princippppi ed applicazioni del metodo degli elementi ...unina.stidue.net/politecnico di...
TRANSCRIPT
Principi ed applicazioni delp ppmetodo degli elementi finiti
Formulazione base con approccio agli spostamentip

PRINCIPIO DEI LAVORI VIRTUALI
Data una certa statica: sforzi σij, forze di volume Fi e forze di superficie fj; si dimostra che imporre la seguente equazione:
ij ij j j j j j jdv Fs dv f s ds r s dsσ ε = + +∫ ∫ ∫ ∫F V
ij ij j j j j j jV V S S
dv Fs dv f s ds r s dsσ ε = + +∫ ∫ ∫ ∫∀ cinematica congruente, cioè deformazioni εij e spostamenti si, tali che:
⎛ ⎞[ ]ji
ij i i Vj i
ss1 in V s s su S2 X X⎛ ⎞∂∂
ε = + =⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠
i l d i l i i di ilib iequivale ad imporre le equazioni di equilibrio:

METODO DEGLI ELEMENTI FINITI PER UN PROBLEMA ELASTICO-LINEARE 2D
Si consideri un problema piano il cui dominio sia quello rappresentato sotto eSi consideri un problema piano, il cui dominio sia quello rappresentato sotto esi voglia determinare lo stato tenso-deformativo del solido indotto dai carichi edai vincoli presenti.

1 Suddivido il mio dominio (bidimensionale) in un certo numero di parti ad
PROCEDURA
1. Suddivido il mio dominio (bidimensionale) in un certo numero di parti, adesempio triangolari, dette elementi finiti (mesh) e numero i nodi della griglia;
1
2 4
513
59
67
810
1112
1314
13
Lo scopo è quello di trasformare un problema differenziale avente come incognitedei campi (funzioni) in un problema algebrico avente come incognite degli scalaridei campi (funzioni), in un problema algebrico avente come incognite degli scalari.Più precisamente si passa dall’avere come incognite primarie le funzioni sx(x,y) esy(x,y) ad avere come incognite gli spostamenti Ux e Uy dei nodi della griglia.

2. Approssimo linearmente il campo di spostamenti su ciascuno di questi pp p p qelementi: (si noti l’introduzione delle numerazione locale dei nodi a livello di elemento)
( )( )
x 1 1 1
y 2 2 2
s x,y a b x c y
s x,y a b x c y
⎧ = + +⎪⎨
= + +⎪⎩
U3y
( )y⎪⎩
3
U
U3x
U1y
U2yCambio di parametri d’interpolazione
1
2U1x
U2xd interpolazione
( ) ( ) ( ) ( ) ( )x 1 1x 2 2x 3 3x i ixs x,y N x,y U N x,y U N x,y U N x,y U⎧ = + + =⎪⎨ ( ) ( ) ( ) ( ) ( )y 1 1y 2 2y 3 3y i iys x,y N x,y U N x,y U N x,y U N x,y U⎨
= + + =⎪⎩

( ) ( ) ( ) i i
j j
j m m j j m j mi
1 x y
2 det 1 x y x y x y y y x x x y
dove : N x,y 2
Δ =
⎛ ⎞− + − + − ⎜ ⎟= ⎜ ⎟Δ ⎜ ⎟
( )( )( )
m m
x j j jx
i j j ij
1 x y
s x ,y Uvale che: N x ,y
⎜ ⎟⎝ ⎠
⎧ =⎪= δ ⇒ ⎨( )( )i j j ij
y j j jy
, ys x ,y U⎨
=⎪⎩
i ii

