thÉorie des distributions -...
TRANSCRIPT

Licence de Physique Fondamentale et Appliquée
3eme année Parcours Physique et Applications Parcours Mécanique
UNIVERSITÉ PARIS-SUDORSAY
THÉORIE DES DISTRIBUTIONS
G. Abramovici
janvier 2015

2

Table des matières
Glossaire 5
I Transformation de Fourier 7
A Notions préalables 91 Topologie dans R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92 Fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133 Intégration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
B Intégration de Lebesgue 251 Mesure de Lebesgue dans R . . . . . . . . . . . . . . . . . . . . . . . . . 252 Intégrale de Lebesgue . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273 Métrique sur les fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . 304 Intégrale à paramètres ou variables multiples . . . . . . . . . . . . . . . 335 Valeur Principale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 346 Convolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
C Transformation de Fourier 391 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403 Opérations sur les transformées de Fourier . . . . . . . . . . . . . . . . . 434 Autres propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
D Résumé sur la transformation de Fourier 55
II Théorie des distributions 57
A Distributions ordinaires 591 Introduction : la fonction de Dirac . . . . . . . . . . . . . . . . . . . . . 592 Espace de fonctions DpRpq . . . . . . . . . . . . . . . . . . . . . . . . . . 613 Espace des distributions D1pRnq . . . . . . . . . . . . . . . . . . . . . . . 644 Distributions régulières . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655 Distributions singulières . . . . . . . . . . . . . . . . . . . . . . . . . . . 686 Multiplication par une distribution C8 . . . . . . . . . . . . . . . . . . . 697 Distributions discontinues . . . . . . . . . . . . . . . . . . . . . . . . . . 708 Dérivée d’une distribution . . . . . . . . . . . . . . . . . . . . . . . . . . 729 Autres transformations sur les distributions . . . . . . . . . . . . . . . . 75
3
10 Support d’une distribution . . . . . . . . . . . . . . . . . . . . . . . . . . 7611 Convolution des distributions . . . . . . . . . . . . . . . . . . . . . . . . 8112 Continuité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
B Transformation de Fourier 891 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 892 Espace de fonctions SpRpq . . . . . . . . . . . . . . . . . . . . . . . . . . 893 Espace des distributions tempérées S1pRq . . . . . . . . . . . . . . . . . . 894 Définition de la transformée de Fourier . . . . . . . . . . . . . . . . . . . 905 Cas des distributions régulières . . . . . . . . . . . . . . . . . . . . . . . 936 Exemples de transformée de Fourier . . . . . . . . . . . . . . . . . . . . 957 Théorème d’inversion de Fourier . . . . . . . . . . . . . . . . . . . . . . 958 Transformation de Fourier et convolution . . . . . . . . . . . . . . . . . . 95
Index des équations 99
Index 100
Références 101
4
Glossaire
ðñ si et seulement siexp1 ” exp2 l’expression exp1 est définie par (ou bien définit) exp2
„ équivalent» à peu près égal
A Ă B l’ensemble A est inclus dans l’ensemble BA Ą B l’ensemble A contient l’ensemble BA XB intersection des ensembles A et BA YB union des ensembles A et BAzB l’ensemble A moins l’ensemble AXB
ra, bs intervalle fermé (a ă b deux réels)ra, br intervalle fermé à gauche et ouvert à droitesa, bs intervalle ouvert à gauche et fermé à droitesa, br intervalle ouverttau singleton ne contenant que a
ta1, .., anu ensemble de n élémentsH ensemble videN ensemble des entiers naturelsZ ensemble des entiers relatifsQ ensemble des nombres rationnelsR ensemble des nombres réelsC ensemble des nombres complexesN˚ Nzt0uZ˚ Zzt0uQ˚ Qzt0uR˚ Rzt0uR` ensemble des réels positifsR˚
` R`zt0uA fermeture de l’ensemble A
maxpAq plus grand élément de l’ensemble AminpAq plus petit élément de l’ensemble AsuppAq limite supérieure de AinfpAq limite inférieure de A
pp presque partoutcf. confereetc. et cæteraresp. respectivementi.e. id est
C.Q.F.D. ce qu’il fallait démontrerssi si et seulement si
5

9ıı le nombre imaginairecos la fonction cosinussin la fonction sinus
sinc la fonction sinus cardinal égale à x ÞÑ sinpπxqπx
ex exponentielle de xe
9ııx exponentielle complexe égale à cospxq ` 9ıı sinpxqlog logarithme népérienf 1 la dérivée d’une fonction x ÞÑ fpxq
ℜpzq partie réelle du nombre complexe zℑpzq partie imaginaire du nombre complexe zz nombre conjugué de z, égal à ℜpzq ´ 9ııℑpzqxi objet x indicé par un entier ifpxq image de l’argument x par la fonction fxp généralement puissance peme de x pour le produit ordinairef ppq dérivée peme de f
n “ i, j n peut prendre les valeurs i ou j
n “ i..j n peut prendre les valeurs de i à j9 proportionneln2ř
i“n1
somme des éléments dont l’indice varie de n1 à n2ři
somme d’éléments d’indice i (plage implicite)śi
produit d’éléments d’indice i
limxÑxo
limite quand x tend vers xo
limxÑx`
o
limite par valeur positive “ limxÑxoxąxo
limxÑx´
o
limite par valeur négative “ limxÑxoxăxo
fpx`o q lim
xÑx`o
fpxq
fpx´o q lim
xÑx´o
fpxq
|x| valeur absolue ou module du nombre x}f} norme de la fonction f
Supportpfq support de la fonction fqf transposée de la fonction ff transformée de Fourier de la fonction fF transformation de Fourier
CppRq ensemble des fonctions p fois dérivables dont la dérivée peme est continueC8pRq ensemble des fonctions infiniment dérivablesDpRq ensemble des fonctions C8pRq à support compactD1pRq ensemble des distributions ordinairesSpRq ensemble des fonctions C8pRq rapidement décroissantesS1pRq ensemble des distributions tempéréesI opérateur identitéˆ
a b
c d
˙matrice 2 ˆ 2
ˇˇ a b
c d
ˇˇ déterminant de la matrice
6

Partie I
Transformation de Fourier
7

8
A Notions préalables
1 Topologie dans R
a Ensembles
¨ N˚ est l’ensemble des entiers naturels, de un à l’infini, qui permet de compter leséléments de chaque ensemble.
¨ N est le même ensemble auquel est adjoint le zéro.¨ Z est l’ensemble des entiers relatifs (on peut le construire comme les différences
des éléments de N˚). (Z,`,ˆ) est un anneau (ce n’est pas un corps car seul 1admet un inverse pour la multiplication).
¨ Q est l’ensemble des nombres rationnels, Q “ t rs, pr, sq P Z ˆ N˚u. (Q,`,ˆ) est
un corps.¨ R est l’ensemble des nombres réels. (R,`,ˆ) est un corps complet. 1
¨ C est l’ensemble des nombres imaginaires z “ x ` 9ııy, où px, yq P R2. (C,`,ˆ)est un corps complet intègre 2 et algébriquement clos. 3
b Intervalle
On distinguera sur la droite réelle R les intervalles sa, br, ra, br, sa, bs et ra, bs, oùa ă b, d’une part, et les intervalles sa,8r, ra,8r, s´8, as, s´8, ar et R “s´8,8r,d’une autre.
¨ Les premiers sont des intervalles finis, les bornes sont notées avec un signe r ous selon qu’elles sont inclues dans l’intervalle ou pas, selon la notation usuelle.
¨ Les seconds sont des intervalles infinis (on dit parfois semi-infinis sauf pour R
lui-même), avec la même notation pour les bornes finies de ces intervalles.¨ Enfin, un singleton tau est un cas particulier d’intervalle fini ra, as.
c Ensemble fini
¨ On appelle ensemble fini un ensemble de n éléments (n étant un entier naturel)ta1, .., anu que l’on peut énumérer de 1 à n.
¨ Le singleton tau est un cas particulier d’ensemble à 1 élément, qui permet d’en-gendrer tous les ensembles finis par union finie (cf. section suivante).
¨ Par extension, on inclut le cas particulier n “ 0, qui correspond à l’ensemblevide.
1. Un ensemble est complet si et seulement si toute suite un de Cauchy, c’est à dire telle quelimmÑ8
nÑ8|um´un| “ 0, les deux limites m Ñ 8 et n Ñ 8 étant a priori indépendantes, est convergente.
Intuitivement, cela signifie qu’il n’y a pas de trou dans l’ensemble.2. Il n’y a pas de diviseur de 0, i.e. ab “ 0 ðñ a “ 0 ou b “ 0.3. Tous les polynômes sont des produits de polynômes du premier degré.
9
d Ensemble dénombrable
¨ On appelle ensemble dénombrable un ensemble infini d’éléments tai, i P N˚u quel’on peut énumérer par les entiers naturels ą 0.
¨ Dans R, non seulement N ou N˚ sont dénombrables, mais également Z : un ordre naturel,bien que non canonique, s’écrit Z “ tri, i P N˚u avec r1 “ 0, r2 “ 1, r3 “ ´1, r4 “ 2,
r5 “ ´2, r6 “ 3, ..., rn “"
n2
si n pair´n´1
2si n impair
.
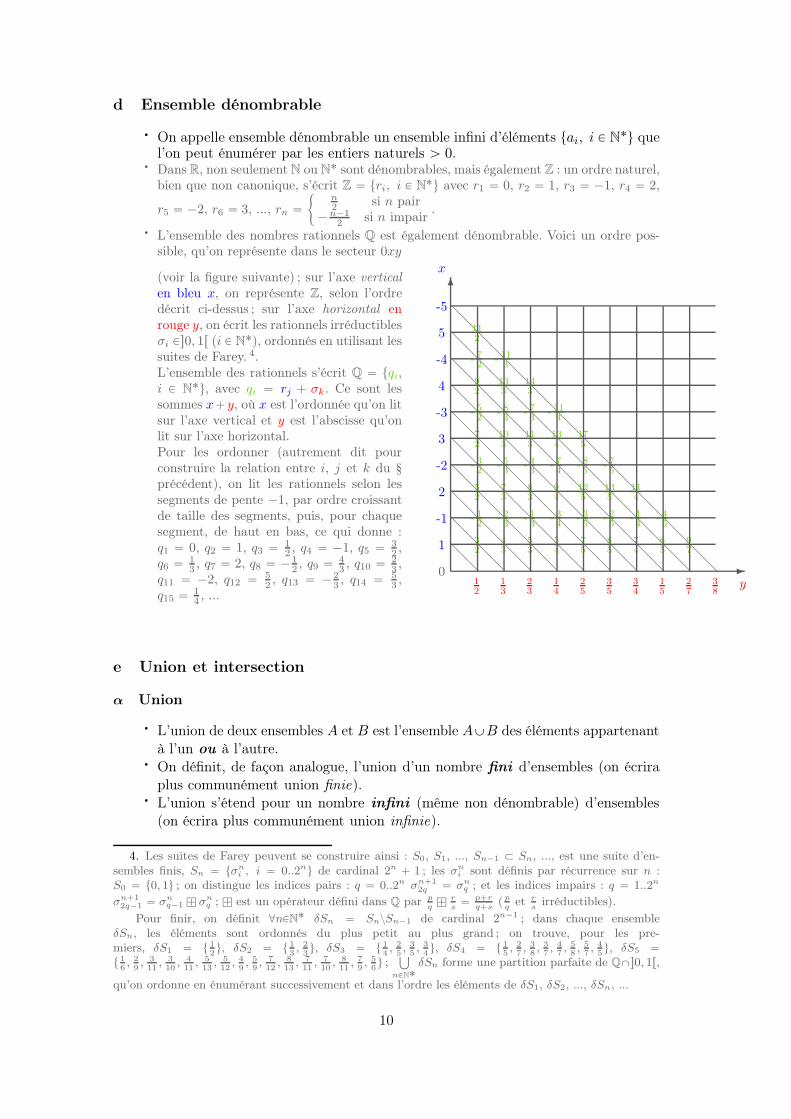
¨ L’ensemble des nombres rationnels Q est également dénombrable. Voici un ordre pos-sible, qu’on représente dans le secteur 0xy
(voir la figure suivante) ; sur l’axe vertical
en bleu x, on représente Z, selon l’ordredécrit ci-dessus ; sur l’axe horizontal enrouge y, on écrit les rationnels irréductiblesσi Ps0, 1r (i P N˚), ordonnés en utilisant lessuites de Farey. 4.L’ensemble des rationnels s’écrit Q “ tqi,i P N˚u, avec qi “ rj ` σk. Ce sont lessommes x`y, où x est l’ordonnée qu’on litsur l’axe vertical et y est l’abscisse qu’onlit sur l’axe horizontal.Pour les ordonner (autrement dit pourconstruire la relation entre i, j et k du §précédent), on lit les rationnels selon lessegments de pente ´1, par ordre croissantde taille des segments, puis, pour chaquesegment, de haut en bas, ce qui donne :q1 “ 0, q2 “ 1, q3 “ 1
2, q4 “ ´1, q5 “ 3
2,
q6 “ 13, q7 “ 2, q8 “ ´ 1
2, q9 “ 4
3, q10 “ 2
3,
q11 “ ´2, q12 “ 52, q13 “ ´2
3, q14 “ 5
3,
q15 “ 14, ...
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
❅❅
0
1
-1
2
-2
3
-3
4
-4
5
-5
x
12
13
23
14
25
35
34
15
27
38
y
- 12
- 23
- 13
- 34
- 35
- 25
- 14
- 45
52
73
83
94
125
135
114
- 32
- 53
- 43
- 74
- 85
- 75
72
103
113
134
175
- 52
- 83
- 73
- 114
92
133
143
- 72
- 113
112
32
43
53
54
75
85
74
65
97
✻
✲
e Union et intersection
α Union
¨ L’union de deux ensembles A et B est l’ensemble AYB des éléments appartenantà l’un ou à l’autre.
¨ On définit, de façon analogue, l’union d’un nombre fini d’ensembles (on écriraplus communément union finie).
¨ L’union s’étend pour un nombre infini (même non dénombrable) d’ensembles(on écrira plus communément union infinie).
4. Les suites de Farey peuvent se construire ainsi : S0, S1, ..., Sn´1 Ă Sn, ..., est une suite d’en-sembles finis, Sn “ tσn
i , i “ 0..2nu de cardinal 2n ` 1 ; les σni sont définis par récurrence sur n :
S0 “ t0, 1u ; on distingue les indices pairs : q “ 0..2n σn`12q “ σn
q ; et les indices impairs : q “ 1..2n
σn`12q´1 “ σn
q´1 ‘ σnq ; ‘ est un opérateur défini dans Q par p
q‘ r
s“ p`r
q`s( p
qet r
sirréductibles).
Pour finir, on définit @nPN˚ δSn “ SnzSn´1 de cardinal 2n´1 ; dans chaque ensembleδSn, les éléments sont ordonnés du plus petit au plus grand ; on trouve, pour les pre-miers, δS1 “ t 1
2u, δS2 “ t 1
3, 2
3u, δS3 “ t 1
4, 2
5, 3
5, 3
4u, δS4 “ t 1
5, 2
7, 3
8, 3
7, 4
7, 5
8, 5
7, 4
5u, δS5 “
t 1
6, 2
9, 3
11, 3
10, 4
11, 5
13, 5
12, 4
9, 5
9, 7
12, 8
13, 7
11, 7
10, 8
11, 7
9, 5
6u ;
ŤnPN˚
δSn forme une partition parfaite de QXs0, 1r,
qu’on ordonne en énumérant successivement et dans l’ordre les éléments de δS1, δS2, ..., δSn, ...
10

β Intersection
¨ L’intersection de deux ensembles A et B est l’ensemble A X B des élémentsappartenant aux deux ensembles à la fois.
¨ On définit, de façon analogue, l’intersection d’un nombre fini ou infini d’en-sembles (on écrira plus communément intersection finie ou infinie).
γ Différence
¨ La différence entre un ensemble A et un ensemble B est l’ensemble AzB deséléments appartenant à A mais pas à B ; il n’est pas nécessaire que B Ă A caron fait la différence entre A et AXB.AzB est aussi appelé complémentaire de B dans A.
¨ Contrairement à l’union, qui est commutative et associative, ainsi que l’intersec-tion, la différence n’est ni commutative, ni associative.
f Composantes connexes
Par définition, si un sous-ensemble A de R peut s’écrire comme l’union d’intervallesdisjoints, ces intervalles sont appelés les composantes connexes de A.
g Sous-ensemble ouvert
¨ Par définition, un sous-ensemble ouvert U (on dira simplement un ouvert) n’at-teint pas ses bornes. 5
¨ L’exemple primordial d’ouvert dans R est l’intervalle fini ouvert sa, br.¨ Par ailleurs, si l’on considère les intervalles infinis, s´8, ar, sa,8r et R “s´8,8r
sont également ouverts.¨ De façon plus générale, l’union finie ou infinie d’intervalles ouverts (disjoints ou
non) est un ouvert.¨ L’intersection d’un nombre fini d’ouverts est un ouvert.¨ Par contre, l’intersection d’un nombre infini d’ouverts peut être un fermé (voir
la définition au § suivant). Par exemple, on a
č
nPN˚
s´ 1
n,1
nr“ t0u .
h Sous-ensemble fermé
α Point d’accumulation
Par définition, un point d’accumulation xo d’un ensemble A est la limite d’une suiteconvergente pxnqnPN à valeur dans A, autrement dit
xo “ limnÑ8
xn avec xn P A @n P N˚ ;
comme par définition la suite est convergente, xo existe forcément, par contre, il n’ap-partient pas a priori à l’ensemble A.
Par exemple, soit A “s0, 1s, et la suite xn “ 1n
définie pour tout n ě 1. On axn ” 1
nPs0, 1s ” A @n P N˚, mais lim
nÑ8xn “ 0 R A.
5. ce qui s’écrit mathématiquement @x P U, Dǫ tel que sx ´ ǫ, x ` ǫrĂ U .
11

β Définition d’un fermé
¨ Par définition, un sous-ensemble fermé (on dira simplement un fermé) contienttous ses points d’accumulation.
¨ L’exemple primordial de fermé dans R est l’intervalle fini fermé ra, bs.¨ Un cas particulier d’intervalle fini fermé est le singleton tau.¨ Par ailleurs, si l’on considère les intervalles infinis, s´8, as, ra,8r et R “s´8,8r
sont également fermés.¨ De façon plus générale, l’union finie de fermés (disjoints ou non) est un fermé.¨ Par contre, l’union infinie de fermés peut très bien être un ouvert.¨ L’intersection d’un nombre fini ou infini de fermés est un fermé.
γ Cas de la droite réelle
R “s´8,8r est un cas très particulier, puisqu’il est à la fois ouvert et fermé.
i Fermeture d’un ensemble
¨ La fermeture A d’un ensemble A quelconque est, par définition, le plus petitfermé contenant A.Par exemple, la fermeture des intervalles sa, br, sa, bs, ra, br et ra, bs est sa, br “sa, bs “ ra, br “ ra, bs “ ra, bs.
¨ Une définition équivalente est A “ t points d’accumulation de Au, soit de façonplus explicite : « la fermeture d’un ensemble A est l’ensemble A des limites dessuites à valeur dans cet ensemble A. »
j Sous-ensemble compact
α Sous-ensemble borné
Par définition, un sous-ensemble borné de R est inclus dans un intervalle fini r´L,Ls.
β Définition d’un compact dans R
¨ Pour la topologie dans R, on peut se contenter d’une définition pratique : unsous-ensemble compact (on dira simplement un compact) est un ensemble à lafois fermé et borné .
¨ Les intervalles fermés finis sont donc compacts, mais pas les intervalles infinis.¨ Une union finie de compacts est un compact.¨ Une union infinie de compacts n’est a priori pas un compact.¨ Une intersection finie ou infinie de compacts est un compact.
k Bornes d’un ensemble
α Minimum et maximum
¨ Par définition, le minimum d’un ensemble A, que l’on note minpAq, est le pluspetit 6 élément de A.
¨ Par définition, le maximum d’un ensemble A, que l’on note maxpAq, est le plusgrand 6 élément de A.
6. au sens de ă car on étudie ici la topologie de R.
12

¨ minpAq ou maxpAq n’existent pas toujours, puisque A ne contient pas nécessai-rement toutes ses bornes.
¨ Si A est compact, minpAq et maxpAq sont bien définis.¨ Si A est ouvert, on ne peut définir ni minpAq, ni maxpAq.¨ Si une borne de A est ´8 (resp. `8), minpAq (resp. maxpAq) n’est pas défini.
β Limites inférieure et supérieure
¨ Par définition, la limite inférieure d’un ensemble A, que l’on note infpAq, est,soit ´8 si A n’est pas borné à gauche, soit minpAq s’il l’est.
¨ Par définition, la limite supérieure d’un ensemble A, que l’on note suppAq, est,soit `8 si A n’est pas borné à droite, soit maxpAq s’il l’est.
¨ infpAq et suppAq sont toujours définies.¨ Si A est compact, minpAq et infpAq coïncident, de même que maxpAq et suppAq,
car la limite est atteinte dans A.¨ Si A est ouvert, infpAq et suppAq n’appartiennent pas à A.
2 Fonctions
On ne s’intéresse ici qu’aux fonctions de R dans C.
a Argument
α Définition
Soit une fonction f R Ñ C, x ÞÑ fpxq, f associe à tout réel x son image complexefpxq. La variable x est appelée l’argument de f .
β Variable muette
¨ Si l’on considère fpxq, pour x donné, il n’est pas possible de changer le nom del’argument.
¨ Par contre, dans de nombreuses expressions génériques, ainsi que dans toutes lesformules de sommation 7 comme
şRfpxqdx, le nom de l’argument est arbitraire.
On dit que la variable est muette.¨ Il faut parfois prendre des précautions, par exemple dans
şRfpxqdx
şRgpxqdx “ş
Rfpxqgpyqdxdy on doit obligatoirement distinguer les variables, quand on trans-
forme le produit d’intégrales simples en intégrale double.¨ On respectera toutefois autant que faire se peut les usages de la physique pour
les noms de variable : x pour l’espace et k pour les nombres d’onde sont, parexemple, deux variables conjuguées par la transformation de Fourier.
b Support
α Définition
¨ On appelle support de f : le sous-ensemble Supportpfq “ tx P R, fpxq ‰ 0u.¨ Pourquoi prend-on la fermeture ? Imaginons, par exemple, que f soit réglée mais
pas continue en x “ xo, et que limxÑx´
o
fpxq ou limxÑx`
o
fpxq ne soient pas nulles.
7. ou de produit dans les intégrales de chemin.
13

