cinématique du solide sciences - s2i.chaptal.free.frs2i.chaptal.free.fr/si/s5/c3.pdf · attaché...
TRANSCRIPT
LYCEE CHAPTAL
COURS
PTSI
Séquence 5
Comportement cinématique des
systèmes
CPGE
PTSI/PT*
Classe
entière
B1 - Justifier ou choisir les grandeurs nécessaires à la modélisation B2 - Proposer un modèle C – Résoudre D1 - Découvrir le fonctionnement d’un système complexe D3 - Mettre en œuvre un protocole expérimental et vérifier sa validé
2h
2017/2018
Cinématique du solide
Sciences Industrielles
pour l’Ingénieur

CPGE PTSI S2I Cinématique du solide
Page1sur20
Sommaire I Préambule.......................................................................................................................................3
II Systèmederéférence......................................................................................................................3
II.1 Notionderepère.....................................................................................................................3
II.2 Notiondetemps......................................................................................................................3
III Cinématiquedupoint......................................................................................................................3
III.1 Vecteurpositiond’unpointparrapportàunrepère..............................................................3
III.2 Trajectoired’unpointparrapportàunrepère.......................................................................4
III.3 Vecteurvitessed’unpointparrapportàunrepère................................................................5
III.4 Vecteuraccélérationd’unpointparrapportàunrepère.......................................................5
IV Dérivationvectorielle......................................................................................................................5
IV.1 Vecteurtauxderotation.........................................................................................................5
IV.2 Dérivéetemporelled’unvecteurmobileparrapportàunebase...........................................6
IV.3 Formulededérivationvectorielle...........................................................................................6
IV.4 Dérivéetemporelled’unvecteurunitairemobileparrapportàunebase.............................7
V Cinématiquedusolideindéformable:vecteurvitesse...................................................................8
V.1 Solideindéformable................................................................................................................8
V.1.1 Définition.........................................................................................................................8
V.1.2 Paramétragedelapositiond’unsolideparrapportàunrepère....................................8
V.2 Champdesvecteursvitessesdespointsd’unsolide...............................................................9
V.2.1 Solideindéformableetéquivalencesolide–repère.......................................................9
V.2.2 Relationentrelesvecteursvitessede2pointsd’unsolide.............................................9
V.2.3 Propriétéd’équiprojectivitéduchampdesvecteursvitesses.......................................10
V.2.4 Représentationparuntorseur......................................................................................11
V.3 Compositiondesmouvements..............................................................................................11
V.3.1 Compositiondesvecteursvitesses................................................................................11
V.3.2 Compositiondesvecteursrotations..............................................................................12
CPGE PTSI S2I Cinématique du solide
Page2sur20
V.3.3 Compositiondestorseurscinématiques.......................................................................12
V.4 Synthèse:démarcheducalculd’unvecteurvitesse.............................................................13
VI Pourallerplusloin:levecteuraccélérationsansdériverlavitesse…..........................................14
VI.1 Champdesvecteursaccélérationsdespointsd’unsolide....................................................14
VI.2 Compositiondesaccélérations..............................................................................................14
VII Cinématiqueducontact................................................................................................................15
VII.1 Vecteurvitessedeglissementenunpointdecontactentredeuxsolides...........................15
VII.2 Notiondepointcoïncidentàtraversunexemple.................................................................16
VII.3 Vecteursrotationderoulementetpivotement....................................................................17
VIII Mouvementplan...........................................................................................................................17
VIII.1 Centreinstantanéderotation...........................................................................................18
VIII.2 Baseetroulante................................................................................................................18
VIII.3 Théorèmedestroisplansglissants....................................................................................19
Compétencesviséesparlaséance
B1 - Justifier ou choisir les grandeurs nécessaires à la modélisation
B11 - Identifier paramètres entrée/sortie cinématique
B2 - Proposer un modèle B222 - Définir les ddl d'un solide B223 - Paramétrer un mécanisme simple B224 - Modéliser la cinématique d'un solide (trajectoire, torseur cinématique, accélération) B225 - Modéliser les liaisons entre solides
C – Résoudre C1 - Déterminer un champ des vecteurs vitesses C8 - Paramétrer un solveur numérique C2 - Déterminer une loi E/S
D1 - Découvrir le fonctionnement d’un système complexe
D11 - Mettre en œuvre un système D12 - Repérer les composants du système D13 - Identifier les grandeurs de flux et d'effort
D3 - Mettre en œuvre un protocole expérimental et vérifier sa validé
D31 - Mettre en œuvre un environnement recréé D32 - Évaluer et commenter les écarts entre les résultats expérimentaux avec l’ordre de grandeurs des résultats attendus (simulés ou définis au cahier des charges)

CPGE PTSI S2I Cinématique du solide
Page3sur20
I PréambuleDans ce chapitre, nous allons étudier les propriétés cinématiques (position, trajectoire, vitesse et accélération) de systèmes techniques industrialisés composés de solides rigides indépendamment des causes qui les produisent. En pratique, on rencontre le plus souvent les situations suivantes :
• détermination d’une commande pour obtenir un mouvement donné : conception d’un profil de came, ...
• vérification d’éléments technologiques ou de phénomènes dynamiques pour un mécanisme : vitesses de glissement entre pièces, phénomènes vibratoires, dimensionnement de moteurs…
II SystèmederéférenceAfin d’étudier le mouvement d’un point ou d’un système de solides, il est nécessaire de mettre en place un système de référence (encore appelé « référentiel »). Il représente en quelque sorte la position d’observation des phénomènes. Il est composé d’une description de l’espace et d’une description du temps.
II.1 NotionderepèreLa description de l’espace est réalisée par la mise en place de repères. Un repère ( )0R O,x,y,z est composé de :
•
•
II.2 NotiondetempsElle est représentée par une quantité scalaire dont l’unité est la seconde. Pour chaque problème, une origine des temps est choisie.
Référentiel = ………………………………..
III Cinématiquedupoint
III.1 Vecteurpositiond’unpointparrapportàunrepèreOn appelle vecteur position d’un point (M) par rapport à un repère (R) (M/R), le vecteur qui relie le point (M) à un point fixe de ( )R O,x,y,z :
• ……………….
