filtresmpsi1-fenelon-sainte-marie.fr/cours/filtres.pdf · ploi des amplificateurs opérationnels...
TRANSCRIPT

filtres
Table des matières
1 grandeurs fondamentales des quadripoles 21.1 Impédances d’entrée et de sortie . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 fonction de transfert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2.2 représentation : diagramme de Bode . . . . . . . . . . . . . . . . . . 31.2.3 fréquences de coupures . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 filtres passe-bas d’ordre 1 52.1 Comportement asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 fonction de transfert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Diagramme de Bode - Pulsation de coupure à -3dB . . . . . . . . . . . . . . 6
2.3.1 Représentation de la courbe de gain . . . . . . . . . . . . . . . . . . 62.3.2 Représentation de la courbe de phase . . . . . . . . . . . . . . . . . . 6
3 filtres passe-haut du premier ordre 73.1 Comportement asymptotique . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2 Fonction de transfert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.3 Diagramme de Bode - Pulsation de coupure à -3dB . . . . . . . . . . . . . . 8
3.3.1 Représentation de la courbe de gain . . . . . . . . . . . . . . . . . . 83.3.2 Représentation de la courbe de phase . . . . . . . . . . . . . . . . . . 8
4 exemple d’un filtre passif du second ordre : circuit RLC série 94.1 sortie ouverte sur C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94.2 sortie ouverte sur R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104.3 sortie ouverte sur L . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5 filtres actifs 115.1 présentation de l’amplificateur opérationnel . . . . . . . . . . . . . . . . . . 115.2 montages de bases en régime linéaire . . . . . . . . . . . . . . . . . . . . . . 145.3 exemple de filtre actif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1

On appelle quadripôle électrocinétique tout système relié électriquement à l’extérieur parquatre conducteurs. Un quadripôle électrocinétique est donc caractérisé par quatre bornesélectriques : deux bornes d’entrée et deux bornes de sortie.
Un quadripôle est généralement relié à un dipôle source par ses deux bornes d’entrée età un dipôle charge par ses deux bornes de sortie. D’un point de vue électrocinétique, lequadripôle est caractérisé par quatre grandeurs électriques, tensions et courants d’entréeet de sortie.
Si ces quatre grandeurs sont reliées entre elles par un système différentiel linéaire, homo-gène, de deux équations à coefficients constants, le quadripôle est dit linéaire.Les tensions d’entrée ue et de sortie us sont reliées par une équation différentielle linéaireà coefficients constants
Andnusdtn
+ ...+A1dusdt
+A0us = Bmdmuedtm
+ ...+B1duedt
+B0ue
En régime sinusoïdal, on a alors
usue
=B0 +B1(jω) + ...+Bm(jω)m
A0 +A1(jω) + ...+An(jω)n
Si le signal d’entrée est sinusoïdal de pulsation ω, le signal de sortie est également sinusoï-dal de même pulsation.Un quadripôle dont la réponse en fonction de la fréquence n’est pas constante est un filtre :il ne laissera passer (sans atténuation significative) que les signaux sinusoidaux de pulsationadaptée alors que certaines composantes vont être atténuées (ou au contraire amplifiées),ce qui va avoir pour effet de modifier l’allure du signal de sortie par rapport à celui appliquéà l’entrée. Ceci est notamment utilisé pour transporter des signaux (radio notamment oùle signal sonore doit être modulé et démodulé pour être transporté à grande distance).
Si le filtre comporte au moins une source auxiliaire d’énergie électrique, il est dit actif.A l’inverse, un filtre passif ne comporte que des éléments passifs ; la puissance moyennedisponible en sortie d’un filtre passif est donc toujours inférieure ou égale à la puissancemoyenne reçue en entrée.Un filtre actif comportant des sources, la puissance moyenne disponible en sortie peut êtresupérieure à celle reçue en entrée.
On se placera pour toute la suite en régime sinusoïdal.
