chapitre 4 : compositions des mouvements - …ferdibou.free.fr/.../s4/mecanique_cours_4.pdf · a)...
TRANSCRIPT
23
Chapitre 4 : Compositions des mouvements
Sommaire
Sommaire ............................................................................................................................................. 23
I. Composition des vecteurs vitesse ................................................................................................ 24
1) Définition des termes : ............................................................................................................. 24
2) Généralisation : ........................................................................................................................ 25
II. Composition des torseurs cinématiques ...................................................................................... 25
III. Mouvement relatif de deux solides en contact ponctuel ......................................................... 26
1) Vecteur unitaire de mouvement .............................................................................................. 26
2) Vecteurs rotations de roulement et de pivotement ................................................................. 26
3) Possibilité de mouvement relatif .............................................................................................. 27
IV. Composition de vecteurs accélération ..................................................................................... 27
V. Mouvement Plan sur Plan ............................................................................................................ 28
1) Centre instantané de rotation – base roulante ........................................................................ 28
A) Centre Instantané de Rotation (CIR) – Définition ................................................................. 29
B) Base – Définition................................................................................................................... 29
C) Roulante – Définition ............................................................................................................ 29
2) Recherche géométrique du CIR ................................................................................................ 29
VI. Applications .............................................................................................................................. 30
24
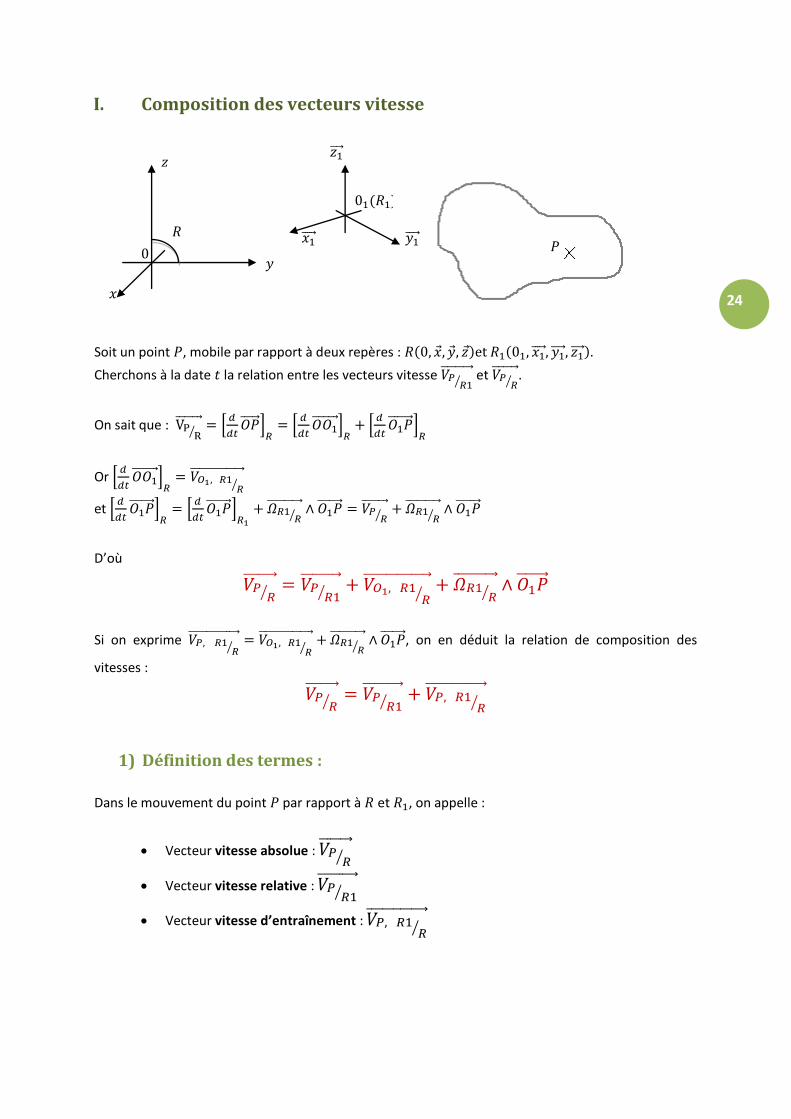
I. Composition des vecteurs vitesse
Soit un point , mobile par rapport à deux repères : .
