1. applications du cours d’electricitemetiersdeleau.hol.es/cliquer ici pour entrer dans le site du...
TRANSCRIPT
1. APPLICATIONS DU COURS D’ELECTRICITE ......................................................................................... 2
1.1. LES DEFINITIONS ................................................................................................................................................ 2
1.1.1. Fonctionnement d’un circuit électrique ..................................................................................................... 2
1.1.2. Mesure des grandeurs courants et tensions ............................................................................................... 2
1.1.3. Mesure de puissance aux bornes d’un dipôle ............................................................................................. 2
1.1.4. Valeurs caractéristiques ............................................................................................................................. 3
1.1.5. Les signaux périodiques sinusoïdaux ......................................................................................................... 3
1.1.6. Exercices .................................................................................................................................................... 4
1.2. LES COMPOSANTS DE BASE ................................................................................................................................ 6
1.2.1. Les résistors ............................................................................................................................................... 6
1.2.2. Les condensateurs ...................................................................................................................................... 8
1.2.3. Les inductances .......................................................................................................................................... 9
1.2.4. PROBLEMES ........................................................................................................................................... 10
2. REGULATION, ASSERVISSEMENT .......................................................................................................... 17
2.1. RAPPEL DE COURS ............................................................................................................................................ 17
2.2. LES REGULATEURS ........................................................................................................................................... 18
2.3. EXERCICES ....................................................................................................................................................... 18
3. AUTOMATIQUE LOGIQUE ......................................................................................................................... 29
3.1. INTRODUCTION ................................................................................................................................................ 29
3.2. EXERCICES DE BASE DE LOGIQUE COMBINATOIRE ............................................................................................ 29
4. CORRIGES ...................................................................................................................................................... 30
4.1. EXERCICES D’ ELECTRICITE .............................................................................................................................. 30
1. APPLICATIONS DU COURS D’ELECTRICITE
1.1. Les définitions
1.1.1. Fonctionnement d’un circuit électrique
un circuit électique peut fonctionner de plusieurs façons:
- en régime permanent
- en régime variable
Le régime permanent peut être de type continu ou de type périodique. Dans le cas du régime
permanent continu, les grandeurs tensions et courants sont des grandeurs indépendantes du temps. Dans le cas du
régime permanent périodique, les grandeurs tensions et courants peuvent être alternative ou périodiques à
composante moyenne non nulle.
Une grandeur alternative est une grandeur de valeur moyenne nulle sur une période. Un cas
particulier de ce type de grandeur est une grandeur sinusoïdale.
Le régime variable est un régime quelconque non continu et non périodique.
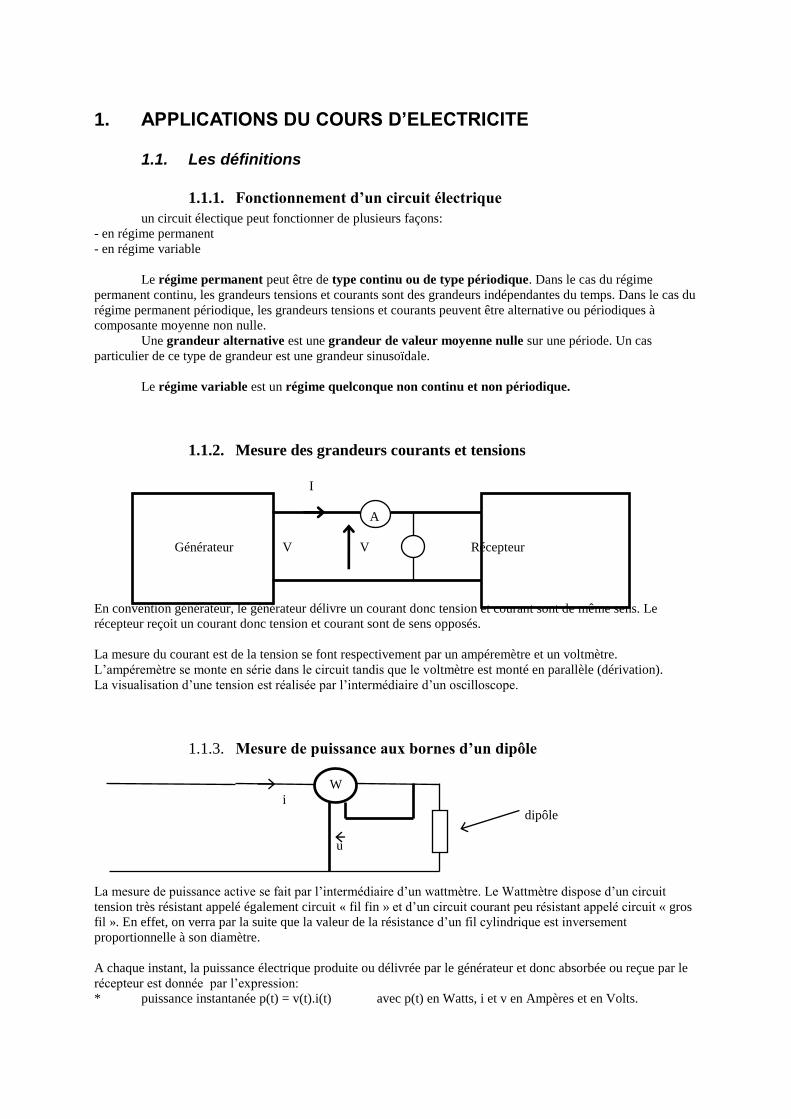
1.1.2. Mesure des grandeurs courants et tensions
I
A
Générateur V V Récepteur
En convention générateur, le générateur délivre un courant donc tension et courant sont de même sens. Le
récepteur reçoit un courant donc tension et courant sont de sens opposés.
La mesure du courant est de la tension se font respectivement par un ampéremètre et un voltmètre.
L’ampéremètre se monte en série dans le circuit tandis que le voltmètre est monté en parallèle (dérivation).
La visualisation d’une tension est réalisée par l’intermédiaire d’un oscilloscope.
1.1.3. Mesure de puissance aux bornes d’un dipôle
W
i
dipôle
u
La mesure de puissance active se fait par l’intermédiaire d’un wattmètre. Le Wattmètre dispose d’un circuit
tension très résistant appelé également circuit « fil fin » et d’un circuit courant peu résistant appelé circuit « gros
fil ». En effet, on verra par la suite que la valeur de la résistance d’un fil cylindrique est inversement
proportionnelle à son diamètre.
A chaque instant, la puissance électrique produite ou délivrée par le générateur et donc absorbée ou reçue par le
récepteur est donnée par l’expression:
* puissance instantanée p(t) = v(t).i(t) avec p(t) en Watts, i et v en Ampères et en Volts.
Les appareils de mesure peuvent être à aiguille, ils sont alors dits analogiques. Lorsque la valeur
mesurée est directement affichée, l’appareil est numérique. Il existe couramment des appareils de mesure à la
fois numérique et analogique. Certains appareils de mesure numériques sont susceptibles de mesurer les
grandeurs courants, tensions... ce sont des multimètres.
Remarque: dans le cas d’un ampéremètre polarisé, le courant doit traverser l’appareil dans un sens déterminé.
1.1.4. Valeurs caractéristiques
La valeur efficace Veff (ou Ieff) d’une tension (ou d’un courant) est égale à la valeur d’une tension (courant)
continue qui provoquerait le même échauffement dans une même résistance R.
L’expression mathématique de la valeur efficace Xeff d’une grandeur x(t) périodique de période T dans le temps
est donnée par:
T
dttxT
Xeff0
2 )(1
La valeur moyenne Vmoy (ou Imoy) d’une tension (ou d’un courant) est donnée par l’expression
mathématiques:
T
dttxT
Xmoy0
)(1
Remarque: dans le cas d’une grandeur constante, la valeur de cette grandeur est égale à la valeur moyenne et à
la valeur efficace de cette grandeur.
La mesure d’une valeur moyenne se fait par l’intermédiaire :
- d’un appareil numérique en position DC
- ou d’un appareil magnétoélectrique (symbole )
- ou par utilisation d’un oscilloscope (mesure en position AC puis en position DC, la translation
verticale corrspond à la valeur moyenne)
La mesure d’une valeur efficace se fait par l’intermédiaire :
- d’un appareil ferromagnétique (symbole ) pour des valeurs de fréquences inférieures à quelques
dizaines d’Hertz)
- d’un appareil numérique RMS (Root Mean Square) en position AC+DC
La valeur efficace d’une grandeur sinusoïdale est égale au quotient de l’amplitude de la sinusoïde par
2 .
Remarque: un appareil numérique RMS en position AC indique uniquement la valeur efficace de l’ondulation
de la grandeur x(t) sans tenir compte de la valeur continue de x(t).
1.1.5. Les signaux périodiques sinusoïdaux
Un signal S(t) est dit périodique lorsqu’il se répéte identiquement à lui-même après une période T, on en
déduit la relation mathématiques:
t , T S(t+T) = S(t)
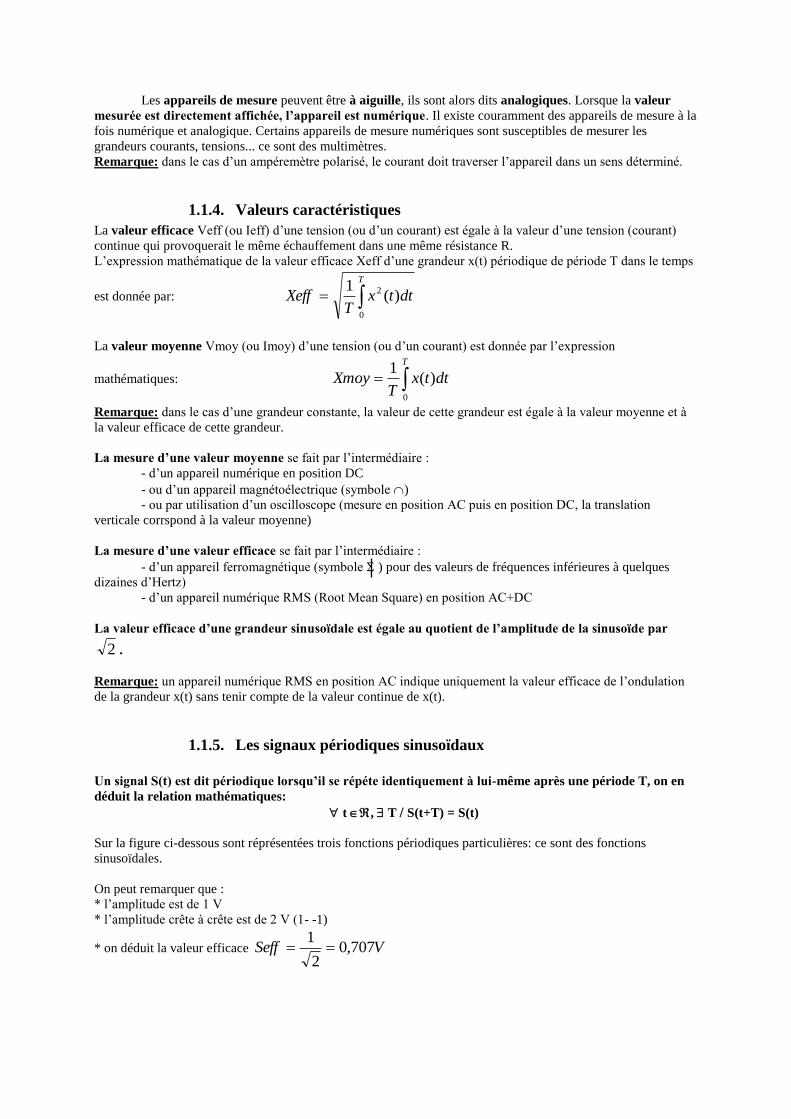
Sur la figure ci-dessous sont réprésentées trois fonctions périodiques particulières: ce sont des fonctions
sinusoïdales.
On peut remarquer que :
* l’amplitude est de 1 V
* l’amplitude crête à crête est de 2 V (1- -1)
* on déduit la valeur efficace VSeff 707,02
1
* la période de chacune des fonctions est de sensiblement 6,3 s => la pulsation est
1.13,6
14,3.2.2..2 srad
Tf
* la fonction S a pour valeur initiale 0 => S(t) = sin (.t)=sin (t)
* la fonction S1 est de la forme S1(t)=sin(.t+), on peut remarquer que S1 passe par 0 à l’instant 0,8 s (soit
2./8 ou /4) => S1(t) = sin (t - /4)
* la fonction S2 par contre passe par 0 à l’instant -0,8s
=> S2(t) = sin (t+ /4)
* le déphasage de S par rapport à S2 est de 45°, le déphasage de S par rapport à S1 est de -45°.
* S est en retard sur S2 mais en avance sur S1.
S S1 S2
-1,5
-1
-0,5
0
0,5
1
1,5
0
0,5 1
1,5 2
2,5 3
3,5 4
4,5 5
5,5 6
6,5 7
7,5
temps en seconde
S, S
1, S
2
1.1.6. Exercices
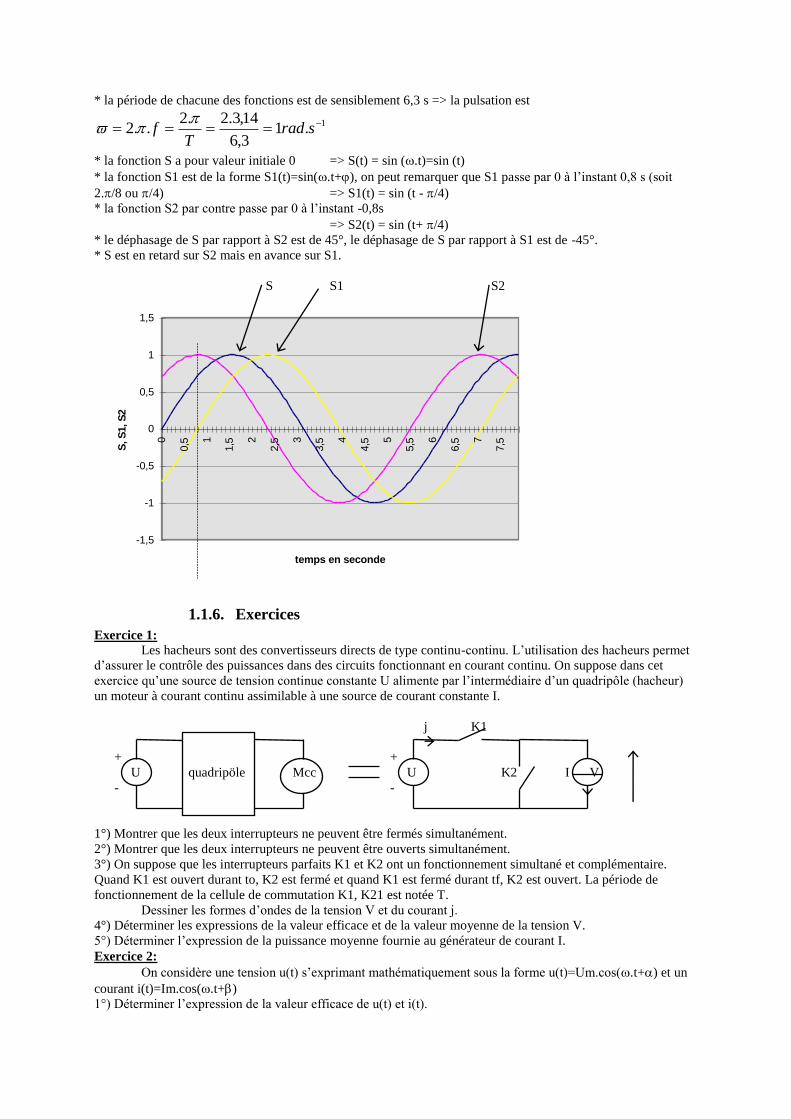
Exercice 1: Les hacheurs sont des convertisseurs directs de type continu-continu. L’utilisation des hacheurs permet
d’assurer le contrôle des puissances dans des circuits fonctionnant en courant continu. On suppose dans cet
exercice qu’une source de tension continue constante U alimente par l’intermédiaire d’un quadripôle (hacheur)
un moteur à courant continu assimilable à une source de courant constante I.
j K1
+ +
U quadripöle Mcc U K2 I V
- -
1°) Montrer que les deux interrupteurs ne peuvent être fermés simultanément.
2°) Montrer que les deux interrupteurs ne peuvent être ouverts simultanément.
3°) On suppose que les interrupteurs parfaits K1 et K2 ont un fonctionnement simultané et complémentaire.
Quand K1 est ouvert durant to, K2 est fermé et quand K1 est fermé durant tf, K2 est ouvert. La période de
fonctionnement de la cellule de commutation K1, K21 est notée T.
Dessiner les formes d’ondes de la tension V et du courant j.
4°) Déterminer les expressions de la valeur efficace et de la valeur moyenne de la tension V.
5°) Déterminer l’expression de la puissance moyenne fournie au générateur de courant I.
Exercice 2:
On considère une tension u(t) s’exprimant mathématiquement sous la forme u(t)=Um.cos(.t+) et un
courant i(t)=Im.cos(.t+)
1°) Déterminer l’expression de la valeur efficace de u(t) et i(t).
2°) Déterminer la valeur moyenne sur une période de u(t) et i(t).
