automatique 3 systèmes asservis - automatic...
TRANSCRIPT
AUTOMATIQUE 3 Systemes Asservis
AUTOMATIQUE 3Systemes Asservis
F. Bateman
Ecole de l’Air
15 decembre 2016
1 / 28
AUTOMATIQUE 3 Systemes Asservis
1 AsservissementNotion de boucle ouverteNotion de boucle fermee
2 PerformancesStabilite en BF
Marges de stabilite
Precision
2 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion d’asservissement - Objectif
Objectif
Commander un systeme pour obtenir une sortie desiree sdes1 sdes = s0 ⇒ probleme de regulation
2 sdes(t) = s(t)⇒ probleme de poursuite
Exemples :
1 maintenir constantes l’altitude et la vitesse d’un avion enpresence de perturbations aerologiques
2 controler l’attitude d’un satellite en vue d’orienter une optique
3 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle ouverte
Commande en boucle ouverte
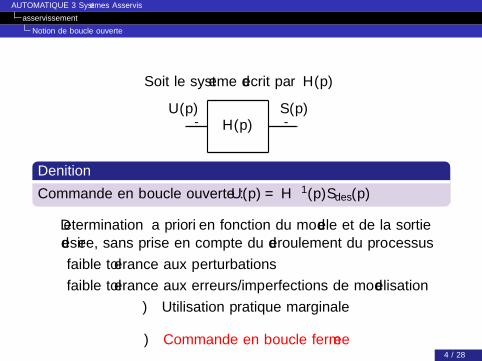
Soit le systeme decrit par H(p)
H(p)- -U(p) S(p)
Definition
Commande en boucle ouverte : U(p) = H−1(p)Sdes(p)
Determination a priori en fonction du modele et de la sortiedesiree, sans prise en compte du deroulement du processus
faible tolerance aux perturbations
faible tolerance aux erreurs/imperfections de modelisation
⇒ Utilisation pratique marginale
⇒ Commande en boucle fermee4 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
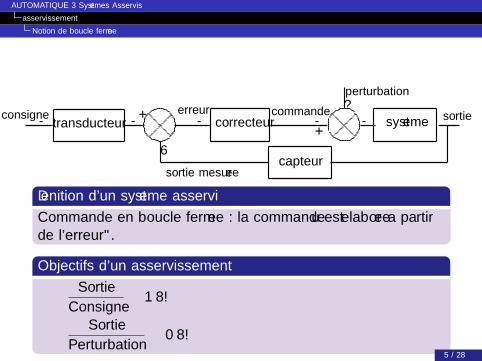
Structure de commande en boucle fermee
+-
−-
sortie mesuree
capteur
transducteur systemeconsigne- sortie
erreur--
commandecorrecteur
?
+
−perturbation
6
Definition d’un systeme asservi
Commande en boucle fermee : la commande u est elaboree a partirde l’erreur ε.
Objectifs d’un asservissement
Sortie
Consigne≈ 1 ∀ω
Sortie
Perturbation≈ 0 ∀ω
BO Vs. BF
5 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Considerations sur les systemes constitutifs de la boucle
Systeme a commander
mal identifiegain statique souvent grandsujet aux perturbations, au vieillissement, etc.
Capteur et chaıne de traitement
precisfideles
Transducteur
adapte la consigne au signal mesure
Comparateur
elabore l’erreur ε entre la consigne et la sortie mesuree
Correcteur
il traite l’erreur et genere un signal de commande u qui amenela sortie vers sa valeur desiree (consigne) (par traitement onentend traitement mathematique du signal : amplification,integration, derivation, etc.) 6 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Exemples d’asservissement
Les moteurs du quadrirotor (la vitesse du rotor est asservie car lavitesse du moteur en BO tend a diminuer avec le niveau de chargedes batteries)
Servocommande (la position de la servocommande est asservie aune position de consigne ou demande tandis que la gouverne etsoumise a un moment resistant du aux efforts aerodynamiques)
Le pilote automatique d’un avion (asservissement de l’altitudebarometrique, vitesse verticale, vitesse air, tenue de pente et de cap)
La boucle a verrouillage de phase (la frequence de l’oscillateur locald’un recepteur est asservie a celle de l’emetteur pour s’affranchir desvariations de frequence dues par exemple a l’effet Doppler)
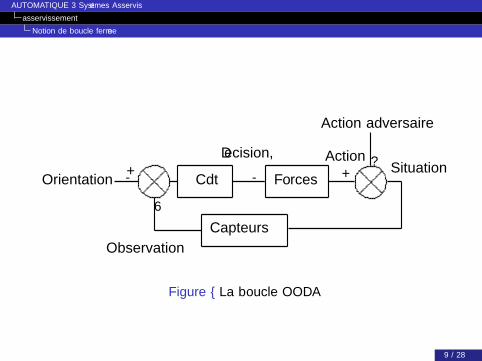
La boucle OODA (Orientation, Observation, Decision, Action) oucycle de Boyd, (les operations sont conduites afin d’atteindre unesituation conforme aux objectifs souhaites i.e les orientations)
Systeme Missile-Cible : missile-cible
7 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Exemples d’asservissement
Les moteurs du quadrirotor (la vitesse du rotor est asservie car lavitesse du moteur en BO tend a diminuer avec le niveau de chargedes batteries)
Servocommande (la position de la servocommande est asservie aune position de consigne ou demande tandis que la gouverne etsoumise a un moment resistant du aux efforts aerodynamiques)
Le pilote automatique d’un avion (asservissement de l’altitudebarometrique, vitesse verticale, vitesse air, tenue de pente et de cap)
La boucle a verrouillage de phase (la frequence de l’oscillateur locald’un recepteur est asservie a celle de l’emetteur pour s’affranchir desvariations de frequence dues par exemple a l’effet Doppler)
La boucle OODA (Orientation, Observation, Decision, Action) oucycle de Boyd, (les operations sont conduites afin d’atteindre unesituation conforme aux objectifs souhaites i.e les orientations)
Systeme Missile-Cible : missile-cible
7 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Exemples d’asservissement
Les moteurs du quadrirotor (la vitesse du rotor est asservie car lavitesse du moteur en BO tend a diminuer avec le niveau de chargedes batteries)
