chapitre i l'engrènement, une liaison...
TRANSCRIPT
10
Chapitre I
L'engrènement, une liaison excitatrice
(Approche bibliographique)
I. Introduction. L'engrenage est l'organe de transmission de puissance par excellence. Il répond parfaitement aux exigences de rendement, de précision et de puissance spécifique imposées dans les architectures mécaniques modernes. Depuis peu, les critères de confort acoustique et de tenue vibratoire sont à l'origine d'une nouvelle pression technologique sur ce composant. L'engrènement apparaît, alors, comme la source principale d'excitation, tant sonore que vibratoire. Ce chapitre présente une synthèse des résultats bibliographiques sur les excitations attribuées à l'engrènement et met en évidence les principaux paramètres influents. Le bruit d'engrènement et l'erreur de transmission sont les grandeurs utilisées pour caractériser les nuisances sonores et définir le niveau vibratoire d'une transmission par engrenages. Le premier paragraphe est donc consacré à leur définition. Nous décrivons ensuite les diverses sources d'excitations vibro-acoustiques propres à l'engrènement et nous nous intéressons, en particulier, aux déformations de dentures, aux variations de la rigidité d'engrènement ainsi qu'aux effets des défauts de forme et de position. Chaque paramètre fait l'objet d'un paragraphe spécifique où il est caractérisé au travers de ses effets sur le bruit d'engrènement et l'erreur de transmission. Les résultats présentés sont, pour la plus grande part, issus d'études expérimentales et les supports industriels principaux sont l'Automobile, l'Aéronautique, ou encore la Machine-Outil.
I.1 Bruit d'engrènement, définition. Le bruit d'engrènement est le niveau sonore émis par un couple d'engrenages ou une structure complète. Dans ce dernier cas, on parle de bruit rayonné, car, s'il comprend principalement le bruit d'engrènement, il est modifié par les émissions acoustiques du carter et des autres organes
11
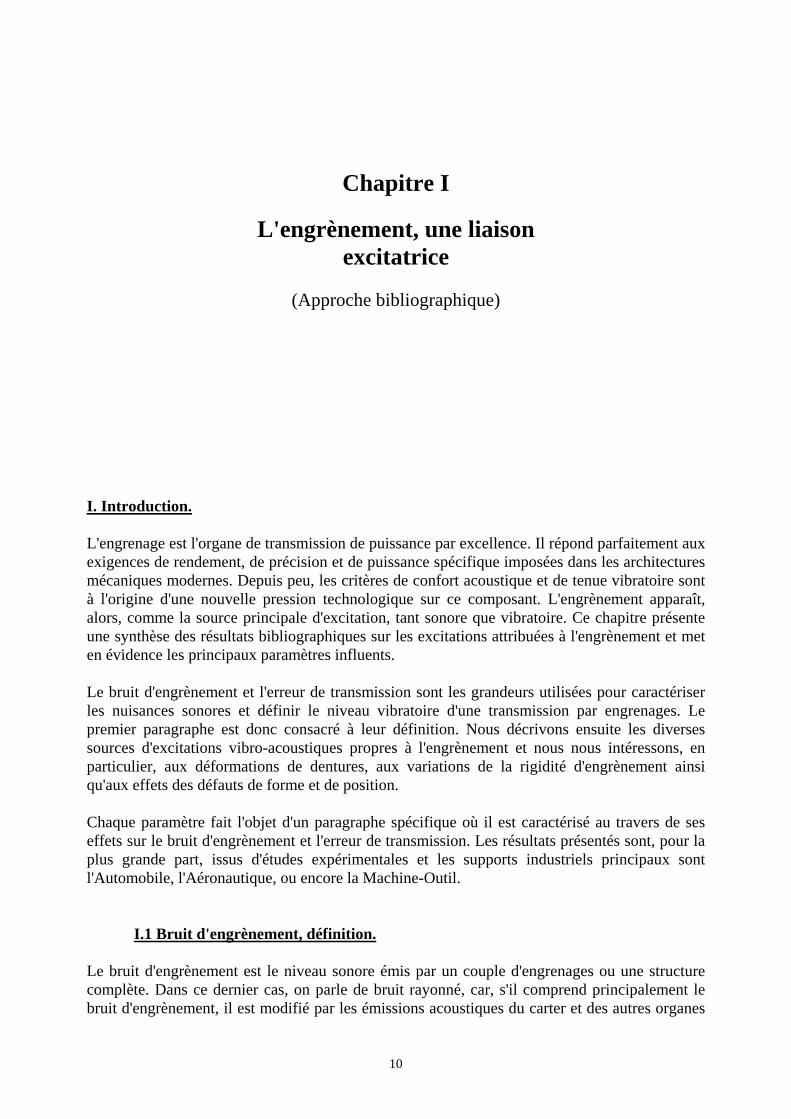
de la transmission (roulements par exemple). Il est classiquement représenté sous forme d'un spectre fréquentiel et est exprimé en décibel dB (Fig. I.1). Notons que la perception humaine privilégie les fréquences situées entre 1000 et 5000 Hz et une unité de mesure spécifique (dBA) permet de traduire l'évolution de cette sensibilité en fonction de la fréquence de façon plus réaliste.
Figure I.1 : Spectre caractéristique d'un signal de bruit d'engrènement (Rémond 1991). 1 : fréquence d'engrènement, 2, 3, 4 et 5 harmoniques supérieurs.
I.2 L'erreur de transmission : indicateur du comportement
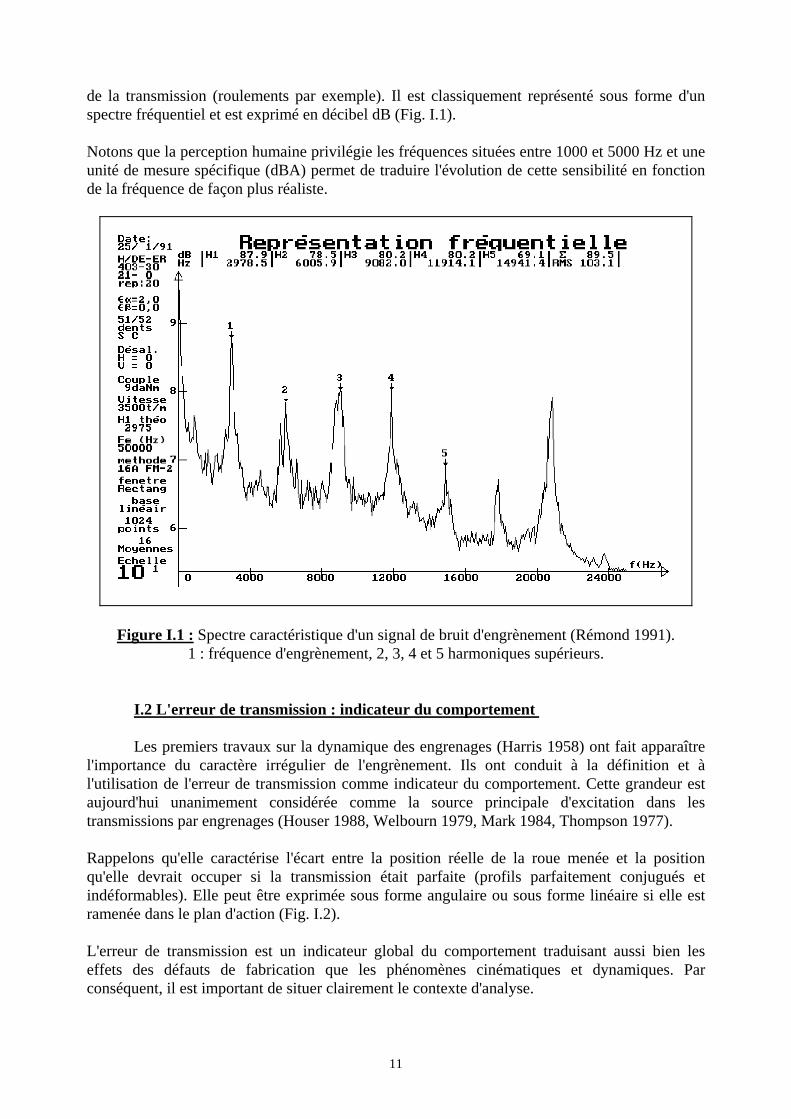
Les premiers travaux sur la dynamique des engrenages (Harris 1958) ont fait apparaître l'importance du caractère irrégulier de l'engrènement. Ils ont conduit à la définition et à l'utilisation de l'erreur de transmission comme indicateur du comportement. Cette grandeur est aujourd'hui unanimement considérée comme la source principale d'excitation dans les transmissions par engrenages (Houser 1988, Welbourn 1979, Mark 1984, Thompson 1977). Rappelons qu'elle caractérise l'écart entre la position réelle de la roue menée et la position qu'elle devrait occuper si la transmission était parfaite (profils parfaitement conjugués et indéformables). Elle peut être exprimée sous forme angulaire ou sous forme linéaire si elle est ramenée dans le plan d'action (Fig. I.2). L'erreur de transmission est un indicateur global du comportement traduisant aussi bien les effets des défauts de fabrication que les phénomènes cinématiques et dynamiques. Par conséquent, il est important de situer clairement le contexte d'analyse.
12
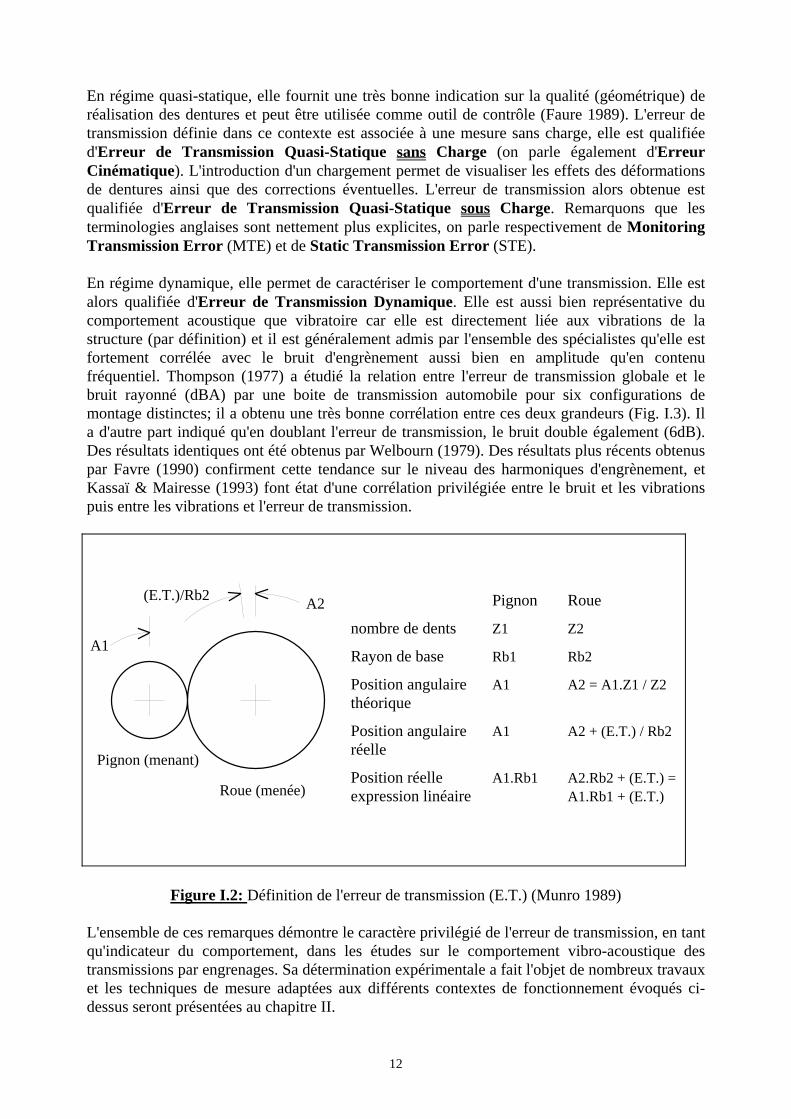
En régime quasi-statique, elle fournit une très bonne indication sur la qualité (géométrique) de réalisation des dentures et peut être utilisée comme outil de contrôle (Faure 1989). L'erreur de transmission définie dans ce contexte est associée à une mesure sans charge, elle est qualifiée d'Erreur de Transmission Quasi-Statique sans Charge (on parle également d'Erreur Cinématique). L'introduction d'un chargement permet de visualiser les effets des déformations de dentures ainsi que des corrections éventuelles. L'erreur de transmission alors obtenue est qualifiée d'Erreur de Transmission Quasi-Statique sous Charge. Remarquons que les terminologies anglaises sont nettement plus explicites, on parle respectivement de Monitoring Transmission Error (MTE) et de Static Transmission Error (STE). En régime dynamique, elle permet de caractériser le comportement d'une transmission. Elle est alors qualifiée d'Erreur de Transmission Dynamique. Elle est aussi bien représentative du comportement acoustique que vibratoire car elle est directement liée aux vibrations de la structure (par définition) et il est généralement admis par l'ensemble des spécialistes qu'elle est fortement corrélée avec le bruit d'engrènement aussi bien en amplitude qu'en contenu fréquentiel. Thompson (1977) a étudié la relation entre l'erreur de transmission globale et le bruit rayonné (dBA) par une boite de transmission automobile pour six configurations de montage distinctes; il a obtenu une très bonne corrélation entre ces deux grandeurs (Fig. I.3). Il a d'autre part indiqué qu'en doublant l'erreur de transmission, le bruit double également (6dB). Des résultats identiques ont été obtenus par Welbourn (1979). Des résultats plus récents obtenus par Favre (1990) confirment cette tendance sur le niveau des harmoniques d'engrènement, et Kassaï & Mairesse (1993) font état d'une corrélation privilégiée entre le bruit et les vibrations puis entre les vibrations et l'erreur de transmission.
A1
A2(E.T.)/Rb2
Pignon (menant)
Roue (menée)
Pignon Roue
nombre de dents Z1 Z2
Rayon de base Rb1 Rb2
Position angulaire A1 A2 = A1.Z1 / Z2 théorique
Position angulaire A1 A2 + (E.T.) / Rb2 réelle
Position réelle A1.Rb1 A2.Rb2 + (E.T.) = expression linéaire A1.Rb1 + (E.T.)
Figure I.2: Définition de l'erreur de transmission (E.T.) (Munro 1989)
L'ensemble de ces remarques démontre le caractère privilégié de l'erreur de transmission, en tant qu'indicateur du comportement, dans les études sur le comportement vibro-acoustique des transmissions par engrenages. Sa détermination expérimentale a fait l'objet de nombreux travaux et les techniques de mesure adaptées aux différents contextes de fonctionnement évoqués ci-dessus seront présentées au chapitre II.
13
0 2 4 6 8 10 12 14
90
92
94
96
98
100
102
104
dB Bruit = K (E.T.)
Bruit Max.
E.T. Max.
-3E.T. x 10 ins.
Figure I.3: Corrélation entre bruit rayonné et erreur de transmission (Thompson 1977) I.3 Principales sources d'excitations dans les transmissions par engrenages.
Le niveau d'excitation est bien entendu directement fonction de la puissance transmise.
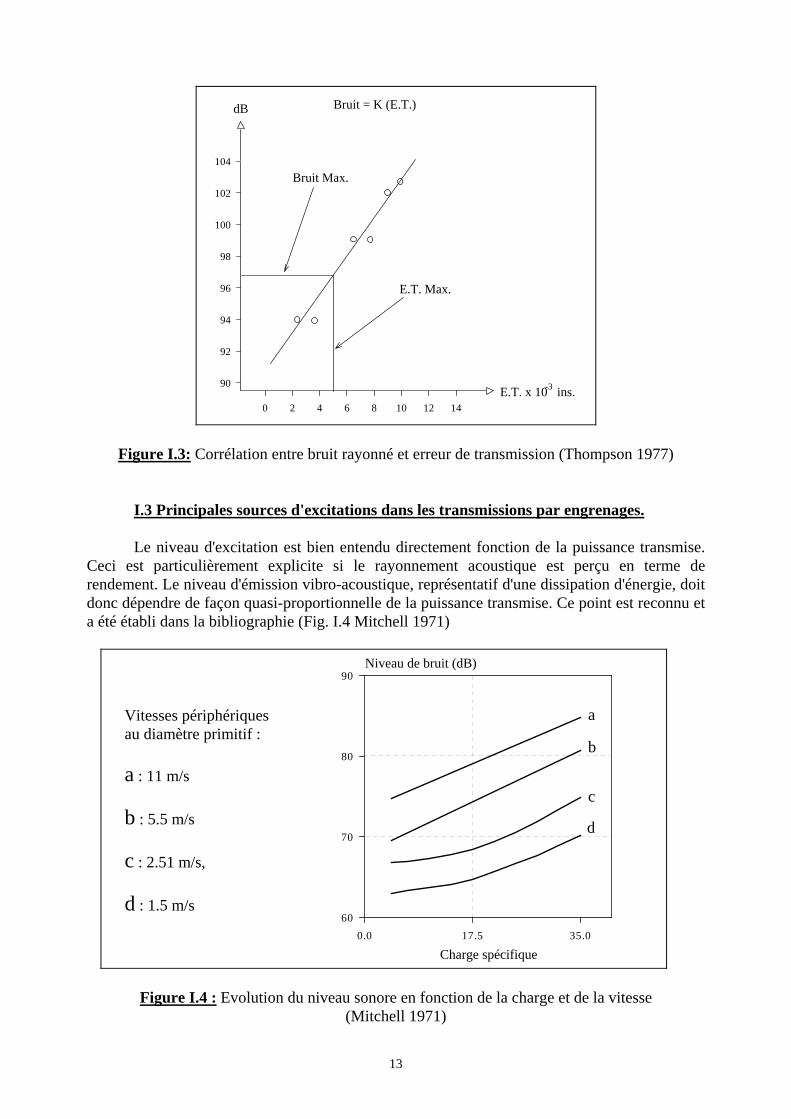
Ceci est particulièrement explicite si le rayonnement acoustique est perçu en terme de rendement. Le niveau d'émission vibro-acoustique, représentatif d'une dissipation d'énergie, doit donc dépendre de façon quasi-proportionnelle de la puissance transmise. Ce point est reconnu et a été établi dans la bibliographie (Fig. I.4 Mitchell 1971)
Vitesses périphériques au diamètre primitif : a : 11 m/s b : 5.5 m/s c : 2.51 m/s, d : 1.5 m/s
0.0 17.5 35.060
70
80
90
Charge spécifique
Niveau de bruit (dB)
a
b
c
d
Figure I.4 : Evolution du niveau sonore en fonction de la charge et de la vitesse
(Mitchell 1971)
14
Néanmoins, l'augmentation de puissance ne peut pas être perçue indifféremment comme une variation de couple ou de vitesse, ces paramètres ayant des effets différents. Rémond (1991) a montré expérimentalement que la vitesse est faiblement influente sur le niveau des harmoniques de la fréquence d'engrènement alors que son influence est déterminante sur le niveau global (RMS) du bruit rayonné. Inversement, le couple est principalement influent sur le niveau des harmoniques et peu sur le niveau global. Les fluctuations de la puissance transmise associées à des pulsations de couple ou de vitesse d'entraînement constituent une source d'excitation importante qui peut, en particulier en régime dynamique, avoir des conséquences importantes sur la durée de vie des dentures. Toutefois, les principales causes d'excitations répertoriées dans la bibliographie sont associées aux :
- déformations élastiques des dentures et de leurs supports, - erreurs de formes et de position résultant de la fabrication (erreur de pas, de distorsion, de profil, excentricités) ou de détériorations en cours d'utilisation (usure, pitting), - erreurs de position relative des engrenages (entraxe, désalignements).
