hmf v 02 - hydro.tg.free.frhydro.tg.free.fr/doc/hydro/linde/linde_moteur_hmf.pdf · *2) dans le...
TRANSCRIPT
HM
F/V/
R-0
2
Moteurs haute pression à plateau d‘inclinaison pour circuit fermé et circuit ouvert
Grâce à ses transmissions hydrostatiques,Linde devient leader mondial
Linde – le pionnier en matière de transmissionhydrostatique pour le marché mobile –a découvert et perfectionné la transmission hydro-statique, transmission idéale pour les engins mobiles.Depuis 1959, Linde a équipé deux millions de véhicules dans les domaines suivants
• Machines de travaux publics• Machines agricoles, viticoles et forestières• Engins communaux• Chariots élévateurs
avec des composants hydrostatiques pour l‘avance-ment et l‘équipement. L‘utilisation de ce type de transmission hydrostatique dans ses propres chariotsélévateurs a fait de Linde le leader mondial!
HM
F/V/
R-0
2 Sommaire Page
1. Caractéristiques et données techniques 2
2. Moteurs à cylindrée fixe HMF-02 4
3. Moteurs à cylindrée variable HMV-02
3.1 Régulation à deux positions (Flip-Flop) 5
3.1 Régulation proportionnelle 6
3.3 Régulation proportionnelle à 7régulation HP prédominante
4. Moteurs HMR-02 à régulation HP 8
5. Choix de géométries pour les orifices
5.1 Disposition des orifices 9haute pression
5.2 Variantes de montage 9
6. Options équipements
6.1 Régulation 10
6.2 Régulation avec commande Vmax 10
6.3 Alimentation pression de 11réglage du plateau
6.4 Balayage 11
6.5 Limitation pression secondaire 12(valve HP)
6.6 Annulation de pression de 12freinage hydrostatique
6.7 Valve de freinage 13
6.8 Capteur de régime 13
7. Codage du produit 14
8. Principales cotes d‘encombrement 16
9. Moteurs d‘exécutions spéciales 18
10. Huiles et filtration 19
11. Exemples d‘applications 20

Propriétés• Moteur à pistons axiaux et à plateau
d‘inclinaisonAvantages:• Grande uniformité• Forte accélération angulaire autorisée • Rendement de démarrage élevé
• Conception compacte à densité de puissance élevée
• Qualité supérieure• optimisée par:
• une haute fiabilité • une longue durée de vie • un faible niveau de bruit • des rendements élevés
Calibres standard• 28, 35, (50)55, 75, 105, 135• 165 et 210 à l‘étude
Caractéristiques de conception• Angle d‘inclinaison 21°• Grande disponibilité grâce à une grande fiabilité et
réserve en puissance de sécurité par des dispositifsde commande et de régulation précis et résistants
• Augmentation de la durée de vie grâce au logementdu plateau dans des paliers lisses et à un type deconnexion nouvelle génération entre pistons etpatins
• Augmentation de l‘étanchéité grâce à un carter résistant avec peu d‘orifices
• Passage de force optimisé par la conception enplateau inclinable
• Larges possibilités de variations du produit grâce àune conception modulaire à combinaisons simples
1. CARACTÉRISTIQUES ET DONNÉES TECHNIQUES
2
Les données qui ont servi de base à ce document correspondent au stade actuel de la conception du produit. Sous réserve demodifications techniques. Les cotes et les données techniques indiquées dans les plans d‘encombrement sont à respecter.

Données techniques
3
*6) à régime de service max, cylindrée max et pression continue*7) à régime de service max, cylindrée max et pression de service max*8) valable pour version à bride (voir chapitre 5.2)*9) version à l‘étude
*10) calibre moteur à cylindrée fixe: 51,3 cm3/trdonc, autres valeurs correspondantes couples/puissance
*1) seulement pour moteurs à cylindrée variable et à régulation*2) régime supérieur à la demande*3) autres valeurs à la demande, voir également valeurs de tarage des valves
secondaires au chapitre 7*4) à pression continue*5) à pression de service max
A l‘
étud
e
Calibre 28 35 55 75 105 135 165 210*10)
Cylindrée maxi [cm3/U] 28,6 35,6 54,8 75,9 105,0 135,6
mini *1) [cm3/U] –*9) –*9) 18,3 25,3 35,0 45,2
Régime max en service [min-1] 4500 4500 4100 3800 3500 3200(en 100% continu) à cylindrée max.
max en pointe *2) [min-1] 4800 4800 4400 4100 3800 3500à cylindrée max.
max en service [min-1] –*9) –*9) 4700 4400 4100 3700(en 100% continu ) à cylindrée min.
max en pointe *2) [min-1] –*9) –*9) 5300 5000 4700 4000à cylindrée min.
Pression continue (delta p) [bar] 250
max en service *3) [bar] 420
max en pointe (temporaire) [bar] 500
interne carter admissible (absolu) [bar] 2,5
Couple couple entraînement continu *4) [Nm] 114 142 218 302 418 540
couple entraînement max *5) [Nm] 191 238 366 508 702 907
Puissance continue *6) [kW] 54 67 94 120 153 181
en pointe *7) [kW] 90 112 157 202 257 304
Charge force de traction axiale [N] 2000admissible force de pression axiale [N] 2000de l‘arbre
force radiale [N] sur demande
Température [°C] 90carter admissible
Masse moteur à cylindrée fixe *8) [kg] 16 16 19 26 33 39
moteur variable et à régulation *8) [kg] –*9) –*9) 28 32 42 56
inertie [kgm2x10-2] 0,25 0,25 0,49 0,79 1,44 2,15
Dimensions Voir chapitre 8principales
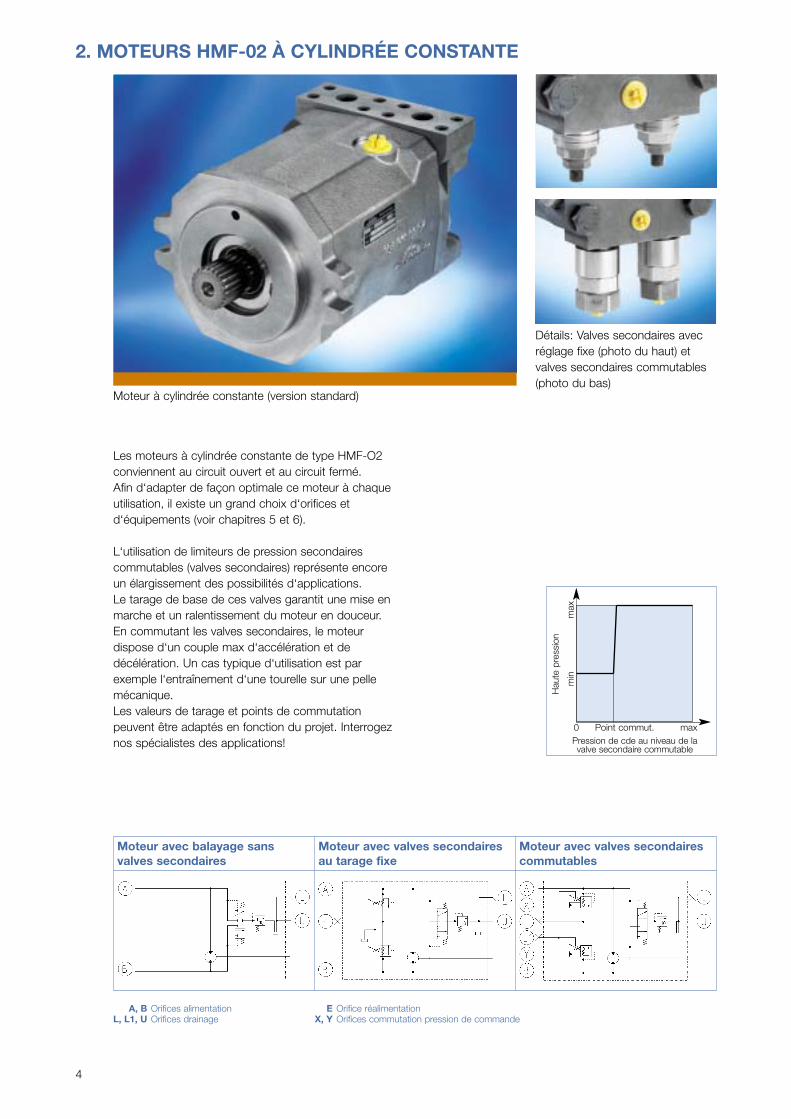
Les moteurs à cylindrée constante de type HMF-O2conviennent au circuit ouvert et au circuit fermé.Afin d‘adapter de façon optimale ce moteur à chaqueutilisation, il existe un grand choix d‘orifices et d‘équipements (voir chapitres 5 et 6).
L‘utilisation de limiteurs de pression secondaires commutables (valves secondaires) représente encoreun élargissement des possibilités d‘applications.Le tarage de base de ces valves garantit une mise enmarche et un ralentissement du moteur en douceur.En commutant les valves secondaires, le moteur dispose d‘un couple max d‘accélération et dedécélération. Un cas typique d‘utilisation est parexemple l‘entraînement d‘une tourelle sur une pellemécanique.Les valeurs de tarage et points de commutation peuvent être adaptés en fonction du projet. Interrogeznos spécialistes des applications!
