machines asynchrones - sciences appliquées ts ...€¦ · un réseau triphasé de fréquence 50...
TRANSCRIPT
Machines asynchrones I.Présentation...................................................................................................................................................2
1.Constitution et principe de fonctionnement..............................................................................................22.Moteur ou génératrice...............................................................................................................................23.Le glissement............................................................................................................................................2
II.Le schéma équivalent...................................................................................................................................21.Mise en place pour une phase...................................................................................................................22.Simplification du schéma.........................................................................................................................3
a.Position du problème...........................................................................................................................3b.Conséquences......................................................................................................................................3
3.Schémas équivalents usuels......................................................................................................................34.Détermination des éléments du schéma équivalent...................................................................................3
a.Essai à vide avec le rotor en courtcircuit............................................................................................3b.Essai avec le rotor en courtcircuit, bloqué et sous tension réduite......................................................4
III.Bilan de puissance......................................................................................................................................61.Fonctionnement en moteur.......................................................................................................................62.Fonctionnement en génératrice.................................................................................................................7
IV.Couple électromagnétique..........................................................................................................................81.Introduction..............................................................................................................................................82.Expression du couple électromagnétique en fonction des éléments du schéma équivalent.......................83.Courbe représentative de l'évolution du couple en fonction du glissement...............................................8
a.Asymptotes et points particuliers.........................................................................................................8b.Courbe représentative..........................................................................................................................8c.Évolution du couple électromagnétique en fonction de la vitesse (en tr/min)......................................8d.Fonctionnements moteur et génératrice...............................................................................................8
4.Stabilité du fonctionnement......................................................................................................................9a.Point de fonctionnement......................................................................................................................9b.Condition de stabilité...........................................................................................................................9c.Exemples.............................................................................................................................................9
V.Diagramme vectoriel des intensités (appelé aussi diagramme du cercle)...................................................151.Introduction............................................................................................................................................152.Trajet du point de fonctionnement :........................................................................................................153.Propriété.................................................................................................................................................16
VI.Démarrage et variation de vitesse.............................................................................................................161.Introduction............................................................................................................................................162.Action sur la valeur efficace des tensions statoriques.............................................................................163.Action sur la résistance rotorique............................................................................................................174.Fonctionnement à V/f constante.............................................................................................................185.Variation du nombre de pôles.................................................................................................................196.Changement du sens de rotation.............................................................................................................19
VII.Fonctionnement en génératrice (parfois appelé alternateur asynchrone).................................................271.Réversibilité............................................................................................................................................272.Utilisation...............................................................................................................................................28
a.Freinage.............................................................................................................................................28b.Fourniture d’énergie à un réseau........................................................................................................28c.Production d’énergie en site isolé......................................................................................................32
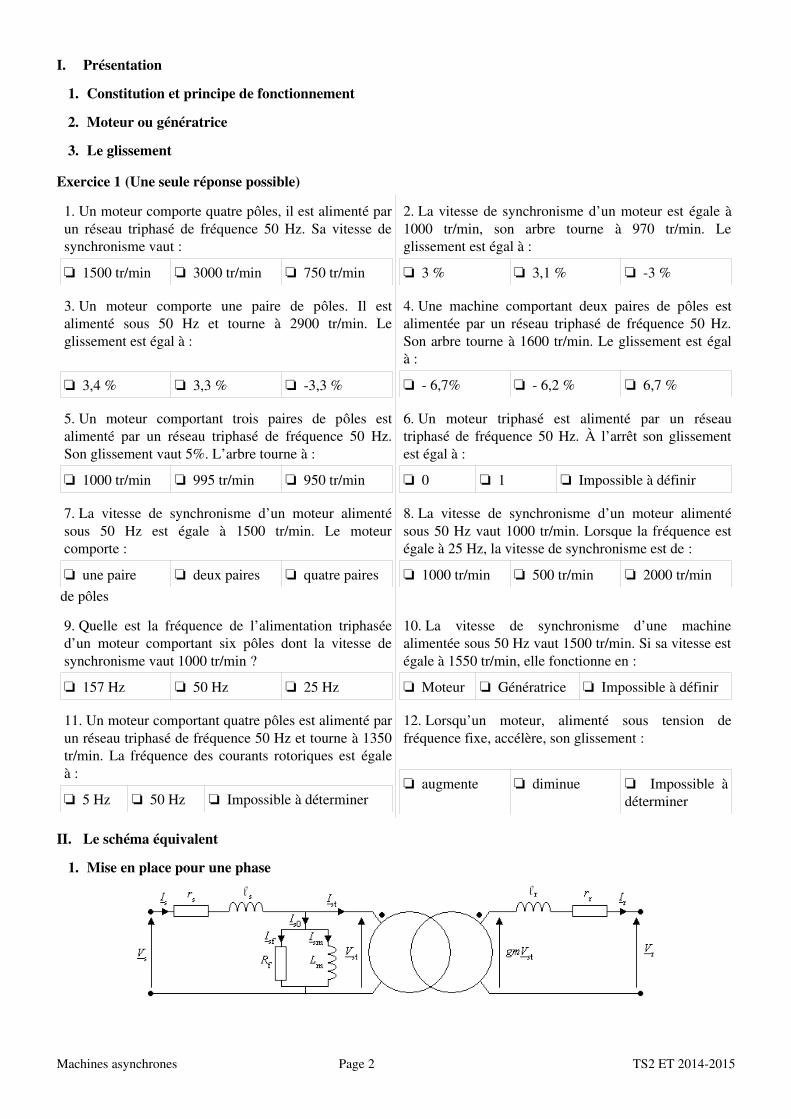
I. Présentation
1. Constitution et principe de fonctionnement
2. Moteur ou génératrice
3. Le glissement
Exercice 1 (Une seule réponse possible)
1. Un moteur comporte quatre pôles, il est alimenté parun réseau triphasé de fréquence 50 Hz. Sa vitesse desynchronisme vaut :
1500 tr/min 3000 tr/min 750 tr/min
2. La vitesse de synchronisme d’un moteur est égale à1000 tr/min, son arbre tourne à 970 tr/min. Leglissement est égal à :
3 % 3,1 % 3 %
3. Un moteur comporte une paire de pôles. Il estalimenté sous 50 Hz et tourne à 2900 tr/min. Leglissement est égal à :
3,4 % 3,3 % 3,3 %
4. Une machine comportant deux paires de pôles estalimentée par un réseau triphasé de fréquence 50 Hz.Son arbre tourne à 1600 tr/min. Le glissement est égalà :
6,7% 6,2 % 6,7 %
5. Un moteur comportant trois paires de pôles estalimenté par un réseau triphasé de fréquence 50 Hz.Son glissement vaut 5%. L’arbre tourne à :
1000 tr/min 995 tr/min 950 tr/min
6. Un moteur triphasé est alimenté par un réseautriphasé de fréquence 50 Hz. À l’arrêt son glissementest égal à :
0 1 Impossible à définir
7. La vitesse de synchronisme d’un moteur alimentésous 50 Hz est égale à 1500 tr/min. Le moteurcomporte :
une paire deux paires quatre pairesde pôles
8. La vitesse de synchronisme d’un moteur alimentésous 50 Hz vaut 1000 tr/min. Lorsque la fréquence estégale à 25 Hz, la vitesse de synchronisme est de :
1000 tr/min 500 tr/min 2000 tr/min
9. Quelle est la fréquence de l’alimentation triphaséed’un moteur comportant six pôles dont la vitesse desynchronisme vaut 1000 tr/min ?
157 Hz 50 Hz 25 Hz
10. La vitesse de synchronisme d’une machinealimentée sous 50 Hz vaut 1500 tr/min. Si sa vitesse estégale à 1550 tr/min, elle fonctionne en :
Moteur Génératrice Impossible à définir
11. Un moteur comportant quatre pôles est alimenté parun réseau triphasé de fréquence 50 Hz et tourne à 1350tr/min. La fréquence des courants rotoriques est égaleà :
5 Hz 50 Hz Impossible à déterminer
12. Lorsqu’un moteur, alimenté sous tension defréquence fixe, accélère, son glissement :
augmente diminue Impossible àdéterminer
II. Le schéma équivalent
1. Mise en place pour une phase
Machines asynchrones Page 2 TS2 ET 20142015
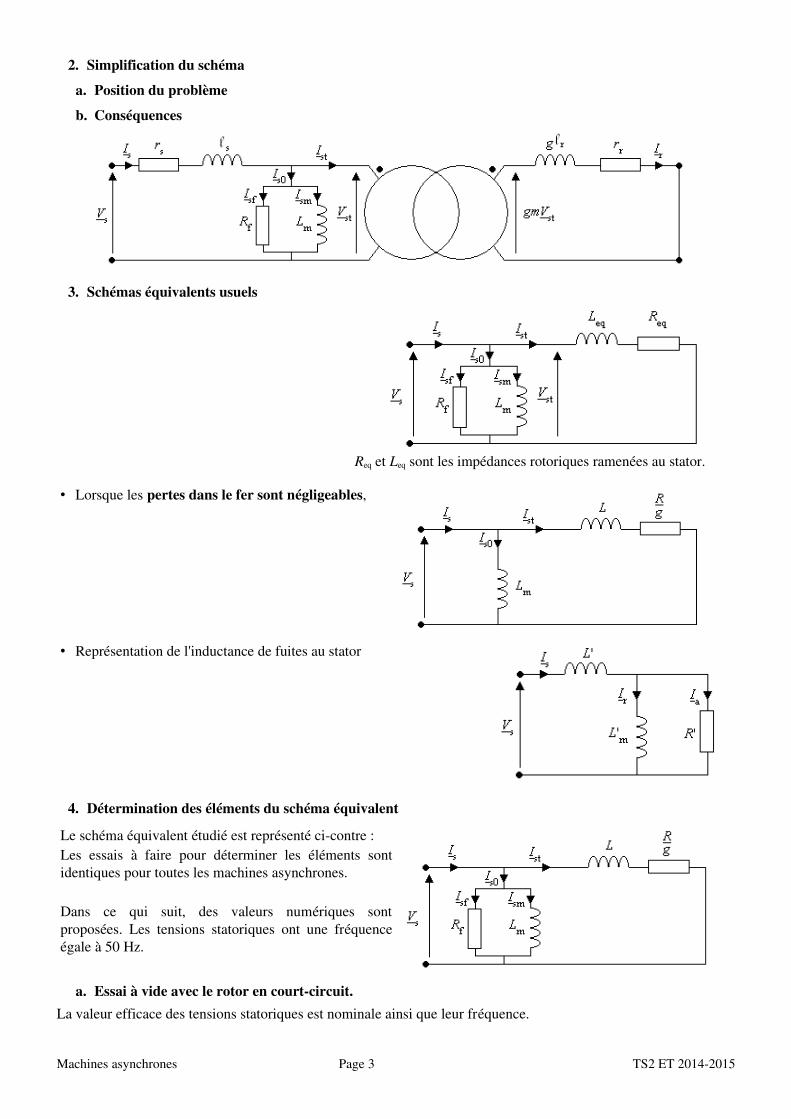
2. Simplification du schéma
a. Position du problème
b. Conséquences
3. Schémas équivalents usuels
Req et Leq sont les impédances rotoriques ramenées au stator.
• Lorsque les pertes dans le fer sont négligeables,
• Représentation de l'inductance de fuites au stator
4. Détermination des éléments du schéma équivalent
Le schéma équivalent étudié est représenté cicontre :Les essais à faire pour déterminer les éléments sontidentiques pour toutes les machines asynchrones.
Dans ce qui suit, des valeurs numériques sontproposées. Les tensions statoriques ont une fréquenceégale à 50 Hz.
a. Essai à vide avec le rotor en courtcircuit.La valeur efficace des tensions statoriques est nominale ainsi que leur fréquence.
Machines asynchrones Page 3 TS2 ET 20142015

Aucune charge mécanique n’est accouplée sur l’arbre. La vitesse de rotation est supposée égale à la vitesse desynchronisme.
➢ On mesure Vs, Is0 et Ps0 (wattmètre triphasé ou méthode des deux wattmètres ouwattmètre monophasé correctement branché).
• Représenter le schéma de câblage pour cet essai et indiquer le mode opératoire
Vs = 230 VIs0 = 2,8 APs0 = 200 W
• Quelle est la valeur du glissement pour cet essai ? En déduire la valeur de Ist. Représenter le schéma équivalent« utile » pour cet essai.
• Quel élément consomme de la puissance active ? Quel élément consomme de la puissance réactive ?➢ Rappeler les relations entre :• la puissance active pour l’essai à vide, l’un des éléments du schéma équivalent et la valeur efficace de la tension
ou de l’intensité.• la puissance réactive pour l’essai à vide, l’un des éléments du schéma équivalent et la valeur efficace de la
tension ou de l’intensité.• En déduire les relations permettant le calcul de Lm et Rf à partir des grandeurs mesurées dans cet essai.
Remarques :• Pour atteindre la vitesse de synchronisme, un moteur auxiliaire peut être accouplé avec la machine asynchrone, il
fournit alors les pertes mécaniques.• Si aucune machine auxiliaire n’est utilisable, il est possible de séparer les pertes fer des pertes mécaniques en
relevant l’évolution des pertes à vide en fonction du carré de la valeur efficace de la tension d’alimentation. Laprolongation de cette courbe (théoriquement une droite) vers l’axe des ordonnées donne les pertes mécaniques.En effet si la valeur efficace des tensions est nulle alors les pertes dans le fer sont nulles et il ne reste que lespertes mécaniques.
• Si la résistance statorique n’est pas négligeable (cas des machines de faible puissance), il est possible de lamesurer lors d’un essai en continu. Lors de l’essai à vide, les pertes par effet Joule au stator devront être prisesen compte.
b. Essai avec le rotor en courtcircuit, bloqué et sous tension réduite.L’arbre est bloqué par un frein à poudre ou un sabot. Le moteur est à l’arrêt. La valeur efficace des tensionsstatoriques est réglée pour que l’intensité efficace des courants statoriques soit nominale.
