Avant-propos, Sommaire
Présentation du produit 1
Les bases du positionnement 2
Montage et dépose 3
Câblage 4
Paramétrage 5
Programmation des fonctionstechnologiques 6
Mise en service 7
Contrôle-commande 8
Description des fonctions 9
Programmation de programmesde déplacement 10
Gestion des erreurs et défauts 11
Annexes
Caractéristiques techniques A
Câbles de liaison B
Bloc de données utilisateur (DB utilisateur) C
Liste des abréviations D
Index
A5E00056648-005
Module de positionnementFM 453 pour servomoteur etmoteur pas à pas
Manuel
Ce manuel a le numéro de référence suivant :
6ES7453-3AH00-8CG0
SIMATIC
Edition 08/2008
Index-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
!Danger
signifie que la non−application des mesures de sécurité appropriées conduit à la mort ou à des lésions corporel-les graves.
!Attention
signifie que la non−application des mesures de sécurité appropriées peut conduire à la mort ou à des lésionscorporelles graves.
!Avertissement
signifie que la non−application des mesures de sécurité appropriées peut conduire à des lésions corporelleslégères.
Avertissement
sans triangle d’avertissement signifie que la non−application des mesures de sécurité appropriées peut conduire àun dommage matériel.
Nota
signifie que la non−application de l’indication appropriée peut entraîner un événement ou une situation indésira-bles.
Si plusieurs niveaux de dangers apparaissent, le signal d’avertissement du niveau le plus élevé correspondant esttoujours utilisé. Quand des risques de lésions corporelles sont signalés dans un avertissement pourvu d’un trian-gle d’avertissement, celui−ci peut également contenir un avertissement de dommages matériels.
Personnel qualifiéLa mise en service et l’utilisation de l’appareil ne doivent être effectuées que conformément au manuel par despersonnes qualifiées. Au sens des règles de sécurité du présent manuel, les personnes qualifiées sont des per-sonnes qui ont l’autorisation de mettre en service, de mettre à la terre et de repérer des appareils, systèmes etcircuits électriques conformément aux règles de sécurité en vigueur.
Utilisation conforme aux dispositionsTenez compte des points suivants :
!Attention
L’appareil ne doit être utilisé que pour les applications spécifiées dans le catalogue ou dans la description techni-que, et exclusivement avec des périphériques et composants recommandés par Siemens.
Le transport, le stockage, le montage, la mise en service ainsi que l’utilisation et la maintenance adéquats de l’ap-pareil sont des conditions indispensables pour garantir un fonctionnement correct et sûre du produit.
Marque de fabriqueToutes les désignations marquées du sont des marques déposées de SIEMENS AG. Les autres désignationsfigurant dans ce document peuvent être des marques dont l’utilisation par des tiers à leurs propres fins peut en-freindre les droits des propriétaires desdites marques.
Informations relatives à la sécuritéCe manuel donne des consignes que vous devez respecter pour votre propre sécurité ainsi que pouréviter des dommages matériels. Elles sont mises en évidence par un triangle d’avertissement et sont pré-sentées, selon le risque encouru, de la façon suivante :
Nous avons vérifié la conformité du contenu du présent manuel avec lematériel et le logiciel qui y sont décrits. Or des divergences n’étant pasexclues, nous ne pouvons pas nous porter garants pour la conformité in-tégrale.Si l’usage de ce manuel devait révéler des erreurs, nous en tiendronscompte et apporterons les corrections nécessaires dès la prochaine édition.
Exclusion de responsabilitéCopyright Siemens AG 1996-2008 All rights reserved
Toute communication ou reproduction de ce support d’information, touteexploitation ou communication de son contenu sont interdites, saufautorisation expresse. Tout manquement à cette règle est illicite et exposeson auteur au versement de dommages et intérêts. Tous nos droits sontréservés, notamment pour le cas de la délivrance d’un brevet ou celui del’enregistrement d’un modèle d’utilité.
Siemens AGAutomation & Drives90437 NürnbergRépublique Fédérale d’Allemagne Siemens AG 1996-2008
Sous réserve de modifications
Siemens Aktiengesellschaft 6ES7 453 1AH01-8CG0
iiiModule de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Avant-propos
Introduction
Le présent manuel renferme toutes les informations relatives au module FM 453 :
• matériel et fonctions
• paramétrage
• contrôle-commande
• blocs S7
• configuration de sécurité
Division du manuel
Les blocs d’information suivants décrivent l’objectif et l’utilisation du présent manuel.
• Présentation générale du module (chapitre 1)
Cette partie indique à l’utilisateur l’objectif et les possibilités d’utilisation du module. Ellecomporte des informations générales sur le FM 453 et ses fonctions.
• Les bases du positionnement (chapitre 2)
L’utilisateur y trouvera une introduction aux méthodes de positionnement ainsi qu’uneexplication de la terminologie correspondante.
• Montage et dépose du FM 453 (chapitre 3)
Cette partie explique le montage et la dépose du FM 453.
• Câblage du FM 453 (chapitre 4)
Cette partie décrit le raccordement et le câblage de l’entraînement, des codeurs et desentrées/sorties TOR.
• Paramétrage du FM 453 (chapitre 5)
Cette partie traite du paramétrage et des fonctions du logiciel ”Paramétrage du FM 453”.
• Programmation du FM 453 (chapitre 6)
Cette partie est consacrée à la programmation du FM 453 avec STEP 7.
• Mise en service du FM 453 (chapitre 7)
Cette partie décrit le déroulement des opérations de mise en service du FM 453.
• Contrôle-commande (chapitre 8)
Cette partie s’attache à décrire les possibilités de commande et de contrôle du FM 453 etindique quels sont les données/signaux susceptibles d’être commandés et observés.
Avant-propos
ivModule de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
• Informations de référence et annexes regroupant les principales informations techniques(fonctions du module, instructions de programmation, signaux d’interface, dépannage,caractéristiques techniques, interface standard de C+C).
• Liste des abréviations et index permettant la recherche des informations.
Conditions requises pour l’utilisateur
Le présent manuel décrit le matériel et les fonctions du module FM 453.
Pour la configuration, la programmation et la mise en service d’un SIMATIC S7-400 avec unmodule FM 453, l’utilisateur doit disposer d’un certain nombre de connaissances sur :
• SIMATIC S7
Manuel de mise en œuvre Automate programmable S7-400/M7-400, Installation et configuration
• les consoles de programmation (PG),
• la programmation avec STEP 7, et
• la configuration de l’interface utilisateur d’un pupitre de commande.
Utilisateurs du FM 453
La structure et le mode de représentation des informations du présent manuel sont axés surle domaine d’application du FM 453 et sur l’activité de l’utilisateur.
On distingue les domaines suivants :
• Le montage
Ces activités comprennent le montage et le câblage du FM 453.
• La programmation
Ces activités comprennent le paramétrage et la programmation du FM 453.
• Le dépannage et le diagnostic
Ces activités comprennent la recherche et l’élimination des défauts et erreurs
− dans la configuration matérielle du module et de ses composants, et
− dans la programmation, la gestion et le pilotage des fonctions du module.
• La conduite
Ces utilisateurs sont ceux qui assurent la conduite du FM 453. L’opérateur est donc unutilisateur uniquement concerné par l’exécution des contrats de positionnement.
Normes et homologations
Nos produits sont conformes aux exigences de la directive européenne 89/336/UE”Compatibilité électromagnétique” et aux normes européennes (NE) harmonisées qui ysont énumérées.
Vous trouverez la déclaration de conformité UE sur Internet :
http://support.automation.siemens.com/WW/view/de/15257461
Avant-propos
vModule de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Recyclage
Pour la récupération et le recyclage respectueux de l’environnement de votre ancien auto-mate SIMATIC selon l’état de la technologie actuelle, veuillez vous adresser à votreinterlocuteur de Siemens. L’interlocuteur correspondant vous trouverez sous l’adresseInternet suivant :
http://www.automation.siemens.com/partner
Assistance technique
Pour les questions techniques, contactez la hotline suivante :
Zone horaire :
Europe/Afrique Asie/Australie Amérique
Téléphone +49 (0) 180 5050 222 +86 1064 719 990 +1 423 262 2522
Fax +49 (0) 180 5050 223 +86 1064 747 474 +1 423 262 2289
Internet http://www.siemens.com/automation/support-request
E-mail [email protected]
Nota
Vous trouverez les numéros de téléphone pour l’assistance technique de chaque pays surInternet : http://www.siemens.com/automation/service&support
Questions à propos du manuel
En cas de questions sur la documentation (suggestions, corrections), veuillez envoyer unfax ou un e−mail à l’adresse suivante :Fax: +49 (0) 9131 98 63 315E-mail: [email protected]
Adresse Internet de Siemens
Vous recevrez des informations actuelles sur les produits SIMATIC sur l’Internet soushttp://www.ad.siemens.de/simatic.
Autre assistance
Afin de vous simplifier le commencement de travail avec un système d’automatisationSIMATIC S7, nous vous offrons de visiter des cours.
Pour de plus amples informations, veuillez vous adresser au centre de formation régional leplus proche ou au centre de formation central situé à D-90027 Nuremberg, téléphone ++49-911-895-3202.

Avant-propos
viModule de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
viiModule de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Sommaire
1 Présentation du produit 1-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Le module FM 453 dans l’automate programmable S7-400 1-2 . . . . . . . . . . . . . . . . . .
1.2 Présentation du module 1-6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Vue d’ensemble des fonctions du module par canal 1-9 . . . . . . . . . . . . . . . . . . . . . . . .
2 Les bases du positionnement 2-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Montage et dépose 3-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Montage du FM 453 3-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Dépose du FM 453 3-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Remplacement d’un module 3-4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Câblage 4-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Schéma de câblage d’un FM 453 4-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Description de l’interface vers l’entraînement 4-6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Raccordement de la partie puissance 4-14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Description de l’interface pour codeur 4-18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Raccordement des codeurs 4-23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Description de l’interface vers la périphérie 4-25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7 Câblage du connecteur frontal 4-33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Paramétrage 5-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Installation de ”Paramétrage du FM 453” 5-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Familiarisation avec ”Paramétrage du FM 453” 5-4 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Données de paramétrage 5-7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3.1 Paramètres machine 5-10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3.2 Consignes 5-25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3.3 Données de correction d’outil 5-26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3.4 Programmes de déplacement 5-28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Paramétrage avec ”Paramétrage du FM 453” 5-30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Mémorisation des données de paramétrage dans SDB >= 1 000 5-31 . . . . . . . . . . . . .
6 Programmation des fonctions technologiques 6-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Bases de la programmation 6-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1.1 Interface, bloc de données utilisateur (DB utilisateur) 6-3 . . . . . . . . . . . . . . . . . . . . . . . 6.1.2 Aperçu des fonctions et blocs standard 6-5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1.3 Communication CPU / FM 453 6-6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1.4 Structure du programme utilisateur 6-7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1.5 Alarme d’embrochage/débrochage, OB 83 6-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1.6 Défaillance de châssis 6-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1.7 Intégration d’un OP 6-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.1.8 Procédure de création du programme utilisateur (AWP) 6-9 . . . . . . . . . . . . . . . . . . . . .
Sommaire
viiiModule de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
6.2 Mise en service avec l’outil de paramétrage 6-10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Description des fonctions standard 6-10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.3.1 Bloc POS_INIT (FC 0) − Initialisation 6-11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.3.2 Bloc POS_CTRL (FC 1) − Echange de données 6-13 . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.3.3 Bloc POS_DIAG (FC 2) − Lecture des données d’alarme de diagnostic 6-23 . . . . . . . 6.3.4 Bloc POS_MSRM (FC 3) − Lecture des valeurs de mesure 6-26 . . . . . . . . . . . . . . . . .
6.4 Alarmes 6-27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 Bloc de données utilisateur (DB utilisateur) 6-29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6 Exemples d’application 6-40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7 Liste des erreurs, signalisations système (CPU) 6-47 . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.8 Caractéristiques techniques 6-49 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Mise en service 7-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Montage et câblage 7-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Valeurs initiales pour test et optimisation 7-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Test et optimisation 7-7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.1 Activation des paramètres machine 7-13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.2 Exploitation des caractéristiques de fonctionnement du moteur pas à pas 7-13 . . . . . 7.3.3 Mise en service de base de la liaison au moteur pas à pas 7-18 . . . . . . . . . . . . . . . . . . 7.3.4 Mise en service de base de la liaison au servomoteur 7-20 . . . . . . . . . . . . . . . . . . . . . . 7.3.5 Contrôle de la liaison au codeur 7-23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.6 Mise en service de l’asservissement de position 7-24 . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.7 Optimisation de l’asservissement de position 7-28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.8 Mise en service de la commande du moteur pas à pas 7-35 . . . . . . . . . . . . . . . . . . . . . 7.3.9 Ajustement de la coordonnée du point de référence 7-38 . . . . . . . . . . . . . . . . . . . . . . . . 7.3.10 Activation du diagnostic du régulateur de position 7-39 . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.11 Activation du diagnostic du moteur pas à pas 7-41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.12 Activation des fins de course logiciels 7-42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.13 Activation de la compensation de dérive 7-42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.14 Activation de la compensation du jeu 7-42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3.15 Possibilité de paramétrage de l’identification d’arrêt 7-44 . . . . . . . . . . . . . . . . . . . . . . . . 7.3.16 Diagnostic standard du régulateur de position en cas de surmodulation du
signal de réglage avec temps de réponse paramétrable 7-45 . . . . . . . . . . . . . . . . . . . .
8 Contrôle-commande 8-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Interface utilisateur standard pour le pupitre opérateur OP 17, 27, 37 8-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1.1 Interface utilisateur de l’OP 17 8-6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.1.2 Interface utilisateur de l’OP 27 8-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.1.3 Interface utilisateur de l’OP 37 8-10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Exploitation du DB utilisateur par le programme utilisateur pour la conduite 8-12 . . . .
8.3 Variables dans le DB utilisateur 8-14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4 Bloc de données pour signalisations d’état (DB-SE) 8-15 . . . . . . . . . . . . . . . . . . . . . . . .
9 Description des fonctions 9-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Signaux de commande/signalisations en retour 9-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.1.1 Signaux de commande 9-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.1.2 Signalisations en retour 9-6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.1.3 Introductions générales pour l’utilisation 9-10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Modes 9-14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2.1 Manuel à vue 9-15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Sommaire
ixModule de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.2.2 Commande 9-18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2.3 Mode ”Prise de référence” 9-20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2.4 Mode ”semi-automatique relatif” 9-25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2.5 MDI (Manual Data Input) 9-28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2.6 Mode automatique 9-32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.2.7 Mode automatique bloc par bloc 9-37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Données système 9-38 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.3.1 Modification de paramètres/données
(contrat d’écriture DB utilisateur, DBX39.3) 9-39 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.3.2 Réglages ponctuels (DB utilisateur, DBB34 et 35) 9-43 . . . . . . . . . . . . . . . . . . . . . . . . . . 9.3.3 Commandes ponctuelles (DB utilisateur, DBB36 et 37) 9-46 . . . . . . . . . . . . . . . . . . . . . 9.3.4 Décalage d’origine (contrat d’écriture DB utilisateur, DBX39.1) 9-48 . . . . . . . . . . . . . . . 9.3.5 Forçage de valeur réelle (contrat d’écriture DB utilisateur, DBX38.7) 9-50 . . . . . . . . . 9.3.6 Forçage de valeur réelle au vol (contrat d’écriture DB utilisateur, DBX39.0) 9-51 . . . . 9.3.7 Demande de données d’application (contrat d’écriture DB utilisateur, DBX39.6) 9-52 9.3.8 Teach-In (contrat d’écriture DB utilisateur, DBX39.7) 9-53 . . . . . . . . . . . . . . . . . . . . . . . 9.3.9 Définition du point de référence (contrat d’écriture DB utilisateur, DBX38.6) 9-53 . . . 9.3.10 Couplage d’axes (contrat d’écriture DB utilisateur, DBX40.0) 9-54 . . . . . . . . . . . . . . . . 9.3.11 Mesures 9-56 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.3.12 Données d’exploitation de base (contrat de lecture DB utilisateur, DBX42.0) 9-59 . . . 9.3.13 Bloc CN actif (contrat de lecture DB utilisateur, DBX42.1), bloc CN suivant
(contrat de lecture DB utilisateur, DBX42.2) 9-60 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.3.14 Données d’application (contrat de lecture DB utilisateur, DBX43.6) 9-61 . . . . . . . . . . . 9.3.15 Valeur réelle au changement de bloc
(contrat de lecture DB utilisateur, DBX42.3) 9-61 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.3.16 Données de maintenance (contrat de lecture DB utilisateur, DBX42.4) 9-61 . . . . . . . . 9.3.17 Données d’exploitation supplémentaires
(contrat de lecture DB utilisateur, DBX43.5) 9-62 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.3.18 Paramètres/Données (contrat de lecture DB utilisateur, DBX43.3) 9-62 . . . . . . . . . . . . 9.3.19 Etat du couplage d’axes (contrat de lecture DB utilisateur, DBX43.0) 9-62 . . . . . . . . .
9.4 Unité 9-63 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.5 Type d’axe 9-64 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6 Codeur 9-67 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.6.1 Codeurs incrémentaux 9-69 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.6.2 Codeurs absolus (SSI) 9-72 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.6.3 Moteur pas à pas sans codeur 9-75 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.6.4 Synchronisation 9-76 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.7 Traitement des consignes 9-78 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.7.1 Interpolation 9-79 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.7.2 Asservissement de position 9-83 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.7.3 Commande de moteur pas à pas 9-90 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.7.4 Driver de signal de réglage 9-93 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9.7.5 Couplage d’étage de puissance 9-97 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.8 Entrées/sorties TOR (contrat de lecture DB utilisateur, DBX43.4) 9-101 . . . . . . . . . . . . 9.8.1 Description du fonctionnement des entrées TOR 9-102 . . . . . . . . . . . . . . . . . . . . . . . . . . 9.8.2 Description du fonctionnement des sorties TOR
(contrat d’écriture DB utilisateur, DBX39.4) 9-103 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.9 Fins de course logiciels 9-104 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.10 Alarme process 9-105 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Sommaire
xModule de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
10 Programmation de programmes de déplacement 10-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1 Blocs de déplacement 10-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Déroulement des programmes et sens d’exécution 10-16 . . . . . . . . . . . . . . . . . . . . . . . . .
10.3 Transitions entre blocs 10-16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11 Gestion des erreurs et défauts 11-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.1 Classes d’erreur et réactions du module 11-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.2 Signalisations de défauts 11-5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2.1 Signalisation de défauts par les LED 11-5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2.2 Alarmes de diagnostic 11-6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2.3 Signalisation de défaut par signalisations en retour 11-7 . . . . . . . . . . . . . . . . . . . . . . . . . 11.2.4 Signalisation dans le bloc de données 11-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2.5 Consultation du tampon de diagnostic (PG/PC) 11-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.3 Liste des défauts et erreurs 11-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3.1 Alarmes de diagnostic 11-9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3.2 Signalisations de défaut 11-15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Caractéristiques techniques A-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Câbles de liaison B-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Câble de liaison pour codeur incrémental avec RS422 ou EXE(pour raccordement de règles linéaires) B-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Câble de liaison pour codeur intégré ROD 320 avec connecteur rond à 17 points B-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 Câble de liaison à extrémité non équipée pour codeur absolu (SSI) B-4 . . . . . . . . . .
B.4 Câble de liaison pour variateur SIMODRIVE 611-A (3 canaux) B-5 . . . . . . . . . . . . . . .
B.5 Câble de liaison pour étages de commande FM STEPDRIVE (3 canaux) B-6 . . . . .
B.6 Câble de liaison pour un étage de commande FM STEPDRIVE et deux variateurs SIMODRIVE 611-A (3 canaux) B-8 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.7 Câble de liaison pour deux étages de commande FM STEPDRIVE et un variateur SIMODRIVE 611-A (3 canaux) B-10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C Bloc données utilisateur (DB utilisateur) C-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D Liste des abréviations D-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Index alphabétique Index-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

1-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Présentation du produit
Contenu du chapitre
Paragraphe Thème Page
1.1 Le module FM 453 dans l’automate programmable S7-400 1-2
1.2 Présentation du module 1-6
1.3 Vue d’ensemble des fonctions du module par canal 1-9
Quelles sont les fonctionnalités du FM 453 ?
Le FM 453 est un module de positionnement piloté par microprocesseur pour la commandede servomoteurs ou de moteurs pas à pas.
Le module comporte trois canaux (axes) fonctionnant indépendamment l’un de l’autre.
Le mode de commande de chaque canal est fixé par le paramétrage.
Le FM 453 est un module performant pour l’asservissement de position et le positionnementavec entraînement pas à pas.
Le module fonctionne de manière autonome ; il est piloté par le biais du programme utilisa-teur dans le système SIMATIC S7-400.
Ce module permet de commander des axes rotatifs et linéaires avec asservissement deposition ou en commande avec poursuite.
Le FM 453 dispose de plusieurs modes de fonctionnement.
Il est équipé d’une mémoire de données non volatile pour le stockage des données de para-métrage.
• Le FM 453 ne nécessite aucun entretien (pas de piles).
• L’intégration et l’adaptation aux données de l’utilisateur sont possibles par le biais d’unparamétrage conforme au système.
1
Présentation du produit
1-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Quels sont les utilisations du FM 453 ?
Le FM 453 peut s’utiliser aussi bien pour de simples positionnements que pour des profils dedéplacement complexes assortis d’exigences très élevées en matière de dynamique, de pré-cision et de rapidité. Il convient également aux applications de positionnement dans des ma-chines fonctionnant à des cadences élevées.
Applications typiques du module de positionnement :
• chaînes-transferts
• lignes de montage
• presses
• machines à bois
• manipulateurs
• dispositifs de chargement
• déplacements auxiliaires dans le cas de fraiseuses et de tours
• machines d’emballage
• transitique.
Les fonctionnalités de base de chaque canal sont comparables à celle du module WF 721du système SIMATIC S5 et à celles du FM 353/354 du système SIMATIC S7-300.
1.1 Le module FM 453 dans l’automate programmable S7-400
Comment le module FM 453 est-il intégré à l’automate S7-400 ?
Le module FM 453 est réalisé sous forme de module de fonction de l’automate program-mable SIMATIC S7-400.
L’automate programmable SIMATIC S7-400 est composé d’une CPU et de différents mod-ules de périphérie montés sur un profilé-support.
Suivant les exigences, la configuration de l’automate peut occuper un châssis de base (ZG)et au maximum 21 châssis d’extension (EG).
Le FM 453 ne peut cependant être implanté que dans le châssis de base ou dans l’un deschâssis d’extension 1 à 6.
Le châssis de base contient la CPU.
Les règles de base pour configurer un automate sont données dans le manuel d’installationSystèmes d’automatisation S7-400/M7-400, Installation et configuration.
Présentation du produit
1-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
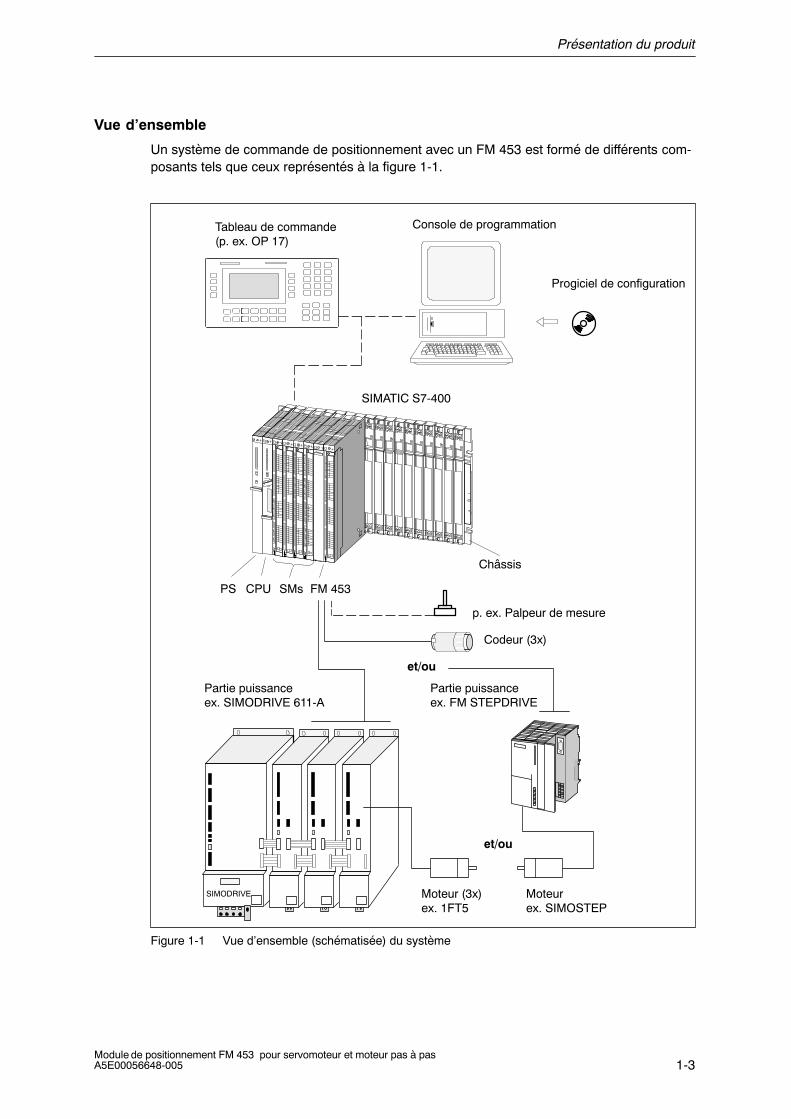
Vue d’ensemble
Un système de commande de positionnement avec un FM 453 est formé de différents com-posants tels que ceux représentés à la figure 1-1.
PS CPU SMs FM 453
SIMODRIVE
SIMATIC S7-400
Tableau de commande(p. ex. OP 17)
Console de programmation
Progiciel de configuration
Châssis
p. ex. Palpeur de mesure
Codeur (3x)
et/ou
Partie puissanceex. SIMODRIVE 611-A
Partie puissanceex. FM STEPDRIVE
et/ou
Moteurex. SIMOSTEP
Moteur (3x)ex. 1FT5
Figure 1-1 Vue d’ensemble (schématisée) du système
Présentation du produit
1-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Liaison MPI
Le module FM 453 peut être piloté par 3 stations MPI (PC, PG, OP) simultanément.
Composants
Les principaux composants et leurs fonctions sont regroupés dans le tableau 1-1.
Tableau 1-1 Composants d’une commande de positionnement
Composants Fonction
Châssis Il constitue la structure d’accueil mécanique et électrique des modulesdu S7-400.
FM 453 C’est le module de positionnement. Il est piloté par la CPU du S7-400.
Module unité centrale(CPU)
Il exécute le programme utilisateur. Il communique avec la PG, le tableaude commande via l’interface MPI et avec le FM 453 via le bus de fond depanier.
Alimentation (PS) Elle convertit la tension secteur (120/230 V c.a.) en 5 V et 24 V c.c.1)
pour l’alimentation du S7-400 et assure des fonctions de surveillance.
Modules de signaux (SM) Ils adaptent le niveau des signaux du processus à celui du S7-400 etinversement.
Console de programma-tion (PG)
Elle sert à configurer, paramétrer, programmer et tester le S7-400 et leFM 453.
Tableau de commande(TC)
Il est l’interface vers la machine. Il sert à la commande et au contrôle. Iln’est pas indispensable pour la conduite d’un FM 453.
Etage de commande Il commande le moteur.
Moteur Il entraîne l’axe.
Codeur Il s’agit du capteur de déplacement qui, en asservissement de position,fournit la position instantanée de l’axe. En comparant position réelle etposition de consigne, le FM 453 décèle immédiatement les écarts ettente de les compenser.
Progiciel de configuration CD-ROM avec :
• ensemble de blocs FC
• DB-PM (pour la mise en service d’un moteur pas à pas)
• outil de paramétrage ”Paramétrage du FM 453”
• interface utilisateur préconfigurée pour OP
• manuel au format PDF
• Getting started au format PDF
1) uniquement pour utilisation interne aux modules S7-400
Présentation du produit
1-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
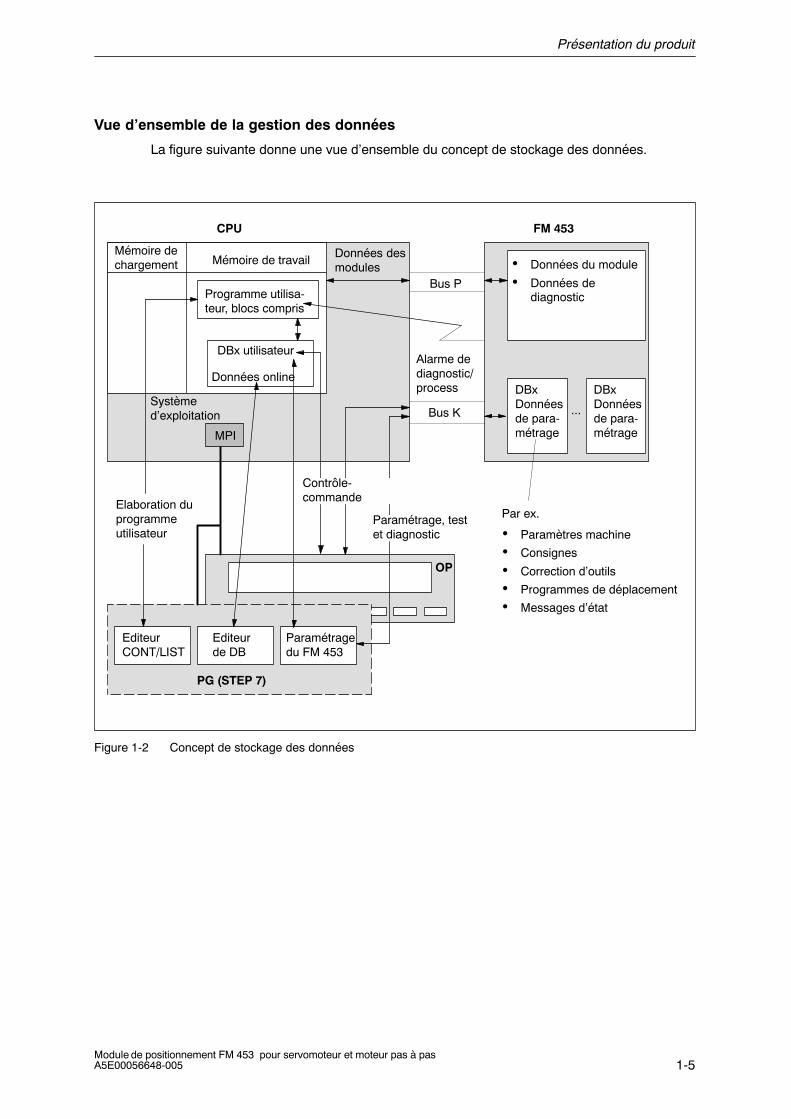
Vue d’ensemble de la gestion des données
La figure suivante donne une vue d’ensemble du concept de stockage des données.
FM 453CPU
OP
PG (STEP 7)
...
MPI
Données desmodules
Programme utilisa-teur, blocs compris
DBx utilisateur
Données online
EditeurCONT/LIST
Editeurde DB
Paramétragedu FM 453
Elaboration duprogrammeutilisateur
Bus P
Bus KSystèmed’exploitation
DBxDonnéesde para-métrage
Par ex.
• Paramètres machine
• Consignes
• Correction d’outils
• Programmes de déplacement
• Messages d’état
Alarme dediagnostic/process
• Données du module
• Données dediagnostic
Mémoire dechargement Mémoire de travail
Contrôle-commande
Paramétrage, testet diagnostic
DBxDonnéesde para-métrage
Figure 1-2 Concept de stockage des données
Présentation du produit
1-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
1.2 Présentation du module
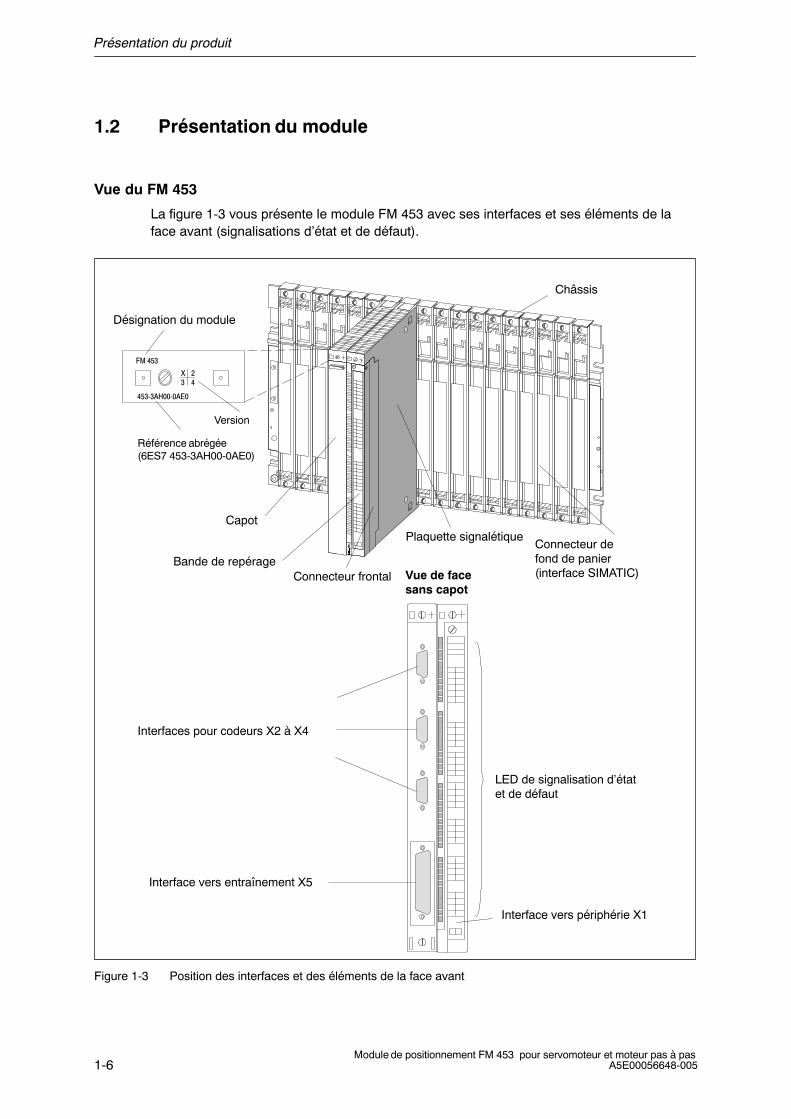
Vue du FM 453
La figure 1-3 vous présente le module FM 453 avec ses interfaces et ses éléments de laface avant (signalisations d’état et de défaut).
Châssis
Connecteur defond de panier(interface SIMATIC)
Plaquette signalétique
Vue de facesans capot
Capot
Interfaces pour codeurs X2 à X4
Interface vers entraînement X5
Connecteur frontalBande de repérage
LED de signalisation d’étatet de défaut
Interface vers périphérie X1
Désignation du module
Version
453-3AH00-0AE0
2
3 4
X
FM 453
Référence abrégée(6ES7 453-3AH00-0AE0)
Figure 1-3 Position des interfaces et des éléments de la face avant
Présentation du produit
1-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
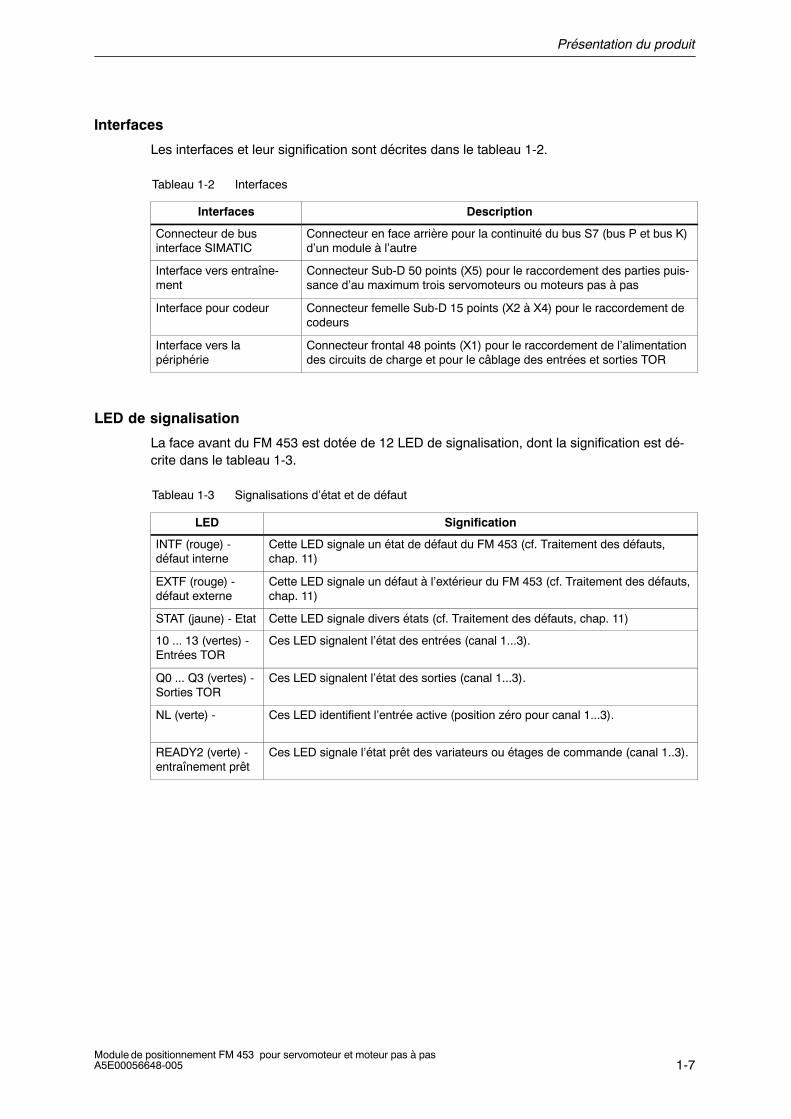
Interfaces
Les interfaces et leur signification sont décrites dans le tableau 1-2.
Tableau 1-2 Interfaces
Interfaces Description
Connecteur de businterface SIMATIC
Connecteur en face arrière pour la continuité du bus S7 (bus P et bus K)d’un module à l’autre
Interface vers entraîne-ment
Connecteur Sub-D 50 points (X5) pour le raccordement des parties puis-sance d’au maximum trois servomoteurs ou moteurs pas à pas
Interface pour codeur Connecteur femelle Sub-D 15 points (X2 à X4) pour le raccordement decodeurs
Interface vers lapériphérie
Connecteur frontal 48 points (X1) pour le raccordement de l’alimentationdes circuits de charge et pour le câblage des entrées et sorties TOR
LED de signalisation
La face avant du FM 453 est dotée de 12 LED de signalisation, dont la signification est dé-crite dans le tableau 1-3.
Tableau 1-3 Signalisations d’état et de défaut
LED Signification
INTF (rouge) -défaut interne
Cette LED signale un état de défaut du FM 453 (cf. Traitement des défauts,chap. 11)
EXTF (rouge) -défaut externe
Cette LED signale un défaut à l’extérieur du FM 453 (cf. Traitement des défauts,chap. 11)
STAT (jaune) - Etat Cette LED signale divers états (cf. Traitement des défauts, chap. 11)
10 ... 13 (vertes) -Entrées TOR
Ces LED signalent l’état des entrées (canal 1...3).
Q0 ... Q3 (vertes) -Sorties TOR
Ces LED signalent l’état des sorties (canal 1...3).
NL (verte) - Ces LED identifient l’entrée active (position zéro pour canal 1...3).
READY2 (verte) -entraînement prêt
Ces LED signale l’état prêt des variateurs ou étages de commande (canal 1..3).
Présentation du produit
1-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
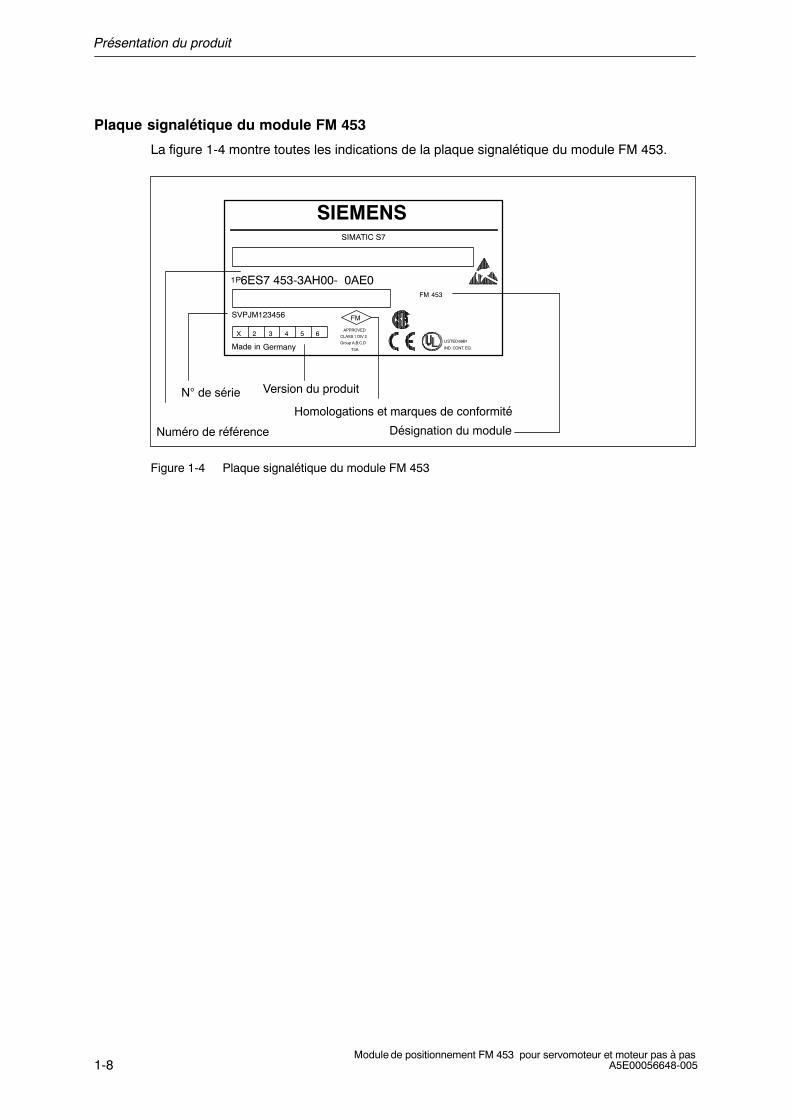
Plaque signalétique du module FM 453
La figure 1-4 montre toutes les indications de la plaque signalétique du module FM 453.
X 2 3 4 5 6 7
APPROVED
8
LISTED 69B1
IND. CONT. EQ.
1P6ES7 453-3AH00- 0AE0
SVPJM123456
Made in Germany
FM 453
2
SIMATIC S7
3 4 5 6X
FM
APPROVED
CLASS 1 DIV 2
Group A,B,C,D
T4A
SIEMENS
Numéro de référence Désignation du module
N° de série
Homologations et marques de conformité
Version du produit
Figure 1-4 Plaque signalétique du module FM 453
Présentation du produit
1-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
1.3 Vue d’ensemble des fonctions du module par canal
Généralités
Les fonctions suivantes sont réalisées dans le module :
• Gestion des modes
• Détermination de la position
• Asservissement de position
• Paramétrage du mode de commande
• Entrées/sorties TOR
• Réglages/fonctions intermodes
• Fins de course logiciels
• Alarmes process
• Commande par séquence de blocs (mode automatique)
• Diagnostic et traitement des défauts
• Gestion des données sur le FM 453
Gestion des modes
Le mode devra être communiqué au FM par le biais du programme utilisateur.
Le FM 453 dispose des modes suivants :
• manuel à vue
• commande
• prise de référence
• semi-automatique relatif
• introduction manuelle des données (MDI = Manuel Data Input)
• automatique
• automatique bloc par bloc
Codeurs
L’interface pour codeur accepte le raccordement de codeurs incrémentaux et de codeursabsolus (SSI).
Asservissement de position
Le traitement de la consigne s’effectue dans le FM 453 par les sous-ensembles fonctionnels:
• interpolation
• asservissement de position
• commande de moteur pas à pas
• driver de signal de réglage
• coupleur d’entraînement

Présentation du produit
1-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Paramétrage du mode de commande
Le paramétrage permet de réaliser les modes de commande suivants :
• servomoteur avec asservissement de position
• moteur pas à pas avec asservissement de position
• moteur pas à pas sans asservissement de position
Entrées/sorties TOR
Les quatre entrées TOR et les quatre sorties TOR peuvent être utilisées selon les besoinsspécifiques de l’utilisateur.
Les signaux suivants peuvent p. ex. être raccordés :
• contact de point de référence
• interrupteur pour départ externe
• palpeur de mesure
• position atteinte, arrêt
• rotation à droite/gauche
L’affectation des fonctions de commutation aux numéros des entrées/sorties s’effectue parle biais des paramètres machine.
Réglages/fonctions intermodes
Au sein des modes, certains réglages permettent d’activer des fonctions spéciales dans leprogramme utilisateur (p. ex. mesure au vol, reprise de référence, etc.).
Fins de course logiciels
La plage de travail (définie par les fins de course logiciels) fait l’objet d’une surveillance auto-matique après exécution de la synchronisation.
Alarmes process
Des alarmes process sont déclenchées p. ex. dans les cas suivants :
• position atteinte
• mesure de longueur terminée
• changement de bloc au vol
• mesure au vol
Le choix des alarmes process s’effectue par le biais des paramètres machine.

Présentation du produit
1-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Commande par séquence de blocs
Traitement autonome d’un programme de déplacement ainsi que de ses sous-programmesqui ont été créés au moyen du paramétrage. Un nombre défini de programmes de déplace-ments est disponible sur le module en vue de leur traitement.
Diagnostic et traitement des défauts
Le module est soumis à une surveillance au démarrage et en cours de fonctionnement parl’intermédiaire d’alarmes de défaut et de diagnostic. Les défauts détectés sont communiquésau système et signalés par les LED sur le module.
Gestion des données sur le FM 453
Les données de paramétrage (paramètres machine, données de correction d’outil, pro-grammes de déplacement et consignes) sont mémorisés de manière rémanente sur leFM 453.

Présentation du produit
1-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
2-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Les bases du positionnement
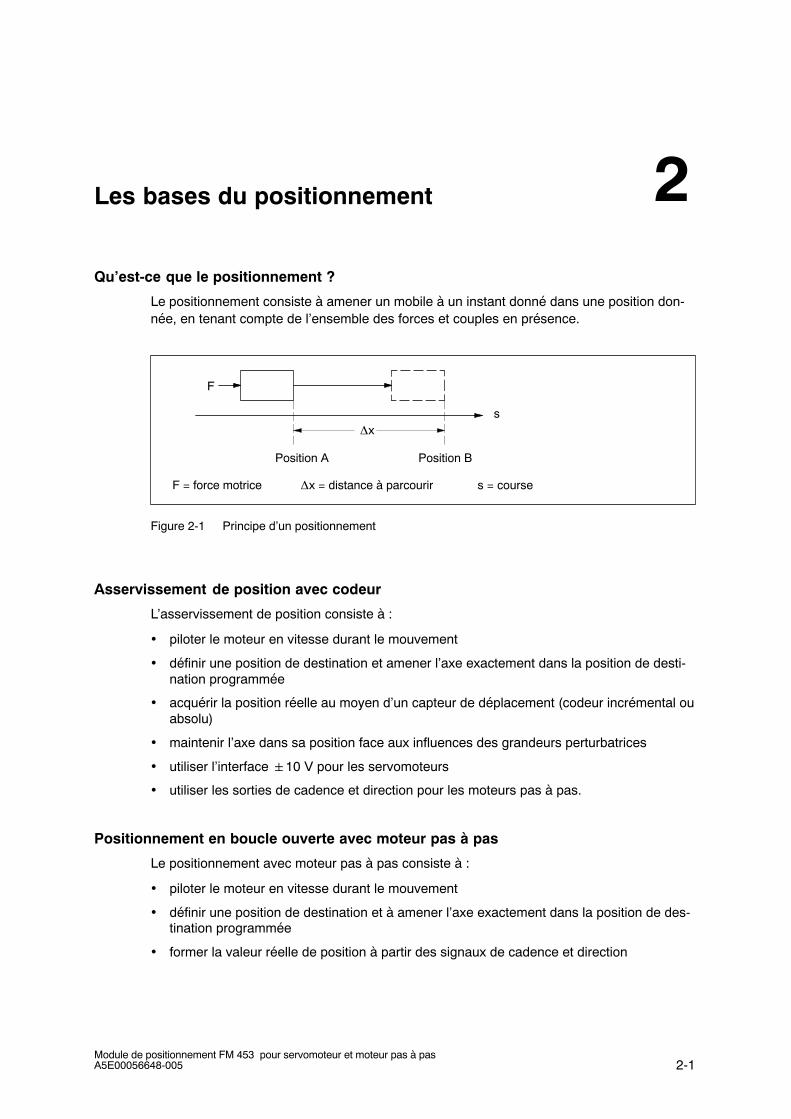
Qu’est-ce que le positionnement ?
Le positionnement consiste à amener un mobile à un instant donné dans une position don-née, en tenant compte de l’ensemble des forces et couples en présence.
Position A Position B
x
F
s
s = coursex = distance à parcourirF = force motrice
Figure 2-1 Principe d’un positionnement
Asservissement de position avec codeur
L’asservissement de position consiste à :
• piloter le moteur en vitesse durant le mouvement
• définir une position de destination et amener l’axe exactement dans la position de desti-nation programmée
• acquérir la position réelle au moyen d’un capteur de déplacement (codeur incrémental ouabsolu)
• maintenir l’axe dans sa position face aux influences des grandeurs perturbatrices
• utiliser l’interface 10 V pour les servomoteurs
• utiliser les sorties de cadence et direction pour les moteurs pas à pas.
Positionnement en boucle ouverte avec moteur pas à pas
Le positionnement avec moteur pas à pas consiste à :
• piloter le moteur en vitesse durant le mouvement
• définir une position de destination et à amener l’axe exactement dans la position de des-tination programmée
• former la valeur réelle de position à partir des signaux de cadence et direction
2
Les bases du positionnement
2-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
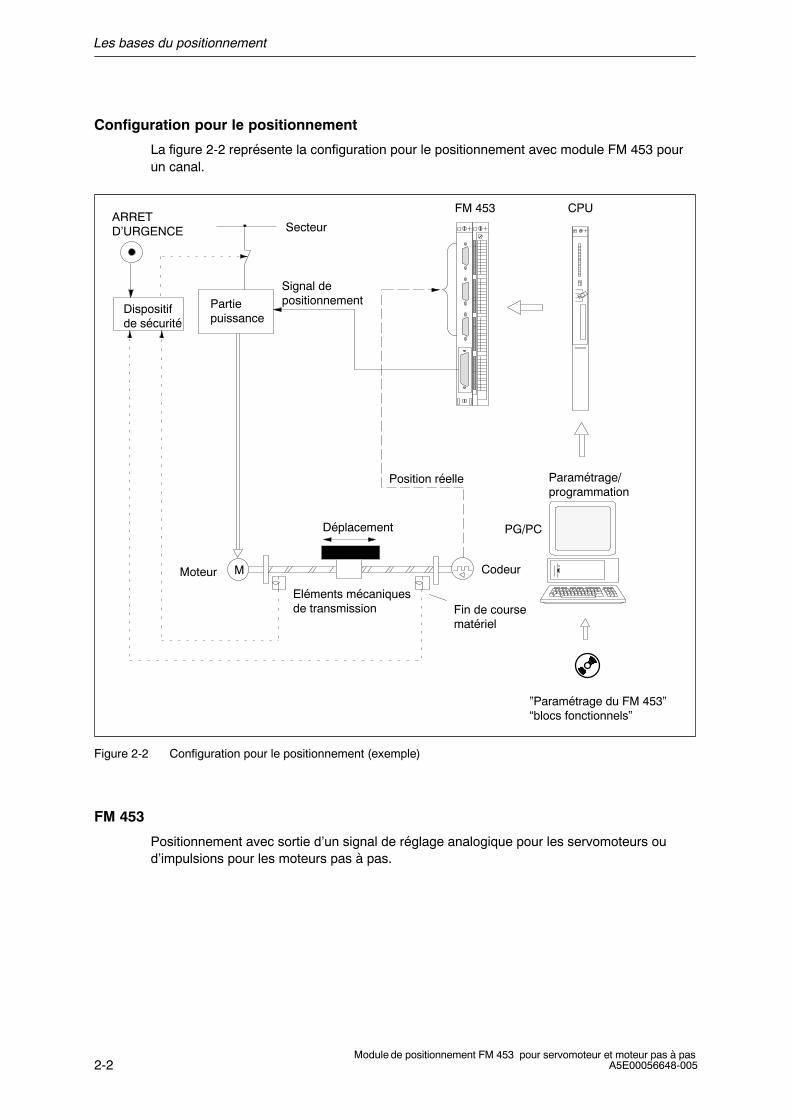
Configuration pour le positionnement
La figure 2-2 représente la configuration pour le positionnement avec module FM 453 pourun canal.
Partiepuissance
M Codeur
Eléments mécaniquesde transmission
CPUFM 453
”Paramétrage du FM 453”“blocs fonctionnels”
Paramétrage/programmation
PG/PC
Signal depositionnement
Position réelle
Moteur
Fin de coursematériel
ARRETD’URGENCE Secteur
Dispositifde sécurité
Déplacement
Figure 2-2 Configuration pour le positionnement (exemple)
FM 453
Positionnement avec sortie d’un signal de réglage analogique pour les servomoteurs oud’impulsions pour les moteurs pas à pas.
Les bases du positionnement
2-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Partie puissance
La partie puissance traite le signal de réglage et fournit au moteur l’énergie électrique re-quise pour l’accomplissement du mouvement.
La partie puissance peut être :
• un variateur, ex. SIMODRIVE 611-A, pour les servomoteurs
• un étage de commande, ex. SIMOSTEP, pour les moteurs pas à pas.
Moteur
Le moteur est commandé par la partie puissance et entraîne l’axe.
Le moteur peut être :
• un servomoteur, ex. 1FT5
• un moteur pas à pas, ex. SIMOSTEP
Codeur
Le codeur capte les mouvements de l’axe. Le codeur incrémental fournit des impulsions auFM 453. Le nombre d’impulsions est proportionnel à la distance parcourue. Le moteur pas àpas peut fonctionner sans codeur.
CPU
La CPU exécute le programme utilisateur.
Eléments mécaniques de transmission
Les éléments mécaniques de transmission comprennent non seulement l’axe, mais aussi lesréducteurs et les systèmes d’accouplement.
Périphérie
Tous les autres équipements sont regroupés sous le terme de ”périphérie”.
Cette dernière comprend principalement :
• les fins de course pour la limitation de la plage de positionnement (dispositifs de sécurité)
• une console de programmation PG pour :
− le paramétrage avec le logiciel de paramétrage ”Paramétrage du FM 453”
− la programmation du FM 453 avec des blocs fonctionnels
− le test/la mise en service

Les bases du positionnement
2-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
3-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Montage et dépose
Contenu du chapitre
Paragraphe Thème Page
3.1 Montage du FM 453 3-2
3.2 Dépose du FM 453 3-3
3.3 Remplacement d’un module 3-4
Généralités
Le module de positionnement FM 453 peut être implanté dans un châssis de base ou unchâssis d’extension (EG1...6) comme un module d’entrées ou de sorties.
Configuration de la structure mécanique
Les possibilités de configuration mécanique ainsi que la marche à suivre lors de la configu-ration sont décrites dans le manuel Systèmes d’automatisation S7-400/M7-400 ; Installationet configuration.
Règles de sécurité importantes
Un certain nombre de règles importantes sont à respecter pour l’intégration d’un automateprogrammable S7-400 avec module FM 453 dans une installation ou un système.
Ces règles et prescriptions sont expliquées dans le manuel Systèmes d’automatisationS7-400/M7-400 ; Installation et configuration.
Remplacement du module
Le module peut être remplacé en cours de fonctionnement de l’automate.
3
Montage et dépose
3-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
3.1 Montage du FM 453
Règles
Le montage du FM 453 ne nécessite de mesures de protection particulières (directivesCSDE).
Nota
Respectez les règles de manipulations données à l’annexe B du manuel d’installationSystèmes d’automatisation S7-400/M7-400, Installation et configuration.
Outillage nécessaire
Tournevis de 4,5 mm
Marche à suivre
Marche à suivre pour le montage du FM 453 :
1. Accrocher le FM 453 au châssis et le rabattre vers le bas.
2. Serrer la vis de fixation du FM 453 (couple de serrage de l’ordre de 80 ... 110 Ncm).
3. Enficher et fixer les connecteurs Sub-D allant aux codeurs et entraînements.
4. Enficher et fixer le connecteur frontal.
5. Mettre en place et verrouiller le capot frontal.
6. Au terme du montage des modules, vous pouvez leur affecter un numéro d’emplace-ment. Il est prévu à cet effet des repères de n° d’emplacement qui sont fournis avec lechâssis.
Le schéma à respecter pour la numérotation et la mise en place des repères de numérosd’emplacement sont décrits dans le manuel Systèmes d’automatisation S7-400/M7-400 ;Installation et configuration.
Nota
L’emplacement détermine l’adresse de début de chaque module.
Montage et dépose
3-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
3.2 Dépose du FM 453
Règles
La dépose du FM 453 ne nécessite pas de mesures de protections particulières (directivesCSDE).
Nota
Respectez les règles de manipulations données à l’annexe B du manuel d’installationSystèmes d’automatisation S7-400/M7-400, Installation et configuration.
Outillage nécessaire
Tournevis de 4,5 mm
Marche à suivre
Marche à suivre pour la dépose du FM 453 :
1. Détacher le connecteur frontal et le retirer.
2. Déverrouiller le capot frontal.
3. Débrancher les connecteurs Sub-D allant vers les codeurs et entraînements.
4. Défaire les vis de fixation du module.
5. Basculer le module pour le décrocher du châssis.
Montage et dépose
3-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
3.3 Remplacement d’un module
Généralités
Lorsque le remplacement d’un module FM 453 défectueux est nécessaire et que l’on ne dis-pose pas d’une console PG ou d’un PC pour le paramétrage ou si l’échange doit se fairesous tension, tenir compte des instructions suivantes dès la mise en service du système(CPU, FM) :
• Clôturer la mise en service en créant un SDB 1 000 (mémorisation des données deparamétrage), voir chapitre 5.5.
• Dans le programme utilisateur :
− intégrer l’OB 83 ”alarme d’embrochage/débrochage”, voir chap. 6
− interrompre la communication avec le module FM 353 débroché, puis la rétablir avecle module FM à nouveau enfiché.
− en cas de modification et de mémorisation rémanente de données/paramètres dans lemodule FM pendant l’exploitation, observer les indications du chapitre 9.3.1.
Remplacement d’un FM 453
Procéder de la manière suivante pour remplacer un module FM 453 défectueux mais déjàparamétré :
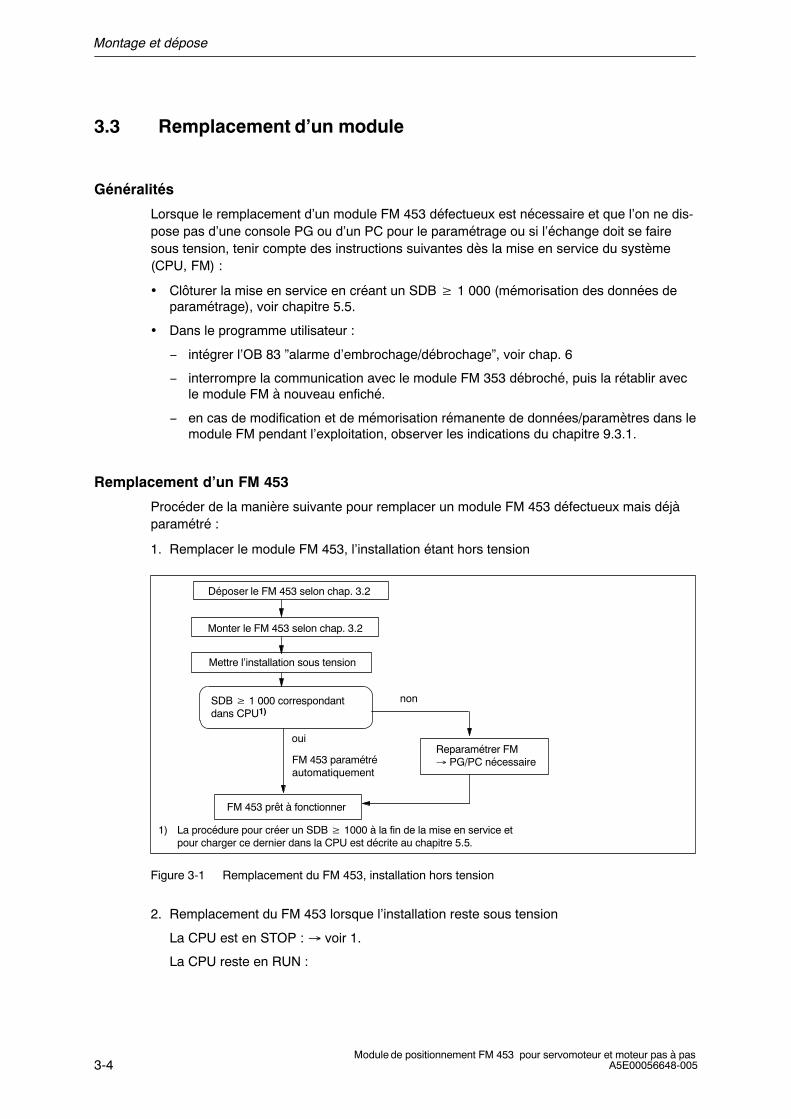
1. Remplacer le module FM 453, l’installation étant hors tension
Déposer le FM 453 selon chap. 3.2
non
Monter le FM 453 selon chap. 3.2
Mettre l’installation sous tension
SDB 1 000 correspondantdans CPU1)
FM 453 paramétréautomatiquement
Reparamétrer FM→ PG/PC nécessaire
oui
FM 453 prêt à fonctionner
1) La procédure pour créer un SDB 1000 à la fin de la mise en service et pour charger ce dernier dans la CPU est décrite au chapitre 5.5.
Figure 3-1 Remplacement du FM 453, installation hors tension
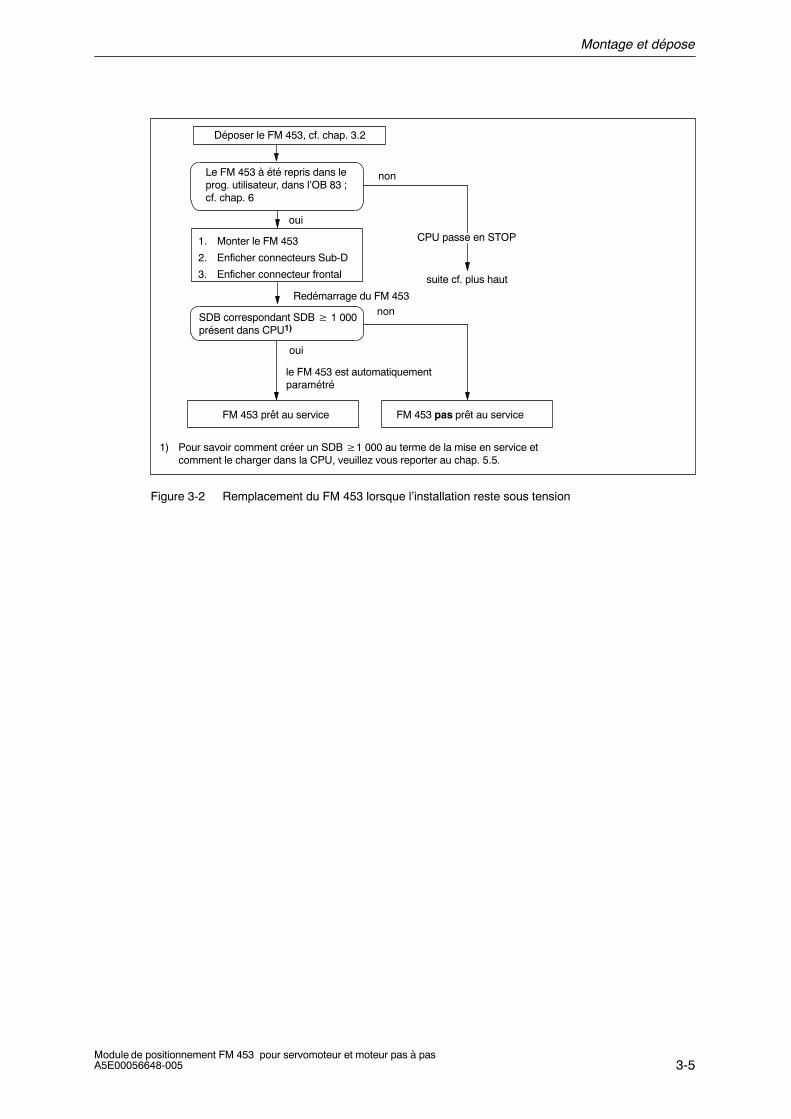
2. Remplacement du FM 453 lorsque l’installation reste sous tension
La CPU est en STOP : → voir 1.
La CPU reste en RUN :
Montage et dépose
3-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Déposer le FM 453, cf. chap. 3.2
non
1. Monter le FM 453
2. Enficher connecteurs Sub-D
3. Enficher connecteur frontal
Redémarrage du FM 453
oui
FM 453 prêt au service
Le FM 453 à été repris dans leprog. utilisateur, dans l’OB 83 ;cf. chap. 6
CPU passe en STOP
suite cf. plus haut
oui
SDB correspondant SDB 1 000présent dans CPU1)
le FM 453 est automatiquementparamétré
non
FM 453 pas prêt au service
1) Pour savoir comment créer un SDB 1 000 au terme de la mise en service etcomment le charger dans la CPU, veuillez vous reporter au chap. 5.5.
Figure 3-2 Remplacement du FM 453 lorsque l’installation reste sous tension

Montage et dépose
3-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
4-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Câblage
Contenu du chapitre
Paragraphe Thème Page
4.1 Schéma de câblage d’un FM 453 4-3
4.2 Description de l’interface vers l’entraînement 4-6
4.3 Raccordement de la partie puissance 4-14
4.4 Description de l’interface du système de mesure 4-18
4.5 Raccordement des codeurs 4-23
4.6 Description de l’interface vers la périphérie 4-25
4.7 Câblage du connecteur frontal 4-33
Règles de sécurité
La sécurité d’exploitation de votre installation exige que les mesures suivantes soient priseset adaptées à vos conditions spécifiques :
• Concept d’ARRET d’URGENCE conforme aux règlements techniques en vigueur (p. ex.normes européennes EN 60204, EN 418 et connexes).
• Mesures complémentaires pour la limitation par fins de course des axes (p. ex. fins decourse matériels)
• Dispositifs et mesures pour la protection des moteurs et de l’électronique de puissanceconformes aux directives d’installation de SIMODRIVE et FM STEPDRIVE/ SIMOSTEP.
Pour mieux cerner les sources de dangers sur l’ensemble de l’installation, nous recomman-dons en outre d’effectuer une analyse des risques conforme aux exigences de base de lasécurité / annexe 1 de la directive machines CE.
4
Câblage
4-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Autres références bibliographiques
Observer également les consignes données dans les chapitres ci-dessous du manuel Systè-mes d’automatisation S7-400/M7-400, Installation et configuration :
• Protection contre la foudre et la surtension : Annexe A.5
• Règles pour la manipulation de composants sensibles aux décharges électrostatiques(CSDE) : annexe B.
• Configuration de l’installation électrique : chapitre 4.
Nous recommandons comme source d’information complémentaire relative aux règles deCEM : Equipements électriques pour machines-outils, Directives de CEM pour équipementsWS/WF, numéro de référence 6ZB5 440-0QX01-0BA1.
Normes et prescriptions
Le câblage du module FM 453 doit être conforme aux prescriptions VDE correspondantes.
Câblage
4-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
4.1 Schéma de câblage d’un FM 453
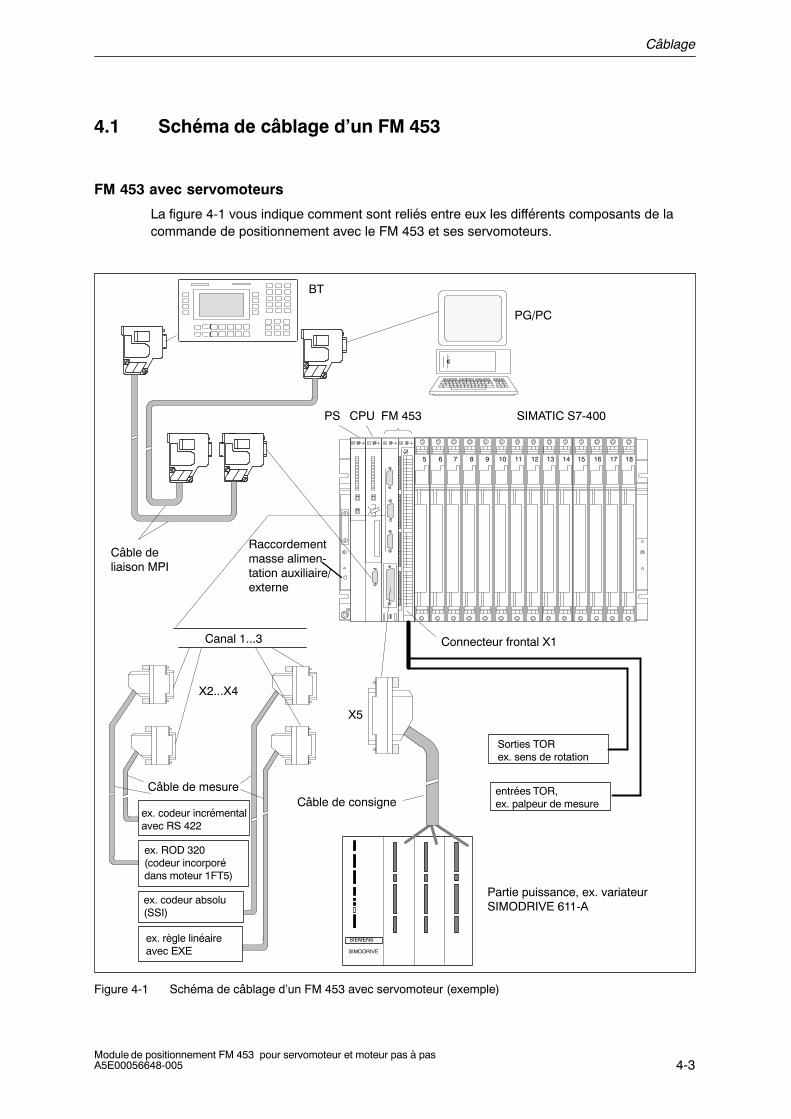
FM 453 avec servomoteurs
La figure 4-1 vous indique comment sont reliés entre eux les différents composants de lacommande de positionnement avec le FM 453 et ses servomoteurs.
PG/PC
FM 453
SIMODRIVE
SIEMENS
entrées TOR, ex. palpeur de mesure
Câble deliaison MPI
Câble de consigneCâble de mesure
Partie puissance, ex. variateurSIMODRIVE 611-A
ex. codeur absolu(SSI)
ex. règle linéaireavec EXE
CPU
BT
SIMATIC S7-400
X5
X2...X4
ex. codeur incrémentalavec RS 422
ex. ROD 320(codeur incorporédans moteur 1FT5)
Sorties TORex. sens de rotation
Connecteur frontal X1
5 6 7 8 9 10 11 12 13 14 15 16 17 18
PS
Canal 1...3
Raccordementmasse alimen-tation auxiliaire/externe
Figure 4-1 Schéma de câblage d’un FM 453 avec servomoteur (exemple)

Câblage
4-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
FM 453 avec moteurs pas à pas
La figure 4-2 montre comment sont reliés les différents composants de la commande depositionnement avec le FM 453 et les moteurs pas à pas.
PG/PC
FM 453
Entrées TOR, ex. palpeur
Câble de liaison MPI
CPU
BT
SIMATIC S7-400
X5
Sorties TOR, ex. sens de rotation
Connecteur frontal X1
5 6 7 8 9 10 11 12 13 14 15 16 17 18
PS
SIEMENS SIEMENS
Etage de commande, ex. FM STEPDRIVE
Câble de consigne
Figure 4-2 Schéma de câblage d’un FM 453 avec moteur pas à pas (exemple)
Câblage
4-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
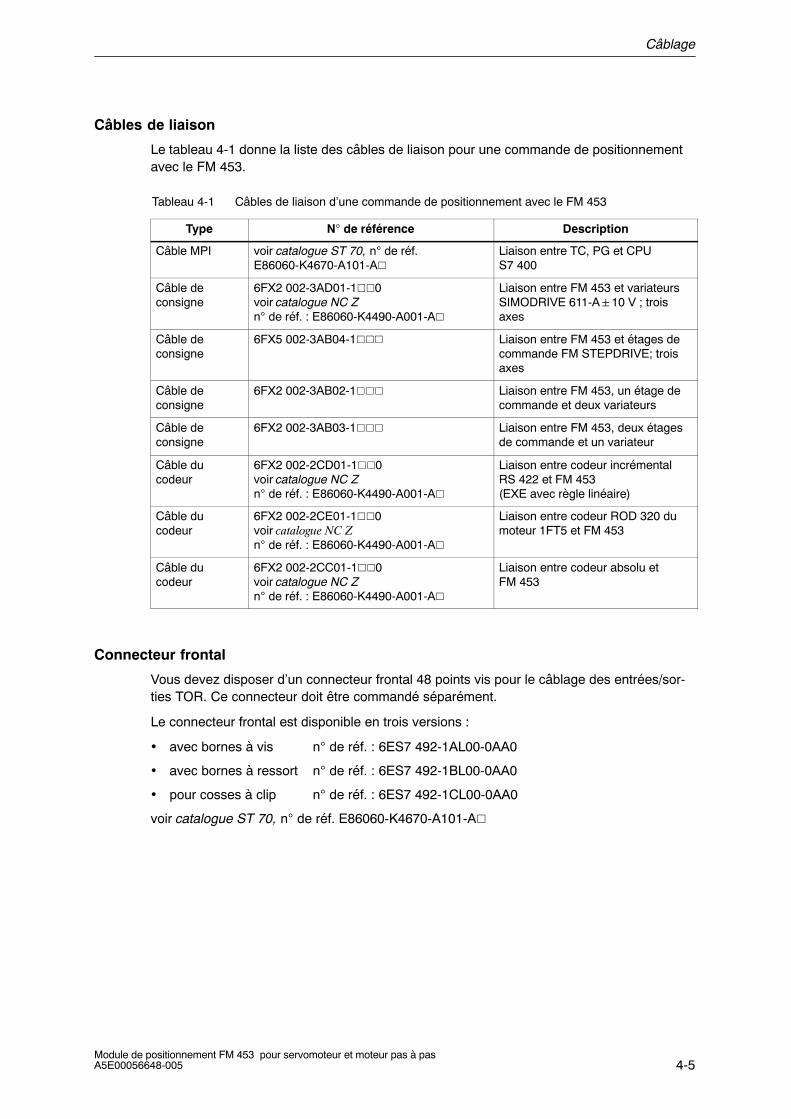
Câbles de liaison
Le tableau 4-1 donne la liste des câbles de liaison pour une commande de positionnementavec le FM 453.
Tableau 4-1 Câbles de liaison d’une commande de positionnement avec le FM 453
Type N° de référence Description
Câble MPI voir catalogue ST 70, n° de réf.E86060-K4670-A101-A
Liaison entre TC, PG et CPUS7 400
Câble deconsigne
6FX2 002-3AD01-10voir catalogue NC Zn° de réf. : E86060-K4490-A001-A
Liaison entre FM 453 et variateursSIMODRIVE 611-A10 V ; troisaxes
Câble deconsigne
6FX5 002-3AB04-1 Liaison entre FM 453 et étages decommande FM STEPDRIVE; troisaxes
Câble deconsigne
6FX2 002-3AB02-1 Liaison entre FM 453, un étage decommande et deux variateurs
Câble deconsigne
6FX2 002-3AB03-1 Liaison entre FM 453, deux étagesde commande et un variateur
Câble ducodeur
6FX2 002-2CD01-10voir catalogue NC Zn° de réf. : E86060-K4490-A001-A
Liaison entre codeur incrémentalRS 422 et FM 453(EXE avec règle linéaire)
Câble ducodeur
6FX2 002-2CE01-10voir catalogue NC Z
n° de réf. : E86060-K4490-A001-A
Liaison entre codeur ROD 320 dumoteur 1FT5 et FM 453
Câble ducodeur
6FX2 002-2CC01-10voir catalogue NC Zn° de réf. : E86060-K4490-A001-A
Liaison entre codeur absolu etFM 453
Connecteur frontal
Vous devez disposer d’un connecteur frontal 48 points vis pour le câblage des entrées/sor-ties TOR. Ce connecteur doit être commandé séparément.
Le connecteur frontal est disponible en trois versions :
• avec bornes à vis n° de réf. : 6ES7 492-1AL00-0AA0
• avec bornes à ressort n° de réf. : 6ES7 492-1BL00-0AA0
• pour cosses à clip n° de réf. : 6ES7 492-1CL00-0AA0
voir catalogue ST 70, n° de réf. E86060-K4670-A101-A
Câblage
4-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
4.2 Description de l’interface vers l’entraînement
Connecteur vers l’étage de commande
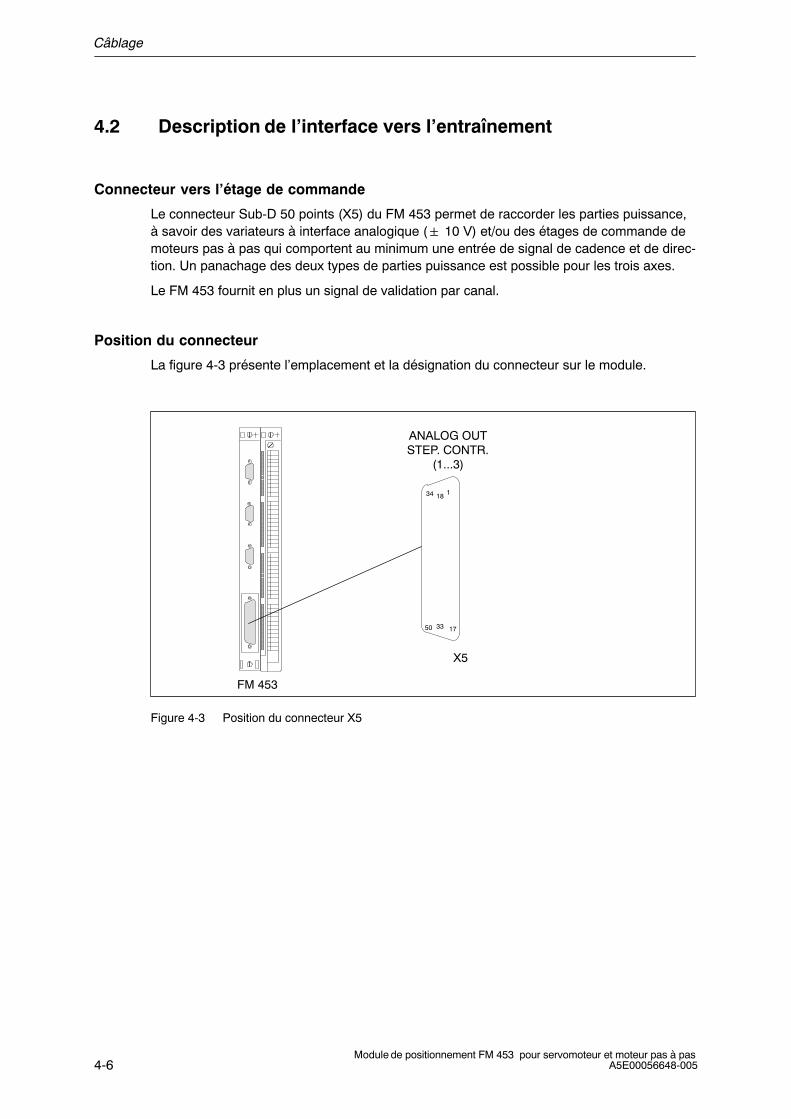
Le connecteur Sub-D 50 points (X5) du FM 453 permet de raccorder les parties puissance,à savoir des variateurs à interface analogique ( 10 V) et/ou des étages de commande demoteurs pas à pas qui comportent au minimum une entrée de signal de cadence et de direc-tion. Un panachage des deux types de parties puissance est possible pour les trois axes.
Le FM 453 fournit en plus un signal de validation par canal.
Position du connecteur
La figure 4-3 présente l’emplacement et la désignation du connecteur sur le module.
FM 453
1
17
1834
3350
X5
ANALOG OUTSTEP. CONTR.
(1...3)
Figure 4-3 Position du connecteur X5
Câblage
4-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
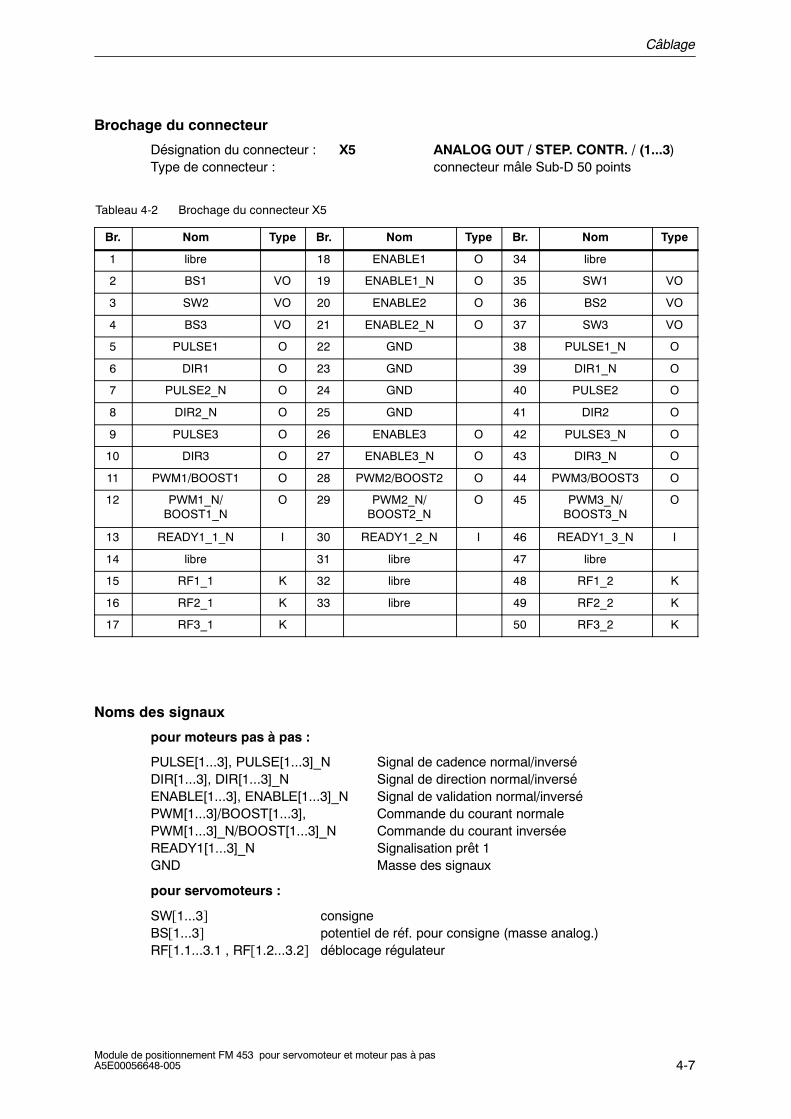
Brochage du connecteur
Désignation du connecteur : X5 ANALOG OUT / STEP. CONTR. / (1...3)Type de connecteur : connecteur mâle Sub-D 50 points
Tableau 4-2 Brochage du connecteur X5
Br. Nom Type Br. Nom Type Br. Nom Type
1 libre 18 ENABLE1 O 34 libre
2 BS1 VO 19 ENABLE1_N O 35 SW1 VO
3 SW2 VO 20 ENABLE2 O 36 BS2 VO
4 BS3 VO 21 ENABLE2_N O 37 SW3 VO
5 PULSE1 O 22 GND 38 PULSE1_N O
6 DIR1 O 23 GND 39 DIR1_N O
7 PULSE2_N O 24 GND 40 PULSE2 O
8 DIR2_N O 25 GND 41 DIR2 O
9 PULSE3 O 26 ENABLE3 O 42 PULSE3_N O
10 DIR3 O 27 ENABLE3_N O 43 DIR3_N O
11 PWM1/BOOST1 O 28 PWM2/BOOST2 O 44 PWM3/BOOST3 O
12 PWM1_N/BOOST1_N
O 29 PWM2_N/BOOST2_N
O 45 PWM3_N/BOOST3_N
O
13 READY1_1_N I 30 READY1_2_N I 46 READY1_3_N I
14 libre 31 libre 47 libre
15 RF1_1 K 32 libre 48 RF1_2 K
16 RF2_1 K 33 libre 49 RF2_2 K
17 RF3_1 K 50 RF3_2 K
Noms des signaux
pour moteurs pas à pas :
PULSE[1...3], PULSE[1...3]_N Signal de cadence normal/inverséDIR[1...3], DIR[1...3]_N Signal de direction normal/inverséENABLE[1...3], ENABLE[1...3]_N Signal de validation normal/inverséPWM[1...3]/BOOST[1...3], Commande du courant normalePWM[1...3]_N/BOOST[1...3]_N Commande du courant inverséeREADY1[1...3]_N Signalisation prêt 1GND Masse des signaux
pour servomoteurs :
SW[1...3] consigneBS[1...3] potentiel de réf. pour consigne (masse analog.)RF[1.1...3.1 , RF[1.2...3.2] déblocage régulateur
Câblage
4-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Type de signal
O signal de sortieI signal d’entréeVO sortie de tensionK contact
Nota
Le niveau actif de tous les signaux peut être paramétré par l’intermédiaire de PM37(cf. chap. 5.3.1,). Consultez la documentation technique de votre unité de commande poursavoir quelle est l’affectation entre niveau de signal et sens de rotation.
Les description de signaux ci-après concernent :
• le variateur SIMODRIVE 611-A pour servomoteurs
• l’étage de commande FM STEPDRIVE pour moteurs pas à pas
Câblage
4-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Servomoteurs
Signaux de sortie :
On dispose pour chaque canal d’un signal de tension et d’un signal de validation.
• CONSIGNE (SW)
Signal de tension analogique dans la plage 10 V correspondant à une consigne de vi-tesse de rotation.
• SIGNAL DE REFERENCE (BS)
Potentiel de référence (masse analogique) pour le signal de consigne, relié de manièreinterne avec la masse logique.
• DEBLOCAGE REGULATEUR (RF)
Paire de contacts de relais commandant le déblocage du régulateur de la partie puis-sance de chaque axe, p. ex. d’un variateur SIMODRIVE. Le FM 453 active ce signal lorsdu passage en mode de commande cyclique, c.-à-d. lorsque le lancement et le pa-ramétrage ont été effectués correctement et que le programme utilisateur a activé leréglage ponctuel “Déblocage régulateur”.
Paramètre des signaux de sortie
La consigne est délivrée en tant que signal différentiel analogique.
Tableau 4-3 Paramètres électriques du signal de consigne
Paramètre mini maxi Unité
Plage de tension nominale -10 10 V
Courant de sortie -3 3 mA
Résolution du convertisseur N/A : 15 bits + signe
Les signaux de validation des axes (déblocage régulateur) transitent par des sorties à relais(contacts NO).
Tableau 4-4 Paramètres électriques des contacts de relais
Paramètre maxi Unité
Tension coupée/établie 50 V
Courant coupé/établi 1 A
Puissance coupée/établie 30 VA
Câble de liaison
Longueur admissible : max. 35 m
Câblage
4-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Moteurs pas à pas
Le FM 453 fournit par canal un signal de cadence, un signal de direction et un signal de val-idation en logique normale et inversée. En plus, il est possible de paramétrer pour chaquecanal un signal servant à commander le courant.
• PULSE (cadence)
Les impulsions de cadence commandent le moteur. A chaque front montant d’une impul-sion, le moteur effectue un pas.
Le nombre d’impulsions émis correspond donc à l’angle de rotation à effectuer par le mo-teur et donc à la distance à parcourir.
La fréquence des impulsions fixe la vitesse de rotation, et donc la vitesse de déplace-ment.
• DIRECTION
Le niveau de ce signal fixe le sens de rotation du moteur :
Signal ”1” : rotation à gaucheSignal ”0” : rotation à droite
PULSE
DIRECTION
20 ns mini
• ENABLE (validation)
Le FM 453 active ce signal dans le cas d’une commande cyclique.
Signal ”1” : étage de commande validéSignal ”0” : étage de commande inhibé, courant moteur nul
• PWM / BOOST
Ce signal exerce une influence sur le courant moteur.
La fonction ”PWM” permet de sortir un signal à modulation de largeur d’impulsions per-mettant de régler le courant moteur entre 0 et 100 %.
La fonction ”BOOST” permet de surélever le courant moteur :
Signal ”1” : courant moteur surélevéSignal ”0” : courant moteur normal
Le réglage de ces signaux doit se faire par l’intermédiaire des paramètres machine (voirPM37, chap. 5.3.1).
Câblage
4-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
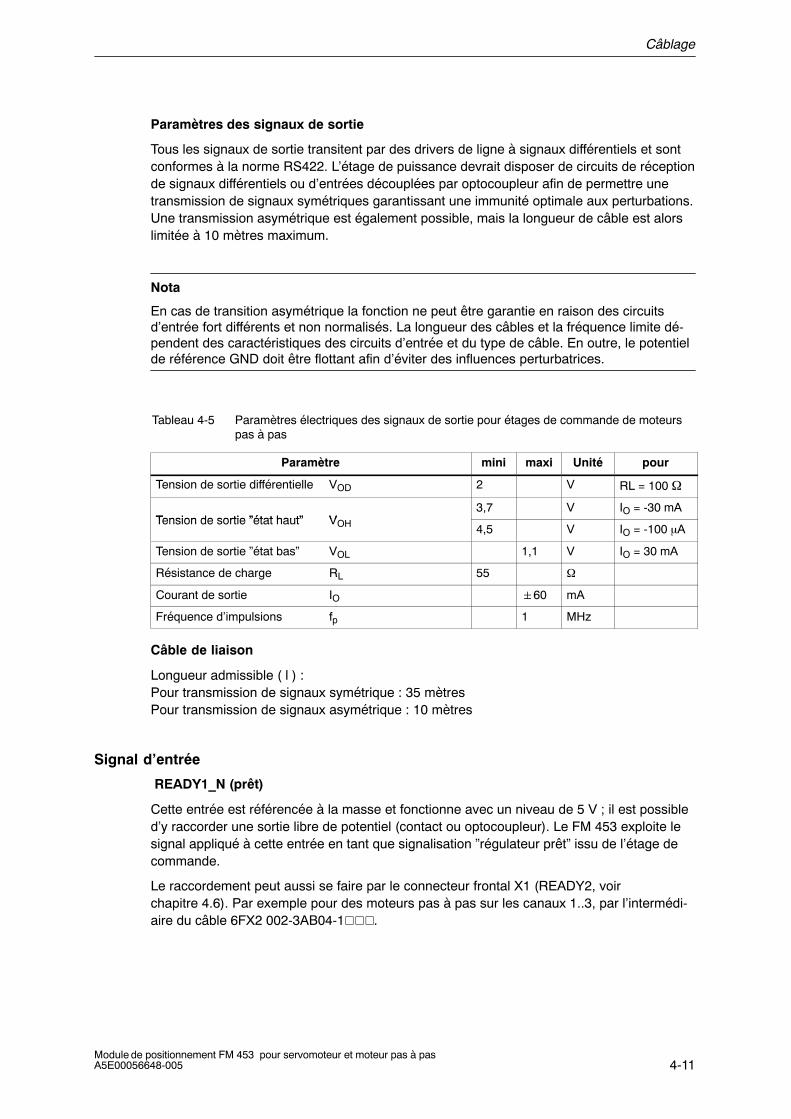
Paramètres des signaux de sortie
Tous les signaux de sortie transitent par des drivers de ligne à signaux différentiels et sontconformes à la norme RS422. L’étage de puissance devrait disposer de circuits de réceptionde signaux différentiels ou d’entrées découplées par optocoupleur afin de permettre unetransmission de signaux symétriques garantissant une immunité optimale aux perturbations.Une transmission asymétrique est également possible, mais la longueur de câble est alorslimitée à 10 mètres maximum.
Nota
En cas de transition asymétrique la fonction ne peut être garantie en raison des circuitsd’entrée fort différents et non normalisés. La longueur des câbles et la fréquence limite dé-pendent des caractéristiques des circuits d’entrée et du type de câble. En outre, le potentielde référence GND doit être flottant afin d’éviter des influences perturbatrices.
Tableau 4-5 Paramètres électriques des signaux de sortie pour étages de commande de moteurspas à pas
Paramètre mini maxi Unité pour
Tension de sortie différentielle VOD 2 V RL = 100 Ω
Tension de sortie ”état haut” V3,7 V IO = -30 mA
Tension de sortie ”état haut” VOH 4,5 V IO = -100 µA
Tension de sortie ”état bas” VOL 1,1 V IO = 30 mA
Résistance de charge RL 55 Ω
Courant de sortie IO 60 mA
Fréquence d’impulsions fp 1 MHz
Câble de liaison
Longueur admissible ( l ) : Pour transmission de signaux symétrique : 35 mètresPour transmission de signaux asymétrique : 10 mètres
Signal d’entrée
READY1_N (prêt)
Cette entrée est référencée à la masse et fonctionne avec un niveau de 5 V ; il est possibled’y raccorder une sortie libre de potentiel (contact ou optocoupleur). Le FM 453 exploite lesignal appliqué à cette entrée en tant que signalisation ”régulateur prêt” issu de l’étage decommande.
Le raccordement peut aussi se faire par le connecteur frontal X1 (READY2, voirchapitre 4.6). Par exemple pour des moteurs pas à pas sur les canaux 1..3, par l’intermédi-aire du câble 6FX2 002-3AB04-1.

Câblage
4-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
L’utilisation de READY1_N et READY2 est paramétrée dans le paramètre machine(cf. PM37, chap. 5.3.1) conformément à la configuration de l’installation.
Paramètres du signal d’entrée
Tableau 4-6 Paramètres électriques du signal d’entrée ”READY1_N”
Paramètre Valeur Unité Observation
Signal ”1”, plage de tension VH 3,5...5,5 V ou entrée en l’air
Signal ”0”, plage de tension VL -1,5...1 V
Signal ”0”, courant d’entrée IL -1,5...-3 mA
Branchement des signaux de sortie
La figure 4-4 montre les différentes possibilités de branchement des signaux de sortie.
=
=
+
-
l 35 m
l 35 m
l 10 m
FM 453
VOD
VOH
RL
IO
GND
GND
GND
IO
VOL
RL
RL
Etage de commande
Transmission symétrique avec entrée différentielle selon RS422
Transmission symétrique avec entrée découplée par optocoupleur
Transmission asymétrique avec entrée découplée par optocoupleur
Figure 4-4 Branchement possible des signaux de sortie sur l’interface de l’étage de commande
Câblage
4-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
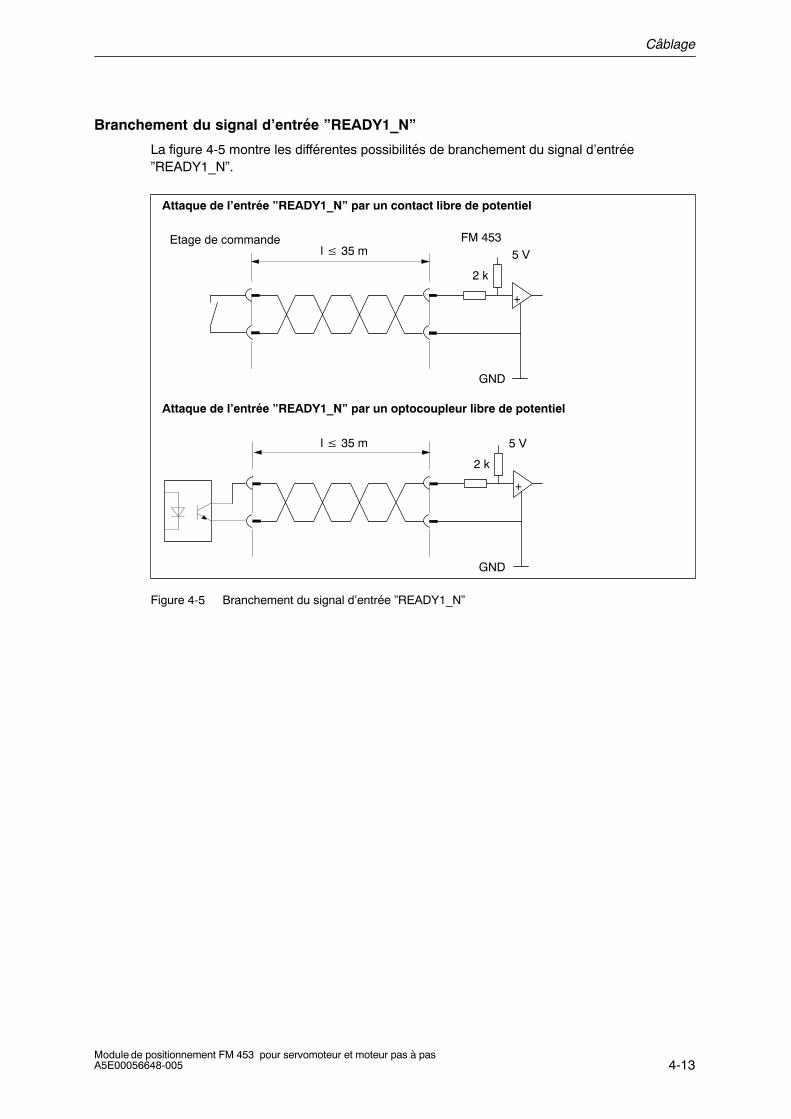
Branchement du signal d’entrée ”READY1_N”
La figure 4-5 montre les différentes possibilités de branchement du signal d’entrée”READY1_N”.
l 35 mFM 453
GND
GND
l 35 m
+
+
2 k
5 V
2 k
5 V
Attaque de l’entrée ”READY1_N” par un contact libre de potentiel
Attaque de l’entrée ”READY1_N” par un optocoupleur libre de potentiel
Etage de commande
Figure 4-5 Branchement du signal d’entrée ”READY1_N”
Câblage
4-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
4.3 Raccordement de la partie puissance
!Danger
Seuls des parties puissance avec séparation de sécurité des circuits sont autorisées.
Raccordement du câble de liaison
Tenir compte des points suivants :
Nota
Utilisez exclusivement des paires torsadées blindées, le blindage devant être connecté auboîtier métallique ou métallisé du connecteur du côté FM. Afin de protéger le signal de con-signe analogique contre les perturbations à basse fréquence, nous recommandons de nepas mettre à la terre le blindage du côté variateur !
Le câble pré-équipé proposé comme accessoire offre une sécurité optimale contre lesperturbations.
Câblage
4-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
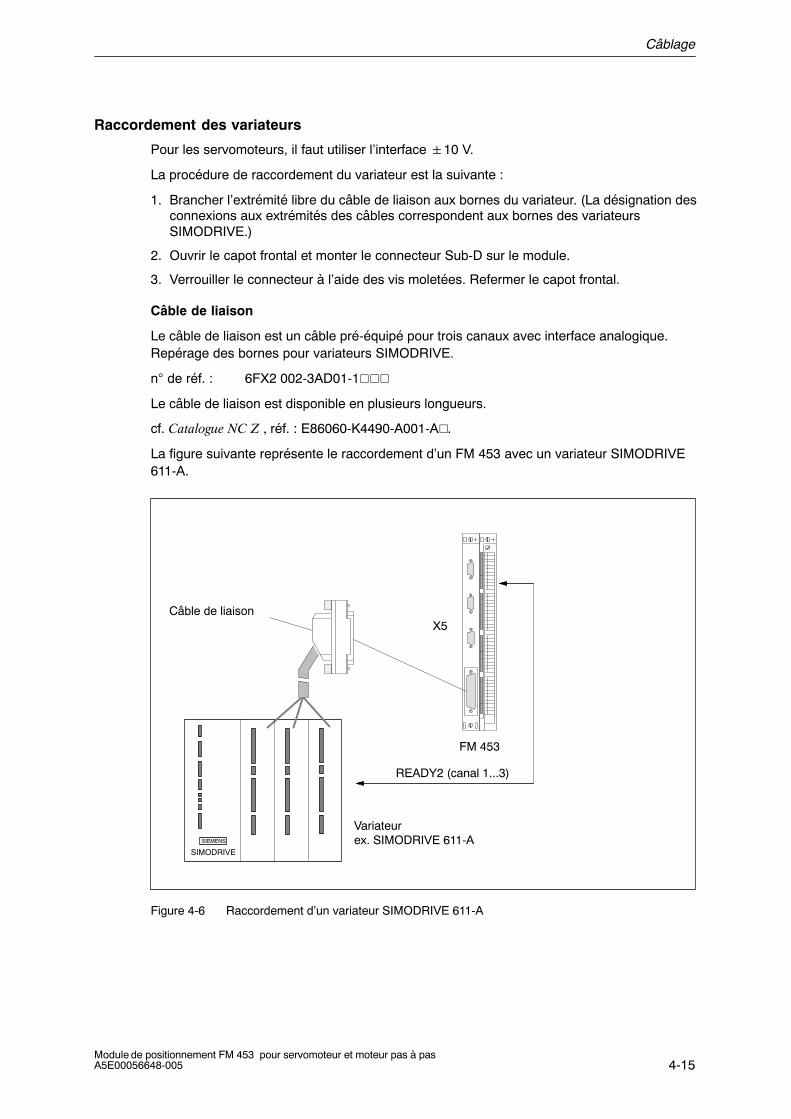
Raccordement des variateurs
Pour les servomoteurs, il faut utiliser l’interface 10 V.
La procédure de raccordement du variateur est la suivante :
1. Brancher l’extrémité libre du câble de liaison aux bornes du variateur. (La désignation desconnexions aux extrémités des câbles correspondent aux bornes des variateursSIMODRIVE.)
2. Ouvrir le capot frontal et monter le connecteur Sub-D sur le module.
3. Verrouiller le connecteur à l’aide des vis moletées. Refermer le capot frontal.
Câble de liaison
Le câble de liaison est un câble pré-équipé pour trois canaux avec interface analogique.Repérage des bornes pour variateurs SIMODRIVE.
n° de réf. : 6FX2 002-3AD01-1
Le câble de liaison est disponible en plusieurs longueurs.
cf. Catalogue NC Z , réf. : E86060-K4490-A001-A.
La figure suivante représente le raccordement d’un FM 453 avec un variateur SIMODRIVE611-A.
FM 453
SIMODRIVE
SIEMENS
Câble de liaison
Variateurex. SIMODRIVE 611-A
X5
READY2 (canal 1...3)
Figure 4-6 Raccordement d’un variateur SIMODRIVE 611-A
Câblage
4-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
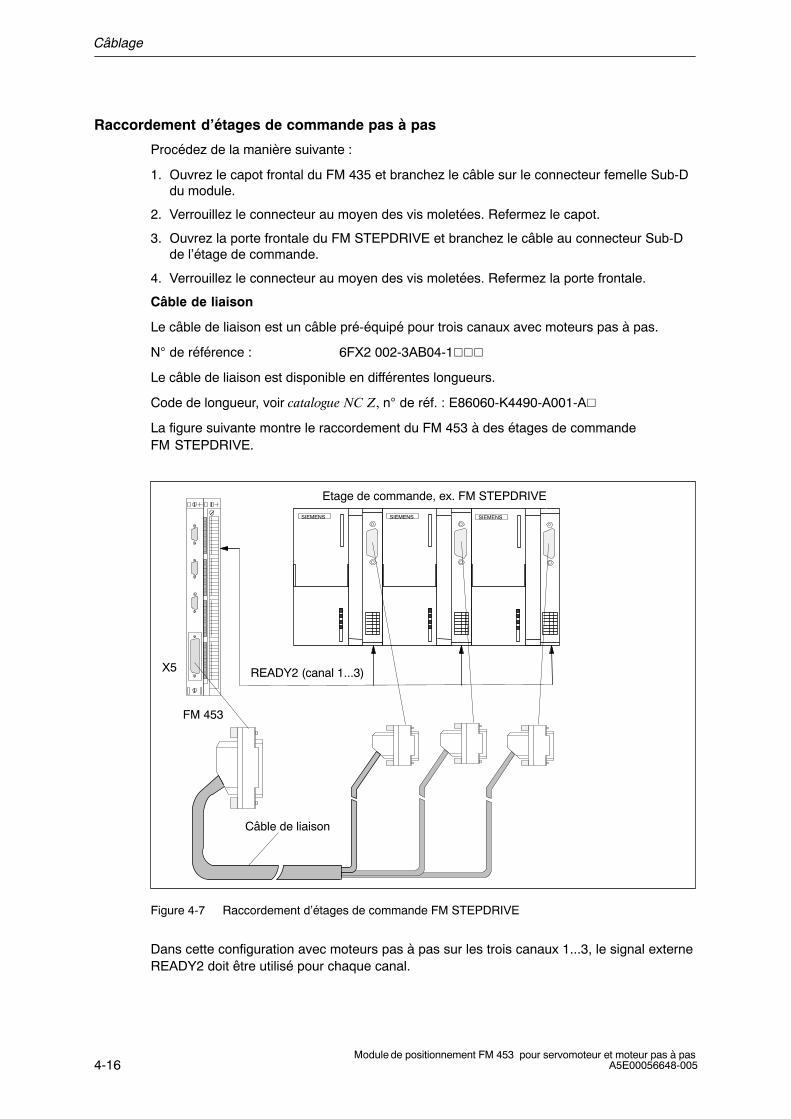
Raccordement d’étages de commande pas à pas
Procédez de la manière suivante :
1. Ouvrez le capot frontal du FM 435 et branchez le câble sur le connecteur femelle Sub-Ddu module.
2. Verrouillez le connecteur au moyen des vis moletées. Refermez le capot.
3. Ouvrez la porte frontale du FM STEPDRIVE et branchez le câble au connecteur Sub-Dde l’étage de commande.
4. Verrouillez le connecteur au moyen des vis moletées. Refermez la porte frontale.
Câble de liaison
Le câble de liaison est un câble pré-équipé pour trois canaux avec moteurs pas à pas.
N° de référence : 6FX2 002-3AB04-1
Le câble de liaison est disponible en différentes longueurs.
Code de longueur, voir catalogue NC Z, n° de réf. : E86060-K4490-A001-A
La figure suivante montre le raccordement du FM 453 à des étages de commandeFM STEPDRIVE.
FM 453
Câble de liaison
X5
SIEMENS SIEMENS
Etage de commande, ex. FM STEPDRIVE
READY2 (canal 1...3)
SIEMENS
Figure 4-7 Raccordement d’étages de commande FM STEPDRIVE
Dans cette configuration avec moteurs pas à pas sur les trois canaux 1...3, le signal externeREADY2 doit être utilisé pour chaque canal.
Câblage
4-17Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
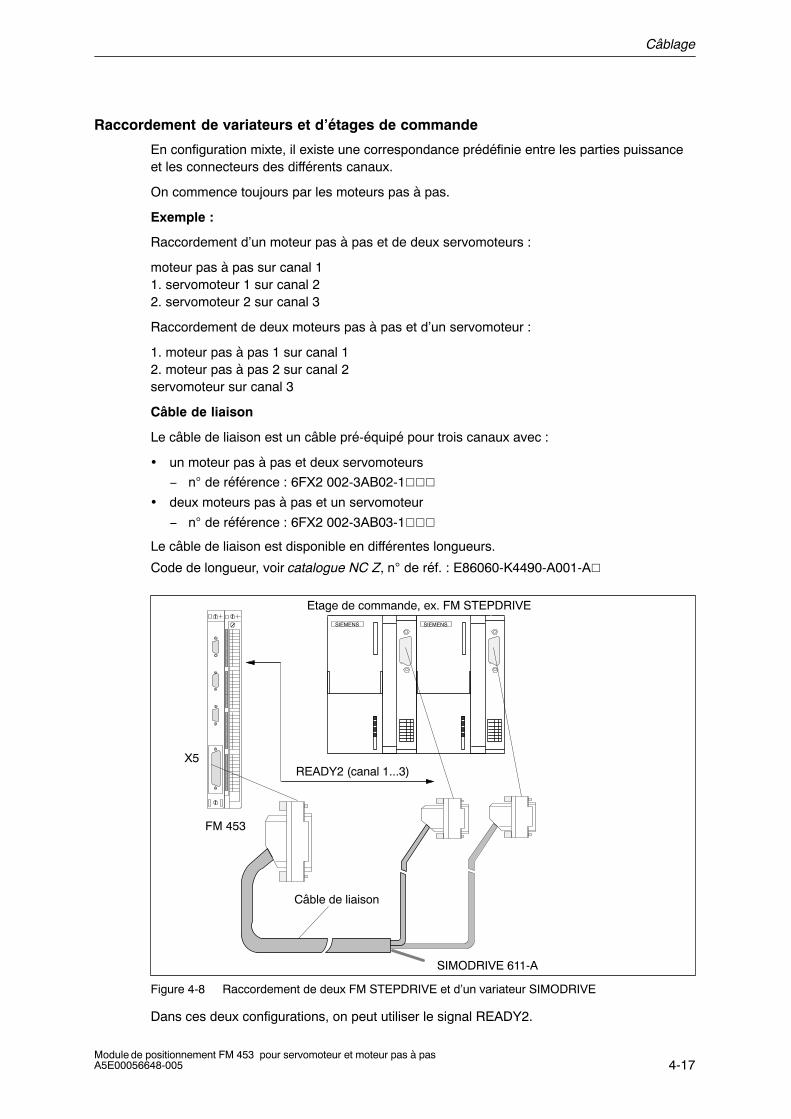
Raccordement de variateurs et d’étages de commande
En configuration mixte, il existe une correspondance prédéfinie entre les parties puissanceet les connecteurs des différents canaux.
On commence toujours par les moteurs pas à pas.
Exemple :
Raccordement d’un moteur pas à pas et de deux servomoteurs :
moteur pas à pas sur canal 11. servomoteur 1 sur canal 22. servomoteur 2 sur canal 3
Raccordement de deux moteurs pas à pas et d’un servomoteur :
1. moteur pas à pas 1 sur canal 12. moteur pas à pas 2 sur canal 2servomoteur sur canal 3
Câble de liaison
Le câble de liaison est un câble pré-équipé pour trois canaux avec :
• un moteur pas à pas et deux servomoteurs
− n° de référence : 6FX2 002-3AB02-1
• deux moteurs pas à pas et un servomoteur
− n° de référence : 6FX2 002-3AB03-1
Le câble de liaison est disponible en différentes longueurs.
Code de longueur, voir catalogue NC Z, n° de réf. : E86060-K4490-A001-A
FM 453
Câble de liaison
X5
SIEMENS SIEMENS
Etage de commande, ex. FM STEPDRIVE
SIMODRIVE 611-A
READY2 (canal 1...3)
Figure 4-8 Raccordement de deux FM STEPDRIVE et d’un variateur SIMODRIVE
Dans ces deux configurations, on peut utiliser le signal READY2.
Câblage
4-18Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
4.4 Description de l’interface pour codeur
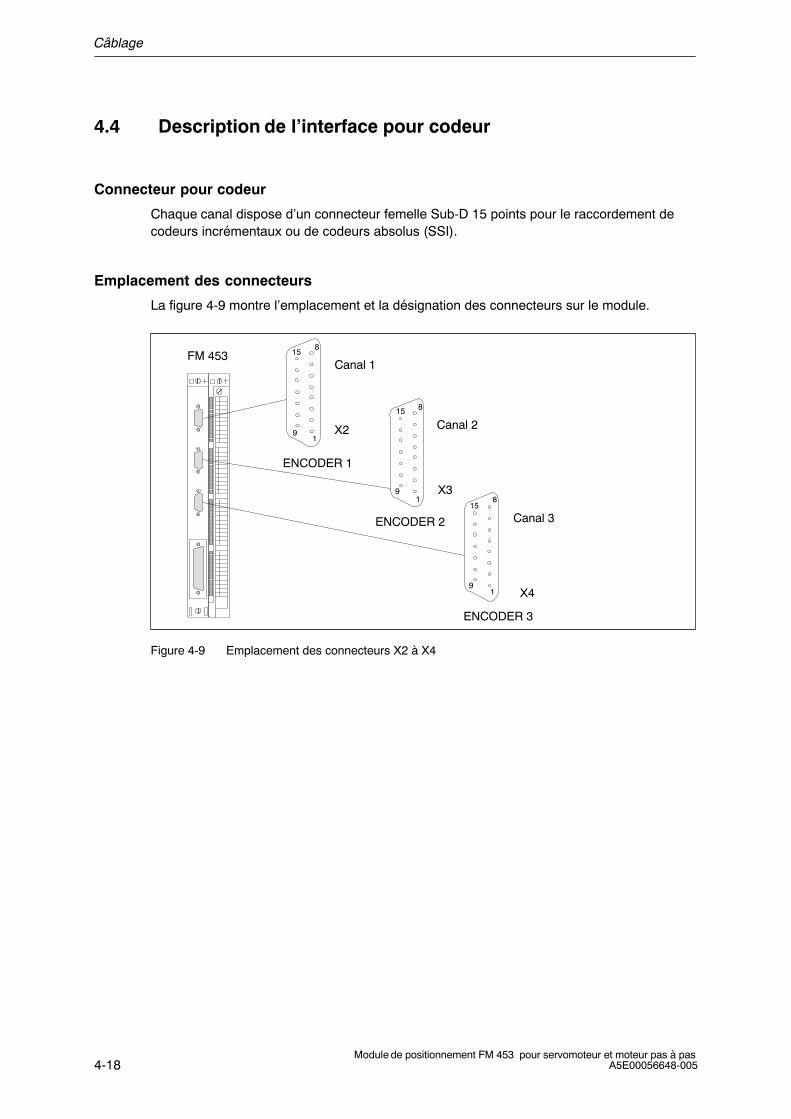
Connecteur pour codeur
Chaque canal dispose d’un connecteur femelle Sub-D 15 points pour le raccordement decodeurs incrémentaux ou de codeurs absolus (SSI).
Emplacement des connecteurs
La figure 4-9 montre l’emplacement et la désignation des connecteurs sur le module.
FM 453
ENCODER 1
1
158
9
ENCODER 2
1
15 8
9
ENCODER 3
1
158
9
X2
X3
X4
Canal 1
Canal 2
Canal 3
Figure 4-9 Emplacement des connecteurs X2 à X4
Câblage
4-19Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
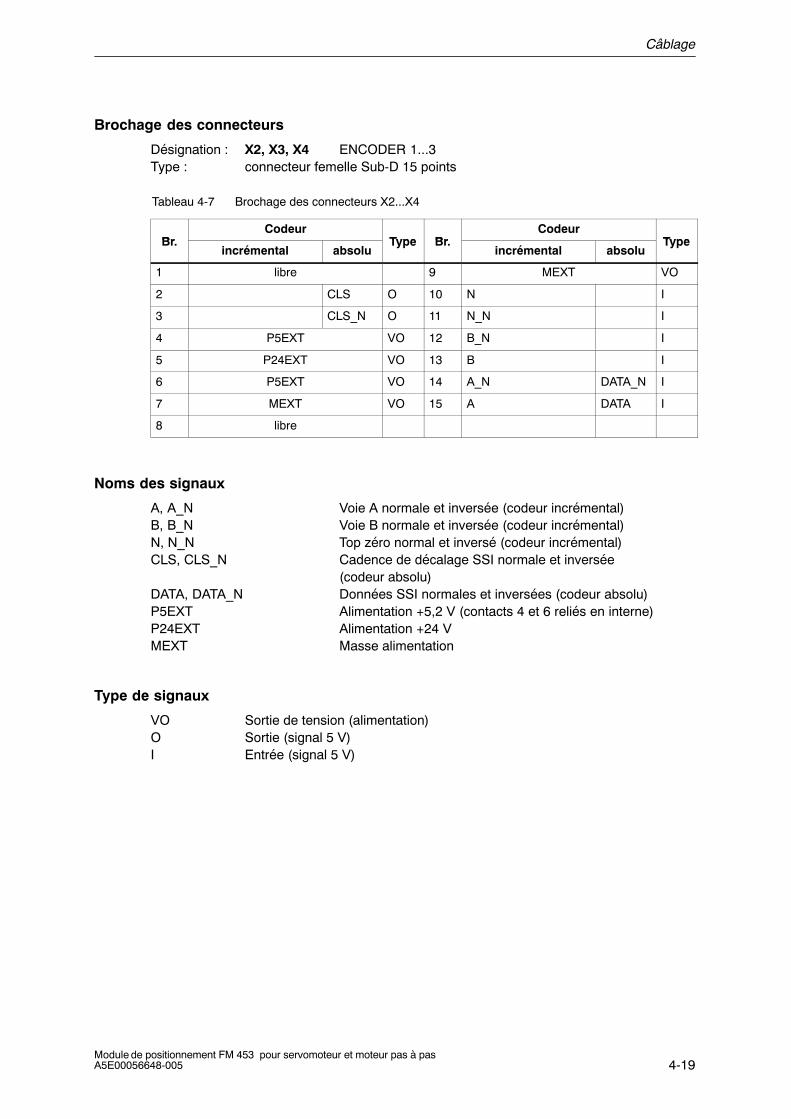
Brochage des connecteurs
Désignation : X2, X3, X4 ENCODER 1...3Type : connecteur femelle Sub-D 15 points
Tableau 4-7 Brochage des connecteurs X2...X4
BrCodeur
Type BrCodeur
TypeBr.incrémental absolu
Type Br.incrémental absolu
Type
1 libre 9 MEXT VO
2 CLS O 10 N I
3 CLS_N O 11 N_N I
4 P5EXT VO 12 B_N I
5 P24EXT VO 13 B I
6 P5EXT VO 14 A_N DATA_N I
7 MEXT VO 15 A DATA I
8 libre
Noms des signaux
A, A_N Voie A normale et inversée (codeur incrémental)B, B_N Voie B normale et inversée (codeur incrémental)N, N_N Top zéro normal et inversé (codeur incrémental)CLS, CLS_N Cadence de décalage SSI normale et inversée
(codeur absolu)DATA, DATA_N Données SSI normales et inversées (codeur absolu)P5EXT Alimentation +5,2 V (contacts 4 et 6 reliés en interne)P24EXT Alimentation +24 VMEXT Masse alimentation
Type de signaux
VO Sortie de tension (alimentation)O Sortie (signal 5 V)I Entrée (signal 5 V)

Câblage
4-20Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Types de codeurs raccordables
Des codeurs de type incrémental ou absolu (SSI) (p. ex. capteurs rotatifs numériques)peuvent être directement raccordés, la sélection s’effectuant par le biais des paramètresmachine.
Des codeurs avec signaux SINUS/COSINUS (p. ex. règles de mesure) peuvent être raccor-dés par le biais d’un système électronique externe de conformation des impulsions (EXE)qui convertit les signaux au niveau 5 V.
Caractéristiques des codeurs
Les codeurs directement raccordables (ou avec EXE) doivent respecter les conditions sui-vantes :
Codeurs incrémentaux
Procédure de transmission : Transmission différentielle avec signauxrectangulaires 5 V (comme la norme RS 422)
Signaux de sortie : Voie A, signal normal et inversé (Ua1, Ua1)Voie B, signal normal et inversé (Ua2, Ua2)Top zéro, signal normal et inversé (Ua0, Ua0)En cas d’utilisation d’un codeur incrémental, les signaux des voies A et B doivent être à l’état TRUE au moment du top zéro (signal normal). Si ce n’est pas le cas, utilisez le signal inversé et effectuez une adaptation de sens.Signal “1” 2,4 VSignal “0” < 0,8 V
Fréquence de sortie max. : 1 MHz
Déphasage voies A et B : 90° 30°
Consommation : max. 300 mA
Codeurs absolus (SSI)
Procédure de transmission : Interface série synchrone (SSI) avec transmis-sion de signaux différentiels 5 V(comme la norme RS 422)
Signal de sortie : Données, signal normal et inversé
Signal d’entrée : Cadence de décalage, signal normal et inversé
Résolution : max. 25 bits
Fréquence de transm. max. :1,25 Mbits/s
Consommation : max. 300 mA
Câblage
4-21Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Alimentation des codeurs
La tension d’alimentation 5 V ou 24 V pour les codeurs est générée à l’intérieur du module, àpartir de la tension auxiliaire d’alimentation 1L+ - 1M. Elle est disponible au niveau du con-necteur femelle Sub-D, ce qui vous permet d’alimenter directement les codeurs via le câblede liaison, sans câblage supplémentaire. La tension délivrée est électroniquement protégéecontre les courts-circuits et les surcharges thermiques et fait l’objet d’une surveillance.
Spécification de la tension auxiliaire d’alimentation :
La tension continue 24 V doit être une très basse tension fonctionnelle (TBTF) à séparationgalvanique sûre.
Une liaison équipotentielle est requise entre la masse de référence 1M et le potentiel deréférence de la CPU (cf. fig. 4-1 “Raccordement masse alimentation auxiliaire/externe”).
Tableau 4-8 Paramètres électriques de l’alimentation des codeurs
Paramètre mini maxi Unité
Alimentation 5 V
Tension 5,1 5,3 V
Ondulation 50 mVcàc
Courant de charge admissible 0,3 A
Alimentation 24 V
Tension 20,4 28,8 V
Ondulation 3,6 Vss
Courant de charge admissible par canal 0,3 A
Nota
Ne pas brancher ou débrancher les capteurs 24 V alimentés en tension par le biais de X2,X3, X4 lorsque le FM 453 est sous tension.
Alimentation des codeurs par une tension externe
Si les codeurs sont alimentés par une tension externe (les codeurs n’utilisent pas l’alimenta-tion du FM), les potentiels de référence des deux alimentations doivent être reliés.
Liaison équipotentielle entre la masse de la tension externe et le potentiel de référence de laCPU (cf. fig. 4-1 “Raccordement masse alimentation auxiliaire/externe”).
La tension externe doit être une très basse tension fonctionnelle (TBTF) à séparation galva-nique sûre.
Câblage
4-22Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Câble de liaison au codeur
La longueur maximale de câble dépend de la spécification de l’alimentation des codeurs etde la fréquence de transmission. Afin d’assurer un fonctionnement sans dérangements, ilconviendrait de ne pas dépasser les valeurs suivantes en cas d’utilisation de câbles de liai-son pré-équipés de SIEMENS.
Tableau 4-9 Longueurs de câble en fonction de l’alimentation du codeur
Tensiond’alimentation Tolérances Consommation
Longueur maxi de câble
5 V cc 4,75 V...5,25 V < 300 mA 25 m
5 V cc 4,75 V...5,25 V < 210 mA 35 m
24 V cc 20,4 V...28,8 V < 300 mA 100 m
24 V cc 11 V...30 V < 300 mA 300 m
Nota
Si vous souhaitez raccorder des codeurs incrémentaux déportés de plus de 25 m ou 35 m,choisissez un type de codeur demandant une alimentation 24 V.
Tableau 4-10 Longueurs maximales de câble en fonction de la fréquence de transmission
Type de codeur Fréquence Longueur maxide câble
Codeur incrémental1 MHz 10 m
Codeur incrémental500 kHz 35 m
Codeur absolu (SSI)1,25 Mbits/s 10 m
Codeur absolu (SSI)156 kbits/s 250 m
Autres indications concernant les codeurs : cf. chap. 9.6.

Câblage
4-23Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
4.5 Raccordement des codeurs
Raccordement des câbles de liaison
Tenir compte des points suivants :
Nota
Utilisez exclusivement des câbles blindés, le blindage devant être connecté au boîtier métal-lique ou métallisé du connecteur.
Les câbles pré-équipés proposés comme accessoires offrent une sécurité optimale contreles perturbations ainsi que des sections suffisantes pour l’alimentation des codeurs.
Le blindage du câble doit être connecté aux deux extrémités (à proximité du FM 453 et descodeurs) à une barre des blindages mise à la terre, en veillant à établir une grande surfacede contact.
FM 453
X3X3X3X3
Canal 1...3
p. ex.codeur absolu(SSI)
p. ex.ROD 320(codeur intégrédans 1FT5)
p. ex.règle de mesureavec EXE
p. ex.codeur incré-mental avecRS 422I
Câble de liaison
Figure 4-10 Raccordement des codeurs
Câblage
4-24Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Marche à suivre lors du branchement des codeurs
La procédure de raccordement du système de mesure est la suivante :
1. Raccorder le câble de liaison au système de mesure.
Pour des codeurs absolus (SSI), il est éventuellement nécessaire d’équiper le câble(extrémité vers le codeur) selon les indications du fabricant.
2. Ouvrir la porte frontale et monter les connecteurs Sub-D sur le module.
3. Verrouiller les connecteurs à l’aide des vis moletées. Refermer le capot frontal.
Câbles de liaison disponibles pour les codeurs
Câble pré-équipé pour codeurs incrémentaux type RS 422 ou EXE (pour le raccordement derègles de mesure)
Réf. : 6FX2 002-2CD01-10
Câble pré-équipé pour codeurs intégrés avec connecteur rond 17 points
Réf. : 6FX2 002-2CE01-10
Câble pré-équipé pour codeurs absolus (SSI) avec une extrémité libre
Réf. : 6FX2 002-2CC01-10
Les câbles de liaison sont disponibles en plusieurs longueurs.
voir catalogue NC Z, réf. E86060-K4490-A001-A
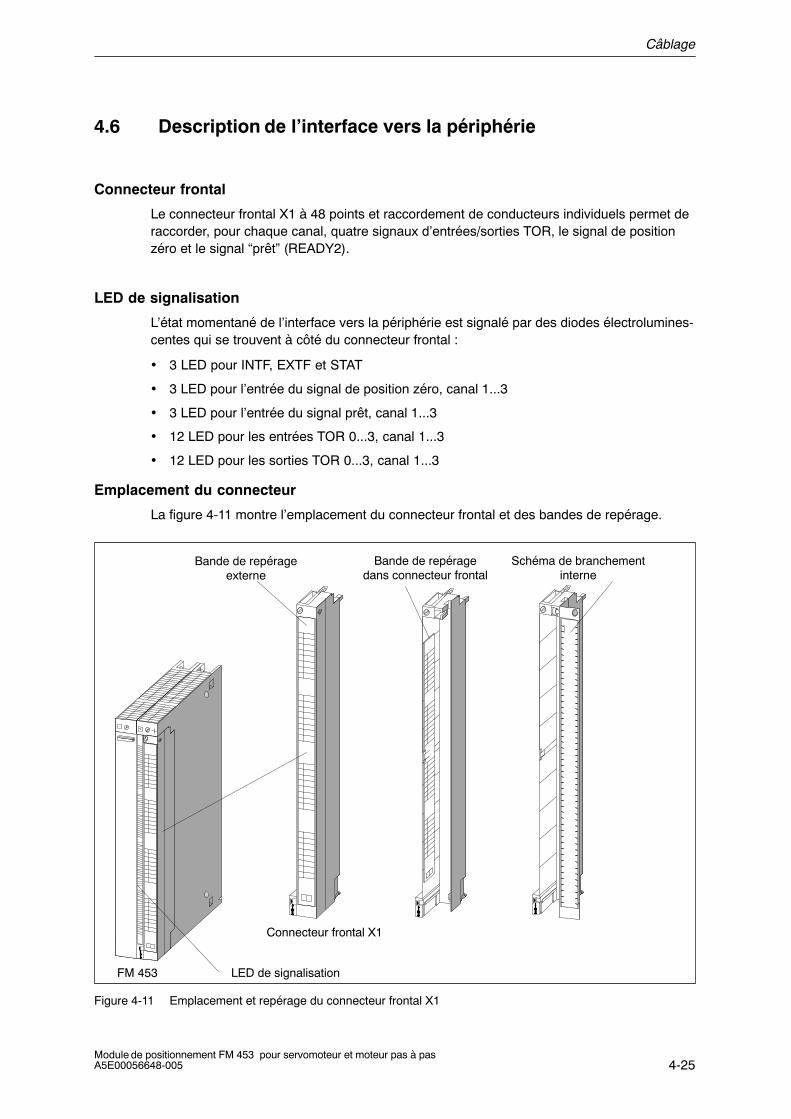
Câblage
4-25Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
4.6 Description de l’interface vers la périphérie
Connecteur frontal
Le connecteur frontal X1 à 48 points et raccordement de conducteurs individuels permet deraccorder, pour chaque canal, quatre signaux d’entrées/sorties TOR, le signal de positionzéro et le signal “prêt” (READY2).
LED de signalisation
L’état momentané de l’interface vers la périphérie est signalé par des diodes électrolumines-centes qui se trouvent à côté du connecteur frontal :
• 3 LED pour INTF, EXTF et STAT
• 3 LED pour l’entrée du signal de position zéro, canal 1...3
• 3 LED pour l’entrée du signal prêt, canal 1...3
• 12 LED pour les entrées TOR 0...3, canal 1...3
• 12 LED pour les sorties TOR 0...3, canal 1...3
Emplacement du connecteur
La figure 4-11 montre l’emplacement du connecteur frontal et des bandes de repérage.
Connecteur frontal X1
FM 453 LED de signalisation
Bande de repérageexterne
Schéma de branchementinterne
Bande de repéragedans connecteur frontal
Figure 4-11 Emplacement et repérage du connecteur frontal X1
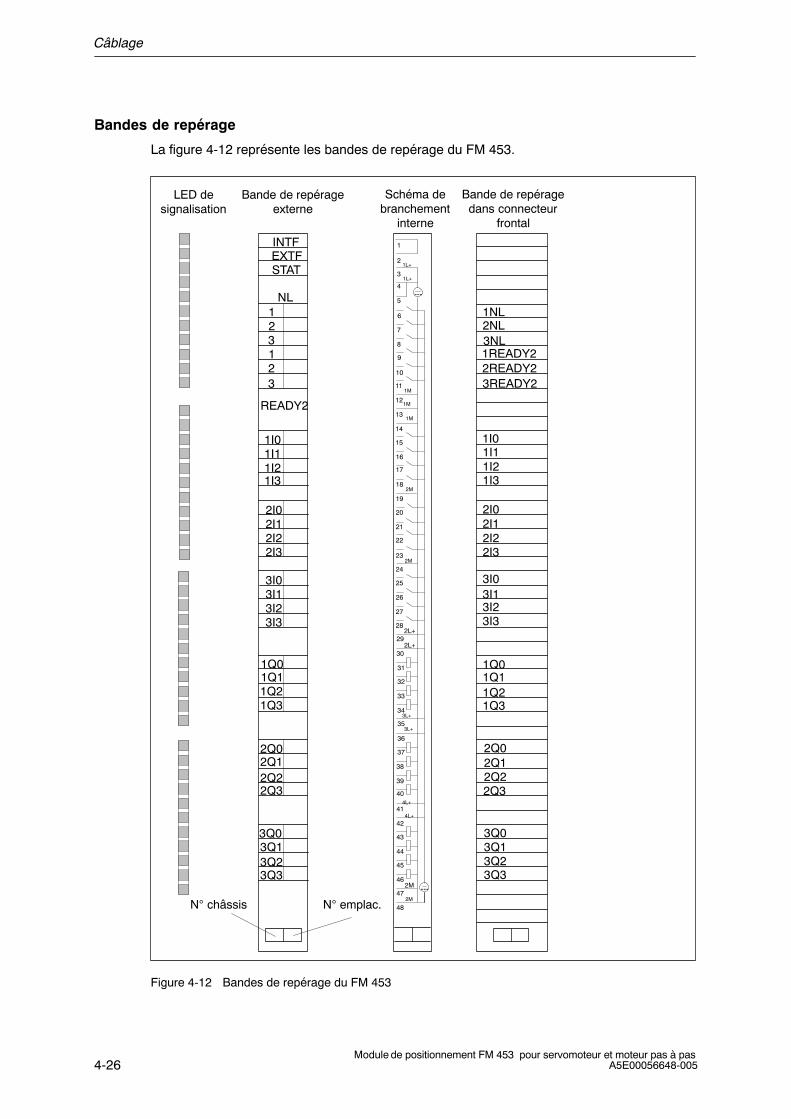
Câblage
4-26Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Bandes de repérage
La figure 4-12 représente les bandes de repérage du FM 453.
Bande de repérageexterne
Schéma debranchement
interne
Bande de repéragedans connecteur
frontal
INTFEXTFSTAT
1L+
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
2M
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
LED designalisation
1L+
2M
4L+
4L+
3L+
3L+
2M
2L+
2L+
2M
1M
1M
1M
1NL2NL3NL1READY22READY23READY2
1I01I11I21I3
2I02I12I22I3
3I03I13I23I3
1Q01Q11Q21Q3
2Q02Q12Q22Q3
3Q03Q13Q23Q3
NL123123
READY2
1I01I11I21I3
2I02I12I22I3
3I03I13I23I3
1Q01Q11Q21Q3
2Q02Q12Q22Q3
3Q03Q13Q23Q3
N° châssis N° emplac.
---
---
Figure 4-12 Bandes de repérage du FM 453
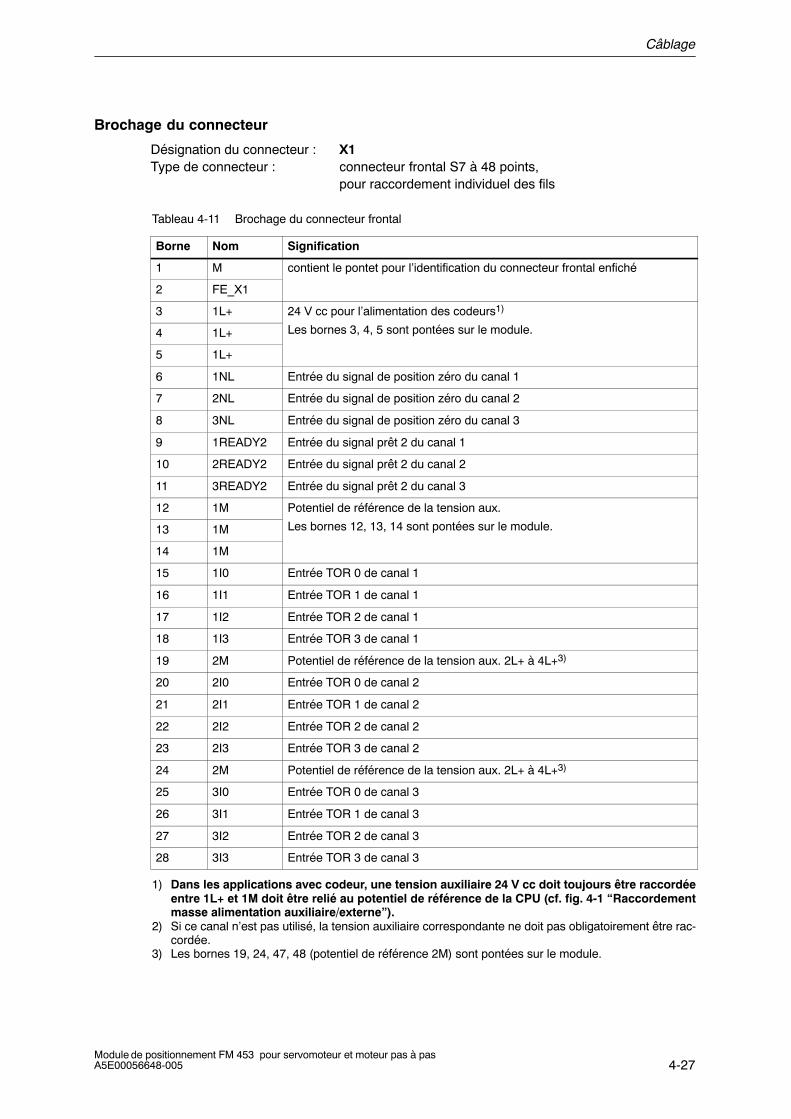
Câblage
4-27Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Brochage du connecteur
Désignation du connecteur : X1Type de connecteur : connecteur frontal S7 à 48 points,
pour raccordement individuel des fils
Tableau 4-11 Brochage du connecteur frontal
Borne Nom Signification
1 M contient le pontet pour l’identification du connecteur frontal enfiché
2 FE_X1
3 1L+ 24 V cc pour l’alimentation des codeurs1)
4 1L+ Les bornes 3, 4, 5 sont pontées sur le module.
5 1L+
6 1NL Entrée du signal de position zéro du canal 1
7 2NL Entrée du signal de position zéro du canal 2
8 3NL Entrée du signal de position zéro du canal 3
9 1READY2 Entrée du signal prêt 2 du canal 1
10 2READY2 Entrée du signal prêt 2 du canal 2
11 3READY2 Entrée du signal prêt 2 du canal 3
12 1M Potentiel de référence de la tension aux.
13 1M Les bornes 12, 13, 14 sont pontées sur le module.
14 1M
15 1I0 Entrée TOR 0 de canal 1
16 1I1 Entrée TOR 1 de canal 1
17 1I2 Entrée TOR 2 de canal 1
18 1I3 Entrée TOR 3 de canal 1
19 2M Potentiel de référence de la tension aux. 2L+ à 4L+3)
20 2I0 Entrée TOR 0 de canal 2
21 2I1 Entrée TOR 1 de canal 2
22 2I2 Entrée TOR 2 de canal 2
23 2I3 Entrée TOR 3 de canal 2
24 2M Potentiel de référence de la tension aux. 2L+ à 4L+3)
25 3I0 Entrée TOR 0 de canal 3
26 3I1 Entrée TOR 1 de canal 3
27 3I2 Entrée TOR 2 de canal 3
28 3I3 Entrée TOR 3 de canal 3
1) Dans les applications avec codeur, une tension auxiliaire 24 V cc doit toujours être raccordéeentre 1L+ et 1M doit être relié au potentiel de référence de la CPU (cf. fig. 4-1 “Raccordementmasse alimentation auxiliaire/externe”).
2) Si ce canal n’est pas utilisé, la tension auxiliaire correspondante ne doit pas obligatoirement être rac-cordée.
3) Les bornes 19, 24, 47, 48 (potentiel de référence 2M) sont pontées sur le module.
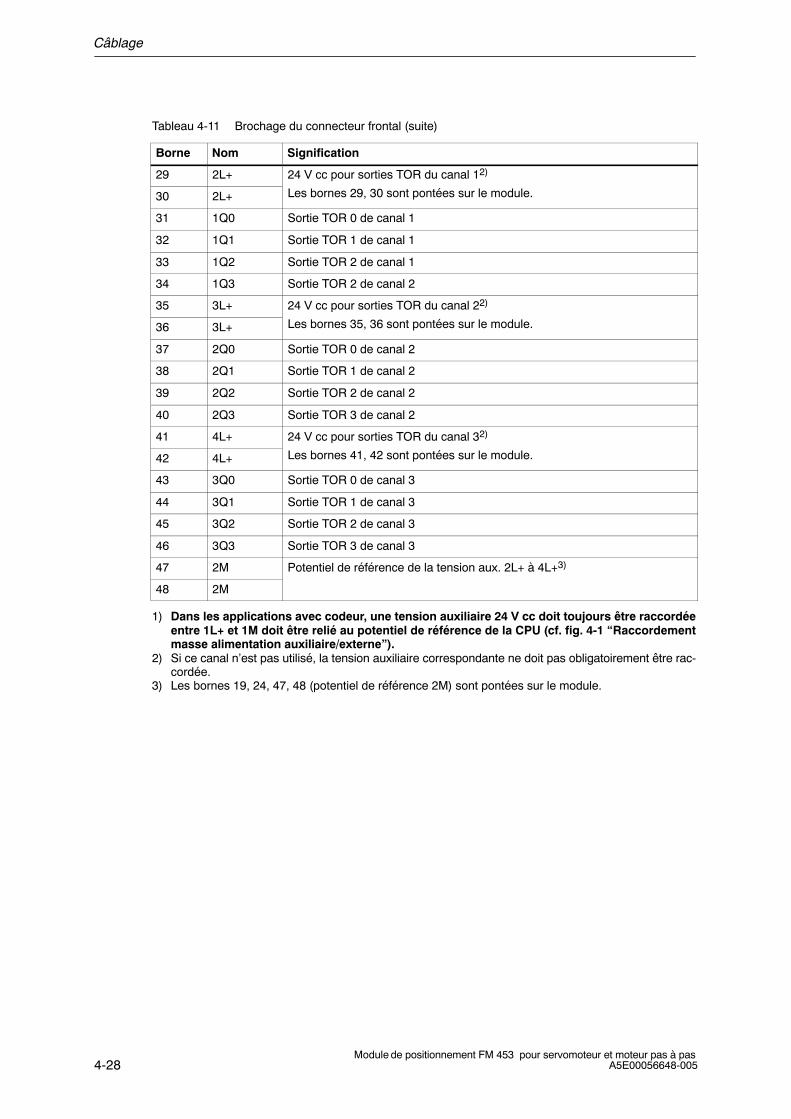
Câblage
4-28Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 4-11 Brochage du connecteur frontal (suite)
Borne SignificationNom
29 2L+ 24 V cc pour sorties TOR du canal 12)
30 2L+ Les bornes 29, 30 sont pontées sur le module.
31 1Q0 Sortie TOR 0 de canal 1
32 1Q1 Sortie TOR 1 de canal 1
33 1Q2 Sortie TOR 2 de canal 1
34 1Q3 Sortie TOR 2 de canal 2
35 3L+ 24 V cc pour sorties TOR du canal 22)
36 3L+ Les bornes 35, 36 sont pontées sur le module.
37 2Q0 Sortie TOR 0 de canal 2
38 2Q1 Sortie TOR 1 de canal 2
39 2Q2 Sortie TOR 2 de canal 2
40 2Q3 Sortie TOR 3 de canal 2
41 4L+ 24 V cc pour sorties TOR du canal 32)
42 4L+ Les bornes 41, 42 sont pontées sur le module.
43 3Q0 Sortie TOR 0 de canal 3
44 3Q1 Sortie TOR 1 de canal 3
45 3Q2 Sortie TOR 2 de canal 3
46 3Q3 Sortie TOR 3 de canal 3
47 2M Potentiel de référence de la tension aux. 2L+ à 4L+3)
48 2M
1) Dans les applications avec codeur, une tension auxiliaire 24 V cc doit toujours être raccordéeentre 1L+ et 1M doit être relié au potentiel de référence de la CPU (cf. fig. 4-1 “Raccordementmasse alimentation auxiliaire/externe”).
2) Si ce canal n’est pas utilisé, la tension auxiliaire correspondante ne doit pas obligatoirement être rac-cordée.
3) Les bornes 19, 24, 47, 48 (potentiel de référence 2M) sont pontées sur le module.

Câblage
4-29Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Entrées TOR (I0...3)
Le FM 453 comporte quatre entrée TOR par canal.
Toutes les entrées ont la même priorité. Il s’agit d’entrées à optocoupleurs avec potentiel deréférence 2M. L’affectation de la fonction de commutation au numéro de l’entrée s’effectuevia les paramètres machine, de même que le choix de la polarité des entrées (front d’activa-tion ou de désactivation).
Ces entrées rapides sont compatibles avec les automates programmables (sortie de typePNP 24 V). Il est possible de raccorder des interrupteurs ou des détecteurs de proximité(capteurs 2 ou 3 fils).
Elles peuvent être utilisées par ex. pour :
• le contact de point de référence
• le commutateur pour départ externe, changement de bloc externe
• le palpeur de mesure.
Autres applications, voir chapitre 5.3.1.
Entrée NL
Cetta autre entrée permet de raccorder pour chaque canal le signal de position zéro enprovenance de l’étage de commande.
Le signal de position zéro est spécifié dans le paramètre PM37 (cf. chap. 5.3.1) et peut être(cf. chap. 9.7) :
• Etat zéro d’alimentation des phases pour la prise de référence
• Top zéro externe (par ex. signal du détecteur de point de référence) pour la prise de ré-férence
Entrée READY2
Une autre entrée sert au raccordement du signal READY2 de chaque canal, (signal régula-teur prêt en provenance de la partie puissance).
Le signal est spécifié dans le paramètre PM37 (cf. chap. 5.3.1).
Nota
L’entrée ”READY2” est une entrée à séparation galvanique par optocoupleur. Les détails surle câblage sont donnés au chap. 4.7

Câblage
4-30Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 4-12 Paramètres électriques des entrées TOR NL, READY2
Tension d’alimentation 24 V cc(plage admissible : 20,4...28,8 V)
Séparation galvanique oui
Tension d’entrée • signal 0 : -3...5 V
• signal 1 : 11...30 V
Courant d’entrée • signal 0 : max. 3 mA
• signal 1 : max. 7 mA
Retard d’entrée
• sur étendue de tension d’entrée
• pour tension d’entrée 24 V
• transition 0 → 1 : max. 15 µs
• transition 1 → 0 : max. 45 µs
• transition 0 → 1 : max. 8 µs
Protection des signaux d’entréecontre l’inversion de polarité
oui
Raccordement des signaux d’entrée
Le raccordement au FM 453 est représenté sur l’exemple du signal prêt READY2.
Les signaux d’entrée peuvent être raccordés de deux manières :
• alimentation à partir de la tension auxiliaire L+
• alimentation à partir de la source de signal externe
Alimentation à partir de la tension auxiliaire L+
La figure 4-13 représente le raccordement du signal prêt au connecteur X1 du FM 453 (ex.variateur SIMODRIVE 611 sur canal 1 du FM).
2L+
2M
30
9
29
48
X1
FM
73
74
Variateur
Contact électroniqueou de relais
Commande du signal prêt par contact électronique ou de relais
ex. SIMODRIVE 611
READY2/canal 1
47
Figure 4-13 Raccordement du signal prêt, alimentation à partir de la tension auxiliaire L+

Câblage
4-31Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Alimentation à partir de la source de signal externe
La figure 4-14 représente l’alimentation du signal prêt à partir de la partie puissance(variateur ou étage de commande).
FM
Commande du signal prêt par contact électronique ou de relais
2M47
9
48
X1
M
P24
Partie puissance
READY2/canal 1
Figure 4-14 Raccordement du signal prêt, alimentation à partir de la partie puissance
Sorties TOR (Q0...3)
Le FM 453 comporte quatre sorties TOR par canal.
Toutes les sorties présentent le même rang. L’affectation de la fonction de commutation aunuméro de la sortie s’effectue via les paramètres machine.
Les quatre sorties servent au câblage de signaux propres à l’utilisateur.
Il peut par ex. s’agir de signaux tels que :
• position atteinte, Arrêt
• fonction auxiliaire M
• sens de rotation avant/arrière
Autres applications, voir chapitre 5.3.1.
Tableau 4-13 Paramètres électriques des sorties TOR
Tension d’alimentation(tension auxiliaire 2L+...4L+)
24 V cc(plage admissible : 20,4...28,8 V)
Séparation galvanique oui
Tension de sortie • signal 0 : courant résiduel maxi 2 mA
• signal 1 : (tension aux. 2L+...4L+ - 0,3 V)
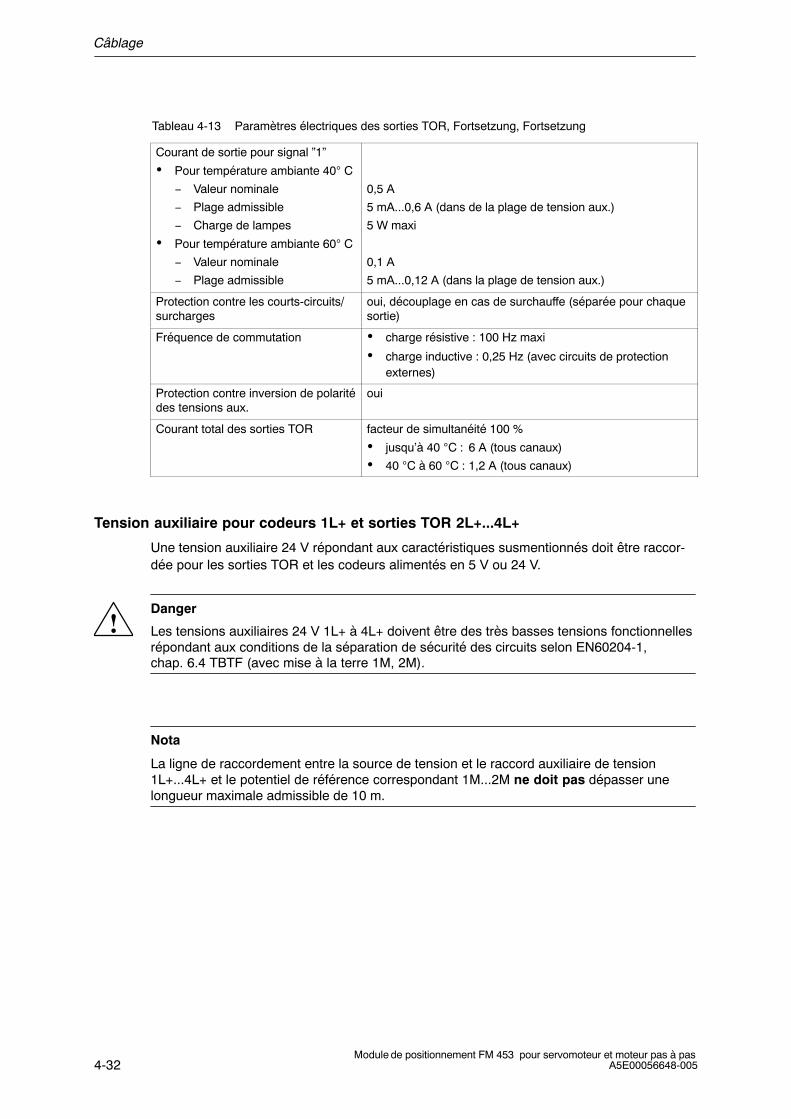
Câblage
4-32Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 4-13 Paramètres électriques des sorties TOR, Fortsetzung, Fortsetzung
Courant de sortie pour signal ”1”
• Pour température ambiante 40° C
− Valeur nominale
− Plage admissible
− Charge de lampes
• Pour température ambiante 60° C
− Valeur nominale
− Plage admissible
0,5 A
5 mA...0,6 A (dans de la plage de tension aux.)
5 W maxi
0,1 A
5 mA...0,12 A (dans la plage de tension aux.)
Protection contre les courts-circuits/surcharges
oui, découplage en cas de surchauffe (séparée pour chaquesortie)
Fréquence de commutation • charge résistive : 100 Hz maxi
• charge inductive : 0,25 Hz (avec circuits de protectionexternes)
Protection contre inversion de polaritédes tensions aux.
oui
Courant total des sorties TOR facteur de simultanéité 100 %
• jusqu’à 40 °C : 6 A (tous canaux)
• 40 °C à 60 °C : 1,2 A (tous canaux)
Tension auxiliaire pour codeurs 1L+ et sorties TOR 2L+...4L+
Une tension auxiliaire 24 V répondant aux caractéristiques susmentionnés doit être raccor-dée pour les sorties TOR et les codeurs alimentés en 5 V ou 24 V.
!Danger
Les tensions auxiliaires 24 V 1L+ à 4L+ doivent être des très basses tensions fonctionnellesrépondant aux conditions de la séparation de sécurité des circuits selon EN60204-1,chap. 6.4 TBTF (avec mise à la terre 1M, 2M).
Nota
La ligne de raccordement entre la source de tension et le raccord auxiliaire de tension1L+...4L+ et le potentiel de référence correspondant 1M...2M ne doit pas dépasser unelongueur maximale admissible de 10 m.
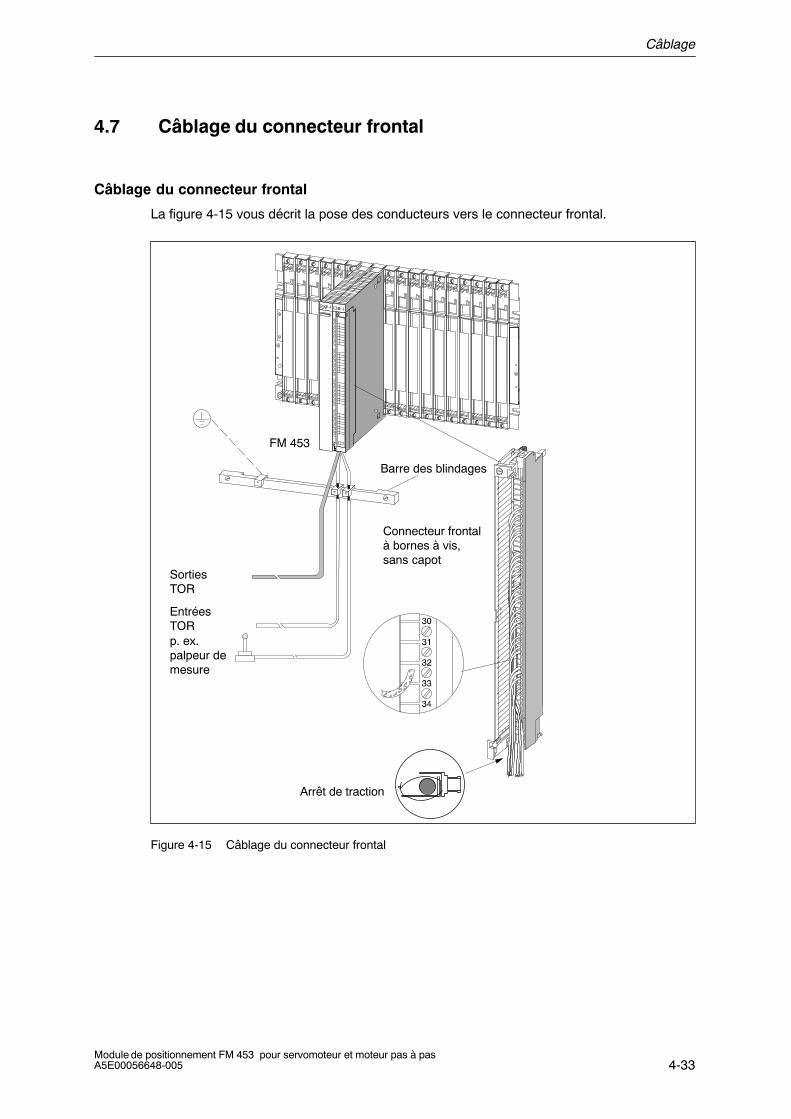
Câblage
4-33Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
4.7 Câblage du connecteur frontal
Câblage du connecteur frontal
La figure 4-15 vous décrit la pose des conducteurs vers le connecteur frontal.
FM 453
ÂÂÂÂÂÂÂÂÂ
Arrêt de traction
Barre des blindages
Connecteur frontalà bornes à vis,sans capot
p. ex.palpeur demesure
SortiesTOR
EntréesTOR
Figure 4-15 Câblage du connecteur frontal
Câblage
4-34Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Câbles de liaison
Câble souple, section :
• 0,5 à 1,5 mm2 pour connecteur frontal pour cosses à clip
• 0,25 à 2,5 mm2 pour connecteur frontal à bornes à vis
• 0,08 à 2,5 mm2 pour connecteur frontal à bornes à ressort
L’utilisation d’embouts n’est pas nécessaire.
Pour les connecteurs frontaux à bornes à vis ou à ressort, vous pouvez utiliser des emboutsà fût isolé ou non isolé selon DIN 46228 partie 1 ou partie 4, forme A, en exécution normale.
Vous pouvez raccorder à une borne deux conducteurs de section unitaire maximale1,0 mm2. Il existe à cet effet des embouts spéciaux.
Voir le manuel d’installation Systèmes d’automatisation S7-400/M7-400, Installation et con-figuration.
Nota
Pour le raccordement aux entrées TOR, NL et READY2, il est nécessaire d’utiliser descâbles blindés afin de garantir une immunité optimale face aux perturbations.
Outillage nécessaire
Tournevis manuel ou électrique de 3,5 mm
Câblage
4-35Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Marche à suivre pour câblage du connecteur frontal
La procédure pour câbler le connecteur frontal est la suivante :
1. Détacher le couvercle du connecteur frontal.
2. Dénuder les conducteurs (sur une longueur de 8 à 10 mm).
3. Si utilisation d’embouts :
isoler les conducteurs sur 10 mm. Sertir les embouts sur les fils.
4. Mettre en place l’arrêt de traction sur le connecteur frontal.
5. Raccorder les conducteurs en commençant par le bas ou par le haut, suivant que lesconducteurs doivent partir par le bas ou par le haut. Serrer aussi les bornes non utilisées.
Le couple de serrage est de 0,6...0,8 Nm.
6. Serrer l’arrêt de traction du faisceau de conducteurs.
7. Fermer le connecteur frontal.
8. Repérer les connexions sur la bande de repérage jointe.
9. Enficher le connecteur frontal sur le module.
Vous trouverez une description détaillée du câblage du connecteur frontal dans le manueld’installation Systèmes d’automatisation S7-400/M7-400, Installation et configuration.
Câbles blindés
En cas d’utilisation de câbles blindés, effectuer les opérations supplémentaires suivantes :
1. A proximité du FM 453, le blindage du câble doit être connecté par une grande surfacede co ntact à une barres des blindages mise à la terre.
voir le manuel d’installation Systèmes d’automatisation S7-400/M7-400, Installation etconfiguration.
2. Prolonger le blindage jusqu’au module, mais ne pas connecter le blindage au niveau dumodule.

