(l,r) e s genie e (l,r) e - hal.archives-ouvertes.fr · resume le système de conversion présenté...
TRANSCRIPT

SYMPOSIUM DE GENIE ELECTRIQUE (SGE’14) : EF-EPF-MGE 2014, 8-9 JUILLET 2014, ENS CACHAN, FRANCE
Modulation par hystérésis de courant à mémoire
d’état d’un onduleur triphasé deux niveaux -
comportement électrique
Philippe Le Moigne*, Philippe Delarue**, Sophie Fernandez**
Laboratoire d’Electrotechnique et d’Electronique, Université Lille Nord de France, F- 59000 Lille
* Ecole Centrale de Lille, CS 20048 - 59651 Villeneuve d’Ascq, France
** Université des Sciences et Technologie de Lille, 59655 Villeneuve d’Ascq Cedex, France
Contact : [email protected]
RESUME - Cet article présente la mise en place d’une
commande par hystérésis simple et originale permettant de
contrôler un convertisseur en maitrisant indirectement sa
fréquence moyenne de commutation. Cette commande est basée
sur la connaissance de l’état du convertisseur et la mise en place
de règles de choix de commutations simples à mettre en œuvre.
Ceci est appliqué à un onduleur triphasé relié au réseau à facteur
de puissance unitaire. Les « pertes silicium » obtenues sont
similaires à celles produites par les modulations naturelles à
fréquence fixe pour une même qualité de courants sur le réseau,
avec des familles d’harmoniques moins concentrées. A l’heure où
les convertisseurs voient leur fréquence augmenter, cela peut être
une voie d’exploration de commandes plus rapides et plus
facilement intégrables par utilisation de composants logiques
programmables, dont les capacités ne cessent de croitre.
Mots-clés— onduleur triphasé – commande par hystérésis – rendement – qualité électrique
1. INTRODUCTION
L’utilisation de convertisseurs statiques au sein des réseaux est de plus en plus répandue, notamment pour connecter les sources de production décentralisées renouvelables. Dans ce cadre, les onduleurs triphasés MLI à injection de courant sinusoïdaux et en phase avec le réseau électrique sont des convertisseurs couramment employés. Les principaux critères qui vont gouverner le choix et le dimensionnement de ces dispositifs de conversion sont le cout, la qualité électrique et le rendement électrique. Pour ce faire, différents types d’onduleurs, d’association de convertisseurs, de semi-conducteurs peuvent être employés pour améliorer les performances de ces dispositifs. Dans tous les cas, une fois la structure de conversion figée (topologie, composants, design), les performances électriques et énergétiques reposent encore sur la commande rapprochée du convertisseur et la stratégie de découpage MLI. L’objet de l’article est de comparer les performances énergétiques et électriques d’un onduleur classique deux niveaux injectant une puissance active nominale de 250kW sur le réseau 400V/50Hz en imposant un THDI de 3% sur les courants nominaux [1].
Le système de conversion présenté sur la figure 1 a été commandé de différentes façons pour permettre l’injection de puissance active sur le réseau à facteur de puissance unitaire. Le problème posé est finalement de définir les 3 fonctions de commande hk des bras de l’onduleur et de tirer le meilleur parti électrique et énergétique du système installé avec :
Vk0 = hk.U/2, où hk =+1/-1 et k=1,2 ou 3 (1)
Fig.1 système étudié: onduleur de tension 2 niveaux connecté au réseau
De fait, deux familles de stratégies de commande ont été abordées sous cet angle :
- commande indirectes : modulations naturelles à fréquence fixe ou modulations vectorielles
- commandes directes : modulations par hystérésis
Les modulations naturelles à fréquence fixe [2, 3] reposent sur des commandes indirectes où une régulation de courant définit une tension de référence que le modulateur doit reproduire en valeur moyenne sur une période de découpage. Ces stratégies sont bien connues et ont été étudiées en profondeur dans la littérature.
i1
i2
i3
U/2
U/2
h1 h2 h3
(L,r) e3
εi3
i2réf
εi2
i3réf
εi1
(L,r) e2
(L,r) e1
+-
+-
--
?
O N
1
2
3
2
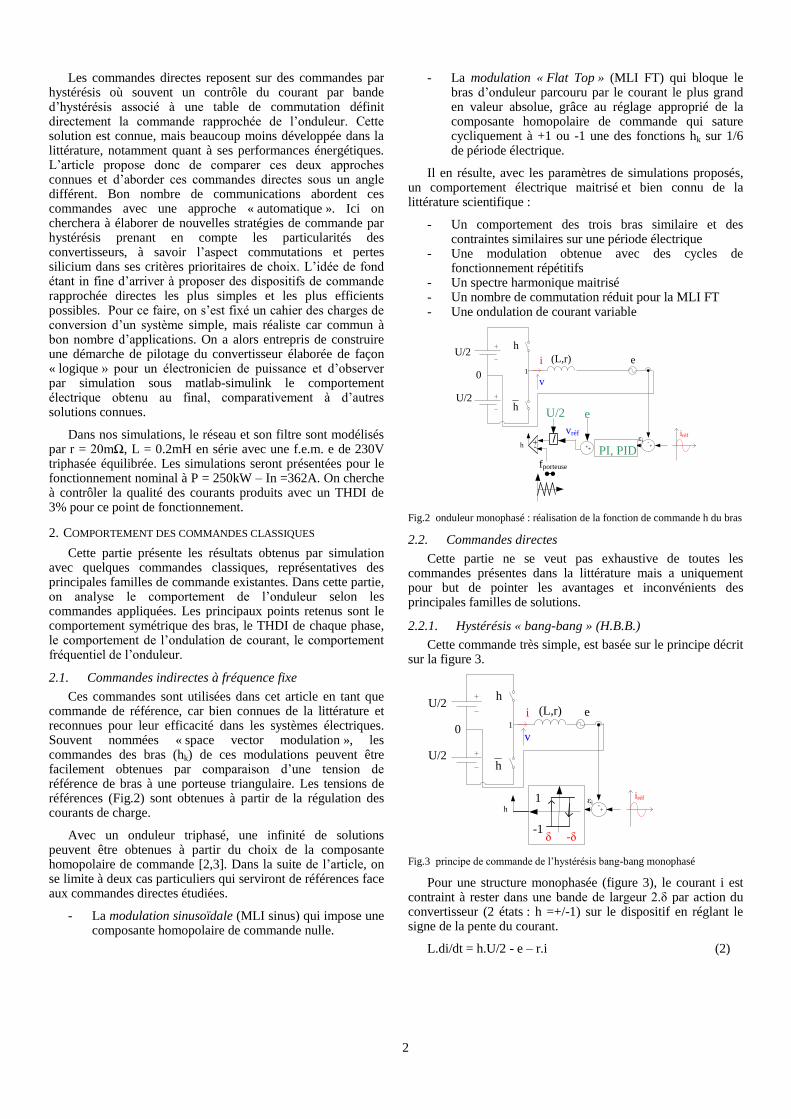
Les commandes directes reposent sur des commandes par hystérésis où souvent un contrôle du courant par bande d’hystérésis associé à une table de commutation définit directement la commande rapprochée de l’onduleur. Cette solution est connue, mais beaucoup moins développée dans la littérature, notamment quant à ses performances énergétiques. L’article propose donc de comparer ces deux approches connues et d’aborder ces commandes directes sous un angle différent. Bon nombre de communications abordent ces commandes avec une approche « automatique ». Ici on cherchera à élaborer de nouvelles stratégies de commande par hystérésis prenant en compte les particularités des convertisseurs, à savoir l’aspect commutations et pertes silicium dans ses critères prioritaires de choix. L’idée de fond étant in fine d’arriver à proposer des dispositifs de commande rapprochée directes les plus simples et les plus efficients possibles. Pour ce faire, on s’est fixé un cahier des charges de conversion d’un système simple, mais réaliste car commun à bon nombre d’applications. On a alors entrepris de construire une démarche de pilotage du convertisseur élaborée de façon « logique » pour un électronicien de puissance et d’observer par simulation sous matlab-simulink le comportement électrique obtenu au final, comparativement à d’autres solutions connues.
