memoire arab belkadi
TRANSCRIPT
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 1/84
République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
Université M’hamed BOUGARA, BoumerdèsFaculté des Sciences de l'Ingénieur
Ecole Doctorale en Energétique et Développement Durable
Mémoire présenté en vue de l'obtention du diplôme de Magister
OPTION
Systèmes Energétiques Avancés
Etude expérimentale du fractionnement des gouttesd’huile dans un mélangeur à advection chaotique.
Présenté par : Arab BELKADI.
Soutenu le : 21/06/2011.
Examinateurs :
Jacques COMITI Professeur Univ-Nantes / France Président
Mohand TAZEROUT Professeur EMNantes/ France Examinateur
Mourad BALISTROU Maître de Conférences UMBB/ Boumerdes Examinateur
Khaled LOUBAR Maître de Conférences EMNantes/ France Examinateur
Jérôme BELLETRE Professeur Polyteche NANTES/France Directeur de mémoi
Abdelkrim LIAZID Professeur Enset/Oran Co- Directeur
Année Universitaire 2010/2011
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 2/84
Table des matières
Liste des tableaux iii
Table des figures iv
Introduction Générale 1
PARTIE BIBLIOGRAPHIQUE 3
I L’advection chaotique 3I.1 Les exposants de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4I.2 Le mélangeur à advection chaotique . . . . . . . . . . . . . . . . . . . . . . . . . . . 4I.3 L’écoulement de Dean alterné . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
II Les émulsions 8II.1 Les émulsifiants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8II.2 Comportement hydrodynamique des émulsions . . . . . . . . . . . . . . . . . . . . . 10
II.2.1 La force visqueuse dans un champ de cisaillement simple . . . . . . . . . . . 10II.2.2 La force capillaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10II.2.3 Le nombre de weber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11II.2.4 Déformation des gouttes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
III Les techniques de visualisation 18III.1 La PIV (Particle Image Velocimetry) . . . . . . . . . . . . . . . . . . . . . . . . . . 18
III.1.1 La corrélation croisée en PIV (PIV - cross correlation) . . . . . . . . . . . . 19III.2 La LIF (Laser Induced Fluorescence) . . . . . . . . . . . . . . . . . . . . . . . . . . 21III.3 La Shadowgraphie (shadowgraphy) . . . . . . . . . . . . . . . . . . . . . . . . . . . 23III.4 La PTV (Particle Tracking Velocimetry) . . . . . . . . . . . . . . . . . . . . . . . . 24III.5 Comparaison des techniques de visualisation . . . . . . . . . . . . . . . . . . . . . . 25
PARTIE EXPERIMENTALE 26
i
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 3/84
IV Description de l’installation experimentale 26IV.1 Veine d’essai hydrodynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26IV.2 Le système d’acquisition PIV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
IV.2.1 Logiciel de traitement des images en PIV . . . . . . . . . . . . . . . . . . . . 28IV.3 Les particules d’ensemencement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29IV.4 Le dispositif de visualisation en forme de T . . . . . . . . . . . . . . . . . . . . . . . 29
IV.4.1 Dimensionnement optique du T . . . . . . . . . . . . . . . . . . . . . . . . . 30IV.4.2 Dimensionnement du T par simulation CFD (établissement de l’écoulement) 31
IV.5 Le système d’acquisition shadowgraphie . . . . . . . . . . . . . . . . . . . . . . . . . 35IV.5.1 Dispositif d’injection de l’huile . . . . . . . . . . . . . . . . . . . . . . . . . . 35
V Résultats expérimentaux 37V.1 Mesure du champ de vitesse secondaire . . . . . . . . . . . . . . . . . . . . . . . . . 37V.2 Champs de vorticité et de vitesse de déformation . . . . . . . . . . . . . . . . . . . 41V.3 Injection d’huile dans le mélangeur . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
V.3.1 Traitement des visualisations des gouttes par le logiciel MatLab . . . . . . . 47
Conclusion Générale 49
Bibliographie 51
Annexes i
ii
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 4/84
Liste des tableaux
III.1 Tableau comparatif des techniques de visualisations employées. . . . . . . . . . . . . 25
IV.1 Tableau récapitulatif du matériel utilisé. . . . . . . . . . . . . . . . . . . . . . . . . 28IV.2 Tableau récapitulatif du matériel utilisé. . . . . . . . . . . . . . . . . . . . . . . . . 36
V.1 Gamme de vitesses débitantes utilisées et le décalage temporel entre deux prisesd’images. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2 Tableau récapitulatif du calcul de θAir. . . . . . . . . . . . . . . . . . . . . . . . . . vii
iii
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 5/84
Table des figures
I.1 Illustration de la sensibilité aux conditions initiales [6] . . . . . . . . . . . . . . . . . 4
I.2 Mélangeur à advection chaotique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6I.3 Mélangeur à advection chaotique. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6I.4 Cellules de Dean contrarotatives dans un plan de coupe transversal au sein d’un
conduit courbe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
II.1 Schéma d’une micelle inverse (à gauche) et d’une goutte d’huile enveloppée par desmolécules d’émulsifiant formant ainsi une micelle en solution aqueuse (à droite) [17]. 9
II.2 Séquence de fractionnement de gouttes en écoulement cisaillant λ = µd/µc = 1, 02,dgoutte
dgouttemax= 1, 17, le temps t = t/τ γ comme indiqué. Images issues de l’expérience [23]. 13
II.3 Déformation des gouttes dans différents champ d’écoulement laminaires [14]. . . . . 14II.4 Evolution du nombre capillaire critique
Cacren fonction du paramètre d’écoulement
et du rapport de viscosité [14]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15II.5 Représentation d’un élément fluide soumis au tenseur gradient de vitess. . . . . . . 16
III.1 Principe de la vélocimétrie induite par Laser (PIV).[26] . . . . . . . . . . . . . . . . 19III.2 Schéma de principe de l’algorithme de la méthode récursive de corrélation croisée
[30]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20III.3 Dispersion huile/eau (O/W)[33]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23III.4 Dispersion eau/huile (W/O)[33]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23III.5 Principe de fonctionnement de la Shadowgraphie [35]. . . . . . . . . . . . . . . . . . 24
IV.1 Installation expérimentale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27IV.2 Distance de mise au point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29IV.3 Loi de réfraction de Snell-Descartes. . . . . . . . . . . . . . . . . . . . . . . . . . . . 30IV.4 Fenêtre de vision sur le T à la sortie du coude. . . . . . . . . . . . . . . . . . . . . . 30IV.5 Application de la loi de snell-descartes pour le cas du T. . . . . . . . . . . . . . . . 31IV.6 Distance dans l’eau en fonction de la distance caméra fenêtre de vision. . . . . . . . 31IV.7 Configuration sans T. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32IV.8 Configuration avec T. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32IV.9 Atténuation de la norme de la vitesse radiale. . . . . . . . . . . . . . . . . . . . . . 35
iv
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 6/84
IV.10Dispositif d’injection de l’huile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
V.1 Les coudes du mélangeur concernés par la mesure PIV-2D. . . . . . . . . . . . . . . 38V.2 Montages réalisés pour mesurer le champs de vitesse secondaire en sortie des diffé-
rents coudes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39V.3 Dn=141, Re=330 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
V.4 Dn=212, Re=500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40V.5 Dn=295, Re=691 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40V.6 Dn=354, Re=830 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40V.7 Dn=442, Re=1037 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40V.8 Dn=530, Re=1242 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40V.9 Influences de la force centrifuge et de la force générée par le gradient de pression. . . 41V.10 Premier coude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42V.11 Second coude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42V.12 Troisième coude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42V.13 Quatrième coude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42V.14 La vorticité à la sortie du premier coude avec application filtre Savitzky-Golay. . . 42V.15 La vitesse débitante sur la vitesse de déformation à la sortie du premier coude avec
filtre Savitzky-Golay. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42V.16 Résultats de la vorticité et de la vitesse de déformation en vue 3D après application
du filtre Savitzky-Golay. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43V.17 Comparaison de la vorticité axiale et la vitesse de déformation transversale. . . . . . 43V.18 Influence de la vitesse débitante sur la vorticité à la sortie du premier coude (avec
filtre Savitzky-Golay). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44V.19 Influence de la vitesse débitante sur la vitesse de déformation à la sortie du premier
coude (avec filtre Savitzky-Golay). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44V.20 Dispositif utilisé pour la technique de la shadowgraphie. . . . . . . . . . . . . . . . . 45
V.21 Injection de l’huile de tournesol pur. . . . . . . . . . . . . . . . . . . . . . . . . . . 46V.22 Injection de l’huile essentielle de Gaulthérie pur. . . . . . . . . . . . . . . . . . . . . 46V.23 Mélange d’huile. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46V.24 Effet du tensioactif sur l’injection d’huile. . . . . . . . . . . . . . . . . . . . . . . . . 47V.25 Goutte déformée verticalement (excentricité de 1,0994). . . . . . . . . . . . . . . . . 48V.26 Goutte déformée longitudinalement (excentricité de 1,144). . . . . . . . . . . . . . . 4827 Schéma d’une micelle inverse et d’une molécule d’émulsifiant le bis(2-ethylexyl sul-
fosuccinate) de sodium ou AOT [40]. . . . . . . . . . . . . . . . . . . . . . . . . . . i28 Molécule de l’émulsifiant bis(2-ethylexyl sulfosuccinate) de sodium ou AOT [17]. . . i29 λ = µd
µc= 0, 003. Apparition d’un angle évalué à 45 de l’axe principale de déforma-
tion par rapport au sens de l’écoulement.[21]. . . . . . . . . . . . . . . . . . . . . . . ii30 λ = µd
µc= 0, 9. Déformation parallèle au sens de l’écoulement.[21]. . . . . . . . . . . . ii
31 λ = µdµc
= 20. L’axe principal de déformation de la goutte au début forme un anglede 45 . Celui-ci tend à être parallèle à l’axe d’écoulement à force que la force decisaillement augmente.[21]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
32 Les trois modes de densité de l’image de particules : (a) faible (PTV), (b) moyenne(PIV), et (c) la densité d’image élevée (LSV) [27]. . . . . . . . . . . . . . . . . . . . v
33 Angles de vision de la caméra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii34 Distance de mise au point : 30cm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii35 Distance de mise au point :13,5cm. . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
v
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 7/84
36 Atténuation de la norme de la vitesse radiale le long de la section droite (cas de lagéométrie sans T). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
37 Atténuation de la norme de la vitesse radiale le long de la section droite (cas de lagéométrie L=20cm, avec T). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
38 Atténuation de la norme de la vitesse radiale le long de la section droite (cas de lagéométrie L=10cm, avec T). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
39 Element coudé composant le mélangeur . . . . . . . . . . . . . . . . . . . . . . . . . x40 Longueur montée entre deux coudes du mélangeur. . . . . . . . . . . . . . . . . . . x41 Représentation de succession de deux coudes intercalés d’une longueur droite. . . . . xi42 Représentation du dispositif de visualisation en forme de T. . . . . . . . . . . . . . xi43 Ensemble : 1 - Divergent, 2 - Chambre de tranquilisation "nid d’abeilles" et 3 -
Cnvergent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi44 Dn=141, Re=330 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii45 Dn=212, Re=500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii46 Dn=295, Re=691 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii47 Dn=354, Re=830 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
48 Dn=442, Re=1037 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii49 Dn=530, Re=1242 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii50 Dn=141, Re=330 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv51 Dn=212, Re=500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv52 Dn=295, Re=691 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv53 Dn=354, Re=830 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv54 Dn=442, Re=1037 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv55 Dn=530, Re=1242 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv56 Dn=141, Re=330 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv57 Dn=212, Re=500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv58 Dn=295, Re=691 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
59 Dn=354, Re=830 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv60 Dn=442, Re=1037 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv61 Dn=530, Re=1242) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
vi

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 8/84
Nomenclature
Symbole Unités Définition
/ Erreur sur la condition initiale
λ / Rapport des viscosités de la phase dispersée sur la phase continue
λL / Exposant de Lyapunov
λt [W.m−1.K −1] Conductivité thermique
Dn / Nombre de Dean
Dh [m] Diametre hydraulique
Rac / Rapport de courbure
Re / Nombre de Reynolds
Rc [m] Rayon de courbure
a [m] Côté de la section de passage du mélangeur
µ [kg.m−1.s−1] Viscosité dynamique
µc [kg.m−1.s−1] Viscosité dynamique de la phase continue
µd [kg.m−1.s−1] Viscosité dynamique de la phase dispersée
Cp [J.kg−1.K −1] la capacité thermique massique
P r / Nombre de Prandtlα [m2.s−1] Diffusivité thermique
ν [m2.s−1] Viscosité cinématique
ρ [kg.m−3] Masse volumique
u [m.s−1] composante suivant l’axe X de la vitesse V
v [m.s−1] composante suivant l’axe Y de la vitesse V
w [m.s−1] composante suivant l’axe Z de la vitesse V
σ [J.m−2] Tension superficielle
C e / Concentration de l’émulsifiant
R [J.mol−1
.K −1
] Constante universelle des gaz parfaitsτ [P a] Contrainte de viscosité
[m] Taux de déformation dans un champ d’écoulement laminaire
γ [s−1] Taux de cisaillement
viii
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 9/84
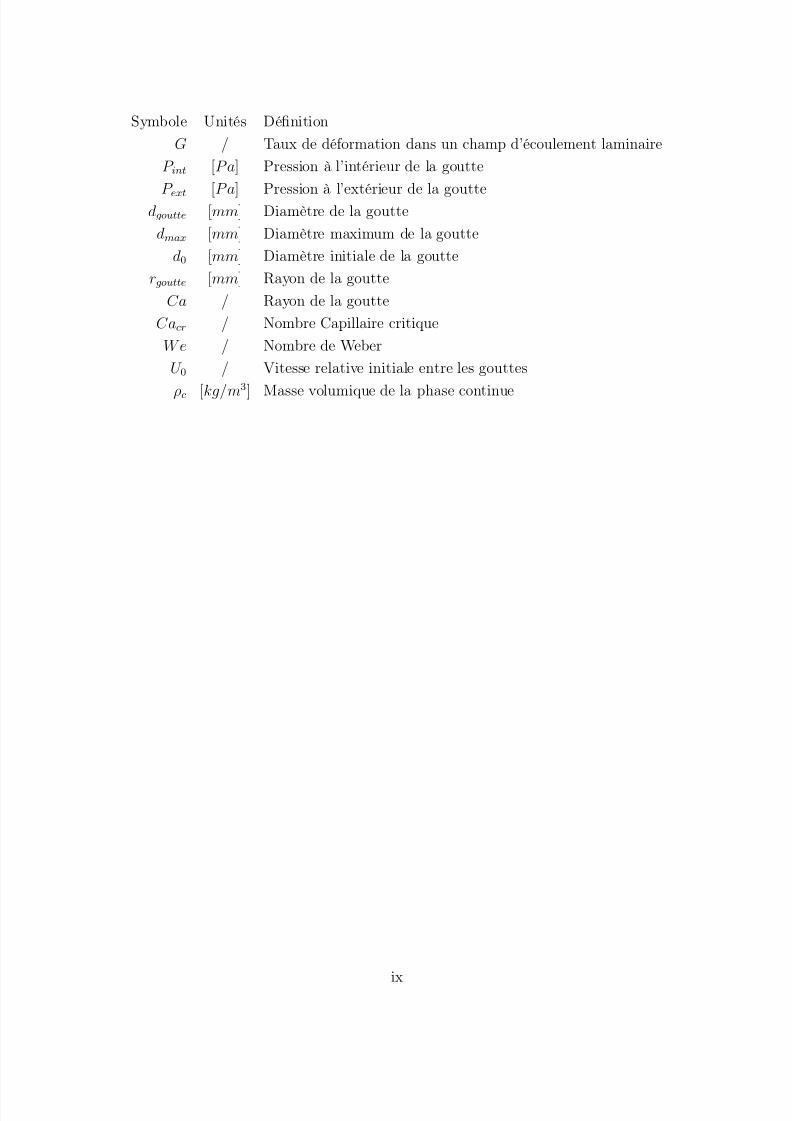
Symbole Unités Définition
G / Taux de déformation dans un champ d’écoulement laminaire
P int [P a] Pression à l’intérieur de la goutte
P ext [P a] Pression à l’extérieur de la gouttedgoutte [mm] Diamètre de la goutte
dmax [mm] Diamètre maximum de la goutte
d0 [mm] Diamètre initiale de la goutte
rgoutte [mm] Rayon de la goutte
Ca / Rayon de la goutte
Cacr / Nombre Capillaire critique
W e / Nombre de Weber
U 0 / Vitesse relative initiale entre les gouttes
ρc [kg/m3] Masse volumique de la phase continue
ix
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 10/84
Remerciements
Il m’est très agréable de réserver cette page comme modeste témoin de reconnaissance àtoutes les personnes qui m’ont soutenu et encadré dans la réalisation de ce travail.
Je tiens à témoigner toute ma gratitude à mes encadrants Cathy CASTELAIN, DominiqueTARLET et Jérôme BELLETTRE qui m’ont offert la chance et la confiance d’effectuer ce stageau sein du Laboratoire de Thermocinétique de l’Ecole Polytechnique de l’Université de Nantes.Durant les neuf mois de ce stage, ils ont su orienter mes recherches aux bons moments en mefaisant découvrir le mélange par advection chaotique.
Je remercie de très vive voix le Professeur Mohand TAZEROUT, sans lequel tout cela nese serait pas concrétisé. D’une rive à l’autre de la méditerranée, il a consacré dix années de sa viepour monter ce formidable et noble projet d’Ecole Doctorale Franco-Algérienne (EDEDD).
Dans la foulée, je remercie également très chaleureusement tout le personnel du Laboratoirede Thermocinétique de Nantes et la formidable équipe de techniciens dont jouit ce laboratoire, enparticulier Gwenaël BIOTTEAU, Jérôme DELMAS, Nicolas LEFEVRE et Christophe LE BOZEC.
x

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 11/84
" I like to see the emergence of interest in chaotic advection as pa
of a broader interest in what we may call the ’Lagrangian view’ of
fluid mechanics." Hassan AREF, 1994.
Traduction :
J’aime voir l’émergence de l’intérêt envers l’advection chaotique da
le cadre d’un plus large domaine d’étude qu’on pourrait appeler ’la
Lagrangienne’ de la mécanique des fluides.
xi
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 12/84
Introduction Générale
Un système dynamique est un système mécanique classique dont l’évolution est dépen-dante du temps. Cette évolution est décrite à la fois dépendante des phénomènes passés et futurs
(causale), mais encore à chaque état final du système correspond un seul et unique état initial (dé-terministe). Un système dynamique est dit chaotique, si la solution obtenue présente une grandesensibilité à une petite variation des conditions initiales (J.M. OTINNO et al. [1]). Une erreur0 > 0 sur la condition initiale va évoluer exponentiellement et l’erreur, à un instant t, aura l’ex-pression suivante : |(t)| = 0eλLt. C’est le problème majeur des systèmes chaotiques, empêchanttoute prédiction sur l’évolution du système au delà d’un certains temps. Ces systèmes chaotiquesdécrivent la majorité des phénomènes physiques comparés aux systèmes dynamiques intégrables,possédant des solutions stationnaires, périodiques ou quasi-périodiques. Grace au développementmathématique dans l’étude des systèmes dynamiques, des solutions pratiques ont pu êtres appor-tées. C’est ainsi que en utilisant les propriétés des systèmes dynamiques H.AREF (1984) a conçu
un modèle idéalisé de mélangeur.
Mélanger revêt une importance capitale dans beaucoup de processus de fabrication indus-triels, pour ce faire, il est souvent fait appel aux mélangeurs mécaniques classiques. Ces derniers,opèrent dans la majorité des cas une agitation turbulente. Dans certaines applications telles quemélanger certaines molécules réputées fragiles car altérables, comme en pharmaceutique, l’agita-tion turbulente reste impossible. Depuis le mélangeur idéalisé pensé par H.AREF, une version dece mélangeur a pu être conçue au LTN. Ce dernier formé d’une succession de coudes à 90˚et chaquecoude le composant est porté par un plan de courbure formant un angle de 90 par rapport auplan suivant. Ce mélangeur fonctionne selon le principe de l’advection chaotique qui est un étatparticulier du régime laminaire. L’advection chaotique offre des aptitudes au mélange toutes aussi
comparables au mélange turbulent.
L’écoulement d’un fluide dans un conduit courbe (coude) et en régime laminaire, donnenaissance à des tourbillons. Ces tourbillons se présentent sous la forme de structures longitudi-nales apparaissant sous l’effet de la force centrifuge portent le nom de " cellules de Dean (1927)".Ces cellules de Dean jouent le rôle d’agitateurs internes, conduisant à l’apparition de trajectoiresspatialement chaotiques (transport en mode d’advection chaotique). Par l’introduction de pertur-bations géométriques telle que l’alternance des plans de courbures comme pour le mélangeur citéci-dessus l’écoulement sera appelé écoulement de Dean alterné.
1
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 13/84
2
Le potentiel de cet écoulement secondaire a été largement étudié de par le monde maiségalement au sein du Laboratoire de Thermocinétique de Nantes (LTN). L’advection chaotique aété largement explorée au laboratoire LTN, en étudiant ses effets sur les transferts thermiques (A.MOKRANI et al. 1997), ou encore une caractérisation qualitative des effets d’étirements replie-ments engendré par un écoulement d’advection chaotique menée par C. CASTELAIN et al. [3].
Une étude de dispersion de gouttes d’eau dans un écoulement principale d’huile a été aussi menéepar C. HABCHI et al. (2009). Enfin, la dernière étude en date est une mesure quantitative parPIV du champ d’écoulement transversal engendré d’un écoulement pulsé dans un conduit courbede section circulaire par M. JARRAHI et al 2010.
La présente étude s’est intéressée à étudier le pouvoir d’émulsification de l’écoulement deDean alterné. Pour ce faire, le mélangeur à advection chaotique a été choisi comme un moyen origi-nal et énergétiquement révolutionnaire pour une dispersion huile/eau. Le mélangeur concerné parcette étude possède les dimensions suivantes : Ri = 200mm , Re = 240mm, section d’écoulement40mm×40mm. Il a été conçu et construit au sein du LTN (Yves LEGUER 1993) et ces dimensions
ont été choisies afin de faciliter son instrumentation. Le travail réalisé est une mesure "in situ" etbidimensionnelle du champ de vitesse secondaire par la PIV. Ce champ de vitesse secondaire seraconfronté aux visualisations d’une autre technique qui est la shadowgraphie afin de caractériser lepouvoir fractionneur de cet écoulement sur des gouttes d’huile.
2
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 14/84
Partie Bibliographique
La présente partie " étude bibliographique " est formée à partir de trois chapitres dis-
tincts. Ces derniers traitent de trois domaines de compétences différents. Ces domaines sont misà contribution afin de donner une définition du sujet, situer le problème et aussi mettre en revueles connaissances nécessaires pour la poursuite de la seconde partie expérimentale du présent thème.
Le premier chapitre s’attèle à rappeler les fondamentaux d’un écoulement d’advection chao-tique, caractéristique de l’emploi d’un mélangeur statique à advection chaotique.
Le second chapitre fait état des conditions nécessaires à l’obtention d’une émulsion de deuxliquides immiscibles (une phase dispersée dans une phase continue). Il figure un bilan des forcesqui agissent et interagissent, modelant ainsi la forme et gouvernant le fractionnement des gouttesde la phase dispersée.
Le dernier chapitre donne les principes de fonctionnement des méthodes de visualisationutilisées lors de expérimentations, à savoir la La Vélocimétrie par Image de Particules (PIV), laFluorescence Induite par Laser (LIF), la Shadowgraphie et la Méthode Lagrangienne de suivi desparticules (PTV : Particle Tracking Velocimetry).

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 15/84
IL’advection chaotique
La première fois où cette expression fut utilisée revient à Hassan AREF, qui présente unarticle dans le programme " Geophysical fluid Dynamics " le 27 juillet 1982 sous le titre " Anidealized model of stirring ". Dans cet article figure une expression fondamentalement importante
" un nouveau régime d’advection, intermédiaire entre le régime turbulent et le régime laminaire,on peut le nommer advection chaotique " [6].
L’idée de base est assez simple. Si une particule, solide ou fluide (dispersion liquide/liquide),subit une poussée d’Archimède et a une inertie si faible qu’elle suit le fluide dans lequel elle setrouve intégrée, partout et pour tous les temps (un compromis doit être trouvé entre la flottabilitéet l’inertie de la particule ou de la goutte), Les équations du mouvement seront simplement leséquations d’advection chaotique. Dans notre cas d’étude il sera question de traiter d’un écoule-ment tridimentionnel stationnaire, selon l’approche Lagrangiènne, les équations seront de la formesuivante :
dxdt
= u(x,y,z)dydt
= v(x,y,z)dzdt
= w(x,y,z)(I.1)
Où u,v et w sont les composantes du champ vitesse du fluide V(u,v,w). Ce dernier est obtenupar la résolution d’équations différentielles partielles telles que les équations d’Euler ou celles deNavier-Stokes. Le système dynamique (V.1) (Equations Différentielles Ordinaires) représente aussiles trajectoires des particules transportées. Du point de vue de la théorie des systèmes dynamiques,l’apparition d’une solution chaotique pour un format simple du problème posé par ce système (V.1)n’est guère étonnant, cela peut conduire à des solutions complexes. [7].
Dans la plupart des analyses, l’écoulement laminaire est restreint d’avantage à être à la foisbidimensionnel (ou axisymétrique) et permanent. Cet écoulement est alors décrit par un systèmedynamique Hamiltonien invariant donc à un degré de liberté. Cela rend le problème d’advectionintégrable car les trajectoires et les lignes de courant coïncident. H. AREF ajoute que des écoule-ments laminaires d’advection en 3D peuvent en principe êtres chaotiques, même pour un régimed’écoulement permanent[8]. Ceci est tout à fait réalisable avec simplement l’introduction d’uneperturbation géométrique dans l’écoulement (coude dans une conduite) comme nous le veront unpeut plus loin.
3
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 16/84
I.1. LES EXPOSANTS DE LYAPUNOV 4
I.1 Les exposants de Lyapunov
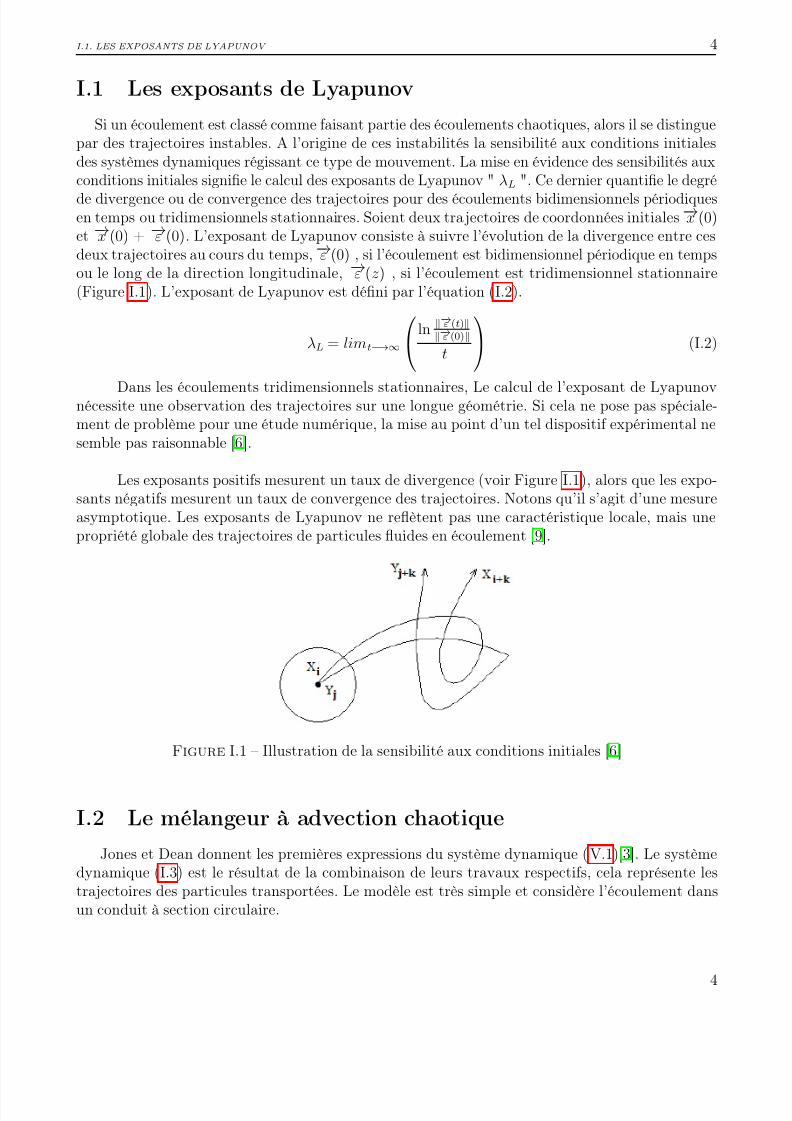
Si un écoulement est classé comme faisant partie des écoulements chaotiques, alors il se distinguepar des trajectoires instables. A l’origine de ces instabilités la sensibilité aux conditions initialesdes systèmes dynamiques régissant ce type de mouvement. La mise en évidence des sensibilités auxconditions initiales signifie le calcul des exposants de Lyapunov " λL ". Ce dernier quantifie le degré
de divergence ou de convergence des trajectoires pour des écoulements bidimensionnels périodiquesen temps ou tridimensionnels stationnaires. Soient deux trajectoires de coordonnées initiales −→x (0)et −→x (0) + −→ε (0). L’exposant de Lyapunov consiste à suivre l’évolution de la divergence entre cesdeux trajectoires au cours du temps,−→ε (0) , si l’écoulement est bidimensionnel périodique en tempsou le long de la direction longitudinale, −→ε (z) , si l’écoulement est tridimensionnel stationnaire(Figure I.1). L’exposant de Lyapunov est défini par l’équation (I.2).
λL = limt−→∞
ln −→ε (t)
−→ε (0)
t
(I.2)
Dans les écoulements tridimensionnels stationnaires, Le calcul de l’exposant de Lyapunovnécessite une observation des trajectoires sur une longue géométrie. Si cela ne pose pas spéciale-ment de problème pour une étude numérique, la mise au point d’un tel dispositif expérimental nesemble pas raisonnable [6].
Les exposants positifs mesurent un taux de divergence (voir Figure I.1), alors que les expo-sants négatifs mesurent un taux de convergence des trajectoires. Notons qu’il s’agit d’une mesureasymptotique. Les exposants de Lyapunov ne reflètent pas une caractéristique locale, mais unepropriété globale des trajectoires de particules fluides en écoulement [9].
Figure I.1 – Illustration de la sensibilité aux conditions initiales [6]
I.2 Le mélangeur à advection chaotique
Jones et Dean donnent les premières expressions du système dynamique (V.1)[3]. Le systèmedynamique (I.3) est le résultat de la combinaison de leurs travaux respectifs, cela représente lestrajectoires des particules transportées. Le modèle est très simple et considère l’écoulement dansun conduit à section circulaire.
4