Même en posant arbitrairement fpxoq “ 0, il faut inclure xo dans le support.En conséquence, les points d’accumulation (notamment les bords) de Supportpfqsont inclus dans le support.
¨ Comme on prend la fermeture, f peut être nulle sur son support ; cependant,l’ensemble des points x du support pour lesquels fpxq “ 0 est négligeable.
β Fonction à support compact
On dit que f est à support compact ssi Dpa, bq P R2 tel que Supportpfq Ă ra, bs.
c Continuité
On ne considérera, dans tout ce cours, que le cas de fonctions continues, sauf éven-tuellement en des points isolés. Les définitions suivantes seront utiles par la suite.
α Fonction réglée
¨ On dit qu’une fonction f est réglée à droite (resp. à gauche) en xo si sa limite àdroite (resp. à gauche)
limxÑx˘
o
fpxq ” fpx˘o q
existe (˘ “ ` si la fonction est réglée à droite, ˘ “ ´ si elle l’est à gauche).¨ On dit qu’une fonction f est réglée en xo si elle est à la fois réglée à droite et à
gauche en ce point.¨ Une fonction réglée en un point xo est prolongeable par continuité en ce point si
et seulement sifpx´
o q “ fpx`o q .
Pour la prolonger par continuité, il suffit de poser
fpxoq “ fpx´o q “ fpx`
o q . (1)
¨ Attention toutefois que la relation (1) peut être artificiellement violée ; dans cecas, la valeur fpxoq de la fonction au point xo n’a aucune signification.
β Fonction continue
¨ Une fonction est continue en un point x P R si elle est réglée en x et qu’ellevérifie la condition (1) en x.
¨ Une fonction continue est une fonction continue en tout point x P R, on noteC0pRq l’ensemble de telles fonctions.
¨ On peut définir, par extension, C0pAq l’ensemble des fonctions continues en tout pointde A (on choisira toujours A connexe, c’est à dire un intervalle).
γ Fonction à dérivée continue
¨ Une fonction f P CnpRq si f pnq sa dérivée n-ème existe et f pnq P C0pRq.¨ On peut définir, par extension, CnpAq l’ensemble des fonctions f telles que f pnq P C
0pAq.
14

d Opérations sur les fonctions
Les espaces de fonctions sont tous munis de l’addition et de la multiplication, ainsique des opérations suivantes, définies par
addition f ` g R Ñ C x ÞÑ pf ` gqpxq “ fpxq ` gpxq ; (2a)
multiplication f g R Ñ C x ÞÑ pf gqpxq “ fpxqgpxq ; (2b)
inverse 1{f R Ñ C x ÞÑ p1{fqpxq “ 1{fpxq ; (2c)
composition f ˝ g R Ñ C x ÞÑ pf ˝ gqpxq “ fpgpxqq . (2d)
Le produit de convolution sera étudié ultérieurement. Il ne faut pas confondre 1{f etf´1 qui va être étudié au § suivant.
e Transformations sur les fonctions
Les définitions suivantes nécessitent des conditions particulières (qu’on n’étudierapas), quand on les applique à des fonctions définies sur A Ĺ R. On les utilisera gé-néralement pour des fonctions définies sur R, pour lesquelles aucune restriction n’estnécessaire.
α Inversion
La réciproque d’une fonction f est notée f´1 et définie par
f ˝ f´1 “ f´1 ˝ f “ I , (3)
ce qui signifie fpf´1pxqq “ f´1pfpxqq “ x @x P R.
β Translation
Soit a P R, on appelle translatée de la fonction f et on note af la fonction
af : x ÞÑ afpxq “ fpx´ aq . (4a)
γ Inflation
On définira l’inflation d’un facteur λ P R˚ et on notera fλ la fonction ainsi dilatée
fλ: x ÞÑ f
λpxq “ fpx{λq . (4b)
δ Transposition
La transposée qf d’une fonction f est définie par une inflation d’un facteur λ “ ´1.On dit encore symétrie pour transposition et symétrique pour transposée. On a donc
qf : x ÞÑ qfpxq “ fp´xq . (4c)
15

f Parité
α Fonction paire
On dit qu’une fonction f définie sur R est paire si et seulement si elle vérifie
@x P R fp´xq “ fpxq ðñ qf “ f . (5a)
β Fonction impaire
On dit qu’une fonction f définie sur R est impaire si et seulement si elle vérifie
@x P R fp´xq “ ´fpxq ðñ qf “ ´f . (5b)
γ Décomposition en parties paire et impaire
Soit f une fonction quelconque, f admet une décomposition unique comme somme d’unefonction paire et d’une fonction impaire :
f “ fpair ` fimp avec
fpair “ f ` qf2
fimp “ f ´ qf2
. (5c)
g Norme
On ne va pas détailler ici les normes qu’on utilise pour les fonctions, cela sera faitplus loin dans le cadre de l’intégrale de Lebesgue. On rappellera seulement quelquesrègles élémentaires, ainsi que la norme sup.
On considère une norme de fonction } } (on ne précise pas dans quel espace defonctions on se place ici).
α Séparation
Rappelons qu’une norme est d’abord une distance, c’est-à-dire qu’elle doit séparerles fonctions différentes : on a
@f, g f ‰ g ðñ }f ´ g} ‰ 0 . (6a)
β Inégalité triangulaire
De même, toute norme vérifie l’inégalité triangulaire des distances :
@f, gˇˇ}f} ´ }g}
ˇˇ ď }f ` g} ď }f} ` }g} . (6b)
16

γ Norme associée à un produit scalaire
¨ Une norme peut être associée à un produit scalaire, que l’on notera ici xf |gy.¨ Elle vérifie alors les propriétés suivantes :
}f} “a
xf |fy ; (6c)
|xf |gy| ď }f} }g} ; (6d)
xf |gy “ }f ` g} ´ }f} ´ }g}2
“ }f ` g} ´ }f ´ g}4
. (6e)
¨ Pour l’inégalité (6d), appelée inégalité de Schwarz , l’égalité est réalisée si etseulement si f9 g.
δ Norme associée à un produit hermitien
Les résultats de la section précédente se généralisent si la norme est associée à unproduit hermitien. Toutefois, l’équation (6e), appelée identité de polarisation, devienttrès fastidieuse :
xf |gy “ }f ` g} ´ }f ´ g} ´ 9ıı}f ` 9ııg} ` 9ıı}f ´ 9ııg}4
. (6f)
ǫ Norme sup
La norme sup est la limite supérieure de t|fpxq|, x P Ru, ce qui s’écrit
suppfq ” supxPR
|fpxq| . (6g)
h Limite de fonction
α Limite associée à une norme
Contrairement à la limite définie dans R, il n’existe pas une limite unique dansl’espace des fonctions.
À toute norme de fonction } } est associée une limite par la définition :
limnÑ8
fn “ f ðñ limnÑ8
}f ´ fn} Ñ 0 (7a)
où la limite dans le terme de droite est prise au sens ordinaire des limites dans R etpfnqnPN˚ est une suite de fonctions.
β Limite simple
¨ Soit pfnqnPN˚ une suite de fonctions, on dit que fn tend simplement vers f (ouque f est la limite simple de la suite) quand
@x P R limnÑ8
fnpxq “ fpxq . (7b)
On dit encore que fn tend vers f point par point .¨ La limite simple est la limite associée à la norme sup.
17

i Exemples fondamentaux
α Fonction caractéristique
Soit un sous-ensemble A de R, on appelle fonction caractéristique de l’ensemble A,et on notera IA, la fonction définie par
IApxq “"
1 si x P A
0 sinon. (8)
β Polynôme
¨ Un polynôme p est une fonction qui a pour image
@x P R ppxq “nÿ
i“0
ai xi (9a)
où n est le degré du polynôme et, par définition, an ‰ 0. Les coefficients ai sontdéfinis de façon univoque : soient deux polynômes p et q, avec ppxq “ řm
i“0 ai xi
et qpxq “ řni“0 bi x
i, on a
p “ q ðñ ai “ bi @i en particulier m “ n . (9b)
¨ On distingue les polynômes à coefficients entiers (ou rationnels, cela revient aumême, à un facteur global près) : ai P Z @i “ 0..n. Ils permettent notammentde définir les nombres transcendants. 8
γ Fraction rationnelle
¨ Une fraction rationnelle est la fraction de deux polynômes, f “ p{q ; on choisirales deux polynômes p et q premiers entre eux. 9
¨ Soit x1, ..., xm, les m racines distinctes de q, alors fpxq diverge quand x Ñ xi,pour i “ 1..m. On dit que les xi sont les pôles de la fonction f .
¨ Soit αi la multiplicité de la racine xi dans q ; au voisinage de xi on peut écrire
fpxq „xi
ci
|x ´ xi|αi
où ci est une constante déterminée.
j Comportement à l’infini
On n’a pas rappelé les fonctions exponentielle, gaussienne, etc., bien qu’on utiliserafréquemment ces fonctions. Une caractéristique bien connue de la fonction x ÞÑ e´x
est que e´x Ñ 0 quand x Ñ `8 plus vite que toute puissance de x. On va introduireplusieurs définitions, qui caractérisent les comportements à l’infini.α Fonction à croissance lente
¨ Une fonction f est dite à croissance lente si elle n’est pas plus divergente qu’unefonction puissance x ÞÑ xα (avec α ě 0) au voisinage de `8 et ´8.
8. Les nombres non-transcendants sont les racines de ces polynômes et forment un espace dénom-brable.
9. c’est-à-dire qu’ils n’ont aucune racine complexe commune.
18

¨ Cela s’écrit, en termes mathématiques, DM ą 0, α ě 0 deux réels tels que @x P R,|fpxq| ď M |x|α.
¨ Cela inclut aussi bien des fonctions comme sin par exemple (M “ 1, α “ 0).Par contre, si la fonction converge vers zéro en `8 et ´8, on préfère parler defonction décroissante, que l’on traite aux § suivants.
¨ On peut montrer le théorème suivant : f est à croissance lente ssi f n’est pasdécroissante et il existe un polynôme tel que
@x P R |fpxq| ď ppxq ; (10)
on notera l’absence de | |, car on peut démontrer qu’il existe toujours un poly-nôme positif qui convient.
¨ L’équation (10) est établie globalement sur R mais on peut très bien la restreindresur R` (resp. sur R´) si f n’est à croissance lente qu’en `8 (resp. en ´8).
β Fonction décroissante ordinaire
¨ Une fonction de R Ñ C est décroissante si |fpxq| Ñ 0 quand x Ñ ˘8.¨ On admet ici qu’on peut trouver des coefficients M ą 0, α ě 0, β P R (sauf siα “ 0 auquel cas β ě 0), γ P R (sauf si α “ β “ 0 auquel cas γ ě 0), etc., telsque
|fpxq| ď M
|x|αplog |x|qβplog | log |x||qγ ... . (11)
¨ On défini α, β, γ, etc., les coefficients associés à une fonction comme les inf 10
des α, β, γ, etc., définis précédemment.¨ Il peut être plus adapté de définir des coefficients α`, β`, γ`, etc., pour le
comportement en `8 et α´, β´, γ´, etc., pour le comportement en ´8. Dansce cas, pα, β, γ, ...q est le minimum de pα`, β`, γ`, ...q et pα´, β´, γ´, ...q au sensde l’ordre défini précédemment.
¨ On peut ne définir que les coefficients pα`, β`, γ`q (resp. pα´, β´, γ´q) si f n’estdécroissante qu’au voisinage de `8 (resp. ´8).
γ Fonction à décroissance rapide
¨ Soit une fonction décroissante (telle que |fpxq| Ñ 0 quand x Ñ ˘8). On seplace maintenant dans le cas où on ne peut définir les coefficients pα, β, γ, ...q.Cela revient à supposer que α “ `8.
¨ Dans ce cas, on dit que la fonction est à décroissance rapide.¨ Une telle fonction f décroît plus vite que n’importe quelle puissance x´p quandx Ñ 8.
¨ On peut ne définir la décroissance rapide qu’au voisinage de `8 ou de ´8 lecas échéant.
¨ Un exemple typique est la fonction e´|x| ( e´x si la décroissance n’est qu’en `8,ex si la décroissance n’est qu’en ´8).
10. Au sens d’un ordre mi numérique, mi alphabétique : pα1, β1, γ1, ...q est plus grand quepα2, β2, γ2, ...q dès que α1 ą α2 ou α1 “ α2 et β1 ą β2 ou α1 “ α2 et β1 “ β2 et γ1 ą γ2, etc.
19

k Pôles d’une fonction quelconque
α Singularité
¨ Une singularité d’une fonction f est une valeur xo au voisinage de laquelle fpxqdiverge.
¨ Il n’existe pas de recensement exhaustif de toutes les singularités possibles. Onétudiera le cas
fpxq „xÑxo
c
|x ´ xo|αplog |x ´ xo|qβplog | log |x´ xo||qγ .. (12a)
où c est une constante déterminée.¨ La singularité peut être très bien définie séparément à gauche et à droite. Dans ce cas,
la constante c doit être remplacée par une constante c` ou c´, et les coefficients α, β,γ, ..., remplacés par des coefficients α`, β`, γ`, ..., ou α´, β´, γ´, ..., selon que l’onobserve la singularité en x`
o ou x´o .
¨ On peut même observer une singularité d’un côté seulement, la fonction étant réglée (engénéral) de l’autre côté. Dans ce cas, on posera α` “ β` “ γ` “ 0 ou α´ “ β´ “ γ´ “ 0
du côté où la fonction est non singulière.
β Pôle
¨ Lorsque la singularité d’une fonction en xo est du type
fpxq „xÑxo
c
|x´ xo|α , (12b)
on dit que c’est un pôle de la fonction, de multiplicité α.¨ Quand α “ 1, on dit que le pôle est simple .¨ Comme pour les singularités générales, on peut rencontrer des fonctions ayant un com-
portement différent à droite et à gauche. Dans ce cas, la multiplicité peut être différenteà droite et à gauche.
¨ Toutefois, on pourra définir une multiplicité globale du pôle dès que α` “ α´.¨ C’est une généralisation des pôles des fractions rationnelles.
γ Décomposition en éléments simples
Soit une fraction rationnelle p{q, avec p et q premiers entre eux. Soient x1, ..., xm,les m racines distinctes de q de sorte que ce polynôme peut s’écrire
qpxq “ an
mź
i“1
px´ xiqαi
où n est le degré de q, an le coefficient de la puissance n, et chaque αi est la multiplicitéde la racine xi (on a donc n “ řm
i“1 αi).On rappelle le résultat suivant : la fraction se décompose en éléments simples ; plus
précisément, il existe βji des coefficients définis pour i “ 1..m, j “ 1..αi, tels que, @x P R,
ppxqqpxq “ rpxq `
ÿ
i“1..mj“1..αi
βji
px ´ xiqj. (13)
r est le reste polynomial, de degré k ´ n, où k est le degré de p ; quand k ă n, r “ 0.
20

3 Intégration
Dans ce chapitre, on ne considère que l’intégration au sens de Riemann, celle définieau sens de Lebesgue sera étudiée par la suite.
a Intégrales propre et impropre
¨ Stricto sensus, l’intégrale de Riemann d’une fonction f est toujours définie avecdes bornes finies, c’est-à-dire
ż b
a
fpxqdx a ă b réels.
¨ Les intégrales avec au moins une borne infinie sont dites impropres 11 car on doitles définir par les limites :
ż 8
a
fpxqdx “ limbÑ8
ż b
a
fpxqdx ; (14a)
ż b
´8fpxqdx “ lim
aÑ´8
ż b
a
fpxqdx ; (14b)
ż 8
´8fpxqdx “ lim
aÑ´8bÑ8
ż b
a
fpxqdx . (14c)
b Intégrale convergente ou divergente
Soit une intégrale I “şbafpxqdx. Deux types de divergences peuvent surgir, qui font
tendre la valeur de l’intégrale I vers ˘8.
α Critères de Riemann et de Bertrand pour les singularités
On ne s’intéresse pas ici au cas de divergence à l’infini, soit que a et b soient finis,soit que I soit convergente à l’infini.
¨ I peut diverger parce qu’il existe une singularité xo P ra, bs (on dit, par abus, unpôle) de la fonction f .
¨ Si la fonction f possède un comportement singulier du type (12a), on peut ap-pliquer le critère de Riemann (cas d’un vrai pôle) généralisé par Bertrand pourtoute singularité :
ż b
a
fpxqdx est localement convergente au voisinage de xo
ðñ
$’’&’’%
α ă 1
ou α “ 1 et β ą 1
ou α “ 1 β “ 1 et γ ą 1
¨ ¨ ¨
(15a)
¨ Au cas où le comportement de f est différent à droite et à gauche, il faut appliquerles critères de Riemann ou Bertrand séparément à droite et à gauche. Pour que I soitconvergente, il faut qu’elle le soit des deux côtés.
11. En fait, f doit être bornée sur ra, bs et les intégrales convergentes découlant de l’équation (15a)sont également des intégrales impropres, qu’il faut définir, en toute rigueur, par une limite.
21

β Critères de Riemann et de Bertrand pour les divergences à l’infini
On suppose ici que, soit a “ ´8, soit b “ `8, soit les deux ensemble.¨ On ne s’intéressera, dans ce cours, qu’au comportement d’une intégrale I à l’infini
(définie au sens impropre de Riemann) d’une fonction f qui tend vers 0 quandx Ñ ˘8 (le signe étant celui de la borne impropre qu’on étudie).
¨ I peut diverger à l’infini bien que |fpxq| Ñ 0 pour x Ñ ˘8.¨ Si la fonction f possède un comportement 12 en ˘8 donné par
fpxq „xÑ˘8
c
|x|αplog |x|qβplog | log |x||qγ .. , (15b)
on peut appliquer le critère de Riemann (cas où seul α ‰ 0) généralisé parBertrand :
ż b
a
fpxqdx pa “ ´8 ou b “ 8q est convergente en ˘ 8
ðñ
$’’&’’%
α ą 1
ou α “ 1 et β ą 1
ou α “ 1 β “ 1 et γ ą 1
¨ ¨ ¨
(15c)
¨ Dans le cas a “ ´8 et b “ 8, si le comportement de la fonction est différent en `8et en ´8, il faut appliquer les critères de Riemann ou Bertrand séparément aux deuxbornes. Pour que l’intégrale soit convergente, il faut qu’elle le soit en `8 et en ´8.
γ Cas général
Dans le cas général, une fonction peut admettre plusieurs singularités. Pour étudier laconvergence, on recense toutes les singularités xi, puis on étudie la convergence aux différentspôles xi, ainsi, éventuellement, qu’en ˘8.
c Majoration d’une intégrale
¨ Soit une fonction f intégrable au sens de Riemann. On a, en toute généralité (aet b peuvent être ´8 et 8, à condition que les intégrales convergent),
ˇˇż b
a
fpxqdxˇˇ ď
ż b
a
|fpxq|dx . (16)
¨ Le cas d’égalité correspond à une fonction f positive ou nulle sur le domained’intégration, c’est-à-dire telle que
@x Psa, br fpxq ě 0 .
12. Malgré la similitude avec le cas d’une singularité en x “ 0, il s’agit ici d’un comportementconvergent.
22

d Changement de variable
Il s’agit ici des changements de variable pour l’intégrale de Riemann ; il y a quelquesdifférences avec le cas de l’intégrale de Lebesgue, qu’on étudiera par la suite.
On considère l’intégrale
I “ż b
a
fpxqdx .
α Translation
¨ On peut faire le changement de variable x1 “ x`xo dans l’intégrale I, où xo estune constante réelle. On a alors
dx1 “ dx (17a)
et l’intégrale devient
I “ż b`xo
a`xo
fpx´ xoqdx ;
il est inutile de garder le 1 car la variable est muette (on l’a donc omis ici).¨ On remarque qu’apparaît la translatée xof dans l’intégrale.¨ Les formules précédentes se généralisent aux cas de bornes infinies a “ ´8 oub “ 8, à condition d’utiliser les règles d’addition
8 ` xo “ 8 ´8 ` xo “ ´8 .
β Changement d’échelle
¨ On peut faire le changement de variable x1 “ λx dans l’intégrale I, où λ est uneconstante réelle non nulle. On a alors
dx1 “ λdx (17b)
et l’intégrale devient
I “ 1
λ
ż λb
λa
fpx{λqdx
où on a de nouveau omis le 1 .¨ On remarque qu’apparaît la dilatée fλ dans l’intégrale.¨ Il faut noter que, dans le cas où λ ă 0, les bornes de l’intégrale sont inversées,
de sorte qu’il faudrait mieux écrire alors
I “ 1
|λ|
ż λa
λb
fpx{λqdx
et |λ| “ ´λ dans ce cas.¨ Les formules précédentes se généralisent au cas de bornes infinies a “ ´8 oub “ 8, à condition d’utiliser les règles de multiplication
si λ ą 0 8λ “ 8 ´8λ “ ´8 ;
si λ ă 0 8λ “ ´8 ´8λ “ 8 .
23

γ Cas général
¨ Soit le changement de variable général x1 “ hpxq (on admet que h est unebijection de sa, br vers shpaq, hpbqr), alors
dx1 “ h1pxqdx (17c)
et l’intégrale devient
I “ż hpbq
hpaqfph´1pxqq 1
h1ph´1pxqqdx
où on a de nouveau omis le 1 .¨ Des problèmes d’inversion des bornes peuvent encore se produire. On peut mon-
trer que cela se produit toujours en coïncidence avec un changement de signe deh1 ˝ h´1.
e Primitive
¨ Soit f une fonction intégrable sur R (il n’est pas nécessaire que son intégraleimpropre soit convergente en ˘8), alors une primitive F est donnée par lesformules suivantes :
F pxq “ż x
a
fptqdt (18a)
ou encore F pxq “ ´ż a
x
fptqdt (18b)
où a est quelconque et peut même valoir ˘8 selon les cas.¨ On peut montrer la formule réciproque suivante : Soit F pxq définie par
F pxq “ż hpxq
gpxqfptqdt
alors, la dérivée de F vaut
F 1pxq “ ph1pxq ´ g1pxqqfpxq .
f Intégration par partie
On rappelle que, pour f et g deux fonctions telles que f 1 g et f g1 soient intégrablessur ra, bs (f et g doivent en particulier être continûment dérivables sur sa, br), on a :
ż b
a
fpxqg1pxqdx `ż b
a
f 1pxqgpxqdx “”fpxqgpxq
ıba
” fpb´qgpb´q ´ fpa`qgpa`q (19)
où on a précisé de quel côté on prend les limites au cas où f ou g ne serait pas continueen a ou b.
24

B Intégration de Lebesgue
1 Mesure de Lebesgue dans R
La mesure d’un sous-ensemble de R permet de quantifier son importance relative.Elle est construite de la façon suivante :
a Mesure d’un intervalle
On définit tout d’abord la mesure de Lebesgue d’un intervalle. La mesure de l’in-tervalle ra, bs est sa longueur µpra, bsq “ µpra, brq “ µpsa, bsq “ µpsa, brq “ b ´ a ; iln’importe pas qu’on choisisse les bornes ouvertes ou fermées.
En particulier, on en déduit que la mesure d’un singleton txou vaut µptxouq “ 0 ;un point ne compte pas relativement à la droite réelle. On dit qu’un singleton estnégligeable pour la mesure de Lebesgue.
b Ensemble négligeable
De façon générale, un ensemble est dit négligeable si sa mesure est nulle. On vaétudier deux exemples très différents ci-dessous.
c Mesure d’un ensemble dénombrable
La mesure d’un ensemble dénombrable N est nulle, µpNq “ 0, autrement dit, lesensembles dénombrables sont négligeables pour la mesure de Lebesgue.
Démonstration : par définition, on a N “ txi, i P N˚u, où les xi sont les éléments de N quel’on peut énumérer dans l’ordre, x1, x2, ...
Soit ε ą 0, montrons dans un premier temps que µpNq ă 2ε1´ε
. Pour cela, on va plonger N
dans un ensemble plus grand, notons le Nε, construit de la façon suivante :Nε “
Ťi“1,2,..8
rxi ´ εi, xi ` εis. Les intervalles rxi ´ εi, xi ` εis peuvent se recouper, mais on a
µpNεq ďř
i µprxi ´ εi, xi ` εisq “ř8
i“1 2εi “ 2ε{p1 ´ εq. On a finalement µpNq ď µpNεq ď
2ε{p1 ´ εq.Comme l’inégalité est vraie @ε ą 0, on peut passer à la limite ε Ñ 0`, d’où µpNq ď 0, soit
finalement µpNq “ 0.
d Ensemble de Cantor
Il existe également des ensembles non dénombrables et négligeables. Le plus ca-ractéristique d’entre eux est l’ensemble de Cantor. On va définir le sous-ensemble deCantor C1 restreint à l’intervalle r0, 1s.
Il existe une construction géométrique par récurrence : dans une première étape, on exclutde r0, 1s l’intervalle r 1
3, 23
s ; il reste donc r0, 13
rYs 23, 1s. Dans chaque intervalle, on réitère la même
exclusion, en recalant l’origine sur sa limite inférieure et en appliquant un facteur d’échelle 1/3 :
25

