fauteuil à assistance électrique - free
TRANSCRIPT

LICENCE VEGA
Fauteuil à assistance électrique
Projet Tutoré
Julien Beluche & Mathieu Vicentin
Fauteuil à assistance électrique
Beluche & Vicentin
Page 1
Remerciements
Nous remercions tout particulièrement Mr HIEBEL, qui nous a suivis tout au long de ce projet et, sans
qui, rien n’aurait été possible.
Nous tenons à remercier également toute l’équipe pédagogique pour l’aide qu’elle nous a apportée
tout au long de l’année à travers les cours et les travaux pratiques.

Fauteuil à assistance électrique
Beluche & Vicentin
Page 2
Sommaire
Table des matières Remerciements ...................................................................................................................................... 1
Sommaire ............................................................................................................................................... 2
1. Introduction .................................................................................................................................... 3
2. Situation initiale .............................................................................................................................. 3
3. Diagramme de Gantt ...................................................................................................................... 4
4. Synoptique...................................................................................................................................... 5
5. Les différents organes. ................................................................................................................... 6
1) Le PIC .......................................................................................................................................... 6
2) Le joystick. .................................................................................................................................. 7
3) Capteur de vitesse ...................................................................................................................... 8
4) Motoréducteurs ......................................................................................................................... 9
5) Module MD03 .......................................................................................................................... 10
6) Carte de puissance ................................................................................................................... 12
7) Carte de commande ................................................................................................................. 13
6. Le protocole I²c (Inter Integrated Circuit) ..................................................................................... 15
7. Les essais ...................................................................................................................................... 16
8. Conclusion .................................................................................................................................... 17
9. Optimisation ................................................................................................................................. 17
10. Annexes ........................................................................................................................................ 18

Fauteuil à assistance électrique
Beluche & Vicentin
Page 3
1. Introduction
Le projet tutoré a pour but de mettre en application nos connaissances acquises tout au long de
l’année, ainsi que notre esprit d’initiative pour répondre à un cahier des charges.
Le but de notre projet est de remettre en service un fauteuil électrique. En effet ce fauteuil, issu
des années précédentes, n’est plus fonctionnel.
Un fauteuil à assistance électrique permet aux personnes à mobilité réduite de se déplacer avec
facilité. Il répond au besoin des personnes qui, malgré leur mobilité limitée, désirent se déplacer
librement.
2. Situation initiale
Notre fauteuil est composé de différents constituants :
Fauteuil complet
2 batteries 12 V (24 V au total)
2 convertisseurs DC/DC (module MD03)
2 motoréducteurs 24V DC associés à chaque roue arrière
Capteur inductif (mesure de vitesse)
Joystick inductif
Bouton arrêt d’urgence et interrupteur alimentation
Carte de puissance
Carte de commande

Fauteuil à assistance électrique
Beluche & Vicentin
Page 4
3. Diagramme de Gantt
Ci-dessous planning prévisionnel sous forme de diagramme de Gantt.
Nous avons tout d’abord découpé notre projet en différentes tâches. Cela nous permet de prendre
en compte leur durée et de connaître notre état d’avancement.

Fauteuil à assistance électrique
Beluche & Vicentin
Page 5
4. Synoptique
Ce synoptique est composé de différents organes que nous allons développer par la suite.
Utilisateur
Joystick
PIC16F877A
I²c
4 entrées analogiques
MD03 D
Mot D
MD03 G
Mot G
Fauteuil
Mouvement

Fauteuil à assistance électrique
Beluche & Vicentin
Page 6
5. Les différents organes.
1) Le PIC
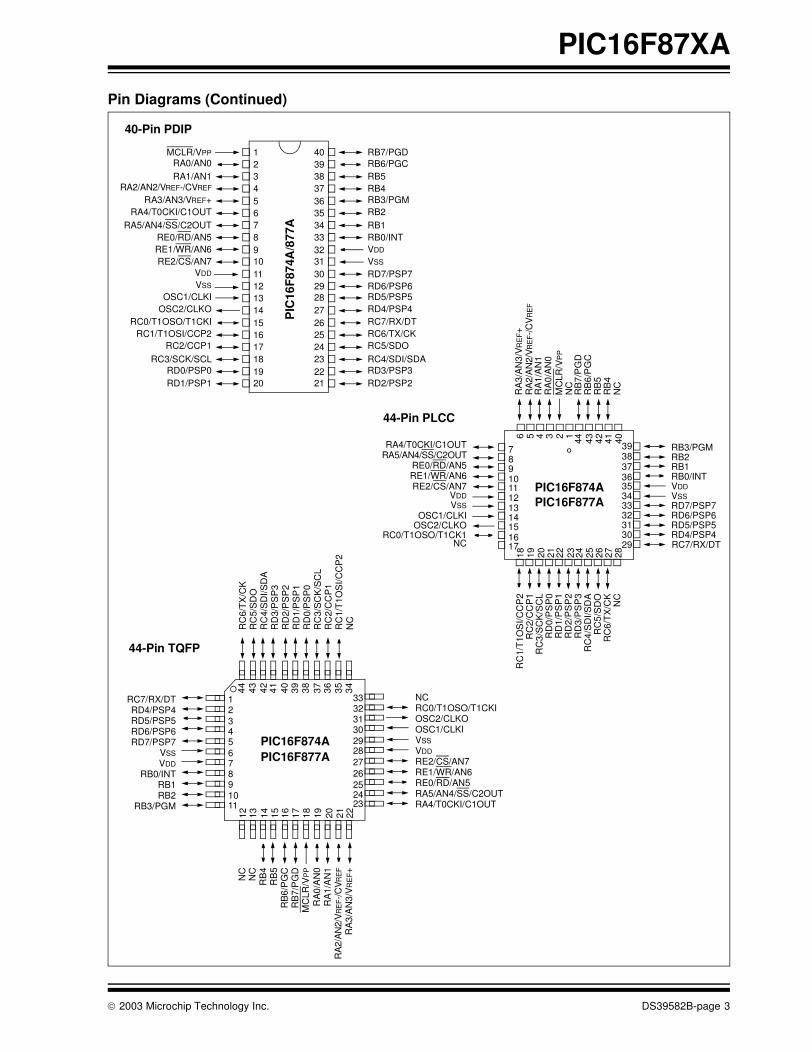
Nous disposons d’un PIC 16F877A, dont voici le schéma. Ce modèle est amplement suffisant car nous
n’utilisons qu’une entrée d’interruption (en vert) pour le capteur inductif. Nous utilisons également
les entrées analogiques (en rouge) pour le joystick ainsi que la sortie correspondant à la PWM (en
bleu) pour moduler la tension d’alimentation des freins. La programmation du PIC se fait via une
liaison RS232 (en jaune). La communication à l’aide du bus I²C utilise les PINS C6 et C7 (en brun).
Joystick
Frein
I²C
Capteur de vitesse
RS232
Fauteuil à assistance électrique
Beluche & Vicentin
Page 7
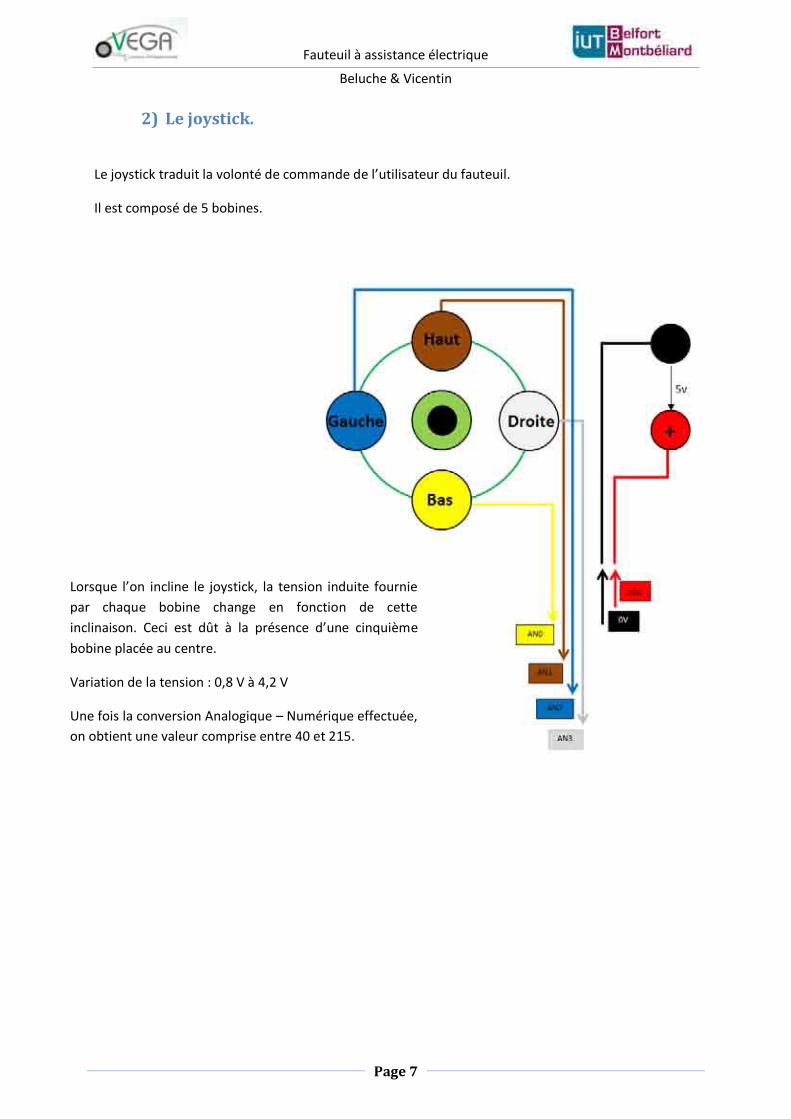
2) Le joystick.
Le joystick traduit la volonté de commande de l’utilisateur du fauteuil.
Il est composé de 5 bobines.
Lorsque l’on incline le joystick, la tension induite fournie
par chaque bobine change en fonction de cette
inclinaison. Ceci est dût à la présence d’une cinquième
bobine placée au centre.
Variation de la tension : 0,8 V à 4,2 V
Une fois la conversion Analogique – Numérique effectuée,
on obtient une valeur comprise entre 40 et 215.

