les gros bras - library.e.abb.com · tion des clients. outre le fait de ... analyse des bagages,...
TRANSCRIPT

Revue ABB 1/2002 25
vant de monter dans un avion,
vous confiez votre valise à la
compagnie aérienne avec la certitude de
la récupérer à quelques milliers de km de
là. C’est pourquoi, le degré de satisfac-
tion des passagers est étroitement lié à la
fiabilité et au professionalisme des servi-
ces de gestion des bagages. Pourtant,
vous ignorez certainement que le charge-
ment et le déchargement des containers à
bagages des avions se font manuellment.
En effet, la profonde complexité de l’opé-
ration a été, jusqu’à présent, un frein
majeur à son automatisation.
Manutentionner les bagages avec soin
n’est qu’une facette du problème; la
sécurité et la santé des bagagistes en
est une autre tout aussi importante.
Déplacer des charges lourdes est un tra-
vail pénible et dangereux, exacerbé par
sa nature répétitive. Les grosses valises
Les gros bras
Une fois votre bagage enregistré à l’aéroport, il disparaît rapidement emmené par un tapis. Vous le
récupérerez dans un autre aéroport, éventuellement à l’autre bout du monde. Entre-temps, il aura été
étiqueté, contrôlé, trié, chargé, déchargé et suivi à la trace par des ordinateurs super-puissants pour
enfin arriver à bon port.
Miracle de la technologie moderne? A vrai dire, pas tout à fait ! Malgré l’automatisation poussée
de la gestion des bagages, leur manutention reste une opération manuelle impliquant un personnel
considérable pour un travail pénible, dangereux et répétitif, et qui pourrait être affecté à des tâches
plus utiles.
La clé du changement? Le système de manutention automatisé des bagages d’ABB qui réduit
fortement les besoins de personnel et les délais tout en améliorant la sécurité et la qualité, à moindre
coût. Le système robotisé de chargement vient de réussir son examen de passage au sein de
l’installation pilote de l’aéroport de Zurich.
A
Dans les aéroports, les robots
ABB allègent la tâche des bagagistes
Les gros bras
Collectif rédactionnel
26 Revue ABB 1/2002
pèsent quelque 20 kg et chaque manu-
tentionnaire soulève au minimum une
tonne de bagages par heure. «Comparée
aux autres activités aéroportuaires, la
manutention manuelle des bagages est
une tâche qui rappelle l’âge de pierre»,
explique le Dr Günther Nagel, responsa-
ble du département Manutention automa-
tisée des bagages d’ABB Airport Techno-
logies.
Les accidents et incapacités de travail
sont des conséquences inévitables des
efforts physiques nécessaires pour soule-
ver les lourdes charges. Le système de
chargement automatisé des bagages
d’ABB réduit fortement les tâches
manuelles et contribue à optimiser une
activité aéroportuaire qui en a bien
besoin. Et, sans prendre la place du
bagagiste, il accroît considérablement la
qualité de son travail.
Qui plus est, les gains de temps
obtenus avec le système permettent de
raccourcir les délais de transit (facteur
essentiel de compétitivité d’un aéroport
moderne). Et il va sans dire que des
temps d’attente courts autour des carrou-
sels à bagages contribuent à la satisfac-
tion des clients.
Outre le fait de réduire les coûts et
d’améliorer la qualité du service, le sys-
tème ABB contribue également à accroît-
re la sécurité, préoccupation majeure
dans le contexte international actuel.
A l’automne dernier, ABB Airport
Technology, en collaboration étroite avec
ABB Corporate Research, a installé un
système pilote de chargement automatisé
des bagages à l’aéroport de Zurich. Les
performances exceptionnelles du système
ont montré qu’en conjuguant technolo-
gies éprouvées (informatique, instrumen-
tation, robotique, mécatronique) et
savoir-faire applicatif, ABB se positionne
en tête sur ce nouveau marché en forte
croissance. Aucune autre entreprise n’of-
fre de solution comparable.
Toutefois, le robot lui-même ne cons-
titue qu’une partie de la solution. Avant
la manutention robotisée des bagages,
deux opérations sont indispensables :
leur analyse et la planification de la
séquence de chargement .
Module d’analyse des
bagages
Le système d’analyse des bagages, où
leur poids, leur taille, leur destination, la
classe du passager et leur volume (repré-
sentation cuboïde de l’objet) sont déter-
minés, constitue une avancée technolo-
gique majeure. Sur la base des données
d’analyse, le robot établit des schémas
d’empilage pour optimiser le chargement,
c’est-à-dire utiliser au mieux l’espace
dans le container à bagages.
