i l i...3 fils de torsion, tendus entre les points a et b, ayant des constantes de torsions c,...
TRANSCRIPT

L L.M.D., Travaux Dirigés physique 3 Oscillations à'plusieurs degrés de-liberté
Exercice 1 : Soit le montage de la figure 12 circuits LC sont couplés par une capacité C. Ici Ci = C2 = C et Li = L2^L
1 ) Ecrire les 2 équations différentielles en i] et i2 (puis en qi et qa).2) 'Trouver les pulsations propres du système et donner la solution générale sachant qu'à t = 0, seul Ci possèdeune charge q.
r 'xcrcice 2 : Soit le montage de la figure 2: i • • ' • ; i v ic . r . ' ' . j i i H l i o : i s diliérentiellcs.
-. .• l ' : - . i i i \ x - r les pulsat ions propres. Donner la matrice de passage.: • i , ' ; ' i :v :<;•:- solutions yénérales.
Exercice 3: Soit le montage de la figure 3! ) Ecrire les équations différentielles.2; i 'roiiver les solutions du régime permanant sachant que xs (t) = a. cosfilt.3) Si 3 = 0 pour qu'elles valeurs de Cl a-t-on résonance.Donner alors dans ce cas la condition pour laquelle la lere masse reste immobile.
figure 1
v. . figure 2La figure 3
c r ±'c: _____ il __ i m
0&-
KS-»m
; 'CTO^*_ x2->
4_i Soit le montage de la figure 4Un pendule de masse m et de longueur L pivote autour du centre de gravité G de la masse M qui glisse sansfrottements sur un plan horizontal. En utilisant les équations de Lagrange, déterminer :1 ; i -'s équations du mouvement du système
' : ' ;•-'. fn.Vii. onces propres\ : ' : i> . .--..T :o mouvement lorsque : iM —> oo ; L —» 0.
h_xe_rtnçLOj. Soit le montage de la figure 52 cylindres (masse M, diamètre 2R) roulent sans glisser sur un support horizontal. La raideur des 3 ressorts estk. soient 61 et 62 les angles de rotation de ces 2 cylindres par rapport à leurs positions d'équilibre respectives.! ) Etablir le Lagrangien du système.2) Trouver les équations du mouvement (On considère les petites oscillations)
Exercice 6 : Soit le montage de la figure' 62 disques mobiles Dl et D2 ayant .des moments d'inertie J par rapport à l'axe de rotation AB sont suspendus par3 fils de torsion, tendus entre les points A et B, ayant des constantes de torsions C, C' et C.Ce système peut effectuer des rotations autour de l'axe AB. Soit 0i et 62 les angles que font les disques parrapport à leur position d'équilibre.1 ) Calculer la pulsation COQ des oscillations de Dl quand D2 est bloqué.2) a) Les 2 disques étant libre d'osciller, calculer (avec J1=J2=J) les pulsations cc>i et 0)2 des 2 modes devibrations.2) h ) A t " 0 les disques sont lâchés avec comme conditions initiales : 0i(t=0) = a et 62 (t=0) = 0 et avec desvitesses nulles, trouver 9i(t) et 02(t).
l ' énerg ie emmagasinée dans le système
A*A
figure 4
figure figure 6 c
C1
Dl
D2
B

t..M.D Travaux Dirigés physique 3 Oscillations à plusieurs degrés deliberté
Soi! le système oscillatoire de la figure 7.i ) é t ab l i r les équations différentielles des masses m] et ni2 , (xj et x2 ) leursamplitudes dynamique respectives).7) Donner le schéma électrique équivalent du système en établissant d'abord leséquations en charges qj et q2 puis en courant i j et 12.3 ) On prer.d mi = mj = m. Trouver les expression des amplitudes complexes dessolutions KI et \2 du régime perrnanant sachant que F(t) = k.xs = a.exp(i fî.t);4 ) Si (i = 0 (pas d'amortissement) :ai Pour quelle pulsation la masse iri2 reste immobile ;b'i Oticlles sont les pulsations de résonance ;,- Considérons le cas non excité (F(t) = 0), trouver :
Les pulsations propres (correspondantes aux modes)I ,a matrice de passage.
