microphones & captation -...
TRANSCRIPT
1
MICROPHONES & CAPTATIONVersion du 03/05/2006
Chapitre 1 : les microphonesLe microphone est un transducteur transformant une variation de pression acoustiqueen variation de tension électrique.
Le processus de transduction se déroule en deux étapes simultanées :
- les variations de pression acoustique provoquées par les ondes sonores mettenten vibration la membrane du microphone ;
- les vibrations de cette membrane sont utilisées pour générer une tensionélectrique alternative.
Les microphones peuvent donc être classés en fonction du mode de transduction :
- acoustique à mécanique : classification acoustique
- mécanique à électrique : classification électrique
La classification acoustique aura notamment une incidence sur la directivité du microphone, càdsur la manière dont il va privilégier les ondes sonores venant d'une ou plusieurs directions autourde lui. La classification électrique influencera plus sa courbe de réponse en fréquence.
A. Classification acoustique1. Microphones à pression.
L'onde agit sur une seule face de la membrane, qui est fixée à un boîtier complètement fermé, àl'exception d'un petit trou d'égalisation de la pression entre l'intérieur et l'extérieur. Il s'agit d'unpur capteur de pression.
F = p.S
F : forcep : pressionS : surface
Ce type de microphone est théoriquement omnidirectionnel car la pression n'a pas de directionprivilégiée. La force F est constante pour quelle que soit la direction d'incidence de l'onde.Les dimensions physiques du micro jouent le rôle d'obstacle pour les ondes de fréquence élevée.Elles tendent à être réfléchies. Il y a renforcement des ondes frontales et affaiblissement desondes arrière. Donc, aux hautes fréquences, la sensibilité du micro diminue en fonction de l'angled'incidence de l'onde. En clair, le micro devient plus directionnel au fur et à mesure que lafréquence augmente (voir figure suivante).
Schéma de principe du capteur à pression.
2
2. Microphones à gradient de pression
L'onde sonore agit sur les deux faces de la membrane fixée à un support ouvert des deux côtés.La force résultante F est engendrée par la différence de pression (le gradient de pression) surchacun des côtés de la membrane.
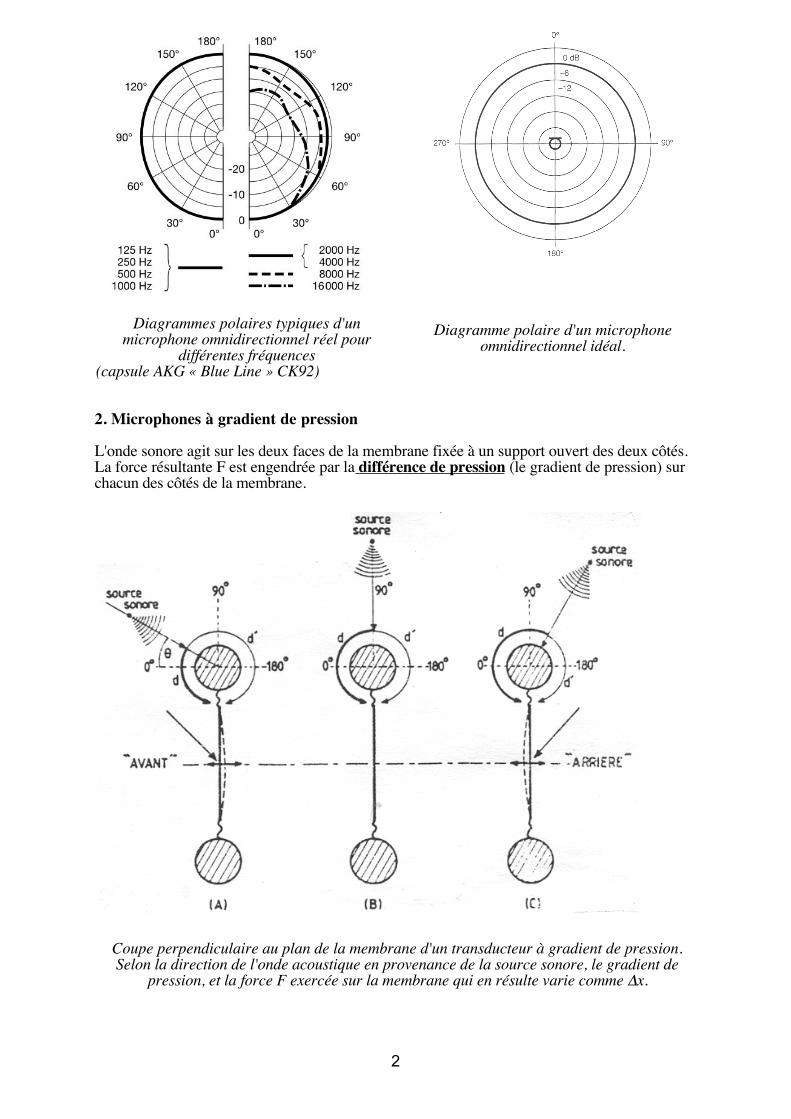
Diagrammes polaires typiques d'unmicrophone omnidirectionnel réel pour
différentes fréquences(capsule AKG « Blue Line » CK92)
Diagramme polaire d'un microphoneomnidirectionnel idéal.
Coupe perpendiculaire au plan de la membrane d'un transducteur à gradient de pression.Selon la direction de l'onde acoustique en provenance de la source sonore, le gradient de
pression, et la force F exercée sur la membrane qui en résulte varie comme Δx.

3
F = (pav- par) . S
Il s'agit d'un pur capteur à gradient de pression. La différence de pression entre l’avant etl’arrière de la membrane est due à la différence de trajet que parcourt l'onde sonore entre la faceavant et la face arrière. Elle est maximale pour des angles d'incidence de 0° et de 180° (anglesfrontal et arrière) et minimale pour des angles d'incidence de 90° et 270° (angles latéraux). Laforce résultante est fonction du cosinus de l'angle d'incidence de la source.
F = cos α
La force F est maximale pour des angles de 0° (face au microphone) et 180° (derrière lui), maisnulle à 90 et 270° (côtés).Elle est de signe négatif entre 90 et 270°
Pour un pur capteur à gradient de pression, la courbe de sensibilité en fonction de l'angled'incidence, appelée diagramme polaire, possède donc la forme d'un huit au centre duquel setrouve la membrane.
Corollaire des microphones à gradient depression : l' effet de proximité. Le décalageentre les deux ondes (avant et arrière)correspond à une différence de trajet fixe. Or,une distance fixe correspond à un décalage dephase variable en fonction de la fréquence. Ladifférence de phase augmente avec lafréquence. À proximité d'une source quasiponctuelle, les ondes sont encore presquesphériques et le niveau de pression décroîtsignificativement avec la distance. Ce quiprovoque une différence de pression quis'ajoute à la différence de phase. D'où ungradient (donc une force sonore) plusimportant pour les basses fréquences. En fait,cela se produit à toutes les fréquences, mais ladistance sensible est plus importante pour lesbasses fréquences. Cet effet de proximitéjustifie la présence de filtres d'atténuation des basses fréquences pour les prises de sonrapprochées. Les microphones Sennheiser MD421 et MD441 possèdent de tels filtres sousforme d'une bague tournante comportant plusieurs crans de réglage, dont les extrêmes sont notésM (Music, sans filtrage) et S (Speech, avec filtrage maximum).
Autre conséquence : la courbe de réponse en fréquence présente une chute dans l’extrême-gravecar la différence de trajet (et donc de phase) entre les ondes arrivant des deux côtés de lamembrane devient de plus en plus petite relativement à une phase complète. Les deux ondestendent donc à s’atténuer l’une l’autre.
Représentation schématique en coupe d’unemembrane d’un microphone à gradient de
pression. La force qui s’exerce finalement surla membrane varie avec l’angle d’incidence de
l’onde de pression acoustique.
4
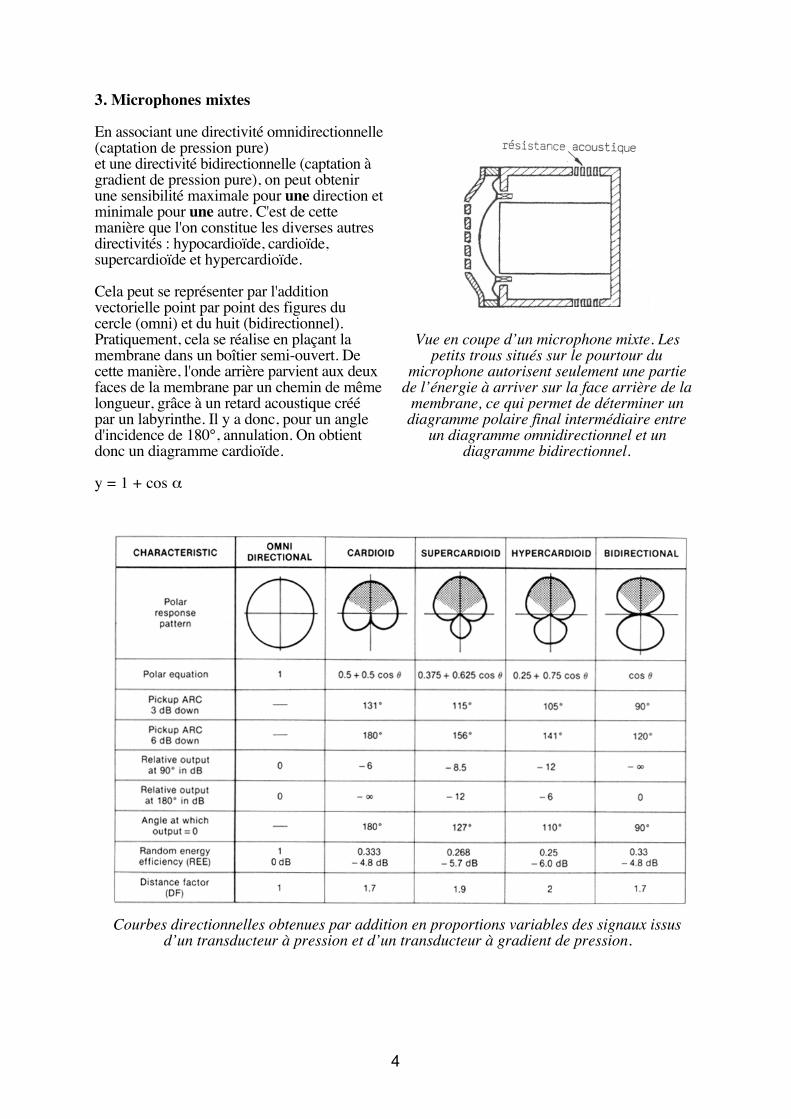
3. Microphones mixtes
En associant une directivité omnidirectionnelle(captation de pression pure)et une directivité bidirectionnelle (captation àgradient de pression pure), on peut obtenirune sensibilité maximale pour une direction etminimale pour une autre. C'est de cettemanière que l'on constitue les diverses autresdirectivités : hypocardioïde, cardioïde,supercardioïde et hypercardioïde.
Cela peut se représenter par l'additionvectorielle point par point des figures ducercle (omni) et du huit (bidirectionnel).Pratiquement, cela se réalise en plaçant lamembrane dans un boîtier semi-ouvert. Decette manière, l'onde arrière parvient aux deuxfaces de la membrane par un chemin de mêmelongueur, grâce à un retard acoustique créépar un labyrinthe. Il y a donc, pour un angled'incidence de 180°, annulation. On obtientdonc un diagramme cardioïde.
y = 1 + cos α
Vue en coupe d’un microphone mixte. Lespetits trous situés sur le pourtour du
microphone autorisent seulement une partiede l’énergie à arriver sur la face arrière de la
membrane, ce qui permet de déterminer undiagramme polaire final intermédiaire entre
un diagramme omnidirectionnel et undiagramme bidirectionnel.
Courbes directionnelles obtenues par addition en proportions variables des signaux issusd’un transducteur à pression et d’un transducteur à gradient de pression.
5
4. Microphones à directivité variable
Certains microphones offrent plusieurs directivités sans changement de capsule. Ils fonctionnentgénéralement par addition des signaux issus de deux transducteurs à gradient de pression. Enfait, on a deux membranes placées de part et d’autre d’une grille perforée. Suivant la proportionet la polarité relative des deux signaux, on obtient l’une ou l’autre directivité (par exemple,lorsque les niveaux des signaux sont égaux, on a une directivité omnidirectionnelle). Ce systèmeest utilisé sur les microphones Neumann U87i AKG SM69 ou Rode NT-2000.
B. Classification électriqueTrois techniques sont majoritairement utilisées aujourd'hui :
• microphones électrodynamiques à bobine mobile ;• microphones à condensateur, appelés aussi statiques ou électrostatiques ;• microphones dynamiques à ruban.