Moteur à cylindrée constante (version standard)
Détails: Valves secondaires avecréglage fixe (photo du haut) et valves secondaires commutables(photo du bas)
Moteur avec balayage sans valves secondaires
Moteur avec valves secondairesau tarage fixe
Moteur avec valves secondairescommutables
2. MOTEURS HMF-02 À CYLINDRÉE CONSTANTE
4
E Orifice réalimentationX, Y Orifices commutation pression de commande
A, B Orifices alimentationL, L1, U Orifices drainage
0 Point commut. maxPression de cde au niveau de lavalve secondaire commutable
min
max
Hau
te p
ress
ion
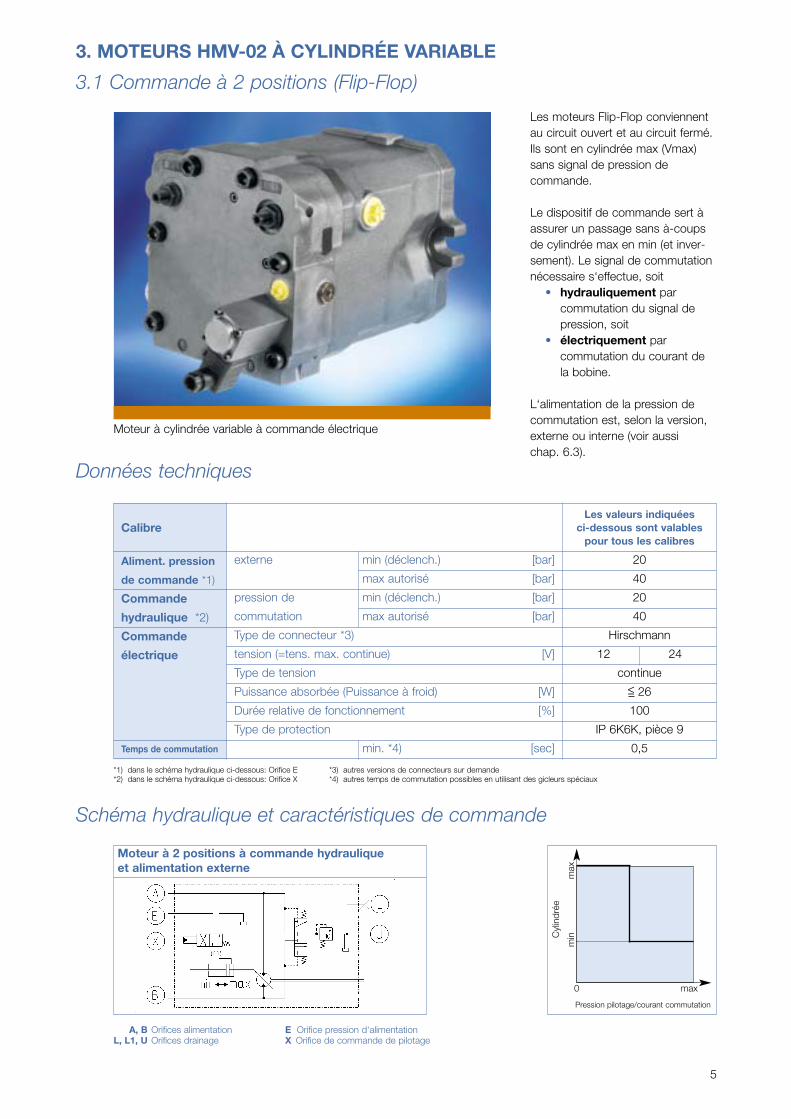
3.1 Commande à 2 positions (Flip-Flop)
3. MOTEURS HMV-02 À CYLINDRÉE VARIABLE
Schéma hydraulique et caractéristiques de commande
Données techniques
5
A, B Orifices alimentationL, L1, U Orifices drainage
E Orifice pression d‘alimentationX Orifice de commande de pilotage
Moteur à 2 positions à commande hydraulique et alimentation externe
externe min (déclench.) [bar]
max autorisé [bar]
pression de min (déclench.) [bar]
commutation max autorisé [bar]
Type de connecteur *3)
tension (=tens. max. continue) [V]
Type de tension
Puissance absorbée (Puissance à froid) [W]
Durée relative de fonctionnement [%]
Type de protection
min. *4) [sec]
Aliment. pression
de commande *1)
Commande
hydraulique *2)
Commande
électrique
Temps de commutation
CalibreLes valeurs indiquées
ci-dessous sont valablespour tous les calibres
20
40
20
40
Hirschmann
12 24
continue≤ 26
100
IP 6K6K, pièce 9
0,5
*1) dans le schéma hydraulique ci-dessous: Orifice E *2) dans le schéma hydraulique ci-dessous: Orifice X
*3) autres versions de connecteurs sur demande *4) autres temps de commutation possibles en utilisant des gicleurs spéciaux
Les moteurs Flip-Flop conviennentau circuit ouvert et au circuit fermé.Ils sont en cylindrée max (Vmax)sans signal de pression de commande.
Le dispositif de commande sert àassurer un passage sans à-coupsde cylindrée max en min (et inver-sement). Le signal de commutationnécessaire s‘effectue, soit
• hydrauliquement parcommutation du signal depression, soit
• électriquement parcommutation du courant de la bobine.
L‘alimentation de la pression decommutation est, selon la version,externe ou interne (voir aussi chap. 6.3).
Moteur à cylindrée variable à commande électrique
0 max
Pression pilotage/courant commutation
min
max
Cyl
indr
ée
Alim. pression decde externe *1)CommandehydrauliqueCommandeélectrique *2)
Temps de cde
2040
8 à 1440
Hirschmann12 24
Tension continue15,6
1300450 225
1200 600100
IP 6K6K, pièce 9100 Hz créneau - Dither
Courant continu (avec ou sans signalDither superposé pour réductiond‘hystérésis ou colmatage;Dither:
+-125 mA, 32-40 Hz, rapport capture 1:1)0,5
Calibre Les valeurs indiquées ci-dessoussont valables pour tous les calibres
minimum (déclenchement) [bar]maximum autorisé [bar]début à fin de commande [bar]pression maximum autorisée [bar]Type de connecteur *3) tension nominale (= tens. max continue) [V]type de tensionpuissance absorbée [W]courant nominal(= cour. max continu) [mA]courant de comm. début comm. [mA]
Fin de comm. [mA]durée relative du fonctionnement [%]type de protectiontypes de pour les boîtescommandes électroniques Linde:
digital par "PWM" Autre alternative possible: commande analogique
Mini. * 4 [sec]
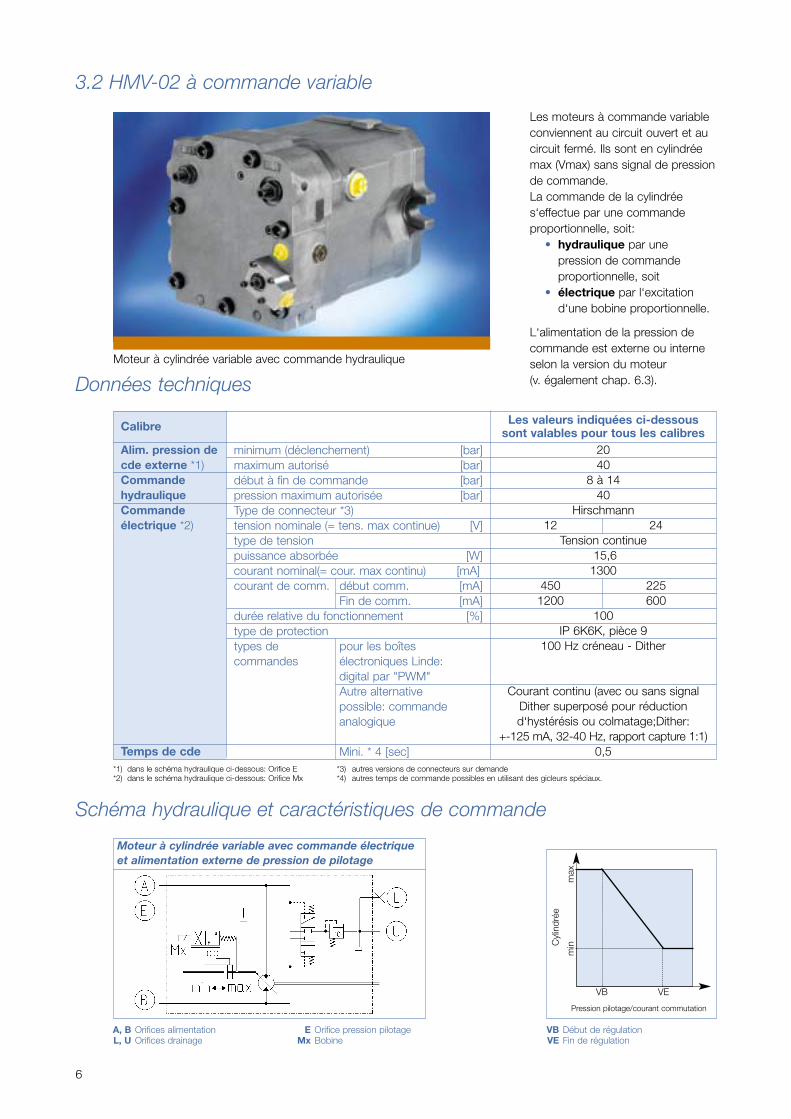
3.2 HMV-02 à commande variable
6
Schéma hydraulique et caractéristiques de commande
Données techniques
VB Début de régulationVE Fin de régulation
A, B Orifices alimentationL, U Orifices drainage
E Orifice pression pilotageMx Bobine
Moteur à cylindrée variable avec commande électrique et alimentation externe de pression de pilotage
*1) dans le schéma hydraulique ci-dessous: Orifice E *2) dans le schéma hydraulique ci-dessous: Orifice Mx
*3) autres versions de connecteurs sur demande *4) autres temps de commande possibles en utilisant des gicleurs spéciaux.
Les moteurs à commande variableconviennent au circuit ouvert et aucircuit fermé. Ils sont en cylindréemax (Vmax) sans signal de pression de commande.La commande de la cylindrées‘effectue par une commande proportionnelle, soit:
• hydraulique par une pression de commande proportionnelle, soit
• électrique par l‘excitationd‘une bobine proportionnelle.
L‘alimentation de la pression decommande est externe ou interneselon la version du moteur (v. également chap. 6.3).