Fauteuil à assistance électrique
Beluche & Vicentin
Page 8
+12
V
1,8 kΩ
2 ,7 kΩ
3) Capteur de vitesse
Toute notre loi de commande dépend de la vitesse du fauteuil. En effet à l’arrêt, le fait de tourner
sous-entend que l’on peut tourner sur place. Ceci est inimaginable en mouvement.
Pour connaitre la vitesse à tout moment, il a été mis en place un capteur inductif qui réagit
lorsqu’une partie métallique se présente face à lui (voir photos ci-dessous).
Voici la courbe de réponse du capteur inductif lors du passage d’une pièce métallique. Le choix du capteur inductif est dû à la facilité de sa mise en œuvre. L’inconvénient est la perte de
précision à faible vitesse.
En sortie du capteur la tension maximale est de 12V, et l’entrée RB0/INT ne supporte que 5V. Il nous
a donc fallu mettre en place un pont diviseur de tension pour adapter celle-ci.
5
VRBO =
Rroue = 0.15 m P = 2πR = 0.942 m 5 rayons donc r = 0.188 m
Donc
Avec n le nombre de front montant par seconde
Pour la mesure de vitesse, nous avons placé 5 pièces
métalliques sur les 5 rayons de la roue. A chaque passage de la
pièce devant le capteur, le signal de sortie est envoyé sur
l’entrée d’interruption externe. On compte le nombre de front
montant pendant une seconde, on convertit et on obtient la
vitesse en km/h. Etant donné que le pont diviseur n’était pas
présent sur la carte de commande, nous avons placé le pont
diviseur de tension sur une carte différente.
Nous avons également visualisé la vitesse sur l’hyperterminal
Bootloader.
Capteur et pièce métallique.

Fauteuil à assistance électrique
Beluche & Vicentin
Page 9
4) Motoréducteurs
Chaque roue est entrainée par un moteur à courant continue à excitation série par le biais d’un
réducteur. Chaque moteur est bloqué par un frein électromagnétique à manque de courant. Etant
des freins fonctionnant en tout ou rien, nous avons choisi de moduler à l’aide d’une PWM la tension
d’alimentation de ceux-ci, ceci a pour but d’économiser la charge des batteries.
Mise en service des moteurs :
Alimentation des moteurs en 24VDC
Tension nécessaire à desserrer les freins U > 17V
Tension nécessaire à serrer les freins U < 5 V
Vitesse nominale des moteurs de 310 tr.min-1
Vitesse maximale du fauteuil à vide de 8 km.h-1
MCC Réducteur MCC Réducteur
Roue gauche Roue droite
24 V
Frein électromagnétique démonté de l’arbre moteur
Schéma de l’ensemble batteries, motoréducteurs, roues.
Frein
MCC