Câblage
4-36Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
5-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Paramétrage
Contenu du chapitre
Paragraphe Thème Page
5.1 Installation de ”Paramétrage du FM 453” 5-3
5.2 Familiarisation avec ”Paramétrage du FM 453” 5-4
5.3 Données de paramétrage 5-7
5.4 Paramétrage avec ”Paramétrage du FM 453” 5-30
5.5 Mémorisation des données de paramétrage dans SDB 1 000 5-31
5

Paramétrage
5-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Généralités
Ce chapitre vous fournit une vue d’ensemble du paramétrage du FM 453 avec l’outil deparamétrage ”Paramétrage du FM 453”.
Bus P
Bus K
MPI
CPUS7-400
Online (traitement dansle menu Système cibleet sélection de l’optionTraitement online )
Offline (traitementdans le menu Fichier)PG
(STEP 7) HW-CONFIG
Setup.exe
• Outil de paramétrage”Paramétrage du FM 453”
• Blocs fonctionnels FC
• DB-PM (pour la mise en service d’un moteur pas à pas)1)
• Interface utilisateur préconfigurée pour OP
• Manuel au format PDF
• Getting started au format PDF
FM 453
(1 DB par canal)
1) cf. Getting started et chapitre 7
Bloc de donnéesutilisateur
Blocs de données (DB)
• DB-PM
• DB-CS
• DB-CO
• DB-CN
(1 DB par canal)
Paramétrage du châssisSélection des modulesActivation des alarmes(paramètres de base)
Interface deparamétrage
Paramétrage du moduleConfiguration : générationdes données système
Figure 5-1 Vue d’ensemble du paramétrage
Paramétrage
5-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
5.1 Installation de ”Paramétrage du FM 453”
Conditions requises
Un des systèmes d’exploitation suivants doit être installé sur la console de programmation(PG)/le PC :
• ”Windows Vista 32 Bit Ultimate”
• ”Windows Vista 32 Bit Business”
• “Windows 2000 SP4”
• “Windows 2003 Server“
• ”Windows XP-Professional”
Il vous faut le programme STEP 7 (à partir de V5.3 + SP2; Windows Vista: à partir deV5.4 + SP3).
Pour l’exploitation en ligne, la PG/le PC doit être connecté à la CPU du S7-400 (cf. Fig. 4-1).
Installation
Le logiciel complet (outil de paramétrage, blocs fonctionnels et interface utilisateur préconfi-gurée pour OP) est livré sur CD-ROM.
1. Introduire le CD-ROM dans le lecteur de votre PG/PC.
2. Démarrer le fichier Setup.exe se trouvant sur le CD-ROM.
3. Suivre étape par étape les instructions affichées par le programme d’installation.
Résultat : le logiciel est installé en standard dans les répertoires suivants :
-- Outil de paramétrage ”Paramétrage du FM 453” :[répertoire STEP7]\S7FUPOS
-- Blocs fonctionnels : [répertoire STEP7]\S7LIBS\FMSTSV_L
-- Interface utilisateur pour OP :[répertoire STEP7]\EXAMPLES\FM453\zFr17_02_FM453_OP_EX
-- Exemples utilisateur : [répertoire STEP7]\EXAMPLES\zEn17_02Nom du projet STEP7: zEn17_02_FM453_EX
-- DB-PM (pour la mise en service d’un moteur pas à pas) :[répertoire STEP7]\EXAMPLES\FM453\MD
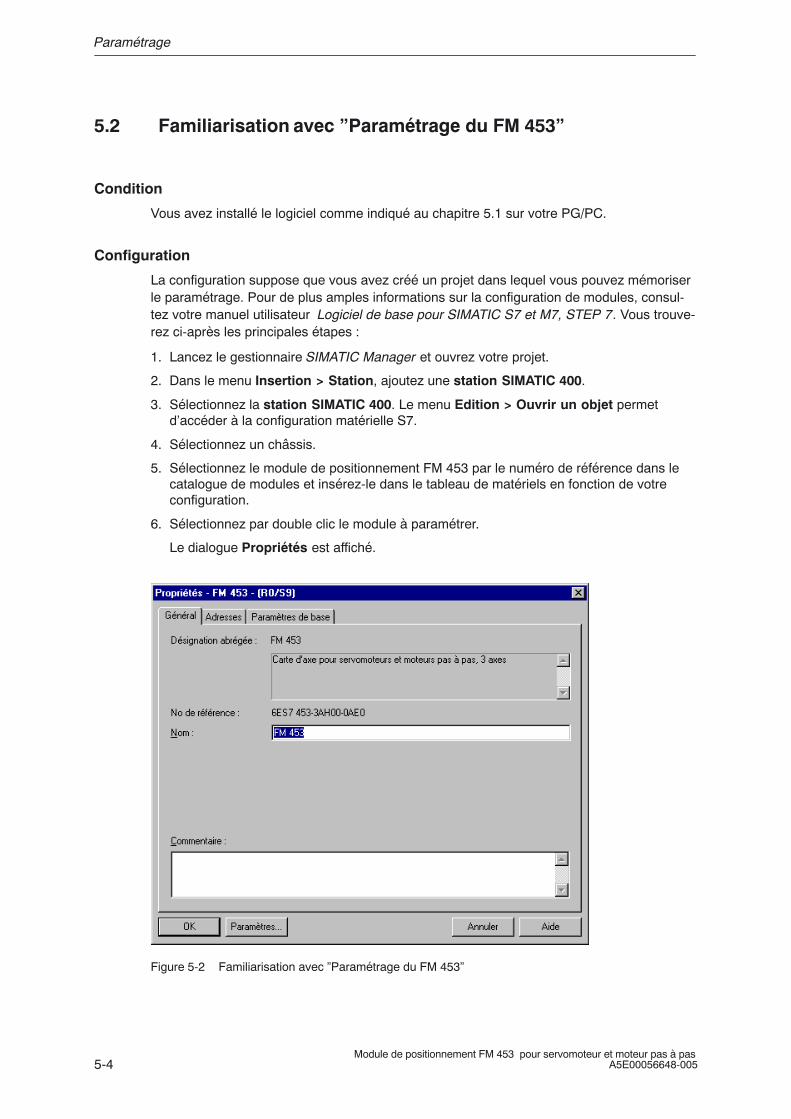
Paramétrage
5-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
5.2 Familiarisation avec ”Paramétrage du FM 453”
Condition
Vous avez installé le logiciel comme indiqué au chapitre 5.1 sur votre PG/PC.
Configuration
La configuration suppose que vous avez créé un projet dans lequel vous pouvez mémoriserle paramétrage. Pour de plus amples informations sur la configuration de modules, consul-tez votre manuel utilisateur Logiciel de base pour SIMATIC S7 et M7, STEP 7. Vous trouve-rez ci-après les principales étapes :
1. Lancez le gestionnaire SIMATIC Manager et ouvrez votre projet.
2. Dans le menu Insertion > Station, ajoutez une station SIMATIC 400.
3. Sélectionnez la station SIMATIC 400. Le menu Edition > Ouvrir un objet permetd’accéder à la configuration matérielle S7.
4. Sélectionnez un châssis.
5. Sélectionnez le module de positionnement FM 453 par le numéro de référence dans lecatalogue de modules et insérez-le dans le tableau de matériels en fonction de votreconfiguration.
6. Sélectionnez par double clic le module à paramétrer.
Le dialogue Propriétés est affiché.
Figure 5-2 Familiarisation avec ”Paramétrage du FM 453”
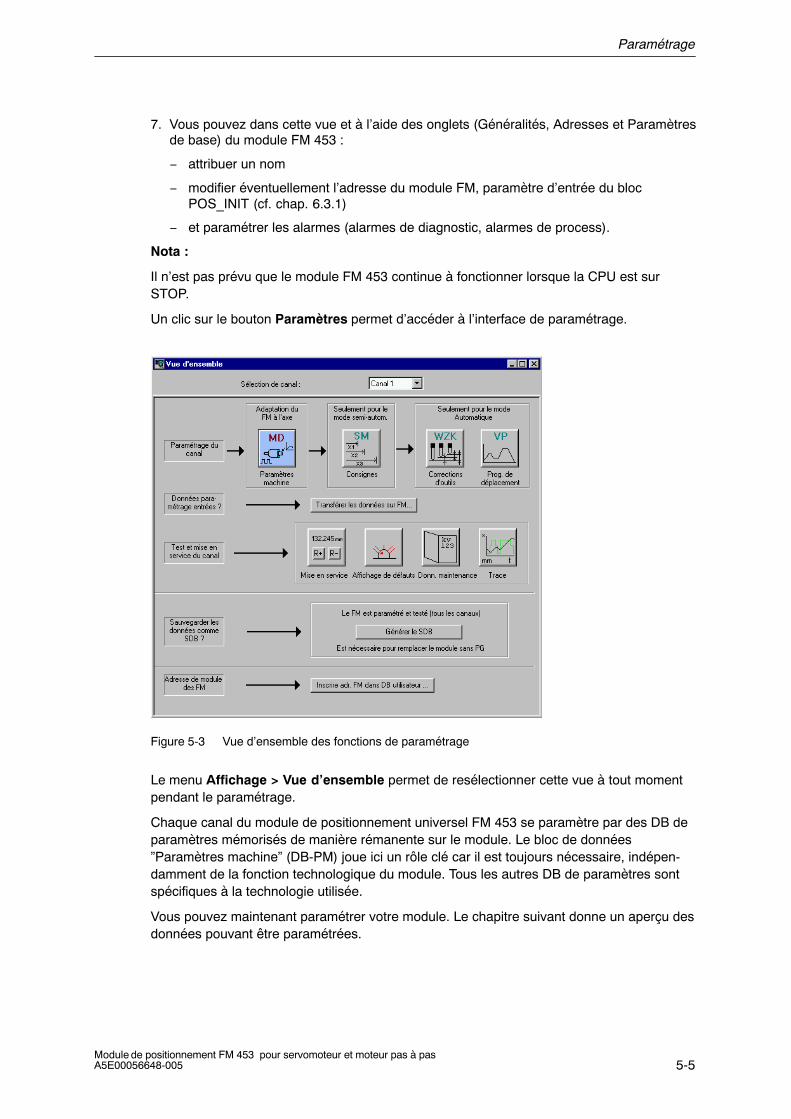
Paramétrage
5-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
7. Vous pouvez dans cette vue et à l’aide des onglets (Généralités, Adresses et Paramètresde base) du module FM 453 :
− attribuer un nom
− modifier éventuellement l’adresse du module FM, paramètre d’entrée du blocPOS_INIT (cf. chap. 6.3.1)
− et paramétrer les alarmes (alarmes de diagnostic, alarmes de process).
Nota :
Il n’est pas prévu que le module FM 453 continue à fonctionner lorsque la CPU est surSTOP.
Un clic sur le bouton Paramètres permet d’accéder à l’interface de paramétrage.
Figure 5-3 Vue d’ensemble des fonctions de paramétrage
Le menu Affichage > Vue d’ensemble permet de resélectionner cette vue à tout momentpendant le paramétrage.
Chaque canal du module de positionnement universel FM 453 se paramètre par des DB deparamètres mémorisés de manière rémanente sur le module. Le bloc de données”Paramètres machine” (DB-PM) joue ici un rôle clé car il est toujours nécessaire, indépen-damment de la fonction technologique du module. Tous les autres DB de paramètres sontspécifiques à la technologie utilisée.
Vous pouvez maintenant paramétrer votre module. Le chapitre suivant donne un aperçu desdonnées pouvant être paramétrées.
Paramétrage
5-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Vous pouvez, avec la souris, adapter la taille de la fenêtre d’introduction des données deparamétrage et de la vue d’ensemble aux dimensions de votre écran.
Procédez de la manière suivante :
1. Placez le pointeur de la souris sur le bord supérieur de la fenêtre jusqu’à ce qu’il se trans-forme en une flèche.
2. Cliquez le bouton gauche de la souris et tirez la souris vers le bas.
3. Relâchez le bouton de la souris.
4. Placez le pointeur de la souris sur la ligne contenant le nom de la fenêtre.
5. Cliquez le bouton gauche de la souris et déplacez la souris vers le haut. Après avoir posi-tionné la fenêtre au bon endroit, relâchez le bouton de la souris.
Une fois que avez configuré votre projet, vous pouvez accéder, dans S7-Configuration, audialogue Propriétés en sélectionnant le module et la commande de menu Edition > Pro-priétés de l’objet.
Aide intégrée
L’interface de paramétrage comporte une aide intégrée pour le paramétrage du module depositionnement d’axe. Pour appeler cette aide:
• Sélectionner la commande de menu Aide > Rubriques d’aide... ou
• appuyer sur la touche F1 ou
• sélectionner le symbole et se placer ensuite sur l’élément ou la fenêtre pour lequel/laquelle des informations sont nécessaires, puis cliquer le bouton gauche de la souris.

Paramétrage
5-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
5.3 Données de paramétrage
Que peut-on paramétrer ?
Les zones de données suivantes peuvent être paramétrées :
• Paramètres machine (PM)
• Consignes (CS)
• Données de correction d’outil (CO)
• Programmes de déplacement (CN)
• Donnés utilisateur (bloc de données utilisateur)
Ces données (sauf les données utilisateur) sont stockées dans des blocs de données (DB)ayant les numéros
1001 à 1239 pour le canal 1
1301 à 1539 pour le canal 2
1601 à 1839 pour le canal 3
Les blocs de données PM, CS, CO, CN sont transférés dans le FM 453 où ils sont mémori-sés de manière rémanente.
Le paramétrage de CS, CO et CN est facultatif et peut être ignoré si les fonctions correspon-dantes ne sont pas utilisées.
Le bloc de données utilisateur doit être mémorisé dans la CPU. Ce n’est qu’à cette conditionqu’il pourra recevoir les données utilisateur en mode online (cf. chap. 6).
Les données de paramétrage (sauf les données utilisateur) peuvent également être créées,traitées et mémorisées en mode offline sur la PG.
Blocs de données (DB)
Le tableau 5-1 vous donne une vue d’ensemble des blocs de données dans le FM 453 ainsique de leur signification.
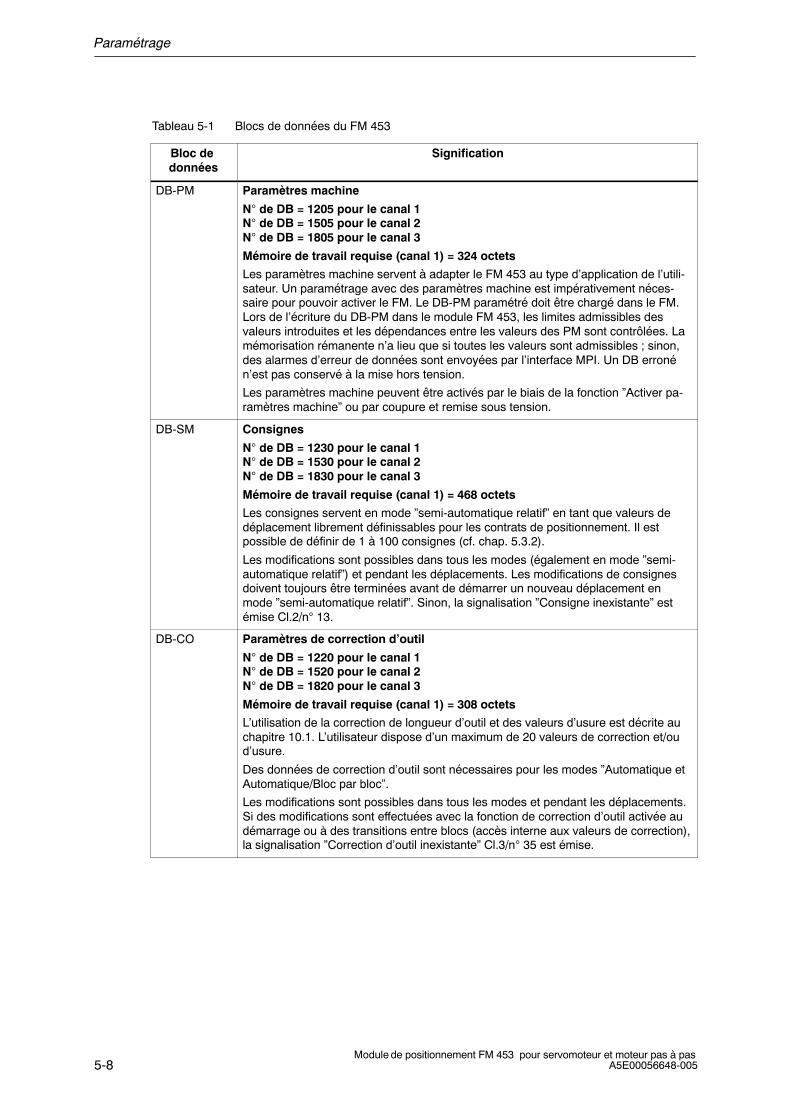
Paramétrage
5-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 5-1 Blocs de données du FM 453
Bloc de données
Signification
DB-PM Paramètres machine
N° de DB = 1205 pour le canal 1N° de DB = 1505 pour le canal 2N° de DB = 1805 pour le canal 3
Mémoire de travail requise (canal 1) = 324 octets
Les paramètres machine servent à adapter le FM 453 au type d’application de l’utili-sateur. Un paramétrage avec des paramètres machine est impérativement néces-saire pour pouvoir activer le FM. Le DB-PM paramétré doit être chargé dans le FM.Lors de l’écriture du DB-PM dans le module FM 453, les limites admissibles desvaleurs introduites et les dépendances entre les valeurs des PM sont contrôlées. Lamémorisation rémanente n’a lieu que si toutes les valeurs sont admissibles ; sinon,des alarmes d’erreur de données sont envoyées par l’interface MPI. Un DB erronén’est pas conservé à la mise hors tension.
Les paramètres machine peuvent être activés par le biais de la fonction ”Activer pa-ramètres machine” ou par coupure et remise sous tension.
DB-SM Consignes
N° de DB = 1230 pour le canal 1N° de DB = 1530 pour le canal 2N° de DB = 1830 pour le canal 3
Mémoire de travail requise (canal 1) = 468 octets
Les consignes servent en mode ”semi-automatique relatif” en tant que valeurs dedéplacement librement définissables pour les contrats de positionnement. Il estpossible de définir de 1 à 100 consignes (cf. chap. 5.3.2).
Les modifications sont possibles dans tous les modes (également en mode ”semi-automatique relatif”) et pendant les déplacements. Les modifications de consignesdoivent toujours être terminées avant de démarrer un nouveau déplacement enmode ”semi-automatique relatif”. Sinon, la signalisation ”Consigne inexistante” estémise Cl.2/n° 13.
DB-CO Paramètres de correction d’outil
N° de DB = 1220 pour le canal 1N° de DB = 1520 pour le canal 2N° de DB = 1820 pour le canal 3
Mémoire de travail requise (canal 1) = 308 octets
L’utilisation de la correction de longueur d’outil et des valeurs d’usure est décrite auchapitre 10.1. L’utilisateur dispose d’un maximum de 20 valeurs de correction et/oud’usure.
Des données de correction d’outil sont nécessaires pour les modes ”Automatique etAutomatique/Bloc par bloc”.
Les modifications sont possibles dans tous les modes et pendant les déplacements.Si des modifications sont effectuées avec la fonction de correction d’outil activée audémarrage ou à des transitions entre blocs (accès interne aux valeurs de correction),la signalisation ”Correction d’outil inexistante” Cl.3/n° 35 est émise.
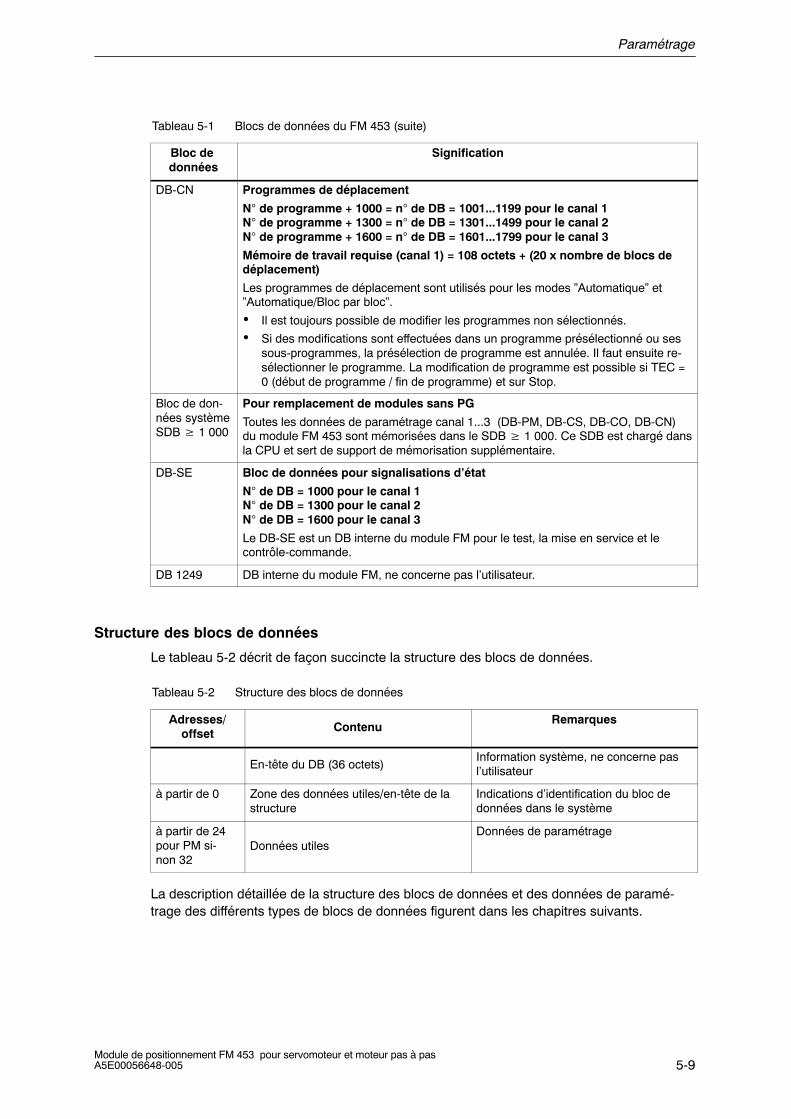
Paramétrage
5-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 5-1 Blocs de données du FM 453 (suite)
Bloc de données
Signification
DB-CN Programmes de déplacement
N° de programme + 1000 = n° de DB = 1001...1199 pour le canal 1N° de programme + 1300 = n° de DB = 1301...1499 pour le canal 2N° de programme + 1600 = n° de DB = 1601...1799 pour le canal 3
Mémoire de travail requise (canal 1) = 108 octets + (20 x nombre de blocs dedéplacement)
Les programmes de déplacement sont utilisés pour les modes ”Automatique” et”Automatique/Bloc par bloc”.
• Il est toujours possible de modifier les programmes non sélectionnés.
• Si des modifications sont effectuées dans un programme présélectionné ou sessous-programmes, la présélection de programme est annulée. Il faut ensuite re-sélectionner le programme. La modification de programme est possible si TEC =0 (début de programme / fin de programme) et sur Stop.
Bloc de don-nées systèmeSDB 1 000
Pour remplacement de modules sans PG
Toutes les données de paramétrage canal 1...3 (DB-PM, DB-CS, DB-CO, DB-CN)du module FM 453 sont mémorisées dans le SDB 1 000. Ce SDB est chargé dansla CPU et sert de support de mémorisation supplémentaire.
DB-SE Bloc de données pour signalisations d’état
N° de DB = 1000 pour le canal 1N° de DB = 1300 pour le canal 2N° de DB = 1600 pour le canal 3
Le DB-SE est un DB interne du module FM pour le test, la mise en service et lecontrôle-commande.
DB 1249 DB interne du module FM, ne concerne pas l’utilisateur.
Structure des blocs de données
Le tableau 5-2 décrit de façon succincte la structure des blocs de données.
Tableau 5-2 Structure des blocs de données
Adresses/offset Contenu
Remarques
En-tête du DB (36 octets)Information système, ne concerne pasl’utilisateur
à partir de 0 Zone des données utiles/en-tête de lastructure
Indications d’identification du bloc dedonnées dans le système
à partir de 24pour PM si-non 32
Données utilesDonnées de paramétrage
La description détaillée de la structure des blocs de données et des données de paramé-trage des différents types de blocs de données figurent dans les chapitres suivants.

Paramétrage
5-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
5.3.1 Paramètres machine
Structure du DB
Le tableau 5-3 vous donne une vue d’ensemble de la structure du bloc de données”Paramètres machine” (DB-PM).
N° DB : 1205 pour le canal 1
N° DB : 1505 pour le canal 2
N° DB : 1805 pour le canal 3
Tableau 5-3 Structure du DB ”Paramètres machine”
Adresse Type devariable
Valeur Signification de la variable Remarque
En-tête de DB (36 octets)
0 WORD Emplacement dans le châssis Adresse du module
2 WORD N° de DB ( 1000) comme dans l’en-tête de DB
4 DWORD réservé
8 WORD N° de défaut (du FM) pour services C+C
10 WORD 1 Numéro de canal
12 2 STRING PM Identification/type de DB 2 caractères ASCII
16 WORD 453 Identifiant du module FM 453
20 4 CHAR 0 Numéro de version/de bloc (Structure du DB)
24... cf. liste des paramètres machinePM 5 ... PM 61
Nota : adresse PM dans DB = (nº PM -5) * 4 + 24
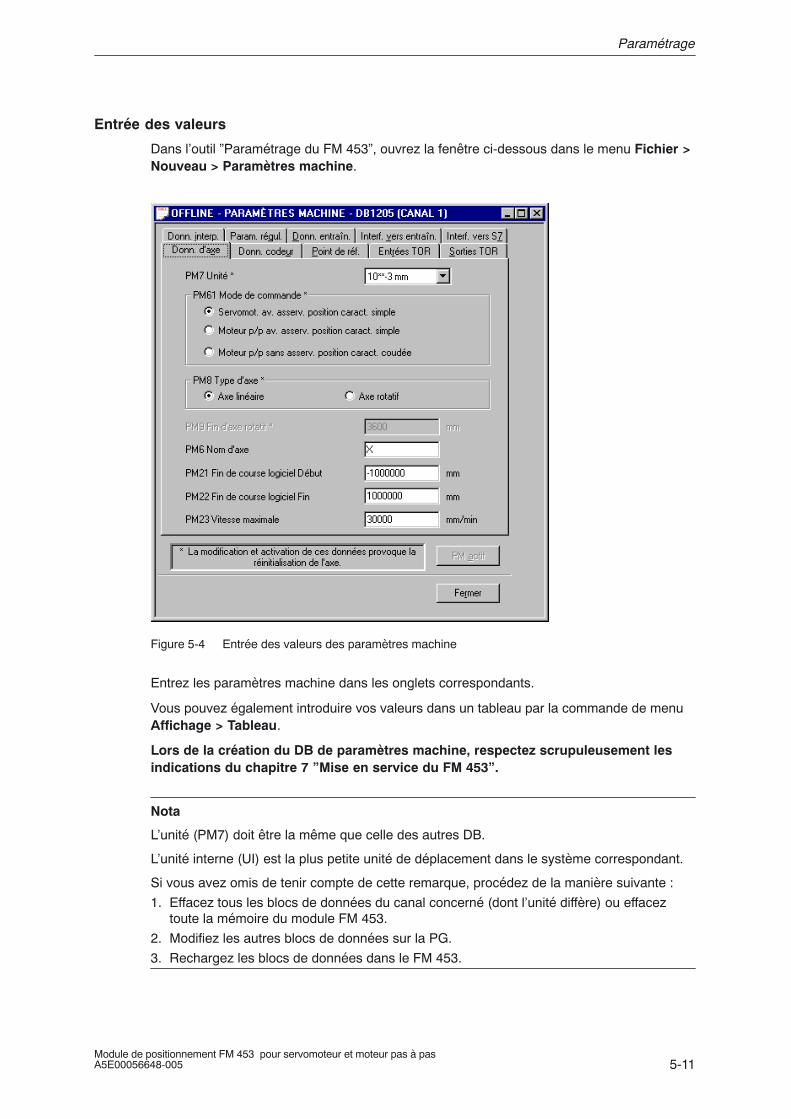
Paramétrage
5-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Entrée des valeurs
Dans l’outil ”Paramétrage du FM 453”, ouvrez la fenêtre ci-dessous dans le menu Fichier >Nouveau > Paramètres machine.
Figure 5-4 Entrée des valeurs des paramètres machine
Entrez les paramètres machine dans les onglets correspondants.
Vous pouvez également introduire vos valeurs dans un tableau par la commande de menuAffichage > Tableau.
Lors de la création du DB de paramètres machine, respectez scrupuleusement lesindications du chapitre 7 ”Mise en service du FM 453”.
Nota
L’unité (PM7) doit être la même que celle des autres DB.
L’unité interne (UI) est la plus petite unité de déplacement dans le système correspondant.
Si vous avez omis de tenir compte de cette remarque, procédez de la manière suivante :
1. Effacez tous les blocs de données du canal concerné (dont l’unité diffère) ou effaceztoute la mémoire du module FM 453.
2. Modifiez les autres blocs de données sur la PG.
3. Rechargez les blocs de données dans le FM 453.
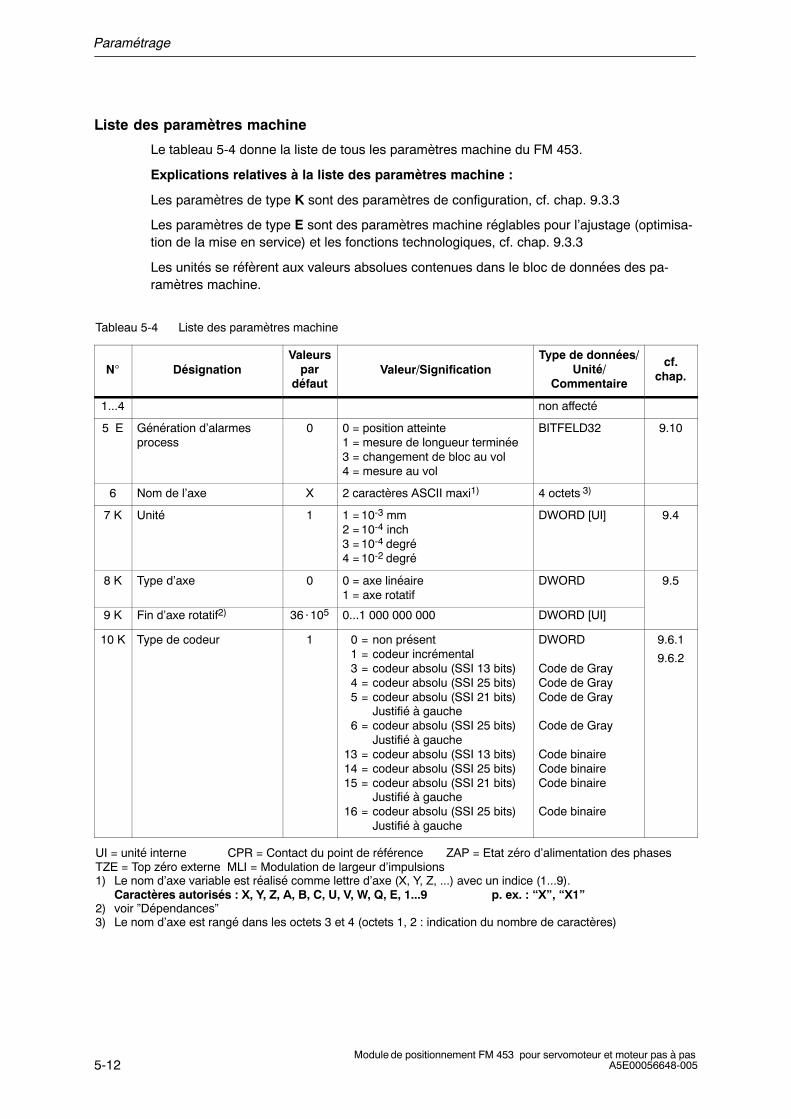
Paramétrage
5-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Liste des paramètres machine
Le tableau 5-4 donne la liste de tous les paramètres machine du FM 453.
Explications relatives à la liste des paramètres machine :
Les paramètres de type K sont des paramètres de configuration, cf. chap. 9.3.3
Les paramètres de type E sont des paramètres machine réglables pour l’ajustage (optimisa-tion de la mise en service) et les fonctions technologiques, cf. chap. 9.3.3
Les unités se réfèrent aux valeurs absolues contenues dans le bloc de données des pa-ramètres machine.
Tableau 5-4 Liste des paramètres machine
N° DésignationValeurs
pardéfaut
Valeur/SignificationType de données/
Unité/Commentaire
cf.chap.
1...4 non affecté
5 E Génération d’alarmesprocess
0 0 = position atteinte1 = mesure de longueur terminée3 = changement de bloc au vol4 = mesure au vol
BITFELD32 9.10
6 Nom de l’axe X 2 caractères ASCII maxi1) 4 octets 3)
7 K Unité 1 1 = 10-3 mm2 = 10-4 inch3 = 10-4 degré4 = 10-2 degré
DWORD [UI] 9.4
8 K Type d’axe 0 0 = axe linéaire1 = axe rotatif
DWORD 9.5
9 K Fin d’axe rotatif2) 36105 0...1 000 000 000 DWORD [UI]
10 K Type de codeur 1 0 = non présent1 = codeur incrémental3 = codeur absolu (SSI 13 bits)4 = codeur absolu (SSI 25 bits)5 = codeur absolu (SSI 21 bits)
Justifié à gauche6 = codeur absolu (SSI 25 bits)
Justifié à gauche13 = codeur absolu (SSI 13 bits)14 = codeur absolu (SSI 25 bits)15 = codeur absolu (SSI 21 bits)
Justifié à gauche16 = codeur absolu (SSI 25 bits)
Justifié à gauche
DWORD
Code de GrayCode de GrayCode de Gray
Code de Gray
Code binaireCode binaireCode binaire
Code binaire
9.6.1
9.6.2
UI = unité interne CPR = Contact du point de référence ZAP = Etat zéro d’alimentation des phasesTZE = Top zéro externe MLI = Modulation de largeur d’impulsions1) Le nom d’axe variable est réalisé comme lettre d’axe (X, Y, Z, ...) avec un indice (1...9).
Caractères autorisés : X, Y, Z, A, B, C, U, V, W, Q, E, 1...9 p. ex. : “X”, “X1”2) voir ”Dépendances”3) Le nom d’axe est rangé dans les octets 3 et 4 (octets 1, 2 : indication du nombre de caractères)
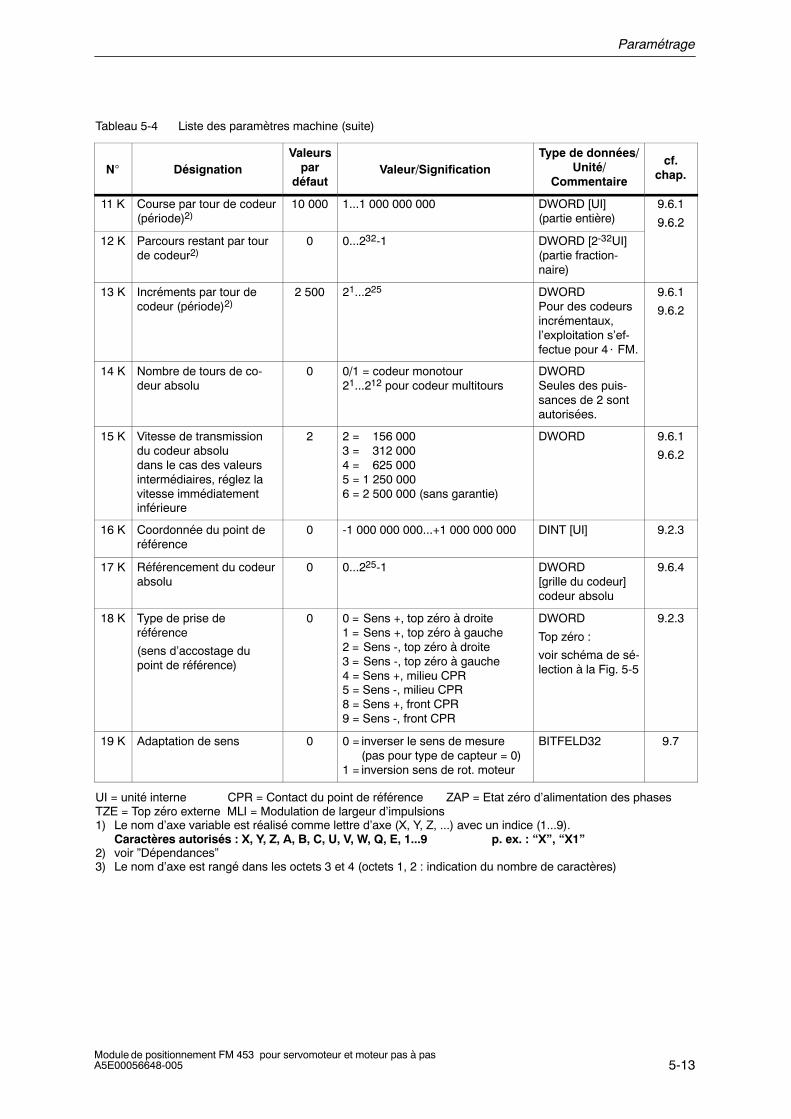
Paramétrage
5-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 5-4 Liste des paramètres machine (suite)
N°cf.
chap.
Type de données/Unité/
CommentaireValeur/Signification
Valeurspar
défautDésignation
11 K Course par tour de codeur(période)2)
10 000 1...1 000 000 000 DWORD [UI](partie entière)
9.6.1
9.6.2
12 K Parcours restant par tourde codeur2)
0 0...232-1 DWORD [2-32UI](partie fraction-naire)
9.6.2
13 K Incréments par tour decodeur (période)2)
2 500 21...225 DWORDPour des codeursincrémentaux,l’exploitation s’ef-fectue pour 4 FM.
9.6.1
9.6.2
14 K Nombre de tours de co-deur absolu
0 0/1 = codeur monotour21...212 pour codeur multitours
DWORDSeules des puis-sances de 2 sontautorisées.
15 K Vitesse de transmissiondu codeur absolu dans le cas des valeursintermédiaires, réglez lavitesse immédiatementinférieure
2 2 = 156 0003 = 312 0004 = 625 0005 = 1 250 0006 = 2 500 000 (sans garantie)
DWORD 9.6.1
9.6.2
16 K Coordonnée du point deréférence
0 -1 000 000 000...+1 000 000 000 DINT [UI] 9.2.3
17 K Référencement du codeurabsolu
0 0...225-1 DWORD[grille du codeur]codeur absolu
9.6.4
18 K Type de prise deréférence
(sens d’accostage dupoint de référence)
0 0 = Sens +, top zéro à droite1 = Sens +, top zéro à gauche2 = Sens -, top zéro à droite3 = Sens -, top zéro à gauche4 = Sens +, milieu CPR5 = Sens -, milieu CPR8 = Sens +, front CPR9 = Sens -, front CPR
DWORD
Top zéro :
voir schéma de sé-lection à la Fig. 5-5
9.2.3
19 K Adaptation de sens 0 0 = inverser le sens de mesure(pas pour type de capteur = 0)
1 = inversion sens de rot. moteur
BITFELD32 9.7
UI = unité interne CPR = Contact du point de référence ZAP = Etat zéro d’alimentation des phasesTZE = Top zéro externe MLI = Modulation de largeur d’impulsions1) Le nom d’axe variable est réalisé comme lettre d’axe (X, Y, Z, ...) avec un indice (1...9).
Caractères autorisés : X, Y, Z, A, B, C, U, V, W, Q, E, 1...9 p. ex. : “X”, “X1”2) voir ”Dépendances”3) Le nom d’axe est rangé dans les octets 3 et 4 (octets 1, 2 : indication du nombre de caractères)
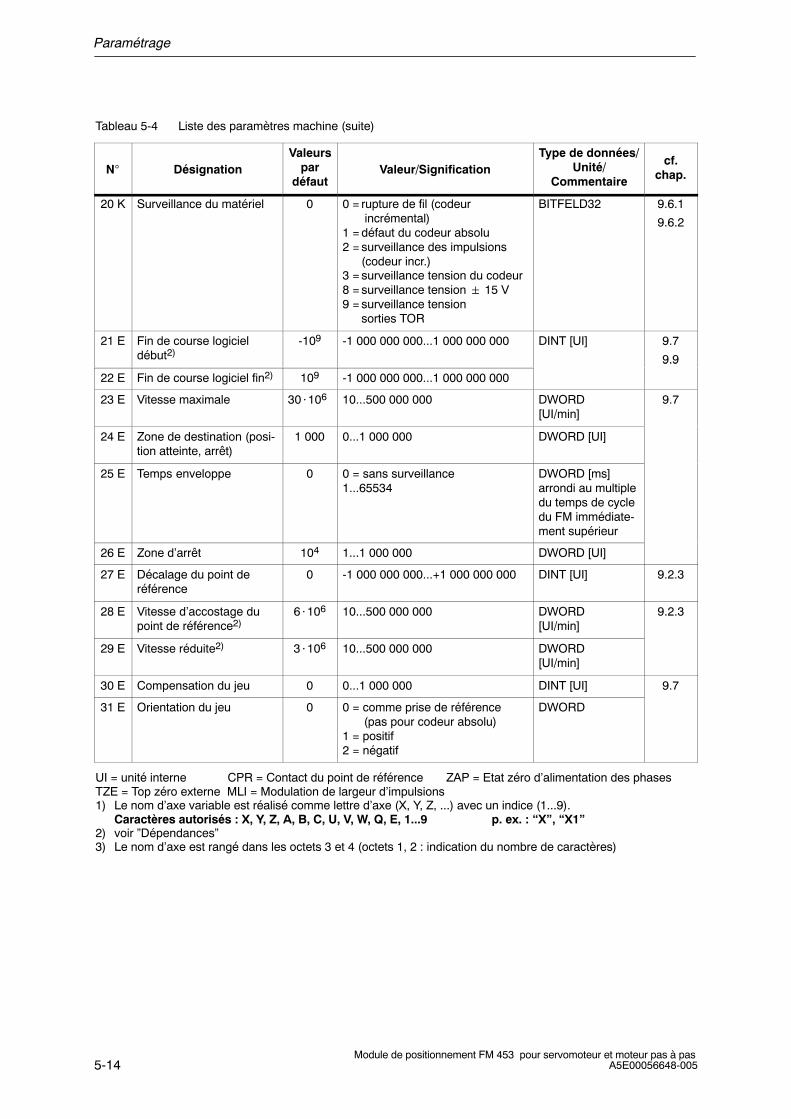
Paramétrage
5-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 5-4 Liste des paramètres machine (suite)
N°cf.
chap.
Type de données/Unité/
CommentaireValeur/Signification
Valeurspar
défautDésignation
20 K Surveillance du matériel 0 0 = rupture de fil (codeur incrémental)
1 = défaut du codeur absolu2 = surveillance des impulsions
(codeur incr.)3 = surveillance tension du codeur8 = surveillance tension 15 V9 = surveillance tension
sorties TOR
BITFELD32 9.6.1
9.6.2
21 E Fin de course logicieldébut2)
-109 -1 000 000 000...1 000 000 000 DINT [UI] 9.7
9.9
22 E Fin de course logiciel fin2) 109 -1 000 000 000...1 000 000 000
9.9
23 E Vitesse maximale 30106 10...500 000 000 DWORD [UI/min]
9.7
24 E Zone de destination (posi-tion atteinte, arrêt)
1 000 0...1 000 000 DWORD [UI]
25 E Temps enveloppe 0 0 = sans surveillance1...65534
DWORD [ms]arrondi au multipledu temps de cycledu FM immédiate-ment supérieur
26 E Zone d’arrêt 104 1...1 000 000 DWORD [UI]
27 E Décalage du point deréférence
0 -1 000 000 000...+1 000 000 000 DINT [UI] 9.2.3
28 E Vitesse d’accostage dupoint de référence2)
6106 10...500 000 000 DWORD [UI/min]
9.2.3
29 E Vitesse réduite2) 3106 10...500 000 000 DWORD [UI/min]
30 E Compensation du jeu 0 0...1 000 000 DINT [UI] 9.7
31 E Orientation du jeu 0 0 = comme prise de référence(pas pour codeur absolu)
1 = positif2 = négatif
DWORD
UI = unité interne CPR = Contact du point de référence ZAP = Etat zéro d’alimentation des phasesTZE = Top zéro externe MLI = Modulation de largeur d’impulsions1) Le nom d’axe variable est réalisé comme lettre d’axe (X, Y, Z, ...) avec un indice (1...9).
Caractères autorisés : X, Y, Z, A, B, C, U, V, W, Q, E, 1...9 p. ex. : “X”, “X1”2) voir ”Dépendances”3) Le nom d’axe est rangé dans les octets 3 et 4 (octets 1, 2 : indication du nombre de caractères)

Paramétrage
5-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 5-4 Liste des paramètres machine (suite)
N°cf.
chap.
Type de données/Unité/
CommentaireValeur/Signification
Valeurspar
défautDésignation
32 K Type de sortie de fonctionM
1 durant le positionnement :
1 = commande temporelle2 = commande par signaux d’ac-quit
avant le positionnement :
3 = commande temporelle4 = commande par signaux d’ac-quit
après le positionnement :
5 = commande temporelle6 = commande par signaux d’ac-quit
DWORDsortie série demax. 3 fonctions Mdans le bloc NC
10.3
9.1
33 K Temps de sortie de lafonction M
10 1...100 000 DWORD [ms] arrondi au multipledu temps de cycledu FM immédiate-ment supérieur
34 K Entrées TOR2) 0 0 = démarrage externe1 = entrée de validation2 = changement de bloc externe3 = préréglage de valeur réelle au
vol4 = mesure5 = CPR pour prise de référence6 = contact d’inversion pour prisede référence
BITFELD32
Affectation desfonctions par co-dage de bits :
N° de bit I/O0N° de bit + 8 I/O1N° de bit + 16 I/O2N° de bit + 24 I/O3
l’activation de la
9.2.39.8
35 K Sorties TOR2) 0 0 = position atteinte, arrêt1 = déplacement axe vers l’avant2 = déplacement axe vers l’arrière3 = modification M974 = modification M985 = autorisation de démarrage7 = sortie directe
l’activation de lafonction se fait tou-jours sur le frontavant indépen-damment de PM36
9.8
36 K Adaptation d’entrée
(traitement de signalinversée)
0 8 = I0 inversée9 = I1 inversée10 = I2 inversée11 = I3 inversée
BITFELD32 9.8
UI = unité interne CPR = Contact du point de référence ZAP = Etat zéro d’alimentation des phasesTZE = Top zéro externe MLI = Modulation de largeur d’impulsions1) Le nom d’axe variable est réalisé comme lettre d’axe (X, Y, Z, ...) avec un indice (1...9).
Caractères autorisés : X, Y, Z, A, B, C, U, V, W, Q, E, 1...9 p. ex. : “X”, “X1”2) voir ”Dépendances”3) Le nom d’axe est rangé dans les octets 3 et 4 (octets 1, 2 : indication du nombre de caractères)
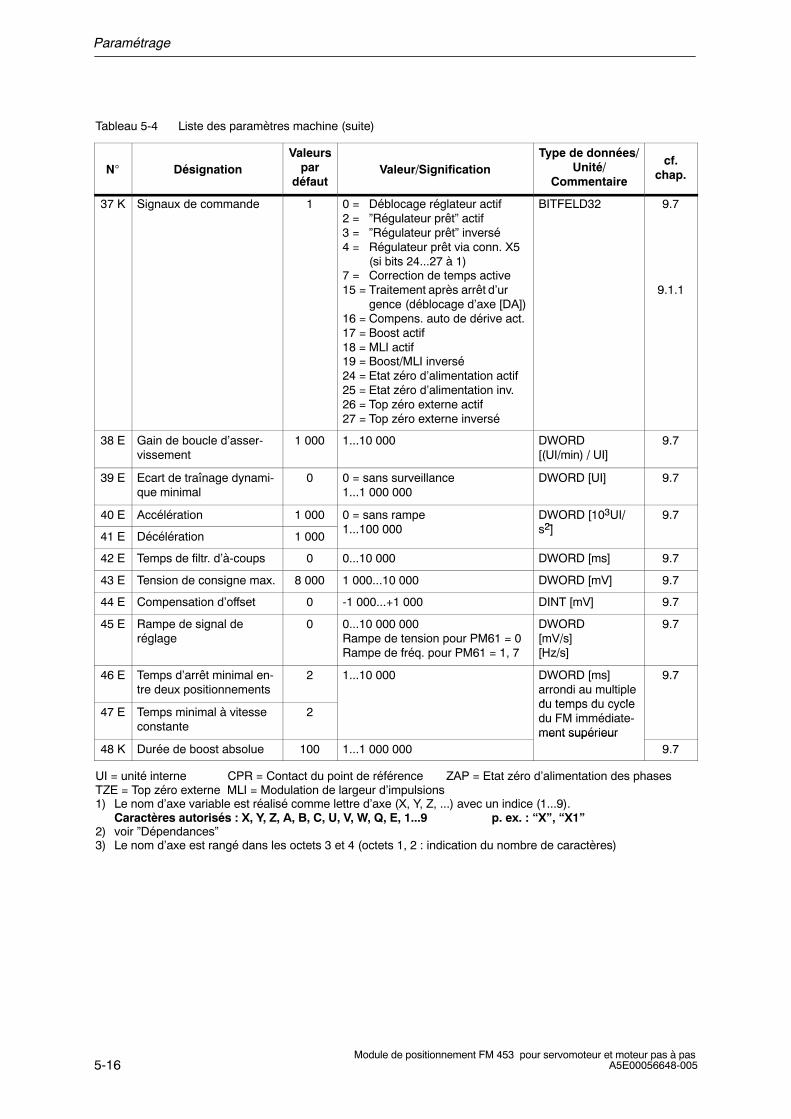
Paramétrage
5-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 5-4 Liste des paramètres machine (suite)
N°cf.
chap.
Type de données/Unité/
CommentaireValeur/Signification
Valeurspar
défautDésignation
37 K Signaux de commande 1 0 = Déblocage réglateur actif2 = ”Régulateur prêt” actif3 = ”Régulateur prêt” inversé4 = Régulateur prêt via conn. X5 (si bits 24...27 à 1)7 = Correction de temps active15 = Traitement après arrêt d’ur
gence (déblocage d’axe [DA])16 = Compens. auto de dérive act.17 = Boost actif18 = MLI actif19 = Boost/MLI inversé24 = Etat zéro d’alimentation actif25 = Etat zéro d’alimentation inv.26 = Top zéro externe actif27 = Top zéro externe inversé
BITFELD32 9.7
9.1.1
38 E Gain de boucle d’asser-vissement
1 000 1...10 000 DWORD [(UI/min) / UI]
9.7
39 E Ecart de traînage dynami-que minimal
0 0 = sans surveillance1...1 000 000
DWORD [UI] 9.7
40 E Accélération 1 000 0 = sans rampe1 100 000
DWORD [103UI/2]
9.7
41 E Décélération 1 0001...100 000 s2]
42 E Temps de filtr. d’à-coups 0 0...10 000 DWORD [ms] 9.7
43 E Tension de consigne max. 8 000 1 000...10 000 DWORD [mV] 9.7
44 E Compensation d’offset 0 -1 000...+1 000 DINT [mV] 9.7
45 E Rampe de signal deréglage
0 0...10 000 000Rampe de tension pour PM61 = 0Rampe de fréq. pour PM61 = 1, 7
DWORD [mV/s][Hz/s]
9.7
46 E Temps d’arrêt minimal en-tre deux positionnements
2 1...10 000 DWORD [ms]arrondi au multipledu temps du cycle
9.7
47 E Temps minimal à vitesseconstante
2du temps du cycledu FM immédiate-ment supérieur
48 K Durée de boost absolue 100 1...1 000 000ment supérieur
9.7
UI = unité interne CPR = Contact du point de référence ZAP = Etat zéro d’alimentation des phasesTZE = Top zéro externe MLI = Modulation de largeur d’impulsions1) Le nom d’axe variable est réalisé comme lettre d’axe (X, Y, Z, ...) avec un indice (1...9).
Caractères autorisés : X, Y, Z, A, B, C, U, V, W, Q, E, 1...9 p. ex. : “X”, “X1”2) voir ”Dépendances”3) Le nom d’axe est rangé dans les octets 3 et 4 (octets 1, 2 : indication du nombre de caractères)
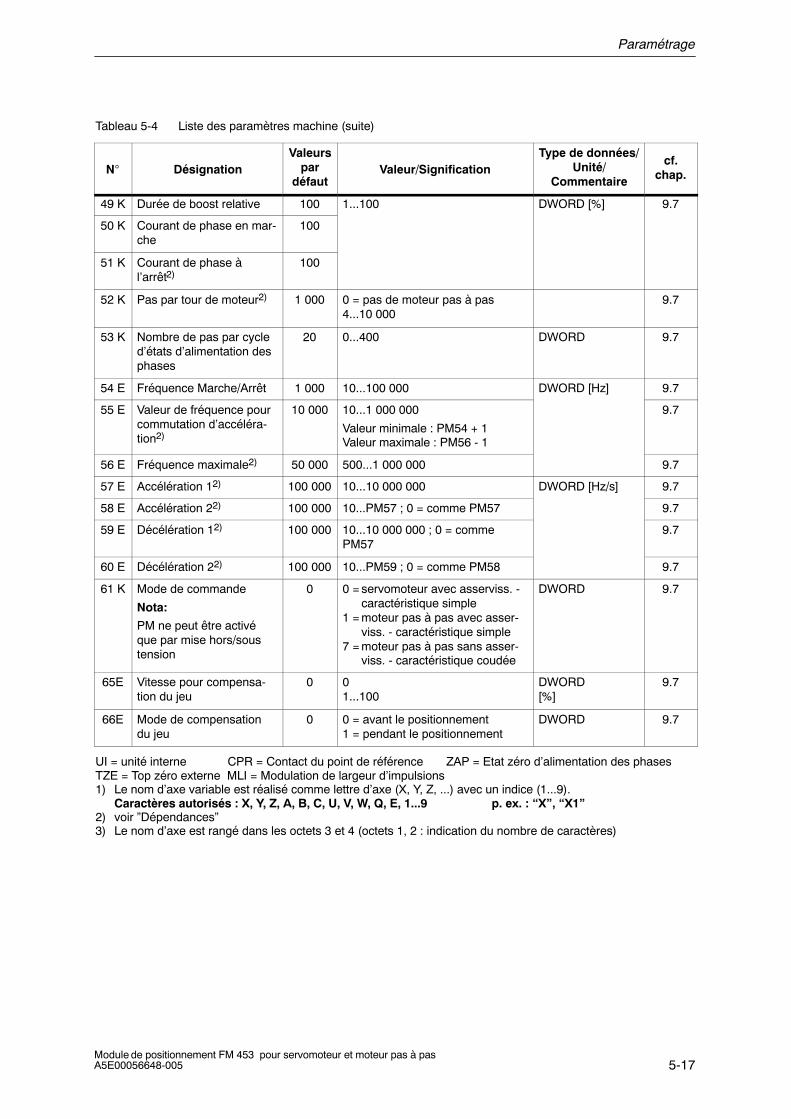
Paramétrage
5-17Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 5-4 Liste des paramètres machine (suite)
N°cf.
chap.
Type de données/Unité/
CommentaireValeur/Signification
Valeurspar
défautDésignation
49 K Durée de boost relative 100 1...100 DWORD [%] 9.7
50 K Courant de phase en mar-che
100
51 K Courant de phase àl’arrêt2)
100
52 K Pas par tour de moteur2) 1 000 0 = pas de moteur pas à pas4...10 000
9.7
53 K Nombre de pas par cycled’états d’alimentation desphases
20 0...400 DWORD 9.7
54 E Fréquence Marche/Arrêt 1 000 10...100 000 DWORD [Hz] 9.7
55 E Valeur de fréquence pourcommutation d’accéléra-tion2)
10 000 10...1 000 000
Valeur minimale : PM54 + 1Valeur maximale : PM56 - 1
9.7
56 E Fréquence maximale2) 50 000 500...1 000 000 9.7
57 E Accélération 12) 100 000 10...10 000 000 DWORD [Hz/s] 9.7
58 E Accélération 22) 100 000 10...PM57 ; 0 = comme PM57 9.7
59 E Décélération 12) 100 000 10...10 000 000 ; 0 = commePM57
9.7
60 E Décélération 22) 100 000 10...PM59 ; 0 = comme PM58 9.7
61 K Mode de commande
Nota:
PM ne peut être activéque par mise hors/soustension
0 0 = servomoteur avec asserviss. - caractéristique simple
1 = moteur pas à pas avec asser-viss. - caractéristique simple
7 = moteur pas à pas sans asser-viss. - caractéristique coudée
DWORD 9.7
65E Vitesse pour compensa-tion du jeu
0 01...100
DWORD[%]
9.7
66E Mode de compensationdu jeu
0 0 = avant le positionnement1 = pendant le positionnement
DWORD 9.7
UI = unité interne CPR = Contact du point de référence ZAP = Etat zéro d’alimentation des phasesTZE = Top zéro externe MLI = Modulation de largeur d’impulsions1) Le nom d’axe variable est réalisé comme lettre d’axe (X, Y, Z, ...) avec un indice (1...9).
Caractères autorisés : X, Y, Z, A, B, C, U, V, W, Q, E, 1...9 p. ex. : “X”, “X1”2) voir ”Dépendances”3) Le nom d’axe est rangé dans les octets 3 et 4 (octets 1, 2 : indication du nombre de caractères)

Paramétrage
5-18Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 5-4 Liste des paramètres machine (suite)
N°cf.
chap.
Type de données/Unité/
CommentaireValeur/Signification
Valeurspar
défautDésignation
67E Vitesse d’arrêt 0 0 Identification d’arrêt automatique
1...1 000 000 Identification d’arrêt en cas desous−dépassement de la vitessed’arrêt
−
[MSR/min]
7.3.15
68E Temps de dépassementdu temps imparti pouridentification d’arrêt
0 0pas de surveillance de tempsdedépassement du temps impartipour identification d’arrêt1...100 000identification d’arrêt forcéeaprèsque le temps de dépasse-ment dutemps imparti se soitachevé
−
[ms]
7.3.15
69 E Temps de réponse du dia-gnostic standard (limitation à 10 V)
0 0Diagnostic standard non ralenti1...10000Temps de réponse du diagnosticstandard (efficace arrondi par grillede 3 ms)> 10000Signalisation de défaut de l’outil deparamétrage : 0x0538 MD69
[ms] 7.3.16
70 E Connexion libre des fonc-tions pour le temps deréponse du PM69
0 101Connexion libre des fonctions pourle temps de réponse du PM69
Toutes les autres valeursPas deconnexion libre des fonctions pourle temps de réponse du PM69
Code
UI = unité interne CPR = Contact du point de référence ZAP = Etat zéro d’alimentation des phasesTZE = Top zéro externe MLI = Modulation de largeur d’impulsions1) Le nom d’axe variable est réalisé comme lettre d’axe (X, Y, Z, ...) avec un indice (1...9).
Caractères autorisés : X, Y, Z, A, B, C, U, V, W, Q, E, 1...9 p. ex. : “X”, “X1”2) voir ”Dépendances”3) Le nom d’axe est rangé dans les octets 3 et 4 (octets 1, 2 : indication du nombre de caractères)
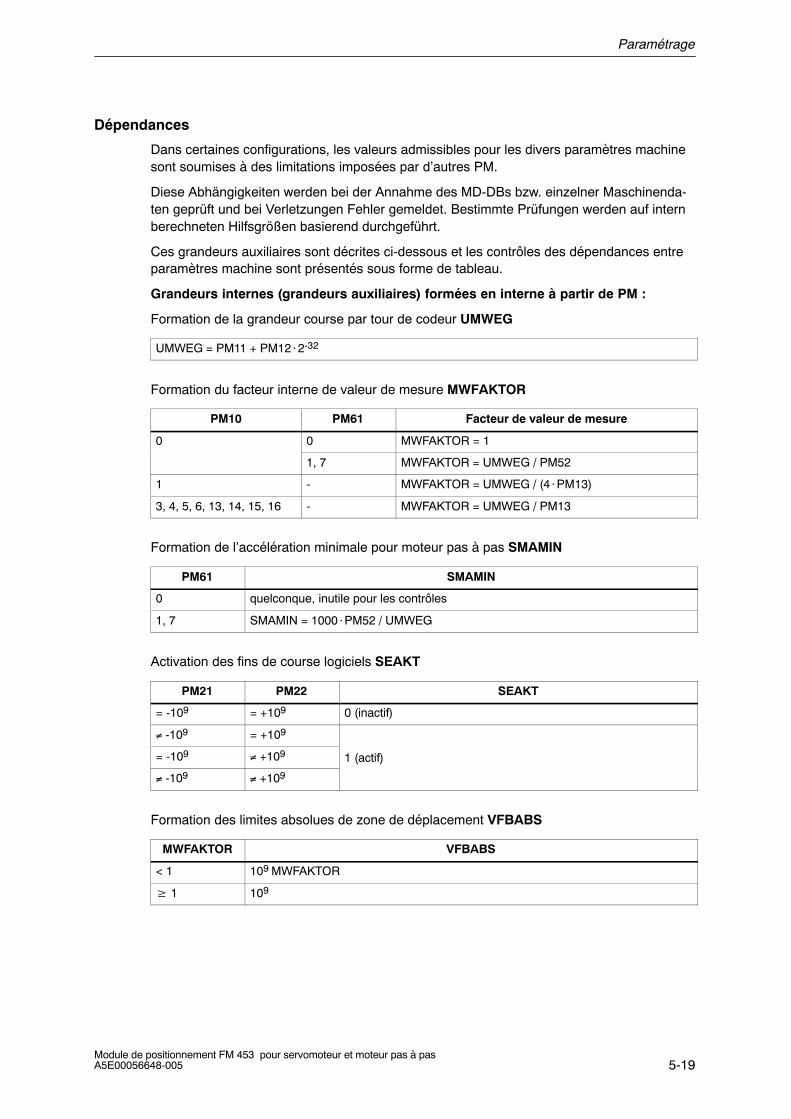
Paramétrage
5-19Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Dépendances
Dans certaines configurations, les valeurs admissibles pour les divers paramètres machinesont soumises à des limitations imposées par d’autres PM.
Diese Abhängigkeiten werden bei der Annahme des MD-DBs bzw. einzelner Maschinenda-ten geprüft und bei Verletzungen Fehler gemeldet. Bestimmte Prüfungen werden auf internberechneten Hilfsgrößen basierend durchgeführt.
Ces grandeurs auxiliaires sont décrites ci-dessous et les contrôles des dépendances entreparamètres machine sont présentés sous forme de tableau.
Grandeurs internes (grandeurs auxiliaires) formées en interne à partir de PM :
Formation de la grandeur course par tour de codeur UMWEG
UMWEG = PM11 + PM122-32
Formation du facteur interne de valeur de mesure MWFAKTOR
PM10 PM61 Facteur de valeur de mesure
0 0 MWFAKTOR = 1
1, 7 MWFAKTOR = UMWEG / PM52
1 - MWFAKTOR = UMWEG / (4PM13)
3, 4, 5, 6, 13, 14, 15, 16 - MWFAKTOR = UMWEG / PM13
Formation de l’accélération minimale pour moteur pas à pas SMAMIN
PM61 SMAMIN
0 quelconque, inutile pour les contrôles
1, 7 SMAMIN = 1000PM52 / UMWEG
Activation des fins de course logiciels SEAKT
PM21 PM22 SEAKT
= -109 = +109 0 (inactif)
≠ -109 = +109
= -109 ≠ +109 1 (actif)
≠ -109 ≠ +109
( )
Formation des limites absolues de zone de déplacement VFBABS
MWFAKTOR VFBABS
< 1 109 MWFAKTOR
1 109

Paramétrage
5-20Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Contrôles pour servomoteur et moteur pas à pas :
Contrôle PM9
PM8 PM10 PM61 Fin d’axe rotatif admissible
0 - - quelconque, non utilisé
10
0 -0
1, 7t t d l dé d
11, 7 tenez compte de la dépendance
supplémentaire de PM18 ! (PM23/60 000)1
0supplémentaire de PM18 ! (PM23/60 000)
pér. scrut. PM9VFBABS
3, 13 - UMWEG mod PM9 == 0VFBABS
4, 5, 6, 14,15, 16
- (PM14UMWEG) mod PM9 == 0 1)
dé d léPM18 Fin d’axe rotatif admissible
dépendance supplémen-taire de PM18
4 -taire de PM18
< 4 MD9 mod UMWEG == 0
1) Le rapport entre PM9 et la plage de valeurs absolues du codeur est une puissance de deux 2x ou 2-x(cf. chap. 9.6.2)
Remarque : période de scrutation prévue 3 ms
Contrôle PM11, PM12, PM13 → donne MWFAKTOR (voir ci-dessus)
Plage admissible facteur valeur de mesure : 2-14 < MWFAKTOR < 214
Contrôle PM13
PM10 Pas par tour de codeur
0, 1 -
3, 4, 13, 14 2x x = 1, 2, 3, ...
5, 15 2x x = 1...12
6, 16 2x x = 1...13
Contrôle PM14
PM10 Nombre de tours
0, 1, 3, 13 -
4, 14 2x x = 1, 2, 3, ...
5, 15 2x x = 1...9
6, 16 2x x = 1...12
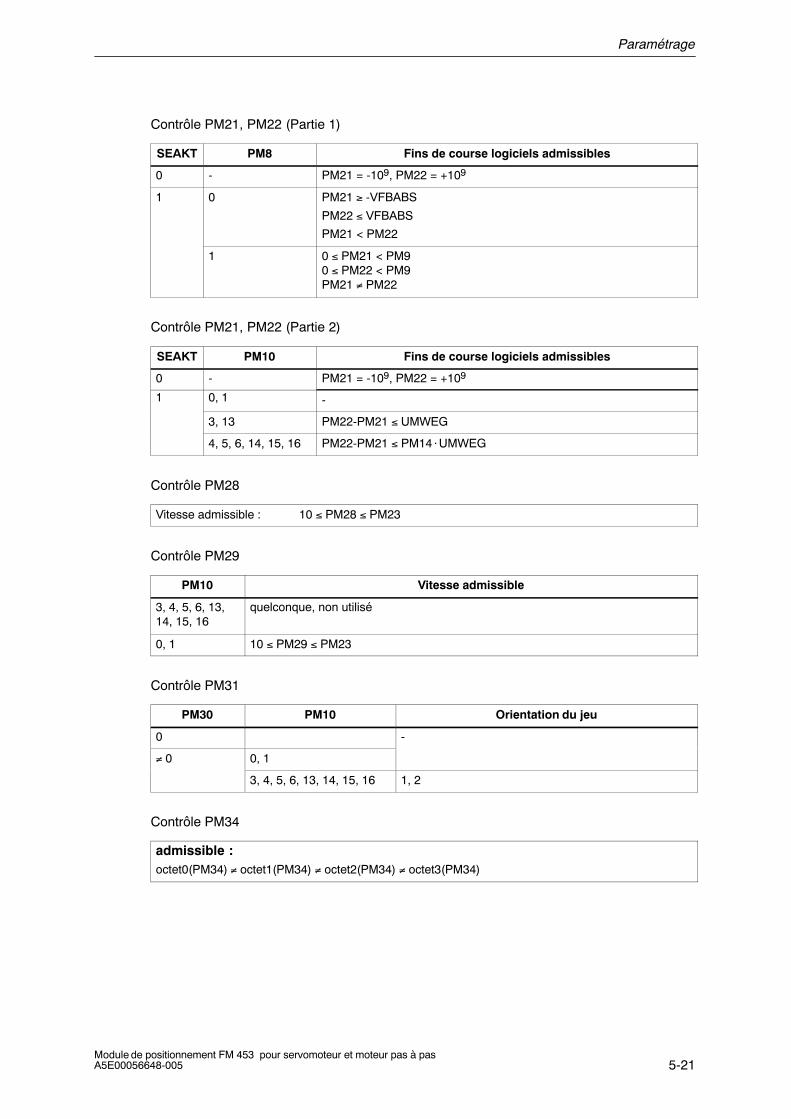
Paramétrage
5-21Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Contrôle PM21, PM22 (Partie 1)
SEAKT PM8 Fins de course logiciels admissibles
0 - PM21 = -109, PM22 = +109
1 0 PM21 ≥ -VFBABS
PM22 ≤ VFBABS
PM21 < PM22
1 0 ≤ PM21 < PM90 ≤ PM22 < PM9PM21 ≠ PM22
Contrôle PM21, PM22 (Partie 2)
SEAKT PM10 Fins de course logiciels admissibles
0 - PM21 = -109, PM22 = +109
1 0, 1 -
3, 13 PM22-PM21 ≤ UMWEG
4, 5, 6, 14, 15, 16 PM22-PM21 ≤ PM14UMWEG
Contrôle PM28
Vitesse admissible : 10 ≤ PM28 ≤ PM23
Contrôle PM29
PM10 Vitesse admissible
3, 4, 5, 6, 13,14, 15, 16
quelconque, non utilisé
0, 1 10 ≤ PM29 ≤ PM23
Contrôle PM31
PM30 PM10 Orientation du jeu
0 -
≠ 0 0, 1
3, 4, 5, 6, 13, 14, 15, 16 1, 2
Contrôle PM34
admissible :octet0(PM34) ≠ octet1(PM34) ≠ octet2(PM34) ≠ octet3(PM34)

Paramétrage
5-22Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Contrôle PM35
admissible :octet0(PM35)&0x7F ≠ octet1(PM35)&0x7F ≠ octet2(PM35)&0x7F ≠ octet3(PM35)&0x7F
Contrôle uniquement pour moteur pas à pas (PM61.0 = 1) :
Contrôle PM52 (vérifié par limite d’entrée)
Nombre de pas admissibles : 4 ≤ PM52
Facteur de pondération admissible : 2-14 < UMWEG/PM52 < 214
Contrôle PM53
PM53 Nombre de pas admissibles par cycle d’états d’alimentation des phases
0
≠ 0 PM53 ≥ 4
Contrôle PM55
Fréquence admissible : PM54 ≤ PM55 ≤ PM56
Contrôle PM56
Fréquence admissible : PM23/MWFAKTOR/60 ≤ PM56 ≤ PM23max/MWFAKTOR/60
Contrôle PM57
Accélération admissible : PM57 ≥ SMAMIN
Contrôle PM58
PM58 Accélération admissible
0
≠ 0 SMAMIN ≤ PM58 ≤ PM57
Contrôle PM59
PM59 Accélération admissible
0
≠ 0 SMAMIN ≤ PM59

Paramétrage
5-23Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Contrôle PM60
PM60 PM59 Accélération admissible
0
≠ 0 0 SMAMIN ≤ PM60 ≤ PM57
≠ 0 SMAMIN ≤ PM60 ≤ PM59
Contrôle PM66
PM66 PM61 PM65 admissible
0 0, 1 0...100
7 0...(PM56 MWFAKTOR 60) 10 / PM23
1 0 PM65 < (10 V - PM43 [V]) 100 / 10 V
1 PM65 < (PM56 - PM23FREQ) 100 / PM23FREQ
7 PM65 < (PM54 - PM23FREQ) 100 / PM23FREQ
(La première valeur en % qui dépasse PM54 en valeur absolueest admissible. Il y a cependant arrondissement à PM54)
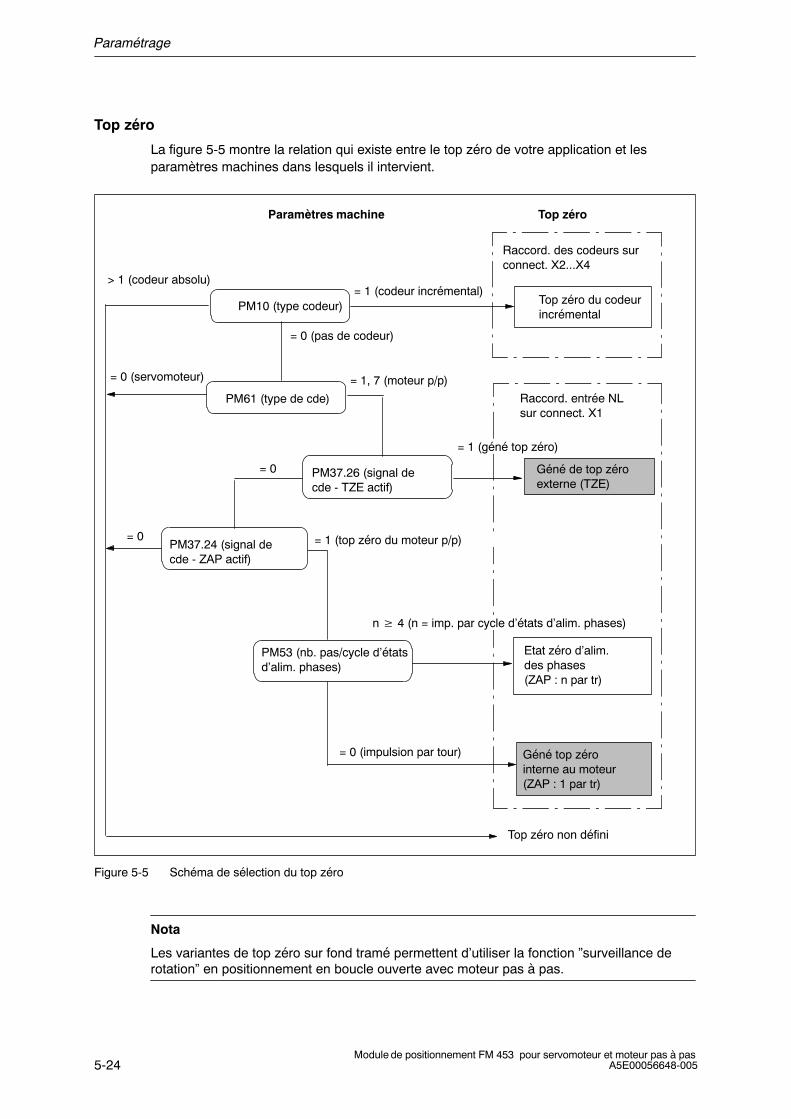
Paramétrage
5-24Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Top zéro
La figure 5-5 montre la relation qui existe entre le top zéro de votre application et lesparamètres machines dans lesquels il intervient.
Paramètres machine
PM10 (type codeur)
Top zéro du codeurincrémental
Top zéro
PM37.26 (signal de cde - TZE actif)
PM61 (type de cde)
PM53 (nb. pas/cycle d’étatsd’alim. phases)
Géné de top zéroexterne (TZE)
Etat zéro d’alim.des phases (ZAP : n par tr)
PM37.24 (signal de cde - ZAP actif)
Géné top zérointerne au moteur (ZAP : 1 par tr)
Top zéro non défini
> 1 (codeur absolu)= 1 (codeur incrémental)
= 0 (pas de codeur)
= 0 (servomoteur) = 1, 7 (moteur p/p)
= 0
= 0
= 0 (impulsion par tour)
Raccord. des codeurs sur connect. X2...X4
Raccord. entrée NLsur connect. X1
= 1 (géné top zéro)
n 4 (n = imp. par cycle d’états d’alim. phases)
= 1 (top zéro du moteur p/p)
Figure 5-5 Schéma de sélection du top zéro
Nota
Les variantes de top zéro sur fond tramé permettent d’utiliser la fonction ”surveillance derotation” en positionnement en boucle ouverte avec moteur pas à pas.
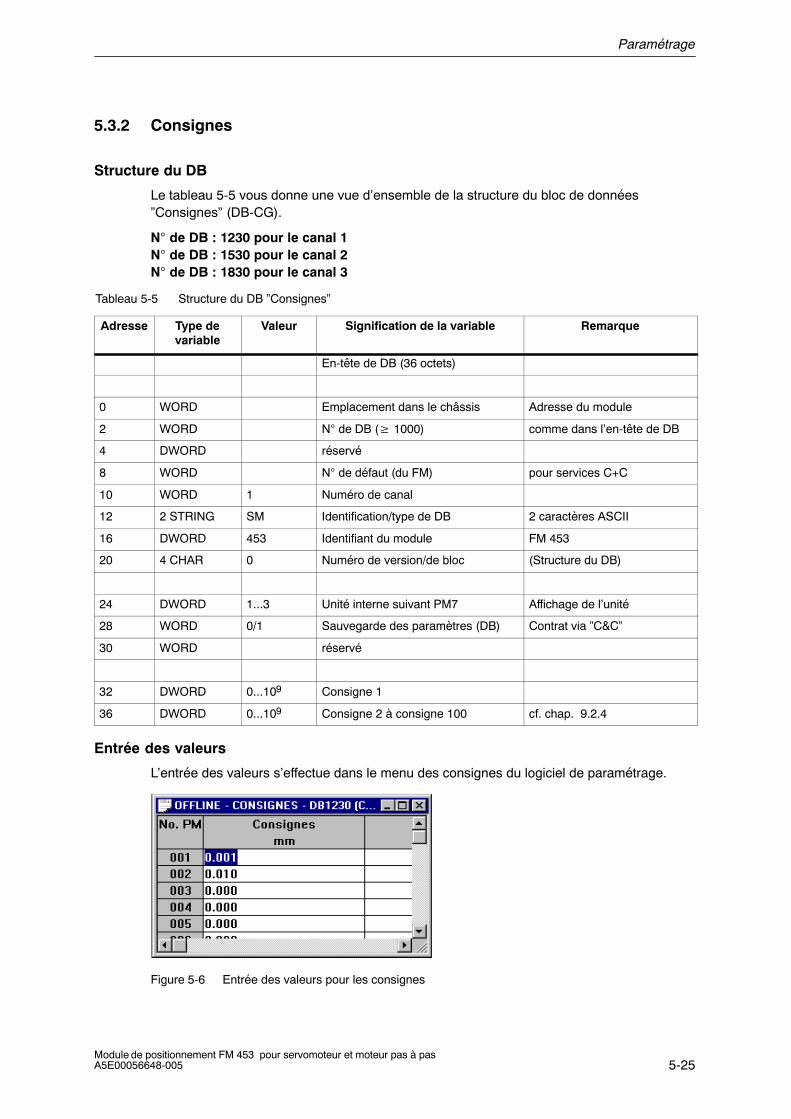
Paramétrage
5-25Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
5.3.2 Consignes
Structure du DB
Le tableau 5-5 vous donne une vue d’ensemble de la structure du bloc de données”Consignes” (DB-CG).
N° de DB : 1230 pour le canal 1N° de DB : 1530 pour le canal 2N° de DB : 1830 pour le canal 3
Tableau 5-5 Structure du DB ”Consignes”
Adresse Type devariable
Valeur Signification de la variable Remarque
En-tête de DB (36 octets)
0 WORD Emplacement dans le châssis Adresse du module
2 WORD N° de DB ( 1000) comme dans l’en-tête de DB
4 DWORD réservé
8 WORD N° de défaut (du FM) pour services C+C
10 WORD 1 Numéro de canal
12 2 STRING SM Identification/type de DB 2 caractères ASCII
16 DWORD 453 Identifiant du module FM 453
20 4 CHAR 0 Numéro de version/de bloc (Structure du DB)
24 DWORD 1...3 Unité interne suivant PM7 Affichage de l’unité
28 WORD 0/1 Sauvegarde des paramètres (DB) Contrat via ”C&C”
30 WORD réservé
32 DWORD 0...109 Consigne 1
36 DWORD 0...109 Consigne 2 à consigne 100 cf. chap. 9.2.4
Entrée des valeurs
L’entrée des valeurs s’effectue dans le menu des consignes du logiciel de paramétrage.
Figure 5-6 Entrée des valeurs pour les consignes
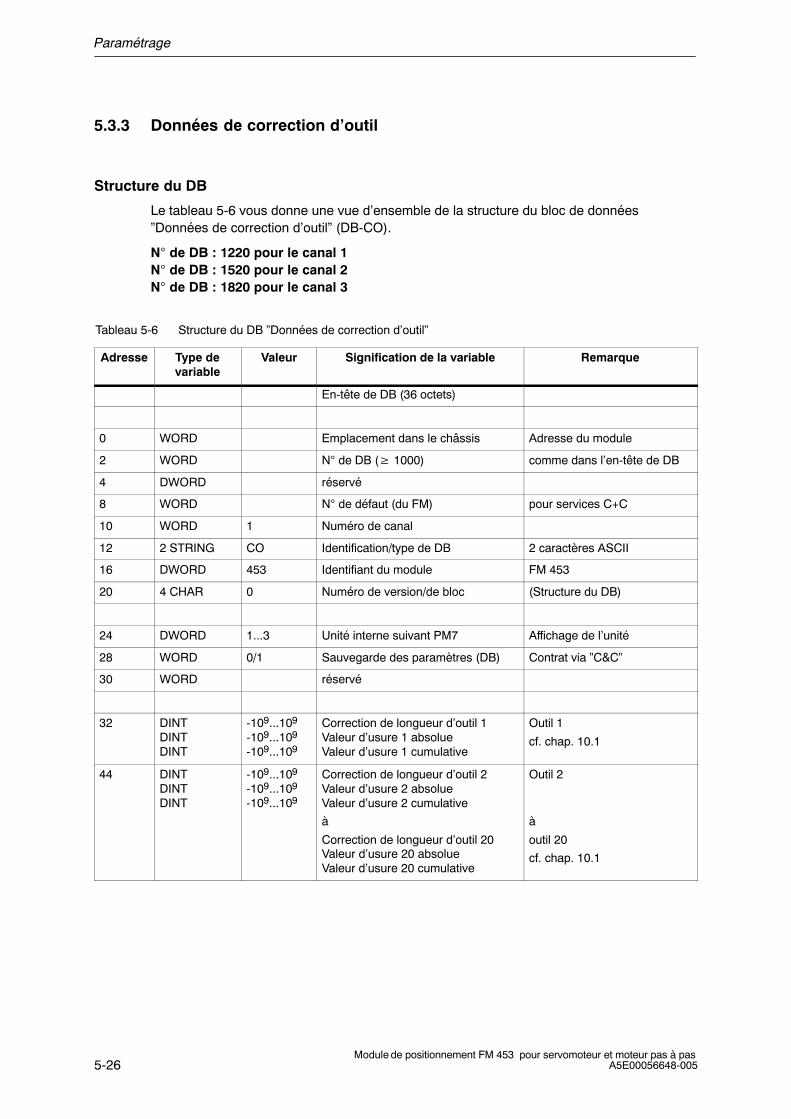
Paramétrage
5-26Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
5.3.3 Données de correction d’outil
Structure du DB
Le tableau 5-6 vous donne une vue d’ensemble de la structure du bloc de données”Données de correction d’outil” (DB-CO).
N° de DB : 1220 pour le canal 1N° de DB : 1520 pour le canal 2N° de DB : 1820 pour le canal 3
Tableau 5-6 Structure du DB ”Données de correction d’outil”
Adresse Type devariable
Valeur Signification de la variable Remarque
En-tête de DB (36 octets)
0 WORD Emplacement dans le châssis Adresse du module
2 WORD N° de DB ( 1000) comme dans l’en-tête de DB
4 DWORD réservé
8 WORD N° de défaut (du FM) pour services C+C
10 WORD 1 Numéro de canal
12 2 STRING CO Identification/type de DB 2 caractères ASCII
16 DWORD 453 Identifiant du module FM 453
20 4 CHAR 0 Numéro de version/de bloc (Structure du DB)
24 DWORD 1...3 Unité interne suivant PM7 Affichage de l’unité
28 WORD 0/1 Sauvegarde des paramètres (DB) Contrat via ”C&C”
30 WORD réservé
32 DINTDINTDINT
-109...109
-109...109
-109...109
Correction de longueur d’outil 1Valeur d’usure 1 absolueValeur d’usure 1 cumulative
Outil 1
cf. chap. 10.1
44 DINTDINTDINT
-109...109
-109...109
-109...109
Correction de longueur d’outil 2Valeur d’usure 2 absolueValeur d’usure 2 cumulative
à
Correction de longueur d’outil 20Valeur d’usure 20 absolueValeur d’usure 20 cumulative
Outil 2
à
outil 20
cf. chap. 10.1
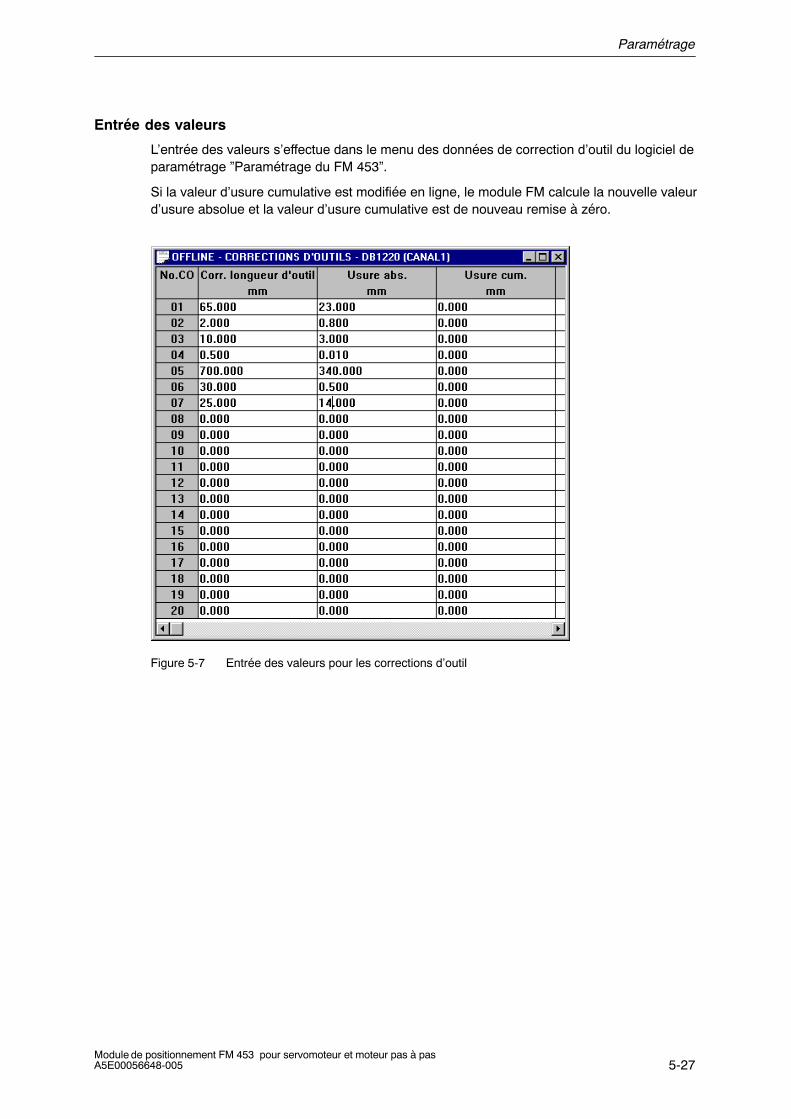
Paramétrage
5-27Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Entrée des valeurs
L’entrée des valeurs s’effectue dans le menu des données de correction d’outil du logiciel deparamétrage ”Paramétrage du FM 453”.
Si la valeur d’usure cumulative est modifiée en ligne, le module FM calcule la nouvelle valeurd’usure absolue et la valeur d’usure cumulative est de nouveau remise à zéro.
Figure 5-7 Entrée des valeurs pour les corrections d’outil
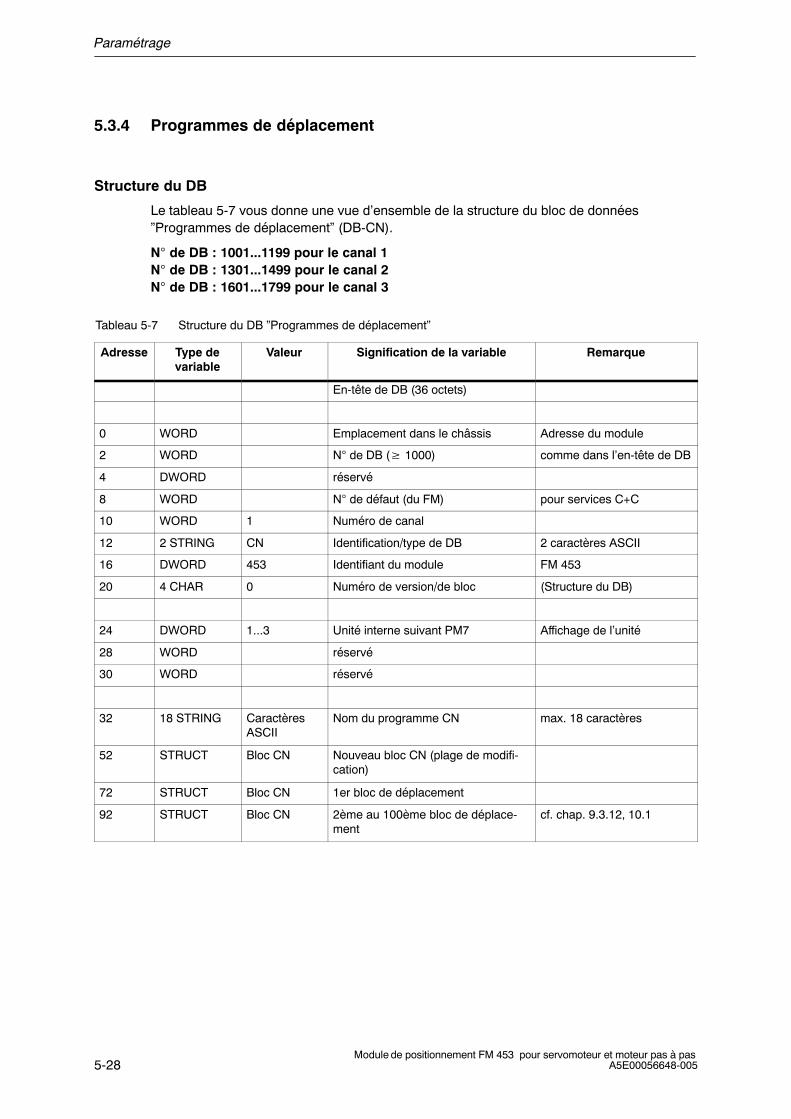
Paramétrage
5-28Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
5.3.4 Programmes de déplacement
Structure du DB
Le tableau 5-7 vous donne une vue d’ensemble de la structure du bloc de données”Programmes de déplacement” (DB-CN).
N° de DB : 1001...1199 pour le canal 1N° de DB : 1301...1499 pour le canal 2N° de DB : 1601...1799 pour le canal 3
Tableau 5-7 Structure du DB ”Programmes de déplacement”
Adresse Type devariable
Valeur Signification de la variable Remarque
En-tête de DB (36 octets)
0 WORD Emplacement dans le châssis Adresse du module
2 WORD N° de DB ( 1000) comme dans l’en-tête de DB
4 DWORD réservé
8 WORD N° de défaut (du FM) pour services C+C
10 WORD 1 Numéro de canal
12 2 STRING CN Identification/type de DB 2 caractères ASCII
16 DWORD 453 Identifiant du module FM 453
20 4 CHAR 0 Numéro de version/de bloc (Structure du DB)
24 DWORD 1...3 Unité interne suivant PM7 Affichage de l’unité
28 WORD réservé
30 WORD réservé
32 18 STRING CaractèresASCII
Nom du programme CN max. 18 caractères
52 STRUCT Bloc CN Nouveau bloc CN (plage de modifi-cation)
72 STRUCT Bloc CN 1er bloc de déplacement
92 STRUCT Bloc CN 2ème au 100ème bloc de déplace-ment
cf. chap. 9.3.12, 10.1
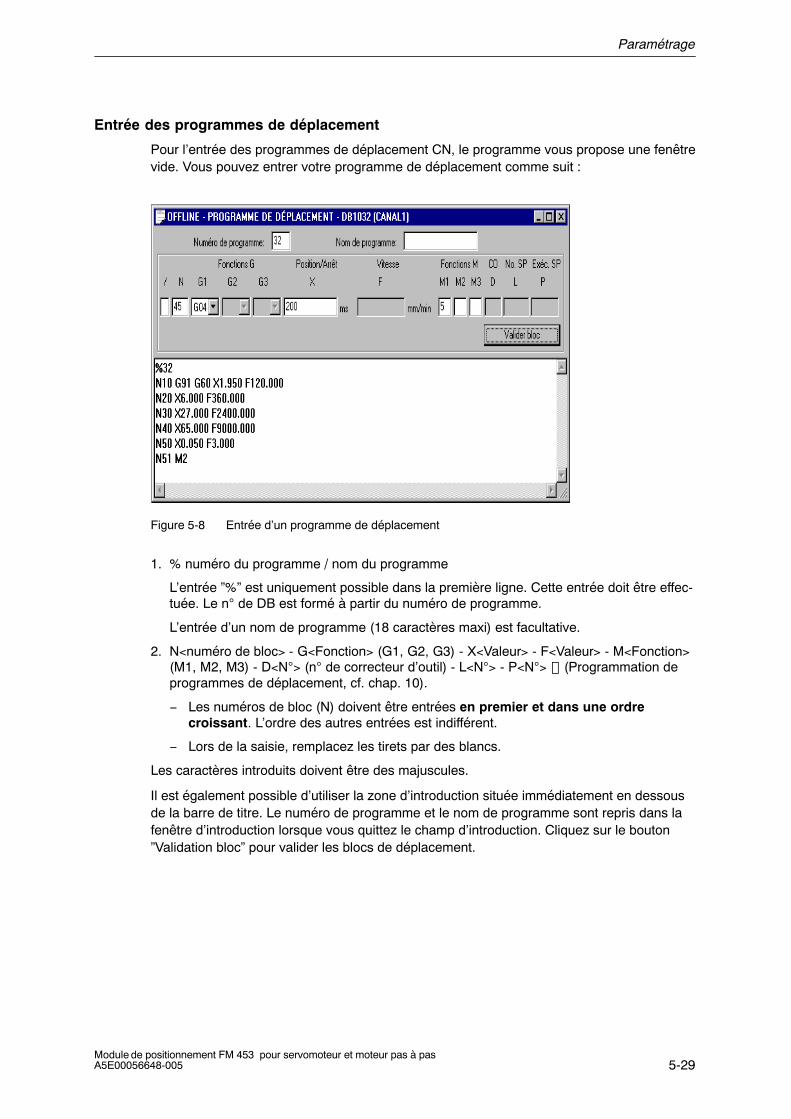
Paramétrage
5-29Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Entrée des programmes de déplacement
Pour l’entrée des programmes de déplacement CN, le programme vous propose une fenêtrevide. Vous pouvez entrer votre programme de déplacement comme suit :
Figure 5-8 Entrée d’un programme de déplacement
1. % numéro du programme / nom du programme
L’entrée ”%” est uniquement possible dans la première ligne. Cette entrée doit être effec-tuée. Le n° de DB est formé à partir du numéro de programme.
L’entrée d’un nom de programme (18 caractères maxi) est facultative.
2. N<numéro de bloc> - G<Fonction> (G1, G2, G3) - X<Valeur> - F<Valeur> - M<Fonction>(M1, M2, M3) - D<N°> (n° de correcteur d’outil) - L<N°> - P<N°> (Programmation deprogrammes de déplacement, cf. chap. 10).
− Les numéros de bloc (N) doivent être entrées en premier et dans une ordrecroissant. L’ordre des autres entrées est indifférent.
− Lors de la saisie, remplacez les tirets par des blancs.
Les caractères introduits doivent être des majuscules.
Il est également possible d’utiliser la zone d’introduction située immédiatement en dessousde la barre de titre. Le numéro de programme et le nom de programme sont repris dans lafenêtre d’introduction lorsque vous quittez le champ d’introduction. Cliquez sur le bouton”Validation bloc” pour valider les blocs de déplacement.

Paramétrage
5-30Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
5.4 Paramétrage avec ”Paramétrage du FM 453”
Entrée des valeurs
Vous disposez de plusieurs possibilités pour introduire vos données de paramétrage :
1. Données utilisateur
L’écran affiche un tableau dans lequel vous pouvez entrer les valeurs ou sélectionner destextes. Il vous suffit de pointer les champs de saisie avec le curseur et d’entrer lesvaleurs. Vous pouvez sélectionner les textes correspondants à l’aide de la barred’espacement.
2. Paramètres machine
L’introduction des valeurs se fait par des dialogues et des onglets.
La commande de menu Affichage > Forme de tableau permet d’accéder auxparamètres machine sous forme de tableau. Vous pouvez y introduire les valeurs commedécrit au point ”Données utilisateur”.
3. Données de correction d’outil et consignes
L’écran affiche un tableau dans lequel vous pouvez entrer les valeurs de correctiond’outil. Il vous suffit de pointer les champs de saisie avec le curseur et d’entrer lesvaleurs.
4. Programmes de déplacement
Les programmes de déplacement seront introduits sous forme de textes.
Les tableaux des valeurs PM, CS, CO comportent une colonne pour commentaire. Ce com-mentaire n’est pas mémorisé dans le bloc de données. Il peut être imprimé ou mémoriséavec les données dans le fichier en cas d’exportation.
Paramétrage
5-31Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
5.5 Mémorisation des données de paramétrage dansSDB >= 1 000
Généralités
Le module FM 453 mémorise en interne les données de paramétrage.
Afin de disposer des données de paramétrage en cas de défaillance du module FM 453 eten l’absence de PG/PC, vous pouvez également mémoriser ces données dans la CPU,dans un bloc de données système (SDB 1 000). A chaque redémarrage, la CPU transfèreau FM 453 ces données mémorisées dans le bloc de données système SDB 1 000. Si lemodule FM 453 ne possède pas de paramètre machine ou que l’horodatage interne (horoda-tage de la création) ne correspond pas, les données contenues dans le bloc SDB 1 000sont reprises par le module FM 453 et y sont mémorisées.
L’horodatage est actualisé à chaque ouverture de DB (données de paramétrage) ou importa-tion de fichier. Si le contenu d’un DB est modifié (p. ex. modification de paramètres ma-chine), l’horodatage sera également actualisé lors de la mémorisation ou du chargement dece DB.
Veillez à ce que les données de paramétrage contenues dans le SDB 1 000 soientbien identiques aux données de paramétrage mémorisées sur le FM 453 à la fin de lamise en service.
Nota
Si vous modifiez des données de paramétrage dans le FM après la création du SDB 1 000, celles-ci seront écrasées lors d’un démarrage de la CPU (cf. ci-dessus, “horoda-tage”).
C’est pourquoi le SDB 1 000 doit être créé à la fin de la mise en service !
Si les données doivent être modifiées ultérieurement, le SDB 1 000 doit être recréé etrechargé dans la CPU. Effacez préalablement le SDB précédent ou écrasez-le par lenouveau. Le nouveau bloc de données système SDB peut avoir un numéro différent duprécédent.

Paramétrage
5-32Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Création d’un SDB
Condition : liaison online établie avec le module FM 453
Sélectionnez le menu Fichier > Créer SDB Si aucun DB-PM sur FM 453 → Abandon
non
Faut-il écraser ce SDB ?
Création du SDB et mémorisation dans le projet S7 sousCPU\Programme S7\Blocs\Données système
Existence dans le projet S7d’un SDB 1 000 corres-pondant pour FM 453 ?
oui Abandon
oui
non
Faut-il écraser ce SDB ?
Figure 5-9 Création d’un SDB 1 000
Afficher/effacer un SDB dans le projet S7
Sélectionnez le menu Fichier > Afficher SDB
Tous les SDB pour le FM 453 du projet sontaffichés
Le SDB doit-il être effacé ? non
oui
Sélectionnez et effacez le SDB correspondant
Fermez lafenêtre
Figure 5-10 Afficher/effacer un SDB 1 000
Paramétrage
5-33Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Transférer un SDB dans la CPU
Lorsque vous avez créé un bloc de données système SDB, vous devez transférer les“données système” du projet dans la CPU.
Deux procédures sont possibles :
1. Variante 1
Dans le gestionnaire SIMATIC Manager, sélectionnez la fenêtre Online (les fenêtresOnline et Offline doivent être ouvertes).
Dans le projet Offline, mémorisez les données système (les faire glisser avec la souris ouavec Copier/Coller) sous CPU\Programme S7\Blocs\Données système dans le projetOnline.
2. Variante 2
Dans le gestionnaire SIMATIC Manager, sélectionnez CPU\ProgrammeS7\Blocs\Données système.
Chargez les données système dans la CPU avec le menu Système cible > Charger(ou bouton droit de la souris)
ou
avec la commande de menu Système cible > charger dans carte mémoire EPROMsur CPU
Vous pouvez également programmer la carte mémoire pour la CPU sur la PG/le PC.
Si la configuration est chargée à partir de HW-Config, ce SDB n’est pas transféré dans laCPU.
Effacez des SDB dans la CPU
Procédez de la manière suivante pour effacer des SDB dans la CPU :
1. Sélectionnez ”Paramétrage du FM 453”.
2. Sélectionnez le menu Fichier > Afficher SDB. Effacez le/les SDB.
3. Fermez l’outil ”Paramétrage du FM 453” et, dans le gestionnaire SIMATIC Manager,sélectionnez CPU\Programme S7\Blocs\Données système dans le projet Online. Effa-cez les données système.
4. Retransférez les données système dans la CPU (voir ci-dessus).

Paramétrage
5-34Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
6-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Programmation des fonctions technologiques
Contenu du chapitre
Paragraphe Thème Page
6.1 Bases de la programmation 6-3
6.2 Mise en service avec l’outil de paramétrage 6-10
6.3 Description des fonctions standard 6-10
6.4 Alarmes 6-27
6.5 Bloc de données utilisateur (DB utilisateur) 6-29
6.6 Exemples d’application 6-40
6.7 Liste des erreurs, signalisations système (CPU) 6-47
6.8 Caractéristiques techniques 6-49
Généralités
Dans ce chapitre sont décrits les fonctions (FC) et l’interface qui assurent la communicationentre la CPU et le module de fonction FM 453 dans le système d’automatisation SIMATICS7. Les fonctions à paramétrer ainsi que le DB utilisateur (= interface avec le FM 453) vouspermettent d’adapter votre programme utilisateur (AWP) à votre application.
Nota
Cette description est valable pour un canal/axe, et s’applique par analogie à chacun desautres canaux/axes.
6
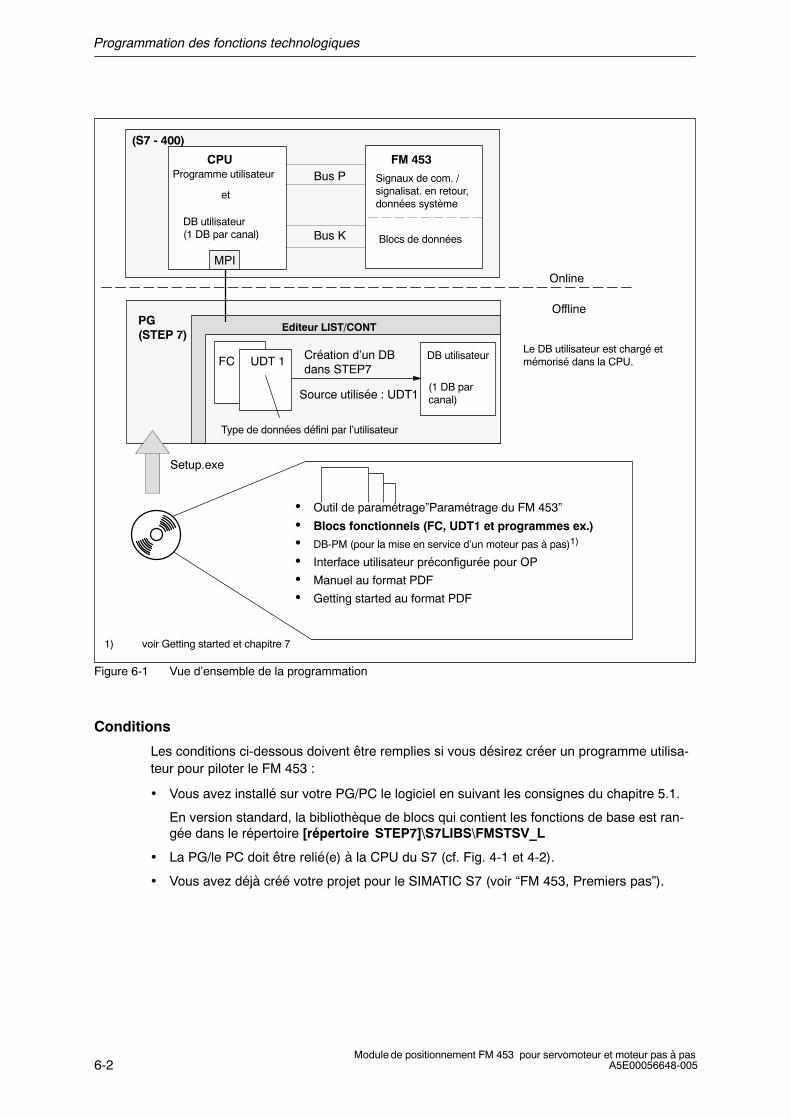
Programmation des fonctions technologiques
6-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Bus P
Bus K
CPU FM 453
(S7 - 400)
Online
OfflinePG (STEP 7)
Setup.exe
UDT 1FC
• Outil de paramétrage”Paramétrage du FM 453”
• Blocs fonctionnels (FC, UDT1 et programmes ex.)
• DB-PM (pour la mise en service d’un moteur pas à pas)1)
• Interface utilisateur préconfigurée pour OP
• Manuel au format PDF
• Getting started au format PDF
Type de données défini par l’utilisateur
Création d’un DBdans STEP7
DB utilisateur
Source utilisée : UDT1
DB utilisateur(1 DB par canal)
(1 DB par canal)
et
MPI
1) voir Getting started et chapitre 7
Signaux de com. /signalisat. en retour,données système
Blocs de données
Programme utilisateur
Editeur LIST/CONT
Le DB utilisateur est chargé etmémorisé dans la CPU.
Figure 6-1 Vue d’ensemble de la programmation
Conditions
Les conditions ci-dessous doivent être remplies si vous désirez créer un programme utilisa-teur pour piloter le FM 453 :
• Vous avez installé sur votre PG/PC le logiciel en suivant les consignes du chapitre 5.1.
En version standard, la bibliothèque de blocs qui contient les fonctions de base est ran-gée dans le répertoire [répertoire STEP7]\S7LIBS\FMSTSV_L
• La PG/le PC doit être relié(e) à la CPU du S7 (cf. Fig. 4-1 et 4-2).
• Vous avez déjà créé votre projet pour le SIMATIC S7 (voir “FM 453, Premiers pas”).

Programmation des fonctions technologiques
6-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.1 Bases de la programmation
Aperçu
Vous trouverez ci-dessous des informations sur :
• Interface, bloc de données utilisateur (DB utilisateur), chapitre 6.1.1, page 6-3
• Aperçu des fonctions et blocs standard, chap. 6.1.2, page 6-5
• Communication CPU / FM 453, chap. 6.1.3, page 6-6
• Alarmes, chap. 6.4, page 6-27
• Structure du programme utilisateur, chap. 6.1.4, page 6-7
• Alarme Débrocher/enficher, chap. 6.1.5, page 6-8
• Défaillance de châssis, chap. 6.1.6, page 6-8
• Intégration d’un OP, chap. 6.1.7, page 6-8
• Procédure de création du programme utilisateur (AWP), chap. 6.1.8, page 6-9
6.1.1 Interface, bloc de données utilisateur (DB utilisateur)
La création du DB utilisateur (interface) s’effectue en mode offline.
Le programme utilisateur peut accéder de façon absolue ou à l’aide de mnémoniques (créa-tion d’un DB utilisateur à structure UDT) aux signaux/données de l’interface.
L’interface est affectée au canal considéré à l’aide du paramètre d’entrée des fonctions stan-dard “DB_NO”. L’adresse du module se trouve dans le DB utilisateur. Elle y est inscrite parle bloc FC POS_INIT ou manuellement, par le biais du bouton “Inscrire adr. FM dans DButilisateur” de la vue d’ensemble de “Paramétrage du FM 453”.
Programmation des fonctions technologiques
6-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Création du DB utilisateur
Procédez de la manière suivante :
1. Ouvrez votre projet et sélectionnez-y SIMATIC xxx > CPUxxx > Programme S7 >Blocs.
2. Vous créez le bloc de données (p. ex. DB 1) sous STEP 7 avec la commande de menuInsertion > Bloc S7 > Bloc de données.
3. Un double-clic sur le bloc de données généré ouvre l’éditeur CONT/LIST/LOG.
4. Dans la boîte de dialogue ”Nouveau bloc de données“, sélectionnez “Bloc de donnéesavec type de donnée spécifique à l’utilisateur“.
5. UDT 1 vous est proposé.
UDT 1 contient la structure du DB utilisateur.
6. Choisissez UDT 1 puis validez avec OK.
7. Vous avez créé le bloc de données utilisateur.
8. La commande de menu Fichier > Enregistrer permet d’enregistrer ce bloc.
9. Fermez l’éditeur.
Remarques concernant la programmation symbolique
En version standard, les blocs sont inscrits avec le nom du mnémonique, l’adresse et le typede donnée dans le tableau des mnémoniques. (Le tableau des mnémoniques se trouve dansle projet et la bibliothèque). Si vous modifiez les numéros de bloc de votre projet dans leSIMATIC-Manager, vous devez également modifier la numérotation dans le tableau desmnémoniques. L’affectation aux blocs est définie de façon univoque par le tableau des mné-moniques.
Avant d’écrire et de compiler votre programme utilisateur, vous devez inscrire les blocs (DButilisateur, FC), que vous utilisez en fonction de votre configuration, dans le tableau desmnémoniques. La structure symbolique de l’interface est rangée dans le bloc UDT fourniavec le module. La corrélation symbolique est établie par le biais de votre projet STEP 7, dutableau des mnémoniques ainsi que du bloc UDT.
Vous trouverez, à l’annexe C, le bloc UDT avec les mnémoniques et les adresses absolues.
Exemple : extrait du tableau des mnémoniques.
Mnémonique Adresse Type dedonnées
Commentaire
DB_FM1 DB 1 UDT 1 DB utilisateur pour le FM 453, canal 1
POS_INIT FC 0 FC 0 Initialisation, canal 1
POS_CTRL FC 1 FC 1 Echange de données, canal 1
DB_FM2 DB 2 UDT 1 DB utilisateur pour le FM 453, canal 2

Programmation des fonctions technologiques
6-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.1.2 Aperçu des fonctions et blocs standard
Le tableau ci−dessous vous donne un aperçu des fonctions (FC), blocs de fonction (FB),blocs de données (DB) et blocs d’organisation (OB) nécessaires à la communication et aupilotage du FM 453.
Tableau 6-1 Blocs et fonctions standard pour le FM 453 (aperçu)
Bloc Nom du bloc Signification/fonction Observation
FC 0page 6-11
POS_INIT Appel dans l’OB 100 et l’OB 83, démarrage/initiali-sation
requis pour l’application, n°modifiable1)
FC 1page 6-13
POS_CTRL Appel dans l’OB 1, traitement cyclique (synchroni-sation avec FM 453)Fonctions de base et modes, traitement de l’interface, contrats d’écriture et delecture
FC 2page 6-23
POS_DIAG Appel dans l’OB 82, défauts internes, défauts ex-ternes et défauts externes de canal du FM
FC 3
page 6-26
POS_MSRM Appel dans l’OB 40 ou l’OB 1,lecture des valeurs de mesure
à utiliser uniquement si lafonction est requise pourl’application,n° modifiable 1)
DB (UDT) DB utilisateur Interface avec le FM requis pour l’application
OB 1 − Niveau cyclique requis pour l’application
OB 82 − Niveau alarme de diagnostic
OB 100 − Niveau démarrage
OB 83 − Alarme d’embrochage/débrochage requis pour alarme d’em-b h /déb h dé
OB 86 − Défaut de châssisbrochage/débrochage, dé-faut de châssis
OB 122 − Erreur lors accès à la périphériefaut de châssis
1) − Le n° de bloc indiqué peut être modifié dans le SIMATIC-Manager− Une modification dans le tableau des mnémoniques est requise uniquement en cas de programmation
symbolique
Nota
Dans la description ci−dessous, les fonctions sont désignées par leurs mnémoniques.

Programmation des fonctions technologiques
6-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
6.1.3 Communication CPU / FM 453
Intégration du FM 453 dans le programme utilisateur
La figure ci-dessous vous montre comment le FM 453, le DB utilisateur et les fonctions tech-nologiques communiquent.
DB utilisateur
CPU
POS_MSRM
POS_CTRL
POS_INIT
FM 453
OB 40(Alarme deprocess)
4 octetsinformation lan-cement OB
OB 1
OB 82(Diagnostic)
FC POS_DIAG
OB 100Démarrage
4 octets, information lancement OB
Contrats de lecture/écritureSignalisation d’erreur
(1 DB par canal)
1)
1) Le bloc ne peut être appelé que dans l’OB 40 ou l’OB 1, mais pas dans les deux simultanément.
2)
2) Il n’est nécessaire d’appeler le bloc qu’une fois pour un canal et par module. Il contient des informations de diagnostic valables pour les trois canaux (voir chap. 6.5 et 11.2.2).
Informations suralarmes de pro-cess et de dia-gnostic
Signaux de com-mande et signali-sations en retour
Données, signali-sation d’erreur/dé-faut et spécifica-tion d’erreur/dé-faut
POS_MSRM1)
Figure 6-2 Vue d’ensemble de l’intégration du FM 453 dans le programme utilisateur

Programmation des fonctions technologiques
6-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.1.4 Structure du programme utilisateur
La figure suivante vous donne un aperçu de la structure du programme utilisateur.
OB 100/OB 83 et OB86n x CALL POS_INIT (paramètres : DB_NO, CH_NO, LADDR)En cas d’erreur à la mise en service, la CPU passe sur “STOP”.
Inscription des paramétrer
DB utilisateur
AWP : mettre à l’étatTRUE, effacer, interrogerdes signaux/données
OB 82
• n x CALL POS_DIAG (paramètre : DB_NO)
• AWP: ouvrir circuit d’arrêt d’urgence, remettre à l’état FALSE dessignaux (le FM a été réinitialisé ou une erreur/un défaut grave estsurvenu dans le FM, voir “Remarques concernant le traitementdes erreurs”)
OB 1 (ou autres niveaux cycliques)
• n x CALL POS_CTRL (paramètre : DB_NO)
• Votre AWP : pour le pilotage de votre installation
• AWP : exploitation des erreurs
n − nombre de canaux (3 maxi)
Nota
L’exécution des contrats GET/PUT (SFC 72/73) vers le FM n’est pas garantie ou cette fonc-tion n’est pas supportée, car elle n’est pas nécessaire. Des modifications de données deparamétrage peuvent être effectuées à l’aide du signal “Modifier paramètres/données” (DButilisateur, DBX39.3).
Remarques concernant le traitement des signaux :
Le cycle de traitement du FM 453 (= 3 ms) et le cycle utilisateur (OB 1) sont asynchrones.En fonction de l’instant de transfert d’un signal au FM 453, le traitement de ce signal peutdurer = 1 à < 2 cycles FM. Tenez particulièrement compte de cette remarque dans le casdes cycle utilisateur courts. Le cas échéant, interrogez l’état de traitement du FM 453 avantd’activer une nouvelle action.
Programmation des fonctions technologiques
6-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Remarques concernant le test du programme utilisateur
En cas de test du programme utilisateur avec la fonction “Positionner point d’arrêt”, tenezcompte du fait que la poursuite de l’exécution du programme avec le FM 453 n’est pas tou-jours possible lorsque le point d’arrêt a été atteint (pour des raisons liées à la technologie).
Des déplacements activés par l’AWP ne peuvent pas être interrompus, lorsque celui-ci aatteint le point d’arrêt.
La reprise de l’exécution du programme est possible après un redémarrage (CPU : STOP/RUN), une remise à zéro du canal ou un changement de mode.
6.1.5 Alarme d’embrochage/débrochage, OB 83
Si l’installation doit continuer à fonctionner si le FM 453 est défectueux, il faut intégrerl’OB 83 dans le programme utilisateur. En cas de débrochage du FM 453, l’OB 83 doit inter-rompre la communication avec le FM 453 dans l’OB 1 (p. ex. par mise à l’état TRUE d’unmémento et exploitation dans l’OB 1). Pour que le programme utilisateur puisse à nouveause synchroniser avec le FM 453, il faut lancer le bloc POS_INIT (déroulement comme dansl’OB 100) lors de l’enfichage du FM 453. En outre, il faut charger le bloc d’organisationOB 122 (OB Erreurs d’accès à la périphérie) dans la CPU.
6.1.6 Défaillance de châssis
Si un FM 453 se trouve dans un châssis d’extension et si l’installation doit continuer à fonc-tionner en cas de coupure de l’alimentation du châssis, il faut intégrer l’OB 86 dans le pro-gramme utilisateur.
Même procédure que pour l’OB 83, voir chap. 6.1.5.
6.1.7 Intégration d’un OP
La zone mémoire du DB utilisateur (DBB498 à DBB515) “Champ de données pour contrôle-commande” n’est prévue que pour des signaux/données d’un OP selon la l’interface utilisa-teur préconfigurée fournie. Pour déclencher des actions, il faut transférer les signaux/don-nées correspondants à l’interface (zone du DB utilisateur) à l’aide du programme utilisateur(voir chap. 6.6, exemple 4).
Programmation des fonctions technologiques
6-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.1.8 Procédure de création du programme utilisateur (AWP)
Le projet exemple “zDt17_02_FM453_EX” fourni avec le progiciel de configuration vous sertde modèle pour la création d’un AWP.
Exemple de procédure :
1. Ouvrez votre projet dans le SIMATIC-Manager.
2. Sélectionnez SIMATIC xxx > CPUxxx > Programme S73. Ouvrez, dans le SIMATIC-Manager, le projet exemple “zDt17_02_FM453_EX” avec
Fichier > Ouvrir... > Projets.
4. Dans ce projet, marquez le répertoire ”EXAMPLES”
5. Marquez le fichier “Mnémoniques” puis copiez-le dans votre projet sous SIMATIC xxx >CPUxxx > Programme S7 (remplacez l’objet existant).
6. Ouvrez le répertoire “Sources” puis copiez toutes les sources LIST qui s’y trouvent dansle répertoire ”Sources” de votre projet.
7. Ouvrez le répertoire ”Blocs” puis copiez tous les blocs qui s’y trouvent dans le répertoire”Blocs” de votre projet (y compris les blocs UDT).
8. Sélectionnez le répertoire “Sources” dans votre projet. En double-cliquant le fichier”OB_example” marqué, vous lancez “l’éditeur CONT/LIST/LOG”.
9. Modifiez, dans l’OB 100 (appel du bloc POS_INIT) et dans l’OB 82 (appel du blocPOS_DIAG), les paramètres d’entrée concernés par votre application (voir chap.6.3.1, bloc POS_INIT et 6.3.3, bloc POS_DIAG).
10.Vous pouvez insérer, dans le segment “Appel des exemples” de l’OB 1, les fonc-tions du projet exemple “zEn17_02_FM453_EX” (voir chap. 6.6) dont vous avezbesoin. En mettant à l’état TRUE/FALSE les signaux du DB 100 fourni (DB utilisa-teur pour les exemples) dans votre AWP, vous activez ces fonctions.Dans le bloc POS_CTRL, vous devez modifier le paramètre d’entrée.
11.Les commandes de menu Fichier > Enregistrer et Fichier > Compiler créent les blocsd’organisation (OB 1, OB 82, OB 100) à partir de la source LIST. (Ignorez les messagesgénérés lors de la compilation.)
12.Fermez l’éditeur.
13.Placez le sélecteur de la CPU sur “STOP” puis mettez la CPU sous tension.
14.Sélectionnez, dans le SIMATIC-Manager, SIMATIC xxx > CPUxxx > Programme S7 >Blocs.
15.Transférez tous les blocs S7 qui s’y trouvent (également les données système) dansvotre CPU (CPU à l’état STOP) à l’aide de la commande de menu Système cible >Charger.
Programmation des fonctions technologiques
6-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
6.2 Mise en service avec l’outil de paramétrage
Pour la mise en service du FM 453 avec l’outil “Paramétrage du FM 453”, la CPU doit êtresur “STOP”. Elle peut également être sur “RUN” si vous désirez, p. ex., piloter des partiesde votre installation ou mettre sous tension les parties puissances de vos entraînements.Pour cela, tenez compte des signaux de commande/signalisations en retour “Commutationinterface bus P sur mise en service” (DB utilisateur, DBX14.1) et “Commutation interfacebus P effectué” (DB utilisateur, DBX22.1). Ces signaux sont décrits au chap. 9.1.
Après la signalisation en retour “Commutation interface bus P effectué” (DB utilisateur,DBX22.1), l’interface n’est plus actualisée dans le FM. Aucune alarme de diagnostic, aucunevaleur de mesure, etc. ne peut être lue.
Veuillez également observer le chap. 7.3 “Test et optimisation” !
Nota
Tenez compte des mesures de sécurité si vous désirez déplacer l’axe.
6.3 Description des fonctions standard
Aperçu
Dans ce chapitre, vous trouverez des informations sur les fonctions suivantes :
• POS_INIT (FC 0) − Initialisation du DB utilisateur, chap. 6.3.1, page 6-11
• POS_CTRL (FC 1) − Echange de données, chap. 6.3.2, page 6-13
• POS_DIAG (FC 2) − Lecture de données d’alarme de diagnostic, chap. 6.3.3, p. 6-23
• POS_MSRM (FC 3) − Lecture de valeurs de mesure, chap. 6.3.4, page 6-26
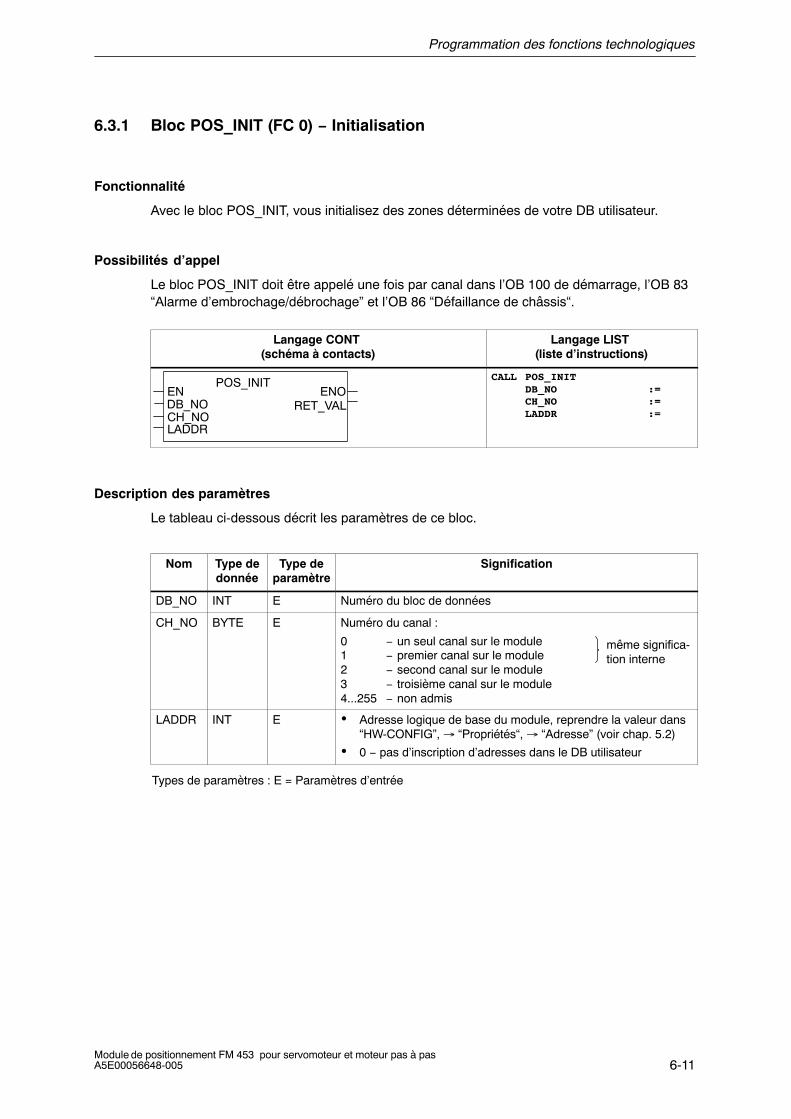
Programmation des fonctions technologiques
6-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.3.1 Bloc POS_INIT (FC 0) − Initialisation
Fonctionnalité
Avec le bloc POS_INIT, vous initialisez des zones déterminées de votre DB utilisateur.
Possibilités d’appel
Le bloc POS_INIT doit être appelé une fois par canal dans l’OB 100 de démarrage, l’OB 83“Alarme d’embrochage/débrochage” et l’OB 86 “Défaillance de châssis“.
Langage CONT (schéma à contacts)
Langage LIST (liste d’instructions)
EN ENOPOS_INIT
LADDRCH_NODB_NO RET_VAL
CALL POS_INITDB_NO :=CH_NO :=LADDR :=
Description des paramètres
Le tableau ci-dessous décrit les paramètres de ce bloc.
Nom Type dedonnée
Type deparamètre
Signification
DB_NO INT E Numéro du bloc de données
CH_NO BYTE E Numéro du canal :
0 − un seul canal sur le module1 − premier canal sur le module2 − second canal sur le module3 − troisième canal sur le module4...255 − non admis
même significa-tion interne
LADDR INT E • Adresse logique de base du module, reprendre la valeur dans “HW-CONFIG”, → “Propriétés“, → “Adresse” (voir chap. 5.2)
• 0 − pas d’inscription d’adresses dans le DB utilisateur
Types de paramètres : E = Paramètres d’entrée

Programmation des fonctions technologiques
6-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Fonctionnement
Le bloc exécute les actions suivantes :
1. Inscription de valeurs d’adressage dans le DB utilisateur, si paramètre LADDR 0
− adresse du module
− Numéro du canal
− adresse du canal, d’où adresse de décalage
2. Effacement des structures suivantes dans le DB utilisateur
− signaux de commande
− signalisations en retour
− signaux de déclenchement, d’achèvement et d’erreur des contrats
− réglages ponctuels et commandes ponctuelles, vos signaux d’achèvement et d’erreur
3. Si le paramètre d’entrée LADDR vaut 0, il n’y pas d’inscription dans le DB utilisateur. Onsuppose que l’inscription des valeurs d’adressage (adresse du module) a été effectuéemanuellement, par le biais du bouton “Inscrire adr. FM dans DB utilisateur” de la vued’ensemble de “Paramétrage du FM 453”.
Exploitation des erreurs
Les erreurs survenues sont indiquées par le résultat binaire (RB = 0) et RET_VAL < 0.
Erreurs possibles :
• Numéro de canal CH_NO inconnu et DB_NO = 0 en tant que paramètres d’entrée, le DButilisateur n’est pas initialisé.
• En l’absence de DB utilisateur, la CPU passe sur “STOP”, voir tampon de diagnostic dela CPU.
L’erreur est indiquée par le paramètre de sortie RET_VAL.
RET_VAL Erreur
−1 Numéro de canal inconnu
−2 DB_NO = 0
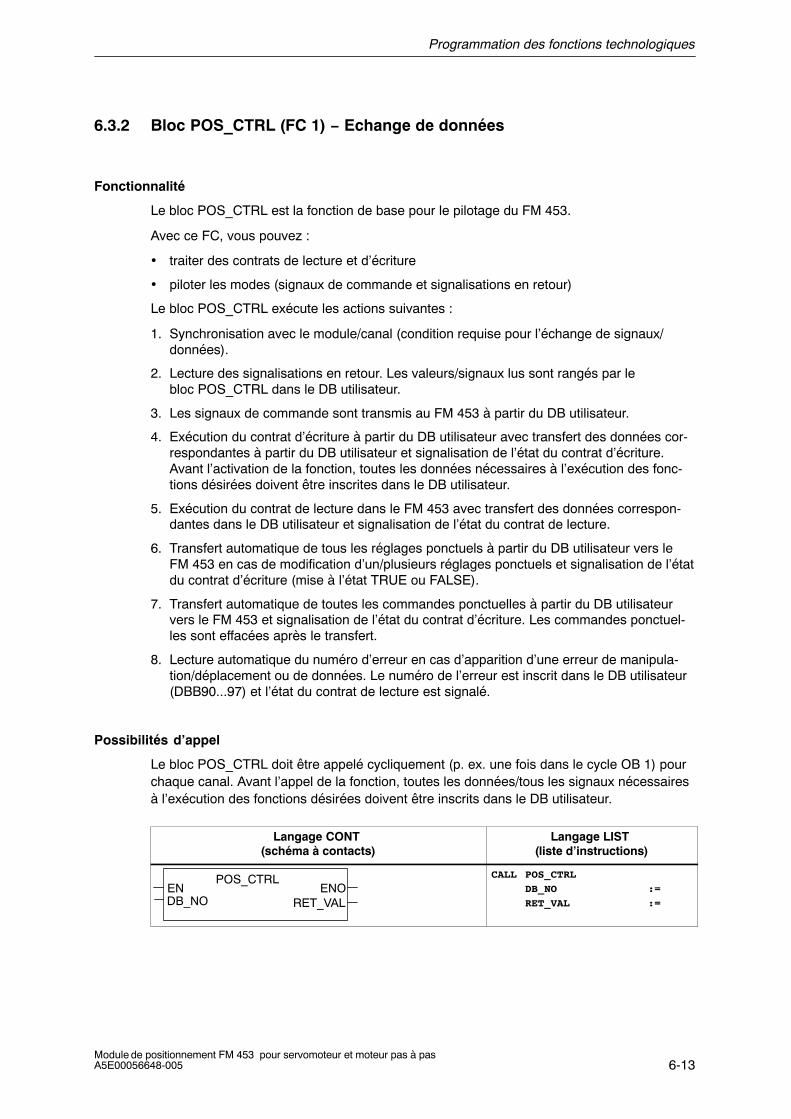
Programmation des fonctions technologiques
6-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.3.2 Bloc POS_CTRL (FC 1) − Echange de données
Fonctionnalité
Le bloc POS_CTRL est la fonction de base pour le pilotage du FM 453.
Avec ce FC, vous pouvez :
• traiter des contrats de lecture et d’écriture
• piloter les modes (signaux de commande et signalisations en retour)
Le bloc POS_CTRL exécute les actions suivantes :
1. Synchronisation avec le module/canal (condition requise pour l’échange de signaux/données).
2. Lecture des signalisations en retour. Les valeurs/signaux lus sont rangés par lebloc POS_CTRL dans le DB utilisateur.
3. Les signaux de commande sont transmis au FM 453 à partir du DB utilisateur.
4. Exécution du contrat d’écriture à partir du DB utilisateur avec transfert des données cor-respondantes à partir du DB utilisateur et signalisation de l’état du contrat d’écriture.Avant l’activation de la fonction, toutes les données nécessaires à l’exécution des fonc-tions désirées doivent être inscrites dans le DB utilisateur.
5. Exécution du contrat de lecture dans le FM 453 avec transfert des données correspon-dantes dans le DB utilisateur et signalisation de l’état du contrat de lecture.
6. Transfert automatique de tous les réglages ponctuels à partir du DB utilisateur vers leFM 453 en cas de modification d’un/plusieurs réglages ponctuels et signalisation de l’étatdu contrat d’écriture (mise à l’état TRUE ou FALSE).
7. Transfert automatique de toutes les commandes ponctuelles à partir du DB utilisateurvers le FM 453 et signalisation de l’état du contrat d’écriture. Les commandes ponctuel-les sont effacées après le transfert.
8. Lecture automatique du numéro d’erreur en cas d’apparition d’une erreur de manipula-tion/déplacement ou de données. Le numéro de l’erreur est inscrit dans le DB utilisateur(DBB90...97) et l’état du contrat de lecture est signalé.
Possibilités d’appel
Le bloc POS_CTRL doit être appelé cycliquement (p. ex. une fois dans le cycle OB 1) pourchaque canal. Avant l’appel de la fonction, toutes les données/tous les signaux nécessairesà l’exécution des fonctions désirées doivent être inscrits dans le DB utilisateur.
Langage CONT (schéma à contacts)
Langage LIST (liste d’instructions)
EN ENOPOS_CTRL
DB_NO RET_VAL
CALL POS_CTRL
DB_NO :=
RET_VAL :=
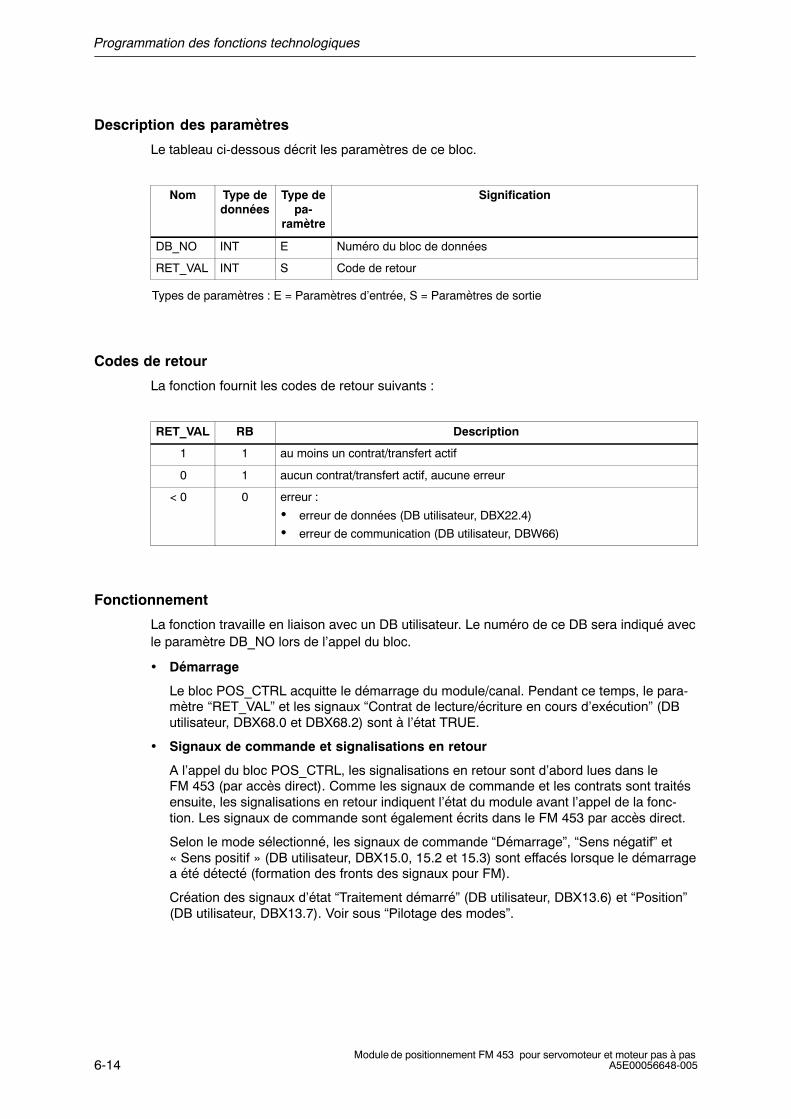
Programmation des fonctions technologiques
6-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Description des paramètres
Le tableau ci-dessous décrit les paramètres de ce bloc.
Nom Type dedonnées
Type depa-
ramètre
Signification
DB_NO INT E Numéro du bloc de données
RET_VAL INT S Code de retour
Types de paramètres : E = Paramètres d’entrée, S = Paramètres de sortie
Codes de retour
La fonction fournit les codes de retour suivants :
RET_VAL RB Description
1 1 au moins un contrat/transfert actif
0 1 aucun contrat/transfert actif, aucune erreur
< 0 0 erreur :
• erreur de données (DB utilisateur, DBX22.4)
• erreur de communication (DB utilisateur, DBW66)
Fonctionnement
La fonction travaille en liaison avec un DB utilisateur. Le numéro de ce DB sera indiqué avecle paramètre DB_NO lors de l’appel du bloc.
• Démarrage
Le bloc POS_CTRL acquitte le démarrage du module/canal. Pendant ce temps, le para-mètre “RET_VAL” et les signaux “Contrat de lecture/écriture en cours d’exécution” (DButilisateur, DBX68.0 et DBX68.2) sont à l’état TRUE.
• Signaux de commande et signalisations en retour
A l’appel du bloc POS_CTRL, les signalisations en retour sont d’abord lues dans leFM 453 (par accès direct). Comme les signaux de commande et les contrats sont traitésensuite, les signalisations en retour indiquent l’état du module avant l’appel de la fonc-tion. Les signaux de commande sont également écrits dans le FM 453 par accès direct.
Selon le mode sélectionné, les signaux de commande “Démarrage”, “Sens négatif” et« Sens positif » (DB utilisateur, DBX15.0, 15.2 et 15.3) sont effacés lorsque le démarragea été détecté (formation des fronts des signaux pour FM).
Création des signaux d’état “Traitement démarré” (DB utilisateur, DBX13.6) et “Position”(DB utilisateur, DBX13.7). Voir sous “Pilotage des modes”.
Programmation des fonctions technologiques
6-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
• Contrats
L’échange de données avec le module dépassant le cadre des signaux de commande etsignalisations en retour est réalisé par le biais de contrats. Les contrats de lecture oud’écriture ne peuvent cependant être exécutés que successivement, un contrat de lectureet un contrat d’écriture pouvant être traités dans un appel du bloc.
Pour délivrer un contrat, mettez à l’état TRUE le signal de déclenchement correspondantdans le DB utilisateur (DBB38...43) et, dans le cas d’un contrat d’écriture, inscrivez aupa-ravant les données à transférer.
Le contrat est exécuté à l’appel du bloc POS_CTRL. Un contrat de lecture ne nécessitequ’un seul appel. Un contrat d’écriture nécessite au moins 3 appels (ou cycles d’OB) dufait des acquittements que le module doit délivrer. L’espacement temporel des appelsdevrait être supérieur à un cycle du FM.
Lorsqu’un contrat est terminé, le signal de déclenchement est remis à l’état FALSE (pasdans le cas de réglages ponctuels).
Le contrat suivant n’est déterminé et exécuté que lors du prochain appel de la fonction.
Pour chaque contrat, il existe, outre le signal de déclenchement, un signal d’achèvement(DB utilisateur, DBX44.0...53.7) et un signal d’erreur (DB utilisateur, DBX54.0...63.7).
Il est recommandé de remettre à l’état FALSE les signaux d’achèvement et d’erreur ducontrat après l’exploitation ou avant la délivrance de ce contrat.
• Ordre d’exécution des contrats/priorités
Vous pouvez délivrer plusieurs contrats simultanément, également en liaison avec descontrats d’écriture pour des commandes ponctuelles ou des réglages ponctuels.
Dès qu’un contrat d’écriture est détecté (également en cas de modification de signaux deréglages ponctuels), il est exécuté immédiatement après l’achèvement du transfert encours, si d’autres contrats sont encore sélectionnés. Veillez à ne pas mettre cycliquementà l’état TRUE des signaux de commandes ponctuelles, car cela pourrait empêcher l’exé-cution d’autres contrats (priorités).
Ordre/priorités des contrats d’écriture :
1. Ecriture de commandes ponctuelles
2. Ecriture de réglages ponctuels
3. Contrats d’écriture.Les contrats d’écriture sont traités dans l’ordre des signaux de déclenchement,qui est fixé dans le DB utilisateur (début DBX38.0...39.7).
Ordre/priorités des contrats de lecture :
1. Lecture code d’erreur, erreur de manipulation/déplacement ou de données
2. Contrats de lectureLes contrats de lecture sont traités dans l’ordre des signaux de déclenchement, qui est fixé dans le DB utilisateur (début DBX42.0...43.6).
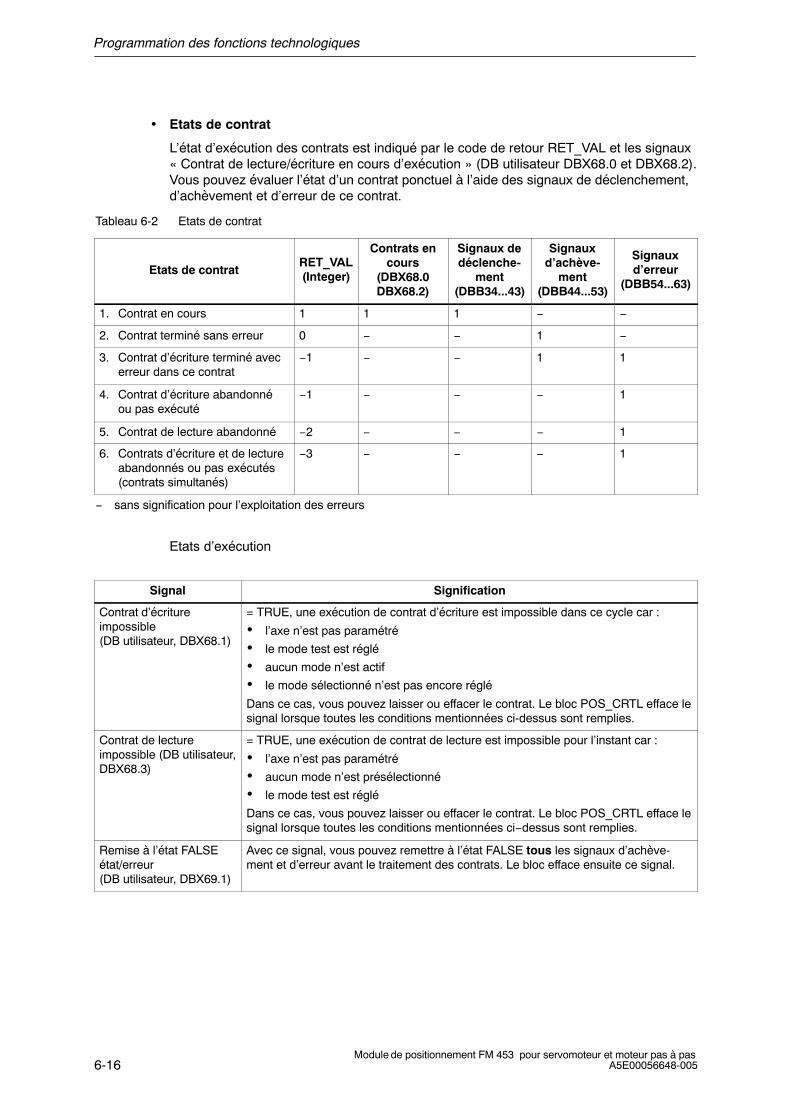
Programmation des fonctions technologiques
6-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
• Etats de contrat
L’état d’exécution des contrats est indiqué par le code de retour RET_VAL et les signaux« Contrat de lecture/écriture en cours d’exécution » (DB utilisateur DBX68.0 et DBX68.2).Vous pouvez évaluer l’état d’un contrat ponctuel à l’aide des signaux de déclenchement,d’achèvement et d’erreur de ce contrat.
Tableau 6-2 Etats de contrat
Etats de contratRET_VAL(Integer)
Contrats encours
(DBX68.0DBX68.2)
Signaux dedéclenche-
ment(DBB34...43)
Signauxd’achève-
ment(DBB44...53)
Signauxd’erreur
(DBB54...63)
1. Contrat en cours 1 1 1 − −
2. Contrat terminé sans erreur 0 − − 1 −
3. Contrat d’écriture terminé avecerreur dans ce contrat
−1 − − 1 1
4. Contrat d’écriture abandonnéou pas exécuté
−1 − − − 1
5. Contrat de lecture abandonné −2 − − − 1
6. Contrats d’écriture et de lectureabandonnés ou pas exécutés(contrats simultanés)
−3 − − − 1
− sans signification pour l’exploitation des erreurs
Etats d’exécution
Signal Signification
Contrat d’écritureimpossible(DB utilisateur, DBX68.1)
= TRUE, une exécution de contrat d’écriture est impossible dans ce cycle car :
• l’axe n’est pas paramétré
• le mode test est réglé
• aucun mode n’est actif
• le mode sélectionné n’est pas encore réglé
Dans ce cas, vous pouvez laisser ou effacer le contrat. Le bloc POS_CRTL efface lesignal lorsque toutes les conditions mentionnées ci-dessus sont remplies.
Contrat de lectureimpossible (DB utilisateur,DBX68.3)
= TRUE, une exécution de contrat de lecture est impossible pour l’instant car :
• l’axe n’est pas paramétré
• aucun mode n’est présélectionné
• le mode test est réglé
Dans ce cas, vous pouvez laisser ou effacer le contrat. Le bloc POS_CRTL efface lesignal lorsque toutes les conditions mentionnées ci−dessus sont remplies.
Remise à l’état FALSEétat/erreur (DB utilisateur, DBX69.1)
Avec ce signal, vous pouvez remettre à l’état FALSE tous les signaux d’achève-ment et d’erreur avant le traitement des contrats. Le bloc efface ensuite ce signal.
Programmation des fonctions technologiques
6-17Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exploitation des erreurs
Les erreurs survenues lors de la communication ou l’interprétation des données dans le FMsont indiquées par le résultat binaire (RB = 0) et RET_VAL < 0 (voir Etats de contrat).
Erreurs possibles :
• Erreur lors transfert de données (transfert pas exécuté entièrement) avec les SFC 58/59“WR_REC / RD_REC”. Le code d’erreur est indiqué dans le DB utilisateur, DBW66 (para-mètre RET_VAL de ces SFC internes) (états de contrat 4., 5., 6. du tableau 6-2, voiraussi la liste des erreurs du chap. 6.7).
• Les données transférées sont contrôlées quant à la présence d’erreurs et interprétéespar le module. En présence d’une erreur de données, la signalisation en retour “Erreur dedonnées” (DB utilisateur, DBX22.4) est mise à l’état TRUE (signalisation : “Contrat d’écri-ture terminé avec erreur dans ce contrat”). Le numéro d’erreur, lu par le biais d’un contratinterne de lecture, est inscrit dans le DB utilisateur, DBB94 et 95 (état de contrat 3. dutableau 6-2).
Vous trouverez des informations complémentaires sur les erreurs de données dans l’outilde paramétrage (commande de menu Test > Analyse des défauts) et au chapitre 11.
Comportement en cas d’erreur lors d’un contrat d’écriture (pas valable pour les comman-des et les réglages ponctuels) :
• Pour le contrat considéré, le signal de déclenchement est remis à l’état FALSE et le si-gnal d’erreur (DB utilisateur, DBX54.0...63.7) et le signal d’achèvement (DB utilisateur,DBX44.0...53.7) sont mis à l’état TRUE (état de contrat 3. du tableau 6-2).
• Pour les contrats d’écriture encore à exécuter, le signal de déclenchement est égalementremis à l’état FALSE et le signal d’erreur mis à l’état TRUE (état de contrat 4. du tableau6-2).
• Le traitement des contrats de lecture présents est poursuivi. Le code d’erreur (DB utilisa-teur, DBW66) est actualisé pour chaque contrat si une erreur survient à nouveau.
Comportement en cas d’erreur lors d’un contrat de lecture :
• Pour le contrat considéré, le signal de déclenchement est remis à l’état FALSE et le si-gnal d’erreur est mis à l’état TRUE (état de contrat 5. du tableau 6-2).
• Le traitement des autres contrats de lecture présents est poursuivi. Le code d’erreur (DButilisateur, DBW66) est actualisé pour chaque contrat si une erreur survient à nouveau.
Comportement en cas d’erreur lors de commandes ponctuelles et réglages ponctuels :
• Un contrat d’écriture n’est pas exécuté entièrement ; le signal d’erreur est mis à l’étatTRUE (état de contrat 4. du tableau 6-2).
• La fonction mise à l’état TRUE/FALSE, qui a déclenché le contrat d’écriture, n’est pasactivée.

