disciplines.ac-toulouse.fr · web viewdans le cadre des systèmes asservis, l’entrée type la...
TRANSCRIPT
Analyse des systèmes asservis
I. IntroductionMise en situation d´un système non asservi
Exemple : fonctionnement sans régulation automatique de vitesse
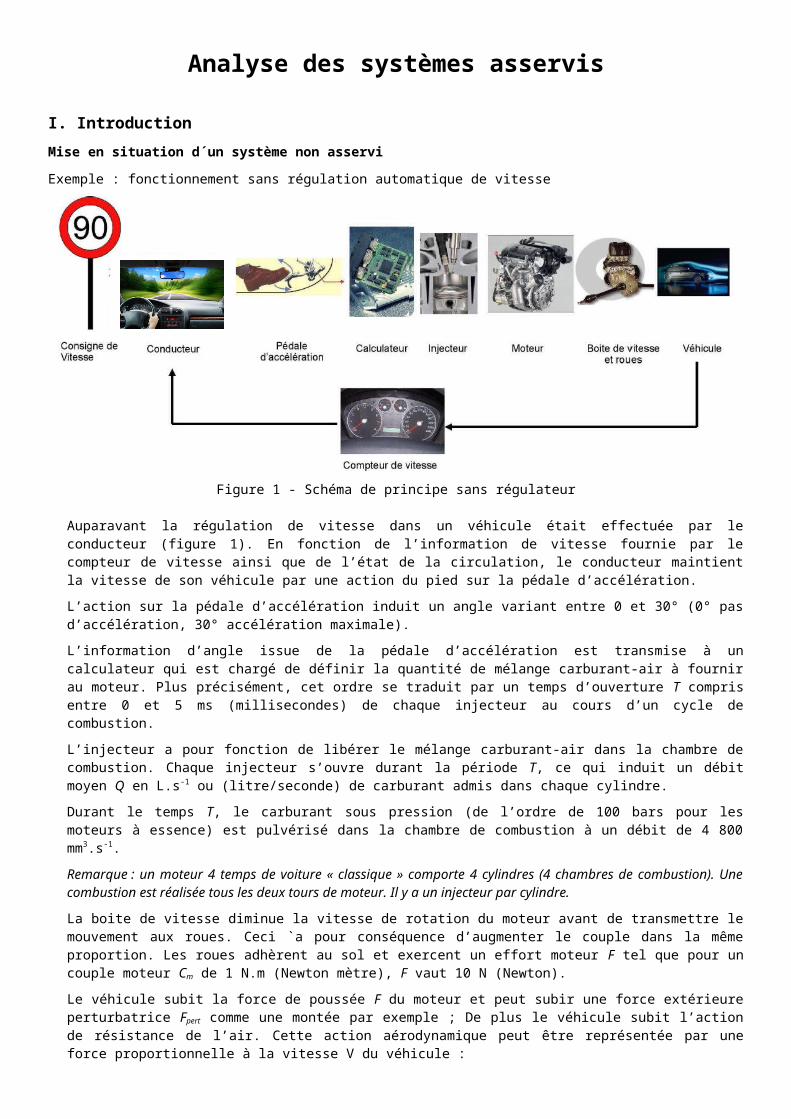
Figure 1 - Schéma de principe sans régulateur
Auparavant la régulation de vitesse dans un véhicule était effectuée par le conducteur (figure 1). En fonction de l’information de vitesse fournie par le compteur de vitesse ainsi que de l’état de la circulation, le conducteur maintient la vitesse de son véhicule par une action du pied sur la pédale d’accélération.
L’action sur la pédale d’accélération induit un angle variant entre 0 et 30° (0° pas d’accélération, 30° accélération maximale).
L’information d’angle issue de la pédale d’accélération est transmise à un calculateur qui est chargé de définir la quantité de mélange carburant-air à fournir au moteur. Plus précisément, cet ordre se traduit par un temps d’ouverture T compris entre 0 et 5 ms (millisecondes) de chaque injecteur au cours d’un cycle de combustion.