Servocommande (la position de la servocommande est asservie aune position de consigne ou demande tandis que la gouverne etsoumise a un moment resistant du aux efforts aerodynamiques)
Le pilote automatique d’un avion (asservissement de l’altitudebarometrique, vitesse verticale, vitesse air, tenue de pente et de cap)
La boucle a verrouillage de phase (la frequence de l’oscillateur locald’un recepteur est asservie a celle de l’emetteur pour s’affranchir desvariations de frequence dues par exemple a l’effet Doppler)
La boucle OODA (Orientation, Observation, Decision, Action) oucycle de Boyd, (les operations sont conduites afin d’atteindre unesituation conforme aux objectifs souhaites i.e les orientations)
Systeme Missile-Cible : missile-cible
7 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Exemples d’asservissement
Les moteurs du quadrirotor (la vitesse du rotor est asservie car lavitesse du moteur en BO tend a diminuer avec le niveau de chargedes batteries)
Servocommande (la position de la servocommande est asservie aune position de consigne ou demande tandis que la gouverne etsoumise a un moment resistant du aux efforts aerodynamiques)
Le pilote automatique d’un avion (asservissement de l’altitudebarometrique, vitesse verticale, vitesse air, tenue de pente et de cap)
La boucle a verrouillage de phase (la frequence de l’oscillateur locald’un recepteur est asservie a celle de l’emetteur pour s’affranchir desvariations de frequence dues par exemple a l’effet Doppler)
La boucle OODA (Orientation, Observation, Decision, Action) oucycle de Boyd, (les operations sont conduites afin d’atteindre unesituation conforme aux objectifs souhaites i.e les orientations)
Systeme Missile-Cible : missile-cible
7 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Exemples d’asservissement
Les moteurs du quadrirotor (la vitesse du rotor est asservie car lavitesse du moteur en BO tend a diminuer avec le niveau de chargedes batteries)
Servocommande (la position de la servocommande est asservie aune position de consigne ou demande tandis que la gouverne etsoumise a un moment resistant du aux efforts aerodynamiques)
Le pilote automatique d’un avion (asservissement de l’altitudebarometrique, vitesse verticale, vitesse air, tenue de pente et de cap)
La boucle a verrouillage de phase (la frequence de l’oscillateur locald’un recepteur est asservie a celle de l’emetteur pour s’affranchir desvariations de frequence dues par exemple a l’effet Doppler)
La boucle OODA (Orientation, Observation, Decision, Action) oucycle de Boyd, (les operations sont conduites afin d’atteindre unesituation conforme aux objectifs souhaites i.e les orientations)
Systeme Missile-Cible : missile-cible
7 / 28

AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Exemples d’asservissement
Les moteurs du quadrirotor (la vitesse du rotor est asservie car lavitesse du moteur en BO tend a diminuer avec le niveau de chargedes batteries)
Servocommande (la position de la servocommande est asservie aune position de consigne ou demande tandis que la gouverne etsoumise a un moment resistant du aux efforts aerodynamiques)
Le pilote automatique d’un avion (asservissement de l’altitudebarometrique, vitesse verticale, vitesse air, tenue de pente et de cap)
La boucle a verrouillage de phase (la frequence de l’oscillateur locald’un recepteur est asservie a celle de l’emetteur pour s’affranchir desvariations de frequence dues par exemple a l’effet Doppler)
La boucle OODA (Orientation, Observation, Decision, Action) oucycle de Boyd, (les operations sont conduites afin d’atteindre unesituation conforme aux objectifs souhaites i.e les orientations)
Systeme Missile-Cible : missile-cible
7 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
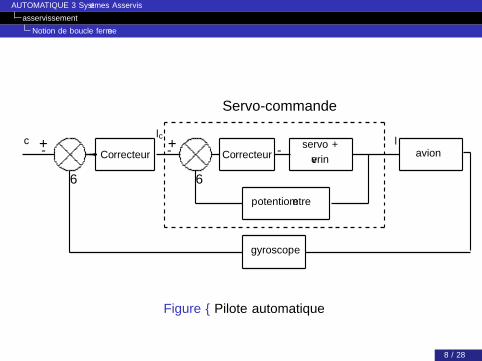
Pilote Automatique
δlc+-
6
+
−
φφc δl-
−6
servo +-
Servo-commande
potentiometre
CorrecteurCorrecteur
gyroscope
avionverin
Figure – Pilote automatique
8 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
La boucle OODA : Orientation Observation DecisionAction
Orientation+-
−6
-
Decision, Action
Observation
ForcesCdt
Capteurs
? Situation+−
Action adversaire
Figure – La boucle OODA
9 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Remarques
On pilote desormais en CONSIGNE et plus en COMMANDE
Les perturbations peuvent intervenir en tout point de laboucle (dans le systeme, sur la mesure...etc)
Structure intuitive et reproduisant le comportement humain
→ Suite du travail
se doter d’outils pour evaluer les performances d’un systemeasservi : stabilite, amortissement, rapidite, precision.synthetiser le correcteur qui genere la bonne commande au vudes performances desirees.