Le tra funzioni di forma dell’elemento triangolare

Dalla combinazione delle tre funzioni di forma si ha l’approsimazione (lineare) del campodi spostamenti sul singolo elemento finito
ssx U1x
sx
U3x
U2x
13
2
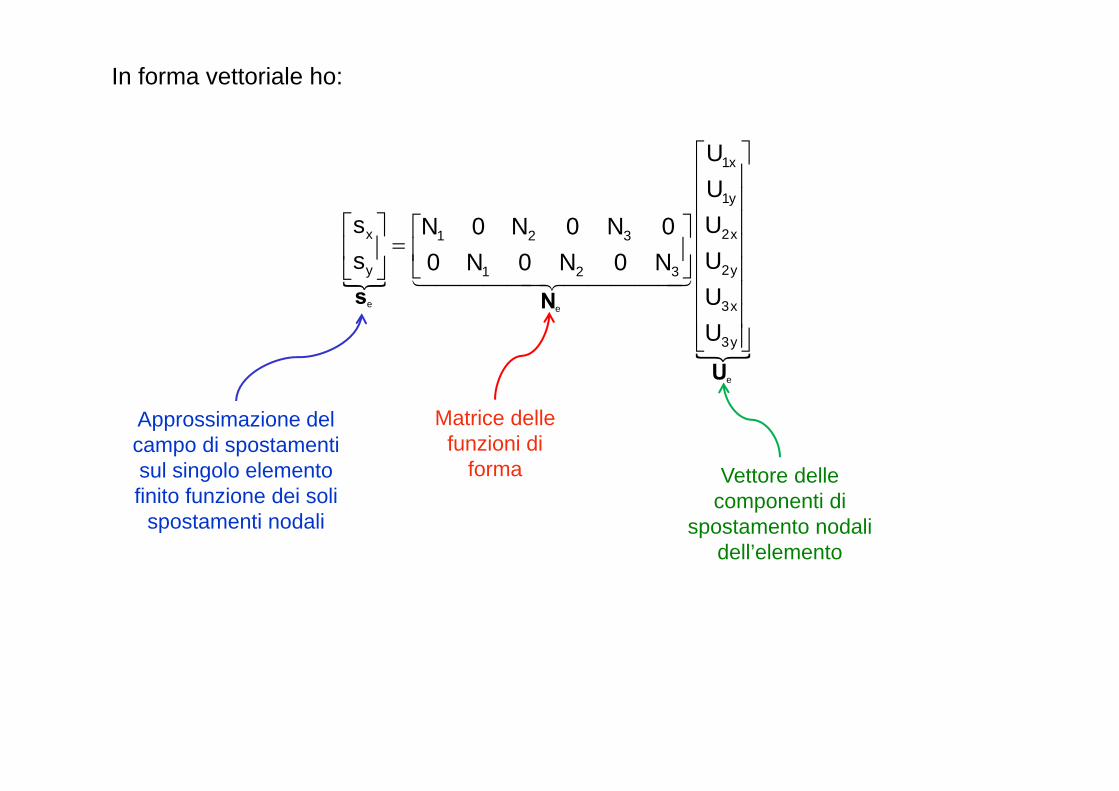
In forma vettoriale ho:
1x
1y
UUU
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤
e
x 2x1 2 3
y 2y1 2 3
3x
s UN 0 N 0 N 0s U0 N 0 N 0 N
U
⎢ ⎥⎡ ⎤ ⎡ ⎤= ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦ ⎢ ⎥
⎢ ⎥⎢ ⎥
s Ne e
e
3x
3yU⎢ ⎥⎢ ⎥⎣ ⎦
N
U
Vettore delle
Matrice delle funzioni di
forma
Approssimazione del campo di spostamenti sul singolo elemento
componenti di spostamento nodali
dell’elemento
finito funzione dei soli spostamenti nodali

Applicando l’operatore differenziale di congruenza ho:
1x
1yx 1,x 2,x 3,x
UU
N 0 N 0 N 0U
⎡ ⎤⎢ ⎥⎢ ⎥⎡ ⎤ ⎡ ⎤ε⎢ ⎥⎢ ⎥ ⎢ ⎥ 2x
y 1,y 2,y 3,y2y
xy 1,y 1,x 2,y 2,x 3,y 3,x3x
U0 N 0 N 0 N
UN N N N N N
U
⎢ ⎥⎢ ⎥ ⎢ ⎥ε = ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥γ⎣ ⎦ ⎣ ⎦ ⎢ ⎥⎢ ⎥ε B
e
3ye U⎢ ⎥
⎢ ⎥⎣ ⎦eε B
U
i
⎥⎥⎤
⎢⎢⎡
∂∂
⎫⎧ x0
ε
caso piano
⎭⎬⎫
⎩⎨⎧
⎥⎥⎥⎥⎥
⎢⎢⎢⎢⎢
∂∂∂∂
∂
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=y
x
xy
y
x
ss
y
x0
γεε
ε
⎥⎥⎦⎢
⎢⎣ ∂∂ xy

3. Fase di assemblaggio: sostituisco ora nell’equazione dei lavori virtuali scritta in forma vettoriale:
T T Tdv dv ds= +∫ ∫ ∫ε σ s F s f F = forza di volumeFV V S
dv dv ds= +∫ ∫ ∫ε σ s F s f
= +∑ ∑ ∑∫ ∫ ∫T T Te e e e e edv dv dsε σ s F s f
f = forza di superficie
e e Fee e eV V S
e e Fe
T T T T T Te e e e e e e e e
e e eV V S
dv dv ds= +∑ ∑ ∑∫ ∫ ∫U B σ U N F U N fe
Ma i gradi di libertà locali Ue di ciascun elemento li posso esprimere in funzione di quelli globali U, attraverso le cosiddette matrice booleane di connettività:
e = eU L U
1x1x
UU ⎡ ⎤⎡ ⎤ ⎢ ⎥1x
1y1y
2x
UUU
U
⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
.Le è una matrice di zeri e uno
2y
3xNx
U
U UU
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦
.
.e
3yNy
e
U U⎢ ⎥ ⎢ ⎥⎣ ⎦
⎣ ⎦UU

ESEMPIO:
21 2
33
12
2
3
2 3• 3x2 = 6 gradi di libertà ∀ elemento
2 10 à
4
5 1
2 3 1
1 • 5x2 = 10 gradi di libertà globali
U
4
⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥
x1x
y
1
1
UU 0 0 1 0 0 0 0 0 0 0 UU 0 0 0 1 0 0 0 0 0 0
U
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥= = ⋅⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥
1y
2x2
2y
U 0 0 0 1 0 0 0 0 0 0U 1 0 0 0 0 0 0 0 0 0
U 0 1 0 0 0 0 0 0 0 0
.U .
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎢ ⎥⎣ ⎦
⎣ ⎦
3xx
3y 6x1y 10x1
5
5
0 0 0 0 0 0 1 0 0 0U U0 0 0 0 0 0 0 1 0 0U U
.
L ⎣ ⎦y 10x12 6x10
L

