technologies des asservissements partie 1: chaîne de...
TRANSCRIPT
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Technologies des AsservissementsPartie 1: Chaîne de conversion
électro-mécanique
Edouard Laroche ([email protected])
ENSPS 3A ISAVMaster IRIV – AR
Université de Strasbourg
2010-2011

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Plan1 Notions de base
Présentation générale des solutionsGrandeurs électriquesMagnétostatique : Production de couple et de force
2 Dimensionnement de la chaine de puissance3 Les convertisseurs statiques
IntroductionLes composantsLe hacheurL’onduleur
4 Les actionneurs électriquesGénéralitésMoteur à courant continuMoteur synchroneMoteur asynchrone

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Introduction
Objectifs du cours
Objectifs du cours
Un système asservi ...... est généralement composé des parties suivantes :
le système à asservir,un ou des actionneurs qui permettent d’agir sur le système,un ou des capteurs qui fournissent les informations sanslesquelles un asservissement n’est pas possibleun calculateur, le plus souvent numérique.
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Introduction
Contenu du cours
Contenu du cours
Trois grandes parties1 les actionneurs électriques, leur alimentation électrique et
leur commande,2 étude des variateurs,3 les capteurs
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Plan1 Notions de base
Présentation générale des solutionsGrandeurs électriquesMagnétostatique : Production de couple et de force
2 Dimensionnement de la chaine de puissance3 Les convertisseurs statiques
IntroductionLes composantsLe hacheurL’onduleur
4 Les actionneurs électriquesGénéralitésMoteur à courant continuMoteur synchroneMoteur asynchrone
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Présentation générale des solutions
Présentation générale des solutions
Trois grandes technologies d’actionneurles moteurs à courant continu sont alimentés par hacheur,les moteurs à courant alternatif sont alimentés paronduleur. Parmi ceux-ci, on distingue :
les moteurs synchrones (encore appelés moteurs DCbrushless),les moteurs asynchrones (encore appelés moteurs àinduction).

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Grandeurs électriques
Grandeurs électriques (1)
Grandeurs instanténéescourant i(t) ou j(t) (en A)tension u(t) ou v(t) (en V)puissance p(t) = u(t) i(t) (W)
Mesures en régime périodique
valeur moyenne 〈u(t)〉 = 1T
∫T u(t)dt
valeur efficace (i.e. valeur RMS) Ieff =√⟨
i2(t)⟩
puissance moyenne P = 〈p(t)〉 (W)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Grandeurs électriques
Grandeurs électriques (2)
Analyse de la puissancepuissance moyenne P = 〈p(t)〉 (W)puissance apparente S = UeffIeff (VA)Facteur de puissance Fp = P/S (Fp ∈ [0; 1] ; bon facteurde puissance : Fp proche de 1 ; problématique industrielledu relèvement du facteur de puissance : baisser le courantaborbé en fournissant le réactif avec des condensateurs)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Grandeurs électriques
Grandeurs électriques (2’)
DéfinitionsRégime alternatif : 〈u(t)〉 = 0 (ou négligeable) et idem pouri(t)Rapport de crête : rapport entre la valeur maximale et lavaleur efficaceFacteur de forme : rapport entre la valeur efficace et lavaleur moyenne
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Régime sinusoïdal
Régime sinusoïdal (1)
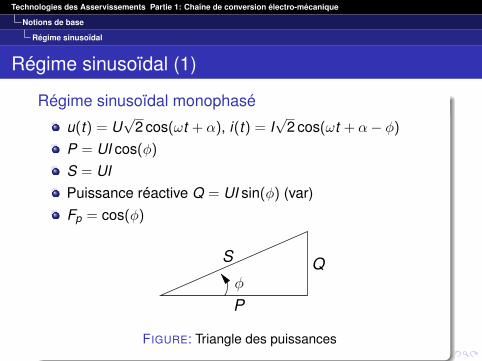
Régime sinusoïdal monophasé
u(t) = U√
2 cos(ωt + α), i(t) = I√
2 cos(ωt + α− φ)
P = UI cos(φ)
S = UIPuissance réactive Q = UI sin(φ) (var)Fp = cos(φ)
Q
Pφ
S
FIGURE: Triangle des puissances
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Régime sinusoïdal
Régime sinusoïdal (2)
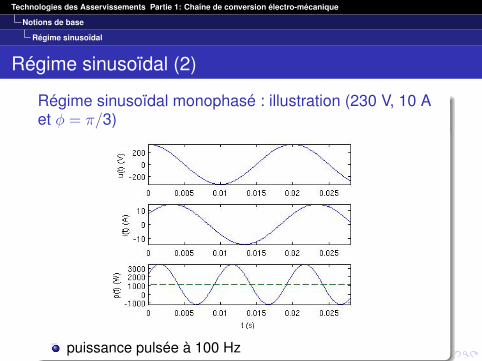
Régime sinusoïdal monophasé : illustration (230 V, 10 Aet φ = π/3)
puissance pulsée à 100 Hz
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Régime sinusoïdal
Régime sinusoïdal (3)
Notations complexes
u(t) = U√
2 cos(ωt + α)→ U = U exp(jα)
i(t) = I√
2 cos(ωt + β)→ U = I exp(jβ)
Puissance complexe S = U I∗
S = |S|P = Re(S)
Q = Im(S)
Fp = arg(S)