L’injecteur a pour fonction de libérer le mélange carburant-air dans la chambre de combustion. Chaque injecteur s’ouvre durant la période T, ce qui induit un débit moyen Q en L.s-1 ou (litre/seconde) de carburant admis dans chaque cylindre.
Durant le temps T, le carburant sous pression (de l’ordre de 100 bars pour les moteurs à essence) est pulvérisé dans la chambre de combustion à un débit de 4 800 mm3.s-1.
Remarque : un moteur 4 temps de voiture « classique » comporte 4 cylindres (4 chambres de combustion). Une combustion est réalisée tous les deux tours de moteur. Il y a un injecteur par cylindre.
La boite de vitesse diminue la vitesse de rotation du moteur avant de transmettre le mouvement aux roues. Ceci `a pour conséquence d’augmenter le couple dans la même proportion. Les roues adhèrent au sol et exercent un effort moteur F tel que pour un couple moteur Cm de 1 N.m (Newton mètre), F vaut 10 N (Newton).
Le véhicule subit la force de poussée F du moteur et peut subir une force extérieure perturbatrice Fpert comme une montée par exemple ; De plus le véhicule subit l’action de résistance de l’air. Cette action aérodynamique peut être représentée par une force proportionnelle à la vitesse V du véhicule :
Fair=−f vV
Données :
f v=20N .s .m−1

Mise en situation d´un système asservi
Exemple : fonctionnement avec régulation automatique de vitesse
Figure 2 - Schéma de principe avec régulateur automatique
Le système de régulation s’adapte sur la chaîne directe précédente (figure 2). Le conducteur entre une consigne de vitesse à l’aide d’un pupitre situé au niveau du volant.
Le calculateur récupère cette consigne ainsi que la vitesse réelle du véhicule issue d’un capteur de vitesse. Les deux informations sont comparées puis ensuite traitées par le calculateur afin d’établir un temps d’ouverture de chaque injecteur. Le gain du calculateur s’établit de la manière suivante, un écart de 10 km.h-1 entraîne un temps d’ouverture de 0,0025 s par injecteur.
II. Structure d’un système asservi
DéfinitionUn système asservi est un système assurant le pilotage d´une grandeur physique de sortie d´un processus, par mesure de la grandeur et ajustement permanent des grandeurs de commande du processus, en vue de suivre la consigne.
La structure classique d´un système asservi est composée :- d’une partie commande qui détermine la grandeur de commande du processus,- d’un processus,- d’un capteur qui mesure la grandeur physique asservie,- d’un comparateur qui élabore un écart entre la grandeur mesurée et la grandeur de la consigne.
Remarque : une perturbation est une sollicitation extérieure non prévisible agissant sur le processus et qui tend à modifier la valeur de sortie.
Grandeurconsigne
Grandeur de commande
Grandeur asservie
Grandeur mesurée
Écart

Exemple de systèmes asservis.
Régulation du chauffage d’une habitation :- grandeur asservie : la température,- processus : l’habitation, la chaudière et les radiateurs,- capteur : la sonde de température,- partie commande : le thermostat.
Les variations de température extérieure, l’ouverture d’une fenêtre ou le soleil chauffant par rayonnement à travers les vitres sont autant de perturbations non prévisibles pour le système de chauffage d’une habitation.La mesure de l’écart par rapport à la consigne permet à la partie commande, placée en amont du processus, de moduler la distribution d’énergie et d’atteindre les performances attendues.
Asservissement d’altitude d’un avion de ligne : - grandeur asservie : l’altitude, - processus : l’avion, ses gouvernes,- capteur : l’altimètre,- partie commande : le calculateur de bord.
