mpp1
TRANSCRIPT
Les moteurs pas à pas « C’est parce qu’on imagine simultanément tous les pas qu’on devra faire qu’on se décourage, alors qu’il s’agit de les aligner un à un. » Marcel Jouhandeau in « De la grandeur »
Résumé A la différence des moteurs à courant continu, synchrones ou asynchrones qui ont des
mouvements où l’angle de rotation varie continûment, le moteur pas à pas est mis en rotation par incréments angulaires.
Le principe de fonctionnement est d’abord présenté au travers d’une machine à quatre pas par tour permettant des sauts angulaires d’amplitude π/2. Un rotor est contraint à se placer dans l’alignement d’enroulements successivement alimentés en courant afin de créer un champ d’induction tournant qui assure sa rotation. Le principe s’étend ensuite à la machine industrielle dans laquelle l’arc polaire correspondant à un cycle d’alimentation électrique s’étend sur une fraction entière de tour pour diminuer le pas angulaire et donc d’assurer un mouvement moins saccadé.
En effectuant l’examen des phases, on établit deux procédés alimentation. Dans le premier, le courant ne circule dans un enroulement que dans un seul sens pour ne former que des pôles magnétiques de même sens : c’est l’alimentation unipolaire. Si le courant circule dans les deux sens, la polarité magnétique peut être inversée : c’est l’alimentation bipolaire. Mais au-delà de ces types d’alimentation, leur panachage permet d’améliorer le fonctionnement, pour travailler en pas entiers, demi-pas, en combiné ou optimisé afin de limiter les fluctuations de couple : ce sont les modes d’alimentation. Le cas idéalisé d’échelons de courant est habituellement admis pour étudier l’alimentation des phases. Mais cette analyse se heurte à la réalité technologique des enroulements : leur nature inductive les rends incapable de commuter les courants instantanément. Une série de moyens est mise en place pour mettre en forme au mieux le courant et le rapprocher des cas idéaux. Ainsi l’action porte sur la constante de temps du circuit RL modélisant l’enroulement (élimination d’une résistance série), sur la tension d’alimentation des enroulements (commutation automatique de sources de tension) ou par action directe sur le courant (hacheur de courant dans chaque phase).
Une fois réglés les moyens d’alimenter les phases, on s’attache à analyser les performances dynamiques de la machine. Puisque l’actionneur est incrémental, l’échelon angulaire est l’excitation la plus appropriée pour décrire le changement de position du rotor. Ce mode d’étude indiciel montre l’apparition d’oscillations du rotor qui mettent en évidence une réponse du deuxième ordre. Pour différents réglages des paramètres dynamiques (amortissement et pulsation propre), le fonctionnement peut être stable ou non, suivant que les oscillations propres sont synchrones ou pas de la répétition de l’excitation de la phase par la commande. C’est d’ailleurs sur ce point que l’étude est complétée en s’intéressant à la réponse à l’échelon de fréquence. Par ce moyen, on apprécie la capacité de la machine, suivant ses caractéristiques électromécaniques, à répondre à une excitation en fréquence. Cette étude montre le comportement de la machine au démarrage en définissant des zones propices ou non à un lancement « à coup sûr ».
Enfin, le document se termine par la description de quelques moyens pour réaliser la commande. D’abord à composant discrets, l’amélioration de l’adéquation machine-commande entraîne une augmentation des fonctions. Le recours aux fonctions intégrées en est la conséquence directe. A cette fin, quelques exemples caractéristiques sont fournis, ainsi que trois exercices ayant trait à la commande du courant des phases, l’agencement de leur excitation et le contrôle de la position dans un asservissement élémentaire.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 1 / 13 Les moteurs pas à pas
Sommaire I. Introduction......................................................................................................... 3 II. Généralités et principe de fonctionnement ......................................................... 3 III. L’alimentation des phases ................................................................................. 5
III.1. Les deux procédés d’alimentation .................................................................................5 III.1.1. Alimentation unipolaire ........................................................................................................5 III.1.2. Alimentation bipolaire ..........................................................................................................5
III.2. Les modes d’alimentation .............................................................................................6 III.2.1. Alimentation d’une seule phase en pas entiers (mode 1).......................................................6 III.2.2. Alimentation de deux phases en pas entiers (mode 2) ...........................................................6 III.2.3. Alimentation combinée (mode 3) ..........................................................................................6 III.2.4. Mode optimisé en demi-pas (mode 4)...................................................................................7 III.2.5. Mode avancé en micropas (mode 5) .....................................................................................7
III.3. Obtention et optimisation des créneaux de courant .......................................................7 III.3.1. Action sur la constante de temps...........................................................................................7 III.3.2. Action sur la tension d’alimentation des phases ....................................................................7 III.3.3. Action directe sur le courant dans les phases ........................................................................8
IV. Performances dynamiques dues aux limitations technologiques ........................ 8 IV.1. Réponse indicielle .........................................................................................................8 IV.2. Démarrage par un échelon de fréquence......................................................................9 IV.3. Le couple disponible en régime permanent .................................................................10
V. Conception de la commande............................................................................ 11 V.1. Principe .......................................................................................................................11 V.2. Commande à l’aide de composants discrets.................................................................11 V.3. Utilisation de circuits spécialisés...................................................................................11
V.3.1. Intégration partielle : exemple du PBL3717A (SGS) ..............................................................11 V.3.2. Intégration totale : L297 (L297A) et L298 ............................................................................12
V.4. Exemple élémentaire d’interface de commande d’une phase (TD) ................................12 V.5. Logique de mise en rotation (TD) .................................................................................13 V.6. Contrôle de position (TD) .............................................................................................13
VI. Bibliographie .................................................................................................. 13
© YC/RN — MPP1-général TSI avril 03 – V 2.9 2 / 13 Les moteurs pas à pas
I. Introduction Le moteur pas à pas (MPP) est un actionneur électrique qui met en application un principe simple
de « champ tournant » afin de mettre en mouvement synchrone un rotor mobile en rotation.
L’essor du contrôle électronique, fondé sur l’électronique de puissance, muni de commandes électroniques plus performantes, ont rendu possible un pilotage efficace du moteur pas à pas. C’est pourquoi, son champ d’application s’est vu renforcé durant les 10 à 15 dernières années.
II. Généralités et principe de fonctionnement Le moteur pas à pas est un actionneur incrémental. A la différence des autres machines électriques
dont le mouvement est « continu », le MPP évolue par « bonds » appelés pas.
Chaque pas est obtenu par la création d’un champ d’induction issu d’un enroulement, appelé phase, placé sur la partie fixe ou stator. Suivant le sens de parcours du courant, on distingue deux modes de contrôle : unipolaire ou bipolaire.