Bien que les microphones à ruban soient aussi des microphones dynamiques, lorsqu’on parle demicrophones dynamiques sans plus de précision, on sous-entend généralement qu’il s’agit demicrophones à bobine mobile.D'autres techniques existent également, mais ne sont plus guère utilisées aujourd'hui pour desraisons de faible qualité. On peut citer les microphones piézoélectriques et les microphones àcharbon (utilisés anciennement surtout en téléphonie).
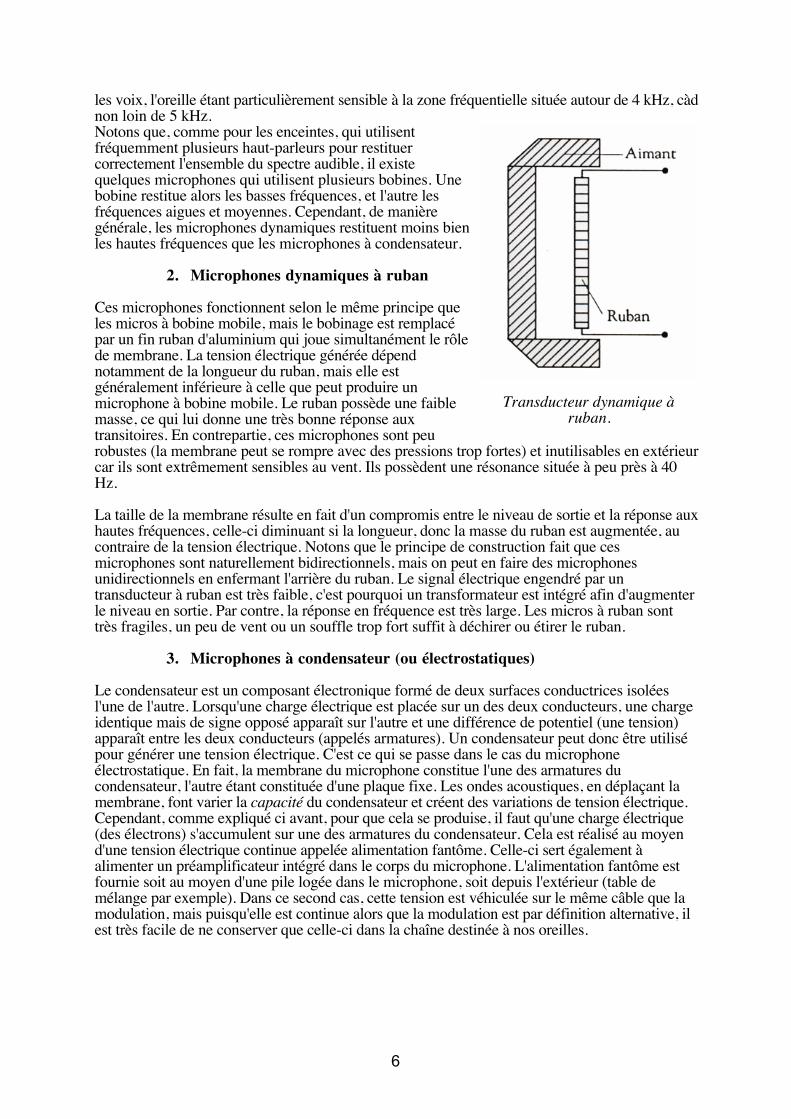
1. Microphones dynamiques à bobine mobile
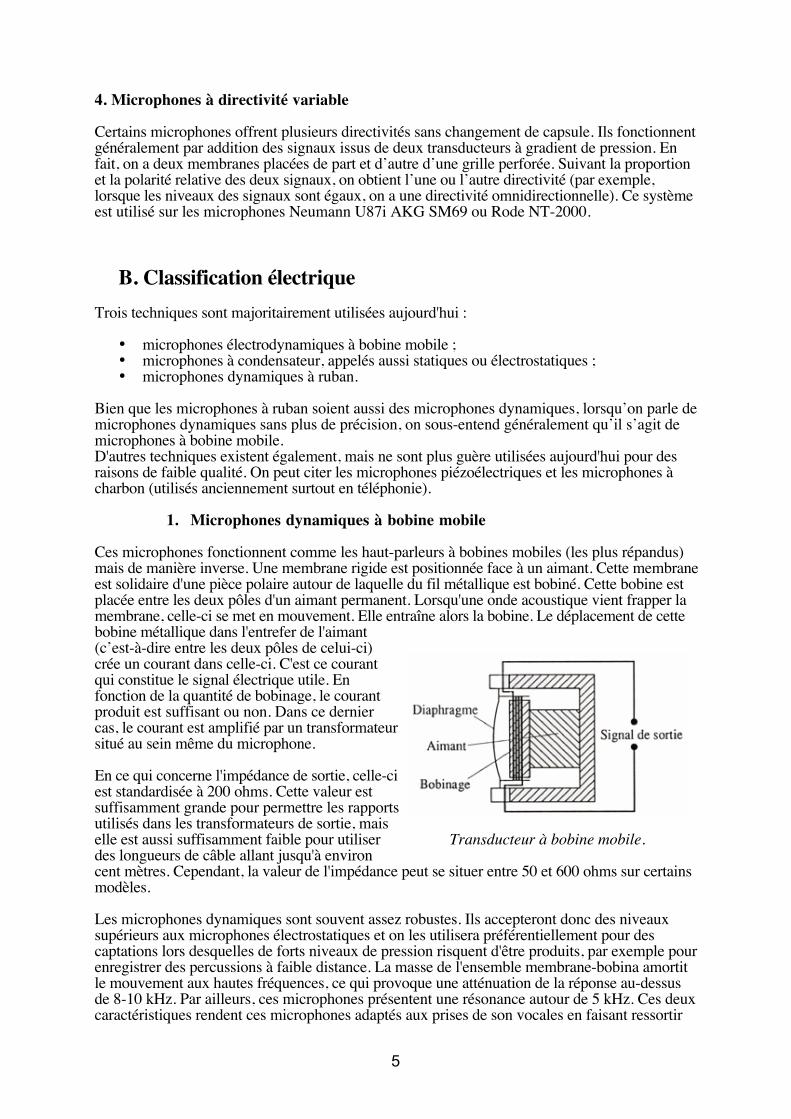
Ces microphones fonctionnent comme les haut-parleurs à bobines mobiles (les plus répandus)mais de manière inverse. Une membrane rigide est positionnée face à un aimant. Cette membraneest solidaire d'une pièce polaire autour de laquelle du fil métallique est bobiné. Cette bobine estplacée entre les deux pôles d'un aimant permanent. Lorsqu'une onde acoustique vient frapper lamembrane, celle-ci se met en mouvement. Elle entraîne alors la bobine. Le déplacement de cettebobine métallique dans l'entrefer de l'aimant(c’est-à-dire entre les deux pôles de celui-ci)crée un courant dans celle-ci. C'est ce courantqui constitue le signal électrique utile. Enfonction de la quantité de bobinage, le courantproduit est suffisant ou non. Dans ce derniercas, le courant est amplifié par un transformateursitué au sein même du microphone.
En ce qui concerne l'impédance de sortie, celle-ciest standardisée à 200 ohms. Cette valeur estsuffisamment grande pour permettre les rapportsutilisés dans les transformateurs de sortie, maiselle est aussi suffisamment faible pour utiliserdes longueurs de câble allant jusqu'à environcent mètres. Cependant, la valeur de l'impédance peut se situer entre 50 et 600 ohms sur certainsmodèles.
Les microphones dynamiques sont souvent assez robustes. Ils accepteront donc des niveauxsupérieurs aux microphones électrostatiques et on les utilisera préférentiellement pour descaptations lors desquelles de forts niveaux de pression risquent d'être produits, par exemple pourenregistrer des percussions à faible distance. La masse de l'ensemble membrane-bobina amortitle mouvement aux hautes fréquences, ce qui provoque une atténuation de la réponse au-dessusde 8-10 kHz. Par ailleurs, ces microphones présentent une résonance autour de 5 kHz. Ces deuxcaractéristiques rendent ces microphones adaptés aux prises de son vocales en faisant ressortir
Transducteur à bobine mobile.
6
les voix, l'oreille étant particulièrement sensible à la zone fréquentielle située autour de 4 kHz, càdnon loin de 5 kHz.Notons que, comme pour les enceintes, qui utilisentfréquemment plusieurs haut-parleurs pour restituercorrectement l'ensemble du spectre audible, il existequelques microphones qui utilisent plusieurs bobines. Unebobine restitue alors les basses fréquences, et l'autre lesfréquences aigues et moyennes. Cependant, de manièregénérale, les microphones dynamiques restituent moins bienles hautes fréquences que les microphones à condensateur.
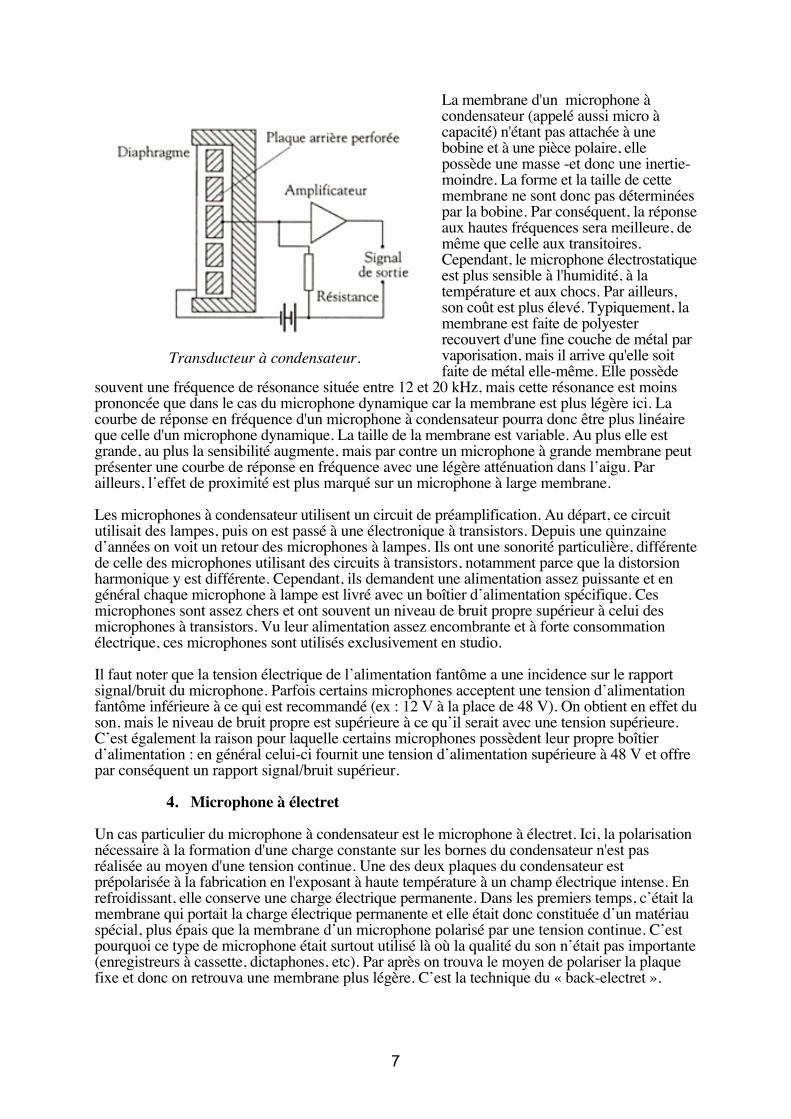
2. Microphones dynamiques à ruban
Ces microphones fonctionnent selon le même principe queles micros à bobine mobile, mais le bobinage est remplacépar un fin ruban d'aluminium qui joue simultanément le rôlede membrane. La tension électrique générée dépendnotamment de la longueur du ruban, mais elle estgénéralement inférieure à celle que peut produire unmicrophone à bobine mobile. Le ruban possède une faiblemasse, ce qui lui donne une très bonne réponse auxtransitoires. En contrepartie, ces microphones sont peurobustes (la membrane peut se rompre avec des pressions trop fortes) et inutilisables en extérieurcar ils sont extrêmement sensibles au vent. Ils possèdent une résonance située à peu près à 40Hz.
La taille de la membrane résulte en fait d'un compromis entre le niveau de sortie et la réponse auxhautes fréquences, celle-ci diminuant si la longueur, donc la masse du ruban est augmentée, aucontraire de la tension électrique. Notons que le principe de construction fait que cesmicrophones sont naturellement bidirectionnels, mais on peut en faire des microphonesunidirectionnels en enfermant l'arrière du ruban. Le signal électrique engendré par untransducteur à ruban est très faible, c'est pourquoi un transformateur est intégré afin d'augmenterle niveau en sortie. Par contre, la réponse en fréquence est très large. Les micros à ruban sonttrès fragiles, un peu de vent ou un souffle trop fort suffit à déchirer ou étirer le ruban.
