b2. proposer ou justifier un modele b2.1...
TRANSCRIPT

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 1 /14
MODELISATION DES ACTIONS MECANIQUES
1. Notion d’Action Mécanique :
1.1. Qu’est-ce qu’une action mécanique ?
On appelle action mécanique toute cause susceptible de déplacer un corps ou de le
maintenir à l’équilibre
1.2. Modélisation des Actions Mécaniques :
En mécanique, les vecteurs sont utilisés pour modéliser des charges concentrées et des
résultantes d’Actions Mécanique très diverses (poids, attraction magnétique…)
Les vecteurs définis par :
- Son point d’application
- Sa direction
- Son sens
- Son intensité mesurée en Newtons (N)
1.2.1. Les vecteurs efforts :
Les efforts ont tendance à déplacer (translation) les solides.
Exemple : Vérin de l’ouvre portail FAAC
0
)/(
)/(
,,,
/ VTB
VTB
zyxO
VT Y
X
B
Notation :

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 2 /14
Point d’application : B
Direction : droite (AB)
Sens : A vers B
Norme :
²² )/()/(/ VTBVTBVT YXB
1.2.2. Les vecteurs Moments :
Les Moments ont tendance à faire tourner (en rotation) les solides.
Définition :
Un moment est une action mécanique agissant sur un point d’un solide, crée par un effort
appliqué un point décalé.
Remarque : Il est impératif que le support de l’effort ne passe pas par le point ou l’on veut calculer le
moment, sinon il donne un moment nul.
Exemple :
Le moment en O de l’effort 2/1F
appliqué en D est modélisé par un vecteur moment
noté )F(M 2/1O
O X
D
X
Y
X Z
2/1F
d
O
Caractéristiques de VTB /
:
x
y
Tracer la résultante VTB /
ci dessus
Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 3 /14
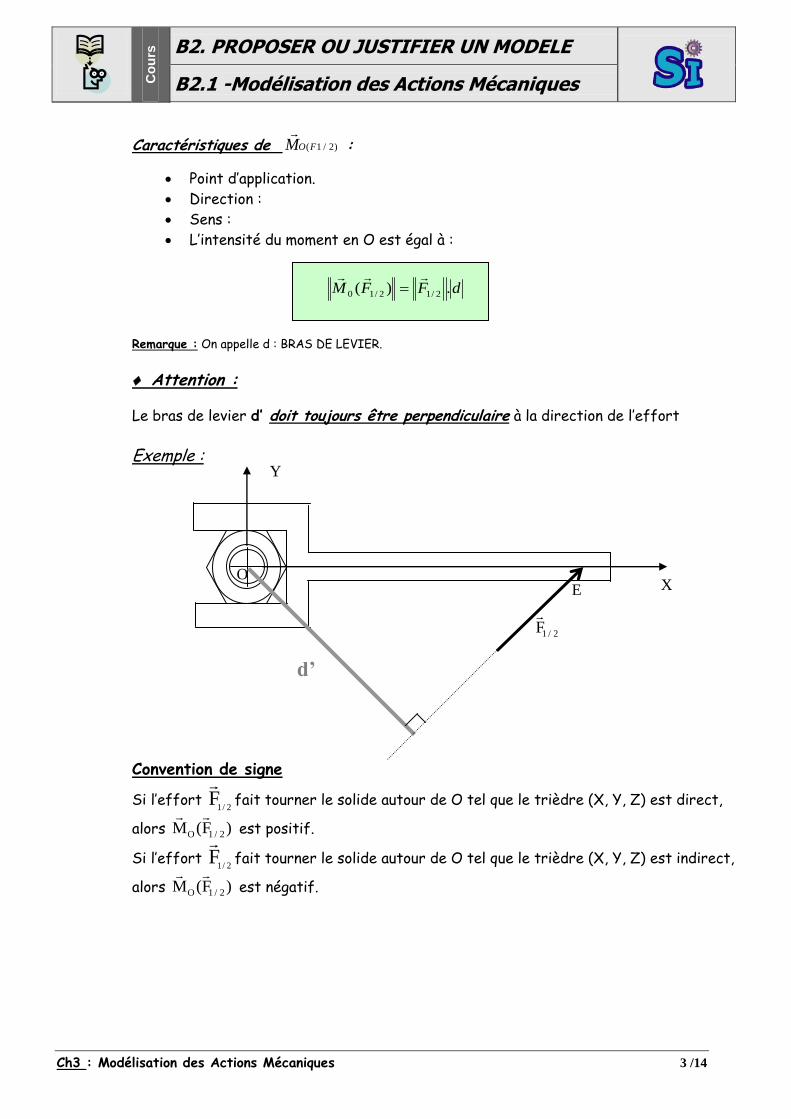
Caractéristiques de )2/1(FOM
:
Point d’application.
Direction :
Sens :
L’intensité du moment en O est égal à :
dFFM .)( 2/12/10
Remarque : On appelle d : BRAS DE LEVIER.
Attention :
Le bras de levier d’ doit toujours être perpendiculaire à la direction de l’effort
Exemple :
Convention de signe
Si l’effort 2/1
F
fait tourner le solide autour de O tel que le trièdre (X, Y, Z) est direct,
alors )F(M 2/1O
est positif.
Si l’effort 2/1
F
fait tourner le solide autour de O tel que le trièdre (X, Y, Z) est indirect,
alors )F(M 2/1O
est négatif.
O X
Y
E
d’
2/1F