Dans nos simulations, le réseau et son filtre sont modélisés par r = 20mΩ, L = 0.2mH en série avec une f.e.m. e de 230V triphasée équilibrée. Les simulations seront présentées pour le fonctionnement nominal à P = 250kW – In =362A. On cherche à contrôler la qualité des courants produits avec un THDI de 3% pour ce point de fonctionnement.
2. COMPORTEMENT DES COMMANDES CLASSIQUES
Cette partie présente les résultats obtenus par simulation avec quelques commandes classiques, représentatives des principales familles de commande existantes. Dans cette partie, on analyse le comportement de l’onduleur selon les commandes appliquées. Les principaux points retenus sont le comportement symétrique des bras, le THDI de chaque phase, le comportement de l’ondulation de courant, le comportement fréquentiel de l’onduleur.
2.1. Commandes indirectes à fréquence fixe
Ces commandes sont utilisées dans cet article en tant que commande de référence, car bien connues de la littérature et reconnues pour leur efficacité dans les systèmes électriques. Souvent nommées « space vector modulation », les commandes des bras (hk) de ces modulations peuvent être facilement obtenues par comparaison d’une tension de référence de bras à une porteuse triangulaire. Les tensions de références (Fig.2) sont obtenues à partir de la régulation des courants de charge.
Avec un onduleur triphasé, une infinité de solutions peuvent être obtenues à partir du choix de la composante homopolaire de commande [2,3]. Dans la suite de l’article, on se limite à deux cas particuliers qui serviront de références face aux commandes directes étudiées.
- La modulation sinusoïdale (MLI sinus) qui impose une composante homopolaire de commande nulle.
- La modulation « Flat Top » (MLI FT) qui bloque le bras d’onduleur parcouru par le courant le plus grand en valeur absolue, grâce au réglage approprié de la composante homopolaire de commande qui sature cycliquement à +1 ou -1 une des fonctions hk sur 1/6 de période électrique.
Il en résulte, avec les paramètres de simulations proposés, un comportement électrique maitrisé et bien connu de la littérature scientifique :
- Un comportement des trois bras similaire et des contraintes similaires sur une période électrique
- Une modulation obtenue avec des cycles de fonctionnement répétitifs
- Un spectre harmonique maitrisé - Un nombre de commutation réduit pour la MLI FT - Une ondulation de courant variable
Fig.2 onduleur monophasé : réalisation de la fonction de commande h du bras
2.2. Commandes directes
Cette partie ne se veut pas exhaustive de toutes les commandes présentes dans la littérature mais a uniquement pour but de pointer les avantages et inconvénients des principales familles de solutions.
2.2.1. Hystérésis « bang-bang » (H.B.B.)
Cette commande très simple, est basée sur le principe décrit sur la figure 3.
Fig.3 principe de commande de l’hystérésis bang-bang monophasé
Pour une structure monophasée (figure 3), le courant i est contraint à rester dans une bande de largeur 2.δ par action du convertisseur (2 états : h =+/-1) sur le dispositif en réglant le signe de la pente du courant.
L.di/dt = h.U/2 - e – r.i (2)
+
i (L,r)
0
U/2
U/2
v1
e
h +-
iréfεi
h
h
vréf
fporteuse
+- +
/
U/2 e
PI, PID
i (L,r)
0
U/2
U/2
v1
e
h +-
iréfεi
h
h
δ -δ
1
-1
3
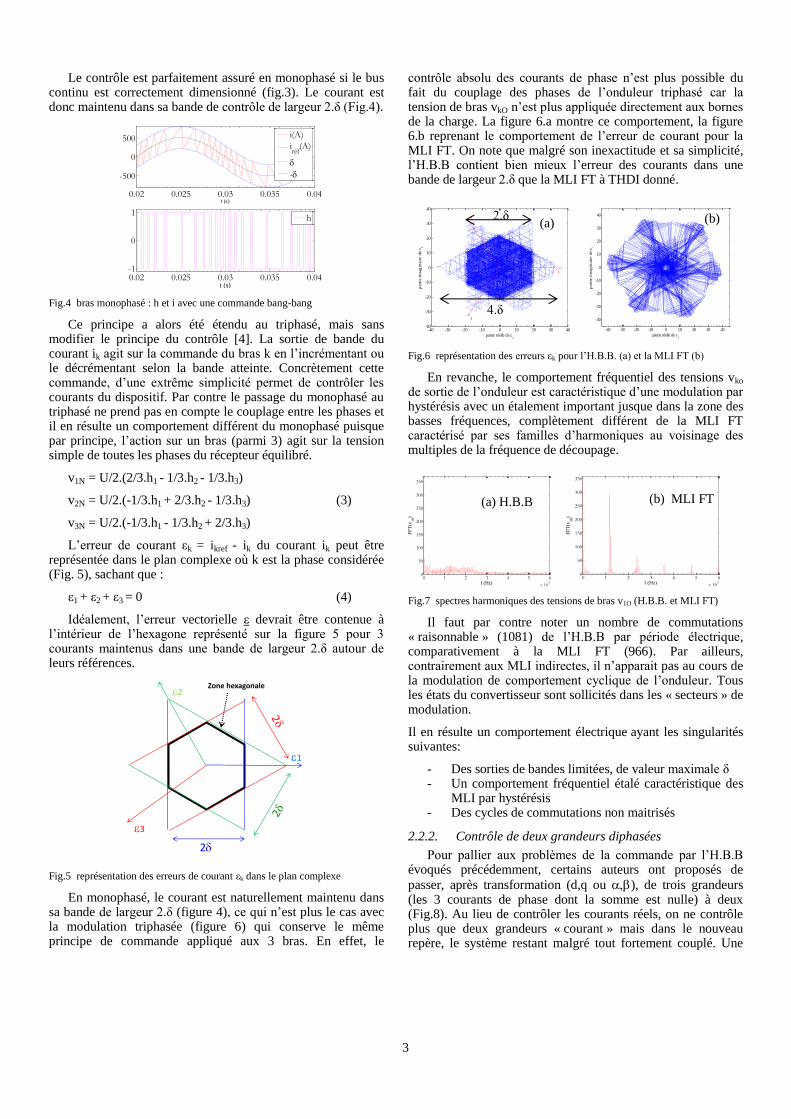
Le contrôle est parfaitement assuré en monophasé si le bus continu est correctement dimensionné (fig.3). Le courant est donc maintenu dans sa bande de contrôle de largeur 2.δ (Fig.4).