3. Microphones à condensateur (ou électrostatiques)
Le condensateur est un composant électronique formé de deux surfaces conductrices isoléesl'une de l'autre. Lorsqu'une charge électrique est placée sur un des deux conducteurs, une chargeidentique mais de signe opposé apparaît sur l'autre et une différence de potentiel (une tension)apparaît entre les deux conducteurs (appelés armatures). Un condensateur peut donc être utilisépour générer une tension électrique. C'est ce qui se passe dans le cas du microphoneélectrostatique. En fait, la membrane du microphone constitue l'une des armatures ducondensateur, l'autre étant constituée d'une plaque fixe. Les ondes acoustiques, en déplaçant lamembrane, font varier la capacité du condensateur et créent des variations de tension électrique.Cependant, comme expliqué ci avant, pour que cela se produise, il faut qu'une charge électrique(des électrons) s'accumulent sur une des armatures du condensateur. Cela est réalisé au moyend'une tension électrique continue appelée alimentation fantôme. Celle-ci sert également àalimenter un préamplificateur intégré dans le corps du microphone. L'alimentation fantôme estfournie soit au moyen d'une pile logée dans le microphone, soit depuis l'extérieur (table demélange par exemple). Dans ce second cas, cette tension est véhiculée sur le même câble que lamodulation, mais puisqu'elle est continue alors que la modulation est par définition alternative, ilest très facile de ne conserver que celle-ci dans la chaîne destinée à nos oreilles.
Transducteur dynamique àruban.
7
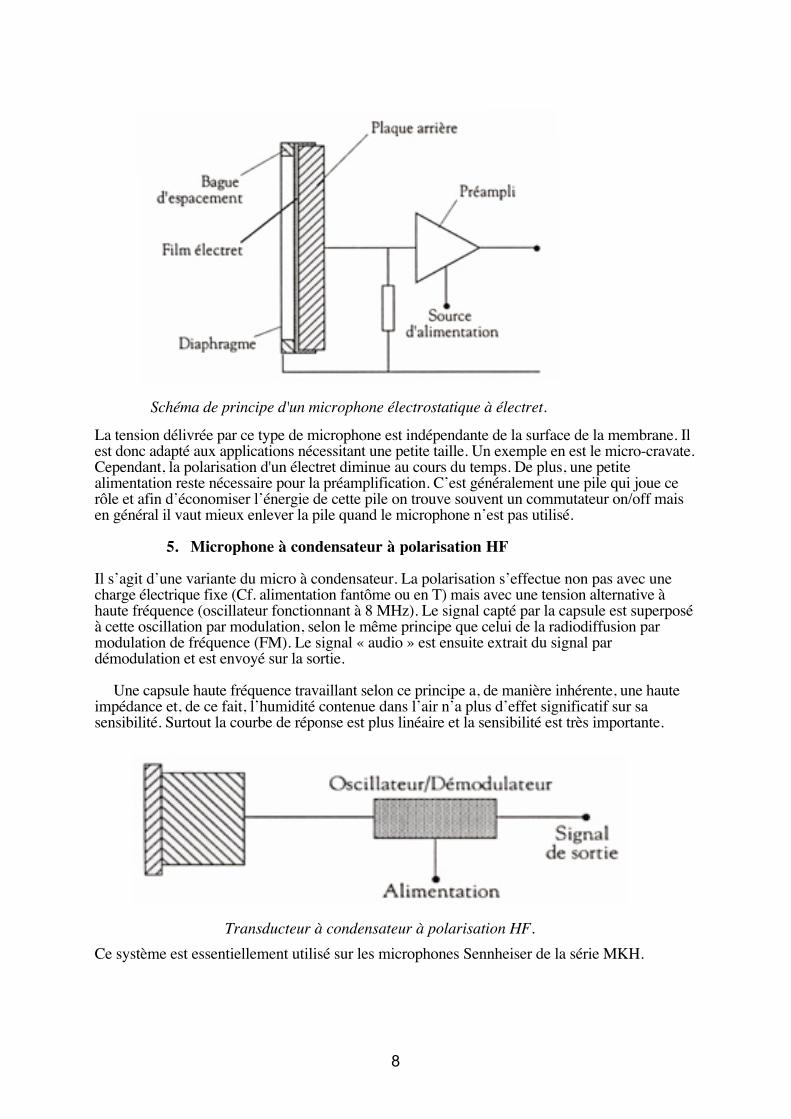
La membrane d'un microphone àcondensateur (appelé aussi micro àcapacité) n'étant pas attachée à unebobine et à une pièce polaire, ellepossède une masse -et donc une inertie-moindre. La forme et la taille de cettemembrane ne sont donc pas déterminéespar la bobine. Par conséquent, la réponseaux hautes fréquences sera meilleure, demême que celle aux transitoires.Cependant, le microphone électrostatiqueest plus sensible à l'humidité, à latempérature et aux chocs. Par ailleurs,son coût est plus élevé. Typiquement, lamembrane est faite de polyesterrecouvert d'une fine couche de métal parvaporisation, mais il arrive qu'elle soitfaite de métal elle-même. Elle possède
souvent une fréquence de résonance située entre 12 et 20 kHz, mais cette résonance est moinsprononcée que dans le cas du microphone dynamique car la membrane est plus légère ici. Lacourbe de réponse en fréquence d'un microphone à condensateur pourra donc être plus linéaireque celle d'un microphone dynamique. La taille de la membrane est variable. Au plus elle estgrande, au plus la sensibilité augmente, mais par contre un microphone à grande membrane peutprésenter une courbe de réponse en fréquence avec une légère atténuation dans l’aigu. Parailleurs, l’effet de proximité est plus marqué sur un microphone à large membrane.
Les microphones à condensateur utilisent un circuit de préamplification. Au départ, ce circuitutilisait des lampes, puis on est passé à une électronique à transistors. Depuis une quinzained’années on voit un retour des microphones à lampes. Ils ont une sonorité particulière, différentede celle des microphones utilisant des circuits à transistors, notamment parce que la distorsionharmonique y est différente. Cependant, ils demandent une alimentation assez puissante et engénéral chaque microphone à lampe est livré avec un boîtier d’alimentation spécifique. Cesmicrophones sont assez chers et ont souvent un niveau de bruit propre supérieur à celui desmicrophones à transistors. Vu leur alimentation assez encombrante et à forte consommationélectrique, ces microphones sont utilisés exclusivement en studio.
Il faut noter que la tension électrique de l’alimentation fantôme a une incidence sur le rapportsignal/bruit du microphone. Parfois certains microphones acceptent une tension d’alimentationfantôme inférieure à ce qui est recommandé (ex : 12 V à la place de 48 V). On obtient en effet duson, mais le niveau de bruit propre est supérieure à ce qu’il serait avec une tension supérieure.C’est également la raison pour laquelle certains microphones possèdent leur propre boîtierd’alimentation : en général celui-ci fournit une tension d’alimentation supérieure à 48 V et offrepar conséquent un rapport signal/bruit supérieur.
4. Microphone à électret
Un cas particulier du microphone à condensateur est le microphone à électret. Ici, la polarisationnécessaire à la formation d'une charge constante sur les bornes du condensateur n'est pasréalisée au moyen d'une tension continue. Une des deux plaques du condensateur estprépolarisée à la fabrication en l'exposant à haute température à un champ électrique intense. Enrefroidissant, elle conserve une charge électrique permanente. Dans les premiers temps, c’était lamembrane qui portait la charge électrique permanente et elle était donc constituée d’un matériauspécial, plus épais que la membrane d’un microphone polarisé par une tension continue. C’estpourquoi ce type de microphone était surtout utilisé là où la qualité du son n’était pas importante(enregistreurs à cassette, dictaphones, etc). Par après on trouva le moyen de polariser la plaquefixe et donc on retrouva une membrane plus légère. C’est la technique du « back-electret ».
Transducteur à condensateur.
8
La tension délivrée par ce type de microphone est indépendante de la surface de la membrane. Ilest donc adapté aux applications nécessitant une petite taille. Un exemple en est le micro-cravate.Cependant, la polarisation d'un électret diminue au cours du temps. De plus, une petitealimentation reste nécessaire pour la préamplification. C’est généralement une pile qui joue cerôle et afin d’économiser l’énergie de cette pile on trouve souvent un commutateur on/off maisen général il vaut mieux enlever la pile quand le microphone n’est pas utilisé.
5. Microphone à condensateur à polarisation HF
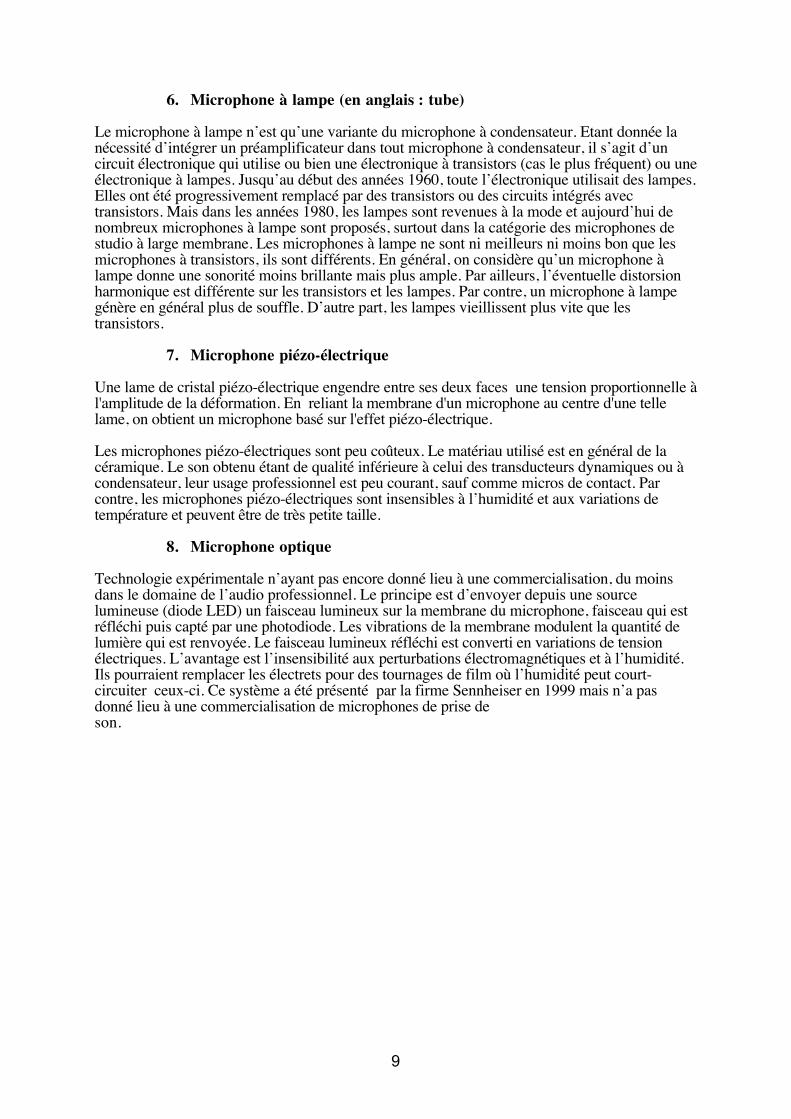
Il s’agit d’une variante du micro à condensateur. La polarisation s’effectue non pas avec unecharge électrique fixe (Cf. alimentation fantôme ou en T) mais avec une tension alternative àhaute fréquence (oscillateur fonctionnant à 8 MHz). Le signal capté par la capsule est superposéà cette oscillation par modulation, selon le même principe que celui de la radiodiffusion parmodulation de fréquence (FM). Le signal « audio » est ensuite extrait du signal pardémodulation et est envoyé sur la sortie.
Une capsule haute fréquence travaillant selon ce principe a, de manière inhérente, une hauteimpédance et, de ce fait, l’humidité contenue dans l’air n’a plus d’effet significatif sur sasensibilité. Surtout la courbe de réponse est plus linéaire et la sensibilité est très importante.
Ce système est essentiellement utilisé sur les microphones Sennheiser de la série MKH.
Schéma de principe d'un microphone électrostatique à électret.
Transducteur à condensateur à polarisation HF.
9
6. Microphone à lampe (en anglais : tube)
Le microphone à lampe n’est qu’une variante du microphone à condensateur. Etant donnée lanécessité d’intégrer un préamplificateur dans tout microphone à condensateur, il s’agit d’uncircuit électronique qui utilise ou bien une électronique à transistors (cas le plus fréquent) ou uneélectronique à lampes. Jusqu’au début des années 1960, toute l’électronique utilisait des lampes.Elles ont été progressivement remplacé par des transistors ou des circuits intégrés avectransistors. Mais dans les années 1980, les lampes sont revenues à la mode et aujourd’hui denombreux microphones à lampe sont proposés, surtout dans la catégorie des microphones destudio à large membrane. Les microphones à lampe ne sont ni meilleurs ni moins bon que lesmicrophones à transistors, ils sont différents. En général, on considère qu’un microphone àlampe donne une sonorité moins brillante mais plus ample. Par ailleurs, l’éventuelle distorsionharmonique est différente sur les transistors et les lampes. Par contre, un microphone à lampegénère en général plus de souffle. D’autre part, les lampes vieillissent plus vite que lestransistors.