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 17/84
I.2. LE MÉLANGEUR À ADVECTION CHAOTIQUE 5
u = dxdt
= Dn288(1− x2 − y2)(4− 5x2 − 23y2 + 8x2y2 + x4 + 7y4)
v = dydt
= Dn2
48xy(1− x2 − y2)(3− x2 − y2)
w = dzdt
= Rc∂θ∂t
= Dn2
Re(1− x2 − y2)
(I.3)
Après avoir opéré une division de chacune des trois équations composant le système (I.3)
sur la troisième équation (c), on obtient une cartographie des particules liquides dans un plan decoupe transversal (section transversale du conduit).
dxdθ
= Re288(4− 5x2 − 23y2 + 8x2y2 + x4 + 7y4)
dydθ
= Re48
xy(3− x2 − y2)(I.4)
Ces expressions restent très élémentaires pour modéliser l’écoulement au sein d’un conduitde section carré, d’ailleurs considéré complexe. Le mélangeur présent au niveau du laboratoire dethermocinétique de Nantes (LTN) qui servira de banc d’essai est aussi à section carré (voir laFigure I.3).
D’après Hassen AREF, la principale raison pour laquelle l’écoulement d’advection chaotique
est si important, c’est que les trajectoires chaotiques des particules transportées (solides ou li-quides) sont, en général, le signal d’un mélange amélioré entre les deux substances réunies. Eneffet, depuis que l’objectif recherché est un mélange efficace dans les applications, l’obtention dece type d’écoulement est généralement considérée comme un résultat positif [7].
Ce type d’écoulement, appelé aussi chaos Lagrangien, trouve maintenant une infinité d’ap-plications industrielles. D’après [10], l’industrie est toujours à la recherche de moyens permettantd’augmenter les transferts de matière et de chaleur dans les appareils. Pour des fluides ayant unnombre de Prandtl élevé1 , une forte agitation, afin d’obtenir un mélange homogène, est très cou-teuse et parfois impossible à réaliser. Dans certaines applications, une agitation vigoureuse risque
de casser les chaines moléculaires de certains polymères, c’est pourquoi on cherche à obtenir cetécoulement chaotique.
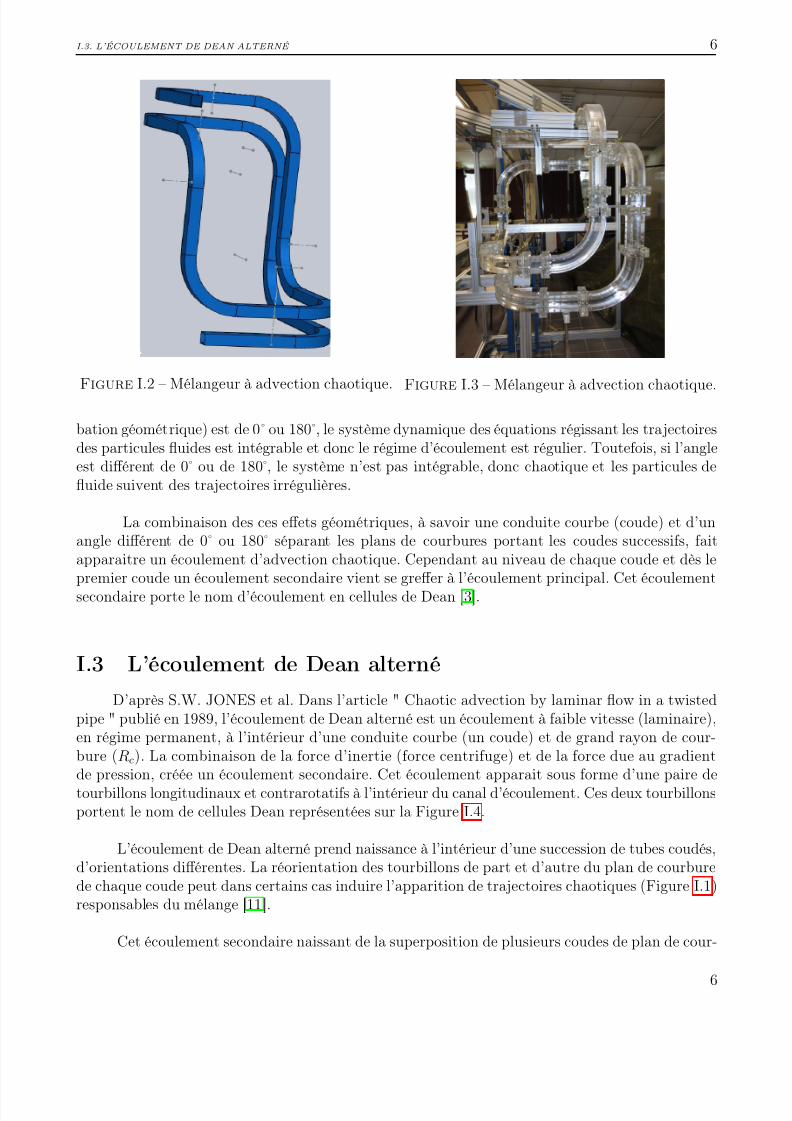
Dans notre cas, une application à la fois originale et énergétiquement intéressante de cemélange chaotique peut être envisagée. Cet écoulement sera généré afin de produire un carburantalternatif (biocarburant) émulsionné. La technique consiste à disperser des gouttes d’eau dans unécoulement continue de graisses animales. Le mélangeur statique à advection chaotique a été choisipour produire une dispersion eau/huile (W/O), ainsi il jouera le rôle d’un système de carbura-tion pour une chaudière " écologique ". L’avantage d’un tel système, grâce à son fonctionnementen régime laminaire (faible débit), est la production et la consommation instantanée de l’émul-sion produite (carburant). Cela peut s’avérer tout à fait intéressant connaissant les problèmes
d’instabilités naissant d’un long stockage des émulsions (séparation des deux liquides immisciblesémulsionnés, voir le chapitre 2 : les émulsions). Ajouté à ça, le présent mélangeur permettra deproduire une émulsion plus fine et plus homogène avec une dépense d’énergie quasiment nulle.Autrement dit, la circulation des fluides dans le canal du mélangeur est obtenue grâce à la forcegravitationnelle(Figure I.2).
D’après C.CASTELAIN et al. [3], expérimentalement l’advection chaotique est générée parl’introduction d’un angle entre les plans de courbure de deux coudes successifs. Si cet angle (pertur-
1Pr = µCpλt
= να
Un Prandtl élevé indique que le champ de température sera très influencé par les effets detransport de la vitesse.
5
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 18/84
I.3. L’ÉCOULEMENT DE DEAN ALTERNÉ 6
Figure
I.2 – Mélangeur à advection chaotique.Figure
I.3 – Mélangeur à advection chaotique.
bation géométrique) est de 0 ou 180 , le système dynamique des équations régissant les trajectoiresdes particules fluides est intégrable et donc le régime d’écoulement est régulier. Toutefois, si l’angleest différent de 0 ou de 180 , le système n’est pas intégrable, donc chaotique et les particules defluide suivent des trajectoires irrégulières.
La combinaison des ces effets géométriques, à savoir une conduite courbe (coude) et d’unangle différent de 0 ou 180 séparant les plans de courbures portant les coudes successifs, faitapparaitre un écoulement d’advection chaotique. Cependant au niveau de chaque coude et dès lepremier coude un écoulement secondaire vient se greffer à l’écoulement principal. Cet écoulementsecondaire porte le nom d’écoulement en cellules de Dean [3].
I.3 L’écoulement de Dean alterné
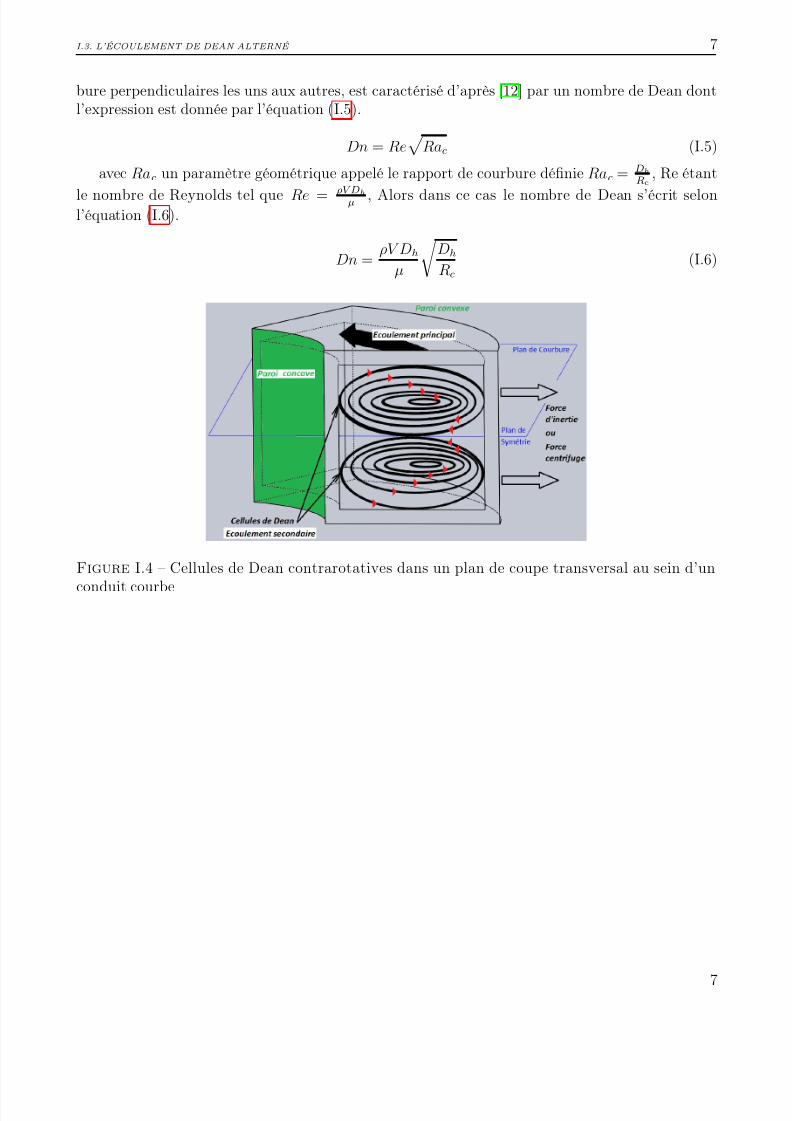
D’après S.W. JONES et al. Dans l’article " Chaotic advection by laminar flow in a twistedpipe " publié en 1989, l’écoulement de Dean alterné est un écoulement à faible vitesse (laminaire),en régime permanent, à l’intérieur d’une conduite courbe (un coude) et de grand rayon de cour-bure (Rc). La combinaison de la force d’inertie (force centrifuge) et de la force due au gradientde pression, créée un écoulement secondaire. Cet écoulement apparait sous forme d’une paire detourbillons longitudinaux et contrarotatifs à l’intérieur du canal d’écoulement. Ces deux tourbillonsportent le nom de cellules Dean représentées sur la Figure I.4.
L’écoulement de Dean alterné prend naissance à l’intérieur d’une succession de tubes coudés,d’orientations différentes. La réorientation des tourbillons de part et d’autre du plan de courburede chaque coude peut dans certains cas induire l’apparition de trajectoires chaotiques (Figure I.1)responsables du mélange [11].
Cet écoulement secondaire naissant de la superposition de plusieurs coudes de plan de cour-
6
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 19/84
I.3. L’ÉCOULEMENT DE DEAN ALTERNÉ 7
bure perpendiculaires les uns aux autres, est caractérisé d’après [12] par un nombre de Dean dontl’expression est donnée par l’équation (I.5).
Dn = Re
Rac (I.5)
avec Rac un paramètre géométrique appelé le rapport de courbure définie Rac = Dh
Rc, Re étant
le nombre de Reynolds tel que Re =ρV D
hµ , Alors dans ce cas le nombre de Dean s’écrit selonl’équation (I.6).
Dn =ρV Dh
µ
Dh
Rc
(I.6)
Figure I.4 – Cellules de Dean contrarotatives dans un plan de coupe transversal au sein d’un
conduit courbe
7
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 20/84
IILes émulsions
Pascal BROCHETTE écrit qu’il existe de nombreuses situations où deux liquides non mis-cibles doivent être compatibilisés (mélange liquide-liquide), de manière que leur mélange puisseêtre utilisé sans démixtion. L’une des techniques les plus répandue consiste à émulsifier une phase
dans l’autre en utilisant une agitation mécanique, d’une part, et un composé émulsifiant, d’autrepart. La formulation obtenue, qui est appelée émulsion, peut le plus souvent être décrite commeune dispersion de gouttelettes de l’une des phases dans l’autre. On distingue donc une phase dis-persée et une phase continue. On parlera d’émulsion eau dans huile W/O si la phase continue estune phase grasse, et d’émulsion huile dans eau O/W si la phase continue est composée de molé-cules électriquement polaires (par exemple l’eau comme c’est le cas dans notre projet d’études)[13].
E.J.Windhab et al distinguent trois types d’émulsions réparties suivant le diamètre desgouttes de la phase dispersée, à savoir : microémulsion (10-100 nm), mini-émulsion (de 100 à 1000nm) et macro-émulsions (0,5 à 100 µm). Les deux dernières sont thermodynamiquement instables,ce qui conduit à la coalescence des gouttes et la séparation de phases [14].
II.1 Les émulsifiants
Une fois obtenue, une émulsion connais une période de stabilité sans émulsifiant mais, pourune durée de temps assez courte. Le rôle de l’émulsifiant étant de prolonger cette stabilité dans letemps par exemple pour un éventuel stockage à long terme.
D.J. McClements décrit l’émulsifiant comme étant toute substance tensioactive ou surfactivequi est capable d’être absorbée à l’interface liquide-liquide (Eau/huile) et protégeant les goutte-lettes de l’émulsion de l’agrégation (floculation et/ou coalescence).
Idéalement l’émulsifiant devrait être absorbé rapidement à l’interface au cours de l’homogé-néisation, réduire la tension inter-faciale et empêcher la coalescence des gouttelettes de se produireau cours de l’homogénéisation. En outre, il est souvent important que l’émulsifiant forme unemembrane qui empêche l’agrégation inter-faciale des gouttelettes (floculation et / ou coalescence)dans les conditions environnementales en cours de fabrication des émulsions, leur transport, leurstockage et leur utilisation [15].
8
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 21/84
II.1. LES ÉMULSIFIANTS 9
Chantal LARPENT [16] indique que le terme anglais de ces substances est SURFACTANT,lequel est une abréviation de SURFace ACTive AgeNTS (agent de surface actif). Ces moléculestensioactives comportent deux parties de polarités différentes : - Une partie apolaire, hydrophobe,lipophile, présentant une affinité pour les huiles (soluble dans l’huile). - Une partie polaire, hydro-phile, présentant une affinité pour l’eau (soluble dans l’eau).
Les deux propriétés essentielles des composés tensioactifs qui permettent de comprendre lesphénomènes observés et qui déterminent leurs domaines d’application sont :
• l’adsorption aux interfaces qui provoque une diminution des tensions inter-faciales. Cettepropriété est en partie responsable du phénomène de fractionnement des gouttes (dispersion) ;
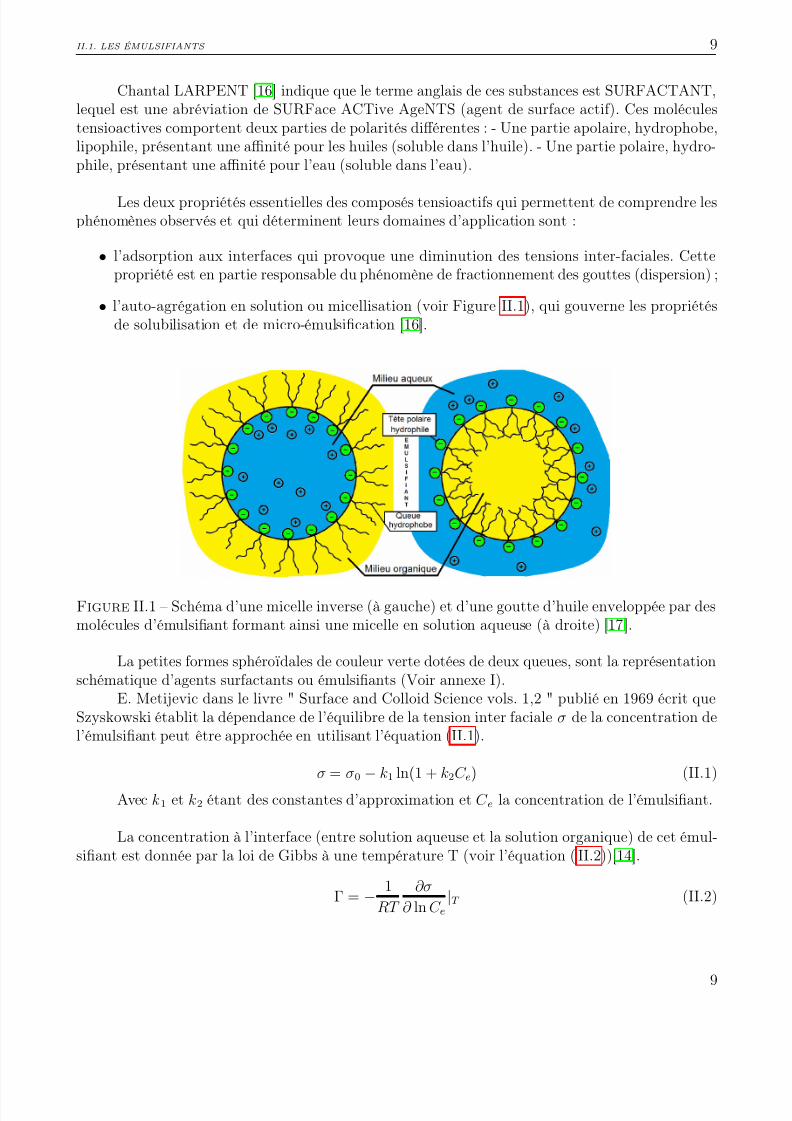
• l’auto-agrégation en solution ou micellisation (voir Figure II.1), qui gouverne les propriétésde solubilisation et de micro-émulsification [16].
Figure II.1 – Schéma d’une micelle inverse (à gauche) et d’une goutte d’huile enveloppée par desmolécules d’émulsifiant formant ainsi une micelle en solution aqueuse (à droite) [17].
La petites formes sphéroïdales de couleur verte dotées de deux queues, sont la représentationschématique d’agents surfactants ou émulsifiants (Voir annexe I).
E. Metijevic dans le livre " Surface and Colloid Science vols. 1,2 " publié en 1969 écrit queSzyskowski établit la dépendance de l’équilibre de la tension inter faciale σ de la concentration del’émulsifiant peut être approchée en utilisant l’équation (II.1).
σ = σ0 − k1 ln(1 + k2C e) (II.1)
Avec k1 et k2 étant des constantes d’approximation et C e la concentration de l’émulsifiant.
La concentration à l’interface (entre solution aqueuse et la solution organique) de cet émul-sifiant est donnée par la loi de Gibbs à une température T (voir l’équation ( II.2))[14].
Γ = −1
RT
∂σ
∂ ln C e|T (II.2)
9

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 22/84
II.2. COMPORTEMENT HYDRODYNAMIQUE DES ÉMULSIONS 10
II.2 Comportement hydrodynamique des émulsions
La déformation des gouttes en écoulement précède leur rupture. Par conséquent, il est d’abordnécessaire de suivre la manière dont la déformation des gouttes de liquide se produit dans unécoulement. Dans le cas de la présente étude expérimentale du fractionnement de gouttes d’huile,il ne sera généré que des écoulements laminaires dans le mélangeur statique (voir la Figure I.3).
Les nombres de Reynolds globaux sont compris entre 200 et 1500.
En écoulement laminaire, D’après [4] Taylor publie que le fractionnement d’une goutte, estbasé sur un équilibre des forces qui agissent sur une seule goutte d’un liquide non miscible dansun écoulement liquide continu (dispersion liquide/liquide). Ces forces au nombre de trois sont : lesdeux forces visqueuses τ externe et interne et les forces de capillarité σ.
II.2.1 La force visqueuse dans un champ de cisaillement simple
Dans le cas d’une dispersion d’un fluide newtonien incompressible de viscosité µd dans un autrefluide newtonien incompressible de viscosité µc en écoulement de cisaillement, la contrainte dedéformation visqueuse s’exprime comme suit :
τ = µcγ (II.3)
Avec τ étant la contrainte de viscosité en [Pa], µc La viscosité dynamique de la phase conti-nue en [ kg
m.s] et γ la vitesse de cisaillement ou taux de cisaillement en [s−1].
N.B : la force visqueuse interne résiste à la déformation induite par la force visqueuseexterne.
II.2.2 La force capillaire
La force capillaire, la tension superficielle ou encore appelée la force inter-faciale est responsablede la forme sphérique d’une goute d’huile en lutant contre les contraintes de déformations, parexemple la contrainte visqueuse, qui règne au sein de l’écoulement dans lequel elle évolue. La forceCapillaire σ est donnée par la relation de Laplace :
(P int − P ext) =4σ
dgoutte
(II.4)
Avec σ la tension inter-faciale ou superficielle en [J/m2], P int la pression à l’intérieur de la
goutte en [Pa], P ext la pression à l’extérieur de la goutte dans en [Pa].
Taylor dans son article " The Viscosity of a Fluid Containing Small Drops of Another Fluid"de 1932 indique, que pour que les gouttes dispersées puissent être presque sphériques, la différencede pression (P int-P ext) due aux forces visqueuses doit être petite comparée à celle engendrée par latension superficielle [18].
Dans une dispersion de liquides non miscibles, la taille des gouttes atteignable est souventdéduite de la valeur critique du nombre capillaire. Ce dernier, représente le rapport des forces
10

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 23/84
II.2. COMPORTEMENT HYDRODYNAMIQUE DES ÉMULSIONS 11
d’inertie (forces centrifuges) sur les forces capillaires (forces inter-faciales ou tensions superficielles)tel que dans le cas d’un champ de cisaillement pur celui-ci s’écrit :
Ca =Forcesdinertie
Forcescapillaires=
τ
σ/rgoutte
=rgoutteτ
σ=
dgoutteτ
2σ(II.5)
Pour un régime d’écoulement laminaire, la contrainte de déformation visqueuse τ agissantsur la surface des gouttes de l’émulsion est générée proportionnellement au taux de cisaillement γ et au taux d’allongement et de la viscosité associée de la phase fluide continue µc [14]. Dans cecas le nombre capillaire s’écrit :
Ca =Forcesdinertie
Forcescapillaires=
τ
σ/rgoutte
=dgoutteτ
2σ=
dgoutteµcG
2σ(II.6)
Avec G le taux de déformation dans un champs d’écoulement laminaire tel que : G = |γ |+|ε|, γ étant le taux de cisaillement [s−1] et ε le taux d’allongement [m] , dgoutte diamètre de la gouttedu fluide dispersé [m].
Ainsi on peut donner la valeur du diamètre maximum pouvant résister à une contrainte decisaillement τ :
dmax =2σ
τ Cacr (II.7)
Le nombre Capillaire critique Cacr pour le fractionnement des gouttes est donné par H.P.GRACE dans " Dispersion phenomena in high viscosity immiscible fluid systems and application of static mixers as dispersion devices in such systems" en 1982 [18] pour un écoulement en cisaillementsimple et un écoulement en élongation :
Cacr = (1−
εmax
γ max )Cacr,cisaillement + (
εmax
γ max )Cacr,elongation (II.8)
II.2.3 Le nombre de weber
Ajouté au nombre capillaire, un autre nombre est considéré pour expliquer la déformation degouttes et leur fractionnement. Il est bien connu des investigations expérimentales, c’est le nombreadimensionnel de Weber. Le nombre de Weber, qui représente le rapport de la traînée de pressionà la tension inter-faciale, est défini comme étant :
W e =ρcd0U 20
σ(II.9)
où d0 désignent le diamètre initiale des gouttes, U 0 et la vitesse relative initiale entre lesgouttes et la phase continue, respectivement, ρc est la densité du fluide ambiant, σ est la tensioninter-faciale. L’étude de Ri-Qiang DUAN [19] se concentre sur les comportements dynamiquesdu fractionnement de gouttes pour un nombre de Weber près de la valeur critique, au cours delaquelle la désintégration des gouttes se produit (la définition du nombre critique de Weber). Leprocessus de fractionnement de la goutte est un enchaînement de plusieurs processus. Une grandegoutte " parent " peut se fractionner générant ainsi de plus petites gouttes " enfants ". Sinon, si lenombre de Weber est suffisamment élevée, sa diminution peut produire une deuxième générationqui peut également se fractionner, la production sera des gouttes de troisième génération dans une
11

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 24/84
II.2. COMPORTEMENT HYDRODYNAMIQUE DES ÉMULSIONS 12
sorte de bifurcation en cascade jusqu’à un nombre de Weber inférieur au nombre critique. La taillemaximale éventuelle stable des gouttes est déterminée par le nombre critique de Weber [19].
II.2.4 Déformation des gouttes
Les investigations menées concernant la déformation des goutes qui composent une dispersion
liquide/liquide reviennent à G. I. Taylor [21]. Ce cas d’étude concerne une goute immergée unchamp de cisaillement pur. Il fut le premier à introduire des outils mathématiques permettant unecaractérisation de la déformation de ce champ de contrainte. D’ailleurs le champ de cisaillement aeu un important gain d’intérêt, de la part des scientifiques et des chercheurs après Taylor, comparéaux autres champs de contraintes existant. Nous citerons deux productions qui en découlent dutravail de Taylor :
D’après David Megías-Alguacil et al. [20] quand une goutte est soumise à un taux decisaillement γ , elle se déforme de la forme initiale sphérique vers une forme ellipsoïdale si ladéformation est faible. Après ça, la goutte atteint un état d’équilibre de déformation qui est le
résultat d’un équilibre entre les forces visqueuses, qui ont tendance à déformer la goutte et mêmela fractionner si elles sont assez grandes, et les forces inter-faciales, qui tentent de récupérer l’étatinitial. G. I. Taylor [21] introduit un paramètre de déformation adimensionnel, D, caractérisant ladéformation de la goutte comme suit :
D =(A−B)
(A + B)(II.10)
où " A " et " B " sont le petit et le grand axe de l’ellipse, respectivement. Pour les petitesdéformations, l’état d’équilibre de la géométrie de la gouttelette peut être décrit en utilisant lathéorie de G. I. Taylor [21] :
D = Ca(19λ + 16)(16λ + 16)
(II.11)
Où λ est un nombre adimentionnel qui représente le rapport de la viscosité de la phasedispersée (c’est-à-dire la goutte) à la viscosité de la phase continue. " Ca " est le nombre capillaire,définie comme suit :
Ca =µcγrgoutte
σ(II.12)
Où µc est la viscosité de la phase fluide continu, γ le taux cisaillement appliqué, rgoutte lerayon des gouttelettes déformées, et σ la tension inter-faciale del’interface.
R.G. Cox [22] a introduit deux nombres adimensionnels le premier est le rapport de viscositéλ = µd/µc, avec µd étant la viscosité dynamique de la phase dispersée (gouttes) et µc étant la visco-sité dynamiques de la phase continue. Le second nombre adimensionnel définit est k = σ/µcγrgoutte
qui représente l’inverse du nombre capillaire définit par l’équation (II.12). Lorsque les effets dela tension inter-faciale dominent ceux de la viscosité (λ = O(1)etk >> 1), la goutte prend uneforme sphéroïde avec un axe de déformation principale formant un angle 45 avec le sens de l’écou-lement cisaillant. Maintenant si les effets de la viscosité dominent ceux la tension inter-faciale(k = O(1)etλ >> 1), la goutte prend une forme sphéroïde avec un axe de déformation principalesuivant l’axe d’écoulement. Ces résultats sont très bien explicités à l’aide de photographies réalisées
12

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 25/84
II.2. COMPORTEMENT HYDRODYNAMIQUE DES ÉMULSIONS 13
par G.I.Taylor attachées en Annexe II.
Figure II.2 – Séquence de fractionnement de gouttes en écoulement cisaillant λ = µd/µc = 1, 02,dgoutte
dgouttemax= 1, 17, le temps t = t/τ γ comme indiqué. Images issues de l’expérience [23].
La Figure II.2 réalisée par V. Cristini et al. [23] est une représentation de la déformationd’une goutte jusqu’à la rupture de celle-ci. La viscosité du liquide formant la goutte sur celle dela phase continue est presque égale à 1 : λ = µd/µc = 1, 02. Ces photographies réalisées par V.CRISTINI confirment, pour un rapport de viscosité λ = 1, 02, que l’axe de déformation maximal
en cisaillement est parallèle à la direction d’écoulement.Ajoutés au champ de cisaillement, E.J.Windhab et al. [14] rajoute encore trois champs
d’écoulement laminaires supplémentaires et pertinents : écoulement extensionnel uni-axial (Uni-axial elongation flow), écoulement extensionnel planaire (Planar elongation flow), écoulement ex-tensionnel equi-bi-axial (Equibiaxial elongation flow) (voir Figure II.3).
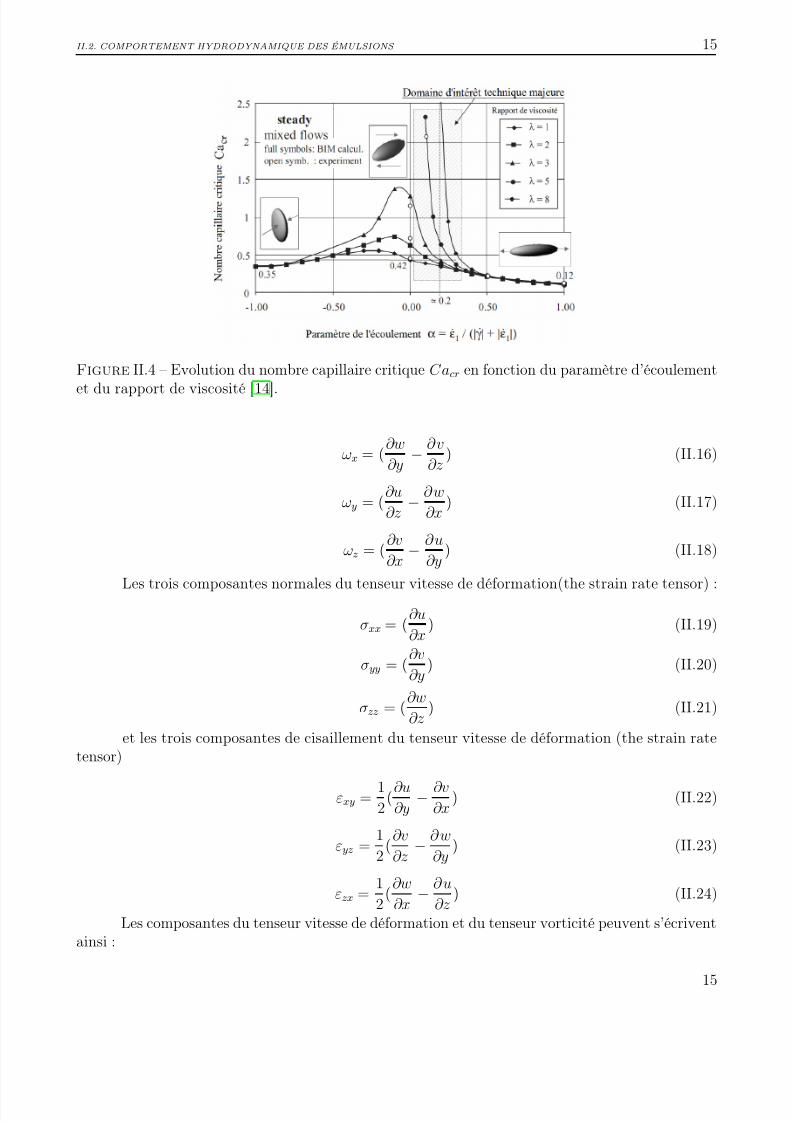
E.J.Windhab et al. [14] Réunissent des résultats expérimentaux et numériques sur la dé-formation permanente (steady-state deformation) et le fractionnement des gouttes individuelles,en cisaillement uniaxiale pure et mixte, en allongement ainsi qu’en allongement équibiaxial. Cesrésultats sont représentés sur la Figure II.4, qui montre la dépendance du nombre capillaire cri-
tique Cacr des rapports des viscosités différents λ en fonction du type d’écoulement exprimé parle paramètre d’écoulement α définis :
α =ε
|γ |+ |ε|(II.13)
α étant compris entre -1 et 1 (−1 =< α < 1), si α = 0 la déformation est un cisaillementpure, α = 1 la déformation est un allongement uni-axial pure et pour α = −1 la déformationsubit est un allongement equi-bi-axial pur. Le tenseur d’un tel écoulement constitué d’un mélanged’écoulement pur est :
13