Fig.4 bras monophasé : h et i avec une commande bang-bang
Ce principe a alors été étendu au triphasé, mais sans modifier le principe du contrôle [4]. La sortie de bande du courant ik agit sur la commande du bras k en l’incrémentant ou le décrémentant selon la bande atteinte. Concrètement cette commande, d’une extrême simplicité permet de contrôler les courants du dispositif. Par contre le passage du monophasé au triphasé ne prend pas en compte le couplage entre les phases et il en résulte un comportement différent du monophasé puisque par principe, l’action sur un bras (parmi 3) agit sur la tension simple de toutes les phases du récepteur équilibré.
v1N = U/2.(2/3.h1 - 1/3.h2 - 1/3.h3)
v2N = U/2.(-1/3.h1 + 2/3.h2 - 1/3.h3) (3)
v3N = U/2.(-1/3.h1 - 1/3.h2 + 2/3.h3)
L’erreur de courant εk = ikref - ik du courant ik peut être représentée dans le plan complexe où k est la phase considérée (Fig. 5), sachant que :
ε1 + ε2 + ε3 = 0 (4)
Idéalement, l’erreur vectorielle ε devrait être contenue à l’intérieur de l’hexagone représenté sur la figure 5 pour 3 courants maintenus dans une bande de largeur 2.δ autour de leurs références.
Fig.5 représentation des erreurs de courant εk dans le plan complexe
En monophasé, le courant est naturellement maintenu dans sa bande de largeur 2.δ (figure 4), ce qui n’est plus le cas avec la modulation triphasée (figure 6) qui conserve le même principe de commande appliqué aux 3 bras. En effet, le
contrôle absolu des courants de phase n’est plus possible du fait du couplage des phases de l’onduleur triphasé car la tension de bras vkO n’est plus appliquée directement aux bornes de la charge. La figure 6.a montre ce comportement, la figure 6.b reprenant le comportement de l’erreur de courant pour la MLI FT. On note que malgré son inexactitude et sa simplicité, l’H.B.B contient bien mieux l’erreur des courants dans une bande de largeur 2.δ que la MLI FT à THDI donné.
Fig.6 représentation des erreurs εk pour l’H.B.B. (a) et la MLI FT (b)
En revanche, le comportement fréquentiel des tensions vko de sortie de l’onduleur est caractéristique d’une modulation par hystérésis avec un étalement important jusque dans la zone des basses fréquences, complètement différent de la MLI FT caractérisé par ses familles d’harmoniques au voisinage des multiples de la fréquence de découpage.
Fig.7 spectres harmoniques des tensions de bras v1O (H.B.B. et MLI FT)
Il faut par contre noter un nombre de commutations « raisonnable » (1081) de l’H.B.B par période électrique, comparativement à la MLI FT (966). Par ailleurs, contrairement aux MLI indirectes, il n’apparait pas au cours de la modulation de comportement cyclique de l’onduleur. Tous les états du convertisseur sont sollicités dans les « secteurs » de modulation.
Il en résulte un comportement électrique ayant les singularités suivantes:
- Des sorties de bandes limitées, de valeur maximale δ - Un comportement fréquentiel étalé caractéristique des
MLI par hystérésis - Des cycles de commutations non maitrisés
2.2.2. Contrôle de deux grandeurs diphasées
Pour pallier aux problèmes de la commande par l’H.B.B évoqués précédemment, certains auteurs ont proposés de
passer, après transformation (d,q ou ), de trois grandeurs (les 3 courants de phase dont la somme est nulle) à deux (Fig.8). Au lieu de contrôler les courants réels, on ne contrôle plus que deux grandeurs « courant » mais dans le nouveau repère, le système restant malgré tout fortement couplé. Une
0.02 0.025 0.03 0.035 0.04
-500
0
500
t (s)
i(A)
iréf
(A)
-
0.02 0.025 0.03 0.035 0.04-1
0
1
t (s)
h
Zone hexagonale
1
2
2
3
-40 -30 -20 -10 0 10 20 30 40-40
-30
-20
-10
0
10
20
30
40
partie réelle de i
part
ie i
mag
inair
e d
e
i
1
3
2
-40 -30 -20 -10 0 10 20 30 40
-40
-30
-20
-10
0
10
20
30
40
partie réelle de i
part
ie i
mag
inair
e d
e
i
0 1 2 3 4 5 6
x 104
0
50
100
150
200
250
300
350
f (Hz)
FF
T(v
10)
0 1 2 3 4 5 6
x 104
0
50
100
150
200
250
300
350
f (Hz)
FF
T(v
10)
4.δ
2.δ (a) (b)
(a) H.B.B (b) MLI FT
4
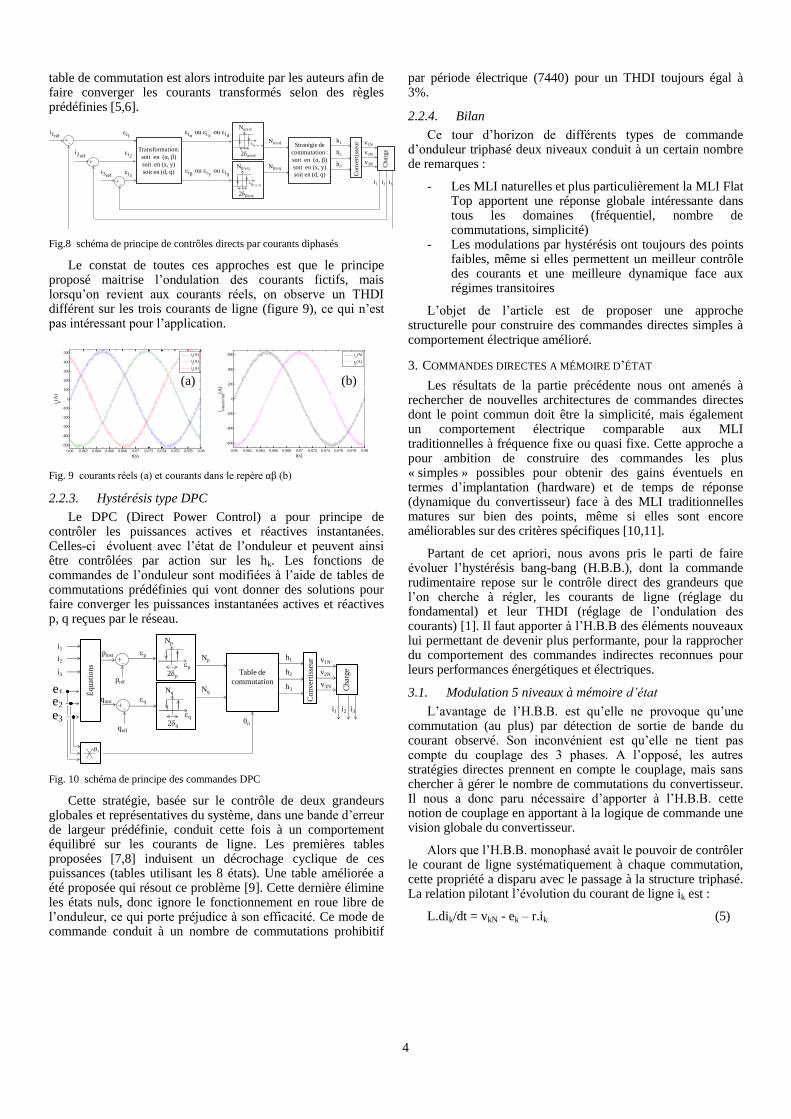
table de commutation est alors introduite par les auteurs afin de faire converger les courants transformés selon des règles prédéfinies [5,6].
Fig.8 schéma de principe de contrôles directs par courants diphasés
Le constat de toutes ces approches est que le principe proposé maitrise l’ondulation des courants fictifs, mais lorsqu’on revient aux courants réels, on observe un THDI différent sur les trois courants de ligne (figure 9), ce qui n’est pas intéressant pour l’application.
