v.tourtchine. programmation en mikroc. application pour les
TRANSCRIPT
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 0 -
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET DE LARECHERCHE SCIENTIFIQUE
UNIVERSITE M’HAMED BOGARA DE BOUMERDES
FACULTE DES SCIENCES - DEPARTEMENT PHYSIQUE
Spécialité : INFOTRONIQUE&
IMAGERIE ET APPAREILLAGE BIOMEDICAL
V. TOURTCHINE
Programmation en mikroC. Application pour lesmicrocontrôleurs de la famille PIC
Manuscrit élaboré selon le programme officiellement agrée et confirme par le Conseil Scientifique de la Faculté des Sciences
BOUMERDES - 2012
/*******************************COMMUNICATION SERIE RS232=========================
Cet exemple illustre l'utilisation de fonction Software_UART de la bibliothèque du compilateur mikroC PRO.Microcontrôl.: 16F887Oscillat.: HS,10.0000 Mhz Fichier: COMMUNIC_RS232.c********************************/char error, byte_read; void main(){
ANSEL = 0; ANSELH = 0;TRISC = 0x00; /*Configurer PORTB en sortie */PORTC = 0; Initialiser Soft_UART en 9600 bods Soft_UART_Init(&PORTC, 7, 6, 9600, 1); if (error > 0)

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 1 -
I. LANGAGE ET COMPILATEUR mikroC POUR PIC
Le langage mikroC pour PIC a trouvé une large application pour le développement de systèmes embarqués sur la base de microcontrôleur. Il assure une combinaison de l'environnement de programmation avancée IDE (Integrated Development Environment) , et d’un vaste ensemble de bibliothèques pour le matériel, de la documentation complète et d’un grand nombre des exemples.
Le compilateur mikroC pour PIC bénéficie d'une prise en main très intuitive et d'une ergonomie sans faille. Ses très nombreux outils intégrés (mode simulateur, terminal de communication Ethernet, terminal de communication USB, gestionnaire pour afficheurs 7 segments, analyseur statistique, correcteur d'erreur, explorateur de code, mode Débug ICD...) associé à sa capacité à pouvoir gérer la plupart des périphériques rencontrés dans l'industrie (Bus I2C™, 1Wire™, SPI™, RS485, Bus CAN™, USB, gestion de cartes compact Flash et SD™/MMC™, génération de signaux PWM, afficheurs LCD alphanumériques et graphiques, afficheurs LEDs à 7 segments, etc...) en font un outil de développement incontournable pour les systèmes embarqués, sans aucun compromis entre la performance et la facilité de débogage.
1.1 Compilateur mikroC PRO pour PIC
La nouvelle version appelée mikroC PRO dispose de très nombreuses améliorations du compilateur mikroC : nouvelles variables utilisables, nouvelle interface IDE, amélioration des performances du linker et de l'optimisateur, cycle de compilation plus rapide, code machine généré plus compact (jusqu'à 40 % suivant les cas), nouveaux PIC supportés, environnement de développement encore plus ergonomique, nouveaux exemples d'applications, etc...
1.2 Installation du compilateur mikroC PRO v. 1.65
Pas 1 : Cliquer sur l’icône mikroC_PRO_1.65.exe (Si la fenêtre du Contrôle de compte d’utilisateur s’ouvre, cliquer sur oui), et attendre que les données de l’installation se décompressent.
1. Dans la suite nous utiliserons le compilateur mikroC PRO v.1.65
2. La simulation des applications de programmation nous réalisons à l’aide du logiciel PROTEUS v.7.6 SP
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 2 -
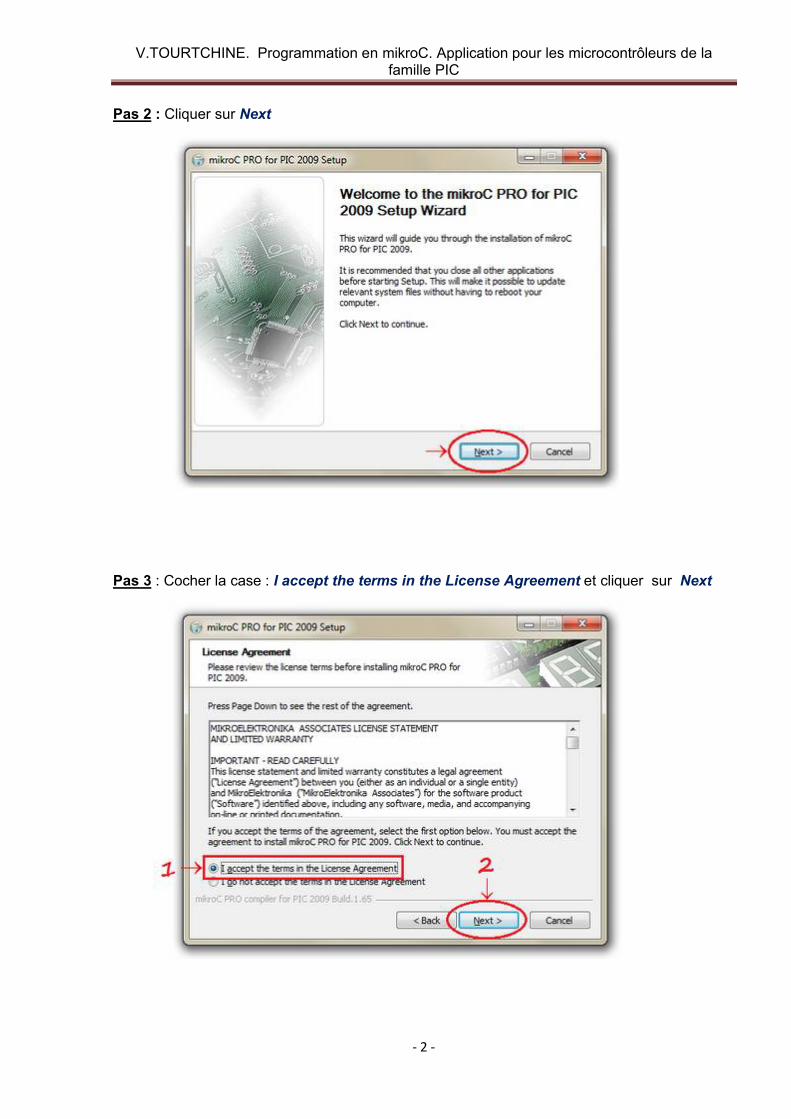
Pas 2 : Cliquer sur Next
Pas 3 : Cocher la case : I accept the terms in the License Agreement et cliquer sur Next
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 3 -
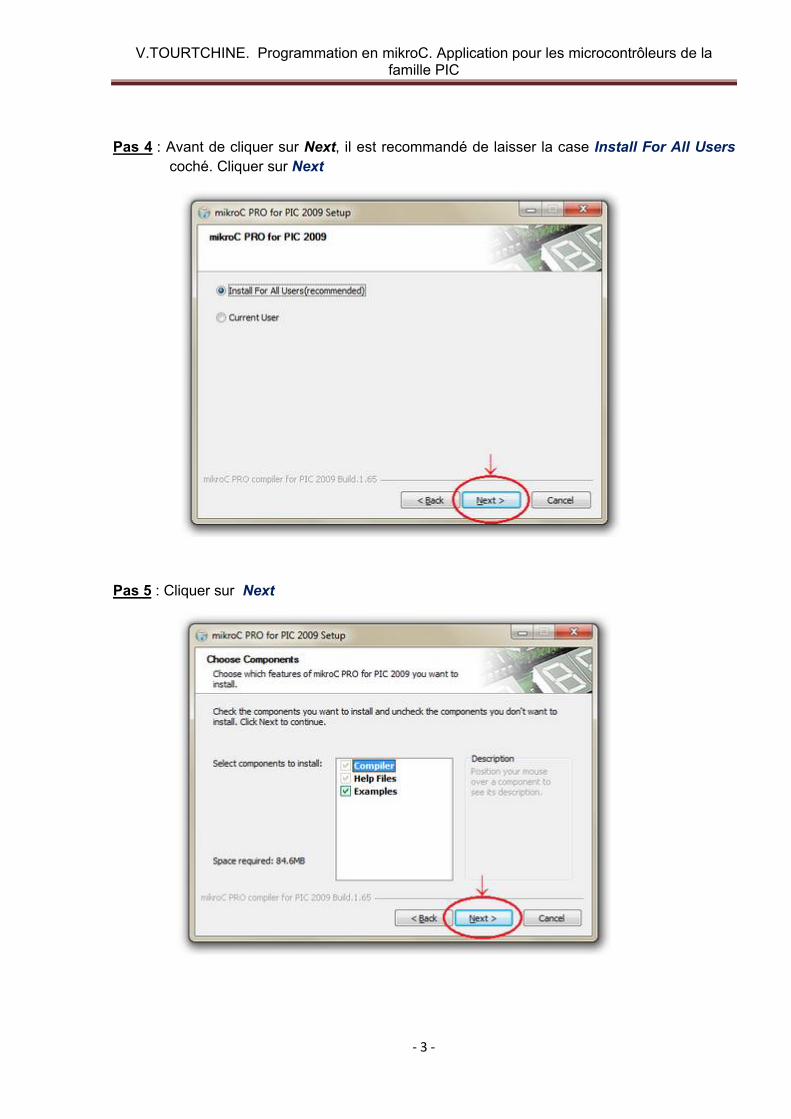
Pas 4 : Avant de cliquer sur Next, il est recommandé de laisser la case Install For All Users coché. Cliquer sur Next
Pas 5 : Cliquer sur Next

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 4 -
Pas 6 : Cliquer sur Install (Noter bien l’endroit d’installation)
Pas 7 : Cliquer sur OUI pour l’association du format de fichier .c avec le logiciel mikroC PRO

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 5 -
Pas 8 : Cliquer sur Finish
Pas 9 : Aller dans le répertoire M_License et copier les deux fichiers qui s’y trouvent.
Pas 10 : Coller pour remplacer les deux fichiers copiés auparavant dans le répertoire oùmikroC PRO a été installé.
Pas 11 : Cliquer deux fois sur le fichier mikroC_PRO_PIC.key pour enregistrer ses informations sur le registre de votre ordinateur.
Pas 12 : Lancer le programme MikroC PRO en cliquant deux fois sur mikroCPIC1618.exe
1.3 IDE mikroC PRO
Lancer le compilateur mikroC PRO en cliquant sur l’icône
mikroC PRO for PIC.lnk
C’est sur la figure 1.1 que vous obtenez lorsque vous démarrez l’ IDE mikroC PRO pour la première fois.Une description détaillé de toutes les options disponibles dans ce compilateur prendre trop de temps, de sorte que nous allions sauter cette étape. Au lieu de cela, nous allons décrire salement le processus d’écriture d’un programme en langage mikroC, un simulateur de contrôle. Pour plus d’informations reportez-vous à l’aide [F1].
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 6 -
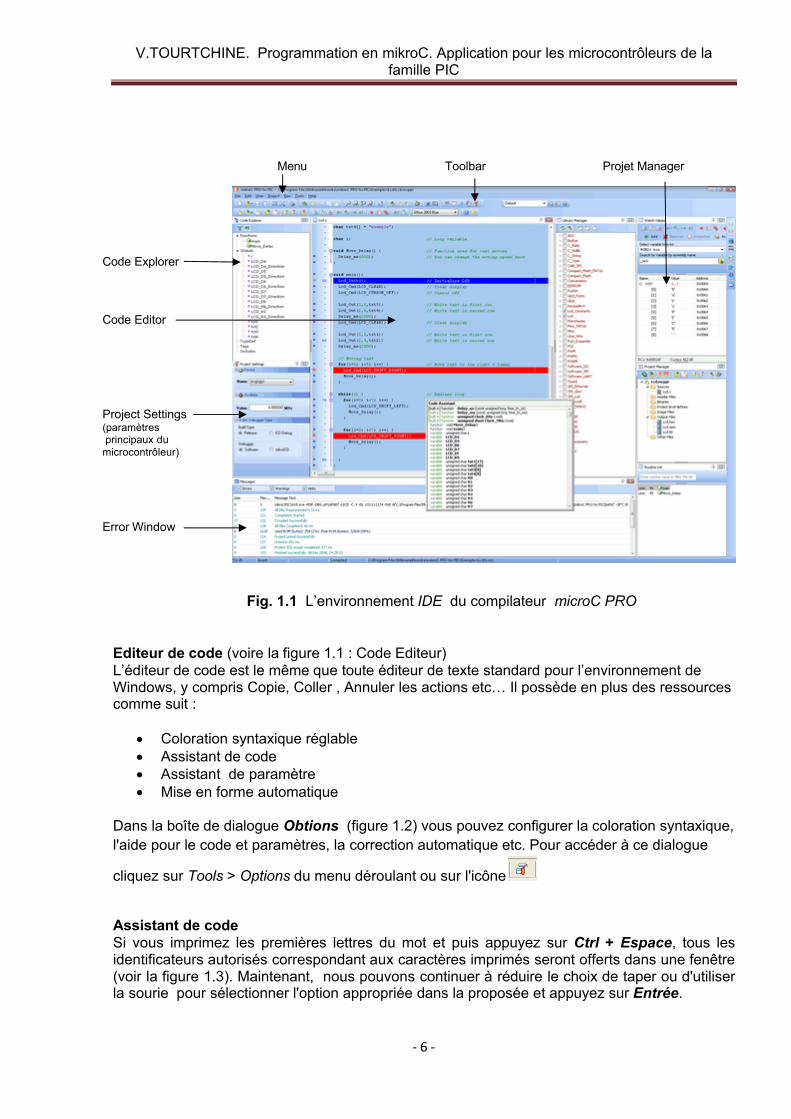
Menu Toolbar Projet Manager
Fig. 1.1 L’environnement IDE du compilateur microC PRO
Editeur de code (voire la figure 1.1 : Code Editeur)L’éditeur de code est le même que toute éditeur de texte standard pour l’environnement de Windows, y compris Copie, Coller , Annuler les actions etc… Il possède en plus des ressources comme suit :
Coloration syntaxique réglable Assistant de code Assistant de paramètre Mise en forme automatique
Dans la boîte de dialogue Obtions (figure 1.2) vous pouvez configurer la coloration syntaxique, l'aide pour le code et paramètres, la correction automatique etc. Pour accéder à ce dialogue
cliquez sur Tools > Options du menu déroulant ou sur l'icône
Assistant de codeSi vous imprimez les premières lettres du mot et puis appuyez sur Ctrl + Espace, tous les identificateurs autorisés correspondant aux caractères imprimés seront offerts dans une fenêtre(voir la figure 1.3). Maintenant, nous pouvons continuer à réduire le choix de taper ou d'utiliserla sourie pour sélectionner l'option appropriée dans la proposée et appuyez sur Entrée.
Code Explorer
Code Editor
Project Settings(paramètresprincipaux dumicrocontrôleur)
Error Window

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 7 -
Fig.1.2. Boîte de dialogue « Options »
Fig.1.3. Assistant de code
Mise en forme automatiqueAfin d'obtenir une lisibilité maximale, il est possible de générer automatiquement la mise en forme de certaines instructions. Par exemple, tapez l'instruction IF, puis CRTL + J. A ce stade, l'éditeur ajoute tout seul les instructions. A vous ensuite de compléter le programme.
Affichage syntaxique coloréToujours dans le but d'obtenir une lisibilité maximale de votre programme, il vous est possible de configurer entièrement les couleurs de chaque partie du listing (figure 1.2). Par exemple les commentaires en "vert", les instructions en "noir", les valeurs numériques en "bleu clair", etc.
Outils intégrésLe compilateur "MikroC PRO" pour PIC intègre différents petits outils très pratiques qui vous simplifieront l’écriture des programmes de vos applications.

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 8 -
a) Mini terminal USARTLe "MikroC PRO" intègre un petit terminal de communication USART RS-232 (Universal Synchronous Asynchronous Receiver) pour lequel vous pourrez configurer le débit, les commandes RTS et DTR....
b) Mini gestionnaire 7 segmentsLe "MikroC PRO" intègre un petit utilitaire qui vous permettra de sélectionner la valeur décimale ou hexadécimale à fournir pour piloter un afficheur 7 segments.
c) Table de conversion ASCIILe "MikroC PRO" intègre un petit utilitaire qui vous permettra d'afficher une table de conversion ASCII (très utile lorsque vous travaillez avec des afficheurs LCD).
d) Gestion des LCD graphiquesLe "MikroC PRO" intègre un petit utilitaire qui vous permettra de convertir des fichiers BMP en données pouvant être affichées sur plusieurs types de LCD graphiques.