Programmation des fonctions technologiques
6-18Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Exécution des contrats d’écriture
Avant l’exécution d’un contrat d’écriture, vous devez inscrire les valeurs à transférer dans lazone de données affectée au contrat et activer le mode adéquat.
Vous déclenchez un contrat d’écriture à l’aide du signal de déclenchement correspondant.
Dans les tableaux ci-dessous, les abréviations ont les significations suivantes :
Mode : T − Manuel à vue STE − CommandeREF − Prise de référenceSM − Semi-automatique relatifMDI − MDI (Manual Data Input)A/AE − Automatique/Automatique bloc par bloc
Les contrats d’écriture suivants sont connus :
Modes
Données systèmeContrat Données T STE REF SM MDI A/AE
voirchap
Niveaux de vitesse 1, 2 DBX38.0 DBB160...167 9.2.1
Niveaux de tension/fréquence 1, 2 DBX38.1 DBB168...175 9.2.2
Consigne pour quote incrémentale DBX38.2 DBB156...159 9.2.4
Bloc MDI DBX38.3 DBB176...195 9.2.5
Bloc MDI au vol DBX38.4 DBB222...241 − − − − x − 9.2.5
réservé DBX38.5
Définition du point de référence DBX38.6 DBB152...155 x x x x x − 9.3.9
Forçage de valeur réelle DBX38.7 DBB144...147 x x − x x x 9.3.5
Forçage de valeur réelle au vol DBX39.0 DBB148...151 x x − x x − 9.3.6
Décalage d’origine DBX39.1 DBB140...143 x x − x x x 9.3.4
réservé DBX39.2 x x x x x x
Modifier paramètres/données DBX39.3 DBB196...219 x x x x x x 9.3.1
Sorties TOR DBX39.4 DBB220...221 x x x x x x 9.8.2
Sélection de programme DBX39.5 DBB242...245 − − − − − 9.2.6
Demande de données d’application DBX39.6 DBB246...249 x x x x x x 9.3.7
Apprentissage (Teach In) DBX39.7 DBB250...251 x − − x x − 9.3.8
Couplage d’axes DBX40.0 DBB252...253 x x x 9.3.10
Les données sont acceptées, mais ne sont traitées que dans le mode correspondant.x Les données sont acceptées et traitées.− Les données sont refusées avec émission d’une signalisation d’erreur (voir Gestion des erreurs et défauts,
Tableau 11-8, Cl. 4/n° 1). Données nécessaires au déplacement de l’axe.
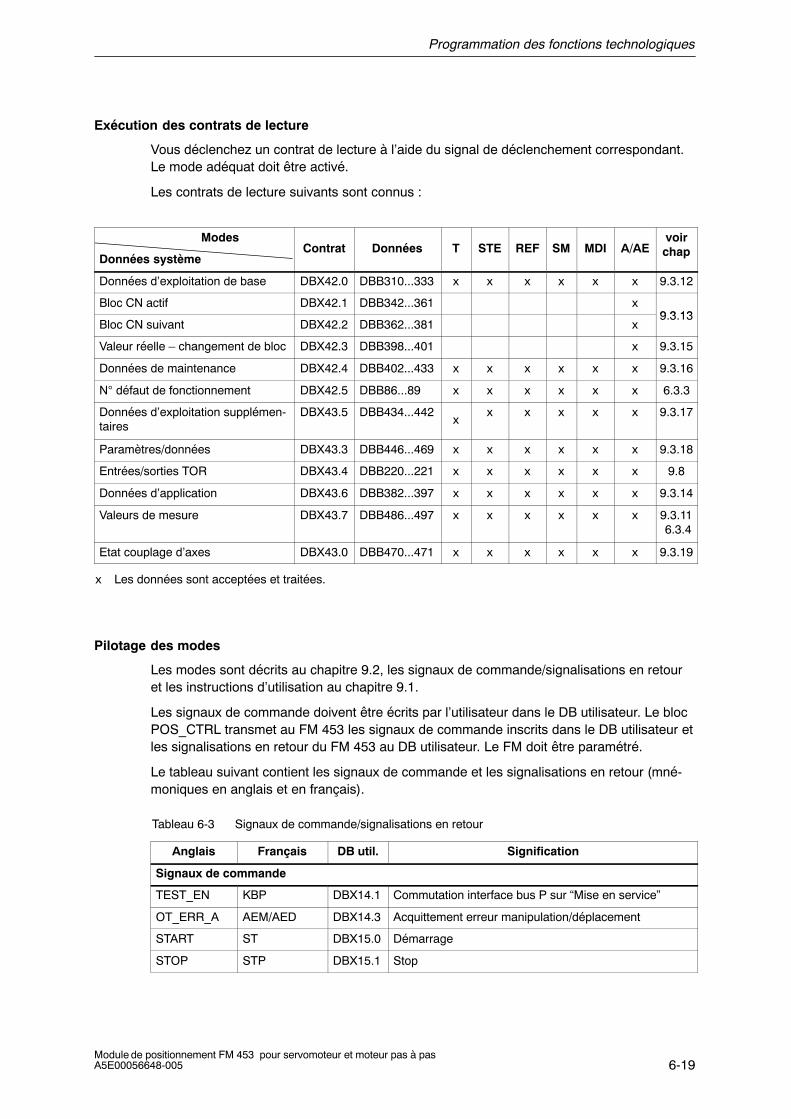
Programmation des fonctions technologiques
6-19Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exécution des contrats de lecture
Vous déclenchez un contrat de lecture à l’aide du signal de déclenchement correspondant.Le mode adéquat doit être activé.
Les contrats de lecture suivants sont connus :
Modes
Données systèmeContrat Données T STE REF SM MDI A/AE
voirchap
Données d’exploitation de base DBX42.0 DBB310...333 x x x x x x 9.3.12
Bloc CN actif DBX42.1 DBB342...361 x9 3 13
Bloc CN suivant DBX42.2 DBB362...381 x9.3.13
Valeur réelle – changement de bloc DBX42.3 DBB398...401 x 9.3.15
Données de maintenance DBX42.4 DBB402...433 x x x x x x 9.3.16
N° défaut de fonctionnement DBX42.5 DBB86...89 x x x x x x 6.3.3
Données d’exploitation supplémen-taires
DBX43.5 DBB434...442x
x x x x x 9.3.17
Paramètres/données DBX43.3 DBB446...469 x x x x x x 9.3.18
Entrées/sorties TOR DBX43.4 DBB220...221 x x x x x x 9.8
Données d’application DBX43.6 DBB382...397 x x x x x x 9.3.14
Valeurs de mesure DBX43.7 DBB486...497 x x x x x x 9.3.11 6.3.4
Etat couplage d’axes DBX43.0 DBB470...471 x x x x x x 9.3.19
x Les données sont acceptées et traitées.
Pilotage des modes
Les modes sont décrits au chapitre 9.2, les signaux de commande/signalisations en retouret les instructions d’utilisation au chapitre 9.1.
Les signaux de commande doivent être écrits par l’utilisateur dans le DB utilisateur. Le blocPOS_CTRL transmet au FM 453 les signaux de commande inscrits dans le DB utilisateur etles signalisations en retour du FM 453 au DB utilisateur. Le FM doit être paramétré.
Le tableau suivant contient les signaux de commande et les signalisations en retour (mné-moniques en anglais et en français).
Tableau 6-3 Signaux de commande/signalisations en retour
Anglais Français DB util. Signification
Signaux de commande
TEST_EN KBP DBX14.1 Commutation interface bus P sur “Mise en service”
OT_ERR_A AEM/AED DBX14.3 Acquittement erreur manipulation/déplacement
START ST DBX15.0 Démarrage
STOP STP DBX15.1 Stop
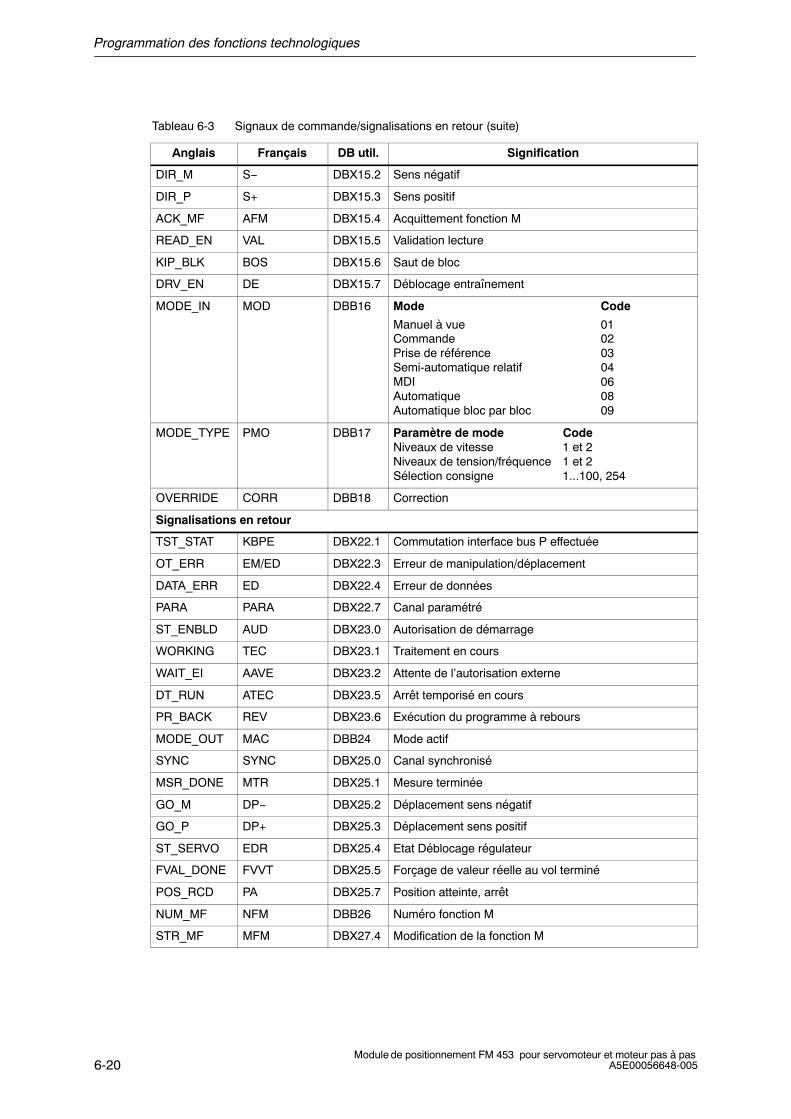
Programmation des fonctions technologiques
6-20Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 6-3 Signaux de commande/signalisations en retour (suite)
Anglais SignificationDB util.Français
DIR_M S− DBX15.2 Sens négatif
DIR_P S+ DBX15.3 Sens positif
ACK_MF AFM DBX15.4 Acquittement fonction M
READ_EN VAL DBX15.5 Validation lecture
KIP_BLK BOS DBX15.6 Saut de bloc
DRV_EN DE DBX15.7 Déblocage entraînement
MODE_IN MOD DBB16 Mode Code
Manuel à vue 01Commande 02Prise de référence 03Semi-automatique relatif 04MDI 06Automatique 08Automatique bloc par bloc 09
MODE_TYPE PMO DBB17 Paramètre de mode CodeNiveaux de vitesse 1 et 2Niveaux de tension/fréquence 1 et 2Sélection consigne 1...100, 254
OVERRIDE CORR DBB18 Correction
Signalisations en retour
TST_STAT KBPE DBX22.1 Commutation interface bus P effectuée
OT_ERR EM/ED DBX22.3 Erreur de manipulation/déplacement
DATA_ERR ED DBX22.4 Erreur de données
PARA PARA DBX22.7 Canal paramétré
ST_ENBLD AUD DBX23.0 Autorisation de démarrage
WORKING TEC DBX23.1 Traitement en cours
WAIT_EI AAVE DBX23.2 Attente de l’autorisation externe
DT_RUN ATEC DBX23.5 Arrêt temporisé en cours
PR_BACK REV DBX23.6 Exécution du programme à rebours
MODE_OUT MAC DBB24 Mode actif
SYNC SYNC DBX25.0 Canal synchronisé
MSR_DONE MTR DBX25.1 Mesure terminée
GO_M DP− DBX25.2 Déplacement sens négatif
GO_P DP+ DBX25.3 Déplacement sens positif
ST_SERVO EDR DBX25.4 Etat Déblocage régulateur
FVAL_DONE FVVT DBX25.5 Forçage de valeur réelle au vol terminé
POS_RCD PA DBX25.7 Position atteinte, arrêt
NUM_MF NFM DBB26 Numéro fonction M
STR_MF MFM DBX27.4 Modification de la fonction M

Programmation des fonctions technologiques
6-21Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Les signalisations en retour “Traitement en cours” et “Position atteinte, arrêt” ne sont trans-mises au programme utilisateur que lorsque le FM a détecté et traité le signal de démarrage( 2 cycles du FM).
A l’appel du bloc POS_CTRL, les signaux suivants sont générés à partir des signaux decommande/signalisations en retour pour assurer une détection plus rapide du démarrage dela procédure.
Signal Signification
Traitement démarré(DB utilisateur,DBX13.6)
= TRUE Lors du démarrage d’un mode/déplacement avec les signaux de commande correspondants ou lors de la signalisation en retour “Traitement en cours” (DB utilisateur, DBX23.1) = 1
“Traitement démarré”
“Traitement en cours”
à l’appel/au démarrage dublocau démarrage du déplacementpar le FM
Position(DB utilisateur,DBX13.7)
= FALSE Lors de la signalisation en retour “!Position atteinte, arrêt“ (DB utilisateur, DBX25.7) = 0 ou lors du démarrage d’un mode avecles signaux de commande correspondants
“Position”
“Position atteinte, arrêt”
à l’appel/au démarrage du bloc
au démarrage du déplacementpar le FM
Des commandes ponctuelles et des réglages ponctuels sont également nécessaires pour lepilotage du FM 453.
Toutes les commandes ponctuelles et tous les réglages ponctuels activés lors de l’appel dubloc POS_CTRL sont transférés. Les commandes ponctuelles sont effacées après le trans-fert, même en cas d’erreur.
Modes
Données systèmeContrat Fonction T STE REF SM MDI A/AE
voirchap
Réglages ponctuels interne DBB34 et 35 x 9.3.2
Commandes ponctuelles interne DBB36 et 37 x x x x x x 9.3.3
x Les données sont acceptées et traitées.
Données nécessaires au déplacement de l’axe.
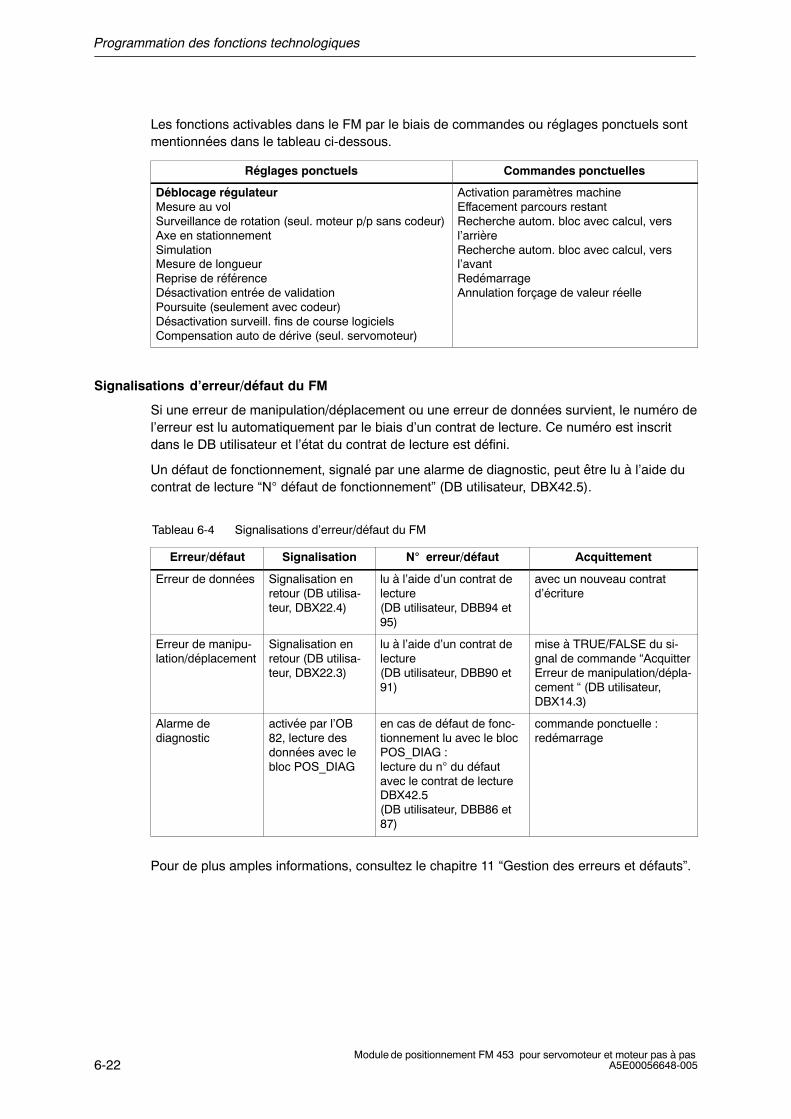
Programmation des fonctions technologiques
6-22Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Les fonctions activables dans le FM par le biais de commandes ou réglages ponctuels sontmentionnées dans le tableau ci-dessous.
Réglages ponctuels Commandes ponctuelles
Déblocage régulateurMesure au volSurveillance de rotation (seul. moteur p/p sans codeur)Axe en stationnementSimulationMesure de longueurReprise de référenceDésactivation entrée de validationPoursuite (seulement avec codeur)Désactivation surveill. fins de course logicielsCompensation auto de dérive (seul. servomoteur)
Activation paramètres machineEffacement parcours restantRecherche autom. bloc avec calcul, versl’arrièreRecherche autom. bloc avec calcul, versl’avantRedémarrageAnnulation forçage de valeur réelle
Signalisations d’erreur/défaut du FM
Si une erreur de manipulation/déplacement ou une erreur de données survient, le numéro del’erreur est lu automatiquement par le biais d’un contrat de lecture. Ce numéro est inscritdans le DB utilisateur et l’état du contrat de lecture est défini.
Un défaut de fonctionnement, signalé par une alarme de diagnostic, peut être lu à l’aide ducontrat de lecture “N° défaut de fonctionnement” (DB utilisateur, DBX42.5).
Tableau 6-4 Signalisations d’erreur/défaut du FM
Erreur/défaut Signalisation N erreur/défaut Acquittement
Erreur de données Signalisation enretour (DB utilisa-teur, DBX22.4)
lu à l’aide d’un contrat delecture (DB utilisateur, DBB94 et95)
avec un nouveau contratd’écriture
Erreur de manipu-lation/déplacement
Signalisation enretour (DB utilisa-teur, DBX22.3)
lu à l’aide d’un contrat delecture (DB utilisateur, DBB90 et91)
mise à TRUE/FALSE du si-gnal de commande “AcquitterErreur de manipulation/dépla-cement “ (DB utilisateur,DBX14.3)
Alarme dediagnostic
activée par l’OB82, lecture desdonnées avec lebloc POS_DIAG
en cas de défaut de fonc-tionnement lu avec le blocPOS_DIAG :lecture du n° du défautavec le contrat de lectureDBX42.5(DB utilisateur, DBB86 et87)
commande ponctuelle : redémarrage
Pour de plus amples informations, consultez le chapitre 11 “Gestion des erreurs et défauts”.
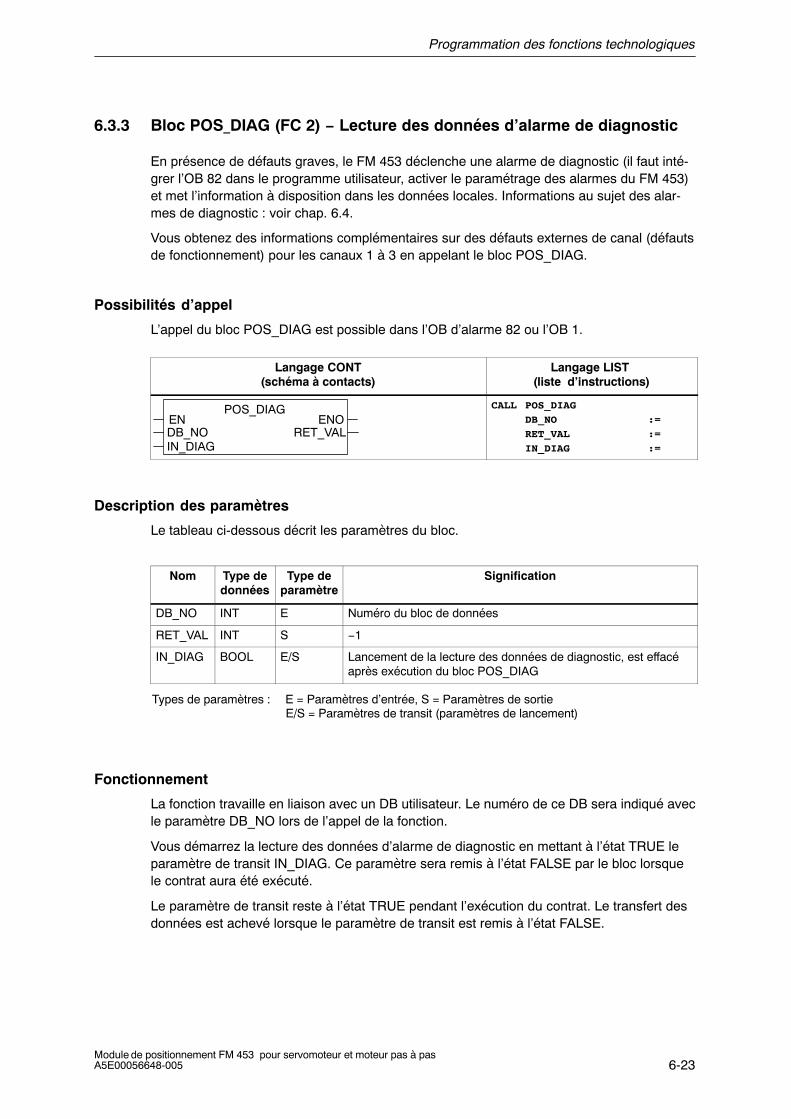
Programmation des fonctions technologiques
6-23Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.3.3 Bloc POS_DIAG (FC 2) − Lecture des données d’alarme de diagnostic
En présence de défauts graves, le FM 453 déclenche une alarme de diagnostic (il faut inté-grer l’OB 82 dans le programme utilisateur, activer le paramétrage des alarmes du FM 453)et met l’information à disposition dans les données locales. Informations au sujet des alar-mes de diagnostic : voir chap. 6.4.
Vous obtenez des informations complémentaires sur des défauts externes de canal (défautsde fonctionnement) pour les canaux 1 à 3 en appelant le bloc POS_DIAG.
Possibilités d’appel
L’appel du bloc POS_DIAG est possible dans l’OB d’alarme 82 ou l’OB 1.
Langage CONT(schéma à contacts)
Langage LIST (liste d’instructions)
EN ENOPOS_DIAG
DB_NO RET_VALIN_DIAG
CALL POS_DIAG
DB_NO :=
RET_VAL :=
IN_DIAG :=
Description des paramètres
Le tableau ci-dessous décrit les paramètres du bloc.
Nom Type dedonnées
Type deparamètre
Signification
DB_NO INT E Numéro du bloc de données
RET_VAL INT S −1
IN_DIAG BOOL E/S Lancement de la lecture des données de diagnostic, est effacéaprès exécution du bloc POS_DIAG
Types de paramètres : E = Paramètres d’entrée, S = Paramètres de sortie E/S = Paramètres de transit (paramètres de lancement)
Fonctionnement
La fonction travaille en liaison avec un DB utilisateur. Le numéro de ce DB sera indiqué avecle paramètre DB_NO lors de l’appel de la fonction.
Vous démarrez la lecture des données d’alarme de diagnostic en mettant à l’état TRUE leparamètre de transit IN_DIAG. Ce paramètre sera remis à l’état FALSE par le bloc lorsquele contrat aura été exécuté.
Le paramètre de transit reste à l’état TRUE pendant l’exécution du contrat. Le transfert desdonnées est achevé lorsque le paramètre de transit est remis à l’état FALSE.
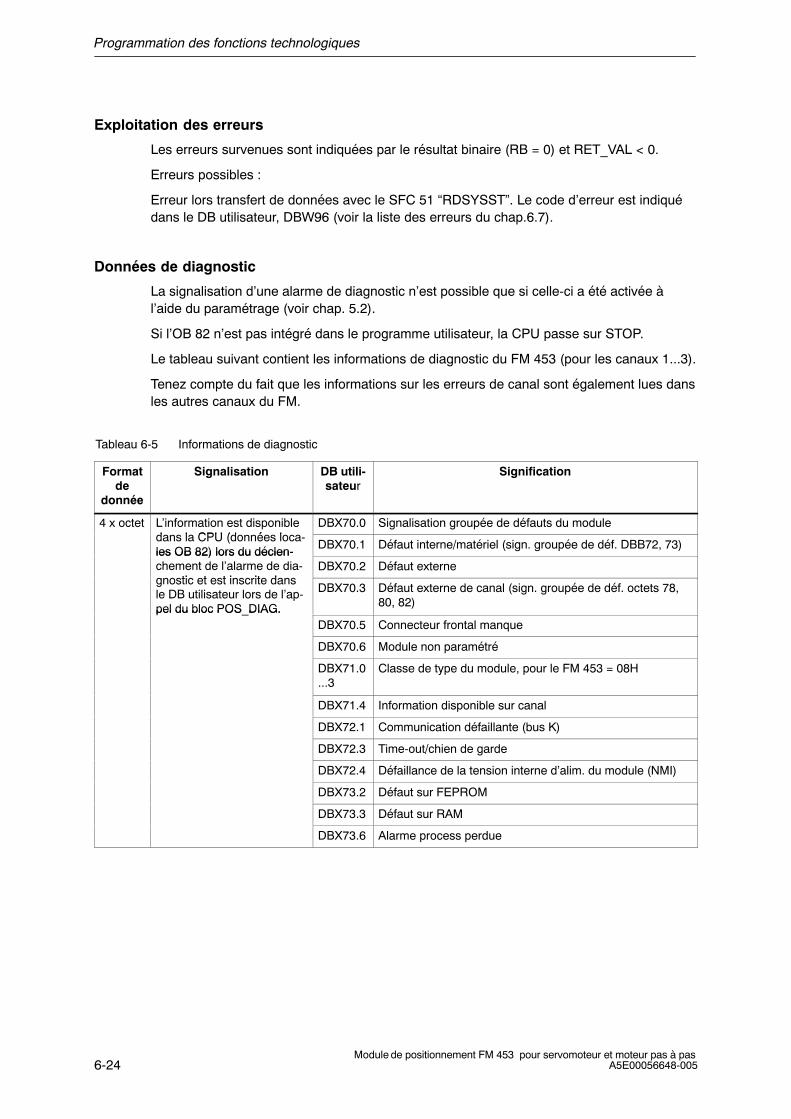
Programmation des fonctions technologiques
6-24Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Exploitation des erreurs
Les erreurs survenues sont indiquées par le résultat binaire (RB = 0) et RET_VAL < 0.
Erreurs possibles :
Erreur lors transfert de données avec le SFC 51 “RDSYSST”. Le code d’erreur est indiquédans le DB utilisateur, DBW96 (voir la liste des erreurs du chap.6.7).
Données de diagnostic
La signalisation d’une alarme de diagnostic n’est possible que si celle-ci a été activée àl’aide du paramétrage (voir chap. 5.2).
Si l’OB 82 n’est pas intégré dans le programme utilisateur, la CPU passe sur STOP.
Le tableau suivant contient les informations de diagnostic du FM 453 (pour les canaux 1...3).
Tenez compte du fait que les informations sur les erreurs de canal sont également lues dansles autres canaux du FM.
Tableau 6-5 Informations de diagnostic
Formatde
donnée
Signalisation DB utili-sateur
Signification
4 x octet L’information est disponibled l CPU (d é l
DBX70.0 Signalisation groupée de défauts du moduledans la CPU (données loca-les OB 82) lors du déclen-
DBX70.1 Défaut interne/matériel (sign. groupée de déf. DBB72, 73)les OB 82) lors du déclen-chement de l’alarme de dia-
ti t t i it dDBX70.2 Défaut externe
gnostic et est inscrite dansle DB utilisateur lors de l’ap-pel du bloc POS DIAG.
DBX70.3 Défaut externe de canal (sign. groupée de déf. octets 78,80, 82)pel du bloc POS_DIAG.
DBX70.5 Connecteur frontal manque
DBX70.6 Module non paramétré
DBX71.0...3
Classe de type du module, pour le FM 453 = 08H
DBX71.4 Information disponible sur canal
DBX72.1 Communication défaillante (bus K)
DBX72.3 Time-out/chien de garde
DBX72.4 Défaillance de la tension interne d’alim. du module (NMI)
DBX73.2 Défaut sur FEPROM
DBX73.3 Défaut sur RAM
DBX73.6 Alarme process perdue
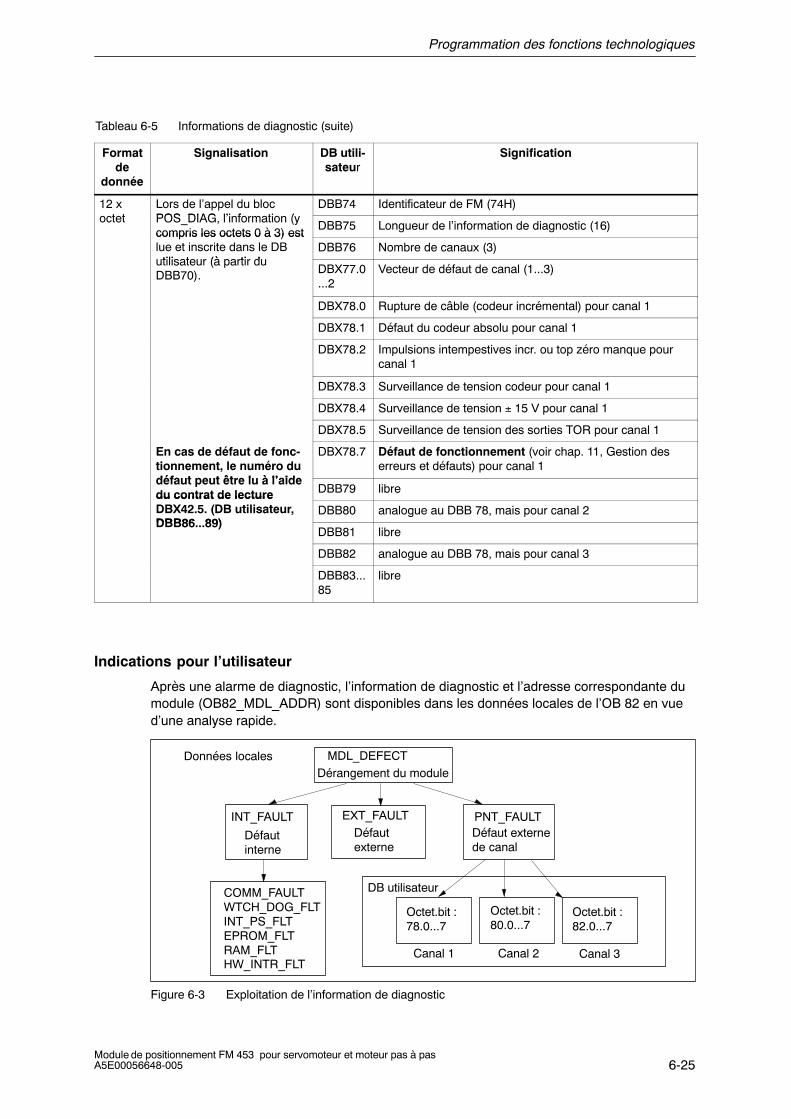
Programmation des fonctions technologiques
6-25Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 6-5 Informations de diagnostic (suite)
Formatde
donnée
SignificationDB utili-sateur
Signalisation
12 xt t
Lors de l’appel du blocPOS DIAG l’i f ti (
DBB74 Identificateur de FM (74H)octet POS_DIAG, l’information (y
compris les octets 0 à 3) estDBB75 Longueur de l’information de diagnostic (16)
compris les octets 0 à 3) estlue et inscrite dans le DBtilisate r (à partir d
DBB76 Nombre de canaux (3)utilisateur (à partir duDBB70). DBX77.0
...2Vecteur de défaut de canal (1...3)
DBX78.0 Rupture de câble (codeur incrémental) pour canal 1
DBX78.1 Défaut du codeur absolu pour canal 1
DBX78.2 Impulsions intempestives incr. ou top zéro manque pourcanal 1
DBX78.3 Surveillance de tension codeur pour canal 1
DBX78.4 Surveillance de tension ± 15 V pour canal 1
DBX78.5 Surveillance de tension des sorties TOR pour canal 1
En cas de défaut de fonc-tionnement, le numéro dudéfaut peut être lu à l’aide
DBX78.7 Défaut de fonctionnement (voir chap. 11, Gestion deserreurs et défauts) pour canal 1
défaut peut être lu à l’aidedu contrat de lecture DBB79 libredu contrat de lectureDBX42.5. (DB utilisateur,DBB86 89)
DBB80 analogue au DBB 78, mais pour canal 2DBB86...89)
DBB81 libre
DBB82 analogue au DBB 78, mais pour canal 3
DBB83...85
libre
Indications pour l’utilisateur
Après une alarme de diagnostic, l’information de diagnostic et l’adresse correspondante dumodule (OB82_MDL_ADDR) sont disponibles dans les données locales de l’OB 82 en vued’une analyse rapide.
Dérangement du moduleMDL_DEFECT
Défautinterne
Défautexterne
Défaut externede canal
Octet.bit : 78.0...7
EXT_FAULTINT_FAULT PNT_FAULT
COMM_FAULTWTCH_DOG_FLTINT_PS_FLTEPROM_FLTRAM_FLTHW_INTR_FLT
Octet.bit : 82.0...7
Octet.bit : 80.0...7
Canal 1 Canal 2 Canal 3
Données locales
DB utilisateur
Figure 6-3 Exploitation de l’information de diagnostic
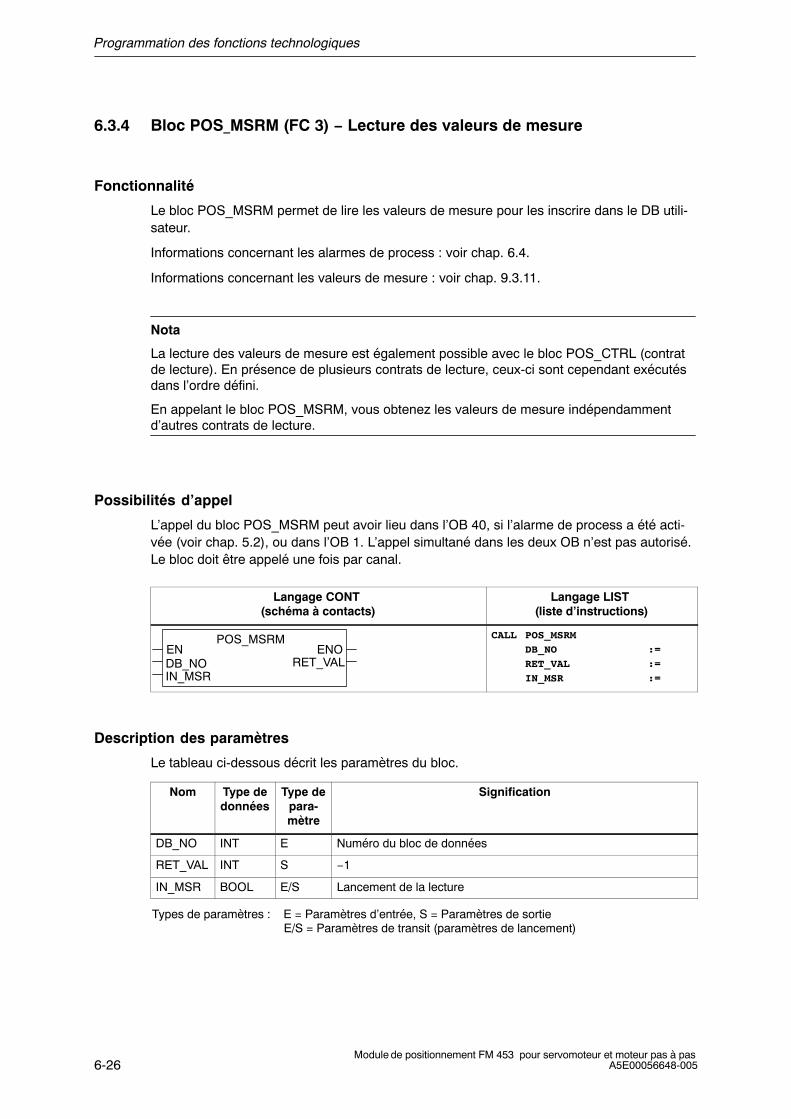
Programmation des fonctions technologiques
6-26Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
6.3.4 Bloc POS_MSRM (FC 3) − Lecture des valeurs de mesure
Fonctionnalité
Le bloc POS_MSRM permet de lire les valeurs de mesure pour les inscrire dans le DB utili-sateur.
Informations concernant les alarmes de process : voir chap. 6.4.
Informations concernant les valeurs de mesure : voir chap. 9.3.11.
Nota
La lecture des valeurs de mesure est également possible avec le bloc POS_CTRL (contratde lecture). En présence de plusieurs contrats de lecture, ceux-ci sont cependant exécutésdans l’ordre défini.
En appelant le bloc POS_MSRM, vous obtenez les valeurs de mesure indépendammentd’autres contrats de lecture.
Possibilités d’appel
L’appel du bloc POS_MSRM peut avoir lieu dans l’OB 40, si l’alarme de process a été acti-vée (voir chap. 5.2), ou dans l’OB 1. L’appel simultané dans les deux OB n’est pas autorisé.Le bloc doit être appelé une fois par canal.
Langage CONT (schéma à contacts)
Langage LIST (liste d’instructions)
EN ENOPOS_MSRM
IN_MSRDB_NO RET_VAL
CALL POS_MSRM
DB_NO :=
RET_VAL :=
IN_MSR :=
Description des paramètres
Le tableau ci-dessous décrit les paramètres du bloc.
Nom Type dedonnées
Type depara-mètre
Signification
DB_NO INT E Numéro du bloc de données
RET_VAL INT S −1
IN_MSR BOOL E/S Lancement de la lecture
Types de paramètres : E = Paramètres d’entrée, S = Paramètres de sortieE/S = Paramètres de transit (paramètres de lancement)
Programmation des fonctions technologiques
6-27Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Fonctionnement
La fonction travaille en liaison avec un DB utilisateur. Le numéro de ce DB sera indiqué avecle paramètre DB_NO lors de l’appel de la fonction.
Vous démarrez la lecture des valeurs de mesure en mettant à l’état TRUE le paramètre detransit IN_MSR. Ce paramètre sera remis à l’état FALSE par le bloc lorsque le contrat auraété exécuté.
Le paramètre de transit reste à l’état TRUE pendant l’exécution du contrat. Le transfert desdonnées est achevé lorsque le paramètre de transit est remis à l’état FALSE.
Exploitation des erreurs
Les erreurs survenues sont indiquées par le résultat binaire (RB = 0) et RET_VAL < 0.
Erreurs possibles :
Erreur lors transfert de données avec le SFC 59 “RD_REC”. Le code d’erreur est indiquédans le DB utilisateur, DBW98 (voir la liste des erreurs du chap. 6.7).
6.4 Alarmes
Traitement des alarmes
Le module FM 453 peut déclencher des alarmes de process et de diagnostic. Vous traitezces alarmes dans un OB d’alarme (OB 40 ou OB 82). Si une alarme est déclenchée alorsque l’OB de traitement n’est pas chargé, la CPU passe sur STOP (voir le manuel Program-mation avec STEP 7).
Vous validez le traitement des alarmes de la façon suivante :
1. Validation générale des alarmes pour l’ensemble du module :
− Sélectionnez le module dans HW-Config.
− Validez les alarmes de process et/ou de diagnostic sous Edition > Propriétés del’objet > Paramètres de base (voir également Fig. 5.2).
− Sélectionnez le numéro de l’OB pour le process sous Edition > Propriétés de l’objet> Adresses.
− Enregistrez et compilez la configuration matérielle.
− Chargez-la dans la CPU.
2. Validation des événements pour les alarmes de process dans les paramètres machine.

Programmation des fonctions technologiques
6-28Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Exploitation d’une alarme de process
Lorsqu’une alarme de process est déclenchée par le FM 453, les informations suivantessont disponibles dans la variable OB40_POINT_ADDR (ou dans la variable correspondanted’un autre OB d’alarme de process) :
Tableau 6-6 Contenu du double mot OB40_POINT_ADDR
Octet Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1Mesure auvol canal 3
Changementde bloc auvol canal 3
Mesure delongueur ter-minée canal 3
Positionatteintecanal 3
2 Mesure auvol canal 2
Changementde bloc auvol canal 2
Mesure delongueur ter-minée canal 2
Positionatteintecanal 2
3 Mesure auvol canal 1
Changementde bloc auvol canal 1
Mesure delongueur ter-minée canal 1
Positionatteintecanal 1
Vous pouvez déduire la cause de l’alarme des octets 1, 2, 3.
Alarmes de process perdues
Lorsqu’une alarme de process est en cours de traitement dans l’OB d’alarme de process, lemodule enregistre tous les événements d’alarme de process qui surviennent. Si un événe-ment survient une seconde fois avant que l’alarme de process a pu être déclenchée, le mo-dule déclenche l’alarme de diagnostic “Alarme de process perdue”.
Exploitation d’une alarme de diagnostic
Après une alarme de diagnostic, l’information de diagnostic est disponible dans les donnéeslocales de l’OB 82 pour une analyse rapide. Appelez la fonction FC POS_DIAG pour connaî-tre la cause exacte de l’alarme (voir chap. 6.3.3).

Programmation des fonctions technologiques
6-29Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.5 Bloc de données utilisateur (DB utilisateur)
Introduction
La structure du DB utilisateur est décrite dans le tableau ci-dessous.
Ce DB utilisateur doit être déclaré pour chaque canal utilisé.
Tableau 6-7 DB utilisateur
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Octet Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Adresses générales
DBW0 Adresse du module (type de donnée : INT)
DBW2 Numéro du canal (type de donnée : INT)
DBD4 Adresse du canal
DBW8 interne (offset enregistrement ; type de donnée : INT)
DBW10àDBB12
réservé
DBB13 PositionTraitementdémarré
Signaux de commande
DBB14
Acquittererreurmanip./déplac.
Commuta-tion inter-face bus P.
DBB15Déblocageentraîne-ment
Saut debloc
Validationlecture
Acquitte-mentfonction M
Sens positifSensnégatif
Stop Démarrage
DBB16 Mode
DBB17 Paramètre de mode
DBB18 Correction
DBB19àDBB21
réservé
Signalisations en retour
DBB22Canalparamétré
Erreur dedonnées
Erreur ma-nipulation/déplace-ment
Commuta-tion inter-face bus Peffectuée
DBB23Exécutionprogrammeà rebours
Arrêt tem-porisé encours
Attente au-torisationexterne
Traitementen cours
Autorisationdedémarrage
DBB24 Mode actif
DBB25Positionatteinte,arrêt
Forçage val.réelle au volterminé
Etat Déblo-cage régu-lateur
Déplace-ment senspos.
Déplace-ment sensnég.
Mesureterminée
Canalsynchronisé
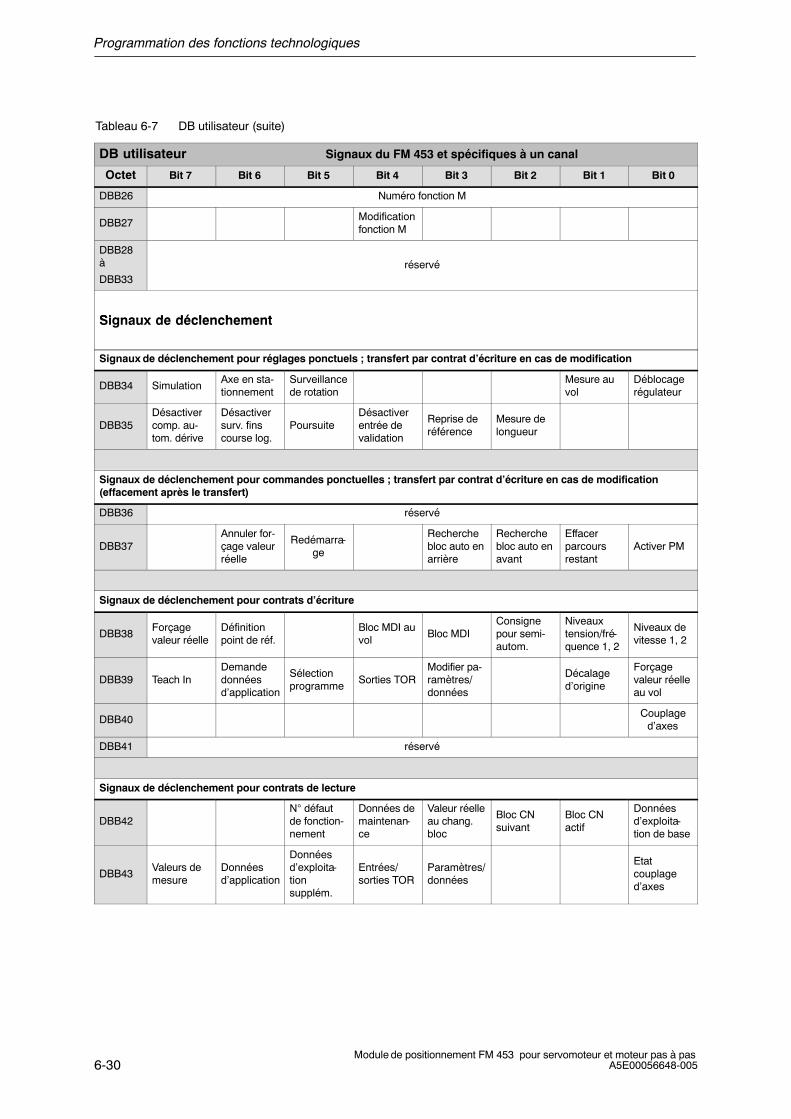
Programmation des fonctions technologiques
6-30Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
DBB26 Numéro fonction M
DBB27Modificationfonction M
DBB28à
DBB33réservé
Signaux de déclenchementSignaux de déclenchement
Signaux de déclenchement pour réglages ponctuels ; transfert par contrat d’écriture en cas de modification
DBB34 SimulationAxe en sta-tionnement
Surveillancede rotation
Mesure auvol
Déblocagerégulateur
DBB35Désactivercomp. au-tom. dérive
Désactiversurv. finscourse log.
PoursuiteDésactiverentrée devalidation
Reprise deréférence
Mesure delongueur
Signaux de déclenchement pour commandes ponctuelles ; transfert par contrat d’écriture en cas de modification (effacement après le transfert)
DBB36 réservé
DBB37Annuler for-çage valeurréelle
Redémarra-ge
Recherchebloc auto enarrière
Recherchebloc auto enavant
Effacerparcoursrestant
Activer PM
Signaux de déclenchement pour contrats d’écriture
DBB38Forçagevaleur réelle
Définitionpoint de réf.
Bloc MDI auvol
Bloc MDIConsignepour semi-autom.
Niveauxtension/fré-quence 1, 2
Niveaux devitesse 1, 2
DBB39 Teach InDemandedonnéesd’application
Sélectionprogramme
Sorties TORModifier pa-ramètres/données
Décalaged’origine
Forçagevaleur réelleau vol
DBB40Couplage
d’axes
DBB41 réservé
Signaux de déclenchement pour contrats de lecture
DBB42N° défautde fonction-nement
Données demaintenan-ce
Valeur réelleau chang.bloc
Bloc CNsuivant
Bloc CNactif
Donnéesd’exploita-tion de base
DBB43Valeurs demesure
Donnéesd’application
Donnéesd’exploita-tionsupplém.
Entrées/sorties TOR
Paramètres/données
Etat couplaged’axes
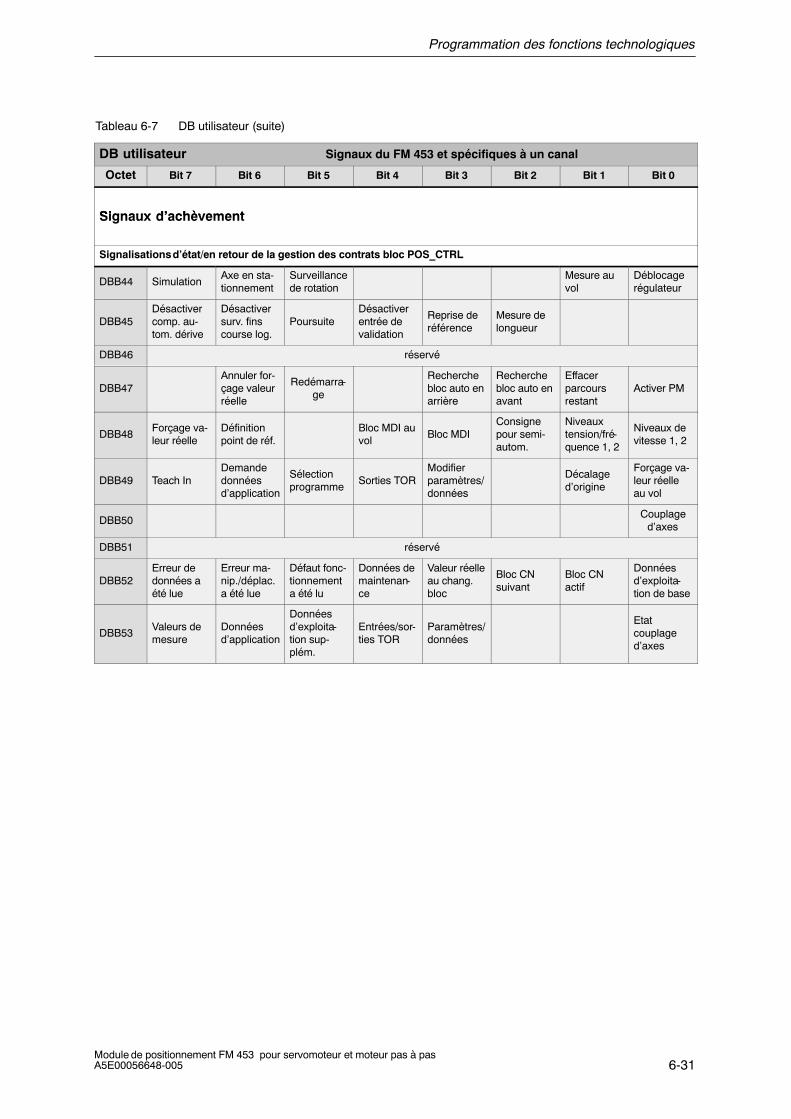
Programmation des fonctions technologiques
6-31Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
Signaux d’achèvementSignaux d’achèvement
Signalisations d’état/en retour de la gestion des contrats bloc POS_CTRL
DBB44 SimulationAxe en sta-tionnement
Surveillancede rotation
Mesure auvol
Déblocagerégulateur
DBB45Désactivercomp. au-tom. dérive
Désactiversurv. finscourse log.
PoursuiteDésactiverentrée devalidation
Reprise deréférence
Mesure delongueur
DBB46 réservé
DBB47Annuler for-çage valeurréelle
Redémarra-ge
Recherchebloc auto enarrière
Recherchebloc auto enavant
Effacerparcoursrestant
Activer PM
DBB48Forçage va-leur réelle
Définitionpoint de réf.
Bloc MDI auvol
Bloc MDIConsignepour semi-autom.
Niveauxtension/fré-quence 1, 2
Niveaux devitesse 1, 2
DBB49 Teach InDemandedonnéesd’application
Sélectionprogramme
Sorties TORModifierparamètres/données
Décalaged’origine
Forçage va-leur réelleau vol
DBB50Couplage
d’axes
DBB51 réservé
DBB52Erreur dedonnées aété lue
Erreur ma-nip./déplac.a été lue
Défaut fonc-tionnementa été lu
Données demaintenan-ce
Valeur réelleau chang.bloc
Bloc CNsuivant
Bloc CNactif
Donnéesd’exploita-tion de base
DBB53Valeurs demesure
Donnéesd’application
Donnéesd’exploita-tion sup-plém.
Entrées/sor-ties TOR
Paramètres/données
Etat couplaged’axes
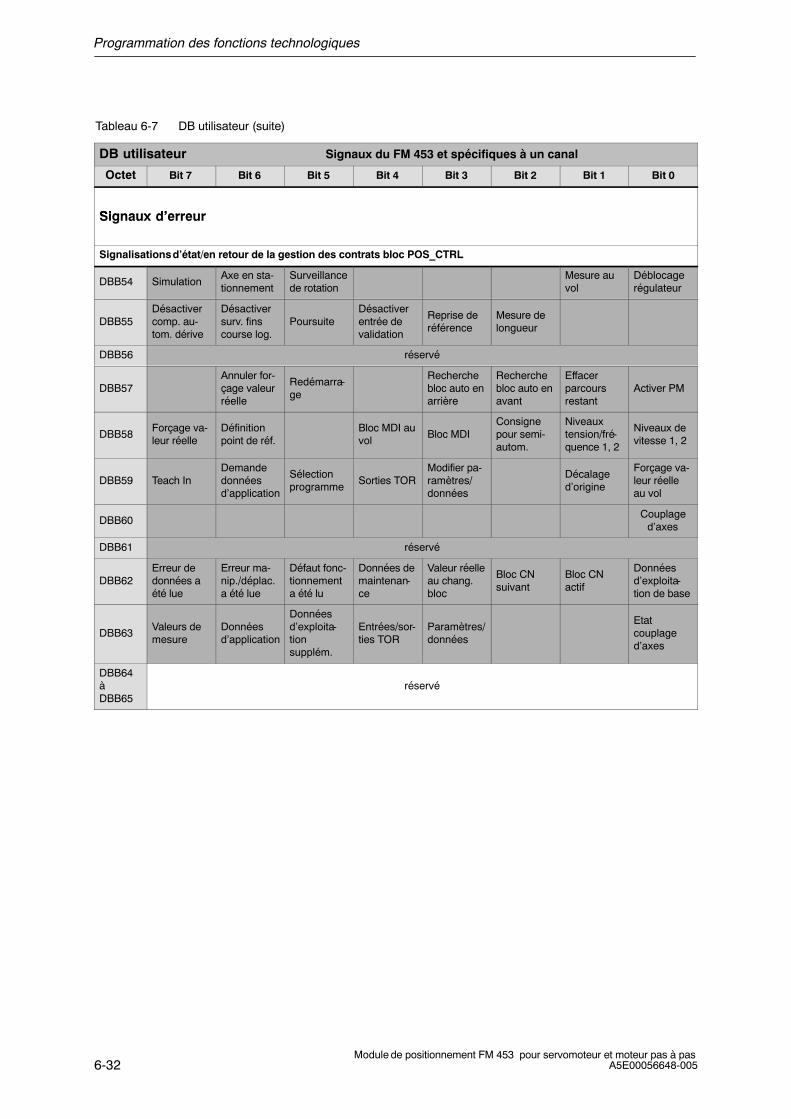
Programmation des fonctions technologiques
6-32Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
Signaux d’erreurSignaux d’erreur
Signalisations d’état/en retour de la gestion des contrats bloc POS_CTRL
DBB54 SimulationAxe en sta-tionnement
Surveillancede rotation
Mesure auvol
Déblocagerégulateur
DBB55Désactivercomp. au-tom. dérive
Désactiversurv. finscourse log.
PoursuiteDésactiverentrée devalidation
Reprise deréférence
Mesure delongueur
DBB56 réservé
DBB57Annuler for-çage valeurréelle
Redémarra-ge
Recherchebloc auto enarrière
Recherchebloc auto enavant
Effacerparcoursrestant
Activer PM
DBB58Forçage va-leur réelle
Définitionpoint de réf.
Bloc MDI auvol
Bloc MDIConsignepour semi-autom.
Niveauxtension/fré-quence 1, 2
Niveaux devitesse 1, 2
DBB59 Teach InDemandedonnéesd’application
Sélectionprogramme
Sorties TORModifier pa-ramètres/données
Décalaged’origine
Forçage va-leur réelleau vol
DBB60Couplage
d’axes
DBB61 réservé
DBB62Erreur dedonnées aété lue
Erreur ma-nip./déplac.a été lue
Défaut fonc-tionnementa été lu
Données demaintenan-ce
Valeur réelleau chang.bloc
Bloc CNsuivant
Bloc CNactif
Donnéesd’exploita-tion de base
DBB63Valeurs demesure
Donnéesd’application
Donnéesd’exploita-tionsupplém.
Entrées/sor-ties TOR
Paramètres/données
Etat couplaged’axes
DBB64àDBB65
réservé
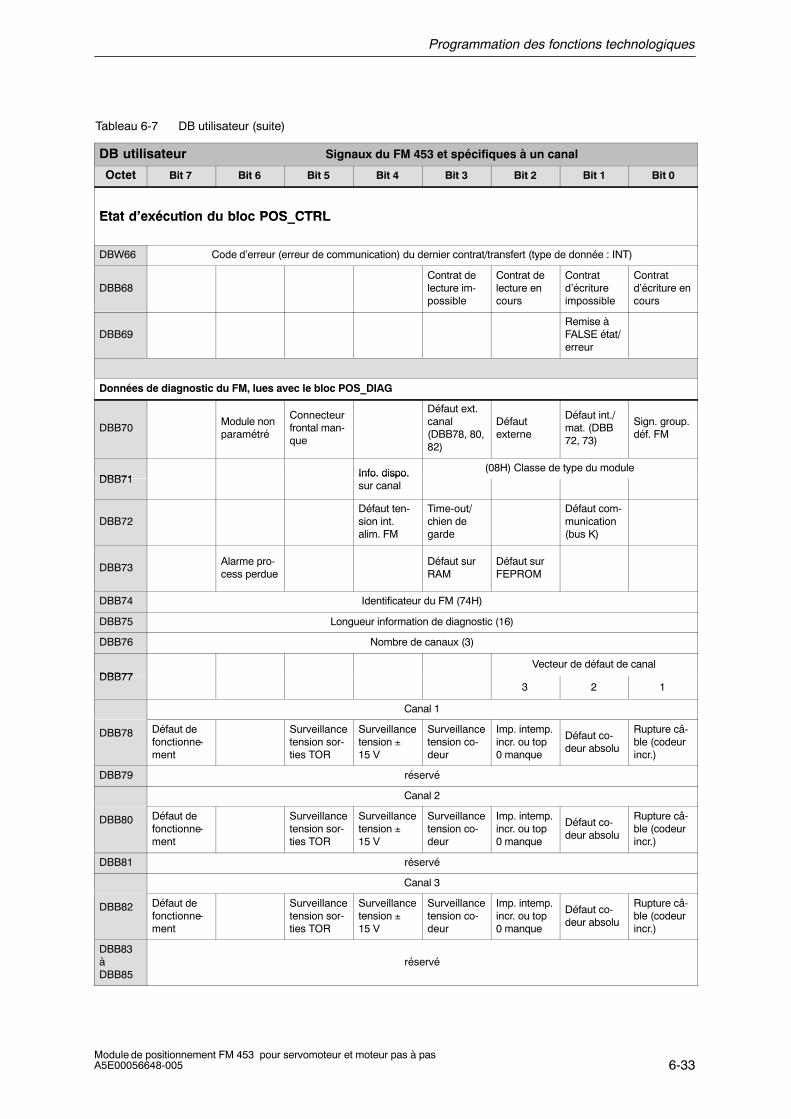
Programmation des fonctions technologiques
6-33Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
Etat d’exécution du bloc POS CTRLEtat d’exécution du bloc POS_CTRL
DBW66 Code d’erreur (erreur de communication) du dernier contrat/transfert (type de donnée : INT)
DBB68Contrat delecture im-possible
Contrat delecture encours
Contratd’écritureimpossible
Contratd’écriture encours
DBB69Remise àFALSE état/erreur
Données de diagnostic du FM, lues avec le bloc POS_DIAG
DBB70Module nonparamétré
Connecteurfrontal man-que
Défaut ext.canal(DBB78, 80,82)
Défautexterne
Défaut int./mat. (DBB72, 73)
Sign. group.déf. FM
DBB71Info. dispo. (08H) Classe de type du module
DBB71Info. dispo.sur canal
DBB72Défaut ten-sion int.alim. FM
Time-out/chien degarde
Défaut com-munication(bus K)
DBB73Alarme pro-cess perdue
Défaut surRAM
Défaut surFEPROM
DBB74 Identificateur du FM (74H)
DBB75 Longueur information de diagnostic (16)
DBB76 Nombre de canaux (3)
DBB77Vecteur de défaut de canal
DBB773 2 1
Canal 1
DBB78 Défaut defonctionne-ment
Surveillancetension sor-ties TOR
Surveillancetension ±15 V
Surveillancetension co-deur
Imp. intemp.incr. ou top0 manque
Défaut co-deur absolu
Rupture câ-ble (codeurincr.)
DBB79 réservé
Canal 2
DBB80 Défaut defonctionne-ment
Surveillancetension sor-ties TOR
Surveillancetension ±15 V
Surveillancetension co-deur
Imp. intemp.incr. ou top0 manque
Défaut co-deur absolu
Rupture câ-ble (codeurincr.)
DBB81 réservé
Canal 3
DBB82 Défaut defonctionne-ment
Surveillancetension sor-ties TOR
Surveillancetension ±15 V
Surveillancetension co-deur
Imp. intemp.incr. ou top0 manque
Défaut co-deur absolu
Rupture câ-ble (codeurincr.)
DBB83 à DBB85
réservé
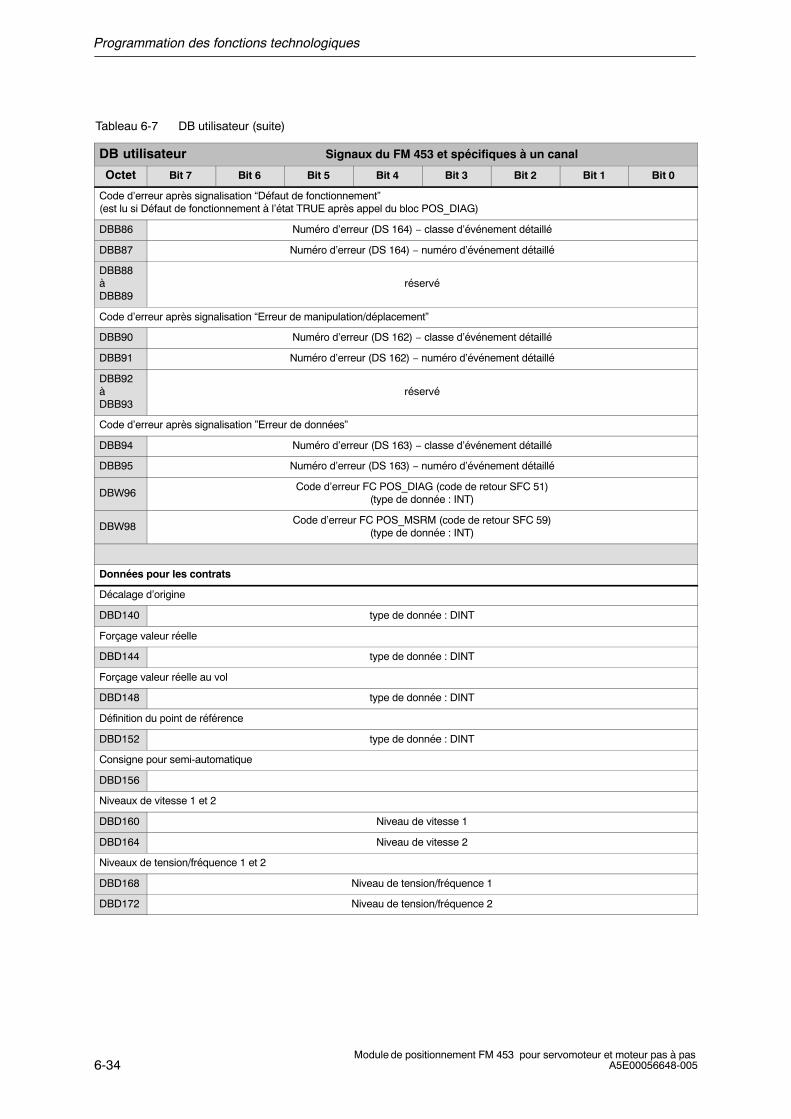
Programmation des fonctions technologiques
6-34Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
Code d’erreur après signalisation “Défaut de fonctionnement” (est lu si Défaut de fonctionnement à l’état TRUE après appel du bloc POS_DIAG)
DBB86 Numéro d’erreur (DS 164) − classe d’événement détaillé
DBB87 Numéro d’erreur (DS 164) − numéro d’événement détaillé
DBB88àDBB89
réservé
Code d’erreur après signalisation “Erreur de manipulation/déplacement”
DBB90 Numéro d’erreur (DS 162) − classe d’événement détaillé
DBB91 Numéro d’erreur (DS 162) − numéro d’événement détaillé
DBB92àDBB93
réservé
Code d’erreur après signalisation ”Erreur de données”
DBB94 Numéro d’erreur (DS 163) − classe d’événement détaillé
DBB95 Numéro d’erreur (DS 163) − numéro d’événement détaillé
DBW96Code d’erreur FC POS_DIAG (code de retour SFC 51)
(type de donnée : INT)
DBW98Code d’erreur FC POS_MSRM (code de retour SFC 59)
(type de donnée : INT)
Données pour les contrats
Décalage d’origine
DBD140 type de donnée : DINT
Forçage valeur réelle
DBD144 type de donnée : DINT
Forçage valeur réelle au vol
DBD148 type de donnée : DINT
Définition du point de référence
DBD152 type de donnée : DINT
Consigne pour semi-automatique
DBD156
Niveaux de vitesse 1 et 2
DBD160 Niveau de vitesse 1
DBD164 Niveau de vitesse 2
Niveaux de tension/fréquence 1 et 2
DBD168 Niveau de tension/fréquence 1
DBD172 Niveau de tension/fréquence 2
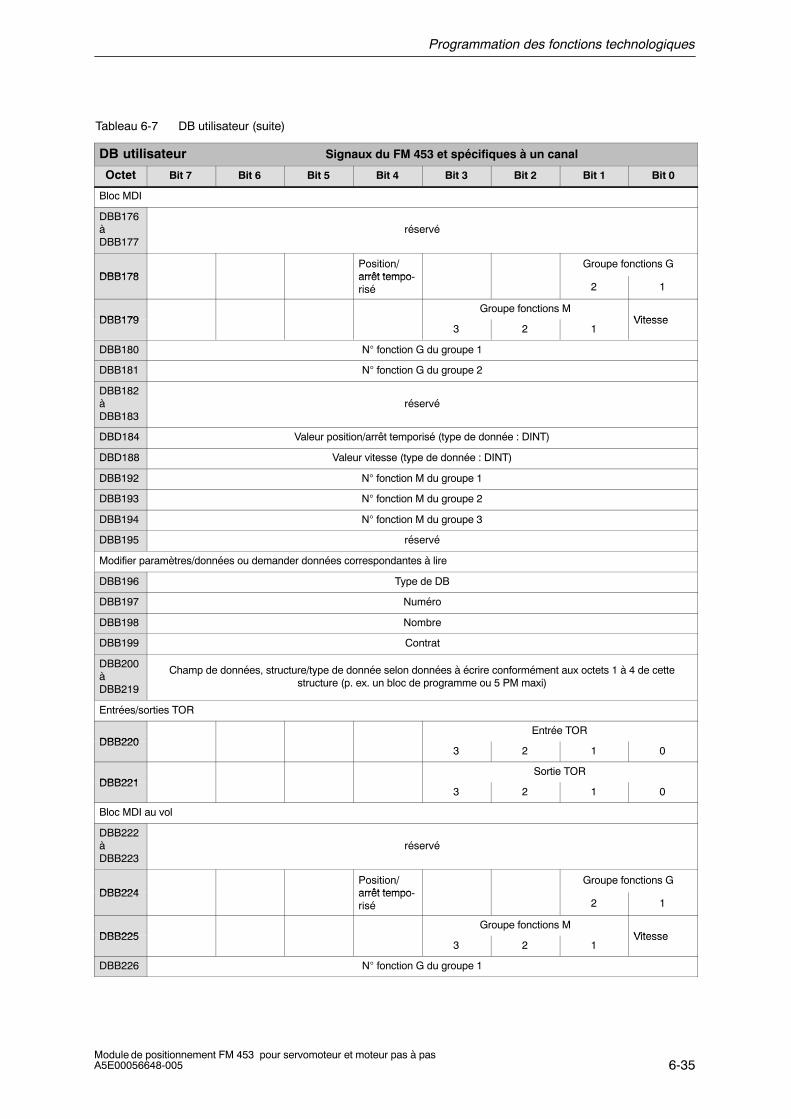
Programmation des fonctions technologiques
6-35Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
Bloc MDI
DBB176àDBB177
réservé
DBB178Position/arrêt tempo
Groupe fonctions GDBB178 arrêt tempo-
risé 2 1
DBB179Groupe fonctions M
VitesseDBB1793 2 1
Vitesse
DBB180 N° fonction G du groupe 1
DBB181 N° fonction G du groupe 2
DBB182àDBB183
réservé
DBD184 Valeur position/arrêt temporisé (type de donnée : DINT)
DBD188 Valeur vitesse (type de donnée : DINT)
DBB192 N° fonction M du groupe 1
DBB193 N° fonction M du groupe 2
DBB194 N° fonction M du groupe 3
DBB195 réservé
Modifier paramètres/données ou demander données correspondantes à lire
DBB196 Type de DB
DBB197 Numéro
DBB198 Nombre
DBB199 Contrat
DBB200àDBB219
Champ de données, structure/type de donnée selon données à écrire conformément aux octets 1 à 4 de cettestructure (p. ex. un bloc de programme ou 5 PM maxi)
Entrées/sorties TOR
DBB220Entrée TOR
DBB2203 2 1 0
DBB221Sortie TOR
DBB2213 2 1 0
Bloc MDI au vol
DBB222àDBB223
réservé
DBB224Position/arrêt tempo
Groupe fonctions GDBB224 arrêt tempo-
risé 2 1
DBB225Groupe fonctions M
VitesseDBB2253 2 1
Vitesse
DBB226 N° fonction G du groupe 1
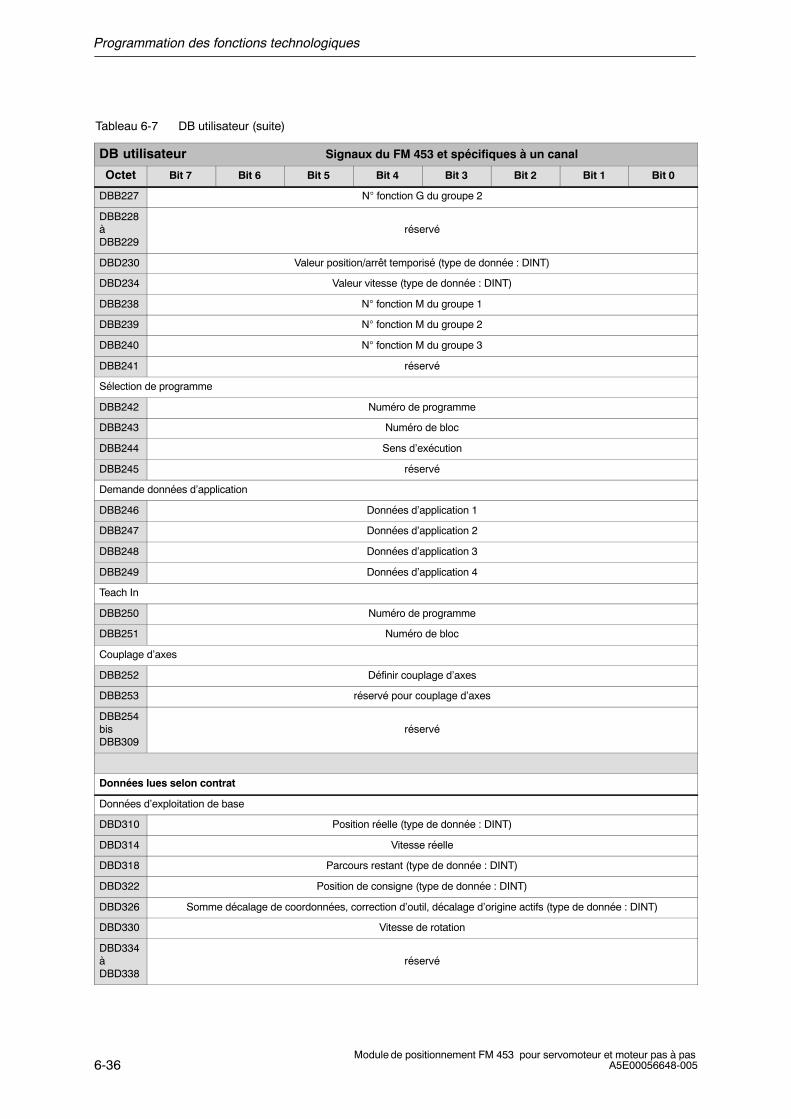
Programmation des fonctions technologiques
6-36Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
DBB227 N° fonction G du groupe 2
DBB228àDBB229
réservé
DBD230 Valeur position/arrêt temporisé (type de donnée : DINT)
DBD234 Valeur vitesse (type de donnée : DINT)
DBB238 N° fonction M du groupe 1
DBB239 N° fonction M du groupe 2
DBB240 N° fonction M du groupe 3
DBB241 réservé
Sélection de programme
DBB242 Numéro de programme
DBB243 Numéro de bloc
DBB244 Sens d’exécution
DBB245 réservé
Demande données d’application
DBB246 Données d’application 1
DBB247 Données d’application 2
DBB248 Données d’application 3
DBB249 Données d’application 4
Teach In
DBB250 Numéro de programme
DBB251 Numéro de bloc
Couplage d’axes
DBB252 Définir couplage d’axes
DBB253 réservé pour couplage d’axes
DBB254bisDBB309
réservé
Données lues selon contrat
Données d’exploitation de base
DBD310 Position réelle (type de donnée : DINT)
DBD314 Vitesse réelle
DBD318 Parcours restant (type de donnée : DINT)
DBD322 Position de consigne (type de donnée : DINT)
DBD326 Somme décalage de coordonnées, correction d’outil, décalage d’origine actifs (type de donnée : DINT)
DBD330 Vitesse de rotation
DBD334àDBD338
réservé
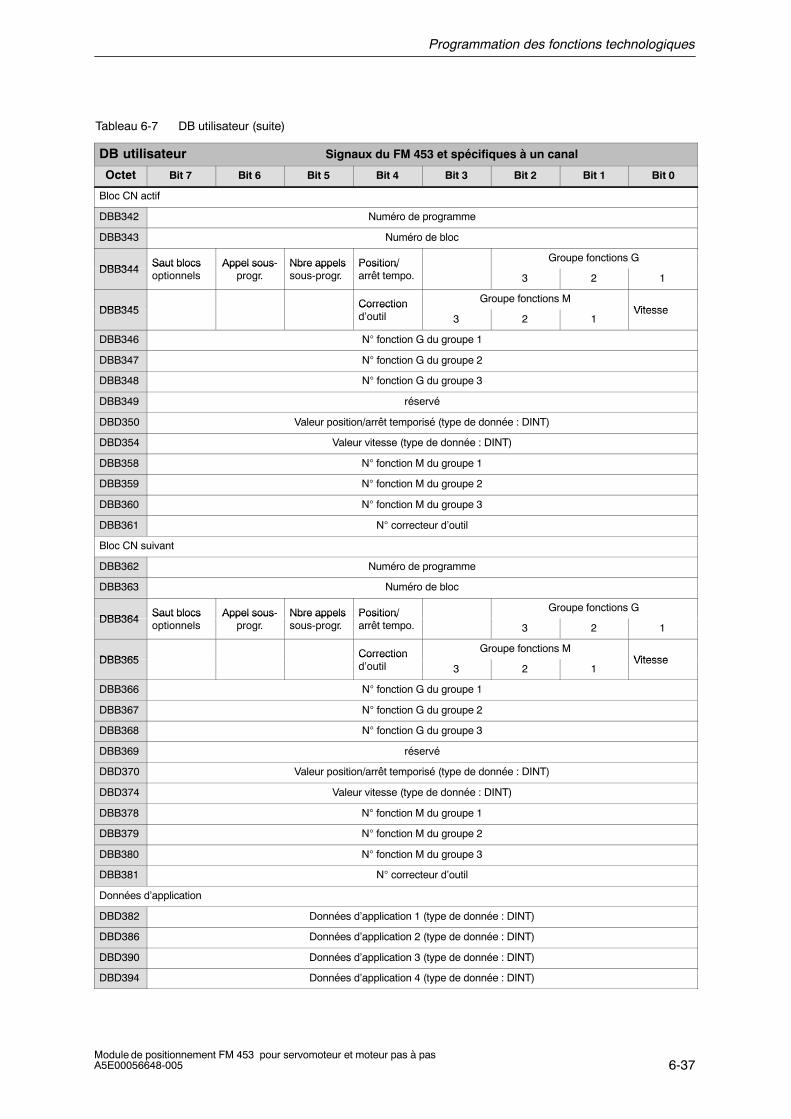
Programmation des fonctions technologiques
6-37Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
Bloc CN actif
DBB342 Numéro de programme
DBB343 Numéro de bloc
DBB344Saut blocs Appel sous- Nbre appels Position/ Groupe fonctions G
DBB344Saut blocsoptionnels
Appel sousprogr.
Nbre appelssous-progr.
Position/arrêt tempo. 3 2 1
DBB345Correction Groupe fonctions M
VitesseDBB345Correctiond’outil 3 2 1
Vitesse
DBB346 N° fonction G du groupe 1
DBB347 N° fonction G du groupe 2
DBB348 N° fonction G du groupe 3
DBB349 réservé
DBD350 Valeur position/arrêt temporisé (type de donnée : DINT)
DBD354 Valeur vitesse (type de donnée : DINT)
DBB358 N° fonction M du groupe 1
DBB359 N° fonction M du groupe 2
DBB360 N° fonction M du groupe 3
DBB361 N° correcteur d’outil
Bloc CN suivant
DBB362 Numéro de programme
DBB363 Numéro de bloc
DBB364Saut blocs Appel sous- Nbre appels Position/ Groupe fonctions G
DBB364Saut blocsoptionnels
Appel sousprogr.
Nbre appelssous-progr.
Position/arrêt tempo. 3 2 1
DBB365Correction Groupe fonctions M
VitesseDBB365Correctiond’outil 3 2 1
Vitesse
DBB366 N° fonction G du groupe 1
DBB367 N° fonction G du groupe 2
DBB368 N° fonction G du groupe 3
DBB369 réservé
DBD370 Valeur position/arrêt temporisé (type de donnée : DINT)
DBD374 Valeur vitesse (type de donnée : DINT)
DBB378 N° fonction M du groupe 1
DBB379 N° fonction M du groupe 2
DBB380 N° fonction M du groupe 3
DBB381 N° correcteur d’outil
Données d’application
DBD382 Données d’application 1 (type de donnée : DINT)
DBD386 Données d’application 2 (type de donnée : DINT)
DBD390 Données d’application 3 (type de donnée : DINT)
DBD394 Données d’application 4 (type de donnée : DINT)

Programmation des fonctions technologiques
6-38Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
Valeur réelle au changement de bloc
DBD398 type de donnée : DINT
Données de maintenance
DBD402 Valeur de sortie du CNA ou valeur de sortie de fréquence (Type de donnée : DINT)
DBD406 Valeur réelle de codeur ou compteur de sortie d’impulsions (Type de donnée : DINT)
DBD410 Impulsions intempestives (Type de donnée : DINT)
DBD414 Gain (Type de donnée : DINT)
DBD418 Ecart de traînage ou écart position consigne/position réelle (Type de donnée : DINT)
DBD422 Ecart de traînage limite (Type de donnée : DINT)
DBD426 Dépassement s/ajustage contact CPR (Type de donnée : DINT)
DBD430 Temps arrivée à dest./constante de temps entraînement (Type de donnée : DINT)
Données d’exploitation supplémentaires
DBB434 Correction de vitesse
DBB435 N° progr. de déplacement CN
DBB436 N° de bloc CN
DBB437 Compteur appels de sous-progr.
DBB438 G90/91 actif
DBB439 G60/64 actif
DBB440 G43/44 actif
DBB441 N° D actif
DBB442Limit. accé-lér./décélér.mini
Limitation à± 10 V
Limitationde vitesse
DBB443àDBB445
réservé
Paramètres/données
DBB446 Type de DB (PM, consignes ou programmes de déplacement)
DBB447 Numéro
DBB448 Nombre
DBB449 Contrat
DBB450àDBB469
Champ de données, structure/type de donnée selon données à lire conformément aux octets 1 à 4 de cette structure(p. ex. un bloc de programme ou 5 PM maxi)
Etat couplage d’axes
DBB470 Etat couplage d’axes
DBB471 réservé pour couplage d’axes
DBB472bisDBB485
réservé
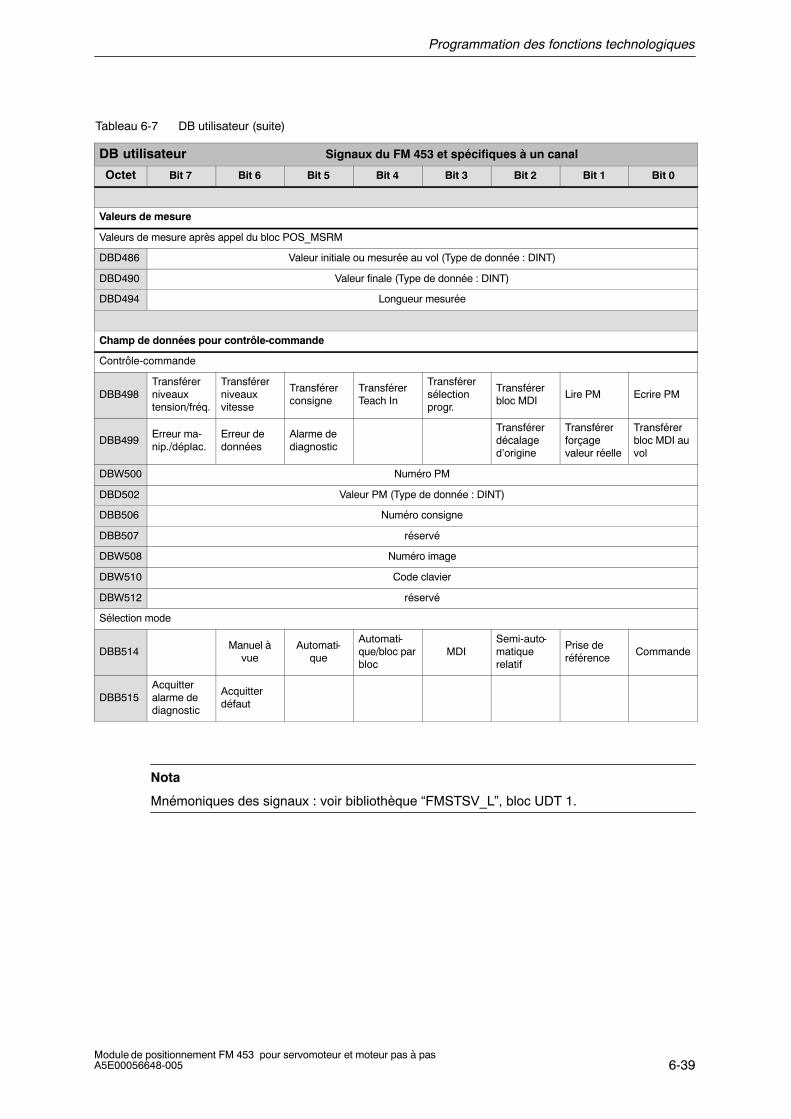
Programmation des fonctions technologiques
6-39Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 6-7 DB utilisateur (suite)
DB utilisateur Signaux du FM 453 et spécifiques à un canal
Bit 0Bit 1Bit 2Bit 3Bit 4Bit 5Bit 6Bit 7Octet
Valeurs de mesure
Valeurs de mesure après appel du bloc POS_MSRM
DBD486 Valeur initiale ou mesurée au vol (Type de donnée : DINT)
DBD490 Valeur finale (Type de donnée : DINT)
DBD494 Longueur mesurée
Champ de données pour contrôle-commande
Contrôle-commande
DBB498Transférerniveauxtension/fréq.
Transférerniveauxvitesse
Transférerconsigne
TransférerTeach In
Transférersélectionprogr.
Transférerbloc MDI
Lire PM Ecrire PM
DBB499Erreur ma-nip./déplac.
Erreur dedonnées
Alarme dediagnostic
Transférerdécalaged’origine
Transférerforçagevaleur réelle
Transférerbloc MDI auvol
DBW500 Numéro PM
DBD502 Valeur PM (Type de donnée : DINT)
DBB506 Numéro consigne
DBB507 réservé
DBW508 Numéro image
DBW510 Code clavier
DBW512 réservé
Sélection mode
DBB514Manuel à
vueAutomati-
que
Automati-que/bloc parbloc
MDISemi-auto-matiquerelatif
Prise deréférence
Commande
DBB515Acquitteralarme dediagnostic
Acquitterdéfaut
Nota
Mnémoniques des signaux : voir bibliothèque “FMSTSV_L”, bloc UDT 1.
Programmation des fonctions technologiques
6-40Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
6.6 Exemples d’application
Aperçu
Dans ce chapitre, vous trouverez les informations suivantes :
• exemple fondamental pour le réglage du mode
• exemple 1 : déplacement d’axes en mode “Manuel à vue” et “Prise de référence”
• exemple 2 : exécution d’un bloc MDI
• exemple 3 : mode “Automatique” avec sélection de programme
• exemple 4: Exemple technologie d’utilisation du pupitre opérateur (PO)
Généralités
Après installation du progiciel de configuration du FM 453, vous disposez du projet exemple“zDt17_02_FM453_EX” ([répertoire STEP7]\EXAMPLES\zEn17_02).
Les fonctions technologiques (POS_CTRL, POS_DIAG, POS_INIT) sont appelées dans lesblocs OB 1, OB 82 et OB 100. Le DB 100 (DBEX) contient les signaux utilisateur/donnéesutilisateur requis pour tous les exemples.
Chaque exemple est programmé en tant que bloc (exemple 1 = FC 101, etc.). L’exemplefondamental (FC 100) est toujours nécessaire aux exemples 1 à 3. Il règle les modescorrespondants et copie les données entre le DB 1 et le DB 100.
Les exemples 1 à 3 sont indépendants. Il s’agit d’exemples simples sur le plantechnologique, que vous pouvez étendre en fonction de vos impératifs. Pour utiliser lesfonctions des exemples 1 à 3, il faut appeler les exemples correspondants dans l’OB 1, defaçon analogue à l’exemple 1.
L’OB 1 contient, après l’appel du POS_CTRL, un exemple de programmation del’exploitation des erreurs signalées du POS_CTRL. Vous pouvez compléter à votre guisecette exploitation des erreurs.
Pour l’exemple 4, il faut compiler le fichier source OB_example4 indiqué dans le classeursource. Comme ceci est un exemple de configuration d’un PO, seul l’exemple 4 devrait êtreappelé dans l’OB1, afin qu’aucune donnée ne soit écrasée.
Nota
Dans les exemples, les axes ne se déplacent pas en mode “simulation” !
Comme le “DBEX” est un DB rémanent, il est initialisé au démarrage (OB 100). Si cela n’estpas nécessaire, il faut effacer la section d’initialisation dans l’OB 100 (segment “InitialisationDBEX”).
Programmation des fonctions technologiques
6-41Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exemple fondamental pour le réglage du mode
Cette exemple est toujours requis pour les exemples 1 à 3.
Ouvrez, dans le SIMATIC-Manager, le projet exemple “zDt17_02_FM453_EX” avec les com-mandes de menu Fichier > Ouvrir... > Projets. La fonction pour cet exemple est FC 100.
Les signaux se trouvent dans le “DBEX”.
Cet exemple doit toujours être appelé. Il règle le mode selon les souhaits de l’utilisateur, ex-ploite la signalisation en retour du mode et indique le mode actuellement réglé. Les signali-sations en retour requises pour les exemples sont copiées dans le “DBEX”.
Pour être en mesure de travailler avec l’exemple 1 en mode “Manuel à vue” ou “Prise deréférence”, l’utilisateur doit régler le code de mode correspondant dans l’octet MODE_IN du“DBEX” (01 pour “Manuel à vue”, 03 pour “Prise de référence”). En cas de sélection dumode “Manuel à vue”, le paramètre de mode 01 (MODE_TYPE) est également réglé pourl’activation du niveau de vitesse 1.
Mode Code
Manuel à vue 01Prise de référence 03MDI 06Automatique 08
Dans l’exemple 2, vous devez régler le mode “MDI » (octet code de mode MODE_IN = 06).
Dans l’exemple 3, vous devez régler le mode “Automatique” (octet code de mode MODE_IN= 08).
Le code du mode actif est indiqué dans l’octet MODE_OUT.
Pour exécuter un redémarrage du module (p. ex. après une alarme de diagnostic), il est né-cessaire de mettre à l’état TRUE le bit RESET_AX dans le “DBEX”. L’exemple met ensuite àl’état TRUE le bit RESET_AX dans le “DB utilisateur”, un redémarrage a lieu puis le bit RE-SET_AX est remis à l’état FALSE dans le “DBEX”.
Pour être en mesure de travailler avec les exemples ci-dessous, vous devez régler le moderequis pour chaque exemple.

Programmation des fonctions technologiques
6-42Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Exemple 1
Ouvrez, dans le SIMATIC-Manager, le projet exemple “zDt17_02_FM453_EX” avec les com-mandes de menu Fichier > Ouvrir... > Projets. La fonction pour cet exemple est FC 101.
Les signaux pour l’exemple 1 se trouvent dans le “DBEX”, structure “EX1”.
Les signaux “Déblocage entraînement” et “Déblocage régulateur” de l’axe sont à l’état TRUEdans le “DBEX” (dans l’OB 100 : DRV_EN = TRUE, SERVO_EN = TRUE) et sont transférésvers l’interface (DB utilisateur) dans l’exemple 1.
Pour que l’exemple fonctionne, vous devez inscrire auparavant le mode“Manuel à vue”(code 01) ou “Prise de référence” (code 03) dans l’octet MODE_IN du “DBEX”. La signalisa-tion en retour du mode est assurée par l’octet MODE_OUT.
Les déplacements sont signalés par les bits “GO_M” = TRUE (déplacement de l’axe 1 ensens négatif) et “GO_P” = TRUE (déplacement de l’axe 1 en sens positif).
Mode “Manuel à vue” actif :
Après l’activation du mode, le contrat d’écriture “VLEV_EN” (DB utilisateur, Transférer ni-veaux de vitesse 1, 2) est exécuté automatiquement une fois. S’il doit être répété, vous de-vez, dans le DB utilisateur, mettre à l’état FALSE le bit “VLEV_D” (Etat/signalisation en re-tour du contrat) ou mettre à l’état TRUE le bit “JOBRESET” (Remise à l’état FALSEétat/erreur).
Si vous effectuez les réglages bit “DIR_M” (Sens négatif) = TRUE ou “DIR_P” (Sens positif)= TRUE dans le “DBEX”, l’axe se déplace en sens négatif ou positif.
Mode “Prise de référence“ actif :
Si vous mettez à l’état TRUE le bit ”START”, l’axe se déplace en sens négatif ou positif (se-lon le réglage effectué dans les paramètres machine) jusqu’à l’atteinte du point de référence.Après la prise de référence, l’axe est synchronisé (SYNC = TRUE).
Une erreur de manipulation ou déplacement est signalée par le bit “OT_ERR” = TRUE. Vouspouvez acquitter cette erreur en mettant à l’état TRUE le bit “OT_ERR_A”.
Nota :
Dans le répertoire “Blocs” se trouve le tableau de variables 1 (VAT1) qui contient tous lessignaux nécessaires au contrôle-commande de l’exemple 1 (outil ”Contrôler et piloter desvariables”).
Programmation des fonctions technologiques
6-43Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exemple 2
Ouvrez, dans le SIMATIC-Manager, le projet exemple ”zDt17_02_FM453_EX“ avec les com-mandes de menu Fichier > Ouvrir... > Projets. La fonction pour cet exemple est FC 102.
Les signaux pour l’exemple 2 se trouvent dans le ”DBEX“, structure « EX2“.
Les signaux ”Déblocage entraînement“ et ”Déblocage régulateur“ de l’axe sont à l’état TRUEdans le ”DBEX“ (dans l’OB 100 : DRV_EN = TRUE, SERVO_EN = TRUE) et sont transférésvers l’interface (DB utilisateur) dans l’exemple 2.
Pour que l’exemple fonctionne, vous devez inscrire auparavant le mode ”MDI“ (code 06)dans l’octet MODE_IN du ”DBEX“. La signalisation en retour du mode est assurée par l’octetMODE_OUT.
Après la sélection du mode, un bloc MDI par défaut est transféré automatiquement au mo-dule (segment MDI) par mise à l’état TRUE du contrat d’écriture ”MDI_EN“ (Transférer blocMDI) dans le DB utilisateur. Ce bloc MDI peut être adapté à l’installation ou aux impératifs.S’il doit être transféré une seconde fois, vous devez, dans le DB utilisateur, mettre à l’étatFALSE le bit ”MDI_D“ (Etat/signalisation en retour du contrat) ou mettre à l’état TRUE le bit”JOBRESET“ (Remise à l’état FALSE état/erreur).
Mettez à l’état TRUE le bit « START“ dans la structure ”EX2“ du ”DBEX“. Le bloc MDI activéest démarré, à condition que l’axe soit synchronisé et possède l’autorisation de démarrage.Le bit ”START“ est ensuite remis à l’état FALSE. Un redémarrage du bloc MDI n’est possibleque lorsque l’autorisation de démarrage est à nouveau présente.
Vous pouvez interrompre le bloc avec le bit ”STOP“.Un redémarrage n’est possible qu’aprèsremise à l’état FALSE du bit ”STOP“ (et ”START“ = TRUE).
Une erreur de manipulation ou déplacement est signalée par le bit ”OT_ERR“ = TRUE. Vouspouvez acquitter cette erreur en mettant à l’état TRUE le bit ”OT_ERR_A“.
Nota :
Dans le répertoire ”Blocs“ se trouve le tableau de variables 2 (VAT2) qui contient tous lessignaux nécessaires au contrôle-commande de l’exemple 2 (outil ”Contrôler et piloter desvariables“).

Programmation des fonctions technologiques
6-44Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Exemple 3
Ouvrez, dans le SIMATIC-Manager, le projet exemple ”zDt17_02_FM453_EX » avec lescommandes de menu Fichier > Ouvrir... > Projets. La fonction pour cet exemple estFC 103.
Les signaux pour l’exemple 3 se trouvent dans le ”DBEX”, structure ”EX3”.
Le programme à sélectionner est le programme numéro ”10”. Ce numéro de programme estinscrit dans l’exemple 3.
Les signaux ”Validation lecture”, “Déblocage entraînement” et ”Déblocage régulateur” del’axe sont à l’état TRUE dans le ”DBEX” (dans l’OB 100 : READ_EN = TRUE, DRV_EN =TRUE, SERVO_EN = TRUE) et sont transférés vers l’interface (DB utilisateur) dans l’exem-ple 3.
La condition pour la réussite de la sélection de programme est la présence du programme àsélectionner dans le FM.
Pour que l’exemple fonctionne, vous devez inscrire auparavant le mode ”Automatique” (code08) dans l’octet MODE_IN du ”DBEX”. La signalisation en retour du mode est assurée parl’octet MODE_OUT.
Après la sélection du mode, le programme numéro ”10” est sélectionné automatiquementpar mise à l’état TRUE du contrat d’écriture ”PROGS_EN » dans le DB utilisateur.
Mettez à l’état TRUE le bit ”START” dans la structure ”EX3” du “DBEX”. Le programme sé-lectionné est démarré, à condition que l’axe soit synchronisé et possède l’autorisation dedémarrage. Le bit ”START” est ensuite remis à l’état FALSE.
Vous pouvez interrompre le programme avec le bit ”STOP”. Un redémarrage n’est possiblequ’après remise à l’état FALSE du bit ”STOP” (et ”START” = TRUE).
Une erreur de manipulation ou déplacement est signalée par le bit ”OT_ERR” = TRUE. Vouspouvez acquitter cette erreur en mettant à l’état TRUE le bit ”OT_ERR_A”.
Nota :
Dans le répertoire ”Blocs” se trouve le tableau de variables 3 (VAT3) qui contient tous lessignaux nécessaires au contrôle-commande de l’exemple 3 (outil ”Contrôler et piloter desvariables”).
Programmation des fonctions technologiques
6-45Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exemple 4
Ouvrez, dans le SIMATIC-Manager, le projet exemple ”zDt17_02_FM453_EX » avec lescommandes de menu Fichier > Ouvrir... > Projets. La fonction pour cet exemple estFC 104. Utilisez l’OB 1, créé dans le classeur source après avoir compilé le fichier source OB_example4.
Dans cet exemple, les signaux d’interface pour la manipulation et l’observation de plage dedonnées DBB 498 à DBB 515 sont transmis dans la plage d’interface pour signaux de com-mande, p. ex. les modes opératoires (voir chapitre 8.2).
Vous pouvez effectuer des déclenchements pour commandes d’écriture et de lecture, quandvous décrivez les champs de données à transmettre à l’aide de paramètres et données cor-respondants.
En cas où vous p. ex. sélectionnez l’image de données de machine PIC_763, vous pouvezécrire une date machine à l’aide de touche programmable (TP) “set” et lire une date machineavec la touche programmable “read”.
Quand vous sélectionnez sur le pupitre opérateur l’image de modes opératoires PIC_75 etactionnez la touche programmable correspondante de mode opératoire, ce mode opératoireest repris dans les signaux de commande de l’interface et le mode opératoire est ajusté.
Si vous sélectionnez l’image diagnostique PIC_77, vous pouvez acquitter une erreur à l’aidede touche programmable “Quit” et à l’aide de touche programmable “Res” une alarme dia-gnostique.
D’une telle manière tous les signaux de l’interface sont appelés qui peuvent être activés parle PO. Vous pouvez préoccuper tous les champs de données et transmettre les déclenche-ments pour les commandes correspondantes.
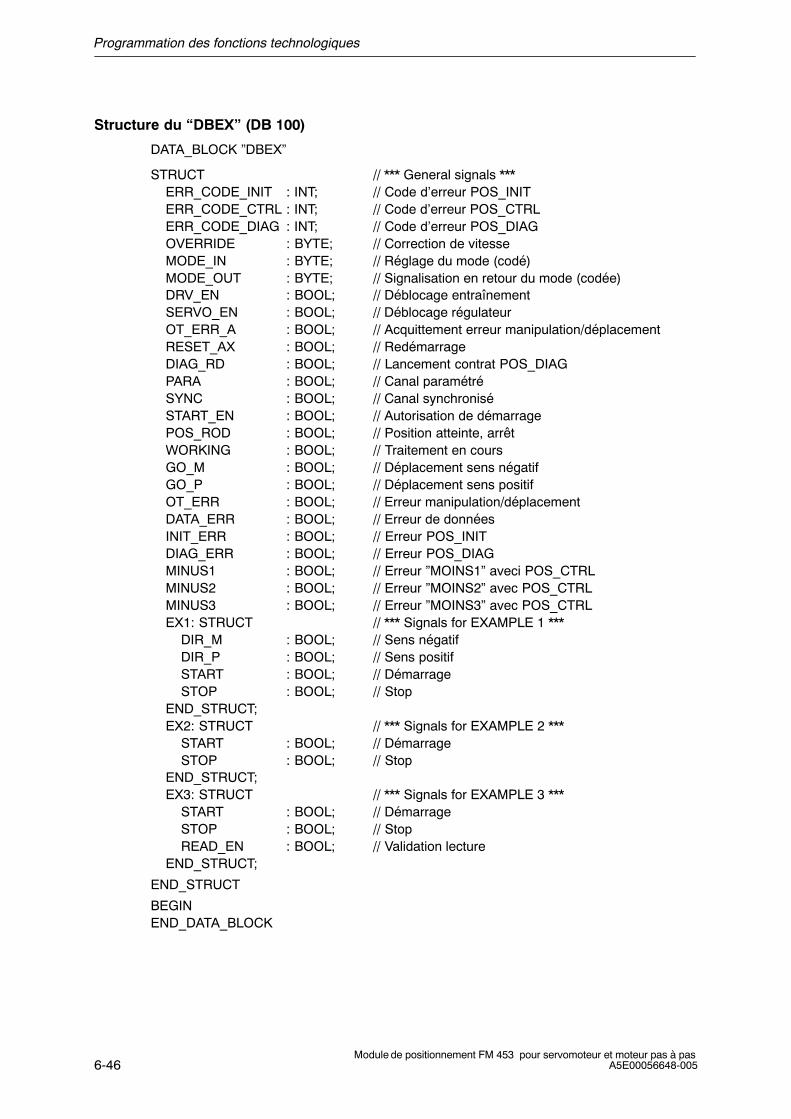
Programmation des fonctions technologiques
6-46Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Structure du “DBEX” (DB 100)
DATA_BLOCK ”DBEX”
STRUCT // *** General signals ***ERR_CODE_INIT : INT; // Code d’erreur POS_INITERR_CODE_CTRL : INT; // Code d’erreur POS_CTRLERR_CODE_DIAG : INT; // Code d’erreur POS_DIAGOVERRIDE : BYTE; // Correction de vitesseMODE_IN : BYTE; // Réglage du mode (codé)MODE_OUT : BYTE; // Signalisation en retour du mode (codée)DRV_EN : BOOL; // Déblocage entraînementSERVO_EN : BOOL; // Déblocage régulateurOT_ERR_A : BOOL; // Acquittement erreur manipulation/déplacementRESET_AX : BOOL; // RedémarrageDIAG_RD : BOOL; // Lancement contrat POS_DIAGPARA : BOOL; // Canal paramétréSYNC : BOOL; // Canal synchroniséSTART_EN : BOOL; // Autorisation de démarragePOS_ROD : BOOL; // Position atteinte, arrêtWORKING : BOOL; // Traitement en coursGO_M : BOOL; // Déplacement sens négatifGO_P : BOOL; // Déplacement sens positifOT_ERR : BOOL; // Erreur manipulation/déplacementDATA_ERR : BOOL; // Erreur de donnéesINIT_ERR : BOOL; // Erreur POS_INITDIAG_ERR : BOOL; // Erreur POS_DIAGMINUS1 : BOOL; // Erreur ”MOINS1” aveci POS_CTRLMINUS2 : BOOL; // Erreur ”MOINS2” avec POS_CTRLMINUS3 : BOOL; // Erreur ”MOINS3” avec POS_CTRLEX1: STRUCT // *** Signals for EXAMPLE 1 ***
DIR_M : BOOL; // Sens négatifDIR_P : BOOL; // Sens positifSTART : BOOL; // DémarrageSTOP : BOOL; // Stop
END_STRUCT;EX2: STRUCT // *** Signals for EXAMPLE 2 ***
START : BOOL; // DémarrageSTOP : BOOL; // Stop
END_STRUCT;EX3: STRUCT // *** Signals for EXAMPLE 3 ***
START : BOOL; // DémarrageSTOP : BOOL; // StopREAD_EN : BOOL; // Validation lecture
END_STRUCT;
END_STRUCT
BEGINEND_DATA_BLOCK

Programmation des fonctions technologiques
6-47Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.7 Liste des erreurs, signalisations système (CPU)
Le tableau ci-dessous contient quelques erreurs qui peuvent survenir lors du transfert dedonnées avec les SFC internes (paramètre RET_VAL des SFC 51/58/59, signalisations sys-tème) (voir manuel de référence Logiciel système pour S7-300/400 ; fonctions système etstandard).
Tableau 6-8 Liste des erreurs
Code d’erreur (DB util., DBW66)
Signification
HEXA DEC INT
0 0 0 pas d’erreur
8081 32897 −32639 Longueur du champ “DR” est trop petite
8082 32898 −32638 SZL_ID est erroné ou manque dans la CPU
8083 32899 −32637 INDEX erroné
8084 32900 −32636 SZL ne peut être appelé par un SFC
8085 32901 −32635 Information momentanément indisponible du fait du système
80A0 32928 −32608 Acquittement négatif lors lecture dans module. Module retiré pendant la lec-ture ou défectueux.
80A1 32929 −32607 Acquittement négatif lors lecture dans module. Module retiré pendant la lec-ture ou défectueux.
80A2 32930 −32606 Erreur protocole DP dans couche 2 (interruption transfert données dansPROFIBUS-DP, p. ex. du fait rupture câble, connecteur de terminaison man-quant, erreur de paramétrage, etc.)
80A3 32931 −32605 Erreur protocole DP dans User-Interface/User (interruption transfert donnéesdans PROFIBUS- DP, p. ex. du fait rupture câble, connecteur de terminaisonmanquant, erreur de paramétrage, etc.)
80A4 32932 −32604 Communication perturbée sur bus K
80B1 32945 −32591 Longueur indiquée erronée
80B2 32946 −32590 Emplacement d’enfichage configuré n’est pas occupé
80B3 32947 −32589 Type réel de module différent de la consigne de type
80C0 32960 −32576 Les données à lire ne sont pas encore disponible dans le module
80C1 32961 −32575 Le module n’a pas encore traité les données d’un contrat d’écriture de mêmenature
80C2 32962 −32574 Le module traite momentanément le nombre maximal de contrats
80C3 32963 −32573 Les ressources nécessaires (mémoire, etc.) sont momentanément occupées
80C4 32964 −32572 Erreur lors communication
80C5 32965 −32571 Périphérie décentralisée indisponible
80C6 32966 −32570 Abandon du fait classe de priorité (redémarrage ou arrière-plan)
8522 34082 −31454 DB trop court. Les données ne peuvent être lues dans le DB. (contrat d’écri-ture)
8532 34098 −31438 DB trop grand. (contrat d’écriture)
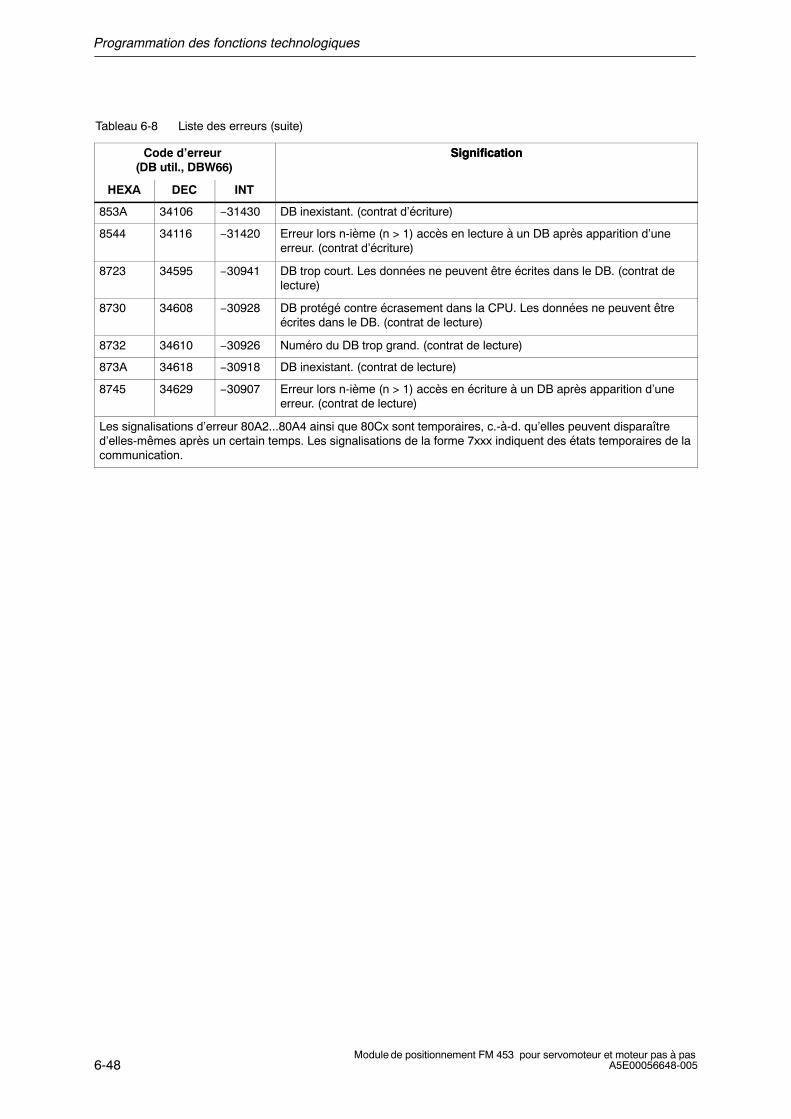
Programmation des fonctions technologiques
6-48Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 6-8 Liste des erreurs (suite)
Code d’erreur (DB util., DBW66)
Signification
HEXA
Signification
INTDEC
853A 34106 −31430 DB inexistant. (contrat d’écriture)
8544 34116 −31420 Erreur lors n-ième (n > 1) accès en lecture à un DB après apparition d’uneerreur. (contrat d’écriture)
8723 34595 −30941 DB trop court. Les données ne peuvent être écrites dans le DB. (contrat delecture)
8730 34608 −30928 DB protégé contre écrasement dans la CPU. Les données ne peuvent êtreécrites dans le DB. (contrat de lecture)
8732 34610 −30926 Numéro du DB trop grand. (contrat de lecture)
873A 34618 −30918 DB inexistant. (contrat de lecture)
8745 34629 −30907 Erreur lors n-ième (n > 1) accès en écriture à un DB après apparition d’uneerreur. (contrat de lecture)
Les signalisations d’erreur 80A2...80A4 ainsi que 80Cx sont temporaires, c.-à-d. qu’elles peuvent disparaîtred’elles-mêmes après un certain temps. Les signalisations de la forme 7xxx indiquent des états temporaires de lacommunication.
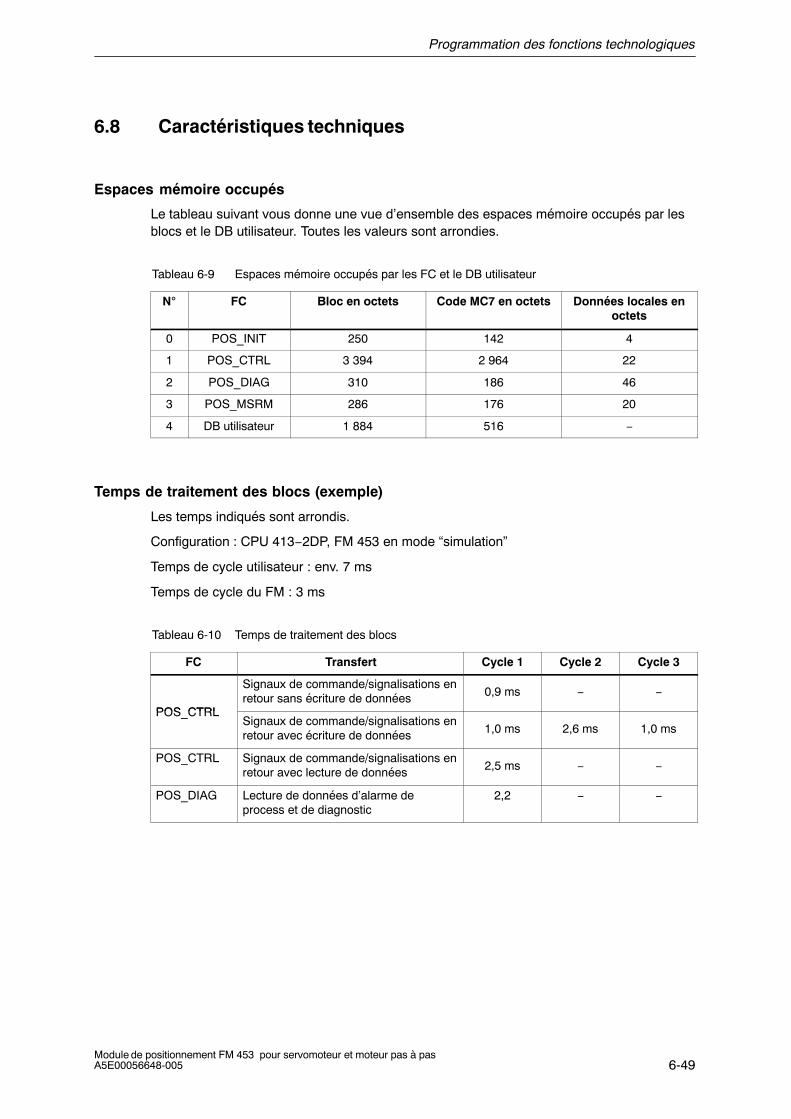
Programmation des fonctions technologiques
6-49Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
6.8 Caractéristiques techniques
Espaces mémoire occupés
Le tableau suivant vous donne une vue d’ensemble des espaces mémoire occupés par lesblocs et le DB utilisateur. Toutes les valeurs sont arrondies.
Tableau 6-9 Espaces mémoire occupés par les FC et le DB utilisateur
N FC Bloc en octets Code MC7 en octets Données locales enoctets
0 POS_INIT 250 142 4
1 POS_CTRL 3 394 2 964 22
2 POS_DIAG 310 186 46
3 POS_MSRM 286 176 20
4 DB utilisateur 1 884 516 −
Temps de traitement des blocs (exemple)
Les temps indiqués sont arrondis.
Configuration : CPU 413−2DP, FM 453 en mode “simulation”
Temps de cycle utilisateur : env. 7 ms
Temps de cycle du FM : 3 ms
Tableau 6-10 Temps de traitement des blocs
FC Transfert Cycle 1 Cycle 2 Cycle 3
POS CTRL
Signaux de commande/signalisations enretour sans écriture de données 0,9 ms − −
POS_CTRLSignaux de commande/signalisations enretour avec écriture de données 1,0 ms 2,6 ms 1,0 ms
POS_CTRL Signaux de commande/signalisations enretour avec lecture de données 2,5 ms − −
POS_DIAG Lecture de données d’alarme deprocess et de diagnostic
2,2 − −

Programmation des fonctions technologiques
6-50Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Mise en service
Contenu du chapitre
Paragraphe Thème Page
7.1 Montage et câblage 7-2
7.2 Valeurs initiales pour test et optimisation 7-3
7.3 Test et optimisation 7-7
Vue d’ensemble
Dans ce chapitre, vous vous familiarisez avec l’interface utilisateur de mise en service et detest et vous trouvez des listes de contrôle pour la mise en service du module de positionne-ment. Ces listes de contrôle vous permettent :
• de contrôler toutes les étapes jusqu’à la mise en service du module,
• d’éviter tout comportement incorrect du module en cours d’exploitation.
Ce chapitre comporte également des instructions pour la mise en service de l’axe machine.
7
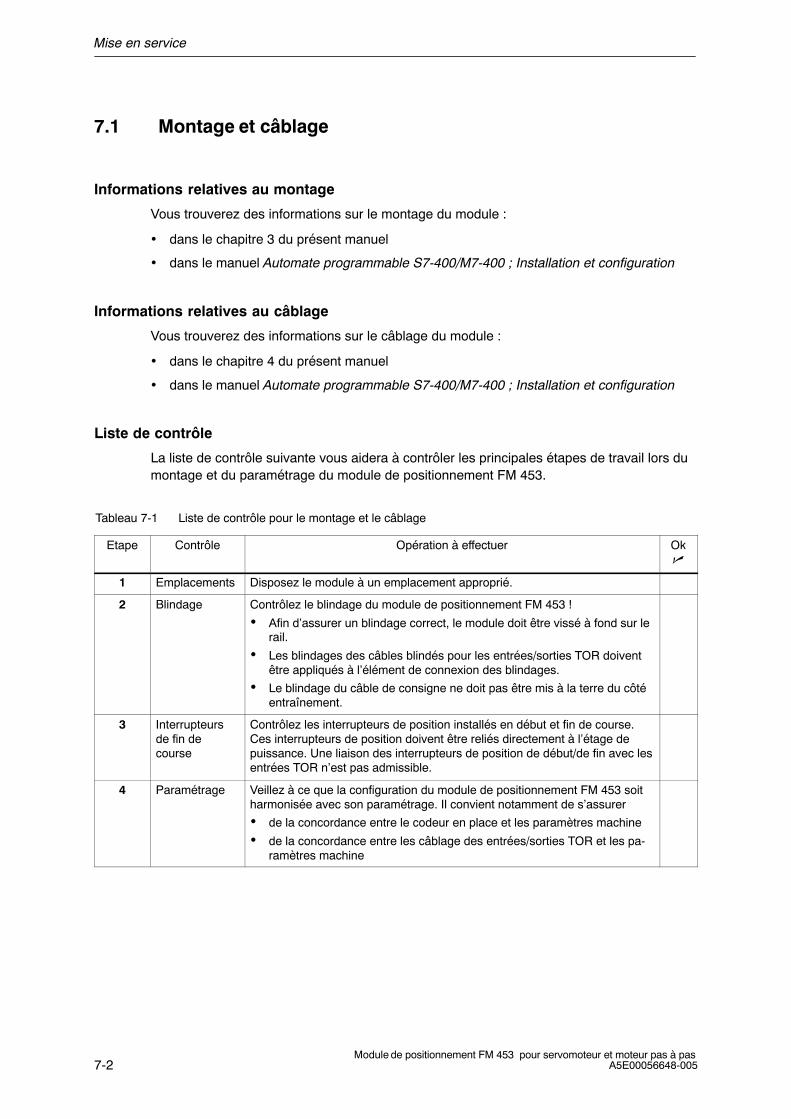
Mise en service
7-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7.1 Montage et câblage
Informations relatives au montage
Vous trouverez des informations sur le montage du module :
• dans le chapitre 3 du présent manuel
• dans le manuel Automate programmable S7-400/M7-400 ; Installation et configuration
Informations relatives au câblage
Vous trouverez des informations sur le câblage du module :
• dans le chapitre 4 du présent manuel
• dans le manuel Automate programmable S7-400/M7-400 ; Installation et configuration
Liste de contrôle
La liste de contrôle suivante vous aidera à contrôler les principales étapes de travail lors dumontage et du paramétrage du module de positionnement FM 453.
Tableau 7-1 Liste de contrôle pour le montage et le câblage
Etape Contrôle Opération à effectuer Ok
1 Emplacements Disposez le module à un emplacement approprié.
2 Blindage Contrôlez le blindage du module de positionnement FM 453 !
• Afin d’assurer un blindage correct, le module doit être vissé à fond sur lerail.
• Les blindages des câbles blindés pour les entrées/sorties TOR doiventêtre appliqués à l’élément de connexion des blindages.
• Le blindage du câble de consigne ne doit pas être mis à la terre du côtéentraînement.
3 Interrupteursde fin decourse
Contrôlez les interrupteurs de position installés en début et fin de course.Ces interrupteurs de position doivent être reliés directement à l’étage depuissance. Une liaison des interrupteurs de position de début/de fin avec lesentrées TOR n’est pas admissible.
4 Paramétrage Veillez à ce que la configuration du module de positionnement FM 453 soitharmonisée avec son paramétrage. Il convient notamment de s’assurer
• de la concordance entre le codeur en place et les paramètres machine
• de la concordance entre les câblage des entrées/sorties TOR et les pa-ramètres machine
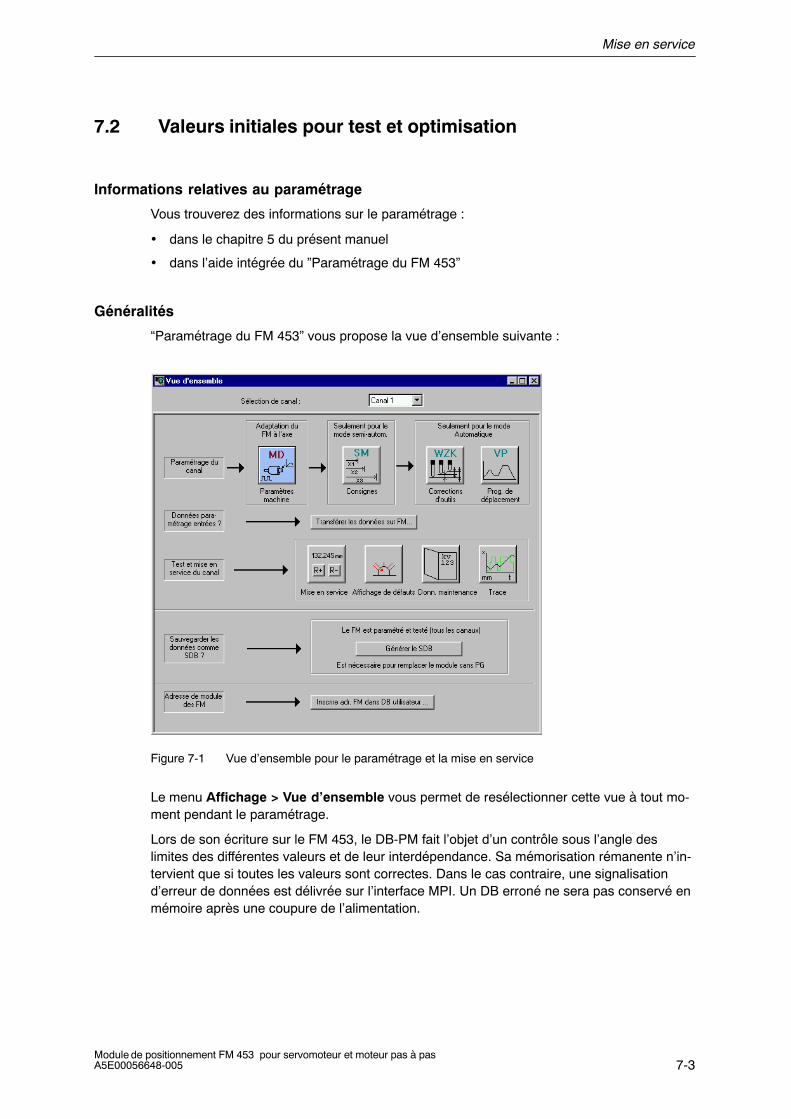
Mise en service
7-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
7.2 Valeurs initiales pour test et optimisation
Informations relatives au paramétrage
Vous trouverez des informations sur le paramétrage :
• dans le chapitre 5 du présent manuel
• dans l’aide intégrée du ”Paramétrage du FM 453”
Généralités
“Paramétrage du FM 453” vous propose la vue d’ensemble suivante :
Figure 7-1 Vue d’ensemble pour le paramétrage et la mise en service
Le menu Affichage > Vue d’ensemble vous permet de resélectionner cette vue à tout mo-ment pendant le paramétrage.
Lors de son écriture sur le FM 453, le DB-PM fait l’objet d’un contrôle sous l’angle deslimites des différentes valeurs et de leur interdépendance. Sa mémorisation rémanente n’in-tervient que si toutes les valeurs sont correctes. Dans le cas contraire, une signalisationd’erreur de données est délivrée sur l’interface MPI. Un DB erroné ne sera pas conservé enmémoire après une coupure de l’alimentation.
Mise en service
7-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Liste de contrôle
Malgré ce contrôle initial, la vérification de l’exactitude de tous les paramètres machine estdu ressort de l’utilisateur du module. Il est donc conseillé de procéder à la mise en servicedu module en s’aidant de la liste de contrôle suivante.
Tableau 7-2 Liste de contrôle en vue du paramétrage
Etape Contrôle Opération à effectuer Ok
1 Paramètresmachine
Affectation de valeurs initiales aux paramètres machine
Comme le montre le tableau 5-4, les paramètres machine se subdivisent enparamètres de configuration (K) et en paramètres de réglage (E). Les pa-ramètres K représentent le couplage du FM 453 à l’axe de la machine et/ouau programme utilisateur CPU et doivent donc être intégralement définis audébut de la mise en service. Lors de la définition du paramètre PM13(nombre de pas par tour de moteur) sélectionnez pour les moteurs pas à pasà nombre de pas réglable le nombre de pas pour lequel votre fréquencemaximale (correspondant à la vitesse maximale prévue de l’axe) atteint lavaleur immédiatement inférieure à la fréquence maximale de 1 MHz duFM 453.
Les paramètres E sont prévus pour des modifications durant la mise en ser-vice et servent à optimiser le comportement du FM 453 pour le processustechnologique de positionnement.
Les valeurs indiquées dans le tableau 7-3 sont recommandées et/ou né-cessaires en tant que valeurs initiales.
Affectation de valeurs initiales aux paramètres machine pourFM STEPDRIVE
Vous trouverez dans le répertoire
[répertoire STEP7]\EXAMPLES\FM453\MD les DB-PM pour le mode ”Com-mande” ; ces DB qui sont des aides pour la mise en service de votre axemachine avec FM STEP-DRIVE et moteur SIMOSTEP :
• SIMOSTEP 2 si02_453.md
• SIMOSTEP 4 si04_453.md
• SIMOSTEP 6 si06_453.md
• SIMOSTEP 10 si10_453.md
• SIMOSTEP 15 si15_453.md
Ces DB PM permettent d’obtenir un fonctionnement optimisé avec les hy-pothèses suivantes :
Icharge= ImotMcharge = 0,1Mnomnmax = 2 000 tr/min
Il est cependant absolument nécessaire d’optimiser ces paramètres ma-chine pour les adapter aux données physiques et technologiques de votreaxe machine.
2 Consignes Les consignes sont nécessaires pour le mode ”semi-automatique relatif”. Pourle déroulement suivant de la mise en service, il est judicieux de créer un blocde données ”Consignes” (DB-CS) contenant les valeurs suivantes :
Valeur 1 1 UI Valeur 2 10 UIValeur 3 100 UIValeur 4 1 000 UIValeur 5 10 000 UI
pour axes rotatifs :
Valeur 6 1 cycle d’axe rotatif (UI) UI = unité interne
Mise en service
7-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 7-2 Liste de contrôle en vue du paramétrage (suite)
Etape Ok
Opération à effectuerContrôle
3 Correctionsd’outil
Les corrections d’outil sont uniquement nécessaires pour le mode ”automati-que” et non pour la mise en service présentement décrite. Elles n’ont géné-ralement d’importance que lors de la mise en service initiale du programmeutilisateur de la CPU du S7-400.
4 Programmesde déplace-ment
Les programmes de déplacement sont uniquement nécessaires pour le mode”automatique” et non pour la mise en service présentement décrite. Elles n’ontgénéralement d’importance que lors de la mise en service initiale du pro-gramme utilisateur de la CPU du S7-400.
5 Créer SDB 1 000
Vous devez, à la fin de la mise en service de votre système avec le moduleFM 453, créer un SDB 1 000, le mémoriser et le charger, dans la CPU ousur la carte mémoire de la CPU. Toutes les données de paramétrage (DB) duFM 453 (tous les 3 canaux) sont mémorisées dans le SDB 1 000. Ce SDBpermet, en cas de défaillance du FM 453, de remplacer le module et de leparamétrer sans PG/PC.
Nota
L’unité interne (PM7) doit correspondre à celle indiquée pour les autres DB.
L’unité interne (UI) est la plus petite unité de déplacement dans le système d’unitésconsidéré.
Si ce n’est pas le cas, procédez comme suit :
1. Effacer tous les blocs de données du canal considéré (non conformes à l’unité interne)ou effacer toute la mémoire du FM 453.
2. Modifier les autres blocs de données sur la PG.
3. Charger à nouveau les blocs de données dans le FM 453.
Valeurs initiales des paramètres machine
Le tableau ci-dessous vous indique les valeurs initiales de paramètres machine E conseil-lées ou nécessaires pour la mise en service de l’axe machine.
Entrer dans les onglets correspondants, en fonction du mode de commande (PM61), lesparamètres machine selon le tableau suivant :

Mise en service
7-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 7-3 Valeurs initiales des paramètres machine
PM (E) Valeur Explications PM61 Ok
0 1 7
5 0 Le FM 453 ne déclenche pas d’alarme process + + +
21/22 −109/+109 [UI] Fins de course logiciels inactifs + + +
231) vmax = 10...5108 [UI/min] Vitesse maximale prévue +1) + +
24 1 000 [UI] Grande zone de destination PA + + +
25 0 Temps enveloppe PA désactivé + +/− −
26 1 000 000 [UI] Surveillance zone d’arrêt sur valeur maxi + +/− −
27 0 Décalage du point de référence (codeur incrém.seulement), val. d’ajustage (cf. chap. 7.3.7)
+ + +
28 0,2vmax Valeur initiale recommandée = 20 % de la vitessemaximale
+ + +
29 0,1vmax Valeur initiale recommandée = 10 % de la vitessemaximale (pas pour les codeurs absolus)
+ + +
30/31 0/0 Compensation de jeu inactive + + +
38 1 000 [UI/min/UI] Gain de boucle valable en général + + −
39 0 Surveillance écart de traînage désactivée + +/− −
40/41 1 000/1 000 [103 UI/s2] Accélération/décélération moyennes + +2) −
42 0 Filtre d’à-coups désactivé + + +
43 Umax = 1 000...10 000 [mV] Consignes pour vitesse maximale +1) − −
44 0 Offset pour consigne d’entraînement + − −
45 0 Rampe de signal de réglage désactivée + + +
46 100 [ms] Temps d’arrêt minimal entre deux positionn. − + +
47 100 [ms] Temps de déplacement minimal à fréq. constante − + +
48 100 Durée de boost absolue − + +
49 100 Durée de boost relative − + +
50 100 Courant de phase en déplacement − + +
51 100 Courant de phase à l’arrêt − + +
54 fSS Fréquence marche/arrêt − − +2)
55 feg Fréquence de commutation d’accélération − − +2)
56 fmax Fréquence maximale de par la conception del’entraînement
− + +
57585960
Valeurs d’accélération et de décélération − − +2)
1) Ce couple de valeurs correspond pour les servomoteurs à la correspondance de vitesse. Il sert de base pour les servomoteursau calcul du gain et doit donc être entré correctement. Recommandation : Umaxdevrait être réglé entre 8 et 9 V.
2) déterminé à partir de la caractéristique de fonctionnement (cf. chap. 7.3.2)+ paramètre machine nécessaire− paramètre machine non nécessaire+/− paramètre machine nécessaire pour axe avec codeur/sans codeur
Mise en service
7-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
7.3 Test et optimisation
Informations relatives au test et à l’optimisation
Au terme des opérations de montage, de câblage et de paramétrage, vous pouvez tester etoptimiser le module de positionnement FM 453. Ces opérations peuvent être réalisées avecl’interface utilisateur de mise en service et de test, avec ou sans programme utilisateur.
Vous pouvez également tester divers modes et vos programmes de déplacement, observeret corriger le déroulement.
Le test peut être effectué de 2 manières :
• CPU en ”STOP”, test sans programme utilisateur
• CPU en ”RUN”, test avec programme utilisateur
Il est possible d’observer l’interface entre le module FM et le programme utilisateur. Lepilotage par l’interface utilisateur de mise en service est possible si le signal de com-mande [KBP] (TEST_EN) est à ”1”dans le programme utilisateur.
L’installation de cette interface s’effectue à l’aide “Paramétrage du FM 453”. Sous réserveque le FM 453 soit paramétré, l’appel de l’interface s’effectue avec le menu Test > Mise enservice ou dans la vue d’ensemble.

Mise en service
7-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Après l’appel de ce menu, l’écran affiche le masque suivant :
1
2
3
4
1 − Zone d’erreurs2 − Zone d’état (p. ex. valeurs réelles, signaux en retour)3 − Zone pour entrées spécifiques aux modes4 − Zone pour entrée de valeurs/réglages/commandes et départ/arrêt du déplacement
Les abréviations des signalisations en retour sont décrites dans le tableau 9-2.
Figure 7-2 Interface utilisateur de mise en service (p. ex. pour le mode ”Prise de référence”)
Mise en service
7-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Nota
Pour le démarrage d’un déplacement, il est conseillé d’adopter l’ordre suivant pour lesintroductions :
• sélection du mode
• activation de la simulation (si l’on souhaite un cas d’exploitation)
• déblocage du régulateur
• déblocage de l’axe
• correction 1....100 %
Commande des boutons ”S+” et ”S−” en mode ”Manuel à vue” :
1. Sélectionner ”S+” ou ”S−” avec la souris
2. Actionner avec la barre d’espacement
Vous pouvez actionner ”START” ou ”STOP” avec la souris ou avec la barre d’espacementlorsque le bouton a été sélectionné.
Les sorties TOR ne sont pas mises à ”1” lorsque la CPU est en ”Stop”.
Des dialogues vous sont proposés lors de l’actionnement des boutons suivants :
• Aff. val.réelle
• Aff. au vol
• Déf. pt. réf.
• Déc. orig
!Attention
Si vous déplacez directement l’axe (sans simulation), il conviendrait − à titre de sécurité − deprévoir une possibilité de coupure matérielle en cas de danger.
Nota
Si vous mettez la CPU du FM 453 sur ”STOP” avec l’interface utilisateur de mise en service,commutez ensuite la CPU sur ”RUN”, puis revenez, à l’aide de [KBP] (TEST_EN)immédiatement à l’interface utilisateur de mise en service dans votre programme utilisateur(p. ex. exemple utilisation 3 lié au programme utilisateur), tenez compte de ce qui suit :
Vous devez resélectionner le mode dans l’interface utilisateur de mise en service oufermer l’interface utilisateur de mise en service et la rouvrir.
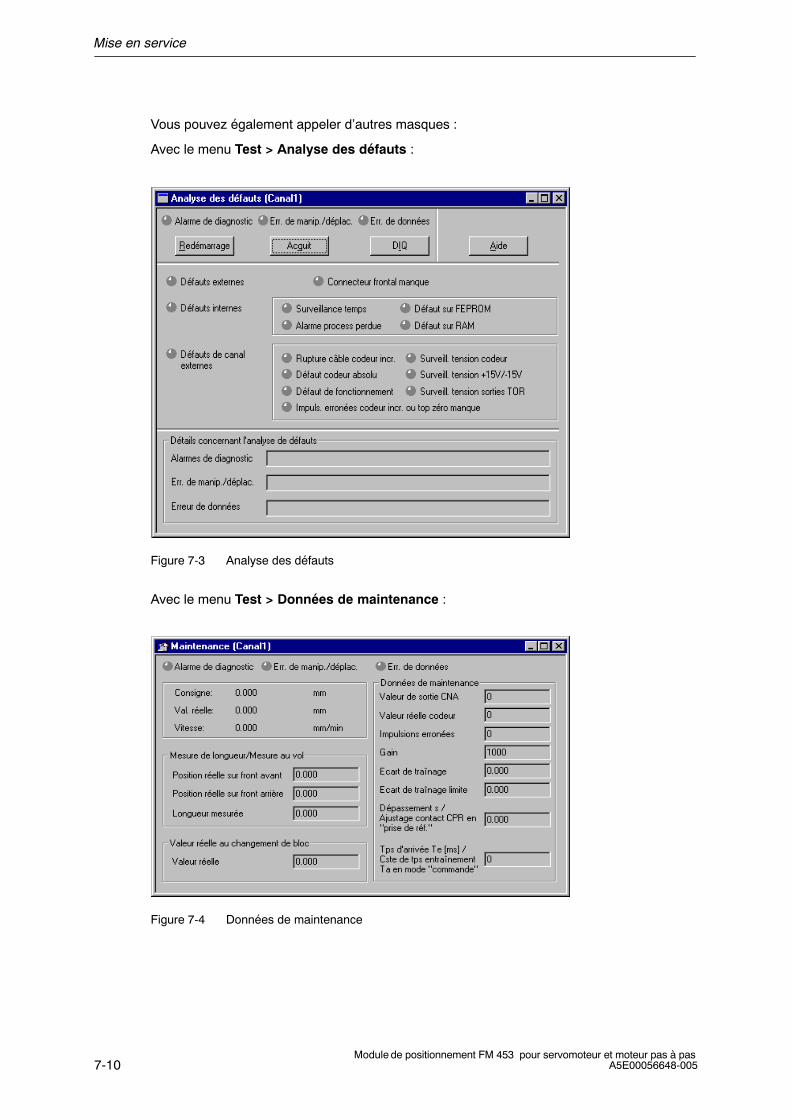
Mise en service
7-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Vous pouvez également appeler d’autres masques :
Avec le menu Test > Analyse des défauts :
Figure 7-3 Analyse des défauts
Avec le menu Test > Données de maintenance :
Figure 7-4 Données de maintenance
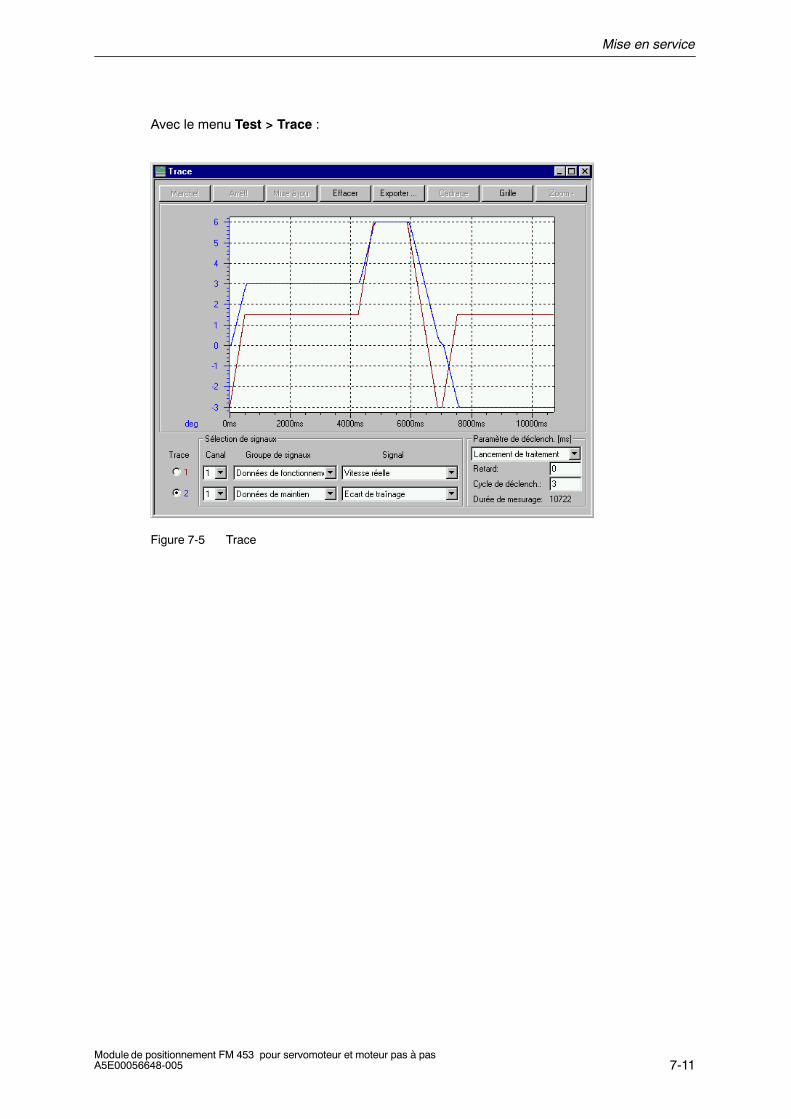
Mise en service
7-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Avec le menu Test > Trace :
Figure 7-5 Trace
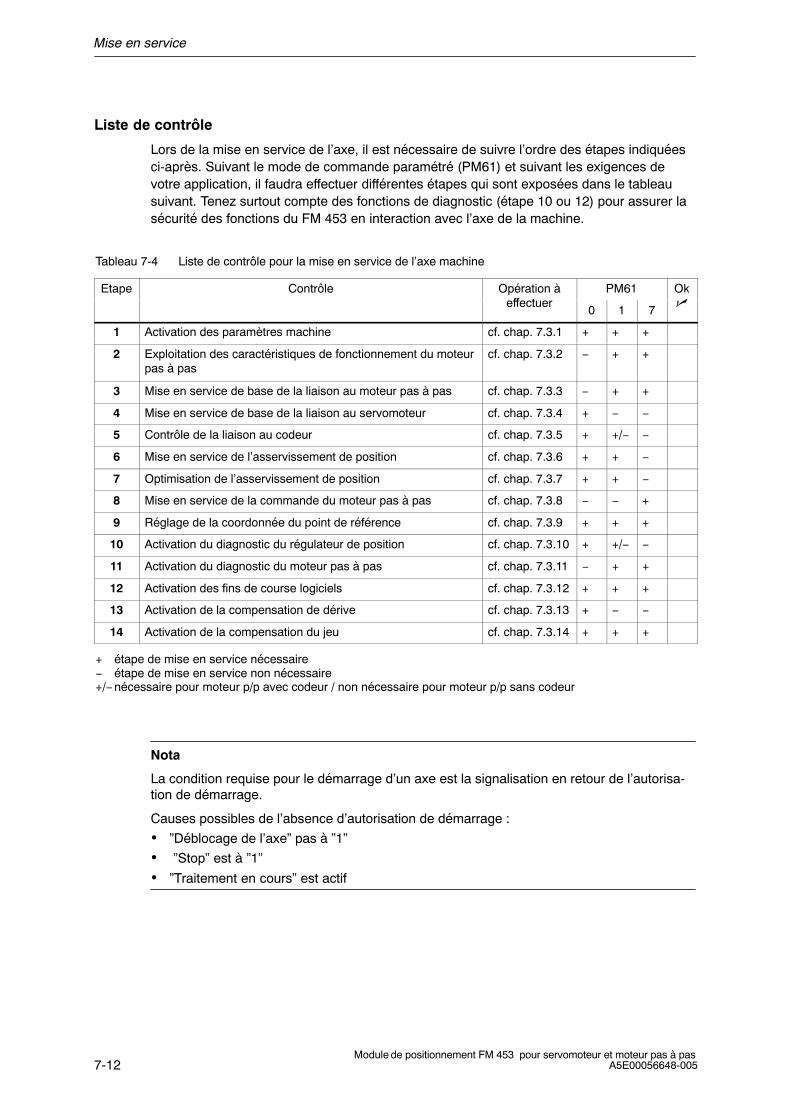
Mise en service
7-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Liste de contrôle
Lors de la mise en service de l’axe, il est nécessaire de suivre l’ordre des étapes indiquéesci-après. Suivant le mode de commande paramétré (PM61) et suivant les exigences devotre application, il faudra effectuer différentes étapes qui sont exposées dans le tableausuivant. Tenez surtout compte des fonctions de diagnostic (étape 10 ou 12) pour assurer lasécurité des fonctions du FM 453 en interaction avec l’axe de la machine.
Tableau 7-4 Liste de contrôle pour la mise en service de l’axe machine
Etape Contrôle Opération àff t
PM61 Okeffectuer
0 1 7
1 Activation des paramètres machine cf. chap. 7.3.1 + + +
2 Exploitation des caractéristiques de fonctionnement du moteurpas à pas
cf. chap. 7.3.2 − + +
3 Mise en service de base de la liaison au moteur pas à pas cf. chap. 7.3.3 − + +
4 Mise en service de base de la liaison au servomoteur cf. chap. 7.3.4 + − −
5 Contrôle de la liaison au codeur cf. chap. 7.3.5 + +/− −
6 Mise en service de l’asservissement de position cf. chap. 7.3.6 + + −
7 Optimisation de l’asservissement de position cf. chap. 7.3.7 + + −
8 Mise en service de la commande du moteur pas à pas cf. chap. 7.3.8 − − +
9 Réglage de la coordonnée du point de référence cf. chap. 7.3.9 + + +
10 Activation du diagnostic du régulateur de position cf. chap. 7.3.10 + +/− −
11 Activation du diagnostic du moteur pas à pas cf. chap. 7.3.11 − + +
12 Activation des fins de course logiciels cf. chap. 7.3.12 + + +
13 Activation de la compensation de dérive cf. chap. 7.3.13 + − −
14 Activation de la compensation du jeu cf. chap. 7.3.14 + + +
+ étape de mise en service nécessaire− étape de mise en service non nécessaire+/−nécessaire pour moteur p/p avec codeur / non nécessaire pour moteur p/p sans codeur
Nota
La condition requise pour le démarrage d’un axe est la signalisation en retour de l’autorisa-tion de démarrage.
Causes possibles de l’absence d’autorisation de démarrage :
• ”Déblocage de l’axe” pas à ”1”
• ”Stop” est à ”1”
• ”Traitement en cours” est actif
Mise en service
7-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
7.3.1 Activation des paramètres machine
Généralités
La présence rémanente d’un DB_PM vous est signalée par le signal en retour PARA. Cesparamètres machine sont automatiquement activés lors du démarrage. Le module est opé-rationnel sous l’angle de la fonctionnalité de positionnement.
En l’absence de DB_PM sur le FM 453 lors de la mise en marche de la commande, la com-munication avec le module n’est possible que via l’interface MPI. Les signaux de commandene sont pas traités par le FM 453. La transmission d’un DB_PM dépourvu d’erreurs entraînel’activation automatique des paramètres machine ; PARA est mis à ”1”, et les signaux decommande sont traités.
Lorsque le FM tourne avec des paramètres machine activés, il est possible de transmettreau module un nouveau bloc de données ou des paramètres individuels modifiés et, en l’ab-sence d’erreur dans l’ensemble du DB-PM, de les activer à l’aide de la fonction “Activer pa-ramètres machine”, à condition qu’un mode soit actif (outil de paramétrage “Vue de mise enservice”).
Le comportement du système est alors le suivant :
• Si les modifications intervenues dans le bloc de paramètres machine depuis la dernièreactivation concernent uniquement des paramètres E, l’activation s’effectuera à l’état dumodule ”Traitement en cours” = 0, sans interruption du cycle. ”SYN” reste conservé.
• Si les modifications intervenues dans le bloc de paramètres machine depuis la dernièreactivation concernent également des paramètres K, l’activation s’effectuera à l’état dumodule ”Traitement en cours” = 0 par un redémarrage comme au démarrage du module.La position réelle instantanée reste affichée, mais il se peut que des impulsions ne soientpas enregistrées dans le cas de codeurs incrémentaux. ”SYN” est remis à ”0”.
• Si le bloc de paramètres machine contient des données erronées au moment de l’activa-tion, la fonction est rejetée, et le message d’erreur ”Paramètres machine non activables”est délivré (cf. Tableau 11-6, Cl. 2/N° 21).
7.3.2 Exploitation des caractéristiques de fonctionnement du moteurpas à pas
Généralités
Le moteur pas à pas est un moteur d’entraînement à dynamique élevée qui suit pratique-ment sans traînage les consignes imposées et qui est capable de réaliser les transitionsentre arrêt et marche (et inversement) par l’intermédiaire de la fréquence de démarrage/arrêt avec une accélération extrêmement élevée. Ceci exige cependant qu’à chaque état dumouvement le couple moteur disponible corresponde au moins au couple nécessaire à l’ex-écution du mouvement. Dans la suite, il est supposé que le couple nécessaire pour le casd’application envisagé est connu suite à une étude de l’entraînement. Le cas échéant con-sulter les formules et tableaux mis à disposition par le constructeur du moteur pas à pas.
Mise en service
7-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
On obtiendra une forme optimale du profil de variation de la vitesse pour le mouvement dedéplacement si l’on parvient à reproduire le diagramme temps-vitesse tel que représenté àla figure 9-8.
Les paramètres du profil de vitesse seront déterminés comme montré dans l’exemple deparamétrage suivant, à partir des caractéristiques de fonctionnement de votre moteur pas àpas. Prévoyez dans tous les cas une réserve de couple d’environ 20 %.
Marche à suivre
Détermination du couple disponible et requis :
Mmoteur = Mcharge + Maccélération
Détermination des moments d’inertie existants :
Jcharge = Jexterne_rotatif + Jexterne_translationJtotal = Jmoteur + Jcharge
Hypothèse pour l’exemple de paramétrage :
Mmoteur= 5 Nm Mcharge = 0,6 Nm (indépend. de la vitesses)Jmoteur = 4 kgcm2 Jcharge = 3 kgcm2
fmax = 10 kHz PM52 = 500 pas par tourvaleurs de décélération comme valeurs d’accélération
Exploitation en boucle ouverte − sans asservissement (PM61 = 7) :
Suivez tous les points des instructions qui suivent !
Exploitation en boucle fermée − avec asservissement (PM61 = 1) :
Suivez les instructions qui suivent et
• sélectionnez dans l’algorithme d’exploitation (Fig. 7-7) le chemin ”paramétrage du profilde vitesse pour une rampe simple”
• transformez comme suit les accélérations/décélérations déterminées pour PM57 etPM59 en PM40, PM41 et PM45 :
dans chaque cas PM40 = PM57(PM11 + PM122−32)/(1000PM52)
pour PM59 = 0 PM41 = PM40
pour PM59 ≠ 0 PM41 = PM59(PM11 + PM122−32)/(1000PM52)
pour PM40 ≤ PM41 PM45 = PM57
pour PM40 > PM41 PM45 = PM59
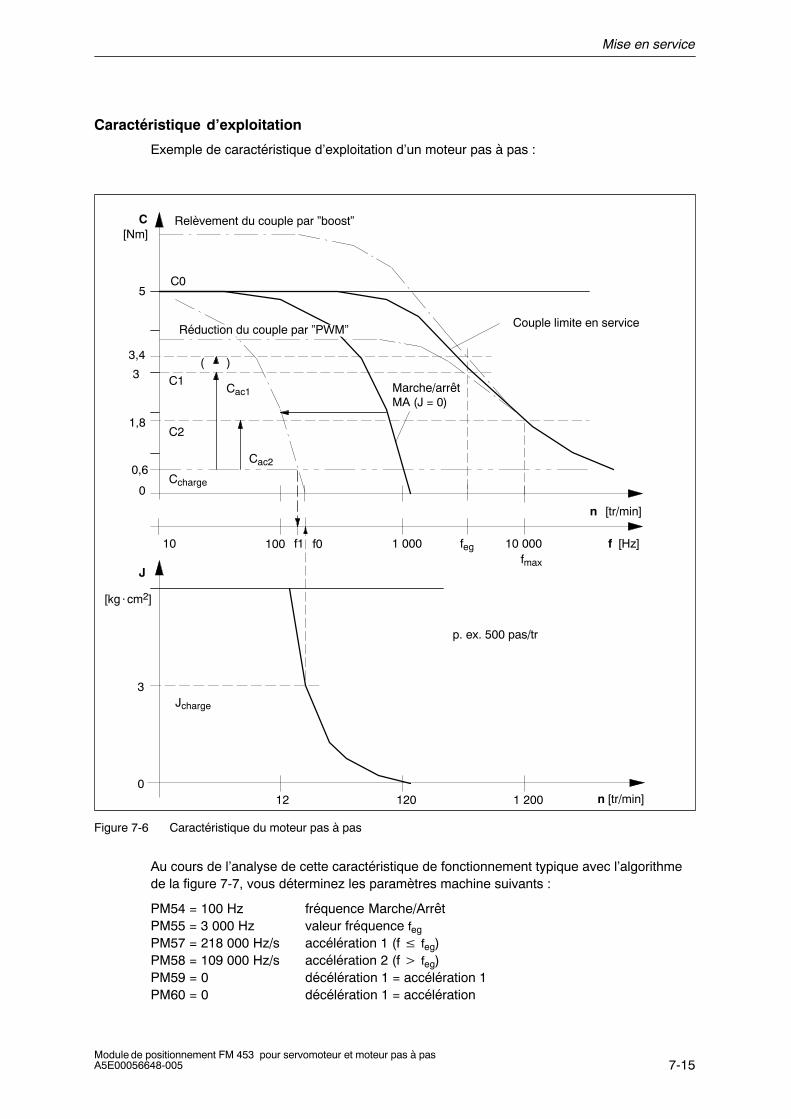
Mise en service
7-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Caractéristique d’exploitation
Exemple de caractéristique d’exploitation d’un moteur pas à pas :
( )
C
3
1,8
0
5
3,4
0,6
J
[Nm]
[kgcm2]
fmax
f [Hz]10 100 f1 f0 1 000 feg 10 000
12 120 1 200
3
0
Relèvement du couple par ”boost”
Réduction du couple par ”PWM”Couple limite en service
Marche/arrêtMA (J = 0)
C1
C2
C0
Ccharge
Cac1
Cac2
p. ex. 500 pas/tr
Jcharge
n
n [tr/min]
[tr/min]
Figure 7-6 Caractéristique du moteur pas à pas
Au cours de l’analyse de cette caractéristique de fonctionnement typique avec l’algorithmede la figure 7-7, vous déterminez les paramètres machine suivants :
PM54 = 100 Hz fréquence Marche/ArrêtPM55 = 3 000 Hz valeur fréquence feg
PM57 = 218 000 Hz/s accélération 1 (f feg)PM58 = 109 000 Hz/s accélération 2 (f feg)PM59 = 0 décélération 1 = accélération 1PM60 = 0 décélération 1 = accélération
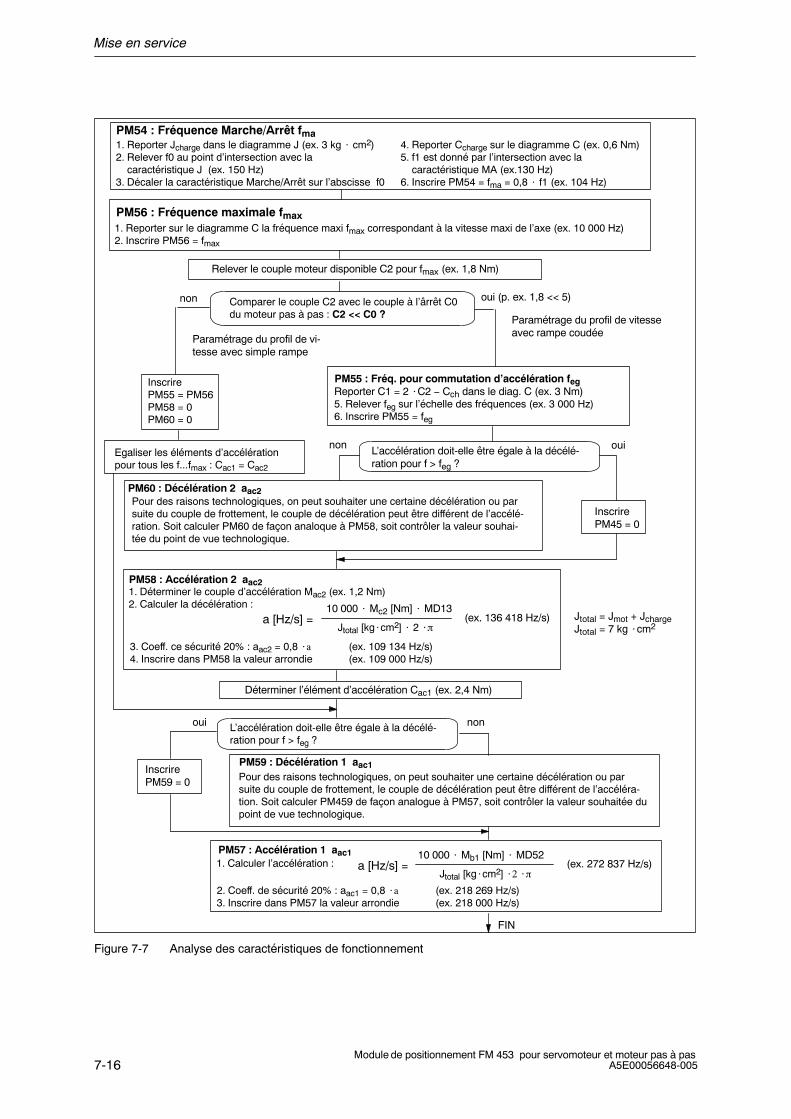
Mise en service
7-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
FIN
InscrirePM59 = 0
PM57 : Accélération 1 aac11. Calculer l’accélération :
Déterminer l’élément d’accélération Cac1 (ex. 2,4 Nm)
nonoui
a [Hz/s] =10 000 Mb1 [Nm] MD52
Jtotal [kgcm2] 2 π(ex. 272 837 Hz/s)
2. Coeff. de sécurité 20% : aac1 = 0,8 a (ex. 218 269 Hz/s)3. Inscrire dans PM57 la valeur arrondie (ex. 218 000 Hz/s)
PM59 : Décélération 1 aac1Pour des raisons technologiques, on peut souhaiter une certaine décélération ou parsuite du couple de frottement, le couple de décélération peut être différent de l’accéléra-tion. Soit calculer PM459 de façon analogue à PM57, soit contrôler la valeur souhaitée dupoint de vue technologique.
L’accélération doit-elle être égale à la décélé-ration pour f > feg ?
PM58 : Accélération 2 aac21. Déterminer le couple d’accélération Mac2 (ex. 1,2 Nm)2. Calculer la décélération :
a [Hz/s] =10 000 Mc2 [Nm] MD13
Jtotal [kgcm2] 2 π(ex. 136 418 Hz/s)
3. Coeff. ce sécurité 20% : aac2 = 0,8 a (ex. 109 134 Hz/s)4. Inscrire dans PM58 la valeur arrondie (ex. 109 000 Hz/s)
Jtotal = Jmot + JchargeJtotal = 7 kg cm2
PM60 : Décélération 2 aac2Pour des raisons technologiques, on peut souhaiter une certaine décélération ou parsuite du couple de frottement, le couple de décélération peut être différent de l’accélé-ration. Soit calculer PM60 de façon analoque à PM58, soit contrôler la valeur souhai-tée du point de vue technologique.
InscrirePM45 = 0
L’accélération doit-elle être égale à la décélé-ration pour f > feg ?
ouinonEgaliser les éléments d’accélérationpour tous les f...fmax : Cac1 = Cac2
InscrirePM55 = PM56PM58 = 0PM60 = 0
PM55 : Fréq. pour commutation d’accélération feg Reporter C1 = 2 C2 − Cch dans le diag. C (ex. 3 Nm)5. Relever feg sur l’échelle des fréquences (ex. 3 000 Hz)6. Inscrire PM55 = feg
oui (p. ex. 1,8 << 5)non Comparer le couple C2 avec le couple à l’ârrêt C0du moteur pas à pas : C2 << C0 ?
Paramétrage du profil de vi-tesse avec simple rampe
Paramétrage du profil de vitesseavec rampe coudée
Relever le couple moteur disponible C2 pour fmax (ex. 1,8 Nm)
PM56 : Fréquence maximale fmax1. Reporter sur le diagramme C la fréquence maxi fmax correspondant à la vitesse maxi de l’axe (ex. 10 000 Hz)2. Inscrire PM56 = fmax
PM54 : Fréquence Marche/Arrêt fma1. Reporter Jcharge dans le diagramme J (ex. 3 kg cm2)2. Relever f0 au point d’intersection avec la
caractéristique J (ex. 150 Hz)3. Décaler la caractéristique Marche/Arrêt sur l’abscisse f0
4. Reporter Ccharge sur le diagramme C (ex. 0,6 Nm)5. f1 est donné par l’intersection avec la
caractéristique MA (ex.130 Hz)6. Inscrire PM54 = fma = 0,8 f1 (ex. 104 Hz)
Figure 7-7 Analyse des caractéristiques de fonctionnement

Mise en service
7-17Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Remarques
Remarques concernant les conditions d’exploitation :
• Il ressort de l’exemple précédent que le couple d’accélération à basse vitesse est environle double de celui à la vitesse maximale. Ceci conduit à un positionnement en temps opti-mal. La fréquence limite pour la commutation d’accélération peut bien sûr être choisielibrement en fonction de certains critères technologiques. Dans ce cas, il en résulte lavaleur de couple C1 ou Cac1 disponible selon la caractéristique du moteur pas à pas.
• Si votre étage de commande dispose de la fonction ”Commande de courant par boost”,vous pouvez déterminer le couple d’accélération avec la couple correspondant au relève-ment du courant. L’avantage d’une plus grande accélération ne ressort de la courbe ducouple que pour les petites vitesses de rotation du moteur (ex. Cac1 = 3,4 Nm − 0,6 Nm = 2,8 Nm, Cac2 inchangé).
On effectuera les réglages suivants :
− branchement électrique
− PM37 (activation de la fonction)
− PM48/49 (surveillance de la durée du boost, cf. chap. 7.3.9)
• Si votre étage de commande dispose de la fonction ”Commande du courant par MLI”,vous pouvez réduire la puissance de perte dans le moteur et ainsi son échauffement enréduisant le courant moteur proportionnellement au couple de charge en considération ducouple d’accélération excédentaire pour l’arrêt et les phase à vitesse constante. L’avan-tage de l’échauffement réduit à vitesse constante ressort de l’allure du couple, notam-ment aux petites vitesses de rotation du moteur.
On effectuera les réglages suivants :
− branchement électrique
− PM37 (activation de la fonction)
− PM50 = (Ccharge (fmax) : Cmoteur (fmax)) 100 % (ex. 60 %)
− PM51 = (Ccharge (f = 0) : Cmoteur (f = 0)) 100 % (ex. 12 %)
Mise en service
7-18Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7.3.3 Mise en service de base de la liaison au moteur pas à pas
Généralités
Dans une première phase de la mise en service, vérifiez si le moteur pas à pas effectue desmouvements sous la commande du FM 453 et vérifiez que les paramètres machine définisjusqu’à présent sont corrects. On accordera une attention particulière à ce fait pour les mo-teurs utilisés sans codeur, car une perte de pas se traduirait par des erreurs de position nondécelables.
Les actigrammes ci-après vous permettent de contrôler le montage de l’étage de commandeet de constater l’exactitude des paramètres machine réglés. Le test suivant consiste à vérif-ier que le moteur pas à pas effectue des mouvements sous la commande du FM 453. Dansun essai ultérieur, on vérifie que le positionnement se fait correctement (cf. chap. 7.3.8).
Nota
Les modifications de paramètres machine doivent toujours être activées explicitement par lacommande ”Activer PM” !
!Avertissement
Avant de déclencher un déplacement, s’assurer que l’axe dispose d’un espace suffisantpour effectuer ce déplacement dans le sens voulu !
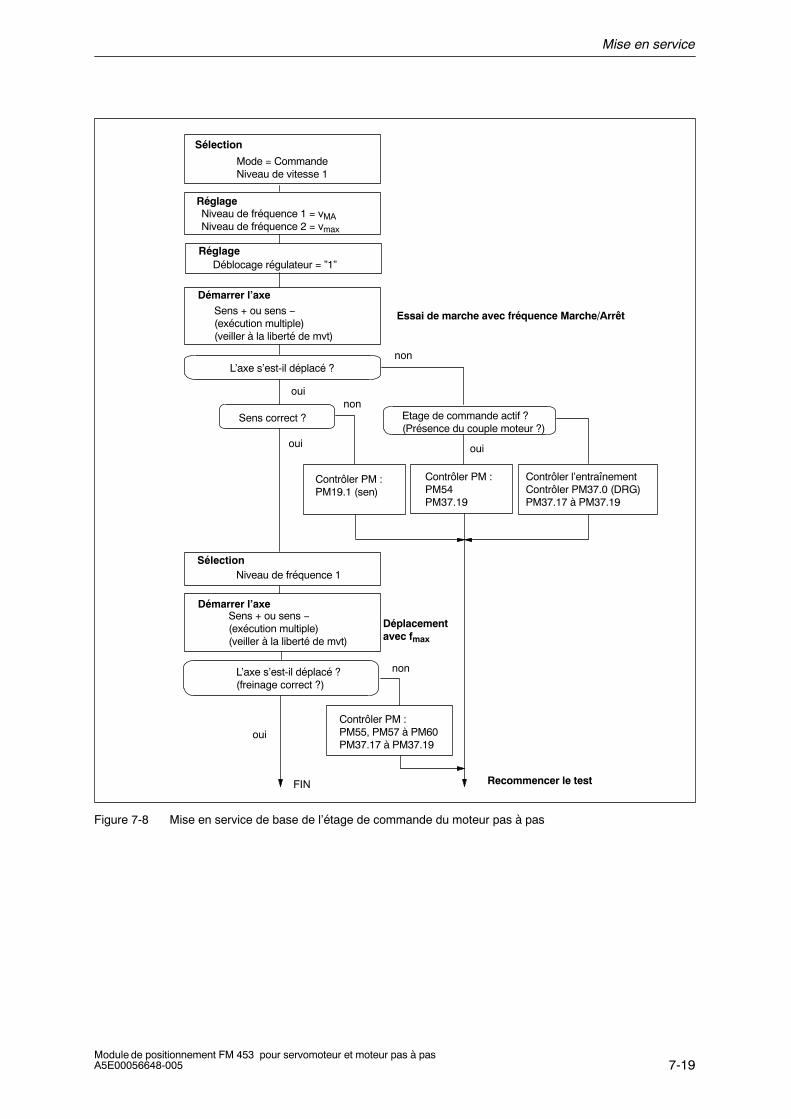
Mise en service
7-19Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
RéglageDéblocage régulateur = ”1”
oui
Essai de marche avec fréquence Marche/Arrêt
Démarrer l’axe
Réglage Niveau de fréquence 1 = vMANiveau de fréquence 2 = vmax
Sélection
Mode = CommandeNiveau de vitesse 1
L’axe s’est-il déplacé ?
Etage de commande actif ?(Présence du couple moteur ?)
SélectionNiveau de fréquence 1
non
oui
non
Sens correct ?
Contrôler PM :PM54PM37.19
Contrôler PM :PM19.1 (sen)
oui
non
oui
Démarrer l’axeSens + ou sens −(exécution multiple)(veiller à la liberté de mvt)
Déplacement avec fmax
Contrôler PM :PM55, PM57 à PM60PM37.17 à PM37.19
Sens + ou sens −(exécution multiple)(veiller à la liberté de mvt)
L’axe s’est-il déplacé ?(freinage correct ?)
Recommencer le test
Contrôler l’entraînementContrôler PM37.0 (DRG)PM37.17 à PM37.19
FIN
Figure 7-8 Mise en service de base de l’étage de commande du moteur pas à pas
Mise en service
7-20Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7.3.4 Mise en service de base de la liaison au servomoteur
Généralités
Les opérations suivantes de mise en service ont pour objet de vérifier que le servomoteureffectue des mouvements sous la commande du FM 453. Elles servent en même à déter-miner la constante de temps du servomoteur nécessaire pour l’optimisation ultérieure del’asservissement de position.
Nota
Les modifications des paramètres machine doivent toujours être activées par la fonction”Activer les paramètres machine” !
!Avertissement
Avant de démarrer un déplacement, il convient de contrôler la présence d’un espace librepour le déplacement de l’axe dans le sens de voulu !
Couplage de l’entraînement
Le diagramme suivant vous permet de contrôler l’entraînement.
Procédure de démarrage de l’axe
Après avoir présélectionné le sens de déplacement avec “Sens positif” ou “Sens négatif”,vous démarrez l’axe avec la touche d’espacement.
Des actionnements de la touche d’espacement se succédant à des intervalles courts sontexécutés l’un après l’autre par les “Propriétés de Windows” (plusieurs démarrages/arrêts del’axe).
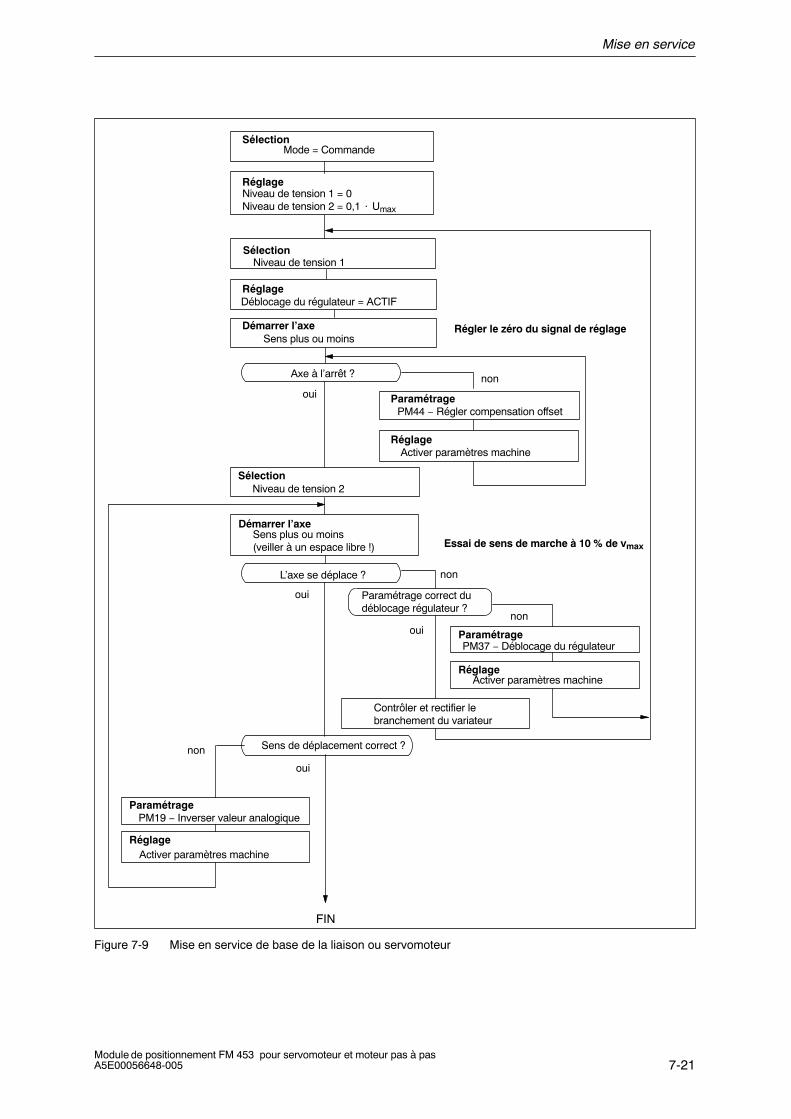
Mise en service
7-21Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
SélectionNiveau de tension 2
L’axe se déplace ?
Démarrer l’axeSens plus ou moins(veiller à un espace libre !)
non
oui Paramétrage correct dudéblocage régulateur ?
ParamétragePM37 − Déblocage du régulateur
RéglageActiver paramètres machine
Contrôler et rectifier lebranchement du variateur
Sens de déplacement correct ?non
oui
ParamétragePM19 − Inverser valeur analogique
RéglageActiver paramètres machine
FIN
nonoui
SélectionMode = Commande
RéglageNiveau de tension 1 = 0Niveau de tension 2 = 0,1 Umax
Sélection
RéglageDéblocage du régulateur = ACTIF
Démarrer l’axeSens plus ou moins
Axe à l’arrêt ?
ParamétragePM44 − Régler compensation offset
RéglageActiver paramètres machine
Niveau de tension 1
nonoui
Régler le zéro du signal de réglage
Essai de sens de marche à 10 % de vmax
Figure 7-9 Mise en service de base de la liaison ou servomoteur
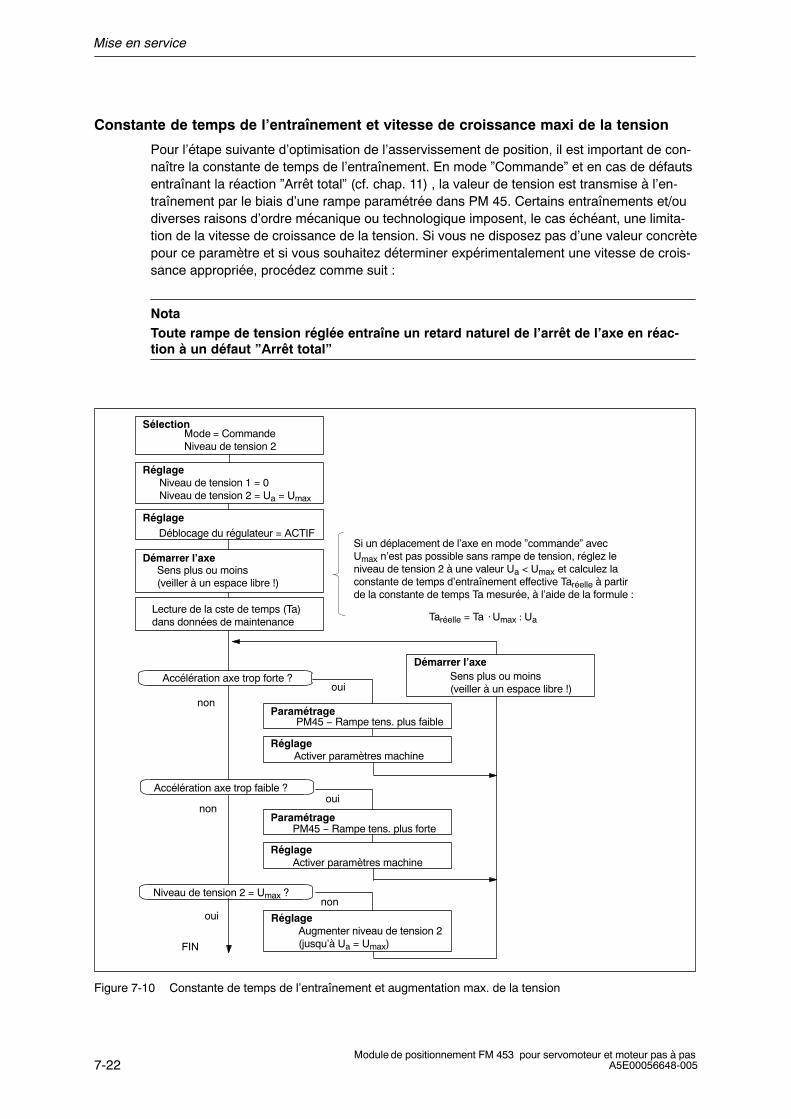
Mise en service
7-22Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Constante de temps de l’entraînement et vitesse de croissance maxi de la tension
Pour l’étape suivante d’optimisation de l’asservissement de position, il est important de con-naître la constante de temps de l’entraînement. En mode ”Commande” et en cas de défautsentraînant la réaction ”Arrêt total” (cf. chap. 11) , la valeur de tension est transmise à l’en-traînement par le biais d’une rampe paramétrée dans PM 45. Certains entraînements et/oudiverses raisons d’ordre mécanique ou technologique imposent, le cas échéant, une limita-tion de la vitesse de croissance de la tension. Si vous ne disposez pas d’une valeur concrètepour ce paramètre et si vous souhaitez déterminer expérimentalement une vitesse de crois-sance appropriée, procédez comme suit :
NotaToute rampe de tension réglée entraîne un retard naturel de l’arrêt de l’axe en réac-tion à un défaut ”Arrêt total”
SélectionMode = CommandeNiveau de tension 2
RéglageNiveau de tension 1 = 0Niveau de tension 2 = Ua = Umax
RéglageDéblocage du régulateur = ACTIF
Démarrer l’axeSens plus ou moins(veiller à un espace libre !)
Accélération axe trop forte ?
ParamétragePM45 − Rampe tens. plus faible
RéglageActiver paramètres machine
non
oui
nonoui
FIN
Accélération axe trop faible ?
ParamétragePM45 − Rampe tens. plus forte
RéglageActiver paramètres machine
Niveau de tension 2 = Umax ?
RéglageAugmenter niveau de tension 2(jusqu’à Ua = Umax)
Lecture de la cste de temps (Ta)dans données de maintenance
nonoui
Démarrer l’axeSens plus ou moins(veiller à un espace libre !)
Si un déplacement de l’axe en mode ”commande” avecUmax n’est pas possible sans rampe de tension, réglez leniveau de tension 2 à une valeur Ua < Umax et calculez laconstante de temps d’entraînement effective Taréelle à partirde la constante de temps Ta mesurée, à l’aide de la formule :
Taréelle = Ta Umax : Ua
Figure 7-10 Constante de temps de l’entraînement et augmentation max. de la tension
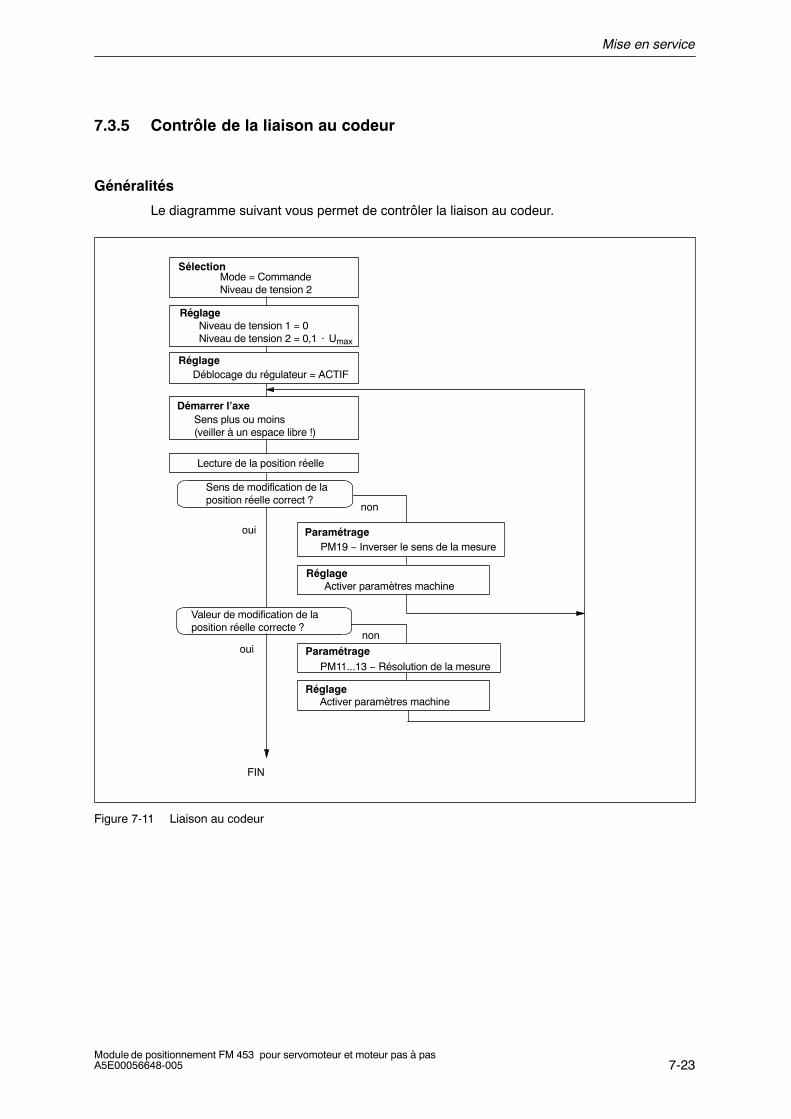
Mise en service
7-23Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
7.3.5 Contrôle de la liaison au codeur
Généralités
Le diagramme suivant vous permet de contrôler la liaison au codeur.
SélectionMode = CommandeNiveau de tension 2
Réglage Niveau de tension 1 = 0Niveau de tension 2 = 0,1 Umax
RéglageDéblocage du régulateur = ACTIF
Démarrer l’axeSens plus ou moins(veiller à un espace libre !)
Sens de modification de laposition réelle correct ?
non
oui
Lecture de la position réelle
ParamétragePM19 − Inverser le sens de la mesure
RéglageActiver paramètres machine
ParamétragePM11...13 − Résolution de la mesure
RéglageActiver paramètres machine
Valeur de modification de laposition réelle correcte ?
nonoui
FIN
Figure 7-11 Liaison au codeur

Mise en service
7-24Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7.3.6 Mise en service de l’asservissement de position
Généralités
Par le retour de la mesure de position fournie par le codeur, l’asservissement de positionferme la boucle extérieure d’une régulation en cascade ayant la structure suivante :
Régul. deposition
Régul. devitesse
Régul. decourant
VariateurFM 453
Pos.consigne
Pos. réelle
Tachy
Codeur
Moteur etmachine
M
Figure 7-12 Boucle d’asservissement de position avec servomoteur
Les étapes suivantes de mise en service vous permettent de contrôler dans son principe lefonctionnement de l’asservissement. Une optimisation selon des critères technologiques sui-vra au chapitre 7.3.7.
Vérifiez d’abord les fonctions de base
• régulation de maintien
• correspondance de vitesse pour servomoteur
• positionnement
Cas particulier :
En mode de commande ”moteur pas à pas avec asservissement” (PM61 = 1) sans codeur,la boucle de régulation est fermée à l’intérieur du FM 453. Le moteur pas à pas en soi estcommandé en boucle ouverte. Les essais qui suivent ne s’appliquent qu’en partie. Tenezcompte des remarques.
Nota
Pour qu’une modification de paramètre machine prenne effet il faut toujours la faire suivrede ”activation paramètres machine”.

