visite pierre emile
DESCRIPTION
visite du lycée pierre emile martin à bourgesTRANSCRIPT
Lycée Pierre Émile Martin
Compte rendu de la visite du vendredi 21 octobre et 18 novembre 2011
Classes de 3e du collège Saint-Exupéry
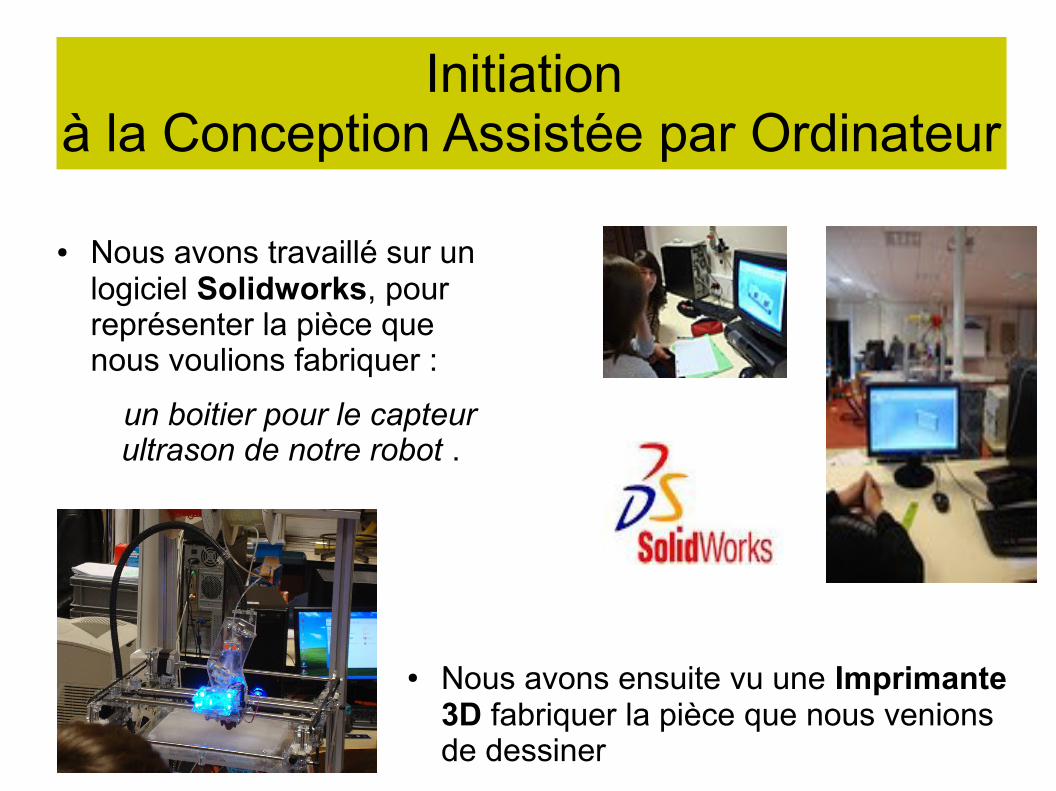
Initiation à la Conception Assistée par Ordinateur
● Nous avons travaillé sur un logiciel Solidworks, pour représenter la pièce que nous voulions fabriquer :
un boitier pour le capteur ultrason de notre robot .
● dessiner
● Nous avons ensuite vu une Imprimante 3D fabriquer la pièce que nous venions de dessiner

Nous avons aussi rencontré le Chef des Travaux qui nous a parlé des branches pour notre orientation,
La rencontre avec le Chef des Travaux.
Célia, Oriane 3e1Puis il nous a fait la visite du lycée.