à la deuxième étape, il y a exactementdeux intervalles, on exclut donc r 1
9, 29
s et r 79, 89
set il reste quatre composantes connexes. À laneme étape, on exclut des segments du typer k3n, k`1
3ns et il reste exactement 2n compo-
santes. On peut montrer qu’à l’infini, cetteconstruction engendre un espace non dénom-brable mais de mesure nulle.
Il existe également une formulation algébrique, plus aisée mais moins parlante. C1 “ tlesnombres décimaux s’écrivant 0,n1n2...ni.. en base 3 tels que ni “ 0, 2u (autrement dit, ni “ 1
est interdit).
e Mesure d’un sous-ensemble quelconque
On considère un sous-espace A de R qui admet une décomposition en un nombredénombrable de composantes connexes :
A “ď
iPN˚
Ii (20)
où Ii sont des intervalles disjoints.α Ensemble mesurable
¨¨ A peut être ouvert, fermé ou quelconque.¨ Il peut arriver que le nombre de composantes connexes d’un ensemble A ne soit pas
dénombrable, bien qu’on puisse le mesurer. C’est le cas notamment de l’espace de CantorC1. Cependant, la démonstration qu’il est de mesure nulle passe par une majoration dela mesure d’un ouvert contenant r0, 1szC1.
¨ Dans le cas général, on ne peut mesurer les ensembles qui ont un nombre non dénom-brable de composantes connexes. D’ailleurs, l’existence d’une telle décomposition n’estassurée qu’à l’aide du lemme de Zorn, on peut tout aussi bien considérer qu’elle n’estpas toujours assurée.
¨ Dans le cas où la décomposition en un nombre dénombrable de composantesconnexes existe, on dit que A est un ensemble mesurable.
β Longueur
¨ La mesure d’un ensemble mesurable A est sa longueur.¨ En posant ℓi “ µpIiq la longueur de chaque intervalle Ii intervenant dans la
formule (20), la mesure de A est donnée par
µpAq “8ÿ
i“1
ℓi . (21)
¨ La mesure µpAq peut être infinie.¨ Dans ce dernier cas, pour mesurer l’importance relative de A dans R, on calcule la limite
limLÑ8
µpAXs´L,Lrq2L
où 2L est la mesure de s´L,Lr.
26
2 Intégrale de Lebesgue
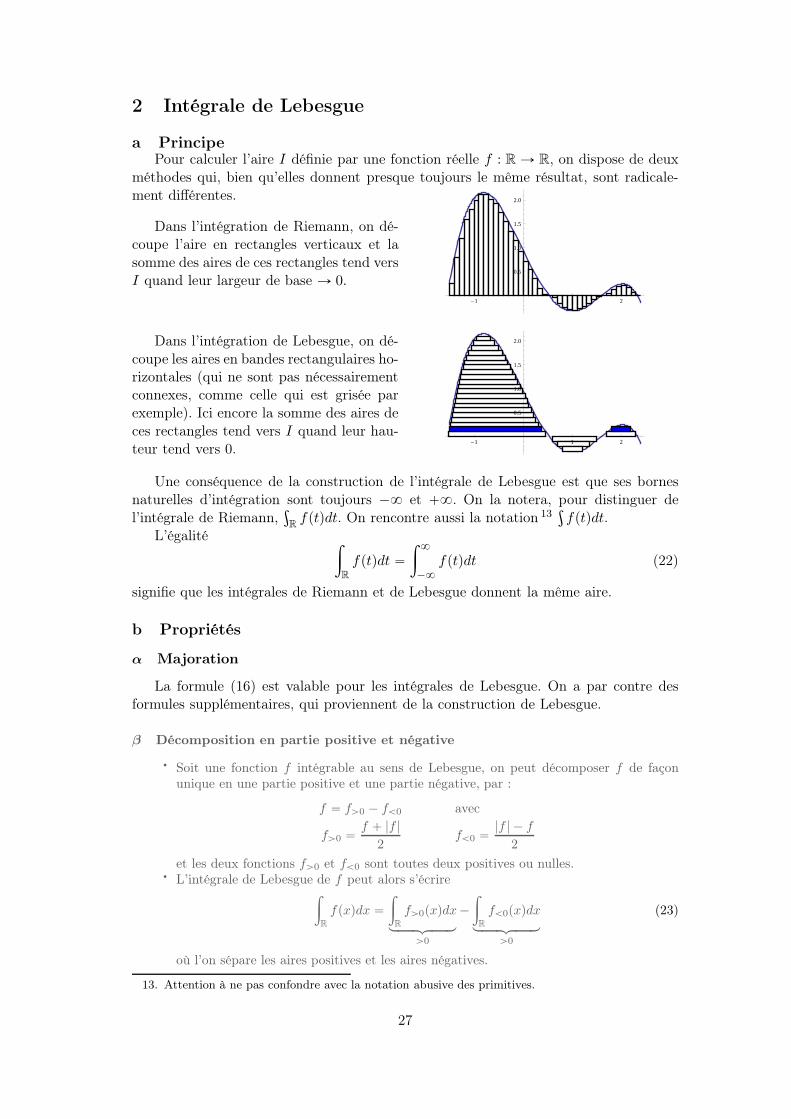
a PrincipePour calculer l’aire I définie par une fonction réelle f : R Ñ R, on dispose de deux
méthodes qui, bien qu’elles donnent presque toujours le même résultat, sont radicale-ment différentes.
Dans l’intégration de Riemann, on dé-coupe l’aire en rectangles verticaux et lasomme des aires de ces rectangles tend versI quand leur largeur de base Ñ 0.
-1 1 2
0.5
1.0
1.5
2.0
Dans l’intégration de Lebesgue, on dé-coupe les aires en bandes rectangulaires ho-rizontales (qui ne sont pas nécessairementconnexes, comme celle qui est grisée parexemple). Ici encore la somme des aires deces rectangles tend vers I quand leur hau-teur tend vers 0.
-1 1 2
0.5
1.0
1.5
2.0
Une conséquence de la construction de l’intégrale de Lebesgue est que ses bornesnaturelles d’intégration sont toujours ´8 et `8. On la notera, pour distinguer del’intégrale de Riemann,
şRfptqdt. On rencontre aussi la notation 13
şfptqdt.
L’égalité ż
R
fptqdt “ż 8
´8fptqdt (22)
signifie que les intégrales de Riemann et de Lebesgue donnent la même aire.
b Propriétés
α Majoration
La formule (16) est valable pour les intégrales de Lebesgue. On a par contre desformules supplémentaires, qui proviennent de la construction de Lebesgue.
β Décomposition en partie positive et négative
¨ Soit une fonction f intégrable au sens de Lebesgue, on peut décomposer f de façonunique en une partie positive et une partie négative, par :
f “ fą0 ´ fă0 avec
fą0 “ f ` |f |2
fă0 “ |f | ´ f
2
et les deux fonctions fą0 et fă0 sont toutes deux positives ou nulles.¨ L’intégrale de Lebesgue de f peut alors s’écrire
ż
R
fpxqdx “ż
R
fą0pxqdxloooooomoooooon
ą0
´ż
R
fă0pxqdxloooooomoooooon
ą0
(23)
où l’on sépare les aires positives et les aires négatives.
13. Attention à ne pas confondre avec la notation abusive des primitives.
27

¨ La formule (23) est a priori interdite pour les intégrales de Riemann impropre. Elleprovient de la construction de Lebesgue, qui au départ ne s’applique qu’aux fonctionspositives, puis est étendue au cas général, justement par la formule (23).
¨ Cette formule permet d’établir le théorème suivant :
γ Théorème d’existence
¨ Soit une fonction f , elle est intégrable au sens de Lebesgue si et seulement si sonmodule |f | est intégrable également. Autrement dit
ż
R
fptqdt existe ðñż
R
|fptq|dt existe . (24)
Démonstration : on aşR
|fptq|dt “şRfą0pxqdx `
şRfă0pxqdx.
¨ Il existe une version analogue de ce théorème pour les intégrales de Riemann définiesproprement sur un intervalle fini (cf. la note 11 de la partie A). Par contre, il est fauxpour les intégrales dites impropres.
c Changement de variable
On considère une intégrale de Lebesgue
I “ż
R
fpxqdx .
α Translation
On peut faire le changement de variable x1 “ x ` xo dans l’intégrale I pour toutxo P R. L’équation (17a) pour l’élément différentiel, que l’on a établie pour l’intégralede Riemann, est valide ici et on a finalement
I “ż
R
fpx´ xoqdx
où on omet systématiquement les primes.
β Changement d’échelle
¨ Pour tout λ P R˚, on peut faire une inflation x1 “ λx dans l’intégrale I. Larelation (17b) n’est pas valable, on écrit à la place :
dx1 “ |λ|dx (25)
et on trouve
I “ 1
|λ|
ż
R
fpxλ
qdx .
¨ Notez bien que les bornes sont inchangées, par définition.¨ Pour le cas λ ă 0, cela revient bien au même que par l’intégration de Riemann ;
le signe de dx{dx1 se compense avec celui provenant de l’inversion des bornes,dans l’intégrale de Riemann :
ż 8
´8fpxqdx “
ż ´8
`8fpλxqλdx “
ż 8
´8fpλxqp´λqdx “ |λ|
ż 8
´8fpλxqdx .
Ce résultat est logique puisque le signe d’une aire ne dépend pas de la façon donton la calcule ; le facteur |λ| ne change pas son signe, contrairement à un facteurλ, qui changerait le signe de l’aire !
28

d Fonction nulle presque partout
On appelle fonction nulle presque partout (ou encore pour presque tout x) unefonction f telle que
şR
|fpxq|dx “ 0. Une telle fonction n’est pas nécessairement nulle,f ‰ 0, car il peut exister des points x0, x1, ..., xn, tels que fpxiq ‰ 0. L’ensemble despoints xi où la fonction f n’est pas nulle est négligeable, c’est-à-dire de mesure nulle. 14
α Fonction caractéristique d’un ensemble négligeable
¨ Un exemple fondamental de fonction nulle presque partout est la fonction caractéristiqued’un ensemble de mesure nulle. En effet, pour tout N de mesure nulle, la fonction INest nulle hors de N ; or, dans ce cas, mesure et intégrale coïncident.
¨ Par exemple, soit Q l’ensemble des nombres rationnels. D’après ce qui précède, on définitfonction IQ par IQpxq “ 1 si x P Q et 0 sinon. Alors,
şRIQptqdt “ 0 : la fonction IQ est
nulle presque partout.¨ Notez bien que montrer que IQ est nulle presque partout et montrer que Q est de mesure
nulle sont un seul et même problème, ce qui permet de réunifier de façon synthétique lanotion d’ensemble négligeable et la notion de fonction nulle presque partout.
β Égalité presque partout
Soit f et g deux fonctions, on définit l’égalité presque partout , qu’on note f “ g pp,
par f ´ g nulle presque partout, f ´ g “ 0 pp.¨ On a alors
f “ g pp ùñż
R
fptqdt “ż
R
gptqdt . (26)
Démonstration : d’après l’équation (16), on a
0 ż
R
fptq ´ gptqdtˇˇ ď
ż
R
|fptq ´ gptq|dt “ 0
où la dernière équation est la définition de f ´ g “ 0 pp.¨ La réciproque est fausse ; par contre, on peut écrire
ż
R
|fptq ´ gptq|dt “ 0 ùñ f “ g pp .
e Conditions d’existence
¨ Il peut arriver que l’intégrale existe au sens de Lebesgue mais pas au sens deRiemann ; c’est par exemple le cas des fonctions nulles presque partout ; on peutcréer d’autres exemples en ajoutant à n’importe quelle fonction intégrable unefonction nulle presque partout.
¨ À l’inverse, il existe des cas où seule l’intégrale de Riemann est définie (il s’agittoujours alors d’intégrale de Riemann impropre). Cela provient du théorème (24).
¨ Contre-exemple fondamental :ş8
´8sinptq
tdt “ π est une intégrale convergente, elle
est bien définie au sens des intégrales impropres de Riemann. Pour le montrer, ilsuffit de remarquer que c’est une série alternée de terme général tendant vers 0.Or,
ş80
| sinptq|t
dt est divergente (à cause du terme en 1t). Donc, d’après le théorème
(24),şR
sinptqtdt n’est pas intégrable au sens de Lebesgue.
14. Tandis que la mesure du complémentaire vaut µpRztxiuq “ µpRq “ 8, f étant nulle sur cecomplémentaire ; pour mieux comprendre, on peut restreindre la fonction à l’intervalle Ă r0, 1s, on aµptxi P r0, 1suq “ 0 et µpr0, 1sztxi P r0, 1suq “ µpr0, 1sq “ 1.
29

¨ L’aspect le plus paradoxal de ce contre-exemple est que l’on montre en intégrantpar parties que cette intégrale est égale à
şR
1´cosptqt2
dt, qui, elle, est bien intégrableau sens de Lebesgue. Ceci prouve simplement que l’intégration par parties estune technique propre à l’intégration de Riemann.
f Intégrale définie sur un sous-ensemble mesurable de R
α Définition
Soit A un sous-ensemble mesurable de R, on définit l’intégrale de Lebesgue d’unefonction f sur A par ż
A
fpxqdx “ż
R
IApxqfpxqdx (27)
où l’on a multiplié f par la fonction caractéristique de A pour annuler l’intégrale surRzA.
β Égalité des intégrales finies de Riemann et Lebesgue
Pour le cas particulier d’un intervalle 15 A “ ra, bs, l’égalité entre intégrales deRiemann et de Lebesgue s’écrit, de façon symbolique,
ż b
a
fpxqdx “ż
ra,bsfpxqdx (28)
où la dernière intégrale est, par définition,şRIra,bspxqfpxqdx.
3 Métrique sur les fonctions
On considère ici les fonctions définies dans R et à valeur dans C, f : R Ñ C et oncherche les normes adaptées à ces fonctions.
a Norme } }p
α Définition
On utilisera les normes } }p, définies par
}f}p “ˆż
R
|fptq|p dt˙ 1
p
. (29)
β Relation entre normes
¨ On ne peut pas ordonner ces normes.¨ Toutefois, on peut montrer la relation
}f}p ď ℓ1
ppp`1q }f}p`1
où ℓ est la longueur du support 16 de f , donnée par la formule (21). Quand ℓ est infini,cette formule est inutilisable.
15. Il n’importe pas de savoir si les bornes sont fermées ou ouvertes puisqu’une intégraleşRfptqdt est
inchangée si on change f sur un ensemble négligeable de points.16. Remarque, pour une fonction réglée par morceaux, Supportpfq est toujours mesurable, et ℓ est
bien défini (mais peut être infini).
30

γ Exemples
¨ Dans la pratique, on n’utilisera que les normes } }1 et } }2 ainsi que le cas limitesuivant :
¨ On définit la norme } }8 correspondant à la limite p Ñ 8 par :
}f}8 “ limpÑ8
}f}p . (30)
δ Lien entre } }8 et la norme sup
¨ Si f est une fonction suffisamment continue, on peut montrer
}f}8 “ supR
pfq (31)
autrement dit, la norme } }8 est égale à la la norme sup des fonctions.¨ Cependant, sup est définie au point près, et donc l’égalité entre }}8 et la norme sup peut
être violée par des fonctions dont la norme supérieure à été artificiellement modifiée enun point.
¨ Par exemple, soit f définie par fpxq “ e´|x| @x ‰ 0 et fp0q “ 2 ; on a }f}8 “ 1 tandisque supRpfq “ 2.
¨ Toutefois, il ne s’agit que d’une différence artificielle et, en dehors de cas spécialementconstruits comme celui-ci, on ne la rencontre jamais.
b Espaces de fonctions
À chaque norme ainsi définie est associé un espace de fonctions.α Espace L1
On note L1 l’ensemble des fonctions intégrables au sens de Lebesgue, L1 “ tf telleque }f}1 ă 8u. Ce sont les fonctions pour lesquelles la norme } }1 est bien définie etelles sont définies presque partout.
β Espace L2
On note L2 l’ensemble des fonctions de carré sommable 17 au sens de Lebesgue,L2 “ tf telle que }f}2 ă 8u. Ce sont les fonctions pour lesquelles la norme } }2 est biendéfinie et elles sont définies presque partout.
γ Espace L8
On note L8 l’ensemble des fonctions bornées presque partout, L8 “ tf telle que}f}8 ă 8u. Ce sont les fonctions pour lesquelles la norme } }8 est bien définie et ellessont définies presque partout.
c Produits scalaire et hermitien
α Produit scalaire
Pour les fonctions R Ñ R (à valeur dans R), on définit le produit scalaire par
xf |gy “ż
R
fptqgptqdt . (32a)
17. C’est un synonyme de intégrable que l’on emploie ici par habitude.
31

Toutefois, on se placera plutôt, dans ce cours, dans le cas complexe :
β Produit hermitien
Pour les fonctions R Ñ C (à valeur dans C), on définit le produit hermitien par
xf |gy “ż
R
fptqgptqdt . (32b)
d Propriétés des normes construites avec Lebesgue
α Fonctions égales presque partout
¨ L’équation (6a) n’est pas vérifiée par les normes construites avec l’intégrale deLebesgue : l’égalité f “ g est remplacée par l’égalité presque partout, f “ g pp,ce qui s’écrit, @p,
f “ g pp ðñ }f ´ g}p “ 0 . (33)
¨ Ceci est vrai pour } }8 également.¨ Autrement dit, deux fonctions égales presque partout ne peuvent pas être dis-
tinguées par leur norme.¨ Par contre, la norme sup vérifie l’équation (6a) et distingue les fonctions de façon stricte.
β Inégalité triangulaire
Ces normes vérifient bien l’inégalité triangulaire (6b).
γ } }2 et les produits scalaire ou hermitien
¨ Selon qu’on considère les fonctions à valeur dans R ou dans C, on peut écrireque }}2 est la norme associée au produit scalaire ou hermitien.
¨ La formule de Schwarz (6d) est bien vérifiée et s’écrit donc,
@pf, gq P L2 ˆ L2 xf |gy ď }f}2}g}2 (34a)
où on choisit le produit scalaire ou hermitien selon que les fonctions sont réellesou complexes.
¨ Dans le cas réel, l’équation (6e) est vérifiée, on peut l’écrire :
@pf, gq P L2 ˆ L2 xf |gy “ }f ` g}2 ´ }f ´ g}24
. (34b)
¨ Dans le cas complexe, l’équation (6f) est vérifiée, on peut l’écrire :
@f, g P L2 xf |gy “ }f ` g}2 ´ }f ´ g}2 ´ 9ıı}f ` 9ııg}2 ` 9ıı}f ´ 9ııg}24
. (34c)
¨ En conséquence, on a le théorème suivant : si pf, gq P L2 ˆL2, alors xf |gy existe.
32

4 Intégrale à paramètres ou variables multiples
a Théorème de convergence dominée
α Définition
Soit une suite de fonctions fn P L1 tendant simplement vers une fonction f (c’est-à-dire que fnpxq Ñ fpxq quand n Ñ 8 pour presque tout x P R).
S’il existe g P L1, tel que |fnpxq| ď gpxq @n P N˚ et pour presque tout x, alors :¨ f P L1pRq ;¨ on a le droit d’intervertir limn et
şdx dans
limnÑ8
ż
R
fnpxqdx “ż
R
limnÑ8
fnpxqdx “ż
R
fpxqdx ; (35a)
¨ g est appelé un dominant .
β Application aux intégrales dépendant d’un paramètre
Soit fpx, λq une fonction à deux variables réelles, λ est un paramètre extérieur.S’il existe une fonction g P L1 telle que @px, λq P R2 |fpx, λq| ď gpxq, alors :¨ @λ P R, fpx, λq est Lebesgue-intégrable 18 par rapport à x, autrement dit
şRfpx, λqdx
existe ;¨ soit F pλq ”
şRfpx, λqdx, si f est continue par rapport à λ, F est une fonction
continue et on peut écrire
limλÑλo
ż
R
fpx, λqdx “ż
R
fpx, λoqdx ; (35b)
¨ il peut exister des λ isolés pour lesquels f n’est pas continue. Dans ce cas, l’égalité (35b)est remplacée par la formule plus générale :
limλÑλo
ż
R
fpx, λqdx “ż
R
limλÑλo
fpx, λqdx ;
¨ g est un dominant grâce auquel on peut intervertir intégrale et limite.
γ Application à la dérivation d’intégrales dépendant d’un paramètre
Soit fpx, λq une fonction à deux variables réelles.
S’il existe une fonction g P L1 telle que @px, λq P R2ˇˇBf
Bλ px, λqˇˇ ď gpxq, alors :
¨ @λ P R, fpx, λq est Lebesgue-intégrable par rapport à x, autrement ditşRfpx, λqdx
existe ;¨ soit F pλq ”
şRfpx, λqdx, si f est dérivable en λo, F l’est également et sa dérivée
s’écrit
F 1pλoq ” dF
dλpλoq ” lim
λÑλo
ż
R
fpx, λq ´ fpx, λoqλ ´ λo
dx “ż
R
BfBλ px, λoqdx
; (35c)
18. En notation savante, cela s’écrit fp_, λq P L1pRq pour tout λ P R.
33

¨ si BfBλ est continue par rapport à λ, F P C1pRq, et la continuité de sa dérivée
s’écrit
limλÑλo
ż
R
BfBλ px, λqdx “
ż
R
BfBλ px, λoqdx ; (35d)
¨ il peut exister des λ isolés pour lesquels BfBλ n’est pas continue. Dans ce cas, l’égalité
(35d) est remplacée par la formule plus générale :
limλÑλo
ż
R
BfBλpx, λqdx “
ż
R
limλÑλo
BfBλpx, λqdx ;
¨ dans l’interversion entre dérivée et intégrale, notez bien que la dérivée totaledevient une dérivée partielle.
b Théorème de Fubini
α Énoncé du théorème
Soit f une fonction de deux variables réelles, f : R2 Ñ C. S’il existe g et h P L1,telles que
@y P R |fpx, y| ď gpxq@x P R |fpx, y| ď hpyq
alors f est intégrable dans R2 au sens de Lebesgue et
ż
R
fpx, yq dxdy “ż
R
ˆż
R
pfpx, yqdx˙dy “
ż
R
ˆż
R
pfpx, yqdy˙dx . (36)
β Intégrale définie dans le plan
Contrairement à ce qu’on laisse entendre parfois, l’intégrale de f dans le plan estdéfinie sans passer par les intégrales simples. La confusion vient de ce que dans tousles exemples usuels, ce sont les termes de droite de l’égalité précédente que l’on utiliseen pratique.
Pour construire une intégrale définie dans le plan, on utilise un découpage en surfacesélémentaires (rectangles, secteurs, anneaux, selon la géométrie des coordonnées utilisées)de façon analogue aux intervalles, pour la mesure d’un sous-ensemble de R.
γ Cas de variables séparées
Soit pf, gq P L1 ˆ L1, les conditions d’existence de l’intégrale de hpx, yq “ fpxqgpyqsont bien réalisées et on a séparation des variables, de sorte que
ż
R
hpx, yq dxdy “ˆż
R
fpxqdx˙ ˆż
R
gpyqdy˙
.
5 Valeur Principale
Il s’agit d’une procédure de régularisation des intégrales divergentes, dans un cas simple(un cas plus complexe sera rapidement étudié avec les distributions).
34

a Régularisation d’un pôle simple
Soit une fonction f admettant un pôle simple xo au sens de l’équation (12b), c’est-à-direque α “ 1. On admettra d’abord que ce pôle est la seule singularité de la fonction.
De plus, on suppose que la constante c est identique à droite et à gauche.
α Divergence de l’intégrale
¨ On considère une intégrale définie au sens de Lebesgue, en utilisant la formule (27).Mais on pourra alternativement l’écrire comme une intégrale de Riemann.
¨ On suppose que xo Psa, br. Alors, l’intégrale
ż
ra,bs
fpxqdx
est divergente d’après le critère de Riemann (15a).¨ On peut généraliser ce qui précède pour les cas a “ ´8 ou b “ 8.
β Régularisation de l’intégrale
¨ On peut régulariser cette intégrale et définir sa valeur principale
vp
˜ż b
a
fpxqdx¸
“ limǫÑ0`
˜ż xo´ǫ
a
fpxqdx `ż b
xo`ǫ
fpxqdx¸
“ limǫÑ0`
ż
ra,bszsxo´ǫ,xoǫr
fpxqdx . (37a)
¨ La valeur principale ne diverge pas et permet de donner un sens à l’intégrale.
b Régularisation à l’infini
Soit une fonction f telle que
fpxq „ c{x
en `8 et en ´8, et la constante c est identique en `8 et en ´8. On admettra d’abord quela fonction n’admet aucune singularité.α Divergence de l’intégrale
L’intégrale, définie exclusivement au sens de Lebesgue,
ż
R
fpxqdx
est divergente d’après le critère de Riemann (15c).
β Régularisation de l’intégrale
¨ On peut régulariser cette intégrale et définir sa valeur principale
vp
ˆż
R
fpxqdx˙
“ limLÑ8
ż L
´L
fpxqdx . (37b)
¨ La valeur principale ne diverge pas et permet de donner un sens à l’intégrale.
35