➢ On mesure Vscc, Iscc et Pscc (wattmètre triphasé ou méthode des deux wattmètres ou wattmètremonophasé correctement branché).
• Représenter le schéma de câblage pour cet essai et indiquer le mode opératoire
Vscc = 40 VIscc = 4,8 APscc = 230 W
• Quelle est la valeur de g lors de cet essai ? Représenter le schéma équivalent utile pour cet essai.• Quels éléments consomment de la puissance active ? Quels éléments consomment de la puissance réactive ?• Exprimer la puissance Pfcc consommée par Rf lors de cet essai. En déduire l’expression de la puissance
consommée par la résistance R en fonction de Vscc, Pscc et Rf.• Calculer les pertes par effet Joule au rotor.• Calculer jscc (le calcul de son cosinus permet de le déterminer), l’intensité est en retard sur la tension.• Représenter Iscc, Is0cc et Istcc sur un diagramme de Fresnel (Vscc est placé verticalement et orienté vers le haut). Lire
Istcc sur le diagramme de Fresnel (il est aussi possible de déterminer Istcc en utilisant les nombres complexes).• Exprimer les pertes par effet Joule au rotor en fonction de R et de Istcc. En déduire R.➢ En appliquant la même démarche avec la puissance réactive, déterminer L.
Exercice 2On considère une machine dont les caractéristiques sont les suivantes :• 220 V – 380 V 4 pôles, le stator est couplé en étoile• Rotor bobiné couplé en étoile, en court circuit• Alimentation : 380 V – 50 HzUn essai à vide, sous tension nominale, a permis de mesurer l’intensité du courant en ligné : I0 = 10,5 A, et lapuissance absorbée : P0 = 1,16 kW.
Machines asynchrones Page 4 TS2 ET 20142015
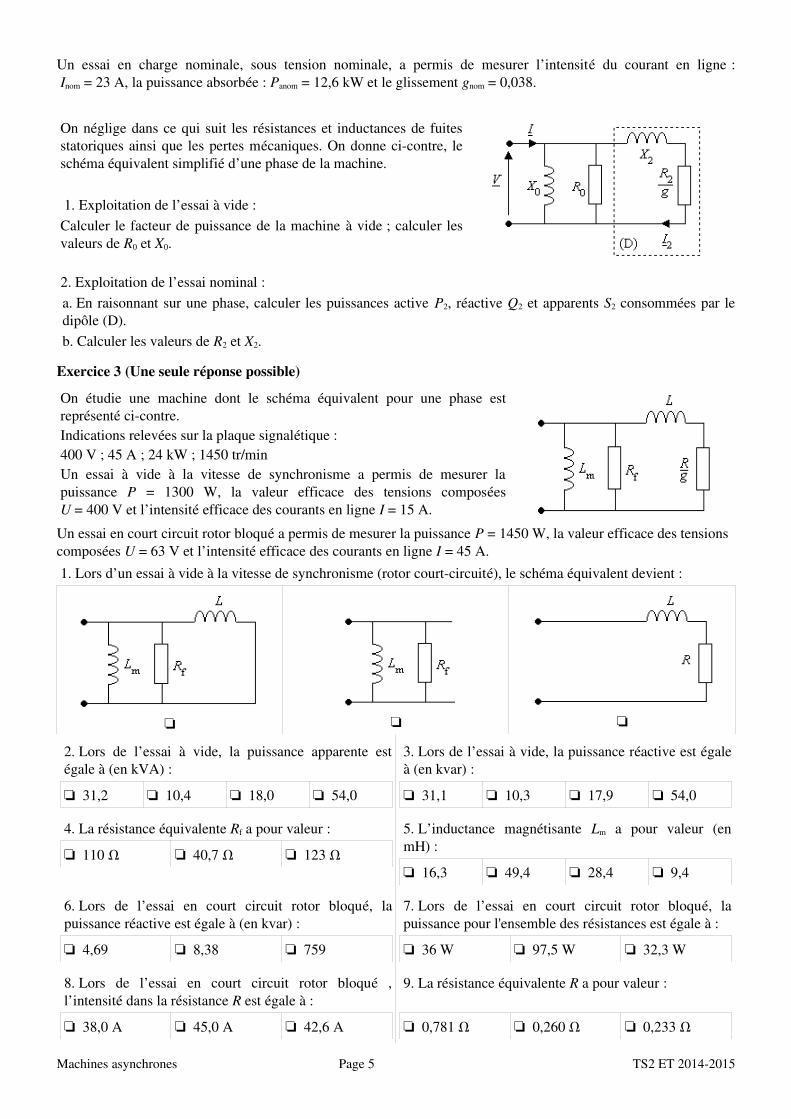
Un essai en charge nominale, sous tension nominale, a permis de mesurer l’intensité du courant en ligne : Inom = 23 A, la puissance absorbée : Panom = 12,6 kW et le glissement gnom = 0,038.
On néglige dans ce qui suit les résistances et inductances de fuitesstatoriques ainsi que les pertes mécaniques. On donne cicontre, leschéma équivalent simplifié d’une phase de la machine.
1. Exploitation de l’essai à vide :Calculer le facteur de puissance de la machine à vide ; calculer lesvaleurs de R0 et X0.
2. Exploitation de l’essai nominal :a. En raisonnant sur une phase, calculer les puissances active P2, réactive Q2 et apparents S2 consommées par ledipôle (D).b. Calculer les valeurs de R2 et X2.
Exercice 3 (Une seule réponse possible)
On étudie une machine dont le schéma équivalent pour une phase estreprésenté cicontre.Indications relevées sur la plaque signalétique :400 V ; 45 A ; 24 kW ; 1450 tr/minUn essai à vide à la vitesse de synchronisme a permis de mesurer lapuissance P = 1300 W, la valeur efficace des tensions composéesU = 400 V et l’intensité efficace des courants en ligne I = 15 A.
Un essai en court circuit rotor bloqué a permis de mesurer la puissance P = 1450 W, la valeur efficace des tensions composées U = 63 V et l’intensité efficace des courants en ligne I = 45 A.
1. Lors d’un essai à vide à la vitesse de synchronisme (rotor courtcircuité), le schéma équivalent devient :
2. Lors de l’essai à vide, la puissance apparente estégale à (en kVA) :
31,2 10,4 18,0 54,0
3. Lors de l’essai à vide, la puissance réactive est égaleà (en kvar) :
31,1 10,3 17,9 54,0
4. La résistance équivalente Rf a pour valeur :
110 W 40,7 W 123 W
5. L’inductance magnétisante Lm a pour valeur (enmH) :
16,3 49,4 28,4 9,4
6. Lors de l’essai en court circuit rotor bloqué, lapuissance réactive est égale à (en kvar) :
4,69 8,38 759
7. Lors de l’essai en court circuit rotor bloqué, lapuissance pour l'ensemble des résistances est égale à :
36 W 97,5 W 32,3 W
8. Lors de l’essai en court circuit rotor bloqué ,l’intensité dans la résistance R est égale à :
38,0 A 45,0 A 42,6 A
9. La résistance équivalente R a pour valeur :
0,781 W 0,260 W 0,233 W
Machines asynchrones Page 5 TS2 ET 20142015

10. Lors de l’essai en court circuit rotor bloqué, lapuissance réactive pour l’inductance Lm est égale à :
775 var 256 var 445 var 1344 var
11. L’inductance équivalente L a pour valeur :
2,32 mH 7,77 mH 2,59 mH
III. Bilan de puissance
1. Fonctionnement en moteurLa puissance absorbée est électrique, la puissance utile est mécanique• Puissance absorbée : Pa=3V s I s coss (il ne faut pas oublier de multiplier par trois car la machine est
triphasée).• Pertes par effet Joule au stator : P js=3 Rs I s
2 avec Rs la résistance d’un enroulement statorique. Ces pertessont négligées dans de nombreux problèmes. Dans ce cas, la résistance n’apparaît pas sur le schéma équivalent.
• Pertes dans le fer au stator : Pfer=3V s
2
Rf
(Attention au trois !). Ces pertes sont négligées dans de très
nombreux problèmes. Dans ce cas, la résistance n’apparaît pas sur le schéma équivalent.• Puissance transmise au rotor : c’est la puissance reçue par le stator diminuée des pertes dans le fer
Ptr=Pa−P fer ou Ptr=3V s I st cosst avec jst le déphasage entre Vs et Ist.Remarque : si les pertes par effet Joule au stator ne sont pas négligeables alors Ptr=Pa−P js−P fer
Le seul élément du rotor équivalent qui consomme de la puissance active est Rg
, la puissance transmise au rotor
peut aussi s’écrire Ptr=3.Rg
I st2 (il ne faut pas oublier de multiplier par trois car la machine est triphasée).
Cette puissance est aussi appelée puissance électromagnétique.• Pertes par effet Joule au rotor P jr=3. R I st
2 (il ne faut pas oublier de multiplier par trois car la machine esttriphasée). La résistance R représente la résistance d’une phase du rotor ramenée au stator. Les pertes par effetJoule au rotor sont reliées à la puissance transmise au rotor par P jr=gP tr .
• Pertes dans le fer au rotor : elles sont négligeables car les courants rotoriques ont une fréquence faible.• Puissance mécanique : c’est la part de puissance transmise au rotor qui est effectivement transformée en
puissance mécanique. Elle est égale à la puissance transmise au rotor diminuée des pertes par effet Joule aurotor : Pm=P tr−P jr
D’après ce qui précède Pm=P tr−gP tr=1−g P tr
Pm=3.Rg
I st2−3. R I st
2=3Rg−RI st
2=3 R1−g
gI st
2
Tout se passe comme si la puissance mécanique était
consommée par la résistance fictive R1−g
g parfois
appelée résistance « motionnelle ».Cette résistance apparaît sur le schéma équivalent cidessus.• Puissance utile : elle est égale à la puissance mécanique diminuée des pertes mécaniques Ppertesméca.
Pu=Pm−Ppertesméca
Ppertesméca correspond aux frottements sur les paliers, à la ventilation, …Ces pertes n’apparaissent pas sur le schéma équivalent (elles sont parfois intégrées à larésistance Rf). Elles sont négligées dans de très nombreux problèmes.
• RendementC’est le rapport de la puissance utile sur la
puissance active =Pu
Pa
.
Machines asynchrones Page 6 TS2 ET 20142015

Si les pertes mécaniques, dans le fer et par effet Joule au stator sont négligeables, le rendement s’écrit :
=Pm
Pa
=1−gP tr
Ptr
=1−g
Si le glissement est élevé, le rendement d’un moteur asynchrone est faible car les pertes par effet Joule au rotoraugmentent avec le glissement.Le rendement peut être déterminé à partir d’essais directs, de la méthode des pertes séparées ou de méthodesd’opposition.
2. Fonctionnement en génératrice
La puissance absorbée est mécanique, lapuissance utile est électrique.Comme pour le fonctionnement moteur, onrecense les pertes dans le fer, les pertes pareffet Joule au rotor et les pertes mécaniques.
Exercice 4On considère le même moteur que celui de l'exercice 2.• Quel est le couplage des enroulements statoriques ?• Pour la charge nominale, calculer les grandeurs suivantes : vitesse de rotation (en tr/min), facteur de puissance,
moment du couple utile, rendement.
Exercice 5La plaque signalétique d’un moteur asynchrone donne les indications suivantes :400 V ; 16,5 A ; cos j = 0,82 ; 8,5 kW ; 4 pôles ; 50 Hz ; 1420 tr/min
1. Calculer son rendement et les pertes totales.
2. Comparer le rendement calculé à la question précédente et sa valeur approchée si les pertes mécaniques etstatoriques (dans le fer et par effet Joule) sont négligeables.
Exercice 6
La machine étudiée comporte quatre pôles et est alimentée sous une fréquencede 50 Hz. À son point de fonctionnement nominal, l’intensité efficace est égaleà 40 A, la valeur efficace d’une tension simple vaut 230 V, le facteur depuissance 0,87 et la vitesse de rotation 1350 tr/min. Le schéma équivalent pourune phase est représenté cicontre.
I. Bilan des pertes
1. Que valent les pertes par effet Joule au stator ?
2. Que valent les pertes dans le fer au stator ?
3. Le schéma équivalent donnetil des indications sur les pertes mécaniques ?
II. Bilan de puissance
1. Calculer la puissance absorbée.
2. Calculer la puissance transmise au rotor.
3. Calculer les pertes par effet Joule au rotor.
4. Calculer le rendement si les pertes mécaniques sont négligeables.
Exercice 7L’essai décrit à la page suivante a été réalisé sur un moteur,comportant deux paires de pôles, dont le stator estcouplé en étoile : l’ampèremètre indique 4 A et le voltmètre 24 V.
1. Calculer la résistance d’un enroulement statorique.
2. L’intensité efficace nominale est égale à 3,4 A. Calculer les pertes par effet Joule au stator.
Machines asynchrones Page 7 TS2 ET 20142015
En fonctionnement « normal », la valeur efficace des tensionscomposées est égale à 400 V et leur fréquence 50 Hz. Dans cesconditions, les pertes dans le fer sont égales à 120 W.
3. On étudie un point de fonctionnement caractérisé par un facteurde puissance égal à 0,84, une vitesse de rotation de 1430 tr/min etune intensité efficace de 3,0 A.
a. Calculer la puissance absorbée.b. Calculer la puissance transmise au rotor.c. Calculer les pertes par effet Joule au rotor.d. Calculer la puissance mécanique.e. Le rendement pour ce point de fonctionnement est égal à 79,5%. Évaluer les pertes mécaniques.
IV. Couple électromagnétique
1. Introduction
La puissance transmise au rotor l’est à un champtournant à la vitesse de synchronisme Ws (en rad/s).
La puissance mécanique est transmise à un arbretournant à la vitesse W (en rad/s).
Le couple électromagnétique peut donc être calculé à partir des deux relations suivantes :
Cem=P tr
sou C em=
Pm
Ces deux relations sont équivalentes.
