analyses fonctionnelle et...
TRANSCRIPT
ANALYSES FONCTIONNELLE ET STRUCTURELLE
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 1/15
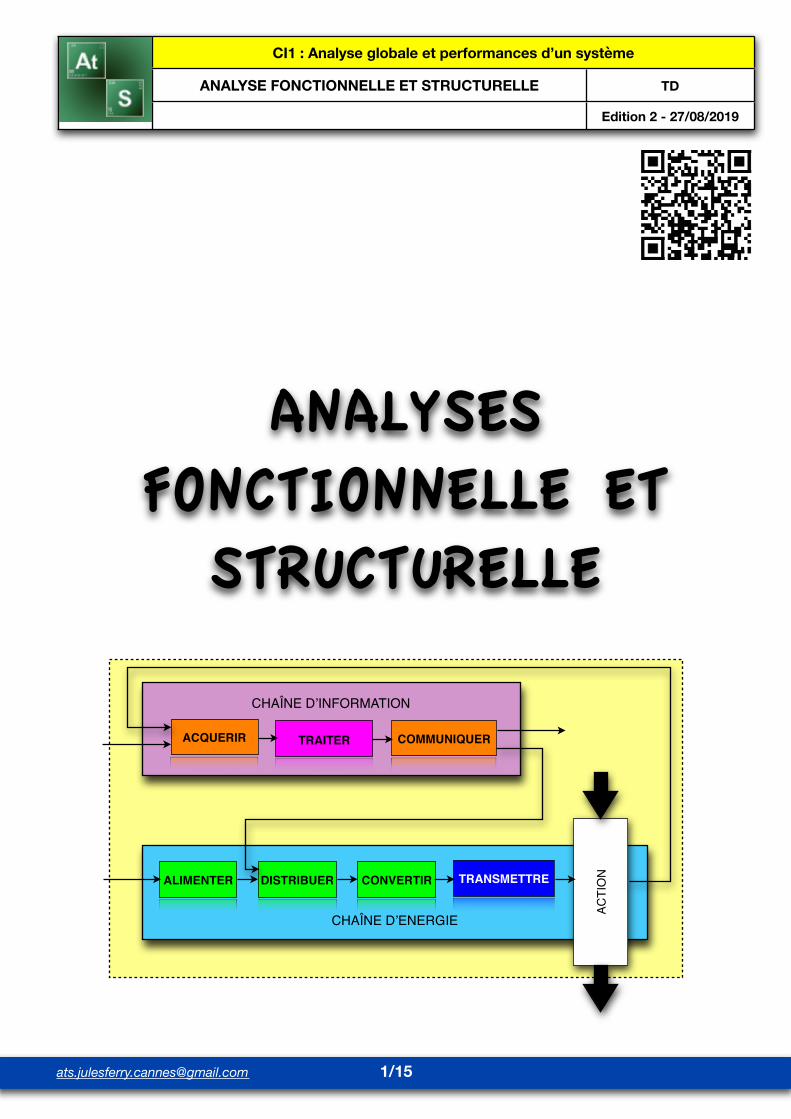
CHAÎNE D’INFORMATION
ACQUERIR TRAITER COMMUNIQUER
CHAÎNE D’ENERGIE
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
ACTI
ON
PROBLEMATIQUE
« Chargé de l’amélioration du véhicule auto-balancé
Segway, il vous faut procéder à l’analyse fonctionnelle et structurelle de ce système, à l’aide des données issues du
cahier des charges initiales et de l’analyse du véhicule existant »
ANALYSERANALYSERANALYSERA1 : Identifier le besoin Analyse fonctionnelleA3 : Analyse fonctionnelle, structurelle, comportementale Analyses fonctionnelle et structurelle
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Problématique Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 2/15
SommaireA. ____________________________________________________Présentation du système! 4
A.1.Mise en situation 4
A.2.Eléments constructifs 5A.2.1. Structure généraleA.2.2. CapteursA.2.3. ContrôleursA.2.4. Motorisation
A.3.Caractéristiques du Segway 7A.3.1. Vitesses de déplacement et de rotationA.3.2. Consigne de directionA.3.3. EnduranceA.3.4. Masse de l’utilisateur
A.4.Extraits du cahier des charges 7A.4.1. Fonction «Permettre à l'utilisateur de se déplacer en milieu urbain»A.4.2. Fonction «Donner une sensation de stabilité»A.4.3. Fonction «Absorber les imperfections de la route»A.4.4. Fonction «Etre manoeuvrable»
B. __________________________________________Analyse fonctionnelle et structurelle! 9
B.1.Analyse structurelle 9
B.2.Analyse fonctionnelle 10B.2.1. Diagramme des cas d’utilisationB.2.2. Diagramme des exigencesB.2.3. Diagramme de définition de blocs (Diagramme de contexte)B.2.4. Diagramme de définition de blocs (Diagramme de structure)B.2.5. Diagramme de bloc interneB.2.6. Diagramme de bloc interne
C. ________________________________________________________Notes personnelles! 16
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Sommaire Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 3/15

A. Présentation du système
A.1. Mise en situation
Le Segway® est un véhicule de transport urbain auto balancé.
Il s’agit d’un gyropode constitué d’une plateforme, d’une barre d’appui et d’une poignée directionnelle :
CT Communication technique Td CT 2.3 Analyse structurelle
Lycée Jules Ferry Page 1 sur 6 TSI1
Le support de l’étude est le véhicule auto balancé Segway® . Il s’agit d’un moyen de transport motorisé qui permet de se déplacer en ville. En termes de prestations, il est moins rapide qu’une voiture ou qu’un scooter, plus maniable, plus écologique, moins encombrant et nettement plus moderne.
