (resp. les zéros) en s du système sont les pôles(resp. les zéros) de G(s) = Y (s)
U∗(s) . Ses pôles (resp. ses zéros)
en z sont les pôles (resp. les zéros) de G(z) = Y (z)U(z) .
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Pôles et zéros d’un système échantillonné (2)
Si G(s) ne comporte que des pôles simples :
G(s) =n∑
i=1
Ai
s − pi
et par conséquent :
g(t) = L−1G(s) =n∑
i=1
Aiepi tU(t).
Les pôles en z sont obtenus en appliquant alors la transforméeen z :
G(z) =n∑
i=1
Aizz − epi Te
.
A un pôle simple en s d’affixe pi correspond donc un pôle en zen epi Te .
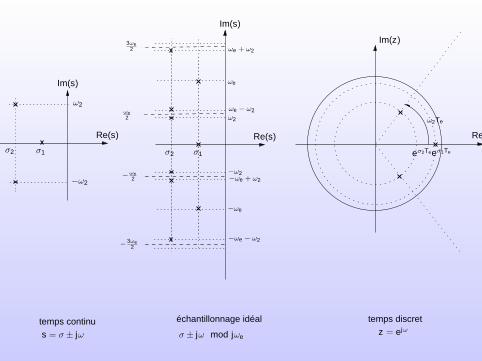
Im(s)
Im(s)
σ2 σ1
échantillonnage idéaltemps continu temps discret
σ ± jω mod jωes = σ ± jω z = ejω
Re(s)
ωe
−ω2
−ωe
ω2
3ωe2
−ωe2
ωe2
− 3ωe2
ωe − ω2
−ωe + ω2
ωe + ω2
−ωe − ω2
−ω2
Re(s)
ω2
Re(z)
ω2Te
Im(z)
σ1σ2 eσ2Teeσ1Te
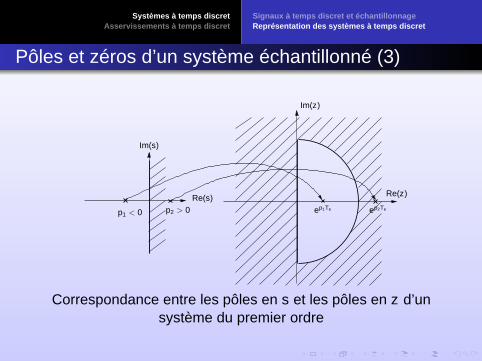
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Pôles et zéros d’un système échantillonné (3)
Im(s)
p1 < 0 ep1Te
Re(z)
Im(z)
p2 > 0Re(s)
ep2Te
Correspondance entre les pôles en s et les pôles en z d’unsystème du premier ordre
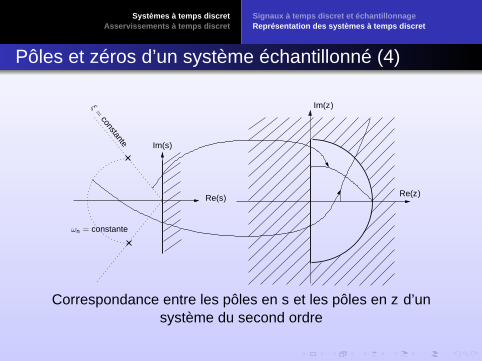
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Pôles et zéros d’un système échantillonné (4)
Im(s)
ξ=
constante
Re(z)
Im(z)
Re(s)
ωn = constante
Correspondance entre les pôles en s et les pôles en z d’unsystème du second ordre
Systèmes à temps discretAsservissements à temps discret
Signaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
Pôles et zéros d’un système échantillonné (5)
Remarque
Il n’existe pas de relation simple entre les zéros de G(s) etceux de G(z).
Pour s’en convaincre il suffit de prendre un exemple. Si l’onconsidère :
g(t) = e−at
alors :
G(s) =1
s + a,
G(z) =z
z − e−aTe.
Ainsi, il existe un pôle en z alors qu’il n’en existe pas en s.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Plan
3 Systèmes à temps discretSignaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
4 Asservissements à temps discretNotion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants

Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Plan
3 Systèmes à temps discretSignaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
4 Asservissements à temps discretNotion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
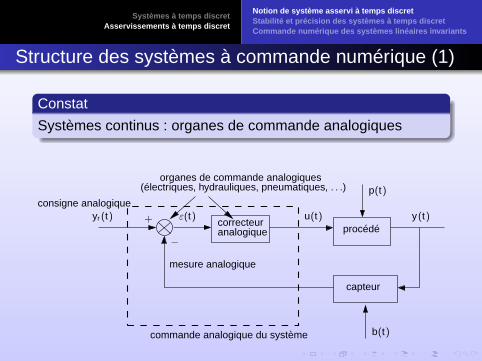
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Structure des systèmes à commande numérique (1)
Constat
Systèmes continus : organes de commande analogiques
+
−procédé
yr (t) ε(t)correcteuranalogique
capteur
u(t)
b(t)
y(t)
mesure analogique
p(t)
commande analogique du système
organes de commande analogiques(électriques, hydrauliques, pneumatiques, . . .)