En effet S=
1−g donc C em=
P tr
1−g
=P tr1−g et comme Ptr 1−g=Pm alors C em=
Pm
2. Expression du couple électromagnétique en fonction des éléments du schéma équivalent.
3. Courbe représentative de l'évolution du couple en fonction du glissement Cem=f (g)
a. Asymptotes et points particuliers
b. Courbe représentative
c. Évolution du couple électromagnétique en fonction de la vitesse (en tr/min).La courbe cidessous représente l’évolution du couple électromagnétique en fonction de la vitesse de rotation del’arbre.
• Placer les vitesses ns (synchronisme), 2ns et ns.
• Repérer les vitesses correspondant auxcouples minimal et maximal et indiquer lazone de fonctionnement pour lesglissements faibles.
• Repérer le couple de démarrage.
d. Fonctionnements moteur et génératriceSi le produit Cem.W est positif alors la machine fonctionne en moteur. Dans le cas contraire elle fonctionne engénératrice.Indiquer sur le graphe Cem = f(n) cidessus les zones de fonctionnement en moteur et en génératrice.
Machines asynchrones Page 8 TS2 ET 20142015
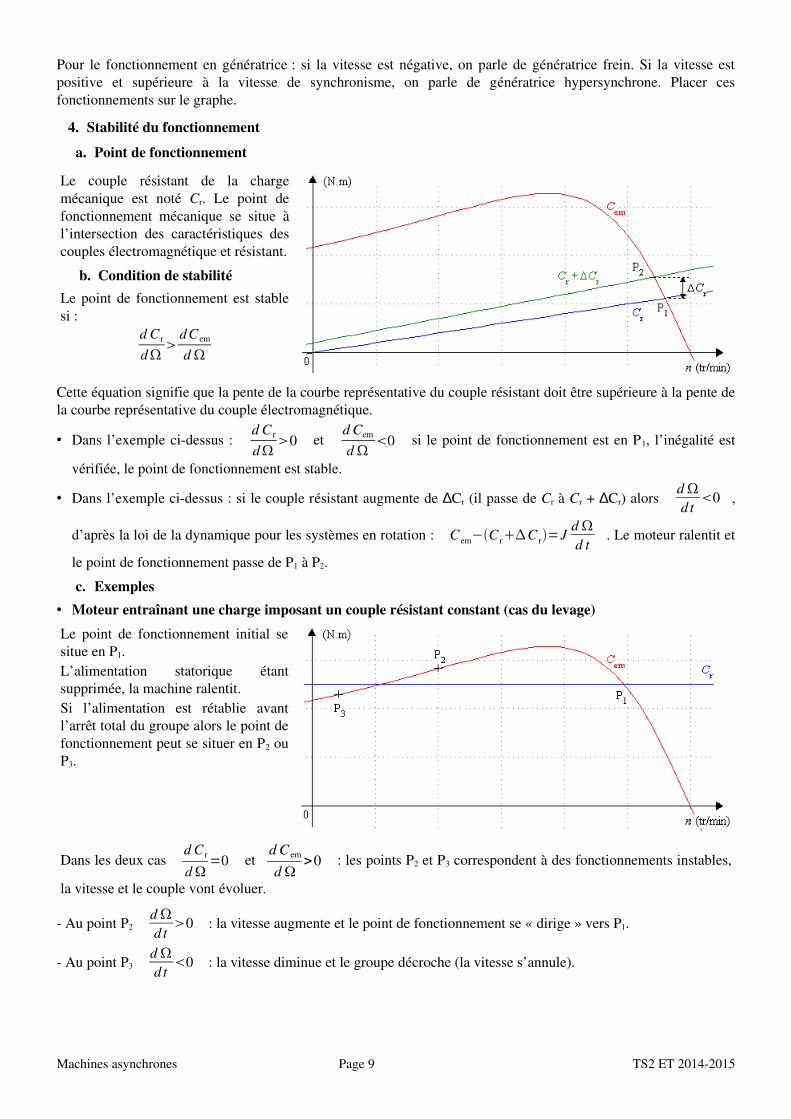
Pour le fonctionnement en génératrice : si la vitesse est négative, on parle de génératrice frein. Si la vitesse estpositive et supérieure à la vitesse de synchronisme, on parle de génératrice hypersynchrone. Placer cesfonctionnements sur le graphe.
4. Stabilité du fonctionnement
a. Point de fonctionnement
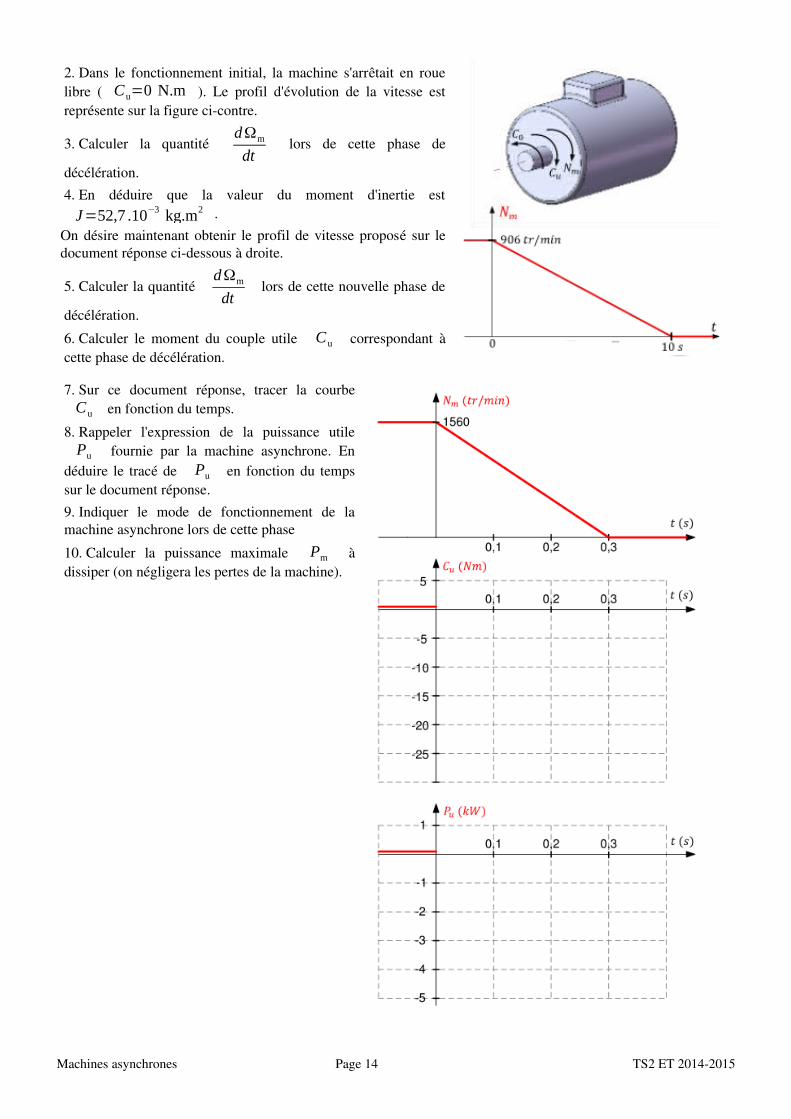
Le couple résistant de la chargemécanique est noté Cr. Le point defonctionnement mécanique se situe àl’intersection des caractéristiques descouples électromagnétique et résistant.
b. Condition de stabilitéLe point de fonctionnement est stablesi :
d C r
d
dC em
d
Cette équation signifie que la pente de la courbe représentative du couple résistant doit être supérieure à la pente dela courbe représentative du couple électromagnétique.
• Dans l’exemple cidessus : d C r
d0 et
d Cem
d0 si le point de fonctionnement est en P1, l’inégalité est
vérifiée, le point de fonctionnement est stable.
• Dans l’exemple cidessus : si le couple résistant augmente de ∆Cr (il passe de Cr à Cr + ∆Cr) alors dd t
0 ,
d’après la loi de la dynamique pour les systèmes en rotation : C em−C rC r=Jdd t
. Le moteur ralentit et
le point de fonctionnement passe de P1 à P2.
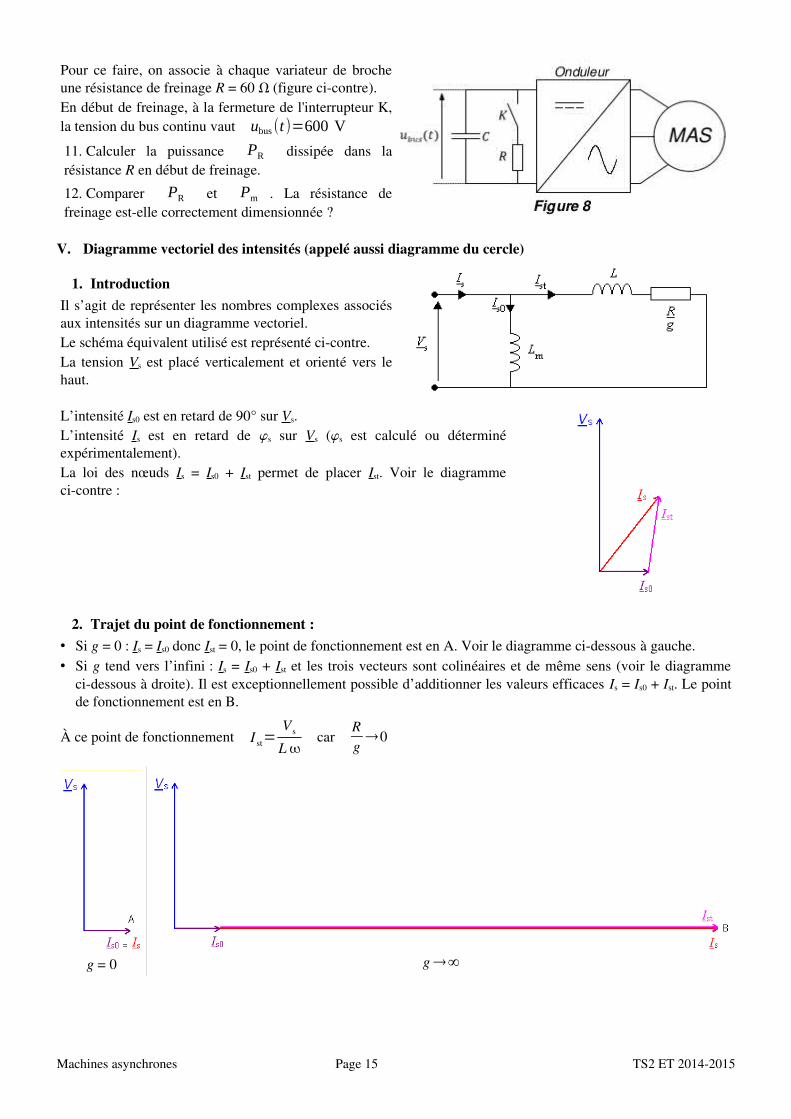
c. Exemples• Moteur entraînant une charge imposant un couple résistant constant (cas du levage)
Le point de fonctionnement initial sesitue en P1.L’alimentation statorique étantsupprimée, la machine ralentit.Si l’alimentation est rétablie avantl’arrêt total du groupe alors le point defonctionnement peut se situer en P2 ouP3.
Dans les deux cas d C r
dΩ=0 et
d C em
dΩ>0 : les points P2 et P3 correspondent à des fonctionnements instables,
la vitesse et le couple vont évoluer.
Au point P2 dd t
0 : la vitesse augmente et le point de fonctionnement se « dirige » vers P1.
Au point P3 dd t
0 : la vitesse diminue et le groupe décroche (la vitesse s’annule).
Machines asynchrones Page 9 TS2 ET 20142015

Pour ce type de charge mécanique, lespoints de fonctionnements situés en dehorsde l’intervalle [gmax, gmax] sont instables.
Indiquer sur le graphe Cem = f(n) ci contre,les zones de fonctionnements stables etinstables pour une charge mécaniqueimposant un couple résistant constant.
• Moteur entraînant une charge imposant un couple résistant quadratique (dépendant du carré de lavitesse, cas des ventilateurs).
Le graphe ci contre représente le coupleélectromagnétique d’un moteur ainsi queles couples résistants de deux chargesquadratiques. Indiquer le point de fonctionnement pourla charge « Cr2 ». Estil stable ? Indiquer le point de fonctionnement pourla charge « Cr1 ». Estil stable ?Pourquoi estil souhaitable d'éviter unfonctionnement de longue durée avec lacharge « Cr1 » ?
Exercice 8Un moteur asynchrone présente la caractéristique mécaniquecicontre :
1. Donner le moment du couple au démarrage, le momentdu couple maximum.
Le moteur est accouplé successivement à trois chargesmécaniques dont le moment du couple résistant est constant :Cr1 = 8 N.m, Cr2 = 14 N.m et Cr3 =10 N.m.
2. Le moteur peutil démarrer dans chacun des cas ?
3. On admet que le moteur entraîne la charge Cr2 (ledémarrage s'est effectué à l'aide d'un dispositif extérieur).
a. Vérifier que l'on obtient deux points d'intersection sur la caractéristique mécanique :• le point A avec n = 663 tr/min• le point B avec n = 1 348 tr/min.b. Le point de fonctionnement du moteur se situe en B. On suppose que pour une raison extérieure (perturbation) lavitesse de l'ensemble « moteur + charge » augmente légèrement. À l'aide de la caractéristique, montrer que lemoment du couple moteur diminue légèrement. Comment évolue alors la vitesse ?c. Le point de fonctionnement du moteur se situe en A. On suppose que pour une raison extérieure (perturbation)la vitesse de l'ensemble « moteur + charge » augmente légèrement. À l'aide de la caractéristique, montrer que lemoment du couple moteur augmente légèrement. Comment évolue alors la vitesse ? En déduire qu'il s'agit d'unezone instable.