Segue che:
e e Fe
T T T T T T T T T Te e e e e e e e e
e e eV V S
dv dv ds = + ∀∑ ∑ ∑∫ ∫ ∫U L B σ U L N F U L N f U
[ ] =
⎡ ⎤
∑ ∫e
T T1X 1X NX NX e e e1x2N
e V
U U ... U U dvL B σ
⎡ ⎤⎢ ⎥⎢ ⎥
≡⎢ ⎥⎢ ⎥⎢ ⎥
iiii
intR
[ ] [ ]
⎢ ⎥⎢ ⎥⎣ ⎦
+
⎡ ⎤ ⎡ ⎤
∑ ∑∫ ∫
i
e Fe
2Nx1
T T T T1X 1X NX NX e e e 1X 1X NX NX e e e1x2N 1x2N
e eV S
U U ... U U dv U U ... U U dsL N F L N f [ ]∀ 1X 1X NX NX 1x2N U U ... U U
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
≡⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
i ii ii ii i
FestR ≡ f
estR
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢⎣ ⎦⎣ ⎦
i ii i
2Nx1⎥
2Nx1

Dovendo valere ∀UT congruente allora deve valere anche per la seguente scelta di UT
[ ]T T [ ]= =T T1 1x2N
1 0 ... 0 0U U
Da cui:Da cui:[ ] =
⎡ ⎤⎢ ⎥
∑ ∫
ie
T Te e e1x2N
e V
1 0 ... 0 0 dvL B σ
⎢ ⎥⎢ ⎥
≡⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
iiii
intR
[ ] [ ]⎢ ⎥⎣ ⎦
+
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥
∑ ∑∫ ∫
i
i ie Fe
2Nx1
T T T Te e e e e e1x2N 1x2N
e eV S
1 0 ... 0 0 dv 1 0 ... 0 0 ds L N F L N f
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
≡ ≡⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦
i ii ii i
fFestestR R
⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦i i 2Nx12Nx1
Da cui, la prima equazione (scalare):
( ) ( ) ( )1 1 1= +F fint est estR R R

Adottando le altre scelte per UT segue che:T T=U Ui=U U
( ) ( ) ( )i i i+F fR R R( ) ( ) ( )i i i= +int est estR R R
Alla fine tutte le equazioni che posso scrivere possono essere espresse in termini q p p pvettoriali:
= +F fint est estR R R
O equivalentemente:
e e Fe
T T T T T Te e e e e e e e e
e e eV V S
dv dv ds= +∑ ∑ ∑∫ ∫ ∫L B σ L N F L N f
Equilibrio in forma debole e discretizzato per elementi finiti

Applichiamo ora le equazioni del legame costitutivo e di congruenza in forma vettoriale:
= = =e e e e e e eσ Dε DB U D B L U
S tit i ll i i di ilib i d b l i f di ti tSostituisco nelle equazioni di equilibrio debole in forma discretizzata:
e e Fe
T T T T T Te e e e e e e e
e e eV V S
dv dv ds= +∑ ∑ ∑∫ ∫ ∫e e eL B D B L U L N F L N f
T T T T T Tdv dv ds= +∑ ∑ ∑∫ ∫ ∫L B D B L U L N F L N f
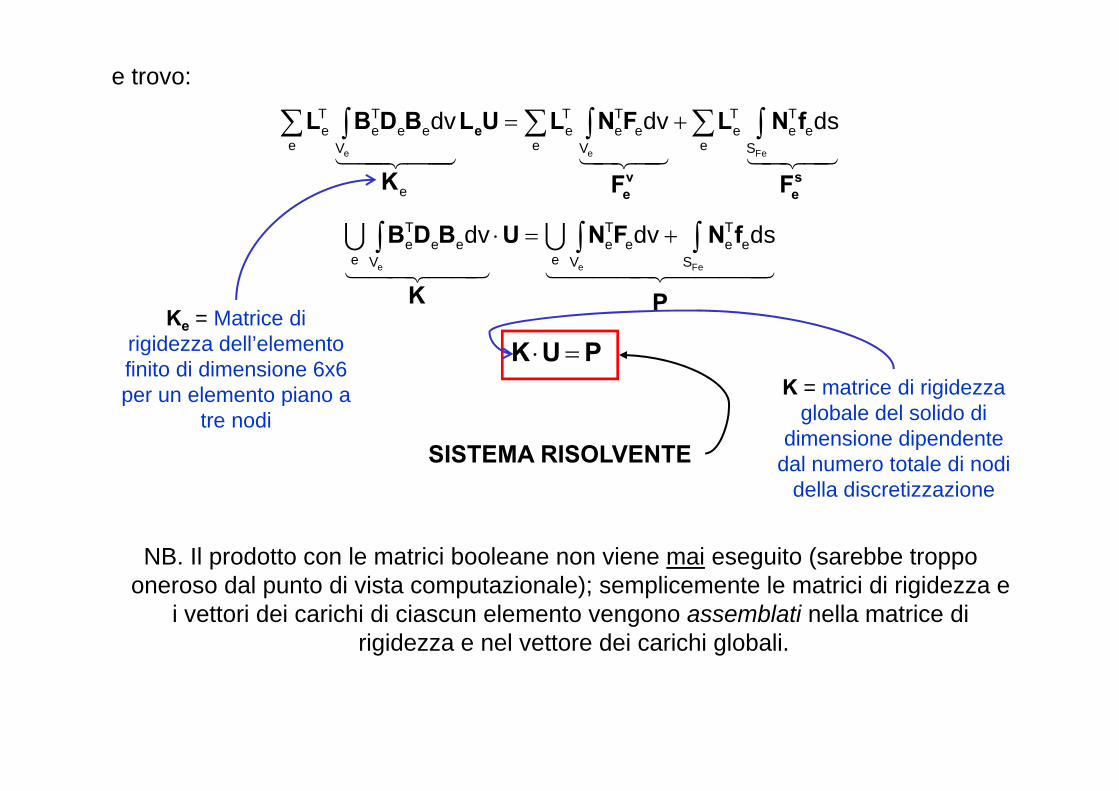
e trovo:
e e Fe
e e e e e e e e e ee e eV V S
e
dv dv ds+∑ ∑ ∑∫ ∫ ∫e
v se e
L B D B L U L N F L N f
K F F
e e Fe
T T Te e e e e e e
e eV V S
dv dv ds⋅ = +∫ ∫ ∫∪ ∪B D B U N F N f
K FP
PUK =⋅
PKe = Matrice di rigidezza dell’elemento finito di dimensione 6x6 per un elemento piano a K = matrice di rigidezza
SISTEMA RISOLVENTE
per un elemento piano a tre nodi
gglobale del solido di
dimensione dipendente dal numero totale di nodi
della discreti a ione
NB. Il prodotto con le matrici booleane non viene mai eseguito (sarebbe troppo
della discretizzazione
oneroso dal punto di vista computazionale); semplicemente le matrici di rigidezza e i vettori dei carichi di ciascun elemento vengono assemblati nella matrice di
rigidezza e nel vettore dei carichi globali.