7. Microphone piézo-électrique
Une lame de cristal piézo-électrique engendre entre ses deux faces une tension proportionnelle àl'amplitude de la déformation. En reliant la membrane d'un microphone au centre d'une tellelame, on obtient un microphone basé sur l'effet piézo-électrique.
Les microphones piézo-électriques sont peu coûteux. Le matériau utilisé est en général de lacéramique. Le son obtenu étant de qualité inférieure à celui des transducteurs dynamiques ou àcondensateur, leur usage professionnel est peu courant, sauf comme micros de contact. Parcontre, les microphones piézo-électriques sont insensibles à l’humidité et aux variations detempérature et peuvent être de très petite taille.
8. Microphone optique
Technologie expérimentale n’ayant pas encore donné lieu à une commercialisation, du moinsdans le domaine de l’audio professionnel. Le principe est d’envoyer depuis une sourcelumineuse (diode LED) un faisceau lumineux sur la membrane du microphone, faisceau qui estréfléchi puis capté par une photodiode. Les vibrations de la membrane modulent la quantité delumière qui est renvoyée. Le faisceau lumineux réfléchi est converti en variations de tensionélectriques. L’avantage est l’insensibilité aux perturbations électromagnétiques et à l’humidité.Ils pourraient remplacer les électrets pour des tournages de film où l’humidité peut court-circuiter ceux-ci. Ce système a été présenté par la firme Sennheiser en 1999 mais n’a pasdonné lieu à une commercialisation de microphones de prise deson.
10
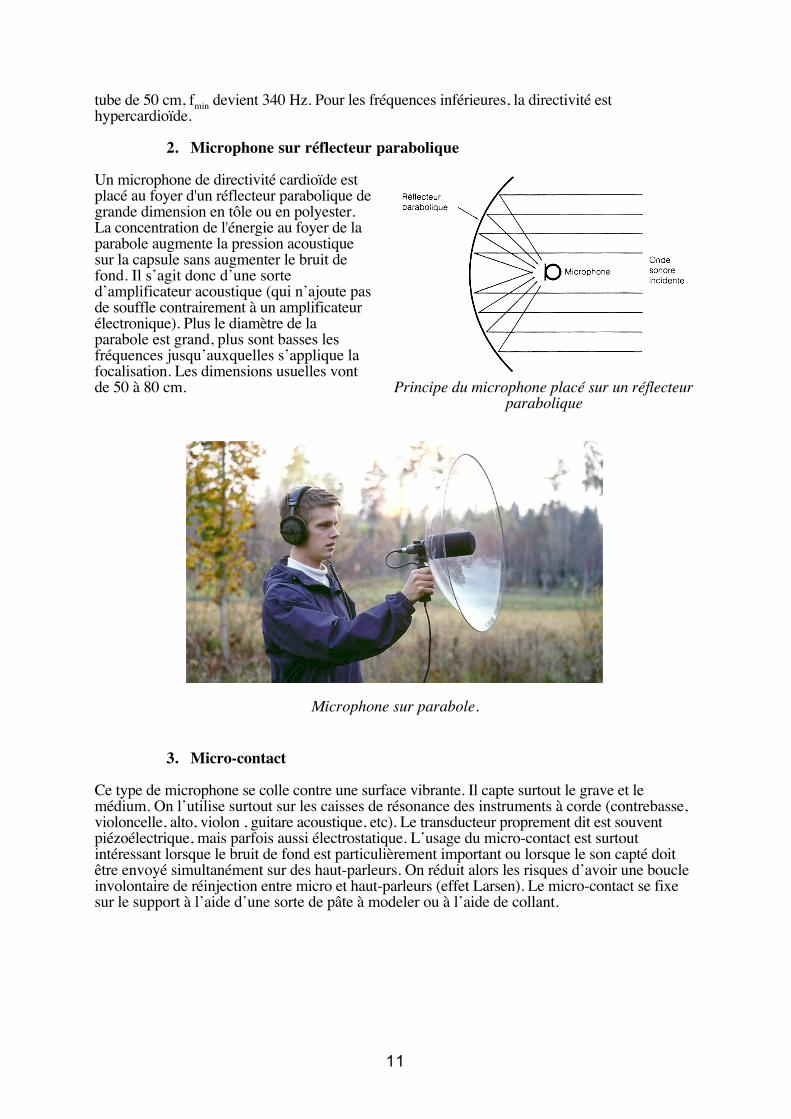
C. Microphones particuliers1. Microphone canon
Appelé également micro-fusil, il résulte de l'association d'un transducteur à gradient de pressionet d'un tube d'interférences. Ce tube est percé de trous répartis régulièrement sur sa longueur. Aufond du tube se trouve la membrane. Lorsque l'onde incidente vient d'une autre direction que ladirection axiale, des interférences apparaissent dans le tube et l'onde n'atteint pas le diaphragme
(déphasage). Ces microphones nes'utilisent qu'en champ ouvert, car en champréverbérant, les ondes réfléchies latéralesrisquent d'annuler plus ou moins l'ondeaxiale et de créer un effet de filtre enpeigne. Le tube ne fonctionne que pour desfréquences dont la longueur d’ondemultipliée par deux est plus petite que salongueur.Exemple :
Quelle est la fréquence la plus basse pourlaquelle l’effet « canon » fonctionne avecun tube de 30 cm ? En utilisant la formulefmin=c/2l on peut faire ce calcul (freprésente la fréquence cherchée, c lavitesse du son et l la longueur du tube).Dans l’air, c vaut approximativement 340m/s (à 20°). Donc l’équation est fmin =340/0,6. Le résultat est 566 Hz. Pour un
Micro avec tube à interférences (« canon »).
11
tube de 50 cm, fmin devient 340 Hz. Pour les fréquences inférieures, la directivité esthypercardioïde.
2. Microphone sur réflecteur parabolique
Un microphone de directivité cardioïde estplacé au foyer d'un réflecteur parabolique degrande dimension en tôle ou en polyester.La concentration de l'énergie au foyer de laparabole augmente la pression acoustiquesur la capsule sans augmenter le bruit defond. Il s’agit donc d’une sorted’amplificateur acoustique (qui n’ajoute pasde souffle contrairement à un amplificateurélectronique). Plus le diamètre de laparabole est grand, plus sont basses lesfréquences jusqu’auxquelles s’applique lafocalisation. Les dimensions usuelles vontde 50 à 80 cm.
3. Micro-contact
Ce type de microphone se colle contre une surface vibrante. Il capte surtout le grave et lemédium. On l’utilise surtout sur les caisses de résonance des instruments à corde (contrebasse,violoncelle, alto, violon , guitare acoustique, etc). Le transducteur proprement dit est souventpiézoélectrique, mais parfois aussi électrostatique. L’usage du micro-contact est surtoutintéressant lorsque le bruit de fond est particulièrement important ou lorsque le son capté doitêtre envoyé simultanément sur des haut-parleurs. On réduit alors les risques d’avoir une boucleinvolontaire de réinjection entre micro et haut-parleurs (effet Larsen). Le micro-contact se fixesur le support à l’aide d’une sorte de pâte à modeler ou à l’aide de collant.
Microphone sur parabole.
Principe du microphone placé sur un réflecteurparabolique
12
4. Microphone de mesure
Il s’agit d’un microphone (électrostatique en général) calibré pour les mesures acoustiques. Engénéral, il admet des niveaux de pression très élevés.
5. Microphone de guitare
Ces microphones ne captent pas des variationsde pression acoustique mais des variations dechamp électromagnétique, liées auxmouvements des cordes métalliques del’instrument. Ils n’offrent donc que peud’intérêt sans guitare, à moins peut-être de lesutiliser avec des corps sonores en métal ???(attention aux électrocutions possibles !).
6. Micro-cravate
Il s’agit d’un microphone de très petite taille qui est très discret du point de vue visuel. On leplace en général sur un bord de vêtement en faisant passer discrètement le câble sous lesvêtements jusqu’à un émetteur HF. Ce type de microphone est surtout intéressant pour latélévision, le cinéma ou le théâtre.
7. Micros sans fil ou « HF »
Il s’agit de microphones munis d’une batterie et d’un émetteur. Le microphone est relié parondes radio à un récepteur distant. Ce type de microphone est surtout utilisé lorsque l’utilisationde câbles est gênante, soit pour des raisons visuelles, soit pour des raisons pratiques : plateauxde télévision, scènes de théâtre, débats où le micro doit circuler dans le public, etc. Ce type de
Micro-contact.
Micro pour guitare.
13
dispositif s’emploie donc essentiellement sur des micros pour voix. Un microphone sans fil estalimenté par pile ou par accumulateur.
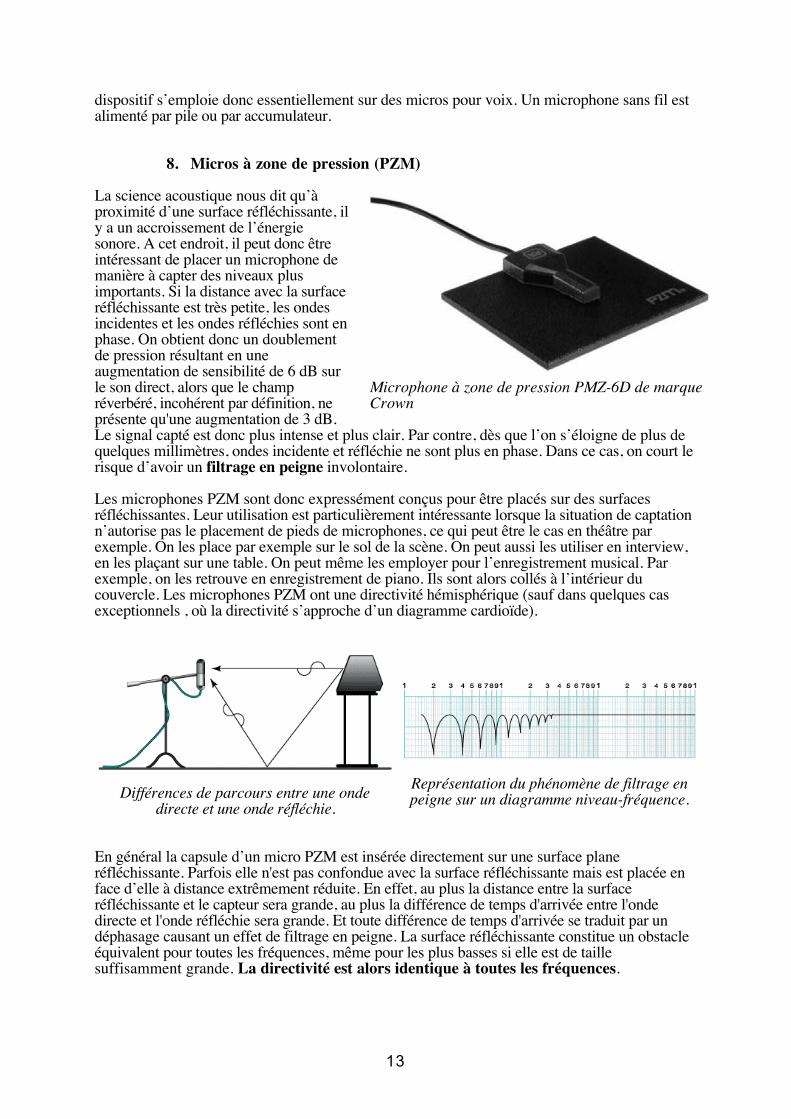
8. Micros à zone de pression (PZM)
La science acoustique nous dit qu’àproximité d’une surface réfléchissante, ily a un accroissement de l’énergiesonore. A cet endroit, il peut donc êtreintéressant de placer un microphone demanière à capter des niveaux plusimportants. Si la distance avec la surfaceréfléchissante est très petite, les ondesincidentes et les ondes réfléchies sont enphase. On obtient donc un doublementde pression résultant en uneaugmentation de sensibilité de 6 dB surle son direct, alors que le champréverbéré, incohérent par définition, neprésente qu'une augmentation de 3 dB.Le signal capté est donc plus intense et plus clair. Par contre, dès que l’on s’éloigne de plus dequelques millimètres, ondes incidente et réfléchie ne sont plus en phase. Dans ce cas, on court lerisque d’avoir un filtrage en peigne involontaire.
Les microphones PZM sont donc expressément conçus pour être placés sur des surfacesréfléchissantes. Leur utilisation est particulièrement intéressante lorsque la situation de captationn’autorise pas le placement de pieds de microphones, ce qui peut être le cas en théâtre parexemple. On les place par exemple sur le sol de la scène. On peut aussi les utiliser en interview,en les plaçant sur une table. On peut même les employer pour l’enregistrement musical. Parexemple, on les retrouve en enregistrement de piano. Ils sont alors collés à l’intérieur ducouvercle. Les microphones PZM ont une directivité hémisphérique (sauf dans quelques casexceptionnels , où la directivité s’approche d’un diagramme cardioïde).