10 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Remarques
On pilote desormais en CONSIGNE et plus en COMMANDE
Les perturbations peuvent intervenir en tout point de laboucle (dans le systeme, sur la mesure...etc)
Structure intuitive et reproduisant le comportement humain
→ Suite du travail
se doter d’outils pour evaluer les performances d’un systemeasservi : stabilite, amortissement, rapidite, precision.synthetiser le correcteur qui genere la bonne commande au vudes performances desirees.
10 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
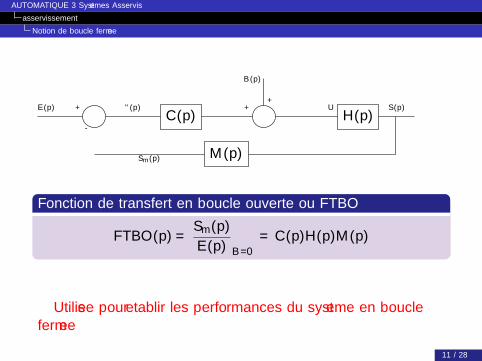
Fonction de transfert en boucle ouverte
C (p) H(p)
M(p)
E(p) + ε(p) ++
B(p)
U S(p)
Sm(p)
-
Fonction de transfert en boucle ouverte ou FTBO
FTBO(p) =Sm(p)
E (p) B=0
= C (p)H(p)M(p)
Utilisee pour etablir les performances du systeme en bouclefermee
11 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Fonction de transfert en boucle fermee
C (p) H(p)
M(p)
E(p) + ε(p) ++
B(p)
U S(p)
Sm(p)
-
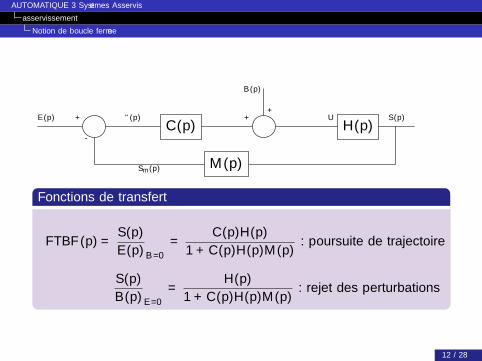
Fonctions de transfert
FTBF (p) =S(p)
E (p)B=0
=C (p)H(p)
1 + C (p)H(p)M(p): poursuite de trajectoire
S(p)
B(p)E=0
=H(p)
1 + C (p)H(p)M(p): rejet des perturbations
12 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Considerations sur la FTBO et la FTBF
Pratiquement
M(p) = M = cte
|C (0)H(0)| >> 1 ⇒ limp→0
S(p)
E (p)B=0
≈ 1
M
En regime permanent, la chaıne de retour definit la relationentree/sortie (ex : amplificateur a AOP, synthese de frequence).
Les systemes en BF sont plus robustes qu’en BO. Le systeme decritpar H(p) est mal identifie :
∆FTBO = CMdH << ∆FTBF =C
(1 + CHM)2∆H
Rejection des perturbations en regime permanent ⇒ gain statiquedu correcteur C (0) eleve
13 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Considerations sur la FTBO et la FTBF
Pratiquement
M(p) = M = cte
|C (0)H(0)| >> 1 ⇒ limp→0
S(p)
E (p)B=0
≈ 1
M
En regime permanent, la chaıne de retour definit la relationentree/sortie (ex : amplificateur a AOP, synthese de frequence).
Les systemes en BF sont plus robustes qu’en BO. Le systeme decritpar H(p) est mal identifie :
∆FTBO = CMdH << ∆FTBF =C
(1 + CHM)2∆H
Rejection des perturbations en regime permanent ⇒ gain statiquedu correcteur C (0) eleve
13 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
Considerations sur la FTBO et la FTBF
Pratiquement
M(p) = M = cte
|C (0)H(0)| >> 1 ⇒ limp→0
S(p)
E (p)B=0
≈ 1
M
En regime permanent, la chaıne de retour definit la relationentree/sortie (ex : amplificateur a AOP, synthese de frequence).