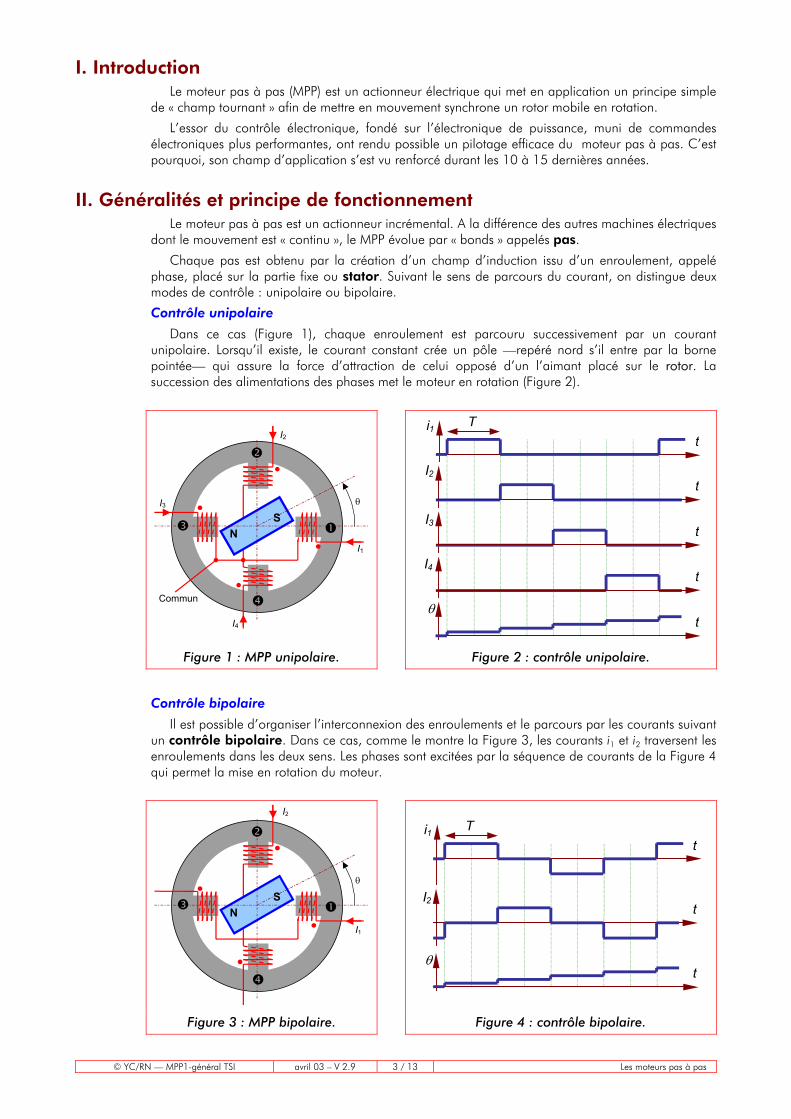
Contrôle unipolaire
Dans ce cas (Figure 1), chaque enroulement est parcouru successivement par un courant unipolaire. Lorsqu’il existe, le courant constant crée un pôle —repéré nord s’il entre par la borne pointée— qui assure la force d’attraction de celui opposé d’un l’aimant placé sur le rotor. La succession des alimentations des phases met le moteur en rotation (Figure 2).
θ
I1
I2
I4
I3
NS
Commun
i1t
I2
θ
I3
I4
t
t
t
t
T
Figure 1 : MPP unipolaire. Figure 2 : contrôle unipolaire.
Contrôle bipolaire
Il est possible d’organiser l’interconnexion des enroulements et le parcours par les courants suivant un contrôle bipolaire. Dans ce cas, comme le montre la Figure 3, les courants i1 et i2 traversent les enroulements dans les deux sens. Les phases sont excitées par la séquence de courants de la Figure 4 qui permet la mise en rotation du moteur.
θ
I1
I2
NS
i1
t
θ
I2t
t
T
Figure 3 : MPP bipolaire. Figure 4 : contrôle bipolaire.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 3 / 13 Les moteurs pas à pas
Dans les deux cas, un champ tournant est créé par les enroulements du stator. Le rotor suit ce champ à la même vitesse. Le fonctionnement s’apparente donc à celui d’une machine synchrone.
Ce moteur de principe dispose de 4 pas par tour puisque quatre phases d’alimentation permettent d’obtenir un tour de rotor. Pour changer la période angulaire (qui est mécanique) sans modifier le nombre de phases, on les fractionne en série. Un cycle est clos sur une ouverture angulaire correspondant à une fraction de tour. En conséquence, le nombre de pas par tour du stator Np est plus élevé et peut atteindre plusieurs centaines.
Pour un cycle électrique T, le moteur tourne d’un angle θp appelé pas angulaire, tel que :
pp N
πθ 2=
Intérêt d’une telle machine
En faible et moyenne puissance, lorsque le contrôle s’opère sans perdre de pas, ce moteur permet de réaliser un contrôle de position angulaire et de vitesse de rotation en boucle ouverte, c’est à dire ne nécessitant aucun asservissement.
Ceci permet des commandes plus simples que celles des MCC par exemple. L’absence d’information de retour évite l’emploi d’un capteur et le traitement du signal associé. Cependant, il faut s’assurer de ne pas perdre de pas. Ceci peut être garanti par une connaissance du comportement dynamique de la machine et de sa charge (inerties).
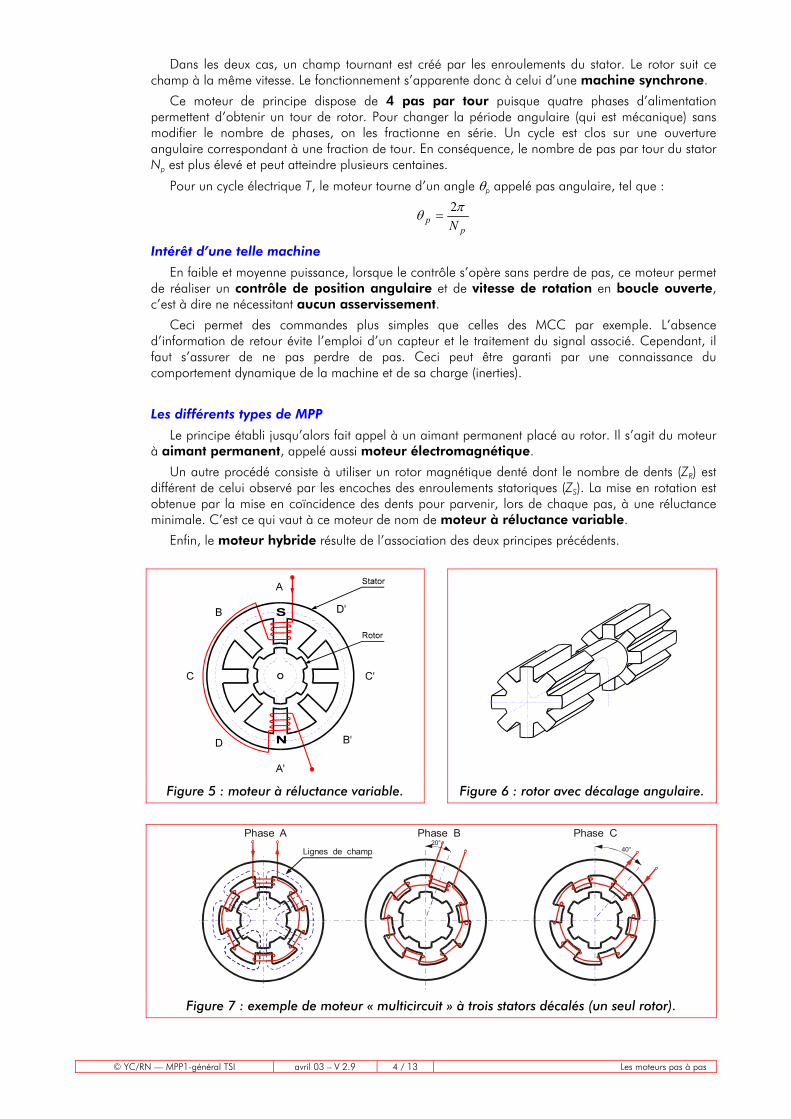
Les différents types de MPP
Le principe établi jusqu’alors fait appel à un aimant permanent placé au rotor. Il s’agit du moteur à aimant permanent, appelé aussi moteur électromagnétique.
Un autre procédé consiste à utiliser un rotor magnétique denté dont le nombre de dents (ZR) est différent de celui observé par les encoches des enroulements statoriques (ZS). La mise en rotation est obtenue par la mise en coïncidence des dents pour parvenir, lors de chaque pas, à une réluctance minimale. C’est ce qui vaut à ce moteur de nom de moteur à réluctance variable.
Enfin, le moteur hybride résulte de l’association des deux principes précédents.
Figure 5 : moteur à réluctance variable. Figure 6 : rotor avec décalage angulaire.