III. Performance de la commande d’un système asservi
Le comportement d´un système asservi est évalué suivant différents critères de performance :
a. La stabilité
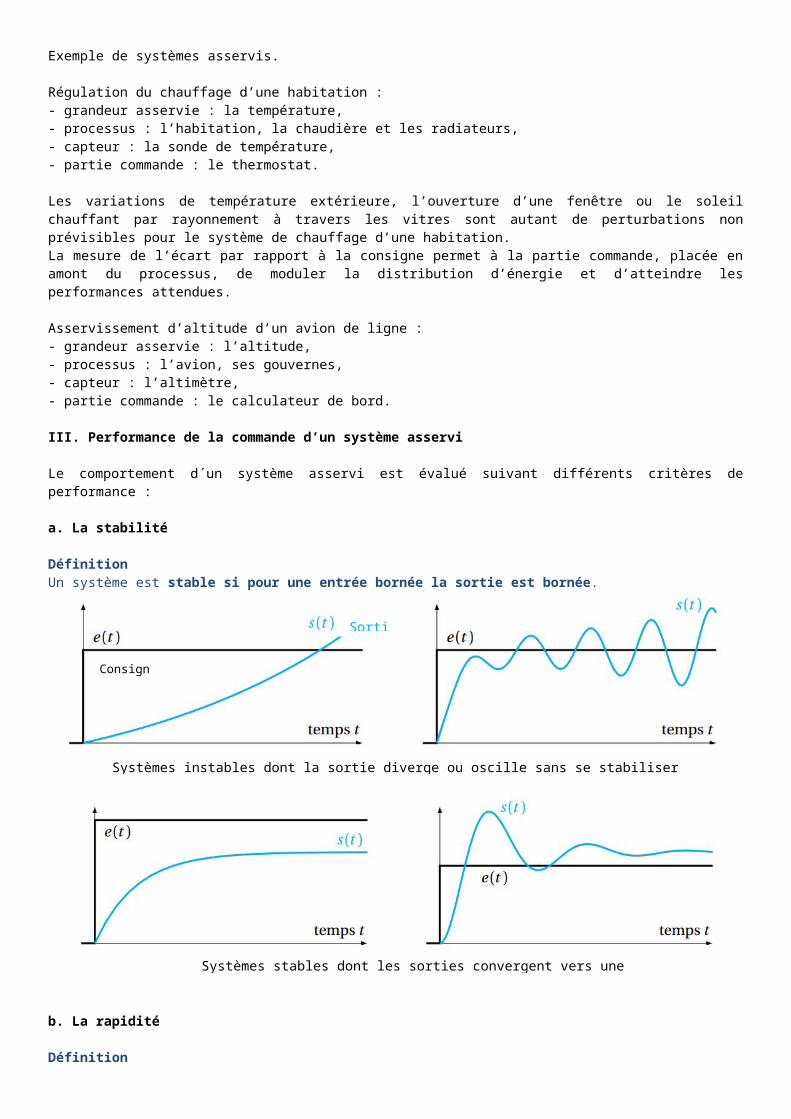
DéfinitionUn système est stable si pour une entrée bornée la sortie est bornée.
b. La rapidité
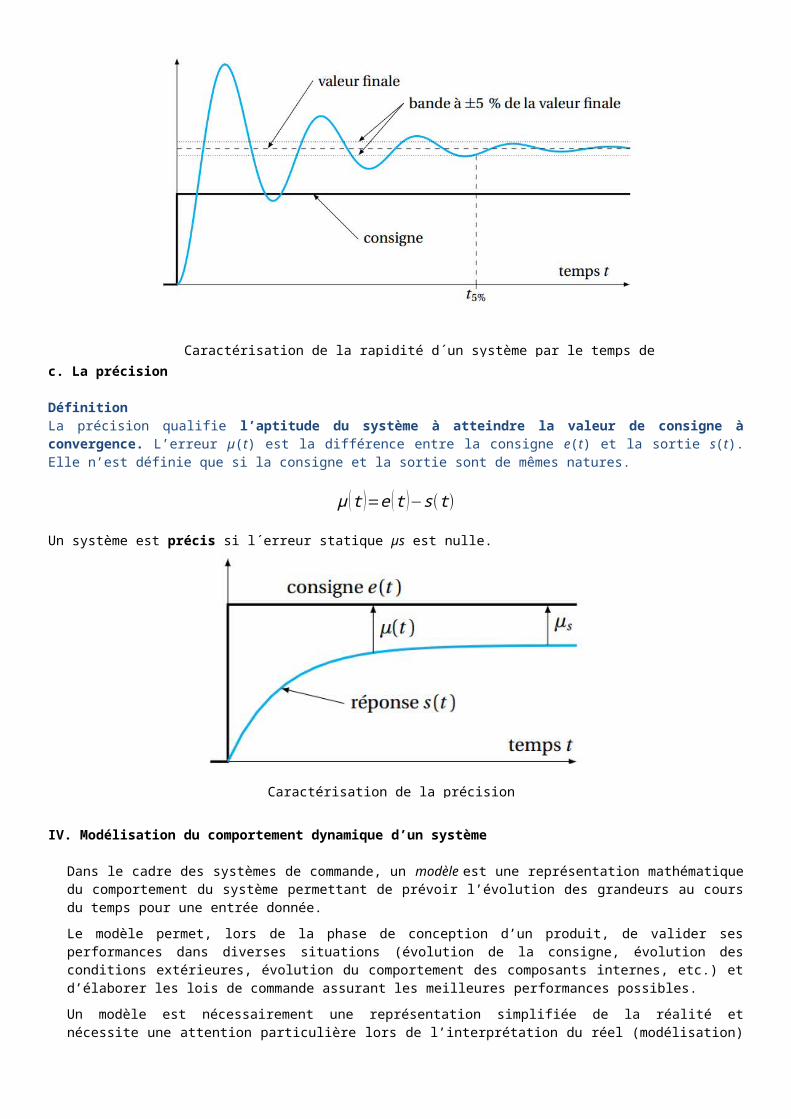
DéfinitionUn système est rapide s’il converge en un temps court au regard de son contexte d’utilisation.La rapidité d’un système est définie par son temps de réponse à 5 % (tr5%). C’est le temps mis par le système pour entrer dans une bande de +5% autour de la valeur à convergence et ne plus en sortir.
Plus le tr5% est petit plus le système est rapide.
Systèmes instables dont la sortie diverge ou oscille sans se stabiliser
Consigne
Sortie
Systèmes stables dont les sorties convergent vers une valeur bornée

c. La précision
DéfinitionLa précision qualifie l’aptitude du système à atteindre la valeur de consigne à convergence. L’erreur µ(t) est la différence entre la consigne e(t) et la sortie s(t). Elle n’est définie que si la consigne et la sortie sont de mêmes natures.
μ (t )=e (t )−s (t)
Un système est précis si l´erreur statique µs est nulle.
IV. Modélisation du comportement dynamique d’un système
Dans le cadre des systèmes de commande, un modèle est une représentation mathématique du comportement du système permettant de prévoir l’évolution des grandeurs au cours du temps pour une entrée donnée.
Le modèle permet, lors de la phase de conception d’un produit, de valider ses performances dans diverses situations (évolution de la consigne, évolution des conditions extérieures, évolution du comportement des composants internes, etc.) et d’élaborer les lois de commande assurant les meilleures performances possibles.
Un modèle est nécessairement une représentation simplifiée de la réalité et nécessite une attention particulière lors de l’interprétation du réel (modélisation) et lors de l’interprétation des résultats. L’analyse d’un système peut se résumer en trois points clés :
• traduire le réel sous forme de modèle mathématique ;
• calculer le résultat du modèle (analytiquement ou sur logiciel de simulation) ;
• interpréter le résultat, au regard du domaine de validité du modèle, de la pertinence des choix de simplification et du retour sur les performances attendues.
Caractérisation de la précision d´un système
Caractérisation de la rapidité d´un système par le temps de réponse à 5%
Interpréter les phénomènes physiques et distinguer ceux prépondérants de ceux qui sont négligeables est une tâche complexe lors de la modélisation. Aussi, la démarche d’analyse est généralement itérative : à partir des conclusions obtenues, le modèle est corrigé ou amélioré progressivement et les résultats commencent à être exploitables après plusieurs itérations.