Machines asynchrones Page 10 TS2 ET 20142015

Exercice 9 (Extrait BTS 2010)Cet exercice porte sur le dimensionnement d'un moteur asynchrone destiné à entraîner un ventilateur d'extractiond'air dans une usine de fabrication de meubles.On souhaite déterminer les conditions d'alimentation de la machine permettant d'obtenir la vitesse d'extraction à lavaleur souhaitée, v' = 23 m.s1.
I. Modèle par phase de la machine asynchrone en régime permanent
Pour obtenir la caractéristique mécanique de la machineasynchrone, on utilise le modèle équivalent simplifié d'unephase du moteur représenté cicontre.
On néglige les pertes mécaniques ainsi que les pertes par effetJoule au stator : pM≈0 et p js≈0
Des essais ont été réalisés sur le moteur afin de calculer la valeur de chaque élément.• Essai à vide sous tension nominale : n0≈1500 tr.min−1 ; P0=5,10 kW et I 0=86 A
• Essai en charge nominale : les valeurs sont celles de la plaque signalétique soient 110 kW ; 1484 tr.min1 pourf=50 Hz ; 230 V / 400 V ; h = 0,946 ; cos j = 0,85 et il a été mesuré au stator : P = 116 kW et I = 198 A.
1. Quelles puissances modélisent les éléments RF et R du modèle équivalent ?
2. Les valeurs numériques obtenues sont XM=2,69 Ω ; X=0,167 Ω et r=15 mΩ . Compléter cesrésultats en calculant la valeur numérique de RF .
On considérera ces quatre valeurs constantes pour la suite du problème.
II. Puissance transmise au rotor
1. Exprimer la puissance Ptr transmise au rotor en fonction de rg
et du courant I ' .
2. Montrer qu'avec les hypothèses envisagées, cette puissance transmise peut aussi s'écrire Ptr=T u .ΩS avecT u moment du couple utile du moteur.
3. En déduire l'expression de T u en fonction de r , g , I ' et ΩS
III. Couple utileLes conditions de fonctionnement du moteur dans cette application font que son glissement reste toujours inférieurà 2 %.
1. Montrer qu'en première approximation X≪rg
2. En tenant compte de ce résultat, relier la valeur efficace I' du courant à la valeur efficace V de la tension v.
3. Le moment du couple utile peut alors s'écrire sous la forme simple T u=A (ΩS−Ω) c'est à direT u=K (nS−n)
Montrer que le coefficient K a pour expression K=3V 2
r.ΩS2 .
2π60
, si les vitesses sont exprimées en tours par
minute.
4. En déduire la condition sur la tension V et la fréquence f que le variateur de vitesse doit assurer pour rendre cecoefficient K constant.
5. Calculer K à l'aide des valeurs nominales.
IV. Point de fonctionnementLa condition précédente étant remplie, la caractéristique mécanique T u=f (n) du moteur est, dans sa zone utile,la droite d'expression T u=44,9. (nN−n)
Machines asynchrones Page 11 TS2 ET 20142015

1. Tracer cette droite pour la fréquence f = 50 Hz, dans le même repère que la caractéristique mécanique duventilateur (documentréponse cidessous). On placera les points de fonctionnement correspondant àT u=0 N.m et T u=900 N.m .
2.
3. Décrire de quelle manière se déplace cette droite si le variateur réduit la fréquence des tensions.
4. En déduire l'effet de la réduction de fréquence sur le débit d'air du ventilateur.Le moment du couple correspondant au point de fonctionnement, adopté pour diminuer la consommationénergétique (vitesse d'extraction réglée à 23 m.s1) vaut T=510 N.m .
5. À l'aide du document réponse cidessus, déterminer la fréquence f 1 de la fréquence que doit imposer levariateur pour obtenir ce point de fonctionnement.
Exercice 10 (Extrait BTS 2010)Cet exercice porte sur le dimensionnement de machines asynchrones entraînant des broches d'usinage.
I. Caractéristique mécanique de la machine asynchrone
Chaque machine asynchrone entraînant une broche possèdetrois paires de pôles. On rappelle, cicontre, le schémaéquivalent d'une phase de cette machine en régimepermanent sinusoïdal, où V est le nombre complexeassocié à la tension simple du réseau, R est la résistance d'unenroulement rotorique ramenée au stator, elle vaut 0,54 W.
La machine asynchrone est pilotée par un variateur à commande en Vf=4,6 V.Hz−1 constant, où f est la
fréquence des courants statoriques (de pulsation w) et V la valeur efficace de la tension simple du réseau.Dans l'ensemble du problème, on néglige les pertes mécaniques de la machine.
1. Dans les conditions de fonctionnement de la machine, on considère que Lω est très inférieur à Rg
.
Exprimer I r la valeur efficace du courant I r en fonction de V, R et du glissement g.
2. En déduire l'expression de la puissance électromagnétique Pem de la machine en fonction de V, R et g.
Machines asynchrones Page 12 TS2 ET 20142015

3. Rappeler la définition du glissement g en fonction de la vitesse de synchronisme NS et de la vitesse derotation Nm de la machine.
4. Montrer que le moment du couple électromagnétique s'exprime :
Cem=K.(NS – N m) avec K=3 . p2
120 .π . R. (Vf)2
où NS et Nm sont exprimées en tr.min1.
5. Vérifier que K = 2,81 N.m .tr1.min
6. Calculer NS pour une fréquence des courants statoriques f = 46 Hz.
7. Pour f = 46 Hz, tracer Cem en fonction de Nm sur le document réponse cidessous.
8. Sur ce même document réponse est fourni le tracé du moment du couple résistant C r appliqué au moteurasynchrone pour une vitesse d'avance V a=40 mm.min−1 . Déterminer les coordonnées [C em0 ; N m0] dupoint de fonctionnement du système en l'état initial.
II. Mise en sécurité de la machineSur un cycle de fonctionnement, les broches atteignent la vitesse de rotation la plus élevée lors de la phase definition. Ainsi, en cas d'arrêt d'urgence du système (suite par exemple à une intrusion dans la zone de sécurité), c'estdurant cette phase que les contraintes pour stopper les broches sont les plus importantes.
La machine asynchrone entraînant une broche exerce unmoment de couple utile Cu sur l'arbre d'entrée (voirla figure cicontre). Les frottements secs exercent sur cemême arbre un moment de couple C0=0,5 N.m .On note J le moment d'inertie du système ramené surl'arbre de la machine.
1. Appliquer le principe fondamental de la dynamiquesur l'arbre de la machine, on notera Ωm la vitesseangulaire de rotation de la machine exprimée en rad.s1.
Machines asynchrones Page 13 TS2 ET 20142015
2. Dans le fonctionnement initial, la machine s'arrêtait en rouelibre ( Cu=0 N.m ). Le profil d'évolution de la vitesse estreprésente sur la figure cicontre.
3. Calculer la quantité dΩm
dt lors de cette phase de
décélération.
4. En déduire que la valeur du moment d'inertie estJ=52,7 .10−3 kg.m2 .
On désire maintenant obtenir le profil de vitesse proposé sur ledocument réponse cidessous à droite.
5. Calculer la quantité dΩm
dt lors de cette nouvelle phase de
décélération.
6. Calculer le moment du couple utile Cu correspondant àcette phase de décélération.
7. Sur ce document réponse, tracer la courbeCu en fonction du temps.
8. Rappeler l'expression de la puissance utilePu fournie par la machine asynchrone. En
déduire le tracé de Pu en fonction du tempssur le document réponse.
9. Indiquer le mode de fonctionnement de lamachine asynchrone lors de cette phase
10. Calculer la puissance maximale Pm àdissiper (on négligera les pertes de la machine).
Machines asynchrones Page 14 TS2 ET 20142015
Pour ce faire, on associe à chaque variateur de brocheune résistance de freinage R = 60 W (figure cicontre).En début de freinage, à la fermeture de l'interrupteur K,la tension du bus continu vaut ubus (t)=600 V
11. Calculer la puissance PR dissipée dans larésistance R en début de freinage.
12. Comparer PR et Pm . La résistance defreinage estelle correctement dimensionnée ?
V. Diagramme vectoriel des intensités (appelé aussi diagramme du cercle)
1. IntroductionIl s’agit de représenter les nombres complexes associésaux intensités sur un diagramme vectoriel.Le schéma équivalent utilisé est représenté cicontre.La tension Vs est placé verticalement et orienté vers lehaut.
L’intensité Is0 est en retard de 90° sur Vs.L’intensité Is est en retard de js sur Vs (js est calculé ou déterminéexpérimentalement).La loi des nœuds Is = Is0 + Ist permet de placer Ist. Voir le diagrammecicontre :
2. Trajet du point de fonctionnement :• Si g = 0 : Is = Is0 donc Ist = 0, le point de fonctionnement est en A. Voir le diagramme cidessous à gauche.• Si g tend vers l’infini : Is = Is0 + Ist et les trois vecteurs sont colinéaires et de même sens (voir le diagramme
cidessous à droite). Il est exceptionnellement possible d’additionner les valeurs efficaces Is = Is0 + Ist. Le pointde fonctionnement est en B.
À ce point de fonctionnement I st=V s
L car
Rg0
g = 0 g∞
Machines asynchrones Page 15 TS2 ET 20142015

On montre que le pointde fonctionnement (Msur le graphe cicontre)se déplace sur un cerclede centre 0 (milieu de
AB) et de rayon Vs
L
3. Propriété
Si le rapport V s
f est constant alors le diagramme du cercle est inchangé et les intensités ne sont pas modifiées.
Remarque : si les chutes de tension aux bornes des impédances statoriques ne sont pas négligeables (c'estàdirelorsque la fréquence, donc Vs, est trop faible) alors la propriété n’est pas vérifiée.
VI. Démarrage et variation de vitesse
1. Introduction➢ Au démarrage, g = 1, le courant statorique sous tension nominale est important (voir le diagramme du cercle) et
le couple de démarrage peu élevé (voir l’évolution du couple électromagnétique en fonction du glissement ou dela vitesse).
➢ Le couple électromagnétique en fonction du glissement est donné par la relation cicontre :
Pour faire varier la vitesse (donc le glissement), il est possible d’agir sur :• la résistance rotorique ramenée au stator : R• la pulsation ou la fréquence des courants statoriques : w ou f• la valeur efficace des tensions statoriques : Vs
• le nombre de paires de pôles : p
Cem=3 pV s
2
2 f
Rg
Rg
2
L2
2. Action sur la valeur efficace des tensions statoriques➢ Le stator de la machine est alimenté par des tensions statoriques de valeur efficace variable et de fréquence fixe.➢ Les graphes cicontre représentent l’évolution du
couple et de l’intensité pour deux valeurs efficacesdifférentes des tensions statoriques. On note V1 et V2
ces deux valeurs, elles sont liées respectivement àCem1, I1 et Cem2, I2. Laquelle des tensions est la plusélevée ?
• Repérer sur les courbes l’intensité efficace descourants statoriques au démarrage. Quelle est la
valeur de I 2D
I 1D
?
• Repérer sur les courbes les couples de démarrage et
maximaux. Calculer C em2D
C em1D
et C em2max
C em1max
. Ce
type de démarrage estil bien adapté si la chargemécanique oppose un couple résistant constant ?
Courbes Cem = f(n) pour deux valeurs efficaces de latension statorique
Machines asynchrones Page 16 TS2 ET 20142015
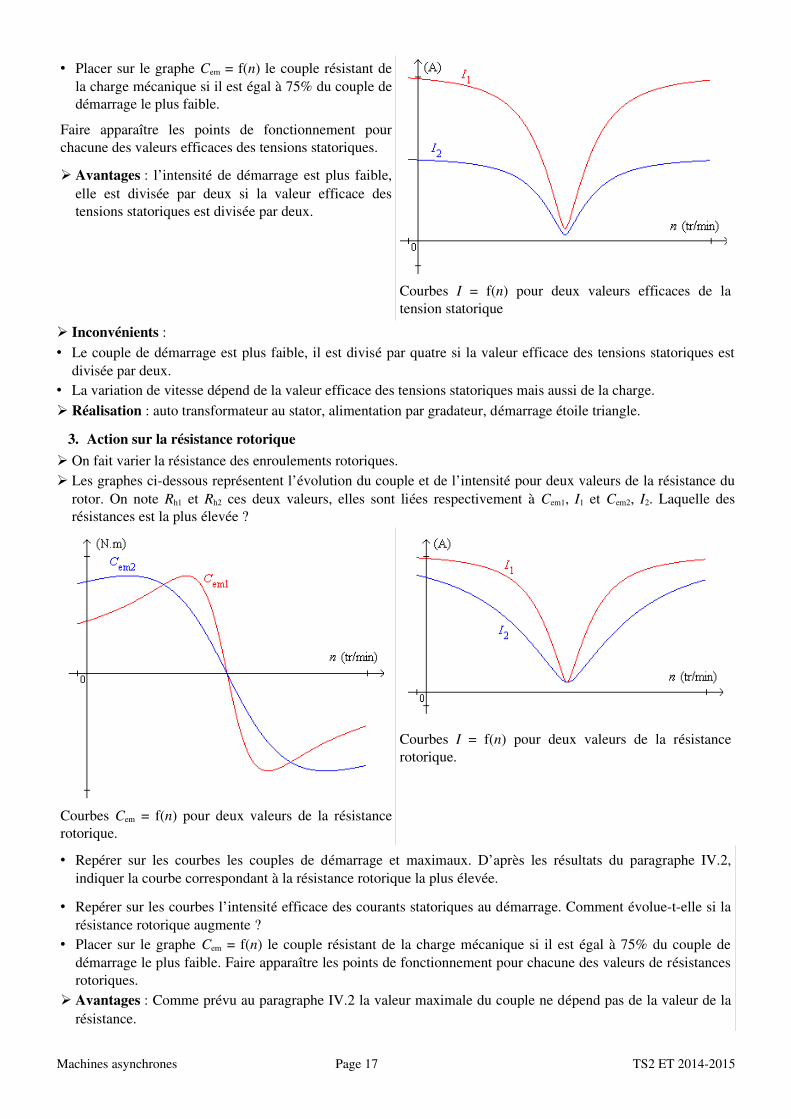
• Placer sur le graphe Cem = f(n) le couple résistant dela charge mécanique si il est égal à 75% du couple dedémarrage le plus faible.