ESEMPIO:
21 2
33
12
2
3
2 3• 3x2 = 6 gradi di libertà ∀ elemento
2 10 à
4
5 1
2 3 1
1 • 5x2 = 10 gradi di libertà globali
U
4
⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥
x1x
y
1
1
UU 0 0 1 0 0 0 0 0 0 0 UU 0 0 0 1 0 0 0 0 0 0
U
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥= = ⋅⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥
1y
2x2
2y
U 0 0 0 1 0 0 0 0 0 0U 1 0 0 0 0 0 0 0 0 0
U 0 1 0 0 0 0 0 0 0 0
.U .
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎣ ⎦ ⎢ ⎥⎣ ⎦
⎣ ⎦
3xx
3y 6x1y 10x1
5
5
0 0 0 0 0 0 1 0 0 0U U0 0 0 0 0 0 0 1 0 0U U
.
L ⎣ ⎦y 10x12 6x10
L

2 2 2 2 2 211 12 13 14 15 16
2 2 2 2 2
K K K K K KK K K K K
⎡ ⎤⎢ ⎥⎢ ⎥
( ) ( )= =x X
Loc. Glob.1 1 322 2 2 2 2
22 23 24 25 262 2 2 233 34 35 36
2 2 2244 45 46
K K K K KK K K K
K K K
⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥
K
( ) ( )( ) ( )( ) ( )( ) ( )
= =
= =y Y
x X
1 2 4
2 3 1 2 4 2
2
112 2
55 56266
Sym K KK
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
( ) ( )( ) ( )( ) ( )
= =
= == =
y Y
x X
y Y
2 4 2
3 5 73 6
1
44 8
2 2 2 2 2 233 34 31 32 35 36
2 2 2 2 2
K K K K 0 0 K K 0 0K K K 0 0 K K 0 0
⎡ ⎤⎢ ⎥⎢ ⎥
( ) ( )y Y
Tabella delle 2 2 2 2 244 41 42 45 46
2 2 2 211 12 15 16
2 2 222 25 26
K K K 0 0 K K 0 0K K 0 0 K K 0 0
K 0 0 K K 0 0
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
Tabella delle incidenze per l’elemento 2
22 25 26
T T1 1 1 3 3
2 2
0 0 0 0 0 00 0 0 0 0
K K 0 0
⎢ ⎥⎢ ⎥
= + +⎢ ⎥⎢ ⎥⎢ ⎥
K L K L L K L 3
2 255 56
266
K K 0 0Sym K 0 0
0 0
⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
T2 2 2
0⎢ ⎥⎢ ⎥⎣ ⎦
L K L