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 4 /14
Application n°1
Application n°2
Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 5 /14
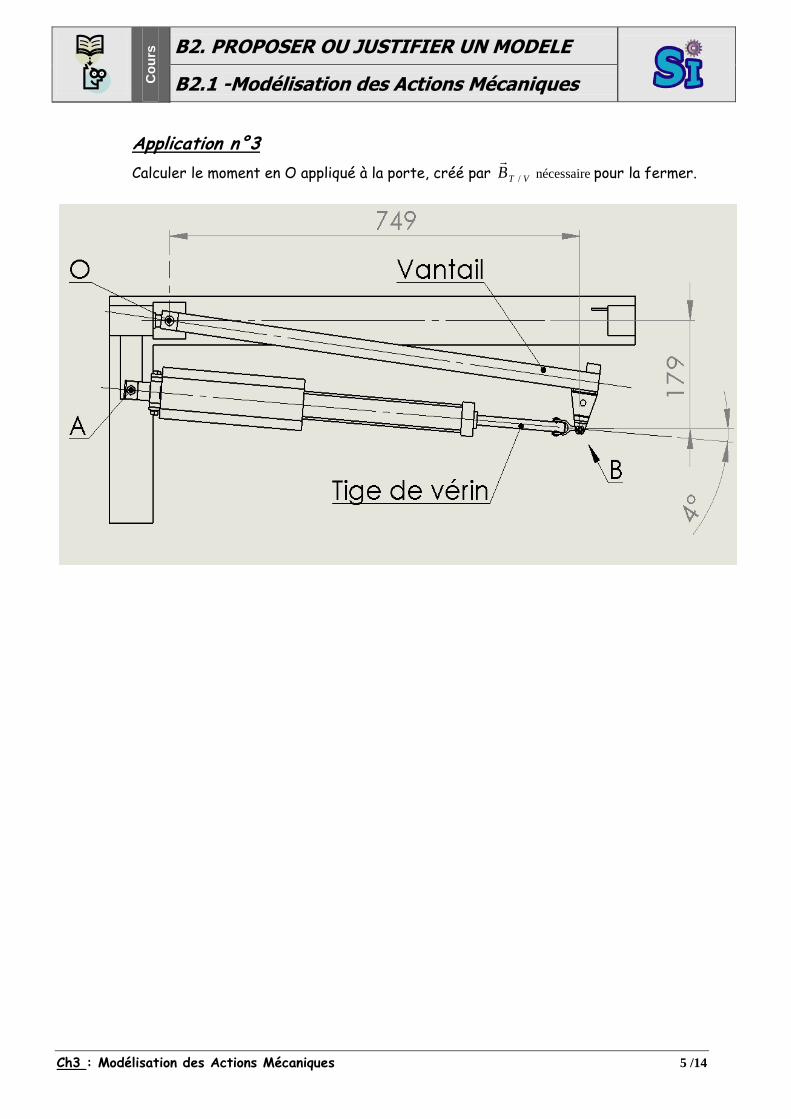
Application n°3
Calculer le moment en O appliqué à la porte, créé par VTB /
nécessaire pour la fermer.