1 grandeurs fondamentales des quadripoles
Il est possible de définir pour un quadripôle des grandeurs caractéristiques comme lesimpédances d’entrée et de sortie, et les gains en tension, courant et puissance.
2

1.1 Impédances d’entrée et de sortie
Pour un filtre passif, l’impédance d’entrée est l’impédance Ze =VeIe
vue à l’entrée quand
la sortie est chargée par une impédance de charge Zu infinie.
L’impédance de sortie est l’impédance Zs =VsIs
vue à la sortie quand l’entrée est reliée à
la masse.
Pour un filtre actif, Pour calculer l’impédance d’entrée, on éteint toutes les osurces libres
et on évalue Ze =VeIe
quand la sortie est chargée par une impédance de charge Zu infinie.
On alimente le filtre par une source de tension Vs placée entre les bornes de sortie. Latension d’entrée est rendue nulle, et toutes les sources libres sont éteintes. L’impédance de
sortie est alors l’impédance Zs =VsIs
1.2 fonction de transfert
1.2.1 définition
La fonction de transfert en tension est définie par
H(jω) =U s
U e
Elle permet de comparer les tensions de sortie et d’entrée. On puet définir l’analogue enterme d’intensité.
La fonction de transfert dépend en général de l’impédance complexe du dipôle d’utili-sation ; on résume ceci en disant que l’utilisation "charge" le quadripôle. On ne peutdonc pas étudier le quadripôle seul.Elle ne dépend par contre en général pas du circuit en amont de l’entrée du quadripôle.
La fonction de transfert se présente généralement comme le rapport de deux polynômes deω. On appelle ordre du filtre le degré le plus élevé des deux polynômes.
H(jω) = G(jω) exp(jϕ(ω))
- G(ω) = |H(jω)| =|Vs(jω)||Ve(jω)|
est le gain en tension.
- ϕ(ω) = arg(Vs) − arg(Ve) est le déphasage de la tension de sortie par rapport àla tension d’entrée.
Pour visualiser l’effet d’un filtre, on représente sa fonction de transfert sous la forme d’undiagramme de Bode.
exercice 10
1.2.2 représentation : diagramme de Bode
On appelle représentation dans le plan de Bode d’une fonction de transfert H(jω) l’en-semble des deux diagrammes suivants :
3
- une courbe donnant le gain en décibels GdB de la fonction de transfert en fonction dela pulsation ω en échelle logarithmique (vu la gamme de pulsations possibles !) :
GdB = f(log10ω) = 20 log10 |H(jω)|
Le décibel est une unité sans dimension qui permet de mesurer le rapport de deuxgrandeurs. Ainsi, si le gain en décibels pour une pulsation ω′ augmente de 20 dB parrapport à celui d’une pulsation ω,
20 log10 |H(jω′)| = G′(ω′) = 20 + 20 log10 |H(jω)| = 20 log10 |10 ∗H(jω)|
ce qui signifie que le module de la fonction de transfert a été multiplié par 10. Si le gainen décibels augmente de 40 dB, cela signifie que le module de la fonction de transfert aété multiplié par 102.
Remarque : le facteur 20 n’est pas anodin : le rapport, en décibel (1/10 deBel), des puissances électriques dissipées par effet Joule dans une résistance estXdB = 10 log10
(P1P0
)= 10 log10
(U21
U20
)= 20 log10
(U1U0
), U1 et U2 désignant les tensions
efficaces aux bornes de la résistance.
Remarque 2 :Les gains en tension sont souvent très petits et l’utilisation des décibels permet demanipuler des nombres plus grands.Par ailleurs, si on place deux étages en cascade de gains G1 = P1/P0 et G2 = P2/P1, legain total est égal au produit G1.G2 des gains des étages. Si les gains sont exprimés endécibels, le gain total en décibels est la somme des gains.