Les systemes en BF sont plus robustes qu’en BO. Le systeme decritpar H(p) est mal identifie :
∆FTBO = CMdH << ∆FTBF =C
(1 + CHM)2∆H
Rejection des perturbations en regime permanent ⇒ gain statiquedu correcteur C (0) eleve
13 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
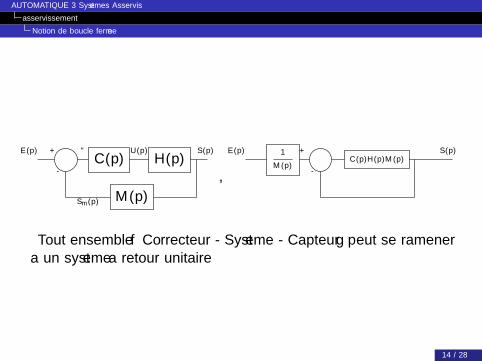
Boucle fermee a retour unitaire
C (p) H(p)
M(p)
E(p) + ε U(p) S(p)
Sm(p)
- ⇔
1
M(p)C(p)H(p)M(p)
E(p) + S(p)
-
Tout ensemble Correcteur - Systeme - Capteur peut se ramenera un systeme a retour unitaire
14 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
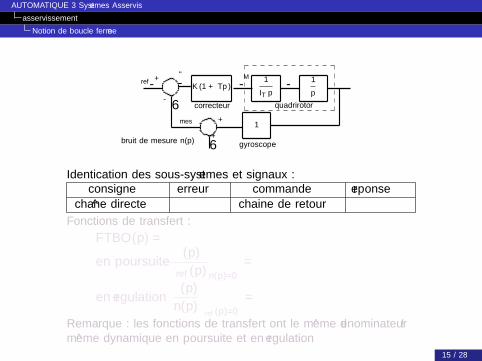
Application a la commande de l’assiette du quadrirotor
1
p
1
IT pK(1 + Tp)
quadrirotor
gyroscope
correcteur
δM
1
-
6
+
-
- --θrefθ
θmes
6bruit de mesure n(p)
+
+
εΩ
Identification des sous-systemes et signaux :consigne erreur commande reponse
chaıne directe chaine de retour
Fonctions de transfert :
FTBO(p) =
en poursuiteθ(p)
θref (p) n(p)=0
=
en regulationθ(p)
n(p) θref (p)=0
=
Remarque : les fonctions de transfert ont le meme denominateur →meme dynamique en poursuite et en regulation
15 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
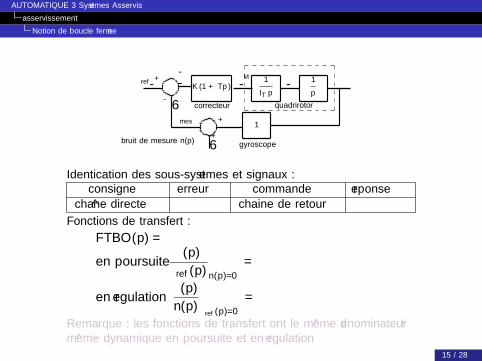
Application a la commande de l’assiette du quadrirotor
1
p
1
IT pK(1 + Tp)
quadrirotor
gyroscope
correcteur
δM
1
-
6
+
-
- --θrefθ
θmes
6bruit de mesure n(p)
+
+
εΩ
Identification des sous-systemes et signaux :consigne erreur commande reponse
chaıne directe chaine de retour
Fonctions de transfert :
FTBO(p) =
en poursuiteθ(p)
θref (p) n(p)=0
=
en regulationθ(p)
n(p) θref (p)=0
=
Remarque : les fonctions de transfert ont le meme denominateur →meme dynamique en poursuite et en regulation
15 / 28
AUTOMATIQUE 3 Systemes Asservis
asservissement
Notion de boucle fermee
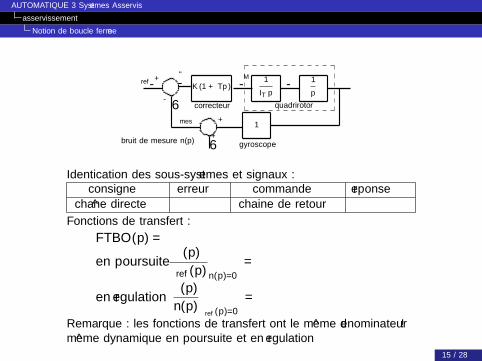
Application a la commande de l’assiette du quadrirotor
1
p
1
IT pK(1 + Tp)
quadrirotor
gyroscope
correcteur
δM
1
-
6
+
-
- --θrefθ
θmes
6bruit de mesure n(p)
+
+
εΩ
Identification des sous-systemes et signaux :consigne erreur commande reponse
chaıne directe chaine de retour
Fonctions de transfert :
FTBO(p) =
en poursuiteθ(p)
θref (p) n(p)=0
=
en regulationθ(p)
n(p) θref (p)=0
=
Remarque : les fonctions de transfert ont le meme denominateur →meme dynamique en poursuite et en regulation
15 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Performances attendues des systemes asservis
Pour ameliorer les performances, synthese d’un correcteur defonction de transfert C (p) tq :
U(p) = C (p)ε(p)
Ce correcteur asssure en BF fermee des performances :. dynamiques (transitoire)
StabiliteRapidite : controle du tR5%Amortissement : controle du D1%