Moteur à cylindrée variable avec commande hydraulique
VB VE
Pression pilotage/courant commutation
min
max
Cyl
indr
ée

7
3.3 HMV-02 à commande variable avec régulation superposée
Schéma hydraulique et caractéristiques de la régulation
Données techniques
Moteur à cylindrée variable avec commande superposéeVmax élect. et annulation pression hydrostatique
Début à fin de régulation [bar]
Pression max autorisée [bar]
Début régul.pression *2) [bar]
Fin régul. pression [bar]
Toutes données électriques
Mini. *3) [sec]
Commande
hydraulique *1)
Régulation
hydraulique
Bobines
Temps de commande
Calibre Les valeurs indiquées ci-dessous sont valables
pour tous les calibres
8 à 14
40
190 - 260
5% au-dessus début régul. HP
Voir tableau p. 50
0,5
*1) dans schéma hydraulique ci-dessous: Orifice X *2) réglable, SVP à indiquer au moment de la commande (voir chap. 7.3)
*3) Autres temps de commande possibles en utilisant des gicleurs spéciaux
Ce moteur est utilisé en circuitfermé et apporte à une commandeautomotive (par exemple avec la pompe Linde HPV-02) une régu-lation secondaire.
Il est en cylindrée max (Vmax) sanssignal de pression de commande.La commande variable s‘effectuehydrauliquement grâce à une pres-sion de commande primaire de lapompe.
A la commande il y a une régulationde pression hydraulique super-posée qui règle le moteur sur uncouple de besoin dès qu‘il atteintune haute pression définie.
Moteur à cylindrée variable avec commande superposée
Ce moteur dispose en plus:• d‘une commande électrique Vmax, qui permet de
le basculer ou de le maintenir ("commande moteurconstant") à une cylindrée max, et cela indépendam-ment de la pression de régulation, ainsi que
• d‘une annulation de pression de décélérationélectrique. Elle prévient les réactions provoquéespar l‘interaction des pressions système pendant lemécanisme de freinage hydrostatique et permetainsi une décélération contrôlée du véhicule.
VB Début comm.VE Fin comm.
RB Pression début.régul.RE Pression fin régul.
VB VE maxPression
min
max
Cyl
indr
ée
0
RB RE max0
Pression utilisation
A, B Orifices alimentation. L, U Orifices drainage
X Orifice pression de commande
M1 Bobine pour commande VmaxM2 Bobine pour annul. pression
hydrostatique de décélération
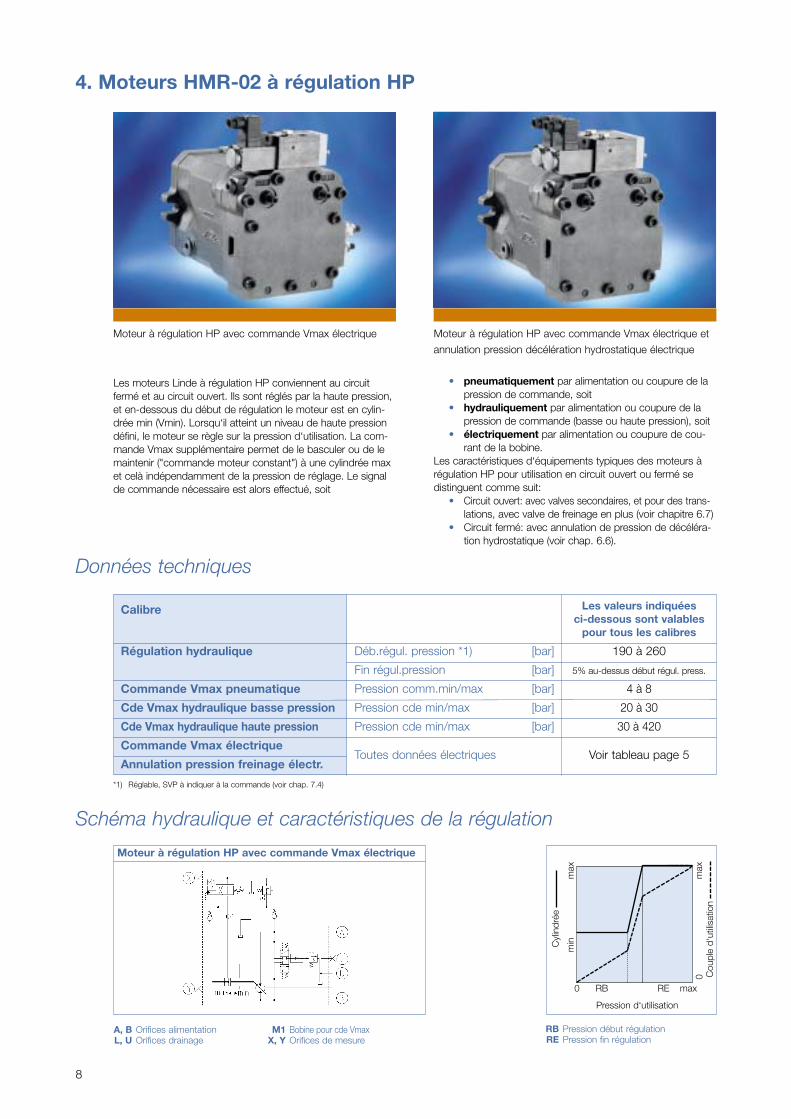
4. Moteurs HMR-02 à régulation HP
8
Moteur à régulation HP avec commande Vmax électrique Moteur à régulation HP avec commande Vmax électrique et
annulation pression décélération hydrostatique électrique
Schéma hydraulique et caractéristiques de la régulation
Données techniques
A, B Orifices alimentationL, U Orifices drainage
M1 Bobine pour cde VmaxX, Y Orifices de mesure
Moteur à régulation HP avec commande Vmax électrique
Déb.régul. pression *1) [bar]
Fin régul.pression [bar]
Pression comm.min/max [bar]
Pression cde min/max [bar]
Pression cde min/max [bar]
Toutes données électriques
Régulation hydraulique
Commande Vmax pneumatique
Cde Vmax hydraulique basse pression
Cde Vmax hydraulique haute pression
Commande Vmax électrique
Annulation pression freinage électr.
Calibre Les valeurs indiquées ci-dessous sont valables
pour tous les calibres
190 à 260
5% au-dessus début régul. press.
4 à 8
20 à 30
30 à 420
Voir tableau page 5
*1) Réglable, SVP à indiquer à la commande (voir chap. 7.4)
Les moteurs Linde à régulation HP conviennent au circuitfermé et au circuit ouvert. Ils sont réglés par la haute pression,et en-dessous du début de régulation le moteur est en cylin-drée min (Vmin). Lorsqu‘il atteint un niveau de haute pressiondéfini, le moteur se règle sur la pression d‘utilisation. La com-mande Vmax supplémentaire permet de le basculer ou de le maintenir ("commande moteur constant") à une cylindrée maxet celà indépendamment de la pression de réglage. Le signalde commande nécessaire est alors effectué, soit
• pneumatiquement par alimentation ou coupure de lapression de commande, soit
• hydrauliquement par alimentation ou coupure de lapression de commande (basse ou haute pression), soit
• électriquement par alimentation ou coupure de cou-rant de la bobine.
Les caractéristiques d‘équipements typiques des moteurs àrégulation HP pour utilisation en circuit ouvert ou fermé sedistinguent comme suit:
• Circuit ouvert: avec valves secondaires, et pour des trans-lations, avec valve de freinage en plus (voir chapitre 6.7)
• Circuit fermé: avec annulation de pression de décéléra-tion hydrostatique (voir chap. 6.6).
RB Pression début régulationRE Pression fin régulation
RB RE max
Pression d‘utilisation
min
0
max
max
Cyl
indr
ée
0
Cou
ple
d‘ut
ilisat
ion
Exécutions et disponibilité pour types moteurs
Version à bride*1)
Version encastrée*1) *2)
Moteur à cyl.constante
Circuit
Moteur à cyl.variable
Cyl. variable + cde HP superpos.
Moteur àrégulation HP
Ouv. Fermé Ouv. Fermé Fermé Ouv. Fermé
✓ ✓ ✓ ✓ ✓ ✓ ✓
✓ ✓ ✓ ✓ ✓ ✓ ✓
9
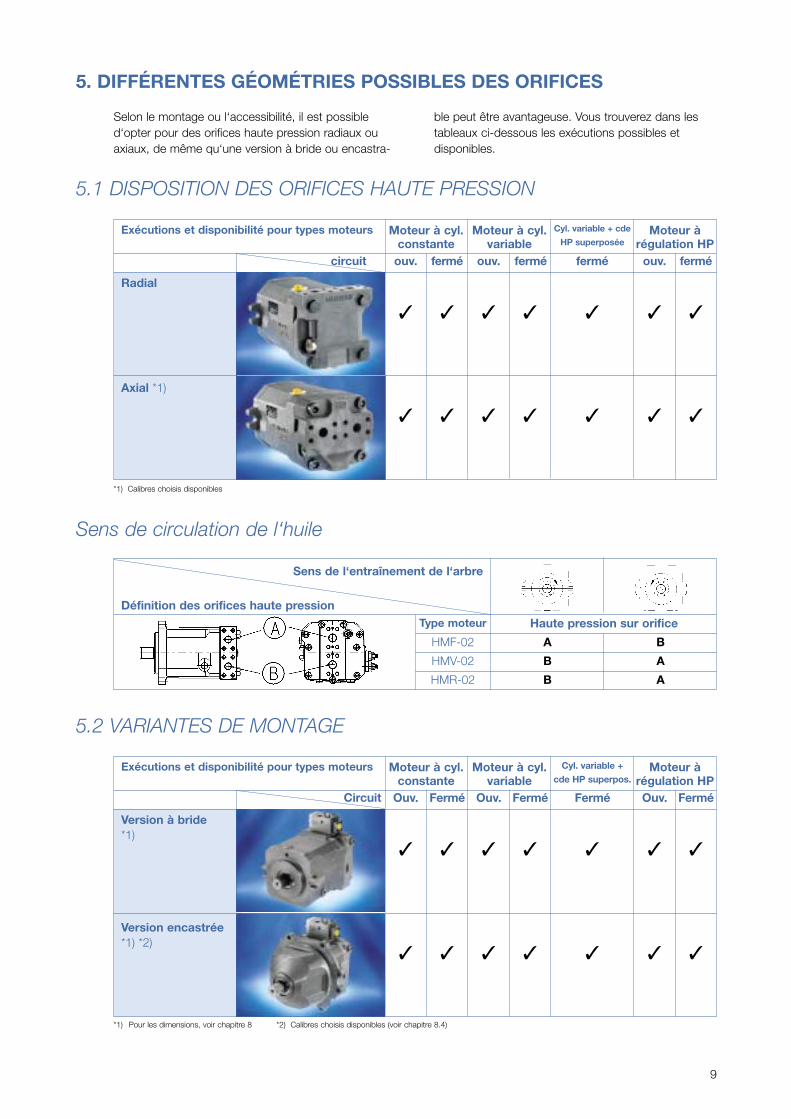
5. DIFFÉRENTES GÉOMÉTRIES POSSIBLES DES ORIFICES
5.1 DISPOSITION DES ORIFICES HAUTE PRESSION
Selon le montage ou l‘accessibilité, il est possibled‘opter pour des orifices haute pression radiaux ouaxiaux, de même qu‘une version à bride ou encastra-
ble peut être avantageuse. Vous trouverez dans lestableaux ci-dessous les exécutions possibles et disponibles.