- Les so lu t ions générales.
Exercice 8:; .H :-.-• sv-;'ième mécanique de la figure 8. Le disque circulaire homogène de masse' • • • - •.;--• ' • : ! • • < ' ! ! i< est m o b i l e sans frottements autour de son axe horizontal.: i :.a-.oc m e. ; t rehée à un point A de la circonférence du disque par une tige sansm a sx; de longueur L L'articulation au point A permet à la tige d'osciller dans lep!:ui .iu .iis^.c sans contraintes (sans frottements). Les angles 6 et 9 permettent decaractériser la position du système à chaque instant.1) Etablir le Lagrangien du système.2) Que devient l'expression de la fonction de Lagrange dans le cas des petites
oscillations autour de la position d'équilibre.3) Ecrire lès équations du mouvement.
Exercice_9Une masse mi suspendu à un ressort de raideur ki est reliée à un amortisseur p.On suspend un ressort k2 et une masse m.2 à mi, figure 9.Une force F(t) = Fo.cos(flt) est appliquée à la masse mi.Soient X| et x2 les déplacements dynamique de m\ et ni2par rapport aux positionsd'équil ibres.î } Ltabl i r les équations différentielles donnant le mouvement des masses mi et m22 ) Donner l'équivalent électrique du système; ; '•. C a l c u l e r x\. Pour quelle fréquence QI, mj reste-elle immobile ?
, J e u x pendules identiques de longueur L = 2a portants à leurs extrémités deuxmasses ponctuelles (figure 10). Le ressort de constante k assure le couplage.Les deux pendules sont repérés à chaque instant par leurs élongations angulaires 61
et92.1) Déterminer l'énergie cinétique et potentielle du système et écrire le Lagrangienen fonction de 9j et 82.2) En déduire les deux équations différentielles du mouvement, dans le cas despetites oscillations.3) Calculer les deux pulsations propres du système.
figure 1C

oos Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
• _ L-'-TÎOC^ÎCxT^
' \ ±:
q=J id t
T(+ +'
2 mailles —s* 2 équations
loi des maies 2 d.d.p. = ]> f.e.m
- '
L, 'J + C3J h'-t
—i-£|2 =0 système de 2 éq. diff. linéaires coupléesA^ •-' .-il ï r- c, r^ .-,»-. i-3 ,-i*-/J«-d £ît ^^ T £
TiX
du second ordresans second membre
_ -= l t t t t
solutions
= 0
Q | | 0 | avec système de 2 éq. à 2 inconus sans 2ème membre
i = i ï tao = —_ 3 existe d'autres SOÎQ&OIÏS que Q j ^ Q j — 0si détamiinant = Q
i - tuû - OJO'
0
0
f Q i
—f=
sultions générales — PQl (Pl)
vecteur propre Vi =
.vecteur propre V2 —
(t) = Ql
matrice de pasage
1 1
-1
P =-1 1
+ Q 2 C O S ( C 0 2 t
+ Qs cos(co3
Les constantes ^i Q^ (pi « 92 sont déterminées grâce aux Conditions Initiales
4 i n c o n n u e s donc nécessaire d'avoir 4 équations
q : \ 0 i = .- , q 3 ( 0 ) = Ù et q O = q3(0) = 0
Qi cas ^i - Qj cos
2 Q i c o s ( f i = q =
0; O j i sin ^p! -- Qs wo sm tps =
Ci M I sm (pi - Qu ùj j sm tp^ = 0
- —t» QJ = q/2 - Q2
qi(t) - <î/2 ( cos coït + cos œj t )
q2(t) = - q/2 ( cos aii.t - cos oo2t )
co 2 sm 92 = 0
io ï sm = 0= 0 ~

L.M.D., suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
Réponse 2
m x, = - .
k(x2-xi) -k(x2-x3)A s?
m x3= -k(x,-:
les rohtions sont sinusoïdales : (^(t) =X!Cos (œ t+ <P.) ;- v • 3 2 ^
avec
écriture rnatntielle des équations différentielle:
2 . •
3
! eu3 ' k^ rn
__ Jk2m
o.