Phase A
Lignes de champ
Phase B Phase C20°
40°
Figure 7 : exemple de moteur « multicircuit » à trois stators décalés (un seul rotor).
© YC/RN — MPP1-général TSI avril 03 – V 2.9 4 / 13 Les moteurs pas à pas
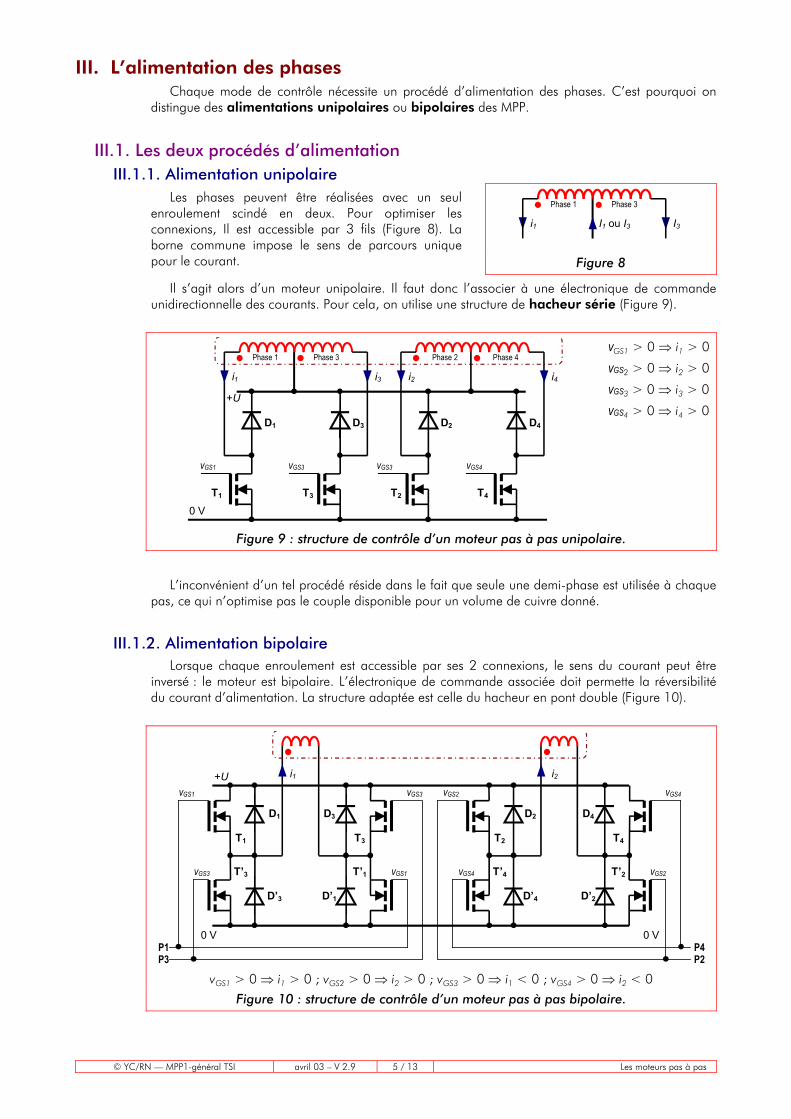
III. L’alimentation des phases Chaque mode de contrôle nécessite un procédé d’alimentation des phases. C’est pourquoi on
distingue des alimentations unipolaires ou bipolaires des MPP.
III.1. Les deux procédés d’alimentation III.1.1. Alimentation unipolaire
i1 I3
Phase 1 Phase 3
I1 ou I3
Les phases peuvent être réalisées avec un seul enroulement scindé en deux. Pour optimiser les connexions, Il est accessible par 3 fils (Figure 8). La borne commune impose le sens de parcours unique pour le courant. Figure 8
Il s’agit alors d’un moteur unipolaire. Il faut donc l’associer à une électronique de commande unidirectionnelle des courants. Pour cela, on utilise une structure de hacheur série (Figure 9).
D1
0 V
+U
i1
D3 D2 D4
i3 i2 i4
Phase 1 Phase 3 Phase 2 Phase 4
T1
vGS1 vGS3
T3
vGS3
T2
vGS4
T4
vGS1 > 0 ⇒ i1 > 0
vGS2 > 0 ⇒ i2 > 0
vGS3 > 0 ⇒ i3 > 0
vGS4 > 0 ⇒ i4 > 0
Figure 9 : structure de contrôle d’un moteur pas à pas unipolaire.
L’inconvénient d’un tel procédé réside dans le fait que seule une demi-phase est utilisée à chaque pas, ce qui n’optimise pas le couple disponible pour un volume de cuivre donné.
III.1.2. Alimentation bipolaire Lorsque chaque enroulement est accessible par ses 2 connexions, le sens du courant peut être
inversé : le moteur est bipolaire. L’électronique de commande associée doit permette la réversibilité du courant d’alimentation. La structure adaptée est celle du hacheur en pont double (Figure 10).
i2
D1
D’3
0 V
+U
D3
D’1
i1
P1P3
T1
vGS1
vGS3 T’3
T3
T’1
vGS3
vGS1
D4
D’2
0 V
D2
D’4
P4P2
T4
vGS4
vGS2T’2
T2
T’4
vGS2
vGS4
vGS1 > 0 ⇒ i1 > 0 ; vGS2 > 0 ⇒ i2 > 0 ; vGS3 > 0 ⇒ i1 < 0 ; vGS4 > 0 ⇒ i2 < 0
Figure 10 : structure de contrôle d’un moteur pas à pas bipolaire.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 5 / 13 Les moteurs pas à pas
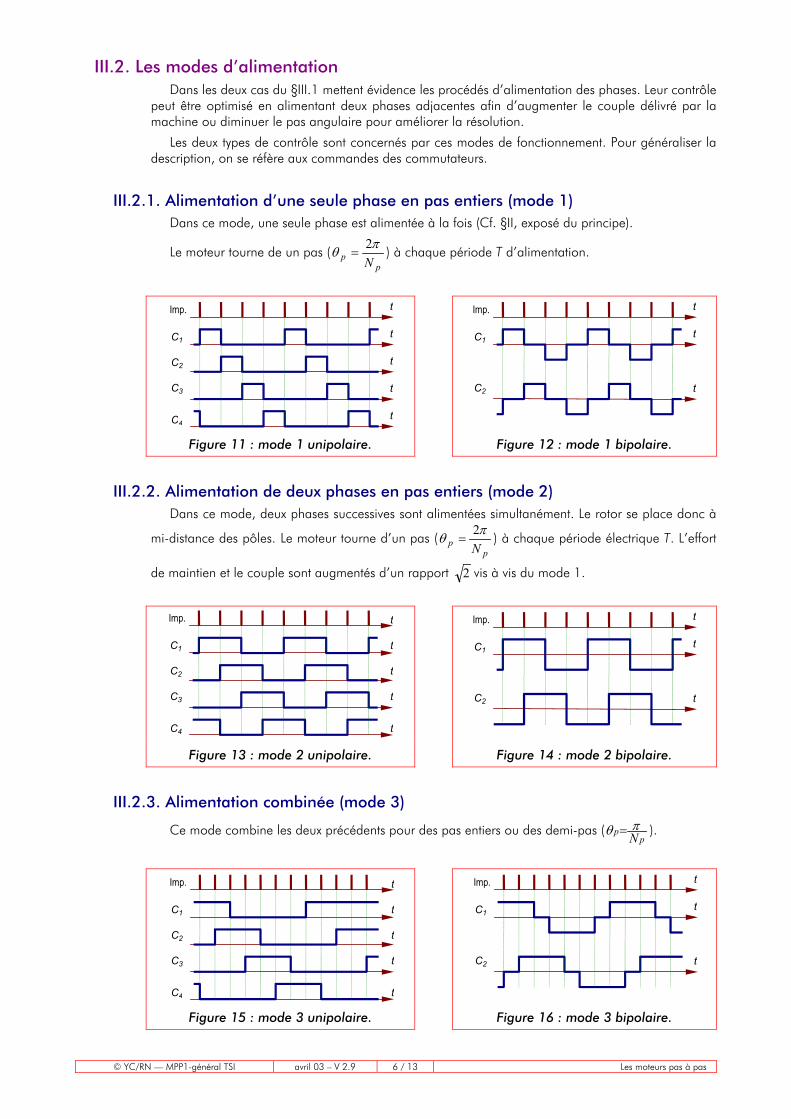
III.2. Les modes d’alimentation Dans les deux cas du §III.1 mettent évidence les procédés d’alimentation des phases. Leur contrôle
peut être optimisé en alimentant deux phases adjacentes afin d’augmenter le couple délivré par la machine ou diminuer le pas angulaire pour améliorer la résolution.