Cherchons à la date la relation entre les vecteurs vitesse
et
.
On sait que :
Or
et
D’où
Si on exprime
, on en déduit la relation de composition des
vitesses :
1) Définition des termes :
Dans le mouvement du point par rapport à et , on appelle :
Vecteur vitesse absolue :
Vecteur vitesse relative :
Vecteur vitesse d’entraînement :
25
2) Généralisation :
Soit un point , mobile par rapport à repères : . On peut écrire successivement :
⁞
Si on ajoute membre à membre ces égalités, il reste :
(1)
Or, on peut écrire directement entre et :
(2)
De (1) et (2), on en déduit :
Relation générale de composition des vitesses
Exemple :
II. Composition des torseurs cinématiques
Soient repères en mouvement les uns par rapport aux autres. Le torseur cinématique du
mouvement du repère par rapport à au point , s’écrit :
On a déjà démontré la relation de composition des vecteurs rotation ; on en déduit la relation de
composition des torseurs cinématiques :
26
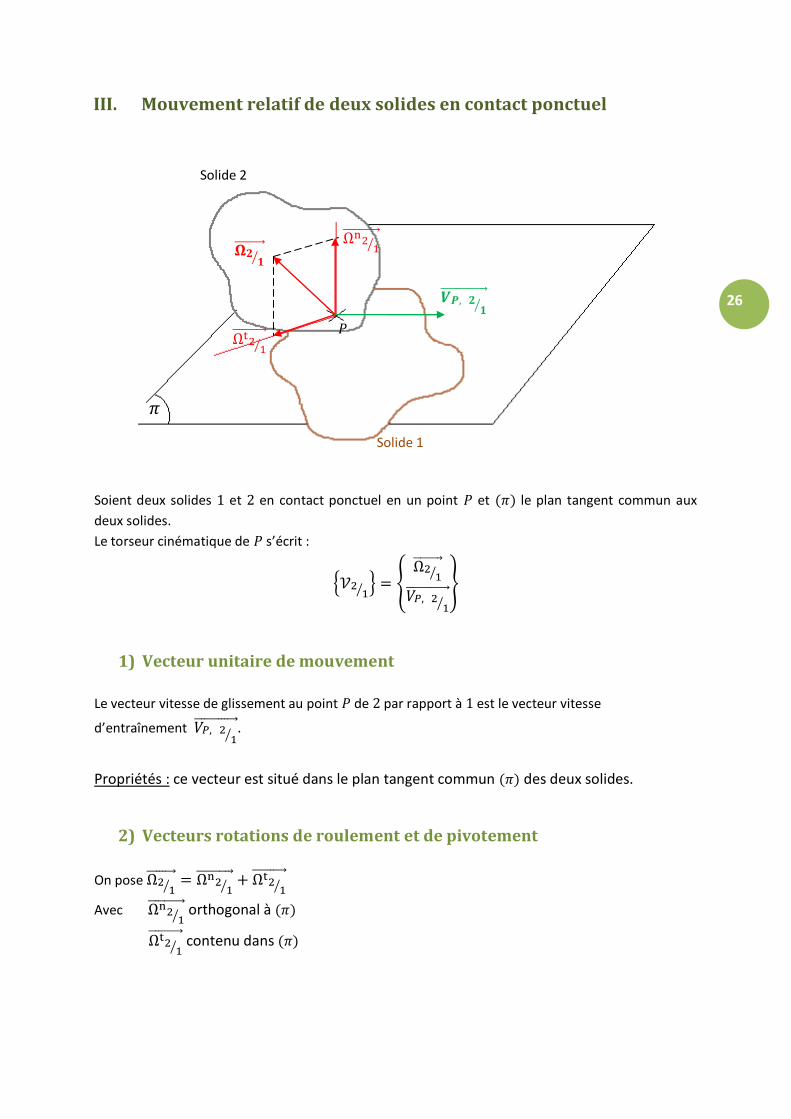
III. Mouvement relatif de deux solides en contact ponctuel
Soient deux solides et en contact ponctuel en un point et le plan tangent commun aux
deux solides.