Notons que de nombreux textes de synthèse, répertoriant les effets de ces paramètres sur le comportement acoustique et vibratoire des transmission par engrenages, ont été publiés. Le lecteur pourra se référer, en complément des informations données dans la suite du texte, à Rémond & col. (1993), Welbourn (1970,1972,1977,1979), Mark (1978, 1982, 1984, 1992), Thompson (1977, 1980), Mitchell (1969,1971).
15
II. Les déformations élastiques, principale source d'excitation à la fréquence d'engrènement.
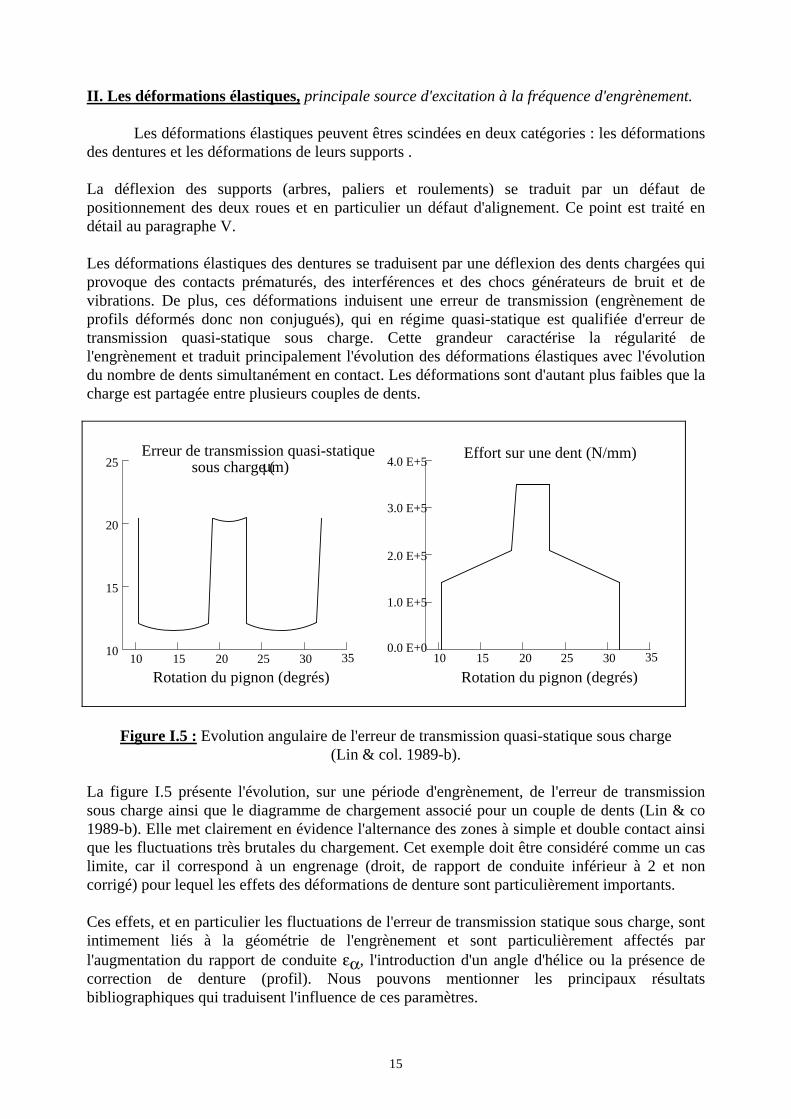
Les déformations élastiques peuvent êtres scindées en deux catégories : les déformations des dentures et les déformations de leurs supports . La déflexion des supports (arbres, paliers et roulements) se traduit par un défaut de positionnement des deux roues et en particulier un défaut d'alignement. Ce point est traité en détail au paragraphe V. Les déformations élastiques des dentures se traduisent par une déflexion des dents chargées qui provoque des contacts prématurés, des interférences et des chocs générateurs de bruit et de vibrations. De plus, ces déformations induisent une erreur de transmission (engrènement de profils déformés donc non conjugués), qui en régime quasi-statique est qualifiée d'erreur de transmission quasi-statique sous charge. Cette grandeur caractérise la régularité de l'engrènement et traduit principalement l'évolution des déformations élastiques avec l'évolution du nombre de dents simultanément en contact. Les déformations sont d'autant plus faibles que la charge est partagée entre plusieurs couples de dents.
Erreur de transmission quasi-statiquesous charge (µm)
Effort sur une dent (N/mm)
Rotation du pignon (degrés)Rotation du pignon (degrés)
25
20
15
10 10 15 20 25 30 35 10 15 20 25 30 35
4.0 E+5
3.0 E+5
2.0 E+5
1.0 E+5
0.0 E+0
Figure I.5 : Evolution angulaire de l'erreur de transmission quasi-statique sous charge (Lin & col. 1989-b).
La figure I.5 présente l'évolution, sur une période d'engrènement, de l'erreur de transmission sous charge ainsi que le diagramme de chargement associé pour un couple de dents (Lin & co 1989-b). Elle met clairement en évidence l'alternance des zones à simple et double contact ainsi que les fluctuations très brutales du chargement. Cet exemple doit être considéré comme un cas limite, car il correspond à un engrenage (droit, de rapport de conduite inférieur à 2 et non corrigé) pour lequel les effets des déformations de denture sont particulièrement importants. Ces effets, et en particulier les fluctuations de l'erreur de transmission statique sous charge, sont intimement liés à la géométrie de l'engrènement et sont particulièrement affectés par l'augmentation du rapport de conduite εα, l'introduction d'un angle d'hélice ou la présence de correction de denture (profil). Nous pouvons mentionner les principaux résultats bibliographiques qui traduisent l'influence de ces paramètres.
16
II.1 Rapport de conduite ε α et rapport de recouvrement ε β.
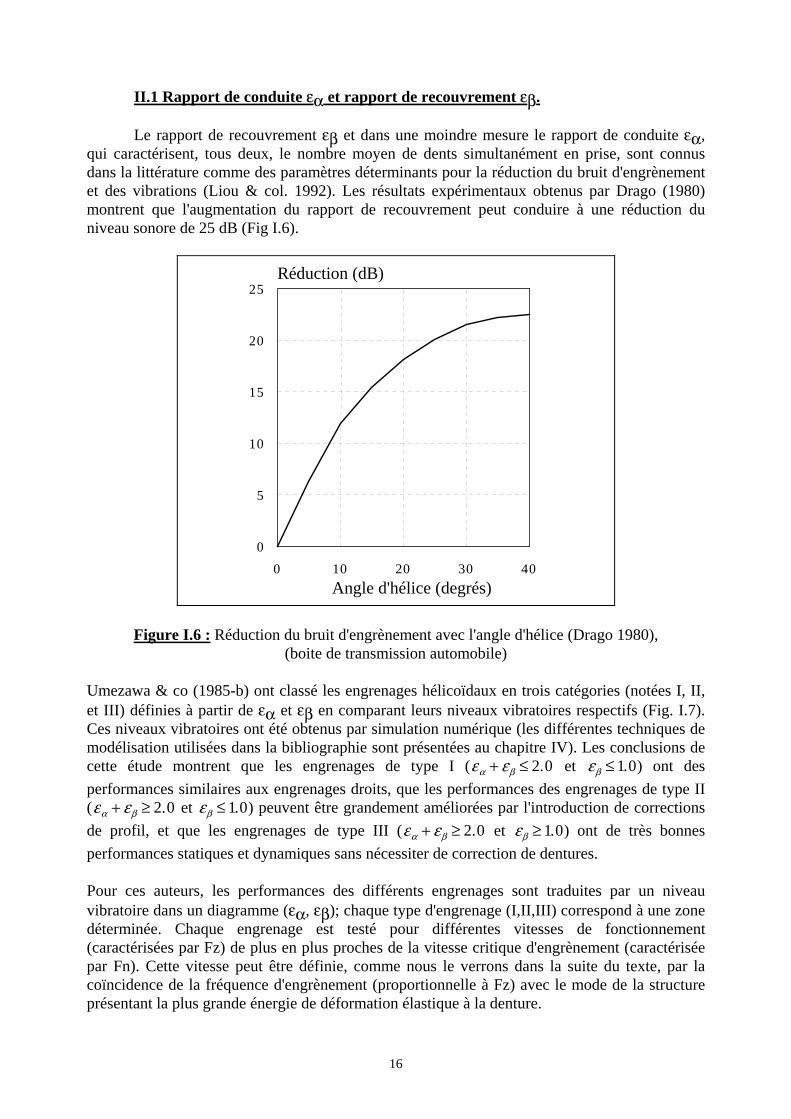
Le rapport de recouvrement εβ et dans une moindre mesure le rapport de conduite εα, qui caractérisent, tous deux, le nombre moyen de dents simultanément en prise, sont connus dans la littérature comme des paramètres déterminants pour la réduction du bruit d'engrènement et des vibrations (Liou & col. 1992). Les résultats expérimentaux obtenus par Drago (1980) montrent que l'augmentation du rapport de recouvrement peut conduire à une réduction du niveau sonore de 25 dB (Fig I.6).
0 10 20 30 400
5
10
15
20
25
Angle d'hélice (degrés)
Réduction (dB)
Figure I.6 : Réduction du bruit d'engrènement avec l'angle d'hélice (Drago 1980), (boite de transmission automobile)
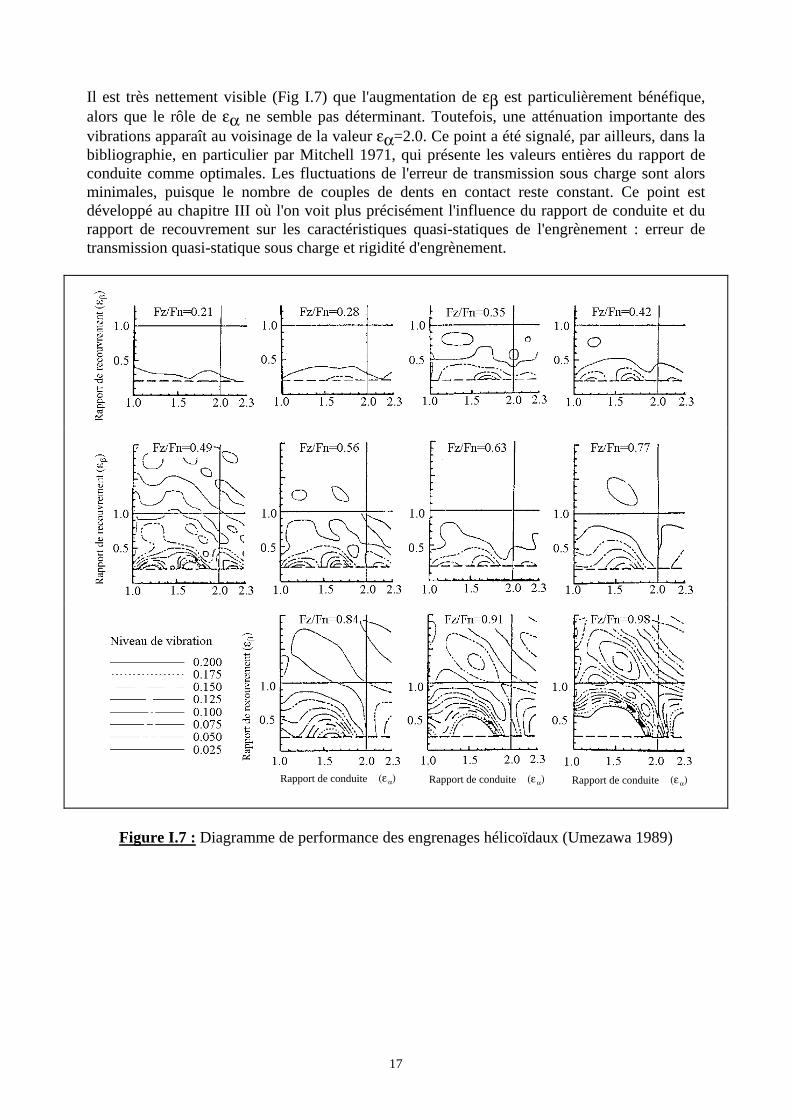
Umezawa & co (1985-b) ont classé les engrenages hélicoïdaux en trois catégories (notées I, II, et III) définies à partir de εα et εβ en comparant leurs niveaux vibratoires respectifs (Fig. I.7). Ces niveaux vibratoires ont été obtenus par simulation numérique (les différentes techniques de modélisation utilisées dans la bibliographie sont présentées au chapitre IV). Les conclusions de cette étude montrent que les engrenages de type I (ε εα β+ ≤ 2 0. et εβ ≤ 1 0. ) ont des performances similaires aux engrenages droits, que les performances des engrenages de type II (ε εα β+ ≥ 2 0. et εβ ≤ 1 0. ) peuvent être grandement améliorées par l'introduction de corrections de profil, et que les engrenages de type III (ε εα β+ ≥ 2 0. et εβ ≥ 1 0. ) ont de très bonnes performances statiques et dynamiques sans nécessiter de correction de dentures. Pour ces auteurs, les performances des différents engrenages sont traduites par un niveau vibratoire dans un diagramme (εα, εβ); chaque type d'engrenage (I,II,III) correspond à une zone déterminée. Chaque engrenage est testé pour différentes vitesses de fonctionnement (caractérisées par Fz) de plus en plus proches de la vitesse critique d'engrènement (caractérisée par Fn). Cette vitesse peut être définie, comme nous le verrons dans la suite du texte, par la coïncidence de la fréquence d'engrènement (proportionnelle à Fz) avec le mode de la structure présentant la plus grande énergie de déformation élastique à la denture.
17
Il est très nettement visible (Fig I.7) que l'augmentation de εβ est particulièrement bénéfique, alors que le rôle de εα ne semble pas déterminant. Toutefois, une atténuation importante des vibrations apparaît au voisinage de la valeur εα=2.0. Ce point a été signalé, par ailleurs, dans la bibliographie, en particulier par Mitchell 1971, qui présente les valeurs entières du rapport de conduite comme optimales. Les fluctuations de l'erreur de transmission sous charge sont alors minimales, puisque le nombre de couples de dents en contact reste constant. Ce point est développé au chapitre III où l'on voit plus précisément l'influence du rapport de conduite et du rapport de recouvrement sur les caractéristiques quasi-statiques de l'engrènement : erreur de transmission quasi-statique sous charge et rigidité d'engrènement.
(ε )αRapport de conduite (ε )αRapport de conduite (ε )αRapport de conduite
Figure I.7 : Diagramme de performance des engrenages hélicoïdaux (Umezawa 1989)
18
II.2 Corrections de denture.
L'expression "corrections de denture" regroupe l'ensemble des modifications volontaires effectuées sur les dentures pour améliorer leur comportement mécanique. Leur vocation initiale est essentiellement l'amélioration du comportement quasi-statique (Henriot 1986), mais leurs effets sur les fluctuations de l'erreur de transmission les font apparaître comme un paramètre déterminant pour la maîtrise du comportement acoustique et vibratoire. Les corrections les plus classiques sont effectuées suivant la largeur de denture (bombé et hélice) et suivant le profil. Les corrections de bombé sont introduites pour compenser les effets des désalignements en minimisant la délocalisation de portée et l'augmentation de la pression qui en résulte. Les corrections d'hélice sont introduites sur les engrenages larges ou hélicoïdaux pour compenser l'évolution de l'angle de torsion suivant la largeur de denture et recentrer la portée sous charge. Les corrections de profil ont, quant à elles, deux fonctions essentielles :
- supprimer les contacts prématurés et donc les chocs à l'entrée de l'engrènement, ce qui permet d'assurer une mise en charge progressive de chaque couple de dents, - diminuer les fluctuations de l'erreur de transmission quasi-statique sous charge et donc les irrégularités de l'engrènement, en particulier pour les engrenages droits ou d'angle d'hélice faible.