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 9 -
1.4 Création d’un nouveau projet
Le mikroC PRO pour PIC organise des applications dans des projets, composé d'un seulfichier de projet (extension. mcppi) et un ou plusieurs fichiers sources (extension).
Les fichiers source peut être compilé que si elles font partie d'un projet.Le fichier projet contient les informations suivantes :
- Nom du projet et une description facultative- Composant cible- Option du composant- Fréquence d’horloge du composant- La liste des fichiers source du projet avec les chemins- Fichiers d'image- Fichiers binaires (* mcl.)- D'autres fichiers
La meilleure façon de créer un projet c’est à l'aide de l'Assistant Nouveau projet (menuProject> New ProjeCt ) ou en cliquant sur l'icône Nouveau projet à partir de la barre d'outilsdu projet.
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 10 -
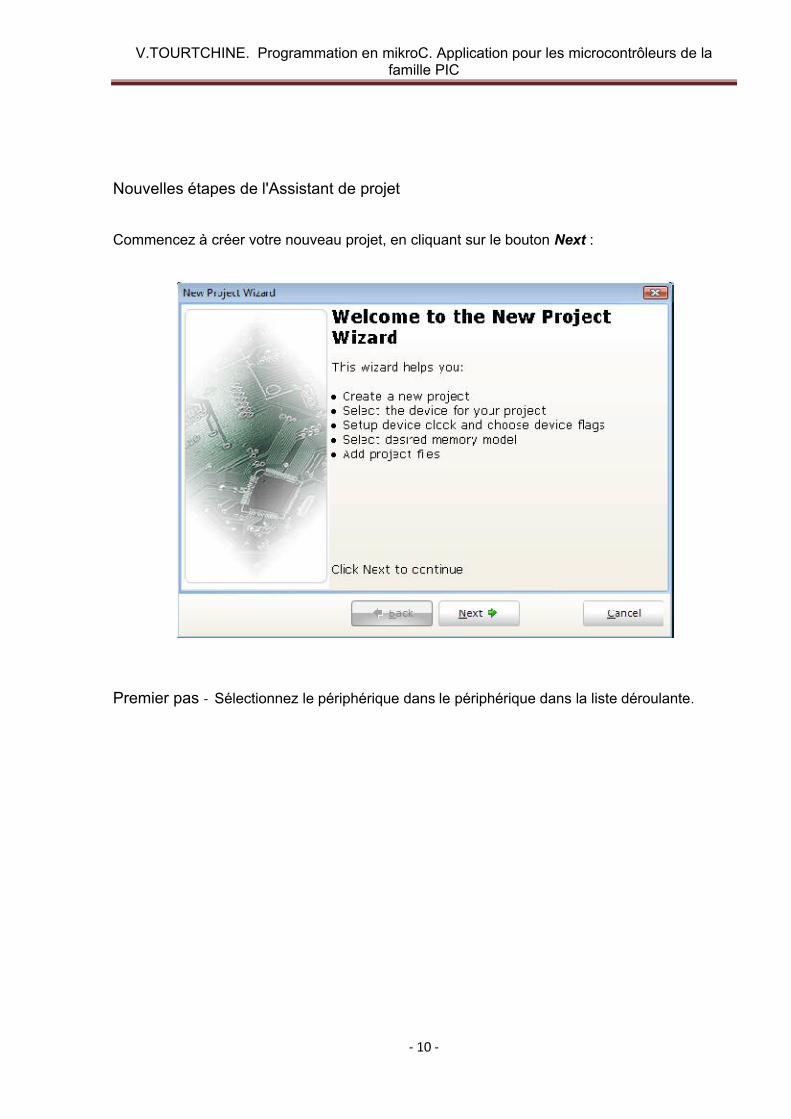
Nouvelles étapes de l'Assistant de projet
Commencez à créer votre nouveau projet, en cliquant sur le bouton Next :
Premier pas - Sélectionnez le périphérique dans le périphérique dans la liste déroulante.

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 11 -
Deuxième pas - Saisir la valeur de fréquence de l'oscillateur.
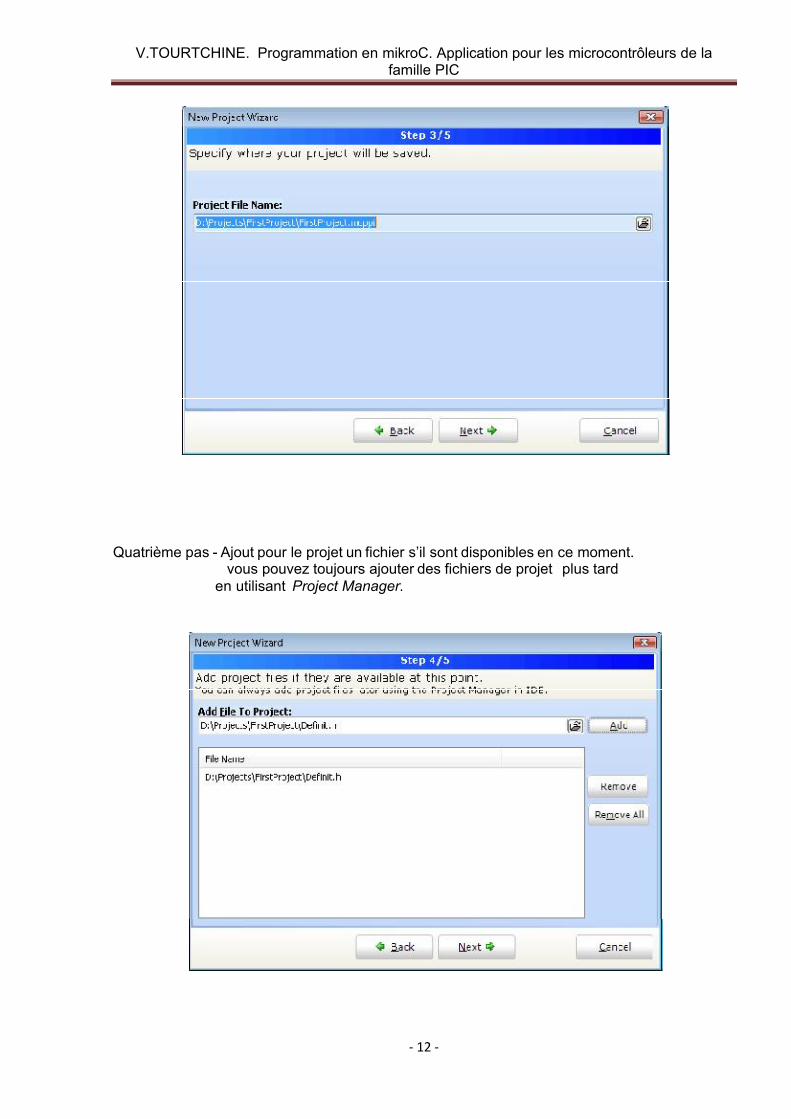
Troisième pas - Spécifiez l'emplacement où votre projet sera enregistré.
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 12 -
Quatrième pas - Ajout pour le projet un fichier s’il sont disponibles en ce moment.vous pouvez toujours ajouter des fichiers de projet plus tard
en utilisant Project Manager.

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 13 -
Cinquième étape - Cliquez sur Finish pour créer votre nouveau projet.
A ce stade, une nouvelle fenêtre vide (fig. 1.4) s’affiche afin que vous pussiez y saisir votre programme.
1.5 Compilation
Ici vous devez saisir votre code-source

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 14 -
Lorsque vous avez créé le projet et écrit le code source, il est temps de le compiler.
Sélectionnez Project Build à partir du menu déroulant ou cliquez sur l'icône Build dansla barre d'outils du projet.
Si plus d'un projet est ouvert, vous pouvez compiler tous ouverts projets en sélectionnant Project
Build All dans le menu déroulant, ou cliquez sur l’icône de la barre d'outils du projet.
Barre de progression s'affiche pour vous informer sur l'état de la compilation. Si il y a desquelques erreurs, vous en serez informé dans la fenêtre d'erreur (fig. 1.4).
Fig. 1.4 Avertissement des érreures
Après la compilation réussie, le compilateur mikroC PRO pour PIC génère des fichiers de sortie dans le dossier du projet (dossier qui contient le fichier projet. mcppi). Les fichiers de sortie sontrésumés dans le tableau ci-dessous:
Format Description Type de fichierIntel HEX Code hexadécimal dans le format Intel. Fichier est utilisé
pour programmer PIC.hex
Binary Fichier compilé pour la bibliothèque mikroC. Les distributions binaires sont des routines qui susceptibles
.mcl
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 15 -
d’être inscrits dans d'autres projets.List File L’mage globale de l’allocation de mémoire du PIC pour :
adresses d’instructions, les registres et les étiquettes du programme.
.lst
Assembler File
Le fichier en assembleur avec des noms symboliques,obtenus à partir de liste des fichiers.
.asm
1.5 Fichiers Sources
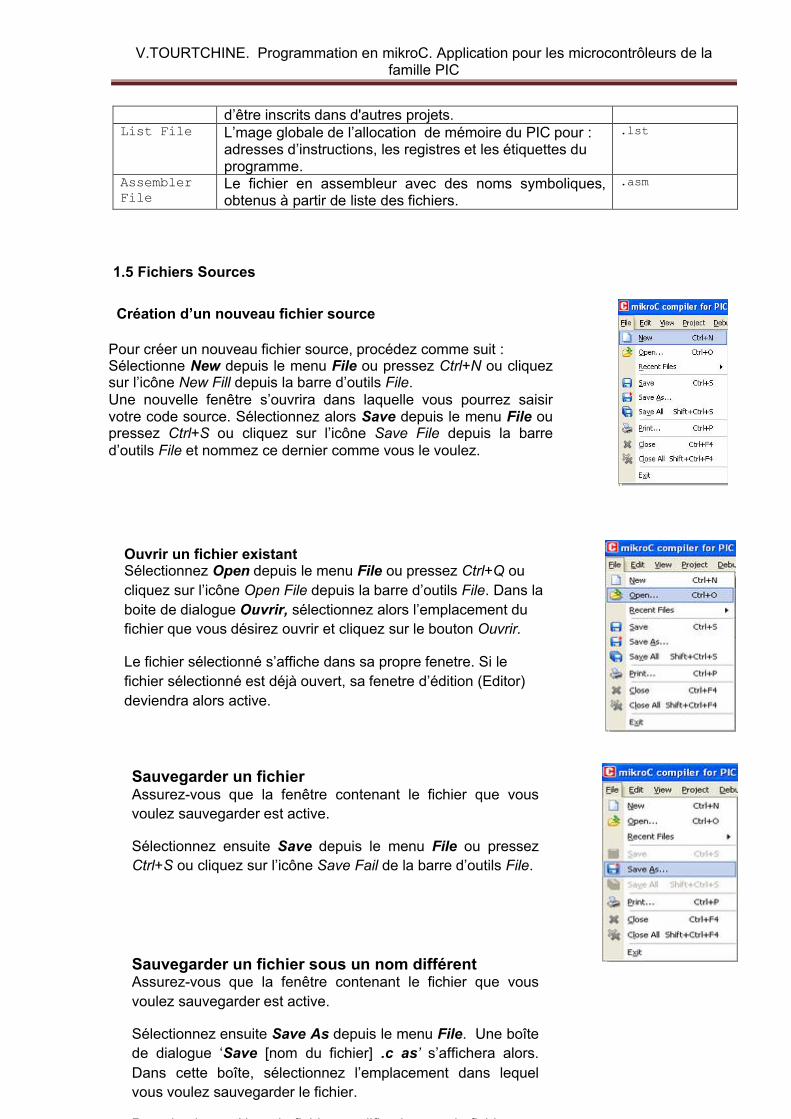
Pour créer un nouveau fichier source, procédez comme suit :Sélectionne New depuis le menu File ou pressez Ctrl+N ou cliquez sur l’icône New Fill depuis la barre d’outils File.Une nouvelle fenêtre s’ouvrira dans laquelle vous pourrez saisir votre code source. Sélectionnez alors Save depuis le menu File ou pressez Ctrl+S ou cliquez sur l’icône Save File depuis la barre d’outils File et nommez ce dernier comme vous le voulez.
Création d’un nouveau fichier source
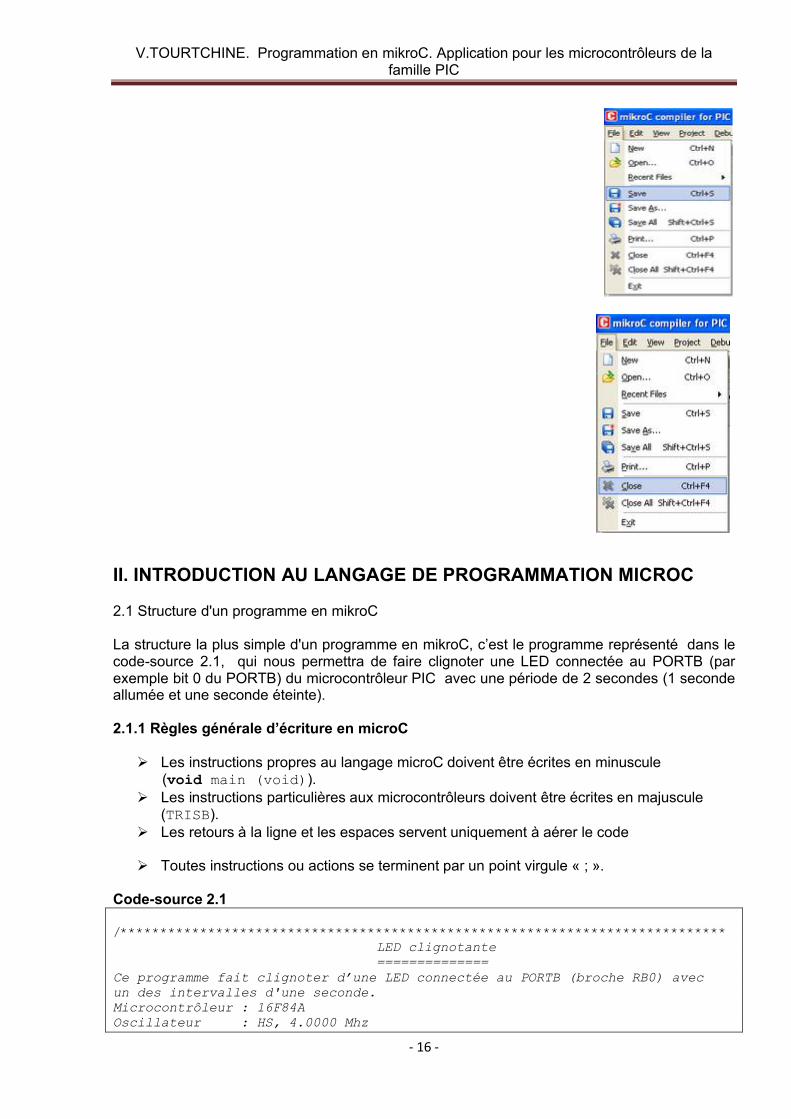
Sauvegarder un fichierAssurez-vous que la fenêtre contenant le fichier que vous voulez sauvegarder est active.
Sélectionnez ensuite Save depuis le menu File ou pressez Ctrl+S ou cliquez sur l’icône Save Fail de la barre d’outils File.
Sauvegarder un fichier sous un nom différentAssurez-vous que la fenêtre contenant le fichier que vous voulez sauvegarder est active.
Sélectionnez ensuite Save As depuis le menu File. Une boîte de dialogue ‘Save [nom du fichier] .c as’ s’affichera alors. Dans cette boîte, sélectionnez l’emplacement dans lequel vous voulez sauvegarder le fichier.
Dans le champ Nom du fichier, modifiez le nom du fichier que
Ouvrir un fichier existantSélectionnez Open depuis le menu File ou pressez Ctrl+Q ou cliquez sur l’icône Open File depuis la barre d’outils File. Dans la boite de dialogue Ouvrir, sélectionnez alors l’emplacement du fichier que vous désirez ouvrir et cliquez sur le bouton Ouvrir.
Le fichier sélectionné s’affiche dans sa propre fenetre. Si le fichier sélectionné est déjà ouvert, sa fenetre d’édition (Editor) deviendra alors active.
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 16 -
II. INTRODUCTION AU LANGAGE DE PROGRAMMATION MICROC
2.1 Structure d'un programme en mikroC
La structure la plus simple d'un programme en mikroC, c’est le programme représenté dans le code-source 2.1, qui nous permettra de faire clignoter une LED connectée au PORTB (par exemple bit 0 du PORTB) du microcontrôleur PIC avec une période de 2 secondes (1 seconde allumée et une seconde éteinte).
2.1.1 Règles générale d’écriture en microC
Les instructions propres au langage microC doivent être écrites en minuscule(void main (void)).
Les instructions particulières aux microcontrôleurs doivent être écrites en majuscule (TRISB).
Les retours à la ligne et les espaces servent uniquement à aérer le code
Toutes instructions ou actions se terminent par un point virgule « ; ».
Code-source 2.1
/****************************************************************************LED clignotante==============
Ce programme fait clignoter d’une LED connectée au PORTB (broche RB0) avecun des intervalles d'une seconde.Microcontrôleur : 16F84AOscillateur : HS, 4.0000 Mhz
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 17 -
Fichier : LED.cDate : Juillet 2012 ****************************************************************************/void main(){for(;;) // Boucle sans fin{TRISB = 0; // Configuration du PORTB en sortiePORTB.0 = 0; // RB0 = 0Delay_Ms(1000); // Pause d’une secondePORTB.F0 = 1; // RB0 = 1Delay_Ms(1000); // Pause d’une seconde
} // Fin de la boucle}
Examinons le fichier LED.c du code-source
2.1.2 Commentaires Les commentaires sont utilisés pour préciser le fonctionnement du programme et pour une annotation du programme. Les lignes de commentaires sont ignorées et non compilé par le compilateur.
En mikroC les commentaires de programmes peuvent être de deux types: de longscommentaires, s’étendant sur plusieurs lignes, et de courts commentaires, occupant une seule ligne.
Un commentaire au début d'un programme peut décrire brièvement le fonctionnement du programme et de fournir le nom de l'auteur, le nom du fichier programme, la date à laquelle le programme a été écrit, et une liste des numéros de version, ainsi que les modifications dans chaque version.
Comme montre le Code-source 2.1 les longs commentaires commencent par le caractère« /* » et se termine par le caractère « */ ».
De même, de courts commentaires commencent par le caractère « // » et il n’a pasbesoin d'un caractère de terminaison.
2.1.2 Début et fin d'un programme
En langage microC, un programme commence avec les mots-clés:
void main()
Après cela, une accolade ouvrante est utilisée pour indiquer le début du corps de programme. Le programme se termine par une accolade fermante.
Ainsi, comme indiqué dans le Code-source 2.1, le programme a la structure suivante :
void main(){
// Votre code ici}
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 18 -
2.1.3 Fin d’une instructionLe point virgule « ; » indique la fin d’une instruction, sinon une erreur du compilateur sera générée.
j = 5; // correcte j = 5 // erreur
2.1.4 Espaces blancs
Les espaces blancs sont des espaces, des flans, les tabulations et les caractères de nouvelle ligne. Le compilateur microC ne tient pas compte tous les espaces blancs. Ainsi, les troisséquences suivantes sont identiques :
int i; char j;
ou
int i;char j;
ou
int i;char j;
De même, les séquences suivantes sont identiques :
i=j+2 ;ou
i=j+2 ;
2.2 Eléments de programmation en mikroC
2.2.1 Les variables. Définition et déclaration de variables
Une variable est une portion réservée d’une mémoire à laquelle on a donné un nom. On peut stocker ou lire les informations de ces variables.Toute variable utilisée dans un programme doit auparavant être définie.La définition d’une variable consiste à la nommer et lui donnée un type et éventuellement lui donner une valeur initiale (initialiser). C’est cette définition qui réserve (alloue) la place mémoire nécessaire en fonction du type.Lorsque le programme que l’on réalise est décomposé en plusieurs modules, une même variable, utilisée dans plusieurs modules, doit être déclarée dans chacun de ces modules. Par contre, on ne définira cette variable que dans un seul de ces modules. C’est au moment de l’édition des liens que l’on mettra en correspondance les variables apparaissant dans plusieurs modulez (variable partagée, mot-clé extern).La position de la déclaration ou de la définition d’une variable détermine sa portée c’est-à-dire sa durée de vie et sa visibilité.
Les variables globales sont déclarées en dehors de toute fonction.