Il faut noter qu’avant l’ère de l’informatique, le calcul du résultat était une tâche difficile (bien souvent, le modèle n’avait pas de solution analytique et des simplifications mathématiques s’imposaient). Aujourd’hui, les logiciels de simulation numérique permettent de faciliter le calcul des résultats.
Bien qu’en ingénierie et recherche, le calcul numérique soit omniprésent, l’étude analytique sur des cas simples est pédagogiquement intéressante pour comprendre la démarche et tirer des généralités sur les architectures classiques.
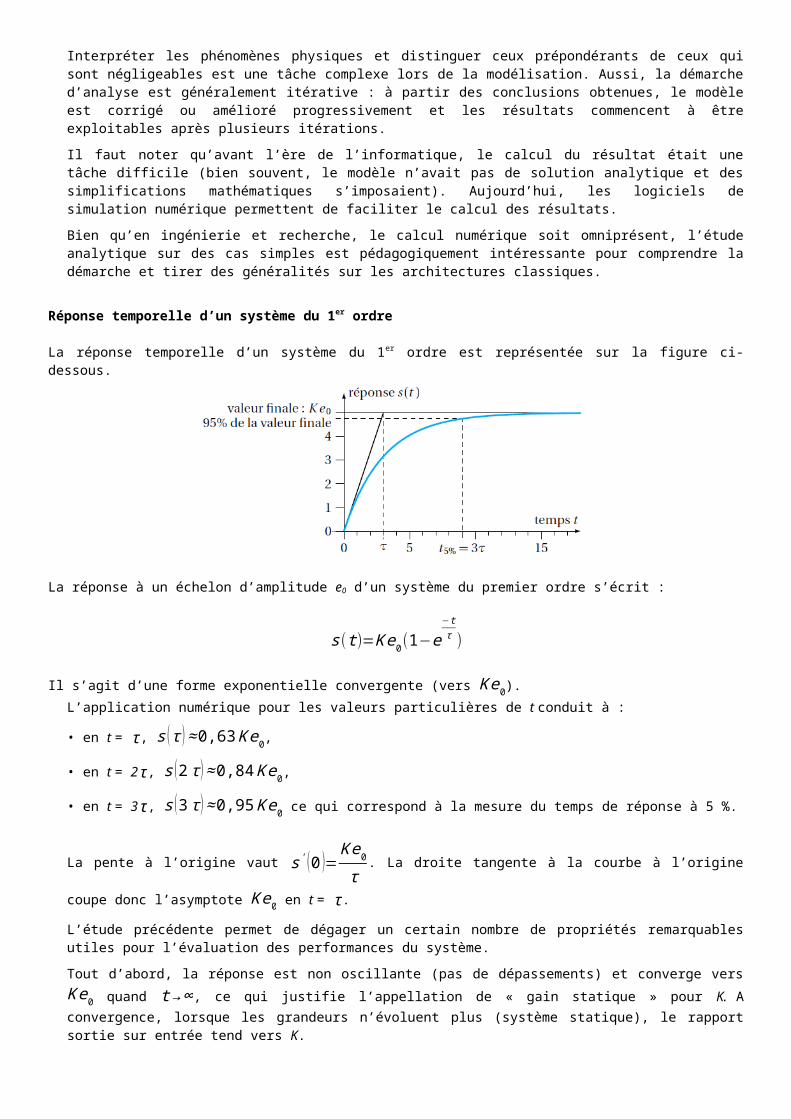
Réponse temporelle d’un système du 1er ordre
La réponse temporelle d’un système du 1er ordre est représentée sur la figure ci-dessous.
La réponse à un échelon d’amplitude e0 d’un système du premier ordre s’écrit :
s(t )=K e0(1−e−tτ )
Il s’agit d’une forme exponentielle convergente (vers K e0).L’application numérique pour les valeurs particulières de t conduit à :
• en t = τ , s (τ )≈0,63 K e0,
• en t = 2τ , s (2 τ )≈0,84K e0,
• en t = 3τ , s (3 τ )≈0,95K e0 ce qui correspond à la mesure du temps de réponse à 5 %.