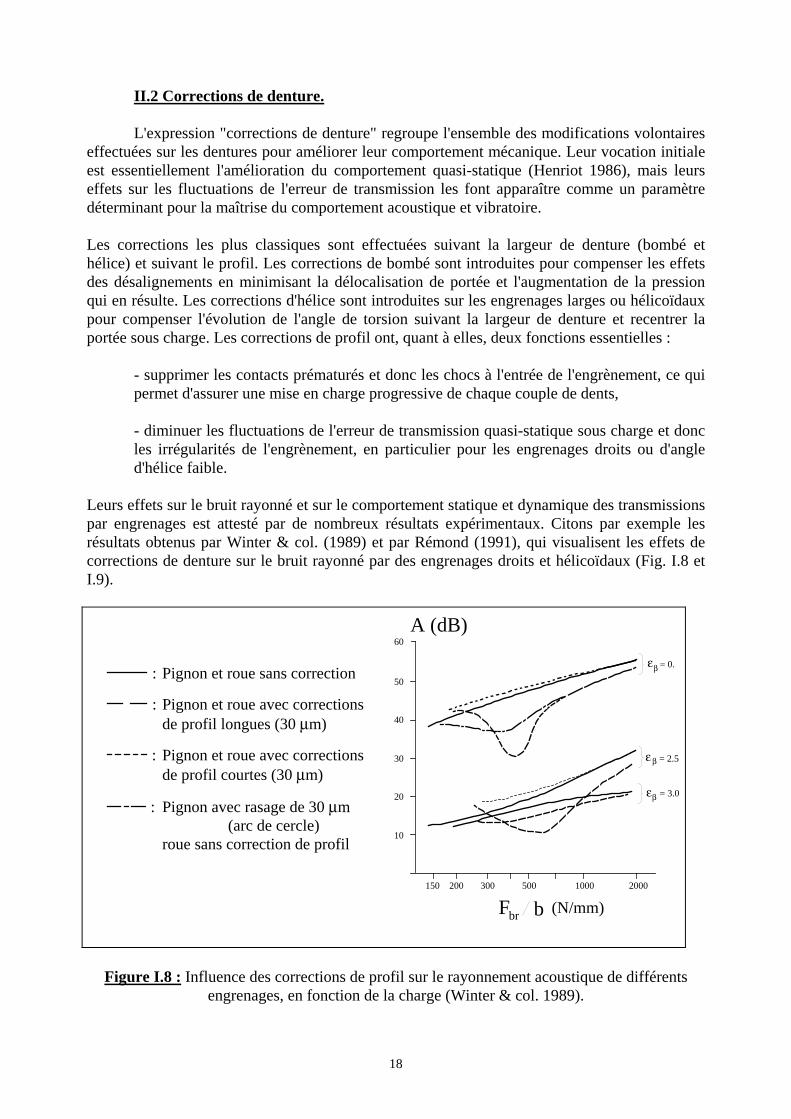
Leurs effets sur le bruit rayonné et sur le comportement statique et dynamique des transmissions par engrenages est attesté par de nombreux résultats expérimentaux. Citons par exemple les résultats obtenus par Winter & col. (1989) et par Rémond (1991), qui visualisent les effets de corrections de denture sur le bruit rayonné par des engrenages droits et hélicoïdaux (Fig. I.8 et I.9). : Pignon et roue sans correction
: Pignon et roue avec corrections de profil longues (30 µm)
: Pignon et roue avec corrections de profil courtes (30 µm)
: Pignon avec rasage de 30 µm (arc de cercle) roue sans correction de profil
150 200 300 500 1000 2000
10
20
30
40
50
60
Fbr b (N/mm)
A (dB)
εβ = 0.
εβ = 2.5
εβ = 3.0
Figure I.8 : Influence des corrections de profil sur le rayonnement acoustique de différents engrenages, en fonction de la charge (Winter & col. 1989).
19
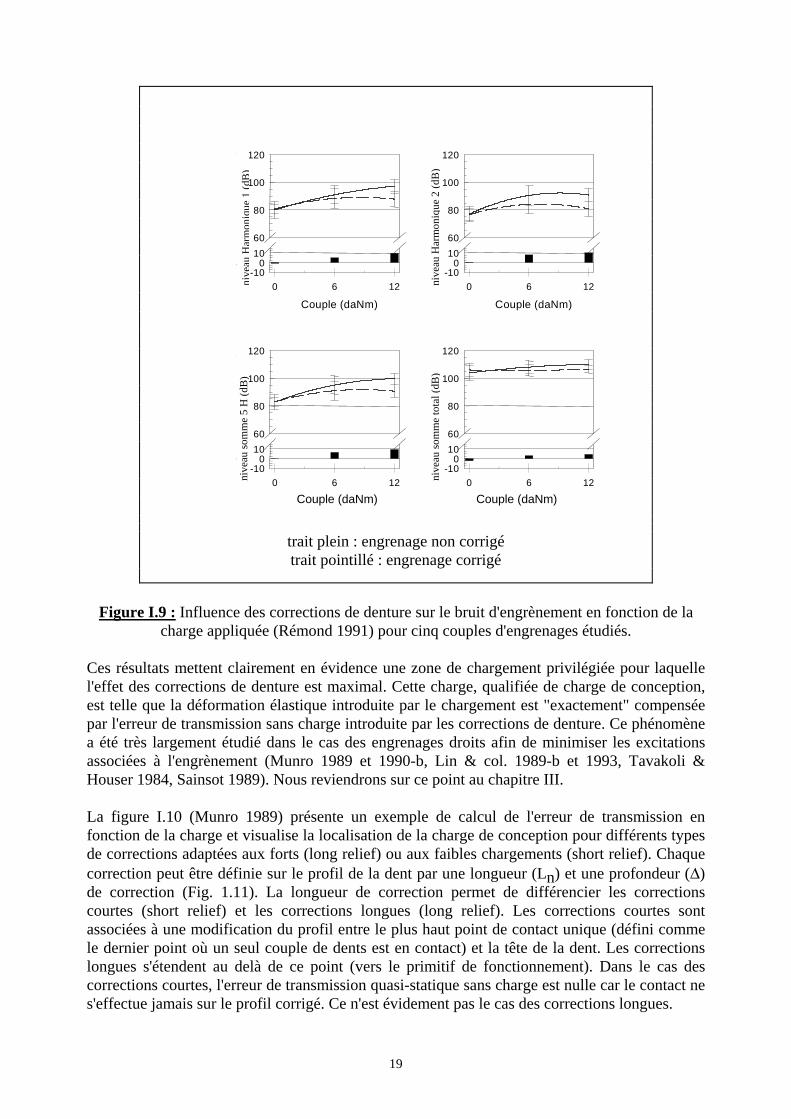
trait plein : engrenage non corrigé trait pointillé : engrenage corrigé
Figure I.9 : Influence des corrections de denture sur le bruit d'engrènement en fonction de la
charge appliquée (Rémond 1991) pour cinq couples d'engrenages étudiés. Ces résultats mettent clairement en évidence une zone de chargement privilégiée pour laquelle l'effet des corrections de denture est maximal. Cette charge, qualifiée de charge de conception, est telle que la déformation élastique introduite par le chargement est "exactement" compensée par l'erreur de transmission sans charge introduite par les corrections de denture. Ce phénomène a été très largement étudié dans le cas des engrenages droits afin de minimiser les excitations associées à l'engrènement (Munro 1989 et 1990-b, Lin & col. 1989-b et 1993, Tavakoli & Houser 1984, Sainsot 1989). Nous reviendrons sur ce point au chapitre III. La figure I.10 (Munro 1989) présente un exemple de calcul de l'erreur de transmission en fonction de la charge et visualise la localisation de la charge de conception pour différents types de corrections adaptées aux forts (long relief) ou aux faibles chargements (short relief). Chaque correction peut être définie sur le profil de la dent par une longueur (Ln) et une profondeur (∆) de correction (Fig. 1.11). La longueur de correction permet de différencier les corrections courtes (short relief) et les corrections longues (long relief). Les corrections courtes sont associées à une modification du profil entre le plus haut point de contact unique (défini comme le dernier point où un seul couple de dents est en contact) et la tête de la dent. Les corrections longues s'étendent au delà de ce point (vers le primitif de fonctionnement). Dans le cas des corrections courtes, l'erreur de transmission quasi-statique sans charge est nulle car le contact ne s'effectue jamais sur le profil corrigé. Ce n'est évidement pas le cas des corrections longues.
0 6 1 2 Niveausonoretotal(dB)
-100
1060
80
100
120
0 6 12N iveausom m e5H (dB)
- 1 0 0
1 0 6 0
8 0
1 0 0
1 2 0
Couple (daN m ) 0 6 1 2
Niveauharmonique2(dB)
-100
1060
80
100
120
C o u ple (daNm)
0 6 12niveauH arm onique1(dB)
- 1 0 0 1 0 6 0
8 0
1 0 0
1 2 0
nive
auH
arm
oniq
ue1
(dB
)
nive
au H
arm
oniq
ue 2
(dB
)
nive
au so
mm
e 5
H (d
B)
nive
au so
mm
e to
tal (
dB)
Couple (daNm) Couple (daNm)

20
Corrections longues
Corrections courtes
Sans chargeCharge 1
Charge 2Charge 3
Sans charge
Charge 1
Charge 2Charge 3
Sans charge
Charge 1
Charge 2Charge 3
Erreur de transmission( > 0. si écrasement de matière)
Sans correction
Figure I.10 : Evolution de l'erreur de transmission en fonction de la charge (Munro 1989), influence des corrections de denture.
Profondeur de correction, ∆
Profil initial (développante de
Longueur decorrection, Ln
Plus haut pointde contactunique, HPCI
Point primitif
Plus bas pointde contactunique, BPCI
Profil modifi
0.40.81.21.62.00
10
20
30
Longueur de correction normalisée, Ln
16 18 20 22 24 26 28Evolution de l'engrènement (deg)
Pointprimitif
HPCIBPCI
Parabolique
Linéaire
Profondeur de correction
0.0
0.5
1.0
1.5µ( m)Réelle Normalisée ( )∆
Figure I.11 : Différents types de corrections de profil pour les engrenages cylindriques en développante de cercle (Lin & col. 1989-a).
21
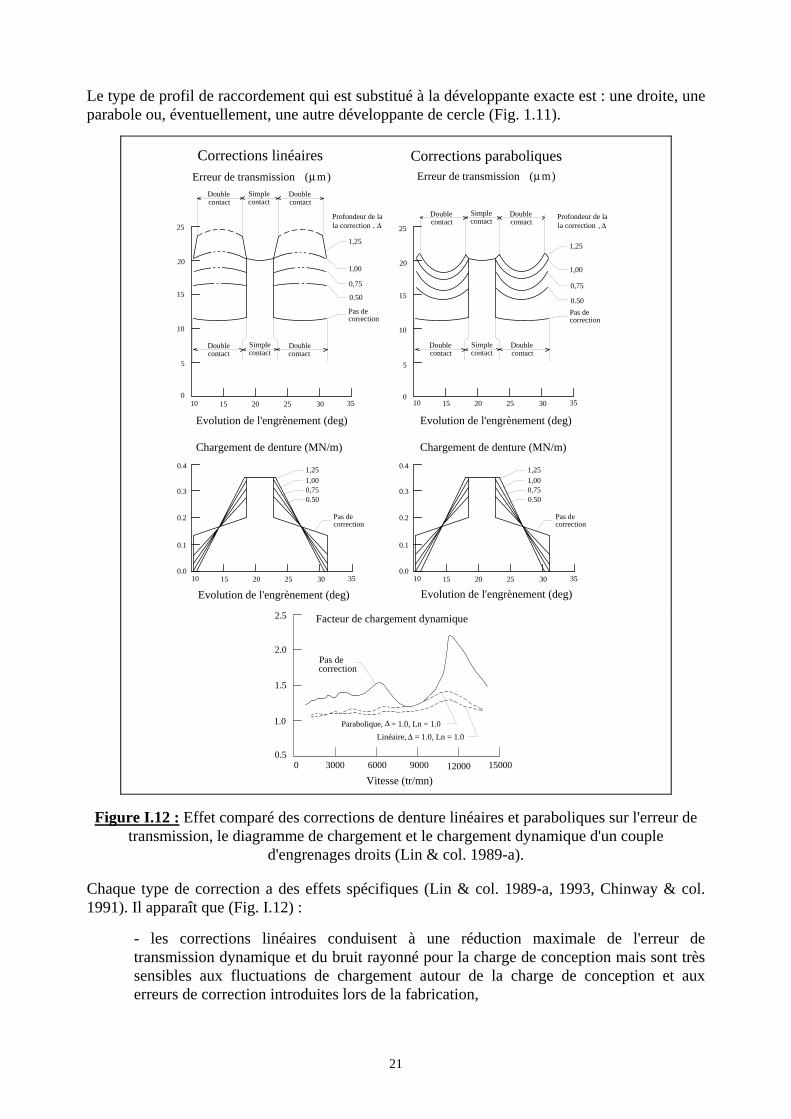
Le type de profil de raccordement qui est substitué à la développante exacte est : une droite, une parabole ou, éventuellement, une autre développante de cercle (Fig. 1.11).
Simplecontact
Doublecontact
Doublecontact
Doublecontact
Doublecontact
Doublecontact
Simplecontact
Doublecontact
Doublecontact
Doublecontact
Profondeur de lala correction ∆,
1,25
1,00
0,75
Pas de correction
Profondeur de lala correction ∆,
1,25
1,00
0,750.50 0.50
Pas de correction
0
5
10
15
20
25
0
5
10
15
20
25
10 15 20 25 30 35 10 15 20 25 30 35
Simplecontact
Simplecontact
Erreur de transmission ( m)µ Erreur de transmission ( m)µ
Evolution de l'engrènement (deg) Evolution de l'engrènement (deg)
1,251,000,75
Pas de correction
0.50
10 15 20 25 30 35
0.4
0.3
0.2
0.1
0.0
Chargement de denture (MN/m)
1,251,000,75
Pas de correction
0.50
10 15 20 25 30 35
0.4
0.3
0.2
0.1
0.0
Chargement de denture (MN/m)
Evolution de l'engrènement (deg)Evolution de l'engrènement (deg)
Corrections linéaires Corrections paraboliques
30000 6000 9000 12000 150000.5
1.0
1.5
2.0
2.5
Pas decorrection
Parabolique, = 1.0, Ln = 1.0Linéaire, = 1.0, Ln = 1.0
∆∆
Vitesse (tr/mn)
Facteur de chargement dynamique
Figure I.12 : Effet comparé des corrections de denture linéaires et paraboliques sur l'erreur de transmission, le diagramme de chargement et le chargement dynamique d'un couple
d'engrenages droits (Lin & col. 1989-a).
Chaque type de correction a des effets spécifiques (Lin & col. 1989-a, 1993, Chinway & col. 1991). Il apparaît que (Fig. I.12) :
- les corrections linéaires conduisent à une réduction maximale de l'erreur de transmission dynamique et du bruit rayonné pour la charge de conception mais sont très sensibles aux fluctuations de chargement autour de la charge de conception et aux erreurs de correction introduites lors de la fabrication,
22
- les corrections paraboliques sont, au contraire, peu sensibles aux erreurs de correction et aux fluctuations de chargement, et conduisent à une réduction comparable bien que légèrement plus faible de l'erreur de transmission et du bruit rayonné,
- les corrections paraboliques nécessitent une longueur (Ln) et une profondeur (∆) de correction plus importante pour produire des effets comparables à ceux des corrections linéaires,
- les deux types de corrections ont les mêmes effets sur le diagramme de chargement d'un couple de dents isolé; ils assurent une mise en charge progressive et sans choc.
0
20
40
1020
3040
5060
7080
20
40
Longueurd'action (mm)
Valeur decorrection ( m)µ
Largeurde denture (mm)
Correction de denture tridimensionnelle,
cas d'un engrenage hélicoïdal.
degrés de liberté :
utiles à la description
Constantes de l'étudeconditionsd'engrènementdéformationscouple extérieurerreurs géométriques
quantité à optimiser :
analyse du contact sous charge
des éléments finis
conditions à respecter :
rapport de conduite
des dentures par la méthode
conditions d'engrènement
conditions de contact etpossibilité d'usinage
optimisation de la correction de denture :
calcul variationelmodification de la
topographie de correctionanalyse du processus
de convergence
critères de choix :
distribution de la chargeet de la pression sur l'airede contact
erreur de transmissionsous charge
objectifs :
augmentation de lacapacité de chargesensibilité aux déplacements faible
faibles
nombre de variables
de la correction correction de denture
excitations dynamiques
Structure du processus de conception des
corrections de denture.
br .ϕ
σH = 2000 N/mm2
br .ϕ
Correction 3-D
Sans correction
distribution de pression.