.,<
k'rn
-eu" + _rn
krn
2 2 2 2 33 - - 3 3 3 3
V-,0 ' ' — 1
_ Jk2m2 k
+ m J
Xj
X3
— x3 .
syste= 0 : à3i
sans
Y, =-a>2 X, e1 fflt ; X :
° J '
système de 3 équationsà 3 inconussans second membre
D existe d'autres solutions que la solution évidente Xj = 0 si le déterminant = 0 = équation aux fréquences propres23
m"
matrice de passage P =
D +'± ) ( -o> ) - — > 3 solutions co , = -1 cJû2 =2-^ nra i m •« m "3 ~~ vr r< k
nik
" ~ - ,~ ' U
rn
' k km rnk k
2m m
0 -±{ u m
/ k * km m\ p.- jj
~2"m f"Q _ k.
, m
1 1 1= 0 - 1 1
-1 1 1
0 ' "k
2m
° 1
0__ k_
2mk ,m
0 ]v
~2"mkm j
Ai_X2
vecteur propreX2 = 0
t^
•^r
[ ^ lt — \
x.1X2
y -y-*• t - A j
= o — *• - X j^ - X
, ^3 j "3
*• _ '
x,Y
1 X3 j
t -X3 r = C
- X3 =^
—
0 *>X
v,=1
0-1
s y vecteur propre^ X,
~ 2 A3 ~ 3 ~
- X -3 0 ^V~^î
0 — >muât
•*S^
-*•2
]_!,
y -^ ^,x^ y _ — vecteur propre
= 0 — N- -Xi
^2
3]— 1> 'solutions générales :
+ 2X 2 - X3 = o —
- X~ 3
x^t)
x,(t)= P vT. (tu
X,jCOS (û
V =3
111
'
t+ 9,)
3 t + T )
X i eus f (0 ; ', + <pi ) + X2 cos (cù21 + 92 ) + Xa cos (0131 + 93 )(J - X2 COS (0)2 t + (p2 ) + X3 COS (CÙ3 t + 93 )
A : L'OS ( O J j 1 -l- cpi ) + X2 COS (CÙ2 t + 92 ) + Xs COS (0)3 t + (p3 )
antes X et 9 sont déterminés par les conditions initiales (C.I.)

L.M.D., suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
Réponse_3
-Œ-. , ;:I - , *• j |—J_
m 2|vs^x v ;
rn — m i - rn -_,
Les solutions du régime permanant sont du même type que l'excitation xs = a cos £1 t
-+ K,(t) = Xjcos ( Q t + <PJ) : écriture complexe ~x~s = a &l Q t
2 2
écnture matritieËe
des équations différentiellem
k.m
km
P , kX,
» k 'a m
ifialm'
système de 2 équations
A B
rn
- n . P1 r k
~ deT^™m
m m
detk_m
arg ( A ,+ i B j ) - arg ( A + i B) = arctg—^-
detm
k.m ifiafm
det m
X,
x, =
- arctg ~A
J m
B.
2 2A 2 + B
A + i B
= arctg
résoanance —1=- det = 0 = (-
m"
B :
2 résonnances
- arc,,, i
^
•fVl i \ **
1"2•3k + k
rnl reste immobile —1> X = 0 —'=• AI = 0 = ~^ "^Tn
ou bien (la 2èrnc équ. ditï) x2 + 0 4 - ^ x^ - 0 = [I
fi =
.m
._ krn
A r>, Je-f - D

L M.D. suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
repos ' pendule vertical, centre de gravité G de M en 0
[y, Pn mouvement rectiligne de x entraine le pendule qui s'écarte de 6
\e système mécanique est oscillatoire à 2 degré de liberté : x et 6
o!