Mise en service
7-25Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Régulation de maintien
Ce test n’est nécessaire qu’en présence d’un codeur.
L’actigramme ci-dessous vous permet de contrôler la régulation de maintien.
SélectionMode = manuel à vueNiveau de vitesse 1CORR = 100 %
Réglage Niveau de vitesse 1 = 0,1 vmaxNiveau de vitesse 2 = 0,5 vmax
Réglage
Déblocage régulateur = OUI
Mouvement court et rapide de l’axe avecmess. de défaut ”sens rotation moteur” ?
non
oui
FIN
Lecture position réelle
oui
Asservissement de pos. fonctionne ?(axe reste en position, s’oppose à undécalage et ne dérive pas)
Répéter l’étape de”mise en service duservomoteur”
non
Répéter les étapes ”mise enservice du servomoteur/contrôle du codeur”
Figure 7-13 Régulation de maintien

Mise en service
7-26Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Correspondance de vitesse du servomoteur
Ce test n’est nécessaire que pour les servomoteurs (PM61 = 0).
L’actigramme ci-après vous permet de vérifier si la vitesse de rotation sur le servomoteurcorrespond aux valeurs dans les paramètres machine.
Si l’étape de mise en service ”contrôle du montage du codeur” a été effectuée correctement,le champ de visualisation ”Vitesse” du menu de mise en service vous affiche pour chaquemouvement de l’axe la vitesse de déplacement de l’axe.
C’est sur la base de ce test que le gain paramétré agira correctement dans la boucle d’as-servissement de position. Un réglage précis du gain pourra se faire dans l’étape de mise enservice ”optimisation de l’asservissement de position” à l’appui de la valeur de gain retour-née dans les données de maintenance.
SélectionMode = commandeNiveau de tension 2
RéglageNiveau de tension 1 = 0Niveau de tension 2 = 0,1 Umax
RéglageDéblocage régulateur = OUI
Démarrer l’axeSens + ou sens −(veiller à la liberté de mvt)
Corriger le rapport de correspon-dance de vitesse sur variateur
oui
Vitesse réelle = 0,1 V PM23correcte ? non
ParamétragePM23 − vitesse maximale
RéglageActiver les paramètres machine
oui
FIN
Umax = PM43
Lire la vitesse réelle du-rant le mouvement
PM23 correct ?
non
Figure 7-14 Test de la correspondance de vitesse

Mise en service
7-27Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Positionnement
Le diagramme suivant vous permet de contrôler le déplacement de l’axe vers une positionde destination.
Recommencer à l’étape de mise en service”étage de commande dumoteur pas à pas”
oui
FIN
non
ouinon
non
SélectionMode = Semi-automatique relatifConsigne = 4CORR = 100 % DB de consignes, valeur 4 = p. ex. 1000 UI
RéglageNiveau de vitesse 1 = 0,1 vmaxNiveau de vitesse 2 = 0,5 vmax
Réglage Déf. point de réf. avec valeur 0
Contrôle du signal en retour SYNC
RéglageDéblocage du régulateur = ACTIF
Démarrer l’axeSens plus ou moins(veiller à un espace libre !)
Lecture de la position réelle
Sens de rotation OK ?
Valeur absolue OK ?
Choisir nouveau CORR 1...200 %
Autre test souhaité ?
Figure 7-15 Positionnement

Mise en service
7-28Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7.3.7 Optimisation de l’asservissement de position
Généralités
Par principe, le comportement d’un axe dépend essentiellement du comportement dynami-que de l’entraînement par moteur pas à pas ou du servomoteur asservi en vitesse, sujetque nous ne pouvons pas aborder ici. Ce comportement est lui-même influencé par des ca-ractéristiques mécaniques de la machine, telles que les frottements, les jeux, les torsions,etc. Par le retour de la mesure de position fournie par le codeur, l’asservissement de posi-tion ferme la boucle extérieure de régulation englobant le variateur et éventuellement l’axede la machine (voir Fig. 7-12).
Marche à suivre
Les instructions suivantes visent à vous aider dans le cadre de la pratique.
Les exigences imposées à l’asservissement de position varient selon les applicationstechnologiques.
Parmi les critères d’évaluation de la qualité de l’opération de positionnement figurent :
• une bonne régularité du mouvement de déplacement
• un dépassement nul ou faible au point de destination du positionnement
• un temps de positionnement court
• une courbe d’accélération constante (déplacement sans à-coup)
Etant donné que bon nombre d’applications imposent simultanément plusieurs de cescritères, l’optimisation du comportement dynamique de l’asservissement de positionnementn’est généralement réalisable qu’au prix de compromis.
Au cours des étapes d’optimisation décrites ci-après, effectuez les déplacements d’essaidécrits à la figure 7-16.
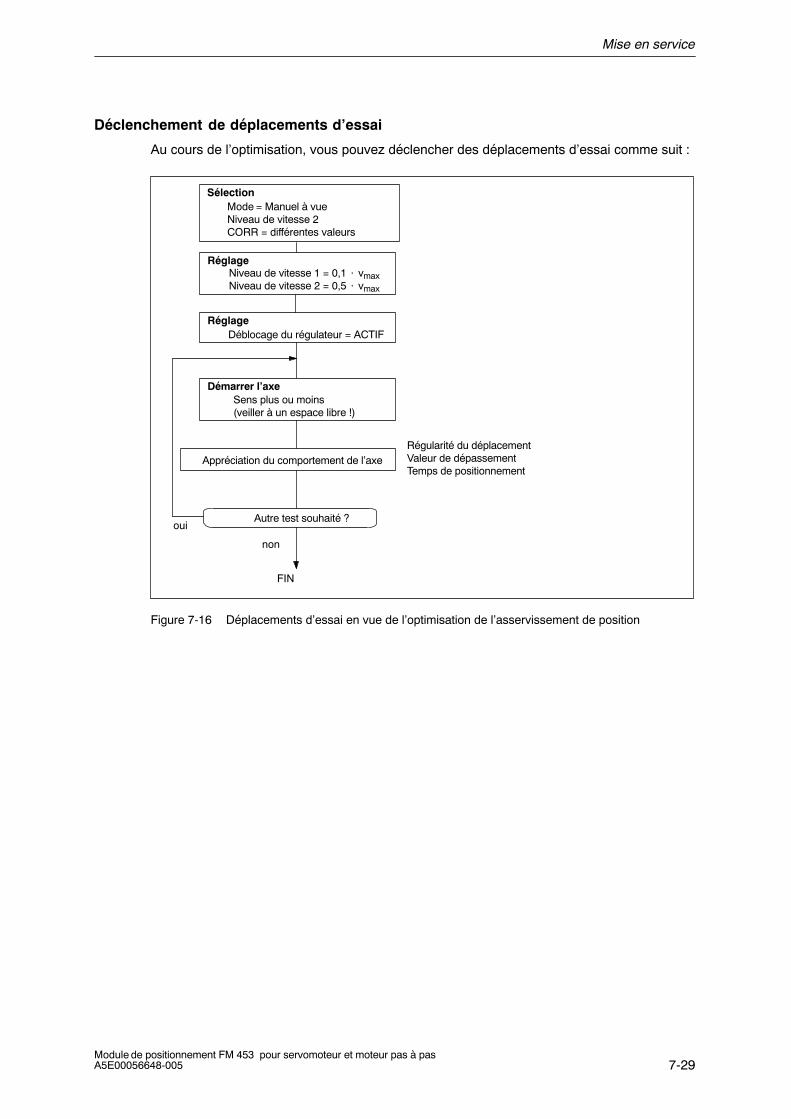
Mise en service
7-29Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Déclenchement de déplacements d’essai
Au cours de l’optimisation, vous pouvez déclencher des déplacements d’essai comme suit :
SélectionMode = Manuel à vueNiveau de vitesse 2CORR = différentes valeurs
RéglageNiveau de vitesse 1 = 0,1 vmaxNiveau de vitesse 2 = 0,5 vmax
RéglageDéblocage du régulateur = ACTIF
FIN
oui
Démarrer l’axeSens plus ou moins(veiller à un espace libre !)
Appréciation du comportement de l’axe
Autre test souhaité ?
non
Régularité du déplacementValeur de dépassementTemps de positionnement
Figure 7-16 Déplacements d’essai en vue de l’optimisation de l’asservissement de position
Mise en service
7-30Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Choix des valeurs de sortie des PM influant sur la dynamique
Servomoteur
Réglez les paramètres machine suivants en fonction de la constante de temps de l’entraîne-ment Ta (Taréelle) déterminée au point 7.3.2 à des valeurs initiales pour les étapes d’opti-misation suivantes, p. ex. pour un axe dans la plage d’unités 10−3 :
• Accélération, décélération
PM40 = PM41 [mm/s2] = 30 PM23 [mm/min] : Ta [ms]
• Temps de filtrage d’à-coups
PM42 [ms] = 0
• Gain de la boucle d’asservissement de position
PM38 [tr/min] = 100 000 : Ta [ms]
La valeur d’accélération effective est réduite par le comportement temporel de la boucled’asservissement de position et dépend donc de la valeur Kv. Avec ce réglage, la valeurmaximale de l’accélération (a) est accordée à la constante de temps de l’entraînement etpeut être estimée comme suit :
amax [mm/s2] = 16 PM23 [mm/min] : Ta [ms]
Moteur pas à pas
Réglez les paramètres machine sur leur valeur initiale pour les étapes d’optimisationsuivantes :
• Accélération, décélération
PM40 = PM41 = selon caractéristique de fonctionnement, voir chap. 7.3.2 sous ”Marcheà suivre”
• Temps de filtrage d’à-coup
PM42 = 0
• Gain de la boucle d’asservissement
PM38 [tr/min] = 1 000 = valeur par défaut
• Temps d’arrêt minimal, temps de déplacement minimal
PM46 = PM47 = 100 ms
Ces paramètres sont moins importants en asservissement étant donné que le comporte-ment temporel de la boucle d’asservissement procure une douceur d’inversion demarche. En général, les paramètres peuvent réglées à leur valeur minimale 1 ms. (Fonc-tion de ces paramètres, voir chap. 7.3.8 sous ”Optimisation du comportement dynami-que”).
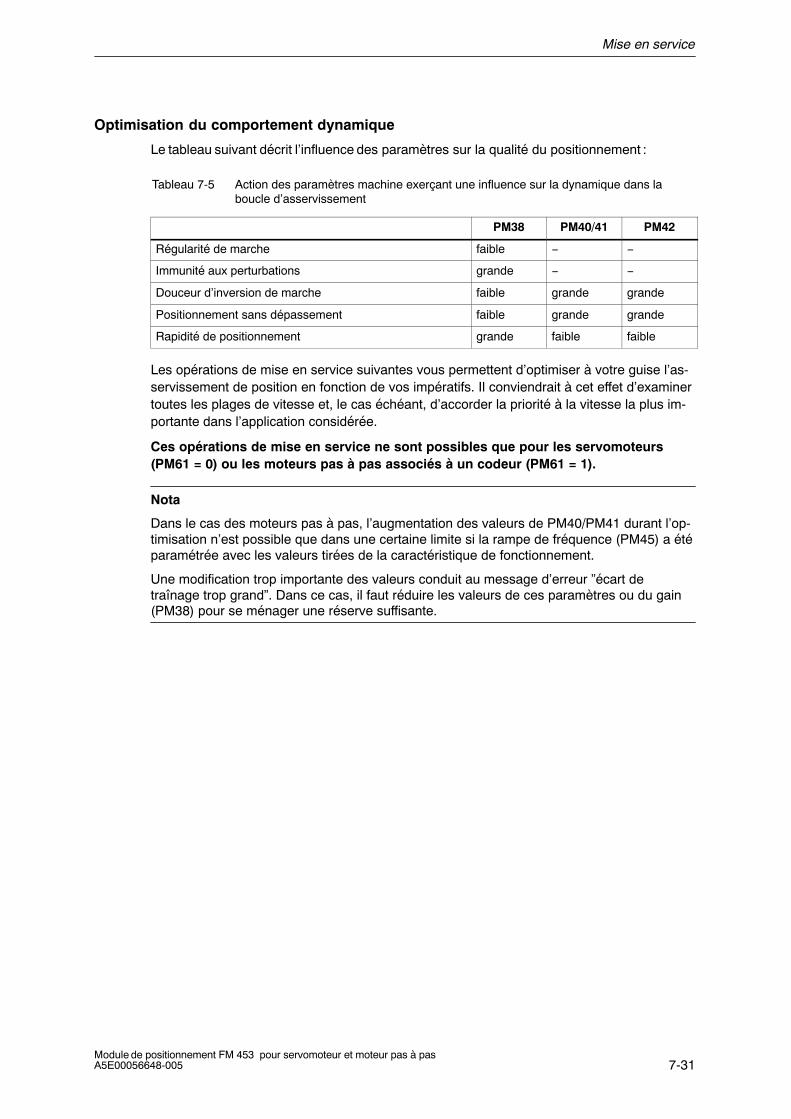
Mise en service
7-31Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Optimisation du comportement dynamique
Le tableau suivant décrit l’influence des paramètres sur la qualité du positionnement :
Tableau 7-5 Action des paramètres machine exerçant une influence sur la dynamique dans laboucle d’asservissement
PM38 PM40/41 PM42
Régularité de marche faible − −
Immunité aux perturbations grande − −
Douceur d’inversion de marche faible grande grande
Positionnement sans dépassement faible grande grande
Rapidité de positionnement grande faible faible
Les opérations de mise en service suivantes vous permettent d’optimiser à votre guise l’as-servissement de position en fonction de vos impératifs. Il conviendrait à cet effet d’examinertoutes les plages de vitesse et, le cas échéant, d’accorder la priorité à la vitesse la plus im-portante dans l’application considérée.
Ces opérations de mise en service ne sont possibles que pour les servomoteurs(PM61 = 0) ou les moteurs pas à pas associés à un codeur (PM61 = 1).
Nota
Dans le cas des moteurs pas à pas, l’augmentation des valeurs de PM40/PM41 durant l’op-timisation n’est possible que dans une certaine limite si la rampe de fréquence (PM45) a étéparamétrée avec les valeurs tirées de la caractéristique de fonctionnement.
Une modification trop importante des valeurs conduit au message d’erreur ”écart detraînage trop grand”. Dans ce cas, il faut réduire les valeurs de ces paramètres ou du gain(PM38) pour se ménager une réserve suffisante.

Mise en service
7-32Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Optimisation de la régularité du mouvement
L’analyse du signal de réglage ou de la vitesse de rotation de l’entraînement (tension de lagénératrice tachymétrique) à l’aide d’un oscilloscope à mémoire vous facilitera grandementl’optimisation de l’asservissement de position. Les oscillogrammes obtenus pour la fonctionde transfert U (t) ou v (t), c’est-à-dire pour le régime transitoire, sont aisément interprétable(cf. Fig. 7-17).
v
t
U
Zone d’action du filtre d’à-coups
Gain trop fort (l’axe oscille avec faible amortissement)
Réglage optimal atteint
Gain/accélération trop faible
Gain/accélération trop fort
Figure 7-17 Fonction de transfert de la boucle d’asservissement
Optimisation du dépassement
Evaluation de la valeur de dépassement à la position de destination (cf. valeur de dépassement dans les données de maintenance)
Modification adéquate des paramètres machine selon tableau 7-5
Optimisation du temps de positionnement
Evaluation du temps d’arrivée à destination (temps d’arrivée à destination Te (dans les données de maintenance)
Modification adéquate des paramètres machine selon tableau 7-5
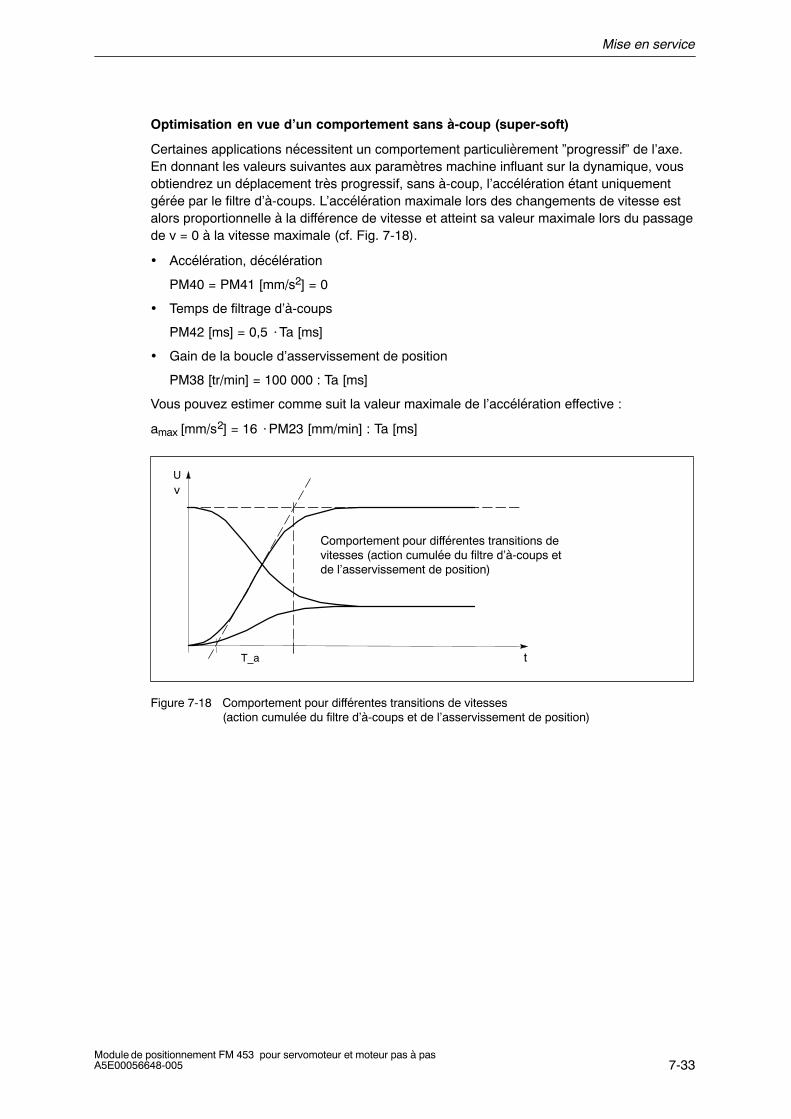
Mise en service
7-33Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Optimisation en vue d’un comportement sans à-coup (super-soft)
Certaines applications nécessitent un comportement particulièrement ”progressif” de l’axe.En donnant les valeurs suivantes aux paramètres machine influant sur la dynamique, vousobtiendrez un déplacement très progressif, sans à-coup, l’accélération étant uniquementgérée par le filtre d’à-coups. L’accélération maximale lors des changements de vitesse estalors proportionnelle à la différence de vitesse et atteint sa valeur maximale lors du passagede v = 0 à la vitesse maximale (cf. Fig. 7-18).
• Accélération, décélération
PM40 = PM41 [mm/s2] = 0
• Temps de filtrage d’à-coups
PM42 [ms] = 0,5 Ta [ms]
• Gain de la boucle d’asservissement de position
PM38 [tr/min] = 100 000 : Ta [ms]
Vous pouvez estimer comme suit la valeur maximale de l’accélération effective :
amax [mm/s2] = 16 PM23 [mm/min] : Ta [ms]
v
tT_a
U
Comportement pour différentes transitions devitesses (action cumulée du filtre d’à-coups etde l’asservissement de position)
Figure 7-18 Comportement pour différentes transitions de vitesses (action cumulée du filtre d’à-coups et de l’asservissement de position)
Mise en service
7-34Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Compromis d’optimisation
Lors de l’optimisation en fonction de plusieurs des critères précités, il est possible de définirles paramètres machine sur la base des résultats des optimisations individuelles en recou-rant à différentes méthodes :
• Garantie de tous les résultats partiels
− réglez la plus petite valeur déterminée pour PM 38
− réglez respectivement la plus grande valeur de PM 40, PM 41 et PM 42
• Priorisation d’une optimisation
Réglez les paramètres machine PM 38 et PM 40 à PM 42 aux valeurs qui correspondentau critère d’optimisation prioritaire pour votre application, puis évaluez à nouveau le com-portement sur la base des autres critères.
• Moyenne des résultats
Réglez les paramètres machine PM 38 et PM 40 à PM 42 à des valeurs correspondant àla moyenne des différents résultats partiels, puis évaluez à nouveau le comportement surla base des autres critères.

Mise en service
7-35Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
7.3.8 Mise en service de la commande du moteur pas à pas
Généralités
L’axe à moteur pas à pas commandé en boucle ouverte par le FM 453 a la structuresuivante :
Commandede moteurpas à pas
Compteur d’étatd’alimentation
Régulateurde courant
Etage decommande
FM 453
Consignede position
Iph − Consigne de courant de phase des n enroulements statoriques
Moteur etmachine
M
Commande descourants de phaseIph
Consignede vitesse
CadenceDirection
MLI/BOOST
Figure 7-19 Structure d’un axe moteur pas à pas
Le comportement dynamique de l’axe dépend des caractéristiques mécaniques de la trans-mission telles que frottements, jeux, torsions, etc. Le FM 453 en tant que module de com-mande doit être paramétré en fonction de ces caractéristiques. Après avoir effectué la miseen service de base conformément au chapitre 7.3.3, il convient à présent d’optimiser le pa-ramétrage pour tenir compte des spécificités de l’application technologique.
Les différentes applications technologiques imposent des contraintes plus ou moins sévèresà la dynamique de l’axe.
Comme critère d’appréciation de la qualité du positionnement, on peut considérer :
• allure continue de l’accélération (mouvement en douceur)
• uniformité du déplacement(vibrations mécaniques, résonnance avec le moteur pas à pas)
• rapidité de positionnement
Dans la plupart des applications, il faut prendre en compte plusieurs de ces critères, ce quioblige à faire certains compromis sur le choix des paramètres.
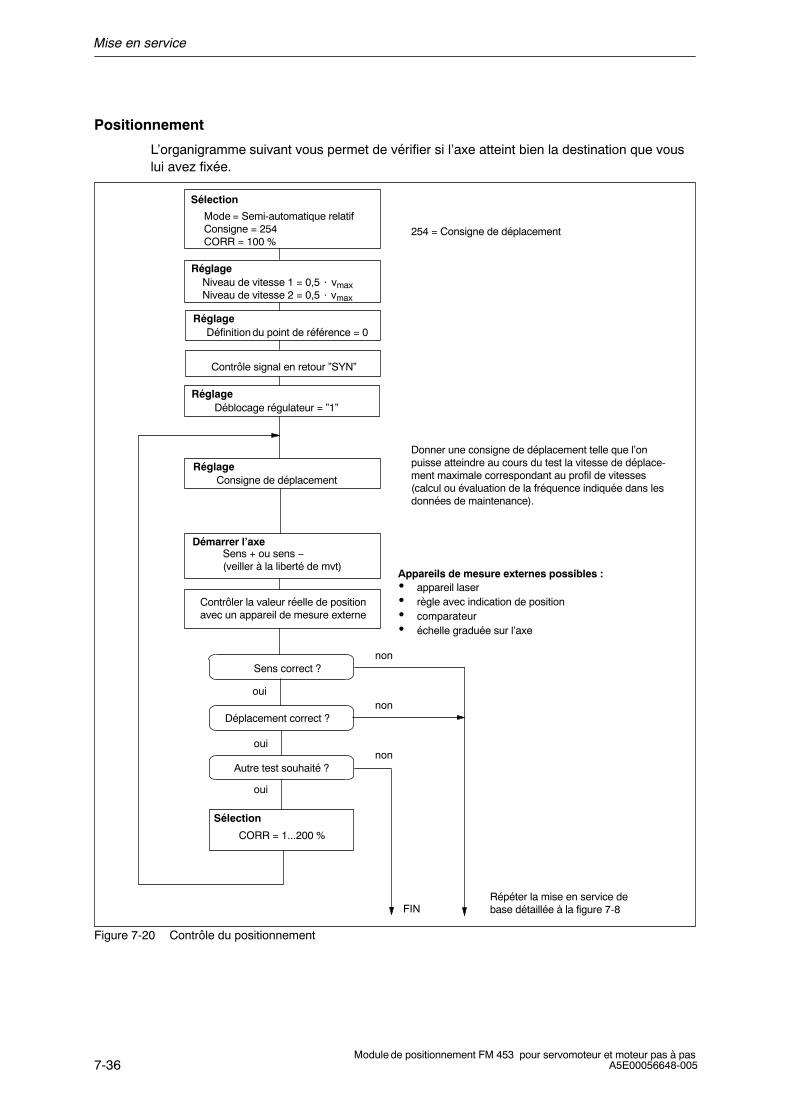
Mise en service
7-36Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Positionnement
L’organigramme suivant vous permet de vérifier si l’axe atteint bien la destination que vouslui avez fixée.
RéglageDéfinition du point de référence = 0
FIN
Appareils de mesure externes possibles :• appareil laser• règle avec indication de position• comparateur• échelle graduée sur l’axe
Démarrer l’axe
RéglageDéblocage régulateur = ”1”
Réglage Niveau de vitesse 1 = 0,5 vmaxNiveau de vitesse 2 = 0,5 vmax
Sélection
Mode = Semi-automatique relatifConsigne = 254CORR = 100 %
Sens + ou sens −(veiller à la liberté de mvt)
Donner une consigne de déplacement telle que l’onpuisse atteindre au cours du test la vitesse de déplace-ment maximale correspondant au profil de vitesses(calcul ou évaluation de la fréquence indiquée dans lesdonnées de maintenance).
oui
non
Répéter la mise en service debase détaillée à la figure 7-8
Sens correct ?
Contrôle signal en retour ”SYN”
RéglageConsigne de déplacement
Contrôler la valeur réelle de positionavec un appareil de mesure externe
Déplacement correct ?
Autre test souhaité ?
Sélection
CORR = 1...200 %
oui
oui
non
non
254 = Consigne de déplacement
Figure 7-20 Contrôle du positionnement

Mise en service
7-37Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Optimisation du comportement dynamique
Le tableau suivant donne en grandeur relative les valeurs des paramètres pour différentescaractéristiques dynamiques de l’axe. Aux paramètres machine préréglés dans le cadre dela mise en service de base viennent s’ajouter maintenant les valeurs de temps PM46 etPM47. Ces temps sont spécifiques à l’entraînement par moteur pas à pas et sont de l’ordrede grandeur de quelques ms, mais peuvent aussi, si la chaîne cinématique de l’axe a ten-dance à osciller, être utilisés pour empêcher un échelon d’accélération d’amplitude doublelors de la transition directe de l’accélération à la décélération (par ex. lors de déplacementssur de courtes distances) ou pour insérer une période de marche à fréquence constante afinde permettre l’amortissement de l’oscillation induite par cette discontinuité.
Tableau 7-6 Action des paramètres machine exerçant une influence sur la dynamique dumoteur pas à pas en mode commande
PM54 PM55 PM57...60 PM46 PM47 PM42
Déplacement en douceur petite − petite grande grande grande
Suppression des oscillations grande − grande grande grande grande
Rapidité de positionnement grande grande grande petite petite petite
Déclenchement de mouvements de test
Déclenchez des mouvements de test selon la Fig. 7-21 pour réaliser l’optimisation de lacommande du moteur pas à pas pour votre application. Il est conseillé de passer en revuetoutes les plages de vitesse en accordant le plus de poids dans l’appréciation du résultat à lavitesse la plus importante du point de vue technologique. Procédez comme suit pourdéclencher les mouvements de test sur l’axe à optimiser :
RéglageDéblocage régulateur = ”1”
Réglage Niveau de vitesse 1 = 0,1 vmaxNiveau de vitesse 2 = 0,5 vmax
SélectionMode = Manuel à vueNiveau de vitesse 2CORR = différentes valeurs
Démarrer l’axe
ouinon
Autre test souhaité ?
Appréciation du comportement
Sens + ou sens −(veiller à la liberté de mvt)
FIN
Régularité du mouvementTendance à oscillerDurée de positionnement
Figure 7-21 Mouvements de test pour l’optimisation de la commande du moteur pas à pas
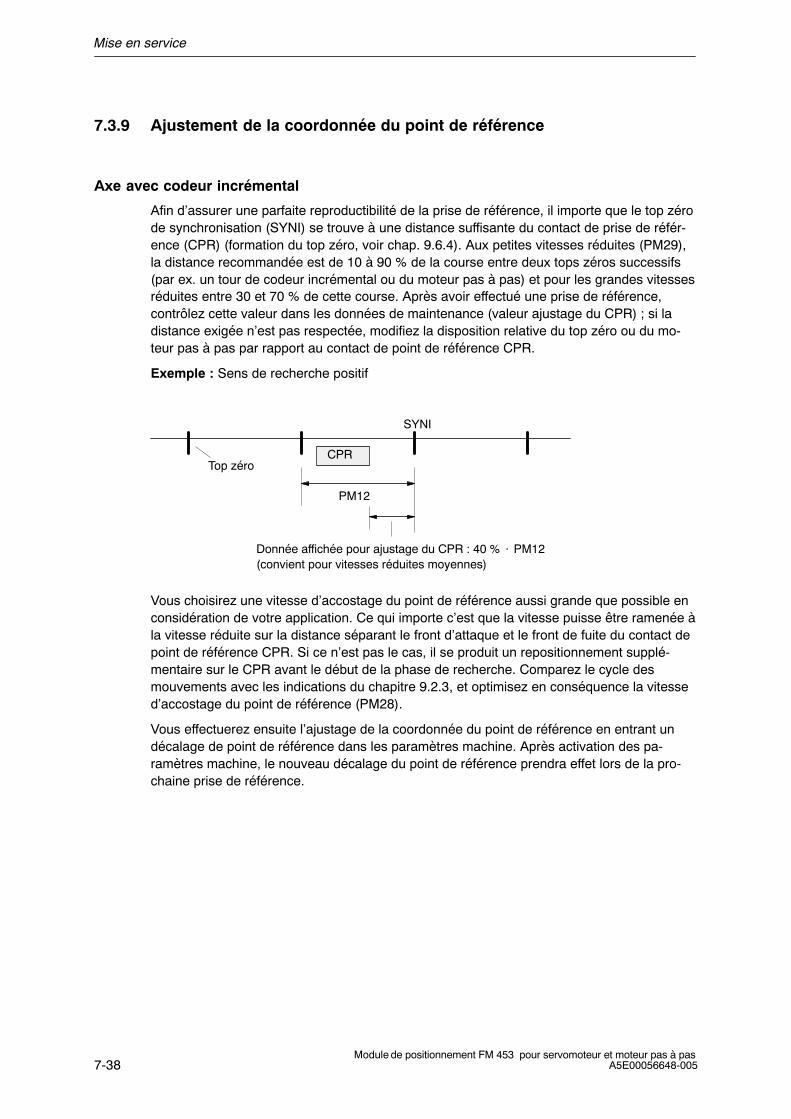
Mise en service
7-38Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7.3.9 Ajustement de la coordonnée du point de référence
Axe avec codeur incrémental
Afin d’assurer une parfaite reproductibilité de la prise de référence, il importe que le top zérode synchronisation (SYNI) se trouve à une distance suffisante du contact de prise de référ-ence (CPR) (formation du top zéro, voir chap. 9.6.4). Aux petites vitesses réduites (PM29),la distance recommandée est de 10 à 90 % de la course entre deux tops zéros successifs(par ex. un tour de codeur incrémental ou du moteur pas à pas) et pour les grandes vitessesréduites entre 30 et 70 % de cette course. Après avoir effectué une prise de référence,contrôlez cette valeur dans les données de maintenance (valeur ajustage du CPR) ; si ladistance exigée n’est pas respectée, modifiez la disposition relative du top zéro ou du mo-teur pas à pas par rapport au contact de point de référence CPR.
Exemple : Sens de recherche positif
SYNI
Top zéro
PM12
Donnée affichée pour ajustage du CPR : 40 % PM12(convient pour vitesses réduites moyennes)
CPR
Vous choisirez une vitesse d’accostage du point de référence aussi grande que possible enconsidération de votre application. Ce qui importe c’est que la vitesse puisse être ramenée àla vitesse réduite sur la distance séparant le front d’attaque et le front de fuite du contact depoint de référence CPR. Si ce n’est pas le cas, il se produit un repositionnement supplé-mentaire sur le CPR avant le début de la phase de recherche. Comparez le cycle desmouvements avec les indications du chapitre 9.2.3, et optimisez en conséquence la vitessed’accostage du point de référence (PM28).
Vous effectuerez ensuite l’ajustage de la coordonnée du point de référence en entrant undécalage de point de référence dans les paramètres machine. Après activation des pa-ramètres machine, le nouveau décalage du point de référence prendra effet lors de la pro-chaine prise de référence.

Mise en service
7-39Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Axe avec codeur absolu (SSI)
Effectuez un déplacement dans un mode approprié (”Manuel à vue”, ”Semi-automatique re-latif”) vers un point connu de l’axe, et exécutez la fonction ”Définition du point de référence”avec la valeur de position connue. Les positions de consigne et réelle seront immédiatementréglées à cette valeur, et l’affectation de valeur absolue pour le codeur absolu (SSI) seraentrée dans le jeu de paramètres machine (PM 17). Si vous souhaitez archiver cette valeurde manière externe, en plus de son stockage rémanent sur le module, il vous suffit de lire leDB de paramètres machine et d’enregistrer son contenu sur une disquette ou sur le disquedur de votre PG.
7.3.10 Activation du diagnostic du régulateur de position
Généralités
Au terme de l’optimisation de l’asservissement de position, activez le diagnostic du régula-teur de position. En cas de dérangement de l’asservissement de position ou de comporte-ment anormal de l’axe, ce dernier déclenche l’émission d’un messages d’erreur.
La mise en service du diagnostic du régulateur de position peut s’effectuer selon le dia-gramme suivant :
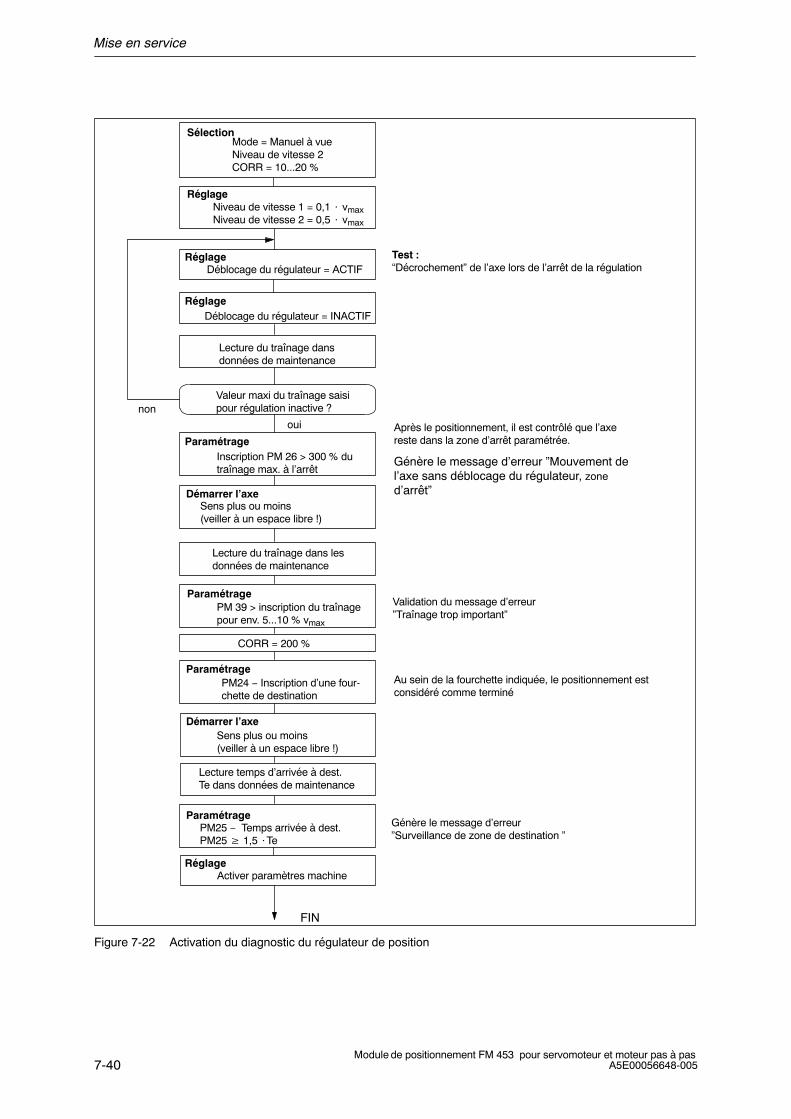
Mise en service
7-40Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
non
oui
Après le positionnement, il est contrôlé que l’axereste dans la zone d’arrêt paramétrée.
Génère le message d’erreur ”Mouvement del’axe sans déblocage du régulateur, zoned’arrêt”
Test :“Décrochement” de l’axe lors de l’arrêt de la régulation
Mode = Manuel à vueNiveau de vitesse 2CORR = 10...20 %
Sélection
Réglage Niveau de vitesse 1 = 0,1 vmaxNiveau de vitesse 2 = 0,5 vmax
RéglageDéblocage du régulateur = ACTIF
RéglageDéblocage du régulateur = INACTIF
Lecture du traînage dansdonnées de maintenance
Valeur maxi du traînage saisipour régulation inactive ?
ParamétrageInscription PM 26 > 300 % dutraînage max. à l’arrêt
Démarrer l’axeSens plus ou moins(veiller à un espace libre !)
Lecture du traînage dans lesdonnées de maintenance
ParamétragePM 39 > inscription du traînagepour env. 5...10 % vmax
Validation du message d’erreur”Traînage trop important”
CORR = 200 %
ParamétragePM24 − Inscription d’une four-chette de destination
Au sein de la fourchette indiquée, le positionnement estconsidéré comme terminé
Démarrer l’axeSens plus ou moins(veiller à un espace libre !)
Lecture temps d’arrivée à dest.Te dans données de maintenance
ParamétragePM25 − Temps arrivée à dest.PM25 1,5 Te
Génère le message d’erreur”Surveillance de zone de destination ”
RéglageActiver paramètres machine
FIN
Figure 7-22 Activation du diagnostic du régulateur de position

Mise en service
7-41Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
7.3.11 Activation du diagnostic du moteur pas à pas
Introduction
Après avoir optimisé la commande du moteur pas à pas, vous pouvez activer au besoin lediagnostic du moteur pas à pas.
Boost
Le signal boost fait l’objet d’une surveillance de durée d’activité afin de protéger le moteurcontre la surchauffe.
Consultez la documentation du moteur pas à pas pour obtenir des informations sur la duréemaximale de boost absolue et relative, et inscrivez ces valeurs dans les paramètres ma-chine correspondants PM48 et PM49.
Lorsque la fonction boost est paramétrée et si le signal boost persiste trop longtemps, leFM 453 délivre la signalisation de défaut “Durée de boost absolue” ou “Durée de boost rela-tive”.
Après avoir effectué le paramétrage, vérifiez l’efficacité des fonctions de diagnostic par unprogramme de test approprié qui contient une part importante de phase d’accélération et dedécélération.
Surveillance de rotation
Cette fonction n’est pas activable dans le mode de commande PM61 = 1 aveccodeur !
L’activation s’effectue par la fonction de réglage ponctuel ”Surveillance de rotation” (descrip-tion de la fonction de surveillance de rotation, cf. chap. 9.7.3).
Lorsque cette fonction de surveillance est programmée et que le moteur pas à pas ne peutplus suivre les consignes de déplacement, le FM 453 émet la signalisation de défaut”Surveillance de rotation”.
Contrôlez l’efficacité de la fonction de diagnostic en déconnectant électriquement le généra-teur de top zéro ou en mettant hors tension l’étage de commande du moteur pas à pas et eneffectuant un mouvement de test dans un des modes de votre choix.

Mise en service
7-42Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7.3.12 Activation des fins de course logiciels
Généralités
Déplacez doucement l’axe jusqu’à ses extrémités définies pour l’exploitation de la machine.Reportez ces valeurs réelles de position en tant que fins de course logiciels dans les pa-ramètres machine PM 21/PM 22 et activez ces paramètres.
Nota
En cas de modification ultérieure de la coordonnée du point de référence ou en cas de dé-finition du point de référence pour le codeur absolu, vous devez redéfinir les valeurs deposition des fins de course logiciels.
Même si vous n’avez pas besoin des fins de course logiciels, il est toutefois impératif d’en-trer les valeurs limites −109 et 109 [UI] dans les paramètres PM 21 et PM 22 (valeurs pardéfaut, cf. Tableau 5-4).
7.3.13 Activation de la compensation de dérive
Généralités
Si vous souhaitez utiliser la fonction de compensation de dérive en plus de la compensationd’offset déjà réglée au chapitre 7.3.2, il suffit alors d’activer cette fonction dans les pa-ramètres machine (voir la description de la fonction dans le chapitre 9.7, Asservissement deposition).
7.3.14 Activation de la compensation du jeu
Généralités
En cas de mesure indirecte de la position (p. ex. capteur sur le moteur), un jeu au niveaudes éléments mécaniques de transmission peut générer, lors du positionnement, un écart deposition de l’élément de la machine à positionner (p. ex. un chariot) qui n’est pas ramené surle régulateur par la boucle de retour. Généralement, il ”manque” une certaine distance aprèsune inversion de sens. Il est possible de calculer une valeur moyenne du jeu à certainespositions de l’axe et de la reporter dans les paramètres machine PM 30 et PM 31.
Vous pourrez déterminer le jeu et activer la compensation à l’aide du diagramme séquentielsuivant.
Tenez également compte des indications concernant la compensation du jeu figurant auchap. 9.7!
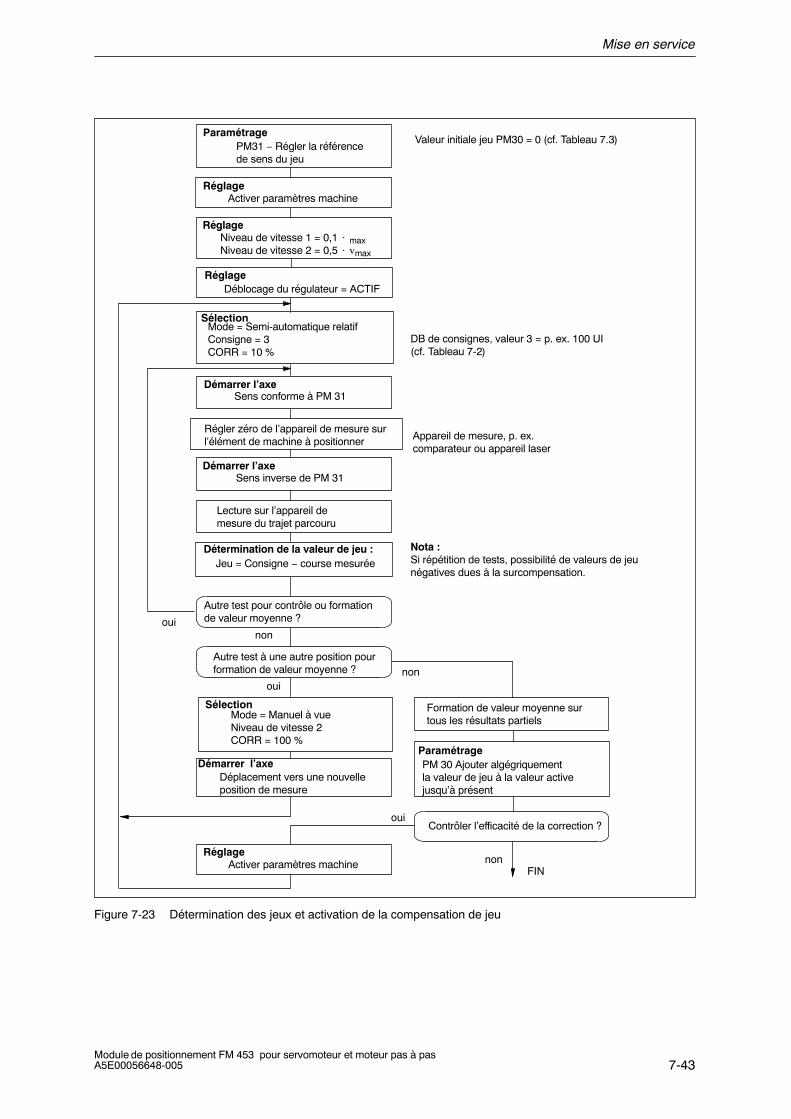
Mise en service
7-43Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
RéglageDéblocage du régulateur = ACTIF
non
oui
FIN
DB de consignes, valeur 3 = p. ex. 100 UI(cf. Tableau 7-2)
Régler zéro de l’appareil de mesure surl’élément de machine à positionner
Détermination de la valeur de jeu :Jeu = Consigne − course mesurée
Nota :Si répétition de tests, possibilité de valeurs de jeunégatives dues à la surcompensation.
Démarrer l’axe
Lecture sur l’appareil demesure du trajet parcouru
RéglageActiver paramètres machine
ParamétragePM31 − Régler la référencede sens du jeu
RéglageActiver paramètres machine
Réglage Niveau de vitesse 1 = 0,1 maxNiveau de vitesse 2 = 0,5 vmax
SélectionMode = Semi-automatique relatifConsigne = 3CORR = 10 %
Sens conforme à PM 31
Appareil de mesure, p. ex.comparateur ou appareil laser
Démarrer l’axeSens inverse de PM 31
Autre test pour contrôle ou formationde valeur moyenne ?
Autre test à une autre position pourformation de valeur moyenne ?
SélectionMode = Manuel à vueNiveau de vitesse 2CORR = 100 %
Démarrer l’axeDéplacement vers une nouvelleposition de mesure
Contrôler l’efficacité de la correction ?
ParamétragePM 30 Ajouter algégriquementla valeur de jeu à la valeur activejusqu’à présent
Formation de valeur moyenne surtous les résultats partiels
non
oui
non
oui
Valeur initiale jeu PM30 = 0 (cf. Tableau 7.3)
Figure 7-23 Détermination des jeux et activation de la compensation de jeu
Mise en service
7-44Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
7.3.15 Possibilité de paramétrage de l’identification d’arrêt
!Attention
L’identification d’arrêt paramétrable est nécessaire seulement pour des cas exception-nels. L’utilisateur doit prendre en charge le paramétrage lui-même et l’effectuer très soi-gneusement.
Pendant l’exploitation d’axe pas réglée, une identification d’arrêt de mouvement d’axe esteffectuée à l’aide de FM 453 par l’analyse de la vitesse.
Ce sont les cas spéciaux, dans lesquels également le rampe de valeur de consigneMD45 est efficace:
• dans le mode opératoire “Gestion”:
Freinage d’un mouvement d’axe
• dans tous les autres modes opératoires:
− Annulation de validation d’entraînement pendant un mouvement d’axe
− Redémarrage pendant un mouvement d’axe
− pour tous les erreurs avec réaction d’erreur “Tout en ARRET”
− pour quelques erreurs avec réaction d’erreur “Avance en ARRET” (voir chapitre 11,Gestion des erreurs et défauts)
L’analyse s’effectue à l’aide d’un automatisme installé dans le logiciel et elle sert:
• à terminer l’état “Traitement en cours”
• à fermer la régulation de position pour validation de régulateur activée
Pour de cas exceptionnels de processus de mouvement technologique nécessaires oude comportement dynamique d’un axe pas typique, dans lesquels cet automatisme n’estpas capable à déterminer un arrêt d’axe d’une manière univoque, de nouveaux pa-ramètres machines sont entrées, à l’aide desquels il sera possible de paramétrer decritères définitifs pour identifier la fin de déplacement.
PM67 Vitesse d’arrêt (voir table 5-4)
PM68 Temps de dépassement du temps imparti pour l’identification d’arrêt (voir table 5-4)
NotaPM67 et PM68 sont occupés par défaut avec la valeur Zéro (0). Grâce à cela, l’identifica-tion d’arrêt automatique est activée − mode de fonctionnement comme dans les versionsde logiciel précédentes.
PM67 et PM68 agissent d’une manière indépendante l’un de l’autre, c.-à-d. ils peuventêtre paramétrés dans toutes les 4 possibilités de combinaison.
Le temps de dépassement de temps imparti est lancé après avoir atteinte la valeur deconsigne 0 à la sortie de valeur de consigne de module FM 453, c.-à-d. quand PM45paségal à 0 après avoir terminé le traitement de rampe de valeurs de consigne.
L’identification d’arrêt paramétrable agit seulement dans les modes de commande “avecrégulation de position” (détermination de mode de commande dans PM61).
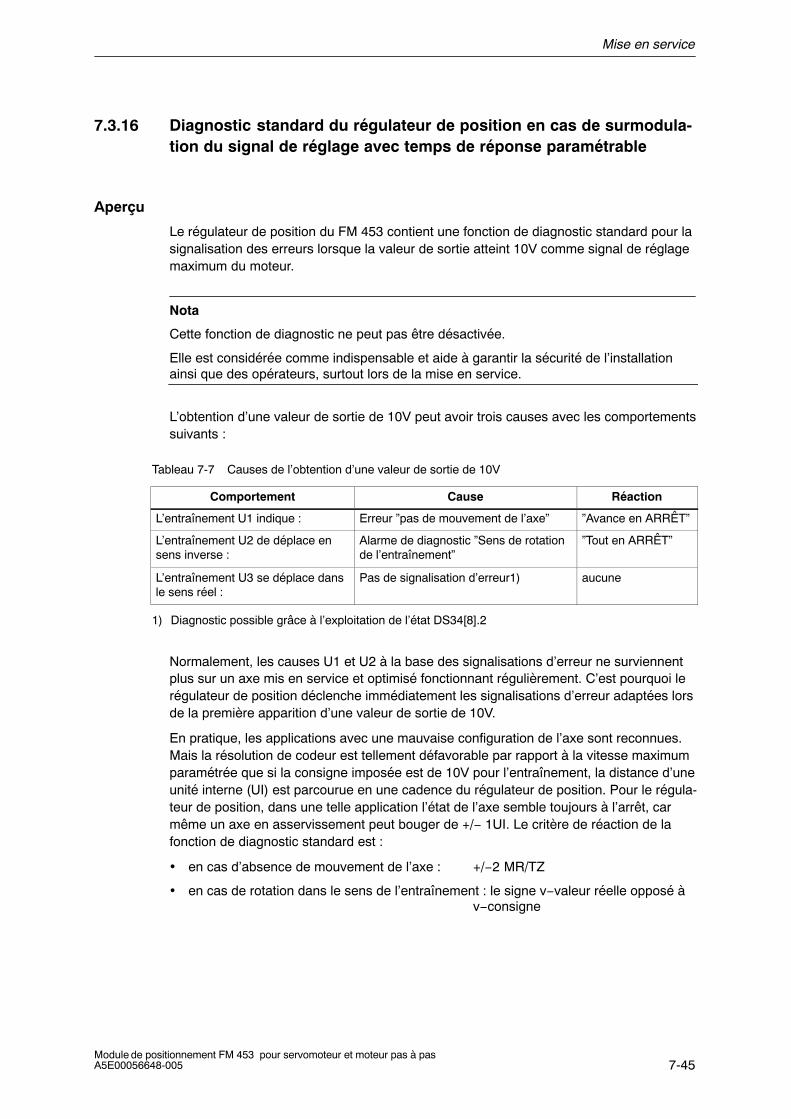
Mise en service
7-45Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
7.3.16 Diagnostic standard du régulateur de position en cas de surmodula-tion du signal de réglage avec temps de réponse paramétrable
Aperçu
Le régulateur de position du FM 453 contient une fonction de diagnostic standard pour lasignalisation des erreurs lorsque la valeur de sortie atteint 10V comme signal de réglagemaximum du moteur.
Nota
Cette fonction de diagnostic ne peut pas être désactivée.
Elle est considérée comme indispensable et aide à garantir la sécurité de l’installationainsi que des opérateurs, surtout lors de la mise en service.
L’obtention d’une valeur de sortie de 10V peut avoir trois causes avec les comportementssuivants :
Tableau 7-7 Causes de l’obtention d’une valeur de sortie de 10V
Comportement Cause Réaction
L’entraînement U1 indique : Erreur ”pas de mouvement de l’axe” ”Avance en ARRÊT”
L’entraînement U2 de déplace ensens inverse :
Alarme de diagnostic ”Sens de rotationde l’entraînement”
”Tout en ARRÊT”
L’entraînement U3 se déplace dansle sens réel :
Pas de signalisation d’erreur1) aucune
1) Diagnostic possible grâce à l’exploitation de l’état DS34[8].2
Normalement, les causes U1 et U2 à la base des signalisations d’erreur ne surviennentplus sur un axe mis en service et optimisé fonctionnant régulièrement. C’est pourquoi lerégulateur de position déclenche immédiatement les signalisations d’erreur adaptées lorsde la première apparition d’une valeur de sortie de 10V.
En pratique, les applications avec une mauvaise configuration de l’axe sont reconnues.Mais la résolution de codeur est tellement défavorable par rapport à la vitesse maximumparamétrée que si la consigne imposée est de 10V pour l’entraînement, la distance d’uneunité interne (UI) est parcourue en une cadence du régulateur de position. Pour le régula-teur de position, dans une telle application l’état de l’axe semble toujours à l’arrêt, carmême un axe en asservissement peut bouger de +/− 1UI. Le critère de réaction de lafonction de diagnostic standard est :
• en cas d’absence de mouvement de l’axe : +/−2 MR/TZ
• en cas de rotation dans le sens de l’entraînement : le signe v−valeur réelle opposé à v−consigne
Mise en service
7-46Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Calcul d’un temps de réponse nécessaire
Avec le paramétrage d’un temps de réponse, la signalisation d’erreur à la limite 10V estralentie d’une valeur de temps déterminée. Si dans le délai en cours, un mouvement del’axe d’au moins 1 MR est reconnu dans le sens de déplacement programmé, le tempsde réponse repart à zéro. A la fin du temps paramétré, la signalisation de défaut se faitselon l’état actuel de l’axe.
Il est recommandé de procéder comme suit :
• Modification de la vitesse maximum (PM23) dans l’unité de mesure MR/TZ;(TZ = 3 ms):
VMR = MD23 / TASTPROMIN / MWFAKTOR
Le calcul de la valeur de mesure MWFAKTOR doit être effectué conformément auchap. 5.3.1, section Dépendances.
Le nombre de cycles de palpage par minute TASTPROMIN est de 20000.
• Calcul de la valeur minimum théorique du temps de réponse nécessaire :
TOV_min = 1 / VMR
• Détermination d’une valeur minimum pratique nécessaire TOV = (2...3) TOV_min. (En cas de problème de démarrage de l’axe, cette valeurdoit néanmoins être multipliée, le cas échéant. A partir d’une valeur de départ, la va-leur lors du test de l’axe peut être corrigée jusqu’à l’obtention d’une position stable etsûre).
La valeur TOV doit être entrée dans le PM69.Pour éviter qu’une valeur non définie dans l’ancien PM69 entraîne automatiquement unnouveau comportement en cas de mise à jour des micro−programmes, une connexionlibre de la fonction doit être établie dans le PM70.PM69 Diagnostic standard (voir tableau 5-4)PM70 Connexion libre des fonctions pour le temps de réponse du PM69
(voir tableau 5-4)
Nota
Par défaut, le PM69 a la valeur zéro (0). Ceci active le diagnostic standard normal →même fonctionnement que dans les versions de logiciel précédentes.
Vous ne pouvez pas désactiver le diagnostic standard, mais seulement le retarder.
Lors de la saisie en ligne, le PM69 est tout de suite actif grâce à l’activation PM (catégo-rie E).
Lors du déroulement du temps de réponse, l’état du dépassement est signalé dans leDS34[8].2 (comme pour la cause U3).
!Attention
L’activation du temps de réponse paramétré du diagnostic standard peut mettre en dan-ger l’installation en cas de valeurs introduites inadaptées. L’utilisation du PM69 est doncsous l’entière responsabilité de l’utilisateur. Siemens décline toute responsabilité en casde dommages de l’installation.

Mise en service
7-47Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exemples de paramétrage
Exemple 1
Paramètres machine :
MD61 = 0
MD10 = 1 MD11 = 2000000 MSR MD12 = 0
MD13 = 1000 MD23 = 1000000 MSR/min
Calcul MD69: MWFAKTOR = (MD11 + MD12 2-32) / (4 MD13)
MWFAKTOR = ( 2000000 + 0 2-32) / (4 1000) = 500
VMR = 1000000 / 20000 / 500 = 0,1
TOV_min = 1 / 0,1 = 10
MD69 = 20 ... 30
Exemple 2
Paramètres machine :
MD61 = 1
MD10 = 1 MD11 = 20000 MSR MD12 = 0
MD13 = 1024 MD23 = 30000000 MSR/min
Calcul MD69: MWFAKTOR = (MD11 + MD12 2-32) / (4 MD13)
MWFAKTOR = (20000 + 0 2-32) / (4 1024) = 4,8828125
VMR = 30000000 / 20000 / 4,8828125 = 307,2
TOV_min = 1 / 307,2 = 0,00325...
MD69 = 0
Dans cet exemple, avec TOV_min < 1, il ne s’agit pas d’un cas de comportement in-adapté de la résolution de codeur en raison de la vitesse maximum paramétrée. Ici, lacause d’une signalisation d’erreur d’un FM453 semble se situer dans la mécanique oudans l’optimisation de l’axe.

Mise en service
7-48Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
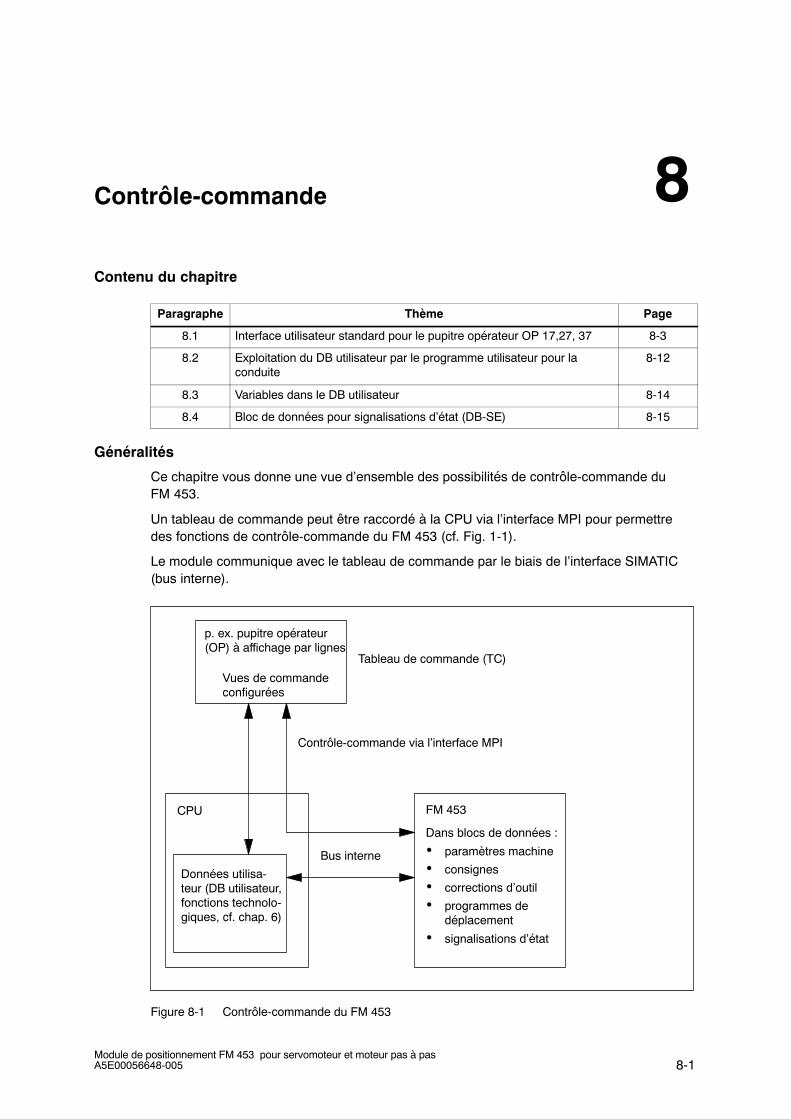
8-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Contrôle-commande
Contenu du chapitre
Paragraphe Thème Page
8.1 Interface utilisateur standard pour le pupitre opérateur OP 17,27, 37 8-3
8.2 Exploitation du DB utilisateur par le programme utilisateur pour la conduite
8-12
8.3 Variables dans le DB utilisateur 8-14
8.4 Bloc de données pour signalisations d’état (DB-SE) 8-15
Généralités
Ce chapitre vous donne une vue d’ensemble des possibilités de contrôle-commande duFM 453.
Un tableau de commande peut être raccordé à la CPU via l’interface MPI pour permettredes fonctions de contrôle-commande du FM 453 (cf. Fig. 1-1).
Le module communique avec le tableau de commande par le biais de l’interface SIMATIC(bus interne).
Vues de commandeconfigurées
Données utilisa-teur (DB utilisateur,fonctions technolo-giques, cf. chap. 6)
CPU
Dans blocs de données :
• paramètres machine
• consignes
• corrections d’outil
• programmes dedéplacement
• signalisations d’état
FM 453
Bus interne
Tableau de commande (TC)
p. ex. pupitre opérateur(OP) à affichage par lignes
Contrôle-commande via l’interface MPI
Figure 8-1 Contrôle-commande du FM 453
8

Contrôle-commande
8-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Contrôle-commande de données/signaux du FM dans la CPU
Les données/signaux permettant des fonctions de contrôle-commande au niveau du tableaude commande se trouvent dans le bloc de données utilisateur. Ces données/signaux doiventêtre traités par le programme utilisateur.
Que peut-on piloter sur le FM 453 ?
Il est possible, par le biais du clavier du tableau de commande, de modifier les données/signaux suivants dans les blocs de données :
• paramètres machineN° de DB 1205 pour canal 1N° de DB 1505 pour canal 2N° de DB 1805 pour canal 3
• consignesN° de DB 1230 pour canal 1N° de DB 1530 pour canal 2N° de DB 1830 pour canal 3
• corrections d’outilN° de DB 1220 pour canal 1N° de DB 1520 pour canal 2N° de DB 1820 pour canal 3
• programmes de déplacementN° de DB 1001...1199 pour canal 1N° de DB 1301...1499 pour canal 2N° de DB 1601...1799 pour canal 3
Que peut-on surveiller sur le FM 453 ?
L’afficheur du tableau de commande permet de visualiser les données/signaux suivants :
• paramètres machine, voir ci-dessus
• consignes, voir ci-dessus
• corrections d’outil, voir ci-dessus
• programmes de déplacement, voir ci-dessus
• messages d’état,
N° de DB 1000 pour canal 1N° de DB 1300 pour canal 2N° de DB 1600 pour canal 3
notamment
− données d’exploitation, p. ex. valeurs réelles
− blocs CN actifs
− mesure de longueur
− valeur réelle au changement de bloc
− signaux en retour et états de défaut
− données de maintenance
Le progiciel de configuration comporte des interfaces préconfigurées pour les pupitres opé-rateur COROS OP 17, 27, 37.
Contrôle-commande
8-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
8.1 Interface utilisateur standard pour le pupitre opérateur OP 17, 27, 37
Généralités
Ce chapitre décrit les interfaces préconfigurées (à adapter à votre projet, p. ex. adresses deFM, n° de DB) pour les pupitres opérateur COROS (tableaux de commande) : OP 17, 27, 37.
L’outil de configuration est le logiciel ”ProTool” qui vous permet de modifier, d’insérer et d’ef-facer des vues (images).
L’interface utilisateur est adressée sur
• les DB utilisateur 1, 2 et 3 (canal 1, 2 et 3) dans la CPU(automate : ”Steuerg_CPU”; adresse = 2; emplacement = 3)
• les blocs de données pour messages d’état DB 1000, 1300 et 1600 (canal 1, 2 et 3) dansle FM 453 (automate : ”Steuerg_453”; adresse 2; emplacement 8) ou sur les pro-grammes de déplacement.
Dans la configuration par défaut, les OP 17, 27, 37 ont été adressés sur l’adresse MPI 9.
Les interfaces préconfigurées ont été créées avec l’outil de configuration “SIMATIC ProTool/Pro CS B5.2.0.18”.
Les configurations par défaut peuvent servir de point de départ pour votre projet. Copiez lefichier correspondant :
• op17_453.pdb pour OP 17
• op27_453.pdb pour OP 27
• op37_453.pdb pour OP 37
Vous pouvez adapter la copie selon les besoins de votre application.
Ces fichiers se trouvent dans le répertoire suivant :
[répertoire STEP7]\EXAMPLES\FM453\zFr17_02_FM453_OP_EX
Vous pouvez remplacer le texte ”Nom du FM” apparaissant à la première ligne des imagespar un texte de votre choix.
Vous pouvez imprimer toutes les données de configuration à partir de ”ProTool”. Vous ob-tiendrez alors une description détaillée des images.
Contrôle-commande
8-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
DB-SE
Ce bloc de données pour les messages d’état renferme les signaux de commande et lessignaux en retour ainsi que les données système du FM 453. Vous pouvez accéder en lec-ture aux données du DB-SE.
Observation
Les données que l’on désire observer peuvent être lues et affichées directement à partir duDB-SE et du DB paramétré sur le FM 453.
La lecture directe dans le FM présente l’avantage qu’il n’est pas nécessaire de lire aupara-vant les valeurs/signaux à l’aide du programme utilisateur.
Conduite
Les données et signaux de commande (entre autres valeurs et mémentos) sont inscritsdans le DB utilisateur du programme utilisateur.
Programme utilisateur
L’interface pour les OP est le DB utilisateur.
Si les OP inscrivent des signaux de commande, des réglages ponctuels ou des commandesponctuelles dans le DB utilisateur, ceux-ci sont transférés immédiatement au FM par le blocPOS_CRTL.
Les signaux inscrits dans la zone “Contrôle-commande” (demande de transfert des donnéesindiquées dans le tableau 8-2 avec un contrat d’écriture) doivent être traités par le pro-gramme utilisateur (tenir éventl. compte des verrouillages spécifiques à l’utilisateur) puis lescontrats d’écriture ou de lecture doivent être activés.
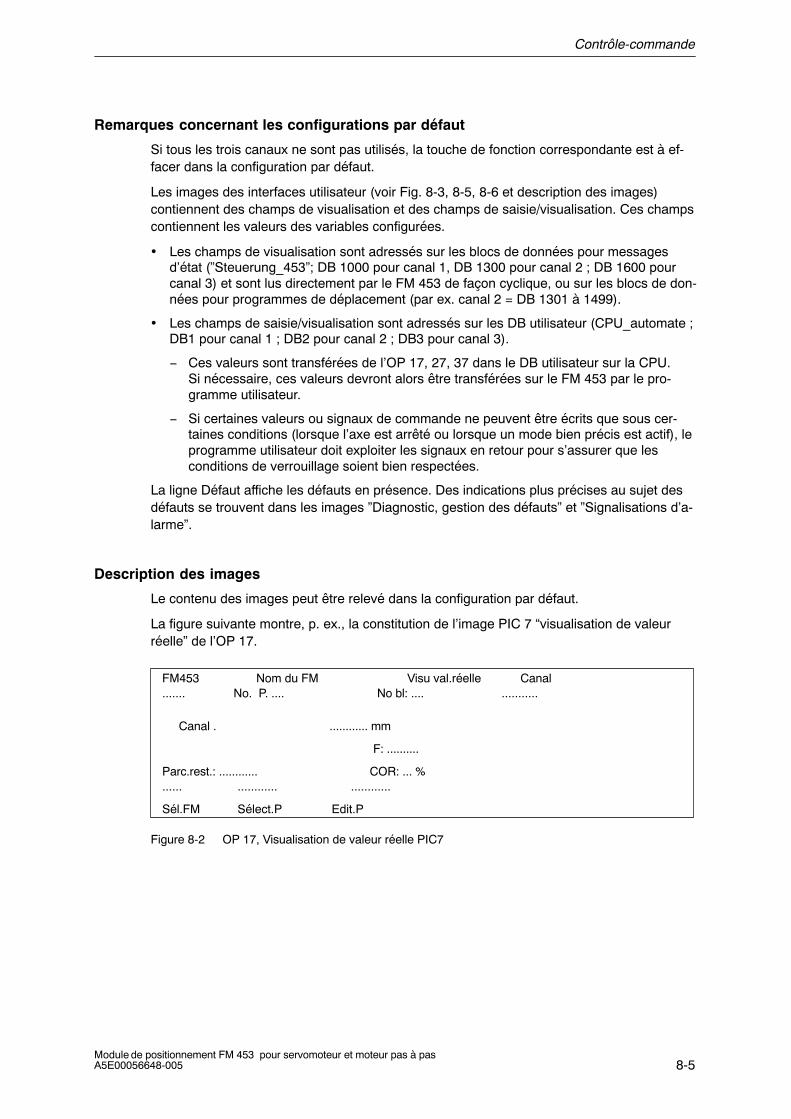
Contrôle-commande
8-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Remarques concernant les configurations par défaut
Si tous les trois canaux ne sont pas utilisés, la touche de fonction correspondante est à ef-facer dans la configuration par défaut.
Les images des interfaces utilisateur (voir Fig. 8-3, 8-5, 8-6 et description des images)contiennent des champs de visualisation et des champs de saisie/visualisation. Ces champscontiennent les valeurs des variables configurées.
• Les champs de visualisation sont adressés sur les blocs de données pour messagesd’état (”Steuerung_453”; DB 1000 pour canal 1, DB 1300 pour canal 2 ; DB 1600 pourcanal 3) et sont lus directement par le FM 453 de façon cyclique, ou sur les blocs de don-nées pour programmes de déplacement (par ex. canal 2 = DB 1301 à 1499).
• Les champs de saisie/visualisation sont adressés sur les DB utilisateur (CPU_automate ;DB1 pour canal 1 ; DB2 pour canal 2 ; DB3 pour canal 3).
− Ces valeurs sont transférées de l’OP 17, 27, 37 dans le DB utilisateur sur la CPU.Si nécessaire, ces valeurs devront alors être transférées sur le FM 453 par le pro-gramme utilisateur.
− Si certaines valeurs ou signaux de commande ne peuvent être écrits que sous cer-taines conditions (lorsque l’axe est arrêté ou lorsque un mode bien précis est actif), leprogramme utilisateur doit exploiter les signaux en retour pour s’assurer que lesconditions de verrouillage soient bien respectées.
La ligne Défaut affiche les défauts en présence. Des indications plus précises au sujet desdéfauts se trouvent dans les images ”Diagnostic, gestion des défauts” et ”Signalisations d’a-larme”.
Description des images
Le contenu des images peut être relevé dans la configuration par défaut.
La figure suivante montre, p. ex., la constitution de l’image PIC 7 “visualisation de valeurréelle” de l’OP 17.
FM453 Nom du FM Visu val.réelle Canal....... No. P. .... No bl: .... ...........
Canal . ............ mm
Parc.rest.: ............ COR: ... %
F: ..........
...... ............ ............
Sél.FM Sélect.P Edit.P
Figure 8-2 OP 17, Visualisation de valeur réelle PIC7
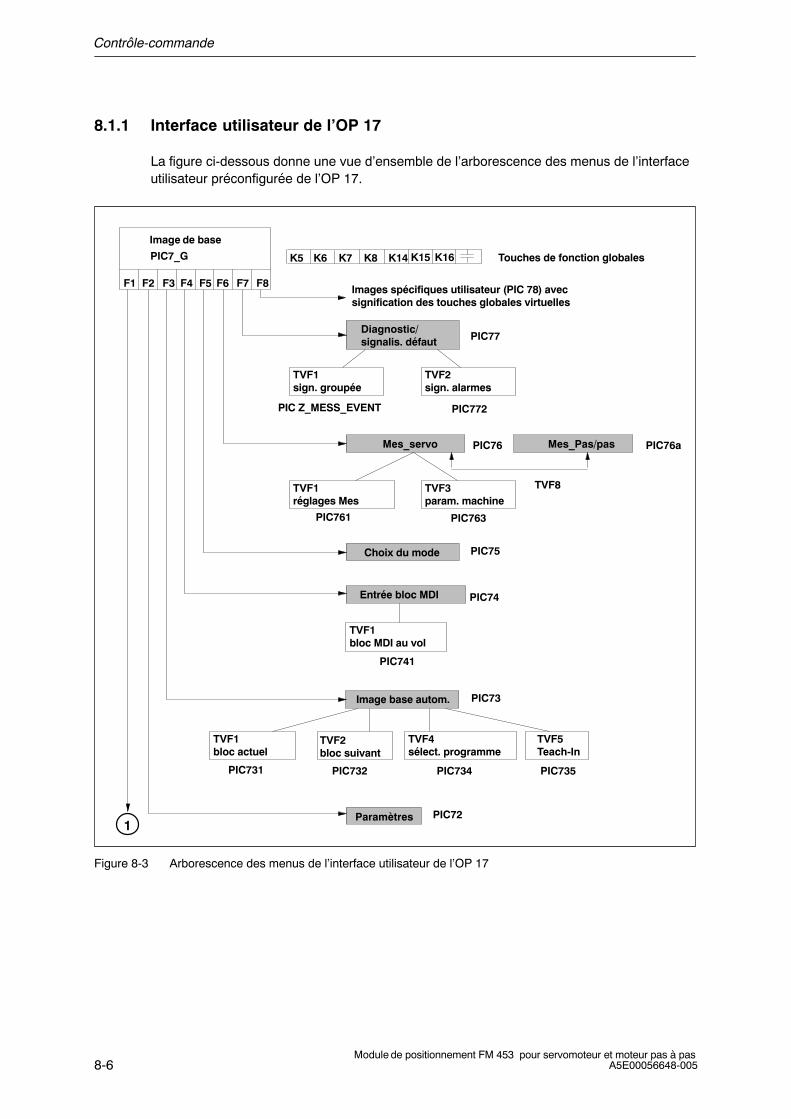
Contrôle-commande
8-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
8.1.1 Interface utilisateur de l’OP 17
La figure ci-dessous donne une vue d’ensemble de l’arborescence des menus de l’interfaceutilisateur préconfigurée de l’OP 17.
F1 F2 F3 F4 F5 F6 F7 F8
Image de base
PIC7_G
Images spécifiques utilisateur (PIC 78) avecsignification des touches globales virtuelles
Diagnostic/signalis. défaut PIC77
TVF1sign. groupée
TVF2sign. alarmes
Mes_servo
TVF1réglages Mes
TVF3param. machine
Choix du mode
Entrée bloc MDI
TVF1bloc MDI au vol
Image base autom.
TVF1bloc actuel
TVF2bloc suivant
TVF4sélect. programme
TVF5Teach-In
Paramètres
PIC Z_MESS_EVENT PIC772
PIC76
PIC763PIC761
PIC75
PIC74
PIC741
PIC73
PIC731 PIC732 PIC734 PIC735
PIC72
Touches de fonction globales
1
K6 K7 K14K5 K15 K16K8
Mes_Pas/pas PIC76a
TVF8
Figure 8-3 Arborescence des menus de l’interface utilisateur de l’OP 17
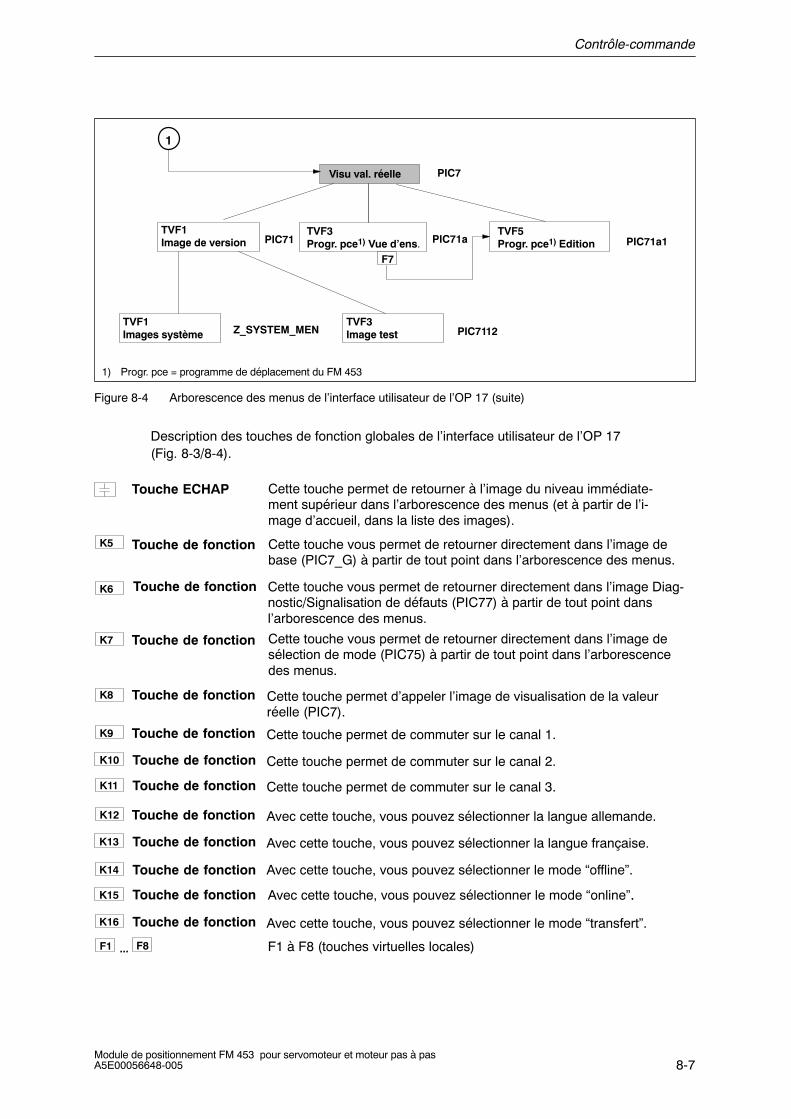
Contrôle-commande
8-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
TVF1Images système
TVF1Image de version
TVF3Progr. pce1) Vue d’ens.
TVF5Progr. pce1) Edition
Visu val. réelle
PIC71 PIC71a PIC71a1
PIC7
1
F7
TVF3Image test PIC7112
1) Progr. pce = programme de déplacement du FM 453
Z_SYSTEM_MEN
Figure 8-4 Arborescence des menus de l’interface utilisateur de l’OP 17 (suite)
Description des touches de fonction globales de l’interface utilisateur de l’OP 17 (Fig. 8-3/8-4).
K16
Touche ECHAP Cette touche permet de retourner à l’image du niveau immédiate-ment supérieur dans l’arborescence des menus (et à partir de l’i-mage d’accueil, dans la liste des images).
Touche de fonction Cette touche vous permet de retourner directement dans l’image debase (PIC7_G) à partir de tout point dans l’arborescence des menus.
Touche de fonction Cette touche vous permet de retourner directement dans l’image Diag-nostic/Signalisation de défauts (PIC77) à partir de tout point dansl’arborescence des menus.
Touche de fonction Cette touche vous permet de retourner directement dans l’image desélection de mode (PIC75) à partir de tout point dans l’arborescencedes menus.
K5
K6
K7
Touche de fonctionK9 Cette touche permet de commuter sur le canal 1.
Touche de fonctionK10
Touche de fonctionK11
F1 à F8 (touches virtuelles locales)F1 ... F8
Touche de fonctionK8 Cette touche permet d’appeler l’image de visualisation de la valeurréelle (PIC7).
Cette touche permet de commuter sur le canal 2.
Cette touche permet de commuter sur le canal 3.
Touche de fonctionK12 Avec cette touche, vous pouvez sélectionner la langue allemande.
Touche de fonctionK13
Touche de fonctionK14
Avec cette touche, vous pouvez sélectionner la langue française.
Avec cette touche, vous pouvez sélectionner le mode “offline”.
Touche de fonctionK15
Touche de fonction
Avec cette touche, vous pouvez sélectionner le mode “online”.
Avec cette touche, vous pouvez sélectionner le mode “transfert”.
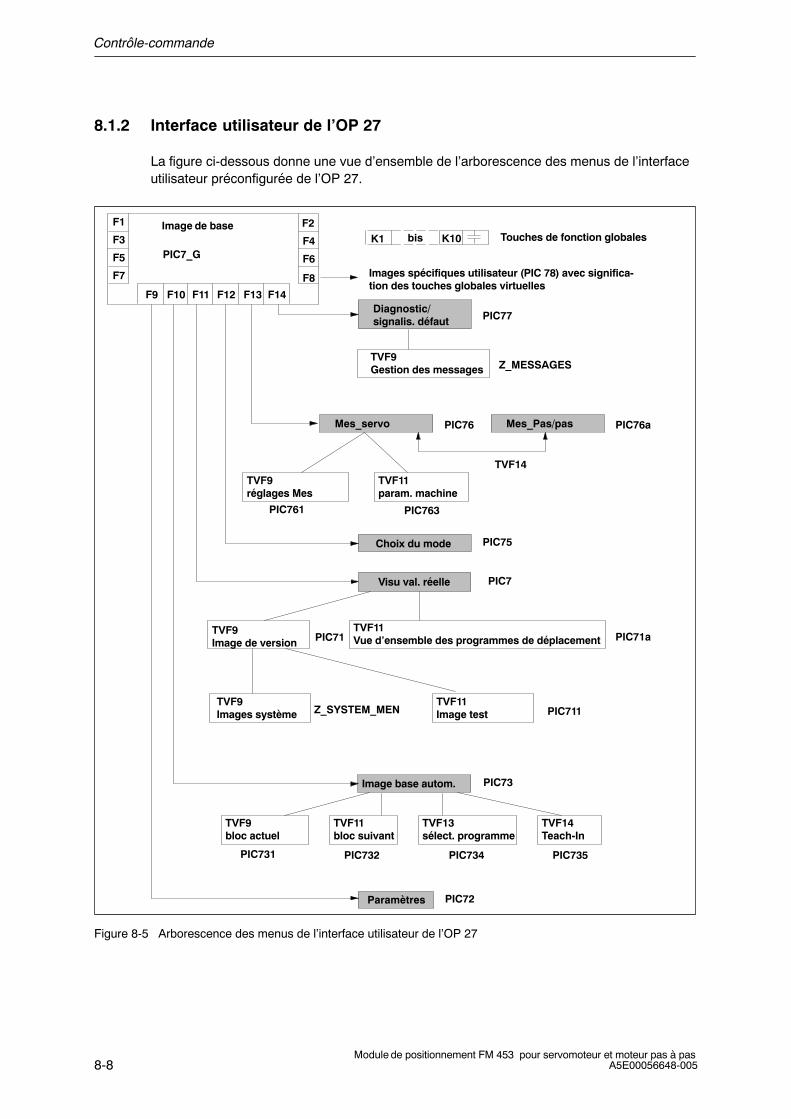
Contrôle-commande
8-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
8.1.2 Interface utilisateur de l’OP 27
La figure ci-dessous donne une vue d’ensemble de l’arborescence des menus de l’interfaceutilisateur préconfigurée de l’OP 27.
K1 bis K10
F1
F9 F10 F14F11 F12 F13
F8
Image de base
PIC7_G
Images spécifiques utilisateur (PIC 78) avec significa-tion des touches globales virtuelles
Diagnostic/signalis. défaut PIC77
Mes_servo
TVF9réglages Mes
TVF11param. machine
Choix du mode
Image base autom.
TVF9bloc actuel
TVF11bloc suivant
TVF13sélect. programme
TVF14Teach-In
Paramètres
PIC76
PIC763PIC761
PIC75
PIC73
PIC731 PIC732 PIC734 PIC735
PIC72
Touches de fonction globales
Mes_Pas/pas PIC76a
TVF14
F2
F6
F4F3
F5
F7
TVF9Images système
TVF9Image de version
TVF11Vue d’ensemble des programmes de déplacement
Visu val. réelle
PIC71 PIC71a
PIC7
TVF11Image test PIC711Z_SYSTEM_MEN
TVF9Gestion des messages Z_MESSAGES
Figure 8-5 Arborescence des menus de l’interface utilisateur de l’OP 27
Contrôle-commande
8-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Description des touches de fonction globales de l’interface utilisateur de l’OP 27 (Fig. 8-5).
Touche ECHAP Cette touche permet de retourner à l’image du niveau immédiatement su-périeur dans l’arborescence des menus (et à partir de l’image d’accueil,dans la liste des images).
Cette touche vous permet de retourner directement dans l’image debase (PIC7_G) à partir de tout point dans l’arborescence des menus.
Cette touche vous permet de retourner directement dans l’image Diag-nostic/Signalisation de défauts (PIC77) à partir de tout point dansl’arborescence des menus.
Avec cette touche, vous pouvez sélectionner la langue allemande.
K1
K2
K6
F1 Cette touche permet de commuter sur le canal 1.
F2
F3
F1 à F14 (touches virtuelles locales)F1 ... F14
K7 Avec cette touche, vous pouvez sélectionner la langue française.
Cette touche permet de commuter sur le canal 2.
Cette touche permet de commuter sur le canal 3.
K8 Avec cette touche, vous pouvez sélectionner le mode “offline”.
K9
K10
Avec cette touche, vous pouvez sélectionner le mode “online”.
Avec cette touche, vous pouvez sélectionner le mode “transfert”.
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
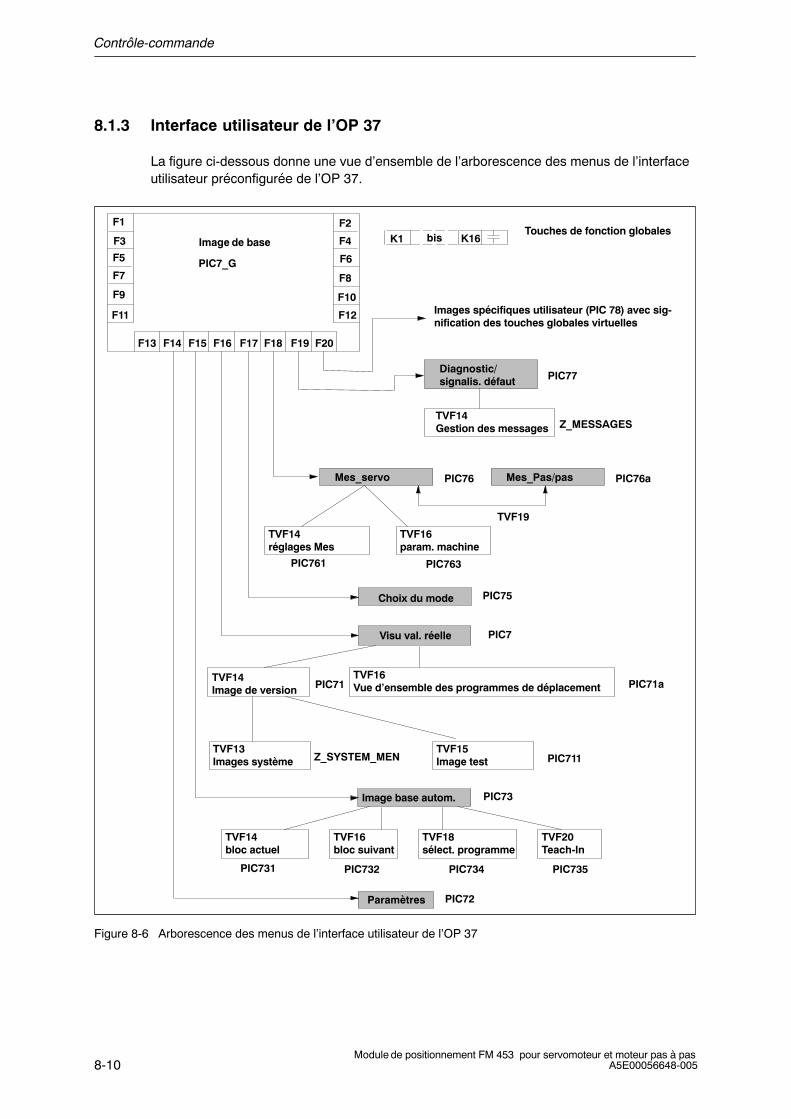
Contrôle-commande
8-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
8.1.3 Interface utilisateur de l’OP 37
La figure ci-dessous donne une vue d’ensemble de l’arborescence des menus de l’interfaceutilisateur préconfigurée de l’OP 37.
K1 bis K16
F1
F13 F14 F18F15 F16 F17
F8
Image de base
PIC7_G
Images spécifiques utilisateur (PIC 78) avec sig-nification des touches globales virtuelles
Diagnostic/signalis. défaut PIC77
TVF14Gestion des messages
Mes_servo
TVF14réglages Mes
TVF16param. machine
Choix du mode
Image base autom.
TVF14bloc actuel
TVF16bloc suivant
TVF18sélect. programme
TVF20Teach-In
Paramètres
Z_MESSAGES
PIC76
PIC763PIC761
PIC75
PIC73
PIC731 PIC732 PIC734 PIC735
PIC72
Touches de fonction globales
Mes_Pas/pas PIC76a
TVF19
F2
F6
F4F3
F5
F7
TVF13Images système
TVF14Image de version
TVF16Vue d’ensemble des programmes de déplacement
Visu val. réelle
PIC71 PIC71a
PIC7
TVF15Image test PIC711Z_SYSTEM_MEN
F12
F10
F11
F9
F20F19
Figure 8-6 Arborescence des menus de l’interface utilisateur de l’OP 37
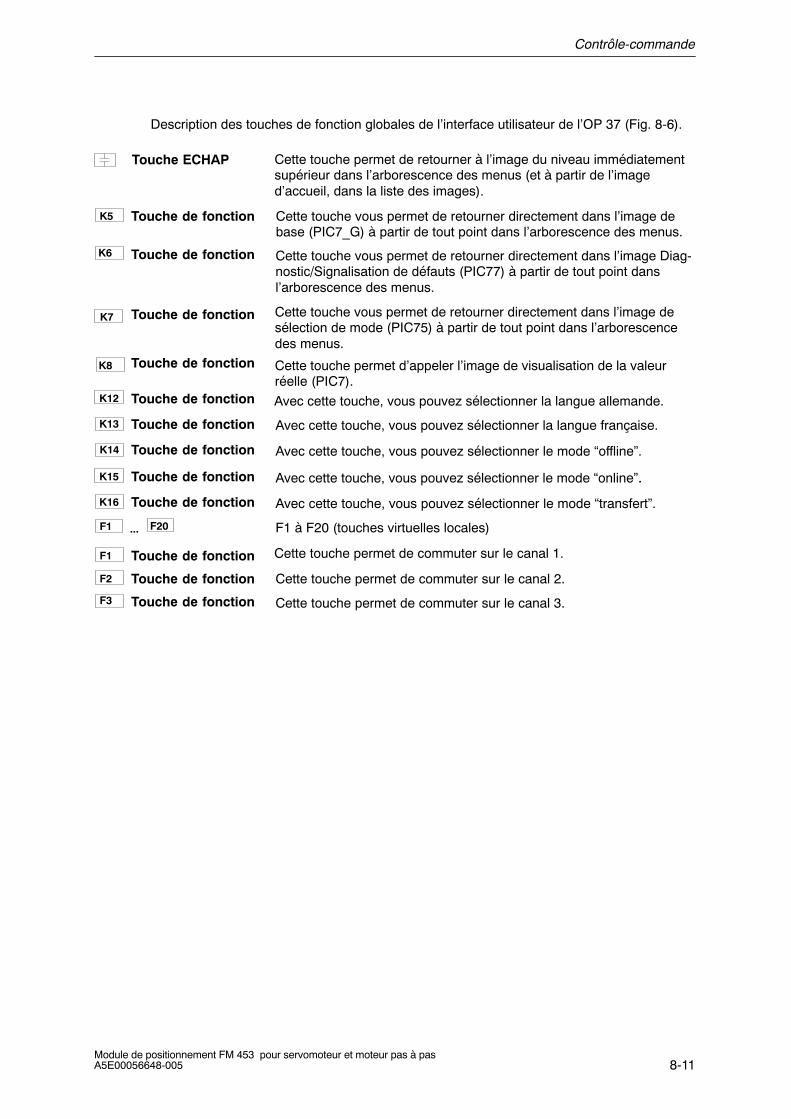
Contrôle-commande
8-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Description des touches de fonction globales de l’interface utilisateur de l’OP 37 (Fig. 8-6).
K13
Touche ECHAP Cette touche permet de retourner à l’image du niveau immédiatementsupérieur dans l’arborescence des menus (et à partir de l’imaged’accueil, dans la liste des images).
Cette touche vous permet de retourner directement dans l’image debase (PIC7_G) à partir de tout point dans l’arborescence des menus.
Cette touche vous permet de retourner directement dans l’image Diag-nostic/Signalisation de défauts (PIC77) à partir de tout point dansl’arborescence des menus.
Cette touche vous permet de retourner directement dans l’image desélection de mode (PIC75) à partir de tout point dans l’arborescencedes menus.
K5
K6
K7
F1 Cette touche permet de commuter sur le canal 1.
F2
F3
F1 à F20 (touches virtuelles locales)F1 ... F20
K8 Cette touche permet d’appeler l’image de visualisation de la valeurréelle (PIC7).
Cette touche permet de commuter sur le canal 2.
Cette touche permet de commuter sur le canal 3.
K14 Avec cette touche, vous pouvez sélectionner le mode “offline”.
K15
K16
Avec cette touche, vous pouvez sélectionner le mode “online”.
Avec cette touche, vous pouvez sélectionner le mode “transfert”.
K12 Avec cette touche, vous pouvez sélectionner la langue allemande.
Avec cette touche, vous pouvez sélectionner la langue française.
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
Touche de fonction
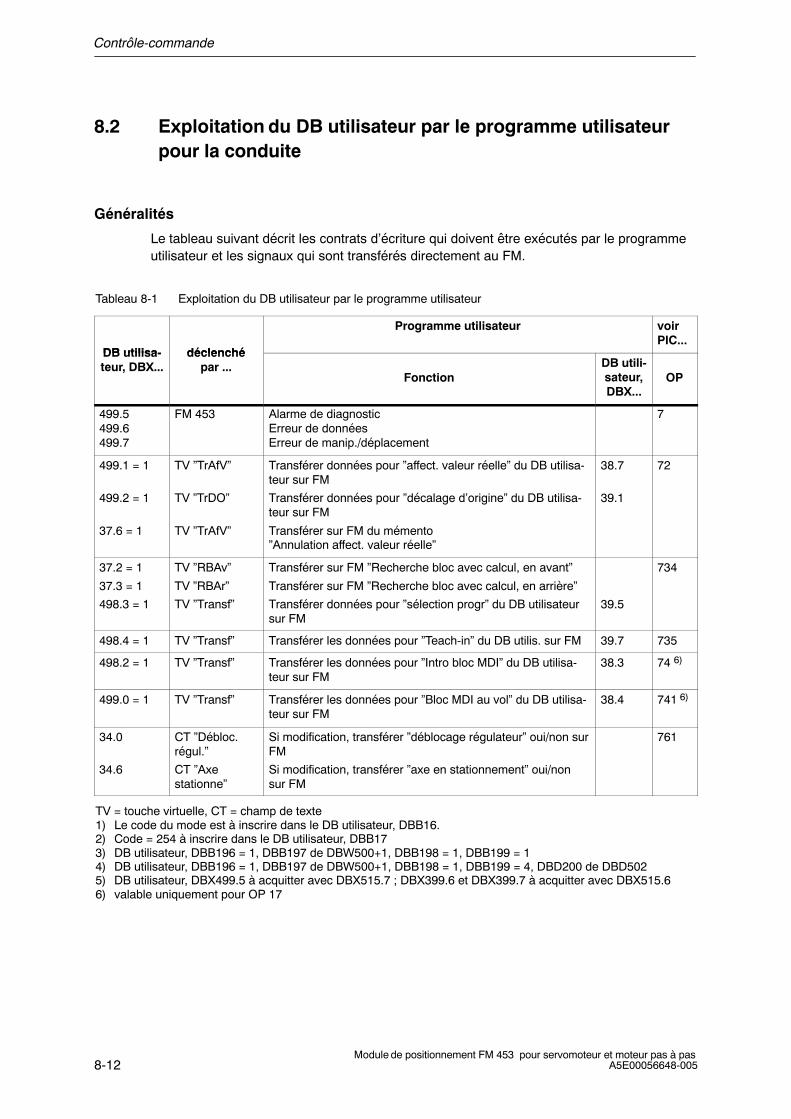
Contrôle-commande
8-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
8.2 Exploitation du DB utilisateur par le programme utilisateurpour la conduite
Généralités
Le tableau suivant décrit les contrats d’écriture qui doivent être exécutés par le programmeutilisateur et les signaux qui sont transférés directement au FM.
Tableau 8-1 Exploitation du DB utilisateur par le programme utilisateur
DB utilisa- déclenché
Programme utilisateur voirPIC...
DB utilisa-teur, DBX...
déclenchépar ...
FonctionDB utili-sateur,DBX...
OP
499.5499.6499.7
FM 453 Alarme de diagnosticErreur de donnéesErreur de manip./déplacement
7
499.1 = 1
499.2 = 1
37.6 = 1
TV ”TrAfV”
TV ”TrDO”
TV ”TrAfV”
Transférer données pour ”affect. valeur réelle” du DB utilisa-teur sur FM
Transférer données pour ”décalage d’origine” du DB utilisa-teur sur FM
Transférer sur FM du mémento ”Annulation affect. valeur réelle”
38.7
39.1
72
37.2 = 1
37.3 = 1
498.3 = 1
TV ”RBAv”
TV ”RBAr”
TV ”Transf”
Transférer sur FM ”Recherche bloc avec calcul, en avant”
Transférer sur FM ”Recherche bloc avec calcul, en arrière”
Transférer données pour ”sélection progr” du DB utilisateursur FM
39.5
734
498.4 = 1 TV ”Transf” Transférer les données pour ”Teach-in” du DB utilis. sur FM 39.7 735
498.2 = 1 TV ”Transf” Transférer les données pour ”Intro bloc MDI” du DB utilisa-teur sur FM
38.3 74 6)
499.0 = 1 TV ”Transf” Transférer les données pour ”Bloc MDI au vol” du DB utilisa-teur sur FM
38.4 741 6)
34.0
34.6
CT ”Débloc.régul.”
CT ”Axestationne”
Si modification, transférer ”déblocage régulateur” oui/non surFM
Si modification, transférer ”axe en stationnement” oui/nonsur FM
761
TV = touche virtuelle, CT = champ de texte1) Le code du mode est à inscrire dans le DB utilisateur, DBB16.2) Code = 254 à inscrire dans le DB utilisateur, DBB173) DB utilisateur, DBB196 = 1, DBB197 de DBW500+1, DBB198 = 1, DBB199 = 14) DB utilisateur, DBB196 = 1, DBB197 de DBW500+1, DBB198 = 1, DBB199 = 4, DBD200 de DBD5025) DB utilisateur, DBX499.5 à acquitter avec DBX515.7 ; DBX399.6 et DBX399.7 à acquitter avec DBX515.66) valable uniquement pour OP 17
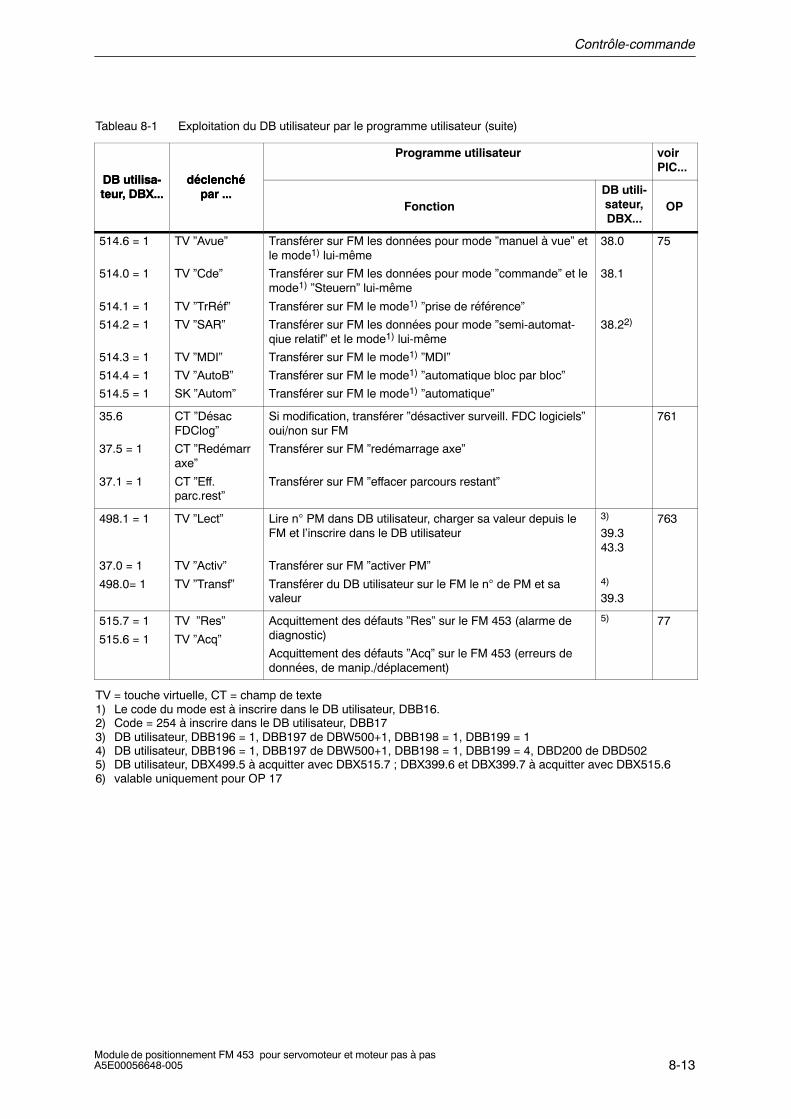
Contrôle-commande
8-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 8-1 Exploitation du DB utilisateur par le programme utilisateur (suite)
DB utilisa-teur, DBX...
voirPIC...
Programme utilisateur
déclenchépar ...
DB utilisa-teur, DBX...
OPDB utili-sateur,DBX...
Fonction
déclenchépar ...
514.6 = 1
514.0 = 1
514.1 = 1
514.2 = 1
514.3 = 1
514.4 = 1
514.5 = 1
TV ”Avue”
TV ”Cde”
TV ”TrRéf”
TV ”SAR”
TV ”MDI”
TV ”AutoB”
SK ”Autom”
Transférer sur FM les données pour mode ”manuel à vue” etle mode1) lui-même
Transférer sur FM les données pour mode ”commande” et lemode1) ”Steuern” lui-même
Transférer sur FM le mode1) ”prise de référence”
Transférer sur FM les données pour mode ”semi-automat-qiue relatif” et le mode1) lui-même
Transférer sur FM le mode1) ”MDI”
Transférer sur FM le mode1) ”automatique bloc par bloc”
Transférer sur FM le mode1) ”automatique”
38.0
38.1
38.22)
75
35.6
37.5 = 1
37.1 = 1
CT ”DésacFDClog”
CT ”Redémarraxe”
CT ”Eff.parc.rest”
Si modification, transférer ”désactiver surveill. FDC logiciels”oui/non sur FM
Transférer sur FM ”redémarrage axe”
Transférer sur FM ”effacer parcours restant”
761
498.1 = 1
37.0 = 1
498.0= 1
TV ”Lect”
TV ”Activ”
TV ”Transf”
Lire n° PM dans DB utilisateur, charger sa valeur depuis leFM et l’inscrire dans le DB utilisateur
Transférer sur FM ”activer PM”
Transférer du DB utilisateur sur le FM le n° de PM et savaleur
3)
39.343.3
4)
39.3
763
515.7 = 1
515.6 = 1
TV ”Res”
TV ”Acq”
Acquittement des défauts ”Res” sur le FM 453 (alarme dediagnostic)
Acquittement des défauts ”Acq” sur le FM 453 (erreurs dedonnées, de manip./déplacement)
5) 77
TV = touche virtuelle, CT = champ de texte1) Le code du mode est à inscrire dans le DB utilisateur, DBB16.2) Code = 254 à inscrire dans le DB utilisateur, DBB173) DB utilisateur, DBB196 = 1, DBB197 de DBW500+1, DBB198 = 1, DBB199 = 14) DB utilisateur, DBB196 = 1, DBB197 de DBW500+1, DBB198 = 1, DBB199 = 4, DBD200 de DBD5025) DB utilisateur, DBX499.5 à acquitter avec DBX515.7 ; DBX399.6 et DBX399.7 à acquitter avec DBX515.66) valable uniquement pour OP 17

Contrôle-commande
8-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
8.3 Variables dans le DB utilisateur
Le tableau suivant contient les signaux/données qui sont inscrits par l’OP dans le DB utilisa-teur (interface du FM).
La structure du DB utilisateur est donnée au chapitre 6.5.
Tableau 8-2 Variable pour le DB utilisateur
DButilisateur
Type devariable Signification
DButilisateur
DBB17 BYTE Niveau de vitesse ou de tension/fréquence 1, 2 [BP] −
DBX34.0DBX34.6DBX35.6
BOOL Réglages ponctuelsDéblocage du régulateurAxe en stationnementDésactiver surveill. fins de course logiciels
contratd’écritureinterne
DBX37.0DBX37.1DBX37.2DBX37.3DBX37.5DBX37.6
BOOL Commandes ponctuellesActiver paramètres machineEffacer parcours restantRecherche de bloc avec calcul, en avantRecherche de bloc avec calcul, en arrièreRedémarrageAnnuler forçage de valeur réelle
contratd’écritureinterne
DBD140 DINT Décalage d’origine DBX39.1
DBD144 DINT Forçage de valeur réelle DBX38.7
DBD156 DWORD Consigne DBX38.2
DBD160 DWORD Niveau de vitesse 1 DBX38.0
DBD164 DWORD Niveau de vitesse 2
DBD168 DWORD Niveau de tension/fréquence 1 DBX38.1
DBD172 DWORD Niveau de tension/fréquence 2
DBB176àDBB195
STRUCT Bloc MDI DBX38.3
DBB222àDBB241
STRUCT Bloc MDI au vol DBX38.4
DBB242 BYTE Sélection de prog. − n° de programme DBX39.5
DBB243 BYTE Sélection de prog. − n° de bloc
DBB244 BYTE Sélection de prog. − sens
DBB250 BYTE Teach-in − n° de programme DBX39.7
DBB251 BYTE Teach-in − n° de bloc
DBW500 WORD N° de paramètre machine PM −
DBD502 DINT/selon PM
Valeur de paramètre machine −
DBB506 BYTE N° de consigne −
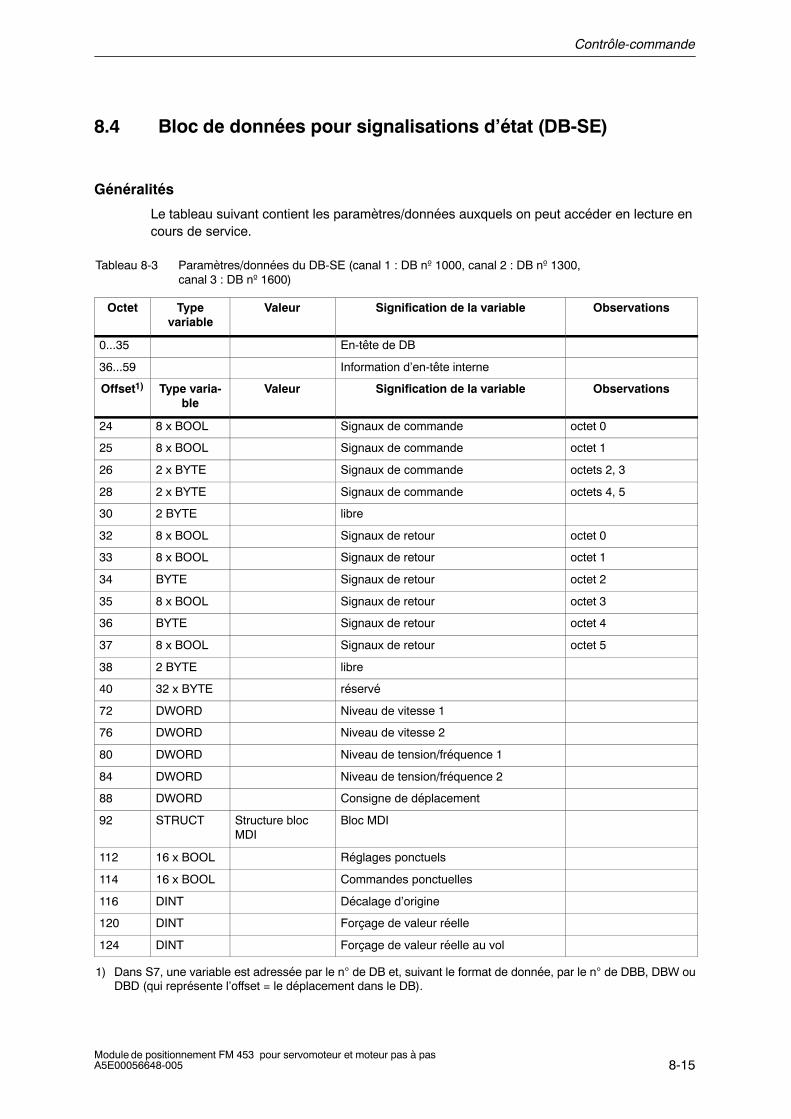
Contrôle-commande
8-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
8.4 Bloc de données pour signalisations d’état (DB-SE)
Généralités
Le tableau suivant contient les paramètres/données auxquels on peut accéder en lecture encours de service.
Tableau 8-3 Paramètres/données du DB-SE (canal 1 : DB nº 1000, canal 2 : DB nº 1300, canal 3 : DB nº 1600)
Octet Typevariable
Valeur Signification de la variable Observations
0...35 En-tête de DB
36...59 Information d’en-tête interne
Offset1) Type varia-ble
Valeur Signification de la variable Observations
24 8 x BOOL Signaux de commande octet 0
25 8 x BOOL Signaux de commande octet 1
26 2 x BYTE Signaux de commande octets 2, 3
28 2 x BYTE Signaux de commande octets 4, 5
30 2 BYTE libre
32 8 x BOOL Signaux de retour octet 0
33 8 x BOOL Signaux de retour octet 1
34 BYTE Signaux de retour octet 2
35 8 x BOOL Signaux de retour octet 3
36 BYTE Signaux de retour octet 4
37 8 x BOOL Signaux de retour octet 5
38 2 BYTE libre
40 32 x BYTE réservé
72 DWORD Niveau de vitesse 1
76 DWORD Niveau de vitesse 2
80 DWORD Niveau de tension/fréquence 1
84 DWORD Niveau de tension/fréquence 2
88 DWORD Consigne de déplacement
92 STRUCT Structure blocMDI
Bloc MDI
112 16 x BOOL Réglages ponctuels
114 16 x BOOL Commandes ponctuelles
116 DINT Décalage d’origine
120 DINT Forçage de valeur réelle
124 DINT Forçage de valeur réelle au vol
1) Dans S7, une variable est adressée par le n° de DB et, suivant le format de donnée, par le n° de DBB, DBW ouDBD (qui représente l’offset = le déplacement dans le DB).
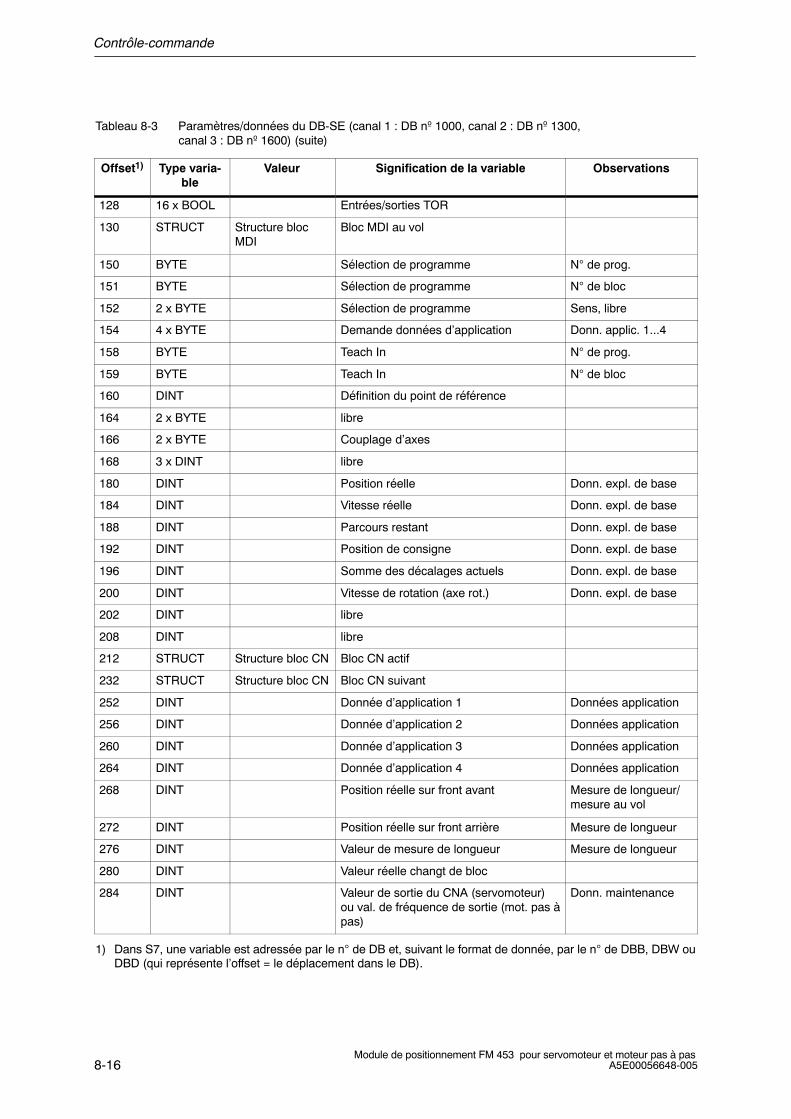
Contrôle-commande
8-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 8-3 Paramètres/données du DB-SE (canal 1 : DB nº 1000, canal 2 : DB nº 1300, canal 3 : DB nº 1600) (suite)
Offset1) ObservationsSignification de la variableValeurType varia-ble
128 16 x BOOL Entrées/sorties TOR
130 STRUCT Structure blocMDI
Bloc MDI au vol
150 BYTE Sélection de programme N° de prog.
151 BYTE Sélection de programme N° de bloc
152 2 x BYTE Sélection de programme Sens, libre
154 4 x BYTE Demande données d’application Donn. applic. 1...4
158 BYTE Teach In N° de prog.
159 BYTE Teach In N° de bloc
160 DINT Définition du point de référence
164 2 x BYTE libre
166 2 x BYTE Couplage d’axes
168 3 x DINT libre
180 DINT Position réelle Donn. expl. de base
184 DINT Vitesse réelle Donn. expl. de base
188 DINT Parcours restant Donn. expl. de base
192 DINT Position de consigne Donn. expl. de base
196 DINT Somme des décalages actuels Donn. expl. de base
200 DINT Vitesse de rotation (axe rot.) Donn. expl. de base
202 DINT libre
208 DINT libre
212 STRUCT Structure bloc CN Bloc CN actif
232 STRUCT Structure bloc CN Bloc CN suivant
252 DINT Donnée d’application 1 Données application
256 DINT Donnée d’application 2 Données application
260 DINT Donnée d’application 3 Données application
264 DINT Donnée d’application 4 Données application
268 DINT Position réelle sur front avant Mesure de longueur/mesure au vol
272 DINT Position réelle sur front arrière Mesure de longueur
276 DINT Valeur de mesure de longueur Mesure de longueur
280 DINT Valeur réelle changt de bloc
284 DINT Valeur de sortie du CNA (servomoteur)ou val. de fréquence de sortie (mot. pas àpas)
Donn. maintenance
1) Dans S7, une variable est adressée par le n° de DB et, suivant le format de donnée, par le n° de DBB, DBW ouDBD (qui représente l’offset = le déplacement dans le DB).
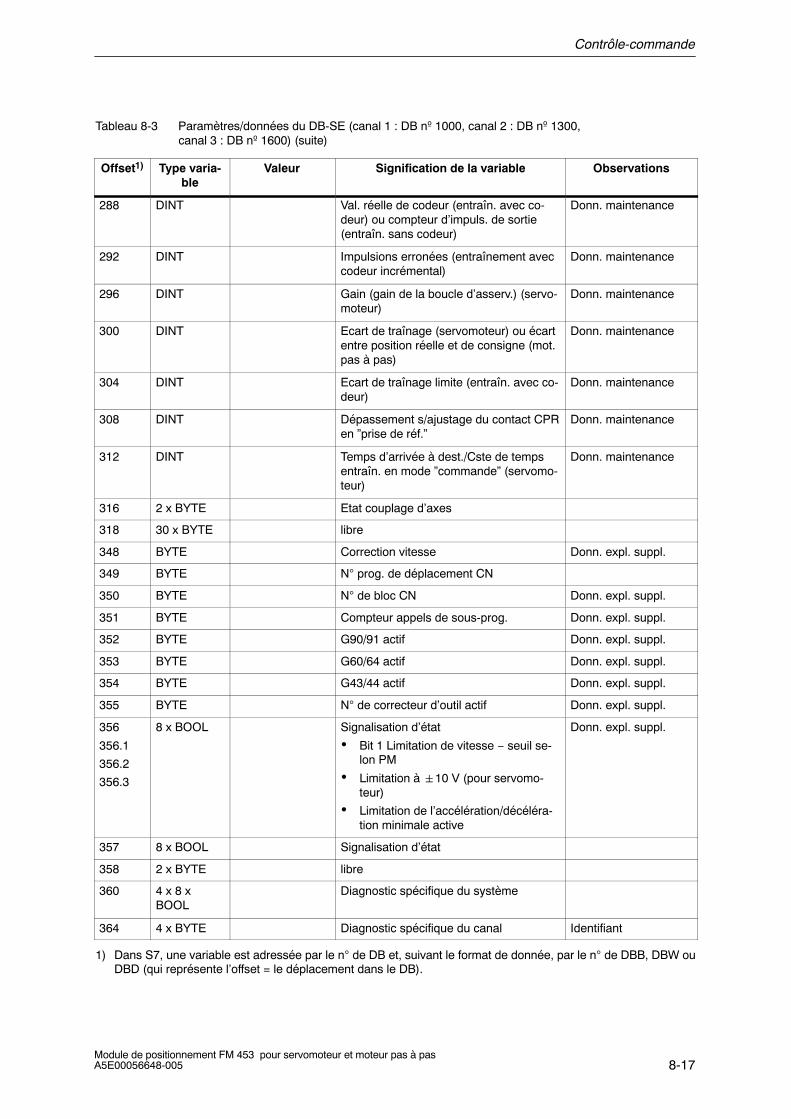
Contrôle-commande
8-17Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 8-3 Paramètres/données du DB-SE (canal 1 : DB nº 1000, canal 2 : DB nº 1300, canal 3 : DB nº 1600) (suite)
Offset1) ObservationsSignification de la variableValeurType varia-ble
288 DINT Val. réelle de codeur (entraîn. avec co-deur) ou compteur d’impuls. de sortie(entraîn. sans codeur)
Donn. maintenance
292 DINT Impulsions erronées (entraînement aveccodeur incrémental)
Donn. maintenance
296 DINT Gain (gain de la boucle d’asserv.) (servo-moteur)
Donn. maintenance
300 DINT Ecart de traînage (servomoteur) ou écartentre position réelle et de consigne (mot.pas à pas)
Donn. maintenance
304 DINT Ecart de traînage limite (entraîn. avec co-deur)
Donn. maintenance
308 DINT Dépassement s/ajustage du contact CPRen ”prise de réf.”
Donn. maintenance
312 DINT Temps d’arrivée à dest./Cste de tempsentraîn. en mode ”commande” (servomo-teur)
Donn. maintenance
316 2 x BYTE Etat couplage d’axes
318 30 x BYTE libre
348 BYTE Correction vitesse Donn. expl. suppl.
349 BYTE N° prog. de déplacement CN
350 BYTE N° de bloc CN Donn. expl. suppl.
351 BYTE Compteur appels de sous-prog. Donn. expl. suppl.
352 BYTE G90/91 actif Donn. expl. suppl.
353 BYTE G60/64 actif Donn. expl. suppl.
354 BYTE G43/44 actif Donn. expl. suppl.
355 BYTE N° de correcteur d’outil actif Donn. expl. suppl.
356
356.1
356.2
356.3
8 x BOOL Signalisation d’état
• Bit 1 Limitation de vitesse − seuil se-lon PM
• Limitation à 10 V (pour servomo-teur)
• Limitation de l’accélération/décéléra-tion minimale active
Donn. expl. suppl.
357 8 x BOOL Signalisation d’état
358 2 x BYTE libre
360 4 x 8 xBOOL
Diagnostic spécifique du système
364 4 x BYTE Diagnostic spécifique du canal Identifiant
1) Dans S7, une variable est adressée par le n° de DB et, suivant le format de donnée, par le n° de DBB, DBW ouDBD (qui représente l’offset = le déplacement dans le DB).
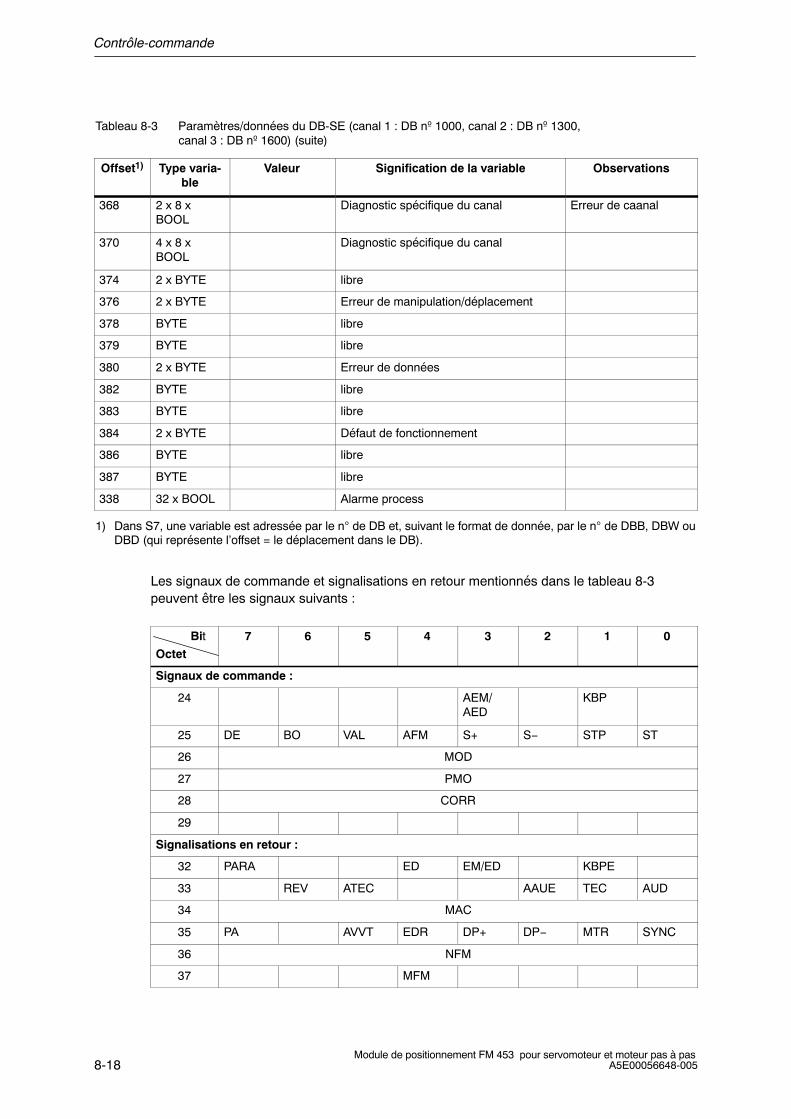
Contrôle-commande
8-18Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 8-3 Paramètres/données du DB-SE (canal 1 : DB nº 1000, canal 2 : DB nº 1300, canal 3 : DB nº 1600) (suite)
Offset1) ObservationsSignification de la variableValeurType varia-ble
368 2 x 8 xBOOL
Diagnostic spécifique du canal Erreur de caanal
370 4 x 8 xBOOL
Diagnostic spécifique du canal
374 2 x BYTE libre
376 2 x BYTE Erreur de manipulation/déplacement
378 BYTE libre
379 BYTE libre
380 2 x BYTE Erreur de données
382 BYTE libre
383 BYTE libre
384 2 x BYTE Défaut de fonctionnement
386 BYTE libre
387 BYTE libre
338 32 x BOOL Alarme process
1) Dans S7, une variable est adressée par le n° de DB et, suivant le format de donnée, par le n° de DBB, DBW ouDBD (qui représente l’offset = le déplacement dans le DB).
Les signaux de commande et signalisations en retour mentionnés dans le tableau 8-3peuvent être les signaux suivants :
Bit
Octet
7 6 5 4 3 2 1 0
Signaux de commande :
24 AEM/AED
KBP
25 DE BO VAL AFM S+ S− STP ST
26 MOD
27 PMO
28 CORR
29
Signalisations en retour :
32 PARA ED EM/ED KBPE
33 REV ATEC AAUE TEC AUD
34 MAC
35 PA AVVT EDR DP+ DP− MTR SYNC
36 NFM
37 MFM
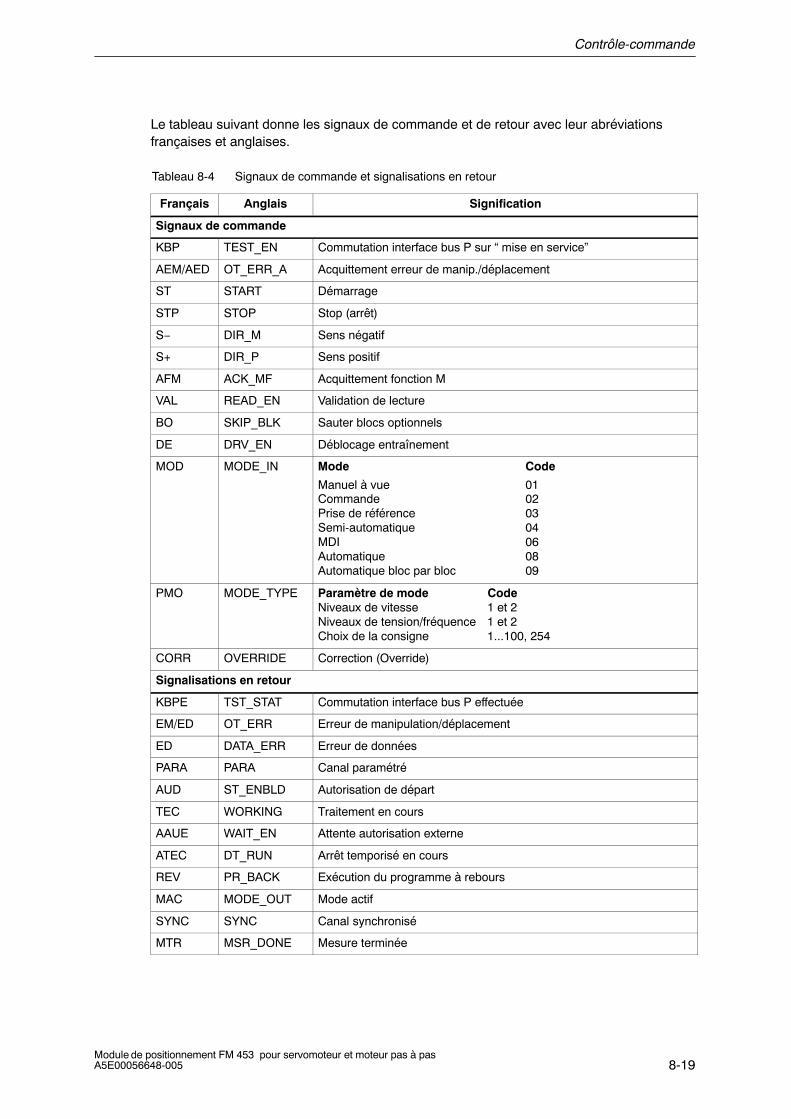
Contrôle-commande
8-19Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Le tableau suivant donne les signaux de commande et de retour avec leur abréviationsfrançaises et anglaises.
Tableau 8-4 Signaux de commande et signalisations en retour
Français Anglais Signification
Signaux de commande
KBP TEST_EN Commutation interface bus P sur “ mise en service”
AEM/AED OT_ERR_A Acquittement erreur de manip./déplacement
ST START Démarrage
STP STOP Stop (arrêt)
S− DIR_M Sens négatif
S+ DIR_P Sens positif
AFM ACK_MF Acquittement fonction M
VAL READ_EN Validation de lecture
BO SKIP_BLK Sauter blocs optionnels
DE DRV_EN Déblocage entraînement
MOD MODE_IN Mode Code
Manuel à vue 01Commande 02Prise de référence 03Semi-automatique 04MDI 06Automatique 08Automatique bloc par bloc 09
PMO MODE_TYPE Paramètre de mode CodeNiveaux de vitesse 1 et 2Niveaux de tension/fréquence 1 et 2Choix de la consigne 1...100, 254
CORR OVERRIDE Correction (Override)
Signalisations en retour
KBPE TST_STAT Commutation interface bus P effectuée
EM/ED OT_ERR Erreur de manipulation/déplacement
ED DATA_ERR Erreur de données
PARA PARA Canal paramétré
AUD ST_ENBLD Autorisation de départ
TEC WORKING Traitement en cours
AAUE WAIT_EN Attente autorisation externe
ATEC DT_RUN Arrêt temporisé en cours
REV PR_BACK Exécution du programme à rebours
MAC MODE_OUT Mode actif
SYNC SYNC Canal synchronisé
MTR MSR_DONE Mesure terminée
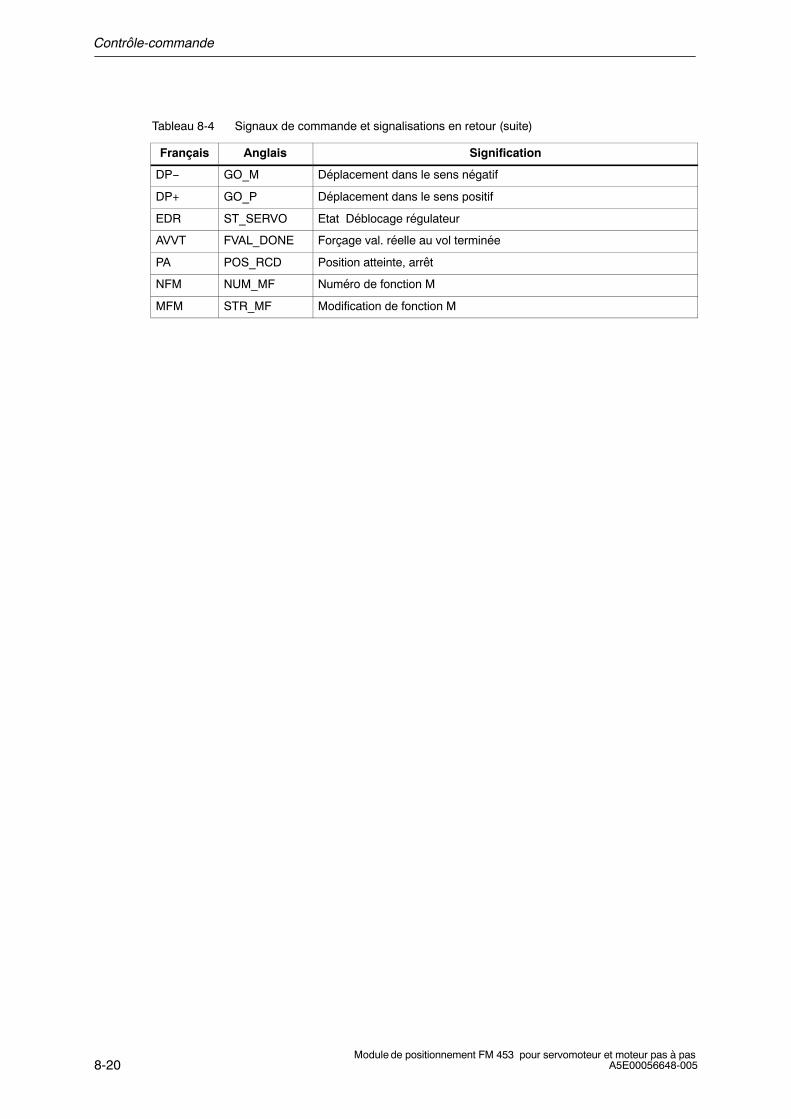
Contrôle-commande
8-20Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 8-4 Signaux de commande et signalisations en retour (suite)
Français SignificationAnglais
DP− GO_M Déplacement dans le sens négatif
DP+ GO_P Déplacement dans le sens positif
EDR ST_SERVO Etat Déblocage régulateur
AVVT FVAL_DONE Forçage val. réelle au vol terminée
PA POS_RCD Position atteinte, arrêt
NFM NUM_MF Numéro de fonction M
MFM STR_MF Modification de fonction M
9-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Description des fonctions
Contenu du chapitre
Paragraphe Thème Page
9.1 Signaux de commande/signalisations en retour 9-2
9.2 Modes 9-14
9.3 Paramètres système 9-38
9.4 Unité 9-63
9.5 Type d’axe 9-64
9.6 Codeur 9-67
9.7 Traitement des consignes 9-78
9.8 Entrées/sorties TOR 9-101
9.9 Fins de course logiciels 9-104
9.10 Alarme process 9-105
Généralités
Ce chapitre décrit les fonctions du FM 453.
Vous pouvez activer ces fonctions en appelant la fonction correspondante (FC) par le biaisdu programme utilisateur.
Nota
La présente description est donnée pour un canal et s’applique de façon analogue auxautres canaux.
9
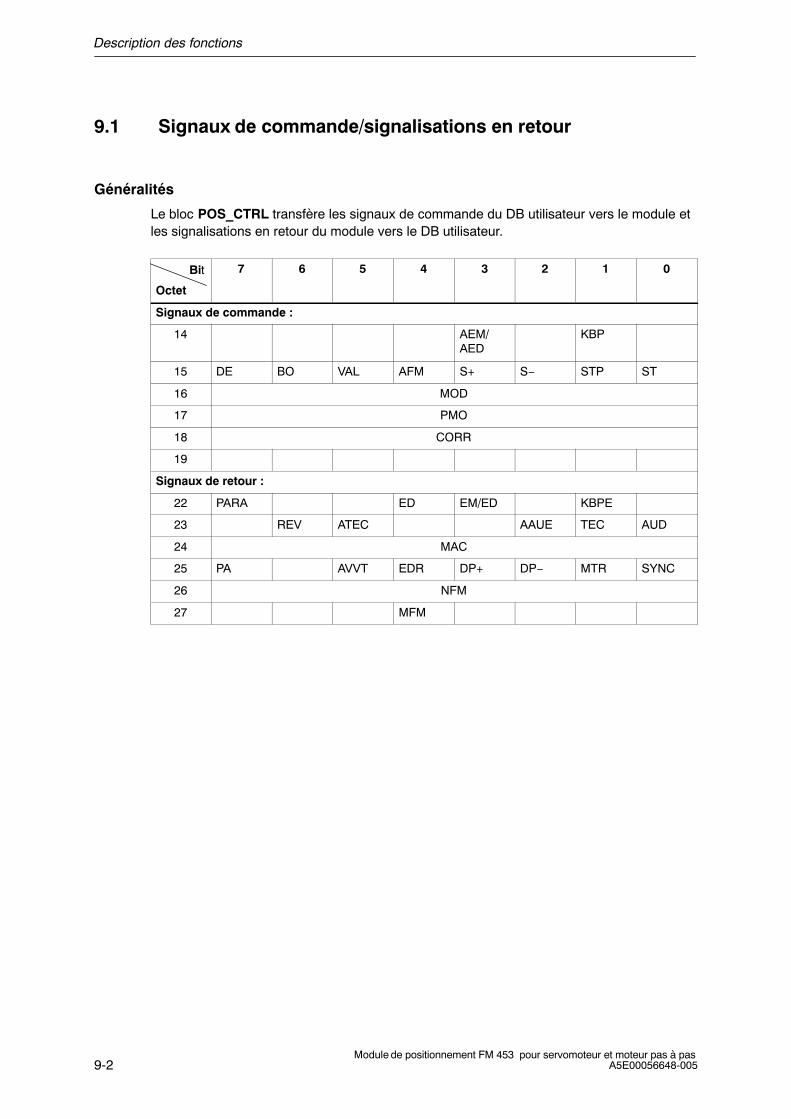
Description des fonctions
9-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.1 Signaux de commande/signalisations en retour
Généralités
Le bloc POS_CTRL transfère les signaux de commande du DB utilisateur vers le module etles signalisations en retour du module vers le DB utilisateur.
Bit
Octet
7 6 5 4 3 2 1 0
Signaux de commande :
14 AEM/AED
KBP
15 DE BO VAL AFM S+ S− STP ST
16 MOD
17 PMO
18 CORR
19
Signaux de retour :
22 PARA ED EM/ED KBPE
23 REV ATEC AAUE TEC AUD
24 MAC
25 PA AVVT EDR DP+ DP− MTR SYNC
26 NFM
27 MFM
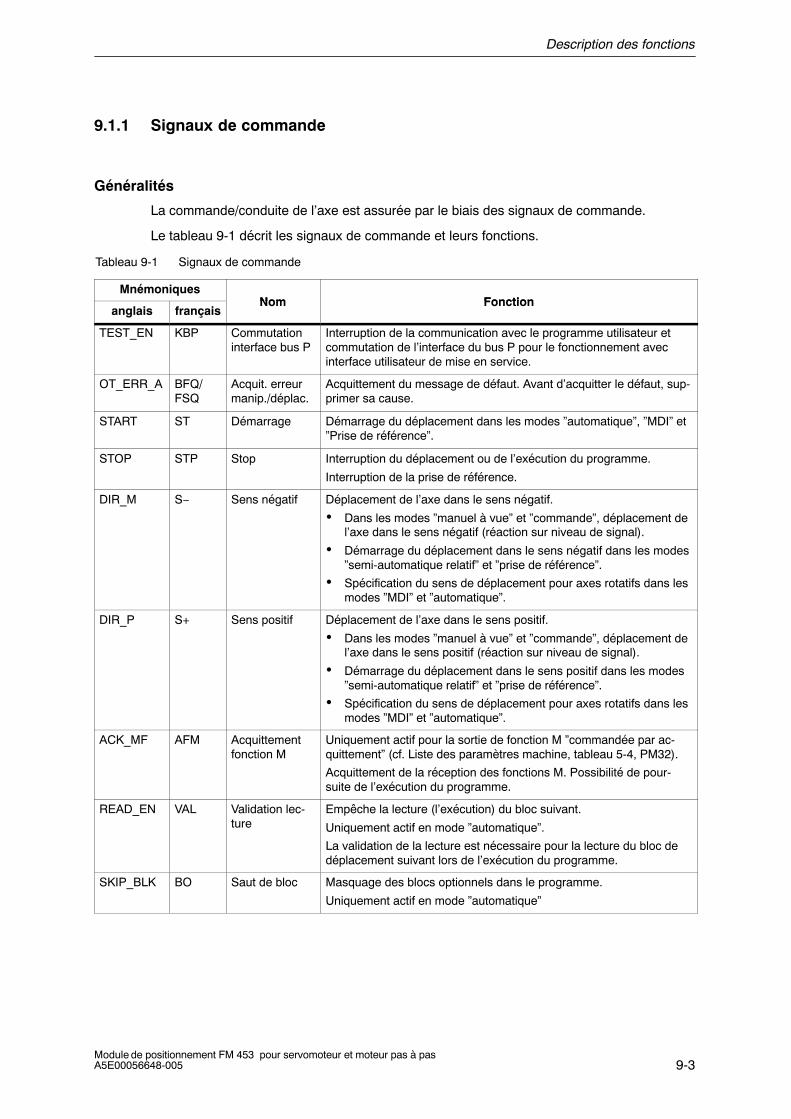
Description des fonctions
9-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.1.1 Signaux de commande
Généralités
La commande/conduite de l’axe est assurée par le biais des signaux de commande.
Le tableau 9-1 décrit les signaux de commande et leurs fonctions.
Tableau 9-1 Signaux de commande
MnémoniquesNom Fonction
anglais françaisNom Fonction
TEST_EN KBP Commutationinterface bus P
Interruption de la communication avec le programme utilisateur etcommutation de l’interface du bus P pour le fonctionnement avecinterface utilisateur de mise en service.
OT_ERR_A BFQ/FSQ
Acquit. erreurmanip./déplac.
Acquittement du message de défaut. Avant d’acquitter le défaut, sup-primer sa cause.
START ST Démarrage Démarrage du déplacement dans les modes ”automatique”, ”MDI” et”Prise de référence”.
STOP STP Stop Interruption du déplacement ou de l’exécution du programme.
Interruption de la prise de référence.
DIR_M S− Sens négatif Déplacement de l’axe dans le sens négatif.
• Dans les modes ”manuel à vue” et ”commande”, déplacement del’axe dans le sens négatif (réaction sur niveau de signal).
• Démarrage du déplacement dans le sens négatif dans les modes”semi-automatique relatif” et ”prise de référence”.
• Spécification du sens de déplacement pour axes rotatifs dans lesmodes ”MDI” et ”automatique”.
DIR_P S+ Sens positif Déplacement de l’axe dans le sens positif.
• Dans les modes ”manuel à vue” et ”commande”, déplacement del’axe dans le sens positif (réaction sur niveau de signal).
• Démarrage du déplacement dans le sens positif dans les modes”semi-automatique relatif” et ”prise de référence”.
• Spécification du sens de déplacement pour axes rotatifs dans lesmodes ”MDI” et ”automatique”.
ACK_MF AFM Acquittementfonction M
Uniquement actif pour la sortie de fonction M ”commandée par ac-quittement” (cf. Liste des paramètres machine, tableau 5-4, PM32).
Acquittement de la réception des fonctions M. Possibilité de pour-suite de l’exécution du programme.
READ_EN VAL Validation lec-ture
Empêche la lecture (l’exécution) du bloc suivant.
Uniquement actif en mode ”automatique”.
La validation de la lecture est nécessaire pour la lecture du bloc dedéplacement suivant lors de l’exécution du programme.
SKIP_BLK BO Saut de bloc Masquage des blocs optionnels dans le programme.
Uniquement actif en mode ”automatique”

Description des fonctions
9-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 9-1 Signaux de commande (suite)
MnémoniquesFonctionNom
anglaisFonctionNom
français
DRV_EN DE Déblocage del’entraînement
Déblocage du déplacement.Lors de la remise à ”0” du signal, le mouvement est rapidementfreiné (selon PM45).Si PM 37.15 = 0, l’exécution du programme et le déplacement sontinterrompus et le parcours restant est effacé.Si PM 37.15 = 1, il y a (traitement après arrêt d’urgence)• un freinage rapide de l’axe• lorsque l’axe est immobile DP+ et DP− = 0 ; TEC = 1
− si l’entraînement reste sous tension et le déblocage du régu-lateur actif, l’axe est maintenu en asservissement de position.
− si l’entraînement est mis hors tension, l’utilisateur doit activer”Poursuite” après la mise hors tension. Ceci désactive la sur-veillance d’arrêt (immobilisation) (l’axe peut se déplacer légè-rement).
• Si une erreur survient dans cet état (p. ex., l’utilisateur démarresans autorisation de démarrage, ...), la réaction de défaut appro-priée se produit, p. ex. effacement du parcours restant, TEC = 0(nouvelle prescription de déplacement nécessaire).
MODE_IN MOD Mode Mode (voir chapitre 9.2) CodeManuel à vue 01Commande 02Prise de référence 03Semi-automatique relatif 04MDI 06Automatique 08Automatique/bloc par bloc 09
MODE_TYPE
PMO Paramètres demode
Sélection des niveaux de vitesse en mode ”manuel à vue”.
Sélection des niveaux de tension/fréquence en mode ”commande”.
Sélection de la consigne dans le mode ”semi-automatique relatif”(valeur 1...100 ou 254).
OVERRIDE CORR Correction Influence sur le comportement du déplacement. Plage : 0 ... 255 %.
La correction est inopérante en mode ”commande”.
• Correction de vitesse
Plage : 0 à 255 %
Effet sur la vitesse en fonction du pourcentage.
Exemple : doublement du facteur de correction de 100 % à 200 %
− doublement de la vitesse v
− les valeurs d’accélération et de décélération ne sont pasinfluencées.
vakt =vprog CORR
100
Le temps de positionnement n’est pas divisé par deux.
v
200 %
100 %
t
vakt
vprog
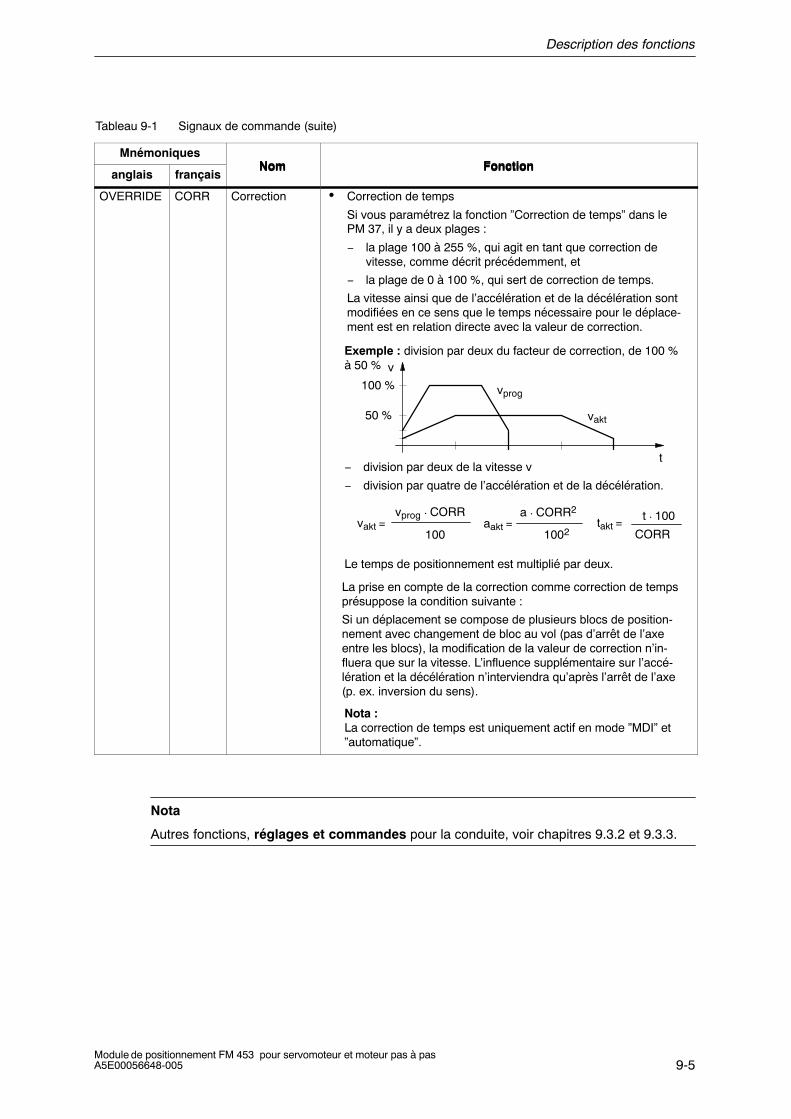
Description des fonctions
9-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-1 Signaux de commande (suite)
MnémoniquesFonctionNom
anglaisFonctionNom
français
OVERRIDE CORR Correction
Nota :La correction de temps est uniquement actif en mode ”MDI” et”automatique”.
La prise en compte de la correction comme correction de tempsprésuppose la condition suivante :
Si un déplacement se compose de plusieurs blocs de position-nement avec changement de bloc au vol (pas d’arrêt de l’axeentre les blocs), la modification de la valeur de correction n’in-fluera que sur la vitesse. L’influence supplémentaire sur l’accé-lération et la décélération n’interviendra qu’après l’arrêt de l’axe(p. ex. inversion du sens).
vakt =vprog CORR
100aakt =
a CORR2
1002takt =
t 100
CORR
− division par deux de la vitesse v
− division par quatre de l’accélération et de la décélération.
Le temps de positionnement est multiplié par deux.
Exemple : division par deux du facteur de correction, de 100 %à 50 %
100 %
t
vakt
vprog
50 %
v
• Correction de temps
Si vous paramétrez la fonction ”Correction de temps” dans lePM 37, il y a deux plages :
− la plage 100 à 255 %, qui agit en tant que correction devitesse, comme décrit précédemment, et
− la plage de 0 à 100 %, qui sert de correction de temps.
La vitesse ainsi que de l’accélération et de la décélération sontmodifiées en ce sens que le temps nécessaire pour le déplace-ment est en relation directe avec la valeur de correction.
Nota
Autres fonctions, réglages et commandes pour la conduite, voir chapitres 9.3.2 et 9.3.3.
Description des fonctions
9-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.1.2 Signalisations en retour
Généralités
Les signalisations en retour indiquent l’état de traitement de l’axe et signalent cet état dansle programme utilisateur.
Le tableau 9-2 décrit les signalisations en retour et leurs fonctions.
Tableau 9-2 Signalisations en retour
SymbolesNom Fonction
anglais françaisNom Fonction
TST_STAT KBPE Commutationinterface busP effectuée
La communication avec le programme utilisateur n’est pas possiblecar l’interface du bus P a été commutée pour fonctionnement avecl’outil de mise en service.
OT_ERR EM/ED Erreur demanipulation/déplacement
Signalisation à l’utilisateur d’une erreur de manipulation ou de déplace-ment (p. ex. transmission d’un ordre illicite tel que S+ et S− en mêmetemps). Cette signalisation d’erreur provoque un abandon du contratde déplacement (cf. chapitre 11).
DATA_ERR ED Erreur dedonnée
... signale à l’utilisateur lorsqu’une erreur de donnée est présente(cf. chapitre 11).
PARA PARA Paramétré Le module est paramétré. Tous les paramètres machine valables pourla conduite d’un axe sont présents sur le module.
ST_ENBLD AUD Autorisationde démar-rage
Signalisation par le FM 453 qu’il est prêt pour le positionnement et lasortie de fonctions.
• L’autorisation de démarrage est mise à ”1” :
− en l’absence d’arrêt statique (stop), d’erreur et si l’entraînementest débloqué,
− lorsque le mode spécifié et la signalisation en retour concord-ent (après changement de mode),
− lorsque aucune fonction de l’axe n’est active (y compris la sor-tie de fonction M et arrêts temporisés) ou lorsque l’exécutiondes fonctions est terminée,
− pour la poursuite du traitement d’une fonction interrompue par”Stop”,
− dans le cas du mode ”automatique”, une fois que la présélec-tion de programme est terminée (un programme actif), et aprèsM0, M2, M30 ou en fin de bloc dans le cas du mode automati-que bloc par bloc.
• L’autorisation de démarrage est remise à ”0” :
− lorsqu’une fonction a été démarrée et qu’elle est active, ou
− lorsqu’une condition (stat.) de démarrage est présente
− en cas d’erreur et pour Stop.
− en poursuite.
• Sans autorisation de démarrage, aucune des fonctions suscepti-bles d’être activées avec ”Déplacement sens +”, ”Déplacementsens −” et ”Start” ne sera exécutée.
Description des fonctions
9-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-2 Signalisations en retour (suite)
SymbolesFonctionNom
anglaisFonctionNom
français
WORKING TEC Traitementen cours
Signalisation qu’une fonction a été démarrée avec ”START” ou ”Dé-placement sens + ou −” et est active.
• ”Traitement en cours” est mis à ”1” dans les cas suivants :
− modes ”manuel à vue”, ”commande” durant le déplacementjusqu’à l’arrêt après suppression de S+, S−
− mode ”prise de référence”, depuis le début du déplacementjusqu’à l’atteinte du point de référence
− modes ”MDI”, ”semi-automatique relatif”, durant le positionne-ment et/ou le traitement des fonctions du bloc MDI
− mode ”automatique”, pendant l’exécution d’un programme dedéplacement, jusqu’à la fin du programme
• ”Traitement en cours” est mis à ”0” dans les cas suivants :
− en cas de défaut et pour ”Redémarrage”
− en cas de changement de mode
− après arrêt de l’axe
WAIT_EI AAUE Attente del’autorisationexterne
Uniquement active lorsqu’une entrée TOR a été paramétrée dansPM34 (cf. chap. 9.8.1).
Mise à ”1” lorsque l’entrée de validation n’a pas encore été mise à ”1”ou remise à ”0” pour un déplacement activé.
DT_RUN ATEC Arrêt tempo-risé en cours
Active seulement dans les modes ”automatique” et ”MDI”.
Dès qu’un bloc de déplacement avec arrêt temporisé est exploité, lesignal ATEC est sorti pendant la durée programmée.
PR_BACK REV Exécution duprog. àrebours
Mise à ”1” après démarrage en mode ”automatique”, lorsqu’un pro-gramme est exécuté en commençant par la fin.
MODE_OUT
MAC Mode actif Le mode choisi ne fait l’objet d’une signalisation en retour que lorsqu’ilest actif de manière interne. En cas de changement de mode, il faut p.ex. arrêter un déplacement avant qu’un autre mode ne puisse être actif(ne s’applique pas au passage entre ”automatique” et ”automatiquebloc par bloc”).
SYNC SYNC Synchronisé Le module est synchronisé (cf. chap. 9.6.4)
Condition pour les déplacements s’axe dans les modes :
• semi-automatique
• MDI
• automatique
MSR_DONE
MTR Mesureterminée
Signalisation d’une mesure effectuée (cf. chap. 9.3.11)

Description des fonctions
9-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 9-2 Signalisations en retour (suite)
SymbolesFonctionNom
anglaisFonctionNom
français
GO_P
GO_M
DP+
DP−
Déplacementsens positif
Déplacementsens négatif
Signifie que l’axe se déplace dans le sens des valeurs réelles crois-santes ou qu’une tension ”+” est sortie en mode ”commande”.
Signifie que l’axe se déplace dans le sens des valeurs réelles décrois-santes ou qu’une tension ”−” est sortie en mode ”commande”.
• Dès qu’un déplacement actif est présent, les signalisations (DP+)ou (DP−) sont sorties en fonction du sens de déplacement. Elless’excluent mutuellement.
• ”Déplacement positif” ou ”Déplacement négatif” est activé dès ledébut de la phase d’accélération et persiste jusqu’à l’arrêt de l’axeou jusqu’à l’arrivée dans la zone de destination PA.
ST_SERVO EDR Etat Déblo-cage régula-teur
• Signalisation en retour de l’état Déblocage régulateur après lance-ment du réglage ponctuel
• voir aussi chap. 9.3.2 “Déblocage régulateur”
• voir aussi chap. 11.1 Réaction “ARRET total”
FVAL_DONE
AVVT Forçagevaleur réelleau vol ter-miné
”Forçage de valeur réelle au vol” est exécuté.
Il suffit d’activer ”Forçage de valeur réelle au vol” pour remettre le sig-nal à ”0” (cf. chap. 9.3.6).
NUM_MF NFM N° de fonct.M
Fonction M 0...99
STR_MF MFM Modificationde la fonct. M
Signalisation se présentant en même temps que le ”n° de fonction M”.
• Si l’on a programmé des fonctions M dans un bloc de déplace-ment, leur délivrance est signalée par la mise à ”1” de ”Modificationde la fonction M”.
• ”Modification de la fonction M” reste à ”1” :
− jusqu’à ce que le temps soit écoulé dans le cas de fonctions Mà commande temporelle,
− jusqu’à ce que l’acquittement par l’utilisateur dans le cas defonctions M à commande par acquittement.