En général la capsule d’un micro PZM est insérée directement sur une surface planeréfléchissante. Parfois elle n'est pas confondue avec la surface réfléchissante mais est placée enface d’elle à distance extrêmement réduite. En effet, au plus la distance entre la surfaceréfléchissante et le capteur sera grande, au plus la différence de temps d'arrivée entre l'ondedirecte et l'onde réfléchie sera grande. Et toute différence de temps d'arrivée se traduit par undéphasage causant un effet de filtrage en peigne. La surface réfléchissante constitue un obstacleéquivalent pour toutes les fréquences, même pour les plus basses si elle est de taillesuffisamment grande. La directivité est alors identique à toutes les fréquences.
Différences de parcours entre une ondedirecte et une onde réfléchie.
Représentation du phénomène de filtrage enpeigne sur un diagramme niveau-fréquence.
Microphone à zone de pression PMZ-6D de marqueCrown
14
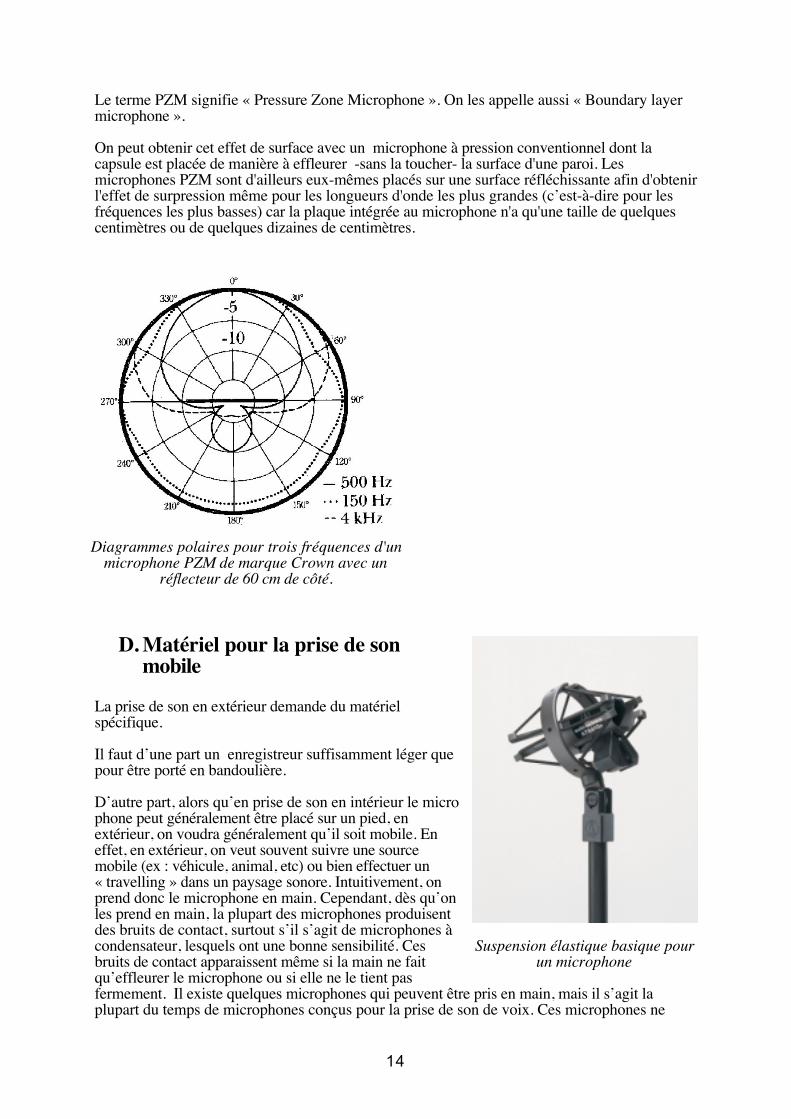
Le terme PZM signifie « Pressure Zone Microphone ». On les appelle aussi « Boundary layermicrophone ».
On peut obtenir cet effet de surface avec un microphone à pression conventionnel dont lacapsule est placée de manière à effleurer -sans la toucher- la surface d'une paroi. Lesmicrophones PZM sont d'ailleurs eux-mêmes placés sur une surface réfléchissante afin d'obtenirl'effet de surpression même pour les longueurs d'onde les plus grandes (c’est-à-dire pour lesfréquences les plus basses) car la plaque intégrée au microphone n'a qu'une taille de quelquescentimètres ou de quelques dizaines de centimètres.
D. Matériel pour la prise de sonmobile
La prise de son en extérieur demande du matérielspécifique.
Il faut d’une part un enregistreur suffisamment léger quepour être porté en bandoulière.
D’autre part, alors qu’en prise de son en intérieur le microphone peut généralement être placé sur un pied, enextérieur, on voudra généralement qu’il soit mobile. Eneffet, en extérieur, on veut souvent suivre une sourcemobile (ex : véhicule, animal, etc) ou bien effectuer un« travelling » dans un paysage sonore. Intuitivement, onprend donc le microphone en main. Cependant, dès qu’onles prend en main, la plupart des microphones produisentdes bruits de contact, surtout s’il s’agit de microphones àcondensateur, lesquels ont une bonne sensibilité. Cesbruits de contact apparaissent même si la main ne faitqu’effleurer le microphone ou si elle ne le tient pasfermement. Il existe quelques microphones qui peuvent être pris en main, mais il s’agit laplupart du temps de microphones conçus pour la prise de son de voix. Ces microphones ne
Diagrammes polaires pour trois fréquences d'unmicrophone PZM de marque Crown avec un
réflecteur de 60 cm de côté.
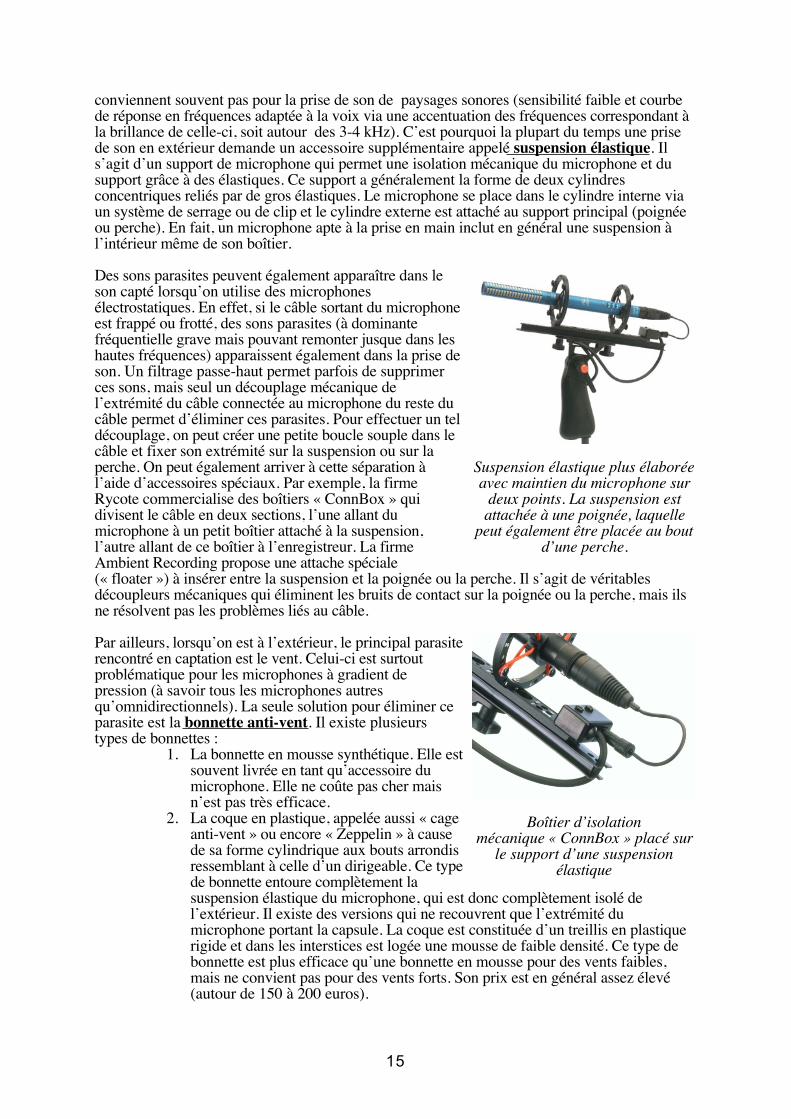
Suspension élastique basique pourun microphone
15
conviennent souvent pas pour la prise de son de paysages sonores (sensibilité faible et courbede réponse en fréquences adaptée à la voix via une accentuation des fréquences correspondant àla brillance de celle-ci, soit autour des 3-4 kHz). C’est pourquoi la plupart du temps une prisede son en extérieur demande un accessoire supplémentaire appelé suspension élastique. Ils’agit d’un support de microphone qui permet une isolation mécanique du microphone et dusupport grâce à des élastiques. Ce support a généralement la forme de deux cylindresconcentriques reliés par de gros élastiques. Le microphone se place dans le cylindre interne viaun système de serrage ou de clip et le cylindre externe est attaché au support principal (poignéeou perche). En fait, un microphone apte à la prise en main inclut en général une suspension àl’intérieur même de son boîtier.
Des sons parasites peuvent également apparaître dans leson capté lorsqu’on utilise des microphonesélectrostatiques. En effet, si le câble sortant du microphoneest frappé ou frotté, des sons parasites (à dominantefréquentielle grave mais pouvant remonter jusque dans leshautes fréquences) apparaissent également dans la prise deson. Un filtrage passe-haut permet parfois de supprimerces sons, mais seul un découplage mécanique del’extrémité du câble connectée au microphone du reste ducâble permet d’éliminer ces parasites. Pour effectuer un teldécouplage, on peut créer une petite boucle souple dans lecâble et fixer son extrémité sur la suspension ou sur laperche. On peut également arriver à cette séparation àl’aide d’accessoires spéciaux. Par exemple, la firmeRycote commercialise des boîtiers « ConnBox » quidivisent le câble en deux sections, l’une allant dumicrophone à un petit boîtier attaché à la suspension,l’autre allant de ce boîtier à l’enregistreur. La firmeAmbient Recording propose une attache spéciale(« floater ») à insérer entre la suspension et la poignée ou la perche. Il s’agit de véritablesdécoupleurs mécaniques qui éliminent les bruits de contact sur la poignée ou la perche, mais ilsne résolvent pas les problèmes liés au câble.
Par ailleurs, lorsqu’on est à l’extérieur, le principal parasiterencontré en captation est le vent. Celui-ci est surtoutproblématique pour les microphones à gradient depression (à savoir tous les microphones autresqu’omnidirectionnels). La seule solution pour éliminer ceparasite est la bonnette anti-vent. Il existe plusieurstypes de bonnettes :
1. La bonnette en mousse synthétique. Elle estsouvent livrée en tant qu’accessoire dumicrophone. Elle ne coûte pas cher maisn’est pas très efficace.
2. La coque en plastique, appelée aussi « cageanti-vent » ou encore « Zeppelin » à causede sa forme cylindrique aux bouts arrondisressemblant à celle d’un dirigeable. Ce typede bonnette entoure complètement lasuspension élastique du microphone, qui est donc complètement isolé del’extérieur. Il existe des versions qui ne recouvrent que l’extrémité dumicrophone portant la capsule. La coque est constituée d’un treillis en plastiquerigide et dans les interstices est logée une mousse de faible densité. Ce type debonnette est plus efficace qu’une bonnette en mousse pour des vents faibles,mais ne convient pas pour des vents forts. Son prix est en général assez élevé(autour de 150 à 200 euros).
Suspension élastique plus élaboréeavec maintien du microphone sur
deux points. La suspension estattachée à une poignée, laquelle
peut également être placée au boutd’une perche.