Données géométriques :
mn = 7 mm Z1 = 27 Z2 = 28
X1 = -0.006 X2 = -0.031 εα = 1.55 εβ = 1.00 αn= 20 ° β = 16 °
b = 78.8 mm a = 200 mm
T1 = 4820. N.m
12.5
15.0
17.5
20.0
22.5
0
20
40
60
80
500
750
1000
1500
1250
Angle d'engrènement
Rigidité de denture globale C (N/mm. m)γ µ
Effort total à la denture F/F (%)tb
Pression de contact maximale (N/mm )σh2
noncorrigé
corrigé
noncorrigé
corrigé
corrigé
noncorrigé
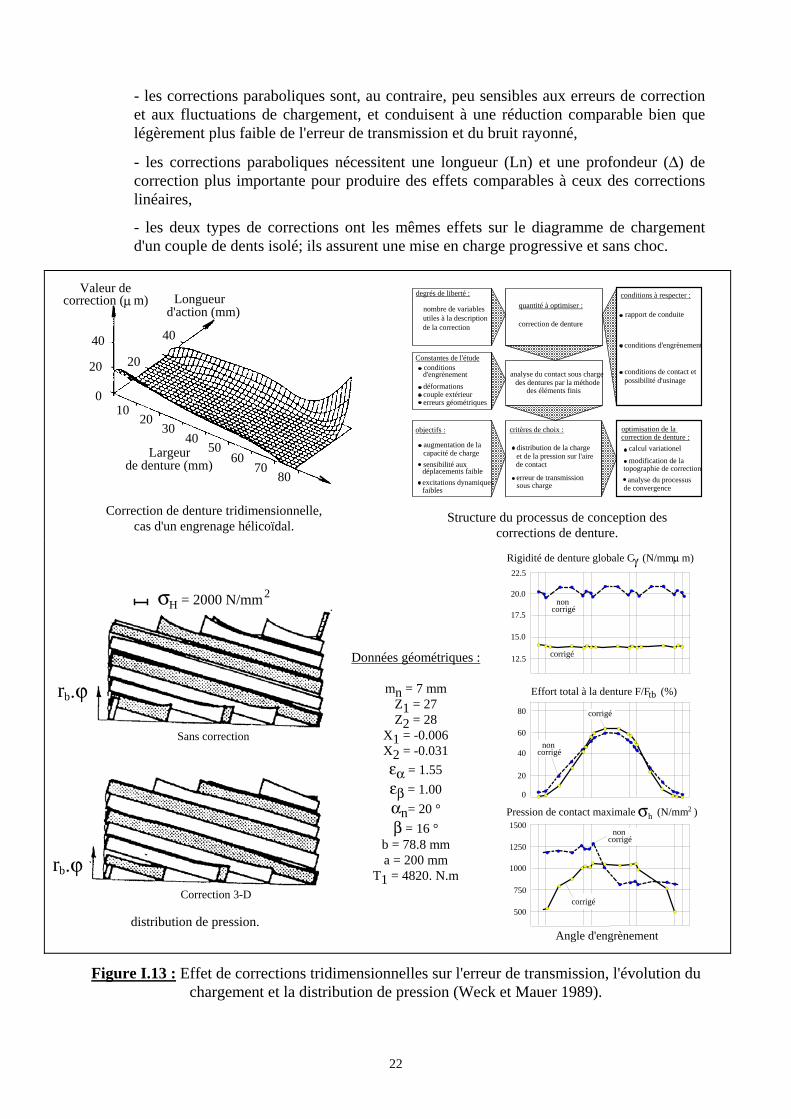
Figure I.13 : Effet de corrections tridimensionnelles sur l'erreur de transmission, l'évolution du chargement et la distribution de pression (Weck et Mauer 1989).

23
Notons également les travaux de Weck & Mauer (1989), Weck & Wittke (1991) qui ont étudié l'effet de corrections tridimensionnelles sur des engrenages hélicoïdaux (Fig. I.13) et ont analysé l'influence de différents procédés de fabrication sur les résultats obtenus. Cette analyse, très réaliste, permet d'optimiser les corrections de dentures en tenant compte des problèmes de fabrication qui sont déterminants compte tenu des faibles valeurs de ces corrections (quelques µm). Cette approche a également été adoptée par d'autres auteurs (Sundaresan & col. 1991). Au total, si les fluctuations de l'erreur de transmission quasi-statique sous charge peuvent être très efficacement compensées par les corrections de denture, l'erreur de transmission ainsi obtenue présente toujours des fluctuations résiduelles, en particulier pour les engrenages droits. Leurs effets sur le comportement dynamique du système ne peuvent pas être connus a priori. Ce point est signalé dans la bibliographie (Sainsot 1989), (Rémond & col. 1993) mais les résultats expérimentaux obtenus sur le bruit d'engrènement montrent que cet effet résiduel est du second ordre et mettent clairement en évidence l'intérêt des corrections de dentures.

24
III. La rigidité d'engrènement, et zones d'instabilité.
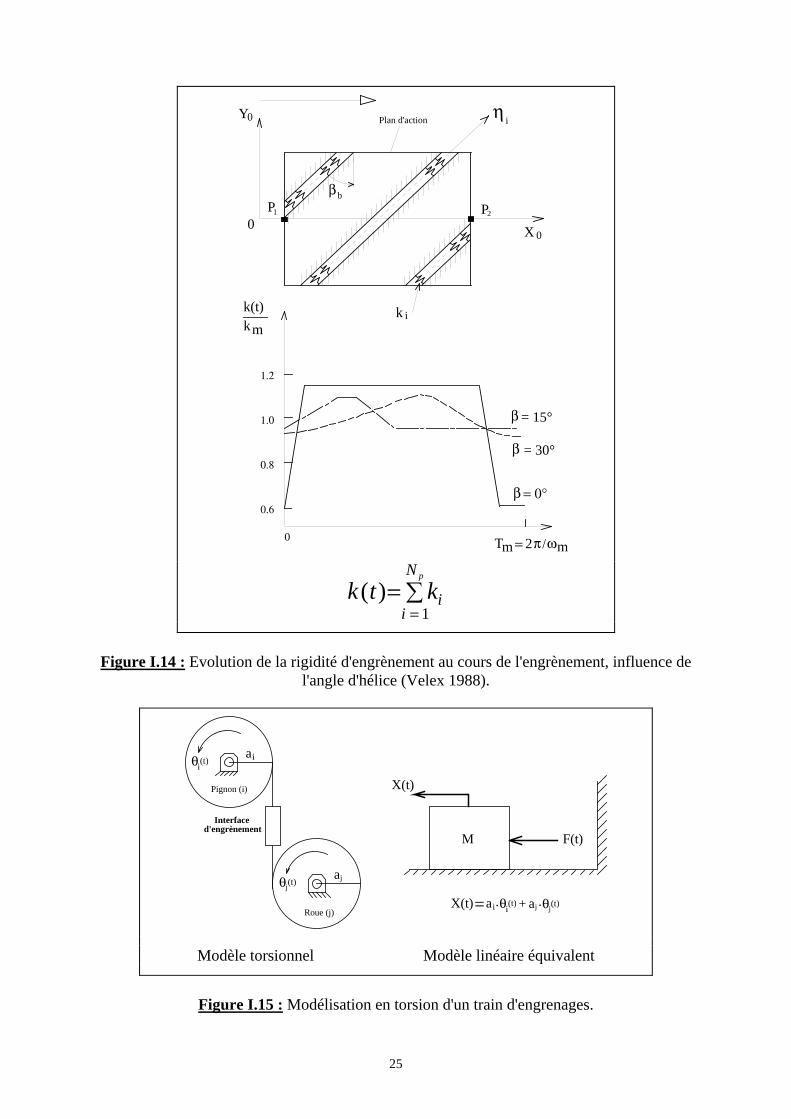
L'évolution du nombre de dents en contact est également responsable de l'évolution de la rigidité globale de l'engrènement. Cette grandeur est intimement liée à l'erreur de transmission statique sous charge et lui est inversement proportionnelle dans le cas d'un engrenage ne présentant pas de défaut géométrique et soumis à un chargement constant. Elle est donc logiquement dépendante des paramètres géométriques de l'engrènement. La figure I.14 présente un exemple d'évolution de la rigidité d'engrènement pour des engrenages droits et hélicoïdaux, et visualise très clairement l'influence de l'introduction d'un angle d'hélice. Ces résultats ont été obtenus par Velex (1988) à partir de la rigidité linéique de denture en traduisant l'évolution de la longueur de contact instantanée déterminée par la cinématique sans charge d'un couple d'engrenages cylindriques.
Les différentes techniques de calcul utilisées dans la bibliographie pour le calcul de la rigidité d'engrènement sont présentées au chapitre III. Cette grandeur est une source d'excitation interne, harmonique à la fréquence d'engrènement, et ses fluctuations sont à l'origine de l'apparition de plages de fonctionnement critique (Velex 1988) caractérisées par des vibrations de grande amplitude et une augmentation importante du bruit rayonné. Les modélisations utilisées dans la littérature pour localiser ces plages de fonctionnement et caractériser le comportement dynamique des transmissions par engrenages sont présentées au chapitre IV. Toutefois, les modélisations simples à un seul degré de liberté en torsion, qui sont historiquement les premières à avoir été utilisées (Özguven & Houser 1988-a), permettent de mettre ce phénomène en évidence et d'isoler les causes de son apparition. Le comportement d'un système à un degré de liberté comportant une raideur variable (Fig. I.15) est gouverné par une équation différentielle à coefficients périodiques (équation de Mathieu-Hill) de la forme:
MX K t X F( )+ = Ce type d'équation présente la particularité de posséder des zones d'instabilité (qualifiées de paramétrique) où, en l'absence d'amortissement, la réponse diverge rapidement (Gibert 1988). Dans notre cas, K(t) peut se mettre sous la forme :
K t K K tm a( ) ( )= +
où Km est la valeur moyenne et K ta ( ) est périodique de pulsation ω (pulsation d'engrènement qui est directement proportionnelle à la vitesse de rotation). Les instabilités (Bergé & col. 1988) sont situées aux régimes de fonctionnement tels que :
ωω0
1=n
avec n entier positif et ω02 = K
Mm .
La figure I.16 représente la zone d'instabilité principale (n=1) dans le cas particulier où :
K t K ta a( ) sin( . )= ω .
25
= 15°β
= 30°β
= 0°β
k(t)km
Tm m2 ωπ= /0
0.6
0.8
1.0
1.2
P
Y0
X 0
P1 2
k i
Plan d'action η i
βb
0
k t kii
N p
( )= ∑= 1
Figure I.14 : Evolution de la rigidité d'engrènement au cours de l'engrènement, influence de
l'angle d'hélice (Velex 1988).
Interfaced'engrènement
Pignon (i)
θi(t)ai
Roue (j)
θ (t)jaj
X(t)
M F(t)
X(t)=ai aj θ (t)jθi(t). + .
Modèle torsionnel Modèle linéaire équivalent
Figure I.15 : Modélisation en torsion d'un train d'engrenages.
26
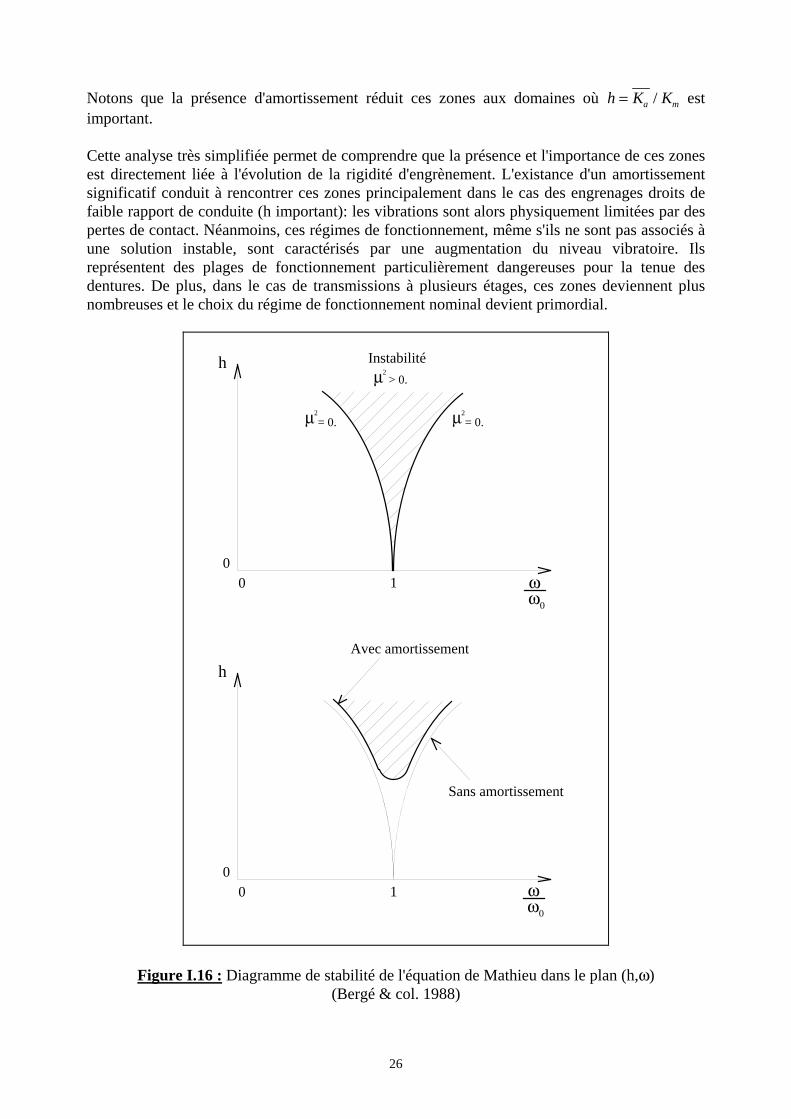
Notons que la présence d'amortissement réduit ces zones aux domaines où h K Ka m= / est important. Cette analyse très simplifiée permet de comprendre que la présence et l'importance de ces zones est directement liée à l'évolution de la rigidité d'engrènement. L'existance d'un amortissement significatif conduit à rencontrer ces zones principalement dans le cas des engrenages droits de faible rapport de conduite (h important): les vibrations sont alors physiquement limitées par des pertes de contact. Néanmoins, ces régimes de fonctionnement, même s'ils ne sont pas associés à une solution instable, sont caractérisés par une augmentation du niveau vibratoire. Ils représentent des plages de fonctionnement particulièrement dangereuses pour la tenue des dentures. De plus, dans le cas de transmissions à plusieurs étages, ces zones deviennent plus nombreuses et le choix du régime de fonctionnement nominal devient primordial.
Instabilitéµ2
> 0.
µ2= 0.µ2
= 0.
h
ωω0
00
h
00 ω
ω0
Avec amortissement
Sans amortissement
1
1
Figure I.16 : Diagramme de stabilité de l'équation de Mathieu dans le plan (h,ω) (Bergé & col. 1988)
27
IV. Erreurs de forme et de position, niveau des harmoniques d'engrènement et bandes latérales.
Les défauts géométriques dont nous allons présenter les effets dans ce paragraphe sont généralement générés lors de la fabrication des dentures, de l'assemblage des roues dentées sur leurs supports ou lors du fonctionnement (usure). Ils sont caractéristiques de la qualité de réalisation de la denture et, au travers de l'erreur de transmission quasi-statique, conduisent à définir la classe de qualité d'une denture suivant des normes (AGMA, ISO). Ces classes ne peuvent être que très approximativement représentatives d'un niveau vibratoire ou acoustique, car l'ensemble des phénomènes associés aux déformations élastiques et au positionnement relatif des roues dentées ne sont pas pris en compte. Toutefois, une denture présentant des défauts importants, et donc répertoriée comme telle dans la norme, produira des niveaux acoustiques et vibratoires élevés. Le contraire n'est pas nécessairement vrai et certains exemples signalés dans la bibliographie le prouvent.
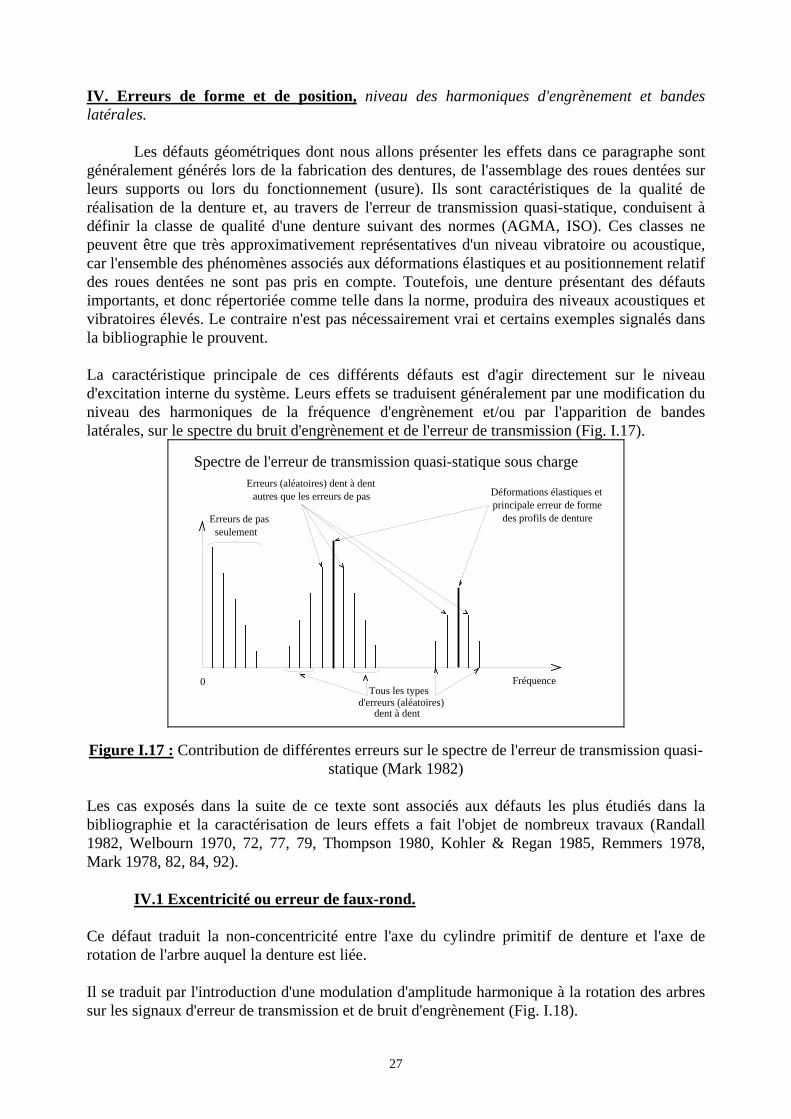
La caractéristique principale de ces différents défauts est d'agir directement sur le niveau d'excitation interne du système. Leurs effets se traduisent généralement par une modification du niveau des harmoniques de la fréquence d'engrènement et/ou par l'apparition de bandes latérales, sur le spectre du bruit d'engrènement et de l'erreur de transmission (Fig. I.17).