c Cas général
¨ Au cas où une fonction possède plusieurs pôles, ou qu’en plus d’un comportement àl’infini en c{x elle possède au moins un pôle, on peut conjuguer les différentes régu-larisations et définir sa valeur principale, qui est non divergente et donne un sens àl’intégrale que l’on étudie.
¨ À titre d’exemple, on peut calculer l’intégrale de la fonction x ÞÑ 1{x sur R en régula-risant à la fois en 0 et à l’infini. La valeur principale de cette intégrale est
limǫÑ0
LÑ8
ż
r´L,Lszs´ǫ,ǫr
1
tdt “ 0 ;
elle est nulle puisque la fonction est impaire !
6 Convolution
a Définition et propriétés
α Définition
Soient f et g deux fonctions de R Ñ C. Pour pf, gq P L1 ˆ L1 ou pf, gq P L2 ˆ L2,on définit le produit de convolution de f et de g, noté f ˙ g, par
f ˙ g pxq “ż
R
fpx´ tqgptqdt . (38)
β Existence
Cas de fonctions intégrables Si pf, gq P L1 ˆL1, on définit hpx, tq “ fpxqgptq qui vérifieles conditions de Fubini (cas de séparation des variables), donc
şRfpxqgptqdxdt existe. On a le
droit de faire le changement de variable px, tq Ñ px1, t1q “ px` t, tq, dont le Jacobien s’écrit (onutilise x “ x1 ´ t1) :
J “ˇˇ
BxBx1
BxBt1
BtBx1
BtBt1
ˇˇ “
ˇˇ 1 ´1
0 1
ˇˇ “ 1
d’oùşRfpxqgptqdxdt “
şRfpx1 ´ t1qgpt1q|J |dx1dt1 “
şRfpx ´ tqgptqdxdt. Comme
şRfpx ´
tqgptqdxdt existe, d’après le théorème de FubinişRfpx´ tqgptqdt existe également pour presque
tout x (et est intégrable !).
Cas de fonctions de carré sommable Si pf, gq P L2ˆL2, on définit h “ x qf , où qu désignela transposée d’une fonction u et la conjugaison complexe, autrement dit hptq “ fp´pt´ xqq“fpx´ tq ; alors h P L2 car L2 est stable par translation, transposition et conjugaison ; donc leproduit hermitien xh|gy existe ; or, il s’écrit
xh|gy “ż
R
hptqgptqdt “ż
R
fpx´ tqgptqdt .
γ Commutativité
Le produit de convolution est commutatif. En effet,ż
R
fpx´ tqgptqdt “ż
R
fptqgpx ´ tqdt
en faisant le changement de variable t Ñ x ´ t.
36
b Convolution de deux fonctions à support compact
α Cas général
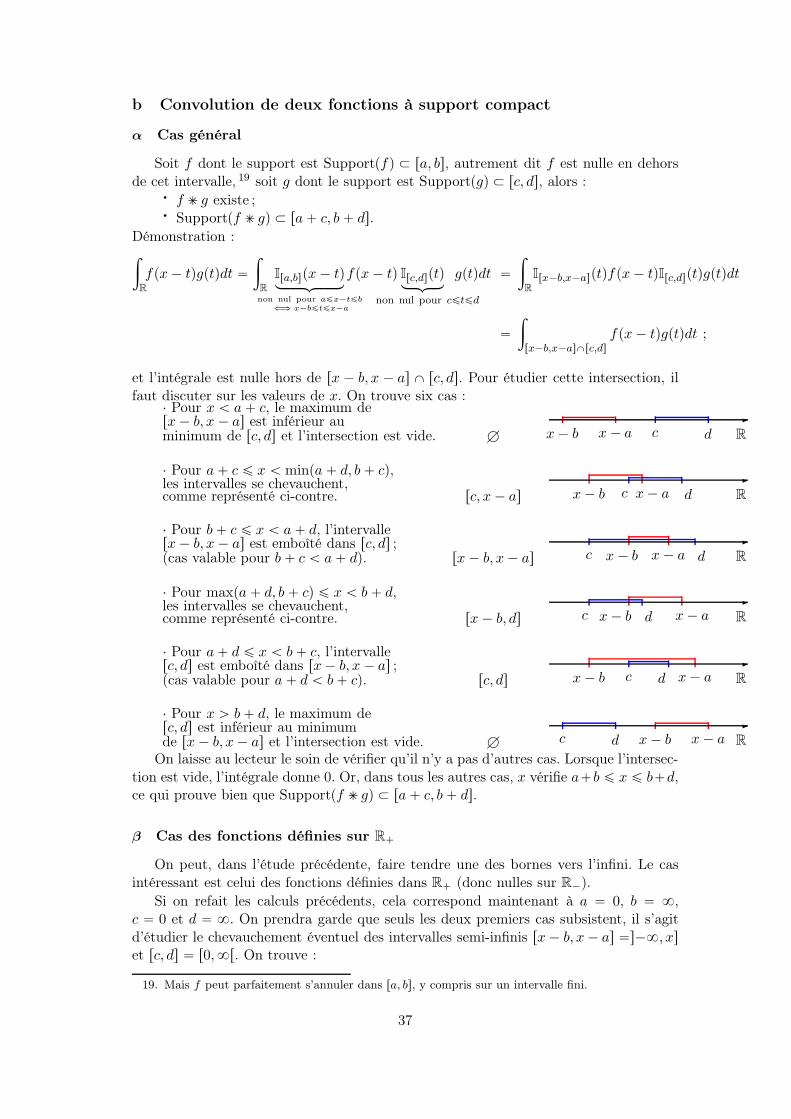
Soit f dont le support est Supportpfq Ă ra, bs, autrement dit f est nulle en dehorsde cet intervalle, 19 soit g dont le support est Supportpgq Ă rc, ds, alors :
¨ f ˙ g existe ;¨ Supportpf ˙ gq Ă ra` c, b ` ds.
Démonstration :ż
R
fpx´ tqgptqdt “ż
R
Ira,bspx´ tqlooooomooooonnon nul pour aďx´tďb
ðñ x´bďtďx´a
fpx´ tq Irc,dsptqloomoonnon nul pour cďtďd
gptqdt “ż
R
Irx´b,x´asptqfpx´ tqIrc,dsptqgptqdt
“ż
rx´b,x´asXrc,dsfpx´ tqgptqdt ;
et l’intégrale est nulle hors de rx ´ b, x ´ as X rc, ds. Pour étudier cette intersection, ilfaut discuter sur les valeurs de x. On trouve six cas :
¨ Pour x ă a` c, le maximum derx´ b, x ´ as est inférieur auminimum de rc, ds et l’intersection est vide. H x´ b x ´ a c d
✲R
¨ Pour a` c ď x ă minpa ` d, b ` cq,les intervalles se chevauchent,comme représenté ci-contre. rc, x ´ as x´ b x´ ac d
✲R
¨ Pour b` c ď x ă a` d, l’intervallerx´ b, x ´ as est emboîté dans rc, ds ;(cas valable pour b ` c ă a` d). rx ´ b, x´ as x ´ b x ´ ac d
✲R
¨ Pour maxpa ` d, b ` cq ď x ă b ` d,les intervalles se chevauchent,comme représenté ci-contre. rx ´ b, ds x´ b x´ ac d
✲R
¨ Pour a` d ď x ă b` c, l’intervallerc, ds est emboîté dans rx´ b, x ´ as ;(cas valable pour a ` d ă b` c). rc, ds x´ b x´ ac d
✲R
¨ Pour x ą b` d, le maximum derc, ds est inférieur au minimumde rx ´ b, x´ as et l’intersection est vide. H x´ b x´ ac d
✲R
On laisse au lecteur le soin de vérifier qu’il n’y a pas d’autres cas. Lorsque l’intersec-tion est vide, l’intégrale donne 0. Or, dans tous les autres cas, x vérifie a`b ď x ď b`d,ce qui prouve bien que Supportpf ˙ gq Ă ra` c, b ` ds.
β Cas des fonctions définies sur R`
On peut, dans l’étude précédente, faire tendre une des bornes vers l’infini. Le casintéressant est celui des fonctions définies dans R` (donc nulles sur R´).
Si on refait les calculs précédents, cela correspond maintenant à a “ 0, b “ 8,c “ 0 et d “ 8. On prendra garde que seuls les deux premiers cas subsistent, il s’agitd’étudier le chevauchement éventuel des intervalles semi-infinis rx´ b, x´ as “s´8, xset rc, ds “ r0,8r. On trouve :
19. Mais f peut parfaitement s’annuler dans ra, bs, y compris sur un intervalle fini.
37

¨ Pour x ă 0, le maximum des´8, xs est inférieur au minimumde r0,8r et l’intersection est vide. H x 0
✲R
¨ Pour 0 ď x, les intervalles se che-vauchent comme représenté ci-contre. r0, xs x0
✲R
Pour x ă 0, l’intégrale donne 0, ce qui prouve que Supportpf ˙ gq Ă r0,8r. L’espacedes fonctions définies sur R` est stable par convolution. 20 De plus,la convolution s’écritplus commodément, dans ce cas spécifique,
f ˙ g pxq “ Hpxqż x
0
fpx´ tqgptqdt
où H est la fonction de Heaviside, Hpxq “"
1 si x ě 0
0 ; sinon.
20. Ce résultat est essentiel pour la définition de la transformation de Laplace. Cette transformationn’est pas à notre programme et généralise celle de Fourier, que nous allons étudier, en remplaçantl’exponentielle complexe par une exponentielle réelle.
38

C Transformation de Fourier
1 Définition
a Définition générale
Soit f P L1pRq ou L2pRq, on appelle transformée de Fourier de f , et on note Frf sou encore f , la fonction définie par la transformation F selon
Frf spkq “ fpkq “ż
R
e´2 9ııπkxfpxqdx “ż
R
cosp2πkxqfpxqdx ´ 9ııż
R
sinp2πkxqfpxqdx . (39)
b Existence
¨ Si f P L1, le théorème de convergence dominée s’applique à la fonction hpx, kq “e´2 9ııπkxfpxq, avec comme dominant g “ |f |.
¨ Si f P L2zL1, l’existence de f provient d’un résultat sur le prolongement analy-tique de F sur L2 (L1 X L2 est dense dans L2).
¨ En particulier, pour f P L2zL1, l’existence de fpkq n’est pas assurée pour toutk P R, il peut exister un ensemble négligeable de points ki pour lesquels fpkiqn’existe pas. Au contraire, pour f P L1, fpkq existe pour tout k P R.
c Exemple : transformée de Fourier de la fonction porte Π
On appelle fonction porte et on note Π la fonction caractéristique de l’intervalle
r´12, 12
s, autrement dit Π “ Ir´ 12, 12
s : R Ñ R, x ÞÑ"1 si x P r´1
2, 12s
0 sinon. La fonction
Π P L1 X L2. Calculons sa transformée de Fourier :
Πpkq “ż
R
Πpxq e´2 9ııπkxdx “ż 1
2
´ 12
e´2 9ııπkxdx “ ´1
29ııπk
”e´2 9ııπkx
ı 12
´ 12
“ sinpπkqπk
” sincpkq
où la fonction caractéristique a été absorbée dans les bornes (on passe d’une intégralede Lebesgue à une intégrale de Riemann selon l’équation (27)).
d Opérateur vectoriel
α Fonction de fonctions
F est une fonction de fonctions, aussi appelée une fonctionnelle, elle agit sur deséléments qui sont eux-mêmes des fonctions (de R dans C).
39

β Linéarité
F est linéaire, c’est-à-dire que Frf ` gs “ Frf s ` Frgs et Frλf s “ λFrf s @λ P C ;cela provient de la linéarité de l’intégrale.
γ Opérateur
F est un opérateur : elle associe, à toute fonction f , une autre fonction f (on distingueainsi les opérateurs des formes linéaires, qui à un élément de l’espace de départ associentun nombre complexe ou réel 21).
δ Opérateur vectoriel
Les deux dernières propriétés se résument de façon synthétique en : « F est unopérateur vectoriel. » Ce type d’opérateur vectoriel est la généralisation en dimensioninfinie des opérateurs matriciels en dimension finie.
ǫ Autres exemples d’opérateurs vectoriels
Les autres opérateurs vectoriels que vous avez déjà rencontrés sont la translation,l’inflation, la dérivation et, quand cela est possible, la primitivation. 22
2 Propriétés
a Nature de f
Si f P L2, on a f P L2 mais parfois f R L1. L’exemple le plus typique qui caractérisecette propriété est f “ Π P L1 X L2. En effet, Π “ sinc P L2 mais R L1.
Si f P L1zL2, il n’existe aucune propriété simple connue et on peut construire desexemples avec f R L1 Y L2.
b Continuité
α Classement selon le comportement global d’une fonction
¨ Soit f P L1, d’après (35b) f est continue.¨ Soit f et x ÞÑ xfpxq P L1, d’après (35d) f P C1pRq.¨ Soit f , ..., x ÞÑ xnfpxq P L1, par récurrence on a f P CnpRq.¨ Si @n P N, x ÞÑ xnfpxq P L1, alors f P C8pRq.
Il existe des propriétés plus fines, qui font le lien entre le comportement local et lacontinuité, et sont, par contre, valables pour les fonctions P L1 YL2 et même s’étendentaux distributions.
β Lien entre le comportement local et la continuité
Le comportement à l’infini de f est lié au comportement local (sur un voisinageinfinitésimal quelconque) de f , et réciproquement, le comportement local de f est liéau comportement à l’infini de f .
21. Cette distinction devient subtile dans le cas présent, car on confond habituellement les nombresλ P C et les fonctions constantes x ÞÑ λ.
22. Mais on peut aussi définir l’addition par une fonction fo, c’est à dire f ÞÑ f `fo, la multiplicationf ÞÑ ffo, la convolution f ÞÑ f ˙ fo, etc.
40

Soit f P L1 ou L2. On assume de plus que f est décroissante à l’infini. Donc, soiton peut définir des coefficients pα, β, γ, ...q conformément 23 à la formule (11), soit lafonction est à décroissance rapide, comme défini au § A 2 j γ. On a le résultat suivant
¨ Si 0 ă α ď 1, alors f admet au moins une discontinuité.¨ Le cas α “ 0 (alors β ą 0 ou β “ 0 et γ ą 0 ou etc.) correspond à des fonctions
qui ne sont ni dans L1, ni dans L2. Leur transformée de Fourier ne peut existerqu’au sens des distributions et présentent une singularité.
¨ Le cas 0 ă α ă 1 ne peut également se définir qu’au sens des distributions.¨ Si 1 ă α ď 2, alors f P C0pRq mais sa dérivée admet au moins une discontinuité.¨ Si n ă α ď n ` 1, pour n P N˚, alors f P Cn´1pRq et f pnq admet au moins une
discontinuité.¨ Si α “ 8, autrement dit si f est à décroissance rapide, alors f P C8pRq.¨ La réciproque s’énonce de façon analogue (en pratique, on échange f et f).
c F est une quasi-bijection de L2pRq
Si on considère l’ensemble de départ L2, alors l’ensemble d’arrivée est FpL2q. On aprécisément FpL2q “ L2, F réalise une bijection de L2 dans lui-même aux fonctionsnulle pp près. Autrement dit, on peut écrire
f “ g pp ðñ f “ g pp . (40)
En termes plus intuitifs, il peut exister des points k pour lesquels fpkq et gpkqsont différents, de même qu’il peut exister des points x pour lesquels fpxq et gpxq sontdifférents ; on a aussi vu qu’il peut même exister des points où f et g ne sont pasdéfinies. Toutefois, ces points forment des ensembles négligeables, et on peut identifierles fonctions (leur distance }f ´ g}2 “ 0 “ }f ´ g}2 est nulle. 24)
d Transformée de Fourier inverse : théorème d’inversion
α Définition de F
On note F ou encore F´1 l’opérateur vectoriel : f ÞÑ Frf s, défini par
Frf spkq “ż
R
e29ııπkxfpxqdx “
ż
R
cosp2πkxqfpxqdx ` 9ııż
R
sinp2πkxqfpxqdx . (41)
Notez que F est définie de façon analogue à F. D’ailleurs, si f est réelle, Frf s est lafonction complexe conjuguée de Frf s.
β Théorème d’inversion
On a les propriétés suivantes :¨ @f P L1 ou L2, Frf s est la transposée de f , autrement dit
Frf spkq “ fp´kq . (42)
23. Le plus souvent, la formule (15b) est vérifié, mais cet énoncé est plus général.24. On choisit ici la norme } }2 car on verra que F est une isométrie de L2 avec sa norme } }2.
41

¨ Si on la restreint à L2pRq, F est la réciproque de F, c’est pourquoi on la noteaussi F´1, autrement dit
@f P L2 FrFrf ss “ FrFrf ss “ f presque partout , (43)
relation dont on donnera une idée de démonstration plus loin et qui est appeléethéorème d’inversion de Fourier.
γ Corollaire : F ˝ F
Un corollaire très utile, qui combine la propriété de symétrie et le théorème d’inver-sion est que F ˝ F est l’opérateur de transposition, autrement dit :
@f P L2 F2 : f ÞÑ ˆf “ qf . (44)
e Continuité
F est continue pour la norme L2 ; c’est une conséquence de la propriété d’isométrie, quel’on verra plus loin.
On peut donc écrire, pour pfnqnPN˚ P L2, et fn Ñ f P L2 quand n Ñ 8, que limnÑ8
Frfns “ f ,
soit :
pour presque tout k P R limfÑfo
Frf spkq “ fopkq
où l’on a utilisé une formulation un peu plus générale. Cette formule peut être étendue aux casoù la limite n’appartient plus à un espace de fonction L2, à condition de prendre la transforméede Fourier au sens des distributions, comme cela sera étudié ultérieurement.
f Comportement à l’infini
Théorème : soit f P L1 ou L2, on a
limkÑ´8
fpkq “ limkÑ`8
fpkq “ 0 . (45)
Démonstration : considérons pour simplifier le cas d’une fonction f réelle et cal-culons la partie réelle de f ; quand k devient suffisamment grand, dans l’intégraleşRfpxq cosp2πxkqdx, la fonction cosinus oscille beaucoup plus vite que la fonction f ,
qui est quasiment constante pendant une période du cosinus. De ce fait, on doit ad-ditionner des aires alternativement positives et négatives qui sont, en valeur absolue,presque égales, puisque f ne varie pratiquement pas. Certes, le nombre des aires àajouter ainsi augmente lui proportionnellement à k, mais on peut se convaincre que cephénomène de compensation est le plus fort, d’où le résultat, qui est illustré sur lesgraphes suivants.
Dans le schéma ci-contre sont tracéesune fonction f réelle en bleu et la fonctionfpxq cosp2πxkq avec k “ 2 en rouge (c’estla partie réelle de la fonction fpxq e´2 9ııπxk
dont f mesure l’aire). Les aires sont al-ternées et se compensent modérément ; on
trouve ici fp2q » ´0,032.
42
-1 1 2
-2
-1
1
2
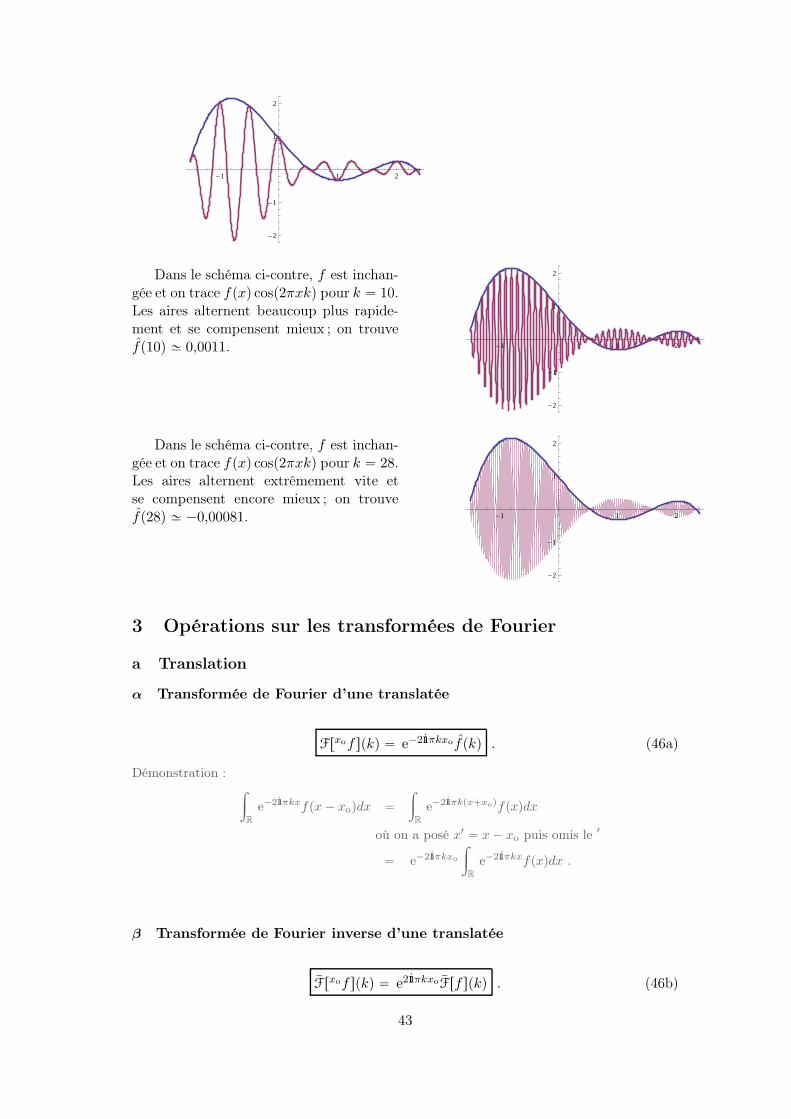
Dans le schéma ci-contre, f est inchan-gée et on trace fpxq cosp2πxkq pour k “ 10.Les aires alternent beaucoup plus rapide-ment et se compensent mieux ; on trouvefp10q » 0,0011. -1 1 2
-2
-1
1
2
Dans le schéma ci-contre, f est inchan-gée et on trace fpxq cosp2πxkq pour k “ 28.Les aires alternent extrêmement vite etse compensent encore mieux ; on trouvefp28q » ´0,00081. -1 1 2
-2
-1
1
2
3 Opérations sur les transformées de Fourier
a Translation
α Transformée de Fourier d’une translatée
Frxof spkq “ e´2 9ııπkxofpkq . (46a)
Démonstration :ż
R
e´2 9ııπkxfpx´ xoqdx “ż
R
e´2 9ııπkpx`xoqfpxqdx
où on a posé x1 “ x´ xo puis omis le 1
“ e´2 9ııπkxo
ż
R
e´2 9ııπkxfpxqdx .
β Transformée de Fourier inverse d’une translatée
Frxof spkq “ e29ııπkxoFrf spkq . (46b)
43
Démonstration :ż
R
e29ııπkxfpx´ xoqdx “
ż
R
e29ııπkpx`xoqfpxqdx
où on a posé x1 “ x´ xo puis omis le 1
“ e29ııπkxo
ż
R
e29ııπkxfpxqdx .
γ Transformée de Fourier d’une fonction multipliée par e29ııπkox
Fr e2 9ııπkoxfpxqs “ kof . (46c)
Démonstration :ż
R
e´2 9ııπkx e2 9ııπkoxfpxqdx “ż
R
e´2 9ııπpk´koqxfpxqdx
“ fpk ´ koq par définition de F .
δ Transformée de Fourier inverse d’une fonction multipliée par e29ııπkox
Fr e2 9ııπkoxfpxqs “ ´koFrf s . (46d)
Démonstration :ż
R
e29ııπkx e2 9ııπkoxfpxqdx “
ż
R
e29ııπpk`koqxfpxqdx
“ Frf spk ` koq par définition de F .
b Inflation
α Transformée de Fourier directe d’une dilatée
Frfλs “ |λ|f 1λ. (47a)
Démonstration :ż
R
e´2 9ııπkxfpx{λqdx “ |λ|ż
R
e´2 9ııπkλx1
fpx1qdx1 en posant x1 “ x{λ et dx1 “ dx{|λ|
“ |λ|ż
R
e´2 9ııπpλkqxfpxqdx
“ |λ|f pλkq .
β Transformée de Fourier inverse d’une dilatée
Frfλspkq “ |λ|Frf spλkq . (47b)
La démonstration est identique à celle pour la transformation directe.
44

γ Transformée de Fourier de la transposée
¨ On rappelle que la transposition est une inflation d’un facteur ´1.¨ La formule (47a) donne pour la transposition
~Frf s “ Fr qf s soit fp´kq “ Fr qf spkq . (47c)
δ Transformée de Fourier inverse de la transposée
On obtient des formules analogues pour F.
c Parité et conjugaison complexe
α Transposition et conjugaison
On peut établir des formules analogues aux relations (42) et (47c), qui les généra-lisent :
Fr qf s “ Frf s “ ~Frf s ; (48a)
Frf s “ Frf s “ ~Frf s “ Frqf s ; (48b)
Fr qf s “ Frf s “ ~Frf s “ ~Frf s . (48c)
Démonstration : pour la première équation de (48a), on écrit
Fr qf spkq “ż
R
e´2 9ııπkxfp´xqdx “ż
R
e29ııπkxfpxqdx
en faisant le changement de variable x Ñ ´x ; puis on applique la relation (42). Pour la premièreéquation de (48b), on écrit
Frf spkq “ż
R
e29ııπkxfpxqdx ;
puis on applique les relations (42) ou (48a). Pour les relations (48c), on applique simultanémentles relations (48a) ou (48b).
β Conservation de la parité
La relation (47c) prouve que la transformation de Fourier conserve la parité :
f paire ðñ f paire ;
f impaire ðñ f impaire.
γ Fonction hermitienne ou antihermitienne
Soit une fonction de R Ñ C, on introduit les définitions suivantes :¨ f est hermitienne si et seulement si
qf “ f ðñ @x P R fp´xq “ fpxq ; (49a)
¨ f est antihermitienne si et seulement si
qf “ ´f ðñ @x P R fp´xq “ ´fpxq ; (49b)
¨ cette notion est utile pour synthétiser les propriétés de la transformation de Fourier,comme suit.
45
δ Formules de conservation par Fourier
¨ À partir des formules (48a), (48b) et (48c), on peut établir les relations suivantespour F :
Frf s ˘ ~Frf s “ Frf ˘ f s ; (50a)
Frf s ˘ Frf s “ Frf ˘ qf s . (50b)
où on remarque qu’apparaît, dans chaque relation, une partie réelle ou imagi-naire de f ou de f .
¨ Ces relations permettent d’établir les lois suivantes :f réelle ðñ f hermitiennef imaginaire ðñ f antihermitiennef hermitienne ðñ f réellef antihermitienne ðñ f imaginaire
¨ On peut résumer ces formules d’une façon assez élégante. En conjuguant la dé-composition dans C et la décomposition paire/impaire (5c), on peut décomposertoute fonction f en quatre fonctions :
f “ fℜpair ` fℑpair ` fℜimp ` fℑimp (51)
une partie réelle paire, une partie imaginaire pure paire, une partie réelle impaireet une partie imaginaire pure impaire. Alors, en appliquant la même décomposi-tion pour f , on établit les correspondances suivantes
f
��
“ fℜpair
��
` fℑpair
��
` fℜimp
((◗◗◗
◗◗◗◗
◗◗◗◗
◗◗◗
` fℑimp
vv♠♠♠♠♠♠♠♠♠♠♠♠♠♠
f “ fℜpair ` fℑpair ` fℜimp ` fℑimp
ce qui s’écrit, de façon plus détaillée,
Frfℜpairs “ fℜpair ; Frfℑpairs “ fℑpair ; Frfℜimps “ fℑimp ; Frfℑimps “ fℜimp .
d Dérivation
α Dérivée de la transformée de Fourier directe ou inverse
df
dk“ ´29ııπFrxfpxqs ; (52a)
dFrf sdk
“ 29ııπFrxfpxqs . (52b)
Condition d’existence : il faut que x ÞÑ xfpxq P L1 ou L2 pour que f soit dérivablepartout. Toutefois, ces formules se généralisent dans des cas où f n’est pas dérivablepartout, éventuellement à l’aide de la théorie des distributions.
46