Analyser Modéliser Résoudre Expérimenter Concevoir Réaliser Communiquer Identifier le besoin et appréhender les problématiques % Savoirs faires associés Questions bilan Décrire le besoin, Présenter la fonction globale, Identifier les domaines d'application, les critères technico-économiques, Identifier les contraintes, Qualifier et quantifier les exigences (critères, niveaux), Identifier et caractériser les fonctions de service
Q1 et Q2
Appréhender les analyses fonctionnelles fonctionnelle et structurelle % Savoirs faires associés Questions bilan Déterminer les constituants dédiés aux fonctions d'un système et en justifier le choix, Identifier les architectures fonctionnelles et structurelles. Identifier la nature des flux échangés (Matière, énergie, information) traversant la frontière d'étude, Préciser leurs caractéristiques (variable potentielle, variable flux), Identifier et décrire les chaînes d'information et d'énergie d'un système, Identifier la nature et les caractéristiques des flux échangés,
Q3 et Q4
TD
Td CT 2.3 TSI1 TSI2
Analyse structurelle et fonctionnelle d’un système X
Période
Comportement dynamique d’un véhicule type Seegway
1 2 3 4 5
Cycle 1 : Communication technique Durée : 2 ,5 semaines X
Photographies 1
Barre d’appui
Poignée directionnelle
Plate forme
Moins rapide qu’un scooter, il est toutefois plus maniable, moins encombrant, plus moderne et plus écologique.
La conduite du Segway® se fait par inclinaison du corps vers l’avant ou vers l’arrière, afin d’accélérer ou freiner le mouvement (comme pour la marche à pied dans laquelle le piéton s’incline vers l’avant pour débuter le mouvement). Les virages à droite et à gauche sont quant à eux commandés par la rotation de la poignée directionnelle située sur la droite du guidon.
Gyropode
Dossier technique
Dossier_Technique_SEGWAY Lycée Jules Ferry – Versailles 4/44
1. Présentation du produit
Inventé par Dean Kamen, le Transporteur Personnel Segway (TP) est le premier moyen de transport fondé sur le principe de l'équilibre dynamique.
Pour avancer ou reculer, il suffit de se pencher en avant ou en arrière. Le Gyropode Segway® s'occupe de maintenir l'équilibre du pilote !
En fait, le fonctionnement du Gyropode Segway® est calqué sur le corps humain.
Si vous vous penchez en avant, il est probable que vous ne tomberez pas. Votre oreille interne aura indiqué à votre cerveau que vous êtes en train de perdre l'équilibre. Vos muscles auront alors reçu l'ordre de mettre un pied en avant pour rétablir les choses. Vous ne tombez pas, vous marchez, en mettant un pied devant l'autre !
Le Gyropode Segway® fonctionne de la même manière. Ses pieds sont des roues, son cerveau est un ensemble de micro-processeurs et son oreille interne est constituée de gyroscopes et de capteurs très sophistiqués. Le Gyropode Segway® détecte votre inclinaison et donne aux roues le mouvement nécessaire pour assurer votre équilibre (donc contrôler votre chute). C'est ainsi que vous avancez.
Il suffit donc de se pencher en avant pour qu'il démarre et de se remettre droit pour qu'il freine.
Si on se penche en arrière, il recule. Redressez-vous il s'arrête. Pour tourner à gauche, il suffit d’incliner le guidon vers la gauche.
C'est totalement instinctif ! L'apprentissage est immédiat.
CT Communication technique Td CT 2.3 Analyse structurelle
Lycée Jules Ferry Page 1 sur 6 TSI1
Le support de l’étude est le véhicule auto balancé Segway® . Il s’agit d’un moyen de transport motorisé qui permet de se déplacer en ville. En termes de prestations, il est moins rapide qu’une voiture ou qu’un scooter, plus maniable, plus écologique, moins encombrant et nettement plus moderne.
Analyser Modéliser Résoudre Expérimenter Concevoir Réaliser Communiquer Identifier le besoin et appréhender les problématiques % Savoirs faires associés Questions bilan Décrire le besoin, Présenter la fonction globale, Identifier les domaines d'application, les critères technico-économiques, Identifier les contraintes, Qualifier et quantifier les exigences (critères, niveaux), Identifier et caractériser les fonctions de service
Q1 et Q2
Appréhender les analyses fonctionnelles fonctionnelle et structurelle % Savoirs faires associés Questions bilan Déterminer les constituants dédiés aux fonctions d'un système et en justifier le choix, Identifier les architectures fonctionnelles et structurelles. Identifier la nature des flux échangés (Matière, énergie, information) traversant la frontière d'étude, Préciser leurs caractéristiques (variable potentielle, variable flux), Identifier et décrire les chaînes d'information et d'énergie d'un système, Identifier la nature et les caractéristiques des flux échangés,
Q3 et Q4
TD
Td CT 2.3 TSI1 TSI2
Analyse structurelle et fonctionnelle d’un système X
Période
Comportement dynamique d’un véhicule type Seegway
1 2 3 4 5
Cycle 1 : Communication technique Durée : 2 ,5 semaines X
Photographies 1
Barre d’appui
Poignée directionnelle
Plate forme
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 4/15
Tout comme le cerveau permet à l’homme de tenir debout sans tomber grâce à l’oreille interne, le système comporte un dispositif d’asservissement d’inclinaison, maintenant la plate forme du véhicule à l’horizontale ou encore la barre d’appui, supposée orthogonale à cette plate forme, à la verticale.
Ces régulations sont possibles grâce à différents capteurs et une unité de traitement numérique à base de microprocesseurs transmettant des consignes aux variateurs des deux moteurs électriques équipant les deux roues.
