instructions de mise en service - sarl hallier 9300/ba... · edb9300fev 00420708 instructions de...
TRANSCRIPT

EDB9300FEV00420708
Instructions demise en service
Variateurs de vitesse
Global Drive
9300 vector
Le présent fascicule s’applique aux variateurs de vitesse 9300 vector des versions suivantes :
33.932X - EV 3x 2x (9321 - 9333)
Type
Forme de constructionE = Appareil sans coffret IP20
Version du matériel et indice
Version du logiciel et indice
Explication
E 1998 Lenze GmbH & Co KG
Toute représentation ou reproduction intégrale oupartielle faite par quelque procédé que ce soit est illicite sans l’autorisation écrite préalable de LenzeGmbH& Co KG.
Les données figurant dans le présent fascicule ont été établies avec le plus grand soin et vérifiées par rapport au matériel et logiciel décrits. Toutefois, nousne pouvonsexclure certainesdivergences. Lenze n’assurepas sa responsabilité sur les dommagesen résultant. Les correctionsnécessaires seront intégréesdans les éditions suivantes.
Edition 3.1 07/2001

r s ^r s ^
mb
o~ÅÅçêÇÉãÉåí ê¨ëÉ~ìÉí ê~ÅÅçêÇÉãÉåí ``
jçÇìäÉ ÇÉ Åçãã~åÇÉ Ç¨ÄêçÅÜ~ÄäÉ^ì ÅÜçáñ W_ìë ÇÉ íÉêê~áåfkqbo_rpJp
_ìë ëóëí≠ãÉ E`^kF
_çêåáÉêë ÇÉ Åçãã~åÇÉ
båíê¨É Ñê¨èìÉåÅÉ éáäçíÉLÅçÇÉìê áåÅê¨ãÉåí~ä
båíê¨É ÅçÇÉìê áåÅê¨ãÉåí~ä
pçêíáÉ Ñê¨èìÉåÅÉ éáäçíÉ
o~ÅÅçêÇÉãÉåí ãçíÉìê
oav fjm fã~ñ jã~ñ c~áä
NO
TSO
PQ
TSP
^Q
pqO
RVpqN
^P
^O^N
bP
bR
PVbQ
bObN
OU
dkaEã
~ëëÉF
ilef
j`qoi J k J ^`q
uQ
uR
uS
uU
uV
mb
iN iO iP Jrd
uNM
qN qO
R
N
R
N
N
R
o~ÅÅçêÇÉãÉåí ÄäáåÇ~ÖÉ
NORM êéã
q∑äÉ ÇÉ ÄäáåÇ~ÖÉ ÇÉë ÅßÄäÉë ãçíÉìê
_äáåÇ~ÖÉë ÇÉë ÅßÄäÉë ÇÉ Åçãã~åÇÉ
q∑äÉ ÇÉ ÄäáåÇ~ÖÉ Çì ê~ÅÅçêÇÉãÉåí ê¨ëÉ~ì
Hrd
o~ÅÅçêÇÉãÉåí mq`
uP
uN

Table des matières
iL _^VPMMsb` co PKN
1 Avant-propos et généralités 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Comment utiliser ces instructions de mise en service 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1.1.1 Terminologie 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1.1.2 Qu’il-y-a-t-il de nouveau ? Quelles modifications ont été apportées ? 1-1. . . . . . . . . . . . . . . . . . . . .
1.2 Equipement livré 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Aspects juridiques 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Consignes de sécurité 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Instructions générales de sécurité et d’emploi relatives aux variateurs de vitesse Lenze 2-1. . . . . . . . . . . . . . . .
2.2 Dangers résiduels 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Présentation des consignes de sécurité 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Spécifications techniques 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Caractéristiques 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Caractéristiques générales/conditions ambiantes 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Caractéristiques nominales (fonctionnement avec 120% de surcharge de courant) 3-3. . . . . . . . . . . . . . . . . . .3.3.1 Conditions de fonctionnement 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.3.2 Types 9321 à 9324 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.3.3 Types 9325 à 9327 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.3.4 Types 9328 à 9330 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.3.5 Types 9331 à 9333 3-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Caractéristiques nominales (fonctionnement avec 150% de surcharge de courant) 3-8. . . . . . . . . . . . . . . . . . .3.4.1 Conditions de fonctionnement 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.4.2 Caractéristiques nominales types 9321 à 9324 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.4.3 Caractéristiques nominales types 9325 à 9327 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.4.4 Caractéristiques nominales types 9328 à 9330 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.4.5 Caractéristiques nominales types 9331 à 9333 3-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Fusibles et sections de câbles 3-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.5.1 Fonctionnement des variateurs de vitesse dans une installation homologuée UL 3-11. . . . . . . . . . . . .3.5.2 Entraînements individuels avec 120 % de surcharge de courant 3-11. . . . . . . . . . . . . . . . . . . . . . . . .3.5.3 Entraînements individuels avec 150 % de surcharge de courant 3-12. . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Filtre réseau 3-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.6.1 Filtre réseau pour entraînements individuels avec 120 % de surcharge de courant 3-12. . . . . . . . . . . .3.6.2 Filtre réseau pour entraînements individuels avec 150 % de surcharge de courant 3-13. . . . . . . . . . . .
3.7 Encombrements 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table des matières
ii L_^VPMMsb` co PKN
4 Installation 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Installation mécanique 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.1.1 Instructions importantes 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.1.2 Montage avec profilés ou équerres de fixation (montage standard) 4-2. . . . . . . . . . . . . . . . . . . . . . .4.1.3 Montage de la variante ”Cold Plate”- plaque de refroidissement 4-3. . . . . . . . . . . . . . . . . . . . . . . . .
4.1.3.1 Généralités 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.1.3.2 Caractéristiques exigées du radiateur 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.1.3.3 Caractéristiques thermiques de l’ensemble du système 4-4. . . . . . . . . . . . . . . . . . . . .4.1.3.4 Avant le montage 4-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.1.3.5 Montage types 9321-V003 ... 9326-V003 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.1.3.6 Montage types 9327-V003 et 9328-V003 4-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Installation électrique 4-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.1 Protection des personnes 4-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.2 Protection du variateur 4-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.3 Protection du moteur 4-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.4 Formes de réseau/spécifications de réseau 4-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.5 Effets réciproques avec des équipements de compensation 4-11. . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.6 Spécification relative aux câbles utilisées 4-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.7 Raccordement partie puissance 4-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.7.1 Raccordement réseau 4-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.7.2 Raccordement moteur 4-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.7.3 Raccordement d’une unité de freinage 4-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.7.4 Plan de raccordement 4-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.8 Fonctionnement en bus CC de plusieurs appareils 4-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.9 Partie commande 4-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.9.1 Borniers de commande 4-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.9.2 Interface d’automatisme (X1) 4-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.9.3 Raccordement du bus système (X4) 4-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.9.4 Entrée fréquence pilote (X9)/sortie fréquence pilote(X10) 4-27. . . . . . . . . . . . . . . . . . . .4.2.9.5 Système de bouclage 4-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.2.9.6 Surveillance de la température moteur 4-31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Installation d’un système d’entraînement de type CE 4-33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Mise en service 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Première mise en service 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Mise en service rapide avec le réglage usine 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.1 Ordre des opérations 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.2.2 Réglage usine des principaux paramètres d’entraînement 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Adaptation des données machine 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.1 Détermination de la plage de vitesse (nmin, nmax) 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.2 Régler les temps d’accélération et de décélération (Tir, Tif) 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.3.3 Réglage des limitations de courant (limitations Imax) 5-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Comment optimiser le comportement de l’entraînement en fonctionnement 5-6. . . . . . . . . . . . . . . . . . . . . . . . .5.4.1 Saisie des données moteur 5-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.4.2 Sélectionner le mode de fonctionnement 5-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.4.3 Comment optimiser les modes de fonctionnement 5-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.3.1 Optimisation du fonctionnement en U//f 5-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.4.3.2 Comment optimiser le contrôle vectoriel 5-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5.4.3.3 Identification moteur 5-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Adapter le traitement des signaux 5-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Table des matières
iiiL _^VPMMsb` co PKN
6 Pendant le fonctionnement 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Messages d’état du clavier de commande 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Concernant la mise en service 6-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6.2.1 Branchement côté moteur 6-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Fonctions d’affichage 6-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Configuration 7-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Configurations de base 7-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.1.1 Modification de la configuration de base 7-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Commande 7-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Paramétrage 7-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.3.1 Paramétrages possibles 7-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.3.2 Structure du jeu de paramètres 7-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.3.3 Liste des menus à sélectionner 7-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4 Comment se servir des blocs fonction 7-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.4.1 Types de signaux 7-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.4.2 Eléments d’un bloc fonction 7-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.4.3 Liaison des blocs fonction 7-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.4.4 Entrées dans le tableau ”déclaration des blocs fonction” 7-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.5 Tableau des blocs fonction disponibles 7-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.6 Surveillances 7-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.6.1 Réactions 7-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.6.2 Fonctions de surveillance 7-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7.6.3 Indication de défaut par sortie numérique 7-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7 Tableau des codes 7-26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.8 Listes de sélection 7-66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Détection et élimination des défauts 8-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Détection des défauts 8-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Diagnostic des défauts à l’aide de l’historique 8-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8.2.1 Structure de l’historique 8-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8.2.2 Travailler avec l’historique 8-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 Messages défauts 8-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4 Réarmement des défauts 8-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Maintenance 9-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Travaux de maintenance 9-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Adresses S.A.V. 9-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Table des matières
iv L_^VPMMsb` co PKN
10 Annexe 10-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1 Exemples d’application 10-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.1 Commande de vitesse (C0005 = 1000) 10-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.2 Commande pas à pas (C0005 = 2000) 10-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.3 Commande de trancanage (C0005 = 3000) 10-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.4 Régulation de couple (C0005 = 4000) 10-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.5 Fréquence pilote maître (C0005 = 5000) 10-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.6 Fréquence pilote esclave (ligne) (C0005 = 6000) 10-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.7 Fréquence pilote – esclave (cascade) (C0005 = 7000) 10-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.8 Régulation pantin (diamètre calcul externe) (C0005 = 8000) 10-19. . . . . . . . . . . . . . . . . . . . . . . . . . . .10.1.9 Régulation pantin (saisie interne du diamètre) (C0005 = 9000) 10-22. . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Glossaire 10-25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.3 Index 10-26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Avant-propos et généralités
1-1l _^VPMMsb` co PKN
1 Avant-propos et généralités
1.1 Comment utiliser ces instructions de mise en service
Les présentes instructions de mise en service permettent d’utiliser en toute sécurité lesvariateurs de vitesse 93XX vector. Les consignes de sécurité doivent impérativement êtrerespectées.
Toute personne utilisant les variateurs de vitesse 93XX vector doit pouvoir consulter cesinstructions à tout instant et est tenue de respecter les indications et consignescorrespondantes.
Le fascicule des instructions de mise en service doit être complet et lisible, en toutecirconstance.
1.1.1 Terminologie
Terme Utilisé dans le présent fascicule pour désigner
93XX un variateur de vitesse 9300 vector
Variateur de vitesse un variateur de vitesse 93XX vector
Système d’entraînement des systèmes d’entraînement avec variateurs 93XX vector et autres éléments d’entraînement Lenze
1.1.2 Qu’il-y-a-t-il de nouveau ? Quelles modifications ont été apportées ?
N° matériel Edition IMPORTANT Modifications apportées
00420708 3.1 07/01 Remplace 00409435 Spécifications techniques: Caractéristiques générales/conditions ambiantes, chapitre 3.2 Caractéristiques nominales, chapitre 3.3 Fusibles et sections de câbles, chapitre 3.5Mise en service rapide avec le réglage usine, chapitre 5.2Tableau des codes, chapitre 7.7Détection des défauts, chapitre 8.1Exemples d’application, chapitre 10.1
1.2 Equipement livré
Equipement livré IMPORTANT
1 variateur 93XX vector 1 documentation ”Instructions de mise en service” 1 kit d’installation (petits composants nécessaires
pour l’installation mécanique et l’installationélectrique)
Vérifier à la réception que l’équipement fourni correspond au bon de livraison.Aucune réclamation ne pourra être formulée ultérieurement.
En cas de dégâts visibles occasionnés par le transport : réclamation immédiate auprès du
transporteur ; vices apparents / livraison incomplète : réclamation immédiate auprès de l’agence
Lenze concernée.

Avant-propos et généralités
1-2 l_^VPMMsb` co PKN
1.3 Aspects juridiques
Identification Plaque signalétique Marquage CE Constructeuro
Les indications figurant sur la plaquesignalétique permettent une identificationprécise des variateurs de vitesse Lenze.
Conformité à la directive CE ”Basse Tension” Lenze GmbH & Co KGPostfach 101352D-31763 Hameln
Utilisationconforme àl’application
Les variateurs 93XX vector ne doivent fonctionner que dans les conditions d’utilisation prescrites par les présentes instructions de mise en service. sont des appareils
– destinés à la commande et à la régulation d’entraînements avec variation de vitesse par des moteurs asynchrones normalisés ou desservomoteurs asynchrones ;
– destinés à être intégrés dans une machine ;– destinés à être assemblés avec d’autres composants pour constituer une machine ;
sont des équipements électriques destinés à être montés dans les armoires de commande ou autres locaux de service clos ; répondent aux exigences de protection de la directive CE Basse Tension ; ne sont pas des machines au sens de la directive CE relative aux machines ; ne sont pas des appareils domestiques, mais des éléments destinés à être intégrés dans des systèmes d’entraînement à usage industriel
exclusivement.Les systèmes d’entraînement avec variateurs 93XX vector sont conformes à la directive CE sur la compatibilité électromagnétique s’ils sont installés conformément aux instructions d’installation d’un
système de type CE ; sont prévus pour fonctionner
– sur des réseaux d’alimentation publics et non publics ;– dans des environnements industriels, résidentiels et commerciaux.
La responsabilité du respect des directives CE pour l’application machine incombe à l’utilisateur.Toute autre utilisation est contre-indiquée !
Responsabilité Les informations, données et consignes contenues dans les instructions de mise en service reflètent l’état le plus avancé de la techniqueau jour de l’impression. Les indications, schémas et descriptions des présentes instructions ne peuvent en aucun cas être rapportés à desvariateurs de vitesse livrés antérieurement.
Les instructions de service et de câblage figurant dans le présent fascicule sont des recommandations dont il convient de vérifier lapertinance par rapport à l’application concernée. Lenze ne garantit en aucune façon la pertinance des recommandations formulées dans leprésent document pour l’application concernée.
Les données figurant dans le présent fascicule permettent de décrire les caractéristiques du produit, sans les garantir. Nous déclinons toute responsabilité sur les dégâts et dysfonctionnements consécutifs à :
– un non-respect des instructions de mise en service,– toute modification du variateur faisant suite à une décision prise en autorité propre,– une erreur de manipulation,– une utilisation non conforme des variateurs.
Garantie Conditions de garantie : voir les conditions générales de vente et de livraison de Lenze. Faire valoir auprès de Lenze tout droit à réclamation après avoir constaté le défaut ou le vice. Il y a suppression de la garantie dans tous les cas où il est impossible de faire valoir un recours en responsabilité.
Traitement desdé h
Matériau A recycler A évacuerdéchets Métal D -
Plastiques D -
Cartes équipées - D
Consignes de sécurité
2-1L _^VPMMsb` co PKN
2 Consignes de sécurité
2.1 Instructions générales de sécurité et d’emploi relativesaux variateurs de vitesse Lenze
Conformes à la directive Basse Tension 73/23/CEE1. GénéralitésSelon leur degré de protection, les variateurs de vitesse Lenze(convertisseurs de fréquence, servovariateurs, variateurs de vitesse)peuvent avoir, pendant leur fonctionnement, des parties sous tension,éventuellement en mouvement ou tournantes. Les surfaces risquentd’être chaudes.Un enlèvement non autorisé des protections prescrites, un usage nonconforme à la fonction, une installation défectueuse ou unemanoeuvre erronée peuvent entraîner des dommages corporels etmatériels graves.Pour informations complémentaires, consulter la documentation.Tous travaux relatifs au transport, à l’installation, à la mise en serviceet à la maintenance doivent être exécutés par du personnel qualifié ethabilité (voir CEI 364 ou CENELEC HD 384 ou DIN VDE 0100 et CEI 664ou DIN VDE 0110, ainsi que les prescriptions nationales de préventiond’accidents).Au sens des présentes instructions de sécurité fondamentales, onentend par personnel qualifié des personnes compétentes en matièred’installation, de montage, de mise en service et de fonctionnementdu produit et possédant les qualifications correspondant à leursactivités.2. Utilisation conforme à l’applicationLes variateurs de vitesse sont des composants destinés à êtreincorporés dans des installations ou machines électriques. Ils neconstituent pas des appareils domestiques, mais des éléments àusage industriel et professionnel au sens de la norme EN 61000-3-2.Cette documentation contient des indications au sujet du respect desvaleurs limites selon EN 61000-3-2.En cas d’incorporation dans une machine, leur mise en service(c’est-à-dire leur mise en fonctionnement conformément à leurfonction) est interdite tant que la conformité de la machine avec lesdispositions de la directive 98/37/CEE (directive sur les machines) n’apas été vérifiée ; respecter la norme EN 60204.Leur mise en service (c’est-à-dire leur mise en fonctionnementconformément à leur fonction) n’est admise que si les dispositions dela directive sur la compatibilité électromagnétique (89/336/CEE) sontrespectées.Les variateurs de vitesse répondent aux exigences de la directiveBasse Tension 73/23/CEE. Les normes harmonisées série EN50178/DIN VDE 0160 sont appliquées aux variateurs de vitesse.Les caractéristiques techniques et les indications relatives auxconditions de raccordement selon la plaque signalétique et ladocumentation doivent obligatoirement être respectées.Attention: Les variateurs de vitesse sont des produits de commercenon courant selon EN 61800-3. En environnement résidentiel, cesproduits risquent de provoquer des interférences radio. Dans ce cas,il peut s’avérer nécessaire de prévoir des mesures appropriées.3. Transport, stockageLes indications relatives au transport, au stockage et au maniementcorrect doivent être respectées.Les conditions climatiques selon EN 50178 doivent être respectées.4. InstallationL’installation et le refroidissement des variateurs de vitesse doiventrépondre aux prescriptions de la documentation fournie avec leproduit.
Manipuler avec précaution et éviter toute contrainte mécanique. Lorsdu transport et de la manutention, veiller à ne pas déformer lescomposants oumodifier les distances d’isolement. Ne pas toucher lescomposants électroniques et les contacts électriques.Les variateurs de vitesse comportent des pièces sensibles auxcontraintes électrostatiques et facilement endommageables par unmaniement inadéquat. Ne pas endommager ou détruire descomposants électroniques sous risque de nuire à la santé !5. Raccordement électriqueLorsque des travaux sont effectués sur le variateur de vitesse soustension, les prescriptions nationales pour la prévention d’accidentsdoivent être respectées (par exemple VBG 4).L’installation électrique doit être exécutée en conformité avec lesprescriptions applicables (par exemple sections des conducteurs,protection par coupe-circuit à fusibles, raccordement du conducteurde protection). Des renseignements plus détaillés figurent dans ladocumentation.Les indications concernant une installation satisfaisant aux exigencesde compatibilité électromagnétique, tels que blindage, mise à la terre,présence de filtres et pose adéquate des câbles et conducteursfigurent dans la documentation qui accompagne les variateurs devitesse. Ces indications doivent également être respectées pour lesvariateurs avecmarquageCE. Le respect desvaleurs limites imposéespar la législation sur la CEM relève de la responsabilité du constructeurde l’installation ou de la machine.6. FonctionnementLes installations dans lesquelles sont incorporés des variateurs devitesse doivent être équipées de dispositifs de protection et desurveillancessupplémentairesprévuspar lesprescriptionsdesécuritéen vigueur qui s’y appliquent, telles que la loi sur lematériel technique,les prescriptions pour la prévention d’accidents, etc. Les variateurs devitesse peuvent être adaptés à votre application. Respecter lesindications à ce sujet figurant dans la documentation.Après la coupure du variateur de l’alimentation, ne pas toucherimmédiatement aux éléments et aux borniers de puissance soustension, en raison des condensateurs éventuellement chargés. A cesujet, tenir compte des informations indiquées sur les variateurs devitesse.Pendant le fonctionnement, les capots de protection et portes doiventrester fermés.Nota concernant les installations homologuées UL avecvariateurs de vitesse intégrés : Les instructions ”ULwarnings” sontdes indications applicables aux installations UL. Cette noticecomprend des indications spéciales au sujet de la norme UL.7. Arrêt sécuriséLa variante V004 des variateurs de vitesse 9300 et 9300 vector, et lavariante Bx4x du variateur de vitesse 8200 vector intègre la fonction”Arrêt sécurisé” qui englobe la protection contre un démarrageincontrôlé selon l’annexe I n° 1.2.7 de la directive CE relative auxmachines 98/37/CE, DIN EN 954-1 catégorie 3 et DIN EN 1037.Respecter impérativement toutes les indications concernant lafonction ”Arrêt sécurisé” figurant dans cette documentation.8. Entretien et maintenanceTenir compte de la documentation du constructeur.Tenir compte également des instructions de sécurité et d’emploispécifiques au produit contenues dans ce document !

Consignes de sécurité
2-2 L_^VPMMsb` co PKN
2.2 Dangers résiduels
Protection des personnes Les bornes de puissance U, V, W et +UG, -UG restent sous tension jusqu’à 3 minutes après coupure réseau. Avant de procéder aux travaux sur le variateur, vérifier si toutes les bornes de puissance sont hors tension.
Protection des appareils Des mises sous tension répétées du variateur de vitesse par L1, L2, L3 ou +UG, +UG peuvent provoquer une surchargevariateur ou une destruction de celui-ci. Respecter impérativement une durée de 3 minutes entre la coupure et la mise sous tension.
Survitesses Les systèmes d’entraînement peuvent atteindre des survitesses dangereuses (exemple : réglage de vitesses élevées sur desmoteurs et machines non appropriées). Les variateurs 93XX ne sont pas protégés contre de telles conditions de fonctionnement. Prévoir des mesures supplémentaires.
2.3 Présentation des consignes de sécurité
Toutes les consignes de sécurité sont présentées de façon identique :– Le pictogramme annonce le type de risque.– Le mot associé au pictogramme indique l’intensité du risque encouru.– L’explication décrit la gravité de ce risque et la façon d’éviter le risque.
AvertissementExplication
Pictogramme utilisé AvertissementDangers menaçantles personnes
Avertissement contretension électriquedangereuse
Danger ! Situation directement dangereusepouvant entraînerla mort ou des blessures graves.
Avertissement contreautre danger
Avertissement ! Situation potentiellement très dangereusepouvant entraînerla mort ou des blessures très graves.
Prudence ! Situation potentiellement dangereusepouvant entraînerdes blessures légères ou bénignes.
Dangers de dégâtsmatériels
Stop ! Risque de dégâts matérielssusceptibles d’endommager le système d’entraînement, l’appareil ou sonenvironnementK
Autres indications Conseil ! Conseil pratique permettant une manipulation plus facile du variateur devitesse/système d’entraînement.

Spécifications techniques
3-1L _^VPMMsb` co PKN
3 Spécifications techniques
3.1 Caractéristiques
Module d’axe individuel en construction étroite– d’où montage peu encombrant
Plage de puissance : 370 W à 90 kW– Carte de commande identique sur toute la plage de puissance d’où un raccordement
identique pour les câbles de commande
Raccords de puissance par le haut (alimentation) et par le bas (moteur)– Raccordement facilité pour des applications multi-axes
Adaptation optimale au moteur grâce à l’évaluation automatique des paramètres moteur
Régulateur process intégré (PID)– pour des régulations de pression, de température, de débit et des régulations pantins
Fonctionnement en U/f pour entraînements individuels ou groupes d’entraînement (plusieursmoteurs connectés, en parallèle, sur un seul variateur)
Contrôle vectoriel pour entraînements individuels– Régulation de vitesse sans capteur de vitesse
Bouclage possible par codeur incrémental– Câble de raccordement enfichable, niveau TTL ou HTL au choix
Consigne de vitesse par fréquence pilote numérique– Entrée fréquence pilote adaptée pour niveau TTL ou HTL au choix– Transmission de la consigne sans erreur d’offset ou de gain– Suivi de vitesse
Couplage possible du circuit intermédiaire CC pour applications multi-axes
Programmation aisée par PC
Configuration interne, signaux d’entrée et de sortie programmables par l’utilisateur– Grande bibliothèque de blocs fonction– Flexibilité accrue grâce à l’adaptation de la structure aux besoins de l’application
Interfaces d’automatisme intégrées– Extensions simplifiées des fonctions de commande et de programmation
Bus système (CAN) pour interconnexion de variateurs 9300 et modules Entrées/Sortiessupplémentaires
Homologation appareils standard UL508, File No. 132659 (listed) (en préparation)
Homologation 9371 BB (BAE) UL508, File No. 132659 (listed)

Spécifications techniques
3-2 L_^VPMMsb` co PKN
3.2 Caractéristiques générales/conditions ambiantes
Domaine Données
Résistance aux chocs Germanischer Lloyd, conditions générales
Humidité admissible Classe d’humidité F sans condensation(humidité relative moyenne 85 %)
Températures admissibles Transport : -25 °C +70 °CStockage : -25 °C +55 °CFonctionnement : 0 °C +40 °C sans réduction de puissance
+40 °C +50 °C avec réduction de puissance
Altitude d’implantation admissible h h ≤ 1000 m au-dessus du niveau de la mer sans réduction de puissance1000 m au-dessus du niveau de la mer < h ≤ 4000 m au-dessusdu niveau de la mer avec réduction de puissance
Pollution ambiante admissible Degré 2 selon VDE 0110, partie 2
Perturbations radioélectriques : émission Selon EN 50081-2, EN 50082-1, CEI 22G-WG4 (Cv) 21Classe A selon EN 55011 (environnement industriel) avec filtre réseau AClasse B selon EN 55022 (environnement résidentiel) avec filtre réseau B et montage dans armoire de commande
Protection contre les parasites Valeurs limites respectées avec filtre réseauSelon EN 50082-2, CEI 22G-WG4 (Cv) 21Exigences Norme DegréDécharges électrostatiques EN61000-4-2 3, c’est-à-dire 8 kV pour espace d’isolement et 6 kV pour contactIrradiation haute fréquence(boîtier) EN61000-4-3 3, c’est-à-dire 10 V/m ; 27 à 1000 MHzTransitoires rapides en salves EN61000-4-4 3/4, c.à.d. 2 kV/5 kHzOndes de choc (tension de chocsur câble réseau) CEI 1000-4-5 3, c.à.d. 1.2/50 µs, 1 kV phase-phase, 2 kV phase-PE
Résistance à l’isolement Classe de surtension III selon VDE 0110
Emballage Selon DIN 41809321 à 9333 : Protection contre les chocs (protection emballage)
Protection IP20IP41 du côté radiateur (en cas de montage avec séparation du radiateur)NEMA 1 : Protection contre contacts accidentels
Homologations CE : Directive Basse TensionDirective CE
UL508 : Industrial Control Equipment (équipement de régulation industrielle)UL508C : Power Conversion Equipment (équipement de conversion de puissance)
Spécifications techniques
3-3L _^VPMMsb` co PKN
3.3 Caractéristiques nominales (fonctionnement avec 120% de surcharge de
courant)
3.3.1 Conditions de fonctionnement
Fonctionnement uniquement autorisé– avec filtre réseau ou self réseau,– sur un réseau 3 CA / 400 V / 50 Hz/60 Hz.
Accessoires côté réseau– Fusibles et sections de câbles ( 3-11)
– Filtres réseau ( 3-12)
– Pour plus de détails concernant les autres accessoires, voir manuel système, partie I,“Accessoires”.
Avec C0018 = 6 (réglage usine), la fréquence de découpage est automatiquement abaissée de8 kHz à 2 kHz (abaissement automatique de la fréquence de découpage) dès que le courantmaxi de sortie est dépassé (INmax8).

Spécifications techniques
3-4 L_^VPMMsb` co PKN
3.3.2 Types 9321 à 9324
120 % de surcharge de courant Type 9321 9322 9323 9324% g o
Réf. de cde EVF9321-EV EVF9322-EV EVF9323-EV EVF9324-EV
Variante “Cold Plate”(plaque derefroidissement)
Type 9321-V003 9322-V003 9323-V003 9324-V003
Réf. de cde EVF9321-CVV003 EVF9322-CVV003 EVF9323-CVV003 EVF9324-CVV003
Tension d’alimentation UN [V] 320 V ±0 % ≤ UN ≤ 440 V ±0 % ; 45 Hz 65 Hz ±0 %
Alimentation CC (alternative) UG [V] 460 V ±0 % ≤ UG ≤ 620 V ±0 %
Courant réseau avec filtre réseau/selfréseau
IN [A] 1,7 2,8 5,0 8,8
Spécifications pour fonctionnement sur réseau 3 CA / 400 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 620 VPuissance nominale moteur (moteurasynchrone 4 pôles)
PN [kW] 0,55 1,1 2,2 4,0asynchrone 4 pôles)pour 2 kHz / 4 kHz / 8 kHz* PN [hp] 0,75 1,5 2,9 5,4
Puissance de sortie U, V, Wpour 2 kHz / 4 kHz / 8 kHz*
SN2/4 [kVA]SN8 [kVA]
1,31,0
2,11,7
3,82,7
6,54,8
Puissance de sortie +UG, -UG 1) PCC [kW] 1,9 0,7 0,0 2,0
2/4 kHz* IN2/4 [A] 1,8 3,0 5,5 9,2
8 kHz* IN8 [A] 1,5 2,5 3,9 7,0Courantde sortie
optimisé en fonction du bruit8 kHz*
IN8 [A] 1,5 2,5 3,9 7,0
optimisé en fonction du bruit16 kHz*
IN16 [A] 1,1 1,8 2,9 5,2
2/4 kHz* INmax2/4 [A] 2,3 3,7 5,9 10,5Courantmaxi de
8 kHz* INmax8 [A] 2,3 3,7 5,9 10,5maxi desortiependant
optimisé en fonction du bruit8 kHz*
INmax8 [A] 2,3 3,7 5,9 10,5
pendant60 s 2) optimisé en fonction du bruit
16 kHz*INmax16 [A] 1,6 2,7 4,3 7,8
Tension moteur 3~ 3) UM [V] 0 ... Uréseau / 0 Hz ... 50 Hz, jusqu’à 600 Hz (au choix)
Puissance dissipée (fonctionnementavec INx)
Pv [W] 50 65 115 165
Réduction de puissance [%/K][%/m]
40 C < Ta < 50 °C : 2 %/K (non homologué UL)1000 m au-dessus du niveau de la mer < h ≤ 4000 m au-dessus du niveau de la mer : 5 %/1000 m
Consigne Résolution relative 214 (par rapport à C0011)gde vitesse Consigne d’entrée Linéarité ±0,5 % (niveau de signal maxi sélectionné : 5 V ou 10 V)g
analogique Températureambiante
0 ... 40 °C : +0,4 %
Offset ±0 %Poids m [kg] 4,9 4,9 5,8 6,0
1) En fonctionnement avec un moteur de puissance adaptée, la puissance restante peut être prélevée du circuit intermédiaire2) Les courants s’entendent pour un cycle de charge périodique, avec une durée de surintensité de 1 min avec le courant indiqué ici et une
durée de charge fondamentale de 2 min avec 75%INx3) Avec self réseau/filtre réseau : tension de sortie maxi env. 96 % de la tension réseau* Fréquence de découpage (C0018)

Spécifications techniques
3-5L _^VPMMsb` co PKN
3.3.3 Types 9325 à 9327
120 % de surcharge de courant Type 9325 9326 9327% g o
Réf. de cde EVF9325-EV EVF9326-EV EVF9327-EV
Variante “Cold Plate”(plaque derefroidissement)
Type 9325-V003 9326-V003 9327-V003
Réf. de cde EVF9325-CVV003 EVF9326-CVV003 EVF9327-CVV003
Tension d’alimentation UN [V] 320 V ±0 % ≤ UN ≤ 440 V ±0 % ; 45 Hz 65 Hz ±0 %
Alimentation CC (alternative) UG [V] 460 V ±0 % ≤ UG ≤ 620 V ±0 %
Courant réseau avec filtre réseau/selfréseau
IN [A] 15,0 20,5 39,0
Spécifications pour fonctionnement sur réseau 3 CA / 400 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 620 VPuissance nominale moteur (moteurasynchrone 4 pôles)
PN [kW] 7,5 11,0 22,0asynchrone 4 pôles)pour 2 kHz / 4 kHz / 8 kHz* PN [hp] 10,0 15,0 30,0
Puissance de sortie U, V, Wpour 2 kHz / 4 kHz / 8 kHz*
SN2/4 [kVA]SN8 [kVA]
11,19,0
16,316,3
29,822,2
Puissance de sortie +UG, -UG 1) PCC [kW] 0,0 0,0 10,2
2/4 kHz* IN2/4 [A] 15,0 23,5 43,0
8 kHz* IN8 [A] 13,0 23,5 32,0Courantde sortie
optimisé en fonction du bruit8 kHz*
IN8 [A] 13,0 23,5 29,0
optimisé en fonction du bruit16 kHz*
IN16 [A] 9,7 15,2 21,0
2/4 kHz* INmax2/4 [A] 19,5 35,3 48,0Courantmaxi de
8 kHz* INmax8 [A] 19,5 35,3 48,0maxi desortiependant
optimisé en fonction du bruit8 kHz*
INmax8 [A] 19,5 35,3 43,0
pendant60 s 2) optimisé en fonction du bruit
16 kHz*INmax16 [A] 14,5 22,9 31,0
Tension moteur 3~ 3) UM [V] 0 ... Uréseau / 0 Hz ... 50 Hz, jusqu’à 600 Hz (au choix)
Puissance dissipée (fonctionnementavec INx)
Pv [W] 260 360 640
Réduction de puissance [%/K][%/m]
40 °C < Ta < 50 °C : 2 %/K (non homologué UL)1000 m au-dessus du niveau de la mer < h ≤ 4000 m au-dessus du niveau de la mer : 5 %/1000 m
Consigne Résolution relative 214 (par rapport à C0011)gde vitesse Consigne d’entrée Linéarité ±0,5 % (niveau de signal maxi sélectionné : 5 V ou 10 V)g
analogique Températureambiante
0 ... 40 °C : +0,4 %
Offset ±0 %Poids m [kg] 7,8 7,8 18,0
1) En fonctionnement avec un moteur de puissance adaptée, la puissance restante peut être prélevée du circuit intermédiaire2) Les courants s’entendent pour un cycle de charge périodique, avec une durée de surintensité de 1 min avec le courant indiqué ici et une
durée de charge fondamentale de 2 min avec 75%INx3) Avec self réseau/filtre réseau : tension de sortie maxi env. 96 % de la tension réseau* Fréquence de découpage (C0018)

Spécifications techniques
3-6 L_^VPMMsb` co PKN
3.3.4 Types 9328 à 9330
120 % de surcharge de courant Type 9328 9329 4) 9330% g o
Réf. de cde EVF9328-EV EVF9329-EV EVF9330-EV
Variante “Cold Plate”(plaque derefroidissement)
Type 9328-V003 - -
Réf. de cde EVF9328-CVV003 - -
Tension d’alimentation UN [V] 320 V ±0 % ≤ UN ≤ 440 V ±0% ; 45 Hz 65 Hz ±0 %
Alimentation CC (alternative) UG [V] 460 V ±0 % ≤ UG ≤ 620 V ±0 %
Courant réseau avec filtre réseau/selfréseau
IN [A] 50,0 60,0 97,0
Spécifications pour fonctionnement sur réseau 3 CA / 400 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 620 VPuissance nominale moteur (moteurasynchrone 4 pôles)
PN [kW] 30,0 37,5 55,0asynchrone 4 pôles)pour 2 kHz / 4 kHz / 8 kHz* PN [hp] 40,0 50,0 74,0
Puissance de sortie U, V, Wpour 2 kHz / 4 kHz / 8 kHz*
SN2/4 [kVA]SN8 [kVA]
39,532,6
46,441,6
74,861,7
Puissance de sortie +UG, -UG 1) PCC [kW] 4,0 0,0 5,1
2/4 kHz* IN2/4 [A] 56,0 66,0 100,0
8 kHz* IN8 [A] 47,0 59,0 89,0Courantde sortie
optimisé en fonction du bruit8 kHz*
IN8 [A] 43,0 47,0 59,0
optimisé en fonction du bruit16 kHz*
IN16 [A] 30,0 35,0 46,0
2/4 kHz* INmax2/4 [A] 70,5 88,5 134,0Courantmaxi de
8 kHz* INmax8 [A] 70,5 88,5 134,0maxi desortiependant
optimisé en fonction du bruit8 kHz*
INmax8 [A] 64,0 70,5 88,0
pendant60 s 2) optimisé en fonction du bruit
16 kHz*INmax16 [A] 45,0 52,5 69,0
Tension moteur 3~ 3) UM [V] 0 ... Uréseau / 0 Hz ... 50 Hz, jusqu’à 600 Hz (au choix)
Puissance dissipée (fonctionnementavec INx)
Pv [W] 610 1350
Réduction de puissance [%/K][%/m]
40 °C < Ta < 50 øC : 2 %/K (non homologué UL)1000 m au-dessus du niveau de la mer < h ≤ 4000 m au-dessus du niveau de la mer : 5 %/1000 m
Consigne Résolution relative 214 (par rapport à C0011)gde vitesse Consigne d’entrée Linéarité ±0,5 % (niveau de signal maxi sélectionné : 5 V ou 10 V)g
analogique Températureambiante
0 ... 40 °C : +0,4 %
Offset ±0 %Poids m [kg] 18 18 36
1) En fonctionnement avec un moteur de puissance adaptée, la puissance restante peut être prélevée du circuit intermédiaire2) Les courants s’entendent pour un cycle de charge périodique, avec une durée de surintensité de 1 min avec le courant indiqué ici et une
durée de charge fondamentale de 2 min avec 75%INx3) Avec self réseau/filtre réseau : tension de sortie maxi env. 96 % de la tension réseau4) Température ambiante maxi admissible pendant le fonctionnement (sans réduction de puissance) : +35 °C* Fréquence de découpage (C0018)

Spécifications techniques
3-7L _^VPMMsb` co PKN
3.3.5 Types 9331 à 9333
120 % de surcharge de courant Type 9331 4) 9332 9333 4)% g o
Réf. de cde EVF9331-EV EVF9332-EV EVF9333-EV
Tension d’alimentation UN [V] 320 V ±0 % ≤ UN ≤ 440 V ±0 % ; 45 Hz 65 Hz ±0 %
Alimentation CC (alternative) UG [V] 460 V ±0 % ≤ UG ≤ 620 V ±0 %
Courant réseau avec filtre réseau/selfréseau
IN [A] 119,0 144,0 185,0
Spécifications pour fonctionnement sur réseau 3 CA / 400 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 620 VPuissance nominale moteur (moteurasynchrone 4 pôles)
PN [kW] 75,0 90,0 110,0asynchrone 4 pôles)pour 2 kHz / 4 kHz / 8 kHz* PN [hp] 100,0 120,0 148,0
Puissance de sortie U, V, Wpour 2 kHz / 4 kHz / 8 kHz*
SN2/4 [kVA]SN8 [kVA]
91,576,2
110,0103,9
142,0124,7
Puissance de sortie +UG, -UG 1) PCC [kW] 0 28,1 40,8
2/4 kHz* IN2/4 [A] 135,0 159,0 205,0
8 kHz* IN8 [A] 110,0 150,0 171,0Courantde sortie
optimisé en fonction du bruit8 kHz*
IN8 [A] 76,0 92,0 100,0
optimisé en fonction du bruit16 kHz*
IN16 [A] 52,0 58,0 63,0
2/4 kHz* INmax2/4 [A] 165,0 225,0 270,0Courantmaxi de
8 kHz* INmax8 [A] 165,0 225,0 221,0maxi desortiependant
optimisé en fonction du bruit8 kHz*
INmax8 [A] 114,0 138,5 150,0
pendant60 s 2) optimisé en fonction du bruit
16 kHz*INmax16 [A] 78,0 87,0 94,0
Tension moteur 3~ 3) UM [V] 0 ... Uréseau / 0 Hz ... 50 Hz, jusqu’à 600 Hz (au choix)
Puissance dissipée (fonctionnementavec INx)
Pv [W] 1470 2100 2400
Réduction de puissance [%/K][%/m]
40 °C < Ta < 50 øC : 2.5 %/K (non homologué UL)1000 m au-dessus du niveau de la mer < h ≤ 4000 m au-dessus du niveau de la mer : 5 %/1000 m
Consigned i
Résolution relative 214 (par rapport à C0011)gde vitesse Consigne d’entrée
l iLinéarité ±0,5 % (niveau de signal maxi sélectionné : 5 V ou 10 V)g
analogique Températureambiante
0 ... 40 °C : +0,4 %
Offset ±0 %
Poids m [kg] 38 70 70
1) En fonctionnement avec un moteur de puissance adaptée, la puissance restante peut être prélevée du circuit intermédiaire2) Les courants s’entendent pour un cycle de charge périodique, avec une durée de surintensité de 1 min avec le courant indiqué ici et une
durée de charge fondamentale de 2 min avec 75%INx3) Avec self réseau/filtre réseau : tension de sortie maxi env. 96 % de la tension réseau4) Température ambiante maxi admissible pendant le fonctionnement (sans réduction de puissance) : +35 °C* Fréquence de découpage (C0018)

Spécifications techniques
3-8 L_^VPMMsb` co PKN
3.4 Caractéristiques nominales (fonctionnement avec 150% de surcharge de
courant)
3.4.1 Conditions de fonctionnement
Fonctionnement uniquement autorisé– sur un réseau 3 CA / 400 ... 480 V / 50 Hz / 60 Hz
Ne faire fonctionner les variateurs 9324, 9326, 9328 ... 9333 qu’avec le filtre réseau/la selfréseau adéquate.
Accessoires côté réseau– Fusibles et sections de câbles ( 3-11)
– Filtres réseau ( 3-12)
– Pour plus de détails concernant les autres accessoires, voir manuel système, partie I,“Accessoires”.
Avec C0018 = 6 (réglage usine), la fréquence de découpage est automatiquement abaissée de8 kHz à 2 kHz (abaissement automatique de la fréquence de découpage) dès que le courantmaxi de sortie est dépassé (INmax8).
3.4.2 Caractéristiques nominales types 9321 à 9324
150 % de surcharge de courant Type 9321 9322 9323 9324Tension d’alimentation UN [V] 320 V ±0 % ≤ UN ≤ 528 V ±0 % ; 45 Hz 65 Hz ±0 %
Alimentation CC (alternative) UG [V] 460 V ±0 % ≤ UG ≤ 740 V ±0 %
Courant réseauavec filtre réseau/self réseausans filtre réseau/self réseau
Iréseau [A]Iréseau [A]
1,52,1
2,53,5
3,95,5
7,0-
Spécifications pour fonctionnement sur réseau 3 CA / 400 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 620 Vou 3 CA / 480 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 740 V
400 V 480 V 400 V 480 V 400 V 480 V 400V 480 V
Puissance nominale moteur (moteurasynchrone 4 pôles)
PN [kW] 0,37 0,37 0,75 0,75 1,5 1,5 3,0 3,0asynchrone 4 pôles)pour 2 kHz / 4 kHz / 8 kHz* PN [hp] 0,5 0,5 1,0 1,0 2,0 2,0 4,0 4,0
Puissance de sortie U, V, Wpour 2 kHz / 4 kHz / 8 kHz*
SN2/4 [kVA]SN8 [kVA]
1,01,0
1,21,2
1,71,7
2,12,1
2,72,7
3,23,2
4,84,8
5,65,6
Puissance de sortie +UG, -UG PCC [kW] 1,9 2,3 0,7 0,9 0,0 0,0 2,0 2,5
2/4 kHz* IN2/4 [A] 1,5 1,5 2,5 2,5 3,9 3,9 7,0 7,0
8 kHz* IN8 [A] 1,5 1,5 2,5 2,5 3,9 3,9 7,0 7,0Courantde sortie
optimisé en fonction du bruit8 kHz*
IN8 [A] 1,5 1,5 2,5 2,5 3,9 3,9 7,0 7,0
optimisé en fonction du bruit16 kHz*
IN16 [A] 1,1 1,1 1,8 1,8 2,9 2,9 5,2 5,2
2/4 kHz* INmax2/4 [A] 2,2 2,2 3,7 3,7 5,8 5,8 10,5 10,5Courantmaxi de
8 kHz* INmax8 [A] 2,2 2,2 3,7 3,7 5,8 5,8 10,5 10,5maxi desortiependant
optimisé en fonction du bruit8 kHz*
INmax8 [A] 2,2 2,2 3,7 3,7 5,8 5,8 10,5 10,5
pendant60 s optimisé en fonction du bruit
16 kHz*INmax16 [A] 1,6 1,6 2,7 2,7 4,3 4,3 7,8 7,8
Puissance dissipée (fonctionnementavec INx)
Pv [W] 50 65 100 150
* Fréquence de découpage (C0018)
Autres données ( 3-4 )

Spécifications techniques
3-9L _^VPMMsb` co PKN
3.4.3 Caractéristiques nominales types 9325 à 9327
150 % de surcharge de courant Type 9325 9326 9327
Tension d’alimentation UN [V] 320 V ±0 % ≤ UN ≤ 528 V ±0 % ; 45 Hz 65 Hz ±0 %
Alimentation CC (alternative) UG [V] 460 V ±0 % ≤ UG ≤ 740 V ±0 %
Courant réseauavec filtre réseau/self réseausans filtre réseau/self réseau
Iréseau [A]Iréseau [A]
12,016,8
20,5-
29,043,5
Spécifications pour fonctionnement sur réseau 3 CA / 400 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 620 Vou 3 CA / 480 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 740 V
400 V 480 V 400 V 480 V 400 V 480 V
Puissance nominale moteur (moteurasynchrone 4 pôles)
PN [kW] 5,5 5,5 11,0 11,0 15,0 18,5asynchrone 4 pôles)pour 2 kHz / 4 kHz / 8 kHz* PN [hp] 7,5 7,5 15,0 15,0 20,0 25,0
Puissance de sortie U, V, Wpour 2 kHz / 4 kHz / 8 kHz*
SN2/4 [kVA]SN8 [kVA]
9,09,0
10,810,8
16,316,3
18,518,5
22,222,2
26,626,6
Puissance de sortie +UG, -UG PCC [kW] 0,0 0,0 0,0 0,0 10,2 11,8
2/4 kHz* IN2/4 [A] 13,0 13,0 23,5 22,3 32,0 30,4
Courant 8 kHz* IN8 [A] 13,0 13,0 23,5 22,3 32,0 30,4Courantde sortie optimisé en fonction du bruit 8 kHz* IN8 [A] 13,0 13,0 23,5 22,3 29,0 27,0
optimisé en fonction du bruit 16 kHz* IN16 [A] 9,7 9,7 15,2 14,6 21,0 19,0
Courant 2/4 kHz* INmax2/4 [A] 19,5 19,5 35,0 33,5 48,0 45,6Courantmaxi desortie
8 kHz* INmax8 [A] 19,5 19,5 35,0 33,5 48,0 45,6sortiependant optimisé en fonction du bruit 8 kHz* INmax8 [A] 19,5 19,5 35,0 33,5 43,0 41,0pendant60 s optimisé en fonction du bruit 16 kHz* INmax16 [A] 14,5 14,5 22,9 21,8 31,0 29,0
Puissance dissipée (fonctionnement avec INx) Pv [W] 210 360 430
* Fréquence de découpage (C0018)Autres données ( 3-5 )
3.4.4 Caractéristiques nominales types 9328 à 9330
150 % de surcharge de courant Type 9328 9329 9330
Tension d’alimentation UN [V] 320 V ±0 % ≤ UN ≤ 528 V ±0 % ; 45 Hz 65 Hz ±0 %
Alimentation CC (alternative) UG [V] 460 V ±0 % ≤ UG ≤ 740 V ±0 %
Courant réseauavec filtre réseau/self réseausans filtre réseau/self réseau
Iréseau [A]Iréseau [A]
42,0-
55,0-
80,0-
Spécifications pour fonctionnement sur réseau 3 CA / 400 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 620 Vou 3 CA / 480 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 740 V
400 V 480 V 400 V 480 V 400 V 480 V
Puissance nominale moteur (moteurasynchrone 4 pôles)
PN [kW] 22,0 30,0 30,0 37,0 45,0 55,0asynchrone 4 pôles)pour 2 kHz / 4 kHz / 8 kHz* PN [hp] 30,0 40,0 40,0 49,5 60,0 74,0
Puissance de sortie U, V, Wpour 2 kHz / 4 kHz / 8 kHz*
SN2/4 [kVA]SN8 [kVA]
32,632,6
39,139,1
41,641,6
49,949,9
61,761,7
73,973,9
Puissance de sortie +UG, -UG PCC [kW] 4,0 4,6 0,0 0,0 5,1 5,9
2/4 kHz* IN2/4 [A] 47,0 44,7 59,0 56,0 89,0 84,0
Courant 8 kHz* IN8 [A] 47,0 44,7 59,0 56,0 89,0 84,0Courantde sortie optimisé en fonction du bruit 8 kHz* IN8 [A] 43,0 41,0 47,0 44,0 59,0 55,0
optimisé en fonction du bruit 16 kHz* IN16 [A] 30,0 29,0 35,0 33,0 46,0 44,0
Courant 2/4 kHz* INmax2/4 [A] 70,5 67,0 89,0 84,0 134,0 126,0Courantmaxi desortie
8 kHz* INmax8 [A] 70,5 67,0 89,0 84,0 134,0 126,0sortiependant optimisé en fonction du bruit 8 kHz* INmax8 [A] 64,0 61,0 70,0 66,0 88,0 82,0pendant60 s optimisé en fonction du bruit 16 kHz* INmax16 [A] 46,0 43,0 53,0 49,0 69,0 65,0
Puissance dissipée (fonctionnement avec INx) Pv [W] 640 810 1100
* Fréquence de découpage (C0018)Autres données ( 3-6 )

Spécifications techniques
3-10 L_^VPMMsb` co PKN
3.4.5 Caractéristiques nominales types 9331 à 9333
150 % de surcharge de courant Type 9331 9332 9333
Tension d’alimentation UN [V] 320 V ±0 % ≤ UN ≤ 528 V ±0 % ; 45 Hz 65 Hz ±0 %
Alimentation CC (alternative) UG [V] 460 V ±0% ≤ UG ≤ 740 V ±0 %
Courant réseauavec filtre réseau/self réseausans filtre réseau/self réseau
Iréseau [A]Iréseau [A]
100,0-
135,0-
165,0-
Spécifications pour fonctionnement sur réseau 3 CA / 400 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 620 Vou 3 CA / 480 V / 50 Hz / 60 Hz ; 460 V ≤ UG ≤ 740 V
400 V 480 V 400 V 480 V 400 V 480 V
Puissance nominale moteur (moteurasynchrone 4 pôles)
PN [kW] 55,0 75,0 75,0 90,0 90,0 110,0asynchrone 4 pôles)pour 2 kHz / 4 kHz / 8 kHz* PN [hp] 74,0 100,0 100,0 120,0 120,0 148,0
Puissance de sortie U, V, Wpour 2 kHz / 4 kHz / 8 kHz*
SN2/4 [kVA]SN8 [kVA]
76,276,2
91,491,4
103,9103,9
124,0124,0
131,2124,7
158,2149,0
Puissance de sortie +UG, -UG PCC [kW] 0,0 0,0 28,1 32,4 40,6 47,1
2/4 kHz* IN2/4 [A] 110,0 105,0 150,0 142,0 180,0 171,0
8 kHz* IN8 [A] 110,0 105,0 150,0 142,0 147,0 141,0Courantde sortie
optimisé en fonction du bruit8 kHz*
IN8 [A] 76,0 71,0 92,0 87,0 100,0 94,0
optimisé en fonction du bruit16 kHz*
IN16 [A] 52,0 49,5 58,0 55,0 63,0 59,0
2/4 kHz* INmax2/4 [A] 165,0 157,0 225,0 213,0 270,0 256,0Courantmaxi de
8 kHz* INmax8 [A] 165,0 157,0 225,0 213,0 221,0 211,0maxi desortiependant
optimisé en fonction du bruit8 kHz*
INmax8 [A] 114,0 107,0 138,0 130,0 150,0 141,0
pendant60 s optimisé en fonction du bruit
16 kHz*INmax16 [A] 78,0 74,0 87,0 83,0 94,0 89,0
Puissance dissipée (fonctionnement avec INx) Pv [W] 1470 1960 2400
* Fréquence de découpage (C0018)
Autres données ( 3-7 )

Spécifications techniques
3-11L _^VPMMsb` co PKN
3.5 Fusibles et sections de câbles
3.5.1 Fonctionnement des variateurs de vitesse dans une installationhomologuée UL
N’utiliser que des fusibles et des supports fusibles homologués UL :– 500 V à 600 V à l’entrée réseau (CA),– 700 V dans le circuit intermédiaire de tension CC,– caractéristique de déclenchement ”H” ou ”K5”.
N’utiliser que des câbles homologués UL.
Conseil !Des fusibles et des supports fusibles homologués UL sont commercialisés, entre autre par lessociétés Bussmann ou Ferraz.
3.5.2 Entraînements individuels avec 120 % de surcharge de courant
Les valeurs figurant dans le tableau s’entendent pour le fonctionnement des variateurs avec unmoteur de puissance adaptée.
Type Entrée réseau L1, L2, L3, PE/raccordement moteur U, V, W, PEyp
Fonctionnement avec filtre réseau/self réseau uniquement
F1, F2, F3 Disjoncteur fusible Section de câble1)
VDE UL VDE mm 2 AWG
9321 M 6A 5A B 6A 1 17
9322 M 6A 5A B 6A 1 17
9323 M 10A 10A B 10A 1,5 15
9324 M 10A 10A B 10A 1,5 15
9325 M 20A 20A B 20A 4 11
9326 M 32A 25A B 32A 6 10
9327 M 50A 50A - 16 5
9328 M 63A 63A - 25 3
9329 M 80A 80A - 25 3
9330 M 125A 125A - 70 2/0
9331 M 160A 175A - 95 3/0
9332 M 160A 175A - 95 3/0
9333 M 200A 200A - 120 4/0
1) Tenir compte de la réglementation en vigueur sur le site

Spécifications techniques
3-12 L_^VPMMsb` co PKN
3.5.3 Entraînements individuels avec 150 % de surcharge de courant
Les valeurs figurant dans le tableau s’entendent pour le fonctionnement des variateurs avec unmoteur de puissance adaptée.
Type Entrée réseau L1, L2, L3, PE/raccordement moteur U, V, W, PEyp
Fonctionnement sans filtre réseau/self réseau Fonctionnement avec filtre réseau/self réseau
Fusible Disjoncteurfusible
Section de câble1) Fusible Disjoncteurfusible
Section de câble1)
VDE UL VDE mm 2 AWG VDE UL VDE mm 2 AWG
9321 M 6A 5A B 6A 1 17 M 6A 5A B 6A 1 17
9322 M 6A 5A B 6A 1 17 M 6A 5A B 6A 1 17
9323 M 10A 10A B 10A 1,5 15 M 10A 10A B 10A 1,5 15
9324 - - - - - M 10A 10A B 10A 1,5 15
9325 M 32A 25A B 25A 6 10 M 20A 20A B 20A 4 11
9326 - - - - - M 32A 25A B 32A 6 10
9327 M 63A - - 16 5 M 35A 35A - 10 7
9328 - - - - - M 50A 50A - 16 5
9329 - - - - - M 80A 80A - 25 3
9330 - - - - - M 100A 100A - 50 0
9331 - - - - - M 125A 125A - 70 2/0
9332 - - - - - M 160A 175A - 95 3/0
9333 - - - - - M 200A 200 - 120 4/0
1) Tenir compte de la réglementation en vigueur sur le site
3.6 Filtre réseau
3.6.1 Filtre réseau pour entraînements individuels avec 120 % de surcharge decourant
Les affectations des filtres figurant dans le tableau s’entendent pour le fonctionnement desvariateurs avec un moteur de puissance adaptée.
Type Caractéristiques nominales (uk ≈ 6 %) Réf. de commande Lenzeyp
Courant nominal Inductance Pour degré antiparasitageA
Pour degré antiparasitageB
9321 1,5 A 24,00 mH EZN3A2400H002 EZN3B1500H003
9322 2,5 A 15,00 mH EZN3A1500H003 EZN3B0900H004
9323 5,0 A 7,50 mH EZN3A0750H005 EZN3B0750H005
9324 9,0 A 4,00 mH EZN3A0400H009 EZN3B0400H009
9325 13,0 A 3,00 mH EZN3A0300H013 EZN3B0250H015
9326 24,0 A 1,50 mH EZN3A0150H024 EZN3B0150H024
9327 42,0 A 0,80 mH EZN3A0080H042 EZN3B0080H042
9328 54,0 A 0,80 mH EZN3A0060H054 EZN3B0060H054
9329 60,0 A 0,55 mH EZN3A0055H060 EZN3B0055H060
9330 110,0 A 0,30 mH EZN3A0030H110 EZN3B0030H110
9331 110,0 A 0,30 mH EZN3A0030H110* EZN3B0030H110*
9332 150,0 A 0,22 mH EZN3A0022H150 EZN3B0022H150
9333 200,0 A 0,17 mH EZN3A0017H200 EZN3B0017H200
* Température maxi admissible pendant le fonctionnement (sans réduction de puissance) : +35 °C
Les filtres réseau pour le degré d’antiparasitage B sont pourvus de composants d’antiparasitagesupplémentaires.