4. Imposizione delle condizioni al contorno
Vi sono due tipi di condizioni al contorno: carichi applicati (dette naturali), i quali compaiono nel vettore dei termini noti P; spostamenti imposti (essenziali), i quali vengono imposti direttamente sui nodi interessati e il sistema lineare viene ridotto
ll l i h l i t t d t li di i i l talle sole righe colonne non interessate da tali condizioni al contorno.
NB: Se uno spostamento è assegnato la relativa forza esterna non può essere prescritta e rimane incognitaprescritta e rimane incognita.
ESEMPIO:ESEMPIO:
1 2
31
2 3
2 351
2 3 1
21
2 3
δ
y
42 1
x
In questo esempio: Ux1=0; Uy3= -δ; Uy4=0; Ux5=0; e il sistema risolvente diventa:
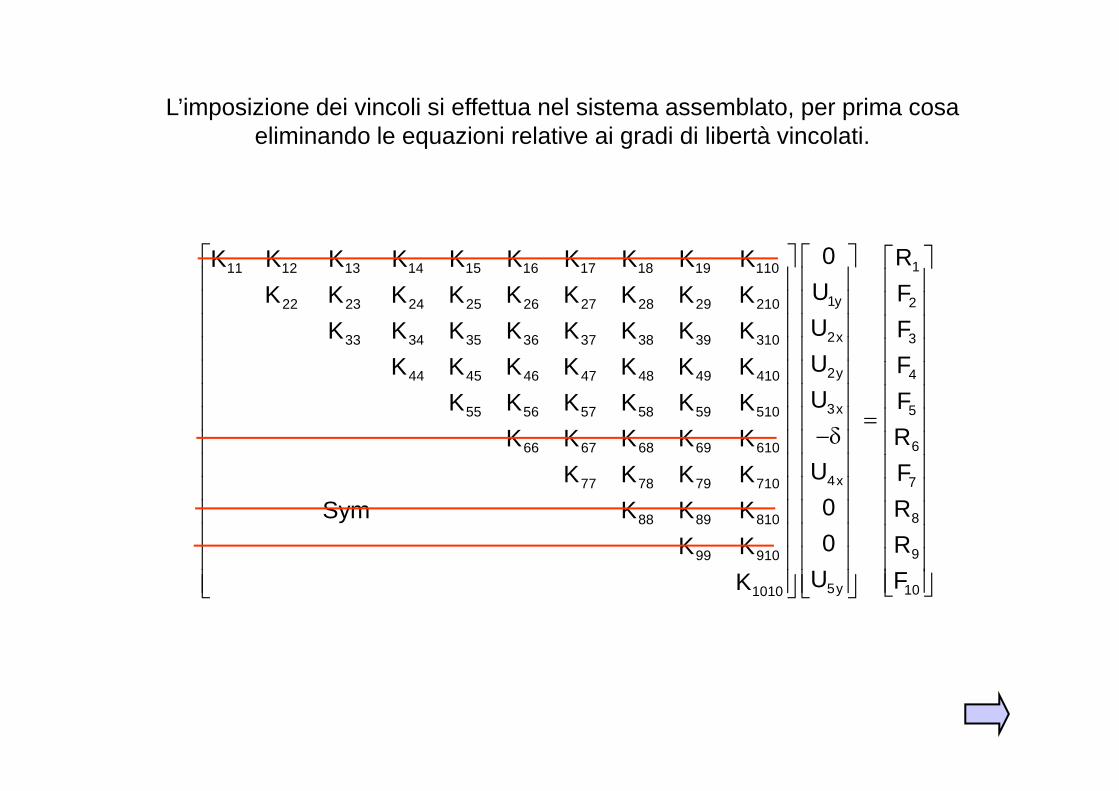
L’imposizione dei vincoli si effettua nel sistema assemblato, per prima cosa eliminando le equazioni relative ai gradi di libertà vincolati.
11 12 13 14 15 16 17 18 19 110
22 23 24 25 26 27 28 29 210
K K K K K K K K K KK K K K K K K K K
⎡ ⎤⎢ ⎥⎢ ⎥
1
1y 2
0 RU F⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥22 23 24 25 26 27 28 29 210
33 34 35 36 37 38 39 310
44 45 46 47 48 49 410
K K K K K K K KK K K K K K K
K K K K K K
⎢ ⎥⎢ ⎥⎢⎢⎢
1y 2
2x 3
2y 4
U FU FU F
⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥
⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥
55 56 57 58 59 510
66 67 68 69 610
77 78 79 710
K K K K K KK K K K K
K K K K
⎢⎢⎢⎢⎢
3x 5
6
4x 7
U FR
U F
⎥ ⎢ ⎥ ⎢ ⎥=⎥ ⎢ ⎥ ⎢ ⎥−δ⎥ ⎢ ⎥ ⎢ ⎥
⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥77 78 79 710
88 89 810
99 910
Sym K K KK K
K
⎢⎢⎢⎢⎢⎣ ⎦
7
8
9
0 R0 R
U F
⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥⎥ ⎢ ⎥ ⎣ ⎦⎣ ⎦1010K⎢⎣ ⎦ 5y 10U F⎢ ⎥⎥ ⎢ ⎥ ⎣ ⎦⎣ ⎦