3°) Donner l’expression de la puissance instantanée et montrer que cette puissance est la somme d’un terme
constant (puissance moyenne ou puissance active) et d’un terme à la pulsation double (puissance fluctuante).
4°) Dans le cas particulier où u(t) a pour valeur efficace 20 V et i(t) à pour valeur efficace 10 A avec =/4 et
i(t) non déphasé par rapport à u(t), représenter l’allure de la puissance instantanée p(t) sur deux périodes. Les
deux grandeurs u(t) et i(t) ont pour fréquence 50 Hz.
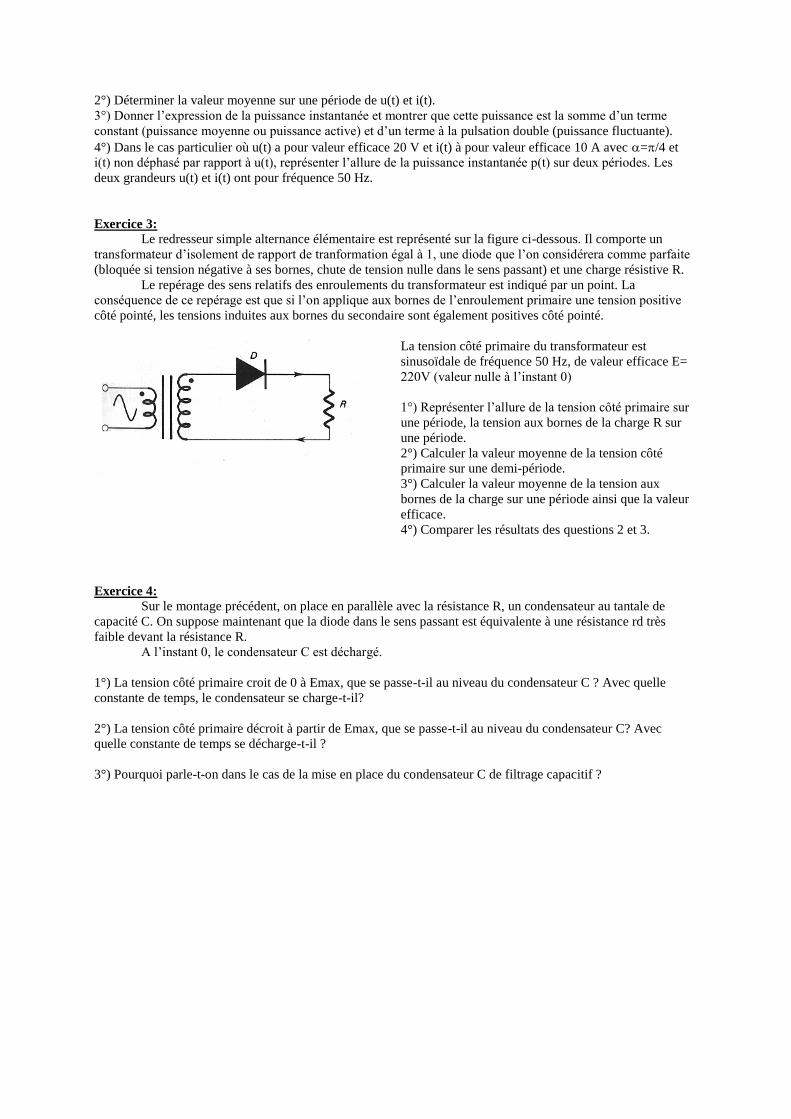
Exercice 3:
Le redresseur simple alternance élémentaire est représenté sur la figure ci-dessous. Il comporte un
transformateur d’isolement de rapport de tranformation égal à 1, une diode que l’on considérera comme parfaite
(bloquée si tension négative à ses bornes, chute de tension nulle dans le sens passant) et une charge résistive R.
Le repérage des sens relatifs des enroulements du transformateur est indiqué par un point. La
conséquence de ce repérage est que si l’on applique aux bornes de l’enroulement primaire une tension positive
côté pointé, les tensions induites aux bornes du secondaire sont également positives côté pointé.
La tension côté primaire du transformateur est
sinusoïdale de fréquence 50 Hz, de valeur efficace E=
220V (valeur nulle à l’instant 0)
1°) Représenter l’allure de la tension côté primaire sur
une période, la tension aux bornes de la charge R sur
une période.
2°) Calculer la valeur moyenne de la tension côté
primaire sur une demi-période.
3°) Calculer la valeur moyenne de la tension aux
bornes de la charge sur une période ainsi que la valeur
efficace.
4°) Comparer les résultats des questions 2 et 3.
Exercice 4:
Sur le montage précédent, on place en parallèle avec la résistance R, un condensateur au tantale de
capacité C. On suppose maintenant que la diode dans le sens passant est équivalente à une résistance rd très
faible devant la résistance R.
A l’instant 0, le condensateur C est déchargé.
1°) La tension côté primaire croit de 0 à Emax, que se passe-t-il au niveau du condensateur C ? Avec quelle
constante de temps, le condensateur se charge-t-il?
2°) La tension côté primaire décroit à partir de Emax, que se passe-t-il au niveau du condensateur C? Avec
quelle constante de temps se décharge-t-il ?
3°) Pourquoi parle-t-on dans le cas de la mise en place du condensateur C de filtrage capacitif ?

1.2. Les composants de base
1.2.1. Les résistors
1.2.1.1.Rappel de cours
Un résistor est aussi appelé résistance ou dipôle résistif. Il peut être linéaire, non linéaire ou
commandé.
Le résistor est un dipôle passif (ne peut fournir d’énergie), symétrique (non polarisé), transformant
intégralement l’énergie électrique qu’il reçoit en énergie calorifique.
Résistor linéaire: - il respecte la loi d’Ohm U = R.i (U en Volts, R en Ohms, i en Ampères)
- par effet joule, il dissipe la puissance P = U.i = R.i² = U²/R (P en Watts)
- la conductance du résistor est donnée par G = 1/R ( G en Siemens)
Conducteur filiforme et homogène: - S
lR (: résistivité en Ohms-mètres, S:section du conducteur,
l: longueur du conducteur)
- = 1/ (: conductivité en Siemens par mètres)
Résistor non linéaire: - un résistor non linéaire est un dipôle dont la caractéristique n’est pas une droite.
Cependant en un point de fonctionnement donné il vérifie la loi d’Ohm. La valeur de la résistance varie en
fonction du point de fonctionnement.
Résistor commandé: - un résistor commandé est un dipôle résistif dont la valeur de la résistance dépend d’un
paramètre physique (exemple: thermistance dont la valeur de la résistance est sensible à la valeur de la
température).
Remarque: les résistors sont généralement des corps métalliques (matériau typique: cuivre). Ceci implique que
ce sont des conducteurs dont la résistivité est de l’ordre de 10-8
m. De plus, une particularité spécifique aux
corps métallliques est que leur résistivité augmente quand la température augmente.
Par opposition, il existe des corps purs (germanium, silicium, sélénium...) ou composés
(carbure de silicium, sulfure de plomb...) dont la résistivité diminue quand la température augmente. Ces corps
sont appelés semiconducteurs, leur résistivité (10-4
à 10-8
) est comprise entre celle des conducteurs et celle des
isolants (1010
).
1.2.1.2.Exercices
Exercice n°5:
On considère un résistor linéaire comportant sur sa plaque signalétique l’indication 100 - 25 W.
a) Déterminer la tension maximale applicable à ses bornes.
b) Déterminer le courant maximale qui peut le traverser.
c) Déterminer la valeur de la conductance du résistor.
Exercice n°6: Un générateur de tension sinusoïdale délivre une tension d’amplitude 5V, de fréquence 200 Hz. La
résistance interne du générateur est de 1,8 . Il permet d’alimenter un résistor dont la résistance est de 47 .
a) Déterminer l’amplitude maximale du courant traversant la résistance de 47 .
b) Déterminer l’amplitude maximale de la tension aux bornes de la résistance de 47 ..
c) Déterminer la puissance maximale devant être dissipée par la résistance de 47 ..
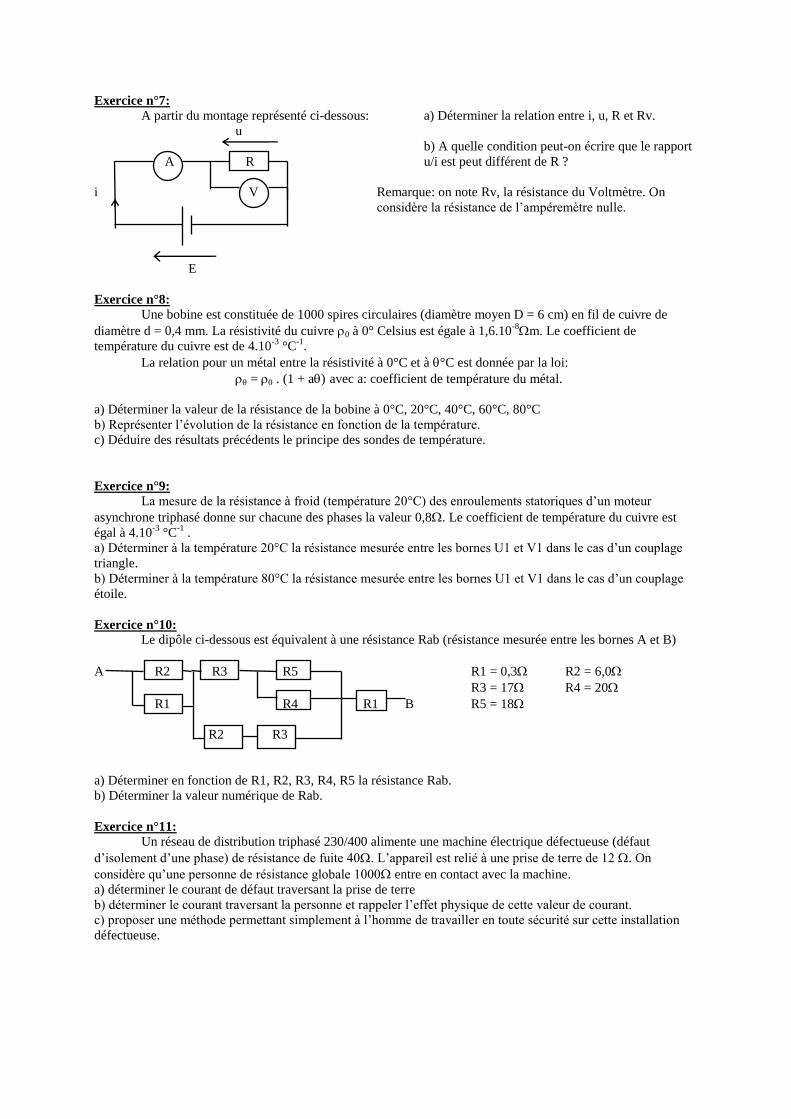
Exercice n°7: A partir du montage représenté ci-dessous: a) Déterminer la relation entre i, u, R et Rv.
u
b) A quelle condition peut-on écrire que le rapport
A R u/i est peut différent de R ?
i V Remarque: on note Rv, la résistance du Voltmètre. On
considère la résistance de l’ampéremètre nulle.
E
Exercice n°8:
Une bobine est constituée de 1000 spires circulaires (diamètre moyen D = 6 cm) en fil de cuivre de
diamètre d = 0,4 mm. La résistivité du cuivre 0 à 0° Celsius est égale à 1,6.10-8m. Le coefficient de
température du cuivre est de 4.10-3
°C-1
.
La relation pour un métal entre la résistivité à 0°C et à °C est donnée par la loi:
= . (1 + a) avec a: coefficient de température du métal.
a) Déterminer la valeur de la résistance de la bobine à 0°C, 20°C, 40°C, 60°C, 80°C
b) Représenter l’évolution de la résistance en fonction de la température.
c) Déduire des résultats précédents le principe des sondes de température.
Exercice n°9:
La mesure de la résistance à froid (température 20°C) des enroulements statoriques d’un moteur
asynchrone triphasé donne sur chacune des phases la valeur 0,8. Le coefficient de température du cuivre est
égal à 4.10-3
°C-1
.
a) Déterminer à la température 20°C la résistance mesurée entre les bornes U1 et V1 dans le cas d’un couplage
triangle.
b) Déterminer à la température 80°C la résistance mesurée entre les bornes U1 et V1 dans le cas d’un couplage
étoile.
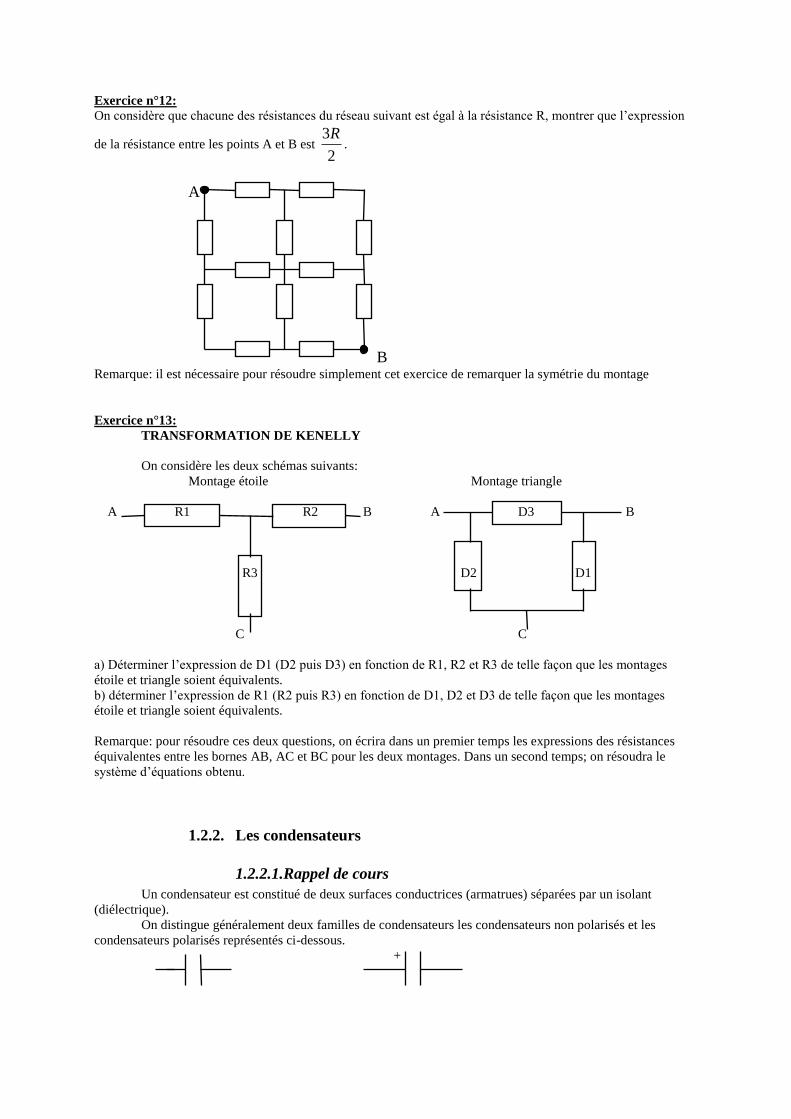
Exercice n°10:
Le dipôle ci-dessous est équivalent à une résistance Rab (résistance mesurée entre les bornes A et B)
A R2 R3 R5 R1 = 0,3 R2 = 6,0
R3 = 17 R4 = 20
R1 R4 R1 B R5 = 18
R2 R3
a) Déterminer en fonction de R1, R2, R3, R4, R5 la résistance Rab.
b) Déterminer la valeur numérique de Rab.
Exercice n°11:
Un réseau de distribution triphasé 230/400 alimente une machine électrique défectueuse (défaut
d’isolement d’une phase) de résistance de fuite 40. L’appareil est relié à une prise de terre de 12 . On
considère qu’une personne de résistance globale 1000 entre en contact avec la machine.
a) déterminer le courant de défaut traversant la prise de terre
b) déterminer le courant traversant la personne et rappeler l’effet physique de cette valeur de courant.
c) proposer une méthode permettant simplement à l’homme de travailler en toute sécurité sur cette installation
défectueuse.