Spécifications techniques
3-13L _^VPMMsb` co PKN
3.6.2 Filtre réseau pour entraînements individuels avec 150 % de surcharge decourant
Les affectations des filtres figurant dans le tableau s’entendent pour le fonctionnement desvariateurs avec un moteur de puissance adaptée.
Type Caractéristiques nominales (uk ≈ 6 %) Réf. de commande Lenzeyp
Courant nominal Inductance Pour degré antiparasitageA
Pour degré antiparasitageB
9321 1,50 A 24,00 mH EZN3A2400H002 EZN3B2400H002
9322 2,5 A 15,00 mH EZN3A1500H003 EZN3B1500H003
9323 4,0 A 9,00 mH EZN3A0900H004 EZN3B0900H004
9324 7,0 A 5,00 mH EZN3A0500H007 EZN3B0500H007
9325 13,0 A 3,00 mH EZN3A0250H013 EZN3B0250H013
9326 24,0 A 1,50 mH EZN3A0150H024 EZN3B0150H024
9327 32,0 A 1,10 mH EZN3A0110H030 EZN3B0110H030
9328 47,0 A 0,80 mH EZN3A0080H042 EZN3B0080H042
9329 60,0 A 0,55 mH EZN3A0055H060 EZN3B0055H060
9330 90,0 A 0,37 mH EZN3A0037H090 EZN3B0037H090
9331 110,0 A 0,30 mH EZN3A0030H110 EZN3B0030H110
9332 150,0 A 0,22 mH EZN3A0022H150 EZN3B0022H150
9333 200,0 A 0,17 mH EZN3A0017H200 EZN3B0017H200
Les filtres réseau pour le degré d’antiparasitage B sont pourvus de composants d’antiparasitagesupplémentaires.

Spécifications techniques
3-14 L_^VPMMsb` co PKN
3.7 Encombrements
Les cotes d’encombrement de chaque appareil varient en fonction du type d’installation mécanique.( 4-1)

Installation
4-1L _^VPMMsb` co PKN
4 Installation
4.1 Installation mécanique
4.1.1 Instructions importantes
Les variateurs doivent être installés avant utilisation !
Respecter les espaces de montage libres prescrits !– Il est possible de monter plusieurs appareils dans une même armoire électrique sans prévoir
un espacement minimum entre eux.– Prévoir un espace libre de 100 mm au-dessus et en dessous du variateur.
Assurer une ventilation suffisante pour évacuer la chaleur dissipée.
Lorsque l’air de refroidissement contient des impuretés (poussières, peluches, graisses, gazagressifs) :– prévoir des mesures appropriées telles que des conduits d’air séparés, le montage de filtres
et un nettoyage régulier.
Ne pas dépasser la plage de température ambiante admissible. ( 3-2)
Si les variateurs de vitesse sont soumis en permanence à des vibrations ou des chocs :– prévoir éventuellement un absorbeur de chocs.
Positions de montage possibles
Montage vertical sur la face arrière de l’armoire électrique, les raccords d’alimentation dirigésvers le haut.– Utiliser les profilés ou les équerres de fixation compris dans l’emballage. ( 4-2)
– Variante V003 avec séparation thermique (radiateur externe) avec technique ”Cold Plate”-plaque de refroidissement (avec radiateur à convection par exemple).
Installation
4-2 L_^VPMMsb` co PKN
4.1.2 Montage avec profilés ou équerres de fixation (montage standard)
p _ `
u
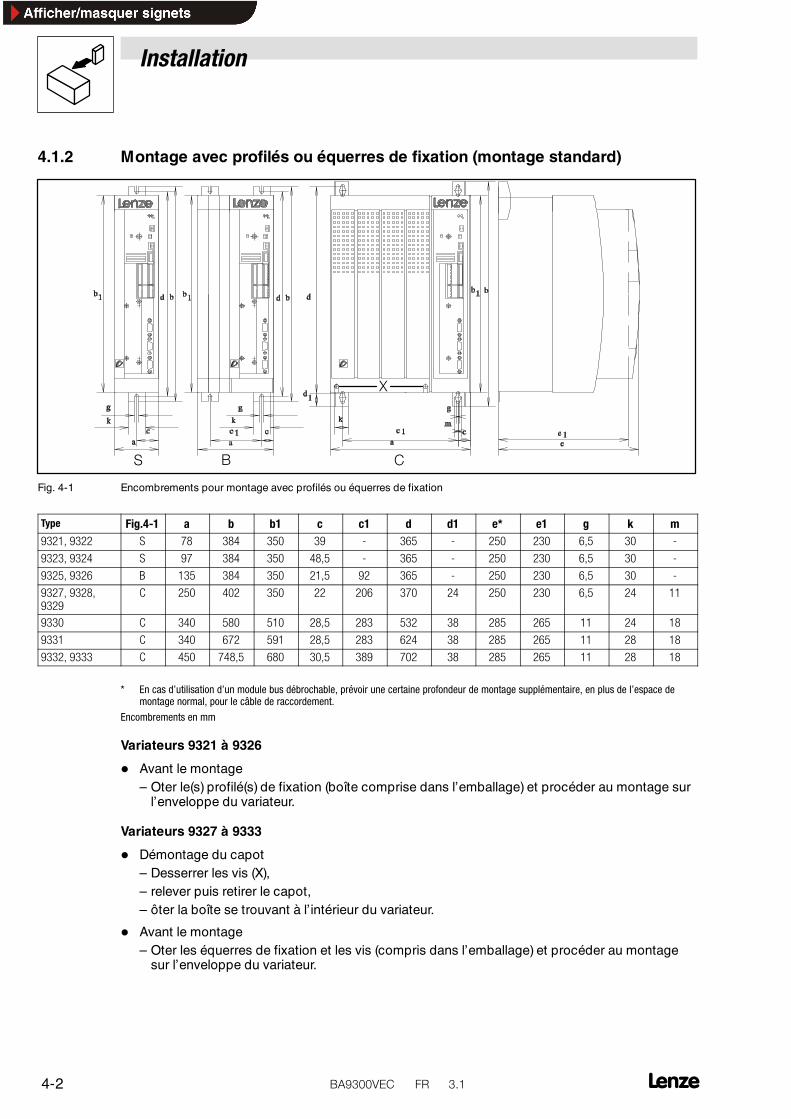
Fig. 4-1 Encombrements pour montage avec profilés ou équerres de fixation
Type Fig.4-1 a b b1 c c1 d d1 e* e1 g k m9321, 9322 S 78 384 350 39 - 365 - 250 230 6,5 30 -
9323, 9324 S 97 384 350 48,5 - 365 - 250 230 6,5 30 -
9325, 9326 B 135 384 350 21,5 92 365 - 250 230 6,5 30 -
9327, 9328,9329
C 250 402 350 22 206 370 24 250 230 6,5 24 11
9330 C 340 580 510 28,5 283 532 38 285 265 11 24 18
9331 C 340 672 591 28,5 283 624 38 285 265 11 28 18
9332, 9333 C 450 748,5 680 30,5 389 702 38 285 265 11 28 18
* En cas d’utilisation d’un module bus débrochable, prévoir une certaine profondeur de montage supplémentaire, en plus de l’espace demontage normal, pour le câble de raccordement.
Encombrements en mm
Variateurs 9321 à 9326
Avant le montage– Oter le(s) profilé(s) de fixation (boîte comprise dans l’emballage) et procéder au montage sur
l’enveloppe du variateur.
Variateurs 9327 à 9333
Démontage du capot– Desserrer les vis (X),– relever puis retirer le capot,– ôter la boîte se trouvant à l’intérieur du variateur.
Avant le montage– Oter les équerres de fixation et les vis (compris dans l’emballage) et procéder au montage
sur l’enveloppe du variateur.

Installation
4-3L _^VPMMsb` co PKN
4.1.3 Montage de la variante ”Cold Plate”- plaque de refroidissement
4.1.3.1 Généralités
Domaines d’application
Utilisation de radiateurs sans motoventilateur– Exemple : Un air de refroidissement fortement pollué n’autorise pas le fonctionnement de
motoventilateurs puisque la fonctionnalité et la durée de vie du ventilateur se trouveraientréduites.
Indice de protection important assuré par une séparation thermique– lorsqu’une séparation thermique doit être réalisée pour réduire l’échauffement dans une
armoire électrique, et que l’indice de protection du radiateur externe doit être plus grand queIP 41.
Installation du variateur directement dans la machine grâce à sa profondeur de montageréduite– Le refroidissement est assuré par des parties de la machine.
Des systèmes de refroidissement communs (par eau, par air pressurisé ...) sont prévus pourtous les variateurs dans le concept global de la machine.
Pour des puissances permanentes > 22 kW, un refroidissement par convection ne peut pasêtre réalisé techniquement. Dans ce cas, prévoir un refroidissement forcé (refroidissement àeau par exemple).
4.1.3.2 Caractéristiques exigées du radiateurL’évacuation de la puissance dissipée par le variateur peut s’effectuer par des radiateursfonctionnant à base de différents fluides de refroidissement (air, eau, huile etc.) .
Outre les critères demandés par l’application, les caractéristiques suivantes sont exigées pourassurer assurer le bon fonctionnement des variateurs.
Bonne connexion thermique au radiateur– La face de contact entre le radiateur et le variateur doit être au moins aussi grande que la
plaque de refroidissement du variateur.– Planéité de la surface de contact : env. 0,05 mm,– Relier le radiateur et la plaque de refroidissement par tous les raccords vissés prescrits.– ( 4-5 ../.. : Autres informations)
Respecter la résistance thermique Rthmin abaissement (transfert radiateur - fluide derefroidissement) selon le tableau suivant. Les valeurs indiquées s’entendent pour– le fonctionnement des variateurs dans les conditions nominales ; ( 3-3../..)
– une température maxi de la plaque de refroidissement de 75°C ; point de mesure voirFig. 4-2, Fig. 4-3 .
Variateurs/unités def i
Refroidissementfreinage
Puissance à dissiper PvAR [W] Rthmin abaissement [K/W]9321-V003 24 1,45
9322-V003 42 0,85
9323-V003 61 0,57
9324-V003 105 0,33
9325-V003 180 0,19
9326-V003 360 0,10
9327-V003 410 0,085
9328-V003 610 0,057
9351-V003 100 0,3
9352-V003 63 0,3

Installation
4-4 L_^VPMMsb` co PKN
4.1.3.3 Caractéristiques thermiques de l’ensemble du système
Les caractéristiques thermiques d’une installation dépendent de différents facteurs. Lors dudimensionnement d’une armoire électrique ou d’une installation, tenir compte des facteurs suivants.
Température ambiante des variateurs
Les caractéristiques nominales et leurs facteurs de réduction de courant pour température élevéesont toujours valables pour la température ambiante des variateurs.
Sources de chaleur à l’intérieur d’armoires électriques
En plus des pertes de puissance de l’appareil qui sont dissipées par le radiateur externe, il faut tenircompte des pertes suivantes :
Pertes à l’intérieur du variateur– Ces pertes sont dues à l’alimentation électronique, au ventilateur, aux condensateurs du
circuit intermédiaire etc.
Pertes des composants côté réseau et côté moteur– Pour ces pertes, se reporter aux spécifications techniques indiquées dans les catalogues,
partie I.
Rayonnement de chaleur du radiateur externe vers l’intérieur– Cette partie de l’énergie calorifique dépend, entre autre, du type de l’unité de
refroidissement et du type de montage.– Données non spécifiées actuellement
9327-V003 et 9328-V003 avec d’autres radiateurs– Données non spécifiées actuellement, calcul empirique nécessaire
Répartition de la chaleur dans un radiateur commun/dans l’armoire électrique
Lorsque plusieurs composants (variateurs, unités de freinage...) sont montés sur un seul radiateur,s’assurer que la température sur la plaque de refroidissement du variateur ne dépasse pas 75°C.
Installation
4-5L _^VPMMsb` co PKN
4.1.3.4 Avant le montage
Appliquer la pâte thermoconductrice avant de visser le radiateur sur la plaque derefroidissement du variateur afin de maintenir la résistance à la transmission de chaleur aussifaible que possible.
La pâte thermoconductrice comprise dans l’emballage est prévue pour une surface d’env.1000 cm2.
Appliquer la pâte thermoconductrice
1. Nettoyer la surface de contact du radiateur et de la plaque de refroidissement avec de l’alcool.
2. Appliquer une fine couche de pâte thermoconductrice à l’aide d’une spatule ou d’un pinceau.

Installation
4-6 L_^VPMMsb` co PKN
4.1.3.5 Montage types 9321-V003 ... 9326-V003
Monter le variateur sur la plaque de refroidissement à l’aide des équerres et des vis de fixationM5 x 20.
Couple de serrage des vis : 3,4 Nm.
max. 75 °C
Fig. 4-2 Encombrements 9321-V003 ... 9326-V003 - montage dans l’armoire électrique
Type a b b1 c c2 d e 3) g9321-V0039322-V003
78 381 350 48 - 367 168 6,5
9323-V0039324-V003
97 381 350 67 - 367 168 6,5
9325-V0039326-V003
135 381 350 105 38 367 168 6,5
Encombrements en mm
3) En cas d’utilisation d’un module bus ou d’un module E/S débrochable,prévoir une profondeur de montage supplémentaire, en plus de l’espace de montage normal, pour le câble de raccordement

Installation
4-7L _^VPMMsb` co PKN
4.1.3.6 Montage types 9327-V003 et 9328-V003
Monter le variateur sur la plaque de refroidissement à l’aide des vis de fixation M5 x 25.
Couple de serrage des vis : 3,4 Nm.
max. 75 °C
Fig. 4-3 Encombrements 9327-V003 et 9328-V003 - montage dans l’armoire électrique
Type a a1 b b1 c c1 d e 3) g9327-V0039328-V003
234 250 381 350 110 220 367 171 6,5
Encombrements en mm
3) En cas d’utilisation d’un module bus ou d’un module E/S débrochable,prévoir une profondeur de montage supplémentaire, en plus de l’espace de montage normal, pour le câble de raccordement

Installation
4-8 L_^VPMMsb` co PKN
4.2 Installation électrique
Les instructions concernant l’installation conforme aux normes sur la CEM se trouvent auchap. 4.3. ( 4-33)
4.2.1 Protection des personnes
Danger !Toutes les bornes de puissance restent sous tension jusqu’à 3 minutes après coupure réseau.
Identification marquée sur le disjoncteurdifférentiel
Signification
Disjoncteur différentiel sensitif courant alternatif (RCCB, type AC)
Disjoncteur différentiel sensitif courant impulsionnel (RCCB, type A)
Disjoncteur différentiel tout courant (RCCB, type B)
Terminologie Par la suite, on désigne par ”disjoncteur différentiel” le disjoncteur différentiel RCCB.
Protection des personnes et desanimaux utiles
DIN VDE 0100 avec disjoncteurs différentiels (RCCB) Un pont redresseur de tension réseau se trouve à l’intérieur des variateurs. De ce fait, après un court-circuit à la masse
un courant continu de défaut peut empêcher le déclenchement du disjoncteur différentiel sensitif courant alternatif oudu disjoncteur différentiel sensitif courant impulsionnel et peut annuler ainsi la fonction de protection de tous leséquipements fonctionnant sur ce disjoncteur différentiel. Il convient alors d’utiliser :– des disjoncteurs différentiels sensitifs courant impulsionnel pour les installations avec variateurs de vitesse surréseau CA monophasé.
– des disjoncteurs différentiels sensitifs tout courant pour les installations avec variateurs de vitesse sur réseau CAtriphasé.
Amplitude du courant nominal dedéfaut
Lors de la sélection du disjoncteur différentiel, tenir compte de l’amplitude du courant nominal de défaut.Des déclenchements inopinés du disjoncteur différentiel peuvent se produire en raison des courants de fuite capacitifs de blindages de câbles (notamment pour des câbles moteur blindés longs), de la connexion réseau simultanée de plusieurs variateurs, de l’utilisation de filtres antiparasites.
Installation Le disjoncteur différentiel ne doit être installé qu’entre le réseau d’alimentation et le variateur.
Remarque sur l’utilisation dedisjoncteurs différentiels sensitifstout courant
Les disjoncteurs différentiels sensitifs tout courant sont décrits, pour la première fois, dans la norme européenneEN50178 (état : octobre 1997). La norme EN 50178 a été harmonisée et est en vigueur depuis octobre 1997. Elleremplace la norme nationale allemande VDE 0160. Par ailleurs, les disjoncteurs différentiels sensitifs tout courant sontdécrits dans la norme CEI 755.
Les disjoncteurs différentiels avec courant de défaut de– 30 mA sont adaptés pour des installations avec variateurs de vitesse sur réseau CA monophasé uniquement.– 300 mA sont adaptés pour des installations avec variateurs de vitesse sur réseau CA triphasé uniquement.
Séparation de potentiel/protectioncontre des contacts accidentels
Sur tous les variateurs, les entrées et sorties de commande sont isolées galvaniquement. Pour éviter tout contactdangereux, se reporter à la description page suivante.
Remplacement de fusiblesdéfectueux
Ne remplacer un fusible défectueux que par le fusible indiqué, l’appareil étant hors tension. Sur des entraînements individuels, le variateur est encore sous tension jusqu’à 3 minutes après la coupure réseau
(danger au contact accidentel). Pour le fonctionnement en bus CC, le blocage variateur doit être activé sur tous les variateurs, suivi d’une coupure du
réseau.
Coupure des variateurs du réseau Pour des raisons de sécurité, couper le variateur du réseau uniquement par un contacteur en amont du variateur. Noter que pour le fonctionnement en bus CC (variateurs connectés entre eux par le bus CC), le blocage variateur doit
également être activé sur tous les variateurs.

Installation
4-9L _^VPMMsb` co PKN
Séparation de potentiel
Sur les variateurs, une séparation de potentiel (espace d’isolement) existe entre le bornier depuissance et le bornier de commande ainsi que par rapport au boîtier.
Les bornes X1 et X5 possèdent une double isolation de base (double espace interborne,séparation de potentiel garantie selon VDE0160). La protection contre contacts accidentelsest assurée sans mesure supplémentaire.
Danger ! Les bornes X3, X4, X6, X8, X9, X10 possèdent une isolation de base simple (contact
interborne simple).
Lorsque l’espace d’isolement présente un défaut, la protection contre les contactsaccidentels n’est assurée qu’avec des mesures supplémentaires.
Avec une alimentation externe CC 24 V, le degré d’isolation du variateur dépend du degréd’isolation de la source de tension.
59 39 A1…A4
E1…E6 (ST)
n.c. 28
L1AC
24 VDCN
X1
X5
X3W
V
U
PE
-UG
+UG
L3
L2
L1
X4 X6 X8 X9 X10
Fig. 4-4 Isolation de base du variateur
Isolation renforcée
Isolation de base simple

Installation
4-10 L_^VPMMsb` co PKN
4.2.2 Protection du variateur
Stop !Les variateurs comprennent des composants à décharges électrostatiques.
Avant de procéder aux travaux sur les raccordements, les personnes effectuant ce travaildevront se libérer des décharges électrostatiques.– La décharge peut s’effectuer en touchant la vis de fixation PE ou une autre surface
métallique mise à la terre dans l’armoire de commande.
Longueur des vis destinées au raccordement de la tresse/de la tôle de blindage sur lesappareils 9327 à 9333 : < 12 mm.
Des coupures réseau répétées risquent d’activer la limitation interne du courant dedémarrage. En cas de coupures régulières, mettre le variateur sous tension toutes les3 minutes au maximum.
Ne faire fonctionner les variateurs 9324, 9326, 9328 et 9330 ... 9333 qu’avec le filtre réseau/laself réseau adéquate. ( 3-13)
La protection électrique du variateur passe par des fusibles externes. ( 3-11)
En cas de condensation, débrancher le variateur du réseau en attendant l’évaporation del’humidité visible.
Equiper les entrées et les sorties de commande non utilisées de connecteurs et protéger àl’aide des bouchons plastiques les prises SubD non utilisées.
4.2.3 Protection du moteur
Protection intégrale du moteur selon VDE :– via un relais de surintensité ou la surveillance de température ;– indispensable pour tout groupe d’entraînement
(plusieurs moteurs connectés en parallèle à un variateur unique).– Nous recommandons une surveillance température du moteur à l’aide de sondes PTC ou de
sondes thermiques. (Les moteurs triphasés asynchrones normalisés LenzeDERAXX/DFRAXX sont équipés en version standard, de contacts thermiques.)
En cas d’utilisation de moteurs dont l’isolation n’est pas adaptée au fonctionnement avecvariateurs :– prière de contacter le fournisseur de moteurs.
Les moteurs triphasés Lenze ont été conçus pour un fonctionnement avec variateurs.
Par un paramétrage, les variateurs peuvent générer des fréquences de rotation pouvantatteindre jusqu’à 600 Hz :– L’utilisation de moteurs mal adaptés peut entraîner une survitesse dangereuse voire la
destruction de l’entraînement.

Installation
4-11L _^VPMMsb` co PKN
4.2.4 Formes de réseau/spécifications de réseau
Veiller au respect des indications données pour chaque forme de réseau !
Réseau Fonctionnement des variateurs RemarquesAvec commun à la terre Sans restriction Respecter les caractéristiques nominales des appareils.Avec commun à la terre(réseaux TT/TN)
Sans restriction Respecter les caractéristiques nominales des appareils.
Avec point neutre isolé(réseaux IT)
Possible, si le variateur est protégé dans le casd’une mise à la terre dans le réseaud’alimentation par des dispositifs appropriés de détection de
mise à la terre et une coupure immédiate de l’alimentation du
variateur.
Dans le cas d’une mise à la terre à la sortie du variateur,un fonctionnement sûr ne peut pas être garanti.
Avec fil de mise à la terre extérieur Le fonctionnement n’est possible qu’avec unevariante.
Contacter l’usine.
Alimentation CC via +UG/-UG La circulation de la tension continue doit êtresymétrique à PE.
La mise à la terre du conducteur +UG ou du conducteur-UG entraîne une destruction du variateur.
4.2.5 Effets réciproques avec des équipements de compensation
La puissance réactive absorbée par le variateur au réseau d’alimentation CA est très faible.Une compensation n’est pas nécessaire.
Si vous faites fonctionner les variateurs sur des réseaux avec équipements de compensation,ceux-ci doivent être pourvus de selfs.– Dans ce cas, veuillez contacter le fournisseur de votre équipement de compensation.
4.2.6 Spécification relative aux câbles utilisées
Les câbles utilisés doivent être conformes aux exigences spécifiées sur le lieu d’utilisation(exemple : UL).
Les sections mini prescrites des conducteurs PE doivent impérativement être respectées. Lasection du conducteur PE doit être au moins égale à la section des conducteurs de puissance.
L’efficacité d’un câble blindé est conditionnée par– un raccordement correct du blindage ;– une faible résistance du blindage ;
N’utiliser que des tresses de cuivre étamées ou nickelées !Le blindage à partir de tresses d’acier est contre-indiqué.
– un taux de couverture de la tresse de blindage :au moins 70 % à 80 % avec un angle de couverture de 90°

Installation
4-12 L_^VPMMsb` co PKN
4.2.7 Raccordement partie puissance
Variateur de vitesse Avant le raccordement partie puissance
9321 ... 9326 Retirer le couvercle des raccords de puissance– Effectuer une légère pression en pivotant par l’avant.– Tirer vers le haut (raccords d’alimentation), vers le bas (raccords moteur).
9327 ... 9333 Démontage du capot– Desserrer les vis (X) (voir Fig. 4-1).– Relever puis retirer le capot.– Oter la boîte se trouvant à l’intérieur du variateur.
4.2.7.1 Raccordement réseau
Types 9321 à 9326 Types 9327 à 9333
mb
iN iO iP JrdHrd
➀
➁
PE
+UG -UGL1 L2 L3
Pour des câbles blindés, appliquer le blindage correctement enutilisant les composants prévus à cet effet(compris dans l’emballage). Visser la tôle de blindage sur l’équerre de fixation . Raccorder le blindage à l’aide de la griffe de serrage. Ne pas
utiliser la tôle de blindage comme support de charge. Appliquer, en plus, le blindage sur le boulon PE à côté des raccords
de puissance pour obtenir un meilleur raccordement du blindage.
Pour des câbles blindés, appliquer le blindage correctement. Appliquer le blindage par un collier adapté sur la plaque de
montage conductrice. Appliquer, en plus, le blindage sur le boulon PE à côté des raccords
de puissance pour obtenir un meilleur raccordement du blindage.
Fig. 4-5 Raccordement réseau recommandé

Installation
4-13L _^VPMMsb` co PKN
Raccorder les câbles réseau aux borniers à vis L1, L2, L3.
Raccorder les câbles de l’unité de freinage (935X), du module d’alimentation (934X) oud’autres variateurs en réseau sur le circuit intermédiaire, aux borniers à vis +UG, -UG situés enhaut sur le variateur de vitesse.
Sections de câbles maxi admissibles et couples de serrage
Bornier
TypeSections de câblesmaxi admissibles
L1, L2, L3, +UG, -UG Raccord PE
9321 - 9326 4 mm2 1) 0,5 ... 0,6 Nm (4.4 ... 5.3 lbin) 3,4 Nm (30 lbin)
9327 - 9329 25 mm2 2) 4 Nm (35 lbin)
9330 - 9331 95 mm2 2) 7 Nm (62 lbin)
9332 - 9333 120 mm2 2) 12 Nm (106.2 lbin)
1) Avec cosse à sertir à embout rond : 6 mm2
Avec embout de câblage : 4 mm2
2) Avec cosse ronde : la section n’est limitée que par le presse-étoupe dans le boîtier
Fusible
Fusibles et sections de câbles Les indications portées dans le chap. 3.5 sont des recommandations et sont relatives à( 3-11 ) une utilisation dans des armoires électriques ou au sein de machines, une installation dans le chemin de câbles, une température ambiante maxi de +40 °C.
Sélection des sections de câbles Lors de la sélection, tenir compte de la chute de tension en cas de charge ≤ 3 %(selon DIN 18015 partie 1).
Protection des lignes et de l’appareil côtéréseau (L1, L2, L3)
Via fusibles de ligne commercialisés Dans les installations UL, les fusibles doivent être agréés UL. Les tensions nominales prévues pour les fusibles doivent correspondre à la tension
d’alimentation disponible. Caractéristique de déclenchement : ”H” ou ”K5”.
Protection des lignes et de l’appareil côtétension continue (+UG, -UG)
Via fusibles CC recommandés Les fusibles/supports fusibles recommandés par Lenze sont répertoriés dans l’homologation
UL.
En cas de fonctionnement en bus CC oualimentation par une source CC
Tenir compte des remarques dans la partie F du manuel système.
Raccordement d’une unité de freinage Lors du raccordement d’une unité de freinage aux borniers +UG/-UG, les fusibles et sectionsde câbles indiqués au chap. 3.5 ne s’entendent pas pour l’unité de freinage. Pour ces donnéesspécifiques à l’appareil, se reporter à la documentation technique de l’unité de freinage.
Autres informations 3-11Concernant la protection des lignes et de l’appareil
Autres normes La responsabilité du respect d’autres normes(exemple : VDE 0113, VDE 0289 incombe à l’utilisateur).

Installation
4-14 L_^VPMMsb` co PKN
4.2.7.2 Raccordement moteur
Pour des raisons de respect de CEM, nous vous recommandons de n’utiliser que des câbles moteurblindés.
Conseil !Le câble moteur doit être blindé uniquement si le respect d’une norme en vigueur est exigé
(exemple : VDE 0160, EN 50178).
Types 9321 à 9326
- . /
Pour des câbles blindés, appliquer le blindage correctement enutilisant les composants prévus à cet effet(compris dans l’emballage). Visser la tôle de blindage sur l’équerre de fixation . Coincer le blindage du câble moteur et, le cas échéant, du
contact thermique à l’aide de la griffe de serrage. Ne pasutiliser la tôle de blindage comme support de charge.
Appliquer, en plus, la tresse sur le boulon PE à côté desraccords moteur pour obtenir un meilleur raccordement dublindage.
Types 9327 à 9329
01
2
2
- . /
Pour des câbles blindés, appliquer le blindagecorrectement. Coincer le blindage du câble moteur et, le cas
échéant, du contact thermique à l’aide de la griffede serrage. Ne pas utiliser la tôle de blindagecomme support de charge.
Appliquer, en plus, la tresse sur le boulon PE à côtédes raccords moteur pour obtenir un meilleurraccordement du blindage.

Installation
4-15L _^VPMMsb` co PKN
Types 9330 à 9331
T1
T2
PE
U V W
M5 X 12
Prévoir un maintien du câble à l’aide de colliers de fixation.
Pour des câbles blindés, appliquer le blindage correctement.– Appliquer le blindage des câbles moteur sur la tôle deblindage à l’aide d’un demi-collier et des vis M5 x 12.
– Appliquer le blindage du contact thermique par unesurface importante sur le boulon PE à côté des raccordsmoteur.
Types 9332 et 9333
T1
T2
PE
U V W
M5 X 12
M4 X 12
Prévoir un maintien du câble à l’aide d’anneaux de fixationet de vis M4 x 12.– Un support de charge/une fixation supplémentaire peutêtre réalisé à l’aide de bandes lieuses de câbles.
Pour des câbles blindés, appliquer le blindage correctement.– Appliquer le blindage des câbles moteur sur la tôle deblindage à l’aide d’un demi-collier et des vis M5 x 12.
– Appliquer le blindage du contact thermique par unesurface importante sur le boulon PE à côté des raccordsmoteur.

Installation
4-16 L_^VPMMsb` co PKN
Veiller à ce que la longueur du câble moteur soit le plus court possible afin d’obtenir unmeilleur fonctionnement.– Le tableau ci-dessous montre la relation entre la longueur du câble moteur et les filtres de
sortie éventuellement nécessaires.– Pour des groupes d’entraînement (plusieurs moteurs connectés à un variateur unique), la
longueur résultante lrés est déterminante.
Irés= Longueur totale de tous les câbles moteur ⋅ Nombre de câbles moteur
– Les indications figurant dans le tableau s’entendent pour des fréquences de découpage≤ 8 kHz (C0018 = 0, 1, 2, 3, 4, 6). En fonctionnement avec des fréquences de découpage> 8 kHz d’autres mesures peuvent s’avérer nécessaire. Veuillez nous contacter à ce sujet.
– En utilisant des câbles moteur non blindés, les indications figurant dans le tableaus’entendent pour la longueur de câble moteur multipliée par deux.
– Veuillez nous contacter pour des longueurs de câbles moteur absolus ou résultantes > 200 m.
Stop !En utilisant des filtres de sortie et des selfs moteur, tenir compte des fréquences de découpageadmissibles.
Programmer une fréquence fixe pour le variateur (exemple : C0018 = 4 8 kHz fixe).
Type Filtres de sortie supplémentaire nécessaires pour le câble moteur9321/9322/93239324/9325/9326
Aucun Filtre moteur/self moteur Filtre sinus
9327/9328 Filtre moteur/self moteurSelf moteur
9329/9330/93319332/9333
AucunAucun
Self moteur(nous contacter)
Longueur (résultante)de câble moteur,câble blindé
0 ... 50 m 50 ... 100 m 100 ... 200 m

Installation
4-17L _^VPMMsb` co PKN
Raccorder les câbles moteur aux borniers à vis U, V, W.– Respecter l’ordre des phases.– Sections de câbles maxi admissibles et couples de serrage
Bornier
TypeSections de câblesmaxi admissibles
U, V, W Raccord PEBlindage/
support de chargeT1, T2
9321 - 9326 4 mm2 1) 0,5 ... 0,6 Nm(4.4 ... 5.3 lbin)
3,4 Nm(30 lbin)
-
9327 - 9329 25 mm2 2) 4 Nm (35 lbin) - 0,5 ... 0,6 Nm9330 - 9331 95 mm2 2) 7 Nm (62 lbin) 3,4 Nm (30 lbin)
0,5 ... 0,6 Nm(4.4 ... 5.3 lbin)
9332 - 9333 120 mm2 2) 12 Nm (106.2 lbin)M4 : 1,7 Nm (15 lbin)M5 : 3,4 Nm (30 lbin)
( )
1) Avec cosse à sertir à embout rond : 6 mm2
Avec embout de câblage : 4 mm2
2) Avec cosse ronde : la section n’est limitée que par le presse-étoupe dans le boîtier
Conseil !Le branchement côté moteur du variateur est autorisé. ( 6-2)
4.2.7.3 Raccordement d’une unité de freinage
Lors du raccordement d’une unité de freinage (module de freinage 9351 avec résistance de freinageintégrée ou module de freinage 9352 avec résistance de freinage externe)respecter impérativementles indications figurant dans les instructions de mise en service afférentes.
Stop !Prévoir un câblage assurant, en cas de déclenchement de la surveillance de température de larésistance de freinage, que pour tous les variateurs fonctionnant en bus CC
les variateurs soient bloqués (X5/28=BAS).
le réseau soit coupé.
( 4-33 ou Fig. 4-7)

Installation
4-18 L_^VPMMsb` co PKN
4.2.7.4 Plan de raccordement
Fig. 4-6 Raccordement partie puissance 93XX
F1, F2, F3 Fusibles
K10 Contacteur réseau
Z1 Self réseau/filtre réseau, voir manuel système, partie I, “Accessoires”
Types 9328-9333, 9324/9326 : ne faire fonctionner qu’avec self réseau/filtre réseau !
Z2 Filtre moteur/filtre sinus, voir manuel système, partie I, “Accessoires”
Z3 Module de freinage avec résistance externe/module de freinage avec résistance de freinage intégrée, voir manuelsystème, partie I, “Accessoires”
RB Résistance de freinage, voir manuel système, partie I, “Accessoires”
ϑRB Surveillance de température de la résistance de freinage
X1 Bornier dans l’armoire électrique
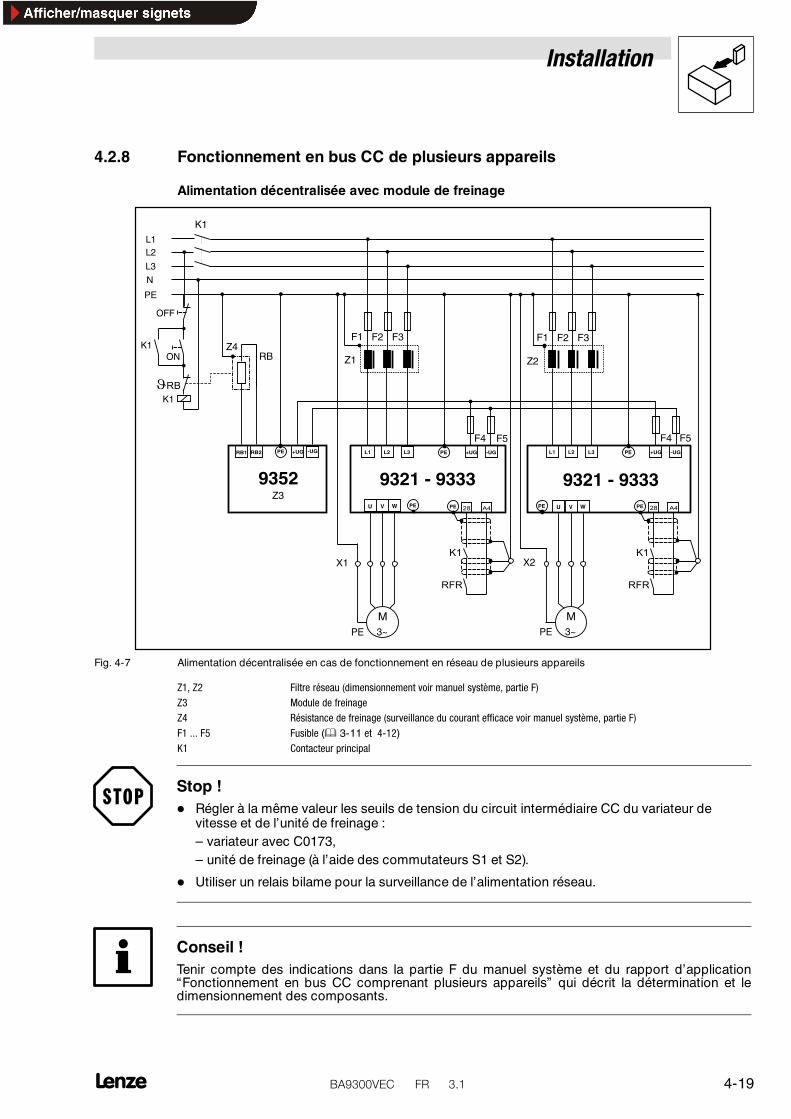
Installation
4-19L _^VPMMsb` co PKN
4.2.8 Fonctionnement en bus CC de plusieurs appareils
Alimentation décentralisée avec module de freinage
K1
K1
L3
N
PE
L1L2
U V W
M3~PE
L1 L2 L3
F1
9321 - 9333
PE +UG -UG
PE
+UG -UG
9352
PERB2RB1
Z1
X1
Z3
RB
K1
U V W
M3~PE
L1 L2 L3
9321 - 9333
PE +UG -UG
PE
Z2
F4 F5 F4 F5
ON
OFF
PE
PE
X2
F2 F3 F1 F2 F3Z4
Fig. 4-7 Alimentation décentralisée en cas de fonctionnement en réseau de plusieurs appareils
Z1, Z2 Filtre réseau (dimensionnement voir manuel système, partie F)Z3 Module de freinageZ4 Résistance de freinage (surveillance du courant efficace voir manuel système, partie F)
F1 ... F5 Fusible ( 3-11 et 4-12)K1 Contacteur principal
Stop ! Régler à la même valeur les seuils de tension du circuit intermédiaire CC du variateur de
vitesse et de l’unité de freinage :– variateur avec C0173,– unité de freinage (à l’aide des commutateurs S1 et S2).
Utiliser un relais bilame pour la surveillance de l’alimentation réseau.
Conseil !Tenir compte des indications dans la partie F du manuel système et du rapport d’application“Fonctionnement en bus CC comprenant plusieurs appareils” qui décrit la détermination et ledimensionnement des composants.

Installation
4-20 L_^VPMMsb` co PKN
Alimentation centralisée par le module d’alimentation et de renvoi sur le réseau
Lors du raccordement d’un module d’alimentation et de renvoi sur le réseau respecterimpérativement les indications figurant dans les instructions de mise en service afférentes.
L3
N
PE
L1L2
L1 L2 L3
F1...F3
9341 - 9343
PE +UG -UG
Z1
K1
U V W
M3~PE
L1 L2 L3
9321 - 9333
PE +UG -UG
PE
U V W
M3~PE
L1 L2 L3
9321 - 9333
PE +UG -UG
PE
F4 F5 F4 F5 F4 F5
Z2
F1...F3
Fig. 4-8 Alimentation centralisée en cas de fonctionnement en bus CC de plusieurs appareils
Z1 Filtres réseau
Z2 Module d’alimentation
F1 ... F5 Fusible ( 3-11et 4-12)
K1 Contacteur principal
Conseil !Si la puissance fournie par le module d’alimentation n’est pas suffisante, il est possible d’établir unealimentation parallèle via l’entrée réseau d’autres variateurs. Dans ce cas, les variateurs doivent êtreutilisés uniquement avec filtre réseau adéquat (mini pour classe limite A).
Pour le dimensionnement des filtres réseau, voir manuel système, partie F.

Installation
4-21L _^VPMMsb` co PKN
4.2.9 Partie commande
4.2.9.1 Borniers de commande
Fixer les câbles de commande sur les borniers à vis.
Section de câble maxi admissible Couples de serrage
1,5 mm2 0,5 ... 0,6 Nm (4.4 ... 5.3 lbin)
Pour les câbles des signaux analogiques, nous vous recommandons de raccorder le blindaged’un seul côté pour éviter des déformations de signaux.
Raccorder les blindages des câbles de commande avec la tôle de blindage sur la facemétallique avant (longueur de vis : 12 mm maxi).
Protection polarité
Une protection contre l’inversion des bornes de commande permet d’éviter une mauvaiseaffectation des entrées de commande. Cependant, une mise en place vigoureuse des borniers peutcontourner cette protection. Dans ce cas, le variateur ne peut pas être débloqué.
Affectation des bornes de commande
GN
DA
1
28
A2E1
A3
X4
X5
X6
E2
A4
E3
n.c
.
E4
E6
(ST)
E5
5939
1 34
763
27
62
LOH
I
Fig. 4-9 Vue des raccords de commande sur la face avant du variateur de vitesse
X4 Bus système CAN
X5/E1 ... X5/E6 (ST) DIGIN
X5/A1 ... X5/A4 DIGOUT
X6/1, X6/2 AIN1
X6/3, X6/4 AIN2

Installation
4-22 L_^VPMMsb` co PKN
Bornes Fonction(réglage usine en gras)
Niveau Données
Entréesanalogiques
1,2 Entrée différentielle tension pilote(consigne principale) 6
42
531
-10 V bis +10 V Résolution :5 mV (11 bits + signe)
Pont X3Entrée différentielle courant pilote
642
531
-20 mA à +20 mA Résolution :20 µA (10 bits + signe)
Pont X3
3, 4 Entrée différentielle tension pilote(inactive)
Pont X3 sans influence -10 V à +10 V Résolution :5 mV (11 bits + signe)
Sortiesanalogiques
62 Image 1(vitesse réelle)
-10 V à +10 V ;2 mA maxi
Résolution :20 mV (9 bits + signe)g q
63 Image 2(courant moteur réel)
-10 V à +10 V ;2 mA maxi
Résolution :20 mV (9 bits + signe)
7 Masse interne, GND - -Entrées
é i28 Déblocage servovariateur (RFR) HAUT BAS : 0 +4 V
numériques E1 Entrée programmable(sens de rotation horaire/arrêt rapide (AR)
HAUT HAUT : +13 +30 V
C ti 24VE2 Entrée programmable(sens de rotation antihoraire/arrêt rapide (AR))
HAUT Consommation sous 24V :8 mA par entrée
E3 Entrée programmable(activation consigne JOG 1)
HAUT Lecture et traitement des entrées :toutes les ms (valeur moyenne)
E4 Entrée programmable(mise en défaut - TRIP-Set)
BAStoutes les ms (valeur moyenne)
E5 Entrée programmable(réarmement défaut - TRIP-Reset)
Impulsion BAS-HAUT
E6 (ST) Entrée programmable HAUTSortiesnumériques
A1 Sortie programmable(message défaut - TRIP)
BAS BAS : 0 +4 VHAUT : +13 +30 Vq
A2 Sortie programmable(nréel < nx) - Qmin
BASCourant de sortie :50 A i tiA3 Sortie programmable
(prêt à fonctionner - RDY)HAUT 50mA maxi par sortie
(résistance externe mini 480 Ω pour 24 V)
A4 Sortie programmable(courant maxi atteint - Imax)
HAUT Les sorties sont actualisées :toutes les ms
39 Masse pour entrées et sorties numériques -toutes les ms
59 Entrée d’alimentation de la carte de commande :24 V externe (I > 1 A)
-
Conseil !Si nécessaire, ôter le module débrochable pour modifier le pont.

Installation
4-23L _^VPMMsb` co PKN
Raccordement des signaux analogiques
Les signaux analogiques sont raccordés via le bornier X6 2 × 4 bornes.
Le pont de X3 doit être positionné en fonction de l’utilisation des entrées analogiques.
Raccordement de la tension d’alimentation externe
STOP ! L’écart de tension admissible entre la source de tension externe et
la masse GND1 (borne X6/7) du variateur est de 10 V maxi(en phase).
L’écart de tension admissible entre la masse GND1 (borne X6/7) etPE est de 50 V maxi.
Assurer une limitation de l’écart de tension : par des composants limitant la surtension ou par la liaison directe de la (des) borne(s) X6/2, X6/4 et X6/7 à GND1
et PE (voir illustration à gauche).
Raccordement de la tension d’alimentation interne
Configuration de la tension d’alimentation interne Configurer une sortie analogique programmable (AOUTx) au niveau
HAUT. Exemple : borne X6/63 : programmer C0436 à FIXED100%.
La sortie X6/63 délivre alors une tension de 10 V.
Conseil !Pour cette application, vous pouvez utiliser une des configurationsprédéfinies en C0005. Avec C0005 = XX1X (exemple : 1010 pourrégulation de vitesse avec commande par bornier), la sortie X6/63 estautomatiquement affectée de FIXED100% ce qui correspond à 10 Vsur la borne X6/63.

Installation
4-24 L_^VPMMsb` co PKN
Raccordement des signaux numériques
Les signaux numériques sont raccordés via le bornier X5 2 × 7 bornes.
Le niveau des entrées et sorties numériques est compatible avec un automate programmable.
Pour la commutation des câbles signaux utiliser impérativement des relais avec contact à courantfaible (recommandation : relais à contact or).
Raccordement de la tension d’alimentation externe
3k
3k
3k
3k
3k
3k
47k
50mA
50mA
50mA
50mA
22 k 10 R
GND 2
GND 2
24 V
24 V
93XX
+
+
-
-
=
X5 28 E1 E2 E3 E4 E5 E6(ST) 39 A1 A2 A3 A4
RFR
QSP TRIPQmin
RDY
Imax
JOG TRIP-/ResetSet
R L
59
=
La source de tension externe alimente les entrées et sortiesnumériques. Si la tension d’alimentation externe est également utilisée comme
une alimentation alternative de l’électronique de commande(assistance en cas de défaillance réseau) :– établir, en plus, la liaison en pointillé ;– s’assurer que la source de tension externe puisse fournir uncourant > 1 A.
– Les valeurs réelles sont alors toujours saisies et traitées, mêmeaprès coupure réseau.
Raccordement de la source de tension externe :– Tension d’alimentation sur X5/59– Masse externe sur X5/39
STOP !L’écart de tension admissible entre la masse GND2 (borne X5/39) etPE est de 50 V maxi
Alimentation de la carte de commandePE est de 50 V maxi.
93XX
+
-
E5 E6(ST) 39 A1 A2
=
Assurer une limitation de l’écart de tension : par des composants limitant la surtension ou par une liaison PE directe de la borne X5/39 (voir illustration à
gauche).
Raccordement de la tension d’alimentation interne
3k
3k
3k
3k
3k
3k
47k
50mA
50mA
50mA
50mA
22 k 10 R
GND 2
GND 2
24 V
93XX
+- =
X5 28 E1 E2 E3 E4 E5 E6(ST) 39 A1 A2 A3 A4
RFR
QSP
FIXED1
Qmin
RDY
Imax
JOG TRIP-/ResetSet
R L
59
Configuration de la tension d’alimentation interne Configurer une sortie numérique programmable (DIGOUTx) au
niveau HAUT. Exemple : borne X5/A1 : affecter C0117/1 avec FIXED1 et activer
C0118/1 = 0 (HAUT actif). La borne X5/A1 délivre alors une tensionde 24 V.
Conseil !Pour cette application, vous pouvez utiliser une des configurationsprédéfinies en C0005. Avec C0005 = XX1X (exemple : 1010 pourrégulation de la vitesse avec commande par bornier), la sortie X5/A1est automatiquement affectée de FIXED1 ce qui correspond à 24 V surla borne X5/A1).
Alimentation de la carte de commande
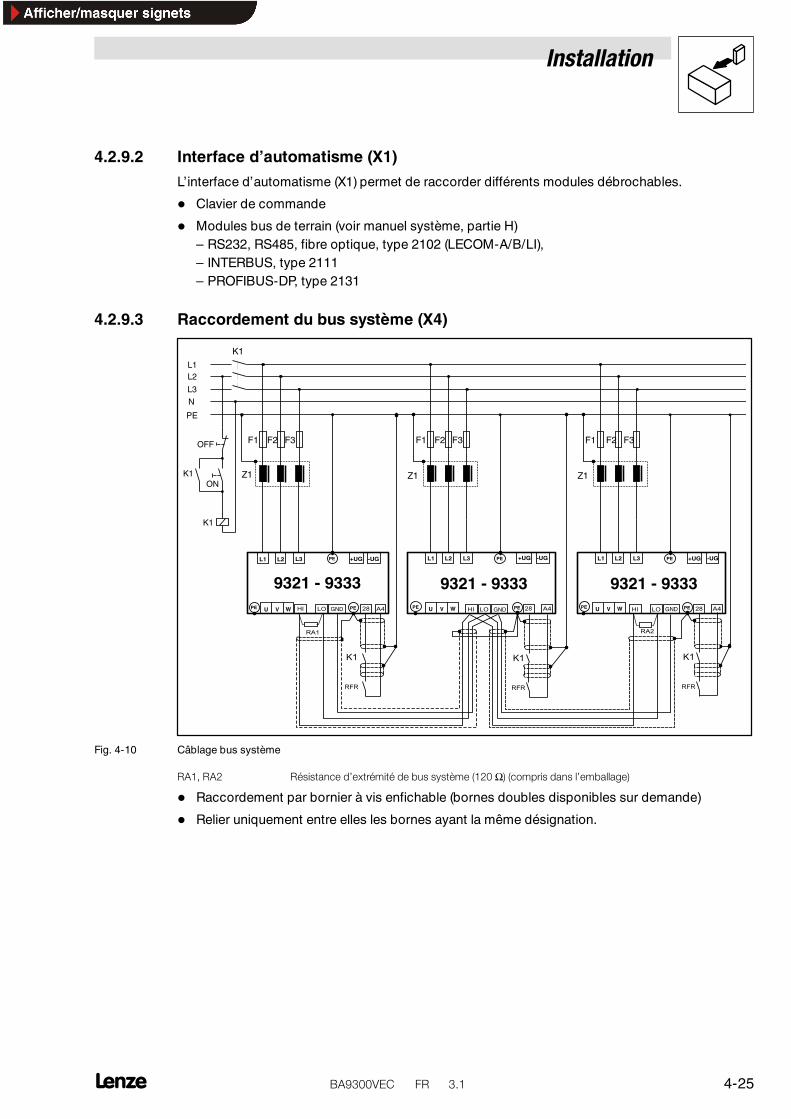
Installation
4-25L _^VPMMsb` co PKN
4.2.9.2 Interface d’automatisme (X1)
L’interface d’automatisme (X1) permet de raccorder différents modules débrochables.
Clavier de commande
Modules bus de terrain (voir manuel système, partie H)– RS232, RS485, fibre optique, type 2102 (LECOM-A/B/LI),– INTERBUS, type 2111– PROFIBUS-DP, type 2131
4.2.9.3 Raccordement du bus système (X4)
K1
K1
L3
N
PE
L1L2
U V W
L1 L2 L3
F1
9321 - 9333
PE +UG -UG
PE
Z1
K1
U V W
L1 L2 L3
9321 - 9333
PE +UG -UG
PE
Z1
F1
ON
OFF
PE
PE U V W
L1 L2 L3
9321 - 9333
PE +UG -UG
PE
Z1
F1
PE
GNDEF GH GNDEF GH
GNDEF GH
F2 F3 F2 F3 F2 F3
Fig. 4-10 Câblage bus système
o^NI o^O o¨ëáëí~åÅÉ ÇÛÉñíê¨ãáí¨ ÇÉ Äìë ëóëí≠ãÉ ENOM ΩF EÅçãéêáë Ç~åë äÛÉãÄ~ää~ÖÉF
Raccordement par bornier à vis enfichable (bornes doubles disponibles sur demande)
Relier uniquement entre elles les bornes ayant la même désignation.

Installation
4-26 L_^VPMMsb` co PKN
Caractéristiques du câble
Longueur totale ducâble
Jusqu’à 300 m 300 m à 1000 m
Type de câble LIYCY 2 x 2 x 0,5 mm2
(torsadé par paire, avec blindage)Paire 1 : CAN-LOW (BAS) (LO) et CAN-HIGH (HAUT) (HI)Paire 2 : 2*GND
CYPIMF 2 x 2 x 0,5 mm2
(torsadé par paire, avec blindage)Paire 1 : CAN-LOW (BAS) (LO) et CAN-HIGH (HAUT) (HI)Paire 2 : 2*GND
Résistance de câble ≤ 40 Ω/km ≤ 40 Ω/km
Capacité câble ≤ 130 nF/km ≤ 60 nF/km
Raccordement des résistances d’extrémité de bus– Installer la résistance 120 Ω sur le premier et sur le dernier participant au bus.– Sur le variateur 93XX, la résistance doit être vissée directement sur les bornes X4/HI et
X4/LO.
Caractéristiques
Base CAN avec protocole bus selon CANopen(CAL-based Communication Profile DS301)
Longueur bus– 25 m avec une vitesse de communication de 1 Mbit/s maxi– Jusqu’à 1 km avec une vitesse de communication réduite
Fiabilité accrue pour le transfert de données (distance Hamming = 6)
Niveau du signal selon ISO 11898
Jusqu’à 63 participants au bus
Accès à tous les paramètres Lenze
Fonctionnalité maître intégrée dans le variateur– possibilité d’échange de données entre deux variateurs sans participation d’un maître
externe (répartition du courant, synchronisation de vitesse, ...)
Pour le raccordement du bus, différentes connexions sont possibles :
liaison à un boîtier d’extension d’Entrées/Sorties
liaison à une commande pilote (automate, entrées et sorties numériques, interface opérateur)
liaison entre plusieurs variateurs
Conseil !Pour plus de détails concernant le bus système et les possibilités d’application et de mise en service,consulter le manuel système, partie H.

Installation
4-27L _^VPMMsb` co PKN
4.2.9.4 Entrée fréquence pilote (X9)/sortie fréquence pilote(X10)
Conseil !Pour le raccordement de l’entrée fréquence pilote (X9) et de la sortie fréquence pilote (X10) utiliserdes câbles préfabriqués Lenze. Le cas échéant, utiliser uniquement des câbles avec brins torsadéspar paire (A, A / B, B / Z, Z) (voir plan de raccordement).
Sortie fréquence pilote X10 Entrée fréquence pilote X9
Caractéristiques Connecteur SubD 9 broches femelle Fréquence de sortie : 0 - 500 kHz Charge maxi par canal : 20 mA 2 signaux inversés 5 V et voie zéro L’affectation de base de X10 varie en fonction de la configuration
programmée en C0005 :– Réglage usine : vitesse réelle
Charge admissible :– En connexion parallèle, trois entraînements esclaves peuventêtre raccordés au maximum.
La broche PIN 8 (EN) en passant au niveau BAS indiquel’initialisation de l’entraînement maître (exemple : dans le cas oùle réseau était coupé entre-temps). D’où la possibilité d’unesurveillance du maître par l’entraînement esclave.
Caractéristiques Connecteur SubD 9 broches mâle Utilisation possible pour codeur incrémental ( 4-28 ../.. ) Fréquence :
– 0 - 500 kHz / niveau TTL– 0 - 200 kHz / niveau HTL
Consommation maxi par canal : 5 mA 2 signaux inversés et voie zéro Pour codeurs incrémentaux avec niveau HTL : utilisation sans
signaux inversés possible ( 4-28../..) Traitement des signaux d’entrée via C0427 (voir en bas de cette
page) La broche PIN 8 permet de surveiller le variateur connecté en
amont. Pour ce faire, la surveillance SD3 doit être activée.– Au niveau BAS de cette broche, le défaut TRIP oul’avertissement est activé.
! " " # $ % & '
( " ) " * +
, ' ,
( " ) " * &
) % $ * $
' -
' - '
' -
' - '
' -
.
Affectation des broches X10 Affectation des broches X9
1 2 3 4 5 6 7 8 9 1 2 3 4 5 6 7 8 9
B A A +5 V GND Z Z EN B B A A +5 V GND Z Z LC B
Traitement des signaux d’entrée
Code FonctionC0427 = 0 Sens horaire Voie A précède voie B de 90° (valeur positive sur DFIN-OUT)
Sens antihoraire Voie A précède voie B de 90° (valeur négative sur DFIN-OUT)C0427 = 1 Sens horaire Voie A transmet la vitesse
Voie B = BAS (valeur positive sur DFIN-OUT)
Sens antihoraire Voie A transmet la vitesseVoie B = HAUT (valeur négative sur DFIN-OUT)
C0427 = 2 Sens horaire Voie A transmet la vitesse et le sens de rotation (valeur positive sur DFIN-OUT)Voie B = BAS
Sens antihoraire Voie B transmet la vitesse et le sens de rotation (valeur négative sur DFIN-OUT)Voie A = BAS

Installation
4-28 L_^VPMMsb` co PKN
4.2.9.5 Système de bouclage
Le codeur incrémental peut être raccordé à l’entrée X8 ou à l’entrée X9 du variateur.
Le signal du codeur incrémental peut être reproduit sur la sortie fréquence pilote X10 pour desentraînements esclaves.
Procéder au raccordement comme l’indiquent les schémas.– Utiliser des câbles en paires torsadées et blindées.– Raccorder le blindage des 2 côtés.– Respecter les sections prescrites.
Codeur incrémental sur entrée X8
Conseil ! Le traitement d’un codeur incrémental via X8 ne peut être activé si pour la configuration des
signaux, l’entrée fréquence pilote X9 et la sortie fréquence X10 sont utilisées.
Cette restriction ne s’applique pas si la sortie fréquence pilote X10 est programmée pourreproduire le signal d’entrée X8 ou X9 (C0540 = 4 ou 5).– Eventuellement, enlever la liaison interne du bloc fonctionnel (FB) DFIN vers le prochain bloc
de fonction afin de désactiver l’entrée fréquence pilote X9.
Seuls des codeurs incrémentaux avec niveau TTL peuvent être raccordés à l’entrée X8.
Activer le système de bouclage– Programmer C0025 = 100. Ensuite, régler en C0420 la constante (1 ... 8192)
ou– programmer C0025 = 110, 111, 112 ou 113. Par ce réglage, la constante est programmée
simultanément (512, 1024, 2048 ou 4096).
La tension d’alimentation du codeur incrémental est fourni par le variateur.
Régler en C0421 la tension d’alimentation VCC5_E (5 V) pour le codeur incrémental afin decompenser, éventuellement, la chute de tension dans le câble codeur incrémental(∆U ≈ 2 * longueur de câble * résistance/m * Icodeur).– charge maxi de la sortie : VCC5_E (X8/4): 200 mA

Installation
4-29L _^VPMMsb` co PKN
Raccordement du codeur incrémental
Stop !Tenir compte de la tension d’alimentation du système codeur utilisé.
B
VCC5_E
GND
Z
+KTY
-KTY
1
2
3
4
5
6
7
8
9
A
X8
l = max. 50 m
0.14 26
1.0
0.14 26
AWG
17
A
A
A
mm2
B
Z
B
B
Z
Z
KTY
Fig. 4-11 Raccordement du codeur incrémental à l’entrée X8
Codeur incrémental avec niveau TTL
Evolution signaux pour rotation en sens horaire
Des codeurs incrémentaux avec 2 signaux complémentés 5 V décalés de 90° (codeur TTL)peuvent être raccordés.– La voie zéro peut être connectée (option).
Connecteur Sub-D, 9 broches femelle
Fréquence d’entrée : 0 - 500 kHz
Consommation maxi par canal : 6 mA
Affectation du connecteur (X8)
Broche 1 2 3 4 5 6 7 8 9
Signal B A A VCC5_E GND (-KTY) Z Z +KTY B
Borne X8/8 4-31

Installation
4-30 L_^VPMMsb` co PKN
Codeur incrémental sur entrée X9
Les codeurs incrémentaux avec niveau HTL peuvent être uniquement raccordés à l’entrée X9.
Activer le système de bouclage– Programmer C0025 = 101. Ensuite, régler en C0420 la constante (1 ... 8192).
Raccordement du codeur incrémental
B
GND
Z
1
2
3
4
5
6
7
8
9
A
X9
l = max. 50 m
0.14 26
1.0
0.14
0.14
26
26
AWG
17
A
A
A
mm2
B
Z
B
B
Z
Z
+
-
Fig. 4-12 Raccordement du codeur incrémental à l’entrée X9
Codeur incrémental avec niveau HTL
Evolution signaux pour rotation en sens horaire
Tension d’alimentation pour le codeur incrémental
Connecteur Sub-D, 9 broches femelle
Fréquence d’entrée : 0 - 200 kHz
Consommation maxi par canal : 5 mA
Affectation du connecteur (X9)
Broche 1 2 3 4 5 6 7 8 9Signal B A A +5 V GND Z Z - B
Conseil !Les codeurs incrémentaux avec niveau HTL qui ne fournissent que les signaux A et B, peuvent êtreraccordés à la broche X9/2 (A)et Pin X9/9 (B). La tension d’alimentation du codeur incrémental doitalors être affectée aux entrées A et B (broche X9/3 et X9/1).