Les deux types de contrôle sont concernés par ces modes de fonctionnement. Pour généraliser la description, on se réfère aux commandes des commutateurs.
III.2.1. Alimentation d’une seule phase en pas entiers (mode 1) Dans ce mode, une seule phase est alimentée à la fois (Cf. §II, exposé du principe).
Le moteur tourne de un pas (p
p Nπθ 2
= ) à chaque période T d’alimentation.
C4
C3
C2
C1
Imp. t
t
t
t
t
Imp. t
t
tC2
C1
Figure 11 : mode 1 unipolaire. Figure 12 : mode 1 bipolaire.
III.2.2. Alimentation de deux phases en pas entiers (mode 2) Dans ce mode, deux phases successives sont alimentées simultanément. Le rotor se place donc à
mi-distance des pôles. Le moteur tourne d’un pas (p
p Nπθ 2
= ) à chaque période électrique T. L’effort
de maintien et le couple sont augmentés d’un rapport 2 vis à vis du mode 1.
Imp. t
t
t
t
tC4
C3
C2
C1
Imp. t
t
tC2
C1
Figure 13 : mode 2 unipolaire. Figure 14 : mode 2 bipolaire.
III.2.3. Alimentation combinée (mode 3)
Ce mode combine les deux précédents pour des pas entiers ou des demi-pas (p
p Nπθ = ).
Imp. t
t
t
t
tC4
C3
C2
C1
Imp. t
t
tC2
C1
Figure 15 : mode 3 unipolaire. Figure 16 : mode 3 bipolaire.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 6 / 13 Les moteurs pas à pas
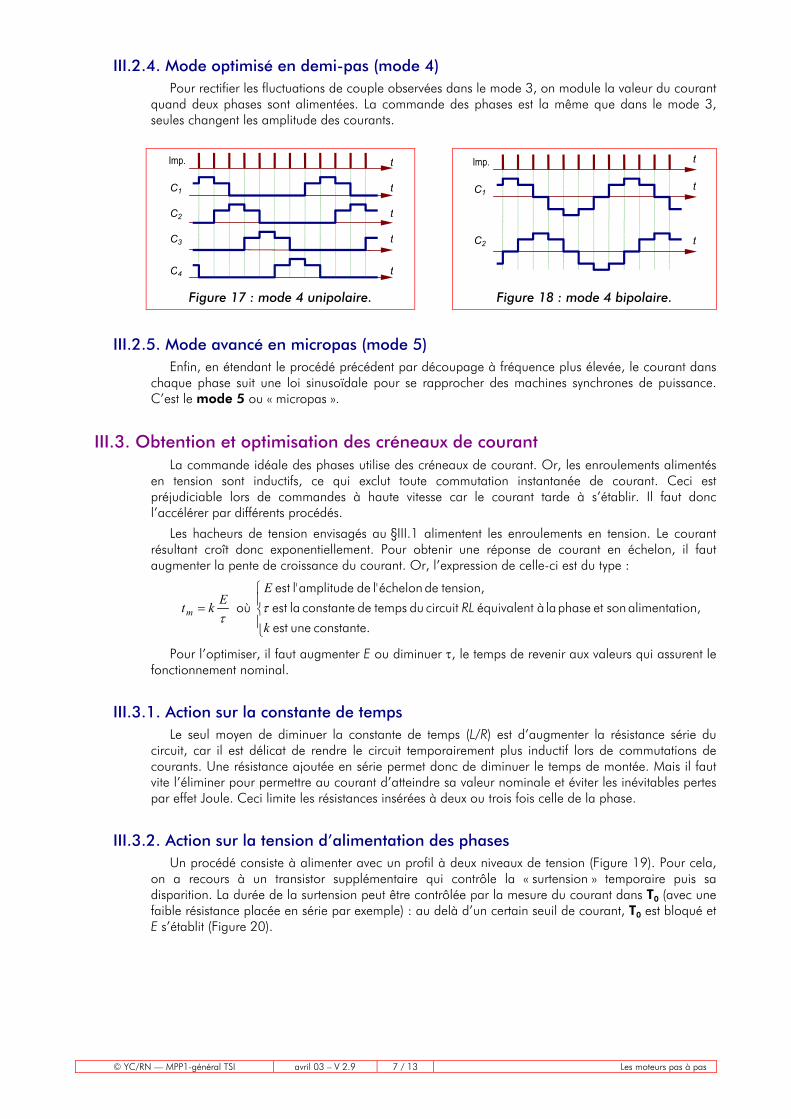
III.2.4. Mode optimisé en demi-pas (mode 4) Pour rectifier les fluctuations de couple observées dans le mode 3, on module la valeur du courant
quand deux phases sont alimentées. La commande des phases est la même que dans le mode 3, seules changent les amplitude des courants.
Imp. t
t
t
t
tC4
C3
C2
C1
Imp. t
t
tC2
C1
Figure 17 : mode 4 unipolaire. Figure 18 : mode 4 bipolaire.
III.2.5. Mode avancé en micropas (mode 5) Enfin, en étendant le procédé précédent par découpage à fréquence plus élevée, le courant dans
chaque phase suit une loi sinusoïdale pour se rapprocher des machines synchrones de puissance. C’est le mode 5 ou « micropas ».
III.3. Obtention et optimisation des créneaux de courant La commande idéale des phases utilise des créneaux de courant. Or, les enroulements alimentés
en tension sont inductifs, ce qui exclut toute commutation instantanée de courant. Ceci est préjudiciable lors de commandes à haute vitesse car le courant tarde à s’établir. Il faut donc l’accélérer par différents procédés.
Les hacheurs de tension envisagés au §III.1 alimentent les enroulements en tension. Le courant résultant croît donc exponentiellement. Pour obtenir une réponse de courant en échelon, il faut augmenter la pente de croissance du courant. Or, l’expression de celle-ci est du type :
τEktm = où
constante. uneest
on,alimentati sonet phase la à équivalent circuit du temps de constante laest
tension, de échelonl' de amplitudel'est
k
ERLτ
Pour l’optimiser, il faut augmenter E ou diminuer τ, le temps de revenir aux valeurs qui assurent le fonctionnement nominal.
III.3.1. Action sur la constante de temps Le seul moyen de diminuer la constante de temps (L/R) est d’augmenter la résistance série du
circuit, car il est délicat de rendre le circuit temporairement plus inductif lors de commutations de courants. Une résistance ajoutée en série permet donc de diminuer le temps de montée. Mais il faut vite l’éliminer pour permettre au courant d’atteindre sa valeur nominale et éviter les inévitables pertes par effet Joule. Ceci limite les résistances insérées à deux ou trois fois celle de la phase.
III.3.2. Action sur la tension d’alimentation des phases Un procédé consiste à alimenter avec un profil à deux niveaux de tension (Figure 19). Pour cela,
on a recours à un transistor supplémentaire qui contrôle la « surtension » temporaire puis sa disparition. La durée de la surtension peut être contrôlée par la mesure du courant dans T0 (avec une faible résistance placée en série par exemple) : au delà d’un certain seuil de courant, T0 est bloqué et E s’établit (Figure 20).