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Régime sinusoïdal
Régime sinusoïdal (4)
Hamoniques de courant
i(t) =∑∞
k=1 Ik√
2 cos(kωt − φk )
Conservation de la puissance (Théorème de Parceval) :I2eff =
∑k I2
k
Taux d’harmoniques : TH =
√∑∞k=2 Ik 2
Ieff
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Régime sinusoïdal
Régime sinusoïdal (5)
Puissance en régime harmonique
u(t) = U√
2 cos(ωt)i(t) =
∑∞k=1 Ik
√2 cos(kωt − φk )
Puissance portée uniquement par le fondamental ducourant : P = UI1 cos(φ1)
Puissance réactive du fondamental : Q = UI1 sin(φ1)
S2 = P2 + Q2 + D2 où D est la puissance déformante(D2 = U2∑∞
k=2 Ik 2)
Fp = I1I cosφ1
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Régime triphasé équilibré
Régime triphasé (1)
Système triphasé équilibré directTensions simples (référencées par rapport au neutre)
va(t) = V√
2 cos(ωt)
vb(t) = V√
2 cos(ωt − 2π3
)
vc(t) = V√
2 cos(ωt − 4π3
)
courants de ligneia(t) = I
√2 cos(ωt − φ)
ib(t) = I√
2 cos(ωt − φ− 2π3
)
ic(t) = I√
2 cos(ωt − φ− 4π3
)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Régime triphasé équilibré
Régime triphasé (2)
PuissanceTensions entre deux phases U =
√3V
P = p(t) =√
3UI cos(φ)
Q =√
3UI sin(φ)
S =√
3UIFp = cos(φ)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Régime triphasé équilibré
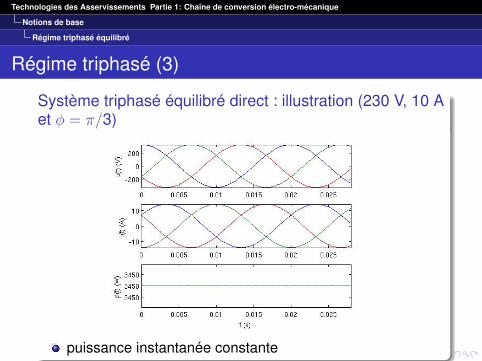
Régime triphasé (3)
Système triphasé équilibré direct : illustration (230 V, 10 Aet φ = π/3)
puissance instantanée constante

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Magnétostatique : Production de couple et de force
Magnétostatique : préliminaires
Circuit magnétique (ou bobine d’inductance)
i(t)
v(t)
Flux coupé par la bobine : φ = LiInductance L (coefficient d’auto-inductance)Loi d’induction v(t) = dφ/dt = Ldi/dtEnergie magnétique Wm = 1
2Li2 = 12φ
2/L

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Magnétostatique : Production de couple et de force
Magnétostatique : moteur élémentaire
Circuit magnétique déformable
i(t)
θ
v(t)charge
Puissance électrique reçue v(t)i(t)Puissance mécanique transmise à la charge Cθ (C est lecouple)Énergie magnétique stockée : Wm(i , θ) ou Wm(φ, θ)

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Magnétostatique : Production de couple et de force
Principe physique
Bilan de puissance
dWm/dt = u i − C θ = i φ− C θ
Avec Wm = Wm(φ, θ), on a dWm/dt = ∂Wm∂φ φ+ ∂Wm
∂θ θ
En identifiant, on obtient ∂Wm(φ,θ)∂φ = i et C = −∂Wm(φ,θ)
∂θ
⇒ Production de couple si la variation de l’énergie à pluxconstant est non nulle.
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Magnétostatique : Production de couple et de force
Principe physique (2)
Cas linéaireφ = L(θ) i (l’inductance dépend de la position)Wm(i , θ) = 1
2Li2, Wm(φ, θ) = 12φ
2/L(θ)
C = −∂Wm(φ,θ)∂θ = i2
2dL(θ)
dθ
⇒ Production de couple si i 6= 0 et dL(θ)dθ 6= 0
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Notions de base
Magnétostatique : Production de couple et de force
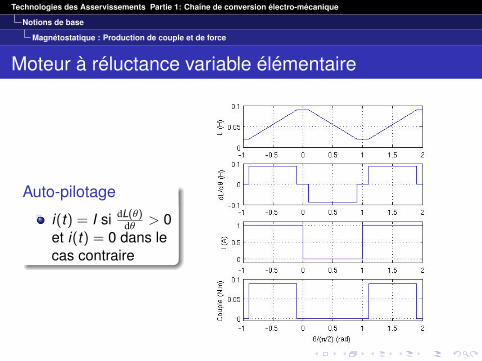
Moteur à réluctance variable élémentaire
Auto-pilotage
i(t) = I si dL(θ)dθ > 0
et i(t) = 0 dans lecas contraire
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Dimensionnement de la chaine de puissance
Plan1 Notions de base
Présentation générale des solutionsGrandeurs électriquesMagnétostatique : Production de couple et de force
2 Dimensionnement de la chaine de puissance3 Les convertisseurs statiques
IntroductionLes composantsLe hacheurL’onduleur
4 Les actionneurs électriquesGénéralitésMoteur à courant continuMoteur synchroneMoteur asynchrone
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Dimensionnement de la chaine de puissance
Dimensionnement de la chaine de puissance
Objectifs
Être capable de déterminer les puissances requises parl’applicationÊtre capable de choisir un actionneur (vitesse et couple) etle réducteur associé
Points clésRelier les déplacements de l’actionneur et de sa chargeCalculer l’inertie globale au niveau du moteur ou au niveaude l’applicationTenir compte des rendements
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Plan1 Notions de base
Présentation générale des solutionsGrandeurs électriquesMagnétostatique : Production de couple et de force
2 Dimensionnement de la chaine de puissance3 Les convertisseurs statiques
IntroductionLes composantsLe hacheurL’onduleur
4 Les actionneurs électriquesGénéralitésMoteur à courant continuMoteur synchroneMoteur asynchrone
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Introduction
Introduction (1)Différents types de conversion
Hacheur (= / =, DC-DC converter) : règle la valeurmoyenne de la tensionOnduleur (= / ', inverter) : réalise une tension alternativede valeur efficace et de fréquence variableRedresseur (' / =, rectifier) : réalise une tension continueà partie d’une tension alternative. Les redresseurs les pluscourants sont à diodes et ne permettent pas de faire varier latension continue en sortie.
Gradateur (' / ', AC-AC converter) : règle la valeurefficace de la tension mais la fréquence reste la même. Abase de triacs (deux thyristors tête-bêche), il est utilisé pour lavariation de lumière, pour la variation de vitesse des moteursuniversels et le démarrage des moteurs asynchrones.