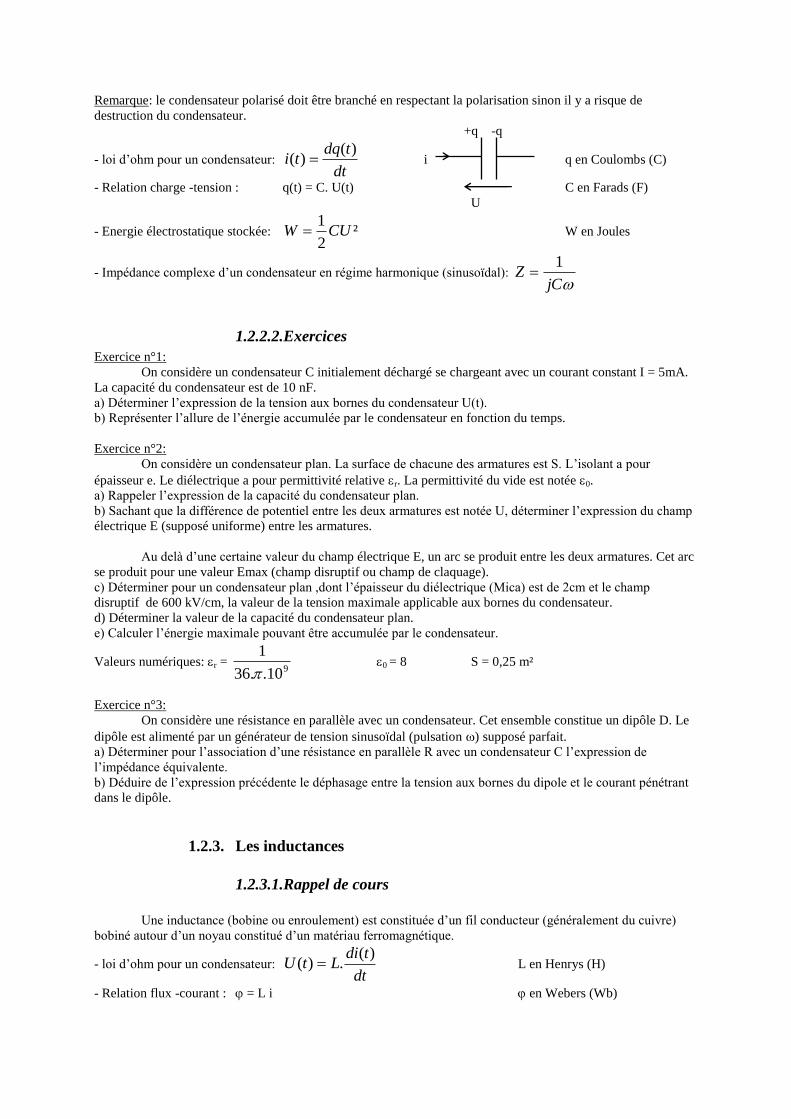
Exercice n°12:
On considère que chacune des résistances du réseau suivant est égal à la résistance R, montrer que l’expression
de la résistance entre les points A et B est 2
3R.
A
B Remarque: il est nécessaire pour résoudre simplement cet exercice de remarquer la symétrie du montage
Exercice n°13:
TRANSFORMATION DE KENELLY
On considère les deux schémas suivants:
Montage étoile Montage triangle
A R1 R2 B A D3 B
R3 D2 D1
C C
a) Déterminer l’expression de D1 (D2 puis D3) en fonction de R1, R2 et R3 de telle façon que les montages
étoile et triangle soient équivalents.
b) déterminer l’expression de R1 (R2 puis R3) en fonction de D1, D2 et D3 de telle façon que les montages
étoile et triangle soient équivalents.
Remarque: pour résoudre ces deux questions, on écrira dans un premier temps les expressions des résistances
équivalentes entre les bornes AB, AC et BC pour les deux montages. Dans un second temps; on résoudra le
système d’équations obtenu.
1.2.2. Les condensateurs
1.2.2.1.Rappel de cours
Un condensateur est constitué de deux surfaces conductrices (armatrues) séparées par un isolant
(diélectrique).
On distingue généralement deux familles de condensateurs les condensateurs non polarisés et les
condensateurs polarisés représentés ci-dessous.
+
Remarque: le condensateur polarisé doit être branché en respectant la polarisation sinon il y a risque de
destruction du condensateur.
+q -q
- loi d’ohm pour un condensateur: dt
tdqti
)()( i q en Coulombs (C)
- Relation charge -tension : q(t) = C. U(t) C en Farads (F)
U
- Energie électrostatique stockée: ²2
1CUW W en Joules
- Impédance complexe d’un condensateur en régime harmonique (sinusoïdal): jC
Z1
1.2.2.2.Exercices
Exercice n°1:
On considère un condensateur C initialement déchargé se chargeant avec un courant constant I = 5mA.
La capacité du condensateur est de 10 nF.
a) Déterminer l’expression de la tension aux bornes du condensateur U(t).
b) Représenter l’allure de l’énergie accumulée par le condensateur en fonction du temps.
Exercice n°2:
On considère un condensateur plan. La surface de chacune des armatures est S. L’isolant a pour
épaisseur e. Le diélectrique a pour permittivité relative r. La permittivité du vide est notée 0.
a) Rappeler l’expression de la capacité du condensateur plan.
b) Sachant que la différence de potentiel entre les deux armatures est notée U, déterminer l’expression du champ
électrique E (supposé uniforme) entre les armatures.
Au delà d’une certaine valeur du champ électrique E, un arc se produit entre les deux armatures. Cet arc
se produit pour une valeur Emax (champ disruptif ou champ de claquage).
c) Déterminer pour un condensateur plan ,dont l’épaisseur du diélectrique (Mica) est de 2cm et le champ
disruptif de 600 kV/cm, la valeur de la tension maximale applicable aux bornes du condensateur.
d) Déterminer la valeur de la capacité du condensateur plan.
e) Calculer l’énergie maximale pouvant être accumulée par le condensateur.
Valeurs numériques: r = 910..36
1
0 = 8 S = 0,25 m²
Exercice n°3:
On considère une résistance en parallèle avec un condensateur. Cet ensemble constitue un dipôle D. Le
dipôle est alimenté par un générateur de tension sinusoïdal (pulsation ) supposé parfait.
a) Déterminer pour l’association d’une résistance en parallèle R avec un condensateur C l’expression de
l’impédance équivalente.
b) Déduire de l’expression précédente le déphasage entre la tension aux bornes du dipole et le courant pénétrant
dans le dipôle.
1.2.3. Les inductances
1.2.3.1.Rappel de cours
Une inductance (bobine ou enroulement) est constituée d’un fil conducteur (généralement du cuivre)
bobiné autour d’un noyau constitué d’un matériau ferromagnétique.
- loi d’ohm pour un condensateur: dt
tdiLtU
)(.)( L en Henrys (H)
- Relation flux -courant : = L i en Webers (Wb)
- Energie électromagnétique stockée: ².2
1LiW W en Joules
- Impédance complexe d’une inductance en régime harmonique (sinusoïdal): jLZ
1.2.3.2.Exercices
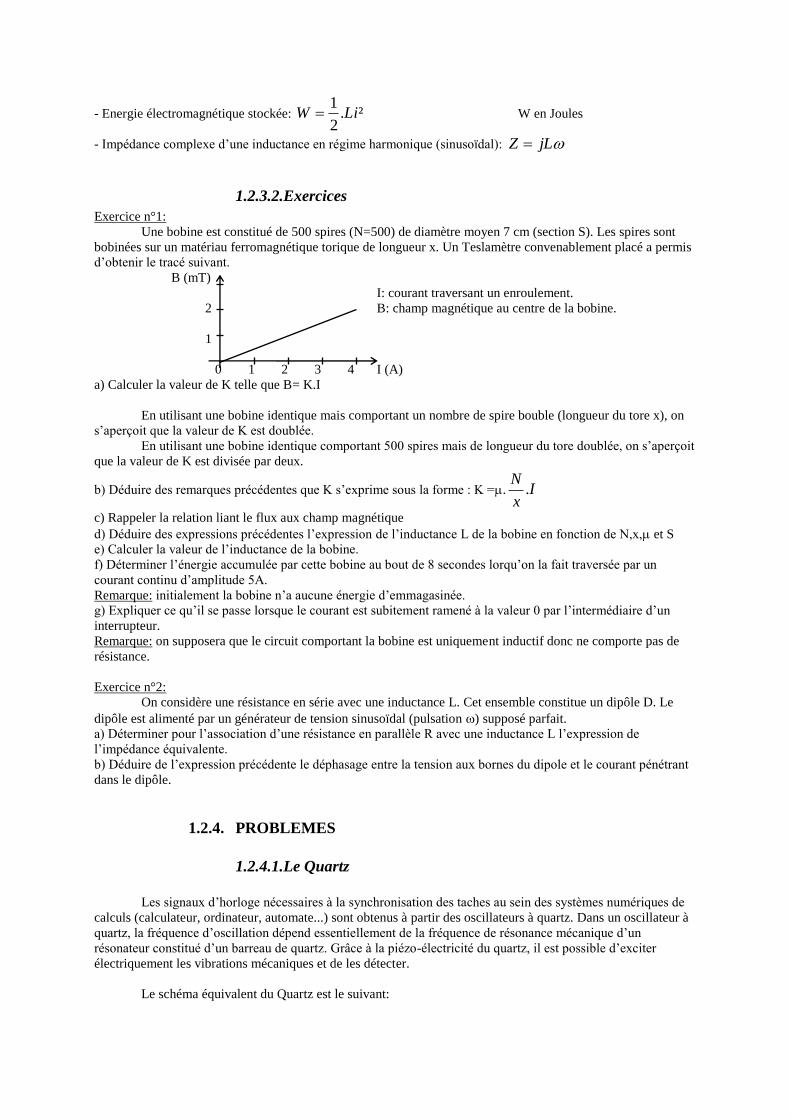
Exercice n°1:
Une bobine est constitué de 500 spires (N=500) de diamètre moyen 7 cm (section S). Les spires sont
bobinées sur un matériau ferromagnétique torique de longueur x. Un Teslamètre convenablement placé a permis
d’obtenir le tracé suivant.
B (mT)
I: courant traversant un enroulement.
2 B: champ magnétique au centre de la bobine.
1
0 1 2 3 4 I (A)
a) Calculer la valeur de K telle que B= K.I
En utilisant une bobine identique mais comportant un nombre de spire bouble (longueur du tore x), on
s’aperçoit que la valeur de K est doublée.
En utilisant une bobine identique comportant 500 spires mais de longueur du tore doublée, on s’aperçoit
que la valeur de K est divisée par deux.
b) Déduire des remarques précédentes que K s’exprime sous la forme : K =. Ix
N.
c) Rappeler la relation liant le flux aux champ magnétique
d) Déduire des expressions précédentes l’expression de l’inductance L de la bobine en fonction de N,x, et S
e) Calculer la valeur de l’inductance de la bobine.
f) Déterminer l’énergie accumulée par cette bobine au bout de 8 secondes lorqu’on la fait traversée par un
courant continu d’amplitude 5A.
Remarque: initialement la bobine n’a aucune énergie d’emmagasinée.
g) Expliquer ce qu’il se passe lorsque le courant est subitement ramené à la valeur 0 par l’intermédiaire d’un
interrupteur.
Remarque: on supposera que le circuit comportant la bobine est uniquement inductif donc ne comporte pas de
résistance.
Exercice n°2:
On considère une résistance en série avec une inductance L. Cet ensemble constitue un dipôle D. Le
dipôle est alimenté par un générateur de tension sinusoïdal (pulsation ) supposé parfait.
a) Déterminer pour l’association d’une résistance en parallèle R avec une inductance L l’expression de
l’impédance équivalente.
b) Déduire de l’expression précédente le déphasage entre la tension aux bornes du dipole et le courant pénétrant
dans le dipôle.
1.2.4. PROBLEMES
1.2.4.1.Le Quartz
Les signaux d’horloge nécessaires à la synchronisation des taches au sein des systèmes numériques de
calculs (calculateur, ordinateur, automate...) sont obtenus à partir des oscillateurs à quartz. Dans un oscillateur à
quartz, la fréquence d’oscillation dépend essentiellement de la fréquence de résonance mécanique d’un
résonateur constitué d’un barreau de quartz. Grâce à la piézo-électricité du quartz, il est possible d’exciter
électriquement les vibrations mécaniques et de les détecter.
Le schéma équivalent du Quartz est le suivant:
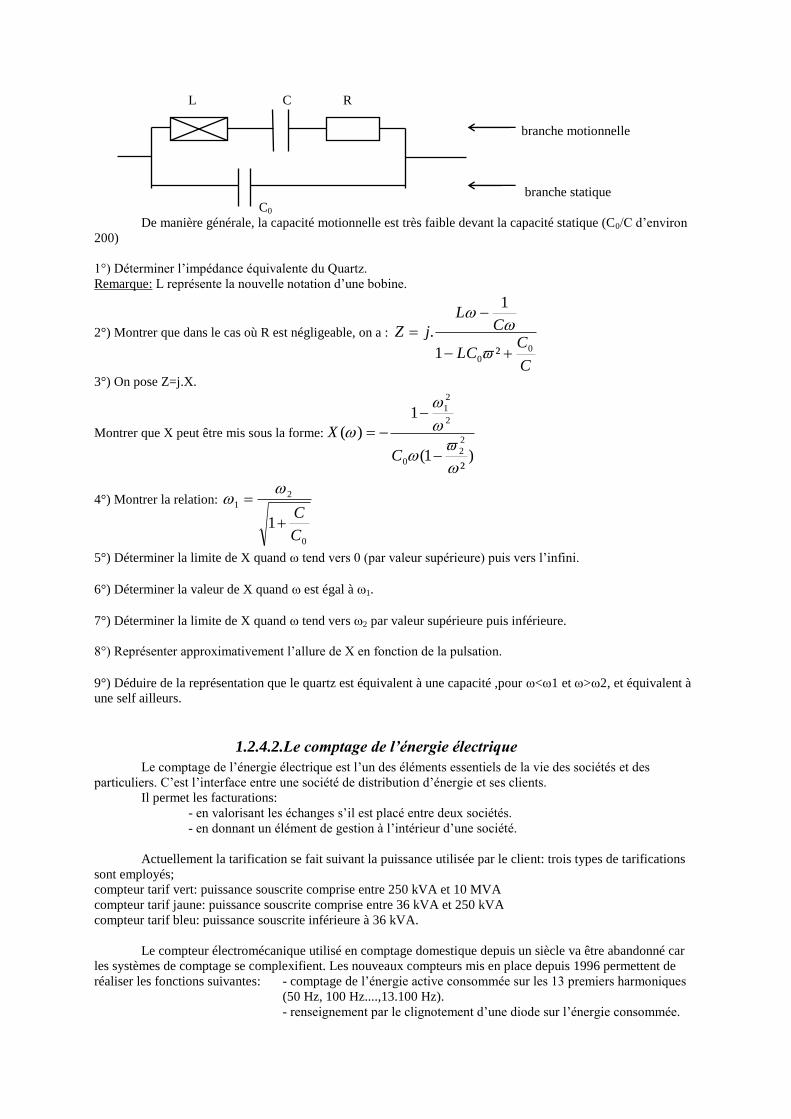
L C R
branche motionnelle
branche statique
C0
De manière générale, la capacité motionnelle est très faible devant la capacité statique (C0/C d’environ
200)
1°) Déterminer l’impédance équivalente du Quartz.
Remarque: L représente la nouvelle notation d’une bobine.
2°) Montrer que dans le cas où R est négligeable, on a :
C
CLC
CL
jZ0
0 ²1
1
.
3°) On pose Z=j.X.
Montrer que X peut être mis sous la forme:
)²
1(
1
)(2
20
2
2
1
C
X
4°) Montrer la relation:
0
21
1C
C
5°) Déterminer la limite de X quand tend vers 0 (par valeur supérieure) puis vers l’infini.
6°) Déterminer la valeur de X quand est égal à 1.
7°) Déterminer la limite de X quand tend vers 2 par valeur supérieure puis inférieure.
8°) Représenter approximativement l’allure de X en fonction de la pulsation.
9°) Déduire de la représentation que le quartz est équivalent à une capacité ,pour <1 et >2, et équivalent à
une self ailleurs.
1.2.4.2.Le comptage de l’énergie électrique
Le comptage de l’énergie électrique est l’un des éléments essentiels de la vie des sociétés et des
particuliers. C’est l’interface entre une société de distribution d’énergie et ses clients.
Il permet les facturations:
- en valorisant les échanges s’il est placé entre deux sociétés.
- en donnant un élément de gestion à l’intérieur d’une société.
Actuellement la tarification se fait suivant la puissance utilisée par le client: trois types de tarifications
sont employés;
compteur tarif vert: puissance souscrite comprise entre 250 kVA et 10 MVA
compteur tarif jaune: puissance souscrite comprise entre 36 kVA et 250 kVA
compteur tarif bleu: puissance souscrite inférieure à 36 kVA.
Le compteur électromécanique utilisé en comptage domestique depuis un siècle va être abandonné car
les systèmes de comptage se complexifient. Les nouveaux compteurs mis en place depuis 1996 permettent de
réaliser les fonctions suivantes: - comptage de l’énergie active consommée sur les 13 premiers harmoniques
(50 Hz, 100 Hz....,13.100 Hz).
- renseignement par le clignotement d’une diode sur l’énergie consommée.
- surveillance des tentatives de fraude.
- programmation locale du contrat souscrit.
- relevé à distance des informations contenues dans le compteur.
- information du client....
La technique de communication pour le transfert à distance des informations est la technique CPL-BT
(courants porteurs sur ligne basse tension). La technique des CPL-BT consiste à acheminer de l’information en
superposant un signal Haute Fréquence de faible puissance (64-74 kHz) au courant alternatif (50 Hz) par
modulation S-FSK (Spead Frequency Shift Keying).
L’objectif du problème est d’effectuer la représentation de la puissance en régime permanent sinusoïdal.
* Calcul de la puissance en régime sinusoïdal
1°) On considère une tension de la forme u(t) = Um cos (t + ) et un courant i(t) = Im cos (t + )
Donner l’expression de la puissance instantanée et montrer que cette puissance est la somme d’un terme
constant (puissance moyenne ou puissance active) et d’un teme à la pulsation double (puissance fluctuante).
2°) Donner dans ces mêmes conditions l’expression de la puissance apparente et en déduire l’expression de la
puissance réactive.
3°) Dessiner en vous inspirant du schéma ci-dessous l’allure de la puissance instantanée dans le cas d’un
ensemble résistif et dans le cas d’un système capacitif.