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 19 -
Les variables locales sont déclarées à l’intérieur des fonctions et ne sont pas visible à l’extérieur de la fonction dans laquelle celle-ci est définie.
Les noms des variables ne peuvent contenir que des lettres de a à z et à partir de A à Z, le trait de soulignement "_" et les chiffres de 0 à 9.
Les noms des variables dans mikroC n'est pas sensible à la casse, de sorte que Sum, som et soM représente le même identifiant.
Voici quelques identificateurs valides:
temperature_V1Pressureno_hitdat2stringSUM3_vtext
... mais voici quelques identificateurs incorrectes:
7temp // ne peut pas commencer par un chiffre% Supérieur // ne peut pas contenir de caractères spéciauxint // ne peut pas répéter un mot-clé
j23.07.04 // ne peut pas contenir de caractères spéciaux(période)
Certains noms sont réservés pour le compilateur lui-même et ne peut pas être utilisés comme noms de variables dans un programme. Le tableau 2.1 donne une liste alphabétique de ces noms réservés.
Tableau 2.1 Noms réservés en mikroCasm enum signed
auto extern sizeof
break float static
case for struct
char goto switch
const if typedef
continue int union
default long unsigned
do register void
double return volatile
else short while
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 20 -
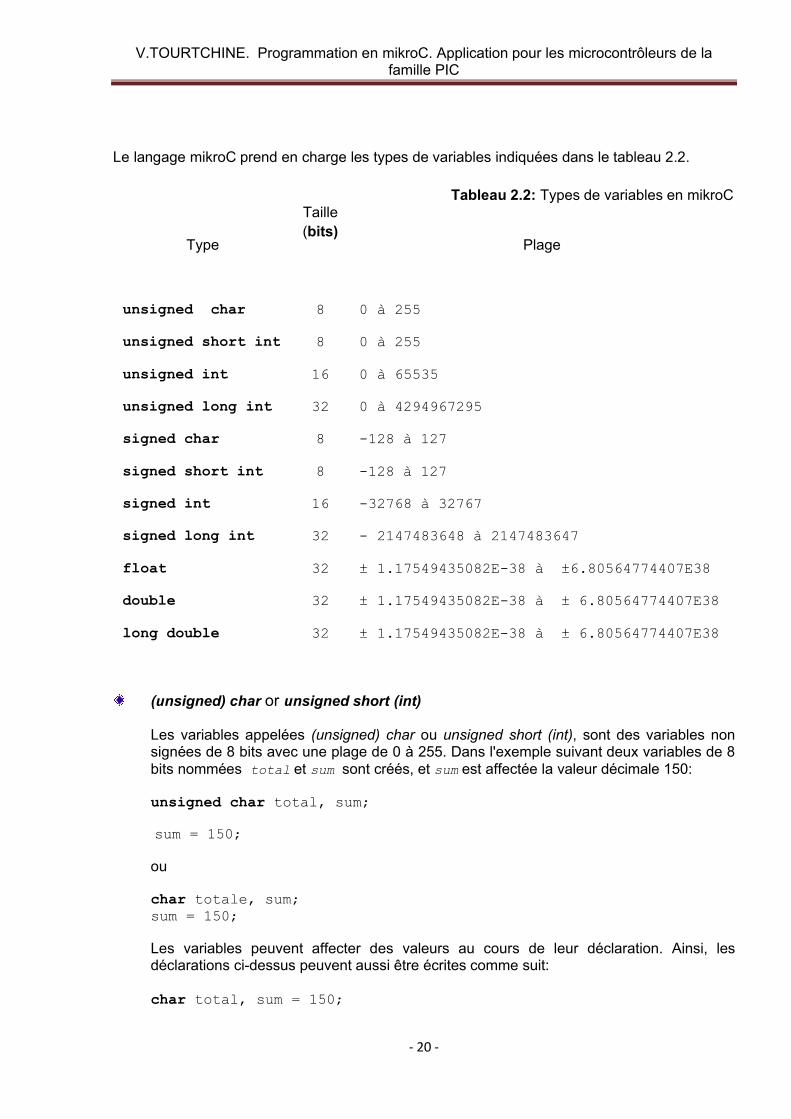
Le langage mikroC prend en charge les types de variables indiquées dans le tableau 2.2.
Tableau 2.2: Types de variables en mikroC
Type
Taille(bits)
Plage
unsigned char 8 0 à 255
unsigned short int 8 0 à 255
unsigned int 16 0 à 65535
unsigned long int 32 0 à 4294967295
signed char 8 -128 à 127
signed short int 8 -128 à 127
signed int 16 -32768 à 32767
signed long int 32 - 2147483648 à 2147483647
float 32 ± 1.17549435082E-38 à ±6.80564774407E38
double 32 ± 1.17549435082E-38 à ± 6.80564774407E38
long double 32 ± 1.17549435082E-38 à ± 6.80564774407E38
(unsigned) char or unsigned short (int)
Les variables appelées (unsigned) char ou unsigned short (int), sont des variables non signées de 8 bits avec une plage de 0 à 255. Dans l'exemple suivant deux variables de 8bits nommées total et sum sont créés, et sum est affectée la valeur décimale 150:
unsigned char total, sum;
sum = 150;
ou
char totale, sum;sum = 150;
Les variables peuvent affecter des valeurs au cours de leur déclaration. Ainsi, les déclarations ci-dessus peuvent aussi être écrites comme suit:
char total, sum = 150;
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 21 -
signed char or (signed) short (int)
Les variables appelées signed char, ou (signed) short (int) sont des variables signées de 8 bits avec une gamme de -128 à +127. Dans l'exemple suivant, une variable signée de 8 bits nommée counter est créé avec une valeur de – 50 :
signed char counter =- 50;soitshort counter = -50;soitshort int counter = -50;
(signed) int
Les variables appelés (signed) int sont des variables signées de 16 bits avec une gamme ayant de - 32768 à +32767. Dans l'exemple suivant d'un entier signé nommé Big est :
int Big;
unsigned (int)
Les variables appelés unsigned (int) sont des variables non signés de 16 bits avec une gamme de 0 à 65535. Dans l'exemple suivant une variable de 16 bits nommée count est affectée la valeur décimale de 12000 :
unsigned int count = 12000;
(signed) long (int)
Les variables appelés (signed) long (int) sont des variables signées de 32 bits avec une gamme de - 2147483648 à +2147483647. Un exemple est suivant :
signed long LargeNumber;
unsigned long (int)
Les variables appelés unsigned long (int) sont des variables non signées de 32 bits ayant une gamme de 0 à 4294967295. Un exemple est suivant:
unsigned long VeryLargeNumber;
float or double or long double
Les variables appelées float ou double ou long double, sont des variables à virgule flottante mis en œuvre en utilisant le mikroC de format 32 bits.Nombres à virgule flottante comprise entre - 1.17549435082E-38 à+ 6.80564774407E38. Dans l'exemple suivant, une variable flottante nommée area estaffectée la valeur 12.235:
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 22 -
float area ;area = 12.235;
Pour éviter toute confusion lors de l'élaboration du programme, il est recommandé de préciser le signe de la variable (signé ou non signé) ainsi que le type de variable. Par exemple, utiliser unsigned char au lieu de char seulement, et unsigned int au lieu de unsigned seulement.
2.2.2 ConstantesConstantes représentent des valeurs fixes (numérique ou caractère) dans des programmes quine peuvent pas être changées. En mikroC, constantes peuvent être entiers, flottants, caractères, les chaînes, ou des types énumérés.
Integer ConstantsLes constantes entières (Integer Constants) peuvent être en décimal, hexadécimal, octalou binaire. Le type de données d'une constante est tiré par le compilateur à partir de sa valeur. Mais suffixes peut être utilisé pour changer le type d'une constante.
Dans le tableau 2.2, nous avons vu que les constantes décimales (signed long int)peuvent avoir des valeurs de – 2147483648 à + 4294967295. Par exemple, nombre constant 210 est stocké comme un entier non signé ( unsigned char) ou (unsigned short int). De même, nombre constant - 200 est stocké comme un entier signé (signed int).
Le suffixe u ou U force la constante d'être non signé (unsigned) et le suffixe l ou L forcela constante d'être longue (long). Utilisation de U (ou u) et L (ou l) oblige la constanted'êtreunsigned long.
Les constantes sont déclarées en utilisant le mot-clé const et sont stockées dans le flash de mémoire du microcontrôleur PIC. Par exemple, MAX est déclaré comme la constante100 :const MAX =100;
Les constantes hexadécimales commencent par les caractères 0x ou 0X et peuvent contenir des données numériques de 0 à 9 et les caractères hexadécimaux de A à F.Dans l'exemple suivant, TOTAL est la constante de la valeur hexadécimale FF:
const TOTAL = 0xFF;
Les constantes octales ont un zéro au début du nombre et peuvent contenir des donnéesnumériques de 0 à 7. Dans l'exemple suivant, une constante CNT est affectée une valeur octale 17 :
const CNT = 017;
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 23 -
Les constantes binaires commencent par 0b ou 0B et ne peuvent contenir que 0 ou 1. Par exemple une constante nommée Min est déclarée comme ayant la valeur binaire11110000:
const Min = 0b11110000
Floating Point Constants
Les constantes à virgule flottante (Floating Point Constants) se compose de:
Entier décimalPoint décimalPartie décimale fractionnaire e ou E et l'ordre du signe
MikroC limite les valeurs de constantes à virgule flottante par la gamme :
±1.17549435082 * 10-38 ... ±6.80564774407 * 1038.
Dans l'exemple suivant, une constante nommée TEMP est déclarée comme ayant la valeur fractionnelle 37.50 :
const TEMP = 37.50ouconst TEMP = 3.750E1
Character Constants
Une constante de caractère (Character Constants) est un caractère renfermé dans des guillemets simples. Par exemple, une constante nommée First_Alpha est déclaréecomme ayant la valeur du caractère ‘‘A’’ :
const First_Alpha = ‘A’;
String Constants
Les constantes de chaîne (String Constants ) sont des séquences fixes de caractèresstockées dans la mémoire flash du microcontrôleur. La chaîne doit commencer et se terminer par un guillemet « " ». Un exemple d’une constante de type chaîne est la suivante :
"Il s'agit d'un exemple de chaîne constante"
Une constante chaîne peut être étendue à travers une frontière en ligne en utilisant une barre oblique inverse « "\" » :
"C'est la première partie de la chaîne \et c'est la poursuite de la chaîne "
Cette déclaration de la constante chaîne est la même que :
"C'est la première partie de la chaîne et c'est la poursuitede la chaîne "
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 24 -
Enumerated Constants
Les constantes énumérées (Enumerated Constants) sont de type entier et sont utilisées pour faire un programme plus facile à suivre. Dans l'exemple suivant, une constante nommée couleur stocke les noms de couleurs. Le premier élément de couleur a la valeur 0:
enum couleur {noir, marron, rouge, orange, jaune, vert, bleu, gris,white};
2.2.3 Séquences d'échappement
Les séquences d'échappement (Escape Sequences) sont utilisées pour représenter les caractères ASCII non imprimables. Tableau 2.3 montre quelques séquences d'échappementcouramment utilisés et de leur représentation en langage microC.
Par exemple, la combinaison de caractères « \n » représente le caractère de nouvelle ligne.
Un caractère ASCII peut également être représenté en précisant son code hexadécimal, après une barre oblique inverse.
Par exemple, le caractère de nouvelle ligne peut également être représenté comme « \x0A ».
Tableau 2.3: Quelques séquences d'échappement
Séquence d'échappement
Valeur de la
séquenceHex Caractère
\ a 0X07 BEL (cloche)
\ b 0X08 BS (backspace)
\ t 0X09 HT (tabulation horizontale)
\ n 0XLF 0A (saut de ligne)
\ v 0X0B VT (tabulation verticale)
\ f 0X0C FF (saut de page)
\ r 0X0D CR (retour chariot)
\ xH Chaîne de chiffres Hex
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 25 -
2.2.4 Variables statiques
Les variables statiques (Static variables ) sont des variables locales utilisées dans les fonctions
lorsque la dernière valeur d'une variable entre les appels successifs de la fonction doit être préservée. Comme le montre l'exemple suivant, les variables statiques sont déclarées en utilisant le mot clé static :
statique unsigned int count ;
2.2.5 Variables externes
Utilisation du mot (extern) devant un nom de variable déclare cette variable comme externe. Ilindique au compilateur que la variable est déclarée ailleurs dans un code-source distincte
module. Dans l'exemple suivant, les variables sum1 et SUM2 sont déclarés comme externesentiers non signés :
extern int sum1, SUM2 ;
2.2.6 Variables volatiles
Les variables volatiles (Volatile Variables ) sont importantes dans d'interruption des programmes et de routines d’entrées-sorties. Utilisation de mot-clé volatile indique que la valeur de la variable peut changer au cours de la durée de vie du programme indépendant de l'écoulement normal du programme. Dans l'exemple suivant, la variable Led est déclarée comme un volatile non signé :
volatile unsigned char Led;
2.2.7 Variables énumérées
Les variables énumérées sont utilisées pour rendre un programme plus lisible. Dans unevariable énumérée, une liste de références est spécifiée et la valeur du premier élément est fixéà 0, l'autre élément est mis à 1, et ainsi de suite. Dans l'exemple suivant, la Semaine de typeest déclaré comme un liste énumérée et LUN = 0, MAR = 1, WEN = 2, et ainsi de suite :
enum Semaine {LUN, MAR, MER, JEU, VEN, SAM, DIM};
Il est possible d'impliquer les valeurs des éléments dans une liste énumérée. Dans leexemple suivant, noir = 2, bleu = 3, rouge = 4, et ainsi de suite.
enum couleurs {noir = 2, bleu, rouge, blanc, gris};
De même, dans l'exemple suivant, noir = 2, bleu = 3, rouge = 8, et gris = 9:
enum couleurs {black = 2, bleu, rouge = 8, gris};
Les variables de type de recensement peuvent être déclarées par les spécifiant après la liste