consigne analogique
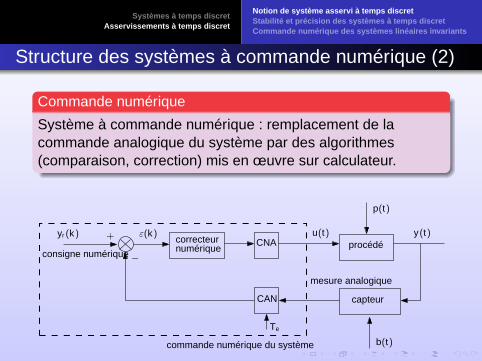
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Structure des systèmes à commande numérique (2)
Commande numérique
Système à commande numérique : remplacement de lacommande analogique du système par des algorithmes(comparaison, correction) mis en œuvre sur calculateur.
procédé
capteur
u(t)
b(t)
y(t)
p(t)
commande numérique du système
+
−
correcteurε(k)
numérique
yr (k)
mesure analogique
CAN
CNA
Te
consigne numérique
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Structure des systèmes à commande numérique (3)
Commande hybride temps continu-temps discret
Traitement de l’information analogique par découpage temporeldes signaux au niveau du calculateur.
Interface calculateur/procédé :
convertisseur numérique-analogique (CNA) pour convertirles signaux issus du calculateur qui constituent l’entrée duprocédé (ou plus généralement de l’ensembleamplification+procédé) ;
convertisseur analogique-numérique (CAN) pour convertirles mesures effectuées sur le procédé et les fournir aucalculateur : échantillonnage et quantification (bruit dequantification).
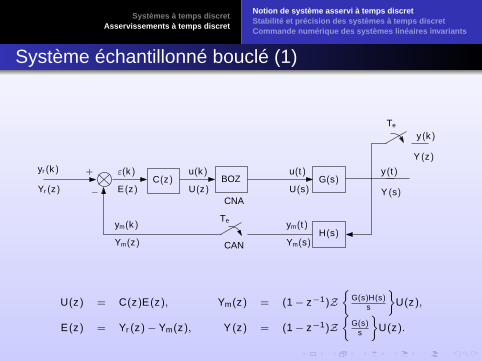
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Système échantillonné bouclé (1)
y(t)
Y (s)
y(k)
Y (z)
Te
+yr (k)
−CNA
Te
CAN
ym(t)ym(k)
ε(k) u(k) u(t)C(z) BOZ G(s)
H(s)
E(z)Yr (z) U(z) U(s)
Ym(s)Ym(z)
U(z) = C(z)E(z), Ym(z) = (1− z−1)Z
G(s)H(s)s
ffU(z),
E(z) = Yr (z)− Ym(z), Y (z) = (1− z−1)Z
G(s)s
ffU(z).

Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Système échantillonné bouclé (2)
U(z) = C(z)E(z),
E(z) = Yr (z)− Ym(z),
Ym(z) = (1− z−1)Z
G(s)H(s)
s
U(z),
Y (z) = (1− z−1)Z
G(s)
s
U(z).
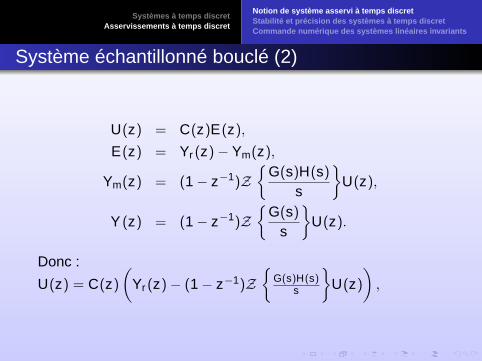
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Système échantillonné bouclé (2)
U(z) = C(z)E(z),
E(z) = Yr (z)− Ym(z),
Ym(z) = (1− z−1)Z
G(s)H(s)
s
U(z),
Y (z) = (1− z−1)Z
G(s)
s
U(z).
Donc :
U(z) = C(z)
(Yr (z)− (1− z−1)Z
G(s)H(s)
s
U(z)
),

Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Système échantillonné bouclé (2)
U(z) = C(z)E(z),
E(z) = Yr (z)− Ym(z),
Ym(z) = (1− z−1)Z
G(s)H(s)
s
U(z),
Y (z) = (1− z−1)Z
G(s)
s
U(z).
Donc :
U(z)
(1 + (1− z−1)C(z)Z
G(s)H(s)
s
)= C(z)Yr (z),
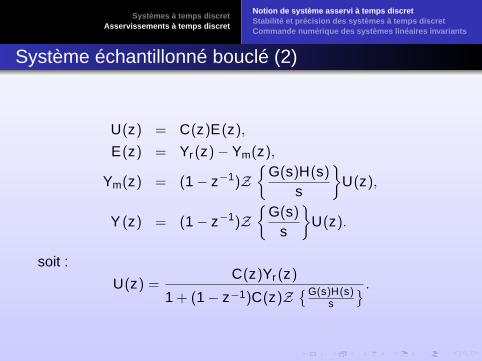
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Système échantillonné bouclé (2)
U(z) = C(z)E(z),
E(z) = Yr (z)− Ym(z),
Ym(z) = (1− z−1)Z
G(s)H(s)
s
U(z),
Y (z) = (1− z−1)Z
G(s)
s
U(z).
soit :
U(z) =C(z)Yr (z)
1 + (1− z−1)C(z)ZG(s)H(s)
s
.