1.2.4.3.La bascule électronique
Présentation: Cette bascule électronique permet le pesage de produits industriels sur une portée de 600 kg avec une
précision de 200g.
Le poids d’un corps ( gMP
) correspond à la force exercée sur le récepteur de charge. Dans le
domaine du pesage industriel, l’unité légale de force (le Newton) n’est pratiquement pas utilisée. C’est la masse
qui est le véritable objet de la mesure.
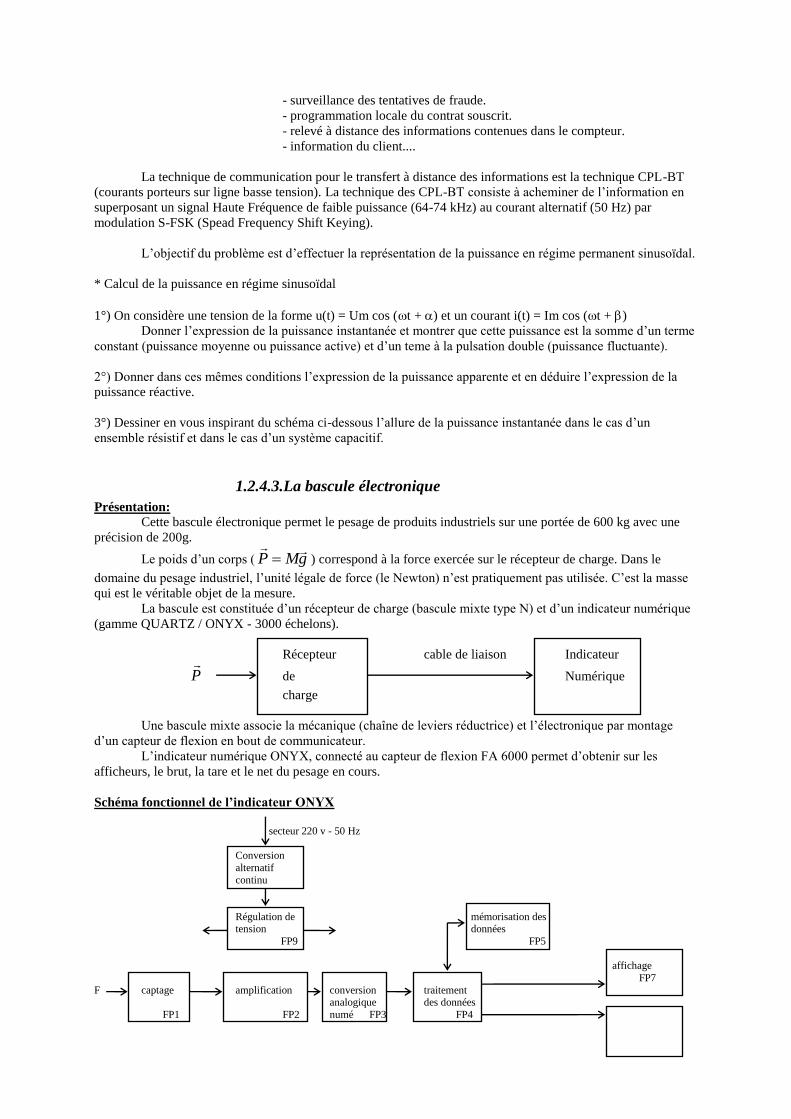
La bascule est constituée d’un récepteur de charge (bascule mixte type N) et d’un indicateur numérique
(gamme QUARTZ / ONYX - 3000 échelons).
Récepteur cable de liaison Indicateur
P
de Numérique
charge
Une bascule mixte associe la mécanique (chaîne de leviers réductrice) et l’électronique par montage
d’un capteur de flexion en bout de communicateur.
L’indicateur numérique ONYX, connecté au capteur de flexion FA 6000 permet d’obtenir sur les
afficheurs, le brut, la tare et le net du pesage en cours.
Schéma fonctionnel de l’indicateur ONYX secteur 220 v - 50 Hz
Conversion
alternatif
continu
Régulation de mémorisation des tension données
FP9 FP5
affichage
FP7
F captage amplification conversion traitement analogique des données
FP1 FP2 numé FP3 FP4
acquisition
des commandes
FP8
transmission
des données FP6
FP1: délivre une tension continue fonction de la force appliquée sur le capteur
FP2: amplifie la tension continue issue du capteur; un filtre est associé à cet amplificateur.
FP3: convertit l’information analogique en une information numérique correspondante.
FP4: permet le traitement des données numériques.
FP5: permet la mémorisation temporaire ou permanente de données numériques.
FP6: permet l’échange bidirectionnel des informations.
FP7: affiche le résultat de la mesure souhaitée par l’utilisateur ou des messages de configuration.
FP8: permet à l’utilisateur de choisir les différents modes de fonctionnement.
FP9: alimente le capteur et les différents circuits.
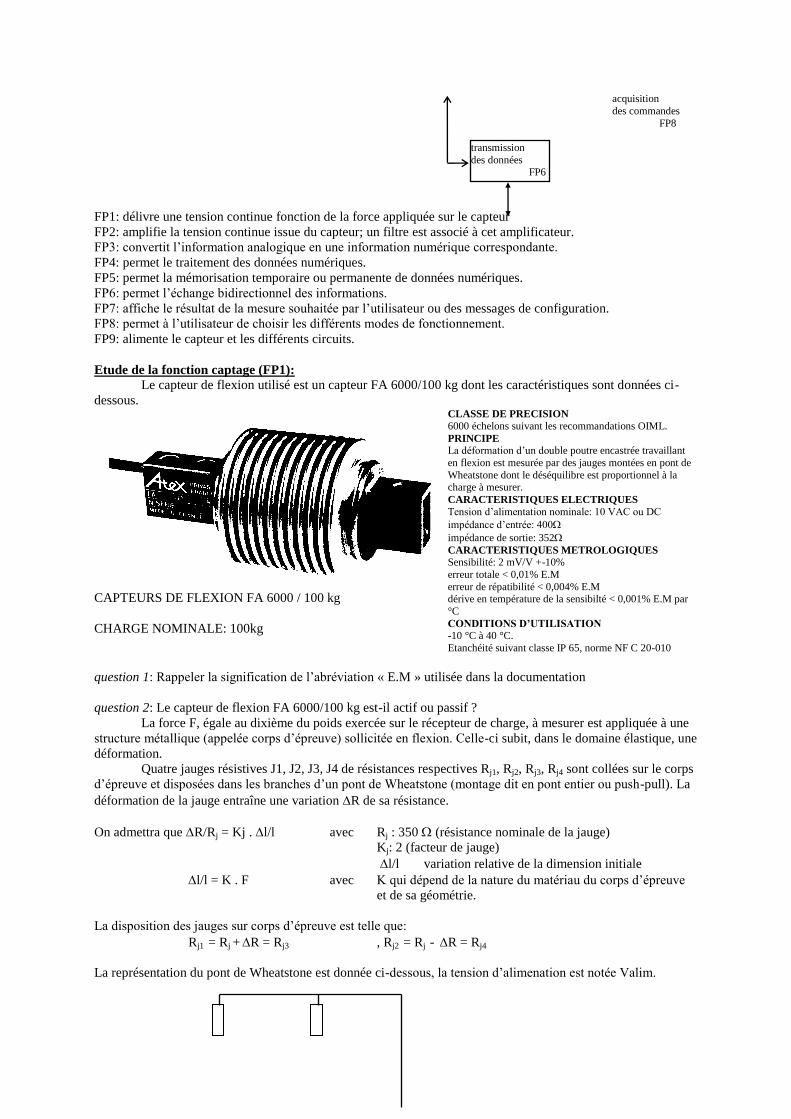
Etude de la fonction captage (FP1):
Le capteur de flexion utilisé est un capteur FA 6000/100 kg dont les caractéristiques sont données ci-
dessous.
CAPTEURS DE FLEXION FA 6000 / 100 kg
CHARGE NOMINALE: 100kg
CLASSE DE PRECISION 6000 échelons suivant les recommandations OIML.
PRINCIPE La déformation d’un double poutre encastrée travaillant
en flexion est mesurée par des jauges montées en pont de
Wheatstone dont le déséquilibre est proportionnel à la charge à mesurer.
CARACTERISTIQUES ELECTRIQUES Tension d’alimentation nominale: 10 VAC ou DC
impédance d’entrée: 400
impédance de sortie: 352
CARACTERISTIQUES METROLOGIQUES Sensibilité: 2 mV/V +-10%
erreur totale < 0,01% E.M
erreur de répatibilité < 0,004% E.M dérive en température de la sensibilté < 0,001% E.M par
°C
CONDITIONS D’UTILISATION -10 °C à 40 °C.
Etanchéité suivant classe IP 65, norme NF C 20-010
question 1: Rappeler la signification de l’abréviation « E.M » utilisée dans la documentation
question 2: Le capteur de flexion FA 6000/100 kg est-il actif ou passif ?
La force F, égale au dixième du poids exercée sur le récepteur de charge, à mesurer est appliquée à une
structure métallique (appelée corps d’épreuve) sollicitée en flexion. Celle-ci subit, dans le domaine élastique, une
déformation.
Quatre jauges résistives J1, J2, J3, J4 de résistances respectives Rj1, Rj2, Rj3, Rj4 sont collées sur le corps
d’épreuve et disposées dans les branches d’un pont de Wheatstone (montage dit en pont entier ou push-pull). La
déformation de la jauge entraîne une variation R de sa résistance.
On admettra que R/Rj = Kj . l/l avec Rj : 350 (résistance nominale de la jauge)
Kj: 2 (facteur de jauge)
l/l variation relative de la dimension initiale
l/l = K . F avec K qui dépend de la nature du matériau du corps d’épreuve
et de sa géométrie.
La disposition des jauges sur corps d’épreuve est telle que:
Rj1 = Rj + R = Rj3 , Rj2 = Rj - R = Rj4
La représentation du pont de Wheatstone est donnée ci-dessous, la tension d’alimenation est notée Valim.
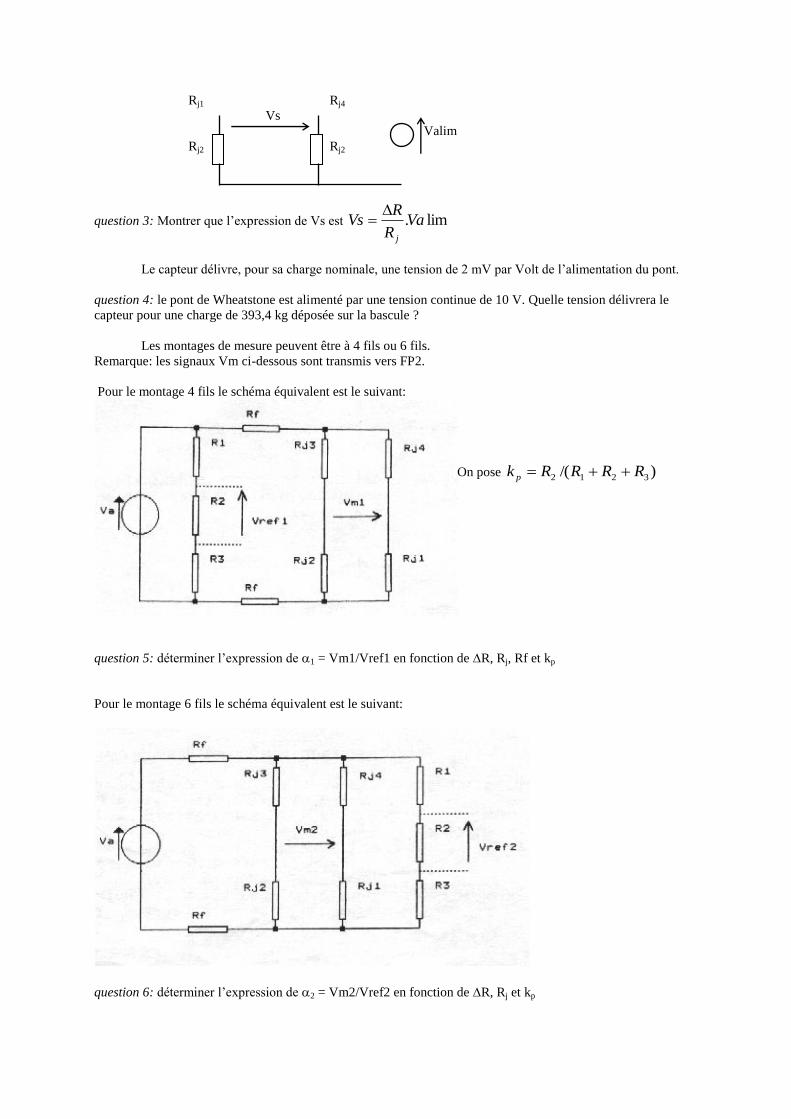
Rj1 Rj4
Vs
Valim
Rj2 Rj2
question 3: Montrer que l’expression de Vs est lim.VaR
RVs
j
Le capteur délivre, pour sa charge nominale, une tension de 2 mV par Volt de l’alimentation du pont.
question 4: le pont de Wheatstone est alimenté par une tension continue de 10 V. Quelle tension délivrera le
capteur pour une charge de 393,4 kg déposée sur la bascule ?
Les montages de mesure peuvent être à 4 fils ou 6 fils.
Remarque: les signaux Vm ci-dessous sont transmis vers FP2.
Pour le montage 4 fils le schéma équivalent est le suivant:
On pose )/( 3212 RRRRk p
question 5: déterminer l’expression de 1 = Vm1/Vref1 en fonction de R, Rj, Rf et kp
Pour le montage 6 fils le schéma équivalent est le suivant:
question 6: déterminer l’expression de 2 = Vm2/Vref2 en fonction de R, Rj et kp
question 7: rappeler la formule de la résistance d’un conducteur homogène cylindrique de section d, de longueur
l et de résistivité
question 8: calculer la longueur maximale de la liaison si on s’impose %1,02
12
section des câbles: 0,28 mm²
résistivité: 1,7.10-8
m
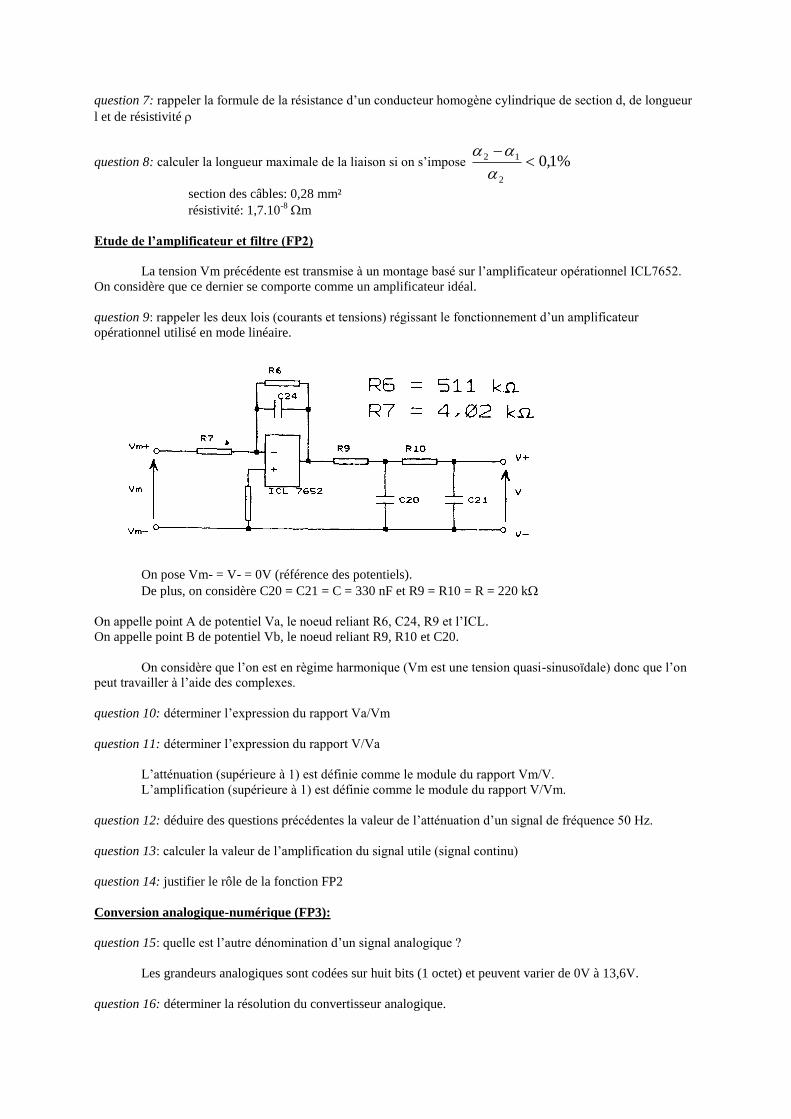
Etude de l’amplificateur et filtre (FP2)
La tension Vm précédente est transmise à un montage basé sur l’amplificateur opérationnel ICL7652.
On considère que ce dernier se comporte comme un amplificateur idéal.
question 9: rappeler les deux lois (courants et tensions) régissant le fonctionnement d’un amplificateur
opérationnel utilisé en mode linéaire.
On pose Vm- = V- = 0V (référence des potentiels).
De plus, on considère C20 = C21 = C = 330 nF et R9 = R10 = R = 220 k
On appelle point A de potentiel Va, le noeud reliant R6, C24, R9 et l’ICL.