• ………. ;
CPGE PTSI S2I Cinématique du solide
Page4sur20
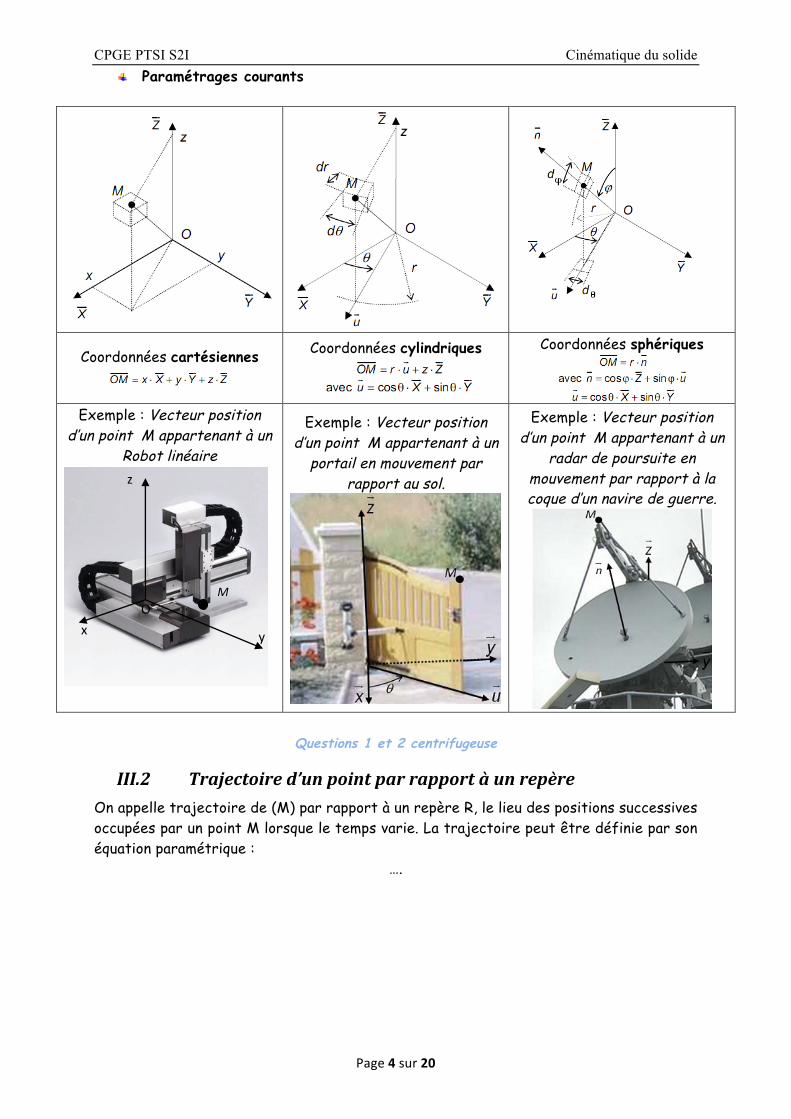
Paramétrages courants
Coordonnées cartésiennes
Coordonnées cylindriques
Coordonnées sphériques
Exemple : Vecteur position
d’un point M appartenant à un Robot linéaire
Exemple : Vecteur position d’un point M appartenant à un
portail en mouvement par rapport au sol.
Exemple : Vecteur position d’un point M appartenant à un
radar de poursuite en mouvement par rapport à la coque d’un navire de guerre.
Questions 1 et 2 centrifugeuse
III.2 Trajectoired’unpointparrapportàunrepèreOn appelle trajectoire de (M) par rapport à un repère R, le lieu des positions successives occupées par un point M lorsque le temps varie. La trajectoire peut être définie par son équation paramétrique :
….
M
x y
z
O
CPGE PTSI S2I Cinématique du solide
Page5sur20
III.3 Vecteurvitessed’unpointparrapportàunrepère Le vecteur vitesse instantanée du point (M) dans son mouvement par rapport au repère (R) est noté /M RV Ce vecteur est tangent à la trajectoire et est défini par la relation :
avec b une base associée au repère R.
III.4 Vecteuraccélérationd’unpointparrapportàunrepèreLe vecteur accélération instantanée du point (M) dans son mouvement par rapport au repère (R) est noté /M RΓ ou /M Ra . Il est défini par la relation : , avec b une base associée à R.
Remarques :
1. La dérivation d’un vecteur par rapport au temps nécessite une base (ou repère
dans certain sujet) de dérivation b
ddt
⎛ ⎞⎜ ⎟⎝ ⎠
à ne pas oublier.
2. Lorsqu’on dérive dans b, le vecteur vitesse n’est pas forcément exprimé dans b.
IV Dérivationvectorielle
IV.1 Vecteurtauxderotation Ce vecteur, noté /i jΩ quantifie :
• par sa direction, la direction de l’axe autour duquel R1 tourne autour de R0, • par sa norme, la vitesse angulaire avec laquelle se fait cette rotation, • par son sens, le sens dans lequel se fait cette rotation.
Dans le cas général, , /
/ , /
, /
x i j
i j y i j
z i j
ω
ω
ω
Ω = avec ωi en rad/s
Question 3 centrifugeuse
CPGE PTSI S2I Cinématique du solide
Page6sur20
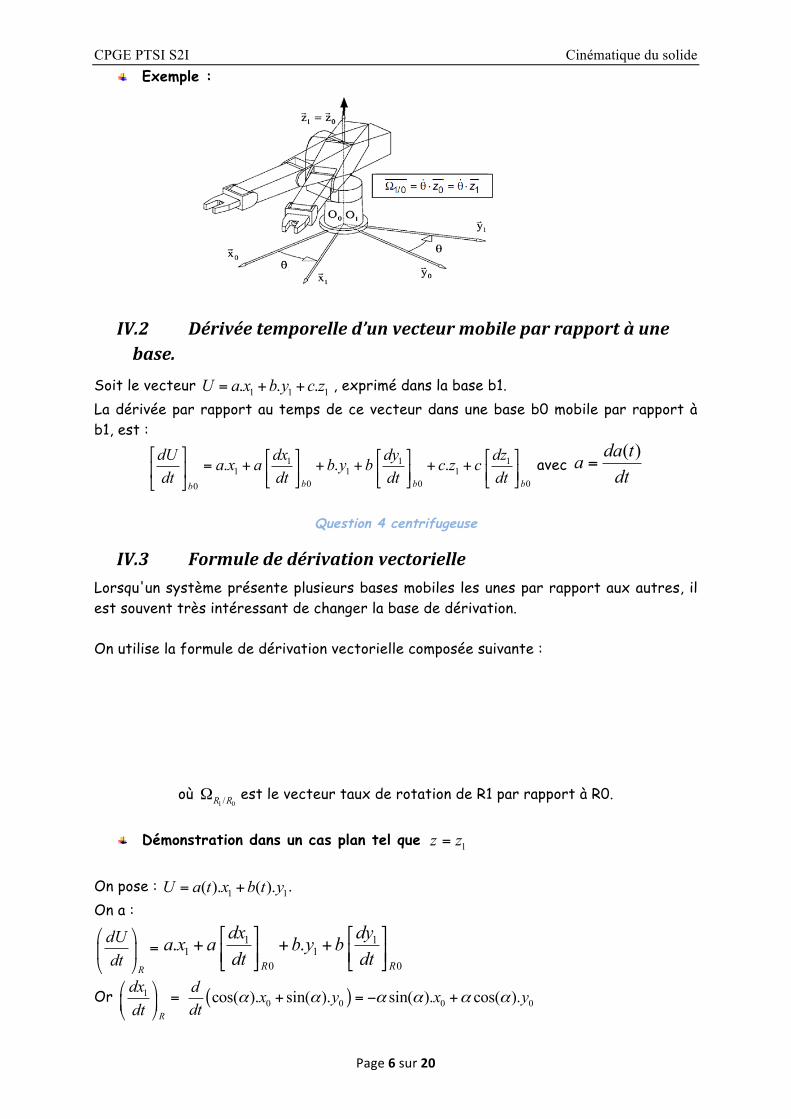
Exemple :
IV.2 Dérivéetemporelled’unvecteurmobileparrapportàunebase.