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 26/84
II.2. COMPORTEMENT HYDRODYNAMIQUE DES ÉMULSIONS 14
Figure II.3 – Déformation des gouttes dans différents champ d’écoulement laminaires [14].
L = G
1 0 0
0 −0, 5 00 0 −0, 5
+ (1 + |α|)
0 0 0
1 0 00 0 0
(II.14)
•
1 0 00 −0, 5 00 0 −0, 5
: indique le tenseur des gradients de vitesse d’un écoulement d’élonga-
tion;
•
0 0 0
1 0 00 0 0
: désigne le tenseur des gradients de vitesse dans un écoulement de cisaillement ;
• G = |γ |+ |ε| : Désigne la déformation dans un champ d’écoulement laminaire [14].
D’après C. TROPEA et al.[24], les principaux domaines d’intérêt pour la compréhension dela structure précise et dynamique d’un écoulement d’un fluide sont tous issue de neuf composantes
simultanées du champ tenseur gradient de vitesse (Figure II.5). En d’autres termes les déformationslocales au sein d’un fluide sont régies par les dérivées spatiales des composantes de la vitesse, c’està dire par le tenseur gradient de vitesse défini par :
∂u∂x
∂u∂y
∂u∂z
∂v∂x
∂v∂y
∂v∂z
∂w∂x
∂w∂y
∂w∂z
(II.15)
Les composants de ce tenseur déterminent les trois composants du vecteur de vorticité :
14
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 27/84
II.2. COMPORTEMENT HYDRODYNAMIQUE DES ÉMULSIONS 15
Figure II.4 – Evolution du nombre capillaire critique Cacr en fonction du paramètre d’écoulement
et du rapport de viscosité [14].
ωx = (∂w
∂y−
∂v
∂z) (II.16)
ωy = (∂u
∂z−
∂w
∂x) (II.17)
ωz = (∂v
∂x−
∂u
∂y) (II.18)
Les trois composantes normales du tenseur vitesse de déformation(the strain rate tensor) :
σxx = (∂u
∂x) (II.19)
σyy = (∂v
∂y) (II.20)
σzz = (∂w
∂z) (II.21)
et les trois composantes de cisaillement du tenseur vitesse de déformation (the strain ratetensor)
εxy = 12
(∂u∂y
− ∂v∂x
) (II.22)
εyz =1
2(
∂v
∂z−
∂w
∂y) (II.23)
εzx =1
2(
∂w
∂x−
∂u
∂z) (II.24)
Les composantes du tenseur vitesse de déformation et du tenseur vorticité peuvent s’écriventainsi :
15
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 28/84
II.2. COMPORTEMENT HYDRODYNAMIQUE DES ÉMULSIONS 16
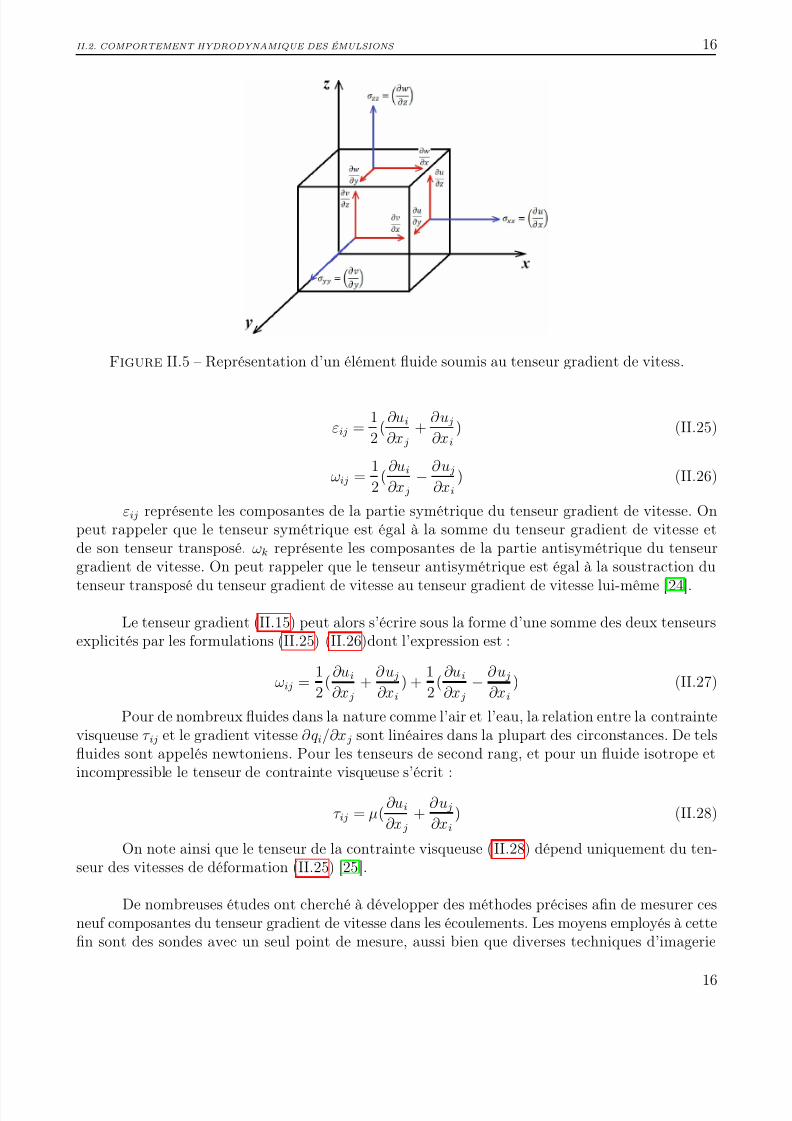
Figure II.5 – Représentation d’un élément fluide soumis au tenseur gradient de vitess.
εij =1
2(
∂ui
∂x j
+∂u j
∂xi
) (II.25)
ωij =1
2(
∂ui
∂x j
−∂u j
∂xi
) (II.26)
εij représente les composantes de la partie symétrique du tenseur gradient de vitesse. Onpeut rappeler que le tenseur symétrique est égal à la somme du tenseur gradient de vitesse etde son tenseur transposé. ωk représente les composantes de la partie antisymétrique du tenseurgradient de vitesse. On peut rappeler que le tenseur antisymétrique est égal à la soustraction du
tenseur transposé du tenseur gradient de vitesse au tenseur gradient de vitesse lui-même [24].
Le tenseur gradient (II.15) peut alors s’écrire sous la forme d’une somme des deux tenseursexplicités par les formulations (II.25) (II.26)dont l’expression est :
ωij =1
2(
∂ui
∂x j
+∂u j
∂xi
) +1
2(
∂ui
∂x j
−∂u j
∂xi
) (II.27)
Pour de nombreux fluides dans la nature comme l’air et l’eau, la relation entre la contraintevisqueuse τ ij et le gradient vitesse ∂qi/∂x j sont linéaires dans la plupart des circonstances. De telsfluides sont appelés newtoniens. Pour les tenseurs de second rang, et pour un fluide isotrope etincompressible le tenseur de contrainte visqueuse s’écrit :
τ ij = µ(∂ui
∂x j
+∂u j
∂xi
) (II.28)
On note ainsi que le tenseur de la contrainte visqueuse (II.28) dépend uniquement du ten-seur des vitesses de déformation (II.25) [25].
De nombreuses études ont cherché à développer des méthodes précises afin de mesurer cesneuf composantes du tenseur gradient de vitesse dans les écoulements. Les moyens employés à cettefin sont des sondes avec un seul point de mesure, aussi bien que diverses techniques d’imagerie
16

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 29/84
II.2. COMPORTEMENT HYDRODYNAMIQUE DES ÉMULSIONS 17
multidimensionnelle [24].
Pour notre cas d’étude expérimentale, des visualisations des structures de Dean seront ef-fectuées. Grâce à la visualisation des étirements-repliements d’une tache de traceur localisée audépart, particulièrement en fonction du lieu de son injection. Les liens entre le champ de concen-tration du traceur (mesuré quantitativement par la LIF) et des grandeurs telles que la vorticitéωij (II.26) et la contrainte visqueuse transversale τ ij (II.28), pouvant être estimées par la PIV,recevront une attention particulière.
17

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 30/84
IIILes techniques de visualisation
Dans le cadre de notre étude expérimentale, quatre techniques de visualisation sont misesà contribution : la Vélocimétrie par Image de Particule (PIV), la Fluorescence Induite par La-ser (LIF), la shadowgraphie (shadowgraphy) et une méthode lagrangienne de suivi de particules
(PTV, Particles Tracking Velocimetry). Ajouté à la caractéristique non-intrusive (ne perturbe pasl’écoulement étudié)dont jouissent ces quatre techniques, chacune d’entre elles joue un rôle biendéfinit dans le cadre expérimental de la présente étude. La LIF permet la visualisation des carac-téristiques du chaos de Lagrange (étirement, repliements), mais aussi la concentration/dispersiondu traceur liquide ou encore le champ de contrainte visqueuse. La PIV étudie le caractère Eulériende l’écoulement permettant l’accès à des données telles que le champ de vitesse, la vorticité et lacontrainte visqueuse. Le caractère Lagrangien de l’écoulement étant mesuré grâce à la PTV, avecune détermination des trajectoires des particules au sein de l’écoulement et enfin la shadowgra-phie permet d’identifier la morphologie des gouttes d’huile (phase dispersée). Etant combinées, cesdeux dernières techniques (la PTV et la shadowgraphie) permettrons d’observer et de commenter
le fractionnement des gouttes au sein de ce mélangeur à advection chaotique.
III.1 La PIV (Particle Image Velocimetry)
La Vélocimétrie par Image de Particules (PIV) est une technique de visualisation globale duchamp d’écoulement (whole-flow-field technique) fournissant des mesures instantanées du vecteurvitesse dans la section transversale d’un écoulement. Deux composantes de vitesse sont mesurées,mais l’utilisation de l’approche stéréoscopique permet à chacun des trois composantes de la vi-tesse d’être enregistrées, ayant pour résultat des vecteurs instantanés de la vitesse en 3D pour la
zone toute entière concernée par la visualisation. L’utilisation de caméras CCD (Charge-CoupledDevice, ou dispositif à transfert de charge 1969) ou des caméras CMOS (Complementary metaloxide semi-conductor 1980) et de logiciels adéquats, permet d’obtenir les cartes en temps réel duchamp vitesse. La PIV une technique de mesure non intrusives au laser optique conçue pour larecherche et le diagnostic dans les écoulements, la turbulence, la micro-fluidique, la pulvérisationet les processus de combustion [26].
Le dispositif expérimental d’un système PIV est composé généralement de plusieurs sous-systèmes. Dans la plupart des applications, des particules traceurs doivent être ajoutées au fluide
18
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 31/84
III.1. LA PIV (PARTICLE IMAGE VELOCIMETRY) 19
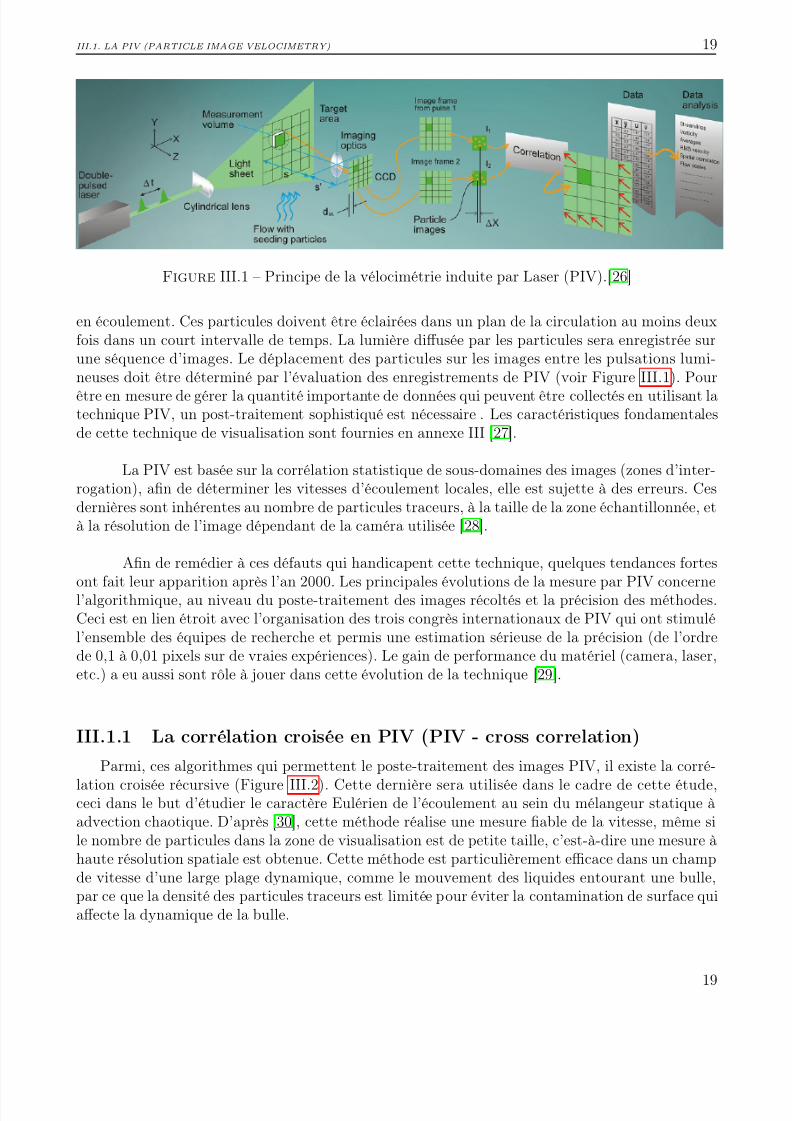
Figure III.1 – Principe de la vélocimétrie induite par Laser (PIV).[26]
en écoulement. Ces particules doivent être éclairées dans un plan de la circulation au moins deuxfois dans un court intervalle de temps. La lumière diffusée par les particules sera enregistrée surune séquence d’images. Le déplacement des particules sur les images entre les pulsations lumi-neuses doit être déterminé par l’évaluation des enregistrements de PIV (voir Figure III.1). Pour
être en mesure de gérer la quantité importante de données qui peuvent être collectés en utilisant latechnique PIV, un post-traitement sophistiqué est nécessaire . Les caractéristiques fondamentalesde cette technique de visualisation sont fournies en annexe III [27].
La PIV est basée sur la corrélation statistique de sous-domaines des images (zones d’inter-rogation), afin de déterminer les vitesses d’écoulement locales, elle est sujette à des erreurs. Cesdernières sont inhérentes au nombre de particules traceurs, à la taille de la zone échantillonnée, età la résolution de l’image dépendant de la caméra utilisée [28].
Afin de remédier à ces défauts qui handicapent cette technique, quelques tendances fortes
ont fait leur apparition après l’an 2000. Les principales évolutions de la mesure par PIV concernel’algorithmique, au niveau du poste-traitement des images récoltés et la précision des méthodes.Ceci est en lien étroit avec l’organisation des trois congrès internationaux de PIV qui ont stimulél’ensemble des équipes de recherche et permis une estimation sérieuse de la précision (de l’ordrede 0,1 à 0,01 pixels sur de vraies expériences). Le gain de performance du matériel (camera, laser,etc.) a eu aussi sont rôle à jouer dans cette évolution de la technique [29].
III.1.1 La corrélation croisée en PIV (PIV - cross correlation)
Parmi, ces algorithmes qui permettent le poste-traitement des images PIV, il existe la corré-
lation croisée récursive (Figure III.2). Cette dernière sera utilisée dans le cadre de cette étude,ceci dans le but d’étudier le caractère Eulérien de l’écoulement au sein du mélangeur statique àadvection chaotique. D’après [30], cette méthode réalise une mesure fiable de la vitesse, même sile nombre de particules dans la zone de visualisation est de petite taille, c’est-à-dire une mesure àhaute résolution spatiale est obtenue. Cette méthode est particulièrement efficace dans un champde vitesse d’une large plage dynamique, comme le mouvement des liquides entourant une bulle,par ce que la densité des particules traceurs est limitée pour éviter la contamination de surface quiaffecte la dynamique de la bulle.
19
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 32/84
III.1. LA PIV (PARTICLE IMAGE VELOCIMETRY) 20
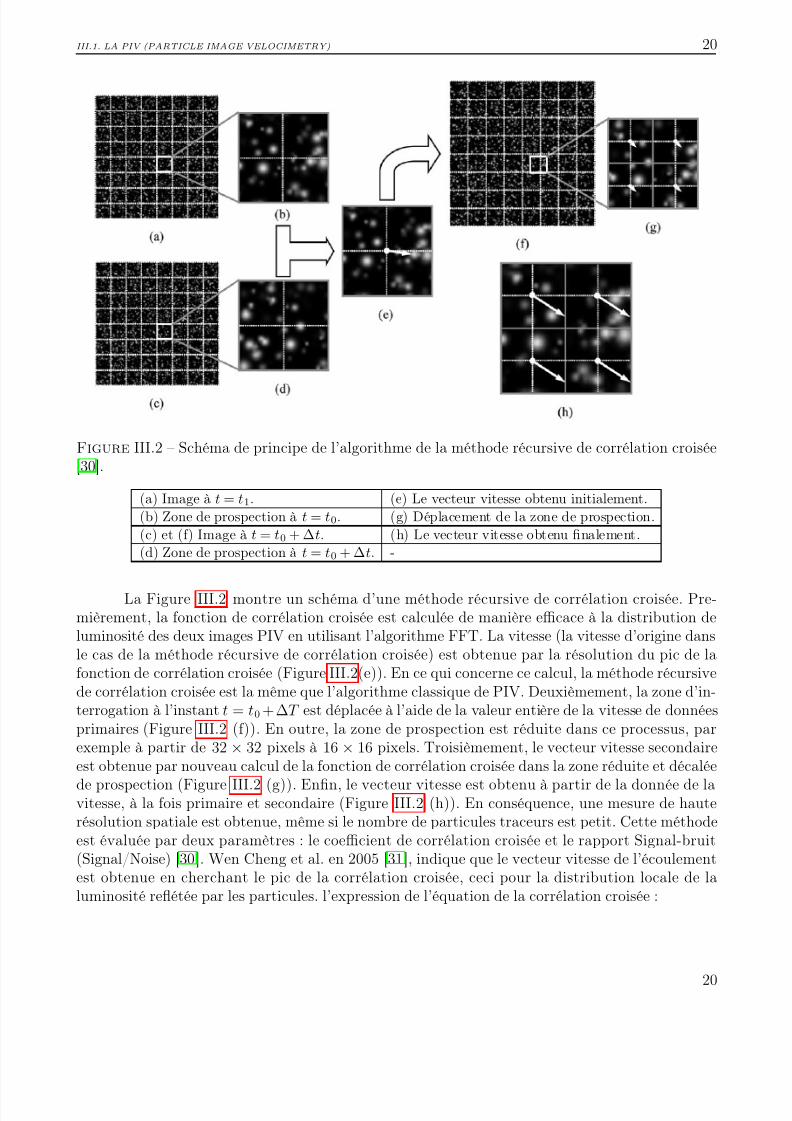
Figure III.2 – Schéma de principe de l’algorithme de la méthode récursive de corrélation croisée[30].
(a) Image à t = t1. (e) Le vecteur vitesse obtenu initialement.
(b) Zone de prospection à t = t0. (g) Déplacement de la zone de prospection.
(c) et (f) Image à t = t0 + ∆t. (h) Le vecteur vitesse obtenu finalement.
(d) Zone de prospection à t = t0 + ∆t. -
La Figure III.2 montre un schéma d’une méthode récursive de corrélation croisée. Pre-mièrement, la fonction de corrélation croisée est calculée de manière efficace à la distribution deluminosité des deux images PIV en utilisant l’algorithme FFT. La vitesse (la vitesse d’origine dansle cas de la méthode récursive de corrélation croisée) est obtenue par la résolution du pic de lafonction de corrélation croisée (Figure III.2(e)). En ce qui concerne ce calcul, la méthode récursivede corrélation croisée est la même que l’algorithme classique de PIV. Deuxièmement, la zone d’in-terrogation à l’instant t = t0 + ∆T est déplacée à l’aide de la valeur entière de la vitesse de donnéesprimaires (Figure III.2 (f)). En outre, la zone de prospection est réduite dans ce processus, parexemple à partir de 32 × 32 pixels à 16 × 16 pixels. Troisièmement, le vecteur vitesse secondaireest obtenue par nouveau calcul de la fonction de corrélation croisée dans la zone réduite et décalée
de prospection (Figure III.2 (g)). Enfin, le vecteur vitesse est obtenu à partir de la donnée de lavitesse, à la fois primaire et secondaire (Figure III.2 (h)). En conséquence, une mesure de hauterésolution spatiale est obtenue, même si le nombre de particules traceurs est petit. Cette méthodeest évaluée par deux paramètres : le coefficient de corrélation croisée et le rapport Signal-bruit(Signal/Noise) [30]. Wen Cheng et al. en 2005 [31], indique que le vecteur vitesse de l’écoulementest obtenue en cherchant le pic de la corrélation croisée, ceci pour la distribution locale de laluminosité reflétée par les particules. l’expression de l’équation de la corrélation croisée :
20