On appelle point B de potentiel Vb, le noeud reliant R9, R10 et C20.
On considère que l’on est en règime harmonique (Vm est une tension quasi-sinusoïdale) donc que l’on
peut travailler à l’aide des complexes.
question 10: déterminer l’expression du rapport Va/Vm
question 11: déterminer l’expression du rapport V/Va
L’atténuation (supérieure à 1) est définie comme le module du rapport Vm/V.
L’amplification (supérieure à 1) est définie comme le module du rapport V/Vm.
question 12: déduire des questions précédentes la valeur de l’atténuation d’un signal de fréquence 50 Hz.
question 13: calculer la valeur de l’amplification du signal utile (signal continu)
question 14: justifier le rôle de la fonction FP2
Conversion analogique-numérique (FP3):
question 15: quelle est l’autre dénomination d’un signal analogique ?
Les grandeurs analogiques sont codées sur huit bits (1 octet) et peuvent varier de 0V à 13,6V.
question 16: déterminer la résolution du convertisseur analogique.
question 17: déterminer la valeur hexadécimale en sortie du CAN associée à la grandeur analogique 4,25 V.
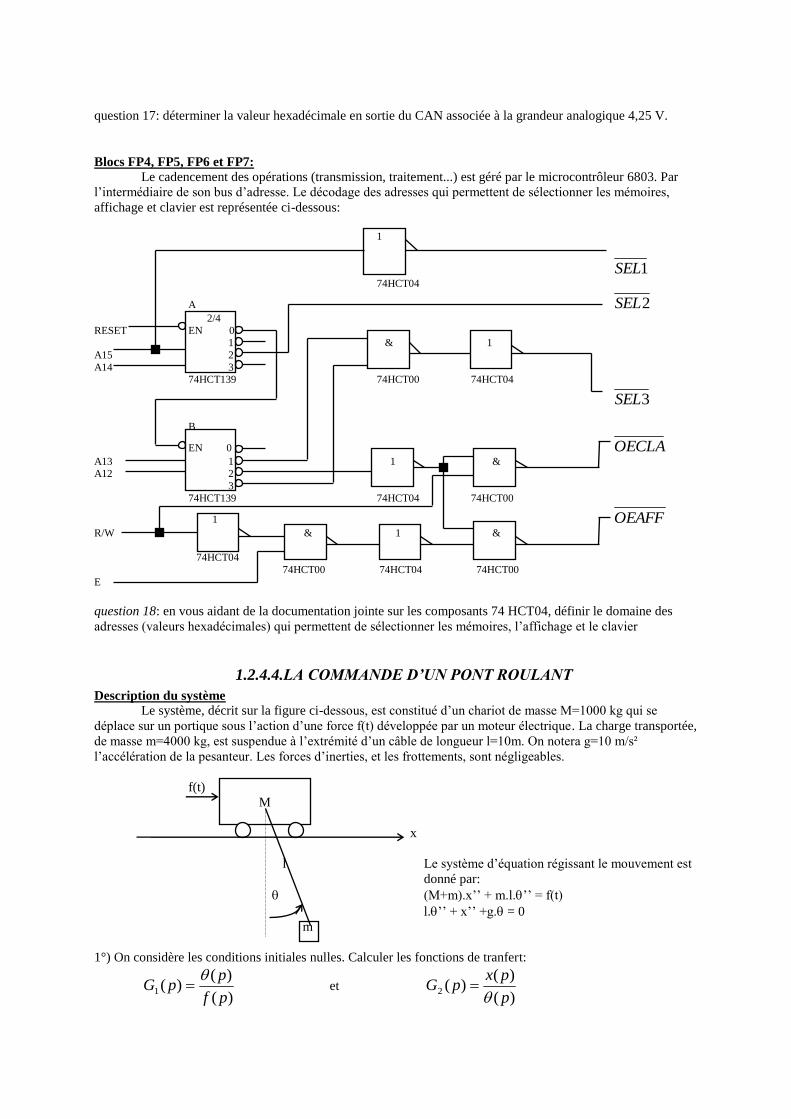
Blocs FP4, FP5, FP6 et FP7:
Le cadencement des opérations (transmission, traitement...) est géré par le microcontrôleur 6803. Par
l’intermédiaire de son bus d’adresse. Le décodage des adresses qui permettent de sélectionner les mémoires,
affichage et clavier est représentée ci-dessous:
1
1SEL
74HCT04
A 2SEL
2/4
RESET EN 0
1 & 1
A15 2
A14 3 74HCT139 74HCT00 74HCT04
3SEL
B
EN 0 OECLA
A13 1 1 & A12 2
3
74HCT139 74HCT04 74HCT00
1 OEAFF
R/W & 1 &
74HCT04
74HCT00 74HCT04 74HCT00
E
question 18: en vous aidant de la documentation jointe sur les composants 74 HCT04, définir le domaine des
adresses (valeurs hexadécimales) qui permettent de sélectionner les mémoires, l’affichage et le clavier
1.2.4.4.LA COMMANDE D’UN PONT ROULANT
Description du système
Le système, décrit sur la figure ci-dessous, est constitué d’un chariot de masse M=1000 kg qui se
déplace sur un portique sous l’action d’une force f(t) développée par un moteur électrique. La charge transportée,
de masse m=4000 kg, est suspendue à l’extrémité d’un câble de longueur l=10m. On notera g=10 m/s²
l’accélération de la pesanteur. Les forces d’inerties, et les frottements, sont négligeables.
f(t)
M
x
l Le système d’équation régissant le mouvement est
donné par:
(M+m).x’’ + m.l.’’ = f(t)
l.’’ + x’’ +g. = 0
m
1°) On considère les conditions initiales nulles. Calculer les fonctions de tranfert:
)(
)()(1
pf
ppG
et
)(
)()(2
p
pxpG
2°) La commande f(t) correspond à un échelon, donc f(p) = 1/p
A partir de l’expression de G1(p), montrer que:
glM
mMp
p
pgmMp
.
)(²
1.
)(
1)(
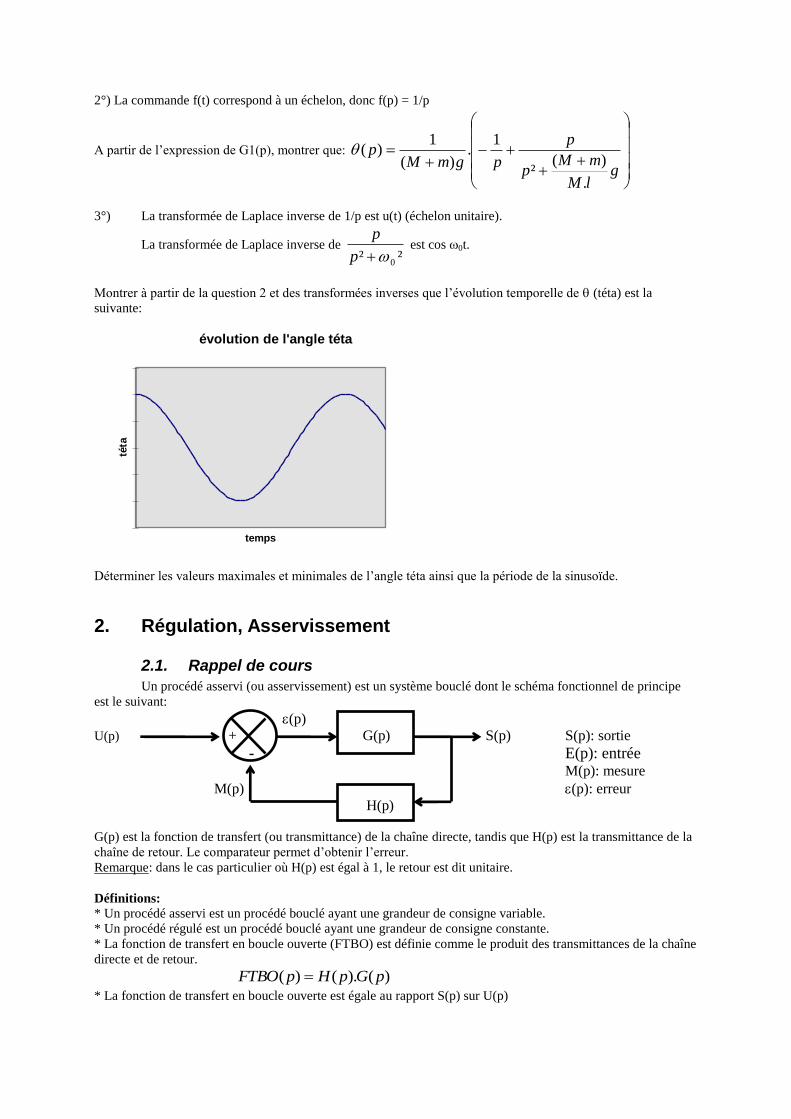
3°) La transformée de Laplace inverse de 1/p est u(t) (échelon unitaire).
La transformée de Laplace inverse de ²² 0p
p est cos 0t.
Montrer à partir de la question 2 et des transformées inverses que l’évolution temporelle de (téta) est la
suivante:
évolution de l'angle téta
temps
téta
Déterminer les valeurs maximales et minimales de l’angle téta ainsi que la période de la sinusoïde.
2. Régulation, Asservissement
2.1. Rappel de cours
Un procédé asservi (ou asservissement) est un système bouclé dont le schéma fonctionnel de principe
est le suivant:
(p)
U(p) + G(p) S(p) S(p): sortie
- E(p): entrée
M(p): mesure
M(p) (p): erreur
H(p)
G(p) est la fonction de transfert (ou transmittance) de la chaîne directe, tandis que H(p) est la transmittance de la
chaîne de retour. Le comparateur permet d’obtenir l’erreur.
Remarque: dans le cas particulier où H(p) est égal à 1, le retour est dit unitaire.
Définitions:
* Un procédé asservi est un procédé bouclé ayant une grandeur de consigne variable.
* Un procédé régulé est un procédé bouclé ayant une grandeur de consigne constante.
* La fonction de transfert en boucle ouverte (FTBO) est définie comme le produit des transmittances de la chaîne
directe et de retour.
)().()( pGpHpFTBO
* La fonction de transfert en boucle ouverte est égale au rapport S(p) sur U(p)

)().(1
)(
)(
)(
pHpG
pG
pU
pS
Remarque: la transformée en p (variable de Laplace) d’une fonction en t (temps) n’est qu’un outil
mathématiques permettant de représenter de façon simple un procédé réel.
2.2. Les régulateurs
Le régulateur industriel permet de travailler en boucle ouverte ou en boucle fermée. En boucle ouverte,
le régulateur est uniquement utilisé pour permettre au technicien de fixer lui-même l’ordre de commande de
l’actionneur.
Les régulateurs peuvent être de type P, PI, PD, PID (proportionnel, intégral, dérivé). Dans les
définitions, on indique les propriétés des réglages I et D qui ne peuvent exister sans terme proportionnel.
Définitions:
* en boucle ouverte, on réalise à l’aide du régulateur des variations de commande (ex: échelon de commande).
* en boucle fermée, on réalise à l’aide du régulateur des variations de consigne (ex: rampe de consigne).
* dans le cas d’un régulateur de type P:
- la sortie est proportionnelle à l’erreur oKtKtR )(.)(
- K: gain proportionne, Ko: signal de décentrement (talon ou bias ou IP)
- KBP 100 : bande proportionnel (en pourcentage)
- Plus le gain est élevé, plus l’écart diminue et plus la réponse est rapide. Cependant il reste toujours
un écart entre la sortie et la consigne.
* dans le cas d’un régulateur de type I:
- la sortie du régulateur est proportionnelle à l’intégral de l’erreur
dttTi
KtR )()( => )(
.)( p
pTi
KpR
- Plus le gain est élevé (ou Ti faible), plus la valeur de la consigne est traversée rapidement mais au
prix de réponses oscillatoires
- en régime permanent, l’erreur est nulle.
* dans le cas du régulateur de type D:
- la sortie du régulateur est proportionnelle à la dérivée de l’erreur
dt
tdTdKtR
)(..)(
=> )(...)( ppTdKpR
- plus le terme Td est important, plus la réponse en boucle fermée est lente. L’action Td apporte donc
un effet stabilisant par rapport à l’action intégrale.
2.3. Exercices
Exercice 1: on considère un groupe Ward-Léonard constitué d’une génératrice à courant continu G, entraînée à
vitesse constante 0, qui alimente un moteur à courant continu M. La moteur entraîne une charge constituée en
première approximation par une inertie pure J.
Pour le moteur M: - équation électrique: U = R.i + e’ e’ = k.
- équation mécanique: Cmdt
dJ
. Cm = k.i
Réaliser le schéma fonctionnel (schéma-bloc) du moteur (commande U(p), sortie (p))
Exercice 2: Un processus thermique est décrit par le système d’équations suivant
)()()()(4
)()()(10
1
11
tvtutyty
tututu
avec v(t): grandeur perturbatrice et u1(t): variable interne
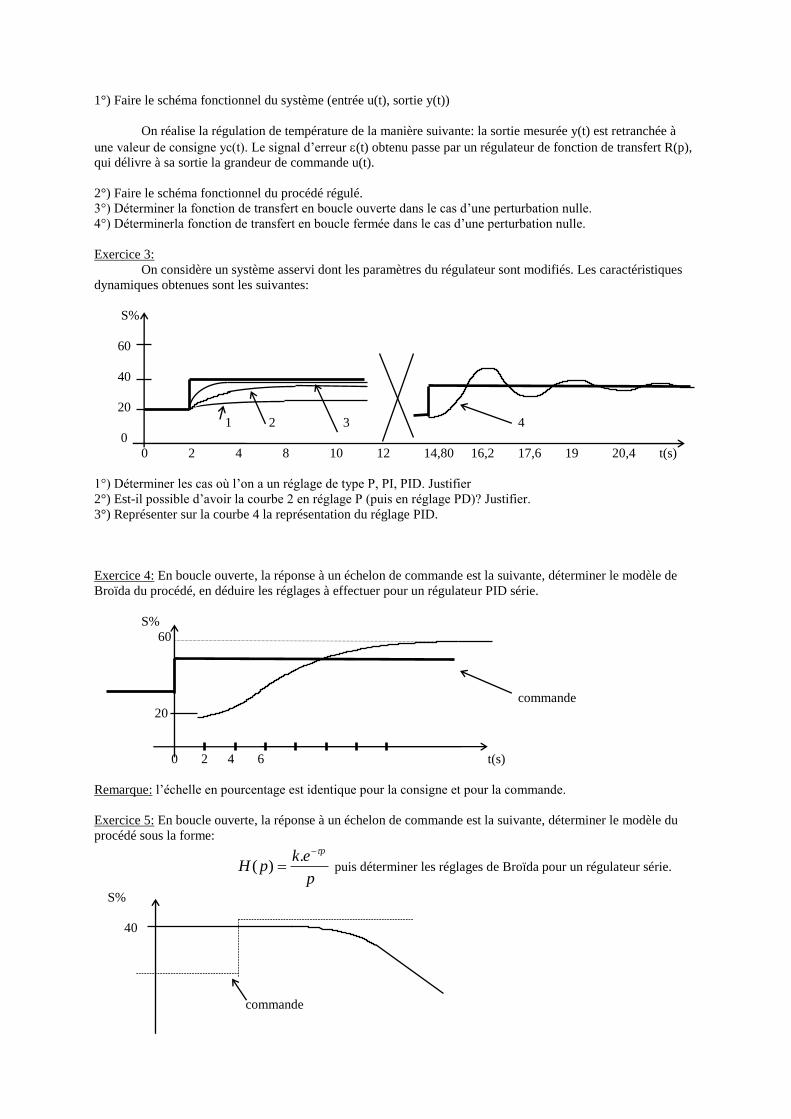
1°) Faire le schéma fonctionnel du système (entrée u(t), sortie y(t))
On réalise la régulation de température de la manière suivante: la sortie mesurée y(t) est retranchée à
une valeur de consigne yc(t). Le signal d’erreur (t) obtenu passe par un régulateur de fonction de transfert R(p),
qui délivre à sa sortie la grandeur de commande u(t).
2°) Faire le schéma fonctionnel du procédé régulé.
3°) Déterminer la fonction de transfert en boucle ouverte dans le cas d’une perturbation nulle.
4°) Déterminerla fonction de transfert en boucle fermée dans le cas d’une perturbation nulle.
Exercice 3:
On considère un système asservi dont les paramètres du régulateur sont modifiés. Les caractéristiques
dynamiques obtenues sont les suivantes:
S%
60
40
20
1 2 3 4
0
0 2 4 8 10 12 14,80 16,2 17,6 19 20,4 t(s)
1°) Déterminer les cas où l’on a un réglage de type P, PI, PID. Justifier
2°) Est-il possible d’avoir la courbe 2 en réglage P (puis en réglage PD)? Justifier.
3°) Représenter sur la courbe 4 la représentation du réglage PID.
Exercice 4: En boucle ouverte, la réponse à un échelon de commande est la suivante, déterminer le modèle de
Broïda du procédé, en déduire les réglages à effectuer pour un régulateur PID série.
S%
60
commande
20
0 2 4 6 t(s)
Remarque: l’échelle en pourcentage est identique pour la consigne et pour la commande.
Exercice 5: En boucle ouverte, la réponse à un échelon de commande est la suivante, déterminer le modèle du
procédé sous la forme:
p
ekpH
p
.