le système est conservatif
(pas d*e frottrements)M
58 68
6L 5Lv
équations du mouvement
avec L - T - V
j _01 Sx ox
T = M ve \ L
—=A
MV = -i- k x - mg L
OM
v d Omm - —M—
dQMdt
x + L 6 cosG
~ L Ô sin8- x2 + v2~ xm + ïm
i - -i;- M x1' -<- •!• m[ ( x + L I cos8 )2+ ( - L 8 sinB )* ]
..- 4. V !x ' J -. 4rm[ x2 + L2 8"-r 2 x L 0 cos8 ] - ^ k xJ + mg Lcos8
!./ans ic cas des petites oscillations. 6 petit, on peut faire les approximations : sin9 ~ 9 et cosG ~ 1
(~>n obtient en appliquant la formule du lagrangien en x puis en 9 , et en négligeant les termes composés (petits),
un système de 2 équations différentielles linéaires du 2eme ordre couplés sans second membre
-> solut ions sinusoïdales
(M + m) ;* + m L 8* + k x = 0 x (0 = Aicos C œ l + \ )
LÏ + V +96 = 0 8Ct) = Aacos( f f l t+(pa )
F(t)=
écriture rnarntielle des équations différentielle:
avec
-to2 (M +m)+k VmL
-tu - œ L + g
8 =-«
0
0
1 fflt
C'est un système de 2 équations à 2 inconnus sans second membre qui possède d'autres solutions.que la
solut ion évidente A ; := A2 = 0 si et seulement si le déterminant - 0 - équation aux fréquences propres

L M.D.. suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
b^ile R.eponse_4
- tu2 (M + m) +k j [ -o) 2 L + g j + «)2 ( -eu2 m L) = 0 ~ <£>*
avec. a- i
A ' = b1 - a c = b
b'2L
e M
2 te»
* (fvl -*- m) g +kL
r*- r\
k g2b'
IL
2 M L ~ M L
-*• pulsations propres eo+ = b' î ^ A' -—* 2 modes
2L ' (^}(2l/
3 _ i).» - -r- oscilafeon pendule simple éô m
L
o* = § pan é'oscfctoci de M
b1 = c«
L """"^f- UIL
M L b ' 2 lorsque L —* 0
= b ' - î b 1 [ 1 -
i2 8 il 2 M L
2ML IM+rrrt
"i « i m ssl cta&aâi .ML psi d* ftsWii * *
2 ~

L.M.0. suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
Réponse 5
Le cylindre roule sans glisser ça veut dire que lorsqu'il tourne de 9 (mouvement de rotation) il se déplace en
même temps de x (mouvement de translation) : x = R6
L'énergie cinétique du système = Ec des cylindres = Ec de rotation + Ec de rotation
T =
J = ' 2 = R 8 2
L'énergie potentielle du système = Ep des 3 ressorts : (l'énergie potentielle des cylindres est constante)
Lorsque le cylindre 1 tourne de 0i , il se déplace en même temps de KI
Donc le point A allonge le ressort 1 de R6i + Xi = 2\\ = 2R9j
Alors ie cylindre 2. entraîné par le ressort du milieu, tourne de 92 et se déplace en même temps de X2
: Jonc le point B comprime le ressort 3 de R02 + X2 = 2x2 = 2R02
Le ressort 2 du milieu est alors déformé de X j - X2 = 2R9 t -
L = T - V.dl 68,'
ses solutions du type • \ A j e; 2
det = -Cû"
24k
mode 2 co = -
sultions générales
1 fflt
= 4 kR2
i f i k
16k
8k
3 M
3 M
— ««•
ei
Ba
; 3 M J ~ : U -
8 k3 M
8 k3 M
= P
-1 -1
-1 -1|
1 -1
1 1
A, C O S f c O1 \
A cos(ct ;
À,
A,2
A1
T3
t + *•
t + (
*" 3M
,.•"
0
0
.1°""
0
Pi)r *jf _t
03 T 3M
[AIIÂ,
0
016k \~3 M
JLJî ] —1> pulsations propres i™™ eu3 _ 11
2 3M
—1=vecteur propre Vj =
vecteur propre V2 =
1
-1
1
1
matrice de pas âge
1 1P =
-1 1
8j(t)=
83(t)=-
Remarque : Les constantes A et cp sont déterminés par les conditions initiales (C.I.)