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Introduction
Introduction (3)
Pourquoi la commutation ? (1)Variation continue (résistance ou transistor en mode nonsaturé)→ mauvais rendementSolutions réservées aux faibles puissances (< 100 W)
u1(t)
i1(t) R i2(t)
u2(t)
u10 u2
η1
FIGURE: Convertisseur en mode continu (sans commutation) :principe et rendement
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Introduction
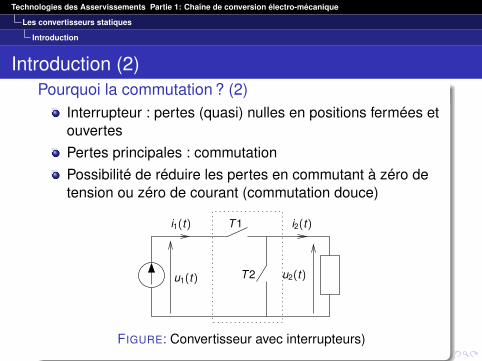
Introduction (2)Pourquoi la commutation ? (2)
Interrupteur : pertes (quasi) nulles en positions fermées etouvertesPertes principales : commutationPossibilité de réduire les pertes en commutant à zéro detension ou zéro de courant (commutation douce)
u1(t)
i1(t) i2(t)
u2(t)
T1
T 2
FIGURE: Convertisseur avec interrupteurs)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Introduction
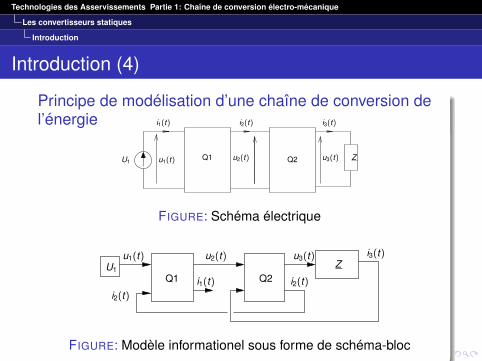
Introduction (4)
Principe de modélisation d’une chaîne de conversion del’énergie
u1(t)
i1(t) i2(t)
u2(t)
i3(t)
Q1 Q2U1u3(t) Z
FIGURE: Schéma électrique
u3(t)u1(t) u2(t)ZU1
Q1 Q2
i2(t)i2(t)i1(t)
i3(t)
FIGURE: Modèle informationel sous forme de schéma-bloc
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Introduction
Introduction (5)
Principe de modélisation : analogiesReprésentation énergétique macroscopiqueBound-graph
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Les composants
Les composants (1)
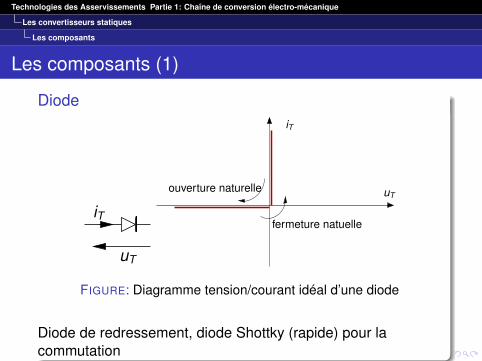
Diode
iT
uT
uT
iT
ouverture naturelle
fermeture natuelle
FIGURE: Diagramme tension/courant idéal d’une diode
Diode de redressement, diode Shottky (rapide) pour lacommutation

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Les composants
Les composants (2)
Thyristor
iT
uT
uT
iT
ouverture naturelle
fermeture commandée
passage à l’état bloqué direct
FIGURE: Diagramme tension/courant idéal d’un thyristor
Utilisé pour les très forts courants

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Les composants
Les composants (3)
Thyristor GTO (gate turn-off ou extinction par la gâchette)
iT
uT
uT
iT
ouverture naturelle
passage à l’état bloqué direct
fermeture et ouverturecommandées
FIGURE: Diagramme tension/courant idéal d’un thyristor GTO
Utilisation pour commuter de très forts courants
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Les composants
Les composants (4)
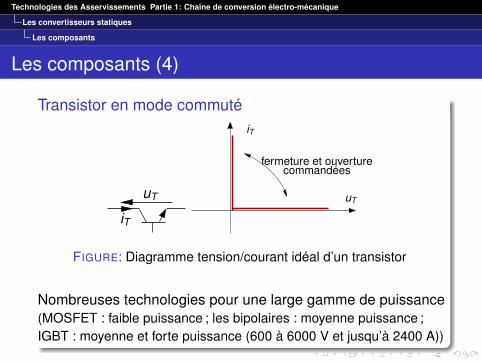
Transistor en mode commuté
iT
uT uT
iT
fermeture et ouverturecommandées
FIGURE: Diagramme tension/courant idéal d’un transistor
Nombreuses technologies pour une large gamme de puissance(MOSFET : faible puissance ; les bipolaires : moyenne puissance ;IGBT : moyenne et forte puissance (600 à 6000 V et jusqu’à 2400 A))