0⎡ ⎤
12 22 23 24 25 26 27 28 29 210K K K K K K K K K K⎡1y
2x 2
0U
U F
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎤ ⎡ ⎤⎢ ⎥12 22 23 24 25 26 27 28 29 210
31 32 33 34 35 36 37 38 39 310
41 42 43 44 45 46 47 48 49 410
K K K K K K K K K KK K K K K K K K K KK K K K K K K K K K
⎡⎢⎢
2x 2
2y 3
43x
U FFU
⎤ ⎡ ⎤⎢ ⎥⎥ ⎢ ⎥⎢ ⎥⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ =⎢ ⎥ ⎢ ⎥⎢ ⎥51 52 53 54 55 56 57 58 59 510
71 72 73 74 75 76 77 78 79 710
101 102 103 104 105 106 107 108 109 1010
K K K K K K K K K KK K K K K K K K K KK K K K K K K K K K⎣
5
74x
10
FFUF0
⎢ ⎥ ⎢ ⎥⎢ ⎥−δ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎣ ⎦⎦101 102 103 104 105 106 107 108 109 1010K K K K K K K K K K⎣ 10
5y
00
U
⎢ ⎥⎢ ⎥ ⎣ ⎦⎦⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
Quindi bisogna portare al secondo membro i termini noti legati al valore imposto dello spostamento.
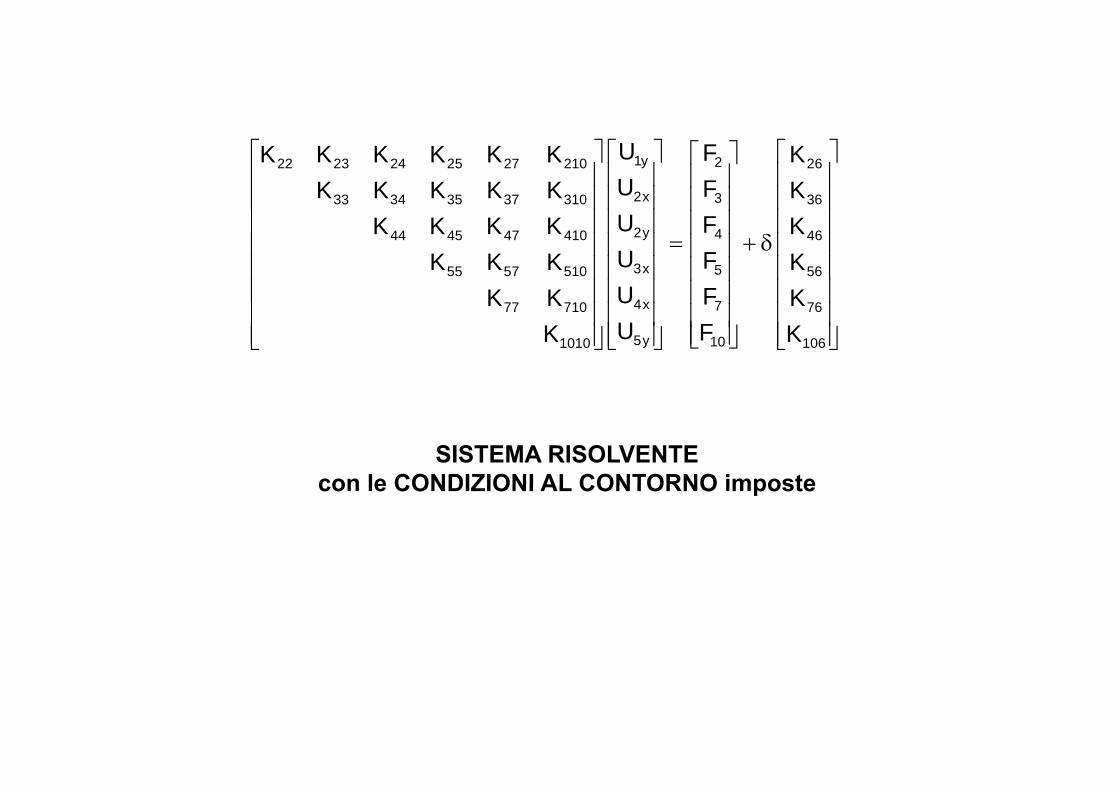
1y 222 23 24 25 27 210 26
2x 333 34 35 37 310 36
U FK K K K K K KU FK K K K K KU F
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥2y 444 45 47 410 46
3x 555 57 510 56
4x 777 710 76
U FK K K K KU FK K K KU FK K K
⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥= + δ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥
⎥⎥
4x 777 710 76
5y 101010 106
K K KU FK K
⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
⎥⎥
SISTEMA RISOLVENTE con le CONDIZIONI AL CONTORNO impostecon le CONDIZIONI AL CONTORNO imposte
