pince schrader - chauvet.lajol.free.frchauvet.lajol.free.fr/tgmbtp/serie4/schrader/schrader.pdf ·...
TRANSCRIPT
L.P.T.I. Saint Joseph La Joliverie
Pince Schrader.doc page 1/3
Pince Schrader
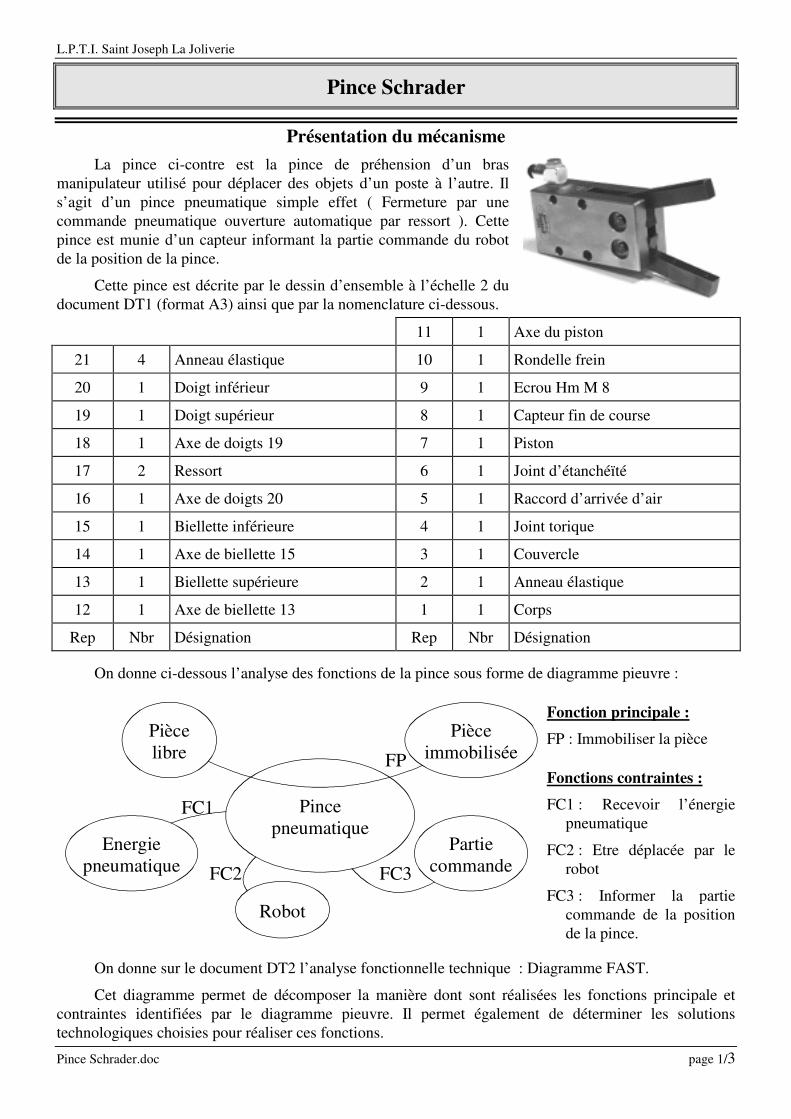
Présentation du mécanisme
La pince ci-contre est la pince de préhension d’un bras
manipulateur utilisé pour déplacer des objets d’un poste à l’autre. Il
s’agit d’un pince pneumatique simple effet ( Fermeture par une
commande pneumatique ouverture automatique par ressort ). Cette
pince est munie d’un capteur informant la partie commande du robot
de la position de la pince.