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 6 /14
1.2.3. Notion de Torseur :
Lorsqu’un solide n°2 agit sur un solide n°1 en un point A, on définit cette action mécanique
par :
- Un vecteur force et noté : )2/1(R
.
- Un vecteur moment au point A noté : )2/1(AM
Les vecteurs )2/1(R
et )2/1(AM
représentent le TORSEUR de l’action mécanique au point A, il
est noté :
12
12
12
12
12
12
)2/1(
)2/1()2/1(
N
M
L
Z
Y
X
M
RT
A
AA
Remarque :
- )2/1(R
: est appelé la résultante du TORSEUR associé à l’action mécanique de 1 sur 2.
- )2/1(AM
: est appelé le moment résultant au point A du TORSEUR associé à l’action
mécanique de 1 sur 2.
- )2/1(R
et )2/1(AM
définissent, au point A, les éléments de réduction du TORSEUR )2/1(T
1.2.3.1. Torseurs particuliers :
TORSEUR glisseur :
On appelle TORSEUR glisseur, tout TORSEUR associé à une action particulière
dont le moment résultant est nul :
0
)2/1()2/1(
R
T
A
TORSEUR Couple :
On appelle TORSEUR couple, tout TORSEUR associé à une action particulière dont
la résultante est nulle :
)2/1(
)2/1(0
AA
MT
Composantes de )2/1(R
Composantes de )2/1(AM
Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 7 /14
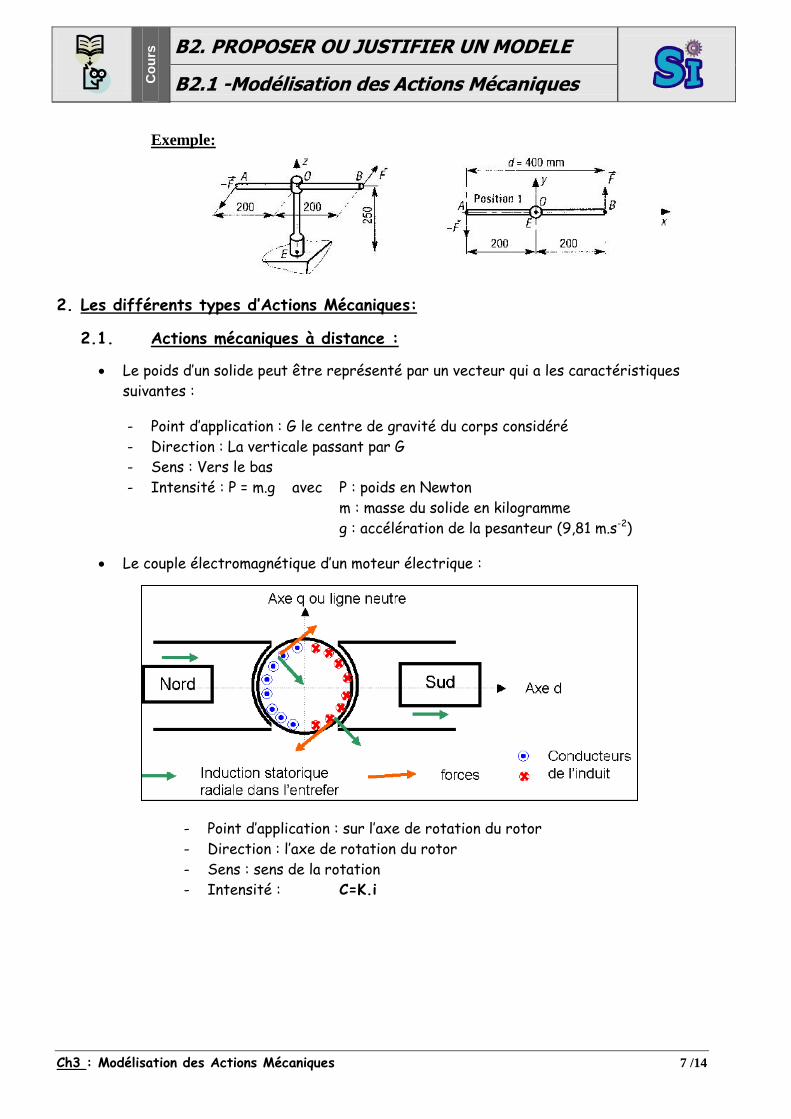
Exemple:
2. Les différents types d’Actions Mécaniques:
2.1. Actions mécaniques à distance :
Le poids d’un solide peut être représenté par un vecteur qui a les caractéristiques
suivantes :
- Point d’application : G le centre de gravité du corps considéré
- Direction : La verticale passant par G
- Sens : Vers le bas
- Intensité : P = m.g avec P : poids en Newton
m : masse du solide en kilogramme
g : accélération de la pesanteur (9,81 m.s-2)
Le couple électromagnétique d’un moteur électrique :
- Point d’application : sur l’axe de rotation du rotor
- Direction : l’axe de rotation du rotor
- Sens : sens de la rotation
- Intensité : C=K.i