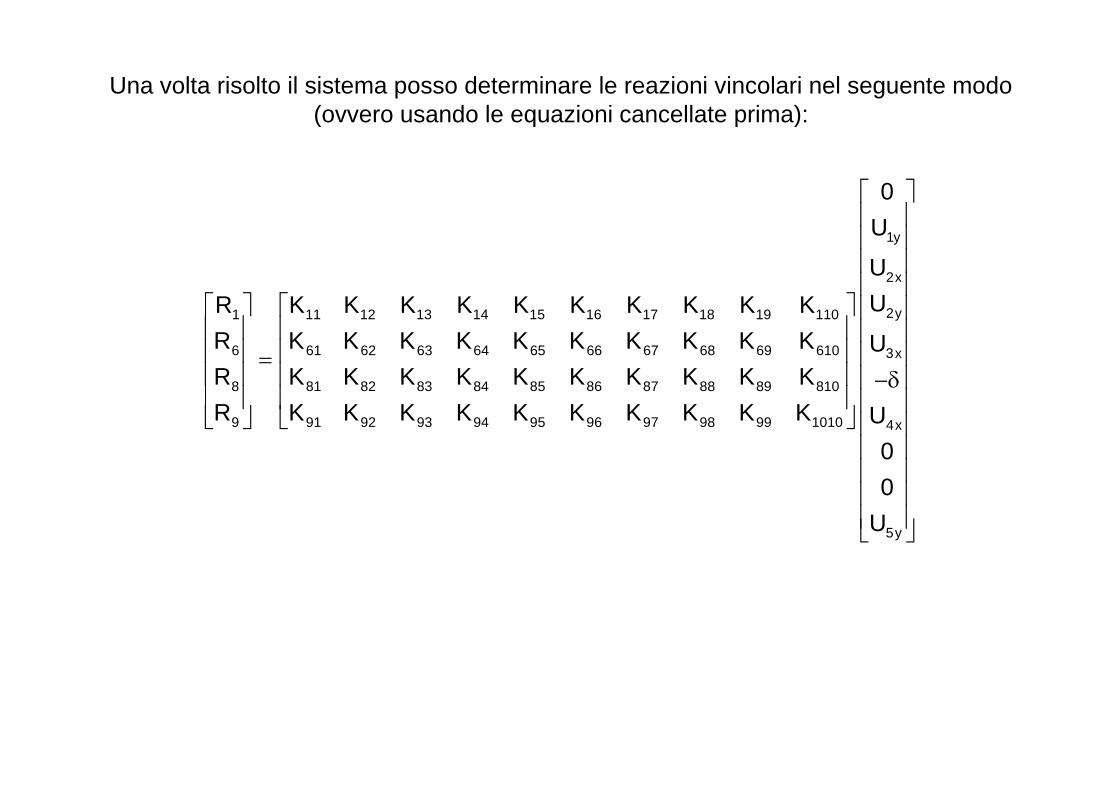
Una volta risolto il sistema posso determinare le reazioni vincolari nel seguente modo (ovvero usando le equazioni cancellate prima):
0⎡ ⎤⎢ ⎥
( q p )
1y
2x
U
UUR K K K K K K K K K K
⎢ ⎥⎢⎢⎢
⎡ ⎤ ⎡ ⎤ ⎢
⎥⎥⎥⎥2y1 11 12 13 14 15 16 17 18 19 110
6 61 62 63 64 65 66 67 68 69 610 3x
8 81 82 83 84 85 86 87 88 89 810
UR K K K K K K K K K KR K K K K K K K K K K UR K K K K K K K K K K
⎡ ⎤ ⎡ ⎤ ⎢⎢ ⎥ ⎢ ⎥ ⎢⎢ ⎥ ⎢ ⎥ ⎢=⎢ ⎥ ⎢ ⎥ ⎢ −δ⎢ ⎥ ⎢ ⎥ ⎢
⎥⎥⎥⎥⎥
9 91 92 93 94 95 96 97 98 99 1010 4xR K K K K K K K K K K U00
⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎦ ⎣ ⎦ ⎢
⎢⎢⎢
⎥⎥⎥⎥⎥
5y
0U⎢⎢⎣ ⎦
⎥⎥
5. Risoluzione del sistema lineare
Metodi diretti:Metodi diretti:• metodo di eliminazione di Gauss;• …Metodi iterativi (calcolano la soluzione come limite di una successione di vettori):Metodi iterativi (calcolano la soluzione come limite di una successione di vettori):• metodi di Richardson stazionari e non;• …
6. Ricostruzione della soluzione: una volta calcolata la soluzione in termini di spostamenti nodali posso calcolare il campo deformativo e di sforzi locali con lespostamenti nodali, posso calcolare il campo deformativo e di sforzi locali con le seguenti relazioni già viste prima:
( ) ( ) ( )B U B L U( ) ( ) ( )x,x, y xy , y= =e e ee eB Uε B L U
( ) ( ) ( ) ( ) ( ) ( ) ( )x,y x, y xx,y x,, y x , yy y x,= = =e e e ee e eD ε D B D BUσ L U