Description des fonctions
9-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-2 Signalisations en retour (suite)
SymbolesFonctionNom
anglaisFonctionNom
français
POS_RCD PA Positionatteinte, arrêt
• Cette signalisation est transmise lorsque la position de destinationspécifiée est correctement atteinte, et reste activée jusqu’au dé-placement suivant de l’axe.
• Par accostage correct de la position de destination on entend uneapproche de la valeur réelle à la position de destination, avec pas-sage en dessous de la tolérance fixée (zone d’arrêt) en l’espace dutemps enveloppe paramétré. Si ce n’est pas le cas, il y a signalisa-tion de défaut et interruption du positionnement.
• L’activation de (PA) n’a lieu que dans les modes suivants et dansles conditions suivantes :
− ”Prise de référence” : le point de référence doit avoir été inté-gralement atteint (décalage de point de référence compris).
− ”MDI”, ”semi-automatique relatif” : la position spécifiée a étéatteinte.
− ”Automatique” : un bloc de déplacement a été positionné jus-qu’au bout, et l’axe reste à l’arrêt jusqu’au déplacement suivant.
• PA n’est pas activé lorsqu’il n’y a pas encore eu de synchronisa-tion.

Description des fonctions
9-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.1.3 Introductions générales pour l’utilisation
Vue d’ensemble
Pour pouvoir transférer des données sur le FM 453, un mode doit être actif (p. ex. ”Manuel àvue” Mode = 1 et MAC = 1). Cela signifie que la communication avec le module FM 453 aété lancée et que le FM 453 possède des paramètres machine valides.
Modes”MOD = code”
Signaux de commandeassociés
Signalisations en retourassociées
Données/réglagesnécessaires
Manuel à vue (01) [S+], [S−], [STOP], [DE], [CORR], [PMO] = 1 ou 2
[TEC], [AUD], [DP+], [DP−],[SYNC], [AAUE]
niveaux de vitesse 1, 2(DB utilisateur, DBX38.0)déblocage régulateur(DB utilisateur, DBX34.0)
Commande (02) [S+], [S−], [STOP], [DE],[PMO] = 1 ou 2
[TEC], [AUD], [DP+], [DP−],[AAUE]
niveaux de tension/fréquence 1, 2 (DB utilisateur, DBX38.1)
Prise de référence (03) [S+], [S−], [ST], [STOP],[DE], [CORR]
[TEC], [AUD], [DP+], [DP−],[AAUE], [SYNC], [PA]
déblocage régulateur(DB utilisateur, DBX34.0)
Semi-automatique rela-tif (04)
[S+], [S−], [STOP], [DE], [CORR], [PMO] = 1...100pour table de consignes ou254
[TEC], [AUD], [DP+], [DP−],[AAUE], [SYNC], [PA]
niveaux de vitesse 1, 2(DB utilisateur, DBX38.0)déblocage régulateur(DB utilisateur, DBX34.0)consigne pour semi-au-tomatique (DB utilisateur, DBX34.2)(uniquement pour PMO= 254, pour PMO =1...100, les consignescorrespondantes doiventêtre paramétrées)
MDI (06) [ST], [STOP], [DE], [AFM],[CORR]
[TEC], [AUD], [DP+], [DP−],[AAUE], [SYNC], [PA],[MFM], [NFM], [ATEC]
bloc MDI (DB utilisateur, DBX38.3)déblocage régulateur(DB utilisateur, DBX34.0)
Automatique (08)
Automatique bloc àbloc (09)
[ST], [BO], [VAL], [STOP],[DE], [AFM], [CORR]
[TEC], [AUD], [DP+], [DP−],[AAUE], [SYNC], [PA],[MFM], [ATEC], [PBR], [NFM]
sélection programme(DB utilisateur, DBX39.5)(à condition que le pro-gramme de déplacementcorrespondant ait été pa-ramétré), déblocage régulateur(DB utilisateur, DBX34.0)
Cas d’erreur :
• signalisation par EM/ED − acquittement par AEM/AED
• signalisation par ED − acquittement lors prochaine transmission de données correcte
• signalisation par alarme de diagnostic - acquittement avec ”redémarrage” (DB utilisateur, DBX37.5)
Description des fonctions
9-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Remarques pour l’utilisateur
Vous trouverez ci-après quelques remarques concernant le démarrage d’un déplacement etle comportement du FM 453 en présence d’une modification d’état de la CPU S7-400 :
condition : le FM 453 doit avoir été correctement paramétré.
• un mode doit d’abord être réglé. Activer ensuite le déblocage du régulateur pour quel’axe ne ”dérive” pas.
• avant de démarrer un déplacement dans un mode, les données correspondantes doiventavoir été préalablement transmises (p. ex. niveaux de vitesse) et la correction doit être> 0.
• Le démarrage du mouvement n’est possible que si l’autorisation de démarrage et l’entréede validation paramétrée sont à ”1”.
L’autorisation de démarrage est à ”1” lorsque
− aucune erreur n’est présente
− un mode est actif
− pas de stop
− le déblocage d’entraînement est à ”1”
• Un signal statique de stop inhibe tout déplacement et traitement de bloc.
• Comportement du module FM 453 au passage de ”RUN” sur ”STOP” de la CPU S7-400 :
− comme décrit sous Redémarrage (voir chapitre 9.3.3)
− les sorties TOR sont inhibées
− inhibation de l’interface vers le programme utilisateur
• Comportement du module FM 453 au passage de ”STOP” sur ”RUN” de la CPU S7-400 :
un démarrage du module est exécuté.
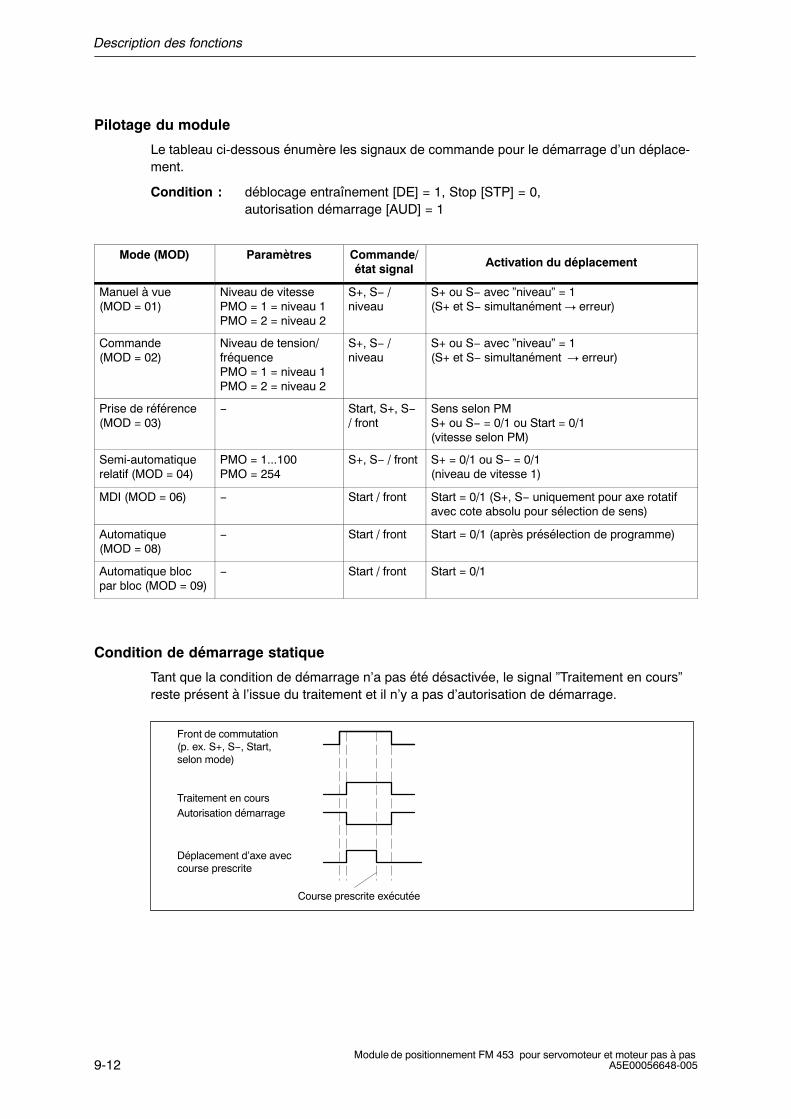
Description des fonctions
9-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Pilotage du module
Le tableau ci-dessous énumère les signaux de commande pour le démarrage d’un déplace-ment.
Condition : déblocage entraînement [DE] = 1, Stop [STP] = 0,autorisation démarrage [AUD] = 1
Mode (MOD) Paramètres Commande/état signal Activation du déplacement
Manuel à vue (MOD = 01)
Niveau de vitesse PMO = 1 = niveau 1PMO = 2 = niveau 2
S+, S− /niveau
S+ ou S− avec ”niveau” = 1(S+ et S− simultanément erreur)
Commande (MOD = 02)
Niveau de tension/fréquencePMO = 1 = niveau 1PMO = 2 = niveau 2
S+, S− /niveau
S+ ou S− avec ”niveau” = 1(S+ et S− simultanément erreur)
Prise de référence(MOD = 03)
− Start, S+, S−/ front
Sens selon PMS+ ou S− = 0/1 ou Start = 0/1(vitesse selon PM)
Semi-automatiquerelatif (MOD = 04)
PMO = 1...100PMO = 254
S+, S− / front S+ = 0/1 ou S− = 0/1(niveau de vitesse 1)
MDI (MOD = 06) − Start / front Start = 0/1 (S+, S− uniquement pour axe rotatifavec cote absolu pour sélection de sens)
Automatique (MOD = 08)
− Start / front Start = 0/1 (après présélection de programme)
Automatique blocpar bloc (MOD = 09)
− Start / front Start = 0/1
Condition de démarrage statique
Tant que la condition de démarrage n’a pas été désactivée, le signal ”Traitement en cours”reste présent à l’issue du traitement et il n’y a pas d’autorisation de démarrage.
Front de commutation(p. ex. S+, S−, Start,selon mode)
Traitement en coursAutorisation démarrage
Déplacement d’axe aveccourse prescrite
Course prescrite exécutée
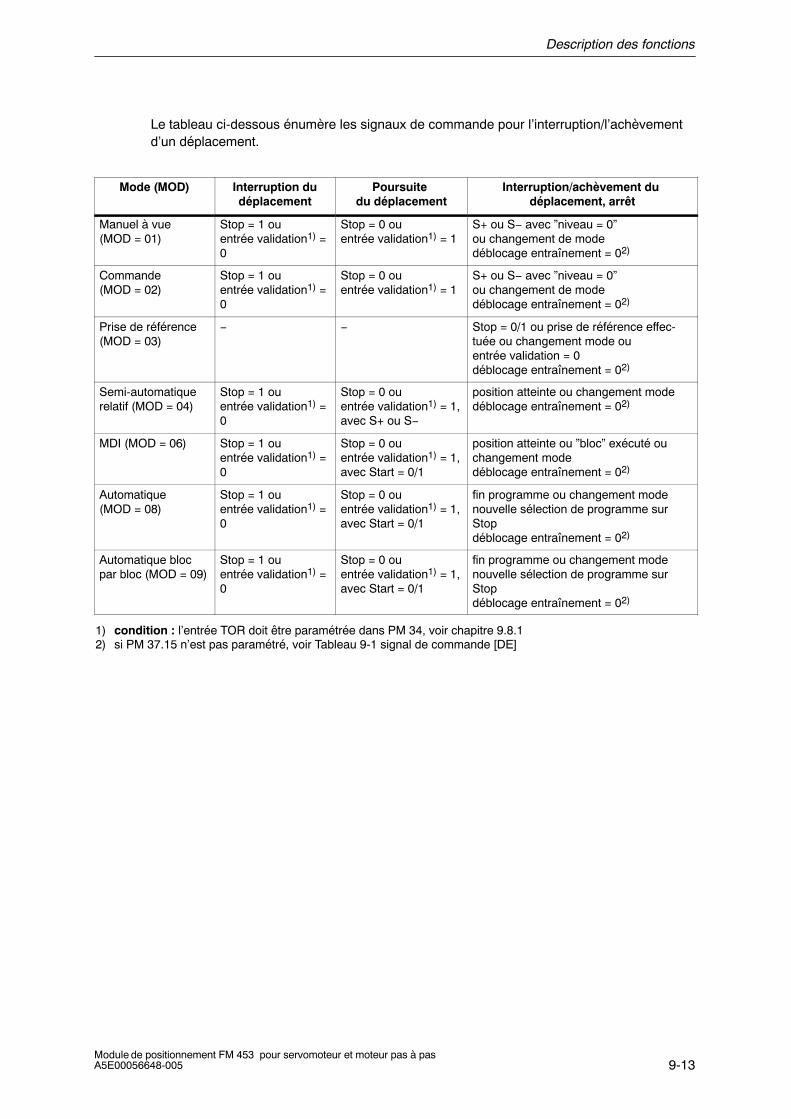
Description des fonctions
9-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Le tableau ci-dessous énumère les signaux de commande pour l’interruption/l’achèvementd’un déplacement.
Mode (MOD) Interruption dudéplacement
Poursuite du déplacement
Interruption/achèvement du déplacement, arrêt
Manuel à vue (MOD = 01)
Stop = 1 ouentrée validation1) =0
Stop = 0 ouentrée validation1) = 1
S+ ou S− avec ”niveau = 0”ou changement de modedéblocage entraînement = 02)
Commande (MOD = 02)
Stop = 1 ouentrée validation1) =0
Stop = 0 ouentrée validation1) = 1
S+ ou S− avec ”niveau = 0”ou changement de modedéblocage entraînement = 02)
Prise de référence(MOD = 03)
− − Stop = 0/1 ou prise de référence effec-tuée ou changement mode ouentrée validation = 0déblocage entraînement = 02)
Semi-automatiquerelatif (MOD = 04)
Stop = 1 ouentrée validation1) =0
Stop = 0 ou entrée validation1) = 1,avec S+ ou S−
position atteinte ou changement modedéblocage entraînement = 02)
MDI (MOD = 06) Stop = 1 ouentrée validation1) =0
Stop = 0 ou entrée validation1) = 1,avec Start = 0/1
position atteinte ou ”bloc” exécuté ouchangement modedéblocage entraînement = 02)
Automatique (MOD = 08)
Stop = 1 ouentrée validation1) =0
Stop = 0 ou entrée validation1) = 1,avec Start = 0/1
fin programme ou changement modenouvelle sélection de programme surStopdéblocage entraînement = 02)
Automatique blocpar bloc (MOD = 09)
Stop = 1 ouentrée validation1) =0
Stop = 0 ou entrée validation1) = 1,avec Start = 0/1
fin programme ou changement modenouvelle sélection de programme surStopdéblocage entraînement = 02)
1) condition : l’entrée TOR doit être paramétrée dans PM 34, voir chapitre 9.8.12) si PM 37.15 n’est pas paramétré, voir Tableau 9-1 signal de commande [DE]
Description des fonctions
9-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.2 Modes
Généralités
Les modes de fonctionnement suivants sont réalisés dans le FM 453 :
• manuel à vue (MàV) code 01
• commande (CD) code 02
• prise de référence (REF) code 03
• semi-automatique relatif (SAR) code 04
• MDI (Manual Data Input) code 06
• automatique (Auto) code 08
• automatique bloc par bloc (AutoB) code 09
Choix du mode de fonctionnement
L’appel du bloc POS_CTRL provoque le transfert vers le FM 453 du mode (code) inscrit parle programme utilisateur dans le bloc de données utilisateur.
La commande de l’axe s’effectue par mise à ”1” et à ”0” des signaux de commande corres-pondants.
Signalisation en retour du mode
En cas de spécification d’un mode, le FM 453 délivre au programme utilisateur une signal-isation en retour relative au mode spécifié. Le mode est actif s’il y a concordance entre lemode présélectionné et le mode signalé en retour.
Changement de mode
Un changement de mode déclenche un arrêt interne.
En cas de changement de mode pendant un déplacement actif, le passage à l’autre moden’interviendra qu’après l’arrêt de l’axe. La signalisation en retour des modes aura lieu lors-que le déplacement dans l’ancien mode sera terminé.
Ceci ne s’applique pas au passage du mode automatique bloc par bloc au mode automati-que pur.

Description des fonctions
9-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.2.1 Manuel à vue
Généralités
En mode ”Manuel à vue”, les déplacements de l’axe sont définis par les touches de sens(S+ ou S−) et par la vitesse.
Vitesse
Avant de pouvoir déplacer l’axe, il faut que les vitesses 1 et 2 aient été transmises auFM 453. (DB utilisateur, DBX38.0)
Avec le paramètre de mode (PMO), vous avez le choix entre deux vitesses indépendantesl’une de l’autre (niveau 1 et niveau 2).
La vitesse peut en outre être influencée par une correction et modifiée pendant le déplace-ment.
Désignation Valeur minimale Valeur maximale Unité
Vitesse 10 500 000 000 UI/min
UI signifie unité interne (cf. chap. 5.3.1)
Actions de l’utilisateur
Le tableau suivant vous donne une vue d’ensemble des actions à la charge de l’utilisateur.
Déclenchement du déplacement,sens
Sélection duniveau
Vitesse
S+ ou S ”commande par niveau”PMO = 1 Valeur du niveau de vitesse 1
S+ ou S− ”commande par niveau”PMO = 2 Valeur du niveau de vitesse 2
Nota
Tenir également compte des indications du chapitre 9.1.3 !
Actions de commande
Conditions :
• le module FM 453 est paramétré
• le mode est sélectionné et signalé en retour
• déblocage entraînement [DE] = 1 (signal de commande, DB utilisateur, DBX15.7)
• Stop [STP] = 0 (signal de commande, DB utilisateur, DBX15.1)
• déblocage régulateur (DR) = 1 (DB utilisateur, DBX34.0)
• les niveaux de vitesse 1 et 2 sont transmis.

Description des fonctions
9-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 9-3 Actions de commande pour le mode ”Manuel à vue” (exemples)
Nom de signal Niveau Explication
Action de commande 1, activer le mode ”Manuel à vue”
Signal de commande :
mode [MOD]
Signalisations en retour :
mode actif [MAC]
autorisation démarrage [AUD]
L’utilisateur choisit [MOD].
Le module signale en retour [MAC] et [AUD].
Action de commande 2, déplacer axe − sens positif
Signaux de commande :
sens + [S+]
déblocage entraînement [DE]
Signalisations en retour :
déplacement sens + [DP+]
autorisation démarrage [AUD]
traitement en cours [TEC]
Si [AUD] et [DE] sont présents, [S+] est activé.
L’axe supprime [AUD] et émet les signalisations [TEC] et[DP+].
Action de commande 3, arrêter axe − sens positif
Signal de commande :
sens + [S+]
Signalisations en retour :
déplacement sens + [DP+]
autorisation démarrage [AUD]
traitement en cours [TEC]
[S+] est supprimé.
Une fois que l’axe s’est arrêté selon la rampe de frei-nage1), les signalisations [TEC] et [DP+] sont suppriméeset [AUD] est activé.
Avant l’immobilisation de l’axe, il est possible de resélec-tionner le sens.
Action de commande 4, déplacer axe − sens négatif
Signaux de commande :
sens − [S−]
niveau de vitesse [PMO]
Signalisations en retour :
déplacement sens − [DP−]
traitement en cours [TEC]
[S−] est activé avec le niveau de vitesse 2.
L’axe se déplace avec le niveau de vitesse 2, signale[TEC] et [DP−]. Le signal [AUD] est supprimé.
Action de commande 5, commuter sur vitesse de réglage
Signal de commande :
niveau de vitesse [PMO] La commutation de [niveau 2 sur niveau 1] entraîne unetransition dynamique entre les niveaux de vitesse 1 et 2.
1) pas valable pour entraînement à moteur pas à pas
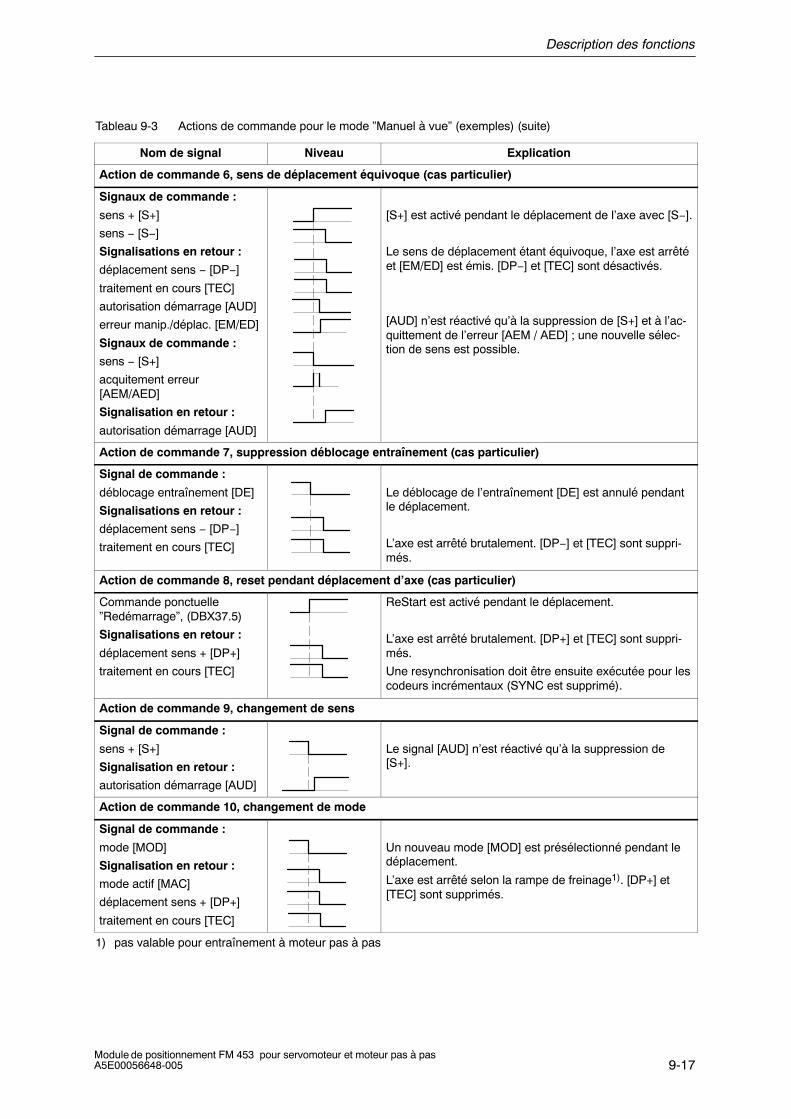
Description des fonctions
9-17Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-3 Actions de commande pour le mode ”Manuel à vue” (exemples) (suite)
Nom de signal ExplicationNiveau
Action de commande 6, sens de déplacement équivoque (cas particulier)
Signaux de commande :
sens + [S+]
sens − [S−]
Signalisations en retour :
déplacement sens − [DP−]
traitement en cours [TEC]
autorisation démarrage [AUD]
erreur manip./déplac. [EM/ED]
Signaux de commande :
sens − [S+]
acquitement erreur [AEM/AED]
Signalisation en retour :
autorisation démarrage [AUD]
[S+] est activé pendant le déplacement de l’axe avec [S−].
Le sens de déplacement étant équivoque, l’axe est arrêtéet [EM/ED] est émis. [DP−] et [TEC] sont désactivés.
[AUD] n’est réactivé qu’à la suppression de [S+] et à l’ac-quittement de l’erreur [AEM / AED] ; une nouvelle sélec-tion de sens est possible.
Action de commande 7, suppression déblocage entraînement (cas particulier)
Signal de commande :
déblocage entraînement [DE]
Signalisations en retour :
déplacement sens − [DP−]
traitement en cours [TEC]
Le déblocage de l’entraînement [DE] est annulé pendantle déplacement.
L’axe est arrêté brutalement. [DP−] et [TEC] sont suppri-més.
Action de commande 8, reset pendant déplacement d’axe (cas particulier)
Commande ponctuelle”Redémarrage”, (DBX37.5)
Signalisations en retour :
déplacement sens + [DP+]
traitement en cours [TEC]
ReStart est activé pendant le déplacement.
L’axe est arrêté brutalement. [DP+] et [TEC] sont suppri-més.
Une resynchronisation doit être ensuite exécutée pour lescodeurs incrémentaux (SYNC est supprimé).
Action de commande 9, changement de sens
Signal de commande :
sens + [S+]
Signalisation en retour :
autorisation démarrage [AUD]
Le signal [AUD] n’est réactivé qu’à la suppression de[S+].
Action de commande 10, changement de mode
Signal de commande :
mode [MOD]
Signalisation en retour :
mode actif [MAC]
déplacement sens + [DP+]
traitement en cours [TEC]
Un nouveau mode [MOD] est présélectionné pendant ledéplacement.
L’axe est arrêté selon la rampe de freinage1). [DP+] et[TEC] sont supprimés.
1) pas valable pour entraînement à moteur pas à pas
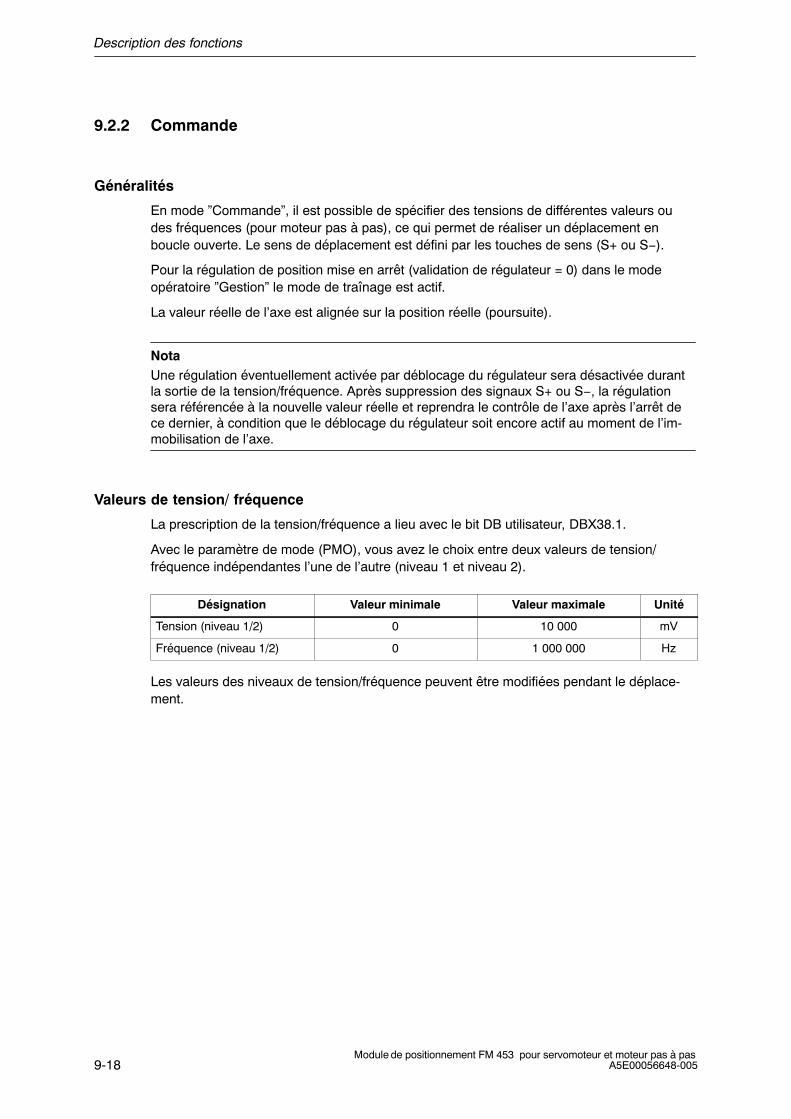
Description des fonctions
9-18Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.2.2 Commande
Généralités
En mode ”Commande”, il est possible de spécifier des tensions de différentes valeurs oudes fréquences (pour moteur pas à pas), ce qui permet de réaliser un déplacement enboucle ouverte. Le sens de déplacement est défini par les touches de sens (S+ ou S−).
Pour la régulation de position mise en arrêt (validation de régulateur = 0) dans le modeopératoire ”Gestion” le mode de traînage est actif.
La valeur réelle de l’axe est alignée sur la position réelle (poursuite).
NotaUne régulation éventuellement activée par déblocage du régulateur sera désactivée durantla sortie de la tension/fréquence. Après suppression des signaux S+ ou S−, la régulationsera référencée à la nouvelle valeur réelle et reprendra le contrôle de l’axe après l’arrêt dece dernier, à condition que le déblocage du régulateur soit encore actif au moment de l’im-mobilisation de l’axe.
Valeurs de tension/ fréquence
La prescription de la tension/fréquence a lieu avec le bit DB utilisateur, DBX38.1.
Avec le paramètre de mode (PMO), vous avez le choix entre deux valeurs de tension/fréquence indépendantes l’une de l’autre (niveau 1 et niveau 2).
Désignation Valeur minimale Valeur maximale Unité
Tension (niveau 1/2) 0 10 000 mV
Fréquence (niveau 1/2) 0 1 000 000 Hz
Les valeurs des niveaux de tension/fréquence peuvent être modifiées pendant le déplace-ment.
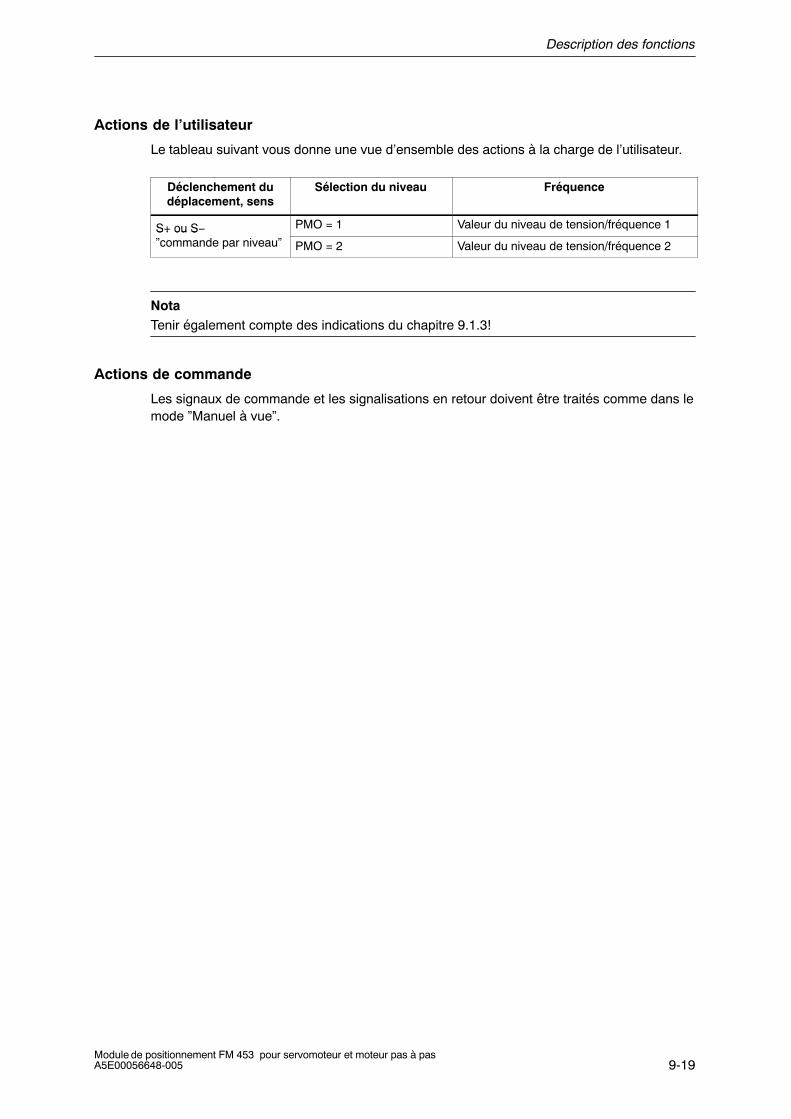
Description des fonctions
9-19Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Actions de l’utilisateur
Le tableau suivant vous donne une vue d’ensemble des actions à la charge de l’utilisateur.
Déclenchement dudéplacement, sens
Sélection du niveau Fréquence
S+ ou S− PMO = 1 Valeur du niveau de tension/fréquence 1S+ ou S”commande par niveau” PMO = 2 Valeur du niveau de tension/fréquence 2
NotaTenir également compte des indications du chapitre 9.1.3!
Actions de commande
Les signaux de commande et les signalisations en retour doivent être traités comme dans lemode ”Manuel à vue”.
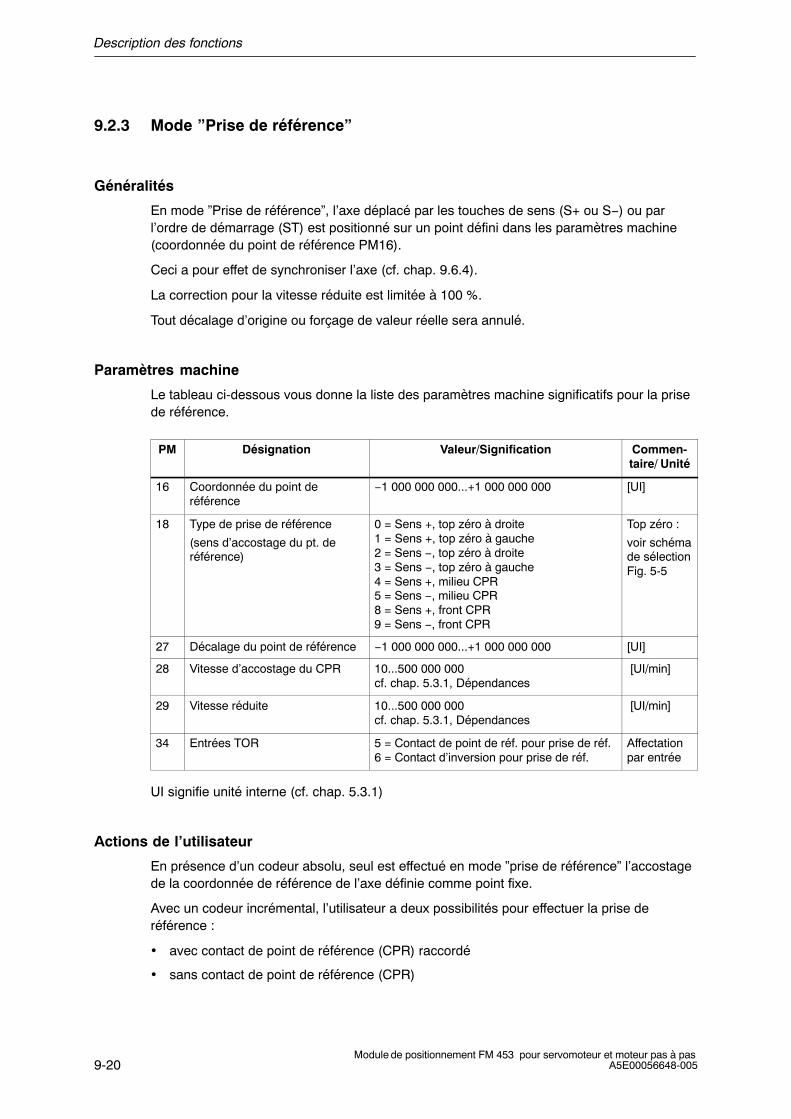
Description des fonctions
9-20Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.2.3 Mode ”Prise de référence”
Généralités
En mode ”Prise de référence”, l’axe déplacé par les touches de sens (S+ ou S−) ou parl’ordre de démarrage (ST) est positionné sur un point défini dans les paramètres machine(coordonnée du point de référence PM16).
Ceci a pour effet de synchroniser l’axe (cf. chap. 9.6.4).
La correction pour la vitesse réduite est limitée à 100 %.
Tout décalage d’origine ou forçage de valeur réelle sera annulé.
Paramètres machine
Le tableau ci-dessous vous donne la liste des paramètres machine significatifs pour la prisede référence.
PM Désignation Valeur/Signification Commen-taire/ Unité
16 Coordonnée du point deréférence
−1 000 000 000...+1 000 000 000 [UI]
18 Type de prise de référence
(sens d’accostage du pt. deréférence)
0 = Sens +, top zéro à droite1 = Sens +, top zéro à gauche2 = Sens −, top zéro à droite3 = Sens −, top zéro à gauche4 = Sens +, milieu CPR5 = Sens −, milieu CPR8 = Sens +, front CPR9 = Sens −, front CPR
Top zéro :
voir schémade sélectionFig. 5-5
27 Décalage du point de référence −1 000 000 000...+1 000 000 000 [UI]
28 Vitesse d’accostage du CPR 10...500 000 000cf. chap. 5.3.1, Dépendances
[UI/min]
29 Vitesse réduite 10...500 000 000cf. chap. 5.3.1, Dépendances
[UI/min]
34 Entrées TOR 5 = Contact de point de réf. pour prise de réf.6 = Contact d’inversion pour prise de réf.
Affectationpar entrée
UI signifie unité interne (cf. chap. 5.3.1)
Actions de l’utilisateur
En présence d’un codeur absolu, seul est effectué en mode ”prise de référence” l’accostagede la coordonnée de référence de l’axe définie comme point fixe.
Avec un codeur incrémental, l’utilisateur a deux possibilités pour effectuer la prise deréférence :
• avec contact de point de référence (CPR) raccordé
• sans contact de point de référence (CPR)
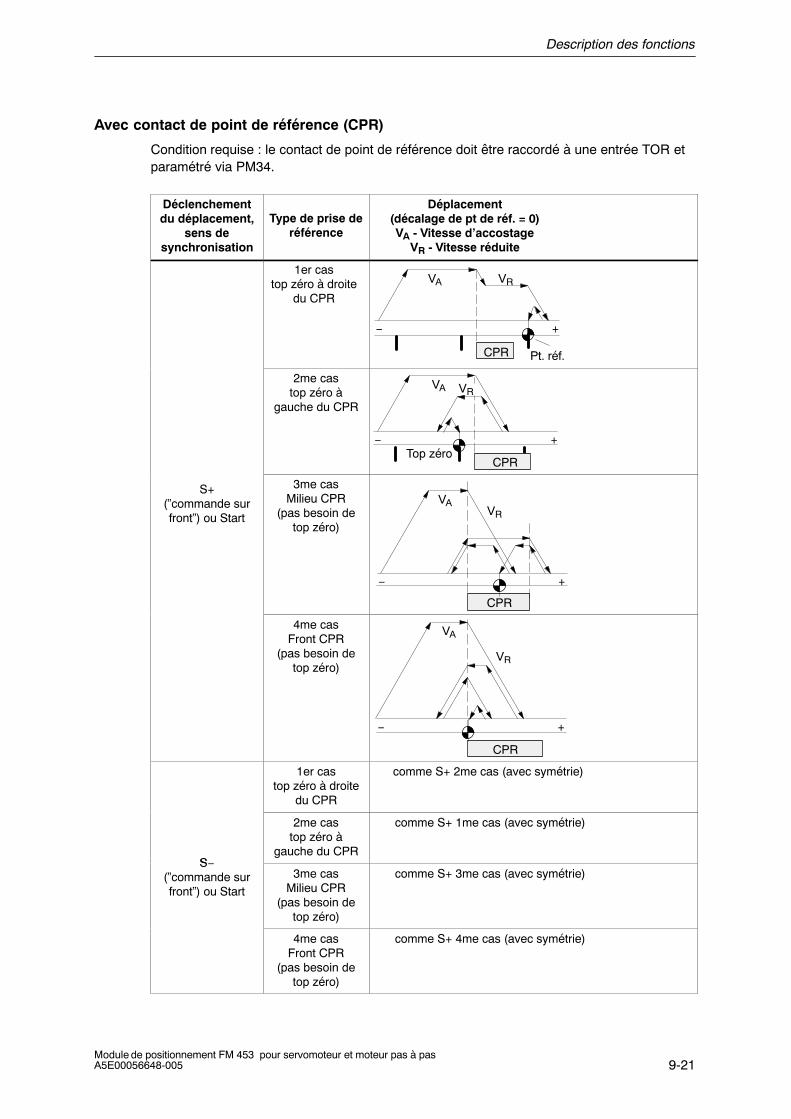
Description des fonctions
9-21Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Avec contact de point de référence (CPR)
Condition requise : le contact de point de référence doit être raccordé à une entrée TOR etparamétré via PM34.
Déclenchementdu déplacement,
sens desynchronisation
Type de prise deréférence
Déplacement(décalage de pt de réf. = 0)VA - Vitesse d’accostage
VR - Vitesse réduite
1er castop zéro à droite
du CPR
CPR
VA VR
− +
Pt. réf.
2me castop zéro à
gauche du CPR
VA VR
− +
CPRTop zéro
S+(”commande surfront”) ou Start
3me casMilieu CPR
(pas besoin detop zéro)
CPR
VAVR
− +
4me casFront CPR
(pas besoin detop zéro)
CPR
VA
VR
− +
1er castop zéro à droite
du CPR
comme S+ 2me cas (avec symétrie)
S
2me castop zéro à
gauche du CPR
comme S+ 1me cas (avec symétrie)
S−(”commande surfront”) ou Start
3me casMilieu CPR
(pas besoin detop zéro)
comme S+ 3me cas (avec symétrie)
4me casFront CPR
(pas besoin detop zéro)
comme S+ 4me cas (avec symétrie)
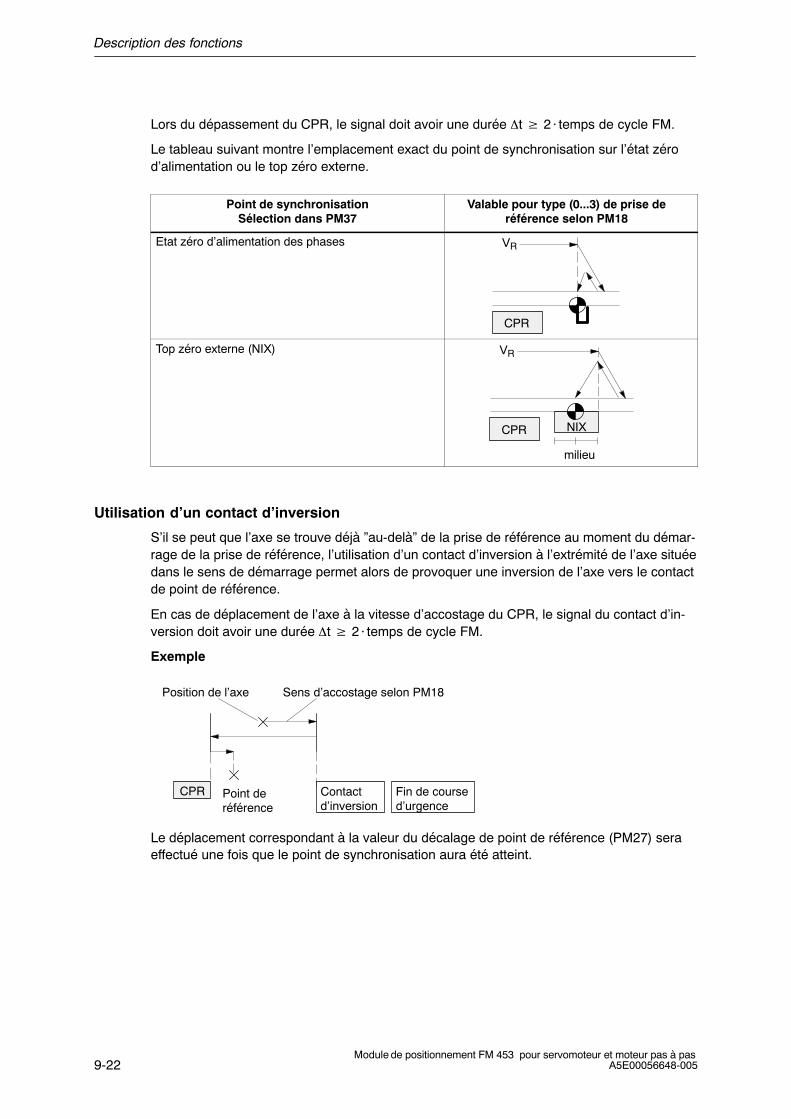
Description des fonctions
9-22Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Lors du dépassement du CPR, le signal doit avoir une durée ∆t 2temps de cycle FM.
Le tableau suivant montre l’emplacement exact du point de synchronisation sur l’état zérod’alimentation ou le top zéro externe.
Point de synchronisationSélection dans PM37
Valable pour type (0...3) de prise deréférence selon PM18
Etat zéro d’alimentation des phases
CPR
VR
Top zéro externe (NIX)
CPR
VR
NIX
milieu
Utilisation d’un contact d’inversion
S’il se peut que l’axe se trouve déjà ”au-delà” de la prise de référence au moment du démar-rage de la prise de référence, l’utilisation d’un contact d’inversion à l’extrémité de l’axe situéedans le sens de démarrage permet alors de provoquer une inversion de l’axe vers le contactde point de référence.
En cas de déplacement de l’axe à la vitesse d’accostage du CPR, le signal du contact d’in-version doit avoir une durée ∆t 2temps de cycle FM.
Exemple
Sens d’accostage selon PM18
Contactd’inversion
Fin de coursed’urgence
Point deréférence
Position de l’axe
CPR
Le déplacement correspondant à la valeur du décalage de point de référence (PM27) seraeffectué une fois que le point de synchronisation aura été atteint.
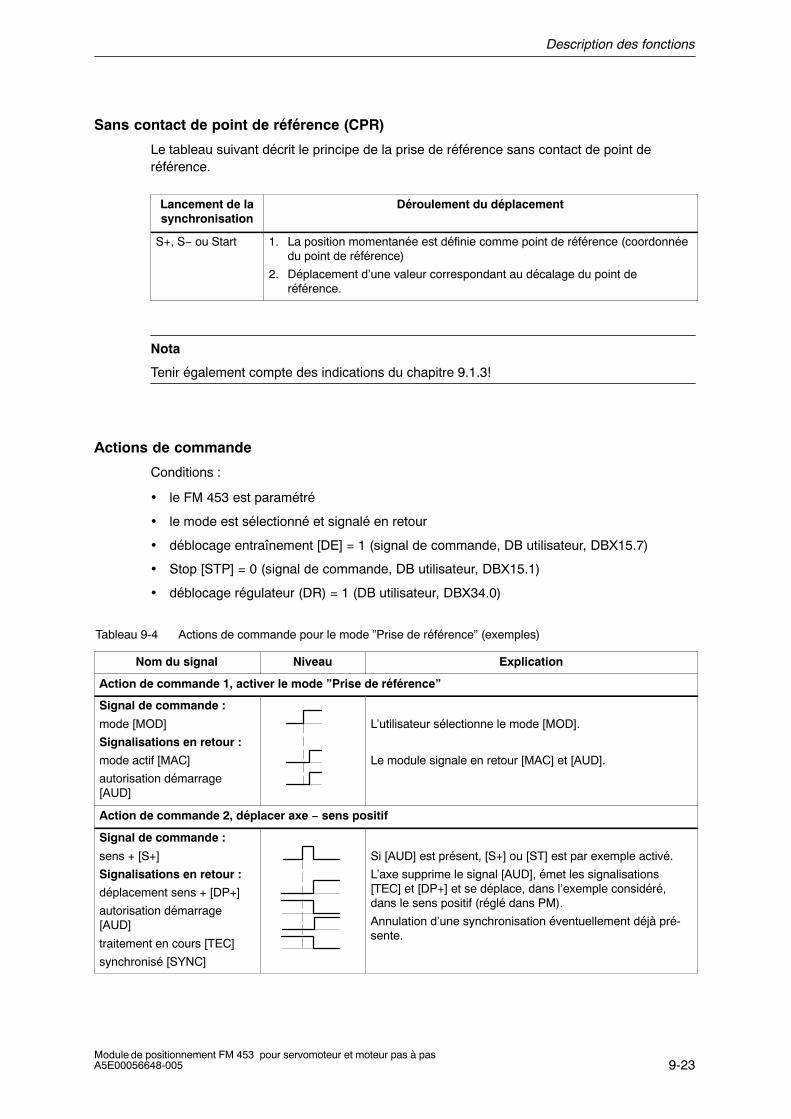
Description des fonctions
9-23Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Sans contact de point de référence (CPR)
Le tableau suivant décrit le principe de la prise de référence sans contact de point deréférence.
Lancement de lasynchronisation
Déroulement du déplacement
S+, S− ou Start 1. La position momentanée est définie comme point de référence (coordonnéedu point de référence)
2. Déplacement d’une valeur correspondant au décalage du point deréférence.
Nota
Tenir également compte des indications du chapitre 9.1.3!
Actions de commande
Conditions :
• le FM 453 est paramétré
• le mode est sélectionné et signalé en retour
• déblocage entraînement [DE] = 1 (signal de commande, DB utilisateur, DBX15.7)
• Stop [STP] = 0 (signal de commande, DB utilisateur, DBX15.1)
• déblocage régulateur (DR) = 1 (DB utilisateur, DBX34.0)
Tableau 9-4 Actions de commande pour le mode ”Prise de référence” (exemples)
Nom du signal Niveau Explication
Action de commande 1, activer le mode ”Prise de référence”
Signal de commande :
mode [MOD]
Signalisations en retour :
mode actif [MAC]
autorisation démarrage[AUD]
L’utilisateur sélectionne le mode [MOD].
Le module signale en retour [MAC] et [AUD].
Action de commande 2, déplacer axe − sens positif
Signal de commande :
sens + [S+]
Signalisations en retour :
déplacement sens + [DP+]
autorisation démarrage[AUD]
traitement en cours [TEC]
synchronisé [SYNC]
Si [AUD] est présent, [S+] ou [ST] est par exemple activé.
L’axe supprime le signal [AUD], émet les signalisations[TEC] et [DP+] et se déplace, dans l’exemple considéré,dans le sens positif (réglé dans PM).
Annulation d’une synchronisation éventuellement déjà pré-sente.
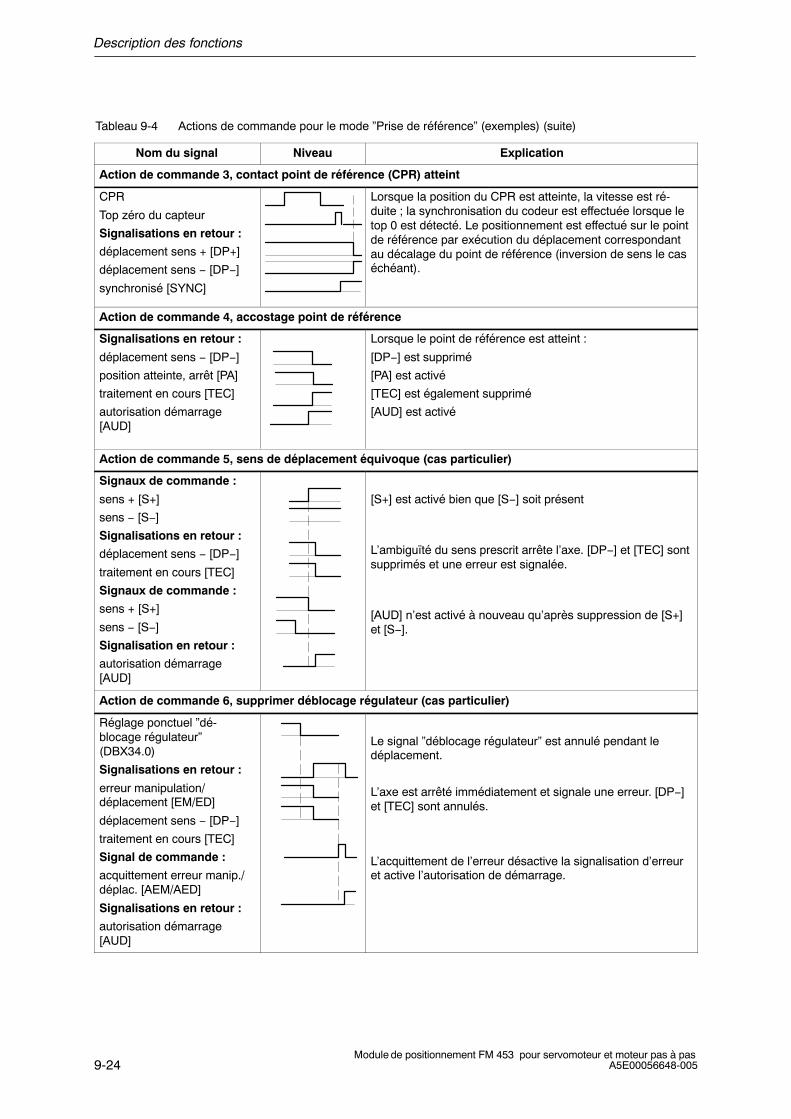
Description des fonctions
9-24Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 9-4 Actions de commande pour le mode ”Prise de référence” (exemples) (suite)
Nom du signal ExplicationNiveau
Action de commande 3, contact point de référence (CPR) atteint
CPR
Top zéro du capteur
Signalisations en retour :
déplacement sens + [DP+]
déplacement sens − [DP−]
synchronisé [SYNC]
Lorsque la position du CPR est atteinte, la vitesse est ré-duite ; la synchronisation du codeur est effectuée lorsque letop 0 est détecté. Le positionnement est effectué sur le pointde référence par exécution du déplacement correspondantau décalage du point de référence (inversion de sens le caséchéant).
Action de commande 4, accostage point de référence
Signalisations en retour :
déplacement sens − [DP−]
position atteinte, arrêt [PA]
traitement en cours [TEC]
autorisation démarrage[AUD]
Lorsque le point de référence est atteint :
[DP−] est supprimé
[PA] est activé
[TEC] est également supprimé
[AUD] est activé
Action de commande 5, sens de déplacement équivoque (cas particulier)
Signaux de commande :
sens + [S+]
sens − [S−]
Signalisations en retour :
déplacement sens − [DP−]
traitement en cours [TEC]
Signaux de commande :
sens + [S+]
sens − [S−]
Signalisation en retour :
autorisation démarrage[AUD]
[S+] est activé bien que [S−] soit présent
L’ambiguïté du sens prescrit arrête l’axe. [DP−] et [TEC] sontsupprimés et une erreur est signalée.
[AUD] n’est activé à nouveau qu’après suppression de [S+]et [S−].
Action de commande 6, supprimer déblocage régulateur (cas particulier)
Réglage ponctuel ”dé-blocage régulateur”(DBX34.0)
Signalisations en retour :
erreur manipulation/déplacement [EM/ED]
déplacement sens − [DP−]
traitement en cours [TEC]
Signal de commande :
acquittement erreur manip./déplac. [AEM/AED]
Signalisations en retour :
autorisation démarrage[AUD]
Le signal ”déblocage régulateur” est annulé pendant ledéplacement.
L’axe est arrêté immédiatement et signale une erreur. [DP−]et [TEC] sont annulés.
L’acquittement de l’erreur désactive la signalisation d’erreuret active l’autorisation de démarrage.

Description des fonctions
9-25Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.2.4 Mode ”semi-automatique relatif”
Généralités
Le mode ”semi-automatique relatif” permet de réaliser des positionnements par déplacementrelatif, c’est-à-dire en commandant le déplacement d’une certaine distance (=consigne) parrapport à la position momentanée.
Le déplacement est déclenché par le biais des touches de sens (S+ et S−).
Transmission de la consigne
Les consignes peuvent être transmises avec le paramètre de mode :
• par le biais du programme utilisateur en transmettant directement une consigne de dé-placement (DB utilisateur, DBX38.2)
Il faut entrer la valeur de consigne pour les incréments avant de déclencher la com-mande d’écriture dans le AW-DB, DBD156.
• via la table des consignes (table CS), voir chap. 5.3.2
La consigne de vitesse utilisée est le niveau de vitesse 1 (DB utilisateur, DBX38.0,cf. chap. 9.2.1), ce dernier étant modifiable durant le déplacement.
Un changement de destination au vol (p. ex. modification de la consigne de position durantun déplacement) n’est pas possible.
Actions de l’utilisateur
Le tableau suivant vous donne une vue d’ensemble des actions à la charge de l’utilisateur.
Déclenchement du déplacement, sens
Sélection de consigne Déplacement à effectuer
S+ ou S−
PMO = 254 selon consigne pour semi-automa-tique (DB utilisateur, DBX38.2)S+ ou S
PMO = 1...100 selon table CS (DB-CS)
Déplacement à effectuer
Désignation Valeur minimale Valeur maximale Unité
Consigne 0 1 000 000 000 UI
UI signifie unité interne (cf. chap. 5.3.1)
Suite à une interruption du déplacement avec ”Stop”, vous pouvez :
• poursuivre le déplacement dans le même sens en actionnant la touche de sens corres-pondante (le parcours restant est exécuté) ;
• poursuivre le déplacement avec ”effacement du parcours restant” (DB utilisateur,DBX37.1) : le parcours restant est effacé et un nouveau déplacement égal à la consigne(si elle n’a pas été modifiée) est effectué ;
• reprendre le déplacement pour un positionnement en sens opposé (le parcours restantest alors automatiquement effacé).
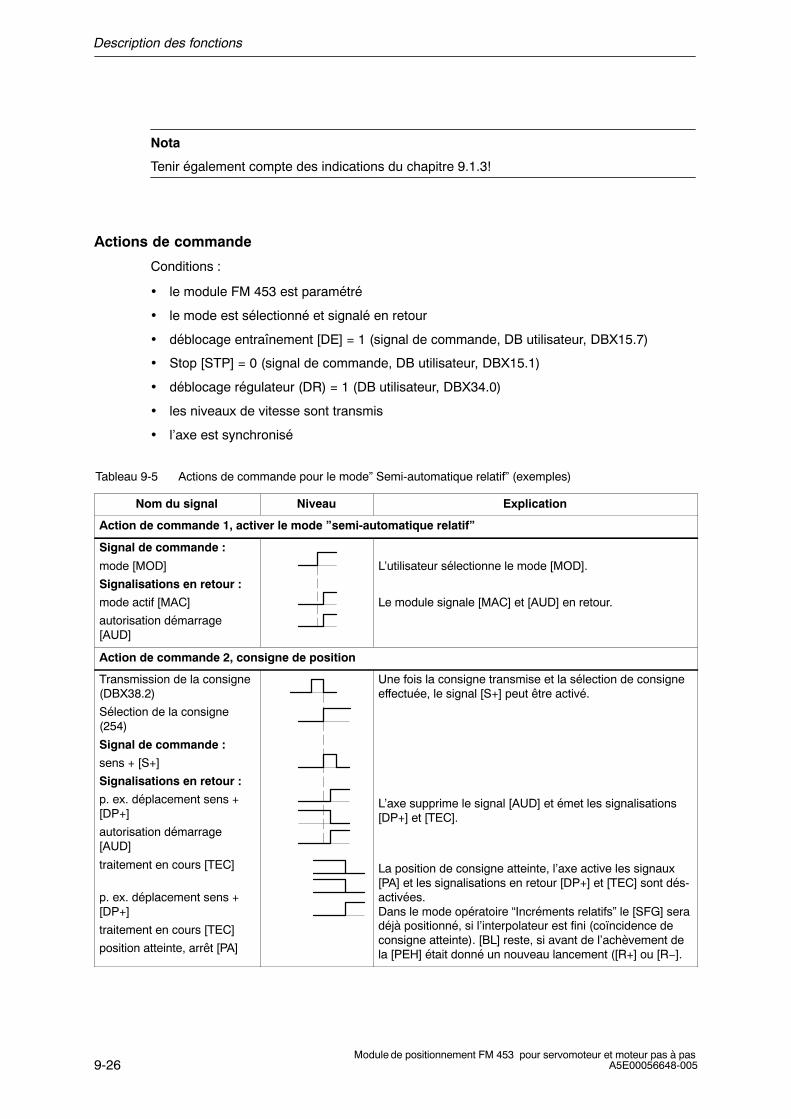
Description des fonctions
9-26Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Nota
Tenir également compte des indications du chapitre 9.1.3!
Actions de commande
Conditions :
• le module FM 453 est paramétré
• le mode est sélectionné et signalé en retour
• déblocage entraînement [DE] = 1 (signal de commande, DB utilisateur, DBX15.7)
• Stop [STP] = 0 (signal de commande, DB utilisateur, DBX15.1)
• déblocage régulateur (DR) = 1 (DB utilisateur, DBX34.0)
• les niveaux de vitesse sont transmis
• l’axe est synchronisé
Tableau 9-5 Actions de commande pour le mode” Semi-automatique relatif” (exemples)
Nom du signal Niveau Explication
Action de commande 1, activer le mode ”semi-automatique relatif”
Signal de commande :
mode [MOD]
Signalisations en retour :
mode actif [MAC]
autorisation démarrage[AUD]
L’utilisateur sélectionne le mode [MOD].
Le module signale [MAC] et [AUD] en retour.
Action de commande 2, consigne de position
Transmission de la consigne(DBX38.2)
Sélection de la consigne(254)
Signal de commande :
sens + [S+]
Signalisations en retour :
p. ex. déplacement sens +[DP+]
autorisation démarrage[AUD]
traitement en cours [TEC]
p. ex. déplacement sens +[DP+]
traitement en cours [TEC]
position atteinte, arrêt [PA]
Une fois la consigne transmise et la sélection de consigneeffectuée, le signal [S+] peut être activé.
L’axe supprime le signal [AUD] et émet les signalisations[DP+] et [TEC].
La position de consigne atteinte, l’axe active les signaux[PA] et les signalisations en retour [DP+] et [TEC] sont dés-activées.Dans le mode opératoire “Incréments relatifs” le [SFG] seradéjà positionné, si l’interpolateur est fini (coïncidence deconsigne atteinte). [BL] reste, si avant de l’achèvement dela [PEH] était donné un nouveau lancement ([R+] ou [R−].
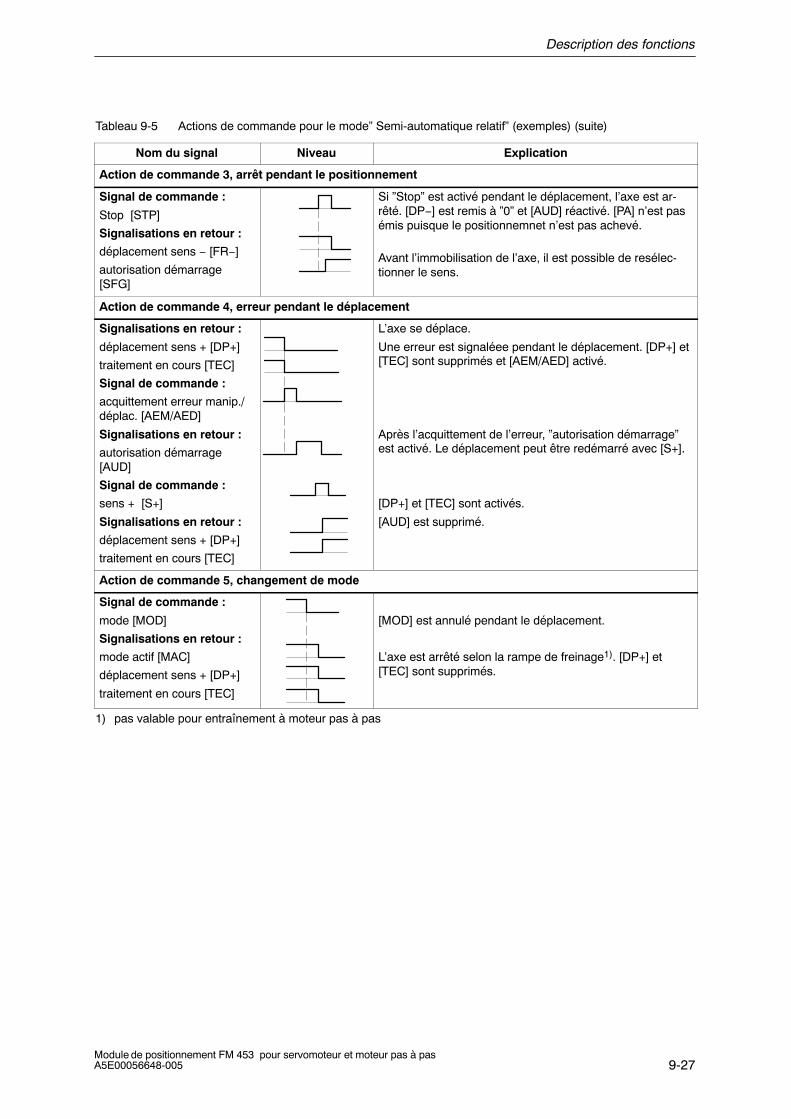
Description des fonctions
9-27Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-5 Actions de commande pour le mode” Semi-automatique relatif” (exemples) (suite)
Nom du signal ExplicationNiveau
Action de commande 3, arrêt pendant le positionnement
Signal de commande :
Stop [STP]
Signalisations en retour :
déplacement sens − [FR−]
autorisation démarrage[SFG]
Si ”Stop” est activé pendant le déplacement, l’axe est ar-rêté. [DP−] est remis à ”0” et [AUD] réactivé. [PA] n’est pasémis puisque le positionnemnet n’est pas achevé.
Avant l’immobilisation de l’axe, il est possible de resélec-tionner le sens.
Action de commande 4, erreur pendant le déplacement
Signalisations en retour :
déplacement sens + [DP+]
traitement en cours [TEC]
Signal de commande :
acquittement erreur manip./déplac. [AEM/AED]
Signalisations en retour :
autorisation démarrage[AUD]
Signal de commande :
sens + [S+]
Signalisations en retour :
déplacement sens + [DP+]
traitement en cours [TEC]
L’axe se déplace.
Une erreur est signaléee pendant le déplacement. [DP+] et[TEC] sont supprimés et [AEM/AED] activé.
Après l’acquittement de l’erreur, ”autorisation démarrage”est activé. Le déplacement peut être redémarré avec [S+].
[DP+] et [TEC] sont activés.
[AUD] est supprimé.
Action de commande 5, changement de mode
Signal de commande :
mode [MOD]
Signalisations en retour :
mode actif [MAC]
déplacement sens + [DP+]
traitement en cours [TEC]
[MOD] est annulé pendant le déplacement.
L’axe est arrêté selon la rampe de freinage1). [DP+] et[TEC] sont supprimés.
1) pas valable pour entraînement à moteur pas à pas
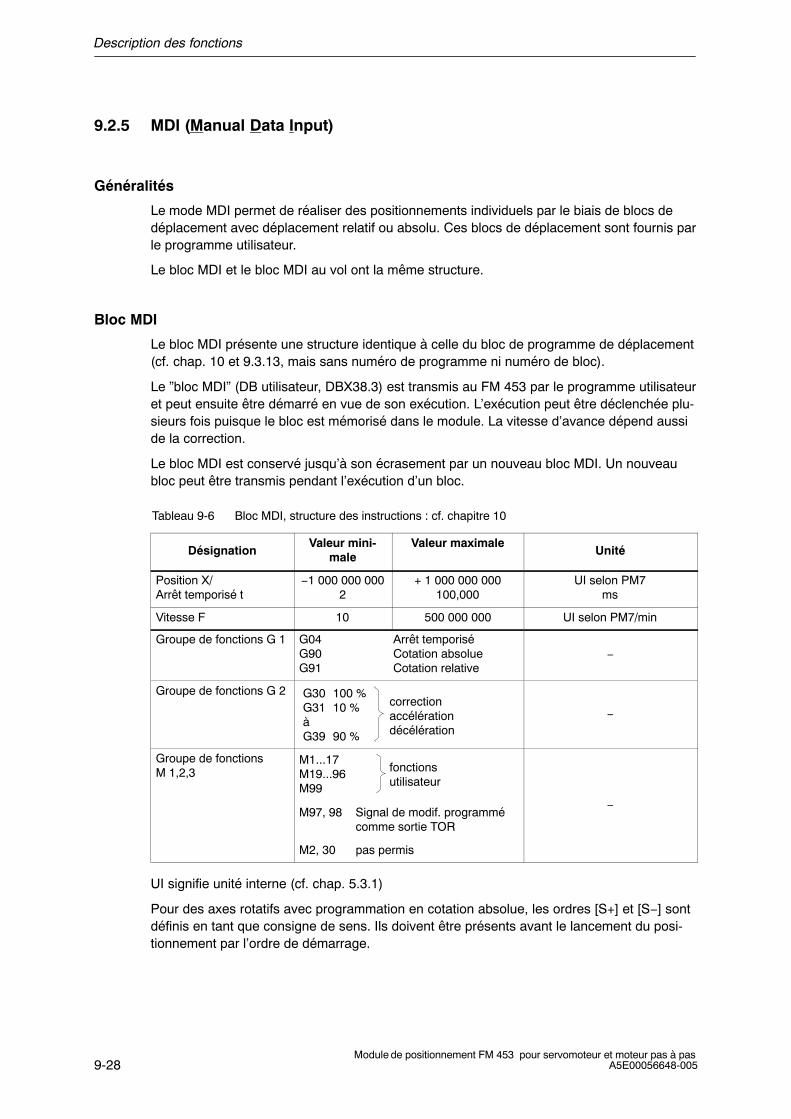
Description des fonctions
9-28Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.2.5 MDI (Manual Data Input)
Généralités
Le mode MDI permet de réaliser des positionnements individuels par le biais de blocs dedéplacement avec déplacement relatif ou absolu. Ces blocs de déplacement sont fournis parle programme utilisateur.
Le bloc MDI et le bloc MDI au vol ont la même structure.
Bloc MDI
Le bloc MDI présente une structure identique à celle du bloc de programme de déplacement(cf. chap. 10 et 9.3.13, mais sans numéro de programme ni numéro de bloc).
Le ”bloc MDI” (DB utilisateur, DBX38.3) est transmis au FM 453 par le programme utilisateuret peut ensuite être démarré en vue de son exécution. L’exécution peut être déclenchée plu-sieurs fois puisque le bloc est mémorisé dans le module. La vitesse d’avance dépend ausside la correction.
Le bloc MDI est conservé jusqu’à son écrasement par un nouveau bloc MDI. Un nouveaubloc peut être transmis pendant l’exécution d’un bloc.
Tableau 9-6 Bloc MDI, structure des instructions : cf. chapitre 10
DésignationValeur mini-
maleValeur maximale
Unité
Position X/Arrêt temporisé t
−1 000 000 0002
+ 1 000 000 000100,000
UI selon PM7ms
Vitesse F 10 500 000 000 UI selon PM7/min
Groupe de fonctions G 1 G04 Arrêt temporiséG90 Cotation absolueG91 Cotation relative
−
Groupe de fonctions G 2 G30 100 %G31 10 %àG39 90 %
correctionaccélérationdécélération
−
Groupe de fonctionsM 1,2,3
M1...17M19...96M99
fonctionsutilisateur
M97, 98 Signal de modif. programmécomme sortie TOR
M2, 30 pas permis
−
UI signifie unité interne (cf. chap. 5.3.1)
Pour des axes rotatifs avec programmation en cotation absolue, les ordres [S+] et [S−] sontdéfinis en tant que consigne de sens. Ils doivent être présents avant le lancement du posi-tionnement par l’ordre de démarrage.
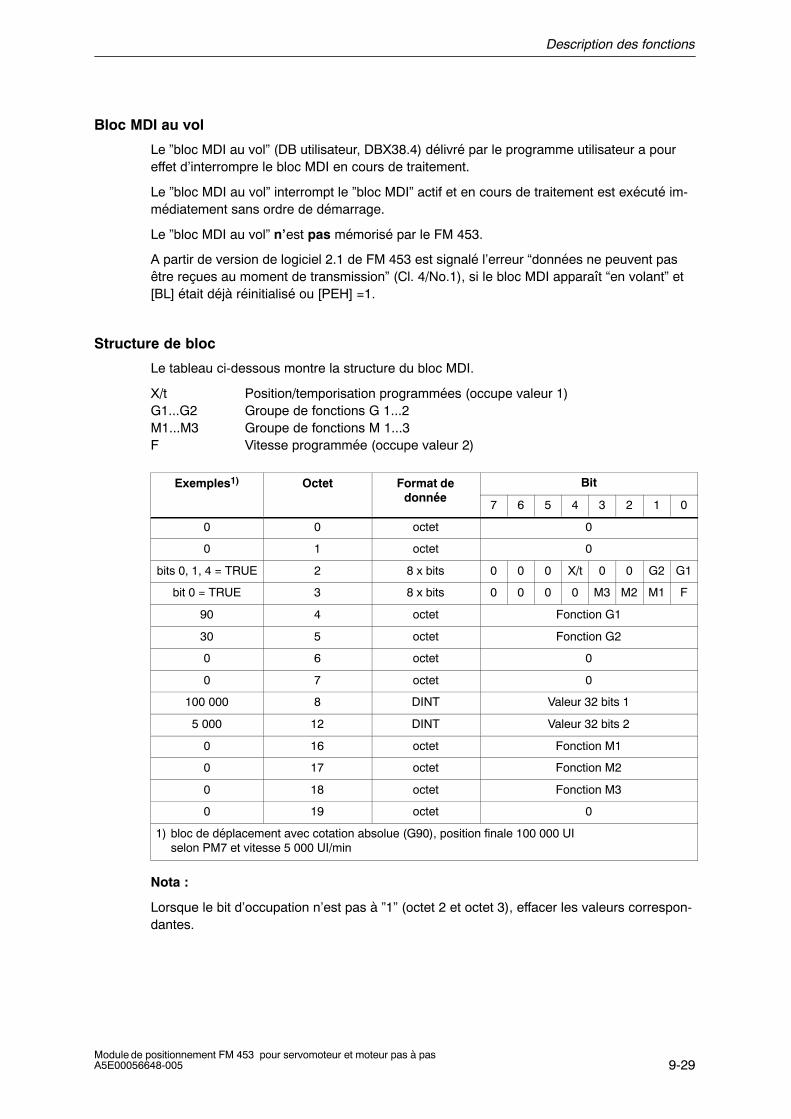
Description des fonctions
9-29Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Bloc MDI au vol
Le ”bloc MDI au vol” (DB utilisateur, DBX38.4) délivré par le programme utilisateur a poureffet d’interrompre le bloc MDI en cours de traitement.
Le ”bloc MDI au vol” interrompt le ”bloc MDI” actif et en cours de traitement est exécuté im-médiatement sans ordre de démarrage.
Le ”bloc MDI au vol” n’est pas mémorisé par le FM 453.
A partir de version de logiciel 2.1 de FM 453 est signalé l’erreur “données ne peuvent pasêtre reçues au moment de transmission” (Cl. 4/No.1), si le bloc MDI apparaît “en volant” et[BL] était déjà réinitialisé ou [PEH] =1.
Structure de bloc
Le tableau ci-dessous montre la structure du bloc MDI.
X/t Position/temporisation programmées (occupe valeur 1)G1...G2 Groupe de fonctions G 1...2M1...M3 Groupe de fonctions M 1...3F Vitesse programmée (occupe valeur 2)
Exemples1) Octet Format ded é
Bitdonnée
7 6 5 4 3 2 1 0
0 0 octet 0
0 1 octet 0
bits 0, 1, 4 = TRUE 2 8 x bits 0 0 0 X/t 0 0 G2 G1
bit 0 = TRUE 3 8 x bits 0 0 0 0 M3 M2 M1 F
90 4 octet Fonction G1
30 5 octet Fonction G2
0 6 octet 0
0 7 octet 0
100 000 8 DINT Valeur 32 bits 1
5 000 12 DINT Valeur 32 bits 2
0 16 octet Fonction M1
0 17 octet Fonction M2
0 18 octet Fonction M3
0 19 octet 0
1) bloc de déplacement avec cotation absolue (G90), position finale 100 000 UI selon PM7 et vitesse 5 000 UI/min
Nota :
Lorsque le bit d’occupation n’est pas à ”1” (octet 2 et octet 3), effacer les valeurs correspon-dantes.
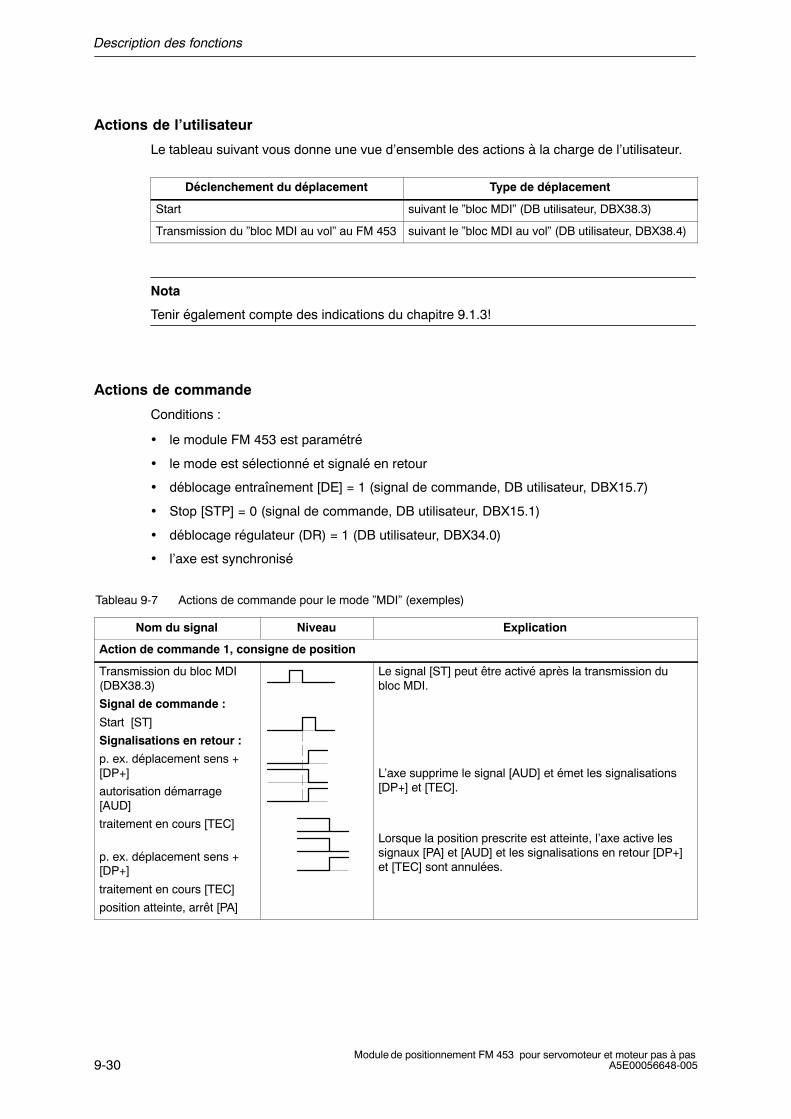
Description des fonctions
9-30Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Actions de l’utilisateur
Le tableau suivant vous donne une vue d’ensemble des actions à la charge de l’utilisateur.
Déclenchement du déplacement Type de déplacement
Start suivant le ”bloc MDI” (DB utilisateur, DBX38.3)
Transmission du ”bloc MDI au vol” au FM 453 suivant le ”bloc MDI au vol” (DB utilisateur, DBX38.4)
Nota
Tenir également compte des indications du chapitre 9.1.3!
Actions de commande
Conditions :
• le module FM 453 est paramétré
• le mode est sélectionné et signalé en retour
• déblocage entraînement [DE] = 1 (signal de commande, DB utilisateur, DBX15.7)
• Stop [STP] = 0 (signal de commande, DB utilisateur, DBX15.1)
• déblocage régulateur (DR) = 1 (DB utilisateur, DBX34.0)
• l’axe est synchronisé
Tableau 9-7 Actions de commande pour le mode ”MDI” (exemples)
Nom du signal Niveau Explication
Action de commande 1, consigne de position
Transmission du bloc MDI(DBX38.3)
Signal de commande :
Start [ST]
Signalisations en retour :
p. ex. déplacement sens +[DP+]
autorisation démarrage[AUD]
traitement en cours [TEC]
p. ex. déplacement sens +[DP+]
traitement en cours [TEC]
position atteinte, arrêt [PA]
Le signal [ST] peut être activé après la transmission dubloc MDI.
L’axe supprime le signal [AUD] et émet les signalisations[DP+] et [TEC].
Lorsque la position prescrite est atteinte, l’axe active lessignaux [PA] et [AUD] et les signalisations en retour [DP+]et [TEC] sont annulées.

Description des fonctions
9-31Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-7 Actions de commande pour le mode ”MDI” (exemples) (suite)
Nom du signal ExplicationNiveau
Action de commande 2, changement de position pendant le positionnement
Transmission du bloc MDI auvol (DBX38.4)
Signalisations en retour :
déplacement sens + [DP+]
déplacement sens − [DP−]
Lorsqu’un nouveau bloc MDI est transmis au vol pendantle positionnement, le positionnement en cours est inter-rompu immédiatement et le nouveau positionnement estentrepris. Dans ce cas, le sens peut p. ex. être modifié de[DP+] en [DP−].
Action de commande 3, arrêt pendant le positionnement avec nouveau signal de démarrage pour reprisedu positionnement
Signal de commande :
Stop [STP]
Signalisations en retour :
déplacement sens − [DP−]
autorisation démarrage[AUD]
Signal de commande :
Start [ST]
Signalisations en retour :
déplacement sens − [DP−]
autorisation démarrage[AUD]
Si Stop est activé pendant le positionnement, l’axe estarrêté. [DP−] est désactivé et [AUD] est activé. [TEC] estmaintenu et [PA] n’est pas sorti, car le positionnement n’estpas terminé.
Lorsque le signal [ST] est de nouveau activé, le signal[DP−] est de nouveau activé, [AUD] est désactivé et lepositionnement est terminé.
Un redémarrage est possible avant l’immobilisation del’axe.
Action de commande 4, arrêt pendant le positionnement avec nouveau démarrage et nouveau bloc MDI
Signal de commande :
Stop [STP]
Signalisations en retour :
déplacement sens + [DP+]
autorisation démarrage[AUD]
transmission bloc MDI (DBX38.3)
transmission ”Effacementparcours restant” (DBX37.1)
Signal de commande :
Start [ST]
Signalisations en retour :
déplacement sens − [DP−]
Si Stop est activé pendant le positionnement, l’axe estarrêté. [DP+] est désactivé et [AUD] est activé.
Après transmission d’un nouveau bloc MDI, le signal [ST]est de nouveau activé. ”Effacement parcours restant” estégalement activé.
L’axe efface le parcours restant de l’ancienne instructionde positionnement et commence à exécuter le nouveaubloc de déplacement.
[DP−] est activé et le signal [AUD] est désactivé.
Nota :
Si aucun nouveau bloc MDI n’est transmis, le bloc MDI encours est exécuté à nouveau entièrement comme décritci-dessus.
En l’absence de ”Effacement parcours restant”, le position-nement interrompu serait poursuivi (voir action de com-mande 3).
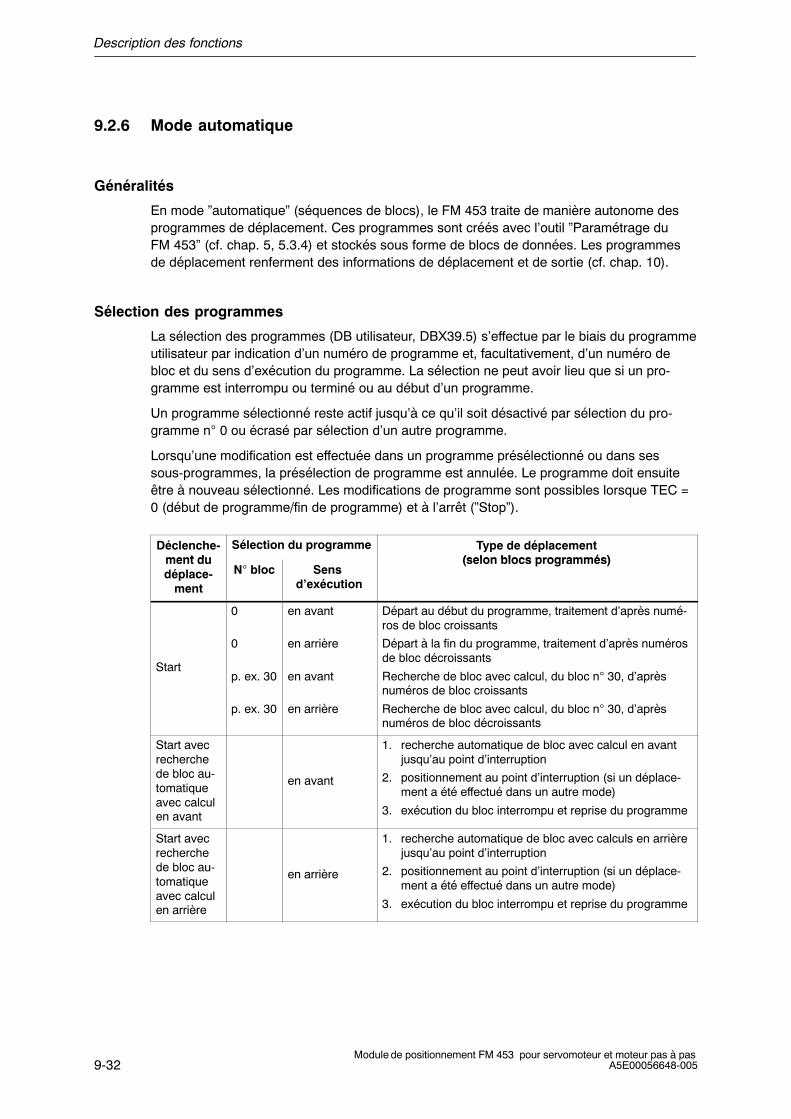
Description des fonctions
9-32Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.2.6 Mode automatique
Généralités
En mode ”automatique” (séquences de blocs), le FM 453 traite de manière autonome desprogrammes de déplacement. Ces programmes sont créés avec l’outil ”Paramétrage duFM 453” (cf. chap. 5, 5.3.4) et stockés sous forme de blocs de données. Les programmesde déplacement renferment des informations de déplacement et de sortie (cf. chap. 10).
Sélection des programmes
La sélection des programmes (DB utilisateur, DBX39.5) s’effectue par le biais du programmeutilisateur par indication d’un numéro de programme et, facultativement, d’un numéro debloc et du sens d’exécution du programme. La sélection ne peut avoir lieu que si un pro-gramme est interrompu ou terminé ou au début d’un programme.
Un programme sélectionné reste actif jusqu’à ce qu’il soit désactivé par sélection du pro-gramme n° 0 ou écrasé par sélection d’un autre programme.
Lorsqu’une modification est effectuée dans un programme présélectionné ou dans sessous-programmes, la présélection de programme est annulée. Le programme doit ensuiteêtre à nouveau sélectionné. Les modifications de programme sont possibles lorsque TEC =0 (début de programme/fin de programme) et à l’arrêt (”Stop”).
Déclenche-ment du
Sélection du programme Type de déplacement(selon blocs programmés)ment du
déplace-ment
N° bloc Sens d’exécution
(selon blocs programmés)
Start
0
0
p. ex. 30
p. ex. 30
en avant
en arrière
en avant
en arrière
Départ au début du programme, traitement d’après numé-ros de bloc croissants
Départ à la fin du programme, traitement d’après numérosde bloc décroissants
Recherche de bloc avec calcul, du bloc n° 30, d’aprèsnuméros de bloc croissants
Recherche de bloc avec calcul, du bloc n° 30, d’aprèsnuméros de bloc décroissants
Start avecrecherchede bloc au-tomatiqueavec calculen avant
en avant
1. recherche automatique de bloc avec calcul en avantjusqu’au point d’interruption
2. positionnement au point d’interruption (si un déplace-ment a été effectué dans un autre mode)
3. exécution du bloc interrompu et reprise du programme
Start avecrecherchede bloc au-tomatiqueavec calculen arrière
en arrière
1. recherche automatique de bloc avec calculs en arrièrejusqu’au point d’interruption
2. positionnement au point d’interruption (si un déplace-ment a été effectué dans un autre mode)
3. exécution du bloc interrompu et reprise du programme
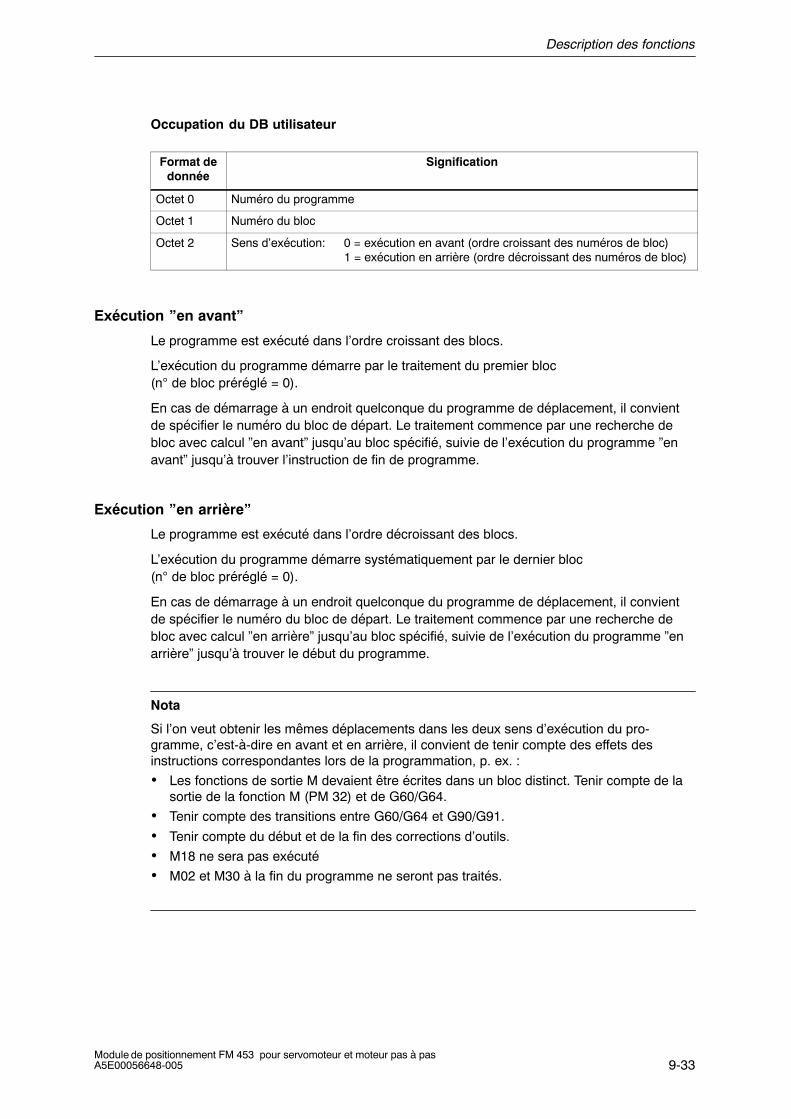
Description des fonctions
9-33Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Occupation du DB utilisateur
Format dedonnée
Signification
Octet 0 Numéro du programme
Octet 1 Numéro du bloc
Octet 2 Sens d’exécution: 0 = exécution en avant (ordre croissant des numéros de bloc)1 = exécution en arrière (ordre décroissant des numéros de bloc)
Exécution ”en avant”
Le programme est exécuté dans l’ordre croissant des blocs.
L’exécution du programme démarre par le traitement du premier bloc(n° de bloc préréglé = 0).
En cas de démarrage à un endroit quelconque du programme de déplacement, il convientde spécifier le numéro du bloc de départ. Le traitement commence par une recherche debloc avec calcul ”en avant” jusqu’au bloc spécifié, suivie de l’exécution du programme ”enavant” jusqu’à trouver l’instruction de fin de programme.
Exécution ”en arrière”
Le programme est exécuté dans l’ordre décroissant des blocs.
L’exécution du programme démarre systématiquement par le dernier bloc(n° de bloc préréglé = 0).
En cas de démarrage à un endroit quelconque du programme de déplacement, il convientde spécifier le numéro du bloc de départ. Le traitement commence par une recherche debloc avec calcul ”en arrière” jusqu’au bloc spécifié, suivie de l’exécution du programme ”enarrière” jusqu’à trouver le début du programme.
Nota
Si l’on veut obtenir les mêmes déplacements dans les deux sens d’exécution du pro-gramme, c’est-à-dire en avant et en arrière, il convient de tenir compte des effets desinstructions correspondantes lors de la programmation, p. ex. :
• Les fonctions de sortie M devaient être écrites dans un bloc distinct. Tenir compte de lasortie de la fonction M (PM 32) et de G60/G64.
• Tenir compte des transitions entre G60/G64 et G90/G91.
• Tenir compte du début et de la fin des corrections d’outils.
• M18 ne sera pas exécuté
• M02 et M30 à la fin du programme ne seront pas traités.
Description des fonctions
9-34Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Recherche de bloc avec calcul, en avant
Le programme est préparé jusqu’au point final du bloc de destination, y compris les correc-tions d’outil. Les fonctions M et les arrêts temporisés sont sortis, mais les mouvements del’axe sont empêchés.
En cas de traitement des programmes de déplacement avec recherche de bloc avec calcul,en avant, il existe quelques cas particuliers :
• Le changement de bloc externe (G50) n’est pas exécuté.
• Les déplacements sans fin avec forçage de valeur réelle au vol (G88, 89) ou annulationdu forçage de valeur réelle (G87) ne sont pas exécutés.
• Les blocs après G50, G87, G89 (dans le sens d’exécution) devraient contenir un dé-placement en cotation absolue.
Recherche de bloc avec calcul, en arrière
Similaire à la recherche de bloc avec calcul, en avant.
Recherche de bloc automatique avec calcul
La recherche de bloc automatique avec calcul, en avant ou arrière, signifie qu’après inter-ruption d’un programme automatique actif (par changement de mode), il est possible de re-prendre le travail au point d’interruption dans le même sens d’exécution du programme.
En cas de recherche en avant, le programme interrompu doit avoir été préalablement ex-écuté dans l’ordre croissant des blocs.
En cas de recherche en arrière, le programme interrompu doit avoir été préalablement traitédans l’ordre décroissant des blocs.
La commande de recherche automatique de bloc en avant ou arrière est analysée par ledémarrage dans le FM 453 et il est déclenchée la recherche en avant ou arrière jusqu’aubloc interrompu avec la vitesse de l’étape 1 de mode opératoire ”manuel à vue”. Il s’en suitun positionnement à l’endroit de l’interruption (si un positionnement a eu lieu auparavantdans un autre mode), puis le bloc interrompu est traité, y compris les éventuelles sorties.
Actions de commande
Conditions :
• le module FM 453 est paramétré
• le mode est sélectionné et signalé en retour
• déblocage entraînement [DE] = 1 (signal de commande, DB utilisateur, DBX15.7)
• Stop [STP] = 0 (signal de commande, DB utilisateur, DBX15.1)
• déblocage régulateur (DR) = 1 (DB utilisateur, DBX34.0)
• l’axe est synchronisé

Description des fonctions
9-35Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-8 Actions de commande pour le mode”Automatique” (exemples)
Nom du signal Niveau Explication
Action de commande 1, mode Automatique/Automatique bloc par bloc
Signaux de commande :
mode [MOD]
validation lecture [VAL]
Signalisations en retour :
mode actif [MAC]
autorisation démarrage[AUD]
L’utilisateur sélectionne le mode [MOD] et valide la lectureavec [VAL].
Le module signale en retour [MAC] et [AUD].
Action de commande 2, positionnement avec sélection de programme
Sélection de programme(DBX39.5)
Signal de commande :
Start [ST]
Signalisations en retour :
déplacement sens + [DP+]ou déplacement sens −[DP−]
autorisation démarrage[AUD]
traitement en cours [TEC]
En présence de l’autorisation de démarrage [AUD], le pro-gramme peut être activé avec [ST] si la validation de lec-ture [VAL] est présente.
Le traitement commence par exemple par un positionne-ment. [DP+] ou [DP−] et [TEC] sont activés. Le signal[AUD] est désactivé.
Action de commande 3, sortie de fonctions M
Signalisations en retour :
modification fonction M[MFM]
N° fonction M [NFM]
Signal de commande :
acquittement fonction M[AFM]
2me fonction M Si la sortie de fonction M est par exemple commandée paracquittement, le nombre de fonction M [NMF] peut êtretraité par le programme utilisateur lorsque [MFM] est pré-sent.
La sortie de fonction M est terminée. La fonction M est ac-quittée avec [AFM] et [MFM] et [NMF] disparaissent.
Action de commande 4, sortie de fonction M et positionnement
Signal de commande :
acquittement fonction M[AFM]
Signalisations en retour :
position atteinte, arrêt [PA]
déplacement sens + [DP+]ou déplacement sens −[DP−]
Démarrage de l’exécution du bloc contenant la sortie defonction M (voir action de commande 3) et la position.
Lorsque la sortie de fonction M est terminée, le programmeest repris. [DP+] ou [DP−] sont réactivés et [PA] est désac-tivé.
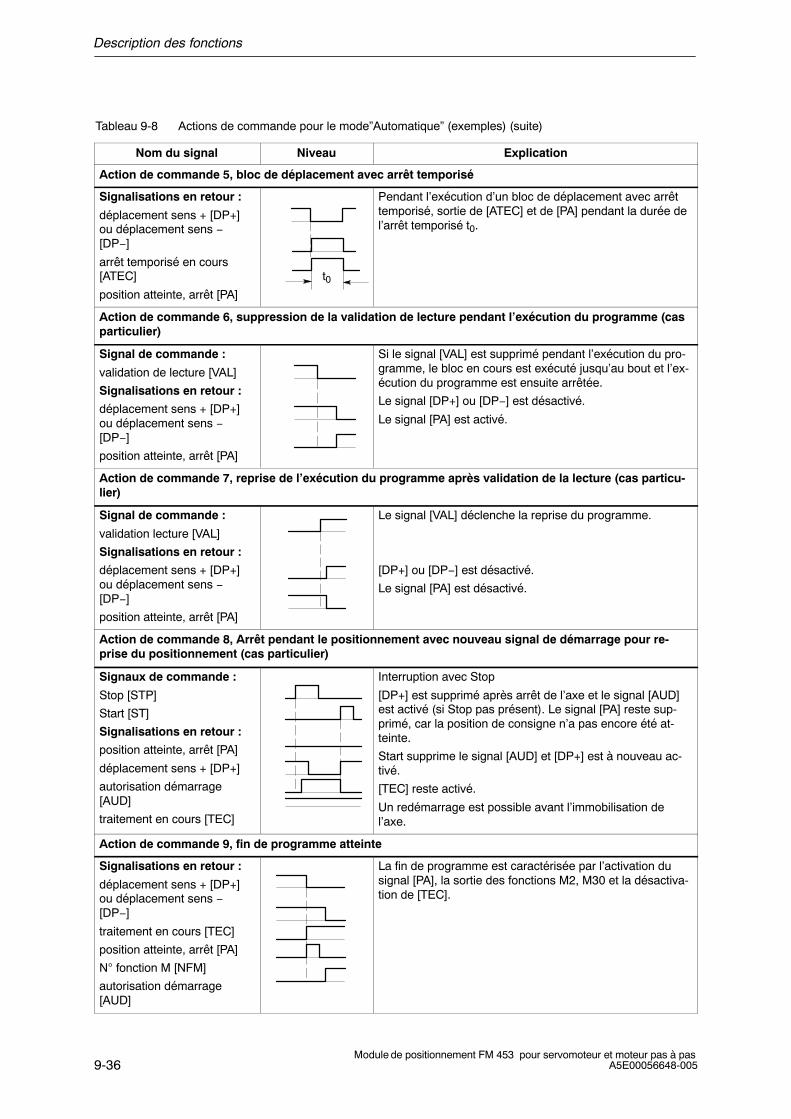
Description des fonctions
9-36Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 9-8 Actions de commande pour le mode”Automatique” (exemples) (suite)
Nom du signal ExplicationNiveau
Action de commande 5, bloc de déplacement avec arrêt temporisé
Signalisations en retour :
déplacement sens + [DP+]ou déplacement sens −[DP−]
arrêt temporisé en cours[ATEC]
position atteinte, arrêt [PA]
t0
Pendant l’exécution d’un bloc de déplacement avec arrêttemporisé, sortie de [ATEC] et de [PA] pendant la durée del’arrêt temporisé t0.
Action de commande 6, suppression de la validation de lecture pendant l’exécution du programme (casparticulier)
Signal de commande :
validation de lecture [VAL]
Signalisations en retour :
déplacement sens + [DP+]ou déplacement sens −[DP−]
position atteinte, arrêt [PA]
Si le signal [VAL] est supprimé pendant l’exécution du pro-gramme, le bloc en cours est exécuté jusqu’au bout et l’ex-écution du programme est ensuite arrêtée.
Le signal [DP+] ou [DP−] est désactivé.
Le signal [PA] est activé.
Action de commande 7, reprise de l’exécution du programme après validation de la lecture (cas particu-lier)
Signal de commande :
validation lecture [VAL]
Signalisations en retour :
déplacement sens + [DP+]ou déplacement sens −[DP−]
position atteinte, arrêt [PA]
Le signal [VAL] déclenche la reprise du programme.
[DP+] ou [DP−] est désactivé.
Le signal [PA] est désactivé.
Action de commande 8, Arrêt pendant le positionnement avec nouveau signal de démarrage pour re-prise du positionnement (cas particulier)
Signaux de commande :
Stop [STP]
Start [ST]
Signalisations en retour :
position atteinte, arrêt [PA]
déplacement sens + [DP+]
autorisation démarrage[AUD]
traitement en cours [TEC]
Interruption avec Stop
[DP+] est supprimé après arrêt de l’axe et le signal [AUD]est activé (si Stop pas présent). Le signal [PA] reste sup-primé, car la position de consigne n’a pas encore été at-teinte.
Start supprime le signal [AUD] et [DP+] est à nouveau ac-tivé.
[TEC] reste activé.
Un redémarrage est possible avant l’immobilisation del’axe.
Action de commande 9, fin de programme atteinte
Signalisations en retour :
déplacement sens + [DP+]ou déplacement sens −[DP−]
traitement en cours [TEC]
position atteinte, arrêt [PA]
N° fonction M [NFM]
autorisation démarrage[AUD]
La fin de programme est caractérisée par l’activation dusignal [PA], la sortie des fonctions M2, M30 et la désactiva-tion de [TEC].
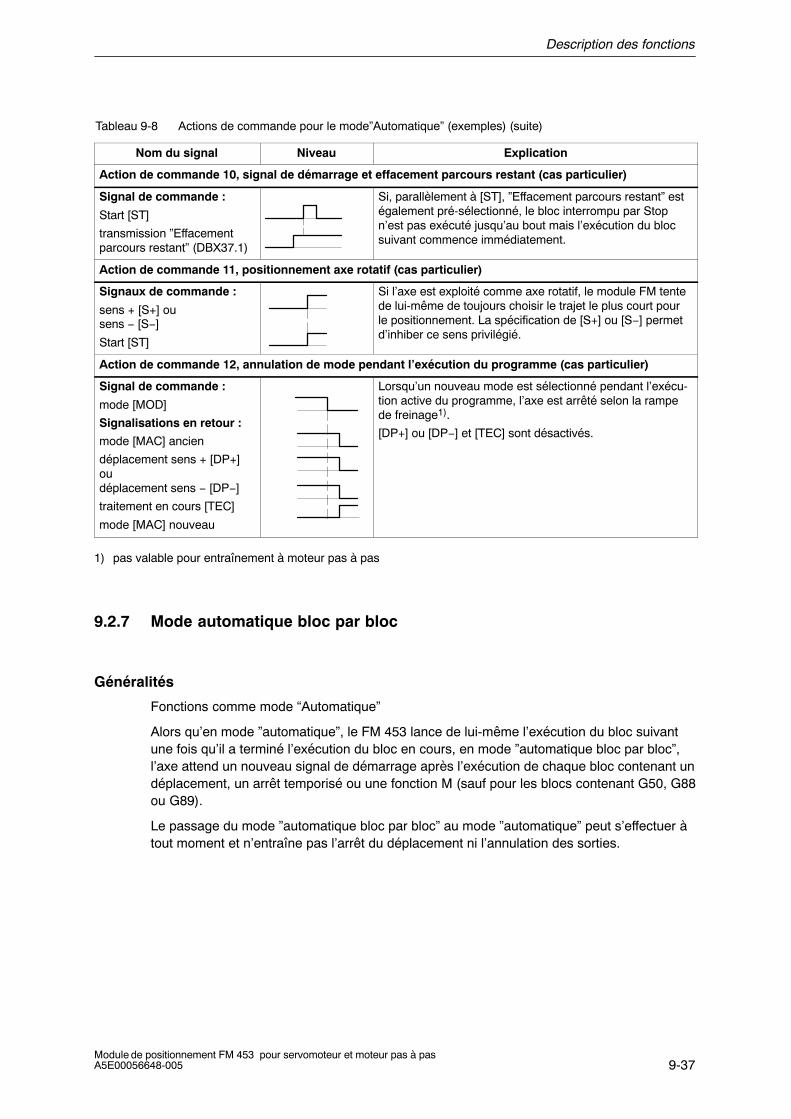
Description des fonctions
9-37Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-8 Actions de commande pour le mode”Automatique” (exemples) (suite)
Nom du signal ExplicationNiveau
Action de commande 10, signal de démarrage et effacement parcours restant (cas particulier)
Signal de commande :
Start [ST]
transmission ”Effacementparcours restant” (DBX37.1)
Si, parallèlement à [ST], ”Effacement parcours restant” estégalement pré-sélectionné, le bloc interrompu par Stopn’est pas exécuté jusqu’au bout mais l’exécution du blocsuivant commence immédiatement.
Action de commande 11, positionnement axe rotatif (cas particulier)
Signaux de commande :
sens + [S+] ousens − [S−]
Start [ST]
Si l’axe est exploité comme axe rotatif, le module FM tentede lui-même de toujours choisir le trajet le plus court pourle positionnement. La spécification de [S+] ou [S−] permetd’inhiber ce sens privilégié.
Action de commande 12, annulation de mode pendant l’exécution du programme (cas particulier)
Signal de commande :
mode [MOD]
Signalisations en retour :
mode [MAC] ancien
déplacement sens + [DP+]oudéplacement sens − [DP−]
traitement en cours [TEC]
mode [MAC] nouveau
Lorsqu’un nouveau mode est sélectionné pendant l’exécu-tion active du programme, l’axe est arrêté selon la rampede freinage1).
[DP+] ou [DP−] et [TEC] sont désactivés.
1) pas valable pour entraînement à moteur pas à pas
9.2.7 Mode automatique bloc par bloc
Généralités
Fonctions comme mode “Automatique”
Alors qu’en mode ”automatique”, le FM 453 lance de lui-même l’exécution du bloc suivantune fois qu’il a terminé l’exécution du bloc en cours, en mode ”automatique bloc par bloc”,l’axe attend un nouveau signal de démarrage après l’exécution de chaque bloc contenant undéplacement, un arrêt temporisé ou une fonction M (sauf pour les blocs contenant G50, G88ou G89).
Le passage du mode ”automatique bloc par bloc” au mode ”automatique” peut s’effectuer àtout moment et n’entraîne pas l’arrêt du déplacement ni l’annulation des sorties.
Description des fonctions
9-38Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.3 Données système
Généralités
Ce chapitre décrit les réglages/fonctions intermodes qui sont également nécessaires pour laconduite/l’exploitation du FM 453 et les données du FM qui sont disponibles pour les signali-sations en retour.
• Modification de paramètres/données (contrat d’écriture DB utilisateur,DBX39.3), page 9-39
• Réglages ponctuels (DB utilisateur, DBB34 et 35), page 9-43
• Commandes ponctuelles (DB utilisateur, DBB36 et 37), page 9-46
• Décalage d’origine (contrat d’écriture DB utilisateur, DBX39.1), page 9-48
• Forçage de valeur réelle (contrat d’écriture DB utilisateur, DBX38.7), page 9-50
• Forçage de valeur réelle au vol (contrat d’écriture DB utilisateur, DBX39.0), page 9-51
• Demande de données d’application (contrat d’écriture DB utilisateur,DBX39.6), page 9-52
• Teach In (contrat d’écriture DB utilisateur, DBX39.7), page 9-53
• Définition du point de référence (contrat d’écriture DB utilisateur, DBX38.6), page 9-53
• Couplage d’axes (contrat d’écriture DB utilisateur, DBX40.0), page 9-54
• Mesures, page 9-56
• Données d’exploitation de base (contrat de lecture DB utilisateur, DBX42.0), page 9-59
• Bloc CN actif (contrat de lecture DB utilisateur, DBX42.1), Bloc CN suivant (contrat de lecture DB utilisateur, DBX42.2), page 9-60
• Données d’application(contrat de lecture DB utilisateur, DBX43.6), page 9-61
• Valeur réelle au changement de bloc (contrat de lecture DB utilisateur, DBX42.3), page 9-61
• Données de maintenance (contrat de lecture DB utilisateur, DBX42.4), page 9-61
• Données d’exploitation supplémentaires (contrat de lecture DB utilisateur, DBX43.5), page 9-62
• Paramètres/données (contrat de lecture DB utilisateur, DBX43.3), page 9-62
• Etat du couplage d’axes (contrat de lecture DB utilisateur, DBX43.0), page 9-62
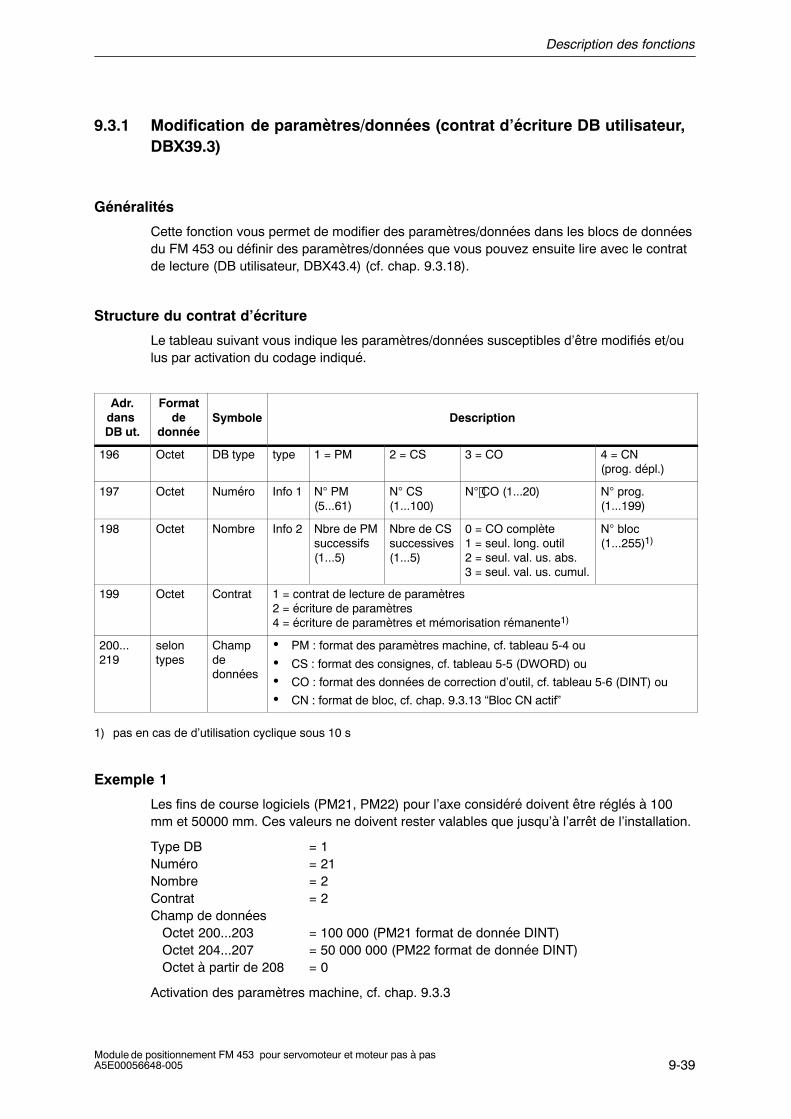
Description des fonctions
9-39Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.3.1 Modification de paramètres/données (contrat d’écriture DB utilisateur,DBX39.3)
Généralités
Cette fonction vous permet de modifier des paramètres/données dans les blocs de donnéesdu FM 453 ou définir des paramètres/données que vous pouvez ensuite lire avec le contratde lecture (DB utilisateur, DBX43.4) (cf. chap. 9.3.18).
Structure du contrat d’écriture
Le tableau suivant vous indique les paramètres/données susceptibles d’être modifiés et/oulus par activation du codage indiqué.
Adr.dans DB ut.
Formatde
donnéeSymbole Description
196 Octet DB type type 1 = PM 2 = CS 3 = CO 4 = CN(prog. dépl.)
197 Octet Numéro Info 1 N° PM(5...61)
N° CS(1...100)
N° CO (1...20) N° prog.(1...199)
198 Octet Nombre Info 2 Nbre de PMsuccessifs(1...5)
Nbre de CSsuccessives(1...5)
0 = CO complète1 = seul. long. outil2 = seul. val. us. abs.3 = seul. val. us. cumul.
N° bloc(1...255)1)
199 Octet Contrat 1 = contrat de lecture de paramètres2 = écriture de paramètres4 = écriture de paramètres et mémorisation rémanente1)
200...219
selontypes
Champdedonnées
• PM : format des paramètres machine, cf. tableau 5-4 ou
• CS : format des consignes, cf. tableau 5-5 (DWORD) ou
• CO : format des données de correction d’outil, cf. tableau 5-6 (DINT) ou
• CN : format de bloc, cf. chap. 9.3.13 “Bloc CN actif”
1) pas en cas de d’utilisation cyclique sous 10 s
Exemple 1
Les fins de course logiciels (PM21, PM22) pour l’axe considéré doivent être réglés à 100mm et 50000 mm. Ces valeurs ne doivent rester valables que jusqu’à l’arrêt de l’installation.
Type DB = 1Numéro = 21Nombre = 2Contrat = 2Champ de données
Octet 200...203 = 100 000 (PM21 format de donnée DINT)Octet 204...207 = 50 000 000 (PM22 format de donnée DINT)Octet à partir de 208 = 0
Activation des paramètres machine, cf. chap. 9.3.3
Description des fonctions
9-40Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Notas
Tenir compte des remarques suivantes pour la modification des données de paramétrage :
• Paramètres machine
Les paramètres machine peuvent toujours être modifiés. Ils doivent être réactivés aprèsune modification (commande ponctuelle, voir chapitre 9.3.3).
• Consignes
Les modifications sont possibles dans tous les modes et pendant les déplacements(également dans le mode”Semi-automatique relatif”). Les modifications des consignesdoivent être toujours terminées avant de démarrer un nouveau déplacement dans lemode ”Semi-automatique relatif”. Dans le cas contraire, le message d’erreur ”Consigneinexistante” Cl. 2/N° 13 est émis.
• Données de correction d’outil
Les modifications sont possibles pendant le déplacement dans tous les modes. Les mod-ifications effectuées avec la en fonction de correction d’outil activée et le démarrage ou àdes transitions entre blocs (accès interne aux valeurs de correction) provoquent la signal-isation d’erreur ”Correction d’outil inexistante” Cl. 3/N° 35.
• Programmes de déplacement
− Tous les programmes non sélectionnés peuvent toujours être modifiés.
− Si des modifications sont effectuées dans un programme présélectionné ou dans sessous-programmes, la présélection de programme est supprimée. Le programme doitêtre à nouveau sélectionné. Les modifications de programme sont possibles lorsqueTEC = 0 (début programme / fin programme) et à l’état Stop.
Effacer bloc : indiquer le numéro de programme et le numéro de bloc dans”Champ de données”.Les autres données/bits ne doivent pas êtreaffectés.
Ajouter bloc : le numéro de bloc entré n’existe pas dans le programme indiqué.Entrer le contenu d’après ”Format de bloc”.
Modifier bloc :le bloc correspondant au numéro de bloc indiqué est écrasé par lecontenu selon ”Format de bloc”.
Description des fonctions
9-41Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exemple 2
Procédure de modification de la valeur réelle de position et de la vitesse dans le bloc 10 duprogramme de déplacement 1 :
1. Créez un contrat pour lire le bloc. Inscrivez les valeurs suivantes dans le DB utilisateur :
Type DB = 4Numéro = 1Nombre = 10Contrat = 1Champ de données = 0
2. Activez le contrat d’écriture (DB utilisateur, DBX39.3).
3. Lorsque le contrat d’écriture est achevé (c.-à-d. un cycle plus tard), lisez le bloc en acti-vant le contrat de lecture (DB utilisateur, DBX43.3)..
4. Mémorisez dans DB utilisateur, DBB196...219 les données lues dans DB utilisateur,DBB446...469.
5. Inscrivez la valeur réelle de position dans le champ de données DB utilisateur,DBB208...211 (type de donnée DINT).
6. Inscrivez la vitesse dans le champ de données DB utilisateur, DBB212...215 (type dedonnée DINT).
7. Inscrivez 4 dans DB utilisateur, DBB199 (contrat) (mémorisation rémanente du bloc).
8. Activez le contrat d’écriture (DB utilisateur, DBX39.3).

Description des fonctions
9-42Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Mémorisation rémanente des données de paramétrage
Tenir compte des remarques suivantes pour l’utilisation de la fonction ”Ecriture et mémorisa-tion rémanente de paramètres” (octet 4, contrat 4) :
L’écriture rémanente ne doit se faire qu’en cas de besoin (pas d’écriture cyclique !).
La gestion rémanente des données (ne nécessitant aucune maintenance, pas de pile desauvegarde) se fait sur FEPROM. Cette mémoire a une limite physique pour les cycles pos-sibles d’effacement/programmation : minimale 105, typique 106. La disponibilité d’un plusgrand espace de mémoire rémanente (nettement plus grand que la mémoire des donnéesde paramétrage) et une organisation correspondante de la mémoire permettent d’augmenterd’un facteur n le nombre de cycles d’effacement/programmation possibles du point de vuede l’utilisateur.
Nombre de cyclesd’effacement/programmation
=128 000 106 (typique)
taille du bloc (en octets) dans lequelseront modifiées les données deparamétrage
Les tailles de bloc :
DB paramètres machine 324 octetsDB consignes 468 octetsDB données de corrections d’outil 308 octetsDB programmes de déplacement 108 + (20 x nombre de blocs de
déplacement) octets
Exemple :
On suppose une durée d’utilisation de dix ans, un fonctionnement quotidien de 24h, unevaleur limite typique pour la mémoire de 106.
Données de pa-ramétrage
Tailledu DB
Nombre de cycles possiblesd’effacement/
programmation
Nombre de cycles possiblesd’effacement/
programmation par minute
PM 324 octets 412,9 106 78
Les programmesde déplacement(20 blocs)
508 octets 251 106 48
Nota
Le bloc de données système SDB 1 000 (créé pour le remplacement du module) contientles données de paramétrage qui étaient valides au moment de la mise en service. Les modi-fications ne sont pas enregistrées dans le SDB 1 000 lorsque les données de paramé-trage sont modifiées pendant le fonctionnement et mémorisées de manière rémanente surle module FM 453. Ces modifications sont perdues après le remplacement du module etdoivent pouvoir être restaurées dans le programme utilisateur.
Description des fonctions
9-43Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.3.2 Réglages ponctuels (DB utilisateur, DBB34 et 35)
Généralités
Cette fonction vous permet de transmettre des réglages ponctuels au FM 453 et d’activerles fonctions correspondantes. Ces réglages sont les suivants :
• Mesure de longueur
• Mesure au vol
• Reprise de fréquence
• Inhibition de l’entrée de validation
• Poursuite (seulement pour moteurs avec codeur)
• Désactivation de la surveillance des fins de course
• Surveillance de rotation (seulement pour moteur pas à pas sans codeur)
• Désactivation de la compensation automatique de dérive (seulement pour servomoteur)
• Déblocage du régulateur
• Axe en stationnement
• Simulation
Appel des différents réglagesLes différentes fonctions restent actives jusqu’à leur annulation.
Mesure de longueur, mesure au vol
Ces deux fonctions utilisant la même entrée TOR du FM 453, on ne peut exécuter qu’unefonction à la fois. En cas de double activation, les deux fonctions sont désactivées et unmessage d’erreur est délivré.
Description du fonctionnement, cf. chap. 9.3.11
Reprise de référence
La condition requise pour la reprise de référence est que l’axe ait préalablement été syn-chronisé par une prise de référence.
Avec ce réglage, l’axe se synchronise à nouveau lors du passage au droit du point de syn-chronisation, si le sens de déplacement correspond au sens de prise de référence. Indépen-damment de la vitesse à l’instant considéré, la coordonnée du point de référence est alorsaffectée à la valeur réelle de position en tenant compte d’un décalage actif.
Lors du dépassement du CPR, le signal doit avoir une durée ∆t 2temps de cycle FM !
La modification de valeur réelle qui en résulte n’entraîne pas de modification de la destina-tion au niveau interne.
Lorsqu’un ”forçage de valeur réelle au vol” doit être exécutée, l’activation de la reprise deréférence est verrouillée.
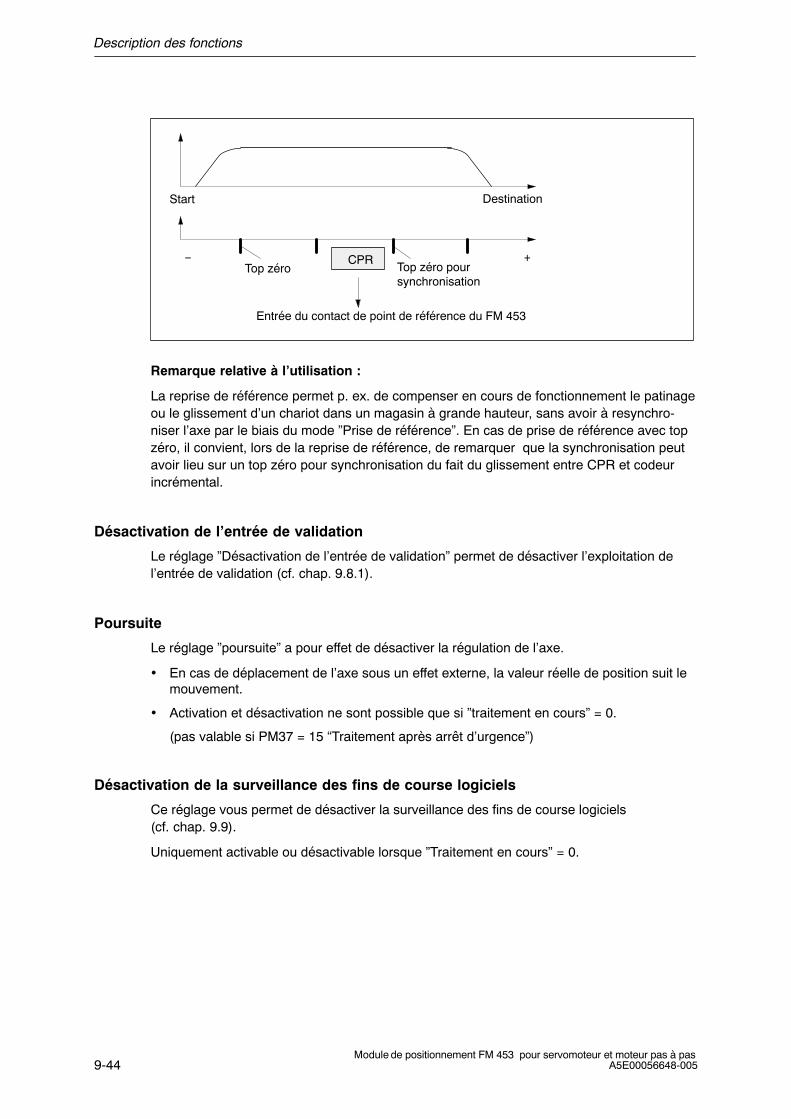
Description des fonctions
9-44Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
− +
Start
CPRTop zéro
Destination
Entrée du contact de point de référence du FM 453
Top zéro poursynchronisation
Remarque relative à l’utilisation :
La reprise de référence permet p. ex. de compenser en cours de fonctionnement le patinageou le glissement d’un chariot dans un magasin à grande hauteur, sans avoir à resynchro-niser l’axe par le biais du mode ”Prise de référence”. En cas de prise de référence avec topzéro, il convient, lors de la reprise de référence, de remarquer que la synchronisation peutavoir lieu sur un top zéro pour synchronisation du fait du glissement entre CPR et codeurincrémental.
Désactivation de l’entrée de validation
Le réglage ”Désactivation de l’entrée de validation” permet de désactiver l’exploitation del’entrée de validation (cf. chap. 9.8.1).
Poursuite
Le réglage ”poursuite” a pour effet de désactiver la régulation de l’axe.
• En cas de déplacement de l’axe sous un effet externe, la valeur réelle de position suit lemouvement.
• Activation et désactivation ne sont possible que si ”traitement en cours” = 0.
(pas valable si PM37 = 15 “Traitement après arrêt d’urgence”)
Désactivation de la surveillance des fins de course logiciels
Ce réglage vous permet de désactiver la surveillance des fins de course logiciels(cf. chap. 9.9).
Uniquement activable ou désactivable lorsque ”Traitement en cours” = 0.
Description des fonctions
9-45Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Surveillance de rotation
La surveillance de rotation est effectuée dans tous les modes de fonctionnement. Elle estdésactivée lors du passage sur le point de synchronisation en mode ”Prise de référence” etpour la fonction ”Reprise de référence”. Elle est désactivée automatiquement.
La fonction ”Surveillance de rotation” est décrite au chapitre 9.7.3.
Désactivation de la compensation automatique de dérive
Ce réglage permet de désactiver la compensation automatique de dérive.
Définition de la compensation automatique de dérive :
correction automatique du signal de réglage analogique se traduisant par l’annulation del’écart de traînage.
• Le réglage peut être activé/désactivé lorsque l’axe est à l’arrêt.
• La compensation automatique de dérive n’est pas active dans les cas suivants :
− en mode ”commande”
− pour le réglage ”Poursuite”
− en l’absence de déblocage du régulateur
− en l’absence de “Régulateur prêt” (si activé)
− lorsque l’axe est en mouvement
Déblocage du régulateur
Ce réglage permet :
• d’activer l’asservissement de position (condition requise pour la fonction d’asservisse-ment du FM 453).
• de transmettre le signal à l’entraînement conformément à PM34.
• d’assurer une régulation de maintien entre les déplacements en mode ”Commande”.
Axe en stationnement
Ce réglage permet p. ex. de remplacer le système de mesure pendant que l’ensemble del’installation reste en service.
Conséquences de ce réglage :
• Suppression de la synchronisation du codeur (SYNC = 0).
• Lors de la désactivation de “Axe en stationnement” effacement des messages d’erreursprésents et pas de déclenchement de nouveaux messages d’erreur (y compris alarmesde diagnostic) provenant du codeur.
• Inactivation des sorties TOR, tension analogique 0 V
Le réglage est activable/désactivable lorsque ”Traitement en cours” = 0.
Description des fonctions
9-46Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Simulation
Ce réglage vous permet :
• de tester tous les déroulements fonctionnels sans entraînement ni système de mesure.
Si un entraînement est raccordé, veuillez à ce qu’il soit hors service.
• d’exploiter toutes les sorties TOR (Attention, si l’on veut simuler des déroulements utili-sant de tels signaux, ces derniers doivent être raccordés aux entrées du FM 453, p. ex.pour la prise de référence).
• L’asservissement simule un système réglé, le signal ”régulateur prêt” n’étant pas nécess-aire à cet effet.
• Le réglage est activable/désactivable lorsque ”Traitement en cours” = 0.
• Tous les déroulements fonctionnels internes se comportent comme en mode normal.
Lors de la désactivation du réglage, l’axe est réinitialisé de manière interne (cf. ”Redémar-rage”, chap. 9.3.3).
9.3.3 Commandes ponctuelles (DB utilisateur, DBB36 et 37)
Généralités
Cette fonction vous permet de transmettre des commandes ponctuelles au FM 453. Cescommandes sont les suivantes :
• Activation des paramètres machine
• Effacement du parcours restant
• Recherche automatique de bloc avec calcul en avant
• Recherche automatique de bloc avec calcul en arrière
• Redémarrage (Restart)
• Annulation du forçage de valeur réelle
Appel des différentes commandes
Les différentes commandes deviennent actives une fois que le jeu de paramètres correspon-dant a été transmis au FM 453.
Les commandes sont effacées dans le FM 453 une fois qu’elles ont été exécutées.
Description des fonctions
9-47Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Activation des paramètres machine
Après avoir rechargé les paramètres machine (PM) ou le bloc PM (via la console PG), il fautles activer. Lors du paramétrage initial, la transmission des paramètres machine s’effectueautomatiquement. On fait une distinction entre les paramètres machine de type ”K” et ceuxde type ”E” car leurs effets sont différents.
Catégorie de PM Effet dans le FM 453 après activation
”K” ”Réinitialisation” du FM
• Tant que la ”réinitialisation” est en cours, il n’est pas possible de transmettred’autres données.
• Comportement interne, voir ”Restart”
”E” L’état de fonctionnement du FM reste conservé
Pour les paramètres machine, voir chapitre 5.3.1
Cette commande n’est possible que lorsque l’axe est à l’arrêt (”Traitement en cours” = 0).Un mode doit être sélectionné.
L’activation/désactivation a également pour effet d’activer un bloc PM.
PM61 ne peut être activé qu’en mettant le FM 453 hors/sous tension.
Effacement du parcours restant
Cette commande permet d’effacer la distance restant à parcourir après une interruption dupositionnement.
• Uniquement active dans les modes ”Semi-automatique relatif”, ”MDI” et ”Automatique”après un arrêt (Stop) (AUD = 1 et TEC = 1). Si le traitement n’a pas été interrompu par”Stop”, la demande ”Effacement du parcours restant” est sans effet dans le FM 453.
• Avec ”Start” et après ”Effacement du parcours restant”, le bloc MDI actif sera repris de-puis le début dans le cas du mode ”MDI”.
• Avec ”Start” et après ”Effacement du parcours restant”, le traitement se poursuivra avecle bloc suivant dans le cas des modes ”Semi-automatique relatif” et ”Automatique”.
Recherche automatique de bloc avec calcul, en avant
Cette commande est décrite au chapitre 9.2.6.
Recherche automatique de bloc avec calcul, en arrière
Cette commande est décrite au chapitre 9.2.6.

Description des fonctions
9-48Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Redémarrage
Cette commande vous permet de réinitialiser l’axe.
• Interruption de la sortie du signal de cadence.
• L’état de traitement momentané est interrompu et dans le cas de codeurs incrémentaux,la synchronisation est effacée.
• Les corrections actives sont effacées.
• Un signal d’acquittement est délivré pour tous les défauts.
Annulation du forçage de valeur réelle
Cette commande vous permet (lorsque l’axe est à l’arrêt) de rétablir la valeur initiale descoordonnées ayant été modifiées par les fonctions ”Forçage de valeur réelle” et ”Forçage devaleur réelle au vol”.
9.3.4 Décalage d’origine (contrat d’écriture DB utilisateur, DBX39.1)
Fonction du décalage d’origine
Le choix, la modification et l’annulation d’un décalage d’origine prennent effet avec le posi-tionnement suivant. Dans le cas de décalage d’origine, le décalage momentané du systèmede coordonnées est supprimé, sous réserve qu’un décalage d’origine ait déjà été actif et quele décalage indiqué (NPVnouveau − NPVvieil) est effectué avec le premier positionnement.Toutes les coordonnées, les fins de course logiciels, le point de référence et la valeur réellesont actualisés en conséquence.
Grâce à décalage d’origine est effectué la correspondance entre le système de coordonnéesde la pièce au système de coordonnées de la machine. Les valeurs réelles qui sont indiquéssur FM 453, concernent le système de coordonnées de la machine. La position de consignedans un bloc de déplacement se rapporte au système de coordonnées de la pièce.
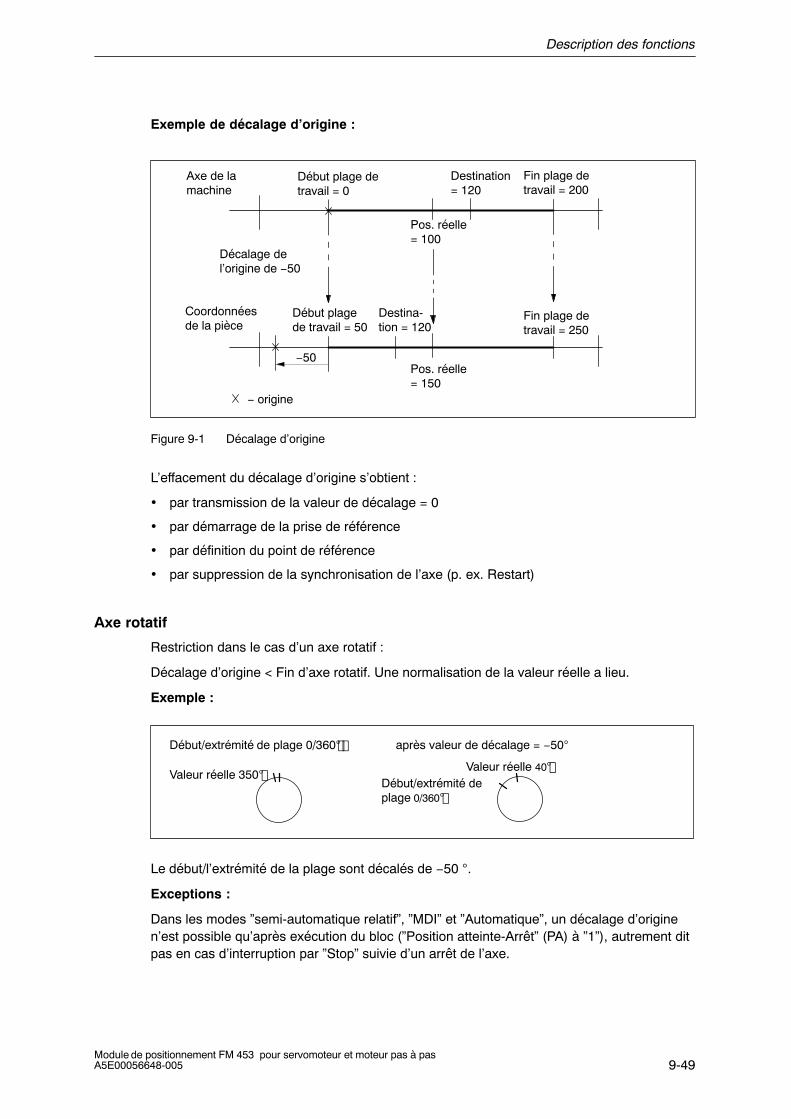
Description des fonctions
9-49Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exemple de décalage d’origine :
−50
Axe de lamachine
Début plage detravail = 0
Destination= 120
Fin plage detravail = 200
Décalage del’origine de −50
Pos. réelle= 150
Fin plage detravail = 250
Début plagede travail = 50
Destina-tion = 120
− origine
Pos. réelle= 100
Coordonnéesde la pièce
Figure 9-1 Décalage d’origine
L’effacement du décalage d’origine s’obtient :
• par transmission de la valeur de décalage = 0
• par démarrage de la prise de référence
• par définition du point de référence
• par suppression de la synchronisation de l’axe (p. ex. Restart)
Axe rotatif
Restriction dans le cas d’un axe rotatif :
Décalage d’origine < Fin d’axe rotatif. Une normalisation de la valeur réelle a lieu.
Exemple :
Début/extrémité de plage 0/360° après valeur de décalage = −50°
Valeur réelle 350°Valeur réelle 40°
Début/extrémité deplage 0/360°
Le début/l’extrémité de la plage sont décalés de −50 °.
Exceptions :
Dans les modes ”semi-automatique relatif”, ”MDI” et ”Automatique”, un décalage d’originen’est possible qu’après exécution du bloc (”Position atteinte-Arrêt” (PA) à ”1”), autrement ditpas en cas d’interruption par ”Stop” suivie d’un arrêt de l’axe.

Description des fonctions
9-50Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.3.5 Forçage de valeur réelle (contrat d’écriture DB utilisateur, DBX38.7)
Généralités
Cette fonction vous permet d’affecter une nouvelle valeur à la valeur réelle actuelle.
Fonction ”Forçage de valeur réelle”
La transmission de la coordonnée a pour effet de régler la valeur réelle à cette valeur. L’axedoit être à l’arrêt (après sélection ”Traitement en cours” = 0). Les coordonnées des fins decourse logiciels restent inchangées.
Exemple de forçage de valeur réelle :
Axe de lamachine
Début plage detravail = 0
Destination= 120
Fin plage detravail = 200
Forçage devaleur réelle 150
Fin plage detravail = 200
Début plagede travail = 0
Destina-tion = 120
Axe de la ma-chine
Pos. réelle= 100
Position réelle = 150
Figure 9-2 Forçage de valeur réelle
La coordonnée reprend sa valeur d’origine :
• par une synchronisation en mode ”Prise de référence”
• par ”définition du point de référence”
• par ”annulation forçage de valeur réelle”
• par ”redémarrage”
Description des fonctions
9-51Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.3.6 Forçage de valeur réelle au vol (contrat d’écriture DB utilisateur,DBX39.0)
Généralités
Cette fonction vous permet d’affecter une nouvelle valeur réelle à la position actuelle par lebiais d’un événement externe.
Fonction ”Forçage de valeur réelle au vol”
La transmission de la coordonnée (nouvelle valeur réelle) a pour effet d’activer ”le forçagede valeur réelle au vol”.
Mais l’exécution de la fonction ”Forçage de valeur réelle” ne sera déclenchée que par lesignal sur l’entrée TOR correspondante lorsque ”Traitement en cours” = 1.
L’activation d’un nouveau ”Forçage de valeur réelle au vol” nécessite une retransmission dela fonction ”Forçage de valeur réelle au vol”.
La coordonnée reprend sa valeur d’origine :
• par synchronisation en mode ”Prise de référence”
• par ”définition du point de référence”
• par ”annulation forçage de valeur réelle”
• par ”redémarrage”
Nota :
”Forçage de valeur réelle au vol” en mode ”Automatique”, cf. chap. 9.2.6.
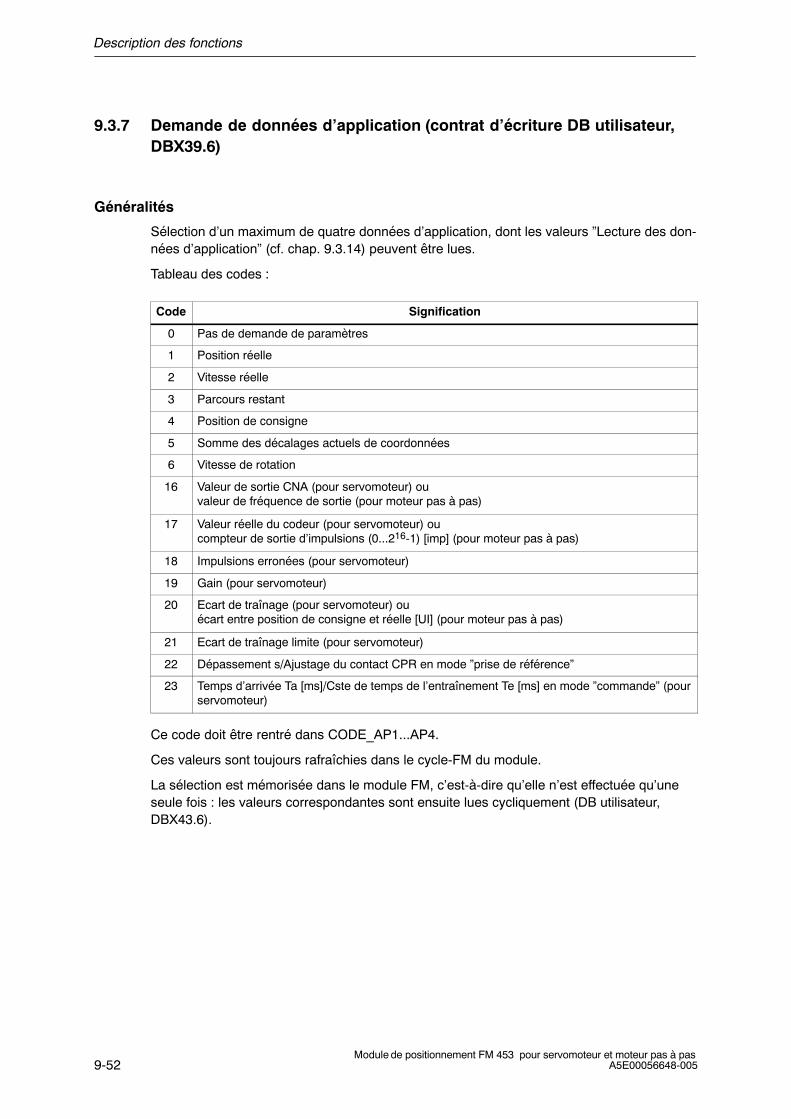
Description des fonctions
9-52Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.3.7 Demande de données d’application (contrat d’écriture DB utilisateur,DBX39.6)
Généralités
Sélection d’un maximum de quatre données d’application, dont les valeurs ”Lecture des don-nées d’application” (cf. chap. 9.3.14) peuvent être lues.
Tableau des codes :
Code Signification
0 Pas de demande de paramètres
1 Position réelle
2 Vitesse réelle
3 Parcours restant
4 Position de consigne
5 Somme des décalages actuels de coordonnées
6 Vitesse de rotation
16 Valeur de sortie CNA (pour servomoteur) ou valeur de fréquence de sortie (pour moteur pas à pas)
17 Valeur réelle du codeur (pour servomoteur) ou compteur de sortie d’impulsions (0...216-1) [imp] (pour moteur pas à pas)
18 Impulsions erronées (pour servomoteur)
19 Gain (pour servomoteur)
20 Ecart de traînage (pour servomoteur) ou écart entre position de consigne et réelle [UI] (pour moteur pas à pas)
21 Ecart de traînage limite (pour servomoteur)
22 Dépassement s/Ajustage du contact CPR en mode ”prise de référence”
23 Temps d’arrivée Ta [ms]/Cste de temps de l’entraînement Te [ms] en mode ”commande” (pourservomoteur)
Ce code doit être rentré dans CODE_AP1...AP4.
Ces valeurs sont toujours rafraîchies dans le cycle-FM du module.
La sélection est mémorisée dans le module FM, c’est-à-dire qu’elle n’est effectuée qu’uneseule fois : les valeurs correspondantes sont ensuite lues cycliquement (DB utilisateur,DBX43.6).
Description des fonctions
9-53Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.3.8 Teach-In (contrat d’écriture DB utilisateur, DBX39.7)
Généralités
La position réelle à l’instant considéré est introduite en tant que consigne de position (Atten-tion : position en cotation absolue) dans un bloc de programme sélectionné avec numéro deprogramme et numéro de bloc.
Le Teach-In n’est possible que dans les modes :
• Manuel à vue
• Semi-automatique relatif
• MDI
et lorsque l’axe est à l’arrêt.
Le programme avec le bloc de programme correspondant doit être présent dans le FM 453(cf. Paramétrage, chap. 5).
9.3.9 Définition du point de référence (contrat d’écriture DB utilisateur,DBX38.6)
Généralités
Cette fonction vous permet de synchroniser l’axe sans accostage du point de référence.
Fonction
Dans le cas de la ”Définition du point de référence”, une coordonnée de position définie dansles paramètres sera affectée à la position momentanée de l’axe et sera adoptée en tant quevaleur réelle.
Pour les axes avec codeur absolu, le référencement de la position est inscrit dans le PM17.L’exécution de la fonction ”définition du point de référence” en un point connu de l’axe a poureffet de transmettre au FM 453 la coordonnée connue de ce point dans le système d’unité.Cette valeur est définie comme position réelle de l’axe. En même temps, ce référencementde position est rendu rémanent, en inscrivant dans PM17 la correspondance entre valeurréelle du codeur et point de référence de l’axe qui est calculée à partir de la correspondanceentre la position réelle définie et la valeur réelle du codeur en ce point.
”Positionner le point de référence” n’est pas possible pendant le traitement en cours ([BL] = 1) ou il devient efficace seulement après le traitement ([BL] = 0).
Cette fonction n’est pas active dans les modes “Automatique” (MOD = 08) et “Automatiquebloc par bloc“ (MOD = 09).