Faire apparaître les points de fonctionnement pourchacune des valeurs efficaces des tensions statoriques.
➢ Avantages : l’intensité de démarrage est plus faible,elle est divisée par deux si la valeur efficace destensions statoriques est divisée par deux.
Courbes I = f(n) pour deux valeurs efficaces de latension statorique
➢ Inconvénients : • Le couple de démarrage est plus faible, il est divisé par quatre si la valeur efficace des tensions statoriques est
divisée par deux.• La variation de vitesse dépend de la valeur efficace des tensions statoriques mais aussi de la charge.➢ Réalisation : auto transformateur au stator, alimentation par gradateur, démarrage étoile triangle.
3. Action sur la résistance rotorique➢ On fait varier la résistance des enroulements rotoriques.➢ Les graphes cidessous représentent l’évolution du couple et de l’intensité pour deux valeurs de la résistance du
rotor. On note Rh1 et Rh2 ces deux valeurs, elles sont liées respectivement à Cem1, I1 et Cem2, I2. Laquelle desrésistances est la plus élevée ?
Courbes Cem = f(n) pour deux valeurs de la résistancerotorique.
Courbes I = f(n) pour deux valeurs de la résistancerotorique.
• Repérer sur les courbes les couples de démarrage et maximaux. D’après les résultats du paragraphe IV.2,indiquer la courbe correspondant à la résistance rotorique la plus élevée.
• Repérer sur les courbes l’intensité efficace des courants statoriques au démarrage. Comment évoluetelle si larésistance rotorique augmente ?
• Placer sur le graphe Cem = f(n) le couple résistant de la charge mécanique si il est égal à 75% du couple dedémarrage le plus faible. Faire apparaître les points de fonctionnement pour chacune des valeurs de résistancesrotoriques.
➢ Avantages : Comme prévu au paragraphe IV.2 la valeur maximale du couple ne dépend pas de la valeur de larésistance.
Machines asynchrones Page 17 TS2 ET 20142015
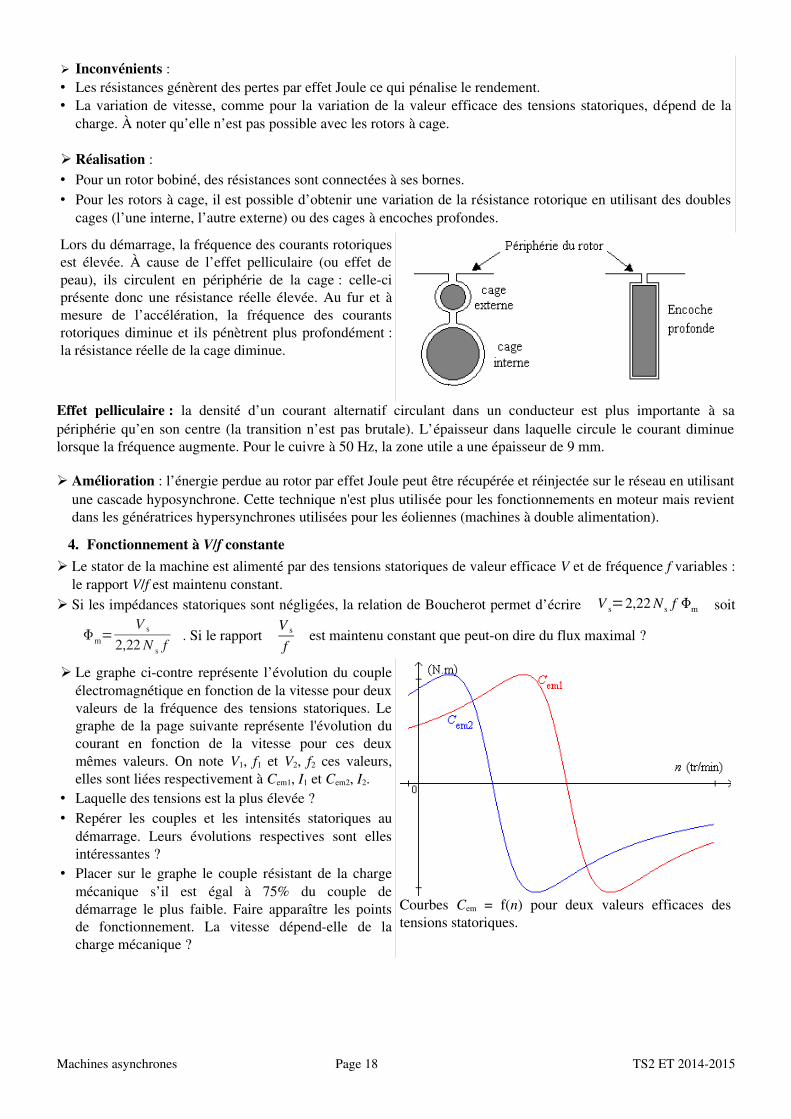
➢ Inconvénients :• Les résistances génèrent des pertes par effet Joule ce qui pénalise le rendement.• La variation de vitesse, comme pour la variation de la valeur efficace des tensions statoriques, dépend de la
charge. À noter qu’elle n’est pas possible avec les rotors à cage.
➢ Réalisation :• Pour un rotor bobiné, des résistances sont connectées à ses bornes.• Pour les rotors à cage, il est possible d’obtenir une variation de la résistance rotorique en utilisant des doubles
cages (l’une interne, l’autre externe) ou des cages à encoches profondes.
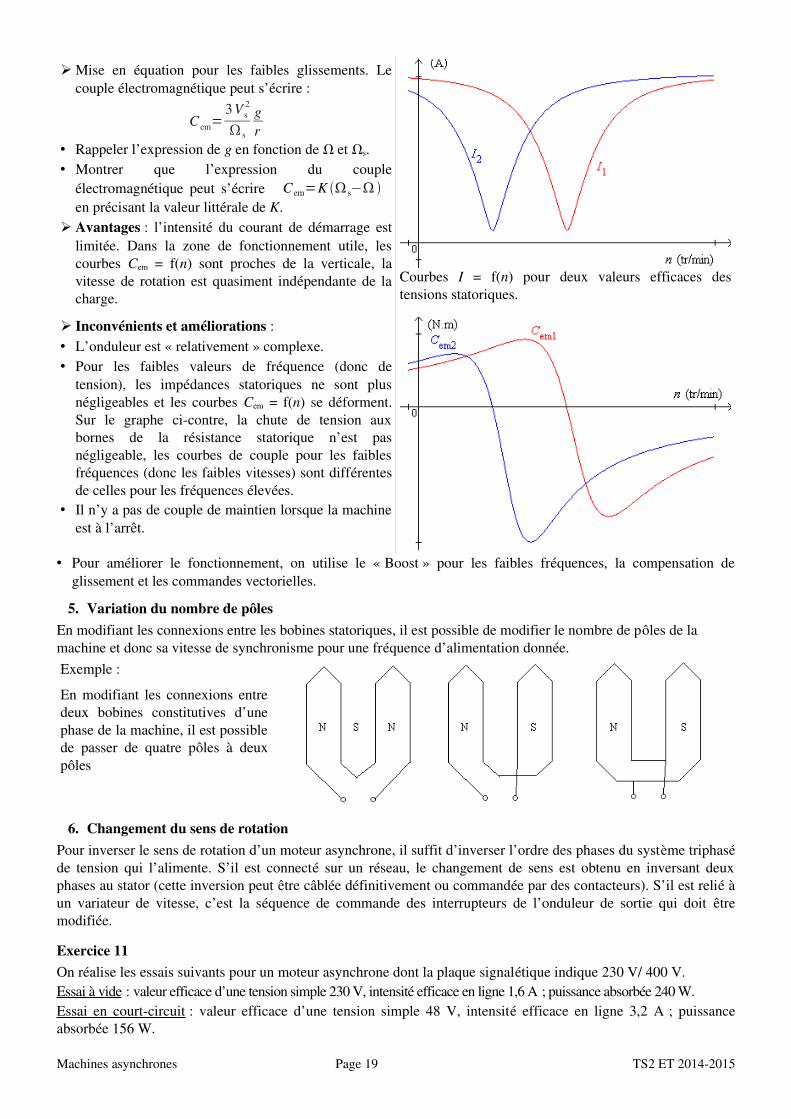
Lors du démarrage, la fréquence des courants rotoriquesest élevée. À cause de l’effet pelliculaire (ou effet depeau), ils circulent en périphérie de la cage : celleciprésente donc une résistance réelle élevée. Au fur et àmesure de l’accélération, la fréquence des courantsrotoriques diminue et ils pénètrent plus profondément :la résistance réelle de la cage diminue.
Effet pelliculaire : la densité d’un courant alternatif circulant dans un conducteur est plus importante à sapériphérie qu’en son centre (la transition n’est pas brutale). L’épaisseur dans laquelle circule le courant diminuelorsque la fréquence augmente. Pour le cuivre à 50 Hz, la zone utile a une épaisseur de 9 mm.
➢ Amélioration : l’énergie perdue au rotor par effet Joule peut être récupérée et réinjectée sur le réseau en utilisantune cascade hyposynchrone. Cette technique n'est plus utilisée pour les fonctionnements en moteur mais revientdans les génératrices hypersynchrones utilisées pour les éoliennes (machines à double alimentation).
4. Fonctionnement à V/f constante➢ Le stator de la machine est alimenté par des tensions statoriques de valeur efficace V et de fréquence f variables :
le rapport V/f est maintenu constant.➢ Si les impédances statoriques sont négligées, la relation de Boucherot permet d’écrire V s=2,22 N s f m soit
m=V s
2,22 N s f. Si le rapport
V s
f est maintenu constant que peuton dire du flux maximal ?
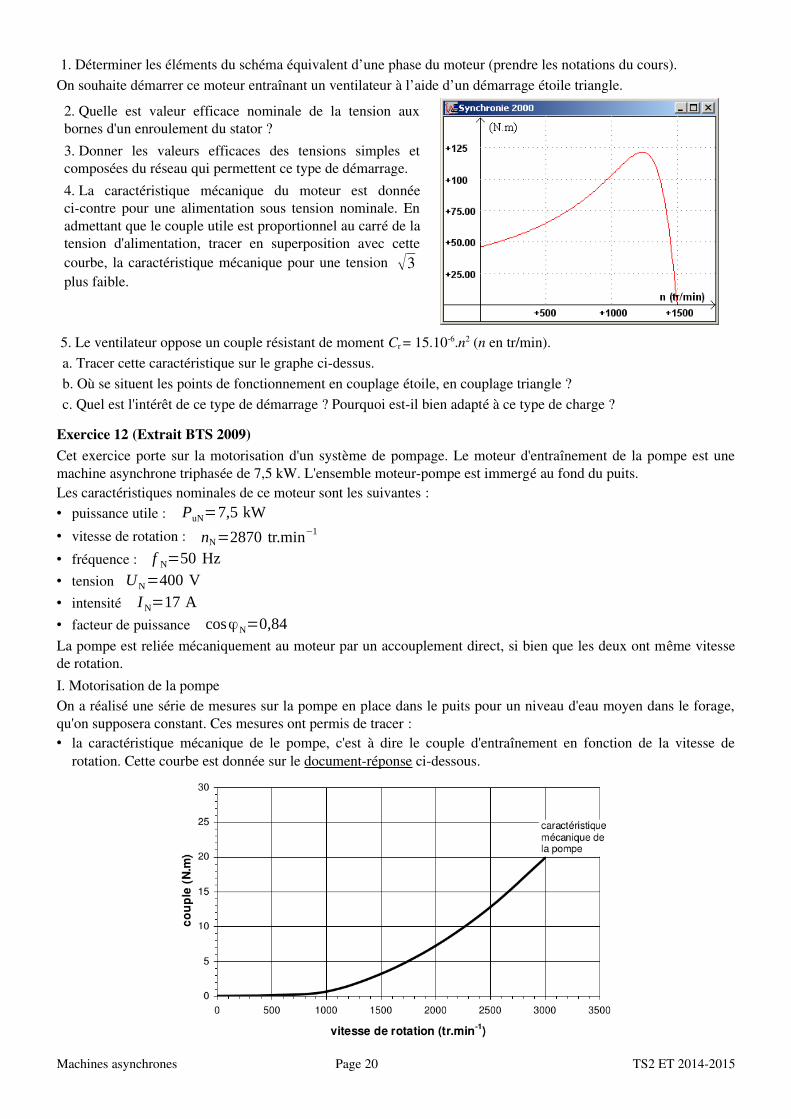
➢ Le graphe cicontre représente l’évolution du coupleélectromagnétique en fonction de la vitesse pour deuxvaleurs de la fréquence des tensions statoriques. Legraphe de la page suivante représente l'évolution ducourant en fonction de la vitesse pour ces deuxmêmes valeurs. On note V1, f1 et V2, f2 ces valeurs,elles sont liées respectivement à Cem1, I1 et Cem2, I2.
• Laquelle des tensions est la plus élevée ?• Repérer les couples et les intensités statoriques au
démarrage. Leurs évolutions respectives sont ellesintéressantes ?
• Placer sur le graphe le couple résistant de la chargemécanique s’il est égal à 75% du couple dedémarrage le plus faible. Faire apparaître les pointsde fonctionnement. La vitesse dépendelle de lacharge mécanique ?
Courbes Cem = f(n) pour deux valeurs efficaces destensions statoriques.
Machines asynchrones Page 18 TS2 ET 20142015
➢ Mise en équation pour les faibles glissements. Lecouple électromagnétique peut s’écrire :
C em=3Vs
2
s
gr
• Rappeler l’expression de g en fonction de W et Ws.• Montrer que l’expression du couple
électromagnétique peut s’écrire Cem=K s−
en précisant la valeur littérale de K.➢ Avantages : l’intensité du courant de démarrage est
limitée. Dans la zone de fonctionnement utile, lescourbes Cem = f(n) sont proches de la verticale, lavitesse de rotation est quasiment indépendante de lacharge.