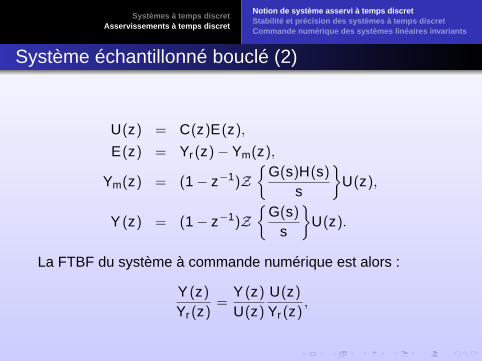
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Système échantillonné bouclé (2)
U(z) = C(z)E(z),
E(z) = Yr (z)− Ym(z),
Ym(z) = (1− z−1)Z
G(s)H(s)
s
U(z),
Y (z) = (1− z−1)Z
G(s)
s
U(z).
La FTBF du système à commande numérique est alors :
Y (z)
Yr (z)=
Y (z)
U(z)
U(z)
Yr (z),
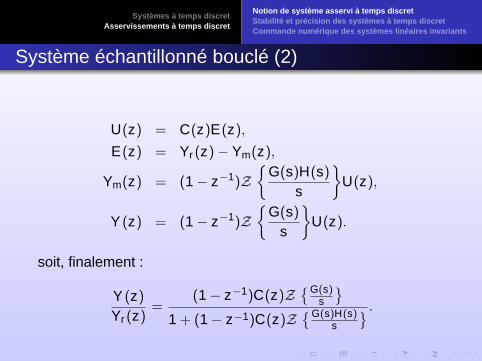
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Système échantillonné bouclé (2)
U(z) = C(z)E(z),
E(z) = Yr (z)− Ym(z),
Ym(z) = (1− z−1)Z
G(s)H(s)
s
U(z),
Y (z) = (1− z−1)Z
G(s)
s
U(z).
soit, finalement :
Y (z)
Yr (z)=
(1− z−1)C(z)ZG(s)
s
1 + (1− z−1)C(z)Z
G(s)H(s)s
.
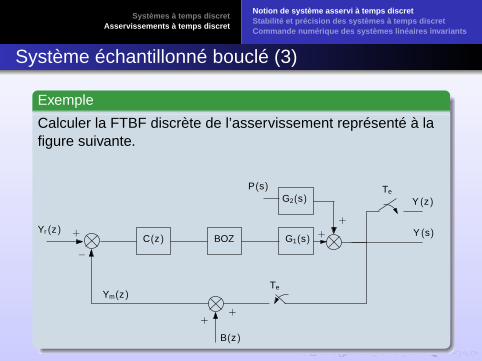
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Système échantillonné bouclé (3)
Exemple
Calculer la FTBF discrète de l’asservissement représenté à lafigure suivante.
+
−
++
B(z)
BOZC(z)
+
+
Y (z)Te
Y (s)Yr (z)
Ym(z)
P(s)
G2(s)
G1(s)
Te
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Plan
3 Systèmes à temps discretSignaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
4 Asservissements à temps discretNotion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Stabilité
Généralités
Les définitions générales de la stabilité s’appliquent bienévidemment aux systèmes échantillonnés.
Pôles en z et condition de stabilité
Un système linéaire invariant à temps discret est stable si etseulement si tous ses pôles sont de module strictementinférieur à un.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Critère algébrique de Jury (1)
On considère un système à temps discret de fonction detransfert :
N(z)
D(z), avec D(z) = a0 + a1z + · · ·+ +anzn,
avec an > 0.
Lorsque les coefficients de D(z) sont réels, ce qui est le cas enpratique pour des systèmes asservis à temps discret, le critèrede Jury permet de conclure sur la stabilité, sans pour autantcalculer les racines de D(z).
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Critère algébrique de Jury (2)
Soit :a0,i = ai , ∀i = 0, 1, . . . , n,
aj+1,i =aj,0 aj,n−j−i
aj,n−j aj,i, avec 0 6 i 6 n − j − 1.
Critère de Jury
Une condition nécessaire et suffisante pour que D(z), àcoefficients réels ait ses racines de module inférieur à l’unitéest que les inégalités suivantes soient vérifiées :
1 |a0| − an < 0 ;2 D(1) > 0 ;3 (−1)n D(−1) > 0 ;4 |aj,0| − |aj,n−j | > 0,∀j = 1, 2, . . . , n − 2.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Critère algébrique de Jury (3)
Exemple
Etudier ce critère pour les systèmes d’ordre inférieur ou égal àtrois.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Critères algébriques de Routh et transformée en w
Le critère de Routh ne s’applique pas tel quel aux systèmes àtemps discret. Pour cela on utilise la transformée en w :
w =z − 1z + 1
⇐⇒ z =1 + w1− w
qui associe à l’intérieur du cercle unité du plan en z ledemi-plan gauche du plan en w .