Fauteuil à assistance électrique
Beluche & Vicentin
Page 10
5) Module MD03
Nous disposons de deux modules identiques qui permettent une variation de vitesse des moteurs à
courant continu.
Caractéristiques des modules :
Tensions d’entrée 50VDC max.
Tensions de sortie 24VDC max.
Courants de sortie 20A max.
Différents modes de commande :
o I2C jusqu’à 8 modules avec changement d’adresse grâce aux interrupteurs.
o 0v-2.5-5v entrée analogique. 0v marche arrière, 2.5v stop, 5v marche avant.
o 0v-5v entrée analogique. 0v stop, 5v vitesse max. (Logique positive pour marche
avant et logique négative pour marche arrière).
o Mode Radio Contrôle.
o PWM.
Pour commander nos 2 modules, nous utiliserons le mode I²c, qui est détaillé plus loin.
Pour commencer il faut affecter deux adresses différentes pour chaque module. Pour ce faire nous
utiliseront les interrupteurs présents sur ces derniers.
Nos deux modules auront donc les adresses 0xB0 et 0xB2.
Fauteuil à assistance électrique
Beluche & Vicentin
Page 11
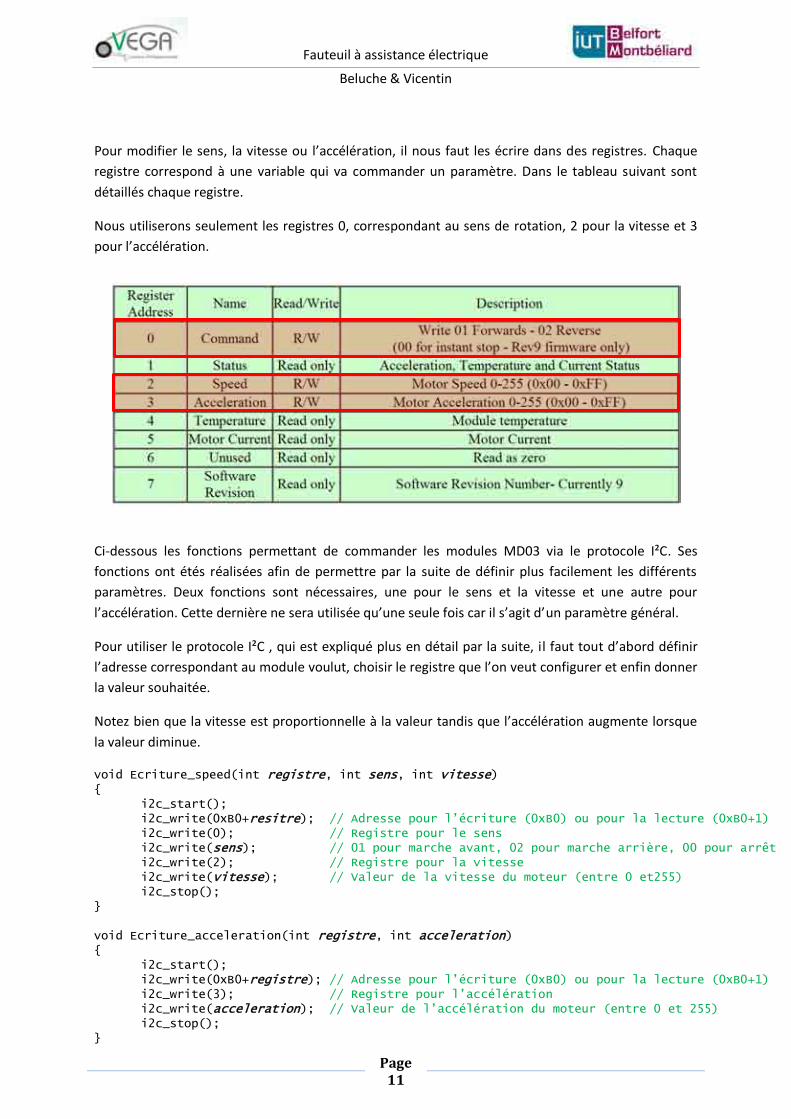
Pour modifier le sens, la vitesse ou l’accélération, il nous faut les écrire dans des registres. Chaque
registre correspond à une variable qui va commander un paramètre. Dans le tableau suivant sont
détaillés chaque registre.
Nous utiliserons seulement les registres 0, correspondant au sens de rotation, 2 pour la vitesse et 3
pour l’accélération.
Ci-dessous les fonctions permettant de commander les modules MD03 via le protocole I²C. Ses
fonctions ont étés réalisées afin de permettre par la suite de définir plus facilement les différents
paramètres. Deux fonctions sont nécessaires, une pour le sens et la vitesse et une autre pour
l’accélération. Cette dernière ne sera utilisée qu’une seule fois car il s’agit d’un paramètre général.
Pour utiliser le protocole I²C , qui est expliqué plus en détail par la suite, il faut tout d’abord définir
l’adresse correspondant au module voulut, choisir le registre que l’on veut configurer et enfin donner
la valeur souhaitée.
Notez bien que la vitesse est proportionnelle à la valeur tandis que l’accélération augmente lorsque
la valeur diminue.
void Ecriture_speed(int registre, int sens, int vitesse)
i2c_start(); i2c_write(0xB0+resitre); // Adresse pour l’écriture (0xB0) ou pour la lecture (0xB0+1) i2c_write(0); // Registre pour le sens i2c_write(sens); // 01 pour marche avant, 02 pour marche arrière, 00 pour arrêt i2c_write(2); // Registre pour la vitesse i2c_write(vitesse); // Valeur de la vitesse du moteur (entre 0 et255) i2c_stop();
void Ecriture_acceleration(int registre, int acceleration)
i2c_start(); i2c_write(0xB0+registre); // Adresse pour l’écriture (0xB0) ou pour la lecture (0xB0+1) i2c_write(3); // Registre pour l’accélération i2c_write(acceleration); // Valeur de l’accélération du moteur (entre 0 et 255) i2c_stop();

Fauteuil à assistance électrique
Beluche & Vicentin
Page 12
6) Carte de puissance
Ci-dessous la carte de puissance que nous avons retranscrite avec tous les éléments associés.
A la mise sous tension, la bobine du relais est excitée et les contacts auxiliaires changent d’état. Ainsi
les modules sont alimentés en 24VDC.
Les freins sont commandés via la sortie PWM. En effet celle-ci permet une variation de tension aux
bornes des freins de 0 et 24 VDC.
L’arrêt d’urgence coupe l’alimentation du relais et donc des modules et freins. Ceux-ci étant à
manque de courant, cela a pour effet de bloquer les moteurs.
Le contact marche/arrêt permet d’alimenter la carte de commande (PIC) en 12VDC.

Fauteuil à assistance électrique
Beluche & Vicentin
Page 13
7) Carte de commande
Ci-dessous le schéma simplifié de la carte de commande.
La carte de commande est alimentée en 12V depuis la carte de puissance, y sont présent différents
élément que nous allons détailler.
L7805 : Régulateur de tension. Il fournit +5V à partir du 12V de la batterie pour l’alimentation
à la fois du PIC et du Joystick.
PIC 16F877A : Microcontrôleur. C’est grâce à lui que nous allons pourvoir communiquer avec
les modules MD03, moduler l’alimentation des freins grâce à la sortie PWM2 et c’est avec les
entrées analogiques que nous pouvons acquérir les données du joystick.

Fauteuil à assistance électrique
Beluche & Vicentin
Page 14
Liaison RS232 : Liaison permettant de programmer le microcontrôleur (PIN C6-C7). Elle se fait
grâce à un adaptateur composer d’un MAX232 et d’une prise DB9.
Liaison MD03 : Liaison permettant de communiquer avec les modules en bus I²C (PIN C3-C4).
Résistances de pull-up : obligatoire pour le bon fonctionnement de la communication I²C, ici
elles valent chacune 2,2kΩ.
Capteur inductif : Il arrive sur l’entrée d’interruption RB0/INT.
TC4426 et IRF540N : Driver MOSFET et Power MOSFET. Grâce à eux que la modulation en
tension entre 0 et 24V se fait pour l’alimentation des freins.
- Fonctionnement de la PWM et de la modulation des freins :
Rappelons que les freins électromagnétiques sont desserrer pour une tension supérieur à 17 V et
serrer lorsqu’elle est inférieure à 5 V. Il a donc fallut définir une modulation de la tension
d’alimentation des freins grâce à la sortie PWM2 du PIC.
Une tension de 24 V est appliquée au bornier. A la sortie PWM2 du PIC (PIN CCP2) on a un signal
variant entre 0 et 5 V. Grâce aux Driver et Power MOSFET ce signal sera augmenté pour varier entre
0 et 24 V. Une tension étant une différence de potentiel, la tension aux bornes des freins sera donc la
différence entre 24 V et la valeur du signal.
Voici le calcul effectué pour définir nos 2 valeurs :
Cela nous permet donc de moduler en alimentation nos freins et ainsi d’économiser au maximum les
batteries. Ce sont les valeurs que nous utilisons dans notre code.
set_pwm2_duty(40);
Nous donne VPWM = 4 V
Donc Vfrein = 24 – 4 = 20 V
Les freins sont desserrés.
set_pwm2_duty(170);
Nous donne VPWM = 17 V
Donc Vfrein = 24 – 17 = 7 V
Les freins sont toujours
desserrés mais cette fois
avec une tension réduite.
Adaptateur port série/PIC
MAX232 et prise DB9

Fauteuil à assistance électrique
Beluche & Vicentin
Page 15
6. Le protocole I²c (Inter Integrated Circuit)
Le but du bus I²c est de faire communiquer plusieurs composants grâce à seulement 3 fils.
Le signal de donnée SDA
Le signal d’horloge SCL
La masse pour le signal de référence
Les données sont transmises en série de manière synchrone, elles sont donc envoyer à la suite sur le
même fils, ici appelé SDA. La vitesse de transmission n’étant pas un élément important de notre
système, ce mode convient parfaitement.
Pour transmettre des données il faut surveiller :
La condition de départ : SCL=1 et SDA passe à 0.
La condition d’arrêt : SCL=1 et SDA passe à 1.
Une fois la condition de départ remplie, l’adresse est transmise sur 8 bits, avec le bit de read/write. Il
y a ensuite un bit d’acquittement ACK (acknowledge) que l’on retrouve avant et après l’octet de
données, et enfin la condition d’arrêt.
Le bus I²c ne peut comporter qu’un seul maître et plusieurs esclaves. N’importe quel esclave peut
devenir maître.