L M.D., suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
1. Di bloqué
!rJLs^n" l-.w^~ï*> f
_~
- J, = v =1 c e; * ic
8 -t-°
x c-( 83
ics solutions du type
co îA, e C' 2 C*C'"•*«*-* il? 4. V-^-^v-v- AJ l 0
^ r* 4. r" •"• i~»^ L
C L 1 * 1 '- „ ï
model
mode 2 tu = —
j C+2C'
J
C+2J
CT"j
les
i
C'
— *
' 8 ,
8,
» | - U - 1 <w -»- —
C' - i -i
' l -. • -, À!
À.À
C1 1 -1i 1
~ 1 î
Ai
Aa
[ A côsfoj +<P1 1]
j j ' ' '
0
0
-H»vecteur propre Vj =
— *>
I f °I =l 0
' V
?**]
-*•vecteur propre V2 =•
g « A - o s f o j +<P ~1_^ ' ' 1 ^ l '
8-2 (t)=- A , c o s ( a i , t + 9i)
U)3 , ^
1
-1matrice de pasage
1 11
1
' " P =-l l
+ A ^ C ^ C U ; +(p,-.2 • ' V a t '2^+ A0 cos(cc2 t + ^Pa)
2.b. 9,(0) = a ; 02(0) = 0 et 0',(0) = 9'2(0) = 0
O i ( 0 ) - A I cos cpi + A 2 cos (p2 = a
02(0) AI cos cpi + AT cos cp2 = 0 — > AI cos cpi = A2 cos 92 — * 2 AI cos Ç] = a = 2A2 cos 92
O ' i ( O ) ~ - AI <jù| sin 9i - A? 0)2 sin 92 = 0
B'2(rO) = A j u j ] sin 91 - A2 012 sin 92 = 0 — » 2 A2 0)2 sin 92 = 0 et 2 AI CO] sin 91 = 0 — » 92 = 0 = 91
-> Ai = a/2 = A2
0i(t) = a/2 ( c^s coït + cos
62 (t) = - a/2 ( cos coï t - cos
énergie totale - Et - T + V = Ijlj3 + ICBf + 1 C'B? + I
énergie du disque 1système 1
+ 1C'8,
énergie du disque 2 énergie du couplagesystème 2