- une courbe donnant l’argument ϕ(ω) de la fonction de transfert, en échelle linéaire enfonction de la pulsation ω en échelle logarithmique, appelée courbe de phase :
ϕ(log10ω) = argH(jω)
Exprimentalement, ϕ(ω) = ϕs − ϕe peut être mesurée à l’aide d’un oscilloscope.
Remarques :- les tracés expérimentaux se font en portant la fréquence en échelle logarithmique : onutilise du papier semi-logarithmique.- Les tracés théoriques se font souvent en utilisant une variable réduite sans dimension :x =ω/ω0, ω0 étant une pulsation caractéristique du système.- On appelle diagrammes asymptotiques de Bode, les diagrammes de Bode réduits à leursasymptotes. Ces diagrammes permettent une approche beaucoup plus rapide de l’aspectdu diagramme de Bode "complet".
- Une décade est l’intervalle de pulsations séparant ω de 10 ω. Cela correspond à une unitéde l’abscisse sur le diagramme de Bode. Une octave est l’intervalle de fréquence séparantune pulsation de son double, soit trois décibels sur le diagramme de Bode.On peut donner les mêmes définitions en terme de fréquence.
4

1.2.3 fréquences de coupures
La courbe de module du gain dans le plan de Bode d’une fonction de transfert d’un sys-tème linéaire est caractérisée par un gain maximal noté Gm et une ou deux fréquences (oupulsations) pour lesquelles la valeur du gain a diminué de 3 dB par rapport au maximum,appelées fréquences (ou pulsations) de coupure.
GdB(ωc) = GdBmax − 3dB ou G(ωc) =Gmax√
2
Le choix de 3 dB revient à définir la bande passante comme la gamme de fréquence pour
laquelle la puissance délivrée à la charge est comprise dans l’intervalle [1
2Pmax, Pmax]
exercice 11
2 filtres passe-bas d’ordre 1
A condition que la sortie ne soit pas cnargée, ce circuit est un diviseur de tension idéal.
2.1 Comportement asymptotique
L’impédance du condensateur vaut ZC =1
jCω.
- Si ω → 0, le condensateur équivaut à un interrupteur ouvert et ZC →∞ et U s → U e.
- Si ω →∞ alors ZC → 0 et U s → 0.
On peut donc dire que le filtre transmet les signaux de basse fréquence et atténue ceux dehaute fréquence. C’est un filtre passe-bas.
2.2 fonction de transfert
H(jω) =U s
U e
U s
U e
=
1
jCω
R+1
jCω
=1
1 + jRCω
H(jω) =1
1 + jω
ω0
en posant ω0 =1
RC. Soit x =
ω
ω0. H(jx) =
1
1 + jx
5

2.3 Diagramme de Bode - Pulsation de coupure à -3dB
2.3.1 Représentation de la courbe de gain
GdB(x) = 20 log10 |H(jω)| = 20 log101√
1 + x2
- Si x→ 0, c’est-à-dire si ω � ω0 alors GdB ' 0
- Si x→∞, c’est-à-dire si ω � ω0 alors GdB ' −20 log10 x droite de pente −20 dB pardécade, ce qui signifie que si ω est multiplié par 10, log x augmente de 1 et GdB diminuede 20 dB
- Les deux asymptotes se coupent pour 0 = −20 log x c’est-à-dire pour ω = ω0 ;
- Pour ω = ω0, H(ω) =1√2et GdB = 20 log
1√2' −3 dB.
ω0 est la pulsation de coupure à −3 dB, notée ωc.Elle peut être interprétée comme la limite entre les comportements BF et HF du filtre :- les signaux de pulsations ω < ωc sont transmis en sortie avec une atténuation inférieureà 3 dB ;- les signaux de pulsations ω > ωc sont transmis en sortie avec une atténuation supérieureà 3 dB ;Idéalement on considérera que le filtre laisse passer une pulsation ω si l’atténuation ensortie est inférieure à 3 dB.