Démonstration : on suppose que f et x ÞÑ xfpxq P L2, le cas général se démontre pardensité :
d
dk
ż
R
e´2 9ııπkxfpxqdx “ż
R
BBk e´2 9ııπkxfpxqdx
on a pu intervertird
dket
ż
R
par le théorème de convergence dominée
“ż
R
p´29ııπxq e´2 9ııπkxfpxqdx
“ ´29ııπFrxfpxqspkq ;
et pour la dérivée de la transformée de Fourier inverse,
d
dk
ż
R
e29ııπkxfpxqdx “
ż
R
BBk e2
9ııπkxfpxqdx
on a pu intervertird
dket
ż
R
par le théorème de convergence dominée
“ż
R
p29ııπxq e2 9ııπkxfpxqdx
“ 29ııπFrxfpxqspkq .
β Transformée de Fourier directe et inverse de la dérivée
Fr dfdx
spkq “ 29ııπkfpkq ; (52c)
Fr dfdx
spkq “ ´29ııπkFrf spkq . (52d)
Condition d’existence : il faut que df{dx P L1 ou L2. On ne peut rien dire dek ÞÑ kfpkq. Par exemple, pour fpxq “ x1{4, on trouve que cette fonction n’est pas dansL1 Y L2 alors que f est dans L1 X L2.
Démonstration : on se restreint à f P L1 X L2, le cas général se démontre par densité :ż
R
e´2 9ııπkx dfdx
pxqdx “ż 8
´8
e´2 9ııπkx dfdx
pxqdx
intégrale de Riemann calculée par parties :
“”e´2 9ııπxfpxq
ı8
´8looooooooomooooooooon“0
´ż
R
p´29ııπkq e´2 9ııπkfpxqdx
“ 29ııπkfpkq ;
et pour la transformée inverse,ż
R
e29ııπkx df
dxpxqdx “
ż 8
´8
e29ııπkx df
dxpxqdx
intégrale de Riemann calculée par parties :
“”e2
9ııπxfpxqı8
´8loooooooomoooooooon“0
´ż
R
p29ııπkq e2 9ııπkfpxqdx
“ ´29ııπkFrf spkq .
47

e Fonctions gaussiennes
Il aurait été logique d’étudier le cas particulier des fonctions gaussiennes plus tôt,mais on ne disposait pas auparavant des propriétés de transformation, qui permettrontune approche plus élégante.
On notera fxo a la fonction gaussienne non normalisée
fxo apxq “ e´πapx´xoq2 .
α Invariance de la fonction e´πx2
La fonction f01 est invariante par F, c’est-à-dire que sa transformée de Fourier estpf01 “ f01.
Démonstration :
¨ il s’agit de montrer que f01 est solution de la même équation différentielle quef01 ;
¨ notons d’abord que f01 est solution de f 1pxq ` 2πxfpxq “ 0 ;¨ calculons f
1
01. D’après ce qui précède,
df01
dkpkq “ ´29ııπ
ż
R
e´2 9ııπxkxf01pxqdx “ 9ııż
R
e´2 9ııπxkp´2xπq e´πx2
dx
“ 9ıı”e´2 9ııπxk e´πx2
ıx“`8
x“´8looooooooomooooooooon“0
´9ııż
R
p´29ııπkq e´2 9ııπxk e´πx2
dx par partie
“ ´2πk
ż
R
e´2 9ııπxk e´πx2
dx “ ´2πkf01pkq
ce qui prouve que f1
01 ` 2πkf01pkq “ 0 ;¨ f01 et f01 sont solutions de la même équation différentielle du premier ordre.
Les solutions d’une équation du premier ordre forment un espace vectoriel dedimension 1, ce qui signifie ici que f019f01. Pour démontrer que le coefficient deproportionnalité est 1, calculons enfin f01p0q ;
¨ f01p0q “şRe´πx2
dx “şRe´t2 dt?
πen posant t “ x
?π. Enfin, on calcule 25
şRe´t2dt “ ?
π, d’où f01p0q “ 1 “ f01p0q.
25. Démonstration : soit I “şRe´t2dt, on écrit
I2 “
ż
R
e´x2
dx
ż
R
e´y2
dy par changement de nom des variables muettes
“
ż
R
e´px2`y2q
dxdy par le théorème de Fubini (cas de variables séparées)
“
ż
R
e´ρ2
ρdρdθ avec le changement de variable px, yq Ñ pρ, θq
“ 2π
«´
e´ρ2
2
ff8
0
“ π
d’où le résultat (on a utilisé le jacobien standard du changement de variables cartésiennes en variables
polaires J “
ˇˇ
BxBρ
BxBθ
ByBρ
ByBθ
ˇˇ “ ρ, d’où le facteur |J | “ ρ).
48

β Transformation d’une gaussienne quelconque
i Montrons que fxo a “ xo
´pf01q?
πa
¯(c’est-à-dire que l’on fait subir une dilatation
d’un facteura
πa
à f01, puis une translation de xo). En effet,
pf01q?πa
pxq ” f01px?aπ q “ e´πpx
?aπ
q2 “ e´ax2
et finalement, xof01pxa
aπ
q “ f01`px ´ xoq
aaπ
˘“ e´apx´xoq2 .
ii On calcule fxo a en utilisant d’abord la formule de translation, 26
fxo apkq “ e´2 9ııπkxoFrpf01q?πa
spkqpuis on applique la formule de dilatation
“ e´2 9ııπkxcπ
af01pk?
πa q
“cπ
ae´2 9ııπkxo e´πpk
?πa
q2
“cπ
ae´2 9ııπkxo e´π2k2{a .
γ Démonstration du théorème d’inversion
On calcule maintenant ˆf pxq, on a
ˆf pxq “
cπ
aF
”e´2 9ııπkxo e´π2k2{a
ıpxq
on applique la réciproque de la formule de translation
“cπ
aF
”e´π2k2{a
ıpx` xoq
“cπ
aF
”e´a1k2
ıpx` xoq en posant a1 “ π2{a
“cπ
a
cπ
a1 e´π2px`xoq2{a1
“ π?a π?
a
e´π2a
π2 px`xoq2
“ e´apx`xoq2 “ fp´xq “ qfpxq .
Pour vérifier le théorème d’inversion de Fourier, on écrit finalement
Frf spxq “ Frf sp´xq “ ˆf p´xq “ e´app´xq`xoq2 “ e´apx´xoq2 “ fpxq
ce qui prouve le résultat pour toutes les fonctions gaussiennes.L’ensemble des gaussiennes est dense 27 dans L2, ce qui permet d’étendre par conti-
nuité le théorème d’inversion à toutes les fonctions de L2.
26. Remarquez l’inversion de l’ordre des transformations.27. Soit f P L2, soit ǫ ą 0, il existe pa1, x1, c1q, ..., paN , xN , cN q, N triplets dans R˚
` ˆRˆC tels que
@x P R, |fpxq ´řN
i“1ci e
aipx´xiq2 | ď ǫ.
49

f Produit de convolution
α Transformée de Fourier d’un produit de convolution
Soit pf, gq P L2 ˆ L2 ou L1 ˆ L1, on a
Frf ˙ gs “ f g . (53a)
Le produit f g existe dans tous les cas, mais on n’est pas assuré qu’il appartienne à L2 ;si pf, gq P L2 ˆ L2, on a f et g P L2, donc f g P L1, ce qui permet de lui appliquer (39).Par contre, si pf, gq P L1 ˆ L1, on sait directement que f ˙ g P L1 et que donc Frf ˙ gsexiste. Le reste découle de la démonstration qui suit.
De même, on a
Frf ˙ gs “ Frf sFrgs . (53b)
Démonstration :
Frf ˙ gspkq “ż
R
dx e´2 9ııπkxż
R
fpx´ tqgptqdt
“ij
R2
fpx´ tq e´2 9ııπkpx´tqgptq e´2 9ııπktdxdt
on fait le changement de variable 28 pt, xq Ñ pt, t1 “ x´ tq
“ij
R2
fpt1q e´2 9ııπkt1
gptq e´2 9ııπktdt1dt
“ fpkqgpkq .
β Transformée de Fourier d’un produit de fonctions
On se restreint ici aux fonctions de L2, ce qui nous permet d’utiliser le théorèmed’inversion de Fourier. La validité de la formule qui suit, pour des fonctions aussi gé-nérales que dans le cas précédent, n’est pas acquise, malgré une fausse impression desymétrie entre les deux formules. Soit f et g P L2, on a
Frfgs “ f ˙ g . (53c)
De mêmeFrfgs “ Frf s ˙ Frgs . (53d)
Démonstration : posons F “ f et G “ g (F et G P L2). On peut écrire FrF ˙Gs “F G. On prend la transformation inverse de cette relation, ce qui donne
Fr {F ˙Gs “ FrF Gs “ Fr ˆf ˆgs “ Fr qfqgs “ Fr|fgs “ Frfgs “ Frfgs
où on a appliqué la conservation de la parité par Fourier, et les formules (48a), (48b) et(48c) (la composition de la transposition et de Fourier inverse n’est autre que Fourierdirect). Si on applique le théorème d’inversion sur le terme de gauche, il vient finalement
F ˙G “ Frfgs ðñ f ˙ g “ xfg
ce qui est bien la formule recherchée.
28. dont le Jacobien vaut (on a x “ t ` t1) J “
ˇˇ Bt
BtBtBt1
BxBt
BxBt1
ˇˇ “
ˇˇ 1 0
1 1
ˇˇ “ 1.
50

4 Autres propriétés
a Lien entre Fourier et intégrale
α Aire totale d’une fonction
Théorème : Soit f P L1 ou L2, si f est continue en k “ 0, on a :
fp0q “ż
R
fptqdt . (54)
Démonstration : cela semble trivial puisque, par définition, en k “ 0, on a
Frf sp0q “ż
R
e´2 9ııπ0xfpxqdx “ż
R
fpxqdx
mais il ne faut pas oublier que l’expression de Fourier n’est valable que presque partout.Plus précisément :
¨ Si f P L1, f est continue, en particulier en 0, et la formule est toujours vraie :« pour les fonctions intégrables, la formule de Fourier est valable pour tout x PR ».
¨ Si f P L2, la condition f continue en 0 assure que 0 ne fait pas partie des valeursde k pour lesquelles la formule Frf spkq “
şRe´2 9ııπkxfpxqdx faillit.
β Cas général
Dans le cas général, on utilise la valeur principale de l’intégrale de f , définie à l’infinipar la formule (37b), qui existe quand f P L2 (ou L1 a priori). On a alors
vp
ˆż
R
fptqdt˙
“ 1
2pfp0`q ` fp0´qq . (55)
γ Régularisation
Soit une fonction de L1 ou de L2, supposons que f admet une discontinuité en xo.En appliquant la formule précédente, à l’aide des diverses formules de transformationde Fourier, on montre que
FrFrf sspxoq “ fpx`o q ` fpx´
o q2
(56)
ce qu’on appelle la formule de régularisation. Un exemple, qui a été étudié en problèmeles années précédentes, est celui de la fonction de Heaviside H, définie par Hpxq “ 1
@x ě 0 et Hpxq “ 0 @x ă 0. Par régularisation, la valeur en 0 de H est 12, puisque
FrHsp0q “ Hp0`q `Hp0´q2
“ 1
2.
(la démonstration nécessite la théorie des distributions).
51

b F est une isométrie de L2
α Isométrie de L2
Soit une fonction f P L2, on a }f}2 “ }f}2 ; autrement dit, F conserve la norme } }2des fonctions. On peut l’écrire, plus précisément,
ż
R
|fpxq|2dx “ż
R
|fpkq|2dk . (57a)
β Cas particulier des gaussiennes
Comme pour le théorème d’inversion de Fourier, on va démontrer la formule (57a)pour les fonctions gaussiennes, sa généralisation pour toutes les autres fonctions décou-lant de la densité des fonctions gaussiennes dans L2.
On reprend la notation fa,xopxq “ e´apx´xoq2 , dont on a calculé précédemment latransformée de Fourier,
fa,xopkq “cπ
ae´2 9ııπkxo e´π2k2{a
et on calcule séparément, d’une part,
ż
R
|fa,xopxq|2dx “ż
R
e´2apx´xoq2dx “ż
R
f2a,xopxqdx “ f2a,xop0q “c
π
2a
où on a appliqué la formule (54) ; et, d’autre part,
ż
R
|fa,xopkq|2dk “ˆc
π
a
˙2 ż
R
e´2π2k2{adk “ π
a
ż
R
f 2π2
a,0
pkqdk “ π
a
dπ2π2
a
“c
π
2a
où le facteur exponentiel a donné un module 1 ; on retrouve bien finalementż
R
|fa,xopxq|2dx “ż
R
|fa,xopkq|2dk .
γ Conservation du produit hermitien
Comme F conserve la norme } }2, il conserve aussi le produit hermitien, qui lui estassocié. Cela s’écrit, @pf, gq P L2 ˆ L2, xf |gy “ xf |gy, soit
ż
R
fpkqgpkqdk “ż
R
fpxqgpxqdx . (57b)
δ Formule de Parseval-Plancherel
Pour tout couple pf, gq de fonctions dans L2 ˆ L2, on a
ż
R
fptqgptqdt “ż
R
fptqgptqdt . (58)
52

Démonstration : on pose F “ f et G “ g, et on applique l’équation (58) : xF |Gy “ xF |Gy, soiten détail ż
R
Frf spuqGpuqdu “ż
R
F pvqGpvqdv
où on a mis des variables muettes nouvelles, car on ne peut plus ici distinguer entre espace
direct et indirect. On applique la relation (48b), fpkq “şRe´2 9ııπkxfpxqdx “
şRe2
9ııπkxfpxqdx “Frfpxqs et la première égalité peut se récrire
ż
R
FrFloomoon“ I
rfpxqspuqgpuqdu “ż
R
fpvqgpvqdv ðñż
R
fpuqgpuqdu “ż
R
fpvqgpvqdv
ðñż
R
fpuqgpuqdu “ż
R
fpvqgpvqdv .
CQFD.
c Continuité de F
F est une fonctionnelle continue dans L2pRq, mais pas dans L1pRq.
53

54
D Résumé sur la transformation de
Fourier
a Propriétés générales
Fonction dans l’espace réel Fonction dans l’espace réciproquefpxq “ Frf spxq fpkq “ Frf spkq
“şRe2
9ııπkxfpkqdk “şRe´2 9ııπkxfpxqdx
xofpxq “ fpx´ xoq e´2 9ııπkxo fpkqe2
9ııπkoxfpxq ko fpkq “ fpk ´ koqfλpxq “ fpx{λq |λ|f 1
λpkq “ |λ|fpλkq
qfpxq “ fp´xq ~Frf s pkq “ fp´kqdf{dx 29ııπkfpkq
´29ııπxfpxq df{dk
b Transformées de Fourier courantes
fonction transformée de Fourier
sincpxq “ sinpπxqπx
Πpkq “"1 si |k| ď 1{20 sinon
e´ax2 aπae´π2k2{a
e´λ|x| 2λλ2`4π2k2
c Formule de Parseval-Plancherel
ż
R
fptqgptqdt “ż
R
fptqgptqdt
55

56
Partie II
Théorie des distributions
57

58

A Distributions ordinaires
1 Introduction : la fonction de Dirac
a Construction d’une fonction de Dirac
La fonction de Dirac, communément notée δ, n’est pas à proprement parler unefonction. On peut la définir comme la limite de diverses suites de fonctions. Par exemple,soit la suite des fonctions fn définies par morceaux,
✲
✻
✂✂✂✂❇❇❇❇ x
´ 1n
1n
n
fnpxq “
$’’&’’%
0 si x ă ´ 1n
,n2x` n si ´ 1
nď x ă 0 ,
´n2x ` n si 0 ď x ă 1n
,0 si x ě 1
n,
cette suite tend, dans un sens que l’on va préciser ultérieurement, vers la fonction deDirac δ.
α Limite de la fonction presque partout
Si on suppose que δ, la limite de la suite pfnqnPN˚ , est une fonction ordinaire, alorscette suite doit au moins tendre simplement vers sa limite.
Or, pour tout x ‰ 0, on a limnÑ8
fnpxq “ 0. On constate que la limite simple de la
suite de fonctions fn est la fonction nulle presque partout.Démonstration : soit, par exemple, x ą 0, soit nx ě 1{x (par exemple nx “ 1` la partie
entière de l’inverse de x), alors, @n ě nx, fnpxq “ 0, car x R r´ 1n, 1n
s.De façon analogue, on montre que lim
nÑ8fnpxq “ 0 pour x ă 0.
Pour x “ 0, fnp0q n’a pas de limite, puisque c’est limnÑ8
fnp0q “ limnÑ8
n “ 8 .
Finalement, on a prouvé que fn Ñ 0 presque partout. 29
29. Il serait parfaitement possible de construire une suite de fonctions fn dont la limite serait nullepour tout x, y compris x “ 0. Par exemple, on peut choisir
fnpxq “
$&%
0 si x ă 0 ou x ě 1
n,
8n2x si 0 ď x ă 1
2n,
´8n2x ` 8n si 1
2nď x ă 1
n,
qui tend simplement vers 0, y compris pour x “ 0, puisque @n P N˚, fnp0q “ 0.
59

β Limite de l’intégrale
L’aire de fn est indépendante de n et vaut 1. On a donc
limnÑ8
ż
R
fnptqdt “ limnÑ8
1 “ 1 .
γ Contradiction
¨ Toujours en supposant que la limite simple existe dans l’espace des fonctions, onconstate qu’on ne peut pas appliquer le théorème de convergence dominée. Onobserve en effet que
limnÑ8
ż
R
fnptqdt “ 1 ‰ 0 “ż
R
limnÑ8
fnptq dt ;
les deux limites sont différentes, et on ne peut intervertir limite et intégrale.¨ Il en résulte qu’on ne peut définir δ comme la limite lim
nÑ8fn. L’objet des distri-
butions est de donner un sens à cette limite, dont on verra qu’elle n’appartientpas à l’ensemble des fonctions.
δ Limite définie avec la fonction de Dirac
Si l’on calcule l’intégraleşRfnptqϕptqdt, où ϕ est une fonction suffisamment régulière,
on peut montrer que cette suite est convergente :
limnÑ8
ż
R
fnptqϕptqdt “ ϕp0q .
Démonstration : quand n est suffisamment grand, on aż
R
fnptqϕptqdt “ż 1
n
´ 1n
fnptqϕptqdt » ϕp0qż 1
n
´ 1n
fnptqdt “ ϕp0q
car ϕptq » ϕp0q pour t P r´ 1n, 1n
s, quand n „ 8.
b Espace dual
α Définition
Soit E un sous-espace vectoriel de fonctions définies de Rp dans Rn (ses élémentssont donc une certaine catégorie de fonctions f , x P Rp ÞÑ fpxq P Rn).
¨ L’espace dual E˚ est défini par les fonctions de fonctions, qui à une fonction deE associent un nombre complexe, on les appelle formes linéaires, et on les noteraΨ P E˚ :
Ψ : E Ñ C, f ÞÑ Ψrf soù la définition implique Ψrf s P C ; de plus, Ψ doit être linéaire :
@pf1, f2q P E2, pλ1, λ2q P C2, Ψrλ1f1 ` λ2f2s “ λ1Ψrf1s ` λ2Ψrf2s . (59)
¨ On peut plonger E dans E˚, de la façon suivante : à f , on associe Ψf par
Ψf : E Ñ C, h ÞÑ Ψf rhs “ż
R
fpxqhpxqdx .
¨ Ceci prouve que E Ă E˚.
60
β Espaces duals inclus
On se rappelle que la limite de la fonction de Dirac limnÑ8
fn n’existe pas dans E, de quelque
façon qu’on choisisse le sous-espace E. Comme E˚ Ą E, si l’on choisit intelligemment E, cettelimite existera dans E˚.
On a la propriété universelle : soit E et F deux sous-espaces, vérifiant E Ă F , alorsE˚ Ą F ˚.
Démonstration : soit Ψ P F˚, montrons que Ψ P E˚. Soit f P E, il suffit de montrer queΨrf s est bien définie @f , pour prouver le résultat. Or, @f P E, f P F également, donc Ψrf sexiste par définition (puisque Ψ P F˚). Ceci prouve bien que Ψ P E˚, et finalement, on a prouvéE˚ Ą F˚.
Cette propriété prend tout son intérêt ici quand on observe que les espaces de fonctions Eet F sont de dimension infinie. En dimension finie, on a, au contraire une bijection canoniqueentre un espace E et son bidual E˚˚ ce qui signifie que tous ces espaces sont algébriquementéquivalents.
Ainsi, plus on choisit E petit, plus son dual est grand. Il est inutile de choisir ungrand sous-espace E. Le but n’est pas seulement d’obtenir un espace E˚ grand mais ausside travailler avec un sous-espace de fonction plus commode. Pour cette raison, on vatravailler dans le sous-espace des fonctions E “ DpRpq, que l’on va définir maintenant.
2 Espace de fonctions DpRpq
a Définition
Les fonctions de DpRpq sont des fonctions de Rp dans Rn, qui vérifient les propriétéssuivantes (on considérera le plus souvent p “ 1 et n “ 2, donc les fonctions de R dansC) : ces fonctions sont C8 et à support compact. On les appellera fonctions test .
α Fonction infiniment dérivable
¨ Soit f P DpRpq, pour tout pn1, n2, ¨ ¨ ¨ , npq P Np, on peut définir
Bn1 ¨ ¨ ¨ Bnpf
Bxn1
1 ¨ ¨ ¨ Bxnpp
et de plus, cette fonction est continue.¨ Pour p “ 1, cela signifie simplement que la neme dérivée f pnq existe et est conti-
nue.
β Fonction à support compact
La notion de fonction à support compact (cf. § IA 2 bβ) se généralise @p P N˚.
b Exemple
On va prouver que DpRpq est non vide, en explicitant un exemple. On se contentede p “ 1, bien que la généralisation soit élémentaire.
¨ Soient a ă b P R, soit la fonction f définie par
fpxq “"
e1
px´aqpx´bq x Psa, br ,0 sinon ;
61

notons que px´ aqpx ´ bq ă 0 @x Psa, br. On en déduit que
limxÑa`
1
px´ aqpx ´ bq “ limxÑb´
1
px´ aqpx ´ bq “ ´8 .
et, par conséquent,
limxÑa`
e1
px´aqpx´bq “ limxÑb´
e1
px´aqpx´bq “ 0 .
¨ f est par construction à support compact. Il reste à prouver que f est C8.¨ En premier lieu, f est clairement C8 sur s´8, ar Y sa, br Y sb,8r. Sur s´8, ar et sur
sb,8r, f et toutes ses dérivées successives sont identiquement nulles. Sur sa, br, l’expres-sion des dérivées successives de f est du type
fraction rationnelle ˆ e1
px´aqpx´bq ;
or, le facteur exponentiel gagne toujours sur les termes polynômiaux, donc on a, @n P N,
limxÑa`
f pnqpxq “ limxÑb´
f pnqpxq “ 0 .
On a donc, @n P N, f pnqpa´q “ f pnqpa`q “ 0 et f pnqpb´q “ f pnqpb`q “ 0, ce qui prouveque f est bien infiniment dérivable en a et b, et finalement sur R entier.
c Suite régularisante
L’espace DpRpq est dense dans l’espace des fonctions continues par morceaux. Onse restreint, comme souvent, à p “ 1.
Commençons par définir une suite ρn de fonctions dans DpRq, qui tend vers lafonction de Dirac.α Suite ρn
¨ On définit
ρnpxq “#
e1
x2´1{n2
M şRe1{pt2´1{n2qdt x Ps´ 1
n, 1n
r ,0 sinon.
¨ On sait, d’après le § b que ρn est infiniment dérivable.¨ De plus, grâce au facteur ad hoc, on a
şRρnptqdt “ 1 @n P N˚.
¨ Puis, pour une fonction f quelconque mais à support compact, et ϕ P DpRq,montrons le résultat suivant : f ˙ϕ P DpRq
β Convolution d’une fonction à support compact et d’une fonction de DpRq
Soit f à support compact ; soit pa, bq P R2 tel que Supportpfq Ă ra, bs. Soit ϕ P DpRq,soit pα, βq P R2 tel que Supportpϕq Ă rα, βs.
¨ Rappelons d’abord que le produit de convolution f ˙ϕ est à support compact. Cela aété fait en détail au I B 6 bα au chapitre sur la convolution des fonctions. Rapidement,on a
f ˙ϕpxq “ż
R
fptqϕpx ´ tqdt .
Or, les fonctions à l’intérieur de l’intégrale sont non nulles pour a ă t ă b et α ă x´ t ăβ, autrement dit
a ă t ă b
x´ β ă t ă x´ α .
62