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 26 -
des articles. Par exemple, pour déclarer la variable My_Week de la Semaine de type énuméré, utilisez la déclaration suivante:
enum Semaine {LUN, MAR, MER, JEU, VEN, SAM, DIM} My_Week;
Maintenant, nous pouvons utiliser My_Week comme une variable dans un programme:
My_Week = MER // assigne 2 à My_Week
ou
My_Week = 2 // le même que ci-dessus
Après avoir défini Semaine comme un type énuméré, nous pouvons déclarer des variables This_Week et Next_Week de type Semaine :
enum Semaine This_Week, Next_Week;
2.2.8 Tableaux
Les tableaux (Arrays) sont utilisés pour stocker des éléments liés dans le même bloc de mémoire et en vertu d'un nom spécifié. Un tableau est déclaré en spécifiant son type, le nom, et le nombre d’éléments à stocker. Par exemple:
unsigned int Total [5] ;
Ce tableau de type unsigned int est nommé Total et dispose de cinq éléments. Le premierélément d'un tableau est indexé à 0. Ainsi, dans cet exemple, Total[0] se réfère au premierélément du tableau et Total[4] se réfère au dernier élément. Le tableau Total est stockédans un mémoire ayant cinq emplacements consécutifs comme suit:
Total[0]Total[1]Total[2]Total[3]Total[4]
Les données peuvent être stockées dans le tableau en spécifiant le nom du tableau et de l'indice. Par exemple, pour stocker 25 dans le deuxième élément du tableau, nous devons écrire:
Total[1] = 25;
De même, le contenu d'un tableau peut être lu en spécifiant le nom du tableau et de sonindex. Par exemple, pour copier l'élément de tableau d’index 2 à une variable appelée Temp , nous devons écrire:
Temp = Total[2];
Le contenu d'un tableau peut être initialisé lors de la déclaration du tableau enattribuant d'une séquence de valeurs séparées par des virgules dans le tableau. Voici un exemple d’un tableau ayant 12 éléments des mois[0] = 31, mois[1] = 28, etainsi de suite:
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 27 -
unsigned char mois[12] = {31,28,31,30,31,30,31,31,30,31,30,31};www.newnespress.
Le même tableau peut également être déclaré sans spécifier sa taille:
unsigned char mois[ ] = {31,28,31,30,31,30,31,31,30,31,30,31};
Des tableaux de caractères peuvent être déclarés de manière similaire. Dans l'exemple suivant, un tableau de caractères nommés Hex_Letters est déclarée avec 6 éléments:
unsigned char Hex_Letters[ ] ={‘A’, ‘B’, ‘C’, ‘D’, ‘E’, ‘F’};
Les chaînes sont des tableaux de caractères avec un terminateur null. Les chaînes peuvent être déclarées soit par enfermant la chaîne entre guillemets, ou en spécifiant chaque caractère du tableau au sein de apostrophes et puis en terminant la chaîne avec un caractère nul. La chaîne de deux déclarations dans l'exemple suivant est identique :
unsigned char Mystring[ ] = “COMP”;
et
unsigned char Mystring[ ] = {‘C’, ‘O’, ‘M’, ‘P’, ‘\0’};
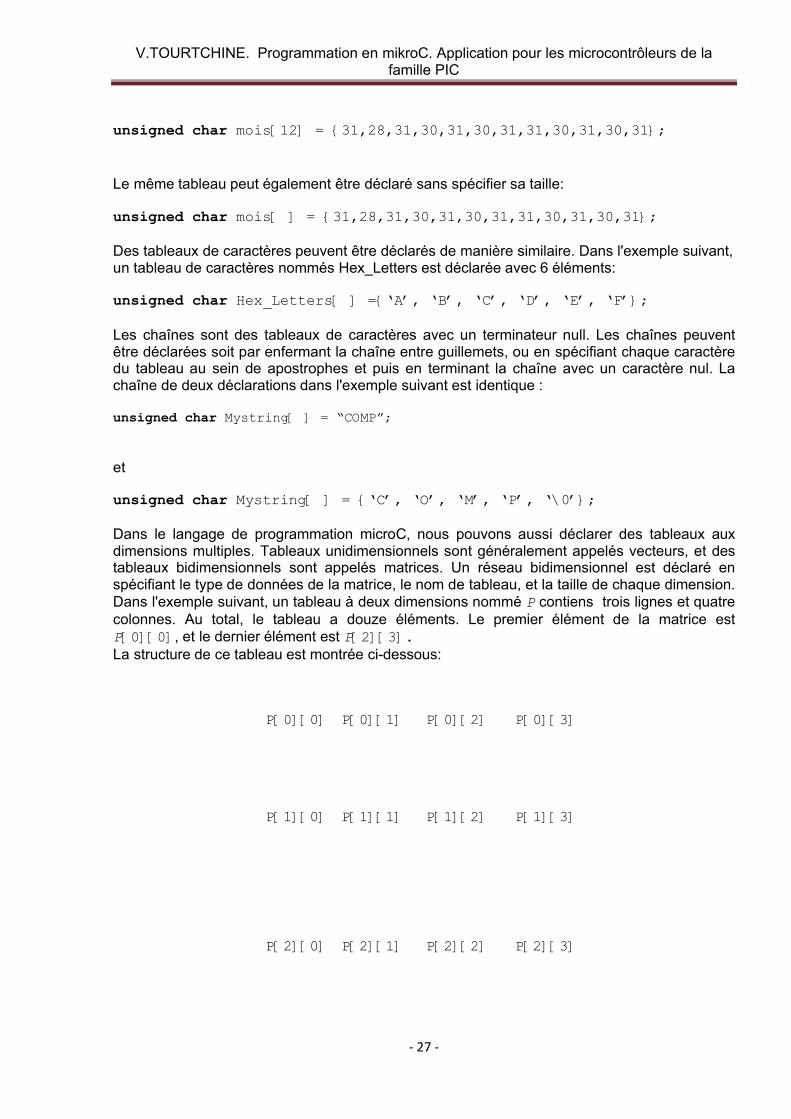
Dans le langage de programmation microC, nous pouvons aussi déclarer des tableaux aux dimensions multiples. Tableaux unidimensionnels sont généralement appelés vecteurs, et des tableaux bidimensionnels sont appelés matrices. Un réseau bidimensionnel est déclaré en spécifiant le type de données de la matrice, le nom de tableau, et la taille de chaque dimension. Dans l'exemple suivant, un tableau à deux dimensions nommé P contiens trois lignes et quatre colonnes. Au total, le tableau a douze éléments. Le premier élément de la matrice est P[0][0], et le dernier élément est P[2][3].La structure de ce tableau est montrée ci-dessous:
P[0][0] P[0][1] P[0][2] P[0][3]
P[1][0] P[1][1] P[1][2] P[1][3]
P[2][0] P[2][1] P[2][2] P[2][3]

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 28 -
Éléments d'un tableau multidimensionnel peut être spécifié lors de la déclaration dutableau. Dans l'exemple suivant, réseau bidimensionnel Q a deux rangées et deuxcolonnes, ses éléments diagonaux sont mis à 1, et de ses éléments non diagonaux sontremis à 0:
unsigned char Q[2][2] = { {1,0}, {0,1} };
2.2.9 PointeursLes pointeurs (Pointers) sont une partie importante du langage microC, car ils occupent les adresses mémoire des autres variables. Les pointeurs sont déclarées de la même manière que d'autres variables, mais avec le caractère « * » en face du nom de variable. Dans l'exemple suivant, un pointeur de caractère non signé du nom pnt est déclaré:
unsigned char *pnt;
Quand un nouveau pointeur est créé, son contenu est d'abord indéterminé et il ne tient pasl'adresse d'une variable. Nous pouvons attribuer l'adresse d'une variable à un pointeur à l'aidele « & » :
pnt = &Count;
Maintenant pnt affecte l'adresse de variable Count. La variable Count peut être affectée à une valeur en utilisant le caractère « * » en avant de son pointeur. Par exemple, le Count peut être attribuée à 10 à l'aide de son pointeur :
* pnt = 10; // Count = 10
c’est la même chose que
Count = 10; // Count = 10ou, la valeur du Count peut être copié à la variable Cnt en utilisant son pointeur :
Cnt = *pnt; // Cnt = Count
Pointeurs de tableaux
Dans le langage microC, le nom d'un tableau est aussi un pointeur de tableau. Ainsi, pour le tableau :unsigned int Total[10];
Le nom Total est également un pointeur de ce tableau, et il contient l'adresse du premierellément de la matrice. Ainsi, les deux énoncés suivants sont égaux:
Total[2] = 0;et*(Total + 2) = 0;
En outre, l'énoncé suivant est vrai:
&Total[j] = Total + j ;

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 29 -
En langage microC, nous pouvons effectuer des opérations arithmétiques pour pointeurs qui peuvent impliquer :
Comparaison de deux pointeurs Addition ou la soustraction d'un pointeur et un entier La soustraction de deux pointeurs Assigner un pointeur vers un autre En comparant un pointeur avec zéroPar exemple, supposons que le pointeur P est affecté afin de contenir l'adresse du tableaud’élément Z[2]:
P = &Z[2];
Nous pouvons maintenant effacer les éléments 2 et 3 du tableau Z, comme dans les deux exemples qui suivent. Les deux exemples sont identiques, sauf que dans le premier exemple pointeur P contient l'adresse de Z[3] à la fin des états, et il contient l'adresse de Z[2]à la fin de deuxième série de déclarations:
*P = 0; // Z[2] = 0
P = P + 1; // maintenant P pointe l’élément 3 de Z*P = 0; // Z[3] = 0
ou
*P = 0; // Z[2] = 0
*(P +1) = 0; // Z[3] = 0
Un pointeur peut être affecté à un autre pointeur. Dans l'exemple suivant, les variables Cnt et Tot sont l’ensable de 10 éléments créés à l'aide de deux pointeurs différents:
unsigned int *i, *j; // déclare 2 pointeurs
unsigned int Cnt, Tot; // déclare deux variables
i = &Cnt; // i pointe vers Cnt
*i = 10; // Cnt = 10
j = i; // copy pointeur i vers pointeur j
Tot = *j; // Tot = 10
2.2.10 Structures

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 30 -
Une structure peut être utilisée pour recueillir des éléments connexes, qui sont ensuite traités comme un seul objet. Contrairement à un tableau, une structure peut contenir un mélange de types de données. Par exemple, un structure permet de stocker les données personnelles (nom, prénom, âge, date de naissance, etc) d'un étudiant.Une structure est créée en utilisant le mot-clé struct, suivie d'une structure de nom et d’uneliste des déclarations de membre. Éventuellement, des variables de même type que la structure peuvent déclarer à l'extrémité de la structure.L'exemple suivant déclare une structure nommée Personne :
struct Personne
{unsigned char name[20];unsigned char prénom[20];
unsigned char nationalité[20];unsigned char âge;}
Nous pouvons déclarer des variables du même type que la structure en donnant le nom de la structure et le nom de la variable.
Par exemple, deux variables Moi et Toi de type Personne vous pouvez créer parla déclaration:
struct Personne Moi, Toi;
Les variables de type Personne peuvent également être créées lors de la déclaration de la structure comme suit :
struct Personne{unsigned char name[20];unsigned char prénom [20];unsigned char nationalité [20];unsigned char âge;
}Moi, Toi
Nous pouvons attribuer des valeurs aux élements d'une structure en spécifiant le nom de la structure, suivi d'un point « . » et le nom de l'élément. Dans l'exemple suivant, l'âge
des variables de structure Moi est mis à 25, et M variable est affecté à la valeur de l'âge dansvariable de structure Vous:
Moi.age = 25;M = Vous.age;
Eléments de la structure peut être initialisé lors de la déclaration de la structure. Dans l'exemple suivant, le rayon et la hauteur de la structure sont initialisés Cylindre à 1.2 et2.5 respectivement :

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 31 -
struct Cylindre{valeur de rayon;valeur d’hauteur;
} MienCylindre {1.2, 2.5};
Les valeurs peuvent également être attribuées pour les éléments d'une structure à l’ade des pointeurs en définissant les variable el les types des pointeurs. Par exemple, si LeCylindreest défini comme un pointeur vers la structure Cylindre, alors nous pouvons écrire :
struct Cylindre{valeur de rayon;flotter d’auteur;
}*LeCylinder;LeCylinder -> rayon = 1.2;LeCylinder -> hauteur = 2.5;
La taille d'une structure est le nombre d'octets contenus dans la structure. Nous pouvons utiliser l'opérateur sizeof pour obtenir la taille d'une structure.
Considéront l'exemple ci-dessus :
sizeof (MienCylindre)
retours 8, étant donné que chaque variable de type float occupe 4 octets en mémoire.
Les champs de bits peuvent être définis en utilisant les structures. Avec les champs de bits, nous pouvons attribuer des identificateurs pour les bits d’une variable. Par exemple, pour identifier les bits 0, 1, 2, 3 d'une variable pour LowNibble et d'identifier les 4 bits restants pour HighNibble nous pouvons écrire :
struct{LowNibble: 4;HighNibble: 4;
} MienVariable;
On peut alors accéder aux quartets bits de la variable MienVariable :
MienVariable.LowNibble = 12;MienVariable.HighNibble = 8;
En microC, nous pouvons utiliser les déclarations typedef pour créer de nouveaux types d’une variable. Par exemple, une nouvelle structure type de données nommé Reg peut être créé comme suit :
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 32 -
typedef struct{
unsigned char nom[20];unsigned char prenom[20];unsigned âge;
}Reg;
Les variables de type Reg peuvent ensuite être créés de la même manière que les autres types de variables. Dans l'exemple suivant, les variables MyReg, Reg1, et Reg2 sont créés à partirde type de données Reg:
Reg MyReg, REG1, REG2;
Le contenu d’une structure peut être copié dans une autre structure, à condition quedes structures soient déterminées à partir du même modèle. Dans l'exemple qui suit , P2 est copié sur P1:struct Personne{unsigned char nom [20];unsigned char prenom [20];unsigned int âge;unsigned int hauteur;unsigned poids;
}
struct Personne P1, P2;. . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . .P2 = P1;
2.2.11 UnionsLes unions sont utilisées pour les variables de recouvrement. Une union est similaire à une structure et il est même défini d'une manière similaire. Les deux sont basés sur des modèles, et les membres de tous les deux sont accessible à l'aide des opérateurs « . » ou « -> ». Une chausse diffère d'une structure en ce que tous variables dans une union occupent la même zone mémoire, ils partagent le même stockage. Un exemple de déclaration de l'union est la suivante :
union flags
{unsigned char x;unsigned int y;
}P;
Dans cet exemple, les variables x et y occupent la même zone de mémoire, et la taille de cel'union est de 2 octets de long, ce qui est de la taille de la plus grande partie de l'union. Quand
la variable y est chargé avec une valeur de 2 octets, la variable x aura la même valeur que faible octet de y.
Dans l'exemple suivant, y est chargé avec 16-bit valeur hexadécimale0xAEFA, et x est chargé avec 0xFA:
P.y = 0xAEFA ;
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 33 -
La taille d'une union est la taille (nombre d'octets) de son élément est le plus important. Ainsi,la déclaration:
sizeof (P)
renvoie 2.
Cette union peut aussi être déclarée comme suit :
union flags{unsigned char x;unsigned int y;
}union flags P;
2.2.12 Opérateurs et expressions en mikroC
Les opérateurs sont appliqués aux variables et d'autres objets dans les expressions pour assurer certaines conditions ou des calculs.
Une expression est un objet syntaxique obtenu en assemblant des constantes, des variables et des opérateurs.
Exemple :
x + 12
Dans le langage microC, il y a d’autres opérateurs que les opérateurs arithmétiques qu’on a l’habitude de manipuler. Il y en a en fait plus de 40 opérateurs.
Opérateurs et priorités
Vous avez l’habitude de manipuler des expressions arithmétiques :
2+3*4*5-2, 2-3-4
On sait que ces expressions sons équivalentes à (2+(3*(4*5)))-2, (2-3)-4.
Introduire les parenthèses permet de définir sans ambiguité l’expression que l’on manipule. Pour éviter l’usage des parenthèses qui alourdissent la lecture, il existe des règles pour lever toute ambigüité :
Exemple :
2+3*4
La sous expression 3*4 est évaluée en premier et le résultat obtenu est ajouté à la valeur 2 (forme avec parenthèse : 2+(3+4)).On dit que l’opérateur « * » possède une priorité supérieur à la priorité de l’opérateur « + ».
2-3-4
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 34 -
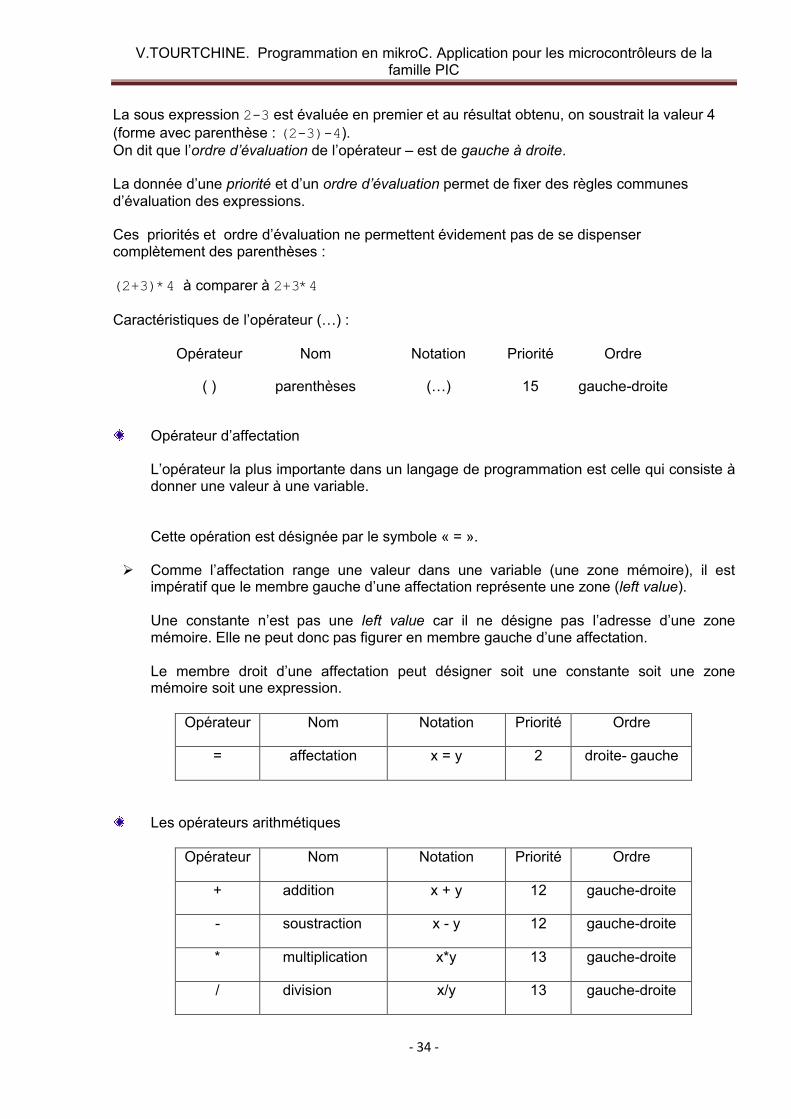
La sous expression 2-3 est évaluée en premier et au résultat obtenu, on soustrait la valeur 4 (forme avec parenthèse : (2-3)-4).On dit que l’ordre d’évaluation de l’opérateur – est de gauche à droite.
La donnée d’une priorité et d’un ordre d’évaluation permet de fixer des règles communes d’évaluation des expressions.
Ces priorités et ordre d’évaluation ne permettent évidement pas de se dispenser complètement des parenthèses :
(2+3)*4 à comparer à 2+3*4
Caractéristiques de l’opérateur (…) :
Opérateur Nom Notation Priorité Ordre
( ) parenthèses (…) 15 gauche-droite
Opérateur d’affectation
L’opérateur la plus importante dans un langage de programmation est celle qui consiste à donner une valeur à une variable.
Cette opération est désignée par le symbole « = ».
Comme l’affectation range une valeur dans une variable (une zone mémoire), il est impératif que le membre gauche d’une affectation représente une zone (left value).
Une constante n’est pas une left value car il ne désigne pas l’adresse d’une zone mémoire. Elle ne peut donc pas figurer en membre gauche d’une affectation.
Le membre droit d’une affectation peut désigner soit une constante soit une zone mémoire soit une expression.
Opérateur Nom Notation Priorité Ordre
= affectation x = y 2 droite- gauche
Les opérateurs arithmétiques
Opérateur Nom Notation Priorité Ordre
+ addition x + y 12 gauche-droite
- soustraction x - y 12 gauche-droite
* multiplication x*y 13 gauche-droite
/ division x/y 13 gauche-droite