Soit le vecteur 1 1 1. . .U a x b y c z= + + , exprimé dans la base b1. La dérivée par rapport au temps de ce vecteur dans une base b0 mobile par rapport à b1, est :
1 1 11 1 1
0 0 00
. . .b b bb
dx dy dzdU a x a b y b c z cdt dt dt dt
⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤= + + + + +⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎣ ⎦ avec
( )da tadt
=
Question 4 centrifugeuse
IV.3 FormulededérivationvectorielleLorsqu'un système présente plusieurs bases mobiles les unes par rapport aux autres, il est souvent très intéressant de changer la base de dérivation. On utilise la formule de dérivation vectorielle composée suivante :
où 1 0/R RΩ est le vecteur taux de rotation de R1 par rapport à R0.
Démonstration dans un cas plan tel que 1z z=
On pose : 1 1( ). ( ).U a t x b t y= + . On a :
R
dUdt
⎛ ⎞=⎜ ⎟
⎝ ⎠
1 11 1
0 0
. .R R
dx dya x a b y bdt dt
⎡ ⎤ ⎡ ⎤+ + +⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
Or 1
R
dxdt
⎛ ⎞ =⎜ ⎟⎝ ⎠
( )0 0 0 0cos( ). sin( ). sin( ). cos( ).d x y x ydt
α α α α α α+ = − +

CPGE PTSI S2I Cinématique du solide
Page7sur20
De même : 1d ydt
ℜ
⎛ ⎞=⎜ ⎟
⎝ ⎠ ( )0 0 0 0sin( ). cos( ). cos( ). sin( ).d x y x ydt
α α α α α α− + = − −
D’où :
0
( )
R
du tdt
⎛ ⎞⎜ ⎟⎝ ⎠
= 1 11 1
0 0
. .R R
dx dya x a b y bdt dt
⎡ ⎤ ⎡ ⎤+ + +⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
( ) ( )1 0 0 1 0 0. sin( ). cos( ). . cos( ). sin( ).a x a x y b y b x yα α α α α α α α= + − + + + − −
( ) ( )1
0 0 0 0( ) sin( ). cos( ). cos( ). sin( ).
R
du t a x y b x ydt
α α α α α α α α⎛ ⎞
= + − + + − −⎜ ⎟⎝ ⎠
( ) ( )( )1
0 0( ) . sin( ) cos( ) . cos( ) sin( )).
R
du t a b x a b ydt
α α α α α⎛ ⎞
= + − − + −⎜ ⎟⎝ ⎠
( ) ( )( )1
0 0( ) . sin( ) cos( ) . cos( ) sin( )).
R
du t z a b y a b xdt
α α α α α⎛ ⎞
= + ∧ + + −⎜ ⎟⎝ ⎠
( )1
1 1( ) . ( ). ( ).
R
du t z a t x b t ydt
α⎛ ⎞
= + ∧ +⎜ ⎟⎝ ⎠
1 0
0 1
/( ) ( ) ( ) ( )R R
R R
du t du t t u tdt dt
⎛ ⎞ ⎛ ⎞= +Ω ∧⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
IV.4 Dérivéetemporelled’unvecteurunitairemobileparrapportàunebase
Dans l’exemple précédent du bras manipulateur, on a 1z z= d’où :
11
b
dx ydθ
⎛ ⎞ =⎜ ⎟⎝ ⎠
et 11
dd b
y xθ
⎛ ⎞ = −⎜ ⎟⎝ ⎠
(Règle : rotation du vecteur à dériver de +π/2 autour de l’axe commun z ) Alors
1 11. .
b b
dx dx d ydt d dt
θθ
θ⎛ ⎞ ⎛ ⎞= =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
et 1 11. .
b b
dy dy d xdt d dt
θθ
θ⎛ ⎞ ⎛ ⎞= = −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(Règle : cf. ci-dessus + placer devant la vitesse θ autour de l’axe commun ici z )
Question 5 centrifugeuse
CPGE PTSI S2I Cinématique du solide
Page8sur20
V Cinématiquedusolideindéformable:vecteurvitesse
V.1 Solideindéformable
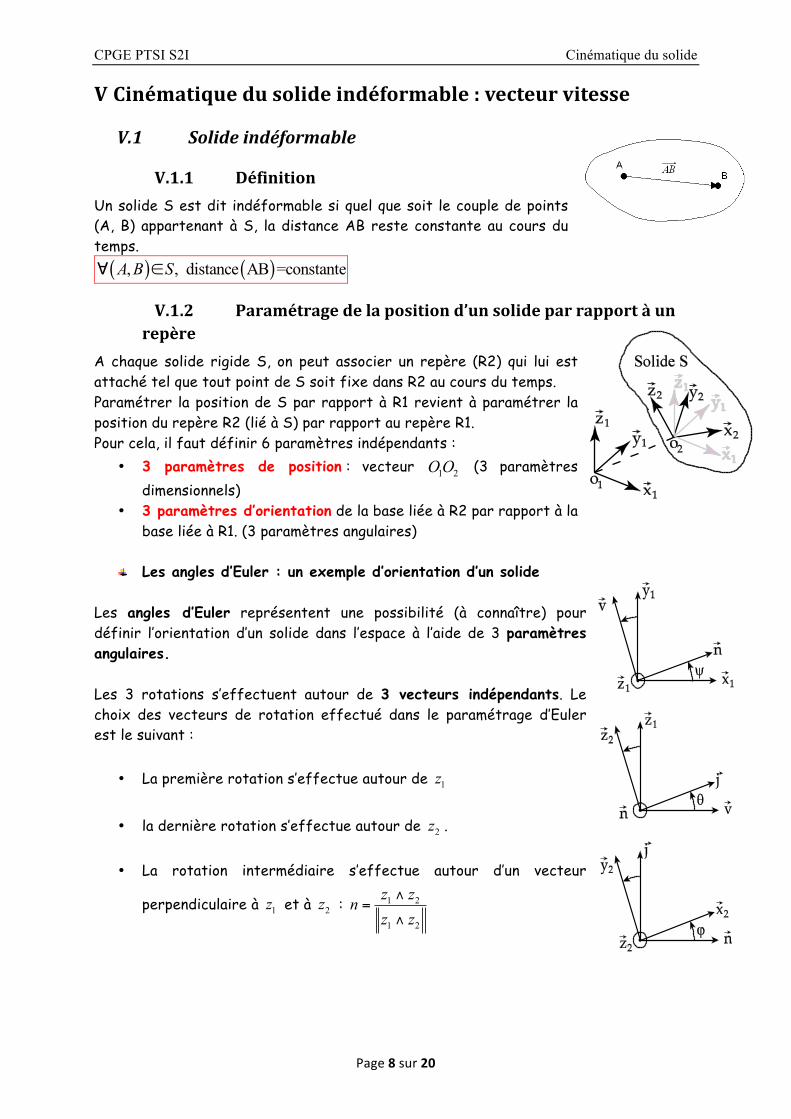
V.1.1 DéfinitionUn solide S est dit indéformable si quel que soit le couple de points (A, B) appartenant à S, la distance AB reste constante au cours du temps. ( ) ( ), , distance AB =constanteA B S∀ ∈
V.1.2 Paramétragedelapositiond’unsolideparrapportàunrepère
A chaque solide rigide S, on peut associer un repère (R2) qui lui est attaché tel que tout point de S soit fixe dans R2 au cours du temps. Paramétrer la position de S par rapport à R1 revient à paramétrer la position du repère R2 (lié à S) par rapport au repère R1. Pour cela, il faut définir 6 paramètres indépendants :
• 3 paramètres de position : vecteur 1 2OO (3 paramètres dimensionnels)
• 3 paramètres d’orientation de la base liée à R2 par rapport à la base liée à R1. (3 paramètres angulaires)
Les angles d’Euler : un exemple d’orientation d’un solide
Les angles d’Euler représentent une possibilité (à connaître) pour définir l’orientation d’un solide dans l’espace à l’aide de 3 paramètres angulaires. Les 3 rotations s’effectuent autour de 3 vecteurs indépendants. Le choix des vecteurs de rotation effectué dans le paramétrage d’Euler est le suivant :
• La première rotation s’effectue autour de 1z • la dernière rotation s’effectue autour de 2z .