Critère de Routh en temps discret
On admet que la stabilité est vérifiée si le polynôme en w :
D′(w) = (1− w)nD(
1 + w1− w
)vérifie le critère de Routh.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Critères algébriques de stabilité
Exemple
A l’aide des critères algébriques précédents, montrer que lesystème de fonction de transfert :
G1(z) =1, 42− 0, 12z + 0, 113z2
0, 1066− 0, 5620z + 1, 67z2 − 2, 2z3 + z4
est stable, alors que le système de fonction de transfert :
G2(z) =1, 42− 0, 12z + 0, 113z2
0, 98− 0, 5620z + 1, 67z2 − 2, 2z3 + z4
est instable.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Critères géométriques de stabilité
Pôles en z et critère géométrique de stabilité
Un système linéaire invariant à temps discret est stable si etseulement si ses pôles sont à l’intérieur du cercle unité dans leplan complexe.
Lieu des racines
Le lieu des racines autorise l’analyse et la commande dessystèmes à temps discrets. Pour pouvoir l’appliquer il suffit detransposer ses propriétés en s, d’après les règles vuesprécédemment.
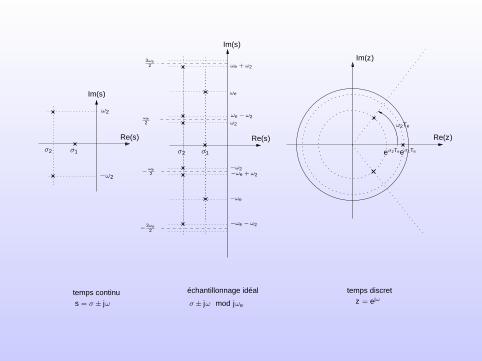
Im(s)
Im(s)
σ2 σ1
échantillonnage idéaltemps continu temps discret
σ ± jω mod jωes = σ ± jω z = ejω
Re(s)
ωe
−ω2
−ωe
ω2
3ωe2
−ωe2
ωe2
− 3ωe2
ωe − ω2
−ωe + ω2
ωe + ω2
−ωe − ω2
−ω2
Re(s)
ω2
Re(z)
ω2Te
Im(z)
σ1σ2 eσ2Teeσ1Te
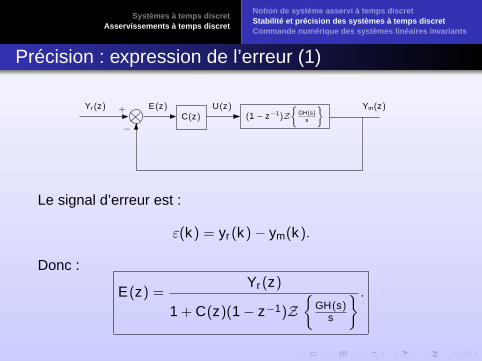
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Précision : expression de l’erreur (1)
+
−C(z)
Yr (z) E(z) U(z) Ym(z)(1− z−1)Z
GH(s)
s
ff
Le signal d’erreur est :
ε(k) = yr (k)− ym(k).
Donc :
E(z) =Yr (z)
1 + C(z)(1− z−1)Z
GH(s)s
.
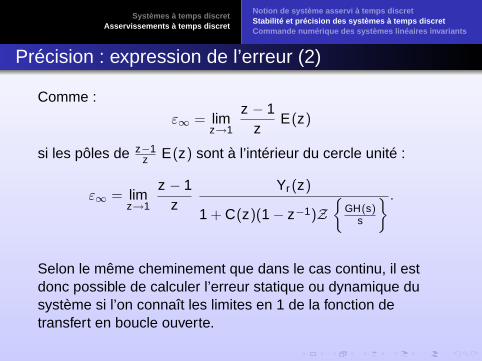
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Précision : expression de l’erreur (2)
Comme :
ε∞ = limz→1
z − 1z
E(z)
si les pôles de z−1z E(z) sont à l’intérieur du cercle unité :
ε∞ = limz→1
z − 1z
Yr (z)
1 + C(z)(1− z−1)Z
GH(s)s
.
Selon le même cheminement que dans le cas continu, il estdonc possible de calculer l’erreur statique ou dynamique dusystème si l’on connaît les limites en 1 de la fonction detransfert en boucle ouverte.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Précision : classe du système
Intégration en z
Dans le cas d’un système à temps discret, une intégration estcaractérisée par la présence d’un pôle en z = e0 = 1.
Ainsi, on sait qu’il y a au moins une intégration si la somme descoefficients du dénominateur de la fonction de transfert dusystème considéré est nulle :
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Précision : classe du système
Intégration en z
Dans le cas d’un système à temps discret, une intégration estcaractérisée par la présence d’un pôle en z = e0 = 1.