Fig. 9 courants réels (a) et courants dans le repère αβ (b)
2.2.3. Hystérésis type DPC
Le DPC (Direct Power Control) a pour principe de contrôler les puissances actives et réactives instantanées. Celles-ci évoluent avec l’état de l’onduleur et peuvent ainsi être contrôlées par action sur les hk. Les fonctions de commandes de l’onduleur sont modifiées à l’aide de tables de commutations prédéfinies qui vont donner des solutions pour faire converger les puissances instantanées actives et réactives p, q reçues par le réseau.
Fig. 10 schéma de principe des commandes DPC
Cette stratégie, basée sur le contrôle de deux grandeurs globales et représentatives du système, dans une bande d’erreur de largeur prédéfinie, conduit cette fois à un comportement équilibré sur les courants de ligne. Les premières tables proposées [7,8] induisent un décrochage cyclique de ces puissances (tables utilisant les 8 états). Une table améliorée a été proposée qui résout ce problème [9]. Cette dernière élimine les états nuls, donc ignore le fonctionnement en roue libre de l’onduleur, ce qui porte préjudice à son efficacité. Ce mode de commande conduit à un nombre de commutations prohibitif
par période électrique (7440) pour un THDI toujours égal à 3%.
2.2.4. Bilan
Ce tour d’horizon de différents types de commande d’onduleur triphasé deux niveaux conduit à un certain nombre de remarques :
- Les MLI naturelles et plus particulièrement la MLI Flat Top apportent une réponse globale intéressante dans tous les domaines (fréquentiel, nombre de commutations, simplicité)
- Les modulations par hystérésis ont toujours des points faibles, même si elles permettent un meilleur contrôle des courants et une meilleure dynamique face aux régimes transitoires
L’objet de l’article est de proposer une approche structurelle pour construire des commandes directes simples à comportement électrique amélioré.
3. COMMANDES DIRECTES A MÉMOIRE D’ÉTAT
Les résultats de la partie précédente nous ont amenés à rechercher de nouvelles architectures de commandes directes dont le point commun doit être la simplicité, mais également un comportement électrique comparable aux MLI traditionnelles à fréquence fixe ou quasi fixe. Cette approche a pour ambition de construire des commandes les plus « simples » possibles pour obtenir des gains éventuels en termes d’implantation (hardware) et de temps de réponse (dynamique du convertisseur) face à des MLI traditionnelles matures sur bien des points, même si elles sont encore améliorables sur des critères spécifiques [10,11].
Partant de cet apriori, nous avons pris le parti de faire évoluer l’hystérésis bang-bang (H.B.B.), dont la commande rudimentaire repose sur le contrôle direct des grandeurs que l’on cherche à régler, les courants de ligne (réglage du fondamental) et leur THDI (réglage de l’ondulation des courants) [1]. Il faut apporter à l’H.B.B des éléments nouveaux lui permettant de devenir plus performante, pour la rapprocher du comportement des commandes indirectes reconnues pour leurs performances énergétiques et électriques.
3.1. Modulation 5 niveaux à mémoire d’état
L’avantage de l’H.B.B. est qu’elle ne provoque qu’une commutation (au plus) par détection de sortie de bande du courant observé. Son inconvénient est qu’elle ne tient pas compte du couplage des 3 phases. A l’opposé, les autres stratégies directes prennent en compte le couplage, mais sans chercher à gérer le nombre de commutations du convertisseur. Il nous a donc paru nécessaire d’apporter à l’H.B.B. cette notion de couplage en apportant à la logique de commande une vision globale du convertisseur.
Alors que l’H.B.B. monophasé avait le pouvoir de contrôler le courant de ligne systématiquement à chaque commutation, cette propriété a disparu avec le passage à la structure triphasé. La relation pilotant l’évolution du courant de ligne ik est :
L.dik/dt = vkN - ek – r.ik (5)
v3N
v2N
i1
Con
ver
tiss
eur
Char
ge
h1
réf1i 1iε
réf2i 2iε
réf3i 3iε
h2
h3
i2 i3
v1N
Transformation:
soit en (α, β)
soit en (x, y)
soit en (d, q)
Stratégie de
commutation :
soit en (α, β)
soit en (x, y)
soit en (d, q)
dxα iii εouεouε
qyβ iii εouεouε
2α/x/d
d/x/αiε
Nα/x/d
2β/y/q
q/y/βiε
Nβ/y/q
Nα/x/d
Nβ/y/q
0.06 0.062 0.064 0.066 0.068 0.07 0.072 0.074 0.076 0.078 0.08
-500
-400
-300
-200
-100
0
100
200
300
400
500
t(s)
i k(A
)
i1(A)
i2(A)
i3(A)
0.06 0.062 0.064 0.066 0.068 0.07 0.072 0.074 0.076 0.078 0.08
-600
-400
-200
0
200
400
600
t(s)
i tran
sfo
rmé(A
)
i
(A)
i(A)
v3N
v2N
i1
Con
vert
isse
ur
Char
ge
h1
h2
h3
i2 i3
v1N
Table de
commutation 2p
Np
Np
Nq
p
q
pinst
qinst
préf
qréf
p
θn
Équat
ions
i1
i2
i3
v1N
v2N
v3N2q
Nq
q
θ1
(b) (a)
e1 e2 e3
5
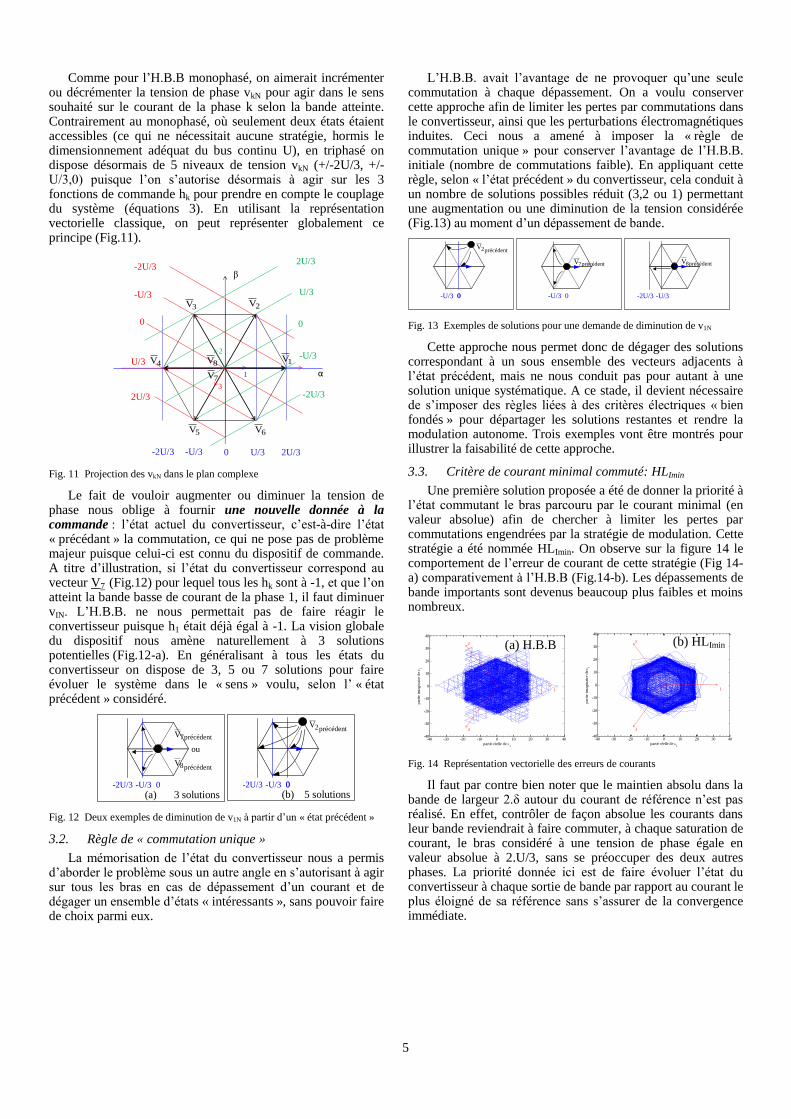
Comme pour l’H.B.B monophasé, on aimerait incrémenter ou décrémenter la tension de phase vkN pour agir dans le sens souhaité sur le courant de la phase k selon la bande atteinte. Contrairement au monophasé, où seulement deux états étaient accessibles (ce qui ne nécessitait aucune stratégie, hormis le dimensionnement adéquat du bus continu U), en triphasé on dispose désormais de 5 niveaux de tension vkN (+/-2U/3, +/-U/3,0) puisque l’on s’autorise désormais à agir sur les 3 fonctions de commande hk pour prendre en compte le couplage du système (équations 3). En utilisant la représentation vectorielle classique, on peut représenter globalement ce principe (Fig.11).