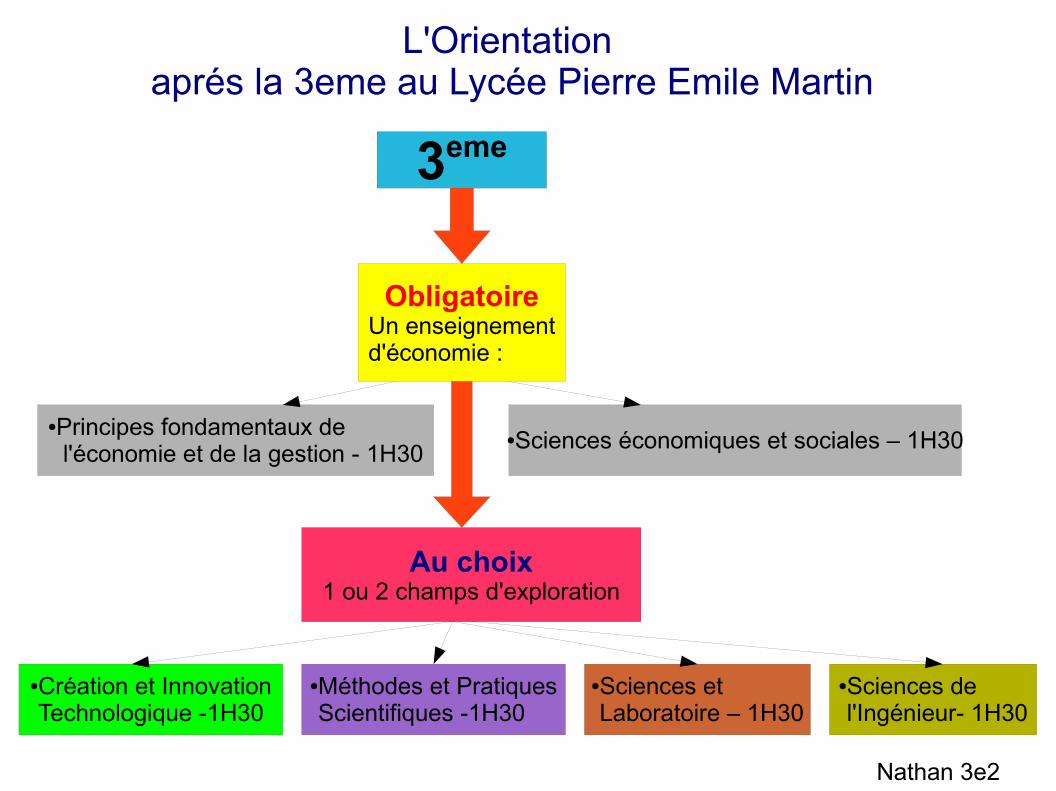
L'Orientation aprés la 3eme au Lycée Pierre Emile Martin
3eme
ObligatoireUn enseignementd'économie :
Au choix1 ou 2 champs d'exploration
●Sciences économiques et sociales – 1H30●Principes fondamentaux de l'économie et de la gestion - 1H30
●Méthodes et PratiquesScientifiques -1H30
●Sciences etLaboratoire – 1H30
●Création et InnovationTechnologique -1H30
●Sciences del'Ingénieur- 1H30
Nathan 3e2

Découverte d'un actionneur : le moteur électrique●Varition de la vitesse ●Réaliser un virage
Étude de 2 capteurs●Qu'estce que l'infrarouge●Le télémetre infra rouge
●Qu'est ce que l'ulltra son●Le téméetre ultrason
Découverte de 2 robots●Le robot Bioloïde●Le robot Droombas
Découvrir la robotiqueLes activités réalisées en groupe

La vitesse d'un moteur . . .L'objectif était de faire le lien entre la vitesse et la tension de pilotage d'un moteur avec un micro-contrôleur.
Pour faire marcher le moteur, on a besoin d'un bloc commande et d'un logiciel ,.
La vitesse du moteur est régulée en fonction de la tension délivrée par la carte mère.