Installation
4-31L _^VPMMsb` co PKN
4.2.9.6 Surveillance de la température moteur
Sélection du capteur demesure
Sonde thermique KTY– Sonde thermique “linéaire” dans le bobinage moteur– Intégrée en version standard sur les moteurs Lenze MDXKX et MDXQX
Sonde thermique PTC– Thermistor avec seuil de déclenchement défini
Contact thermique TKO– Contact thermique (contact à ouverture)
Autres surveillances KTY, PTC et TKO n’assurent pas de protection complète. Pour améliorer la surveillance, Lenze vous recommande l’utilisation d’unrelais thermique bilame.
Autre possibilité desurveillance
Les comparateurs (CMP1 ... CMP4) peuvent permettre de déterminer le courant moteur maxi admissible (courant de blocage) dansla plage de faibles vitesses ou à l’arrêt du moteur. La durée du courant de blocage peut être limitée à l’aide d’un temporisateurconnecté en aval (TRANS1, TRANS2).Cette fonction peut être réalisée par une liaison de blocs fonction déterminés (voir manuel système).
Réactions possibles Selon la surveillance température, différentes réactions peuvent être activées ( 7-21 ).
Stop !Ne pas appliquer de tension externe sur les entrées.
Moteur Moteurs Lenze avec sonde thermique KTY Moteurs Lenzeavec contacts thermiques
Moteurs d’autres marques avecsonde thermique
Raccordement Entrée codeur incrémental X8 :– X8/8 = +KTY, X8/5 = -KTY
Bornes T1/T2 à côtés des bornes U, V, W
Message défaut (MONIT-)OH3 (MONIT-)OH7 (MONIT-)OH8Réactions possibles TRIP (C0583 = 0)
OFF (C0583 = 3) Avertissement (C0584 = 2) OFF (C0584 = 3)
TRIP (C0585 = 0) Avertissement (C0585 = 2) OFF (C0585 = 3)
Seuil dedéclenchement
fixe pour 150 °C réglable en C0121 fixe, en fonction de la sonde PTC/contact thermique :PTC : pour R ϑ > 1600 Ω
Remarques Par le réglage usine, la surveillance n’est pas activée. La surveillance de température est appliquée si la saisie
de la température moteur est activée en C0594. Ainsi, lasonde KTY est également surveillée (interruption,court circuit)
Par le réglage usine, la surveillance n’est pas activée. La surveillance température par contact thermique ou sonde thermique est
activée via C0585 = 2 (avertissement) ou C0585 = 0 (défaut TRIP). Le raccordement s’effectue selon DIN 44081 (voir aussi Fig. 4-13).
court-circuit). Pour plus de détails concernant le raccordement de la
sonde thermique, consulter les instructions de mise enservice du système de bouclage concerné.
Nous vous recommandons d’utiliserune sonde thermique PTC (jusqu’à150 °C) de la société Ziehl :K15301075 ou un contactthermique.

Installation
4-32 L_^VPMMsb` co PKN
Types 9321 à 9326 Types 9327 et 9330 Câblage interne
PE
U V W
X10
T1 T2
1
5
MONIT-OH8T1
T2
7X6
24 V
93xxK350052
ϑ
3,3k
7,4k
2,7k
Types 9330 et 9331 Types 9332 et 9333
T1
T2
PE
U V W
T1
T2
PE
U V W
Fig. 4-13 Raccordement d’une sonde thermique aux bornes T1 et T2 et câblage interne
Conseil ! Si vous souhaitez confectionner vous-même vos câbles :
– veiller à ce que les câbles cheminent dans des conduits différents des câbles moteur.

Installation
4-33L _^VPMMsb` co PKN
4.3 Installation d’un système d’entraînement de type CE
Généralités La compatibilité électromagnétique d’une machine dépend de la manière et du soin apportés à l’installation. Tenir compte, en particulier,– du montage,– du filtrage,– du blindage,– et de la mise à la terre.
Lorsque l’installation ne remplit pas toutes ces conditions, il faut vérifier la conformité de la machine ou de l’installation à la directive CErelative à la compatibilité électromagnétique. Exemples :– dans le cas d’utilisation de câbles non blindés,– dans le cas d’utilisation d’un seul filtre antiparasite pour plusieurs appareils à la place d’un filtre antiparasite affecté à chaque variateur,– dans le cas d’un fonctionnement sans filtre réseau.
La responsabilité du respect de la directive CEM pour l’application machine incombe à l’utilisateur.– En prenant les mesures suivantes, vous éviterez tout problème de CEM provoqué par le système d’entraînement pendant lefonctionnement de la machine et vous serez assuré du respect de la directive et de la loi CEM.
– Lorsque des appareils qui ne répondent pas aux exigences CE au sens de la compatibilité électromagnétique selon la norme EN 50082-2sont utilisés à proximité des variateurs de vitesse, ces appareils risquent de subir l’influence électromagnétique des variateurs de vitesse.
Montage Pour les variateurs de vitesse, les selfs réseau et les filtres réseau, il est nécessaire d’appliquer une surface de contact importante sur laplaque de montage reliée à la terre.– Les plaques de montage à surface conductrice (revêtement zinc ou acier inox) assurent un contact de longue durée.– Les plaques vernies ne sont pas adaptées pour une installation conforme CEM.
Lorsque plusieurs plaques de montage sont utilisées :– relier entre elles les plaques de montage par des surfaces conductrices importantes (exemple : avec bandes cuivrées).
Veiller à ce que les câbles moteur soient séparés des câbles de commande et des câbles réseau. Eviter d’utiliser un bornier commun pour l’arrivée de la tension réseau et la sortie moteur. Assurer un placement des câbles le plus près possible du potentiel de référence. Les câbles suspendus fonctionnent comme des antennes.
Filtrage Il faut utiliser impérativement les filtres antiparasites et les selfs réseau adaptés aux appareils.– Les filtres antiparasites permettent de ramener à un niveau admissible les perturbations haute fréquence non admissibles.– Les selfs réseau permettent de réduire les perturbations basse fréquence qui circulent le long des câbles moteur. Ces perturbations sontétroitement liées à la longueur des câbles moteur.
– Les filtres réseau cumulent les fonctions de self réseau et de filtre antiparasite.
Blindage Sur le variateur, relier le blindage du câble moteur– avec le raccord du blindage du variateur ;– ainsi qu’avec la plaque de montage par une surface importante.– Recommandation : utiliser des colliers de mise à la terre sur des surfaces de montage métalliques brillantes.
Si des contacts, des interrupteurs de protection ou des bornes sont utilisés pour le câble moteur :– relier le blindage des câbles connectés et appliquer une surface de contact importante sur la plaque de montage.
Relier le blindage avec PE par une surface conductrice large dans la boîte à bornes moteur ou sur la carcasse moteur.– Les raccords vissés métalliques de câbles sur la boîte à bornes moteur garantissent une surface de contact large du blindage avec lacarcasse moteur.
Si la longueur totale du câble entre filtre réseau et variateur de vitesse est plus grande que 300 mm :– blinder les câbles réseau ;– relier le blindage des câbles réseau par des surfaces importantes sur la plaque de montage.
En cas d’utilisation d’un module de freinage :– Relier le blindage du câble de la résistance de freinage directement au module et à la résistance par des surfaces larges sur la plaque demontage ;
– relier le blindage du câble entre le variateur et le module de freinage directement au variateur et au module par des surfaces importantessur la plaque de montage.
Blinder les câbles de commande :– blindage des câbles de commande numériques (deux extrémités) ;– blindage des câbles de commande analogiques (une extrémité) ;– relier au plus court les blindages avec les raccords de blindage sur le variateur.
Utilisation des variateurs en environnements résidentiels :– Pour limiter les émissions parasites ≥ 10 dB prévoir un amortissement supplémentaire par blindage. Il suffit généralement d’installer lesappareils dans les armoires ou boîtiers de commande métalliques commercialisés et reliés à la terre.
Mise à la terre Prévoir une mise à la terre de tous les éléments métalliques conducteurs (servovariateur, filtre réseau, self réseau) par des câbles adéquats àpartir d’un point central de mise à la terre (barre PE).
Respecter les sections mini prescrites par la réglementation de sécurité.– Cependant, pour la compatibilité électromagnétique, ce n’est pas la section mais la surface de contact qui importe.
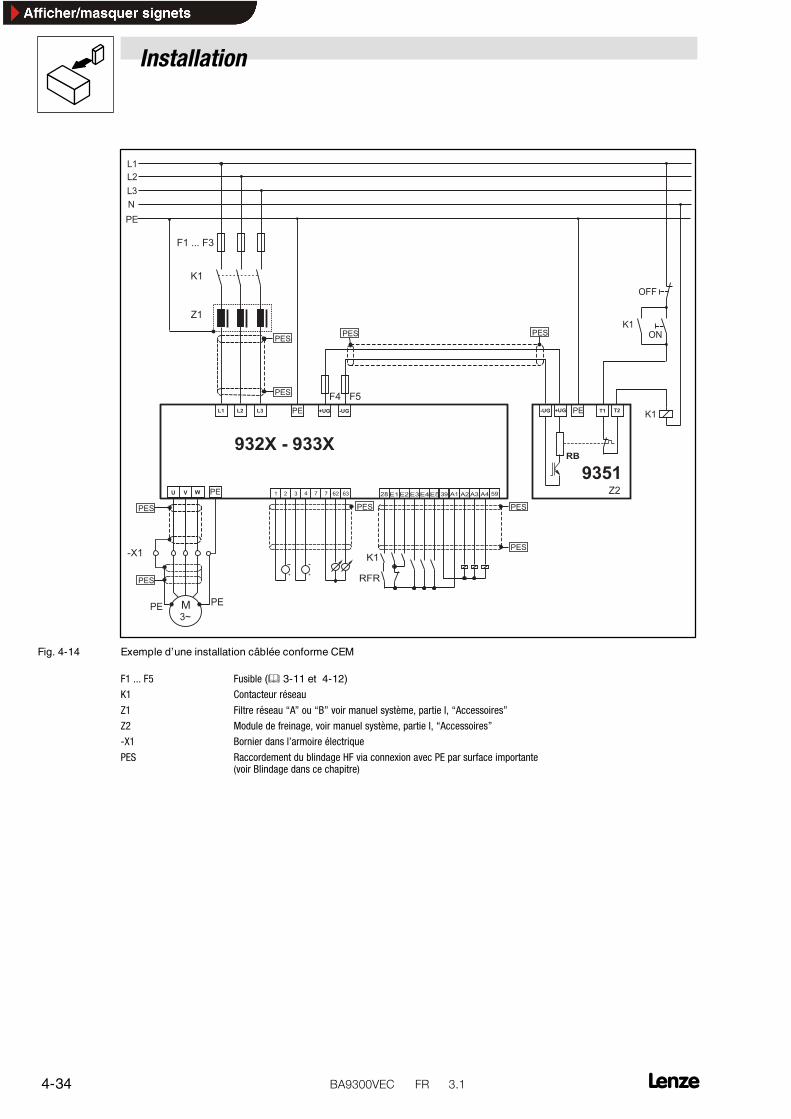
Installation
4-34 L_^VPMMsb` co PKN
Fig. 4-14 Exemple d’une installation câblée conforme CEM
F1 ... F5 Fusible ( 3-11 et 4-12)
K1 Contacteur réseau
Z1 Filtre réseau “A” ou “B” voir manuel système, partie I, “Accessoires”
Z2 Module de freinage, voir manuel système, partie I, “Accessoires”
-X1 Bornier dans l’armoire électrique
PES Raccordement du blindage HF via connexion avec PE par surface importante(voir Blindage dans ce chapitre)

Mise en service
5-1L _^VPMMsb` co PKN
5 Mise en serviceLes variateurs possèdent un réglage usine permettant aux moteurs asynchrones normalisés 4 pôlesde fonctionner sans réglage supplémentaire :
400 V, 50 Hz
460 V, 60 Hz
480 V, 60 Hz
Avec le clavier de commande 9371BB ou un PC avec le logiciel GDC et module bus de terrain,quelques réglages suffisent pour adapter le variateur à votre application. ( 5-3 et 5-6)
5.1 Première mise en service
Stop !Avant la première mise en service, vérifier le câblage dans son intégralité pour éviter un court-circuitou un défaut terre.
Raccordement puissance– Alimentation par les bornes L1, L2 et L3 (alimentation réseau directe)– ou par les bornes +UG, -UG (couplage bus CC, fonctionnement en bus de plusieurs
appareils)
Raccordement moteur– Respecter l’ordre des phases (sens de rotation)
Codeur incrémental (sens de rotation) si utilisé
Bornes de commande– La borne X5/39 constitue le potentiel de référence des bornes de commande numériques.– Déblocage variateur : borne X5/28– Choix du sens de rotation : borne X5/E1 ou X5/E2 (réglage usine)– Entrée consigne externe : bornes X6/1, X6/2 (potentiel de référence : borne X6/7)
En cas de condensation, débrancher le variateur du réseau en attendant l’évaporation del’humidité visible.
Respecter l’ordre des opérations !

Mise en service
5-2 L_^VPMMsb` co PKN
5.2 Mise en service rapide avec le réglage usine
Les indications mentionnées par lasuitesur leparamétrage et l’affectation des bornes decommandes’entendent pour une configuration de base C0005 = 1000, régulation de vitesse (réglage usine).
5.2.1 Ordre des opérations
Etape
1. Brancher la tension réseau. Le variateur est prêt à fonctionner au bout de 2 s environ.
2. Borne X5/E4 Appliquer une tension de +12...+30 V à la borne X5/E4 (signal haut). Appliquer une tension de 24 V CC à l’entrée E4
– autrement, le défaut TRIP est activé.
3. Choisir le sens de rotation. Sens horaire :– Appliquer une tension de +12 ... + 30 V à la borne X5/E1(signal HAUT).
Sens antihoraire :– Appliquer une tension de +12 ... + 30 V à la borne X5/E2(signal HAUT).
4. Envoyer la consigne. Appliquer une tension 0 ... + 10 V entre les bornes X6/1, X6/2.
5. Débloquer le variateur. Appliquer une tension de +12 ... + 30 V à la borne X5/28 (signal HAUT).
6. L’entraînement tourne avec le réglage usine.
5.2.2 Réglage usine des principaux paramètres d’entraînement
Réglage Code Réglage usine Adaptation àl’application
Configuration C0005 1000 Régulation devitesse
Données machine 5-3../..
Plage de vitesse Vitesse mini C0010 0 rpm(min -1)
Uniquement avec entrée consigne analogiquevia AIN1, bornes X6/1, X6/2
5-3
Vitesse maxi C0011 3000 rpm(min-1)
Tempsd’accélération et
Temps d’accélération C0012 5.00 s 5-4d’accélération etde décélération Temps de décélération C0013 5.00 s
Limitation courantI
Fonctionnement moteur C0022 Imax [A], courant maxi de l’appareil 5-5Imax Fonctionnement générateur C0023 Imax [A], courant maxi de l’appareil
Caractéristiques d’entraînement 5-6../..
Courant, Mode de fonctionnement C0006 5 Fonctionnement en U/f,couple,i
Fréquence nominale U/f C0015 50 Hzpuissance Réglage Umin C0016 0 %
Compensation de glissement C0021 Glissement du moteur sélectionné(en fonction du moteur)
Sélection de la courbecaractéristique
C0014 0 Courbe linéaire
Tension moteur C0090 400 V
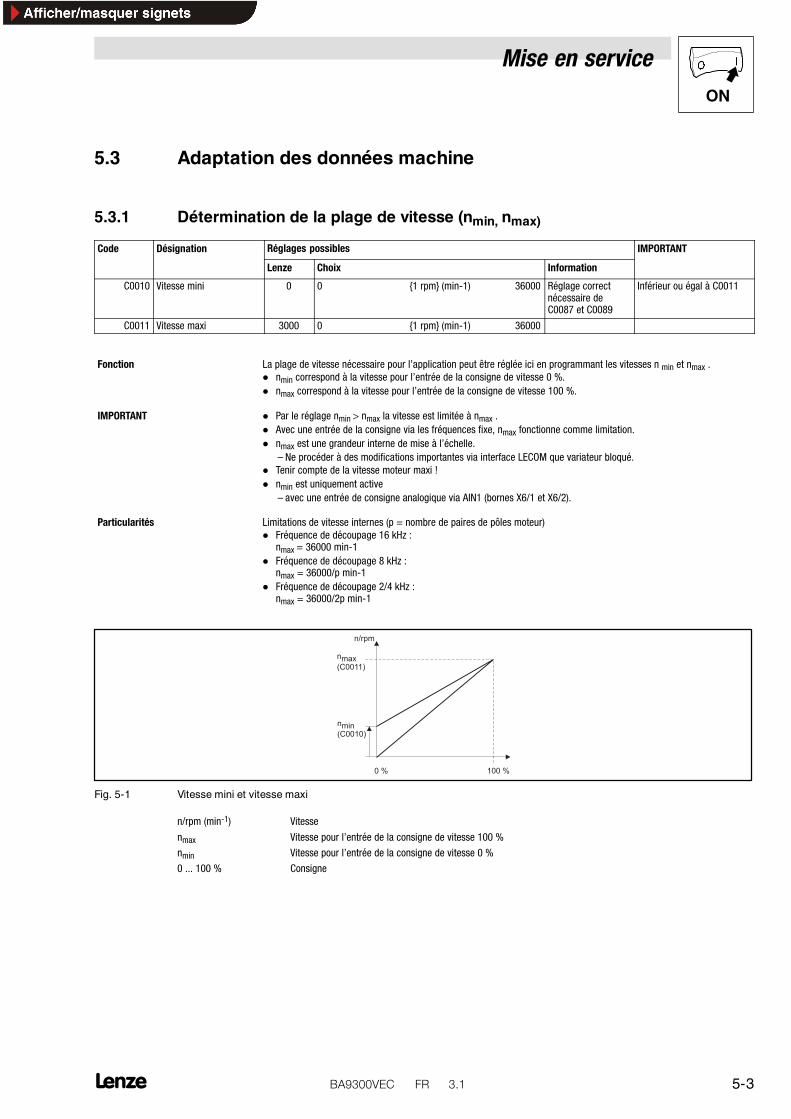
Mise en service
5-3L _^VPMMsb` co PKN
5.3 Adaptation des données machine
5.3.1 Détermination de la plage de vitesse (nmin, nmax)
Code Désignation Réglages possibles IMPORTANT
Lenze Choix Information
C0010 Vitesse mini 0 0 1 rpm (min-1) 36000 Réglage correctnécessaire deC0087 et C0089
Inférieur ou égal à C0011
C0011 Vitesse maxi 3000 0 1 rpm (min-1) 36000
Fonction La plage de vitesse nécessaire pour l’application peut être réglée ici en programmant les vitesses n min et nmax . nmin correspond à la vitesse pour l’entrée de la consigne de vitesse 0 %. nmax correspond à la vitesse pour l’entrée de la consigne de vitesse 100 %.
IMPORTANT Par le réglage nmin > nmax la vitesse est limitée à nmax . Avec une entrée de la consigne via les fréquences fixe, nmax fonctionne comme limitation. nmax est une grandeur interne de mise à l’échelle.
– Ne procéder à des modifications importantes via interface LECOM que variateur bloqué. Tenir compte de la vitesse moteur maxi ! nmin est uniquement active
– avec une entrée de consigne analogique via AIN1 (bornes X6/1 et X6/2).
Particularités Limitations de vitesse internes (p = nombre de paires de pôles moteur) Fréquence de découpage 16 kHz :
nmax = 36000 min-1 Fréquence de découpage 8 kHz :
nmax = 36000/p min-1 Fréquence de découpage 2/4 kHz :
nmax = 36000/2p min-1
n/rpm
0 % 100 %
nmax(C0011)
nmin(C0010)
Fig. 5-1 Vitesse mini et vitesse maxi
n/rpm (min-1) Vitesse
nmax Vitesse pour l’entrée de la consigne de vitesse 100 %
nmin Vitesse pour l’entrée de la consigne de vitesse 0 %
0 ... 100 % Consigne

Mise en service
5-4 L_^VPMMsb` co PKN
5.3.2 Régler les temps d’accélération et de décélération (Tir, Tif)
Code Désignation Réglages possibles IMPORTANT
Lenze Choix Information
C0012 Temps d’accélération 5.00 0.00 0.01 s 9999.90 Tempsd’accélération Tirpour la consigneprincipale de NSET
Relatif à la différence devitesse 0nmaxi
C0013 Temps de décélération 5.00 0.00 0.01 s 9999.90 Temps dedécélération Tif pourla consigneprincipale de NSET
C0105 AR Tif 5.00 0.00 0.01 s 9999.90 Temps d’arrêt rapide(AR)
Fonction Les temps d’accélération et de décélération permettent de déterminer la vitesse à laquelle l’entraînement suit unemodification de consigne.
Réglage Les temps d’accélération et de décélération se rapportent à une modification de la vitesse de 0 min-1 à la vitesse maxiréglée en C0011.
Déterminer les temps Tir et Tif à régler en C0012 et C0013.– tir et tif correspondent aux temps souhaités pour le changement entre n 1 et n2:
qáê = íáê ⋅åã~ñ
åO− åNTif = tif ⋅
nmaxn2− n1
IMPORTANT Avec des temps d’accélération et de décélération trop courts, le variateur risque de passer en défaut TRIP ”surcharge”(OC3). Régler les temps d’accélération et de décélération de façon à ce que l’entraînement puisse suivre le profil devitesse sans que Imax du variateur soit atteint.
n/rpm
nmax
tir tift
Tir Tif
n2
n1
0
Fig. 5-2 Temps d’accélération et de décélération
n/rpm (min-1) Vitesse
nmax Vitesse pour l’entrée de la consigne de vitesse 100 %
n1, n2 Changement de vitesse en fonction de tir ou tift Temps
Mise en service
5-5L _^VPMMsb` co PKN
5.3.3 Réglage des limitations de courant (limitations Imax)
Code Désignation Réglages possibles IMPORTANT
Lenze Choix Information
C0022 Limitation ImaxFonctionnement moteur
0.00 0.01 A 500.00 En fonction de C0086
C0023 Limitation ImaxFonctionnementgénérateur
0.00 0.01 A 500.00
Fonction Les variateurs disposent d’une régulation de limitations de courant qui détermine le comportement de l’entraînement encas de surcharge. Le courant moteur réel est alors comparé avec la limitation du courant réglée en C0022 pour unecharge moteur et en C0023 pour une charge génératrice. Si les limitations de courant sont dépassées, le variateur modifieson comportement normal.
Réglage Régler les temps d’accélération et de décélération de façon à ce que l’entraînement puisse suivre le profil de vitesse sansque I max du variateur soit atteint.
Comportement de l’entraînement sila valeur limite est atteinte
Pendant l’accélération :– augmentation de la rampe d’accélération.
Pendant la décélération :– augmentation de la rampe de décélération.
Pour une charge croissante avec vitesse constante :– Lorsque le courant limite en fonctionnement en moteur est atteint :abaissement de la vitesse jusqu’à 0 min-1.
– Lorsque le courant limite en fonctionnement en générateur est atteint :augmentation de la vitesse jusqu’à nmax (C0011).
– Annulation de la modification de la fréquence dès que la charge est inférieure à la valeur limite.
IMPORTANT Une régulation de courant (régulateur PI : Vp = C0075, Tn = C0076) n’est pas possible, en fonctionnement engénérateur, que si on connecte un module de freinage ou que le bus CC permet un échange d’énergie entre variateurs.
En fonctionnement avec des fréquences de découpage > 8 kHz régler les courant limites aux valeurs indiquées pour En fonctionnement avec des fréquences de découpage > 8 kHz, régler les courant limites aux valeurs indiquées pourles données nominales ”Imax pendant 60 s” (réduction de courant pour des fréquences de découpage importantes).( 3-3 ou 3-8 )

Mise en service
5-6 L_^VPMMsb` co PKN
5.4 Comment optimiser le comportement de l’entraînement enfonctionnement
Les réglages suivants vous permettent de modifier le comportement du courant, du couple et de lapuissance du moteur connecté.
Deux modes de fonctionnement sont possibles : ” fonctionnement en U/f” et ”contrôle vectoriel” .
Par la suite, vous trouverez des aides afin de faciliter votre sélection.
5.4.1 Saisie des données moteur
Pour obtenir des caractéristiques optimales de vitesse/couple du moteur il faut entrer les donnéesde la plaque signalétique moteur.
Lorsqu’un moteur Lenze est utilisé :– sélectionner le type de moteur en C0086 (voir tableau des codes) ;
les autres données moteur sont automatiquement réglées par le variateur.– En C0006, sélectionner le mode de fonctionnement “ fonctionnement en U/f” ou “contrôle
vectoriel).
Lorsque le type de moteur ne figure pas dans la liste C0086, entrer les données figurant sur laplaque signalétique. Les données moteur suivantes doivent être entrées manuellement :
Code Désignation
C0006 Mode de fonctionnement
C0022 Adaptation Imax au courant maxi moteur
C0023 Limitation Imax pour fonctionnement en générateur
C0081 Puissance nominale moteur
C0087 Vitesse nominale moteur
C0088 Courant nominal moteur
C0089 Fréquence nominale moteur
C0090 Tension nominale moteur
C0091 Cos phi moteurϕ
Pour optimiser le mode de fonctionnement sélectionné, lancer ensuite l’identification moteurafin de saisir automatiquement des paramètres moteur supplémentaires (C0148 = 1).Procéder de cette manière aussi bien à la première mise en service qu’en cas de modificationdu système d’entraînement.
Prudence !En mode de fonctionnement ”contrôle vectoriel” , si les paramètres machine déterminées ou entréesne sont pas corrects, le moteur risque de démarrer dans le sens inverse dès le déblocage duvariateur. ( 5-12)
Mémoriser le jeu de paramètres en C0003 afin de sauvegarder les valeurs déterminées en casde coupure réseau.

Mise en service
5-7L _^VPMMsb` co PKN
Conseil ! Toutes les données nécessaires figurent dans le menu ”Motor/Feedb” (moteur/système de
bouclage).
Si un type de moteur est sélectionné en C0086 et qu’ensuite une des données moteurmentionnées ci-dessus est modifiée, C0086 = 0 (COMMON) est activé (cela signifie que lemoteur utilisé n’est pas un moteur Lenze).
C0086 C0081 C0087 C0088 C0089 C0090 C0091 Type moteur Sonde thermique
N° Affichage PN [kW] nN [min-1] IN [A] fN [Hz] UN [V] cos
9 DSGA056-22-100 0,24 2790 0,76 100 0,71
10 MDSKA-56-140 0,80 3950 2,4 140 0,70
11 MDFKA-71-120 2,20 3410 6,0 120 0,75
12 MDSKA-71-140 1,70 4050 4,4 140 0,76
13 MDFKA-80-60 2,10 1635 4,8 60 0,81
14 MDSKA-80-70 1,40 2000 3,3 70 390 0,75
15 MDFKA-80-120 3,90 3455 9,1 120 0,80
16 MDSKA-80-140 2,30 4100 5,8 140 0,75
17 MDFKA-90-60 3,80 1680 8,5 60 0,80
18 MDSKA-90-80 2,60 2300 5,5 80 0,81Servomoteur asynchrone KTY
19 MDFKA-90-120 6,90 3480 15,8 120 0,80Servomoteur asynchrone KTY
20 MDSKA-90-140 4,10 4110 10,2 140 350 0,80
21 MDFKA-100-60 6,40 1700 13,9 60 0,83
22 MDSKA-100-80 4,00 2340 8,2 80 390 0,80
23 MDFKA-100-120 13,20 3510 28,7 120 0,80
24 MDSKA-100-140 5,20 4150 14,0 140 330 0,78
25 MDFKA-112-60 11,00 1710 22,5 60 0,85
26 MDSKA-112-85 6,40 2490 13,5 85 390 0,83
27 MDFKA-112-120 20,30 3520 42,5 120 0,80
28 MDSKA-112-140 7,40 4160 19,8 140 320 0,80
30 MDFQA-100-50 10,6 1420 26,5 50 0,84
31 MDFQA-100-100 20,30 2930 46,9 100 0,80Ser omote r as nchrone32 MDFQA-112-28 11,50 760 27,2 28 0,87 Servomoteur asynchrone
blindé ventilé33 MDFQA-112-58 22,70 1670 49,1 58 0,85
blindé ventilé(en couplage Y)
34 MDFQA-132-20 17,00 550 45,2 20 360 0,81(en couplage Y)
35 MDFQA-132-42 35,4 1200 88,8 42 0,78
40 MDFQA-112-50 20,10 1425 43,7 50 0,86Ser omote r as nchrone41 MDFQA-112-100 38,40 2935 81,9 100 0,83 Servomoteur asynchrone
blindé ventilé42 MDFQA-132-36 31,10 1030 77,4 36 0,78
blindé ventilé(en couplage ∆)
43 MDFQA-132-76 60,10 2235 144,8 76 340 0,80(en couplage ∆)
210 DXRA071-12-50 0,25 1410 0,9 0,69
211 DXRA071-22-50 0,37 1398 1,2 0,70TKO
212 DXRA080-12-50 0,55 1400 1,7 0,66TKO
(contact thermique)213 DXRA080-22-50 0,75 1410 2,3 0,67
(contact thermique)
214 DXRA090-12-50 1,10 1420 2,7 0,77
215 DXRA090-32-50 1,50 1415 3,6 0,77
216 DXRA100-22-50 2,20 1425 4,8 0,80 Moteur asynchrone217 DXRA100-32-50 3,00 1415 6,6 50 400 0,81
Moteur asynchroneconvertisseur( l Y)218 DXRA112-12-50 4,00 1435 8,3 0,82 (en couplage Y)
219 DXRA132-12-50 5,50 1450 11,0 0,84
220 DXRA132-22-50 7,50 1450 14,6 0,85
221 DXRA160-12-50 11,00 1460 21,0 0,85
222 DXRA160-22-50 15,00 1460 27,8 0,87
223 DXRA180-12-50 18,50 1470 32,8 0,90
224 DXRA180-22-50 22,00 1456 38,8 0,90

Mise en service
5-8 L_^VPMMsb` co PKN
C0086 Sonde thermiqueType moteurC0091C0090C0089C0088C0087C0081
N° cos UN [V]fN [Hz]IN [A]nN [min-1]PN [kW]Affichage250 DXRA071-12-87 0,45 2525 1,5 0,69
251 DXRA071-22-87 0,64 2515 2,0 0,70
252 DXRA080-12-87 0,95 2515 2,9 0,66
253 DXRA080-22-87 1,30 2525 4,0 0,67
254 DXRA090-12-87 2,00 2535 4,7 0,77
255 DXRA090-32-87 2,70 2530 6,2 0,77
256 DXRA100-22-87 3,90 2535 8,3 0,80 Moteur asynchrone257 DXRA100-32-87 5,35 2530 11,4 87 400 0,81
Moteur asynchroneconvertisseur( l )258 DXRA112-12-87 7,10 2545 14,3 0,82 (en couplage ∆)
259 DXRA132-12-87 9,70 2555 19,1 0,84
260 DXRA132-22-87 13,20 2555 25,4 0,85
261 DXRA160-12-87 19,30 2565 36,5 0,85
262 DXRA160-22-87 26,40 2565 48,4 0,87
263 DXRA180-12-87 32,40 2575 57,8 0,90
264 DXRA180-22-87 38,70 2560 67,4 0,90
410 DXMA071-12-50 0,25 1400 0,8 0,70
411 DXMA071-32-50 0,37 1400 1,2 0,71
412 DXMA080-12-50 0,55 1400 1,6 0,72 TKO413 DXMA080-32-50 0,75 1380 2,0 0,76
Motoréducteur asynchrone
TKO(contact thermique)
414 DXMA090-12-50 1,10 1420 2,7 50 0,77Motoréducteur asynchrone
(en couplage Y)
( q )
415 DXMA090-32-50 1,50 1420 3,5 0,80(en couplage Y)
416 DXMA100-12-50 2,20 1400 5,6 0,78
417 DXMA100-32-50 3,00 1400 7,3 0,81
418 DXMA112-32-50 4,00 1430 8,5 0,85
440 DXMA071-12-87 0,43 2436 1,4 0,70
441 DXMA071-32-87 0,64 2419 2,1 400 0,71
442 DXMA080-12-87 0,95 2436 2,8400
0,72
443 DXMA080-32-87 1,30 2401 3,5 0,76
444 DXMA090-12-87 2,00 2453 4,5 87 0,80
445 DXMA090-32-87 2,70 2471 6,1 0,80 Motoréducteur asynchrone446 DXMA100-12-87 3,90 2436 9,7 0,78
Motoréducteur asynchrone(en couplage ∆)
447 DXMA100-32-87 5,40 2436 12,7 0,81
( p g )
448 DXMA112-22-87 7,10 2506 14,8 0,85
449 DXMA112-32-50 5,50 1460 12,5 0,78
450 DXMA132-22-50 7,50 1460 16,8 50 0,77
451 DXMA132-32-50 9,20 1450 19,550
0,85

Mise en service
5-9L _^VPMMsb` co PKN
5.4.2 Sélectionner le mode de fonctionnement
Code Désignation Réglages possibles IMPORTANT
Lenze Choix Information
[C0006] Mode de fonctionnement 5 1 Contrôle vectoriel5 Fonctionnement en U/f avec
accroissement constant Umin
Caractéristique de lacourbe de tensionC0014
Avec contrôle vectoriel : Entrer les données
moteur, puis lancerl’identification moteur.
Fonction Le code C0006 vous permet de régler le mode de commande du variateur.– Le contrôle vectoriel permet une “régulation de vitesse sans capteur”. Comparé au fonctionnement U/f, un couplebeaucoup plus élevé et une consommation de courant réduite en marche à vide peuvent être atteints.
Aides à la sélection
Aide à la sélection Câble moteur
blindé≤ 50 mnon blindé≤ 100 m
blindé> 50 mnon blindé> 100 m
C0006 C0006Entraînements individuels Recommandation Au choix : Recommandation Au choix :Avec charge constante 1 5 5 -
Avec charges variables fréquentes 1 5 5 -
Avec démarrage dans des conditions sévères 1 5 5 -
Entraînements de positionnements et d’approches avec dynamique élevée 1 5 5 -
Enrouleurs avec pantin 1 5 - -
Dérouleurs avec pantin 5 - - -
Entraînements de levage 5 - 5 -
Entraînements de pompes et de ventilateurs 1) 5 - 5 -
Moteurs triphasés à réluctance 5 - 5 -
Moteurs triphasés linéaires 5 - 5 -
Moteurs triphasés avec courbe fréquence/tension fixe 5 - 5 -
Groupes d’entraînement lrés= i ⋅ (l1+ l2+ + li)L’unité de référence est la longueurrésultante des câbles moteur:
2
Moteurs identiques avec charges identiques 1 5 5 -
Moteurs différents et/ou charges alternantes 5 - 5 -
1) Pour cette application, nous recommandons une courbe quadratique (C0014 = 1)2) i = Nombre de câbles dirigé vers chaque moteur
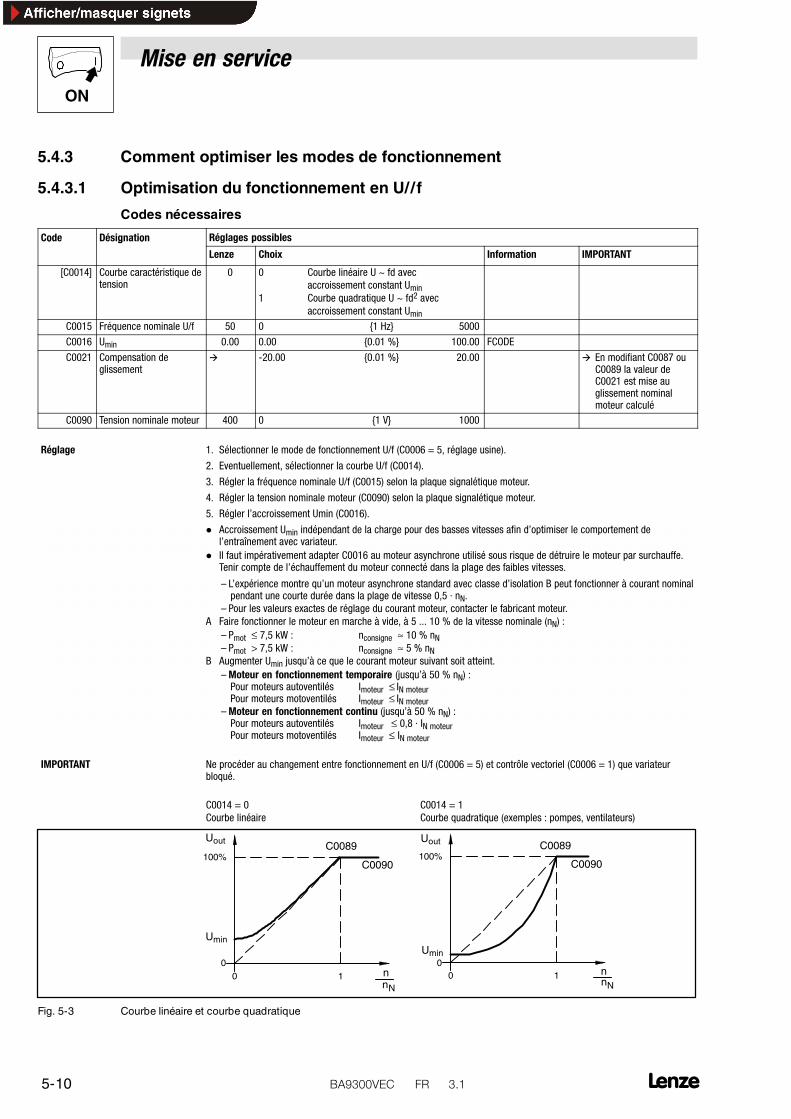
Mise en service
5-10 L_^VPMMsb` co PKN
5.4.3 Comment optimiser les modes de fonctionnement
5.4.3.1 Optimisation du fonctionnement en U//f
Codes nécessaires
Code Désignation Réglages possibleso g o
Lenze Choix Information IMPORTANT
[C0014] Courbe caractéristique detension
0 0 Courbe linéaire U ~ fd avecaccroissement constant Umin
1 Courbe quadratique U ~ fd2 avecaccroissement constant Umin
C0015 Fréquence nominale U/f 50 0 1 Hz 5000
C0016 Umin 0.00 0.00 0.01 % 100.00 FCODE
C0021 Compensation deglissement
-20.00 0.01 % 20.00 En modifiant C0087 ouC0089 la valeur deC0021 est mise auglissement nominalmoteur calculé
C0090 Tension nominale moteur 400 0 1 V 1000
Réglage 1. Sélectionner le mode de fonctionnement U/f (C0006 = 5, réglage usine).
2. Eventuellement, sélectionner la courbe U/f (C0014).
3. Régler la fréquence nominale U/f (C0015) selon la plaque signalétique moteur.
4. Régler la tension nominale moteur (C0090) selon la plaque signalétique moteur.
5. Régler l’accroissement Umin (C0016).
Accroissement Umin indépendant de la charge pour des basses vitesses afin d’optimiser le comportement del’entraînement avec variateur.
Il faut impérativement adapter C0016 au moteur asynchrone utilisé sous risque de détruire le moteur par surchauffe.Tenir compte de l’échauffement du moteur connecté dans la plage des faibles vitesses.
– L’expérience montre qu’un moteur asynchrone standard avec classe d’isolation B peut fonctionner à courant nominalpendant une courte durée dans la plage de vitesse 0,5 · nN.
– Pour les valeurs exactes de réglage du courant moteur, contacter le fabricant moteur.A Faire fonctionner le moteur en marche à vide, à 5 ... 10 % de la vitesse nominale (nN) :
– Pmot ≤ 7,5 kW : nconsigne ≈ 10 % nN– Pmot > 7,5 kW : nconsigne ≈ 5 % nN
B Augmenter Umin jusqu’à ce que le courant moteur suivant soit atteint.–Moteur en fonctionnement temporaire (jusqu’à 50 % nN) :Pour moteurs autoventilés Imoteur ≤ IN moteurPour moteurs motoventilés Imoteur ≤ IN moteur
–Moteur en fonctionnement continu (jusqu’à 50 % nN) :Pour moteurs autoventilés Imoteur ≤ 0,8 · IN moteurPour moteurs motoventilés Imoteur ≤ IN moteur
IMPORTANT Ne procéder au changement entre fonctionnement en U/f (C0006 = 5) et contrôle vectoriel (C0006 = 1) que variateurbloqué.
C0014 = 0Courbe linéaire
C0014 = 1Courbe quadratique (exemples : pompes, ventilateurs)
100%
00 1 n
n
Umin
00 1
Umin
Uout
100%
Uout
N
C0089 C0089
C0090 C0090
nnN
Fig. 5-3 Courbe linéaire et courbe quadratique

Mise en service
5-11L _^VPMMsb` co PKN
5.4.3.2 Comment optimiser le contrôle vectoriel
Codes nécessaires
Code Désignation Réglages possibles IMPORTANT
Lenze Choix Information
[C0014] Courbe caractéristique detension
0 0 Courbe linéaire U ~ fd avecaccroissement constant Umin
1 Courbe quadratique U ~ fd2 avecaccroissement constant Umin
5-10
C0081 Puissance nominalemoteur
0.01 0.01 kW 500.00 En fonction de C0086
C0087 Vitesse nominale moteur 300 1 rpm (min-1) 36000
C0088 Courant nominal moteur 0.5 0.1 A 500.0
C0089 Fréquence nominalemoteur
10 1 Hz 5000
C0090 Tension nominale moteur 0 1 V 1000
C0091 Cos moteur 0.50 0.01 1.00
C0092 Inductance statoriquemoteur
0,0 0,0 0.1 mH 6553.0
Réglage 1. Sélectionner le mode de fonctionnement ”contrôle vectoriel”(C0006 = 1).
2. Sélectionner le moteur :– Pour les moteurs Lenze, en C0086.– Pour les autres marques, entrer les données selon la plaque signalétique du moteur connecté. ( 5-6 )
3. Lancer l’identification moteur (C0148 = 1).
Réglage précis 4. Lorsque l’identification moteur ne permet pas d’obtenir la caractéristique de fonctionnement optimale, il est possible deprocéder manuellement à un réglage précis de la régulation par le code C0092.– Augmenter la valeur en C0092 (+15 % au maximum de la valeur déterminée par l’identification moteur) afind’obtenir le couple moteur maxi.
– Diminuer la valeur en C0092 (-15 % au maximum de la valeur déterminée par l’identification moteur) si la régulationest irrégulière dans la plage de faibles vitesses.
IMPORTANT Ne procéder au changement entre fonctionnement en U/f (C0006 = 5) et contrôle vectoriel (C0006 = 1) que variateurbloqué.En fonctionnement avec d’autres marques de moteurs :Il est nécessaire d’entrer, en plus, la fréquence nominale et la puissance nominale du moteur connecté afin d’obtenir unaffichage correct de la vitesse actuelle et du couple de référence.

Mise en service
5-12 L_^VPMMsb` co PKN
5.4.3.3 Identification moteur
Code Désignation Réglages possibles IMPORTANT
Lenze Choix Information
C0148 Identification moteur 0 0 Blocage identification moteur
1 Activation identification moteur Durée env.1 ... 2 min
Identification avec moteur àl’arrêt
Fonction L’identification moteur permet d’optimiser, en premier lieu, la fréquence de découpage du variateur, de déterminer, ensuite, les paramètres moteur internes nécessaires pour le contrôle vectoriel puis de prendre en compte la valeur ohmique du câble moteur entre le variateur et le moteur.
Fonctionnement en U/fPour ce mode de fonctionnement, l’identification moteur n’est pas impérative. Le variateur travaille avec une courbeinterne (réglage usine) définie pour un moteur à puissance adaptée, avec un câble moteur de 10 m. Cependant,l’identification moteur s’impose lorsque la stabilité n’est pas satisfaisante.
Réglage
Identification moteur manuelle viaC0148
1. Bloquer le variateur.2. Sélectionner le moteur Lenze en C0086 ou entrer les données selon la plaque signalétique. ( 5-6 )3. Activer l’identification moteur (C0148 = 1).4. Débloquer le variateur.5. L’identification moteur dure env. 1 ... 2 min (selon la puissance nominale moteur). Le moteur est alors à l’arrêt.6. Une fois l’identification moteur achevée
– C0148 = 0 est activé,– le blocage variateur est activé,– un défaut est affiché, si l’identification moteur est erronée.
Identification moteur automatiquevia C0149
1. Sélectionner le moteur Lenze en C0086 ou entrer les données selon la plaque signalétique. ( 5-6 )2. Activer l’identification moteur automatique par C0149 = 1 et sauvegarder les réglages dans le jeu de paramètres 1.3. L’identification moteur démarre automatiquement après la mise sous tension suivi du déblocage variateur.
– L’identification moteur dure env. 1 ... 2 min (selon la puissance nominale moteur). Le moteur est alors à l’arrêt.4. Une fois l’identification moteur achevée
– le blocage du variateur est activé et les paramètres déterminés sont automatiquement sauvegardés dans le jeu deparamètres 1 ;
– un message défaut apparaît en cas d’erreur d’identification moteur (dans ce cas, acquitter le défaut par TRIP-Reset(réarmement défaut) et lancer l’identification moteur à nouveau).
Si, après erreur d’identification moteur, vous coupez la tension réseau et vous la rebranchez, l’identification moteurdémarre à nouveau.
Pour désactiver l’identification moteur automatique, entrer C0149 = 0.
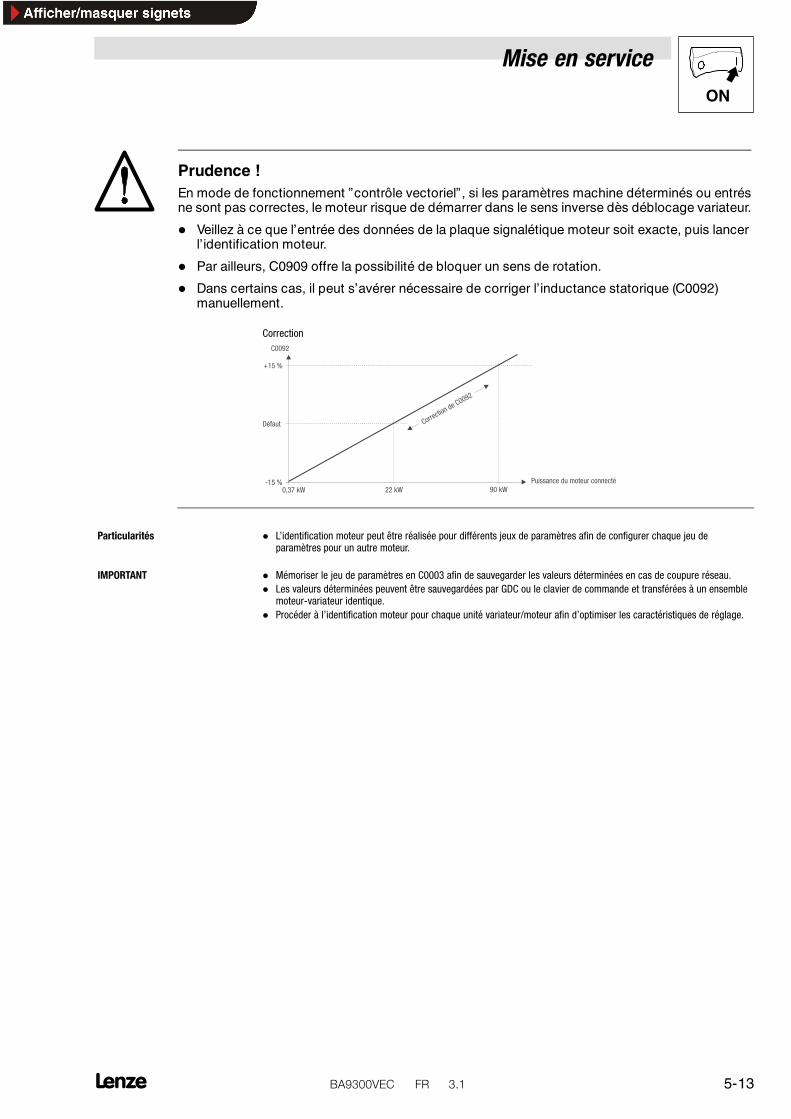
Mise en service
5-13L _^VPMMsb` co PKN
Prudence !En mode de fonctionnement ”contrôle vectoriel” , si les paramètres machine déterminés ou entrésne sont pas correctes, le moteur risque de démarrer dans le sens inverse dès déblocage variateur.
Veillez à ce que l’entrée des données de la plaque signalétique moteur soit exacte, puis lancerl’identification moteur.
Par ailleurs, C0909 offre la possibilité de bloquer un sens de rotation.
Dans certains cas, il peut s’avérer nécessaire de corriger l’inductance statorique (C0092)manuellement.
Correction
Particularités L’identification moteur peut être réalisée pour différents jeux de paramètres afin de configurer chaque jeu deparamètres pour un autre moteur.
IMPORTANT Mémoriser le jeu de paramètres en C0003 afin de sauvegarder les valeurs déterminées en cas de coupure réseau. Les valeurs déterminées peuvent être sauvegardées par GDC ou le clavier de commande et transférées à un ensemble
moteur-variateur identique. Procéder à l’identification moteur pour chaque unité variateur/moteur afin d’optimiser les caractéristiques de réglage.

Mise en service
5-14 L_^VPMMsb` co PKN
5.5 Adapter le traitement des signaux
L’adaptation du traitement interne des signaux à l’application d’entraînement (exemple : commandepas à pas ou régulation pantin) s’effectue en sélectionnant une configuration de base prédéfinie.Le réglage usine vous permet déjà d’accéder à une régulation de vitesse. ( 7-26)
Pour une description détaillée des différentes configurations de base avec affectation desbornes, schémas logiques et exemples d’application, se reporter au chap.10.1. ( 10-1)
Bloquer le variateur pour pouvoir charger une configuration de base via C0005.
En modifiant la configuration via C0005, l’affectation des entrées et sorties est substituée parl’affectation de base afférente. Eventuellement, adapter l’affectation des fonctions à votrecâblage.– Pour l’adaptation des affectations de blocs fonction à un câblage déterminé ou pour
l’extension du traitement de signaux voir ”Comment utiliser les blocs fonction” . ( 7-8)

Pendant le fonctionnement
6-1L _^VPMMsb` co PKN
6 Pendant le fonctionnement Ne remplacer un fusible défectueux que par le fusible indiqué, l’appareil étant hors tension.
Aucun fusible n’est installé à l’intérieur de l’appareil.
En cas de coupures réseau répétées ou régulières :– Connecter le variateur toutes les 3 minutes au maximum afin d’éviter une activation de la
limitation interne du courant de démarrage.
Démarrage côté moteur– Lors du branchement d’un moteur, variateur débloqué, des fonctions de protection risquent
d’être activées. ( 6-2)
Certains réglages du variateur peuvent provoquer une surchauffe du moteur connecté.– Exemples : fonctionnement prolongé du frein CC,– fonctionnement prolongé dans la plage des basses vitesses pour des moteurs autoventilés.
Par réglage, la fréquence de sortie du variateur peut atteindre 600 Hz :– Le branchement d’un moteur non approprié peut conduire à des survitesses dangereuses.
En utilisant la fonction ”redémarrage à la volée” (C0142 = 2, 3) avec des machines à momentd’inertie et frottement faibles :– après déblocage du variateur à l’arrêt, un démarrage ou une inversion du sens inopinés
peuvent survenir. Eventuellement, procéder à une légère modification des valeursprogrammées en C0146 et C0147.
6.1 Messages d’état du clavier de commande
Messages d’état du clavier de commande
Affichage allumé éteint
RDY Prêt à fonctionner Initialisation ou défaut
IMP Sorties de puissance bloquées Déblocage des impulsions
FAIL Défaut actif(TRIP, message ou avertissement)
Sans défaut
IMAX Consigne courant moteur ≥ C0022 Freinage CC actif
Consigne courant moteur< C0022
MMAX Régulateur de vitesse en butée ;entraînement régulé en couple
Entraînement avec régulation de vitesse
Pendant le fonctionnement
6-2 L_^VPMMsb` co PKN
6.2 Concernant la mise en service
Stop ! Des mises sous tension répétées du variateur de vitesse par L1, L2, L3 ou +UG, -UG peuvent
provoquer une surcharge variateur ou une destruction de celui-ci.– Respecter impérativement une durée de 3 minutes entre la coupure et la mise sous tension.
Lors de la mise sous tension, le fait que d’autres variateurs soient connectés sur le circuitintermédiaire ne pose aucun problème.
6.2.1 Branchement côté moteur
L’installation d’un contacteur côté moteur est autorisé en cas de coupure de sécurité (arrêtd’urgence).
Précaution– Toute commande du contacteur, variateur débloqué, peut conduire au défaut ”OCx”
(court-circuit, mise à la terre) ou à une destruction de l’appareil.– Pour des câbles moteur longs ou en cas de fonctionnement d’appareils à puissance de
sortie réduite, les courants de fuite générés par les capacités parasites de ligne peuventdéclencher l’affichage de défaut ”OCx” .
6.3 Fonctions d’affichage
Affichages des valeurs réelles
La lecture des valeurs réelles peut s’effectuer à l’aide des codes suivants :
Code SignificationC0051 Vitesse réelle absolue [min-1]
C0052 Tension moteur absolue [V]
C0053 Tension circuit intermédiaire absolue [V]
C0054 Courant moteur absolu [A]
C0058 Fréquence réelle à la sortie variateur [Hz]
C0061 Température radiateur [C]
C0063 Température moteur [°C]
C0064 Charge utilisation du variateur [%]
Identification
Le code C0099 vous indique la version logicielle du variateur.
Le code C0093 vous indique le type de variateur.

Configuration
7-1L _^VPMMsb` co PKN
7 ConfigurationDans la pratique, chaque application nécessite une configuration interne, spécifique à l’utilisation.Pour ce faire, il existe de blocs fonction qu’il faut relier entre eux pour les adapter correctement àl’application concernée. ( 7-11)
7.1 Configurations de base
Pour des applications standard du variateur, des configurations de base sont prédéfinies. Ellespeuvent être sélectionnées et activées en C0005. La sélection s’effectue par un nombre à 4 chiffres.A chaque chiffre sont affectées des caractéristiques spécifiques.
Le premier chiffre
détermine la fonction de base de la configuration.
Configuration C0005 Fonction de base1xxx Régulation de vitesse
2xxx Commande pas à pas
3xxx Commande de trancanage
4xxx Commande de couple
5xxx Maître fréquence pilote
6xxx Esclave fréquence pilote (ligne)
7xxx Esclave fréquence pilote (cascade)
8xxx Régulation pantin (saisie externe du diamètre)
9xxx Régulation pantin (saisie interne du diamètre)
Le deuxième chiffre
détermine la fonction supplémentaire. Celle-ci sert d’extension de la fonction de base.
Configuration C0005 Fonction supplémentaire
x0xx Sans fonction supplémentaire
x1xx Commande du frein par la sortie numérique X5/A2
x2xx Entrée de consigne via potentiomètre motorisé
x3xx Régulateur PID pour régulation des données process
x4xx Régulation de coupure réseau
x5xx Entrée de consigne via entrée fréquence pilote
x6xx Ajustement analogique du facteur de réduction
x7xx Ajustement numérique du facteur de réduction
x8xx Générateur de rampe fréquence pilote
Conseil !Vous trouverez les principaux codes pour le paramétrage de la configuration de base dans GDC etsur le clavier de commande sous les menus “Short setup” (mise en service rapide).