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 8 /14
2.2. Actions mécaniques de contact solide sur solide sans frottements
Il en existe trois groupes correspondant aux différents types de contacts (ponctuel,
linéaire, surfacique).
Actions ou charges concentrées (contact ponctuel) :
L’action de 2 / 1est caractérisée par un support (perpendiculaire au plan tangent de contact) un
sens et une intensité.
Actions réparties sur une ligne ou charges linéiques:
L’effort de contact est réparti sur une ligne (droite ou non). L’action exercée est schématisée par
une charge linéique (q), uniforme ou non. Unité : N/m ou N.m-1.
Exemple : Action exercée par un plan horizontal (0) sur un cylindre (1).
L’effort de contact est réparti de façon uniforme (q constant) le long de AB et schématisé par une
charge linéique q . Dans le but de simplifier les résolutions, la charge répartie peut être remplacée
par sa résultante R, au milieu de AB et d’intensité : R = q L.
Ex : bille / plan
A B
q
A B
R ( R = q.L )
L/2L/2L
0
A
B
1
0
A B
1
0
1
q
Cas d’une répartition uniforme
Cylindre 1 isolé
1
2 G
Solide 1 isolé
1/2F
G
Charge réelle Modélisation pour étude
Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 9 /14
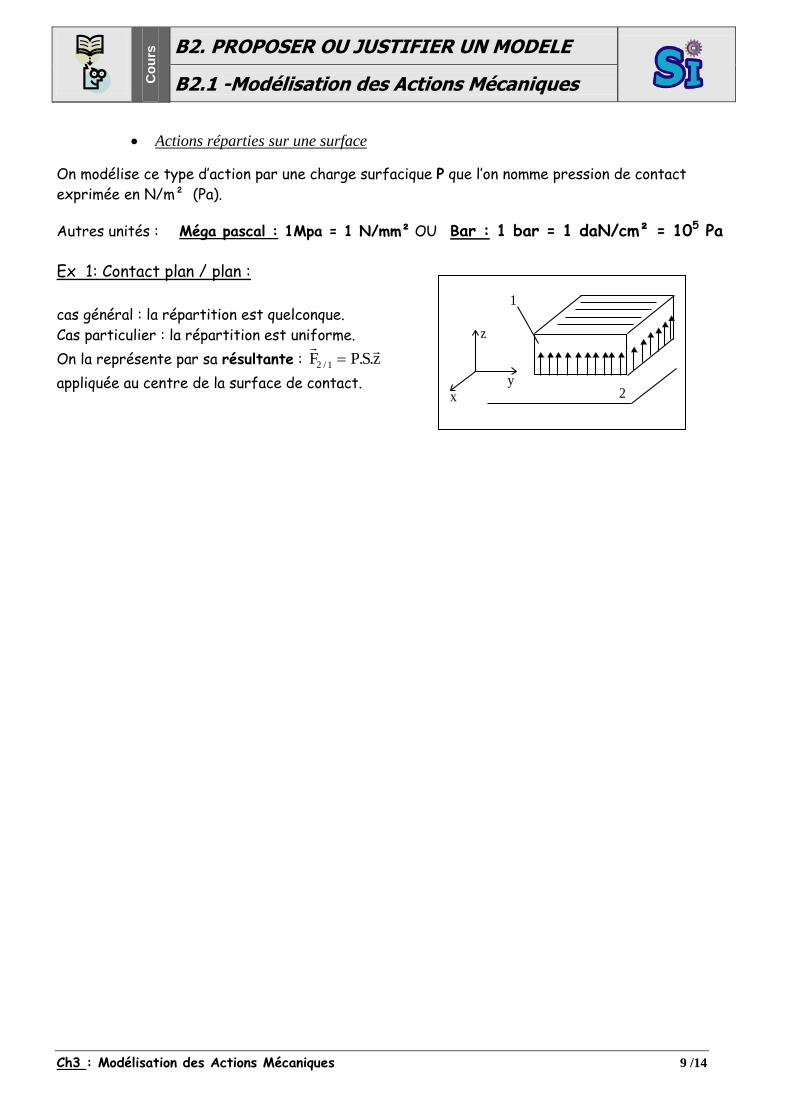
Actions réparties sur une surface
On modélise ce type d’action par une charge surfacique P que l’on nomme pression de contact
exprimée en N/m² (Pa).
Autres unités : Méga pascal : 1Mpa = 1 N/mm² OU Bar : 1 bar = 1 daN/cm² = 105 Pa
Ex 1: Contact plan / plan :
cas général : la répartition est quelconque.
Cas particulier : la répartition est uniforme.
On la représente par sa résultante : z.S.PF 1/2
appliquée au centre de la surface de contact.
y
x
z
2
1