Ainsi, on sait qu’il y a au moins une intégration si la somme descoefficients du dénominateur de la fonction de transfert dusystème considéré est nulle :
D(z) = a0 + a1z + · · ·+ anzn,
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Précision : classe du système
Intégration en z
Dans le cas d’un système à temps discret, une intégration estcaractérisée par la présence d’un pôle en z = e0 = 1.
Ainsi, on sait qu’il y a au moins une intégration si la somme descoefficients du dénominateur de la fonction de transfert dusystème considéré est nulle :
D(1) = a0 + a1 + · · ·+ an.
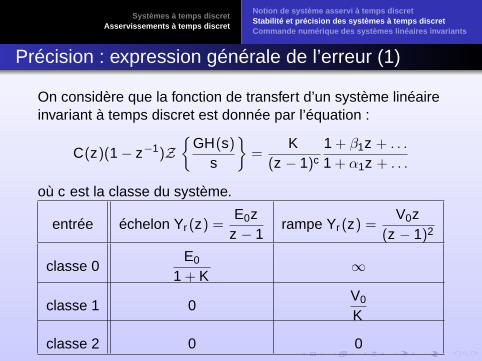
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Précision : expression générale de l’erreur (1)
On considère que la fonction de transfert d’un système linéaireinvariant à temps discret est donnée par l’équation :
C(z)(1− z−1)Z
GH(s)
s
=
K(z − 1)c
1 + β1z + . . .
1 + α1z + . . .
où c est la classe du système.
entrée échelon Yr (z) =E0z
z − 1rampe Yr (z) =
V0z(z − 1)2
classe 0E0
1 + K∞
classe 1 0V0
K
classe 2 0 0
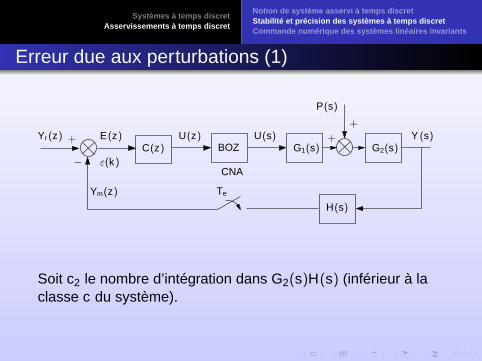
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Erreur due aux perturbations (1)
+
−CNA
Te
C(z) BOZ
H(s)
E(z)
ε(k)
U(z) U(s)
Ym(z)
+
+
G1(s) G2(s)Y (s)
P(s)
Yr (z)
Soit c2 le nombre d’intégration dans G2(s)H(s) (inférieur à laclasse c du système).
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Erreur due aux perturbations (2)
On montre que pour un échelon de perturbation d’amplitudeE0 :
ε∞ = −E0K1 limz→1 (z − 1)c−c2
limz→1(z − 1)c + K2
où K1 et K2 sont des constantes. On en déduit le théorèmesuivant.
Conséquence
Pour obtenir une erreur statique nulle en présence d’uneperturbation constante, il faut et il suffit que c > c2, c’est-à-direqu’il y ait au moins un intégrateur en amont du pointd’application de la perturbation.
Rejet d’un bruit permanent : intégration dans le correcteur, etc..
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Plan
3 Systèmes à temps discretSignaux à temps discret et échantillonnageReprésentation des systèmes à temps discret
4 Asservissements à temps discretNotion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
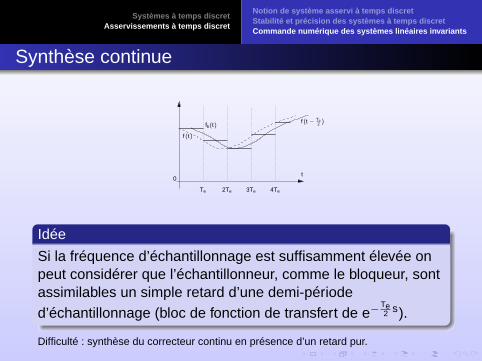
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Synthèse continue
0t
Te 2Te 3Te 4Te
fb(t)
f (t)
f (t − Te2 )
Idée
Si la fréquence d’échantillonnage est suffisamment élevée onpeut considérer que l’échantillonneur, comme le bloqueur, sontassimilables un simple retard d’une demi-périoded’échantillonnage (bloc de fonction de transfert de e−
Te2 s).
Difficulté : synthèse du correcteur continu en présence d’un retard pur.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Transposition de correcteurs continus
Principe de la méthode
Cette méthode de synthèse de correcteur consiste à discrétiserun correcteur continu préexistant ou synthétisé par uneméthode continue pour l’utiliser dans un schéma de commandenumérique.
Problème à résoudre
On cherche pour cela les conditions permettant d’approcher aumieux un correcteur continu à l’aide d’équations auxdifférences.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Différences vers l’arrière (1)
Principe
Approximer la dérivation (multiplication par s en continu) par laformule des rectangles (Euler), comme une différence versl’arrière :
df (t)dt' f (t)− f (t − Te)
Te.