. statique (permanent)
Precision : ε = consigne - sortie mesuree → 0
16 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Performances attendues des systemes asservis
Pour ameliorer les performances, synthese d’un correcteur defonction de transfert C (p) tq :
U(p) = C (p)ε(p)
Ce correcteur asssure en BF fermee des performances :. dynamiques (transitoire)
StabiliteRapidite : controle du tR5%Amortissement : controle du D1%
. statique (permanent)
Precision : ε = consigne - sortie mesuree → 0
16 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Performances attendues des systemes asservis
Pour ameliorer les performances, synthese d’un correcteur defonction de transfert C (p) tq :
U(p) = C (p)ε(p)
Ce correcteur asssure en BF fermee des performances :. dynamiques (transitoire)
StabiliteRapidite : controle du tR5%Amortissement : controle du D1%
. statique (permanent)
Precision : ε = consigne - sortie mesuree → 0
16 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
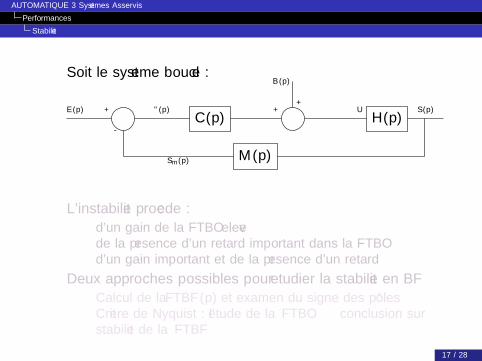
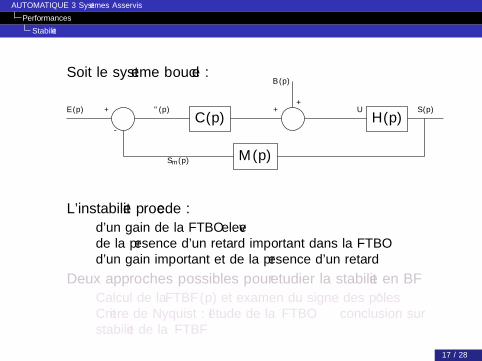
Stabilite en BFSoit le systeme boucle :
C (p) H(p)
M(p)
E(p) + ε(p) ++
B(p)
U S(p)
Sm(p)
-
L’instabilite procede :
d’un gain de la FTBO elevede la presence d’un retard important dans la FTBOd’un gain important et de la presence d’un retard
Deux approches possibles pour etudier la stabilite en BF
Calcul de la FTBF (p) et examen du signe des polesCritere de Nyquist : l’etude de la FTBO conclusion surstabilite de la FTBF
17 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
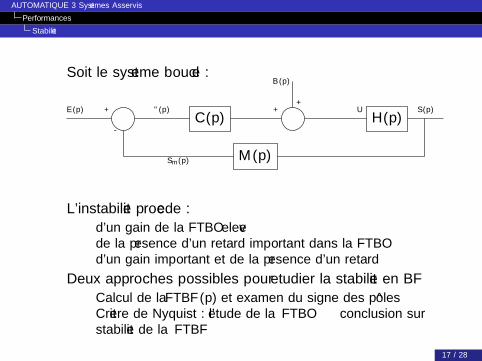
Stabilite en BFSoit le systeme boucle :
C (p) H(p)
M(p)
E(p) + ε(p) ++
B(p)
U S(p)
Sm(p)
-
L’instabilite procede :
d’un gain de la FTBO elevede la presence d’un retard important dans la FTBOd’un gain important et de la presence d’un retard
Deux approches possibles pour etudier la stabilite en BF
Calcul de la FTBF (p) et examen du signe des polesCritere de Nyquist : l’etude de la FTBO conclusion surstabilite de la FTBF
17 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
Stabilite en BFSoit le systeme boucle :
C (p) H(p)
M(p)
E(p) + ε(p) ++
B(p)
U S(p)
Sm(p)
-
L’instabilite procede :
d’un gain de la FTBO elevede la presence d’un retard important dans la FTBOd’un gain important et de la presence d’un retard
Deux approches possibles pour etudier la stabilite en BF
Calcul de la FTBF (p) et examen du signe des polesCritere de Nyquist : l’etude de la FTBO conclusion surstabilite de la FTBF
17 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
Approche qualitative de l’instabilite en BF
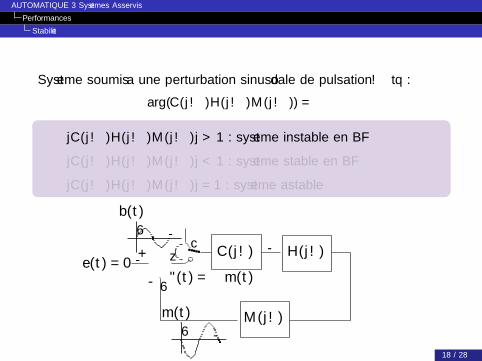
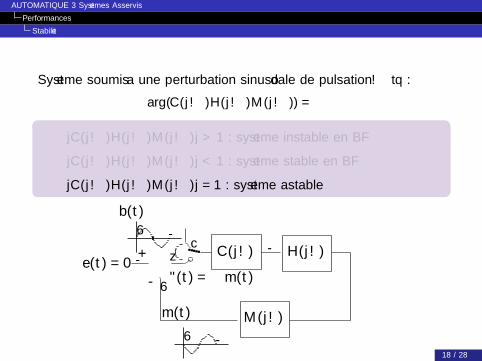