Boîtier d’isolationmécanique « ConnBox » placé sur
le support d’une suspensionélastique
16
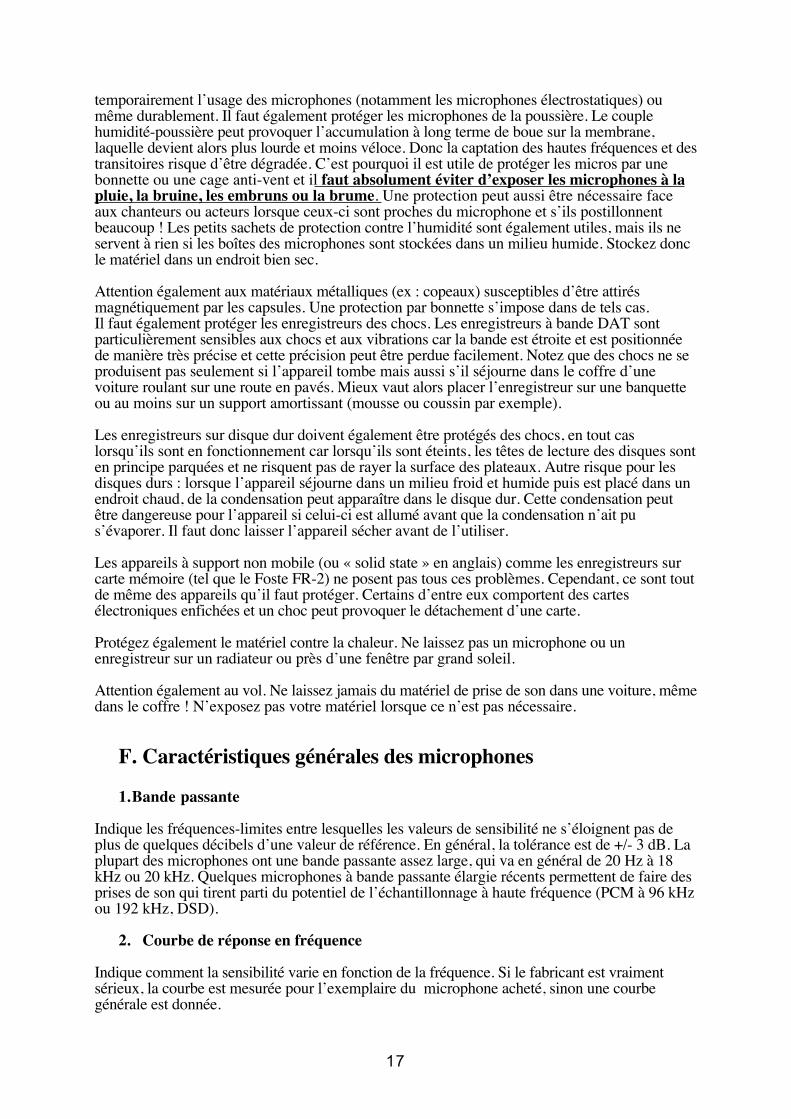
3. La fourrure synthétique, appelée parfois « chien », voire « poils » ou encore« lapin » constitue une protection supplémentaire qui se place tout autour d’unecage anti-vent. Elle est nécessaire lorsqu’il y a un vent moyen ou important. Sonprix est assez élevé également.
À défaut d’autre chose, on peut recouvrir unmicrophone d’une ou plusieurs chaussettes,mais cette solution entraîne une forte atténuationdes hautes fréquences dans le son capté. Notezqu’une bonnette professionnelle atténueégalement certaines fréquences, surtout dans legrave dans le cas d’une cage anti-vent.
Un outil intéressant en captation extérieure est laperche. Celle-ci sert à rapprocher le microphoned’une source lointaine ou difficilementaccessible. En prise de son cinéma, une percheest quasiment utilisée systématiquement car ellepermet de rapprocher le microphone de la sourcetout en étant au-dessus du bord du cadre image.En captation purement sonore, cettepréoccupation ne nous concerne pas. Pourtantune perche est tout de même utile car il fautparfois rapprocher le micro de la source etd’autre part une perche permet de se placer par-dessus une source et de viser vers le bas, ce qui apour avantage de réduire la captation des sources sonores situées derrière la source, situationrencontrée si le microphone est face à la source et vise celle-ci selon un axe horizontal.
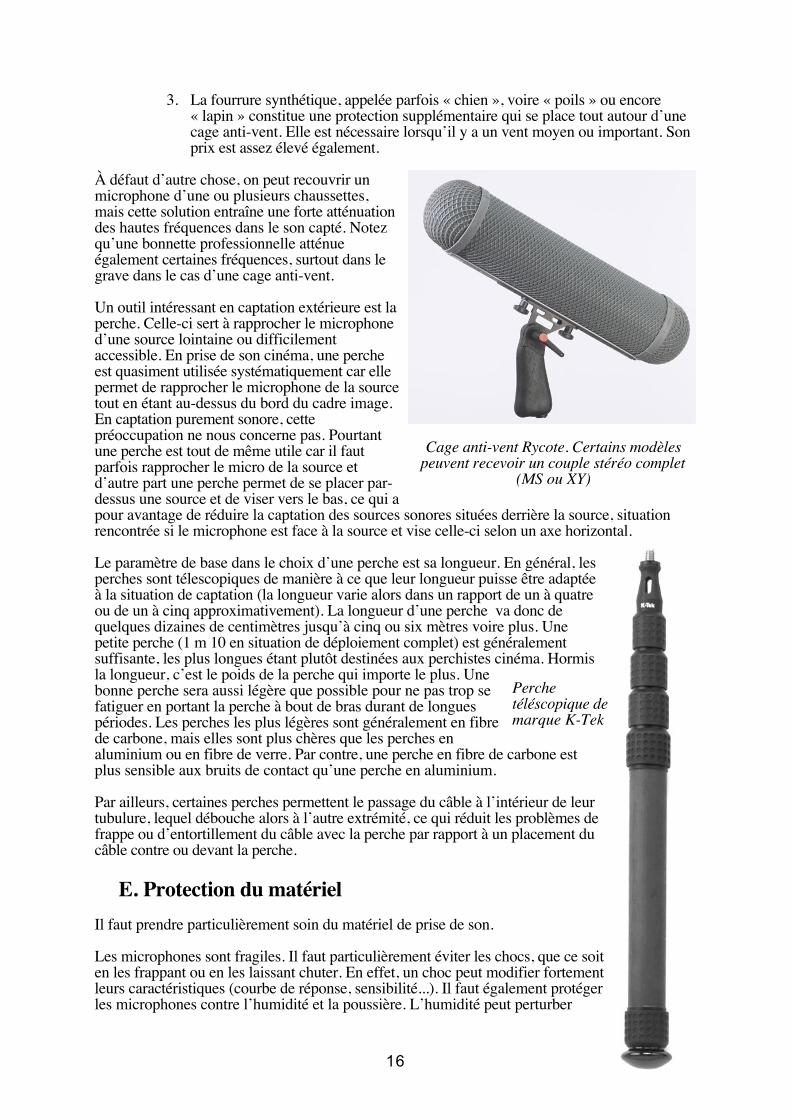
Le paramètre de base dans le choix d’une perche est sa longueur. En général, lesperches sont télescopiques de manière à ce que leur longueur puisse être adaptéeà la situation de captation (la longueur varie alors dans un rapport de un à quatreou de un à cinq approximativement). La longueur d’une perche va donc dequelques dizaines de centimètres jusqu’à cinq ou six mètres voire plus. Unepetite perche (1 m 10 en situation de déploiement complet) est généralementsuffisante, les plus longues étant plutôt destinées aux perchistes cinéma. Hormisla longueur, c’est le poids de la perche qui importe le plus. Unebonne perche sera aussi légère que possible pour ne pas trop sefatiguer en portant la perche à bout de bras durant de longuespériodes. Les perches les plus légères sont généralement en fibrede carbone, mais elles sont plus chères que les perches enaluminium ou en fibre de verre. Par contre, une perche en fibre de carbone estplus sensible aux bruits de contact qu’une perche en aluminium.
Par ailleurs, certaines perches permettent le passage du câble à l’intérieur de leurtubulure, lequel débouche alors à l’autre extrémité, ce qui réduit les problèmes defrappe ou d’entortillement du câble avec la perche par rapport à un placement ducâble contre ou devant la perche.
E. Protection du matérielIl faut prendre particulièrement soin du matériel de prise de son.
Les microphones sont fragiles. Il faut particulièrement éviter les chocs, que ce soiten les frappant ou en les laissant chuter. En effet, un choc peut modifier fortementleurs caractéristiques (courbe de réponse, sensibilité...). Il faut également protégerles microphones contre l’humidité et la poussière. L’humidité peut perturber
Cage anti-vent Rycote. Certains modèlespeuvent recevoir un couple stéréo complet
(MS ou XY)
Perchetéléscopique demarque K-Tek
17
temporairement l’usage des microphones (notamment les microphones électrostatiques) oumême durablement. Il faut également protéger les microphones de la poussière. Le couplehumidité-poussière peut provoquer l’accumulation à long terme de boue sur la membrane,laquelle devient alors plus lourde et moins véloce. Donc la captation des hautes fréquences et destransitoires risque d’être dégradée. C’est pourquoi il est utile de protéger les micros par unebonnette ou une cage anti-vent et il faut absolument éviter d’exposer les microphones à lapluie, la bruine, les embruns ou la brume. Une protection peut aussi être nécessaire faceaux chanteurs ou acteurs lorsque ceux-ci sont proches du microphone et s’ils postillonnentbeaucoup ! Les petits sachets de protection contre l’humidité sont également utiles, mais ils neservent à rien si les boîtes des microphones sont stockées dans un milieu humide. Stockez doncle matériel dans un endroit bien sec.
Attention également aux matériaux métalliques (ex : copeaux) susceptibles d’être attirésmagnétiquement par les capsules. Une protection par bonnette s’impose dans de tels cas.Il faut également protéger les enregistreurs des chocs. Les enregistreurs à bande DAT sontparticulièrement sensibles aux chocs et aux vibrations car la bande est étroite et est positionnéede manière très précise et cette précision peut être perdue facilement. Notez que des chocs ne seproduisent pas seulement si l’appareil tombe mais aussi s’il séjourne dans le coffre d’unevoiture roulant sur une route en pavés. Mieux vaut alors placer l’enregistreur sur une banquetteou au moins sur un support amortissant (mousse ou coussin par exemple).
Les enregistreurs sur disque dur doivent également être protégés des chocs, en tout caslorsqu’ils sont en fonctionnement car lorsqu’ils sont éteints, les têtes de lecture des disques sonten principe parquées et ne risquent pas de rayer la surface des plateaux. Autre risque pour lesdisques durs : lorsque l’appareil séjourne dans un milieu froid et humide puis est placé dans unendroit chaud, de la condensation peut apparaître dans le disque dur. Cette condensation peutêtre dangereuse pour l’appareil si celui-ci est allumé avant que la condensation n’ait pus’évaporer. Il faut donc laisser l’appareil sécher avant de l’utiliser.
Les appareils à support non mobile (ou « solid state » en anglais) comme les enregistreurs surcarte mémoire (tel que le Foste FR-2) ne posent pas tous ces problèmes. Cependant, ce sont toutde même des appareils qu’il faut protéger. Certains d’entre eux comportent des cartesélectroniques enfichées et un choc peut provoquer le détachement d’une carte.
Protégez également le matériel contre la chaleur. Ne laissez pas un microphone ou unenregistreur sur un radiateur ou près d’une fenêtre par grand soleil.
Attention également au vol. Ne laissez jamais du matériel de prise de son dans une voiture, mêmedans le coffre ! N’exposez pas votre matériel lorsque ce n’est pas nécessaire.
F. Caractéristiques générales des microphones
1. Bande passante
Indique les fréquences-limites entre lesquelles les valeurs de sensibilité ne s’éloignent pas deplus de quelques décibels d’une valeur de référence. En général, la tolérance est de +/- 3 dB. Laplupart des microphones ont une bande passante assez large, qui va en général de 20 Hz à 18kHz ou 20 kHz. Quelques microphones à bande passante élargie récents permettent de faire desprises de son qui tirent parti du potentiel de l’échantillonnage à haute fréquence (PCM à 96 kHzou 192 kHz, DSD).
2. Courbe de réponse en fréquence
Indique comment la sensibilité varie en fonction de la fréquence. Si le fabricant est vraimentsérieux, la courbe est mesurée pour l’exemplaire du microphone acheté, sinon une courbegénérale est donnée.
18
Pour un microphone généraliste, une courbe linéaire est recommandée. Cependant, lesmicrophones directionnels pont en général une courbe qui chute en dessous de 100 Hz demanière à compenser l’effet de proximité.
Un microphone peut avoir une courbe de réponse adaptée à une situation particulière. Onn’utilise pas le même microphone pour enregistrer une grosse caisse et pour capter du chant !Par exemple, un microphone peut être adapté à un instrument donné ou à une distance deplacement spécifique. Par exemple, le fabricant allemand Schoeps fabrique des capsules pourplacement en champ diffus, capsules dont la courbe de réponse en fréquence présentent unebosse dans l’aigu de manière à compenser l’atténuation liée à la distance.
3. Sensibilité
C'est le rapport entre la tension électrique de sortie du microphone et une pression sonoreincidente de un Pascal (94 dB SPL). La mesure est donnée pour la fréquence de 1 kHz, lemicrophone étant chargé par une impédance de 1 kohms. En général, au plus la sensibilité estélevée, au mieux c'est. Cependant, une sensibilité trop importante est inutile pour capter des sonsissus de corps sonores très puissants tels que des percussions ou des cuivres. Dans ces cas-là, leniveau de signal peut être trop important et entraîner l’apparition de distorsion dans lemicrophone lui-même ou bien dans le circuit de préamplification en aval. C’est pourquoi ontrouve souvent un atténuateur (PAD) qui va réduire temporairement la sensibilité de 10 ou 20dB.