Pour que l’intégrale soit non nulle, il faut donc que l’intersection ra, bs X rx´ β, x´ αssoit non nulle. Ceci implique, en particulier que x´ β ă b et x´α ă a ; soit finalementx ă b` β et x ą a` α.Ceci prouve que le support de f ˙ϕ est inclus dans ra`α, b`βs, donc que cette fonctionest à support compact.
¨ Montrons maintenant que le produit de convolution est infiniment dérivable.Si on veut calculer dpf ˙ϕ
dxp , il faut dériver sous le signe somme. Or, comme lesfonctions sont à support compact, on peut toujours les majorer, ou leurs dérivées,par leur maximum, qui est bien intégrable sur le support, et par zéro ailleurs.Finalement, on peut appliquer le théorème de convergence dominée et écrire
dpf ˙ϕ
dxppxq “ dp
dxp
ż
R
fptqϕpx ´ tqdt
“ż
R
fptqBpϕBxp px´ tqdt
“ż
R
fptqdpϕ
dxppx´ tq dpx
dpx ´ tqploooomoooonegal
30a 1
dt
“ż
R
fptqϕppqpx ´ tqdt
qui est bien définie, puisque ϕ est infiniment dérivable. Ceci prouve que f ˙ϕ
l’est également. De plus, en examinant le calcul précédent, on prouve, plus pré-cisément,
pf ˙ϕqppq “ f ˙ϕppq . (60)
¨ On en déduit finalement que ρn ˙ϕ P DpRq.On définit finalement la suite régularisante
γ Suite régularisante
Soit f continue par morceaux, on définit fn “ pfIr´n,nsq ˙ ρn.
¨ Vérifions d’abord que fn P DpRq. Soit n P N˚, par construction, supportfIr´n,ns Ăr´n, ns, fIr´n,ns est à support compact. D’après le § précédent, fn P DpRq.
¨ Montrons maintenant que limnÑ8
fn “ f . Pour cela, calculons fn ´ f :
fnpxq ´ fpxq “ż n
´n
fptqρnpx´ tqdt ´ fpxqż
R
ρnpx´ tqdtlooooooomooooooon
“1
on choisit n suffisamment grand pour que x` 1
nă n et x´ 1
ną ´ n à la fois
il suffit de prendre n ą |x| `?x2 ` 4
2
“ż
R
pfptq ´ fpxqq ρnpx´ tqloooomoooon“0 pour |x´t|ą 1
n
dt
“ż x` 1
n
x´ 1
n
pfptq ´ fpxqqρnpx´ tqdt
30. Pour p “ 1, on écrit dϕ
dxpupxqq “ du
dxutϕ1pupxqq et du
dx“ dx´t
dx“ 1 et on généralise @p par récurrence.
63

d’où
|fnpxq ´ fpxq| ăż x` 1
n
x´ 1
n
|fptq ´ fpxq|ρnpx´ tqdt .
Supposons que f est continue en x ; soit ǫ, soit α tel que, pour |t´x| ă α, |fptq´fpxq| ăǫ ; alors, pour n ą 1{α (et vérifiant les conditions précédentes), on a
|fpxq ´ fnpxq| ăż x` 1
n
x´ 1
n
ǫρnpx´ tqdt “ ǫ ,
ce qui démontre que fnpxq Ñ fpxq.¨ Si x est un point de discontinuité de f , on ne peut prouver le résultat. Mais l’ensemble
de ces points est de mesure nulle.Finalement, on a prouvé que, pour presque tout x P R, fnpxq Ñ fpxq quand n Ñ 8.On dit que fn Ñ f simplement.
3 Espace des distributions D1pRnq
a Définition
D1pRnq est un espace dual de l’espace DpRnq, plus précisément, c’est l’ensemble desformes linéaires T de DpRpq Ñ C, ϕ ÞÑ T rϕs, où ϕ est une fonction test quelconque,vérifiant la propriété de continuité suivante :
α Propriété de continuité
Soit I un intervalle quelconque, alors T est continue au sens des distributions si etseulement si il existe c P R˚
` et m P N tels que, @ϕ P DpRpq telle que Supportpϕq Ă I,on ait
|T rϕs| ă c }ϕpmq} ; (61)
(il n’est pas utile de préciser de quelle façon on définit la norme de ϕpmq, car, cettefonction étant à support compact, toutes les normes sont équivalentes. En pratique, onprendra souvent 31 }ϕ}8 “ max
xPSupportpϕq|ϕpxq|).
β Suite de fonctions convergente
Soit une distribution T , la propriété de continuité (61) implique que, si l’on a unesuite convergente définie dans DpRpq, ϕn Ñ ϕ quand n Ñ 8, alors, la suite définie dansC : T rϕns est aussi convergente, et sa limite est T rϕs.
γ Notation de Dirac
Par la suite, on utilisera la notation de Dirac, T rϕs “ xT |ϕy. Les distributions sontà gauche , les fonctions test à droite .
Quand cela sera nécessaire, on utilisera la notation des physiciens T pxq, où x estune variable muette. Dans ce cas, xT pxq|ϕpxqy signifie que T agit sur la fonction test ϕ.
31. L’égalité est vraie car ϕ P C8pRq.
64

b Propriétés
α Addition dans D1pRpq
Soient T1 et T2 P D1pRpq, la forme linéaire T1 ` T2, définie par
@ϕ P DpRpq xT1 ` T2|ϕy “ xT1|ϕy ` xT2|ϕy , (62a)
est bien une distribution.Démonstration : soit I “ rα, βs un intervalle, soit pc1, c2q P R˚
`2, et p1 et p2 tels que les
propriétés de continuité de T1 et de T2 s’écrivent
@ϕ P DpRq |T1pϕq| ď c1}ϕpp1q}8 et |T2pϕq| ď c2}ϕpp2q}8 ;
supposons, par exemple, que p1 ď p2, notons p2 ´ p1 “ m. En appliquant récursivement laformule des accroissements finis, on montre que maxϕpp1q ď pβ´αqm maxϕpp2q, autrement dit,}ϕpp1q}8 ď pβ ´ αqm}ϕpp2q}8, d’où on tire
|xT1 ` T2|ϕy| “ |xT1|ϕy ` xT2|ϕy|ď |xT1|ϕy| ` |xT2|ϕy|ď c1}ϕpp1q}8 ` c2}ϕpp2q}8
ď c1pβ ´ αqm}ϕpp2q}8 ` c2}ϕpp2q}8
“ pc1pβ ´ αqm ` c2q }ϕpp2q}8
ce qui prouve la propriété de continuité (61) pour T1 ` T2.
β Multiplication par une constante
Soient T P D1pRpq et λ P C, on a
@ϕ P DpRpq xλT |ϕy “ λxT |ϕy “ xT |λϕy , (62b)
(la dernière égalité utilise le fait que les distributions sont des formes linéaires).
γ Suite
On dit qu’une suite pTnqnPN˚ définie dans D1pRpq converge vers T , et on note Tn Ñ T
quand n Ñ 8, si et seulement si, @ϕ P DpRpq, on a xTn|ϕy Ñ xT |ϕy quand n Ñ 8.
δ Linéarité dans DpRq
Ceci est un simple rappel : les distributions sont des formes linéaires, donc, commeon l’a déjà vu dans le rappel sur la dualité, soit T P D1pRpq, on a
@pϕ1, ϕ2q P DpRpq xT |ϕ1 ` ϕ2y “ xT |ϕ1y ` xT |ϕ2y . (62c)
Ceci exclut, par exemple, ϕ ÞÑşR
|ϕptq|dt des distributions.
4 Distributions régulières
On rappelle que E peut être plongé dans E˚. Les distributions régulières sont jus-tement les images des fonctions élémentaires, quand on les plonge dans D1pRpq. On vad’abord définir l’espace des fonctions que l’on peut prolonger comme distribution. Onse restreindra, dorénavant, à p “ 1.
65

a Espace L1locpRq
On dit que f est localement intégrable et on écrit f P L1locpRq si et seulement,
@pa, bq P R2,ş
ra,bs |fptq|dt existe. Autrement dit, f n’est pas forcément intégrable, mais
fIra,bs l’est, @pa, bq P R2. On évacue ainsi les problèmes d’intégrabilité à l’infini.On peut remarquer, par exemple, que x ÞÑ 1 P L1
locpRq.
b Définition
Soit f P L1locpRq, on définit la distribution régulière associée à f , que l’on notera
rf s, par :
@ϕ P DpRq xrf s|ϕy ”ż
R
fptqϕptqdt . (63)
Vérifions queşRfϕdt existe bien. Soit I Ą Supportpϕq un intervalle I “ ra, bs contenant
le support de ϕ ; soit M “ maxxPSupportpϕq
|ϕpxq| ; on a
ˇˇż
R
fptqϕptqdtˇˇ ď
ż
R
|fptqϕptq|dt ď M
ż b
a
|fptq|dt
qui existe bien, puisque f P L1locpRq. Par dessus le marché, on a démontré (61) avec
m “ 0 et c “şI
|fptq|dt.Plutôt que d’écrire rf spxq, on notera simplement rfpxqs, où la variable muette per-
met de préciser la façon dont on fait l’intégrale. Ainsi, xrfpxqs|ϕpxqy ” xrf s|ϕy “şRfpxqϕpxqdx, tandis que xrfpxqs|ϕpx ` yqy “
şRfpxqϕpx ` yqdx.
c Produit scalaire
L’espace des fonctions L2 de carré sommable est muni du produit scalaire (on serestreint dans ce § aux fonctions réelles) :
@pf, gq P L2 xf |gy ”
ż
R
fptqgptqdt .
On remarque que la définition du § précédent d’une distribution régulière généralisele produit scalaire, autrement dit, on serait tenté d’écrire
xrf s|ϕy “ xf |ϕy .
Cette identification est formellement exacte, elle permet d’identifier f et la distribu-tion régulière associée rf s. Cela dit, on notera toujours rf s de façon propre, sans faired’abus de notation ; en effet, l’espace L1
locpRq est beaucoup plus grand que L2pRq, etl’intégrale
şRfptqϕptqdt n’existe que parce que la fonction test ϕ P DpRq, qui est un
espace beaucoup plus restreint. Autrement dit, soit f P L1locpRq, soit g P L2pRq, alors
l’intégraleşRfptqgptqdt n’est généralement pas convergente.
d Propriétés
α Addition
Soient rh1s et rh2s deux distributions régulières, on a
rh1s ` rh2s “ rh1 ` h2s . (64a)
66

Démonstration : soit ϕ P DpRq, on a
xrh1s ` rh2s|ϕy “ xrh1s|ϕy ` xrh2s|ϕy
“ż
R
h1ptqϕptqdt `ż
R
h2ptqϕptqdt
“ż
R
ph1ptq ` h2ptqqϕptqdt “ xrh1 ` h2sϕy .
β Multiplication par une constante
De même, soit λ P C, soit rhs une distribution régulière, on a
λrhs “ rλhs . (64b)
γ Densité
trhs, h P L1locpRqu est dense dans D1pRpq.
Démonstration : soit T P D1pRpq, on définit hn par
hnpyq “ xT pxq|ρnpx ´ yqy
où ρn est la suite régularisante définie plus haut ; alors, on trouve
@ϕ P DpRq xrhns|ϕy “ż
R
hnpyqϕpyqdy
“ż
R
xT pxq|ρnpx´ yqyϕpyqdy
“ xT pxq|ż
R
ρnpx´ yqϕpyqdyy
“ xT |ρn ˙ϕyÝÑnÑ8 xT |ϕy
cela est vrai pour toute ϕ P DpRq, donc rhns Ñ T quand n Ñ 8. Le passage entre la secondeligne et la troisième, où on intervertit intégrale et notation de Dirac, peut se comprendre dela façon suivante : l’intégrale peut s’interpréter comme une somme finie de N termes, dont onprend la limite N Ñ 8. Comme l’interversion est acquise pour un nombre fini de N termes,parce que T est une forme linéaire, il suffit de prouver qu’on peut intervertir limite et notationde Dirac. Or, ceci découle de la continuité de la distribution. On pourrait le montrer à la main,en faisant la différence entre les deux termes et en la majorant à l’aide de (61).
e Distributions régulières particulières
α Distribution nulle
¨ Soit h P L1locpRq, nulle presque partout. Alors, rhs “ 0 est la distribution nulle.
¨ Réciproquement, la distribution nulle est bien régulière, puisqu’on peut l’écrire0 “ r0s.
67

β Distribution C8pRq
On appelle distribution P C8pRq une distribution T “ rf s avec f P C8pRq. Pources distributions, on notera spécifiquement f au lieu de rf s dès que f intervient dansun produit de distributions, ce qui permet de distinguer cette classe particulière dedistributions.
5 Distributions singulières
On va étudier deux exemples de distributions singulières, sans aborder ici la défini-tion formelle, qui sera vue avec l’étude du support d’une distribution.
a Distribution de Dirac
α Définition
On note δa ou encore δpx´ aq la distribution de Dirac centrée en x “ a, définie par
@ϕ P DpRq δa : ϕ ÞÑ xδa|ϕy ” ϕpaq . (65)
En particulier, on notera δ ” δ0 la distribution centrée en x “ 0.
β Suite régularisante à support compact
Soit ρn une suite de fonctions, vérifiant les trois propriétés suivantes :
¨ Supportpρnq Ñ t0u ; ce qui s’écrit rigoureusementŞnPN
´ Ťkěn
Supportpρkq¯
“ t0u ;
¨ @n P N
ż
R
ρnptqdt “ 1 ;
¨ la suiteşR
|ρnptq|dt reste bornée, c’est-à-dire qu’il existe M P R tel que
@n P N
ż
R
|ρnptq|dt ď M ;
(on remarque que la suite ρn P DpRq introduite plus haut vérifie bien ces propriétés 32),alors, au sens des distributions,
limnÑ8
rρns “ δ .
Démonstration : soit ϕ P DpRq, calculons
xrρns|ϕy ´ xδ|ϕy “ż
R
ρnptqϕptqdt ´ ϕp0qż
R
ρnptqdt
ďż
R
ρnptqpϕptq ´ ϕp0qlooooomooooon“tϕ1pt1q
qdt
32. La troisième est ici triviale puisque, dans ce cas, ρnptq ě 0 pour tout t, et doncşR
|ρn|dt “şRρndt “ 1.
68

où t1 Ps0, tr d’après le théorème des accroissements finis. Soit M 1 “ maxxPSupportpϕq
|ϕ1pxq|, on trouve
ˇxrρns|ϕy ´ xδ|ϕy
ˇď
ż
R
|ρnptqpϕptq ´ ϕp0qq|dt
ď M 1
ż
R
|ρnptq||t|dt
ď M 1
ˆmax
xPSupportpρnq|x|
˙ ż
R
|ρnptq|dt
ď MM 1 maxxPSupportpρnq
|x|loooooooomoooooooonÑ0 quand nÑ8
donc, @ϕ P DpRq, xrρns|ϕy Ñ xδ|ϕy quand n Ñ 8 ; donc, par définition, rρns Ñ δ. CQFD.
(Remarquons que la troisième propriété assure queşRtρnptqdt reste bornée ; sans elle, il
serait facile de fabriquer des contre-exemples).
b Peigne de Dirac
On appelle peigne de Dirac, et on note Шa pour tout a P R la distribution suivante :
Шa “ÿ
pPZδpa “ lim
NÑ8
Nÿ
p“´N
δpa . (66)
Vérifions que cette distribution est bien définie, soit ϕ P DpRq, on a
xШa|ϕy “8ÿ
p“´8ϕpnaq
or, tous les termes tels que na R Supportpϕq sont nuls, donc
“ÿ
minpSupportpϕqqa
ďpďmaxpSupportpϕqqa
ϕpnaq ,
la dernière expression est une somme finie, elle est donc toujours bien définie (pourdémontrer la propriété de continuité (61), il suffit de remarquer que, à I fixé, le nombrede termes est fini et déterminé, et d’utiliser l’addition dans D1pRq).
On note Ш “ Ш1 quand a “ 1.
6 Multiplication par une distribution C8
a Impossibilité de définir le produit en toute généralité
La multiplication des distributions est très mal définie. Ainsi, il est impossible dedéfinir le produit de deux distributions dans les cas suivants :
¨ Soit T “ δxo , avec xo P R, il est impossible de définir T 2, autrement dit leproduit de T par lui-même.
¨ Soit h1 et h2 deux fonctions dans L1locpRq, on ne peut définir en toute généralité
leur produit au sens des distributions rh1srh2s, alors que h1h2 P L1locpRq et que
donc rh1h2s est défini.En particulier, on ne peut pas identifier a priori le produit rh1srh2s avec rh1h2s,car la relation (73) n’est pas vérifiée dans tous les cas.
69
¨ Soit T “ δxo , pour xo P R et h P L1locpRq, on ne peut définir le produit rhsT
quand h est discontinue en xo.Toutefois, on pourra le définir dans des cas particuliers. On procédera en deux temps,
on va ici introduire le produit d’une distribution quelconque par une distribution C8pRq.
b Produit d’une distribution quelconque par une distribution C8pRq
Soit une fonction f P C8pRq et une distribution T P D1pRpq quelconques, on définitle produit fT par 33
@ϕ P DpRpq xfT |ϕy ” xT |fϕy ; (67)
on remarque que fϕ P DpRpq parce que f est C8 ; ainsi, xT |fϕy est-il bien défini.
c Multiplication d’une distribution régulière par une distribution C8pRq
Soit f une fonction C8, soit rhs une distribution régulière, on a
f rhs “ rfhs . (68)
Démonstration : soit ϕ P DpRq, on a
xf rhs|ϕy “ xrhs|fϕy
“ż
R
hptqfptqϕptqdt “ xrfts|ϕy .
7 Distributions discontinues
¨ Les distributions discontinues sont des distributions non singulières, définies àpartir d’une fonction h, comme les distributions régulières. Mais, contrairementau cas des distributions régulières, h admet une singularité telle qu’elle n’est pluslocalement intégrable, h R L1
locpRq. Dans ce cas, pour certaines fonctions test ϕ,şRhptqϕptqdt diverge.
¨ Pour définir les distributions associées à ces fonctions h, il faut donner un sensaux intégrales
şRhptqϕptqdt divergentes. On appelle cela régulariser l’intégrale.
¨ Il existe deux méthodes principales de régularisation, valeur principale et partiefinie.
¨ On va étudier valeur principale à travers un exemple fondamental, de façondétaillée.
¨ Partie finie généralise valeur principale, mais cette méthode est beaucoup plussophistiquée et on n’en verra rapidement qu’un seul exemple.
a Valeur Principale de 1{x
Remarquons tout d’abord que x ÞÑ 1{x R L1locpRq car il y a un problème en x “ 0. On
contourne cette divergence en introduisant la définition suivante :
33. Rappel : on note de façon spécifique f et non rfs parce que f P C8pRq.
70

α Définition
On note vpp 1x
q la distribution définie par 34
@ϕ P DpRq xvpp1x
q|ϕy ” limǫÑ0`
ż ´ǫ
´8
ϕptqtdt`
ż 8
ǫ
ϕptqtdt . (69a)
Autrement dit, on retire l’intervalle symétrique r´ǫ, ǫs dansşR
ϕptqtdt, puis on fait
tendre ǫ Ñ 0.
β Définitions équivalentes
On a deux autres définitions
xvpp1x
q|ϕy “ż
r´c,cs
ϕptq ´ ϕp0qt
dt (69b)
et
xvpp1x
q|ϕy “ż 8
0
ϕptq ´ ϕp´tqt
dt , (69c)
où c ą 0 est tel que Supportpϕq Ă r´c, cs (on prend pa, bq tels que Supportpϕq Ă ra, bs,puis on choisit c “ maxp|a|, |b|q).
Montrons que (69a) ðñ (69c), puis que (69b) ðñ (69c). On aż ´ǫ
´8
ϕptqtdt`
ż 8
ǫ
ϕptqtdt “
ż 8
ǫ
ϕptq ´ ϕp´tqt
dt
où l’on a fait le changement de variable t Ñ ´t dans la première intégrale.Quand on prend la limite ǫ Ñ 0 de cette égalité, on obtient exactement (69c). Pour
(69b), on écritż
r´c,cs
ϕptq ´ ϕp0qt
dt “ż 0
´c
ϕptq ´ ϕp0qt
dt `ż c
0
ϕptq ´ ϕp0qt
dt
où on coupe l’intégrale en deux. On fait t Ñ ´ t dans le premier terme
“ż c
0
ϕp´tq ´ ϕp0q´t dt`
ż c
0
ϕptq ´ ϕp0qt
dt
“ż c
0
ϕptq ´ ϕp´tqt
dt “ż 8
0
ϕptq ´ ϕp´tqt
dt .
b Partie finie de 1{x2
Remarquons tout d’abord que x ÞÑ 1{x2 R L1locpRq car l’intégrale n’est pas conver-
gente au voisinage de x “ 0. On contourne cette divergence par la définition suivante :α Définition
On note pfp 1x2 q la distribution définie par
@ϕ P DpRq xpfp 1
x2q|ϕy ” lim
LÑ8
ż L
´L
ϕptq ´ ϕp0q ´ tϕ1p0qt2
dt . (70a)
34. Cette définition est liée à la valeur principale des intégrales divergentes définie au I B 5 b eq. (37b),on peut écrire
xvpp1
xq|ϕy ” vp
ˆż
R
dxϕpxq
x
˙.
71

β Définition équivalente
On a une définition équivalente
xpfp 1
x2q|ϕy “
ż 8
0
ϕptq ` ϕp´tq ´ 2ϕp0qt2
dt . (70b)
8 Dérivée d’une distribution
a Définition
Dans de nombreux paragraphes, on étudiera d’abord le cas des distributions régu-lières, pour s’inspirer de l’identification entre h et rhs afin de trouver des expressionsgénérales qui préservent cette identification.
α Cas des distributions régulières dérivables
Soit h P L1locpRq et h dérivable. 35 On cherche une formule compatible avec l’identification,
donc
rhs1 “ rh1s .
Soit ϕ P DpRq, on a alors
xrhs1|ϕy “ xrh1s|ϕy “ż
R
h1ptqϕptqdt
“ rhptqϕptqs`8´8 ´
ż
R
hptqϕ1ptqdt
où l’on a fait une intégration par partie
“ ´xrhs|ϕ1y ,
où l’on se rappelle que ϕ est nulle à l’infini.
β Formule générale
D’après la dernière formule, on définit, de façon plus générale, pour toute distributionT P D1pRq, sa dérivée T 1 par
@ϕ P DpRq xT 1|ϕy “ ´ xT |ϕ1y . (71a)
On définit de la même façon la dérivé à n’importe quel ordre :
@ϕ P DpRq xT ppq|ϕy “ p´1qpxT |ϕppqy . (71b)
35. Toutes les fonctions de L1loc ne sont pas dérivables.
72