Systeme soumis a une perturbation sinusoıdale de pulsation ωπ tq :
arg(C (jωπ)H(jωπ)M(jωπ)) = −π
|C (jωπ)H(jωπ)M(jωπ)| > 1 : systeme instable en BF
|C (jωπ)H(jωπ)M(jωπ)| < 1 : systeme stable en BF
|C (jωπ)H(jωπ)M(jωπ)| = 1 : systeme astable
6
-
-+
-
e(t) = 0
cz
m(t)
C (jω) H(jω)
M(jω)6 -
ε(t) = −m(t)
b(t)
6 -
18 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
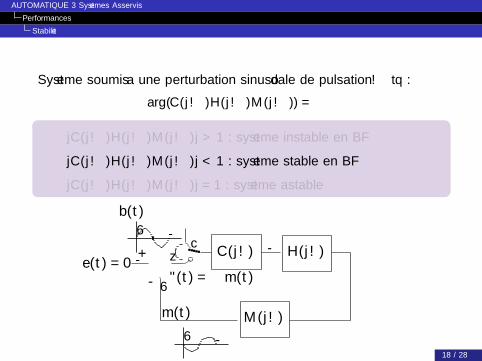
Approche qualitative de l’instabilite en BF
Systeme soumis a une perturbation sinusoıdale de pulsation ωπ tq :
arg(C (jωπ)H(jωπ)M(jωπ)) = −π
|C (jωπ)H(jωπ)M(jωπ)| > 1 : systeme instable en BF
|C (jωπ)H(jωπ)M(jωπ)| < 1 : systeme stable en BF
|C (jωπ)H(jωπ)M(jωπ)| = 1 : systeme astable
6
-
-+
-
e(t) = 0
cz
m(t)
C (jω) H(jω)
M(jω)
ε(t) = −m(t)
b(t)
6 -
6 -18 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
Approche qualitative de l’instabilite en BF
Systeme soumis a une perturbation sinusoıdale de pulsation ωπ tq :
arg(C (jωπ)H(jωπ)M(jωπ)) = −π
|C (jωπ)H(jωπ)M(jωπ)| > 1 : systeme instable en BF
|C (jωπ)H(jωπ)M(jωπ)| < 1 : systeme stable en BF
|C (jωπ)H(jωπ)M(jωπ)| = 1 : systeme astable
6
-
-+
-
e(t) = 0
cz
m(t)
C (jω) H(jω)
M(jω)
ε(t) = −m(t)
b(t)
6 -
6 -18 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
Critere du Revers - traduction dans diagramme de Bode
Critere de stabilite
Tracer diagrammes de Bode en BO d’un systeme stable en BO
Relever ω0dB tq GdB(ω0dB ) = 0dB et ωπ tq ϕ(ωπ) = −180
Le systeme est stable en boucle fermee si :
GdB(ωπ) < 0ϕ(ω0dB ) > −180
−150
−100
−50
0
50
Mag
nitu
de (
dB)
10−2
10−1
100
101
102
−270
−225
−180
−135
−90
−45
0
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
GdB
(ωπ)>0
instable en BF
GdB
(ωπ)<0
stable en BF
ωπ
Figure – Diagramme de Bode de systemes en BO
19 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
Marges de stabilite
Marges de stabilite : quantification de la stabilite et de larobustesse aux perturbations et imperfections de modelisation
Marge de gain : Gain que l’on peut ajouter en BO (a phaseconstante) avant de destabiliser la BF. (En pratiqueMG ≥ 10dB)
MG = −|FTBO(jωπ)|dB et < FTBO(jωπ) >= −π
Marge de phase : Phase que l’on peut enlever en BO (a gainconstant) avant de destabiliser la BF. (En pratique Mφ ≥ 45)
Mφ = 180+ < FTBO(jω0dB ) > et |FTBO(jω0dB )| = 0dB
Marge de retard : retard avant destabilisation (du aux tempsde traitement par exemple)
Mret(s)=
Mφ(rad)
ω0dB(rad/s)
20 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
Marges de stabilite
Marges de stabilite : quantification de la stabilite et de larobustesse aux perturbations et imperfections de modelisation
Marge de gain : Gain que l’on peut ajouter en BO (a phaseconstante) avant de destabiliser la BF. (En pratiqueMG ≥ 10dB)