Les bagages sont examinés par les
1
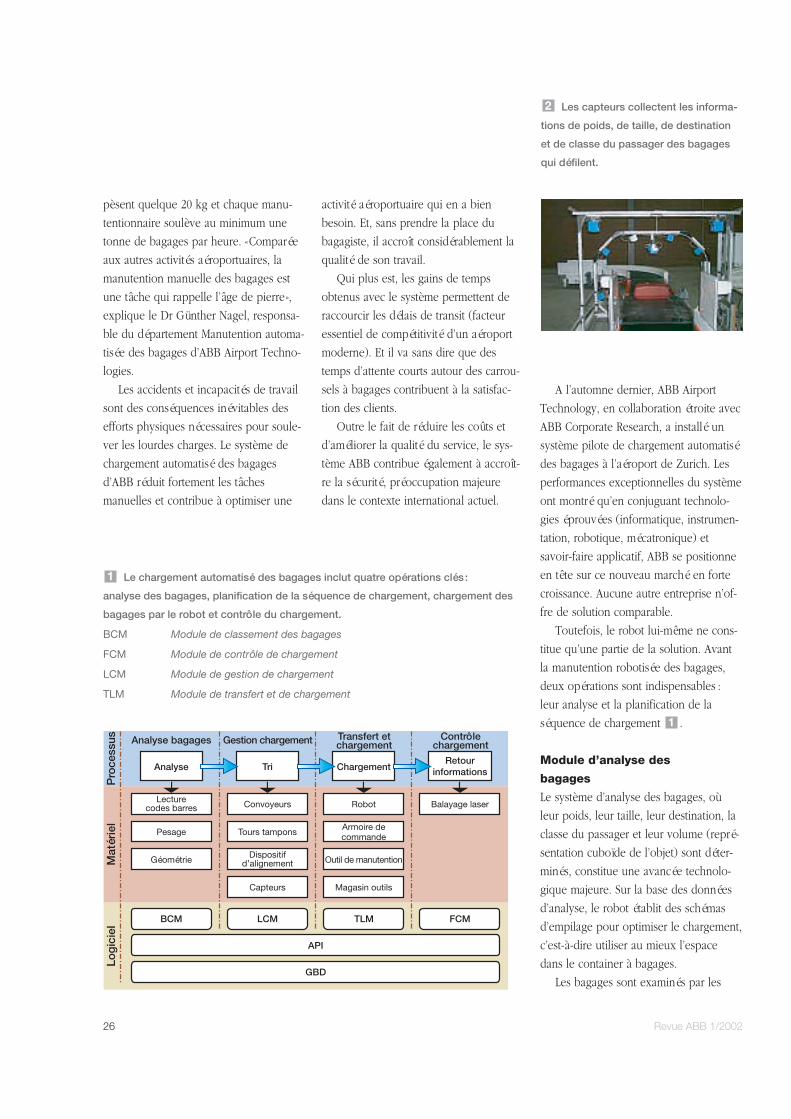
Les capteurs collectent les informa-
tions de poids, de taille, de destination
et de classe du passager des bagages
qui défilent.
2
Analyse
Lecturecodes barres
Pesage
Géométrie
Tri ChargementRetour
informations
Analyse bagages
Pro
cess
usM
atér
iel
Log
icie
l
Gestion chargement Transfert etchargement
Contrôlechargement
Convoyeurs
Tours tampons
Dispositifd’alignement
Capteurs
LCMBCM FCM
API
GBD
TLM
Robot
Armoire decommande
Outil de manutention
Magasin outils
Balayage laser
Le chargement automatisé des bagages inclut quatre opérations clés:
analyse des bagages, planification de la séquence de chargement, chargement des
bagages par le robot et contrôle du chargement.
BCM Module de classement des bagages
FCM Module de contrôle de chargement
LCM Module de gestion de chargement
TLM Module de transfert et de chargement
1
Revue ABB 1/2002 27
trois séries de capteurs du module d’ana-
lyse : en premier lieu, un lecteur de
codes barres qui lit les étiquettes et com-
pare les données aux informations de vol
du système de gestion des départs de
l’aéroport. Ensuite, le pesage à la volée
sur des convoyeurs pouvant avancer à la
vitesse maximale de 2 m/s. Pour finir,
l’identification de la forme géométrique
du bagage. Toutes les données des cap-
teurs servent à classer les bagages pour
simplifier leur manutention automatisée.
Ce classement se fait en temps réel alors
que les bagages défilent devant les cap-
teurs.
Le module logiciel intelligent, appelé
Baggage Classification Manager (BCM),
a été spécialement développé par ABB
pour ce produit.