Courbes I = f(n) pour deux valeurs efficaces destensions statoriques.
➢ Inconvénients et améliorations :• L’onduleur est « relativement » complexe.• Pour les faibles valeurs de fréquence (donc de
tension), les impédances statoriques ne sont plusnégligeables et les courbes Cem = f(n) se déforment.Sur le graphe cicontre, la chute de tension auxbornes de la résistance statorique n’est pasnégligeable, les courbes de couple pour les faiblesfréquences (donc les faibles vitesses) sont différentesde celles pour les fréquences élevées.
• Il n’y a pas de couple de maintien lorsque la machineest à l’arrêt.
• Pour améliorer le fonctionnement, on utilise le « Boost » pour les faibles fréquences, la compensation deglissement et les commandes vectorielles.
5. Variation du nombre de pôlesEn modifiant les connexions entre les bobines statoriques, il est possible de modifier le nombre de pôles de la machine et donc sa vitesse de synchronisme pour une fréquence d’alimentation donnée.Exemple :
En modifiant les connexions entredeux bobines constitutives d’unephase de la machine, il est possiblede passer de quatre pôles à deuxpôles
6. Changement du sens de rotationPour inverser le sens de rotation d’un moteur asynchrone, il suffit d’inverser l’ordre des phases du système triphaséde tension qui l’alimente. S’il est connecté sur un réseau, le changement de sens est obtenu en inversant deuxphases au stator (cette inversion peut être câblée définitivement ou commandée par des contacteurs). S’il est relié àun variateur de vitesse, c’est la séquence de commande des interrupteurs de l’onduleur de sortie qui doit êtremodifiée.
Exercice 11On réalise les essais suivants pour un moteur asynchrone dont la plaque signalétique indique 230 V/ 400 V.Essai à vide : valeur efficace d’une tension simple 230 V, intensité efficace en ligne 1,6 A ; puissance absorbée 240 W.Essai en courtcircuit : valeur efficace d’une tension simple 48 V, intensité efficace en ligne 3,2 A ; puissanceabsorbée 156 W.
Machines asynchrones Page 19 TS2 ET 20142015
1. Déterminer les éléments du schéma équivalent d’une phase du moteur (prendre les notations du cours).On souhaite démarrer ce moteur entraînant un ventilateur à l’aide d’un démarrage étoile triangle.
2. Quelle est valeur efficace nominale de la tension auxbornes d'un enroulement du stator ?
3. Donner les valeurs efficaces des tensions simples etcomposées du réseau qui permettent ce type de démarrage.
4. La caractéristique mécanique du moteur est donnéecicontre pour une alimentation sous tension nominale. Enadmettant que le couple utile est proportionnel au carré de latension d'alimentation, tracer en superposition avec cettecourbe, la caractéristique mécanique pour une tension 3plus faible.
5. Le ventilateur oppose un couple résistant de moment Cr = 15.106.n2 (n en tr/min).a. Tracer cette caractéristique sur le graphe cidessus.b. Où se situent les points de fonctionnement en couplage étoile, en couplage triangle ?c. Quel est l'intérêt de ce type de démarrage ? Pourquoi estil bien adapté à ce type de charge ?
Exercice 12 (Extrait BTS 2009)Cet exercice porte sur la motorisation d'un système de pompage. Le moteur d'entraînement de la pompe est unemachine asynchrone triphasée de 7,5 kW. L'ensemble moteurpompe est immergé au fond du puits.Les caractéristiques nominales de ce moteur sont les suivantes :• puissance utile : PuN=7,5 kW
• vitesse de rotation : nN=2870 tr.min−1
• fréquence : f N=50 Hz
• tension UN=400 V
• intensité IN=17 A
• facteur de puissance cosϕN=0,84La pompe est reliée mécaniquement au moteur par un accouplement direct, si bien que les deux ont même vitessede rotation.
I. Motorisation de la pompeOn a réalisé une série de mesures sur la pompe en place dans le puits pour un niveau d'eau moyen dans le forage,qu'on supposera constant. Ces mesures ont permis de tracer :• la caractéristique mécanique de le pompe, c'est à dire le couple d'entraînement en fonction de la vitesse de
rotation. Cette courbe est donnée sur le documentréponse cidessous.
Machines asynchrones Page 20 TS2 ET 20142015

• Le débit de la pompe en fonction de savitesse de rotation. Cette courbe estreprésentée sur la figure cicontre.
1. Déterminer la vitesse de synchronismenominale nS et le nombre de paires depôles p de ce moteur.
2. En déduire la valeur du glissement nominalgN .
3. Calculer son rendement nominal ηN .
4. Calculer son couple utile nominal T uN .
5. Rajouter sur le document réponse (page précédente) la caractéristique mécanique du moteur dont seule la partieutile sera tracée (entre le fonctionnement à vide et le fonctionnement nominal), pour une fréquence d'alimentationde 50 Hz. Cette caractéristique sera clairement nommée « C0 ».
6. En déduire la valeur QN du débit obtenu lorsque le moteur de pompe est alimenté sous tension et fréquencenominales. Montrer alors que le débit maximum attendu de 10 m3.h1 est envisageable.
II. Entraînement à vitesse variableLe moteur de la pompe est piloté par un variateur de vitesse ATV61.Ce variateur fonctionne selon le principe représenté sur le schéma du document réponse cidessous (schéma donnépar le constructeur). Il est possible de connecter une résistance de freinage entre les bornes PA et PB, non utiliséesdans notre application. La résistance CR est courtcircuitée en fonctionnement normal (elle ne sert que durant lamise sous tension du variateur).Le variateur ATV61 gère la vitesse du moteur asynchrone avec une commande dite à U/f constant.
1. Sur le document réponse cidessus, identifier clairement les trois parties fonctionnelles suivantes du variateur :redresseur ; filtrage de la tension ; onduleur.
2. En analysant la réversibilité de l'application, expliquer pourquoi on n'a pas utilisé ici de résistance de freinage ?
3. Lors du raccordement du moteur de pompe au variateur, estil important de respecter l'ordre des phases ?Pourquoi ?
4. Le variateur permet de modifier la fréquence des tensions d'alimentation du moteur. Comment évolue alors lapartie utile de la caractéristique mécanique du moteur sachant que la commande est du type U/f constant ?
5. Donner n, vitesse de rotation de la pompe permettant d'obtenir le débit moyen attendu Q=7 m3. h−1 .
6. Tracer sur le document réponse de la page précédente la caractéristique mécanique du moteur correspondant àQ=7 m3. h−1 , qui devra être clairement nommée « C1 ».
7. En déduire le couple utile T u délivré par le moteur et la fréquence f des tensions de sortie du variateur pource fonctionnement.
8. Quel est le débit Q' obtenu pour une fréquence f' = 26,3 Hz en sortie du variateur ?
Machines asynchrones Page 21 TS2 ET 20142015
9. La commande du moteur de pompe par le variateur répondelle, en terme de débit, aux exigences de notreinstallation ? Justifier.
Exercice 13Sur la plaque signalétique d’un moteur asynchrone triphasé on lit les indications suivantes : 230 V /400V ;50 Hz ; 3,2 kW ; 1455 tr/min ; cos j = 0,76 ; rendement h = 0,87.
I. Généralités
1. Déterminer le nombre de pôles du stator.
2. Calculer la puissance électrique nominale absorbée par le moteur.
3. Quelle doit être la tension entre phases du réseau triphasé d’alimentation permettant de coupler ce moteur enétoile puis en triangle ?
4. Calculer pour chaque couplage la valeur nominale de l’intensité du courant en ligne I.
II. Étude du moteur couplé en étoileDans la suite du problème le stator est couplé en étoile.
1. La résistance entre deux bornes du stator couplé est mesurée à chaud par la méthode voltampèremétrique ; latension mesurée est égale à U1 = 11,2 V pour une intensité débitée par l’alimentation I1 = 7,0 A.a. Donner le schéma de principe du montage en précisant la nature des appareils de mesure et la nature del’alimentation que l’on suppose réglable.b. Calculer la résistance entre bornes du stator couplé.
2. On veut déterminer expérimentalement l’ensemble des pertes dans le fer du stator et des pertes mécaniques dumoteur.a. Donner le schéma de principe de ce montage avec les appareils de mesure nécessaires. Préciser les conditionsd’essai et donner une valeur approchée de la fréquence de rotation du moteur lors de cet essai.
b. Faire un bilan des puissances actives mises en jeu lors de cetessai en précisant les notations utilisées.
3. Déterminer pour le point de fonctionnement nominal :a. Le glissement.b. Le moment du couple utile Tu.c. On admet que la partie utile de la caractéristique mécaniqueTu (n) du moteur est une droite, n étant la fréquence de rotationdu moteur ; tracer cette caractéristique sur le documentréponse cicontre.
III. Variation de vitesseCe moteur est utilisé pour entraîner une charge qui impose uncouple résistant de moment Tr = 14 N.m constant
1. Il est alimenté par un réseau triphasé 400 V, 50 Hz ; déterminer la fréquence de rotation n1 du groupe.
2. On veut faire varier la vitesse de ce moteur tout en gardant constant le rapport Uf
(U est la valeur efficace
d’une tension et f la fréquence de la tension d’alimentation).a. Avec quel dispositif peuton réaliser cette variation de vitesse ?b. On veut entraîner la machine à la fréquence de rotation n2 = 1 170 tr /min :• Tracer la nouvelle caractéristique mécanique du moteur sachant que les parties utiles des caractéristiques pour
différentes valeurs de f restent parallèles entre elles.• Déterminer la nouvelle vitesse de synchronisme.• Déterminer la nouvelle fréquence f de la tension d’alimentation du moteur.
Machines asynchrones Page 22 TS2 ET 20142015
Exercice 14 (Extrait BTS 2012)Cet exercice porte sur le dimensionnement de la motorisation d'une centrifugeuse, utilisée dans le processus defabrication de sucre à partir de betteraves, en vue d'améliorer la productivité.
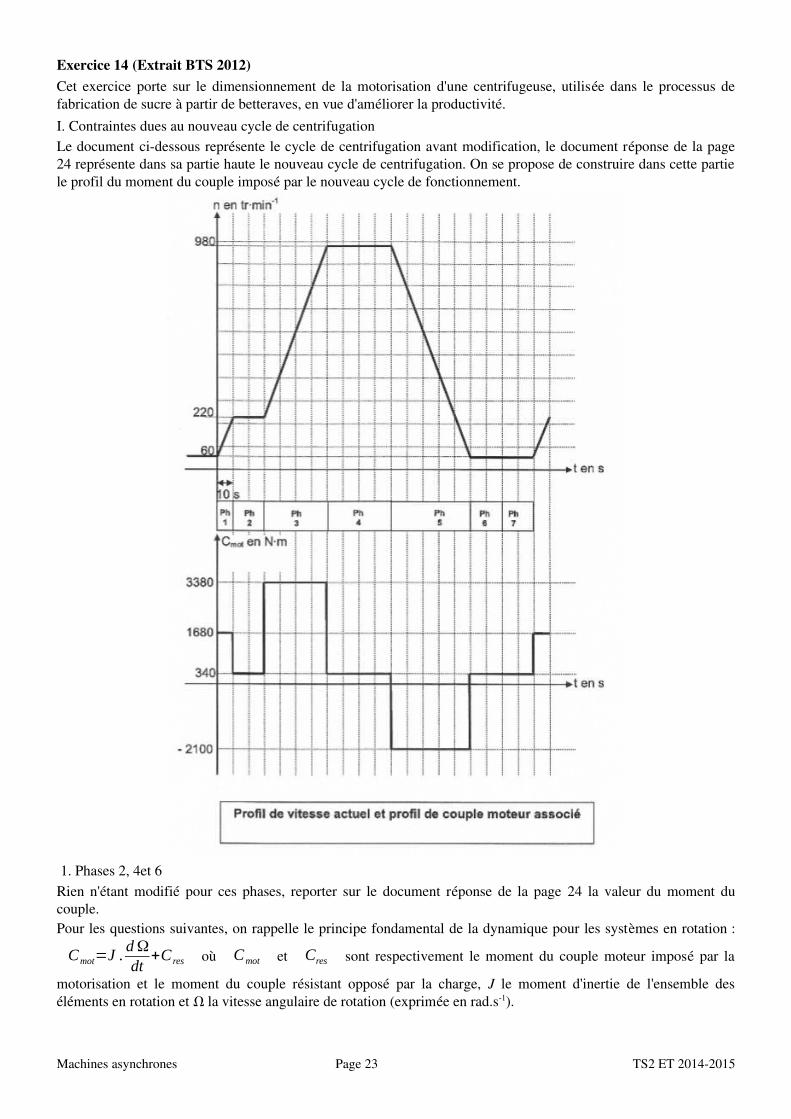
I. Contraintes dues au nouveau cycle de centrifugationLe document cidessous représente le cycle de centrifugation avant modification, le document réponse de la page24 représente dans sa partie haute le nouveau cycle de centrifugation. On se propose de construire dans cette partiele profil du moment du couple imposé par le nouveau cycle de fonctionnement.
1. Phases 2, 4et 6Rien n'étant modifié pour ces phases, reporter sur le document réponse de la page 24 la valeur du moment ducouple.Pour les questions suivantes, on rappelle le principe fondamental de la dynamique pour les systèmes en rotation :
Cmot=J .dΩdt
+C res où Cmot et Cres sont respectivement le moment du couple moteur imposé par la
motorisation et le moment du couple résistant opposé par la charge, J le moment d'inertie de l'ensemble deséléments en rotation et W la vitesse angulaire de rotation (exprimée en rad.s1).