Donc, dans le cas discret :
Z
f (t)− f (t − Te)
Te
=
1− z−1
TeF (z) =
z − 1z Te
F (z).
D’où :
s ←→ z − 1z Te
.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Différences vers l’arrière (1)
Principe
Approximer la dérivation (multiplication par s en continu) par laformule des rectangles (Euler), comme une différence versl’arrière :
df (t)dt' f (t)− f (t − Te)
Te.
Donc, dans le cas discret :
Z
f (t)− f (t − Te)
Te
=
1− z−1
TeF (z) =
z − 1z Te
F (z).
D’où :
s ←→ z − 1z Te
.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Différences vers l’arrière (1)
Principe
Approximer la dérivation (multiplication par s en continu) par laformule des rectangles (Euler), comme une différence versl’arrière :
df (t)dt' f (t)− f (t − Te)
Te.
Donc, dans le cas discret :
Z
f (t)− f (t − Te)
Te
=
1− z−1
TeF (z) =
z − 1z Te
F (z).
D’où :
s ←→ z − 1z Te
.
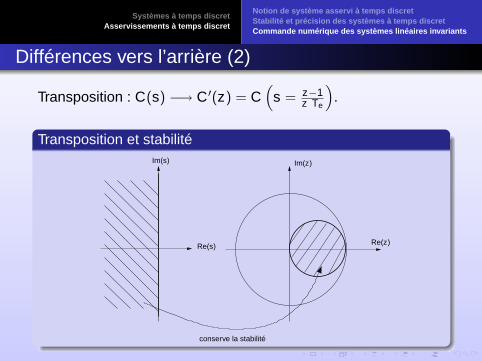
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Différences vers l’arrière (2)
Transposition : C(s) −→ C′(z) = C(
s = z−1z Te
).
Transposition et stabilitéIm(s)
Re(z)
Im(z)
Re(s)
conserve la stabilité
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Différences vers l’avant (1)
Principe
Approximer la dérivation d’un signal à temps continu f (t) parune différence vers l’avant :
df (t)dt
=f (t + Te)− f (t)
Te
Donc, dans le cas discret :
Z
f (t + Te)− f (t)Te
=
z − 1Te
F (z)
D’où :
s ←→ z − 1Te
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Différences vers l’avant (1)
Principe
Approximer la dérivation d’un signal à temps continu f (t) parune différence vers l’avant :
df (t)dt
=f (t + Te)− f (t)
Te
Donc, dans le cas discret :
Z
f (t + Te)− f (t)Te
=
z − 1Te
F (z)
D’où :
s ←→ z − 1Te
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Différences vers l’avant (1)
Principe
Approximer la dérivation d’un signal à temps continu f (t) parune différence vers l’avant :
df (t)dt
=f (t + Te)− f (t)
Te
Donc, dans le cas discret :
Z
f (t + Te)− f (t)Te
=
z − 1Te
F (z)
D’où :
s ←→ z − 1Te
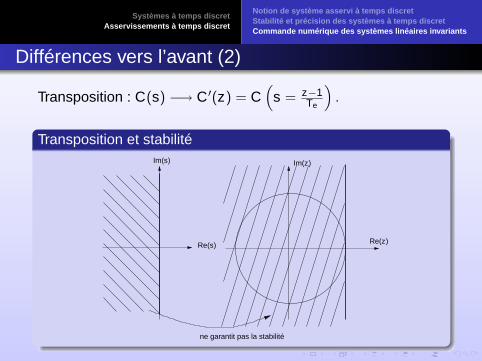
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Différences vers l’avant (2)
Transposition : C(s) −→ C′(z) = C(
s = z−1Te
).
Transposition et stabilitéIm(s)
Re(z)
Im(z)
Re(s)
ne garantit pas la stabilité
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Transformation bilinéaire (1)
On définit la transformation bilinéaire :
z =1 + Te
2 s
1− Te2 s
qui est en fait une approximation linéaire du changement devariable z = eTes :
eTes =e
Te2 s
e−Te
2 s,
'1 + Te
2 s
1− Te2 s
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Transformation bilinéaire (1)
On définit la transformation bilinéaire :
z =1 + Te
2 s
1− Te2 s
qui est en fait une approximation linéaire du changement devariable z = eTes :
eTes =e
Te2 s
e−Te
2 s,
'1 + Te
2 s
1− Te2 s
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Transformation bilinéaire (1)
On définit la transformation bilinéaire :
z =1 + Te
2 s
1− Te2 s
qui est en fait une approximation linéaire du changement devariable z = eTes :
eTes =e
Te2 s
e−Te
2 s,
'1 + Te
2 s
1− Te2 s
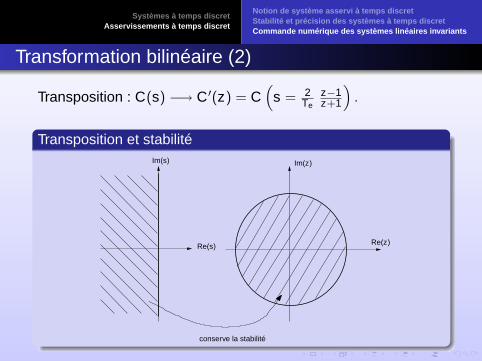
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Transformation bilinéaire (2)
Transposition : C(s) −→ C′(z) = C(
s = 2Te
z−1z+1
).