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 33/84
III.2. LA LIF (LASER INDUCED FLUORESCENCE) 21
C =
M i=1
N j=1(f i,j × gi,j) M
i=1
N j=1 f 2i,j×
M i=1
N j=1 g2i,j
(III.1)
Ici, f et g sont la luminosité, les indices i et j sont les coordonnées de l’image numérisée,M et N sont les dimensions de la zone concernée par la prospection. La luminosité utilisée danscette formule est généralement retenue après le retranchement de la luminosité moyenne localedans chaque zone de prospection, ceci afin d’évaluer que la similitude des deux motifs d’images.Pour les images d’un écoulement à bulles, il est nécessaire de soustraire la luminosité moyenne lo-cale pour éviter des correspondances biaisées en raison des distributions non-uniformes des bulles.L’algorithme de corrélation croisée est réalisée en répétant le calcul de corrélation croisée définiepar l’équation (II.28) des grandes aux petites zone de prospection [31].
III.2 La LIF (Laser Induced Fluorescence)
L’utilisation, en mécanique des fluides, de la méthode dite Fluorescence Induite par Laser (LIF),consiste à ensemencer le fluide avec un marqueur fluorescent qui est injecté à une position donnéedans l’écoulement. La caméra LIF, équipée d’un filtre correspondant à l’onde de fluorescence destraceurs, détecte les niveaux de fluorescence dans le liquide. Le système traite ensuite les imagesLIF en produisant une carte de concentration des particules fluorescentes [26].
La Fluorescence induite par laser (LIF) est largement utilisée comme moyen d’investigationnon intrusif, c’est-à-dire sans introduction de sondes ou d’objet dans le système à étudier. Cettetechnique sert à la détection de la concentration ou de la température avec la PLIF (Planar LaserInduced Fluorescence). Dans la durée d’une seule impulsion laser (typiquement quelques nanose-
condes) un élément de volume dans la gamme submillimétrique peut être observé. Des sectionstransversales bidimensionnelles peuvent être illuminées avec les nappes lumineuses et le signallumineux résultant peut être capté sur des caméras CCD (Charge-Coupled Device). La fluores-cence, induite par le laser, est émise à partir des niveaux électroniquement excités qui sont causéspar l’absorption des photons laser, typiquement dans les régions spectrales visibles et ultra-violets.Habituellement la longueur d’onde d’absorption augmente avec l’augmentation de la taille du chro-mophore1 de la molécule excité (c’est-à-dire la partie active de la molécule qui absorbe la lumière).Il est aussi important de respecter une concentration optimale de traceurs fluorescents, le but prin-cipal étant une caractérisation du système à étudier non une modification [32].
Cameron Tropea et al. en 2007 [24] donne deux paramètres caractérisant la fluorescence :l’intensité de la LIF I LIF et Le rendement quantique de fluorescence φ. La visualisation avec laLIF qui peut être comprise, comme s’effectuant en deux étapes. En premier lieu, l’absorption d’unphoton conduit à un état excité (généralement par voie électronique) de l’atome ou la moléculede traceur. Après un certain temps cette espèce excitée peut se retrouver dans un état désexcité
1Le terme est apparu dans l’industrie des colorants, il se réfère aux groupes présents dans la molécule qui sontresponsables de la couleur de la teinture. Par définition c’est la partie (un atome ou un groupe d’atomes) d’unemolécule possédant la propriété optique d’absorber une gamme d’ondes reçue et d’en émettre les autres donnant sacoloration à la molécule. [IUPAC. Compendium of Chemical Terminology, 2nd ed. (the "Gold Book"). Compiledby A. D. McNaught and A. Wilkinson. Blackwell Scientific Publications, Oxford (1997).]
21
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 34/84
III.2. LA LIF (LASER INDUCED FLUORESCENCE) 22
en émettant un photon de fluorescence. L’équation (III.2) décrit l’intensité de la LIF "I LIF " d’uneespèce dans un régime d’excitation faible.
I LIF = cI laserN ( p,T )f (v,j)(T )BikΓ( p,T )φ (III.2)
avec c un paramètre dépendant de la configuration spécifique expérimentale. L’intensité de
LIF " I LIF " est proportionnelle à la densité du nombre de molécules excitables dans le volumesondé V, qui est déterminée par la densité du nombre d’espèces respectives N(p, T) multipliépar la dépendance à la température de Boltzmann f (v,j) donne la population du niveau initiali. Le coefficient d’Einstein Bik décrit la probabilité d’absorption pour la transition i → k. Dansle régime linéaire, l’intensité de fluorescence dépend linéairement de l’intensité du laser I laser etdu chevauchement spectral Γ( p,T ) du profil de laser et la raie d’absorption. Tous ces facteursdéterminent la densité de nombre de molécules excitées et, par conséquent, la partie d’absorptiondu processus de la LIF. Le rendement quantique de fluorescence φ dans l’équation (III.3), donne leratio du taux d’émission spontanée (à partir du niveau k) par rapport au taux total de (radiatif etnon radiatif) processus de désexcitation. Autrement dit, φ est le rapport du taux de fluorescence(photons émis) sur le taux d’excitation (photons reçus).
φ =Aki
j Akj + Qk( p,T ) + P k(III.3)
φ dépend donc du taux d’émission spontanée donné par le coefficient d’Einstein Aki (tauxde fluorescence) divisé par la somme des taux de tous les processus de désexcitation de l’état ex-cité (émission spontanée de l’état k vers tous les niveaux d’état fondamental possibles
j Akj , le
quenching Qk( p,T ) et la pré-dissociation Pk) [24].
L’équipement de base nécessaire pour mener à bien une mesure à l’aide de la LIF :
• Une source laser, typiquement le laser Nd-YAG (Grenat d’Yttrium-Aluminium dopé au Néo-
dyme) ou le laser Argon-ion avec le système optique approprié pour former une fine nappede lumière ;
• Un colorant fluorescent qui marque le fluide et qui est tracée lors de la mesure. Les colorantscouramment utilisés dans les expériences manipulant des liquides sont la rhodamine 6G(pour les mesures de concentration), la rhodamine B (pour les mesures de température) etde sodium de fluorescéine (pour la concentration ou la température des mesures) ;
• Un appareil photo équipé d’une coupure nette (a sharp cut-off) ou d’un filtre à bande étroit,de sorte que seule la lumière fluorescente est enregistrée. Cette caméra agit comme un réseaude détecteurs de lumière (pixels)[26].
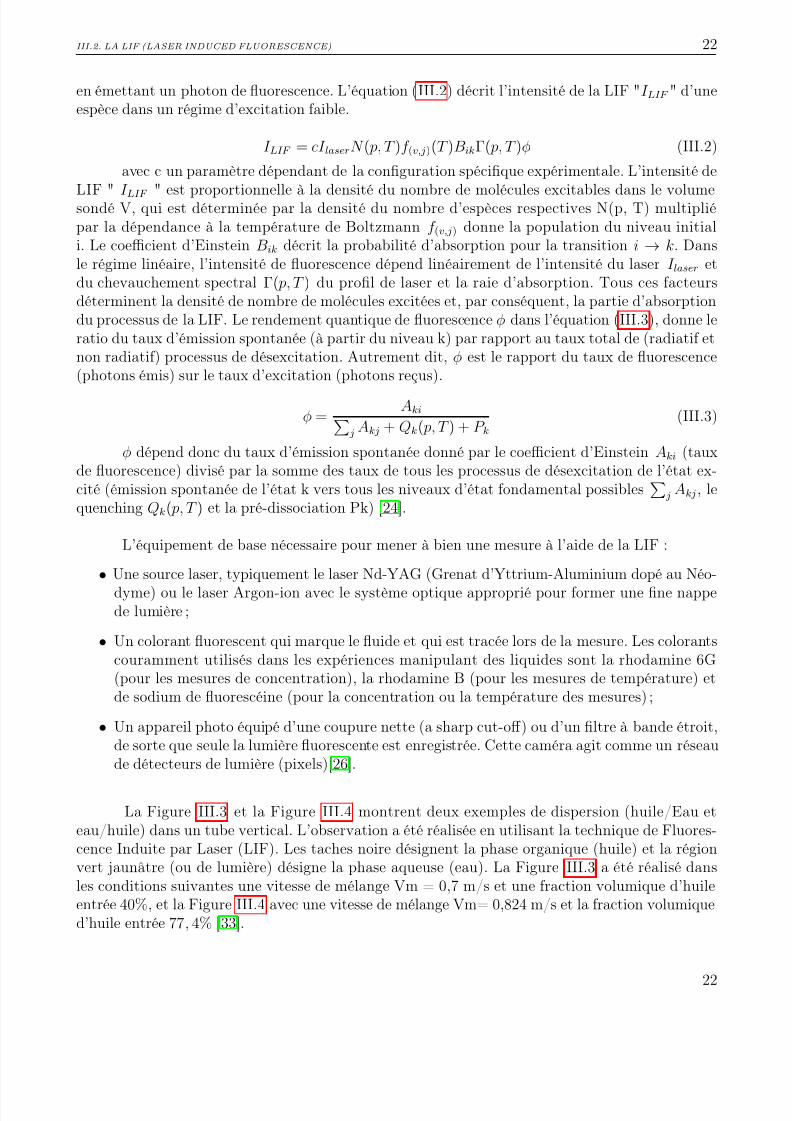
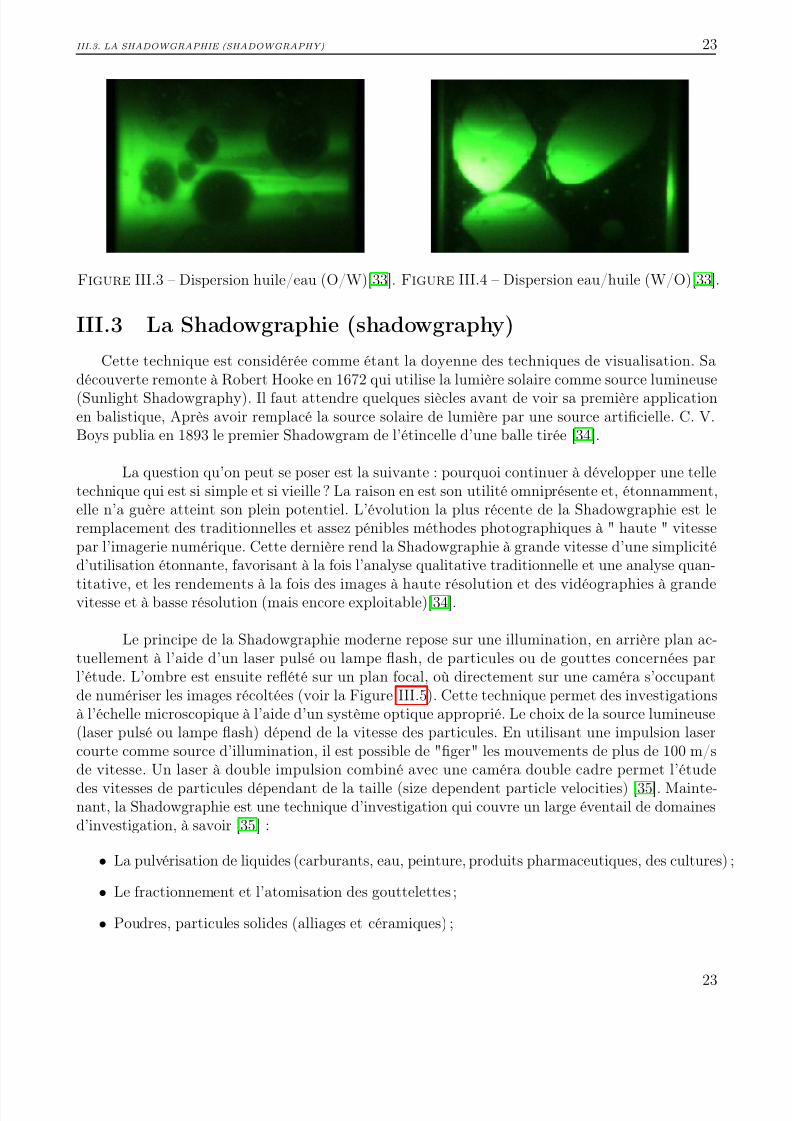
La Figure III.3 et la Figure III.4 montrent deux exemples de dispersion (huile/Eau eteau/huile) dans un tube vertical. L’observation a été réalisée en utilisant la technique de Fluores-cence Induite par Laser (LIF). Les taches noire désignent la phase organique (huile) et la régionvert jaunâtre (ou de lumière) désigne la phase aqueuse (eau). La Figure III.3 a été réalisé dansles conditions suivantes une vitesse de mélange Vm = 0,7 m/s et une fraction volumique d’huileentrée 40%, et la Figure III.4 avec une vitesse de mélange Vm= 0,824 m/s et la fraction volumiqued’huile entrée 77, 4% [33].
22
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 35/84
III.3. LA SHADOWGRAPHIE (SHADOWGRAPHY) 23
Figure III.3 – Dispersion huile/eau (O/W)[33]. Figure III.4 – Dispersion eau/huile (W/O)[33].
III.3 La Shadowgraphie (shadowgraphy)
Cette technique est considérée comme étant la doyenne des techniques de visualisation. Sadécouverte remonte à Robert Hooke en 1672 qui utilise la lumière solaire comme source lumineuse(Sunlight Shadowgraphy). Il faut attendre quelques siècles avant de voir sa première applicationen balistique, Après avoir remplacé la source solaire de lumière par une source artificielle. C. V.Boys publia en 1893 le premier Shadowgram de l’étincelle d’une balle tirée [34].
La question qu’on peut se poser est la suivante : pourquoi continuer à développer une telletechnique qui est si simple et si vieille? La raison en est son utilité omniprésente et, étonnamment,elle n’a guère atteint son plein potentiel. L’évolution la plus récente de la Shadowgraphie est leremplacement des traditionnelles et assez pénibles méthodes photographiques à " haute " vitessepar l’imagerie numérique. Cette dernière rend la Shadowgraphie à grande vitesse d’une simplicitéd’utilisation étonnante, favorisant à la fois l’analyse qualitative traditionnelle et une analyse quan-
titative, et les rendements à la fois des images à haute résolution et des vidéographies à grandevitesse et à basse résolution (mais encore exploitable)[34].
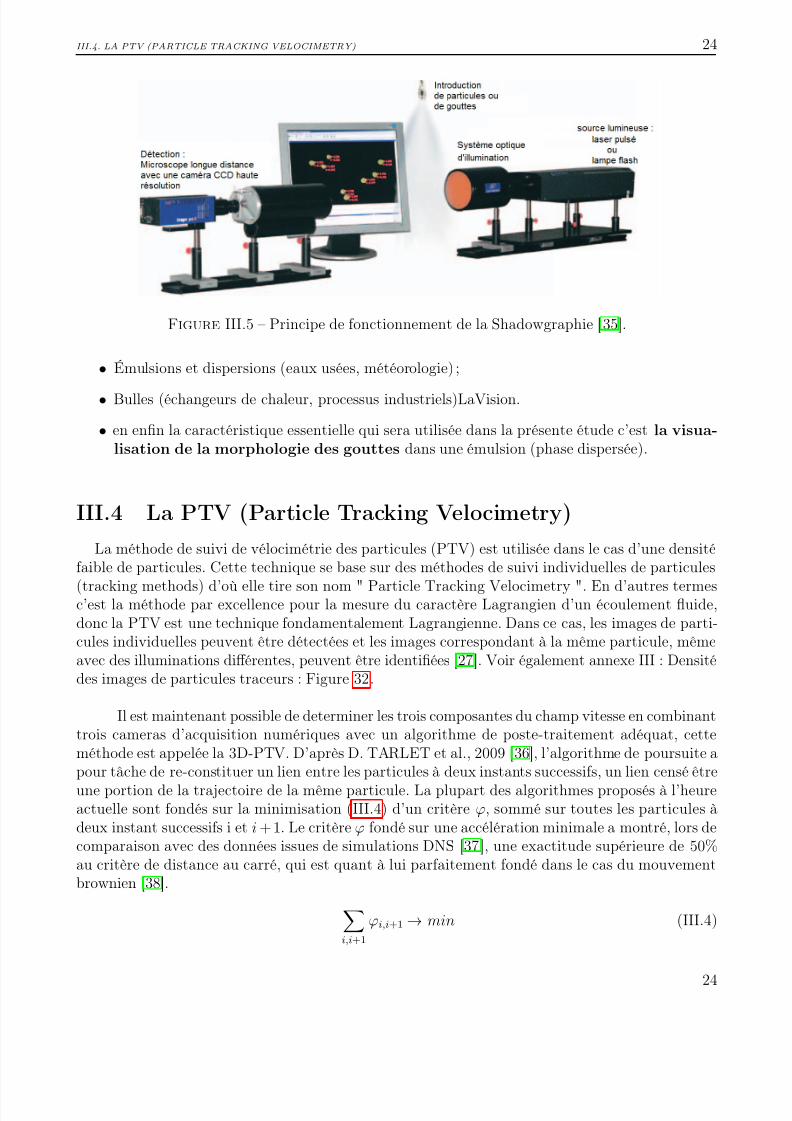
Le principe de la Shadowgraphie moderne repose sur une illumination, en arrière plan ac-tuellement à l’aide d’un laser pulsé ou lampe flash, de particules ou de gouttes concernées parl’étude. L’ombre est ensuite reflété sur un plan focal, où directement sur une caméra s’occupantde numériser les images récoltées (voir la Figure III.5). Cette technique permet des investigationsà l’échelle microscopique à l’aide d’un système optique approprié. Le choix de la source lumineuse(laser pulsé ou lampe flash) dépend de la vitesse des particules. En utilisant une impulsion lasercourte comme source d’illumination, il est possible de "figer" les mouvements de plus de 100 m/sde vitesse. Un laser à double impulsion combiné avec une caméra double cadre permet l’étude
des vitesses de particules dépendant de la taille (size dependent particle velocities) [35]. Mainte-nant, la Shadowgraphie est une technique d’investigation qui couvre un large éventail de domainesd’investigation, à savoir [35] :
• La pulvérisation de liquides (carburants, eau, peinture, produits pharmaceutiques, des cultures
• Le fractionnement et l’atomisation des gouttelettes ;
• Poudres, particules solides (alliages et céramiques) ;
23
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 36/84
III.4. LA PTV (PARTICLE TRACKING VELOCIMETRY) 24
Figure III.5 – Principe de fonctionnement de la Shadowgraphie [35].
• Émulsions et dispersions (eaux usées, météorologie) ;
• Bulles (échangeurs de chaleur, processus industriels)LaVision.
• en enfin la caractéristique essentielle qui sera utilisée dans la présente étude c’est la visua-lisation de la morphologie des gouttes dans une émulsion (phase dispersée).
III.4 La PTV (Particle Tracking Velocimetry)
La méthode de suivi de vélocimétrie des particules (PTV) est utilisée dans le cas d’une densitéfaible de particules. Cette technique se base sur des méthodes de suivi individuelles de particules
(tracking methods) d’où elle tire son nom " Particle Tracking Velocimetry ". En d’autres termesc’est la méthode par excellence pour la mesure du caractère Lagrangien d’un écoulement fluide,donc la PTV est une technique fondamentalement Lagrangienne. Dans ce cas, les images de parti-cules individuelles peuvent être détectées et les images correspondant à la même particule, mêmeavec des illuminations différentes, peuvent être identifiées [27]. Voir également annexe III : Densitédes images de particules traceurs : Figure 32.
Il est maintenant possible de determiner les trois composantes du champ vitesse en combinanttrois cameras d’acquisition numériques avec un algorithme de poste-traitement adéquat, cetteméthode est appelée la 3D-PTV. D’après D. TARLET et al., 2009 [36], l’algorithme de poursuite apour tâche de re-constituer un lien entre les particules à deux instants successifs, un lien censé êtreune portion de la trajectoire de la même particule. La plupart des algorithmes proposés à l’heureactuelle sont fondés sur la minimisation (III.4) d’un critère ϕ, sommé sur toutes les particules àdeux instant successifs i et i + 1. Le critère ϕ fondé sur une accélération minimale a montré, lors decomparaison avec des données issues de simulations DNS [37], une exactitude supérieure de 50%au critère de distance au carré, qui est quant à lui parfaitement fondé dans le cas du mouvementbrownien [38].
i,i+1
ϕi,i+1 → min (III.4)
24
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 37/84
III.5. COMPARAISON DES TECHNIQUES DE VISUALISATION 25
III.5 Comparaison des techniques de visualisation
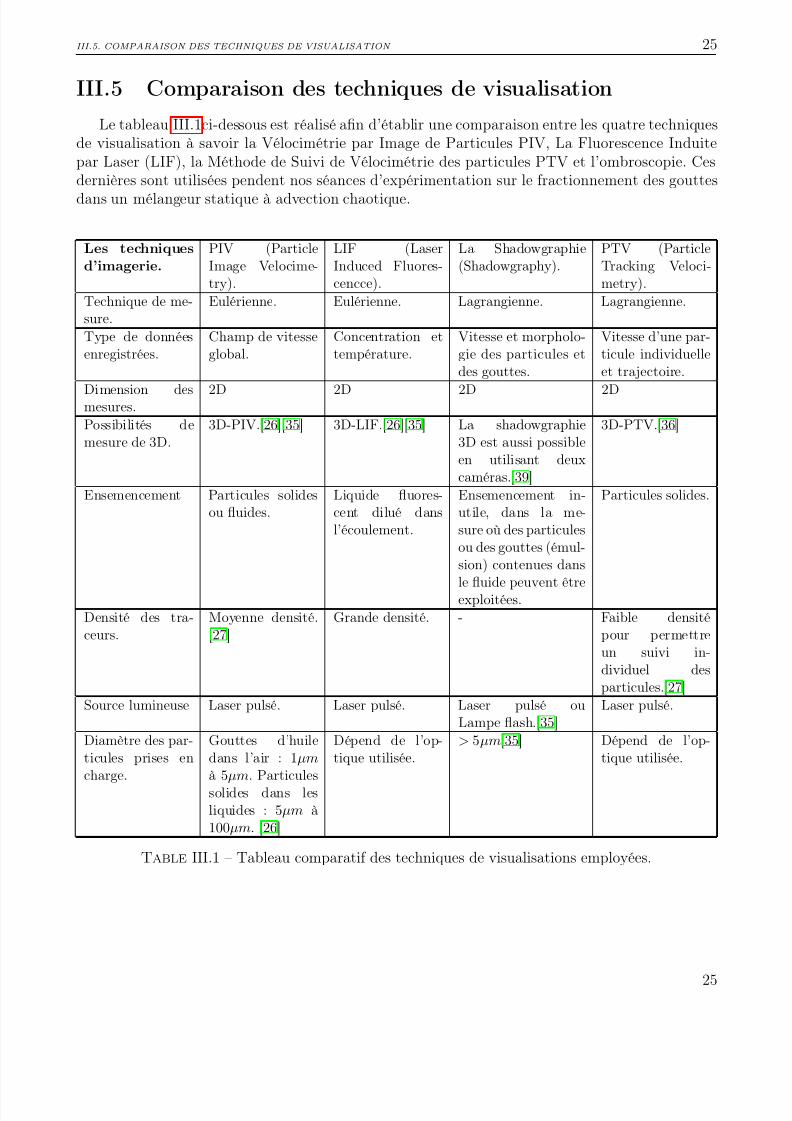
Le tableau III.1ci-dessous est réalisé afin d’établir une comparaison entre les quatre techniquesde visualisation à savoir la Vélocimétrie par Image de Particules PIV, La Fluorescence Induitepar Laser (LIF), la Méthode de Suivi de Vélocimétrie des particules PTV et l’ombroscopie. Cesdernières sont utilisées pendent nos séances d’expérimentation sur le fractionnement des gouttes
dans un mélangeur statique à advection chaotique.
Les techniques
d’imagerie.
PIV (ParticleImage Velocime-try).
LIF (LaserInduced Fluores-cencce).
La Shadowgraphie(Shadowgraphy).
PTV (ParticleTracking Veloci-metry).
Technique de me-sure.
Eulérienne. Eulérienne. Lagrangienne. Lagrangienne.
Type de donnéesenregistrées.
Champ de vitesseglobal.
Concentration ettempérature.
Vitesse et morpholo-gie des particules etdes gouttes.
Vitesse d’une par-ticule individuelleet trajectoire.
Dimension desmesures.
2D 2D 2D 2D
Possibilités demesure de 3D.
3D-PIV.[26][35] 3D-LIF.[26][35] La shadowgraphie3D est aussi possibleen utilisant deuxcaméras.[39]
3D-PTV.[36]
Ensemencement Particules solidesou fluides.
Liquide fluores-cent dilué dansl’écoulement.
Ensemencement in-utile, dans la me-sure où des particulesou des gouttes (émul-sion) contenues dans
le fluide peuvent êtreexploitées.
Particules solides.
Densité des tra-ceurs.
Moyenne densité.[27]
Grande densité. - Faible densitépour permettreun suivi in-dividuel desparticules.[27]
Source lumineuse Laser pulsé. Laser pulsé. Laser pulsé ouLampe flash.[35]
Laser pulsé.
Diamètre des par-ticules prises encharge.
Gouttes d’huiledans l’air : 1µmà 5µm. Particulessolides dans lesliquides : 5µm à100µm. [26]
Dépend de l’op-tique utilisée.
> 5µm[35] Dépend de l’op-tique utilisée.
Table III.1 – Tableau comparatif des techniques de visualisations employées.
25

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 38/84
Partie expérimentale
Cette deuxième partie permet de pénétrer dans le vif du sujet. Il sera question tout d’abord
de donner une présentation technique du matériel qui aura été mis à contribution durant les com-pagnes de mesures et de caractérisation par imagerie laser (PIV et shadowgraphie). Une partie dece matériel a été dimensionnée afin d’obéir aux exigences expérimentales.
Une présentation de la méthode utilisée pour mener la campagne de prise d’images a étéfaite. Ensuite, les méthodes de traitement des données recueillies par la PIV sont analysées afin dedonner naissance aux champs de vorticité et de vitesse de déformation (strain rate). Ces résultatsissus de la PIV et traités par méthode numérique, sont confrontés aux visualisations des formes degouttes obtenues par la shadowgraphie.
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 39/84
IVDescription de l’installation experimentale
IV.1 Veine d’essai hydrodynamique
Le banc expérimental utilisé a été spécialement conçu et construit au LTN Nantes, afin defournir un écoulement laminaire au débit contrôlé. L’installation, qui est un circuit en boucleouverte, est représentée schématiquement par la figure IV.1. L’eau étant le fluide de travail, lapression est fournie par la hauteur d’eau dans le réservoir d’une capacité de 256 litres. Le débit estmaintenu parfaitement constant grâce à la hauteur dans la cuve qui elle aussi est constante ( IV.1(1)). Ensuite, l’eau s’écoule à partir de ce bac par gravité, tout en traversant une série d’éléments"tranquillisants" (IV.1 (6)) afin de faire établir l’écoulement juste avant l’entrée du mélangeur(IV.1 (8)). Cette section d’établissement comporte :
• Un divergent de section carrée de 650mm de longueur avec un angle de 4 par rapport à l’axe.
• Une chambre de tranquillisation de 120mm × 120mm avec une longueur de 160mm (cettechambre possède une structure de type "‘nid d’abeilles"’ afin de garder des lignes de couranttout à fait parallèles).
• Un convergent de rapport de contraction de 6,5 et de longueur de 140mm.
• Enfin, un long canal métallique d’une longueur de 2m rallongé d’une longueur en plexiglasde 80cm (IV.1 (7)) sont montés entre la sortie du convergent et l’entrée du mélangeur.Cette section droite d’une longueur droite de 2m80 représente 70 fois la valeur du diamètrehydraulique.
L’élément (8) de la figure IV.1, joue le rôle de pièce maitresse dans l’installation expéri-mentale. Il reçoit la dénomination de mélangeur à advection chaotique à cause de la successionde coudes le formant. Chaque coude le composant est porté par un plan de courbure qui formeun angle de 90 par rapport au plan voisin. Dans ce type de mélangeur les trajectoires chaotiquessont générées spécialement (chaos spacial) par l’introduction de perturbations géométriques quise trouve être des coudes. Ainsi, la section d’écoulement de ce mélangeur est de forme carrée dedimensions 40mm × 40mm. Les coudes ont un rayon de courbures de Rc = 220mm, les rayonsintérieurs et extérieurs courbes sont respectivement Ri = 200mm et Ro = 240mm le ratio decourbure est β = Rc/a = 5, 5. Les coudes sont usinés dans un bloc de plexiglas transparent. Lefaible rayon de courbure a été choisi pour fournir un fort gradient de pression radial dans le coude
26
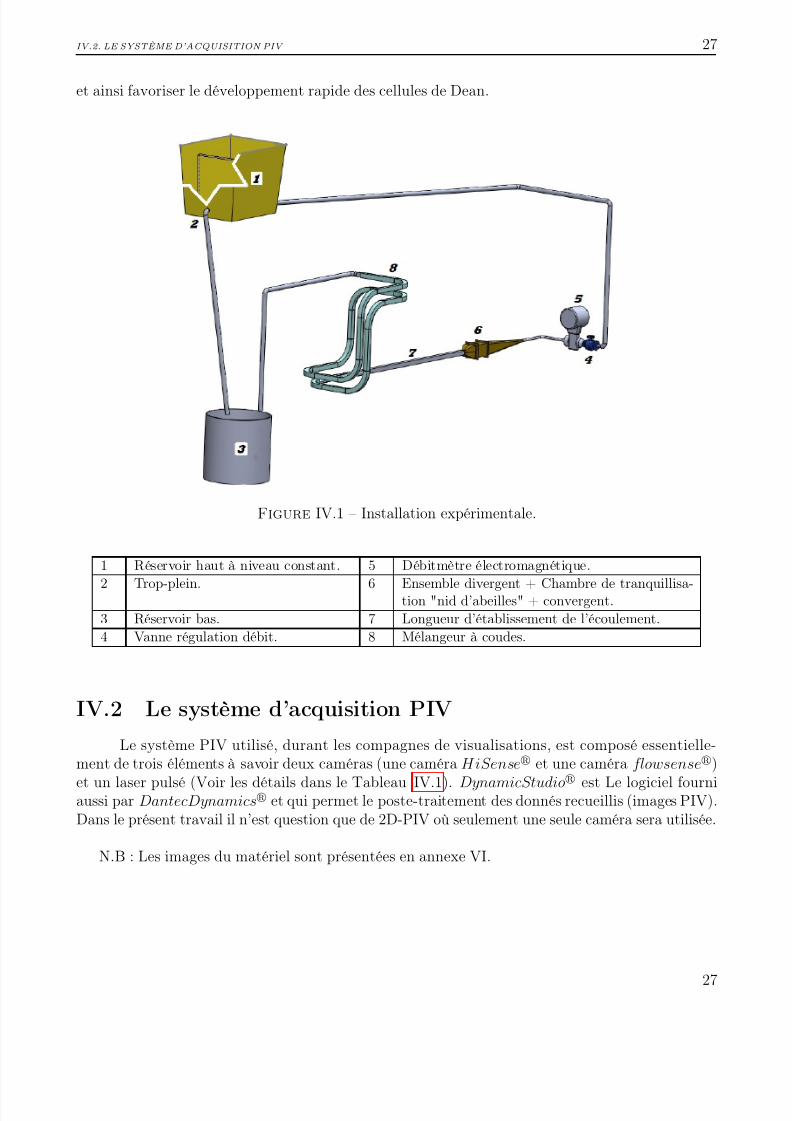
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 40/84
IV.2. LE SYSTÈME D’ACQUISITION PIV 27
et ainsi favoriser le développement rapide des cellules de Dean.
Figure IV.1 – Installation expérimentale.
1 Réservoir haut à niveau constant. 5 Débitmètre électromagnétique.
2 Trop-plein. 6 Ensemble divergent + Chambre de tranquillisa-tion "nid d’abeilles" + convergent.
3 Réservoir bas. 7 Longueur d’établissement de l’écoulement.
4 Vanne régulation débit. 8 Mélangeur à coudes.
IV.2 Le système d’acquisition PIV
Le système PIV utilisé, durant les compagnes de visualisations, est composé essentielle-ment de trois éléments à savoir deux caméras (une caméra HiSense et une caméra flowsense)
et un laser pulsé (Voir les détails dans le Tableau IV.1). DynamicStudio est Le logiciel fourniaussi par DantecDynamics et qui permet le poste-traitement des donnés recueillis (images PIV).Dans le présent travail il n’est question que de 2D-PIV où seulement une seule caméra sera utilisée.
N.B : Les images du matériel sont présentées en annexe VI.
27
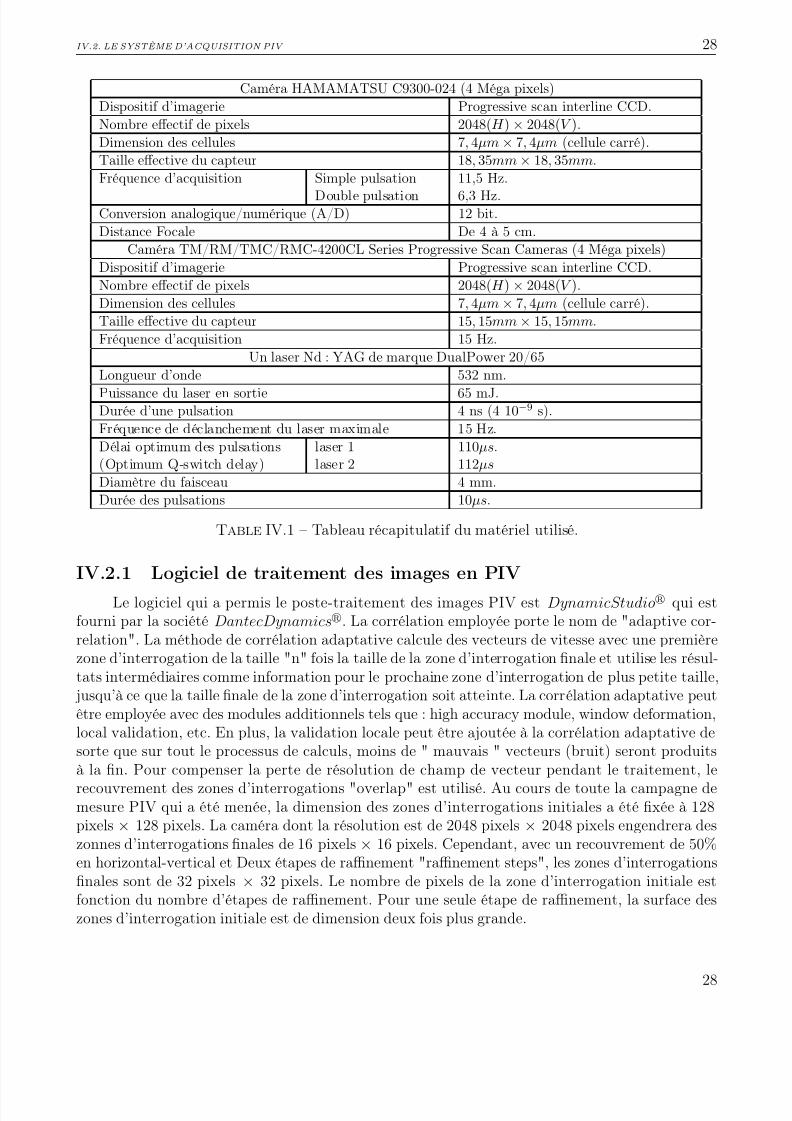
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 41/84
IV.2. LE SYSTÈME D’ACQUISITION PIV 28
Caméra HAMAMATSU C9300-024 (4 Méga pixels)
Dispositif d’imagerie Progressive scan interline CCD.
Nombre effectif de pixels 2048(H )× 2048(V ).
Dimension des cellules 7, 4µm× 7, 4µm (cellule carré).
Taille effective du capteur 18, 35mm× 18, 35mm.
Fréquence d’acquisition Simple pulsation 11,5 Hz.
Double pulsation 6,3 Hz.Conversion analogique/numérique (A/D) 12 bit.
Distance Focale De 4 à 5 cm.
Caméra TM/RM/TMC/RMC-4200CL Series Progressive Scan Cameras (4 Méga pixels)
Dispositif d’imagerie Progressive scan interline CCD.
Nombre effectif de pixels 2048(H )× 2048(V ).
Dimension des cellules 7, 4µm× 7, 4µm (cellule carré).
Taille effective du capteur 15, 15mm× 15, 15mm.
Fréquence d’acquisition 15 Hz.
Un laser Nd : YAG de marque DualPower 20/65
Longueur d’onde 532 nm.
Puissance du laser en sortie 65 mJ.Durée d’une pulsation 4 ns (4 10−9 s).
Fréquence de déclanchement du laser maximale 15 Hz.
Délai optimum des pulsations laser 1 110µs.(Optimum Q-switch delay) laser 2 112µs
Diamètre du faisceau 4 mm.
Durée des pulsations 10µs.
Table IV.1 – Tableau récapitulatif du matériel utilisé.
IV.2.1 Logiciel de traitement des images en PIV
Le logiciel qui a permis le poste-traitement des images PIV est DynamicStudio qui estfourni par la société DantecDynamics. La corrélation employée porte le nom de "adaptive cor-relation". La méthode de corrélation adaptative calcule des vecteurs de vitesse avec une premièrezone d’interrogation de la taille "n" fois la taille de la zone d’interrogation finale et utilise les résul-tats intermédiaires comme information pour le prochaine zone d’interrogation de plus petite taille,
jusqu’à ce que la taille finale de la zone d’interrogation soit atteinte. La corrélation adaptative peutêtre employée avec des modules additionnels tels que : high accuracy module, window deformation,local validation, etc. En plus, la validation locale peut être ajoutée à la corrélation adaptative desorte que sur tout le processus de calculs, moins de " mauvais " vecteurs (bruit) seront produitsà la fin. Pour compenser la perte de résolution de champ de vecteur pendant le traitement, le
recouvrement des zones d’interrogations "overlap" est utilisé. Au cours de toute la campagne demesure PIV qui a été menée, la dimension des zones d’interrogations initiales a été fixée à 128pixels × 128 pixels. La caméra dont la résolution est de 2048 pixels × 2048 pixels engendrera deszonnes d’interrogations finales de 16 pixels × 16 pixels. Cependant, avec un recouvrement de 50%en horizontal-vertical et Deux étapes de raffinement "raffinement steps", les zones d’interrogationsfinales sont de 32 pixels × 32 pixels. Le nombre de pixels de la zone d’interrogation initiale estfonction du nombre d’étapes de raffinement. Pour une seule étape de raffinement, la surface deszones d’interrogation initiale est de dimension deux fois plus grande.
28
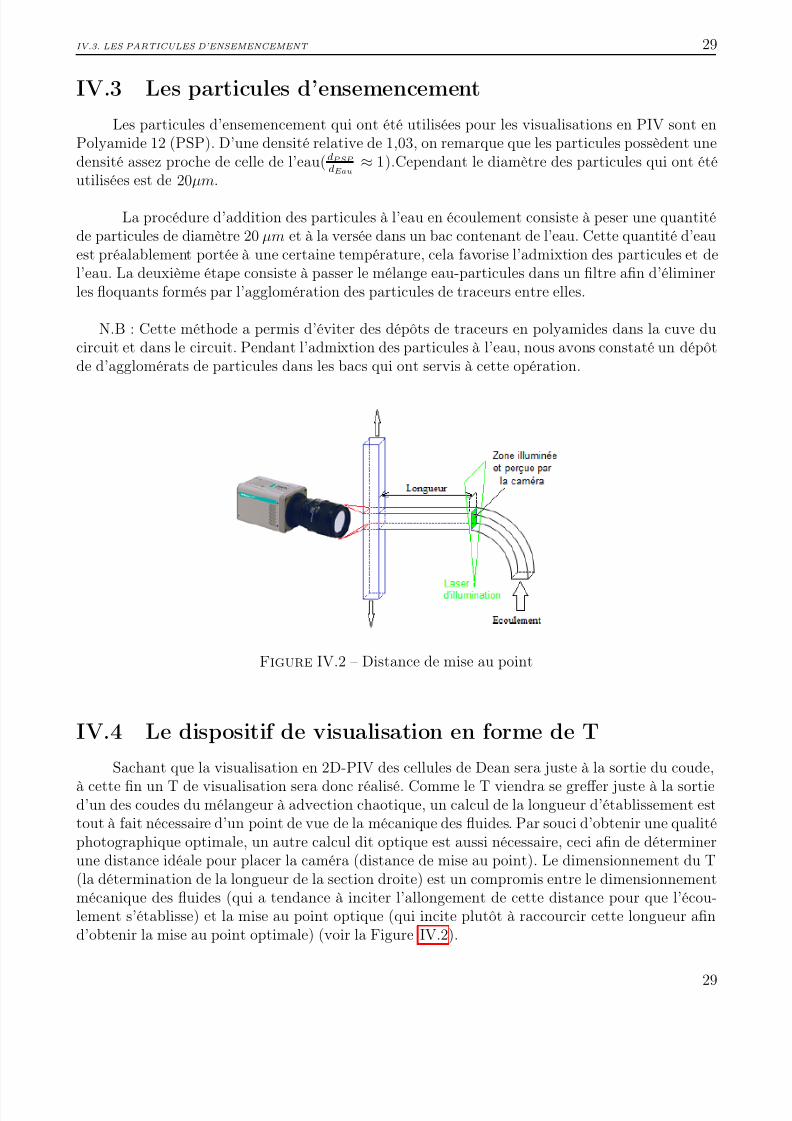
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 42/84
IV.3. LES PARTICULES D’ENSEMENCEMENT 29
IV.3 Les particules d’ensemencement
Les particules d’ensemencement qui ont été utilisées pour les visualisations en PIV sont enPolyamide 12 (PSP). D’une densité relative de 1,03, on remarque que les particules possèdent unedensité assez proche de celle de l’eau( dPSP
dEau≈ 1).Cependant le diamètre des particules qui ont été
utilisées est de 20µm.
La procédure d’addition des particules à l’eau en écoulement consiste à peser une quantitéde particules de diamètre 20 µm et à la versée dans un bac contenant de l’eau. Cette quantité d’eauest préalablement portée à une certaine température, cela favorise l’admixtion des particules et del’eau. La deuxième étape consiste à passer le mélange eau-particules dans un filtre afin d’éliminerles floquants formés par l’agglomération des particules de traceurs entre elles.
N.B : Cette méthode a permis d’éviter des dépôts de traceurs en polyamides dans la cuve ducircuit et dans le circuit. Pendant l’admixtion des particules à l’eau, nous avons constaté un dépôtde d’agglomérats de particules dans les bacs qui ont servis à cette opération.
Figure IV.2 – Distance de mise au point
IV.4 Le dispositif de visualisation en forme de T
Sachant que la visualisation en 2D-PIV des cellules de Dean sera juste à la sortie du coude,
à cette fin un T de visualisation sera donc réalisé. Comme le T viendra se greffer juste à la sortied’un des coudes du mélangeur à advection chaotique, un calcul de la longueur d’établissement esttout à fait nécessaire d’un point de vue de la mécanique des fluides. Par souci d’obtenir une qualitéphotographique optimale, un autre calcul dit optique est aussi nécessaire, ceci afin de déterminerune distance idéale pour placer la caméra (distance de mise au point). Le dimensionnement du T(la détermination de la longueur de la section droite) est un compromis entre le dimensionnementmécanique des fluides (qui a tendance à inciter l’allongement de cette distance pour que l’écou-lement s’établisse) et la mise au point optique (qui incite plutôt à raccourcir cette longueur afind’obtenir la mise au point optimale) (voir la Figure IV.2).
29
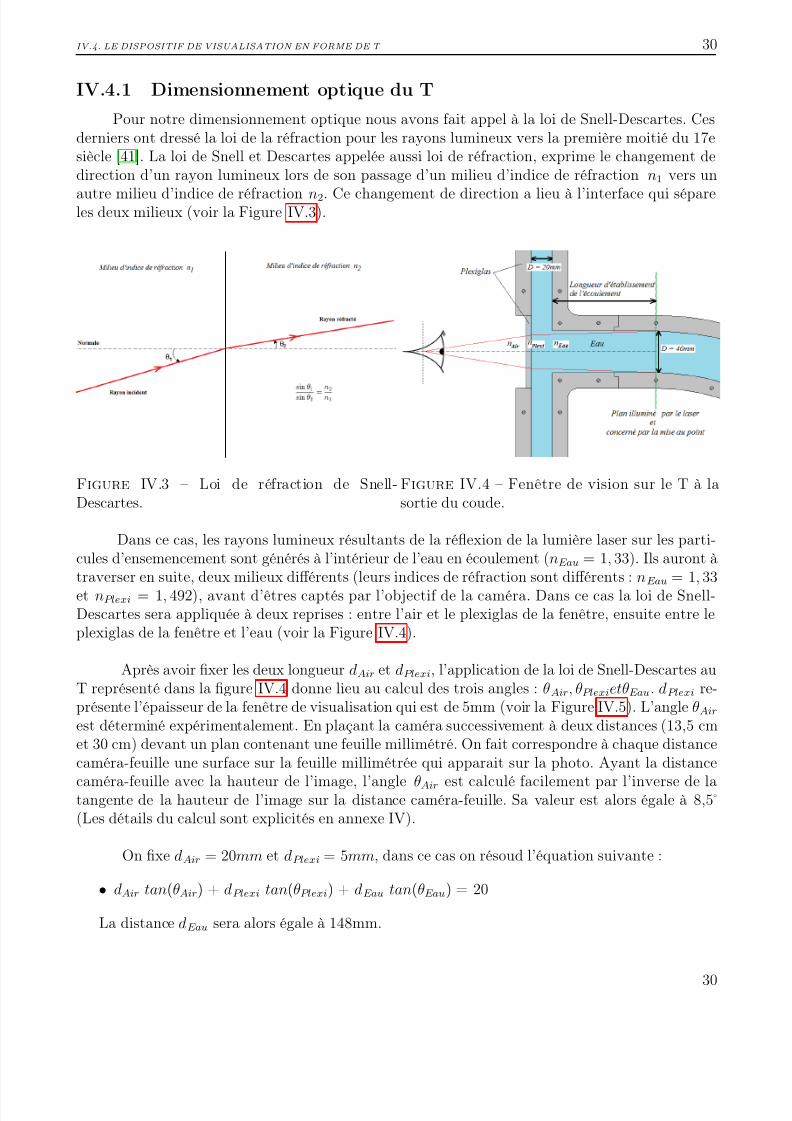
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 43/84
IV.4. LE DISPOSITIF DE VISUALISATION EN FORME DE T 30
IV.4.1 Dimensionnement optique du T
Pour notre dimensionnement optique nous avons fait appel à la loi de Snell-Descartes. Cesderniers ont dressé la loi de la réfraction pour les rayons lumineux vers la première moitié du 17esiècle [41]. La loi de Snell et Descartes appelée aussi loi de réfraction, exprime le changement dedirection d’un rayon lumineux lors de son passage d’un milieu d’indice de réfraction n1 vers un
autre milieu d’indice de réfraction n2. Ce changement de direction a lieu à l’interface qui sépareles deux milieux (voir la Figure IV.3).
Figure IV.3 – Loi de réfraction de Snell-Descartes.
Figure IV.4 – Fenêtre de vision sur le T à lasortie du coude.
Dans ce cas, les rayons lumineux résultants de la réflexion de la lumière laser sur les parti-cules d’ensemencement sont générés à l’intérieur de l’eau en écoulement (nEau = 1, 33). Ils auront àtraverser en suite, deux milieux différents (leurs indices de réfraction sont différents : nEau = 1, 33et nPlexi = 1, 492), avant d’êtres captés par l’objectif de la caméra. Dans ce cas la loi de Snell-Descartes sera appliquée à deux reprises : entre l’air et le plexiglas de la fenêtre, ensuite entre leplexiglas de la fenêtre et l’eau (voir la Figure IV.4).
Après avoir fixer les deux longueur dAir et dPlexi, l’application de la loi de Snell-Descartes auT représenté dans la figure IV.4 donne lieu au calcul des trois angles : θAir, θPlexietθEau. dPlexi re-présente l’épaisseur de la fenêtre de visualisation qui est de 5mm (voir la Figure IV.5). L’angle θAir
est déterminé expérimentalement. En plaçant la caméra successivement à deux distances (13,5 cmet 30 cm) devant un plan contenant une feuille millimétré. On fait correspondre à chaque distancecaméra-feuille une surface sur la feuille millimétrée qui apparait sur la photo. Ayant la distance
caméra-feuille avec la hauteur de l’image, l’angle θAir est calculé facilement par l’inverse de latangente de la hauteur de l’image sur la distance caméra-feuille. Sa valeur est alors égale à 8,5(Les détails du calcul sont explicités en annexe IV).
On fixe dAir = 20mm et dPlexi = 5mm, dans ce cas on résoud l’équation suivante :
• dAir tan(θAir) + dPlexi tan(θPlexi) + dEau tan(θEau) = 20
La distance dEau sera alors égale à 148mm.
30
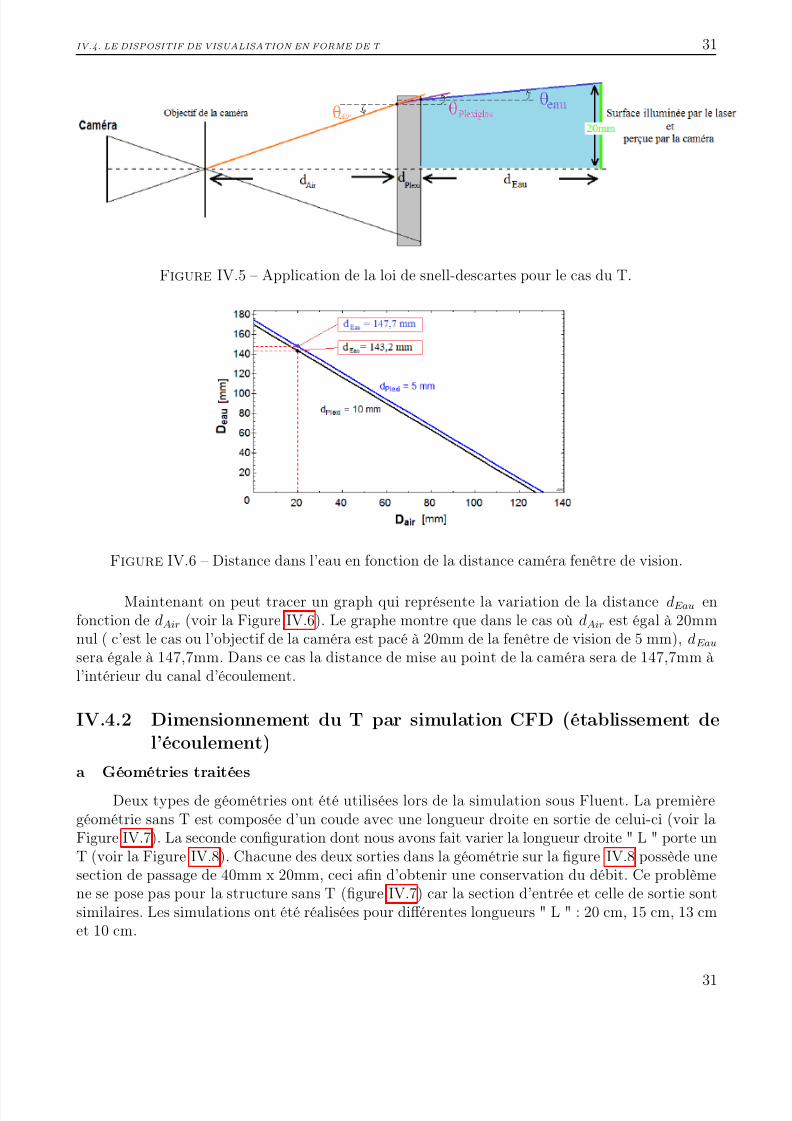
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 44/84
IV.4. LE DISPOSITIF DE VISUALISATION EN FORME DE T 31
Figure IV.5 – Application de la loi de snell-descartes pour le cas du T.
Figure IV.6 – Distance dans l’eau en fonction de la distance caméra fenêtre de vision.
Maintenant on peut tracer un graph qui représente la variation de la distance dEau enfonction de dAir (voir la Figure IV.6). Le graphe montre que dans le cas où dAir est égal à 20mmnul ( c’est le cas ou l’objectif de la caméra est pacé à 20mm de la fenêtre de vision de 5 mm), dEau
sera égale à 147,7mm. Dans ce cas la distance de mise au point de la caméra sera de 147,7mm àl’intérieur du canal d’écoulement.
IV.4.2 Dimensionnement du T par simulation CFD (établissement del’écoulement)
a Géométries traitées
Deux types de géométries ont été utilisées lors de la simulation sous Fluent. La premièregéométrie sans T est composée d’un coude avec une longueur droite en sortie de celui-ci (voir laFigure IV.7). La seconde configuration dont nous avons fait varier la longueur droite " L " porte unT (voir la Figure IV.8). Chacune des deux sorties dans la géométrie sur la figure IV.8 possède unesection de passage de 40mm x 20mm, ceci afin d’obtenir une conservation du débit. Ce problèmene se pose pas pour la structure sans T (figure IV.7) car la section d’entrée et celle de sortie sontsimilaires. Les simulations ont été réalisées pour différentes longueurs " L " : 20 cm, 15 cm, 13 cmet 10 cm.
31