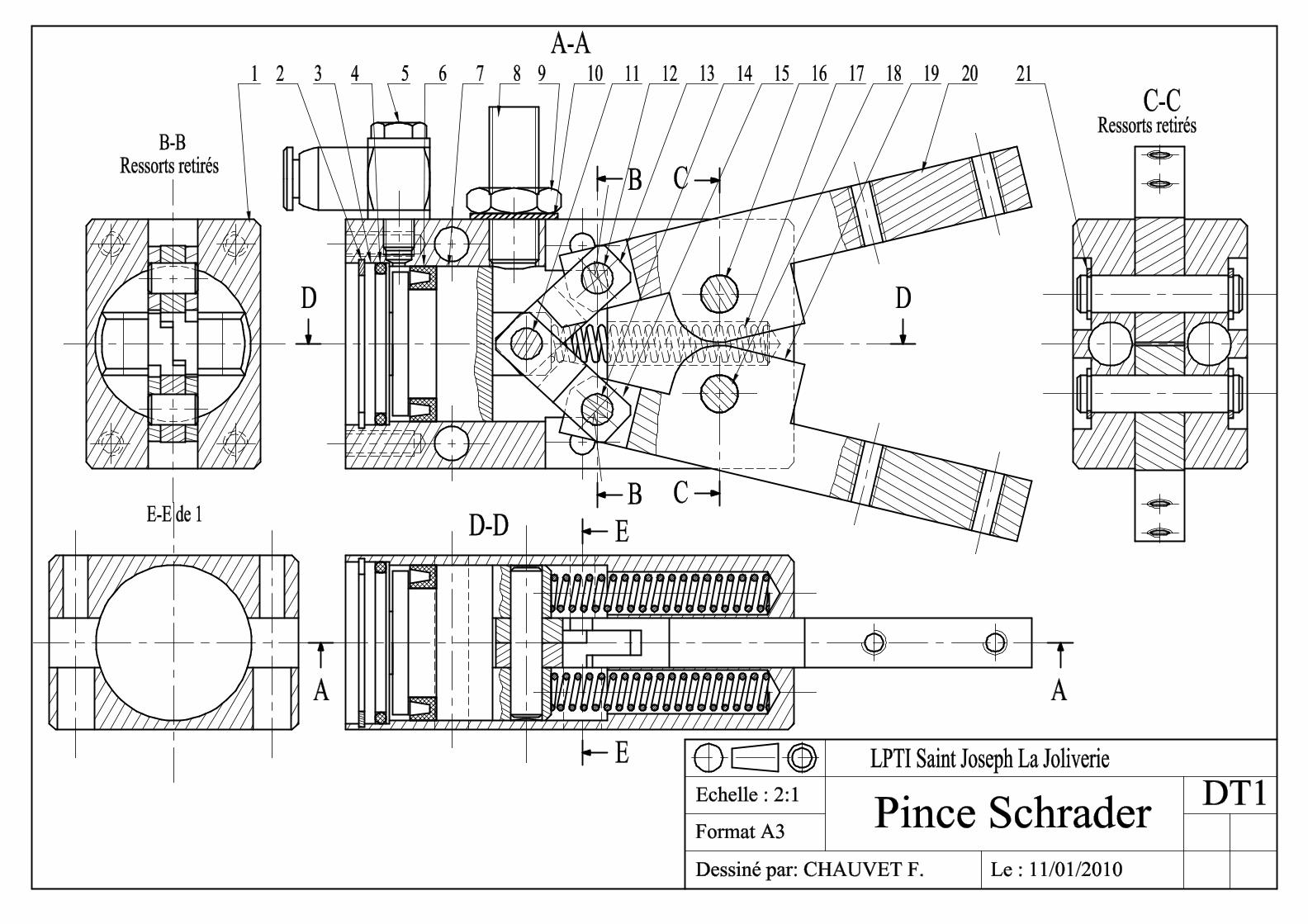
Cette pince est décrite par le dessin d’ensemble à l’échelle 2 du
document DT1 (format A3) ainsi que par la nomenclature ci-dessous.