• La rotation intermédiaire s’effectue autour d’un vecteur
perpendiculaire à 1z et à 2z : 1 2
1 2
z znz z∧
=∧

CPGE PTSI S2I Cinématique du solide
Page9sur20
Vecteur taux de rotation de R2/R1 :
2 1/ 1 2. . .R R z n zθ ϕΩ =Ψ + +
V.2 Champdesvecteursvitessedespointsd’unsolide
V.2.1 Solideindéformableetéquivalencesolide–repère.Les solides dont la fonction est de se déformer (ressorts, barres de torsion, …) sont exclus des études de cinématique du solide. Dans un repère la position relative des axes est invariante. Donc …………………………… ………………. ;
Conséquence : Etudier le mouvement de (S2) par rapport à (S1) est équivalent à étudier le mouvement de R2 lié à (S2) par rapport à R1 lié à (S1). On ………….. ……………………………….
V.2.2 Relationentrelesvecteursvitessede2pointsd’unsolide.Soit un solide (S) en mouvement par rapport à un repère R.
Champ équiprojectif des vecteurs vitesse :
Démonstration
Soient A et B deux points de (S). On exploite AB cste= en calculant R
d ABdt⎛ ⎞⎜ ⎟⎝ ⎠
On a /S R
R S
d dAB AB ABdt dt⎛ ⎞ ⎛ ⎞= +Ω ∧⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
avec :
Z2
x2
Y2
x1
y1
z1
n
ψ
θ
ϕ
A B
(S) R
O
CPGE PTSI S2I Cinématique du solide
Page10sur20
AB fixe dans S donc 0S
d ABdt⎛ ⎞ =⎜ ⎟⎝ ⎠
AB OB OA= − donc ( ) ( )/ /R R R
d d dAB OB OA V B R V A Rdt dt dt⎛ ⎞ ⎛ ⎞ ⎛ ⎞= − = −⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠
On obtient : ( ) ( ) // / S RV B R V A R AB= +Ω ∧ . Il peut exister une ambiguïté dans la notation lorsque l’on a plusieurs solides. On préfère écrire :
( ) ( ) // / S RV B S R V A S R BA∈ = ∈ + ∧Ω
Question 6 centrifugeuse
V.2.3 Propriétéd’équiprojectivitéduchampdesvecteursvitesses.
Soient A et B deux points d’un solide indéformable (S) en mouvement par rapport à un repère R. On a alors : 2 .AB AB AB=
Dérivons cette expression (AB étant constant) : 0 2. .R
dAB ABdt⎛ ⎞= ⎜ ⎟⎝ ⎠
Ainsi, si le point O est fixe dans R, on a : . .R R
d dAB OA AB OBdt dt⎛ ⎞ ⎛ ⎞=⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
On en déduit :
( ) ( )ABRSAVABRSBV ././ ∈=∈ .
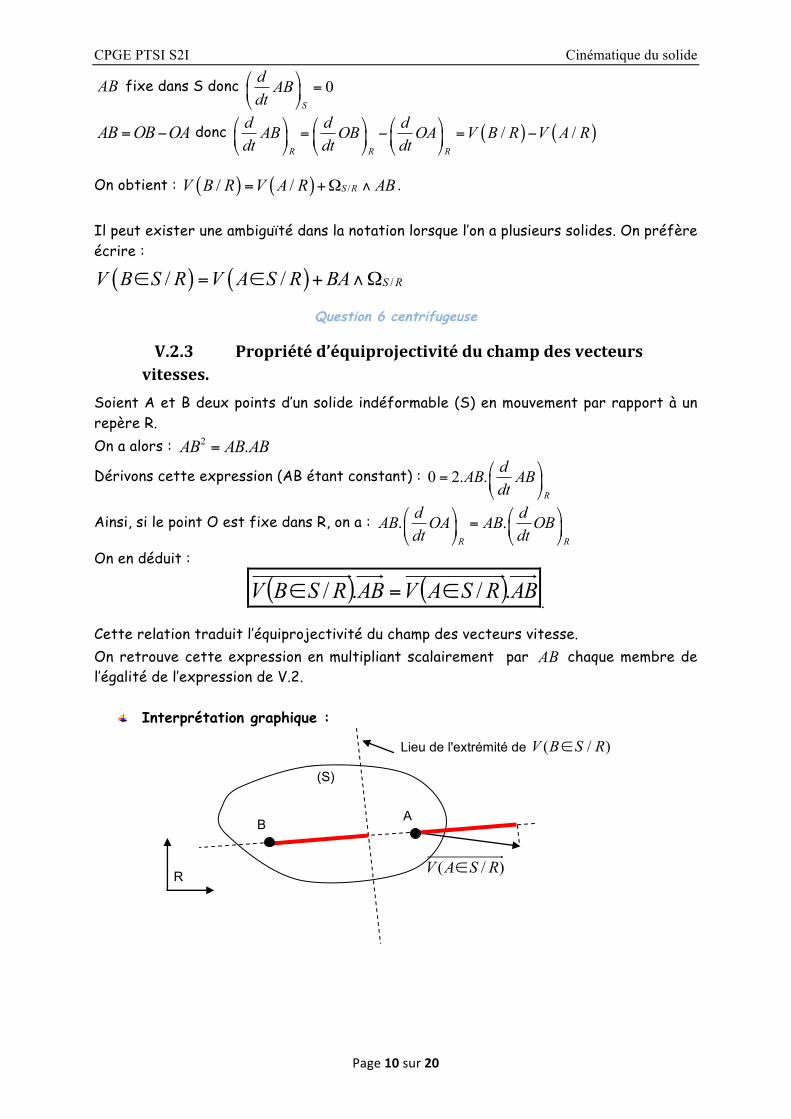
Cette relation traduit l’équiprojectivité du champ des vecteurs vitesse. On retrouve cette expression en multipliant scalairement par AB chaque membre de l’égalité de l’expression de V.2.
Interprétation graphique :
A
)/( RSAV ∈ R
(S)
B
Lieu de l'extrémité de ( / )V B S R∈

CPGE PTSI S2I Cinématique du solide
Page11sur20
V.2.4 Représentationparuntorseur.Pour connaître les vecteurs vitesse de tous les points d’un solide en mouvement par rapport à un repère R, ce que l’on appelle le champ des vecteurs vitesse des points d’un solide, il suffit d’avoir :
• Le vecteur rotation du mouvement : /S RΩ • Le vecteur vitesse d’un point du solide (par exemple ( / )V A S R∈ ).