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 45/84
IV.4. LE DISPOSITIF DE VISUALISATION EN FORME DE T 32
En modélisant plusieurs géométries, en premier lieu une longueur droite uniquement placéeà la sortie du coude, ensuite en plaçant un T et enfin en variant la longueur droite " L ", nousavons pu caractériser l’influence du T et de la longueur droite sur la vitesse secondaire. Cettevitesse secondaire étant assimilée à une vitesse radiale (voir équation IV.3) contenue dans un planperpendiculaire à l’écoulement dans le canal (plan transversal). Cette vitesse secondaire est lagrandeur de la vitesse qui sera mesurée grâce au montage expérimental PIV.
Figure IV.7 – Configuration sans T. Figure IV.8 – Configuration avec T.
b Maillage du canal
Sur l’ensemble des différentes géométries modélisées, le maillage utilisé est un maillage qua-dratique de (1mm x 1mm x 1mm). Sur les surfaces des géométries, apparait un maillage carré de
dimensions (1mm x 1mm).
c Equations résolues
La vitesse d’écoulement à l’intérieur du canal modélisé est faible, dans ce cas le régimed’écoulement est considéré laminaire. Pour la modélisation de cet écoulement, la résolution dusystème composé des quatre équations citées ci-dessous est nécessaire (IV.1 : équation de continuitéet IV.2 : équations de Naviers-Stokes). Les inconnues sont u,v,w et P.
∂u∂x
+ ∂v∂y
+ ∂w∂z
= 0 (IV.1)
∂u∂t + u ∂u
∂x + v ∂u∂y + w ∂u
∂z = −∂P ∂x + ν ( ∂
2
u∂x2 + ∂
2
u∂y2 + ∂
2
u∂z2 )
∂v∂t
+ u ∂v∂x
+ v ∂v∂y
+ w ∂v∂z
= −∂P ∂y
+ ν ( ∂ 2v∂x2 + ∂ 2v
∂y2+ ∂ 2v
∂z2)
∂w∂t
+ u ∂w∂x
+ v ∂w∂y
+ w ∂w∂z
= −∂P ∂z
+ ν ( ∂ 2w∂x2 + ∂ 2w
∂y2+ ∂ 2w
∂z2)
(IV.2)
d Conditions aux limites
Pour la configuration désignée par la Figure IV.7, on a appliqué une vitesse de normeconstante selon la direction z, c’est-à-dire perpendiculaire à la section entrée. En ce qui concerne
32
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 46/84
IV.4. LE DISPOSITIF DE VISUALISATION EN FORME DE T 33
la sortie une condition aux limites de types " Pressure-Outlet1 " est appliquée. Pour la configu-ration avec T (voir Figure IV.8) une vitesse de magnitude constante aussi a été appliquée selonla direction z, la vitesse est toujours perpendiculaire à la section entrée. Pour les deux sorties unecondition aux limites de types " Pressure-Outlet " a été appliquée.
e Méthodes numériques
La simulation a été résolue en considérant la méthode des volumes finis. Le schéma de discré-tisation adopté est : 1st order upwind : la pression et la vitesse ont été couplées selon un schémasimple. Nous avons choisi une discrétisation standard pour la pression. En ce qui concerne la quan-tité de mouvement, on a choisi un schéma amont de discrétisation du second ordre (second orderupwind). Les facteurs de relaxation utilisés lors de la simulation sont de 0,3 pour la pression, 1pour la densité et 0,7 pour la quantité de mouvement.
f Critères de convergence
Le critère de convergence a été fixé à 10−7 pour la valeur des résidus de vitesse et decontinuité Malgré avoir attient cette limite, la convergence a été validée uniquement si l’erreur estresté invariable (stable) avec d’avantage d’itérations. On a enregistré des cas où l’erreur n’atteintpas la limite fixée de 10−7, en revanche la stabilité de l’erreur au cours des itérations a été atteinte.
g Tests de maillage
Sachant que le maillage utilisé est de type quadratique simple, notre test de maillage a étéréalisé en considérant trois dimensions de ces mailles à savoir : 5mm, 2mm et 1mm.
La fonction norme de la vitesse radiale (voir équation IV.3) a été employé et cela a per-mis de mettre les résultats sous format graphique (voir annexe V). Les représentations graphiquesmontrent l’évolution de cette vitesse dans la conduite droite à partir de la sortie du coude.
Dans le cas de la géométrie sans T, on constate qu’il y’a une faible différence entre les maillesde 1mm et 2mm, par contre la maille de 5mm pointe une différence significative. Pour un nombrede Reynolds de 200 cette erreur relative entre les deux mailles de 1mm et 2mm est de moins de 1%allant jusqu’à 7% pour un nombre de Reynolds égal à 1500. Pour les deux mailles de 2mm et 5mml’erreur relative est de 2% pour un nombre de Reynolds de 200, cette erreur atteint 23% pour unnombre de Reynolds de 1500.
Dans le cas de la géométrie avec T dont la longueur est à 20cm, on remarque une différenceentre la maille de 1mm et 2mm allant de 2% pour un nombre de Reynolds de 200 jusqu’à 8% pourun nombre de Reynolds de 1500. L’écart est plus prononcé entre les mailles 2mm et 5mm, il débutepar 6% (Re=200) pour atteindre 46% pour un nombre de Reynolds de 1500.
Dans le cas de la géométrie avec T dont la longueur est à 10cm, on remarque une différenceentre la maille de 1mm et 2mm allant de 3% pour un nombre de Reynolds de 200 jusqu’à 8% pourun nombre de Reynolds de 1500. L’écart est plus prononcé entre les mailles 2mm et 5mm, il débute
1La condition aux limites de type Pressure-Outlet est une sépécification d’une pression statique seule.
33
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 47/84
IV.4. LE DISPOSITIF DE VISUALISATION EN FORME DE T 34
par 10% (Re=200) pour atteindre 34% pour un nombre de Reynolds de 1500.
En se référant aux résultats des erreurs entre les trois dimensions de mailles testées, la maillede dimension 1mm a été choisie. Le nombre de mailles de 1mm ainsi obtenus est de 1115200 demailles et le temps de calcul est aussi important. Cependant, l’importance de la précision du di-mensionnement du T est primordiale pour la suite des visualisations.
h Validation et commentaire des résultats
Un paramètre a été introduit qui est la norme de la vitesse radiale représentée sur la sectiontransversale (z,y), juste en sortie du coude. Cette grandeur a pour expression l’équation ci-dessous :
V r = V 2y + V 2z (IV.3)
Cette équation représente la vitesse secondaire qui est moyennée sur un plan transversal
perpendiculaire au sens de l’écoulement dans le conduit. La Figure IV.9 représente cette vitesseradiale uniquement à partir de la sortie du coude. Elle est moyennée sur des sections transversalesrepérées à différentes positions le long de la conduite carrée. Cette vitesse a été calculée pourdifférents nombres de Reynolds (Re = 200, Re = 500, Re = 1000 et Re=1500) mais en demeuranttoujours en régime laminaire (condition nécessaire pour la visualisation des cellules de Dean). Dif-férentes longueurs droites ont été aussi considérées, pour les géométries avec T (100mm, 130mm,150mm et 200mm).
Les courbes qui pointent vers le haut (présentant des pics) représentent les géométries avecT. On remarque que la norme de la vitesse radiale est importante juste à la sortie du coude (en-trée de la section droite intervalle des cinq premiers centimètres) et elle décroit à partir de cette
limite. Cette norme de la vitesse radiale croit aussi à la fin de la section droite, juste en entréedu la bifurcation pour les géométrie avec T. Ceci est expliqué par le fait qu’à la sortie du coudeou au niveau de la bifrcation du T une composante transversale de la vitesse importante appa-rait, du fait de la forme du canal en amont (coude) et en aval (bifurcation du T) de la section droite.
Les autres courbes représentent les géométries sans T, ce qui diffère c’est la longueur de lasection droite entre le coude et le T. On a pris quatre longueurs à savoir 200mm, 150mm, 130mmet 10cm (voir la Figure IV.9). La variation du nombre de Reynolds a été aussi prise en comptepour chaque géométrie.
La figure IV.9 montre clairement que la configuration portant une longueur droite de 10cmpeut être adoptée. Il est clair que le raccourcissement de la longueur droite jusqu’à 100mm n’a euaucune influence sur la vitesse radiale. La meilleure configuration de prise d’images sera de pointeravec la caméra sur uniquement la surface de la section de passage. La configuration indiquée sur lafigure 35 dans l’annexe IV est l’idéale avec une distance de mise au point de 135mm. Maintenant,en combinant tout les résultats Le T sera réalisé avec une distance du canal droit entre le coude etla bifurcation du T sera de 100mm. La distance caméra-fenêtre de vision sera de 30mm pour uneépaisseur de la fenêtre de vision de 5mm.
34
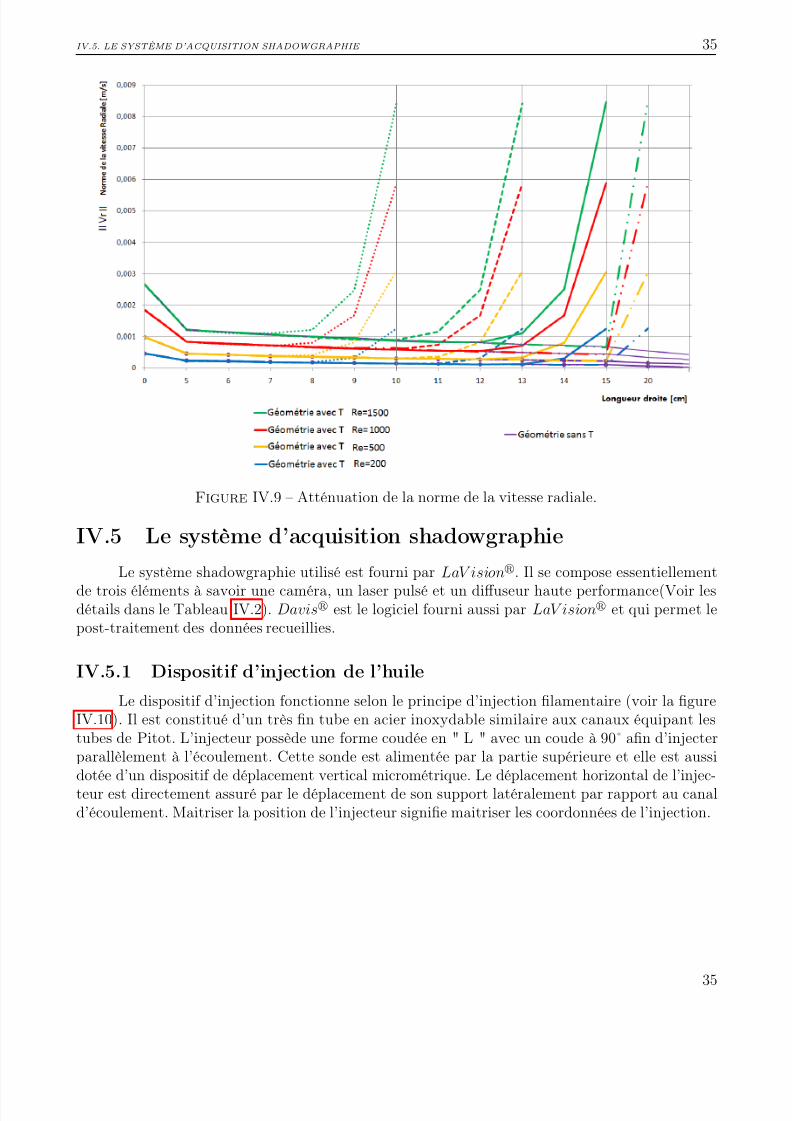
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 48/84
IV.5. LE SYSTÈME D’ACQUISITION SHADOWGRAPHIE 35
Figure IV.9 – Atténuation de la norme de la vitesse radiale.
IV.5 Le système d’acquisition shadowgraphie
Le système shadowgraphie utilisé est fourni par LaV ision. Il se compose essentiellement
de trois éléments à savoir une caméra, un laser pulsé et un diffuseur haute performance(Voir lesdétails dans le Tableau IV.2). Davis est le logiciel fourni aussi par LaV ision et qui permet lepost-traitement des données recueillies.
IV.5.1 Dispositif d’injection de l’huile
Le dispositif d’injection fonctionne selon le principe d’injection filamentaire (voir la figureIV.10). Il est constitué d’un très fin tube en acier inoxydable similaire aux canaux équipant lestubes de Pitot. L’injecteur possède une forme coudée en " L " avec un coude à 90 afin d’injecterparallèlement à l’écoulement. Cette sonde est alimentée par la partie supérieure et elle est aussi
dotée d’un dispositif de déplacement vertical micrométrique. Le déplacement horizontal de l’injec-teur est directement assuré par le déplacement de son support latéralement par rapport au canald’écoulement. Maitriser la position de l’injecteur signifie maitriser les coordonnées de l’injection.
35

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 49/84
IV.5. LE SYSTÈME D’ACQUISITION SHADOWGRAPHIE 36
Caméra CCD Imager Pro SX 5 Méga pixels
Dispositif d’imagerie Progressive scan interline CCD.
Nombre effectif de pixels 2448(H )× 2050(V ).
Dimension des cellules 3, 45µm× 3, 54µm (cellule rectangulaire).
Fréquence d’acquisition 11 Hz.Conversion analogique/numérique (A/D) 12 bit.
Diffuser haute performance
Puissance laser minimale recommandée 15 mJ, 527-532 nm.
Diamètre de sortie de la lumière diffuse 120 mm.
Longuer d’onde de la lumière diffuse 574-580 nm.
Durée de l’impulsion lumineuse (à 5 ns laser) 20 ns.
Un laser Nd : YAG de marque Litron lasers
Longueur d’onde 532 nm.
Puissance du laser en sortie 65 mJ.
Durée d’une pulsation 4 ns (4 10−9 s).
Fréquence de déclanchement du laser maximale 15 Hz.Délai optimum des pulsations laser 1 106µs.(Optimum Q-switch delay) laser 2 102µs.
Diamètre du faisceau 4 mm.
Table IV.2 – Tableau récapitulatif du matériel utilisé.
Figure IV.10 – Dispositif d’injection de l’huile.
36
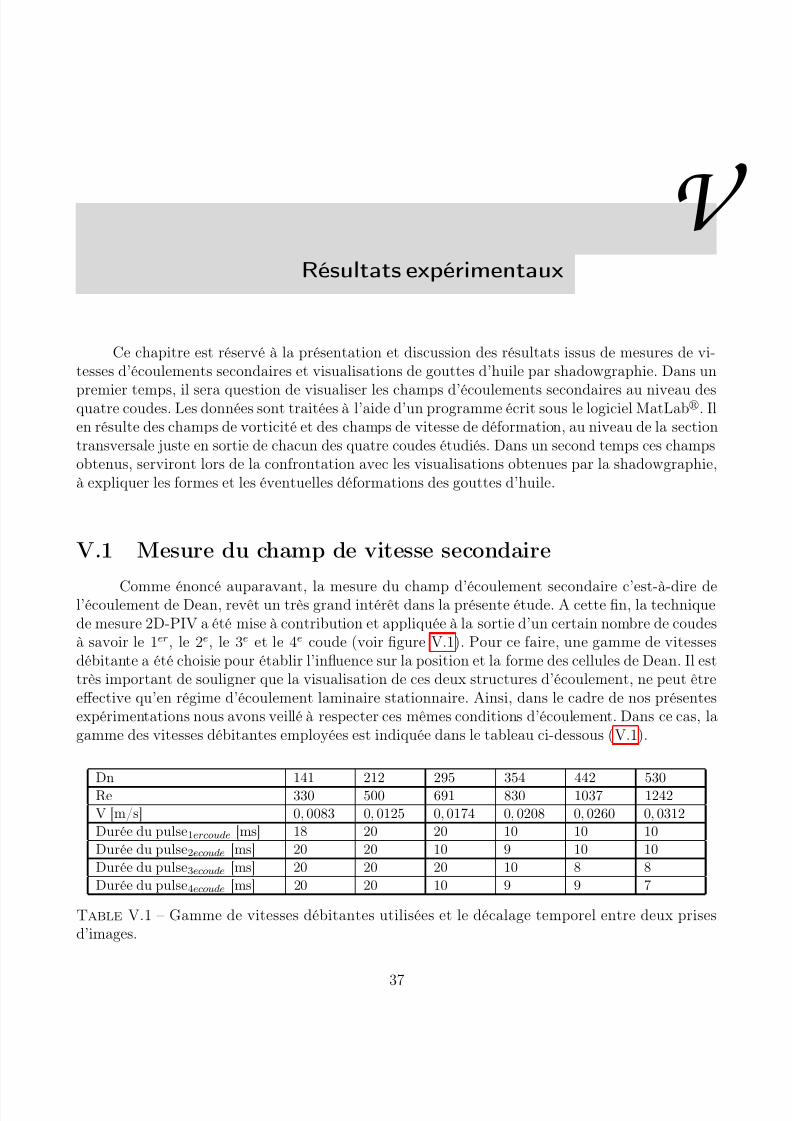
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 50/84
VRésultats expérimentaux
Ce chapitre est réservé à la présentation et discussion des résultats issus de mesures de vi-tesses d’écoulements secondaires et visualisations de gouttes d’huile par shadowgraphie. Dans un
premier temps, il sera question de visualiser les champs d’écoulements secondaires au niveau desquatre coudes. Les données sont traitées à l’aide d’un programme écrit sous le logiciel MatLab. Ilen résulte des champs de vorticité et des champs de vitesse de déformation, au niveau de la sectiontransversale juste en sortie de chacun des quatre coudes étudiés. Dans un second temps ces champsobtenus, serviront lors de la confrontation avec les visualisations obtenues par la shadowgraphie,à expliquer les formes et les éventuelles déformations des gouttes d’huile.
V.1 Mesure du champ de vitesse secondaire
Comme énoncé auparavant, la mesure du champ d’écoulement secondaire c’est-à-dire del’écoulement de Dean, revêt un très grand intérêt dans la présente étude. A cette fin, la techniquede mesure 2D-PIV a été mise à contribution et appliquée à la sortie d’un certain nombre de coudesà savoir le 1er, le 2e, le 3e et le 4e coude (voir figure V.1). Pour ce faire, une gamme de vitessesdébitante a été choisie pour établir l’influence sur la position et la forme des cellules de Dean. Il esttrès important de souligner que la visualisation de ces deux structures d’écoulement, ne peut êtreeffective qu’en régime d’écoulement laminaire stationnaire. Ainsi, dans le cadre de nos présentesexpérimentations nous avons veillé à respecter ces mêmes conditions d’écoulement. Dans ce cas, lagamme des vitesses débitantes employées est indiquée dans le tableau ci-dessous (V.1).
Dn 141 212 295 354 442 530Re 330 500 691 830 1037 1242
V [m/s] 0, 0083 0, 0125 0, 0174 0, 0208 0, 0260 0, 0312
Durée du pulse1ercoude [ms] 18 20 20 10 10 10
Durée du pulse2ecoude [ms] 20 20 10 9 10 10
Durée du pulse3ecoude [ms] 20 20 20 10 8 8
Durée du pulse4ecoude [ms] 20 20 10 9 9 7
Table V.1 – Gamme de vitesses débitantes utilisées et le décalage temporel entre deux prisesd’images.
37