Les chiffres de sensibilité peuvent s’exprimer selon deux manières. La première manièreconsiste à donner la tension électrique en sortie pour une pression d'un Pascal. La secondemanière est d'exprimer la tension sous la forme d'un niveau en dB par rapport à une référenceélectrique de tension, comme 0 dBm (càd 0,775 V - on devrait en fait utiliser le dBu, puisque ledBm correspond à une référence de puissance et non de tension) ou 0 dBV (càd 1 V).Malheureusement, certains constructeurs, plutôt que d'être clair et d'exprimer les unitésrigoureusement (ex : -54 dBV/Pa) omettent parfois de noter l'unité Pa, voire le V de « Volts ».On se retouve donc avec une sensibilité exprimée simplement en dB (-54 dB). Notons que lavaleur de sensibilité est donnée pour la fréquence de 1 kHz, et qu'elle est en principe mesuréepour un son atteignant le microphone de front (càd dans l'axe).
Cette façon d'exprimer la sensibilité n'utilise pas toujours la référence de 1 Pascal. En effet, 1Pascal correspond à un niveau de 94 dB SPL. Or, en prenant plutôt la référence de 74 dB SPL,on a une meilleure idée de ce que la sensibilité représente, car 74 dB SPL, c'est à peu près lapression provoquée par une voix parlée située à 1 m de distance du microphone. 74 dBcorrespondant à une pression dix fois inférieure à 94 dB (enlever 20 dB d'un niveau de pressionrevient à diviser cette pression par 10), on peut aussi dire qu'il s'agit de la sensibilité exprimée parrapport à une pression de 0,1 Pa. On trouvera parfois une autre unité encore pour exprimer lapression : le microbar (µB). Une pression d'un µB correspond à 0,1 Pa.
Exemples :
Modèle MD 441 de chez Sennheiser, un microphone hypercardioïde à bobine mobile : 1,8mV/Pa.
Modèle MKH 40 de chez Sennheiser, un microphone cardioïde à condensateur : 25 mV/Pa.
1 Pa = 10 µB = 94 dB SPL
1 µB = 0,1 Pa = 74 dB SPL
19
Modèle M260 de chez Beyerdynamic, un transducteur hypercardioïde à ruban : -58 dBV/Pa.
Pour pouvoir comparer deux microphones dont les spécifications sont exprimées selon deuxsystèmes différents, ce n'est pas très compliqué. Par exemple, considérons deux micros àcondensateur cardioïdes : le 451 AKG avec une capsule CK5 et l'Audio-Technica ATM11. Le451 possède une sensibilité de 9,5 mV/Pa, alors que le ATM11 a une sensibilité de -56 dBm.Pour exprimer cette seconde mesure en mV/Pa, il suffit de :1) Se remémorer la tension électrique correspondant au dBm, soit 0,775 V.2) Exprimer le rapport à la référence sous la forme de chiffres ronds auxquels correspondent desfacteurs mémorisables facilement. 56, cela peut s'exprimer sous la forme 20 + 20 + 10 + 6. Leschiffres de 20, 10 et 6 dB sont des chiffres ronds auxquels correspondent les facteurs 10, 10et 2, puisqu'il s'agit de pression. 56 dB, cela correspond donc à 10 x 10 x 10 x 2, càd à 632,46.3) Il suffit maintenant de diviser 0,775 V par ce facteur - diviser puisque la mesure exprimée endB était négative (-56 dBm). On obtient le chiffre de 1,22 mV.On constate donc que le microphone Electro-Voice est bien moins sensible que le microphoneAKG.
On aurait pu effectuer l'opération contraire, à savoir exprimer la mesure de sensibilité de 9,5mV/Pa du microphone AKG en dBm. Il suffit d'effectuer le calcul suivant :
sensibilité en dBm = 20 log (9,5 x 10-3 / 0,775)= -38,23 dBm
La sensibilité des microphones électrostatiques est de loin supérieure à celle des microphonesdynamiques (elle est 5 à 15 mV/Pa, voire 20 ou 25, contre des chiffres de l'ordre de 2 à 3 mv/Papour des microphones à bobine mobile et de 1 à 2 mV/Pa pour les microphones à ruban). Lesmicrophone à électret sont en général un peu moins sensibles que les microphones àcondensateur « réels » alimentés par une alimentation fantôme.
4. Niveau de bruit propre
Les microphones ne sont pas totalementsilencieux. Leurs propres constituants engendrentdu bruit, qu'il s'agisse du bruit provoqué parl'agitation thermique dans les rubans, les bobines,ou bien de celui causé par les préamplificateursou les résistances de polarisation des microsélectrostatiques, ou encore par lestransformateurs de sortie.
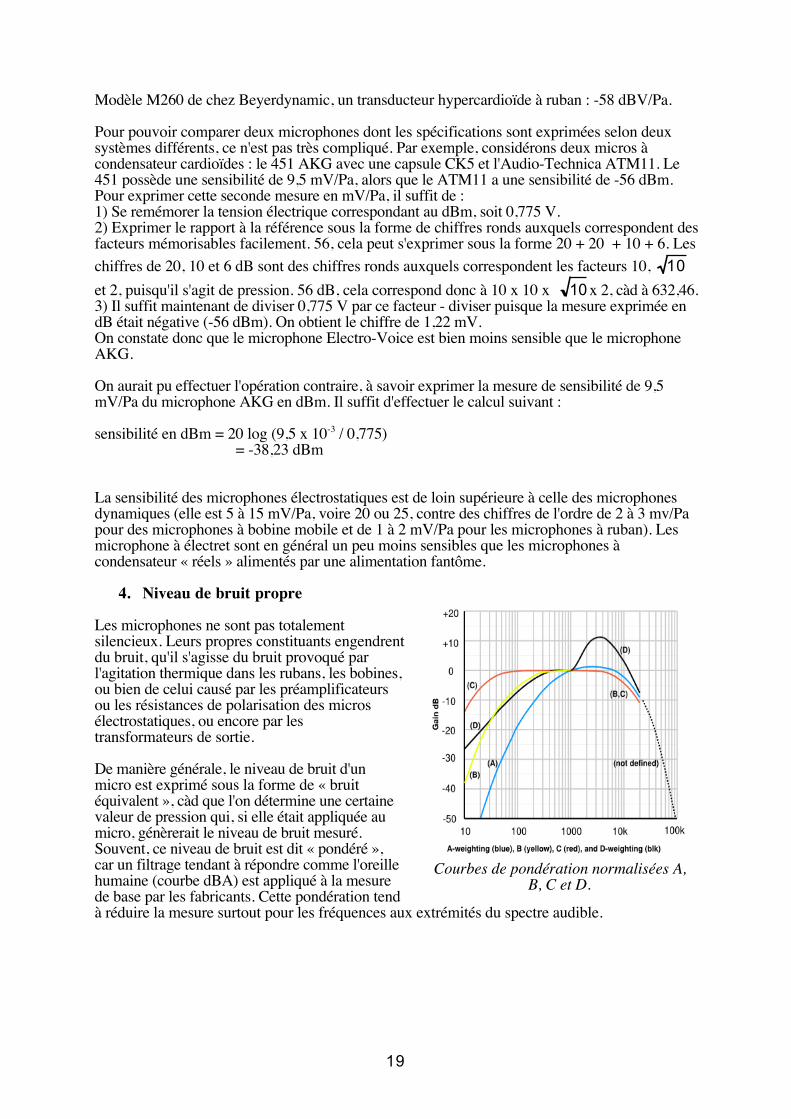
De manière générale, le niveau de bruit d'unmicro est exprimé sous la forme de « bruitéquivalent », càd que l'on détermine une certainevaleur de pression qui, si elle était appliquée aumicro, génèrerait le niveau de bruit mesuré.Souvent, ce niveau de bruit est dit « pondéré »,car un filtrage tendant à répondre comme l'oreillehumaine (courbe dBA) est appliqué à la mesurede base par les fabricants. Cette pondération tendà réduire la mesure surtout pour les fréquences aux extrémités du spectre audible.
Courbes de pondération normalisées A,B, C et D.
20
Ex : micro électrostatique Sennheiser MKH 40. Leniveau de bruit équivalent est de 21 dB.
Pour le même micro MKH 40, avec une pondération onn’obtient plus que 12 dBA.
Attention : parfois, il n'est pas précisé très clairement dequel type de mesure il s'agit. Cependant, il est parfois faitréférence à des numéros de normes. Celles-ci permettent(en principe) de savoir à quel type de mesure on à affaire.
Mesure en dB : CCIR 468-1DIN 45405DIN 45590
Mesure en dBA : DIN 179IEC 651
5. Niveau maximum de pression admissible
Appelé également limite de pression ou encore seuil dedistorsion.
Il s'agit de la pression maximale que peut « encaisser »la microphone, càd au-delà de laquelle une distorsionharmonique trop importante apparaît. Cette pression estd'ailleurs celle à laquelle correspond une distorsion de0,5% dans le signal électrique généré (parfois c'est unedistorsion de 1% qui est prise en considération).
Exemples :
Le MKH 40 Sennheiser, microphone électrostatiquecardioïde, possède un niveau limite de pression de 134dB SPL.
Le C451 AKG, électrostatique, avec capsule CK1(cardioïde), admet une pression maximale de 120 dBSPL.
De manière générale, les microphones à bobine mobileadmettent des niveaux supérieurs aux microphonesélectrostatiques. Notez que la distorsion peut êtreprovoquée par l'étage de préamplification et non par letransducteur lui-même. C'est pourquoi nombre demicrophones sont équipés d'un commutateur permettantla mise en fonction d'un atténuateur de 10 ou 20 dB(PAD) placé entre la capsule et le préamplificateur. Unefois activé, le microphone admet des niveaux de pressionplus importants.
6. Rapport signal/bruit et dynamique totale
Le rapport signal/bruit indique la plage dynamiquedisponible entre le niveau de fonctionnement nominal etle niveau de bruit, alors que la dynamique totale indique
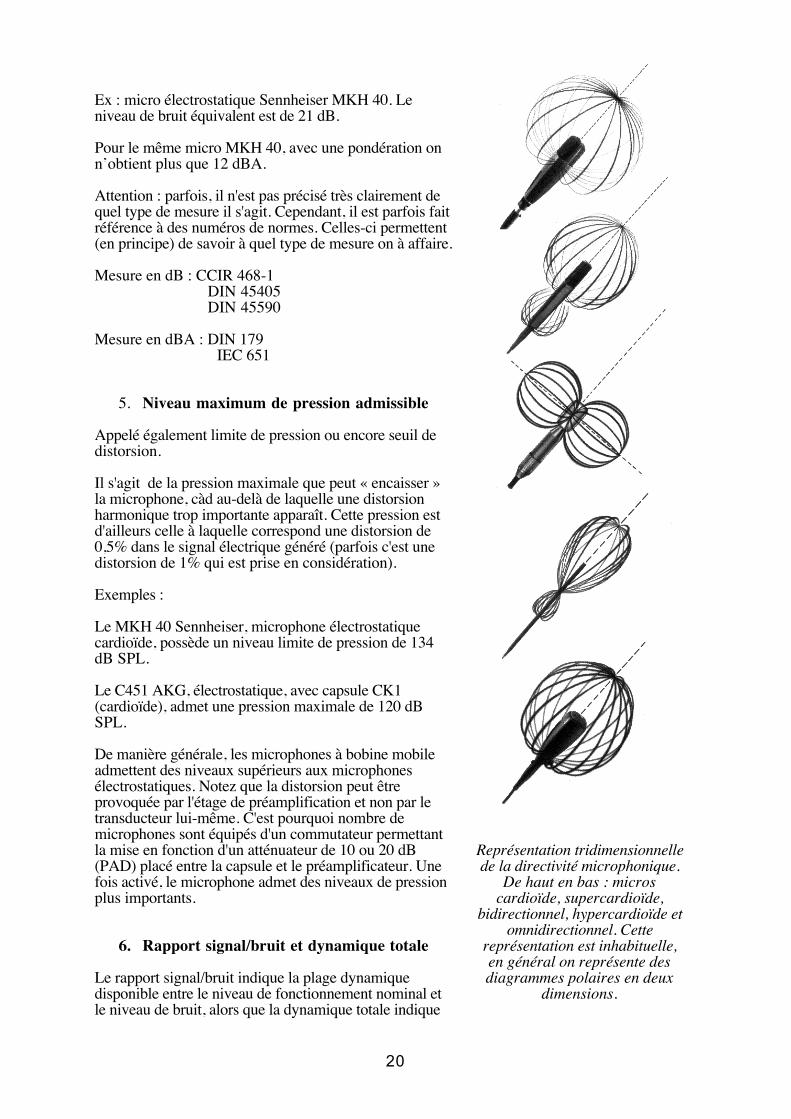
Représentation tridimensionnellede la directivité microphonique.
De haut en bas : microscardioïde, supercardioïde,
bidirectionnel, hypercardioïde etomnidirectionnel. Cette
représentation est inhabituelle,en général on représente desdiagrammes polaires en deux
dimensions.