11 1 Axe du piston
21 4 Anneau élastique 10 1 Rondelle frein
20 1 Doigt inférieur 9 1 Ecrou Hm M 8
19 1 Doigt supérieur 8 1 Capteur fin de course
18 1 Axe de doigts 19 7 1 Piston
17 2 Ressort 6 1 Joint d’étanchéïté
16 1 Axe de doigts 20 5 1 Raccord d’arrivée d’air
15 1 Biellette inférieure 4 1 Joint torique
14 1 Axe de biellette 15 3 1 Couvercle
13 1 Biellette supérieure 2 1 Anneau élastique
12 1 Axe de biellette 13 1 1 Corps
Rep Nbr Désignation Rep Nbr Désignation
On donne ci-dessous l’analyse des fonctions de la pince sous forme de diagramme pieuvre :
Pince
pneumatique
Pièce
libre
Pièce
immobiliséeFP
Energie
pneumatique
Robot
Partie
commande
FC1
FC2 FC3
Fonction principale :
FP : Immobiliser la pièce
Fonctions contraintes :
FC1 : Recevoir l’énergie
pneumatique
FC2 : Etre déplacée par le
robot
FC3 : Informer la partie
commande de la position
de la pince.
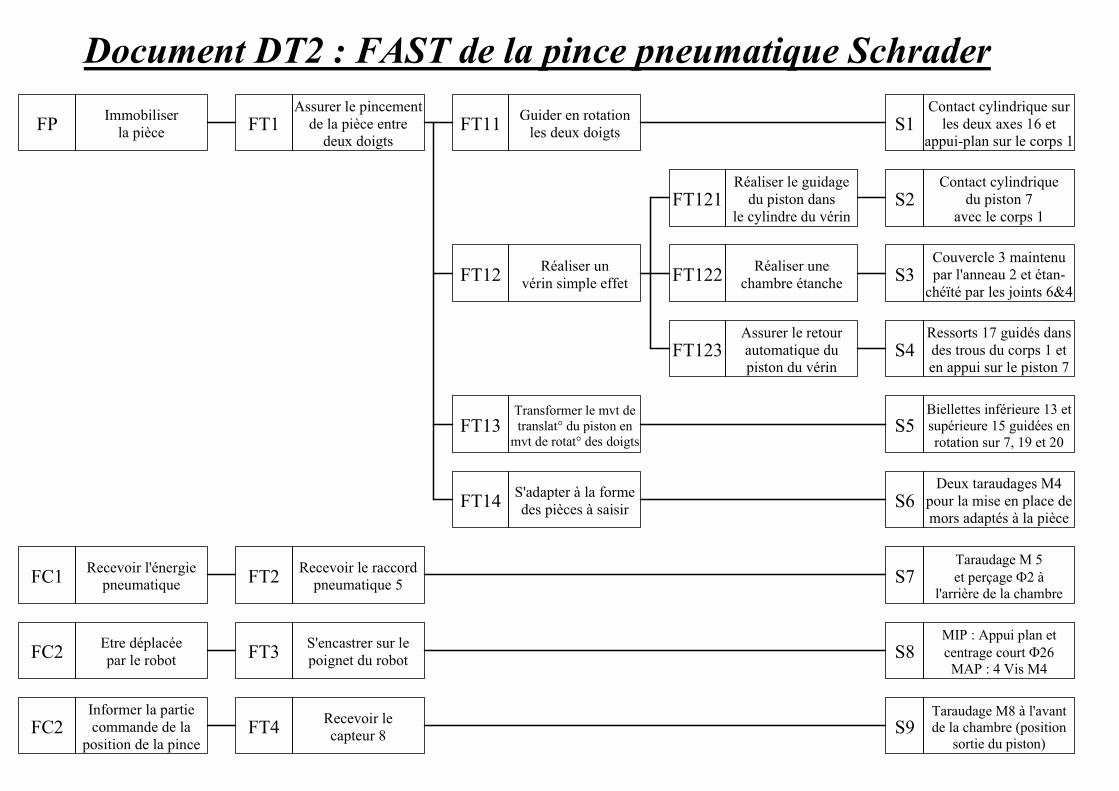
On donne sur le document DT2 l’analyse fonctionnelle technique : Diagramme FAST.