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 51/84
V.1. MESURE DU CHAMP DE VITESSE SECONDAIRE 38
Figure V.1 – Les coudes du mélangeur concernés par la mesure PIV-2D.
Pour remédier aux contraintes d’inaccessibilités aux zones de mesure et aux distorsions op-tiques dans les courbures des coudes, un T a été conçu et réalisé (voir figure IV.4). Ce dernier estainsi monté juste à la sortie des quatre coudes successivement. La figure V.2 montre les différentesconfigurations adoptées. Les éléments courbes (coudes) et les sections droites entre les coudes sontassemblés à la structure, à mesure de l’avancement des visualisations, du premier coude jusqu’auquatrième. Les surfaces représentées en couleur verte (de dimensions égale à la section de passage40mm x 40mm), indiquent le plan de mise au point de la caméra mais également le plan illuminépar le laser, par conséquent c’est le plan concerné par la mesure 2D-PIV.
En raison du fort écart de vitesse (rapport de 1 à 10), constaté entre les vitesses secon-daires à mesurer et la vitesse d’écoulement principale dans le canal, mesurer un tel champ devitesse transversal par PIV nécessite l’optimisation d’un certain nombre de paramètres explicitésci-contre. En premier, l’épaisseur de la nappe laser qui doit être la plus mince possible afin d’éviterun déplacement des particules dans l’épaisseur du laser. Un tel déplacement ne pourra être corrélépar le logiciel réglé pour des mesures PIV bidimensionnelles. En second lieu, l’objectif de la camérase doit d’être placé perpendiculairement à la nappe laser. Ensuite, les expériences de visualisationdoivent être menées dans une ambiance parfaitement sombre. Ceci dans le but d’éviter toute lu-mière parasite émanant d’autres sources que celles des particules d’ensemencement illuminées parla lumière laser. Et enfin, ajuster le temps entre les deux expositions laser (pulsations laser). Ladurée entre les deux expositions laser est fonction du nombre de Dean et donc de la vitesse des par-
ticules (voir le tableau IV.2). Il existe une certaine durée entre deux instants de capture d’images,dépassant cette limite les particules sortent du champ de corrélation du logiciel (zones d’interro-gations) ce qui conduit à une mauvaise corrélation et un champ de vitesse non représentatif de laréalité.
Après optimisation des paramètres du système PIV, les résultats de mesures en 2D-PIVà la sortie du premier coude et pour les nombres de Dean indiqués dans le tableau V.1 sont re-présentés par les figures V.3-V.8. Les résultats des trois autres coudes (deuxième, troisième etquatrième) sont attachés en annexe VII. Les champs de vitesses transversales sont affichés se-
38
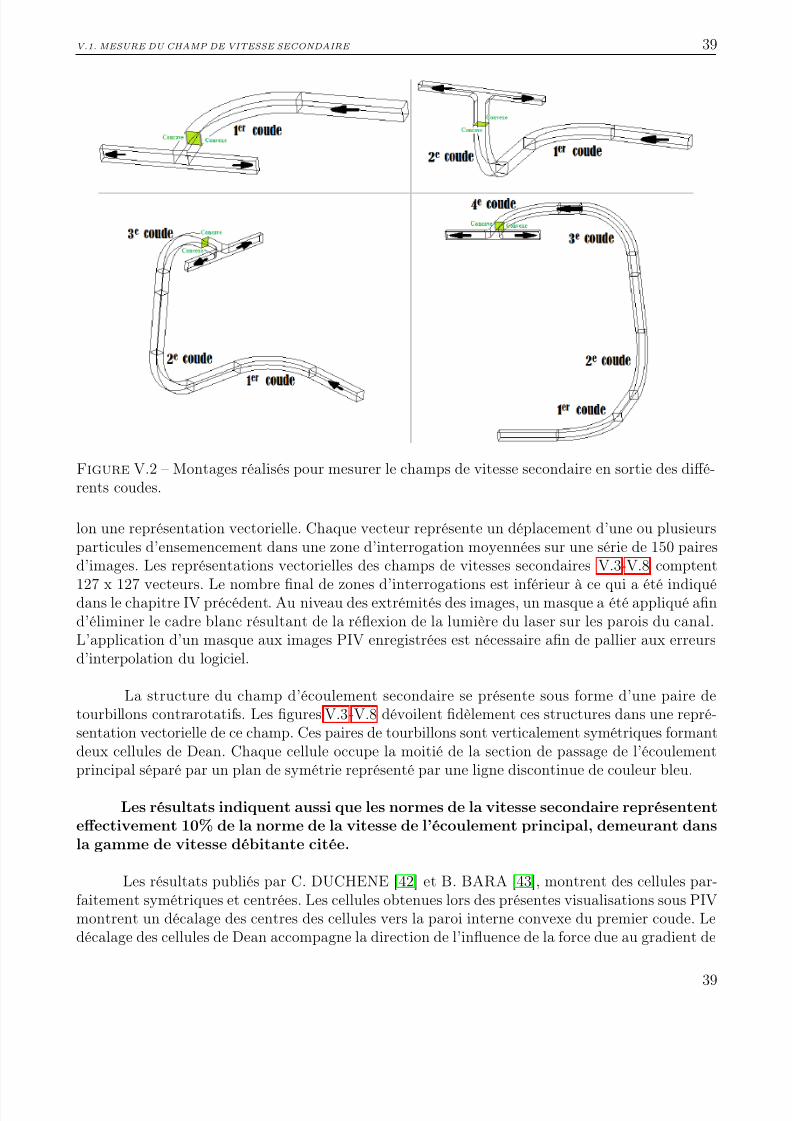
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 52/84
V.1. MESURE DU CHAMP DE VITESSE SECONDAIRE 39
Figure V.2 – Montages réalisés pour mesurer le champs de vitesse secondaire en sortie des diffé-rents coudes.
lon une représentation vectorielle. Chaque vecteur représente un déplacement d’une ou plusieursparticules d’ensemencement dans une zone d’interrogation moyennées sur une série de 150 pairesd’images. Les représentations vectorielles des champs de vitesses secondaires V.3-V.8 comptent
127 x 127 vecteurs. Le nombre final de zones d’interrogations est inférieur à ce qui a été indiquédans le chapitre IV précédent. Au niveau des extrémités des images, un masque a été appliqué afind’éliminer le cadre blanc résultant de la réflexion de la lumière du laser sur les parois du canal.L’application d’un masque aux images PIV enregistrées est nécessaire afin de pallier aux erreursd’interpolation du logiciel.
La structure du champ d’écoulement secondaire se présente sous forme d’une paire detourbillons contrarotatifs. Les figures V.3-V.8 dévoilent fidèlement ces structures dans une repré-sentation vectorielle de ce champ. Ces paires de tourbillons sont verticalement symétriques formantdeux cellules de Dean. Chaque cellule occupe la moitié de la section de passage de l’écoulementprincipal séparé par un plan de symétrie représenté par une ligne discontinue de couleur bleu.
Les résultats indiquent aussi que les normes de la vitesse secondaire représententeffectivement 10% de la norme de la vitesse de l’écoulement principal, demeurant dansla gamme de vitesse débitante citée.
Les résultats publiés par C. DUCHENE [42] et B. BARA [43], montrent des cellules par-faitement symétriques et centrées. Les cellules obtenues lors des présentes visualisations sous PIVmontrent un décalage des centres des cellules vers la paroi interne convexe du premier coude. Ledécalage des cellules de Dean accompagne la direction de l’influence de la force due au gradient de
39
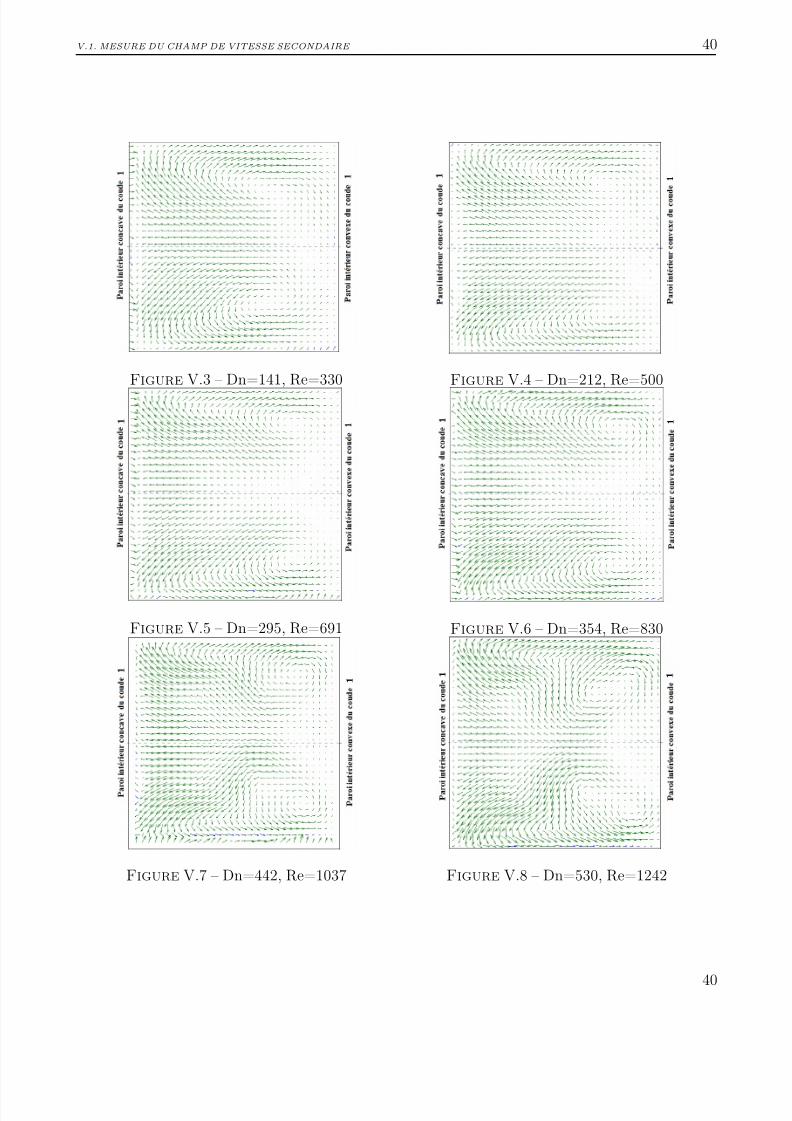
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 53/84
V.1. MESURE DU CHAMP DE VITESSE SECONDAIRE 40
Figure V.3 – Dn=141, Re=330 Figure V.4 – Dn=212, Re=500
Figure V.5 – Dn=295, Re=691 Figure V.6 – Dn=354, Re=830
Figure V.7 – Dn=442, Re=1037 Figure V.8 – Dn=530, Re=1242
40
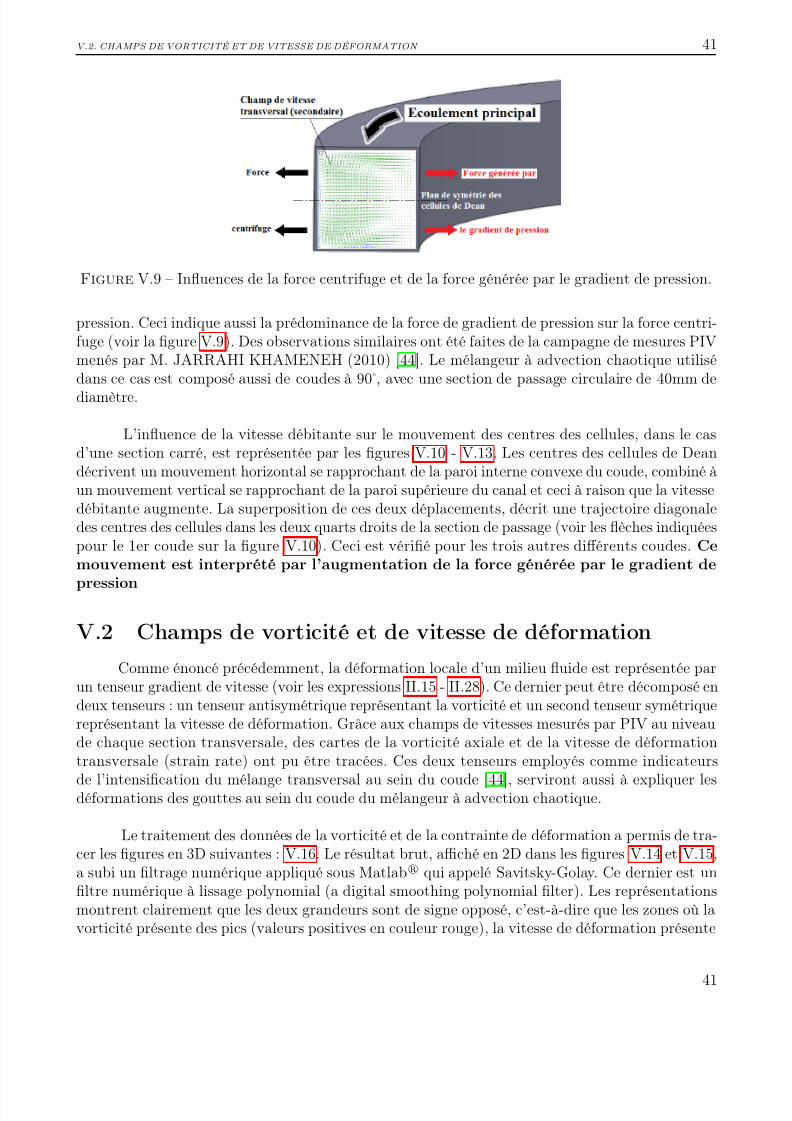
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 54/84
V.2. CHAMPS DE VORTICITÉ ET DE VITESSE DE DÉFORMATION 41
Figure V.9 – Influences de la force centrifuge et de la force générée par le gradient de pression.
pression. Ceci indique aussi la prédominance de la force de gradient de pression sur la force centri-fuge (voir la figure V.9). Des observations similaires ont été faites de la campagne de mesures PIVmenés par M. JARRAHI KHAMENEH (2010) [44]. Le mélangeur à advection chaotique utilisédans ce cas est composé aussi de coudes à 90 , avec une section de passage circulaire de 40mm dediamètre.
L’influence de la vitesse débitante sur le mouvement des centres des cellules, dans le casd’une section carré, est représentée par les figures V.10 - V.13. Les centres des cellules de Deandécrivent un mouvement horizontal se rapprochant de la paroi interne convexe du coude, combiné àun mouvement vertical se rapprochant de la paroi supérieure du canal et ceci à raison que la vitessedébitante augmente. La superposition de ces deux déplacements, décrit une trajectoire diagonaledes centres des cellules dans les deux quarts droits de la section de passage (voir les flèches indiquéespour le 1er coude sur la figure V.10). Ceci est vérifié pour les trois autres différents coudes. Cemouvement est interprété par l’augmentation de la force générée par le gradient de
pression
V.2 Champs de vorticité et de vitesse de déformation
Comme énoncé précédemment, la déformation locale d’un milieu fluide est représentée parun tenseur gradient de vitesse (voir les expressions II.15 - II.28). Ce dernier peut être décomposé endeux tenseurs : un tenseur antisymétrique représentant la vorticité et un second tenseur symétriquereprésentant la vitesse de déformation. Grâce aux champs de vitesses mesurés par PIV au niveaude chaque section transversale, des cartes de la vorticité axiale et de la vitesse de déformationtransversale (strain rate) ont pu être tracées. Ces deux tenseurs employés comme indicateurs
de l’intensification du mélange transversal au sein du coude [44], serviront aussi à expliquer lesdéformations des gouttes au sein du coude du mélangeur à advection chaotique.
Le traitement des données de la vorticité et de la contrainte de déformation a permis de tra-cer les figures en 3D suivantes : V.16. Le résultat brut, affiché en 2D dans les figures V.14 et V.15,a subi un filtrage numérique appliqué sous Matlab qui appelé Savitsky-Golay. Ce dernier est unfiltre numérique à lissage polynomial (a digital smoothing polynomial filter). Les représentationsmontrent clairement que les deux grandeurs sont de signe opposé, c’est-à-dire que les zones où lavorticité présente des pics (valeurs positives en couleur rouge), la vitesse de déformation présente
41

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 55/84
V.2. CHAMPS DE VORTICITÉ ET DE VITESSE DE DÉFORMATION 42
Figure V.10 – Premier coude Figure V.11 – Second coude
Figure V.12 – Troisième coude Figure V.13 – Quatrième coude
Figure V.14 – La vorticité à la sortiedu premier coude avec application filtreSavitzky-Golay.
Figure V.15 – La vitesse débitante sur lavitesse de déformation à la sortie du premiercoude avec filtre Savitzky-Golay.
42
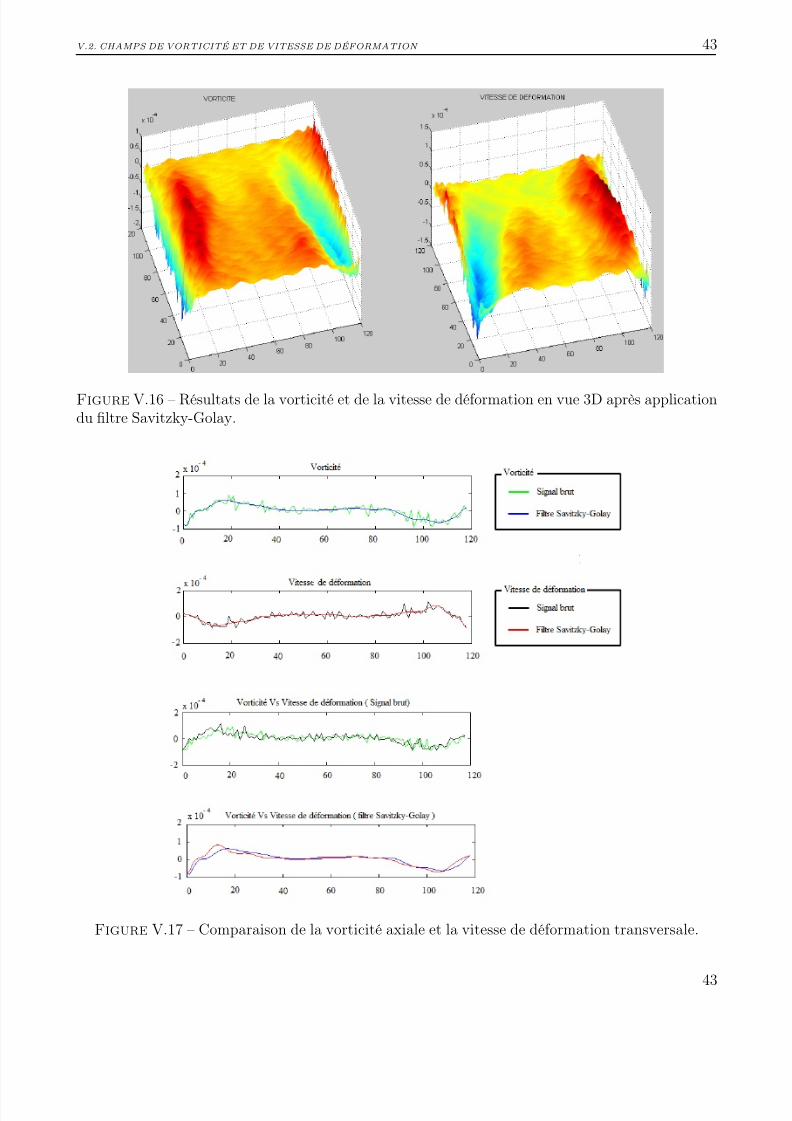
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 56/84
V.2. CHAMPS DE VORTICITÉ ET DE VITESSE DE DÉFORMATION 43
Figure V.16 – Résultats de la vorticité et de la vitesse de déformation en vue 3D après applicationdu filtre Savitzky-Golay.
Figure V.17 – Comparaison de la vorticité axiale et la vitesse de déformation transversale.
43
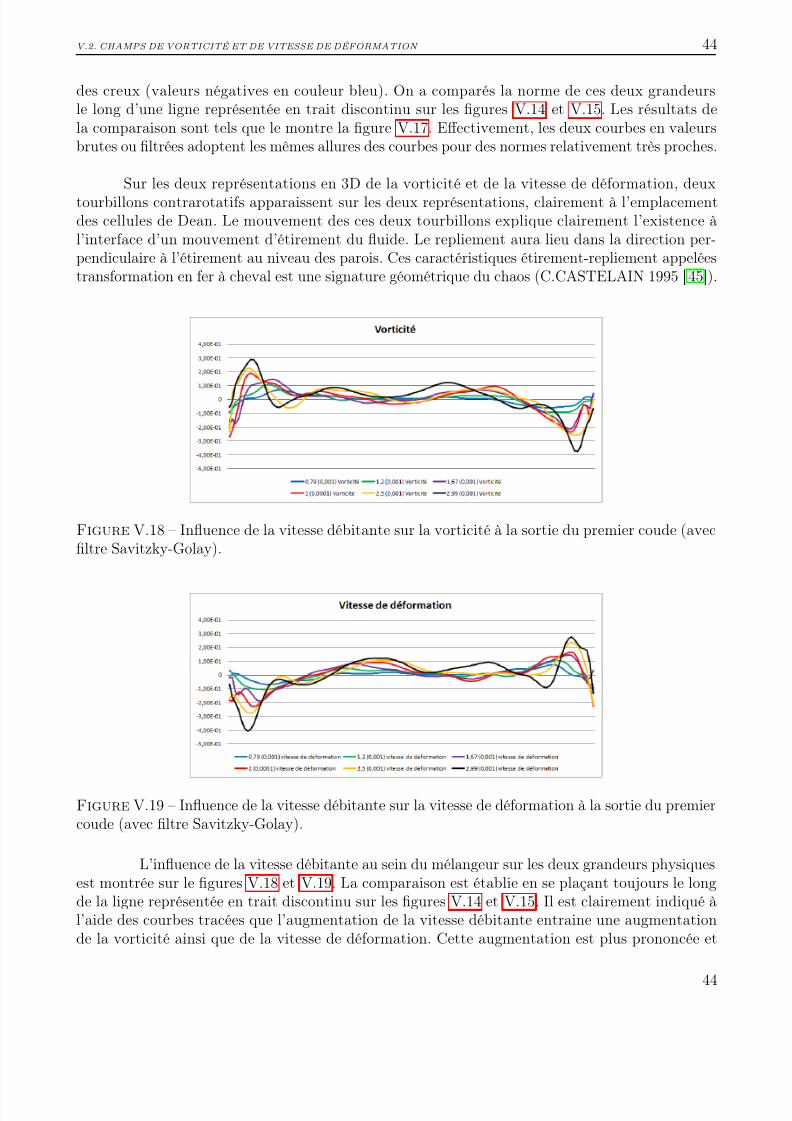
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 57/84
V.2. CHAMPS DE VORTICITÉ ET DE VITESSE DE DÉFORMATION 44
des creux (valeurs négatives en couleur bleu). On a comparés la norme de ces deux grandeursle long d’une ligne représentée en trait discontinu sur les figures V.14 et V.15. Les résultats dela comparaison sont tels que le montre la figure V.17. Effectivement, les deux courbes en valeursbrutes ou filtrées adoptent les mêmes allures des courbes pour des normes relativement très proches.
Sur les deux représentations en 3D de la vorticité et de la vitesse de déformation, deuxtourbillons contrarotatifs apparaissent sur les deux représentations, clairement à l’emplacementdes cellules de Dean. Le mouvement des ces deux tourbillons explique clairement l’existence àl’interface d’un mouvement d’étirement du fluide. Le repliement aura lieu dans la direction per-pendiculaire à l’étirement au niveau des parois. Ces caractéristiques étirement-repliement appeléestransformation en fer à cheval est une signature géométrique du chaos (C.CASTELAIN 1995 [ 45]).
Figure V.18 – Influence de la vitesse débitante sur la vorticité à la sortie du premier coude (avecfiltre Savitzky-Golay).
Figure V.19 – Influence de la vitesse débitante sur la vitesse de déformation à la sortie du premiercoude (avec filtre Savitzky-Golay).
L’influence de la vitesse débitante au sein du mélangeur sur les deux grandeurs physiquesest montrée sur le figures V.18 et V.19. La comparaison est établie en se plaçant toujours le longde la ligne représentée en trait discontinu sur les figures V.14 et V.15. Il est clairement indiqué àl’aide des courbes tracées que l’augmentation de la vitesse débitante entraine une augmentationde la vorticité ainsi que de la vitesse de déformation. Cette augmentation est plus prononcée et
44
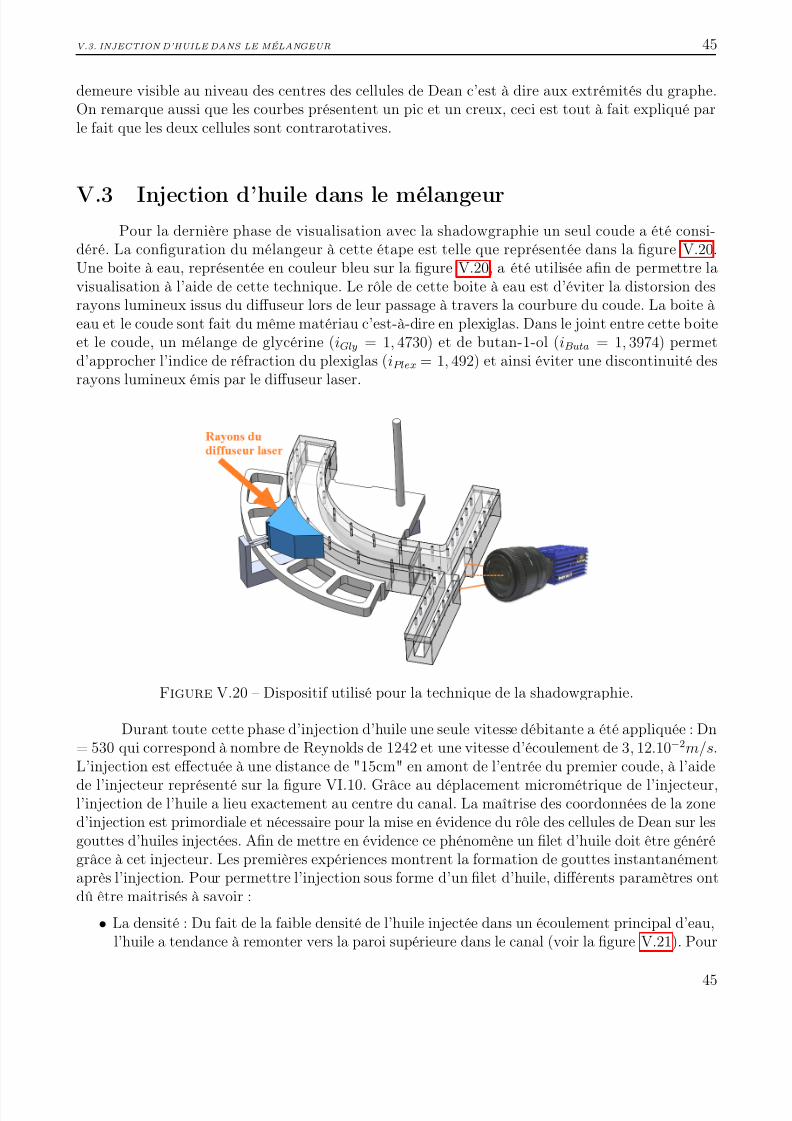
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 58/84
V.3. INJECTION D’HUILE DANS LE MÉLANGEUR 45
demeure visible au niveau des centres des cellules de Dean c’est à dire aux extrémités du graphe.On remarque aussi que les courbes présentent un pic et un creux, ceci est tout à fait expliqué parle fait que les deux cellules sont contrarotatives.
V.3 Injection d’huile dans le mélangeurPour la dernière phase de visualisation avec la shadowgraphie un seul coude a été consi-
déré. La configuration du mélangeur à cette étape est telle que représentée dans la figure V.20.Une boite à eau, représentée en couleur bleu sur la figure V.20, a été utilisée afin de permettre lavisualisation à l’aide de cette technique. Le rôle de cette boite à eau est d’éviter la distorsion desrayons lumineux issus du diffuseur lors de leur passage à travers la courbure du coude. La boite àeau et le coude sont fait du même matériau c’est-à-dire en plexiglas. Dans le joint entre cette boiteet le coude, un mélange de glycérine (iGly = 1, 4730) et de butan-1-ol (iButa = 1, 3974) permetd’approcher l’indice de réfraction du plexiglas (iPlex = 1, 492) et ainsi éviter une discontinuité desrayons lumineux émis par le diffuseur laser.
Figure V.20 – Dispositif utilisé pour la technique de la shadowgraphie.
Durant toute cette phase d’injection d’huile une seule vitesse débitante a été appliquée : Dn= 530 qui correspond à nombre de Reynolds de 1242 et une vitesse d’écoulement de 3, 12.10−2m/s.L’injection est effectuée à une distance de "15cm" en amont de l’entrée du premier coude, à l’aide
de l’injecteur représenté sur la figure VI.10. Grâce au déplacement micrométrique de l’injecteur,l’injection de l’huile a lieu exactement au centre du canal. La maîtrise des coordonnées de la zoned’injection est primordiale et nécessaire pour la mise en évidence du rôle des cellules de Dean sur lesgouttes d’huiles injectées. Afin de mettre en évidence ce phénomène un filet d’huile doit être générégrâce à cet injecteur. Les premières expériences montrent la formation de gouttes instantanémentaprès l’injection. Pour permettre l’injection sous forme d’un filet d’huile, différents paramètres ontdû être maitrisés à savoir :
• La densité : Du fait de la faible densité de l’huile injectée dans un écoulement principal d’eau,l’huile a tendance à remonter vers la paroi supérieure dans le canal (voir la figure V.21). Pour
45

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 59/84
V.3. INJECTION D’HUILE DANS LE MÉLANGEUR 46
pallier à cette difficulté, l’huile de Gaulthérie (Gaultheria procumbens d=1,18) plus dense quel’eau est utilisée. Le problème a été inversé car l’huile de gaulthérie a tendance à précipiterdans l’eau (voir la figure V.22). Une huile d’une densité égale à 1 a pu être atteint, avec unmélange de 31% en volume d’huile de Gaulthérie et de 69% en volume d’huile de tournesol(d=0,92).
Figure V.21 – Injection de l’huile de tournesolpur.
Figure V.22 – Injection de l’huile essentielle deGaulthérie pur.
Figure V.23 – Mélange d’huile.
• La viscosité : Comme le diamètre de l’injecteur est de 0.5mm, la viscosité impose une influencenon négligeable sur la pression d’injection. Une viscosité importante impose une pressiond’injection importante.
• La tension superficielle : appelée aussi la tension inter-faciale est responsable de la formesphérique des gouttes d’huile dans l’eau, en luttant contre toutes les forces de déformationdes gouttes.
Afin de mettre en évidence l’effet de l’écoulement de Dean sur ce filet et ces gouttes d’huile,un tensioactif est ajouté à l’huile (TWEEN 201 et du SPAN 832). Le rôle de ce dernier étantd’inhiber l’effet de la tension superficielle, ainsi l’influence des cellules de Dean sur le filet d’huilesera mise en évidence. La figure V.24 montre nettement que le filet est de longueur plus importante,cependant la pression d’injection demeure importante aussi. Le fractionnement du filet intervientà l’entrée du coude comme indiqué, avec les premières contractions du filet.
1TWEEN 20 est le nom commercial du Polyoxyethylene (20) sorbitan monolaurate, dont la formule chimiqueest C 58H 114O26
2SPAN 83 est le nom commercial du Sorbitan Sesquioleate, dont la formule chimique est C 66H 126O16
46

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 60/84
V.3. INJECTION D’HUILE DANS LE MÉLANGEUR 47
Figure V.24 – Effet du tensioactif sur l’injection d’huile.
V.3.1 Traitement des visualisations des gouttes par le logiciel MatLab
Dans un premier temps on a utilisé une caméra à haute définition (1920 pixels x 1080 pixels)dans le but de filmer le passage et le comportement des gouttes dans le premier coude. La caméraest placée en face de la fenêtre de visualisation, selon la configuration indiqué sur la figure V.20, la
différence réside dans la non utilisation du diffuseur laser. La profondeur de champ de la caméraétant importante, cela permet de couvrir une large distance du parcours des gouttes d’huile. Unefois les films enregistrés, certaines gouttes d’huile déformées ont pu êtres repérées en l’occurrence.Des images ont été tirées des ces films conduisant aux deux figures V.25 et V.26.
Les deux images V.25-(a) et V.26-(a) montrent la condition d’injection de l’huile. Le filetinitialement formé par le passage de l’huile à travers l’injecteur se rompt formant plusieurs gouttes.Afin de mesurer le degrés de déformation un critère à été introduit portant le nom d’excentricité,défini par l’équation V.1 ci-dessous :
e =
dmax
dmin (V.1)La figure V.25 affiche une déformation verticale d’une goutte d’huile de e = 1,0994. Cette
goutte est repérée proche de la paroi concave interne en sortie du premier coude. La figure V.26affiche une déformation horizontale d’une goutte d’huile avec e = 1,144. Cette dernière est repéréeproche de la paroi supérieure du canal courbe.
La déformation de gouttes d’huile a été bien mise en évidence à l’issue de l’exploitation desséquences d’injection enregistrées. Néanmoins, à ce stade du projet ces déformations de gouttes nesont pas un résultat reproductible correspondant au passage des gouttes dans une zone donnée del’écoulement. Par conséquent, la mesure optique de l’excentricité ne permet pas de conclure quand
au caractère fractionnant/émulsificateur de l’écoulement au premier coude.
47
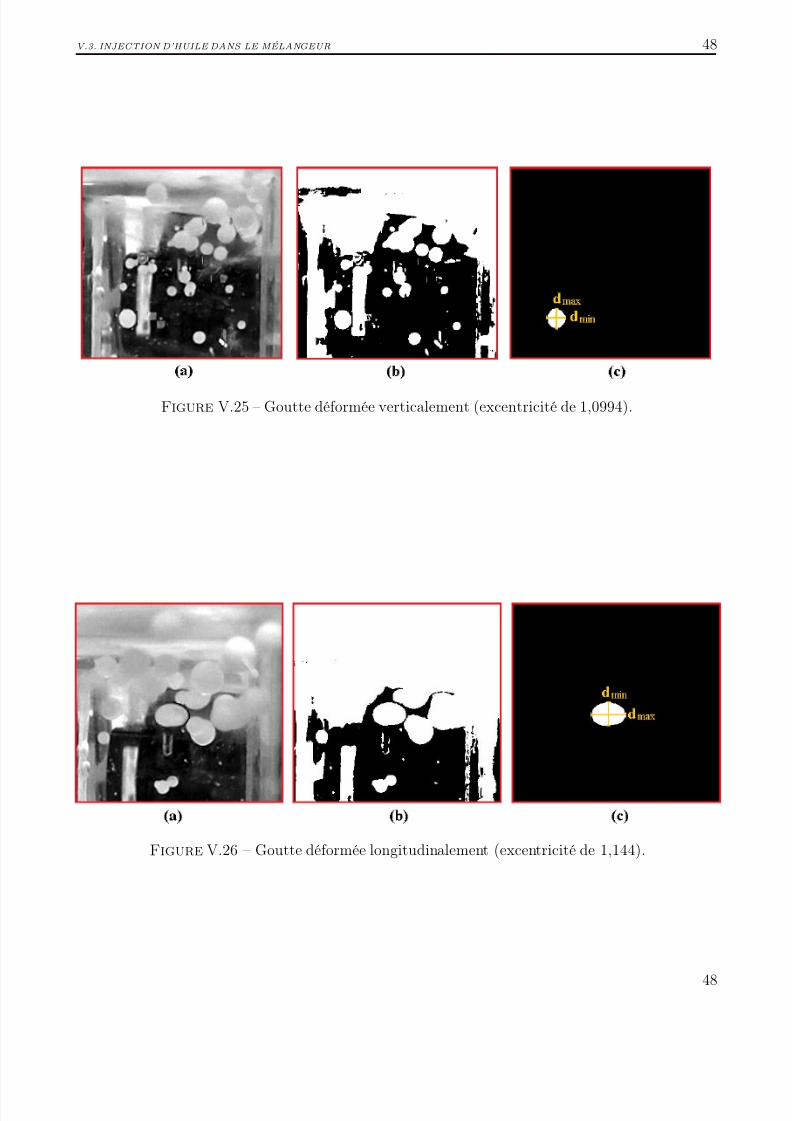
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 61/84
V.3. INJECTION D’HUILE DANS LE MÉLANGEUR 48
Figure V.25 – Goutte déformée verticalement (excentricité de 1,0994).
Figure V.26 – Goutte déformée longitudinalement (excentricité de 1,144).
48
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 62/84
Conclusion Générale
Le présent projet de recherche avait comme objectif, l’étude du pouvoir de l’écoulement deDean alterné à fractionner des gouttes d’huile dans un écoulement principal d’eau chaotique.
Une présentation du phénomène d’advection chaotique a pu être établie. Un exemple concretdu mélangeur à advection chaotique fonctionnant selon le principe d’écoulement de Dean alternéa pu être instrumenté dans le cadre de ce projet. Après le dimensionnement du dispositif de visua-lisation en forme de T, des mesures du champ de vitesse par PIV ont pu être réalisées.
Les champs de vitesses bidimensionnels sont mesurés à la sortie de chacun des quatre pre-miers coudes du mélangeur utilisant la 2D-PIV. Ces champs dans une représentation vectorielle,montrent des cellules de Dean dont les centres (tourbillons) sont attirés vers la paroi interne convexedu coude. Les données expérimentales révèlent que les cellules sont plus influencées pas la force dû
au gradient de pression qui prédomine sur la force centrifuge. D’un coude à l’autre les cellules sesont réorganisées selon l’influence de ce gradient de pression (attirées vers la paroi interne convexedu coude). La variation du nombre de Dean (vitesse d’écoulement) marque aussi son influence surla position des ces centres. Les centres des cellules, pour les quatre coudes, se rapprochent encored’avantage de la paroi interne convexe à mesure que la vitesse d’écoulement augmente.
La mesure du champ de vitesse transversal donne lieu à l’élaboration de deux indicateursphysiques : la vorticité axiale et la vitesse de déformation transversale. Ces deux grandeurs ontpermis d’identifier les zones d’étirements-repliements caractéristique d’un écoulement chaotique.
La dernière étape du projet a eu pour but la visualisation de la déformation d’un filet oude gouttes d’huile entrainé vers cette zone dite chaotique. Les premiers résultats de visualisationmontrent des déformations de gouttes non reproductibles correspondant au passage des gouttesdans une zone donnée de l’écoulement. Par conséquent, la mesure optique de l’excentricité ne per-met pas de conclure quand au caractère fractionnant /émulsificateur de l’écoulement au premiercoude.
Le prochain axe de recherche sera d’effectuer des mesures de PIV stéréoscopiques (3D-PIV)des champs de vitesses secondaires. L’écoulement étant tridimensionnel stationnaire en régime la-minaire, des boites à eau ont été dimensionnées pour permette une visualisation stéréoscopique
49