Configuration
7-2 L_^VPMMsb` co PKN
Le troisième chiffre
détermine si l’alimentation des entrées de commande analogiques et numériques doit être interne ou externe. ( 4-21 )
Configuration C0005 Tension d’alimentation
xx0x Alimentation externe
xx1x Alimentation interne via bornes X5/A1 et X6/63
Le quatrième chiffredétermine l’interface permettant la lecture de certains signaux de commande (exemple : consigne de vitesse).
Configuration C0005 Interface
xxx0 Borniers de commande
xxx1 RS 232, RS 485 ou fibre optique
xxx3 INTERBUS ou PROFIBUS-DP
xxx5 Bus système (CAN)
Conseil !Pour une description plus détaillée des configurations de base et pour des exemples d’application,se reporter au chapitre 10.1. ( 10-1)
7.1.1 Modification de la configuration de base
Si la configuration de base doit être modifiée, procéder de la façon suivante :
1. Sélectionner une configuration de base en C0005 qui répond en grande partie aux exigencesde l’application.
2. Ajouter les fonctions non existantes en– modifiant la configuration des entrées et/ou des sorties– paramétrant les blocs fonction ( 7-9 )– en ajoutant ou supprimant des blocs fonction ( 7-15 )
Conseil !En modifiant le flux de signaux de la configuration de base (exemple : en ajoutant des blocs fonction)le code C0005 est mis à ”0” . L’affichage ”COMMON” apparaît.

Configuration
7-3L _^VPMMsb` co PKN
7.2 Commande
La commande du variateur peut s’effectuer par bornier (X5 et X6), par bus de terrain via l’interfaceX1 ou par bus système CAN via l’interface X4. Des commandes mixtes sont également possibles.
Conseil !Le code C0005 contient des configurations prédéfinies permettant de changer facilement le modede commande. ( 7-1)
Exemple : C0005 = 1005
Cette configuration correspond à une régulation de vitesse avec commande par bus système (CAN).
Si des entrées des blocs fonction doivent être commandées (éventuellement via une autre interface),vous devez
affecter des ”objets de commande” aux entrées des blocs fonction à commander. ( 7-11)
– Codes de commande libres (FCODES) :en cas de commande via LECOM-A/B/LI (RS232, RS485 ou interface fibre optique) ouclavier de commande.
– Objets AIF :en cas de commande par bus de terrain.
– Objets CAN :en cas de commande par bus système.
Ensuite, les entrées peuvent être commandées par ces codes ou objets d’entrée. L’accèss’effectue via l’interface.
Exemple de répartition de la commande d’une part par bornier et d’autre part par LECOM-A (RS 232)
En configuration C0005 = 1000, la consigne principale de la vitesse doit être commandée parLECOM-A/B/LI. Toutes les autres entrées restent en commande par bornier.
1. Sélectionner C0780.– C0780 est un code de configuration pour la consigne principale de vitesse NSET-N dans le
bloc fonctionnel ” traitement de la consigne de vitesse”(NSET).
2. Affecter un code de commande (FCODE) libre via l’indicateur de sélection :– Exemple : 19515 (code de commande C0141).
La consigne principale de vitesse est maintenant commandée par C0141.

Configuration
7-4 L_^VPMMsb` co PKN
7.3 Paramétrage
Le paramétrage du variateur permet d’adapter l’entraînement à vos applications.
Le jeu de paramètres est structuré en codes. Commençant par ”C” , ces codes sont classéspar ordre numérique croissant. ( 7-26)
Le jeu de paramètres de votre application peut être sauvegardé.– Vous pouvez utiliser 4 jeux de paramètres ce qui permet d’adapter rapidement votre
variateur à une autre application.– A la livraison, les jeux de paramètres sont programmés par le réglage usine.
7.3.1 Paramétrages possibles
Vous avez 2 possibilités pour modifier des paramètres :
à l’aide du clavier de commande ;
à l’aide du système maître (PC ou API) via un module bus de terrain ou programme utilisateur,partie I, “Accessoires”).
Les présentes instructions de mise en service contiennent exclusivement la modification desparamètres avec clavier de commande.
7.3.2 Structure du jeu de paramètres
Les différents niveaux de menu accessibles par le clavier de commande 9371BB ou par le logicielPC GLOBAL DRIVECONTROLE(GDC)vous facilitent la commande en vous guidant rapidement auxcodes souhaités.
Le menu principal– comprend des sous-menus– comprend toute la liste des codes
Les sous-menus– comprennent les codes correspondants
Les codes se décomposent en :
Niveau code– Les codes sans sous-codes contiennent un seul paramètre– Les codes avec sous-codes contiennent plusieurs paramètres
Niveau paramètre/niveau fonctionnementIl existe quatre types de paramètres différents :– Grandeurs physiques en valeur absolue
(exemple : 400 V, 10 s)– Grandeurs internes en valeur relative
(exemple : 50 % consigne)– Codes numériques pour des états donnés
(exemple : 0 = Variateur bloqué, 1 = Variateur débloqué)– Valeurs d’affichage
Elles ne sont accessibles qu’en lecture et ne peuvent être modifiées(exemple : valeur réelle du courant moteur en C0054)
Les valeurs absolues ou relatives peuvent être modifiées de manière discrète.
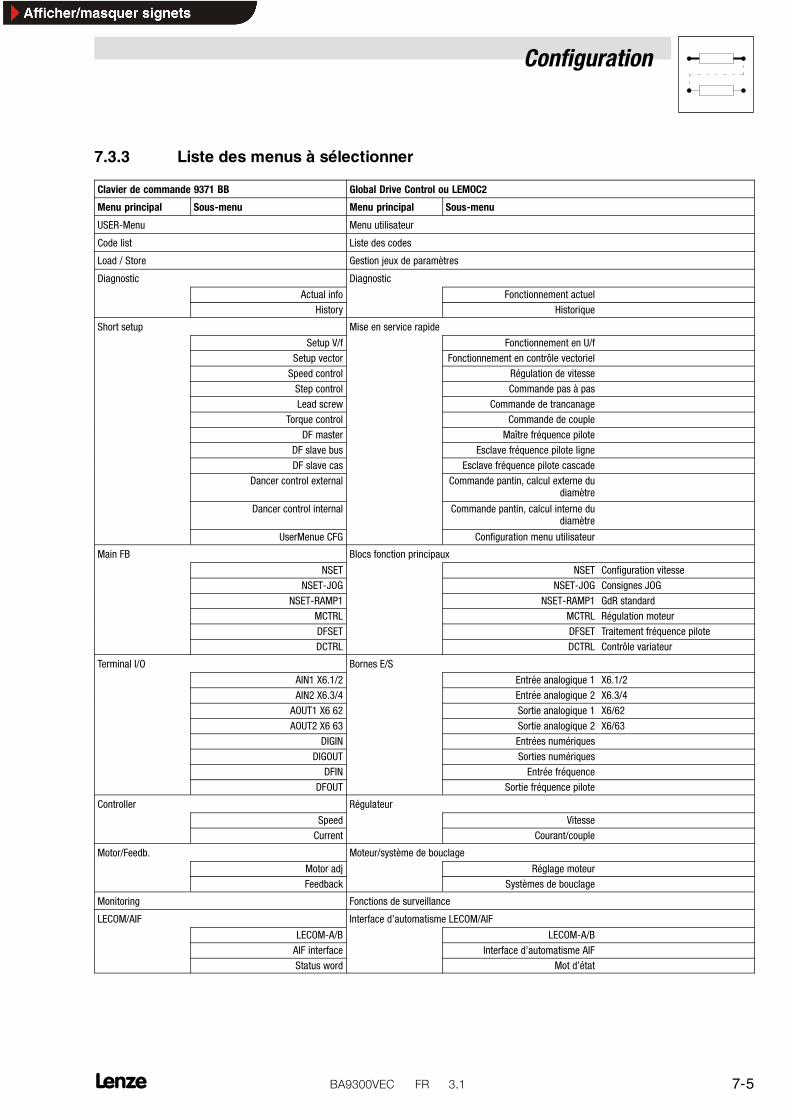
Configuration
7-5L _^VPMMsb` co PKN
7.3.3 Liste des menus à sélectionner
Clavier de commande 9371 BB Global Drive Control ou LEMOC2
Menu principal Sous-menu Menu principal Sous-menu
USER-Menu Menu utilisateur
Code list Liste des codes
Load / Store Gestion jeux de paramètres
Diagnostic Diagnostic
Actual info Fonctionnement actuel
History Historique
Short setup Mise en service rapide
Setup V/f Fonctionnement en U/f
Setup vector Fonctionnement en contrôle vectoriel
Speed control Régulation de vitesse
Step control Commande pas à pas
Lead screw Commande de trancanage
Torque control Commande de couple
DF master Maître fréquence pilote
DF slave bus Esclave fréquence pilote ligne
DF slave cas Esclave fréquence pilote cascade
Dancer control external Commande pantin, calcul externe dudiamètre
Dancer control internal Commande pantin, calcul interne dudiamètre
UserMenue CFG Configuration menu utilisateur
Main FB Blocs fonction principaux
NSET NSET Configuration vitesse
NSET-JOG NSET-JOG Consignes JOG
NSET-RAMP1 NSET-RAMP1 GdR standard
MCTRL MCTRL Régulation moteur
DFSET DFSET Traitement fréquence pilote
DCTRL DCTRL Contrôle variateur
Terminal I/O Bornes E/S
AIN1 X6.1/2 Entrée analogique 1 X6.1/2
AIN2 X6.3/4 Entrée analogique 2 X6.3/4
AOUT1 X6 62 Sortie analogique 1 X6/62
AOUT2 X6 63 Sortie analogique 2 X6/63
DIGIN Entrées numériques
DIGOUT Sorties numériques
DFIN Entrée fréquence
DFOUT Sortie fréquence pilote
Controller Régulateur
Speed Vitesse
Current Courant/couple
Motor/Feedb. Moteur/système de bouclage
Motor adj Réglage moteur
Feedback Systèmes de bouclage
Monitoring Fonctions de surveillance
LECOM/AIF Interface d’automatisme LECOM/AIF
LECOM-A/B LECOM-A/B
AIF interface Interface d’automatisme AIF
Status word Mot d’état

Configuration
7-6 L_^VPMMsb` co PKN
Clavier de commande 9371 BB Global Drive Control ou LEMOC2
Menu principal Sous-menuMenu principalSous-menu
System bus Bus système CAN
Management Gestion CAN
CAN-IN1 CAN-IN1 Bloc d’entrée 1
CAN-OUT1 CAN-OUT1 Bloc de sortie 1
CAN-IN2 CAN-IN2 Bloc d’entrée 2
CAN-OUT2 CAN-OUT2 Bloc de sortie 2
CAN-IN3 CAN-IN3 Bloc d’entrée 3
CAN-OUT3 CAN-OUT3 Bloc de sortie 3
Status word Mot d’état
FDO FDO Sorties numériques libres
Diagnostic Diagnostic
FB config Déclaration des blocs fonction
Func. blocks Blocs fonction
ABS1 ABS1 Valeur absolue
ADD1 ADD1 Addition
ADD2 ADD2 Addition
AIF-OUT AIF-OUT Interface d’automatisme
AIN1 AIN1 Entrée analogique 1 (br. 1/2)
AIN2 AIN2 Entrée analogique 2 (br. 3/4)
AND1 AND1 Fonction logique ET
AND2 AND2 Fonction logique ET
AND3 AND3 Fonction logique ET
AND4 AND4 Fonction logique ET
AND5 AND5 Fonction logique ET
ANEG1 ANEG1 Inverseur analogique
ANEG2 ANEG2 Inverseur analogique
AOUT1 AOUT1 Sortie analogique br. 62
AOUT2 AOUT2 Sortie analogique br. 63
ARIT1 ARIT1 Arithmétique
ARIT2 ARIT2 Arithmétique
ARIT3 ARIT3 Arithmétique
ASW1 ASW1 Commutateur analogique
ASW2 ASW2 Commutateur analogique
ASW3 ASW3 Commutateur analogique
BRK1 BRK1 Logique de freinage
CAN-OUT1 CAN-OUT1 Bloc de sortie 1
CAN-OUT2 CAN-OUT2 Bloc de sortie 2
CAN-OUT3 CAN-OUT3 Bloc de sortie 3
CFG-FB CFG Déclaration des blocs fonction
CMP1 CMP1 Comparateur analogique
CMP2 CMP2 Comparateur analogique
CMP3 CMP3 Comparateur analogique
CMP4 CMP4 Comparateur analogique
CONV1 CONV1 Convertisseur
CONV2 CONV2 Convertisseur
CONV3 CONV3 Convertisseur
CONV4 CONV4 Convertisseur
CONV5 CONV5 Convertisseur
CONVPHA1 CONVPHA1 Conversion 32 bits
CURVE1 CURVE1 Fonction courbe
DB1 DB1 Zone morte analogique
DCALC1 DCALC1 Calculateur diamètre
DCTRL DCTRL Contrôle variateur

Configuration
7-7L _^VPMMsb` co PKN
Clavier de commande 9371 BB Global Drive Control ou LEMOC2
Menu principal Sous-menuMenu principalSous-menu
DFIN DFIN Entrée fréquence pilote
DFOUT DFOUT Sortie fréquence pilote
DFRFG1 DFRFG1 Générateur de rampes fréquence pilote
DFSET DFSET Traitement fréquence pilote
DIGDEL1 DIGDEL1 Temporisation numérique
DIGDEL2 DIGDEL2 Temporisation numérique
DIGIN DIGIN Entrées numériques E1 - E5
DIGOUT DIGOUT Sortie numérique A1 - A4
DT1 DT1 Elément dérivateur
FCNT1 FCNT1 Compteur
FDO FDO Sorties numériques libres
FEV-AN1 FEVAN1 Variable d’entrée analogiqueprogrammable
FIXSET FIXSET Consignes fixes
FLIP1 FLIP1 Bascule bistable
FLIP2 FLIP2 Bascule bistable
FOLL1 FOLL1 Régulateur de suivi
INT1 INT1 Intégrateur
INT2 INT2 Intégrateur
LIM1 LIM1 Limitateur
MCTRL1 MCTRL1 Fonctionnement en U/f
MCTRL2 MCTRL2 Régulation moteur
MFAIL MFAIL Détection coupure réseau
MPOT1 MPOT1 Potentiomètre motorisé
NLIM1 NLIM1 Vitesses masquées
NOT1 NOT1 Fonction logique NON
NOT2 NOT2 Fonction logique NON
NOT3 NOT3 Fonction logique NON
NOT4 NOT4 Fonction logique NON
NOT5 NOT5 Fonction logique NON
NSET NSET Configuration vitesse
NSET-JOG NSET-JOG Consignes JOG
NSET-RAMP1 NSET-RAMP1 GdR standard
OR1 OR1 Fonction logique OU
OR2 OR2 Fonction logique OU
OR3 OR3 Fonction logique OU
OR4 OR4 Fonction logique OU
OR5 OR5 Fonction logique OU
OSZ OSZ Fonction oscilloscope
PCTRL1 PCTRL1 Régulateur de process
PCTRL2 PCTRL2 Régulateur de process
PT1-1 PT1-1 Elément de filtrage
PT1-2 PT1-2 Elément de filtrage
R/L/Q R/L/Q Horaire/antihoraire / AR
SRFG1 SRFG1 Générateur de rampe en ”S”
SQRT1 SQRT1 Racine carrée
S&H1 S&H1 Mémorisation valeur
STAT STAT Signaux d’état numériques
TRANS1 TRANS1 Temporisation impulsionnelle binaire
TRANS2 TRANS2 Temporisation impulsionnelle binaire
FCODE Codes libres
Identify Identification
Drive Variateur de vitesse
Op Keypad LECOM

Configuration
7-8 L_^VPMMsb` co PKN
7.4 Comment se servir des blocs fonction
Vous pouvezvous-même configurer le flux de signaux dans le variateur, en liant les blocs fonction ; celaafin de permettre une adaptation aisée du variateur à des applications les plus diverses.
7.4.1 Types de signaux
Chaque bloc fonction comprend un certain nombre d’entrées et de sorties pouvant être reliées entreelles. Selon la fonction, seuls des signaux précis peuvent être appliqués sur chacune des entrées etsorties.
Signaux quasi analogiques– Symbole :
– Unité : %– Désignation : a– Plage de valeurs : 16384 = 100 %– Résolution : 16 bits
Signaux numériques– Symbole : – Unité : binaire avec niveau HAUT ou BAS– Désignation : d– Résolution : 1 bit
Signaux vitesse– Symbole :n– Unité : rpm (min-1)– Désignation : phd– Résolution : 16 bits
Signaux angulaires– Symbole : Y
– Unité : incréments– Désignation : ph– Résolution : 16 bits
Seuls des types de signaux identiques peuvent être reliés entre eux. Exemple : le signal de sortieanalogique peut être relié uniquement avec une entrée analogique d’un bloc fonction. La liaison estrefusée si on essaie de relier entre eux deux signaux de type différent.
Conseil !Pour une description détaillée de tous les blocs fonction, consulter le manuel système.

Configuration
7-9L _^VPMMsb` co PKN
7.4.2 Eléments d’un bloc fonction
FCNT1-CLKUPC1102/1
C1102/2
FCNT1-LOADC1102/3
C1104/3
FCNT1-OUT
FCNT1
C1101/1
C1101/2C1103/2
C1103/1
C1104/2
FCNT1-LD-VAL
FCNT1-CLKDWN
C1104/1
C1100
CTRL
FCNT1-CMP-VAL
FCNT1-EQUALSymbole d’entrée
Code de configuration
Code d’affichage
Fonction
Nom de l’entrée Nom du bloc fonction
Nom de la sortie
Symbole de sortie
Code de paramétrage
Fig. 7-1 Exemple d’un bloc fonction (FB) : FCNT1
Nom du bloc fonction
Le nom du bloc fonction (FB)permet de l’identifier de façon précise. Lorsque plusieurs blocs fonctionréalisent la même fonction, le chiffre après le nom indique quel bloc fonction est utilisé.
Chaque bloc fonction est défini par un numéro de sélection. Pour qu’un bloc fonction soit traité, ilfaut programmer son numéro de sélection dans le tableau ”déclaration des blocs fonction” . ( 7-15)
Les numéros de sélection sont regroupés dans la liste de sélection 5. ( 7-66)
Exemple
(FCNT1, voir Fig. 7-1)
N° de sélection de FCNT1 : 6400 (liste de sélection 5).
Symbole d’entrée
Le symbole d’entrée indique le type du signal de sortie qui est permis comme source à cette entrée.( 7-8)
Conseil !Seules des entrées qui sont rendues accessibles par le bloc fonction peuvent être programmées.
Nom de l’entrée
Le nom de l’entrée se compose du nom du bloc fonction correspondant et du nom de l’entréeconcernée. Lorsque plusieurs entrées portent le même nom, un chiffre les distingue.

Configuration
7-10 L_^VPMMsb` co PKN
Code de configuration
Ce code permet de déterminer la source du signal (exemple : signal borne, code de commande,sortie d’un bloc fonction). Les entrées possédant le même code de configuration se distinguent parle sous-code. Le sous-code est rattaché au code (Cxxxx/1). Dans ce cas, la configuration s’effectuepar le sous-code.
Il n’est pas possible de raccorder plusieurs signaux sur une entrée de bloc fonction.
Code d’affichage
Ce code permet d’afficher la valeur actuelle de l’entrée. Des entrées possédant le même coded’affichage se distinguent par le sous-code. Le sous-code est rattaché au code (Cxxxx/1). Pour cescodes, l’affichage s’effectue par le sous-code.
Les codes d’affichage ne peuvent pas être modifiés.
Fonction
La fonction mathématique du bloc fonction concerné est représentée et décrite sous forme deschéma de principe (voir Fig. 7-1).
Code de paramétrage
Ces codes permettent d’adapter la fonction ou les caractéristiques du bloc fonction à l’application.Les possibilités de réglage sont représentées par des textes déroulants et/ou des graphiqueslinéaire. ( 7-18)
Symbole de sortie
Le symbole de sortie désigne le type de signal de sortie. Le raccordement du signal de sortie à desentrées de même type est possible. ( 7-8)
Chaque sortie est définie par un numéro de sélection. Les numéros de sélection sont regroupés dansles listes de sélection (1 ... 4), selon les différents types de signaux. La liaison d’une sortie avec uneentrée s’effectue par les numéros de sélection. ( 7-66)
Exemple
(FCNT1, voir Fig. 7-1)
N° de sélection de FCNT1-OUT : 6400 (signal analogique, liste de sélection 1).
N° de sélection de FCNT1-EQUAL : 6400 (signal numérique, liste de sélection 2).
Conseil !Seules des sorties qui sont rendues accessibles par le bloc fonction peuvent être programmées.
Nom de la sortie
Le nom de la sortie se compose du nom bloc fonction correspondant et du nom de la sortieconcernée. Lorsque plusieurs sorties portent le même nom, un chiffre les distingue.

Configuration
7-11L _^VPMMsb` co PKN
7.4.3 Liaison des blocs fonction
Conditions générales
A chaque entrée est affectée une source de signal.
A chaque entrée peut être affectée une source seulement.
Des entrées de blocs fonction différents peuvent avoir la même source de signal.
Seuls des signaux de type identique peuvent être reliés entre eux.
Stop !Les liaisons existantes qui ne sont pas souhaitées doivent être supprimées lors d’une nouvelleconfiguration. Sinon, l’entraînement peut ne pas remplir les fonctions souhaitées.
Conseil !Pour la visualisation de liaisons existantes, Lenze vous propose un générateur de liste réseau (voirmanuel système, partie I, “Accessoires” : programme PC GDC).
^kaN
C
^kaNJfkN
^kaNJfkO
^kaNJfkP
^kaNJlrq
`MUONLN
`MUONLO
`MUONLP
`MUOMLN
`MUOMLO
`MUOMLP
loN
öN
loNJfkN
loNJfkO
loNJfkP
loNJlrq`MUPNLN
`MUPNLO
`MUPNLP
`MUPMLN
`MUPMLO
`MUPMLP
klqNN klqNJlrqklqNJfk
`MUQN
klqON klqOJlrqklqOJfk
`MUQP
`MUQM
`MUQO
íM
afdabiNJfk
`MTOQ
afdabiNJlrq
afdabiN`MTON`MTOM
`MTOP
iá~áëçå é~ë éçëëáÄäÉ
iá~áëçå éçëëáÄäÉ
X
Fig. 7-2 Comment relier correctement les blocs fonction

Configuration
7-12 L_^VPMMsb` co PKN
Principe de manipulation
1. Sélectionner le code de configuration de l’entrée du bloc fonction à modifier.
2. Sélectionner la source de signal pour l’entrée du bloc fonction (exemple : la sortie d’un autrebloc fonction).
3. L’affectation de l’entrée du bloc fonction est réalisée par un menu contenant uniquement lessources de signaux dont le type est identique à celui de l’entrée à affecter.
4. Sélectionner et valider les sources de signaux.
5. Si nécessaire, annuler les liaisons non souhaitées.– Pour ce faire, sélectionner l’affectation nécessaire correspondante (exemple : FIXED 0,
FIXED 1, FIXED 0%, ...).
6. Reprendre les points 1 à 5 jusqu’à ce que toutes les sorties souhaitées soient affectées.
7. Sauvegarder les configurations modifiées dans le jeu de paramètres souhaité.
Exemple
Condition :– Réglage usine
Application :– Elever au carré le signal analogique de X6/3, X6/4 et le sortir sur X6/62.
Solution :– Vous devez utiliser les blocs fonction AIN2, ARIT2 et AOUT2.
H J GL ñLENJóF
`MSMM
ñó
^ofqO
^ofqOJlrq`MSMOLN
OMMB
`MSMOLO
^ofqOJfkN
^ofqOJfkO
`MSMNLN
`MSMNLO
SO
^lrqN`QPQLN
H
H
^lrqNJfk
^lrqNJd^fk
^lrqNJlccpbq
`MQPQLP
`MQPQLO
`MQPN
`MQPP
`MQPO
P
Q
^fkO
HH
^fkOJlrq
^fkOJd^fk
^fkOJlccpbq
`MQMVLN
`MQMVLO
`MQMT
`MQMU
`MNMULN
`MNMVLN
`MMOTLO
`MMOSLO
Fig. 7-3 Exemple d’une configuration simple

Configuration
7-13L _^VPMMsb` co PKN
Etablir des liaisons
1. Déterminer la source du signal de ARIT2-IN1– Passer au niveau code à l’aide des flèches.– Passer en C0601/1 avec ou .– Appuyer sur PRG pour passer au niveau paramètres.– Sélectionner la sortie AIN2-OUT (n° de sélection 55) avec ou .– Valider avec SH + PRG.– Appuyer sur PRG pour passer au niveau code.
2. Déterminer la source de signal de ARIT2-IN2– Passer en C0601/2 avec .– Appuyer sur PRG pour passer au niveau paramètres.– Sélectionner la sortie AIN2-OUT (n° de sélection 55) avec ou .– Valider avec SH + PRG.– Appuyer sur PRG pour passer au niveau code.
3. Paramétrer ARIT2– Passer en C0600 avec .– Appuyer sur PRG pour passer au niveau paramètres.– Sélectionner la multiplication (n° de sélection 3).– Valider avec SH + PRG.– Appuyer sur PRG pour passer au niveau code.
4. Déterminer la source de signaux pour AOUT1– Passer en C0431 avec .– Appuyer sur PRG pour passer au niveau paramètres.– Sélectionner la sortie ARIT2-OUT (n° de sélection 5505).– Valider avec SH + PRG.– Appuyer sur PRG pour passer au niveau code.
5. Entrer le bloc fonction ARIT2 dans le tableau ”déclaration des blocs fonction”– Passer en C0465 et sélectionner le sous-code 8 avec .– Appuyer sur PRG pour passer au niveau paramètres.– Entrer le bloc fonction ARIT2 (n° de sélection 5505).– Valider avec SH + PRG.– Appuyer sur PRG pour passer au niveau code.– Ainsi est déterminé l’ordre de traitement des blocs fonction.

Configuration
7-14 L_^VPMMsb` co PKN
Supprimer des liaisons
Etant donné qu’une source peut avoir plusieurs destinations, des liaisons non souhaitéespeuvent exister.
Exemple– Par le réglage usine de la configuration C0005 = 1000 (régulation de vitesse), ASW1-IN1 et
AIN2-OUT sont reliés.– Cette liaison n’est pas supprimée automatiquement par les travaux décrits ci-dessus ! Si ces
liaisons ne sont pas souhaitées il faut les supprimer.
H J GL ñLENJóF
`MSMM
ñó
^ofqO
^ofqOJlrq`MSMOLN
OMMB
`MSMOLO
^ofqOJfkN
^ofqOJfkO
`MSMNLN
`MSMNLO
SO
^lrqN`QPQLN
H
H
^lrqNJfk
^lrqNJd^fk
^lrqNJlccpbq
`MQPQLP
`MQPQLO
`MQPN
`MQPP
`MQPO
P
Q
^fkO
HH
^fkOJlrq
^fkOJd^fk
^fkOJlccpbq
`MQMVLN
`MQMVLO
`MQMT
`MQMU
`MNMULN
`MNMVLN
`MMOTLO
`MMOSLO
^ptNJfkN
`MUNOLN
N
M
`MUNOLO
^ptNJpbq
^ptNJfkO
^ptN
^ptNJlrq
`MUNP
`MUNMLN
`MUNMLO
`MUNNcfubaM
cfubaMBkpbqJk^aa
Fig. 7-4 Supprimer les liaisons d’une configuration
6. Supprimer la liaison entre ASW1-IN1 et AIN2-OUT– Passer en C0810/1 avec ou .– Appuyer sur PRG pour passer au niveau paramètres.– Sélectionner la constante FIXED0% (n° de sélection 1000) avec ou .– Valider avec SH + PRG.– Appuyer sur PRG pour passer au niveau code.
La liaison est alors supprimée.
7. Si nécessaire, sauvegarder la nouvelle configuration– Pour éviter que les modifications soient perdues après coupure réseau, il faut sauvegarder la
nouvelle configuration dans un jeu de paramètres, en C0003.

Configuration
7-15L _^VPMMsb` co PKN
7.4.4 Entrées dans le tableau ”déclaration des blocs fonction”
Avec le variateur 93XX, vous disposez d’un temps de calcul déterminé pour le traitement des blocsfonction (FB). Or, étant donné que le type et le nombre des blocs fonction peuvent varierconsidérablement en fonction de l’application, tous les blocs fonction disponibles ne sont pas traitésen permanence. Le code C0465 propose un tableau ”déclaration des blocs fonction” qui necomprend que les blocs fonction utilisés. Le système d’entraînement est alors parfaitement adaptéà l’application.
Si d’autres blocs fonction sont intégrés dans une configuration existante, ceux-ci doivent êtredéclarés dans le tableau ”déclaration des blocs fonction” .
Il faut alors tenir compte des points suivants :
Le nombre des blocs fonction à traiter est limité
50 blocs fonction au maximum peuvent être reliés dans une configuration. Chaque bloc fonctionnécessite un certain temps de traitement (durée de traitement). Le code C0466 indique le temps deprocess restant pour le traitement des blocs fonction. Une fois ce temps écoulé, d’autres blocsfonction ne peuvent plus être intégrés.
Ordre d’entrées des blocs fonction
De façon générale, l’ordre de déclaration de blocs en C0465 n’est pas déterminant ; cependant,l’ordre peut jouer un rôle lorsqu’il s’agit d’entraînements hautement dynamiques. En général, l’ordrele plus favorable est celui représentant le flux de signaux.
Exemple
&
&
≥1
!
"
"
"
"
"!
#
"
"
"
"
$
$
$
$
%&
%&
Fig. 7-5 Exemple d’une configuration
Configuration
7-16 L_^VPMMsb` co PKN
Structure du tableau ”déclaration des blocs fonction” pour l’exemple de configuration en Fig. 7-5 :
1. DIGIN ne doit pas être entré dans le tableau ”déclaration des blocs fonction” .
2. Le premier bloc fonction est AND1, puisque celui-ci reçoit ses signaux d’entrée de DIGIN etqu’il a des successeurs.
3. Le deuxième bloc fonction est OR1, car la source de son signal provient de AND1(prédécesseur). Le signal de sortie de AND1 doit être généré en premier avant d’être traité enOR1. OR1 a aussi des successeurs. Il faut alors entrer OR1 avant son successeur dans letableau ”déclaration des blocs fonction” .
4. Le troisième bloc fonction est AND2, puisque celui-ci à un prédécesseur (voir 3.)
5. Il faut programmer en C0465 :– emplacement 10 : AND1 10500– emplacement 11 : OR1 10550– emplacement 12 : AND2 10505
Pour cet exemple, nous avons commencé avec l’emplacement 10, puisque les emplacements10 ... 12 ne sont pas affectés par le réglage usine.
Entrer directement des blocs fonction l’un après l’autre n’est pas une obligation. Les emplacementsvides ne gênent en rien la déclaration des blocs fonction.
Conseil !D’autres blocs fonction peuvent être insérés entre les blocs cités dans l’exemple.
Certains blocs fonction ne doivent pas être programmés dans le tableau ”déclaration desblocs fonction”
Les blocs fonction suivants sont toujours traités et ne doivent pas, par conséquent, êtreprogrammésdans le tableau ”déclaration des blocs fonction” :
AIF-IN
CANx-IN
DIGIN
DIGOUT
FCODE (tous les codes libres)
MCTRL1, MCTRL2
Sources signaux fixes (FIXED0, FIXED0%, etc.)

Configuration
7-17L _^VPMMsb` co PKN
Erreurs couramment rencontrées lors de la configuration des blocs fonction
Fonction incorrecte Origine Remède
Le bloc fonction ne fournit qu’un signal desortie = 0
Le bloc fonction n’a pas été déclaré dans letableau ”déclaration des blocs fonction” enC0465
Déclarer le bloc fonction
Le bloc fonction ne fournit plus que des signauxconstants
Le bloc fonction a été effacé du tableau”déclaration des blocs fonction” C0465 ou a étéréécrit
Déclarer à nouveau le bloc fonction, éventuellement à unautre sous-code (emplacement liste)
Le signal de sortie ne parvient pas au blocfonction suivant
La liaison entre les blocs fonction n’a pas étéétablie
Etablir la liaison via le code de configuration (CFG) (du pointde vue du bloc fonction suivant)
Le bloc fonction ne peut pas être déclaré dans letableau ”déclaration des blocs fonction” C0465
Le temps process restant n’est pas suffisant(voir C0466)
Supprimer les blocs fonction non utilisés(exemple : entrées et sorties non utilisées)
Pour les systèmes comprenant plusieurs entraînements,transférer éventuellement des fonctions vers d’autresvariateurs
Le variateur fournit des signaux internes avec unretard sur les sorties
Les blocs fonction sont traités dans un ordreincorrect
Adapter le tableau ”déclaration des blocs fonction” C0465 auflux de signaux
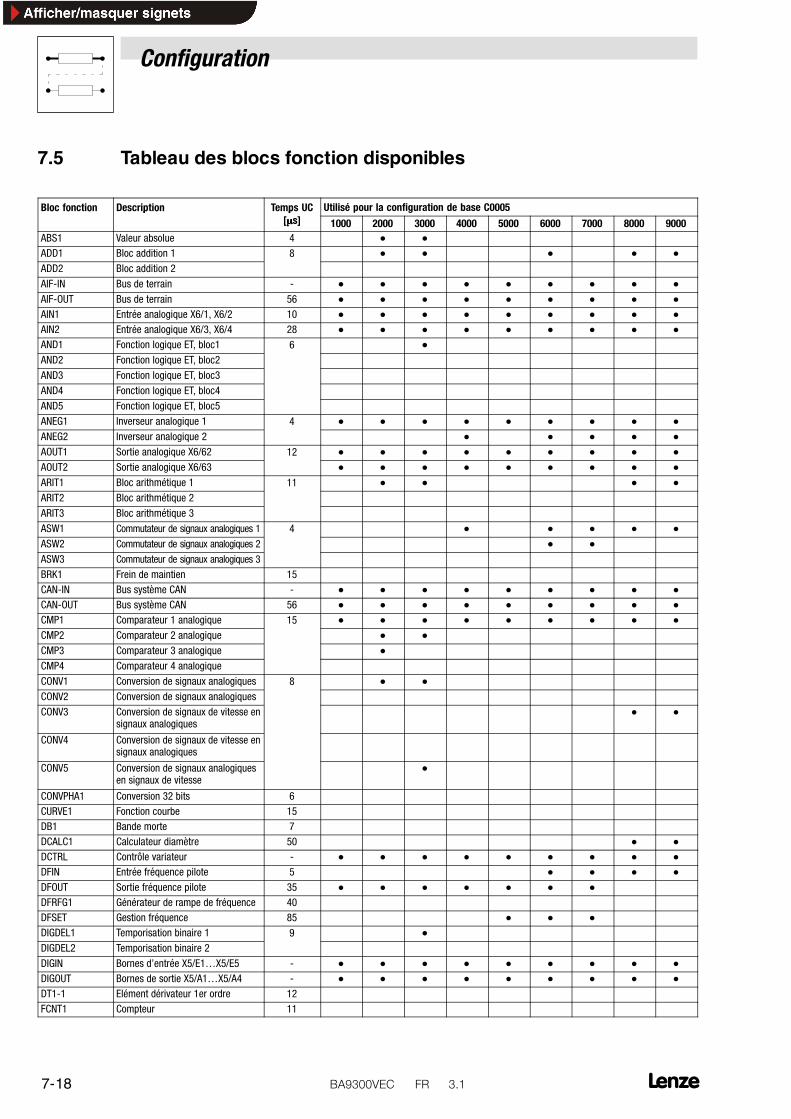
Configuration
7-18 L_^VPMMsb` co PKN
7.5 Tableau des blocs fonction disponibles
Bloc fonction Description Temps UC Utilisé pour la configuration de base C0005o o o p o p[s] 1000 2000 3000 4000 5000 6000 7000 8000 9000
ABS1 Valeur absolue 4 D D
ADD1 Bloc addition 1 8 D D D D D
ADD2 Bloc addition 2
AIF-IN Bus de terrain - D D D D D D D D D
AIF-OUT Bus de terrain 56 D D D D D D D D D
AIN1 Entrée analogique X6/1, X6/2 10 D D D D D D D D D
AIN2 Entrée analogique X6/3, X6/4 28 D D D D D D D D D
AND1 Fonction logique ET, bloc1 6 D
AND2 Fonction logique ET, bloc2
AND3 Fonction logique ET, bloc3
AND4 Fonction logique ET, bloc4
AND5 Fonction logique ET, bloc5
ANEG1 Inverseur analogique 1 4 D D D D D D D D D
ANEG2 Inverseur analogique 2 D D D D D
AOUT1 Sortie analogique X6/62 12 D D D D D D D D D
AOUT2 Sortie analogique X6/63 D D D D D D D D D
ARIT1 Bloc arithmétique 1 11 D D D D
ARIT2 Bloc arithmétique 2
ARIT3 Bloc arithmétique 3
ASW1 Commutateur de signaux analogiques 1 4 D D D D D
ASW2 Commutateur de signaux analogiques 2 D D
ASW3 Commutateur de signaux analogiques 3
BRK1 Frein de maintien 15CAN-IN Bus système CAN - D D D D D D D D D
CAN-OUT Bus système CAN 56 D D D D D D D D D
CMP1 Comparateur 1 analogique 15 D D D D D D D D D
CMP2 Comparateur 2 analogique D D
CMP3 Comparateur 3 analogique D
CMP4 Comparateur 4 analogique
CONV1 Conversion de signaux analogiques 8 D D
CONV2 Conversion de signaux analogiques
CONV3 Conversion de signaux de vitesse ensignaux analogiques
D D
CONV4 Conversion de signaux de vitesse ensignaux analogiques
CONV5 Conversion de signaux analogiquesen signaux de vitesse
D
CONVPHA1 Conversion 32 bits 6CURVE1 Fonction courbe 15DB1 Bande morte 7DCALC1 Calculateur diamètre 50 D D
DCTRL Contrôle variateur - D D D D D D D D D
DFIN Entrée fréquence pilote 5 D D D D
DFOUT Sortie fréquence pilote 35 D D D D D D D
DFRFG1 Générateur de rampe de fréquence 40DFSET Gestion fréquence 85 D D D
DIGDEL1 Temporisation binaire 1 9 D
DIGDEL2 Temporisation binaire 2
DIGIN Bornes d’entrée X5/E1X5/E5 - D D D D D D D D D
DIGOUT Bornes de sortie X5/A1X5/A4 - D D D D D D D D D
DT1-1 Elément dérivateur 1er ordre 12FCNT1 Compteur 11

Configuration
7-19L _^VPMMsb` co PKN
Bloc fonction Utilisé pour la configuration de base C0005Temps UC[s]
DescriptionBloc fonction
900080007000600050004000300020001000
Temps UC[s]
Description
FCODE16 Codes de commande libres - D D D D D D D D D
FCODE17 D D D D D D D D D
FCODE26/1 D D D D D D D D D
FCODE26/2 D D D D D D D D D
FCODE27/1 D D D D D D D D D
FCODE27/2 D D D D D D D D D
FCODE32 D D D
FCODE37FCODE108/1 D D D D D D D D D
FCODE108/2 D D D D D D D D D
FCODE109/1 D D D D D D D D D
FCODE109/2 D D D D D D D D D
FCODE141 D D D D D
FCODE175FCODE250FCODE471FCODE472/1 D D D
FCODE472/2FCODE472/3FCODE472/4FCODE472/5FCODE472/6FCODE472/7FCODE472/8FCODE472/9FCODE472/10FCODE472/11FCODE472/12
FCODE472/13FCODE472/14FCODE472/15FCODE472/16FCODE472/17FCODE472/18FCODE472/19FCODE472/20FCODE473/1 D D D
FCODE473/2FCODE473/3FCODE473/4
FCODE473/5FCODE473/6FCODE473/7FCODE473/8FCODE473/9FCODE473/10FCODE474/1 D D
FCODE474/2 D
FCODE475/1FCODE475/2
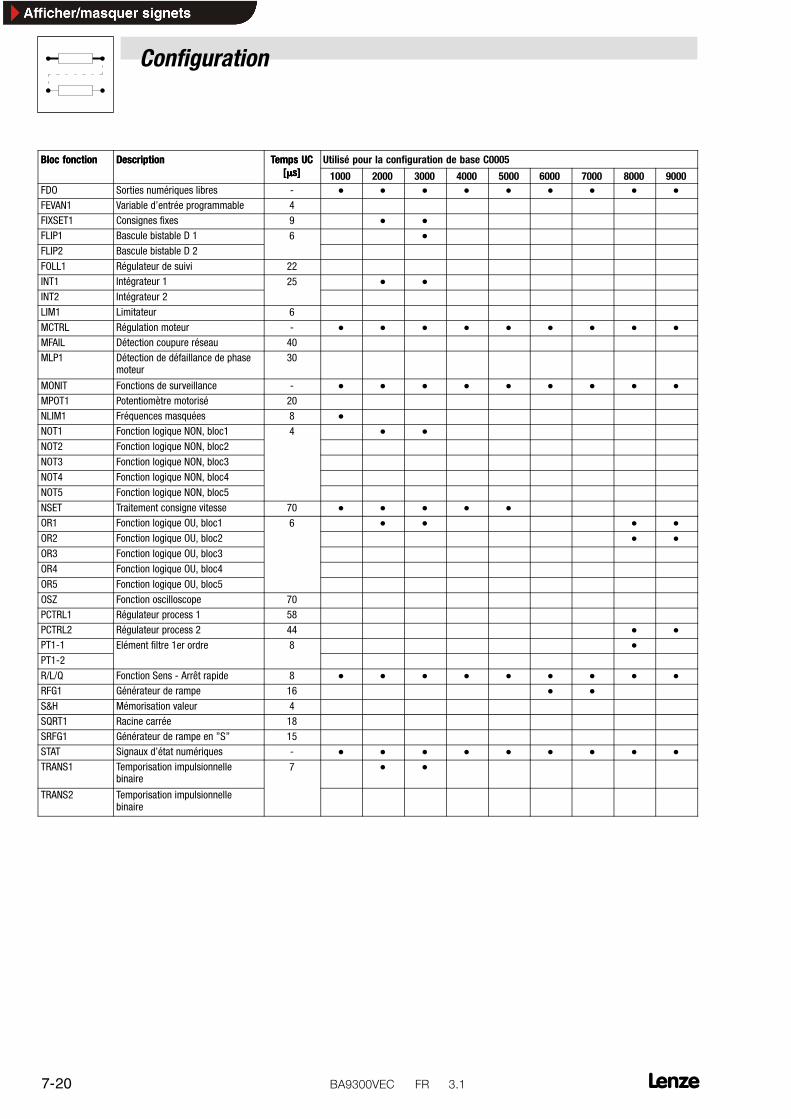
Configuration
7-20 L_^VPMMsb` co PKN
Bloc fonction Utilisé pour la configuration de base C0005Temps UC[s]
DescriptionBloc fonction
900080007000600050004000300020001000
Temps UC[s]
Description
FDO Sorties numériques libres - D D D D D D D D D
FEVAN1 Variable d’entrée programmable 4FIXSET1 Consignes fixes 9 D D
FLIP1 Bascule bistable D 1 6 D
FLIP2 Bascule bistable D 2
FOLL1 Régulateur de suivi 22INT1 Intégrateur 1 25 D D
INT2 Intégrateur 2
LIM1 Limitateur 6
MCTRL Régulation moteur - D D D D D D D D D
MFAIL Détection coupure réseau 40MLP1 Détection de défaillance de phase
moteur30
MONIT Fonctions de surveillance - D D D D D D D D D
MPOT1 Potentiomètre motorisé 20NLIM1 Fréquences masquées 8 D
NOT1 Fonction logique NON, bloc1 4 D D
NOT2 Fonction logique NON, bloc2
NOT3 Fonction logique NON, bloc3
NOT4 Fonction logique NON, bloc4
NOT5 Fonction logique NON, bloc5
NSET Traitement consigne vitesse 70 D D D D D
OR1 Fonction logique OU, bloc1 6 D D D D
OR2 Fonction logique OU, bloc2 D D
OR3 Fonction logique OU, bloc3
OR4 Fonction logique OU, bloc4
OR5 Fonction logique OU, bloc5
OSZ Fonction oscilloscope 70PCTRL1 Régulateur process 1 58PCTRL2 Régulateur process 2 44 D D
PT1-1 Elément filtre 1er ordre 8 D
PT1-2
R/L/Q Fonction Sens - Arrêt rapide 8 D D D D D D D D D
RFG1 Générateur de rampe 16 D D
S&H Mémorisation valeur 4SQRT1 Racine carrée 18SRFG1 Générateur de rampe en ”S” 15STAT Signaux d’état numériques - D D D D D D D D D
TRANS1 Temporisation impulsionnellebinaire
7 D D
TRANS2 Temporisation impulsionnellebinaire
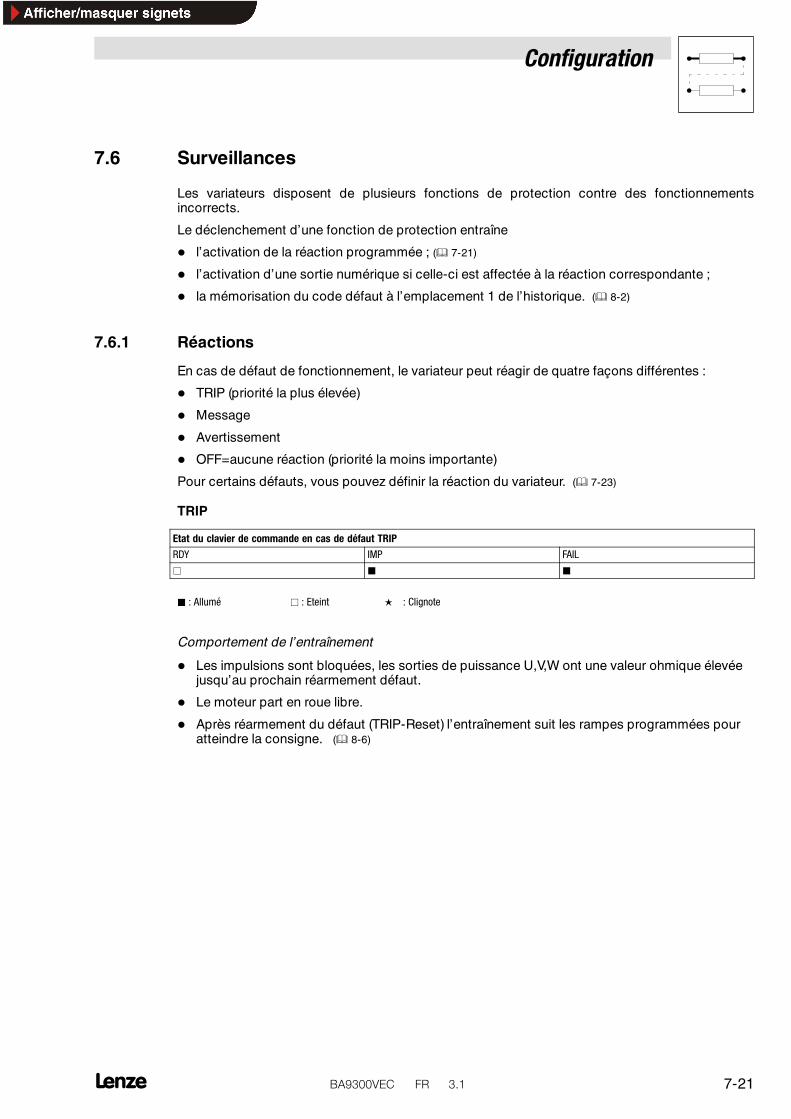
Configuration
7-21L _^VPMMsb` co PKN
7.6 Surveillances
Les variateurs disposent de plusieurs fonctions de protection contre des fonctionnementsincorrects.
Le déclenchement d’une fonction de protection entraîne
l’activation de la réaction programmée ; ( 7-21)
l’activation d’une sortie numérique si celle-ci est affectée à la réaction correspondante ;
la mémorisation du code défaut à l’emplacement 1 de l’historique. ( 8-2)
7.6.1 Réactions
En cas de défaut de fonctionnement, le variateur peut réagir de quatre façons différentes :
TRIP (priorité la plus élevée)
Message
Avertissement
OFF=aucune réaction (priorité la moins importante)
Pour certains défauts, vous pouvez définir la réaction du variateur. ( 7-23)
TRIP
Etat du clavier de commande en cas de défaut TRIP
RDY IMP FAIL
j J J
J : Allumé j : Eteint L : Clignote
Comportement de l’entraînement
Les impulsions sont bloquées, les sorties de puissance U,V,W ont une valeur ohmique élevéejusqu’au prochain réarmement défaut.
Le moteur part en roue libre.
Après réarmement du défaut (TRIP-Reset) l’entraînement suit les rampes programmées pouratteindre la consigne. ( 8-6)
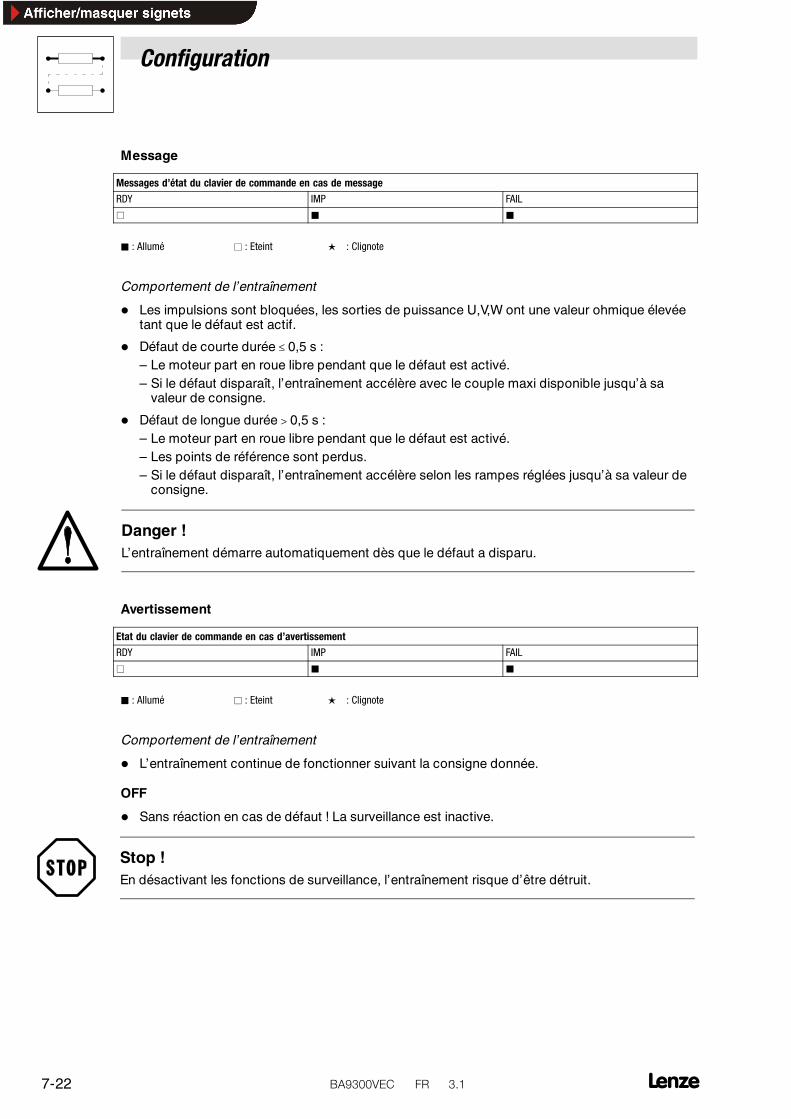
Configuration
7-22 L_^VPMMsb` co PKN
Message
Messages d’état du clavier de commande en cas de message
RDY IMP FAIL
j J J
J : Allumé j : Eteint L : Clignote
Comportement de l’entraînement
Les impulsions sont bloquées, les sorties de puissance U,V,W ont une valeur ohmique élevéetant que le défaut est actif.
Défaut de courte durée ≤ 0,5 s :– Le moteur part en roue libre pendant que le défaut est activé.– Si le défaut disparaît, l’entraînement accélère avec le couple maxi disponible jusqu’à sa
valeur de consigne.
Défaut de longue durée > 0,5 s :– Le moteur part en roue libre pendant que le défaut est activé.– Les points de référence sont perdus.– Si le défaut disparaît, l’entraînement accélère selon les rampes réglées jusqu’à sa valeur de
consigne.
Danger !L’entraînement démarre automatiquement dès que le défaut a disparu.
Avertissement
Etat du clavier de commande en cas d’avertissement
RDY IMP FAIL
j J J
J : Allumé j : Eteint L : Clignote
Comportement de l’entraînement
L’entraînement continue de fonctionner suivant la consigne donnée.
OFF
Sans réaction en cas de défaut ! La surveillance est inactive.
Stop !En désactivant les fonctions de surveillance, l’entraînement risque d’être détruit.