Fig. 11 Projection des vkN dans le plan complexe
Le fait de vouloir augmenter ou diminuer la tension de phase nous oblige à fournir une nouvelle donnée à la commande : l’état actuel du convertisseur, c’est-à-dire l’état « précédant » la commutation, ce qui ne pose pas de problème majeur puisque celui-ci est connu du dispositif de commande. A titre d’illustration, si l’état du convertisseur correspond au vecteur V7 (Fig.12) pour lequel tous les hk sont à -1, et que l’on atteint la bande basse de courant de la phase 1, il faut diminuer vIN. L’H.B.B. ne nous permettait pas de faire réagir le convertisseur puisque h1 était déjà égal à -1. La vision globale du dispositif nous amène naturellement à 3 solutions potentielles (Fig.12-a). En généralisant à tous les états du convertisseur on dispose de 3, 5 ou 7 solutions pour faire évoluer le système dans le « sens » voulu, selon l’ « état précédent » considéré.
Fig. 12 Deux exemples de diminution de v1N à partir d’un « état précédent »
3.2. Règle de « commutation unique »
La mémorisation de l’état du convertisseur nous a permis d’aborder le problème sous un autre angle en s’autorisant à agir sur tous les bras en cas de dépassement d’un courant et de dégager un ensemble d’états « intéressants », sans pouvoir faire de choix parmi eux.
L’H.B.B. avait l’avantage de ne provoquer qu’une seule commutation à chaque dépassement. On a voulu conserver cette approche afin de limiter les pertes par commutations dans le convertisseur, ainsi que les perturbations électromagnétiques induites. Ceci nous a amené à imposer la « règle de commutation unique » pour conserver l’avantage de l’H.B.B. initiale (nombre de commutations faible). En appliquant cette règle, selon « l’état précédent » du convertisseur, cela conduit à un nombre de solutions possibles réduit (3,2 ou 1) permettant une augmentation ou une diminution de la tension considérée (Fig.13) au moment d’un dépassement de bande.
Fig. 13 Exemples de solutions pour une demande de diminution de v1N
Cette approche nous permet donc de dégager des solutions correspondant à un sous ensemble des vecteurs adjacents à l’état précédent, mais ne nous conduit pas pour autant à une solution unique systématique. A ce stade, il devient nécessaire de s’imposer des règles liées à des critères électriques « bien fondés » pour départager les solutions restantes et rendre la modulation autonome. Trois exemples vont être montrés pour illustrer la faisabilité de cette approche.
3.3. Critère de courant minimal commuté: HLImin
Une première solution proposée a été de donner la priorité à l’état commutant le bras parcouru par le courant minimal (en valeur absolue) afin de chercher à limiter les pertes par commutations engendrées par la stratégie de modulation. Cette stratégie a été nommée HLImin. On observe sur la figure 14 le comportement de l’erreur de courant de cette stratégie (Fig 14-a) comparativement à l’H.B.B (Fig.14-b). Les dépassements de bande importants sont devenus beaucoup plus faibles et moins nombreux.
Fig. 14 Représentation vectorielle des erreurs de courants
Il faut par contre bien noter que le maintien absolu dans la bande de largeur 2.δ autour du courant de référence n’est pas réalisé. En effet, contrôler de façon absolue les courants dans leur bande reviendrait à faire commuter, à chaque saturation de courant, le bras considéré à une tension de phase égale en valeur absolue à 2.U/3, sans se préoccuper des deux autres phases. La priorité donnée ici est de faire évoluer l’état du convertisseur à chaque sortie de bande par rapport au courant le plus éloigné de sa référence sans s’assurer de la convergence immédiate.
β
α
2U/3U/30-U/3-2U/3
U/3
2U/3
0
-U/3
-2U/32U/3
U/3
0
-U/3
-2U/3
1
3
2
1V
2V3V
4V
5V 6V
7V
8V
-2U/3 -U/3 0
précédent8
précédent7
V
ou
V
-2U/3 -U/3 0
précédent2V
0
-U/3 0
précédent2V
0 -U/3 0
précédent7V
-2U/3 -U/3
précédent8V
-40 -30 -20 -10 0 10 20 30 40-40
-30
-20
-10
0
10
20
30
40
partie réelle de i
par
tie
imag
inai
re d
e i
1
3
2
-40 -30 -20 -10 0 10 20 30 40-40
-30
-20
-10
0
10
20
30
40
partie réelle de i
par
tie
imag
inai
re d
e i
1
3
2
(a) 3 solutions (b) 5 solutions
(a) H.B.B (b) HLImin
6
En effet, le contrôle cherche à maintenir aussi bien que possible les 3 courants ik dans leurs bandes d’erreur de courant de largeur 2.δ :
-δ< εk<δ avec εk = ikref – ik
Quand εk atteint sa bande basse, il faut l’augmenter c’est à dire avoir:
dεk/dt = dikref /dt – dik/dt >0, soit dik/dt < dikref /dt (6)
La même démarche est appliquée pour la bande haute en inversant le signe.
Pour illustrer ceci, on a simulé la valeur de la dérivée du courant imposée par le convertisseur selon le niveau de tension v1N de l’onduleur (Fig. 15) et celle de la référence du courant nominal i1ref. Selon l’instant considéré, il faut soit absolument imposer - 2U/3 pour maintenir i1 dans sa bande, soit légèrement diminuer le niveau de tension pour obtenir la croissance de l’erreur.
Fig. 15 principe de controlabilité de ε1
Comme on a choisi d’opter pour une commande la plus légère possible en temps de calcul, on accepte de ne pas s’assurer d’inverser la pente de l’erreur en un coup, sachant que cela ne portera pas préjudice à la stabilité globale du dispositif. Si la pente n’est pas inversée, la commande attend la sortie de courant d’une autre phase et applique alors la même règle sur le courant ayant l’erreur la plus grande. La modulation HLImin produit alors des courants quasi-sinusoïdaux.