A.2. Eléments constructifs
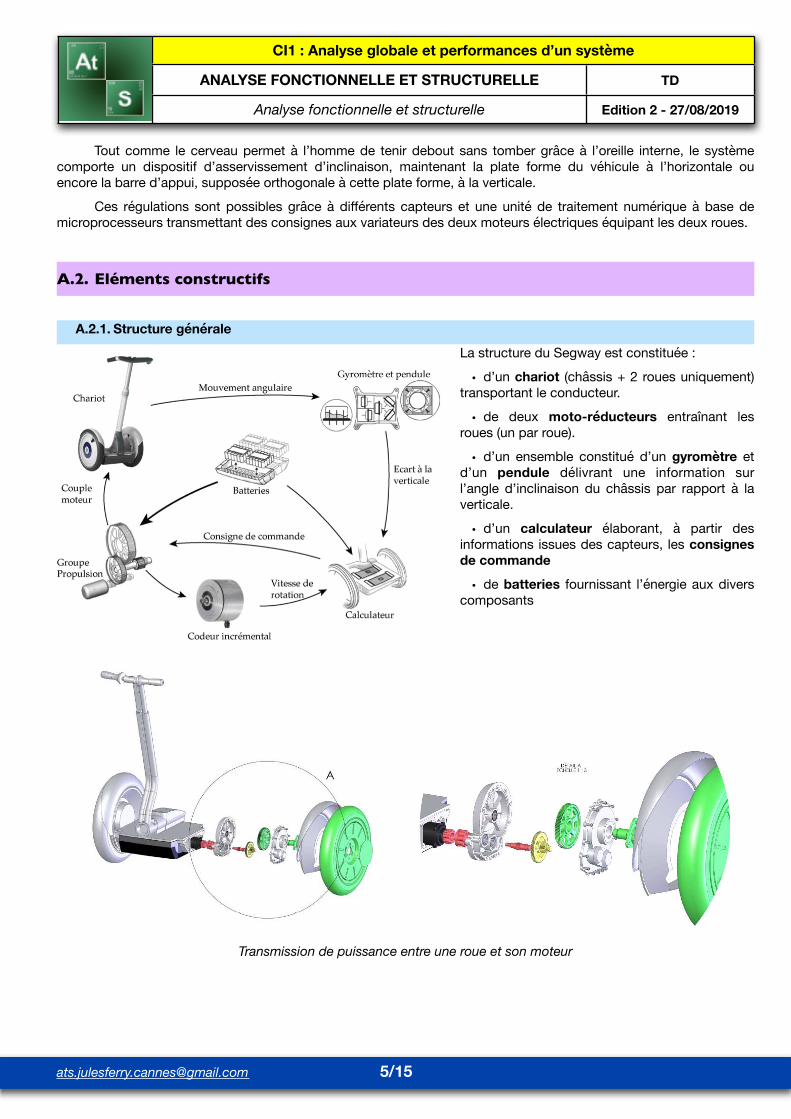
A.2.1. Structure générale
La structure du Segway est constituée :
• d’un chariot (châssis + 2 roues uniquement) transportant le conducteur.
• de deux moto-réducteurs entraînant les roues (un par roue).
• d’un ensemble constitué d’un gyromètre et d’un pendule délivrant une information sur l’angle d’inclinaison du châssis par rapport à la verticale.
• d’un calculateur élaborant, à partir des informations issues des capteurs, les consignes de commande
• de batteries fournissant l’énergie aux divers composants
Gyropode
Dossier technique
Dossier_Technique_SEGWAY Lycée Jules Ferry – Versailles 32/44
Gyropode
Dossier technique
Dossier_Technique_SEGWAY Lycée Jules Ferry – Versailles 32/44
Transmission de puissance entre une roue et son moteur
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 5/15

A.2.2. Capteurs
Les gyromètres et capteurs d’inclinaison détectent les variations de position du centre de gravité à une fréquence de 100 Hz.
A.2.2.1. Gyroscope
Le gyroscope est constitué de trois accéléromètres à semi conducteur, disposés en triangle. L’équilibre de ces accéléromètres est assuré par un calculateur interne qui va contrer la précession gyroscopique. La tension nécessaire pour contrer cette précession est proportionnelle à la vitesse angulaire.
A.2.2.2. Codeur incrémental de direction
La direction est contrôlée par la rotation de la potence. L’angle de rotation de cette potence est mesuré par un codeur incrémental.
A.2.3. Contrôleurs
Au nombre de deux, pour des raisons de redondance de sécurité (si un contrôleur tombe en panne, le second prend le relais). Ils sont caractérisés par une très grande rapidité de calcul, nécessaire pour assurer l’équilibre du système.
Le calculateur a pour objectifs :
1. d’assurer la stabilité du système
2. de mettre en mouvement le système
La stabilité est issue de la mesure ou du calcul de :
• la vitesse angulaire dθ / dt
• l’angle d’inclinaison θ
• la position horizontale x (par comparaison entre l’angle des axes moteur et l’angle d’inclinaison)
• la vitesse horizontale dx / dt
A.2.4. Motorisation
Chaque roue est indépendante, et mise en rotation par un moteur à courant continu brushless piloté par un onduleur triphasé commandé en Modulation de Largeur d’Impulsion MLI (également désigné sous l’acronyme PWM : Pulse Width Modulation).
La puissance unitaire de chaque moteur est égale à 1,5 kW. Par sécurité, chaque bobine est doublée en parallèle, de sorte qu’en cas de défaillance d’une bobine le moteur puisse continuer à fonctionner jusqu’à son arrêt.
En sortie de moteur, on trouve un réducteur qui transmet aux roues la puissance du moteur. Un codeur incrémental est installé en sortie de chaque motoréducteur afin de mesurer l’angle des axes moteur, et d’en déduire leurs vitesses angulaire.
Gyropode
Dossier technique
Dossier_Technique_SEGWAY Lycée Jules Ferry – Versailles 22/44
7.2 Les contrôleurs
Les informations sont transmises à 2 ordinateurs dont la puissance est supérieure à celle d'un PC standard. Cette puissance est nécessaire pour accomplir très rapidement tous les calculs extrêmement précis nécessaires au maintien de l'équilibre. Si l'un des ordinateurs tombe en panne, l'autre prend immédiatement la relève pour arrêter le Gyropode Segway® en équilibre et en sécurité.
Les ordinateurs utilisent un logiciel très sophistiqué. Il traite toutes les informations des gyroscopes et ajuste la vitesse des moteurs en conséquence. Les moteurs (alimentés par 2 batteries NiMH) actionnent chaque roue indépendamment à des vitesses variables.