Cet diagramme permet de décomposer la manière dont sont réalisées les fonctions principale et
contraintes identifiées par le diagramme pieuvre. Il permet également de déterminer les solutions
technologiques choisies pour réaliser ces fonctions.
L.P.T.I. Saint Joseph La Joliverie
Pince Schrader.doc page 2/3
Travail à faire
1- Etude de la cinématique du mécanisme
1.1- On donne les classes d’équivalence du mécanisme.
Corps : {1} = {1,2,3,4,5,8,9,10,16,18,21} Piston : {6} = {6,7,11}
Doigt supérieur : {12} = {12,20} Biellette supérieure : {13} = {13}
Doigt inférieur : {14} = {14,19} Biellette inférieure : {15} = {15}
Réaliser le graphe des liaisons du mécanisme ainsi qu’un schéma cinématique suivant la coupe A-A
du dessin d’ensemble.
1.2- Calculer H le degré d’hyperstatisme du mécanisme : H = N + M – 6 ( C – 1 )
Où : - N est le nombre de degrés de liberté supprimés par l’ensemble des liaisons
- M est le degré de mobilité du mécanisme (Nombre de possibilités qu’a le mécanisme
de bouger : Nombre minimum de degrés de liberté à supprimer pour immobiliser
totalement le mécanisme )