0
Spectre de l'erreur de transmission quasi-statique sous charge
Erreurs de passeulement
Erreurs (aléatoires) dent à dentautres que les erreurs de pas Déformations élastiques et
principale erreur de formedes profils de denture
Tous les typesd'erreurs (aléatoires)
dent à dent
Fréquence
Figure I.17 : Contribution de différentes erreurs sur le spectre de l'erreur de transmission quasi-statique (Mark 1982)
Les cas exposés dans la suite de ce texte sont associés aux défauts les plus étudiés dans la bibliographie et la caractérisation de leurs effets a fait l'objet de nombreux travaux (Randall 1982, Welbourn 1970, 72, 77, 79, Thompson 1980, Kohler & Regan 1985, Remmers 1978, Mark 1978, 82, 84, 92).
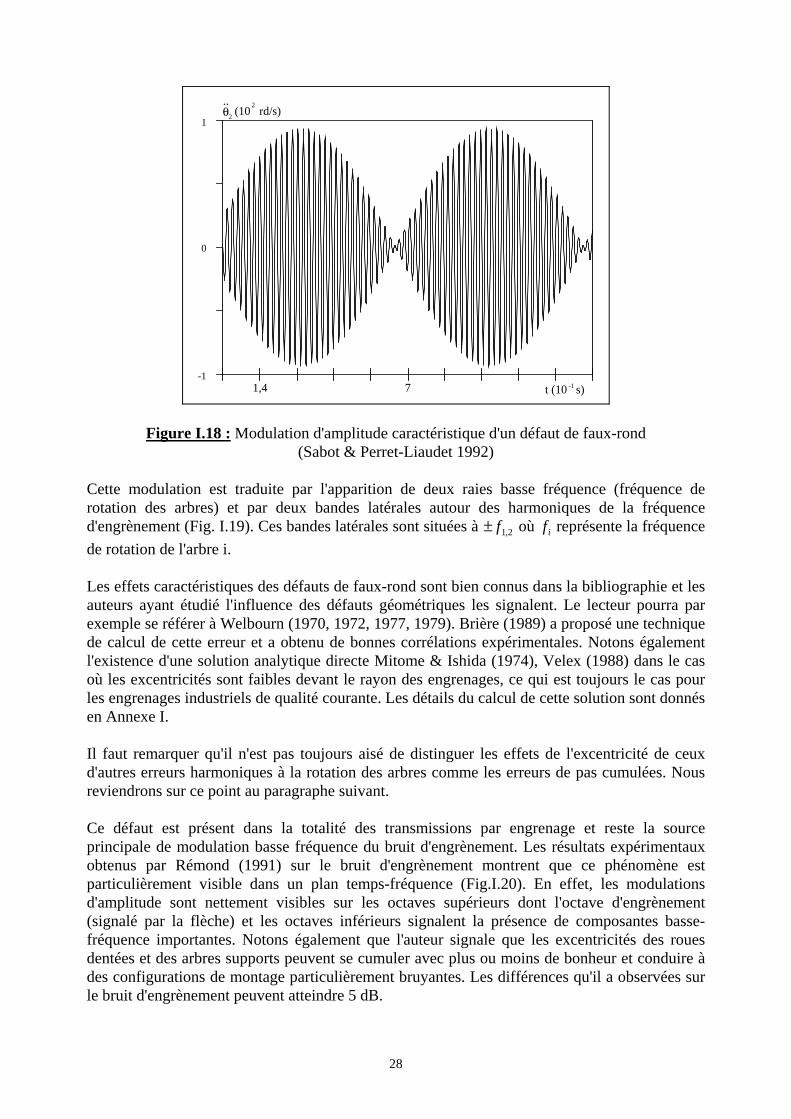
IV.1 Excentricité ou erreur de faux-rond. Ce défaut traduit la non-concentricité entre l'axe du cylindre primitif de denture et l'axe de rotation de l'arbre auquel la denture est liée. Il se traduit par l'introduction d'une modulation d'amplitude harmonique à la rotation des arbres sur les signaux d'erreur de transmission et de bruit d'engrènement (Fig. I.18).
28
1,4 7 t (10 s)-1-1
0
1θ2 (10 rd/s)2..
Figure I.18 : Modulation d'amplitude caractéristique d'un défaut de faux-rond (Sabot & Perret-Liaudet 1992)
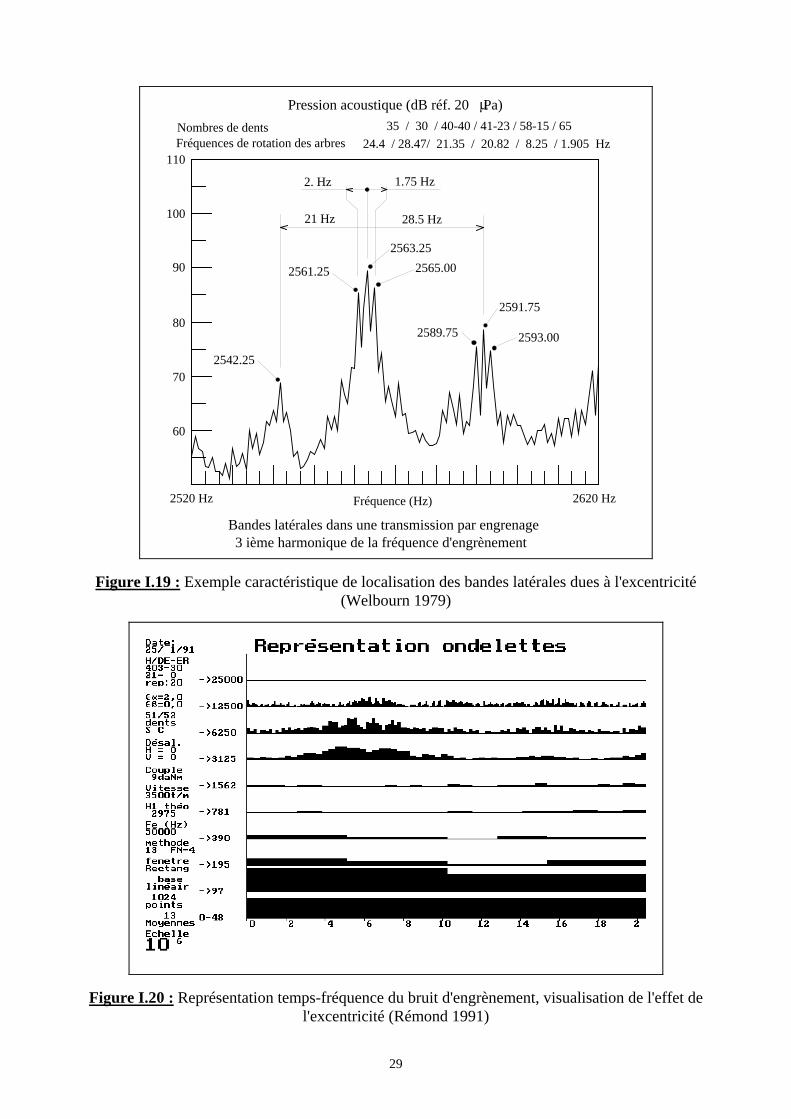
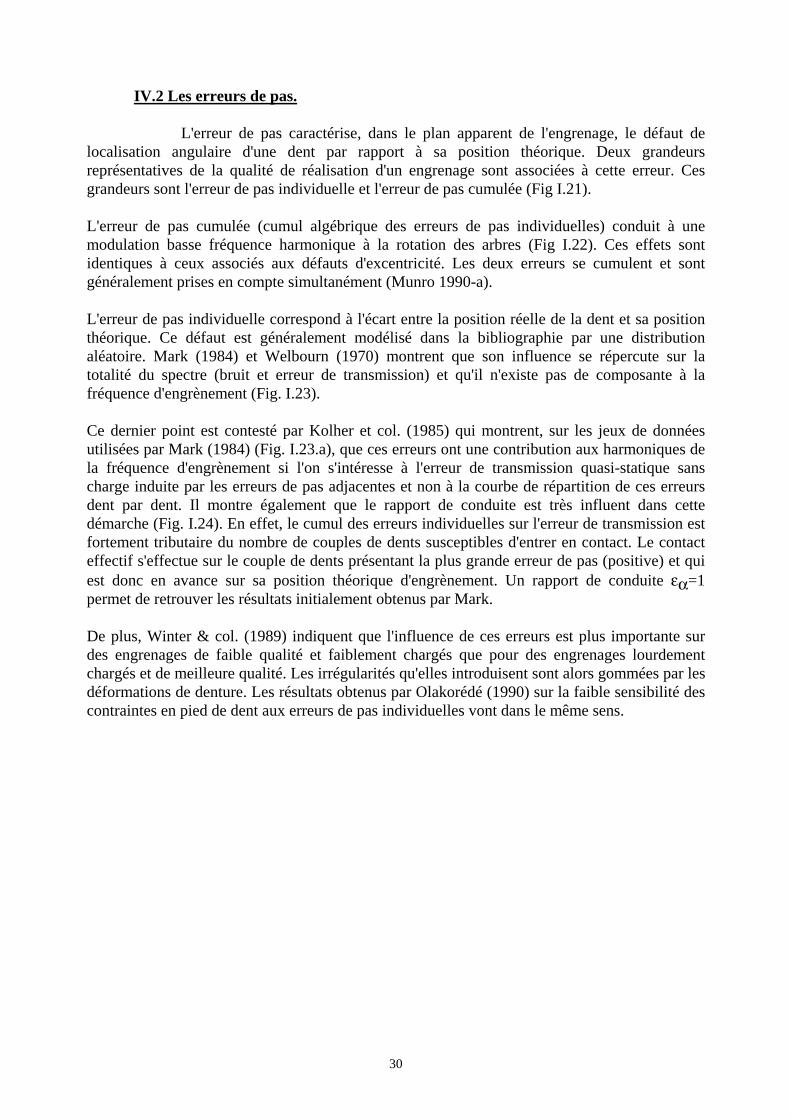
Cette modulation est traduite par l'apparition de deux raies basse fréquence (fréquence de rotation des arbres) et par deux bandes latérales autour des harmoniques de la fréquence d'engrènement (Fig. I.19). Ces bandes latérales sont situées à ± f1 2, où fi représente la fréquence de rotation de l'arbre i. Les effets caractéristiques des défauts de faux-rond sont bien connus dans la bibliographie et les auteurs ayant étudié l'influence des défauts géométriques les signalent. Le lecteur pourra par exemple se référer à Welbourn (1970, 1972, 1977, 1979). Brière (1989) a proposé une technique de calcul de cette erreur et a obtenu de bonnes corrélations expérimentales. Notons également l'existence d'une solution analytique directe Mitome & Ishida (1974), Velex (1988) dans le cas où les excentricités sont faibles devant le rayon des engrenages, ce qui est toujours le cas pour les engrenages industriels de qualité courante. Les détails du calcul de cette solution sont donnés en Annexe I. Il faut remarquer qu'il n'est pas toujours aisé de distinguer les effets de l'excentricité de ceux d'autres erreurs harmoniques à la rotation des arbres comme les erreurs de pas cumulées. Nous reviendrons sur ce point au paragraphe suivant. Ce défaut est présent dans la totalité des transmissions par engrenage et reste la source principale de modulation basse fréquence du bruit d'engrènement. Les résultats expérimentaux obtenus par Rémond (1991) sur le bruit d'engrènement montrent que ce phénomène est particulièrement visible dans un plan temps-fréquence (Fig.I.20). En effet, les modulations d'amplitude sont nettement visibles sur les octaves supérieurs dont l'octave d'engrènement (signalé par la flèche) et les octaves inférieurs signalent la présence de composantes basse-fréquence importantes. Notons également que l'auteur signale que les excentricités des roues dentées et des arbres supports peuvent se cumuler avec plus ou moins de bonheur et conduire à des configurations de montage particulièrement bruyantes. Les différences qu'il a observées sur le bruit d'engrènement peuvent atteindre 5 dB.
29
2561.25
2563.252565.00
2542.25
2589.75 2593.00
2591.75
1.75 Hz2. Hz
28.5 Hz21 Hz
2620 Hz2520 Hz Fréquence (Hz)
Pression acoustique (dB réf. 20 Pa)µNombres de dents Fréquences de rotation des arbres
35 / 30 / 40-40 / 41-23 / 58-15 / 6524.4 / 28.47/ 21.35 / 20.82 / 8.25 / 1.905 Hz
110
100
90
80
70
60
Bandes latérales dans une transmission par engrenage3 ième harmonique de la fréquence d'engrènement
Figure I.19 : Exemple caractéristique de localisation des bandes latérales dues à l'excentricité (Welbourn 1979)
Figure I.20 : Représentation temps-fréquence du bruit d'engrènement, visualisation de l'effet de l'excentricité (Rémond 1991)
30
IV.2 Les erreurs de pas.
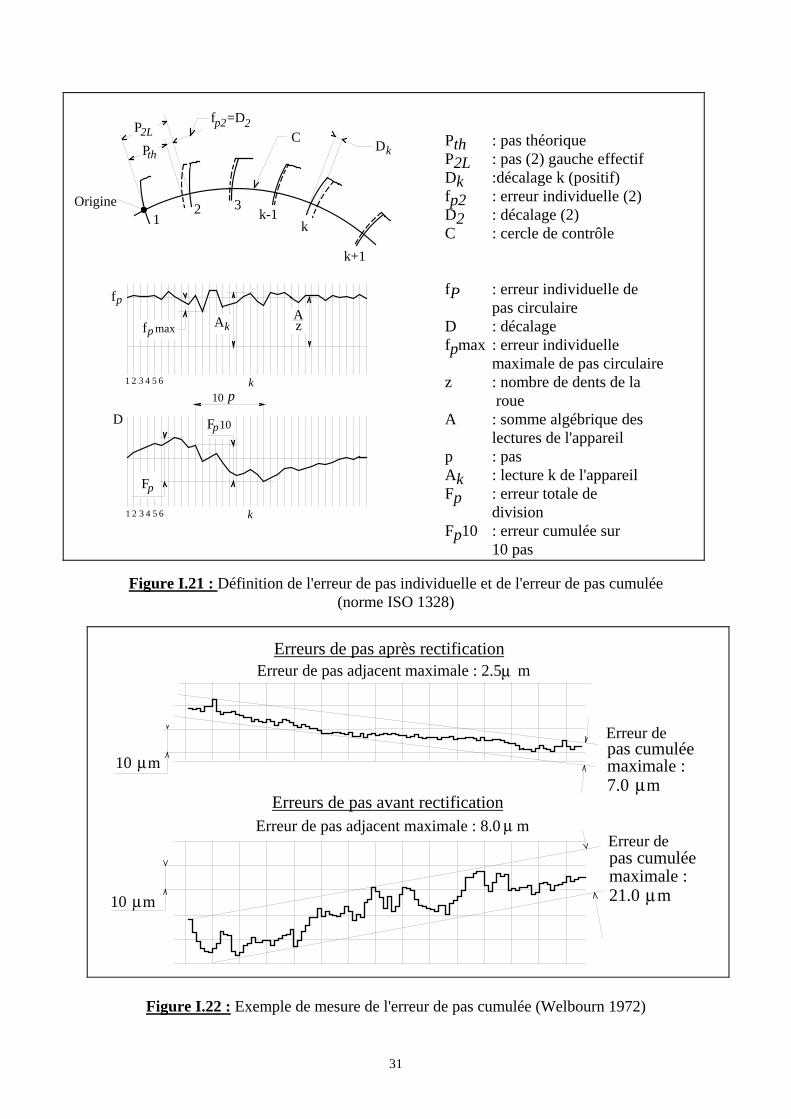
L'erreur de pas caractérise, dans le plan apparent de l'engrenage, le défaut de localisation angulaire d'une dent par rapport à sa position théorique. Deux grandeurs représentatives de la qualité de réalisation d'un engrenage sont associées à cette erreur. Ces grandeurs sont l'erreur de pas individuelle et l'erreur de pas cumulée (Fig I.21).