)( puis déterminer les réglages de Broïda pour un régulateur série.
S%
40
commande
0
0 5 t(s)
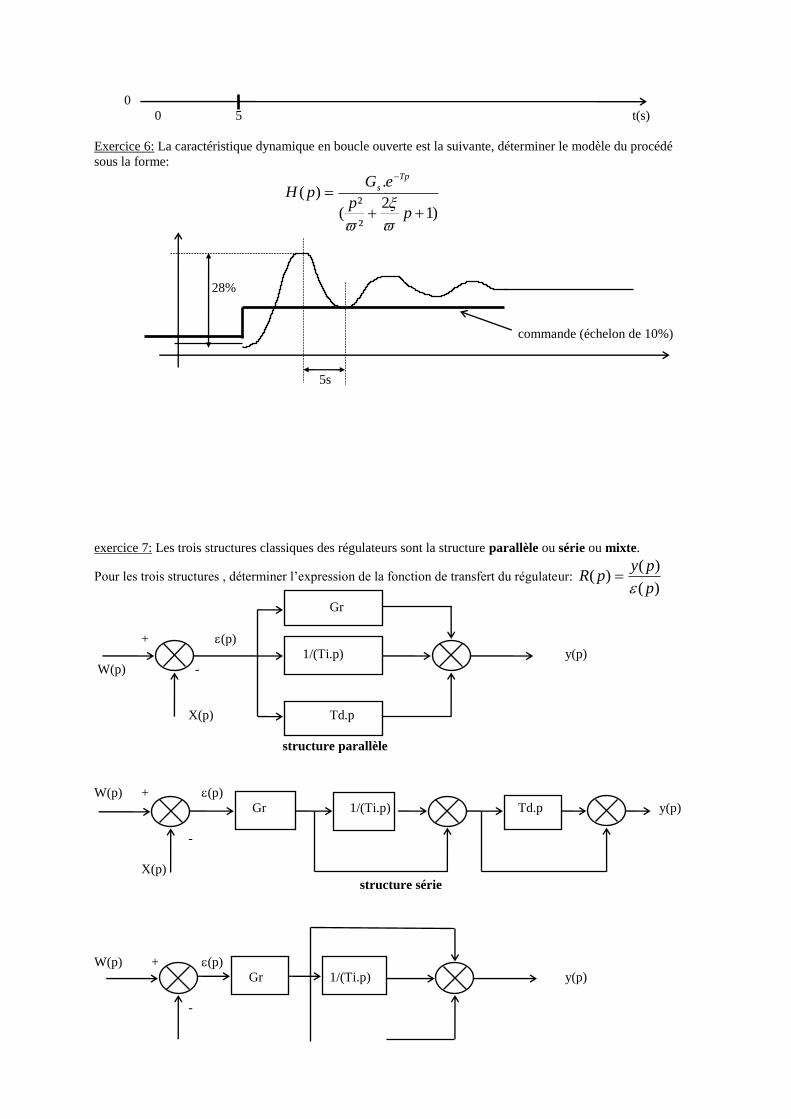
Exercice 6: La caractéristique dynamique en boucle ouverte est la suivante, déterminer le modèle du procédé
sous la forme:
)12
²
²(
.)(
pp
eGpH
Tp
s
28%
commande (échelon de 10%)
5s
exercice 7: Les trois structures classiques des régulateurs sont la structure parallèle ou série ou mixte.
Pour les trois structures , déterminer l’expression de la fonction de transfert du régulateur: )(
)()(
p
pypR
Gr
+ (p)
1/(Ti.p) y(p)
W(p) -
X(p) Td.p
structure parallèle
W(p) + (p)
Gr 1/(Ti.p) Td.p y(p)
-
X(p)
structure série
W(p) + (p)
Gr 1/(Ti.p) y(p)
-
X(p) Td.p
structure mixte
Remarque: on notera que la consigne se note communément W(p), la mesure X(p), le signal de commande
du procédé Y(p)
exercice n°8:
La norme française impose la définition:
- écart: différence entre la mesure et la consigne. x(t) - w(t) = écart
Le régulateur est à action directe si une augmentation de l’écart implique une augmentation du signal de
commande du procédé.
Le régulateur est à action inverse si une augmentation de l’écart implique une diminution du signal de
commande du procédé.
Etablir une procédure applicable en travaux pratiques pour mettre en évidence le sens d’action d’un régulateur.
exercice n°9: L’objectif de la régulation est une régulation de niveau.
On considère une vanne commandée de type NO alimentant un réservoir à débit d’évacuation constant.
La vanne NO est commandée par un régulateur de type PID. Le régulateur de type PID reçoit un signal de
mesure d’un capteur de niveau à ultrasons
a) Déterminer en justifiant le sens d’action du régulateur.
b) Même question en remplaçant par une vanne NF.
c) Même question avec vanne NO et capteur de pression en fond de réservoir.
d) Même question avec vanne NF et capteur de pression en fond du réservoir.
exercice n°10:
Présentation:
On considère dans cet exercice le procédé de régulation de pH présenté ci-dessous.
Le rejet issu du réservoir numéro 1 aboutit dans un réservoir de stockage numéroté 2. L’évacuation du
réservoir 2 se fait par l’intermédiaire d’une pompe centrifuge.
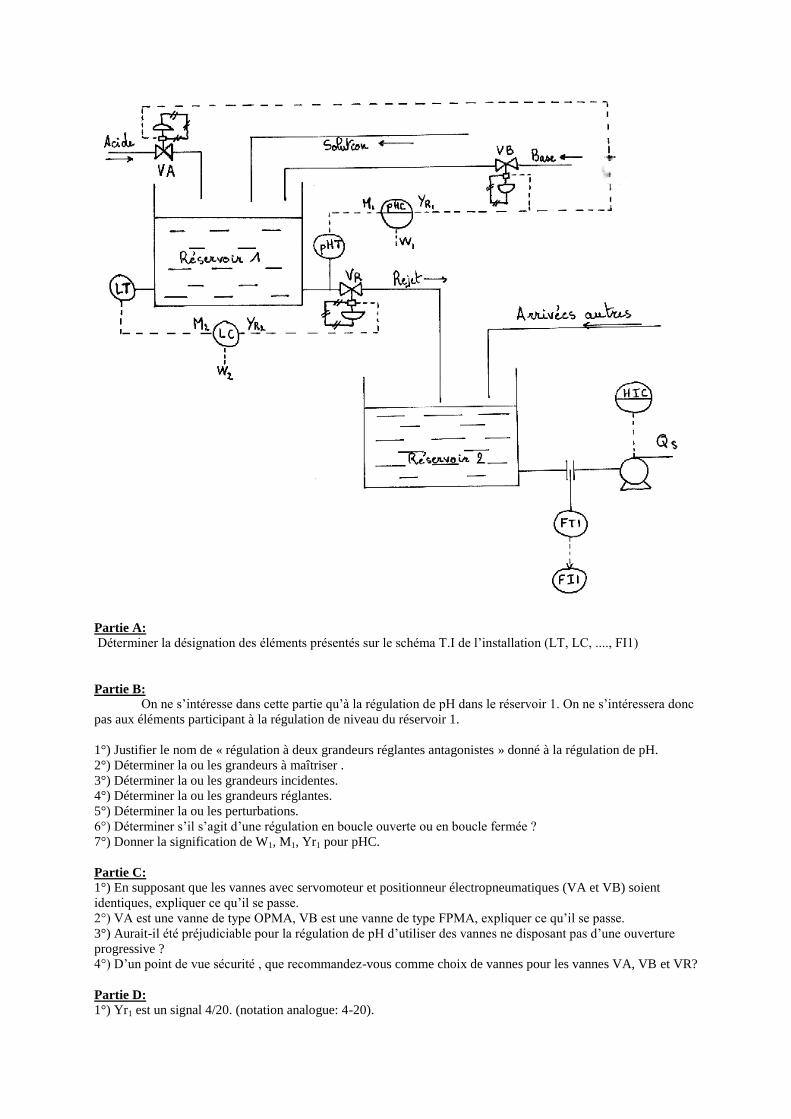
Partie A: Déterminer la désignation des éléments présentés sur le schéma T.I de l’installation (LT, LC, ...., FI1)
Partie B: On ne s’intéresse dans cette partie qu’à la régulation de pH dans le réservoir 1. On ne s’intéressera donc
pas aux éléments participant à la régulation de niveau du réservoir 1.
1°) Justifier le nom de « régulation à deux grandeurs réglantes antagonistes » donné à la régulation de pH.
2°) Déterminer la ou les grandeurs à maîtriser .
3°) Déterminer la ou les grandeurs incidentes.
4°) Déterminer la ou les grandeurs réglantes.
5°) Déterminer la ou les perturbations.
6°) Déterminer s’il s’agit d’une régulation en boucle ouverte ou en boucle fermée ?
7°) Donner la signification de W1, M1, Yr1 pour pHC.
Partie C:
1°) En supposant que les vannes avec servomoteur et positionneur électropneumatiques (VA et VB) soient
identiques, expliquer ce qu’il se passe.
2°) VA est une vanne de type OPMA, VB est une vanne de type FPMA, expliquer ce qu’il se passe.
3°) Aurait-il été préjudiciable pour la régulation de pH d’utiliser des vannes ne disposant pas d’une ouverture
progressive ?
4°) D’un point de vue sécurité , que recommandez-vous comme choix de vannes pour les vannes VA, VB et VR?
Partie D:
1°) Yr1 est un signal 4/20. (notation analogue: 4-20).

Décrire avec précision la signification d’un signal 4-20.
2°) Quel intérêt voyez-vous à utiliser plus communément un signal 4 -20 plutôt qu’un signal 0-20 ?
3°) Quel avantage voyez-vous à utiliser pour de longues distances de transfert informationnel un signal 4/20
plutôt qu’un signal tension 0/10 ?
4°) On rappelle que la résistance d’un homme est sensiblement de l’ordre du k. De plus, en grandeur continue,
on évalue que jusqu’à 20 mA (10 mA en alternatif) l’effet ressenti lors du passage du courant est très faible
(picotements).
Quels sont les risques encourus par un homme (assurant la continuité du courant) si l’on a rupture de
ligne accidentelle pour le signal 4/20 puis 0/10?
Remarque: à partir de 20 mA en continu (10 mA en alternatif), on a tétanisation musculaire.
Partie E:
1°) VA (NO) et VB (NF) ont des caractéristiques linéaires.
a) Parle-t-on de caractéristiques statiques ou dynamiques ?
b) Le gain statique des vannes VA et VB est-il constant ?
2°) Le débit maximum autorisé à passer dans chacune des vannes est de 16 L.min-1
.
a) - déterminer le débit de base et le débit d’acide pour un signal Yr1 de 20 %.
b) - déterminer la valeur de Yr1 en mA correspondant à 20 % de la pleine échelle.
c) - effectuer le tracé du débit de base en fonction de Yr1 exprimé en pourcentage.
PARTIE F:
On s’intéresse maintenant à l’ensemble du schéma T.I.
1°) Montrer que la régulation de niveau est une régulation en boucle fermée.
2°) Proposer une régulation de niveau autre que celle proposée.
Votre méthode devra être moins onéreuse donc plus simple et en accord avec les impératifs du procédé
étudié.
3°) Expliquer brièvement le fonctionnement du transmetteur de débit utilisé.
4°) Par souci d’économie et vu que l’indication affichée par l’indicateur de débit n’est que visuelle, on choisit de
remplacer l’ensemble FT1, FI1 par un rotamètre. Effectuer un schéma de l’installation.
On indiquera les régles de base à respecter lors de la mise en place du rotamètre.
5°) En vue d’éviter le surdimensionnement du réservoir 2, la vitesse de rotation de la pompe d’évacuation est
asservie au débit de la solution (quasiment constamment égal aux arrivées autres).
- déterminer si la régulation de la vitesse de rotation de la pompe se fait en boucle ouverte ou fermée
6°) Vu le schéma T.I de l’installation, est-il nécessaire a priori d’effectuer une étude hydraulique sur la
possibilité de coup de bélier ?
7°) Y-a-t-il lieu de prévoir un clapet côté aspiration ?
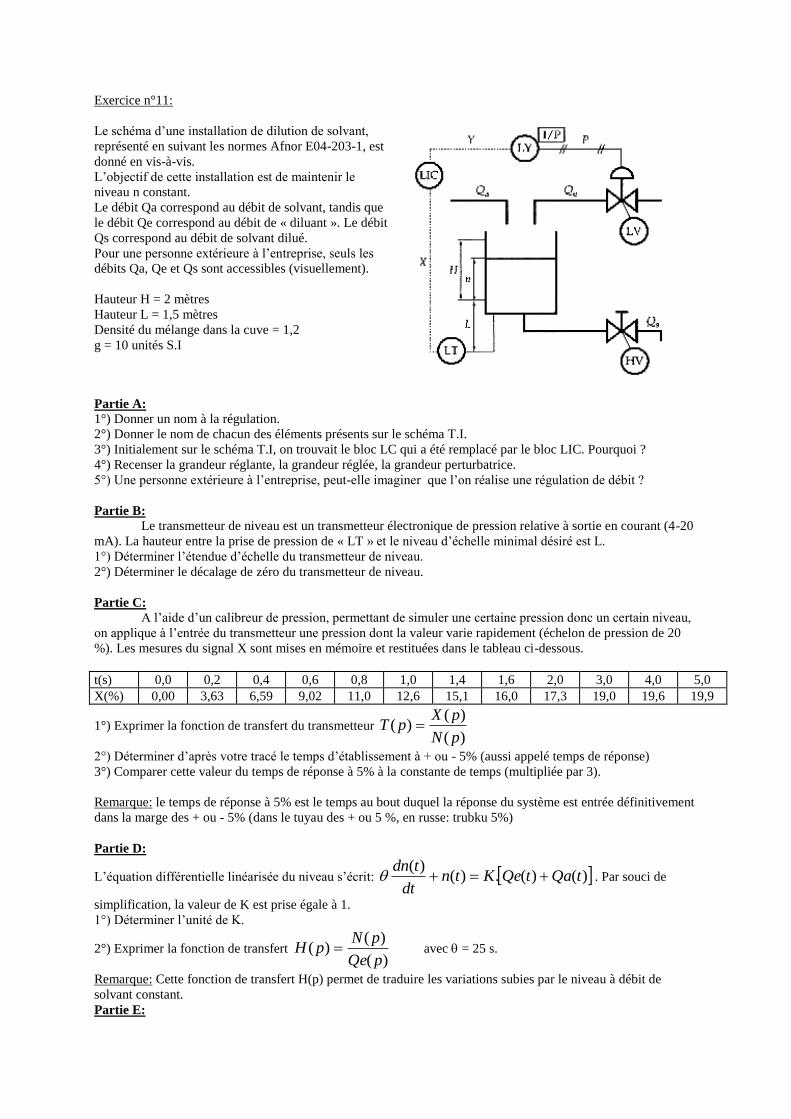
Exercice n°11:
Le schéma d’une installation de dilution de solvant,
représenté en suivant les normes Afnor E04-203-1, est
donné en vis-à-vis.
L’objectif de cette installation est de maintenir le
niveau n constant.
Le débit Qa correspond au débit de solvant, tandis que
le débit Qe correspond au débit de « diluant ». Le débit
Qs correspond au débit de solvant dilué.
Pour une personne extérieure à l’entreprise, seuls les
débits Qa, Qe et Qs sont accessibles (visuellement).
Hauteur H = 2 mètres
Hauteur L = 1,5 mètres
Densité du mélange dans la cuve = 1,2
g = 10 unités S.I
Partie A:
1°) Donner un nom à la régulation.
2°) Donner le nom de chacun des éléments présents sur le schéma T.I.
3°) Initialement sur le schéma T.I, on trouvait le bloc LC qui a été remplacé par le bloc LIC. Pourquoi ?
4°) Recenser la grandeur réglante, la grandeur réglée, la grandeur perturbatrice.
5°) Une personne extérieure à l’entreprise, peut-elle imaginer que l’on réalise une régulation de débit ?
Partie B:
Le transmetteur de niveau est un transmetteur électronique de pression relative à sortie en courant (4-20
mA). La hauteur entre la prise de pression de « LT » et le niveau d’échelle minimal désiré est L.
1°) Déterminer l’étendue d’échelle du transmetteur de niveau.
2°) Déterminer le décalage de zéro du transmetteur de niveau.
Partie C:
A l’aide d’un calibreur de pression, permettant de simuler une certaine pression donc un certain niveau,
on applique à l’entrée du transmetteur une pression dont la valeur varie rapidement (échelon de pression de 20
%). Les mesures du signal X sont mises en mémoire et restituées dans le tableau ci-dessous.
t(s) 0,0 0,2 0,4 0,6 0,8 1,0 1,4 1,6 2,0 3,0 4,0 5,0
X(%) 0,00 3,63 6,59 9,02 11,0 12,6 15,1 16,0 17,3 19,0 19,6 19,9
1°) Exprimer la fonction de transfert du transmetteur )(
)()(
pN
pXpT
2°) Déterminer d’après votre tracé le temps d’établissement à + ou - 5% (aussi appelé temps de réponse)
3°) Comparer cette valeur du temps de réponse à 5% à la constante de temps (multipliée par 3).