Fauteuil à assistance électrique
Beluche & Vicentin
Page 16
7. Les essais
Voici un récapitulatif des essais et travaux effectués :
Test de fonctionnement des moteurs
Identification des différents éléments et notamment des cartes de commande et de
puissance.
Mise en place de l’acquisition du signal fourni par le capteur pour obtenir une vitesse
exploitable.
Conversion de cette valeur et visualisation sur l’hyperterminal de la vitesse calculée.
Mise en place de la conversion analogique numérique pour les valeurs du joystick.
Essai de communication entre la carte de commande et les modules MD03 via le protocole
I²C sur un petit moteur, essai des différentes variables, sens, vitesse et accélération et de les
commander avec le joystick.
Définition des tensions d’alimentations nécessaires aux serrage/desserrage des freins et mise
en place de la modulation de celle-ci grâce à une PWM.
Câblage.
Fauteuil à assistance électrique
Beluche & Vicentin
Page 17
8. Conclusion
Ce projet très complet nous a permis d’appréhender différentes problématiques, dans plusieurs
domaines tels que la programmation ou le câblage électrique.
Nous avons eu quelque problème avec la mise en place du protocole I²C et la prise en main des
modules MD03. De plus l’identification des cartes déjà existantes a nécessitée de longues
investigations du fait de l’absence de document. Enfin certain composant n’ont pas supportés les
essais, ce qui nous a obligé à les remplacer.
Comme vous pouvez le voir chaque élément du fauteuil fonctionne indépendamment. Par manque
de temps nous n’avons pas encore pu tester le programme complet mais nous espérons le faire
valider très prochainement.
9. Optimisation
Toutefois le fauteuil pourrait être encore amélioré:
En ajoutant une gestion de charge des batteries. En effet une mesure du courant absorbé en
fonction de temps permettrait de mesurer avec précision le niveau de charge des batteries.
En ajoutant un capteur de vitesse sur la deuxième roue. On obtiendrait une meilleure mesure
de vitesse en moyennant les valeurs
En optimisant la loi de commande. Celle que nous avons créée ne permet qu’une seule
valeur de sensibilité de la direction à vitesse non nulle. Une loi dont la sensibilité serait
inversement proportionnelle à la vitesse serait plus adaptée.
En améliorant l’ergonomie du câblage entre les différents composants.
En mettant en place une méthode simple de recharge des batteries, car dans notre cas il faut
les démonter du fauteuil pour les recharger.
Voilà différents aspect qui pourraient être plus approfondies à l’avenir.

Fauteuil à assistance électrique
Beluche & Vicentin
Page 18
10. Annexes
1) Programme
#include <C:\Logiciels\PICC\Devices\16F877A.h>
#fuses HS,NOWDT,NOPROTECT,NOLVP
#use i2c(MASTER, sda=PIN_C4, scl=PIN_C3) // Utilisation bus I2c
#use delay (clock=20000000)
#use rs232 (baud=19200, xmit=PIN_C6, rcv=PIN_C7) // Utilisation RS232
#include <Z:\Projet Tut\Programme\MD03_2013.c> // Include des fonctions prédéfinies
int h,b,g,d,i,n; // 4 positions du joystick et autres variables
float v;
#int_ext
ext() // Comptage des fronts montants correspondant au capteur de vitesse
i++;
#int_timer0
tmr0() // Création de la base de temps de une seconde pour le comptage
// des fronts montants
n=i;
i=0;
set_timer0(46004);
void main()
setup_ccp2 (CCP_PWM); // Utilisation de la PWM2
setup_timer_2(T2_DIV_BY_4,255,1); // Réglage du timer 2
enable_interrupts (INT_EXT); // Réglage des intérruptions
ext_int_edge (0,L_TO_H);
enable_interrupts (INT_TIMER0);
enable_interrupts (GLOBAL);
setup_timer_0(RTCC_INTERNAL|RTCC_DIV_256); // Réglage du timer0
set_timer0 (46004);
while (true)
v=n*0.188*3.6; // Formule de la vitesse avec v en km/h
setup_adc(adc_clock_internal);
setup_adc_ports(ALL_ANALOG); // Utilisation des entrées analogique pour
set_adc_channel(0); // la conversion analogique/numérique
b=read_adc();
delay_us(50);
set_adc_channel(1);
h=read_adc();
delay_us(50);
set_adc_channel(2);
g=read_adc();
delay_us(50);
set_adc_channel(3);
Fauteuil à assistance électrique
Beluche & Vicentin
Page 19
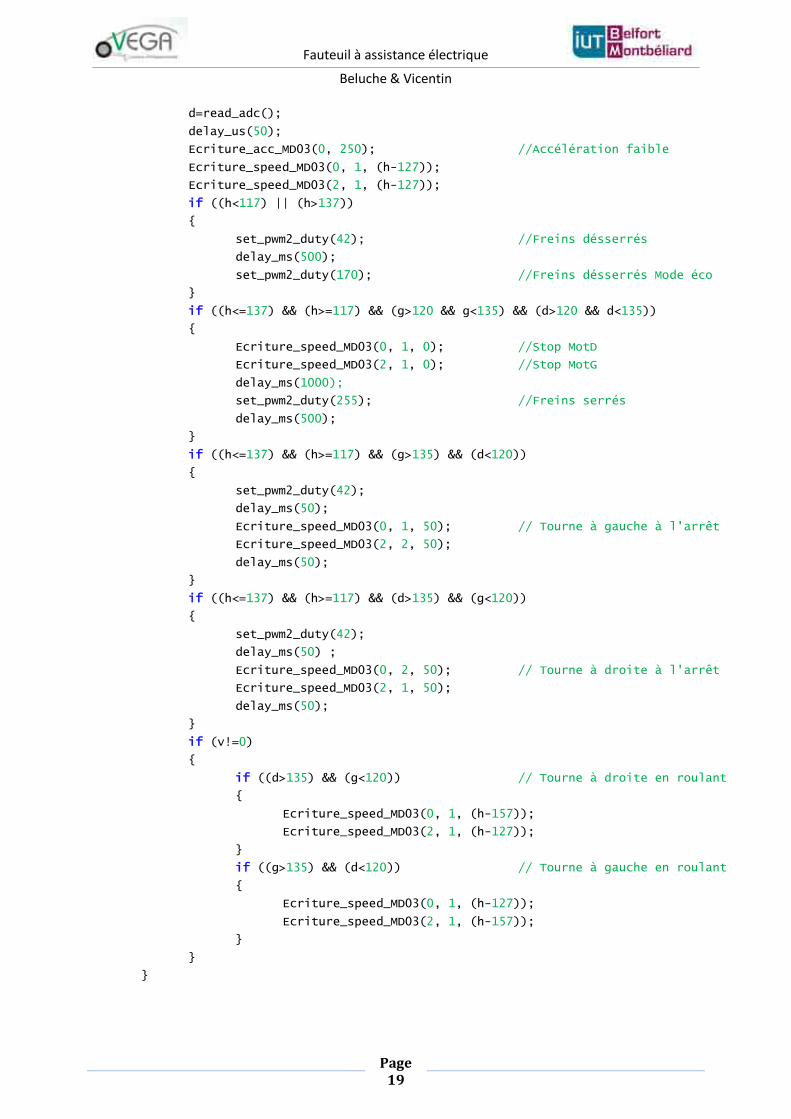
d=read_adc();
delay_us(50);
Ecriture_acc_MD03(0, 250); //Accélération faible
Ecriture_speed_MD03(0, 1, (h-127));
Ecriture_speed_MD03(2, 1, (h-127));
if ((h<117) || (h>137))
set_pwm2_duty(42); //Freins désserrés
delay_ms(500);
set_pwm2_duty(170); //Freins désserrés Mode éco
if ((h<=137) && (h>=117) && (g>120 && g<135) && (d>120 && d<135))
Ecriture_speed_MD03(0, 1, 0); //Stop MotD
Ecriture_speed_MD03(2, 1, 0); //Stop MotG
delay_ms(1000);
set_pwm2_duty(255); //Freins serrés
delay_ms(500);
if ((h<=137) && (h>=117) && (g>135) && (d<120))
set_pwm2_duty(42);
delay_ms(50);
Ecriture_speed_MD03(0, 1, 50); // Tourne à gauche à l'arrêt
Ecriture_speed_MD03(2, 2, 50);
delay_ms(50);
if ((h<=137) && (h>=117) && (d>135) && (g<120))
set_pwm2_duty(42);
delay_ms(50) ;
Ecriture_speed_MD03(0, 2, 50); // Tourne à droite à l'arrêt
Ecriture_speed_MD03(2, 1, 50);
delay_ms(50);
if (v!=0)
if ((d>135) && (g<120)) // Tourne à droite en roulant
Ecriture_speed_MD03(0, 1, (h-157));
Ecriture_speed_MD03(2, 1, (h-127));
if ((g>135) && (d<120)) // Tourne à gauche en roulant
Ecriture_speed_MD03(0, 1, (h-127));
Ecriture_speed_MD03(2, 1, (h-157));