Transposition et stabilitéIm(s)
Re(z)
Im(z)
Re(s)
conserve la stabilité
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Choix de la période d’échantillonnage
Critères :
Te suffisamment petite par rapport à la constante de tempsτ du système. Typiquement, on impose Te 6 τ
5 ;
si l’on souhaite obtenir une bande passante ωn pour lesystème bouclé, il faut que Te 6 1
10 ωn;
si Te est du même ordre que le temps de calcul de lacommande, il faut modéliser le retard dû à ce calcul (termede retard pur z−1 ou esTe dans un bloc continu) ;
Te pas trop petite, sinon les pôles dominants sont prochesdu cercle unité (eaTe ' 1 si Te petit) : problèmesnumériques.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Choix de la période d’échantillonnage
Critères :
Te suffisamment petite par rapport à la constante de tempsτ du système. Typiquement, on impose Te 6 τ
5 ;
si l’on souhaite obtenir une bande passante ωn pour lesystème bouclé, il faut que Te 6 1
10 ωn;
si Te est du même ordre que le temps de calcul de lacommande, il faut modéliser le retard dû à ce calcul (termede retard pur z−1 ou esTe dans un bloc continu) ;
Te pas trop petite, sinon les pôles dominants sont prochesdu cercle unité (eaTe ' 1 si Te petit) : problèmesnumériques.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Choix de la période d’échantillonnage
Critères :
Te suffisamment petite par rapport à la constante de tempsτ du système. Typiquement, on impose Te 6 τ
5 ;
si l’on souhaite obtenir une bande passante ωn pour lesystème bouclé, il faut que Te 6 1
10 ωn;
si Te est du même ordre que le temps de calcul de lacommande, il faut modéliser le retard dû à ce calcul (termede retard pur z−1 ou esTe dans un bloc continu) ;
Te pas trop petite, sinon les pôles dominants sont prochesdu cercle unité (eaTe ' 1 si Te petit) : problèmesnumériques.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Choix de la période d’échantillonnage
Critères :
Te suffisamment petite par rapport à la constante de tempsτ du système. Typiquement, on impose Te 6 τ
5 ;
si l’on souhaite obtenir une bande passante ωn pour lesystème bouclé, il faut que Te 6 1
10 ωn;
si Te est du même ordre que le temps de calcul de lacommande, il faut modéliser le retard dû à ce calcul (termede retard pur z−1 ou esTe dans un bloc continu) ;
Te pas trop petite, sinon les pôles dominants sont prochesdu cercle unité (eaTe ' 1 si Te petit) : problèmesnumériques.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Choix de la période d’échantillonnage
Critères :
Te suffisamment petite par rapport à la constante de tempsτ du système. Typiquement, on impose Te 6 τ
5 ;
si l’on souhaite obtenir une bande passante ωn pour lesystème bouclé, il faut que Te 6 1
10 ωn;
si Te est du même ordre que le temps de calcul de lacommande, il faut modéliser le retard dû à ce calcul (termede retard pur z−1 ou esTe dans un bloc continu) ;
Te pas trop petite, sinon les pôles dominants sont prochesdu cercle unité (eaTe ' 1 si Te petit) : problèmesnumériques.
Exemple
Soit le système de fonction de transfert :
F1(s) =5000
s3 + 61s2 + 560s + 500=
5000(s + 1)(s + 10)(s + 50)
.
On veut maintenant une erreur statique nulle, un coefficientd’amortissement de 0, 9 et un temps de réponse t5% < 0, 2s.
1 Déterminer le correcteur continu permettant de remplir cecahier des charges.
2 Réaliser la commande numérique de ce correcteur enchoisissant soigneusement la période d’échantillonnage eten transposant le correcteur par transformation bilinéaire.
3 Donner l’équation aux différences vérifiée par le correcteur.4 Déduire le modèle discret de l’asservissement.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Correcteur PID numérique standard (1)
La forme standard du correcteur PID numérique provient de latransposition de la forme standard continue. En appliquant latransposition par différences vers l’avant au terme intégral et latransposition par différences vers l’arrière au terme dérivé, onobtient :
C(z) = Kp
(1 +
Te
τi(z − 1)+
N(z − 1)
(1 + NTeτd
)z − 1
).
Les variantes P, PI et PD, aisément déduites de la formeprécédente, sont bien évidemment également utilisées.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Correcteur PID numérique standard (2)
Exemple
Mettre le correcteur :
C(s) = 0, 154(
s + 11 +1s
)trouvé précédemment sous forme standard.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Anti-saturation du terme intégral
Problème de saturation du terme intégral
Dans le cas (c’est-à-dire toujours) où les actionneursprésentent des saturations, la présence d’un terme intégraldans le correcteur peut poser problème.