Le torseur cinématique de s’écrit :
1) Vecteur unitaire de mouvement
Le vecteur vitesse de glissement au point de par rapport à est le vecteur vitesse
d’entraînement
.
Propriétés : ce vecteur est situé dans le plan tangent commun des deux solides.
2) Vecteurs rotations de roulement et de pivotement
On pose
Avec
orthogonal à
contenu dans
Solide 2
Solide 1
27
Définition : Dans le mouvement du solide par rapport à en contact ponctuel au point :
vecteur vitesse de roulement :
vecteur vitesse de pivotement :
3) Possibilité de mouvement relatif
Le mouvement de par rapport à en contact ponctuel en est une combinaison de glissement, de
roulement et de pivotement.
Par exemple : on peut dire qu’une sphère roule sans glisser ni pivoter sur un plan si :
IV. Composition de vecteurs accélération
Soit un point , mobile par rapport à deux repères : .
Cherchons à la date la relation entre les vecteurs vitesse
et
.
En réécrivant le vecteur vitesse d’entraînement :
En dérivant chaque terme par rapport à dans , on obtient la relation de composition des
accélérations :
Dans le mouvement de par rapport aux deux repères et , on appelle :
vecteur accélération absolue :
vecteur accélération relative :
vecteur accélération d’entrainement :
vecteur accélération de Coriolis :
28
V. Mouvement Plan sur Plan
1) Centre instantané de rotation – base roulante
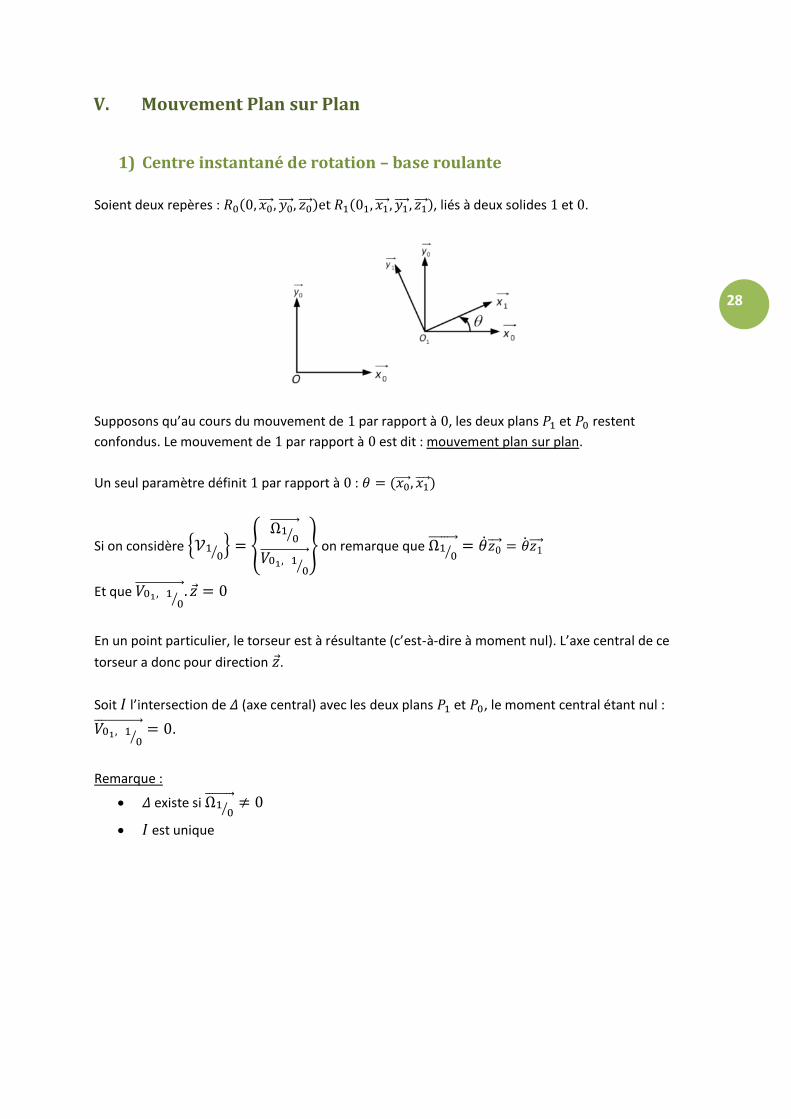
Soient deux repères : , liés à deux solides et .