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 35 -
% modulo x%y 13 gauche-droite
Les opérateurs +, -, * , fonctionnent comme en arithmétique.
Par contre, l’opérateur / (division) se comporte de manière différente selon que les opérandes sont des entier ou des nombres flottants :
Nombres flottants : le résultat est un nombre flottant obtenu en divisant les deux nombres. Nombres entiers : le résultat est un nombre entier obtenu en calculant la division entier ou division euclidienne. L’opérateur % n’est défini que pour les entiers et le résultat est le reste de la division entière des opérandes.
Rappel sur la division entière : On appelle quotient et reste de la division entière de a et de b, les nombres entiers q et vérifiant :
a = q*b +r ; 0 < r < B
Exemple 1 :
Si a = 20 et b = 3 alors q = 6 et r = 2 (on a vérifié : 20 = 6*3 + 2)
Exemple 2 :
int a, b, c ;float x, y, z ;
a = b/c; //division entièrea = x/y; //reste entierx = y/z; //division réellex = 2/3; //division entièrex = 2.0/3.0; //division réellex = (float)((float)a)/y; //division réelle
L’opérateur unaire « – » a une priorité supérieure aux opérateurs binaires arithmétiques :
Les opérateurs de comparaison
Opérateur Nom Notation Priorité Ordre
-(unaire) négation -x 13 droite- gauche
Opérateur Nom Notation Priorité Ordre
== teste d’égalité x == y 9 gauche-droite
!= teste de non égalité x ! = y 9 gauche-droite
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 36 -
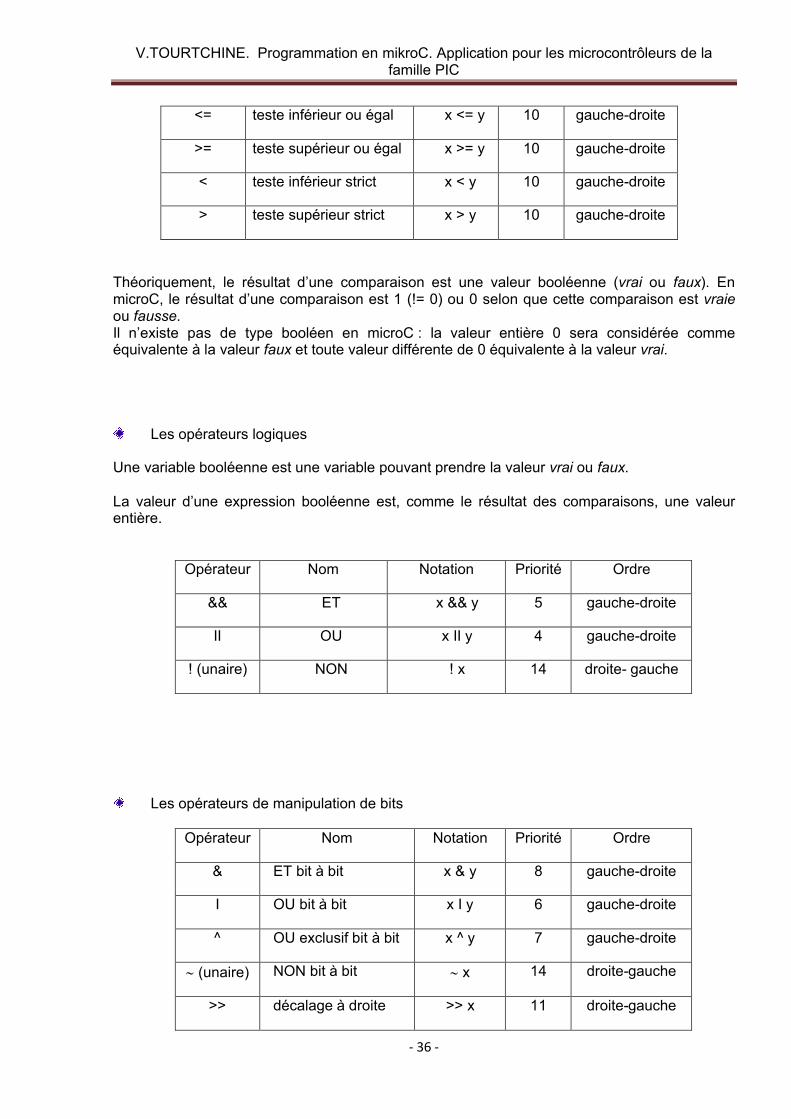
Théoriquement, le résultat d’une comparaison est une valeur booléenne (vrai ou faux). En microC, le résultat d’une comparaison est 1 (!= 0) ou 0 selon que cette comparaison est vraieou fausse.Il n’existe pas de type booléen en microC : la valeur entière 0 sera considérée comme équivalente à la valeur faux et toute valeur différente de 0 équivalente à la valeur vrai.
Les opérateurs logiques
Une variable booléenne est une variable pouvant prendre la valeur vrai ou faux.
La valeur d’une expression booléenne est, comme le résultat des comparaisons, une valeur entière.
Opérateur Nom Notation Priorité Ordre
&& ET x && y 5 gauche-droite
II OU x II y 4 gauche-droite
! (unaire) NON ! x 14 droite- gauche
Les opérateurs de manipulation de bits
Opérateur Nom Notation Priorité Ordre
& ET bit à bit x & y 8 gauche-droite
I OU bit à bit x I y 6 gauche-droite
^ OU exclusif bit à bit x ^ y 7 gauche-droite
(unaire) NON bit à bit x 14 droite-gauche
>> décalage à droite >> x 11 droite-gauche
<= teste inférieur ou égal x <= y 10 gauche-droite
>= teste supérieur ou égal x >= y 10 gauche-droite
< teste inférieur strict x < y 10 gauche-droite
> teste supérieur strict x > y 10 gauche-droite

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 37 -
<< décalage à gauche << x 11 droite-gauche
Les autres opérateurs binaires d’affectation
Les opérateurs suivants ne sont que des raccourcis de notation (pas d’optimisation du code généré) :
Opérateur Equivalent Notation Priorité Ordre
+= x = x + y x += y 2 droite-gauche
-= x = x - y x -= y 2 droite-gauche
*= x = x * y x *= y 2 droite-gauche
/= x = x / y x /= y 2 droite-gauche
%= x = x % y x %= y 2 droite-gauche
= x = x y x = y 2 droite-gauche
<<= x = x << y x <<= y 2 droite-gauche
&= x = x & y x &= y 2 droite-gauche
I= x = x I y x I= y 2 droite-gauche
^= x = x ^ y x ^= y 2 droite-gauche
Autres opérateurs unaires d’affectation
y = x++ ;
c’est le raccourci pour y = x ; x = x+1 ;y = ++x ; c’est le raccourci pour x = x + 1 ; y = x ;
Autres opérateurs
Opérateur conditionnel
Opérateur Equivalent Notation Priorité Ordre
++ x = x + 1 x++ ou ++x 14 droite-gauche
-- x = x - 1 x-- ou --x 14 droite-gauche
Opérateur Equivalent Notation Priorité Ordre
? opérateur conditionnel
e ? x : y 3 droite-gauche
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 38 -
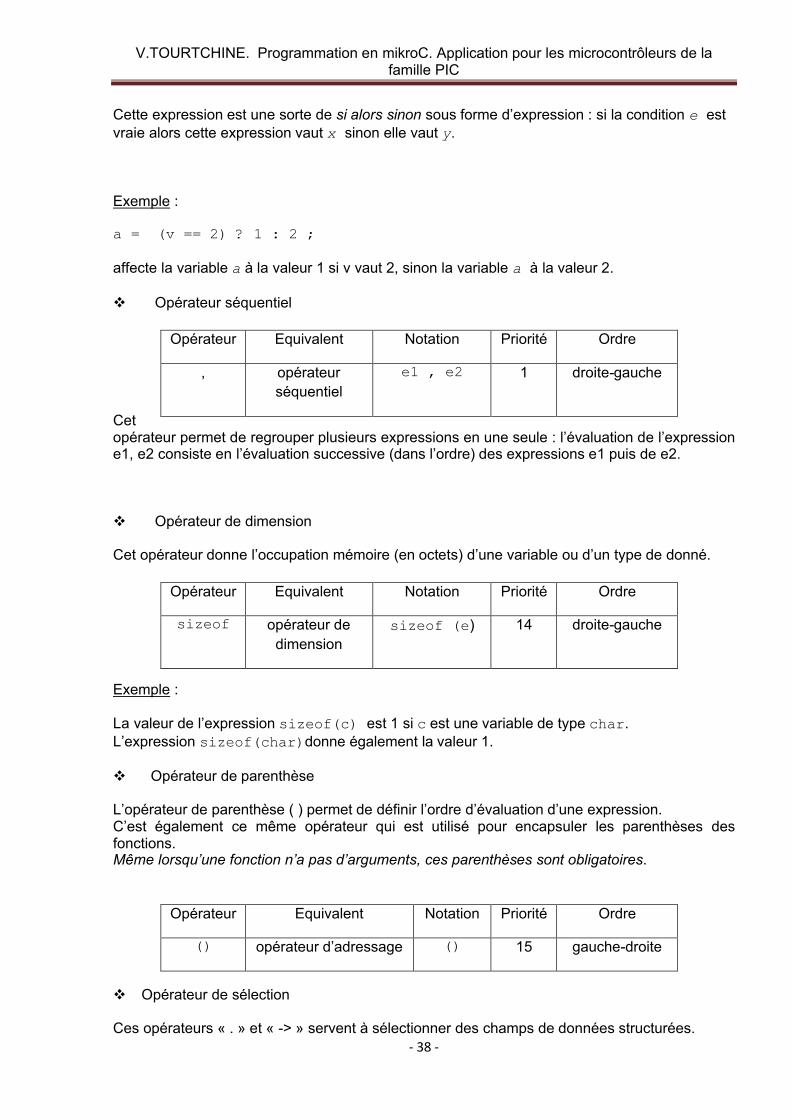
Cette expression est une sorte de si alors sinon sous forme d’expression : si la condition e est vraie alors cette expression vaut x sinon elle vaut y.
Exemple :
a = (v == 2) ? 1 : 2 ;
affecte la variable a à la valeur 1 si v vaut 2, sinon la variable a à la valeur 2.
Opérateur séquentiel
Cet opérateur permet de regrouper plusieurs expressions en une seule : l’évaluation de l’expression e1, e2 consiste en l’évaluation successive (dans l’ordre) des expressions e1 puis de e2.
Opérateur de dimension
Cet opérateur donne l’occupation mémoire (en octets) d’une variable ou d’un type de donné.
Exemple :
La valeur de l’expression sizeof(c) est 1 si c est une variable de type char.L’expression sizeof(char)donne également la valeur 1.
Opérateur de parenthèse
L’opérateur de parenthèse ( ) permet de définir l’ordre d’évaluation d’une expression.C’est également ce même opérateur qui est utilisé pour encapsuler les parenthèses des fonctions.Même lorsqu’une fonction n’a pas d’arguments, ces parenthèses sont obligatoires.
Opérateur de sélection
Ces opérateurs « . » et « -> » servent à sélectionner des champs de données structurées.
Opérateur Equivalent Notation Priorité Ordre
, opérateur séquentiel
e1 , e2 1 droite-gauche
Opérateur Equivalent Notation Priorité Ordre
sizeof opérateur de dimension
sizeof (e) 14 droite-gauche
Opérateur Equivalent Notation Priorité Ordre
() opérateur d’adressage () 15 gauche-droite

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 39 -
Opérateurs du préprocesseur
Toute ligne de code-source commence par « # » est considérée comme un opérateur de préprocesseur (ou l’opérateur de prétraitement ou encore la ligne de commande).Les opérateurs du préprocesseur sont généralement placés au début du code-source, mais ils ont le droit d'être n'importe où dans le programme.
Le préprocesseur permet à un programmeur de :
Compiler un programme de sorte que les parties du code ne sont pas compilés Remplacer les symboles avec d'autres symboles ou des valeurs Insérer des fichiers texte dans un programme
La syntaxe plus commune d'un opérateur du préprocesseur est :
#include <math.h>
MikroC compilateur prend en charge les commandes de préprocesseur suivantes:
#define #undef#if #elif #endif#ifdef #ifndef#error#ligne
Commande du préprocesseur #define
La commande préprocesseur #define fournit une macro où chaque apparition de son nomdans le programme est remplacé par la valeur de ce nom.
Par exemple, pour remplacer toutes les apparitions de MAX avec une valeur de 100, nous pouvons écrire:
#define MAX 100
Notez que la commande préprocesseur #define n’occupe pas l’espace en mémoire.
Nous pouvons passer des paramètres à une définition de macro en précisant les paramètres entre les parenthèses après le nom de la macro. Par exemple :
#define ADD (a, b) (a + b)
Opérateur Equivalent Notation Priorité Ordre
. opérateur de sélection x,info 15 gauche-droite
-> opérateur de sélection x->info 15 gauche-droite
[] opérateur de sélection x[3] 15 gauche-droite
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 40 -
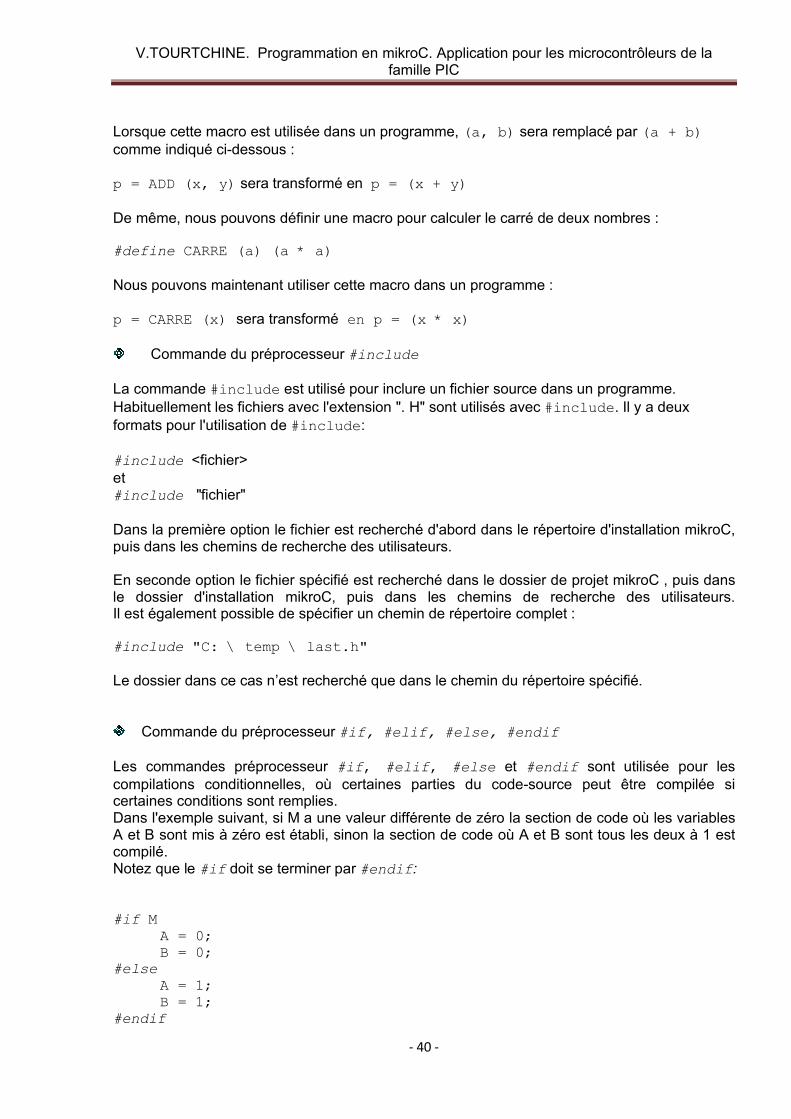
Lorsque cette macro est utilisée dans un programme, (a, b) sera remplacé par (a + b)comme indiqué ci-dessous :
p = ADD (x, y) sera transformé en p = (x + y)
De même, nous pouvons définir une macro pour calculer le carré de deux nombres :
#define CARRE (a) (a * a)
Nous pouvons maintenant utiliser cette macro dans un programme :
p = CARRE (x) sera transformé en p = (x * x)
Commande du préprocesseur #include
La commande #include est utilisé pour inclure un fichier source dans un programme. Habituellement les fichiers avec l'extension ". H" sont utilisés avec #include. Il y a deuxformats pour l'utilisation de #include:
#include <fichier>et#include "fichier"
Dans la première option le fichier est recherché d'abord dans le répertoire d'installation mikroC, puis dans les chemins de recherche des utilisateurs.
En seconde option le fichier spécifié est recherché dans le dossier de projet mikroC , puis dansle dossier d'installation mikroC, puis dans les chemins de recherche des utilisateurs.Il est également possible de spécifier un chemin de répertoire complet :
#include "C: \ temp \ last.h"
Le dossier dans ce cas n’est recherché que dans le chemin du répertoire spécifié.
Commande du préprocesseur #if, #elif, #else, #endif
Les commandes préprocesseur #if, #elif, #else et #endif sont utilisée pour les compilations conditionnelles, où certaines parties du code-source peut être compilée si certaines conditions sont remplies. Dans l'exemple suivant, si M a une valeur différente de zéro la section de code où les variablesA et B sont mis à zéro est établi, sinon la section de code où A et B sont tous les deux à 1 est compilé.Notez que le #if doit se terminer par #endif:
#if MA = 0;B = 0;
#elseA = 1;B = 1;
#endif

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 41 -
Nous pouvons également utiliser la condition #elif, qui teste une nouvelle condition si la condition précédente était fausse :
#if MA = 0;B = 0;
#elif NA = 1;B = 1;
#elseA = 2;B = 2;
#endif
Dans l'exemple ci-dessus, si M a une valeur différente de zéro, A = 0 ; B = 0. Sinon, si N est une valeur non nulle, A = 1; B = 1. Enfin, si à la fois M et N sont égaux à zéro, alors A = 2 ; B = 2.Notez qu’une seule section de code est compilé entre #if et #endif et qu'une section de code peut contenir n'importe quel nombre d’instructions.
2.2.13 Structure de contrôle de programme
Les instructions sont normalement exécutées séquentiellement à partir du début à la fin d’un programme. Nous pouvons utiliser des instructions de contrôle pour modifier ce flux séquentiel
normal dans un programme C. Les instructions de contrôle suivantes sont disponibles dans les programmes en mikroC:
De sélection if et switchD'itération ou bouclage forModifications inconditionnels d’exécution
Instructions de sélection if et switch
Instruction ifCette instruction conditionnelle if permet d’exécuter des instructions de manière sélective en fonction du résultat d’un test. La déclaration du format général de l'instruction if est la suivante :
if (expression)instruction1
elseinstruction2
ou
if(expression) instruction1; else instruction2;
Si l’expression est vraie (valeur non nulle), l’instruction1 s’exécute sinon, dans le deuxième cas, c’est l’istruction2 qui s’exécute.