MG = −|FTBO(jωπ)|dB et < FTBO(jωπ) >= −π
Marge de phase : Phase que l’on peut enlever en BO (a gainconstant) avant de destabiliser la BF. (En pratique Mφ ≥ 45)
Mφ = 180+ < FTBO(jω0dB ) > et |FTBO(jω0dB )| = 0dB
Marge de retard : retard avant destabilisation (du aux tempsde traitement par exemple)
Mret(s)=
Mφ(rad)
ω0dB(rad/s)
20 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
Marges de stabilite
Marges de stabilite : quantification de la stabilite et de larobustesse aux perturbations et imperfections de modelisation
Marge de gain : Gain que l’on peut ajouter en BO (a phaseconstante) avant de destabiliser la BF. (En pratiqueMG ≥ 10dB)
MG = −|FTBO(jωπ)|dB et < FTBO(jωπ) >= −π
Marge de phase : Phase que l’on peut enlever en BO (a gainconstant) avant de destabiliser la BF. (En pratique Mφ ≥ 45)
Mφ = 180+ < FTBO(jω0dB ) > et |FTBO(jω0dB )| = 0dB
Marge de retard : retard avant destabilisation (du aux tempsde traitement par exemple)
Mret(s)=
Mφ(rad)
ω0dB(rad/s)
20 / 28

AUTOMATIQUE 3 Systemes Asservis
Performances
Stabilite
Marges de stabilite - Bode
-150
-100
-50
0
50
Gai
n (d
B)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Pha
se (
deg)
Diagramme de Bode
Pulsation (rad/sec)
ω0dB
ωπ
Mφ
MG
Figure – Marges de gain et de phase dans Bode21 / 28

AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
Precision : un apercu
22 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
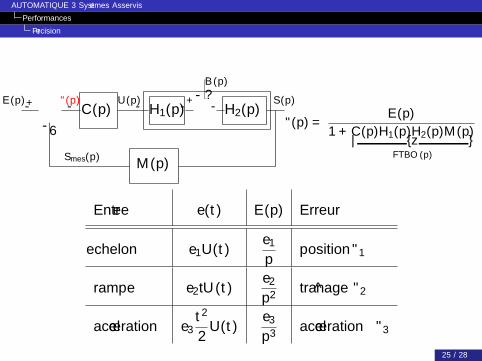
Precision
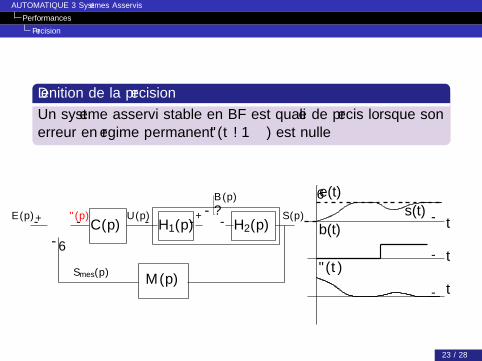
Definition de la precision
Un systeme asservi stable en BF est qualifie de precis lorsque sonerreur en regime permanent ε(t →∞) est nulle
6
- -
-
E(p)C (p) H1(p)
M(p)
ε(p)
Smes(p)
U(p) S(p)H2(p)- -
?B(p)
- -++
6
-
-
-
t
t
ε(t)
e(t)
s(t)
b(t)
t
23 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
Precision d’un systeme asservis - Notion de classe
Definition
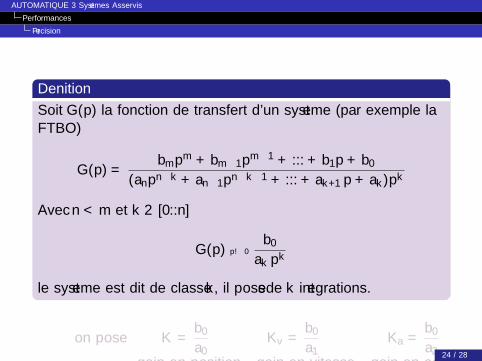
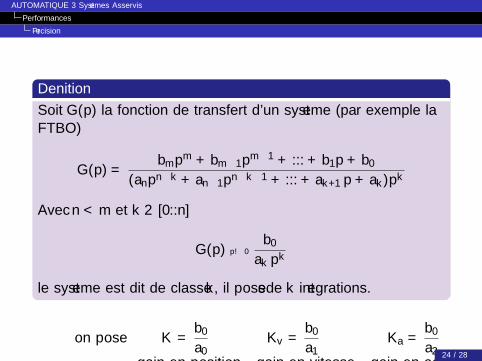
Soit G (p) la fonction de transfert d’un systeme (par exemple laFTBO)
G (p) =bmp
m + bm−1pm−1 + ...+ b1p + b0
(anpn−k + an−1pn−k−1 + ...+ ak+1p + ak)pk
Avec n < m et k ∈ [0..n]
G (p)∼
p→0b0
ak pk
le systeme est dit de classe k, il possede k integrations.
on pose K =b0
a0Kv =
b0
a1Ka =
b0
a2gain en position gain en vitesse gain en acceleration
24 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
Precision d’un systeme asservis - Notion de classe
Definition
Soit G (p) la fonction de transfert d’un systeme (par exemple laFTBO)
G (p) =bmp
m + bm−1pm−1 + ...+ b1p + b0
(anpn−k + an−1pn−k−1 + ...+ ak+1p + ak)pk
Avec n < m et k ∈ [0..n]
G (p)∼
p→0b0
ak pk
le systeme est dit de classe k, il possede k integrations.