Le champ des vecteurs vitesses est représenté par un torseur dans lequel on indique ces deux éléments : Torseur cinématique :
Terminologie associée à cette notation /S RΩ et ( / )V A S R∈ sont ……………………………………………….
du torseur au point A. /S RΩ est la ………………………. du torseur, indépendante du
point choisi pour écrire les éléments de réduction. ( / )V A S R∈ est le …………………………du torseur au point A.
{ }/S Rυ est appelé torseur cinématique du mouvement de S/R ou torseur distributeur des vitesses.
Remarque La notation sous forme de torseur ne sert à décrire que les champs de vecteurs équiprojectifs.
Question 7 centrifugeuse
V.3 Compositiondesmouvements
V.3.1 CompositiondesvecteursvitesseSoit un solide (S) en mouvement par rapport à deux repères 1 1 1 1 1( ; , , )R O x y z et
2 2 2 2 2( ; , , )R O x y z eux-mêmes en mouvement l’un par rapport à l’autre.
Soit un point P de (S), cherchons une relation entre les vecteurs ( )1/V P R et ( )2/V P R .
( ) ( )1 1 1 2
1 1 1 2 2 2 2 1 2 2 1 2/ / ( / )R R R R
d d d dV P R O P OO O P V O R R O P R R O Pdt dt dt dt
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞= = + = ∈ + +Ω ∧⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
Soit ( ) ( ) ( )
( ) ( )1 2 2 1 2 2 1 2
2 2 2 1 2 1 2
/ / / ( / )
/ / ( / )
V P R V O R R V P R R R O P
V P R V O R R R R O P
= ∈ + +Ω ∧
= + ∈ +Ω ∧
D’où ( ) ( ) ( )1 2 2 1/ / /V P R V P R V P R R= + ∈
Pour éviter les ambiguïtés, on préfère écrire :
………………………………………………
Question 8 centrifugeuse

CPGE PTSI S2I Cinématique du solide
Page12sur20
Remarque Le calcul de ( )2 1/V P R R∈ ne peut se faire qu’en utilisant le champ des vecteurs vitesse
des points de R2 en mouvement par rapport à R1, car le point 2P R∈ est un point coïncident avec le point P S∈ . Pour ce point 2P R∈ , il n’existe pas de vecteur position
que l’on puisse dériver pour obtenir ( )2 1/V P R R∈ .
V.3.2 CompositiondesvecteursrotationSoit un solide (S) en mouvement par rapport à deux repères 1R et 2R .
Cherchons une relation entre les vecteurs 1( / )S RΩ , 2( / )S RΩ et 2 1( / )R RΩ .
Soit U un vecteur quelconque.
1
2 12
22
( / )
( / )
R R
R S
d dU U R R Udt dt
d dU U S R Udt dt
⎛ ⎞ ⎛ ⎞= +Ω ∧⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
⎛ ⎞ ⎛ ⎞= +Ω ∧⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Et 1
1( / )R S
d dU U S R Udt dt
⎛ ⎞ ⎛ ⎞= +Ω ∧⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Donc :
1 2 2 1( / ) ( / ) ( / )S R S R R RΩ =Ω +Ω
Question 9 centrifugeuse
V.3.3 CompositiondestorseurscinématiquesSoit un solide (S) en mouvement par rapport à deux repères 1R et 2R .
Nous avons établi : ( ) ( ) ( )
1 2 2 1
1 2 2 1
( / ) ( / ) ( / )
/ / /
S R S R R R
V P S R V P S R V P R R
⎧ Ω =Ω +Ω⎪⎨
∈ = ∈ + ∈⎪⎩ .
Nous traduisons ces relations par : { } { } { }1 2 2 1/ / /S R S R R Rυ υ υ= + .
Remarques • pour sommer des torseurs, les éléments de réduction doivent être exprimés au
même point ; • la composition de mouvement peut faire intervenir n repères intermédiaires ;
{ } { } { } { }1 2 1/ / / /... ...nS R S R i j R Rυ υ υ υ= + + + + .
CPGE PTSI S2I Cinématique du solide
Page13sur20
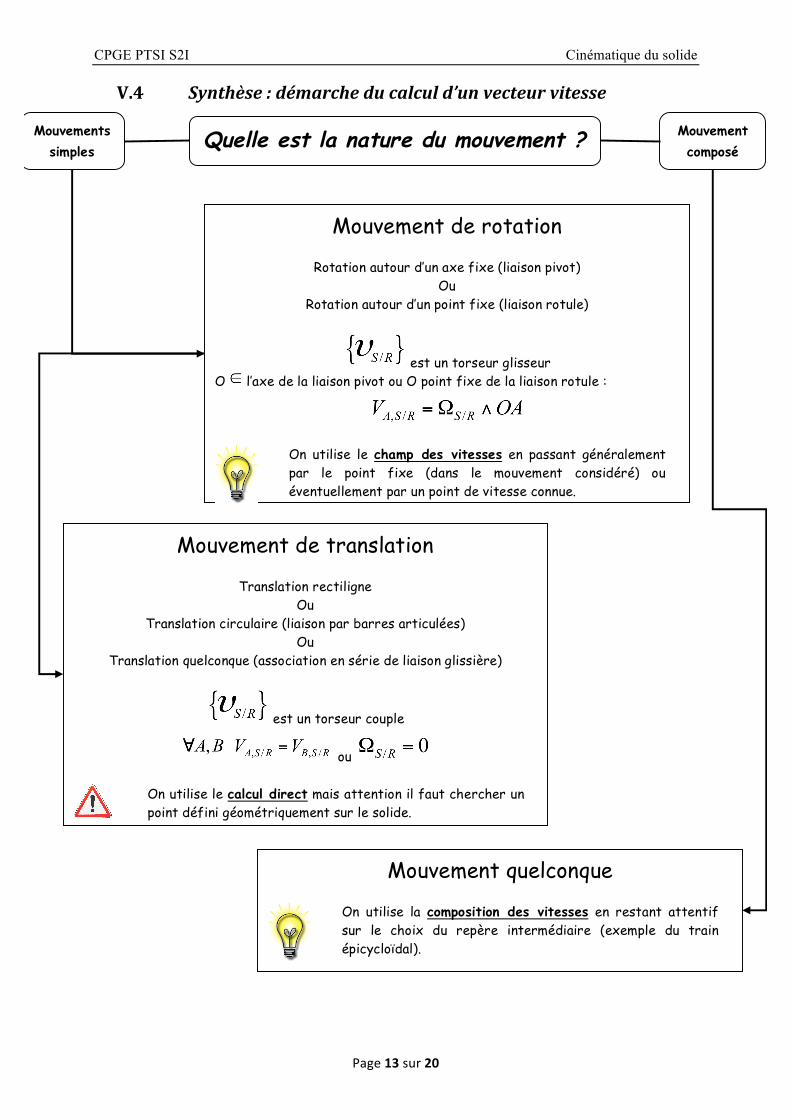
V.4 Synthèse:démarcheducalculd’unvecteurvitesse
Quelle est la nature du mouvement ?