Module de gestion de
chargement
Une fois les différents paramètres de
chaque bagage déterminés par le module
BCM, le module de gestion de charge-
ment (LCM, Load Control Manager) éta-
blit l’ordre de chargement des bagages
dans le container. Tous les bagages ne
sont, cependant, pas chargés dans leur
ordre d’arrivée; ceux de format standard
sont rapidement et directement placés
dans le container, alors que ceux horsformat ou très lourds sont temporaire-
ment stockés à part jusqu’à ce qu’une
place appropriée soit disponible.
Le fonctionnement du système est
étroitement lié au processus de gestion
de bagages de l’aéroport ; outre le fait
d’exploiter les données issues du module
BCM, le module LCM reçoit également
des données du système d’information
aéroportuaire. Ainsi, le système sait, par
2
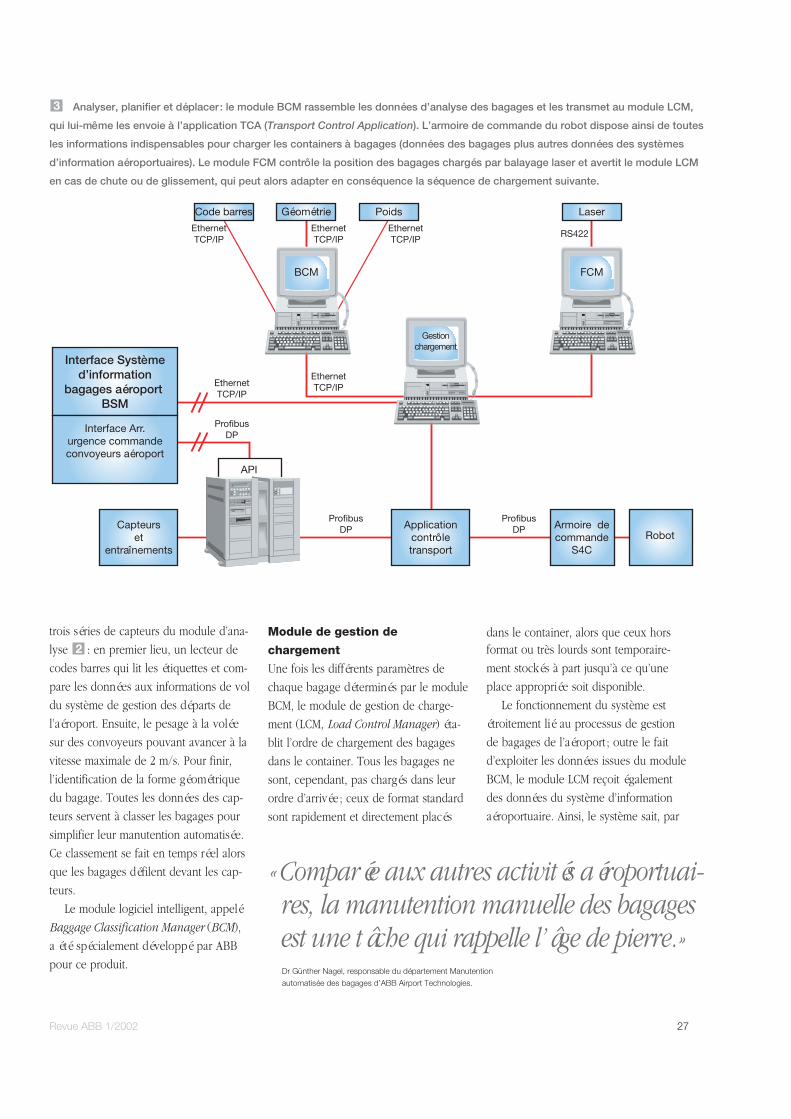
Code barres Géométrie Poids Laser
Interface Systèmed’information
bagages aéroport BSM
Interface Arr.urgence commandeconvoyeurs aéroport
Capteurset
entraînements
Applicationcontrôletransport
Armoire decommande
S4CRobot
API
EthernetTCP/IP
EthernetTCP/IP
EthernetTCP/IP
ProfibusDP
ProfibusDP
ProfibusDP
EthernetTCP/IP
EthernetTCP/IP
RS422
FCMBCM
Gestionchargement
Analyser, planifier et déplacer : le module BCM rassemble les données d’analyse des bagages et les transmet au module LCM,
qui lui-même les envoie à l’application TCA (Transport Control Application). L’armoire de commande du robot dispose ainsi de toutes
les informations indispensables pour charger les containers à bagages (données des bagages plus autres données des systèmes
d’information aéroportuaires). Le module FCM contrôle la position des bagages chargés par balayage laser et avertit le module LCM
en cas de chute ou de glissement, qui peut alors adapter en conséquence la séquence de chargement suivante.