La bande passante de ce filtre, c’est-à-dire l’ensemble des pulsations qu’il laisse passer,est donc [0, ω0].
2.3.2 Représentation de la courbe de phase
ϕ(ω) = argH(jω)
ϕ(ω) = 0− arg(1 + jω
ω0) = − arctan
ω
ω0
ϕ(x) = − arctanx
avce cosϕ > 0 donc ϕ ∈ [−π2,π
2]
- Si ω � ω0 alors ϕ ' 0
- Si ω � ω0 alors ϕ ' −π2
6

- Si ω = ω0 alors ϕ = −π4
Pour ω = 0, 1 ω0 , ϕ = −0, 1 rad et pour ω = 10 ω0 , ϕ = −1, 47 rad.
L’essentiel de la rotation de phase se fait donc entre 0, 1 ω0 et 10 ω0 c’est-à-dire sur deuxdécades.
Remarque : On vérifiera qu’en remplaçant la résistance par une inductance L, le conden-
sateur par une résistance et en posant ωc =R
L, on obtient la même fonction de transfert.
3 filtres passe-haut du premier ordre
3.1 Comportement asymptotique
L’impédance du condensateur vaut ZC =1
jCω.
- En régime permanent, c’est-à-dire si ω → 0, le condensateur équivaut à un interrupteurouvert : ZC →∞ et U s → 0.
- Si ω →∞ alors ZC → 0 et U s → U e.
On peut donc dire que le filtre transmet les signaux de hautes fréquences et atténue ceuxde basses fréquences d’où la dénomination de filtre passe-haut.
3.2 Fonction de transfert
H(jω) =U s
U e
7

Avec le diviseur de tension, on obtientU s
U e
=R
R+1
jCω
=jRCω
1 + jRCω=
jω
ω0
1 + jω
ω0
H(jω) =jx
1 + jx
en posant ω0 =1
RCet x =
ω
ω0
3.3 Diagramme de Bode - Pulsation de coupure à -3dB
3.3.1 Représentation de la courbe de gain
GdB = 20 log |H(jω)| = 20 logω
ω0− 10 log
(1 +
(ω
ω0
)2)
GdB(x) = 20 log x− 10 log(1 + x2
)- Si x→ 0, c’est-à-dire si ω � ω0 alors GdB ' 20 log x- Si x→∞, c’est-à-dire si ω � ω0 alors GdB ' 20 log x− 10 log x2 = 0
Pour ω = ω0, H(ω) =1√2et GdB = 20 log
1√2= GdBmax − 3 dB.
ω0 est la pulsation de coupure à −3 dB, notée ωc.Les deux asymptotes se coupent pour 0 = 20 log x c’est-à-dire pour ω = ω0 = ωc, pulsationde coupure à −3 dB.
La bande passante de ce filtre est donc [ω0,∞[.
3.3.2 Représentation de la courbe de phase
ϕ(ω) = arg(jω
ω0)− arg(1 + j
ω
ω0) =
π
2− arctan
ω
ω0
ϕ(x) =π
2− arctanx
avec cosϕ > 0 donc ϕ ∈ [−π2,π
2] .
La courbe se déduit de celle du passe-bas par une translation deπ
2.
La phase varie de 90̊ pour x = 0,1 à 0 pour x = 10. Elle est égale à 45̊ pour la fréquence
8

de coupure.On vérifiera qu’en remplaçant la résistance par une inductance L, le condensateur par une
résistance R et en posant ωc =R
L, on obtient la même fonction de transfert.
4 exemple d’un filtre passif du second ordre : circuit RLCsérie
4.1 sortie ouverte sur C
La fonction de transfert en tension du filtre est :
H(jω) =U s
U e
=1/jCω
R+ jLω + 1/jCω
H(jω) =1
1− LCω2 + jRCω
On pose ω0 =1√LC
, x=ω
ω0et Q=
1
RCω0.