Fig. 16 courants de phase ik avec HLImin
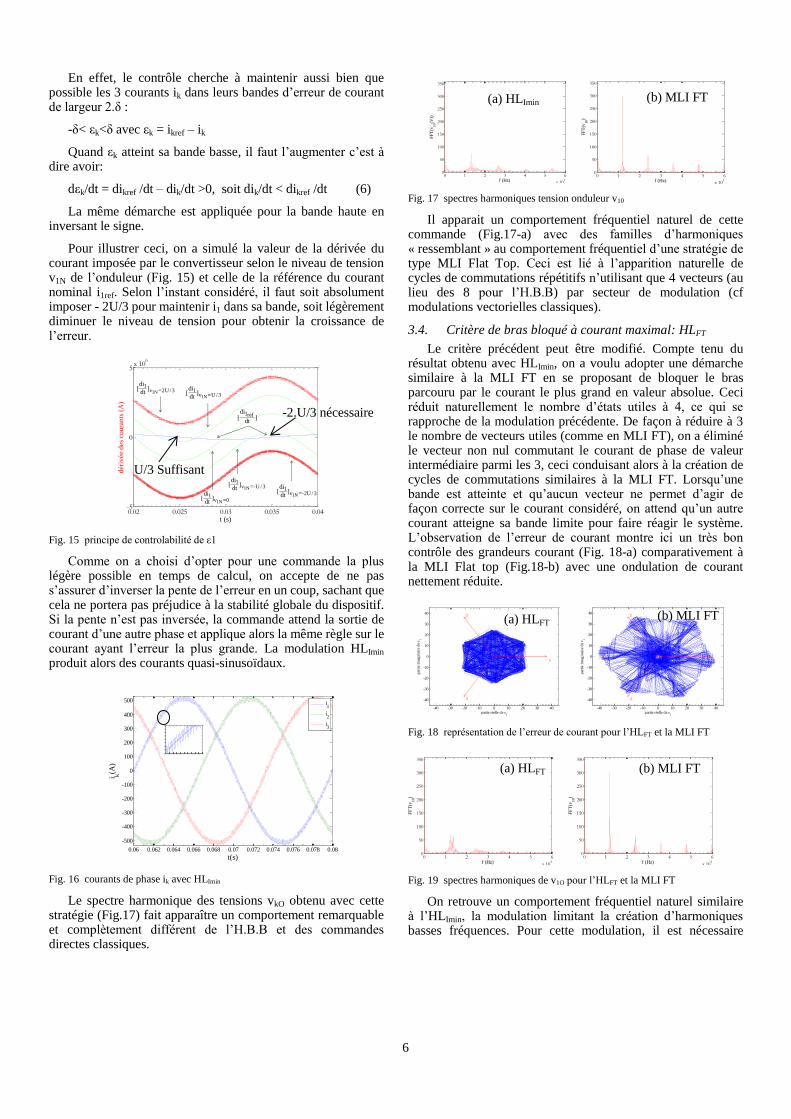
Le spectre harmonique des tensions vkO obtenu avec cette stratégie (Fig.17) fait apparaître un comportement remarquable et complètement différent de l’H.B.B et des commandes directes classiques.
Fig. 17 spectres harmoniques tension onduleur v10
Il apparait un comportement fréquentiel naturel de cette commande (Fig.17-a) avec des familles d’harmoniques « ressemblant » au comportement fréquentiel d’une stratégie de type MLI Flat Top. Ceci est lié à l’apparition naturelle de cycles de commutations répétitifs n’utilisant que 4 vecteurs (au lieu des 8 pour l’H.B.B) par secteur de modulation (cf modulations vectorielles classiques).
3.4. Critère de bras bloqué à courant maximal: HLFT
Le critère précédent peut être modifié. Compte tenu du résultat obtenu avec HLImin, on a voulu adopter une démarche similaire à la MLI FT en se proposant de bloquer le bras parcouru par le courant le plus grand en valeur absolue. Ceci réduit naturellement le nombre d’états utiles à 4, ce qui se rapproche de la modulation précédente. De façon à réduire à 3 le nombre de vecteurs utiles (comme en MLI FT), on a éliminé le vecteur non nul commutant le courant de phase de valeur intermédiaire parmi les 3, ceci conduisant alors à la création de cycles de commutations similaires à la MLI FT. Lorsqu’une bande est atteinte et qu’aucun vecteur ne permet d’agir de façon correcte sur le courant considéré, on attend qu’un autre courant atteigne sa bande limite pour faire réagir le système. L’observation de l’erreur de courant montre ici un très bon contrôle des grandeurs courant (Fig. 18-a) comparativement à la MLI Flat top (Fig.18-b) avec une ondulation de courant nettement réduite.
Fig. 18 représentation de l’erreur de courant pour l’HLFT et la MLI FT
Fig. 19 spectres harmoniques de v1O pour l’HLFT et la MLI FT
On retrouve un comportement fréquentiel naturel similaire à l’HLImin, la modulation limitant la création d’harmoniques basses fréquences. Pour cette modulation, il est nécessaire
0.02 0.025 0.03 0.035 0.04-5
0
5x 10
6
t (s)
déri
vée d
es
coura
nts
(A
)
3/U2=v1
N1]
dt
di[
3/U=v1
N1]
dt
di[
0=v1
N1]
dt
di[
3/U-=v1
N1]
dt
di[
3/U-2=v1
N1]
dt
di[
]dt
di[
réf1
0.06 0.062 0.064 0.066 0.068 0.07 0.072 0.074 0.076 0.078 0.08
-500
-400
-300
-200
-100
0
100
200
300
400
500
t(s)
i k(A
)
i1
i2
i3
0.0625 0.0626 0.0627 0.0628 0.0629 0.063 0.0631 0.0632 0.0633 0.0634 0.0635360
370
380
390
400
410
420
430
440
0 1 2 3 4 5 6
x 104
0
50
100
150
200
250
300
350
f (Hz)
FF
T(v
10)
0 1 2 3 4 5 6
x 104
0
50
100
150
200
250
300
350
f (Hz)
FF
T(v
10(V
))
0 1 2 3 4 5 6
x 104
0
50
100
150
200
250
300
350
f (Hz)
FF
T(v
10)
-40 -30 -20 -10 0 10 20 30 40
-40
-30
-20
-10
0
10
20
30
40
partie réelle de i
par
tie
imag
inai
re d
e i
1
3
2
-40 -30 -20 -10 0 10 20 30 40
-40
-30
-20
-10
0
10
20
30
40
partie réelle de i
par
tie
imag
inai
re d
e i
1
3
2
0 1 2 3 4 5 6
x 104
0
50
100
150
200
250
300
350
f (Hz)
FF
T(v
10)
0 1 2 3 4 5 6
x 104
0
50
100
150
200
250
300
350
f (Hz)
FF
T(v
10)
(a) HLImin (b) MLI FT
(a) HLFT (b) MLI FT
-2.U/3 nécessaire
U/3 Suffisant
(a) HLFT (b) MLI FT
7
d’identifier le secteur du courant de référence dans le plan vectoriel pour pouvoir orienter le choix des 3 états utilisables.
3.5. synthèse
L’approche proposée nous a permis d’établir de nouvelles lois de commandes directes appliquées à un dispositif couramment utilisé et obtenues à partir de règles et données simples : état de l’onduleur, valeurs et « tri » des courants, réglage de la largeur de bande δ, identification du secteur.