Machines asynchrones Page 23 TS2 ET 20142015

Document réponse
2. Déduire de la valeur du moment du couple pour les phases 2, 4 et 6 la valeur de Cres .
3. Phase 1
Le moment d'inertie du tambour est donné par la relation J tam=M tamRtam2 avec M tam la masse du tambour
et Rtam le rayon du tambour (données numériques du tambour : diamètre de 1,1 m et masse de 1250 kg).
a. Calculer J tam en donnant explicitement son unité légale.
b. Calculer dΩdt
lors de la phase 1.
c. En déduire alors que le moment du couple mécanique pendant cette phase est proche de 3020 N.m.
Machines asynchrones Page 24 TS2 ET 20142015
4. Phase 3
Durant la phase 2, on a introduit 1750 kg de « masse cuite » de masse volumique ρmc=1450 kg.m−3 dans letambour. Compte tenu de la rotation, cette masse va se « coller » sur la périphérie du tambour modifiant le momentd'inertie de l'ensemble. Sa valeur devient J ' tam=1530 USI (unité du système international) en fin deremplissage).On fait l'hypothèse simplificatrice que la valeur du moment d'inertie (1530 USI) ne varie pas durant la phase 3 (enréalité, elle diminue car le jus commence à être éliminé lors de la montée en vitesse).
a. Calculer dΩdt
lors de la phase 3.
b. En déduire alors que le moment du couple mécanique pendant cette phase est proche de 4400 N.m.
5. Phase 5À la fin de la phase de centrifugation, le jus a été extrait et le moment d'inertie est donc modifié. Sa valeur devientJ ' 'tam=1270 USI .
a. Calculer dΩdt
lors de la phase 5.
b. En déduire alors que le moment du couple mécanique pendant cette phase est proche de 3740 N.m.
6. Détermination des modes de fonctionnement moteur ou générateura. Dessiner sur le document réponse de la page 24 le profil du moment du couple mécanique Cmot à fournir parla motorisation sur tout le cycle de centrifugation.b. Compléter le document réponse de la page 24 en hachurant les cases correspondant à un mode defonctionnement moteur (M) ou générateur (G) de la machine d'entraînement.
II. Choix d'un nouveau variateurLes caractéristiques du moteur sont les suivantes :PuN = 315 kW ; UN = 400 V ; IN = 580 A ; cos jN = 0,82 ; nN = 741 tr.min1 ; hN = 0,96 ; fN = 50 HzLe variateur de vitesse et le moteur ont la particularité de pouvoir absorber une surcharge de 50 % pendant unedurée de 60 s. Il existe plusieurs versions de ce variateur : 1 quadrant, 2 quadrants et 4 quadrants.
1. Calculer le moment du couple nominal du nouveau moteur proposé.
2. Préciser la version du variateur que l'entreprise doit commander pour remplir le cahier des charges.
3. Tenue en surcharge du motovariateura. À partir du document réponse page 24, relever le moment du couple maximum nécessaire à l'entraînement de lacentrifugeuse.b. Exprimer alors en % la surcharge en couple moteur.c. Justifier le choix du couple moteur – variateur en termes de surcharge et de durée de la surcharge.d. Sur quelles grandeurs physiques appliquées au moteur le variateur agitil pour permettre la rotation à980 tr.min1 ?
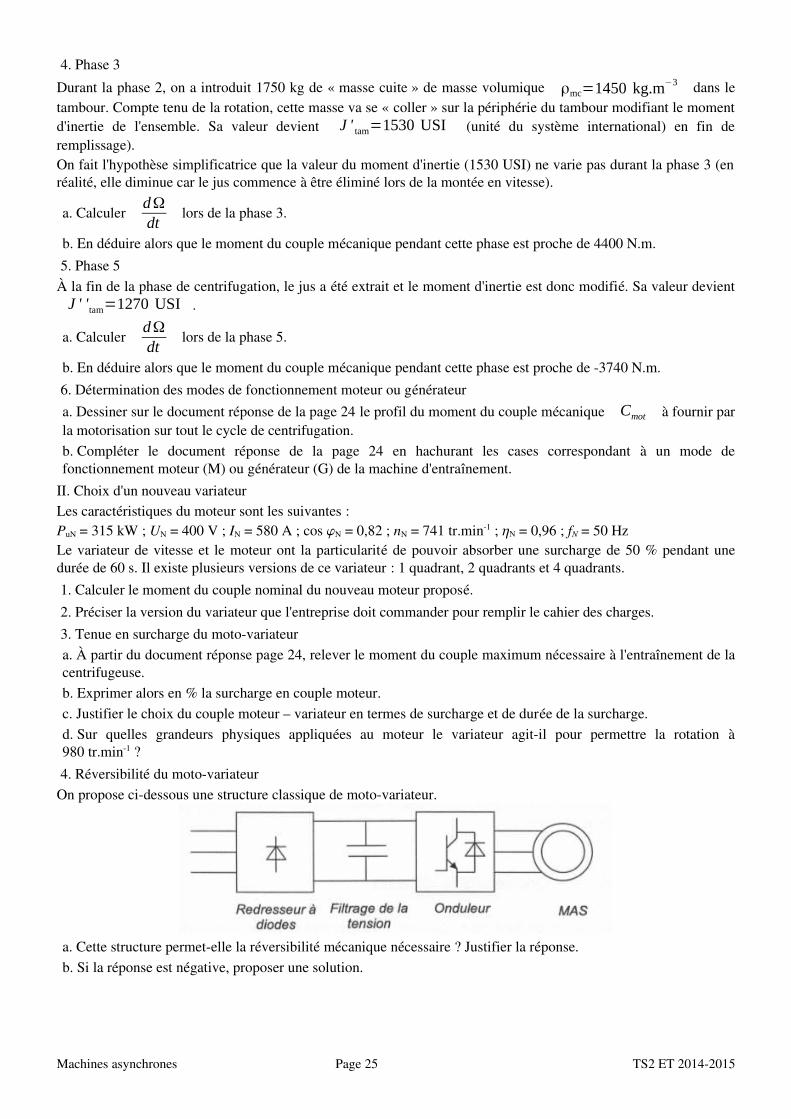
4. Réversibilité du motovariateurOn propose cidessous une structure classique de motovariateur.
a. Cette structure permetelle la réversibilité mécanique nécessaire ? Justifier la réponse.b. Si la réponse est négative, proposer une solution.
Machines asynchrones Page 25 TS2 ET 20142015
Exercice 15Un moteur asynchrone triphasé 220 V / 380 V, 50 Hz a un stator à 4 pôles couplé en étoile et un rotor à cage. Sousalimentation nominale, on a obtenu :• à vide, un courant de ligne d’intensité 6 A.• à charge nominale, un courant de ligne d’intensité 19,4 A, une puissance absorbée de 11 kW et une fréquence de
rotation de 1440 tr/min.Dans tout le problème, on néglige les résistances et inductances de fuite statoriques, les pertes fer et les pertesmécaniques.
I. Étude de la machine alimentée par un réseau fixeLa machine asynchrone est alimentée sous 220 V / 380 V, 50 Hz.
1. Déterminer pour le fonctionnement à charge nominale :• le glissement g.• la puissance réactive absorbée.Donner le schéma de branchement des deux wattmètres permettant de mesurer la puissance active P et la puissanceréactive Q absorbées.
Calculer• le moment du couple nominal Cn.• les pertes rotoriques par effet Joule.
2. Montrer que les éléments du schéma équivalent par phase donné cicontreont pour valeurs :
L = 117 mH ; l = 9,4 mH ; r = 0,5 W
3. Montrer que le moment C du couple de la machine peut s’écrire : C=6V 2
rg
rg
2
l2
4. Pour quelle valeur de glissement gmax le moment du couple estil maximal ? Donner la valeur de ce maximumCmax et la fréquence de rotation correspondante en tr/min.
5. Tracer l’allure du graphe donnant le moment du couple C en fonction de la fréquence de rotation de 0 à3000 tr/min. Préciser le type de fonctionnement suivant la fréquence de rotation.
II. Étude du moteur alimenté à fréquence variable et V/f = constante
La tension simple V et sa fréquence f restent dans un rapport constant Vf=k=4,4 volts / Hertz jusqu’à
l’alimentation nominale de la machine. On suppose la machine non saturée : la valeur de L est indépendante de lafréquence.
1. Montrer que l’expression du moment du couple C peut alors s’écrire C=A
1r
g l
glr
. Donner la valeur
numérique de A.
2. La valeur maximale du moment du couple dépendelle de la fréquence d’alimentation ?
3. En régime permanent stable, pour un moment C du couple fixé, on montre que la quantité gw reste constantequand la fréquence f varie.
Si Ns est la fréquence de synchronisme, N la fréquence de rotation, exprimer N=N s−N . Quelle est lapropriété de N quand f varie à couple fixé ?Préciser les valeurs de N pour les couples Cn et Cmax.
4. Dans un tableau, donner les valeurs numériques de la fréquence de rotation N en tr/min pour les trois valeurs10 Hz, 30 Hz et 50 Hz de la fréquence et correspondant à des fonctionnements :• à vide• à couple nominal Cn
Machines asynchrones Page 26 TS2 ET 20142015
• à couple maximal Cmax.
5. Tracer pour les trois fréquences précédentes l’allure du réseau de caractéristiques C(N) en le limitant au cas dufonctionnement stable en moteur. Dans la suite du problème on se limitera à ce cas.
6. Déterminer la fréquence minimale pour obtenir un couple de démarrage au moins égal au couple nominal Cn.
7. Le moteur entraîne une charge mécanique qui lui oppose un couple résistant de moment constantCr = 40 N.m. Déterminer la fréquence de rotation du groupe en régime permanent pour une alimentation àfréquence 30 Hz (On pourra effectuer des approximations en les justifiant).
8. En faisant apparaître les impédances sur le schéma équivalent par phase, établir sans calcul une propriétéremarquable de la valeur efficace I du courant en ligne lorsque la fréquence d’alimentation du moteur asynchronevarie alors que le moment du couple résistant reste constant (On posera V = Kw et on utilisera la linéarité deséquations de l’électricité).
Exercice 161. Un moteur à deux pôles tourne à 2850 tr/min lorsqu’il est connecté à un réseau de fréquence 50 Hz. Calculer leglissement.
2. Pour changer le sens de rotation, deux phases sont inversées alors que le moteur tourne. En supposant que lavitesse est inchangée pendant l’inversion, calculer le nouveau glissement.
Quel est alors le mode de fonctionnement de la machine ? Le couple estil important ? L’intensité efficace descourants statoriques estelle importante ?
VII.Fonctionnement en génératrice (parfois appelé alternateur asynchrone)
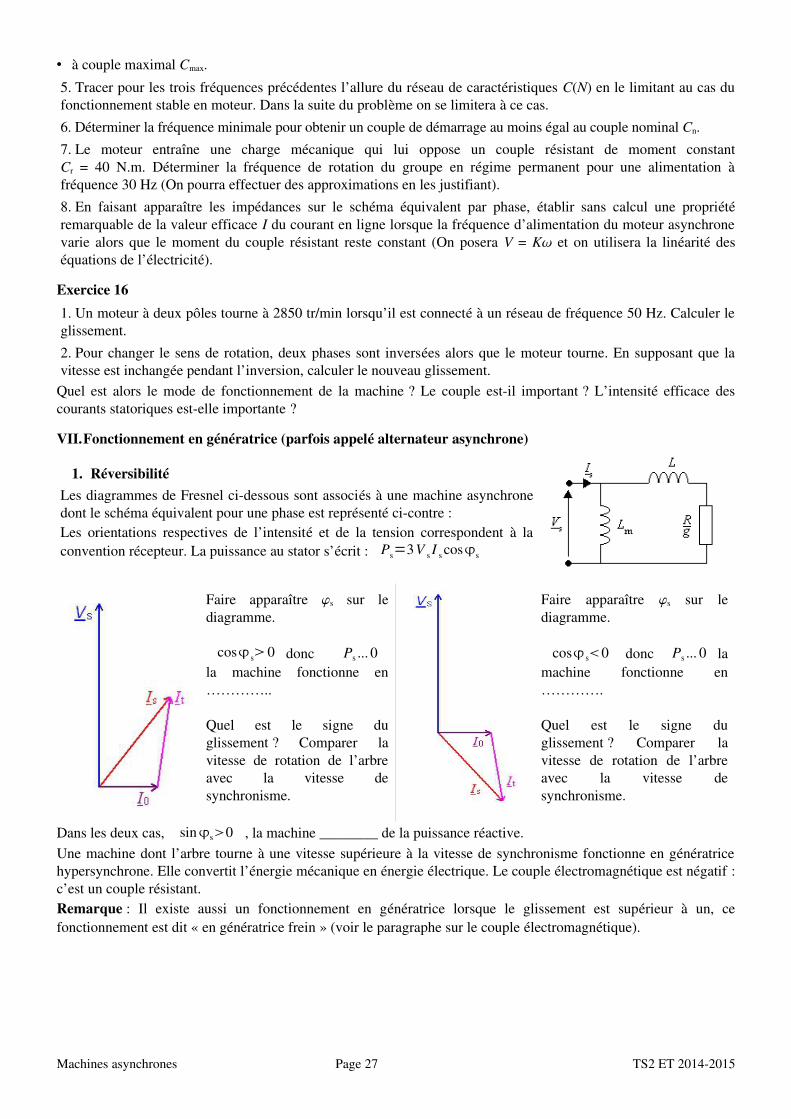
1. RéversibilitéLes diagrammes de Fresnel cidessous sont associés à une machine asynchronedont le schéma équivalent pour une phase est représenté cicontre :Les orientations respectives de l’intensité et de la tension correspondent à laconvention récepteur. La puissance au stator s’écrit : Ps=3V s I s coss
Faire apparaître js sur lediagramme.
cos s0 donc Ps ... 0la machine fonctionne en…………..
Quel est le signe duglissement ? Comparer lavitesse de rotation de l’arbreavec la vitesse desynchronisme.
Faire apparaître js sur lediagramme.
cos s0 donc Ps ... 0 lamachine fonctionne en………….