γ Exemple : dérivée de la distribution de Heaviside
On rappelle que la fonction de Heaviside H est définie par
Hpxq “"1 x ě 0 ,
0 x ă 0 .
H P L1locpRq mais n’est pas partout dérivable. On lui applique la définition générale :
soit ϕ P DpRq, on a
xrHs1|ϕy “ ´xrHs|ϕ1y
“ ´ż 8
0
ϕ1ptqdt “ ´rϕs80
“ ϕp0q “ xδ|ϕy ;
finalement, comme c’est vrai pour toute ϕ P DpRq, on a prouvé
rHs1 “ δ .
Remarque : H est dérivable presque partout (sur R˚). Or, sa dérivée, définie presquepartout, est nulle et définit donc la distribution nulle r0s “ 0. Heureusement que l’iden-tification ne donne pas simplement rHs1 ‰ rH 1s “ 0.
b Formule des sauts
C’est une généralisation du cas précédent pour une fonction réglée sur R dérivablepar morceaux. Soient a1, a2, ¨ ¨ ¨, aN P R tels que a1ăa2ă ¨ ¨ ¨ ăaN et que h soit dérivablesur chaque intervalle s´8, a1r, sa1, a2r, ¨ ¨ ¨ , saN ,8r. Calculons rhs1. Soit ϕ P DpRq, ona
xrhs1|ϕy “ ´xrhs|ϕ1y “ ´ż
R
hptqϕ1ptqdt
“ ´ż a1
´8hptqϕ1ptqdt ´
ż a2
a1
hptqϕ1ptqdt ´ ¨ ¨ ¨ ´ż 8
aN
hptqϕ1ptqdt
par partie “ ´rhptqϕptqsa1´8 ´ rhptqϕptqsa2a1 ¨ ¨ ¨ ´ rhptqϕptqs8aN
`ż a1
´8h1ptqϕptqdt ` ¨ ¨ ¨ `
ż 8
aN
h1ptqϕptqdt
on peut raccorder les intégrales, par contre, on doit distinguer hpa`i q et hpa´
i q“ ´phpa´
1 qϕpa1q ´ 0q ´ phpa´2 qϕpa2q ´ hpa`
1 qϕpa1qq ¨ ¨ ¨ ´ p0 ´ hpa`N qϕpaN qq
`ż
R
h1ptqϕptqdt
“ ϕpa1qphpa`1 q ´ hpa´
1 qq ` ¨ ¨ ¨ ` ϕpaN qphpa`N q ´ hpa´
N qq ` xrh1s|ϕy“ xδa1∆hpa1q ` ¨ ¨ ¨ ` δaN∆hpaN q ` rh1s|ϕy
où l’on a définit ∆hpaiq “ hpa`i q ´ hpa´
i q. Comme cela est vrai pour tout ϕ P DpRq, ona prouvé la formule générale
rhs1 “ rh1s ` δa1∆hpa1q ` ¨ ¨ ¨ ` δaN∆hpaN q . (72)
La dérivée de h au sens des distributions est égale à la dérivée au sens des fonctionsplus la somme des distributions de Dirac aux points de discontinuité de h pondérées parles sauts de h en ces points.
Remarque : on retrouve directement rHs1 “ δ, puisque, d’une part H 1 “ 0, et d’autrepart, le saut en 0 vaut 1.
73

c Dérivée du produit d’une distribution quelconque et d’une distri-
bution C8
Soit T P D1pRq et f P C8, on a
pfT q1 “ f 1T ` fT 1 , (73)
où la dérivée de f est prise au sens des fonctions puisqu’il n’y a pas de saut (la dérivationau sens des distributions et au sens des fonctions se confondent). En particulier, lanotation f 1 au lieu de rf 1s est bien légitime puisque f 1 P CpRq.
Démonstration : soit ϕ P DpRq, on a
xpfT q1|ϕy “ ´xfT |ϕ1y“ ´xT |fϕ1y“ ´xT |pfϕq1 ´ f 1ϕy“ xT 1|fϕy ` xT |f 1ϕy“ xfT 1|ϕy ` xf 1T |ϕy“ xfT 1 ` f 1T |ϕy
vrai pour toute ϕ donc on a bien le résultat.
d Primitive d’une distribution
On a le résultat suivant : toute distribution T P D1pRq admet une primitive.Démonstration : soit ϕ P DpRq, soit ρ “ ρ1 définie à la section 2cα. On a
şRρptqdt “ 1 et
ρptq “ 0 pour tout t R r´1, 1s.α Primitive d’une fonction de DpRq
¨ La fonction Ppϕq définie par
Ppϕqpxq “ż x
´8
ˆϕptq ´ ρptq
ż
R
ϕpt1qdt1˙dt
existe et P DpRq.¨ En effet, notons I “ rminp´1,minpSupportpϕqqq,maxp1,maxpSupportpϕqqqs, la fonction t ÞÑϕptq ´ ρptq
şRϕpt1qdt1 est nulle en dehors de I, donc bien intégrable.
¨ C’est, par construction, une fonction infiniment dérivable, et on vérifie que Ppϕqpxq estégalement nulle hors de I. Finalement, on a prouvé que Ppϕq P DpRq.
¨ Enfin, Ppϕq est une primitive de ϕ ´ ρşRϕdt, par construction.
β Primitive d’une distribution de D1pRq
Soit T P DpRq, on définit sa primitive P par
@ϕ P DpRq xP |ϕy “ ´xT |Ppϕqy ,
on trouve alors, soit ϕ P DpRq,
xP 1|ϕy “ ´xP |ϕ1y “ xT |Ppϕ1qy ;
commeşRϕ1dt “ 0, Ppϕ1q est une primitive de ϕ1. Donc, Ppϕ1q et ϕ sont égales à une constante
près. Comme elles sont nulles à l’infini, elles sont égales. On a donc
xP 1|ϕy “ xT |ϕy
vrai pour toute ϕ P DpRq, donc, finalement, P 1 “ T . CQFD.
74

9 Autres transformations sur les distributions
a Translation
α Translatée d’une distribution régulière
On définit la translatée d’une distribution régulière par
arhs “ rahs . (74a)
Soit ϕ P DpRq, on a
xarhs|ϕy “ xrahs|ϕy “ż
R
hpt ´ aqϕptqdt
pchgt de var. t Ñ t` a q “ż
R
hptqϕpt ` aqdt “ xrhs|´aϕy .
β Translatée d’une distribution
On définira donc la translatée aT d’une distribution T par
@ϕ P DpRq xaT |ϕy ” xT |´aϕy , (74b)
soit encore xT px´ aq|ϕpxqy “ xT pxq|ϕpx ` aqy.
b Changement d’échelle
α Dilatation d’une distribution régulière
On définit le changement d’échelle d’une distribution régulière par
@λ P R˚ rhsλ “ rhλs . (75a)
Soit ϕ P DpRq, on a
xrhsλ|ϕy “ xrhλs|ϕy “ż
R
hp tλ
qϕptqdt
pchgt de var. t Ñ λt q “ |λ|ż
R
hptqϕpλtqdt “ |λ|xrhs|ϕ 1λ
y .
β Dilatation d’une distribution
On définira donc la dilatation Tλ d’une distribution T par
@ϕ P DpRq xTλ|ϕy ” |λ|xT |ϕ 1λ
y , (75b)
soit encore xT px{λq|ϕpxqy “ |λ|xT pxq|ϕpλxqy.N.B. : Шa n’est pas la dilatée de Ш, mais elle est proportionnelle à pШqa.
c Transposition
¨ On définit la transposée d’une distribution régulière rhs par |rhs “ rqhs.¨ On définit la transposée d’une distribution S par
@ϕ P DpRq x qS|ϕy ” xS| qϕy , (76)
soit encore xSp´xq|ϕpxqy “ xSpxq|ϕp´xqy.
75
d Parité
α Distribution paire
Soit S P D1pRq, on dit que S est paire si et seulement qS “ S.
β Distribution impaire
On dit que S est impaire si et seulement si qS “ ´S.
γ Définitions équivalentes
On montre que¨ S paire ðñ @ϕ P DpRq impaire, on a xS|ϕy “ 0.¨ S impaire ðñ @ϕ P DpRq paire, on a xS|ϕy “ 0.
Démonstration :¨ soit S paire, c’est-à-dire ϕ P DpRq une fonction test, on a
xS|ϕ´ qϕy “ xS|ϕy ´ x qS|ϕy “ xS|ϕy ´ xS|ϕy “ 0
ce qui démontre que S donne 0 pour la partie impaire de ϕ, donc pour toute fonctiontest impaire.
¨ Soit S impaire, soit ϕ P DpRq une fonction test, on a
xS|ϕ` qϕy “ xS|ϕy ` x qS|ϕy “ xS|ϕy ´ xS|ϕy “ 0
ce qui démontre que S donne 0 pour la partie paire de ϕ, donc pour toute fonction testpaire.
¨ Soit S donnant 0 sur toute fonction test impaire, soit ϕ P DpRq une fonction test, on a
xS ´ qS|ϕy “ xS|ϕy ´ xS| qϕy “ xS|ϕ´ qϕy “ 0
où la dernière fonction test est la partie impaire de ϕ et donne 0. On en déduit queqS “ S.
¨ Soit S donnant 0 sur toute fonction test paire, soit ϕ P DpRq une fonction test, on a
xS ` qS|ϕy “ xS|ϕy ` xS| qϕy “ xS|ϕ` qϕy “ 0
où la dernière fonction test est la partie paire de ϕ et donne 0. On en déduit que qS “ ´S.
10 Support d’une distribution
a Support d’une distribution régulière
Il est naturel de définir le support d’une distribution régulière rhs par Supportprhsq “Supportphq. On cherche à caractériser cet espace de façon plus intrinsèque, de façon àgénéraliser la notion à toutes les distributions.
Introduisons tout d’abord la notion de portage.
b Portage d’une distribution
Soit une distribution T , soit I un intervalle ouvert, ou une union quelconque d’in-tervalles ouverts disjoints, on dit que I porte la distribution T si et seulement si, pourtoute ϕ P DpRq vérifiant @x P I, ϕpxq “ 0, alors, xT |ϕy “ 0.
Notons que R, par exemple, porte toutes les distributions !
76

c Propriété fondamentale
Soit une distribution régulière rhs, on a la propriété suivante : I porte rhs si etseulement si I Ą Supportprhsq.
Vérifions d’abord que I Ą Supportprhsq ñ I porte rhs : Soit ϕ P DpRq, vérifiant @x P I
ϕpxq “ 0, on remarque que RzI Ă zRSupportrhs et on calcule
xrhs|ϕy “ż
R
hptqϕptqdt “ż
I
hptq ϕptqloomoon“0
sur cet intervalle
dt `ż
RzI
hptqloomoon“0
sur cet intervalle
ϕptqdt “ 0 .
Vérifions maintenant I Č Supportprhsq ñ I ne porte pas rhs.Soit donc un intervalle ouvert U ‰ H inclus dans Supportprhsq et exclus de I, on a
SupportprhsqXpRzIq Ą U ; soit xo P U et ǫ ą 0 tels 36 que sxo´ǫ, xo`ǫrĂ U et @x Psxo´ǫ, xo`ǫr,hpxq ‰ 0. On définit alors ϕ par
ϕpxq “"hpxq e
1
ǫ2´px´xoq2 |x´ xo| ă ǫ ,
0 sinon .
ϕ est bien nulle sur tout l’intervalle I, par construction, et pourtant,
xrhs|ϕy “ż xo`ǫ
xo´ǫ
h2ptq e1
ǫ2´pt´xoq2 dt ą 0
ce qui prouve bien que I ne porte pas, en ce cas, rhs.Finalement, les deux sens de l’implication sont prouvés, et la propriété est vraie. CQFD.
d Définition intrinsèque pour une distribution régulière
Grâce à la propriété fondamentale, on peut maintenant donner la définition dusupport d’une distribution rhs :
Supportprhsq “č
I portant rhsI .
α Exemple
Le support de rIra,bss et de rIsa,brs est l’intervalle fermé ra, bs.
β Propriétés
Si h est dérivable, on a Supportprhs1q “ Supportprh1sq Ă Supportprhsq.Bien sûr, si h n’est pas dérivable, on espère généraliser cette propriété, mais cela ne
sera possible qu’avec la définition générale du support d’une distribution.
e Support d’une distribution
α Définition
On définit le support d’une distribution T P D1pRq par
SupportpT q “č
I portant T
I .
Par construction, cette définition recoupe celle pour une distribution régulière.
36. Il est toujours possible de trouver un tel intervalle sinon h serait nulle sur U , contrairementaux hypothèses. Il est certes possible de trouver xo tel que h ne soit pas continue en xo. Mais, lesdiscontinuités de h forment, par définition d’une distribution régulière, un ensemble discret, et donc demesure nulle. Donc, il est toujours possible d’éviter un tel cas, sinon U serait de mesure nulle lui-même,absurde.
77

β Propriété
¨ La propriété fondamentale du §c se généralise à toutes les distributions.¨ Soit T une distribution quelconque, on a SupportpT 1q Ă SupportpT q.
Pour le montrer, il suffit de montrer que, si I porte T , il porte aussi T 1. Or, ϕpxq “ 0
@x P I implique ϕ1pxq “ 0 @x P I (ceci n’est valable que parce que I est constituéd’intervalles ouverts).
f Distributions singulières
Les supports ponctuels posent un problème particulier. Examinons un cas simple :α Support de δa
Considérons T “ δa. @I Ą tau, I ouvert, I porte T . En effet, soit ϕ P DpRq, telleque @x P I ϕpxq “ 0, on a ϕpaq “ 0 en particulier, donc,
xδa|ϕy “ 0 .
Finalement,Ş
IĄtau“ tau : le support de la distribution de Dirac est le singleton tau.
β Support de δppqa
Il aurait été plus simple de définir directement, dans l’exemple précédent, Supportpδaqcomme le plus petit ensemble portant δa (en étendant alors la propriété fondamentaleaux intervalles fermés).
Cependant, ceci n’aurait pas fonctionné avec δ1a : Le support de δ1
a est bien tau, maisil est facile de construire des fonctions ϕ telles que
ϕpaq “ 0 et xδ1a|ϕy “ ´ϕ1paq ‰ 0 simultanément.
Au contraire, quelque soit I ouvert contenant tau, chaque fonction ϕ P DpRq nullesur I a toutes ses dérivées nulles en a, ce qui prouve que I porte δppq @p P N, et finalement
Supportpδppqa q “ tau . (77)
γ Théorème
Réciproquement, soit une distribution T telle que son support s’écrive SupportpT q “tau, alors, T est une combinaison linéaire finie des distributions δppq
a , p P N,
T “Nÿ
p“0
cpδppqa où N P N .
δ Définition d’une distribution singulière
¨ Soit une distribution T , on dit que T est singulière (on dit parfois purement
singulière) si Dtxi, i P N˚u un ensemble dénombrable, sans point d’accumulation,tel que
SupportpT q “ txi, i P N˚u .
78

¨ D’après le théorème précédent, il existe des coefficients pcniq P RNˆN˚tel que
T “ÿ
iPN˚ nPNcniδ
pnqpx´ xiq . (78)
¨ Par exemple, la fonction de Dirac est singulière, ainsi que le peigne de Dirac.
ǫ Décomposition d’une distribution
Théorème : « Une distribution T quelconque peut être décomposée de façon uniqueen une distribution singulière Tsing et une distribution Th, associée à une fonction h,qui peut être soit discontinue (comme Th “ vpp1{xq), soit régulière. »
g Distribution causale
α Définition d’une distribution causale
On dit qu’une distribution T est causale si son support SupportpT q Ă ra,8r, oùa P R. D’après la propriété fondamentale du §c, cela signifie que, pour toute ϕ P DpRqtelle que, @x ě a, ϕpxq “ 0, alors
xT |ϕy “ 0 .
β Exemple
rHs est causale, puisque SupportprHsq “ r0,8r.
γ Action sur des fonctions test anticausales
Soit T causale et a P R tel que SupportpT q Ă ra,8r. Soit une fonction test ϕ P DpRq.Remarquons d’abord que si on remplace ϕ par x ÞÑ Hpx´ aqϕpxq, on ne change pas le résultatpuisque ces deux fonctions ne diffèrent que sur l’intervalle s ´ 8, ar, qui ne porte pas T .
Ce raisonnement est faux parce que aHϕ R DpRq. S’il y a une discontinuité en x “ a,l’action de T pourrait induire une erreur. Pour corriger la construction, on va rendre la coupurecontinue. Pour cela, on définit rHn “ Hpx´ 1
nq ˙ ρn, où n P N˚ et ρn est la fonction régularisante
définie à la section 2cα.Soit ϕ P DpRq, on observe que x rHnpx ´ aqT pxq|ϕpxqy “ xT pxq| rHnpx ´ aqϕpxqy “ xT |ϕy.
La première égalité est vraie parce que a rHn P C8pRq et la différence des deux derniers termess’écrit xT |χy avec χ “ pa rHn ´ 1qϕ. La fonction χ est nulle sur ra,8r, donc, par définition deSupportpT q, xT |χy “ 0, ce qui démontre la deuxième égalité.
Finalement, soit une fonction ϕ P C8pRq anticausale (ce qui signifie que Supportpϕq Ă
s ´ 8, as où a P R, c’est l’opposé de la causalité et a priori ϕ R DpRq). Remarquons quea rHnϕ P DpRq parce qu’elle est à la fois causale et anticausale 37 et elle coincide avec ϕ surra,8r. On définit l’action de T sur ϕ par
xT |ϕy ” xT pxq|ϕpxq rHnpx´ aqy .
Si n Ñ 8, on remarque que a rHnϕ Ña Hϕ mais il ne faut pas atteindre la limite (qui peut êtreR C
8pRq). Au contraire, dans la plupart des cas, on peut se contenter de n “ 1.
37. Soit b tel que Supportpϕq Ăs ´ 8, bs, alors Supportpa rHnϕ Ă ra ´ 1
n, bs. Si a ą b, ce support est
H pour n suffisamment grand, ce qui signifie que l’action de T sur ϕ donne alors 0.
79

h Définition d’une distribution à support compact
On dit qu’une distribution S est à support compact si son support SupportpSq Ăra, bs, où pa, bq P R2. D’après la propriété fondamentale du §c, cela signifie que, pourtoute ϕ P DpRq et telle que @x P ra, bs, alors
xS|ϕy “ 0 .
α Exemple
rΠs est causale, puisque SupportprΠsq “ r´12, 12s.
β Action sur des fonctions test étendues
Soit S à support compact, a et b P R tels que SupportpSq Ă ra, bs. Soit une fonction testϕ P DpRq. Remarquons d’abord que si on remplace ϕ par x ÞÑ Πp 1
b´ax ´ a`b
2pb´aq qϕpxq, on nechange pas le résultat puisque ces deux fonctions ne diffèrent que sur l’intervalle s´8, arYsb,8r,qui ne porte pas S.
Ce raisonnement est faux parce quea`b
2pb´aq Πb´aϕ R DpRq. S’il y a une discontinuité enx “ a ou en x “ b, l’action de S pourrait induire une erreur. Pour corriger la construction,on va rendre la coupure continue. Pour cela, on définit rΠn “ Ir´ 1
2´ 1
n, 12
` 1
ns ˙ ρn, avec encore la
fonction régularisante ρn définie à la section 2cα. La fonction rΠn P DpRq.Soit ϕ P DpRq, on observe que xrΠnp 1
b´ax´ a`b
2pb´aq qSpxq|ϕpxqy “ xSpxq|rΠnp 1b´a
x´ a`b2pb´aq qϕpxqy
“ xS|ϕy. La première égalité est vraie parce quea`b
2pb´aq prΠnqb´a P C8pRq et la différence des deux
derniers termes s’écrit xS|χy avec χ “ pa`b
2pb´aq prΠnqb´a ´ 1qϕ. La fonction χ est nulle sur ra, bs,donc, par définition de SupportpSq, xS|χy “ 0, ce qui démontre la deuxième égalité.
Finalement, soit une fonction ϕ P C8pRq quelconque (donc a priori, ϕ R DpRq). Remarquons
quea`b
2pb´aq prΠnqb´aϕ P DpRq (parce quez`b
2pb´aq prΠnqb´a est à support compact) et elle coincideavec ϕ sur ra, bs. On définit l’action de S sur ϕ par
xS|ϕy ” xSpxq|ϕpxqrΠnp 1
b´ ax´ a` b
2pb´ aq qy .
Si n Ñ 8, on remarque quea`b
2pb´aq prΠnqb´aϕ Ña`b
2pb´aq Πb´aϕ mais il ne faut pas atteindre lalimite (qui peut être R C8pRq). Au contraire, dans la plupart des cas, on peut se contenter den “ 1.
i Produit de distributions
On va généraliser le produit de distributions à de nouveaux cas.
α Multiplication d’une distribution par une fonction C8pUq
¨ Soit une distribution T donnée. Soit U un ouvert connexe contenant son support, U ĄSupportpT q et une fonction f P C8pUq. Alors, le produit rf sT est bien défini.Démonstration : on a
@ϕ P DpRq xrf sT |ϕy “ xrf sT |ϕIUy“ xT |ϕfIUy“ xrfIU sT |ϕy
où on a remplacé ϕ par ϕIU , puisque leur différence est nulle sur le support de T etdonne 0. Or, finalement fIU P C8pRq et comme rfIU sT existe bien, rf sT également.
80