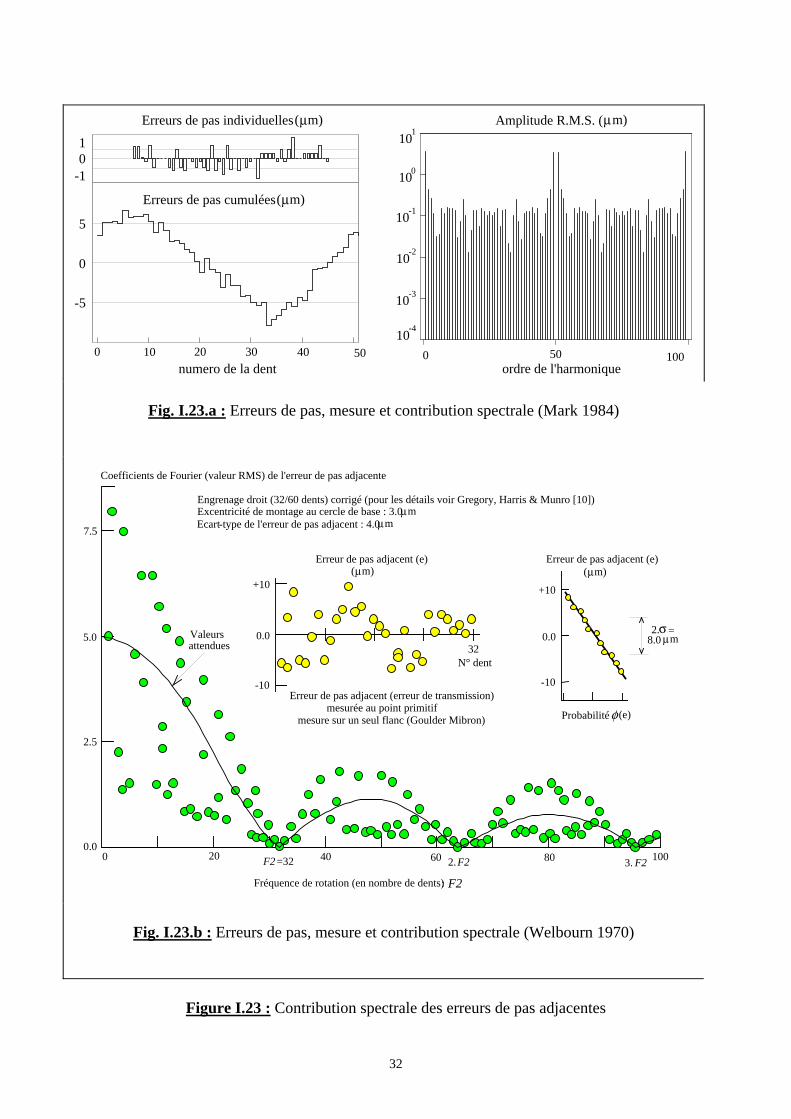
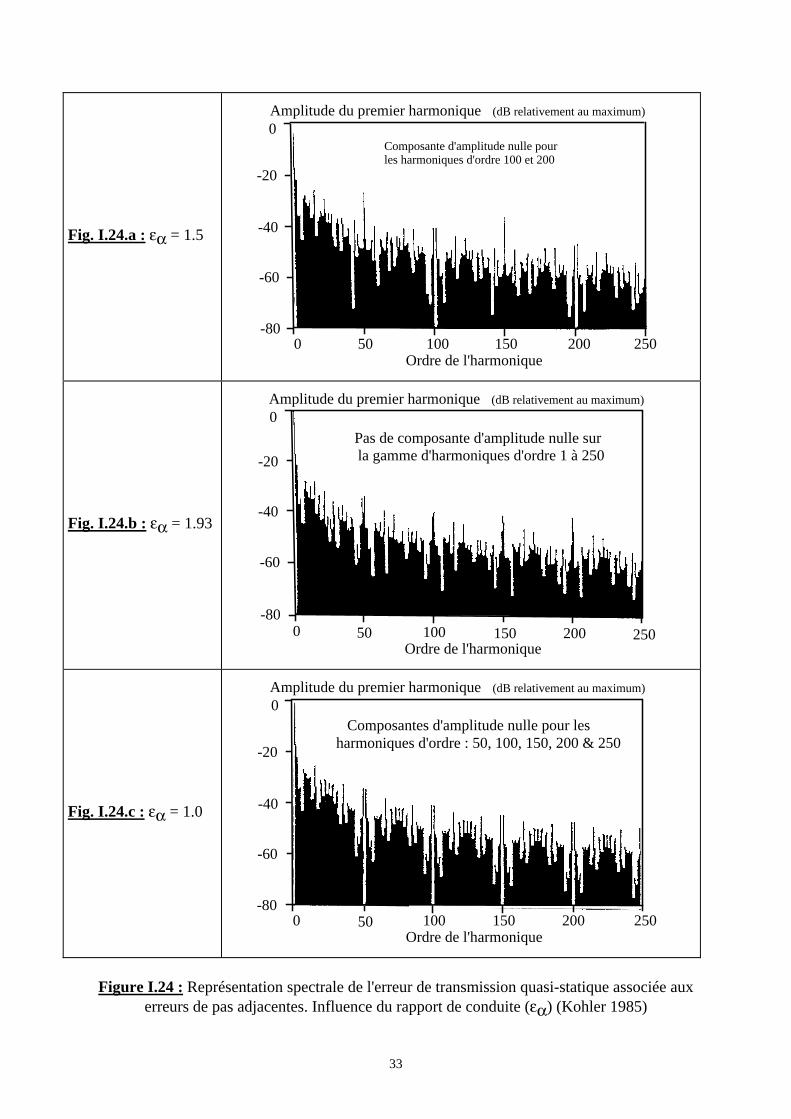
L'erreur de pas cumulée (cumul algébrique des erreurs de pas individuelles) conduit à une modulation basse fréquence harmonique à la rotation des arbres (Fig I.22). Ces effets sont identiques à ceux associés aux défauts d'excentricité. Les deux erreurs se cumulent et sont généralement prises en compte simultanément (Munro 1990-a). L'erreur de pas individuelle correspond à l'écart entre la position réelle de la dent et sa position théorique. Ce défaut est généralement modélisé dans la bibliographie par une distribution aléatoire. Mark (1984) et Welbourn (1970) montrent que son influence se répercute sur la totalité du spectre (bruit et erreur de transmission) et qu'il n'existe pas de composante à la fréquence d'engrènement (Fig. I.23). Ce dernier point est contesté par Kolher et col. (1985) qui montrent, sur les jeux de données utilisées par Mark (1984) (Fig. I.23.a), que ces erreurs ont une contribution aux harmoniques de la fréquence d'engrènement si l'on s'intéresse à l'erreur de transmission quasi-statique sans charge induite par les erreurs de pas adjacentes et non à la courbe de répartition de ces erreurs dent par dent. Il montre également que le rapport de conduite est très influent dans cette démarche (Fig. I.24). En effet, le cumul des erreurs individuelles sur l'erreur de transmission est fortement tributaire du nombre de couples de dents susceptibles d'entrer en contact. Le contact effectif s'effectue sur le couple de dents présentant la plus grande erreur de pas (positive) et qui est donc en avance sur sa position théorique d'engrènement. Un rapport de conduite εα=1 permet de retrouver les résultats initialement obtenus par Mark. De plus, Winter & col. (1989) indiquent que l'influence de ces erreurs est plus importante sur des engrenages de faible qualité et faiblement chargés que pour des engrenages lourdement chargés et de meilleure qualité. Les irrégularités qu'elles introduisent sont alors gommées par les déformations de denture. Les résultats obtenus par Olakorédé (1990) sur la faible sensibilité des contraintes en pied de dent aux erreurs de pas individuelles vont dans le même sens.
31
fp
D
fp max AkAz
1 2 3 4 5 6
1 2 3 4 5 6
k
k
Fp
Fp10
10 p
P2LPth
fp2=D2
Origine1
2 3k-1
k
k+1
C Dk
Pth : pas théorique P2L : pas (2) gauche effectif Dk :décalage k (positif) fp2 : erreur individuelle (2) D2 : décalage (2) C : cercle de contrôle fP : erreur individuelle de pas circulaire D : décalage fpmax : erreur individuelle maximale de pas circulaire z : nombre de dents de la roue A : somme algébrique des lectures de l'appareil p : pas Ak : lecture k de l'appareil Fp : erreur totale de division Fp10 : erreur cumulée sur 10 pas
Figure I.21 : Définition de l'erreur de pas individuelle et de l'erreur de pas cumulée (norme ISO 1328)
Erreurs de pas après rectification
Erreurs de pas avant rectification
Erreur de pas adjacent maximale : 2.5 mµ
Erreur de pas adjacent maximale : 8.0 mµ
10 mµ
10 mµ
Erreur de
Erreur de
pas cumulée
pas cumulée
maximale :
maximale :
7.0 mµ
21.0 mµ
Figure I.22 : Exemple de mesure de l'erreur de pas cumulée (Welbourn 1972)
32
50
0 10 20 30 40numero de la dent
Erreurs de pas individuelles( m)µ
( m)µErreurs de pas cumulées
10
-1
5
0
-5
Amplitude R.M.S. ( m)µ101
100
10-1
10-2
10-3
10-4
ordre de l'harmonique500 100
Fig. I.23.a : Erreurs de pas, mesure et contribution spectrale (Mark 1984)
σ2. =8.0 µm0.0
-10
+10
(e)φ
Erreur de pas adjacent (e)(µm)
N° dent32
Erreur de pas adjacent (e)(µm)
0.0
-10
+10
Erreur de pas adjacent (erreur de transmission)mesurée au point primitif
mesure sur un seul flanc (Goulder Mibron)
Fréquence de rotation (en nombre de dents): F2
20 40 60 80 100F2=32 2.F2 3. F200.0
2.5
5.0
7.5
Coefficients de Fourier (valeur RMS) de l'erreur de pas adjacente
µmExcentricité de montage au cercle de base : 3.0Ecart type de l'erreur de pas adjacent : 4.0µm
Engrenage droit (32/60 dents) corrigé (pour les détails voir Gregory, Harris & Munro [10])
Valeursattendues
-
Probabilité
Fig. I.23.b : Erreurs de pas, mesure et contribution spectrale (Welbourn 1970)
Figure I.23 : Contribution spectrale des erreurs de pas adjacentes
33
Fig. I.24.a : εα = 1.5
Composante d'amplitude nulle pourles harmoniques d'ordre 100 et 200
0 50 100 150 200 250
0
-20
-40
-60
-80
Ordre de l'harmonique
Amplitude du premier harmonique (dB relativement au maximum)
Fig. I.24.b : εα = 1.93
Composante d'amplitude nulle pourles harmoniques d'ordre 100 et 200
0 50 100 150 200 250
0
-20
-40
-60
-80
Ordre de l'harmonique
Amplitude du premier harmonique (dB relativement au maximum)
Pas de composante d'amplitude nulle surla gamme d'harmoniques d'ordre 1 à 250
Fig. I.24.c : εα = 1.0
0
-20
-40
-60
-80
Ordre de l'harmonique
Amplitude du premier harmonique (dB relativement au maximum)
Composantes d'amplitude nulle pour les
0 50 100 150 200 250
harmoniques d'ordre : 50, 100, 150, 200 & 250
Figure I.24 : Représentation spectrale de l'erreur de transmission quasi-statique associée aux erreurs de pas adjacentes. Influence du rapport de conduite (εα) (Kohler 1985)
34
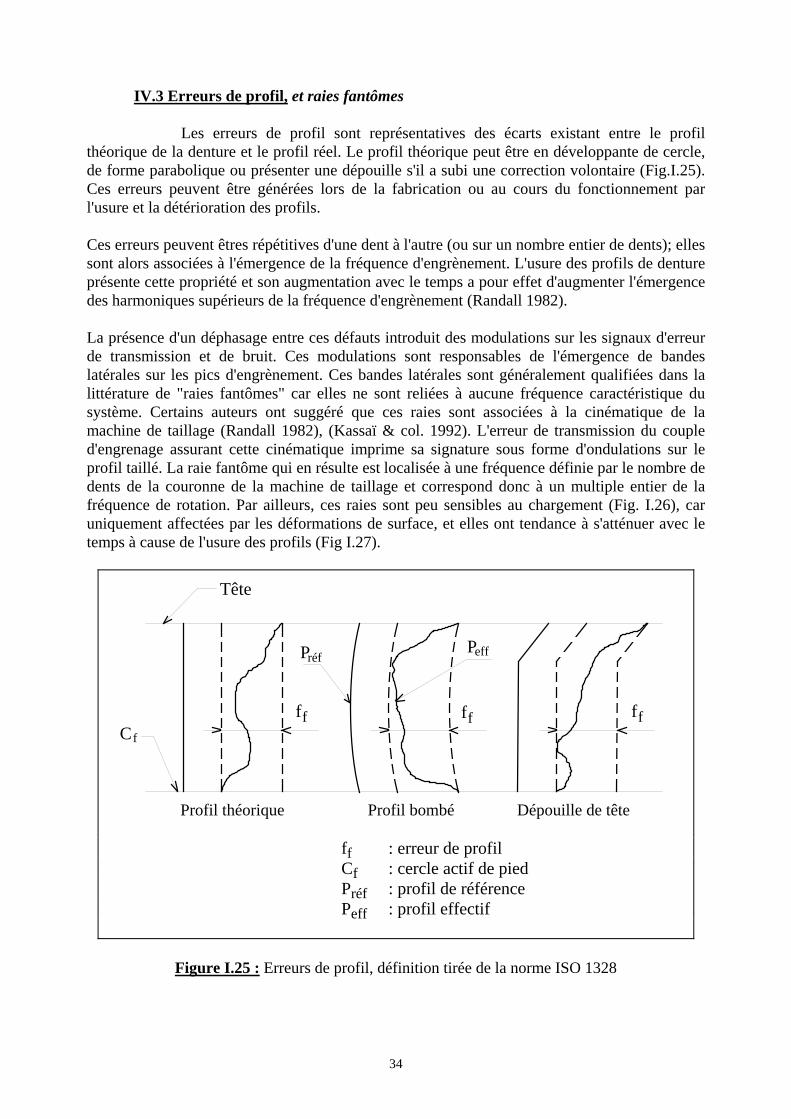
IV.3 Erreurs de profil, et raies fantômes Les erreurs de profil sont représentatives des écarts existant entre le profil
théorique de la denture et le profil réel. Le profil théorique peut être en développante de cercle, de forme parabolique ou présenter une dépouille s'il a subi une correction volontaire (Fig.I.25). Ces erreurs peuvent être générées lors de la fabrication ou au cours du fonctionnement par l'usure et la détérioration des profils.
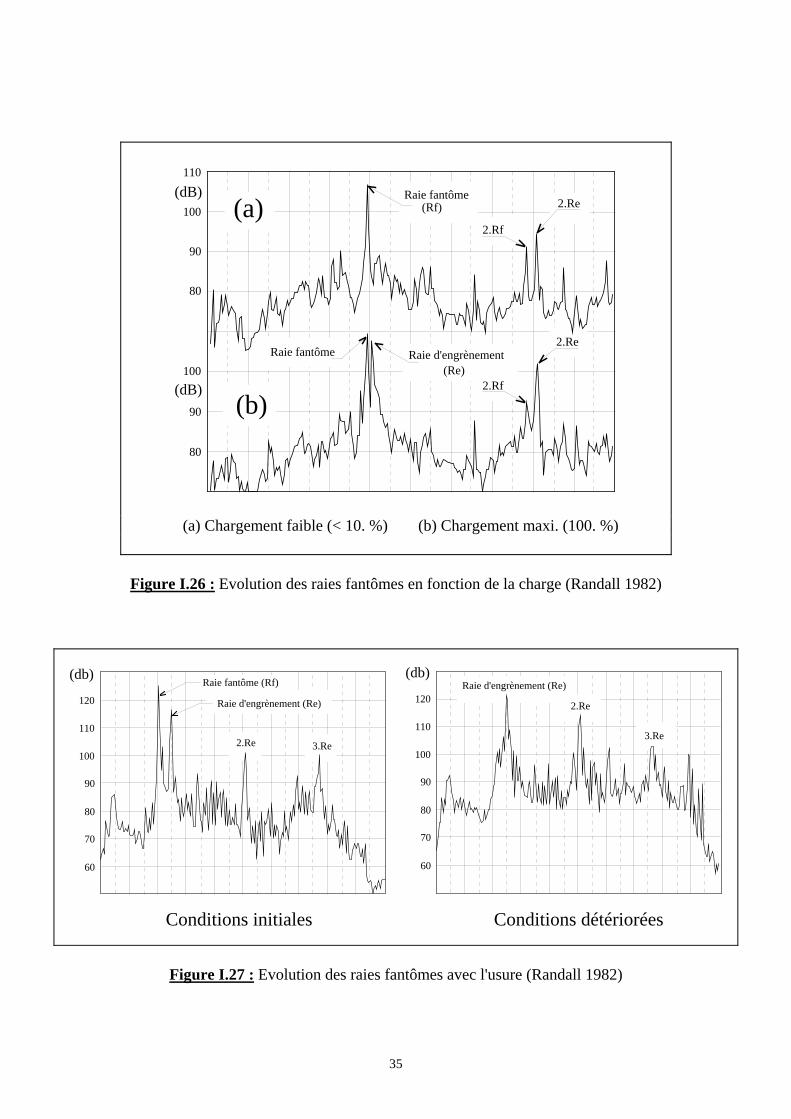
Ces erreurs peuvent êtres répétitives d'une dent à l'autre (ou sur un nombre entier de dents); elles sont alors associées à l'émergence de la fréquence d'engrènement. L'usure des profils de denture présente cette propriété et son augmentation avec le temps a pour effet d'augmenter l'émergence des harmoniques supérieurs de la fréquence d'engrènement (Randall 1982). La présence d'un déphasage entre ces défauts introduit des modulations sur les signaux d'erreur de transmission et de bruit. Ces modulations sont responsables de l'émergence de bandes latérales sur les pics d'engrènement. Ces bandes latérales sont généralement qualifiées dans la littérature de "raies fantômes" car elles ne sont reliées à aucune fréquence caractéristique du système. Certains auteurs ont suggéré que ces raies sont associées à la cinématique de la machine de taillage (Randall 1982), (Kassaï & col. 1992). L'erreur de transmission du couple d'engrenage assurant cette cinématique imprime sa signature sous forme d'ondulations sur le profil taillé. La raie fantôme qui en résulte est localisée à une fréquence définie par le nombre de dents de la couronne de la machine de taillage et correspond donc à un multiple entier de la fréquence de rotation. Par ailleurs, ces raies sont peu sensibles au chargement (Fig. I.26), car uniquement affectées par les déformations de surface, et elles ont tendance à s'atténuer avec le temps à cause de l'usure des profils (Fig I.27).