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 10 /14
2.3. Actions de contact exercées dans les liaisons mécaniques usuelles
Type de liaison
Représentation
en perspective
Degrés de
libertés dans
l’espace
Action Mécanique
Transmissibles de
S1/S2 dans l’espace
Représentation
plane
Torseur des Actions
mécaniques de S1/S2
dans le plan
Exemples
Ponctuelle de
normale z
Linéaire
rectiligne de
normale z
Appui plan de
normale z
Pivot d’axe x

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 11 /14
Type de liaison
Représentatio
n en
perspective
Degrés de
libertés dans
l’espace
Action Mécanique
Transmissibles de
S1/S2 dans l’espace
Représentation
plane
Torseur des Actions
mécaniques de S1/S2
dans le plan
Exemples
Pivot Glissant
d’axe x
Rotule
Linéaire
annulaire
d‘axe
Glissière
d’axe
Glissière
Hélicoïdale
d’axe
Encastrement

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
SS
I
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 12 /14
2.4. Actions mécaniques d’un fluide sur un solide
Ex 2: Action exercée par un fluide sous pression sur un piston de vérin:
L’effort de contact entre huile et piston est réparti de façon uniforme sur une surface circulaire
de diamètre d et est schématisé par la pression p qui est la pression du fluide.
Dans le but de simplifier les résolutions, cette action peut être remplacée par sa résultante ,
dirigée suivant l’axe du piston et d’intensité R = p.S = p..d²/4 .
Application : Vérin de l’ouvre portail FAAC
Calculer l’effort résultant de la
pression du fluide sur le piston.
Données :
VERIN POUSSANT VERIN TIRANT
R

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
SS
I
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 13 /14
P
R
Tension
Cmoteur
Bâti
Capteur de
position
Chariot Moto
Réducteur
Chaîne
2.5. Actions mécaniques d’un ressort :
2.5.1. Ressort linéaire :
Exemple d’application : MACHINE A CORDER
Expression du vecteur effort dûe à l’écrasement du ressort

Co
urs
B2. PROPOSER OU JUSTIFIER UN MODELE
SS
I
B2.1 -Modélisation des Actions Mécaniques
Ch3 : Modélisation des Actions Mécaniques 14 /14
2.5.2. Ressort Angulaire
Exemple d’application : VIGIPARK
M
O
A G
y
x
B
Montée
0°
Cale permettant à
l’arceau de reposer
horizontalement
G
’