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 42 -
Le mot-clé else est optionnel et peut être omis. Dans l'exemple suivant, si la valeur de x est supérieure à MAX alors la variable P estincrémentée de 1, sinon elle est décrémenté de 1:
if (x > MAX)P++;
elseP--;
Nous pouvons avoir plus d'une instruction en joignant les déclarations dans bouclésentre parenthèses. Par exemple:
if (x> MAX){
P++;Cnt = P;Sum = Sum = Cnt;
}elseP--;
Dans cet exemple, si x est supérieur à MAX, donc les trois instructions bouclésentre les parenthèses sont exécutés, sinon la déclaration P-- est exécuté.
Un autre exemple en utilisant l'instruction if est la suivante:
if (x> 0 && x <10){Total + = Sum;Sum++;
}else{Total = 0;Sum = 0;
}
Instruction switch
L'instruction switch (commutateur) est utilisé pour assurer le commutation entre des déférentes déclarations si un certain nombre des conditions son vraie ou faut.
La syntaxe de commutation :
switch (condition){case condition1:Instructions;break;
case condition2:Instructions;
break;. . . . . . . . . . . . . . . . . . . . .
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 43 -
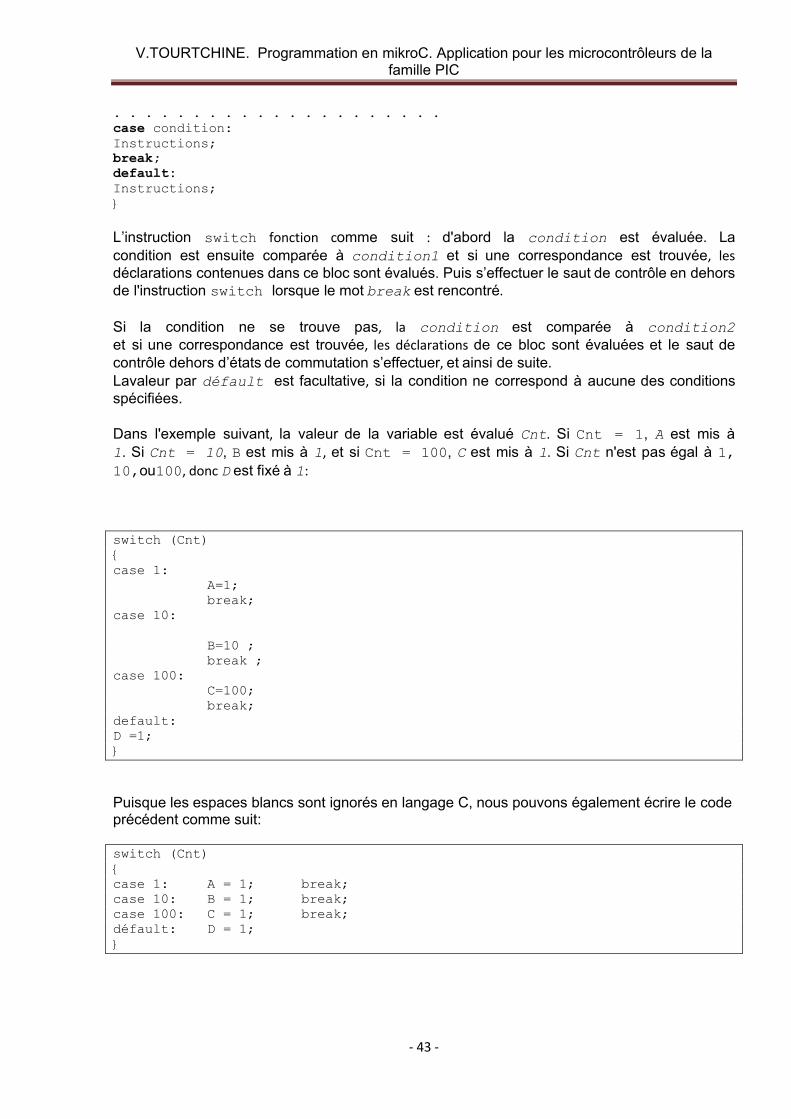
. . . . . . . . . . . . . . . . . . . . .case condition:Instructions;break;default:Instructions;}
L’instruction switch fonction comme suit : d'abord la condition est évaluée. Lacondition est ensuite comparée à condition1 et si une correspondance est trouvée, les déclarations contenues dans ce bloc sont évalués. Puis s’effectuer le saut de contrôle en dehorsde l'instruction switch lorsque le mot break est rencontré.
Si la condition ne se trouve pas, la condition est comparée à condition2et si une correspondance est trouvée, les déclarations de ce bloc sont évaluées et le saut de contrôle dehors d’états de commutation s’effectuer, et ainsi de suite. Lavaleur par défault est facultative, si la condition ne correspond à aucune des conditionsspécifiées.
Dans l'exemple suivant, la valeur de la variable est évalué Cnt. Si Cnt = 1, A est mis à1. Si Cnt = 10, B est mis à 1, et si Cnt = 100, C est mis à 1. Si Cnt n'est pas égal à 1, 10,ou100, donc D est fixé à 1:
switch (Cnt){case 1:
A=1;break;
case 10:
B=10 ;break ;
case 100:C=100;break;
default:D =1;}
Puisque les espaces blancs sont ignorés en langage C, nous pouvons également écrire le code précédent comme suit:
switch (Cnt){case 1: A = 1; break;case 10: B = 1; break;case 100: C = 1; break;défault: D = 1;}

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 44 -
Instructions d'itération for, while, do, goto, continue et break
Les instructions d'itération nous permettent d'effectuer des boucles dans un programme, où une partie d'un code doit être répété un certain nombre de fois. Dans mikroC l'itération peut être effectuée de quatre façons. Nous se penchera sur chacun des exemples :
Utilisation de for Utilisation de while Utilisation de do Utilisation de goto, continue et break
Instruction forLa syntaxe d'une instruction for est :
for (expression initiale; expression de condition; expressionincrément){Instructions;
}
L'expression initiale définit la variable au départ de la boucle, et cette variable estcomparée à l'expression de condition avant l'entrée dans la boucle. Déclarations à l'intérieur de la boucle sont exécutées de façon répétée, et après chaque itération la valeur d’expression est incrémentée. L'itération se poursuit jusqu'à moment où l'expression de condition devient fausse. Une boucle sans fin est formée si l'expression condition est toujours vraie.
L'exemple suivant montre comment une boucle peut être mise en place pour exécuter 10 fois. Dans cet exemple, la variable i commence par 0 et elle est augmentée de 1 à la fin de chaque itération. La boucle se termine quand i = 10, puisque dans ce cas, la condition i <10 devient fausse. À la sortie de la boucle, la valeur de i est de 10:
for(i = 0; i < 10; i ++){
Instructions;}
Cette boucle pourrait également être lancée par une expression initiale avec une valeur différente de zéro. Ici, i commence par 1 et la boucle se termine quand i = 11. La sortie de la boucle se produira lorsque la valeur dei sera de 11 :
for (i = 1; i <= 10; i++){Instructions;
}
Les paramètres d'une boucle for sont tous optionnels et peuvent être omises. Si la condition expression est laissée de côté, il est supposé pour être vrai. Dans l'exemple suivant, une boucle sans fin est formée par l'expression de condition qui est toujours vraie et la valeur de icommence avec 0 et est incrémenté après chaque itération :
// Boucle sans fin avec incrémentation ifor (i = 0;; i++){Instructions;
}

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 45 -
Dans l'exemple suivant d'une boucle sans fin où tous les paramètres sont omis :
// Exemple de boucle sans finfor (;;){Instructions;
}
Dans la boucle sans fin suivante, i commence par 1 et n'est pas incrémenté à l'intérieur de la boucle :
// Boucle sans fin avec i = 1 for (i = 1;;){Instructions;
}
S’il n'y a qu'une seule instruction à l'intérieur de la boucle for, les accolades peuvent être omises comme c’est montré dans l'exemple suivant :
for (k = 0; k <10; k++) Total = Total + Sum;
Les boucles imbriquées peuvent également être utilisés. Dans une boucle for imbriquée, la boucle intérieure est exécutée pour chaque itération de la boucle externe. Dans l'exemple suivant la boucle interne est exécutée 5 fois et la boucle extérieure est exécutée 10 fois. Le nombre d’itérations totales est de cinquante :
// Exemple de deux boucles imbriquées for (i = 0; i < 10; i++){for (j = 0; j < 5; j++){Instructions;
}}
Dans l'exemple suivant, la somme de tous les éléments d'un matrice M [3 x 4] est calculéeet stockées dans une variable appelée Sum :
// Ajouter tous les éléments d'une matrice 3x4Sum = 0;for (i = 0; i < 3; i++){for (j = 0; j < 4; j++){Sum = Sum + M[i][j];
}}
Comme il n'y a qu'une seule instruction à exécuter, l'exemple précédent pourrait également êtres'écrit :
// Ajouter tous les éléments d'une matrice 3x4Sum = 0;for (i = 0; i < 3; i++)
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 46 -
{for (j = 0; j < 4; j++) Sum = Sum + M[i][j];
}
Instruction while
La syntaxe d'une instruction while est la suivante :
while (condition){
Instructions;}
Ici, les instructions sont exécutées jusqu'à ce que la condition devienne fausse, ou les instructions sont exécutées de façon répétée aussi longtemps que la condition est vraie. Si la condition est fausse à l'entrée de la boucle, la boucle ne sera pas exécuté et le programme seracontinuer de l'extrémité de la boucle while. Il est important que la condition est changéintérieur de la boucle, sinon une boucle sans fin sera formé.Le code suivant montre comment mettre en place une boucle d'exécuter 10 fois :
// Une boucle qui s'exécute 10 foisk = 0;while (k <10){
Instructions;k++;
}
Au début du code, la variable k est égal à 0. Comme k est inférieur à 10, la boucle whilecommence. L'intérieur de la boucle, la valeur de k est incrémenté d’un après chaque itération.La boucle se répète tant que k < 10 et se termine lorsque k = 10. À la fin la valeur de k est10. Notez qu’une boucle sans fin sera formé si k n'est pas incrémenté à l'intérieur de la boucle:
// Une boucle sans fink = 0;while (k <10){
Instructions;}
Une boucle sans fin peut également être formée par réglage de la condition qui doit être toujours vrai :
// Une boucle sans finwhile (k = k){Instructions;
}
Voici un exemple de calcul de la somme des nombres de 1 à 10 et le stockage durésultat d'une somme variable appelée sum :
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 47 -
// Calculer la somme des nombres de 1 à 10unsigned int k, sum;k = 1;sum = 0;while (k <= 10){sum = sum + k;k++;
}
Il est possible d'avoir une déclaration while sans corps. Une telle déclaration est utile, pour par exemple, si nous attendons un port d'entrée pour changer sa valeur. Voici un exemple où leprogramme va attendre aussi longtemps que le bit 0 de PORTB (PORTB.0) est au niveau logique 0. Le programme se poursuivra jusqu’au changement à la valeur logique 1 sur les broches du port.
while (PORTB.F0 == 0); // Attendre jusqu'à ce que PORTB.0 devient unouwhile (PORTB.F0);
Instruction do
Une déclaration do est similaire à une déclaration while sauf ce que la boucle
exécute jusqu'à ce que la condition devient fausse, ou, la boucle s'exécute tant que lala condition est vraie. La condition est testée à la fin de la boucle. La syntaxe d'une déclarationdo est la suivante :
do{
Instructions;} while (condition);
La première itération est toujours effectuée si la condition est vraie ou fausse. Il s'agit de laprincipale différence entre une déclaration while et une déclaration do.Le code suivant montre comment mettre en place une boucle d'exécuter 10 fois en utilisant ladéclaration do
/*Exécute 10 fois */k = 0;do{
Instructions;k++;
} while (k <10);
La boucle commence avec k = 0, et la valeur de k est incrémenté intérieur de la boucle après chaque itération. À la fin de boucle k est testé, et si k n'est pas inférieur à 10, la boucle termine. Dans cet exemple k = 0 au début de la boucle, à la fin de la boucle la valeur de k est 10. Une boucle sans fin sera formée si la condition n'est pas modifiée à l'intérieur de la boucle, comme est illustré dans l'exemple ci-dessous. Ici k est toujours inférieur à 10 :
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 48 -
/*Une boucle sans fin*/k = 0 ; do{Instructions;
} while (k < 10);
Une boucle sans fin peut également être créée si la condition est réglée pour être vrai tout le temps:
/* Une boucle sans fin */do{Instructions;
}while (k = k);
Instruction goto, continue et break
Une instruction goto peut être utilisée pour modifier le flux normal de contrôle dans unprogramme. Elle provoque le programme à sauter à une étiquette spécifiée. Une étiquette peut
être n'importe quel jeu de caractères alphanumériques commençant par une lettre et se terminant par le caractère « : ».Bien que l’instruction goto soit non recommandée, elle peut être utilisée conjointement avecune instruction if pour créer un programme en itérations. L'exemple suivant montre comment mettre en place une boucle pour l’exécuter 10 fois en utilisant goto et if :
/ * Exécute 10 fois * /k = 0;Boucle:
Instructions;k++;
if (k < 10) goto Boucle;
La boucle commence par l’étiquette Boucle et la variable k = 0. Les instructions sont exécutées à l'intérieur de la boucle et k est incrémenté de 1. La valeur de k est alors comparé à
10 et le programme retourne à l’étiquette Boucle si k <10. Ainsi, la boucle est exécutée 10fois jusqu'à ce que la condition à la fin devienne fausse. À la fin de la boucle la valeur de k est10.
Les instructions continue et break peuvent être utilisés à l'intérieur d’itérations pour modifier le flux de commande. Une instruction continue est généralement utilisée avec une instructionif et provoque le saut de la boucle d’itération.
Voici un exemple qui calcule la somme des nombres de 1 à 10, sauf le nombre 5:
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 49 -
/* Calculer la somme des nombres 1,2,3,4,6,7,8,9,10 */Sum = 0;i = 1;for (i = 1; i <= 10; i++){if (i == 5) continue; // Passer numéro 5Sum = Sum + i;
}
De même, une instruction break peut être utilisé pour mettre fin à une boucle à l'intérieur de la boucle.
Dans l'exemple suivant, la somme des nombres de 1 à 5 est calculée, même si les paramètres de la boucle sont mis à parcourir 10 fois:
/ * Calculer la somme des nombres 1,2,3,4,5 * /Sum = 0;i = 1;for (i = 1; i <= 10; i++){if (i > 5) break; // Stop boucle si i > 5
}2.2.14 Utilisation mikroC avec des instructions en langage d’assembleur
Il devient parfois nécessaire d’utiliser la langue assembleur pour microcontrôleurs PIC et des instructions en langage mikroC.Des instructions en langage assembleur peuvent être incluses dans un programme en utilisantmot-clé asm (ou _asm, ou __ asm).
La syntaxe est la suivante:
asm{
Instructions }
Commentaires du langage d’assembleur (une ligne commençant par un point-virgule) ne sont pas autorisés, mais les deux types de commentaires en microC peuvent être utilisés dans les routines en langage d'assembleur :
asm{
// Ce code introduit un temporisation
MOVLW 6 // Charge W avec 6. . . . . . . . . . . . . . .. . . . . . . . . . . . . . .
}
Les variables en microC peuvent être utilisées dans les routines en langage d'assembleur, mais elles doivent être déclarées et initialisées avant son utilisation.
Par exemple, une variable Temp peut être initialisée et ensuite chargée dans le registre W :
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 54 -
III. FONCTIONS ET BIBLIOTHEQUES DANS MIKROC
3.1 Fonctions dans mikroC
Les fonctions sont généralement définies comme des sous-programmes qui renvoient une valeur fondée sur un certain nombre de paramètres d'entrée. Chaque programme doit avoir une seule fonction externe marquant le point d'entrée dans le programme principale. Les fonctions sont déclarés comme des prototypes en standard ou fourni par l'utilisateur, ou par des fichiers du programme. Chaque programme écrit en langage mikroC se compose de nombre plus ou moins de fonctions. L'idée principale est de diviser un programme en plusieurs parties qui utilisent ces fonctions afin de résoudre le problème réel plus facile. En outre, les fonctions nous permettent d'utiliser les compétences et les connaissances d'autres programmeurs. Par exemple, s’il est nécessaire d'envoyer une chaîne de caractères à un écran LCD, il est beaucoup plus facile d'utiliser une partie déjà écrite du programme que de recommencer. Les fonctions consistent des commandes précisant ce qui doit être fait sur des variables. Elles peuvent être comparées à des sous-routines. En règle générale, il est beaucoup mieux d'avoir un programme composé d'un grand nombre de fonctions simples que de quelques fonctions importantes.
3.1.1 Déclaration d’une fonction
Chaque fonction doit être déclarée de manière à être correctement interprété au cours du processus de compilation. Déclaration contient les éléments suivants:
Nom de la fonction Liste des paramètres Déclaration des paramètres Corps de la fonction Type de résultat de la fonction
La syntaxe générale d'une définition de fonction est montrée ci-dessous :
type_de_résultat nom_fonction(parameter1, parameter2, .....){.............corps de la fonction.............
}
Dans l’exemple qui suit, la fonction, nommée Mult, reçoit deux arguments entiers, a et b, et renvoie leur produit. Notez que l'utilisation des parenthèses dans une instruction de retour est facultative :
int Mult(int a, int b){return (a*b);
}
Quand une fonction est appelée, elle s'attend généralement à donner le nombre d'argumentsexprimés en liste d'arguments de la fonction. Par exemple, la fonction précédente peut êtreappelée :
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 55 -
z = Mult (x, y);
où la variable z est le type de données int. Notez que les arguments déclarés dans ladéfinition de la fonction et les arguments passés lorsque la fonction est appelée sontindépendants les uns des autres, même si elles ont le même nom. Dans l'exemple précédent,lorsque la fonction est appelée, variable x est copié à a et variable y et est copiée à b surentrée en fonction Mult.
Certaines fonctions ne renvoient pas de données. Le type de données de ces fonctions doit être déclarées comme nul. Par exemple
void LED(unsigned char D){PORTB = D;
}
Fonctions void peut être appelée sans aucune instruction d'affectation, mais les parenthèsessont nécessaire pour indiquer au compilateur que un appel de fonction est faite: LED ();
En outre, certaines fonctions ne possèdent pas d'arguments. Dans l'exemple suivant, lafonction, nommée Compl, complète PORTC du microcontrôleur. Il ne renvoie pas de donnéeset n'a pas d'arguments:
void Compl(){PORTC = PORTC;
}
Cette fonction peut être appelée en tant que :
Compl ();
Les fonctions sont normalement définies avant le début du programme principal.
Certaines définitions de fonction et de leur utilisation dans les programmes principaux sont illustrées dans les exemples suivants:
Exercice 3.1
Écrire une fonction appelée Cercle_Surface pour calculer la surface d'un cercle dont le rayon sera utilisé comme un argument. Utilisez cette fonction dans un programme principal pour calculer la surface d'un cercle dont le rayon est de 2,5 cm. Sauvegarder la valeur de cettesurface dans une variable appelée Cercle.
Solution 3.1
Le type de données de la fonction est déclaré comme float. La surface d'un cercle est calculée par la formule :
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 62 -
3.1.3 Définition de fonction
La fonction se compose de sa déclaration et de son corps de la fonction. Le corps de fonctionest un bloc, représentant de définitions locales et des déclarations entre les accolades {}. Toutes les variables déclarées au sein de corps sont locales. La fonction elle-même peut être définie uniquement dans le cadre du fichier. Cela signifie que les déclarations ne peuvent pasêtre imbriquées. Pour revenir au résultat de la fonction, utilisez l'instruction de return. Déclaration à retour d’une fonction de type void ne peut pas avoir un paramètre, vous pouvez omettre l’instruction return si elle est la dernière instruction du corps de la fonction. Voici unedéfinition de fonction échantillon :
// retourne Max avec le plus grand l'un de ses 2 arguments
int Max (int x, int y) {return (x >= y)? x: y;
}
Voici un exemple de fonction qui dépend des effets secondaires plutôt que de la valeur de retour :
/* Fonction qui convertit coordonnées Descartes (x, y)en coordonnées polaires (r, fi): */
#include <math.h>voide polaire (double x, double y, double *r, double *fi){*r = sqrt (x * x + y y *);*fi = (x == 0 && y == 0)? 0: atan2 (y, x);return; // cette ligne peut être omise
}
3.1.3 Appels de fonctions
Une fonction est appelée avec des arguments réels placés dans la même séquence que leurcorrespondant paramètres formels. Utilisez un opérateur d'appel de fonction () :
fonction_nom (expression_1, expression_2, ..., expression_n)
Chaque expression dans l'appel de fonction est un argument réel. Nombre et types desarguments réels doivent correspondre à ceux des paramètres de fonctions formelles. Arguments réels peuvent être de n'importe quelle complexité. Sur l’appel de fonction, tous les paramètres formels sont créés en tant qu'objets locaux initialisé par des valeurs d'arguments réels. De retour d'une fonction, l’objet temporaire est créé à la place de l'appel, et il est initialisé par l'expression de la déclaration de retour.
Cela signifie que l'appel de fonction comme un opérande de l'expression complexe est traitée en résultat de fonction.
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 63 -
Si la fonction est sans résultat (type void) ou vous n'avez pas besoin du résultat, vous pouvez écrire l'appel de fonction comme une expression autonome.En C, les paramètres scalaires sont toujours passés à la fonction par valeur. Une fonction peutmodifier les valeurs de ses paramètres formels, mais cela n'a aucun effet sur le réel argument dans la routine d'appel. Vous pouvez passer objet scalaire par le discours de déclarer un paramètre formel d'être un pointeur. Ensuite, utilisez l'opérateur « * » pour accéder à l'objet pointu.
3.1.4 Conversion argument
Quand un prototype de la fonction n'a pas été préalablement déclaré, mikroC convertit arguments intégraux à un appel de fonction de l'élargissement intégrante (l'expansion)Quand un prototype de fonction est en portée, mikroC convertit l'argument donné par le type de paramètre déclaré comme par affectation.
Si un prototype est présent, le nombre d'arguments doivent correspondre. Les types doiventêtre compatibles uniquement dans la mesure où une cession peut également les convertir. Vous pouvez toujours utiliser une conversion explicite pour convertir un argument pour un type qui est acceptable à un prototype de fonction.
Remarque : Si le prototype de fonction ne correspond pas à la définition de la fonction réelle,mikroC permet le détecter si et seulement si cette définition se trouve dans la même unité de compilation comme le prototype. Le compilateur est aussi capable de forcer les arguments du type approprié. Supposons que vous ayez le code qui suit :
int limit = 32;char ch = 'A';long res;
extern long fonc(long par1, long par2); // prototype
main (){
//...res = fonc(limit, ch); // fonction call (appeler)
}
Comme il a le prototype de fonction pour func, ce programme convertit limit et chà long, en utilisant la règle standard, avant qu'il ne les place sur la pile pour l'appel la fonction fonc.Sans le prototype de fonction, limit et ch aurait été placé dans la pile comme un entier et un caractère, respectivement. Dans ce cas, la contenu de pile ne serait pas correspondre à la tailleou le contenu de fonc, conduisant à un problème. L’utilisation des prototypes de fonctionsfacilite grandement dans la révélation des erreurs.