L.M.D., suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
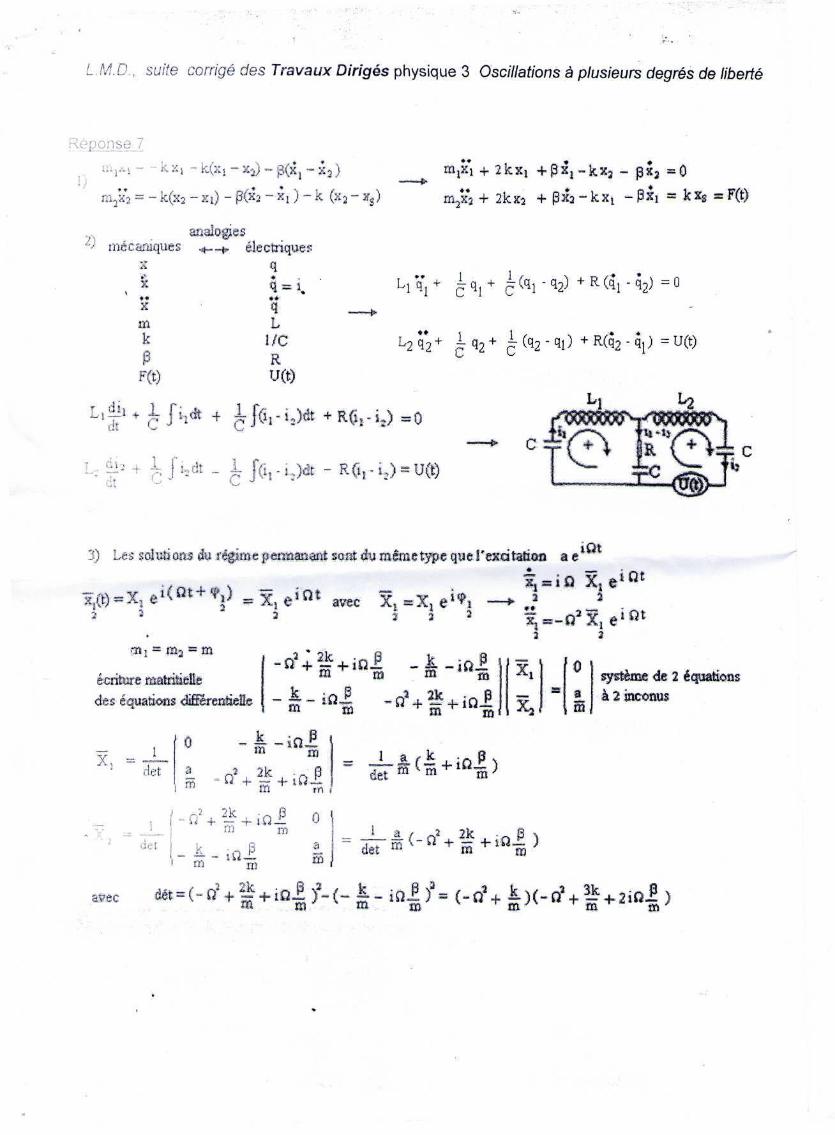
Ré£onse_7
m2x*2 = - k(x2 - KI) - p(K2 - K! ) - k (xa •
analogiesmécaniques ,3,—,, électriques
x q
xmk
qLi/cR
c
=F(t)
= U(t)
E
3) Les sd^oftf Éi:rlgim«peosffl»«lsffirtdw aetOt
miû1 *f X
k^^l ~— ,-y. ~— i-J,','is- 1 ^^ ilA^i ^^ 1.4,1
écriture niatriieledes éqatfooat <i®renM.e
0 - 1Y = _L.
det
' diêT
H
a ^j ^S * u + j
'' "/\fo , * *-*" ni ^
^, r~ ïtif ^
• _Q^2k + io J3 k - Q p y ~ | f o im ^' • " m ""3yâ . X,
-|-ÎQ| -flVf+iûlJ x,J" |(- - i f i j |
œk • * pH + iB
Qj 0ni
afil
1 a > - k, .A j3 sJïgj.'"" *'»**" • "g '
1 a / pî 2k • Q p \det rn " "' + m "in
système de 2 équationsà 2 iïicoaus
m
avec .

L.M.D., suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
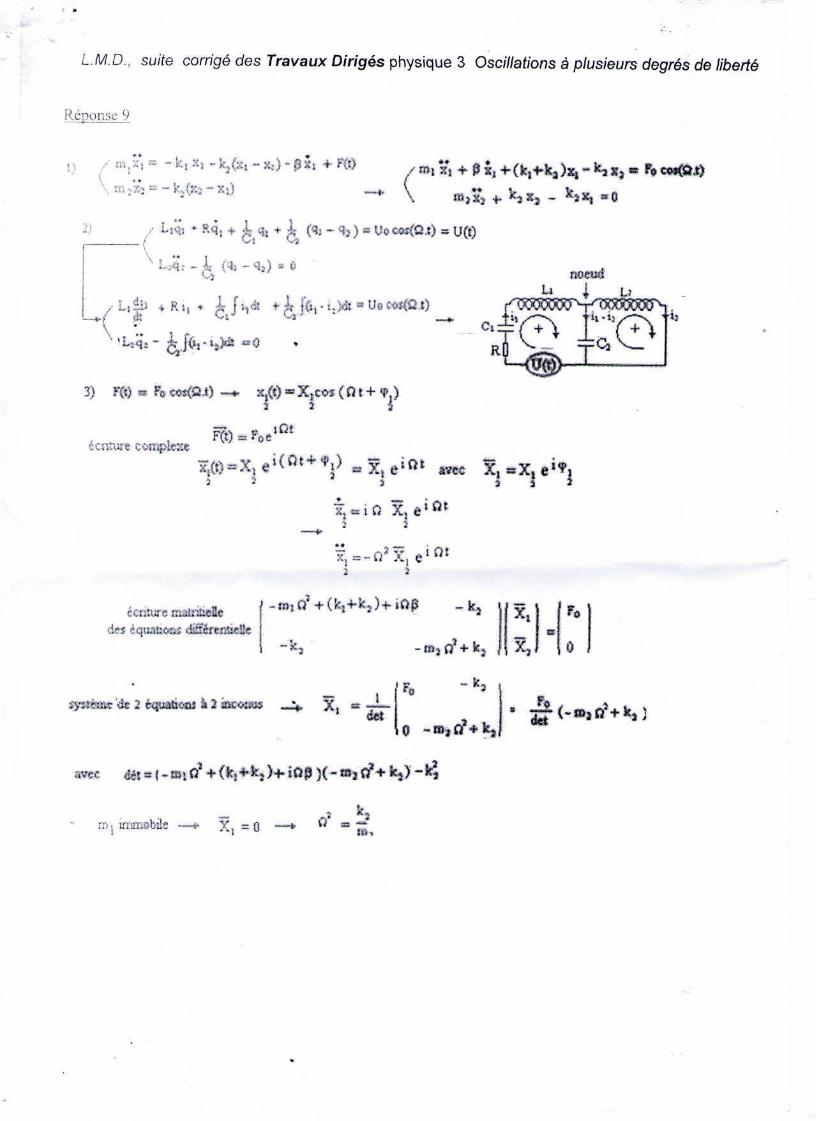
SyjteRéponse?
•4) <3 = o a. la masse m^ immobile
rj m
D = (1 „_*£y 2rC"' '* m
.à .trft *
nu».— ' i. ___ ,
Q' _ 3k 0 _ fîk.' r2 » r2 i m
ka
}3 2k* m ,
X, „X
0
0.
il easte "d'autre s sûlùtions que les soilîMotts X t ™ f l si éel= 0' * (~ Û: 4- — )(- Û 4. ." ' '
2 modes
! -1«M-l 1 x.
_ÉJ.
V -" • :..::
S ~* - m
mf~ «apropres
* ' matrice de passg«
i lp= '
sultîons gënéraleïX2 cosCûj t + fa)
ij (t)
«a (*)
eos( QJ
-1 I
+ X3 cos (Û2
+ X8
les constantes Xi et (y t sont déterminés gi'âce aux C.I.2 l