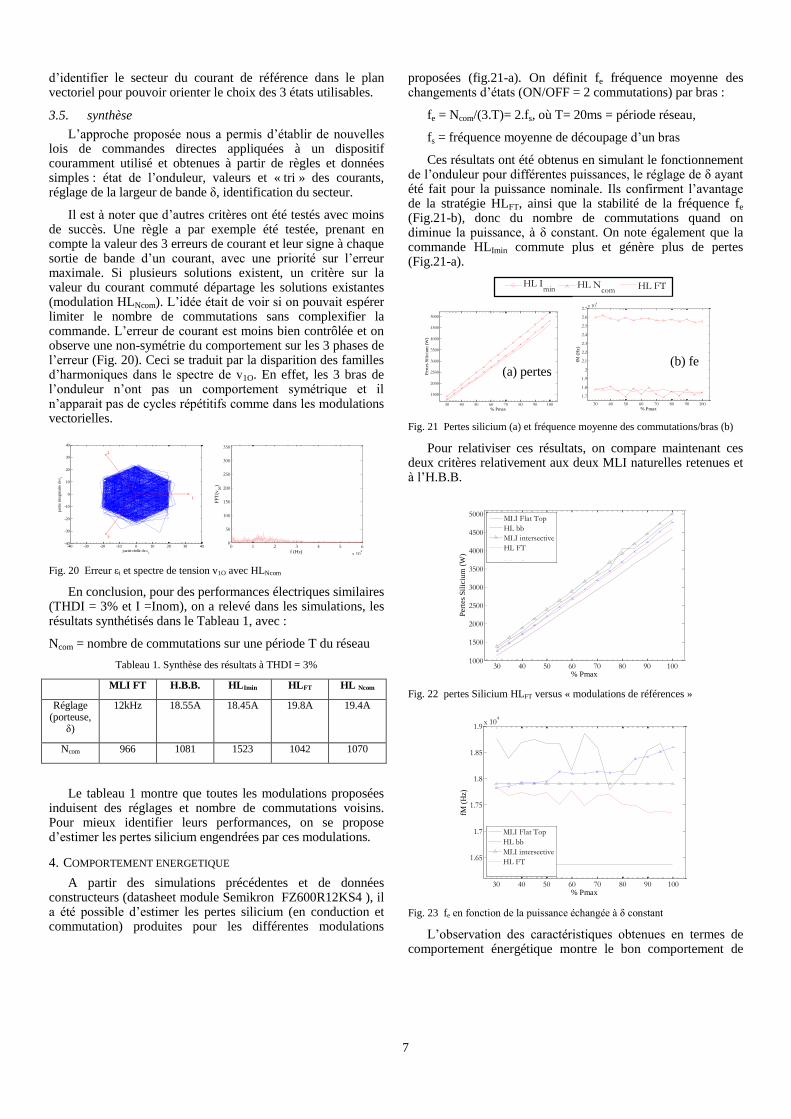
Il est à noter que d’autres critères ont été testés avec moins de succès. Une règle a par exemple été testée, prenant en compte la valeur des 3 erreurs de courant et leur signe à chaque sortie de bande d’un courant, avec une priorité sur l’erreur maximale. Si plusieurs solutions existent, un critère sur la valeur du courant commuté départage les solutions existantes (modulation HLNcom). L’idée était de voir si on pouvait espérer limiter le nombre de commutations sans complexifier la commande. L’erreur de courant est moins bien contrôlée et on observe une non-symétrie du comportement sur les 3 phases de l’erreur (Fig. 20). Ceci se traduit par la disparition des familles d’harmoniques dans le spectre de v1O. En effet, les 3 bras de l’onduleur n’ont pas un comportement symétrique et il n’apparait pas de cycles répétitifs comme dans les modulations vectorielles.
Fig. 20 Erreur εi et spectre de tension v1O avec HLNcom
En conclusion, pour des performances électriques similaires (THDI = 3% et I =Inom), on a relevé dans les simulations, les résultats synthétisés dans le Tableau 1, avec :
Ncom = nombre de commutations sur une période T du réseau
Tableau 1. Synthèse des résultats à THDI = 3%
MLI FT H.B.B. HLImin HLFT HL Ncom
Réglage (porteuse,
δ)
12kHz 18.55A 18.45A 19.8A 19.4A
Ncom 966 1081 1523 1042 1070
Le tableau 1 montre que toutes les modulations proposées induisent des réglages et nombre de commutations voisins. Pour mieux identifier leurs performances, on se propose d’estimer les pertes silicium engendrées par ces modulations.
4. COMPORTEMENT ENERGETIQUE
A partir des simulations précédentes et de données constructeurs (datasheet module Semikron FZ600R12KS4 ), il a été possible d’estimer les pertes silicium (en conduction et commutation) produites pour les différentes modulations
proposées (fig.21-a). On définit fe fréquence moyenne des changements d’états (ON/OFF = 2 commutations) par bras :
fe = Ncom/(3.T)= 2.fs, où T= 20ms = période réseau,
fs = fréquence moyenne de découpage d’un bras
Ces résultats ont été obtenus en simulant le fonctionnement de l’onduleur pour différentes puissances, le réglage de δ ayant été fait pour la puissance nominale. Ils confirment l’avantage de la stratégie HLFT, ainsi que la stabilité de la fréquence fe (Fig.21-b), donc du nombre de commutations quand on diminue la puissance, à δ constant. On note également que la commande HLImin commute plus et génère plus de pertes (Fig.21-a).
Fig. 21 Pertes silicium (a) et fréquence moyenne des commutations/bras (b)
Pour relativiser ces résultats, on compare maintenant ces deux critères relativement aux deux MLI naturelles retenues et à l’H.B.B.
Fig. 22 pertes Silicium HLFT versus « modulations de références »
Fig. 23 fe en fonction de la puissance échangée à δ constant
L’observation des caractéristiques obtenues en termes de comportement énergétique montre le bon comportement de
-40 -30 -20 -10 0 10 20 30 40-40
-30
-20
-10
0
10
20
30
40
partie réelle de i
par
tie
imag
inai
re d
e i
1
3
2
0 1 2 3 4 5 6
x 104
0
50
100
150
200
250
300
350
f (Hz)
FF
T(v
10)
30 40 50 60 70 80 90 100
3200
3400
3600
3800
4000
4200
4400
4600
4800
5000
5200
% Pmax
Per
tes
sili
ciu
m (
W)
HL Imin
HL Ncom
HL FT
30 40 50 60 70 80 90 100
3200
3400
3600
3800
4000
4200
4400
4600
4800
5000
5200
% Pmax
Pert
es
sili
ciu
m (
W)
HL Imin
HL Ncom
HL FT
30 40 50 60 70 80 90 100
3200
3400
3600
3800
4000
4200
4400
4600
4800
5000
5200
% Pmax
Per
tes
sili
ciu
m (
W)
HL Imin
HL Ncom
HL FT
30 40 50 60 70 80 90 100
1500
2000
2500
3000
3500
4000
4500
5000
% Pmax
Pert
es
Sil
iciu
m (
W)
30 40 50 60 70 80 90 100
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6
2.7x 10
4
% Pmax
fM (
Hz)
30 40 50 60 70 80 90 1001000
1500
2000
2500
3000
3500
4000
4500
5000
% Pmax
Pert
es
Sil
iciu
m (
W)
MLI Flat Top
HL bb
MLI intersective
HL FT
HP 2C
30 40 50 60 70 80 90 100
1.65
1.7
1.75
1.8
1.85
1.9x 10
4
% Pmax
fM (
Hz)
MLI Flat Top
HL bb
MLI intersective
HL FT
HP 2C
(b) fe (a) pertes
8
l’HLFT puisque ses performances sont majorées par la MLI FT et minorées par la MLI sinusoïdale et sont meilleures que l’H.B.B.