Configuration
7-23L _^VPMMsb` co PKN
7.6.2 Fonctions de surveillance
Présentation des sources de défaut détectées par le variateur et des réactions correspondantes
Message défaut Réglages possibles pour la réaction
Affichage Codedéfaut
Signification T M A Eteint Code
CCr T : 71 Erreur système D - - - -
CE0 T : 61A : 2061
Erreur de communication (AIF) n - n D C0126
CE1 D : 62A : 2062
Erreur de communication sur l’objet donnée process d’entréeCAN-IN1 (horloge réglable en C0357/1)
n - n D C0591
CE2 D : 63A : 2063
Erreur de communication sur l’objet donnée process d’entréeCAN-IN2 (horloge réglable en C0357/2)
n - n D C0592
CE3 D : 64A : 2064
Erreur de communication sur l’objet donnée process d’entréeCAN-IN3 (horloge réglable en C0357/3)
n - n D C0593
CE4 D : 65A : 2065
Etat BUS-OFF (trop d’erreurs de communication) n - n D C0595
EEr D : 91A : 2091M : 1091
Défaut externe D n n n C0581
H05 D : 105 Défaut interne D - - - -
H07 D : 107 Défaut interne D - - - -
H10 D : 110 Défaut capteur température radiateur D - - n C0588
H10 D : 111 Défaut capteur température interne D - - n
ID1 D : 140 Identification moteur échouée - courbe caractéristique D - - - -
ID2 D : 141 Identification moteur échouée - caractéristiques moteur D - - - -
LP1 D : 32 Défaut phases moteur (bloc fonction doit être programmé enC0465)
n - n D C0597
LU M : 1030 Sous-tension - D - - -
NMAX D : 200 Vitesse maxi dépassée (C0596) D - - - -
OC1 D : 11 Court-circuit D - - - -
OC2 D : 12 Mise à la terre D - - - -
OC3 D : 13 Surcharge pendant l’accélération ou la décélération D - - - -
OC5 A : 2015 Surcharge I x t - - D - -
OH D : 50 Température radiateur 1 (maxi admissible, fixe) D - - - -
OH3 D : 53 Température moteur 1 (maxi admissible, fixe) n - - D C0583
OH4 A : 2054 Température radiateur 2 (réglable ; C0122) - - D n C0582
OH7 A : 2057 Température moteur 2 (réglable ; code : C0121) - - n D C0584
OH8 D : 58A : 2058
Température moteur (fixe) via entrées T1/T2 n - n* D C0585
OU M : 1020 Surtension dans le circuit intermédiaire - D - - -

Configuration
7-24 L_^VPMMsb` co PKN
Message défaut Réglages possibles pour la réaction
Affichage CodeEteintAMTSignificationCodedéfaut
PEr D : 74 Erreur programme D - - - -
PI D : 79 Erreur pendant l’initialisation D - - - -
PR0 D : 75 Erreur générale de jeux de paramètres D - - - -
PR1 D : 72 Défaut jeu de paramètres 1 D - - - -
PR2 D : 73 Défaut jeu de paramètres 2 D - - - -
PR3 D : 77 Défaut jeu de paramètres 3 D - - - -
PR4 D : 78 Défaut jeu de paramètres 4 D - - - -
Sd3 D : 83A : 2083
Défaut codeur sur X9 broche 8 n - n* D C0587
Sd5 D : 85A : 2085
Défaut consigne sur X6/1 X6/2 (C0034 = 1) n - n D C0598
Sd6 D : 86A : 2086
Défaut sonde température moteur (X8) n - n D C0594
D : Défaut M : Message A : Avertissement D: Lenze n: Possible - : Pas possible
n* : En principe possible ; cependant, le moteur risque d’être détruit si le défaut n’est pas éliminé à temps
Conseil !Les indications figurant dans la colonne ” Identification défaut” sont affichées en C0168/x, si l’accèsà l’historique des défauts est réalisé via le bus de terrain ou le bus système.
Configuration
7-25L _^VPMMsb` co PKN
7.6.3 Indication de défaut par sortie numérique
Les indications de défaut TRIP, message et avertissement peuvent être émises par les sortiesnumériques via le bloc fonction DIGOUT (exemples : bornes X5/A1 X5/A4).
Indication séparée du défaut TRIP ou du message ou de l’avertissement (messageindividuel)
1. Sélectionner la sortie numérique au niveau code via C0117 et le sous-code correspondant.
2. Affecter DCTRL-TRIP ou DCTRL-MESS ou DCTRL-WARN au niveau paramètres.
Indication commune du défaut TRIP, du message et de l’avertissement (message collectif)
1. Affecter DCTRL-TRIP, DCTRL-MESS et DCTRL-WARN à un élément OU.
2. Sélectionner la sortie numérique au niveau code via C0117 et le sous-code correspondant.
3. Au niveau paramètres, affecter la sortie du bloc OU (ORx-OUT) à cette sortie.
Sortie individuelle des fonctions de surveillance
1. Sélectionner la sortie numérique au niveau code via C0117 et le sous-code correspondant.
2. Affecter une fonction de surveillance (exemple : MONIT-OH7).
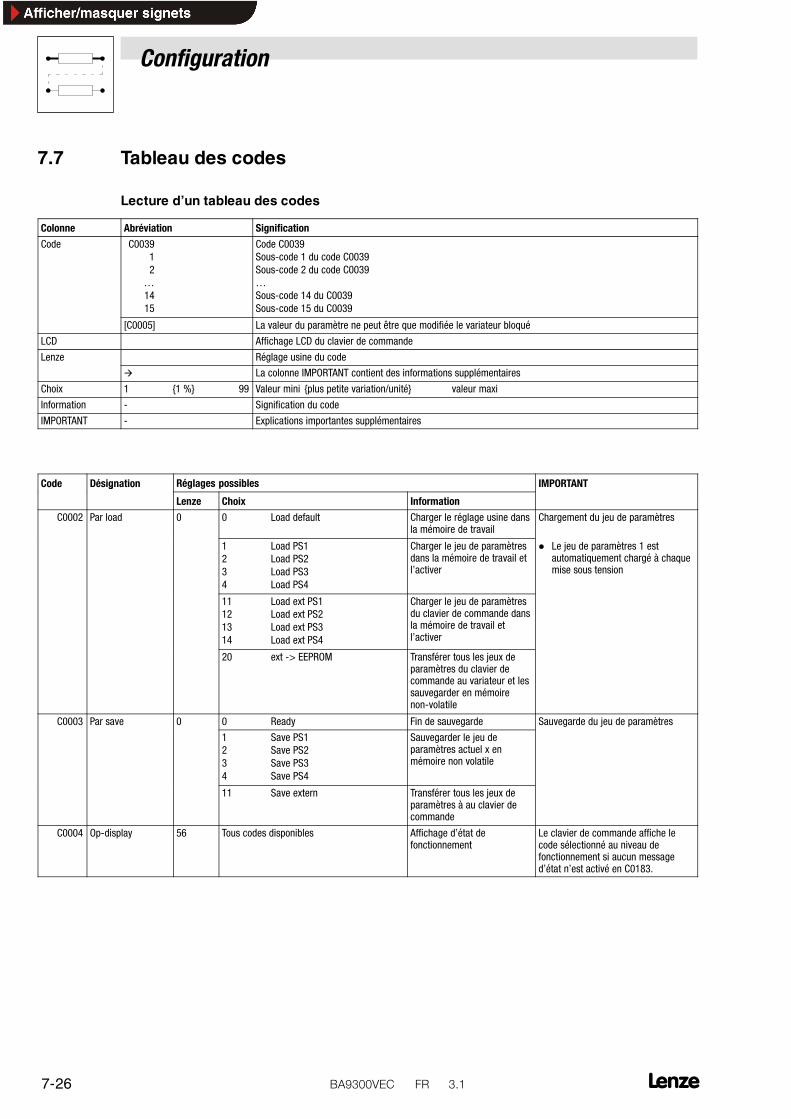
Configuration
7-26 L_^VPMMsb` co PKN
7.7 Tableau des codes
Lecture d’un tableau des codes
Colonne Abréviation Signification
Code C003912
1415
Code C0039Sous-code 1 du code C0039Sous-code 2 du code C0039
Sous-code 14 du C0039Sous-code 15 du C0039
[C0005] La valeur du paramètre ne peut être que modifiée le variateur bloqué
LCD Affichage LCD du clavier de commande
Lenze Réglage usine du code
La colonne IMPORTANT contient des informations supplémentaires
Choix 1 1 % 99 Valeur mini plus petite variation/unité valeur maxi
Information - Signification du code
IMPORTANT - Explications importantes supplémentaires
Code Désignation Réglages possibles IMPORTANTo g o
Lenze Choix Information
C0002 Par load 0 0 Load default Charger le réglage usine dansla mémoire de travail
Chargement du jeu de paramètres
1 Load PS12 Load PS23 Load PS34 Load PS4
Charger le jeu de paramètresdans la mémoire de travail etl’activer
Le jeu de paramètres 1 estautomatiquement chargé à chaquemise sous tension
11 Load ext PS112 Load ext PS213 Load ext PS314 Load ext PS4
Charger le jeu de paramètresdu clavier de commande dansla mémoire de travail etl’activer
20 ext -> EEPROM Transférer tous les jeux deparamètres du clavier decommande au variateur et lessauvegarder en mémoirenon-volatile
C0003 Par save 0 0 Ready Fin de sauvegarde Sauvegarde du jeu de paramètres
1 Save PS12 Save PS23 Save PS34 Save PS4
Sauvegarder le jeu deparamètres actuel x enmémoire non volatile
11 Save extern Transférer tous les jeux deparamètres à au clavier decommande
C0004 Op-display 56 Tous codes disponibles Affichage d’état defonctionnement
Le clavier de commande affiche lecode sélectionné au niveau defonctionnement si aucun messaged’état n’est activé en C0183.

Configuration
7-27L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0005] Signal CFG 1000 Configuration des signaux(configurations de baseprédéfinies)
0000 Common Configuration de basemodifiée
0100 CFG : empty Toutes les liaisons internessont effacées
10xx Speed mode11xx Speed 10012xx Speed 20013xx Speed 30014xx Speed 40015xx Speed 500
Régulation de vitesse Le premier chiffre indique la fonctionde base prédéfinie. 1xxx : Régulation de vitesse 2xxx : Commande pas à pas 3xxx : Commande de
trancanage15xx Speed 500 trancanage 4xxx : Commande de couple 5xxx : Maître fréquence pilote 6xxx : Esclave fréquence pilote
(ligne) 7xxx : Esclave fréquence pilote
(cascade)20xx Step mode21xx Step 10025xx Step 500
Commande pas à pas(cascade)
8xxx : Régulation pantin(saisie externe dudiamètre)
9xxx : Régulation pantin(saisie interne dudiamètre)
30xx Lead screw35xx Lead 500
Commande de trancanagediamètre)
Le deuxième chiffre indique lesfonctions additionnelles x0xx : Sans fonction
supplémentaire40xx Torque mode41xx Torque 10045xx Torque 500
Régulation de couple aveclimitation de vitesse
supplémentaire x1xx : Commande de frein x2xx : Entrée de consigne via
Potentiomètre motorisé x3xx : Régulateur PID x4xx : Régulation coupure
é50xx DF mst51xx DF mst 10052xx DF mst 20054xx DF mst 400
Maître pour bouclagefréquence pilote
g préseau
x5xx : Entrée de consigne viafréquence pilote
x6xx : Ajustement analogique54xx DF mst 40055xx DF mst 50056xx DF mst 60057xx DF mst 700
x6xx : Ajustement analogiquedu facteur de réduction
x7xx : Ajustement numériquedu rapport de réduction
8 Gé é t d60xx DF slv bus63xx DF slv bus 30066xx DF slv bus 600
Fréquence pilote en ligne -esclave
x8xx : Générateur de rampefréquence pilote
L t i iè hiff i di l66xx DF slv bus 60067xx DF slv bus 70068xx DF slv bus 800
Le troisième chiffre indique la sourcede tension prédéfinie pour les bornesde commande.
xx0x Tension d’alimentation70xx DF slv cas76xx DF slv cas 60077xx DF slv cas 700
Fréquence pilote en cascade -esclave
xx0x : Tension d’alimentationexterne
xx1x : Tension d’alimentationinterne
80xx Dancer ctrl extern Régulation pantin (saisieexterne du diamètre) Le quatrième indique la commande
prédéfinie. xxx0 : Borniers de commande xxx1 : RS232, RS485,
fib i

Configuration
7-28 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
90xx Dancer ctrl intern Régulation pantin (saisieinterne du diamètre)
fibre optique xxx3 : INTERBUS ou
PROFIBUS-DP xxx5 : Bus système (CAN)
[C0006] Op mode 5 Mode de fonctionnementrégulation moteur
1 vector ctrl Régulation sans capteur
5 V/f Fonctionnement en U/f avecaccroissement constant Umin
C0009 LECOM address 1 1 1 99 Adresse de l’appareil N° de l’abonné au bus enfonctionnement via interface 10, 20, ..., 90 réservé pour
messages Broadcast des groupesd’abonnés pour RS232, RS485,fibre optique
C0010 Nmin 0 0 1 rpm (min-1) 36000 Vitesse mini Réglage correct de C0059
nécessaire C0010 < C0011 Uniquement avec entrée
consigne analogique viaAIN1
Grandeur de référence pour l’entrée deconsigne absolue et relative, pour lestemps d’accélération et dedécélération Programmation par interface :
Si une modification importante doitêtre effectuée par interface, il estpréférable de le faire variateur
C0011 Nmax 3000 0 1 rpm (min-1) 36000 Vitesse maxipréférable de le faire variateurbloqué.
C0012 Tir (acc) 5.00 0.00 0,01 s 9999.90 Temps d’accélération Tir pourla consigne principale deNSET
Relatif à la différence de vitesse0nmaxi
C0013 Tif (déc) 5.00 0.00 0,01 s 9999.90 Temps de décélération Tifpour la consigne princiaple deNSET
Relatif à la différence de vitessenmaxi...0.
C0014 V/f charakt. 0 0 Courbe linéaire Courbe linéaire U/f
1 quad. Courbe quadratique U/f
C0015 Rated freq 50 0 1 Hz 5000 Identique par rapport à C0089
C0016 FCODE V boost 0.00 0.00 0,01 % 100.00 Code configurable poursignaux analogiques relatifs
Accroissement de la tension
C0017 FCODE (Qmin) 50 -36000 1 rpm (min-1) 36000 Seuil nréel < nx nréel < C0017 entraîne l’activation dela sortie comparateur CMP1-OUT
C0018 fchop 6 0 16/8/2 kHz sin Fonctionnement optimisé enfonction du bruit aveccommutation automatique àdes fréquences de découpageinférieures
Tenir compte des indications sur leréduction du courant pour desfréquences de découpage importantes.
1 2 kHz sin Fonctionnement optimisé enfonction de la puissance
2 4 kHz f_top Fonctionnement optimisé enfonction de la puissance
3 8 kHZ f_top Fonctionnement optimisé enfonction de la puissance
4 8 kHz sin Fonctionnement optimisé enfonction du bruit
5 16 kHz sin Fonctionnement optimisé enfonction du bruit
6 8/2 kHz sin Fonctionnement optimisé enfonction de la puissance aveccommutation automatique àdes fréquences de découpageinférieures
C0019 Thresh nact=0 0 -36000 1 rpm (min-1) 36000 Seuil au-dessous duquelnréel = 0.
Avec un temps d’arrêt réglé enC0107 > 0, le freinage CC estautomatiquement activé dès que lavaleur est inférieure au seuil.

Configuration
7-29L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0020 turn value 100 0 1 % 200 Stabilité de vitesse du moteur Influence manuelle sur la stabliité devitesse du moteur
C0021 Slipcomp -20.00 0,01 % 20.00 Compensation de glissement En modifiant C0087 ou C0089 lavaleur de C0021 est mise auglissement nominal moteur calculé
C0022 Imax current 0 0,01 A 500.00 Limitation Imax pourfonctionnement en moteur
En fonction de C0086 Entrée du courant maxi pour
fonctionnement en moteur
C0023 Imax gen. 0 0,01 A 500.00 Limitation Imax pourfonctionnement en générateur
En fonction de C0086 Entrée du courant maxi pour
fonctionnement en générateur
[C0025] Feedback type 1 Sélection du système debouclage
Sur X8, utiliser uniquement descodeurs incrémentaux avec niveauTTL 5 V1 no feedback Sans bouclage (régulation
sans capteur)
TTL 5 V Sur X9, utiliser uniquement des
codeurs incrémentaux avec niveau100 IT (C420) - X8 Codeur incrémental sur X8 et
réglage de la constante viaC0420
codeurs incrémentaux avec niveauHTL
101 IT (C420) - X9 Codeur incrémental sur X9 etréglage de la constante viaC0420
110 IT-512-5V111 IT-1024-5V112 IT-2048-5V113 IT-4096-5V
Codeur incrémental sur X8avec présélection de laconstante comme suit :110 = 512111 = 1024112 = 2048113 = 4096
C002612
FCODE (offset)FCODE (offset)
0.000.00
-199.99 0,01 % 199.99Codes configurables poursignaux analogiques relatifs
Utilisé pour :offset pour bornes X6/1,2offset pour bornes X6/3,4
C002712
FCODE (gain)FCODE (gain)
100.00100.00
-199.99 0,01 % 199.99Codes configurables poursignaux analogiques relatifs
Utilisé pour :gain pour bornes X6/1,2gain pour bornes X6/3,4
C0030 DFOUT const 3 0 256 inc/tour1 512 inc/tour2 1024 inc/tour3 2048 inc/rev4 4096 inc/rev5 8192 inc/rev6 16384 inc/rev
Constante de la sortiefréquence pilote enincréments/tour
C0032 FCODE Gearbox 1 -32767 1 32767 Code configurable Utilisé pour :Numérateur rapport de réduction pourDFSET
C0033 Gearbox denom 1 1 1 32767 Rapport de réduction(dénominateur) pour DFSET
C0034 Mst current 0 0 -10 V ... + 10 V1 +4 mA ... +20 mA2 -20 mA ... +20 mA
Sélection : tensionpilote/courant pilote pourconsigne principale
C0036 DC brk value 0.00 0.00 0,01 A 500.00 Courant CC de freinage
C0037 Set-value rpm 0 -36000 1 rpm (min-1) 36000 Consigne en tours/min
C0038123456
N 1 startN 1 stopN 2 startN 2 stopN 3 startN 3 stop
000000
0 1 rpm (min-1) 36000Fonctions pour bloc fonctionNLIM1
Entrée de plages de vitesse qui nepeuvent être traversées que de façondynamiqueSuppression d’une fréquence proprepar une plage interdite

Configuration
7-30 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0039123456789...1415
JOG set-valueJOG set-valueJOG set-valueJOG set-valueJOG set-valueJOG set-valueJOG set-valueJOG set-valueJOG set-value...JOG set-valueJOG set-value
1500100050020010050000...00
-36000 1 rpm (min-1) 36000Consignes JOG (vitesses fixes)pour NSET sélectionnables parentrées numériques
C0040 Ctrl enable 0 0 Ctrl inhibit1 Ctrl enable
Blocage variateur Ecriture :– commande du code
Lecture :– lecture de l’état du variateur
C0042 DIS: QSP 0 AR inactif1 AR actif
Etat arrêt rapide Seulement en affichage
C0043 Trip reset 0 0 no/trip reset
1 trip active
Réarmement du défaut TRIPactuelDéfaut ”TRIP” actif
Réarmement d’un défaut TRIP actif : Entrer C0043 = 0
C0045 DIS: act JOG 0 Nset active1 JOG 12 JOG 2...15 JOG 15
Consigne JOG activée Seulement en affichage
C0046 DIS: N -199.99 0,01 % 199.99 Consigne principale Seulement en affichage
C0049 DIS: NADD -199.99 0,01 % 199.99 Consigne supplémentaire Seulement en affichage
C0050 MCTRL-NSET2 -100.00 0,01 % 100.00 nconsigne à l’entrée durégulateur de vitesse
Seulement en affichage
C0051 MCTRL-NACT -36000 1 rpm (min-1) 36000 Vitesse réelle Seulement en affichage
C0052 MCTRL-Umot 0 1 V 800 Tension réelle moteur Seulement en affichage
C0053 UG-VOLTAGE 0 1 V 900 Tension circuit intermédiaire Seulement en affichage
C0054 IMot 0.0 0,1 A 500.0 Courant réel moteur Seulement en affichage
C0056 MCTRL-MSET2 -100 1 % 100 Consigne de couple (sortie durégulateur de vitesse)
Seulement en affichage
C0057 Max Torque 0 1 Nm 500 Couple maxi possible pour laconfiguration d’entraînement
Seulement en affichage En fonction de C0022, C0086
C0058 MCTRL-FACT 0.0 -600.0 0,1 Hz 600.0 Fréquence à la sortie duvariateur
Seulement en affichage
C0059 Mot pole no. 1 1 50 Nombre de paire de pôlesmoteur
Seulement en affichage
C0061 Heatsink temp 0 1 _C 100 Température radiateur Seulement en affichage
C0063 Mot temp 0 1 _C 200 Température moteur Seulement en affichage
C0064 Utilization 0 1 % 150 Charge appareil I x t pendantles dernières 180 s
Seulement en affichage C0064 > 100 % déclenche
avertissement OC5 C0064 > 140 % active la limitation
du courant de sortie au courantnominal du variateur
C0067 Act trip Voir liste de sélection 10Tous les messages défaut
Message défaut actuel Seulement en affichage
C0070 Vp speed-CTRL 10 0.0 0,1 255.9 Vpn régulateur de vitesse
C0071 Tn speed-CTRL 50 1 1 ms 60006000 ms = inactif
Tnn régulateur de vitesse
C0074 value N 10.00 0.00 0,01 % 100.00 Ecart maxi en % par rapport àla consigne
Limitation de l’influence du régulateurde vitesse en fonctionnement avecbouclage

Configuration
7-31L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0075 Vp curr-CTRL 0.20 0.00 0,01 0.99 Vpi régulateur de courant Vpi régulateur de courant pourcontrôle vectoriel
Régulateur de courant maxi pourfonctionnement en U/f
C0076 Tn curr-CTRL 10.0 0.1 0,1 ms 2000.02000 ms inactif
Tni régulateur de courant Tni régulateur de courant pourcontrôle vectoriel
Régulateur de courant maxi pourfonctionnement en U/f
C0077 Ti field-CTRL 4,0 0,3 0,1 ms 5000.0 Régulateur de champ Ti Uniquement actif avec bouclage
C0078 Tn slip-CTRL 100 1 1 ms 6000 Régulateur de glissement Tn Temps de filtrage pourcompensation de glissement(C0021)
Uniquement en fonctionnement U/f(C0006 = 5)
[C0081] Mot power 0.80 0.01 0,01 kW 500.00 Puissance nominale moteurselon plaque signalétique
En fonction de C0086 En modifiant C0086 la valeur est
remise au réglage usine affecté La modification de C0081
déclenche C0086 = 0
[C0082] Mot Rr 0.000 0,001 65.000 Résistance rotorique moteur Valeur déterminée lors del’id ifi i (C0148)[C0084] Mot Rs 0.00 0,01 m 100000.00 Résistance statorique moteur l’identification moteur (C0148)
[C0085] Mot Lss 0.0 0,1 mH 6500.0 Inductance de fuite moteur[C0086] Mot type Sélection type moteur En fonction de l’appareil
En modifiant C0086, la valeurdeC0022, C0081, C0087, C0088,C0089, C0090, C0091 est remiseau réglage usine
0 COMMON Marque moteur autre queLenze
9 DSGA056-22-10010 MDSKA56-14011 MDFKA71-12012 MDSKA71-14013 MDFKA80-6014 MDSKA80-7015 MDFKA80-12016 MDSKA80-14017 MDFKA90-6018 MDSKA90-8019 MDFKA90-12020 MDSKA90-14021 MDFKA100-6022 MDSKA100-8023 MDFKA100-12024 MDSKA100-14025 MDFKA112-6026 MDSKA112-8527 MDFKA112-12028 MDSKA112-140
SDSGAXX056-22, fN : 100 HzMDSKAXX056-22, fN : 140 HzMDFKAXX071-22, fN : 120 HzMDSKAXX071-22, fN : 140 HzMDFKAXX080-22, fN : 60 HzMDSKAXX080-22, fN : 70 HzMDFKAXX080-22, fN : 120 HzMDSKAXX080-22, fN : 140 HzMDFKAXX090-22, fN : 60 HzMDSKAXX090-22, fN : 80 HzMDFKAXX090-22, fN : 120 HzMDSKAXX090-22, fN : 140 HzMDFKAXX100-22, fN : 60 HzMDSKAXX100-22, fN : 80 HzMDFKAXX100-22, fN : 120 HzMDSKAXX100-22, fN : 140 HzMDFKAXX112-22, fN : 60 HzMDSKAXX112-22, fN : 85 HzMDFKAXX112-22, fN : 120 HzMDSKAXX112-22, fN : 140 Hz
Servomoteurs asynchrones Lenzeavec surveillance température intégréevia bouclage codeur incrémental
30 MDFQA-100-5031 MDFQA-100-10032 MDFQA-112-2833 MDFQA-112-5834 MDFQA-132-2035 MDFQA-132-42
MDFQAXX100, fN : 50 HzMDFQAXX100, fN : 100 HzMDFQAXX112, fN : 28 HzMDFQAXX112, fN : 58 HzMDFQAXX132, fN : 20 HzMDFQAXX132, fN : 42 Hz
Servomoteurs asynchrones Lenze(couplage en Y)avec surveillance température intégréepar contact thermique
40 MDFQA-112-5041 MDFQA-112-10042 MDFQA-132-3643 MDFQA-132-76
MDFQAXX112, fN : 50 HzMDFQAXX100, fN : 100 HzMDFQAXX036, fN : 36 HzMDFQAXX076, fN : 76 Hz
Servomoteurs asynchrones Lenze(couplage en )avec surveillance température intégréevia bouclage codeur incrémental

Configuration
7-32 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0086] Mot type 210 DXRA071-12-50211 DXRA071-22-50212 DXRA080-12-50214 DXRA090-12-50215 DXRA090-32-50216 DXRA100-22-50217 DXRA100-32-50218 DXRA112-12-50219 DXRA132-12-50220 DXRA132-22-50221 DXRA160-12-50222 DXRA160-22-50223 DXRA180-12-50224 DXRA180-22-50
DXRAXX071-12, fd : 50 HzDXRAXX071-22, fd : 50 HzDXRAXX080-12, fd : 50 HzDXRAXX090-12, fd : 50 HzDXRAXX090-32, fd : 50 HzDXRAXX100-22, fd : 50 HzDXRAXX100-32, fd: 50 HzDXRAXX112-12, fd : 50 HzDXRAXX132-12, fd : 50 HzDXRAXX132-22, fd : 50 HzDXRAXX160-12, fd : 50 HzDXRAXX160-22, fd : 50 HzDXRAXX180-12, fd : 50 HzDXRAXX180-22, fd : 50 Hz
Moteur-convertisseur Lenze (couplageen Y)
250 DXRA071-12-87251 DXRA071-22-87252 DXRA080-12-87254 DXRA090-12-87255 DXRA090-32-87256 DXRA100-22-87257 DXRA100-32-87258 DXRA112-12-87259 DXRA132-12-87260 DXRA132-22-87261 DXRA160-12-87262 DXRA160-22-87263 DXRA180-12-87264 DXRA180-22-87
DXRAXX071-12, fd : 87 HzDXRAXX071-22, fd : 87 HzDXRAXX080-12, fd : 87 HzDXRAXX090-12, fd : 87 HzDXRAXX090-32, fd : 87 HzDXRAXX100-22, fd: 87 HzDXRAXX100-32, fd : 87 HzDXRAXX112-12, fd : 87 HzDXRAXX132-12, fd : 87 HzDXRAXX132-22, fd : 87 HzDXRAXX160-12, fd : 87 HzDXRAXX160-22, fd : 87 HzDXRAXX180-12, fd : 87 HzDXRAXX180-22, fd : 87 Hz
Moteur-convertisseur Lenze (couplageen )
410 DXMA071-12-50411 DXMA071-32-50412 DXMA080-12-50413 DXMA080-32-50414 DXMA090-12-50415 DXMA090-32-50416 DXMA100-12-50417 DXMA100-32-50418 DXMA112-32-50
DXMAXX071-12, fd : 50 HzDXMAXX071-32, fd : 50 HzDXMAXX080-12, fd : 50 HzDXMAXX080-32, fd : 50 HzDXMAXX090-12, fd : 50 HzDXMAXX090-32, fd : 50 HzDXMAXX100-12, fd : 50 HzDXMAXX100-32, fd : 50 HzDXMAXX112-32, fd : 50 Hz
Motoréducteur asynchrone Lenze(couplage en Y)avec surveillance température intégréepar contact thermique
440 DXMA071-12-87441 DXMA071-32-87442 DXMA080-12-87443 DXMA080-32-87444 DXMA090-12-87445 DXMA090-32-87446 DXMA100-12-87447 DXMA100-32-87448 DXMA112-22-87
DXMAXX071-12, fd : 87 HzDXMAXX071-32, fd : 87 HzDXMAXX080-12, fd : 87 HzDXMAXX080-32, fd : 87 HzDXMAXX090-12, fd : 87 HzDXMAXX090-32, fd : 87 HzDXMAXX100-12, fd : 87 HzDXMAXX100-32, fd : 87 HzDXMAXX112-22, fd : 87 Hz
Motoréducteur asynchrone Lenze(couplage en )avec surveillance température intégréepar contact thermique
449 DXMA112-32-50450 DXMA132-22-50451 DXMA132-32-50
DXMAXX112-32, fd : 50 HzDXMAXX132-22, fd : 50 HzDXMAXX132-32, fd : 50 Hz
[C0087] Mot speed 50 1 rpm (min-1) 36000 Vitesse nominale moteur En fonction de C0086 En modifiant C0086 la valeur est
remise au réglage usine affecté La modification de C0087
déclenche C0086 = 0
[C0088] Mot current 0.5 0,1 A 500.0 Courant nominal moteur En fonction de C0086 En modifiant C0086 la valeur est
remise au réglage usine affecté La modification de C0088
déclenche C0086 = 0
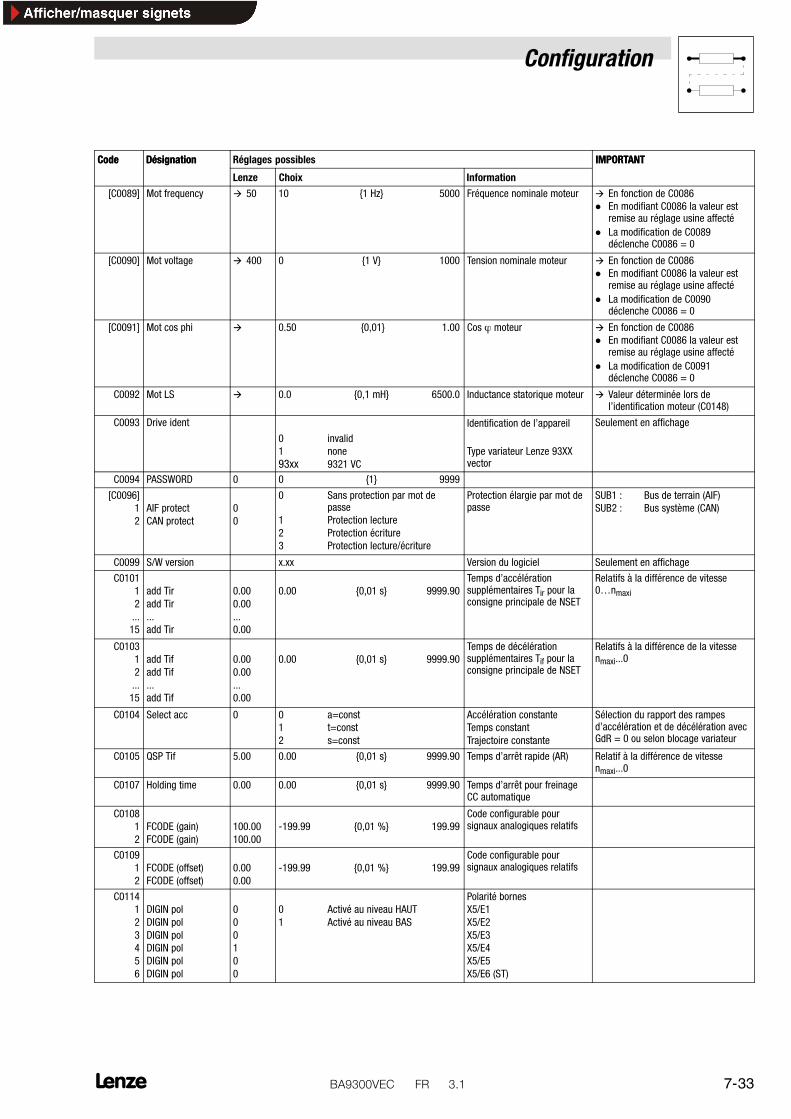
Configuration
7-33L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0089] Mot frequency 50 10 1 Hz 5000 Fréquence nominale moteur En fonction de C0086 En modifiant C0086 la valeur est
remise au réglage usine affecté La modification de C0089
déclenche C0086 = 0
[C0090] Mot voltage 400 0 1 V 1000 Tension nominale moteur En fonction de C0086 En modifiant C0086 la valeur est
remise au réglage usine affecté La modification de C0090
déclenche C0086 = 0
[C0091] Mot cos phi 0.50 0,01 1.00 Cos φ moteur En fonction de C0086 En modifiant C0086 la valeur est
remise au réglage usine affecté La modification de C0091
déclenche C0086 = 0
C0092 Mot LS 0.0 0,1 mH 6500.0 Inductance statorique moteur Valeur déterminée lors del’identification moteur (C0148)
C0093 Drive ident Identification de l’appareil Seulement en affichage
0 invalid1 none93xx 9321 VC
Type variateur Lenze 93XXvector
g
C0094 PASSWORD 0 0 1 9999
[C0096]12
AIF protectCAN protect
00
0 Sans protection par mot depasse
1 Protection lecture2 Protection écriture3 Protection lecture/écriture
Protection élargie par mot depasse
SUB1 : Bus de terrain (AIF)SUB2 : Bus système (CAN)
C0099 S/W version x.xx Version du logiciel Seulement en affichage
C010112...15
add Tiradd Tir...add Tir
0.000.00...0.00
0.00 0,01 s 9999.90Temps d’accélérationsupplémentaires Tir pour laconsigne principale de NSET
Relatifs à la différence de vitesse0nmaxi
C010312...15
add Tifadd Tif...add Tif
0.000.00...0.00
0.00 0,01 s 9999.90Temps de décélérationsupplémentaires Tif pour laconsigne principale de NSET
Relatifs à la différence de la vitessenmaxi...0
C0104 Select acc 0 0 a=const1 t=const2 s=const
Accélération constanteTemps constantTrajectoire constante
Sélection du rapport des rampesd’accélération et de décélération avecGdR = 0 ou selon blocage variateur
C0105 QSP Tif 5.00 0.00 0,01 s 9999.90 Temps d’arrêt rapide (AR) Relatif à la différence de vitessenmaxi...0
C0107 Holding time 0.00 0.00 0,01 s 9999.90 Temps d’arrêt pour freinageCC automatique
C010812
FCODE (gain)FCODE (gain)
100.00100.00
-199.99 0,01 % 199.99Code configurable poursignaux analogiques relatifs
C010912
FCODE (offset)FCODE (offset)
0.000.00
-199.99 0,01 % 199.99Code configurable poursignaux analogiques relatifs
C0114123456
DIGIN polDIGIN polDIGIN polDIGIN polDIGIN polDIGIN pol
000100
0 Activé au niveau HAUT1 Activé au niveau BAS
Polarité bornesX5/E1X5/E2X5/E3X5/E4X5/E5X5/E6 (ST)

Configuration
7-34 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0116]
12...3132
CFG: FDOCFG: FDO...CFG: FDOCFG: FDO
10001000...10001000
Voir liste de sélection 2
FIXED 0FIXED 0...FIXED 0FIXED 0
Configuration des signauxFDOFDO 0FDO 1...FDO 30FDO 31
Sorties numériques programmables ;évaluation uniquement en bus avecinterfaces d’automatisme
[C0117]
1234
CFG: DIGOUTCFG: DIGOUTCFG: DIGOUTCFG: DIGOUT
15000106505005002
Voir liste de sélection 2
DCTRL-TRIPCMP1-OUTDCTRL-RDYMCTRL-IMAX
Configuration des signauxDIGOUTX5/A1X5/A2X5/A3X5/A4
En fonction de C0005
C01181234
DIGOUT polDIGOUT polDIGOUT polDIGOUT pol
1100
0 Actif au niveau HAUT1 Actif au niveau BAS
Polarité bornes DIGOUTX5/A1X5/A2X5/A3X5/A4
C0121 OH7 limit 150 45 1 _C 150 Seuil températureavertissement températuremoteur (défaut OH7)
C0122 OH4 limit 80 45 1 _C 95 Seuil températureavertissement températureradiateur (défaut OH4)
C0125 Vitesse detransmission
0 0 9600 bauds1 4800 bauds2 2400 bauds3 1200 bauds4 19200 bauds
Vitesse de transmissionLECOM pour module 2102
C0126 MONIT CE0 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance erreur decommunication avec interfaced’automatisme CE0
C0130 DIS: act Ti Temps Tiactivés de NSET Seulement en affichage
0 C12/C131 Ti 12 Ti 2...14 Ti 1415 Ti 15
C0012/C0013 actifTir1/Tif1 actifTir2/Tif2 actif...Tir14/Tif14 actifTir15/Tif15 actif
g
C0134 RFG charac 0 0 Courbe linéaire1 Courbe en “S”
Courbe linéaireCourbe en ”S”
Courbe de générateur de rampe pourconsigne principale
C0135 Control word 0 1 65535 Mot de commande pour busavec interfacesd’automatisme
Mot de commande décimal Appareil interprète une information
16 bits, codification binaire
C013612
3
DIS: CTRLWORDDIS: CTRLWORD
DIS: CTRLWORD
Mot de commande en DCTRLMot de commande enCAN-IN1Mot de commande en AIF-IN
Seulement en affichage
C0141 FCODE (setval) 0.00 -199.99 0,01 % 199.99 Code configurable poursignaux analogiques relatifs
Utilisé comme consigne principalepour les configurations C0005 = xxx1

Configuration
7-35L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0142 Start options 1 Conditions de démarrage Actionné :p
0 Start lock (blocage démarrage)
1 Auto start
2 flying lock
3 Fly restart
0 = Protection dedémarrage
1 = Démarrageautomatique
2 = Redémarrage à lavolée
3 = Redémarrage à lavolée activé audémarrage
après la mise sous tension après message (t > 0,5 s) après défaut TRIP
C0143 limit 2 kHz 0.0 0.0 0,1 Hz 20,0 Seuil de commutation 2 kHz(en fonction du champtournant)
Le variateur passe automatiquement à2 kHz dès que la valeur est inférieureau seuil.
C0144 OH switch 1 0 Switch off1 Switch on
Seuil de commutation 2 kHz(en fonction de latempérature) Ref : C0122
Le variateur passe automatiquement à2 kHz dès que le seuil OH4 est atteint.
C0145 select ref 1 Référence lors de la recherche de lal d dé d dé à l0 REF: C0011
1 REF: N-ACT2 REF: N-SET
valeur de départ du redémarrage à lavolée
C0146 fly current 0 -500 1 500 Influence de l’intensité lors duredémarrage à la volée
C0147 fly dt-f 0 -82 1 82 Pas de la fréquence lors duredémarrage à la volée
C0148 ident run 0 Identification moteur Identification avec moteur à l’arrêt
0 WRK stop1 WRK run
0 = Stop1 = Start
C0149 Auto ident 00 Id inactive1 Id active
Auto-Ident0 = inactif1 = actif
Lancement automatique del’identification moteur après déblocagevariateur et sauvegarde des valeurssaisies en jeu de paramètres 1
C0150 Status word 0 1 65535 Mot d’état pour bus avecinterfaces d’automatisme
Mot d’état décimal Seulement en affichage Interprétation binaire fournit les
bits d’état
C0151 DIS: FDO (DW) Signaux de sortie configurables en C0116 Configuration des signaux desorties numériquesprogrammables (hexadécimal)
Seulement en affichage Interprétation binaire fournit les
bits d’état
C0155 Status word 2 0 1 65535 Mot d’état 2 Mot d’état décimal étendu Seulement en affichage Interprétation binaire fournit les
bits d’état
[C0156]1234567
CFG: STAT.B0CFG: STAT.B2CFG: STAT.B3CFG: STAT.B4CFG: STAT.B5CFG: STAT.B14CFG: STAT.B15
200050025003505010650505500
Voir liste de sélection 2DCTRL-PAR*1-OMCTRL-IMAXMCTRL-MMAXNSET-RFG I=OCMP1-OUTDCTRL-CW/CCWDCTRL-RDY
Configuration des bitsprogrammables du mot d’état
C01571234567
DIS: STAT.B0DIS: STAT.B2DIS: STAT.B3DIS: STAT.B4DIS: STAT.B5DIS: STAT.B14DIS: STAT.B15
0 1Etat des bits programmablesdu mot d’état
Seulement en affichage
C0161 Act trip Voir liste de sélection 10Tous les messages défaut(voir chap. 8.3)
Message défaut actuel (idemC0168/1)
Seulement en affichage

Configuration
7-36 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0167 Reset failmem 0 0 No reset1 Reset Efface l’historique des défauts
C016812345678
Fail no. actFail no. old1Fail no. old2Fail no. old3Fail no. old4Fail no. old5Fail no. old6Fail no. old7
Voir liste de sélection 10Tous les messages défaut(voir chap. 8.3)
Défauts survenus :Défaut actuellement activéDernier défautAvant-dernier défautAvant-avant dernier défautDéfaut n° 4Défaut n° 5Défaut n° 6Défaut n° 7
Historique Liste des défauts survenus Seulement en affichage
C016912345678
Failtime actFailtime old1Failtime old2Failtime old3Failtime old4Failtime old5Failtime old6Failtime old7
Temps de mise sous tension correspondant Apparition des défauts :Défaut actuellement activéDernier défautAvant-dernier défautAvant-avant dernier défautDéfaut n° 4Défaut n° 5Défaut n° 6Défaut n° 7
Historique des défauts Liste des temps d’apparition du
défaut affiché en C0168 Par rapport à C0179 Seulement en affichage
C0170
12345678
Counter actCounter old1Counter old2Counter old3Counter old4Counter old5Counter old6Counter old7
Fréquence d’apparitiondéfaut :Défaut actuellement activéDernier défautAvant-dernier défautAvant-avant dernier défautDéfaut n° 4Défaut n° 5Défaut n° 6Défaut n° 7
Historique des défauts Liste indiquant le nombre
d’apparitions répétitives en C0168 Seulement en affichage
[C0173] UG limit 1 Adaptation des seuils ducircuit intermédiaire CC
Vérifier et adapter lors de la miseen service
0 Mains<400V+-B Fonctionnement sur réseau< 400 V avec ou sans modulede freinage
Prévoir le même seuil pour tous lescomposants d’entraînement enréseau
1 Mains=400V+-B Fonctionnement sur réseau400 V avec ou sans modulede freinage
2 Mains=460V+-B Fonctionnement sur réseau460 V avec ou sans modulede freinage
3 Mains=480V-B Fonctionnement sur réseau480 V sans module defreinage
4 Mains=480V+B Fonctionnement sur réseau480 V avec module defreinage
C0178 Op timer 0 0 1 s 4294967295 Compteur de secondes defonctionnement
Temps pendant lequel le variateur étaitdébloqué
C0179 Mains timer 0 0 1 s 4294967295 Nombre de secondes de misesous tension
Temps de mise sous tension
C0182 Ti S-shaped 20.00 0,01 s 0,01 s 50.00 s Ti du générateur de rampecourbe en”S” pour NSET
Détermine l’évolution de la courbe en”S” Valeurs faibles ⇒ courbure
faible Valeurs importantes ⇒ courbure
importante

Configuration
7-37L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0183 Diagnostics Diagnostic de l’entraînement Seulement en affichageg
0 OK101 Init102 TRIP103 RFG P-OFF104 IMP Message105 Power off111 BSP C135112 BSP AIF113 BSP CAN121 CINH term 28122 CINH int 1123 CINH int 2124 CINH C135/STP125 CINH AIF126 CINH CAN141 Lock mode
Sans défautInitialisationDéfaut ”TRIP” actifArrêt d’urgence activéMessage activé
Blocage
Blocage variateur via : X5/28DCTRL-CINH1DCTRL-CINH2Touche STOP de 9371BBBlocage variateur via : AIFBlocage variateur via : CANProtection autodémarrageactivée
g Affiche messages de défaut et
d’état Lorsque plusieurs messages de
défaut et d’état sont activés,l’information avec le numéro leplus faible est affiché
142 IMP Sorties puissance valeurohmique élevée
151 QSP ext term152 QSP C135/STP153 QSP AIF154 QSP CAN161 DC brk extern162 Dc brk C135163 DC brk AIF164 DC brk CAN170 Ident run250 Warning
AR via MCTRL-QSPAR via touche STOPAR via AIFAR via CANFreinCC via bornierFreinCC via C0135FreinCC via AIFFreinCC via CANIdentification moteur activéeAvertissement actif
C0190 NSET arit 0 0 OUT = C461 C46 + C492 C46 - C493 C46 * C494 C46 / C495 C46/(100 - C49)
Bloc arithmétique du blocfonction NSET
Relie la consigne principale C0046 etla consigne supplémentaire C0049
C0195 BRK T act 99.9 0.0 0,1 s 99.999.9 s = illimité
Temps de fermeture frein Temps d’enclenchement du frein demaintien mécanique (voircaractéristiques techniques du frein) Le temps en C0195 écoulé, l’état
”frein mécanique fermé” estatteint.
C0196 BRK T release 0.0 0.0 0,1 s 60,0 Temps d’ouverture frein Temps de coupure du frein demaintien mécanique (voircaractéristiques techniques du frein) Le temps en C0196 écoulé, l’état
”frein mécanique ouvert” estatteint.
C0200 S/W Id Identification du logiciel Seulement en affichage
C0201 S/W date Date d’établissement dulogiciel
Seulement en affichage
C0203 Komm.-No. x / xxxx / xxxxx N° de commission Seulement en affichage
C0204 Serial-No. 0 1 65535 N° série Seulement en affichage
C0206 Produkt date Date de fabrication Seulement en affichage
C0207 DL info 1 Download-Info 1 (informationtéléchargement)
Seulement en affichage
C0208 DL info 2 Download-Info 2 Seulement en affichage
C0209 DL info 3 Download-Info 3 Seulement en affichage
C0220 NSET Tir add 2.00 0.00 0,01 s 9999.90 Temps d’accélération Tir pourla consigne supplémentaire deNSET
Relatif à la diférence de vitesse0nmaxi
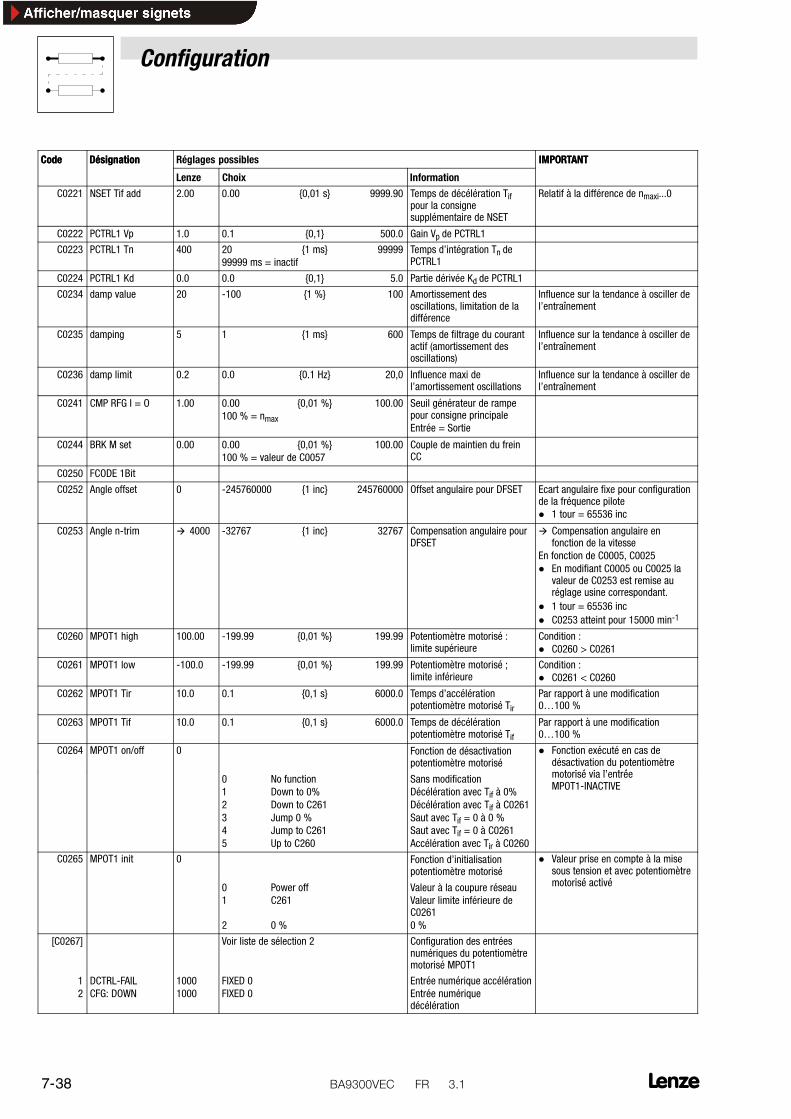
Configuration
7-38 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0221 NSET Tif add 2.00 0.00 0,01 s 9999.90 Temps de décélération Tifpour la consignesupplémentaire de NSET
Relatif à la différence de nmaxi...0
C0222 PCTRL1 Vp 1.0 0.1 0,1 500.0 Gain Vp de PCTRL1
C0223 PCTRL1 Tn 400 20 1 ms 9999999999 ms = inactif
Temps d’intégration Tn dePCTRL1
C0224 PCTRL1 Kd 0.0 0.0 0,1 5.0 Partie dérivée Kd de PCTRL1
C0234 damp value 20 -100 1 % 100 Amortissement desoscillations, limitation de ladifférence
Influence sur la tendance à osciller del’entraînement
C0235 damping 5 1 1 ms 600 Temps de filtrage du courantactif (amortissement desoscillations)
Influence sur la tendance à osciller del’entraînement
C0236 damp limit 0.2 0.0 0.1 Hz 20,0 Influence maxi del’amortissement oscillations
Influence sur la tendance à osciller del’entraînement
C0241 CMP RFG I = O 1.00 0.00 0,01 % 100.00100 % = nmax
Seuil générateur de rampepour consigne principaleEntrée = Sortie
C0244 BRK M set 0.00 0.00 0,01 % 100.00100 % = valeur de C0057
Couple de maintien du freinCC
C0250 FCODE 1Bit
C0252 Angle offset 0 -245760000 1 inc 245760000 Offset angulaire pour DFSET Ecart angulaire fixe pour configurationde la fréquence pilote 1 tour = 65536 inc
C0253 Angle n-trim 4000 -32767 1 inc 32767 Compensation angulaire pourDFSET
Compensation angulaire enfonction de la vitesse
En fonction de C0005, C0025 En modifiant C0005 ou C0025 la
valeur de C0253 est remise auréglage usine correspondant.
1 tour = 65536 inc C0253 atteint pour 15000 min-1
C0260 MPOT1 high 100.00 -199.99 0,01 % 199.99 Potentiomètre motorisé :limite supérieure
Condition : C0260 > C0261
C0261 MPOT1 low -100.0 -199.99 0,01 % 199.99 Potentiomètre motorisé ;limite inférieure
Condition : C0261 < C0260
C0262 MPOT1 Tir 10.0 0.1 0,1 s 6000.0 Temps d’accélérationpotentiomètre motorisé Tir
Par rapport à une modification0100 %
C0263 MPOT1 Tif 10.0 0.1 0,1 s 6000.0 Temps de décélérationpotentiomètre motorisé Tif
Par rapport à une modification0100 %
C0264 MPOT1 on/off 0 Fonction de désactivationpotentiomètre motorisé
Fonction exécuté en cas dedésactivation du potentiomètre
t i é i l’ t é0 No function1 Down to 0%2 Down to C2613 Jump 0 %4 Jump to C2615 Up to C260
Sans modificationDécélération avec Tif à 0%Décélération avec Tif à C0261Saut avec Tif = 0 à 0 %Saut avec Tif = 0 à C0261Accélération avec Tir à C0260
pmotorisé via l’entréeMPOT1-INACTIVE
C0265 MPOT1 init 0 Fonction d’initialisationpotentiomètre motorisé
Valeur prise en compte à la misesous tension et avec potentiomètre
t i é ti é0 Power off1 C261
2 0 %
Valeur à la coupure réseauValeur limite inférieure deC02610 %
pmotorisé activé
[C0267] Voir liste de sélection 2 Configuration des entréesnumériques du potentiomètremotorisé MPOT1
12
DCTRL-FAILCFG: DOWN
10001000
FIXED 0FIXED 0
Entrée numérique accélérationEntrée numériquedécélération

Configuration
7-39L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0268]CFG: INACT 1000
Voir liste de sélection 2FIXED 0
Configuration de l’entréepotentiomètre motoriséMPOT1-INACTIVE
C0269123
DIS: UPDIS: DOWNDIS: INACTIVE
Signaux d’entréepotentiomètre motorisé
Seulement en affichage
C0325 Vp2 adapt 1.0 0.1 0,1 500.0 Gain adaptation régulateurprocess (Vp2) de PCTRL1
C0326 Vp3 adapt 1.0 0.1 0,1 500.0 Gain adaptation régulateurprocess (Vp3) de PCTRL1
C0327 Set2 adapt 100.00 0.00 0,01 % 100.00 Adaptation régulateur processnconsigne2 de PCTRL1
Seuil de consigne de vitesse pourl’adaptation régulateur processCondition : C0327 > C0328
C0328 Set1 adapt 0.00 0.00 0,01 % 100.00 Adaptation régulateur processnconsigne1 de PCTRL1
Seuil de consigne de vitesse pourl’adaptation régulateur processCondition : C0328 < C0327
C0329 Adapt on/off 0 Activation de l’adaptationrégulateur process de PCTRL1
0 no
1 Extern Vp2 Set-value3 Ctrl diff
Sans adaptation du régulateurprocessExterne, via l’entréeAdaptation via consigneAdaptation via écart deréglage
C0332 PCTRL1 Tir 0 0 1 s 10000 Régulateur process tempsd’accélération tir de PCTRL1
Se rapportant à une modification de laconsigne 0100 %
C0333 PCTRL1 Tif 0 0 1 s 10000 Régulateur process temps dedécélération Tir de PCTRL1
Se rapportant à une modification de laconsigne 0100 %
C0336 DIS: act Vp 0.0 0,1 500.0 Régulateur process Vp actuelde PCTRL1
Seulement en affichage
C0337 Bipolaire/unipolaire 0 0 bipolaire1 unipolaire
Régulateur process plaged’influence bipolaire/unipolaire de PCTRL1
C0338 ARIT1 funct 1 0 OUT = IN11 IN1 + IN22 IN1 - IN23 IN1 * IN24 IN1 / IN25 IN1/(100 - IN2)
Fonction du bloc arithmétiqueARIT1
Relie les entrées IN1 et IN2
[C0339]12
CFG: INCFG: IN
10001000
Voir liste de sélection 1FIXED 0 %FIXED 0 %
Configuration du blocarithmétique ARIT1
C034012
DIS: INDIS: IN
-199.99 0,01 % 199.99 Signaux d’entrée du blocarithmétique ARIT1
Seulement en affichage
[C0350] CAN address 1 1 1 63 Adresse sur le bus CAN
[C0351] Vitesse detransmission dubus CAN
0 0 500 kbit/s1 250 kbit/s2 125 kbit/s3 50 kbit/s4 1000 kbit/s5 20 kbit/s
Vitesse de transmission dubus CAN
[C0352] CAN mst 0 0 Esclave1 Maître
Configurer le fonctionnementmaître du bus CAN

Configuration
7-40 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0353123
CAN addr sel1CAN addr sel2CAN addr sel3
000
0 C03501 C0354
Sélection du moded’adressage desidentificateurs pour les blocsCAN-INx et CAN-OUTx
C0354123456
IN1 addr2OUT1 addr2IN2 addr2OUT2 addr2IN3 addr2OUT3 addr2
1291257258385386
1 1 512Code variable pourdétermination desidentificateurs des blocsCAN-INx et CAN-OUTx
C0355123456
CAN-IN1 IdCAN-OUT1 IdCAN-IN2 IdCAN-OUT2 IdCAN-IN3 IdCAN-OUT3 Id
0 1 2047Identificateur des blocsCAN-INx et CAN-OUTx
Seulement en affichage
C03561234
CAN boot upCAN-OUT2 cycleCAN-OUT3 cycleCAN delay
30000020
0 1 ms 65000Temps de réglage du busCAN-Bus
[C0357]123
CE1monit timeCE2monit timeCE3monit time
300030003000
0 1 ms 65000Temps de surveillance du busCAN
C0358 Reset node 0 0 no function1 CAN reset
Configurer la réinitialisation dubus CAN
C0359 CAN state 0 0 Operational1 Pre-Operat.2 Warning3 Bus off
Etat du bus CAN Seulement en affichage
C0360
1
23
4
5
6
7
8
9
10
11
12
Message OUT
Message INMessage OUT1
Message OUT2
Message OUT3
Message POUT1
Message POUT2
Message IN1
Message IN2
Message IN3
Message PIN1
Message PIN2
0 1 65535Compteur de télégrammes(nombre de télégrammes)Total des télégrammesenvoyésTotal des télégrammes reçusTélégrammes envoyés surCAN-OUT1Télégrammes envoyés surCAN-OUT2Télégrammes envoyés surCAN-OUT3Télégrammes envoyés surcanal param.1Télégrammes envoyés surcanal param.2Télégrammes reçus parCAN-IN1Télégrammes reçus parCAN-IN2Télégrammes reçus parCAN-IN3Télégrammes reçus par canalparam.1Télégrammes reçus par canalparam.2
Seulement en affichage Pour valeurs du compteur > 65535
le comptage commence à nouveauà 0

Configuration
7-41L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0361123
4
5
6
7
891011
12
Load OUTLoad INLoad OUT1
Load OUT2
Load OUT3
Load POUT1
Load POUT2
Load IN1Load IN2Load IN3Load PIN1
Load PIN2
0.00 0,01 % 100.00 Charge du bus CANCharge totale émiseCharge totale reçueCharge envoyée surCAN-OUT1Charge envoyée surCAN-OUT2Charge envoyée surCAN-OUT3Charge envoyée sur canalparam.1Charge envoyée sur canalparam.l2Charge reçue par CAN-IN1Charge reçue par CAN-IN2Charge reçue par CAN-IN3Charge reçue par canalparam.1Charge reçue par canalparam.2
Seulement en affichage Prévoir une charge totale du bus
(tous les participants concernés)inférieure à 80% afin d’assurer unbon fonctionnement
C0364CFG:CAN activ 1000
Voir liste de sélection 2FIXED 0
Activation externe desdonnées process
Commutation de l’étatpré-opérationnel à l’état opérationnel
C0365 DIS:CAN activ 0 1 Signal d’entrée CAN actif Seulement en affichage
C0366 Sync Response 1 0 no sync response1 sync response
0 = Sans réponse1 = Réponse
Coupure de la réponse sur télégrammeSync du maître
C0367 Sync Rx ID 128 1 1 256 Identificateur de réception Réglage d’un identificateur Syncréglable pour la saise des donnéesdans le bloc fonction CAN-IN1
C0368 Sync Tx ID 128 1 1 256 Identificateur d’envoi Réglage variable d’un identificateurpour la génération d’un télégrammeSync
C0369 Sync Tx Time 0 0 1 65000 Temps de transmission Sync Intervalle de transmission de l’objetréglé en C0368