La pente à l’origine vaut s' (0 )=K e0τ
. La droite tangente à la courbe à l’origine coupe donc l’asymptote K e0 en t = τ .
L’étude précédente permet de dégager un certain nombre de propriétés remarquables utiles pour l’évaluation des performances du système.
Tout d’abord, la réponse est non oscillante (pas de dépassements) et converge vers K e0 quand t→∞, ce qui justifie l’appellation de « gain statique » pour K. A convergence, lorsque les grandeurs n’évoluent plus (système statique), le rapport sortie sur entrée tend vers K.
Le temps de réponse à 5 % vaut approximativement 3 τ , comme cela a déjà été indiqué précédemment. Plus τ est petit, plus le système est rapide.
Identification de modèle
L’identification de modèle consiste à proposer un modèle théorique à partir de la réponse d’un système à une entrée type, mesurée expérimentalement. Le modèle obtenu est appelé modèle de comportement puisqu’il traduit le comportement observé en sortie, sans se préoccuper du fonctionnement interne.
Cette démarche s’oppose à la démarche d’analyse, consistant à détailler et modéliser le fonctionnement interne afin d’en déduire un modèle global, appelé alors modèle de connaissance, puisqu’il est le fruit de la compréhension du fonctionnement interne du système.
Dans le cadre des systèmes asservis, l’entrée type la plus communément utilisée est l’échelon. Si la réponse mesurée présente les caractéristiques de la réponse indicielle d’un système du 1er ordre (allure exponentielle, pente initiale non nulle,
pas d’oscillations hors éventuel bruit de mesure et convergence vers une valeur constante), alors il est raisonnable de modéliser le comportement de ce système par une fonction de transfert du 1er ordre.
Les paramètres caractéristiques K et τ sont identifiés sur la courbe mesurée :
• K : par l’intermédiaire de la valeur finale qui vaut K e0, sachant que e0 est connu.
• τ : trois méthodes sont possibles suivant la qualité de la courbe :
– la tangente à l’origine coupe l’asymptote K e0 en t = τ ;
– le temps où la courbe atteint 63 % de la valeur finale vaut τ ;
– le temps où la courbe atteint 95 % de la valeur finale vaut 3 τ .
Exemple du télescope Astrolab
Le télescope motorisé Astrolab concentre des solutions technologiques évoluées qui allient des capacités optiques associées à des fonctions mécatroniques destinées à simplifier son utilisation. Pour cela il assure de manière automatique le pointage et le suivi d’un objet céleste.Les performances attendues au cahier des charges du télescope Astrolab sont :
- la stabilité du système,- la précision du suivi de l´objet céleste.
Ici la rapidité du système n’est pas un critère de performance demandé vue la vitesse de déplacement de l’objet céleste.
III. Architecture de commande des systèmes asservis
Représenter l’architecture de commande d’un système consiste à décrire la manière dont les grandeurs physiques de certains composants modifient le comportement d’autres composants en cascade jusqu’à la grandeur de sortie.
D’un point de vue qualitatif, l’architecture peut être représentée par un diagramme de type "chaîne d’information et chaîne d’énergie", comme sur la figure ci-dessous pour le cas du télescope Astrolab :
Consignede
positionӨc (t) uc(t) um(t) ωm(t) ωr(t)
Micro contrôleur
ɛ(t) Angle azimut
impulsionsposition Ө (t)
Le schéma blocs fonctionnel permet de décrire ces relations de cause à effet, en représentant chaque composant par un bloc (en précisant son nom) et de relier les blocs par des liens orientés représentant des grandeurs physiques ou des signaux. Pour comparer la consigne à la mesure ou représenter l’influence de la perturbation, un sommateur (ou soustracteur) complète cette représentation élémentaire.
Schéma blocs fonctionnel du système azimutal du télescope Astrolab
Chaîne d´énergie et d´information du télescope Astrolab
Micro contrôleur
Correcteur
Convertisseur Codeur
Pont en H Moteur RéducteurRoue-vis sans
fin + intégrateur