Supposons qu’au cours du mouvement de par rapport à , les deux plans et restent
confondus. Le mouvement de par rapport à est dit : mouvement plan sur plan.
Un seul paramètre définit par rapport à :
Si on considère
on remarque que
Et que
En un point particulier, le torseur est à résultante (c’est-à-dire à moment nul). L’axe central de ce
torseur a donc pour direction .
Soit l’intersection de (axe central) avec les deux plans et , le moment central étant nul :
.
Remarque :
existe si
est unique
29
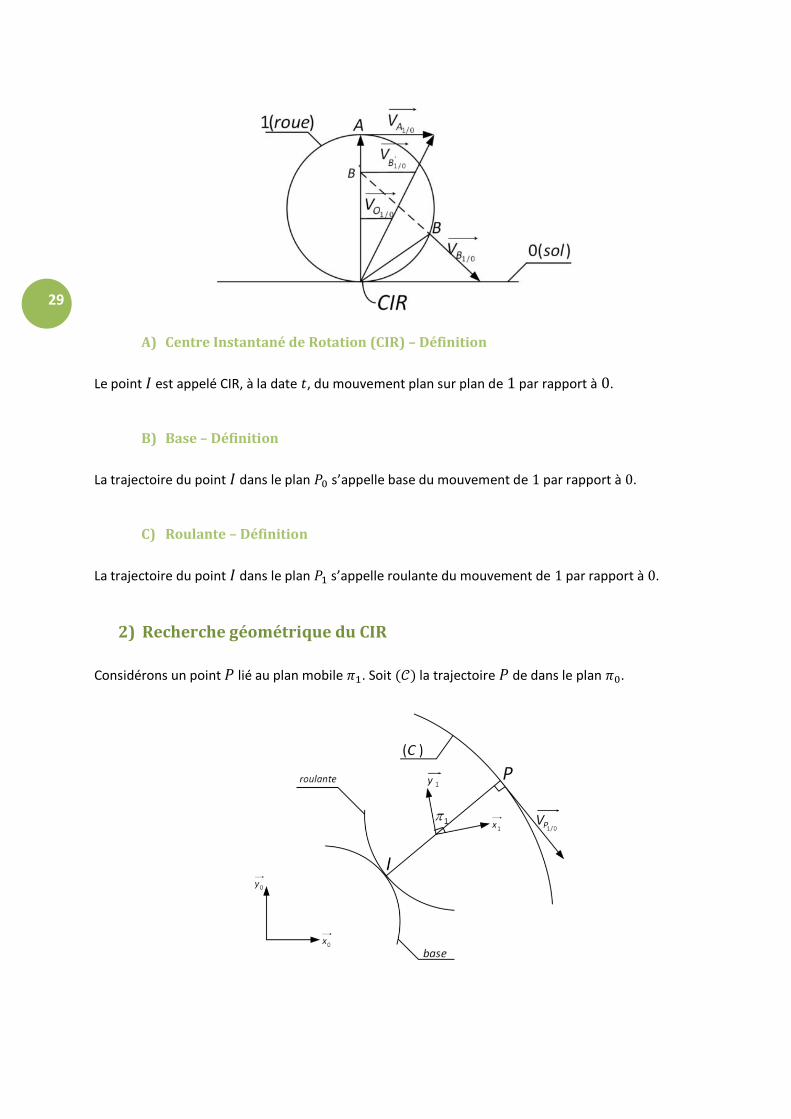
A) Centre Instantané de Rotation (CIR) – Définition
Le point est appelé CIR, à la date , du mouvement plan sur plan de par rapport à .