Configuration
7-42 L_^VPMMsb` co PKN
Code Désignation Réglages possibles IMPORTANTo g o
Lenze Choix Information
C0400 DIS: OUT -199.99 0,01 % 199.99 Sortie de AIN1 Seulement en affichage
[C0402]CFG: OFFSET 19502
Voir liste de sélection 1FCODE26/1
Configuration de l’offset deAIN1
[C0403]CFG: GAIN 19504
Voir liste de sélection 1FCODE27/1
Configuration du gain de AIN1
C040412
DIS: OFFSETDIS: GAIN
-199.99 0,01 % 199.99Signaux d’entrée de AIN1 Seulement en affichage
C0405 DIS: OUT -199.99 1 % 199.99 Sortie de AIN2 Seulement en affichage
[C0407]CFG: OFFSET 19503
Voir liste de sélection 1FCODE26/2
Configuration de l’offset deAIN2
[C0408]CFG: GAIN 19505
Voir liste de sélection 1FCODE27/2
Configuration du gain de AIN2
C040912
DIS: OFFSETDIS: GAIN
-199.99 0,01 % 199.99Signaux d’entrée de AIN2 Seulement en affichage
[C0420] Encoder const 512 1 1 inc/tour 8192 Constante du codeurincrémental pour entréecodeur incrémental X8 et X9en incréments par tour
Utiliser le codeur incrémental avecniveau HTL uniquement sur l’entréecodeur incrémental X9
[C0421] Encoder volt 5.0 5.0 0,1 V 8.0 Tension d’alimentation ducodeur incrémental
Une programmation incorrecte risquede détruire le codeur incrémental !
C0425 DFIN const 3 0 256 inc/rev1 512 inc/tour2 1024 inc/tour3 2048 inc/tour4 4096 inc/tour5 8192 inc/tour6 16384 inc/tour
Constante pour entréefréquence pilote enincréments par tour
C0426 DIS: OUT -36000 1 rpm (min-1) 36000 Signal de sortie DFIN Seulement en affichage
C0427 DFIN function 0 0 2-phase1 A puls/B dir2 Puls A or B
Fonction DFIN
C0429 TP5 delay 0 -32767 1 inc 32767 Temporisation de TP5
[C0431]CFG: IN 5001
Voir liste de sélection 1MCTRL-NACT
Configuration de l’entrée deAOUT1
[C0432]CFG: OFFSET 19512
Voir liste de sélection 1FCODE109/1
Configuration de l’offset deAOUT1
[C0433]CFG: GAIN 19510
Voir liste de sélection 1FCODE108/1
Configuration du gain deAOUT1
C0434123
DIS: INDIS: OFFSETDIS: GAIN
-199.99 0,01 % 199.99Signaux d’entrée de AOUT1 Seulement en affichage
[C0436]CFG: IN 5004
Voir liste de sélection 1MCTRL-IACT
Configuration de l’entrée deAOUT2
[C0437]CFG: OFFSET 19513
Voir liste de sélection 1FCODE109/2
Configuration de l’offset deAOUT2
[C0438]CFG: GAIN 19511
Voir liste de sélection 1FCODE108/2
Configuration du gain deAOUT2
C0439123
DIS: INDIS: OFFSETDIS: GAIN
-199.99 0,01 % 199.99Signaux d’entrée de AOUT2 Seulement en affichage
C0443 DIS: DIGIN-OUT 0 1 255 Signaux sur X5/E1 à X5/E5Valeur décimale
Seulement en affichage Interprétation binaire fournit les
bits d’état
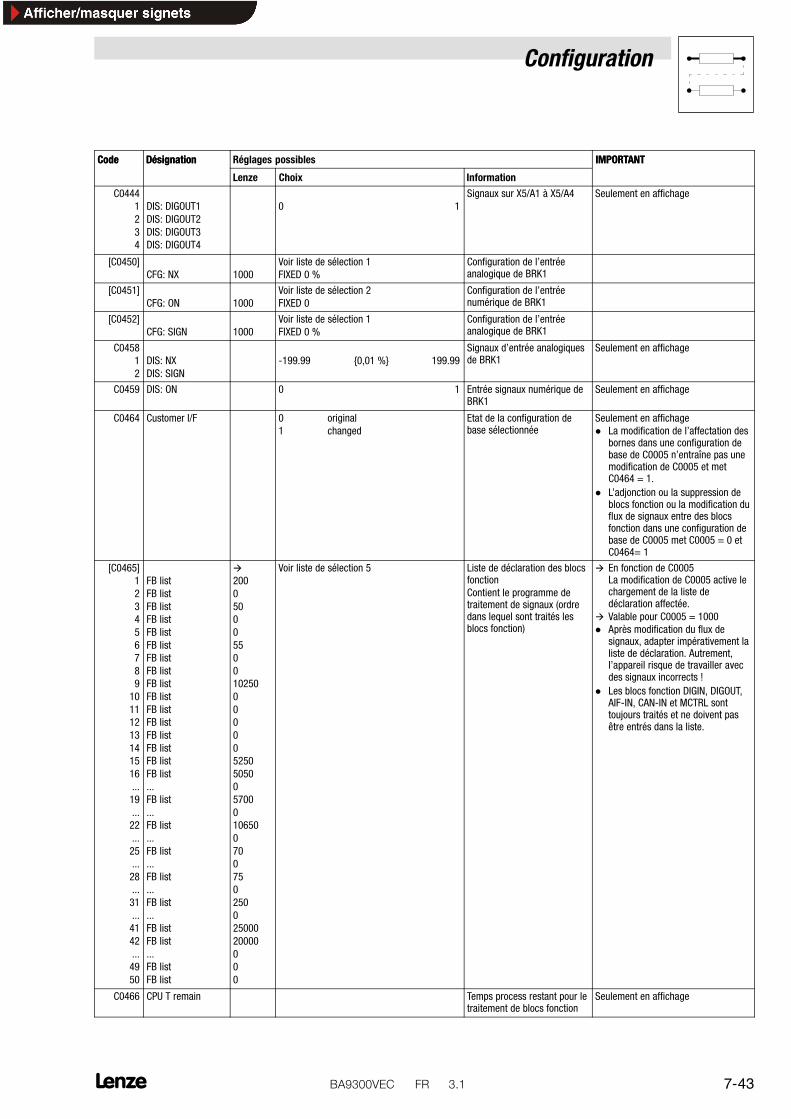
Configuration
7-43L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C04441234
DIS: DIGOUT1DIS: DIGOUT2DIS: DIGOUT3DIS: DIGOUT4
0 1Signaux sur X5/A1 à X5/A4 Seulement en affichage
[C0450]CFG: NX 1000
Voir liste de sélection 1FIXED 0 %
Configuration de l’entréeanalogique de BRK1
[C0451]CFG: ON 1000
Voir liste de sélection 2FIXED 0
Configuration de l’entréenumérique de BRK1
[C0452]CFG: SIGN 1000
Voir liste de sélection 1FIXED 0 %
Configuration de l’entréeanalogique de BRK1
C045812
DIS: NXDIS: SIGN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde BRK1
Seulement en affichage
C0459 DIS: ON 0 1 Entrée signaux numérique deBRK1
Seulement en affichage
C0464 Customer I/F 0 original1 changed
Etat de la configuration debase sélectionnée
Seulement en affichage La modification de l’affectation des
bornes dans une configuration debase de C0005 n’entraîne pas unemodification de C0005 et metC0464 = 1.
L’adjonction ou la suppression deblocs fonction ou la modification duflux de signaux entre des blocsfonction dans une configuration debase de C0005 met C0005 = 0 etC0464= 1
[C0465]12345678910111213141516...19...22...25...28...31...4142...4950
FB listFB listFB listFB listFB listFB listFB listFB listFB listFB listFB listFB listFB listFB listFB listFB list...FB list...FB list...FB list...FB list...FB list...FB listFB list...FB listFB list
20005000550010250000005250505005700010650070075025002500020000000
Voir liste de sélection 5 Liste de déclaration des blocsfonctionContient le programme detraitement de signaux (ordredans lequel sont traités lesblocs fonction)
En fonction de C0005La modification de C0005 active lechargement de la liste dedéclaration affectée.
Valable pour C0005 = 1000 Après modification du flux de
signaux, adapter impérativement laliste de déclaration. Autrement,l’appareil risque de travailler avecdes signaux incorrects !
Les blocs fonction DIGIN, DIGOUT,AIF-IN, CAN-IN et MCTRL sonttoujours traités et ne doivent pasêtre entrés dans la liste.
C0466 CPU T remain Temps process restant pour letraitement de blocs fonction
Seulement en affichage

Configuration
7-44 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0469] Fct STP key 2 Fonction de la touche STOP duclavier de commande
Fonction activée en appuyant sur latouche STOP
0 inactif1 CINH2 AR
DésactivéBlocage variateurArrêt rapide
C04701234
FCODE bit 0-7FCODE bit 8-15FCODE bit 16-23FCODE bit 24-31
0000
0 1 255Codes configurables pour lessignaux numériques
Les mots de données C0470 et C0471sont en parallèle et sont identiques
C0471 FCODE 32 bit 0 0 1 4294967296 Codes configurables pour lessignaux numériques
Les mots de données C0470 et C0471sont en parallèle et sont identiques
C0472123...1920
FCODE analogFCODE analogFCODE analog...FCODE analogFCODE analog
0.000.00100.00...0.000.00
-199.99 0,01 % 199.99Codes configurables poursignaux analogiques relatifs
C0473123...910
FCODE absFCODE absFCODE abs...FCODE absFCODE abs
110...00
-32767 1 32767Codes configurables poursignaux analogiques absolus
C047412
FCODE PHFCODE PH
00
-2000000000 1 200000000Codes programmables de typeposition
1 tour = 65536 inc
C047512
FCODE DFFCODE DF
00
-16000 1 16000Codes configurables pour lessignaux vitesse
C0497 Nact-filter 2,5 0.0 0,1 ms 50.00 ms =inactif
Constante de temps vitesseréelle
C0510CFG: IN1 1000
Voir liste de sélection 1FIXED0%
Configuration NLIM1
C0511 DIS: IN1 -199.99 0,01 % 199.99 Signal d’entrée de NLIM1 Seulement en affichage
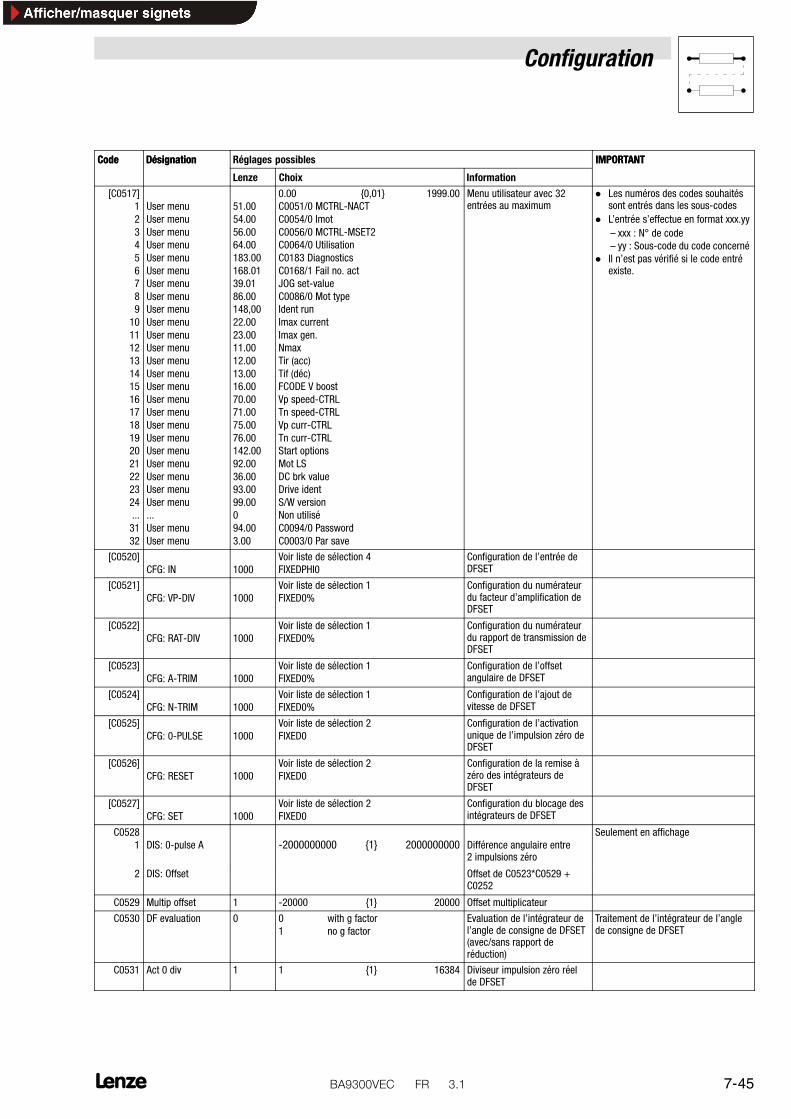
Configuration
7-45L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0517]123456789101112131415161718192021222324...3132
User menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menuUser menu...User menuUser menu
51.0054.0056.0064.00183.00168.0139.0186.00148,0022.0023.0011.0012.0013.0016.0070.0071.0075.0076.00142.0092.0036.0093.0099.00094.003.00
0.00 0,01 1999.00C0051/0 MCTRL-NACTC0054/0 ImotC0056/0 MCTRL-MSET2C0064/0 UtilisationC0183 DiagnosticsC0168/1 Fail no. actJOG set-valueC0086/0 Mot typeIdent runImax currentImax gen.NmaxTir (acc)Tif (déc)FCODE V boostVp speed-CTRLTn speed-CTRLVp curr-CTRLTn curr-CTRLStart optionsMot LSDC brk valueDrive identS/W versionNon utiliséC0094/0 PasswordC0003/0 Par save
Menu utilisateur avec 32entrées au maximum
Les numéros des codes souhaitéssont entrés dans les sous-codes
L’entrée s’effectue en format xxx.yy– xxx : N° de code– yy : Sous-code du code concerné
Il n’est pas vérifié si le code entréexiste.
[C0520]CFG: IN 1000
Voir liste de sélection 4FIXEDPHI0
Configuration de l’entrée deDFSET
[C0521]CFG: VP-DIV 1000
Voir liste de sélection 1FIXED0%
Configuration du numérateurdu facteur d’amplification deDFSET
[C0522]CFG: RAT-DIV 1000
Voir liste de sélection 1FIXED0%
Configuration du numérateurdu rapport de transmission deDFSET
[C0523]CFG: A-TRIM 1000
Voir liste de sélection 1FIXED0%
Configuration de l’offsetangulaire de DFSET
[C0524]CFG: N-TRIM 1000
Voir liste de sélection 1FIXED0%
Configuration de l’ajout devitesse de DFSET
[C0525]CFG: 0-PULSE 1000
Voir liste de sélection 2FIXED0
Configuration de l’activationunique de l’impulsion zéro deDFSET
[C0526]CFG: RESET 1000
Voir liste de sélection 2FIXED0
Configuration de la remise àzéro des intégrateurs deDFSET
[C0527]CFG: SET 1000
Voir liste de sélection 2FIXED0
Configuration du blocage desintégrateurs de DFSET
C05281 DIS: 0-pulse A -2000000000 1 2000000000 Différence angulaire entre
2 impulsions zéro
Seulement en affichage
2 DIS: Offset Offset de C0523*C0529 +C0252
C0529 Multip offset 1 -20000 1 20000 Offset multiplicateur
C0530 DF evaluation 0 0 with g factor1 no g factor
Evaluation de l’intégrateur del’angle de consigne de DFSET(avec/sans rapport deréduction)
Traitement de l’intégrateur de l’anglede consigne de DFSET
C0531 Act 0 div 1 1 1 16384 Diviseur impulsion zéro réelde DFSET

Configuration
7-46 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0532 0-pulse/TP 1 1 0-pulse2 Touch probe
Sélection impulsion zéro dusystème de bouclage ouTouch probe pour DFSET
C0533 Vp denom 1 1 1 32767 Facteur d’amplificationdénominateur de DFSET
C0534 0-pulse fct 0 Fonction impulsion zéro deDFSET
0 Inactive1 Continuous2 Cont. switch10 Once,fast way11 Once, CW12 Once, CCW13 Once, 2*0-puls
C0535 Set 0 div 1 1 1 16384 Diviseur impulsion zéroconsigne de DFSET
C0536123
DIS: VP-DIVDIS: RAT-DIVDIS: A-TRIM
-32767 1 32767Signaux d’entrées analogiquesabsolus de DFSET
Seulement en affichage
C0537 DIS: N-TRIM -199.99 0,01 % 199.99 Signal d’entrée relatifanalogique de DFSET
Seulement en affichage
C0538123
DIS: 0-PULSEDIS: RESETDIS: SET
0 1 Signaux d’entrées numériquesde DFSET
Seulement en affichage
C0539 DIS: IN -36000 1 rpm (min-1) 36000 Signal d’entrée de DFSET Seulement en affichage
[C0540] Function 0 0 Analog input Entrée analogique[ ]
1 PH diff input Entrée vitesse X9 est bloqué si 0 ou 1 a étéél i é2 Res + int 0 Inactif
qsélectionné
3 Res + ext 0 Inactif
4 X10 = X9 X9 est sorti sur X10 Les signaux d’entrée sont copiés def h d5 X10 = X8 X8 est sorti sur X10
g pfaçon hard.
[C0541]CFG: AN-IN 5001
Voir liste de sélection 1MCTRL-NACT
Configuration de l’entréeanalogique de DFOUT
[C0542]CFG: DF-IN 1000
Voir liste de sélection 4FIXEDPHI 0
Configuration de l’entréefréquence pilote de DFOUT
[C0544]CFG: SYN-RDY 1000
Voir liste de sélection 2FIXED 0
Configuration du signal desynchronisation pourl’impulsion zéro de DFOUT
C0545 PH offset 0 0 1 inc 65535 Offset angulaire de DFOUT 1 tour = 65535 inc
C0546 Min inc/rev 1000 1 1 inc 1800000000 1 tour = 65535 inc
C0547 DIS: AN-IN -199.99 0,01 % 199.99 Signal d’entrée relatifanalogique de DFOUT
Seulement en affichage
C0548 DIS: SYN-RDY Signal d’entrée numérique deDFOUT
Seulement en affichage
C0549 DIS: DF-IN -32767 1 rpm (min-1) 32767 Signal d’entrée absoluanalogique de DFOUT
Seulement en affichage
C056012345...1415
Fix set-valueFix set-valueFix set-valueFix set-valueFix set-value...Fix set-valueFix set-value
100.0075.0050.0025.000.00...0.000.00
-199.99 0,01 % 199.99Consignes fixes de FIXSET1
[C0561]CFG: AIN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de FIXSET1

Configuration
7-47L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0562]1234
CFG: INCFG: INCFG: INCFG: IN
1000100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0FIXED0
Configuration des entréesnumériques de FIXSET1
C0563 DIS: AIN -199.99 0,01 % 199.99 Signal d’entrée analogique deFIXSET1
Seulement en affichage
C05641234
DIS: INDIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquede FIXSET1
Seulement en affichage
[C0570]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de S&H1
[C0571]CFG: LOAD 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de S&H1
C0572 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique deS&H1
Seulement en affichage
C0573 DIS: LOAD 0 1 Signal d’entrée numérique deS&H1
Seulement en affichage
C0581 MONIT EEr 0 0 TRIP1 IMP2 Warning3 Off
Configuration de lasurveillance EEr (défautexterne)
C0582 MONIT OH4 2 2 Warning3 Off
Configuration de lasurveillance OH4 (températureradiateur)
C0583 MONIT OH3 3 0 TRIP3 Off
Configuration de lasurveillance OH3 (températuremoteur fixe)
C0584 MONIT OH7 3 2 Warning3 Off
Configuration de lasurveillance OH7 (températuremoteur réglable)
C0585 MONIT OH8 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance OH8 (températuremoteur réglable)
Surveillance température viaentrée PTC
C0587 MONIT SD3 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance SD3 (codeur surX9)
C0588 MONIT H10/H11 3 0 TRIP3 Off
Configuration de lasurveillance H10 et H11(capteurs de températuredans le variateur de vitesse)
C0591 MONIT CE1 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance CE1 (défautCAN-IN1)
C0592 MONIT CE2 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance CE2 (défautCAN-IN2)
C0593 MONIT CE3 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance CE3 (défautCAN-IN3)
C0594 MONIT SD6 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance SD6 (capteur detempérature moteur)
C0595 MONIT CE4 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance CE4 (CAN-BusOff)
C0596 Nmax limit 4000 0 1 rpm (min-1) 36000 Surveillance : vitesse de lamachine

Configuration
7-48 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0597 MONIT LP1 0 0 TRIP2 Warning3 Off
Configuration de lasurveillance défaillance phasemoteur
C0598 MONIT SD5 3 0 TRIP2 Warning3 Off
Configuration de lasurveillance courant pilote surX5/1,2 < 2 mA
C0599 Limit LP1 5.0 1.0 0,1 % 10.0 Limitation courant LP1 Limitation courant pour surveillance dedéfaillance de phase moteur LP1
C0600 Function 1 0 OUT = IN11 IN1 + IN22 IN1 - IN23 IN1 * IN24 IN1 / IN25 IN1/(100 - IN2)
Fonction du bloc arithmétiqueARIT2
Relie les entrées IN1 et IN2
[C0601]12
CFG: INCFG: IN
10001000
Voir liste de sélection 1FIXED 0 %FIXED 0 %
Configuration des entréesanalogiques de ARIT2
C060212
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde ARIT 2
Seulement en affichage
C0603 Function 1 0 OUT = IN11 IN1 + IN22 IN1 - IN23 IN1 * IN24 IN1 / IN25 IN1/(100 - IN2)
Fonction du bloc arithmétiqueARIT3
Relie les entrées IN1 et IN2
[C0604]12
CFG: INCFG: IN
10001000
Voir liste de sélection 1FIXED0%FIXED0%
Configuration des entréesanalogiques de ARIT3
C060512
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux de l’entréeanalogiques de ARIT 3
Seulement en affichage
[C0608]CFG: IN 1000
Liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de SQRT1
C0609 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée de SQRT1 Seulement en affichage
[C0610]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 1FIXED0%FIXED0%FIXED0%
Configuration des entréesanalogiques du bloc additionADD1
Addition des entrées IN1, IN2 etsoustraction de IN3
C0611123
DIS: INDIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde ADD1
Seulement en affichage
[C0612]CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 1FIXED0%FIXED0%FIXED0%
Configuration des entréesanalogiques du bloc additionADD2
Addition des entrées IN1, IN2 etsoustraction de IN3
C0613123
DIS: INDIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde ADD2
Seulement en affichage
C0620 DB1 gain 1.00 -10.00 0,01 10.00 Gain de l’élément zone morteDB1
C0621 DB1 value 1.00 0.00 0,01 % 100.00 Zone morte de DB1
[C0622]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de DB1
C0623 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique deDB1
Seulement en affichage
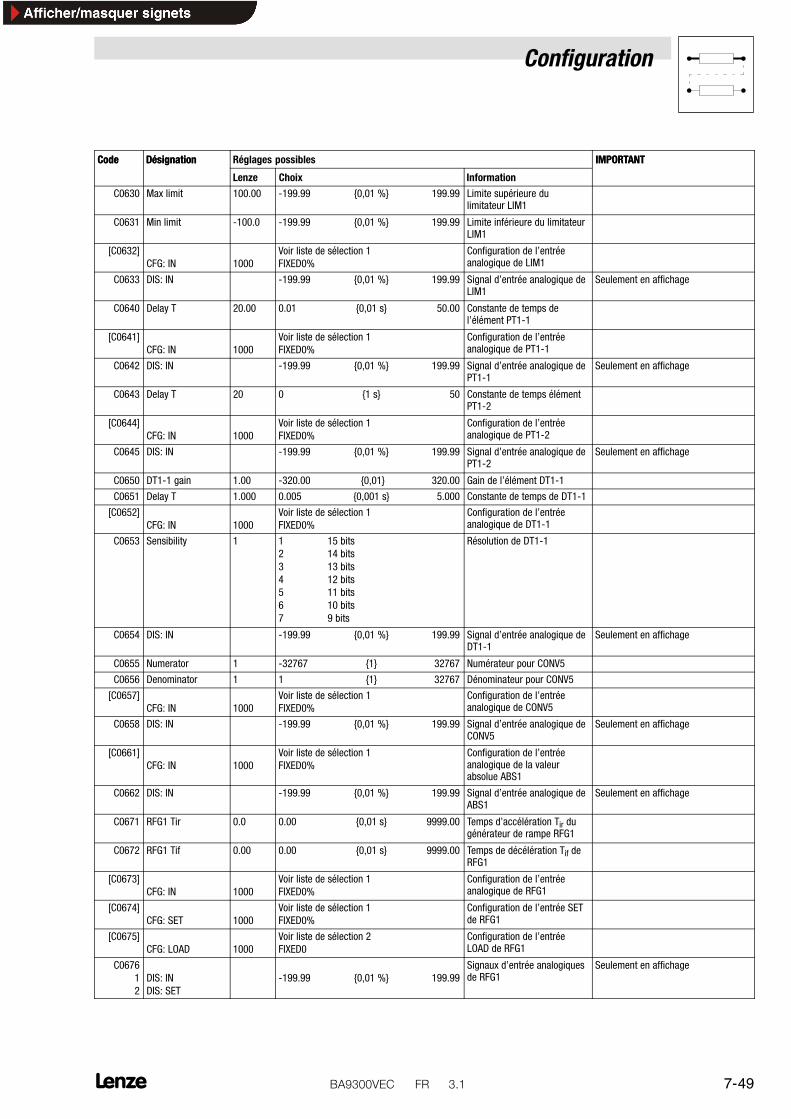
Configuration
7-49L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0630 Max limit 100.00 -199.99 0,01 % 199.99 Limite supérieure dulimitateur LIM1
C0631 Min limit -100.0 -199.99 0,01 % 199.99 Limite inférieure du limitateurLIM1
[C0632]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de LIM1
C0633 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique deLIM1
Seulement en affichage
C0640 Delay T 20.00 0.01 0,01 s 50.00 Constante de temps del’élément PT1-1
[C0641]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de PT1-1
C0642 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique dePT1-1
Seulement en affichage
C0643 Delay T 20 0 1 s 50 Constante de temps élémentPT1-2
[C0644]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de PT1-2
C0645 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique dePT1-2
Seulement en affichage
C0650 DT1-1 gain 1.00 -320.00 0,01 320.00 Gain de l’élément DT1-1
C0651 Delay T 1.000 0.005 0,001 s 5.000 Constante de temps de DT1-1
[C0652]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de DT1-1
C0653 Sensibility 1 1 15 bits2 14 bits3 13 bits4 12 bits5 11 bits6 10 bits7 9 bits
Résolution de DT1-1
C0654 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique deDT1-1
Seulement en affichage
C0655 Numerator 1 -32767 1 32767 Numérateur pour CONV5
C0656 Denominator 1 1 1 32767 Dénominateur pour CONV5
[C0657]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de CONV5
C0658 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique deCONV5
Seulement en affichage
[C0661]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de la valeurabsolue ABS1
C0662 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique deABS1
Seulement en affichage
C0671 RFG1 Tir 0.0 0.00 0,01 s 9999.00 Temps d’accélération Tir dugénérateur de rampe RFG1
C0672 RFG1 Tif 0.00 0.00 0,01 s 9999.00 Temps de décélération Tif deRFG1
[C0673]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de RFG1
[C0674]CFG: SET 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entrée SETde RFG1
[C0675]CFG: LOAD 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréeLOAD de RFG1
C067612
DIS: INDIS: SET
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde RFG1
Seulement en affichage
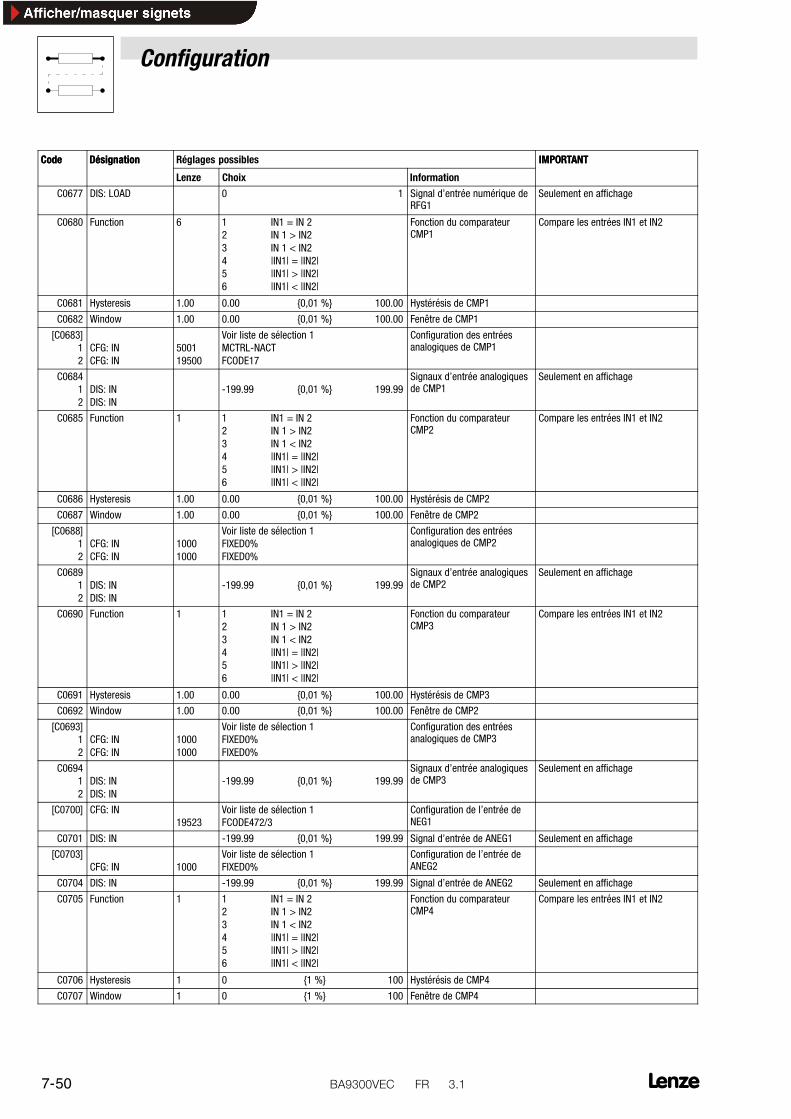
Configuration
7-50 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0677 DIS: LOAD 0 1 Signal d’entrée numérique deRFG1
Seulement en affichage
C0680 Function 6 1 IN1 = IN 22 IN 1 > IN23 IN 1 < IN24 |IN1| = |IN2|5 |IN1| > |IN2|6 |IN1| < |IN2|
Fonction du comparateurCMP1
Compare les entrées IN1 et IN2
C0681 Hysteresis 1.00 0.00 0,01 % 100.00 Hystérésis de CMP1
C0682 Window 1.00 0.00 0,01 % 100.00 Fenêtre de CMP1
[C0683]12
CFG: INCFG: IN
500119500
Voir liste de sélection 1MCTRL-NACTFCODE17
Configuration des entréesanalogiques de CMP1
C068412
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde CMP1
Seulement en affichage
C0685 Function 1 1 IN1 = IN 22 IN 1 > IN23 IN 1 < IN24 |IN1| = |IN2|5 |IN1| > |IN2|6 |IN1| < |IN2|
Fonction du comparateurCMP2
Compare les entrées IN1 et IN2
C0686 Hysteresis 1.00 0.00 0,01 % 100.00 Hystérésis de CMP2
C0687 Window 1.00 0.00 0,01 % 100.00 Fenêtre de CMP2
[C0688]12
CFG: INCFG: IN
10001000
Voir liste de sélection 1FIXED0%FIXED0%
Configuration des entréesanalogiques de CMP2
C068912
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde CMP2
Seulement en affichage
C0690 Function 1 1 IN1 = IN 22 IN 1 > IN23 IN 1 < IN24 |IN1| = |IN2|5 |IN1| > |IN2|6 |IN1| < |IN2|
Fonction du comparateurCMP3
Compare les entrées IN1 et IN2
C0691 Hysteresis 1.00 0.00 0,01 % 100.00 Hystérésis de CMP3
C0692 Window 1.00 0.00 0,01 % 100.00 Fenêtre de CMP2
[C0693]12
CFG: INCFG: IN
10001000
Voir liste de sélection 1FIXED0%FIXED0%
Configuration des entréesanalogiques de CMP3
C069412
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde CMP3
Seulement en affichage
[C0700] CFG: IN19523
Voir liste de sélection 1FCODE472/3
Configuration de l’entrée deNEG1
C0701 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée de ANEG1 Seulement en affichage
[C0703]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entrée deANEG2
C0704 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée de ANEG2 Seulement en affichage
C0705 Function 1 1 IN1 = IN 22 IN 1 > IN23 IN 1 < IN24 |IN1| = |IN2|5 |IN1| > |IN2|6 |IN1| < |IN2|
Fonction du comparateurCMP4
Compare les entrées IN1 et IN2
C0706 Hysteresis 1 0 1 % 100 Hystérésis de CMP4
C0707 Window 1 0 1 % 100 Fenêtre de CMP4

Configuration
7-51L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0708]12
CFG: INCFG: IN
10001000
Voir liste de sélection 1FIXED0%FIXED0%
Configuration des entréesanalogiques de CMP4
C070912
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde CMP4
Seulement en affichage
C0710 Function 1 0 Rising trans1 Falling trans2 Both trans
Fonction temporisationimpulsionnelle binaire TRANS1
C0711 Pulse T 0.001 0.001 0,001 s 60.000 Durée d’impulsion de TRANS1
[C0713]CFG: IN 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de TRANS1
C0714 DIS: IN 0 1 Signal d’entrée numérique deTRANS1
Seulement en affichage
C0715 Function 0 0 Rising trans1 Falling trans2 Both trans
Fonction temporisationimpulsionnelle binaire TRANS2
C0716 Pulse T 0.001 0.001 0,001 s 60.000 Durée d’impulsion de TRANS2
[C0718]CFG: IN 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de TRANS2
C0719 DIS: IN 0 1 Signal d’entrée numérique deTRANS2
Seulement en affichage
C0720 Function 2 0 On delay1 Off delay2 On/Off delay
Fonction du retard numériqueDIGDEL1
C0721 Delay T 1.000 0.001 0,001 s 60.000 Temporisation de DIGDEL1
[C0723]CFG: IN 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de DIGDEL1
C0724 DIS: IN 0 1 Signal d’entrée numérique deDIGDEL1
Seulement en affichage
C0725 Function 0 0 On delay1 Off delay2 On/Off delay
Fonction du retard numériquede temporisation DIGDEL2
C0726 Delay T 1.00 0.001 0,001 s 60.000 Temporisation de DIGDEL2
[C0728]CFG: IN 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de DIGDEL2
C0729 DIS: IN 0 1 Signal d’entrée numérique deDIGDEL2
Seulement en affichage
C0730 Mode 0 0 Activation mesure1 Arrêt mesure
Démarrage/arrêt del’enregistrement des valeursde mesure de OSC
C0731 Status (état) 0 Mesure terminée1 Mesure activée2 Trigger reconnu3 Interruption4 Interruption après trigger5 Lecture de la mémoire
Etat actuel de fonctionnementde OSC
Seulement en affichage
[C0732]1234
CFG: Canal1CFG: Canal2CFG: Canal3CFG: Canal4
1000100010001000
Voir liste de sélection 1FIXED0%FIXED0%FIXED0%FIXED0%
Configuration des entréesanalogiques de OSC
[C0733]1 CFG: Dig. Trigger 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréetrigger de OSC
C0734 Source trigger 0 0 Entrée trigger numérique1 Canal 12 Canal 23 Canal 34 Canal 4
Evaluation de la source triggerde OSC
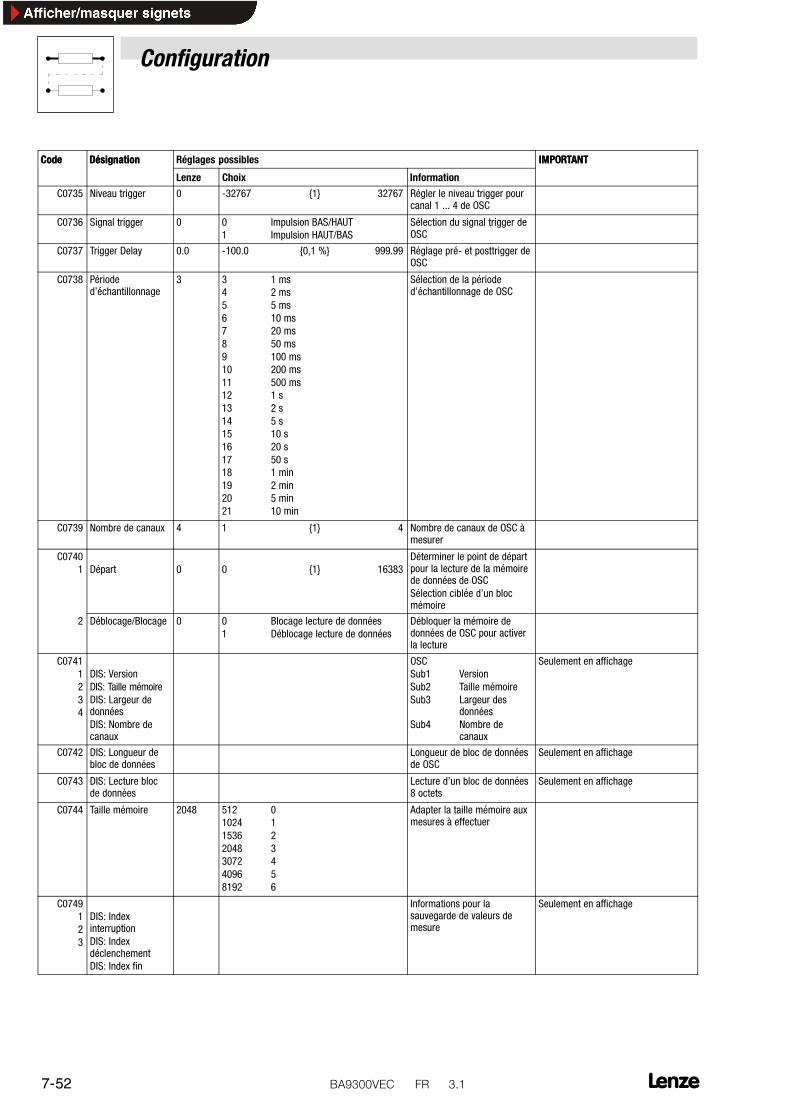
Configuration
7-52 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0735 Niveau trigger 0 -32767 1 32767 Régler le niveau trigger pourcanal 1 ... 4 de OSC
C0736 Signal trigger 0 0 Impulsion BAS/HAUT1 Impulsion HAUT/BAS
Sélection du signal trigger deOSC
C0737 Trigger Delay 0.0 -100.0 0,1 % 999.99 Réglage pré- et posttrigger deOSC
C0738 Périoded’échantillonnage
3 3 1 ms4 2 ms5 5 ms6 10 ms7 20 ms8 50 ms9 100 ms10 200 ms11 500 ms12 1 s13 2 s14 5 s15 10 s16 20 s17 50 s18 1 min19 2 min20 5 min21 10 min
Sélection de la périoded’échantillonnage de OSC
C0739 Nombre de canaux 4 1 1 4 Nombre de canaux de OSC àmesurer
C07401 Départ 0 0 1 16383
Déterminer le point de départpour la lecture de la mémoirede données de OSCSélection ciblée d’un blocmémoire
2 Déblocage/Blocage 0 0 Blocage lecture de données1 Déblocage lecture de données
Débloquer la mémoire dedonnées de OSC pour activerla lecture
C07411234
DIS: VersionDIS: Taille mémoireDIS: Largeur dedonnéesDIS: Nombre decanaux
OSCSub1 VersionSub2 Taille mémoireSub3 Largeur des
donnéesSub4 Nombre de
canaux
Seulement en affichage
C0742 DIS: Longueur debloc de données
Longueur de bloc de donnéesde OSC
Seulement en affichage
C0743 DIS: Lecture blocde données
Lecture d’un bloc de données8 octets
Seulement en affichage
C0744 Taille mémoire 2048 512 01024 11536 22048 33072 44096 58192 6
Adapter la taille mémoire auxmesures à effectuer
C0749123
DIS: IndexinterruptionDIS: IndexdéclenchementDIS: Index fin
Informations pour lasauvegarde de valeurs demesure
Seulement en affichage
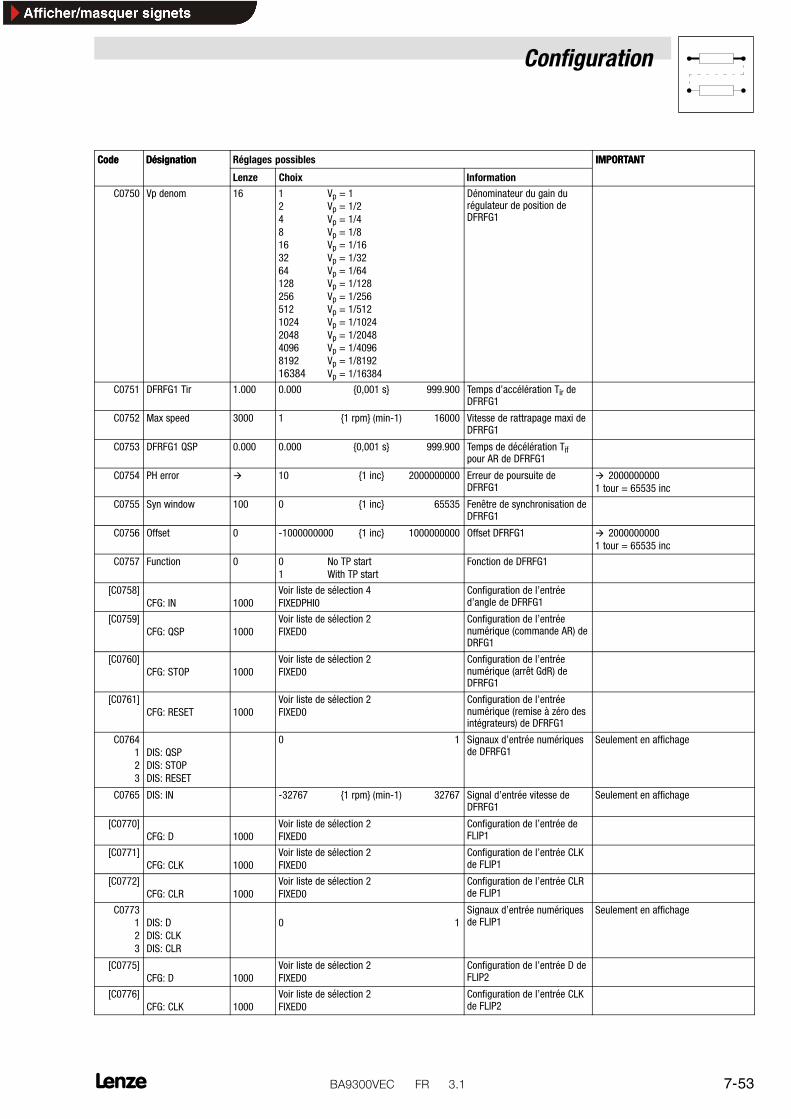
Configuration
7-53L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0750 Vp denom 16 1 Vp = 12 Vp = 1/24 Vp = 1/48 Vp = 1/816 Vp = 1/1632 Vp = 1/3264 Vp = 1/64128 Vp = 1/128256 Vp = 1/256512 Vp = 1/5121024 Vp = 1/10242048 Vp = 1/20484096 Vp = 1/40968192 Vp = 1/819216384 Vp = 1/16384
Dénominateur du gain durégulateur de position deDFRFG1
C0751 DFRFG1 Tir 1.000 0.000 0,001 s 999.900 Temps d’accélération Tir deDFRFG1
C0752 Max speed 3000 1 1 rpm (min-1) 16000 Vitesse de rattrapage maxi deDFRFG1
C0753 DFRFG1 QSP 0.000 0.000 0,001 s 999.900 Temps de décélération Tifpour AR de DFRFG1
C0754 PH error 10 1 inc 2000000000 Erreur de poursuite deDFRFG1
20000000001 tour = 65535 inc
C0755 Syn window 100 0 1 inc 65535 Fenêtre de synchronisation deDFRFG1
C0756 Offset 0 -1000000000 1 inc 1000000000 Offset DFRFG1 20000000001 tour = 65535 inc
C0757 Function 0 0 No TP start1 With TP start
Fonction de DFRFG1
[C0758]CFG: IN 1000
Voir liste de sélection 4FIXEDPHI0
Configuration de l’entréed’angle de DFRFG1
[C0759]CFG: QSP 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique (commande AR) deDRFG1
[C0760]CFG: STOP 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique (arrêt GdR) deDFRFG1
[C0761]CFG: RESET 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique (remise à zéro desintégrateurs) de DFRFG1
C0764123
DIS: QSPDIS: STOPDIS: RESET
0 1 Signaux d’entrée numériquesde DFRFG1
Seulement en affichage
C0765 DIS: IN -32767 1 rpm (min-1) 32767 Signal d’entrée vitesse deDFRFG1
Seulement en affichage
[C0770]CFG: D 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée deFLIP1
[C0771]CFG: CLK 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée CLKde FLIP1
[C0772]CFG: CLR 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée CLRde FLIP1
C0773123
DIS: DDIS: CLKDIS: CLR
0 1Signaux d’entrée numériquesde FLIP1
Seulement en affichage
[C0775]CFG: D 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée D deFLIP2
[C0776]CFG: CLK 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée CLKde FLIP2

Configuration
7-54 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0777]CFG: CLR 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée CLRde FLIP2
C0778123
DIS: DDIS: CLKDIS: CLR
0 1Signaux d’entrée numériquesde FLIP2
Seulement en affichage
[C0780]CFG: N 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeconsigne principale de NSET
[C0781]CFG: N-INV 10251
Voir liste de sélection 2R/L/Q-R/L
Configuration de l’inversionconsigne principale de NSET
[C0782]CFG: NADD 5650
Voir liste de sélection 1ASW1-OUT
Configuration de l’entréeconsigne supplémentaire deNSET
[C0783]CFG: NADD-INV 1000
Voir liste de sélection 2FIXED0
Configuration de l’inversionconsigne supplémentaire deNSET
[C0784]CFG: CINH-VAL 5001
Voir liste de sélection 1MCTRL-NACT
Configuration du signal desortie avec variateur bloquéde NSET
[C0785]CFG: SET 5000
Voir liste de sélection 1MCTRL-NSET2
Configuration du générateurde rampe de NSET
[C0786]CFG: LOAD 5001
Voir liste de sélection 2MCTRL-QSP-OUT
Configuration de l’entréenumérique (chargement GdR)de NSET1
[C0787]1234
CFG: JOG*1CFG: JOG*2CFG: JOG*4CFG: JOG*8
53100010001000
Voir liste de sélection 2DIGIN3FIXED0FIXED0FIXED0
Configuration de la sélectionJOG et activation JOG deNSET
Interprétation binaire
[C0788]1234
CFG: TI*1CFG: TI*2CFG: TI*4CFG: TI*8
1000100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0FIXED0
Configuration de la sélectionTi et activation Ti de NSET
Interprétation binaire Tir et Tif identiques par paire
[C0789]CFG: RFG-0 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique (GdR = 0) deNSET1
[C0790]CFG: RFG-STOP 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique (arrêt GdR) deNSET1
C079812
DIS: CINH-VALDIS: SET
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde NSET
Seulement en affichage
C079912345678910111213
DIS: N-INVDIS: NADD-INVDIS: LOADDIS: JOG*1DIS: JOG*2DIS: JOG*4DIS: JOG*8DIS: TI*1DIS: TI*2DIS: TI*4DIS: TI*8DIS RFG-0DIS: RFG-STOP
0 1Signaux d’entrée numériquesde NSET
Seulement en affichage
[C0800]CFG: SET 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entrée deconsigne régulateur processPCTRL1
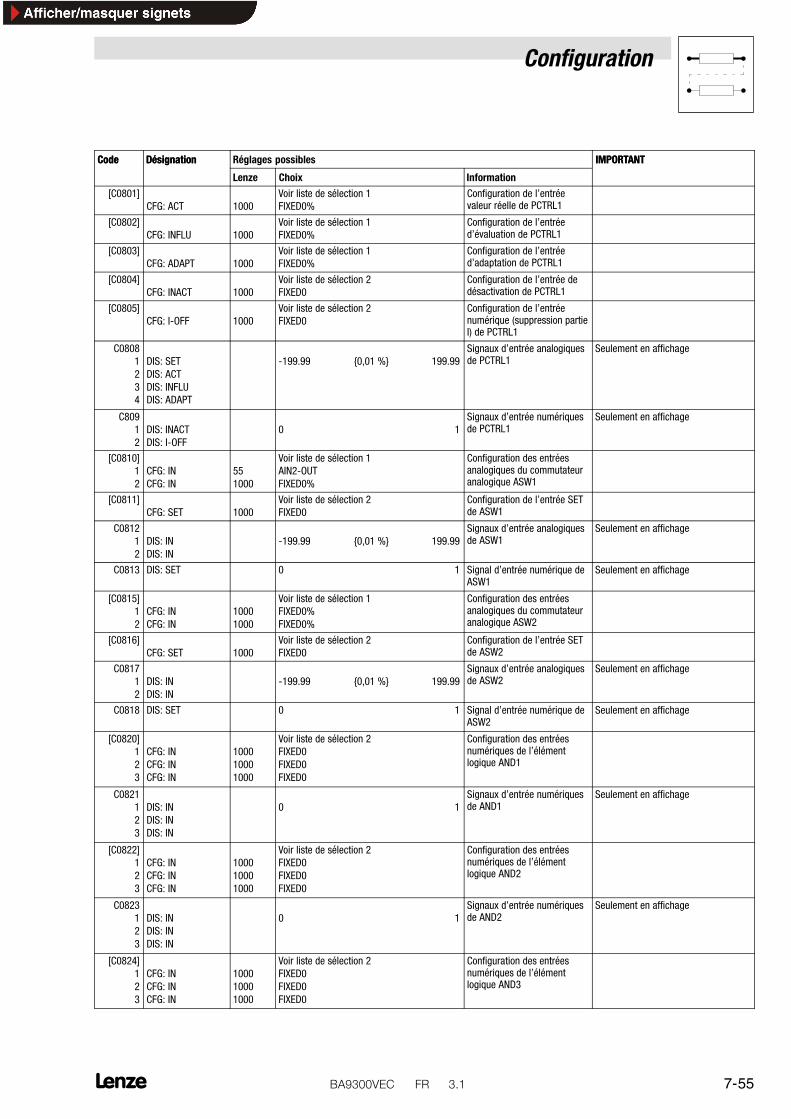
Configuration
7-55L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0801]CFG: ACT 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréevaleur réelle de PCTRL1
[C0802]CFG: INFLU 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréed’évaluation de PCTRL1
[C0803]CFG: ADAPT 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréed’adaptation de PCTRL1
[C0804]CFG: INACT 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée dedésactivation de PCTRL1
[C0805]CFG: I-OFF 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique (suppression partieI) de PCTRL1
C08081234
DIS: SETDIS: ACTDIS: INFLUDIS: ADAPT
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde PCTRL1
Seulement en affichage
C80912
DIS: INACTDIS: I-OFF
0 1Signaux d’entrée numériquesde PCTRL1
Seulement en affichage
[C0810]12
CFG: INCFG: IN
551000
Voir liste de sélection 1AIN2-OUTFIXED0%
Configuration des entréesanalogiques du commutateuranalogique ASW1
[C0811]CFG: SET 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée SETde ASW1
C081212
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde ASW1
Seulement en affichage
C0813 DIS: SET 0 1 Signal d’entrée numérique deASW1
Seulement en affichage
[C0815]12
CFG: INCFG: IN
10001000
Voir liste de sélection 1FIXED0%FIXED0%
Configuration des entréesanalogiques du commutateuranalogique ASW2
[C0816]CFG: SET 1000
Voir liste de sélection 2FIXED0
Configuration de l’entrée SETde ASW2
C081712
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde ASW2
Seulement en affichage
C0818 DIS: SET 0 1 Signal d’entrée numérique deASW2
Seulement en affichage
[C0820]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique AND1
C0821123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde AND1
Seulement en affichage
[C0822]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique AND2
C0823123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde AND2
Seulement en affichage
[C0824]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique AND3

Configuration
7-56 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0825123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde AND3
Seulement en affichage
[C0826]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique AND4
C0827123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde AND4
Seulement en affichage
[C0828]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique AND5
C0829123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde AND5
Seulement en affichage
[C0830]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique OR1
C0831123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde OR1
Seulement en affichage
[C0832]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique OR2
C0833123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde OR2
Seulement en affichage
[C0834]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique OR3
C0835123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde OR3
Seulement en affichage
[C0836]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique OR4
C0837123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde OR4
Seulement en affichage
[C0838]123
CFG: INCFG: INCFG: IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de l’élémentlogique OR5

Configuration
7-57L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0839123
DIS: INDIS: INDIS: IN
0 1Signaux d’entrée numériquesde OR5
Seulement en affichage
[C0840] CFG: IN1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de l’élémentlogique NOT1
C0841 DIS: IN 0 1 Signal d’entrée numérique deNOT1
Seulement en affichage
[C0842]CFG: IN 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de l’élémentlogique NOT2
C0843 DIS: IN 0 1 Signal d’entrée numérique deNOT2
Seulement en affichage
[C0844]CFG: IN 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de l’élémentlogique NOT3
C0845 DIS: IN 0 1 Signal d’entrée numérique deNOT3
Seulement en affichage
[C0846]CFG: IN 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de l’élémentlogique NOT4
C0847 DIS: IN 0 1 Signal d’entrée numérique deNOT4
Seulement en affichage
[C0848]CFG: IN 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de l’élémentlogique NOT5
C0849 DIS: IN 0 1 Signal d’entrée numérique deNOT5
Seulement en affichage
[C0850]123
CFG: OUT.W1CFG: OUT.W2CFG: OUT.W3
100010001000
Voir liste de sélection 1FIXED0%FIXED0%FIXED0%
Configuration des motsprocess de sortie pourl’interface d’automatisme AIF(X1)
[C0851]1 CFG: OUT.D1 1000
Voir liste de sélection 3FIXED0INC
Configuration de l’informationd’angle 32 bits
C0852 Type OUT.W2 0 0 analog1 digital 0-152 low phase
Configuration du mot processde sortie 2 pour interfaced’automatisme AIF (X1)
C0853 Type OUT.W3 0 0 analogiques1 digital 16-312 high phase
Configuration du mot processde sortie 3 pour interfaced’automatisme AIF (X1)
C0855 DIS: IN (0-15)DIS: IN (16-31)
0 FFFF Mots process d’entréehexadécim. pour interfaced’automatisme AIF (X1)
Seulement en affichage
C0856123
DIS: IN.W1DIS: IN.W2DIS: IN.W3
-199.99 0,01 % 199.99Mots process d’entréedécimaux
Seulement en affichage100 % = 16384
C0857 DIS: IN.D1 -2147483648 1 2147483647 Information d’angle 32 bits Seulement en affichage
C0858123
DIS: OUT.W1DIS: OUT.W2DIS: OUT.W3
-199.99 0,01 % 199.99Mots process de sortie Seulement en affichage
100 % = 16384
C0859 DIS: OUT.D1 -2147483648 1 2147483647 Information d’angle 32 bits Seulement en affichage

Configuration
7-58 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0860]1234567891011
CFG: OUT1.W1CFG: OUT1.W2CFG: OUT1.W3CFG: OUT2.W1CFG: OUT2.W2CFG: OUT2.W3CFG: OUT2.W4CFG: OUT3.W1CFG: OUT3.W2CFG: OUT3.W3CFG: OUT3.W4
10001000100010001000100010001000100010001000
Voir liste de sélection 1FIXED0%FIXED0%FIXED0%FIXED0%FIXED0%FIXED0%FIXED0%FIXED0%FIXED0%FIXED0%FIXED0%
Configuration des motsprocess de sortie pour blocsde sortie bus système (CAN)
[C0861]123
CFG: OUT1.D1CFG: OUT2.D1CFG: OUT3.D1
100010001000
Voir liste de sélection 3FIXED0INCFIXED0INCFIXED0INC
Configuration de l’informationd’angle 32 bits pour blocs desortie bus système (CAN)
C0863123456
DIS: IN1 dig0DIS: IN1 dig16DIS: IN2 dig0DIS: IN2 dig16DIS: IN3 dig0DIS: IN3 dig16
0 FFFFMots process d’entréehexadécim. pour bus système(CAN)
Seulement en affichage
C0864123
Type OUT1.W2Type OUT2.W1Type OUT3.W1
000
0 analog sign1 digital 0-152 low phase
Configuration des motsprocess de sortie pour bussystème (CAN)
C0865123
Type OUT1.W3Type OUT2.W2Type OUT3.W2
000
0 analog sign1 digital 16-312 high phase
Configuration des motsprocess de sortie pour bussystème (CAN)
C08661234567891011
DIS: IN1.W1DIS: IN1.W2DIS: IN1.W3DIS: IN2.W1DIS: IN2.W2DIS: IN2.W3DIS: IN2.W4DIS: IN3.W1DIS: IN3.W2DIS: IN3.W3DIS: IN3.W4
-199.99 0,01 % 199.99Mots process d’entrée pourbus système (CAN)
Seulement en affichage100 % = 16384
C0867123
DIS: IN1.D1DIS: IN2.D1DIS: IN3.D1
-2147483648 1 2147483647Information d’angle 32 bitspour bus système (CAN)
Seulement en affichage
C08681234567891011
DIS: OUT1.W1DIS: OUT1.W2DIS: OUT1.W3DIS: OUT2.W1DIS: OUT2.W2DIS: OUT2.W3DIS: OUT2.W4DIS: OUT3.W1DIS: OUT3.W2DIS: OUT3.W3DIS: OUT3.W4
-199.99 0,01 % 199.99Mots process de sortie bussystème (CAN)
Seulement en affichage100 % = 16384

Configuration
7-59L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0869123
DIS: OUT1.D1DIS: OUT2.D1DIS: OUT3.D1
-2147483648 1 2147483647Information d’angle 32 bitspour bus système (CAN)
Seulement en affichage
[C0870]12
CFG: CINHCFG: CINH
10001000
Voir liste de sélection 2FIXED0FIXED0
Configuration des entréesnumériques (blocagevariateur) de DCTRL
[C0871]CFG: TRIP-SET 54
Voir liste de sélection 2DIGIN 4
Configuration de l’entréenumérique (TRIP-Set) deDCTRL
[C0876]CFG: TRIP-RES 55
Voir liste de sélection 2DIGIN 5
Configuration de l’entréenumérique (réarmementdéfaut TRIP-Reset) de DCTRL
C08781234
DIS: CINH1DIS: CINH2DIS: TRIP-SETDIS: TRIP-RES
0 1 Signaux d’entrée numériquesde DCTRL
Seulement en affichage
C0879123
Reset C135Reset AIFReset CAN
000
0 no reset (pas de réarmement)1 reset
Remise à zéro des mots decommande
Avec C0879 = 1 la remise à zéroest mise en oeuvre une seule fois
[C0880]12
CFG: PAR*1CFG: PAR*2
10001000
Voir liste de sélection 2FIXED0FIXED0
Configuration de la sélectiondu jeu de paramètres deDCTRL
[C0881]CFG:PAR-LOAD 1000
Voir liste de sélection 2FIXED0
Configuration du chargementdu jeu de paramètres deDCTRL
C0884123
DIS: PAR*1DIS: PAR*2DIS: PAR-LOAD
Signaux pour la sélection dujeu de paramètres de DCTRL
Seulement en affichage
[C0885]CFG: R 51
Voir liste de sélection 2DIGIN 1
Configuration de l’entréenumérique (sens horaire) deR/L/Q
[C0886]CFG: L 52
Voir liste de sélection 2DIGIN 2
Configuration de l’entréenumérique (sens antihoraire)de R/L/Q
C088912
DIS: RDIS: L
0 1Signaux d’entrée numériquesde R/L/Q
Seulement en affichage
[C0890]CFG: N-SET 5050
Voir liste de sélection 1NSET-NOUT
Configuration de l’entréeconsigne de vitesse régulationmoteur MCTRL
[C0891]CFG: M-ADD 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeconsigne de couple de MCTRL
[C0892]CFG: LO-M-LIM 5700
Voir liste de sélection 1ANEG1-OUT
Configuration de la limiteinférieure du couple deMCTRL
[C0893]CFG: HI-M-LIM 19523
Voir liste de sélection 1FCODE472/3
Configuration de la limitesupérieure du couple deMCTRL
[C0899]CFG: N/M-SWT 1000
Voir liste de sélection 2FIXED0
Configuration de lacommutation entre régulationde vitesse et régulation ducouple de MCTRL
[C0900]CFG: QSP 10250
Voir liste de sélection 2R/L/Q-QSP
Configuration du signal decommande pour activation deAR de MCTRL