H(jx) =1
1− x2 + jx
Q
étude du gain :
GdB = 20 log(1√
(1− x2)2 + x2
Q2)
GdB(x) = −10 log((1− x2)2 + x2
Q2
)Si x→ 0, GdB → 0Si x→∞, GdB → −40 log x
9
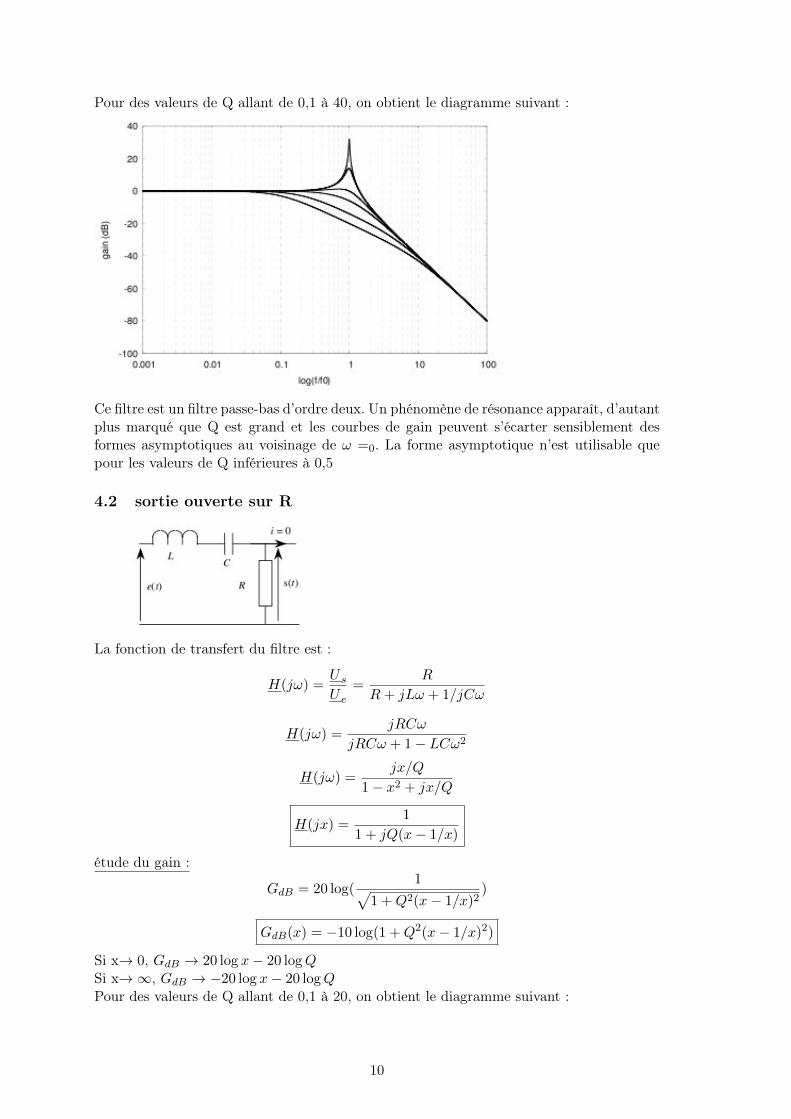
Pour des valeurs de Q allant de 0,1 à 40, on obtient le diagramme suivant :
Ce filtre est un filtre passe-bas d’ordre deux. Un phénomène de résonance apparaît, d’autantplus marqué que Q est grand et les courbes de gain peuvent s’écarter sensiblement desformes asymptotiques au voisinage de ω =0. La forme asymptotique n’est utilisable quepour les valeurs de Q inférieures à 0,5
4.2 sortie ouverte sur R
La fonction de transfert du filtre est :
H(jω) =U s
U e
=R
R+ jLω + 1/jCω
H(jω) =jRCω
jRCω + 1− LCω2
H(jω) =jx/Q
1− x2 + jx/Q
H(jx) =1
1 + jQ(x− 1/x)
étude du gain :
GdB = 20 log(1√
1 +Q2(x− 1/x)2)
GdB(x) = −10 log(1 +Q2(x− 1/x)2)
Si x→ 0, GdB → 20 log x− 20 logQSi x→∞, GdB → −20 log x− 20 logQPour des valeurs de Q allant de 0,1 à 20, on obtient le diagramme suivant :
10

Le filtre est un filtre passe-bande d’ordre 2.