B) Base – Définition
La trajectoire du point dans le plan s’appelle base du mouvement de par rapport à .
C) Roulante – Définition
La trajectoire du point dans le plan s’appelle roulante du mouvement de par rapport à .
2) Recherche géométrique du CIR
Considérons un point lié au plan mobile . Soit la trajectoire de dans le plan .
30
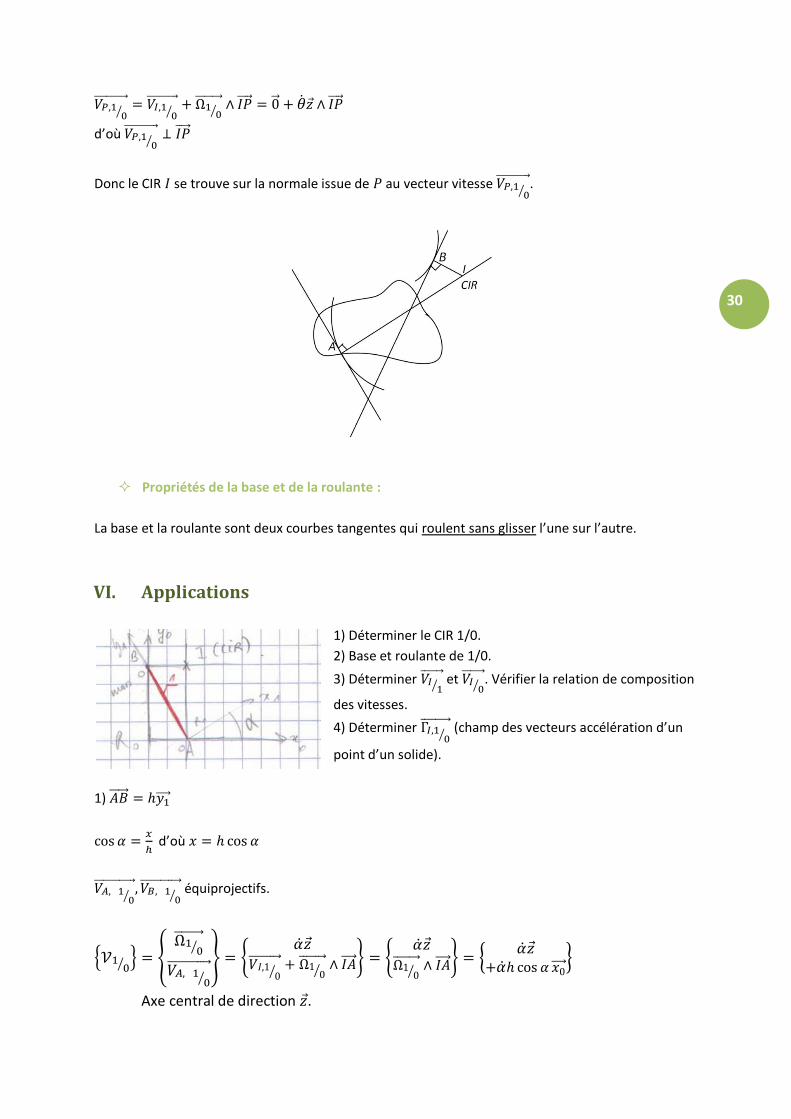
d’où
Donc le CIR se trouve sur la normale issue de au vecteur vitesse
.