- C est le nombre de classes d’équivalence du mécanisme (Bâti compris).
1.3- Que peut-on en conclure pour le montage du mécanisme ? Quelles sont les précautions à
prendre quant à la réalisation des pièces.
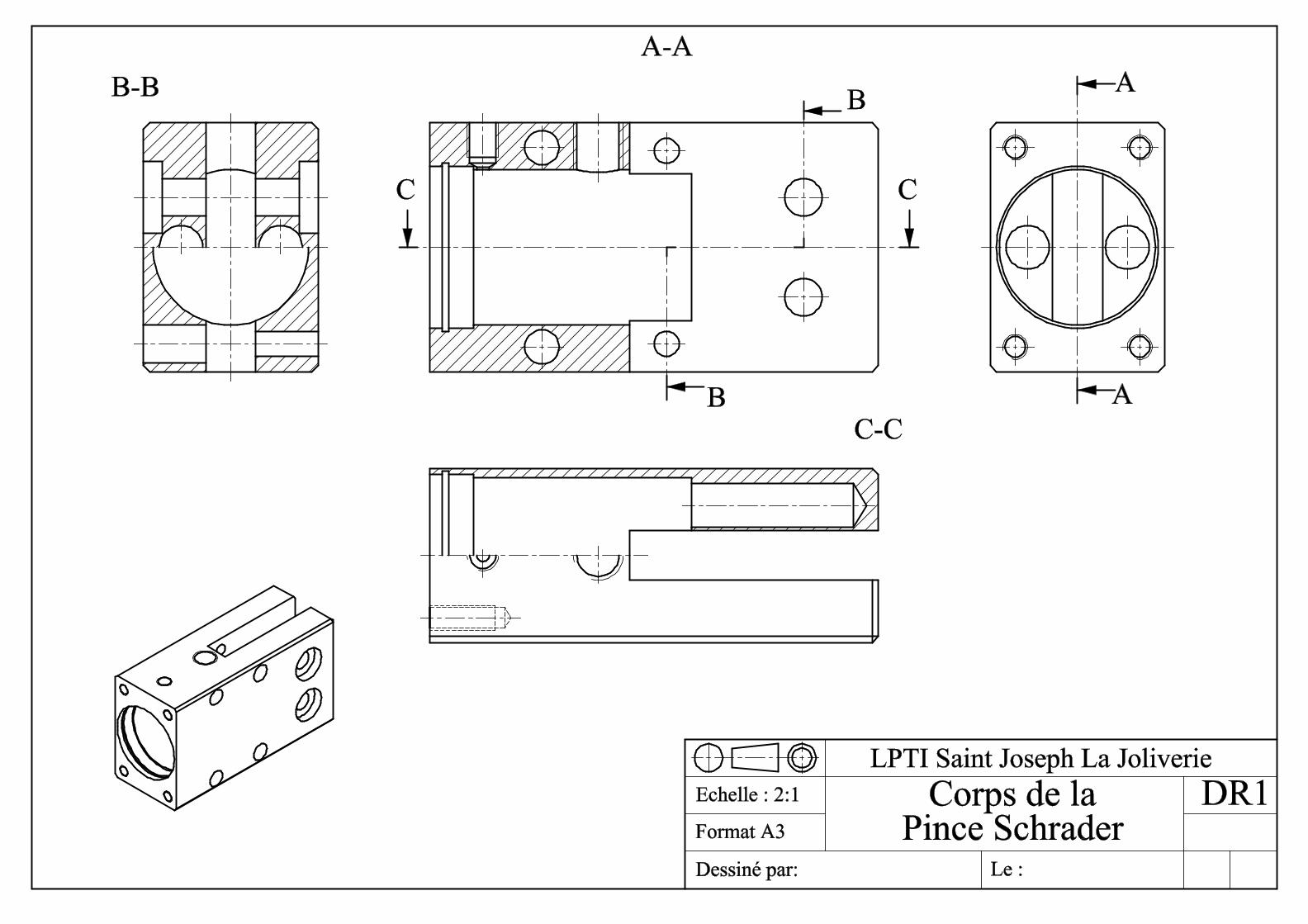
2- Identification des cotes fonctionnelles du corps 1
2.1- Quelles sont les fonctions techniques de dernier niveau ( FT11, FT121, FT122, FT123, FT13,
FT14, FT2, FT3, FT4) pour lesquelles le corps intervient dans la solution technologique retenue.
2.2- Repasser en rouge sur le dessin de définition du corps à l’échelle 2 (Document DR1 au format
A3) les surfaces fonctionnelles relatives aux fonctions techniques identifiées à la question précédente.
3- Tracés de chaînes de cotes
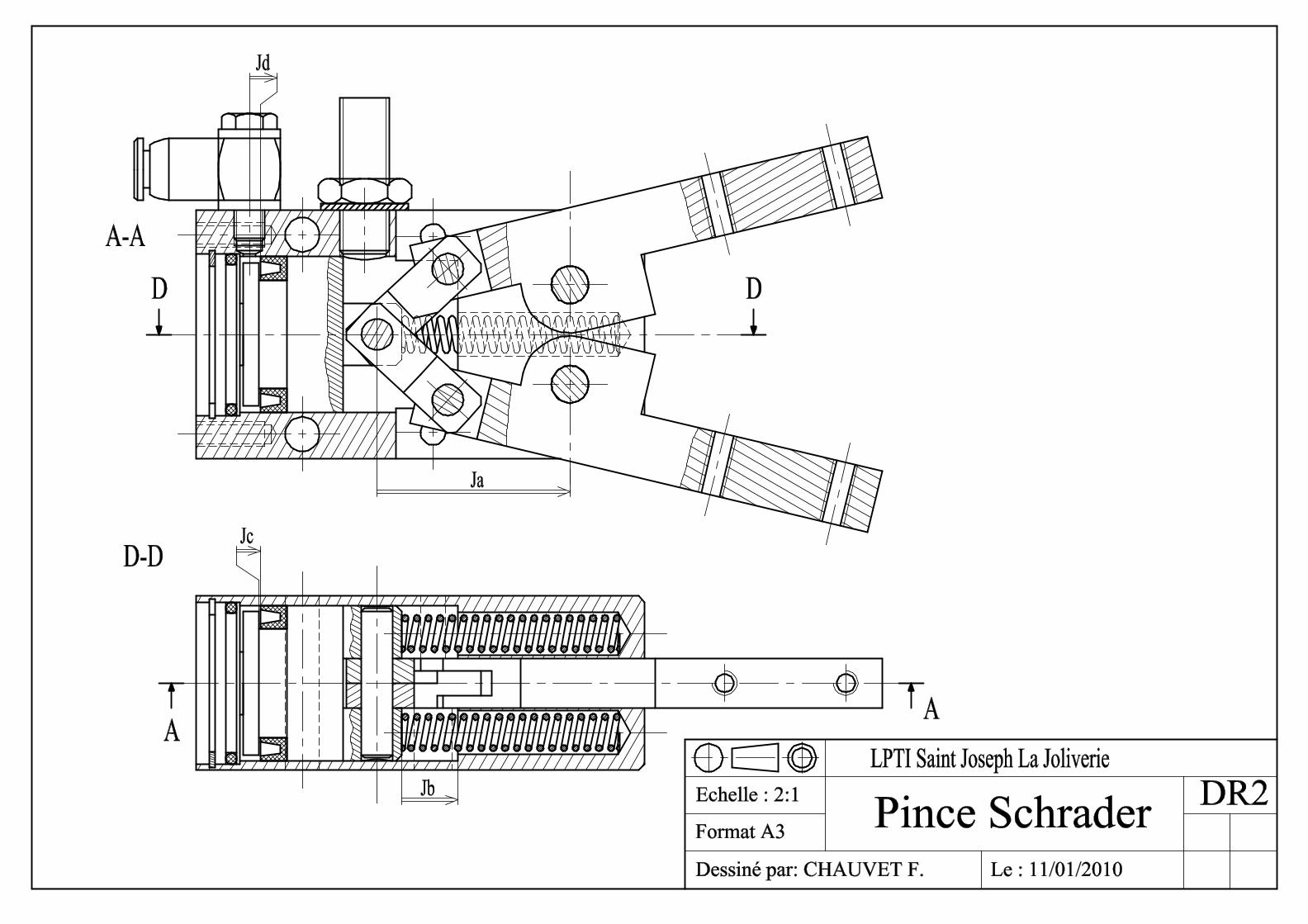
3.1- Repasser en rouge sur les deux vues du document réponse DR2 les surfaces de contact entre les
pièces suivantes : Corps 1, Anneaux élastique 2, couvercle 3, Joint d’étanchéité 6 et piston 7. Puis tracer
sur les deux vues les lignes de rappel de ces surfaces de contact.
3.2- La fonction technique FT121 (Guider le piston) nécessite deux conditions fonctionnelles :
� Ja : Une distance entre l’axe du perçage du piston 7 et celui du corps 1.
� Jb : Une distance entre les surfaces planes du piston 7 et du corps 1.
Tracé sur le document DR2 les chaines de cotes relatives à ces conditions fonctionnelles Ja et Jb puis
repasser en rouge les cotes fonctionnelle du piston 7 de ces deux chaines de cotes.
Puis écrire sur ce même document réponse DR2 la relation entre la condition fonctionnelle Ja et les
cotes fonctionnelles a1, a2, a3, a6 et a7. ainsi que la relation entre la condition fonctionnelle Jb et les cotes
fonctionnelles b1, b2, b3, b6 et b7.
L.P.T.I. Saint Joseph La Joliverie
Pince Schrader.doc page 3/3
3.3- La fonction technique FT122 (Réaliser une chambre étanche) nécessite deux conditions
fonctionnelles :
� Jc : Jeux entre la surface plane du joint 6 et celle du piston 7.
� Jd : Une distance entre l’axe du perçage du corps 1 et la surface plane du joint 6.
Tracé sur le document DR2 les chaines de cotes relatives à ces conditions fonctionnelles Jc et Jd puis
repasser en rouge les cotes fonctionnelle du piston 7 de ces deux chaines de cotes.