Fauteuil à assistance électrique
Beluche & Vicentin
Page 20
2) Typon de la carte de commande

Inductive sensors
Made in Germany
IG5285IGB3008-BPKGInductive sensor
Metal thread M18 x 1Cable
Sensing range 8 mm [nf]non-flush mountable
DC PNPElectrical designnormally openOutput
18...36 DCOperating voltage [V]150 (...50 °C) / 125 (...80 °C)Current rating [mA]
pulsedShort-circuit protectionyesReverse polarity protectionyesOverload protection< 2.5Voltage drop [V]
< 15 (24 V)Current consumption [mA]
8 ± 10 %Real sensing range [mm]0...6.5Operating distance [mm]-10...10Switch-point drift [% of Sr]1...15Hysteresis [% of Sr]200Switching frequency [Hz]
mild steel = 1 / stainless steel approx. 0.7 / brass approx. 0.4 / Al approx. 0.3 / Cuapprox. 0.2
Correction factors
-25...80Ambient temperature [°C]IP 67, IIProtection
EN 60947-5-2class BEN 55011:
EMC
brass white bronze coated; active face: PC (polycarbonate)Housing materialsFunction display
yellowSwitching status LED
PVC cable / 2 m; 3 x 0.5 mm²Connection
0.127Weight [kg]2 lock nutsAccessories (included)
WiringCore colours
brownBNblueBUblackBK
ifm electronic gmbh • Friedrichstraße 1 • 45128 Essen — We reserve the right to make technical alterations without prior notice. — GB — IG5285 — 06.03.2003
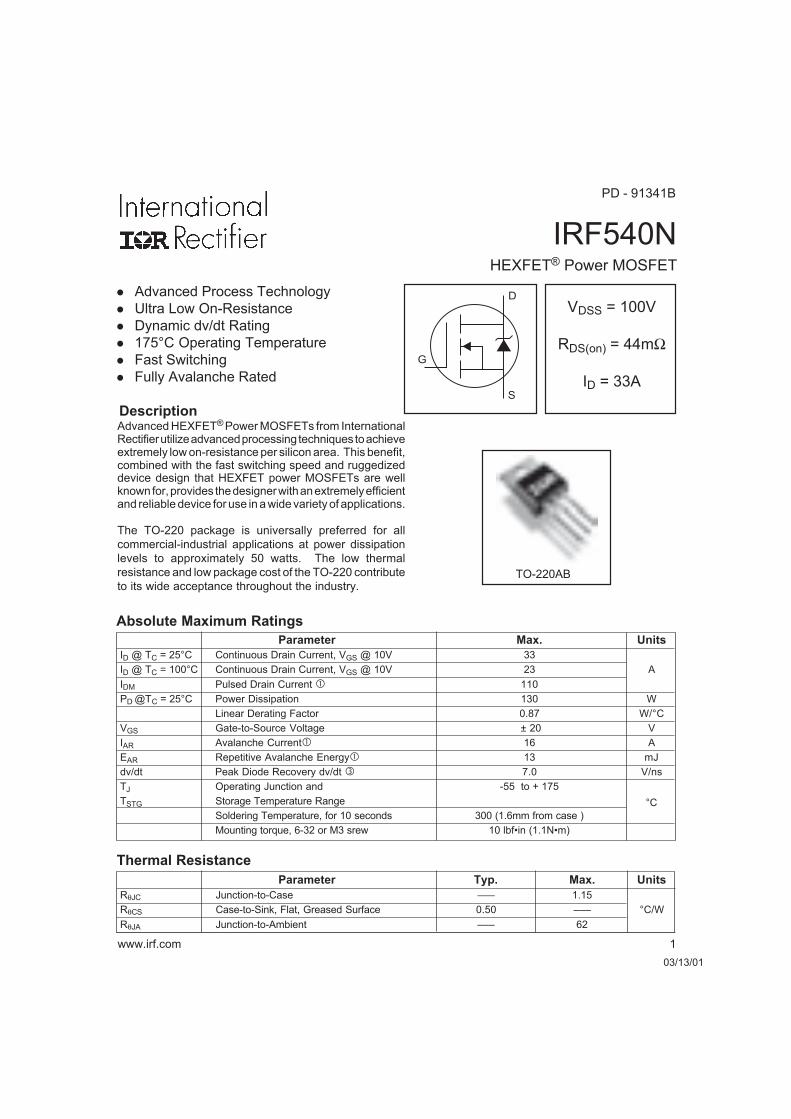
IRF540NHEXFET® Power MOSFET
03/13/01
Parameter Typ. Max. Units
RθJC Junction-to-Case ––– 1.15
RθCS Case-to-Sink, Flat, Greased Surface 0.50 ––– °C/W
RθJA Junction-to-Ambient ––– 62
Thermal Resistance
www.irf.com 1
VDSS = 100V
RDS(on) = 44mΩ
ID = 33AS
D
G
TO-220AB
Advanced HEXFET® Power MOSFETs from InternationalRectifier utilize advanced processing techniques to achieveextremely low on-resistance per silicon area. This benefit,combined with the fast switching speed and ruggedizeddevice design that HEXFET power MOSFETs are wellknown for, provides the designer with an extremely efficientand reliable device for use in a wide variety of applications.
The TO-220 package is universally preferred for all
commercial-industrial applications at power dissipation
levels to approximately 50 watts. The low thermal
resistance and low package cost of the TO-220 contribute
to its wide acceptance throughout the industry.
l Advanced Process Technology
l Ultra Low On-Resistance
l Dynamic dv/dt Rating
l 175°C Operating Temperature
l Fast Switching
l Fully Avalanche Rated
Description
Absolute Maximum Ratings
Parameter Max. Units
ID @ TC = 25°C Continuous Drain Current, VGS @ 10V 33
ID @ TC = 100°C Continuous Drain Current, VGS @ 10V 23 A
IDM Pulsed Drain Current 110
PD @TC = 25°C Power Dissipation 130 W
Linear Derating Factor 0.87 W/°C
VGS Gate-to-Source Voltage ± 20 V
IAR Avalanche Current 16 A
EAR Repetitive Avalanche Energy 13 mJ
dv/dt Peak Diode Recovery dv/dt 7.0 V/ns
TJ Operating Junction and -55 to + 175
TSTG Storage Temperature Range
Soldering Temperature, for 10 seconds 300 (1.6mm from case )
°C
Mounting torque, 6-32 or M3 srew 10 lbf•in (1.1N•m)
PD - 91341B