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Les composants
Les composants (5)
Association transistor-diode
uT
iT
iT
fermeture et ouverturecommandées
natuellesfermeture et ouverture
uT
FIGURE: Diagramme tension/courant idéal d’une associationtransistor/diode ou GTO/diode
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Les composants
Les composants (6)
Commande rapprochée (1)Circuit électronique permettant de commuter l’interrupteurEntrée : signal binaire TTLPas développé dans ce cours
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Les composants
Les composants (6)
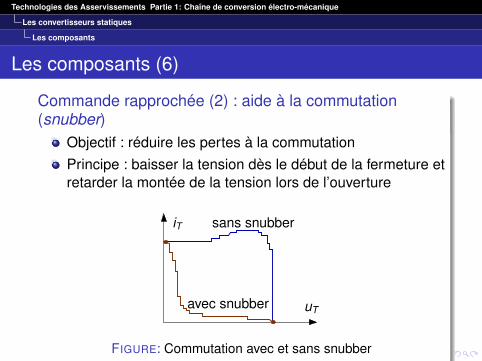
Commande rapprochée (2) : aide à la commutation(snubber)
Objectif : réduire les pertes à la commutationPrincipe : baisser la tension dès le début de la fermeture etretarder la montée de la tension lors de l’ouverture
uTavec snubber
sans snubberiT
FIGURE: Commutation avec et sans snubber
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Le hacheur
Hacheur 1Q (1)
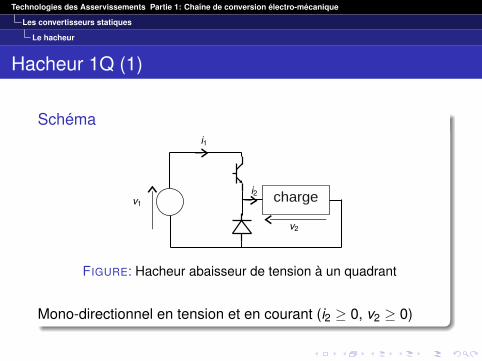
Schéma
v1
i1
v2
i2
FIGURE: Hacheur abaisseur de tension à un quadrant
Mono-directionnel en tension et en courant (i2 ≥ 0, v2 ≥ 0)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Le hacheur
Hacheur 1Q (2)
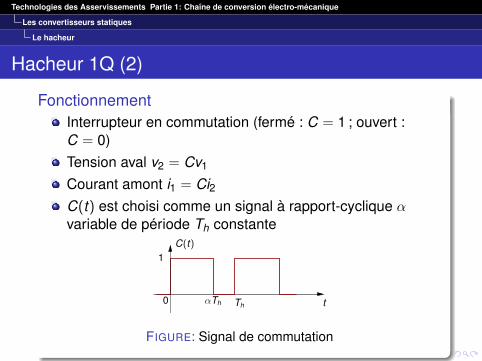
FonctionnementInterrupteur en commutation (fermé : C = 1 ; ouvert :C = 0)Tension aval v2 = Cv1
Courant amont i1 = Ci2C(t) est choisi comme un signal à rapport-cyclique αvariable de période Th constante
t
C(t)
1
0 αTh Th
FIGURE: Signal de commutation
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Le hacheur
Hacheur 1Q (3)
Grandeurs moyennesHypothèse : v1 et i2 sont constants sur une période dehachageOn définit 〈x(t)〉T comme la valeur moyenne calculée surune période de hachage〈C(t)〉T = α
〈v2(t)〉T = αv1
〈i1(t)〉T = αi2α permet un réglage continu de la tension avale (et de lapuissance)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Le hacheur
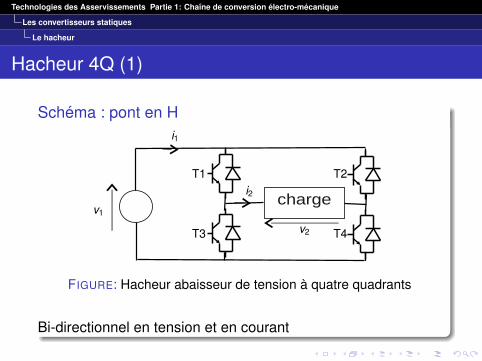
Hacheur 4Q (1)
Schéma : pont en H
v1
i1
T1i2
v2
T2
T3 T4
FIGURE: Hacheur abaisseur de tension à quatre quadrants
Bi-directionnel en tension et en courant
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Le hacheur
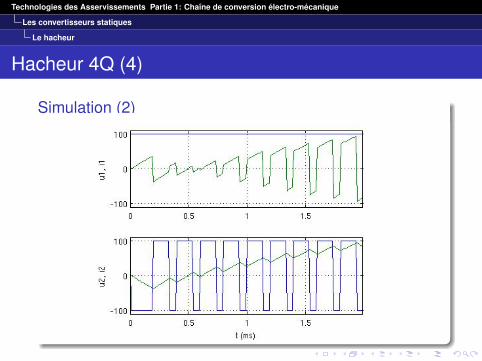
Hacheur 4Q (2)
Fonctionnement à deux niveauxDeux états :
C = 1 : T1 et T4 fermés ; T2 et T3 ouverts. Alors,v2(t) = v1(t) et i1(t) = i2(t)C = 0 : T1 et T4 ouverts ; T2 et T3 fermés. Alors,v2(t) = −v1(t) et i1(t) = −i2(t)
Modèle synthétique : v2 = (2C − 1)v1 et i1 = (2C − 1)i2Commande à rapport cyclique α : 〈v2〉T = (2α− 1)v1 et〈i1〉T = (2α− 1)i2
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Le hacheur
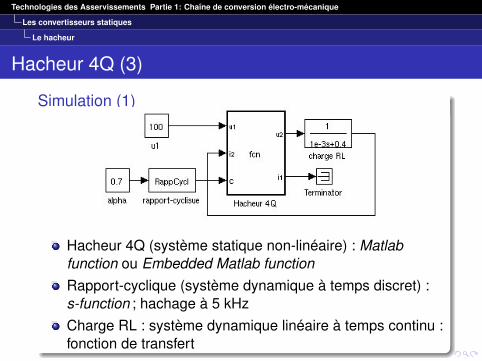
Hacheur 4Q (3)
Simulation (1)
Hacheur 4Q (système statique non-linéaire) : Matlabfunction ou Embedded Matlab functionRapport-cyclique (système dynamique à temps discret) :s-function ; hachage à 5 kHzCharge RL : système dynamique linéaire à temps continu :fonction de transfert
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
Le hacheur
Hacheur 4Q (4)
Simulation (2)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
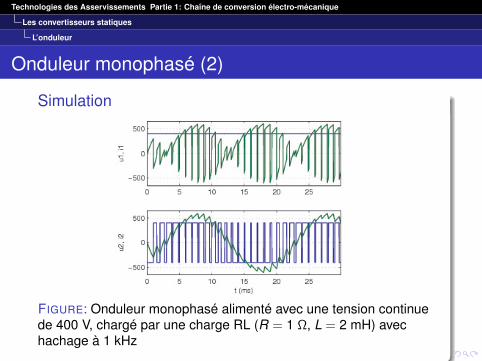
Onduleur monophasé (1)
PrincipeIdem au hacheur 4QRapport-cyclique variableRéglage du rapport-cyclique :α = 1
2(1 + v∗2/v1)⇒ 〈v2〉T = v∗2
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
Onduleur monophasé (2)
Simulation
FIGURE: Onduleur monophasé alimenté avec une tension continuede 400 V, chargé par une charge RL (R = 1 Ω, L = 2 mH) avechachage à 1 kHz
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
Onduleur monophasé (3)
Temps-mortsObjectif : prévenir le court-circuit des deux transistors d’unbras de pontMéthode : au moment de changement d’état de C(t),retarder la fermeture par rapport à l’ouverture d’une duréepermettant de garantir que l’interrupteur à ouvrir a terminésa commutation avant de déclencher la fermeture dusecond interrupteur
Ondulation de courant
Calcul approché : ∆i = 2α(1−α)v1fhL où fh est la fréquence de
hachage