Exécutions et disponibilité pour types moteurs
Radial
Axial *1)
Moteur à cyl.constante
Moteur à cyl.variable
Cyl. variable + cde
HP superposéeMoteur à
régulation HPouv. fermé ouv. fermé fermé ouv. fermé
✓ ✓ ✓ ✓ ✓ ✓ ✓
✓ ✓ ✓ ✓ ✓ ✓ ✓
*1) Calibres choisis disponibles
Sens de circulation de l‘huile
Définition des orifices haute pression
Sens de l‘entraînement de l‘arbre
Type moteur Haute pression sur orifice
HMF-02 A B
HMV-02 B A
HMR-02 B A
5.2 VARIANTES DE MONTAGE
*1) Pour les dimensions, voir chapitre 8 *2) Calibres choisis disponibles (voir chapitre 8.4)
circuit
10
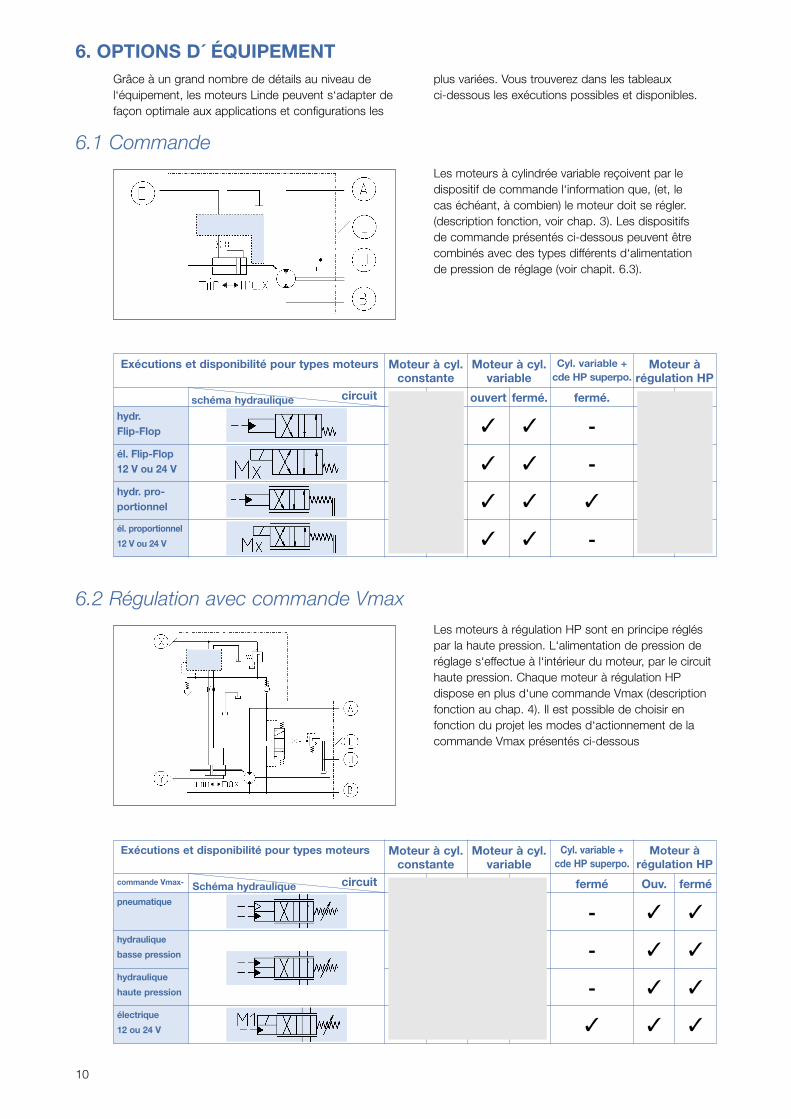
Exécutions et disponibilité pour types moteurs
hydr. Flip-Flop
él. Flip-Flop 12 V ou 24 V
hydr. pro-portionnel
él. proportionnel
12 V ou 24 V
Moteur à cyl.constante
circuitschéma hydraulique
Moteur à cyl.variable
Cyl. variable + cde HP superpo.
Moteur àrégulation HP
ouvert fermé. fermé.
✓
✓
✓
✓
✓
✓
✓
✓
-
-
✓
-
6.1 Commande
Grâce à un grand nombre de détails au niveau del‘équipement, les moteurs Linde peuvent s‘adapter defaçon optimale aux applications et configurations les
plus variées. Vous trouverez dans les tableaux ci-dessous les exécutions possibles et disponibles.
6. OPTIONS D´ ÉQUIPEMENT
Les moteurs à cylindrée variable reçoivent par le dispositif de commande l‘information que, (et, le cas échéant, à combien) le moteur doit se régler. (description fonction, voir chap. 3). Les dispositifs de commande présentés ci-dessous peuvent être combinés avec des types différents d‘alimentation de pression de réglage (voir chapit. 6.3).
Exécutions et disponibilité pour types moteurs
pneumatique
commande Vmax-
hydraulique
basse pression
hydraulique
haute pression
électrique
12 ou 24 V
Moteur à cyl.constante
circuitSchéma hydraulique
Moteur à cyl.variable
Cyl. variable + cde HP superpo.
Moteur àrégulation HP
fermé Ouv. fermé
-
-
-
✓ ✓ ✓
✓ ✓
✓ ✓
✓ ✓
6.2 Régulation avec commande VmaxLes moteurs à régulation HP sont en principe régléspar la haute pression. L‘alimentation de pression deréglage s‘effectue à l‘intérieur du moteur, par le circuithaute pression. Chaque moteur à régulation HP dispose en plus d‘une commande Vmax (descriptionfonction au chap. 4). Il est possible de choisir en fonction du projet les modes d‘actionnement de lacommande Vmax présentés ci-dessous
11
Exécutions et disponibilité pour types moteurs
alimentationexterne
alimentationinterne par la haute pression
Moteur à cyl. const.
CircuitSchéma hydraulique
Moteur à cyl. Variable
Cyl. variable +cde HP superp.
Moteur à régulation HP
ouv. fermé fermé ouv. fermé
- ✓ - - -
- ✓ ✓ - -
✓ - - ✓ ✓
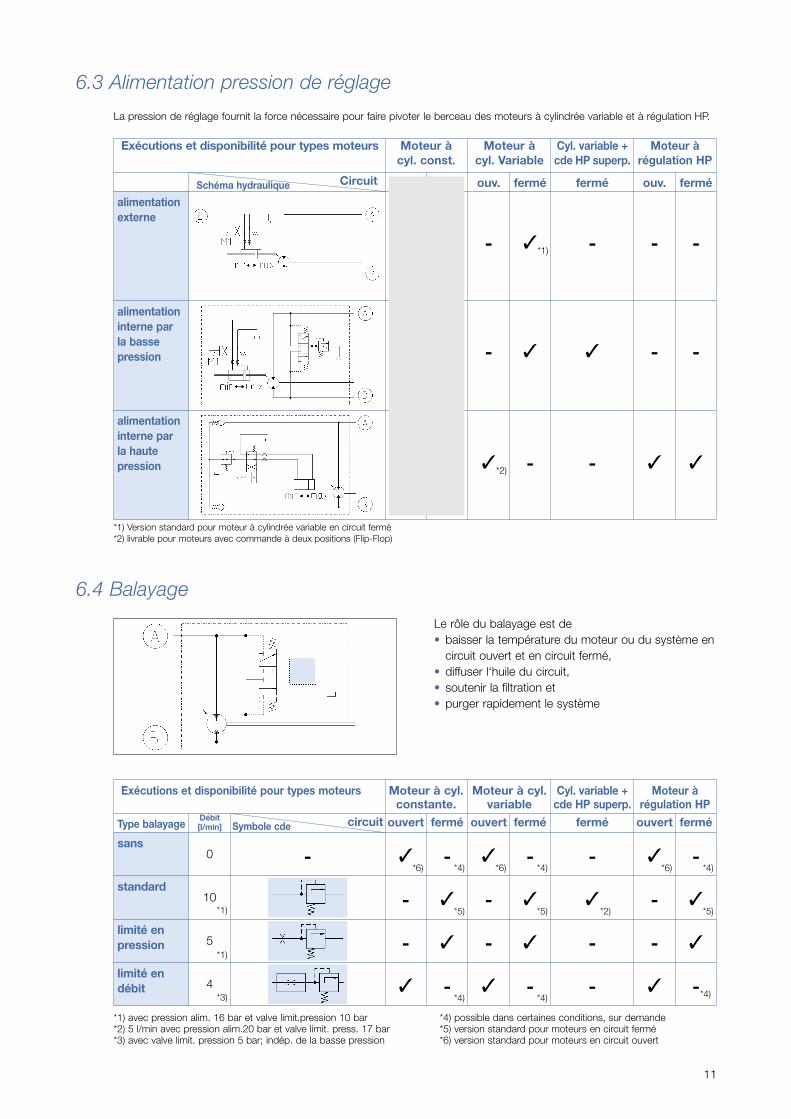
6.3 Alimentation pression de réglage
La pression de réglage fournit la force nécessaire pour faire pivoter le berceau des moteurs à cylindrée variable et à régulation HP.