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 63/84
V.3. INJECTION D’HUILE DANS LE MÉLANGEUR 50
avec la PIV. L’obtention des mesures du champ de vitesse tridimensionnel au sien du coude, facili-tera l’interprétation des déformations des gouttes d’huile dispersées. En effet un indicateur globaldu caractère fractionnant, émulsifiant de l’écoulement bénéficiera de la connaissance des trois com-posantes de la vitesse.
Une maitrise parfaite des paramètres influents sur l’injection (densité, viscosité et tensionsuperficielle) sera plus que souhaité afin de diriger les gouttes d’huile vers les zones d’étirements-repliements. Combiné à la mesure de par la shadowgraphie peut mener à la détermination desexcentricités de gouttes d’huile.
Ajouté aux indicateurs physiques cités dans le présent travail, d’autres indicateurs pertinentscapables d’expliquer au mieux les éventuelles déformations des gouttes dans l’écoulement de Deanalterné, doivent être élaborés. Ceci dans la perspective de pouvoir mettre en point un outil capablede démontrer la géométrie idéale d’un mélangeur à advection chaotique apte à disperser de l’huiledans l’eau avec une efficacité optimale.
50

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 64/84
Bibliographie
[1] J.M.OTINNO and M.F. DOLERTY Chaos in deterministic systems : strange attractors, tur-
bulence, and applications in chemical engineering. Chemical Engineering Science Volume 43,Issue 2, Pages 139-183, 1988.
[2] A. MOKRANI, C. CASTELAIN, and H. PEERHOSSAINI, The effects of chaotic advectionon heattransfer. International Journal of Heat and Mass Tranfer Volume 40, 3089–3104, 1997.
[3] C. CASTELAIN, A. MOKRANI, Y. LE GUER, H. PEERHOSSAINI - Experimental study of chaotic advection regime in a twisted duct flow. Nantes, France : European Journal of Mechanics- B/Fluids Volume 20, Issue 2, pp. 205-232, 2001.
[4] C. HABCHI, T. LEMENAND, D. DELLA, H. PEERHOSSAINI - Liquid/liquid dispersion ina chaotic advection flow. Nantes, France : International Journal of Multiphase Flow Volume 35,
Issue 6, pp. 485-497, 2009.
[5] M. JARRAHI, C. CASTELAIN, and H. PEERHOSSAINI. Secondary flow patterns and mixingin laminar pulsating flow through a curved pipe. Experiments in Fluids, pages 1–20, 2010.10.1007/s00348-010-1012-z.
[6] Y. LASBET - Thèse de DOCTORAT : Performances hydrodynamiques, thermiques et énergé-tiques de géométries chaotiques. Application au refroidissement des PEMFC - Ecole Polytech-nique de l’Université de Nantes, 04 Avril 2008.
[7] H. AREF - chaotic advection in perspective - Chaos, Sohtons and Fractals Volume 4, Issue 6,
1994. pp.745-748.[8] H. AREF - An idealized model of stirring. Massachusetts : Woods Hole Oceanographic Insti-
tution Technical Report WHOI, 1982.pp.188-189. WHOI, 82 (45).
[9] A. MOKRANI, C. CASTELAIN, H. PEERHOSSAINI - Mesure du chaos dans les systèmesconservatifs en vue de l’étude des transferts dans les systèmes ouverts. Revue Générale de Ther-mique Volume 37, Issue 6, p 459-474, 1998.
51
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 65/84
BIBLIOGRAPHIE 52
[10] E. SAATDJIAN, M. I. CHASSAING, N.MIDOUX, J. C. ANDRE - Sur le chaos Lagrangiendans une cuve elliptique. Nancy, France : Journal de Physique III Volume 5, Issue 2, pp. 175-196,1995.
[11] S. GIBOUT, Y. LE GUER, E. SCHALL - Mélange chaotique réactif en écoulement périodiquetridimensionnel, Récents Progrès en Génie des Procédés, Numéro 92 - 2005.
[12] LiqiuWang, Fang Liu - Forced convection in tightly coiled ducts : Bifurcation in a highDeannumber region, International Journal of Non-Linear Mechanics Volume 42, pp.1018-1034, 2007.
[13] P. BROCHETTE - Émulsification - Élaboration et étude des émulsions par(J2150).
[14] E.J. WINDHAB, M. DRESSLER, K. FEIGL, P. FISCHER, D. MEGIAS-ALGUACIL - Emul-sion processing-fromsingle-drop deformation to design of complex processes and products, Che-mical Engineering Science Volume 60, pp.2101-2113, 2005. - 2113
[15] D. J. MCCLEMENTS - Food emulsions : principles, practice and techniques. CRC Press, NewYork, 2005.
[16] C. LARPENT - Tensioactifs, Traité Constantes physico-chimiques, Techniques de l’ingé-nieur,p.15. K342, 1995.
[17] C. CABOS, , J. MARIGNAN, E. BOURRET - Agrégation micellaire phase L2 : étude parultracentrifugation et diffusion centrale des rayons X. Journal de Physique Volume 48, Issue 8pp.1377-1383, 1987.
[18] G.I. TAYLOR - The Viscosity of a Fluid Containing Small Drops of Another Fluid. London,UK : Proceedings of the Royal Society of London. Series A, Containing Papers of a Mathematicaland Physical Character Volume 138, Issue 834, pp. 41-48, 1932.
[19] R. DUAN, S. KOSHIZUKA, Y. OKA - Two-dimensional simulation of drop deformation andbreakup at around the critical Weber number. Tokyo, Japan : Nuclear Engineering and DesignVolume 225, pp. 37-48, 2003.
[20] D. MEGIAS.ALGUACIL, P. FISCHER, and E. J. WINDHAB - Experimental determinationof interfacial tension by different dynamical methods under simple shear flow conditions with anovel computer-controlled parallel band apparatus. Zürich, Switzerland : Journal of Colloid andInterface Science Volume 274, pp. 631-636, 2004.
[21] G. I. TAYLOR - The Formation of Emulsions in Definable Fields of Flow. London, UK :Proceedings of the Royal Society of London. Series A, Containing Papers of a matical andPhysical Character Volume 146, Issue 858, pp. 501-523, 1934.
[22] R. G. COX - The deformation of a drop in a general time-dependent fluid flow. Montreal,Canada : Journal of fluid mechanic volume 37, Issue 3, pp. 601-623, 1968.
[23] V. CRISTINI - Drop breakup and fragment size distribution in shearflow. Californie, USA :Journal of Rheology Volume 47, Issue 5, pp. 1283-1298, 2003.
[24] C. TROPEA, A. L. YARIN, J. F. FOSS - Springer Handbook of Experimental Fluid Mecha-nics. Berlin, Germany : Springer, 2007. 978-3-540-25141-5.
52

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 66/84
BIBLIOGRAPHIE 53
[25] Chiang C. MEI - Relations between stress and rate-of-strain tensors, Lecture Notes on FluidDynamics (1.63J/2.21J), 2007. pp.1-4.
[26] Dantec Dynamics c - laser optical measurement systems sensors, www.dantecdynamics.com.
[27] M.RAFFEL, C. E. WILLERT, S. T. WERELEY, J. KOMPENHANS, Particle Image Velo-
cimetry A Practical Guide. 2e édition. Berlin : s.n., 2007. 978-3-540-72307-3.[28] D. P. HART, PIV Error Correction. Massachusetts, USA : Experiments in Fluids Volume 29,
Issue 1, pp. 13-22, 2000.
[29] L. DAVID, P. GICQUEL, Evolutions de la technique PIV à travers quelques conférencesinternationales de 2000 à aujourd’hui. Toulouse : Congrès Francophone de Techniques Laser,CFTL 2006, 2006.
[30] K.SAKAKIBARA, M. Yamada, Y. Miyamoto, T. Saito, Measurement of the surroundingliquid motion of a single rising bubble using a Dual-Camera PIV system. Shizuoka, Japan :Flow Measurement and Instrumentation Volume 18, Issues 5-6, pp.211-215, 2007.
[31] W. CHENG, S. YUICHIMURAI, F. Y. TOSHIO, Bubble velocity measurement with a re-cursive cross correlation PIV technique. Fukui, Japan : Flow Measurement and InstrumentationVolume 16, Issue 1, pp. 35-46, 2005.
[32] C. SCHULZ, V. SICK, Tracer-LIF diagnostics : quantitative measurement of fuel concen-tration, temperature and fuel/air ratio in practical combustion systems. Duisburg, Germany :Progress in Energy and Combustion Science Volume 31, Issue 1, pp. 75-121, 2005.
[33] L. LAN , K. M. OMAR, J. L. CHRISTOPHER, Laser-induced fluorescence (LIF) studiesof liquid-liquid flows. Part I : Flow structures and phase inversion. London, UK : Chemical
Engineering Science Volume 61, Issue 12, pp. 4007-4021, 2006.[34] M. M. BISS, et al. 2009. High-speed digital shadowgraphy of shock waves from explosions and
gunshots. USA : 26th International Symposium on Shock Waves Volume 1, pp. 91-96, 2009.
[35] LaVision c - We count on photons, www.lavision.de
[36] D. TARLET, C. BENDICKS, R. BORDAS, B. WUNDERLICH, D. THEVENIN, B. MI-CHAELIS, Mesures par " particle tracking velocimetry "(3-d ptv) gazeuse avec traceurs multico-lores. Reims : 13ème Congrès Français de Visualisation et de Traitement d’Images en Mécaniquedes Fluides (FLUVISU 13), pp. 1-8, 2009.
[37] N. T. OUELLETTE, H. Xu, E. BODENSCHATZ, A quantitative study of three-dimensionallagrangian Particle Tracking algorithms. NewYork, USA : Experiments in Fluids Volume 40,Issue 2, pp. 301-313, 2006.
[38] J. C.CROCKER and D. G. GRIER, Methods of digital video microscopy for colloidal studies.Chicago, USA : Journal of Colloid and Interface Science Volume 179, pp. 179-298, 1996.
[39] C. W. McCUTCHEN, Flow visualization with stereo shadowgraphs of stratified fluid. Mary-land, USA : Journal of experimental Biologie Volume 65, Issue 1, pp. 11-20, 1976.
53
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 67/84
BIBLIOGRAPHIE 54
[40] Cristina M.L.CAVALHO and Joaquim M.S. CABRAL, Reverse micelles as reaction media forlipases. Lisbon, Portugal : Biochimie Volume 82, Issue 11, pp. 1063-1085, 2000.
[41] S.A. KAVALENKO, Descartes-Snell law of refraction with absoption, Kyiv, Ukraine : Semi-conductor Physics, Quantum Electronics and Optoelectronics Volume 4, Issue 3, pp. 214-218,2001.
[42] C. DUCHENE, H. PEERHOSSAINI and P.J. MICHARD, On the velocity field and tracerpatterns in a twisted duct flow, Nantes, France : Physics of Fluids Volume 7, Issue 6, pp. 1307-1317, 1995.
[43] B.BARA, K.NANDAKUMAR and J.H. MASLIYAH, An experimental and numerical studyof the Dean problem : flow development towards two-dimentional multiple solutions, Edmonton,Canada : Journal of Fluid Mechanics Volume 244, pp. 339-376, 1992.
[44] M. JARRAHI KHAMENEH - Thèse de DOCTORAT : intensification du mélange par advec-tion chaotique pulsée - Ecole Polytechnique de l’Université de Nantes, 1er décembre 2010.
[45] Cathy CASTELAIN - Thèse de DOCTORAT : Etude expérimentale de la dynamique desfluides et dees transferts thermiques dans un éécoulement de Dean alterné en régime d’advectionchaotique - Ecole centrale de l’Université de Nantes, 28 juin 1995.
54
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 68/84
Annexes
55
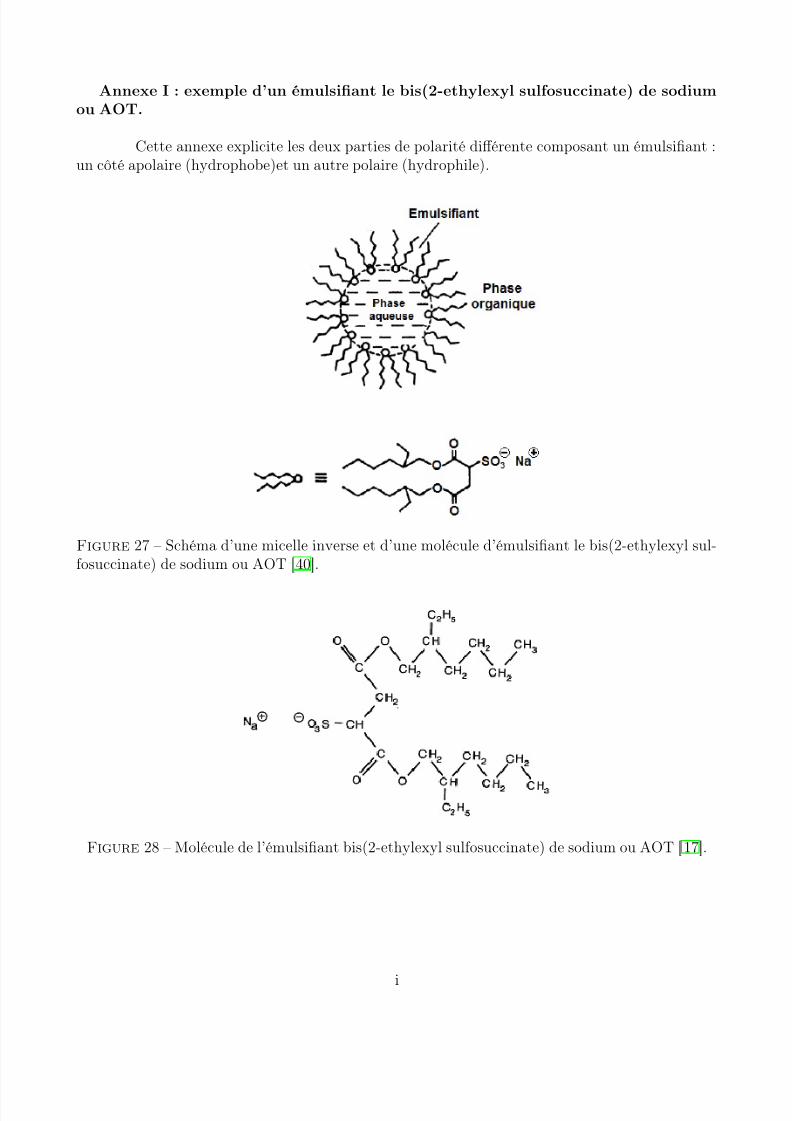
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 69/84
Annexe I : exemple d’un émulsifiant le bis(2-ethylexyl sulfosuccinate) de sodiumou AOT.
Cette annexe explicite les deux parties de polarité différente composant un émulsifiant :un côté apolaire (hydrophobe)et un autre polaire (hydrophile).
Figure 27 – Schéma d’une micelle inverse et d’une molécule d’émulsifiant le bis(2-ethylexyl sul-fosuccinate) de sodium ou AOT [40].
Figure 28 – Molécule de l’émulsifiant bis(2-ethylexyl sulfosuccinate) de sodium ou AOT [17].
i
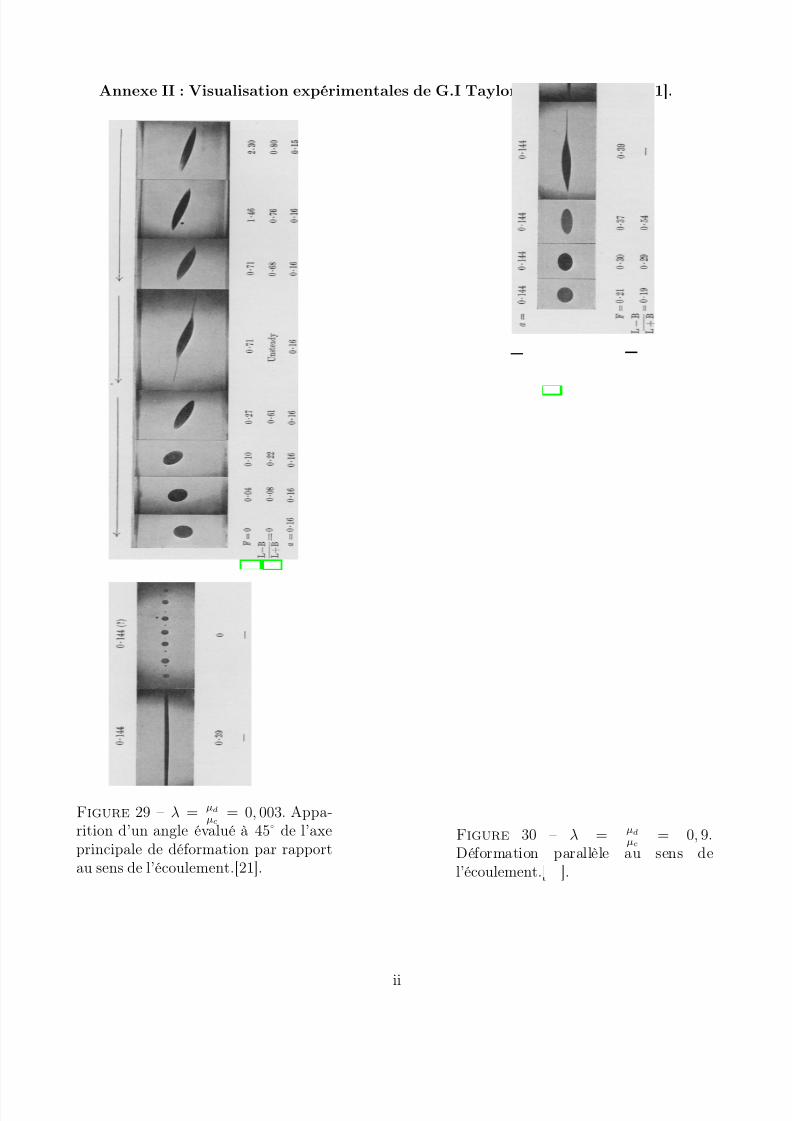
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 70/84
Annexe II : Visualisation expérimentales de G.I Taylor sur des gouttes [21].
Figure 29 – λ = µdµc
= 0, 003. Appa-rition d’un angle évalué à 45 de l’axeprincipale de déformation par rapportau sens de l’écoulement.[21].
Figure 30 – λ = µdµc
= 0, 9.Déformation parallèle au sens del’écoulement.[21].
ii
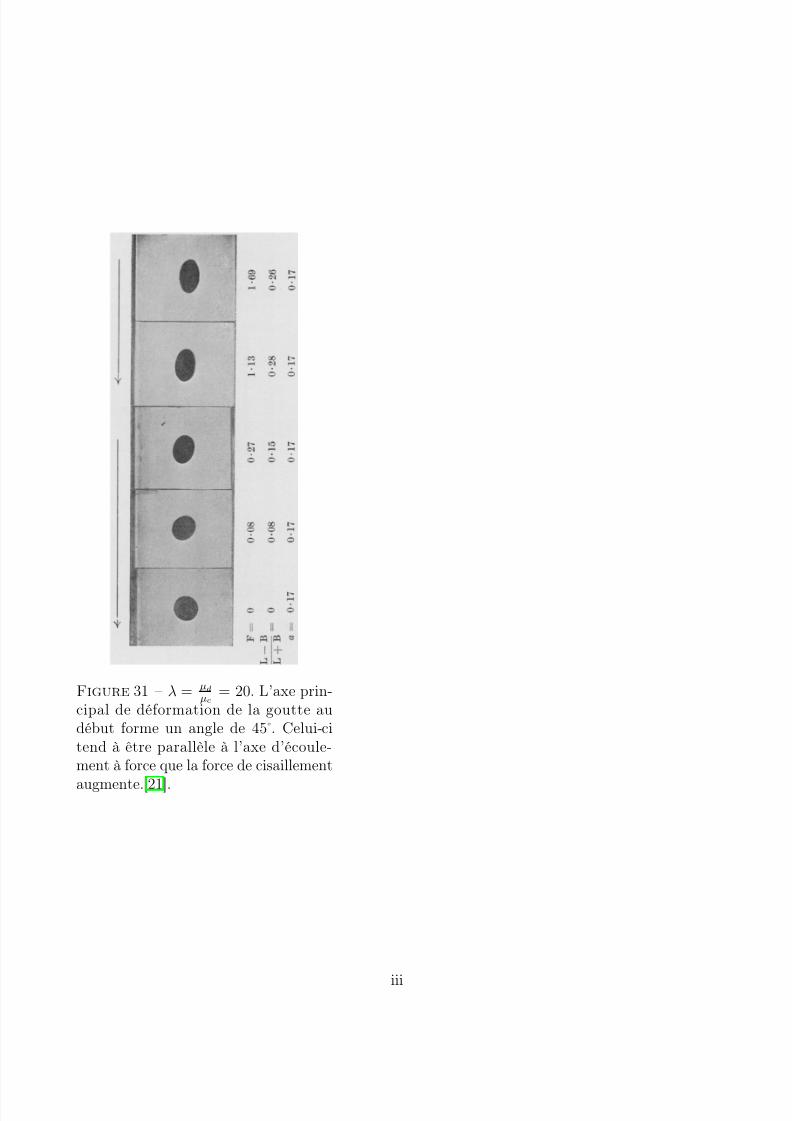
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 71/84
Figure 31 – λ = µdµc
= 20. L’axe prin-cipal de déformation de la goutte audébut forme un angle de 45 . Celui-citend à être parallèle à l’axe d’écoule-ment à force que la force de cisaillement
augmente.[21].
iii
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 72/84
Annexe III : Caractéristiques de la techniques PIV [27].
Dans la présente annexe figure certaines caractéristiques de la technique PIV, en vue defaciliter la compréhension.
• Mesure non-intrusive de la vitesse : Contrairement aux techniques de mesure des vitesses
d’écoulement qui emploient des sondes de pression tels que des tubes ou des fils chaud, latechnique de PIV est une technique optique fonctionnant de façon non intrusive. Cela permetl’emploi de la PIV, même lors d’écoulements à grande vitesse avec des chocs (supersonique)ou dans les couches limites près des parois, dont le débit peut être perturbé par la présencedes sondes.
• Mesure indirecte de la vitesse : De la même manière que la LDV (laser Doppler Veloci-metry), la PIV mesure la vitesse d’un élément fluide indirectement par l’intermédiaire de lamesure de la vitesse des traceurs dans l’écoulement, ce qui - dans la plupart des applications- ont été ajoutés dans l’écoulement (ensemencement) avant le début de l’expérience.
• Technique de mesure globale du champ d’écoulement : La PIV est une techniquequi permet d’enregistrer des images d’une grande partie des champs d’écoulement, dans unevariété d’applications, dans des milieux gazeux et liquides et d’extraire les informations de lavitesse de ces images. Cette caractéristique est propre à la technique de PIV. La résolutionspatiale de la PIV est grande, alors que la résolution temporelle (fréquence d’enregistrementdes images PIV) est limitée en raison des restrictions technologiques actuelles. Ces carac-téristiques doivent venir à l’esprit lorsqu’on compare les résultats obtenus par PIV à ceuxobtenus avec les techniques traditionnelles. La capture instantanée d’image et à haute résolu-tion spatiale de la PIV permet la détection de structures spatiales encore dans des domainesen régime transitoire.
• Décalage de vitesse (Velocity lag) : La nécessité d’employer les particules traceurs pourla mesure de la vitesse d’écoulement nous oblige à vérifier soigneusement, pour chaque expé-rience, si les particules suivent fidèlement le mouvement du fluide, au moins jusqu’à ce degrérequis par les objectifs des investigations. Les petites particules suivront mieux l’écoulement.
• L’illumination : Pour des applications dans des écoulements de gaz, une source lumineuse depuissance élevée pour l’illumination des particules minuscules de traceurs est nécessaire afinde bien exposer la caméra à la lumière diffusée. Toutefois, la nécessité d’utiliser des particulesplus grosses en raison de leur meilleure efficacité de diffusion de lumière est contradictoireavec l’utilisation de plus de petites particules afin de suivre fidèlement l’écoulement. Dansla plupart des applications un compromis doit être trouvé. Dans des écoulements liquides,
on peut habituellement accepter de plus grandes particules qui diffusent beaucoup plus delumière. Ainsi, des sources lumineuses d’une puissance de crête considérablement inférieurepeuvent être employées.
• Durée de l’impulsion d’illumination : La durée de l’impulsion lumineuse doit être assezcourte " pour figer " le mouvement des particules pendant l’exposition à l’impulsion et ainsiéviter de créer des stries lumineuses (streaks).
• Le temps de retard entre les impulsions d’illumination : Le temps de retard entreles impulsions d’illumination doit être assez long, pour pouvoir déterminer le déplacement
iv
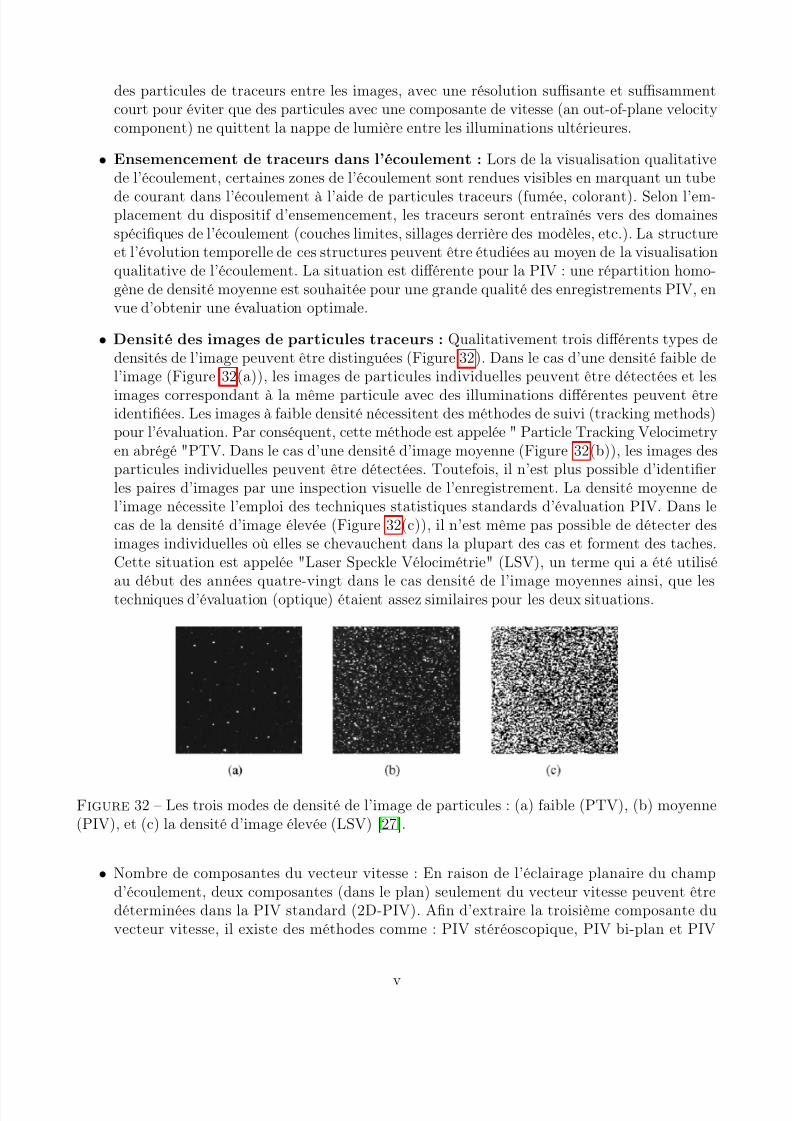
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 73/84
des particules de traceurs entre les images, avec une résolution suffisante et suffisammentcourt pour éviter que des particules avec une composante de vitesse (an out-of-plane velocitycomponent) ne quittent la nappe de lumière entre les illuminations ultérieures.
• Ensemencement de traceurs dans l’écoulement : Lors de la visualisation qualitativede l’écoulement, certaines zones de l’écoulement sont rendues visibles en marquant un tube
de courant dans l’écoulement à l’aide de particules traceurs (fumée, colorant). Selon l’em-placement du dispositif d’ensemencement, les traceurs seront entraînés vers des domainesspécifiques de l’écoulement (couches limites, sillages derrière des modèles, etc.). La structureet l’évolution temporelle de ces structures peuvent être étudiées au moyen de la visualisationqualitative de l’écoulement. La situation est différente pour la PIV : une répartition homo-gène de densité moyenne est souhaitée pour une grande qualité des enregistrements PIV, envue d’obtenir une évaluation optimale.
• Densité des images de particules traceurs : Qualitativement trois différents types dedensités de l’image peuvent être distinguées (Figure 32). Dans le cas d’une densité faible del’image (Figure 32(a)), les images de particules individuelles peuvent être détectées et les
images correspondant à la même particule avec des illuminations différentes peuvent êtreidentifiées. Les images à faible densité nécessitent des méthodes de suivi (tracking methods)pour l’évaluation. Par conséquent, cette méthode est appelée " Particle Tracking Velocimetryen abrégé "PTV. Dans le cas d’une densité d’image moyenne (Figure 32(b)), les images desparticules individuelles peuvent être détectées. Toutefois, il n’est plus possible d’identifierles paires d’images par une inspection visuelle de l’enregistrement. La densité moyenne del’image nécessite l’emploi des techniques statistiques standards d’évaluation PIV. Dans lecas de la densité d’image élevée (Figure 32(c)), il n’est même pas possible de détecter desimages individuelles où elles se chevauchent dans la plupart des cas et forment des taches.Cette situation est appelée "Laser Speckle Vélocimétrie" (LSV), un terme qui a été utilisé
au début des années quatre-vingt dans le cas densité de l’image moyennes ainsi, que lestechniques d’évaluation (optique) étaient assez similaires pour les deux situations.
Figure 32 – Les trois modes de densité de l’image de particules : (a) faible (PTV), (b) moyenne(PIV), et (c) la densité d’image élevée (LSV) [27].
• Nombre de composantes du vecteur vitesse : En raison de l’éclairage planaire du champd’écoulement, deux composantes (dans le plan) seulement du vecteur vitesse peuvent êtredéterminées dans la PIV standard (2D-PIV). Afin d’extraire la troisième composante duvecteur vitesse, il existe des méthodes comme : PIV stéréoscopique, PIV bi-plan et PIV
v