Description des fonctions
9-54Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.3.10 Couplage d’axes (contrat d’écriture DB utilisateur, DBX40.0)
Généralités
Cette fonction permet de réaliser un déplacement synchrone d’axes.
La fonction “Couplage d’axe” est disponible à partir de version de logiciel 2.1 du FM 453.
Définir un couplage d’axes
DB utilisateur, DBB252 : 0 = pas de couplage3 = couplage axe 1 avec axe 25 = couplage axe 1 avec axe 37 = couplage axe 1 avec axes 2 et axes 3
Effets des signaux
Selon le mode sélectionné, les signaux suivants de l’axe pilote sont transférés aux axesasservis en cas de couplage des axes :
• mode Manuel à vue : Sens positif, Sens négatif, Correction, Niveaux de vitesse, Entrée de validation (entrée TOR)
• modes MDI/Automatique : Sens positif, Sens négatif, Démarrage, Correction, Démarrage externe, Entrée de validation (entrée TOR)
Ceci permet un “démarrage simultané” des axes (en fait, démarrages successifs à inter-valles d’environ 1 ms en l’espace d’un cycle du FM). Ceux-ci continuent à fonctionner defaçon indépendante (pas d’interpolation).
Seuls les signaux indiqués sont couplés. L’utilisateur doit assurer que tous les axes cou-plés puissent être déplacés, c.-à-d. même mode (Manuel à vue ou MDI/Automatique),absence d’erreur / défaut, trajets à parcourir et vitesses définis. Les signaux transféra-bles aux axes asservis doivent être définis pour l’axe 1. Le FM 453 les transfère instanta-nément aux axes asservis. Le couplage d’axe réglé est conservé dans les modes “Com-mande”, “Semi-automatique relatif” et “Prise de référence”, mais il n’est pas actif.
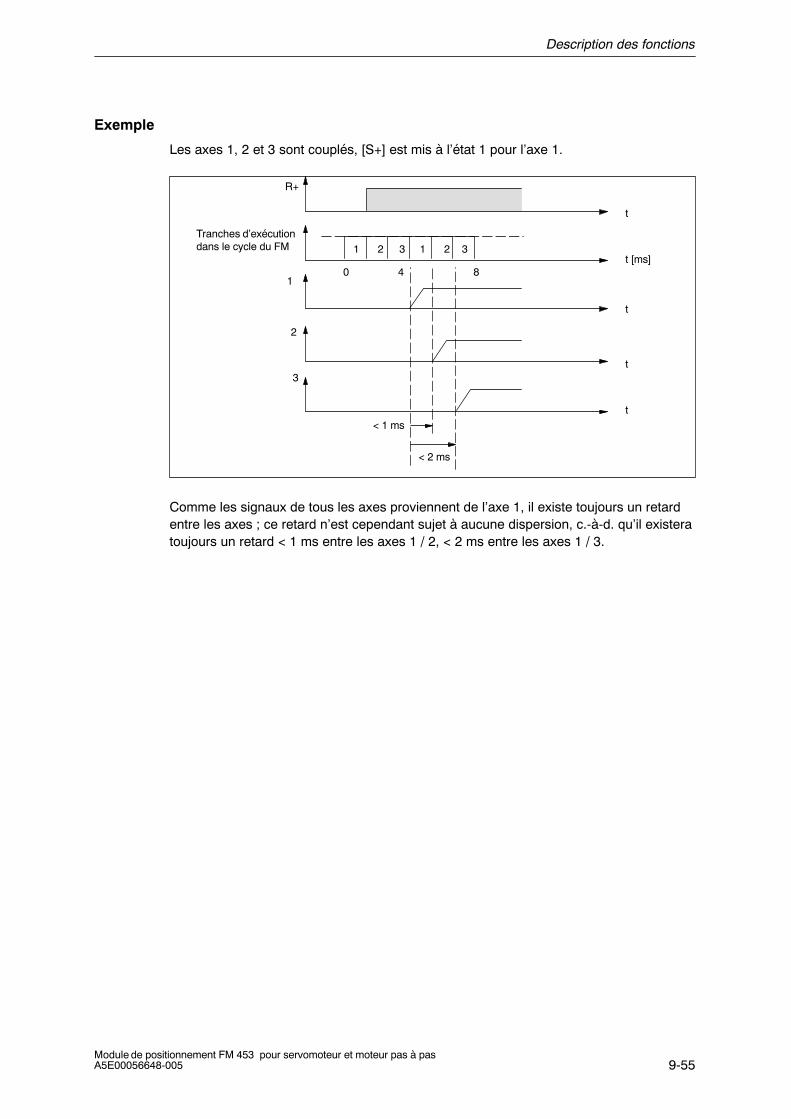
Description des fonctions
9-55Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exemple
Les axes 1, 2 et 3 sont couplés, [S+] est mis à l’état 1 pour l’axe 1.
R+
Tranches d’exécutiondans le cycle du FM 1 2 3 1 2 3
t
t [ms]
t
t
t
0 4 81
2
3
< 1 ms
< 2 ms
Comme les signaux de tous les axes proviennent de l’axe 1, il existe toujours un retardentre les axes ; ce retard n’est cependant sujet à aucune dispersion, c.-à-d. qu’il existeratoujours un retard < 1 ms entre les axes 1 / 2, < 2 ms entre les axes 1 / 3.
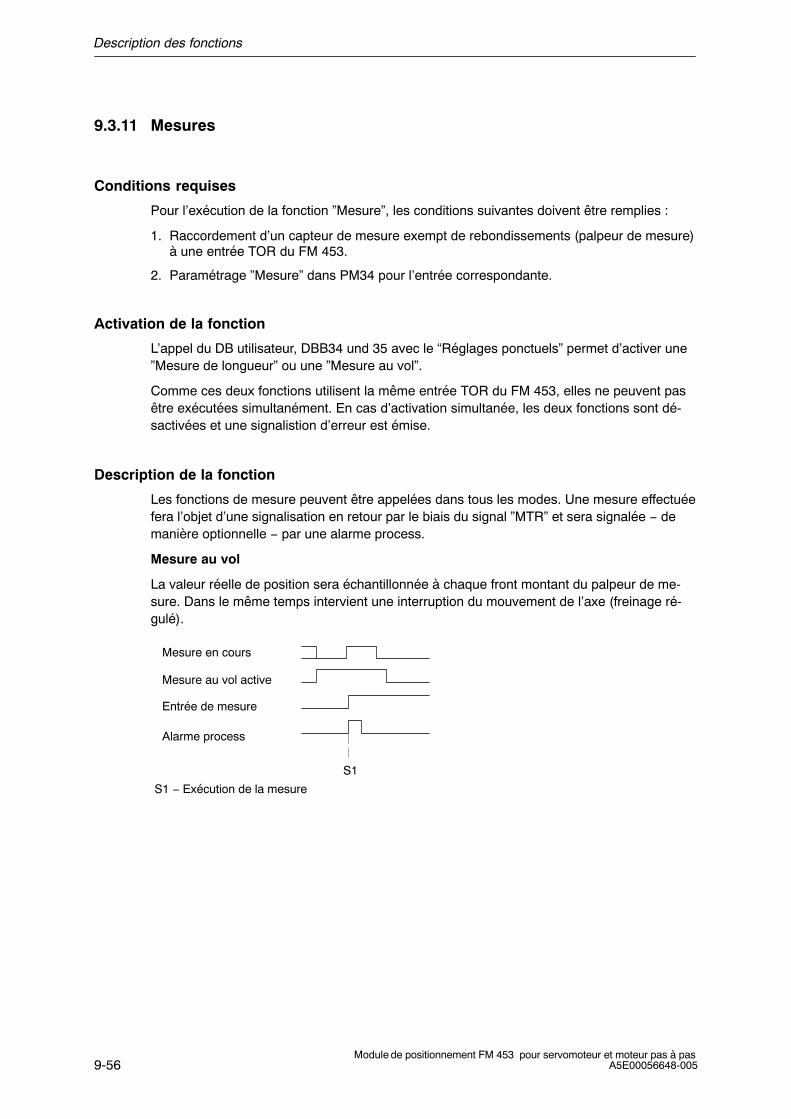
Description des fonctions
9-56Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.3.11 Mesures
Conditions requises
Pour l’exécution de la fonction ”Mesure”, les conditions suivantes doivent être remplies :
1. Raccordement d’un capteur de mesure exempt de rebondissements (palpeur de mesure)à une entrée TOR du FM 453.
2. Paramétrage ”Mesure” dans PM34 pour l’entrée correspondante.
Activation de la fonction
L’appel du DB utilisateur, DBB34 und 35 avec le “Réglages ponctuels” permet d’activer une”Mesure de longueur” ou une ”Mesure au vol”.
Comme ces deux fonctions utilisent la même entrée TOR du FM 453, elles ne peuvent pasêtre exécutées simultanément. En cas d’activation simultanée, les deux fonctions sont dé-sactivées et une signalistion d’erreur est émise.
Description de la fonction
Les fonctions de mesure peuvent être appelées dans tous les modes. Une mesure effectuéefera l’objet d’une signalisation en retour par le biais du signal ”MTR” et sera signalée − demanière optionnelle − par une alarme process.
Mesure au vol
La valeur réelle de position sera échantillonnée à chaque front montant du palpeur de me-sure. Dans le même temps intervient une interruption du mouvement de l’axe (freinage ré-gulé).
S1
S1 − Exécution de la mesure
Mesure au vol active
Entrée de mesure
Alarme process
Mesure en cours
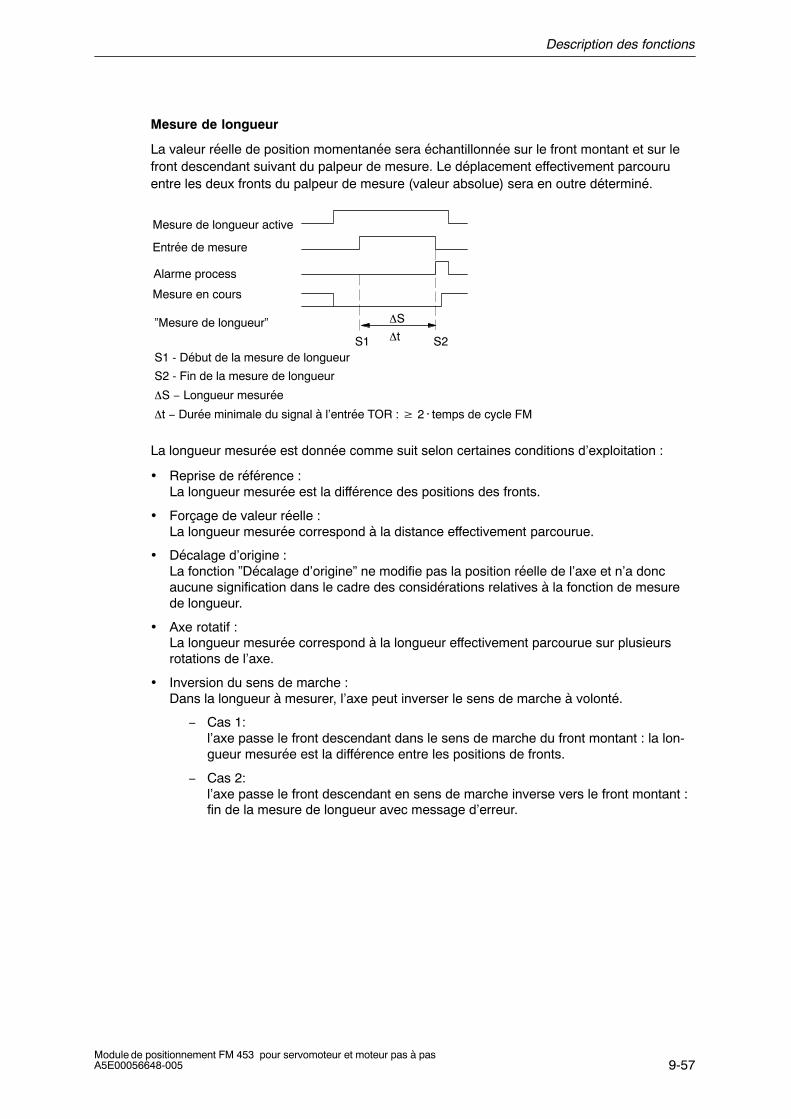
Description des fonctions
9-57Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Mesure de longueur
La valeur réelle de position momentanée sera échantillonnée sur le front montant et sur lefront descendant suivant du palpeur de mesure. Le déplacement effectivement parcouruentre les deux fronts du palpeur de mesure (valeur absolue) sera en outre déterminé.
Mesure de longueur active
Entrée de mesure
Alarme process
Mesure en cours
”Mesure de longueur” ∆S
S1 S2S1 - Début de la mesure de longueur
S2 - Fin de la mesure de longueur
∆S − Longueur mesurée
∆t − Durée minimale du signal à l’entrée TOR : 2temps de cycle FM
∆t
La longueur mesurée est donnée comme suit selon certaines conditions d’exploitation :
• Reprise de référence :La longueur mesurée est la différence des positions des fronts.
• Forçage de valeur réelle : La longueur mesurée correspond à la distance effectivement parcourue.
• Décalage d’origine :La fonction ”Décalage d’origine” ne modifie pas la position réelle de l’axe et n’a doncaucune signification dans le cadre des considérations relatives à la fonction de mesurede longueur.
• Axe rotatif :La longueur mesurée correspond à la longueur effectivement parcourue sur plusieursrotations de l’axe.
• Inversion du sens de marche :Dans la longueur à mesurer, l’axe peut inverser le sens de marche à volonté.
− Cas 1:l’axe passe le front descendant dans le sens de marche du front montant : la lon-gueur mesurée est la différence entre les positions de fronts.
− Cas 2:l’axe passe le front descendant en sens de marche inverse vers le front montant :fin de la mesure de longueur avec message d’erreur.
Description des fonctions
9-58Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Messages de défaut
Le tableau suivant vous donne la liste des défauts susceptibles d’apparaître lors de l’exécu-tion de la fonction ”Mesure”.
Défaut Signification
Erreur dedéplacement
En cas de sélection d’une fonction de mesure sans paramétrage d’une entrée TOR, l’erreur ”En-trée TOR non paramétrée” sera signalée (cf. Analyse des défauts, tableau 11-7, Cl. 3/N° 30).
Erreur demanipulation
En cas de sélection des deux fonctions de mesure, l’erreur ”Fonction de mesure indéfinie” serasignalée (cf. Analyse des défauts, tableau 11-6, Cl. 2/N° 16).
Erreur demesure
Toute mesure de longueur erronée sera signalée en retour par la valeur de longueur ”−1”.Causes possibles du défaut :
• Nouvelle synchronisation en mode ”Prise de référence” pendant une mesure en cours.
• Exécution de la fonction ”Définition du point de référence” pendant qu’une mesure est encours.
• Le sens de déplacement au niveau du front descendant diffère de celui au niveau du frontdescendant.
Signalisations en retour pour la mesure
Le signal en retour ”MTR” (cf. chap. 9.1) signale l’état d’exécution de la fonction commesuit :
“MTR” Mesure au vol Mesure de longueur
0 • Les fonctions ”Mesure de longueur” et”Mesure au vol” sont inactives
• Avec Start après une mesure précédente.
• Les fonctions ”Mesure de longueur” et”Mesure au vol” sont inactives
• Sur le front avant du signal du palpeur demesure après une mesure précédente.
1 Sur le front avant du signal du palpeur de me-sure(= mesure au vol terminée)
Sur le front arrière du signal du palpeur demesure (= mesure de longueur terminée)
Lecture des valeurs de mesure
L’appel du bloc POS_MSRM et le contrat de lecture DB utilisateur, DBB43.7 (cf. chap.6.3.4) vous permet de lire dans le FM 353 le résultat de l’exécution des fonctions ”Me-sure de longueur” et ”Mesure au vol”.
Les valeurs de mesures lues sont valables pour la mesure en cours, commençant avecla signalisation en retour par le biais du signal ”MTR” jusqu’à l’apparition du front montantd’une mesure suivante.

Description des fonctions
9-59Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
N° Valeur ”0” Valeur ”−1” Toutes autresvaleurs positi-
ves
Toutes autresvaleurs négati-
ves
1 Les fonctions ”Mesure de longueur” et ”Me-sure au vol” sont inactives
Valeur de position sur le front montant du palpeur de me-sure pour les fonctions ”Mesure au vol” et ”Mesure de lon-gueur”
2 • Les fonctions ”Mesure de longueur” et”Mesure au vol” sont inactives
• Toujours pour la fonction ”Mesure auvol”
Valeur de position sur le front descendant du palpeur demesure pour la fonction ”Mesure de longueur”
3 • Les fonctions ”Mesure de longueur” et”Mesure au vol” sont inactives
• Toujours pour la fonction ”Mesure auvol”
• Longueur mesurée ”0” possible parcommutation du palpeur de mesure lors-que l’axe est à l’arrêt.
Mesure de lon-gueur erronée
Longueur mesu-rée
n’existent pas
9.3.12 Données d’exploitation de base (contrat de lecture DB utilisateur,DBX42.0)
Généralités
Ce sont les données d’affichage suivantes :
• Position réelle [UI]
• Vitesse réelle [UI/min]
• Parcours restant [UI]
• Position de consigne [UI]
• Somme des décalages de coordonnées, correction d’outil, décalage d’origine actifs [UI]
• Vitesse de rotation (uniquement axe rotatif) [tr/min]
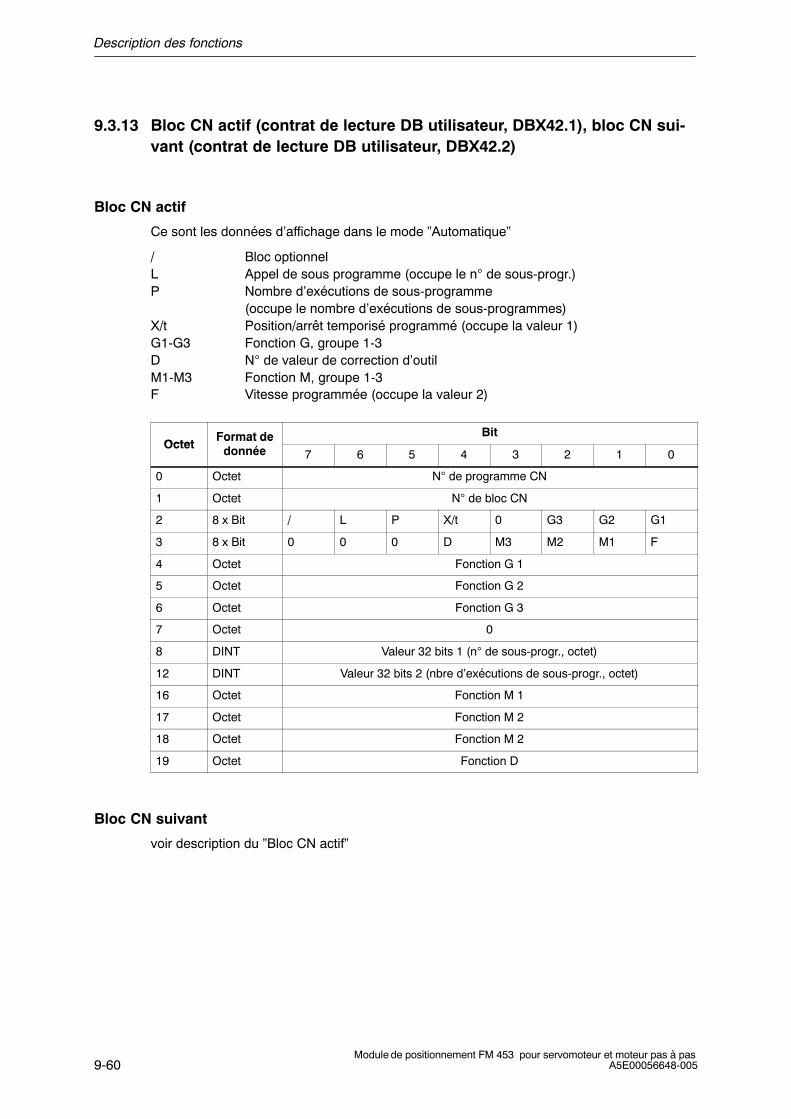
Description des fonctions
9-60Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.3.13 Bloc CN actif (contrat de lecture DB utilisateur, DBX42.1), bloc CN sui-vant (contrat de lecture DB utilisateur, DBX42.2)
Bloc CN actif
Ce sont les données d’affichage dans le mode ”Automatique”
/ Bloc optionnelL Appel de sous programme (occupe le n° de sous-progr.)P Nombre d’exécutions de sous-programme
(occupe le nombre d’exécutions de sous-programmes)X/t Position/arrêt temporisé programmé (occupe la valeur 1)G1-G3 Fonction G, groupe 1-3D N° de valeur de correction d’outilM1-M3 Fonction M, groupe 1-3F Vitesse programmée (occupe la valeur 2)
OctetFormat de Bit
OctetFormat de
donnée 7 6 5 4 3 2 1 0
0 Octet N° de programme CN
1 Octet N° de bloc CN
2 8 x Bit / L P X/t 0 G3 G2 G1
3 8 x Bit 0 0 0 D M3 M2 M1 F
4 Octet Fonction G 1
5 Octet Fonction G 2
6 Octet Fonction G 3
7 Octet 0
8 DINT Valeur 32 bits 1 (n° de sous-progr., octet)
12 DINT Valeur 32 bits 2 (nbre d’exécutions de sous-progr., octet)
16 Octet Fonction M 1
17 Octet Fonction M 2
18 Octet Fonction M 2
19 Octet Fonction D
Bloc CN suivant
voir description du ”Bloc CN actif”
Description des fonctions
9-61Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.3.14 Données d’application (contrat de lecture DB utilisateur, DBX43.6)
Généralités
Les valeurs mises à disposition avec ”Demande de données d’applications”, DB utilisateur,DBX42.3 (cf. chap. 9.3.7) sont retournées par le FM 453, si le contrat de lecture (DB utilisa-teur, DBX43.6) est activé par le programme utilisateur.
Ces valeurs sont actualisées sur le FM 453 à intervalles correspondant au temps decycle-FM du module.
9.3.15 Valeur réelle au changement de bloc (contrat de lecture DB utilisateur,DBX42.3)
Généralités
La fonction ”Valeur réelle au changement de bloc” est décrite au chapitre 10.1, G50, G88,G89.
9.3.16 Données de maintenance (contrat de lecture DB utilisateur, DBX42.4)
Généralités
Les données de maintenance sont constituées par les données d’affichage suivantes de laboucle de régulation :
• Valeur de sortie CNA [mV] (pour servomoteur) ou valeur de fréquence de sortie [Hz] (pour moteur pas à pas)
• Valeur réelle du codeur [UI] (pour servomoteur) ou compteur de sortie d’impulsions (0...216-1) [imp] (pour moteur pas à pas)
• Impulsions erronées (pour servomoteur)
• Gain (de la boucle d’asservissement) (pour servomoteur)
• Ecart de traînage [UI] (pour servomoteur) ou écart entre position de consigne et réelle [UI] (pour moteur pas à pas)
• Ecart de traînage limite [UI] (pour servomoteur)
• Dépassement s/Ajustage du contact CPR en mode ”prise de référence” [UI]
• Temps d’arrivée Ta [ms]/Cste de temps de l’entraînement Te [ms] en mode ”commande”(pour servomoteur)
Description des fonctions
9-62Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.3.17 Données d’exploitation supplémentaires (contrat de lecture DButilisateur, DBX43.5)
Généralités
Ce sont les données d’affichage suivantes :
• Correction de vitesse/de temps [%]
• Programme de déplacement CN
• N° de bloc CN
• Compteur de nombre d’appels de sous-programme
• G90/G91 actif, cf. chap. 10.1
• G60/G64 actif, cf. chap. 10.1
• G43/G44 actif, cf. chap. 10.1
• N° D actif, cf. chap. 10.1
• Signalisations d’état 1 (type de données : BOOL) :
− Limitation de la vitesse à la fréquence maximale selon PM23
− limitation à 10 V (pour servomoteur)
− limitation à l’accélération ou décélération minimale
• Signalisations d’état 2 (type de données : BOOL) : non utilisées
9.3.18 Paramètres/Données (contrat de lecture DB utilisateur, DBX43.3)
Généralités
Les paramètres/données faisant l’objet d’un contrat de lecture du fait de la fonction ”Modifi-cation de paramètres/données”, contrat d’écriture DB utilisateur, DBX39.3 (cf. chap. 9.3.1)peuvent être lus.
9.3.19 Etat du couplage d’axes (contrat de lecture DB utilisateur, DBX43.0)
Généralités
Ce contrat permet la lecture de l’état momentané du couplage d’axes.
DB utilisateur, DBB470 : 0 = pas de couplage3 = couplage axe 1 avec axe 25 = couplage axe 1 avec axe 37 = couplage axe 1 avec axes 2 et axes 3
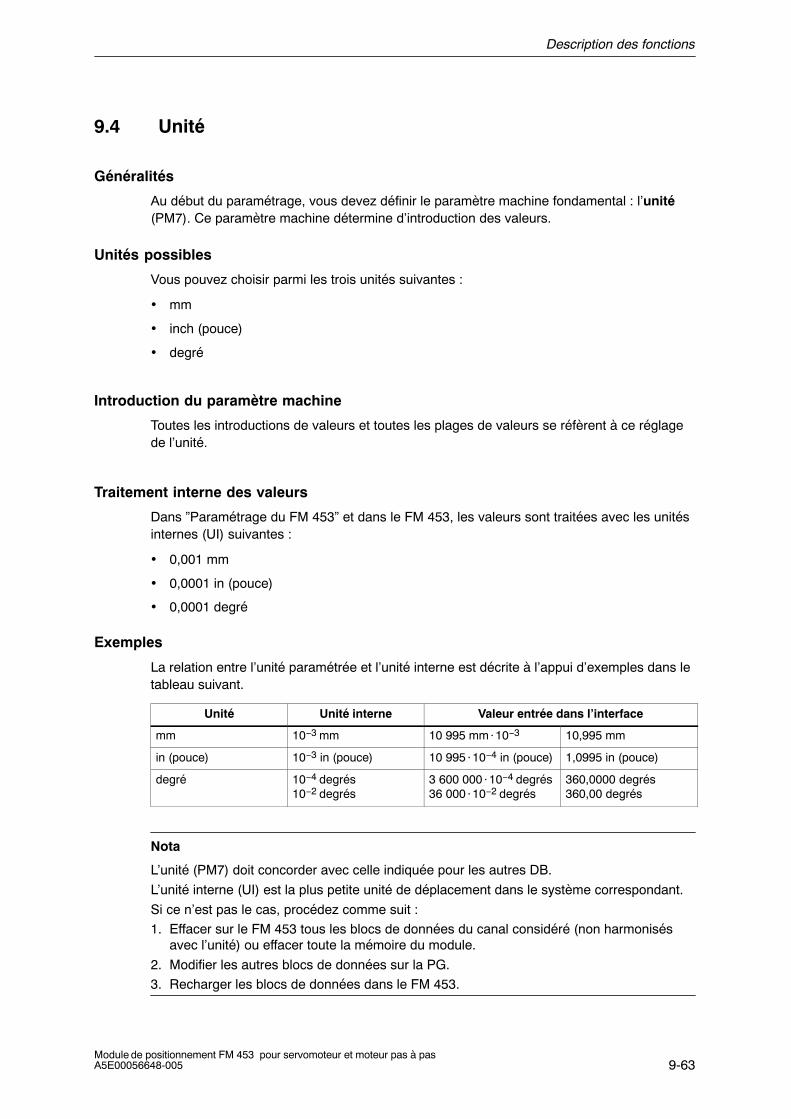
Description des fonctions
9-63Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.4 Unité
Généralités
Au début du paramétrage, vous devez définir le paramètre machine fondamental : l’unité(PM7). Ce paramètre machine détermine d’introduction des valeurs.
Unités possibles
Vous pouvez choisir parmi les trois unités suivantes :
• mm
• inch (pouce)
• degré
Introduction du paramètre machine
Toutes les introductions de valeurs et toutes les plages de valeurs se réfèrent à ce réglagede l’unité.
Traitement interne des valeurs
Dans ”Paramétrage du FM 453” et dans le FM 453, les valeurs sont traitées avec les unitésinternes (UI) suivantes :
• 0,001 mm
• 0,0001 in (pouce)
• 0,0001 degré
Exemples
La relation entre l’unité paramétrée et l’unité interne est décrite à l’appui d’exemples dans letableau suivant.
Unité Unité interne Valeur entrée dans l’interface
mm 10−3 mm 10 995 mm10−3 10,995 mm
in (pouce) 10−3 in (pouce) 10 99510−4 in (pouce) 1,0995 in (pouce)
degré 10−4 degrés10−2 degrés
3 600 00010−4 degrés36 00010−2 degrés
360,0000 degrés360,00 degrés
Nota
L’unité (PM7) doit concorder avec celle indiquée pour les autres DB.
L’unité interne (UI) est la plus petite unité de déplacement dans le système correspondant.
Si ce n’est pas le cas, procédez comme suit :
1. Effacer sur le FM 453 tous les blocs de données du canal considéré (non harmonisésavec l’unité) ou effacer toute la mémoire du module.
2. Modifier les autres blocs de données sur la PG.
3. Recharger les blocs de données dans le FM 453.
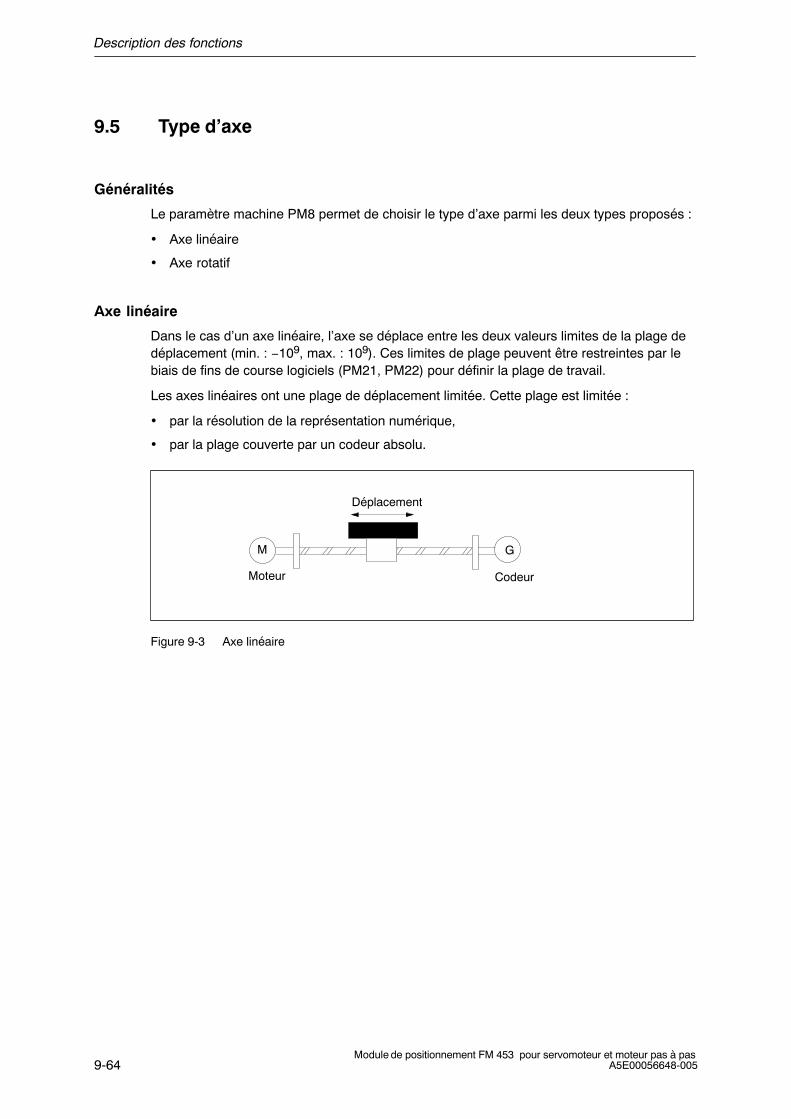
Description des fonctions
9-64Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.5 Type d’axe
Généralités
Le paramètre machine PM8 permet de choisir le type d’axe parmi les deux types proposés :
• Axe linéaire
• Axe rotatif
Axe linéaire
Dans le cas d’un axe linéaire, l’axe se déplace entre les deux valeurs limites de la plage dedéplacement (min. : −109, max. : 109). Ces limites de plage peuvent être restreintes par lebiais de fins de course logiciels (PM21, PM22) pour définir la plage de travail.
Les axes linéaires ont une plage de déplacement limitée. Cette plage est limitée :
• par la résolution de la représentation numérique,
• par la plage couverte par un codeur absolu.
M
Déplacement
Codeur
G
Moteur
Figure 9-3 Axe linéaire

Description des fonctions
9-65Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Axe rotatif
Dans le cas d’un axe rotatif, la valeur réelle est remise à ”0” au bout d’un tour. Les axes ro-tatifs présentent donc une plage de déplacement illimitée.
0
5 000
9 999
Figure 9-4 Axe rotatif
Avant de démarrer un déplacement dans les modes ”MDI” et ”Automatique”, vous pouvezspécifier le sens de rotation avec les signaux de commande S+ ou S−.
Fin d’axe rotatif
Le paramètre machine PM9 définit la valeur pour laquelle le FM 453 détecte l’extrémité del’axe rotatif.
Cette valeur est théoriquement la valeur maximale que peut prendre la valeur réelle. Unefois cette valeur atteinte, l’affichage repasse à la valeur ”0”.
La valeur maximale théorique n’est toutefois jamais affichée, car elle se trouve physique-ment sur la même position que l’origine de l’axe rotatif (0).
Exemple :
L’exemple suivant selon Fig. 9-4 illustre cette situation.
Vous avez défini la valeur 10000 pour la fin d’axe rotatif.
La valeur 10000 ne sera pas affichée. L’affichage passera systématiquement de 9999 à 0.
En cas de sens de rotation négatif, l’affichage sautera de 0 à 9999.
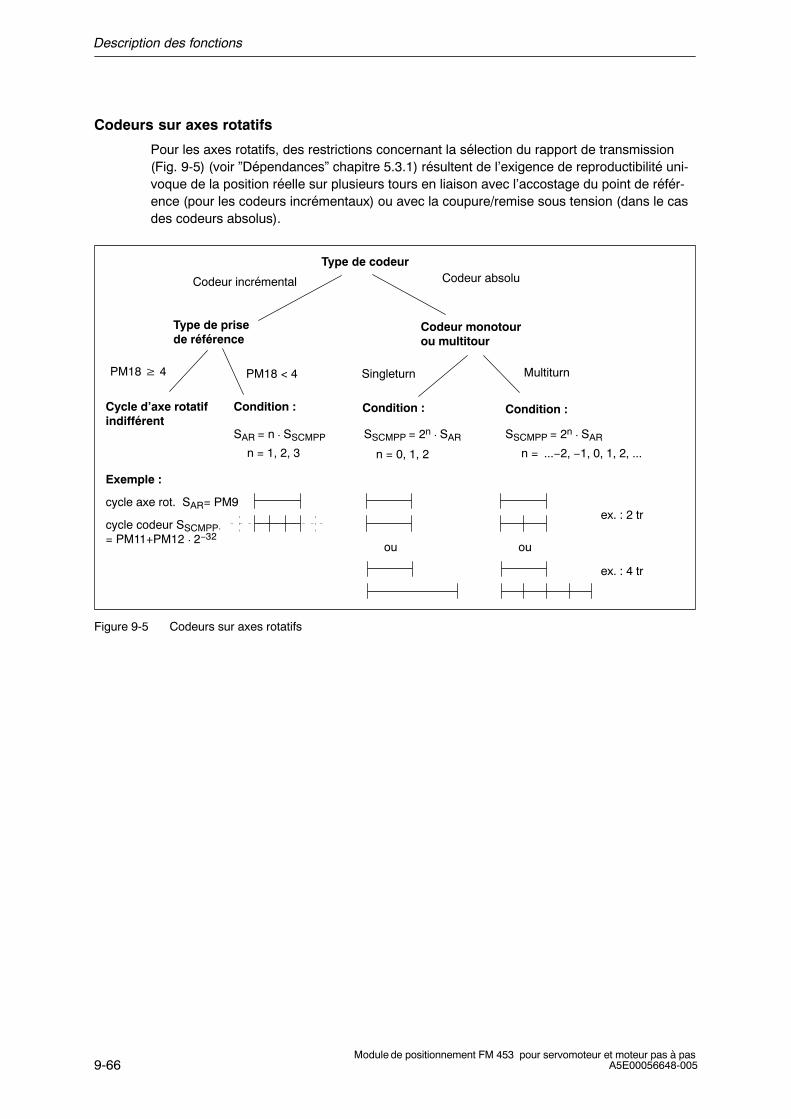
Description des fonctions
9-66Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Codeurs sur axes rotatifs
Pour les axes rotatifs, des restrictions concernant la sélection du rapport de transmission(Fig. 9-5) (voir ”Dépendances” chapitre 5.3.1) résultent de l’exigence de reproductibilité uni-voque de la position réelle sur plusieurs tours en liaison avec l’accostage du point de référ-ence (pour les codeurs incrémentaux) ou avec la coupure/remise sous tension (dans le casdes codeurs absolus).
Type de codeur
Codeur incrémental Codeur absolu
Type de prise de référence
Codeur monotour ou multitour
PM18 4 PM18 < 4 Singleturn Multiturn
Cycle d’axe rotatifindifférent
Condition :
SAR = n SSCMPP
n = 1, 2, 3
SSCMPP = 2n SAR
n = 0, 1, 2
SSCMPP = 2n SAR
n = ...−2, −1, 0, 1, 2, ...
Exemple :
cycle axe rot. SAR= PM9
cycle codeur SSCMPP= PM11+PM12 2−32
ou ou
ex. : 2 tr
ex. : 4 tr
Condition :Condition :
Figure 9-5 Codeurs sur axes rotatifs

Description des fonctions
9-67Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.6 Codeur
Vue d’ensemble
L’un des codeurs suivants doit être raccordé à l’interface du système de mesure du FM 453(cf. Fig. 1-1) :
• Codeur incrémental
• Codeur absolu (SSI)
Les déplacements et les positions sont représentés en 10−3 mm, 10−4 pouces ou 10−4 de-grés suivant la sélection dans le paramètre machine PM7.
La résolution de l’axe machine résultant du codeur est calculée de manière interne dans leFM à partir des paramètres machine PM11 à PM13.
Choix du codeur
Pour obtenir une précision de positionnement donnée, il est impératif que le codeur délivreune résolution de parcours n fois meilleure.
Valeurs recommandées pour n
valeur minimale valeur optimale valeur maximale
2 4 10
Lors de la configuration de l’application envisagée, il conviendrait donc de choisir un codeurqui corresponde aux impératifs de précision de positionnement voulue.
A partir des paramètres intrinsèques connus de la machine et de la résolution de mesure R :
R = 1n précision de positionnement [mm], [pouce], [degré]
on peut calculer le nombre d’impulsion par tour de codeur à l’aide des équations suivantes(exemple en système métrique) :
Codeur incrémental Absolutgeber (SSI) Moteur pas à pas sans codeur
IC =S [mm]
4 iCS A [mm]SC =
S [mm]
iCS A [mm]SM =
S [mm]
iCS A [mm]
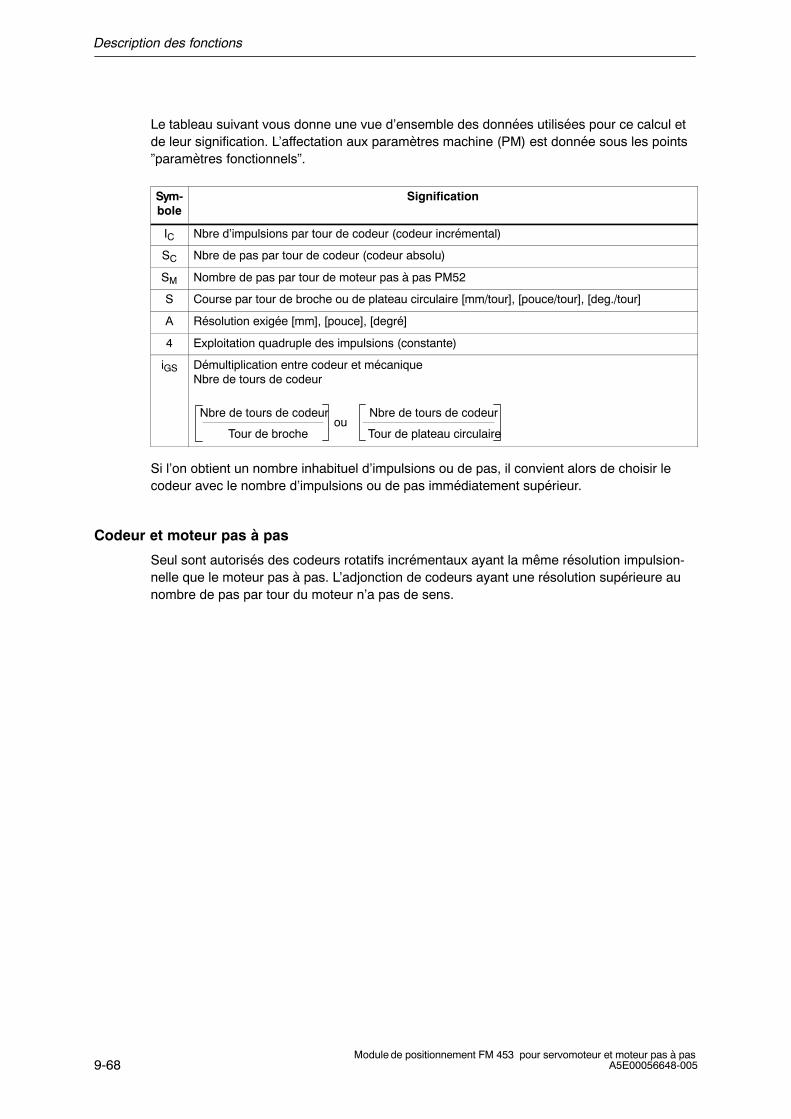
Description des fonctions
9-68Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Le tableau suivant vous donne une vue d’ensemble des données utilisées pour ce calcul etde leur signification. L’affectation aux paramètres machine (PM) est donnée sous les points”paramètres fonctionnels”.
Sym-bole
Signification
IC Nbre d’impulsions par tour de codeur (codeur incrémental)
SC Nbre de pas par tour de codeur (codeur absolu)
SM Nombre de pas par tour de moteur pas à pas PM52
S Course par tour de broche ou de plateau circulaire [mm/tour], [pouce/tour], [deg./tour]
A Résolution exigée [mm], [pouce], [degré]
4 Exploitation quadruple des impulsions (constante)
iGS Démultiplication entre codeur et mécaniqueNbre de tours de codeur
Nbre de tours de codeur
Tour de broche
Nbre de tours de codeur
Tour de plateau circulaireou
Si l’on obtient un nombre inhabituel d’impulsions ou de pas, il convient alors de choisir lecodeur avec le nombre d’impulsions ou de pas immédiatement supérieur.
Codeur et moteur pas à pas
Seul sont autorisés des codeurs rotatifs incrémentaux ayant la même résolution impulsion-nelle que le moteur pas à pas. L’adjonction de codeurs ayant une résolution supérieure aunombre de pas par tour du moteur n’a pas de sens.
Description des fonctions
9-69Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.6.1 Codeurs incrémentaux
Généralités
Les codeurs incrémentaux servent à la saisie de la valeur réelle de position. Ils délivrent àcet effet des impulsions qui sont totalisées dans le FM 453 de sorte à obtenir une valeur ab-solue. Après la mise en marche du FM 453, il existe un décalage impossible à prévoir à l’a-vance entre la valeur de position interne et la position mécanique de l’axe. Afin d’établir uneréférence de position, il est donc nécessaire, pour une position définie de l’axe, d’affecter àla valeur interne une valeur connue − la coordonnée du point de référence − qui sera enre-gistrée dans les paramètres machine PM (cf. chap. 9.2.3).
Codeurs incrémentaux
Les variantes d’utilisation possibles sont les suivantes :
• Codeurs incrémentaux rotatifs sur axes linéaire
Il est possible d’utiliser des codeurs avec un top zéro par tour. Le nombre d’impulsionsdoit correspondre à un multiple de dix ou à une puissance de 2.
• Codeurs incrémentaux rotatifs sur axes rotatifs
Il est possible d’utiliser des codeurs avec un top zéro par tour. Le nombre d’impulsionsdoit correspondre à un multiple de dix ou à une puissance de 2. En cas de montage indi-rect du codeur et en cas de prise de reférence avec top zéro (PM18 4) il est impératifque le rapport de transmission soit choisi de manière que l’axe rotatif fasse un nombreentier de tours entre deux tops zéro successifs (voir ”Dépendances”, chap. 5.3.1. etchap. 9.5).
• Règles linéaires sur axes linéaires
Il est possible d’utiliser des règles linéaires avec au minimum un top zéro de référence ouavec un top zéro cyclique.
Contrairement aux codeurs incrémentaux rotatifs, on ne se base pas ici sur le nombre detours de codeur, mais sur la période qui correspond par ex. à la distance entre deux im-pulsions de top zéro.

Description des fonctions
9-70Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Paramètres fonctionnels
Le tableau 9-9 vous indique comment adapter le codeur sélectionné au FM 453.
Tableau 9-9 Paramètres fonctionnels du codeur incrémental
PM Désignation Valeur/Signification Commentaire/Unité
10 Type de codeur 1 = codeur incrémental (code)
11 Course par tourde codeur (pé-riode)
1...1 000 000 000cf chap. 5.3.1, Dépendances
[UI] (partie entière)
12 Parcours re-stant par tour decodeur(période)
0...232−1cf chap. 5.3.1, Dépendances
[2−32UI](partiefractionnaire)
13 Incréments partour de codeur(période)
21...225
cf chap. 5.3.1, DépendancesValeur relevée surla plaquette signa-létique du codeur
19.0 Adaptation dedirection
1 = inversion du sens de mesure −
20
20.020.220.3
Surveillancehardware
1 = rupture de fil1 = surveillance des impulsions1 = surveillance de la tension
Inscription pour lessurveillances àactiver !
UI = unité interne (cf. chap. Annexe 5.3.1)
Exemple d’adaptation d’un codeurCodeur : nombre d’incréments par tour (PM13) = 2500
(Le FM 453 fonctionne avec le principe de l’exploitation quadruple. Au sein du FM 453, il enrésulte un nombre d’incréments par tour = 10000).
Caractéristiques de la chaîne cinématique :
• moteur avec réducteur 50:30 sur broche filetée au pas de 10 mm = 10000 UI
• codeur sur le moteur
La formule de calcul du chemin parcouru par tour de codeur est la suivante :
Course par tour de codeur =
50 tours de broche30 tours de moteur
i 10 000 UI = 16 666,666... UI
= 1,666 666...Facteur de démultiplica-tion du réducteur :
i =
Les valeurs suivantes seront inscrites dans les paramètres machine :
PM Valeur Unité
11 16 666 [10−3 mm]
12 0,666... 232 = 2 863 311 530 [2−32 10−3 mm]
13 2 500 [Imp/tr]
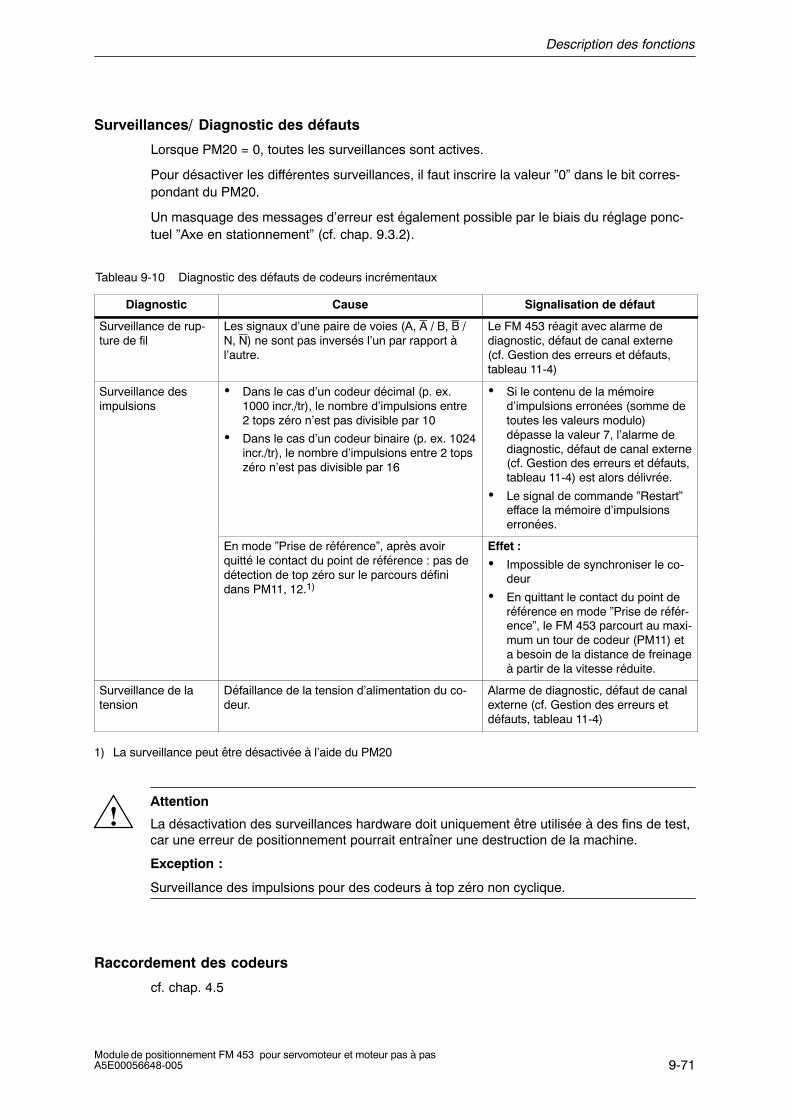
Description des fonctions
9-71Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Surveillances/ Diagnostic des défauts
Lorsque PM20 = 0, toutes les surveillances sont actives.
Pour désactiver les différentes surveillances, il faut inscrire la valeur ”0” dans le bit corres-pondant du PM20.
Un masquage des messages d’erreur est également possible par le biais du réglage ponc-tuel ”Axe en stationnement” (cf. chap. 9.3.2).
Tableau 9-10 Diagnostic des défauts de codeurs incrémentaux
Diagnostic Cause Signalisation de défaut
Surveillance de rup-ture de fil
Les signaux d’une paire de voies (A, A / B, B /N, N) ne sont pas inversés l’un par rapport àl’autre.
Le FM 453 réagit avec alarme dediagnostic, défaut de canal externe(cf. Gestion des erreurs et défauts,tableau 11-4)
Surveillance desimpulsions
• Dans le cas d’un codeur décimal (p. ex.1000 incr./tr), le nombre d’impulsions entre2 tops zéro n’est pas divisible par 10
• Dans le cas d’un codeur binaire (p. ex. 1024incr./tr), le nombre d’impulsions entre 2 topszéro n’est pas divisible par 16
• Si le contenu de la mémoired’impulsions erronées (somme detoutes les valeurs modulo)dépasse la valeur 7, l’alarme dediagnostic, défaut de canal externe(cf. Gestion des erreurs et défauts,tableau 11-4) est alors délivrée.
• Le signal de commande ”Restart”efface la mémoire d’impulsionserronées.
En mode ”Prise de référence”, après avoirquitté le contact du point de référence : pas dedétection de top zéro sur le parcours définidans PM11, 12.1)
Effet :
• Impossible de synchroniser le co-deur
• En quittant le contact du point deréférence en mode ”Prise de référ-ence”, le FM 453 parcourt au maxi-mum un tour de codeur (PM11) eta besoin de la distance de freinageà partir de la vitesse réduite.
Surveillance de latension
Défaillance de la tension d’alimentation du co-deur.
Alarme de diagnostic, défaut de canalexterne (cf. Gestion des erreurs etdéfauts, tableau 11-4)
1) La surveillance peut être désactivée à l’aide du PM20
!Attention
La désactivation des surveillances hardware doit uniquement être utilisée à des fins de test,car une erreur de positionnement pourrait entraîner une destruction de la machine.
Exception :
Surveillance des impulsions pour des codeurs à top zéro non cyclique.
Raccordement des codeurs
cf. chap. 4.5
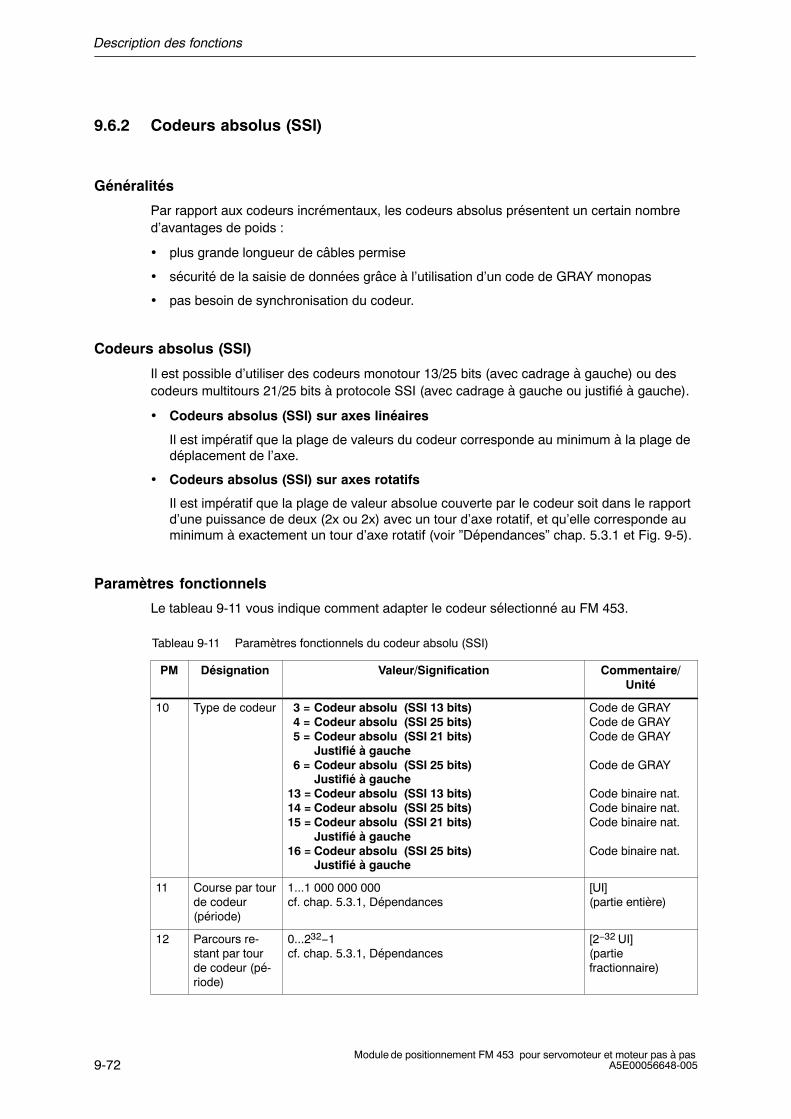
Description des fonctions
9-72Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.6.2 Codeurs absolus (SSI)
Généralités
Par rapport aux codeurs incrémentaux, les codeurs absolus présentent un certain nombred’avantages de poids :
• plus grande longueur de câbles permise
• sécurité de la saisie de données grâce à l’utilisation d’un code de GRAY monopas
• pas besoin de synchronisation du codeur.
Codeurs absolus (SSI)
Il est possible d’utiliser des codeurs monotour 13/25 bits (avec cadrage à gauche) ou descodeurs multitours 21/25 bits à protocole SSI (avec cadrage à gauche ou justifié à gauche).
• Codeurs absolus (SSI) sur axes linéaires
Il est impératif que la plage de valeurs du codeur corresponde au minimum à la plage dedéplacement de l’axe.
• Codeurs absolus (SSI) sur axes rotatifs
Il est impératif que la plage de valeur absolue couverte par le codeur soit dans le rapportd’une puissance de deux (2x ou 2x) avec un tour d’axe rotatif, et qu’elle corresponde auminimum à exactement un tour d’axe rotatif (voir ”Dépendances” chap. 5.3.1 et Fig. 9-5).
Paramètres fonctionnels
Le tableau 9-11 vous indique comment adapter le codeur sélectionné au FM 453.
Tableau 9-11 Paramètres fonctionnels du codeur absolu (SSI)
PM Désignation Valeur/Signification Commentaire/Unité
10 Type de codeur 3 = Codeur absolu (SSI 13 bits)4 = Codeur absolu (SSI 25 bits)5 = Codeur absolu (SSI 21 bits)
Justifié à gauche6 = Codeur absolu (SSI 25 bits)
Justifié à gauche13 = Codeur absolu (SSI 13 bits)14 = Codeur absolu (SSI 25 bits)15 = Codeur absolu (SSI 21 bits)
Justifié à gauche16 = Codeur absolu (SSI 25 bits)
Justifié à gauche
Code de GRAYCode de GRAYCode de GRAY
Code de GRAY
Code binaire nat.Code binaire nat.Code binaire nat.
Code binaire nat.
11 Course par tourde codeur(période)
1...1 000 000 000cf. chap. 5.3.1, Dépendances
[UI] (partie entière)
12 Parcours re-stant par tourde codeur (pé-riode)
0...232−1cf. chap. 5.3.1, Dépendances
[2−32 UI](partiefractionnaire)

Description des fonctions
9-73Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 9-11 Paramètres fonctionnels du codeur absolu (SSI) (suite)
PM Commentaire/Unité
Valeur/SignificationDésignation
13 Incréments partour de codeur(période)
21...225
cf. chap. 5.3.1, DépendancesValeur relevée surla plaquette signa-létique du codeur
14 Nombre detours de codeurSSI
0/1 = codeur monotour21...212 pour codeurs multitourscf. chap. 5.3.1, Dépendances
Seules sont autori-sées des puis-sances de 2
15 Vitesse detransmissionSSI
1 = 78 000 bauds2 = 156 000 bauds3 = 312 000 bauds4 = 625 000 bauds5 = 1 250 000 bauds6 = 2 500 000 bauds (sans garantie)
(Code)
La vitesse detransm. dépend dela longueur de câ-ble entre FM 453et codeur
19.0 Adaptation desens
1 = inverser le sens de mesure −
20
20.120.3
Surveillancehardware
1 = Défaut du codeur absolu1 = surveillande de la tension
Inscription pourles surveillances àactiver !
UI = unité interne (cf. chap. 5.3.1)
Exemple d’adaptation d’un codeur
Codeur : Nombre d’incréments par tour (PM13) = 4096 = 212
Nombre de tours (PM14) = 256 = 28
Caractéristiques de la chaîne cinématique :
• moteur avec réducteur 50:30 sur broche filetée au pas de 10 mm = 10000 UI
• codeur sur le moteur
La formule de calcul du chemin parcouru par tour de codeur est la suivante :
i =
Course par tour de codeur =
50 tours de broche30 tours de moteur
i 10 000 UI = 16 666,666... UI
= 1,666 666...Facteur de démultiplica-tion du réducteur :
Les valeurs suivantes seront inscrites dans les paramètres machine :
PM Valeur Unité
11 16 666 [10−3 mm]
12 0,666... 232 = 2 863 311 530 [2−32 10−3 mm]
13 4096 [Imp/tr]
14 256 [tr]
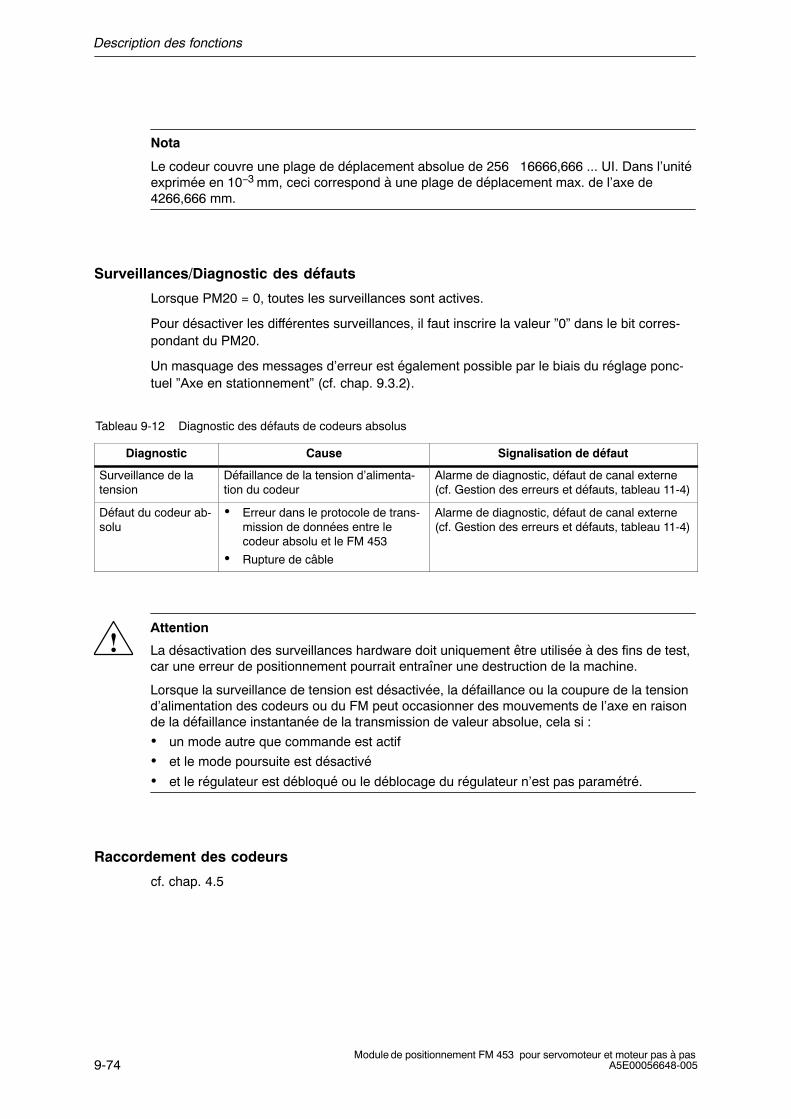
Description des fonctions
9-74Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Nota
Le codeur couvre une plage de déplacement absolue de 256 16666,666 ... UI. Dans l’unitéexprimée en 10−3 mm, ceci correspond à une plage de déplacement max. de l’axe de4266,666 mm.
Surveillances/Diagnostic des défauts
Lorsque PM20 = 0, toutes les surveillances sont actives.
Pour désactiver les différentes surveillances, il faut inscrire la valeur ”0” dans le bit corres-pondant du PM20.
Un masquage des messages d’erreur est également possible par le biais du réglage ponc-tuel ”Axe en stationnement” (cf. chap. 9.3.2).
Tableau 9-12 Diagnostic des défauts de codeurs absolus
Diagnostic Cause Signalisation de défaut
Surveillance de latension
Défaillance de la tension d’alimenta-tion du codeur
Alarme de diagnostic, défaut de canal externe(cf. Gestion des erreurs et défauts, tableau 11-4)
Défaut du codeur ab-solu
• Erreur dans le protocole de trans-mission de données entre lecodeur absolu et le FM 453
• Rupture de câble
Alarme de diagnostic, défaut de canal externe(cf. Gestion des erreurs et défauts, tableau 11-4)
!Attention
La désactivation des surveillances hardware doit uniquement être utilisée à des fins de test,car une erreur de positionnement pourrait entraîner une destruction de la machine.
Lorsque la surveillance de tension est désactivée, la défaillance ou la coupure de la tensiond’alimentation des codeurs ou du FM peut occasionner des mouvements de l’axe en raisonde la défaillance instantanée de la transmission de valeur absolue, cela si :
• un mode autre que commande est actif
• et le mode poursuite est désactivé
• et le régulateur est débloqué ou le déblocage du régulateur n’est pas paramétré.
Raccordement des codeurs
cf. chap. 4.5

Description des fonctions
9-75Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.6.3 Moteur pas à pas sans codeur
Généralités
Le FM 453 peut commander des moteurs pas à pas dépourvus de capteur de déplacement.
La résolution du déplacement de l’axe est donnée par le déplacement correspondant à unpas du moteur pas à pas.
Les impulsions du signal de cadence fournies par le FM 453 sont cumulées de façon internepour former une valeur réelle de position.
Paramètres fonctionnels
Le tableau suivant vous indique comment adapter un moteur pas à pas au FM 453.
PM Désignation Valeur/Signification Commentaire/Unité
11 Course/tour de moteur(période)
1...1 000 000 000cf. chap. 5.3.1, Dépendances
[UI] (partie entière)
12 Parcours restant/tour demoteur(période)
0...232−1cf. chap. 5.3.1, Dépendances
[2−32UI](partie fractionnaire)
13 Pas/tour de moteur(période)
4...10 000 Valeur relevée sur laplaque signalétiquedu moteur pas à pas
UI signifie unité interne (cf. chap. 5.3.1)
Exemple d’adaptation de moteur pas à pas
Caractéristiques de transmission :
moteur avec réducteur 50:30 sur vis de pas 10 mm = 10 000 UI
On en déduit la course par tour de moteur :
Course par tour de moteur =
50 tours de vis30 tours de moteur
i 10 000 UI = 16 666,666... UI
rapport du réducteur : i = = 1,666 666...
On affectera aux paramètres les valeurs suivantes :
PM Valeur Unité
11 16 666 [10−3 mm]
12 0,666... 232 = 2 863 311 530 [2−32 10−3 mm]
52 10 000
Description des fonctions
9-76Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.6.4 Synchronisation
Généralités
En cas d’utilisation de codeurs incrémentaux ou de moteurs pas à pas sans codeur, il existe,après la mise en marche, un décalage impossible à prévoir à l’avance entre la valeur deposition interne du FM et la position mécanique de l’axe. Afin d’établir une référence de posi-tion, la valeur interne du FM doit être synchronisée avec la valeur de position réelle de l’axe.Cette synchronisation s’effectue par adoption d’une valeur de position en un point connu del’axe.
En cas d’utilisation de codeurs absolus (SSI), il existe dès la mise en marche une relationdéfinie entre la valeur de position interne du FM et la position mécanique de l’axe. Cetterelation peut être réglée par le biais d’une valeur de référencement du codeur absolu (cf.chap. 9.3.9, Définition du point de référence).
Référencement de codeur absolu
Il s’agit de la valeur de correction pour l’ajustage numérique de la valeur de position internedu FM.
Top zéro
Signale le point de synchronisation de l’axe, éventuellement en conjugaison avec le contactde point de référence (voir schéma de sélection top zéro Fig. 5-5).
Prise de référence
Il s’agit d’un mode de fonctionnement permettant de positionner l’axe sur un point deréférence.
Point de référence
Il s’agit du point fixe de l’axe.
• Il est la coordonnée de destination en mode ”Prise de référence”,
• Pour des axes avec codeurs incrémentaux ou avec moteurs pas à pas sans codeur, il estdistant du point de synchronisation de la valeur absolue correspondant au décalage depoint de référence.
Décalage de point de référence
Différence de parcours entre point de synchronisation et point de référence.
Le décalage de point de référence sert :
• pour le référencement numérique du codeur absolu en cas de changement de codeur,
• de réserve de parcours pour le freinage de l’entraînement après passage au point desynchronisation.
Contact du point de référence (CPR)
Le contact du point de référence sélectionne le top zéro à synchroniser sur le parcours del’axe.
• Il sert en même temps à délivrer un signal de réduction de la vitesse avant d’atteindre lepoint de synchronisation.
• Il est raccordé à une entrée TOR du FM 453.
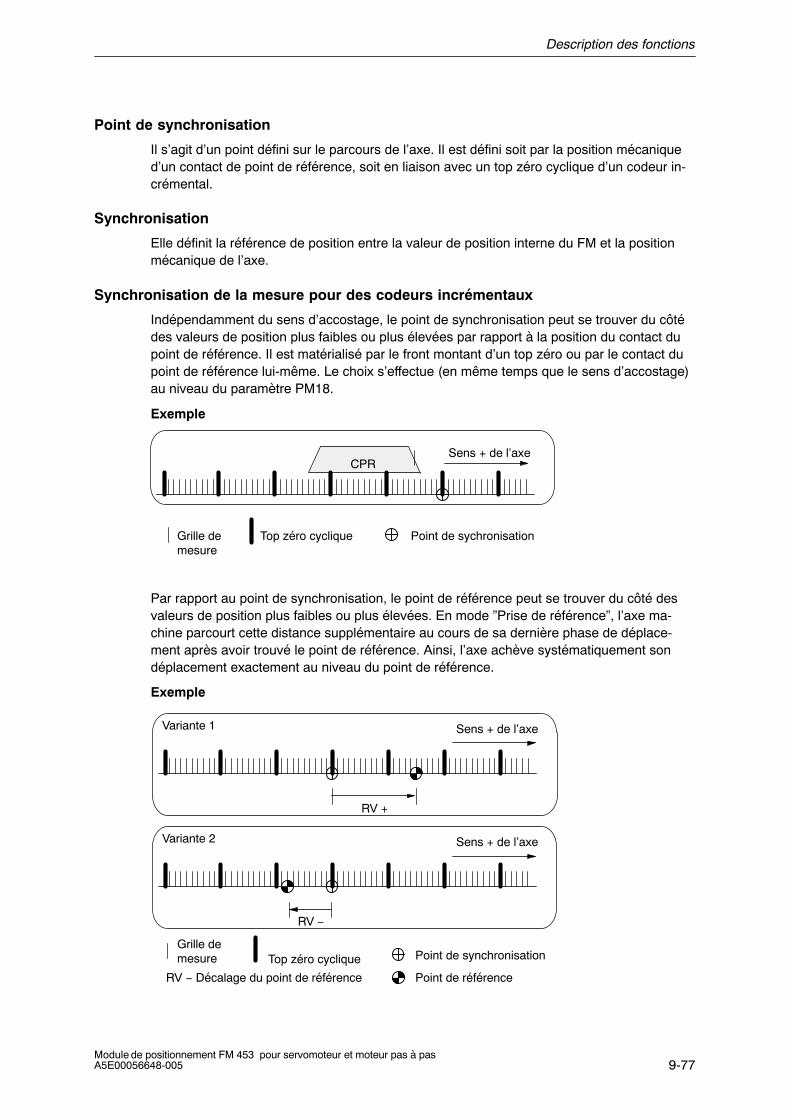
Description des fonctions
9-77Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Point de synchronisation
Il s’agit d’un point défini sur le parcours de l’axe. Il est défini soit par la position mécaniqued’un contact de point de référence, soit en liaison avec un top zéro cyclique d’un codeur in-crémental.
Synchronisation
Elle définit la référence de position entre la valeur de position interne du FM et la positionmécanique de l’axe.
Synchronisation de la mesure pour des codeurs incrémentaux
Indépendamment du sens d’accostage, le point de synchronisation peut se trouver du côtédes valeurs de position plus faibles ou plus élevées par rapport à la position du contact dupoint de référence. Il est matérialisé par le front montant d’un top zéro ou par le contact dupoint de référence lui-même. Le choix s’effectue (en même temps que le sens d’accostage)au niveau du paramètre PM18.
Exemple
CPRSens + de l’axe
Point de sychronisationTop zéro cycliqueGrille demesure
Par rapport au point de synchronisation, le point de référence peut se trouver du côté desvaleurs de position plus faibles ou plus élevées. En mode ”Prise de référence”, l’axe ma-chine parcourt cette distance supplémentaire au cours de sa dernière phase de déplace-ment après avoir trouvé le point de référence. Ainsi, l’axe achève systématiquement sondéplacement exactement au niveau du point de référence.
Exemple
RV +
RV −
Variante 1
Variante 2
Sens + de l’axe
Sens + de l’axe
Grille demesure Top zéro cyclique Point de synchronisation
Point de référenceRV − Décalage du point de référence

Description des fonctions
9-78Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.7 Traitement des consignes
Généralités
Le traitement des consignes dans le FM 453 est réalisé par les sous-ensembles fonctionnelsinterpolation, asservissement de position ou commande de moteur pas à pas, driver de sig-nal de réglage et couplage à l’étage de puissance. Selon le mode de commande (PM61), cesera le sous-ensemble asservissement de position ou commande de moteur pas à pas quisera actif. La fig. 9-6 donne une vue d’ensemble de l’interaction des sous-ensembles fonc-tionnels. Les chapitres suivants donnent des explications plus détaillées au sujet de chacundes sous-ensembles fonctionnels et leur interdépendance avec les paramètres machine.
du codeur (val. réelle)ex. : canal 1
X2
Couplageétage puiss.
Driver signalde réglage
Commandemoteur p/p(PM61 = 7)
PM61(ou)
Asserviss. pos.(PM61 = 0 ou 1)
Interpolation
X5
vers étage depuiss. (val. réglage)
Consigne pos.
Consigne vitesse
Consigne en mode”commande”
Figure 9-6 Vue d’ensemble des sous-ensembles fonctionnels de traitement des consignes
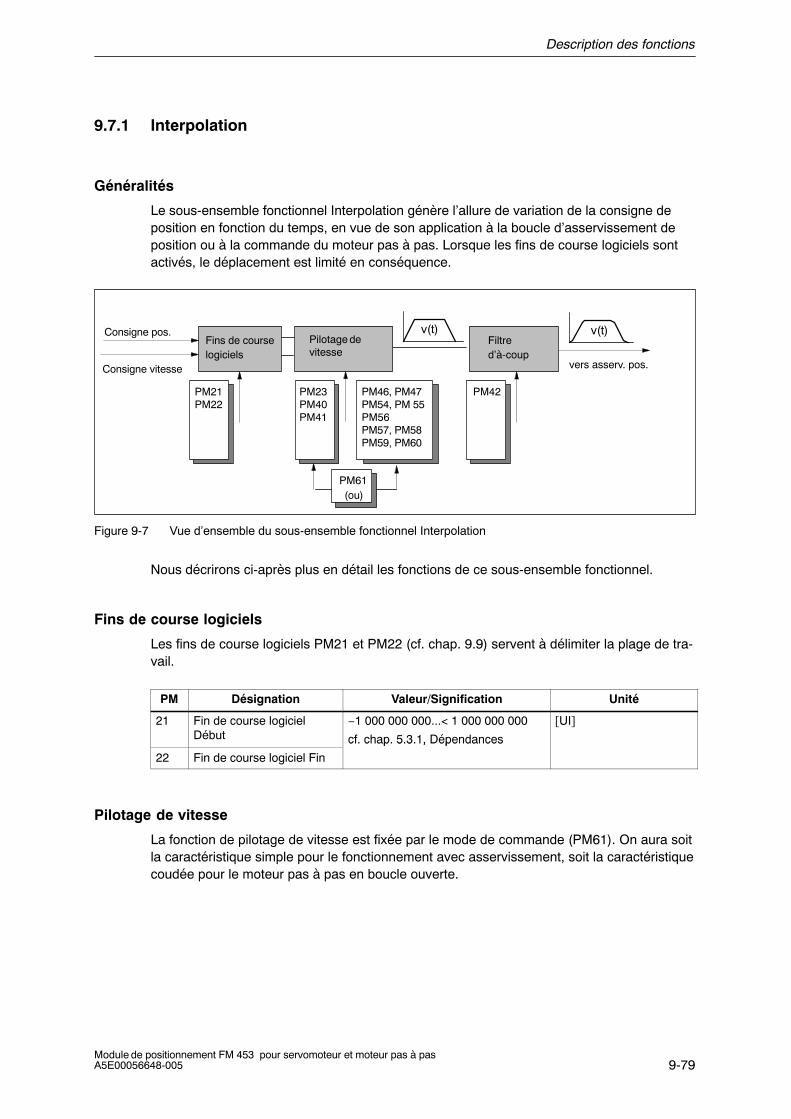
Description des fonctions
9-79Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.7.1 Interpolation
Généralités
Le sous-ensemble fonctionnel Interpolation génère l’allure de variation de la consigne deposition en fonction du temps, en vue de son application à la boucle d’asservissement deposition ou à la commande du moteur pas à pas. Lorsque les fins de course logiciels sontactivés, le déplacement est limité en conséquence.
Filtred’à-coup
Pilotage devitesse
PM21PM22
Fins de courselogiciels
Consigne pos.
Consigne vitesse vers asserv. pos.
PM23PM40PM41
PM42PM46, PM47PM54, PM 55PM56PM57, PM58PM59, PM60
PM61(ou)
v(t) v(t)
Figure 9-7 Vue d’ensemble du sous-ensemble fonctionnel Interpolation
Nous décrirons ci-après plus en détail les fonctions de ce sous-ensemble fonctionnel.
Fins de course logiciels
Les fins de course logiciels PM21 et PM22 (cf. chap. 9.9) servent à délimiter la plage de tra-vail.
PM Désignation Valeur/Signification Unité
21 Fin de course logicielDébut
−1 000 000 000...< 1 000 000 000
cf. chap. 5.3.1, Dépendances
[UI]
22 Fin de course logiciel Fin
cf. chap. 5.3.1, Dépendances
Pilotage de vitesse
La fonction de pilotage de vitesse est fixée par le mode de commande (PM61). On aura soitla caractéristique simple pour le fonctionnement avec asservissement, soit la caractéristiquecoudée pour le moteur pas à pas en boucle ouverte.
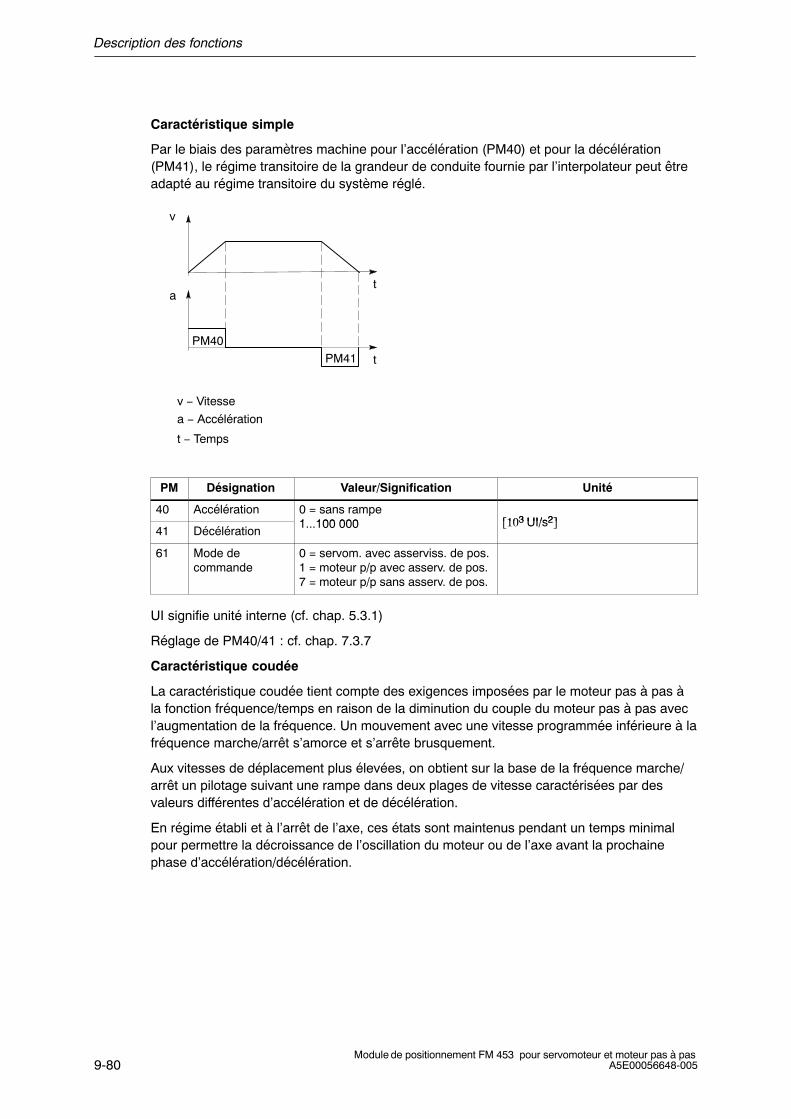
Description des fonctions
9-80Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Caractéristique simple
Par le biais des paramètres machine pour l’accélération (PM40) et pour la décélération(PM41), le régime transitoire de la grandeur de conduite fournie par l’interpolateur peut êtreadapté au régime transitoire du système réglé.
v
a
t
t
PM41
PM40
t − Temps
v − Vitesse
a − Accélération
PM Désignation Valeur/Signification Unité
40 Accélération 0 = sans rampe1 100 000 [103 UI/s2]
41 Décélération1...100 000 [103 UI/s2]
61 Mode decommande
0 = servom. avec asserviss. de pos.1 = moteur p/p avec asserv. de pos.7 = moteur p/p sans asserv. de pos.
UI signifie unité interne (cf. chap. 5.3.1)
Réglage de PM40/41 : cf. chap. 7.3.7
Caractéristique coudée
La caractéristique coudée tient compte des exigences imposées par le moteur pas à pas àla fonction fréquence/temps en raison de la diminution du couple du moteur pas à pas avecl’augmentation de la fréquence. Un mouvement avec une vitesse programmée inférieure à lafréquence marche/arrêt s’amorce et s’arrête brusquement.
Aux vitesses de déplacement plus élevées, on obtient sur la base de la fréquence marche/arrêt un pilotage suivant une rampe dans deux plages de vitesse caractérisées par desvaleurs différentes d’accélération et de décélération.
En régime établi et à l’arrêt de l’axe, ces états sont maintenus pendant un temps minimalpour permettre la décroissance de l’oscillation du moteur ou de l’axe avant la prochainephase d’accélération/décélération.
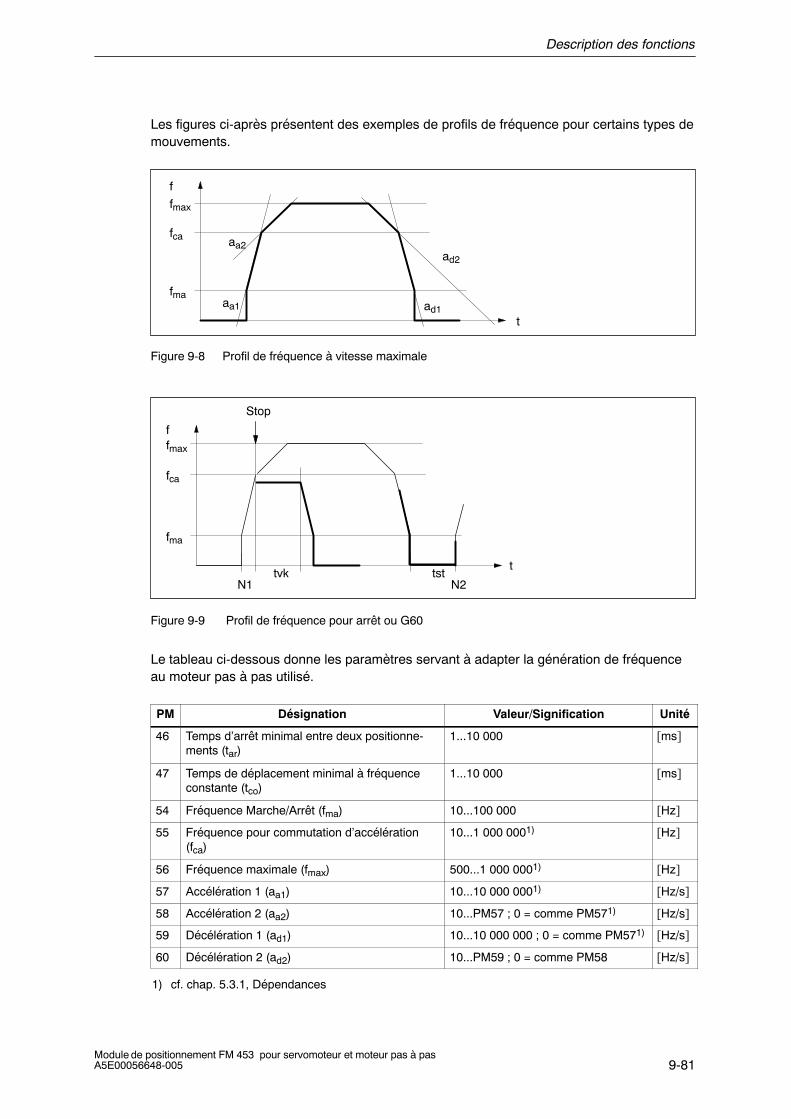
Description des fonctions
9-81Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Les figures ci-après présentent des exemples de profils de fréquence pour certains types demouvements.
t
f
fmax
fca
fma
ad2
aa2
ad1aa1
Figure 9-8 Profil de fréquence à vitesse maximale
ffmax
fca
fma
Stop
N1 N2tsttvk
t
Figure 9-9 Profil de fréquence pour arrêt ou G60
Le tableau ci-dessous donne les paramètres servant à adapter la génération de fréquenceau moteur pas à pas utilisé.
PM Désignation Valeur/Signification Unité
46 Temps d’arrêt minimal entre deux positionne-ments (tar)
1...10 000 [ms]
47 Temps de déplacement minimal à fréquenceconstante (tco)
1...10 000 [ms]
54 Fréquence Marche/Arrêt (fma) 10...100 000 [Hz]
55 Fréquence pour commutation d’accélération(fca)
10...1 000 0001) [Hz]
56 Fréquence maximale (fmax) 500...1 000 0001) [Hz]
57 Accélération 1 (aa1) 10...10 000 0001) [Hz/s]
58 Accélération 2 (aa2) 10...PM57 ; 0 = comme PM571) [Hz/s]
59 Décélération 1 (ad1) 10...10 000 000 ; 0 = comme PM571) [Hz/s]
60 Décélération 2 (ad2) 10...PM59 ; 0 = comme PM58 [Hz/s]
1) cf. chap. 5.3.1, Dépendances
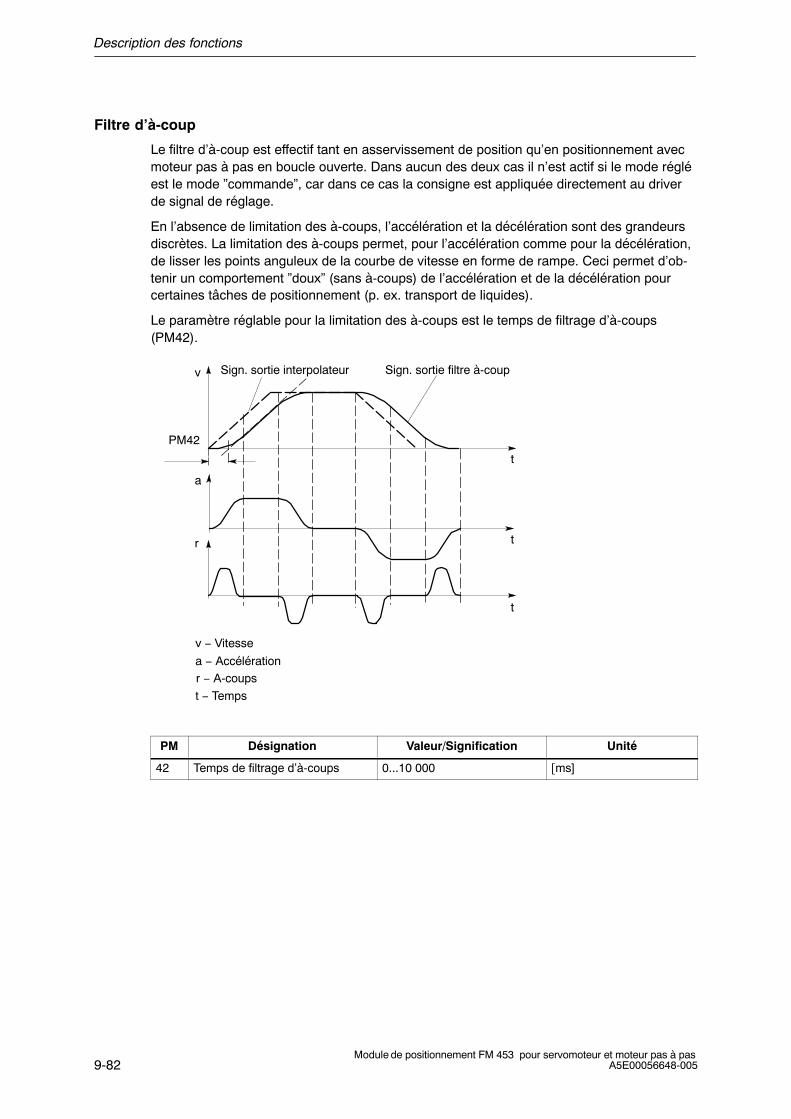
Description des fonctions
9-82Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Filtre d’à-coup
Le filtre d’à-coup est effectif tant en asservissement de position qu’en positionnement avecmoteur pas à pas en boucle ouverte. Dans aucun des deux cas il n’est actif si le mode régléest le mode ”commande”, car dans ce cas la consigne est appliquée directement au driverde signal de réglage.
En l’absence de limitation des à-coups, l’accélération et la décélération sont des grandeursdiscrètes. La limitation des à-coups permet, pour l’accélération comme pour la décélération,de lisser les points anguleux de la courbe de vitesse en forme de rampe. Ceci permet d’ob-tenir un comportement ”doux” (sans à-coups) de l’accélération et de la décélération pourcertaines tâches de positionnement (p. ex. transport de liquides).
Le paramètre réglable pour la limitation des à-coups est le temps de filtrage d’à-coups(PM42).
v
a
t
PM42
t
t
r
Sign. sortie interpolateur Sign. sortie filtre à-coup
t − Temps
v − Vitesse
a − Accélérationr − A-coups
PM Désignation Valeur/Signification Unité
42 Temps de filtrage d’à-coups 0...10 000 [ms]
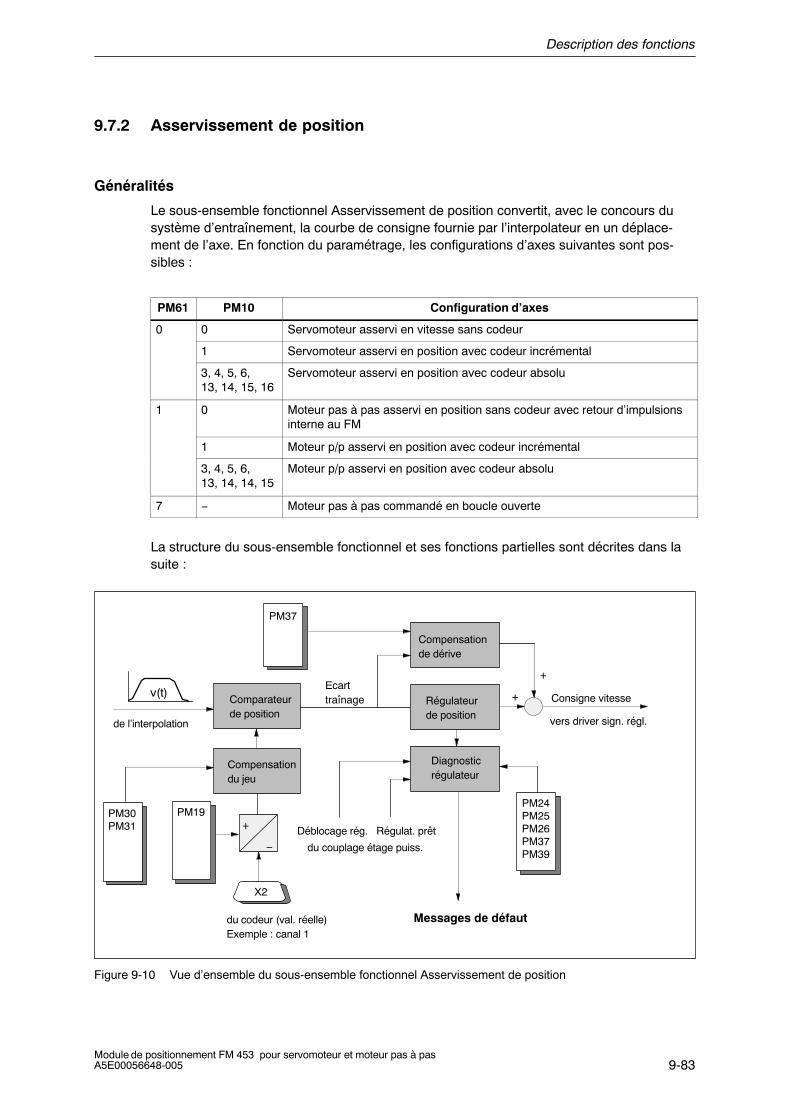
Description des fonctions
9-83Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.7.2 Asservissement de position
Généralités
Le sous-ensemble fonctionnel Asservissement de position convertit, avec le concours dusystème d’entraînement, la courbe de consigne fournie par l’interpolateur en un déplace-ment de l’axe. En fonction du paramétrage, les configurations d’axes suivantes sont pos-sibles :
PM61 PM10 Configuration d’axes
0 0 Servomoteur asservi en vitesse sans codeur
1 Servomoteur asservi en position avec codeur incrémental
3, 4, 5, 6, 13, 14, 15, 16
Servomoteur asservi en position avec codeur absolu
1 0 Moteur pas à pas asservi en position sans codeur avec retour d’impulsionsinterne au FM
1 Moteur p/p asservi en position avec codeur incrémental
3, 4, 5, 6, 13, 14, 14, 15
Moteur p/p asservi en position avec codeur absolu
7 − Moteur pas à pas commandé en boucle ouverte
La structure du sous-ensemble fonctionnel et ses fonctions partielles sont décrites dans lasuite :
du codeur (val. réelle)Exemple : canal 1
X2
Messages de défaut
Comparateurde position
de l’interpolation
Compensationdu jeu
Régulateurde position
Diagnosticrégulateur
vers driver sign. régl.
Consigne vitesse
PM24PM25PM26PM37PM39
+
+
+
−
PM30PM31 Régulat. prêtDéblocage rég.
Ecarttraînage
PM19
PM37
du couplage étage puiss.
v(t)
Compensationde dérive
Figure 9-10 Vue d’ensemble du sous-ensemble fonctionnel Asservissement de position
Description des fonctions
9-84Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Comparateur de position
La comparaison cyclique de la consigne de position fournie par l’interpolateur avec la posi-tion réelle de l’axe venant du codeur forme l’écart de traînage.
Ecart de traînage = consigne de position - position réelle
Régulateur de position
Sur la base de l’écart de traînage formé par le comparateur de position, le régulateur deposition calcule un signal de réglage dont l’effet est d’annuler l’écart de traînage. Ce signalde réglage est une consigne de vitesse qui est appliquée au driver de signal de réglage. Lerégulateur de position est à action proportionnelle, fonctionnant selon la relation :
consigne de vitesse interne = écart de traînage ⋅ gain boucle d’asservissement
le gain de la boucle d’asservissement exerce par conséquent une grande influence sur l’effetd’un certain écart de traînage sur la formation du signal de réglage qui sera appliqué à l’é-tage de puissance (variateur pour servomoteur ou étage de commande de moteur pas àpas).
Gain de la boucle d’asservissement
Le gain de la boucle d’asservissement (G) définit la relation entre la vitesse de déplacementde l’axe et l’écart de traînage. La relation mathématique (proportionnelle) est la suivante :
G =Vitesse
Ecart de traînage=
v [103 UI/min]
∆s [UI]
Même si la valeur de l’écart de traînage ne joue pas un rôle dominant pour un axe isolé, legain influe pourtant sur les grandeurs caractéristiques importantes de l’axe que sont :
• la précision de positionnement et la régulation de maintien
• la régularité du mouvement
• le temps de positionnement.
Description des fonctions
9-85Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
La relation entre ces grandeurs caractéristiques est la suivante :
Plus les caractéristiques mécaniques de l’axe sont bonnes, plus le gain pourra être grand etplus les paramètres de l’axe seront favorables sous l’angle technologique. La mesure dugain sera surtout influencé par les contantes de temps ainsi que par les jeux et les élémentsélastiques dans la boucle d’asservissement. Dans des cas d’applications réels, le gain sesitue dans la fourchette suivante :
• G = 0,2...0,5 : axe de mauvaise qualité
• G = 0,5...1,5 : axe de bonne qualité (cas normal)
• G = 1,5...2,5 : axe de très bonne qualité
L’introduction dans le paramètre PM38 s’effectue avec une finesse égale à 103, ce quidonne les valeurs suivantes :
Vitesse
Ecart de traînage=
v [103 UI/min]
∆s [UI]103 PM38 = 103 G = 103
PM Désignation Valeur/Signification Unité
38 Gain de la boucle d’asservissement 1...10 000 [(UI/min)/UI]
Diagnostic du régulateur
Diagnostic de base
En mode asservi, le signal de réglage calculé est comparé cycliquement aux valeurs maxi-males admises (10 V ou fréquence maximale). Un dépassement est interprété de la façonsuivante :
pas de mouvement de l’axe : message de défaut ”pas de mouvement de l’axe”(cf. tableau 11-7, cl. 3/N° 65)
sens de déplacem. inversé : message de défaut ” sens rot. moteur”(cf. tableau 11-5, cl. 3/N° 11)
bon sens de rotation : signalis. de dépassement dans message d’état 1(cf. chap. 9.3.17, Données de fonctionnementadditionnelles)
Dans tous les modes sauf le mode ”Commande”, le signal ”Déblocage régulateur” est né-cessaire indépendamment du paramétrage pour la durée de chaque déplacement. L’ab-sence ou la disparition du déblocage du régulateur pendant le déplacement déclenche lasignalisation de défaut ”Déblocage régulateur manque” (voir Tableau 11-5, Cl. 3 N° 61).
Dans tous les modes sauf le mode ”Commande”, le signal ”Régulateur prêt” est nécessaire,le paramétrage (PM37.2) étant activé, pour la durée de tout déplacement. En cas d’absenceou de disparition du signal ”Régulateur prêt” pendant le déplacement, le message d’erreur”Régulateur pas prêt” est déclenché (voir Tableau 11-5, Cl.3/ N° 62).

Description des fonctions
9-86Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Arrivée à destination
s
tt1 t2 t3
bc
a
Zone de destination (PA) (PM24)
Temps enveloppe (PM25)
Position à atteindre
Limite supérieure
Limite inférieure
s − Course
PA − Position atteinte, arrêt
cons.
réel
t − Temps
L’entrée dans la zone de destination s’accompagne d’une activation du temps enveloppe :
Instant Surveillance de la position
t1 (a) Une fois que la position de destination est atteinte par l’interpolateur, le temps enveloppe(PM25) pour le contrôle d’arrivée dans la zone de destination est démarré dansl’asservissement de position lorsque, compte tenu du filtrage d’à-coups, la consigne at-teint la zone de destination.
t2 (b) Avant écoulement du temps enveloppe, la position réelle atteint la zone de destination.Le positionnement est terminé, PA est signalé, le réglage fin est assuré par le régulateurde position.
t3 (c) Après écoulement du temps enveloppe, la position réelle n’est pas arrivée dans la zonede destination (PA).
Message de défaut : ”PA - Surveillance de zone de destination ” (cf. Gestion des er-reurs et défauts, tableau 11-5, Cl.3/n° 64).
PM Désignation Valeur/Signification Unité
24 Zone de destination 0...1 000 000 [UI]
25 Temps enveloppe 0 = sans surveillance1...65 534
[ms], arrondi par pas de 3 ms
Surveillance de l’écart de traînage
Arrêt de l’axe
L’axe étant à l’arrêt, cette position momentanée fait l’objet d’un surveillance qui signale sil’axe a tendance à ”dériver” sous l’action d’influences perturbatrices.
PM Désignation Valeur/Signification Unité
26 Zone d’arrêt 0...1 000 000 [UI]

Description des fonctions
9-87Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
La zone d’arrêt est placée symétriquement par rapport à la position de destination.
Position de destination
Zone d’arrêt
En cas de dépassement de la fenêtre de tolérance pour l’arrêt, le FM 453 signale le défaut”Zone d’arrêt” (cf. Gestion des erreurs et défauts, tableau 11-5, Cl.1/n° 12).
Déplacement de l’axe
Afin de permettre la surveillance de l’écart de traînage durant le déplacement, le FM 453calcule pour la vitesse de déplacement momentanée l’écart de traînage à partir du gain pa-ramétré pour la boucle d’asservissement (PM 38). Au-delà de ”l’écart de traînage dynamiqueminimal” le système procède à une comparaison avec la valeur réelle de l’écart de traînage.
PM39
vmax (PM23)
Allure (idéalisée) de l’écart detraînage en fonction de G
Surveillancedynamiqueactive
Allure calculée de la limite dynamique d’écart de traînage (∆scalc),dont le dépassement déclenche une signalisation d’erreur∆s
Allure effective del’écart de traînage
v
∆s − Ecart de traînagev − Vitesse
PM Désignation Valeur/Signification Unité
39 Ecart de traînage dynamique minimal 0 = sans surveillance0...100 000
[UI]
En cas de dépassement de la limite dynamique d’écart de traînage calculée(1,5 fois d’écart de traînage idéalisé) le FM 453 signale l’erreur ”Ecart de traînage tropgrand”, (voir Gestion des erreurs et défauts, Tab. 11-7, Cl. 3/No. 66).
Exception :
Si l’axe est immobile alors que l’écart de traînage est supérieur à la valeur paramétrée pour”écart de traînage minimal dynamique”, on obtient le message de défaut comme sous diag-nostic de base ”pas de mouvement de l’axe” (cf. Tableau 11-7, cl. 3/N° 65).
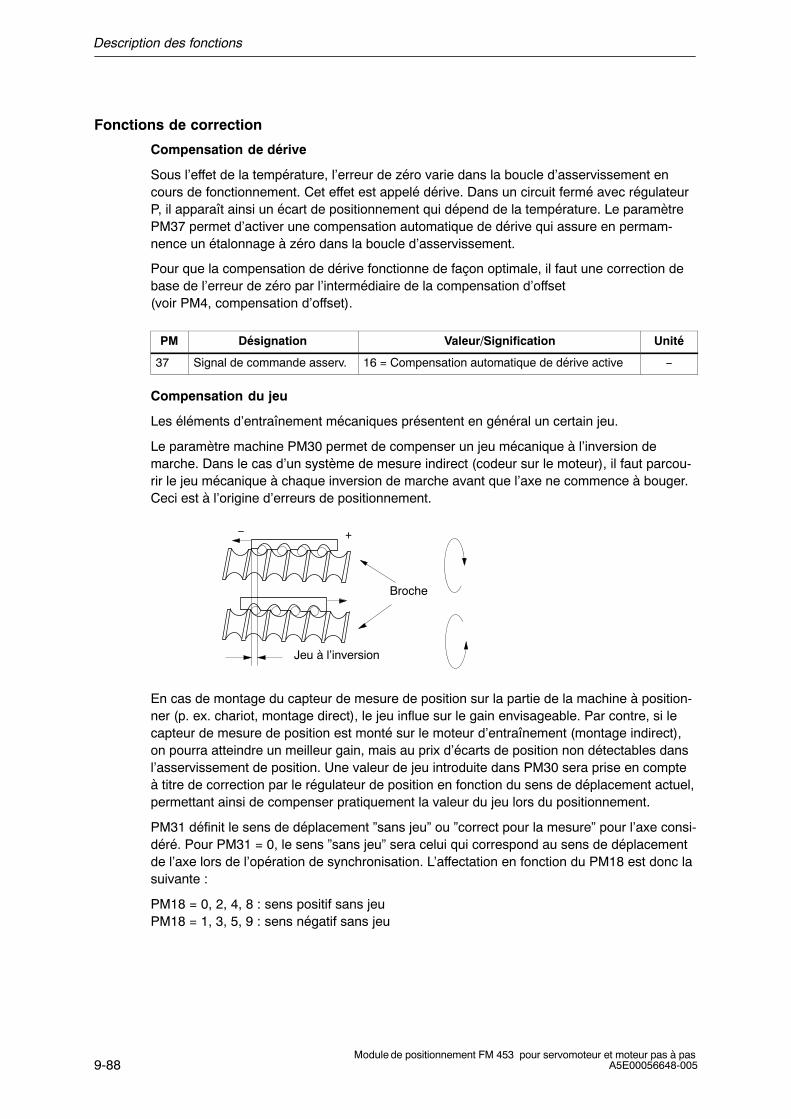
Description des fonctions
9-88Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Fonctions de correction
Compensation de dérive
Sous l’effet de la température, l’erreur de zéro varie dans la boucle d’asservissement encours de fonctionnement. Cet effet est appelé dérive. Dans un circuit fermé avec régulateurP, il apparaît ainsi un écart de positionnement qui dépend de la température. Le paramètrePM37 permet d’activer une compensation automatique de dérive qui assure en permam-nence un étalonnage à zéro dans la boucle d’asservissement.
Pour que la compensation de dérive fonctionne de façon optimale, il faut une correction debase de l’erreur de zéro par l’intermédiaire de la compensation d’offset (voir PM4, compensation d’offset).
PM Désignation Valeur/Signification Unité
37 Signal de commande asserv. 16 = Compensation automatique de dérive active −
Compensation du jeu
Les éléments d’entraînement mécaniques présentent en général un certain jeu.
Le paramètre machine PM30 permet de compenser un jeu mécanique à l’inversion demarche. Dans le cas d’un système de mesure indirect (codeur sur le moteur), il faut parcou-rir le jeu mécanique à chaque inversion de marche avant que l’axe ne commence à bouger.Ceci est à l’origine d’erreurs de positionnement.
− +
Jeu à l’inversion
Broche
En cas de montage du capteur de mesure de position sur la partie de la machine à position-ner (p. ex. chariot, montage direct), le jeu influe sur le gain envisageable. Par contre, si lecapteur de mesure de position est monté sur le moteur d’entraînement (montage indirect),on pourra atteindre un meilleur gain, mais au prix d’écarts de position non détectables dansl’asservissement de position. Une valeur de jeu introduite dans PM30 sera prise en compteà titre de correction par le régulateur de position en fonction du sens de déplacement actuel,permettant ainsi de compenser pratiquement la valeur du jeu lors du positionnement.
PM31 définit le sens de déplacement ”sans jeu” ou ”correct pour la mesure” pour l’axe consi-déré. Pour PM31 = 0, le sens ”sans jeu” sera celui qui correspond au sens de déplacementde l’axe lors de l’opération de synchronisation. L’affectation en fonction du PM18 est donc lasuivante :
PM18 = 0, 2, 4, 8 : sens positif sans jeuPM18 = 1, 3, 5, 9 : sens négatif sans jeu
Description des fonctions
9-89Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
PM Désignation Valeur/Signification Unité
30 Compensation du jeu 0...1 000 000 [UI]
31 Orientation du jeu 0 = comme prise de référence (uniquement pour codeurs incrémentaux)
−
Le jeu est parcouru à une vitesse égale à 1 % de la vitesse maximale (PM23).
Autres possibilités de réglage
Le déroulement de la compensation du jeu est réglable à l’aide de PM65 et PM66.
PM Désignation Valeur/Signification Unité
65 Vitesse pour com-pensation du jeu
0 Vitesse 1 % de PM23
1...1 00 Vitesse en % de PM23 [%]
66 Mode de compen-sation du jeu
0= compensation avant le positionnement
1= compensation pendant le positionnementLa vitesse de compensation s’ajoute à la vitesse programmée pour le contrat de dépla-cement influencée par la correction de vitesse.
−
Tenez compte des particularités suivantes :
• La compensation du jeu n’est pas influencée par la correction de vitesse et ne peut êtreinterrompue.
• Dans le cas d’un moteur pas à pas sans asservissement (PM61 = 7), il y a, pour PM66 = 1, une limitation de PM65 à la fréquence de Marche/Arrêt (PM54) et, pourPM66 = 0, une limitation de PM65 à 10 % de la fréquence maximale (0,1 * PM56).
• En présence d’un asservissement de position (PM61 = 0 ou PM61 = 1), il y a, pour PM66 = 1, une limitation de PM65 par la marge de régulation (dans le cas d’un ser-vomoteur, cf. réglage de PM43). Dans le cas d’un moteur pas à pas, cette marge estformée à partir de la différence entre la fréquence correspondant à la vitesse maximale(PM23) et la fréquence maximale (PM56) du moteur pas à pas.
• En cas de non respect des dépendances entre les PM, la signalisation d’erreur ayantpour cause “Plage de valeurs inadmissible” est émise.
• La compensation du jeu a lieu avant la prise de référence.
• Une modification de PM30 (valeur du jeu) ne prend effet qu’après un déplacement dansle sens sans jeu (PM31).
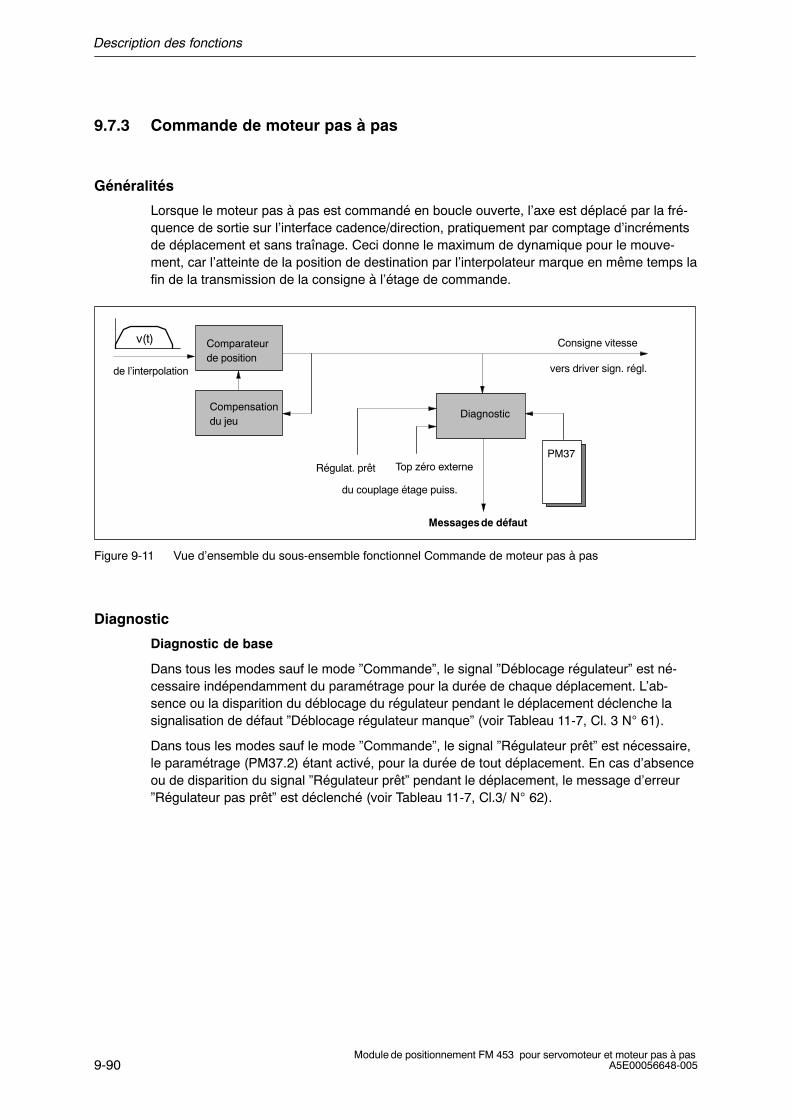
Description des fonctions
9-90Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.7.3 Commande de moteur pas à pas
Généralités
Lorsque le moteur pas à pas est commandé en boucle ouverte, l’axe est déplacé par la fré-quence de sortie sur l’interface cadence/direction, pratiquement par comptage d’incrémentsde déplacement et sans traînage. Ceci donne le maximum de dynamique pour le mouve-ment, car l’atteinte de la position de destination par l’interpolateur marque en même temps lafin de la transmission de la consigne à l’étage de commande.
Messages de défaut
Comparateurde position
de l’interpolation
Compensationdu jeu
Diagnostic
vers driver sign. régl.
Consigne vitesse
Régulat. prêt Top zéro externePM37
du couplage étage puiss.
v(t)
Figure 9-11 Vue d’ensemble du sous-ensemble fonctionnel Commande de moteur pas à pas
Diagnostic
Diagnostic de base
Dans tous les modes sauf le mode ”Commande”, le signal ”Déblocage régulateur” est né-cessaire indépendamment du paramétrage pour la durée de chaque déplacement. L’ab-sence ou la disparition du déblocage du régulateur pendant le déplacement déclenche lasignalisation de défaut ”Déblocage régulateur manque” (voir Tableau 11-7, Cl. 3 N° 61).
Dans tous les modes sauf le mode ”Commande”, le signal ”Régulateur prêt” est nécessaire,le paramétrage (PM37.2) étant activé, pour la durée de tout déplacement. En cas d’absenceou de disparition du signal ”Régulateur prêt” pendant le déplacement, le message d’erreur”Régulateur pas prêt” est déclenché (voir Tableau 11-7, Cl.3/ N° 62).
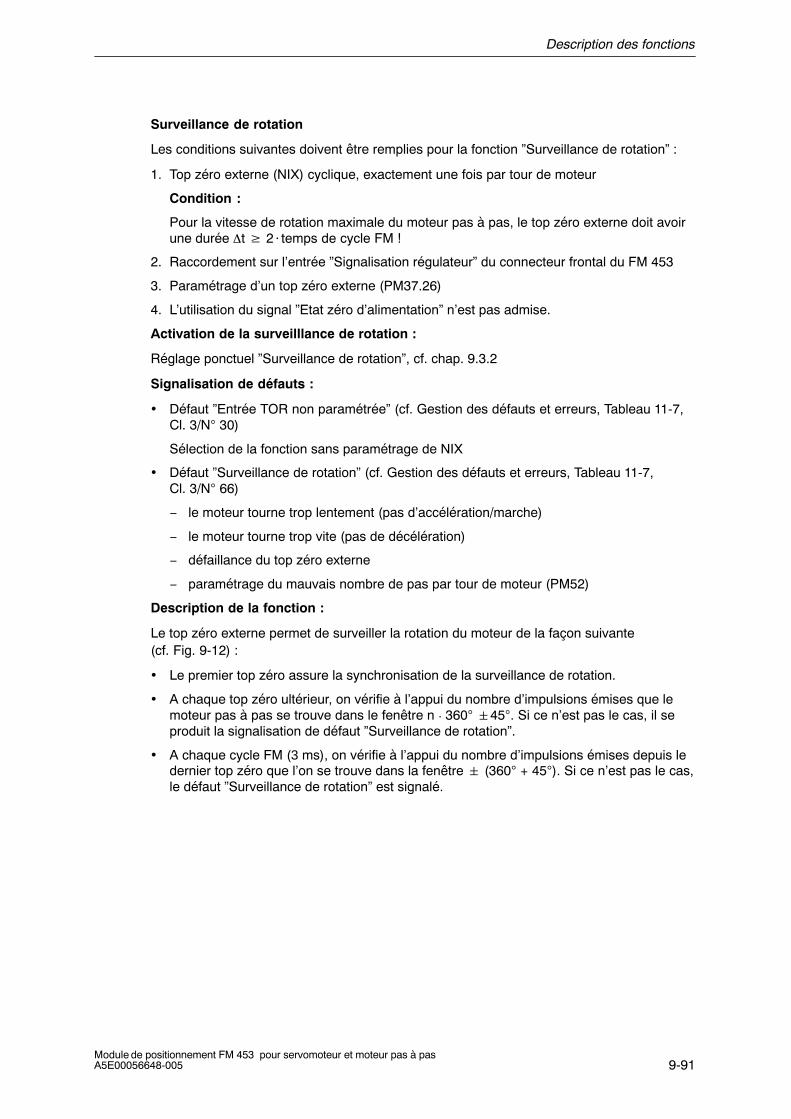
Description des fonctions
9-91Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Surveillance de rotation
Les conditions suivantes doivent être remplies pour la fonction ”Surveillance de rotation” :
1. Top zéro externe (NIX) cyclique, exactement une fois par tour de moteur
Condition :
Pour la vitesse de rotation maximale du moteur pas à pas, le top zéro externe doit avoirune durée ∆t 2temps de cycle FM !
2. Raccordement sur l’entrée ”Signalisation régulateur” du connecteur frontal du FM 453
3. Paramétrage d’un top zéro externe (PM37.26)
4. L’utilisation du signal ”Etat zéro d’alimentation” n’est pas admise.
Activation de la surveilllance de rotation :
Réglage ponctuel ”Surveillance de rotation”, cf. chap. 9.3.2
Signalisation de défauts :
• Défaut ”Entrée TOR non paramétrée” (cf. Gestion des défauts et erreurs, Tableau 11-7,Cl. 3/N° 30)
Sélection de la fonction sans paramétrage de NIX
• Défaut ”Surveillance de rotation” (cf. Gestion des défauts et erreurs, Tableau 11-7,Cl. 3/N° 66)
− le moteur tourne trop lentement (pas d’accélération/marche)
− le moteur tourne trop vite (pas de décélération)
− défaillance du top zéro externe
− paramétrage du mauvais nombre de pas par tour de moteur (PM52)
Description de la fonction :
Le top zéro externe permet de surveiller la rotation du moteur de la façon suivante(cf. Fig. 9-12) :
• Le premier top zéro assure la synchronisation de la surveillance de rotation.
• A chaque top zéro ultérieur, on vérifie à l’appui du nombre d’impulsions émises que lemoteur pas à pas se trouve dans le fenêtre n 360° 45°. Si ce n’est pas le cas, il seproduit la signalisation de défaut ”Surveillance de rotation”.
• A chaque cycle FM (3 ms), on vérifie à l’appui du nombre d’impulsions émises depuis ledernier top zéro que l’on se trouve dans la fenêtre (360° + 45°). Si ce n’est pas le cas,le défaut ”Surveillance de rotation” est signalé.
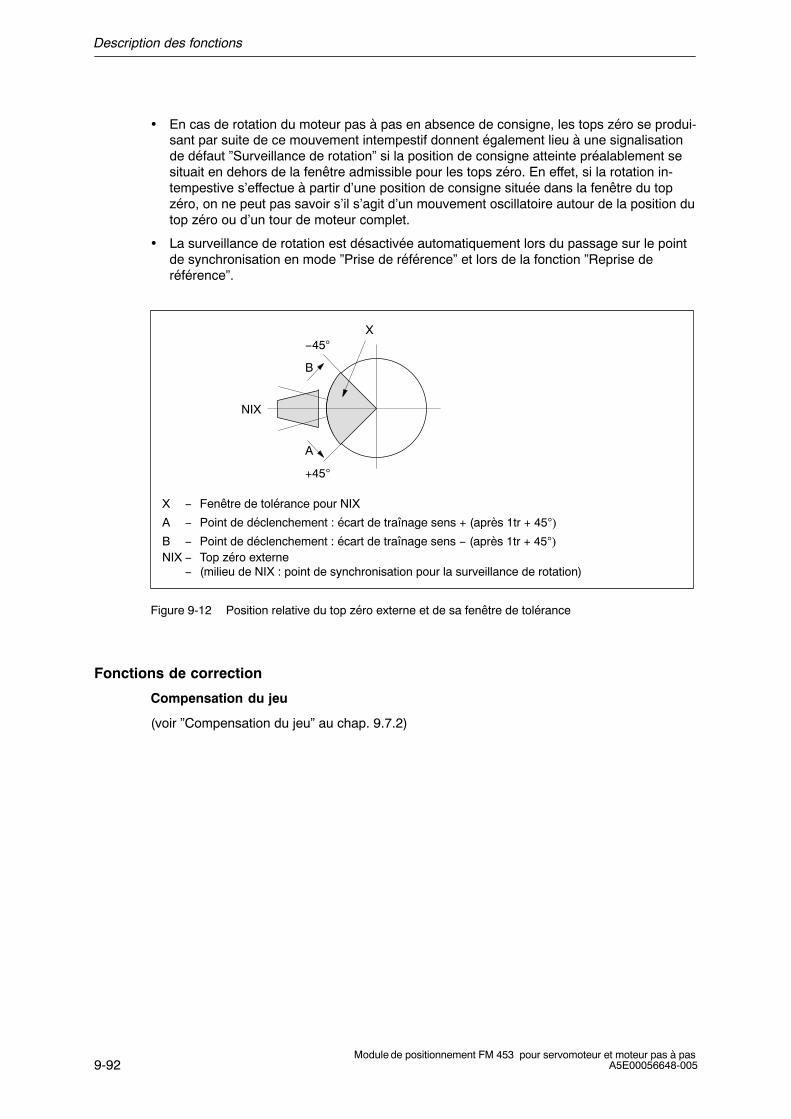
Description des fonctions
9-92Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
• En cas de rotation du moteur pas à pas en absence de consigne, les tops zéro se produi-sant par suite de ce mouvement intempestif donnent également lieu à une signalisationde défaut ”Surveillance de rotation” si la position de consigne atteinte préalablement sesituait en dehors de la fenêtre admissible pour les tops zéro. En effet, si la rotation in-tempestive s’effectue à partir d’une position de consigne située dans la fenêtre du topzéro, on ne peut pas savoir s’il s’agit d’un mouvement oscillatoire autour de la position dutop zéro ou d’un tour de moteur complet.
• La surveillance de rotation est désactivée automatiquement lors du passage sur le pointde synchronisation en mode ”Prise de référence” et lors de la fonction ”Reprise deréférence”.
X−45°
+45°
B
A
NIX
NIX − Top zéro externe− (milieu de NIX : point de synchronisation pour la surveillance de rotation)
X − Fenêtre de tolérance pour NIX
A − Point de déclenchement : écart de traînage sens + (après 1tr + 45°)
B − Point de déclenchement : écart de traînage sens − (après 1tr + 45°)
Figure 9-12 Position relative du top zéro externe et de sa fenêtre de tolérance
Fonctions de correction
Compensation du jeu
(voir ”Compensation du jeu” au chap. 9.7.2)
Description des fonctions
9-93Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.7.4 Driver de signal de réglage
Généralités
Le driver de signal de réglage assure la conversion de la consigne interne de vitesse issuede l’asservissement de position pour la sortie sur le CNA (convertisseur numérique-analogi-que) dans le cas d’un servomoteur ou sur le CNF (convertisseur numérique-fréquence) dansle cas d’un moteur pas à pas.
Sortie de consigne analogique Interface ± 10 V
de asserv.de position
Correspondancevitesse-tension
Rampe detension
vers couplageétage puiss.
Consignevitesse +
+
+
−
PM23PM43
Consigne en mode”commande”
PM19
Valeur CNA
PM44
PM45
Figure 9-13 Vue d’ensemble de la sortie de consigne analogique
Adaptation du sens
Le PM19 permet de définir une relation de sens entre le signe de la tension du signal de ré-glage et le déplacement de l’axe.
PM Désignation Valeur/Signification Unité
19.1 Adaptation du sens 1 = inverser le sens de rotation −
Compensation d’offset
La présence de modules analogiques (convertisseur NA du FM 453 et module de régulationde l’entraînement) dans la boucle d’asservissement de position entraîne une erreur de zéroen raison des tolérances sur la tension de service et les éléments mécaniques. Il en résulteque le moteur peut se mettre à tourner de manière intempestive alors que la consigne nu-mérique interne de vitesse de rotation du FM 453 est égale à zéro. Les régulateurs d’en-traînement présentent généralement des possibilités de réglage pour la compensation del’offset. Un offset de tension réglable via PM44 permet d’assurer du côté FM un étalonnageà zéro de la boucle analogique lors de la mise en service.
PM Désignation Valeur/Signification Unité
44 Compensation d’offset −5 000...+5 000 [mV]
Détermination de l’offset, voir chap. 7.3.4, Mise en service de base de la liaison sur servo-moteur.

Description des fonctions
9-94Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Correspondance vitesse-tension
Le signal de réglage calculé par le régulateur de position est présent en interne dans le FMsous forme d’une consigne de vitesse (cf. gain de la boucle d’asservissement de position).Un facteur de conversion interne FM (facteur CNA) est nécessaire pour pouvoir convertircette valeur en signal de réglage analogique. Ce facteur est constitué par le quotient dePM43 et PM23. Le paramètre PM 23 contient la vitesse maximale configurée pour l’axe ma-chine, et le paramètre PM43 la consigne de tension pour le signal de réglage que doit sortirle FM 453 pour obtenir cette vitesse maxi. Cette consigne de tension doit être un compromisentre une résolution aussi élevée que possible et une réserve de régulation suffisante. Elledoit se situer dans la plage comprise entre 8V et 9,5 V.
!Attention
Cette correspondance doit être obligatoirement identique avec celle réglée sur levariateur.
PM Désignation Valeur/Signification Unité
23 Vitesse maximale 10...500 000 000 [UI/min]
43 Tension de consigne max. 1 000...10 000 [mV]
Rampe de tension
Le PM45 permet de paramétrer une croissance/décroissance progressive (rampe) de la ten-sion qui est transmise à l’entraînement lorsque l’asservissement de position est inactif(mode ”Commande” et délivrance d’une tension nulle en cas d’inactivation des sorties du FMen réaction à un défaut). Cette rampe permet de limiter l’accélération et donc le courant pourle régulateur de l’entraînement et devrait être préférée à une éventuelle possibilité de ré-glage du côté entraînement, car elle n’a aucun effet négatif sur l’asservissement de positionactif.
La rampe de tension devient active dans les situations suivantes :
• en permanence dans le mode ”commande”
• freinage par suppression du déblocage d’entraînement (cf. chap. 9.1.1)
• freinage lors du passage de la CPU de RUN en STOP
• freinage par réaction à un défaut ”Arrêt total” (cf. chap. 11.1, Tab. 11-4 et 11-5)
• erreur(s) cl. 3/nº 62, 65, 66 (cf. Tab. 11-7)
PM Désignation Valeur/Signification Unité
45 Rampe de tension 0...10 000 000 [mV/s]
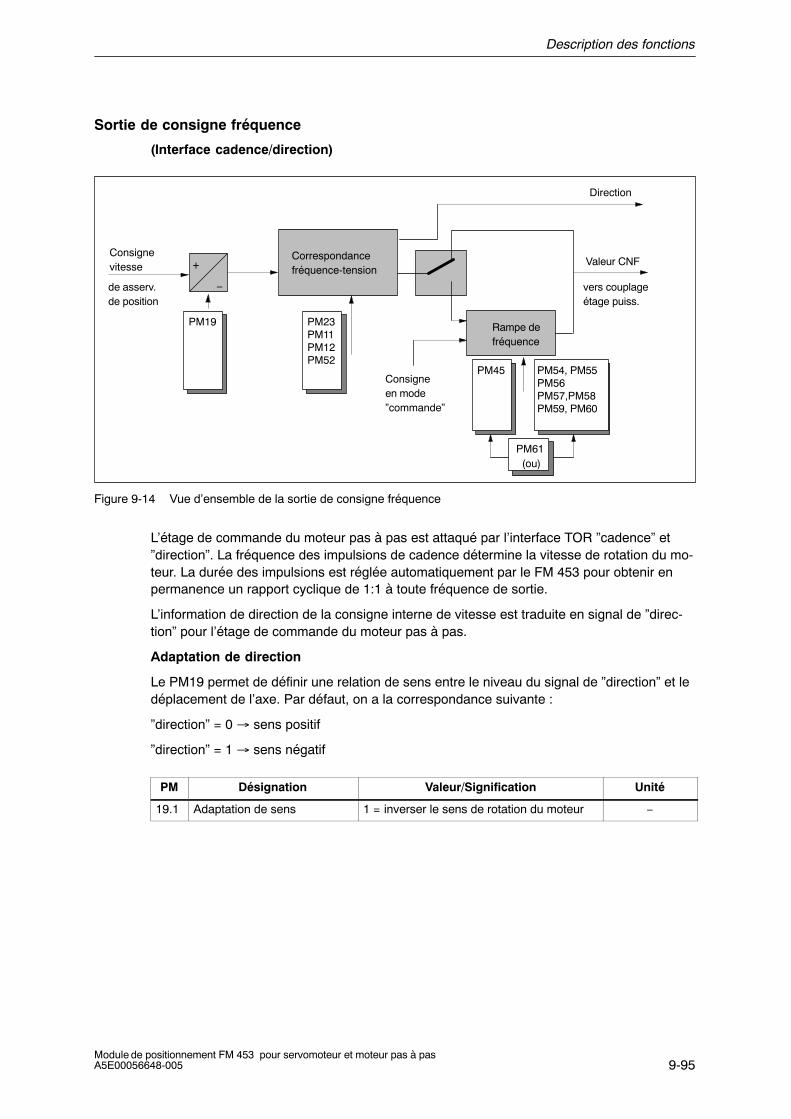
Description des fonctions
9-95Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Sortie de consigne fréquence
(Interface cadence/direction)
de asserv.de position
Correspondancefréquence-tension
Rampe defréquence
vers couplageétage puiss.
Consignevitesse +
−
PM23PM11PM12PM52
Consigneen mode”commande”
PM19
Valeur CNF
PM45 PM54, PM55PM56PM57,PM58PM59, PM60
Direction
PM61(ou)
Figure 9-14 Vue d’ensemble de la sortie de consigne fréquence
L’étage de commande du moteur pas à pas est attaqué par l’interface TOR ”cadence” et”direction”. La fréquence des impulsions de cadence détermine la vitesse de rotation du mo-teur. La durée des impulsions est réglée automatiquement par le FM 453 pour obtenir enpermanence un rapport cyclique de 1:1 à toute fréquence de sortie.
L’information de direction de la consigne interne de vitesse est traduite en signal de ”direc-tion” pour l’étage de commande du moteur pas à pas.
Adaptation de direction
Le PM19 permet de définir une relation de sens entre le niveau du signal de ”direction” et ledéplacement de l’axe. Par défaut, on a la correspondance suivante :
”direction” = 0 → sens positif
”direction” = 1 → sens négatif
PM Désignation Valeur/Signification Unité
19.1 Adaptation de sens 1 = inverser le sens de rotation du moteur −
Description des fonctions
9-96Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Correspondance vitesse-fréquence
Pour convertir la consigne interne de vitesse dans la consigne nécessaire pour la pro-grammation de la commande de sortie de fréquence afin de générer le signal physique defréquence, il faut sur le FM un facteur de conversion (facteur CNF). Il est déterminé à partirde la résolution du moteur pas à pas et se calcule à partir des valeurs attribuées aux pa-ramètres de déplacement PM11, PM12 et PM52. Dans le cadre du contrôle des paramètresmachine, on vérifie qu’avec ce facteur on obtient pour la vitesse maximale PM23 une fré-quence inférieure ou égale à la fréquence maximale PM56 paramétrée pour le moteur(cf. chap. 5.3.1, tableau des ”Dépendances”). Vous pouvez donc toujours utiliser un moteurpas à pas dont la vitesse ou la fréquence nominale est supérieure à la valeur requise parl’axe du point de vue technologique (PM23), mais jamais inférieure à cette valeur.
PM Désignation Valeur/Signification Unité
11 Course par tour de codeur(période)
1...1 000 000 0001) [UI]
12 Parcours restant par tour decodeur (période)
0...232−11) [2−32UI]
23 Vitesse maximale 10...500 000 000 [UI/min]
52 Pas par tour de moteur(période)
4...10 0001)
56 Fréquence maximale 500...1 000 0001) [Hz]
1) cf. chap. 5.3.1, Dépendances
Nota
Le rapport de PM56 à PM23 ne fixe pas la correspondance de vitesse !
Rampe de fréquence
Le PM45 permet de paramétrer une croissance/décroissance progressive de la fréquencede sortie, selon une rampe qui diffère des valeurs paramétrées pour la caractéristique depilotage de la vitesse.
La rampe de fréquence devient active dans les situations suivantes :
• en permanence dans le mode ”commande”
• freinage par suppression du déblocage d’entraînement (cf. chap. 9.1.1)
• freinage lors du passage de la CPU de RUN en STOP
• freinage par réaction à un défaut ”Arrêt total” (cf. chap. 11.1, Tab. 11-4 et 11-5)
• erreur(s) cl. 3/nº 62, 65, 66 (cf. Tab. 11-7)
PM Désignation Valeur/Signification Unité
45 Rampe de fréquence 0 = rampe de fréquence selon caractéristique(cf. chap. 9.7.1, pilotage de vitesse)
1...10 000 000
[Hz/s]

Description des fonctions
9-97Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.7.5 Couplage d’étage de puissance
Généralités
Par l’interface entre FM 453 et étage de puissance (variateur pour servomoteur/ étage decommande de moteur pas à pas) ne transit pas seulement le signal de réglage de la vitessemais aussi d’autres signaux.
X5
Top zéro ext.
PM37 Régulateur prêt
Signaux d’entréedu FM 453
Signaux desortie du FM453
Cadence (valeur CNF)
Direction
Déblocage régul.
Boost/MLI
READY2 NL
actif seulement pour moteur pas à pasactif indépendamment du moteur
X1
RE
AD
Y!_
N
10 V (valeur CNA)
actif seulement pour servomoteur
Figure 9-15 Vue d’ensemble du sous-ensemble fonctionnel Couplage d’étage de puissance
Signaux optionnels ”Déblocage régulateur”, ”Régulateur prêt”
Ces signaux permettent de contrôler l’activation de l’étage de commande.
Le signal ”Régulateur prêt” peut être branché sur le FM 453 soit par le connecteur X5 avecle niveau TTL soit par le connecteur X1 avec le niveau 24 V (cf. chap. 4).
”Déblocage régulateur” actif est sorti en tant que contact fermé (cf. chap. 4.2).
PM Désignation Valeur/Signification
37 Signaux de commande spéciaux
37.0 Déblocage régulateur actif 0 : Signal non utilisé1 : Signal utilisé
Signal desortie
37.2 Régulateur prêt actif 0 : Signal non raccordé1 : Signal raccordé
Signald’entrée
37.3 Régulateur prêt inversé 0 : Signal actif à l’état haut1 : Signal actif à l’état bas
37.4 Entrée de ”Régulateur prêt” 0 : Connecteur frontal X1 (RM) 1 : Connect. Sub-D X5 (READY1_N)
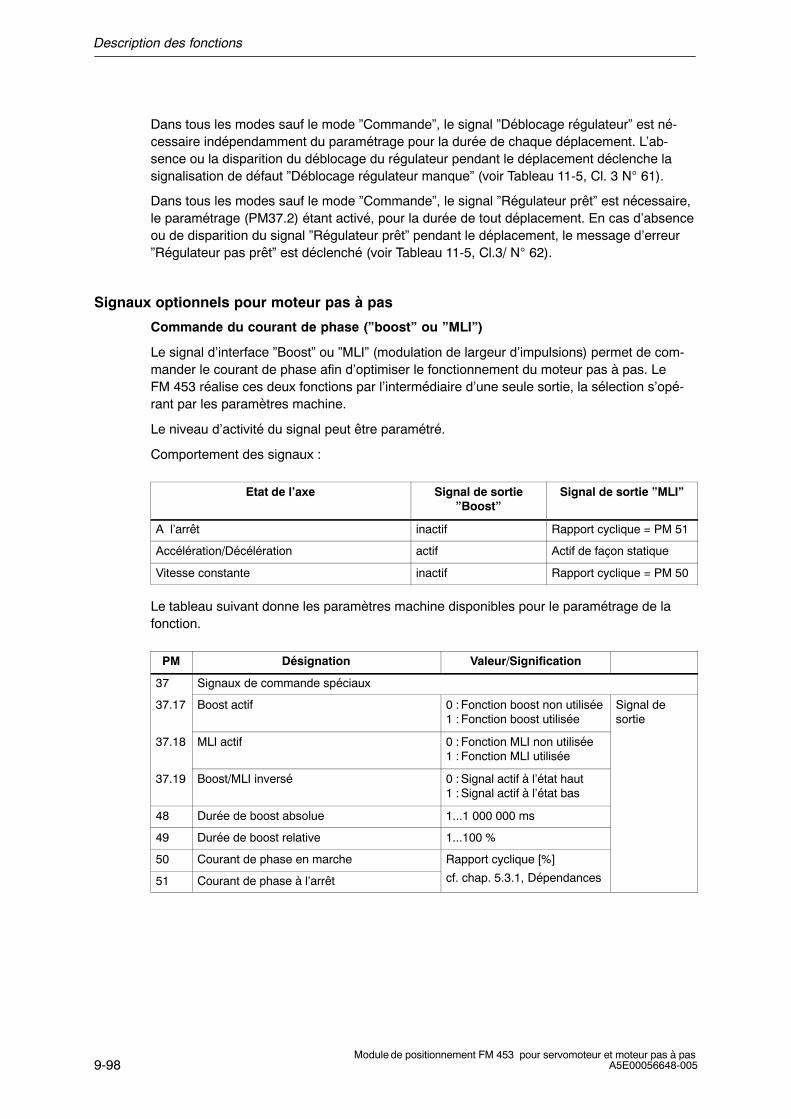
Description des fonctions
9-98Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Dans tous les modes sauf le mode ”Commande”, le signal ”Déblocage régulateur” est né-cessaire indépendamment du paramétrage pour la durée de chaque déplacement. L’ab-sence ou la disparition du déblocage du régulateur pendant le déplacement déclenche lasignalisation de défaut ”Déblocage régulateur manque” (voir Tableau 11-5, Cl. 3 N° 61).
Dans tous les modes sauf le mode ”Commande”, le signal ”Régulateur prêt” est nécessaire,le paramétrage (PM37.2) étant activé, pour la durée de tout déplacement. En cas d’absenceou de disparition du signal ”Régulateur prêt” pendant le déplacement, le message d’erreur”Régulateur pas prêt” est déclenché (voir Tableau 11-5, Cl.3/ N° 62).
Signaux optionnels pour moteur pas à pas
Commande du courant de phase (”boost” ou ”MLI”)
Le signal d’interface ”Boost” ou ”MLI” (modulation de largeur d’impulsions) permet de com-mander le courant de phase afin d’optimiser le fonctionnement du moteur pas à pas. LeFM 453 réalise ces deux fonctions par l’intermédiaire d’une seule sortie, la sélection s’opé-rant par les paramètres machine.
Le niveau d’activité du signal peut être paramétré.
Comportement des signaux :
Etat de l’axe Signal de sortie”Boost”
Signal de sortie ”MLI”
A l’arrêt inactif Rapport cyclique = PM 51
Accélération/Décélération actif Actif de façon statique
Vitesse constante inactif Rapport cyclique = PM 50
Le tableau suivant donne les paramètres machine disponibles pour le paramétrage de lafonction.
PM Désignation Valeur/Signification
37 Signaux de commande spéciaux
37.17 Boost actif 0 : Fonction boost non utilisée1 : Fonction boost utilisée
Signal desortie
37.18 MLI actif 0 : Fonction MLI non utilisée1 : Fonction MLI utilisée
37.19 Boost/MLI inversé 0 : Signal actif à l’état haut1 : Signal actif à l’état bas
48 Durée de boost absolue 1...1 000 000 ms
49 Durée de boost relative 1...100 %
50 Courant de phase en marche Rapport cyclique [%]
51 Courant de phase à l’arrêt cf. chap. 5.3.1, Dépendances
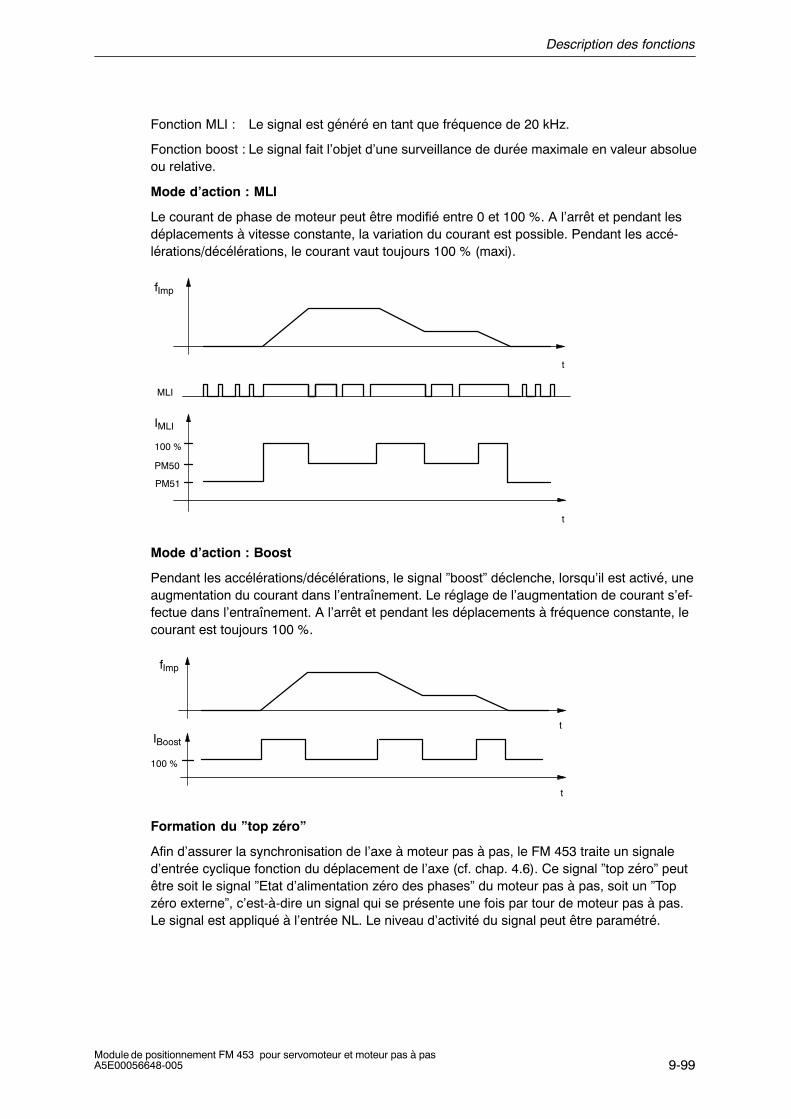
Description des fonctions
9-99Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Fonction MLI : Le signal est généré en tant que fréquence de 20 kHz.
Fonction boost : Le signal fait l’objet d’une surveillance de durée maximale en valeur absolueou relative.
Mode d’action : MLI
Le courant de phase de moteur peut être modifié entre 0 et 100 %. A l’arrêt et pendant lesdéplacements à vitesse constante, la variation du courant est possible. Pendant les accé-lérations/décélérations, le courant vaut toujours 100 % (maxi).
fImp
MLI
IMLI
t
t
PM51
PM50
100 %
Mode d’action : Boost
Pendant les accélérations/décélérations, le signal ”boost” déclenche, lorsqu’il est activé, uneaugmentation du courant dans l’entraînement. Le réglage de l’augmentation de courant s’ef-fectue dans l’entraînement. A l’arrêt et pendant les déplacements à fréquence constante, lecourant est toujours 100 %.
IBoost
100 %
fImp
t
t
Formation du ”top zéro”
Afin d’assurer la synchronisation de l’axe à moteur pas à pas, le FM 453 traite un signaled’entrée cyclique fonction du déplacement de l’axe (cf. chap. 4.6). Ce signal ”top zéro” peutêtre soit le signal ”Etat d’alimentation zéro des phases” du moteur pas à pas, soit un ”Topzéro externe”, c’est-à-dire un signal qui se présente une fois par tour de moteur pas à pas.Le signal est appliqué à l’entrée NL. Le niveau d’activité du signal peut être paramétré.
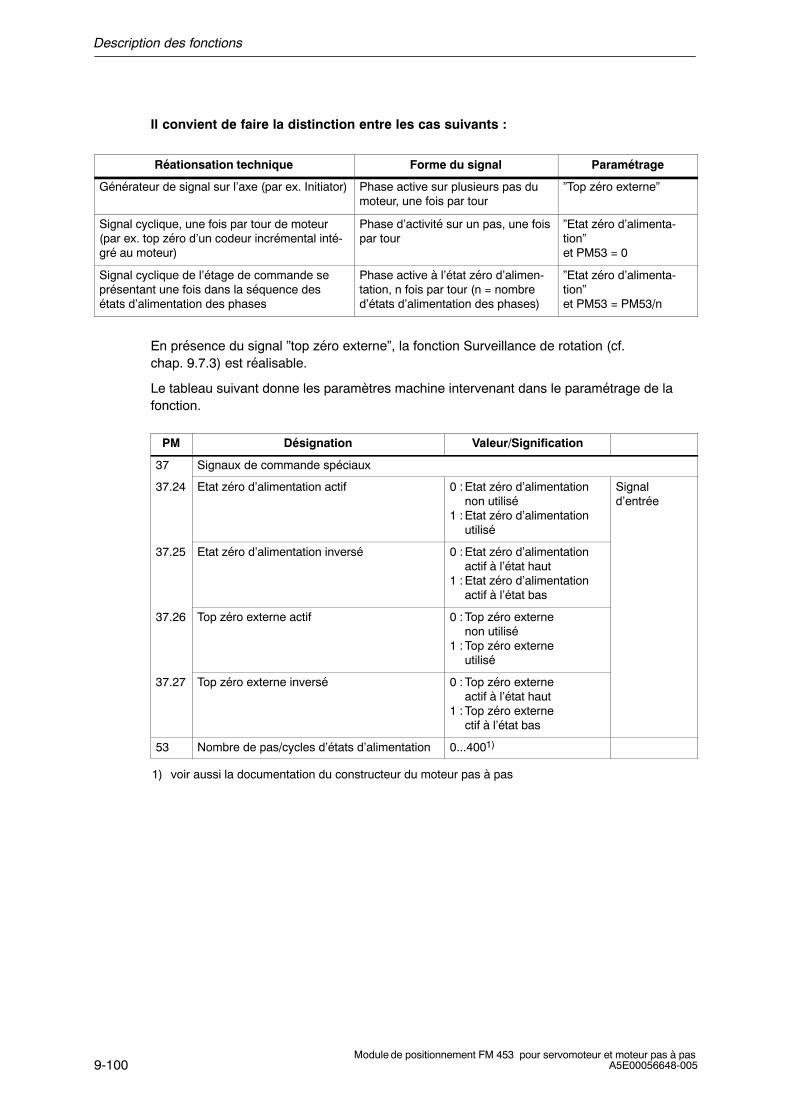
Description des fonctions
9-100Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Il convient de faire la distinction entre les cas suivants :
Réationsation technique Forme du signal Paramétrage
Générateur de signal sur l’axe (par ex. Initiator) Phase active sur plusieurs pas dumoteur, une fois par tour
”Top zéro externe”
Signal cyclique, une fois par tour de moteur(par ex. top zéro d’un codeur incrémental inté-gré au moteur)
Phase d’activité sur un pas, une foispar tour
”Etat zéro d’alimenta-tion”et PM53 = 0
Signal cyclique de l’étage de commande seprésentant une fois dans la séquence desétats d’alimentation des phases
Phase active à l’état zéro d’alimen-tation, n fois par tour (n = nombred’états d’alimentation des phases)
”Etat zéro d’alimenta-tion”et PM53 = PM53/n
En présence du signal ”top zéro externe”, la fonction Surveillance de rotation (cf.chap. 9.7.3) est réalisable.
Le tableau suivant donne les paramètres machine intervenant dans le paramétrage de lafonction.
PM Désignation Valeur/Signification
37 Signaux de commande spéciaux
37.24 Etat zéro d’alimentation actif 0 : Etat zéro d’alimentation non utilisé
1 : Etat zéro d’alimentation utilisé
Signald’entrée
37.25 Etat zéro d’alimentation inversé 0 : Etat zéro d’alimentation actif à l’état haut
1 : Etat zéro d’alimentation actif à l’état bas
37.26 Top zéro externe actif 0 : Top zéro externenon utilisé
1 : Top zéro externeutilisé
37.27 Top zéro externe inversé 0 : Top zéro externeactif à l’état haut
1 : Top zéro externectif à l’état bas
53 Nombre de pas/cycles d’états d’alimentation 0...4001)
1) voir aussi la documentation du constructeur du moteur pas à pas
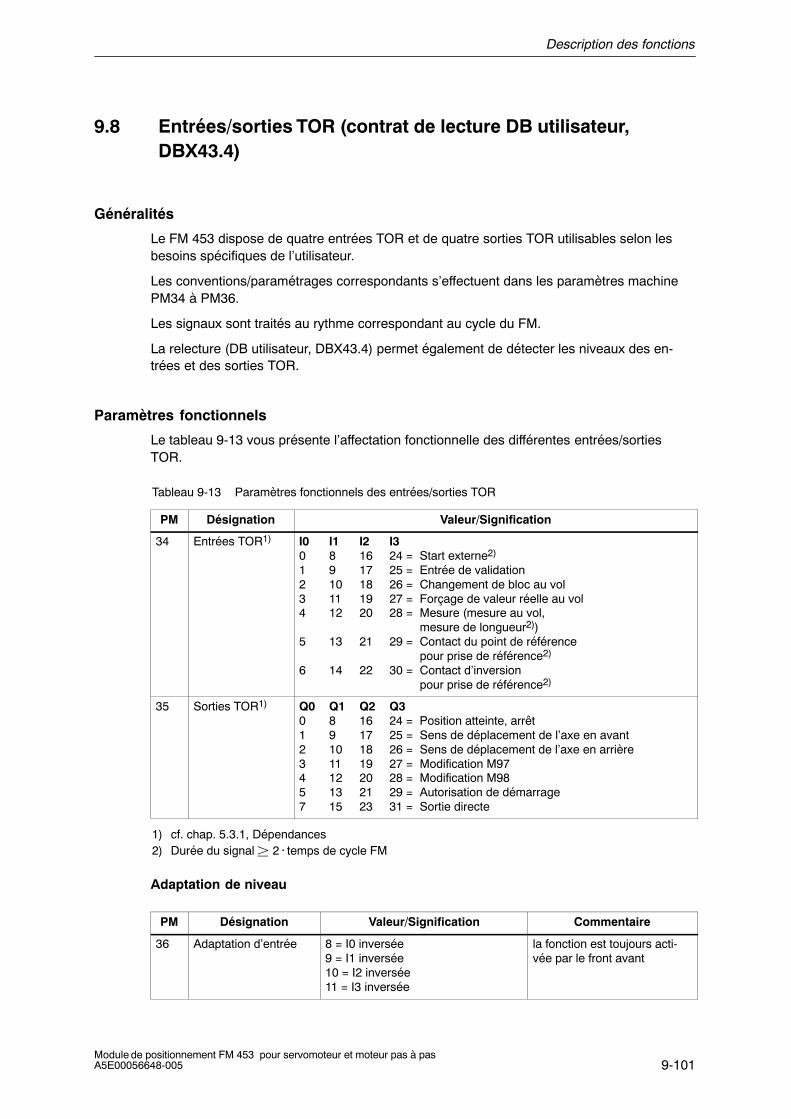
Description des fonctions
9-101Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
9.8 Entrées/sorties TOR (contrat de lecture DB utilisateur,DBX43.4)
Généralités
Le FM 453 dispose de quatre entrées TOR et de quatre sorties TOR utilisables selon lesbesoins spécifiques de l’utilisateur.
Les conventions/paramétrages correspondants s’effectuent dans les paramètres machinePM34 à PM36.
Les signaux sont traités au rythme correspondant au cycle du FM.
La relecture (DB utilisateur, DBX43.4) permet également de détecter les niveaux des en-trées et des sorties TOR.
Paramètres fonctionnels
Le tableau 9-13 vous présente l’affectation fonctionnelle des différentes entrées/sortiesTOR.
Tableau 9-13 Paramètres fonctionnels des entrées/sorties TOR
PM Désignation Valeur/Signification
34 Entrées TOR1) I0 I1 I2 I30 8 16 24 = Start externe2)
1 9 17 25 = Entrée de validation2 10 18 26 = Changement de bloc au vol3 11 19 27 = Forçage de valeur réelle au vol4 12 20 28 = Mesure (mesure au vol,
mesure de longueur2))5 13 21 29 = Contact du point de référence
pour prise de référence2)
6 14 22 30 = Contact d’inversionpour prise de référence2)
35 Sorties TOR1) Q0 Q1 Q2 Q30 8 16 24 = Position atteinte, arrêt1 9 17 25 = Sens de déplacement de l’axe en avant2 10 18 26 = Sens de déplacement de l’axe en arrière3 11 19 27 = Modification M974 12 20 28 = Modification M985 13 21 29 = Autorisation de démarrage7 15 23 31 = Sortie directe
1) cf. chap. 5.3.1, Dépendances2) Durée du signal 2temps de cycle FM
Adaptation de niveau
PM Désignation Valeur/Signification Commentaire
36 Adaptation d’entrée 8 = I0 inversée9 = I1 inversée10 = I2 inversée11 = I3 inversée
la fonction est toujours acti-vée par le front avant

Description des fonctions
9-102Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.8.1 Description du fonctionnement des entrées TOR
Start externe
Les signaux de commande de l’axe comprennent le signal de démarrage (Start), lequel dé-clenche un positionnement dans les modes ”Prise de référence”, ”MDI” et ”Automatique”. Ilest possible de réaliser une combinaison OU à partir de l’entrée TOR ”Start externe” et dusignal de commande (Start).
Le Start externe est raccordé à l’entrée TOR I1.
Démarrage du positionnement
ST
Entrée TOR ”Start externe”
1
231
1
2
3
Entrée I1 non inversée (PM36) Entrée I1 inversée (PM36)
Exemple
Durée minimale du signal à l’entrée TOR : 2temps de cycle FM
Entrée de validation
La condition requise pour un positionnement/déplacement de l’axe et la mise à ”1” de l’en-trée de validation, si elle a été paramétrée avec PM34. La remise à ”0” de cette entréestoppe le déplacement (validation de déplacement externe).
• Dans les modes ”Manuel à vue” et ”Commande”, le mouvement de l’axe se poursuit tantque la combinaison ET du signal de commande (S+/S−) et de l’entrée de validation estvraie.
Positionnement
S+ ou S−
Validation
1
2
3&
1
2
3
Exemple
• Dans les autres modes, tenir compte des points suivants :
Si l’entrée de validation n’est pas encore à ”1” après un front de démarrage, ce dernierest mémorisé de manière interne, et ”Attente de validation” est signalé en retour. Dèsque l’entrée de validation est mise à ”1”, le déplacement démarre et le front de démar-rage mémorisé est effacé (un ”Stop” efface également le front de démarrage mémorisé).
Description des fonctions
9-103Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Changement de bloc externe cf. chap. 10
Forçage de valeur réelle au vol cf. chap. 10, 9.3.6
Mesure cf. chap. 9.3.11
Contact du point de référence pour prise de référence cf. chap. 9.2.3
Contact d’inversion pour prise de référence cf. chap. 9.2.3
9.8.2 Description du fonctionnement des sorties TOR (contrat d’écriture DB utilisateur, DBX39.4)
Sortie de PA, DP+, DP−, AUD
Les signaux en retour ”Position atteinte, arrêt” (PA), ”Déplacement de l’axe en avant” (DP+),”Déplacement de l’axe en arrière” (DP-) et ”Autorisation de démarrage” (AUD) sont en outredélivrés par le biais de sorties TOR. Le paramétrage de l’affectation des sorties s’effectuevia PM35.
Sortie de ”Modification M97 ou M98”
Le signal en retour de modification de la fonction M (MFM) pour les fonctions M97 et M98est délivré sur une sortie TOR. Ainsi, ces fonctions M (signaux de commutation) peuventainsi être exploitée sans retard par le temps de cycle utilisateur.
Sortie directe
Les sorties Q0...Q3 (D_OUT1...D_OUT4) paramétrées comme ”Sorties directes” dans lePM35 peuvent être utilisées directement par le programme utilisateur (DB utilisateur,DBX39.4) et pilotées simultanément par le module FM 453.
La même mémoire étant utilisée pour le contrat d’écriture (DB utilisateur, DBX39.4) et lecontrat de lecture (DB utilisateur, DBX43.4) dans le DB utilisateur, les contrats ne doiventpas être utilisés simultanément dans le cycle.
Nota
En cas de défaut appartenant à une classe d’erreur avec rédaction ”Arrêt total”, les sortiesTOR sont désactivées.
Description des fonctions
9-104Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
9.9 Fins de course logiciels
Généralités
Les fins de course logiciels définis par les valeurs introduites dans les paramètres machine(PM21 et PM22) constituent les bornes délimitant la plage de travail. Ces fins de course sontactifs dès que l’axe est synchronisé.
Si l’on a pas besoin des fins de course logiciels, il faut alors introduire dans les paramètresmachine PM21 et PM22 des valeurs situées hors de la plage de travail possible ou désac-tiver la surveillance par le biais du programme utilisateur.
!Attention
Les fins de course logiciels ne remplacent pas les fins de course matériels pour les réac-tions d’ARRET D’URGENCE.
Action des fins de course logiciels dans les différents modes
Mode ”Manuel à vue”
Le mouvement de déplacement est arrêté à hauteur du fin de course et un défaut estsignalé.
Mode ”Commande”
Si la valeur réelle est située hors de la position finale, le mouvement de déplacement estarrêté et un défaut est signalé. La position du fin de course est dépassée de la valeur de lacourse de freinage nécessaire.
Mode ”Prise de référence”
Sans effet.
Modes ”Semi-automatique relatif”, ”MDI”, ”Automatique”
L’axe s’arrête déjà ou ne démarre pas lorsque la position de consigne se situe hors de laplage de travail lors de la lecture de cette position de consigne. Un défaut est signalé.
Cas particuliers :
• Déplacement sans fin sens (−) pour forçage de valeur réelle au vol (G88, cf. chap. 10)
• Déplacement sans fin sens (+) pour forçage de valeur réelle au vol (G89, cf. chap. 10)
Action des fins de course en mode ”Poursuite”
Un défaut est signalé si la valeur réelle se situe au-delà de la position finale.
Description des fonctions
9-105Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Réaction après un défaut
Quitter la position finale et/ou réintégrer la plage de travail après un défaut
1. Acquitter le message de défaut !
2. Déplacement dans la plage de travail au moyen des modes ”Manuel à vue”,”Commande”, ”Semi-automatique relatif”, ou ”MDI”.
Axe rotatif
La position finale de PMdébut peut être supérieure à celle de PMfin.
Lors du déplacement dans la plage de travail (p. ex. si la position finale a été préalablementdésactivée), le chemin choisi sera systématiquement le trajet plus court.
Si ces deux valeurs par défaut sont paramétrées, les fins de course logiciels sont alorsinactifs.
9.10 Alarme process
Généralités
Les alarmes process sont des alarmes qui signalent rapidement les états au programmeutilisateur durant le cours du process.
Le réglage correspondant du paramètre machine (PM5) permet de définir les signaux quiseront rapidement transmis au programme utilisateur.
Génération d’alarme process
La génération d’alarme process s’opère par le biais du paramètre machine PM5 :
PM Désignation Signification
5 Génération d’alarme process(type de données − BITFELD)
0 = Position atteinte1 = Mesure de longueur terminée3 = Changement de bloc au vol4 = Mesure au vol
Indications pour l’utilisateur
La routine de traitement des alarmes doit être programmée dans l’OB40.
Condition requise : la signalisation des alarmes process doit avoir été activée lors de la con-figuration (cf. chap. 5).