Exécutions et disponibilité pour types moteurs
sans
standard
limité enpression
limité endébit
Type balayageDébit[l/min]
Moteur à cyl.constante.
circuitSymbole cde
Moteur à cyl.variable
Cyl. variable +cde HP superp.
Moteur à régulation HP
fermé ouvert ferméouvert ferméouvert fermé
- ✓ -✓ -✓-0
10
5
4
-
6.4 Balayage
Le rôle du balayage est de • baisser la température du moteur ou du système en
circuit ouvert et en circuit fermé, • diffuser l‘huile du circuit, • soutenir la filtration et• purger rapidement le système
*1)
*2)
alimentationinterne parla bassepression
*1) Version standard pour moteur à cylindrée variable en circuit fermé*2) livrable pour moteurs avec commande à deux positions (Flip-Flop)
*1) avec pression alim. 16 bar et valve limit.pression 10 bar*2) 5 l/min avec pression alim.20 bar et valve limit. press. 17 bar*3) avec valve limit. pression 5 bar; indép. de la basse pression
*4) possible dans certaines conditions, sur demande*5) version standard pour moteurs en circuit fermé*6) version standard pour moteurs en circuit ouvert
*6) *4) *6) *4) *4)*6)
✓ - ✓- ✓- ✓*5) *5) *5)*2)
- - ✓- ✓- ✓
- ✓ -✓ -✓ -*4) *4) *4)
*1)
*1)
*3)
Cyl. variable +cde HP superp.
12
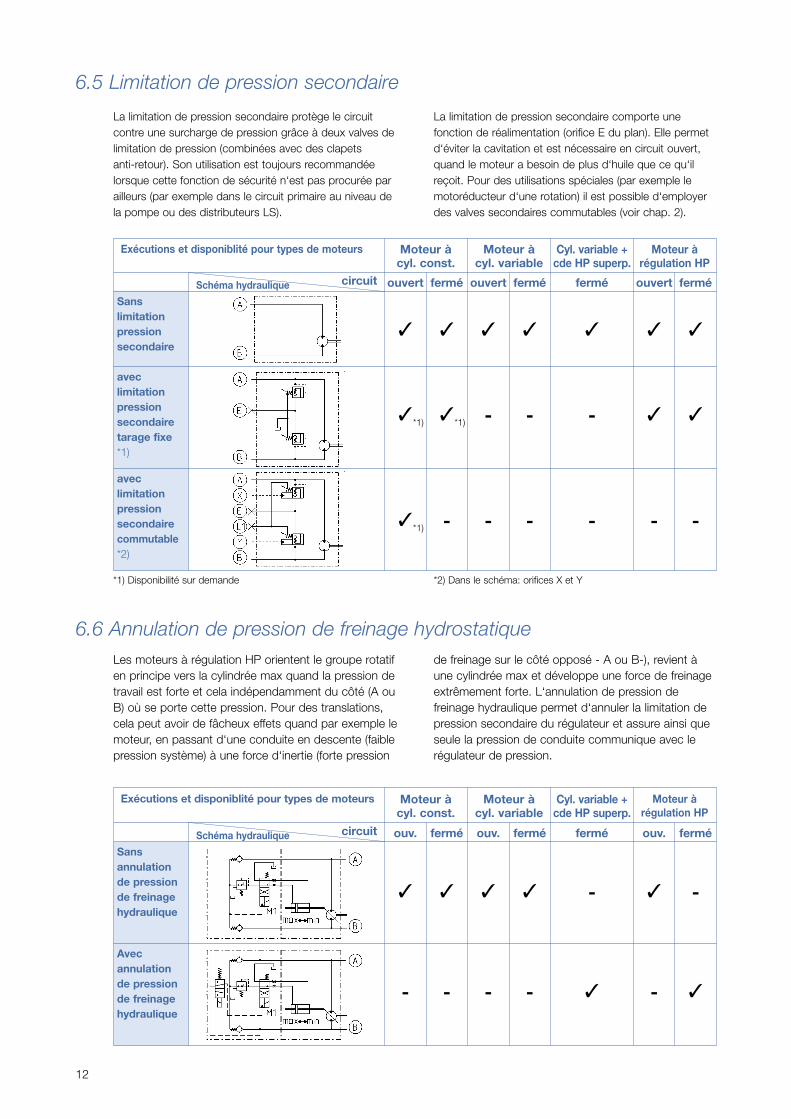
Exécutions et disponiblité pour types de moteurs
Sanslimitationpressionsecondaire
aveclimitationpressionsecondairetarage fixe*1)
aveclimitationpressionsecondairecommutable*2)
Moteur à cyl. const.
circuitSchéma hydraulique
Moteur à cyl. variable
Cyl. variable +cde HP superp.
Moteur à régulation HP
ouvert fermé ouvert fermé fermé ouvert fermé
✓ ✓ ✓ ✓ ✓ ✓ ✓
✓ ✓ - - - ✓ ✓
✓ - - - - - -
*1)
*1)
*1)
6.6 Annulation de pression de freinage hydrostatiqueLes moteurs à régulation HP orientent le groupe rotatifen principe vers la cylindrée max quand la pression detravail est forte et cela indépendamment du côté (A ouB) où se porte cette pression. Pour des translations,cela peut avoir de fâcheux effets quand par exemple lemoteur, en passant d‘une conduite en descente (faiblepression système) à une force d‘inertie (forte pression
de freinage sur le côté opposé - A ou B-), revient àune cylindrée max et développe une force de freinageextrêmement forte. L‘annulation de pression de freinage hydraulique permet d‘annuler la limitation de pression secondaire du régulateur et assure ainsi queseule la pression de conduite communique avec lerégulateur de pression.
Exécutions et disponiblité pour types de moteurs
Sansannulationde pressionde freinagehydraulique
Avec annulationde pressionde freinagehydraulique
Moteur à cyl. const.
circuitSchéma hydraulique
Moteur à cyl. variable
Moteur à régulation HP
ouv. fermé ouv. fermé fermé ouv. fermé
✓ ✓ ✓ ✓ - ✓ -
- - - - ✓ - ✓
*1) Disponibilité sur demande *2) Dans le schéma: orifices X et Y
6.5 Limitation de pression secondaire
La limitation de pression secondaire protège le circuitcontre une surcharge de pression grâce à deux valves delimitation de pression (combinées avec des clapets anti-retour). Son utilisation est toujours recommandée lorsque cette fonction de sécurité n‘est pas procurée parailleurs (par exemple dans le circuit primaire au niveau dela pompe ou des distributeurs LS).
La limitation de pression secondaire comporte une fonction de réalimentation (orifice E du plan). Elle permetd‘éviter la cavitation et est nécessaire en circuit ouvert,quand le moteur a besoin de plus d‘huile que ce qu‘ilreçoit. Pour des utilisations spéciales (par exemple lemotoréducteur d‘une rotation) il est possible d‘employerdes valves secondaires commutables (voir chap. 2).
13
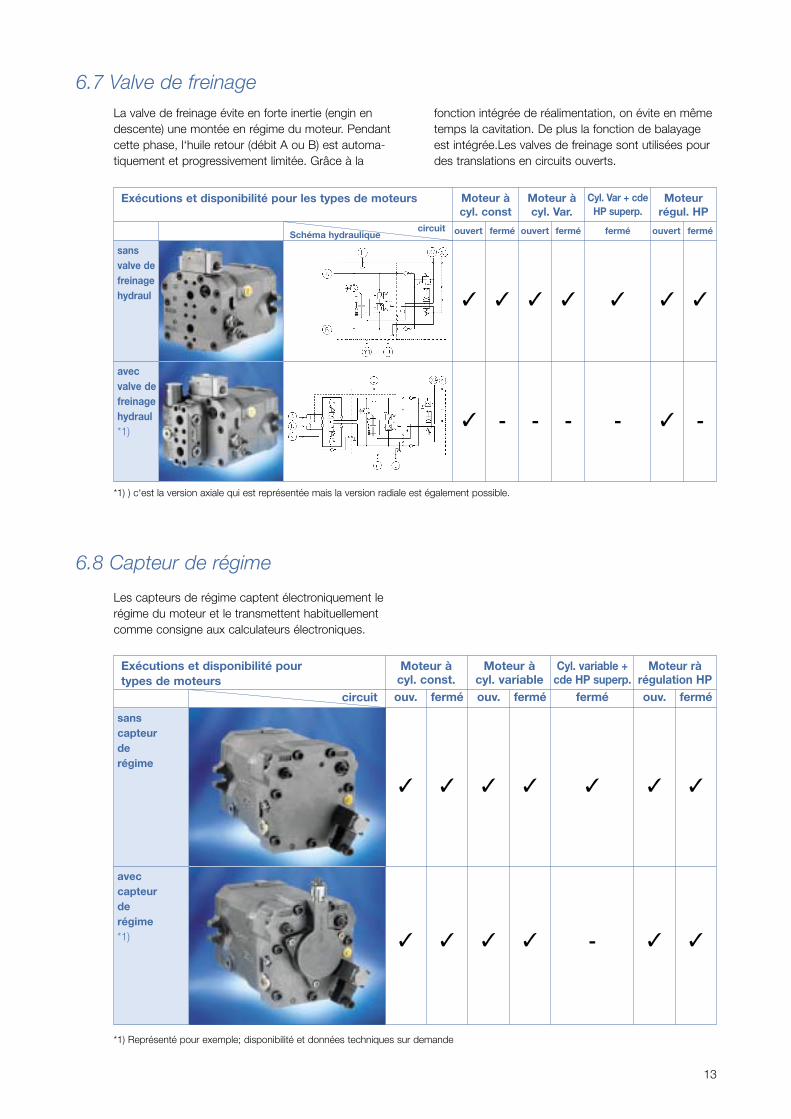
*1) ) c‘est la version axiale qui est représentée mais la version radiale est également possible.
*1) Représenté pour exemple; disponibilité et données techniques sur demande
6.7 Valve de freinageLa valve de freinage évite en forte inertie (engin endescente) une montée en régime du moteur. Pendantcette phase, l‘huile retour (débit A ou B) est automa-tiquement et progressivement limitée. Grâce à la
fonction intégrée de réalimentation, on évite en mêmetemps la cavitation. De plus la fonction de balayageest intégrée.Les valves de freinage sont utilisées pourdes translations en circuits ouverts.