Propriétés de la base et de la roulante :
La base et la roulante sont deux courbes tangentes qui roulent sans glisser l’une sur l’autre.
VI. Applications
1) Déterminer le CIR 1/0.
2) Base et roulante de 1/0.
3) Déterminer
et
. Vérifier la relation de composition
des vitesses.
4) Déterminer
(champ des vecteurs accélération d’un
point d’un solide).
1)
d’où
équiprojectifs.
Axe central de direction .
31
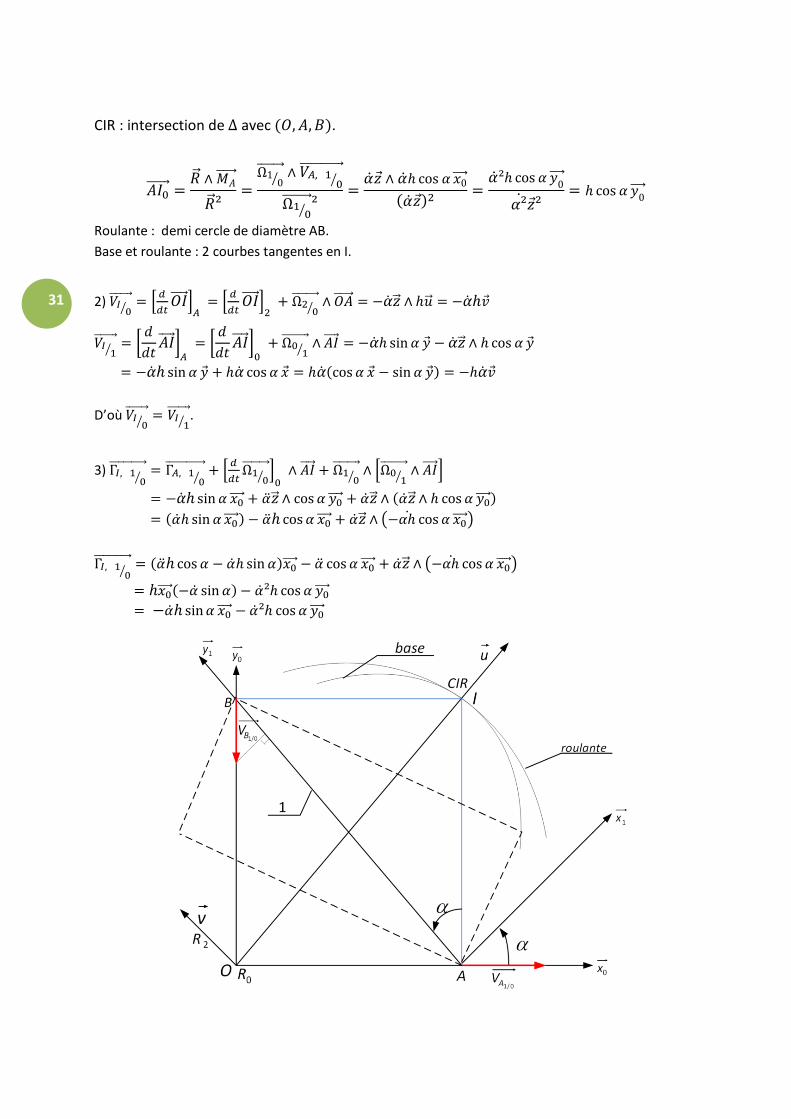
CIR : intersection de avec .
Roulante : demi cercle de diamètre AB.
Base et roulante : 2 courbes tangentes en I.
2)
D’où
.
3)