étude du déphasage :
ϕ(x) = −Arg(1 + jQ(x− 1/x)) = − arctan(Q(x− 1/x))
avec cosϕ > 0 donc ϕ ∈ [−π2,π
2] .
Si x→ 0, ϕ→ π/2Si x→∞, ϕ→ −π/2ϕ(ω0) = 0
4.3 sortie ouverte sur L
On pourra montrer qu’on constitue un filtre passe-haut d’ordre 2.
5 filtres actifs
5.1 présentation de l’amplificateur opérationnel
Les amplificateurs opérationnels ont été conçus initialement pour la résolution analogiquede problèmes numériques tels que l’étude d’équations différentielles dont les solutions ana-lytiques sont inconnues. Le développement des calculateurs numériques a rendu caducl’usage de ces calculateurs analogiques. Ils sont maintenant utilisés dans de nombreux do-maines de l’électronique analogique.
- L’AO est un "CIL" (circuit intégré logique). L’A.O. est un petit circuit imprimé (puce desilicium de 1 mm2 environ) qui renferme l’équivalent d’une vingtaine de composants diffé-rents. Ce circuit interne est toujours compliqué, et on ne cherchera pas à savoir en détailsce qui s’y passe. La puce est encapsulée et munie d’au moins cinq pattes (ou broches) :- deux bornes d’entrée E+ (non inverseuse) et E−(inverseuse)- une borne de sortie S- deux bornes d’alimentation +V et −V
11

L’A.O. ne peut jouer son rôle d’amplificateur que grâce à l’énergie électrique qu’il reçoit dumilieu extérieur, par une alimentation +15V/-15V qui n’est généralement pas représentéesur les schémas.
ATTENTION : sous peine de détérioration, les bornes d’alimentation sonttoujours branchées en premier et débranchées en dernier.
- symbole :
En général, les courants d’entrée iE+ et iE− sont négligeables. Par contre, lecourant de sortie is est non nul. La tension de sortie dépend de la tension dif-férentielle d’entrée ε = VE+ − VE−.
- caractéristique de transfert en régime continu :
En régime saturé (zones 1 et 3), Vs = ±Vsat .En régime linéaire (zone (2)), Us = µ0(ε− Vd) , avec µ0 ∼ 105. On admettra que l’AOpeut fonctionner en régime linéaire s’il y a une boucle de rétroaction entre la sortie etl’entrée inverseuse.
Un amplificateur est considéré comme idéal si l’on peut admettre que son gain est in-fini, que ses impédances d’entrée sont infinies et que sa résistance de sortie est nulle. Latension de sortie étant finie, la tension différentielle d’entrée ε doit alors être nulle.Les impédances d’entrée étant infinies, les courants d’entrée sont nuls.Le symbole de l’AO idéal est le suivant :
12
Remarque : si Vd est non nulle, elle peut être compensée par le réglage de l’offset.