Quand le Gyropode Segway® s'incline en avant, les 2 roues tournent vers l'avant pour l'empêcher de tomber. Et inversement si le Gyropode Segway® s'incline en arrière. Quand l'utilisateur tourne la poignée de direction, les moteurs font tourner une roue plus vite que l'autre ou dans des directions opposées pour faire pivoter le Gyropode Segway®.
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 6/15
A.3. Caractéristiques du Segway
A.3.1. Vitesses de déplacement et de rotation
Il existe trois modes possible de fonctionnement :
1. le mode «Tortue» : Vitesse maximale 9,6 km/h - Virages lents
2. le mode «Piéton» : Vitesse maximale 13 km/h - Virages rapides
3. le mode «Espace ouvert» : Vitesse maximale 20 km/h - Virages très rapides
A.3.2. Consigne de direction
La consigne de direction est donnée par rotation de la potence
A.3.3. Endurance
Pour une charge complète, l’endurance (ne pas confondre avec l’autonomie) se situe entre 25 et 38 km. Cette endurance dépend évidemment du profil topographique et de la vitesse, mais également de la température extérieure.
2 types de batterie sont prévues :
• Batterie Li-Ion, pour une endurance moyenne de 31 km• Batterie NiMH, pour une endurance moyenne de 16 km
Les batteries Li-Ion permettent une utilisation de -10°C à 50 °C
A.3.4. Masse de l’utilisateur
Il existe deux limites à la masse de l’utilisateur :
* La masse maximale de l’utilisateur : 118 kg. Cette limite supérieure est liée à des contraintes de résistance structurelle.
* La masse minimale de l’utilisateur : 50 kg. Cette limite inférieure est liée au contrôle de l’asservissement, pour lequel un rapport masse du conducteur/masse du gyropode minimal existe.
A.2. Extraits du cahier des charges Un certain nombre de fonctions ont été identifiées dans le cahier des charges
A.2.1. Fonction «Permettre à l'utilisateur de se déplacer en milieu urbain»
Le Segway doit pouvoir se déplacer entre 0 et 20 km/h, avec une accélération en fonctionnement normal égale à au moins 1,5 m.s-2.
La distance d’arrêt à 20 km/h ne doit pas dépasser 3 m.
Les commandes doivent être ergonomiques, de manipulation intuitive.
Au plus 3 sacoches doivent pouvoir être embarquées.
A.2.2. Fonction «Donner une sensation de stabilité»
Le temps de réponse pour passer de 0 à 5 km/h ne doit pas dépasser 1 seconde
L'inclinaison du châssis par rapport à la verticale doit converger vers 0
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 7/15
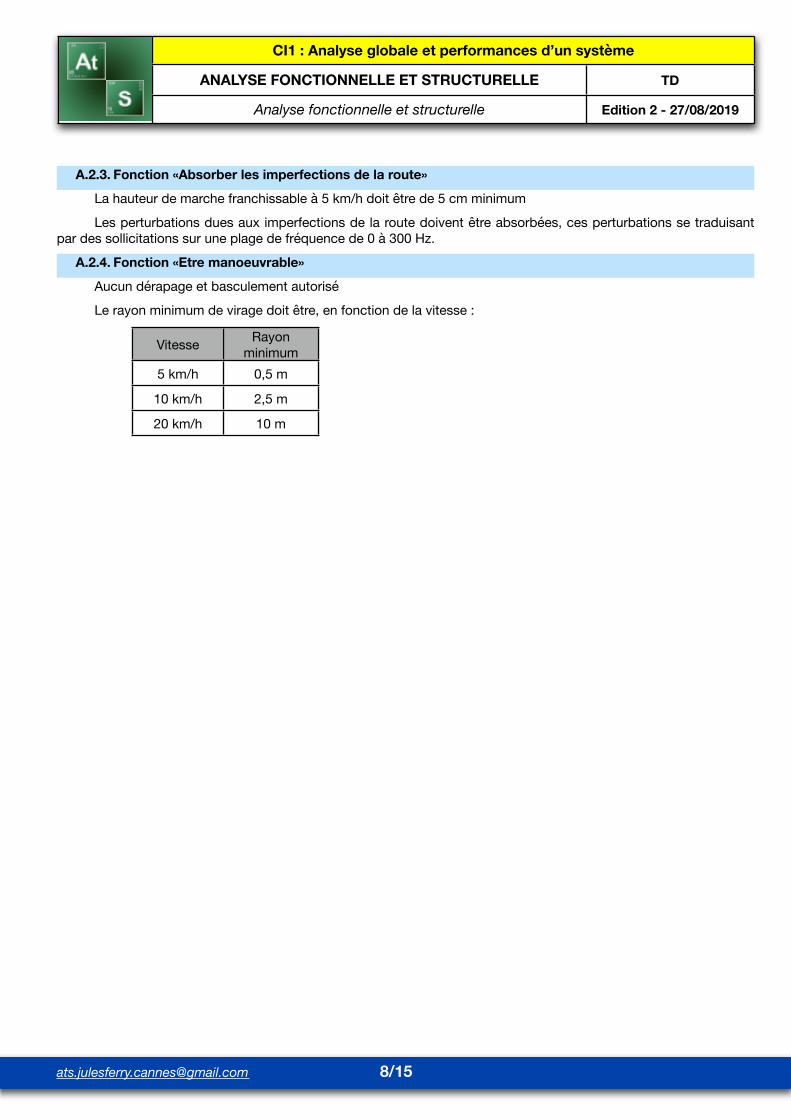
A.2.3. Fonction «Absorber les imperfections de la route»
La hauteur de marche franchissable à 5 km/h doit être de 5 cm minimum
Les perturbations dues aux imperfections de la route doivent être absorbées, ces perturbations se traduisant par des sollicitations sur une plage de fréquence de 0 à 300 Hz.