Remarque : lorsque l'excitation est arrêté, le système continu à osciller avec une des fréquence de résonance

L.M.D., suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
Réponse 8
0
T "•2
'fh
f »a
>' =*-mg ( R co*f * L cost )
, « T * V
K SKI ff' •*- L sm id Orn
MIL | ,
CtSf
»J•âiis cas des petite? oj
*
f ê + mgR(
«8» m Cl * mRLf
").
«0
L f * I f * g« « 0
L.M.D., suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
/ I«,îQi. *•
f ! ' _. JL,
Cj
3)
loi are •;• G m «s
•-%)
g
3 a
F(t)
s i
U(t)
"^ 11 -III
mep
x,
à 2del
§
m H i

L.M.D., suite corrigé des Travaux Dirigés physique 3 Oscillations à plusieurs degrés de liberté
Réponse 1(7V
T= +-1 * ")3 B21) 2
V = - mgL c os & - mgL c os 0.
= 2a
avec et X'2= asinftj
L = T - V = 2 ma2( ftf + |: ) + 2mga (cos8, + cos 62 ) - ^-]
4 ma2 &t + 2mgasin6î - ka2 (sin82 - sine»)cosB, =0
' 2 4ma2 E, + 2mgasin82 + ka2 (sin62 - sin8i,)cosB2 =0
Dan.s le cas des petites oscillations, 9] et 69 petits, on peut faire les approximations : sin9 ~ 9 et cosG ~ 1
4ma
4 ma2 a, + ,(2mga
ka2
83 - kr^ »\ a =n"^ ' X2a7 mf ' 40l.
On obtient un système de 2 équations différentielles du second ordre linéaires couplée sans second membre.
3) — ,
v>ff Tf slfa » c t. A | •<•• *« |
4es équations
a 4mA4KÎ
kX,
x,.
. 4.L 2m
~L
; à
&
propre