IRF540N
2 www.irf.com
S
D
G
Parameter Min. Typ. Max. Units Conditions
IS Continuous Source Current MOSFET symbol
(Body Diode)––– –––
showing the
ISM Pulsed Source Current integral reverse
(Body Diode)––– –––
p-n junction diode.
VSD Diode Forward Voltage ––– ––– 1.2 V TJ = 25°C, IS = 16A, VGS = 0V
trr Reverse Recovery Time ––– 115 170 ns TJ = 25°C, IF = 16A
Qrr Reverse Recovery Charge ––– 505 760 nC di/dt = 100A/µs
ton Forward Turn-On Time Intrinsic turn-on time is negligible (turn-on is dominated by LS+LD)
Source-Drain Ratings and Characteristics
33
110
A
Starting TJ = 25°C, L =1.5mH
RG = 25Ω, IAS = 16A. (See Figure 12)
Repetitive rating; pulse width limited by
max. junction temperature. (See fig. 11)
Notes:
ISD ≤ 16A, di/dt ≤ 340A/µs, VDD ≤ V(BR)DSS,
TJ ≤ 175°C
Pulse width ≤ 400µs; duty cycle ≤ 2%.
This is a typical value at device destruction and represents
operation outside rated limits.
This is a calculated value limited to TJ = 175°C .
Parameter Min. Typ. Max. Units Conditions
V(BR)DSS Drain-to-Source Breakdown Voltage 100 ––– ––– V VGS = 0V, ID = 250µA
∆V(BR)DSS/∆TJ Breakdown Voltage Temp. Coefficient ––– 0.12 ––– V/°C Reference to 25°C, ID = 1mA
RDS(on) Static Drain-to-Source On-Resistance ––– ––– 44 mΩ VGS = 10V, ID = 16A
VGS(th) Gate Threshold Voltage 2.0 ––– 4.0 V VDS = VGS, ID = 250µA
gfs Forward Transconductance 21 ––– ––– S VDS = 50V, ID = 16A
––– ––– 25µA
VDS = 100V, VGS = 0V
––– ––– 250 VDS = 80V, VGS = 0V, TJ = 150°C
Gate-to-Source Forward Leakage ––– ––– 100 VGS = 20V
Gate-to-Source Reverse Leakage ––– ––– -100nA
VGS = -20V
Qg Total Gate Charge ––– ––– 71 ID = 16A
Qgs Gate-to-Source Charge ––– ––– 14 nC VDS = 80V
Qgd Gate-to-Drain ("Miller") Charge ––– ––– 21 VGS = 10V, See Fig. 6 and 13
td(on) Turn-On Delay Time ––– 11 ––– VDD = 50V
tr Rise Time ––– 35 ––– ID = 16A
td(off) Turn-Off Delay Time ––– 39 ––– RG = 5.1Ω
tf Fall Time ––– 35 ––– VGS = 10V, See Fig. 10
Between lead,––– –––
6mm (0.25in.)
from package
and center of die contact
Ciss Input Capacitance ––– 1960 ––– VGS = 0V
Coss Output Capacitance ––– 250 ––– VDS = 25V
Crss Reverse Transfer Capacitance ––– 40 ––– pF ƒ = 1.0MHz, See Fig. 5
EAS Single Pulse Avalanche Energy ––– 700 185 mJ IAS = 16A, L = 1.5mH
nH
Electrical Characteristics @ TJ = 25°C (unless otherwise specified)
LD Internal Drain Inductance
LS Internal Source Inductance ––– –––S
D
G
IGSS
ns
4.5
7.5
IDSS Drain-to-Source Leakage Current

August 2006 Rev. 13 1/47
47
L7800 series
Positive voltage regulators
Feature summary
Output current to 1.5A
Output voltages of 5; 5.2; 6; 8; 8.5; 9; 10; 12;
15; 18; 24V
Thermal overload protection
Short circuit protection
Output transition SOA protection
Description
The L7800 series of three-terminal positive
regulators is available in TO-220, TO-220FP, TO-3
and D2PAK packages and several fixed output
voltages, making it useful in a wide range of
applications. These regulators can provide local
on-card regulation, eliminating the distribution
problems associated with single point regulation.
Each type employs internal current limiting,
thermal shut-down and safe area protection,
making it essentially indestructible. If adequate
heat sinking is provided, they can deliver over 1A
output current. Although designed
primarily as fixed voltage regulators, these
devices can be used with external components to
obtain adjustable voltage and currents.
TO-220FP
D2PAK
TO-220
TO-3
www.st.com
Schematic diagram

L7800 series Pin configuration
3/47
1 Pin configuration
Figure 1. Pin connections (top view)
TO220FP
TO-3
TO-220
D2PAK (Any Type)
Figure 2. Schematic diagram

Maximum ratings L7800 series
4/47
2 Maximum ratings
Note: Absolute Maximum Ratings are those values beyond which damage to the device may occur. Functional operation under these condition is not implied
Table 1. Absolute maximum ratings
Symbol Parameter Value Unit
VI DC Input voltagefor VO= 5 to 18V 35
Vfor VO= 20, 24V 40
IO Output current Internally Limited
PD Power dissipation Internally Limited
TSTG Storage temperature range -65 to 150 °C
TOP Operating junction temperature rangefor L7800 -55 to 150
°Cfor L7800C 0 to 150
Table 2. Thermal Data
Symbol Parameter D2PAK TO-220 TO-220FP TO-3 Unit
RthJC Thermal resistance junction-case 3 5 5 4 °C/W
RthJA Thermal resistance junction-ambient 62.5 50 60 35 °C/W
Figure 3. Application circuits