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
Onduleur triphasé (1)
Structure
v1
T1 T2 T3
T4 T5 T6
i1
va
ia
FIGURE: Onduleur triphasé

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
Onduleur triphasé (2)
Principe (1) : MLI (modulation de largeur d’impulsion ouPWM)
Trois bras de pont commandés indépendamment avec lessignaux Ca(t), Cb(t) et Cc(t) synchronisés à la fréquencefhPour le bras a :
Ca = 1⇒ va = v1 et i1 = iaCa = 0⇒ va = 0 et i1 = 0Récapitulatif : va = Cav1 et i1 = Caia
En considérant les trois phases :
vavbvc
= v1
CaCbCc
et
i1 = Ca ia + Cb ib + Cc ic
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
Onduleur triphasé (3)
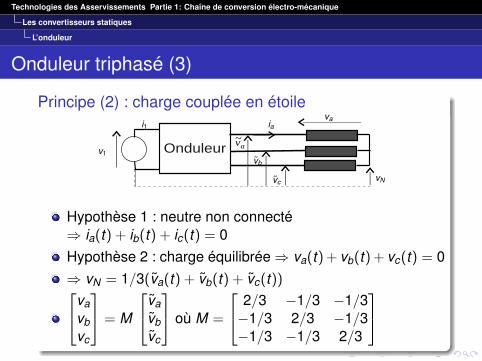
Principe (2) : charge couplée en étoile
v1
i1
vb
vc
vaia
vN
Hypothèse 1 : neutre non connecté⇒ ia(t) + ib(t) + ic(t) = 0Hypothèse 2 : charge équilibrée⇒ va(t) + vb(t) + vc(t) = 0⇒ vN = 1/3(va(t) + vb(t) + vc(t))va
vbvc
= M
vavbvc
où M =
2/3 −1/3 −1/3−1/3 2/3 −1/3−1/3 −1/3 2/3
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
Onduleur triphasé (4)
CommandeRq. : matrice M non inversible
Tensions à réaliser :
v∗a (t)v∗b (t)v∗c (t)
= V√
2
sin(ωt)sin(ωt − 2π/3)sin(ωt + 2π/3)
Solution :
αa = α0 + v∗a/Eαb = α0 + v∗b/Eαc = α0 + v∗c /E
où α = 0.5
Vérification : calculer 〈va(t)〉T , 〈vb(t)〉T et 〈vc(t)〉T
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
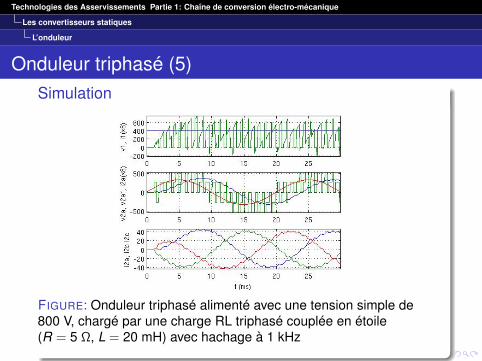
Onduleur triphasé (5)Simulation
FIGURE: Onduleur triphasé alimenté avec une tension simple de800 V, chargé par une charge RL triphasé couplée en étoile(R = 5 Ω, L = 20 mH) avec hachage à 1 kHz
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les convertisseurs statiques
L’onduleur
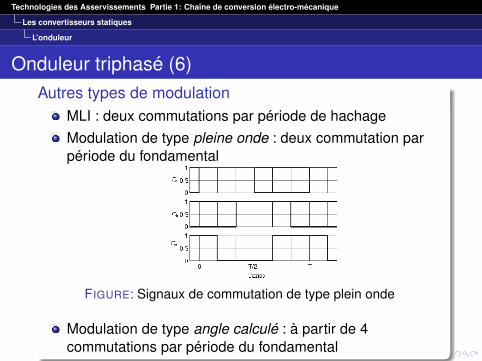
Onduleur triphasé (6)Autres types de modulation
MLI : deux commutations par période de hachageModulation de type pleine onde : deux commutation parpériode du fondamental
FIGURE: Signaux de commutation de type plein onde
Modulation de type angle calculé : à partir de 4commutations par période du fondamental
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Plan1 Notions de base
Présentation générale des solutionsGrandeurs électriquesMagnétostatique : Production de couple et de force
2 Dimensionnement de la chaine de puissance3 Les convertisseurs statiques
IntroductionLes composantsLe hacheurL’onduleur
4 Les actionneurs électriquesGénéralitésMoteur à courant continuMoteur synchroneMoteur asynchrone
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Généralités
Les actionneurs électriques
GénéralitésCouple produit par l’interaction d’un champ stator et d’unchamp rotor au niveau de l’entreferEfficacité maximale : champ stator et rotor en quadratureDeux principes :
moteurs à excitation (aimants ou excitation bobinée) :moteur à courant continu, moteur synchronemoteur à induction (moteur asynchrone)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Généralités
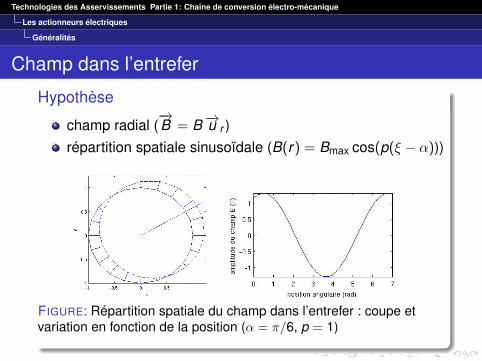
Champ dans l’entrefer
Hypothèse
champ radial (−→B = B−→u r )
répartition spatiale sinusoïdale (B(r) = Bmax cos(p(ξ − α)))
FIGURE: Répartition spatiale du champ dans l’entrefer : coupe etvariation en fonction de la position (α = π/6, p = 1)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Généralités
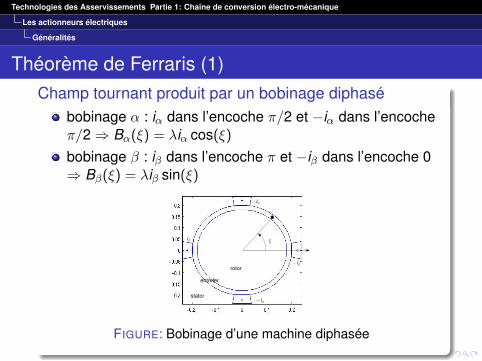
Théorème de Ferraris (1)Champ tournant produit par un bobinage diphasé
bobinage α : iα dans l’encoche π/2 et −iα dans l’encocheπ/2⇒ Bα(ξ) = λiα cos(ξ)
bobinage β : iβ dans l’encoche π et −iβ dans l’encoche 0⇒ Bβ(ξ) = λiβ sin(ξ)
ξ
iα
−iα
iβ
rotor
entrefer
stator
−iβ
FIGURE: Bobinage d’une machine diphasée