Remarque: le temps de réponse à 5% est le temps au bout duquel la réponse du système est entrée définitivement
dans la marge des + ou - 5% (dans le tuyau des + ou 5 %, en russe: trubku 5%)
Partie D:
L’équation différentielle linéarisée du niveau s’écrit: )()(.)()(
tQatQeKtndt
tdn . Par souci de
simplification, la valeur de K est prise égale à 1.
1°) Déterminer l’unité de K.
2°) Exprimer la fonction de transfert )(
)()(
pQe
pNpH avec = 25 s.
Remarque: Cette fonction de transfert H(p) permet de traduire les variations subies par le niveau à débit de
solvant constant.
Partie E:
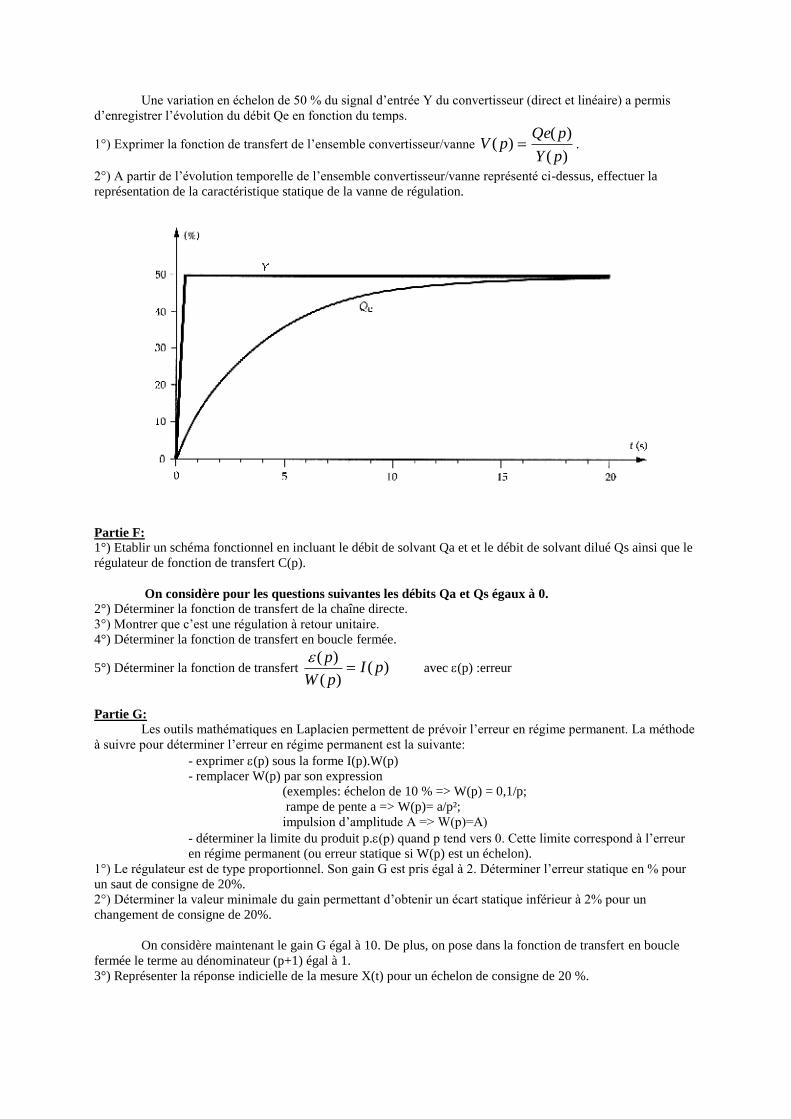
Une variation en échelon de 50 % du signal d’entrée Y du convertisseur (direct et linéaire) a permis
d’enregistrer l’évolution du débit Qe en fonction du temps.
1°) Exprimer la fonction de transfert de l’ensemble convertisseur/vanne )(
)()(
pY
pQepV .
2°) A partir de l’évolution temporelle de l’ensemble convertisseur/vanne représenté ci-dessus, effectuer la
représentation de la caractéristique statique de la vanne de régulation.
Partie F:
1°) Etablir un schéma fonctionnel en incluant le débit de solvant Qa et et le débit de solvant dilué Qs ainsi que le
régulateur de fonction de transfert C(p).
On considère pour les questions suivantes les débits Qa et Qs égaux à 0. 2°) Déterminer la fonction de transfert de la chaîne directe.
3°) Montrer que c’est une régulation à retour unitaire.
4°) Déterminer la fonction de transfert en boucle fermée.
5°) Déterminer la fonction de transfert )()(
)(pI
pW
p
avec (p) :erreur
Partie G:
Les outils mathématiques en Laplacien permettent de prévoir l’erreur en régime permanent. La méthode
à suivre pour déterminer l’erreur en régime permanent est la suivante:
- exprimer (p) sous la forme I(p).W(p)
- remplacer W(p) par son expression
(exemples: échelon de 10 % => W(p) = 0,1/p;
rampe de pente a => W(p)= a/p²;
impulsion d’amplitude A => W(p)=A)
- déterminer la limite du produit p.(p) quand p tend vers 0. Cette limite correspond à l’erreur
en régime permanent (ou erreur statique si W(p) est un échelon).
1°) Le régulateur est de type proportionnel. Son gain G est pris égal à 2. Déterminer l’erreur statique en % pour
un saut de consigne de 20%.
2°) Déterminer la valeur minimale du gain permettant d’obtenir un écart statique inférieur à 2% pour un
changement de consigne de 20%.
On considère maintenant le gain G égal à 10. De plus, on pose dans la fonction de transfert en boucle
fermée le terme au dénominateur (p+1) égal à 1.
3°) Représenter la réponse indicielle de la mesure X(t) pour un échelon de consigne de 20 %.
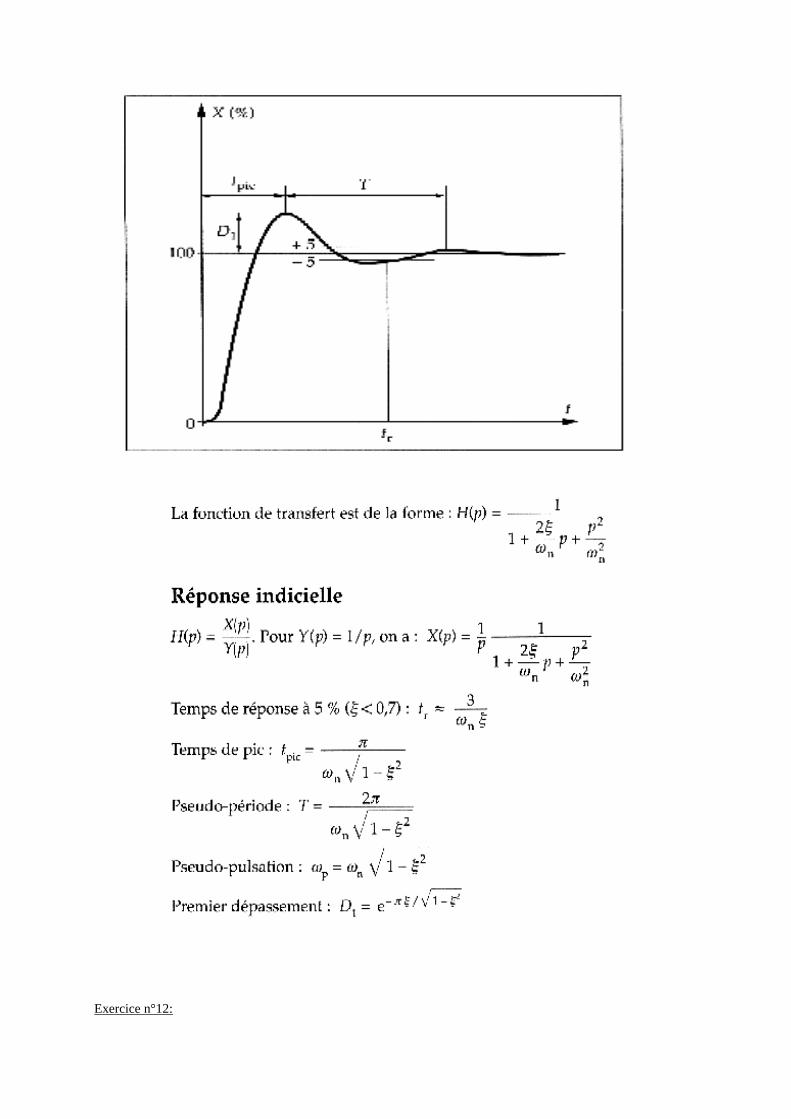
Exercice n°12:
On rappelle que la réponse indicielle d’un système correspond à la réponse à un échelon de commande
ou de consigne suivant que l’on travaille en boucle ouverte ou en boucle fermée.
La transformée de Laplace d’un échelon d’amplitude A est : p
A
La transformée de Laplace d’une rampe de pente est : 2p
On rappelle qu’un procédé est dit naturellement stable ou autoréglant si sa fonction de transfert ne
comporte pas le pôle p=0.
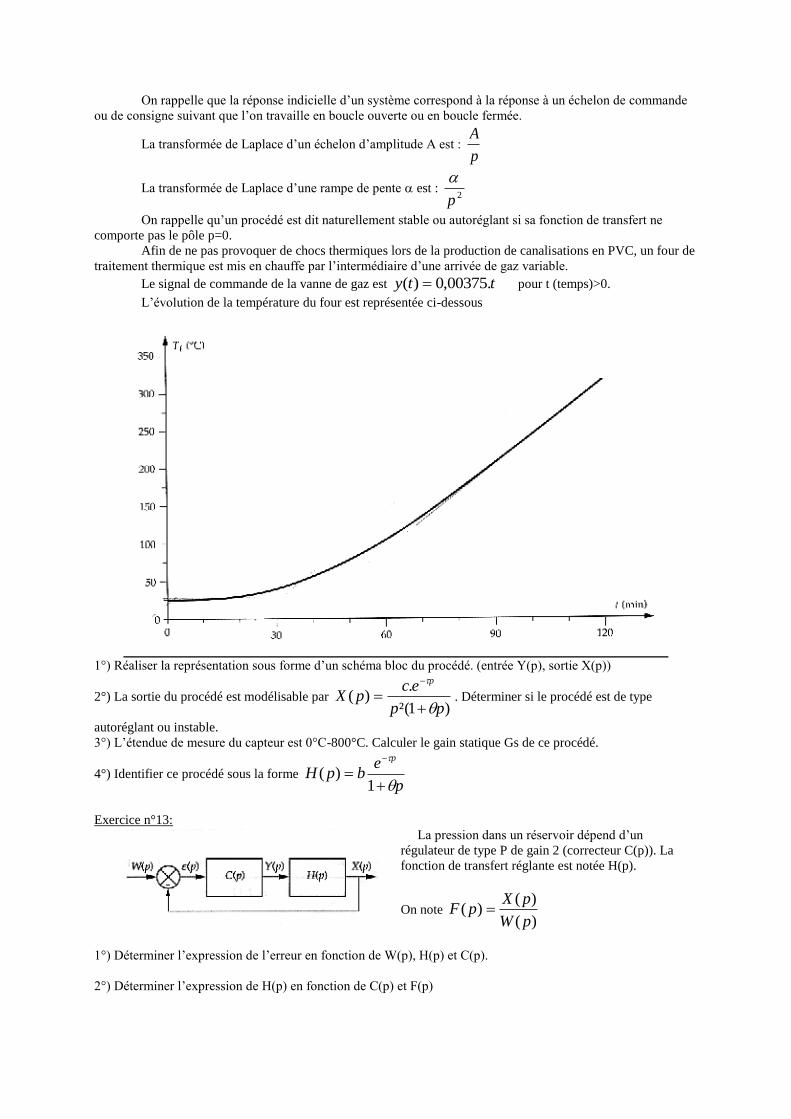
Afin de ne pas provoquer de chocs thermiques lors de la production de canalisations en PVC, un four de
traitement thermique est mis en chauffe par l’intermédiaire d’une arrivée de gaz variable.
Le signal de commande de la vanne de gaz est tty .00375,0)( pour t (temps)>0.
L’évolution de la température du four est représentée ci-dessous
1°) Réaliser la représentation sous forme d’un schéma bloc du procédé. (entrée Y(p), sortie X(p))
2°) La sortie du procédé est modélisable par )1²(
.)(
pp
ecpX
p
. Déterminer si le procédé est de type
autoréglant ou instable.
3°) L’étendue de mesure du capteur est 0°C-800°C. Calculer le gain statique Gs de ce procédé.
4°) Identifier ce procédé sous la forme p
ebpH
p
1)(
Exercice n°13:
La pression dans un réservoir dépend d’un
régulateur de type P de gain 2 (correcteur C(p)). La
fonction de transfert réglante est notée H(p).
On note )(
)()(
pW
pXpF
1°) Déterminer l’expression de l’erreur en fonction de W(p), H(p) et C(p).
2°) Déterminer l’expression de H(p) en fonction de C(p) et F(p)
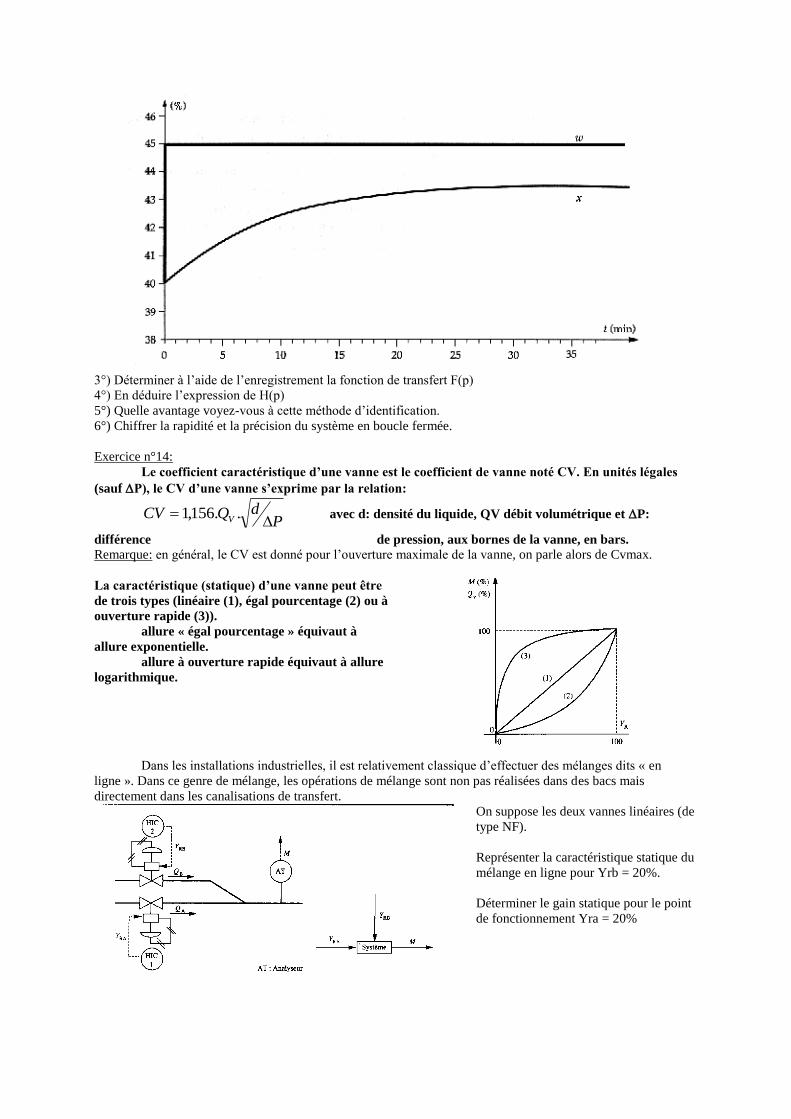
3°) Déterminer à l’aide de l’enregistrement la fonction de transfert F(p)
4°) En déduire l’expression de H(p)
5°) Quelle avantage voyez-vous à cette méthode d’identification.
6°) Chiffrer la rapidité et la précision du système en boucle fermée.
Exercice n°14:
Le coefficient caractéristique d’une vanne est le coefficient de vanne noté CV. En unités légales
(sauf P), le CV d’une vanne s’exprime par la relation:
P
dQCV V ..156,1 avec d: densité du liquide, QV débit volumétrique et P:
différence de pression, aux bornes de la vanne, en bars.
Remarque: en général, le CV est donné pour l’ouverture maximale de la vanne, on parle alors de Cvmax.
La caractéristique (statique) d’une vanne peut être
de trois types (linéaire (1), égal pourcentage (2) ou à
ouverture rapide (3)).
allure « égal pourcentage » équivaut à
allure exponentielle.
allure à ouverture rapide équivaut à allure
logarithmique.
Dans les installations industrielles, il est relativement classique d’effectuer des mélanges dits « en
ligne ». Dans ce genre de mélange, les opérations de mélange sont non pas réalisées dans des bacs mais
directement dans les canalisations de transfert.
On suppose les deux vannes linéaires (de
type NF).
Représenter la caractéristique statique du
mélange en ligne pour Yrb = 20%.
Déterminer le gain statique pour le point
de fonctionnement Yra = 20%
3. AUTOMATIQUE LOGIQUE
3.1. Introduction
De manière générale, les activités humaines correspondent à l’exécution simultanée ou successive de
tâches. Ces tâches peuvent être de type informationnelle (traitement de l’information) ou énergétiques (mise en
rotation, ouverture de porte...). L’objectif primaire de l’automatique logique est de réduire l’intervention de
l’homme sur des tâches répétitives et de ce fait forcément agaçantes (ou éreintantes). De cet objectif primaire
découle également la certitude d’obtention d’un produit en quantité et en qualité égal quel que soit le temps.