Puis écrire sur ce même document réponse DR2 la relation entre la condition fonctionnelle Jc et les
cotes fonctionnelles c1, c2, c3, c6 et c7. ainsi que la relation entre la condition fonctionnelle Jd et les cotes
fonctionnelles d1, d2, d3, d6 et d7.
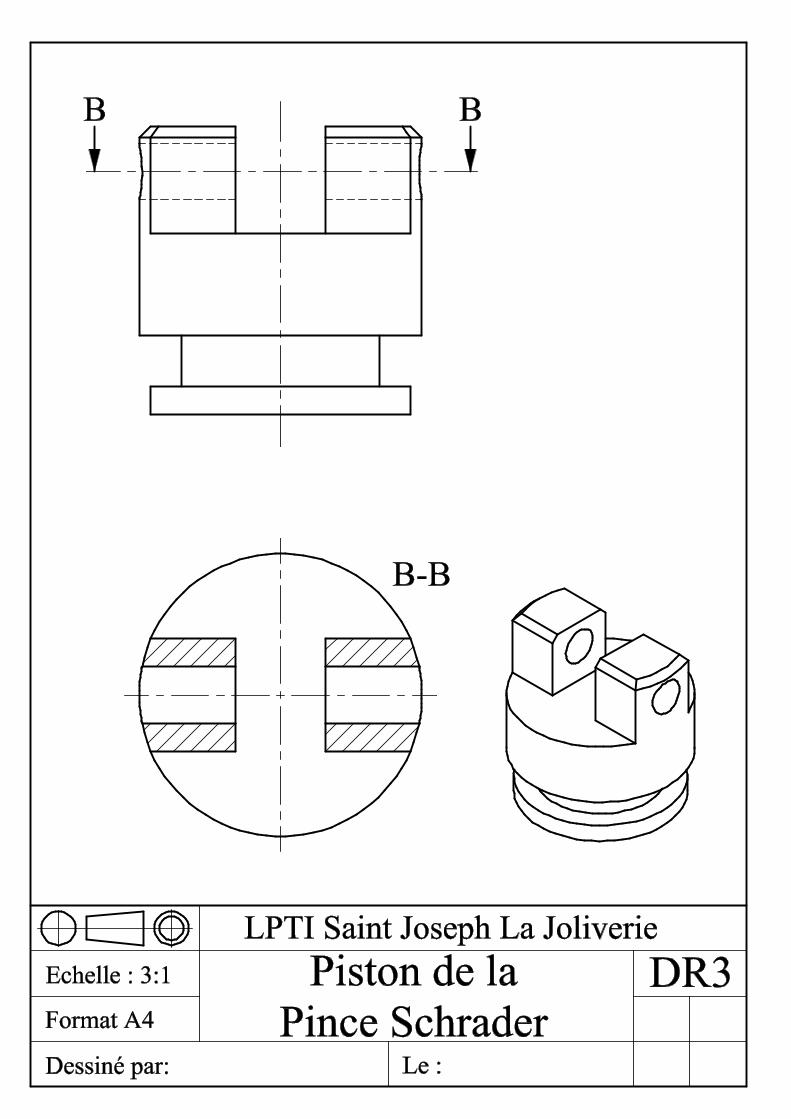
4- Cotation fonctionnelles du piston 7
3.1- Quelles sont les fonctions techniques de dernier niveau ( FT11, FT121, FT122, FT123, FT13,
FT14, FT2, FT3, FT4) pour lesquelles le piston intervient dans la solution technologique retenue.
3.2- On donne dans le dossier de votre classe le modèle volumique du piston 7. Sur ce modèle on a
repassé en bleu les surfaces fonctionnelles du piston 7 relatives à la fonction technique FT121. Tracer sur
le document réponse DR3 les trois cotes fonctionnelles du piston 7 relatives à cette fonction technique.