Description des fonctions
9-106Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
10-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Programmation de programmes dedéplacement
Contenu du chapitre
Paragraphe Thème Page
10.1 Blocs de déplacement 10-3
10.2 Déroulement des programmes et sens d’exécution 10-16
10.3 Transitions entre blocs 10-16
Généralités
Pour pouvoir exécuter les opérations désirées en mode ”Automatique” (chronologie, posi-tion, etc.), le module FM 453 doit connaître certaines informations. Ces informations sontentrées sous forme de programme de déplacement (syntaxe analogue à DIN 66025) aumoyen du logiciel ”Paramétrage du FM 453”.
Programme de déplacement
Chaque programme de déplacement est stocké sous un numéro de programme.
Un programme de déplacement peut compter 100 blocs de déplacement.
Le numéro de programme et les blocs de déplacement sont convertis en un format interne(cf. chap. 9.3.13) rangées dans le bloc de données correspondant et transférés vers lemodule.
Le nombre de programmes possible dépend de la mémoire disponible (maxi 16 Ko) et de lalongueur des différents programmes.
Longueur de programme en octets : 108 + (20 x nombre de blocs de déplacement)
10
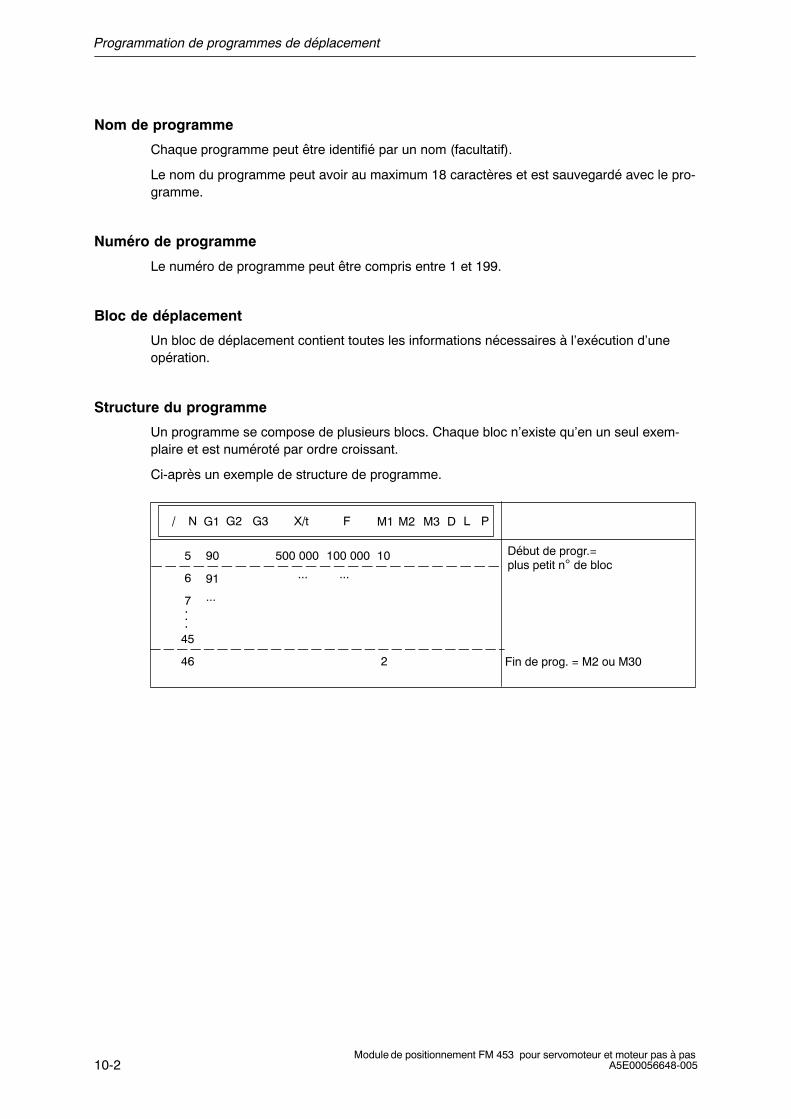
Programmation de programmes de déplacement
10-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Nom de programme
Chaque programme peut être identifié par un nom (facultatif).
Le nom du programme peut avoir au maximum 18 caractères et est sauvegardé avec le pro-gramme.
Numéro de programme
Le numéro de programme peut être compris entre 1 et 199.
Bloc de déplacement
Un bloc de déplacement contient toutes les informations nécessaires à l’exécution d’uneopération.
Structure du programme
Un programme se compose de plusieurs blocs. Chaque bloc n’existe qu’en un seul exem-plaire et est numéroté par ordre croissant.
Ci-après un exemple de structure de programme.
/ N G1 G2 G3 X/t F D PL
100 000 10500 0005 90
6
7
45
91
...
... ...
46 2
...
M1 M2 M3
Début de progr.=plus petit n° de bloc
Fin de prog. = M2 ou M30

Programmation de programmes de déplacement
10-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
10.1 Blocs de déplacement
Structure de bloc
La figure suivante donne un aperçu de la structure des blocs de déplacement.
/ N G1 G2 G3 X/t F M1 M2 M3 D PL
/ − Identification d’un bloc optionnelN − Numéro de blocG1 − Fonction G du groupe de fonctions 1G2 − Fonction G du groupe de fonctions 2 cf. Tableau 10-1G3 − Fonction G du groupe de fonctions 3X/t − Position / Arrêt temporiséF − VitesseM1 − Fonction M du groupe de fonctions 1M2 − Fonction M du groupe de fonctions 2 cf. Tableau 10-2M3 − Fonction M du groupe de fonctions 3D − Numéro de correction d’outilL − Appel d’un programme comme sous-programmeP − Nombre d’exécutions de sous-programme
Bloc optionnel /
Les blocs qui ne doivent pas être traités obligatoirement à chaque passage du programmepeuvent être déclarés comme blocs optionnels en les faisant précéder du signe ”/”. En coursd’exécution du programme, le signal de commande ”saut de blocs optionnels” permet alorsde décider si les blocs optionnels doivent être sautés ou non. Le dernier bloc d’un pro-gramme ne doit pas être un bloc optionnel.
Numéro de bloc N
Le programme peut être exécuté dans l’ordre croissant des numéros de blocs 1...255 oudans l’ordre décroissant des numéros (sens ”en arrière”).
Fonction G du groupe 1...3
Un bloc de déplacement ne peut contenir qu’une fonction G de chaque groupe de fonctions.
La figure suivante en donne un exemple :
/ N G1 G2 G3 X/t F M1 M2 M3 D
400 00100 00010 90 4334 10

Programmation de programmes de déplacement
10-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Fonctions G
Le tableau 10-1 donne la liste des fonctions G possibles dans les différents groupes de fonc-tions G.
Tableau 10-1 Fonctions G
N° fct.G
Fonction G Groupe defonctions G
041) Arrêt temporisé
87 Annulation décalage système de mesure pour forçage de valeur réelle au vol
881) Déplacement sans fin sens (−) pour forçage val. réelle au vol1
891) Déplacement sans fin sens (+) pour forçage val. réelle au vol1
90 Cotation absolue
91 Cotation relative
303132...39
Correction accélération/décélération de100 %Correction accélération/décélération de 10 %Correction accélération/décélération de 20 %...Correction accélération/décélération de 90 %
2
43 Correction d’outil (+)
44 Correction d’outil (−)
501) Changement de bloc externe 3
60 Changement de bloc avec arrêt précis
64 Changement de bloc au vol, contournage
1) Ces fonctions G ne sont actives que dans le bloc où elles sont programmées. Les autres fonctions Gcont actives jusqu’à leur annulation.
G30, G90 et G64 sont les fonctions par défaut après le début du programme.
Arrêt temporisé G04
Un bloc de déplacement avec arrêt temporisé ne peut contenir en dehors de cette fonctionG avec indication de durée que des fonctions M.
Pour l’arrêt temporisé, on a :
Désignation Valeur minimale Valeur maximale Unité
Arrêt temporisé 3 100 000 ms
Les valeurs introduites sont arrondies à un multiple du temps de cycle du FM (3 ms). Lesarrêts temporisés ne sont actifs qu’à l’intérieur du bloc où il sont appelés.
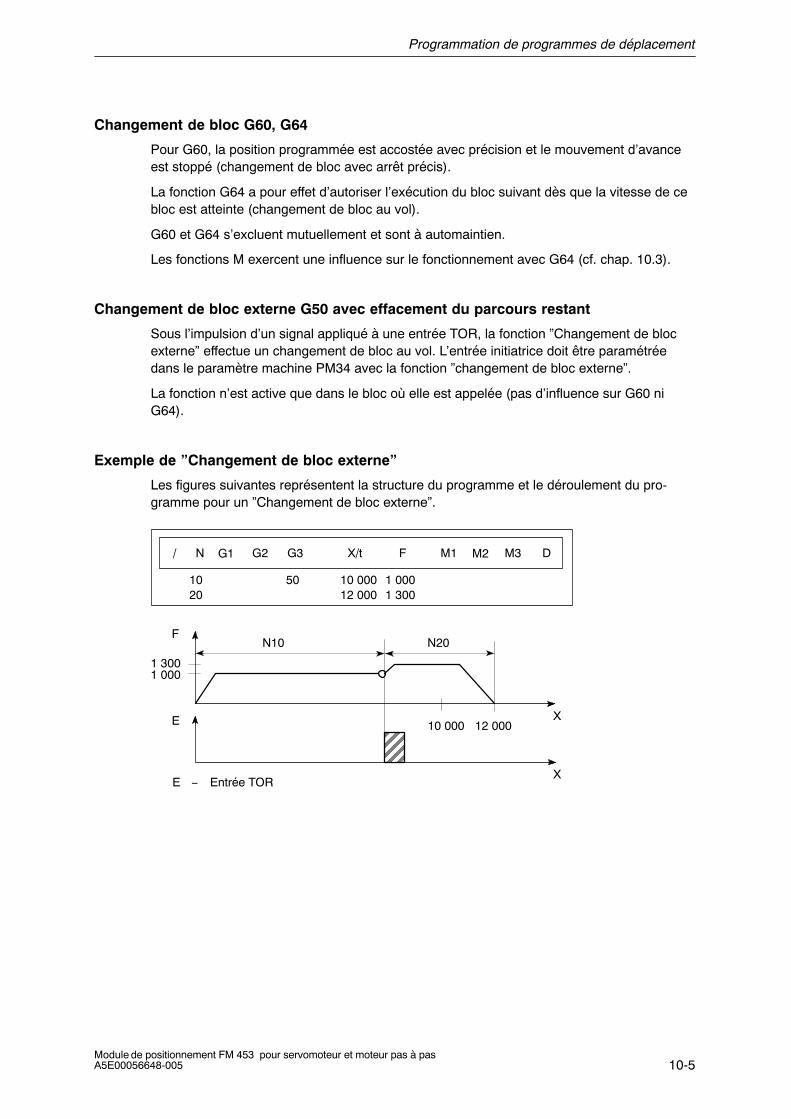
Programmation de programmes de déplacement
10-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Changement de bloc G60, G64
Pour G60, la position programmée est accostée avec précision et le mouvement d’avanceest stoppé (changement de bloc avec arrêt précis).
La fonction G64 a pour effet d’autoriser l’exécution du bloc suivant dès que la vitesse de cebloc est atteinte (changement de bloc au vol).
G60 et G64 s’excluent mutuellement et sont à automaintien.
Les fonctions M exercent une influence sur le fonctionnement avec G64 (cf. chap. 10.3).
Changement de bloc externe G50 avec effacement du parcours restant
Sous l’impulsion d’un signal appliqué à une entrée TOR, la fonction ”Changement de blocexterne” effectue un changement de bloc au vol. L’entrée initiatrice doit être paramétréedans le paramètre machine PM34 avec la fonction ”changement de bloc externe”.
La fonction n’est active que dans le bloc où elle est appelée (pas d’influence sur G60 niG64).
Exemple de ”Changement de bloc externe”
Les figures suivantes représentent la structure du programme et le déroulement du pro-gramme pour un ”Changement de bloc externe”.
/ N G1 G2 G3 X/t F M1 M2 M3 D
10 5020
10 00012 000
1 0001 300
1 3001 000
ÍÍÍÍÍÍ
FN10 N20
X
X
E
E − Entrée TOR
12 00010 000

Programmation de programmes de déplacement
10-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Explications concernant l’exemple de ”Changement de bloc externe”
L’axe se déplace jusqu’à ce que le signal à l’entrée TOR passe de 0 à 1. Ceci déclenchedeux réactions :
• changement de bloc au vol et donc exécution immédiate du bloc N20
• sauvegarde dans ”valeur réelle au changement de bloc” de la position réelle au momentdu changement d’état du signal d’entrée. Cette position constitue aussi le point de départpour la programmation en cotation relative qui fait suite.
Suivant la situation, le bloc N20 est traité de la façon suivante :
• Si la position définie dans le bloc N20 est plus petite que la position réelle à l’instant duchangement d’état de l’entrée TOR (inversion de marche), le mouvement s’arrête pourrepartir vers la nouvelle destination en sens inverse.
• Si aucune position n’est programmée dans le bloc N20, le mouvement est décéléré, lesfonctions programmées dans N20 sont exécutées et on passe au bloc suivant (sauf siN20 contient M0, M2 ou M30).
• Si le parcours programmé dans N20 est inférieur à la distance de freinage, la destinationprogrammée est dépassée, puis est réaccostée en sens inverse.
S’il ne se produit pas de changement d’état sur l’entrée TOR, il se produit un positionnementsur la destination définie dans N10 mais avec le comportement suivant :
à l’arrivée à destination, le message d’erreur ”entrée TOR non commandée” est délivré(cf. Tableau 11-5, Cl. 2/N° 15).
Forçage de valeur réelle au vol G87,G88, G89
La fonction ”Forçage de valeur réelle au vol” est programmée et déclenchée par une entréeTOR ; le changement de bloc s’effectue au vol en même temps qu’une nouvelle valeur(coordonnée programmée) est affectée à la valeur réelle de position. L’entrée TOR initiatricedoit être paramétrée avec la fonction ”Forçage de valeur réelle au vol ” dans le paramètremachine PM34.
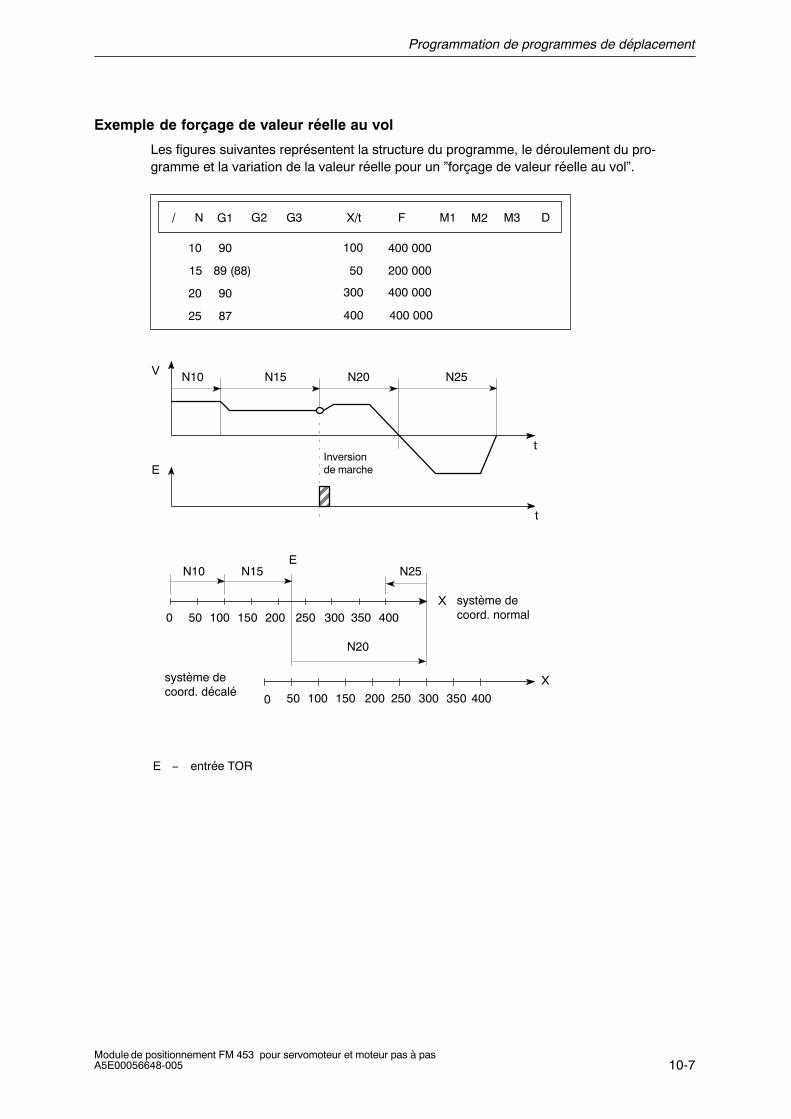
Programmation de programmes de déplacement
10-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Exemple de forçage de valeur réelle au vol
Les figures suivantes représentent la structure du programme, le déroulement du pro-gramme et la variation de la valeur réelle pour un ”forçage de valeur réelle au vol”.
/ N G1 G2 G3 X/t F M1 M2 M3 D
400 00010 90
15
20
25
50
300
400
200 000
400 000
400 000
89 (88)
90
87
100
ÍÍÍÍ
V
t
E
N10 N15 N20 N25
t
Inversionde marche
0 50 100 150 200 250 300 350 400
0 50 100 150 200 250 300 350 400
X
X
EN15N10 N25
N20
système decoord. normal
système decoord. décalé
E − entrée TOR

Programmation de programmes de déplacement
10-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Explication concernant le forçage de valeur réelle au vol
Changement de bloc au vol de N10 à N15, G89 donnant un mouvement dans le sens ”+” etG88 un mouvement dans le sens ”−” avec la vitesse programmée pour N15.
L’axe se déplace dans le sens spécifié jusqu’à ce qu’il se produise un front montant sur l’en-trée TOR, ce qui a pour effet de déclencher les réactions suivantes :
• changement de bloc au vol et exécution immédiate du bloc N20
• forçage de valeur réelle au vol, à savoir positionnement de la valeur réelle sur la positiondu bloc N15 (dans l’exemple 50), d’où décalage du système de coordonnées
• sauvegarde de la valeur réelle valable au moment du changement de bloc
La position programmée dans N20 se rapporte au système de coordonnées décalé.
En passant de N20 à N25, G87 annule le décalage du système de coordonnées et donnelieu à une programmation en cotation absolue sur la position définie dans le bloc N25.
”Valeur réelle au changement de bloc” permet de récupérer la valeur réelle sauvegardée.
Le décalage du système de coordonnées persiste jusqu’à la désactivation de G87 ou lasélection d’un autre mode de fonctionnement. Il est possible d’utiliser le décalage dusystème de coordonnées dans divers programmes. Le système de coordonnées peut êtredécalé une nouvelle fois sans obligation d’annuler le décalage du système de coordonnéesexistant.
G88, G89 peuvent être programmés à répétition. Le décalage se rapporte toujours à la posi-tion initiale. Les fins de course logiciels sont décalés en même temps.
S’il ne se produit pas de changement d’état sur l’entrée TOR, l’axe se déplace jusqu’à at-teinte d’un fin de course.
Nota
Les fonctions G87, G88, G89 ne sont actives que dans le bloc où elles ont été appelées etdoivent êre rappelées le cas échéant.
Cotation G90, G91
Le déplacement vers une position de destination peut être décrit en
• cotation absolue G90 ou
• cotation relative G91.
Il est possible de commuter à volonté entre cotation relative et cotation absolue.
La situation standard est la programmation en cotation relative G90
Les fonctions G90 et G91 sont à automaintien.
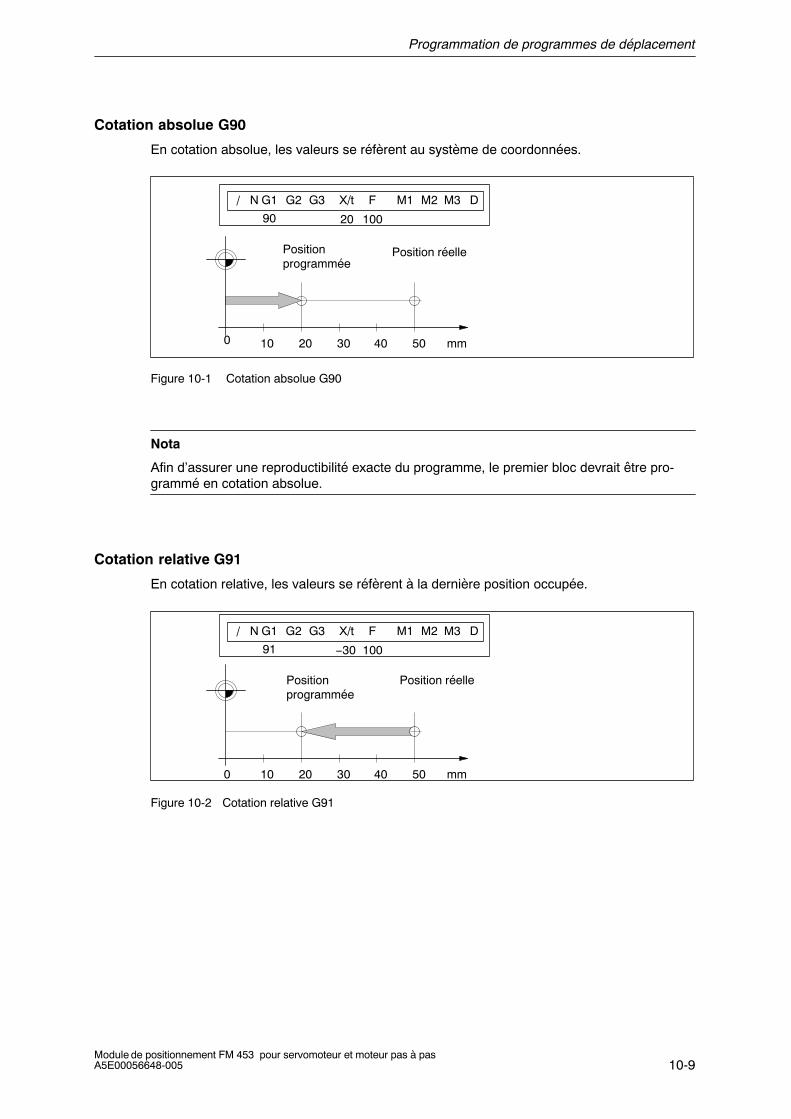
Programmation de programmes de déplacement
10-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Cotation absolue G90
En cotation absolue, les valeurs se réfèrent au système de coordonnées.
90 20
/ N G1 G2 G3 X/t F M1 M2 M3 D
100
0 10 20 30 40 50 mm
Positionprogrammée
Position réelle
Figure 10-1 Cotation absolue G90
Nota
Afin d’assurer une reproductibilité exacte du programme, le premier bloc devrait être pro-grammé en cotation absolue.
Cotation relative G91
En cotation relative, les valeurs se réfèrent à la dernière position occupée.
91 −30
/ N G1 G2 G3 X/t F M1 M2 M3 D
100
0 10 20 30 40 50 mm
Positionprogrammée
Position réelle
Figure 10-2 Cotation relative G91
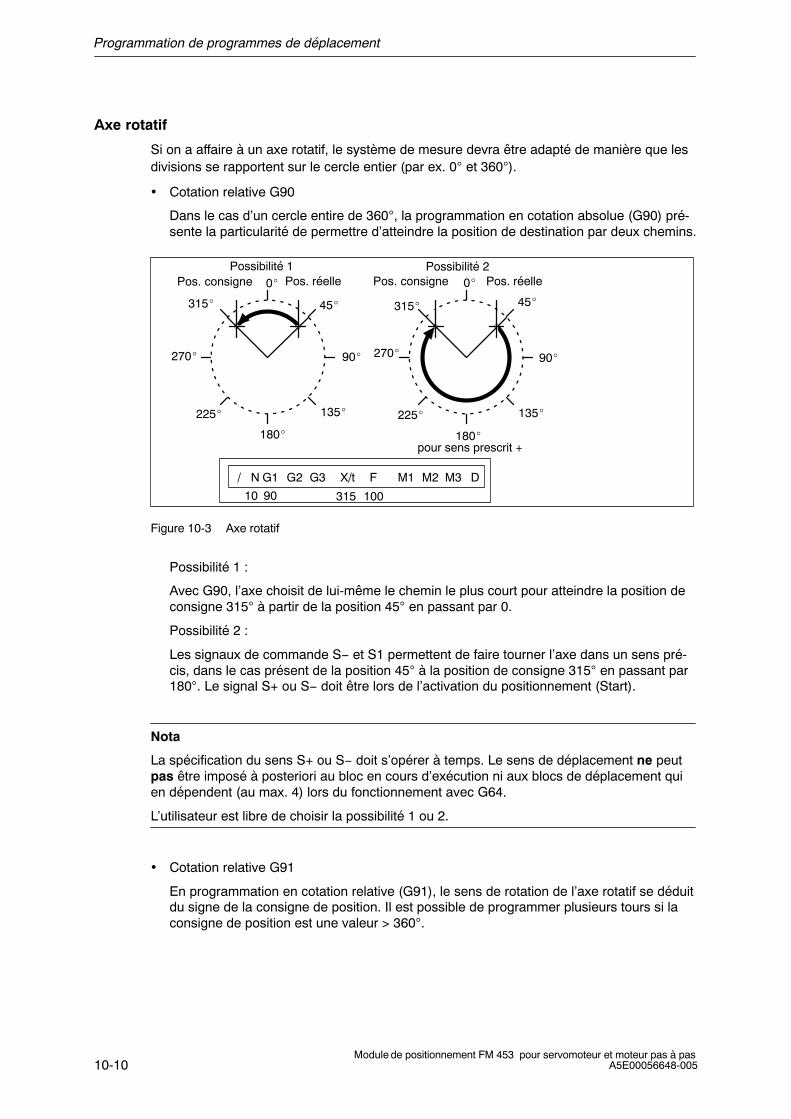
Programmation de programmes de déplacement
10-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Axe rotatif
Si on a affaire à un axe rotatif, le système de mesure devra être adapté de manière que lesdivisions se rapportent sur le cercle entier (par ex. 0° et 360°).
• Cotation relative G90
Dans le cas d’un cercle entire de 360°, la programmation en cotation absolue (G90) pré-sente la particularité de permettre d’atteindre la position de destination par deux chemins.
0
315
225
180
135
90
45
270
Pos. réellePos. consigne0
315
225
180
135
90
45
Pos. réelle
270
Pos. consigne
10 90 315
pour sens prescrit +
/ N G1 G2 G3 X/t F M1 M2 M3 D
100
Possibilité 1 Possibilité 2
Figure 10-3 Axe rotatif
Possibilité 1 :
Avec G90, l’axe choisit de lui-même le chemin le plus court pour atteindre la position deconsigne 315° à partir de la position 45° en passant par 0.
Possibilité 2 :
Les signaux de commande S− et S1 permettent de faire tourner l’axe dans un sens pré-cis, dans le cas présent de la position 45° à la position de consigne 315° en passant par180°. Le signal S+ ou S− doit être lors de l’activation du positionnement (Start).
Nota
La spécification du sens S+ ou S− doit s’opérer à temps. Le sens de déplacement ne peutpas être imposé à posteriori au bloc en cours d’exécution ni aux blocs de déplacement quien dépendent (au max. 4) lors du fonctionnement avec G64.
L’utilisateur est libre de choisir la possibilité 1 ou 2.
• Cotation relative G91
En programmation en cotation relative (G91), le sens de rotation de l’axe rotatif se déduitdu signe de la consigne de position. Il est possible de programmer plusieurs tours si laconsigne de position est une valeur > 360°.
Programmation de programmes de déplacement
10-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Correction accélération/décélération G30...G39
La correction d’accélération permet d’intervenir sur les valeurs d’accélération et de décéléra-tion pour les opérations de positionnement. Les valeurs d’accélération et de décélérationsont définies dans des paramètres machine. Les fonctions G30 à G39 permettent d’obtenirune réduction en pourcents des deux valeurs dans un bloc de déplacement. Ces fonctionssont à automaintien.
Fonction G
30 correction accélération/décélération de 100 %
31 correction accélération/décélération de 10 %
à
39 correction accélération/décélération de 90 %
La modification de la correction d’accélération dans le programme empêche le changementde bloc au vol. Il en résulte que le bloc précédent est exécuté forcément avec changementde bloc avec arrêt précis (comportement G60).
L’annulation de la correction d’accélération s’effectue par :
• changement de mode
• réinitialisation de l’axe par Restart (commande ponctuelle)
• changement de programme et fin de programme
Correction d’outil, G43, G44
La correction d’outil permet de continuer à utiliser le même programme d’usinage après lamodification des cotes de l’outil.
La sélection de la correction d’outil s’opère par G43 ou G44 avec indication du numéro decorrection d’outil D1 ... D20. L’annulation de la correction d’outil s’effectue par G43 ou G44associée au numéro de correction d’outil D0.
On dispose au total de 20 mémoires de correction d’outil et mémoires d’usure d’outils. Lesvaleurs sont chargées sur le module FM par le biais du bloc de données ”données decorrection d’outils” où elles sont conservées de façon rémanente. La sélection, le change-ment et l’annulation d’une correction d’outil ne prennent effet que lors du positionnement sui-vant.
Une correction d’outil sélectionnée reste opérante tant qu’elle n’est pas annulée ou rempla-cée par une nouvelle. Un changement de mode ou de programme ainsi que la fin du pro-gramme se traduisent aussi par l’annulation de la correction d’outil.
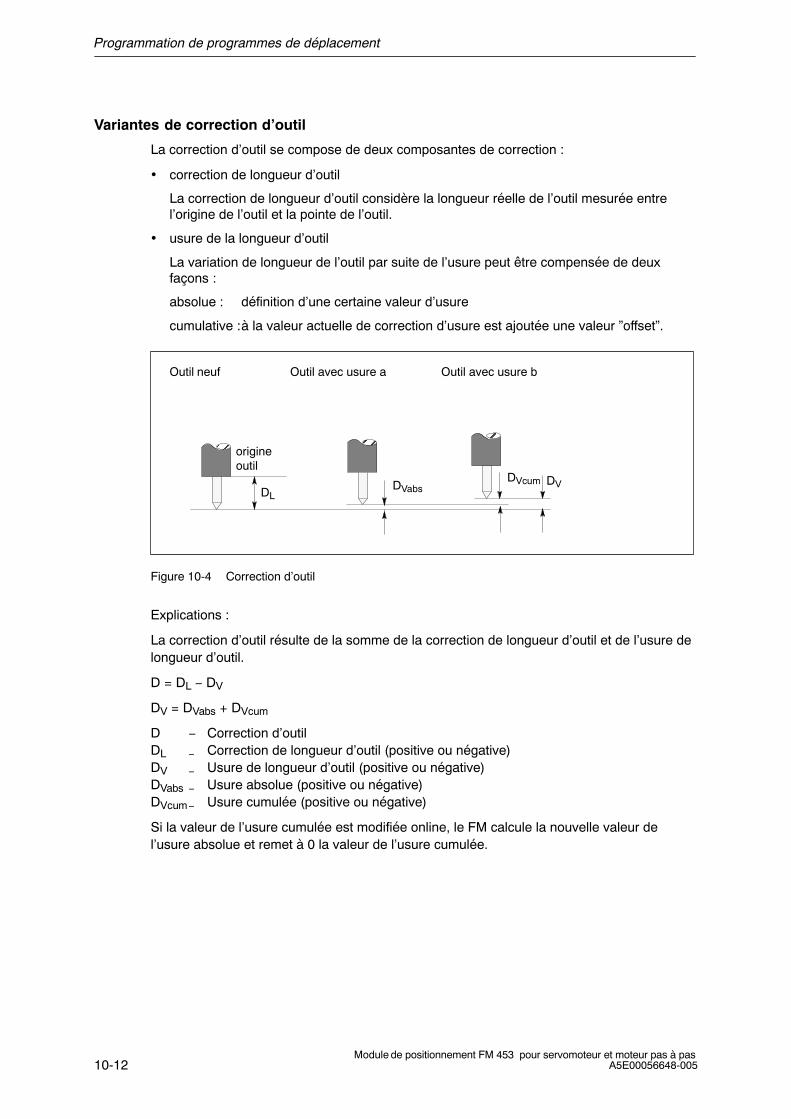
Programmation de programmes de déplacement
10-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Variantes de correction d’outil
La correction d’outil se compose de deux composantes de correction :
• correction de longueur d’outil
La correction de longueur d’outil considère la longueur réelle de l’outil mesurée entrel’origine de l’outil et la pointe de l’outil.
• usure de la longueur d’outil
La variation de longueur de l’outil par suite de l’usure peut être compensée de deuxfaçons :
absolue : définition d’une certaine valeur d’usure
cumulative :à la valeur actuelle de correction d’usure est ajoutée une valeur ”offset”.
DL
DV
ÉÉÉÉ
ÉÉ ÉÉ
DVabsDVcum
Outil neuf Outil avec usure a Outil avec usure b
origineoutil
Figure 10-4 Correction d’outil
Explications :
La correction d’outil résulte de la somme de la correction de longueur d’outil et de l’usure delongueur d’outil.
D = DL − DV
DV = DVabs + DVcum
D − Correction d’outilDL − Correction de longueur d’outil (positive ou négative)DV − Usure de longueur d’outil (positive ou négative)DVabs − Usure absolue (positive ou négative)DVcum− Usure cumulée (positive ou négative)
Si la valeur de l’usure cumulée est modifiée online, le FM calcule la nouvelle valeur del’usure absolue et remet à 0 la valeur de l’usure cumulée.
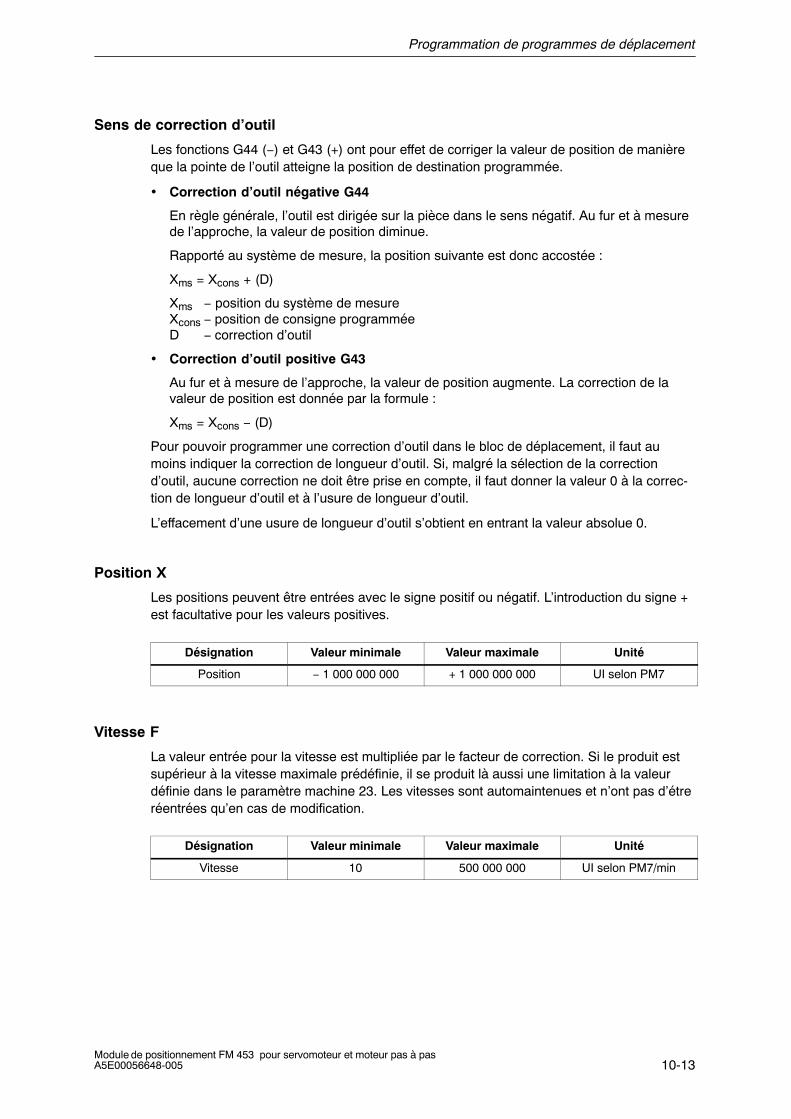
Programmation de programmes de déplacement
10-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Sens de correction d’outil
Les fonctions G44 (−) et G43 (+) ont pour effet de corriger la valeur de position de manièreque la pointe de l’outil atteigne la position de destination programmée.
• Correction d’outil négative G44
En règle générale, l’outil est dirigée sur la pièce dans le sens négatif. Au fur et à mesurede l’approche, la valeur de position diminue.
Rapporté au système de mesure, la position suivante est donc accostée :
Xms = Xcons + (D)
Xms − position du système de mesureXcons − position de consigne programméeD − correction d’outil
• Correction d’outil positive G43
Au fur et à mesure de l’approche, la valeur de position augmente. La correction de lavaleur de position est donnée par la formule :
Xms = Xcons − (D)
Pour pouvoir programmer une correction d’outil dans le bloc de déplacement, il faut aumoins indiquer la correction de longueur d’outil. Si, malgré la sélection de la correctiond’outil, aucune correction ne doit être prise en compte, il faut donner la valeur 0 à la correc-tion de longueur d’outil et à l’usure de longueur d’outil.
L’effacement d’une usure de longueur d’outil s’obtient en entrant la valeur absolue 0.
Position X
Les positions peuvent être entrées avec le signe positif ou négatif. L’introduction du signe +est facultative pour les valeurs positives.
Désignation Valeur minimale Valeur maximale Unité
Position − 1 000 000 000 + 1 000 000 000 UI selon PM7
Vitesse F
La valeur entrée pour la vitesse est multipliée par le facteur de correction. Si le produit estsupérieur à la vitesse maximale prédéfinie, il se produit là aussi une limitation à la valeurdéfinie dans le paramètre machine 23. Les vitesses sont automaintenues et n’ont pas d’étreréentrées qu’en cas de modification.
Désignation Valeur minimale Valeur maximale Unité
Vitesse 10 500 000 000 UI selon PM7/min
Programmation de programmes de déplacement
10-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Fonction M
On peut programmer au maximum trois fonctions M dans un bloc de déplacement, l’affecta-tion des fonctions M1, M2 et M3 étant libre. L’ordre chronologique de sortie des fonctions Mest toujours M1 M2 M3. (cf. chap. 9.1).
La figure suivante montre un exemple.
/ N G1 G2 G3 X/t F M1 M2 M3 D
400 00 10100 00010 90 4334 11 12 1
Tableau 10-2 Fonctions M
N° fct. M Fonction M Groupe defonctions M
0 Arrêt en fin de bloc
2, 30 Fin de programme
1, 3...17 Fonctions utilisateur
18 Boucle sans fin (saut au début du programme)1, 2, 3
19...29,31...96
Fonctions utilisateur1, 2, 3
97, 98 Signal de modification programmable comme sortie TOR
99 Fonctions utilisateur
M0, M2, M18 et M30 sont toujours sorties à la fin du mouvement de déplacement.
M0, M2, M18 et M30 s’excluent mutuellement dans un même bloc.
Arrêt en fin de bloc M0
Si on programme dans un bloc de déplacement une fonction M de numéro 0, l’exécution duprogramme s’arrête à la fin du bloc de déplacement, et M0 est sortie. La poursuite du pro-gramme de déplacement exige de donner un nouvel ordre Start.
Fin de programme M2, M30
Si M2 ou M30 est programmée dans un bloc, le positionnement est suivi de la sortie de lafonction M puis de l’arrêt du programme et du retour au début du programme. Le pro-gramme peut être relancé par un ordre Start. M2 ou M30 est la dernière fonction à être sor-tie dans le bloc.
Si le programme est appelé en tant que sous-programme, il se produit un saut de retourdans le programme principal. Dans ce cas, M2 ou M30 ne sont pas sorties.
Programmation de programmes de déplacement
10-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Boucle sans fin M18
M18 est toujours sortie comme dernière fonction M du bloc.
On distingue les deux cas suivants :
• La fonction M18 est sortie comme toute autre fonction M. Le retour au début du pro-gramme n’a lieu qu’après exécution complète du bloc (M18 comprise).
• Si la fonction M18 est la seule fonction programmée dans le dernier bloc du programmede déplacement, la fonction M n’est pas sortie, mais l’axe retourne immédiatement aupoint de départ du programme.
Signal de modifica-tion comme sortie TOR M97, M98
Si M97 ou M98 est programmée dans un bloc, la sortie de la fonction M s’effectue par l’inter-médiaire des sorties TOR comme spécifié dans le paramètre machine PM35, à la façon dessignalisations en retour.
Numéro de correction d’outil D
20 numéros de correction d’outil sont possibles (D1...D20). En liaison avec G43 ou G44, D0a pour effet d’annuler la correction d’outil. Les valeurs de correction doivent avoir été char-gées auparavant sur le module. Les valeurs de correction non déclarées sont prises commeétant égales à 0.
Appels de sous-programme P, L
Un bloc contenant un appel de sous-programme (P est ”nombre d’exécutions”, L est le ”nu-méro de programme”) ne doit contenir aucune autre information.
Dans un programme, max. 19 sous-programmes peuvent être appelés. Une imbricationn’est pas possible.
Désignation Valeur minimale Valeur maximale
P = nombre d’exécutions de sous-programmes 1 250
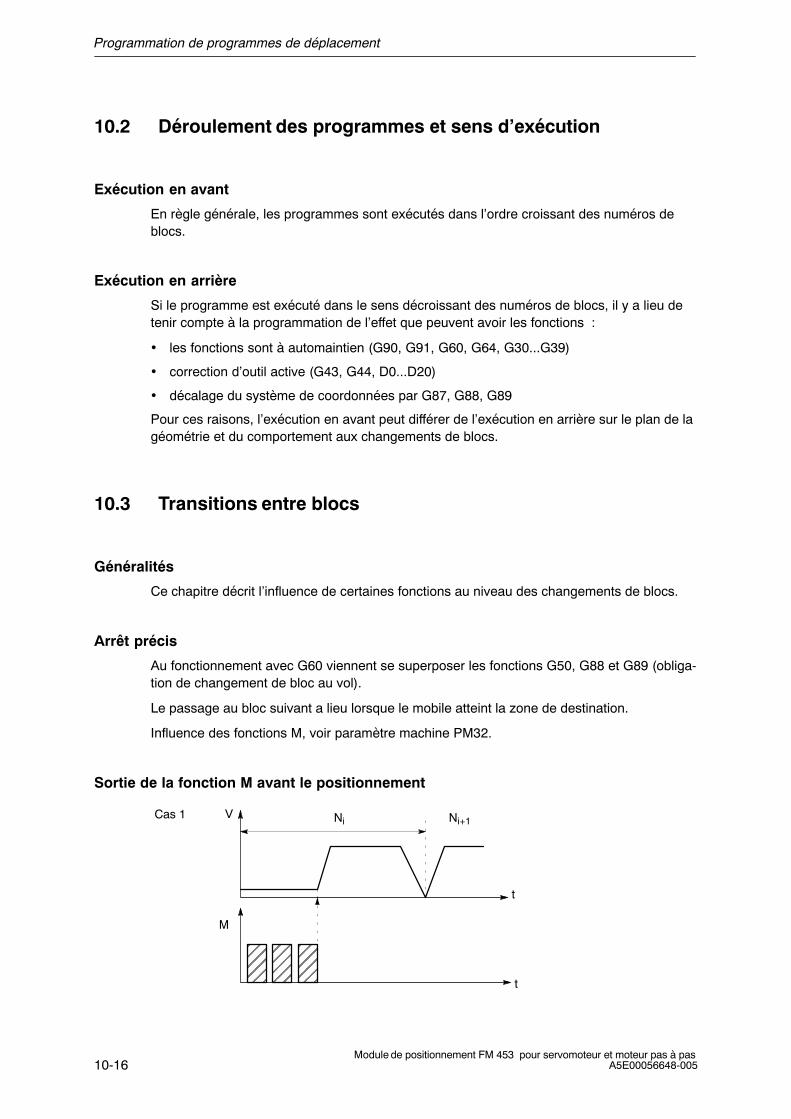
Programmation de programmes de déplacement
10-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
10.2 Déroulement des programmes et sens d’exécution
Exécution en avant
En règle générale, les programmes sont exécutés dans l’ordre croissant des numéros deblocs.
Exécution en arrière
Si le programme est exécuté dans le sens décroissant des numéros de blocs, il y a lieu detenir compte à la programmation de l’effet que peuvent avoir les fonctions :
• les fonctions sont à automaintien (G90, G91, G60, G64, G30...G39)
• correction d’outil active (G43, G44, D0...D20)
• décalage du système de coordonnées par G87, G88, G89
Pour ces raisons, l’exécution en avant peut différer de l’exécution en arrière sur le plan de lagéométrie et du comportement aux changements de blocs.
10.3 Transitions entre blocs
Généralités
Ce chapitre décrit l’influence de certaines fonctions au niveau des changements de blocs.
Arrêt précis
Au fonctionnement avec G60 viennent se superposer les fonctions G50, G88 et G89 (obliga-tion de changement de bloc au vol).
Le passage au bloc suivant a lieu lorsque le mobile atteint la zone de destination.
Influence des fonctions M, voir paramètre machine PM32.
Sortie de la fonction M avant le positionnement
V Ni Ni+1
ÉÉÉÉÉÉ
ÉÉÉÉÉÉ
M
t
ÉÉÉÉÉÉ
t
Cas 1
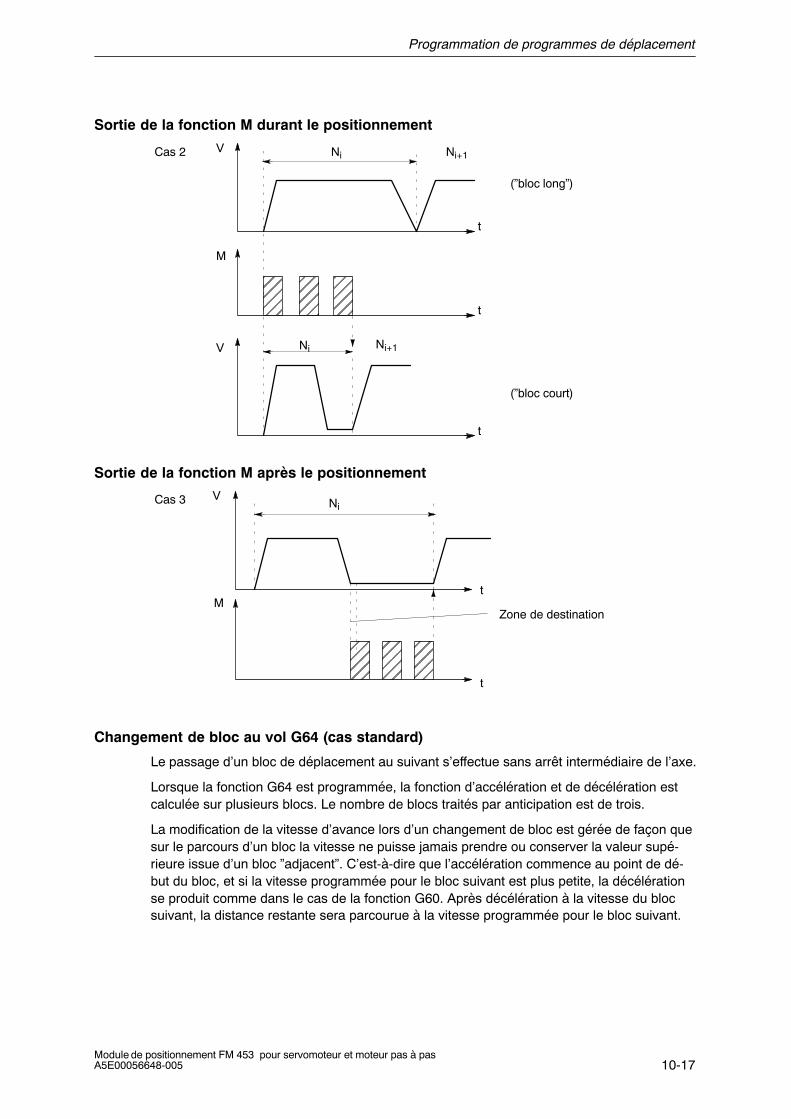
Programmation de programmes de déplacement
10-17Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Sortie de la fonction M durant le positionnement
V Ni Ni+1
t
(”bloc long”)
ÉÉÉÉÉÉ
ÉÉÉÉÉÉ
ÉÉÉÉÉÉ
M
t
V Ni Ni+1
t
(”bloc court)
Cas 2
Sortie de la fonction M après le positionnement
ÉÉÉÉÉÉ
ÉÉÉÉÉÉ
ÉÉÉÉÉÉ
M
V
t
t
Ni
Zone de destination
Cas 3
Changement de bloc au vol G64 (cas standard)
Le passage d’un bloc de déplacement au suivant s’effectue sans arrêt intermédiaire de l’axe.
Lorsque la fonction G64 est programmée, la fonction d’accélération et de décélération estcalculée sur plusieurs blocs. Le nombre de blocs traités par anticipation est de trois.
La modification de la vitesse d’avance lors d’un changement de bloc est gérée de façon quesur le parcours d’un bloc la vitesse ne puisse jamais prendre ou conserver la valeur supé-rieure issue d’un bloc ”adjacent”. C’est-à-dire que l’accélération commence au point de dé-but du bloc, et si la vitesse programmée pour le bloc suivant est plus petite, la décélérationse produit comme dans le cas de la fonction G60. Après décélération à la vitesse du blocsuivant, la distance restante sera parcourue à la vitesse programmée pour le bloc suivant.

Programmation de programmes de déplacement
10-18Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Exemple de programmation (cas standard)
La figure suivante reproduit un exemple de programme et son déroulement.
/ N G1 G2 G3 X/t F M1 M2 M3 D
100 0010 000
10
90 645
15
20
25 64
20 000
30 000
40 000
30 000
200 00
150 00
100 00
t
VN5 N10 N15 N20 N25
1 2
34
5
1 − Le bloc N10 est lancé à l’instant de début du freinage de N5.
2 − Le bloc N15 est lancé à l’instant de début du freinage freinage de N10.Parvenu à la position de consigne de N10, il se produit une accélérationà une vitesse de déplacement plus élevée.
3 − Le bloc N20 avec vitesse de déplacement plus petite est lancé au pointde freinage de N15.
4 − A l’inversion de marche, l’axe décélère jusqu’à l’arrêt et attend que lavaleur réelle du codeur ait réintégré la zone de destination.
5 − Parvenu dans la fenêtre d’arrêt précis, il se produit l’accélération en sensinverse jusqu’à la vitesse programmée dans le nouveau bloc.
Pour pouvoir accoster correctement la position, l’axe doit calculer l’instant de début du frei-nage. Les valeurs intervenant dans ce calcul sont : le parcours restant, la valeur de décé-lération et la vitesse de déplacement momentanée.
L’instant de début du freinage est en même temps l’instant auquel il peut se produire au plustôt un changement de vol.
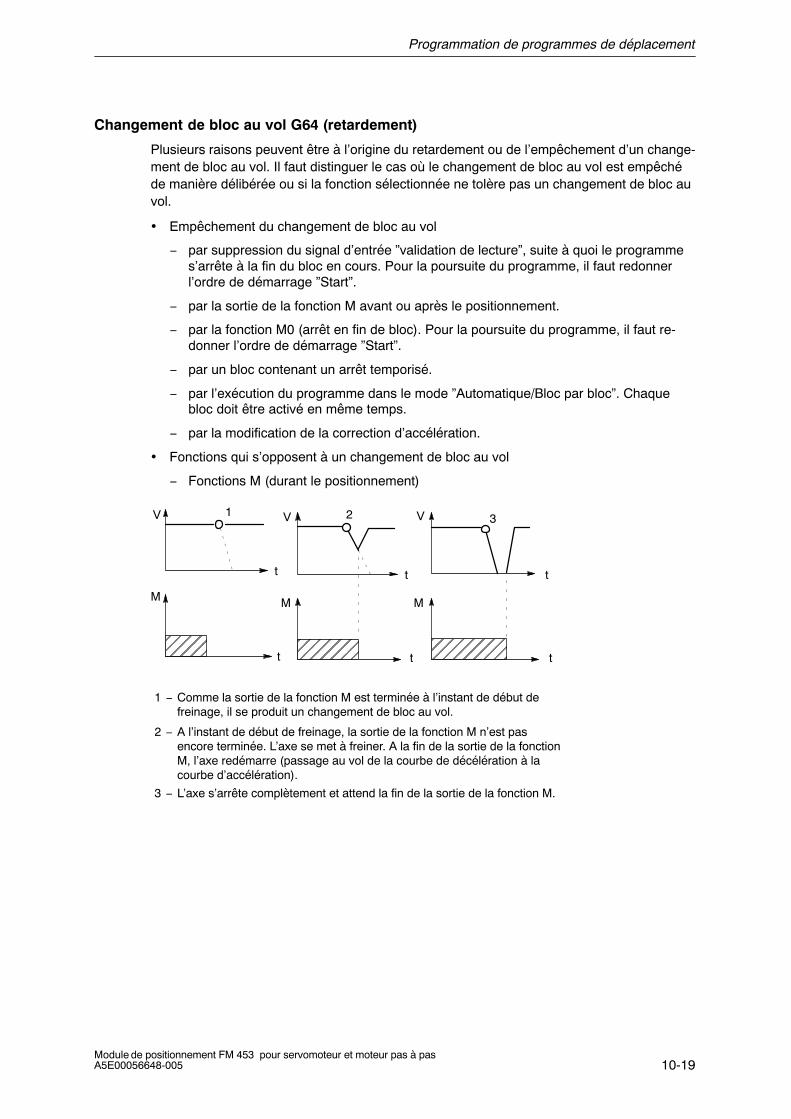
Programmation de programmes de déplacement
10-19Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Changement de bloc au vol G64 (retardement)
Plusieurs raisons peuvent être à l’origine du retardement ou de l’empêchement d’un change-ment de bloc au vol. Il faut distinguer le cas où le changement de bloc au vol est empêchéde manière délibérée ou si la fonction sélectionnée ne tolère pas un changement de bloc auvol.
• Empêchement du changement de bloc au vol
− par suppression du signal d’entrée ”validation de lecture”, suite à quoi le programmes’arrête à la fin du bloc en cours. Pour la poursuite du programme, il faut redonnerl’ordre de démarrage ”Start”.
− par la sortie de la fonction M avant ou après le positionnement.
− par la fonction M0 (arrêt en fin de bloc). Pour la poursuite du programme, il faut re-donner l’ordre de démarrage ”Start”.
− par un bloc contenant un arrêt temporisé.
− par l’exécution du programme dans le mode ”Automatique/Bloc par bloc”. Chaquebloc doit être activé en même temps.
− par la modification de la correction d’accélération.
• Fonctions qui s’opposent à un changement de bloc au vol
− Fonctions M (durant le positionnement)
1V
t
M
ÉÉÉÉÉÉ
t
t
2
ÉÉÉÉÉÉÉÉ
t
t
3
M
ÉÉÉÉÉÉÉÉ
M
V V
t
1 − Comme la sortie de la fonction M est terminée à l’instant de début defreinage, il se produit un changement de bloc au vol.
2 − A l’instant de début de freinage, la sortie de la fonction M n’est pasencore terminée. L’axe se met à freiner. A la fin de la sortie de la fonctionM, l’axe redémarre (passage au vol de la courbe de décélération à lacourbe d’accélération).
3 − L’axe s’arrête complètement et attend la fin de la sortie de la fonction M.
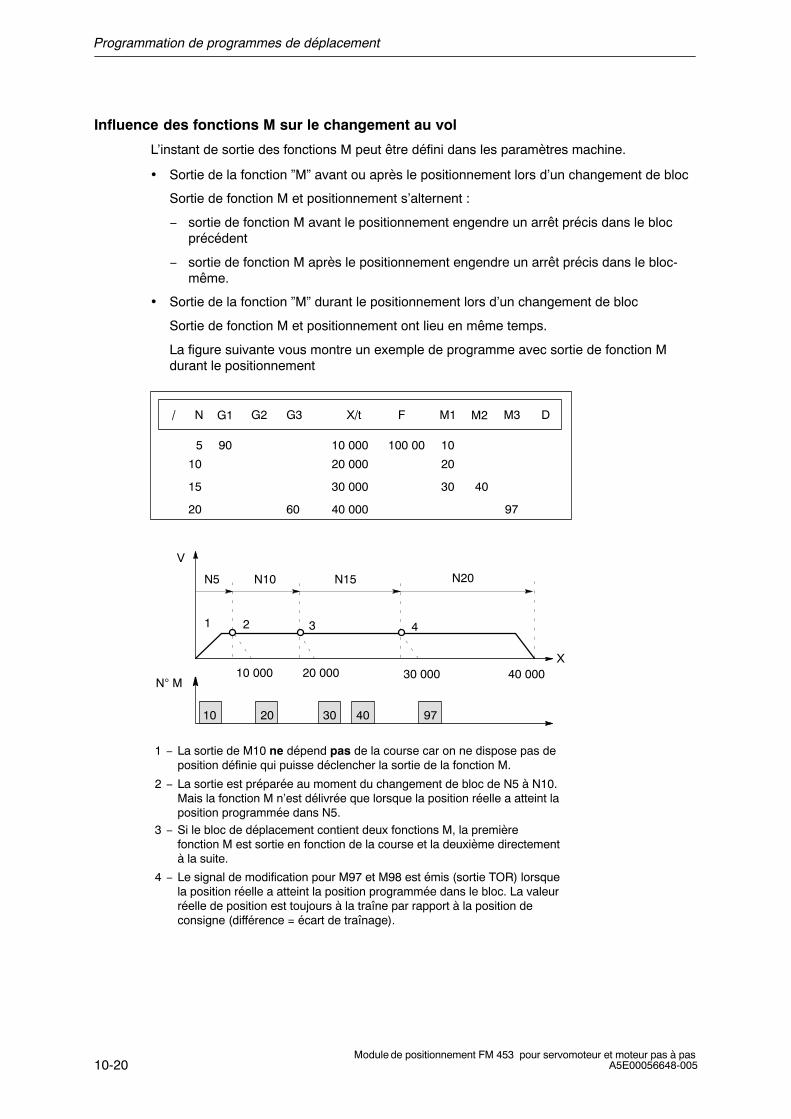
Programmation de programmes de déplacement
10-20Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Influence des fonctions M sur le changement au vol
L’instant de sortie des fonctions M peut être défini dans les paramètres machine.
• Sortie de la fonction ”M” avant ou après le positionnement lors d’un changement de bloc
Sortie de fonction M et positionnement s’alternent :
− sortie de fonction M avant le positionnement engendre un arrêt précis dans le blocprécédent
− sortie de fonction M après le positionnement engendre un arrêt précis dans le bloc-même.
• Sortie de la fonction ”M” durant le positionnement lors d’un changement de bloc
Sortie de fonction M et positionnement ont lieu en même temps.
La figure suivante vous montre un exemple de programme avec sortie de fonction Mdurant le positionnement
/ N G1 G2 G3 X/t F M1 M2 M3 D
100 00 1010 000
10
90
40
97
5
15
20 60
20 000
30 000
40 000
20
30
V
X
N5 N10 N15 N20
10 000 20 000 30 000 40 000
10 20 30 40 97
1 2 3 4
N° M
1 − La sortie de M10 ne dépend pas de la course car on ne dispose pas deposition définie qui puisse déclencher la sortie de la fonction M.
2 − La sortie est préparée au moment du changement de bloc de N5 à N10.Mais la fonction M n’est délivrée que lorsque la position réelle a atteint laposition programmée dans N5.
3 − Si le bloc de déplacement contient deux fonctions M, la premièrefonction M est sortie en fonction de la course et la deuxième directementà la suite.
4 − Le signal de modification pour M97 et M98 est émis (sortie TOR) lorsquela position réelle a atteint la position programmée dans le bloc. La valeurréelle de position est toujours à la traîne par rapport à la position deconsigne (différence = écart de traînage).

11-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Gestion des erreurs et défauts
Contenu du chapitre
Paragraphe Thème Page
11.1 Classes d’erreur et réactions du module 11-3
11.2 Signalisations de défauts 11-5
11.3 Liste des défauts et erreurs 11-8
Généralités
Le FM 453 fournit des informations de diagnostic au sujet :
• de la périphérie
• des processus sur le module.
Le présent chapitre décrit les types de défauts et d’erreurs, leurs causes, leurs effets et lesmoyens d’y remédier.
11
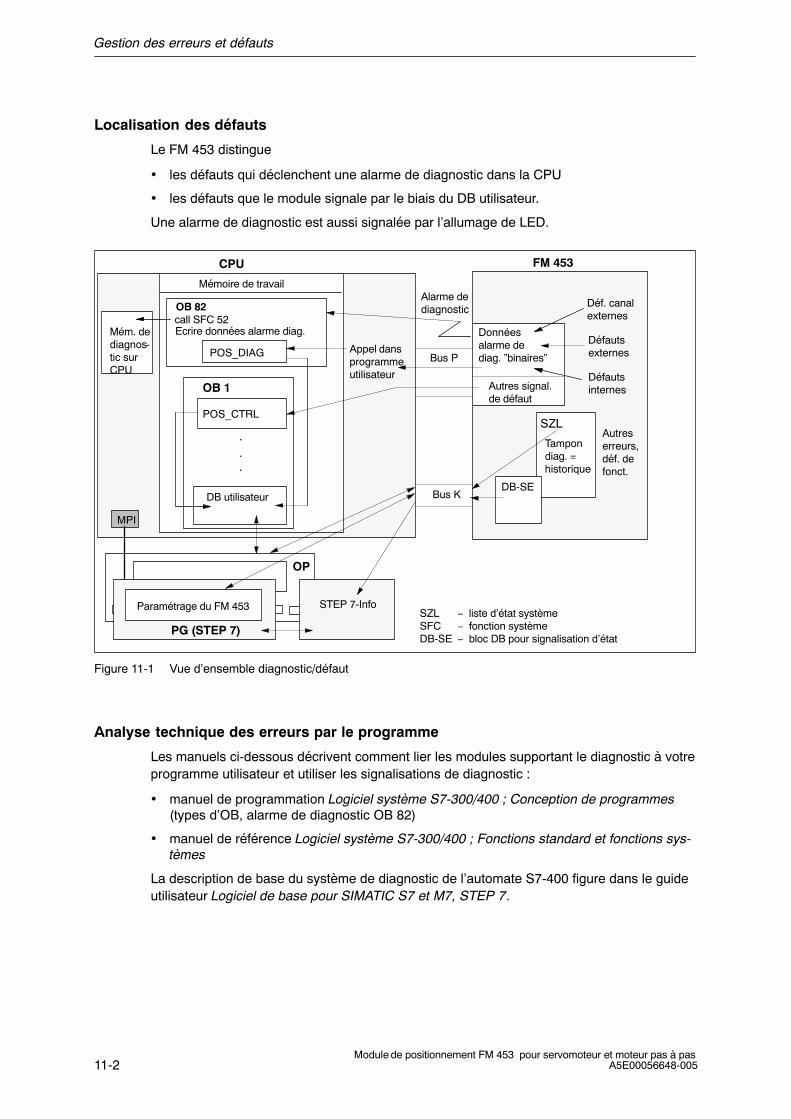
Gestion des erreurs et défauts
11-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Localisation des défauts
Le FM 453 distingue
• les défauts qui déclenchent une alarme de diagnostic dans la CPU
• les défauts que le module signale par le biais du DB utilisateur.
Une alarme de diagnostic est aussi signalée par l’allumage de LED.
FM 453CPU
Appel dansprogrammeutilisateur
DB utilisateur
MPI
OP
PG (STEP 7)
Bus P
Bus K
SZL
Alarme dediagnostic
Donnéesalarme dediag. ”binaires”
Mémoire de travail
Tampondiag. =historique
DB-SE
Autreserreurs,déf. defonct.
Déf. canalexternes
Défautsexternes
OB 1
OB 82call SFC 52
.
Mém. dediagnos-tic surCPU
Ecrire données alarme diag.
.
.
STEP 7-InfoParamétrage du FM 453SZL − liste d’état systèmeSFC − fonction systèmeDB-SE − bloc DB pour signalisation d’état
Défautsinternes
POS_CTRL
POS_DIAG
Autres signal.de défaut
Figure 11-1 Vue d’ensemble diagnostic/défaut
Analyse technique des erreurs par le programme
Les manuels ci-dessous décrivent comment lier les modules supportant le diagnostic à votreprogramme utilisateur et utiliser les signalisations de diagnostic :
• manuel de programmation Logiciel système S7-300/400 ; Conception de programmes(types d’OB, alarme de diagnostic OB 82)
• manuel de référence Logiciel système S7-300/400 ; Fonctions standard et fonctions sys-tèmes
La description de base du système de diagnostic de l’automate S7-400 figure dans le guideutilisateur Logiciel de base pour SIMATIC S7 et M7, STEP 7.
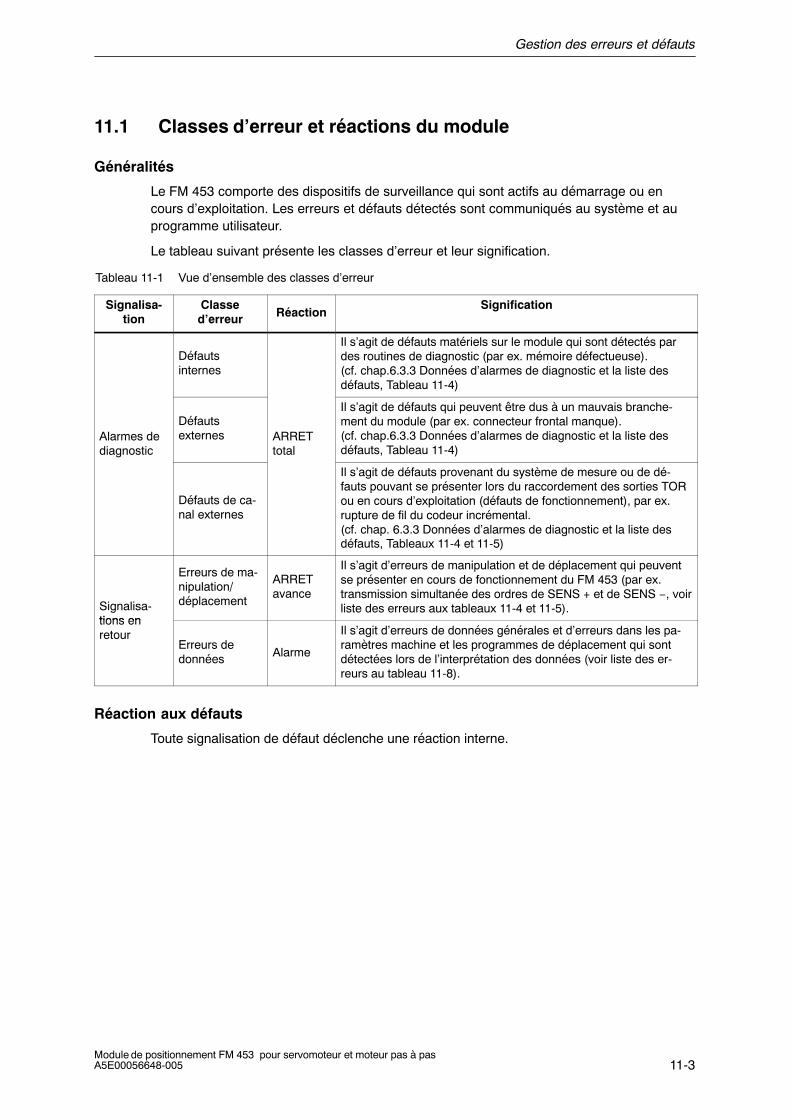
Gestion des erreurs et défauts
11-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
11.1 Classes d’erreur et réactions du module
Généralités
Le FM 453 comporte des dispositifs de surveillance qui sont actifs au démarrage ou encours d’exploitation. Les erreurs et défauts détectés sont communiqués au système et auprogramme utilisateur.
Le tableau suivant présente les classes d’erreur et leur signification.
Tableau 11-1 Vue d’ensemble des classes d’erreur
Signalisa-tion
Classed’erreur Réaction
Signification
Défautsinternes
Il s’agit de défauts matériels sur le module qui sont détectés pardes routines de diagnostic (par ex. mémoire défectueuse).(cf. chap.6.3.3 Données d’alarmes de diagnostic et la liste desdéfauts, Tableau 11-4)
Alarmes dediagnostic
Défautsexternes ARRET
total
Il s’agit de défauts qui peuvent être dus à un mauvais branche-ment du module (par ex. connecteur frontal manque).(cf. chap.6.3.3 Données d’alarmes de diagnostic et la liste desdéfauts, Tableau 11-4)
Défauts de ca-nal externes
Il s’agit de défauts provenant du système de mesure ou de dé-fauts pouvant se présenter lors du raccordement des sorties TORou en cours d’exploitation (défauts de fonctionnement), par ex.rupture de fil du codeur incrémental.(cf. chap. 6.3.3 Données d’alarmes de diagnostic et la liste desdéfauts, Tableaux 11-4 et 11-5)
Signalisa-tions en
Erreurs de ma-nipulation/déplacement
ARRETavance
Il s’agit d’erreurs de manipulation et de déplacement qui peuventse présenter en cours de fonctionnement du FM 453 (par ex.transmission simultanée des ordres de SENS + et de SENS −, voirliste des erreurs aux tableaux 11-4 et 11-5).
tions enretour
Erreurs dedonnées Alarme
Il s’agit d’erreurs de données générales et d’erreurs dans les pa-ramètres machine et les programmes de déplacement qui sontdétectées lors de l’interprétation des données (voir liste des er-reurs au tableau 11-8).
Réaction aux défauts
Toute signalisation de défaut déclenche une réaction interne.

Gestion des erreurs et défauts
11-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-2 Vue d’ensemble des réactions internes aux défauts
Réaction Signification
ARRET total • Arrêt du déplacement via rampe de fréquence (PM44/PM45)
• Désactivation des sorties TOR
• Annulation du déblocage du régulateur
• SYN est effacé après acquittement de l’erreur avec redémarrage
• Nouveau contrat de déplacement impossible
ARRETavance
• arrêt de déplacement par décélération contrôlée
• Abandon et clôture du contrat de déplacement
• L’acquisition des mesures et l’asservissement de position se poursuivent
• Nouveau contrat de déplacement impossible
Alarme • Uniquement signalisation
• Le déplacement et la commande des axes ne sont pas influencés

Gestion des erreurs et défauts
11-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
11.2 Signalisations de défauts
Généralités
On dispose des possibilités suivantes pour localiser les défauts du FM 453 :
• signalisation des défauts par les diodes électroluminescentes (LED),
• signalisation de défauts au système et au programme utilisateur.
11.2.1 Signalisation de défauts par les LED
LED de signalisation d’état et de défaut
Le FM 453 comporte les LED suivantes pour la signalisation d’état et de défaut.
INTFEXTFSTAT
Figure 11-2 LED de signalisation d’état et de défaut du FM 453
Signification des LED de signalisation d’état et de défaut
Les LED de signalisation d’état et de défaut sont expliquées dans l’ordre dans lequel ellesse trouvent sur le FM 453.
Tableau 11-3 LED de signalisation d’état et de défaut
LED Signification Explications
INTF (rouge)
LED allumée
Signalisationgroupée de dé-fauts internes
Cette LED signale la présence d’un défaut erreur sur le FM 453.Alarme de diagnostic (défaut interne)Remède, voir la liste de défauts, tableau 11-4
EXTF (rouge)
LED allumée
Signalisationgroupée de dé-fauts externes
Cette LED signale divers états de diagnostic.Alarme de diagnostic (défaut externe ou défaut de canal externe)Remède, voir la liste de défauts, tableau 11-4
STAT (jaune)
LED allumée
LED clignote
Diagnostic Cette LED signale un défaut (de canal) externe.Alarme de diagnostic (défaut de canal externe)Elimination du défaut, voir liste au tableau 11-4.Si cette LED clignote en même qu’est allumée la LED ”INTF”, il y a défautdu système. Dans ce cas, adressez-vous à l’agence Siemens compétenteen précisant dans la mesure du possible les circonstances qui ont menéau défaut.

Gestion des erreurs et défauts
11-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
11.2.2 Alarmes de diagnostic
Généralités
Si le système est réceptif aux alarmes, les défauts internes, les défauts externes et les dé-fauts de canal externes lui sont communiqués par des alarmes de diagnostic (voir donnéesd’alarmes de diagnostic, tableau 11-4, 11-5 et chap. 6.3.3). Ceci exige que la signalisationd’alarmes de diagnostic a été activée au moment de la configuration (cf. chap. 5.2). Si lesystème n’est pas réceptif aux alarmes, les données d’alarmes de diagnostic doivent êtrelues cycliquement avec le bloc POS_DIAG.
Classe d’erreur Code Signalisation
Défauts internes N° d’octet bit 0.1
Signalisation groupée octet 2,3
LED ”INF”
Défauts externes N° de bit d’octet 0.2 LED ”EXTF” et ”STAT”
Défauts externes de canal N° d’octet bit 0.2, 0.3 LED ”EXTF” et ”STAT”
Signalisation groupée octet 8
Le FM 453 signale une alarme de diagnostic à son apparition (”entrant”) et à sa disparition(”partant”).
Alarme de diagnostic
Signalisation à la CPU (condition : signalisation d’alarme activée, voirchap. 5.2)
Signalisation dansla vue ”Analysedes défauts” de
Rangementdans letampon de
pas d’OB 82 pré-sent la CPU
OB 82 OB 1
des défauts de”Paramétrage duFM 453”
tampon dediagnostic
sent la CPUpasse en STOP Rangement de
l’information dediagnosticdans le tampon
Rangement del’information dediagnostic dansle DB utilisateur
Appel dubloc POS_DIAG
Menu: Test > Ana-lyse des défauts
dans le tamponde diagnosticde la CPU(4 octets) aveccall SFC 52
le DB utilisateurà partir de l’a-dresse 70 avecappel debloc POS_DIAG
Acquittement des alarmes
Si le traitement doit être poursuivi après le déclenchement d’une alarme de diagnostic, cettealarme de diagnostic doit être acquittée dans le canal considéré avec Redémarrage (DB uti-lisateur, DBX37.5) après élimination du défaut.
Les défauts internes ne sont pas acquittables. Les défauts externes sont à auto-acquitte-ment.

Gestion des erreurs et défauts
11-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
11.2.3 Signalisation de défaut par signalisations en retour
Généralités
Les erreurs de manipulation/de déplacement [EM/ED] et erreurs de données/de paramètresmachine/de programmes de déplacement [ED] sont communiquées par des signalisationsen retour (appel du bloc POS_CTRL) à l’opérateur et les défauts de fonctionnement par desalarmes de diagnostic (cf. chap. 6.3.3). La spécification de l’erreur est stockée dans l’enre-gistrement correspondant sous la forme d’un numéro d’erreur (voir liste des erreurs,tableaux 11-6...11-8).
Acquittement des erreurs
Activation/désactivation du signal de commande [AEM/AED]oupour signalisation [ED] écriture d’un nouveau contrat d’écriture
Nota
Les données erronées ne sont pas acceptées. Les données d’origine sont conservées.
Numéros d’erreurs
Les défauts et erreurs sont identifiés par une classe d’événement détaillé (CED) et par unnuméro d’événement détaillé (NED).
Classe d’erreur technologique CED NED Signalisation
Défauts de fonctionnement 1 1...n Alarme de diagnostic
Erreurs de manipulation 2 1...n Signalisations en retour
Erreurs de déplacement 3 1...n Signalisations en retour
Erreurs de données 4 1...n Signalisations en retour
Erreurs de paramètres machine 5 1...n ou
bl d d éErreurs de programmes de déplacement 8 1...n bloc de données

Gestion des erreurs et défauts
11-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
11.2.4 Signalisation dans le bloc de données
Généralités
En cas d’accès direct aux DB (p. ex. à l’aide d’OP) tenir compte de ce qui suit.
Si des erreurs de données/de paramètres machine/de programmes de déplacement sontdécelées au moment de l’écriture de paramètres dans le bloc de données (p. ex. avec l’outilde paramétrage), elles sont signalées par l’inscription d’une signalisation d’erreur dans lebloc de données. La spécification de l’erreur est stockée dans le bloc de données concernésous la forme d’un numéro d’erreur (voir liste des erreurs, tableau 11-8). La signalisationd’erreur se représente à chaque écriture dans le bloc de données jusqu’à ce que sa causeait disparu.
Il est recommandé de vérifier si une signalisation d’erreur est présente après chaque écri-ture.
11.2.5 Consultation du tampon de diagnostic (PG/PC)
Généralités
Le tampon de diagnostic contient les 5 dernières signalisations de défaut.
Procédez de la manière suivante :
1. Ouvrez votre projet dans le gestionnaire SIMATIC 7 Manager.
2. Sélectionnez Affichage > en ligne.
3. Dans le dialogue ainsi ouvert, sélectionnez le module FM 453 et le programme corres-pondant.
4. Vous pouvez consulter le tampon de diagnostic dans le menu Système cible > Etat dumodule.
11.3 Liste des défauts et erreurs
Nota
Dans les tableaux ci-dessous :
La réaction du module décrite sous ”Effet” concerne la réaction du module spécifique audéfaut. Elle est accompagnée pour chaque défaut / erreur de la réaction décrite autableau 11-2.
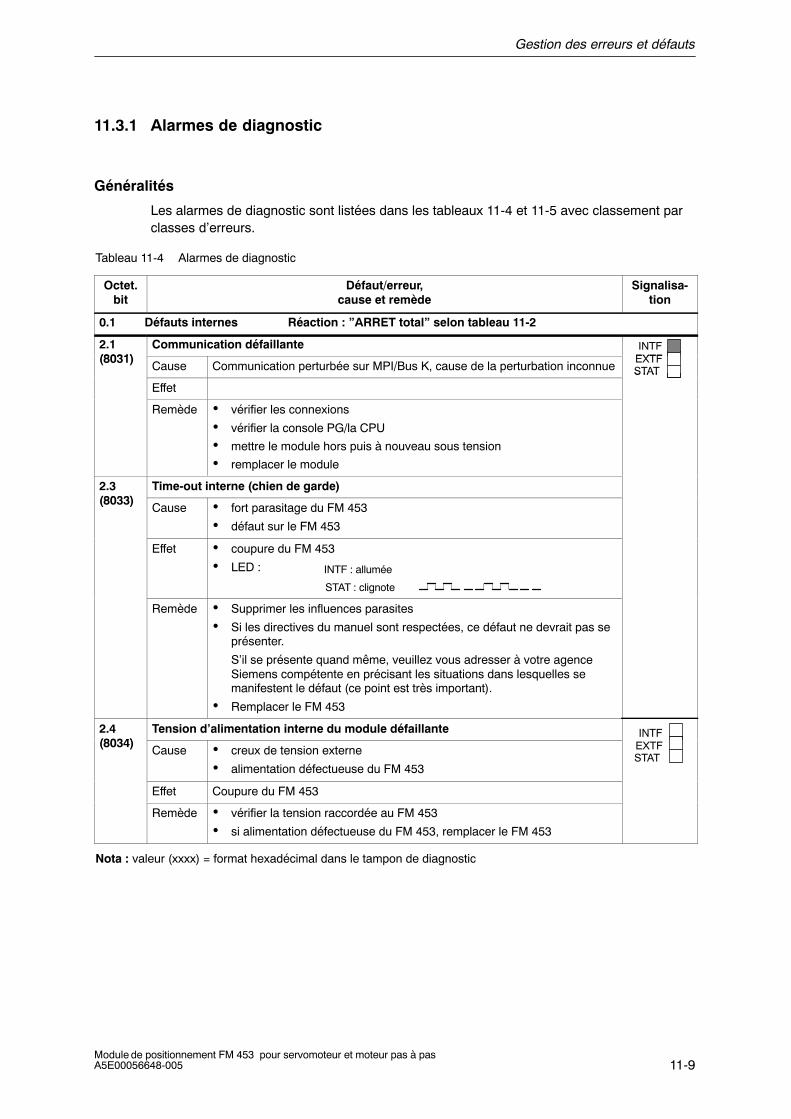
Gestion des erreurs et défauts
11-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
11.3.1 Alarmes de diagnostic
Généralités
Les alarmes de diagnostic sont listées dans les tableaux 11-4 et 11-5 avec classement parclasses d’erreurs.
Tableau 11-4 Alarmes de diagnostic
Octet.bit
Défaut/erreur,cause et remède
Signalisa-tion
0.1 Défauts internes Réaction : ”ARRET total” selon tableau 11-2
2.1(8031)
Communication défaillante INTFEXTF(8031)
Cause Communication perturbée sur MPI/Bus K, cause de la perturbation inconnueEXTFSTAT
EffetSTAT
Remède • vérifier les connexions
• vérifier la console PG/la CPU
• mettre le module hors puis à nouveau sous tension
• remplacer le module
2.3(8033)
Time-out interne (chien de garde)(8033)
Cause • fort parasitage du FM 453
• défaut sur le FM 453
Effet • coupure du FM 453
• LED :
STAT : clignote
INTF : allumée
Remède • Supprimer les influences parasites
• Si les directives du manuel sont respectées, ce défaut ne devrait pas seprésenter.
S’il se présente quand même, veuillez vous adresser à votre agenceSiemens compétente en précisant les situations dans lesquelles semanifestent le défaut (ce point est très important).
• Remplacer le FM 453
2.4(8034)
Tension d’alimentation interne du module défaillante INTF(8034)
Cause • creux de tension externe
• alimentation défectueuse du FM 453
INTFEXTFSTAT
Effet Coupure du FM 453
Remède • vérifier la tension raccordée au FM 453
• si alimentation défectueuse du FM 453, remplacer le FM 453
Nota : valeur (xxxx) = format hexadécimal dans le tampon de diagnostic
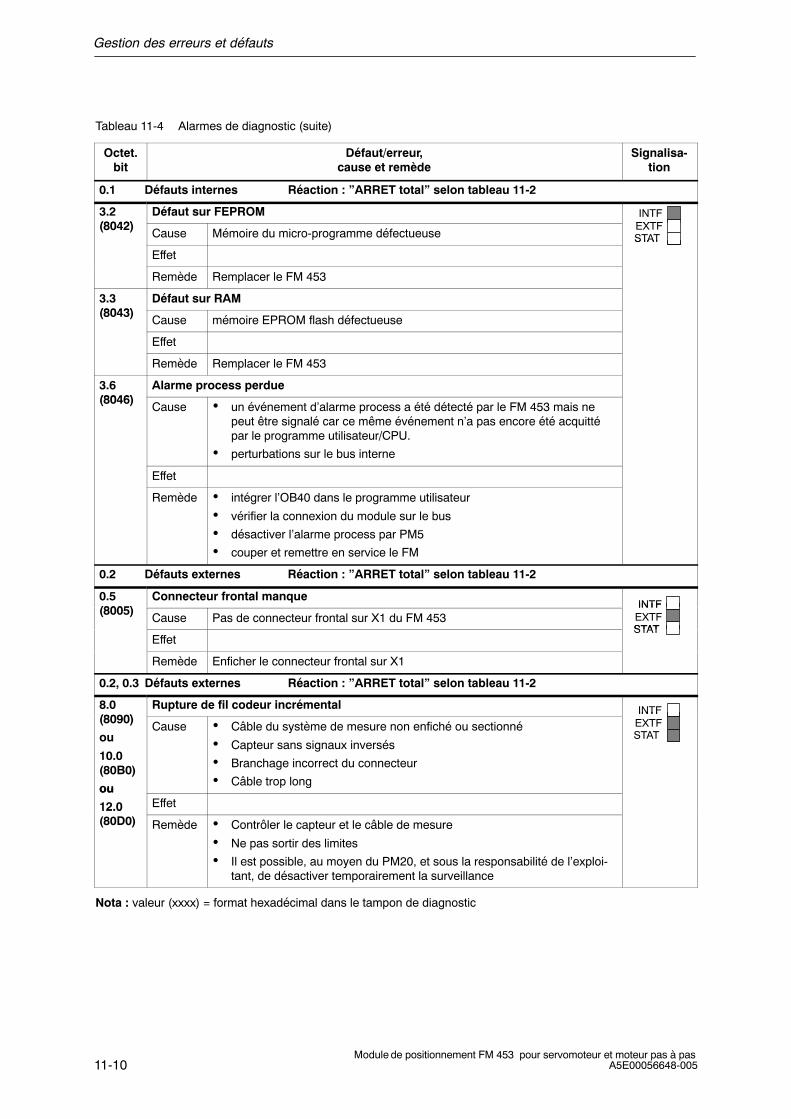
Gestion des erreurs et défauts
11-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-4 Alarmes de diagnostic (suite)
Signalisa-tion
Défaut/erreur,cause et remède
Octet.bit
0.1 Défauts internes Réaction : ”ARRET total” selon tableau 11-2
3.2(8042)
Défaut sur FEPROM INTFEXTF(8042)
Cause Mémoire du micro-programme défectueuseEXTFSTAT
EffetSTAT
Remède Remplacer le FM 453
3.3(8043)
Défaut sur RAM(8043)
Cause mémoire EPROM flash défectueuse
Effet
Remède Remplacer le FM 453
3.6(8046)
Alarme process perdue(8046)
Cause • un événement d’alarme process a été détecté par le FM 453 mais nepeut être signalé car ce même événement n’a pas encore été acquittépar le programme utilisateur/CPU.
• perturbations sur le bus interne
Effet
Remède • intégrer l’OB40 dans le programme utilisateur
• vérifier la connexion du module sur le bus
• désactiver l’alarme process par PM5
• couper et remettre en service le FM
0.2 Défauts externes Réaction : ”ARRET total” selon tableau 11-2
0.5(8005)
Connecteur frontal manqueINTF(8005)
Cause Pas de connecteur frontal sur X1 du FM 453INTF
EXTFSTAT
EffetSTAT
Remède Enficher le connecteur frontal sur X1
0.2, 0.3 Défauts externes Réaction : ”ARRET total” selon tableau 11-2
8.0(8090)
Rupture de fil codeur incrémental INTF(8090)
ou
10.0(80B0)
ou
Cause • Câble du système de mesure non enfiché ou sectionné
• Capteur sans signaux inversés
• Branchage incorrect du connecteur
• Câble trop long
INTFEXTFSTAT
ou
12.0 Effet12.0(80D0) Remède • Contrôler le capteur et le câble de mesure
• Ne pas sortir des limites
• Il est possible, au moyen du PM20, et sous la responsabilité de l’exploi-tant, de désactiver temporairement la surveillance
Nota : valeur (xxxx) = format hexadécimal dans le tampon de diagnostic
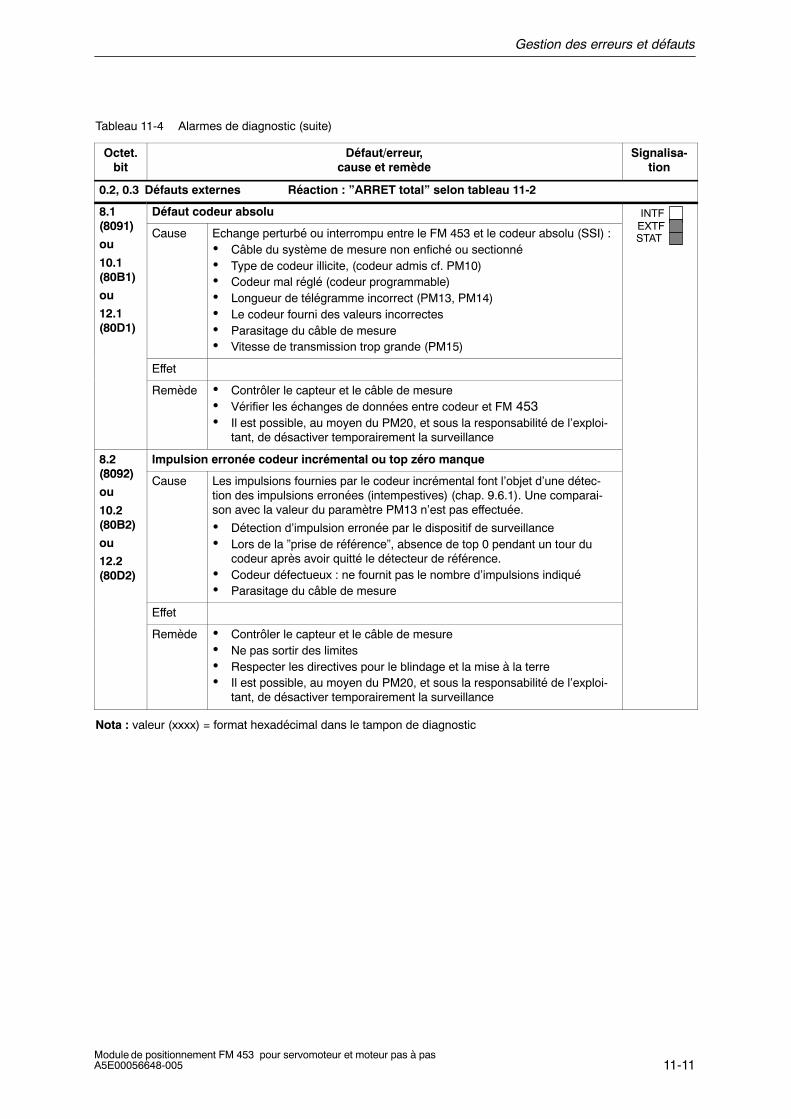
Gestion des erreurs et défauts
11-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-4 Alarmes de diagnostic (suite)
Signalisa-tion
Défaut/erreur,cause et remède
Octet.bit
0.2, 0.3 Défauts externes Réaction : ”ARRET total” selon tableau 11-2
8.1(8091)
Défaut codeur absolu INTFEXTF(8091)
ou
10.1(80B1)
ou
12.1(80D1)
Cause Echange perturbé ou interrompu entre le FM 453 et le codeur absolu (SSI) :• Câble du système de mesure non enfiché ou sectionné• Type de codeur illicite, (codeur admis cf. PM10)• Codeur mal réglé (codeur programmable)• Longueur de télégramme incorrect (PM13, PM14)• Le codeur fourni des valeurs incorrectes• Parasitage du câble de mesure• Vitesse de transmission trop grande (PM15)
EXTFSTAT
Effet
Remède • Contrôler le capteur et le câble de mesure• Vérifier les échanges de données entre codeur et FM 453• Il est possible, au moyen du PM20, et sous la responsabilité de l’exploi-
tant, de désactiver temporairement la surveillance
8.2(8092)
Impulsion erronée codeur incrémental ou top zéro manque(8092)
ou
10.2(80B2)
ou
12.2(80D2)
Cause Les impulsions fournies par le codeur incrémental font l’objet d’une détec-tion des impulsions erronées (intempestives) (chap. 9.6.1). Une comparai-son avec la valeur du paramètre PM13 n’est pas effectuée.
• Détection d’impulsion erronée par le dispositif de surveillance• Lors de la ”prise de référence”, absence de top 0 pendant un tour du
codeur après avoir quitté le détecteur de référence.• Codeur défectueux : ne fournit pas le nombre d’impulsions indiqué• Parasitage du câble de mesure
Effet
Remède • Contrôler le capteur et le câble de mesure• Ne pas sortir des limites• Respecter les directives pour le blindage et la mise à la terre• Il est possible, au moyen du PM20, et sous la responsabilité de l’exploi-
tant, de désactiver temporairement la surveillance
Nota : valeur (xxxx) = format hexadécimal dans le tampon de diagnostic
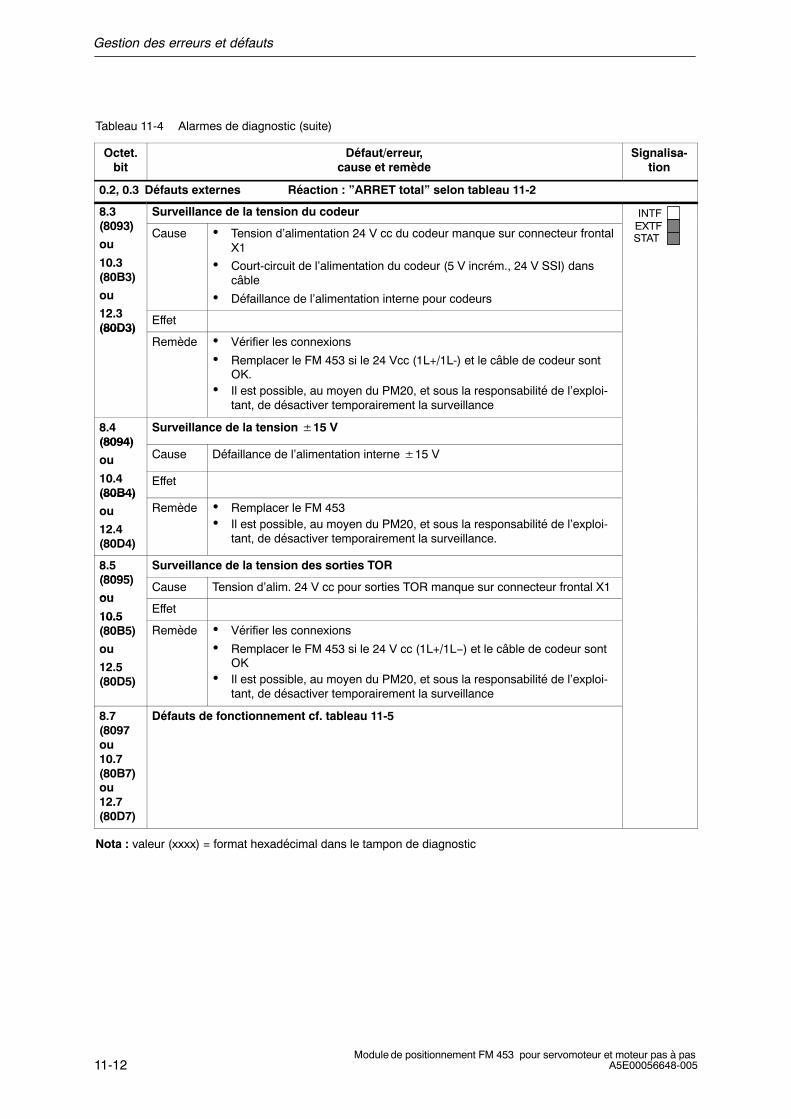
Gestion des erreurs et défauts
11-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-4 Alarmes de diagnostic (suite)
Signalisa-tion
Défaut/erreur,cause et remède
Octet.bit
0.2, 0.3 Défauts externes Réaction : ”ARRET total” selon tableau 11-2
8.3(8093)
Surveillance de la tension du codeur INTFEXTF(8093)
ou
10.3(80B3)
ou
12 3
Cause • Tension d’alimentation 24 V cc du codeur manque sur connecteur frontalX1
• Court-circuit de l’alimentation du codeur (5 V incrém., 24 V SSI) danscâble
• Défaillance de l’alimentation interne pour codeurs
EXTFSTAT
12.3(80D3)
Effet(80D3)
Remède • Vérifier les connexions
• Remplacer le FM 453 si le 24 Vcc (1L+/1L-) et le câble de codeur sontOK.
• Il est possible, au moyen du PM20, et sous la responsabilité de l’exploi-tant, de désactiver temporairement la surveillance
8.4(8094)
Surveillance de la tension 15 V(8094)
ou Cause Défaillance de l’alimentation interne 15 V
10.4(80B4)
Effet(80B4)
ou
12.4(80D4)
Remède • Remplacer le FM 453• Il est possible, au moyen du PM20, et sous la responsabilité de l’exploi-
tant, de désactiver temporairement la surveillance.
8.5(8095)
Surveillance de la tension des sorties TOR(8095)
ouCause Tension d’alim. 24 V cc pour sorties TOR manque sur connecteur frontal X1
ou
10.5Effet
10.5(80B5)
ou
12.5(80D5)
Remède • Vérifier les connexions
• Remplacer le FM 453 si le 24 V cc (1L+/1L−) et le câble de codeur sontOK
• Il est possible, au moyen du PM20, et sous la responsabilité de l’exploi-tant, de désactiver temporairement la surveillance
8.7(8097ou10.7(80B7)ou12.7(80D7)
Défauts de fonctionnement cf. tableau 11-5
Nota : valeur (xxxx) = format hexadécimal dans le tampon de diagnostic
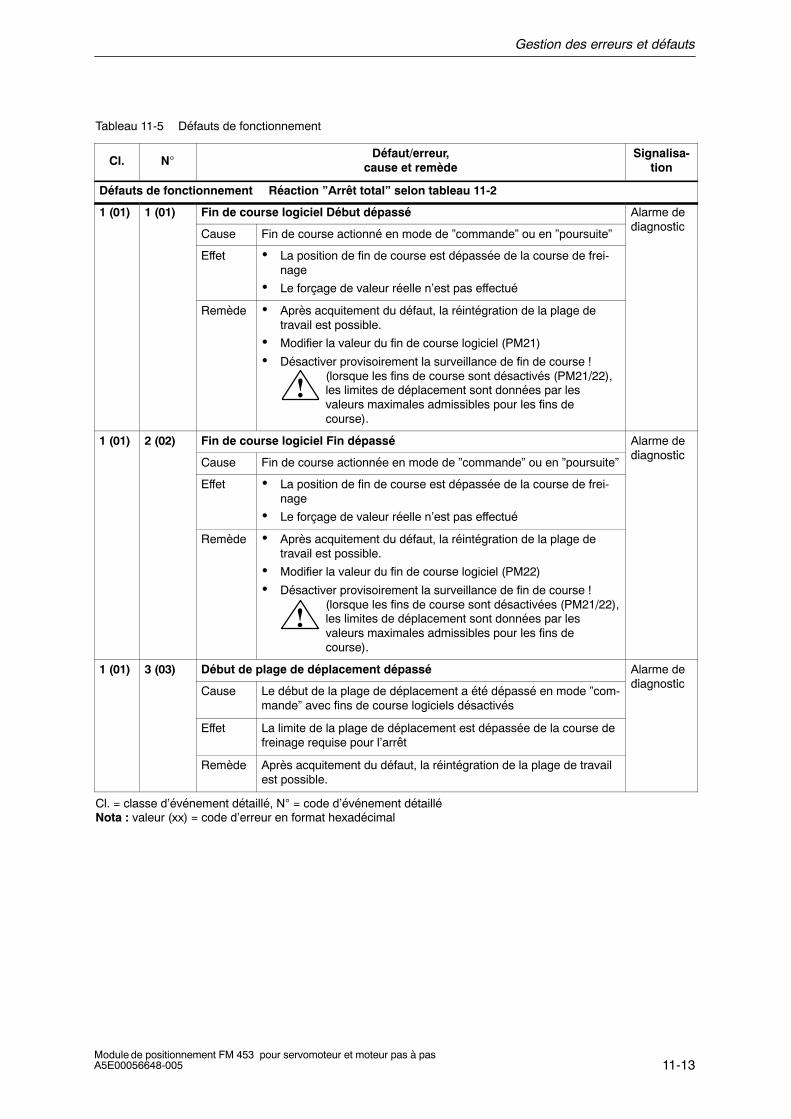
Gestion des erreurs et défauts
11-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-5 Défauts de fonctionnement
Cl. N°Défaut/erreur,
cause et remèdeSignalisa-
tion
Défauts de fonctionnement Réaction ”Arrêt total” selon tableau 11-2
1 (01) 1 (01) Fin de course logiciel Début dépassé Alarme dedi ti
Cause Fin de course actionné en mode de ”commande” ou en ”poursuite”diagnostic
Effet • La position de fin de course est dépassée de la course de frei-nage
• Le forçage de valeur réelle n’est pas effectué
Remède • Après acquitement du défaut, la réintégration de la plage detravail est possible.
• Modifier la valeur du fin de course logiciel (PM21)
• Désactiver provisoirement la surveillance de fin de course !(lorsque les fins de course sont désactivés (PM21/22), les limites de déplacement sont données par les valeurs maximales admissibles pour les fins de course).
!
1 (01) 2 (02) Fin de course logiciel Fin dépassé Alarme dedi ti
Cause Fin de course actionnée en mode de ”commande” ou en ”poursuite”diagnostic
Effet • La position de fin de course est dépassée de la course de frei-nage
• Le forçage de valeur réelle n’est pas effectué
Remède • Après acquitement du défaut, la réintégration de la plage detravail est possible.
• Modifier la valeur du fin de course logiciel (PM22)
• Désactiver provisoirement la surveillance de fin de course !(lorsque les fins de course sont désactivées (PM21/22),les limites de déplacement sont données par les valeurs maximales admissibles pour les fins de course).
!
1 (01) 3 (03) Début de plage de déplacement dépassé Alarme dedi ti
Cause Le début de la plage de déplacement a été dépassé en mode ”com-mande” avec fins de course logiciels désactivés
diagnostic
Effet La limite de la plage de déplacement est dépassée de la course defreinage requise pour l’arrêt
Remède Après acquitement du défaut, la réintégration de la plage de travailest possible.
Cl. = classe d’événement détaillé, N° = code d’événement détailléNota : valeur (xx) = code d’erreur en format hexadécimal
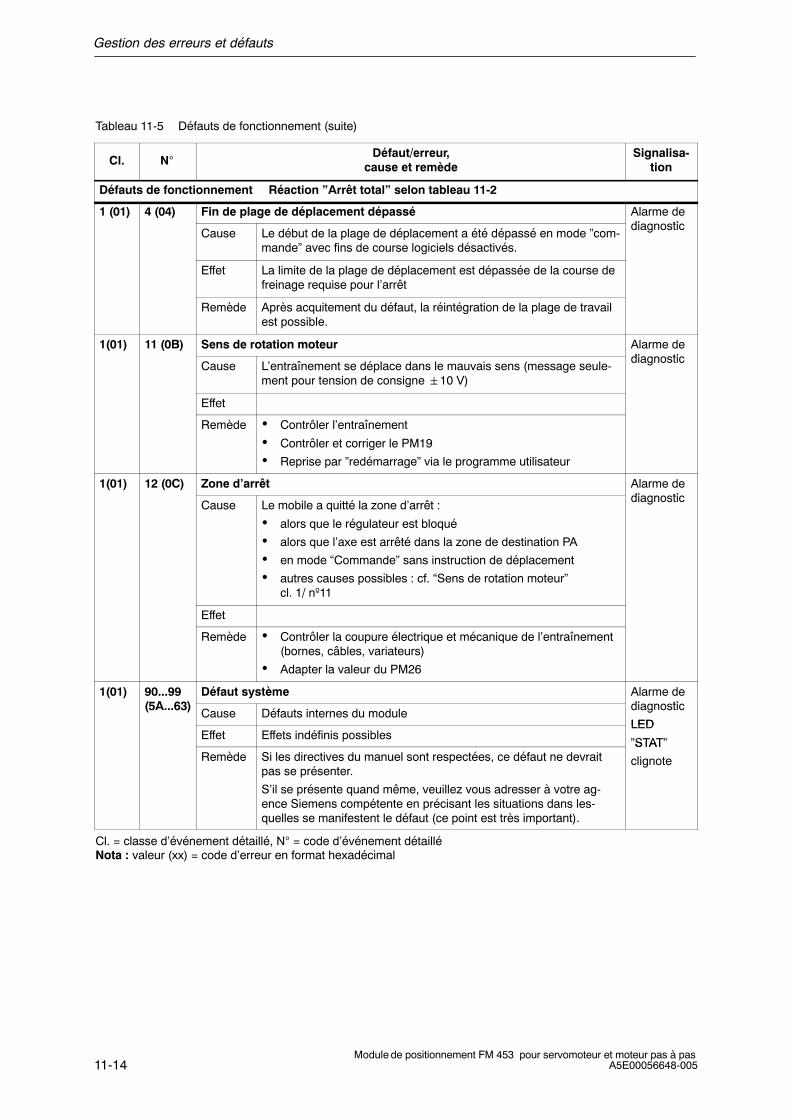
Gestion des erreurs et défauts
11-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-5 Défauts de fonctionnement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Défauts de fonctionnement Réaction ”Arrêt total” selon tableau 11-2
1 (01) 4 (04) Fin de plage de déplacement dépassé Alarme dedi ti
Cause Le début de la plage de déplacement a été dépassé en mode ”com-mande” avec fins de course logiciels désactivés.
diagnostic
Effet La limite de la plage de déplacement est dépassée de la course defreinage requise pour l’arrêt
Remède Après acquitement du défaut, la réintégration de la plage de travailest possible.
1(01) 11 (0B) Sens de rotation moteur Alarme dedi ti
Cause L’entraînement se déplace dans le mauvais sens (message seule-ment pour tension de consigne 10 V)
diagnostic
Effet
Remède • Contrôler l’entraînement
• Contrôler et corriger le PM19
• Reprise par ”redémarrage” via le programme utilisateur
1(01) 12 (0C) Zone d’arrêt Alarme dedi ti
Cause Le mobile a quitté la zone d’arrêt :
• alors que le régulateur est bloqué
• alors que l’axe est arrêté dans la zone de destination PA
• en mode “Commande” sans instruction de déplacement
• autres causes possibles : cf. “Sens de rotation moteur” cl. 1/ nº11
diagnostic
Effet
Remède • Contrôler la coupure électrique et mécanique de l’entraînement(bornes, câbles, variateurs)
• Adapter la valeur du PM26
1(01) 90...99(5A 63)
Défaut système Alarme dedi ti(5A...63)
Cause Défauts internes du modulediagnostic
LEDEffet Effets indéfinis possibles
LED
”STAT”Remède Si les directives du manuel sont respectées, ce défaut ne devrait
pas se présenter.
S’il se présente quand même, veuillez vous adresser à votre ag-ence Siemens compétente en précisant les situations dans les-quelles se manifestent le défaut (ce point est très important).
STAT
clignote
Cl. = classe d’événement détaillé, N° = code d’événement détailléNota : valeur (xx) = code d’erreur en format hexadécimal
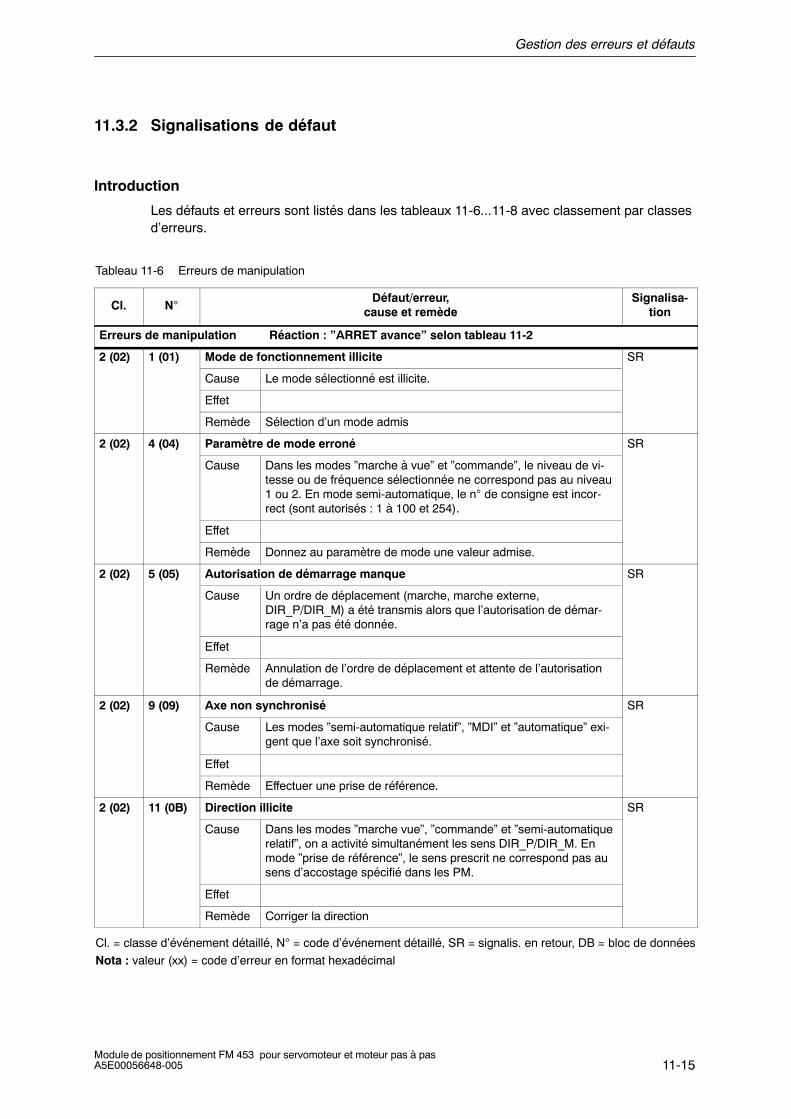
Gestion des erreurs et défauts
11-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
11.3.2 Signalisations de défaut
Introduction
Les défauts et erreurs sont listés dans les tableaux 11-6...11-8 avec classement par classesd’erreurs.
Tableau 11-6 Erreurs de manipulation
Cl. N°Défaut/erreur,
cause et remèdeSignalisa-
tion
Erreurs de manipulation Réaction : ”ARRET avance” selon tableau 11-2
2 (02) 1 (01) Mode de fonctionnement illicite SR
Cause Le mode sélectionné est illicite.
Effet
Remède Sélection d’un mode admis
2 (02) 4 (04) Paramètre de mode erroné SR
Cause Dans les modes ”marche à vue” et ”commande”, le niveau de vi-tesse ou de fréquence sélectionnée ne correspond pas au niveau1 ou 2. En mode semi-automatique, le n° de consigne est incor-rect (sont autorisés : 1 à 100 et 254).
Effet
Remède Donnez au paramètre de mode une valeur admise.
2 (02) 5 (05) Autorisation de démarrage manque SR
Cause Un ordre de déplacement (marche, marche externe,DIR_P/DIR_M) a été transmis alors que l’autorisation de démar-rage n’a pas été donnée.
Effet
Remède Annulation de l’ordre de déplacement et attente de l’autorisationde démarrage.
2 (02) 9 (09) Axe non synchronisé SR
Cause Les modes ”semi-automatique relatif”, ”MDI” et ”automatique” exi-gent que l’axe soit synchronisé.
Effet
Remède Effectuer une prise de référence.
2 (02) 11 (0B) Direction illicite SR
Cause Dans les modes ”marche vue”, ”commande” et ”semi-automatiquerelatif”, on a activité simultanément les sens DIR_P/DIR_M. Enmode ”prise de référence”, le sens prescrit ne correspond pas ausens d’accostage spécifié dans les PM.
Effet
Remède Corriger la direction
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
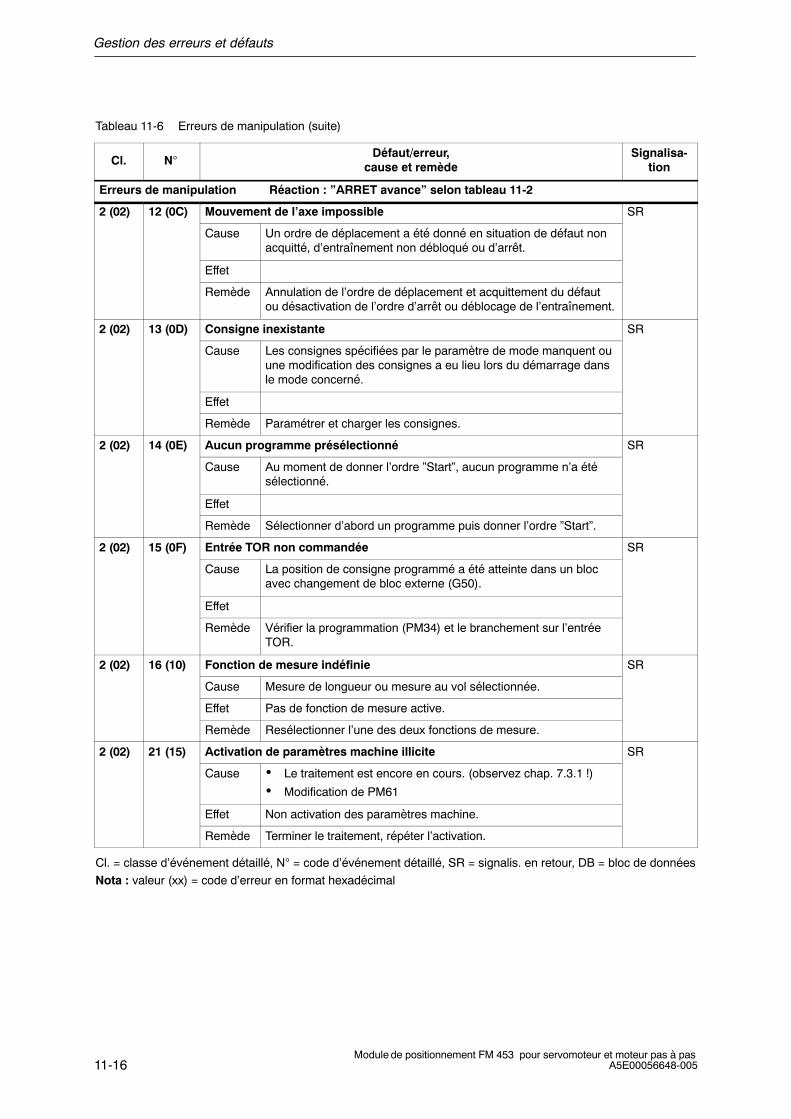
Gestion des erreurs et défauts
11-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-6 Erreurs de manipulation (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de manipulation Réaction : ”ARRET avance” selon tableau 11-2
2 (02) 12 (0C) Mouvement de l’axe impossible SR
Cause Un ordre de déplacement a été donné en situation de défaut nonacquitté, d’entraînement non débloqué ou d’arrêt.
Effet
Remède Annulation de l’ordre de déplacement et acquittement du défautou désactivation de l’ordre d’arrêt ou déblocage de l’entraînement.
2 (02) 13 (0D) Consigne inexistante SR
Cause Les consignes spécifiées par le paramètre de mode manquent ouune modification des consignes a eu lieu lors du démarrage dansle mode concerné.
Effet
Remède Paramétrer et charger les consignes.
2 (02) 14 (0E) Aucun programme présélectionné SR
Cause Au moment de donner l’ordre ”Start”, aucun programme n’a étésélectionné.
Effet
Remède Sélectionner d’abord un programme puis donner l’ordre ”Start”.
2 (02) 15 (0F) Entrée TOR non commandée SR
Cause La position de consigne programmé a été atteinte dans un blocavec changement de bloc externe (G50).
Effet
Remède Vérifier la programmation (PM34) et le branchement sur l’entréeTOR.
2 (02) 16 (10) Fonction de mesure indéfinie SR
Cause Mesure de longueur ou mesure au vol sélectionnée.
Effet Pas de fonction de mesure active.
Remède Resélectionner l’une des deux fonctions de mesure.
2 (02) 21 (15) Activation de paramètres machine illicite SR
Cause • Le traitement est encore en cours. (observez chap. 7.3.1 !)
• Modification de PM61
Effet Non activation des paramètres machine.
Remède Terminer le traitement, répéter l’activation.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
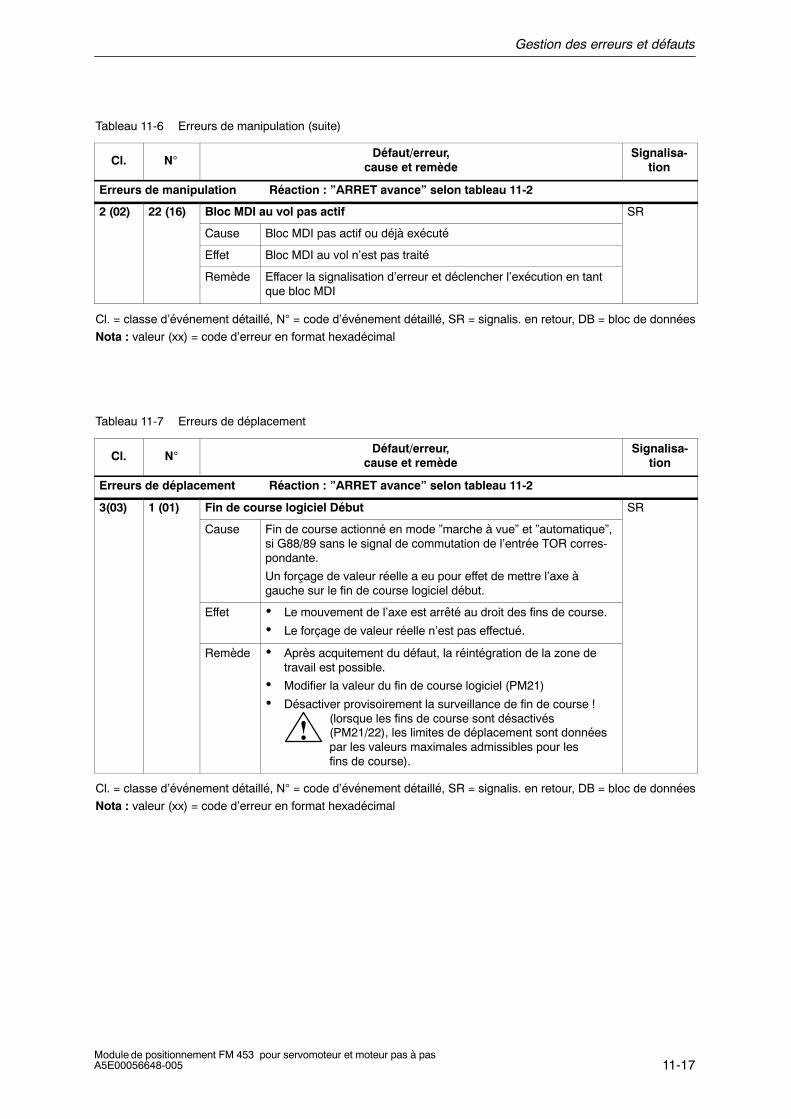
Gestion des erreurs et défauts
11-17Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-6 Erreurs de manipulation (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de manipulation Réaction : ”ARRET avance” selon tableau 11-2
2 (02) 22 (16) Bloc MDI au vol pas actif SR
Cause Bloc MDI pas actif ou déjà exécuté
Effet Bloc MDI au vol n’est pas traité
Remède Effacer la signalisation d’erreur et déclencher l’exécution en tantque bloc MDI
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
Tableau 11-7 Erreurs de déplacement
Cl. N°Défaut/erreur,
cause et remèdeSignalisa-
tion
Erreurs de déplacement Réaction : ”ARRET avance” selon tableau 11-2
3(03) 1 (01) Fin de course logiciel Début SR
Cause Fin de course actionné en mode ”marche à vue” et ”automatique”,si G88/89 sans le signal de commutation de l’entrée TOR corres-pondante.
Un forçage de valeur réelle a eu pour effet de mettre l’axe àgauche sur le fin de course logiciel début.
Effet • Le mouvement de l’axe est arrêté au droit des fins de course.
• Le forçage de valeur réelle n’est pas effectué.
Remède • Après acquitement du défaut, la réintégration de la zone detravail est possible.
• Modifier la valeur du fin de course logiciel (PM21)
• Désactiver provisoirement la surveillance de fin de course !(lorsque les fins de course sont désactivés (PM21/22), les limites de déplacement sont données par les valeurs maximales admissibles pour les fins de course).
!
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal

Gestion des erreurs et défauts
11-18Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-7 Erreurs de déplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de déplacement Réaction : ”ARRET avance” selon tableau 11-2
3(03) 2 (02) Fin de course logiciel Fin SR
Cause Fin de course actionné en mode ”marche à vue” et ”automatique”,si G88/89 sans le signal de commutation de l’entrée TOR corres-pondante.
Un forçage de valeur réelle a pour effet de mettre l’axe à gauchesur le fin de course logiciel début.
Effet • Le mouvement de l’axe est arrêté au droit des fins de course.
• Le forçage de valeur réelle n’est pas effectuée.
Remède • Après acquitement du défaut, la réintégration de la zone detravail est possible.
• Modifier la valeur du fin de course logiciel (PM22)
• Désactiver provisoirement la surveillance de fin de course !(lorsque les fins de course sont désactivés (PM21/22), les limites de déplacement sont données par les valeurs maximales admissibles pour les fins de course).
!
3 (03) 3 (03) En début de plage de déplacement SR
Cause • Le début de la plage de déplacement a été atteint en déplace-ment avec fin de course désactivé.
• En affectant une valeur réelle, l’axe se retrouve à gauche dudébut de plage de déplacement.(plage déplacement : 109 ou plage couverte par le codeurabsolu)
Effet • Le déplacement de l’axe est arrêté au droit des limites de laplage de déplacement.
• Le forçage de valeur réelle n’est pas exécutée.
Remède Déplacer l’axe dans le sens opposé.
3 (03) 4 (04) En fin de plage de déplacement SR
Cause • La fin de la plage de déplacement a été atteinte en déplace-ment avec fin de course désactivé.
• En affectant une valeur réelle, l’axe se retrouve à gauche/àdroite de la fin de la plage de déplacement.(plage déplacement : 109 ou plage couverte par le codeurabsolu)
Effet • Le déplacement de l’axe est arrêté au droit des limites de laplage de déplacement.
• Le forçage de valeur réelle n’est pas exécutée.
Remède Déplacer l’axe dans le sens opposé.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
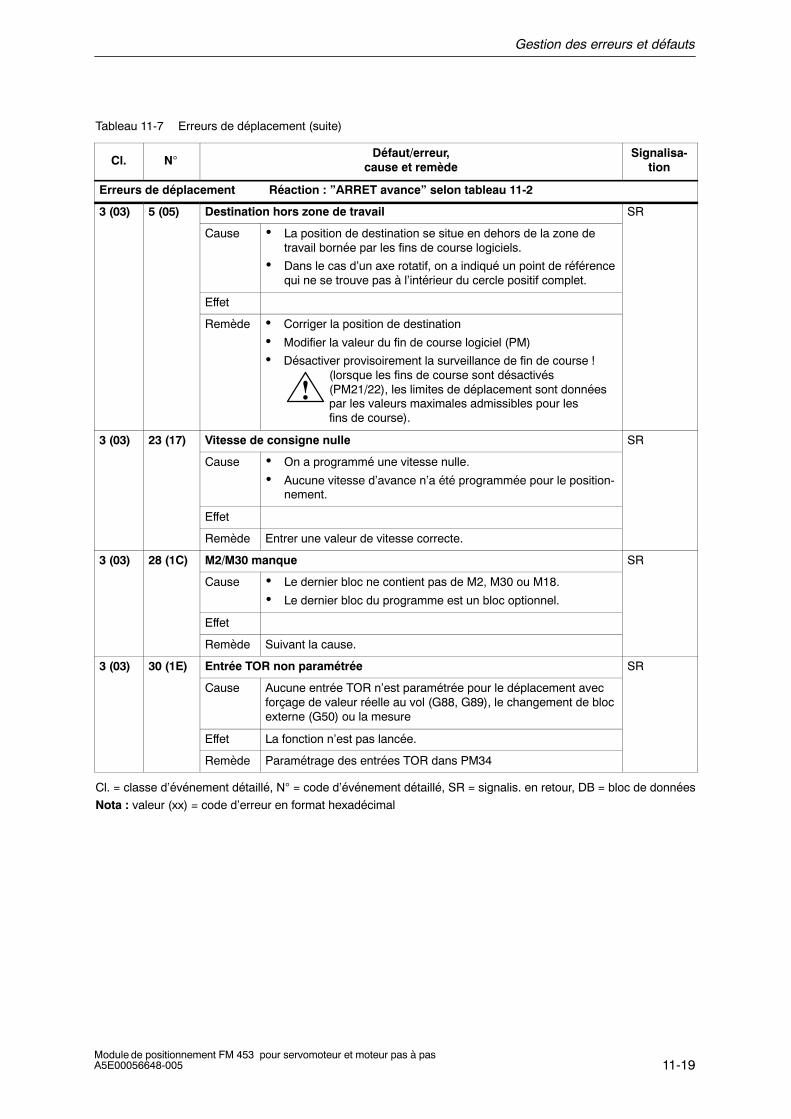
Gestion des erreurs et défauts
11-19Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-7 Erreurs de déplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de déplacement Réaction : ”ARRET avance” selon tableau 11-2
3 (03) 5 (05) Destination hors zone de travail SR
Cause • La position de destination se situe en dehors de la zone detravail bornée par les fins de course logiciels.
• Dans le cas d’un axe rotatif, on a indiqué un point de référencequi ne se trouve pas à l’intérieur du cercle positif complet.
Effet
Remède • Corriger la position de destination
• Modifier la valeur du fin de course logiciel (PM)
• Désactiver provisoirement la surveillance de fin de course !(lorsque les fins de course sont désactivés (PM21/22), les limites de déplacement sont données par les valeurs maximales admissibles pour les fins de course).
!
3 (03) 23 (17) Vitesse de consigne nulle SR
Cause • On a programmé une vitesse nulle.
• Aucune vitesse d’avance n’a été programmée pour le position-nement.
Effet
Remède Entrer une valeur de vitesse correcte.
3 (03) 28 (1C) M2/M30 manque SR
Cause • Le dernier bloc ne contient pas de M2, M30 ou M18.
• Le dernier bloc du programme est un bloc optionnel.
Effet
Remède Suivant la cause.
3 (03) 30 (1E) Entrée TOR non paramétrée SR
Cause Aucune entrée TOR n’est paramétrée pour le déplacement avecforçage de valeur réelle au vol (G88, G89), le changement de blocexterne (G50) ou la mesure
Effet La fonction n’est pas lancée.
Remède Paramétrage des entrées TOR dans PM34
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal

Gestion des erreurs et défauts
11-20Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-7 Erreurs de déplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de déplacement Réaction : ”ARRET avance” selon tableau 11-2
3 (03) 35 (23) Correction d’outil inexistante SR
Cause Absence de valeurs de correction d’outil sur le FM 453 ou, lacorrection d’outil étant activée, il y a accès aux valeurs de correc-tion d’outil pour en modifier certaines.
Effet
Remède Paramétrer et charger des valeurs de correction d’outils.
3 (03) 36 (24) Forçage valeur réelle au vol, mauvaise valeur SR
Cause Valeur hors des limites 109
Effet
Remède Entrer une valeur correcte.
3 (03) 37 (25) Bloc MDI au vol, syntaxe incorrecte SR
Cause Commandes M ou G incorrectes ou syntaxe incorrecte du bloc.
Effet
Remède Entrer un bloc MDI correct.
3 (03) 38 (26) Bloc MDI au vol, vitesse incorrecte SR
Cause Vitesse non comprise entre 0 et la vitesse de déplacement maxi-male (500 000 000 UI/min)
Effet
Remède Entrer un bloc MDI correct.
3 (03) 39 (27) Bloc MDI au vol, position ou arrêt temporisé incorrect SR
Cause Position ou arrêt temporisé hors des limites admissibles.Position : 109 UIArrêt temporisé : > 100 000 ms
Effet
Remède Entrer un bloc MDI correct.
3 (03) 40 (28) Bloc MDI au vol, erroné SR
Cause Syntaxe incorrecte du bloc
Effet
Remède Entrer un bloc MDI correct.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
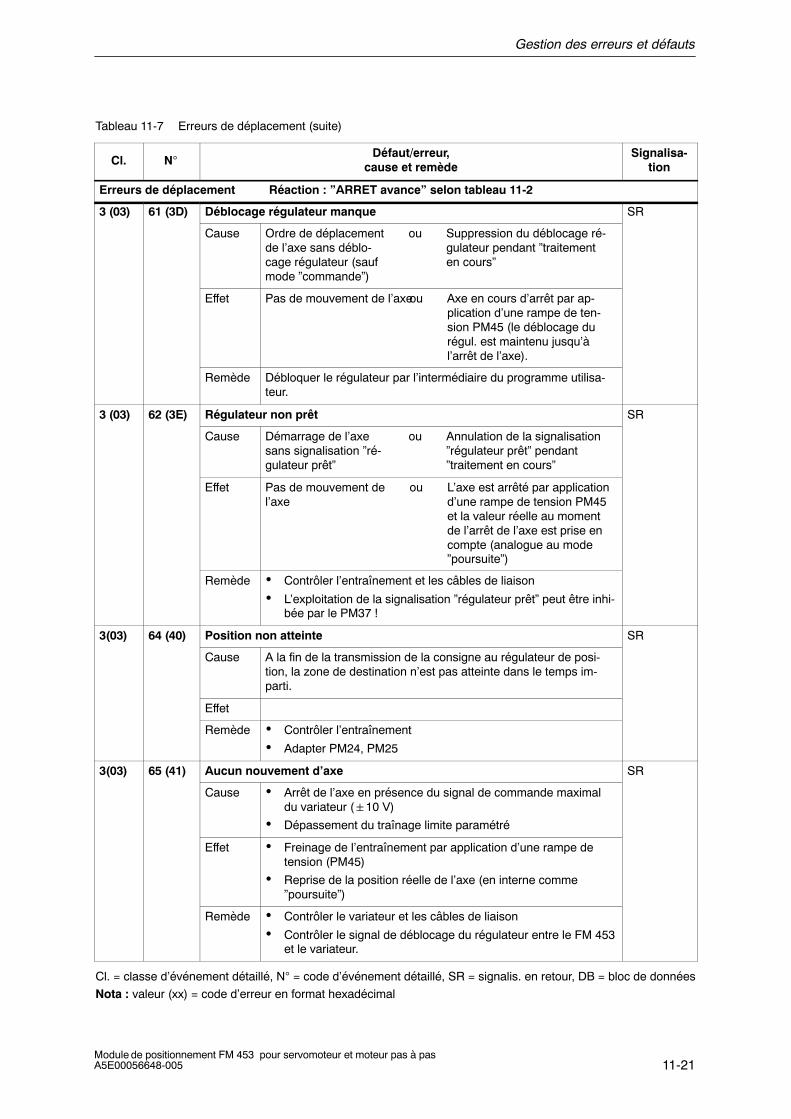
Gestion des erreurs et défauts
11-21Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-7 Erreurs de déplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de déplacement Réaction : ”ARRET avance” selon tableau 11-2
3 (03) 61 (3D) Déblocage régulateur manque SR
Cause Ordre de déplacementde l’axe sans déblo-cage régulateur (saufmode ”commande”)
Suppression du déblocage ré-gulateur pendant ”traitementen cours”
ou
Effet Pas de mouvement de l’axe Axe en cours d’arrêt par ap-plication d’une rampe de ten-sion PM45 (le déblocage durégul. est maintenu jusqu’àl’arrêt de l’axe).
ou
Remède Débloquer le régulateur par l’intermédiaire du programme utilisa-teur.
3 (03) 62 (3E) Régulateur non prêt SR
Cause Démarrage de l’axesans signalisation ”ré-gulateur prêt”
Annulation de la signalisation”régulateur prêt” pendant”traitement en cours”
ou
Effet Pas de mouvement del’axe
L’axe est arrêté par applicationd’une rampe de tension PM45et la valeur réelle au momentde l’arrêt de l’axe est prise encompte (analogue au mode”poursuite”)
ou
Remède • Contrôler l’entraînement et les câbles de liaison
• L’exploitation de la signalisation ”régulateur prêt” peut être inhi-bée par le PM37 !
3(03) 64 (40) Position non atteinte SR
Cause A la fin de la transmission de la consigne au régulateur de posi-tion, la zone de destination n’est pas atteinte dans le temps im-parti.
Effet
Remède • Contrôler l’entraînement
• Adapter PM24, PM25
3(03) 65 (41) Aucun nouvement d’axe SR
Cause • Arrêt de l’axe en présence du signal de commande maximaldu variateur (10 V)
• Dépassement du traînage limite paramétré
Effet • Freinage de l’entraînement par application d’une rampe detension (PM45)
• Reprise de la position réelle de l’axe (en interne comme”poursuite”)
Remède • Contrôler le variateur et les câbles de liaison
• Contrôler le signal de déblocage du régulateur entre le FM 453et le variateur.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
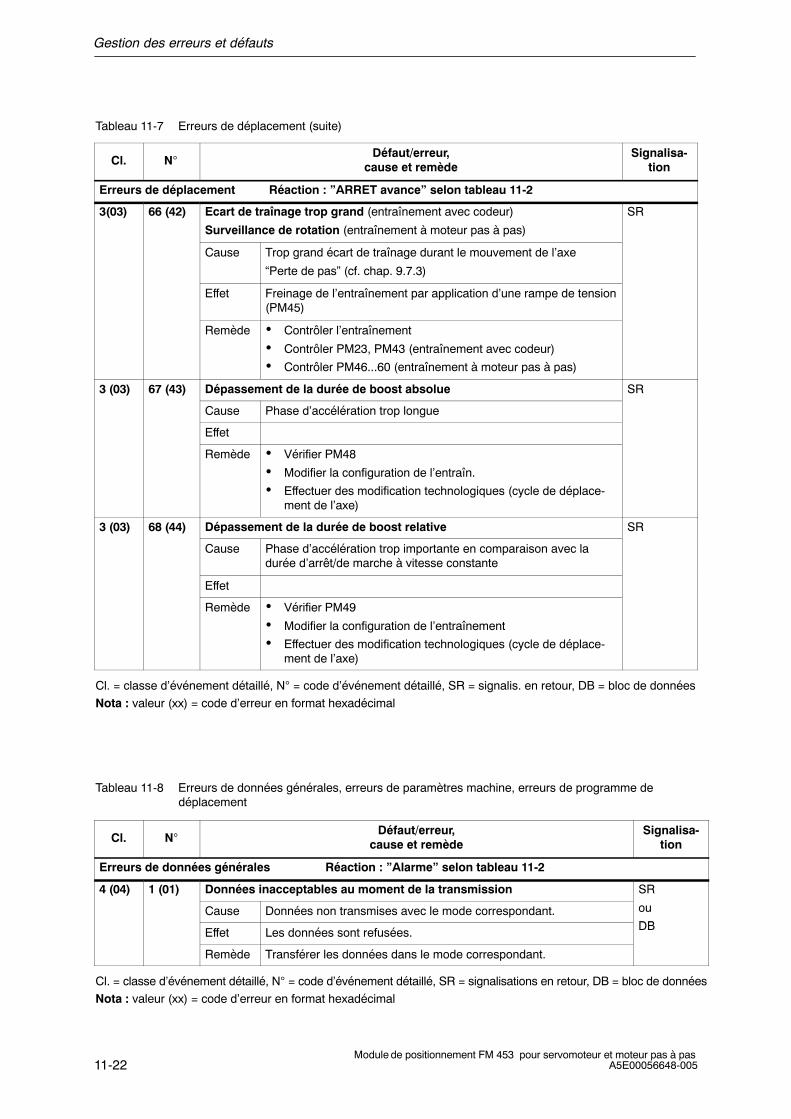
Gestion des erreurs et défauts
11-22Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-7 Erreurs de déplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de déplacement Réaction : ”ARRET avance” selon tableau 11-2
3(03) 66 (42) Ecart de traînage trop grand (entraînement avec codeur)
Surveillance de rotation (entraînement à moteur pas à pas)
SR
Cause Trop grand écart de traînage durant le mouvement de l’axe
“Perte de pas” (cf. chap. 9.7.3)
Effet Freinage de l’entraînement par application d’une rampe de tension(PM45)
Remède • Contrôler l’entraînement
• Contrôler PM23, PM43 (entraînement avec codeur)
• Contrôler PM46...60 (entraînement à moteur pas à pas)
3 (03) 67 (43) Dépassement de la durée de boost absolue SR
Cause Phase d’accélération trop longue
Effet
Remède • Vérifier PM48
• Modifier la configuration de l’entraîn.
• Effectuer des modification technologiques (cycle de déplace-ment de l’axe)
3 (03) 68 (44) Dépassement de la durée de boost relative SR
Cause Phase d’accélération trop importante en comparaison avec ladurée d’arrêt/de marche à vitesse constante
Effet
Remède • Vérifier PM49
• Modifier la configuration de l’entraînement
• Effectuer des modification technologiques (cycle de déplace-ment de l’axe)
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalis. en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement
Cl. N°Défaut/erreur,
cause et remèdeSignalisa-
tion
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
4 (04) 1 (01) Données inacceptables au moment de la transmission SR
Cause Données non transmises avec le mode correspondant. ou
DBEffet Les données sont refusées. DB
Remède Transférer les données dans le mode correspondant.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
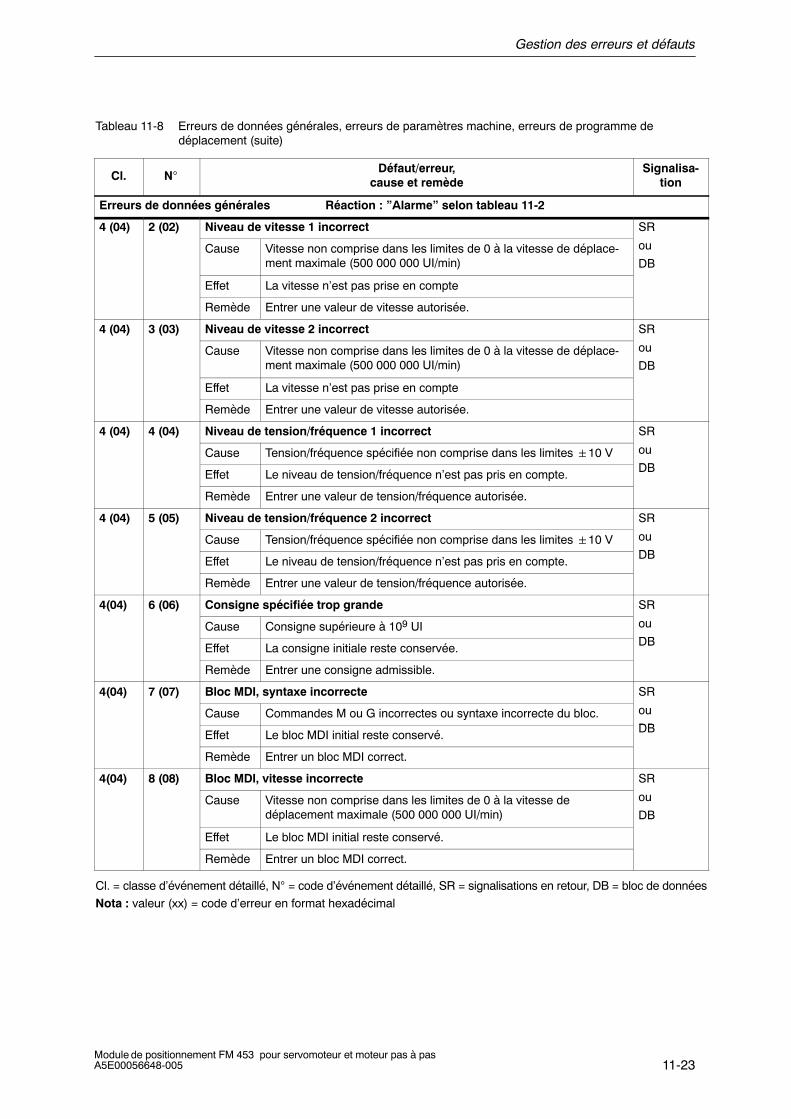
Gestion des erreurs et défauts
11-23Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
4 (04) 2 (02) Niveau de vitesse 1 incorrect SR
Cause Vitesse non comprise dans les limites de 0 à la vitesse de déplace-ment maximale (500 000 000 UI/min)
ou
DB
Effet La vitesse n’est pas prise en compte
Remède Entrer une valeur de vitesse autorisée.
4 (04) 3 (03) Niveau de vitesse 2 incorrect SR
Cause Vitesse non comprise dans les limites de 0 à la vitesse de déplace-ment maximale (500 000 000 UI/min)
ou
DB
Effet La vitesse n’est pas prise en compte
Remède Entrer une valeur de vitesse autorisée.
4 (04) 4 (04) Niveau de tension/fréquence 1 incorrect SR
Cause Tension/fréquence spécifiée non comprise dans les limites 10 V ou
DBEffet Le niveau de tension/fréquence n’est pas pris en compte. DB
Remède Entrer une valeur de tension/fréquence autorisée.
4 (04) 5 (05) Niveau de tension/fréquence 2 incorrect SR
Cause Tension/fréquence spécifiée non comprise dans les limites 10 V ou
DBEffet Le niveau de tension/fréquence n’est pas pris en compte. DB
Remède Entrer une valeur de tension/fréquence autorisée.
4(04) 6 (06) Consigne spécifiée trop grande SR
Cause Consigne supérieure à 109 UI ou
DBEffet La consigne initiale reste conservée. DB
Remède Entrer une consigne admissible.
4(04) 7 (07) Bloc MDI, syntaxe incorrecte SR
Cause Commandes M ou G incorrectes ou syntaxe incorrecte du bloc. ou
DBEffet Le bloc MDI initial reste conservé. DB
Remède Entrer un bloc MDI correct.
4(04) 8 (08) Bloc MDI, vitesse incorrecte SR
Cause Vitesse non comprise dans les limites de 0 à la vitesse dedéplacement maximale (500 000 000 UI/min)
ou
DB
Effet Le bloc MDI initial reste conservé.
Remède Entrer un bloc MDI correct.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal

Gestion des erreurs et défauts
11-24Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
4(04) 9 (09) Bloc MDI, position ou arrêt temporisé incorrect SR
Cause Position ou arrêt temporisé en dehors des limites admises.Position : 109 UIArrêt temporisé : > 100 000 ms
ou
DB
Effet Le bloc MDI initial reste conservé.
Remède Entrer un bloc MDI correct.
4(04) 10 (0A) Décalage d’origine, valeur incorrecte SR
Cause Valeur hors des limites 109 UI ou
DBEffet Le décalage n’est pas pris en compte. DB
Remède Entrer une valeur correcte.
4(04) 11 (0B) Forçage valeur réelle, valeur incorrecte SR
Cause La valeur réelle se situe hors des fins de course logiciels ou deslimites 109 UI
ou
DB
Effet Le forçage de valeur réelle n’est pas exécuté.
Remède Entrer une valeur correcte
4(04) 12 (0C) Définition du point de référence, coordonnée incorrecte SR
Cause Valeur hors des limites 109 UI ou
DBEffet La définition du point de référence n’est pas exécutée. DB
Remède Entrer une valeur correcte.
4(04) 13 (0D) Sortie TOR non possible SR
Cause Sortie non disponible pour l’émission directe par le programme utili-sateur.
ou
DB
Effet La sortie n’est pas exécutée.
Remède • Corriger le programme utilisateur
• Corriger le paramétrage de l’affectation des sorties dans le PM35
4(04) 14 (0E) Demande incorrecte de données d’application SR
Cause Code de demande incorrect ou
DBEffet Les anciennes données d’application sont conservées. DB
Remède Code de demande 0...6, 16...23 et 25 possible
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
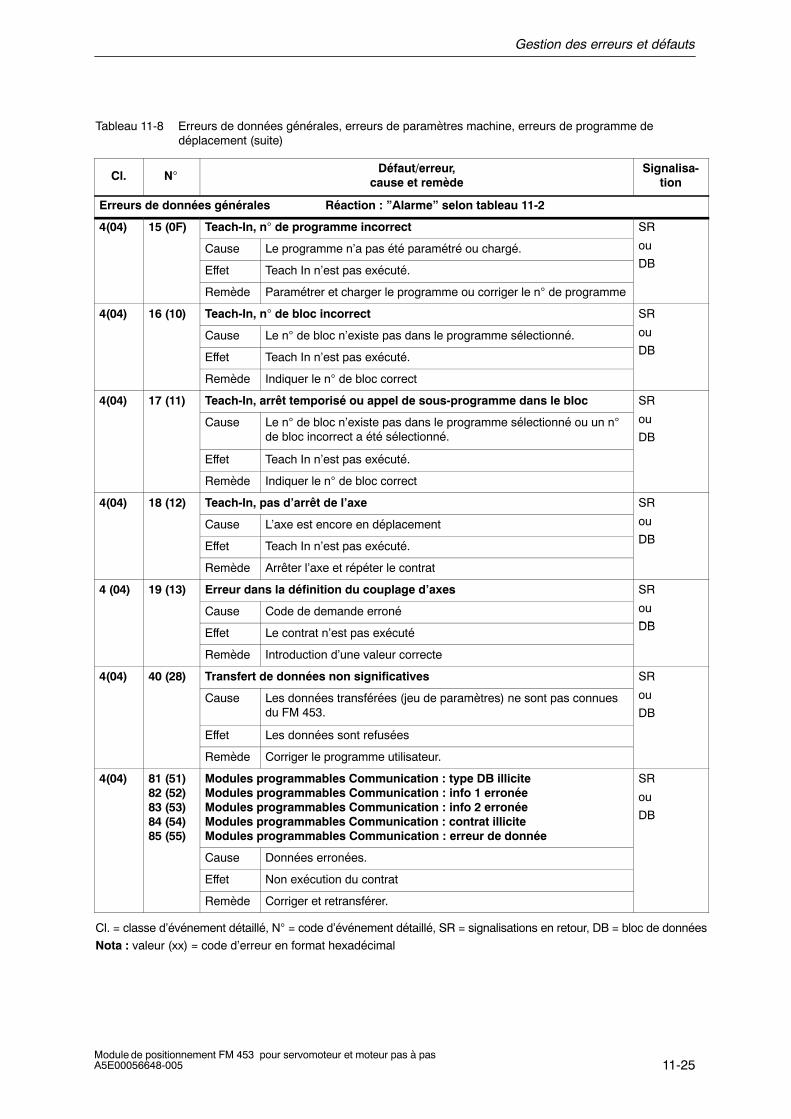
Gestion des erreurs et défauts
11-25Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
4(04) 15 (0F) Teach-In, n° de programme incorrect SR
Cause Le programme n’a pas été paramétré ou chargé. ou
DBEffet Teach In n’est pas exécuté. DB
Remède Paramétrer et charger le programme ou corriger le n° de programme
4(04) 16 (10) Teach-In, n° de bloc incorrect SR
Cause Le n° de bloc n’existe pas dans le programme sélectionné. ou
DBEffet Teach In n’est pas exécuté. DB
Remède Indiquer le n° de bloc correct
4(04) 17 (11) Teach-In, arrêt temporisé ou appel de sous-programme dans le bloc SR
Cause Le n° de bloc n’existe pas dans le programme sélectionné ou un n°de bloc incorrect a été sélectionné.
ou
DB
Effet Teach In n’est pas exécuté.
Remède Indiquer le n° de bloc correct
4(04) 18 (12) Teach-In, pas d’arrêt de l’axe SR
Cause L’axe est encore en déplacement ou
DBEffet Teach In n’est pas exécuté. DB
Remède Arrêter l’axe et répéter le contrat
4 (04) 19 (13) Erreur dans la définition du couplage d’axes SR
Cause Code de demande erroné ou
DBEffet Le contrat n’est pas exécuté DB
Remède Introduction d’une valeur correcte
4(04) 40 (28) Transfert de données non significatives SR
Cause Les données transférées (jeu de paramètres) ne sont pas connuesdu FM 453.
ou
DB
Effet Les données sont refusées
Remède Corriger le programme utilisateur.
4(04) 81 (51)82 (52)83 (53)84 (54)85 (55)
Modules programmables Communication : type DB illicite Modules programmables Communication : info 1 erronée Modules programmables Communication : info 2 erronée Modules programmables Communication : contrat illicite Modules programmables Communication : erreur de donnée
SR
ou
DB
Cause Données erronées.
Effet Non exécution du contrat
Remède Corriger et retransférer.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
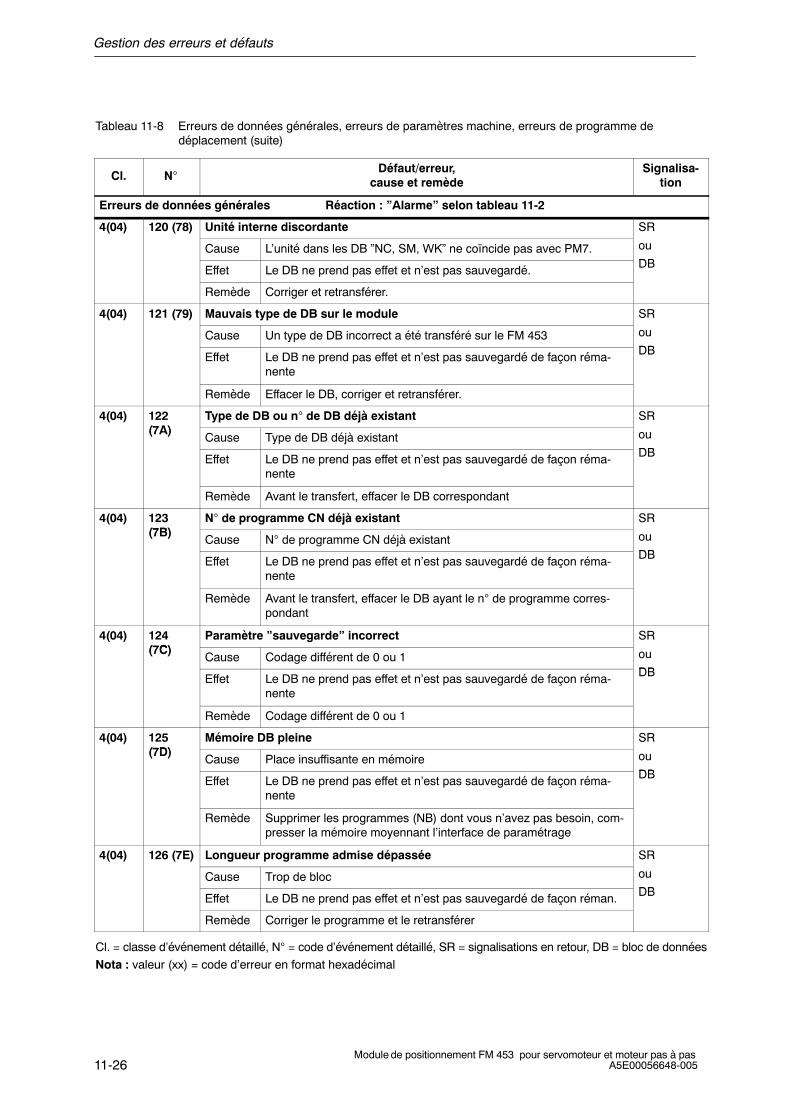
Gestion des erreurs et défauts
11-26Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
4(04) 120 (78) Unité interne discordante SR
Cause L’unité dans les DB ”NC, SM, WK” ne coïncide pas avec PM7. ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé. DB
Remède Corriger et retransférer.
4(04) 121 (79) Mauvais type de DB sur le module SR
Cause Un type de DB incorrect a été transféré sur le FM 453 ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
DB
Remède Effacer le DB, corriger et retransférer.
4(04) 122(7A)
Type de DB ou n° de DB déjà existant SR(7A)
Cause Type de DB déjà existant ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
DB
Remède Avant le transfert, effacer le DB correspondant
4(04) 123(7B)
N° de programme CN déjà existant SR(7B)
Cause N° de programme CN déjà existant ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
DB
Remède Avant le transfert, effacer le DB ayant le n° de programme corres-pondant
4(04) 124(7C)
Paramètre ”sauvegarde” incorrect SR(7C)
Cause Codage différent de 0 ou 1 ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
DB
Remède Codage différent de 0 ou 1
4(04) 125(7D)
Mémoire DB pleine SR(7D)
Cause Place insuffisante en mémoire ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
DB
Remède Supprimer les programmes (NB) dont vous n’avez pas besoin, com-presser la mémoire moyennant l’interface de paramétrage
4(04) 126 (7E) Longueur programme admise dépassée SR
Cause Trop de bloc ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réman. DB
Remède Corriger le programme et le retransférer
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
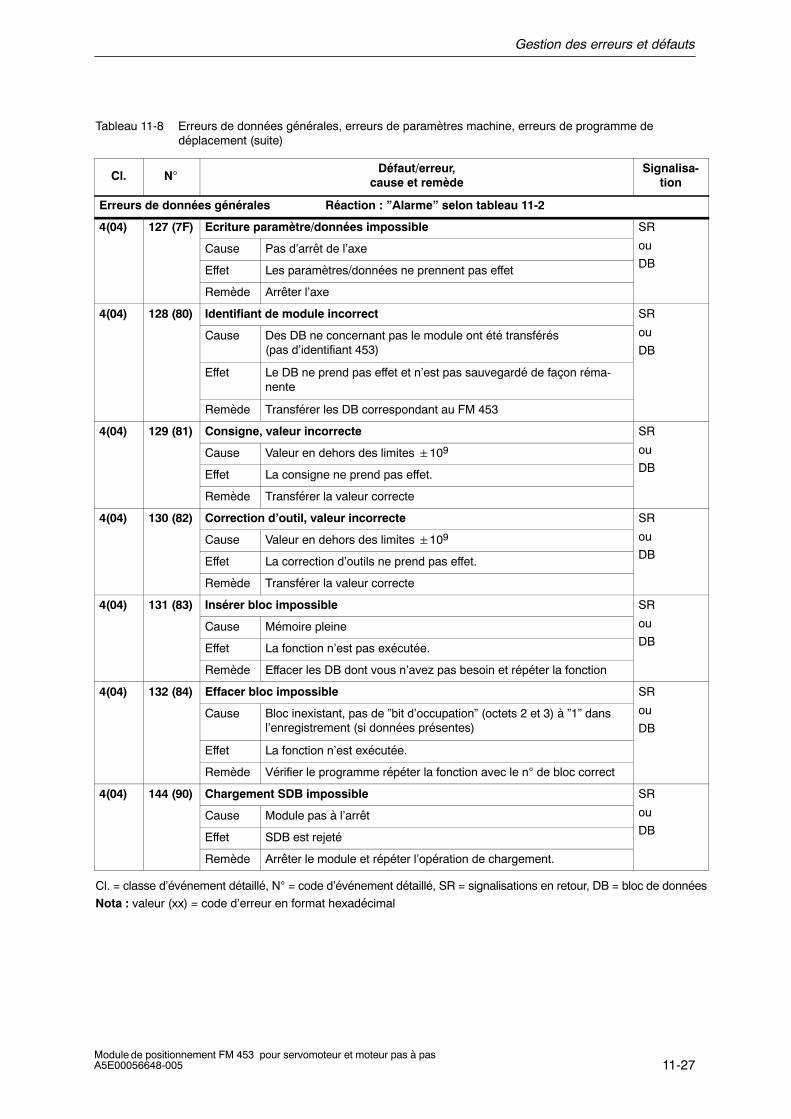
Gestion des erreurs et défauts
11-27Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
4(04) 127 (7F) Ecriture paramètre/données impossible SR
Cause Pas d’arrêt de l’axe ou
DBEffet Les paramètres/données ne prennent pas effet DB
Remède Arrêter l’axe
4(04) 128 (80) Identifiant de module incorrect SR
Cause Des DB ne concernant pas le module ont été transférés (pas d’identifiant 453)
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
Remède Transférer les DB correspondant au FM 453
4(04) 129 (81) Consigne, valeur incorrecte SR
Cause Valeur en dehors des limites 109 ou
DBEffet La consigne ne prend pas effet. DB
Remède Transférer la valeur correcte
4(04) 130 (82) Correction d’outil, valeur incorrecte SR
Cause Valeur en dehors des limites 109 ou
DBEffet La correction d’outils ne prend pas effet. DB
Remède Transférer la valeur correcte
4(04) 131 (83) Insérer bloc impossible SR
Cause Mémoire pleine ou
DBEffet La fonction n’est pas exécutée. DB
Remède Effacer les DB dont vous n’avez pas besoin et répéter la fonction
4(04) 132 (84) Effacer bloc impossible SR
Cause Bloc inexistant, pas de ”bit d’occupation” (octets 2 et 3) à ”1” dansl’enregistrement (si données présentes)
ou
DB
Effet La fonction n’est exécutée.
Remède Vérifier le programme répéter la fonction avec le n° de bloc correct
4(04) 144 (90) Chargement SDB impossible SR
Cause Module pas à l’arrêt ou
DBEffet SDB est rejeté DB
Remède Arrêter le module et répéter l’opération de chargement.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
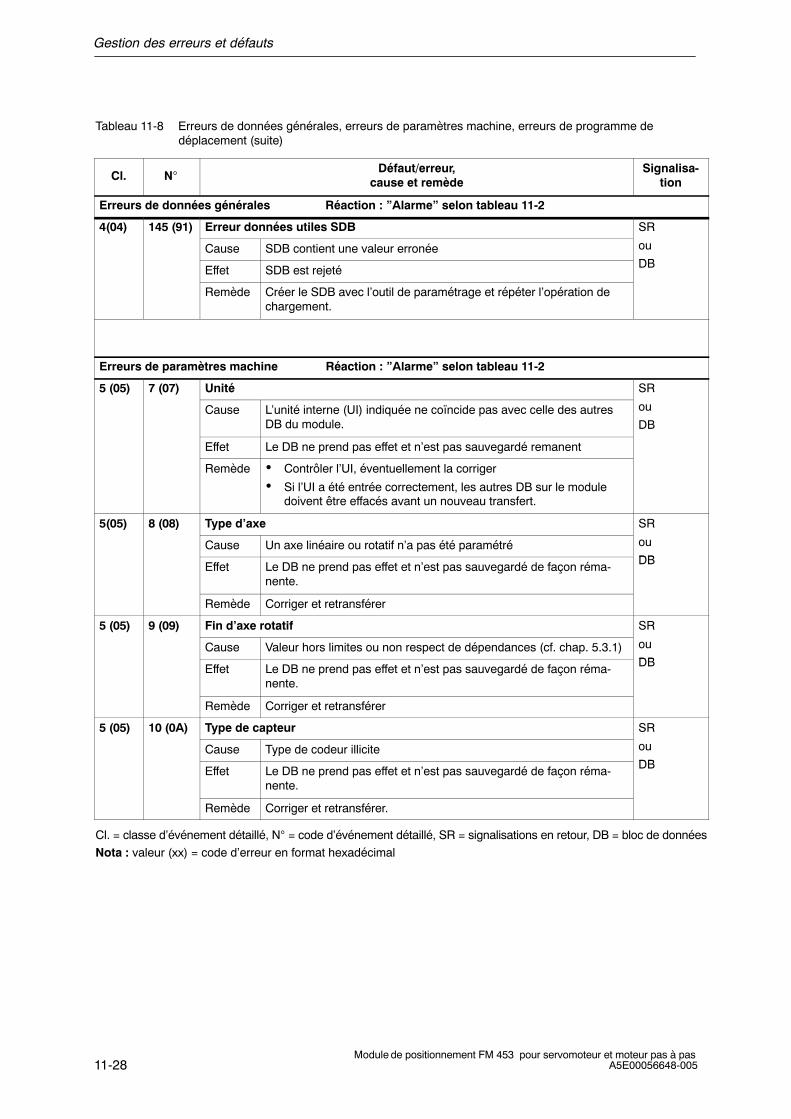
Gestion des erreurs et défauts
11-28Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
4(04) 145 (91) Erreur données utiles SDB SR
Cause SDB contient une valeur erronée ou
DBEffet SDB est rejeté DB
Remède Créer le SDB avec l’outil de paramétrage et répéter l’opération dechargement.
Erreurs de paramètres machine Réaction : ”Alarme” selon tableau 11-2
5 (05) 7 (07) Unité SR
Cause L’unité interne (UI) indiquée ne coïncide pas avec celle des autresDB du module.
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé remanent
Remède • Contrôler l’UI, éventuellement la corriger
• Si l’UI a été entrée correctement, les autres DB sur le moduledoivent être effacés avant un nouveau transfert.
5(05) 8 (08) Type d’axe SR
Cause Un axe linéaire ou rotatif n’a pas été paramétré ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
DB
Remède Corriger et retransférer
5 (05) 9 (09) Fin d’axe rotatif SR
Cause Valeur hors limites ou non respect de dépendances (cf. chap. 5.3.1) ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
DB
Remède Corriger et retransférer
5 (05) 10 (0A) Type de capteur SR
Cause Type de codeur illicite ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
DB
Remède Corriger et retransférer.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
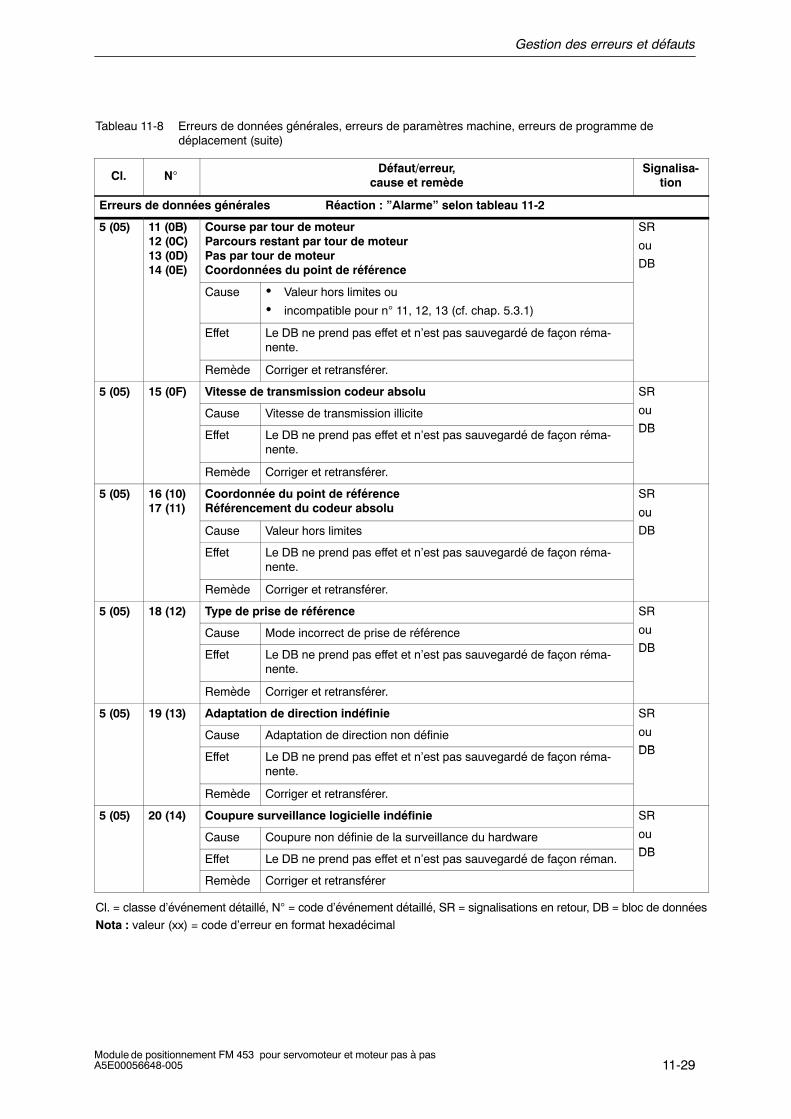
Gestion des erreurs et défauts
11-29Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
5 (05) 11 (0B)12 (0C)13 (0D)14 (0E)
Course par tour de moteurParcours restant par tour de moteurPas par tour de moteurCoordonnées du point de référence
SR
ou
DB
Cause • Valeur hors limites ou
• incompatible pour n° 11, 12, 13 (cf. chap. 5.3.1)
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
Remède Corriger et retransférer.
5 (05) 15 (0F) Vitesse de transmission codeur absolu SR
Cause Vitesse de transmission illicite ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
DB
Remède Corriger et retransférer.
5 (05) 16 (10)17 (11)
Coordonnée du point de référenceRéférencement du codeur absolu
SR
ou
Cause Valeur hors limites
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
Remède Corriger et retransférer.
5 (05) 18 (12) Type de prise de référence SR
Cause Mode incorrect de prise de référence ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
DB
Remède Corriger et retransférer.
5 (05) 19 (13) Adaptation de direction indéfinie SR
Cause Adaptation de direction non définie ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
DB
Remède Corriger et retransférer.
5 (05) 20 (14) Coupure surveillance logicielle indéfinie SR
Cause Coupure non définie de la surveillance du hardware ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réman. DB
Remède Corriger et retransférer
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal

Gestion des erreurs et défauts
11-30Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
5 (05) 21 (15)22 (16)23 (17)24 (18)25 (19)26 (1A)27 (1B)28 (1C)29 (1D)30 (1E)
Fin de course logiciel DébutFin de course logiciel FinVitesse maximaleZone de destination (PA)Temps enveloppeZone d’arrêtDécalage du point de référenceVitesse de prise de référenceVitesse réduiteCompensation du jeu
SR
ou
DB
Cause • Valeur hors limites ou
• non respect de dépendances pour n° 21, 22, 28, 29(cf. chap. 5.3.1)
SR
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
DB
Remède Corriger et retransférer
5(05) 31 (1F) Orientation du jeu SR
Cause Orientation du jeu non définie ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réman. DB
Remède Corriger et retransférer
5(05) 32 (20) Mode de sortie de la fonction M SR
Cause Mode de sortie non défini pour la fonction M ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réman. DB
Remède Corriger et retransférer
5(05) 33 (21) Durée de sortie de la fonction M SR
Cause Valeur hors limites ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réman. DB
Remède Corriger et retransférer
5(05) 34 (22) Entrées TOR SR
Cause Entrées non définies ou définies plusieurs fois ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réman. DB
Remède Corriger et retransférer
5(05) 35 (23) Sorties TOR SR
Cause Sorties non définies ou définies plusieurs fois ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réman. DB
Remède Corriger et retransférer
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
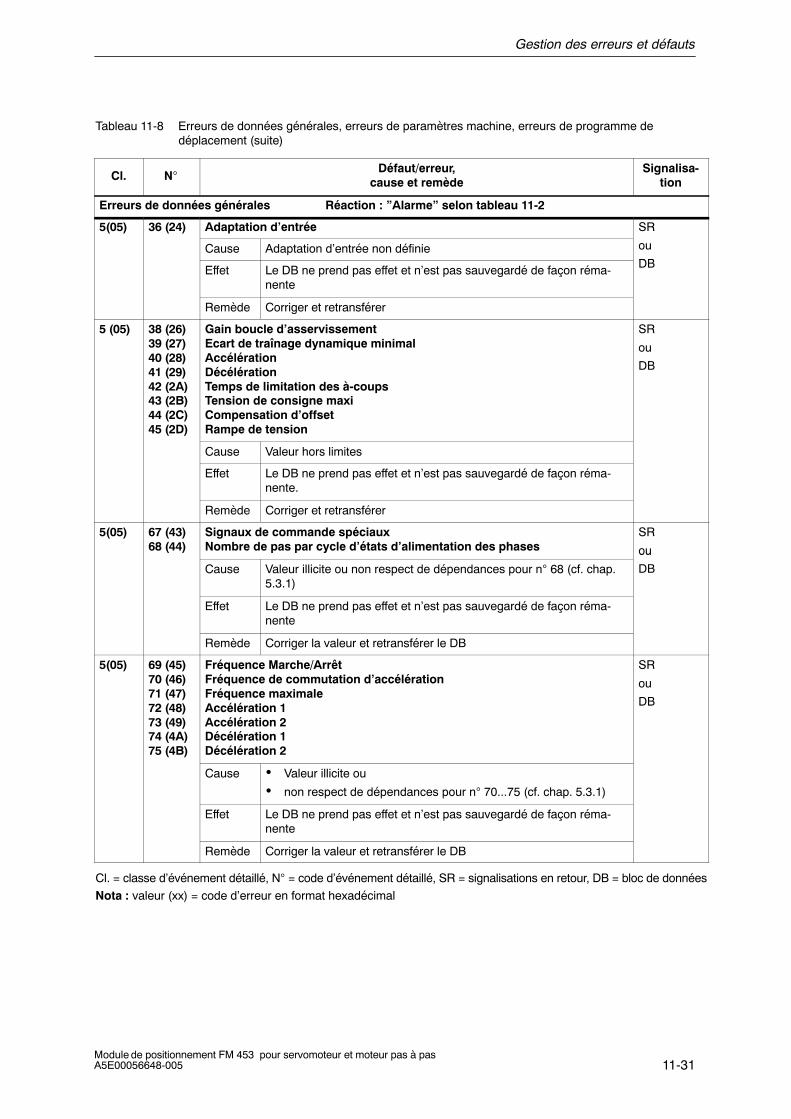
Gestion des erreurs et défauts
11-31Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
5(05) 36 (24) Adaptation d’entrée SR
Cause Adaptation d’entrée non définie ou
DBEffet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
DB
Remède Corriger et retransférer
5 (05) 38 (26)39 (27)40 (28)41 (29)42 (2A)43 (2B)44 (2C)45 (2D)
Gain boucle d’asservissementEcart de traînage dynamique minimalAccélérationDécélérationTemps de limitation des à-coupsTension de consigne maxiCompensation d’offsetRampe de tension
SR
ou
DB
Cause Valeur hors limites
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
Remède Corriger et retransférer
5(05) 67 (43)68 (44)
Signaux de commande spéciauxNombre de pas par cycle d’états d’alimentation des phases
SR
ou
Cause Valeur illicite ou non respect de dépendances pour n° 68 (cf. chap.5.3.1)
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
Remède Corriger la valeur et retransférer le DB
5(05) 69 (45)70 (46)71 (47)72 (48)73 (49)74 (4A)75 (4B)
Fréquence Marche/ArrêtFréquence de commutation d’accélérationFréquence maximaleAccélération 1Accélération 2Décélération 1Décélération 2
SR
ou
DB
Cause • Valeur illicite ou
• non respect de dépendances pour n° 70...75 (cf. chap. 5.3.1)
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
Remède Corriger la valeur et retransférer le DB
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
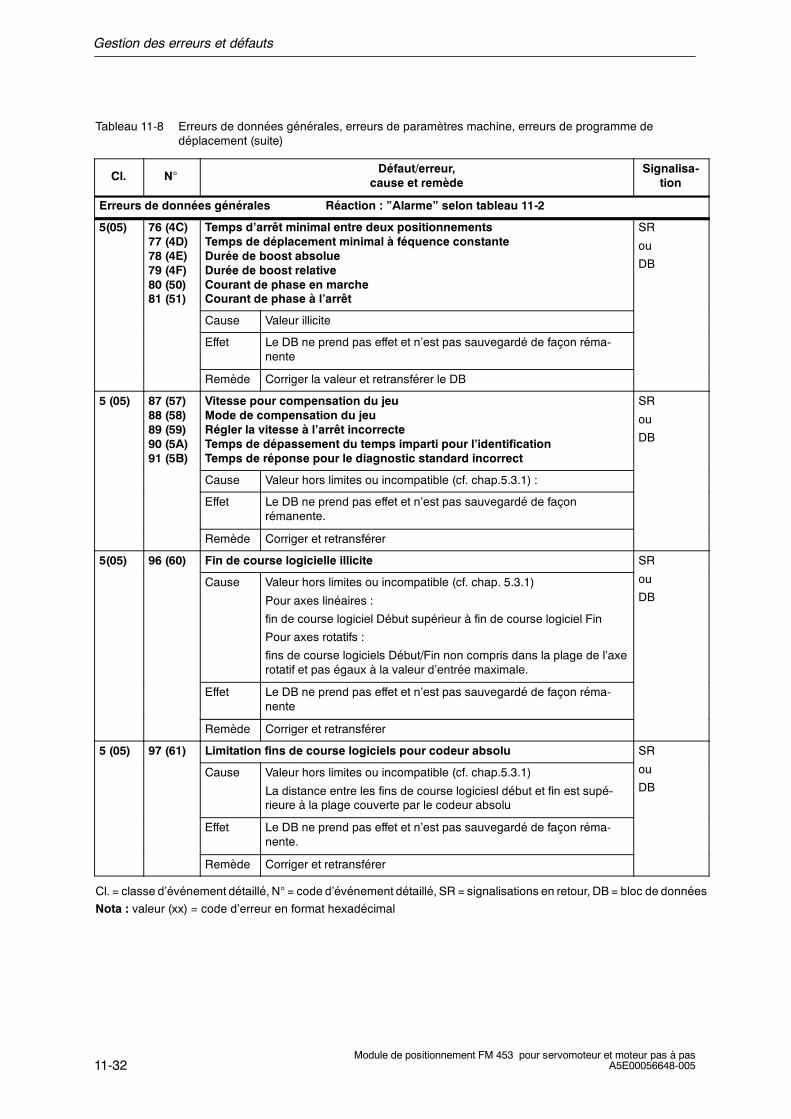
Gestion des erreurs et défauts
11-32Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
5(05) 76 (4C)77 (4D)78 (4E)79 (4F)80 (50)81 (51)
Temps d’arrêt minimal entre deux positionnementsTemps de déplacement minimal à féquence constanteDurée de boost absolueDurée de boost relativeCourant de phase en marcheCourant de phase à l’arrêt
SR
ou
DB
Cause Valeur illicite
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
Remède Corriger la valeur et retransférer le DB
5 (05) 87 (57)88 (58)89 (59)90 (5A)91 (5B)
Vitesse pour compensation du jeuMode de compensation du jeuRégler la vitesse à l’arrêt incorrecteTemps de dépassement du temps imparti pour l’identificationTemps de réponse pour le diagnostic standard incorrect
SR
ou
DB
Cause Valeur hors limites ou incompatible (cf. chap.5.3.1) :
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façonrémanente.
Remède Corriger et retransférer
5(05) 96 (60) Fin de course logicielle illicite SR
Cause Valeur hors limites ou incompatible (cf. chap. 5.3.1)
Pour axes linéaires :
fin de course logiciel Début supérieur à fin de course logiciel Fin
Pour axes rotatifs :
fins de course logiciels Début/Fin non compris dans la plage de l’axerotatif et pas égaux à la valeur d’entrée maximale.
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente
Remède Corriger et retransférer
5 (05) 97 (61) Limitation fins de course logiciels pour codeur absolu SR
Cause Valeur hors limites ou incompatible (cf. chap.5.3.1)
La distance entre les fins de course logiciesl début et fin est supé-rieure à la plage couverte par le codeur absolu
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
Remède Corriger et retransférer
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de donnéesNota : valeur (xx) = code d’erreur en format hexadécimal
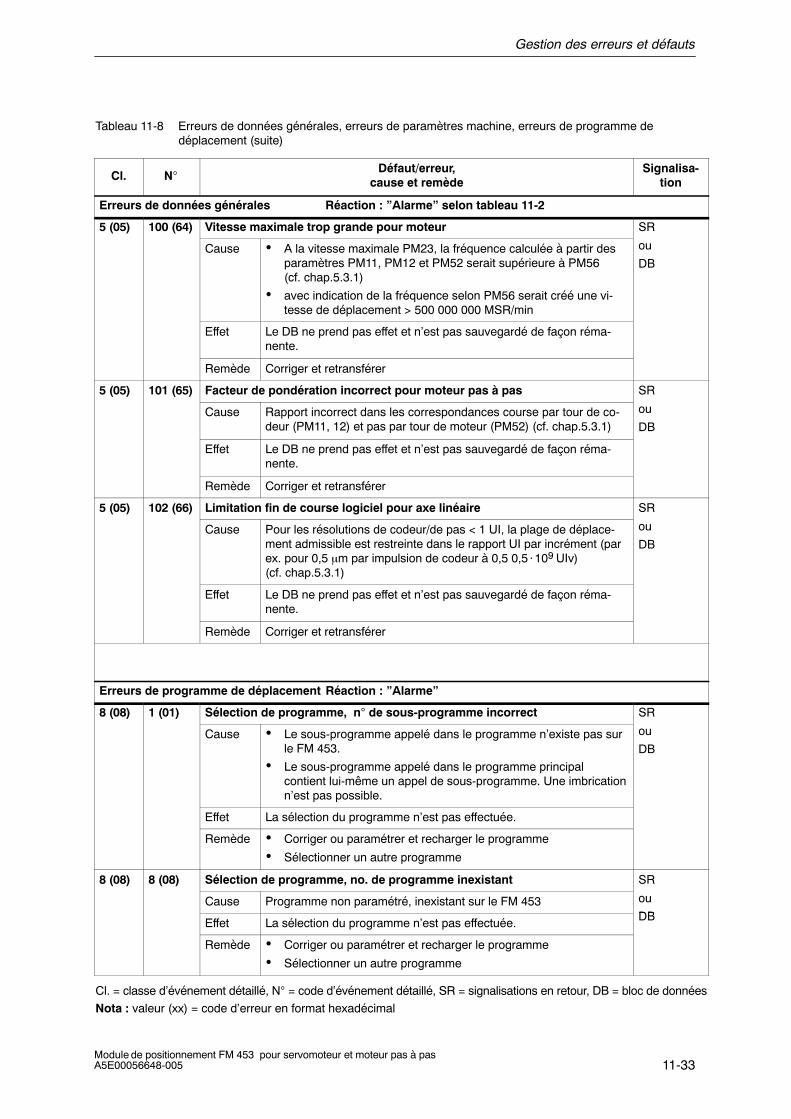
Gestion des erreurs et défauts
11-33Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de données générales Réaction : ”Alarme” selon tableau 11-2
5 (05) 100 (64) Vitesse maximale trop grande pour moteur SR
Cause • A la vitesse maximale PM23, la fréquence calculée à partir desparamètres PM11, PM12 et PM52 serait supérieure à PM56(cf. chap.5.3.1)
• avec indication de la fréquence selon PM56 serait créé une vi-tesse de déplacement > 500 000 000 MSR/min
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
Remède Corriger et retransférer
5 (05) 101 (65) Facteur de pondération incorrect pour moteur pas à pas SR
Cause Rapport incorrect dans les correspondances course par tour de co-deur (PM11, 12) et pas par tour de moteur (PM52) (cf. chap.5.3.1)
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
Remède Corriger et retransférer
5 (05) 102 (66) Limitation fin de course logiciel pour axe linéaire SR
Cause Pour les résolutions de codeur/de pas < 1 UI, la plage de déplace-ment admissible est restreinte dans le rapport UI par incrément (parex. pour 0,5 µm par impulsion de codeur à 0,5 0,5109 UIv) (cf. chap.5.3.1)
ou
DB
Effet Le DB ne prend pas effet et n’est pas sauvegardé de façon réma-nente.
Remède Corriger et retransférer
Erreurs de programme de déplacement Réaction : ”Alarme”
8 (08) 1 (01) Sélection de programme, n° de sous-programme incorrect SR
Cause • Le sous-programme appelé dans le programme n’existe pas surle FM 453.
• Le sous-programme appelé dans le programme principalcontient lui-même un appel de sous-programme. Une imbricationn’est pas possible.
ou
DB
Effet La sélection du programme n’est pas effectuée.
Remède • Corriger ou paramétrer et recharger le programme
• Sélectionner un autre programme
8 (08) 8 (08) Sélection de programme, no. de programme inexistant SR
Cause Programme non paramétré, inexistant sur le FM 453 ou
DBEffet La sélection du programme n’est pas effectuée. DB
Remède • Corriger ou paramétrer et recharger le programme
• Sélectionner un autre programme
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
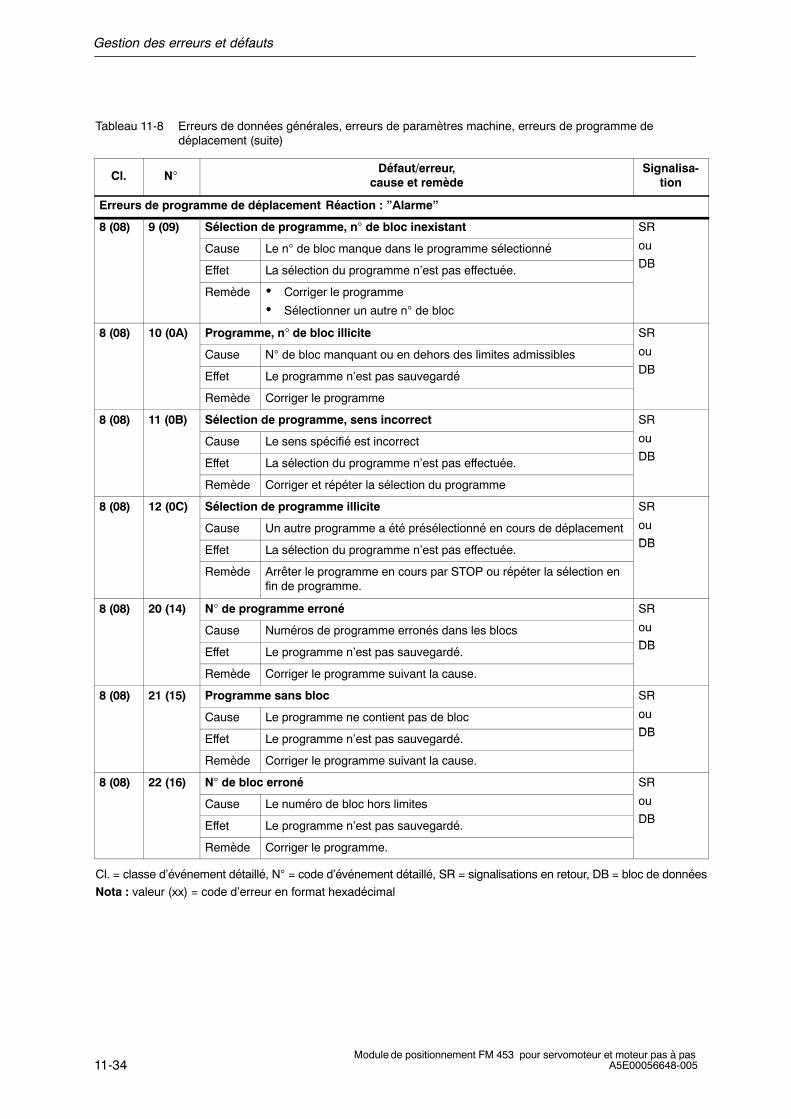
Gestion des erreurs et défauts
11-34Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de programme de déplacement Réaction : ”Alarme”
8 (08) 9 (09) Sélection de programme, n° de bloc inexistant SR
Cause Le n° de bloc manque dans le programme sélectionné ou
DBEffet La sélection du programme n’est pas effectuée. DB
Remède • Corriger le programme
• Sélectionner un autre n° de bloc
8 (08) 10 (0A) Programme, n° de bloc illicite SR
Cause N° de bloc manquant ou en dehors des limites admissibles ou
DBEffet Le programme n’est pas sauvegardé DB
Remède Corriger le programme
8 (08) 11 (0B) Sélection de programme, sens incorrect SR
Cause Le sens spécifié est incorrect ou
DBEffet La sélection du programme n’est pas effectuée. DB
Remède Corriger et répéter la sélection du programme
8 (08) 12 (0C) Sélection de programme illicite SR
Cause Un autre programme a été présélectionné en cours de déplacement ou
DBEffet La sélection du programme n’est pas effectuée. DB
Remède Arrêter le programme en cours par STOP ou répéter la sélection enfin de programme.
8 (08) 20 (14) N° de programme erroné SR
Cause Numéros de programme erronés dans les blocs ou
DBEffet Le programme n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
8 (08) 21 (15) Programme sans bloc SR
Cause Le programme ne contient pas de bloc ou
DBEffet Le programme n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
8 (08) 22 (16) N° de bloc erroné SR
Cause Le numéro de bloc hors limites ou
DBEffet Le programme n’est pas sauvegardé. DB
Remède Corriger le programme.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
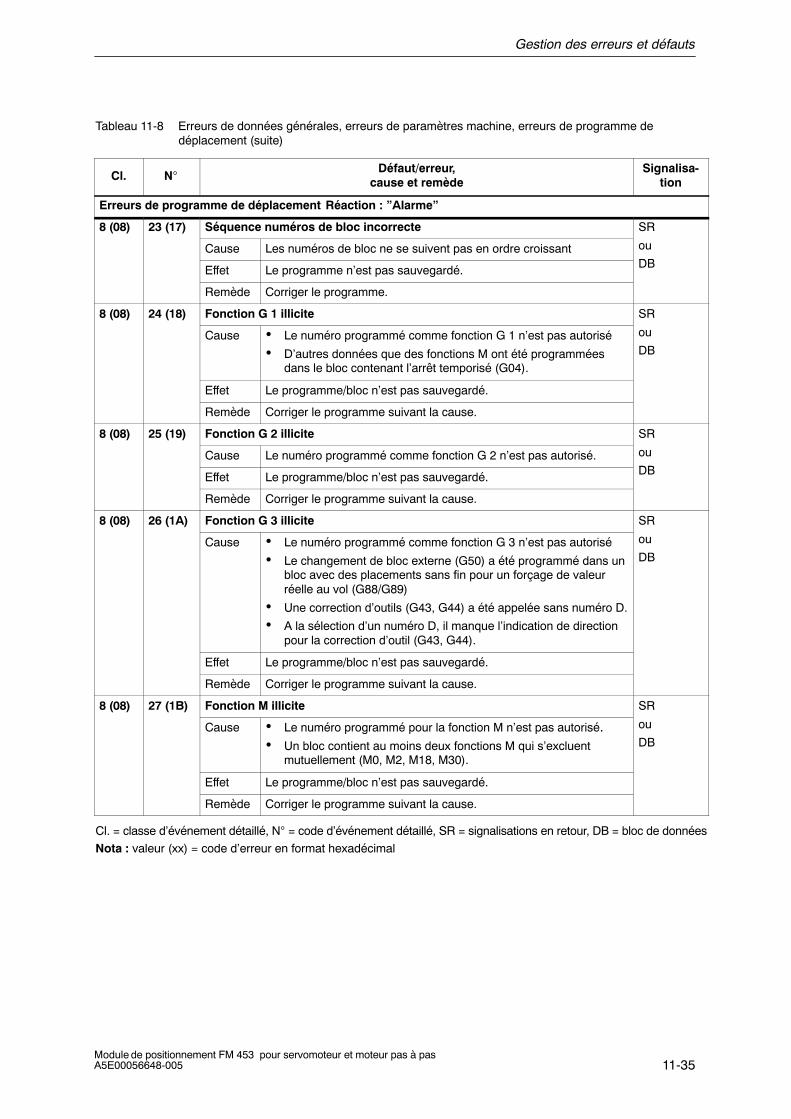
Gestion des erreurs et défauts
11-35Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de programme de déplacement Réaction : ”Alarme”
8 (08) 23 (17) Séquence numéros de bloc incorrecte SR
Cause Les numéros de bloc ne se suivent pas en ordre croissant ou
DBEffet Le programme n’est pas sauvegardé. DB
Remède Corriger le programme.
8 (08) 24 (18) Fonction G 1 illicite SR
Cause • Le numéro programmé comme fonction G 1 n’est pas autorisé
• D’autres données que des fonctions M ont été programméesdans le bloc contenant l’arrêt temporisé (G04).
ou
DB
Effet Le programme/bloc n’est pas sauvegardé.
Remède Corriger le programme suivant la cause.
8 (08) 25 (19) Fonction G 2 illicite SR
Cause Le numéro programmé comme fonction G 2 n’est pas autorisé. ou
DBEffet Le programme/bloc n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
8 (08) 26 (1A) Fonction G 3 illicite SR
Cause • Le numéro programmé comme fonction G 3 n’est pas autorisé
• Le changement de bloc externe (G50) a été programmé dans unbloc avec des placements sans fin pour un forçage de valeurréelle au vol (G88/G89)
• Une correction d’outils (G43, G44) a été appelée sans numéro D.
• A la sélection d’un numéro D, il manque l’indication de directionpour la correction d’outil (G43, G44).
ou
DB
Effet Le programme/bloc n’est pas sauvegardé.
Remède Corriger le programme suivant la cause.
8 (08) 27 (1B) Fonction M illicite SR
Cause • Le numéro programmé pour la fonction M n’est pas autorisé.• Un bloc contient au moins deux fonctions M qui s’excluent
mutuellement (M0, M2, M18, M30).
ou
DB
Effet Le programme/bloc n’est pas sauvegardé.
Remède Corriger le programme suivant la cause.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal
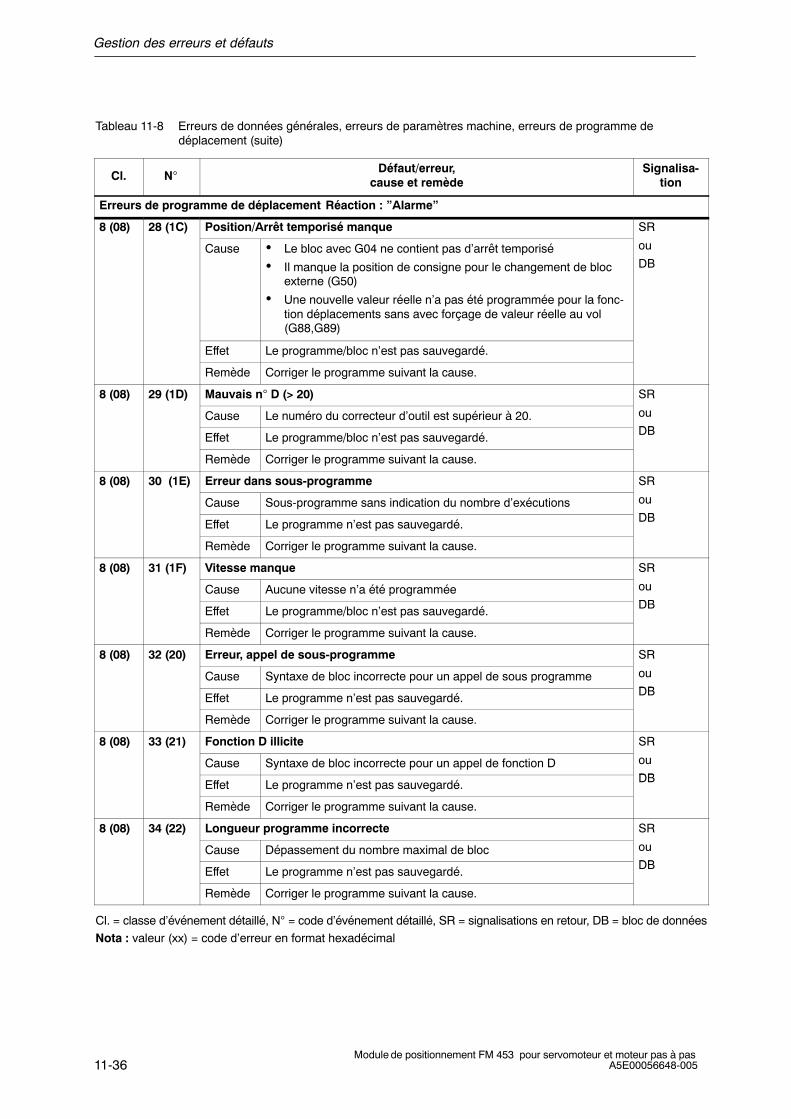
Gestion des erreurs et défauts
11-36Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau 11-8 Erreurs de données générales, erreurs de paramètres machine, erreurs de programme dedéplacement (suite)
Cl.Signalisa-
tionDéfaut/erreur,
cause et remèdeN°
Erreurs de programme de déplacement Réaction : ”Alarme”
8 (08) 28 (1C) Position/Arrêt temporisé manque SR
Cause • Le bloc avec G04 ne contient pas d’arrêt temporisé
• Il manque la position de consigne pour le changement de blocexterne (G50)
• Une nouvelle valeur réelle n’a pas été programmée pour la fonc-tion déplacements sans avec forçage de valeur réelle au vol(G88,G89)
ou
DB
Effet Le programme/bloc n’est pas sauvegardé.
Remède Corriger le programme suivant la cause.
8 (08) 29 (1D) Mauvais n° D (> 20) SR
Cause Le numéro du correcteur d’outil est supérieur à 20. ou
DBEffet Le programme/bloc n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
8 (08) 30 (1E) Erreur dans sous-programme SR
Cause Sous-programme sans indication du nombre d’exécutions ou
DBEffet Le programme n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
8 (08) 31 (1F) Vitesse manque SR
Cause Aucune vitesse n’a été programmée ou
DBEffet Le programme/bloc n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
8 (08) 32 (20) Erreur, appel de sous-programme SR
Cause Syntaxe de bloc incorrecte pour un appel de sous programme ou
DBEffet Le programme n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
8 (08) 33 (21) Fonction D illicite SR
Cause Syntaxe de bloc incorrecte pour un appel de fonction D ou
DBEffet Le programme n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
8 (08) 34 (22) Longueur programme incorrecte SR
Cause Dépassement du nombre maximal de bloc ou
DBEffet Le programme n’est pas sauvegardé. DB
Remède Corriger le programme suivant la cause.
Cl. = classe d’événement détaillé, N° = code d’événement détaillé, SR = signalisations en retour, DB = bloc de données
Nota : valeur (xx) = code d’erreur en format hexadécimal

A-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Caractéristiques techniques
Généralités
Ce chapitre décrit les caractéristiques techniques du module de positionnement FM 453.
• Caractéristiques techniques générales
• Dimensions et poids
• Mémoire de chargement
• Entrées de codeurs
• Interface vers l’étage de commande
• Entrées TOR
• Sorties TOR
Caractéristiques techniques générales
Les caractéristiques techniques générales concernent :
• compatibilité électromagnétique
• conditions de transport et de stockage
• conditions d’environnement mécaniques et climatiques
• indications concernant les essais d’isolement, la classe et le degré de protection
Ces caractéristiques précisent les normes et valeurs d’essais auxquelles satisfait le S7-400et selon quels critères d’essai le S7-400 a été testé.
Les caractéristiques techniques générales se trouvent dans le manuel ”Automate program-mable S7-400 − Installation et configuration”.
Homologations UL/CSA
Le S7-400 bénéficie des homologations suivantes :
UL-Recognition-MarkUnderwriters Laboratories (UL) selon Standard UL 508, File E 85972
CSA-Certification-MarkCanadian Standard Association (CSA) selonStandard C 22.2 No. 142
A
Caractéristiques techniques
A-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Homologation FM
Le S7-400 bénéficie de l’homologation suivante :Homologation FM selon Factory Mutual Approval Standard Class Number 3611, Class I,Division 2, Group A, B, C, D.
!Attention
Risques pour les personnes et le matériel.
Dans des zones à atmosphère explosible, le fait de débrancher des connecteurs d’unS7-400 en cours de fonctionnement peut entraîner des risques pour les personnes et pourle matériel.
Dans des zones à atmosphère explosible, il faut systématiquement couper l’alimentationélectrique du S7-400 avant de débrancher les connecteurs.
!Attention
WARNING - DO NOT DISCONNECT WHILE CIRCUIT IS LIVEUNLESS LOCATION IS KNOWN TO BE NONHAZARDOUS
Marquage CE
Nos produits satisfont aux exigences de la directive communautaire ”Compatibilité électro-magnétique” 89/336/CEE et des normes européennes harmonisées (EN) qui y sont citées.
La déclaration de conformité CE telle que spécifiée dans l’article 10 de la directive commu-nautaire se trouve sur Internet à l’adresse:
http://support.automation.siemens.com/WW/view/de/15257461
Domaine d’utilisation
Les produits SIMATIC sont conçus pour une utilisation en milieu industriel.
Domaine d’utilisation Exigences en matière de
émissions de perturbations immunité aux perturbations
Industrie EN 50081-2 : 1993 EN 61000-6-2 : 1999
Respect des directives de montage
Les produits SIMATIC satisfont aux exigences imposées si leur installation et leur exploita-tion sont conformes aux directives de montage spécifiées dans les manuels.

Caractéristiques techniques
A-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Valeurs de raccordement
Consommation sur bus de fond de panier 5 V max. 1,6 A (courant nominal)
Puissance dissipée 8 W
Tension d’alimentation 1L+...4L+
• plage dynamique
• plage statique
24 V cc
18,5...30,2 V (ondul. comprise)
20,4...28,8 V
Consommation 1L sous tension nominale(génération de la tension d’alim. des capteurs àpartir de 1L+)
max. 1,0 A pour capteur 24 Vmax. 0,4 A pour capteur 5 V
Consommation 2L+...4L+ sous tension nominaleentrées TOR canal 1 à 3
max. 2 A par canal
Dimensions et poids
Dimensions L H P [mm] 50 290 210
Poids [g] env. 1620
Mémoire des données de paramétrage
RAM de 64 Ko au total pour les données de paramétrage des 3 canaux
Temps de cycle FM
3 ms
Interface vers entraînement
Servomoteur
Signal de consigne
Plage de tension nominale −10...10 V
Courant de sortie −3...3 mA
Contact de relais Déblocage régulateur
Tension de commutation max. 50 V
Courant de commutation max. 1 A
Puissance de commutation max. 30 VA
Longueur de câble max. 35 m
Résolution du convertisseur N/A : cf. chap. 4.2.

Caractéristiques techniques
A-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Moteur pas à pas
Signaux de sortie 5 V selon norme RS422
Tension de sortie différ VOD min. 2 V (RL = 100 Ω)
Tension de sortie ”1” VOH typ. 3,7 V (IO = −30 mA)
Tension de sortie ”0” VOL typ. 1,1 V (IO = 30 mA)
Résistance de charge RL min. 55 Ω
Courant de sortie IO max. 60 mA
Fréquence d’impulsions fP max. 1 MHz
Signal prêt READY1 (entraînement prêt)
Tension d’entrée ”1” en l’air ou min. 3,5 V
Tension d’entrée ”0” max. 1 V (sous charge 2 A)
Longueur de câble35 m pour transmission symétrique
10 m pour transmission asymétrique
Entrées des capteurs
Mesure de déplacement • incrémentale
• absolue
Tensions de signal entrées : 5 V selon RS422
Alimentation des capteurs • 5 V/300 mA
• 24 V/300 mA
Fréquence d’entrée et longueur decâble pour codeurs incrémentaux
• max. 1 MHz pour câble blindé de 10 m
• max. 500 kHz pour câble blindé de 35 m
Vitesse de transmission et longueurde câble pour codeurs absolus (SSI)
• max. 1,25 Mbits/s pour câble blindé de 10 m
• max. 156 kbits/s pour câble blindé de 250 m
Longueur de câble pour codeursincrémentaux
• ⋅alimentation des capteurs 5 V
• alimentation des capteurs 24 V
• max. 25 m pour max. 300 mA(tolérance 4,75...5,25 V)
• max. 35 m pour max. 210 mA(tolérance 4,75...5,25 V)
• max. 100 m pour max. 300 mA(tolérance 20,4...28,8 V)
• max. 300 m pour max. 300 mA(tolérance 11...30 V)
Longueur de câble pour codeursabsolus
voir vitesse de transmission
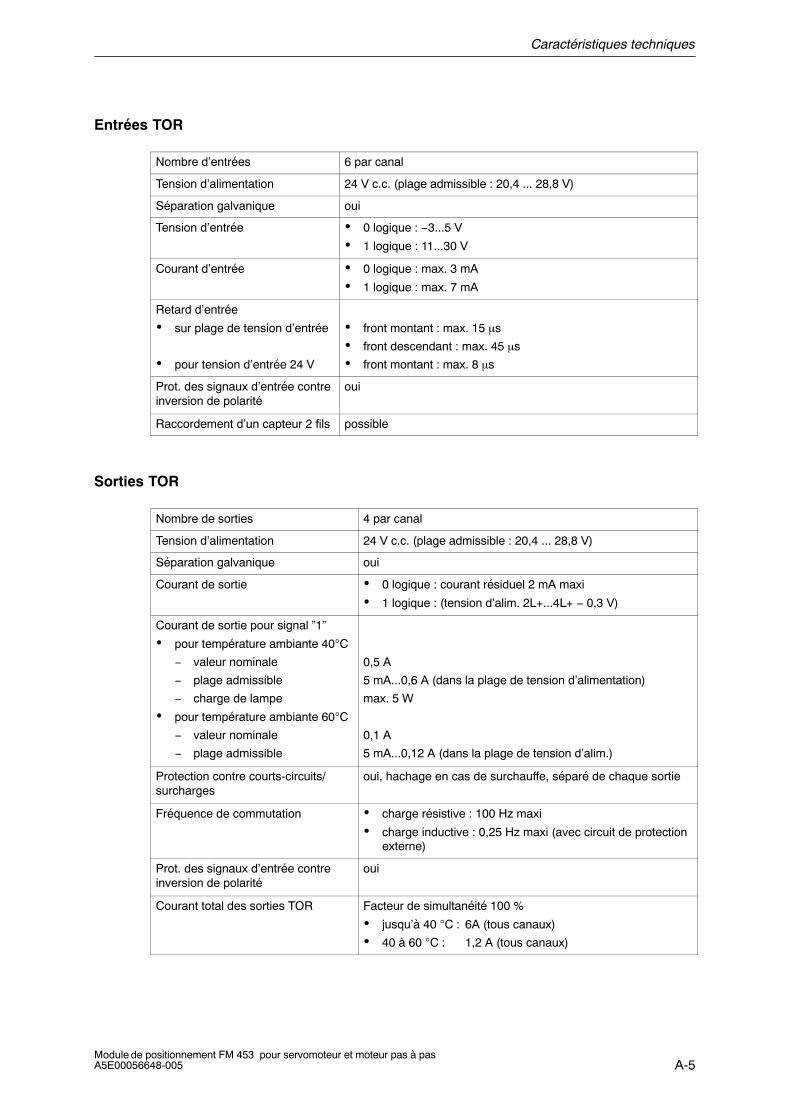
Caractéristiques techniques
A-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Entrées TOR
Nombre d’entrées 6 par canal
Tension d’alimentation 24 V c.c. (plage admissible : 20,4 ... 28,8 V)
Séparation galvanique oui
Tension d’entrée • 0 logique : −3...5 V
• 1 logique : 11...30 V
Courant d’entrée • 0 logique : max. 3 mA
• 1 logique : max. 7 mA
Retard d’entrée
• sur plage de tension d’entrée
• pour tension d’entrée 24 V
• front montant : max. 15 µs
• front descendant : max. 45 µs
• front montant : max. 8 µs
Prot. des signaux d’entrée contreinversion de polarité
oui
Raccordement d’un capteur 2 fils possible
Sorties TOR
Nombre de sorties 4 par canal
Tension d’alimentation 24 V c.c. (plage admissible : 20,4 ... 28,8 V)
Séparation galvanique oui
Courant de sortie • 0 logique : courant résiduel 2 mA maxi
• 1 logique : (tension d’alim. 2L+...4L+ − 0,3 V)
Courant de sortie pour signal ”1”
• pour température ambiante 40°C
− valeur nominale
− plage admissible
− charge de lampe
• pour température ambiante 60°C
− valeur nominale
− plage admissible
0,5 A
5 mA...0,6 A (dans la plage de tension d’alimentation)
max. 5 W
0,1 A
5 mA...0,12 A (dans la plage de tension d’alim.)
Protection contre courts-circuits/surcharges
oui, hachage en cas de surchauffe, séparé de chaque sortie
Fréquence de commutation • charge résistive : 100 Hz maxi
• charge inductive : 0,25 Hz maxi (avec circuit de protectionexterne)
Prot. des signaux d’entrée contreinversion de polarité
oui
Courant total des sorties TOR Facteur de simultanéité 100 %
• jusqu’à 40 °C : 6A (tous canaux)
• 40 à 60 °C : 1,2 A (tous canaux)

Caractéristiques techniques
A-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
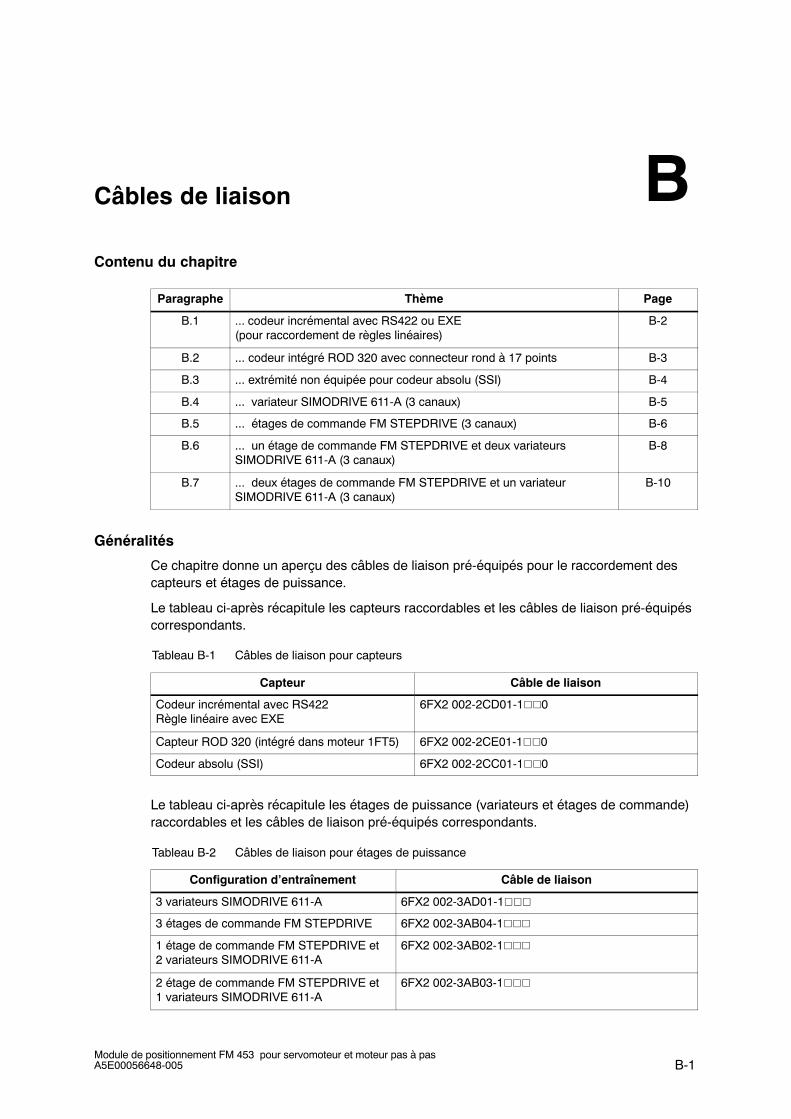
B-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Câbles de liaison
Contenu du chapitre
Paragraphe Thème Page
B.1 ... codeur incrémental avec RS422 ou EXE (pour raccordement de règles linéaires)
B-2
B.2 ... codeur intégré ROD 320 avec connecteur rond à 17 points B-3
B.3 ... extrémité non équipée pour codeur absolu (SSI) B-4
B.4 ... variateur SIMODRIVE 611-A (3 canaux) B-5
B.5 ... étages de commande FM STEPDRIVE (3 canaux) B-6
B.6 ... un étage de commande FM STEPDRIVE et deux variateurs SIMODRIVE 611-A (3 canaux)
B-8
B.7 ... deux étages de commande FM STEPDRIVE et un variateur SIMODRIVE 611-A (3 canaux)
B-10
Généralités
Ce chapitre donne un aperçu des câbles de liaison pré-équipés pour le raccordement descapteurs et étages de puissance.
Le tableau ci-après récapitule les capteurs raccordables et les câbles de liaison pré-équipéscorrespondants.
Tableau B-1 Câbles de liaison pour capteurs
Capteur Câble de liaison
Codeur incrémental avec RS422Règle linéaire avec EXE
6FX2 002-2CD01-10
Capteur ROD 320 (intégré dans moteur 1FT5) 6FX2 002-2CE01-10
Codeur absolu (SSI) 6FX2 002-2CC01-10
Le tableau ci-après récapitule les étages de puissance (variateurs et étages de commande)raccordables et les câbles de liaison pré-équipés correspondants.
Tableau B-2 Câbles de liaison pour étages de puissance
Configuration d’entraînement Câble de liaison
3 variateurs SIMODRIVE 611-A 6FX2 002-3AD01-1
3 étages de commande FM STEPDRIVE 6FX2 002-3AB04-1
1 étage de commande FM STEPDRIVE et 2 variateurs SIMODRIVE 611-A
6FX2 002-3AB02-1
2 étage de commande FM STEPDRIVE et 1 variateurs SIMODRIVE 611-A
6FX2 002-3AB03-1
B
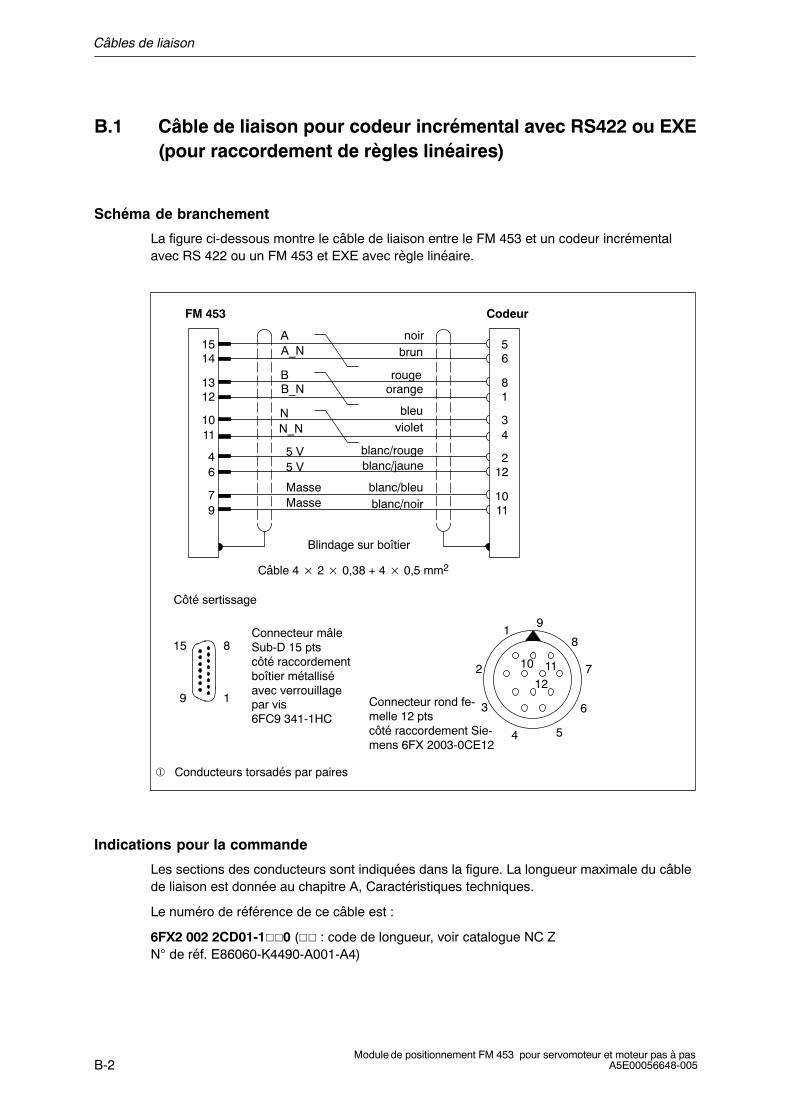
Câbles de liaison
B-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
B.1 Câble de liaison pour codeur incrémental avec RS422 ou EXE(pour raccordement de règles linéaires)
Schéma de branchement
La figure ci-dessous montre le câble de liaison entre le FM 453 et un codeur incrémentalavec RS 422 ou un FM 453 et EXE avec règle linéaire.
1514
1312
1011
6
7
56
81
34
12
11
2
10
A
B_NB
N_NN
rouge
noirbrun
orange
bleuviolet
blanc/jaune
blanc/noir
FM 453 Codeur
5 V
Blindage sur boîtier
Câble 4 2 0,38 + 4 0,5 mm2
Connecteur mâleSub-D 15 ptscôté raccordementboîtier métalliséavec verrouillagepar vis6FC9 341-1HC
Connecteur rond fe-melle 12 ptscôté raccordement Sie-mens 6FX 2003-0CE12
1
2
3
4 5
6
7
8
9
10
129
15
1
8
11
Côté sertissage
blanc/rouge
blanc/bleu
4
9
Masse
5 V
Masse
A_N
Conducteurs torsadés par paires
Indications pour la commande
Les sections des conducteurs sont indiquées dans la figure. La longueur maximale du câblede liaison est donnée au chapitre A, Caractéristiques techniques.
Le numéro de référence de ce câble est :
6FX2 002 2CD01-10 ( : code de longueur, voir catalogue NC ZN° de réf. E86060-K4490-A001-A4)
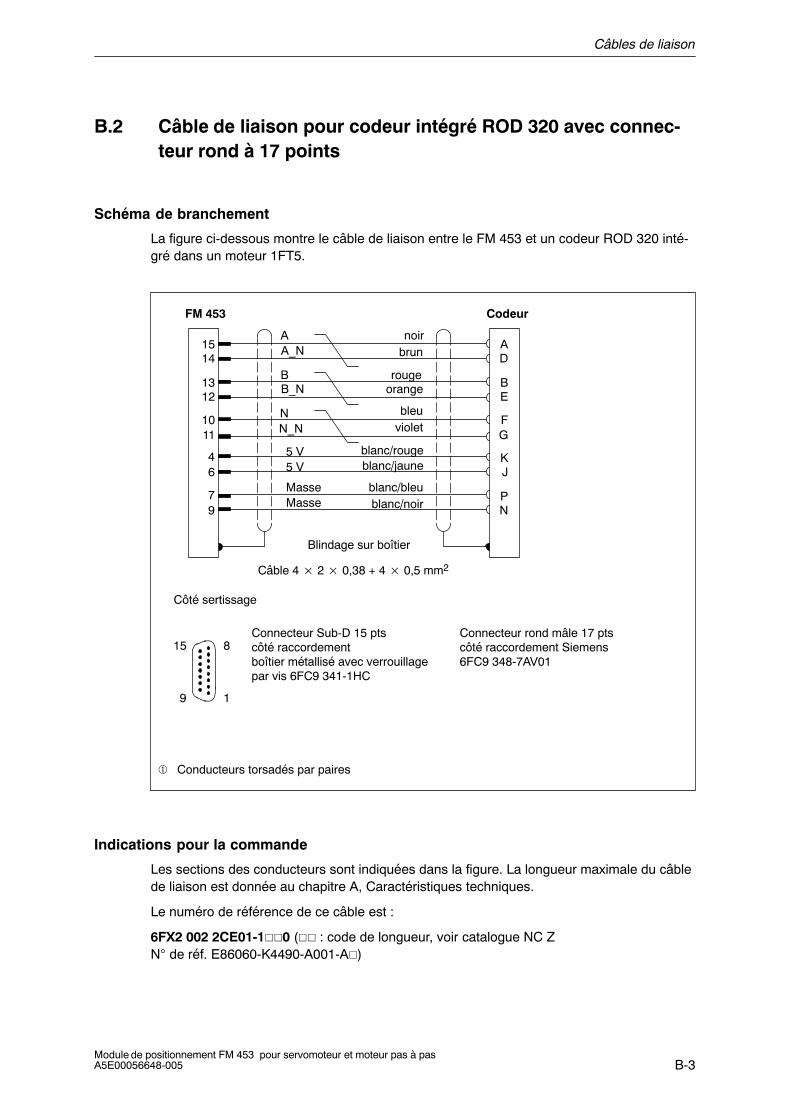
Câbles de liaison
B-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
B.2 Câble de liaison pour codeur intégré ROD 320 avec connec-teur rond à 17 points
Schéma de branchement
La figure ci-dessous montre le câble de liaison entre le FM 453 et un codeur ROD 320 inté-gré dans un moteur 1FT5.
1514
1312
1011
6
7
AD
BE
FG
J
N
K
P
A
B_NB
N_NN
rouge
noirbrun
orange
bleuviolet
blanc/jaune
blanc/noir
FM 453 Codeur
5 V
Blindage sur boîtier
Câble 4 2 0,38 + 4 0,5 mm2
Connecteur Sub-D 15 ptscôté raccordementboîtier métallisé avec verrouillagepar vis 6FC9 341-1HC
Connecteur rond mâle 17 ptscôté raccordement Siemens6FC9 348-7AV01
9
15
1
8
Côté sertissage
blanc/rouge
blanc/bleu
4
9
Masse
5 V
Masse
A_N
Conducteurs torsadés par paires
Indications pour la commande
Les sections des conducteurs sont indiquées dans la figure. La longueur maximale du câblede liaison est donnée au chapitre A, Caractéristiques techniques.
Le numéro de référence de ce câble est :
6FX2 002 2CE01-10 ( : code de longueur, voir catalogue NC ZN° de réf. E86060-K4490-A001-A)

Câbles de liaison
B-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
B.3 Câble de liaison à extrémité non équipée pour codeur absolu(SSI)
Schéma de branchement
La figure ci-dessous montre le câble de liaison entre le FM 453 et un codeur absolu.
1514
23
75
CLS
violetbleu
noirbrun
blanc/rouge
FM 453 Codeur
+24 V
Blindage sur boîtier
Câble 4 2 0,38 + 4 0,5 mm2
Connecteur Sub-D 15 ptscôté raccordementboîtier métallisé avec verrouillagepar vis 6FC9 341-1HC
9
15
1
8
Masse
DATA
Gaine du câble retiréesur 100 mm
DATADATA_N
CLSCLS_N
Masse24 V
DATA_N
CLS_N
Côté sertissage
blanc/jaune
Conducteurs torsadés par paires
Indications pour la commande
Les sections des conducteurs sont indiquées dans la figure. La longueur maximale du câblede liaison est donnée au chapitre A, Caractéristiques techniques.
Le numéro de référence de ce câble est :
6FX2 002 2CC01-10 ( : code de longueur, voir catalogue NC ZN° de réf. E86060-K4490-A001-A)
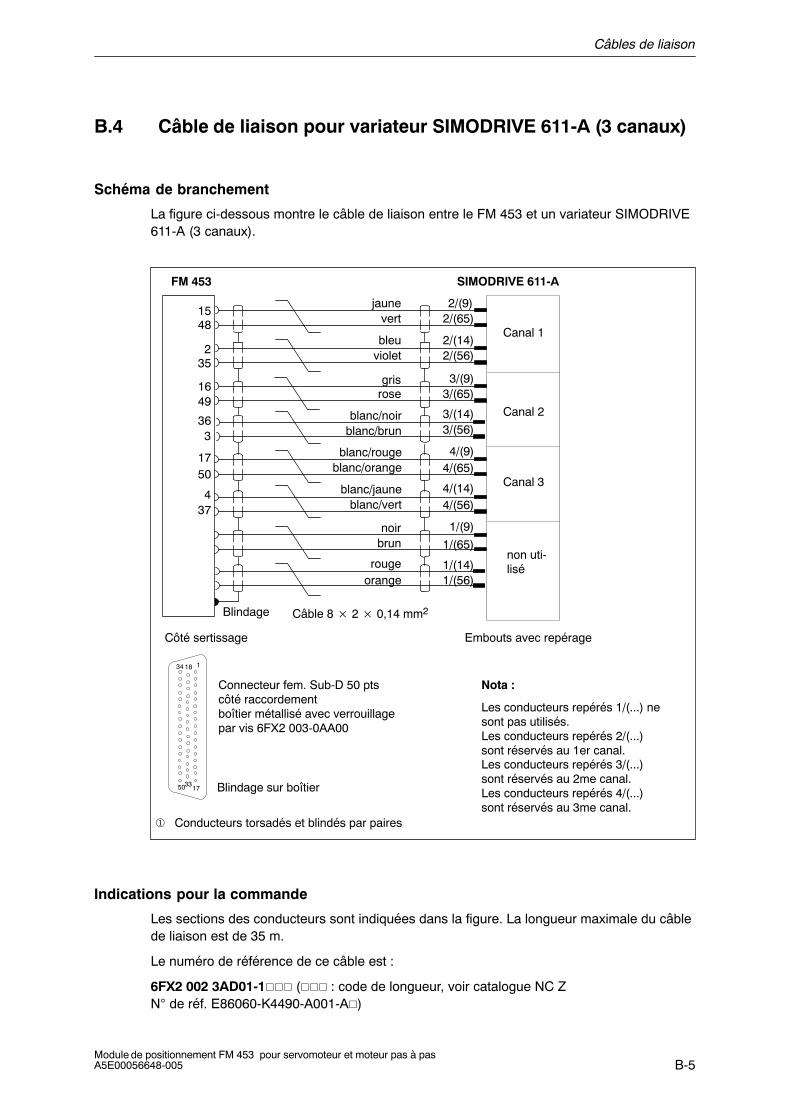
Câbles de liaison
B-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
B.4 Câble de liaison pour variateur SIMODRIVE 611-A (3 canaux)
Schéma de branchement
La figure ci-dessous montre le câble de liaison entre le FM 453 et un variateur SIMODRIVE611-A (3 canaux).
1548
235
1649
jaunevert
bleuviolet
grisrose
blanc/brun
FM 453 SIMODRIVE 611-A
Blindage sur boîtier
Câble 8 2 0,14 mm2
Connecteur fem. Sub-D 50 ptscôté raccordementboîtier métallisé avec verrouillagepar vis 6FX2 003-0AA00
blanc/noir
Embouts avec repérage
1
17
1834
3350
363
1750
437
Côté sertissage
Blindage
Canal 1
Canal 2
Canal 3
non uti-lisé
blanc/rougeblanc/orange
blanc/jauneblanc/vert
2/(9)2/(65)
2/(14)2/(56)
3/(9)3/(65)
3/(14)3/(56)
4/(9)4/(65)
4/(56)4/(14)
1/(9)
1/(65)
1/(14)1/(56)
noirbrun
rougeorange
Nota :
Les conducteurs repérés 1/(...) nesont pas utilisés.Les conducteurs repérés 2/(...)sont réservés au 1er canal.Les conducteurs repérés 3/(...)sont réservés au 2me canal.Les conducteurs repérés 4/(...)sont réservés au 3me canal.
Conducteurs torsadés et blindés par paires
Indications pour la commande
Les sections des conducteurs sont indiquées dans la figure. La longueur maximale du câblede liaison est de 35 m.
Le numéro de référence de ce câble est :
6FX2 002 3AD01-1 ( : code de longueur, voir catalogue NC ZN° de réf. E86060-K4490-A001-A)

Câbles de liaison
B-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
B.5 Câble de liaison pour étages de commande FM STEPDRIVE(3 canaux)
Schéma de branchement
La figure ci-dessous montre le câble de liaison entre le FM 453 et 3 étages de commandeFM STEPDRIVE (3 canaux).
538
639
1819
FM 453 FM STEPDRIVES
Blindage sur boîtier
Câble 12 2 0,14 mm2
Connecteur fem.Sub-D 50 ptscôté raccordementboîtier métallisé avecverrouillage par vis6FX2 003-0AA00
1
17
1834
3350
1112
407
418
Côté sertissage
Blindage
2021
2829
942
10
26
43
27
4445
158
91
Connecteur fem.Sub-D 15 ptscôté raccordementboîtier métallisé avecverrouillage par vis6FC9 348-7HX
Côté sertissage
19
210
311
412
19
210
311
412
19
210
311
412
Can
al 1
Can
al 2
Can
al 3
noirbrun
rougeorange
jaunevert
blanc/vertbrun/noir
bleuviolet
vertblanc
blanc/noirblanc/brun
brun/rougebrun/orange
blanc/rougeblanc/orange
blanc/jauneblanc/vert
blanc/brunblanc/violet
brun/vertbrun/vert
Conducteurs torsadés et blindés par paires

Câbles de liaison
B-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Nota
Dans cette configuration avec entraînements à moteur pas à pas pour les canaux 1...3, lesignal externe READY2 doit être utilisé pour chaque canal (cf. 4-7).
Indications pour la commande
Les sections des conducteurs sont indiquées dans la figure. La longueur maximale du câblede liaison est de
• 35 m en transmission symétrique
• 10 m en transmission asymétrique
Le numéro de référence de ce câble est :
6FX2 002-3AB04-1 ( : code de longueur, voir catalogue NC ZN° de réf. E86060-K4490-A001-A)1)
1) Inscription au catalogue en instance
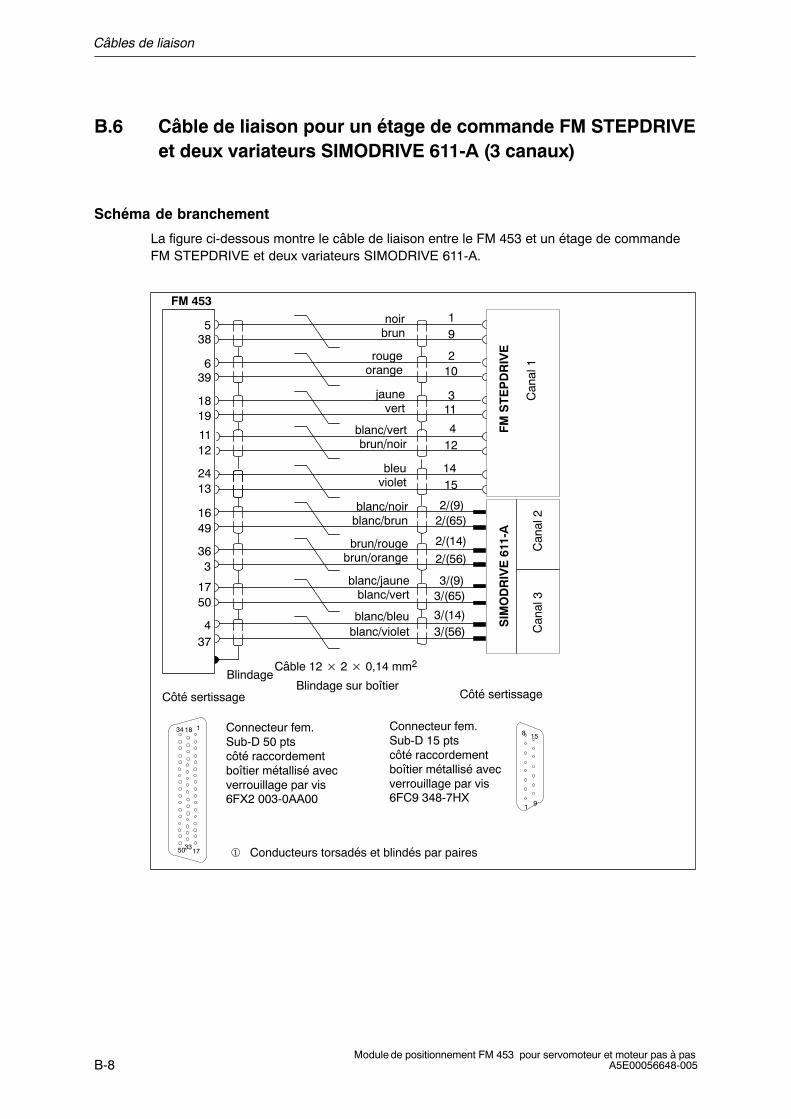
Câbles de liaison
B-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
B.6 Câble de liaison pour un étage de commande FM STEPDRIVEet deux variateurs SIMODRIVE 611-A (3 canaux)
Schéma de branchement
La figure ci-dessous montre le câble de liaison entre le FM 453 et un étage de commandeFM STEPDRIVE et deux variateurs SIMODRIVE 611-A.
538
639
1819
FM 453
Blindage sur boîtier
Câble 12 2 0,14 mm2
Connecteur fem.Sub-D 50 ptscôté raccordementboîtier métallisé avecverrouillage par vis6FX2 003-0AA00
1
17
1834
3350
1112
Côté sertissage
Blindage
1649
363
1750
437
158
91
Connecteur fem.Sub-D 15 ptscôté raccordementboîtier métallisé avecverrouillage par vis6FC9 348-7HX
Côté sertissage
19
210
311
412
2/(9)2/(65)
2/(14)
2/(56)
3/(9)3/(65)
3/(14)3/(56)
Can
al 1
Can
al 2
Can
al 3
SIM
OD
RIV
E 6
11-A
FM
ST
EP
DR
IVE
brun/rougebrun/orange
blanc/jauneblanc/vert
blanc/bleublanc/violet
2413
1415
noirbrun
rougeorange
jaunevert
blanc/vertbrun/noir
bleuviolet
blanc/noirblanc/brun
Conducteurs torsadés et blindés par paires
Câbles de liaison
B-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Indications pour la commande
Les sections des conducteurs sont indiquées dans la figure. La longueur maximale du câblede liaison est de 35 m.
Le numéro de référence de ce câble est :
6FX2 002-3AB02-1 ( : code de longueur, voir catalogue NC ZN° de réf. E86060-K4490-A001-A)1)
1) Inscription au catalogue en instance
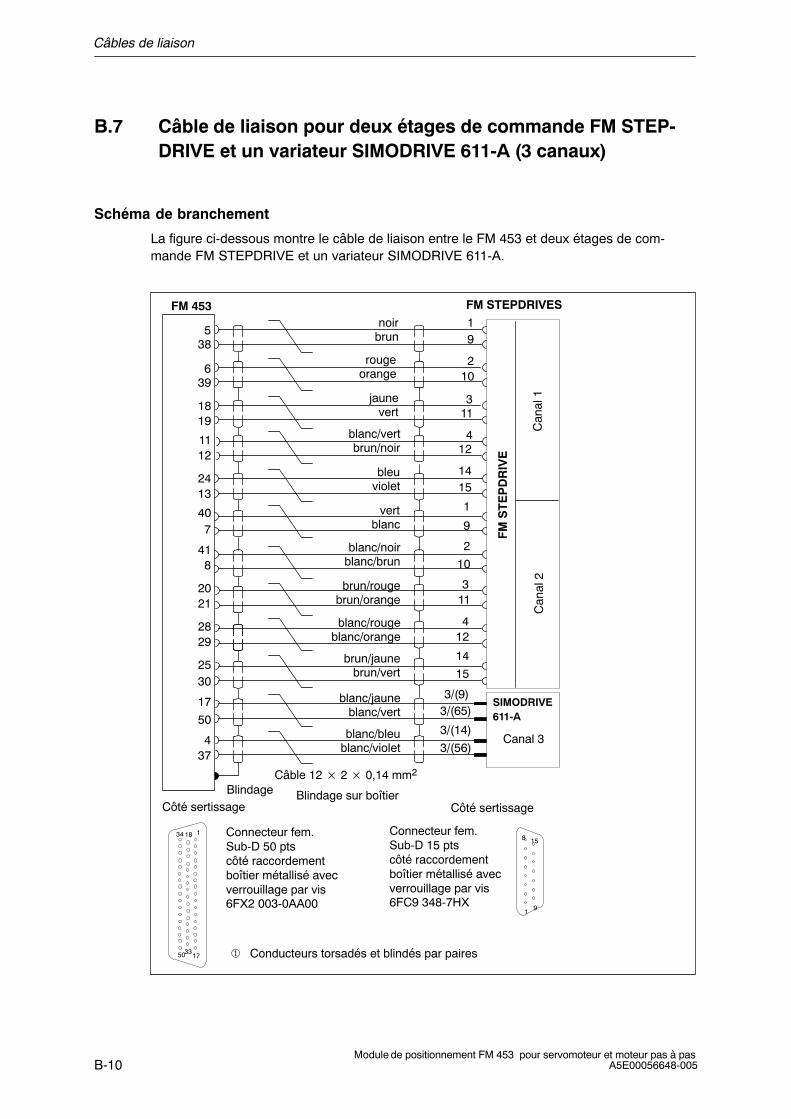
Câbles de liaison
B-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
B.7 Câble de liaison pour deux étages de commande FM STEP-DRIVE et un variateur SIMODRIVE 611-A (3 canaux)
Schéma de branchement
La figure ci-dessous montre le câble de liaison entre le FM 453 et deux étages de com-mande FM STEPDRIVE et un variateur SIMODRIVE 611-A.
538
639
1819
FM 453 FM STEPDRIVES
Blindage sur boîtier
Câble 12 2 0,14 mm2
Connecteur fem.Sub-D 50 ptscôté raccordementboîtier métallisé avecverrouillage par vis6FX2 003-0AA00
1
17
1834
3350
1112
407
418
Côté sertissageBlindage
2021
2829
2413
25
17
30
50
437
158
91
Connecteur fem.Sub-D 15 ptscôté raccordementboîtier métallisé avecverrouillage par vis6FC9 348-7HX
Côté sertissage
19
210
311
412
1
9
2
10
311
412
14
15
Can
al 1
Can
al 2
1415
3/(9)3/(65)
3/(14)
3/(56)
FM
ST
EP
DR
IVE
SIMODRIVE611-A
Canal 3
noirbrun
rougeorange
jaunevert
blanc/vertbrun/noir
bleuviolet
vertblanc
blanc/noirblanc/brun
brun/rougebrun/orange
blanc/rougeblanc/orange
blanc/jauneblanc/vert
blanc/bleublanc/violet
brun/jaunebrun/vert
Conducteurs torsadés et blindés par paires
Câbles de liaison
B-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Indications pour la commande
Les sections des conducteurs sont indiquées dans la figure. La longueur maximale du câblede liaison est de 35 m.
Le numéro de référence de ce câble est :
6FX2 002-3AB03-1 ( : code de longueur, voir catalogue NC ZN° de réf. E86060-K4490-A001-A)1)
1) Inscription au catalogue en instance

Câbles de liaison
B-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
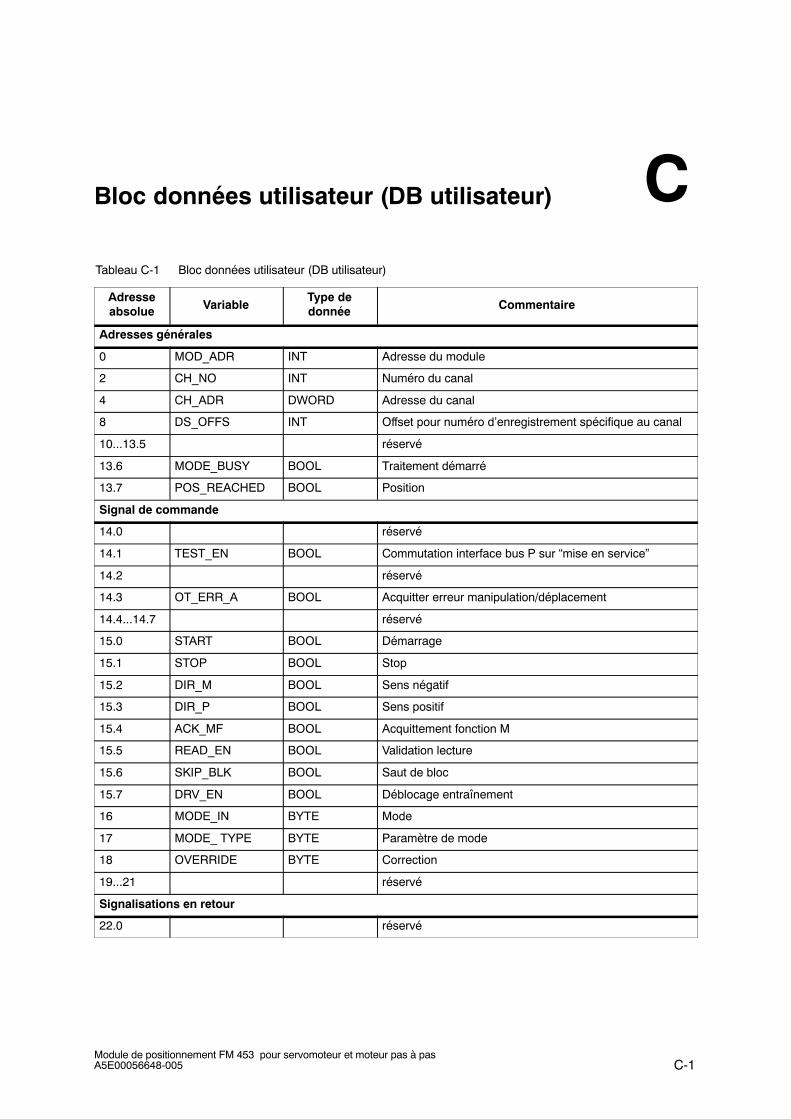
C-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Bloc données utilisateur (DB utilisateur)
Tableau C-1 Bloc données utilisateur (DB utilisateur)
Adresseabsolue Variable
Type dedonnée Commentaire
Adresses générales
0 MOD_ADR INT Adresse du module
2 CH_NO INT Numéro du canal
4 CH_ADR DWORD Adresse du canal
8 DS_OFFS INT Offset pour numéro d’enregistrement spécifique au canal
10...13.5 réservé
13.6 MODE_BUSY BOOL Traitement démarré
13.7 POS_REACHED BOOL Position
Signal de commande
14.0 réservé
14.1 TEST_EN BOOL Commutation interface bus P sur “mise en service”
14.2 réservé
14.3 OT_ERR_A BOOL Acquitter erreur manipulation/déplacement
14.4...14.7 réservé
15.0 START BOOL Démarrage
15.1 STOP BOOL Stop
15.2 DIR_M BOOL Sens négatif
15.3 DIR_P BOOL Sens positif
15.4 ACK_MF BOOL Acquittement fonction M
15.5 READ_EN BOOL Validation lecture
15.6 SKIP_BLK BOOL Saut de bloc
15.7 DRV_EN BOOL Déblocage entraînement
16 MODE_IN BYTE Mode
17 MODE_ TYPE BYTE Paramètre de mode
18 OVERRIDE BYTE Correction
19...21 réservé
Signalisations en retour
22.0 réservé
C
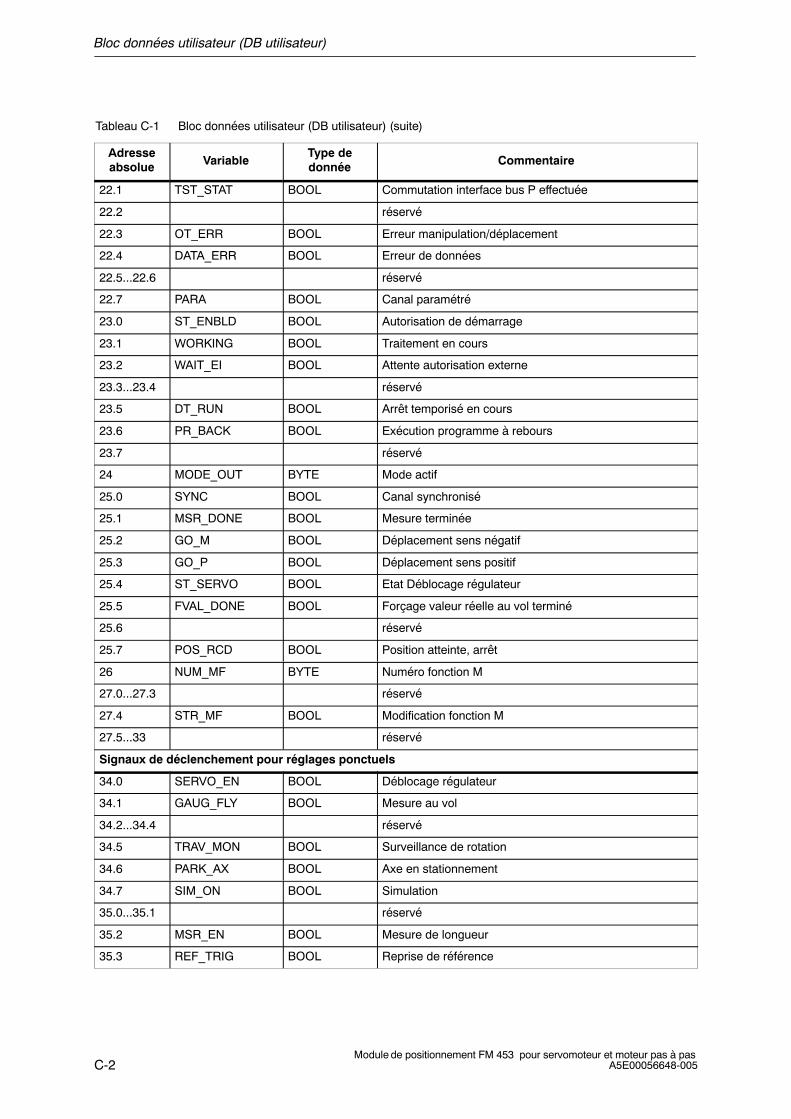
Bloc données utilisateur (DB utilisateur)
C-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
22.1 TST_STAT BOOL Commutation interface bus P effectuée
22.2 réservé
22.3 OT_ERR BOOL Erreur manipulation/déplacement
22.4 DATA_ERR BOOL Erreur de données
22.5...22.6 réservé
22.7 PARA BOOL Canal paramétré
23.0 ST_ENBLD BOOL Autorisation de démarrage
23.1 WORKING BOOL Traitement en cours
23.2 WAIT_EI BOOL Attente autorisation externe
23.3...23.4 réservé
23.5 DT_RUN BOOL Arrêt temporisé en cours
23.6 PR_BACK BOOL Exécution programme à rebours
23.7 réservé
24 MODE_OUT BYTE Mode actif
25.0 SYNC BOOL Canal synchronisé
25.1 MSR_DONE BOOL Mesure terminée
25.2 GO_M BOOL Déplacement sens négatif
25.3 GO_P BOOL Déplacement sens positif
25.4 ST_SERVO BOOL Etat Déblocage régulateur
25.5 FVAL_DONE BOOL Forçage valeur réelle au vol terminé
25.6 réservé
25.7 POS_RCD BOOL Position atteinte, arrêt
26 NUM_MF BYTE Numéro fonction M
27.0...27.3 réservé
27.4 STR_MF BOOL Modification fonction M
27.5...33 réservé
Signaux de déclenchement pour réglages ponctuels
34.0 SERVO_EN BOOL Déblocage régulateur
34.1 GAUG_FLY BOOL Mesure au vol
34.2...34.4 réservé
34.5 TRAV_MON BOOL Surveillance de rotation
34.6 PARK_AX BOOL Axe en stationnement
34.7 SIM_ON BOOL Simulation
35.0...35.1 réservé
35.2 MSR_EN BOOL Mesure de longueur
35.3 REF_TRIG BOOL Reprise de référence
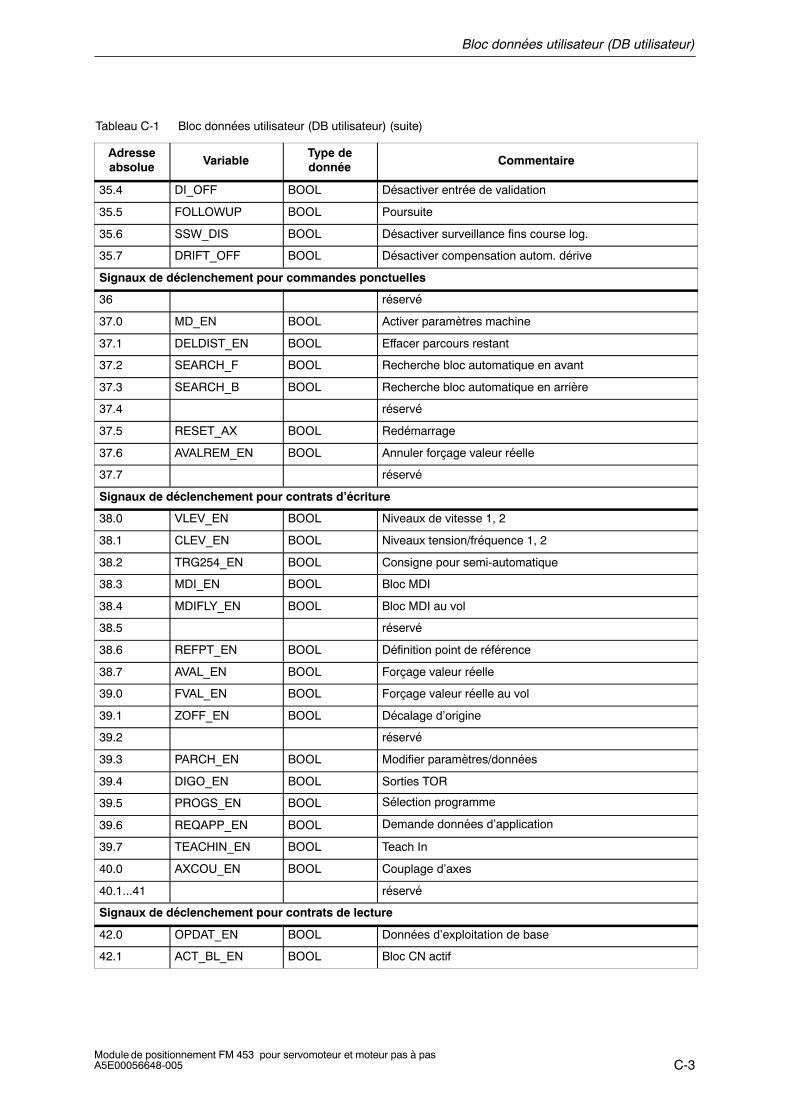
Bloc données utilisateur (DB utilisateur)
C-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
35.4 DI_OFF BOOL Désactiver entrée de validation
35.5 FOLLOWUP BOOL Poursuite
35.6 SSW_DIS BOOL Désactiver surveillance fins course log.
35.7 DRIFT_OFF BOOL Désactiver compensation autom. dérive
Signaux de déclenchement pour commandes ponctuelles
36 réservé
37.0 MD_EN BOOL Activer paramètres machine
37.1 DELDIST_EN BOOL Effacer parcours restant
37.2 SEARCH_F BOOL Recherche bloc automatique en avant
37.3 SEARCH_B BOOL Recherche bloc automatique en arrière
37.4 réservé
37.5 RESET_AX BOOL Redémarrage
37.6 AVALREM_EN BOOL Annuler forçage valeur réelle
37.7 réservé
Signaux de déclenchement pour contrats d’écriture
38.0 VLEV_EN BOOL Niveaux de vitesse 1, 2
38.1 CLEV_EN BOOL Niveaux tension/fréquence 1, 2
38.2 TRG254_EN BOOL Consigne pour semi-automatique
38.3 MDI_EN BOOL Bloc MDI
38.4 MDIFLY_EN BOOL Bloc MDI au vol
38.5 réservé
38.6 REFPT_EN BOOL Définition point de référence
38.7 AVAL_EN BOOL Forçage valeur réelle
39.0 FVAL_EN BOOL Forçage valeur réelle au vol
39.1 ZOFF_EN BOOL Décalage d’origine
39.2 réservé
39.3 PARCH_EN BOOL Modifier paramètres/données
39.4 DIGO_EN BOOL Sorties TOR
39.5 PROGS_EN BOOL Sélection programme
39.6 REQAPP_EN BOOL Demande données d’application
39.7 TEACHIN_EN BOOL Teach In
40.0 AXCOU_EN BOOL Couplage d’axes
40.1...41 réservé
Signaux de déclenchement pour contrats de lecture
42.0 OPDAT_EN BOOL Données d’exploitation de base
42.1 ACT_BL_EN BOOL Bloc CN actif

Bloc données utilisateur (DB utilisateur)
C-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
42.2 NXT_BL_EN BOOL Bloc CN suivant
42.3 BLEXT_EN BOOL Valeur réelle au changement de bloc
42.4 SERVDAT_EN BOOL Données de maintenance
42.5 OC_ERR_EN BOOL Nº défaut de fonctionnement
42.6...42.7 réservé
43.0 AXCOURD_EN BOOL Etat couplage d’axes
43.1...43.2 réservé
43.3 PARRD_EN BOOL Paramètres/données
43.4 DIGIO_EN BOOL Entrées/sorties TOR
43.5 OPDAT1_EN BOOL Données d’exploitation supplémentaires
43.6 APPDAT_EN BOOL Données d’application
43.7 MSRRD_EN BOOL Valeurs de mesure
Signaux d’achèvement pour réglages ponctuels
44.0 SERVO_D BOOL Déblocage régulateur
44.1 GAUG_FLY_D BOOL Mesure au vol
44.2...44.4 réservé
44.5 TRAV_MON_D BOOL Surveillance de rotation
44.6 PARK_AX_D BOOL Axe en stationnement
44.7 SIM_ON_D BOOL Simulation
45.0...45.1 réservé
45.2 MSR_D BOOL Mesure de longueur
45.3 REF_TRIG_D BOOL Reprise de référence
45.4 DI_OFF_D BOOL Désactiver entrée de validation
45.5 FOLLOWUP_D BOOL Poursuite
45.6 SSW_DIS_D BOOL Désactiver surveillance fins course log.
45.7 DRIFT_OFF_D BOOL Désactiver compensation autom. dérive
Signaux d’achèvement pour commandes ponctuelles
46 réservé
47.0 MD_D BOOL Activer paramètres machine
47.1 DELDIST_D BOOL Effacer parcours restant
47.2 SEARCH_F_D BOOL Recherche bloc automatique en avant
47.3 SEARCH_B_D BOOL Recherche bloc automatique en arrière
47.4 réservé
47.5 RESET_AX_D BOOL Redémarrage
47.6 AVALREM_D BOOL Annuler forçage valeur réelle
47.7 réservé

Bloc données utilisateur (DB utilisateur)
C-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
Signaux d’achèvement pour contrats d’écriture
48.0 VLEV_D BOOL Niveaux de vitesse 1, 2
48.1 CLEV_D BOOL Niveaux tension/fréquence 1, 2
48.2 TRG254_D BOOL Consigne pour semi-automatique
48.3 MDI_D BOOL Bloc MDI
48.4 MDIFLY_D BOOL Bloc MDI au vol
48.5 réservé
48.6 REFPT_D BOOL Définition point de référence
48.7 AVAL_D BOOL Forçage valeur réelle
49.0 FVAL_D BOOL Forçage valeur réelle au vol
49.1 ZOFF_D BOOL Décalage d’origine
49.2 réservé
49.3 PARCH_D BOOL Modifier paramètres/données
49.4 DIGO_D BOOL Sorties TOR
49.5 PROGS_D BOOL Sélection programme
49.6 REQAPP_D BOOL Demande données d’application
49.7 TEACHIN_D BOOL Teach In
50.0 AXCOU_D BOOL Couplage d’axes
50.1...51 réservé
Signaux d’achèvement pour contrats de lecture
52.0 OPDAT_D BOOL Données d’exploitation de base
52.1 ACT_BL_D BOOL Bloc CN actif
52.2 NXT_BL_D BOOL Bloc CN suivant
52.3 BLEXT_D BOOL Valeur réelle au changement de bloc
52.4 SERVDAT_D BOOL Données de maintenance
52.5 OC_ERR_D BOOL Défaut de fonctionnement a été lu
52.6 OT_ERR_D BOOL Erreur manipulation/déplacement a été lue
52.7 DA_ERR_D BOOL Erreur de données a été lue
53.0 AXCOURD_D BOOL Etat couplage d’axes
53.1...53.2 réservé
53.3 PARRD_D BOOL Paramètres/données
53.4 DIGIO_D BOOL Entrées/sorties TOR
53.5 OPDAT1_D BOOL Données d’exploitation supplémentaires
53.6 APPDAT_D BOOL Données d’exploitation supplémentaires
53.7 MSRRD_D BOOL Données d’application
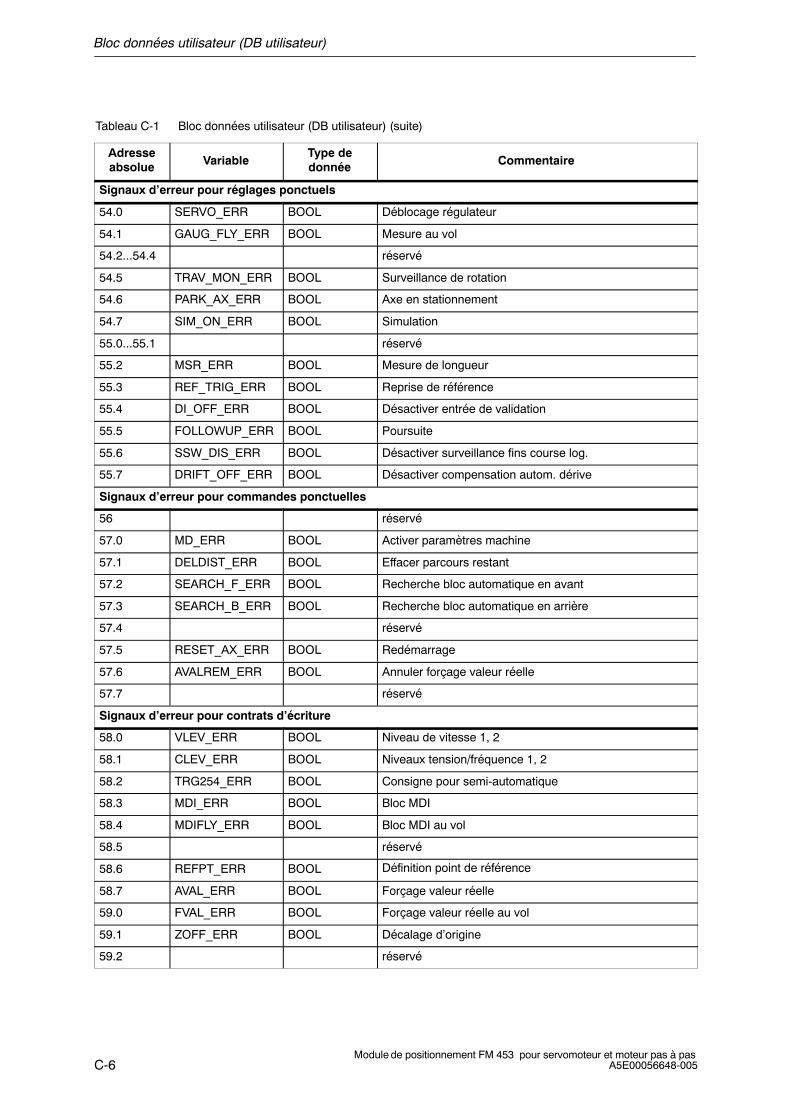
Bloc données utilisateur (DB utilisateur)
C-6Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
Signaux d’erreur pour réglages ponctuels
54.0 SERVO_ERR BOOL Déblocage régulateur
54.1 GAUG_FLY_ERR BOOL Mesure au vol
54.2...54.4 réservé
54.5 TRAV_MON_ERR BOOL Surveillance de rotation
54.6 PARK_AX_ERR BOOL Axe en stationnement
54.7 SIM_ON_ERR BOOL Simulation
55.0...55.1 réservé
55.2 MSR_ERR BOOL Mesure de longueur
55.3 REF_TRIG_ERR BOOL Reprise de référence
55.4 DI_OFF_ERR BOOL Désactiver entrée de validation
55.5 FOLLOWUP_ERR BOOL Poursuite
55.6 SSW_DIS_ERR BOOL Désactiver surveillance fins course log.
55.7 DRIFT_OFF_ERR BOOL Désactiver compensation autom. dérive
Signaux d’erreur pour commandes ponctuelles
56 réservé
57.0 MD_ERR BOOL Activer paramètres machine
57.1 DELDIST_ERR BOOL Effacer parcours restant
57.2 SEARCH_F_ERR BOOL Recherche bloc automatique en avant
57.3 SEARCH_B_ERR BOOL Recherche bloc automatique en arrière
57.4 réservé
57.5 RESET_AX_ERR BOOL Redémarrage
57.6 AVALREM_ERR BOOL Annuler forçage valeur réelle
57.7 réservé
Signaux d’erreur pour contrats d’écriture
58.0 VLEV_ERR BOOL Niveau de vitesse 1, 2
58.1 CLEV_ERR BOOL Niveaux tension/fréquence 1, 2
58.2 TRG254_ERR BOOL Consigne pour semi-automatique
58.3 MDI_ERR BOOL Bloc MDI
58.4 MDIFLY_ERR BOOL Bloc MDI au vol
58.5 réservé
58.6 REFPT_ERR BOOL Définition point de référence
58.7 AVAL_ERR BOOL Forçage valeur réelle
59.0 FVAL_ERR BOOL Forçage valeur réelle au vol
59.1 ZOFF_ERR BOOL Décalage d’origine
59.2 réservé
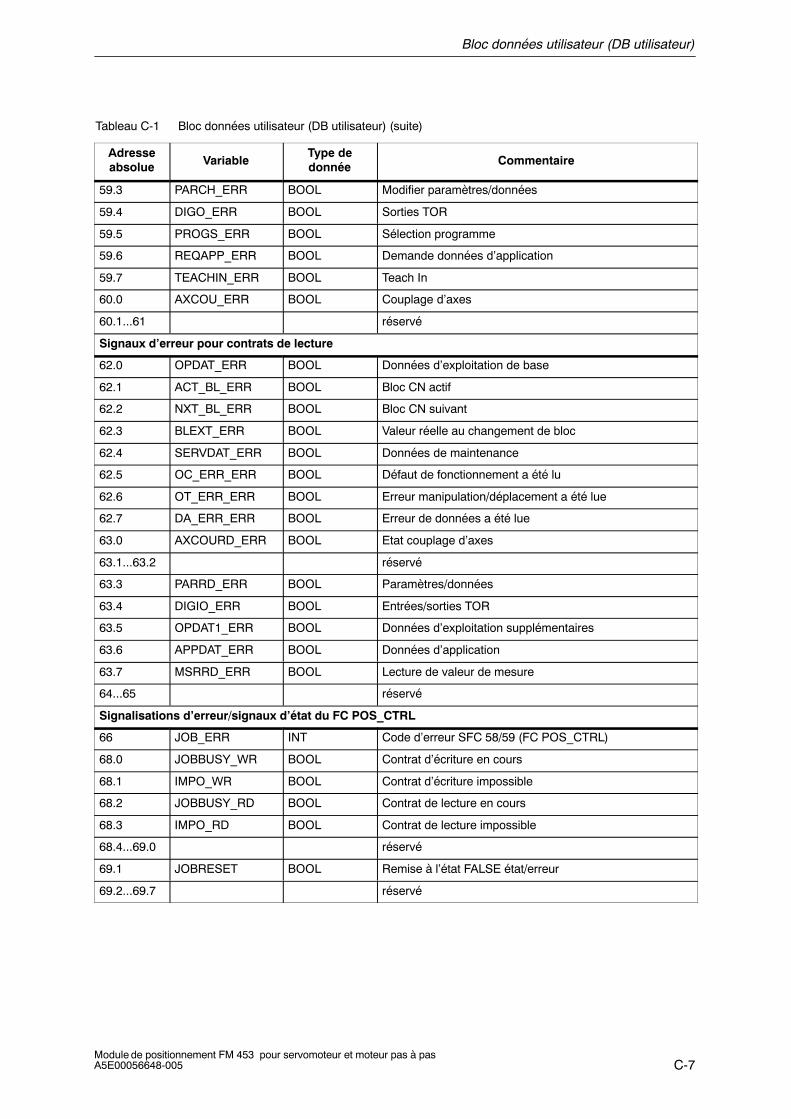
Bloc données utilisateur (DB utilisateur)
C-7Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
59.3 PARCH_ERR BOOL Modifier paramètres/données
59.4 DIGO_ERR BOOL Sorties TOR
59.5 PROGS_ERR BOOL Sélection programme
59.6 REQAPP_ERR BOOL Demande données d’application
59.7 TEACHIN_ERR BOOL Teach In
60.0 AXCOU_ERR BOOL Couplage d’axes
60.1...61 réservé
Signaux d’erreur pour contrats de lecture
62.0 OPDAT_ERR BOOL Données d’exploitation de base
62.1 ACT_BL_ERR BOOL Bloc CN actif
62.2 NXT_BL_ERR BOOL Bloc CN suivant
62.3 BLEXT_ERR BOOL Valeur réelle au changement de bloc
62.4 SERVDAT_ERR BOOL Données de maintenance
62.5 OC_ERR_ERR BOOL Défaut de fonctionnement a été lu
62.6 OT_ERR_ERR BOOL Erreur manipulation/déplacement a été lue
62.7 DA_ERR_ERR BOOL Erreur de données a été lue
63.0 AXCOURD_ERR BOOL Etat couplage d’axes
63.1...63.2 réservé
63.3 PARRD_ERR BOOL Paramètres/données
63.4 DIGIO_ERR BOOL Entrées/sorties TOR
63.5 OPDAT1_ERR BOOL Données d’exploitation supplémentaires
63.6 APPDAT_ERR BOOL Données d’application
63.7 MSRRD_ERR BOOL Lecture de valeur de mesure
64...65 réservé
Signalisations d’erreur/signaux d’état du FC POS_CTRL
66 JOB_ERR INT Code d’erreur SFC 58/59 (FC POS_CTRL)
68.0 JOBBUSY_WR BOOL Contrat d’écriture en cours
68.1 IMPO_WR BOOL Contrat d’écriture impossible
68.2 JOBBUSY_RD BOOL Contrat de lecture en cours
68.3 IMPO_RD BOOL Contrat de lecture impossible
68.4...69.0 réservé
69.1 JOBRESET BOOL Remise à l’état FALSE état/erreur
69.2...69.7 réservé
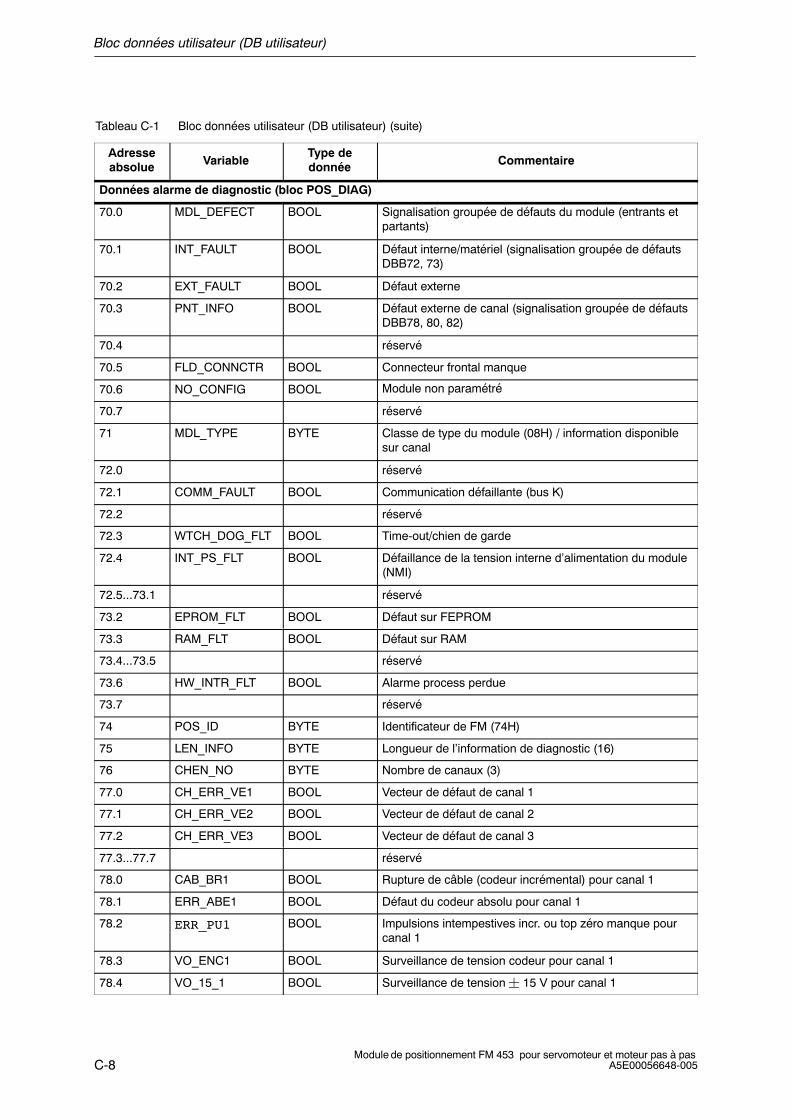
Bloc données utilisateur (DB utilisateur)
C-8Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
Données alarme de diagnostic (bloc POS_DIAG)
70.0 MDL_DEFECT BOOL Signalisation groupée de défauts du module (entrants etpartants)
70.1 INT_FAULT BOOL Défaut interne/matériel (signalisation groupée de défautsDBB72, 73)
70.2 EXT_FAULT BOOL Défaut externe
70.3 PNT_INFO BOOL Défaut externe de canal (signalisation groupée de défautsDBB78, 80, 82)
70.4 réservé
70.5 FLD_CONNCTR BOOL Connecteur frontal manque
70.6 NO_CONFIG BOOL Module non paramétré
70.7 réservé
71 MDL_TYPE BYTE Classe de type du module (08H) / information disponiblesur canal
72.0 réservé
72.1 COMM_FAULT BOOL Communication défaillante (bus K)
72.2 réservé
72.3 WTCH_DOG_FLT BOOL Time-out/chien de garde
72.4 INT_PS_FLT BOOL Défaillance de la tension interne d’alimentation du module(NMI)
72.5...73.1 réservé
73.2 EPROM_FLT BOOL Défaut sur FEPROM
73.3 RAM_FLT BOOL Défaut sur RAM
73.4...73.5 réservé
73.6 HW_INTR_FLT BOOL Alarme process perdue
73.7 réservé
74 POS_ID BYTE Identificateur de FM (74H)
75 LEN_INFO BYTE Longueur de l’information de diagnostic (16)
76 CHEN_NO BYTE Nombre de canaux (3)
77.0 CH_ERR_VE1 BOOL Vecteur de défaut de canal 1
77.1 CH_ERR_VE2 BOOL Vecteur de défaut de canal 2
77.2 CH_ERR_VE3 BOOL Vecteur de défaut de canal 3
77.3...77.7 réservé
78.0 CAB_BR1 BOOL Rupture de câble (codeur incrémental) pour canal 1
78.1 ERR_ABE1 BOOL Défaut du codeur absolu pour canal 1
78.2 ERR_PU1 BOOL Impulsions intempestives incr. ou top zéro manque pourcanal 1
78.3 VO_ENC1 BOOL Surveillance de tension codeur pour canal 1
78.4 VO_15_1 BOOL Surveillance de tension 15 V pour canal 1

Bloc données utilisateur (DB utilisateur)
C-9Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
78.5 VO_DIO1 BOOL Surveillance de tension des sorties TOR pour canal 1
78.6 réservé
78.7 OC_ERR_EN1 BOOL Défaut de fonctionnement pour canal 1
79 réservé
80.0 CAB_BR2 BOOL Rupture de câble (codeur incrémental) pour canal 2
80.1 ERR_ABE2 BOOL Défaut du codeur absolu pour canal 2
80.2 ERR_PU2 BOOL Impulsions intempestives incr. ou top zéro manque pourcanal 2
80.3 VO_ENC2 BOOL Surveillance de tension codeur pour canal 2
80.4 VO_15_2 BOOL Surveillance de tension 15 V pour canal 2
80.5 VO_DIO2 BOOL Surveillance de tension des sorties TOR pour canal 2
80.6 réservé
80.7 OC_ERR_EN2 BOOL Défaut de fonctionnement pour canal 2
81 réservé
82.0 CAB_BR3 BOOL Rupture de câble (codeur incrémental) pour canal 3
82.1 ERR_ABE3 BOOL Défaut du codeur absolu pour canal 3
82.2 ERR_PU3 BOOL Impulsions intempestives incr. ou top zéro manque pourcanal 3
82.3 VO_ENC3 BOOL Surveillance de tension codeur pour canal 3
82.4 VO_15_3 BOOL Surveillance de tension 15 V pour canal 3
82.5 VO_DIO3 BOOL Surveillance de tension des sorties TOR pour canal 3
82.6 réservé
82.7 OC_ERR_EN3 BOOL Défaut de fonctionnement pour canal 3
83...85 réservé
86 OC_ERR_NO BYTE Numéro d’erreur (DS 164) − classe d’événement détaillé
87 OC_REE_CL BYTE Numéro d’erreur (DS 164) − numéro d’événement détaillé
88...89 réservé
90 OT_ERR_NO BYTE Numéro d’erreur (DS 162) − classe d’événement détaillé
91 OT_ERR_CL BYTE Numéro d’erreur (DS 162) − numéro d’événement détaillé
92...93 réservé
94 DA_ERR_NO BYTE Numéro d’erreur (DS 163) − classe d’événement détaillé
95 DA_ERR_CL BYTE Numéro d’erreur (DS 163) − numéro d’événement détaillé
96 DIAG_ERR INT Code d’erreur POS_DIAG (code de retour SFC 51)
98 MSRM_ERR INT Code d’erreur POS_MSRM (code de retour SFC 59)
100 ARRAY [100..139]BYTE
réservé à des fins internes

Bloc données utilisateur (DB utilisateur)
C-10Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
Données pour les contrats
140 ZOFF DINT Décalage d’origine
144 AVAL DINT Forçage valeur réelle
148 FVAL DINT Forçage valeur réelle au vol
152 REFPT DINT Définition du point de référence
156 TRG254 DWORD Consigne pour semi-automatique
160 VLEVEL_1 DWORD Niveau de vitesse1
164 VLEVEL_2 DWORD Niveau de vitesse 2
168 CLEVEL_1 DWORD Niveau de tension/fréquence 1
172 CLEVEL_2 DWORD Niveau de tension/fréquence 2
Bloc MDI
176 MDIB STRUCT Bloc MDI
+ 0...+1 réservé
+ 2.0 G_1_EN BOOL Groupe fonctions G 1
+ 2.1 G_2_EN BOOL Groupe fonctions G 2
+ 2.2...+ 2.3 réservé
+ 2.4 X_T_EN BOOL Position/arrêt temporisé
+ 2.5...+ 2.7 réservé
+ 3.0 V_EN BOOL Valeur vitesse
+ 3.1 M_1_EN BOOL Groupe fonctions M 1
+ 3.2 M_2_EN BOOL Groupe fonctions M 2
+ 3.3 M_3_EN BOOL Groupe fonctions M 3
+ 3.4...+ 3.7 réservé
+ 4 G_1_VAL BYTE Nº fonction G du groupe 1
+ 5 G_2_VAL BYTE Nº fonction G du groupe 2
+ 6...+ 7 réservé
+ 8 X_T_VAL DINT Valeur position/arrêt temporisé
+ 12 V_VAL DINT Valeur vitesse
+ 16 M_1_VAL BYTE Nº fonction M du groupe 1
+ 17 M_2_VAL BYTE Nº fonction M du groupe 2
+ 18 M_3_VAL BYTE Nº fonction M du groupe 3
+ 19 réservé
END_STRUCT
Modifier paramètres/données
196 PAR_CHAN STRUCT Modifier paramètres/données
+ 0 TYP BYTE Type de DB
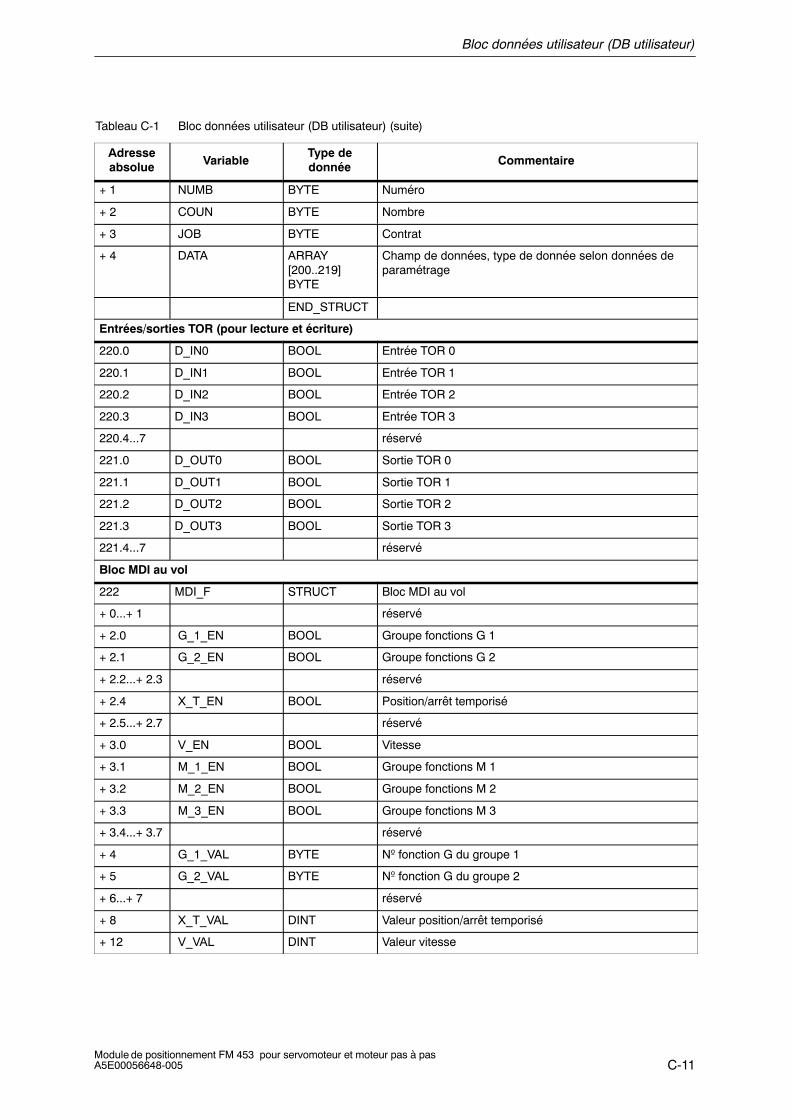
Bloc données utilisateur (DB utilisateur)
C-11Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
+ 1 NUMB BYTE Numéro
+ 2 COUN BYTE Nombre
+ 3 JOB BYTE Contrat
+ 4 DATA ARRAY [200..219]BYTE
Champ de données, type de donnée selon données deparamétrage
END_STRUCT
Entrées/sorties TOR (pour lecture et écriture)
220.0 D_IN0 BOOL Entrée TOR 0
220.1 D_IN1 BOOL Entrée TOR 1
220.2 D_IN2 BOOL Entrée TOR 2
220.3 D_IN3 BOOL Entrée TOR 3
220.4...7 réservé
221.0 D_OUT0 BOOL Sortie TOR 0
221.1 D_OUT1 BOOL Sortie TOR 1
221.2 D_OUT2 BOOL Sortie TOR 2
221.3 D_OUT3 BOOL Sortie TOR 3
221.4...7 réservé
Bloc MDI au vol
222 MDI_F STRUCT Bloc MDI au vol
+ 0...+ 1 réservé
+ 2.0 G_1_EN BOOL Groupe fonctions G 1
+ 2.1 G_2_EN BOOL Groupe fonctions G 2
+ 2.2...+ 2.3 réservé
+ 2.4 X_T_EN BOOL Position/arrêt temporisé
+ 2.5...+ 2.7 réservé
+ 3.0 V_EN BOOL Vitesse
+ 3.1 M_1_EN BOOL Groupe fonctions M 1
+ 3.2 M_2_EN BOOL Groupe fonctions M 2
+ 3.3 M_3_EN BOOL Groupe fonctions M 3
+ 3.4...+ 3.7 réservé
+ 4 G_1_VAL BYTE Nº fonction G du groupe 1
+ 5 G_2_VAL BYTE Nº fonction G du groupe 2
+ 6...+ 7 réservé
+ 8 X_T_VAL DINT Valeur position/arrêt temporisé
+ 12 V_VAL DINT Valeur vitesse
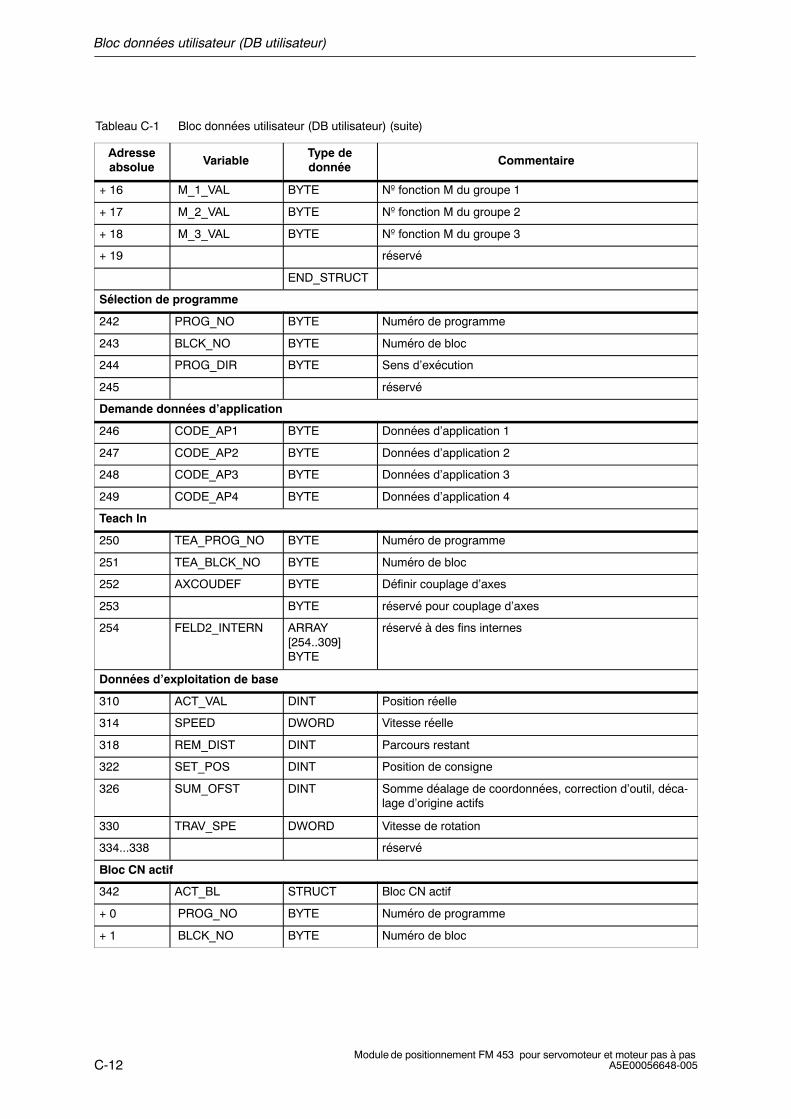
Bloc données utilisateur (DB utilisateur)
C-12Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
+ 16 M_1_VAL BYTE Nº fonction M du groupe 1
+ 17 M_2_VAL BYTE Nº fonction M du groupe 2
+ 18 M_3_VAL BYTE Nº fonction M du groupe 3
+ 19 réservé
END_STRUCT
Sélection de programme
242 PROG_NO BYTE Numéro de programme
243 BLCK_NO BYTE Numéro de bloc
244 PROG_DIR BYTE Sens d’exécution
245 réservé
Demande données d’application
246 CODE_AP1 BYTE Données d’application 1
247 CODE_AP2 BYTE Données d’application 2
248 CODE_AP3 BYTE Données d’application 3
249 CODE_AP4 BYTE Données d’application 4
Teach In
250 TEA_PROG_NO BYTE Numéro de programme
251 TEA_BLCK_NO BYTE Numéro de bloc
252 AXCOUDEF BYTE Définir couplage d’axes
253 BYTE réservé pour couplage d’axes
254 FELD2_INTERN ARRAY[254..309]BYTE
réservé à des fins internes
Données d’exploitation de base
310 ACT_VAL DINT Position réelle
314 SPEED DWORD Vitesse réelle
318 REM_DIST DINT Parcours restant
322 SET_POS DINT Position de consigne
326 SUM_OFST DINT Somme déalage de coordonnées, correction d’outil, déca-lage d’origine actifs
330 TRAV_SPE DWORD Vitesse de rotation
334...338 réservé
Bloc CN actif
342 ACT_BL STRUCT Bloc CN actif
+ 0 PROG_NO BYTE Numéro de programme
+ 1 BLCK_NO BYTE Numéro de bloc
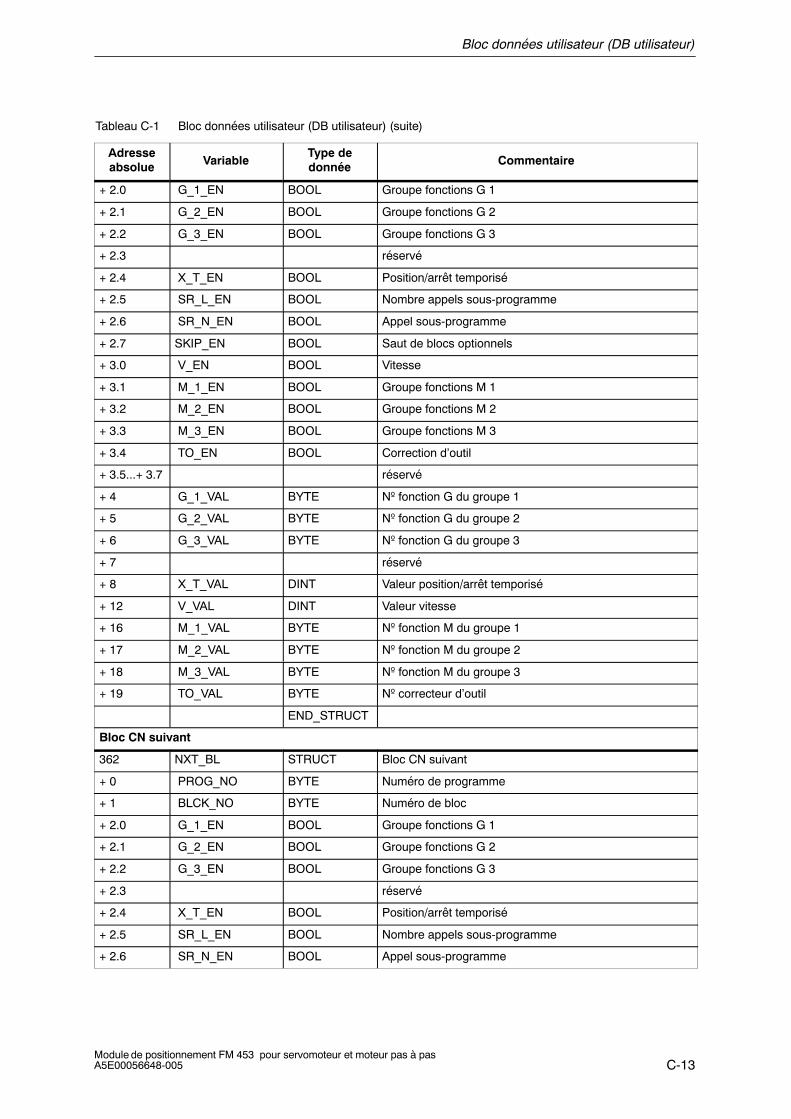
Bloc données utilisateur (DB utilisateur)
C-13Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
+ 2.0 G_1_EN BOOL Groupe fonctions G 1
+ 2.1 G_2_EN BOOL Groupe fonctions G 2
+ 2.2 G_3_EN BOOL Groupe fonctions G 3
+ 2.3 réservé
+ 2.4 X_T_EN BOOL Position/arrêt temporisé
+ 2.5 SR_L_EN BOOL Nombre appels sous-programme
+ 2.6 SR_N_EN BOOL Appel sous-programme
+ 2.7 SKIP_EN BOOL Saut de blocs optionnels
+ 3.0 V_EN BOOL Vitesse
+ 3.1 M_1_EN BOOL Groupe fonctions M 1
+ 3.2 M_2_EN BOOL Groupe fonctions M 2
+ 3.3 M_3_EN BOOL Groupe fonctions M 3
+ 3.4 TO_EN BOOL Correction d’outil
+ 3.5...+ 3.7 réservé
+ 4 G_1_VAL BYTE Nº fonction G du groupe 1
+ 5 G_2_VAL BYTE Nº fonction G du groupe 2
+ 6 G_3_VAL BYTE Nº fonction G du groupe 3
+ 7 réservé
+ 8 X_T_VAL DINT Valeur position/arrêt temporisé
+ 12 V_VAL DINT Valeur vitesse
+ 16 M_1_VAL BYTE Nº fonction M du groupe 1
+ 17 M_2_VAL BYTE Nº fonction M du groupe 2
+ 18 M_3_VAL BYTE Nº fonction M du groupe 3
+ 19 TO_VAL BYTE Nº correcteur d’outil
END_STRUCT
Bloc CN suivant
362 NXT_BL STRUCT Bloc CN suivant
+ 0 PROG_NO BYTE Numéro de programme
+ 1 BLCK_NO BYTE Numéro de bloc
+ 2.0 G_1_EN BOOL Groupe fonctions G 1
+ 2.1 G_2_EN BOOL Groupe fonctions G 2
+ 2.2 G_3_EN BOOL Groupe fonctions G 3
+ 2.3 réservé
+ 2.4 X_T_EN BOOL Position/arrêt temporisé
+ 2.5 SR_L_EN BOOL Nombre appels sous-programme
+ 2.6 SR_N_EN BOOL Appel sous-programme
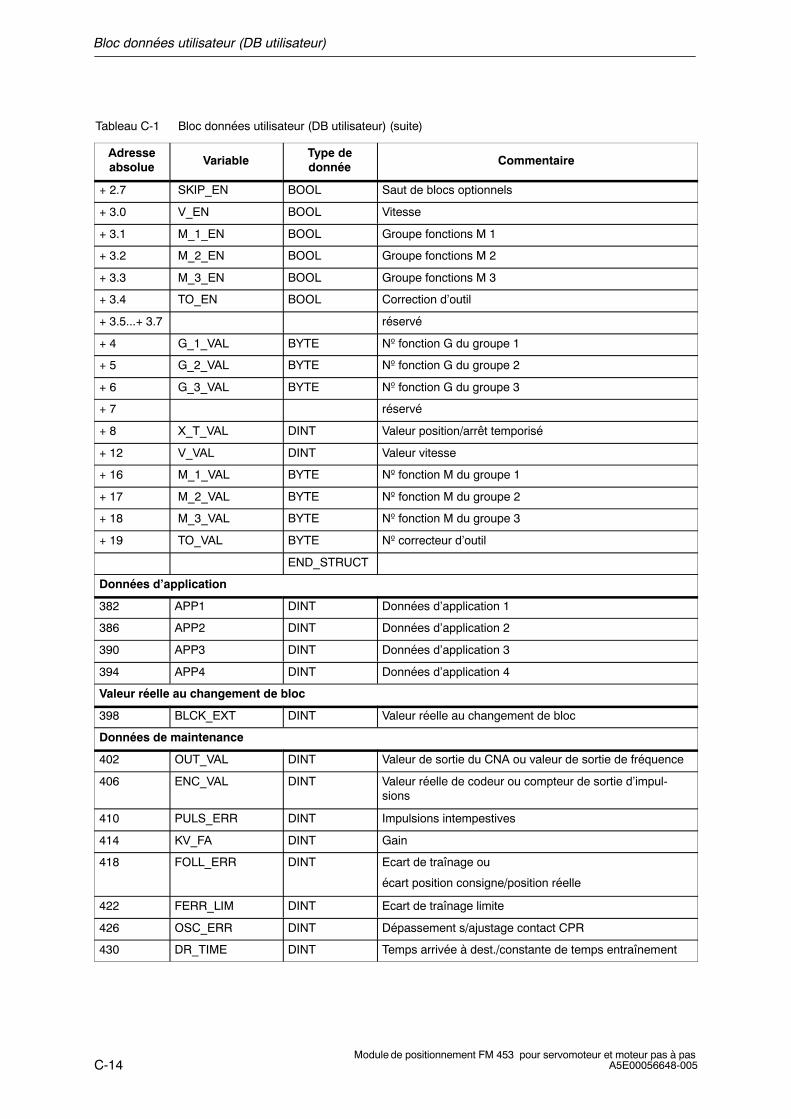
Bloc données utilisateur (DB utilisateur)
C-14Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
+ 2.7 SKIP_EN BOOL Saut de blocs optionnels
+ 3.0 V_EN BOOL Vitesse
+ 3.1 M_1_EN BOOL Groupe fonctions M 1
+ 3.2 M_2_EN BOOL Groupe fonctions M 2
+ 3.3 M_3_EN BOOL Groupe fonctions M 3
+ 3.4 TO_EN BOOL Correction d’outil
+ 3.5...+ 3.7 réservé
+ 4 G_1_VAL BYTE Nº fonction G du groupe 1
+ 5 G_2_VAL BYTE Nº fonction G du groupe 2
+ 6 G_3_VAL BYTE Nº fonction G du groupe 3
+ 7 réservé
+ 8 X_T_VAL DINT Valeur position/arrêt temporisé
+ 12 V_VAL DINT Valeur vitesse
+ 16 M_1_VAL BYTE Nº fonction M du groupe 1
+ 17 M_2_VAL BYTE Nº fonction M du groupe 2
+ 18 M_3_VAL BYTE Nº fonction M du groupe 3
+ 19 TO_VAL BYTE Nº correcteur d’outil
END_STRUCT
Données d’application
382 APP1 DINT Données d’application 1
386 APP2 DINT Données d’application 2
390 APP3 DINT Données d’application 3
394 APP4 DINT Données d’application 4
Valeur réelle au changement de bloc
398 BLCK_EXT DINT Valeur réelle au changement de bloc
Données de maintenance
402 OUT_VAL DINT Valeur de sortie du CNA ou valeur de sortie de fréquence
406 ENC_VAL DINT Valeur réelle de codeur ou compteur de sortie d’impul-sions
410 PULS_ERR DINT Impulsions intempestives
414 KV_FA DINT Gain
418 FOLL_ERR DINT Ecart de traînage ou
écart position consigne/position réelle
422 FERR_LIM DINT Ecart de traînage limite
426 OSC_ERR DINT Dépassement s/ajustage contact CPR
430 DR_TIME DINT Temps arrivée à dest./constante de temps entraînement
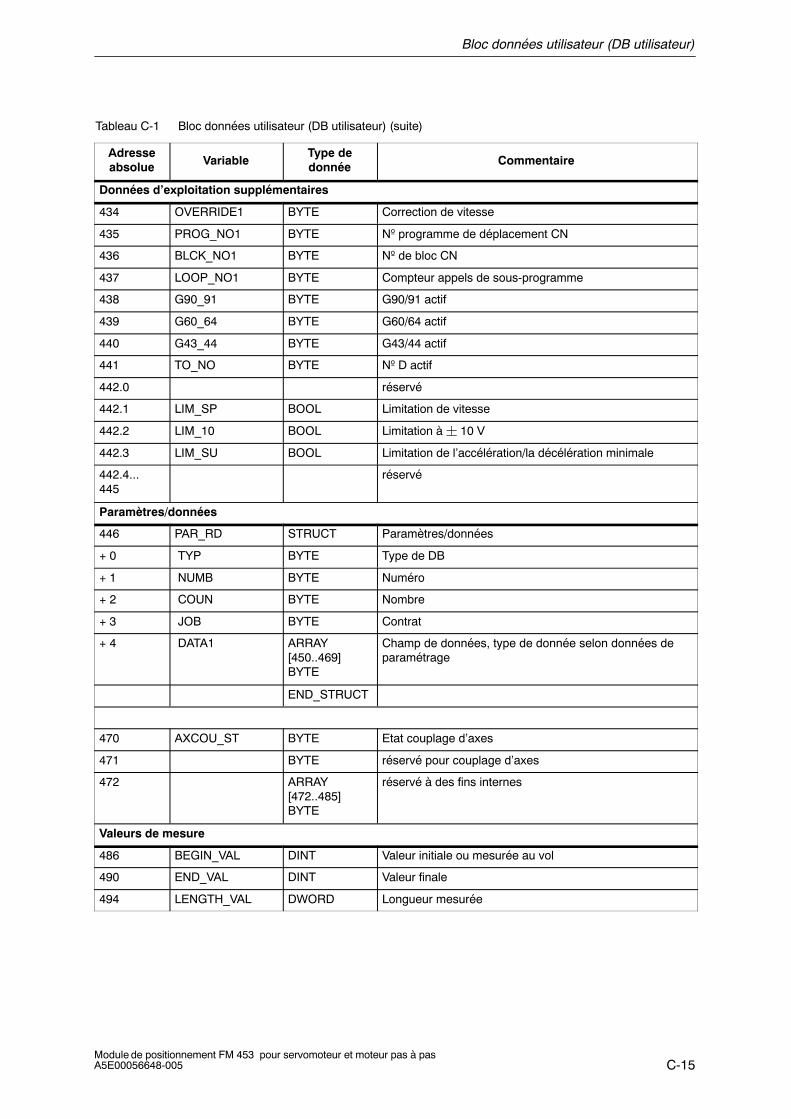
Bloc données utilisateur (DB utilisateur)
C-15Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
Données d’exploitation supplémentaires
434 OVERRIDE1 BYTE Correction de vitesse
435 PROG_NO1 BYTE Nº programme de déplacement CN
436 BLCK_NO1 BYTE Nº de bloc CN
437 LOOP_NO1 BYTE Compteur appels de sous-programme
438 G90_91 BYTE G90/91 actif
439 G60_64 BYTE G60/64 actif
440 G43_44 BYTE G43/44 actif
441 TO_NO BYTE Nº D actif
442.0 réservé
442.1 LIM_SP BOOL Limitation de vitesse
442.2 LIM_10 BOOL Limitation à 10 V
442.3 LIM_SU BOOL Limitation de l’accélération/la décélération minimale
442.4...445
réservé
Paramètres/données
446 PAR_RD STRUCT Paramètres/données
+ 0 TYP BYTE Type de DB
+ 1 NUMB BYTE Numéro
+ 2 COUN BYTE Nombre
+ 3 JOB BYTE Contrat
+ 4 DATA1 ARRAY [450..469]BYTE
Champ de données, type de donnée selon données deparamétrage
END_STRUCT
470 AXCOU_ST BYTE Etat couplage d’axes
471 BYTE réservé pour couplage d’axes
472 ARRAY [472..485]BYTE
réservé à des fins internes
Valeurs de mesure
486 BEGIN_VAL DINT Valeur initiale ou mesurée au vol
490 END_VAL DINT Valeur finale
494 LENGTH_VAL DWORD Longueur mesurée

Bloc données utilisateur (DB utilisateur)
C-16Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Tableau C-1 Bloc données utilisateur (DB utilisateur) (suite)
Adresseabsolue Commentaire
Type dedonnéeVariable
Contrôle-commande
498 USR STRUCT Contrôle-commande
+ 0.0 BITC_0 BOOL Ecrire PM
+ 0.1 BITC_1 BOOL Lire PM
+ 0.2 BITC_2 BOOL Transférer bloc MDI
+ 0.3 BITC_3 BOOL Transférer sélection programme
+ 0.4 BITC_4 BOOL Transférer Teach In
+ 0.5 BITC_5 BOOL Transférer consigne
+ 0.6 BITC_6 BOOL Transférer niveaux vitesse
+ 0.7 BITC_7 BOOL Transférer niveaux tension/fréquence
+ 1.0 BITC_8 BOOL Transférer bloc MDI au vol
+ 1.1 BITC_9 BOOL Transférer forçage valeur réelle
+ 1.2 BITC_10 BOOL Transférer décalage d’origine
+ 1.3...+ 1.4 réservé
+ 1.5 BITC_13 BOOL Alarme de diagnostic
+ 1.6 BITC_14 BOOL Erreur de données
+ 1.7 BITC_15 BOOL Erreur manipulation/déplacement
+ 2 MD_NO WORD Numéro PM
+ 4 MD_VALUE DINT Valeur PM
+ 8 INC_NO BYTE Numéro consigne
+ 9 réservé
+ 10 PICT_NO WORD Numéro image
+ 12 KEY_CODE WORD Code clavier
+ 14...+15 réservé
+ 16.0 BITA_0 BOOL Commande
+ 16.1 BITA_1 BOOL Prise de référence
+ 16.2 BITA_2 BOOL Semi-automatique relatif
+ 16.3 BITA_3 BOOL MDI
+ 16.4 BITA_4 BOOL Automatique/bloc par bloc
+ 16.5 BITA_5 BOOL Automatique
+ 16.6 BITA_6 BOOL Manuel à vue
+ 16.7...+17.5
réservé
+ 17.6 BITA_14 BOOL Acquitter défaut
+ 17.7 BITA_15 BOOL Acquitter alarme de diagnostic
END_STRUCT
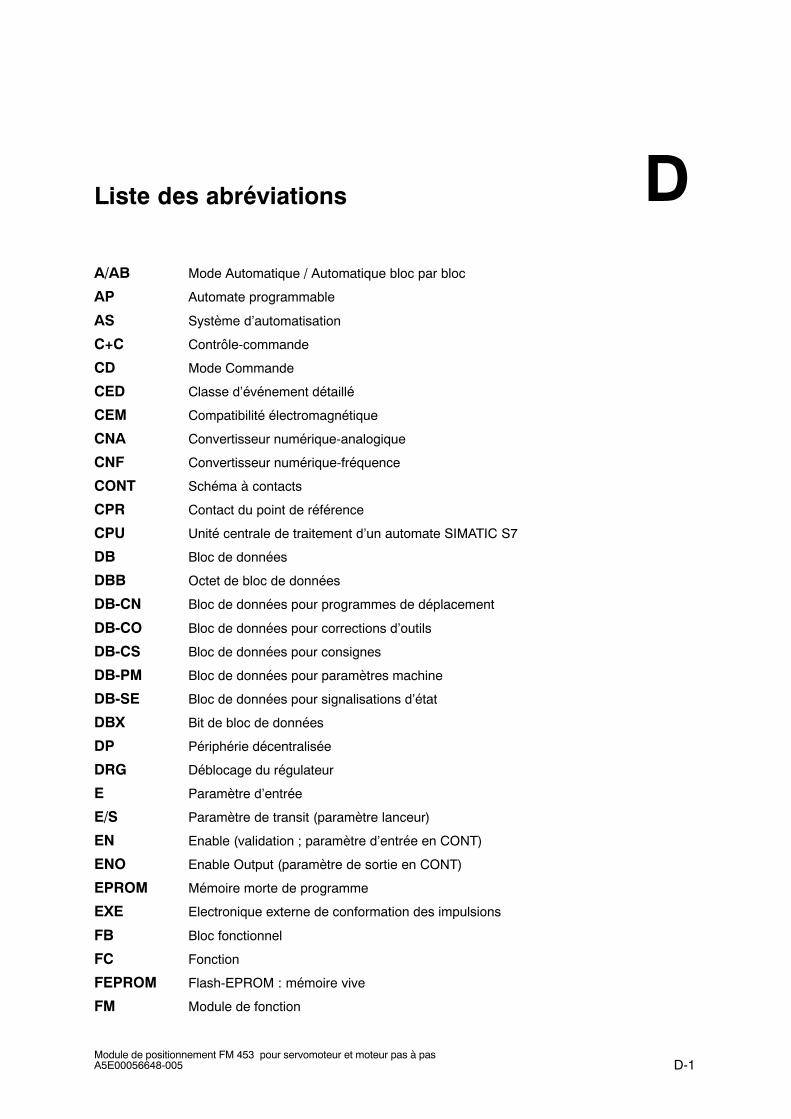
D-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Liste des abréviations
A/AB Mode Automatique / Automatique bloc par bloc
AP Automate programmable
AS Système d’automatisation
C+C Contrôle-commande
CD Mode Commande
CED Classe d’événement détaillé
CEM Compatibilité électromagnétique
CNA Convertisseur numérique-analogique
CNF Convertisseur numérique-fréquence
CONT Schéma à contacts
CPR Contact du point de référence
CPU Unité centrale de traitement d’un automate SIMATIC S7
DB Bloc de données
DBB Octet de bloc de données
DB-CN Bloc de données pour programmes de déplacement
DB-CO Bloc de données pour corrections d’outils
DB-CS Bloc de données pour consignes
DB-PM Bloc de données pour paramètres machine
DB-SE Bloc de données pour signalisations d’état
DBX Bit de bloc de données
DP Périphérie décentralisée
DRG Déblocage du régulateur
E Paramètre d’entrée
E/S Paramètre de transit (paramètre lanceur)
EN Enable (validation ; paramètre d’entrée en CONT)
ENO Enable Output (paramètre de sortie en CONT)
EPROM Mémoire morte de programme
EXE Electronique externe de conformation des impulsions
FB Bloc fonctionnel
FC Fonction
FEPROM Flash-EPROM : mémoire vive
FM Module de fonction
D

Liste des abréviations
D-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
HEX Désignation abrégée de nombre hexadécimal
IM Coupleur SIMATIC S7 (Interface Modul)
LED Light Emitting Diode : diode électroluminescente
LIST Liste d’instruction
MDI (Manual Data Input) Introduction manuelle
MLFB Numéro de référence
MLI Modulation de largeur d’impulsions (= PWM)
MPI Interface multipoint
MV Mode Manuel à vue
NED Numéro d’événement détaillé
OB Bloc d’organisation
OP Pupitre opérateur
PA Position atteinte, Arrêt
PG Console de programmation
RB Résultat binaire
REF Mode Prise de référence
S Paramètre de sortie
S7-300 Automate programmable du milieu de gamme
SAR Mode Semi-automatique relatif
SDB Bloc de données système
SFC Système Function Call (fonction système intégrée)
SM Module de signaux (par ex. module d’entrées/sorties)
SSI Interface série synchrone
STEP 7 Logiciel de programmation pour SIMATIC S7
SZL Liste d’états système
TC Tableau de commande
TF Fonction technologique
UI Unité interne
Index-1Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Index alphabétique
AAccélération, 9-99 Activation des paramètres machine, 9-47 Adaptation
de direction, 9-95 du sens, 9-93
Alarme, 9-105 process, 9-105
Alarme Débrocher/enficher OB 83, 6-8 Alarmes, 6-27
alarmes de process perdues, 6-28 exploitation d’une alarme de diagnostic, 6-28 exploitation d’une alarme de process, 6-28 traitement des alarmes, 6-27
Alarmes de diagnostic, 11-6 , 11-9 défauts de fonctionnement, 11-13 défauts externes, 11-6 défauts externes de canal, 11-6 défauts internes, 11-6
Alarmes de process perdues, 6-28 Alimentation des codeurs, 4-21 Analyse de défauts, 7-10 Annulation du forcage de valeur réelle, 9-48 Arborescence des menus
OP 17, 8-6 OP 27, 8-8 OP 37, 8-10
Arrêt temporisé, 10-4 Arrivée à destination, 9-86 Asservissement de position, 7-24, 9-83
adaptation de direction, 9-95 adaptation du sens, 9-93 arrivée à destination, 9-86 avec codeur, 2-1 compensation d’offset, 7-42 , 9-93 compensation de dérive, 9-88 compensation du jeu, 9-88 critères d’évaluation, 7-28 diagnostic du régulateur de position, 7-39 gain de la boucle d’asservissement, 9-84 rampe de fréquence, 9-96 rampe de tension, 9-94 surveillance de l’écart de traînage, 9-86 vitesse et consigne de tension maxi, 9-94, 9-96
Automatique, 9-10, 9-32 bloc à bloc, 9-10 , 9-37 exécution ”en arrière”, 9-33 exécution ”en avant”, 9-33 recherche de bloc avec calcul
en arrière, 9-34 en avant, 9-34
sélection des programmes, 9-32 Autorisation de démarrage, 9-6 Axe
en stationnement, 9-45 linéaire, 9-64 rotatif, 9-49 , 9-65
BBloc CN
actif, 9-60 suivant, 9-60
Bloc de déplacement, 9-28 axe rotatif, 10-10 changement de bloc, 10-5 fonctions G, 10-4 fonctions M, 10-14 structure de bloc, 10-3
Bloc de données, 5-7 consignes, 5-8, 5-25 données de correction d’outil, 5-26 paramètres de correction d’outil, 5-8 paramètres machine, 5-8, 5-10 pour signalisation d’état, 8-4, 8-15 programme de déplacement, 5-9, 5-28 système, 5-9
Bloc de données utilisateur (DB utilisateur), 6-29 Bloc POS_CTRL (FC 1) − Echange de données,
6-13 Bloc POS_DIAG (FC 2) − Lecture des données
d’alarme de diagnostic, 6-23 Bloc POS_INIT (FC 0) − Initialisation, 6-11 Bloc POS_MSRM (FC 3) − Lecture des valeurs de
mesure, 6-26
Index alphabétique
Index-2Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Blocs de fonctions standard, 6-5 aperçu, 6-5 FC POS_CTRL (FC 1) − Echange de données,
6-13 FC POS_DIAG (FC 2) − lecture des données
d’alarme de diagnostic, 6-23 FC POS_INIT (FC 0) − initialisation, 6-11 FC POS_MSRM (FC 3) − lecture des valeurs
de mesure, 6-26 Boucle d’asservissement de position, 7-24
CCâblage
du connecteur frontal, 4-33 du FM 453, 4-1
Câble de liaison, 4-5, B-1 câble du système de mesure, 4-24 de consigne, 4-5 MPI, 4-5
Câble du codeur, 4-5 Changement de bloc, 10-5
externe, 10-5 Classe d’erreur, 11-3
défaut de canal externe, 11-3 défaut externe, 11-3 défaut interne, 11-3
Codeur, 4-18, 9-67 absolu, 4-19, 9-72 incrémental, 4-19, 9-69
synchronisation de la mesure, 9-77 raccordement des codeurs, 4-23
Commande, 9-10 , 9-18 Commande à moteur pas à pas
diagnostic, 9-91 surveillance de rotation, 9-91
Commande ponctuelle, 9-46 activation des paramètres machine, 9-47 annulation du forcage de valeur réelle, 9-48 effacement du parcours restant, 9-47 poursuite, 9-44 recherche de bloc automatique avec calcul,
9-34 redémarrage, 9-48
Commandes ponctuelles, 6-22 Communication CPU / FM 453, 6-6 Compensation
d’offset, 9-93 de dérive, 7-42, 9-88 du jeu, 7-42, 9-88
Configuration, 5-4
Connecteur frontal, 1-6, 4-5, 4-25câblage, 4-33 câbles de liaison, 4-34
Consigne, 5-25 Contact
d’inversion, 9-22 de point de référence, 9-21 , 9-76
Contrôle-commande, 8-1 , 8-4 blocs de données, 8-1 données utilisateur, 8-1
Coordonnée du point de référence, 7-38, 7-42 Correction, 9-4
d’accélération, 10-11 d’outil, 10-11 de temps, 9-5 de vitesse, 9-4
Cotation, 10-8 absolue, 10-9 relative, 10-9
Couplage d’axes, 9-54 Cycle FM, 9-22, 9-43, 9-57 , 9-61, 9-91, 9-101,
9-102, A-3
DDB utilisateur, création, 6-4 Déblocage
de l’entraînement, 9-4 du régulateur, 9-45, 9-85
Décalaged’origine, 9-48 de point de référence, 9-76
Défaillance de châssis, 6-8 Définition du point de référence, 9-53 Démarrage de l’axe, 7-20 Dépose du FM 353, 3-3 Désactivation
de l’entrée de validation, 9-44 de la compensation automatique de dérive,
9-45 de la surveillance des fins de course logiciels,
9-44 Diagnostic/défaut (vue d’ensemble), 11-2 Dimensions du FM 453, A-3 Domaine d’utilisation, 1-2, A-2
Index alphabétique
Index-3Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Donnéesd’application, 9-61
demande, 9-52 d’exploitation de base, 9-59 d’exploitation supplémentaires, 9-62 de correction d’outils, 5-26 de maintenance, 7-10, 9-61 de paramétrage, 5-7 utilisateur, 8-1
Données de diagnostic, 6-24 Données système, 9-38
commande ponctuelle, 9-46 Couplage d’axes, 9-54 décalage d’origine, 9-48 définition du point de référence, 9-53 forcage de valeur réelle, 9-50 forcage de valeur réelle au vol, 9-51 mesures, 9-56 modification de paramètres/données, 9-39 réglage ponctuel, 9-43
EEcriture de données
demande de données d’application, 9-52 Teach-In, 9-53
Effacement du parcours restant, 9-47 Eléments de la face avant, 1-6 , 1-7
LED de signalisation, 1-7 Entrées des capteurs, A-4 Entrées TOR, 4-29 , 9-102 , A-5
changement de bloc externe, 10-5 contact d’inversion, 9-22 contact de référence (CPR), 9-21 entrée de validation, 9-102 forcage de valeur réelle au vol, 9-51, 10-6mesures, 9-56 Start externe, 9-102
Entrées/sorties TOR, 4-29, 4-31, 9-101 Erreur
de données, 11-3 de manipulation/déplacement, 11-3
Etat du couplage d’axes, 9-62 Etats de contrat, 6-16 Exécution des contrats d’écriture, 6-18 Exécution des contrats de lecture, 6-19 Exemples d’application, 6-40 Exploitation d’une alarme de diagnostic, 6-28 Exploitation d’une alarme de process, 6-28
FFiltre d’à-coup, 9-82
Filtre d’à-coup, 7-32 Fins
d’axe rotatif, 9-65 de course logiciels, 7-42, 9-104
Fonctions G, 10-4 Fonctions M, 10-14 Forcage
de valeur réelle, 9-50 de valeur réelle au vol, 9-8, 9-51, 10-6
GGain de la boucle d’asservissement, 9-84 Génération de fréquence, 9-81 Gestion, 9-42 Gestionnaire SIMATIC, 5-4
HHomologation
CSA, A-1 FM, A-2 UL, A-1
IIntégration d’un OP, 6-8 Interface, 1-6, 1-7, 4-6, 4-18, 4-25
connecteur de bus SIMATIC, 1-6, 1-7entraînement, 1-6 , 1-7 , 4-6, A-3
signaux optionnels, 9-97pour codeurs, 1-6, 1-7, 4-18 vers la périphérie, 1-6, 1-7, 4-25
Interface de commandesignaux optionnels, 4-10, 4-11 signaux standard, 4-10
Interpolation, 9-79
LLecture de données
bloc CN actif, 9-60 bloc CN suivant, 9-60 données d’application, 9-61 données d’exploitation de base, 9-59 données d’exploitation supplémentaires, 9-62 données de maintenance, 9-61 Etat du couplage d’axes, 9-62 paramètres/données, 9-62 valeur réelle au changement de bloc, 9-61
Liaison MPI, 1-4

Index alphabétique
Index-4Module de positionnement FM 453 pour servomoteur et moteur pas à pas
A5E00056648-005
Listedes erreurs et défauts, 11-8
défauts de fonctionnement, 11-13 défauts internes, 11-9 erreurs de déplacement, 11-17 erreurs de données générales, 11-22 erreurs de manipulation, 11-15 erreurs de paramètres machine, 11-28 erreurs de programme de déplacement,
11-33 erreurs externes, 11-10
des paramètres machine, 5-12
MManuel à vue, 9-10 , 9-15 Marquage CE, A-2 MDI (Manual Data Input), 9-10 , 9-28 Mémoire des données de paramétrage, A-3 Mesure, 9-56
au vol, 9-56 de longueur, 9-57
Mise en service, 7-7 avec l’outil de paramétrage, 6-10
Mode, 9-14 automatique, 9-32 automatique bloc par bloc, 9-37 commande, 9-18 manuel à vue, 9-15 MDI, 9-28 prise de référence, 9-20 semi-automatique relatif, 9-25
Modification de paramètres/données, 9-39 Montage du FM 453, 3-2 Montage et dépose du FM 453, 3-1 Moteur pas à pas, A-4
sans codeur, 9-75
NNiveaux de fréquence, 9-18 Normes et homologations, iv
OOptimisation, asservissement de position, 7-28,
7-31
PParamétrage, 5-1 , 5-30
alarmes, 5-5 Paramètre de mode, 9-15, 9-18, 9-25
Paramètres machine, 5-10 activation, 7-13 dépendances, 5-19, 7-3 limites, 7-3
Paramètres/Données, 9-62 Partie puissance, 4-14 Pilotage les modes, 6-19 Piloter les modes, 6-13 Poids, A-3 Point de référence, 9-76
défintion, 7-39 , 7-42 Positionnement, 2-1 , 7-36
avec moteur pas à pas, 2-1 critères d’appréciation, 7-35 critères d’évaluation, 7-28 temps enveloppe, 9-86
Possibilité de paramétrage de l’identificationd’arrêt, 7-44
Poursuite, 9-44 Prise de référence, 9-10, 9-20, 9-48
vitesse d’accostage du point de référence,7-38
Procédure de création du programme utilisateur,6-9
Procédure de démarrage de l’axe, 7-20 Programmation des fonctions technologiques, 6-1
bases, 6-3 communication CPU / FM 453, 6-6 exemples d’application, 6-40 interface, bloc de données utilisateur, 6-3 procédure de création du programme utilisa-
teur, 6-9 programmation symbolique, 6-4 structure du programme utilisateur, 6-7 test du programme utilisateur, 6-8
Programme de déplacement, 5-28, 9-32, 10-1bloc de déplacement, 10-2, 10-3 entrée, 5-29 nom de programme, 10-2 numéro de programme, 10-2 sens d’exécution, 10-16 structure du programme, 10-2 transition entre blocs, 10-16
Programme utilisateur, 8-4 Pupitre opérateur COROS, 8-3
RRampe
de fréquence, 9-96 de tension, 9-94
Réaction aux défauts, 11-3 Redémarrage, 9-48 Référencement de codeur absolu, 9-76

Index alphabétique
Index-5Module de positionnement FM 453 pour servomoteur et moteur pas à pasA5E00056648-005
Réglage ponctuel, 9-43 axe en stationnement, 9-45 déblocage du régulateur, 9-45 désactivation de l’entrée de validation, 9-44 désactivation de la compensation automatique
de dérive, 9-45 mesure au vol, 9-43 mesure de longueur, 9-43 reprise de référence, 9-43 simulation, 9-46 surveillance de rotation, 9-45 surveillance des fins de course logiciels, 9-44
Réglages ponctuels, 6-21, 6-22 Règles
de CEM, 4-2 de sécurité, 4-1
dispositifs d’ARRET D’URGENCE, 4-1 Régulateur de position, 9-84 Régulateur prêt, 9-85 Remplacement d’un module, 3-4, 5-9 Reprise de référence, 9-43 Résolution de parcours, 9-67
SSchéma de câblage d’un FM 453, 4-3 Sélection de programme, 9-32
Semi-automatique relatif, 9-10, 9-25 Sens d’exécution, 9-33 Servomoteur, A-3 Signalisations
de défauts, 11-5 par les LED, 11-5
en retour, 8-19, 9-6 Signalisations d’erreur/défaut du FM, 6-22 Signalisations en retour, 6-14 Signaux de commande, 6-13, 6-14, 8-19, 9-3 Simulation, 9-46 Sorties TOR, 4-31, 9-103, A-5
sortie directe, 9-103 Structure du programme utilisateur, 6-7
traitement des signaux, 6-7 Surveillance
de l’écart de traînage, 9-86 de rotation, 9-45 , 9-91
Synchronisation, 9-76 , 9-77 Synchronisation des codeurs
contact du point de référence, 9-76 décalage de point de référence, 9-76 mesure pour codeurs, 9-77 point de référence, 9-76 point de synchronisation, 9-77 prise de référence, 9-76 référencement de codeur absolu, 9-76