Configuration
7-60 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C0901]CFG: I-SET 1000
Voir liste de sélection 1FIXED0%
Configuration du chargementde la partie I du régulateur devitesse de MCTRL
[C0902]CFG: I-LOAD 1000
Voir liste de sélection 2FIXED0
Configuration du signald’activation pour chargementde la partie I du régulateur devitesse de MCTRL
[C0903]CFG: BOOST 5015
Voir liste de sélection 1MCTRL-BOOST
Configuration de l’entréeMCTRL-BOOST
Standard = FCODE16
[C0904]CFG: DC-BREAK 1000
Voir liste de sélection 2FIXED0
Configuration du signald’entrée MCTRL-GSB deMCTRL
C0905 DIS: DC-BREAK 0 1 Signal d’entrée MCTRL-GSBde MCTRL
Seulement en affichage
C0906123456
DIS: N-SETDIS: M-ADDDIS: LO-MLIMDIS: HI-MLIMDIS: I- ETDIS: BOOST
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde MCTRL
Seulement en affichage
C0907234
DIS: N/M-SWTDIS: QSPDIS: I-LOAD
0 1Signaux d’entrée numériquesde MCTRL
Seulement en affichage
C0909 speed limit 1 1 +/- 175 %2 0 .. +175 %3 -175 .. 0 %
Limitation de vitesse pour laconsigne de vitesse de MCTRL
C0910CFG: Vp-Adapt 1006
Voir liste de sélection 1FIXED100%
Configuration du signald’entrée analogique pourl’adaptation du gain durégulateur de vitesse enMCTRL1
Avec gain N variable, relier avecCURVE-OUT du bloc fonctionnel FBCURVE
C0911 DIS: Vp-Adapt -199.99 0,01 % 199.99 Signal d’entrée analogique deMCTRL1
Seulement en affichage
C0940 Numerator 1 -32767 1 32767 Numérateur pour CONV1
C0941 Denominator 1 1 1 32767 Dénominateur pour CONV1
[C0942]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique CONV1
C0943 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique deCONV1
Seulement en affichage
C0945 Numerator 1 -32767 1 32767 Numérateur pour CONV2
C0946 Denominator 1 1 1 32767 Dénominateur pour CONV2
[C0947]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique CONV2
C0948 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée analogique deCONV2
Seulement en affichage
C0950 Numerator 1 -32767 1 32767 Numérateur pour CONV3
C0951 Denominator 1 1 1 32767 Dénominateur pour CONV3
[C0952]CFG: IN 1000
Voir liste de sélection 4FIXEDPHI0
Configuration de l’entréesignal de vitesse CONV3
C0953 DIS: IN -32767 1 rpm (min-1) 32767 Signal d’entrée de vitesseCONV3
Seulement en affichage
C0955 Numerator 1 -32767 1 32767 Numérateur pour CONV4
C0956 Denominator 1 1 1 32767 Dénominateur pour CONV4
[C0957]CFG: IN 1000
Voir liste de sélection 4FIXEDPHI0
Configuration de l’entréesignal de vitesse CONV4
C0958 DIS: IN -32767 1 rpm (min-1) 32767 Signal d’entrée de vitesseCONV4
Seulement en affichage

Configuration
7-61L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C0960 Function 1 1 Function12 Function23 Function3
Courbe CURVE1-IN
C0961 y0 0.00 0.00 0,01 % 199.99 Ordonnée du couple devaleurs (x = 0 % / y0) deCURVE1
C0962 y1 50.00 0.00 0,01 % 199.99 Ordonnée du couple devaleurs (x1 / y1) de CURVE1
C0963 y2 75.00 0.00 0,01 % 199.99 Ordonnée du couple devaleurs (x2 / y2) de CURVE1
C0964 y100 100.00 0.00 0,01 % 199.99 Ordonnée du couple devaleurs (x = 100 % / y100) deCURVE1
C0965 x1 50.00 0.01 0,01 % 100.00 Abscisse du couple de valeurs(x1 / y1) de CURVE1
C0966 x2 75.00 0.01 0,01 % 100.00 Abscisse du couple de valeurs(x2 / y2) de CURVE1
[C0967]CFG: IN 1000
Voir liste de sélection 1FIXED0
Configuration de la courbeCURVE1-IN
C0968 DIS: IN -199.99 0,01 % 199.99 Signal d’entrée relatifanalogique de CURVE1
Seulement en affichage
[C0970]CFG: N-SET 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréevitesse de la régulationcoupure réseau MFAIL
[C0971]CFG: FAULT 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréecoupure réseau détectée deMFAIL
[C0972]CFG: RESET 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréeréarmement régulationcoupure réseau de MFAIL
[C0973]CFG: ADAPT 1000
Voir liste de sélection 1FIXED0%
[C0974]CFG: CONST 1000
Voir liste de sélection 1FIXED0%
[C0975]CFG: THRESHLD 1000
Voir liste de sélection 1FIXED0%
[C0976]CFG: NACT 1000
Voir liste de sélection 1FIXED0%
[C0977]CFG: SET 1000
Voir liste de sélection 1FIXED0%
Configuration de la vitesse dedémarrage de MFAIL
[C0978]CFG: DC-SET 1000
Voir liste de sélection 1FIXED0%
Configuration de la consignedu tension circuitintermédiaire de MFAIL
C0980 MFAIL Vp 0.500 0.001 0,001 31.000 Gain Vp de MFAIL
C0981 MFAIL Tn 100 20 1 ms 2000 Constante de temps de MFAIL
C0982 MFAIL Tir 2.000 0.001 1,000 s 16.00 Temps d’accélération Tir deMFAIL
C0983 Retrigger T 1.000 0.001 0,001 s 60.000
C09881234567
DIS: N-SETDIS: ADAPTDIS: CONSTDIS: THRESHLDDIS: NACTDIS: SETDIS: DC-SET
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde MFAIL
Seulement en affichage
C098912
DIS: FAULTDIS: RESET
0 1Signaux d’entrée numériquesde MFAIL
Seulement en affichage

Configuration
7-62 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C1040 Accelaration 100.000 0.001 0,001 5000.000 Accélération de SRFG1
C1041 Jerk 0.200 0.001 0,001 999.999 Jerk de SRFG1
[C1042]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration deSRFG1-IN
[C1043]CFG: SET 1000
Voir liste de sélection 1FIXED0%
Configuration du signalSRFG1-SET
[C1044]CFG: LOAD 1000
Voir liste de sélection 1FIXED0%
Configuration du signalSRFG1-LOAD
C104512
DIS: INDIS: SET
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde SRFG1
Seulement en affichage
C1046 DIS: LOAD 0 1 Signal d’entrée numérique deSRFG1
Seulement en affichage
C1090 Output signal -2147483648 1 2147483647 Signal de sortie Seulement en affichage
C1091 Code 141 2 1 2000 Code FEVAN1
C1092 Subcode 0 0 1 255 Sous-code de FEVAN1
C1093 Numerator 1.0000 0.0001 0,0001 100000.0000 Numérateur de FEVAN1
C1094 Denomiator 0.0001 0.0001 1 100000.0000 Dénominateur de FEVAN1
C1095 Offset 0 0 1 1000000000 Offset de FEVAN1
[C1096]CFG: IN 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de FEVAN1
[C1097]123
CFG: LOADCFG: BUSY-INCFG: FAIL-IN
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de FEVAN1
C1098 DIS: IN -32768 1 32767 Signal d’entrée numérique deFEVAN1
Seulement en affichage
C1099 DIS: LOAD 0 1 Signal d’entrée numérique deFEVAN1-LOAD
Seulement en affichage
C1100 Function 1 1 Return2 Hold
Fonctions de FCNT1
[C1101]12
CFG: LD-VALCFG: CMP-VAL
10001000
Voir liste de sélection 1FIXED0%FIXED0%
Configuration des entréesanalogiques de FCNT1
[C1102]123
CFG: CLKUPCFG: CLKDWNCFG: LOAD
100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0
Configuration des entréesnumériques de FCNT1
C110312
DIS: LD-VALDIS: CMP-VAL
-32768 1 32768Signaux d’entrée analogiquesde FCNT1
Seulement en affichage
C1104123
DIS: CLKUPDIS: CLKDWNDIS: LOAD
0 1Signaux d’entrée numériquesde FCNT1
Seulement en affichage
[C1160]12
CFG: INCFG: IN
10001000
Voir liste de sélection 1FIXED0%FIXED0%
Configuration des entréesanalogiques de ASW3
[C1161]CFG: SET 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de ASW3
C116212
DIS: INDIS: IN
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde ASW3
Seulement en affichage
C1163 DIS: SET 0 1 Signal d’entrée numérique deASW3
Seulement en affichage
C1300 N-motor/Dmax 300 0 1 rpm (min-1) 32767 Vitesse nominale del’entraînement enrouleur

Configuration
7-63L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
C1301 N-line max 3000 0 1 rpm (min-1) 32767 Vitesse nominale del’entraînement ligne
C1302 calc cycle 1.0 0.1 0,1 rev 100.0 Cycle de calcul
C1303 time const 0.10 0.01 0,01 s 50.00 Constante de temps defiltrage
C1304 Dmax 500 1 1 mm 10000 Diamètre d’enroulementnominal
C1305 lower D-limit 50 1 1 mm 10000 Diamètre d’enroulement mini
C1306 upper D-limit 500 1 1 mm 10000 Diamètre d’enroulement maxi
C1307 hyst D-limit 1.00 0.00 0,01 % 100.0 Hystérésis pour sortieDmin /Dmax
C1308 arit funktion 1 0 DCALC1-OUT = D1 DCALC1-OUT = 1/D
Fonction arithmétique
C1309 Dmin 50 1 1 mm 10000 Diamètre d’enroulement
C1310 Ti-time 0.000 0.000 0,001 s 999.900 Temps d’accélération et dedécélération
C1311 window D-calc 1.00 0.00 0,01 % 100.00 Fenêtre pour écart dediamètre admissible
[C1320]CFG: SET 1000
Voir liste de sélection 1FIXED0%
Configuration de l’entréeanalogique de DCALC1
[C1321]12
CFG: LOADCFG: HOLD
10001000
Voir liste de sélection 2FIXED 0FIXED 0
Configuration des entréesnumériques de DCALC1
C132212
DIS: N-LINEDIS: N-WIND
-32767 1 rpm (min-1) 32767Entrées angulaires de DCALC1 Seulement en affichage
C1325 DIS: SET -199.99 0,01 % 199.99 Signal d’entrée analogique deDCALC
Seulement en affichage
C132612
DIS: LOADDIS: HOLD
0 1Signaux d’entrée numériquesde DCALC1
Seulement en affichage
[C1327]12
CFG: N-LINECFG: N-WIND
10001000
Voir liste de sélection 3FIXED0INCFIXED0INC
Configuration des entréesd’angle de DCALC1
C1328 DIS: D-ACT 0 1 mm 10000 Diamètre d’enroulementactuel de DCALC1
Seulement en affichage
C1330 PCTRL2 Tir 1.0 0.1 0,1 s 6000.0 Régulateur process tempsd’accélération Tir de PCTRL2
Se rapportant à une modification de laconsigne 0100 %
C1331 PCTRL2 Tif 1.0 0.1 0,1 s 6000.0 Régulateur process temps dedécélération Tif PCTRL2
Se rapportant à une modification de laconsigne 100 %...0
C1332 PCTRL2 VP 1.0 0.1 0,1 500.0 Gain Vp de PCTRL2
C1333 PCTRL2 Tn 400 20 1 ms 99999 Temps d’intégration Tn dePCTRL2
C1334 PCTRL2 Kd 0.0 0.0 0,1 5.0 Partie dérivée Kd de PCTRL2
C1335 bipolaire/unipolaire 0 0 bipolaire1 unipolaire
Fonction plage de réglage dePCTRL2
C1336 Tir overlay 1.0 0.1 0,1 s 6000.0 Temps d’accélération Tir dugénérateur de rampeCommande de l’influence durégulateur process PCTRL2
C1337 Tif overlay 1.0 0.1 0,1 s 6000.0 Temps de décélération Tif dugénérateur de rampeCommande de l’influence durégulateur process PCTRL2

Configuration
7-64 L_^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C1340]1234
CFG: RFG-SETCFG: SETCFG: ACTCFG: INFL
1000100010001000
Voir liste de sélection 1FIXED0%FIXED0%FIXED0%FIXED0%
Configuration des entréesanalogiques de PCTRL2
[C1341]1234
CFG: RFG-LOADCFG: I-OFFCFG: INACTCFG: OVERLAY
1000100010001000
Voir liste de sélection 2FIXED0FIXED0FIXED0FIXED0
Configuration des entréesnumériques de PCTRL2
C13441234
DIS: RFG-SETDIS: SETDIS: ACTDIS: INFL
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde PCTRL2
Seulement en affichage
C13451234
DIS: RFG-LOADDIS: I-OFFDIS: INACTDIS: OVERLAY
0 1Signaux d’entrée numériquesde PCTRL2
Seulement en affichage
C1350 INT1 funktion 0 0 ABS > REF1 |ABS| >= REF
Sélection comparative de INT1
C1351 INT1 scaling 6553600 65536 1 1000000000 Constante de mise à échellepour INT1
[C1354]CFG: REF 1000
Voir liste de sélection 3FIXED0INC
Configuration de l’entrée 32bits de INT1
[C1355]CFG: IN 1000
Voir liste de sélection 4FIXEDPHI-0
Configuration de l’entréeangle de INT1
[C1356]CFG: RESET 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de INT1
C1357 DIS : REF -199.99 0,01 199.99 Entrées 32 bis de INT1 Seulement en affichage
C1358 DIS : IN -32767 1 rpm (min-1) 32767 Entrée d’angle de INT1 Seulement en affichage
C1359 DIS : RESET 0 1 Entrée numérique de INT1 Seulement en affichage
C1360 INT2 funktion 0 0 ABS > REF1 |ABS| >= REF
Sélection comparative de INT2
C1361 INT2 scaling 6553600 65536 1 1000000000 Constante de mise à échellepour INT12
[C1364]CFG: REF 1000
Voir liste de sélection 3FIXED0INC
Configuration de l’entrée 32bits de INT2
[C1365]CFG: IN 1000
Voir liste de sélection 4FIXEDPHI-0
Configuration de l’entréed’angle de INT2
[C1366]CFG: RESET 1000
Voir liste de sélection 2FIXED0
Configuration de l’entréenumérique de INT2
C1367 DIS : REF -199.99 0,01 199.99 Entrée 32 bits de INT2 Seulement en affichage
C1368 DIS : IN -32767 1 rpm (min-1) 32767 Entrée d’angle de INT2 Seulement en affichage
C1369 DIS : RESET 0 1 Entrée numérique de INT2 Seulement en affichage
C1370 FOLL max 100.00 -199.99 0,01 % 199.99 Limite supérieure de FOLL1
C1371 FOLL min -100.00 -199.99 0,01 % 199.99 Limite inférieure de FOLL1
C1372 FOLL Tir 10.0 0.1 0,1 s 6000.0 Temps d’accélération deFOLL1
C1373 FOLL Tif 10.0 0.1 0,1 s 6000.0 Temps de décélération deFOLL1
[C1375]1234
CFG: SIGNCFG: INCFG: REFCFG: LOAD
1000100010001000
Voir liste de sélection 1FIXED0%FIXED0%FIXED0%FIXED0%
Configuration des signauxd’entrée analogiques deFOLL1
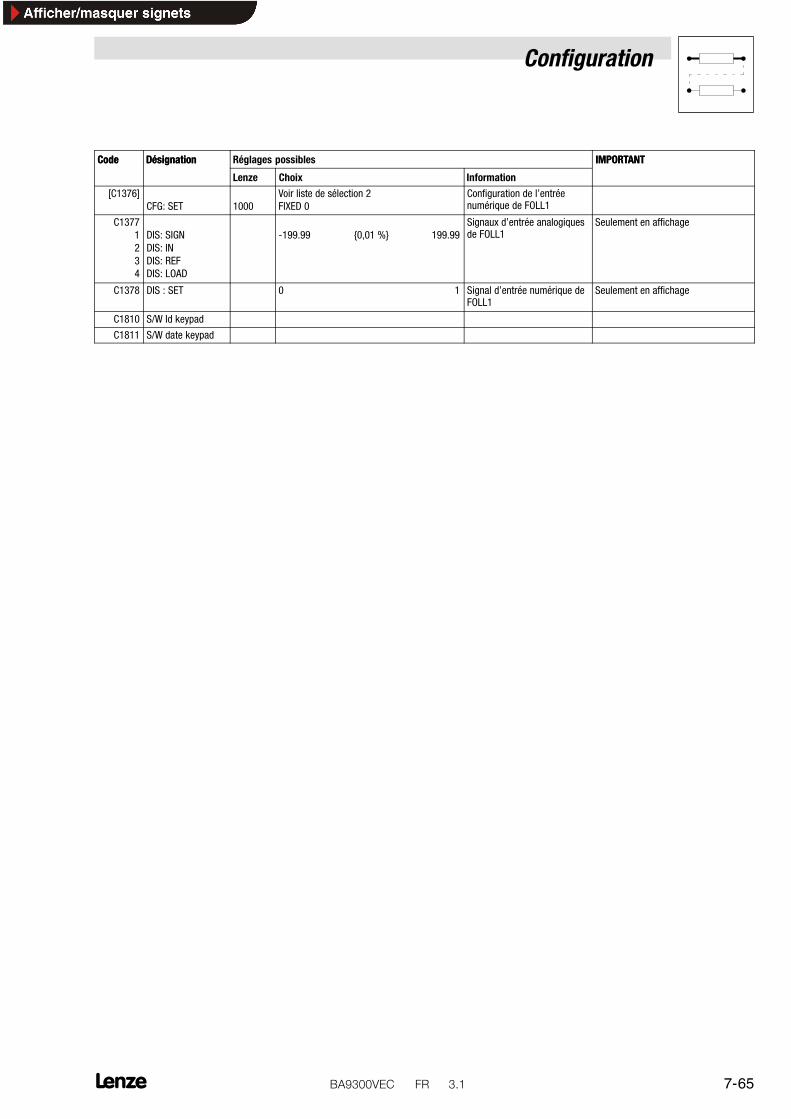
Configuration
7-65L _^VPMMsb` co PKN
Code IMPORTANTRéglages possiblesDésignationCode IMPORTANT
InformationChoixLenze
Désignation
[C1376]CFG: SET 1000
Voir liste de sélection 2FIXED 0
Configuration de l’entréenumérique de FOLL1
C13771234
DIS: SIGNDIS: INDIS: REFDIS: LOAD
-199.99 0,01 % 199.99Signaux d’entrée analogiquesde FOLL1
Seulement en affichage
C1378 DIS : SET 0 1 Signal d’entrée numérique deFOLL1
Seulement en affichage
C1810 S/W Id keypad
C1811 S/W date keypad

Configuration
7-66 L_^VPMMsb` co PKN
7.8 Listes de sélection
Liste de sélection 1, signaux de sortie analogiques (f)
000050 AIN1-OUT 006100 MFAIL-NOUT 019500 FCODE-17 020101 CAN-IN1.W1
000055 AIN2-OUT 006150 DB1-OUT 019502 FCODE-26/1 020102 CAN-IN1.W2
000100 DFSET-NOUT 006200 CONV1-OUT 019503 FCODE-26/2 020103 CAN-IN1.W3
001000 FIXED0% 006205 CONV2-OUT 019504 FCODE-27/1 020201 CAN-IN2.W1
001006 FIXED100% 006210 CONV3-OUT 019505 FCODE-27/2 020202 CAN-IN2.W2
001007 FIXED-100% 006215 CONV4-OUT 019506 FCODE-32 020203 CAN-IN2.W3
005000 MCTRL-NSET2 006230 CONVPHA1-OUT 019507 FCODE-37 020204 CAN-IN2.W4
005001 MCTRL-NACT 006300 S&H1-OUT 019510 FCODE-108/1 020301 CAN-IN3.W1
005002 MCTRL-MSET2 006350 CURVE1-OUT 019511 FCODE-108/2 020302 CAN-IN3.W2
005003 MCTRL-MACT 006400 FCNT1-OUT 019512 FCODE-109/1 020303 CAN-IN3.W3
005004 MCTRL-IACT 010000 BRK1-M-SET 019513 FCODE-109/2 020304 CAN-IN3.W4
005005 MCTRL-DCVOLT 011000 DCALC1-D-OUT 019515 FCODE-141 025101 AIF-IN.W1
005006 MCTRL-VACT 011001 DCALC1-OUT 019521 FCODE-472/1 025102 AIF-IN.W2
005007 MCTRL-FACT 011050 PCTRL2-OUT 019522 FCODE-472/2 025103 AIF-IN.W3
005008 MCTRL-IxT 011100 INT1-AOUT 019523 FCODE-472/3005009 MCTRL-PHI-ACT 011105 INT2-AOUT 019524 FCODE-472/4
005010 MCTRL-M-TEMP 011150 FOLL1-OUT 019525 FCODE-472/5
005015 MCTRL-BOOST 019526 FCODE-472/6
005050 NSET-NOUT 019527 FCODE-472/7
005051 NSET-RFG-I 019528 FCODE-472/8
005052 NSET-C10-C11 019529 FCODE-472/9
005100 MPOT1-OUT 019530 FCODE-472/10
005150 PCTRL1-OUT 019531 FCODE-472/11
005250 NLIM1-OUT 019532 FCODE-472/12
005500 ARIT1-OUT 019533 FCODE-472/13
005505 ARIT2-OUT 019534 FCODE-472/14
005510 ARIT3-OUT 019535 FCODE-472/15
005540 SQRT1-OUT 019536 FCODE-472/16
005550 ADD1-OUT 019537 FCODE-472/17
005555 ADD2-OUT 019538 FCODE-472/18
005600 RFG1-OUT 019539 FCODE-472/19
005610 SRFG1-OUT 019540 FCODE-472/20
005611 SRFG1-DIFF 019551 FCODE-473/1
005650 ASW1-OUT 019552 FCODE-473/2
005655 ASW2-OUT 019553 FCODE-473/3
005660 ASW3-OUT 019554 FCODE-473/4
005700 ANEG1-OUT 019555 FCODE-473/5
005705 ANEG2-OUT 019556 FCODE-473/6
005750 FIXSET1-OUT 019557 FCODE-473/7
005800 LIM1-OUT 019558 FCODE-473/8
005850 ABS1-OUT 019559 FCODE-473/9
005900 PT1-1-OUT 019560 FCODE-473/10
005905 PT1-2-OUT
005950 DT1-1-OUT

Configuration
7-67L _^VPMMsb` co PKN
Liste de sélection 2, signaux de sortie numériques (j)000051 DIGIN1 010650 CMP1-OUT 019500 FCODE-250 019751 FCODE-135.B0
000052 DIGIN2 010655 CMP2-OUT 019521 FCODE-471.B0 019752 FCODE-135.B1
000053 DIGIN3 010660 CMP3-OUT 019522 FCODE-471.B1 019753 FCODE-135.B2
000054 DIGIN4 010665 CMP4-OUT 019523 FCODE-471.B2 019755 FCODE-135.B4
000055 DIGIN5 010700 DIGDEL1-OUT 019524 FCODE-471.B3 019756 FCODE-135.B5
000056 DIGIN6(ST) 010705 DIGDEL2-OUT 019525 FCODE-471.B4 019757 FCODE-135.B6
000065 DIGIN-CINH 010750 TRANS1-OUT 019526 FCODE-471.B5 019758 FCODE-135.B7
000100 DFSET-ACK 010755 TRANS2-OUT 019527 FCODE-471.B6 019763 FCODE-135.B12
000500 DCTRL-RDY 010900 FLIP1-OUT 019528 FCODE-471.B7 019764 FCODE-135.B13
000501 DCTRL-CINH 010905 FLIP2-OUT 019529 FCODE-471.B8 019765 FCODE-135.B14
000502 DCTRL-INIT 011000 DCALC1-DMAX 019530 FCODE-471.B9 019766 FCODE-135.B15
000503 DCTRL-IMP 011001 DCALC1-DMIN 019531 FCODE-471.B10
000504 DCTRL-NACT=0 011002 DCALC1-I=0 019532 FCODE-471.B11
000505 DCTRL-CW/CCW 011100 INT1-DOUT 019533 FCODE-471.B12
001000 FIXED0 011105 INT2-DOUT 019534 FCODE-471.B13
001001 FIXED1 013000 FEVAN1-BUSY 019535 FCODE-471.B14
002000 DCTRL-PAR*1 013001 FEVAN1-FAIL 019536 FCODE-471.B15
002001 DCTRL-PAR*2 015000 DCTRL-TRIP 019537 FCODE-471.B16
002002 DCTRL-PAR-BUSY 015001 DCTRL-MESS 019538 FCODE-471.B17
005001 MCTRL-QSP-OUT 015002 DCTRL-WARN 019539 FCODE-471.B18
005002 MCTRL-IMAX 015003 DCTRL-FAIL 019540 FCODE-471.B19
005003 MCTRL-MMAX 015010 MONIT-LU 019541 FCODE-471.B20
005006 MCTRL-GSB-OUT 015011 MONIT-OU 019542 FCODE-471.B21
005050 NSET-RFG-I=0 015012 MONIT-EEr 019543 FCODE-471.B22
006000 DFRFG1-FAIL 015013 MONIT-OC1 019544 FCODE-471.B23
006001 DFRFG1-SYNC 015014 MONIT-OC2 019545 FCODE-471.B24
006100 MFAIL-STATUS 015015 MONIT-LP1 019546 FCODE-471.B25
006101 MFAIL-I-RESET 015016 MONIT-OH 019547 FCODE-471.B26
006400 FCNT1-EQUAL 015018 MONIT-OH4 019548 FCODE-471.B27
010000 BRK1-OUT 015020 MONIT-OH8 019549 FCODE-471.B28
010001 BRK1-CINH 015026 MONIT-CE0 019550 FCODE-471.B29
010002 BRK1-QSP 015027 MONIT-NMAX 019551 FCODE-471.B30
010003 BRK1-M-STORE 015028 MONIT-OC5 019552 FCODE-471.B31
010250 R/L/Q-QSP 015029 MONIT-SD5
010251 R/L/Q-R/L 015031 MONIT-SD7
010500 AND1-OUT 015032 MONIT-H07
010505 AND2-OUT 015033 MONIT-H10
010510 AND3-OUT 015034 MONIT-H11
010515 AND4-OUT 015040 MONIT-CE1
010520 AND5-OUT 015041 MONIT-CE2
010550 OR1-OUT 015042 MONIT-CE3
010555 OR2-OUT 015043 MONIT-CE4
010560 OR3-OUT 015044 MONIT-OC3
010565 OR4-OUT 015045 MONIT-ID1
010570 OR5-OUT 015046 MONIT-ID2
010600 NOT1-OUT
010605 NOT2-OUT
010610 NOT3-OUT
010615 NOT4-OUT
010620 NOT5-OUT

Configuration
7-68 L_^VPMMsb` co PKN
Liste de sélection 2, signaux de sortie numériques (j) (suite)020001 CAN-CTRL.B0 020201 CAN-IN2.B0 020301 CAN-IN3.B0 025001 AIF-CTRL.B0
020002 CAN-CTRL.B1 020202 CAN-IN2.B1 020302 CAN-IN3.B1 025002 AIF-CTRL.B1
020003 CAN-CTRL.B2 020203 CAN-IN2.B2 020303 CAN-IN3.B2 025003 AIF-CTRL.B2
020005 CAN-CTRL.B4 020204 CAN-IN2.B3 020304 CAN-IN3.B3 025005 AIF-CTRL.B4
020006 CAN-CTRL.B5 020205 CAN-IN2.B4 020305 CAN-IN3.B4 025006 AIF-CTRL.B5
020007 CAN-CTRL.B6 020206 CAN-IN2.B5 020306 CAN-IN3.B5 025007 AIF-CTRL.B6
020008 CAN-CTRL.B7 020207 CAN-IN2.B6 020307 CAN-IN3.B6 025008 AIF-CTRL.B7
020013 CAN-CTRL.B12 020208 CAN-IN2.B7 020308 CAN-IN3.B7 025013 AIF-CTRL.B12
020014 CAN-CTRL.B13 020209 CAN-IN2.B8 020309 CAN-IN3.B8 025014 AIF-CTRL.B13
020015 CAN-CTRL.B14 020210 CAN-IN2.B9 020310 CAN-IN3.B9 025015 AIF-CTRL.B14
020016 CAN-CTRL.B15 020211 CAN-IN2.B10 020311 CAN-IN3.B10 025016 AIF-CTRL.B15
020101 CAN-IN1.B0 020212 CAN.IN2.B11 020312 CAN-IN3.B11 025101 AIF-IN.B0
020102 CAN-IN1.B1 020213 CAN-IN2.B12 020313 CAN-IN3.B12 025102 AIF-IN.B1
020103 CAN-IN1.B2 020214 CAN-IN2.B13 020314 CAN-IN3.B13 025103 AIF-IN.B2
020104 CAN-IN1.B3 020215 CAN-IN2.B14 020315 CAN-IN3.B14 025104 AIF-IN.B3
020105 CAN-IN1.B4 020216 CAN-IN2.B15 020316 CAN-IN3.B15 025105 AIF-IN.B4
020106 CAN-IN1.B5 020217 CAN-IN2.B16 020317 CAN-IN3.B16 025106 AIF-IN.B5
020107 CAN-IN1.B6 020218 CAN-IN2.B17 020318 CAN-IN3.B17 025107 AIF-IN.B6
020108 CAN-IN1.B7 020219 CAN-IN2.B18 020319 CAN-IN3.B18 025108 AIF-IN.B7
020109 CAN-IN1.B8 020220 CAN-IN2.B19 020320 CAN-IN3.B19 025109 AIF-IN.B8
020110 CAN-IN1.B9 020221 CAN-IN2.B20 020321 CAN-IN3.B20 025110 AIF-IN.B9
020111 CAN-IN1.B10 020222 CAN-IN2.B21 020322 CAN-IN3.B21 025111 AIF-IN.B10
020112 CAN-IN1.B11 020223 CAN-IN2.B22 020323 CAN-IN3.B22 025112 AIF-IN.B11
020113 CAN-IN1.B12 020224 CAN-IN2.B23 020324 CAN-IN3.B23 025113 AIF-IN.B12
020114 CAN-IN1.B13 020225 CAN-IN2.B24 020325 CAN-IN3.B24 025114 AIF-IN.B13
020115 CAN-IN1.B14 020226 CAN-IN2.B25 020326 CAN-IN3.B25 025115 AIF-IN.B14
020116 CAN-IN1.B15 020227 CAN-IN2.B26 020327 CAN-IN3.B26 025116 AIF-IN.B15
020117 CAN-IN1.B16 020228 CAN-IN2.B27 020328 CAN-IN3.B27 025117 AIF-IN.B16
020118 CAN-IN1.B17 020229 CAN-IN2.B28 020329 CAN-IN3.B28 025118 AIF-IN.B17
020119 CAN-IN1.B18 020230 CAN-IN2.B29 020330 CAN-IN3.B29 025119 AIF-IN.B18
020120 CAN-IN1.B19 020231 CAN-IN2.B30 020331 CAN-IN3.B30 025120 AIF-IN.B19
020121 CAN-IN1.B20 020232 CAN-IN2.B31 020332 CAN-IN3.B31 025121 AIF-IN.B20
020122 CAN-IN1.B21 020400 CAN-SYNC-OUT 025122 AIF-IN.B21
020123 CAN-IN1.B22 025123 AIF-IN.B22
020124 CAN-IN1.B23 025124 AIF-IN.B23
020125 CAN-IN1.B24 025125 AIF-IN.B24
020126 CAN-IN1.B25 025126 AIF-IN.B25
020127 CAN-IN1.B26 025127 AIF-IN.B26
020128 CAN-IN1.B27 025128 AIF-IN.B27
020129 CAN-IN1.B28 025129 AIF-IN.B28
020130 CAN-IN1.B29 025130 AIF-IN.B29
020131 CAN-IN1.B30 025131 AIF-IN.B30
020132 CAN-IN1.B31 025132 AIF-IN.B31

Configuration
7-69L _^VPMMsb` co PKN
Liste de sélection 3 :Signaux angulaires (Y)
Liste de sélection 4 :Signaux de vitesse ( ∆)
Liste de sélection 5 : Blocs fonction
000100 DFSET-PSET 000050 DFIN-OUT 000000 empty 010000 BRK1
001000 FIXED0INC 000100 DFSET-POUT 000050 AIN1 010250 R/L/Q
005000 MCTRL-PHI-ANG 000250 DFOUT-OUT 000055 AIN2 010500 AND1
011100 INT1-POUT 001000 FIXEDPHI-0 000070 AOUT1 010505 AND2
011105 INT2-POUT 005000 MCTRL-PHI-ACT 000075 AOUT2 010510 AND3
019521 FCODE-474/1 006000 DFRFG-OUT 000100 DFSET 010515 AND4
019522 FCODE-474/2 006220 CONV5-OUT 000200 DFIN 010520 AND5
020103 CAN-IN1.D1 019521 FCODE-475/1 000250 DFOUT 010550 OR1
020201 CAN-IN2.D1 019522 FCODE-475/2 005050 NSET 010555 OR2
020301 CAN-IN3.D1 005100 MPOT1 010560 OR3025103 AIF-IN.D1 005150 PCTRL1 010565 OR4
005250 NLIM1 010570 OR5
005500 ARIT1 010600 NOT1
005505 ARIT2 010605 NOT2
005510 ARIT3 010610 NOT3
005540 SQRT1 010615 NOT4
005550 ADD1 010620 NOT5
005555 ADD2 010650 CMP1
005600 RFG1 010655 CMP2
005610 SRFG1 010660 CMP3
005650 ASW1 010700 DIGDEL1
005655 ASW2 010705 DIGDEL2
005660 ASW3 010750 TRANS1
005700 ANEG1 010755 TRANS2
005705 ANEG2 010900 FLIP1
005750 FIXSET1 010905 FLIP2
005800 LIM1 011000 DCALC1
005850 ABS1 011050 PCTRL2
005900 PT1-1 011100 INT1
005905 PT1-2 011105 INT2
005950 DT1-1 011150 FOLL1
006000 DFRFG1 013000 FEV-AN1
006100 MFAIL 013100 OSZ
006150 DB1 015100 MLP1
006200 CONV1 020000 CAN-OUT
006205 CONV2 025000 AIF-OUT
006210 CONV3
006215 CONV4
006220 CONV5
006230 CONVPHA1
006300 S&H1
006350 CURVE1
006400 FCNT1

Configuration
7-70 L_^VPMMsb` co PKN
Liste de sélection 10 : Défauts Liste de sélection 10 : Défauts000000 No fail 000105 H05 trip 001030 LV message 002015 OC5 warning
000011 OC1 trip 000107 H07 trip 001091 EEr message 002020 OV warning
000012 OC2 trip 000110 H10 trip 002032 LP1 warning
000013 OC3 trip 000111 H11 trip 002054 OH4 warning
000022 LUQ trip 000140 Id1 trip 002057 OH7 warning
000032 LP1 trip 000141 Id2 trip 002058 OH8 warning
000050 OH trip 000200 NMAX trip 002061 CE0 warning
000053 OH3 trip 002062 CE1 warning
000057 OH7 trip 002063 CE2 warning
000058 OH8 trip 002064 CE3 warning
000061 CE0 trip 002065 CE4 warning
000062 CE1 trip 002083 Sd3 warning
000063 CE2 trip 002085 Sd5 warning
000064 CE3 trip 002086 Sd6 warning
000065 CE4 trip 002091 EER warning
000070 U15 trip
000071 CCr trip
000072 Pr1 trip
000073 Pr2 trip
000074 PEr trip
000075 Pr0 trip
000077 Pr3 trip
000078 Pr4 trip
000079 PI trip
000083 Sd3 trip
000085 Sd5 trip
000086 Sd6 trip
000091 EEr trip

Détection et élimination des défauts
8-1L _^VPMMsb` co PKN
8 Détection et élimination des défauts Les différents affichages et informations d’états vous permettent de reconnaître rapidement
l’apparition d’une anomalie de fonctionnement. ( 8-1)
Le diagnostic des défauts s’effectue à l’aide de l’historique. ( 8-2)
La liste des messages défauts vous donne des conseils pour éliminer les défauts. ( 8-4)
8.1 Détection des défauts
Affichage sur le variateur de vitesse
Deux LEDs vous indiquent l’état de l’appareil.
LED verte LED rouge Contrôle
J j Variateur débloqué ; pas de défaut
L j C0183 ; éventuellement C0168/1
j L C0168/1
L L C0168/1
J : Allumé j : Eteint L : Clignote
Affichage sur le clavier de commande
Les messages d’états sur l’afficheur vous indiquent l’état de l’appareil.
FAIL = J : TRIP ou message ou avertissement actif
FAIL RDY IMP Contrôle
j J j Variateur débloqué ; pas de défaut
J j J C0168/1
j j J C0183
j J J C0183
J J j C0168/1
J J J C0168/1
J : Allumé j : Eteint
Affichage via mot d’état LECOM C0150
Quatre bits du mot d’état vous indiquent l’état de l’appareil.
Bit 7RFR
Bit 12Avertissement
Bit 13Message
Bit 15Prêt à fonctionner
Contrôle
1 0 0 1 C0183
1 1 1 0 C0168/1
0 1 0 1 C0168/1
1 0 1 1 C0168/1
0 1 0 1 C0168/1
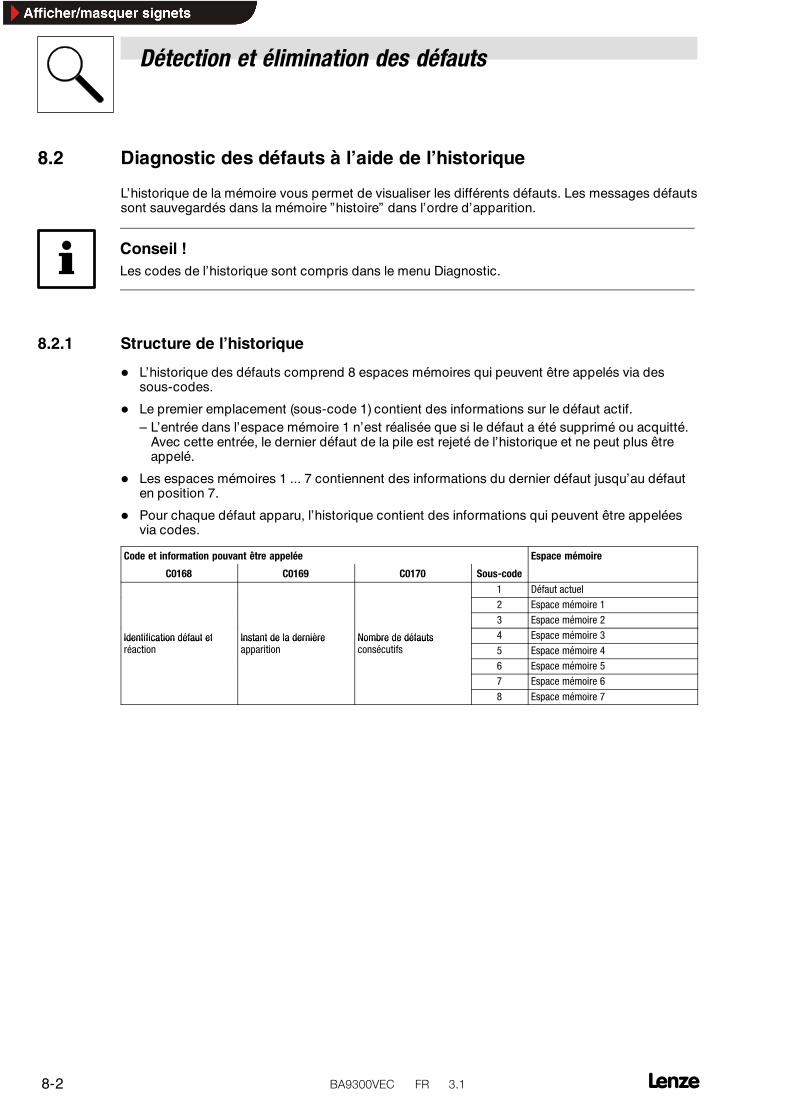
Détection et élimination des défauts
8-2 L_^VPMMsb` co PKN
8.2 Diagnostic des défauts à l’aide de l’historique
L’historique de la mémoire vous permet de visualiser les différents défauts. Les messages défautssont sauvegardés dans la mémoire ”histoire” dans l’ordre d’apparition.
Conseil !Les codes de l’historique sont compris dans le menu Diagnostic.
8.2.1 Structure de l’historique
L’historique des défauts comprend 8 espaces mémoires qui peuvent être appelés via dessous-codes.
Le premier emplacement (sous-code 1) contient des informations sur le défaut actif.– L’entrée dans l’espace mémoire 1 n’est réalisée que si le défaut a été supprimé ou acquitté.
Avec cette entrée, le dernier défaut de la pile est rejeté de l’historique et ne peut plus êtreappelé.
Les espaces mémoires 1 ... 7 contiennent des informations du dernier défaut jusqu’au défauten position 7.
Pour chaque défaut apparu, l’historique contient des informations qui peuvent être appeléesvia codes.
Code et information pouvant être appelée Espace mémoire
C0168 C0169 C0170 Sous-code1 Défaut actuel
2 Espace mémoire 1
3 Espace mémoire 2
Identification défaut et Instant de la dernière Nombre de défauts 4 Espace mémoire 3Identification défaut etréaction
Instant de la dernièreapparition
Nombre de défautsconsécutifs 5 Espace mémoire 4pp
6 Espace mémoire 5
7 Espace mémoire 6
8 Espace mémoire 7

Détection et élimination des défauts
8-3L _^VPMMsb` co PKN
8.2.2 Travailler avec l’historique
Identification défaut et réaction
Le code C0168 contient l’identification du défaut et la réaction déclenchée par le défaut.– L’entrée s’effectue par n° défaut LECOM. ( 7-23)
Noter que
lorsque plusieurs défauts provoquant des réactions différentes apparaissent en même temps,– seul le défaut dont la réaction possède la priorité la plus élevé est mémorisé
(priorité = TRIP message avertissement) ;
lorsque plusieurs défauts provoquant des réactions identiques (exemples : 2 messages)apparaissent en même temps,– seul le défaut activé en premier est mémorisé.
Instant d’apparition
En C0169 sont entrés les instants d’apparition de défauts :– l’état du compteur de mise sous tension (C0179) constitue l’instant de référence.
Noter que
lorsqu’un défaut apparaît plusieurs fois d’affilée, seul l’instant de la dernière apparition estsauvegardé.
Fréquence d’apparition
Le nombre d’apparitions successives du même défaut est affiché en C0170. L’instant de ladernière apparition est sauvegardé.
Remise à zéro de l’historique
Entrer C0167 = 1, afin de mettre à zéro l’historique.

Détection et élimination des défauts
8-4 L_^VPMMsb` co PKN
8.3 Messages défauts
Conseil !La lecture de l’historique des défauts par bus de terrain conduit à un numéro LECOM correspondantau type de défaut (C0168/x). Pour la signification des n° LECOM, se reporter au chapitre ” fonctionsde surveillance” . ( 7-23)
Affichage Défaut Origine Remède--- Sans défaut - -
CCr Erreur système Interférences importantes sur les câbles de commande Blinder les câbles de commande.
Boucles de masse ou de terre dans le câblage Procéder au câblage PE de type CEM ( 4-33 )
CE0 Erreur de communication Erreur de transmission d’instructions de commande vial’interface d’automatisme X1
Enficher le module d’automatisme, si nécessaire, fixer parvis.
CE1 Erreur de communicationsur l’objet donnée processd’entrée CAN_IN_1
L’objet CAN_IN_1 reçoit des données erronées ou lacommunication est interrompue.
Vérifier le câble sur X4.Vérifier l’émetteur.Eventuellement, augmenter le temps de surveillance en C0357/1.
CE2 Erreur de communicationsur l’objet donnée processd’entrée CAN_IN_2
L’objet CAN_IN_2 reçoit des données erronées ou lacommunication est interrompue.
Vérifier le câble sur X4.Vérifier l’émetteur.Eventuellement, augmenter le temps de surveillance en C0357/2.
CE3 Erreur de communicationsur l’objet donnée processd’entrée CAN_IN_3
L’objet CAN_IN_3 reçoit des données erronées ou lacommunication est interrompue.
Vérifier le câble sur X4.Vérifier l’émetteur.Eventuellement, augmenter le temps de surveillance en C0357/3.
CE4 Etat BUS-OFF Le nombre de télégrammes défectueux reçus par levariateur via le bus système X4 est trop élevé ; le variateurs’est déconnecté du bus.
Vérifier le câblage :vérifier la terminaison du bus (existe-t-elle ?) ;vérifier le blindage des câbles ;vérifier le câblage PE.Vérifier la charge du bus :réduire la vitesse de transmission (tenir compte de lalongueur des câbles)
EEr Défaut externe (TRIP-Set) Une entrée numérique affectée à la fonction ”mise endéfaut” (TRIP-Set) a été activée.
Vérifier l’alimentation externe.
H05 Défaut interne Contacter votre service Lenze.
H07 Partie puissance nonappropriée
Pendant la phase d’initialisation, le variateur a reconnu unepartie puissance non appropriée.
Contacter votre service Lenze.
H10 Défaut capteur detempérature radiateur
Le capteur de température radiateur indique des valeursindéfinies.
Contacter votre service Lenze.
H10 Défaut capteur detempérature interne
Le capteur de température interne indique des valeursindéfinies.
Contacter votre service Lenze.
ID1 Identification moteurerronée
Saisie de la courbe caractéristique échouéeDimensionnement du moteur beaucoup trop petit(Pmoteur% P variateur de vitesse)
Vérifier le câble moteur.Prévoir un dimensionnement moteur plus grand.
ID2 Identification moteurerronée
Sans identification des paramètres moteur Entrer les données selon la plaque signalétique du moteurconnecté.
LP1 Défauts phases moteur Défaillance d’une phase moteur Vérifier le moteur :vérifier les câbles moteur.
La limitation courant réglée est trop faible. Augmenter la limitation courant en C0599.
Cette surveillance n’est pas adaptée pour : des servomoteurs synchrones des fréquences de rotation> 480 Hz
Désactiver la surveillance avec C0597= 3.
LU Sous-tension Tension circuit intermédiaire inférieure à la valeur déduitede C0173
Vérifier la tension réseau.Vérifier le module d’alimentation.
NMAX Vitesse maxi dépassée(C0596)
Charge active trop importante (exemple : engins de levage). Vérifier le dimensionnement de l’entraînement.
Entraînement sans régulation de vitesse, limitation ducouple trop élevée
Eventuellement, augmenter la limitation du couple.
La vitesse actuelle n’est pas saisie correctement. Vérifier le codeur sélectionné (C0025).Vérifier les données moteur.

Détection et élimination des défauts
8-5L _^VPMMsb` co PKN
Affichage RemèdeOrigineDéfaut
OC1 Court-circuit Court-circuitCourant de charge capacitif du câble moteur trop élevé
Chercher la cause du court-circuit ; vérifier le câble.Utiliser des câbles plus courts ou des câbles à plus faible capacité.
OC2 Mise à la terre Court-circuit à la masse d’une phase moteurCourant de charge capacitif du câble moteur trop élevé
Vérifier le moteur ; vérifier le câble.Utiliser des câbles plus courts ou des câbles à plus faiblecapacité.
OC3 TRIP suite à unesurcharge
Rampes d’accélération et de décélération réglées tropcourtes (C0012, C0013)
Augmenter les rampes d’accélération et de décélération.
Valeur pour paramètre courant Vp (C0075) trop faible Vérifier le réglage.
OC5 Surcharge I x t Accélérations nombreuses ou trop longues avecsurintensitéCharge excessive permanente avec Imoteur > 1,05 x INx
Vérifier le dimensionnement de l’entraînement.
OH La température duradiateur est supérieure àla valeur réglée sur levariateur.
Température ambianteTa > 40 °C ou 50 °C
Laisser refroidir l’appareil et assurer une meilleureventilation.Vérifier la température ambiante et assurer une meilleureventilation.
Radiateur poussiéreux Nettoyer le radiateur.
Position de montage incorrecte Modifier la position de montage.
OH3 1) La température du moteurest supérieure à la valeurréglée sur le variateur.
Moteur trop chaud en raison des courants trop élevés etdes accélérations nombreuses et trop longues.
Vérifier le dimensionnement de l’entraînement.
PTC non ou mal connectée sur X7 ou X8 Raccorder la sonde PTC ou déconnecter la surveillance(C0583 = 3).
OH4 La température duradiateur est supérieure àla valeur réglée en C0122.
Température ambianteTa > 40 °C ou 50 °C
Laisser refroidir l’appareil et assurer une meilleure ventilation.Vérifier la température ambiante et assurer une meilleureventilation.
Radiateur poussiéreux Nettoyer le radiateur.
Position de montage incorrecte Modifier la position de montage.
La valeur réglée en C0122 est trop faible. Augmenter la valeur réglée.
OH7 1) La température du moteurest supérieure à la valeurréglée en C0121.
Moteur trop chaud en raison des courants trop élevés etdes accélérations nombreuses et trop longues.
Vérifier le dimensionnement de l’entraînement.
PTC non ou mal connectée sur X7 ou X8 Raccorder la sonde PTC ou déconnecter la surveillance(C0584 = 3).
La valeur réglée en C0121 est trop faible. Augmenter la valeur réglée.
OH8 PTC sur bornes T1, T2indique surtempérature dumoteur
Moteur trop chaud en raison des courants trop élevés etdes accélérations nombreuses et trop longues.
Vérifier le dimensionnement de l’entraînement.
Bornes T1, T2 non affectées Raccorder la sonde PTC ou déconnecter la surveillance(C0585 = 3).
OU Surtension Energie de freinage trop élevée (adaptation circuitintermédiaire supérieure à la valeur réglée en C0173)
Utiliser une unité de freinage ou un module d’alimentation etun module de freinage ou un module de renvoi sur le réseau.
PEr Erreur programme Un défaut a été constaté dans le déroulement duprogramme.
Renvoyer le variateur avec jeu de données sur disquettechez Lenze.
PI Erreur d’initialisation Un défaut a été constaté lors du transfert de paramètresentre les variateurs de vitesse.Le jeu de paramètres n’est pas adapté au variateur.
Corriger le jeu de paramètres.
PR0PR1PR2PR3PR4
Erreur jeu de paramètres Erreur pendant le chargement du jeu de paramètresATTENTION Le réglage usine est chargé automatiquement.
Régler le paramétrage souhaité et le sauvegarder enC0003.Avec PR0, supprimer, en plus, la tension d’alimentation.
Sd3 Erreur codeur sur X9/8 Câble interrompuEntrée X9 Pin 8 non affectée
Vérifier s’il y a rupture de fil du câbleAppliquer 5V sur l’entrée X9 pin 8 ou déconnecter lasurveillance (C0587 = 3).
Sd5 Défaut sur consignecourant
Consigne courant sur X6/1, X6/2 < 2 mA Vérifier s’il y a rupture de fil du câble.Vérifier le générateur courant pilote.
Sd6 Défaut capteur Capteur de la détection de la température moteur sur X7 ouX8 indique des valeurs indéfinies
Vérifier le câblage.Eventuellement, déconnecter la surveillance avec C0594 = 3.
1) Saisie température par codeur incrémental X8

Détection et élimination des défauts
8-6 L_^VPMMsb` co PKN
8.4 Réarmement des défauts
TRIP
Après élimination du défaut, le blocage des impulsions n’est supprimé qu’après acquittement.
Acquitter le défaut TRIP– Clavier de commande :
Appuyer sur la touche STOP.Ensuite, appuyer sur la touche RUN pour débloquer le variateur.
– LECOM : Régler C0043 = 0.– Mot de commande C0135– Borne X5/E5– Mot de commande AIF– Mot de commande bus système
Conseil !Si la source du défaut TRIP est toujours activée, le réarmement ne peut pas être mis en oeuvre.
Message
Après élimination du défaut, le blocage des impulsions est supprimé automatiquement.

Maintenance
9-1L _^VPMMsb` co PKN
9 Maintenance
9.1 Travaux de maintenance
Le variateur ne nécessite aucun entretien à condition de respecter les conditions d’utilisationprescrites. ( 3-2)
L’air ambiant pollué risque de boucher les grilles d’aération.– Il convient de procéder à un contrôle régulier des grilles d’aération (toutes les 4 semaines
environ).– Enlever la poussière sur les grilles d’aération à l’aide d’un aspirateur.
Stop !Pour le nettoyage des grilles d’aération, ne pas utiliser des objets aigus et tranchants (exemple :couteaux, tourne-vis).

Maintenance
9-2 L_^VPMMsb` co PKN
9.2 Adresses S.A.V.
Vous trouverez les adresses du S.A.V. ou des agences LENZE dans le monde entier sur la dernièrepage de la couverture de chaque documentation Lenze.

Annexe
10-1L _^VPMMsb` co PKN
10 Annexe
10.1 Exemples d’application
Pour les applications les plus courantes, le traitement de signaux à l’intérieur du variateur estsauvegardé sous forme de configurations de base.
Vous pouvez sélectionner la configuration de base en C0005, puis l’activer et l’adapter parquelques réglage à votre application (Short Setup/mise en service rapide). ( 7-1)
En règle générale, la programmation des données moteur et l’adaptation de la régulations’effectue indépendamment de la configuration (voir chapitre “mise en service”). ( 5-1)
Configuration Fonction de base1xxx Régulation de vitesse 10-22xxx Commande pas à pas 10-43xxx Commande de trancanage 10-74xxx Commande de couple 10-105xxx Fréquence pilote - maître 10-126xxx Esclave fréquence pilote (ligne) 10-147xxx Esclave fréquence pilote (cascade) 10-168xxx Régulation pantin (saisie externe du diamètre) 10-199xxx Régulation pantin (calcul interne du diamètre) 10-22
Conseil !Dans le programme GDC et sur le clavier de commande, vous trouverez les principaux codes desconfigurations de base dans les menus “mise en service rapide” .