3.3- On donne dans le dossier de votre classe le modèle volumique du piston 7. Sur ce modèle on a
repassé en vert les surfaces fonctionnelles du piston 7 relatives à la fonction technique FT122. Tracer sur
le document réponse DR3 les trois cotes fonctionnelles du piston 7 relatives à cette fonction technique.
3.4- On donne dans le dossier de votre classe le modèle volumique du piston 7. Sur ce modèle on a
repassé en rouge les surfaces fonctionnelles du piston 7 relatives à la fonction technique FT13. Tracer sur
le document réponse DR3 les deux cotes fonctionnelles du piston 7 relatives à cette fonction technique.
5- Cotation fonctionnelles du corps 1
En vous inspirant de la démarche adoptée pour le piston 7, réaliser sur le document réponse DR1 la
cotation fonctionnelle du corps 1.
F P I m m o b i l i s e rl a p i è c e F T 1
A s s u r e r l e p i n c e m e n td e l a p i è c e e n t r ed e u x d o i g t s
F T 1 1 G u i d e r e n r o t a t i o nl e s d e u x d o i g t s
F T 1 2 R é a l i s e r u nv é r i n s i m p l e e f f e t
F T 1 2 1R é a l i s e r l e g u i d a g ed u p i s t o n d a n s
l e c y l i n d r e d u v é r i n
S 1C o n t a c t c y l i n d r i q u e s u rl e s d e u x a x e s 1 6 e t
a p p u i - p l a n s u r l e c o r p s 1
F T 1 2 2 R é a l i s e r u n ec h a m b r e é t a n c h e
F T 1 2 3A s s u r e r l e r e t o u ra u t o m a t i q u e d up i s t o n d u v é r i n
F T 1 3 T r a n s f o r m e r l e m v t d et r a n s l a t ° d u p i s t o n e n
m v t d e r o t a t ° d e s d o i g t s
F C 1 R e c e v o i r l ' é n e r g i ep n e u m a t i q u e F T 2 R e c e v o i r l e r a c c o r d
p n e u m a t i q u e 5
F C 2 E t r e d é p l a c é ep a r l e r o b o t F T 3 S ' e n c a s t r e r s u r l e
p o i g n e t d u r o b o t
F C 2I n f o r m e r l a p a r t i ec o m m a n d e d e l a
p o s i t i o n d e l a p i n c eF T 4 R e c e v o i r l e
c a p t e u r 8
S 2C o n t a c t c y l i n d r i q u e
d u p i s t o n 7a v e c l e c o r p s 1
S 3C o u v e r c l e 3 m a i n t e n up a r l ' a n n e a u 2 e t é t a n -
c h é ï t é p a r l e s j o i n t s 6 & 4
S 5B i e l l e t t e s i n f é r i e u r e 1 3 e ts u p é r i e u r e 1 5 g u i d é e s e nr o t a t i o n s u r 7 , 1 9 e t 2 0
S 4R e s s o r t s 1 7 g u i d é s d a n sd e s t r o u s d u c o r p s 1 e te n a p p u i s u r l e p i s t o n 7
S 7T a r a u d a g e M 5e t p e r ç a g e F 2 à
l ' a r r i è r e d e l a c h a m b r e
S 8M I P : A p p u i p l a n e tc e n t r a g e c o u r t F 2 6M A P : 4 V i s M 4
S 9T a r a u d a g e M 8 à l ' a v a n td e l a c h a m b r e ( p o s i t i o n
s o r t i e d u p i s t o n )
D o c u m e n t D T 2 : F A S T d e l a p i n c e p n e u m a t i q u e S c h r a d e r
F T 1 4 S ' a d a p t e r à l a f o r m ed e s p i è c e s à s a i s i r S 6
D e u x t a r a u d a g e s M 4p o u r l a m i s e e n p l a c e d em o r s a d a p t é s à l a p i è c e