Tête
Cf
ffff
PréfPeff
ff
Profil théorique Profil bombé Dépouille de tête
ff : erreur de profil Cf : cercle actif de pied Préf : profil de référence Peff : profil effectif
Figure I.25 : Erreurs de profil, définition tirée de la norme ISO 1328
35
Raie fantôme
Raie fantôme Raie d'engrènement(Re)
(Rf)
2.Rf
2.Re
2.Rf
2.Re
80
90
100
80
90
100
110
(dB)
(dB)
(a)
(b)
(a) Chargement faible (< 10. %) (b) Chargement maxi. (100. %)
Figure I.26 : Evolution des raies fantômes en fonction de la charge (Randall 1982)
Raie fantôme (Rf)
2.Re 3.Re
Raie d'engrènement (Re)
60
70
80
90
100
110
120
(db)
Conditions initiales
Raie d'engrènement (Re)
3.Re
2.Re
60
70
80
90
100
110
120
(db)
Conditions détériorées
Figure I.27 : Evolution des raies fantômes avec l'usure (Randall 1982)
36
Ordre1.00 150.0020.00
60.00
(dB)
Raie d'engrènement
Raies fantômes
Rectifié m1(une passe)
Rectifié m10(deux passes)
Rasé endurance
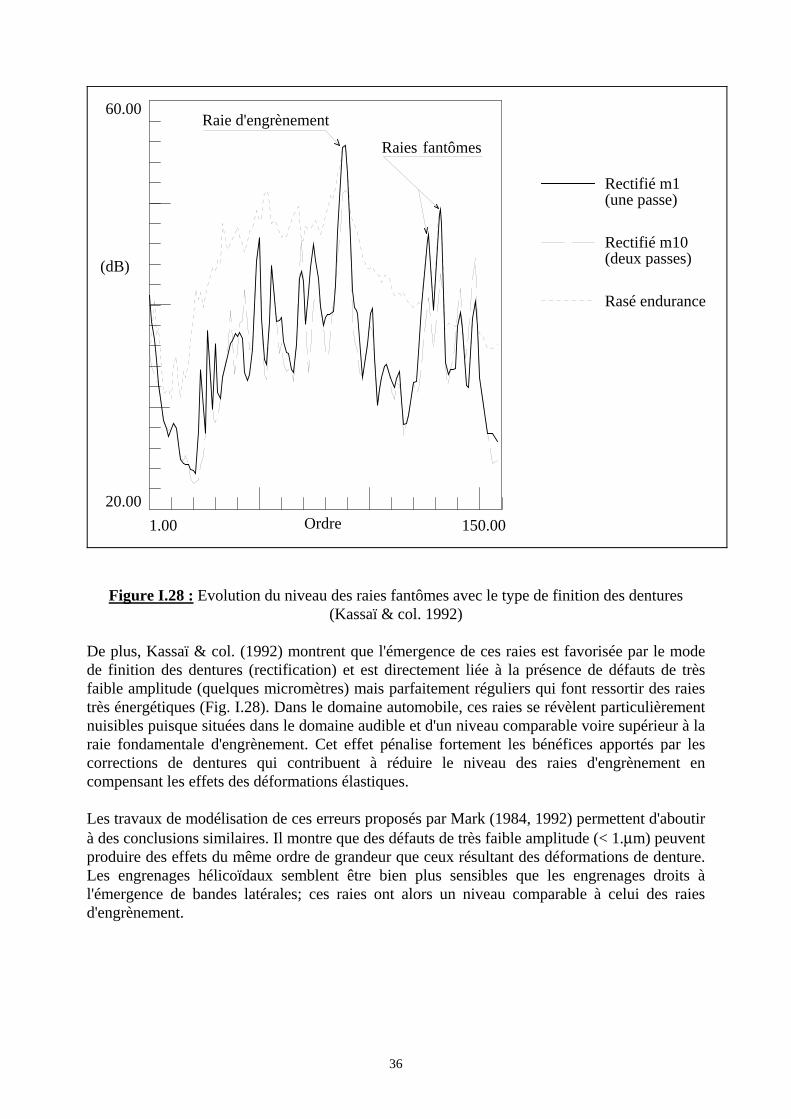
Figure I.28 : Evolution du niveau des raies fantômes avec le type de finition des dentures (Kassaï & col. 1992)
De plus, Kassaï & col. (1992) montrent que l'émergence de ces raies est favorisée par le mode de finition des dentures (rectification) et est directement liée à la présence de défauts de très faible amplitude (quelques micromètres) mais parfaitement réguliers qui font ressortir des raies très énergétiques (Fig. I.28). Dans le domaine automobile, ces raies se révèlent particulièrement nuisibles puisque situées dans le domaine audible et d'un niveau comparable voire supérieur à la raie fondamentale d'engrènement. Cet effet pénalise fortement les bénéfices apportés par les corrections de dentures qui contribuent à réduire le niveau des raies d'engrènement en compensant les effets des déformations élastiques. Les travaux de modélisation de ces erreurs proposés par Mark (1984, 1992) permettent d'aboutir à des conclusions similaires. Il montre que des défauts de très faible amplitude (< 1.µm) peuvent produire des effets du même ordre de grandeur que ceux résultant des déformations de denture. Les engrenages hélicoïdaux semblent être bien plus sensibles que les engrenages droits à l'émergence de bandes latérales; ces raies ont alors un niveau comparable à celui des raies d'engrènement.
37
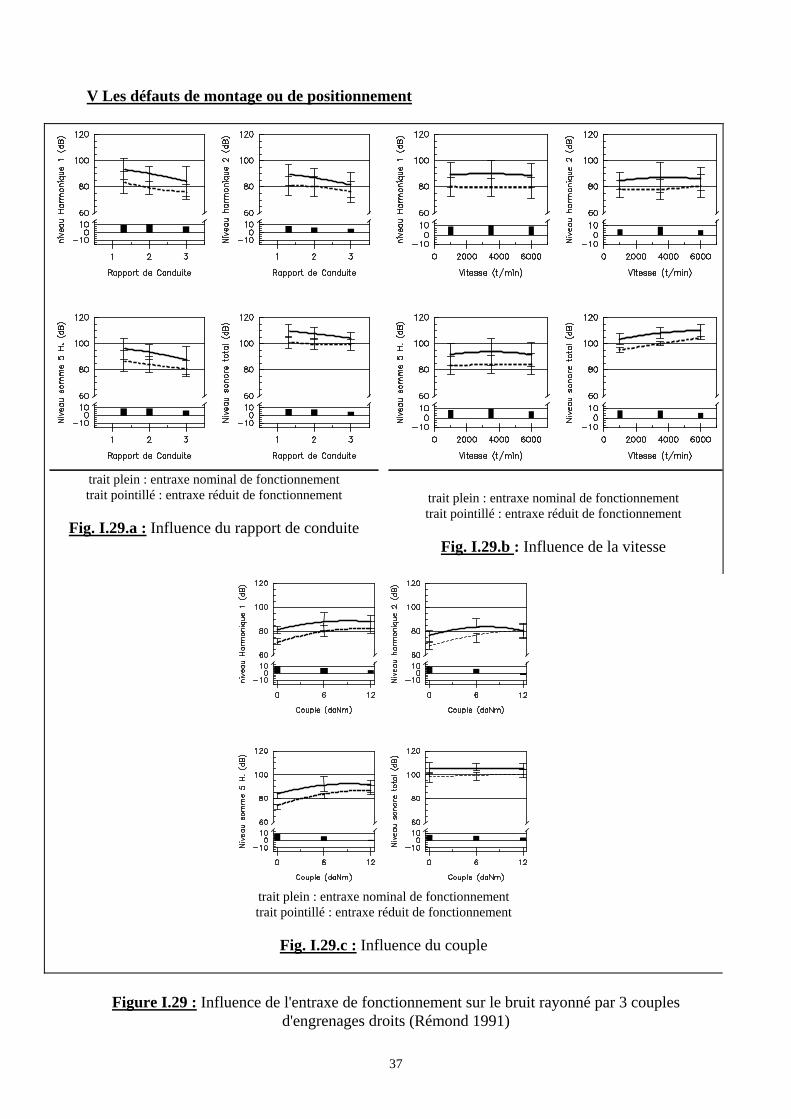
V Les défauts de montage ou de positionnement
trait plein : entraxe nominal de fonctionnement trait pointillé : entraxe réduit de fonctionnement
Fig. I.29.a : Influence du rapport de conduite
trait plein : entraxe nominal de fonctionnement trait pointillé : entraxe réduit de fonctionnement
Fig. I.29.b : Influence de la vitesse
trait plein : entraxe nominal de fonctionnement trait pointillé : entraxe réduit de fonctionnement
Fig. I.29.c : Influence du couple
Figure I.29 : Influence de l'entraxe de fonctionnement sur le bruit rayonné par 3 couples d'engrenages droits (Rémond 1991)

38
Ces défauts sont généralement sous-estimés alors qu'ils peuvent expliquer les différences de niveau sonore observées sur des transmissions d'architecture absolument identique (série de boites de vitesses par exemple). L'ensemble de ces défauts caractérise le positionnement relatif des deux roues dentées résultant du montage ou de la déformation de la structure (arbres, paliers et carter) lors de l'application du chargement. Ils sont représentés par le défaut d'entraxe (écart entre l'entraxe de conception de la denture et l'entraxe réel) et les défauts de parallélisme entre les axes des roues.
V.1 Défaut d'entraxe. L'entraxe est un paramètre particulièrement important. Il agit directement sur le jeu de
fonctionnement et modifie la géométrie du contact (localisation des points de contact). Mitchell (1971) signale ce paramètre comme étant particulièrement important mais aucune étude ne conforte ces indications. Welbourn (1977, 1979) mentionne des résultats expérimentaux obtenus sur une boite de transmission de camion qui est silencieuse avec un jeu minimum ou important et bruyante avec un jeu modéré. Dans la bibliographie les résultats expérimentaux obtenus par Rémond (1991) semblent les plus importants sur ce sujet. Il a observé sur plusieurs couples d'engrenages droits une réduction du niveau sonore voisine de 10 dB lorsque l'entraxe nominal de fonctionnement est diminué de 0.1 mm. Cette réduction est très peu affectée par la vitesse et le rapport de conduite (Fig. I.29.a et I.29.b) et diminue sensiblement lorsque le couple appliqué augmente (Fig. I.29.c). Ce dernier résultat semble indiquer que l'effet de l'entraxe est fortement lié aux déformations élastiques des dentures.
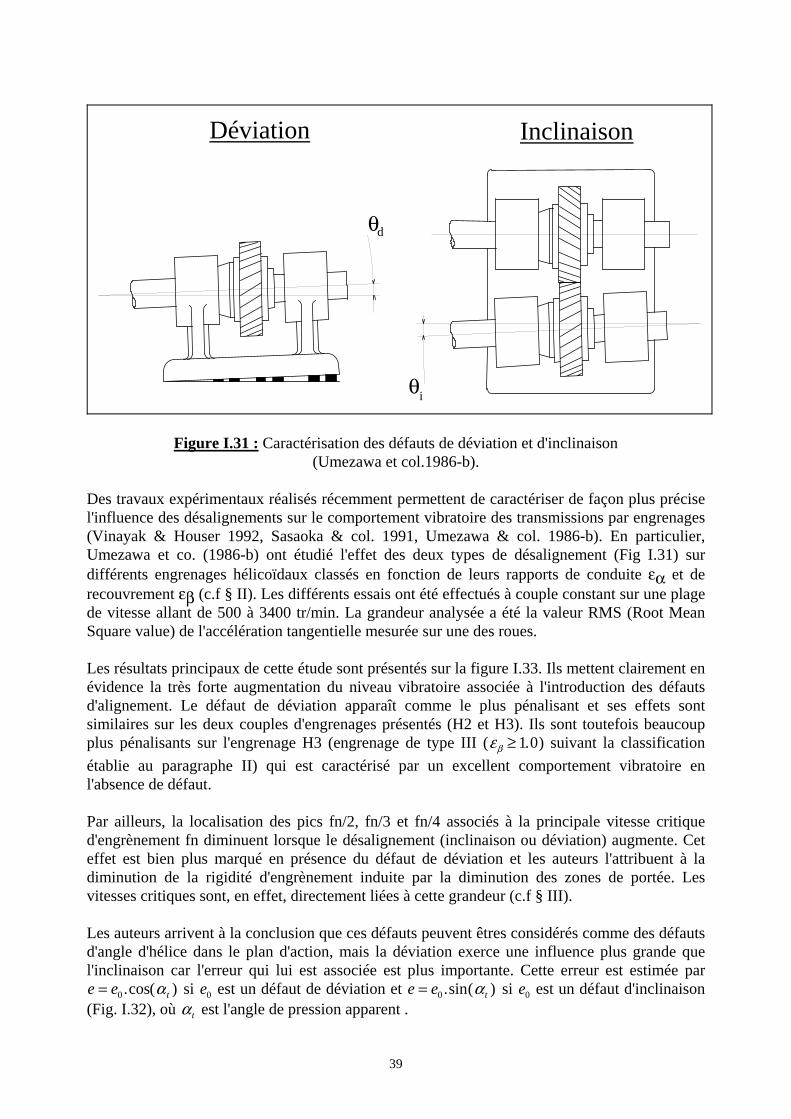
V.2 défauts d'inclinaison et de déviation. La norme caractérise les défauts d'alignement par deux angles appelés angle
d'inclinaison et angle de déviation (Fig. I.30). L'angle d'inclinaison est associé à une rotation dans le plan des axes, et l'angle de déviation conduit à une délocalisation latérale des portées de denture (Fig. I.31).
X1 X2 X1 X2 X1 X2L
A1 A2A2' A1 A2
' A1 A2'A2
''
A2A2fx fy fx
fy
fx : inclinaison fy : déviation
B1 B2 B1 B2 B1 B2
(a) inclinaison seule (b) déviation seule (c) effets cumulés
L : largeur de denture X1 : direction de l'axe du pignon X2 : direction de l'axe de la roue
Figure I.30 : Définition des défauts d'inclinaison et de déviation selon la norme ISO 1328
39
θi
θd
InclinaisonDéviation
Figure I.31 : Caractérisation des défauts de déviation et d'inclinaison
(Umezawa et col.1986-b).
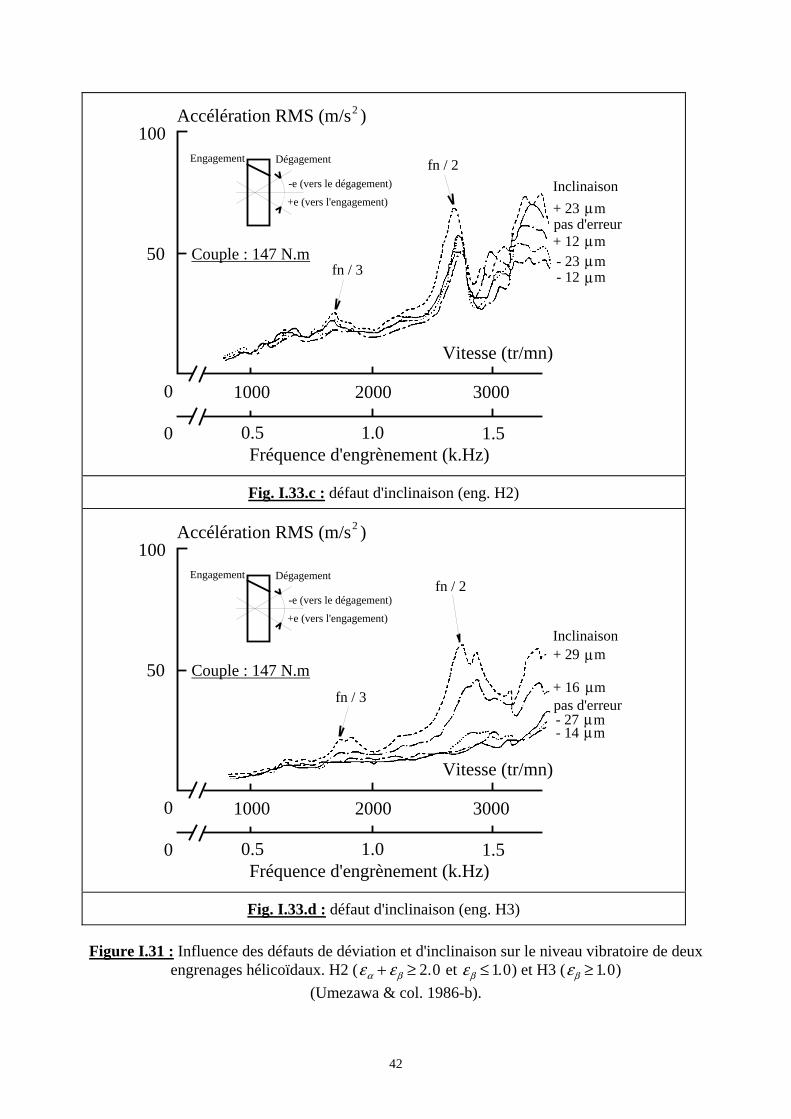
Des travaux expérimentaux réalisés récemment permettent de caractériser de façon plus précise l'influence des désalignements sur le comportement vibratoire des transmissions par engrenages (Vinayak & Houser 1992, Sasaoka & col. 1991, Umezawa & col. 1986-b). En particulier, Umezawa et co. (1986-b) ont étudié l'effet des deux types de désalignement (Fig I.31) sur différents engrenages hélicoïdaux classés en fonction de leurs rapports de conduite εα et de recouvrement εβ (c.f § II). Les différents essais ont été effectués à couple constant sur une plage de vitesse allant de 500 à 3400 tr/min. La grandeur analysée a été la valeur RMS (Root Mean Square value) de l'accélération tangentielle mesurée sur une des roues. Les résultats principaux de cette étude sont présentés sur la figure I.33. Ils mettent clairement en évidence la très forte augmentation du niveau vibratoire associée à l'introduction des défauts d'alignement. Le défaut de déviation apparaît comme le plus pénalisant et ses effets sont similaires sur les deux couples d'engrenages présentés (H2 et H3). Ils sont toutefois beaucoup plus pénalisants sur l'engrenage H3 (engrenage de type III (εβ ≥ 1 0. ) suivant la classification établie au paragraphe II) qui est caractérisé par un excellent comportement vibratoire en l'absence de défaut. Par ailleurs, la localisation des pics fn/2, fn/3 et fn/4 associés à la principale vitesse critique d'engrènement fn diminuent lorsque le désalignement (inclinaison ou déviation) augmente. Cet effet est bien plus marqué en présence du défaut de déviation et les auteurs l'attribuent à la diminution de la rigidité d'engrènement induite par la diminution des zones de portée. Les vitesses critiques sont, en effet, directement liées à cette grandeur (c.f § III). Les auteurs arrivent à la conclusion que ces défauts peuvent êtres considérés comme des défauts d'angle d'hélice dans le plan d'action, mais la déviation exerce une influence plus grande que l'inclinaison car l'erreur qui lui est associée est plus importante. Cette erreur est estimée par e e t= 0 .cos( )α si e0 est un défaut de déviation et e e t= 0 .sin( )α si e0 est un défaut d'inclinaison (Fig. I.32), où α t est l'angle de pression apparent .