Configuration assimilable à une boucle ouverte :
en cas de variations de la consigne, intégration jusqu’à detrès grandes valeurs (effet mémoire) ;
quand l’erreur est réduite (action intégrale désaturée),temps important pour que les valeurs des variables nesoient correctes de nouveau.
Solutions possibles :suspendre l’action intégrale en cas de saturation ;recalculer le terme intégral pour ne pas saturer.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Synthèse directe par placement de pôles (1)
Correcteur possédant un certain nombre de degrés de liberté :
C(z) = Kc
(z
z − 1
)l DI(z)
NI(z)
1 + β1z + . . .
1 + α1z + . . .
avec :
l nombre minimal d’intégrations permettant de satisfaire laspécification en précision ;
compensation des pôles et zéros à l’intérieur du cercleunité (sauf les pôles oscillants trop proches du cercle etceux à partie réelle négative) ;
introduction alternativement de pôles et de zérossupplémentaires et réglage du gain ajustable Kc .
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Synthèse directe par placement de pôles (1)
Correcteur possédant un certain nombre de degrés de liberté :
C(z) = Kc
(z
z − 1
)l DI(z)
NI(z)
1 + β1z + . . .
1 + α1z + . . .
avec :
l nombre minimal d’intégrations permettant de satisfaire laspécification en précision ;
compensation des pôles et zéros à l’intérieur du cercleunité (sauf les pôles oscillants trop proches du cercle etceux à partie réelle négative) ;
introduction alternativement de pôles et de zérossupplémentaires et réglage du gain ajustable Kc .
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Synthèse directe par placement de pôles (1)
Correcteur possédant un certain nombre de degrés de liberté :
C(z) = Kc
(z
z − 1
)l DI(z)
NI(z)
1 + β1z + . . .
1 + α1z + . . .
avec :
l nombre minimal d’intégrations permettant de satisfaire laspécification en précision ;
compensation des pôles et zéros à l’intérieur du cercleunité (sauf les pôles oscillants trop proches du cercle etceux à partie réelle négative) ;
introduction alternativement de pôles et de zérossupplémentaires et réglage du gain ajustable Kc .
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Synthèse directe par placement de pôles (1)
Correcteur possédant un certain nombre de degrés de liberté :
C(z) = Kc
(z
z − 1
)l DI(z)
NI(z)
1 + β1z + . . .
1 + α1z + . . .
avec :
l nombre minimal d’intégrations permettant de satisfaire laspécification en précision ;
compensation des pôles et zéros à l’intérieur du cercleunité (sauf les pôles oscillants trop proches du cercle etceux à partie réelle négative) ;
introduction alternativement de pôles et de zérossupplémentaires
et réglage du gain ajustable Kc .
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Synthèse directe par placement de pôles (1)
Correcteur possédant un certain nombre de degrés de liberté :
C(z) = Kc
(z
z − 1
)l DI(z)
NI(z)
1 + β1z + . . .
1 + α1z + . . .
avec :
l nombre minimal d’intégrations permettant de satisfaire laspécification en précision ;
compensation des pôles et zéros à l’intérieur du cercleunité (sauf les pôles oscillants trop proches du cercle etceux à partie réelle négative) ;
introduction alternativement de pôles et de zérossupplémentaires et réglage du gain ajustable Kc .
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Synthèse directe par placement de pôles (2)
Exemple
On considère un asservissement à retour unitaire du procédéayant pour fonction de transfert :
G(s) =K
s(1 + τs)
avec K = 50, τ = 0, 3 et fe = 100 Hz.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Synthèse directe par placement de pôles (3)
Questions
1 Calculer la fonction de transfert en z équivalente au blocBOZ + procédé notée GH(z) ;
2 On souhaite que le système en boucle fermée ait uncomportement analogue à celui d’un deuxième ordre depulsation naturelle ωn = 4 rad/s et de coefficientd’amortissement ξ = 0, 71. Par ailleurs, on souhaite avoirune erreur de position nulle en régime permanent et uneerreur de vitesse de 0, 1 rad/s en présence d’uneconsigne en rampe.
donner la forme du correcteur envisagé ;calculer ce correcteur de façon a ce qu’il remplisse lecahier des charges précédent ;en déduire l’équation aux différences constituant la relationentrée-sortie de ce correcteur.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Méthode du lieu des racines (1)
La compensation de zéros et de pôles par leur introductiondans la fonction de transfert d’un correcteur série trouve unintérêt particulier lorsque l’on réalise cette synthèse ens’appuyant sur le lieu des racines, dont on connaît leparamétrage en courbes de même amortissement et encourbes de même pulsation naturelle.
On peut adopter les règles générales vues dans le paragrapheprécédent pour choisir la forme du correcteur que l’on règlealors en s’appuyant sur la construction du lieu des racines.
Systèmes à temps discretAsservissements à temps discret
Notion de système asservi à temps discretStabilité et précision des systèmes à temps discretCommande numérique des systèmes linéaires invariants
Méthode du lieu des racines (2)
Exemple
On reprend la synthèse précédente en s’appuyant sur le lieudes racines.