21
le rapport entre le niveau maximum admissible et le niveau de bruit.
Par exemple, le rapport signal/bruit du MKH-40 est de 82 dB avec pondération A (73 dB sanspondération), alors que sa dynamique totale est de 122 dB (avec pondération A), et même de 130dB lorsqu’on active l’atténuateur PAD.
On notera que la dynamique totale d’un microphone est généralement supérieure à la dynamiquetotale d’une console de mélange (analogique), elle-même supérieure à la dynamique totale d’unenregistreur (analogique) par exemple. Ceci est lié au fait qu’un programme enregistré possèdeune dynamique qui est adaptée à une écoute dans un environnement non isolé. Cela parce que,d’une part, des bruits peuvent gêner l’écoute par masquage, ce qui nécessite un relèvement desniveaux les plus faibles, et que, d’autre part, l’écoute à des niveaux trop élevés peut elle-mêmegêner le voisinage, ce qui nécessite un abaissement des niveaux les plus élevés.
Donc, au fur et à mesure que l’on descend la chaîne électroacoustique, la dynamique diminue.Elle peut être encore être réduite pour des raisons particulières : diffusion d’un programme radioen FM destiné à être écouté dans des lieux publics bruyants (commerces) ou diffusion d’unprogramme de télévision à des heures tardives dont on sait qu’il risque d’être écouté à faibleniveau pour ne pas déranger les voisins.
7. Directivité
Liée au principe acoustique du microphone (voir plus haut)
Synonymes : diagramme polaire, zone de couverture. Selon leur conception acoustique, lesmicrophones diffèrent au niveau de leur sensibilité face à des sons provenant de directionsdifférentes. Ainsi, les capteurs de pression possèdent une sensibilité indépendante de laprovenance des sons (directivité omnidirectionnelle). Les capteurs à gradient de pressionpermettent d’obtenir une directivité cardioïde, hypocardioïde, supercardioïde/hypercardioïde oubidirectionnelle (figure de huit). Pour obtenir une sélectivité encore plus prononcée, on peututiliser des capteurs à interférences, qui possèdent des directivités en forme de lobes. Casparticulier : les têtes artificielles reproduisent la captation d’un ensemble oreille/tête humaine,mais il s’agit en fait de couples stéréophoniques.
L’indice de directivité (en dB) se réfère au comportement d'un microphone dans le champ diffus.Il indique de combien de dB son niveau est plus faible par rapport à un microphoneomnidirectionnel idéal. Plus cette différence est grande, plus son indice de directivité est élevé, etplus le champs diffus capté est atténué. Cette mesure est dépendante de la fréquence et augmentegénéralement avec la fréquence. On parle aussi de facteur de distance (voir le tableau p. 5).
Le choix de la directivité du microphone s’effectue notamment suivant la distance entremicrophone et corps sonore (source) ainsi qu’en fonction de l’acoustique si le prise de sons’effectue en intérieur. En général, une prise de son dans un milieu très réverbérant va con
8. Impédance de charge minimale
Valeur d’impédance de charge pour laquelle l’appareil spécifié permet d’obtenir lescaractéristiques annoncées. S’il est relié à une impédance plus basse, le plus souvent la tensionde sortie sera inférieure et le taux de distorsion supérieur.
En général, un microphone professionnel possède une impédance inférieure ou égale à 600ohms. Un microphone non professionnel possède une impédance plus grande. Ce qui estimportant, c’est que l’impédance de sortie du microphone soit inférieure à l’impédance d’entréede l’appareil sur lequel on le branche. Dans le cas contraire, on a une perte de signal (doncbesoin d’amplifier plus et diminution du rapport signal/bruit). Typiquement, on reconnaît unmicrophone non professionnel à deux caractéristiques : son connecteur n’est pas de type XLR

22
mais Jack (voire mini-Jack !) ou bien un câble lui est directement attaché. Typiquement, unpréampli microphonique offre une haute impédance d’entrée (supérieure à 10 kohms) demanière à ne pas « charger » le microphone. Par ailleurs, une basse impédance de sortie permetde transporter le signal sur un long câble sans perte alors qu’une sortie à haute impédance peutconduire à des pertes dans les hautes fréquences si la longueur du câble dépasse 6 mapproximativement.
Notez que pour obtenir une impédance aussi basse le microphone contient un circuit placé entrela capsule et la sortie. Sur un microphone dynamique, ce circuit de préamplification permet deréduire l’impédance de sortie à partir d’une valeur initiale de plusieurs milliers d’ohms, ce quiest en général réalisé avec un transformateur. Sur un microphone à condensateur, il faut uncircuit plus élaboré car l’impédance initiale est d’environ deux milliards d’ohms.
Il existe des préamplificateurs microphoniques à impédance d’entrée ajustables, mais ils sontrares.
23
Chapitre 2 : choix d’un microphoneCelui-ci s’effectue en fonction de différentes variables.
A. Les caractéristiques dynamiques et fréquentielles de la source à capter
1. Intensité et dynamique
La source produit-elle des sons forts, des sons faibles, présente-t-elle de grands écartsdynamiques ou non ?
2. Courbe de réponse en fréquence
Certains instruments ou corps sonores produisent essentiellement des basses fréquences (ex :grosse caisse), d’autres des hautes fréquences (violon), d’autres couvrent tous les registres(piano, orgue, etc). Il faut donc adapter le microphone à ce registre.
3. Diffusion des différentes fréquences autour de l’instrument
Chaque instrument ou corps sonore ne diffuse pas ses différentes fréquences de la mêmemanière dans toutes les directions. Il faut donc chercher un angle de captation correct qui vadonner un son équilibré. Dans certains cas, il peut être utile de capter un instrument/corps sonoreavec plusieurs microphones. C’est par exemple le cas du saxophone
B. Les habitudes d’écoute
1. Instrument
Pour toute musique antérieure à la seconde moitié du 20e siècle (et pour beaucoup de celles quiont été composées ensuite) nous avons l’habitude d’écouter chaque instrument (ceci nes’applique pas aux autres corps sonores) dans une situation de concert qui détermine la manièredont l’instrument est placé par rapport aux auditeurs. Par exemple, dans un orchestresymphonique, le son des cors est transmis aux auditeurs via les réflexions sur le fond de la salle.Il ne faut donc pas placer un microphone en face du pavillon d’un cor pour prétendument« mieux capter le son de l’instrument». Le son qui résulterait d’un prise de son perturberaitl’auditeur.
2. Le genre et l’époque de composition de la musique jouée
Les musiques anciennes demandent en général une acoustique bien présente via uneréverbération de durée assez longue. La musique religieuse est un cas typique : étant jouéenormalement dans des églises, lieux qui présentent en général une réverbération marquée, uneacoustique trop matte ne leur convient absolument pas. Notamment dans le cas de chantsgrégoriens, la réverbération est réellement indispensable. Au contraire, pour certaines musiquescontemporaines, une réverbération courte peut être préférée. Il faut donc faire attention à ladistance source-microphone(s) et à la directivité du ou des microphones. Pour certainesmusiques instrumentales ou vocales postérieures à la seconde guerre mondiale, un dispositifd’amplification avec captation par microphones peut même être partie intégrante de lacomposition (ex ; Tehilim de Steve Reich). Il convient alors de placer une partie des micros decaptation de manière similaire aux micros du dispositif d’amplification, ou bien de mélanger lessignaux issus de ces microphones avec ceux issus de micros spécifiques à la captation, ou bienencore de capter à la fois le son des instruments et le son du système d’amplification si celui-ciest de bonne qualité. Dans le cas de musiques électroacoustiques, ce problème devient plus aigusi une spatialisation est présente.

24
C. L’orchestration
En musique instrumentale, lorsqu’un soliste est présent, il doit normalement faire jeu égal avecl’ensemble. Il est donc souvent nécessaire de placer sur ce soliste un microphone dédié, quipermet d’éventuellement renforcer la présence du soliste dans l’enregistrement par rapport àun couple stéréophonique principal par exemple.
En général, un ensemble instrumental est bien équilibré acoustiquement, surtout s’il s’agit demusiciens expérimentés et de formations aussi traditionnelles qu’un quatuor à cordes, mais cetéquilibre dépend aussi de l’écriture. La musique contemporaine emploie parfois des ensemblesinhabituels qui ont plus de mal à trouver un équilibre. Dans ce cas, l’usage de microphonesadditionnels peut s’imposer en sus d’un couple principal.
D. L’occupation de l’espace
En général, la captation d’un soliste ou d’un ensemble sera effectuée via un couplestéréophonique placé de telle manière que le son occupe l’ensemble de la rampestéréophonique. Si un micro est placé sur un soliste, il faut le placer correctement sur la rampestéréophonique l’image sonore donnée par ce microphone, et ce avec le potentiomètrepanoramique.
La captation de concerts acousmatiques pose des problèmes particuliers car ces concertsimpliquent le plus souvent une interprétation spatialisée, laquelle implique une diffusion sonorenon plus seulement sur scène mais également depuis les côtés de la salle, de l’arrière, voire duplafond. Dans ce cas, un dispositif de captation multicanal peut être utile et la diffusion de plusen plus large dans le public de dispositifs d’écoute de type multicanal pousse à effectuer desenregistrements de ce type.
25
Conseils de base ou « ce qu’il ne faut pas perdre de vue d’oreille »1. Choix du microphone :
- directivité (diagramme polaire);- sensibilité, limite de pression (ou seuil de distorsion) et gamme dynamique ;- bande passante. Par exemple, si vous travaillez à une fréquence
d’échantillonnage supérieure à 48 kHz, seuls quelques microphones vousproposent une bande passante élargie au-delà des 20 kHz.
- courbe de réponse en fréquence. Celle-ci peut être adaptée à une sourceparticulière (voix) ou parfois compenser une distance de placement particulière(ex : bosse dans l’aigu sur certaines capsules Schoeps ou atténuation du gravesur les capsules cardioïdes).
- Réponse aux transitoires. A priori un microphone à membrane légère (ruban oustatique) donne une meilleure réponse aux transitoires mais en contrepartie despointes plus fortes peuvent être générées sur les attaques des sons et donc ladynamique est plus importante;
2. Choix du lieu :
A. Prise de son en extérieur. Dans ce cas-là, l’identité sonore de l’endroitfait partie de la prise de son.
B. En intérieur. S’il s’agit d’enregistrer des corps sonores, un lieusilencieux et pas trop réverbérant est préférable car il est possibled’ajouter de la réverbération artificiellement, mais il est difficile d’enenlever. Eventuellement corriger l’acoustique en plaçant des matériauxabsorbants si le réverbération est trop intense (ex : couvertures, tentures,matelas, etc). s’il s’agit d’enregistrer un musicien ou des musiciens,l’acoustique doit être adaptée à l’époque et au genre. Ainsi, de lamusique baroque demande une réverbération plus présente que de lamusique contemporaine ou du Jazz.
3. Distance de positionnement : suivant la puissance acoustique de la source, du plan deprésence recherché, suivant l’acoustique du lieu (champ réverbéré/champ ouvert) etsuivant la directivité du microphone. Avec des microphones directionnels, faire attention àl’effet de proximité et éventuellement le compenser par filtrage passe-haut au moment dela prise de son.
4. Angle : suivant la manière dont l’énergie de la source rayonne aux diverses fréquences.
5. Position verticale : faire attention aux réflexions du sol (si celui-ci est dans un matériauréfléchissant). Même remarques pour les murs et le plafond.
6. Position du microphone dans le local d’écoute : éviter les noeuds de vibration liés auxmodes propres de l’acoustique, c’est-à-dire en priorité les points situés à la moitié et auxtiers des dimensions du local (si le local n’a pas une forme cubique ou si des objets s’ytrouvent, ces points peuvent être déplacés). Egalement éviter de placer les microphonestrop près de surfaces réfléchissantes. Cela peut conduire à un son non naturel ou même àune modification du diagramme polaire.
7. Positions relatives des microphones : si plusieurs microphones sont utilisés, penser à larègle des 3 pour 1 pour éviter un effet de filtrage en peigne. C’est-à-dire que la distanceentre les deux microphones devrait être équivalente à au moins trois fois la distanceséparant la source des microphones. Éventuellement aligner les microphones dans letemps avec un délai.
8. Dynamique : si possible essayer un fortississimo de la source pour vérifier qu’iln’entraîne pas de distorsion sinon prendre un repère de gain sur l’enregistreur et ne pas
26
le dépasser dans les passages forts. Garder une marge dynamique et moduler (c’est-à-dire changer le niveau d’enregistrement suivant les évolutions des niveaux de pression dela source) si nécessaire. Si moduler vous empêche de faire un travail musical correct,faire appel à une autre personne pouvant jouer le rôle de l’ingénieur du son.Éventuellement utiliser un système automatique de compression de la dynamique(compresseur) si la dynamique de la source est trop large ou un limiteur si des pointesoccasionnelles se produisent.