Mouvement de rotation
Rotation autour d’un axe fixe (liaison pivot) Ou
Rotation autour d’un point fixe (liaison rotule)
est un torseur glisseur O l’axe de la liaison pivot ou O point fixe de la liaison rotule :
On utilise le champ des vitesses en passant généralement par le point fixe (dans le mouvement considéré) ou éventuellement par un point de vitesse connue.
Mouvement de translation
Translation rectiligne Ou
Translation circulaire (liaison par barres articulées) Ou
Translation quelconque (association en série de liaison glissière)
est un torseur couple
ou
On utilise le calcul direct mais attention il faut chercher un point défini géométriquement sur le solide.
Mouvement quelconque
On utilise la composition des vitesses en restant attentif sur le choix du repère intermédiaire (exemple du train épicycloïdal).
Mouvement composé
Mouvements simples

CPGE PTSI S2I Cinématique du solide
Page14sur20
VI Pourallerplusloin:levecteuraccélérationsansdériverlavitesse…
VI.1 Champdesvecteursaccélérationsdespointsd’unsolideSoient A et B deux points d’un solide (S) en mouvement par rapport à un repère R.
Nous avons établi : ( ) ( ) // / S RV B S R V A S R BA∈ = ∈ + ∧Ω Dérivons cette expression par rapport au temps dans R.
( ) ( ) ( ) ( )/ / / /b b b b
d d d dV B S R V A S R S R AB S R ABdt dt dt dt⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞∈ = ∈ + Ω ∧ +Ω ∧⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
Soit
( ) ( ) ( ) ( ) ( )/ / / / /b b
d dB S R A S R S R AB S R AB S R ABdt dt
⎛ ⎞⎛ ⎞ ⎛ ⎞Γ ∈ = Γ ∈ + Ω ∧ +Ω ∧ +Ω ∧⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
Or AB est fixe dans S. D’où :
( ) ( ) ( ) ( ) ( )( )/ / / / /b
dB S R A S R S R AB S R S R ABdt⎛ ⎞Γ ∈ = Γ ∈ + Ω ∧ +Ω ∧ Ω ∧⎜ ⎟⎝ ⎠
Champ des vecteurs accélérations
Le champ des vecteurs accélération des points d’un solide ne peut pas être décrit par un torseur car ce n’est pas un champ de moment (le double produit vectoriel du dernier terme l'en empêche). La propriété d’équiprojectivité n’est pas respectée.
VI.2 CompositiondesaccélérationsSoit un solide (S) en mouvement par rapport à deux repères 1 1 1 1 1( ; , , )R O x y z et
2 2 2 2 2( ; , , )R O x y z eux-mêmes en mouvement l’un par rapport à l’autre.
Soit un point P de (S), cherchons une relation entre les vecteurs ( )1/P S RΓ ∈ et
( )2/P S RΓ ∈ .
( ) ( ) ( ) ( )2 2
2 2 1 1 2/ / / /R R
d dP S R V P S R V P S R V P R Rdt dt⎛ ⎞ ⎛ ⎞Γ ∈ = ∈ = ∈ + ∈⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
( ) ( )1 2
1 1 2 1 1 1 2 1 1 2/ ( / ) ( / ) / ( / )R R
d dV P S R R R V P S R V O R R PO R Rdt dt⎛ ⎞ ⎛ ⎞= ∈ +Ω ∧ ∈ + ∈ + ∧Ω⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
( ) ( )2
1 1 2 1 1 1 2 1 1 2/ ( / ) ( / ) / ( / )R
dP S R R R V P S R O R R PO R Rdt⎛ ⎞= Γ ∈ +Ω ∧ ∈ +Γ ∈ + ∧Ω⎜ ⎟⎝ ⎠
( ) ( )2
1
1 1 1 2 1 2 1 1 2 1
1 2 1 1 2 1
/ / ( / ) ( / ) ( / )
( / ) ( / )
R
R
dP S R O R R R R O P R R V P S Rdt
dR R O P R R O Pdt
⎛ ⎞= Γ ∈ +Γ ∈ + Ω ∧ +Ω ∧ ∈⎜ ⎟⎝ ⎠
⎡ ⎤⎛ ⎞+Ω ∧ +Ω ∧⎢ ⎥⎜ ⎟⎝ ⎠⎢ ⎥⎣ ⎦
( ) ( ) ( )2 1 1 2 1 2 1/ / / 2 ( / ) ( / )P S R P S R P R R R R V P S RΓ ∈ =Γ ∈ +Γ ∈ + Ω ∧ ∈
Composition des accélérations
CPGE PTSI S2I Cinématique du solide
Page15sur20
Car ( ) ( )2
1 2 1 1 2 1 2 1 1 2 1 2 1/ / ( / ) ( / ) ( / )R
dP R R O R R R R O P R R R R O Pdt
⎛ ⎞ ⎡ ⎤Γ ∈ = Γ ∈ + Ω ∧ +Ω ∧ Ω ∧⎜ ⎟ ⎣ ⎦⎝ ⎠
Le deuxième terme ( ( )1 2/P R RΓ ∈ ) est appelé accélération d'entraînement du repère
R1 par rapport au repère R2. Le dernier terme 1 2 12 ( / ) ( / )R R V P S RΩ ∧ ∈ est appelé accélération de Coriolis.
VII Cinématiqueducontact
VII.1 Vecteur vitesse de glissement en un point de contact entredeuxsolides
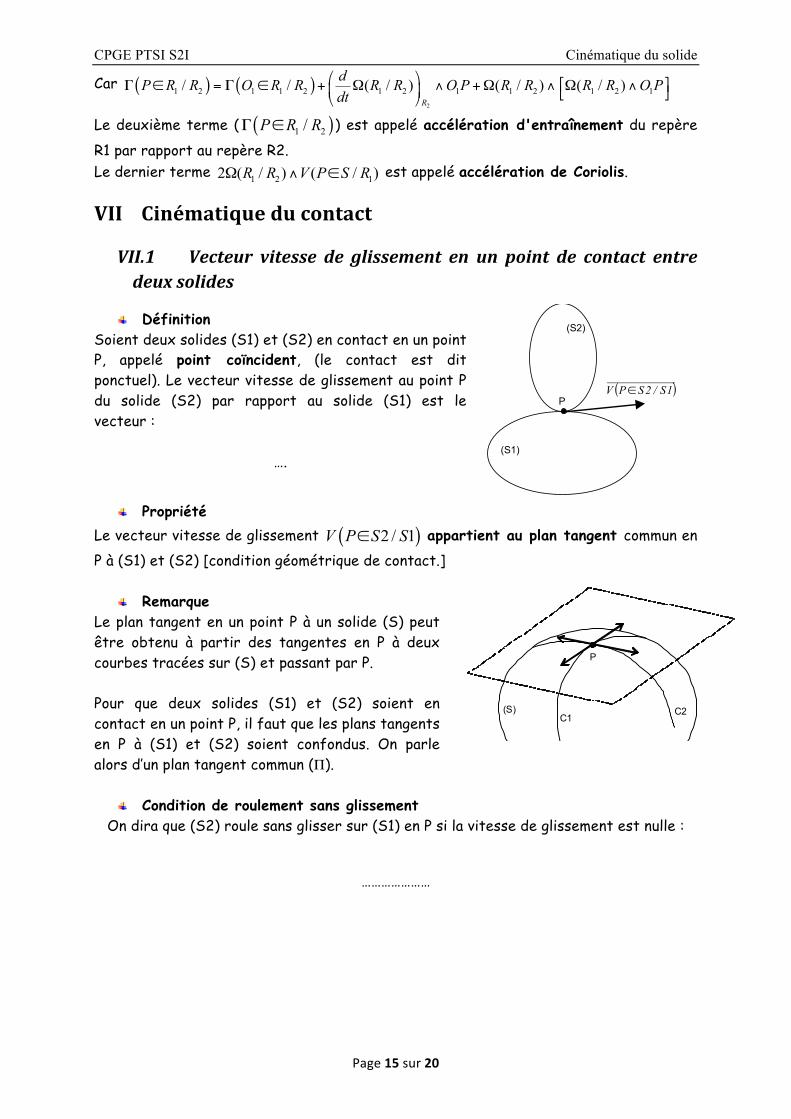
Définition Soient deux solides (S1) et (S2) en contact en un point P, appelé point coïncident, (le contact est dit ponctuel). Le vecteur vitesse de glissement au point P du solide (S2) par rapport au solide (S1) est le vecteur :
….