Quel est le signe duglissement ? Comparer lavitesse de rotation de l’arbreavec la vitesse desynchronisme.
Dans les deux cas, sins0 , la machine ________ de la puissance réactive.Une machine dont l’arbre tourne à une vitesse supérieure à la vitesse de synchronisme fonctionne en génératricehypersynchrone. Elle convertit l’énergie mécanique en énergie électrique. Le couple électromagnétique est négatif :c’est un couple résistant.Remarque : Il existe aussi un fonctionnement en génératrice lorsque le glissement est supérieur à un, cefonctionnement est dit « en génératrice frein » (voir le paragraphe sur le couple électromagnétique).
Machines asynchrones Page 27 TS2 ET 20142015
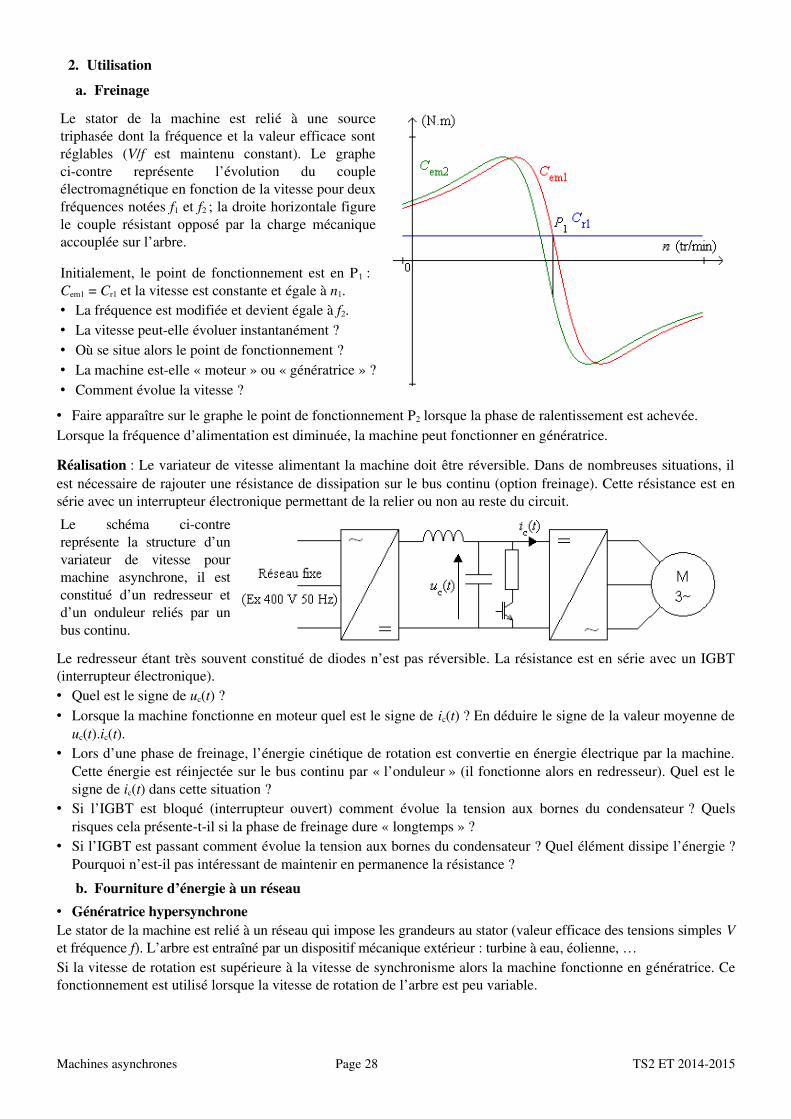
2. Utilisation
a. Freinage
Le stator de la machine est relié à une sourcetriphasée dont la fréquence et la valeur efficace sontréglables (V/f est maintenu constant). Le graphecicontre représente l’évolution du coupleélectromagnétique en fonction de la vitesse pour deuxfréquences notées f1 et f2 ; la droite horizontale figurele couple résistant opposé par la charge mécaniqueaccouplée sur l’arbre.
Initialement, le point de fonctionnement est en P1 : Cem1 = Cr1 et la vitesse est constante et égale à n1. • La fréquence est modifiée et devient égale à f2.• La vitesse peutelle évoluer instantanément ?• Où se situe alors le point de fonctionnement ?• La machine estelle « moteur » ou « génératrice » ?• Comment évolue la vitesse ?
• Faire apparaître sur le graphe le point de fonctionnement P2 lorsque la phase de ralentissement est achevée.Lorsque la fréquence d’alimentation est diminuée, la machine peut fonctionner en génératrice.
Réalisation : Le variateur de vitesse alimentant la machine doit être réversible. Dans de nombreuses situations, ilest nécessaire de rajouter une résistance de dissipation sur le bus continu (option freinage). Cette résistance est ensérie avec un interrupteur électronique permettant de la relier ou non au reste du circuit.
Le schéma cicontrereprésente la structure d’unvariateur de vitesse pourmachine asynchrone, il estconstitué d’un redresseur etd’un onduleur reliés par unbus continu.
Le redresseur étant très souvent constitué de diodes n’est pas réversible. La résistance est en série avec un IGBT(interrupteur électronique).• Quel est le signe de uc(t) ?• Lorsque la machine fonctionne en moteur quel est le signe de ic(t) ? En déduire le signe de la valeur moyenne de
uc(t).ic(t).• Lors d’une phase de freinage, l’énergie cinétique de rotation est convertie en énergie électrique par la machine.
Cette énergie est réinjectée sur le bus continu par « l’onduleur » (il fonctionne alors en redresseur). Quel est lesigne de ic(t) dans cette situation ?
• Si l’IGBT est bloqué (interrupteur ouvert) comment évolue la tension aux bornes du condensateur ? Quelsrisques cela présentetil si la phase de freinage dure « longtemps » ?
• Si l’IGBT est passant comment évolue la tension aux bornes du condensateur ? Quel élément dissipe l’énergie ?Pourquoi n’estil pas intéressant de maintenir en permanence la résistance ?
b. Fourniture d’énergie à un réseau• Génératrice hypersynchroneLe stator de la machine est relié à un réseau qui impose les grandeurs au stator (valeur efficace des tensions simples Vet fréquence f). L’arbre est entraîné par un dispositif mécanique extérieur : turbine à eau, éolienne, …Si la vitesse de rotation est supérieure à la vitesse de synchronisme alors la machine fonctionne en génératrice. Cefonctionnement est utilisé lorsque la vitesse de rotation de l’arbre est peu variable.
Machines asynchrones Page 28 TS2 ET 20142015

• Machine asynchrone à double alimentation
Le schéma de principe est représentécicontre : L’étude qui suit est faite en régime établi devitesse, toutes les pertes sont négligées saufles pertes par effet Joule au rotor, le schémaéquivalent utilisé est représenté cidessous.Les puissances électriques pour le stator etle rotor sont notées Pstator et Protor, lapuissance mécanique (sur l’arbre) est notéePméca. Le convertisseur Cnv1 est un « redresseur », Cnv2 est un
« onduleur », ils sont reliés par l’intermédiaire d’un bus continu (lefiltre n’est pas représenté).
Le schéma équivalent est orienté avec la conventionrécepteur côté stator : en fonctionnement moteur, lapuissance électrique statorique est transférée au rotoret à l’arbre d’où l’équation Pstator=P rotorPméca .
Le convertisseur rotorique reçoit Pext telle que :
Pext+P rotor=P jr avec Pjr les pertes par effet Joule au rotor. En fonctionnement moteur avec le rotor en courtcircuit, Pext = 0, le rotor consomme ses pertes par effet Joule.
La vitesse de synchronisme est notée Ws et celle de l’arbre est notée W (en rad/s). Le couple électromagnétique est
donné par les relations C em=Pstator
s=
Pméca
et comme Pméca=P rotor−P stator alors
Pstator
s=
P stator−P rotor
soit
Protor=Pstator
s−
s=g Pstator
Lorsque la machine fonctionne en génératrice, la puissance Pstator est négative (à cause de la convention récepteurchoisie précédemment), les trois cas suivants peuvent être rencontrés :• g=0 : le rotor tourne à la même vitesse que le champ tournant statorique, les courants rotoriques sont
continus, c’est un fonctionnement en génératrice synchrone.• g<0 : le rotor tourne plus vite que la vitesse de synchronisme. Dans ce cas P rotor0 (car g < 0 et
Pstator0 ). Si PextP jr alors il y a un transfert d’énergie du rotor vers le réseau.• g>0 : le rotor tourne moins vite que la vitesse de synchronisme. Dans ce cas Protor0 (car g > 0 et
stator 0P < ). Il y a un transfert d’énergie du réseau vers le rotor.Application aux éoliennes
Le graphe cicontre représente unexemple d’évolution de la puissance surl’arbre de l’hélice en fonction de lavitesse de rotation du générateur pourdifférentes valeurs de la vitesse du vent.
Ces courbes passent par un maximum quidépend de la vitesse de rotation : pourobtenir ce maximum de puissance, lavitesse de rotation de la machine doit êtreajustée à la vitesse du vent. D’autre part,lorsque la vitesse du vent est faible, cemaximum correspond à une vitesseinférieure à la vitesse de synchronisme.
Machines asynchrones Page 29 TS2 ET 20142015

Exercice 17 (Extrait BTS 2014 )La structure de la génératrice asynchrone à double alimentation (MADA) mise en œuvre dans l'éolienne G90correspond au synoptique suivante :
I. Bilan de puissancesRappel du bilan de puissance classique d'une machine asynchrone à cage en convention génératrice :
Pour la suite, on négligera toutes les pertes autres que les pertes joules rotorique ( p jr ).
1. Déterminer la relation entre Pstator , Pméca et g
2. Déterminer la relation entre p jr , Pstator et g
3. En déduire la relation entre p jr , Pméca et gCes trois relations seront exploitées pour compléter les schémas de puissance dans la partie suivante.
II. Puissance rotoriqueDans une structure de type MADA, la puissance électrique au niveau du rotor correspond non seulement aux pertesjoules rotoriques ( p jr ) du bilan précédent mais aussi à la puissance active échangée entre le rotor et le réseaupar l'intermédiaire de deux convertisseurs MLI. La dénomination p jr sera dorénavant remplacée par Protor ,puissance active rotorique.La commande des convertisseurs permet de contrôler le couple et donc par régulation la vitesse de la génératrice.L'avantage de la MADA est de pouvoir fonctionner aussi bien en hypo synchronisme ( n<ns ) qu'en hypersynchronisme ( n>ns ) que ce soit en mode moteur ou en mode génératrice, avec un couple non nul à n=ns .
1. Déterminer à partir de la documentation technique des éoliennes G902MW (page 31) et pour un réseau de50 Hz :• le rapport de vitesse du multiplicateur• les deux vitesses limites du rotor de la machine asynchrone exprimées en tr.min1.
2. En déduire la vitesse de synchronisme ns et le nombre de pôles de cette machine sachant que ns est quasiment aucentre de la plage de vitesse.
3. Calculer les deux valeurs de g que l'on désignera par g+ (hyper synchronisme) et g (hypo synchronisme)correspondant aux vitesses limites.
L'éolienne étant destinée à produire de l'électricité, la MADA fonctionnera donc presque systématiquement engénératrice hypo ou hyper synchrone. On adoptera ainsi la convention générateur : la puissance mécanique fourniepar les pales et la puissance électrique statorique seront positives quand la MADA fonctionnera effectivement engénératrice électrique, le signe de la puissance rotorique dépendra lui des relations issues du bilan de puissance.
Machines asynchrones Page 30 TS2 ET 20142015

On obtient ainsi algébriquement : Protor=−g
1−g×Pméca et Pstator=
11– g
×Pméca
Pour g=g+ , la puissance mécanique fournie par les pales sera prise égale à + 2 MW. La vitesse du ventassociée à ce point de fonctionnement est d'environ 12 m.s1.
4. Calculer Protor , Pstator et compléter le diagramme n°1 du document réponse (page suivante). En déduirePréseau .
Une éolienne est caractérisée par sa courbe Cp=f (λ) , l étant le coefficient d'avance (« Tip Speed Ratio »
défini par le rapport λ=R×Ωvvent
avec : R, le rayon du disque balayé par les pales de l'éolienne en m ; W, la vitesse angulaire de rotation des pales en rad.s1 ; v vent , la vitesse du vent en amont de l'éolienne en m.s1.
5. Calculer la valeur du coefficient d'avance l pour le point de fonctionnement précédent.
Machines asynchrones Page 31 TS2 ET 20142015

6. Le coefficient l étant maintenu constant pour tous les points de fonctionnement de l'éolienne, montrer que lavitesse du vent qui correspond à g=g - (fonctionnement hypo synchrone), a pour valeur v vent=5,7 m.s-1
7. En déduire la nouvelle valeur de la puissance mécanique fournie par les pales sachant que cette dernière est enpremière approximation proportionnelle au cube de la vitesse du vent.
8. Calculer les puissances Protor , Pstator et compléter le diagramme n°2 du document réponse. En déduirePréseau .
9. Quelle doit être la valeur de la puissance nominale des deux convertisseurs MLI de la structure MADA ensupposant que l'éolienne est dimensionnée pour une vitesse de vent de 12 m.s1 ?
Document réponse : Compléter les cases vides avec les valeurs numériques associées au point de fonctionnement correspondant :
Diagramme n°1 : g=g+=−0,273 Diagramme n°2 : g=g -
=
c. Production d’énergie en site isoléPour fournir l’énergie réactive dont la machine a besoin,des condensateurs sont placés aux bornes du stator.DE représente le dispositif entraînant.
La fréquence et la valeur efficace des tensions dépend de la capacité des condensateurs et de la vitesse de rotation.La capacité des condensateurs doit donc être ajustée en fonction de la charge ce qui fait que ces dispositifs sontassez peu utilisés.
Machines asynchrones Page 32 TS2 ET 20142015