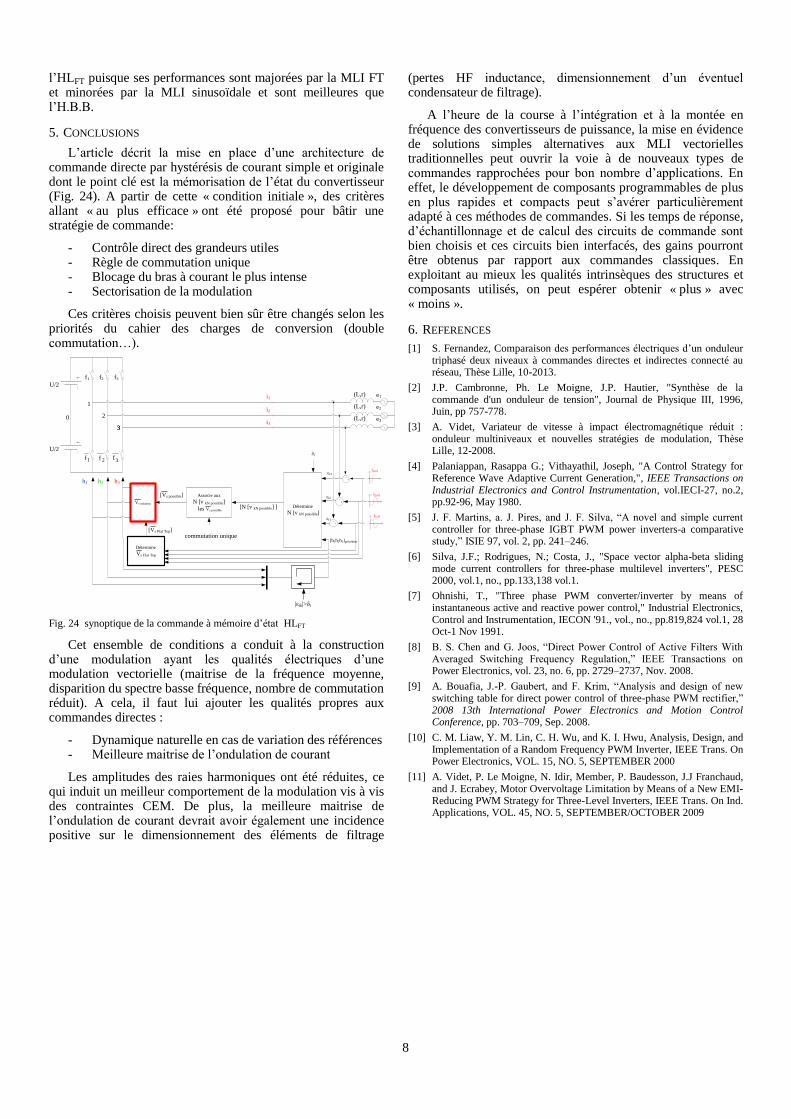
5. CONCLUSIONS
L’article décrit la mise en place d’une architecture de commande directe par hystérésis de courant simple et originale dont le point clé est la mémorisation de l’état du convertisseur (Fig. 24). A partir de cette « condition initiale », des critères allant « au plus efficace » ont été proposé pour bâtir une stratégie de commande:
- Contrôle direct des grandeurs utiles - Règle de commutation unique - Blocage du bras à courant le plus intense - Sectorisation de la modulation
Ces critères choisis peuvent bien sûr être changés selon les priorités du cahier des charges de conversion (double commutation…).
Fig. 24 synoptique de la commande à mémoire d’état HLFT
Cet ensemble de conditions a conduit à la construction d’une modulation ayant les qualités électriques d’une modulation vectorielle (maitrise de la fréquence moyenne, disparition du spectre basse fréquence, nombre de commutation réduit). A cela, il faut lui ajouter les qualités propres aux commandes directes :
- Dynamique naturelle en cas de variation des références - Meilleure maitrise de l’ondulation de courant
Les amplitudes des raies harmoniques ont été réduites, ce qui induit un meilleur comportement de la modulation vis à vis des contraintes CEM. De plus, la meilleure maitrise de l’ondulation de courant devrait avoir également une incidence positive sur le dimensionnement des éléments de filtrage
(pertes HF inductance, dimensionnement d’un éventuel condensateur de filtrage).
A l’heure de la course à l’intégration et à la montée en fréquence des convertisseurs de puissance, la mise en évidence de solutions simples alternatives aux MLI vectorielles traditionnelles peut ouvrir la voie à de nouveaux types de commandes rapprochées pour bon nombre d’applications. En effet, le développement de composants programmables de plus en plus rapides et compacts peut s’avérer particulièrement adapté à ces méthodes de commandes. Si les temps de réponse, d’échantillonnage et de calcul des circuits de commande sont bien choisis et ces circuits bien interfacés, des gains pourront être obtenus par rapport aux commandes classiques. En exploitant au mieux les qualités intrinsèques des structures et composants utilisés, on peut espérer obtenir « plus » avec « moins ».
6. REFERENCES
[1] S. Fernandez, Comparaison des performances électriques d’un onduleur triphasé deux niveaux à commandes directes et indirectes connecté au réseau, Thèse Lille, 10-2013.
[2] J.P. Cambronne, Ph. Le Moigne, J.P. Hautier, "Synthèse de la commande d'un onduleur de tension", Journal de Physique III, 1996, Juin, pp 757-778.
[3] A. Videt, Variateur de vitesse à impact électromagnétique réduit : onduleur multiniveaux et nouvelles stratégies de modulation, Thèse Lille, 12-2008.
[4] Palaniappan, Rasappa G.; Vithayathil, Joseph, "A Control Strategy for Reference Wave Adaptive Current Generation,", IEEE Transactions on Industrial Electronics and Control Instrumentation, vol.IECI-27, no.2, pp.92-96, May 1980.
[5] J. F. Martins, a. J. Pires, and J. F. Silva, “A novel and simple current controller for three-phase IGBT PWM power inverters-a comparative study,” ISIE 97, vol. 2, pp. 241–246.
[6] Silva, J.F.; Rodrigues, N.; Costa, J., "Space vector alpha-beta sliding mode current controllers for three-phase multilevel inverters", PESC 2000, vol.1, no., pp.133,138 vol.1.
[7] Ohnishi, T., "Three phase PWM converter/inverter by means of instantaneous active and reactive power control," Industrial Electronics, Control and Instrumentation, IECON '91., vol., no., pp.819,824 vol.1, 28 Oct-1 Nov 1991.
[8] B. S. Chen and G. Joos, “Direct Power Control of Active Filters With Averaged Switching Frequency Regulation,” IEEE Transactions on Power Electronics, vol. 23, no. 6, pp. 2729–2737, Nov. 2008.
[9] A. Bouafia, J.-P. Gaubert, and F. Krim, “Analysis and design of new switching table for direct power control of three-phase PWM rectifier,” 2008 13th International Power Electronics and Motion Control Conference, pp. 703–709, Sep. 2008.
[10] C. M. Liaw, Y. M. Lin, C. H. Wu, and K. I. Hwu, Analysis, Design, and Implementation of a Random Frequency PWM Inverter, IEEE Trans. On Power Electronics, VOL. 15, NO. 5, SEPTEMBER 2000
[11] A. Videt, P. Le Moigne, N. Idir, Member, P. Baudesson, J.J Franchaud, and J. Ecrabey, Motor Overvoltage Limitation by Means of a New EMI-Reducing PWM Strategy for Three-Level Inverters, IEEE Trans. On Ind. Applications, VOL. 45, NO. 5, SEPTEMBER/OCTOBER 2009
N
i1
i2
i3
1
2
3
2 3
0
U/2
U/2
(L,r) e3
(L,r) e2
(L,r) e1
h1 h2 h3
i1réf
εi3
i2réfεi2
i3réf
εi1
+-
+-
Détermine
N [v kN possible]
Associe aux
N [v kN possible]
les Vs possible[N [v kN possible] ]
[Vs possible]
δi
[h1h2h3]précédent
+-
Vs solution
f1 f2 f3
3
1f f f
commutation unique
|εik|>δi
Détermine
Vs Flat Top
[Vs Flat Top]