L’automatisation est définie comme l’exécution automatique de tâches en l’absence de l’intervention
de l’homme.
L’automatique est la science de l’automatisation qui étudie les méthodes et moyens de conception et de
construction de systèmes automatiques.
L’automatisme n’est rien d’autre qu’un réflexe. En revanche, l’automatisme logique est un système
logique ayant été conçu en accord avec les méthodes et moyens de l’automatique.
Dans un système automatisé (régulation ou automatique logique), les types de signaux informationnels
sont au nombre de trois.
- information logique ou TOR: information binaire codée sur un bit (vrai faux, passant bloqué, absent présent,
0 1)
- information numérique: information traduisant une quantité multiple d’une grandeur étalon. Cet information
est constituée d’une suite de bits (ex: vanne aux trois quarts ouverte, 000 fermée, 001 au quart ouverte, 010 à
demi-ouverte, 011 aux trois quarts ouvertes, 100 vanne totalement ouverte). L’information logique est
évidemment un cas particulier de signal numérique).
- information continue: information évoluant de façon continue ou analogique.
Une information discrète est une information numérique. En automatique logique, les signaux utilisés
sont des signaux numériques. En régulation, ce sont essentiellement des signaux analogiques.
L’automatique logique se découpe en deux parties: la logique combinatoire et la logique séquentielle.
En logique combinatoire, la ou les variables de sortie sont uniquement fonction des variables d’entrée. En
logique séquentielle, la ou les variables de sortie sont fonction des variables d’entrée mais également des
variables de sortie à un instant donné. L’automatique logique est batie sur l’algèbre de Boole (communément
appelé algèbre binaire), les équations sont appelées équations logiques. Les trois opérations de base de
l’automatique logique sont le (OUI) NON, OU et ET. Les deux opérations composées sont le NAND et le NOR.
3.2. Exercices de base de logique combinatoire
Exercice n°1:
1°) Déterminer la table de vérité de l’équation logique du OU EXCLUSIF S = baba ..
2°) Déterminer la représentation électrique du OU EXCLUSIF.
Exercice n°2:
1°) Déterminer la représentation en norme ancienne et nouvelle de l’équation logique ABCCADS ...
2°) Déterminer la table de vérité de cette sortie.
3°) Déterminer la forme simplifiée de l’expression de S par utilisation de la table de Karnaugh.
Exercice n°3:
1°) Simplifier par utilisation de la table de Karnaugh l’expression ).(... aacbcabaS
2°) Simplifier cette même expression par application des propriétés de l’algèbre binaire.
Exercirce n°4:
1°) Simplifier l’expression cbacbaS ....
2°) Simplifier l’expression bdcdadcbcbaS ).(..)..(

4. CORRIGES
4.1. Exercices d’ électricité
Exercice n°1: 1°) une source de tension ne peut être court-circuitée donc les interrupteurs ne peuvent être fermés
simultanément.
2°) une source de courant ne peut subir de discontinuité en courant donc K1 et K2 ne peuvent être ouverts
simultanément.
3°) durant le temps tf, K1 est passant et K2 est ouvert donc le courant j est égal au courant I et la tension V est
égale à U. Durant le temps to, K2 est passant, K1 est ouvert donc j est égal à 0 et V est égale à 0.
j
t
V
0 t
tf T T-tf =to
4°) UT
tfdtU
Tdttv
TVeff
tfT
*1
)(1
0
2
0
2
tfT
UT
tfUdt
Tdttv
TVmoy
00
*1
)(1
Remarque: Il est possible de calculer la valeur moyenne Vmoy sans passer par les intégrales, en effet V
vaut U pendant un temps tf puis est nulle pendant un temps to. Donc la valeur Vmoy est égale au produit de U
par tf divisée par la période T.
Le rapport Tf/T est appelé rapport cyclique.
5°) IUT
tfIdtU
Tdttitv
TPmoy
tfT
00
1)()(
1
Dans ce cas particulier, la puissance moyenne est égale au produit de la tension moyenne Vmoy par le courant I.
Exercice n°2:
1°)
TTT
dtt
T
UmdttUm
Tdttu
TUeff
0
2
0
22
0
2
2
))..(2cos(1).cos(
1)(
1
2
))..(2cos(1).cos(
2
tt
T
2
TT
dtTt
T
UmUmdt
t
T
UmUeff
00
2
2
))/.2.(2cos(
22
))..(2cos(1
02
)2sin()42sin(.82.4
*2
)2/4sin(
2 0
UmTUmTTtUmUeff
T
2
UmUeff et de la même façon
2
ImIeff
Remarque: la valeur efficace d’une grandeur sinusoïdale dephasée ou non par rapport à l’origine des
temps est toujours égale à la valeur maximale de cette grandeur divisée par racine de deux.
2°) Plutôt que de réaliser le calcul de la valeur moyenne de u(t) et i(t), il est simple de remarquer que des
grandeurs sinusoïdales sont des grandeurs alternatives donc les valeurs moyennes de u(t) et i(t) sont nulles sur
une période.
3°)
2
)cos()..2cos(Im.).cos(.Im).cos(.)(
tUmttUmtP
On remarque que la puissance instantanée se compose de deux termes dont l’un est égal à Um.Im/2.cos(-).
L’angle - correspond au déphasage de I par rapport à V.
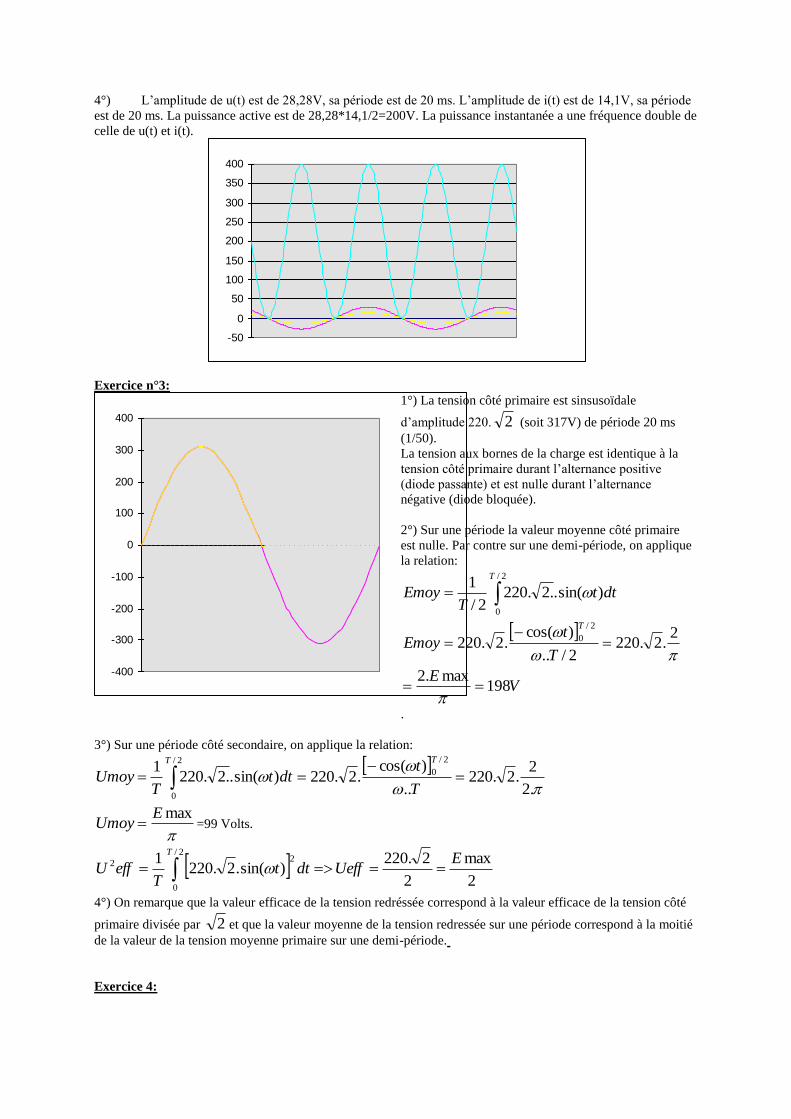
4°) L’amplitude de u(t) est de 28,28V, sa période est de 20 ms. L’amplitude de i(t) est de 14,1V, sa période
est de 20 ms. La puissance active est de 28,28*14,1/2=200V. La puissance instantanée a une fréquence double de
celle de u(t) et i(t).
-50
0
50
100
150
200
250
300
350
400
Exercice n°3:
-400
-300
-200
-100
0
100
200
300
400
1°) La tension côté primaire est sinsusoïdale
d’amplitude 220. 2 (soit 317V) de période 20 ms
(1/50).
La tension aux bornes de la charge est identique à la
tension côté primaire durant l’alternance positive
(diode passante) et est nulle durant l’alternance
négative (diode bloquée).
2°) Sur une période la valeur moyenne côté primaire
est nulle. Par contre sur une demi-période, on applique
la relation:
2/
0
)sin(..2.2202/
1T
dttT
Emoy
VE
T
tEmoy
T
198max.2
2.2.220
2/..
)cos(.2.220
2/
0
.
3°) Sur une période côté secondaire, on applique la relation:
2/
0
)sin(..2.2201
T
dttT
Umoy
.2
2.2.220
..
)cos(.2.220
2/
0
T
tT
maxEUmoy =99 Volts.
2
max
2
2.220)sin(.2.220
12/
0
22 E
UeffdttT
effU
T
4°) On remarque que la valeur efficace de la tension redréssée correspond à la valeur efficace de la tension côté
primaire divisée par 2 et que la valeur moyenne de la tension redressée sur une période correspond à la moitié
de la valeur de la tension moyenne primaire sur une demi-période.
Exercice 4:

1°) Initialement, le condensateur est déchargé. Lorsque la diode devient passante donc la tension côté primaire
croit de 0 à Emax, la capacité se charge avec la constante de temps rd.C (très petite) et donc suit quasiment
l’allure de la tension côté primaire. A la fin de cette première séquence, la capacité est chargée à la valeur Emax.
2°) Le condensateur est maintenant chargé à la valeur Emax donc si la tension côté primaire décroit alors la
tension aux bornes de la diode devient négative et donc la diode se bloque. Dans le même temps, le condensateur
se décharge à la travers la résistance R avec la constante de temps RC. En supposant cette constante de temps
importante devant une période (20 ms), on peut alors considérer que la tension aux bornes de la capacité ne varie
quasiment pas de Emax, on notera cette nouvelle tension E’max.
3°) Quand la tension côté primaire devient supérieure à E’max, le condensateur se charge jusque Emax puis par
la suite se décharge jusque E’max... On peut donc considérer que la tension aux bornes de la charge R est
quasiment toujours égale à Emax d’où le nom de filtre capacitif.
Exercice n°5: a) R
UP
2
d’où VRPU 50100.25. b) IRU . d’où AI 5,0100
50
c) mSR
G 101
Exercice n°6: Pour résoudre cet exercice le mieux est de réaliser un schéma du montage
U=5.cos (t) avec = 2..f = 1256,6 rad.s-1
Rg Rg = 1,8 R= 47
U
R U’
a, b,c) première méthode: on note I le courant traversant les résistances Rg et R: IRRgU ).( donc
AI 1,08,147
5
d’où VIRU 7,4.' d’où WIRP 47,01,0.47. 22
a,b,c) seconde méthode: on applique la loi du diviseur de tension URgR
RU .'
puis
R
UI
'
Exercice n°7: a) on note Ir le courant dans R et Iv le courant dans le voltmètre => u = R.Ir = Rv.Iv avec Iv+Ir=i
=> u/R+u/Rv=i
b) d’après le résultat précédent: u.(1/R+1/Rv)=i => u/i=Rv.R (R+Rv)
La condition est respectée ssi Rv >> R d’où la nécessité d’avoir un voltmètre à forte résistance afin de
ne pas fausser la mesure de u.
Exercice n°8:
a) On a la relation S
lR donc
S
lR Ici ²126,04/)4,0(* 2 mmS et
ml 5,18806,0**1000
en donnant les valeurs numériques de la résistivité à chaque température, on obtient:
R0 = 23,9 R20=25,9 R40=27,8 R60=29,7 R80=31,6
b) et c) Il est clair que la résistance augmente linéairement avec la température. De ce fait une sonde de
température est une résistance variable linéairement en fonction de la température. Il est simple de retrouver à
partir de la résistance la valeur de la température.
Remarque: la loi exprimant la résistance ne tient pas compte de la dilatation ou de la contraction des
matériaux en fonction de la température. Si l’on veut que cette relation soit inchangée, il faut donc limiter
l’utilisation sur une certaine plage de mesure. (problème classique des capteurs).
Exercice n°9:
a) on suppose le couplage de type triangle donc on mesure entre deux bornes U1, V1 la résistance R calculée de
la manière suivante:
U1 W1 V1
53,0
8,0
1
8,02
1
1R
b) en couplage étoile à 20°C, on mesure entre deux bornes 1,6 (deux résistances de 0,8 en série)
donc à 80°C d’après la loi de l’exercice 8, R’=1,6.(1+4.10-3
.60)=1,99
Exercice n°10:
a)
32
1
54
5.43
1
11
21
2.1
RR
RR
RRR
RRR
RRRab
b) Rab=12,9
Exercice n°11:
a) en toute rigueur, on considère que la résistance de l’homme vient se placer en parallèle avec la résistance de
terre. Cette résistance globale est elle-même en série avec la résistance de fuite de la machine donc la résistance
de l’ensemble vaut (1000.12/1012+40) 51,85
Le courant de défaut vaut 230/51,85=4,44A
b) L’homme est soumis à la tension 230-40*4,44 ou par application de la loi du diviseur de tension
11,85/51,85*230=52,56 V
Il est donc traversé par un courant de 52,56 mA. Ceci signifie qu’il est alors en paralysie respiratoire.
c) Le meilleur moyen serait d’augmenter la résistance de 1000. Le moyen le plus simple est de munir
l’individu de gants isolants, ainsi que de le faire travailler sur un tapis isolant.
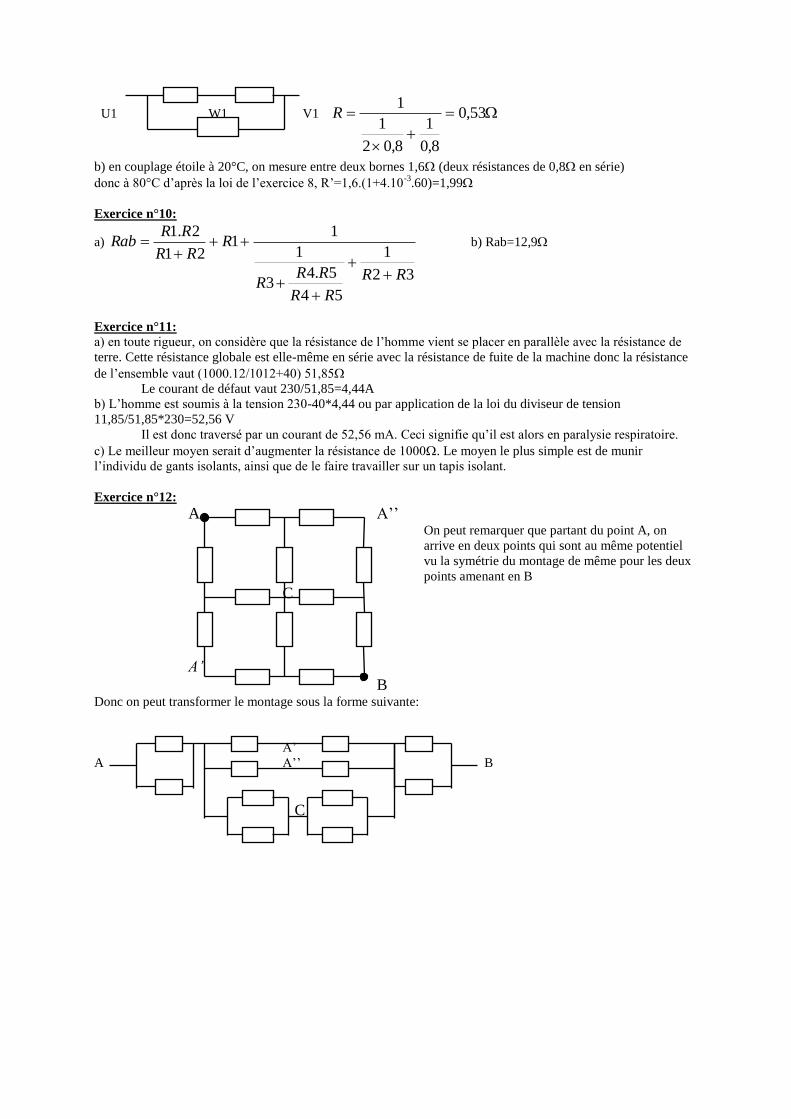
Exercice n°12:
A A’’ On peut remarquer que partant du point A, on
arrive en deux points qui sont au même potentiel vu la symétrie du montage de même pour les deux points amenant en B C
A’
B Donc on peut transformer le montage sous la forme suivante:
A’
A A’’ B
C