3
«Comparée aux autres activités aéroportuai-res, la manutention manuelle des bagagesest une tâche qui rappelle l’âge de pierre.» Dr Günther Nagel, responsable du département Manutention
automatisée des bagages d’ABB Airport Technologies.
exemple, si le passager est enregistré et si
son bagage peut être chargé.
Par ailleurs, le module de contrôle de
chargement FCM (Feedback Control
Manager) vérifie le volume encore
disponible, et sa forme, dans le container
à bagages et en informe le module
LCM . Pour ce faire, le module FCM
utilise un balayage laser. L’ensemble
du processus est ainsi plus souple et
même plus fiable : en cas de chute ou
de glissement de bagages, les informa-
tions sont transmises au module LCM,
qui réagit immédiatement et réajuste
la position du bagage suivant, sélectionne
un autre bagage ou, si la situation
l’exige, demande l’intervention d’un
opérateur.
Enfin, une « liste de chargement» est
établie avec le poids exact de chaque
container et l’emplacement de chaque
bagage. Cette liste simplifie la recherche
d’un bagage qui doit être déchargé (un
avion n’est pas autorisé à partir s’il
contient un bagage dont le propriétaire
n’a pas embarqué). De nombreux retards
sont liés à la recherche d’un bagage dans
la soute de l’avion.
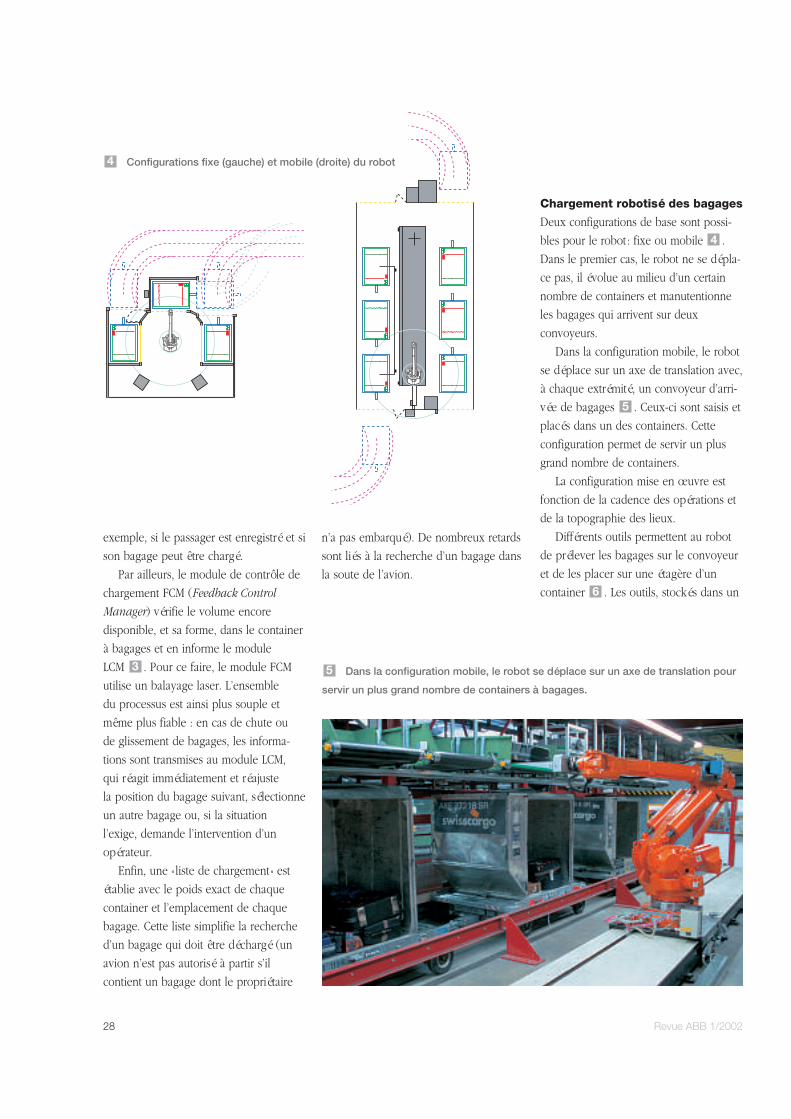
Chargement robotisé des bagages
Deux configurations de base sont possi-
bles pour le robot: fixe ou mobile .
Dans le premier cas, le robot ne se dépla-
ce pas, il évolue au milieu d’un certain
nombre de containers et manutentionne
les bagages qui arrivent sur deux
convoyeurs.