Annexe
10-2 L_^VPMMsb` co PKN
10.1.1 Commande de vitesse (C0005 = 1000)
La configuration C0005 = 1000 (réglage usine) s’adresse principalement aux entraînementsindividuels. La consigne pour la vitesse d’entrée est réglée par l’entrée analogique X6/1.Le traitement interne du signal s’effectue en liaison avec les signaux de commande numériques.
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Traitement de la consigne C0010 Entrée d’une vitesse mini pour la consigne = 0 0 rpm (min-1)o g
C0012 Temps d’accélération pour la consigne principale 5.00 s
C0013 Temps de décélération pour la consigne principale 5.00 s
C0034 Commutation sur consigne courant 4 ... 20 mA 0
C0038/1...6 Plages de fréquence masquées 0 rpm (min-1)
C0039/1 Fréquence JOG, activée via l’entrée numérique X5/E3 1500 rpm (min-1)
C0190 Activation du canal consigne supplémentaire 0
C0220 Temps d’accélération pour la consigne supplémentaire 2.00 s
C0221 Temps de décélération pour la consigne supplémentaire 2.00 s
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectoriel 5g o o
C0011 Vitesse maxi 3000 rpm (min-1)
C0016 Accroissement de la tension (Umin) 0.00 %
C0021 Compensation de glissement En fonction del’appareil
C0022 Courant maxi pour fonctionnement moteur En fonction del’appareil
C0023 Courant maxi pour fonctionnement générateur En fonction del’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0019 Seuil pour freinage CC automatique 0 rpm (min-1)
C0107 Temps d’arrêt pour freinage CC 0.00 s
C0036 Consigne courant pour freinage CC 0.00 A
C0018 Fréquence de découpage du variateur 6
C0142 Comportement après déblocage variateur 1
Avec contrôle vectoriel oud i é l
C0070 Gain du régulateur de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de vitesse 50 ms
C0074 Influence du régulateur de vitesse (uniquement pour fonctionnement enU/f)
10.00 %

Annexe
10-3L _^VPMMsb` co PKN
!
!
!
!
!
"#$%&'&(%)*&)+#)),-(.$/(&
0/1+#%$-()'
-%&1"
""2%)"#3$*&
!
"#$
%
$&
'!
#(
)
)
0/1+#%&1")(
-(,%$-((&'&(%)&()
-(%"4+&)5&,%-"$&+
"#$
Fig. 10-1 Schéma logique de la configuration 1000 : Commande de vitesse

Annexe
10-4 L_^VPMMsb` co PKN
10.1.2 Commande pas à pas (C0005 = 2000)
La configuration C0005 = 2000 est destinée aux applications dont l’entraînement doit assurer unnombre déterminé de tours et ce, de façon répétée. C’est ainsi que, par exemple, des objets peuventêtre acheminés un à un sur une bande transporteuse ou qu’un dosage déterminé peut être réaliséà l’aide d’un convoyeur roue et vis.
La vitesse de transport et le déplacement ou la vitesse de dosage et la quantité doivent alors êtrecommandés indépendamment l’un de l’autre via les deux entrées analogiques. La commande d’unpas est lancée via l’entrée numérique X5/E4.
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Traitement de la consigne C0010 Entrée d’une vitesse mini pour la consigne vitesse = 0 0 rpm (min -1)o g
C0012 Temps d’accélération pour la consigne de vitesse 1.00 s
C0013 Temps de décélération pour la consigne de vitesse 1.00 s
C0034 Commutation sur consigne courant 4 ... 20 mA 0
C1351 Constante de mise à échelle pour programmation du déplacement(valeur = nombre de tours pour la consigne de déplacement = 100 %,65536 = 1 tour)
6553600
C0560/1 Consigne de déplacement interne, activée via l’entrée numérique X5/E3 100 %
C0940, Adaptation de la longueur d’arrêt C0940 = 1,C0941
[C0940][C0941]
= [C0011] ⋅ [C013] ⋅ 65536120 ⋅ [1351]
C0941 = 4
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectoriel 5g o o
C0011 Vitesse maxi 3000 rpm (min-1)
C0016 Accroissement de la tension (Umin) 0.00 %
C0021 Compensation de glissement En fonction del’appareil
C0022 Courant maxi pour fonctionnement moteur En fonction del’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0019 Seuil pour freinage CC automatique 0 rpm (min-1)
C0107 Temps d’arrêt pour freinage CC 0.00 s
C0036 Consigne courant pour freinage CC 0.00 A
C0018 Fréquence de découpage du variateur 6
Avec contrôle vectoriel oui é
C0070 Gain du régulateur de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de vitesse 50 ms
C0074 Influence du régulateur de vitesse (uniquement pour fonctionnement enU/f)
10.00 %
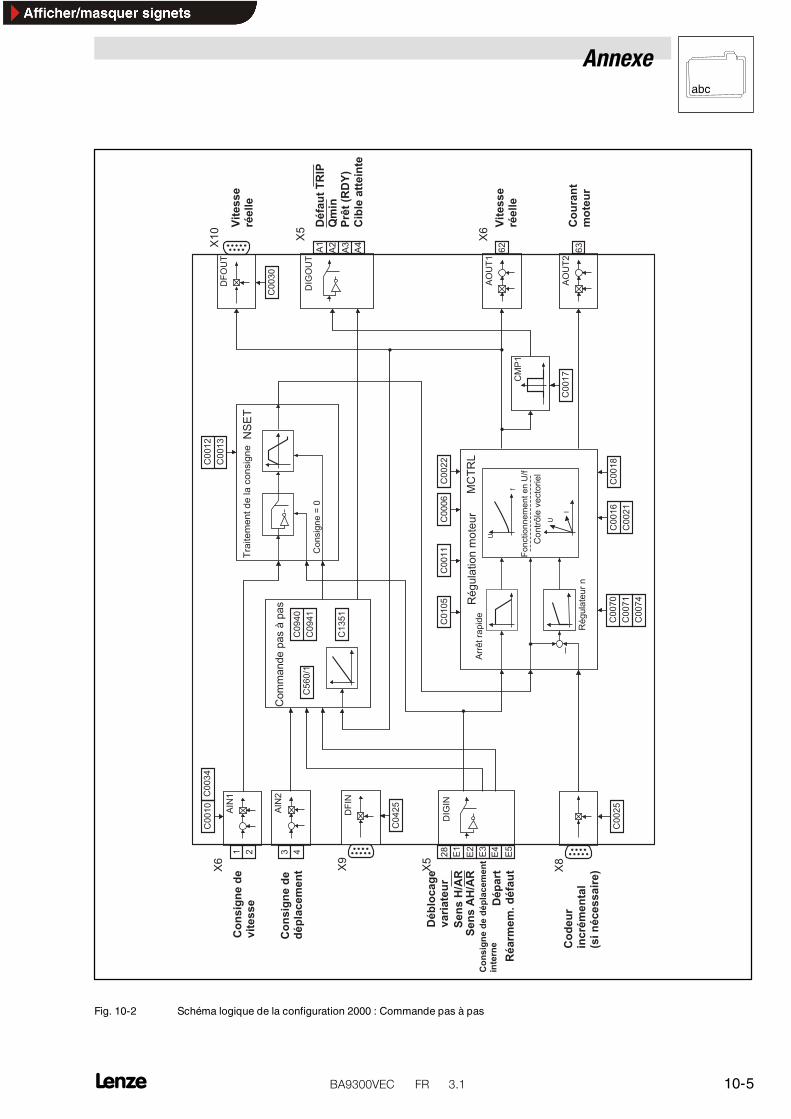
Annexe
10-5L _^VPMMsb` co PKN
!
!
!
!
"#$
%
$&
'!
-(,%$-((&'&(%)&()
-(%"4+&)5&,%-"$&+
"#$%&'&(%)*&)+#),-(.$/(&
0/1+#%$-()'
-%&1"
""2%)"#3$*&
0/1+#%&1")(
!
-''#(*&)3#.)6)3#.
-(.$/(&)7)
)
)
Fig. 10-2 Schéma logique de la configuration 2000 : Commande pas à pas

Annexe
10-6 L_^VPMMsb` co PKN
( % " # 8 ( & ' & ( % ) * & ) * - . # / &
( % " # 8 ( & ' & ( %, - ( 5 - 9 & 1 "
Fig. 10-3 Schéma de principe pour la commande pas à pas d’un poste de remplissage pour produits en vrac
Affectation des entrées et des sorties Entraînement de dosage Entraînement convoyeur
Entrées analogiques Vitesse de dosage Quantité de dosage
Vitesse de déplacement Longueur du pas
Entrées numériques Déblocage variateur Sens de rotation Quantité de dosage déterminée Départ dosage Réarmement défaut (TRIP-Reset)
Déblocage variateur Sens déplacement Longueur de pas déterminée Début du déplacement Réarmement défaut (TRIP-Reset)
Sorties numériques Défaut (TRIP) Vitesse actuelle > C0017 (Qmin) Prêt à fonctionner (RDY) Dosage achevé
Défaut (TRIP) Vitesse actuelle > C0017 (Qmin) Prêt à fonctionner (RDY) Déplacement achevé
Sorties analogiques Vitesse réelle Courant moteur
Vitesse réelle Courant moteur

Annexe
10-7L _^VPMMsb` co PKN
10.1.3 Commande de trancanage (C0005 = 3000)
La configuration C0005 = 3000 est pourvue pour des entraînements de broches assurant letrancanage du matériau sur des enrouleurs.
La vitesse de rotation de la bobine, base de la vitesse de trancanage, est transmise par l’entréeanalogique 1. Chaque inversion du sens de rotation est commandée via les entrées numériquesX5/E1 et X5/E2. Pour ce faire, il est possible d’utiliser des contacts de fin de course qui provoquentle blocage du sens de rotation actuel (contacts à ouverture).
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Traitement de la consigne C0012 Temps d’accélération 1.00 so g
C0013 Temps de décélération 1.00 s
C0034 Commutation sur consigne courant 4 ... 20 mA 0
C0141 Consigne supplémentaire pour marche par à-coups via l’entrée numériqueX5/E3
10.00 %
C0472/1 Réglage du pas de trancanage 100.00 %
C0474/1 Réglage de la pause de trancanage (Avec 65536, on obtient une paused’un tour moteur si 100 % correspondent à la consigne 3000 min-1).
10.000
C0104 Sélection de l’accélération : déplacement constant (nombre constant detours)
2
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectoriel 5g o o
C0011 Vitesse maxi 3000 rpm (min-1)
C0016 Accroissement de la tension (Umin) 0.00 %
C0021 Compensation de glissement En fonction del’appareil
C0022 Courant maxi pour fonctionnement moteur En fonction del’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0019 Seuil pour freinage CC automatique 0 rpm (min-1)
C0107 Temps d’arrêt pour freinage CC 0.00 s
C0036 Consigne courant pour freinage CC 0.00 A
C0018 Fréquence de découpage du variateur 6
Avec contrôle vectoriel oud i é l
C0070 Gain du régulateur de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de vitesse 50 ms
C0074 Influence du régulateur de vitesse (uniquement pour fonctionnement enU/f)
10 %

Annexe
10-8 L_^VPMMsb` co PKN
!
!
!
!
!
!
!
-(,%$-((&'&(%)&()
-(%"4+&)5&,%-"$&+
"#$%&'&(%)*&)+#),-(.$/(&
0/1+#%$-()'
-%&1"
""2%)"#3$*&
0/1+#%&1")(
!
*
&
!
$
-''#(*&)*&
%"#(,#(#/&
-(.$/(&)7)
)
)
"#$
%
$&
'!
Fig. 10-4 Schéma logique de la configuration 3000 : Commande de trancanage

Annexe
10-9L _^VPMMsb` co PKN
( % " # 8 ( & ' & ( % ) * & ) + # ) : - : $ ( &
- ( . $ / ( & ) * &" 0 0 " & ( , &; : - : $ ( & <
& ( . ) = - " # $ " &
& ( .# ( % $ = - " # $ " &
( % " # 8 ( & ' & ( % ) * & ) % " # ( , # ( # / &
Fig. 10-5 Schéma de principe d’une commande de trancanage
Affectation des entrées et des sorties Entraînement de trancanage
Entrée analogique Consigne de référence (bobine)
Entrées numériques Déblocage variateur Sens de rotation Consigne supplémentaire Départ trancanage Réarmement défaut (TRIP-Reset)
Sorties numériques Défaut (TRIP) Vitesse actuelle > C0017 (Qmin) Prêt à fonctionner (RDY) Pause de trancanage
Sorties analogiques Vitesse réelle Courant moteur
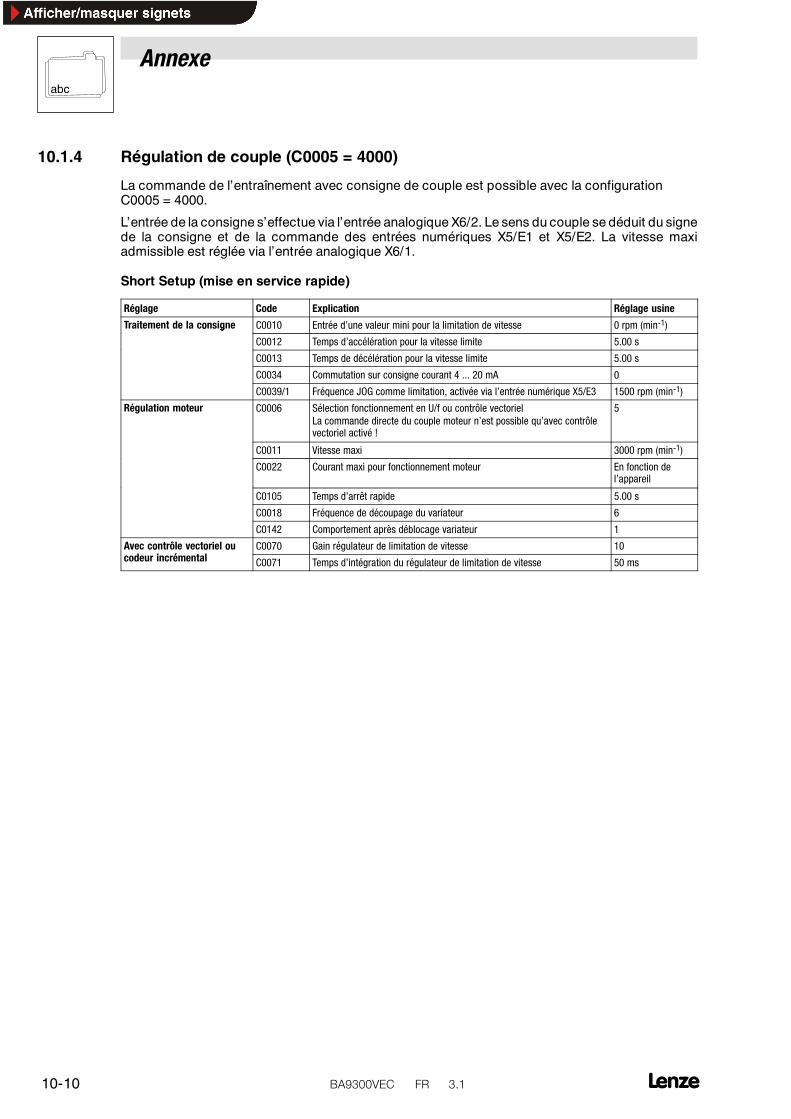
Annexe
10-10 L_^VPMMsb` co PKN
10.1.4 Régulation de couple (C0005 = 4000)
La commande de l’entraînement avec consigne de couple est possible avec la configurationC0005 = 4000.
L’entrée de la consigne s’effectue via l’entrée analogique X6/2. Le sens du couple se déduit du signede la consigne et de la commande des entrées numériques X5/E1 et X5/E2. La vitesse maxiadmissible est réglée via l’entrée analogique X6/1.
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Traitement de la consigne C0010 Entrée d’une valeur mini pour la limitation de vitesse 0 rpm (min-1)o g
C0012 Temps d’accélération pour la vitesse limite 5.00 s
C0013 Temps de décélération pour la vitesse limite 5.00 s
C0034 Commutation sur consigne courant 4 ... 20 mA 0
C0039/1 Fréquence JOG comme limitation, activée via l’entrée numérique X5/E3 1500 rpm (min-1)
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectorielLa commande directe du couple moteur n’est possible qu’avec contrôlevectoriel activé !
5
C0011 Vitesse maxi 3000 rpm (min-1)
C0022 Courant maxi pour fonctionnement moteur En fonction del’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0018 Fréquence de découpage du variateur 6
C0142 Comportement après déblocage variateur 1
Avec contrôle vectoriel oud i é l
C0070 Gain régulateur de limitation de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de limitation de vitesse 50 ms

Annexe
10-11L _^VPMMsb` co PKN
!
!
!
-(%"4+&)5&,%-"$&+
"#$%&'&(%)*&)+#),-(.$/(&
0/1+#%$-()'
-%&1"
""2%)"#3$*&
$'
$%#%$-()(
+
"#$
!
"#$
%
$&
'!
#(
)
)
Fig. 10-6 Schéma logique de la configuration 4000 : Commande de couple

Annexe
10-12 L_^VPMMsb` co PKN
10.1.5 Fréquence pilote maître (C0005 = 5000)
La configuration C0005 = 5000 permet de commander un système comprenant plusieursentraînements. La consigne de vitesse traitée est utilisée, aussi bien pour le maître que pour lesentraînements esclaves comme grandeur de référence. La transmission de la fréquence auxentraînements esclaves s’effectue via la sortie fréquence pilote X10.
L’ajustement paramétrable de la grandeur de référence permet d’adapter le rapport de vitesse dechaque entraînement au process.
Pour le schéma de principe d’une mise en réseau fréquence pilote d’une machine textile, voirFig. 10-10 ( 10-18)
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Traitement de la consigne C0010 Entrée d’une vitesse mini pour la consigne = 0 0 rpm (min-1)o g
C0012 Temps d’accélération pour la consigne principale 5.00 s
C0013 Temps de décélération pour la consigne principale 5.00 s
C0034 Commutation sur consigne courant 4 ... 20 mA 0
C0039/1 Fréquence JOG, activée via l’entrée numérique X5/E3 1500 rpm (min-1)
C0190 Activation du canal consigne supplémentaire 0
C0220 Temps d’accélération pour la consigne supplémentaire 2.00 s
C0221 Temps de décélération pour la consigne supplémentaire 2.00 s
Gestion fréquence C0030 Sélection constante fréquence pilote sortie X10 3o q
C0473/1,C0533
Numérateur, dénominateur - évaluation fréquence pilote C0473/1 = 1C0533 = 1
C0032,C0033
Numérateur, dénominateur du rapport de réduction C0032 = 1C0033 = 1
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectoriel 5g o o
C0011 Vitesse maxi 3000 rpm (min-1)
C0016 Accroissement de la tension (Umin) 0.00 %
C0021 Compensation de glissement En fonction del’appareil
C0022 Courant maxi pour fonctionnement moteur En fonction del’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0019 Seuil pour freinage CC automatique 0 rpm (min-1)
C0107 Temps d’arrêt pour freinage CC 0.00 s
C0036 Consigne courant pour freinage CC 0.00 A
C0018 Fréquence de découpage du variateur 6
Avec contrôle vectoriel oud i é l
C0070 Gain du régulateur de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de vitesse 50 ms
C0074 Influence du régulateur de vitesse (uniquement pour fonctionnementen U/f)
10.00 %

Annexe
10-13L _^VPMMsb` co PKN
!
!
!
!
!
-(,%$-((&'&(%)&()
-(%"4+&)5&,%-"$&+
"#$%&'&(%)*&)+#),-(.$/(&
0/1+#%$-()'
-%&1"
""2%)"#3$*&
0/1+#%&1")(
"#$
!
"#$
%
$&
'!
#(
,-
.
!
)
Fig. 10-7 Schéma logique de la configuration 5000 : Fréquence pilote maître

Annexe
10-14 L_^VPMMsb` co PKN
10.1.6 Fréquence pilote esclave (ligne) (C0005 = 6000)
La configuration C0005 = 6000 permet d’intégrer le variateur dans un réseau comprenant plusieursentraînements.
La consigne fréquence pilote est entrée via l’entrée X9 et sert de grandeur de référence del’entraînement. L’évaluation qui suit permet d’adapter la vitesse de l’entraînement au process.
L’entrée numérique X5/E3 permet, par ailleurs, d’activer une consigne supplémentaire interne.
La consigne fréquence pilote n’est pas modifiée avant d’être transmise aux entraînements esclaves.
Pour le schéma de principe d’une mise en réseau fréquence pilote d’une machine textile, voirFig. 10-10 ( 10-18)
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Traitement de la consigne C0141 Consigne de déplacement interne, activée via l’entrée numérique X5/E3 10.00 %o g
C0671 Temps d’accélération pour la consigne supplémentaire 0.0 s
C0672 Temps de décélération pour la consigne supplémentaire 0.00 s
Gestion fréquence C0425 Sélection constante fréquence pilote entrée X9 3o q
C0473/1,C0533
Numérateur, dénominateur - évaluation fréquence pilote C0473/1 = 1C0533 = 1
C0032,C0033
Numérateur, dénominateur du rapport de réduction C0032 = 1C0033 = 1
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectoriel 5g o o
C0011 Vitesse maxi 3000 rpm (min-1)
C0016 Accroissement de la tension (Umin) 0.00 %
C0021 Compensation de glissement En fonction del’appareil
C0022 Courant maxi pour fonctionnement moteur En fonction del’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0019 Seuil pour freinage CC automatique 0 rpm (min-1)
C0107 Temps d’arrêt pour freinage CC 0.00 s
C0036 Consigne courant pour freinage CC 0.00 A
C0018 Fréquence de découpage du variateur 6
Avec contrôle vectoriel oud i é l
C0070 Gain du régulateur de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de vitesse 50 ms
C0074 Influence du régulateur de vitesse (uniquement pour fonctionnement enU/f)
10.00 %

Annexe
10-15L _^VPMMsb` co PKN
!
!
!
!
!
!
!
!
-(,%$-((&'&(%)&()
-(%"4+&)5&,%-"$&+
0/1+#%$-()'
-%&1"
""2%)"#3$*&
0/1+#%&1")(
"#$
!
"#$
%
$&
'!
#(
,-
.
!
)
"#$%&'&(%)*&)+#)"0>1&(,&
3$+-
%&
,-
!
Fig. 10-8 Schéma logique de la configuration 6000 : Fréquence pilote esclave (ligne)
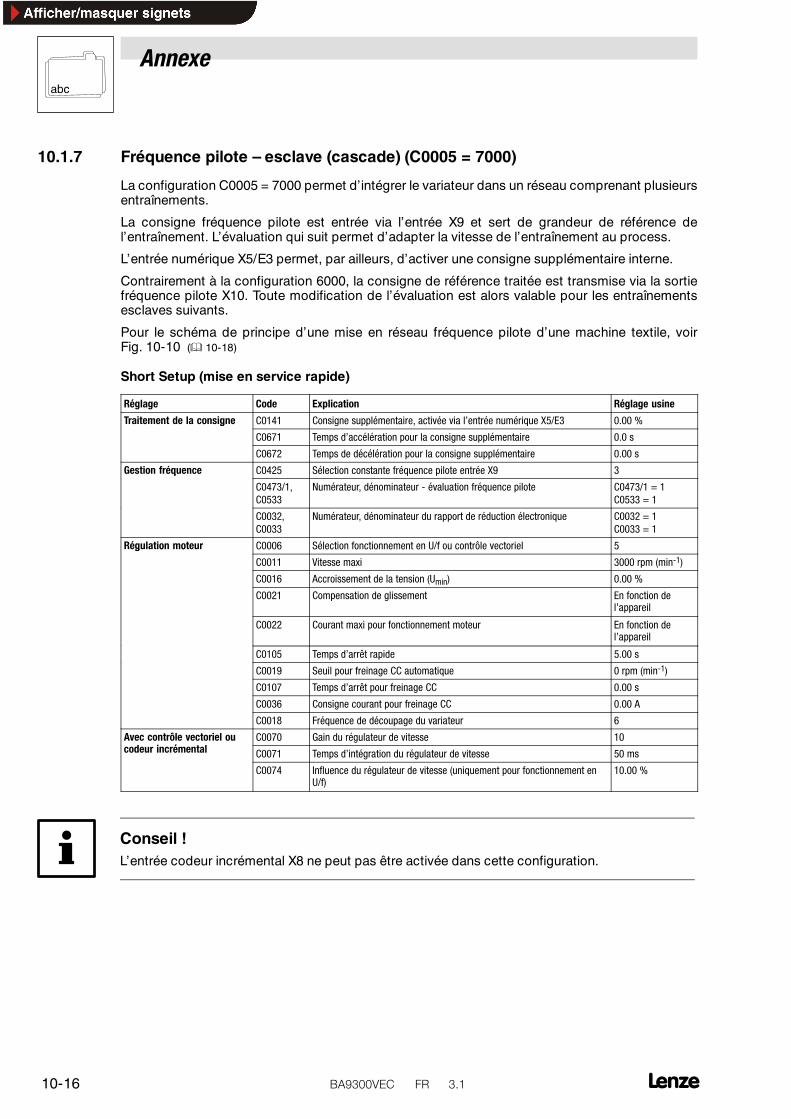
Annexe
10-16 L_^VPMMsb` co PKN
10.1.7 Fréquence pilote – esclave (cascade) (C0005 = 7000)
La configuration C0005 = 7000 permet d’intégrer le variateur dans un réseau comprenant plusieursentraînements.
La consigne fréquence pilote est entrée via l’entrée X9 et sert de grandeur de référence del’entraînement. L’évaluation qui suit permet d’adapter la vitesse de l’entraînement au process.
L’entrée numérique X5/E3 permet, par ailleurs, d’activer une consigne supplémentaire interne.
Contrairement à la configuration 6000, la consigne de référence traitée est transmise via la sortiefréquence pilote X10. Toute modification de l’évaluation est alors valable pour les entraînementsesclaves suivants.
Pour le schéma de principe d’une mise en réseau fréquence pilote d’une machine textile, voirFig. 10-10 ( 10-18)
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Traitement de la consigne C0141 Consigne supplémentaire, activée via l’entrée numérique X5/E3 0.00 %o g
C0671 Temps d’accélération pour la consigne supplémentaire 0.0 s
C0672 Temps de décélération pour la consigne supplémentaire 0.00 s
Gestion fréquence C0425 Sélection constante fréquence pilote entrée X9 3o q
C0473/1,C0533
Numérateur, dénominateur - évaluation fréquence pilote C0473/1 = 1C0533 = 1
C0032,C0033
Numérateur, dénominateur du rapport de réduction électronique C0032 = 1C0033 = 1
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectoriel 5g o o
C0011 Vitesse maxi 3000 rpm (min-1)
C0016 Accroissement de la tension (Umin) 0.00 %
C0021 Compensation de glissement En fonction del’appareil
C0022 Courant maxi pour fonctionnement moteur En fonction del’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0019 Seuil pour freinage CC automatique 0 rpm (min-1)
C0107 Temps d’arrêt pour freinage CC 0.00 s
C0036 Consigne courant pour freinage CC 0.00 A
C0018 Fréquence de découpage du variateur 6
Avec contrôle vectoriel oud i é l
C0070 Gain du régulateur de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de vitesse 50 ms
C0074 Influence du régulateur de vitesse (uniquement pour fonctionnement enU/f)
10.00 %
Conseil !L’entrée codeur incrémental X8 ne peut pas être activée dans cette configuration.

Annexe
10-17L _^VPMMsb` co PKN
!
!
!
!
!
!
!
-(,%$-((&'&(%)&()
-(%"4+&)5&,%-"$&+
0/1+#%$-())'-%&1"
""2%)"#3$*&
0/1+#%&1")(
"#$
"#$
%
$&
'!
#(
,-
.
!
)
"#$%&'&(%)*&)+#)"0>1&(,&
3$+-
%&
,-
!
Fig. 10-9 Schéma logique de la configuration 7000 : Fréquence pilote esclave (cascade)

Annexe
10-18 L_^VPMMsb` co PKN
( % " # 8 ( & ' & ( % ) 3 " $ ( , $ 3 # + " 0 > 1 & ( , & ) 3 $ + - % & ) ? ) ' # 8 % " &
- ( . $ / ( & ) 3 " $ ( , $ 3 # + &
# % $ @ " & ) 3 " & ' $ @ " &
= # 1 # / & # $ ( # / & ) * & ) + # ) . 1 " # , &
( % " # 8 ( & ' & ( % . ) & . , + # 5 & . " 0 > 1 & ( , & ) 3 $ + - % & ) & . , + # 5 & ) ; + $ / ( & , # . , # * & <
" 0 > 1 & ( , & ) 3 $ + - % &
Fig. 10-10 Schéma de principe pour une mise en réseau fréquence pilote d’une machine textile

Annexe
10-19L _^VPMMsb` co PKN
10.1.8 Régulation pantin (diamètre calcul externe) (C0005 = 8000)
La configuration C0005 = 8000 est prévue pour des entraînements d’enroulage/déroulage avecrégulation pantin et saisie diamètre externe.
La précommande de l’entraînement avec la vitesse de ligne ou la vitesse du produit s’effectue parun signal fréquence pilote. Le régulateur pantin établit un facteur de correction en fonction de laposition réelle du pantin ; ce facteur est ajouté au signal de précommande. Il en résulte la consignede vitesse du cylindre, qui peut être utilisée directement comme consigne de vitesse pour unenrouleur contact.
Pour un enrouleur axial, on obtient la consigne de vitesse par l’évaluation du diamètre d’enroulage.Le signal analogique généré par le capteur de diamètre est traité en conséquence, par le régulateur.
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Précommande fréquenceil
C0425 Sélection constante fréquence pilote entrée X9 3o qpilote C0950 Numérateur pour évaluation de la fréquence pilote 5
C0951 Dénominateur pour l’évaluation de la fréquence pilote 1
Régulation pantin C0141 Consigne pantin 10.00 %g o p
C0687 Fenêtre position pantin réelle = consigne position pantin 1.00 %
C1330 Temps d’accélération pour la consigne pantin 1.0 s
C1331 Temps de décélération pour la consigne pantin 1.0 s
C1332 Gain régulateur pantin 1.0
C1333 Temps d’intégration du régulateur pantin 400 ms
C0472/1 Influence du régulateur pantin 10.00 %
Saisie diamètre C0026/2 Offset entrée analogique X6/2 0.00 %
C0027/2 Gain entrée analogique X6/2 100.00 %
C0640 Constante de temps de filtrage du filtre diamètre réel 1.00 s
C1304 Diamètre maxi Dmax (correspond à valeur réelle = 100 %) 500 mm
C1305 Limite diamètre inférieure 100 mm
C1306 Limite diamètre supérieure 500 mm
C1308 Sélection fonction arithmétique 1/D 1
C1309 Diamètre mini Dmin 100
C1310 Temps d’accélération/de décélération pour le nouveau diamètre initial 1.000 s
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectoriel 5g o o
C0011 Vitesse maxi 3000 rpm (min-1)
C0016 Accroissement de la tension (Umin) 0.00 %
C0021 Compensation de glissement En fonction de l’appareil
C0022 Courant maxi pour fonctionnement moteur En fonction del’appareil
C0023 Courant maxi pour fonctionnement générateur En fonction del’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0018 Fréquence de découpage du variateur 6
Avec contrôle vectoriel oud i é l
C0070 Gain du régulateur de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de vitesse 50 ms
C0074 Influence du régulateur de vitesse (uniquement pour fonctionnement en U/f) 10.00 %
C0540 Sélection sortie signal sur la sortie fréquence pilote X10 0
Conseil !L’entrée codeur incrémental X8 peut êtreactivée dans cette configuration si lasortie fréquencepiloteX10 est programmée pour reproduire le signal d’entrée X8 (C0540 = 5).

Annexe
10-20 L_^VPMMsb` co PKN
!
!
!
!
!
!
/
"#$
) 0
$&
'!
(
)
12
345304!
0/1+#%$-()3#(%$(
,-
!
"#$%&'&(%)*1).$/(#+
$
6
!
0/1+#%$-()'
-%&1"
""2%)"#3$*&
0/1+#%&1")(
-(,%$-((&'&(%)&()
-(%"4+&)5&,%-"$&+
)
Fig. 10-11 Schéma logique de la configuration 8000 : Régulation pantin (saisie diamètre externe)
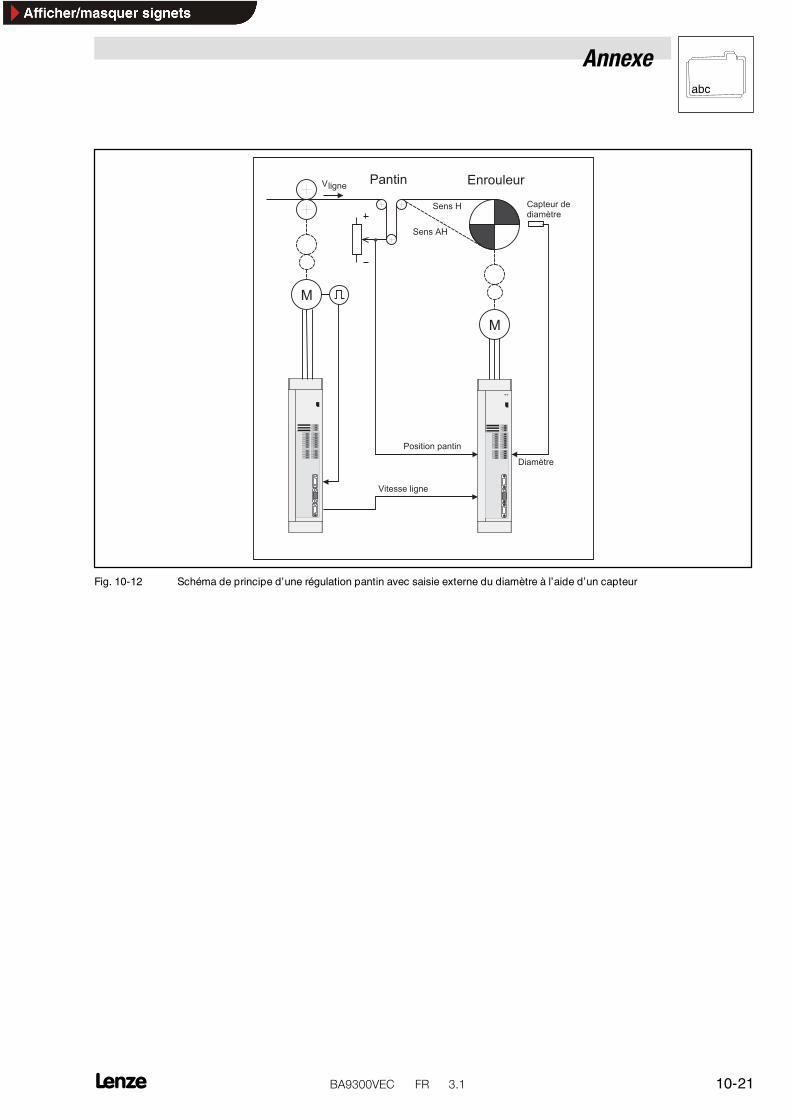
Annexe
10-21L _^VPMMsb` co PKN
( " - 1 + & 1 " # ( % $ (A + $ / ( &
# 3 % & 1 " ) * &* $ # ' @ % " &
& ( . ) B
& ( . ) B
A $ % & . . & ) + $ / ( &
- . $ % $ - ( ) 3 # ( % $ (
$ # ' @ % " &
Fig. 10-12 Schéma de principe d’une régulation pantin avec saisie externe du diamètre à l’aide d’un capteur

Annexe
10-22 L_^VPMMsb` co PKN
10.1.9 Régulation pantin (saisie interne du diamètre) (C0005 = 9000)
La configuration C0005 = 9000 est prévue pour des entraînements d’enroulage/déroulage avecrégulation pantin. Contrairement à la configuration 8000, il s’agit d’un calcul interne du diamètre.
La précommande de l’entraînement avec la vitesse de ligne ou la vitesse du produit s’effectue parun signal fréquence pilote. Le régulateur pantin établit un facteur de correction en fonction de laposition réelle du pantin ; ce facteur est ajouté au signal de commande. Il en résulte la consigne devitesse du cylindre qui est multipliée par 1/D pour donner la consigne de vitesse.
Le calcul du diamètre d’enroulement s’effectue à partir des signaux de la vitesse de ligne et de lavitesse d’enroulage/déroulage. Après changement de la bobine, le nouveau diamètre initial peut êtrechargé.
Short Setup (mise en service rapide)
Réglage Code Explication Réglage usine
Précommande fréquencepilote
C0425 Sélection de la constante de fréquence pilote entrée X9 3
Précommande fréquencei
C0950 Numérateur pour évaluation de la fréquence pilote 5o qpilote C0951 Dénominateur pour l’évaluation de la fréquence pilote 1
Régulation pantin C0141 Consigne pantin 10.00 %g o p
C0687 Fenêtre position pantin réelle = consigne position pantin 1.00 %
C1330 Temps d’accélération pour la consigne pantin 1.0 s
C1331 Temps de décélération pour la consigne pantin 1.0 s
C1332 Gain régulateur pantin 1.0
C1333 Temps d’intégration du régulateur pantin 400 ms
C0472/1 Influence du régulateur pantin 10.00 %
Calcul du diamètre C1300 Vitesse nominale pour diamètre maxi (C0051) 500 rpm (min-1)
C1301 Vitesse nominale selon signal fréquence pilote (C0426) 2500 rpm (min-1)
C1302 Cycle de calcul 1.0
C1303 Constante de temps de filtrage pour diamètre réel 1.00 s
C1304 Diamètre maxi Dmax (correspond à valeur réelle = 100 %) 500 mm
C1305 Limite diamètre inférieure 100 mm
C1306 Limite diamètre supérieure 500 mm
C1308 Sélection fonction arithmétique 1/D 1
C1309 Diamètre mini Dmin 100
C1310 Temps d’accélération/de décélération pour le nouveau diamètre initial 1.000 s
Régulation moteur C0006 Sélection fonctionnement en U/f ou contrôle vectoriel 5g o o
C0011 Vitesse maxi 3000 rpm (min-1)
C0016 Accroissement de la tension (Umin) 0.00 %
C0021 Compensation de glissement En fonction de l’appareil
C0022 Courant maxi pour fonctionnement moteur En fonction de l’appareil
C0023 Courant maxi pour fonctionnement générateur En fonction de l’appareil
C0105 Temps d’arrêt rapide 5.00 s
C0018 Fréquence de découpage du variateur 6
Avec contrôle vectoriel oui é
C0070 Gain du régulateur de vitesse 10o o ocodeur incrémental C0071 Temps d’intégration du régulateur de vitesse 50 ms
C0074 Influence du régulateur de vitesse (uniquement pour fonctionnement en U/f) 10.00 %
C0540 Sélection sortie signal sur la sortie fréquence pilote X10 0
Conseil !L’entrée codeur incrémental X8 peut êtreactivée dans cette configuration si lasortie fréquencepiloteX10 est programmée pour reproduire le signal d’entrée X8 (C0540 = 5).

Annexe
10-23L _^VPMMsb` co PKN
!
!
!
!
!
!
-(,%$-((&'&(%)&()
-(%"4+&)5&,%-"$&+
0/1+#%$-()'
-%&1"
""2%)"#3$*&
0/1+#%&1")(
/
$6
!
"#$
) 0
$&
'!
(
)
127
345304!
)
0/1+#%$-()3#(%$(
#+,1+)*1)*$#'@%"&
$
6
,-
!
Fig. 10-13 Schéma logique de la configuration 9000 : Régulation pantin (calcul du diamètre interne)
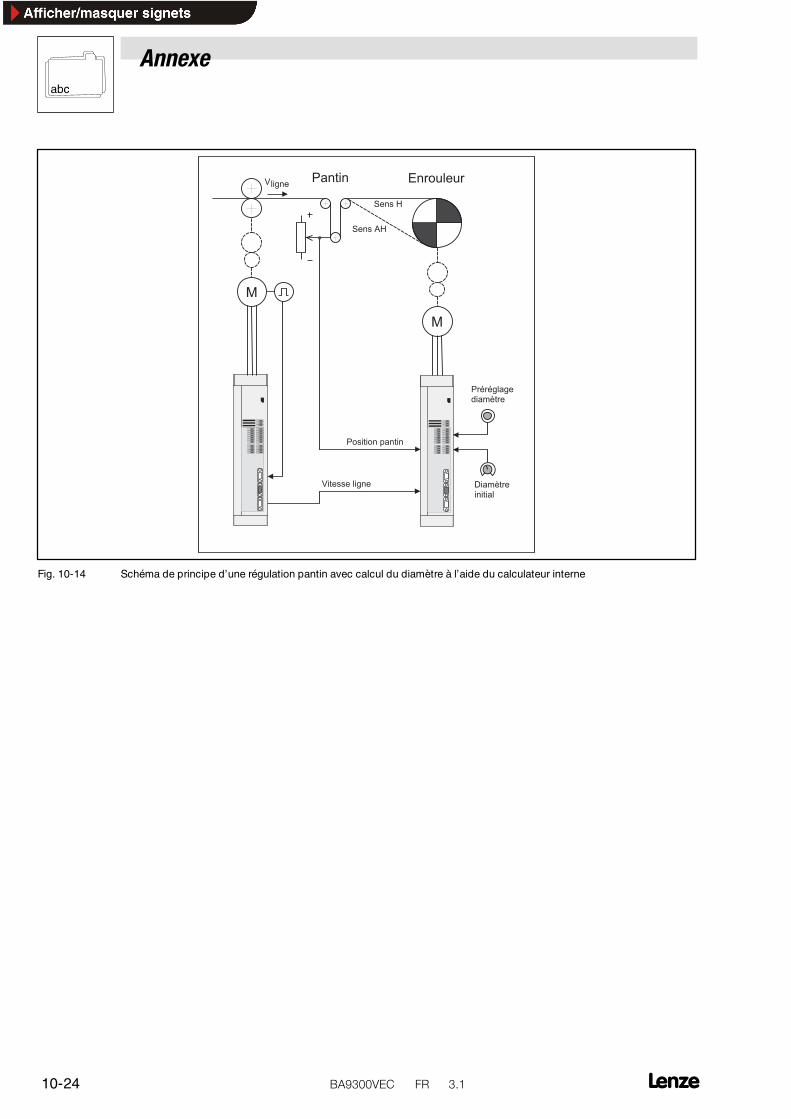
Annexe
10-24 L_^VPMMsb` co PKN
( " - 1 + & 1 " # ( % $ (A + $ / ( &
& ( . ) B
& ( . ) B
$ # ' @ % " &$ ( $ % $ # +
" 0 " 0 / + # / &* $ # ' @ % " &
A $ % & . . & ) + $ / ( &
- . $ % $ - ( ) 3 # ( % $ (
Fig. 10-14 Schéma de principe d’une régulation pantin avec calcul du diamètre à l’aide du calculateur interne

Annexe
10-25L _^VPMMsb` co PKN
10.2 Glossaire
Terme Signification
AIF Interface d’automatisme (X1)
AP Aimant permanent
API Automate programmable industriel
AR Arrêt rapide
Bus de terrain Sert à l’échange de données entre une commande maître et la commande d’entraînement(exemples : INTERBUS-S ou PROFIBUS-DP)
CAN Controller Area Network
CE Communauté Européenne
Code Sert à l’entrée et l’affichage (l’accès) des valeurs de paramètresAdressages de variables selon le format ”code / sous-code” (Cxxxx/xx)Toutes les variables peuvent être appelées par les désignations des codes.
Données process Exemple : consignes et valeurs réelles qui doivent être échangées très rapidement. Il s’agit de données cycliques de quantité faible.
Avec PROFIBUS-DP, ces données sont transmises par une voie logique de données process.
Esclave Participant au bus qui n’a le droit à l’émission qu’après demande du maître. Les variateurs sont des esclaves.
FB Bloc fonction
FPDA Sortie numérique programmable
FPDE Entrée numérique programmable
GDC Global-Drive-Control (logiciel PC pour variateurs Lenze sous Windows)
GdR Générateur de rampe
INTERBUS Communication standard industrielle selon DIN E19258
JOG Vitesse fixe / Entrée pour la vitesse fixe
KTY Sonde thermique “linéaire” de l’enroulement moteur
LECOM Lenze Communication
LEMOC2 Programme PC pour variateurs Lenze sous DOS
LU Sous-tension
Maître Les systèmes pilotes (exemples : PC ou API) sont des maîtres.
OU Surtension
PC Ordinateur personnel
Position cible Postion à atteindre avec le profil de déplacement réglé
PROFIBUS-DP Norme de communication DIN 19245, comprenant la partie 1, la partie 2 et la partie 3
PTC Thermistor avec seuil de déclenchement défini
RFR Déblocage variateur
RSP Blocage variateur ( = Déblocage variateur )
SSC Régulation de la vitesse sans capteur SSC
SSI Interface synchrone série
TKO Contact thermique / contact à ouverture

Annexe
10-26 L_^VPMMsb` co PKN
10.3 Index
AAdaptation du moteur, 5-6
Adaptation régulateur process n, 7-39
Adresse de l’appareil, 7-28
Adresse sur le bus CAN, 7-39
Adresses S.A.V., 9-2
Affectation des bornes, 5-14Modification, 5-14
Affichage, Valeurs réelles, 6-2
Affichage des valeurs réelles, 6-2
Aides de sélection, 5-9
Altitude d’implantation admissible, 3-2
AR (arrêt rapide), 7-30
Aspects juridiques, 1-2
Avertissement, 7-22
BBlindage
Câble de commande, 4-21
Câble moteur, 4-14
CEM, 4-33
Blocage variateur, 7-30
Blocs fonction, 7-8Code de configuration, 7-10
Code(s) d’affichage, 7-10
Code(s) de paramétrage, 7-10
Description, 7-18
Etablir des liaisons, 7-13
Liaison, 7-11
Nom de l’entrée, 7-9
Nom de la sortie, 7-10
Nom du bloc fonction, 7-9
Supprimer la liaison, 7-14
Symbole d’entrée, 7-9
Symbole de sortie, 7-10
Tableau, 7-18
Types de signaux, 7-8
Borniers de commande, 4-21Affectation des bornes, 4-21
Protection polarité, 4-21
Sections de câbles maxi admissibles, pour le raccordementmoteur, 4-21
Vue d’ensemble, 4-21
Branchement côté moteur, 6-2
CCâble moteur
Blindage, 4-14Influence de la longueur, 4-16
Caractéristiques d’entraînement, influence de la longueur ducâble moteur, 4-16
Caractéristiques électriquesTypes 9328 à 9330, 3-9Types 9321 à 9324, 3-4Types 9321 à 9325, 3-5Types 9325 à 9327, 3-9Types 9326 à 9332, 3-8Types 9328 à 9330, 3-6Types 9331 à 9333, 3-7, 3-10
Caractéristiques nominales, 3-3Filtre réseau, 3-12Fusibles, sections de câbles, 3-11Types 9328 à 9330, 3-9Types 9321 à 9324, 3-4, 3-8Types 9325 à 9327, 3-5, 3-9Types 9328 à 9330, 3-6Types 9331 à 9333, 3-7, 3-10
CEMBlindage, 4-33Filtrage, 4-33Mise à la terre, 4-33Montage, 4-33Système d’entraînement de type CE, Installation, 4-33
Charge utilisation du variateur, 7-30
Chargement du jeu de paramètres, 7-26
Chute de tension, 4-13
Clavier de commande, Messages d’état, 6-1
Clavier de commande 9371 BB, 5-14
Code, Tableau des codes, 7-26
Codeur incrémental, 4-28Avec niveau HTL, 4-30Avec niveau TTL, 4-28Raccordement sur X8, 4-29, 4-30Raccordement sur X9, 4-30Tension d’alimentation, 4-28, 4-30
Cold PlateCaractéristiques exigées du radiateur, 4-3Domaines d’application, 4-3Résistance thermique, 4-3Température maxi plaque de refroidissement, 4-3Variante, 4-3
Comment optimiser, l’identification, 5-12
Comparateur, 7-50

Annexe
10-27L _^VPMMsb` co PKN
Compensation de glissement, 7-29
Compteur de secondes de fonctionnement, 7-36
Concernant la mise en service, 6-2
Condensation, 5-1
Conditions ambiantes, 3-2Altitude d’implantation admissible, 3-2Emballage, 3-2Homologations, 3-2Humidité admissible, 3-2Perturbations radioélectriques : émission, 3-2Plages de température admissibles, 3-2
Pollution ambiante admissible, 3-2Protection, 3-2Protection contre les parasites, 3-2Résistance à l’isolement, 3-2Résistance aux chocs, 3-2
Configuration, 7-1Blocs fonction, 7-8Configurations de base, 7-1Fonctions de surveillance, 7-21Temps d’accélération et de décélération, 5-4
Valeurs limites courant, 5-5Vitesse maxi, 5-3Vitesse mini, 5-3
Configuration de base, Changement, 5-14
Configuration des signaux, 7-27
Consigne JOG, 7-30
Consigne principale, 7-30
Consigne supplémentaire, 7-30
Consignes de sécurité, 2-1Consignes relatives aux variateurs de vitesse (conformes à ladirective Basse tension), 2-1Présentation, 2-2
Autres indications, 2-2Dangers de dégâts matériels, 2-2Dangers menaçant les personnes, 2-2
Consignes fixes, 7-46
Constructeur, 1-2
Contrôle variateur, 7-27
Contrôle vectoriel, Optimisation, 5-11
Couples de serrageBornier de puissance, 4-13, 4-17Borniers de commande, 4-21
Courant réel moteur, 7-30
Courbe, 7-61
DDangers résiduels, 2-2
Défauts de fonctionnement, 7-21
Démarrage côté moteur, 4-17
Dénominateur, 7-49
Détection des défauts, 8-1Défaut TRIP, message, avertissement, 8-1
Mot d’état LECOM C0150, 8-1
Détection des défauts, élimination des défautsDétection des défauts, 8-1
Historique, 8-2
Messages défauts, 8-4
Réarmement des défauts, 8-6
Diagnostic de l’entraînement, 7-37
Disjoncteur différentiel, 4-8
Disjoncteurs différentiels, 4-8
Données moteur, 5-6cos phi moteur, 5-6
Courant nominal moteur, 5-6
Fréquence nominale moteur, 5-6
Puissance nominale moteur, 5-6
Tension nominale moteur, 5-6
Types moteur - Vue d’ensemble, 5-7
Vitesse nominale moteur, 5-6
Données process, 7-41
Durée d’impulsion, 7-51
EElément filtre, 7-51
Emballage, 3-2
Encombrements, Cold Plate - plaque de refroidissementTypes 9321 à 9326, 4-6
Types 9327, 9328, 4-7
Entrée fréquence pilote, 7-42
EntréesEntrées analogiques, 4-22
Entrées numériques, 4-22
Equipement livré, 1-1
Erreur de poursuite, 7-53
Espace de montage, 4-1

Annexe
10-28 L_^VPMMsb` co PKN
F
Fenêtre, 7-50
Fenêtre de synchronisation, 7-53
Filtres réseau
Pour entraînements individuels avec 120 % de surcharge decourant, 3-12
Pour entraînements individuels avec 150 % de surcharge decourant, 3-13
Fonction, Fonction conforme à l’application, 1-2
Fonction de base, 7-27
Fonction temporisation impulsionnelle binaire, 7-51
Fonctionnement en bus CC, Alimentation centralisée, 4-20
Fonctionnement en réseau, 4-19
Alimentation décentralisée, 4-19
Fonctionnement en U/f, optimisation, 5-10
Fonctionnement optimisé en fonction de la puissance, 7-28
Fonctionnement optimisé en fonction du bruit, 7-28
Fonctions de surveillance, 7-21
Configuration, 7-47
Fonctions de surveillance, 7-23
Indication de défaut par sortie numérique, 7-25
Réactions : avertissement, message, défaut TRIP, 7-21
Vue d’ensemble, 7-23
Formes de réseau, 4-11
Fréquence pilote en cascade - esclave, 7-27
Fréquence pilote en ligne - esclave, 7-27
Fusible, Raccordement réseau, 4-13
Fusibles, 3-11
Pour entraînements individuels avec 120 % de surcharge decourant, 3-11
Pour entraînements individuels avec 150 % de surcharge decourant, 3-12
G
Garantie, 1-2
Gaz, agressifs, 4-1
Glossaire, 10-25
HHistorique, 7-36
Historique des défauts, 8-2Défaut actuel, 8-2Identification défaut, 8-3Montage, 8-2travail, 8-3
Homologations, 3-2
Humidité admissible, 3-2
Hystérésis, 7-50
IIdentificateur des blocs CAN-INx et CAN-OUTx, 7-40
Identification, Variateur de vitesse, 1-2
Identification moteur, 5-12
Installation, 4-1(montage standard), 4-2
Décharges électrostatiques, 4-10Espaces de montage, 4-1Installation de type CE, 4-33Installation électrique, 4-8Installation mécanique, 4-1Positions de montage, 4-1Système d’entraînement de type CE
Blindage, 4-33Filtrage, 4-33Mise à la terre, 4-33Montage, 4-33
Interface d’automatisme, 4-25
KKit de montage, 1-1
LLimitation courant Imax, 5-5
Limitation de la vitesse, 7-27
Limitation du courant de démarrage, 6-1
Limitation ImaxPour fonctionnement en générateur, 7-29Pour fonctionnement moteur, 7-29
Liste de déclaration, 7-43
Listes de sélection, 7-66

Annexe
10-29L _^VPMMsb` co PKN
MMaintenance, 9-1
Maître pour bouclage fréquence pilote, 7-27
Message, 7-22
Message défaut, Réarmement, 8-6
Message défaut actuel, 7-30, 7-35
Messages défauts, 8-4
Mise en service, 5-1Première mise en service, 5-1
Mise en service rapide, 5-2
Mises sous tension, répétées, 6-1
Mode de fonctionnement admissible, 5-9
Mode de fonctionnement régulation moteur, 7-28
Modes de fonctionnement, Optimisation, 5-10
Modules bus de terrain, INTERBUS, PROFIBUS-DP, 4-25
Montageavec profilés ou équerres de fixation, 4-2
Technologie avec techniqueCaractéristiques exigées du radiateur, 4-3Caractéristiques thermiques, 4-4Domaines d’application, 4-3Préparatifs, 4-5Types 9321 à 9326, 4-6Types 9327, 9328, 4-7
Mot d’état, 7-35
Mot de commande, 7-34
MoteurAdaptation, 5-6
Identification moteur, 5-12
Mots process d’entrée, 7-57
Mots process de sortie, 7-57
NNettoyage, 9-1
Nombre de secondes de mise sous tension, 7-36
Numérateur, 7-49
OOptimisation
Contrôle vectoriel, 5-11
Fonctionnement en U/f, 5-10
Ordre des opérations, Réglage usine, 5-2
PParamétrage, 7-4
Paramétrages possibles, 7-4
ParamètresClasses de paramètres, 7-4Programme PC, 7-4
Paramètres d’entraînement, Réglage usine, 5-2
Partie commande, 4-21Entrée fréquence, 4-27Raccordement du bus système, 4-25
Sortie fréquence pilote, 4-27
Pâte thermoconductrice, 4-5
Perturbations radioélectriques : émission, 3-2
Plages de température admissibles, 3-2
Plan de raccordementPartie commande, 4-23, 4-24Partie puissance, 4-18
Pollution ambiante admissible, 3-2
Pont, Consigne d’entrée analogique, 4-22
Positions de montage, 4-1
Potentiomètre motorisé, 7-38
Première mise en service, 5-1
ProgrammationMenus à sélectionner, 7-5
Menu principal, sous-menu, 7-5
Structure du jeu de paramètres, 7-4
Programme PC, 7-4
Protection, 3-2
Protection contre des contacts accidentels, 4-8
Protection contre les parasites, 3-2
Protection des appareils, 2-2
Protection des personnes, 2-2
Protection du moteur, 4-10Relais de surintensité, surveillance de température, 4-10
Protection polarité, 4-21
Puissance nominale moteur, 7-31
QQu’il-y-a-t-il de nouveau?, 1-1
Annexe
10-30 L_^VPMMsb` co PKN
RRaccordement
Câbles de commande, 4-21
Moteur, 4-14
Partie commande, Plan de raccordement, 4-23, 4-24
Partie puissance, 4-12Plan de raccordement, 4-18
Réseau, 4-12
Signaux analogiques, 4-23
Signaux numériques, 4-24
Unité de freinage, 4-17
Raccordement du bus système, 4-25CAN-, CANopen, 4-26
Raccordement moteur, 4-14
Raccordement partie puissance, 4-12Sections de câbles maxi admissibles
Pour le raccordement moteur, 4-17Pour le raccordement réseau, 4-13
Raccordement réseau, 4-12Fusible, 4-13
Rapport de réduction, 7-29
Réarmement, Message défaut, 8-6
Redémarrage à la volée, 6-1
Réduction du courant, 5-5
Réglage usineMise en service rapide, 5-2
Ordre des opérations, 5-2
Principaux paramètres d’entraînement, 5-2
Régulateur de champ Ti, 7-31
Régulation coupure réseau, 7-61
Régulation de couple, 7-27
Régulation de vitesse, 7-27
Régulation moteur, 7-59
Remarques concernant le service, 6-2
Résistance à l’isolement, 3-2
Résistance aux chocs, 3-2
Résistance thermique, 4-3
Résistances d’extrémité de bus, 4-25
Responsabilité, 1-2
SSauvegarde du jeu de paramètres, 7-26
Sections de câbles, 3-11, 4-13Câbles de commande, 4-21Pour entraînements individuels avec 120 % de surcharge decourant, 3-11Pour entraînements individuels avec 150 % de surcharge decourant, 3-12Raccordement moteur, 4-17Raccordement réseau, 4-13
Sélection du système de bouclage, 7-29
Sélection type moteur, 7-31
Séparation de potentiel, 4-8, 4-9Double isolation de base, 4-9Selon VDE 0160, 4-9
Signaux de bouclageRaccordement du codeur incrémental X8, 4-28Raccordement du codeur incrémental X9, 4-30Surveillance température, 4-31
Sortie fréquence pilote, 7-29
Sortie image, 4-22
SortiesSorties analogiques, 4-22Sorties numériques, 4-22
Spécification relative aux câbles utilisés, 4-11
Spécifications de réseau, 4-11
Spécifications techniques, 3-1Caractéristiques, 3-1Caractéristiques électriques, 3-3Caractéristiques générales/conditions ambiantes, 3-2Fusibles et sections de câbles, 3-11
Suppression des défauts, 8-1
Surveillance températureKTY (PTC) ou contact thermique (TKO), 4-31Raccordement, 4-31Seuil de déclenchement, 4-31
Survitesse, 6-1
Survitesses, 2-2
Système d’entraînement, 1-1Installation de type CE, 4-33
Systèmes de bouclage, Codeur incrémental, 4-28

Annexe
10-31L _^VPMMsb` co PKN
TTableau , 7-15
Tableau des blocs fonction, 7-18
Tableau des codes, 7-26Explication, 7-26
Température maxi, 4-3
Température moteur, 7-30
Température radiateur, 7-30
Temporisation, 7-51
Temps d’accélération, 5-4, 7-28, 7-37
Temps d’arrêt rapide (AR), 5-4, 7-33
Temps d’ouverture frein, 7-37
Temps de décélération, 5-4, 7-28, 7-38
Temps de fermeture frein, 7-37
Temps process, 7-43
Tension circuit intermédiaire, 7-30
Tension nominale moteur, 7-33
Tension réelle moteur, 7-30
Terminologie, 1-1
Tn régulateur de glissement, 7-31
Tni régulateur de courant, 7-31
Tnn régulateur de vitesse, 7-30
Tôle de blindage, 4-21
Touche STOP, 7-44
Traitement des déchets, 1-2
Traitement des signaux, Adaptation, 5-14
Transport, Stockage, 2-1
TRIP, 7-21
Types moteur - Vue d’ensemble, 5-7
U
Unité de freinage, 4-17
Utilisation conforme à l’application, 1-2
V
Variante
9321-V003 à 9326-V003, 4-6
9327-V003, 9328-V003, 4-7
Cold Plate, 4-3
V003, 4-3
Variateur. Voir Variateur de vitesse
Variateur de vitesse, 1-1
Conditions ambiantes, 3-2
Configuration, 7-1
Identification, 1-2
Utilisation conforme à l’application, 1-2
Variateur vector. Voir Variateur de vitesse
Version du logiciel, 7-33
Vitesse
Vitesse maxi, 5-3
Vitesse mini, 5-3
Vitesse de transmission de données, 4-26
Vitesse maxi, 7-28
Vitesse réelle, 7-30
Vitsse mini, 7-28
Vpi régulateur de courant, 7-31
Vpn régulateur de vitesse, 7-30

Annexe
10-32 L_^VPMMsb` co PKN