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 74/84
holographique d’enregistrement qui est elle même en 3D. Elle serait appelées 3D-PIV. Lesdeux méthodes travaillent dans des domaines planaires du champ d’écoulement (2D-PIV).
• La résolution temporelle : La plupart des systèmes PIV permettent d’enregistrer à hauterésolution spatiale, mais à des vitesses relativement faibles. Toutefois, l’évolution récente dela grande vitesse des lasers et des caméras permet une résolution temporelle des mesures de
la plupart des écoulements liquides et d’écoulements aérodynamiques à faibles vitesses.
• La résolution spatiale : La taille des zones prospectées lors de l’expérimentation doivent êtresuffisamment petites, pour que les gradients de vitesse n’aient pas d’influence notable sur lesrésultats. En outre, elle détermine le nombre de vecteurs de vitesse indépendants et donc larésolution spatiale maximale de la carte de vitesse qui peut être obtenue avec une résolutionspatiale donnée de la camera employée pour l’enregistrement.
vi
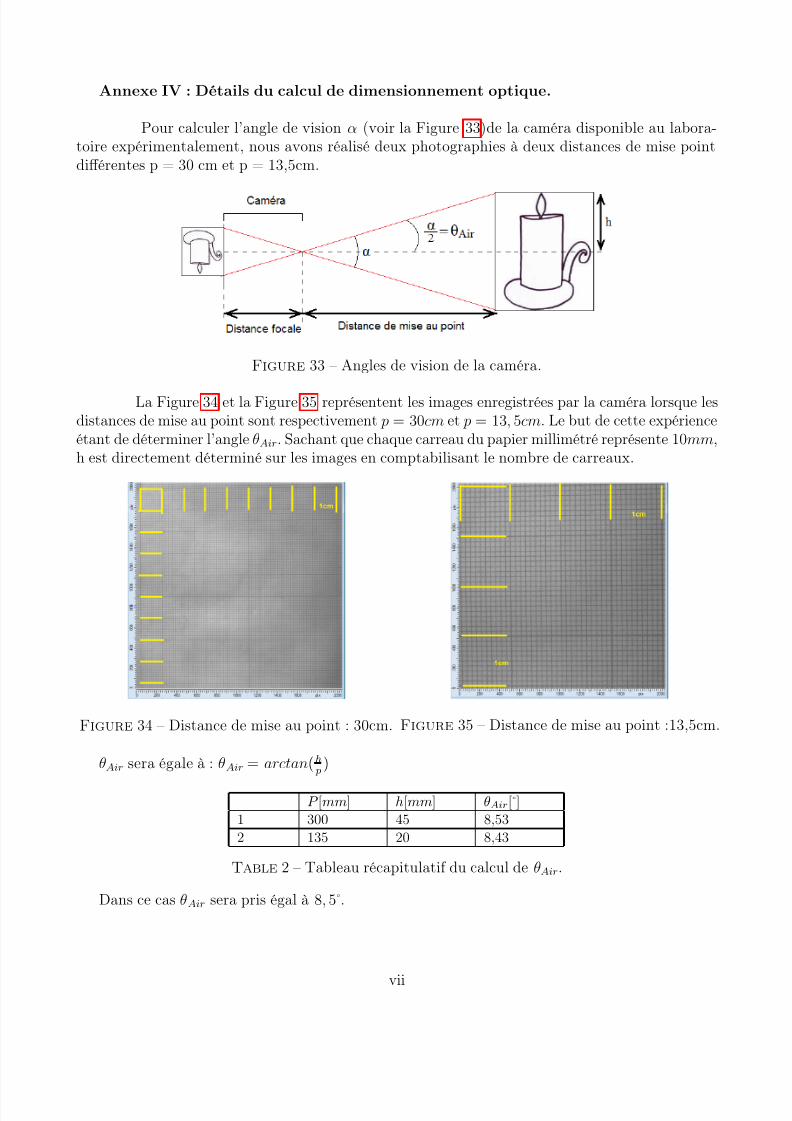
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 75/84
Annexe IV : Détails du calcul de dimensionnement optique.
Pour calculer l’angle de vision α (voir la Figure 33)de la caméra disponible au labora-toire expérimentalement, nous avons réalisé deux photographies à deux distances de mise pointdifférentes p = 30 cm et p = 13,5cm.
Figure 33 – Angles de vision de la caméra.
La Figure 34 et la Figure 35 représentent les images enregistrées par la caméra lorsque lesdistances de mise au point sont respectivement p = 30cm et p = 13, 5cm. Le but de cette expérienceétant de déterminer l’angle θAir. Sachant que chaque carreau du papier millimétré représente 10mm,h est directement déterminé sur les images en comptabilisant le nombre de carreaux.
Figure 34 – Distance de mise au point : 30cm. Figure 35 – Distance de mise au point :13,5cm.
θAir sera égale à : θAir = arctan( h p
)
P [mm] h[mm] θAir [ ]
1 300 45 8,53
2 135 20 8,43
Table 2 – Tableau récapitulatif du calcul de θAir.
Dans ce cas θAir sera pris égal à 8, 5 .
vii
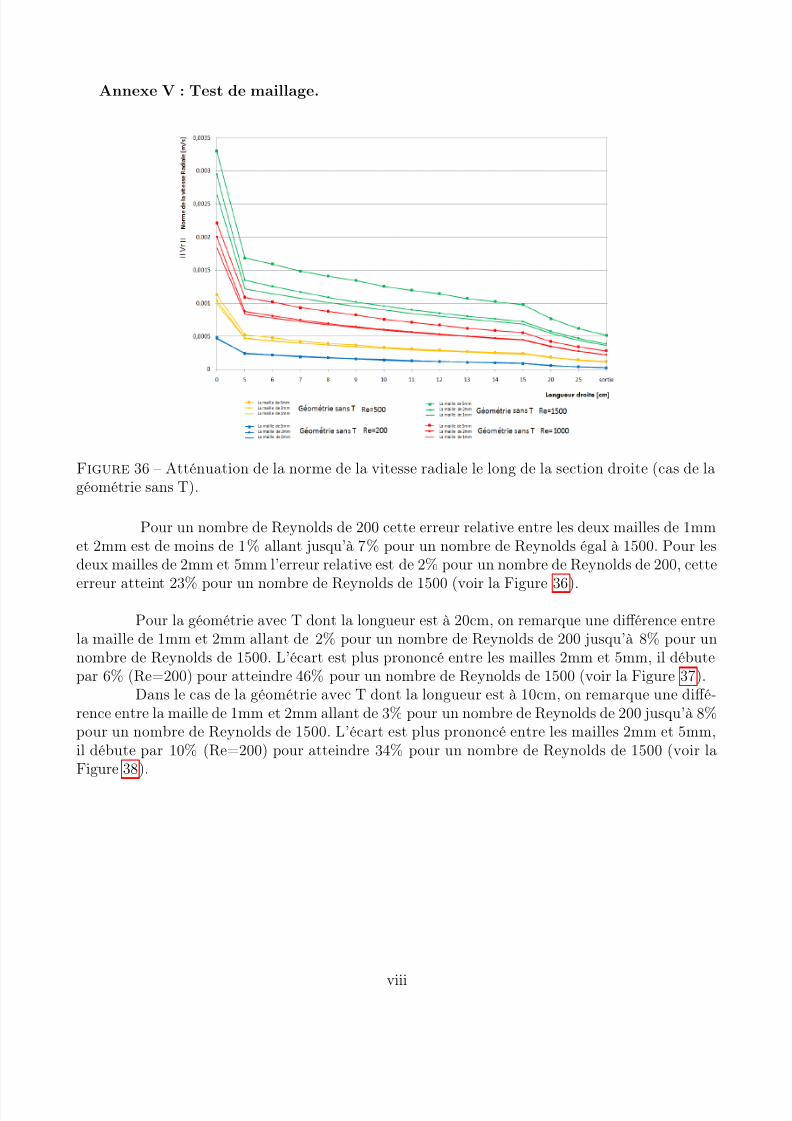
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 76/84
Annexe V : Test de maillage.
Figure 36 – Atténuation de la norme de la vitesse radiale le long de la section droite (cas de lagéométrie sans T).
Pour un nombre de Reynolds de 200 cette erreur relative entre les deux mailles de 1mmet 2mm est de moins de 1% allant jusqu’à 7% pour un nombre de Reynolds égal à 1500. Pour lesdeux mailles de 2mm et 5mm l’erreur relative est de 2% pour un nombre de Reynolds de 200, cette
erreur atteint 23% pour un nombre de Reynolds de 1500 (voir la Figure 36).
Pour la géométrie avec T dont la longueur est à 20cm, on remarque une différence entrela maille de 1mm et 2mm allant de 2% pour un nombre de Reynolds de 200 jusqu’à 8% pour unnombre de Reynolds de 1500. L’écart est plus prononcé entre les mailles 2mm et 5mm, il débutepar 6% (Re=200) pour atteindre 46% pour un nombre de Reynolds de 1500 (voir la Figure 37).
Dans le cas de la géométrie avec T dont la longueur est à 10cm, on remarque une diffé-rence entre la maille de 1mm et 2mm allant de 3% pour un nombre de Reynolds de 200 jusqu’à 8%pour un nombre de Reynolds de 1500. L’écart est plus prononcé entre les mailles 2mm et 5mm,il débute par 10% (Re=200) pour atteindre 34% pour un nombre de Reynolds de 1500 (voir laFigure 38).
viii
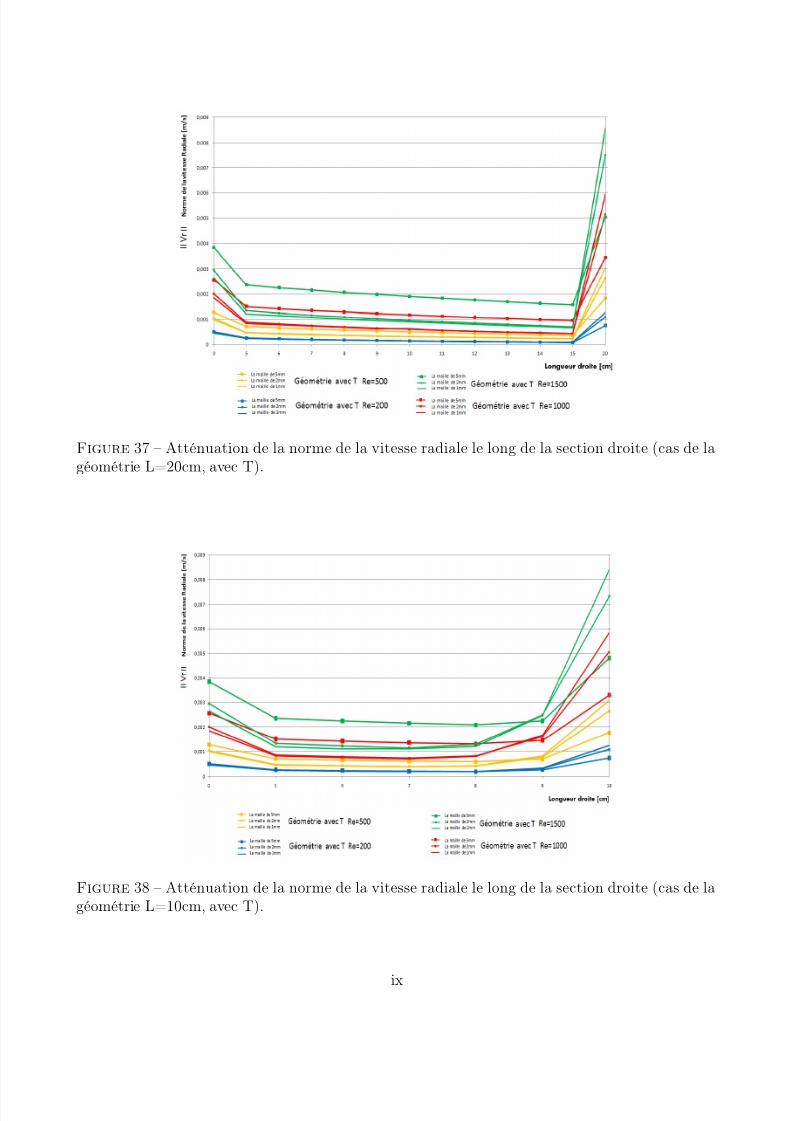
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 77/84
Figure 37 – Atténuation de la norme de la vitesse radiale le long de la section droite (cas de lagéométrie L=20cm, avec T).
Figure 38 – Atténuation de la norme de la vitesse radiale le long de la section droite (cas de lagéométrie L=10cm, avec T).
ix
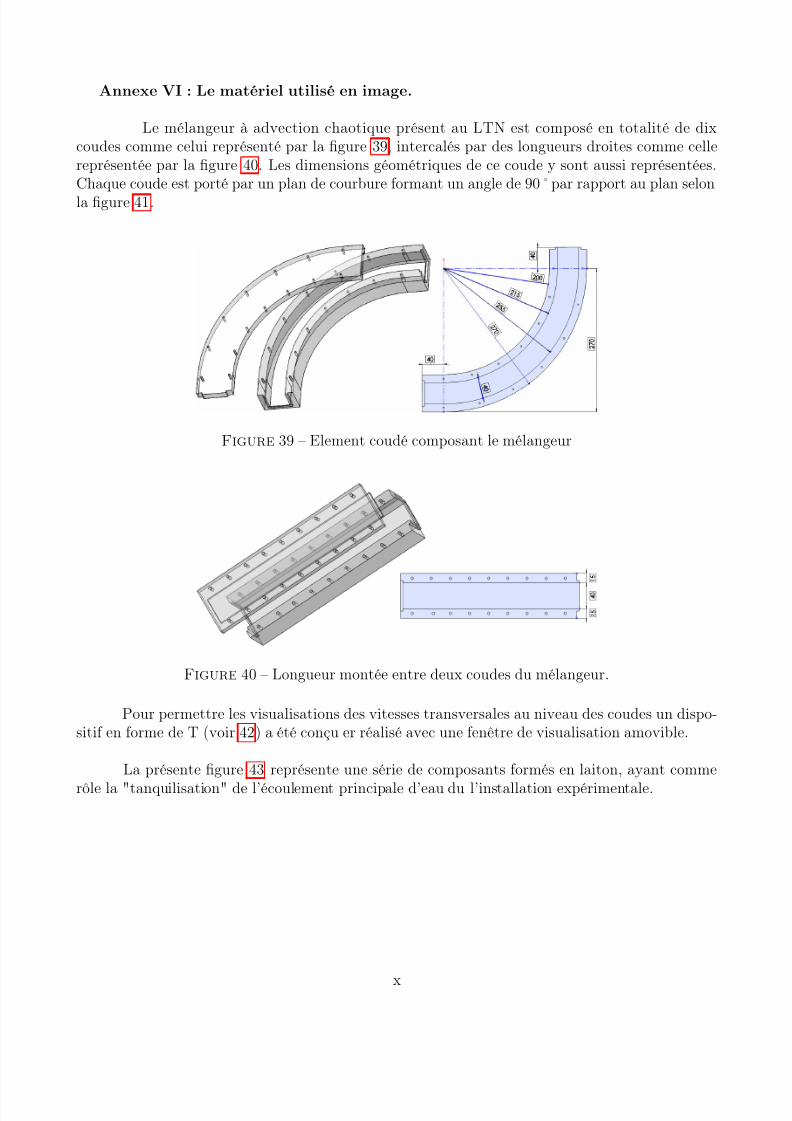
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 78/84
Annexe VI : Le matériel utilisé en image.
Le mélangeur à advection chaotique présent au LTN est composé en totalité de dixcoudes comme celui représenté par la figure 39, intercalés par des longueurs droites comme cellereprésentée par la figure 40. Les dimensions géométriques de ce coude y sont aussi représentées.Chaque coude est porté par un plan de courbure formant un angle de 90˚par rapport au plan selonla figure 41.
Figure 39 – Element coudé composant le mélangeur
Figure 40 – Longueur montée entre deux coudes du mélangeur.
Pour permettre les visualisations des vitesses transversales au niveau des coudes un dispo-sitif en forme de T (voir 42) a été conçu er réalisé avec une fenêtre de visualisation amovible.
La présente figure 43 représente une série de composants formés en laiton, ayant comme
rôle la "tanquilisation" de l’écoulement principale d’eau du l’installation expérimentale.
x
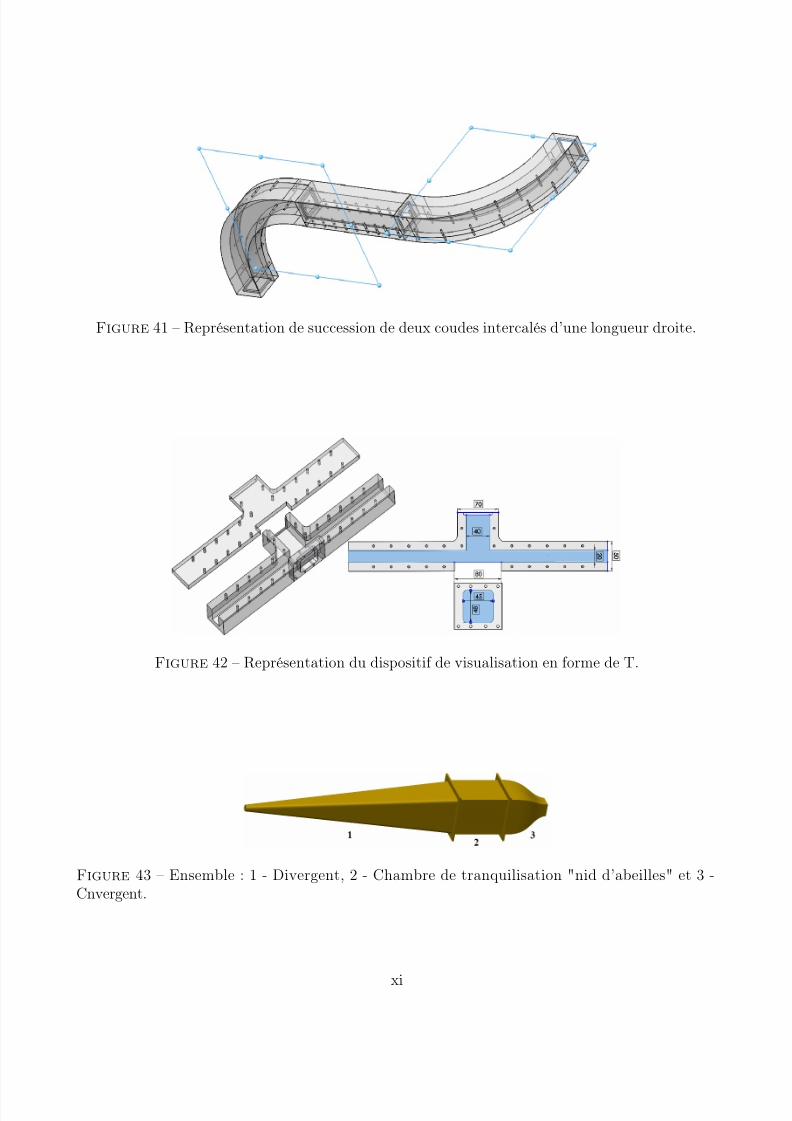
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 79/84
Figure 41 – Représentation de succession de deux coudes intercalés d’une longueur droite.
Figure 42 – Représentation du dispositif de visualisation en forme de T.
Figure 43 – Ensemble : 1 - Divergent, 2 - Chambre de tranquilisation "nid d’abeilles" et 3 -Cnvergent.
xi

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 80/84
Annexe VII : Résultats de PIV des champs d’écoulement secondaire.
xii
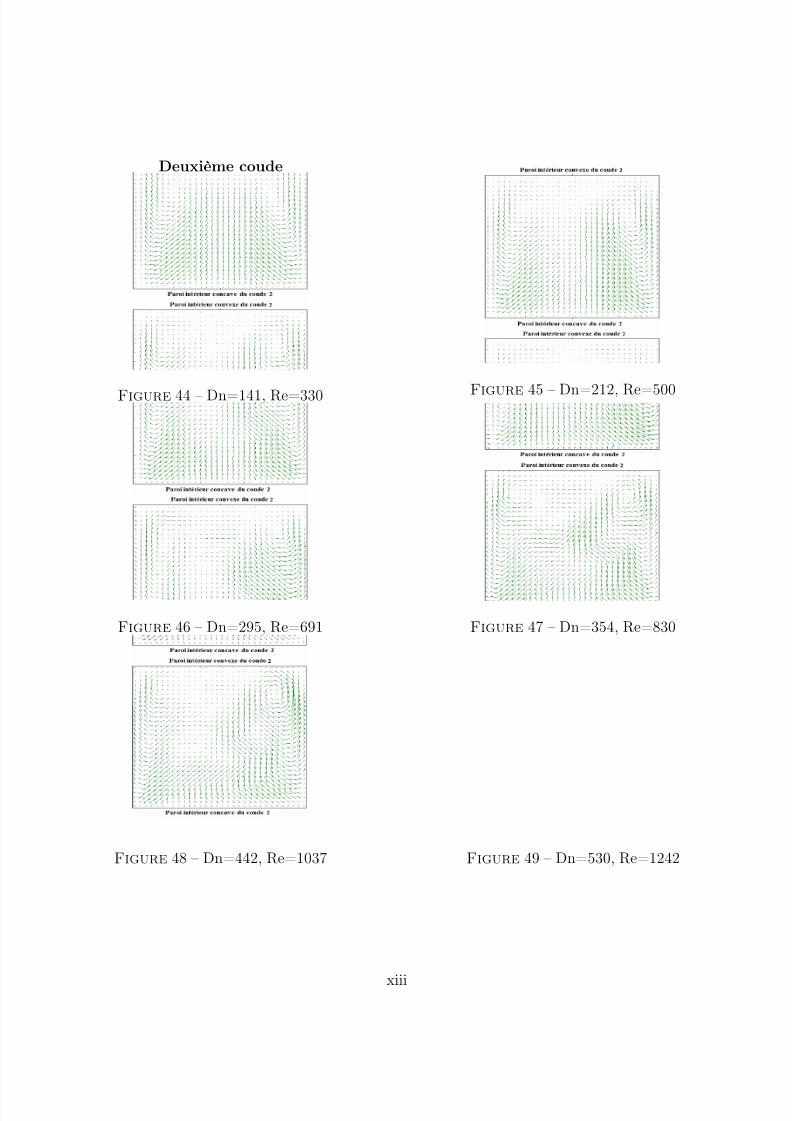
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 81/84
Deuxième coude
Figure 44 – Dn=141, Re=330 Figure 45 – Dn=212, Re=500
Figure 46 – Dn=295, Re=691 Figure 47 – Dn=354, Re=830
Figure 48 – Dn=442, Re=1037 Figure 49 – Dn=530, Re=1242
xiii
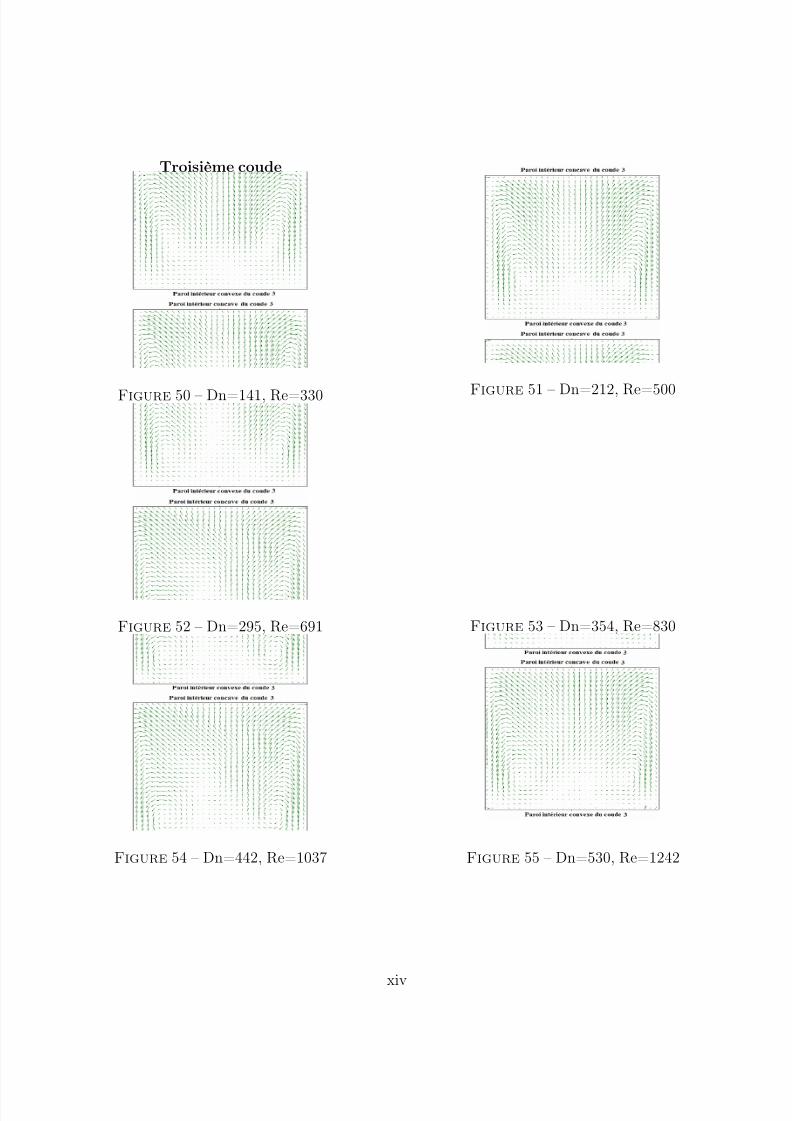
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 82/84
Troisième coude
Figure 50 – Dn=141, Re=330 Figure 51 – Dn=212, Re=500
Figure 52 – Dn=295, Re=691 Figure 53 – Dn=354, Re=830
Figure 54 – Dn=442, Re=1037 Figure 55 – Dn=530, Re=1242
xiv
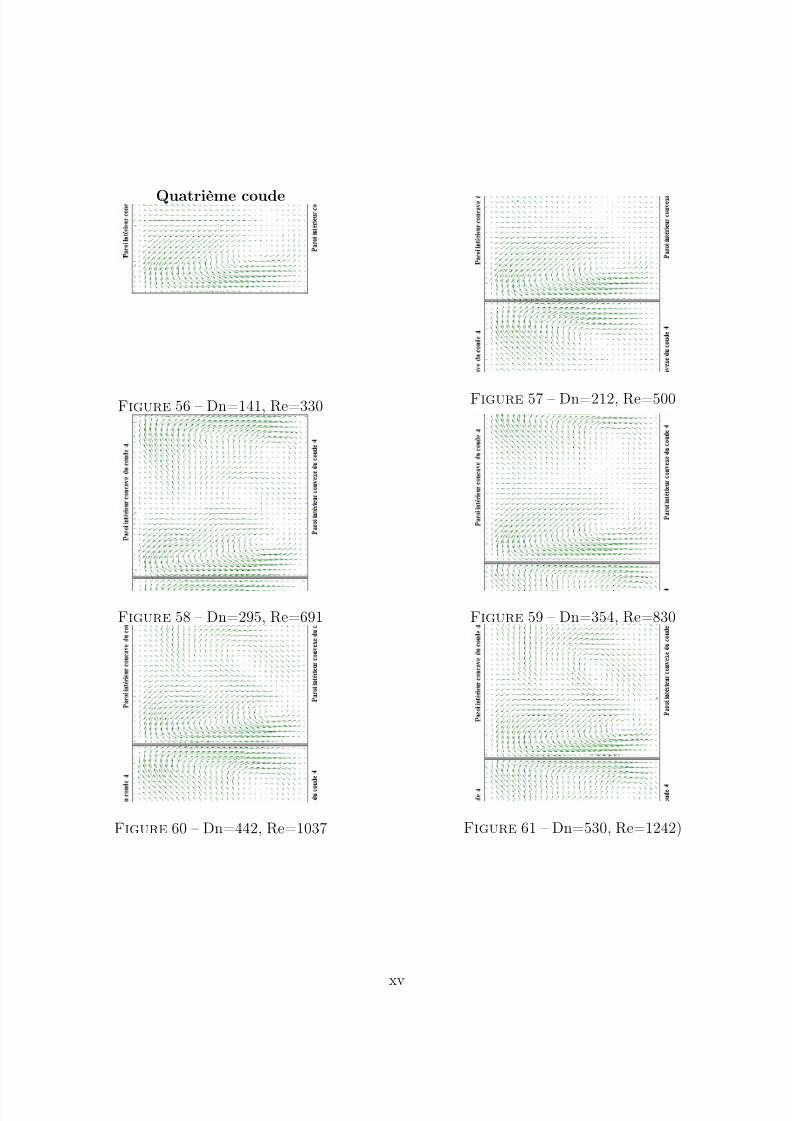
5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 83/84
Quatrième coude
Figure 56 – Dn=141, Re=330 Figure 57 – Dn=212, Re=500
Figure 58 – Dn=295, Re=691 Figure 59 – Dn=354, Re=830
Figure 60 – Dn=442, Re=1037 Figure 61 – Dn=530, Re=1242)
xv

5/11/2018 Memoire Arab BELKADI - slidepdf.com
http://slidepdf.com/reader/full/memoire-arab-belkadi 84/84
Résumé :
L’objectif de ce travail est l’étude du mélange par écoulement de Dean alterné, au sein d’un mé-langeur à advection chaotique à section de passage carrée, par la caractérisation de la dispersionhuile/eau. Une étude expérimentale sur un nombre réduit de gouttes a été effectuée. Dans cetteétude une mesure insitu du champ de vitesse transversal (résponsable du mélange) par 2D-PIV, a
été menée à la sortie des éléments courbes (coude 90 ) composant le mélangeur à advection chao-tique. La déformation des gouttes est visualisée par shadowgraphie. La confrontation des informa-tions de champ de vorticity et vitesse de déformation des domaines d’écoulement aux visualisationsdes formes des gouttes sous shadowgraphie a permis de déterminer le rôle de l’advection chaotiquesur la dispersion liquide/liquide.
Abstract :
The objective of this work is to study of the mexture by the Dean flow, in a chaotic advection mixerwith square cross section, is studied by characterizing the dispersion oil/water. An experimental
study on a small number of drops has been carried out. In this study an insitu measurement of transverse velocity field (responsible of mixing) by 2D-PIV, was conducted at the exit of curvedduct (angle 90 ) calling chaotic advection mixer. The deformation of the droplets is visualizedby shadowgraphy. The comparison of field information vorticity and strain rate fields of the flowvisualizations of the shapes of drops under shadowgraph was used to determine the role of chaoticadvection on the dispersion liquid/liquid.
:
Dean
90
2D − P IV
Shadowgraphie
shadowgraphie