2003 Microchip Technology Inc. DS39582B-page 1
PIC16F87XA
Devices Included in this Data Sheet:
High-Performance RISC CPU:
• Only 35 single-word instructions to learn
• All single-cycle instructions except for program
branches, which are two-cycle
• Operating speed: DC – 20 MHz clock input
DC – 200 ns instruction cycle
• Up to 8K x 14 words of Flash Program Memory,
Up to 368 x 8 bytes of Data Memory (RAM),
Up to 256 x 8 bytes of EEPROM Data Memory
• Pinout compatible to other 28-pin or 40/44-pin
PIC16CXXX and PIC16FXXX microcontrollers
Peripheral Features:
• Timer0: 8-bit timer/counter with 8-bit prescaler
• Timer1: 16-bit timer/counter with prescaler,
can be incremented during Sleep via external
crystal/clock
• Timer2: 8-bit timer/counter with 8-bit period
register, prescaler and postscaler
• Two Capture, Compare, PWM modules
- Capture is 16-bit, max. resolution is 12.5 ns
- Compare is 16-bit, max. resolution is 200 ns
- PWM max. resolution is 10-bit
• Synchronous Serial Port (SSP) with SPI™
(Master mode) and I2C™ (Master/Slave)
• Universal Synchronous Asynchronous Receiver
Transmitter (USART/SCI) with 9-bit address
detection
• Parallel Slave Port (PSP) – 8 bits wide with
external RD, WR and CS controls (40/44-pin only)
• Brown-out detection circuitry for
Brown-out Reset (BOR)
Analog Features:
• 10-bit, up to 8-channel Analog-to-Digital
Converter (A/D)
• Brown-out Reset (BOR)
• Analog Comparator module with:
- Two analog comparators
- Programmable on-chip voltage reference
(VREF) module
- Programmable input multiplexing from device
inputs and internal voltage reference
- Comparator outputs are externally accessible
Special Microcontroller Features:
• 100,000 erase/write cycle Enhanced Flash
program memory typical
• 1,000,000 erase/write cycle Data EEPROM
memory typical
• Data EEPROM Retention > 40 years
• Self-reprogrammable under software control
• In-Circuit Serial Programming™ (ICSP™)
via two pins
• Single-supply 5V In-Circuit Serial Programming
• Watchdog Timer (WDT) with its own on-chip RC
oscillator for reliable operation
• Programmable code protection
• Power saving Sleep mode
• Selectable oscillator options
• In-Circuit Debug (ICD) via two pins
CMOS Technology:
• Low-power, high-speed Flash/EEPROM
technology
• Fully static design
• Wide operating voltage range (2.0V to 5.5V)
• Commercial and Industrial temperature ranges
• Low-power consumption
• PIC16F873A
• PIC16F874A
• PIC16F876A
• PIC16F877A
Device
Program Memory Data
SRAM
(Bytes)
EEPROM
(Bytes)I/O
10-bit
A/D (ch)
CCP
(PWM)
MSSP
USARTTimers
8/16-bitComparators
Bytes# Single Word
InstructionsSPI
Master
I2C
PIC16F873A 7.2K 4096 192 128 22 5 2 Yes Yes Yes 2/1 2
PIC16F874A 7.2K 4096 192 128 33 8 2 Yes Yes Yes 2/1 2
PIC16F876A 14.3K 8192 368 256 22 5 2 Yes Yes Yes 2/1 2
PIC16F877A 14.3K 8192 368 256 33 8 2 Yes Yes Yes 2/1 2
28/40/44-Pin Enhanced Flash Microcontrollers
2003 Microchip Technology Inc. DS39582B-page 3
PIC16F87XA
Pin Diagrams (Continued)
RB7/PGD
RB6/PGC
RB5
RB4
RB3/PGM
RB2
RB1
RB0/INT
VDD
VSS
RD7/PSP7
RD6/PSP6RD5/PSP5
RD4/PSP4
RC7/RX/DT
RC6/TX/CK
RC5/SDO
RC4/SDI/SDA
RD3/PSP3
RD2/PSP2
MCLR/VPP
RA0/AN0
RA1/AN1RA2/AN2/VREF-/CVREF
RA3/AN3/VREF+
RA4/T0CKI/C1OUT
RA5/AN4/SS/C2OUT
RE0/RD/AN5
RE1/WR/AN6
RE2/CS/AN7
VDD
VSS
OSC1/CLKI
OSC2/CLKO
RC0/T1OSO/T1CKI
RC1/T1OSI/CCP2
RC2/CCP1
RC3/SCK/SCL
RD0/PSP0
RD1/PSP1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
PIC
16
F87
4A
/87
7A
40-Pin PDIP
1011121314151617
18
19
20
21
22
23
24
25
26
44
87
6 5 4 3 2 1
27
28
2930313233343536373839
40
41
42
43
9
PIC16F874A
RA4/T0CKI/C1OUTRA5/AN4/SS/C2OUT
RE0/RD/AN5
OSC1/CLKIOSC2/CLKO
RC0/T1OSO/T1CK1NC
RE1/WR/AN6RE2/CS/AN7
VDD
VSS
RB3/PGMRB2RB1RB0/INTVDD
VSS
RD7/PSP7RD6/PSP6RD5/PSP5RD4/PSP4
RA
3/A
N3/V
RE
F+
RA
2/A
N2/V
RE
F-/
CV
RE
F
RA
1/A
N1
RA
0/A
N0
MC
LR
/VP
P
NC
RB
7/P
GD
RB
6/P
GC
RB
5R
B4
NC
NC
RC
6/T
X/C
KR
C5
/SD
OR
C4
/SD
I/S
DA
RD
3/P
SP
3R
D2
/PS
P2
RD
1/P
SP
1R
D0
/PS
P0
RC
3/S
CK
/SC
LR
C2/C
CP
1R
C1/T
1O
SI/
CC
P2
1011
2
345
6
1
18
19
20
21
22
12
13
14
15
38
87
44
43
42
41
40
39
16
17
29
30313233
232425
26
27
28
36
34
35
9
PIC16F874A
37
RA
3/A
N3/V
RE
F+
RA
2/A
N2/V
RE
F-/
CV
RE
F
RA
1/A
N1
RA
0/A
N0
MC
LR
/VP
P
NC
RB
7/P
GD
RB
6/P
GC
RB
5R
B4
NC
RC
6/T
X/C
KR
C5/S
DO
RC
4/S
DI/
SD
AR
D3/P
SP
3R
D2/P
SP
2R
D1/P
SP
1R
D0/P
SP
0R
C3/S
CK
/SC
LR
C2/C
CP
1R
C1/T
1O
SI/
CC
P2
NC
NCRC0/T1OSO/T1CKIOSC2/CLKOOSC1/CLKIVSS
VDD
RE2/CS/AN7RE1/WR/AN6RE0/RD/AN5RA5/AN4/SS/C2OUTRA4/T0CKI/C1OUT
RC7/RX/DTRD4/PSP4RD5/PSP5RD6/PSP6RD7/PSP7
VSS
VDD
RB0/INTRB1RB2
RB3/PGM
44-Pin PLCC
44-Pin TQFP
PIC16F877A
PIC16F877A
RC7/RX/DT

2003 Microchip Technology Inc. DS39582B-page 5
PIC16F87XA
1.0 DEVICE OVERVIEW
This document contains device specific information
about the following devices:
• PIC16F873A
• PIC16F874A
• PIC16F876A
• PIC16F877A
PIC16F873A/876A devices are available only in 28-pin
packages, while PIC16F874A/877A devices are avail-
able in 40-pin and 44-pin packages. All devices in the
PIC16F87XA family share common architecture with
the following differences:
• The PIC16F873A and PIC16F874A have one-half
of the total on-chip memory of the PIC16F876A
and PIC16F877A
• The 28-pin devices have three I/O ports, while the
40/44-pin devices have five
• The 28-pin devices have fourteen interrupts, while
the 40/44-pin devices have fifteen
• The 28-pin devices have five A/D input channels,
while the 40/44-pin devices have eight
• The Parallel Slave Port is implemented only on
the 40/44-pin devices
The available features are summarized in Table 1-1.
Block diagrams of the PIC16F873A/876A and
PIC16F874A/877A devices are provided in Figure 1-1
and Figure 1-2, respectively. The pinouts for these
device families are listed in Table 1-2 and Table 1-3.
Additional information may be found in the PICmicro®
Mid-Range Reference Manual (DS33023), which may
be obtained from your local Microchip Sales Represen-
tative or downloaded from the Microchip web site. The
Reference Manual should be considered a complemen-
tary document to this data sheet and is highly recom-
mended reading for a better understanding of the device
architecture and operation of the peripheral modules.
TABLE 1-1: PIC16F87XA DEVICE FEATURES
Key Features PIC16F873A PIC16F874A PIC16F876A PIC16F877A
Operating Frequency DC – 20 MHz DC – 20 MHz DC – 20 MHz DC – 20 MHz
Resets (and Delays) POR, BOR
(PWRT, OST)
POR, BOR
(PWRT, OST)
POR, BOR
(PWRT, OST)
POR, BOR
(PWRT, OST)
Flash Program Memory
(14-bit words)
4K 4K 8K 8K
Data Memory (bytes) 192 192 368 368
EEPROM Data Memory (bytes) 128 128 256 256
Interrupts 14 15 14 15
I/O Ports Ports A, B, C Ports A, B, C, D, E Ports A, B, C Ports A, B, C, D, E
Timers 3 3 3 3
Capture/Compare/PWM modules 2 2 2 2
Serial Communications MSSP, USART MSSP, USART MSSP, USART MSSP, USART
Parallel Communications — PSP — PSP
10-bit Analog-to-Digital Module 5 input channels 8 input channels 5 input channels 8 input channels
Analog Comparators 2 2 2 2
Instruction Set 35 Instructions 35 Instructions 35 Instructions 35 Instructions
Packages 28-pin PDIP
28-pin SOIC
28-pin SSOP
28-pin QFN
40-pin PDIP
44-pin PLCC
44-pin TQFP
44-pin QFN
28-pin PDIP
28-pin SOIC
28-pin SSOP
28-pin QFN
40-pin PDIP
44-pin PLCC
44-pin TQFP
44-pin QFN