Exécutions et disponibilité pour les types de moteurs
sansvalve defreinagehydraul
avecvalve defreinagehydraul*1)
Moteur àcyl. const
circuitSchéma hydraulique
Moteur àcyl. Var.
Cyl. Var + cdeHP superp.
Moteurrégul. HP
ouvertouvertouvert ferméferméferméfermé
✓✓✓
✓-
✓
---✓
✓✓✓
-
6.8 Capteur de régime
Les capteurs de régime captent électroniquement lerégime du moteur et le transmettent habituellementcomme consigne aux calculateurs électroniques.
Exécutions et disponibilité pour types de moteurs
sanscapteurderégime
aveccapteurderégime*1)
Moteur à cyl. const.
circuit
Moteur à cyl. variable
Cyl. variable +cde HP superp.
Moteur ràrégulation HP
ouv. fermé ouv. fermé fermé ouv. fermé
✓ ✓ ✓ ✓ ✓ ✓ ✓
✓ ✓ ✓ ✓ - ✓ ✓
-02
14
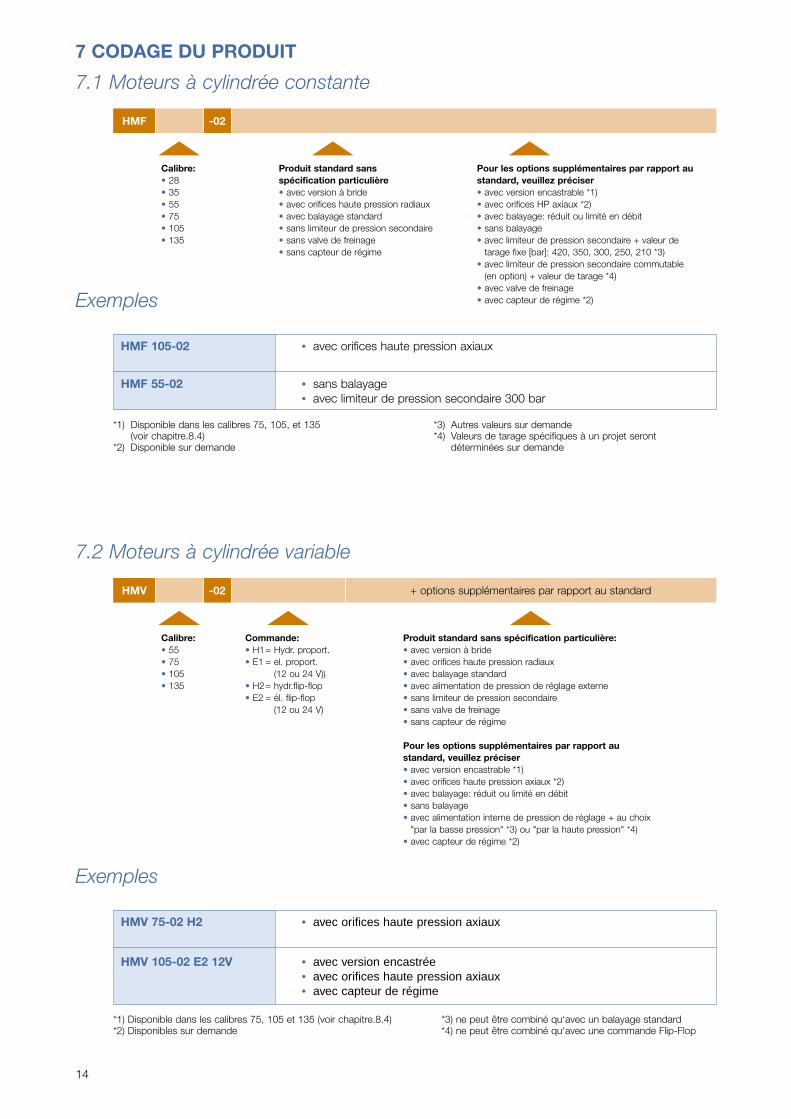
7 CODAGE DU PRODUIT
7.1 Moteurs à cylindrée constante
Exemples
HMF -02
Calibre:• 28• 35• 55• 75• 105• 135
Produit standard sans spécification particulière• avec version à bride• avec orifices haute pression radiaux • avec balayage standard• sans limiteur de pression secondaire• sans valve de freinage• sans capteur de régime
Pour les options supplémentaires par rapport austandard, veuillez préciser• avec version encastrable *1)• avec orifices HP axiaux *2)• avec balayage: réduit ou limité en débit• sans balayage• avec limiteur de pression secondaire + valeur de
tarage fixe [bar]: 420, 350, 300, 250, 210 *3)• avec limiteur de pression secondaire commutable
(en option) + valeur de tarage *4)• avec valve de freinage• avec capteur de régime *2)
HMF 105-02 • avec orifices haute pression axiaux
HMF 55-02 • sans balayage• avec limiteur de pression secondaire 300 bar
*1) Disponible dans les calibres 75, 105, et 135 (voir chapitre.8.4)
*2) Disponible sur demande
*3) Autres valeurs sur demande*4) Valeurs de tarage spécifiques à un projet seront
déterminées sur demande
7.2 Moteurs à cylindrée variable
Exemples
HMV + options supplémentaires par rapport au standard
Calibre:• 55• 75• 105• 135
Produit standard sans spécification particulière:• avec version à bride• avec orifices haute pression radiaux• avec balayage standard• avec alimentation de pression de réglage externe• sans limiteur de pression secondaire• sans valve de freinage• sans capteur de régime
Pour les options supplémentaires par rapport au standard, veuillez préciser• avec version encastrable *1)• avec orifices haute pression axiaux *2)• avec balayage: réduit ou limité en débit• sans balayage• avec alimentation interne de pression de réglage + au choix
"par la basse pression" *3) ou "par la haute pression" *4)• avec capteur de régime *2)
Commande:• H1= Hydr. proport.• E1 = el. proport.
(12 ou 24 V))• H2= hydr.flip-flop• E2 = él. flip-flop
(12 ou 24 V)
HMV 75-02 H2 • avec orifices haute pression axiaux
HMV 105-02 E2 12V • avec version encastrée• avec orifices haute pression axiaux• avec capteur de régime
*1) Disponible dans les calibres 75, 105 et 135 (voir chapitre.8.4)*2) Disponibles sur demande
*3) ne peut être combiné qu‘avec un balayage standard*4) ne peut être combiné qu‘avec une commande Flip-Flop
HMR -02 RB
HMV -02EH1P RB
15
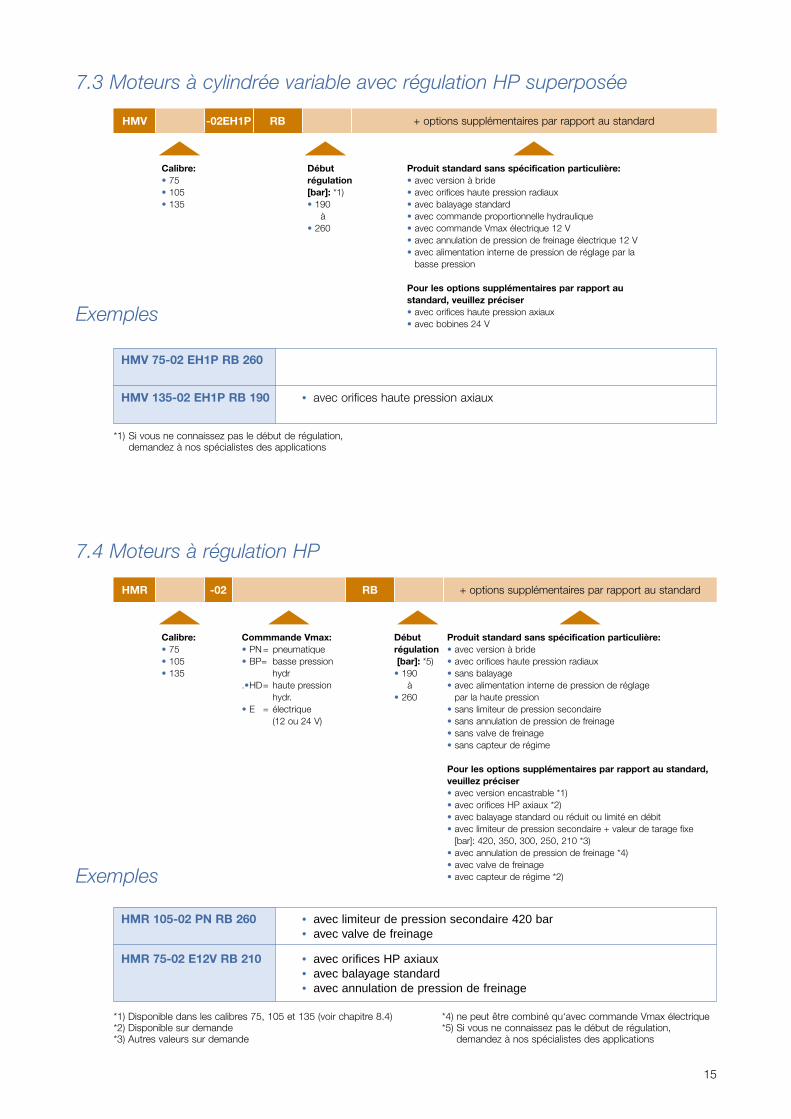
7.3 Moteurs à cylindrée variable avec régulation HP superposée
Exemples
+ options supplémentaires par rapport au standard
Calibre:• 75• 105• 135
Débutrégulation[bar]: *1)• 190
à• 260
Produit standard sans spécification particulière:• avec version à bride• avec orifices haute pression radiaux• avec balayage standard • avec commande proportionnelle hydraulique• avec commande Vmax électrique 12 V• avec annulation de pression de freinage électrique 12 V• avec alimentation interne de pression de réglage par la
basse pression
Pour les options supplémentaires par rapport au standard, veuillez préciser• avec orifices haute pression axiaux• avec bobines 24 V
HMV 75-02 EH1P RB 260
HMV 135-02 EH1P RB 190 • avec orifices haute pression axiaux
*1) Si vous ne connaissez pas le début de régulation, demandez à nos spécialistes des applications
7.4 Moteurs à régulation HP
Exemples
+ options supplémentaires par rapport au standard
Calibre:• 75• 105• 135
Débutrégulation[bar]: *5)
• 190à
• 260
Produit standard sans spécification particulière:• avec version à bride• avec orifices haute pression radiaux• sans balayage• avec alimentation interne de pression de réglage
par la haute pression• sans limiteur de pression secondaire• sans annulation de pression de freinage • sans valve de freinage• sans capteur de régime