© YC/RN — MPP1-général TSI avril 03 – V 2.9 7 / 13 Les moteurs pas à pas
t
Tension d’alimentation E1
E
De 3 à 5 fois E
t
Courant dans la phase
RE
I 11 =
REI =
E1
T0
E
Mesure I
D1
D’3
0 V
D3
D’1
T1
T’3
T3
T’1
Figure 19 : profil de la tension d’alim. Figure 20 : contrôle de la tension.
III.3.3. Action directe sur le courant dans les phases
t
Courant de phase Imax
Imin∆I
Avec contrôle du courant
Cas idéal
Dans ce procédé, pour améliorer davantage la réponse, la tension d’alimentation est bien supérieure à la tension nominale (comme au §III.3.2), mais maintenue de manière permanente. Tout le contrôle s’opère sur le courant qui est mesuré de la même manière. Une limite haute et basse contrôlent la conduction des transistors du pont de commande. Figure 21 : contrôle du courant
Les oscillation du courant entre les deux valeurs prédéfinies sont à l’origine de la dénomination de ce procédé dit à « fourchette de courant ».
IV. Performances dynamiques dues aux limitations technologiques L’étude dynamique du moteur pas à pas conduit à établir différentes caractéristiques fréquence-
couple de charge qui définissent des domaines limites durant les étapes de fonctionnement de la machine.
La commande de l’alimentation des phases est relayée par les interfaces de puissance jusqu’à la machine. Puisqu’elle est impulsionnelle, le paramètre de commande qui est pris en compte est la fréquence. Elle conduit immédiatement à la vitesse de rotation qui lui est proportionnelle.
Les lois de comportement électromécaniques sont issues d’études dynamiques qui ne sont pas précisées dans de document. La consultation de [3] apportera tous les développements utiles.
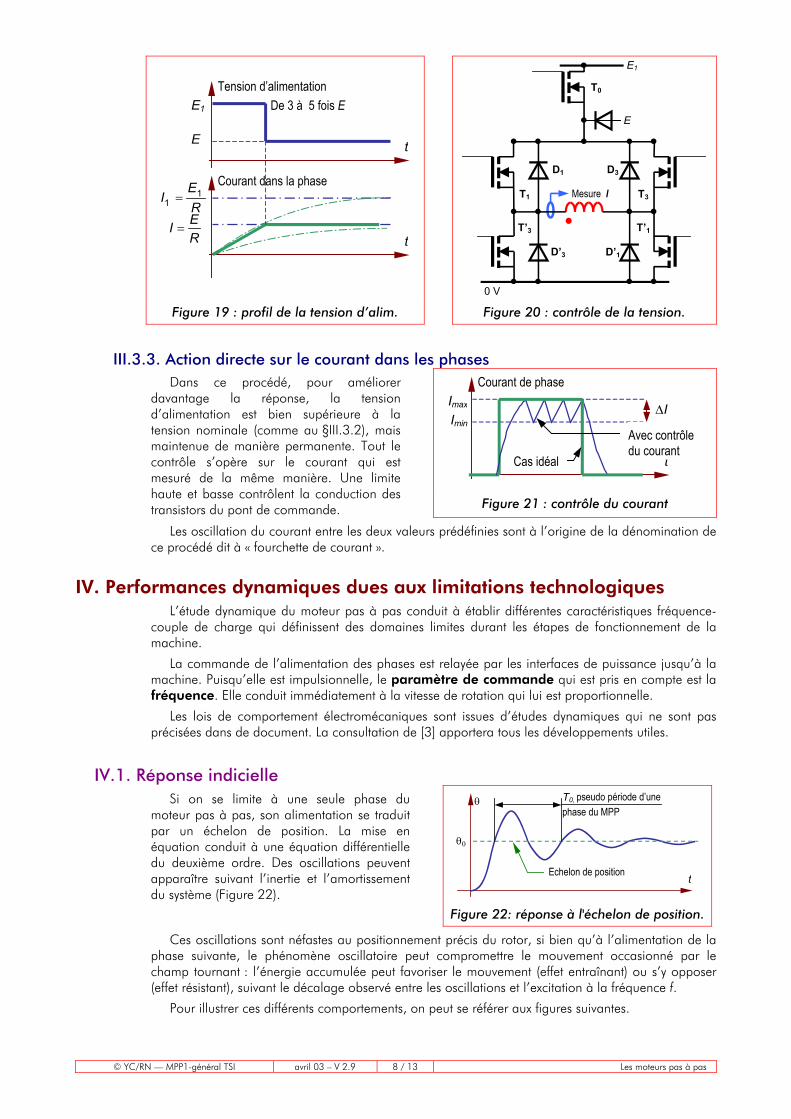
IV.1. Réponse indicielle
t
θ0
θ
Echelon de position
T0, pseudo période d’une phase du MPP
Si on se limite à une seule phase du moteur pas à pas, son alimentation se traduit par un échelon de position. La mise en équation conduit à une équation différentielle du deuxième ordre. Des oscillations peuvent apparaître suivant l’inertie et l’amortissement du système (Figure 22).
Figure 22: réponse à l'échelon de position.
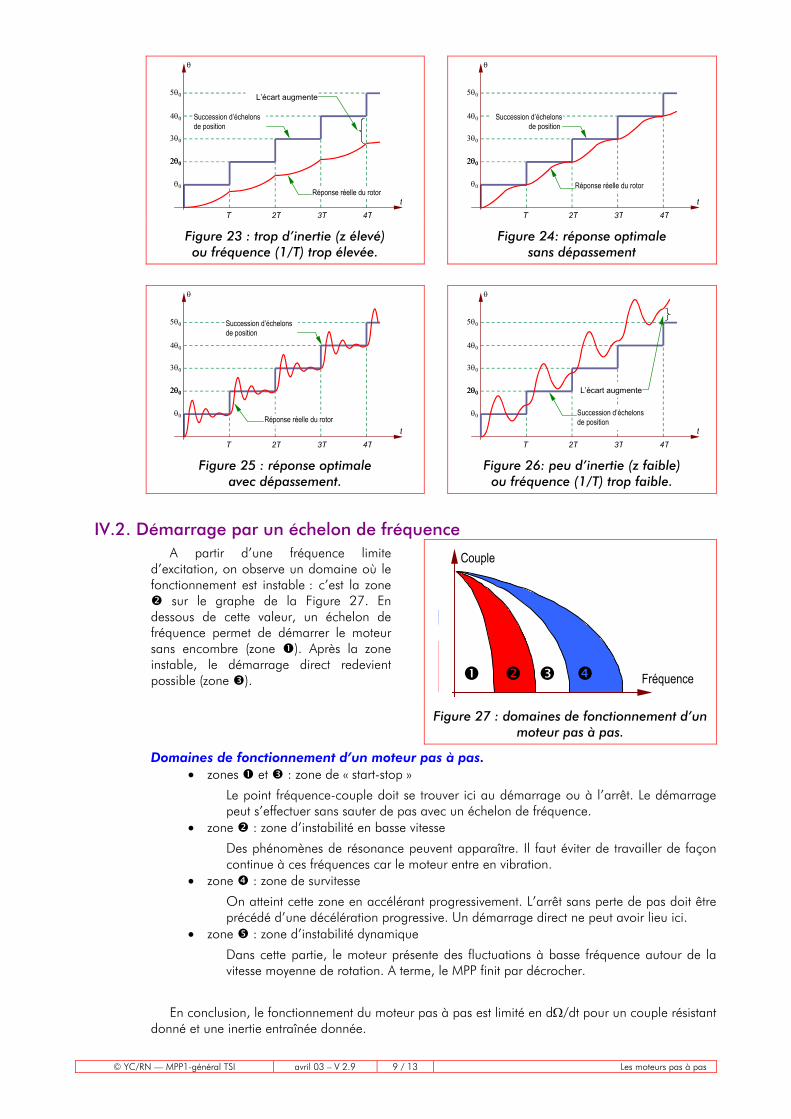
Ces oscillations sont néfastes au positionnement précis du rotor, si bien qu’à l’alimentation de la phase suivante, le phénomène oscillatoire peut compromettre le mouvement occasionné par le champ tournant : l’énergie accumulée peut favoriser le mouvement (effet entraînant) ou s’y opposer (effet résistant), suivant le décalage observé entre les oscillations et l’excitation à la fréquence f.
Pour illustrer ces différents comportements, on peut se référer aux figures suivantes.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 8 / 13 Les moteurs pas à pas
t
Succession d’échelons de position
2θ0
θ0
2θ0
4θ0
3θ0
5θ0 L’écart augmente
Réponse réelle du rotor
θ
T 2T 3T 4T
t
Succession d’échelonsde position
2θ0
θ0
2θ0
4θ0
3θ0
5θ0
Réponse réelle du rotor
θ
T 2T 3T 4T Figure 23 : trop d’inertie (z élevé) ou fréquence (1/T) trop élevée.
Figure 24: réponse optimale sans dépassement
t
Succession d’échelons de position
2θ0
θ0
2θ0
4θ0
3θ0
5θ0
Réponse réelle du rotor
θ
T 2T 3T 4T
t
Succession d’échelons de position
2θ0
θ0
2θ0
4θ0
3θ0
5θ0
θ
L’écart augmente
T 2T 3T 4T Figure 25 : réponse optimale
avec dépassement. Figure 26: peu d’inertie (z faible)
ou fréquence (1/T) trop faible.
IV.2. Démarrage par un échelon de fréquence
Fréquence
Couple
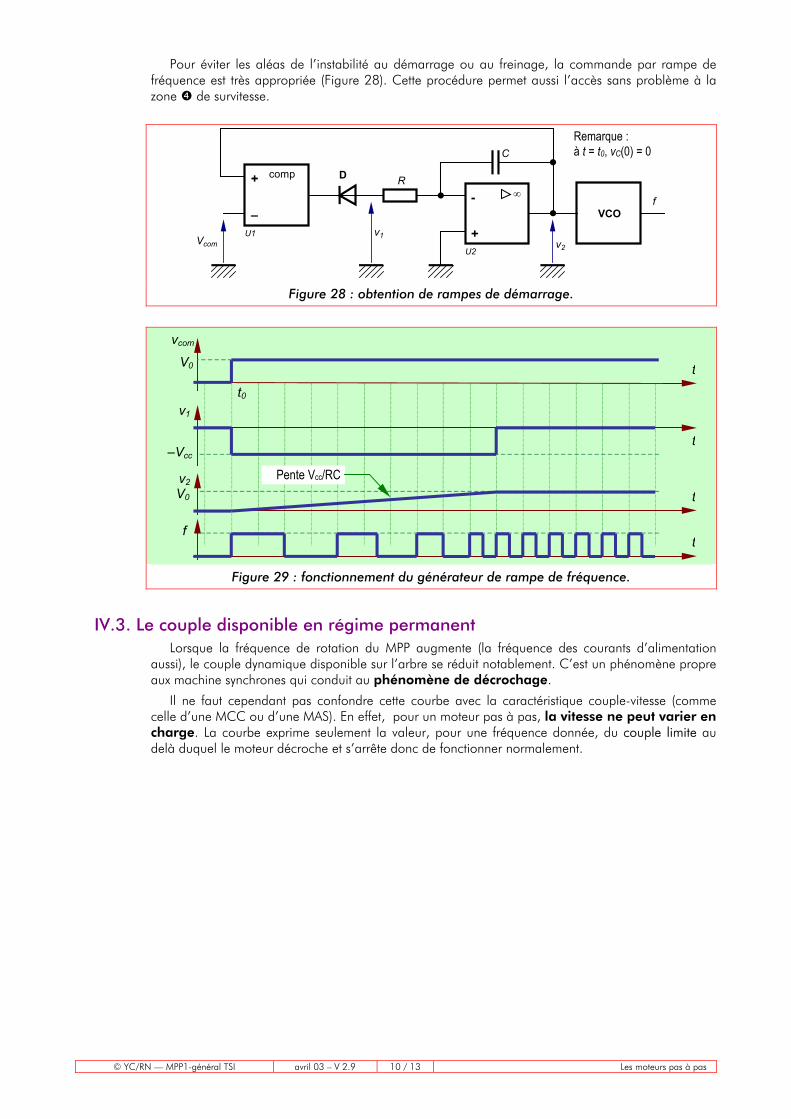
A partir d’une fréquence limite d’excitation, on observe un domaine où le fonctionnement est instable : c’est la zone
sur le graphe de la Figure 27. En dessous de cette valeur, un échelon de fréquence permet de démarrer le moteur sans encombre (zone ). Après la zone instable, le démarrage direct redevient possible (zone ).
Figure 27 : domaines de fonctionnement d’un moteur pas à pas.
Domaines de fonctionnement d’un moteur pas à pas. • zones et : zone de « start-stop »
Le point fréquence-couple doit se trouver ici au démarrage ou à l’arrêt. Le démarrage peut s’effectuer sans sauter de pas avec un échelon de fréquence.
• zone : zone d’instabilité en basse vitesse
Des phénomènes de résonance peuvent apparaître. Il faut éviter de travailler de façon continue à ces fréquences car le moteur entre en vibration.
• zone : zone de survitesse
On atteint cette zone en accélérant progressivement. L’arrêt sans perte de pas doit être précédé d’une décélération progressive. Un démarrage direct ne peut avoir lieu ici.
• zone : zone d’instabilité dynamique
Dans cette partie, le moteur présente des fluctuations à basse fréquence autour de la vitesse moyenne de rotation. A terme, le MPP finit par décrocher.
En conclusion, le fonctionnement du moteur pas à pas est limité en dΩ/dt pour un couple résistant donné et une inertie entraînée donnée.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 9 / 13 Les moteurs pas à pas
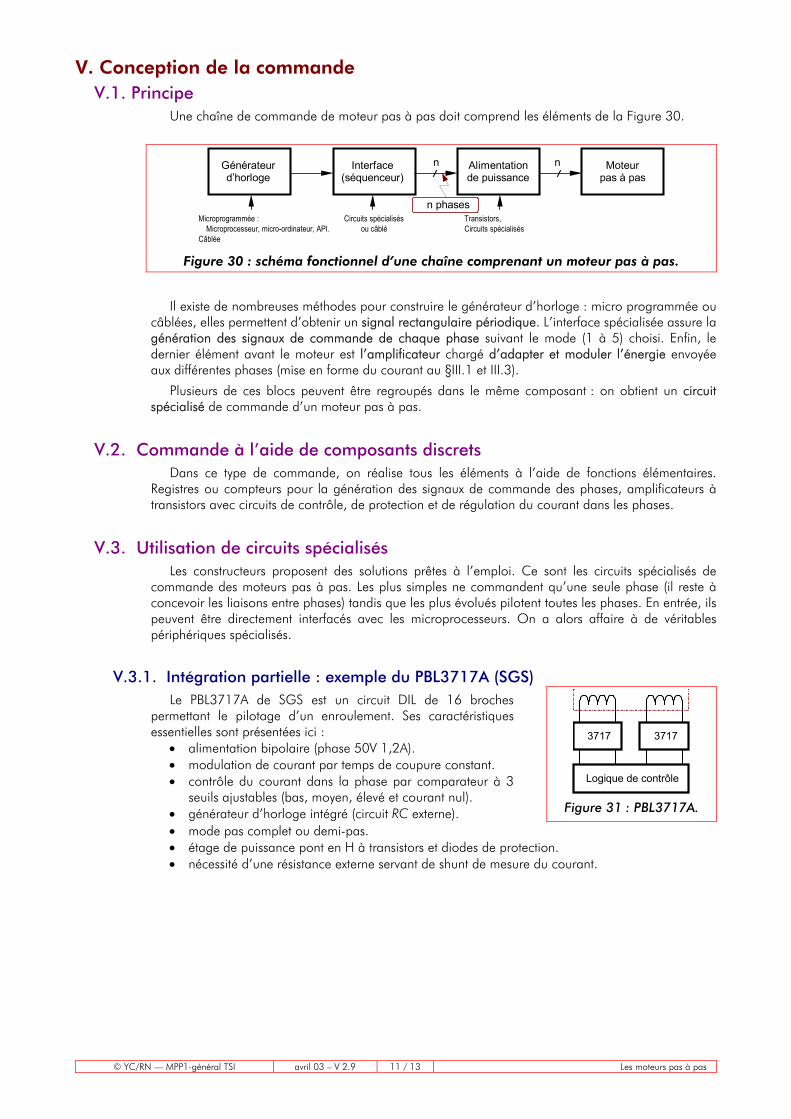
Pour éviter les aléas de l’instabilité au démarrage ou au freinage, la commande par rampe de fréquence est très appropriée (Figure 28). Cette procédure permet aussi l’accès sans problème à la zone de survitesse.
–
+
v1
C
+
- ∞ R
v2 U1
U2Vcom
VCO f
comp D
Remarque : à t = t0, vC(0) = 0
Figure 28 : obtention de rampes de démarrage.
vcom
t
v1
v2
f
t
t
t
t0
V0
–Vcc
V0 Pente Vcc/RC
Figure 29 : fonctionnement du générateur de rampe de fréquence.
IV.3. Le couple disponible en régime permanent Lorsque la fréquence de rotation du MPP augmente (la fréquence des courants d’alimentation
aussi), le couple dynamique disponible sur l’arbre se réduit notablement. C’est un phénomène propre aux machine synchrones qui conduit au phénomène de décrochage.
Il ne faut cependant pas confondre cette courbe avec la caractéristique couple-vitesse (comme celle d’une MCC ou d’une MAS). En effet, pour un moteur pas à pas, la vitesse ne peut varier en charge. La courbe exprime seulement la valeur, pour une fréquence donnée, du couple limite au delà duquel le moteur décroche et s’arrête donc de fonctionner normalement.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 10 / 13 Les moteurs pas à pas
V. Conception de la commande V.1. Principe
Une chaîne de commande de moteur pas à pas doit comprend les éléments de la Figure 30.
Transistors, Circuits spécialisés
Circuits spécialisés ou câblé
Microprogrammée : Microprocesseur, micro-ordinateur, API.
Câblée
Générateur d’horloge
Interface (séquenceur)
n n Alimentation de puissance
n phases
Moteur pas à pas
Figure 30 : schéma fonctionnel d’une chaîne comprenant un moteur pas à pas.
Il existe de nombreuses méthodes pour construire le générateur d’horloge : micro programmée ou câblées, elles permettent d’obtenir un signal rectangulaire périodique. L’interface spécialisée assure la génération des signaux de commande de chaque phase suivant le mode (1 à 5) choisi. Enfin, le dernier élément avant le moteur est l’amplificateur chargé d’adapter et moduler l’énergie envoyée aux différentes phases (mise en forme du courant au §III.1 et III.3).
Plusieurs de ces blocs peuvent être regroupés dans le même composant : on obtient un circuit spécialisé de commande d’un moteur pas à pas.
V.2. Commande à l’aide de composants discrets Dans ce type de commande, on réalise tous les éléments à l’aide de fonctions élémentaires.
Registres ou compteurs pour la génération des signaux de commande des phases, amplificateurs à transistors avec circuits de contrôle, de protection et de régulation du courant dans les phases.
V.3. Utilisation de circuits spécialisés Les constructeurs proposent des solutions prêtes à l’emploi. Ce sont les circuits spécialisés de
commande des moteurs pas à pas. Les plus simples ne commandent qu’une seule phase (il reste à concevoir les liaisons entre phases) tandis que les plus évolués pilotent toutes les phases. En entrée, ils peuvent être directement interfacés avec les microprocesseurs. On a alors affaire à de véritables périphériques spécialisés.
V.3.1. Intégration partielle : exemple du PBL3717A (SGS)
3717
Logique de contrôle
3717
Le PBL3717A de SGS est un circuit DIL de 16 broches permettant le pilotage d’un enroulement. Ses caractéristiques essentielles sont présentées ici :
• alimentation bipolaire (phase 50V 1,2A). • modulation de courant par temps de coupure constant. • contrôle du courant dans la phase par comparateur à 3
seuils ajustables (bas, moyen, élevé et courant nul). • générateur d’horloge intégré (circuit RC externe). Figure 31 : PBL3717A.
• mode pas complet ou demi-pas. • étage de puissance pont en H à transistors et diodes de protection. • nécessité d’une résistance externe servant de shunt de mesure du courant.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 11 / 13 Les moteurs pas à pas
V.3.2. Intégration totale : L297 (L297A) et L298 Le L297 peut piloter directement les 4 phases (20 mA maxi) d’un moteur unipolaire ou les 2 d’un
moteur bipolaire. Si les courants sont plus importants, on a recours au L298 ou à un étage de puissance à transistor externe. Le L297 est un DIL 20 broches et le L298 un boîtier TO de 15 broches multiwatt. Voici ses caractéristiques essentielles :
• pour moteurs bipolaires (2 phases) ou unipolaires (4 phases) deux sens de rotation. • commande normale ou modulée (MLI). • résistances externes servant de shunt de mesure pour la régulation et la limitation du
courant. • générateur d’horloge intégré (circuit RC externe) ou externe (entrée prévue). • sortie référence de position (ABCD=0101) si transistor de sortie HOME (CO) bloqué. • contrôle de la décroissance rapide du courant dans la phase. • mode pas complet ou demi-pas.
L297/L298
Figure 32 : utilisation des L297 et L298.
Pour le L298, on ajoute les fonctions d’amplification : • tension d’alimentation les enroulements jusqu’à 46V. Courant jusqu’à 4A. • protection en température • étage de puissance par double pont en H à transistor et diodes de protection. • connexion directe avec le L297.
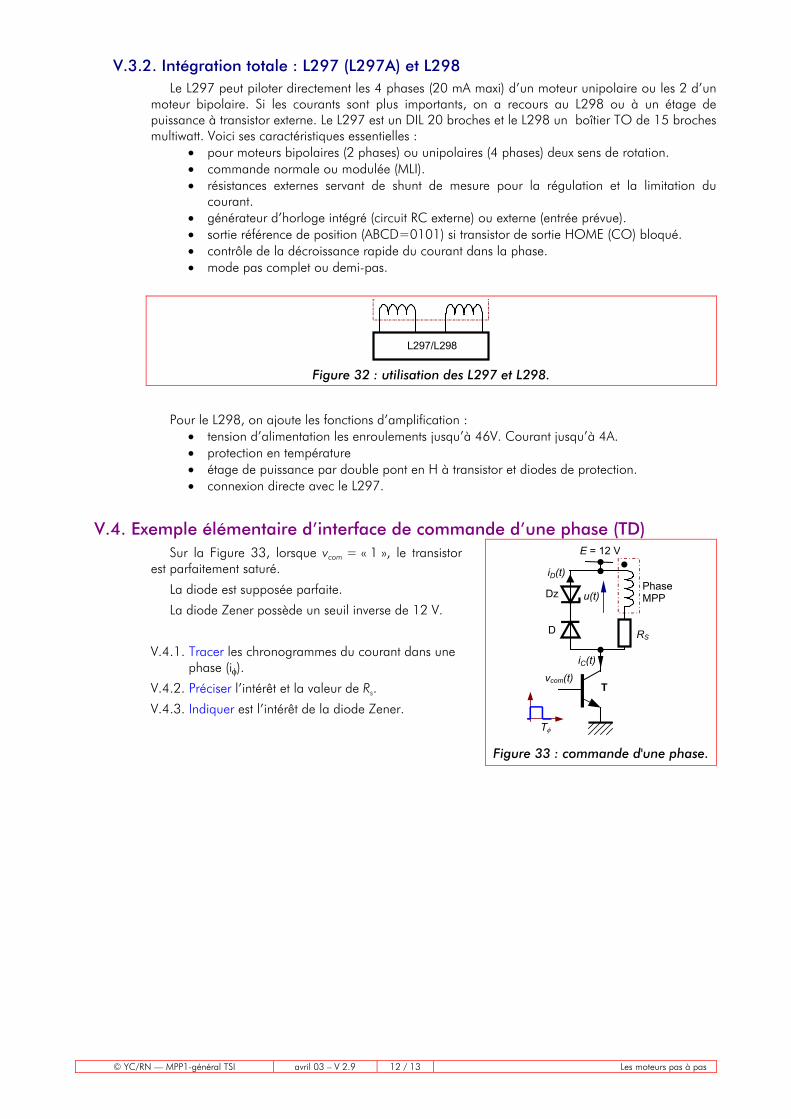
V.4. Exemple élémentaire d’interface de commande d’une phase (TD) E = 12 V
D
Dz
T
iC(t)
u(t)
iD(t)
RS
Phase MPP
vcom(t)
Tφ
Sur la Figure 33, lorsque vcom = « 1 », le transistor est parfaitement saturé.
La diode est supposée parfaite.
La diode Zener possède un seuil inverse de 12 V.
V.4.1. Tracer les chronogrammes du courant dans une phase (iφ).
V.4.2. Préciser l’intérêt et la valeur de Rs.
V.4.3. Indiquer est l’intérêt de la diode Zener.
Figure 33 : commande d'une phase.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 12 / 13 Les moteurs pas à pas
V.5. Logique de mise en rotation (TD sans corrigé)
CLK
Sens
Mise en rotation
Prep
Données de sortie QB QC QDQA
Registre ‘198
Pour réaliser les quatre signaux commandant les interfaces, on utilise un registre à décalage 8 bits (74LS198 à la Figure 34).
V.5.1 Déterminer les différentes opérations à effectuer sur le registre pour obtenir la mise en rotation, ainsi que les valeurs correspondantes de S1, S0.
Figure 34
V.5.2 En déduire le schéma de câblage de S1 et S0 en fonction des entrées de contrôle (prépositionnement prioritaire, sens, mise en rotation).
V.5.3 Indiquer précisément les sorties utilisées pour réaliser S1, S2, S3 et S4.
V.5.4 Proposer un schéma de câblage du circuit pour obtenir une mise en rotation en pas entiers, puis en ½ pas.
V.5.5 Préciser comment contrôler la vitesse de rotation du moteur.
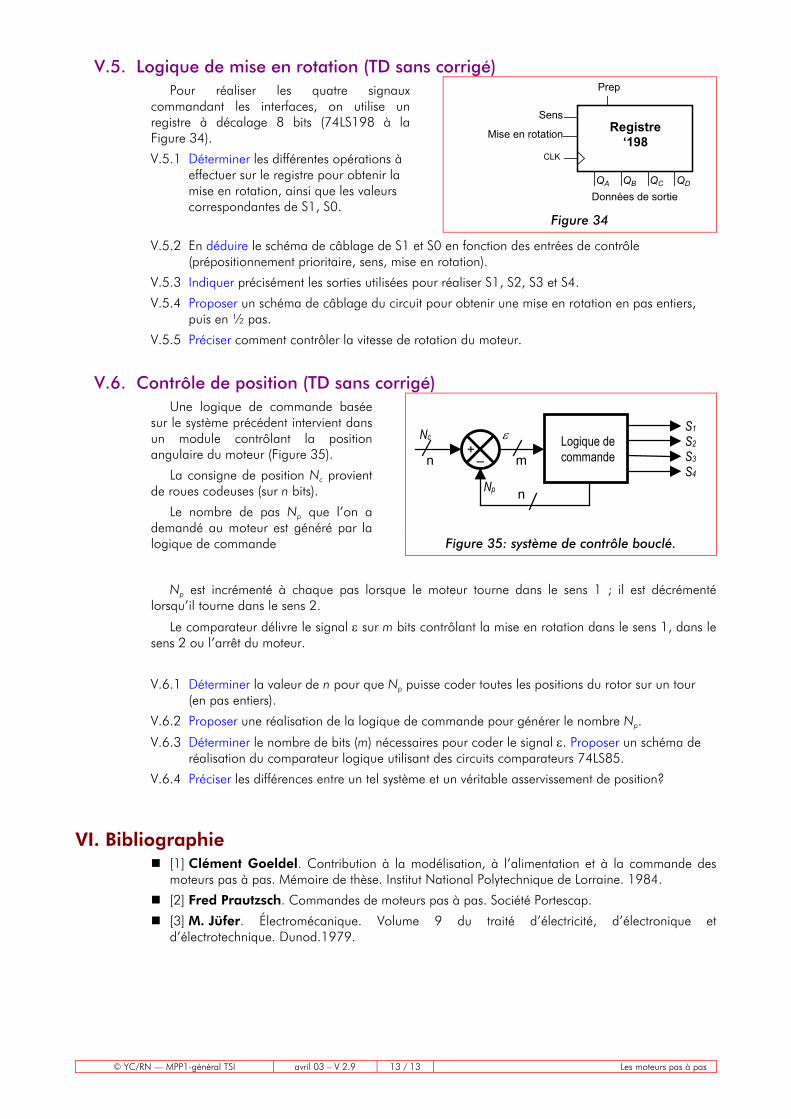
V.6. Contrôle de position (TD sans corrigé)
–+
Nc Logique de commande m
n
n
Np
S1 S2 S3 S4
ε
Une logique de commande basée sur le système précédent intervient dans un module contrôlant la position angulaire du moteur (Figure 35).
La consigne de position Nc provient de roues codeuses (sur n bits).
Le nombre de pas Np que l’on a demandé au moteur est généré par la logique de commande Figure 35: système de contrôle bouclé.
Np est incrémenté à chaque pas lorsque le moteur tourne dans le sens 1 ; il est décrémenté lorsqu’il tourne dans le sens 2.
Le comparateur délivre le signal ε sur m bits contrôlant la mise en rotation dans le sens 1, dans le sens 2 ou l’arrêt du moteur.
V.6.1 Déterminer la valeur de n pour que Np puisse coder toutes les positions du rotor sur un tour (en pas entiers).
V.6.2 Proposer une réalisation de la logique de commande pour générer le nombre Np.
V.6.3 Déterminer le nombre de bits (m) nécessaires pour coder le signal ε. Proposer un schéma de réalisation du comparateur logique utilisant des circuits comparateurs 74LS85.
V.6.4 Préciser les différences entre un tel système et un véritable asservissement de position?
VI. Bibliographie [1] Clément Goeldel. Contribution à la modélisation, à l’alimentation et à la commande des
moteurs pas à pas. Mémoire de thèse. Institut National Polytechnique de Lorraine. 1984.
[2] Fred Prautzsch. Commandes de moteurs pas à pas. Société Portescap.
[3] M. Jüfer. Électromécanique. Volume 9 du traité d’électricité, d’électronique et d’électrotechnique. Dunod.1979.
© YC/RN — MPP1-général TSI avril 03 – V 2.9 13 / 13 Les moteurs pas à pas