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 64 -
3.2 Fonctions intégrées
Le compilateur mikroC fournit un ensemble de fonctions intégrées qui peuvent être appelées à partir du programme. Ces fonctions sont énumérées dans le tableau 3.1, avec une brève description de chacune. La plupart de ces fonctions peuvent être utilisées dans un programme sans avoir à inclure des fichiers d'en-tête.
Tableau 3.1: Fonctions intégréesFonction Description
Lo Renvoie le plus faible nombre d'octets (bits 0 à 7)
Hi Renvoie le plus faible nombre d'octets (bits 8 à 15)
Higher Renvoie le plus élevée d'octet d'un nombre (bits 16 à 23)
Highest Retourne le plus grand d'octets d'un nombre (bits 24 à 31)
Delay_us Crée le retard dans les unités de microseconde
Delay_ms Crée le retard constante dans les unités de millisecondes
Vdelay_ms Crée le retard en millisecondes en utilisant des variables de programme
Delay_Cyc Crée le retard basé sur l'horloge de microcontrôleur
Clock_Khz Régler l’horloge de microcontrôleur en KHz
Clock_Mhz Régler l’horloge de microcontrôleur en MHz
Les exceptions sont des fonctions Lo, Hi, Higher, et Highest, qui exigent le fichier d’en-têtebuilt_in.h. De plus détails sur l'utilisation de ces fonctions sont disponibles dans le manuel de mikroC.Delay_us et delay_ms fonctions sont fréquemment utilisés dans les programmes où les retards sont requis (par exemple, se met à clignoter une LED).
L'exemple suivant illustre l'utilisation de la fonction Delay_ms :
Exercice 3.6
Une LED est connectée au PORTB (broche RB0) d'un microcontrôleur PIC16F84Aà travers d’une résistance de limitation, comme indiqué dans la figure 3.1.
Ecrire un programme qui fera clignoter le LED ON et OFF en permanence dans l’intervalle d'une seconde.
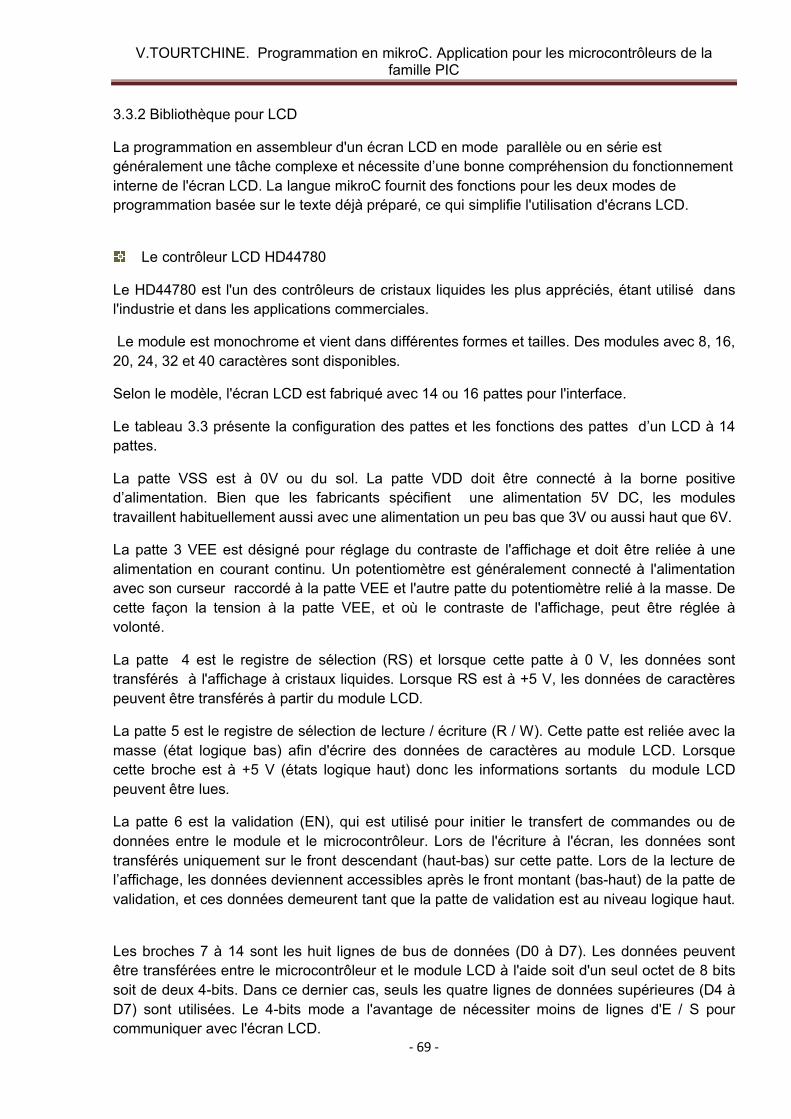
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 69 -
3.3.2 Bibliothèque pour LCD
La programmation en assembleur d'un écran LCD en mode parallèle ou en série est généralement une tâche complexe et nécessite d’une bonne compréhension du fonctionnement interne de l'écran LCD. La langue mikroC fournit des fonctions pour les deux modes de programmation basée sur le texte déjà préparé, ce qui simplifie l'utilisation d'écrans LCD.
Le contrôleur LCD HD44780
Le HD44780 est l'un des contrôleurs de cristaux liquides les plus appréciés, étant utilisé dansl'industrie et dans les applications commerciales.
Le module est monochrome et vient dans différentes formes et tailles. Des modules avec 8, 16, 20, 24, 32 et 40 caractères sont disponibles.
Selon le modèle, l'écran LCD est fabriqué avec 14 ou 16 pattes pour l'interface.
Le tableau 3.3 présente la configuration des pattes et les fonctions des pattes d’un LCD à 14 pattes.
La patte VSS est à 0V ou du sol. La patte VDD doit être connecté à la borne positived’alimentation. Bien que les fabricants spécifient une alimentation 5V DC, les modulestravaillent habituellement aussi avec une alimentation un peu bas que 3V ou aussi haut que 6V.
La patte 3 VEE est désigné pour réglage du contraste de l'affichage et doit être reliée à unealimentation en courant continu. Un potentiomètre est généralement connecté à l'alimentation avec son curseur raccordé à la patte VEE et l'autre patte du potentiomètre relié à la masse. De cette façon la tension à la patte VEE, et où le contraste de l'affichage, peut être réglée à volonté.
La patte 4 est le registre de sélection (RS) et lorsque cette patte à 0 V, les données sont transférés à l'affichage à cristaux liquides. Lorsque RS est à +5 V, les données de caractères peuvent être transférés à partir du module LCD.
La patte 5 est le registre de sélection de lecture / écriture (R / W). Cette patte est reliée avec la masse (état logique bas) afin d'écrire des données de caractères au module LCD. Lorsquecette broche est à +5 V (états logique haut) donc les informations sortants du module LCDpeuvent être lues.
La patte 6 est la validation (EN), qui est utilisé pour initier le transfert de commandes ou de données entre le module et le microcontrôleur. Lors de l'écriture à l'écran, les données sonttransférés uniquement sur le front descendant (haut-bas) sur cette patte. Lors de la lecture de l’affichage, les données deviennent accessibles après le front montant (bas-haut) de la patte de validation, et ces données demeurent tant que la patte de validation est au niveau logique haut.
Les broches 7 à 14 sont les huit lignes de bus de données (D0 à D7). Les données peuvent être transférées entre le microcontrôleur et le module LCD à l'aide soit d'un seul octet de 8 bitssoit de deux 4-bits. Dans ce dernier cas, seuls les quatre lignes de données supérieures (D4 à D7) sont utilisées. Le 4-bits mode a l'avantage de nécessiter moins de lignes d'E / S pour communiquer avec l'écran LCD.
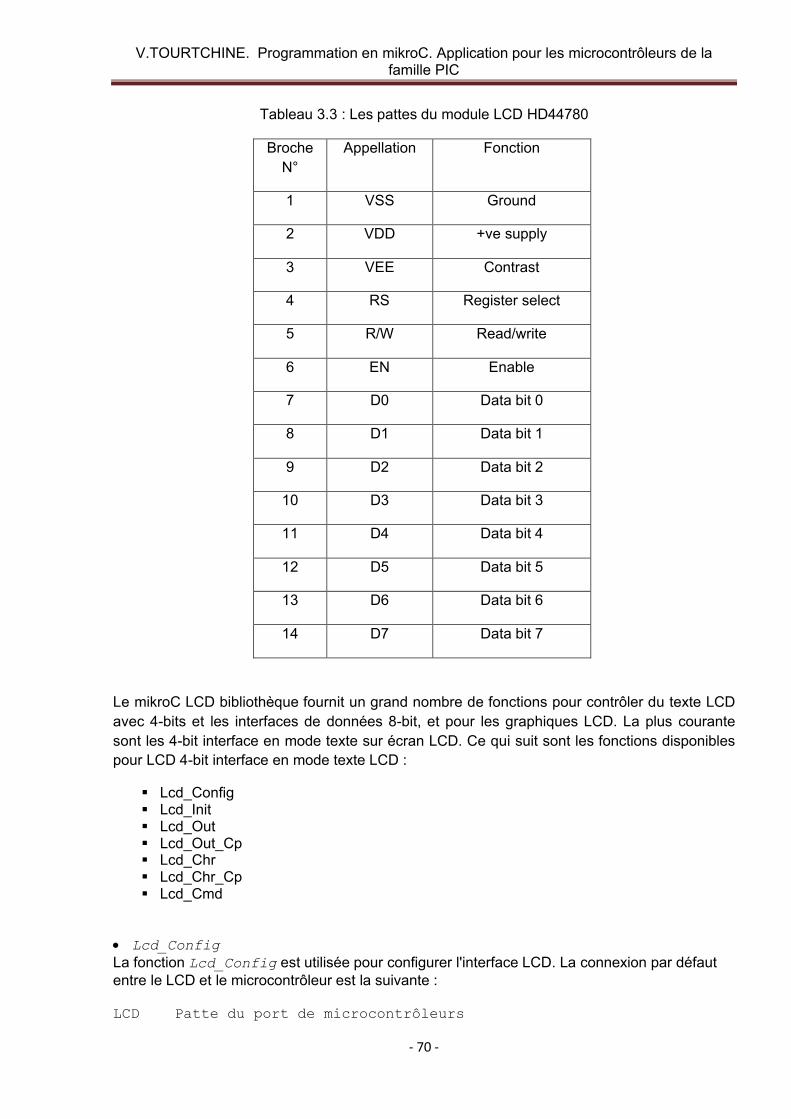
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 70 -
Tableau 3.3 : Les pattes du module LCD HD44780
Le mikroC LCD bibliothèque fournit un grand nombre de fonctions pour contrôler du texte LCD avec 4-bits et les interfaces de données 8-bit, et pour les graphiques LCD. La plus courantesont les 4-bit interface en mode texte sur écran LCD. Ce qui suit sont les fonctions disponibles pour LCD 4-bit interface en mode texte LCD :
Lcd_Config Lcd_Init Lcd_Out Lcd_Out_Cp Lcd_Chr Lcd_Chr_Cp Lcd_Cmd
Lcd_ConfigLa fonction Lcd_Config est utilisée pour configurer l'interface LCD. La connexion par défaut entre le LCD et le microcontrôleur est la suivante :
LCD Patte du port de microcontrôleurs
BrocheN°
Appellation Fonction
1 VSS Ground
2 VDD +ve supply
3 VEE Contrast
4 RS Register select
5 R/W Read/write
6 EN Enable
7 D0 Data bit 0
8 D1 Data bit 1
9 D2 Data bit 2
10 D3 Data bit 3
11 D4 Data bit 4
12 D5 Data bit 5
13 D6 Data bit 6
14 D7 Data bit 7