Pour les options supplémentaires par rapport au standard,veuillez préciser• avec version encastrable *1)• avec orifices HP axiaux *2)• avec balayage standard ou réduit ou limité en débit• avec limiteur de pression secondaire + valeur de tarage fixe
[bar]: 420, 350, 300, 250, 210 *3)• avec annulation de pression de freinage *4)• avec valve de freinage• avec capteur de régime *2)
HMR 105-02 PN RB 260 • avec limiteur de pression secondaire 420 bar• avec valve de freinage
HMR 75-02 E12V RB 210 • avec orifices HP axiaux • avec balayage standard• avec annulation de pression de freinage
*1) Disponible dans les calibres 75, 105 et 135 (voir chapitre 8.4)*2) Disponible sur demande*3) Autres valeurs sur demande
*4) ne peut être combiné qu‘avec commande Vmax électrique*5) Si vous ne connaissez pas le début de régulation,
demandez à nos spécialistes des applications
Commmande Vmax:• PN= pneumatique• BP= basse pression
hydr.•HD= haute pression
hydr. • E = électrique
(12 ou 24 V)
16
Flasque de montage et bout d‘arbre selon norme ISO 3019-1Tous les filetages métriques des orifices selon norme DIN 3852
Filetages orifices selon norme ISO 6149 sur demandeDimensions des exécutions avec capteur de régime sur demande
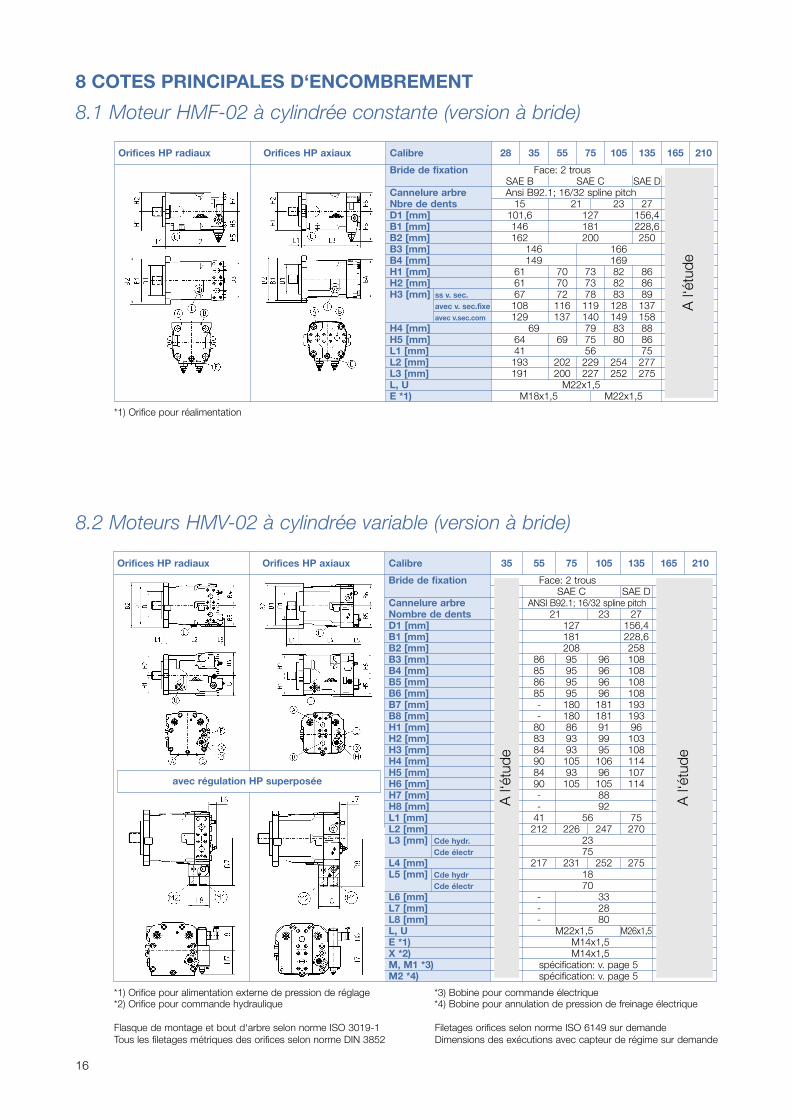
8.1 Moteur HMF-02 à cylindrée constante (version à bride)
8 COTES PRINCIPALES D‘ENCOMBREMENT
8.2 Moteurs HMV-02 à cylindrée variable (version à bride)
*1) Orifice pour réalimentation
*1) Orifice pour alimentation externe de pression de réglage *2) Orifice pour commande hydraulique
*3) Bobine pour commande électrique *4) Bobine pour annulation de pression de freinage électrique
Orifices HP radiaux Orifices HP axiaux Calibre 28 35 55 75 105 135 165 210
Bride de fixation Face: 2 trousSAE B SAE C SAE D
Cannelure arbre Ansi B92.1; 16/32 spline pitchNbre de dents 15 21 23 27D1 [mm] 101,6 127 156,4B1 [mm] 146 181 228,6B2 [mm] 162 200 250B3 [mm] 146 166B4 [mm] 149 169H1 [mm] 61 70 73 82 86H2 [mm] 61 70 73 82 86H3 [mm] ss v. sec. 67 72 78 83 89
avec v. sec.fixe 108 116 119 128 137avec v.sec.com 129 137 140 149 158
H4 [mm] 69 79 83 88H5 [mm] 64 69 75 80 86L1 [mm] 41 56 75L2 [mm] 193 202 229 254 277L3 [mm] 191 200 227 252 275L, U M22x1,5E *1) M18x1,5 M22x1,5
A l‘
étud
e
Orifices HP radiaux Orifices HP axiaux Calibre 35 55 75 105 135 165 210
Bride de fixation Face: 2 trousSAE C SAE D
Cannelure arbre ANSI B92.1; 16/32 spline pitchNombre de dents 21 23 27D1 [mm] 127 156,4B1 [mm] 181 228,6B2 [mm] 208 258B3 [mm] 86 95 96 108B4 [mm] 85 95 96 108B5 [mm] 86 95 96 108B6 [mm] 85 95 96 108B7 [mm] - 180 181 193B8 [mm] - 180 181 193H1 [mm] 80 86 91 96H2 [mm] 83 93 99 103H3 [mm] 84 93 95 108H4 [mm] 90 105 106 114H5 [mm] 84 93 96 107H6 [mm] 90 105 105 114H7 [mm] - 88H8 [mm] - 92L1 [mm] 41 56 75L2 [mm] 212 226 247 270L3 [mm] Cde hydr. 23
Cde électr 75L4 [mm] 217 231 252 275L5 [mm] Cde hydr 18
Cde électr 70L6 [mm] - 33L7 [mm] - 28L8 [mm] - 80L, U M22x1,5 M26x1,5E *1) M14x1,5X *2) M14x1,5M, M1 *3) spécification: v. page 5M2 *4) spécification: v. page 5
avec régulation HP superposée
A l‘
étud
e
A l‘
étud
e
Flasque de montage et bout d‘arbre selon norme ISO 3019-1Tous les filetages métriques des orifices selon norme DIN 3852
Filetages des orifices selon norme ISO 6149 sur demande Dimensions des exécutions avec capteur de régime sur demande
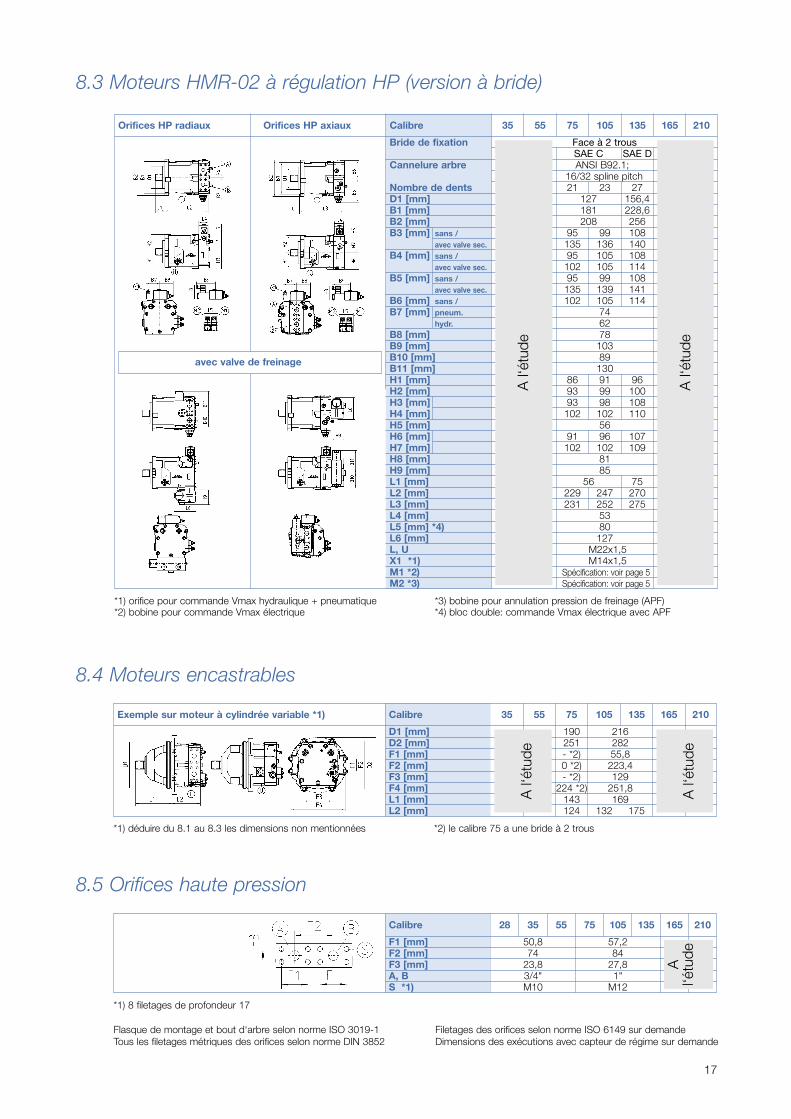
8.3 Moteurs HMR-02 à régulation HP (version à bride)
8.4 Moteurs encastrables
*1) orifice pour commande Vmax hydraulique + pneumatique*2) bobine pour commande Vmax électrique
*3) bobine pour annulation pression de freinage (APF)*4) bloc double: commande Vmax électrique avec APF
*1) déduire du 8.1 au 8.3 les dimensions non mentionnées *2) le calibre 75 a une bride à 2 trous
8.5 Orifices haute pression
*1) 8 filetages de profondeur 17
17
avec valve de freinage
A l‘
étud
e
A l‘
étud
e
Orifices HP radiaux Orifices HP axiaux Calibre 35 55 75 105 135 165 210
Bride de fixation Face à 2 trousSAE C SAE D
Cannelure arbre ANSI B92.1; 16/32 spline pitch
Nombre de dents 21 23 27D1 [mm] 127 156,4B1 [mm] 181 228,6B2 [mm] 208 256B3 [mm] sans / 95 99 108
avec valve sec. 135 136 140B4 [mm] sans / 95 105 108
avec valve sec. 102 105 114B5 [mm] sans / 95 99 108
avec valve sec. 135 139 141B6 [mm] sans / 102 105 114B7 [mm] pneum. 74