(S2)
(S1)
( )1S/2SPV ∈P
Propriété Le vecteur vitesse de glissement ( )2 / 1V P S S∈ appartient au plan tangent commun en P à (S1) et (S2) [condition géométrique de contact.]
Remarque Le plan tangent en un point P à un solide (S) peut être obtenu à partir des tangentes en P à deux courbes tracées sur (S) et passant par P. Pour que deux solides (S1) et (S2) soient en contact en un point P, il faut que les plans tangents en P à (S1) et (S2) soient confondus. On parle alors d’un plan tangent commun (Π).
Condition de roulement sans glissement On dira que (S2) roule sans glisser sur (S1) en P si la vitesse de glissement est nulle :
…………………
C1 C2
P
(S)
CPGE PTSI S2I Cinématique du solide
Page16sur20
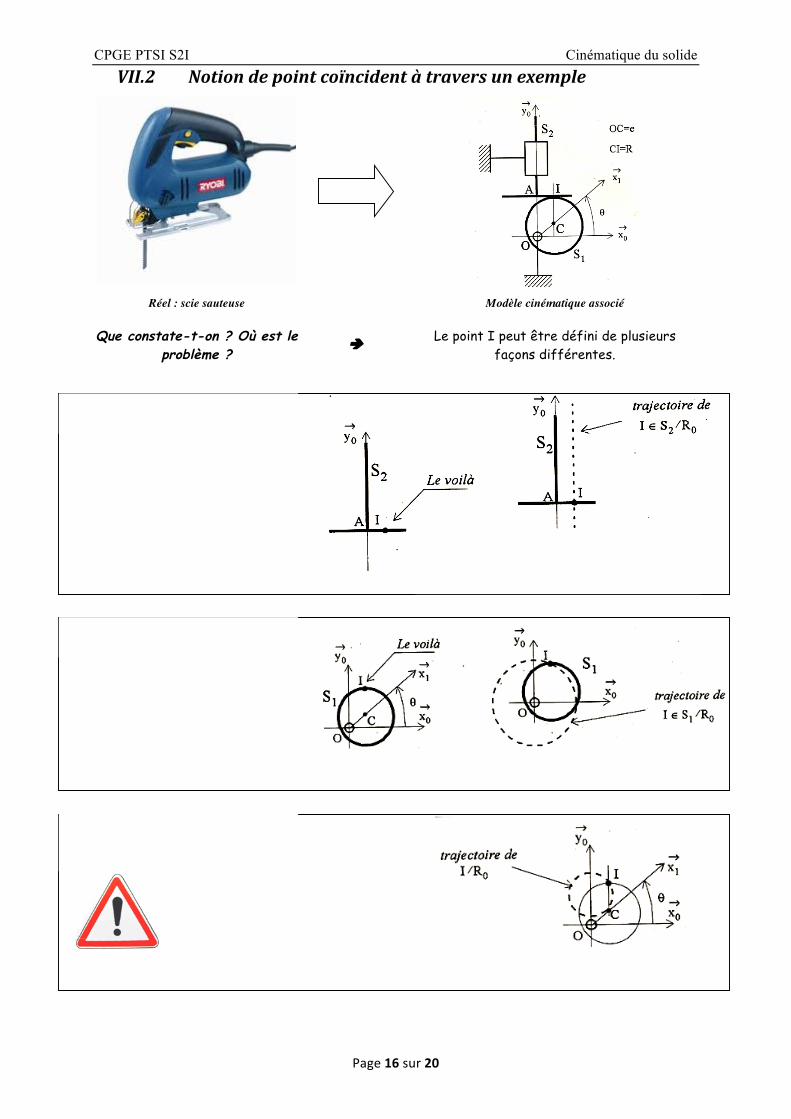
VII.2 Notiondepointcoïncidentàtraversunexemple
Réel : scie sauteuse Modèle cinématique associé
Que constate-t-on ? Où est le problème ?
è Le point I peut être défini de plusieurs façons différentes.
CPGE PTSI S2I Cinématique du solide
Page17sur20
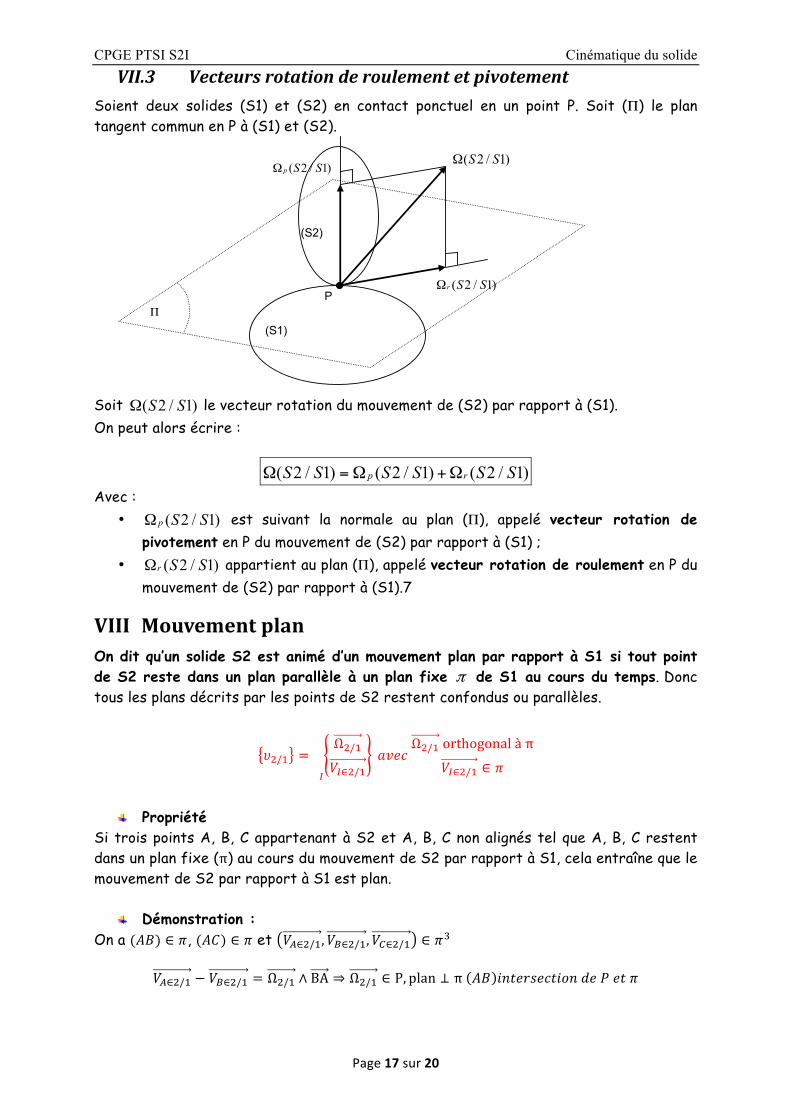
VII.3 Vecteursrotationderoulementetpivotement Soient deux solides (S1) et (S2) en contact ponctuel en un point P. Soit (Π) le plan tangent commun en P à (S1) et (S2).