INTEGRAZIONE NUMERICA:
( ) ( ) ⎟⎞
⎜⎛ ∑∑∫
GG1
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛=ξ≅ξξ ∑∑∫
==− iii
iii HfHfdf
111
Tra le tante tecniche di integrazione numerica, una delle più efficienti è quella diGauss, in cui la posizione dei punti di Gauss ξi e dei relativi pesi Hi sonodeterminati in modo tale che con n punti di Gauss, un polinomio di ordine 2n-1p ppossa essere integrato esattamente.

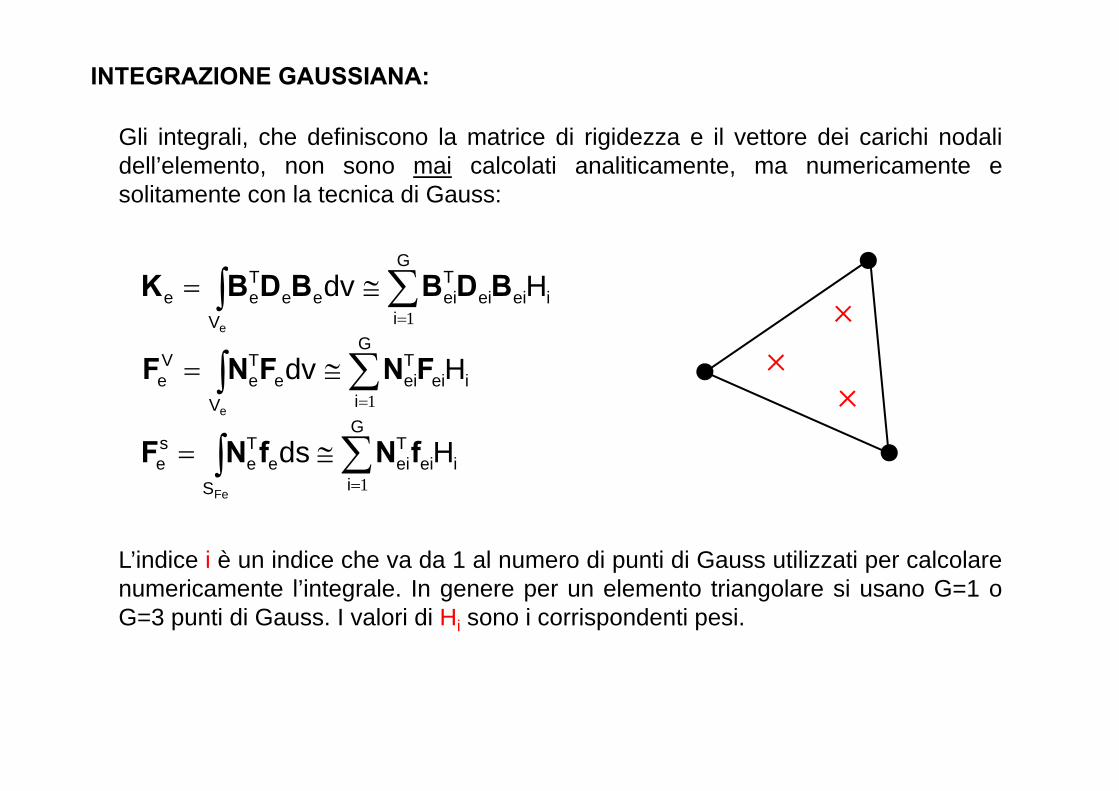
INTEGRAZIONE GAUSSIANA:
Gli integrali, che definiscono la matrice di rigidezza e il vettore dei carichi nodalidell’elemento, non sono mai calcolati analiticamente, ma numericamente esolitamente con la tecnica di Gauss:
∑∫ ≅=G
ieieiTeiee
Tee Hdv BDBBDBK ∑∫
=iVe 1
∑∫ ≅=G
iiei
Teie
Te
Ve Hdv
1FNFNF
=iVe 1
∑∫=
≅=G
iiei
Teie
S
Te
se Hds
1
fNfNF=iSFe 1
L’indice i è un indice che va da 1 al numero di punti di Gauss utilizzati per calcolarenumericamente l’integrale. In genere per un elemento triangolare si usano G=1 oG=3 punti di Gauss. I valori di Hi sono i corrispondenti pesi.

L’ELEMENTO a QUATTRO NODI
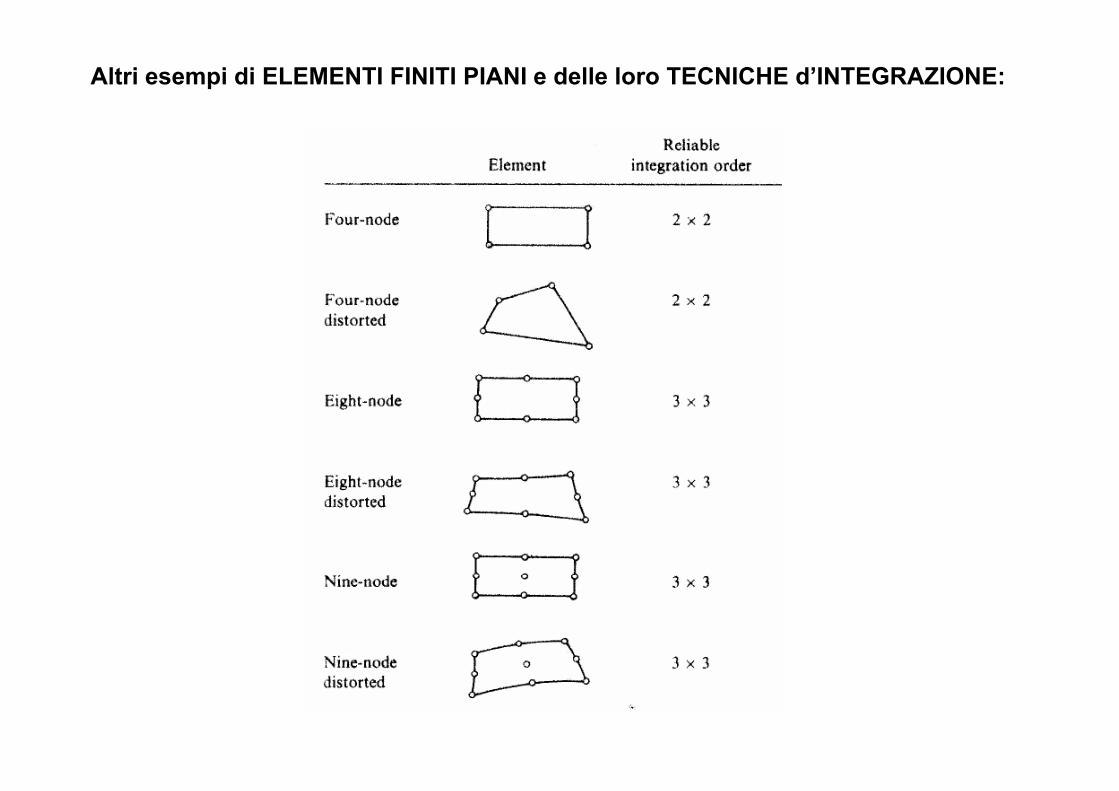
Altri esempi di ELEMENTI FINITI PIANI e delle loro TECNICHE d’INTEGRAZIONE:
