mise en œuvre d'une simulation de trafic sur l'aire urbaine de lyon
TRANSCRIPT
MISE EN ŒUVRE D’UNE SIMULATION DE
TRAFIC SUR L’AIRE URBAINE DE LYON
ANALYSE DE DIFFERENTES METHODES D’AFFECTATION
EN VUE DE LES COMPARER A LA METHODE METROPOLIS
Président du jury : Richard MITANCHEY Maître de TFE : Jean-Pierre NICOLAS Expert : Frédéric REUTENAUER
Juin 2006
Emmanuel BERNE
VA Transport
Promotion 51
3
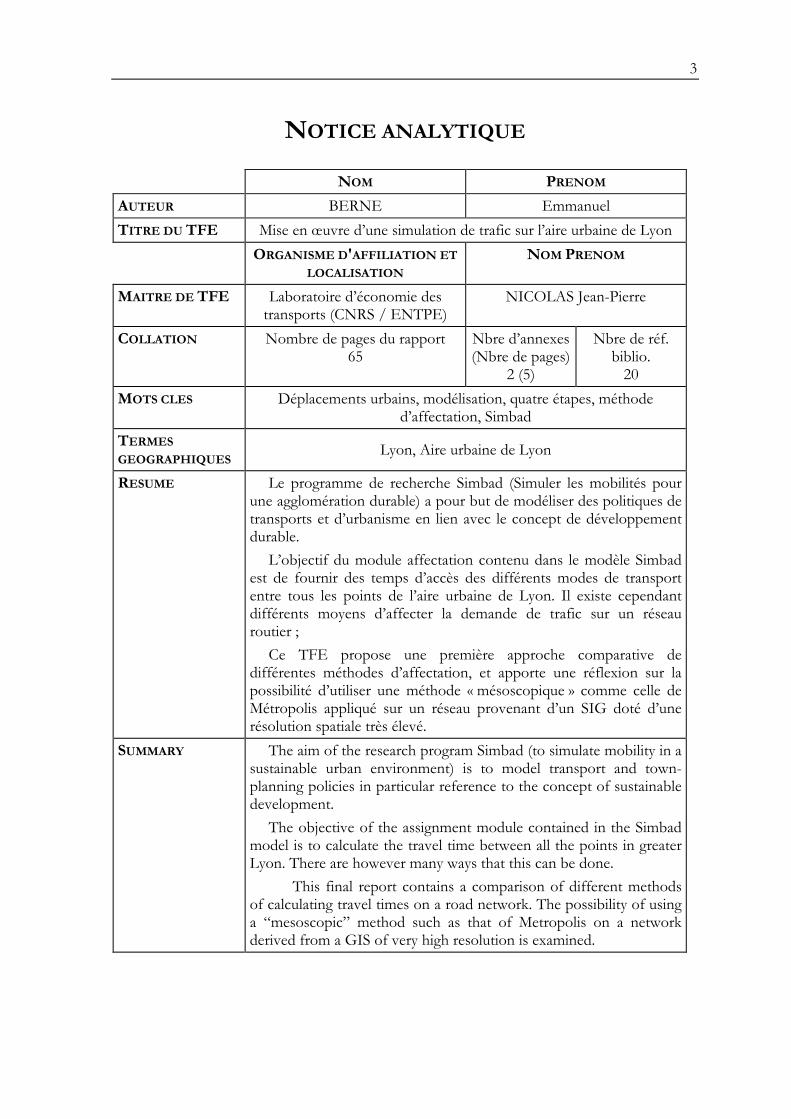
NOTICE ANALYTIQUE
NOM PRENOM
AUTEUR BERNE Emmanuel
TITRE DU TFE Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
ORGANISME D'AFFILIATION ET
LOCALISATION NOM PRENOM
MAITRE DE TFE Laboratoire d’économie des transports (CNRS / ENTPE)
NICOLAS Jean-Pierre
COLLATION Nombre de pages du rapport 65
Nbre d’annexes (Nbre de pages)
2 (5)
Nbre de réf. biblio. 20
MOTS CLES Déplacements urbains, modélisation, quatre étapes, méthode d’affectation, Simbad
TERMES
GEOGRAPHIQUES Lyon, Aire urbaine de Lyon
RESUME Le programme de recherche Simbad (Simuler les mobilités pour une agglomération durable) a pour but de modéliser des politiques de transports et d’urbanisme en lien avec le concept de développement durable.
L’objectif du module affectation contenu dans le modèle Simbad est de fournir des temps d’accès des différents modes de transport entre tous les points de l’aire urbaine de Lyon. Il existe cependant différents moyens d’affecter la demande de trafic sur un réseau routier ;
Ce TFE propose une première approche comparative de différentes méthodes d’affectation, et apporte une réflexion sur la possibilité d’utiliser une méthode « mésoscopique » comme celle de Métropolis appliqué sur un réseau provenant d’un SIG doté d’une résolution spatiale très élevé.
SUMMARY The aim of the research program Simbad (to simulate mobility in a sustainable urban environment) is to model transport and town-planning policies in particular reference to the concept of sustainable development.
The objective of the assignment module contained in the Simbad model is to calculate the travel time between all the points in greater Lyon. There are however many ways that this can be done.
This final report contains a comparison of different methods of calculating travel times on a road network. The possibility of using a “mesoscopic” method such as that of Metropolis on a network derived from a GIS of very high resolution is examined.


5
SOMMAIRE
INTRODUCTION 7
Contexte : le projet Simbad 7
Problématique et objectifs 9
Organisation du travail 9
PARTIE 1 : PLANIFICATION DE LA DEMANDE DE TRANSPORT 11
1.1 Les enjeux et fondements théoriques de la modélisation 11
1.1.1 La notion de modèle 11
1.1.2 L’opérationnalité d’un modèle 12
1.1.3 Bref historique de la modélisation des transports 12
1.1.4 Les besoins actuels : utilités et usages de la modélisation 13
1.2 Architecture générale des modèles à quatre étapes 14
1.3 Première étape : la génération de la demande de déplacement 15
1.4 Deuxième étape : la distribution des déplacements 16
1.4.1 Le modèle gravitaire 17
1.4.2 Coûts et temps généralisés 18
1.5 Troisième étape : la répartition modale 19
1.5.1 Modèles normatifs 19
1.5.2 Modèles logit 20
1.6 Quatrième étape : l’affectation des déplacements 20
PARTIE 2 : L’AFFECTATION : METHODES, MODELES ET LOGICIELS 23
2.1 Un préalable, le choix du périmètre d’étude et de zonage 23
2.2 Courbes débit-vitesse et coût-débit 26
2.3 Les méthodes classiques d’affectation statique 28
2.3.1 Affectation « tout ou rien » 28
2.3.2 Affectation stochastique simple ou affectation multichemins 29
2.3.3 Affectation à l’équilibre de Wardrop 29
2.3.4 Affectation à l’équilibre stochastique 30
2.4 Une brève revue des logiciels d’affectation dynamique 31
2.4.1 L’affectation microscopique (VISSIM, AIMSUN, PARAMICS) 31

6 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
2.4.2 L’affectation macroscopique (METACOR) 33
2.4.3 L’affectation mésoscopique (Metropolis) 34
2.5 Metropolis, une méthode d’affectation originale 34
2.6 Le travail de calage de l’affectation 37
PARTIE 3 : DE LA THEORIE AUX PREMIERS RESULTATS 39
3.1 Importation de la base de donnée GéoRoute vers le logiciel Davisum 39
3.1.1 GéoRoute, un SIG développé par l’IGN 39
3.1.2 Procédure du transfert de données 43
3.2 Sensibilité du réseau du CETE aux variations de la demande 44
3.2.1 Affectation à l’équilibre : courbes INRETS 45
3.2.2 Affectation à l’équilibre : courbes BPR3 (a=1, b=2, c=1 et d=0) 48
3.3 Courbe débit-vitesse de Métropolis 50
CONCLUSION ET PERSPECTIVES DE TRAVAIL 53
BIBLIOGRAPHIE 55
LISTES DES TABLEAUX, FIGURES ET ABBREVIATIONS 57
Liste des tableaux 57
Liste des figures 57
Liste des abréviations 58
ANNEXES 61
Annexes A : Description du logiciel Davisum 61
Annexes B : Liste des attributs fournis avec le SIG de l’IGN 63
7
INTRODUCTION
Contexte : le projet Simbad
Le concept de développement durable intervient de plus en plus souvent dans les discussions sur l’avenir des transports. Il est désormais inscrit dans la loi et guide un grand nombre de décisions politiques. On le définit généralement en le décomposant selon ses trois enjeux (enjeux environnementaux, économiques et sociaux).
Le contrat de recherche Simbad (Simuler les Mobilités pour une Agglomération Durable) est financé par l’ADEME1 et la DRAST, avec l’aide de l’agence d’urbanisme de Lyon et en concertation avec la mission « Déplacement » du grand Lyon. L’objectif de ce programme de recherche est de simuler différents scénarios de politiques de transports et d’urbanisme pour tester leurs impacts sur les mobilités urbaines et pour mesurer les conséquences environnementales, économiques et sociales de ces scénarios.
Simbad consiste à développer un modèle prospectif à l’horizon 2025 sur l’aire urbaine de Lyon, en prêtant une grande attention à la modélisation des interactions entre les transports et l’urbanisme. L’objectif de ce programme de recherche est de susciter une réflexion, à partir des sorties du modèle, pour fournir un éclairage pertinent sur les impacts économiques, environnementaux et sociaux des politiques urbaines touchant aux transports. Il s’inspire du travail qui a été réalisé par le LET à l’occasion du développement du modèle Télescopage.
Simbad se divise en plusieurs modules interagissant entre eux (localisation des activités économiques, localisations résidentielles, génération de la demande de transport de passagers, génération de la demande de transport de marchandises et affectation des déplacements sur les réseaux routiers et de transport collectif). La figure ci-dessous représente l’agencement de ces modules :
1 Pour la signification des sigles et acronymes, voir la table en fin de rapport

8 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
Figure 0-1 : Architecture des différents modules
Les calculs entre les différents modules peuvent être décrits de la manière suivante :
1. Les localisations résidentielles et des activités économiques sont initialement données, sous la forme de 777 zones IRIS sur l’aire urbaine de Lyon ;
2. Il est possible à partir de ces localisations de déterminer la demande de déplacements pour chaque zone. Les déplacements domicile-travail sont par exemple fortement corrélés à la proportion d’actifs et d’emplois dans la zone. De même, la localisation des activités permet de déterminer la demande de transport de marchandises ;
3. Cette demande de déplacement par zone permet ensuite de déterminer la demande de déplacements entre chaque zone ;
4. Ces déplacements sont répartis par mode sur l’ensemble de la journée ;
5. L’ensemble du trafic de personnes et de marchandises est affecté sur le réseau routier, ce qui permet de calculer des accessibilités moyennes par mode et par horaire entre les zones ;
6. Ces accessibilités ont une influence sur les localisations résidentielles et sur les activités économiques (rétroaction).
Le travail réalisé à l’occasion de ce TFE, qui sera suivi de mon mémoire de master recherche concerne l’étape d’affectation (étape numéro cinq dans la numérotation précédente). L’affectation correspond au choix de l’itinéraire pour se rendre d’une origine à
Modèle d’occupation du sol
Génération
Distribution
Choix modal
Affectation
Recensement INSEE
Occupation du sol initiale
Densité de population Densité d’emplois
Accessibilité transport
Modèle à 4 étapes
Accessibilité transports
9
une destination donnée. La détermination de cet itinéraire tient compte de la congestion du réseau routier et permet ensuite de calculer les temps d’accès entre toutes les zones.
Problématique et objectifs
Comme on vient de le voir, l’étape d’affectation dans Simbad a pour but de fournir des temps d’accès des différents modes entre toutes les zones de l’aire urbaine de Lyon, pour alimenter les modules de localisation des activités économiques et de la population. Or :
• Au départ, Télescopage fait appel au modèle Davisum calibré sur l’agglomération Lyonnaise et utilisé par le CETE de Lyon pour répondre à ses besoins en matière d’affectation du trafic. Cependant, cet outil ne permet pas de couvrir correctement la totalité de l’aire urbaine. D’autre part, le contenu des bases de données utilisées étant propriété du CETE, son intégration à la procédure informatique de Simbad n’est pas possible.
• Le recours à une procédure d’affectation agrégée entre 39 zones proposé par le modèle Télescopage reste toujours possible, mais il fournit des résultats trop grossiers pour des accessibilités susceptibles d’alimenter un modèle de localisation.
Le projet sur lequel porte ce travail de fin d’étude fait donc suite à la volonté de développer une procédure d’affectation alternative qui puisse être intégrée au projet Simbad. Nous nous proposons d’exploiter la possibilité d’utiliser un modèle d’affectation dit « mésoscopique », appliqué sur un réseau provenant d’un SIG doté d’une résolution spatiale très élevée. L’objectif de mon travail est alors de mettre en place une méthode permettant de comparer entre elles des procédures d’affectations différentes.
Ce problème présente plusieurs facettes :
• D’une part, l’organisation des tests à réaliser pour valider l’intérêt de cette procédure ;
• D’autre part, la définition d’une série d’indicateurs pertinents communs aux différents modules de Simbad ;
• Enfin, la mise en place d’une technologie adéquate pour l’interface logicielle qui permette aux modèles de localisation et d’occupation du sol d’accéder de manière transparente aux performances de l’infrastructure de transport sans avoir à tenir compte de la complexité d’un modèle de transport complet.
Organisation du travail
Ce travail est suivi par Jean-Pierre Nicolas, chercheur CNRS au Laboratoire d’économie des transports et responsable scientifique du programme Simbad. Il est réalisé en concertation avec Fabrice Marchal, chercheur CNRS au Laboratoire d’économie des transports, et avec Jean-Baptiste Ferey, chargé d’étude en modélisation des transports urbains au CETE de Lyon.
Il se dissocie en cinq parties. Les trois premières ont été réalisées au cours de mon Travail de fin d’étude, tandis que les deux suivantes le seront à l’occasion de mon mémoire de Master Recherche (ex-mémoire de DEA).

10 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
• La première étape constitue une description de la simulation du trafic (enjeux et fondements, modèles de planification à quatre étapes), et plus précisément les enjeux de la procédure d’affectation. Cette étape, largement bibliographique, correspond aux deux premières parties de ce présent rapport ;
• La deuxième étape de travail consiste à utiliser le logiciel de modélisation du trafic Davisum ainsi qu’à importer les données issues d’un SIG et de bases de données du CETE vers ce logiciel. Les premiers résultats obtenus à l’issue de cette étape de travail sont présentés dans ce rapport, en troisième partie ;
• Ces deux précédentes étapes me permettront d’établir un scénario de base. Ce scénario vise à déterminer des indicateurs qui permettront de comparer entre elles les méthodes d’affectation classiques avec la méthode d’affectation Métropolis ;
• L’étape suivante consistera à réaliser le calage du modèle à partir de données réelles fournies par le CETE de Lyon (temps de parcours sur des itinéraires définis) ;
• Une fois ce calage réalisé, il sera possible de comparer entre elles les procédures d’affectation, puis de déterminer celle qui sera utilisée dans le projet Simbad ;
11
Partie 1 : PLANIFICATION DE LA DEMANDE DE
TRANSPORT
Travailler dans le domaine de la modélisation des transports nécessite inévitablement de prendre du recul par rapport aux décisions que l’on est amené à prendre, ceci pour permettre une interprétation correcte des résultats obtenus. Une telle prise de recul ne peut se faire que si l’on a une compréhension correcte de l’ensemble des éléments qui constituent la chaîne de modélisation.
Cette première partie, portant sur la modélisation à quatre étapes, répond à ce besoin. Elle permet de mieux définir les objectifs que l’on souhaite poursuivre, de prendre conscience des conséquences des hypothèses que l’on peut être amené à prendre, et de pouvoir dans la mesure du possible estimer la qualité, et l’« opérationnalité » du modèle que l’on est en train de construire.
1.1 Les enjeux et fondements théoriques de la modélisation
Les modèles de transport sont d’indispensables outils de compréhension et de planification des déplacements. Il est en effet essentiel de disposer d’instruments permettant de simuler l’évolution des trafics et donc de prévoir la fréquentation des futures infrastructures de transport, de comparer l’intérêt de plusieurs variantes ou bien de tester des scénarios prospectifs à l’échelle d’un territoire.
La modélisation est cependant un exercice difficile qui nécessite une constante prise de recul par rapport aux hypothèses que l’on est amené à prendre. Cette partie a donc pour objet d’apporter des éléments de réponse liés à ce problème. Après avoir défini la notion de modèle et dressé un rapide historiques de l’évolution des modèles de planification de la demande, nous nous interrogerons sur la nécessité de modéliser les comportements des utilisateurs de systèmes de transports et sur les difficultés induites par l’utilisation de modèles.
1.1.1 La notion de modèle Le terme modèle possède deux sens opposés. Un modèle, c’est à l’origine un objet que l’on
cherche à imiter ou à représenter. On peut citer comme exemple le modèle du peintre. Par la suite, ce terme a évolué pour désigner un concept ou un objet qui est la représentation d’un autre. C’est ainsi le cas du modèle réduit.
Ce deuxième sens a vraisemblablement pour origine l’habitude des scientifiques à construire un prototype, réel ou conceptuel, servant de « modèle » soit à une construction réelle, soit à un assemblage de concepts représentant de manière simplifié un phénomène réel ou une prédiction théorique.
Mais le terme modèle signifie encore autre chose. On appelle modèle une construction théorique qui décrit un processus physique, biologique ou social, à l’aide d’un ensemble de variables et d’un ensemble de relations logiques reliant ces variables1. De tels modèles, à la base de nombreuses théories scientifiques, sont construits pour permettre un raisonnement logique. Ces modèles se concrétisent par l’intermédiaire de simulations, de nature prédictive, souvent mises en œuvre par ordinateur.
1 http://fr.wikipedia.org/wiki/Modèle
12 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
Une distinction peut cependant être faite entre modèle et théorie. Alors que le terme modèle est mieux adapté lorsqu’il s’agit de renoncement à atteindre une vérité absolue, celui de théorie a un caractère moins éphémère et certainement aussi plus ambitieux. Comme le note Alain Bonnafous à propos des physiciens du début du vingtième siècle travaillant sur le modèle planétaire de l’atome, « les savants qui ont vécu ce cyclone intellectuel croyaient produire des théories. Quelques générations plus tard, ceux qui racontent leurs aventures disent qu’ils fabriquaient des modèles »1.
1.1.2 L’opérationnalité d’un modèle L’opérationnalité peut se définir de la manière suivante : un modèle est opérationnelle dès
lors qu’il fournit ce pour quoi il a été construit. Ce concept est cependant moins évident qu’il n’y paraît ; la vérification d’un modèle peut se faire selon plusieurs critères :
• Celui de la cohérence. Un modèle ne doit pas contenir de contradiction interne. De même, il doit répondre à une cohérence d’objectifs (par exemple comporter autant d’équation que d’inconnues) ;
• Celui de la pertinence. Le modèle doit être conforme à ce qu’on croit être la réalité. L’économétrie (ensemble des techniques destinée à mesurer des grandeurs économiques) est à même d’apprécier la pertinence des résultats issu d’un modèle économique ;
• Celui de la mesurabilité : seuls les modèles quantitatifs sont concernés par ce critère. Le modèle doit manipuler des grandeurs mesurables, pour permettre justement l’évaluation de sa pertinence.
1.1.3 Bref historique de la modélisation des transports La modélisation dans le domaine des transports est apparue dans les années cinquante,
suite à la généralisation de l’usage de l’automobile aux Etats-Unis. Les premiers modèles mis en place donnent la largeur des voies en fonction du trafic, l’objectif étant de « résoudre les problèmes en cours par des réalisations à court terme ».2
Outre Atlantique, l’augmentation incessante du nombre de véhicules pose de nouveaux problèmes qu’il faut surmonter. Par nécessité, les modèles deviennent donc des instruments prévisionnels destinés à orienter et à maintenir la croissance. Ces derniers utilisent la méthode des facteurs de croissance, pour calculer le trafic futur à partir du trafic existant. Cette méthode n’est toutefois pas satisfaisante pour simuler le trafic dans des zones où l’urbanisation est en forte évolution. Ces techniques ont donc évolué pour intégrer plusieurs composantes nouvelles, telles que :
• « l'adoption systématique d'un horizon de long terme ;
• l'abandon de la référence contextuelle aux déplacements existants ;
• la prise en compte de l'ensemble du réseau au lieu d'un seul axe isolé »3.
1 Bonnafous, 1989, p.36 2 Dupuy, 1975, p.17 in Bonnel, 2002 3 Dupuy, 1975, p.30 in Bonnel, 2002
13
Les années 60 voient s’opérer un important transfert de technologies entre les Etats-Unis et la France. Des enquêtes origine-destination sont réalisées pour permettre d’alimenter ces modèles avec des données françaises. Le fameux modèle à quatre étapes est introduit en France en 1966 à travers une note du SERC intitulée « le test des Schémas de structure1 et des Transports ».
Davis (qui a par suite donné naissance à Davisum par croisement avec Visum), est développé en 1968. Avec les années 70, l’usage des modèles s’intensifie, suite à une période de mise en place de nouvelles procédures de planification urbaine. Cette codification s'accompagne de la constitution de « dossiers pilotes diffusés dans toutes les villes concernées. Il s'agit de véritables manuels prévoyant en détail les conditions de lancement des études, les outputs attendus et les instruments à utiliser.... Du point de vue des modèles de trafic, il s'agit probablement d'une date significative dans l'histoire de leur développement. En effet, les dossiers pilotes font tous référence à l'utilisation de modèles ».2
A partir du début des années 80, le monde des transports évolue rapidement. En 1982 la Loi d’orientation des transports intérieurs (LOTI) est votée et permet la mise en place des Plans de déplacements urbains (PDU). Ce n’est cependant qu’à la suite de l’adoption de la loi sur l’air que les PDU ont été rendu obligatoires, dans les agglomérations de plus de 100 000 habitants, incitant dès lors un fort développement de la modélisation des transports urbains.
1.1.4 Les besoins actuels : utilités et usages de la modélisation Pourquoi analyser les déplacements ? De multiples raisons expliquent aujourd’hui la
nécessité de modéliser, et plus généralement de prévoir la demande de déplacement.
La première de ces raisons est liée aux caractéristiques des infrastructures de transport. A titre d’exemple, une ligne de Train à grande vitesse (TGV) coûte généralement plus de 3 milliards d’euros, une autoroute représente un investissement variant entre 7 et 100 millions d’euros par kilomètre selon sa localisation (en rase campagne ou en zone urbaine dense) et le prix d’une ligne de métro varie entre 50 et 80 millions d’euros par kilomètre.3
Le coût systématiquement très élevé des infrastructures de transport oblige donc les décideurs à évaluer les montants maximaux qu’il est possible d’investir dans l’opération. Ils ont alors pour cela besoin de déterminer les seuils de rentabilité et de prévoir la fréquentation à venir des infrastructures afin de réaliser prioritairement les investissements les plus rentables.
La rentabilité n’est pas perçue de la même manière si l’infrastructure est financée par l’Etat ou bien par un investisseur privé. Dans le premier cas, la rentabilité sociale et économique possède un grand intérêt. Si c’est un investisseur privé qui finance la construction de l’infrastructure, la question de la rentabilité financière reste plus importante ; mais dans les deux cas, les modèles de prévision de la fréquentation de l’infrastructure représentent des enjeux fondamentaux.
1 De nombreuses communes commencent à se doter de plan d’urbanisme, appelé à l’époque Schémas de structure
2 Dupuy, 1975, p.106-107 in Bonnel, 2002 3 Bonnel, 2002
14 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
Un autre point à mentionner pour justifier la nécessité de prévoir et de modéliser concerne l’anticipation des évolutions et des dysfonctionnements de l’infrastructure. Il est par exemple appréciable pour un exploitant de pouvoir anticiper les éventuels travaux de rénovation d’une chaussée dès sa construction, afin de pouvoir ensuite optimiser le calendrier des dépenses d’entretien et d’exploitation.
De manière plus générale, la modélisation des déplacements répond à différents critères, évoluant avec le temps, tels que :
• « La stratégie en matière de politique de transports ;
• l’élaboration de documents de planification (PDU, SCOT) ;
• la programmation (échéancier chiffré des investissements) ;
• la compréhension des comportements de mobilité, de l’usage des modes ;
• l’évaluation économique ;
• la rentabilité financière ;
• la conception et le dimensionnement des réseaux ;
• l’évaluation des impacts environnementaux des déplacements (bruit, pollution de l’air, etc.) »1.
Dans le cas du projet Simbad, l’objectif de la modélisation est de prévoir à l’horizon 2025 les conséquences de plusieurs scénarios de mobilité. Le caractère durable de ces scénarios sera un des éléments à mesurer.
1.2 Architecture générale des modèles à quatre étapes
Il existe plusieurs familles de modèles dans le domaine des transports, répondants à des problèmes et des objectifs différents. On peut facilement en recenser trois :
• Les modèles microscopiques. Ils permettent d’analyser le fonctionnement de carrefours et d’échangeurs complexes, mais ne sont cependant pas facilement utilisables à l’échelle d’une ville ;
• Les modèles de transports en milieu interurbain ;
• Les modèles de transports en milieu urbain.
Ce dernier type de modèle est celui qui sera utilisé dans le programme de recherche Simbad, en intégrant cependant un module de prévision de la demande de transport interurbaine pour calculer les flux d’échange et de transit.
L’objectif des modèles de planification est de prévoir les déplacements à des horizons donnés. Ces modèles se décomposent généralement en quatre séquences et sont appelés « modèles à quatre étapes ». Chacune de ses étapes correspond à une question :
1 CERTU, mars 2003

15
1. Est-ce que je me déplace ? (Étape de génération)
2. Dans quelle direction je me déplace ? (Étape de distribution)
3. En utilisant quel mode de transport ? (Étape de choix modal)
4. Quel chemin j’emprunte pour réaliser ce déplacement ? (Étape d’affectation)
Alors que les deux premières étapes correspondent à la détermination de la demande de déplacement, les deux dernières ont pour objectif de répartir le trafic en fonction de l’offre modale et routière. Les parties suivantes décrivent les rôles de chacune de ces quatre étapes, pour ensuite les mettre en perspective avec l’étape d’affectation.
1.3 Première étape : la génération de la demande de déplacement
L’étape de génération, première des quatre étapes, a pour objet la détermination du nombre de déplacement émis et reçus par zone. Cette étape correspond au choix de l’individu de se déplacer ou non. Il est important de noter que les déplacements ne sont pas considérés ici dans leur intégralité ; seules leurs extrémités sont comptabilisées comme des déplacements émis ou reçus.
Les attractions correspondent à l’ensemble des déplacements dont la destination se situe à l’intérieur de la zone alors que les émissions correspondent à l’ensemble des déplacements dont l’origine se situe dans la zone (cf. figure ci-dessous).
Figure 1-1 : Emission et attraction
Pour faire en sorte que la phase de génération soit la plus représentative possible de la réalité, les déplacements sont généralement dissociés selon leurs motifs. Il devient alors plus
A3
A2A1
E3
E2E1
Légende :
Centroïde
Emission
Attraction
Zone 2
Zone 1
Zone 3

16 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
facile de calculer le nombre de déplacements en émission ou en attraction en fonction des caractéristiques propres à chaque zone. Par exemple, les déplacements en attraction domicile-travail sont généralement fortement corrélés au nombre d’emplois dans la zone, alors que les déplacements en attraction domicile-achats services sont plus importants aux abords d’un centre commercial.
Figure 1-2 : Exemple d’émissions et d’attractions pour une heure donnée
Les zones de Simbad sont définies de manière à correspondre au découpage spatial IRIS (Ilots regroupés pour l’information statistique). Les îlots IRIS-2000 forment des « petits quartiers » constitués d’îlots contigus, qui servent de base en matière de diffusion des données locales. La population des IRIS se situe entre 1800 et 5000 habitants, vivants dans des logements homogènes.
1.4 Deuxième étape : la distribution des déplacements
Alors que la première étape correspond au choix pour l’individu de se déplacer ou non, la distribution des déplacements correspond au choix pour l’individu de sa destination. Elle vient après l’étape de génération, car elle utilise les sorties de cette première étape, c’est-à-dire les émissions et les attractions par zone, pour produire ensuite la matrice origine-destination des déplacements. L’objectif de cette étape est donc de relier l’origine et la destination des déplacements sur l’aire d’étude.
Le nombre de déplacements entre les zones i et j est noté Tij
Ai Domicile-autre motif et déplacements secondaires
Ai Domicile-loisirs
Ei Domicile-autre motif et déplacements secondaires
Ei Domicile-loisir
Ai Domicile-travail
Ei Domicile-travail
Légende :
Centroïde
Emission
Attraction
Zone i

17
Figure 1-3 : Matrice origine-destination
Cette matrice possède des propriétés qui permettent de déterminer les coefficients ijT . En
effet, la somme de tous les éléments de la première ligne doit être égale aux émissions de la zone 1 :
11 ETj
j∑ =
De manière plus générale, on a ce que l’on appelle les contraintes aux marges :
ij
ij ET∑ = , ji
ij AT∑ = et ∑∑ =j
ji
i AE
Le système à n² inconnues ( =× nn nombre de cases de la matrice = nombre de coefficients
ijT ) et 12 +n équations (la somme des flux de chaque ligne et de chaque colonne plus
l’équation d’égalité des flux émis et reçus) possède une infinité de solutions, alors que seulement quelques unes d’entre elles sont vraisemblables du point de vue des transports.
Plusieurs méthodes permettent, à partir de ces 12 +n relations, de déterminer les coefficients Tij de la matrice origine-destination. Elles ont cependant un point commun, elles font généralement appel au concept de coût généralisé, ou de temps généralisé. Le modèle le plus souvent utilisé est le modèle gravitaire.
1.4.1 Le modèle gravitaire Le modèle gravitaire porte ce nom car il a été construit par analogie avec la loi de
gravitation universelle de Newton. Les flux échangés entre deux zones augmentent avec le poids de chacune de ces zones, et diminue avec leur distance l’une de l’autre.
2ij
jiij d
mmGF
××=
Avec Fij la force attractive entre les deux masses mi et mj, G la constante universelle de gravitation universelle et dij la distance séparant les deux masses.
Le modèle gravitaire dans le domaine des transports a donc la forme suivante :
)( ij
jiij Cgf
AEaT
××=
j
i
Tji
T12
Tnn
T11 T22
T31 T21
T13 T23
T32

18 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
Avec Ei l’émission de la zone i, et Aj l’attraction de la zone j, a un coefficient de proportionnalité et Cgij le coût généralisé du déplacement entre la zone i et la zone j
Pour s’assurer de la prise en compte de la contrainte aux marges, le coefficient de proportionnalité a doit être décomposé en deux termes jia βα ×= , ce qui nous permet de
calculer ces deux termes :
∑=
lilll
i CgfA )(
1
βα et
∑=
kkjkk
i CgfE )(
1
αβ
Des algorithmes permettent ensuite en quelques itérations (généralement 4 ou 5) de converger vers une solution stable.
Le coût d’un déplacement peut être une distance, mais il est généralement calculé à travers le concept de temps généralisé ou de coûts généralisés.
1.4.2 Coûts et temps généralisés Le coût total d’un déplacement est une notion prise en compte dans la phase de
distribution des déplacements. Ce coût total peut être proportionnel à la distance entre la zone origine et la zone destination, mais le plus souvent, il tient compte de nombreux autres paramètres. Le coût généralisé s’écrit classiquement :
( ) BPdCttkt df −++−+= )(V Cg 00t
Les composantes de cette égalité sont les suivantes :
• Vt la valeur du temps ;
• t et t0 respectivement les temps de parcours en charge et à vide ;
• kf un coefficient de fiabilité1 ;
• Cd et d respectivement le coût kilométrique et la distance parcourue ;
• P l’éventuel prix du péage ;
• B l’éventuel bonus ou malus (paysage attractifs, route sécurisante, ou au contraire longs tunnels…).
Pour passer du coût généralisé au temps généralisé, il suffit de diviser la précédente équation par la valeur du temps :
( )t
df
t V
BPdCttkt
V
Cg )( Tg 00
−++−+==
1 Ce coefficient traduit l’incertitude du temps de parcours. Dans Davisum, il est pris par défaut égal à 1.25. L’automobiliste intègre donc plus fortement le temps qu’il peut perdre sur un itinéraire.
19
1.5 Troisième étape : la répartition modale
Comme son nom l’indique, cette étape a pour but de déterminer le mode utilisé par les individus. Elle utilise en entrée les matrices origine-destination issues de l’étape de distribution pour fournir en sortie les matrices origine-destination par mode de transport (voiture particulière ou transport en commun).
La répartition modale se fait en général de manière agrégée. Les modèles agrégés ont l’avantage d’être simple à manipuler et de fournir des résultats facilement utilisables.
Plusieurs facteurs déterminent le choix du mode. Ils peuvent être classés en trois groupes1 :
• Les caractéristiques de l’individu réalisant le déplacement (disponibilité ou propriété d’une voiture, possession d’un permis de conduire, structure du ménage, revenus, etc.) ;
• Les caractéristiques du déplacement (motif du déplacement, moment de la journée au cours duquel ce déplacement est réalisé, etc.) ;
• Les caractéristiques de l’offre de transport (temps de parcours pour chaque mode, coûts généralisés pour chaque mode, disponibilité et coût du parking, mais aussi confort, régularité ou sécurité, etc.).
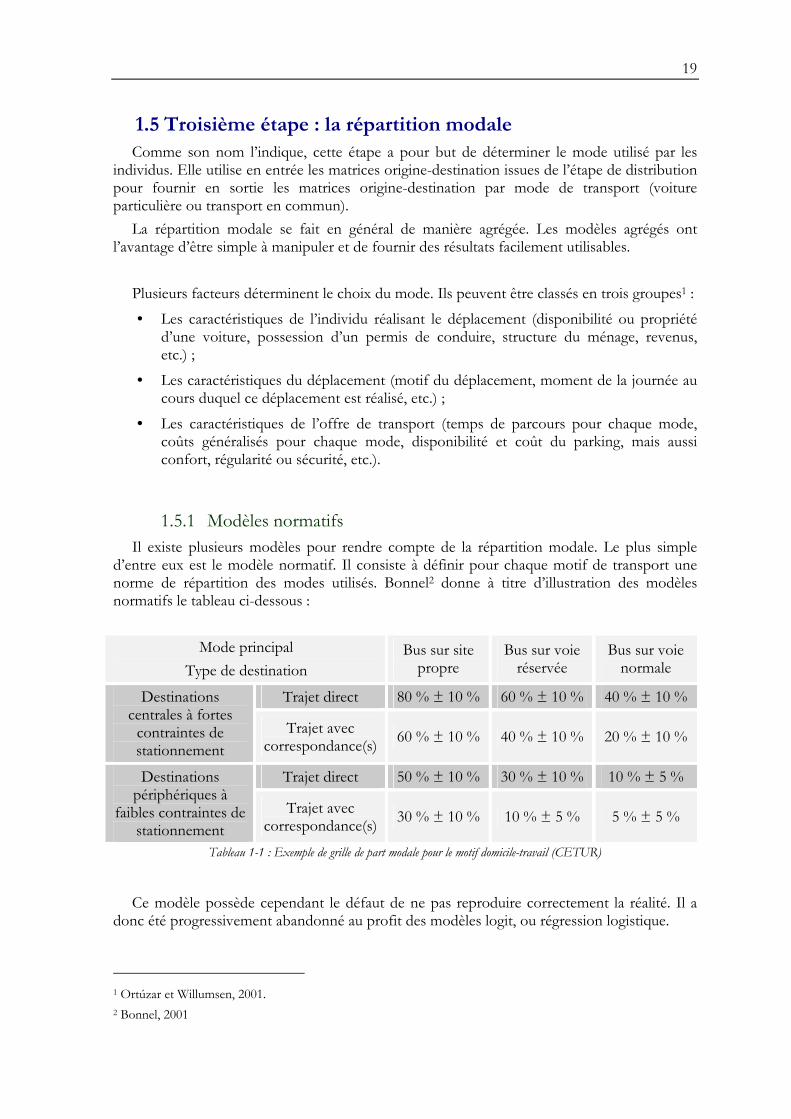
1.5.1 Modèles normatifs Il existe plusieurs modèles pour rendre compte de la répartition modale. Le plus simple
d’entre eux est le modèle normatif. Il consiste à définir pour chaque motif de transport une norme de répartition des modes utilisés. Bonnel2 donne à titre d’illustration des modèles normatifs le tableau ci-dessous :
Mode principal
Type de destination Bus sur site propre
Bus sur voie réservée
Bus sur voie normale
Trajet direct 80 % ± 10 % 60 % ± 10 % 40 % ± 10 % Destinations centrales à fortes contraintes de stationnement
Trajet avec correspondance(s)
60 % ± 10 % 40 % ± 10 % 20 % ± 10 %
Trajet direct 50 % ± 10 % 30 % ± 10 % 10 % ± 5 % Destinations périphériques à
faibles contraintes de stationnement
Trajet avec correspondance(s)
30 % ± 10 % 10 % ± 5 % 5 % ± 5 %
Tableau 1-1 : Exemple de grille de part modale pour le motif domicile-travail (CETUR)
Ce modèle possède cependant le défaut de ne pas reproduire correctement la réalité. Il a donc été progressivement abandonné au profit des modèles logit, ou régression logistique.
1 Ortúzar et Willumsen, 2001. 2 Bonnel, 2001

20 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
1.5.2 Modèles logit Ces modèles ont pour bases théoriques la théorie du « rational choice » développée dans le
cadre de la théorie micro-économique. Les hypothèses de cette théorie sont que « le consommateur type est supposé rationnel. L’unique motivation du consommateur, lorsqu’il acquiert ou vend des biens et services sur le marché, est de maximiser sa satisfaction ou, en d’autres termes, son utilité »1.
L’utilité est une fonction mathématique qui permet d’évaluer la satisfaction que procure un bien ou un service. Dans l’approche déterministe et agrégée, l’utilité s’écrit ∑=
kkk XU β , avec
U l’utilité du bien considéré, kX les différentes variables aléatoires permettant d’estimer cette utilité et kβ les coefficients des variables kX . Ainsi, si pour une origine destination donnée UTC < UVP, les individus choisiront d’emprunter les transports en communs plutôt que la voiture particulière.
Dans les modèles de transports, les variables généralement utilisées correspondent globalement aux trois groupes des déterminants du choix du mode dont nous avons parlé plus haut :
• le coût généralisé (ou le temps généralisé) ;
• la motorisation, définie à travers des variables comme le taux de motorisation (nombre moyen de voitures à disposition par ménage) ou le taux d’équipement (pourcentage de ménages équipés) ;
• le stationnement, définit à travers des variables comme la densité d’emplois dans la zone.
Une fonction de répartition de type logistique (du type )(1
1)(
VPTC UUVPTCe
UUF −−+=− µ )
permet de répartir la probabilité pour un individu de prendre un mode de transport plutôt qu’un autre.
1.6 Quatrième étape : l’affectation des déplacements
L’affectation des déplacements constitue la dernière étape des modèles à quatre étapes. Elle correspond au choix de l’itinéraire pour se rendre d’une origine à une destination donnée et avec un mode de déplacement donné.
Concrètement, le modèle d’affectation utilise comme données d’entrée les matrices de demande par mode (modèle de répartition modale) et les données de réseaux (calcul des temps de parcours sur les liens)
La principale sortie du modèle d’affectation consiste à produire la charge de trafic sur les différents réseaux, puis à déterminer son impact sur le temps de parcours par l’intermédiaire de courbes débit-vitesse. Plus précisément, il s’agit de prendre en compte l’incidence de la congestion sur les temps de parcours et donc sur les choix d’itinéraires. Le calcul des temps
1 Bonnel, 2001 in Brémond, 1990

21
avec les réseaux chargés effectué par le modèle d’affectation permet à la fin de calculer les matrices origine-destination de coûts généralisés par mode.
Les modèles d’affectation reposent sur le principe suivant : chaque individu cherche à maximiser son utilité, c’est-à-dire à minimiser le coût généralisé de son déplacement. Pour une
origine-destination et un mode donné : ti
ii V*TPCg
α+= ∑ , avec P le prix du
déplacement, iT la durée du déplacement, tV la valeur du temps et iα un coefficient pondérateur du temps élémentaire
La seconde partie de ce présent rapport décrit avec plus de précision cette étape.

23
Partie 2 : L’AFFECTATION : METHODES, MODELES ET
LOGICIELS
Comme il l’a été dit en introduction de ce rapport, mon travail de fin d’étude et de mon mémoire de recherche s’inscrivent dans le cadre de la réalisation du module « affectation du trafic sur le réseau routier ». Il fait suite à la volonté du laboratoire d’économie des transport de savoir s’il est possible de réaliser cette affectation en se basant sur un réseau provenant d’un SIG détaillé, et en utilisant une procédure d’affectation originale. C’est pour cette raison que j’y consacre une partie entière.
Alors que les étapes précédentes (génération, distribution et choix modal) avaient pour objectif de modéliser et de représenter la demande de transport, l’étape d’affectation vise quant à elle à répartir cette demande en fonction de l’offre proposée sur l’aire d’étude, afin de trouver un équilibre entre l’offre en infrastructures de transport et la demande de déplacements. L’objet de cette étape d’affectation est donc d’affecter un itinéraire à chaque individu se déplaçant d’une zone à une autre.
Pour les économistes, ce point d’équilibre est atteint lorsque « le coût marginal de production et de vente d’un bien ou d’un service est égal au revenu marginal obtenu de la vente de ces derniers »1. La théorie économique reconnaît toutefois que cet équilibre n’est dans la pratique jamais atteint, puisque le système de prix et le niveau de production s’ajustent constamment pour faire face aux changements introduits par l’extérieur (nouvelles technologies, nouvelles techniques de production, etc.).
Pour un réseau de transport, l’offre est constituée du réseau routier, pour lequel un coût est donné à chaque arc, en fonction de la longueur de cet arc, de sa capacité, de sa vitesse à vide, et d’une relation débit-vitesse. La demande correspond au nombre de déplacements par origine-destination et par niveau de service. Le niveau de service est calculé en fonction du temps de parcours, des coûts monétaires… Ainsi, si le niveau de service du réseau de transport diminue, cela s’accompagnera d’une réduction de la demande de transport, et peut-être d’un basculement vers d’autres modes de transport, vers d’autres destinations ou vers d’autres horaires de déplacements.
La première chose à faire est donc de définir l’offre de transport sur le périmètre d’étude, avec l’aide de concepts introduits dans cette partie.
2.1 Un préalable, le choix du périmètre d’étude et de zonage
La détermination du périmètre d’étude est importante, car ce périmètre détermine la nature des interactions entre l’espace sur lequel on travaille et ce qui est géographiquement extérieur à cet espace. Tous les phénomènes se situant en dehors du périmètre d’étude sont considérés comme exogènes ; les évolutions à l’extérieure de ce périmètre sont donc indépendantes de ce
1 Ortúzar et Willumsen, 2001
24 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
qu’il se passe à l’intérieur. Même si les évolutions extérieures peuvent être prise en compte par le modèle, les évolutions intérieures n’agissent pas sur l’extérieur.
En général, l’espace extérieur au périmètre d’étude est segmenté en plusieurs zones de taille bien plus importantes que les zones internes.
L’étape du zonage, préalable à l’étape d’affectation, consiste à diviser le territoire d’étude (i.e. territoire à l’intérieur du périmètre d’étude) en portions de territoire que l’on peut considérer comme homogènes d’un point de vue de la nature des déplacements. La manière de découper l’espace et le nombre de zones créées dépendent bien sûr de l’objectif de la modélisation, mais aussi de la nature des données disponibles et de la taille de l’agglomération.
Le zonage permet d’agréger certaines données utilisées par le modèle, comme des données socio-économiques (nombre et type d’emplois dans la zone, revenu moyen des résidents de cette zone, etc.) ou bien des données de transport (temps d’accès au réseau de transport en commun, etc.). La création d’une zone s’accompagne donc d’une diminution de l’information disponible. Un zonage fin donne des résultats plus précis, mais nécessite en contrepartie des données nombreuses. Pour choisir la taille des zones, le modélisateur doit faire des arbitrages en prenant en compte à la fois les objectifs de l’étude, les données disponibles, l’homogénéité des zones, etc.
On définit ensuite pour chaque zone un objet appelé centroïde, point fictif à l’intérieur d’une zone et dont les coordonnées correspondent généralement au centre de gravité de cette zone. L’intérêt du centroïde est de concentrer en un seul point l’ensemble des informations agrégées relatives à cette zone. Les trafics internes à cette zone sont négligés (d’où l’intérêt d’avoir une zone homogène), et on ne s’intéresse plus qu’aux trafics entre deux zones. Pour que l’utilisation de ce centroïde ait un sens, il est nécessaire que la zone considérée soit relativement homogène. A l’intérieur de cette zone, les distances sont considérées comme nulles. C’est pour corriger cette approximation que l’on utilise ce qu’on appelle un connecteur de centroïde.
Le connecteur de centroïde est un objet chargé d’assurer la liaison entre le centroïde et le réseau. Il possède, par construction, une capacité infinie. Cependant, d’autres grandeurs doivent lui être affectées, comme par exemple une vitesse de circulation, une longueur ou un temps de parcours. La vitesse de circulation correspond à la vitesse à vide pratiquée par les véhicules circulant à l’intérieur de la zone et dont l’origine ou la destination est extérieure à la zone. Il en est de même pour la distance, qui est la distance moyenne parcourue par ces véhicules.
Les nœuds de réseau s’apparentent à des interactions entre les liens de réseau. Ils permettent de relier l’ensemble du réseau. Dans le cas de « carrefours » entre les connecteurs de centroïdes et les liens de réseau, les nœuds n’ont pas de signification géographique. D’une manière générale, les nœuds de réseau ne disposent pas d’attributs précis.
Les liens de réseau représentent les infrastructures de transport, d’une façon plus ou moins détaillée. A chaque lien est associé un ensemble d’attributs, permettant de le définir (longueur, capacité, vitesse à vide, etc.). Dans des représentations agrégées, un lien peut représenter plusieurs voies : la définition de ses attributs est donc difficile. Il est possible de « moyenner » les valeurs des attributs des différentes infrastructures, mais le résultat ne sera pas représentatif de la réalité. D’un autre côté, les données disponibles ne permettent pas une pondération par les trafics, plus réaliste. Enfin, il paraît plus sage de retenir les caractéristiques de la voie principale.
25
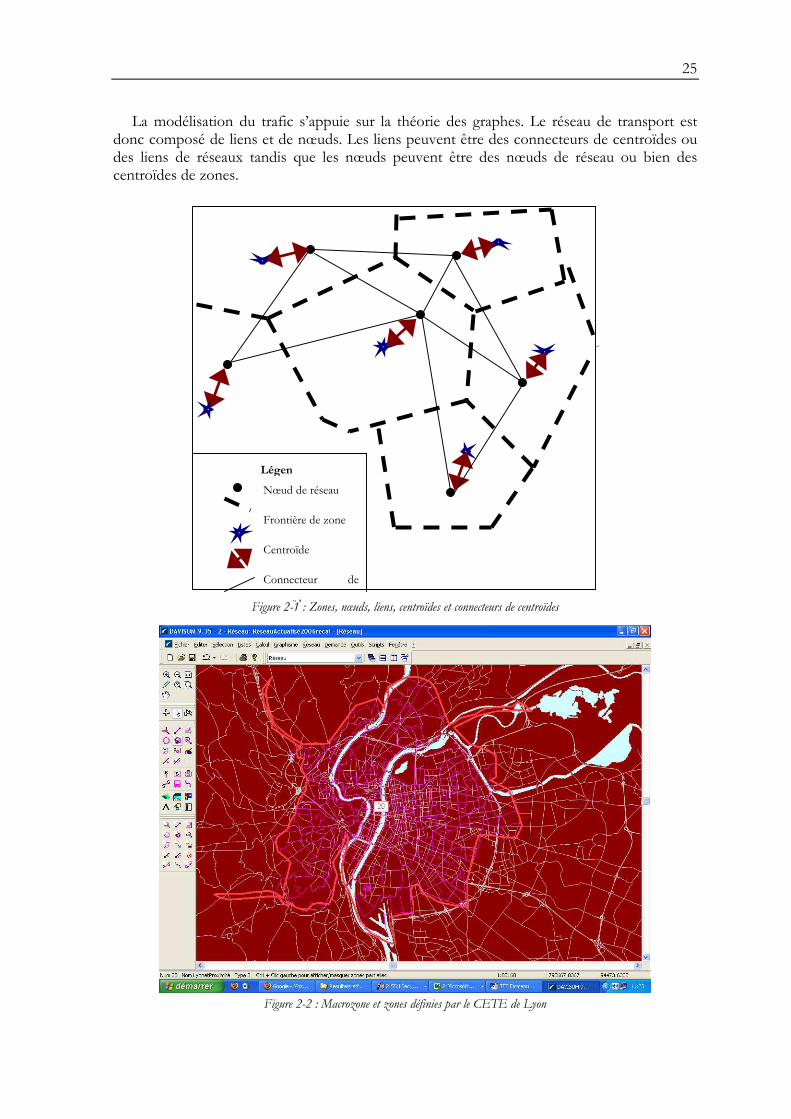
La modélisation du trafic s’appuie sur la théorie des graphes. Le réseau de transport est donc composé de liens et de nœuds. Les liens peuvent être des connecteurs de centroïdes ou des liens de réseaux tandis que les nœuds peuvent être des nœuds de réseau ou bien des centroïdes de zones.
Figure 2-1 : Zones, nœuds, liens, centroïdes et connecteurs de centroïdes
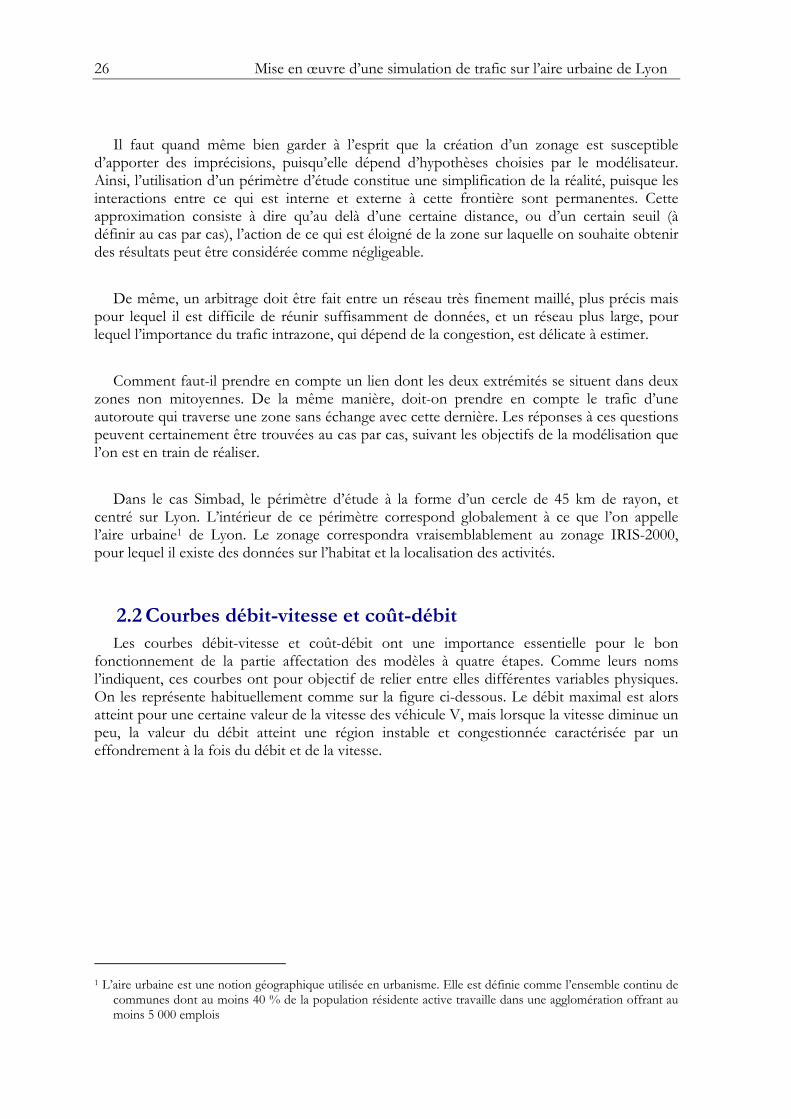
Figure 2-2 : Macrozone et zones définies par le CETE de Lyon
Nœud de réseau
Frontière de zone
Centroïde
Connecteur de
centroïde
Légen
26 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
Il faut quand même bien garder à l’esprit que la création d’un zonage est susceptible d’apporter des imprécisions, puisqu’elle dépend d’hypothèses choisies par le modélisateur. Ainsi, l’utilisation d’un périmètre d’étude constitue une simplification de la réalité, puisque les interactions entre ce qui est interne et externe à cette frontière sont permanentes. Cette approximation consiste à dire qu’au delà d’une certaine distance, ou d’un certain seuil (à définir au cas par cas), l’action de ce qui est éloigné de la zone sur laquelle on souhaite obtenir des résultats peut être considérée comme négligeable.
De même, un arbitrage doit être fait entre un réseau très finement maillé, plus précis mais pour lequel il est difficile de réunir suffisamment de données, et un réseau plus large, pour lequel l’importance du trafic intrazone, qui dépend de la congestion, est délicate à estimer.
Comment faut-il prendre en compte un lien dont les deux extrémités se situent dans deux zones non mitoyennes. De la même manière, doit-on prendre en compte le trafic d’une autoroute qui traverse une zone sans échange avec cette dernière. Les réponses à ces questions peuvent certainement être trouvées au cas par cas, suivant les objectifs de la modélisation que l’on est en train de réaliser.
Dans le cas Simbad, le périmètre d’étude à la forme d’un cercle de 45 km de rayon, et centré sur Lyon. L’intérieur de ce périmètre correspond globalement à ce que l’on appelle l’aire urbaine1 de Lyon. Le zonage correspondra vraisemblablement au zonage IRIS-2000, pour lequel il existe des données sur l’habitat et la localisation des activités.
2.2 Courbes débit-vitesse et coût-débit
Les courbes débit-vitesse et coût-débit ont une importance essentielle pour le bon fonctionnement de la partie affectation des modèles à quatre étapes. Comme leurs noms l’indiquent, ces courbes ont pour objectif de relier entre elles différentes variables physiques. On les représente habituellement comme sur la figure ci-dessous. Le débit maximal est alors atteint pour une certaine valeur de la vitesse des véhicule V, mais lorsque la vitesse diminue un peu, la valeur du débit atteint une région instable et congestionnée caractérisée par un effondrement à la fois du débit et de la vitesse.
1 L’aire urbaine est une notion géographique utilisée en urbanisme. Elle est définie comme l’ensemble continu de communes dont au moins 40 % de la population résidente active travaille dans une agglomération offrant au moins 5 000 emplois

27
Figure 2-3 : Exemple de courbes débit-vitesse et débit-temps
La courbe de gauche, souvent appelée diagramme fondamental, a pour équation
DbVaV ×+×=² avec a vitesse à vide et max
20
4 D
Vb
×= . Ce diagramme fondamental possède
cependant certains défauts affectant son efficacité :
• Les mesures faites sur le terrain montrent que cette courbe peut avoir un aspect légèrement différent ;
• Il existe deux vitesses, et donc deux valeurs de temps de parcours pour un débit donné ;
• Pour des trafics supérieurs à la capacité, la vitesse n’est pas définie.
La courbe de droite fait partie des courbes dites BPR. Basées sur des mesures issues de données de trafic, elles ont généralement des équations de la forme
4
max1__
+= D
VtrajetdeTemps . Leur domaine de validité se borne à une zone située loin
de la congestion. Lorsque les débits pratiqués approchent ou dépassent le débit maximum de la voie, ces courbes perdent leur précision.
Figure 2-4 : Allure de courbes débit-vitesse
Débit D (véh/h)
Dmax Débit D (véh/h)
V0
Dmax
Vitesse (km/h)
Vitesse (km/h)
Débit D (véh/h)
Dmax Débit D (véh/h)
V0
Dmax
Vitesse V
Temps de trajet
(min/km)
28 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
D'autres relations débit-vitesse ou coût-débit sont utilisées. Parmi elles, on peut noter les courbes à hystérésis générées par le logiciel Metropolis (cf. troisième partie)
2.3 Les méthodes classiques d’affectation statique
Les modèles d’affectation ont les mêmes bases théoriques que les étapes précédentes. Ils partent du principe selon lequel chaque individu cherche à maximiser son utilité, en optant pour l’itinéraire le moins coûteux, c’est-à-dire l’itinéraire pour lequel le coût généralisé est le plus faible.
Cependant, au delà de cette volonté pour chaque individu de maximiser ses gains, il existe un nombre très important de facteurs influençant le choix de l’itinéraire (temps de parcours, congestion, distance, dépense de carburant, type de manœuvres nécessaires, type de route, paysage, travaux routiers, etc.). Il est donc difficile pour un individu d’estimer le coût généralisé de toutes ses possibilités d’itinéraires intégrant tous ces facteurs. Tous les individus réalisant un déplacement sur une même origine-destination n’opteront donc pas pour le même itinéraire.
La modélisation des comportements de ces individus en est alors d’autant plus difficile. Un grand nombre de modèles proposent de reproduire ces comportements. Nous pouvons classer les méthodes les plus courantes en quatre grandes familles, en fonction des réponses données aux deux questions suivantes :1
1. Le modèle tient-il compte des contraintes de capacité dans le choix de l’itinéraire ?
2. Le modèle tient-il compte des effets stochastiques (aléatoires) dans le choix de l’itinéraire ?
Selon les réponses données à ces deux questions, le tableau suivant peut être dégagé :
Effets aléatoires ?
Non Oui
Non Méthode tout-ou-rien ou plus
court chemin
Procédure stochastique pure (multichemin Dial, Burrell…),
prix-temps Contraintes de
capacité ? Oui
Méthode d’équilibre (équilibre de Wardrop, affectation par
tranche)
Méthode d’équilibre avec utilité stochastique
Tableau 2-1 : Classification des différentes méthodes d’affectation
Voyons maintenant plus précisément quelles sont les caractéristiques de chacune de ces catégories de modèles.
2.3.1 Affectation « tout ou rien » L’ensemble des déplacements d’une même origine-destination est affecté à l’itinéraire
correspondant au plus faible coût généralisé, ou bien au plus faible temps généralisé. Cette méthode à l’avantage d’être la plus simple, et donc la plus facile à mettre en œuvre, mais elle a aussi deux importants défauts :
• Les chemins légèrement plus coûteux sont ignorés ;
1 Ortúzar et Willumsen, 2001

29
• La congestion provoquée par l’augmentation de la charge des arcs au cours de l’étape d’affectation n’est pas prise en compte.
L’absence de congestion signifie que le coût de chaque lien est fixé, c’est-à-dire que la vitesse ne varie pas lorsque la charge augmente. Cette hypothèse est donc valable lorsque le réseau modélisé n’est pas congestionné, ou alors lorsque il n’existe pas d’itinéraires alternatifs.
2.3.2 Affectation stochastique simple ou affectation multichemins Le principe de comportement du modèle lors d’une affectation stochastique est le suivant :
pour chaque origine-destination, les automobilistes se répartissent sur les différents itinéraires possibles, proportionnellement à leurs probabilités d’utilisations.
Cela correspond dans la réalité aux variations engendrées soit par le manque d’informations des automobilistes sur le meilleur chemin à emprunter, soit par la volonté pour certain de varier leur itinéraire habituel. Deux catégories de modèles correspondent à ce type d’affectation, la méthode de Burrell et la méthode de type logit.
• Pour la méthode de Burrell, les individus ayant le choix entre plusieurs itinéraires se répartissent selon une loi de distribution (par exemple de type normale, uniforme…). La qualité de l’affectation dépend alors du nombre de tirages aléatoires réalisés. Plus ce nombre est grand, meilleure est la précision de l’affectation.
• La seconde méthode consiste à introduire un logit pour déterminer au mieux les différentes probabilités d’utilisation des différents itinéraires accessible à chaque individu (cf. figure ci-dessous). La probabilité d’utiliser le chemin n (n étant le numéro
de l’itinéraire) est alors la suivante :
∑=
×−
×−=3
1
)exp(
)exp(
ii
nn
C
Cp
α
α, où α est un coefficient
positif et Ci le coût généralisé du déplacement sur l’itinéraire i.
Figure 2-5 : Illustration de la méthode de type logit
2.3.3 Affectation à l’équilibre de Wardrop Les modèles d’affectation dits de Wardrop ont pour objectif d’aboutir au premier principe
de Wardrop (généralement appelé équilibre de Wardrop), formulé en 1952 de la manière suivante :
• « à l’équilibre, le trafic s’arrange de lui-même de manière à ce qu’aucun individu ne puisse réduire son coût généralisé en modifiant son itinéraire ;
Itinéraire 3
Itinéraire 1
Itinéraire 2

30 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
• à l’équilibre, le trafic s’arrange de lui-même de manière à ce que tous les itinéraires utilisés entre une même origine et une même destination aient un coût généralisé égal et minimal. Les itinéraires non utilisés ont un coût généralisé égal et maximal »1.
Wardrop a également proposé un autre principe d’affectation, souvent appelé second principe de Wardrop :
• « à l’équilibre, le coût global de transport est minimisé pour la collectivité »2.
Lorsque le réseau est peu saturé, les premiers et second principes de Wardrop diffèrent peu. En revanche, lorsque la congestion augmente, les différences d’affectation s’amplifient significativement3. Cela nous permet de dire qu’en période de congestion, la somme des intérêts particuliers n’est pas égale à l’intérêt général.
Pour illustrer le premier principe de Wardrop, Ortúzar et Willumsen ont utilisé l’exemple suivant : supposons qu’à l’heure de pointe 3500 véhicules approchent de la ville et que chaque chauffeur souhaite minimiser son temps de parcours en passant par le centre-ville.
Il est certain que tous ne pourront pas faire cela, sans quoi la capacité de l’itinéraire A serait
dépassée. Beaucoup vont donc opter pour l’itinéraire B, afin d’éviter de prendre du retard. Certains chauffeurs vont vraisemblablement essayer les deux itinéraires jusqu’à trouver un arrangement plus ou moins stable, lorsque aucun ne pourra plus améliorer son temps de parcours en changeant d’itinéraire. C’est un exemple typique d’équilibre de Wardrop.
2.3.4 Affectation à l’équilibre stochastique Les modèles d’équilibre incluant une composante aléatoire sont légèrement différents des
modèles de Wardrop puisqu’ils supposent que chaque individu a une perception du temps généralisé de son trajet qui lui est propre. Pour chaque usager, le parcours choisi est celui qui présente le coût le plus faible et donc aucun usager n’a intérêt à choisir un autre itinéraire. L’équilibre de Wardrop est alors atteint.
L’introduction d’un facteur aléatoire a pour inconvénient de compliquer les algorithmes d’équilibres et leurs convergences, tout en d’augmentant les temps de calculs. Il semble cependant que c’est en prenant en compte à la fois la congestion et les phénomènes
1 Wardrop, 1952 in Ortúzar et Willumsen, 2001, p. 337 2 Wardrop, 1952 in Ortúzar et Willumsen, 2001, p. 339 3 CERTU, mars 2003
Itinéraire A, passant par le centre-ville
1000 véh/h
Itinéraire B, empruntant une déviation
3000 véh/h
3500 véh/h
31
probabilistes que l’on reproduit le plus fidèlement les réseaux sur lesquels existent des problèmes de saturation sans toutefois être entièrement congestionnés1.
Ces quatre familles de méthodes se basent sur deux hypothèses principales : la prise en compte ou non des contraintes de capacité et des effets aléatoires. Là encore un arbitrage doit être fait, entre la précision (parfois illusoire) de la modélisation et la vitesse de calcul des ordinateurs chargés d’effectuer cette affectation.
2.4 Une brève revue des logiciels d’affectation dynamique
Connaître les autres modèles d’affectation dynamique est important pour savoir si celui que l’on souhaite utiliser correspond à l’utilisation que l’on veut en faire. C’est pour cette raison qu’une revue de différents modèles d’affectation est proposée dans cette partie. Il existe un grand nombre de modèles et décrire chacun d’entre eux aurait été autant fastidieux qu’inutile. Nous avons donc choisi de décrire quelques modèles parmi les plus connus.
Il existe beaucoup de modèles d’affectation dynamique, mais tous ne fonctionnent pas de la même manière. La plupart d’entre eux fournissent l’évolution de la congestion sur une période donnée comprenant l’heure de pointe. Certains modélisent aussi le choix de l’heure de départ et les variations engendrées d’un jour sur l’autre.
2.4.1 L’affectation microscopique (VISSIM, AIMSUN, PARAMICS) Les modèles d’affectation dynamique microscopiques ont été développés pour comprendre
les éléments de base de la congestion. Ils sont utilisés pour étudier les problèmes de congestion à l’échelle locale, plutôt que de prendre en compte l’ensemble du réseau. Ces logiciels reproduisent l’écoulement du trafic en considérant chaque véhicule pris individuellement. Ils utilisent des variables pouvant se rapporter à la manière de conduire (caractéristiques d’accélération et de freinage des véhicules, comportement des conducteurs, changement de voies, etc.). Ces logiciels sont donc particulièrement recommandés lorsqu’il s’agit de réaliser des études d’aménagement local. Ils permettent par exemple de reproduire fidèlement l’écoulement du trafic et la congestion aux abords d’un carrefour, en tenant compte des déplacements de chaque véhicule. Par contre, leur niveau de précision élevé nécessite des ordinateurs puissants (et donc coûteux) et ne permet de les utiliser que sur de petits réseaux.
Distribué depuis 1992, VISSIM est un logiciel de simulation microscopique de la circulation destiné à modéliser le trafic urbain. Il est vendu en France par la société PTV-France et a été développé en Allemagne par la société PTV système. VISSIM a pour caractéristique de simuler un grand nombre de flux de trafics différents, en différenciant les voitures des camions, des bus, des tramways, des cyclistes et des piétons. Il permet aussi de simuler le trafic en prenant en compte la géométrie de la voirie et les systèmes de signalisation (feux, céder-le-passage...). C’est pour ces particularités que ce logiciel est utilisé principalement
1 CERTU, mars 2003, p.153

32 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
dans la simulation des zones à fort trafic, comme par exemple aux abords d’un carrefour urbain. Les concepteurs de ce logiciel se sont attachés à soigner la qualité graphique des simulations. Le résultat de ces simulations peut ensuite être transformé en séquences vidéo dynamiques. Ces animations facilitent la compréhension du fonctionnement du trafic et peuvent être utilisées pour faire un choix entre plusieurs variantes :
Figure 2-6 : VISSIM
Dans le cas des déplacements longitudinaux, le logiciel VISSIM a pour base un modèle original. Il s’appuie sur le modèle de perception psychophysique décrit par Wiedemann en 1974 pour modéliser le comportement des conducteurs1. L’idée est que le conducteur d’un véhicule rapide n commence à freiner au moment où il atteint son seuil individuel de perception. Mais comme il est difficile d’estimer la vitesse du véhicule précédent n+1, le véhicule n réduit sa vitesse au deçà de celle du véhicule n+1. Par conséquent, n est obligé d’accélérer après le franchissement de son seuil de perception.
Ce logiciel est aussi adapté pour étudier l’intégration des transports en commun dans la circulation. Il est par exemple capable de prendre en compte un système tel que celui de la priorité aux feux.
AIMSUN/GETRAM (Advanced Interactive Microscopic Simulator for Urban and non-urban Networks) est un logiciel de simulation microscopique du trafic commercialisé par Transport Simulation Systems et qui comprend entre autres AIMSUN, un simulateur microscopique du trafic, AIMSUN 3D, un logiciel d’animation en trois dimensions des simulations obtenues, TEDI, un éditeur graphique du réseau et l’expansion GETRAM, une interface de programmation. Il est capable de simuler un réseau de rues, une autoroute, un échangeur, ou encore un carrefour à feux. Sa structure de base est la suivante : les véhicules entrent dans le réseau à certains points. Leurs déplacements sont déterminés par des algorithmes de voiture suiveuse et de changement de file. Le logiciel attribue à chaque véhicule entrant dans le réseau un ensemble de règles géométriques et comportementales qui sont ensuite utilisées par ces algorithmes pour modéliser le mouvement du véhicule. Ainsi, derrière chaque type de véhicules on trouve des caractéristiques différentes dont les variations sont basées sur des distributions statistiques2.
1 Martin, 1997 2 Jones et Al., 2004
33
Figure 2-7 : AIMSUN
Un des points forts d’AIMSUN est son architecture ouverte, qui permet à l’utilisateur de relier ce logiciel avec n’importe quelle application de son choix. Il est par exemple possible d’incorporer à AIMSUN un sous-programme définissant une autre manière de générer des véhicules.
2.4.2 L’affectation macroscopique (METACOR) Les modèles macroscopiques utilisent des variables prises par analogie à la mécanique des
fluides, tels que le flux, la vitesse moyenne ou bien la densité de véhicule sur une voie. Cela permet de décrire la congestion de manière globale plutôt que de modéliser les mouvements individuels de chaque véhicule. La mise en œuvre numérique de ces modèles repose le plus souvent sur la discrétisation spatiale et temporelle d’équations différentielles.
METACOR est un modèle macroscopique destiné à l'étude de corridors (voiries urbaines et autoroutières). Les variables utilisées pour la description de l'évolution dynamique du trafic sont la densité exprimée en véh/km, la vitesse (km/h) et le débit (véh/h). La modélisation de l'affectation est incluse pour permettre le guidage dynamique des usagers dans le réseau.
Figure 2-8 : METACOR
Le réseau étudié est constitué d’un graphe orienté. Les divergents et convergents autoroutiers, les accès et les sorties autoroutières sont représentés par des nœuds tandis que les liaisons entre ces nœuds sont représentées par des tronçons. Les deux directions de circulation sur un tronçon sont modélisées par deux tronçons disjoints. En outre, sur chacun des
34 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
tronçons, les caractéristiques géométriques telles que le nombre de voies et la courbure sont supposées homogènes. En cas de non homogénéité géométrique, le tronçon est décomposé en deux tronçons successifs séparés par un nœud, lieu des changements géométriques. La limite du réseau est modélisée par des tronçons destinations ou origines afin de permettre l'entrée ou la sortie du trafic.
2.4.3 L’affectation mésoscopique (Metropolis) Les simulateurs de type mésoscopiques reproduisent ces phénomènes d’écoulement à un
niveau intermédiaire entre l’échelle microscopique et l’échelle macroscopique. On peut se représenter le fonctionnement de ces modèles mésoscopiques en imaginant le mouvement de « paquets » de véhicules se déplaçant ensemble.
Chaque lien fait l’objet du calcul suivant. Le temps de parcours sur le lien i )(tiτ est relié au
flux )(tiΦ , à l’occupation )(tDi , ainsi qu’à d’autres paramètres iP tels que la longueur du lien
ou bien sa capacité : ( )iiii PtDtft ),(),()( Φ=τ .
Le simulateur Metropolis est décrit dans la partie suivante.
2.5 Metropolis, une méthode d’affectation originale1
Metropolis utilise l’approche mésoscopique, ce qui lui permet d’affecter le trafic sur un réseau de grande taille. Il tient compte du choix de l’heure de départ dans sa fonction de coût généralisé et permet également de mettre en place un processus d’ajustement de jour en jour.
Les modèles statiques considèrent souvent que le choix de l’heure de départ n’intervient pas dans l’affectation. Ce n’est pas le cas de Métropolis, qui en tient compte à travers l’équation suivante : ( )( ))()(.)( * tttttttttC ijijij +−+= βα dans le cas des arrivées précoces à
destination et ( )( ))()(.)( * tttttttttC ijijij ++−+= γα dans le cas des arrivées tardives à
destination. Le terme ttij(t) représente le temps de trajet minimal entre l’origine i et la destination j. Les autres paramètres devant être fixé par l’utilisateur sont α le coût unitaire du temps, β le coût unitaire du aux arrivées précoces, γ le coût unitaire dû aux arrivées tardives et t* l’heure officielle de début de travail. Ces différents coûts s’additionnent avec le coût du trajet.
Il est tout de même important de noter que cette procédure d’affectation ne peut s’appliquer que pour ceux qui ont un fort intérêt à arriver à l’heure à destination. C’est généralement le cas des automobilistes réalisant un trajet domicile-travail. Par contre, certains automobilistes peuvent avoir des valeurs de β et de γ très faible (ça peut être le cas de ceux qui réalisent un déplacement domicile-loisir par exemple).
1 de Palma A. et Marchal F., 2002

35
Heure d'arrivée
Coû
t de
dépl
acem
ent
Avance Retard Temps de trajet Coût du déplacement
Figure 2-9 : Modèle de Vickrey : arbitrage temps de trajet / horaire
Le coût total du déplacement est égal à la somme des coûts d’arrivée précoce ou tardive et du coût du déplacement. Un automobiliste perçoit plus négativement une arrivée tardive qu’une arrivée précoce, et peut ainsi avoir intérêt dans certaines situations à décaler son heure de départ.
Comme l’illustrent les trois figures ci-dessous, l’affectation Métropolis à une influence sur l’étalement de la demande1.
Figure 2-10 : Profil du pic du matin
1 Marchal, 2004
36 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
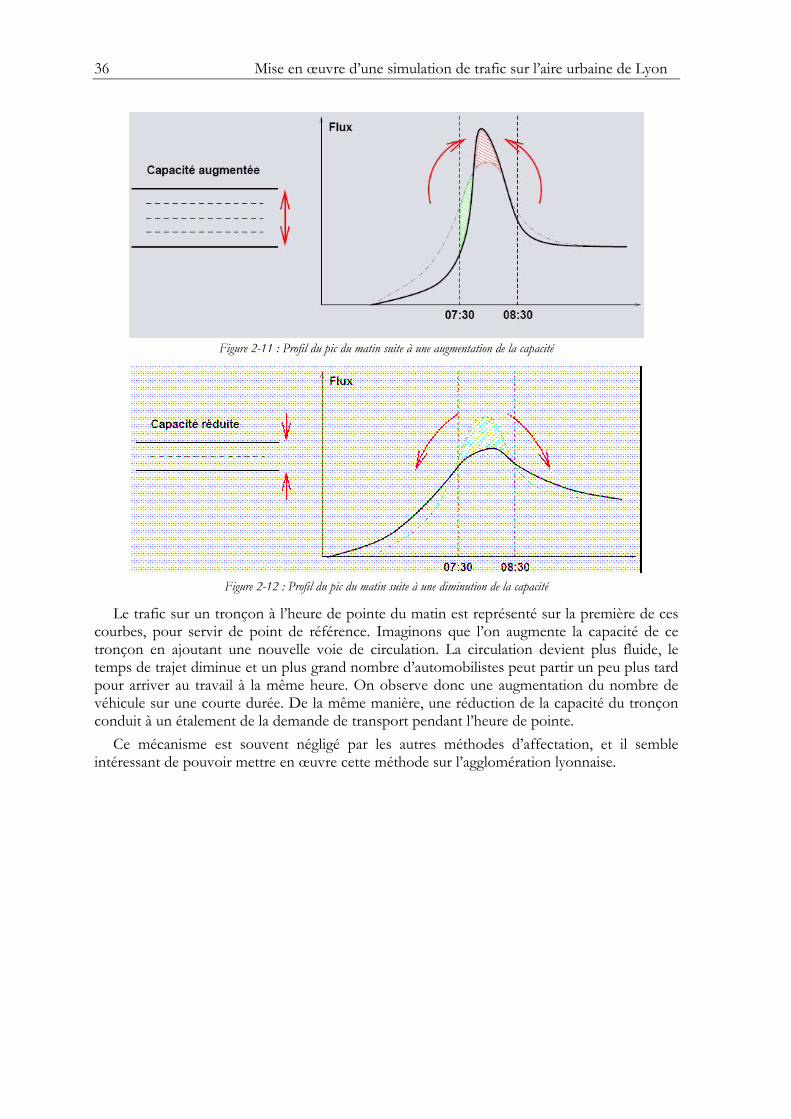
Figure 2-11 : Profil du pic du matin suite à une augmentation de la capacité
Figure 2-12 : Profil du pic du matin suite à une diminution de la capacité
Le trafic sur un tronçon à l’heure de pointe du matin est représenté sur la première de ces courbes, pour servir de point de référence. Imaginons que l’on augmente la capacité de ce tronçon en ajoutant une nouvelle voie de circulation. La circulation devient plus fluide, le temps de trajet diminue et un plus grand nombre d’automobilistes peut partir un peu plus tard pour arriver au travail à la même heure. On observe donc une augmentation du nombre de véhicule sur une courte durée. De la même manière, une réduction de la capacité du tronçon conduit à un étalement de la demande de transport pendant l’heure de pointe.
Ce mécanisme est souvent négligé par les autres méthodes d’affectation, et il semble intéressant de pouvoir mettre en œuvre cette méthode sur l’agglomération lyonnaise.
37
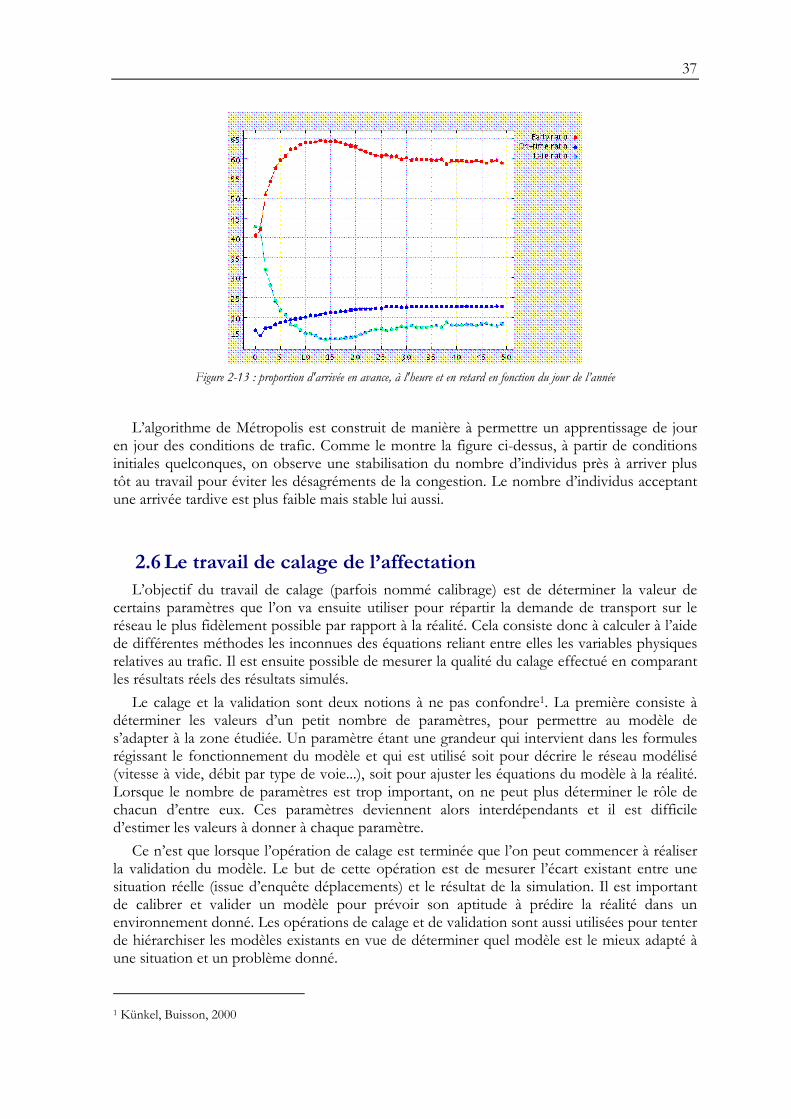
Figure 2-13 : proportion d'arrivée en avance, à l'heure et en retard en fonction du jour de l’année
L’algorithme de Métropolis est construit de manière à permettre un apprentissage de jour en jour des conditions de trafic. Comme le montre la figure ci-dessus, à partir de conditions initiales quelconques, on observe une stabilisation du nombre d’individus près à arriver plus tôt au travail pour éviter les désagréments de la congestion. Le nombre d’individus acceptant une arrivée tardive est plus faible mais stable lui aussi.
2.6 Le travail de calage de l’affectation
L’objectif du travail de calage (parfois nommé calibrage) est de déterminer la valeur de certains paramètres que l’on va ensuite utiliser pour répartir la demande de transport sur le réseau le plus fidèlement possible par rapport à la réalité. Cela consiste donc à calculer à l’aide de différentes méthodes les inconnues des équations reliant entre elles les variables physiques relatives au trafic. Il est ensuite possible de mesurer la qualité du calage effectué en comparant les résultats réels des résultats simulés.
Le calage et la validation sont deux notions à ne pas confondre1. La première consiste à déterminer les valeurs d’un petit nombre de paramètres, pour permettre au modèle de s’adapter à la zone étudiée. Un paramètre étant une grandeur qui intervient dans les formules régissant le fonctionnement du modèle et qui est utilisé soit pour décrire le réseau modélisé (vitesse à vide, débit par type de voie...), soit pour ajuster les équations du modèle à la réalité. Lorsque le nombre de paramètres est trop important, on ne peut plus déterminer le rôle de chacun d’entre eux. Ces paramètres deviennent alors interdépendants et il est difficile d’estimer les valeurs à donner à chaque paramètre.
Ce n’est que lorsque l’opération de calage est terminée que l’on peut commencer à réaliser la validation du modèle. Le but de cette opération est de mesurer l’écart existant entre une situation réelle (issue d’enquête déplacements) et le résultat de la simulation. Il est important de calibrer et valider un modèle pour prévoir son aptitude à prédire la réalité dans un environnement donné. Les opérations de calage et de validation sont aussi utilisées pour tenter de hiérarchiser les modèles existants en vue de déterminer quel modèle est le mieux adapté à une situation et un problème donné.
1 Künkel, Buisson, 2000
38 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
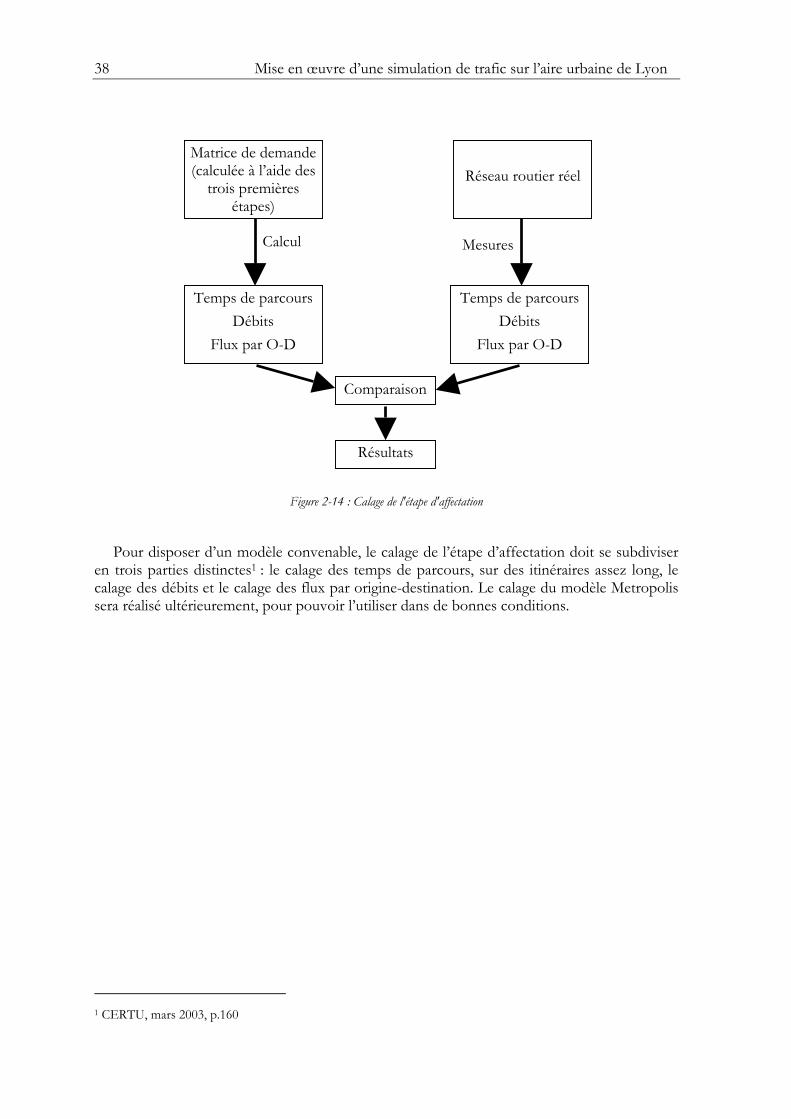
Figure 2-14 : Calage de l'étape d'affectation
Pour disposer d’un modèle convenable, le calage de l’étape d’affectation doit se subdiviser en trois parties distinctes1 : le calage des temps de parcours, sur des itinéraires assez long, le calage des débits et le calage des flux par origine-destination. Le calage du modèle Metropolis sera réalisé ultérieurement, pour pouvoir l’utiliser dans de bonnes conditions.
1 CERTU, mars 2003, p.160
Calcul
Matrice de demande (calculée à l’aide des trois premières étapes)
Temps de parcours
Débits
Flux par O-D
Temps de parcours
Débits
Flux par O-D
Comparaison
Résultats
Mesures
Réseau routier réel

39
Partie 3 : DE LA THEORIE AUX PREMIERS RESULTATS
3.1 Importation de la base de donnée GéoRoute vers le logiciel Davisum
Dans l’introduction de ce rapport, il est dit que « la deuxième étape de mon travail consiste à utiliser le logiciel de modélisation du trafic Davisum ainsi qu’à importer les données issues du SIG GéoRoute et des bases de données du CETE vers ce logiciel. »
Un Systèmes d’information géographique (SIG) est une base de donnée permettant d'afficher, d’interroger, d’actualiser et d’analyser des données localisées (points géographiques) et les informations qui leur sont associées. Un SIG peut être utilisé pour traiter divers types de cartes. Elles prennent généralement la forme de plusieurs couches différentes où chaque couche contient des données pour un type d’entité particulier. Chacune des entités est liée à une position sur l’image d’une carte et les couches de données sont organisées de façon à en permettre l’étude et l’analyse statistique.
3.1.1 GéoRoute, un SIG développé par l’IGN L’IGN est un établissement public français placé sous la tutelle du Ministère de
l’Equipement et des Transports. Il a pour vocation « de décrire, d’un point de vue géométrique et physique, la surface du territoire national et l’occupation de son sol, d’en faire toutes les représentations appropriées et de diffuser les informations correspondantes. »1
C’est dans cet objectif qu’a été construit et développé GéoRoute. GéoRoute est un vaste SIG qui contient les données détaillées des voies de communication de toutes les agglomérations de plus de 10 000 habitants, complété par un réseau routier interurbain. Il contient 5 thèmes, réunis dans le tableau ci-dessous :
Thèmes contenus dans le SIG Exemple d’attributs
Voies de communications
Nom de rues, sens interdits, interdiction de tourner, restrictions (riverains, poids lourds, matières
dangereuses)
Equipements publics Bâtiments administratifs, gares, aéroports, ports, zones industrielles
Equipements routiers Parking, aires de services
Habillage Hydrographie, réseau ferré, espaces verts, zones d’activité, zone d’habitat
Limites administratives Frontières communales Tableau 3-1 : Le SIG GéoRoute développé par l’IGN
1 IGN, Rapport d’activité 2004
40 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
Outre le ministère de l’Equipement et des transports et ses services déconcentrés (DDE, CETE…), de nombreuses entreprises et collectivités territoriales sont clientes de l’IGN. C’est le cas de la RATP, SNCF, des conseils généraux, des services techniques des mairies, et de manière plus large de tous ceux qui sont amené à gérer des réseaux.
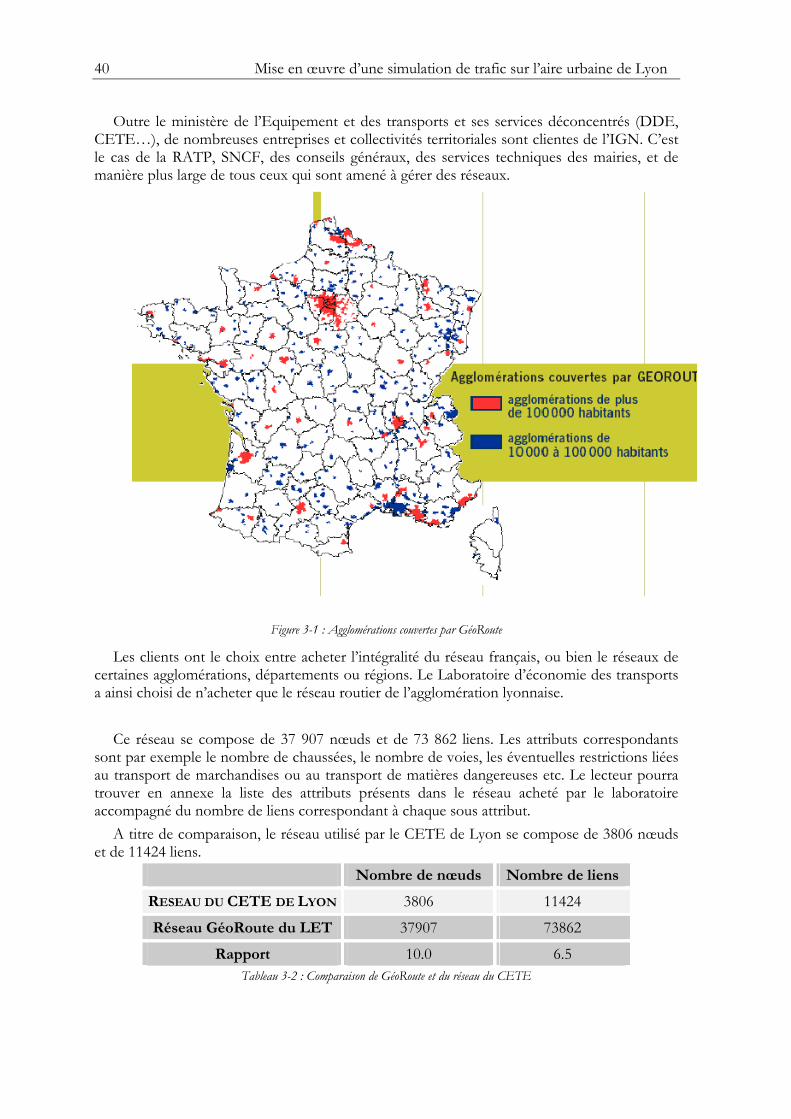
Figure 3-1 : Agglomérations couvertes par GéoRoute
Les clients ont le choix entre acheter l’intégralité du réseau français, ou bien le réseaux de certaines agglomérations, départements ou régions. Le Laboratoire d’économie des transports a ainsi choisi de n’acheter que le réseau routier de l’agglomération lyonnaise.
Ce réseau se compose de 37 907 nœuds et de 73 862 liens. Les attributs correspondants sont par exemple le nombre de chaussées, le nombre de voies, les éventuelles restrictions liées au transport de marchandises ou au transport de matières dangereuses etc. Le lecteur pourra trouver en annexe la liste des attributs présents dans le réseau acheté par le laboratoire accompagné du nombre de liens correspondant à chaque sous attribut.
A titre de comparaison, le réseau utilisé par le CETE de Lyon se compose de 3806 nœuds et de 11424 liens.
Nombre de nœuds Nombre de liens
RESEAU DU CETE DE LYON 3806 11424
Réseau GéoRoute du LET 37907 73862
Rapport 10.0 6.5 Tableau 3-2 : Comparaison de GéoRoute et du réseau du CETE
41
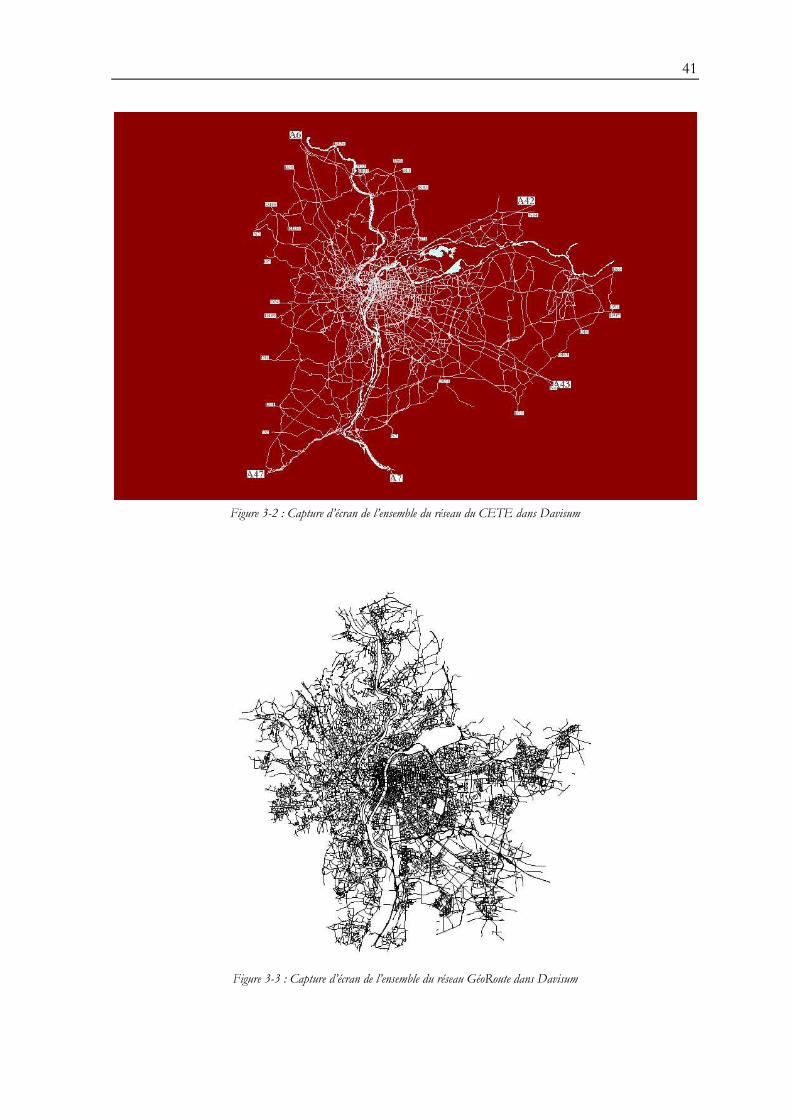
Figure 3-2 : Capture d’écran de l’ensemble du réseau du CETE dans Davisum
Figure 3-3 : Capture d’écran de l’ensemble du réseau GéoRoute dans Davisum
42 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
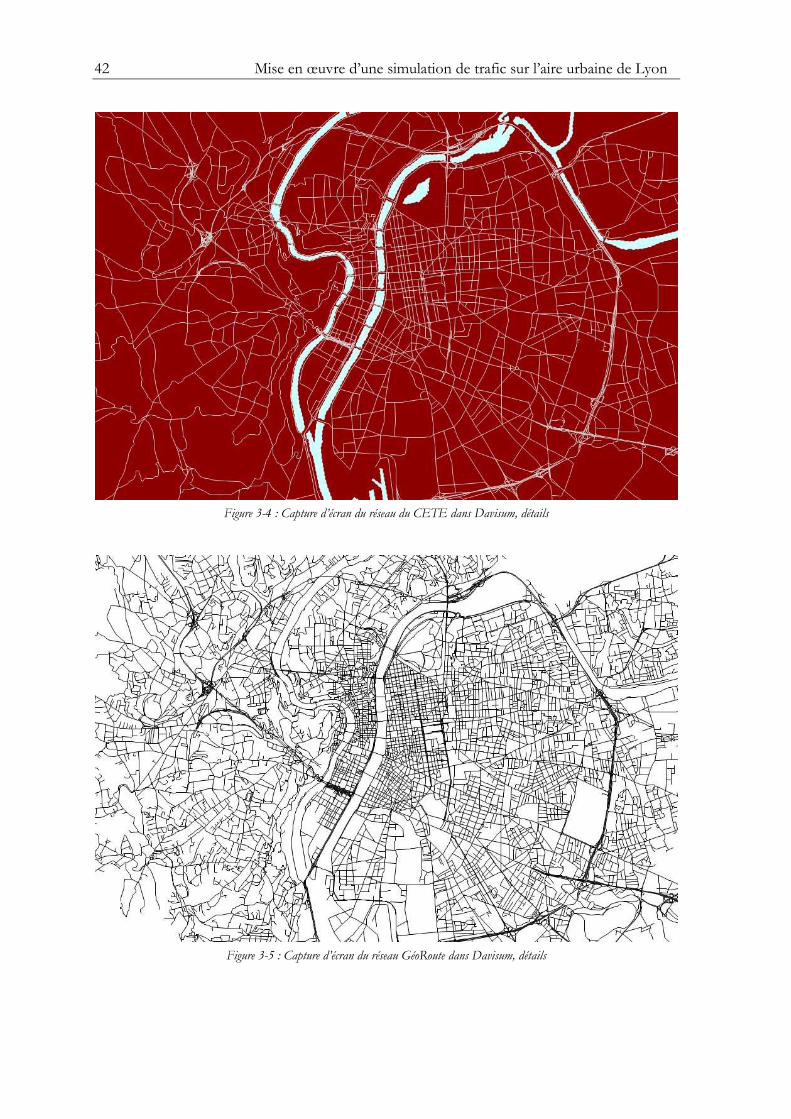
Figure 3-4 : Capture d’écran du réseau du CETE dans Davisum, détails
Figure 3-5 : Capture d’écran du réseau GéoRoute dans Davisum, détails
43
3.1.2 Procédure du transfert de données Le SIG GéoRoute ne peut cependant pas être utilisée tel quel par le logiciel d’affectation
du trafic Davisum. Il doit préalablement être transféré et modifié. Transféré dans un format de fichier lisible par Davisum et modifié de manière à contenir des éléments liés à la demande de transport (création d’un périmètre d’étude, d’un zonage et incorporation d’une matrice origine-destination, cf. partie 2 sur l’affectation pour plus de détail)
Ce transfert a été une opération consommatrice de temps. La procédure n’étant pas automatisée, j’ai du procéder par tâtonnement, en manipulant des fichiers très volumineux.
L’importation de données est une action délicate, et cela principalement pour trois raisons :
• Premièrement, ce transfert ne se fait pas de manière automatique. Il faut donc manipuler des fichiers, écrire des macros ou des petits programmes informatiques pour traiter les données et les rendre lisibles pour les autres logiciels.
• Il est de plus très important de faire en sorte que cette opération de transfert soit reproductible. Ce transfert devra certainement être a nouveau réalisé, et il est pour cela important de garder la trace de toutes les opérations effectuées.
• Enfin, un des dangers serait de perdre trop d’information. Il est souvent nécessaire de modifier la nature des attributs, par exemple en choisissant de négliger certains attributs, ou bien en simplifiant excessivement
Description des étapes conduisant à transférer le SIG GéoRoute depuis le logiciel GéoConcept vers Davisum :
1. Les fichiers contenant le système d’information géographique GéoRoute sur l’agglomération lyonnaise sont de type « .GCM » et « .GCR », lisible depuis le logiciel GéoConcept ;
2. les formats « .GCM » et « .GCR » sont propres au logiciel GéoConcept et ne peuvent pas être lus par d’autres logiciels (MapInfo ou Davisum). GéoConcept peut toutefois exporter ce SIG en un fichier de format « .DXF » ;
3. Le fichier « .DXF » ainsi créé ne peut toujours pas être lu par Davisum, mais il peut être transféré via MapInfo en une série de fichier « .DAT », « .MAP », « .TAB » et « .ID » ;
4. Les fichiers « .DAT », « .MAP », « .TAB » et « .ID » peuvent être ouverts avec MapInfo ;
5. MapInfo permet, à l’aide de requêtes, de modifier les tables contenant les attributs, et de cette manière de préparer l’importation de l’étape numéro 7 ;
6. Le fichier MapInfo ainsi modifié peut ensuite être exporté en un fichier ShapeFile « .SHP » ;
7. Ce fichier ShapeFile peut enfin être importé dans Davisum, en prenant garde de bien faire correspondre les bons attributs sources avec les bons attributs cibles.
De manière générale, tous les réseaux provenant de la base de donnée GéoRoute développée par l’IGN peuvent être importé de la même manière.
44 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
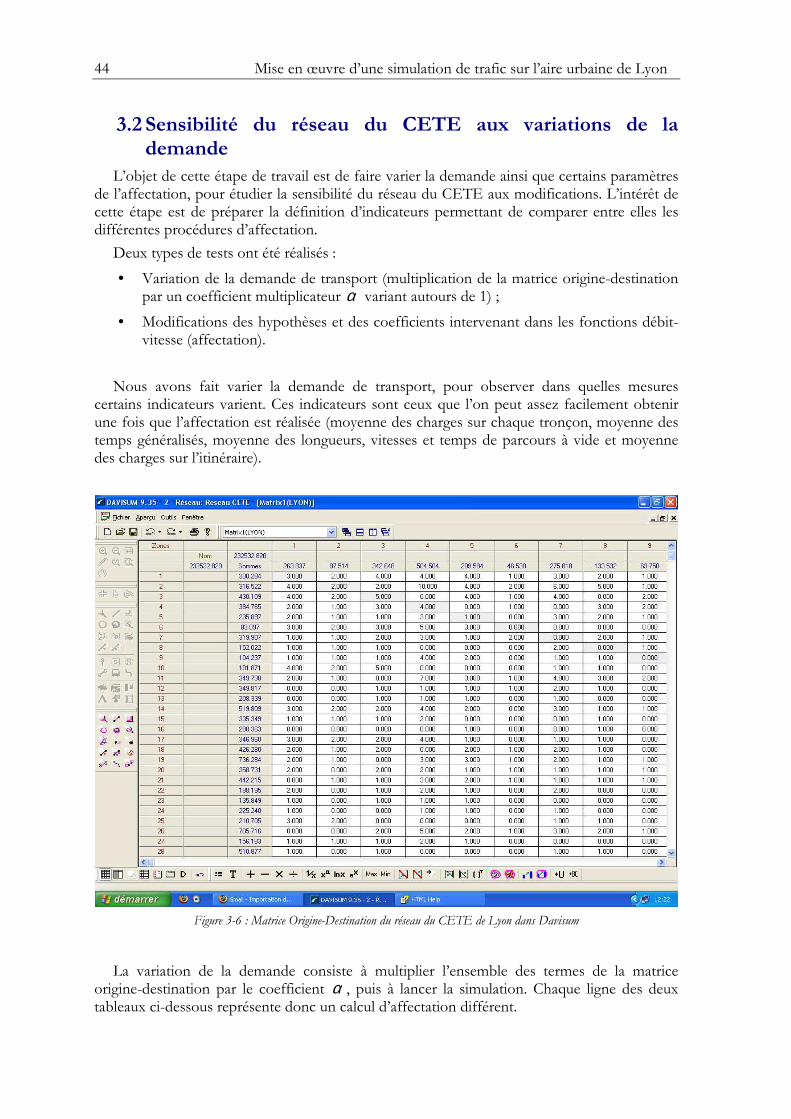
3.2 Sensibilité du réseau du CETE aux variations de la demande
L’objet de cette étape de travail est de faire varier la demande ainsi que certains paramètres de l’affectation, pour étudier la sensibilité du réseau du CETE aux modifications. L’intérêt de cette étape est de préparer la définition d’indicateurs permettant de comparer entre elles les différentes procédures d’affectation.
Deux types de tests ont été réalisés :
• Variation de la demande de transport (multiplication de la matrice origine-destination par un coefficient multiplicateur α variant autours de 1) ;
• Modifications des hypothèses et des coefficients intervenant dans les fonctions débit-vitesse (affectation).
Nous avons fait varier la demande de transport, pour observer dans quelles mesures certains indicateurs varient. Ces indicateurs sont ceux que l’on peut assez facilement obtenir une fois que l’affectation est réalisée (moyenne des charges sur chaque tronçon, moyenne des temps généralisés, moyenne des longueurs, vitesses et temps de parcours à vide et moyenne des charges sur l’itinéraire).
Figure 3-6 : Matrice Origine-Destination du réseau du CETE de Lyon dans Davisum
La variation de la demande consiste à multiplier l’ensemble des termes de la matrice origine-destination par le coefficient α , puis à lancer la simulation. Chaque ligne des deux tableaux ci-dessous représente donc un calcul d’affectation différent.
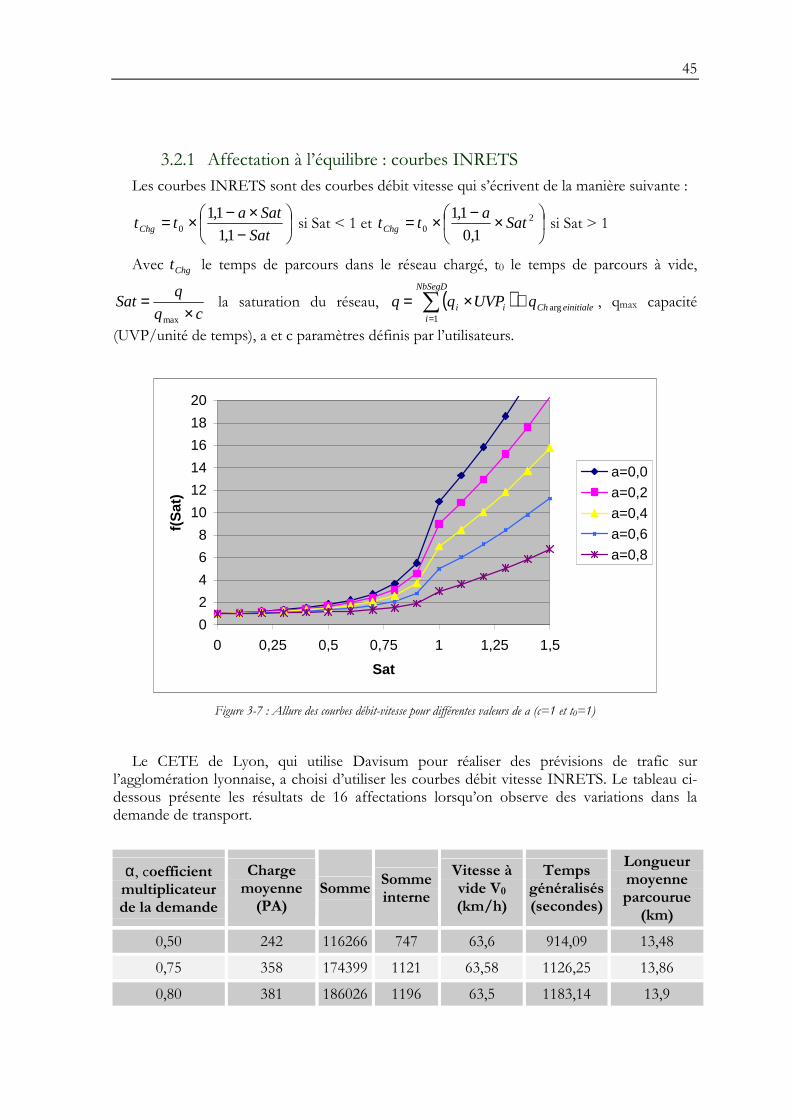
45
3.2.1 Affectation à l’équilibre : courbes INRETS Les courbes INRETS sont des courbes débit vitesse qui s’écrivent de la manière suivante :
−×−×=Sat
SatattChg 1,1
1,10 si Sat < 1 et
×−×= 20 1,0
1,1Sat
attChg si Sat > 1
Avec Chgt le temps de parcours dans le réseau chargé, t0 le temps de parcours à vide,
cq
qSat
×=
max
la saturation du réseau, ( )∑=
+×=NbSegD
ieinitialeChii qUVPqq
1arg , qmax capacité
(UVP/unité de temps), a et c paramètres définis par l’utilisateurs.
0
2
4
6
8
10
12
14
16
18
20
0 0,25 0,5 0,75 1 1,25 1,5
Sat
f(S
at)
a=0,0a=0,2a=0,4a=0,6a=0,8
Figure 3-7 : Allure des courbes débit-vitesse pour différentes valeurs de a (c=1 et t0=1)
Le CETE de Lyon, qui utilise Davisum pour réaliser des prévisions de trafic sur l’agglomération lyonnaise, a choisi d’utiliser les courbes débit vitesse INRETS. Le tableau ci-dessous présente les résultats de 16 affectations lorsqu’on observe des variations dans la demande de transport.
α, coefficient multiplicateur de la demande
Charge moyenne (PA)
Somme Somme interne
Vitesse à vide V0 (km/h)
Temps généralisés (secondes)
Longueur moyenne parcourue
(km)
0,50 242 116266 747 63,6 914,09 13,48
0,75 358 174399 1121 63,58 1126,25 13,86
0,80 381 186026 1196 63,5 1183,14 13,9
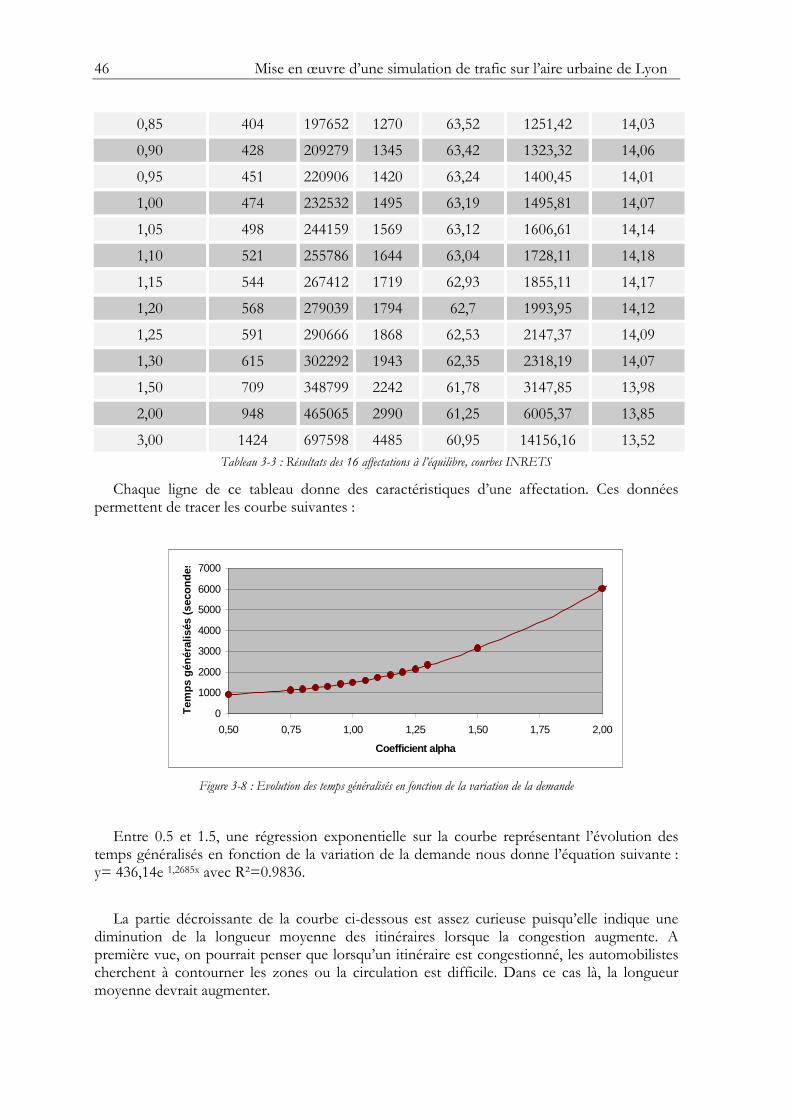
46 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
0,85 404 197652 1270 63,52 1251,42 14,03
0,90 428 209279 1345 63,42 1323,32 14,06
0,95 451 220906 1420 63,24 1400,45 14,01
1,00 474 232532 1495 63,19 1495,81 14,07
1,05 498 244159 1569 63,12 1606,61 14,14
1,10 521 255786 1644 63,04 1728,11 14,18
1,15 544 267412 1719 62,93 1855,11 14,17
1,20 568 279039 1794 62,7 1993,95 14,12
1,25 591 290666 1868 62,53 2147,37 14,09
1,30 615 302292 1943 62,35 2318,19 14,07
1,50 709 348799 2242 61,78 3147,85 13,98
2,00 948 465065 2990 61,25 6005,37 13,85
3,00 1424 697598 4485 60,95 14156,16 13,52 Tableau 3-3 : Résultats des 16 affectations à l’équilibre, courbes INRETS
Chaque ligne de ce tableau donne des caractéristiques d’une affectation. Ces données permettent de tracer les courbe suivantes :
0
1000
2000
3000
4000
5000
6000
7000
0,50 0,75 1,00 1,25 1,50 1,75 2,00
Coefficient alpha
Tem
ps g
énér
alis
és (
seco
ndes
)
Figure 3-8 : Evolution des temps généralisés en fonction de la variation de la demande
Entre 0.5 et 1.5, une régression exponentielle sur la courbe représentant l’évolution des temps généralisés en fonction de la variation de la demande nous donne l’équation suivante : y= 436,14e 1,2685x avec R²=0.9836.
La partie décroissante de la courbe ci-dessous est assez curieuse puisqu’elle indique une diminution de la longueur moyenne des itinéraires lorsque la congestion augmente. A première vue, on pourrait penser que lorsqu’un itinéraire est congestionné, les automobilistes cherchent à contourner les zones ou la circulation est difficile. Dans ce cas là, la longueur moyenne devrait augmenter.
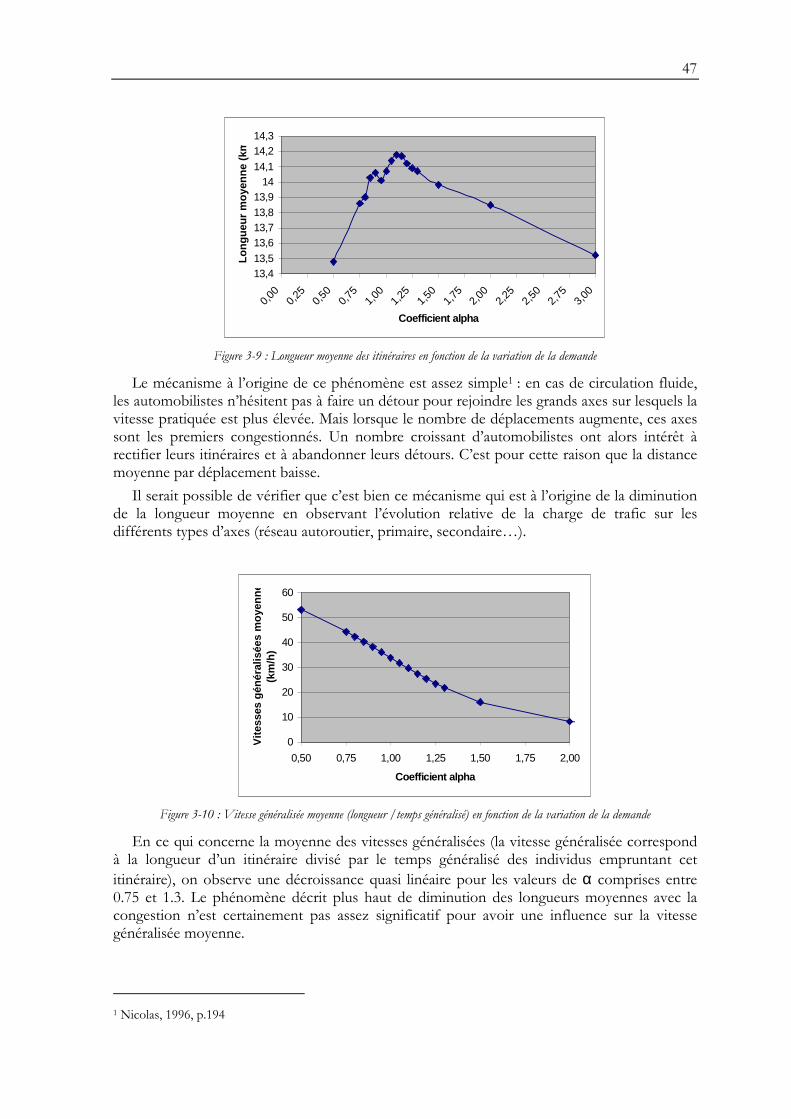
47
13,413,5
13,613,713,813,9
1414,1
14,214,3
0,00
0,25
0,50
0,75
1,00
1,25
1,50
1,75
2,00
2,25
2,50
2,75
3,00
Coefficient alpha
Long
ueur
moy
enne
(km
)
Figure 3-9 : Longueur moyenne des itinéraires en fonction de la variation de la demande
Le mécanisme à l’origine de ce phénomène est assez simple1 : en cas de circulation fluide, les automobilistes n’hésitent pas à faire un détour pour rejoindre les grands axes sur lesquels la vitesse pratiquée est plus élevée. Mais lorsque le nombre de déplacements augmente, ces axes sont les premiers congestionnés. Un nombre croissant d’automobilistes ont alors intérêt à rectifier leurs itinéraires et à abandonner leurs détours. C’est pour cette raison que la distance moyenne par déplacement baisse.
Il serait possible de vérifier que c’est bien ce mécanisme qui est à l’origine de la diminution de la longueur moyenne en observant l’évolution relative de la charge de trafic sur les différents types d’axes (réseau autoroutier, primaire, secondaire…).
0
10
20
30
40
50
60
0,50 0,75 1,00 1,25 1,50 1,75 2,00
Coefficient alpha
Vite
sses
gén
éral
isée
s m
oyen
nes
(km
/h)
Figure 3-10 : Vitesse généralisée moyenne (longueur /temps généralisé) en fonction de la variation de la demande
En ce qui concerne la moyenne des vitesses généralisées (la vitesse généralisée correspond à la longueur d’un itinéraire divisé par le temps généralisé des individus empruntant cet itinéraire), on observe une décroissance quasi linéaire pour les valeurs de α comprises entre 0.75 et 1.3. Le phénomène décrit plus haut de diminution des longueurs moyennes avec la congestion n’est certainement pas assez significatif pour avoir une influence sur la vitesse généralisée moyenne.
1 Nicolas, 1996, p.194
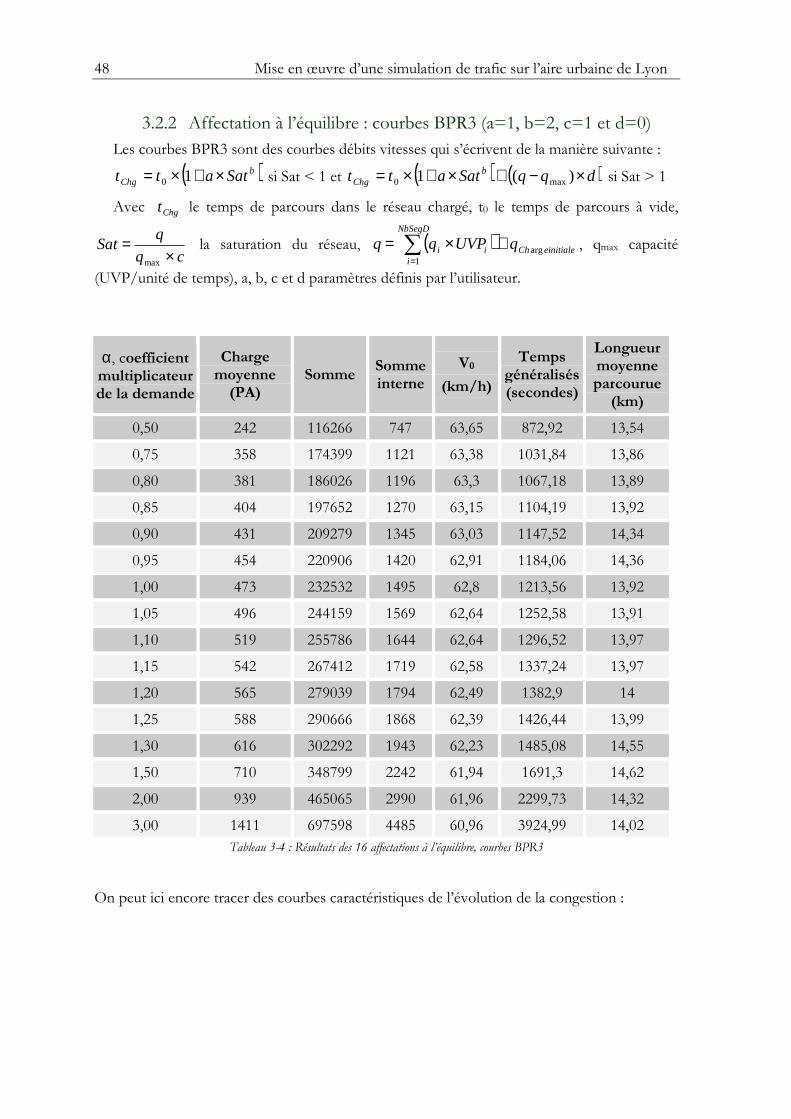
48 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
3.2.2 Affectation à l’équilibre : courbes BPR3 (a=1, b=2, c=1 et d=0) Les courbes BPR3 sont des courbes débits vitesses qui s’écrivent de la manière suivante :
( )bChg Satatt ×+×= 10 si Sat < 1 et ( ) ( )dqqSatatt b
Chg ×−+×+×= )(1 max0 si Sat > 1
Avec Chgt le temps de parcours dans le réseau chargé, t0 le temps de parcours à vide,
cq
qSat
×=
max
la saturation du réseau, ( )∑=
+×=NbSegD
ieinitialeChii qUVPqq
1arg , qmax capacité
(UVP/unité de temps), a, b, c et d paramètres définis par l’utilisateur.
α, coefficient multiplicateur de la demande
Charge moyenne (PA)
Somme Somme interne
V0
(km/h)
Temps généralisés (secondes)
Longueur moyenne parcourue
(km)
0,50 242 116266 747 63,65 872,92 13,54
0,75 358 174399 1121 63,38 1031,84 13,86
0,80 381 186026 1196 63,3 1067,18 13,89
0,85 404 197652 1270 63,15 1104,19 13,92
0,90 431 209279 1345 63,03 1147,52 14,34
0,95 454 220906 1420 62,91 1184,06 14,36
1,00 473 232532 1495 62,8 1213,56 13,92
1,05 496 244159 1569 62,64 1252,58 13,91
1,10 519 255786 1644 62,64 1296,52 13,97
1,15 542 267412 1719 62,58 1337,24 13,97
1,20 565 279039 1794 62,49 1382,9 14
1,25 588 290666 1868 62,39 1426,44 13,99
1,30 616 302292 1943 62,23 1485,08 14,55
1,50 710 348799 2242 61,94 1691,3 14,62
2,00 939 465065 2990 61,96 2299,73 14,32
3,00 1411 697598 4485 60,96 3924,99 14,02 Tableau 3-4 : Résultats des 16 affectations à l’équilibre, courbes BPR3
On peut ici encore tracer des courbes caractéristiques de l’évolution de la congestion :
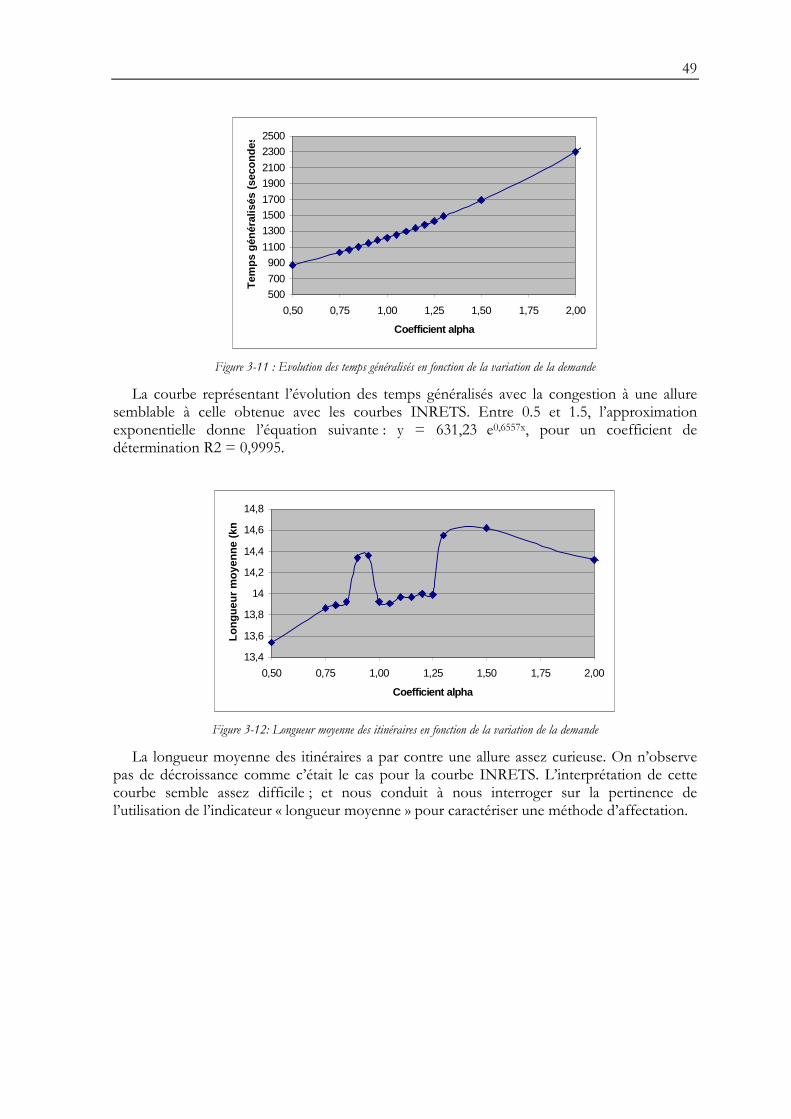
49
500
700
900
1100
1300
1500
1700
1900
2100
2300
2500
0,50 0,75 1,00 1,25 1,50 1,75 2,00
Coefficient alpha
Tem
ps g
énér
alis
és (
seco
ndes
)
Figure 3-11 : Evolution des temps généralisés en fonction de la variation de la demande
La courbe représentant l’évolution des temps généralisés avec la congestion à une allure semblable à celle obtenue avec les courbes INRETS. Entre 0.5 et 1.5, l’approximation exponentielle donne l’équation suivante : y = 631,23 e0,6557x, pour un coefficient de détermination R2 = 0,9995.
13,4
13,6
13,8
14
14,2
14,4
14,6
14,8
0,50 0,75 1,00 1,25 1,50 1,75 2,00
Coefficient alpha
Long
ueur
moy
enne
(km
)
Figure 3-12: Longueur moyenne des itinéraires en fonction de la variation de la demande
La longueur moyenne des itinéraires a par contre une allure assez curieuse. On n’observe pas de décroissance comme c’était le cas pour la courbe INRETS. L’interprétation de cette courbe semble assez difficile ; et nous conduit à nous interroger sur la pertinence de l’utilisation de l’indicateur « longueur moyenne » pour caractériser une méthode d’affectation.

50 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
0
10
20
30
40
50
60
0,50 0,75 1,00 1,25 1,50 1,75 2,00
Coefficient alpha
Vite
sse
géné
ralis
ée m
oyen
ne (
km/h
)
Figure 3-13 : Vitesse généralisée moyenne (longueur / temps généralisé) en fonction de la variation de la demande
3.3 Courbe débit-vitesse de Métropolis
Voyons comment la courbe reliant le débit et la vitesse (courbe de droite) est générée par le modèle Metropolis à partir de quelques équations très simples. Ces simulations ont été réalisées en réécrivant les équations de base du modèle Métropolis dans un tableur Excel.
On se donne comme donnée exogène une loi normale représentant le flux entrant sur une voie, variant selon le temps. L'objectif de cette courbe est de simuler une demande de transport à l'heure de pointe. Notons tout de même que le résultat final est indépendant du choix de la courbe initiale.
0
500
1000
1500
2000
2500
3000
5h5h
30 6h6h
30 7h7h
30 8h8h
30 9h9h
30 10h
10h3
011
h11
h30
12h
12h3
0
Heure de la journée
Déb
it Débit théorique
Débit réelCapacité K
Figure 3-14 : Loi normale et loi normale plafonnée

51
Puisque la demande est supérieure à l'offre (le flux entrant est supérieur à la capacité de la route), une file d'attente se forme à l'entrée de la route. Metropolis utilise l'hypothèse suivante, pour modéliser le nombre de véhicule présent dans la file d'attente :
≠>Φ−Φ=≤Φ
=)0()(
)0()(0)(NouKsiK
NetKsi
dt
tdN
inin
in .
Cela signifie que le nombre de véhicules N stockés dans la file d'attente ne varie pas lorsque le flux entrant est inférieur à la capacité et que la file d'attente est vide. En revanche, dès qu'une de ces deux précédentes conditions n'est plus réalisée, c'est-à-dire si Kin >Φ ou si
0≠N , le nombre de voitures dans la file d'attente est la solution particulière de l'équation
différentielle Ktdt
tdNin −Φ= )(
)( (avec inΦ le flux entrant et K la capacité de la voie). Il est
alors possible de représenter une solution de cette équation différentielle :
0100200300400500600700800900
5h5h
30 6h6h
30 7h7h
30 8h8h
30 9h9h
30 10h
10h3
011
h11
h30
12h
12h3
0Heure de la journée
Nom
bre
de v
éhic
ules
dan
s la
fil
e d'
atte
nte
Figure 3-15 : Longueur de la file d’attente
La courbe obtenue possède plusieurs parties assez caractéristiques. Tant que la demande ne dépasse pas l'offre, aucune voiture n'est stockée dans la file d'attente. Ainsi, la courbe est nulle jusqu'à 7h15. Ensuite, le nombre de véhicules stockés croît jusqu'à ce que la demande devienne inférieure à la capacité K. A partir de ce moment, N(t) diminue de plus en plus rapidement pour atteindre 0 vers 10h.
0
20
40
60
80
100
120
5h5h
30 6h6h
30 7h7h
30 8h8h
30 9h9h
30 10h
10h3
011
h
11h3
012
h
12h3
0
Heure de la journée
Vite
sse
Figure 3-16 : Evolution des vitesses pratiquées
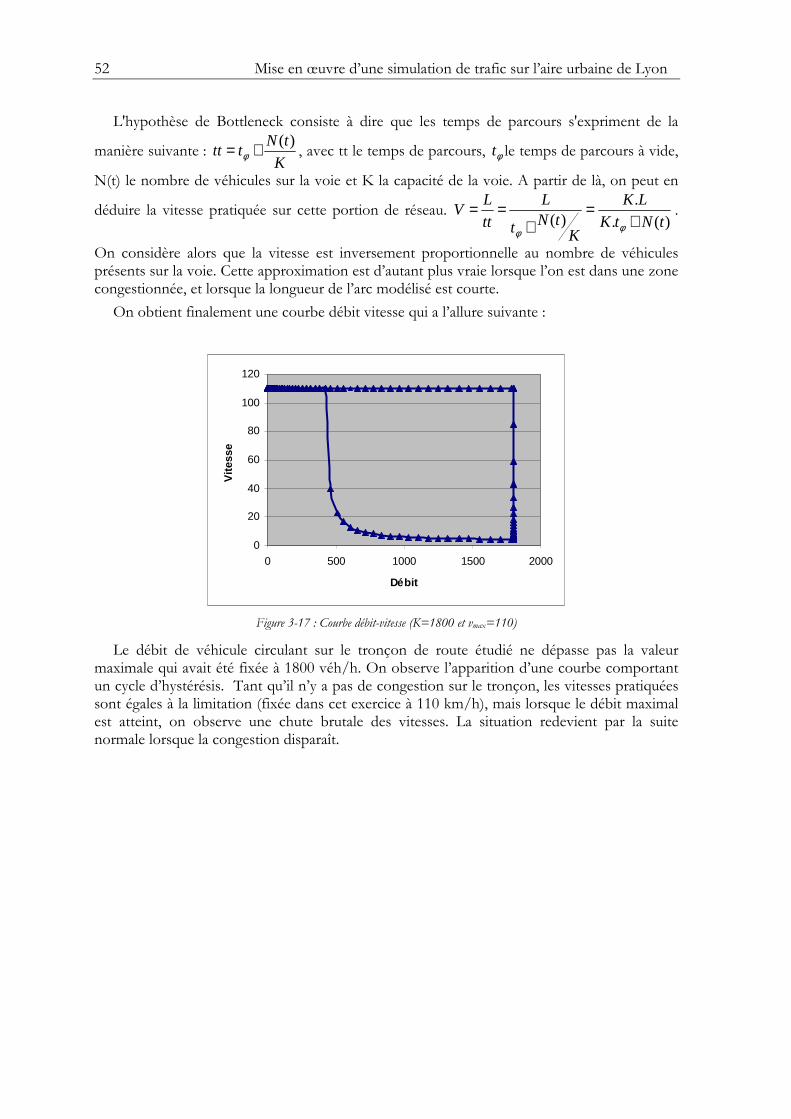
52 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
L'hypothèse de Bottleneck consiste à dire que les temps de parcours s'expriment de la
manière suivante : K
tNttt
)(+= φ , avec tt le temps de parcours, φt le temps de parcours à vide,
N(t) le nombre de véhicules sur la voie et K la capacité de la voie. A partir de là, on peut en
déduire la vitesse pratiquée sur cette portion de réseau. )(.
.)( tNtK
LK
KtNt
L
tt
LV
+=
+==
φφ
.
On considère alors que la vitesse est inversement proportionnelle au nombre de véhicules présents sur la voie. Cette approximation est d’autant plus vraie lorsque l’on est dans une zone congestionnée, et lorsque la longueur de l’arc modélisé est courte.
On obtient finalement une courbe débit vitesse qui a l’allure suivante :
0
20
40
60
80
100
120
0 500 1000 1500 2000
Débit
Vite
sse
Figure 3-17 : Courbe débit-vitesse (K=1800 et vmax=110)
Le débit de véhicule circulant sur le tronçon de route étudié ne dépasse pas la valeur maximale qui avait été fixée à 1800 véh/h. On observe l’apparition d’une courbe comportant un cycle d’hystérésis. Tant qu’il n’y a pas de congestion sur le tronçon, les vitesses pratiquées sont égales à la limitation (fixée dans cet exercice à 110 km/h), mais lorsque le débit maximal est atteint, on observe une chute brutale des vitesses. La situation redevient par la suite normale lorsque la congestion disparaît.
53
CONCLUSION ET PERSPECTIVES DE TRAVAIL
Les modèles à quatre étapes permettent de planifier et de prévoir les investissements d’infrastructures de transport pour faire face à l’augmentation des trafics et de la mobilité. Ces modèles sont utilisés pour prévoir l’évolution du trafic sur un réseau donné selon l’heure de la journée considérée. Le projet Simbad a pour vocation d’intégrer à ces modèles une nouvelle composante, celle de l’urbanisme, pour évaluer des politiques de transport et d’urbanisme à la lumière du développement durable.
Ce travail aura permis, nous l’espérons, de faire ressortir les enjeux de la modélisation du trafic routier urbain et de l’affectation de ce trafic sur un réseau routier. En effet, bien comprendre les problèmes liés à la modélisation est un préalable indispensable pour aller plus loin dans cette discipline.
Après avoir largement décrit les modèles à quatre étapes en général et l’étape d’affectation en particulier, il reste à traiter la problématique sur laquelle le laboratoire d’économie des transports s’interroge, et en réponse de laquelle ce travail est réalisé : Est-il possible d’intégrer une méthode d’affectation innovante (Metropolis) au sein du programme Simbad ? Cette question en appelle bien sûr d’autres : quels sont les tests à réaliser pour valider l’intérêt de l’affectation selon la méthode Metropolis ; est-il possible de définir puis de mesurer des indicateurs pertinents, communs aux différentes méthodes d’affectation, pour ensuite les comparer entre eux ?
La définition des tests à réaliser et des indicateurs permettant de comparer ces méthodes d’affectation feront l’objet d’un autre mémoire, en vue d’obtenir le master recherche « transport, espace réseaux ».

55
BIBLIOGRAPHIE
• Bonnafous A., 1989, Le siècle des ténèbres de l’économie, Economica, Paris, 184p.
• Bonnel P., 2004, Prévoir la demande de transport, Presse de l’ENPC, 415p.
• Buisson Ch., Kunkel F., 2000, Simulation dynamique du trafic routier, Collection du CERTU.
• CERTU, 1998, L’enquête ménage déplacement « méthode standard », Lyon, 295p.
• CERTU, mars 2003, Modélisation des déplacements urbains de voyageurs, Lyon, 263p.
• de Palma A., Marchal F., 2002, Real case application of the fully dynamic Metropolis tool-box: an advocacy for a large-scale mesoscopic transportation systems, Networks and special economics, pp.347-369.
• de Palma A. et Marchal F., 1996, METROPOLIS : Un outil de simulation du trafic urbain, Université de Cergy-Pontoise, 30p.
• Deymier G., Nicolas J.-P., 2005, Modèles d’interaction entre transport et urbanisme : état de l’art et choix du modèle pour le projet Simbad, Rapport du Laboratoire d’économie des transports, Lyon, 47p.
• Ferey J.-B., 2002, Analyse des méthodes d’estimation des modèles de répartition modale, mémoire de DEA, Lyon, 137p.
• Institut Géographique National, 2004, Rapport d’activité, 58p.
• Marchal F., 2004, Métropolis, un outil de simulation du trafic adapté aux systèmes de transports de grande taille, Présentation PowerPoint.
• Marchal F., 2005, A trip generation method for time-dependent large-scale simulation of transport and land-use, Networks and spatial economics, pp.179-192.
• Nicolas J.-P., 1996, Ville, transports et environnement : contribution relative des paramètres du trafic routier affectant la pollution sonore et atmosphérique en milieu urbain, doctorat de sciences économiques, Lyon, 420p.
56 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
• Nicolas J.-P., Homocianu M., Marchal F., Routhier J.-L., 2006, L’architecture du modèle au sein du projet Simbad, Rapport du Laboratoire d’économie des transports, Lyon, 36p.
• Nicolas J.-P., MORICE N., 2006, Scénarios prospectifs pour le projet Simbad, Rapport du Laboratoire d’économie des transports, Lyon, 92p.
• Ortúzar J. et Willumsen L., 2001, Modelling transport, third edition, Wiley, Londres, 499p.
• PREDIT, 2004, La modélisation des trafics, un outil au service de la planification et de la prospective, collection Recherche & Synthèses, Paris, 4p.
• PTV, 2002, Manuel de l’utilisateur de Davisum, Karlsruhe, 1070p.
• Scaron S., 2004, Apport des systèmes d’information géographique à la modélisation en milieu urbain, Travail de fin d’étude de l’ENTPE, Lyon, 71p.
• VERRY D., NICOLAS J.-P., 2005, Indicateurs de mobilité durable : de l’état de l’art à la définition des indicateurs dans le projet Simbad, Rapport du Laboratoire d’économie des transports, Lyon, 96p.
57
LISTES DES TABLEAUX, FIGURES ET ABBREVIATIONS
Liste des tableaux
Tableau 1-1 : Exemple de grille de part modale pour le motif domicile-travail (CETUR) 19
Tableau 2-1 : Classification des différentes méthodes d’affectation 28
Tableau 3-1 : Le SIG GéoRoute développé par l’IGN 39
Tableau 3-2 : Comparaison de GéoRoute et du réseau du CETE 40
Tableau 3-3 : Résultats des 16 affectations à l’équilibre, courbes INRETS 46
Tableau 3-4 : Résultats des 16 affectations à l’équilibre, courbes BPR3 48
Liste des figures
Figure 0-1 : Architecture des différents modules 8
Figure 1-1 : Emission et attraction 15
Figure 1-2 : Exemple d’émissions et d’attractions pour une heure donnée 16
Figure 1-3 : Matrice origine-destination 17
Figure 2-1 : Zones, nœuds, liens, centroïdes et connecteurs de centroïdes 25
Figure 2-2 : Macrozone et zones définies par le CETE de Lyon 25
Figure 2-3 : Exemple de courbes débit-vitesse et débit-temps 27
Figure 2-4 : Allure de courbes débit-vitesse 27
Figure 2-5 : Illustration de la méthode de type logit 29
Figure 2-6 : VISSIM 32
Figure 2-7 : AIMSUN 33
Figure 2-8 : METACOR 33
Figure 2-9 : Modèle de Vickrey : arbitrage temps de trajet / horaire 35
Figure 2-10 : Profil du pic du matin 35
Figure 2-11 : Profil du pic du matin suite à une augmentation de la capacité 36
Figure 2-12 : Profil du pic du matin suite à une diminution de la capacité 36
Figure 2-13 : proportion d'arrivée en avance, à l'heure et en retard en fonction du jour de l’année 37
Figure 2-14 : Calage de l'étape d'affectation 38
Figure 3-1 : Agglomérations couvertes par GéoRoute 40
Figure 3-2 : Capture d’écran de l’ensemble du réseau du CETE dans Davisum 41
58 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
Figure 3-3 : Capture d’écran de l’ensemble du réseau GéoRoute dans Davisum 41
Figure 3-4 : Capture d’écran du réseau du CETE dans Davisum, détails 42
Figure 3-5 : Capture d’écran du réseau GéoRoute dans Davisum, détails 42
Figure 3-6 : Matrice Origine-Destination du réseau du CETE de Lyon dans Davisum 44
Figure 3-7 : Allure des courbes débit-vitesse pour différentes valeurs de a (c=1 et t0=1) 45
Figure 3-8 : Evolution des temps généralisés en fonction de la variation de la demande 46
Figure 3-9 : Longueur moyenne des itinéraires en fonction de la variation de la demande 47
Figure 3-10 : Vitesse généralisée moyenne (longueur /temps généralisé) en fonction de la variation de la demande 47
Figure 3-11 : Evolution des temps généralisés en fonction de la variation de la demande 49
Figure 3-12: Longueur moyenne des itinéraires en fonction de la variation de la demande 49
Figure 3-13 : Vitesse généralisée moyenne (longueur / temps généralisé) en fonction de la variation de la demande 50
Figure 3-14 : Loi normale et loi normale plafonnée 50
Figure 3-15 : Longueur de la file d’attente 51
Figure 3-16 : Evolution des vitesses pratiquées 51
Figure 3-17 : Courbe débit-vitesse (K=1800 et vmax=110) 52
Figure A-1 : Architecture du logiciel Visum 62
Liste des abréviations
• ADEME : Agence de l’environnement et de la maîtrise de l’énergie
• AIMSUN : Advanced Interactive Microscopic Simulator for Urban and non-urban Networks
• CETE : Centre technique de l’Equipement
• CNRS : Centre national de recherche scientifique
• DAVIS : Distribution, affectation et visualisation du trafic
• DAVISUM : Logiciel d’aide à la planification des transports développé par la société PTV
• DRAST : Direction de la recherche et des affaires scientifiques et techniques
• ENTPE : Ecole nationale des travaux publics de l’Etat
• IGN : Institut géographique national
• LET : Laboratoire d’économie des transports
• LOTI : Loi d’orientation sur les transports intérieurs
• PDU : Plan de déplacement urbain
• PTV : Professional transportation planning
• SETRA : Service d’étude technique des routes et autoroutes

59
• SIG : Système d’information géographique
• SIMBAD : Simuler les mobilités pour une agglomération durable
• TFE : Travail de fin d’étude
• TGV : Train à grande vitesse
• UVP : Unité de véhicule particulier


61
ANNEXES
Annexes A : Description du logiciel Davisum
Informations données sur le site internet de PTV :
Davisum est la nouvelle référence en matière de modélisation du trafic. Davisum dépasse largement le niveau de détail des modèles de réseaux existants, qu'il s'agisse de réseaux VP ou TC. La dynamique temporelle pour les VP et les TC, l'extension de la modélisation TC (par exemple pour des zones de station et pour la représentation des jours de service par l'intermédiaire d'une fonction calendrier) sont des nouveautés du programme révélatrices de sa supériorité.
En plus de cela, Davisum progresse de manière exemplaire en matière de mise en relation des systèmes de planification de l'exploitation des TC. PTV dispose depuis plusieurs années déjà d'un produit spécifique pour la programmation de l'exploitation : INTERPLAN. Sur la base du savoir-faire issu de cette famille de produits, nous avons procédé à une large extension du modèle de données de Davisum. Il deviendra ainsi possible d'intégrer les données issues de fiches horaires et de l'exploitation des lignes, à partir de la détermination de l'offre, directement dans la programmation de l'exploitation. Inversement il sera possible d'intégrer dans Davisum les données de performance issues de systèmes d'aide à l'exploitation (SAE).
La puissance de Davisum est liée à l'orientation stratégique du produit et à l'intégration des méthodes scientifiques combinées aux technologies de pointe en matière de programmation informatiques. La planification des transports avec Davisum est un gage d'innovation et d'intégration. L'évolution du produit Davisum est constante et se fait de manière prospective en suivant les objectifs suivants :
• base intégrée pour la planification des transports pour les VP et les TC ;
• représentation détaillée du trafic dans la modélisation ;
• méthodes scientifiques reconnues ;
• analyse objective et évaluation des mesures ;
• prévisions compréhensibles des mesures programmées ;
• évaluation des concepts d'offre à l'aide de données issues de l'exploitation ;
• planification et modification interactive du réseau ;
• génération de plates-formes de données pour des systèmes d'information de trafic englobant.
Davisum est le premier système d'information et de planification qui est en mesure, grâce à son modèle de données détaillé, de prendre en compte de manière identique les aspects liés à la programmation stratégique et à la programmation opérationnelle et de les mettre en relation. A cet égard la version 9.0 représente une évolution puisqu'elle permet d'intégrer des données issues de l'exploitation en temps réel dans les bases de la programmation stratégique. Les effets de la programmation stratégique peuvent ainsi être évalués à l'aide des données issues de l'exploitation opérationnelle. En outre, pour la première fois, ces valeurs provenant des modifications en temps réel peuvent également être intégrées dans les données de base de la programmation.
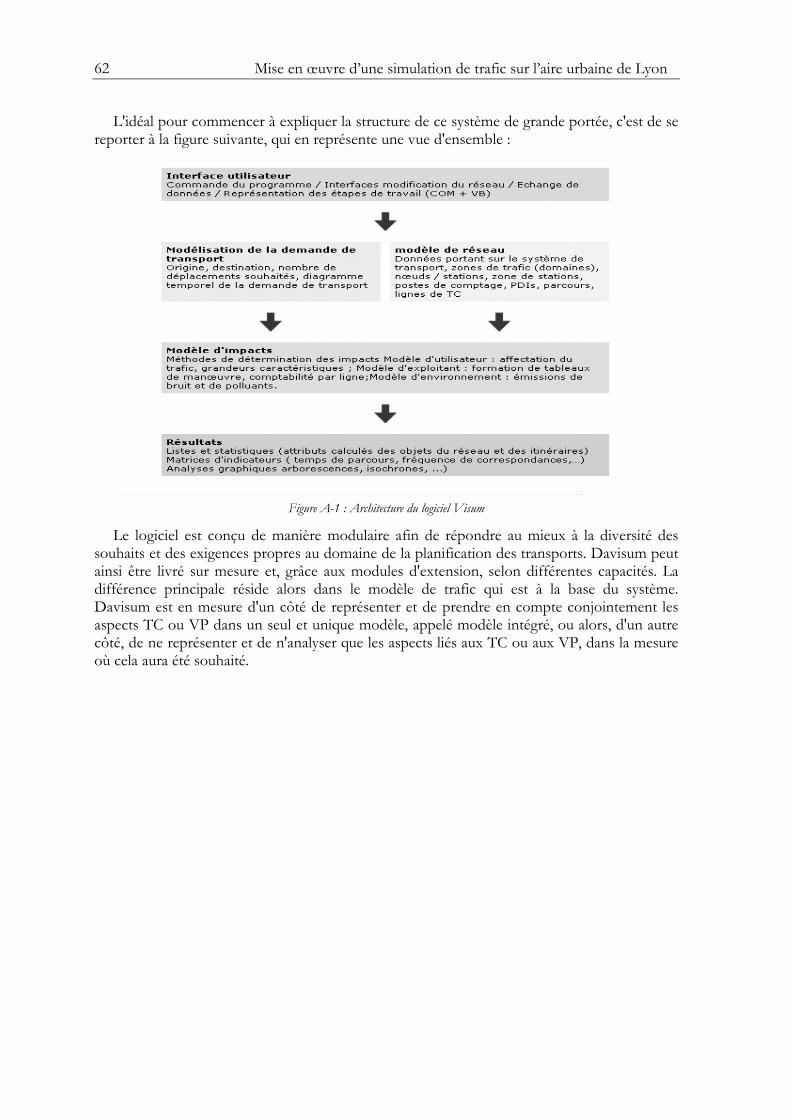
62 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
L'idéal pour commencer à expliquer la structure de ce système de grande portée, c'est de se reporter à la figure suivante, qui en représente une vue d'ensemble :
Figure A-1 : Architecture du logiciel Visum
Le logiciel est conçu de manière modulaire afin de répondre au mieux à la diversité des souhaits et des exigences propres au domaine de la planification des transports. Davisum peut ainsi être livré sur mesure et, grâce aux modules d'extension, selon différentes capacités. La différence principale réside alors dans le modèle de trafic qui est à la base du système. Davisum est en mesure d'un côté de représenter et de prendre en compte conjointement les aspects TC ou VP dans un seul et unique modèle, appelé modèle intégré, ou alors, d'un autre côté, de ne représenter et de n'analyser que les aspects liés aux TC ou aux VP, dans la mesure où cela aura été souhaité.
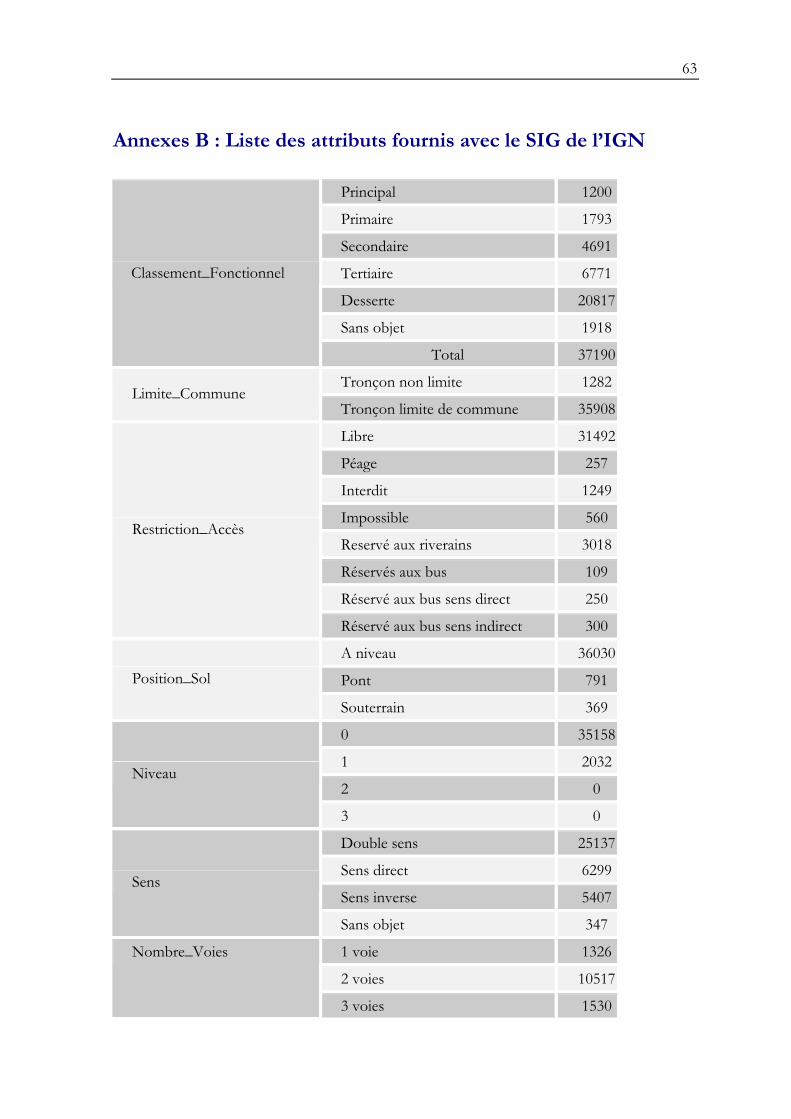
63
Annexes B : Liste des attributs fournis avec le SIG de l’IGN
Principal 1200
Primaire 1793
Secondaire 4691
Tertiaire 6771
Desserte 20817
Sans objet 1918
Classement_Fonctionnel
Total 37190
Tronçon non limite 1282 Limite_Commune
Tronçon limite de commune 35908
Libre 31492
Péage 257
Interdit 1249
Impossible 560
Reservé aux riverains 3018
Réservés aux bus 109
Réservé aux bus sens direct 250
Restriction_Accès
Réservé aux bus sens indirect 300
A niveau 36030
Pont 791 Position_Sol
Souterrain 369
0 35158
1 2032
2 0 Niveau
3 0
Double sens 25137
Sens direct 6299
Sens inverse 5407 Sens
Sans objet 347
1 voie 1326
2 voies 10517
Nombre_Voies
3 voies 1530
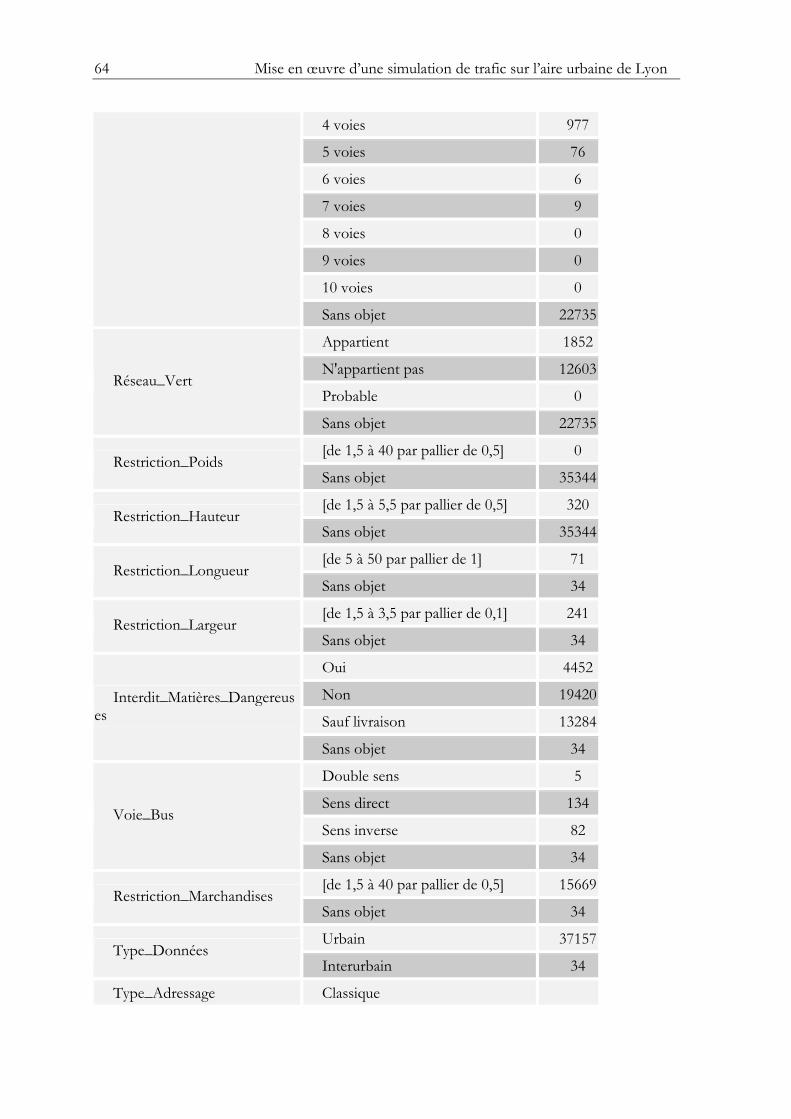
64 Mise en œuvre d’une simulation de trafic sur l’aire urbaine de Lyon
4 voies 977
5 voies 76
6 voies 6
7 voies 9
8 voies 0
9 voies 0
10 voies 0
Sans objet 22735
Appartient 1852
N'appartient pas 12603
Probable 0 Réseau_Vert
Sans objet 22735
[de 1,5 à 40 par pallier de 0,5] 0 Restriction_Poids
Sans objet 35344
[de 1,5 à 5,5 par pallier de 0,5] 320 Restriction_Hauteur
Sans objet 35344
[de 5 à 50 par pallier de 1] 71 Restriction_Longueur
Sans objet 34
[de 1,5 à 3,5 par pallier de 0,1] 241 Restriction_Largeur
Sans objet 34
Oui 4452
Non 19420
Sauf livraison 13284
Interdit_Matières_Dangereuses
Sans objet 34
Double sens 5
Sens direct 134
Sens inverse 82 Voie_Bus
Sans objet 34
[de 1,5 à 40 par pallier de 0,5] 15669 Restriction_Marchandises
Sans objet 34
Urbain 37157 Type_Données
Interurbain 34
Type_Adressage Classique

65
Métrique
Linéaire
Anarchique
Inconnu
Sans objet
Borne_Début_Droite
Borne_Fin_Gauche
Borne_Fin_Droite
Insee_Commune_Gauche
Insee_Commune_Droite
Date_Mise_Service
Périmètre du grand Lyon
Nom
Coordonnées (X, Y, X', et Y')
Id_Géoroute