Flore, Léana, Louis, 3e4

Nous devions faire tourner le robot,
● Si nous voulions le faire tourner à droite il fallait augmenter la vitesse des roues gauches et ralentir les roues droites, ● Si voulions le faire tourner à gauche inversement
Nous avons diminué l'écart entre les deux roues, ce qui fait que le robot tourne plus faiblement.
Marie et Romane 3eme3
Réaliser un virage
Cliquer pour voir la vidéo
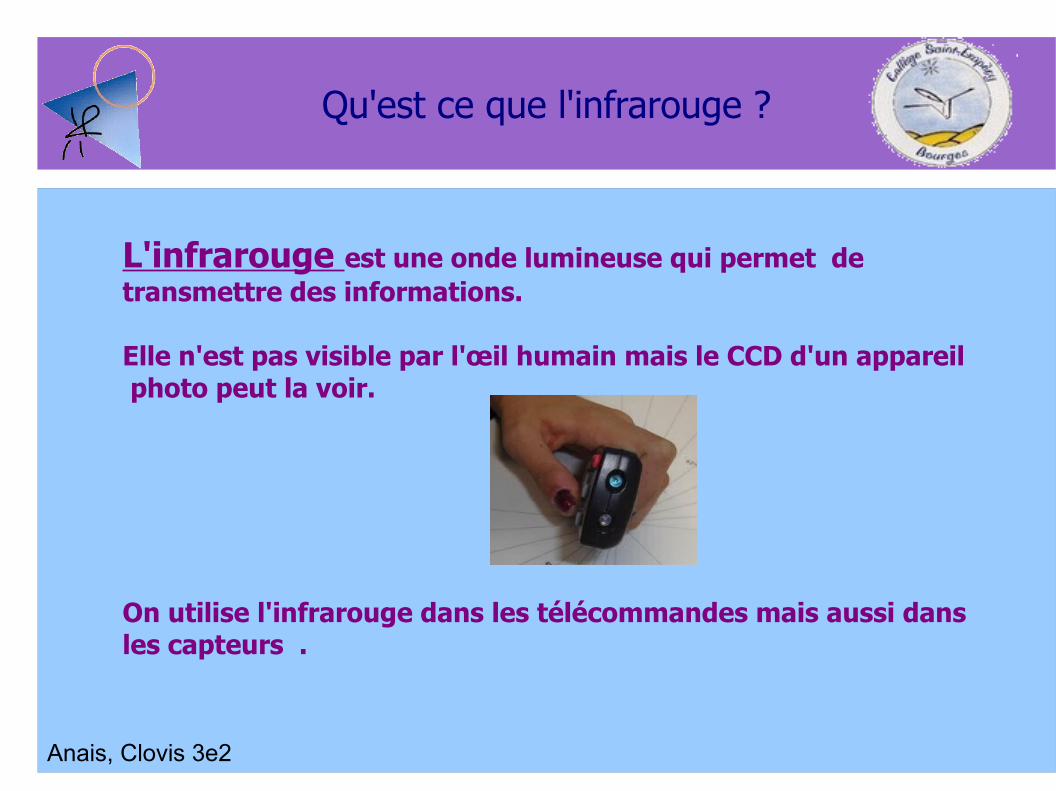
Qu'est ce que l'infrarouge ?
L'infrarouge est une onde lumineuse qui permet de transmettre des informations.
Elle n'est pas visible par l'œil humain mais le CCD d'un appareil photo peut la voir.
On utilise l'infrarouge dans les télécommandes mais aussi dans les capteurs .