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 71 -
RS → 2FR → 3D4 → 4D5 → 5D6 → 6D7 → 7
La patte R / W de l'écran n'est pas utilisé et doit être reliée à la masse.
Cette fonction devrait être utilisée pour modifier la connexion par défaut. Il devrait être appelé avec les paramètres dans l'ordre suivant :
nom de port, RS patte, EN patte, R/W patte, D7 patte, D6 patte, D5patte, D4 patte
Le nom du port doit être spécifié en passant son adresse. Par exemple, si RS patte estconnectée à RB0, EN patte à RB1, D7 patte à RB2, D6 patte à RB3, D5 patte à RB4, et D4 patte à RB5, alors la fonction doit être appelée comme suit :
Lcd_Init
La fonction Lcd_Init est appelée pour configurer l'interface entre le microcontrôleur et l'écran LCD lorsque les connexions sont faites par défaut que vient d'être illustré. Le nom du port doit être spécifié en passant son adresse. Par exemple, en supposant que LCD est reliée à PORTB et les connexions par défaut précédentes sont utilisées, la fonction doit être appelée en tant que :
Lcd_Init();
Lcd_Out
La fonction Lcd_Out affiche du texte à la ligne indiquée et la position des colonnesde l'écran LCD. La fonction doit être appelée avec des paramètres dans l'ordre suivant :
ligne, colonne, texte
Par exemple, pour afficher du texte "Ordinateur" à la ligne 1 et la colonne 2 de l'écran LCD nous devrions appeler la fonction comme suit :
Lcd_Out (1, 2, "Ordinateur");
Lcd_Out_Cp
La fonction Lcd_Out_Cp affiche le texte à la position actuelle du curseur.Par exemple, pour afficher le texte "Ordinateur" à la position actuelle du curseur, la fonctiondevrait être appelé en tant que :
Lcd_Out_Cp ("Ordinateur");
Lcd_Chr
La fonction Lcd_Chr affiche un caractère à la ligne indiquée et la colonne la position du curseur. La fonction doit être appelée avec les paramètres dans le l'ordre suivant :

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 72 -
ligne, colonne, caractère
Par exemple, pour afficher caractère "K" à la ligne 2 et la colonne 4 de l'écran LCD nous devrions appeler la fonction de :
Lcd_Chr(2, 4, ‘K’);
Lcd_Chr_Cp
La fonction Lcd_Chr_Cp affiche un caractère à la position actuelle du courser. Par exemple, pour afficher le caractère "M" à la position actuelle du curseur, la fonction doit être appelée en tant que :
Lcd_Chr_Cp ('M'); Lcd_Cmd
La fonction Lcd_Cmd est utilisée pour envoyer une commande à l'écran LCD. Avec cecommande, nous pouvons déplacer le curseur vers n'importe quelle ligne, désactiver l'écran LCD, faire clignote le curseur, décaler l'affichage, etc. Une liste des plus couramment utiliséscommandes LCD est donnée dans Tableau 3.4.
Par exemple, pour effacer l'écran LCD nous devrions appeler la fonction comme suit :
Lcd_Cmd (Lcd_Clear);
Tableau 3.4: Commandes LCDCommande LCD Description
LCD_CLEAR Effacer l'affichage
LCD_RETURN_HOME Retourner vers la position du curseur
LCD_FIRST_ROW Déplacer le curseur vers la première ligne
LCD_SECOND_ROW Déplacer le curseur vers la deuxième ligne
LCD_THIRD_ROW Déplacer le curseur vers la troisième ligne
LCD_FOURTH_ROW Déplacer le curseur vers la quatrième ligne
LCD_BLINK_CURSOR_ON Clignotement du curseur
LCD_MOVE_CURSOR_LEFT Déplacer le curseur à gauche
LCD_MOVE_CURSOR_RIGHT Déplacer le curseur à droite
LCD_SHIFT_LEFT Décaler l'affichage à gauche
LCD_SHIFT_RIGHT Décaler l'affichage à droite
Un exercice ci-dessous illustre l'initialisation et l'utilisation de l'écran LCD.
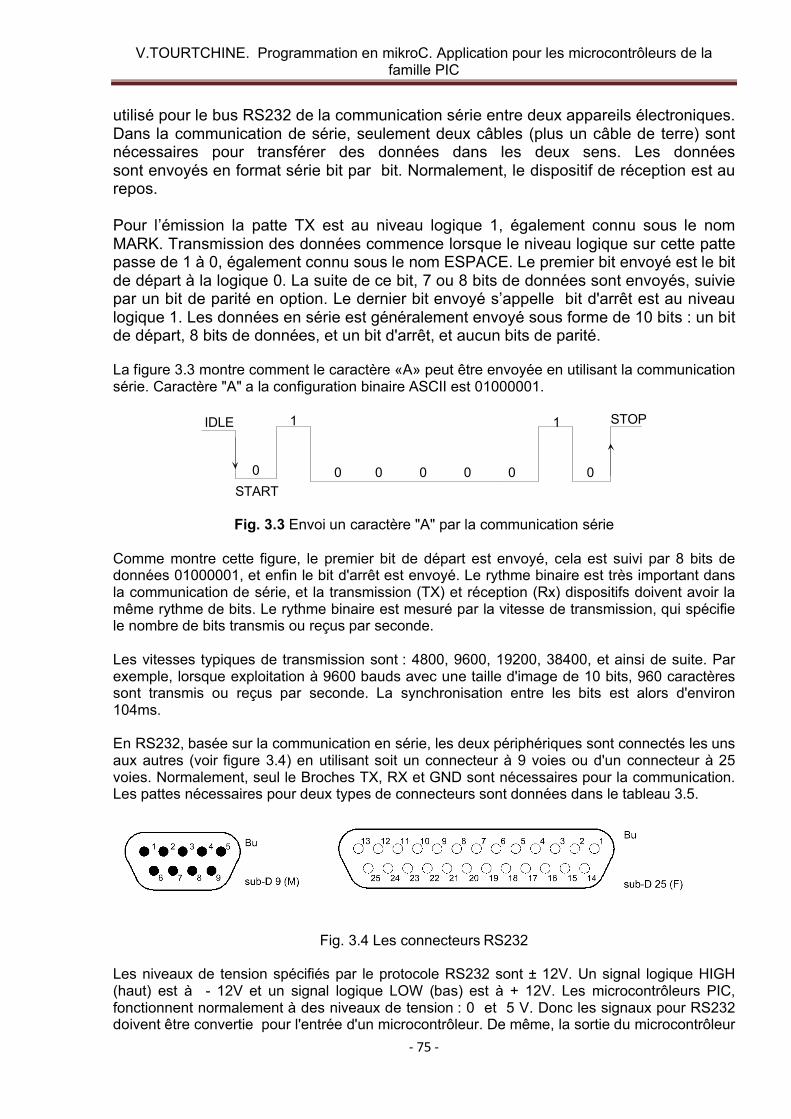
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 75 -
utilisé pour le bus RS232 de la communication série entre deux appareils électroniques. Dans la communication de série, seulement deux câbles (plus un câble de terre) sont nécessaires pour transférer des données dans les deux sens. Les donnéessont envoyés en format série bit par bit. Normalement, le dispositif de réception est au repos.
Pour l’émission la patte TX est au niveau logique 1, également connu sous le nom MARK. Transmission des données commence lorsque le niveau logique sur cette pattepasse de 1 à 0, également connu sous le nom ESPACE. Le premier bit envoyé est le bit de départ à la logique 0. La suite de ce bit, 7 ou 8 bits de données sont envoyés, suivie par un bit de parité en option. Le dernier bit envoyé s’appelle bit d'arrêt est au niveau logique 1. Les données en série est généralement envoyé sous forme de 10 bits : un bitde départ, 8 bits de données, et un bit d'arrêt, et aucun bits de parité.
La figure 3.3 montre comment le caractère «A» peut être envoyée en utilisant la communication série. Caractère "A" a la configuration binaire ASCII est 01000001.
0 0 0000 0
IDLE
START
STOP11
Fig. 3.3 Envoi un caractère "A" par la communication série
Comme montre cette figure, le premier bit de départ est envoyé, cela est suivi par 8 bits de données 01000001, et enfin le bit d'arrêt est envoyé. Le rythme binaire est très important dans la communication de série, et la transmission (TX) et réception (Rx) dispositifs doivent avoir la même rythme de bits. Le rythme binaire est mesuré par la vitesse de transmission, qui spécifie le nombre de bits transmis ou reçus par seconde.
Les vitesses typiques de transmission sont : 4800, 9600, 19200, 38400, et ainsi de suite. Par exemple, lorsque exploitation à 9600 bauds avec une taille d'image de 10 bits, 960 caractères sont transmis ou reçus par seconde. La synchronisation entre les bits est alors d'environ 104ms.
En RS232, basée sur la communication en série, les deux périphériques sont connectés les uns aux autres (voir figure 3.4) en utilisant soit un connecteur à 9 voies ou d'un connecteur à 25voies. Normalement, seul le Broches TX, RX et GND sont nécessaires pour la communication. Les pattes nécessaires pour deux types de connecteurs sont données dans le tableau 3.5.
Fig. 3.4 Les connecteurs RS232
Les niveaux de tension spécifiés par le protocole RS232 sont ± 12V. Un signal logique HIGH (haut) est à - 12V et un signal logique LOW (bas) est à + 12V. Les microcontrôleurs PIC, fonctionnent normalement à des niveaux de tension : 0 et 5 V. Donc les signaux pour RS232doivent être convertie pour l'entrée d'un microcontrôleur. De même, la sortie du microcontrôleur
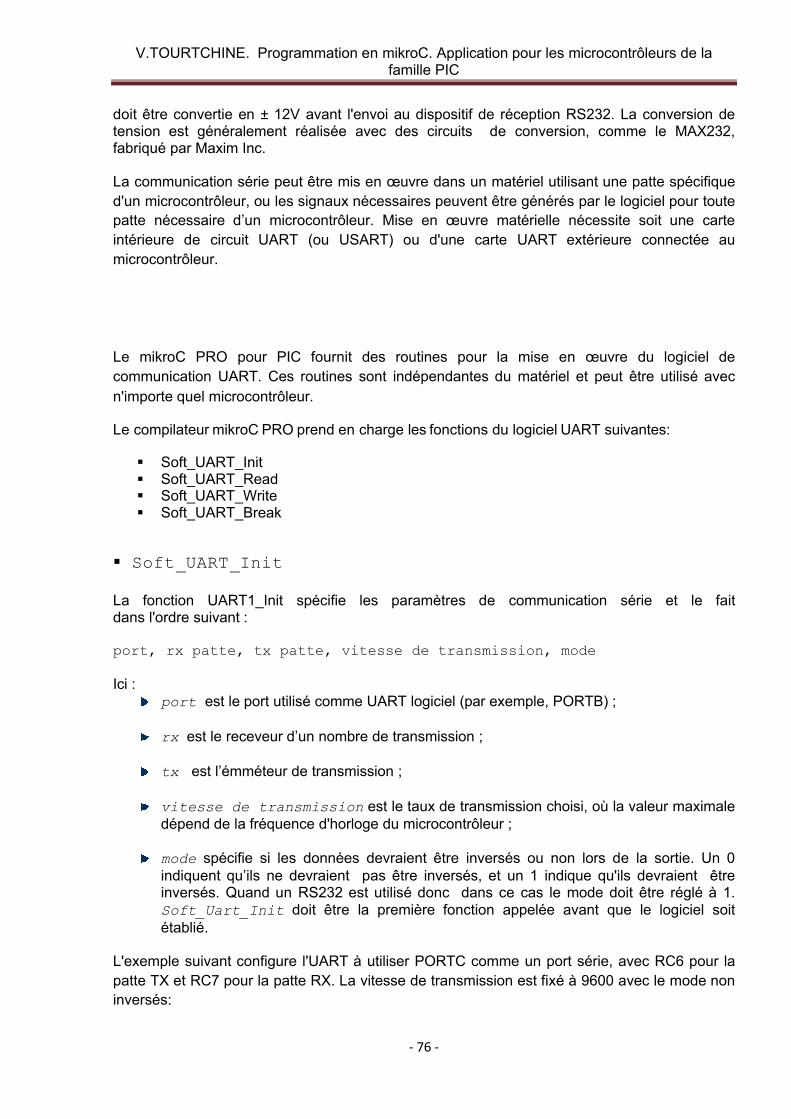
V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 76 -
doit être convertie en ± 12V avant l'envoi au dispositif de réception RS232. La conversion detension est généralement réalisée avec des circuits de conversion, comme le MAX232,fabriqué par Maxim Inc.
La communication série peut être mis en œuvre dans un matériel utilisant une patte spécifiqued'un microcontrôleur, ou les signaux nécessaires peuvent être générés par le logiciel pour toute patte nécessaire d’un microcontrôleur. Mise en œuvre matérielle nécessite soit une carteintérieure de circuit UART (ou USART) ou d'une carte UART extérieure connectée au microcontrôleur.
Le mikroC PRO pour PIC fournit des routines pour la mise en œuvre du logiciel de communication UART. Ces routines sont indépendantes du matériel et peut être utilisé avec n'importe quel microcontrôleur.
Le compilateur mikroC PRO prend en charge les fonctions du logiciel UART suivantes:
Soft_UART_Init Soft_UART_Read Soft_UART_Write Soft_UART_Break
Soft_UART_Init
La fonction UART1_Init spécifie les paramètres de communication série et le faitdans l'ordre suivant :
port, rx patte, tx patte, vitesse de transmission, mode
Ici :port est le port utilisé comme UART logiciel (par exemple, PORTB) ;
rx est le receveur d’un nombre de transmission ;
tx est l’émméteur de transmission ;
vitesse de transmission est le taux de transmission choisi, où la valeur maximale dépend de la fréquence d'horloge du microcontrôleur ;
mode spécifie si les données devraient être inversés ou non lors de la sortie. Un 0 indiquent qu’ils ne devraient pas être inversés, et un 1 indique qu'ils devraient être inversés. Quand un RS232 est utilisé donc dans ce cas le mode doit être réglé à 1. Soft_Uart_Init doit être la première fonction appelée avant que le logiciel soit établié.
L'exemple suivant configure l'UART à utiliser PORTC comme un port série, avec RC6 pour la patte TX et RC7 pour la patte RX. La vitesse de transmission est fixé à 9600 avec le mode non inversés:

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 77 -
Soft_Uart_Init (PORTB, 0, 1, 9600, 0);
Soft_Uart_Read
La fonction Soft_Uart_Read reçoit un octet à partir d'une patte du port série spécifié. Larenvoie une condition d'erreur et les données sont lues à partir du port série. La fonctionne pas attendre que les données soient disponibles sur le port, et donc le paramètre d'erreur doit être testé si un octet est prévu. L'erreur est normalement de 1 et devient 0 quand un octet est lu à partir du port.
L'exemple suivant illustre la lecture d'un octet à partir du port configuré en série en appelant la fonction Soft_Uart_Init. L'octet reçu est stocké dans une variable Temp:
doTemp = Soft_Uart_Read(&Rx_Error);
while (Rx_Error);
Soft_Uart_Write
La fonction Soft_Uart_Write transmet un octet à une patte de port configuré en série. Les données à envoyer doivent être spécifiés comme un paramètre dans l'appel de la fonction.
Par exemple, pour envoyer un caractère "A" à la patte de port série :
char MyData = ‘A’;Soft_Uart_Write(MyData);
L'exercice suivant illustre l'utilisation des fonctions du logiciel UART.
Exercice 3.9
Le port série d'un ordinateur (par exemple, COM1) est relié à un microcontrôleur PIC16F887, etlogiciel d'émulation de terminal (par exemple, HyperTerminal) est exploité sur le PC pour utiliser un port série. Pattes RC6 et RC7 du microcontrôleur sont les broches TX et RX respectivement. Le débit en bauds est de 9600.Ecrire un programme pour lire les données du terminal, puis les renvoyer vers le terminal. Par Un circuit intégré de conversion MAX232 est utilisé pour convertir les signaux du microcontrôleur à des niveaux RS232. La figure 3.5 montre le schéma du circuit de cet exercice.
Solution 3.9
Le circuit MAX232 reçoit le signal TX de la patte RC6 du microcontrôleur et le convertit enniveaux RS232. Les données séries reçues du circuit MAX232 sont converties en niveaux de tension du microcontrôleur, puis envoyé à la patte RC7. Noter que le fonctionnement correct du circuit MAX232 nécessite quatre condensateurs à être connecté au circuit.

V.TOURTCHINE. Programmation en mikroC. Application pour les microcontrôleurs de la famille PIC
- 80 -
Tableau 3.5 Fonctions de la bibliothèque CtypeFonction Description
isalnum Retourne 1 si le caractère spécifié est alphanumérique (a - z, A - Z, 0 - 9)
isalpha Retourne 1 si le caractère spécifié est alphabétique ( a - z, A - Z)
isntrl Retourne 1 si le caractère spécifié est un caractère de contrôle (décimale 0- 31 et 127)
isdigit Retourne 1 si le caractère spécifié est un chiffre (0 - 9)
islower Retourne 1 si le caractère spécifié est en minuscules
isprint Retourne 1 si le caractère spécifié est imprimable (décimal 32 - 126)
isupper Retourne 1 si le caractère spécifié est en majuscule
toupper Convertir un caractère en majuscules
tolower Convertir un caractère en minuscule
Bibliothèque Stdlib
La bibliothèque stdlib contient des fonctions de bibliothèque standard. Tableau 3.7 dresse la liste des fonctions les plus utilisées dans cette bibliothèque.
Tableau 3.6 Fonctions de la bibliothèque MathFonction Description
acos Retours en radians de l'arc cosinus de son paramètreasin Retours en radians de l'arc sinus de son paramètreatan Retours en radians de l'arc tangent de son paramètreatan2 Retours en radians de l'arc tangent de son paramètre où les signes des
paramètres sont utilisés pour déterminer le quadrant du résultatcos Retourne le cosinus de son paramètre en radianscosh Renvoie le cosinus hyperbolique de son paramètreexp Renvoie la valeur exponentielle de son paramètrefabs Retourne la valeur absolue de son paramètrelog Retourne le logarithme naturel de son paramètreLog10 Retourne le logarithme en base 10 de son paramètrepow Retourne la puissance d'un nombresin Retourne le sinus de son paramètre en radianssinh Retourne le sinus hyperbolique de son paramètresqrt Retourne la racine carrée de ses paramètretan Retourne la tangente de son paramètre en radianstanh Retourne la tangente hyperbolique de son paramètre en radians
Tableau 3.7 Fonctions de la bibliothèque Stdlib