A.2.4. Fonction «Etre manoeuvrable»
Aucun dérapage et basculement autorisé
Le rayon minimum de virage doit être, en fonction de la vitesse :
Vitesse Rayon minimum
5 km/h 0,5 m
10 km/h 2,5 m
20 km/h 10 m
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 8/15
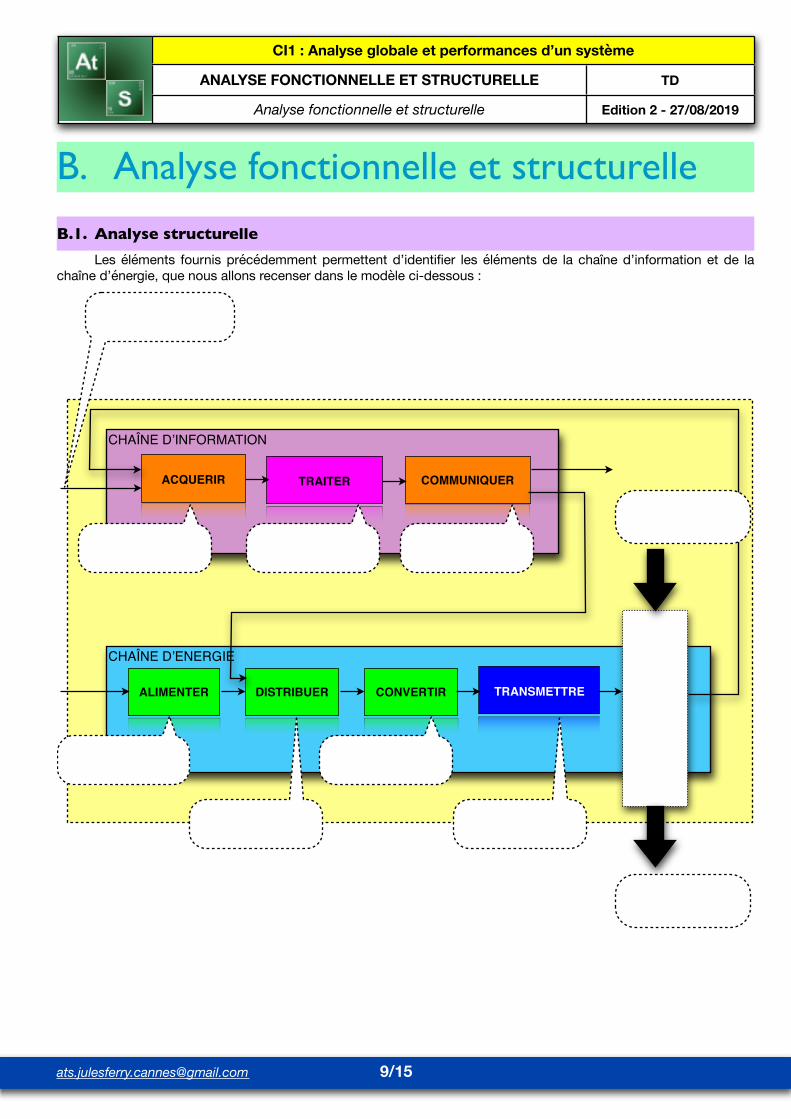
B. Analyse fonctionnelle et structurelle
B.1. Analyse structurelleLes éléments fournis précédemment permettent d’identifier les éléments de la chaîne d’information et de la
chaîne d’énergie, que nous allons recenser dans le modèle ci-dessous :
CHAÎNE D’INFORMATION
ACQUERIR TRAITER COMMUNIQUER
CHAÎNE D’ENERGIE
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 9/15
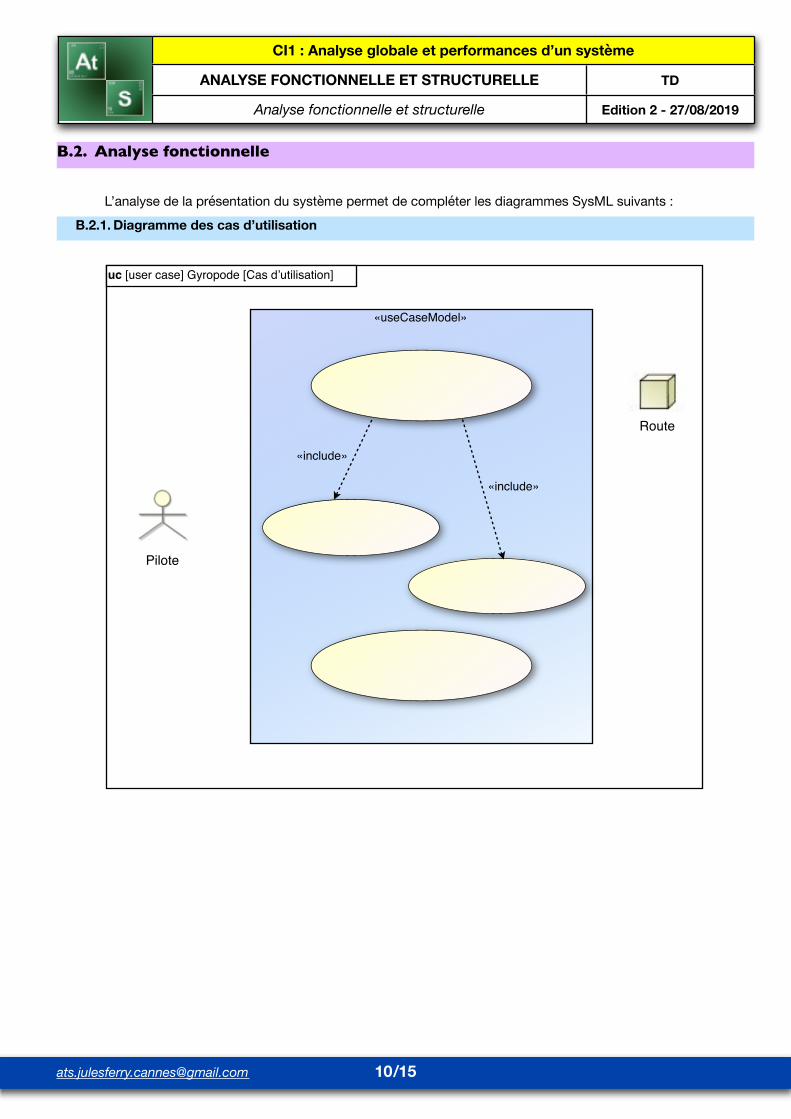
B.2. Analyse fonctionnelle
L’analyse de la présentation du système permet de compléter les diagrammes SysML suivants :