( 2 / 1)p S SΩ
(S2)
(S1)
P Π
( 2 / 1)S SΩ
( 2 / 1)r S SΩ
Soit ( 2 / 1)S SΩ le vecteur rotation du mouvement de (S2) par rapport à (S1). On peut alors écrire :
( 2 / 1) ( 2 / 1) ( 2 / 1)p rS S S S S SΩ =Ω +Ω Avec :
• ( 2 / 1)p S SΩ est suivant la normale au plan (Π), appelé vecteur rotation de pivotement en P du mouvement de (S2) par rapport à (S1) ;
• ( 2 / 1)r S SΩ appartient au plan (Π), appelé vecteur rotation de roulement en P du mouvement de (S2) par rapport à (S1).7
VIII Mouvementplan On dit qu’un solide S2 est animé d’un mouvement plan par rapport à S1 si tout point de S2 reste dans un plan parallèle à un plan fixe π de S1 au cours du temps. Donc tous les plans décrits par les points de S2 restent confondus ou parallèles.
𝜐"/$ =Ω"/$𝑉(∈"/$(
𝑎𝑣𝑒𝑐Ω"/$orthogonalàπ
𝑉(∈"/$ ∈ 𝜋
Propriété
Si trois points A, B, C appartenant à S2 et A, B, C non alignés tel que A, B, C restent dans un plan fixe (π) au cours du mouvement de S2 par rapport à S1, cela entraîne que le mouvement de S2 par rapport à S1 est plan.
Démonstration : On a (𝐴𝐵) ∈ 𝜋, (𝐴𝐶) ∈ 𝜋 et 𝑉?∈"/$, 𝑉A∈"/$, 𝑉B∈"/$ ∈ 𝜋C
𝑉?∈"/$ − 𝑉A∈"/$ = Ω"/$ ∧ BA ⇒ Ω"/$ ∈ P, plan ⊥ π 𝐴𝐵 𝑖𝑛𝑡𝑒𝑟𝑠𝑒𝑐𝑡𝑖𝑜𝑛𝑑𝑒𝑃𝑒𝑡𝜋

CPGE PTSI S2I Cinématique du solide
Page18sur20
𝑉?∈"/$ − 𝑉B∈"/$ = Ω"/$ ∧ CA ⇒ Ω"/$ ∈ PU, plan ⊥ π 𝐴𝐶 𝑖𝑛𝑡𝑒𝑟𝑠𝑒𝑐𝑡𝑖𝑜𝑛𝑑𝑒𝑃′𝑒𝑡𝜋
Or 𝑃 ≠ 𝑃U donc Ω"/$ orthogonal à 𝜋
VIII.1 CentreinstantanéderotationSoient deux solides S1 et S2 en mouvement plan dans le plan 𝝅. Il existe un point unique I tel qu'à l'instant considéré 𝑽𝑰∈𝟐/𝟏 = 𝟎
…………………………….
I2/1 est situé à l’intersection de l’axe central ∆ avec le plan 𝜋,on peut dire qu’il y a roulement sans glissement de S2 par rapport à S1 en I2/1.
Détermination graphique de I2/1 Soit A et B deux point de S2 dont on connait les directions des vitesses.
On a 𝑉(∈"/$ = 𝑉?∈"/$ + Ω"/$ ∧ 𝐴𝐼 = 0 ⇒ 𝐴𝐼 = bc/d∧ef∈c/d
bc/dc
Donc I est situé sur une droite D perpendiculaire à 𝑉?∈"/$ passant par A
De même I est situé sur une droite D’ perpendiculaire à 𝑉A∈"/$ passant par B
I est donc à l’intersection de D et D’
Utilisation du CIR A l’instant t, le CIR I2/1 se comporte comme un centre de rotation, les vitesses des points M de S2 par rapport à S1 seront donc perpendiculaires aux droites (IM) et proportionnelles aux distance IM.
VIII.2 BaseetroulanteRoulante : c'est la trajectoire de I2/1 dans S2 notée C2
Base: c'est la trajectoire de I2/1 dans S1 notée C1
……………………..
Donc tout mouvement plan peut se ramener au roulement sans glissement de la roulante sur la base.
Soient ℛ$ 𝑂$, 𝑥$, 𝑦$, 𝑧$ repère lié à S1, ℛ" 𝑂", 𝑥", 𝑦", 𝑧" repère lié à S2
C2 est donnée par 𝑂"I"/$ =bc/d∧emc∈c/d
bc/dc
C1 est donnée par 𝑂$I"/$ = 𝑂$𝑂" + 𝑂"I"/$ = 𝑂$𝑂" +bc/d∧emd∈c/d
bc/dc

CPGE PTSI S2I Cinématique du solide
Page19sur20
VIII.3 ThéorèmedestroisplansglissantsSoient 3 solides S0, S1, S2 en mouvement plan les uns par rapport aux autres. On note :
• I0/1 le C.I.R. du mouvement de 0/1 • I1/2 le C.I.R. du mouvement de 1/2 • I2/0 le C.I.R. du mouvement de 2/0
….
Démonstration : Soit 𝑧 la normale aux plans des mouvements.
On a Ωn/$ = Ωn/$. z; Ω$/" = Ω$/". z; Ω"/n = Ω"/n. z
On a 𝑉(q/c∈n/" = 0 ⇒ 𝑉(q/c∈n/$ + 𝑉(q/c∈$/" = 0
𝑉(q/d∈n/$ + Ωn/$. z ∧ 𝐼n/$𝐼n/" + 𝑉(q/d∈$/" + Ω$/". z ∧ 𝐼n/$𝐼$/" = 0
Ωn/$. z ∧ 𝐼n/$𝐼n/" + Ω$/". z ∧ 𝐼n/$𝐼$/" = 0
z ∧ Ωn/$. 𝐼n/$𝐼n/" + Ω$/". 𝐼n/$𝐼$/" = 0
Or Ωn/$. 𝐼n/$𝐼n/" + Ω$/". 𝐼n/$𝐼$/" ⊥ z
Donc Ωn/$. 𝐼n/$𝐼n/" + Ω$/". 𝐼n/$𝐼$/" = 0 ⇒ 𝐼n/$