Anais, Clovis 3e2
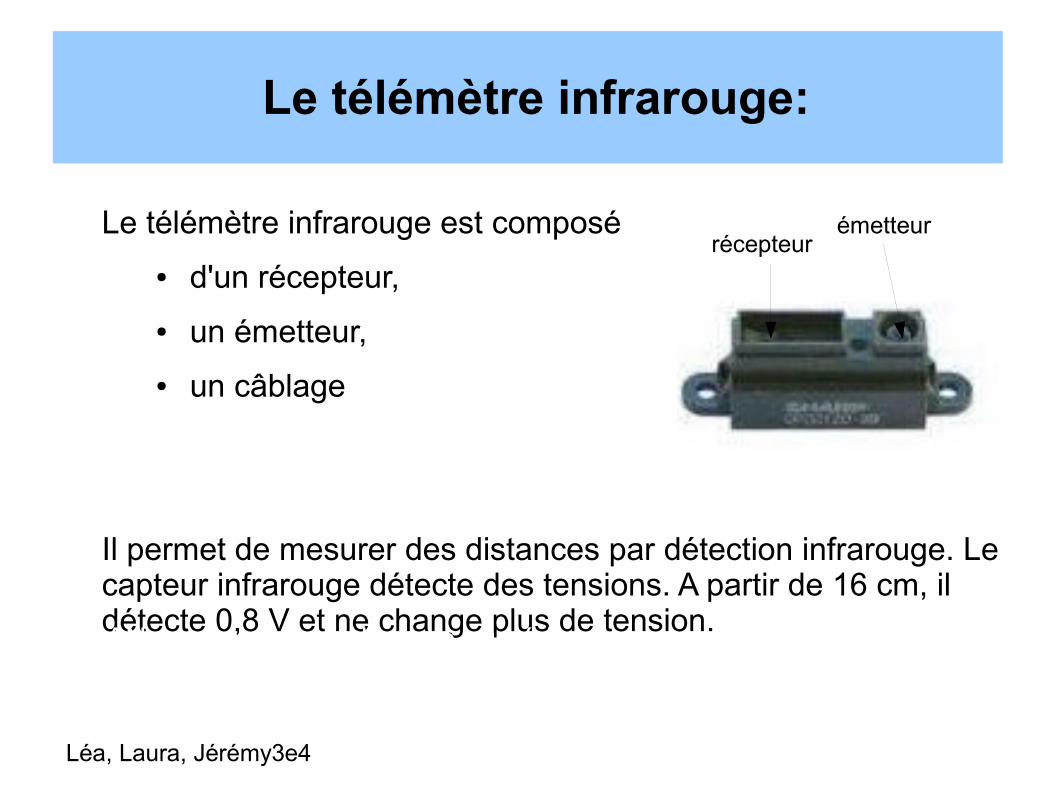
Le télémètre infrarouge:
Le télémètre infrarouge est composé ● d'un récepteur, ● un émetteur, ● un câblage
Il permet de mesurer des distances par détection infrarouge. Le capteur infrarouge détecte des tensions. A partir de 16 cm, il détecte 0,8 V et ne change plus de tension. CAN: conversion analogique numérique.
récepteurémetteur
Léa, Laura, Jérémy3e4
Qu'est ce que l'Ultrason ? Nous nous sommes informées sur différentes applications nécessitant l'ultrason (ex : échographie, sonars des sous-marins, sonnerie inaudible...etc) Nous avons trouvé nos limites auditives avec le logiciel « true RTA ».