B.2.1. Diagramme des cas d’utilisation
uc [user case] Gyropode [Cas d’utilisation]
Pilote
Route
«useCaseModel»
«include»
«include»
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 10/15
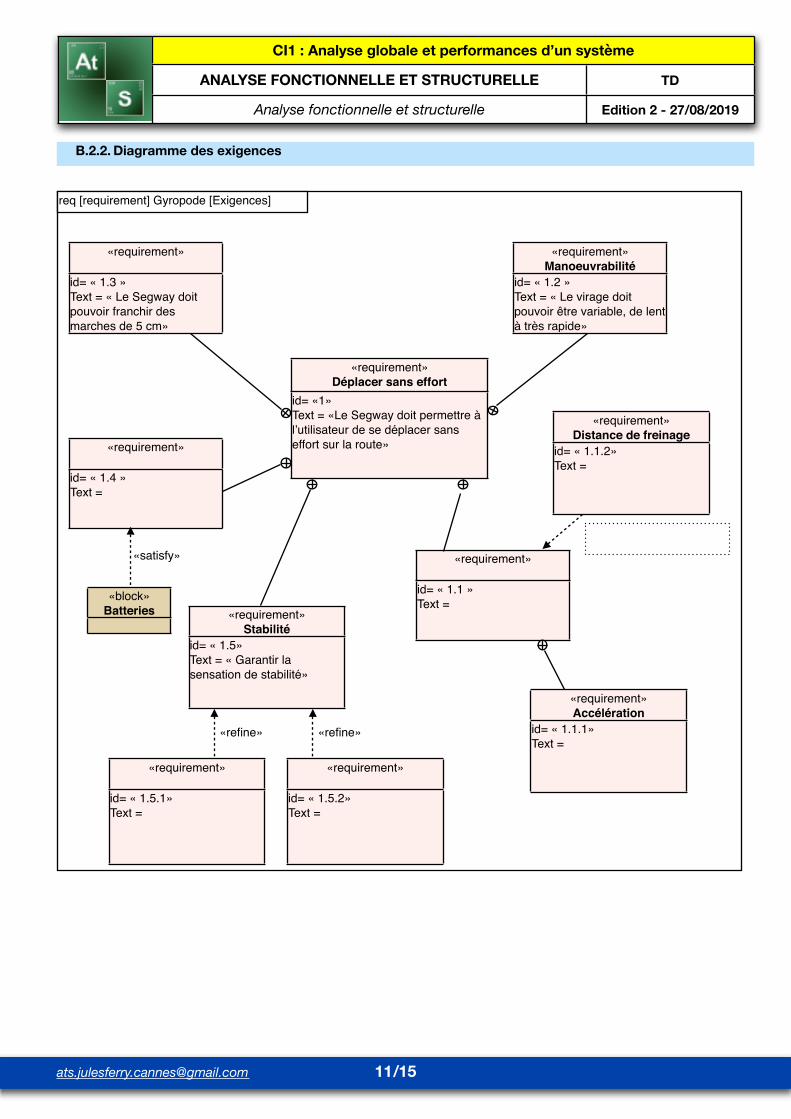
B.2.2. Diagramme des exigences
req [requirement] Gyropode [Exigences]
«requirement»Déplacer sans effort
id= «1»Text = «Le Segway doit permettre à l’utilisateur de se déplacer sans effort sur la route»
«requirement»
id= « 1.1 »Text =
«requirement»Distance de freinage
id= « 1.1.2»Text =
«requirement»Accélération
id= « 1.1.1»Text =
«requirement»
id= « 1.3 »Text = « Le Segway doit pouvoir franchir des marches de 5 cm»
«requirement»Manoeuvrabilité
id= « 1.2 »Text = « Le virage doit pouvoir être variable, de lent à très rapide»
«requirement»
id= « 1.4 »Text =
«block»Batteries
«requirement»
id= « 1.5.1»Text =
«satisfy»