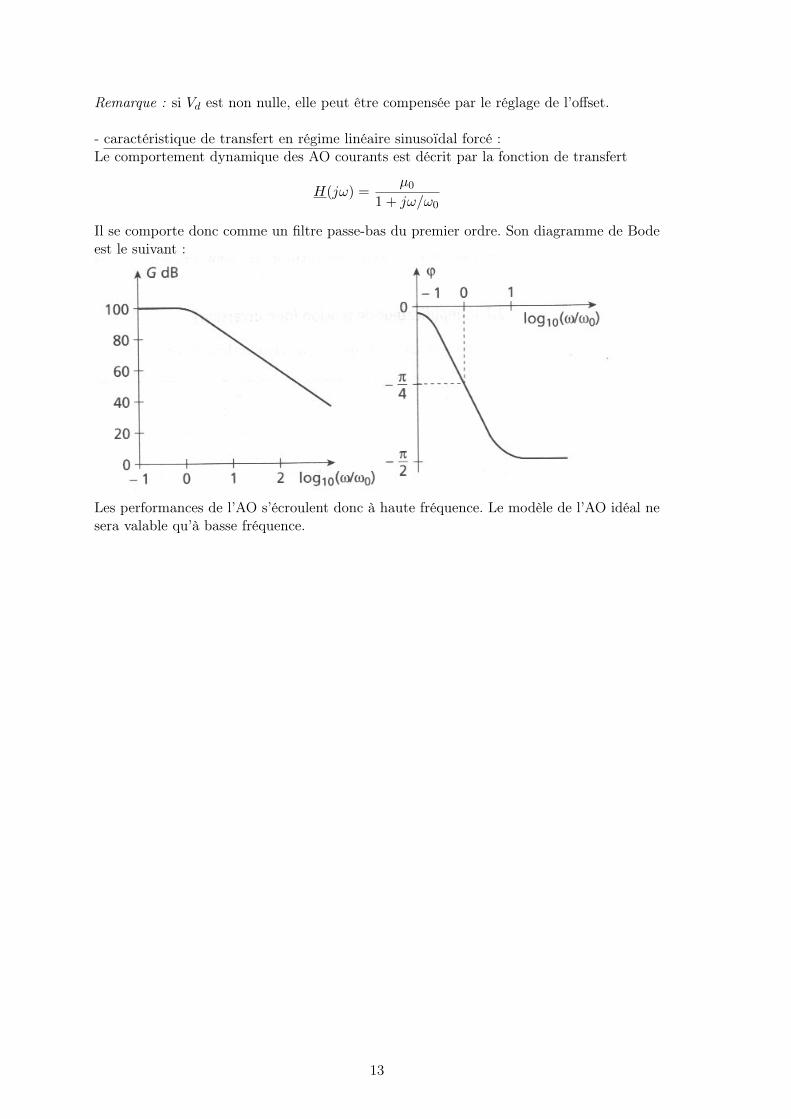
- caractéristique de transfert en régime linéaire sinusoïdal forcé :Le comportement dynamique des AO courants est décrit par la fonction de transfert
H(jω) =µ0
1 + jω/ω0
Il se comporte donc comme un filtre passe-bas du premier ordre. Son diagramme de Bodeest le suivant :
Les performances de l’AO s’écroulent donc à haute fréquence. Le modèle de l’AO idéal nesera valable qu’à basse fréquence.
13

5.2 montages de bases en régime linéaire
nom schéma gain
suiveur G = 1
non inverseur G = 1 +R′
R
inverseur G = −R′
R
sommateur Vs = −R(V1R1
+V2R2
)
dérivateur H = −jRCω
intégrateur H = − 1
jRCω
résistance négative14

exercices 13 à 16
5.3 exemple de filtre actif
Les filtres réalisés à partir de dipôles passifs introduisent une atténuation du signal. L’em-ploi des amplificateurs opérationnels permet de réaliser simplement des filtres RC actifsdont les caractéristiques sont équivalentes à celles des filtres LC passifs. Il existe un nombreconsidérable de filtres actifs différents classés selon la forme de leur fonction de transfert.Soit l’exemple ci-dessous :
D’après le théorème de Millman en A,
0 = VA =
Ve
R1+ Vs
(1
R2+ jCω
)1
R1+
1
R2+ jCω
Vs
Ve=
−R2
R1
1 + jR2Cω
Il s’agit donc d’un filtre passe-bas actif, pour lequel le gain peut, avec un choix appropriédes résistances, être spérieur à 1.
15