© 2006 Microchip Technology Inc. DS21422D-page 1
TC4426/TC4427/TC4428
Features:
• High Peak Output Current – 1.5A
• Wide Input Supply Voltage Operating Range:
- 4.5V to 18V
• High Capacitive Load Drive Capability – 1000 pF
in 25 ns (typ.)
• Short Delay Times – 40 ns (typ.)
• Matched Rise and Fall Times
• Low Supply Current:
- With Logic ‘1’ Input – 4 mA
- With Logic ‘0’ Input – 400 µA
• Low Output Impedance – 7Ω
• Latch-Up Protected: Will Withstand 0.5A Reverse
Current
• Input Will Withstand Negative Inputs Up to 5V
• ESD Protected – 4 kV
• Pin-compatible with the TC426/TC427/TC428
• Space-saving 8-Pin MSOP and 8-Pin 6x5 DFN
Packages
Applications:
• Switch Mode Power Supplies
• Line Drivers
• Pulse Transformer Drive
General Description:
The TC4426/TC4427/TC4428 are improved versions
of the earlier TC426/TC427/TC428 family of MOSFET
drivers. The TC4426/TC4427/TC4428 devices have
matched rise and fall times when charging and
discharging the gate of a MOSFET.
These devices are highly latch-up resistant under any
conditions within their power and voltage ratings. They
are not subject to damage when up to 5V of noise spik-
ing (of either polarity) occurs on the ground pin. They
can accept, without damage or logic upset, up to
500 mA of reverse current (of either polarity) being
forced back into their outputs. All terminals are fully
protected against Electrostatic Discharge (ESD) up to
4 kV.
The TC4426/TC4427/TC4428 MOSFET drivers can
easily charge/discharge 1000 pF gate capacitances in
under 30 ns. These devices provide low enough
impedances in both the on and off states to ensure the
MOSFET’s intended state will not be affected, even by
large transients.
Other compatible drivers are the TC4426A/TC4427A/
TC4428A family of devices. The TC4426A/TC4427A/
TC4428A devices have matched leading and falling
edge input-to-output delay times, in addition to the
matched rise and fall times of the TC4426/TC4427/
TC4428 devices.
Package Types
Note 1: Exposed pad of the DFN package is electrically isolated.
8-Pin DFN(1)
NC
IN A
GND
IN B
2
3
4 5
6
7
811
2
3
4
NC
5
6
7
8
OUT A
OUT B
NC
IN A
GND
IN B
VDD
TC4426
TC4427
TC4426 TC4427
NC
OUT A
OUT B
VDD
TC4426
TC4427
TC4428
NC
OUT A
OUT B
VDDTC4428
TC4428
NC
OUT A
OUT B
VDD
TC4426 TC4427
NC
OUT A
OUT B
VDD
TC4428
NC
OUT A
OUT B
VDD
8-Pin MSOP/PDIP/SOIC
1.5A Dual High-Speed Power MOSFET Drivers

TC4426/TC4427/TC4428
DS21422D-page 2 © 2006 Microchip Technology Inc.
Functional Block Diagram
Effective Input C = 12 pF (Each Input)
TC4426/TC4427/TC4428
Output
Input
GND
VDD
300 mV
4.7V
Inverting
Non-Inverting
Note 1: TC4426 has two inverting drivers, while the TC4427 has two non-inverting
drivers. The TC4428 has one inverting and one non-inverting driver.
2: Ground any unused driver input.
1.5 mA

© 2006 Microchip Technology Inc. DS21422D-page 3
TC4426/TC4427/TC4428
1.0 ELECTRICAL CHARACTERISTICS
Absolute Maximum Ratings †
Supply Voltage .....................................................+22V
Input Voltage, IN A or IN B
..................................... (VDD + 0.3V) to (GND – 5V)
Package Power Dissipation (TA ≤ 70°C)
DFN .............................................................. Note 3
MSOP..........................................................340 mW
PDIP ............................................................ 730 mW
SOIC............................................................ 470 mW
Storage Temperature Range.............. -65°C to +150°C
Maximum Junction Temperature...................... +150°C
† Stresses above those listed under “Absolute Maximum
Ratings” may cause permanent damage to the device. These
are stress ratings only and functional operation of the device
at these or any other conditions above those indicated in the
operation sections of the specifications is not implied.
Exposure to Absolute Maximum Rating conditions for
extended periods may affect device reliability.
PIN FUNCTION TABLE
DC CHARACTERISTICS
Name Function
NC No Connection
IN A Input A
GND Ground
IN B Input B
OUT B Output B
VDD Supply Input
OUT A Output A
NC No Connection
Electrical Specifications: Unless otherwise noted, TA = +25ºC with 4.5V ≤ VDD ≤ 18V.
Parameters Sym Min Typ Max Units Conditions
Input
Logic ‘1’, High Input Voltage VIH 2.4 — — V Note 2
Logic ‘0’, Low Input Voltage VIL — — 0.8 V
Input Current IIN -1.0 — +1.0 µA 0V ≤ VIN ≤ VDD
Output
High Output Voltage VOH VDD – 0.025 — — V DC Test
Low Output Voltage VOL — — 0.025 V DC Test
Output Resistance RO — 7 10 Ω IOUT = 10 mA, VDD = 18V
Peak Output Current IPK — 1.5 — A VDD = 18V
Latch-Up Protection
Withstand Reverse Current
IREV — > 0.5 — A Duty cycle ≤ 2%, t ≤ 300 µs
VDD = 18V
Switching Time (Note 1)
Rise Time tR — 19 30 ns Figure 4-1
Fall Time tF — 19 30 ns Figure 4-1
Delay Time tD1 — 20 30 ns Figure 4-1
Delay Time tD2 — 40 50 ns Figure 4-1
Power Supply
Power Supply Current IS —
—
—
—
4.5
0.4
mA VIN = 3V (Both inputs)
VIN = 0V (Both inputs)
Note 1: Switching times ensured by design.
2: For V temperature range devices, the VIH (Min) limit is 2.0V.
3: Package power dissipation is dependent on the copper pad area on the PCB.

TC4426/TC4427/TC4428
DS21422D-page 4 © 2006 Microchip Technology Inc.
DC CHARACTERISTICS (OVER OPERATING TEMPERATURE RANGE)
TEMPERATURE CHARACTERISTICS
Electrical Specifications: Unless otherwise noted, over operating temperature range with 4.5V ≤ VDD ≤ 18V.
Parameters Sym Min Typ Max Units Conditions
Input
Logic ‘1’, High Input Voltage VIH 2.4 — — V Note 2
Logic ‘0’, Low Input Voltage VIL — — 0.8 V
Input Current IIN -10 — +10 µA 0V ≤ VIN ≤ VDD
Output
High Output Voltage VOH VDD – 0.025 — — V DC Test
Low Output Voltage VOL — — 0.025 V DC Test
Output Resistance RO — 9 12 Ω IOUT = 10 mA, VDD = 18V
Peak Output Current IPK — 1.5 — A VDD = 18V
Latch-Up Protection
Withstand Reverse Current
IREV — >0.5 — A Duty cycle ≤ 2%, t ≤ 300 µs
VDD = 18V
Switching Time (Note 1)
Rise Time tR — — 40 ns Figure 4-1
Fall Time tF — — 40 ns Figure 4-1
Delay Time tD1 — — 40 ns Figure 4-1
Delay Time tD2 — — 60 ns Figure 4-1
Power Supply
Power Supply Current IS —
—
—
—
8.0
0.6
mA VIN = 3V (Both inputs)
VIN = 0V (Both inputs)
Note 1: Switching times ensured by design.
2: For V temperature range devices, the VIH (Min) limit is 2.0V.
Electrical Specifications: Unless otherwise noted, all parameters apply with 4.5V ≤ VDD ≤ 18V.
Parameters Sym Min Typ Max Units Conditions
Temperature Ranges
Specified Temperature Range (C) TA 0 — +70 °C
Specified Temperature Range (E) TA -40 — +85 °C
Specified Temperature Range (V) TA -40 — +125 °C
Maximum Junction Temperature TJ — — +150 °C
Storage Temperature Range TA -65 — +150 °C
Package Thermal Resistances
Thermal Resistance, 8L-6x5 DFN θJA — 33.2 — °C/W
Thermal Resistance, 8L-MSOP θJA — 206 — °C/W
Thermal Resistance, 8L-PDIP θJA — 125 — °C/W
Thermal Resistance, 8L-SOIC θJA — 155 — °C/W