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Généralités
Théorème de Ferraris (2)
Alimentation des bobines en courant alternatifiα = Imax cos(ωt)iβ = Imax sin(ωt)
Champ résultantB(ξ, t) = Bα + Bβ = λImax cos(ξ − ωt)Champ tournant à la vitesse angulaire ω
Théorème de Ferrarisn bobinages, à p paires de pôles, régulièrement espacé etalimentés par des courant à la pulsation ω régulièredéphasés produisent un champ tournant à la vitesse ω/p
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Généralités
Principes de fonctionnement (1)
MCCchamp statique (αs et αr constants)excitation au stator (aimants ou bobinage)courant d’induit (au rotor) amenés par le collecteurpermettant de réaliser l’ondulation des courants au rotor
MSchamp tournant à la vitesse Ω
excitation au rotor (aimants ou bobinage)courant d’induit (au stator) à la pulsation ω = pΩ
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Généralités
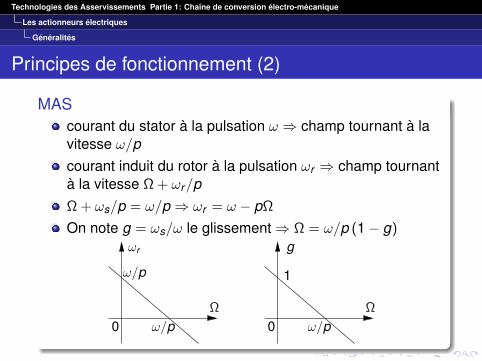
Principes de fonctionnement (2)
MAScourant du stator à la pulsation ω ⇒ champ tournant à lavitesse ω/pcourant induit du rotor à la pulsation ωr ⇒ champ tournantà la vitesse Ω + ωr/pΩ + ωs/p = ω/p ⇒ ωr = ω − pΩ
On note g = ωs/ω le glissement⇒ Ω = ω/p (1− g)
Ω
ω/p
ω/p0
ωr
Ω
ω/p0
g
1
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur à courant continu
Moteur à courant continu (1)
ConstitutionStator : excitation (inducteur) différentes technologies aupossibles :
aimants permanentsbobinage alimenté par un courant continu (électro-aimant)
Rotor : système d’enroulement polyphasé alimenté via lecollecteur (onduleur mécanique)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur à courant continu
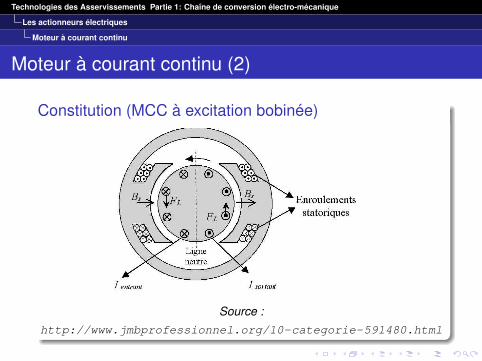
Moteur à courant continu (2)
Constitution (MCC à excitation bobinée)
Source :http://www.jmbprofessionnel.org/10-categorie-591480.html
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur à courant continu
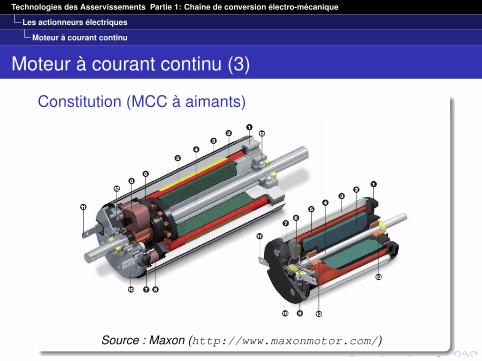
Moteur à courant continu (3)
Constitution (MCC à aimants)
Source : Maxon (http://www.maxonmotor.com/)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur à courant continu
Moteur à courant continu (4)
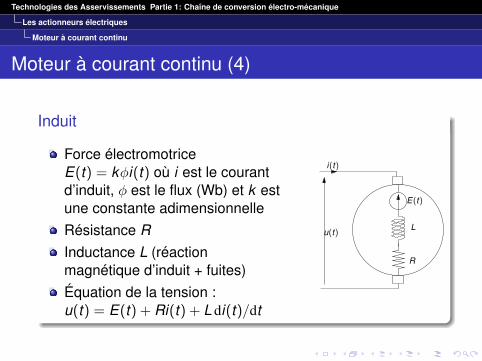
Induit
Force électromotriceE(t) = kφi(t) où i est le courantd’induit, φ est le flux (Wb) et k estune constante adimensionnelleRésistance RInductance L (réactionmagnétique d’induit + fuites)Équation de la tension :u(t) = E(t) + Ri(t) + L di(t)/dt
L
R
i(t)
u(t)
E(t)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur à courant continu
Moteur à courant continu (5)
Équation mécaniqueCouple électromécanique C(t) = kφΩ(t)Équation mécanique : J dΩ(t)/dt = C(t)− Cf − Cch où Jest l’inertie totale du système en mouvement rapportée àl’axe du moteur,Cf est le couple de frottement (frottements secs et fluidesCf = Cfssigne(Ω) + f Ω)Cch est le couple de chargeRq. : puissance électromécanique : CΩ = EI
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur à courant continu
Moteur à courant continu (6) : variations
Moteur à aimants et à excitation constanteSimplification des équations avec K = kφ (C = Ki etE = K Ω)Cas le plus courant (notamment en robotique)
Moteur universelExcitation sérieHypothèse linéaire φ = Lei
⇒ C = kLei2
Couple positif en présence de courant continu ou alternatif
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur synchrone
Moteur synchrone (1)
Constitution (MS triphasée)Stator : système de 3 enroulement à p paires de pôlesRotor : inducteur de différentes technologies au possibles
aimants permanentsbobinage alimenté par un courant continu (électro-aimant)