40
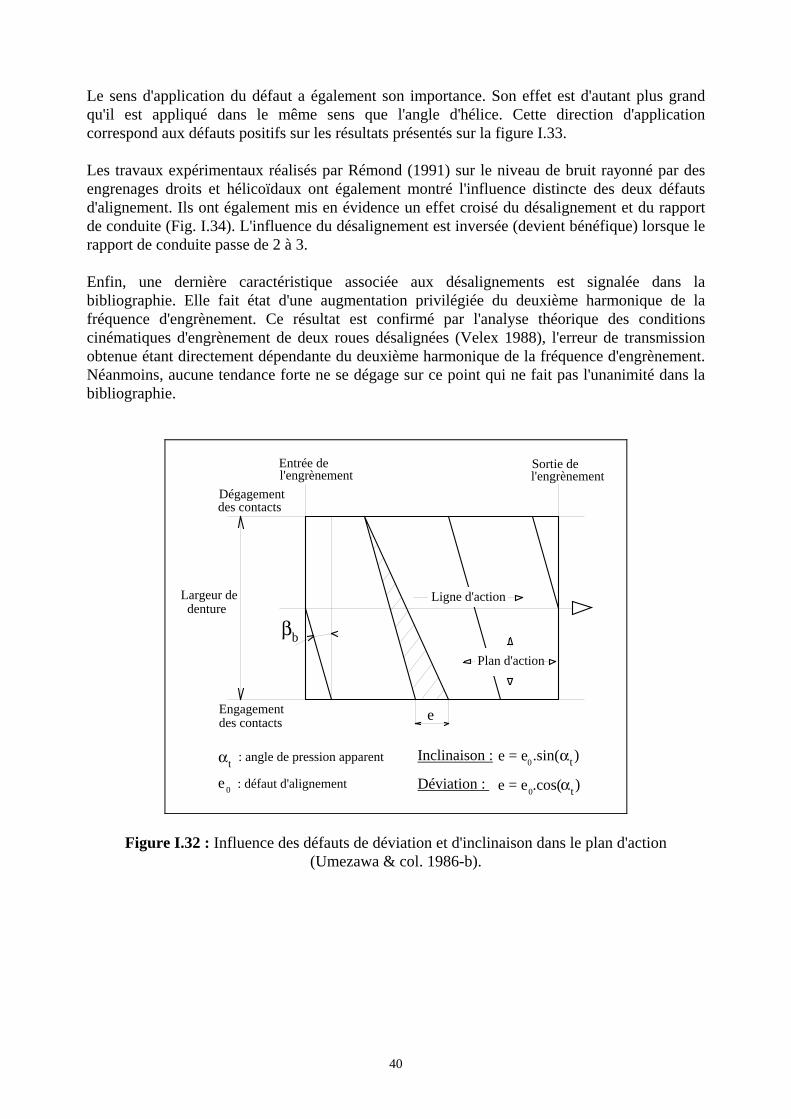
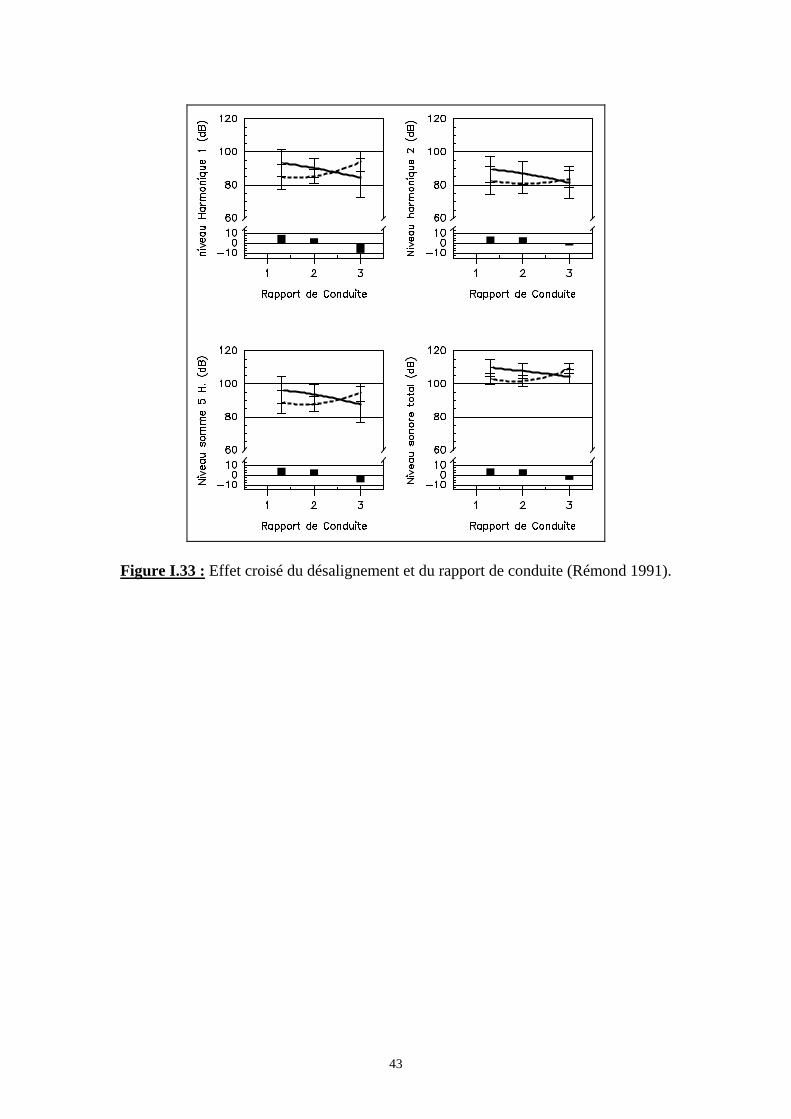
Le sens d'application du défaut a également son importance. Son effet est d'autant plus grand qu'il est appliqué dans le même sens que l'angle d'hélice. Cette direction d'application correspond aux défauts positifs sur les résultats présentés sur la figure I.33. Les travaux expérimentaux réalisés par Rémond (1991) sur le niveau de bruit rayonné par des engrenages droits et hélicoïdaux ont également montré l'influence distincte des deux défauts d'alignement. Ils ont également mis en évidence un effet croisé du désalignement et du rapport de conduite (Fig. I.34). L'influence du désalignement est inversée (devient bénéfique) lorsque le rapport de conduite passe de 2 à 3. Enfin, une dernière caractéristique associée aux désalignements est signalée dans la bibliographie. Elle fait état d'une augmentation privilégiée du deuxième harmonique de la fréquence d'engrènement. Ce résultat est confirmé par l'analyse théorique des conditions cinématiques d'engrènement de deux roues désalignées (Velex 1988), l'erreur de transmission obtenue étant directement dépendante du deuxième harmonique de la fréquence d'engrènement. Néanmoins, aucune tendance forte ne se dégage sur ce point qui ne fait pas l'unanimité dans la bibliographie.
Entrée del'engrènement
Sortie del'engrènement
Largeur dedenture
βb
Ligne d'action
Dégagement
Engagementdes contacts
des contacts
e
Plan d'action
e = e0 αt ).cos(Déviation :
e = e0.sin(αt )Inclinaison :αt : angle de pression apparent
e0 : défaut d'alignement
Figure I.32 : Influence des défauts de déviation et d'inclinaison dans le plan d'action (Umezawa & col. 1986-b).
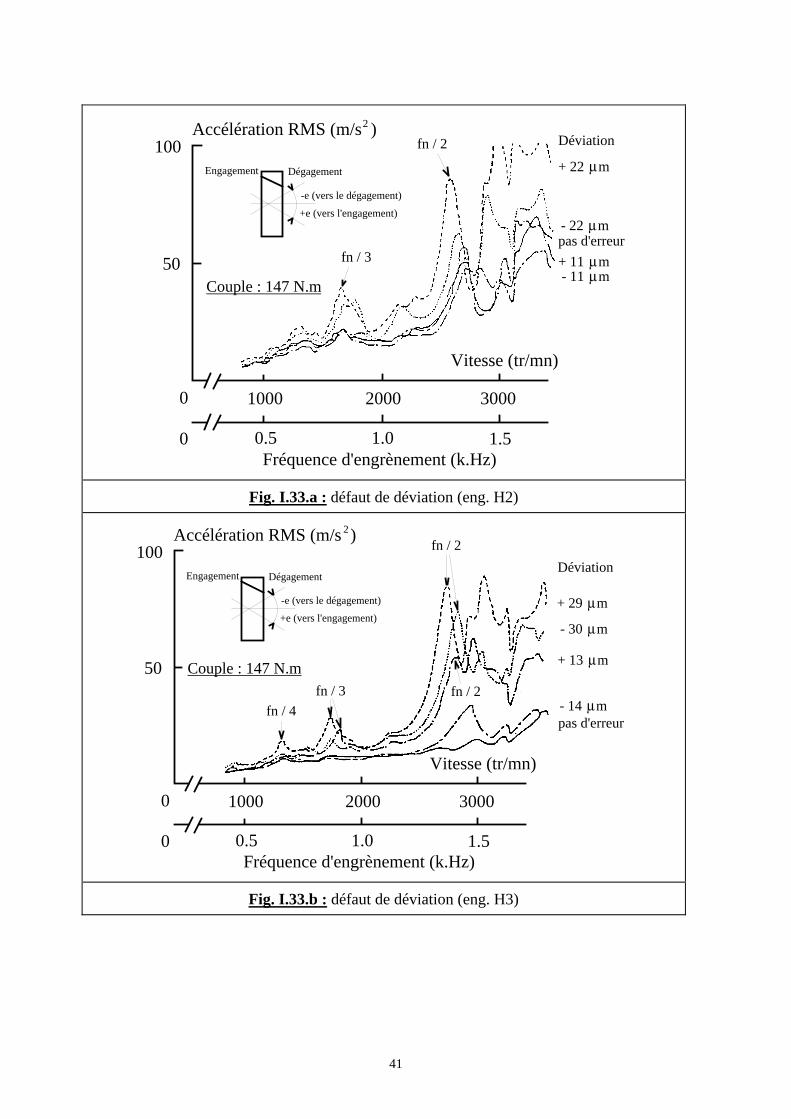
41
Couple : 147 N.m
fn / 3
fn / 2 Déviation
+ 22 m
pas d'erreur+ 11 m- 11 m
- 22 m
µ
µ
µµ
+e (vers l'engagement)
-e (vers le dégagement)
Engagement Dégagement
100
50
0 1000 2000 3000
0 0.5 1.0 1.5Fréquence d'engrènement (k.Hz)
Vitesse (tr/mn)
Accélération RMS (m/s )2
Fig. I.33.a : défaut de déviation (eng. H2)
- 14 m
+ 13 m
+ 29 m
- 30 m
Couple : 147 N.mfn / 3
fn / 2Déviation
pas d'erreur
µ
µ
µ
µ
+e (vers l'engagement)
-e (vers le dégagement)
Engagement Dégagement
100
50
0 1000 2000 3000
0 0.5 1.0 1.5Fréquence d'engrènement (k.Hz)
Vitesse (tr/mn)
Accélération RMS (m/s )2
fn / 2fn / 4
Fig. I.33.b : défaut de déviation (eng. H3)
42
Couple : 147 N.mfn / 3
pas d'erreur
µ
µ
µ
µ
+e (vers l'engagement)
-e (vers le dégagement)
Engagement Dégagement
100
50
0 1000 2000 3000
0 0.5 1.0 1.5Fréquence d'engrènement (k.Hz)
Vitesse (tr/mn)
Accélération RMS (m/s )2
fn / 2
+ 23 m
+ 12 m
- 12 m- 23 m
Inclinaison
Fig. I.33.c : défaut d'inclinaison (eng. H2)
Couple : 147 N.mfn / 3
fn / 2
pas d'erreur
µ
µ
µµ
+e (vers l'engagement)
-e (vers le dégagement)
Engagement Dégagement
100
50
0 1000 2000 3000
0 0.5 1.0 1.5Fréquence d'engrènement (k.Hz)
Vitesse (tr/mn)
Accélération RMS (m/s )2
Inclinaison+ 29 m
+ 16 m
- 14 m- 27 m
Fig. I.33.d : défaut d'inclinaison (eng. H3)
Figure I.31 : Influence des défauts de déviation et d'inclinaison sur le niveau vibratoire de deux
engrenages hélicoïdaux. H2 (ε εα β+ ≥ 2 0. et εβ ≤ 1 0. ) et H3 (εβ ≥ 1 0. ) (Umezawa & col. 1986-b).
43
Figure I.33 : Effet croisé du désalignement et du rapport de conduite (Rémond 1991).
44
VI Conclusion
Ce premier chapitre a été entièrement consacré à la description des excitations attribuées à l'engrènement. Il était organisé sous la forme d'une synthèse bibliographique et les résultats présentés sont, pour la plus grande part, issus d'études expérimentales sur le bruit ou les vibrations d'engrènement. Les paramètres influents ont été isolés et leurs principales caractéristiques mises en évidence.
Il ressort de cette analyse que la principale source d'excitation à la fréquence d'engrènement est introduite par les déformations élastiques de denture et plus particulièrement par l'évolution du nombre de dents en contact. Ceci se traduit par l'apparition d'une erreur de transmission propre aux déformations élastiques et qualifiée d'erreur de transmission quasi-statique sous charge. Cette grandeur est très affectée par la géométrie des dentures et plus particulièrement par le rapport de conduite (εα) et le rapport de recouvrement (εβ) qui caractérisent le nombre moyen de dents simultanément en contact. Ces deux grandeurs permettent d'établir une première classification des engrenages au regard des excitations d'engrènement qu'ils produisent. Dans ce contexte, les valeurs entières du rapport de conduite, l'utilisation d'engrenages hélicoïdaux (εβ ≠ 0.) ou l'introduction de corrections de denture apparaissent comme très bénéfiques car ces choix conduisent à une diminution des fluctuations de l'erreur de transmission quasi-statique sous charge. Par ailleurs, les fluctuations de la rigidité d'engrènement sont également très significatives. Elles sont, en effet, directement responsables des régimes de fonctionnement critiques où les vibrations d'engrènement augmentent considérablement. Ces régimes de fonctionnement sont directement reliés à la vitesse de rotation des engrenages car ils correspondent à la coïncidence de la fréquence d'engrènement avec un mode de la transmission étudiée. Les vitesses associées sont qualifiées de vitesses critiques de denture. En dehors de ces effets qui sont les plus significatifs, la présence d'erreurs de forme ou de position induit des excitations supplémentaires. La caractéristique principale des erreurs de forme est l'apparition de modulations de la fréquence d'engrènement. Ces modulations se traduisent par la présence de bandes latérales sur les pics d'engrènement (analyse de Fourier) qui sont qualifiées de raies fantômes si elles ne sont harmoniques à aucune des fréquences fondamentales du système (fréquence de rotation des arbres et fréquence d'engrènement). Ceci est particulièrement le cas des défauts de profils induits par la machine de taillage. Les modulations introduites par l'excentricité ou les erreurs de pas cumulées ne rentrent pas dans cette catégorie car elles sont parfaitement harmoniques à la fréquence de rotation. De la même façon, les effets de l'usure qui sont sensiblement identiques sur les dents successives se traduisent uniquement par l'augmentation du niveau de la raie fondamentale d'engrènement. Enfin, les erreurs ne présentant pas de périodicité spécifique, comme les erreurs de pas individuelles (généralement présentées comme aléatoires), se traduisent par une augmentation globale du niveau vibratoire en dehors des pics d'engrènement où leurs effets sont "gommés" par les déformations élastiques. De façon générale, les effets de ces défauts sur les déformations élastiques de denture sont considérés comme négligeables et leur caractérisation passe par la détermination, en régime quasi-statique sans charge, de l'erreur de transmission qu'ils induisent. Les erreurs de positionnement sont, au contraire, directement responsables de modifications importantes des déformations élastiques de denture. C'est particulièrement le cas des défauts
45
d'alignement qui conduisent à une diminution très marquée de la rigidité de denture. Cette diminution se traduit directement par une délocalisation importante des vitesses critiques de denture et une forte augmentation du niveau vibratoire. Compte-tenu des tendances présentées dans la bibliographie et rappelées ci-dessus, la caractérisation des excitations d'engrènement passe par la détermination, en régime quasi-statique, de l'évolution de l'erreur de transmission sans et sous charge et de la rigidité d'engrènement. Cette étude est entreprise au chapitre III entièrement consacré à l'analyse de l'engrènement en régime quasi-statique. Les effets des paramètres influents (rapport de conduite, rapport de recouvrement, correction de denture, désalignement, ...) ainsi que des principaux défauts de forme et de position sont alors étudiés.