«refine»
«requirement»Stabilité
id= « 1.5»Text = « Garantir la sensation de stabilité»
«refine»
«requirement»
id= « 1.5.2»Text =
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 11/15
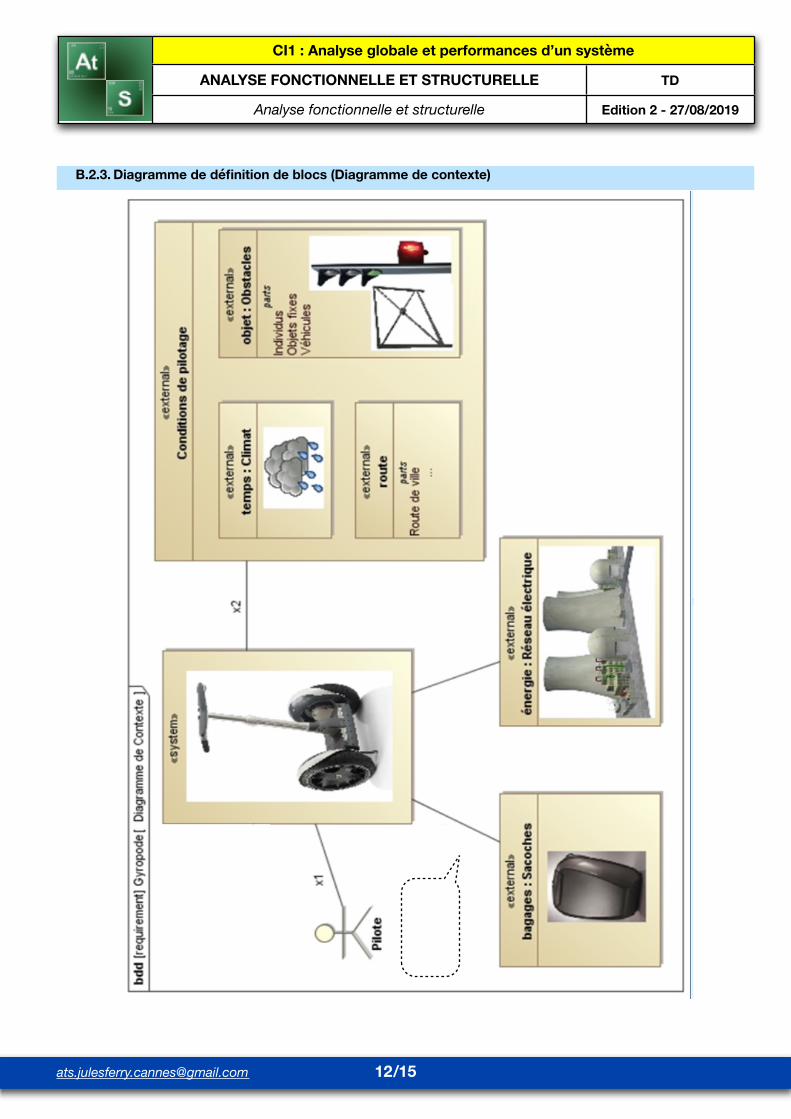
B.2.3. Diagramme de définition de blocs (Diagramme de contexte)
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 12/15
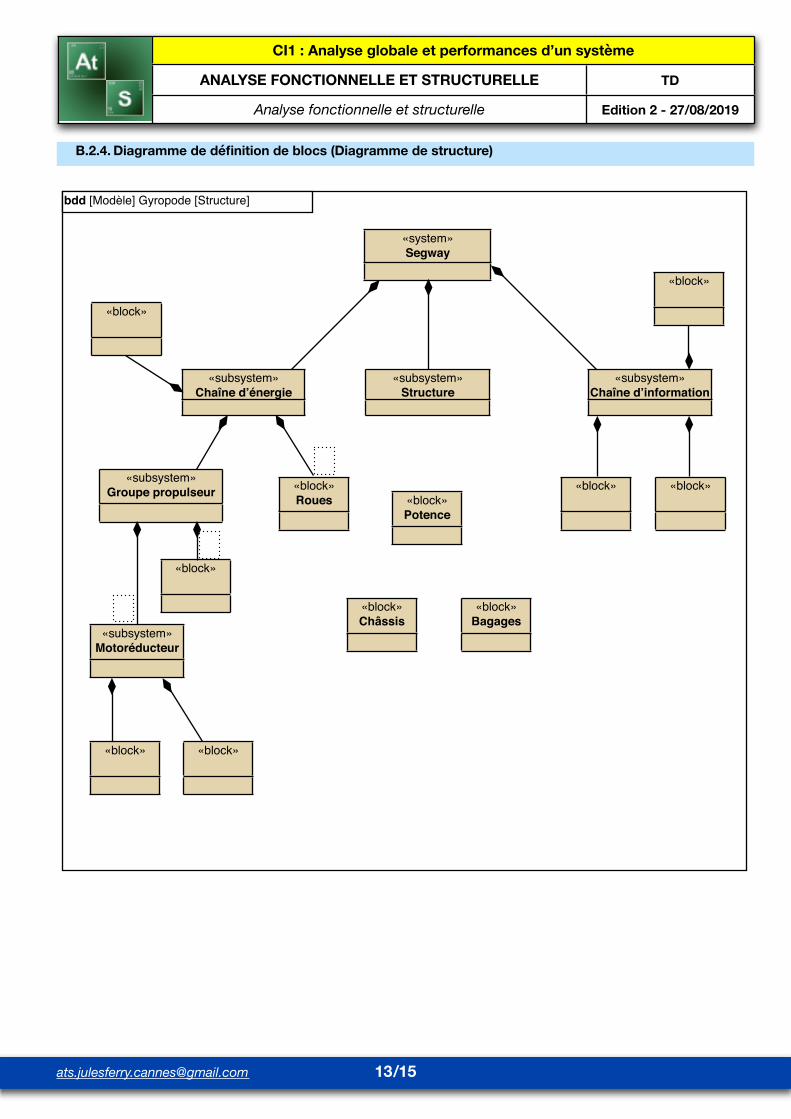
B.2.4. Diagramme de définition de blocs (Diagramme de structure)
«system»Segway
«subsystem»Chaîne d’énergie
«subsystem»Chaîne d’information
«block»
«block» «block»
«block»Châssis
«block»
«subsystem»Motoréducteur
«block»Potence
«block» «block»
«block»Bagages
«subsystem»Structure
«block»Roues
«block»
«subsystem»Groupe propulseur
bdd [Modèle] Gyropode [Structure]
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 13/15
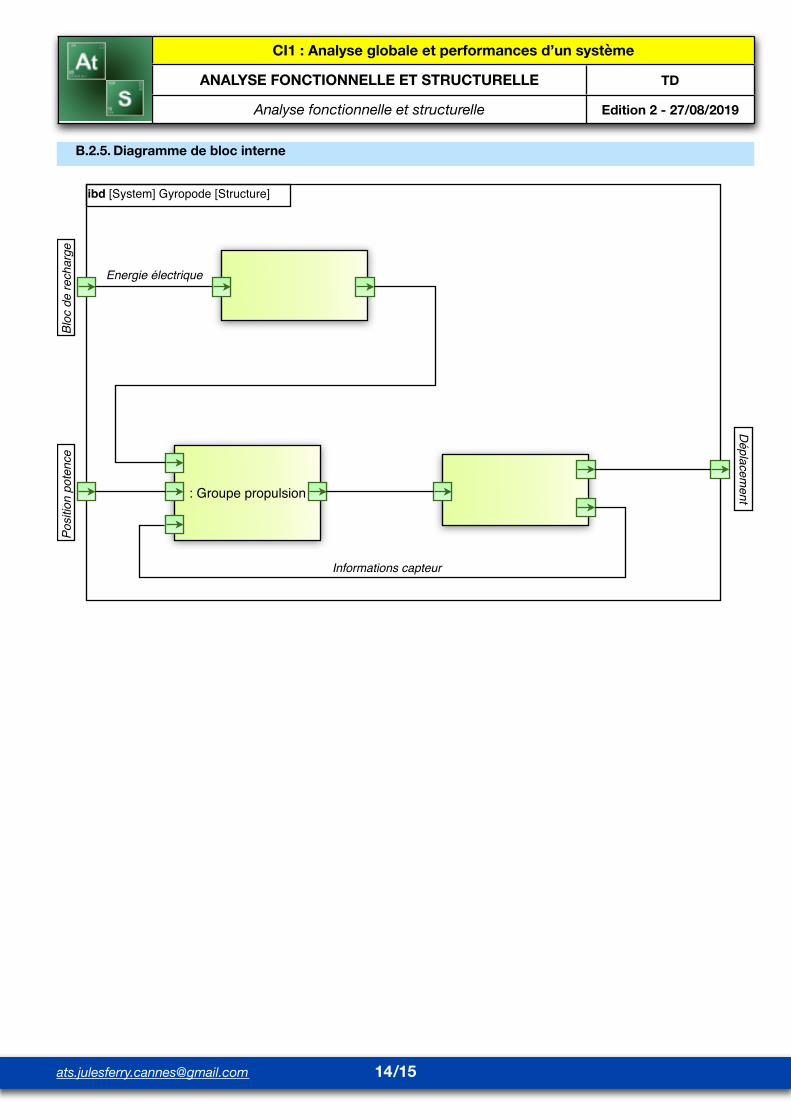