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur synchrone
Moteur synchrone (2)
Stator
encochedent
(Sources : http://www.gel.usherbrooke.ca/leroux/projet/data/Moteur/chap9/Liens/09matp5a.gif et
http://uran.donetsk.ua/~masters/2006/eltf/romanova/
library/280px-Stator_feuillete.jpg)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur synchrone
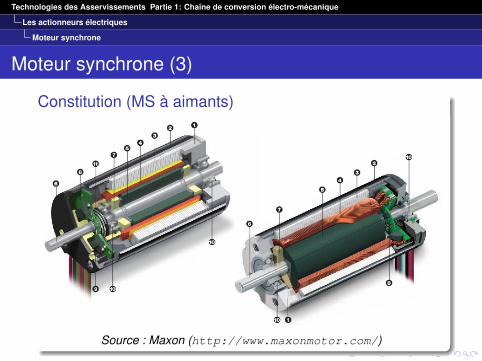
Moteur synchrone (3)
Constitution (MS à aimants)
Source : Maxon (http://www.maxonmotor.com/)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur synchrone
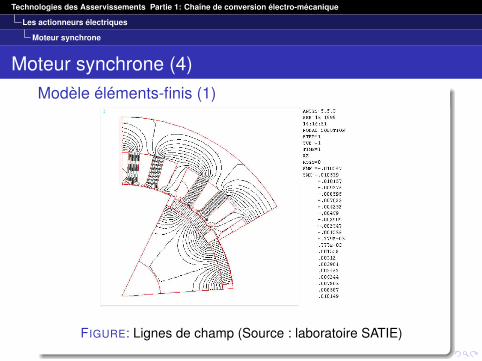
Moteur synchrone (4)Modèle éléments-finis (1)
FIGURE: Lignes de champ (Source : laboratoire SATIE)

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur synchrone
Moteur synchrone (5)Modèle éléments-finis (2)
FIGURE: Induction magnétique (Source : laboratoire SATIE)

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur synchrone
Moteur synchrone (6)
Modèle par phase de Behn-Eschenburg à fréquenceconstante
Hypothèses : machine à pôles lisses non saturéeFem E0a
Résistance RRéactance Xs (Réaction Magnétique d’Induit et fuites)V a = E0a − jXsIa − RsIa où V a et Ia sont respectivement latension et le courant de la phase a
V aIa RsIa
jXsIa
E0a
φ ψ
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur synchrone
Moteur synchrone (7)
Puissance et couplePuissance électromécanique : CΩ = 3E0Ia cos(ψ)
Couple : C = 3KIa cos(ψ) où K = E0/Ω
ExerciceUn alternateur triphasé débite sur un réseau 50 Hz230/400 V. L’alternateur est entrainé par une turbine quifournit 2 kW. On négligé les pertes (Rs = 0). On donneXs = 20 Ω et E0 = 250 V.Déterminez la valeur efficace du courant, la puissanceréactive absorbée par l’alternateur et le facteur depuissance de l’installation.

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone triphasé (1)
ConstitutionStator : système de 3 enroulement à p paires de pôles(idem MS)Rotor : différentes technologies au possibles :
Rotor à cage : barreaux d’aluminium coulés dans unempilement de tôles magnétiques et refermés par desanneaux de court-circuit (le plus utilisé)Rotor bobiné : même structure qu’un stator alimentée par 3contacts glissants. Intérêt : possibilité d’ouvrir lecourt-circuit (mesure, machine à double alimentation)Rotor massif : matériau unique permettant la circulation ducourant et des lignes de champ