Dans la configuration mobile, le robot
se déplace sur un axe de translation avec,
à chaque extrémité, un convoyeur d’arri-
vée de bagages . Ceux-ci sont saisis et
placés dans un des containers. Cette
configuration permet de servir un plus
grand nombre de containers.
La configuration mise en œuvre est
fonction de la cadence des opérations et
de la topographie des lieux.
Différents outils permettent au robot
de prélever les bagages sur le convoyeur
et de les placer sur une étagère d’un
container . Les outils, stockés dans un6
5
4
3
28 Revue ABB 1/2002
Configurations fixe (gauche) et mobile (droite) du robot4
Dans la configuration mobile, le robot se déplace sur un axe de translation pour
servir un plus grand nombre de containers à bagages.
5

Revue ABB 1/2002 29
magasin de la cellule robotisée, peuvent
être changés à la volée. L’outil est choisi
par le module LCM, en fonction du type
de bagage et de sa position calculée.
Dans ce cas précis, le robot est dépourvu
de toute intelligence (pas de système de
vision), recevant tous ses ordres du
module LCM.
En moyenne, un manutentionnaire
déplace 20 à 30 bagages par heure. Selon
la conception de la cellule robotisée, la
capacité du système de chargement auto-
matisé varie de 120 à 300 bagages par
heure. Alors que le chargement manuel
est réalisé par trois équipes travaillant
8 heures, le robot ne s’arrête quasiment
jamais (le taux de disponibilité prévu est
de 95%).
L’élément humain n’est toutefois pas
complètement absent : un opérateur qui
supervise jusqu’à 4 postes doit être
disponible en permanence. En cas de
besoin, celui-ci peut arrêter le robot, le
réinitialiser et le redémarrer.
Evolution future
L’approche technologique adoptée pour
ce produit conjugue de manière optimale
des techniques parfaitement maîtrisées et
un savoir-faire applicatif, ce qui en fait
une solution inédite et unique. Comme le
souligne le Dr Axel Stepken, directeur
général d’ABB Airport Technologies,
«Le système de manutention automatisé
de bagages illustre parfaitement les
synergies possibles entre les différents
métiers du Groupe ABB: la connaissance
des activités aéroportuaires est intégrée
aux technologies de la robotique et de
l’informatique industrielle. »
Dans le droit fil de sa stratégie globale
d’entreprise, ABB s’est engagé dans un
vaste programme de développement
de produits regroupés sous l’égide Indus-
trialIT. Cette initiative obéit à une volonté
de standardisation de l’ensemble de l’of-
fre ABB pour en faire la «brique de base»
de solutions de plus grande envergure,
tout en la dotant de fonctionnalités
permettant à une multitude de produits
d’interagir en toute transparence, au sein
d’automatismes et de systèmes d’informa-
tion temps réel. IndustrialIT est bien plus
qu’une stratégie d’entreprise: elle symbo-
lise la quasi-totalité des actions de pro-
grès menées par ABB. Cela se traduit par
un engagement à long terme qui permet-
tra à IndustrialIT de se démarquer de la
concurrence. Le système de manutention
automatisé de bagages s’inscrit dans cette
démarche IndustrialIT.
Qui plus est, la technologie mise en
œuvre pour le chargement des bagages
peut aisément être adaptée à un large
éventail d’applications, notamment la
distribution des produits et la mise en
service.
Le système de manutention automatisé
de bagages n’est qu’un exemple parmi
d’autres de produits conférant à ABB un
leadership technologique dans ce secteur
d’activités. Ainsi, une solution de déchar-
gement est en cours de développement
qui fait appel à une technologie plus sim-
ple mais tout aussi efficace (un mouve-
ment de basculement décharge les baga-
ges du chariot à rampe ou du container
sur les convoyeurs). La première installa-
tion pilote est prévue pour 2002. (ab)
Deux outils interchangeables de base suffisent pour résoudre
la plupart des problèmes de manutention.
6
Daniel Thévenaz, PDG de Swissport Baggage Sorting AG explique:
«Pour moi, le chargement assisté par robot constitue une étape décisive
dans le remplacement de tâches manuelles dangereuses et d’un autre âge
par une technologie moderne.»
Et le Dr Axel Stepken, directeur général d’ABB Airport Technologies, d’ajouter :
«Le système de manutention automatisé de bagages illustre parfaitement
les synergies possibles entre les différents métiers du Groupe ABB: la
connaissance des activités aéroportuaires est intégrée aux technologies
de la robotique et de l’informatique industrielle.»
Témoignages