B.2.5. Diagramme de bloc interne
ibd [System] Gyropode [Structure]
: Groupe propulsion
Bloc
de
rech
arge
Energie électrique
Posi
tion
pote
nce
Déplacem
ent
Informations capteur
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 14/15
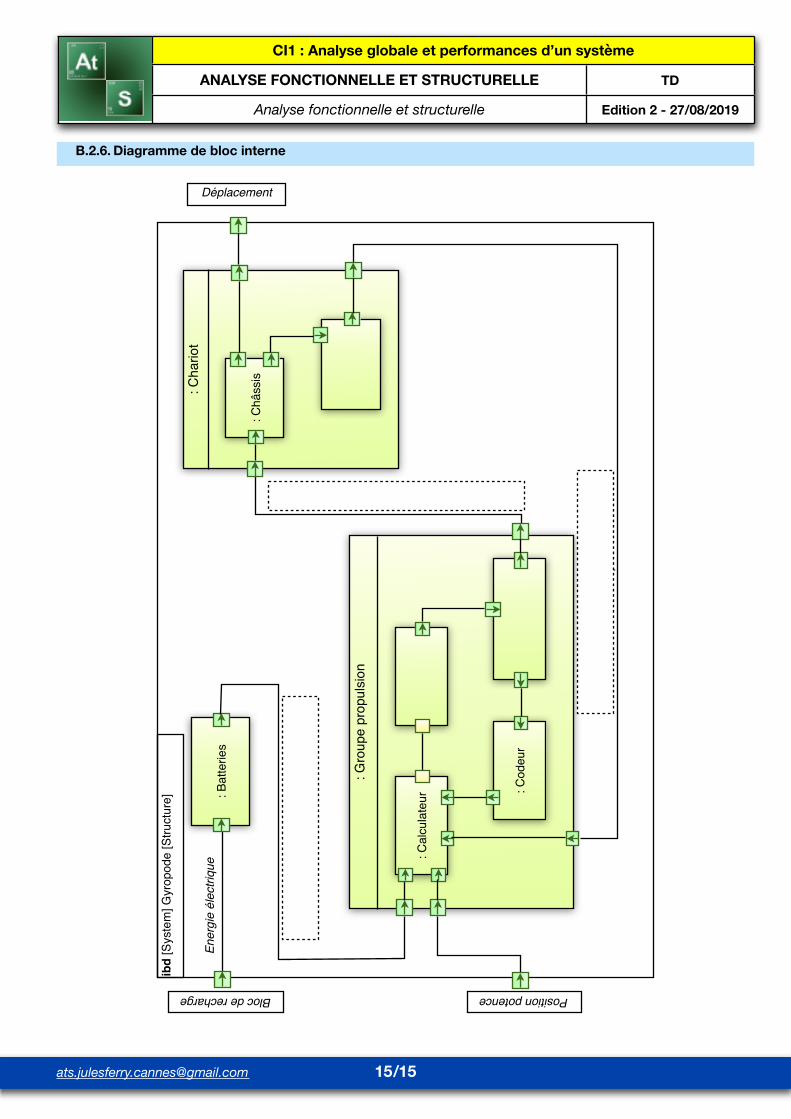
B.2.6. Diagramme de bloc interne
Ener
gie
élec
triqu
e: B
atte
ries
Info
rmat
ions
cap
teur
Ener
gie
élec
triqu
e
ibd
[Sys
tem
] Gyr
opod
e [S
truct
ure]
Bloc de recharge Position potence
Déplacement: C
hario
t
: Châ
ssis
: Gro
upe
prop
ulsi
on
: Cal
cula
teur
: Cod
eur
CI1 : Analyse globale et performances d’un systèmeCI1 : Analyse globale et performances d’un système
ANALYSE FONCTIONNELLE ET STRUCTURELLE TD
Analyse fonctionnelle et structurelle Edition 2 - 27/08/2019
L y c é e J u l e s F e r r y - 0 6 4 0 0 C a n n e s [email protected] 15/15