on pose K =b0
a0Kv =
b0
a1Ka =
b0
a2gain en position gain en vitesse gain en acceleration
24 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
Precision d’un systeme asservis - influence de l’entree
6
- -
-
E(p)C (p) H1(p)
M(p)
ε(p)
Smes(p)
U(p) S(p)H2(p)- -
?B(p)
- -++
ε(p) =E (p)
1 + C (p)H1(p)H2(p)M(p)︸ ︷︷ ︸FTBO(p)
Entree e(t) E (p) Erreur
echelon e1U(t)e1
pposition ε1
rampe e2tU(t)e2
p2traınage ε2
acceleration e3t2
2U(t)
e3
p3acceleration ε3
25 / 28

AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
Erreurs de position et de trainage
0 2 4 6 8 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temps (s)
réponseconsigne
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
consigneréponse
ε(+∞)
ε(+∞)
Figure – Erreur de position et de trainage
26 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
Calcul de l’erreur en regime permanent
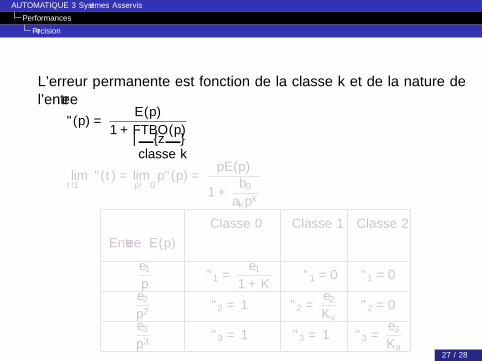
L’erreur permanente est fonction de la classe k et de la nature del’entree
ε(p) =E (p)
1 + FTBO(p)︸ ︷︷ ︸classe k
limt→∞
ε(t) = limp→0
pε(p) =pE (p)
1 +b0
akpk
Classe 0 Classe 1 Classe 2
Entree E (p)
e1
pε1 =
e1
1 + Kε1 = 0 ε1 = 0
e2
p2ε2 =∞ ε2 =
e2
Kvε2 = 0
e3
p3ε3 =∞ ε3 =∞ ε3 =
e3
Ka27 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
Calcul de l’erreur en regime permanent
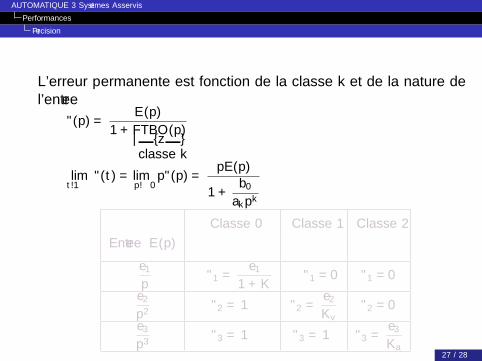
L’erreur permanente est fonction de la classe k et de la nature del’entree
ε(p) =E (p)
1 + FTBO(p)︸ ︷︷ ︸classe k
limt→∞
ε(t) = limp→0
pε(p) =pE (p)
1 +b0
akpk
Classe 0 Classe 1 Classe 2
Entree E (p)
e1
pε1 =
e1
1 + Kε1 = 0 ε1 = 0
e2
p2ε2 =∞ ε2 =
e2
Kvε2 = 0
e3
p3ε3 =∞ ε3 =∞ ε3 =
e3
Ka27 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Precision
Calcul de l’erreur en regime permanent
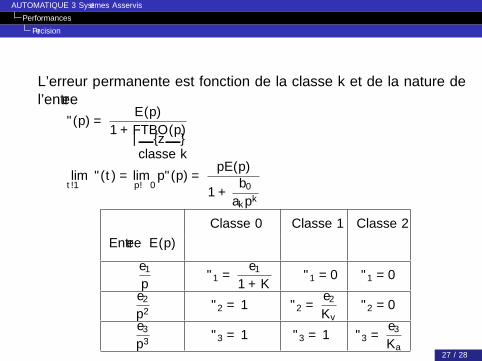
L’erreur permanente est fonction de la classe k et de la nature del’entree
ε(p) =E (p)
1 + FTBO(p)︸ ︷︷ ︸classe k
limt→∞
ε(t) = limp→0
pε(p) =pE (p)
1 +b0
akpk
Classe 0 Classe 1 Classe 2
Entree E (p)
e1
pε1 =
e1
1 + Kε1 = 0 ε1 = 0
e2
p2ε2 =∞ ε2 =
e2
Kvε2 = 0
e3
p3ε3 =∞ ε3 =∞ ε3 =
e3
Ka27 / 28
AUTOMATIQUE 3 Systemes Asservis
Performances
Precision~Precision d’un systeme asservi - Remarques
Resultats du tableau applicables seulement si
systeme stable (Conditions d’application du Th de la VF)schema fonctionnel equivalent a celui donne
Pour un schema fonctionnel different (erreur due aux perturbationspar exemple) ⇒ calcul a refaire
Etablir ε(p) en fonction de B(p) : ε(p) =−M(p)H2(p)
1 + FTBO(p)B(p)
Particulariser pour l’entree B(p) proposee, H2(p) est supposeede classe jAppliquer le Th de la VF
limt→∞
ε(t) = limp→0
pε(p) = p−M(0)β(0)
αjpj
1 + b0
akpk
B(p)
Pour un type d’entree donnee l’erreur depend de k − j laclasse de C (p)H1(p) (amont de la perturbation)
28 / 28