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (2)
Rotor à cage
FIGURE: Coupe d’un rotor à cage (Source : http://fr.academic.ru/pictures/frwiki/67/Coupe_rotor_machine_asynchrone.jpg)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (3)
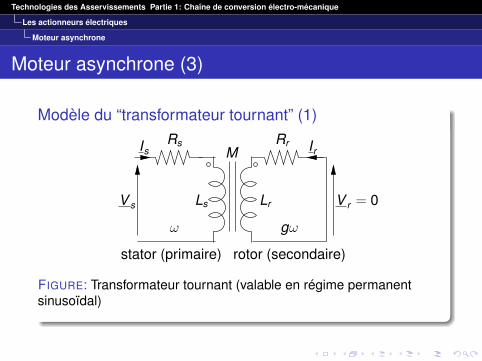
Modèle du “transformateur tournant” (1)Rs Rr
LrLs
IrIs
V s
M
ω gω
stator (primaire) rotor (secondaire)
V r = 0
FIGURE: Transformateur tournant (valable en régime permanentsinusoïdal)

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (4)Modèle du “transformateur tournant” (2)
Équations aux tensions :
V s = RsIs + jωφs0 = V r = Rr Ir + jgωφr
Équations aux flux :
φs = LsIs + MIr
φr = MIs + Lr Ir
Réécriture de l’équation de la tension du rotor :
0 =Rr
gIr + jωφr

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (5)
Modèle du “transformateur tournant” (3)
Rs Rr/g
LrLs
IrIs
V s
M
ω ω
FIGURE: Transformateur tournant avec secondaire ramené à lapulsation ω

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (6)
Modèle du “transformateur tournant” (4)
Équation d’un transformateur court-circuité au secondairepar une résistance Rr/g
Remarque : Rr/g = Rr + 1−gg Rr ; on retrouve :
Les pertes Joule du rotor Rr I2r (puissance par phase)
La puissance électro-mécanique 1−gg Rr I2
r (par phase)
La puissance électro-mécanique est représentée par unerésistance fictive
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (7)
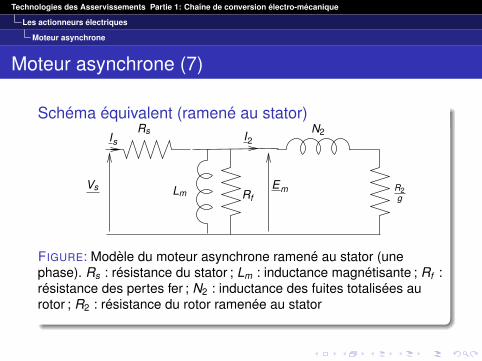
Schéma équivalent (ramené au stator)
R2gRf
Em
N2Is
Vs Lm
Rs I2
FIGURE: Modèle du moteur asynchrone ramené au stator (unephase). Rs : résistance du stator ; Lm : inductance magnétisante ; Rf :résistance des pertes fer ; N2 : inductance des fuites totalisées aurotor ; R2 : résistance du rotor ramenée au stator

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (8)Diagramme du cercle
Is = Y (g) V s avec Y (g) = 1jLmω
+ 1Rf
+ 1jN2ω+
R2g
Dans le plan complexe, Y (g) décrit un cercle
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (9)
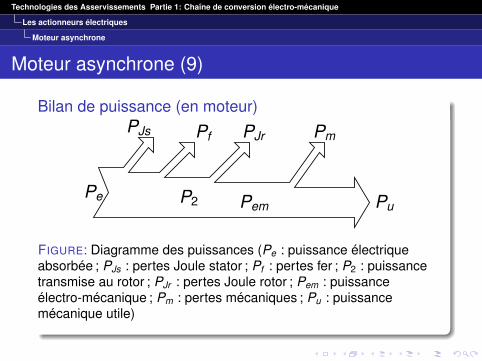
Bilan de puissance (en moteur)PJs Pf PJr Pm
PuPe Pem
P2
FIGURE: Diagramme des puissances (Pe : puissance électriqueabsorbée ; PJs : pertes Joule stator ; Pf : pertes fer ; P2 : puissancetransmise au rotor ; PJr : pertes Joule rotor ; Pem : puissanceélectro-mécanique ; Pm : pertes mécaniques ; Pu : puissancemécanique utile)
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (10)
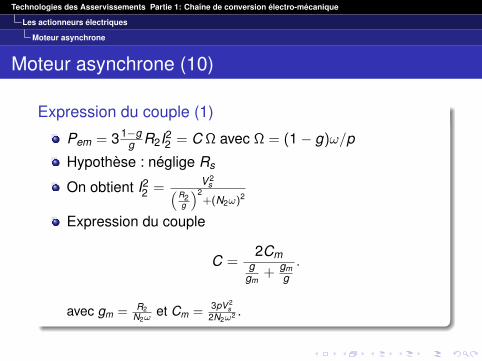
Expression du couple (1)
Pem = 31−gg R2I2
2 = C Ω avec Ω = (1− g)ω/p
Hypothèse : néglige Rs
On obtient I22 = V 2
s(R2g
)2+(N2ω)
2
Expression du couple
C =2Cm
ggm
+ gmg.
avec gm = R2N2ω
et Cm =3pV 2
s2N2ω2 .

Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
Moteur asynchrone (11)
Expression du couple (2)
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−10
−5
0
5
10
Couple d’une MAS
glissement
Cou
ple
(N.m
)
FIGURE: Couple d’une machine asynchrone
Technologies des Asservissements Partie 1: Chaîne de conversion électro-mécanique
Les actionneurs électriques
Moteur asynchrone
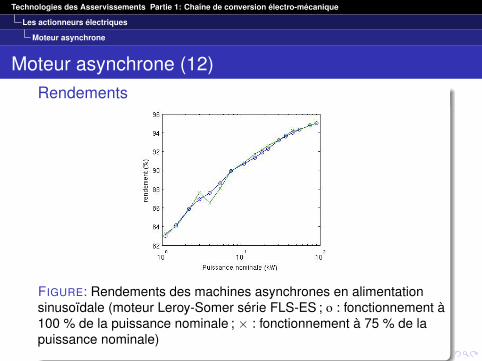
Moteur asynchrone (12)Rendements
FIGURE: Rendements des machines asynchrones en alimentationsinusoïdale (moteur Leroy-Somer série FLS-ES ; o : fonctionnement à100 % de la puissance nominale ; × : fonctionnement à 75 % de lapuissance nominale)