● Ondes les plus basses audibles :30hz● Ondes les plus hautes audibles : 20000hz
Ces limites varient d'une personnes à l'autre et en fonction de l'âge
Cloé, Charlotte, Nassim 3e3
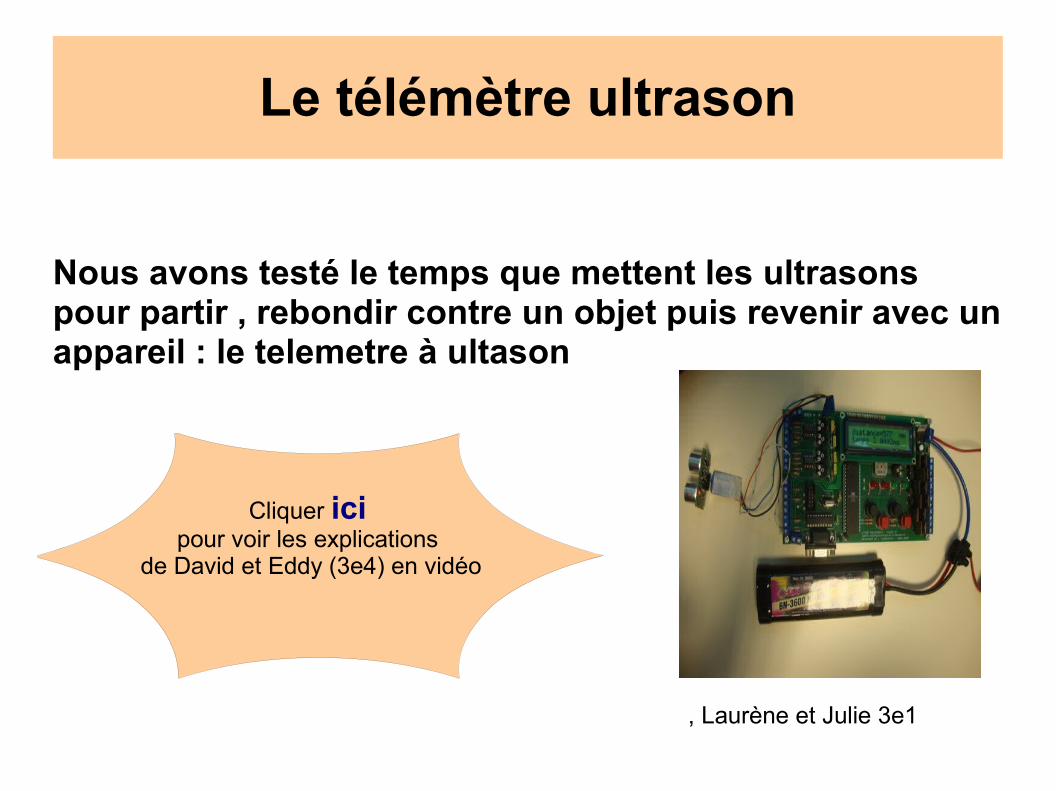
, Laurène et Julie 3e1
Le télémètre ultrason
Nous avons testé le temps que mettent les ultrasons pour partir , rebondir contre un objet puis revenir avec un appareil : le telemetre à ultason
Cliquer ici pour voir les explications
de David et Eddy (3e4) en vidéo

Les capteurs du Bioloïde
Nous avons étudié le fonctionnement des capteurs du Robot Bioloïde.Il est géré par sa commande CM5.Grâce aux capteurs placés sur sa tête, le Bioloïde reconnaît les mouvements, les sons, la lumière, nos gestes et il peut bouger en fonction du programme que nous avons réalisé auparavant.
Cliquer sur le robot pour voir la démonstrationManon, Marine, Blandine
3e3

● nous avons travaillé avec un aspirateur robot se nommant «Droombas»
● Nous avons eu des fiches
d'explications pour nous aider à comprendre le fonctionnement de l'aspirateur.
● Il fonctionne en autonomie car il va tout seule recharger sa batterie
● Il se déplace et détecte les saletés grâce à ses divers capteurs.
Découverte du robot aspirateur
Voici une vidéo du robot
Coralie, Mathias, Aubin 3e1
● Cette sortie à Pierre Émile Martin était instructive et très intéressante
● Cela nous a fait découvrir le monde lycéen. Mais nous avons trouver que les activités étaient un peu longues et compliquées à faire.
● C'était une bonne expérience pour nous aider à créer notre robot pour le défi du collège
● C'était bien, nous avons vu comment est un lycée, la cantine, les bâtiments, la cours
Nos impressions
Merci aux professeurs du lycée qui nous ont accueillisMerci au Chef des travaux qui nous a expliqué l'orientation après la 3emeMerci à notre professeur de technologie qui a organisé cette visite