hydr. 62B8 [mm] 78B9 [mm] 103B10 [mm] 89B11 [mm] 130H1 [mm] 86 91 96H2 [mm] 93 99 100H3 [mm] 93 98 108H4 [mm] 102 102 110H5 [mm] 56H6 [mm] 91 96 107H7 [mm] 102 102 109H8 [mm] 81H9 [mm] 85L1 [mm] 56 75L2 [mm] 229 247 270L3 [mm] 231 252 275L4 [mm] 53L5 [mm] *4) 80L6 [mm] 127L, U M22x1,5X1 *1) M14x1,5M1 *2) Spécification: voir page 5M2 *3) Spécification: voir page 5
Exemple sur moteur à cylindrée variable *1) Calibre 35 55 75 105 135 165 210
D1 [mm] 190 216D2 [mm] 251 282F1 [mm] - *2) 55,8F2 [mm] 0 *2) 223,4F3 [mm] - *2) 129F4 [mm] 224 *2) 251,8L1 [mm] 143 169L2 [mm] 124 132 175
A l‘
étud
e
A l‘
étud
e
Calibre 28 35 55 75 105 135 165 210
F1 [mm] 50,8 57,2F2 [mm] 74 84F3 [mm] 23,8 27,8A, B 3/4" 1"S *1) M10 M12
Al‘é
tude

18
9. MOTEURS D‘EXÉCUTIONS SPÉCIALES
En dehors des versions présentées dans les chapitres2 à 4, Linde offre en outre des solutions sur mesurepour des demandes spécifiques. Au cas où vous ne
trouveriez pas dans cette brochure la réponse à votredemande, n‘hésitez pas à consulter nos spécialistesdes applications!
Grâce à ses fonctions auxiliaires intégrées, ce moteur offre
• une fonction de distributeur rotation droite/gauche• une fonction Torque-Control• une fonction prioritaire• une protection secondaire (limiteur de pression)
combinée avec une fonction de réalimentation
• une fonction balayage• une possibilité de décélération par des valves HP
avec les caractéristiques adaptables (= fonctionTorque-Control inversée)
c‘est à dire les conditions idéales pour des applicationsde rotation ( tourelle pelle) et de treuils en circuit ouvert.
Grâce à ses• deux arbres de sortie couplés et • une plage de cylindrées importante
ce moteur offre les conditions idéales pour utilisationdans des engins automoteurs multiaxiaux qui, outreun couple élevé de démarrage, doivent égalementatteindre progressivement des vitesses maximalesélevées.
9.1 Moteur à cylindrée constante avec fonctions auxiliaires intégrées
9.2 Moteur double
P, T Orifices d‘alimentationL, U Orifices de drainage
LS Pression LSMA, MB, MC Orifices de mesure
Schéma hydraulique
Moteur double, vue isométrique Moteur double, vue latérale
19
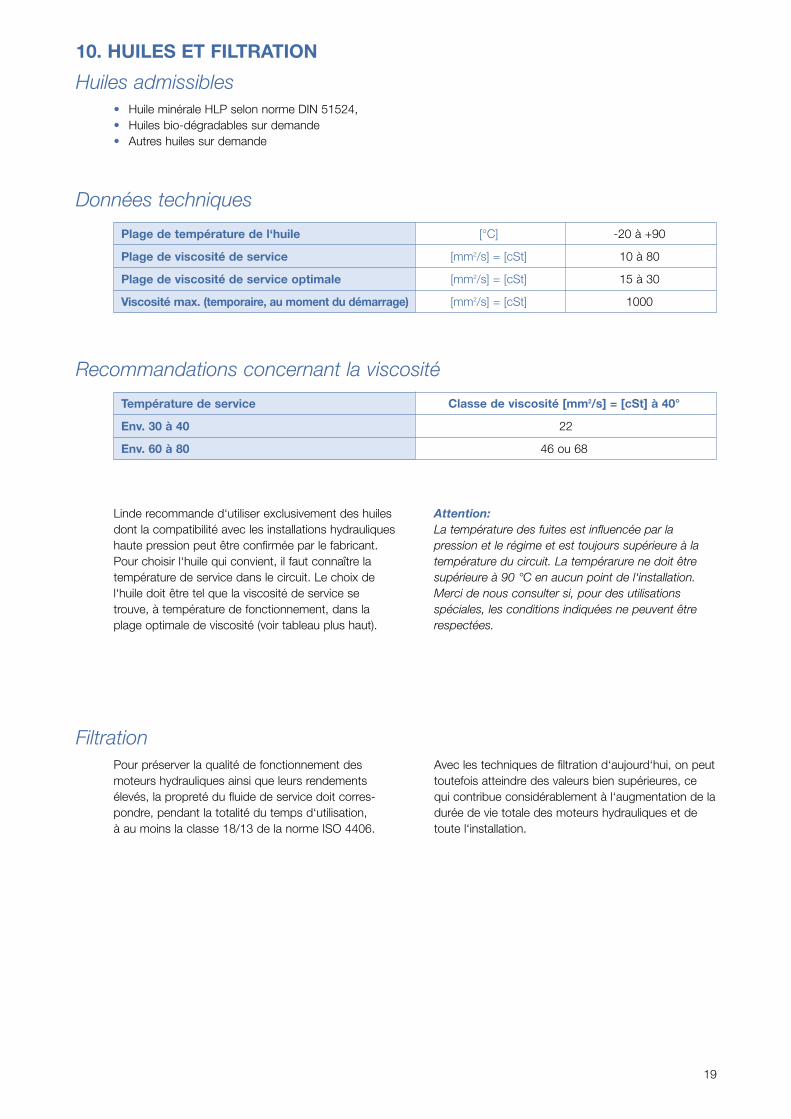
Huiles admissibles
10. HUILES ET FILTRATION
• Huile minérale HLP selon norme DIN 51524, • Huiles bio-dégradables sur demande• Autres huiles sur demande
Données techniques
Recommandations concernant la viscosité
Linde recommande d‘utiliser exclusivement des huilesdont la compatibilité avec les installations hydrauliqueshaute pression peut être confirmée par le fabricant.Pour choisir l‘huile qui convient, il faut connaître latempérature de service dans le circuit. Le choix del‘huile doit être tel que la viscosité de service se trouve, à température de fonctionnement, dans laplage optimale de viscosité (voir tableau plus haut).
Attention:La température des fuites est influencée par la pression et le régime et est toujours supérieure à latempérature du circuit. La tempérarure ne doit êtresupérieure à 90 °C en aucun point de l‘installation.Merci de nous consulter si, pour des utilisations spéciales, les conditions indiquées ne peuvent êtrerespectées.
FiltrationPour préserver la qualité de fonctionnement desmoteurs hydrauliques ainsi que leurs rendements élevés, la propreté du fluide de service doit corres-pondre, pendant la totalité du temps d‘utilisation, à au moins la classe 18/13 de la norme ISO 4406.
Avec les techniques de filtration d‘aujourd‘hui, on peuttoutefois atteindre des valeurs bien supérieures, ce qui contribue considérablement à l‘augmentation de ladurée de vie totale des moteurs hydrauliques et detoute l‘installation.
Plage de température de l‘huile
Plage de viscosité de service
Plage de viscosité de service optimale
Viscosité max. (temporaire, au moment du démarrage)
[°C]
[mm2/s] = [cSt]
[mm2/s] = [cSt]
[mm2/s] = [cSt]
-20 à +90
10 à 80
15 à 30
1000
Température de service
Env. 30 à 40
Env. 60 à 80
Classe de viscosité [mm2/s] = [cSt] à 40°
22
46 ou 68

11. APPLICATIONS
20
Fenwick - Linde
Activité Linde Hydraulique en direct
Vous pouvez nous joindre
• par téléphone 01 30 68 46 47
• par fax 01 30 68 47 72
• par internet http:\\www.fenwick-linde.fr
• par la poste Fenwick-Linde SARLActivité Linde Hydraulique1, rue du Maréchal de Lattre de Tassigny
F – 78854 Elancourt Cedex
Fenwick-Linde SARL1, rue du Maréchal de Lattre de Tassigny • F – 78854 Elancourt Cedex
LFH
-HM
F/V
/R-0
2 04
/00D