¨ En pratique, on traite différemment les cas où SupportpT q est compact (auquel cas, iln’y a aucune condition à l’infini sur f) des autres cas, par exemple, si T est causale,fpxq doit s’annuler quand x Ñ 8 (à moins que la distribution ne soit tempérée, auquelcas elle doit décroître rapidement, cf. plus loin).
β Multiplication de distributions ayant des supports séparés
¨ Soit T et T 1 deux distributions telles que SupportpT q XSupportpT 1q “ H, alors on peutdéfinir leur produit, qui vaut TT 1 “ 0.
¨ Le complémentaire de SupportpT 1q joue le rôle de U pour T , et réciproquement.¨ Un exemple élémentaire est
δx0δx1
“ 0
pour x0 ‰ x1 (on rappelle que ce produit n’existe pas pour x0 “ x1).
γ Combinaison des cas précédents
Soit T et T 1, telles que, sur chaque composante connexe U de SupportpT q X SupportpT 1q,l’une des deux soit une distribution C
8pUq, alors on peut définir leur produit en combinant lesdifférents cas déjà étudiés.
Il ne faut guère espérer de meilleure généralisation. Toutefois, on sait définir à la main leproduit vp 1
xpar lui-même, qui vaut δ.
11 Convolution des distributions
Avant de définir la convolution, étudions rapidement D1pR2q.
a Distributions de D1pR2q
Soit T P D1pR2q, soit une fonction test à deux variables ϕ P DpR2q, on noteraxT |ϕy “ xT px, yq|ϕpx, yqy à la façon des physiciens. ϕ est à support compact dans leplan R2, ce qui signifie qu’on peut inclure son support dans un carré (ou au choix undisque) fini.
α Produit tensoriel
Les seules distributions à deux variables dont nous aurons besoin sont les distribu-tions SpxqT pyq ; on a une sorte de formule de Fubini, qui s’écrit :
ϕ P DpR2q ÞÑ xSpxqT pyq|ϕpx, yqy “ xSpxqˇˇxT pyq|ϕpx, yqloooooomoooooon
fonction de x
yy
“ xT pyqˇˇxSpxq|ϕpx, yqloooooomoooooon
fonction de y
yy ;
β Exemple
La distribution de Dirac à deux dimensions δa,b “ δpx ´ aqδpy ´ bq est définie par
@ϕ P DpR2q xδa,b|ϕy “ xδpx ´ aq|xδpy ´ bq|ϕyy “ xδpy ´ bq|xδpx ´ aq|ϕyy “ ϕpa, bq .
81
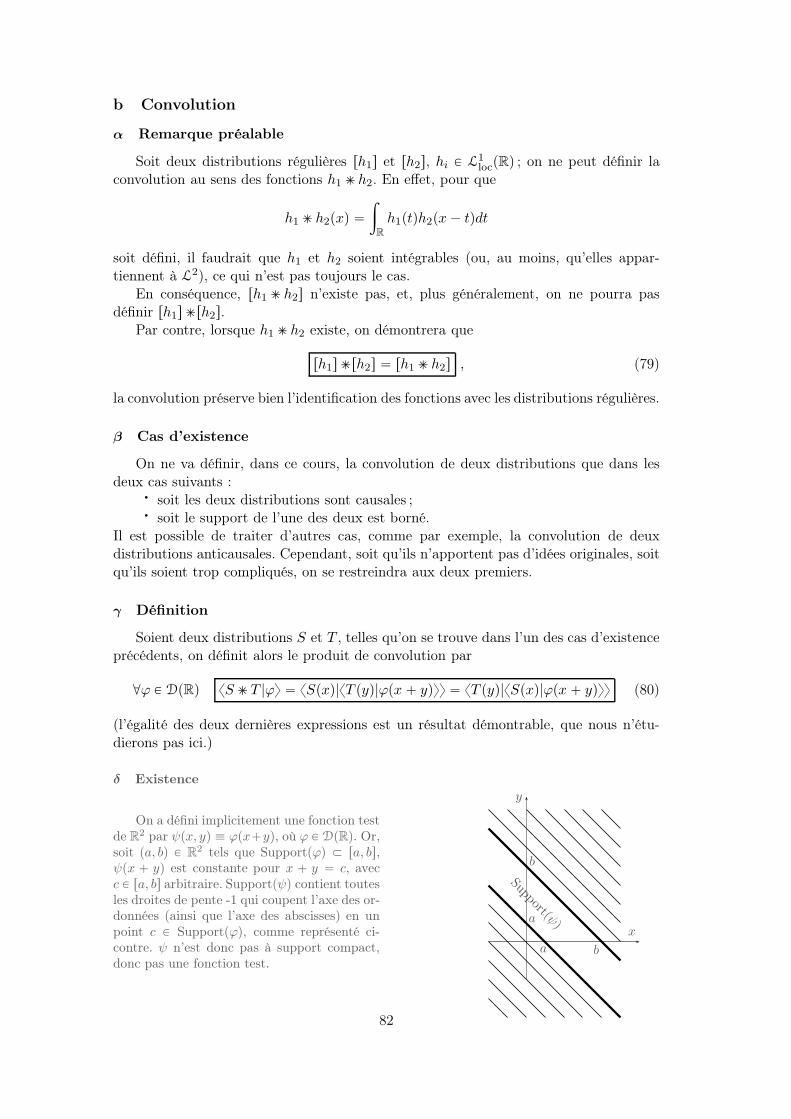
b Convolution
α Remarque préalable
Soit deux distributions régulières rh1s et rh2s, hi P L1locpRq ; on ne peut définir la
convolution au sens des fonctions h1 ˙h2. En effet, pour que
h1 ˙h2pxq “ż
R
h1ptqh2px ´ tqdt
soit défini, il faudrait que h1 et h2 soient intégrables (ou, au moins, qu’elles appar-tiennent à L2), ce qui n’est pas toujours le cas.
En conséquence, rh1 ˙h2s n’existe pas, et, plus généralement, on ne pourra pasdéfinir rh1s ˙rh2s.
Par contre, lorsque h1 ˙h2 existe, on démontrera que
rh1s ˙rh2s “ rh1 ˙h2s , (79)
la convolution préserve bien l’identification des fonctions avec les distributions régulières.
β Cas d’existence
On ne va définir, dans ce cours, la convolution de deux distributions que dans lesdeux cas suivants :
¨ soit les deux distributions sont causales ;¨ soit le support de l’une des deux est borné.
Il est possible de traiter d’autres cas, comme par exemple, la convolution de deuxdistributions anticausales. Cependant, soit qu’ils n’apportent pas d’idées originales, soitqu’ils soient trop compliqués, on se restreindra aux deux premiers.
γ Définition
Soient deux distributions S et T , telles qu’on se trouve dans l’un des cas d’existenceprécédents, on définit alors le produit de convolution par
@ϕ P DpRq xS˙T |ϕy “ xSpxq|xT pyq|ϕpx ` yqyy “ xT pyq|xSpxq|ϕpx ` yqyy (80)
(l’égalité des deux dernières expressions est un résultat démontrable, que nous n’étu-dierons pas ici.)
δ Existence
On a défini implicitement une fonction testde R2 par ψpx, yq ” ϕpx`yq, où ϕ P DpRq. Or,soit pa, bq P R2 tels que Supportpϕq Ă ra, bs,ψpx ` yq est constante pour x ` y “ c, avecc P ra, bs arbitraire. Supportpψq contient toutesles droites de pente -1 qui coupent l’axe des or-données (ainsi que l’axe des abscisses) en unpoint c P Supportpϕq, comme représenté ci-contre. ψ n’est donc pas à support compact,donc pas une fonction test.
x
y
b
b
a
a
Support(ψ)
82
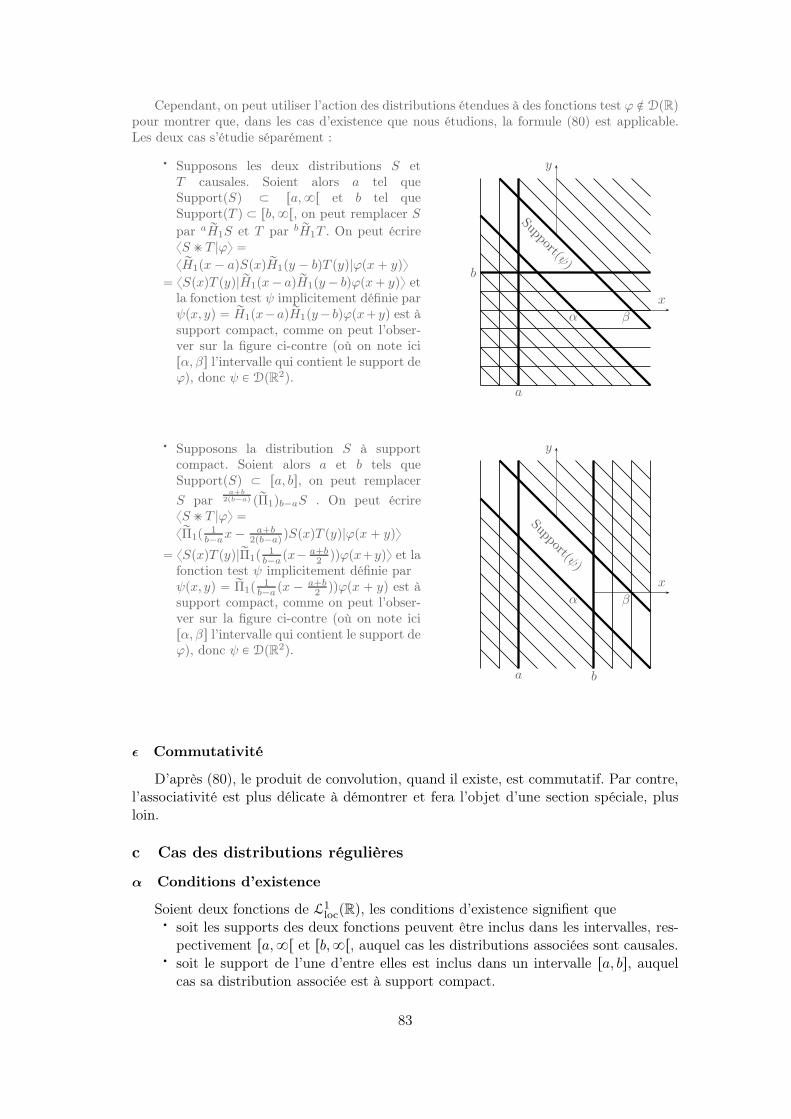
Cependant, on peut utiliser l’action des distributions étendues à des fonctions test ϕ R DpRqpour montrer que, dans les cas d’existence que nous étudions, la formule (80) est applicable.Les deux cas s’étudie séparément :
¨ Supposons les deux distributions S etT causales. Soient alors a tel queSupportpSq Ă ra,8r et b tel queSupportpT q Ă rb,8r, on peut remplacer Spar a rH1S et T par b rH1T . On peut écrirexS˙T |ϕy “x rH1px´ aqSpxq rH1py ´ bqT pyq|ϕpx` yqy
“ xSpxqT pyq| rH1px´ aq rH1py´ bqϕpx` yqy etla fonction test ψ implicitement définie parψpx, yq “ rH1px´aq rH1py´ bqϕpx`yq est àsupport compact, comme on peut l’obser-ver sur la figure ci-contre (où on note icirα, βs l’intervalle qui contient le support deϕ), donc ψ P DpR2q.
x
y
βα
Support(ψ)
a
b
¨ Supposons la distribution S à supportcompact. Soient alors a et b tels queSupportpSq Ă ra, bs, on peut remplacer
S para`b
2pb´aq prΠ1qb´aS . On peut écrirexS˙T |ϕy “xrΠ1p 1
b´ax´ a`b
2pb´aq qSpxqT pyq|ϕpx ` yqy“ xSpxqT pyq|rΠ1p 1
b´apx´ a`b
2qqϕpx`yqy et la
fonction test ψ implicitement définie parψpx, yq “ rΠ1p 1
b´apx ´ a`b
2qqϕpx ` yq est à
support compact, comme on peut l’obser-ver sur la figure ci-contre (où on note icirα, βs l’intervalle qui contient le support deϕ), donc ψ P DpR2q.
x
y
βα
Support(ψ)
a b
ǫ Commutativité
D’après (80), le produit de convolution, quand il existe, est commutatif. Par contre,l’associativité est plus délicate à démontrer et fera l’objet d’une section spéciale, plusloin.
c Cas des distributions régulières
α Conditions d’existence
Soient deux fonctions de L1locpRq, les conditions d’existence signifient que
¨ soit les supports des deux fonctions peuvent être inclus dans les intervalles, res-pectivement ra,8r et rb,8r, auquel cas les distributions associées sont causales.
¨ soit le support de l’une d’entre elles est inclus dans un intervalle ra, bs, auquelcas sa distribution associée est à support compact.
83

β Produit de convolution des fonctions
Remarquons qu’alors l’intégraleşRh1ptqh2px ´ tqdt est bien définie. En effet, selon
les cas, elle peut se récrire
¨ż
R
h1ptqh2px´ tqdt “ż
R
Hpt´aqh1ptqHpx´ t´bqh2px´ tqdt “ż x´b
a
h1ptqh2px´tqdt(h1 et h2 étant causales), on voit de plus sur cette expression que la fonctionh1 ˙h2 est également causale et vérifie Supportph1˙ h2q Ă ra` b,`8r.
¨ż
R
h1ptqh2px´ tqdt “ż b
a
h1ptqh2px ´ tqdtoù h1 est à support compact. Ici, par contre, on ne sait rien du produit h1 ˙h2.
γ Produit de convolution des distributions
Pour finir, démontrons l’égalité (79). Soit ϕ P DpRq, on a
xrh1s ˙rh2s|ϕy “ xrh1pxqs|xrh2pyqs|ϕpx` yqyy
“ xrh1pxqs|ż
R
h2pyqϕpx` yqdyy
“ż
R
h1pxq´ ż
R
h2pyqϕpx ` yqdy¯dx
“ż
R
h1pxqh2pyqϕpx ` yqdxdy on pose t “ x` y
“ż
R
h1pxqh2pt ´ xqϕptqdxdt
“ż
R
ϕptq´ ż
R
h1pxqh2pt ´ xqdx¯dt
“ż
R
ϕptq h1 h2ptqdt
“ xrh1 ˙h2s|ϕy .
d Exemples
α L’élément neutre de la convolution est δ
Soit T P D1pRqδ˙T “ T . (81a)
Démonstration : soit ϕ P DpRq, on a
xδ˙T |ϕy “ xδpxq|xT pyq|ϕpx` yqyy “ xT pyq|ϕp0 ` yqy “ xT |ϕy .
β L’opérateur de translation est T ÞÑ δa ˙T
Soit T P D1pRqδa ˙T “ aT . (81b)
Démonstration : soit ϕ P DpRq, on a
xδa ˙T |ϕy “ xδpx´ aq|xT pyq|ϕpx` yqyy “ xT pyq|ϕpa` yqy “ xT |´aϕy “ xaT |ϕy .
84

γ L’opérateur de dérivation est T ÞÑ δ1 ˙T
Soit T P D1pRqδ1 ˙T “ T 1 . (81c)
Démonstration : soit ϕ P DpRq, on a
xδ1 ˙T |ϕy “ xδ1pxq|xT pyq|ϕpx ` yqyy
“ ´ d
dxxT pyq|ϕpx` yqy
]x“0
“ ´xT pyq|Bϕpx` yqBx y
]x“0
“ ´xT pyq| dϕ
dx` ypx` yq Bx` y
Bxloomoon“1
y]x“0
“ ´xT pyq|ϕ1px` yqux“0y “ ´xT pyq|ϕ1pyqy “ xT 1|ϕy .
e Associativité
Soit R, S, T P D1pRq, vérifiant l’une de ses deux conditions :¨ soit elles sont toutes causales.¨ soit deux au moins d’entre elles sont à support compact.
alors, on peut démontrer que
R˙pS ˙T q “ pR˙Sq ˙T , (82)
nous ne le ferons pas mais noter que R˙S, R˙T et S ˙T sont bien définies.
α Application à la dérivation
Soit S et T P D1pRq, si S˙T existe, autrement dit, soit qu’elles sont toutes deuxcausales, soit que l’une est à support compact, alors, δ1, S et T vérifient les conditionsprécédentes (en effet, dans le premier cas, elles sont toutes causales, y compris δ1, etdans le second, deux sont bien à support compact, en particulier δ1). On a
pδ1 ˙Sq ˙T “ S˙pδ1 ˙T q “ δ1 ˙pS˙T q
doncS1 ˙T “ S˙T 1 “ pS ˙T q1 ; (83a)
« pour dériver un produit de convolution, il suffit de dériver l’un des facteur. »
On peut généraliser la formule à tout ordre, et écrire, @pp, qq P N2,
Sppq ˙T pqq “ Spp`qq ˙T “ S˙T pp`qq “ pS ˙T qpp`qq . (83b)
β Application à la primitive d’une distribution causale
Soit une distribution causale T P D1pRq, alors, une primitive P de T s’écrit toutsimplement P “ rHs ˙ T .
Démonstration : P 1 “ prHs ˙ T q1 “ rHs1 ˙T “ δ˙T “ T .
85

γ Contre-exemple
rHs, δ1 et r1s ne vérifient pas les conditions pour lesquelles on a prouvé l’associativité.Or, les produits prHs ˙ δ1q ˙r1s et rHs ˙pδ1 ˙r1sq existent et sont différents. En effet,
prHs ˙ δ1q ˙r1s “ rHs1 ˙r1s “ δ˙r1s “ r1s ;rHs ˙pδ1 ˙r1sq “ rHs ˙r1s1 “ rHs ˙ 0 “ 0 .
De plus, il faut noter que le troisième produit δ1 ˙prHs ˙r1sq n’existe pas, carrHs ˙r1s n’existe pas !
δ Application à la translation
Soit S et T P D1pRq, telles que S˙T existe. De façon identique à l’applicationde l’associativité à la dérivation, δa, S et T vérifient les conditions d’application del’associativité. On a
pδa ˙Sq ˙ T “ S˙pδa ˙T q “ δa ˙pS ˙T q
doncaS˙T “ S˙ aT “ apS˙T q ; (84)
« pour translater un produit de convolution, il suffit de translater l’un des facteurs. »
On peut généraliser la formule et écrire, @pa, bq P R2,
aS˙ bT “ a`bS˙T “ S ˙ a`bT “ a`bpS˙T q .
12 Continuité
a Principe
Les applications, définies dans D1pRq, associées respectivement à l’addition, la multiplicationpar une constante complexe, la multiplication par une distribution C8pRq, la translation parune constante, l’inflation par une constante, la dérivation, la convolution par une distribution,sont continues.
b Applications
En pratique, on utilise la continuité lorsque l’on étudie une suite convergente dans D1pRqSn Ñ S. Elle implique que l’on peut inverser la limite et l’application en question.
Soit donc une suite convergente Sn Ñ S. La continuité des applications sus-citées impliquela convergence des suites suivantes :
α Addition
Soit To P D1pRq, la suite Sn ` To est convergente, et sa limite est S ` To.
β Multiplication par une constante complexe
Soit λ P C, la suite λSn est convergente, et sa limite est λS.
γ Multiplication par une distribution C8
Soit f une fonction infiniment dérivable, la suite fSn est convergente, et sa limite est fS.
86

δ Translation
Soit a P R, la suite aSn est convergente, et sa limite est aS.
ǫ Inflation
Soit λ P R, la suite pSnqλ est convergente, et sa limite est Sλ.
ζ Dérivation
La suite S1n est convergente, et sa limite est S1.
η Convolution par une distribution
Soit T , telle que Sn ˙T existe ; (soit les distributions Sn y compris S et T sont toutescausales, soit T est à support compact, soit les distributions Sn sont toutes, y compris S, àsupport compact).
La suite Sn ˙T est convergente, et sa limite est S ˙T .En particulier, si Sn est une suite régularisante à support compact rρns, telle que rρns Ñ δ,
pour toute T P D1pRq, la suite rρns ˙T est convergente, et sa limite est δ˙T “ T .
87

88

B Transformation de Fourier
1 Introduction
Dans l’espace des fonctions, la transformée de Fourier d’un produit de convolution estle produit simple des transformées de Fourier. Dans l’espace des distributions, le produitordinaire et le produit de convolution posent les problèmes que l’on vient d’étudier ; celaprésage de grande difficultés.
En fait, l’espace D1pRpq est trop large pour définir correctement la transformation deFourier. Suivant les notions qui ont été rappelées au A 1b, on va considérer un espacede fonction SpRpq Ą DpRpq, et son dual associé S1pRpq, qui vérifie donc S1pRpq Ă D1pRpq.On appellera S1pRpq l’espace des distributions tempérées.
2 Espace de fonctions SpRpq
On dit qu’une fonction ϕpx1, x2, ¨ ¨ ¨ , xpq P SpRpq si et seulement si ϕ P C8pRpq et, @pm1, n1, ¨ ¨ ¨ ,
mp, npqP N, l’ensemble t|xm1
1 ¨ ¨ ¨xmpp
Bn1
Bxn1
1
¨ ¨ ¨ Bnp
Bxnpp
ϕpx1, ¨ ¨ ¨ , xpq|, xi P Ru est borné.
Le cas p “ 1 sur lequel nous nous restreindrons la plupart du temps s’écrit plussimplement ϕ P SpRq si et seulement si ϕ P C8pRq et, @pm,nq P N, t|xmϕpnqpxq|, x P Ruest borné : ϕ et toutes ses dérivées sont à décroissance rapide (cf. §IA 2 j γ, elles tendentvers zéro, quand x Ñ ˘8, plus vite que toute puissance de x).
3 Espace des distributions tempérées S1pRq
S1pRq est le dual de SpRq, mais muni d’une propriété de continuité plus délicate quesur D1pRq ; on ne la détaillera pas ici.
a Restriction à l’espace de fonctions DpRq
On a S1pRq Ă D1pRq, donc toute distribution tempérée S P S1pRq est une distributionordinaire, et pour toute ϕ P DpRq, on peut définir
xS|ϕy ;
en pratique, on exprimera les choses en sens inverse : soit une distribution quelconqueS P D1pRq, est-elle tempérée, autrement dit, a-t-on S P S1pRq ?
b Exemples
Pour mieux comprendre la notion de distribution tempérée, donnons quelques exemples :¨ δa est tempérée, de même que les dérivées δppq
a .
89

¨ Le peigne de Dirac, Шa, est tempéré. Vérifions le. Soit ϕ P SpRq, on a
xШa|ϕy “8ÿ
n“´8ϕpnaq “
8ÿ
n“0
ϕpnaq `8ÿ
n“1
ϕp´naq ;
les deux suites sont convergentes ; en effet, ϕpnaq tend vers 0 plus vite que 1{n2 ;on peut donc les majorer par des suites convergentes. CQFD.
¨ expШa n’est, par contre, pas tempérée : soit ϕ P SpRq, on a
xexpШa|ϕy “ xШapxq| exϕpxqy “8ÿ
n“´8enaϕpnaq “
8ÿ
n“0
enaϕpnaq`8ÿ
n“1
e´naϕp´naq ;
or, cette fois-ci, la suite de terme enaϕpnaq n’est pas forcément convergente(puisqu’on peut choisir ϕ P SpRq telle que ϕpxq „ e´x quand x „ 8).
c Addition des distributions tempérées
L’espace des distributions tempérées S1pRq est stable par addition. Soient donc S etT deux distributions tempérées, alors S ` T est tempérée.
Démonstration : il suffit de sommer les majorations afférant à chacun des cas.
d Multiplication d’une distribution tempérée par une distribution C8
Les deux derniers exemples du b démontrent que, contrairement à l’espace D1pRq,il n’est pas possible de définir la multiplication par une distribution C8pRq dans S1pRq,puisque Шa P S1pRq et que expШ R S1pRq ; par contre, pour S P S1pRq et f C8pRq, on afS P D1pRq.
Toutefois, on peut définir le produit de S P S1pRq par une distribution associée à unpolynôme p, ou à toute fonction f à croissance lente 38 ; par extension, on dira que rf sest une distribution à croissance lente.
e Transformations dans S1pRq
S1pRq est stable par les transformations suivantes : Soit S P S1pRq, on a¨ qS P S1pRq.¨ aS P S1pRq.¨ Sλ P S1pRq.¨ S1 P S1pRq.
4 Définition de la transformée de Fourier
a Stabilité de l’espace de fonctions SpRq par Fourier
Soit ϕ P SpRq, alors la transformée de Fourier ϕ existe, et de plus, ϕ P SpRq, ce quipermet de définir la transformée de Fourier réciproque de ϕ.
Cela provient des résultats du I c 2 β : comme ϕ P C8pRq, sa transformée ϕ est àdécroissance rapide. Comme ϕ est à décroissance rapide, ϕ P C8pRq.
38. C’est une fonction telle que @x P R, |fpxq| ă ppxq, cf. équation (10).
90

b Définition
Soit S P S1pRq, on définit sa transformée de Fourier pS “ FrSs par
@ϕ P SpRq x pS|ϕy ” xS|ϕy (85a)
et la transformée inverse de Fourier par
@ϕ P SpRq xFrSs|ϕy ” xS|Frϕsy . (85b)
c Variables
Attention, si on appelle x la variable de l’espace direct, et k celle de l’espace réciproque,dans ces formules, pS agit dans l’espace réciproque, donc sur une fonction ϕpkq, tandis que S
agit dans l’espace direct, donc sur une fonction ϕpxq.Ainsi, il faut inverser espace direct et espace réciproque quand on passe des distributions
aux fonctions, et introduire
F : ϕpkq ÞÑ Frϕspxq “ ϕpxq “ż
R
e´2 9ııπkxϕpkqdk
et
F : ϕpxq ÞÑ Frϕspkq “ ϕpkq “ż
R
e29ııπkxϕpxqdx
où le seul changement par rapport aux formules habituelles est l’inversion x Ø k.Par exemple, les formules (52a) et (52c) de dérivation avec la transformation de Fourier
s’écrivent maintenant
¨ Frdϕdk
spxq “ 29ııπxFrϕspxq “ 29ııπxϕpxq .
¨ dϕ
dxpxq “ ´29ııπFrkϕpkqspxq .
De même, les formules (46a) et (46c) de translation ou (47a) d’inflation avec la transformationde Fourier s’écrivent maintenant
¨ xoϕpxq “ Fr e2 9ııπkxoϕpkqspxq .
¨ Frkoϕpkqspxq “ e´2 9ııπkoxϕpxq .
¨ Frϕλpkqspxq “ |λ|ϕ 1
λpxq .
d Propriétés
α Dérivation
Soit S P S1pRq, on a les formules suivantes :
d pSdk
“ ´p29ııπq xxS . (86a)
Démonstration : soit ϕpkq P SpRq, on a
xdpS
dk|ϕy “ ´x pS|ϕ1y
“ ´xS|ydϕdk
y
“ ´xS|29ııπxϕpxqy“ xp´29ııπxqS|ϕy“ xp´29ııπq xxS|ϕy ;
91

en appliquant la relation (52c) telle qu’écrite à la section c précédente ; comme cela est vrai@ϕ P SpRq, le résultat est démontré. CQFD.
F
„dS
dx
“ 29ııπk pS . (86b)
Démonstration : soit ϕpkq P SpRq, on a
xF„dS
dx
|ϕpkqy “ xdS
dx|ϕpxqy
“ ´xS|dϕdx
y
“ ´xS| ´ 29ııπFrkϕpkqsy“ x29ııπ pS|kϕpkqy“ x29ııπk pS|ϕy ;
en appliquant la relation (52a) telle qu’écrite à la section c précédente ; comme cela est vrai@ϕ P SpRq, le résultat est démontré. CQFD.
β Translation
Soit S P S1pRq, on a les formules suivantes :
FrxoSs “ e´2 9ııπkxo pS . (87a)
Démonstration : soit ϕpkq P SpRq, on a
xFrxoSs|ϕpkqy “ xxoS|ϕpxqy“ xS|´xoϕpxq“ xS|Fr e´2 9ııπkxoϕpkqspxqy“ x pS| e´2 9ııπkxoϕpkqy“ x e´2 9ııπkxo pS|ϕy ;
en appliquant la relation (46c) telle qu’écrite à la section c précédente ; comme cela est vrai@ϕ P SpRq, le résultat est démontré. CQFD.
ko pS “ Fr e2 9ııπkoxSs . (87b)
Démonstration : soit ϕpkq P SpRq, on a
xko pS|ϕpkqy “ x pS|´koϕpkqy“ xS|Fr´koϕpkqspxqy“ xS| e2 9ııπkoxϕpxqy“ x e2 9ııπkoxS|ϕpxqy“ xFr e2 9ııπkoxSs|ϕy ;
en appliquant la relation (46a) telle qu’écrite à la section précédente ; comme cela est vrai@ϕ P SpRq, le résultat est démontré. CQFD.
On remarque que les fonctions k Ñ e˘2 9ııπkxo et x Ñ e˘2 9ııπkox sont majorées, enmodule, par 1, et donc que la multiplication de S par ces fonctions est bien légitime.
92

γ Dilatation
Soit S P S1pRq, on a la formule suivante :
FrSλs “ |λ| pS 1
λ. (88a)
Démonstration : soit ϕpkq P SpRq, on a
xFrSλs|ϕy “ xSλ|ϕpxqy“ |λ|xS|ϕ 1
λpxqy
“ xS|Frϕλpkqspxqy“ x pS|ϕλpkqy“ |λ|x pS 1
λ|ϕy
où on a utilisé les règles d’inflation (47a) (telle qu’écrite à la section c précédente) et (75b)pour une homothétie de rapport 1
λ; comme cela est vrai @ϕ P SpRq, le résultat est démontré.
CQFD.
δ Transposition
Soit S P S1pRq, on a
~FrSs “ Fr qSs . (88b)
Démonstration : soit ϕpkq P SpRq, on a
x ~FrSs|ϕy “ x pS| qϕy“ xS|Fr qϕsy“ xS| qϕy“ x qS|ϕy“ xFr qSs|ϕy ;
où on a utilisé la relation (47c) ; comme cela est vrai @ϕ P SpRq, le résultat est démontré.CQFD.
ǫ Continuité
La transformation de Fourier est continue dans S1pRq. Autrement dit, soit une suite deS1pRq, convergente : Sn Ñ S quand n Ñ 8, alors la suite pSn est également convergente, et ona pSn Ñ pS quand n Ñ 8.
5 Cas des distributions régulières
On cherche tout d’abord à quelles conditions une distribution régulière rhs est tem-pérée. On distingue les quatre cas suivants :
a Conditions pour qu’une distribution régulière soit tempérée
Soit h P L1
locpRq, rhs est tempérée quand
i h P L1, h est intégrable.
ii |hpxq| ă ppxq, où p est un polynôme (h est à croissance lente).
93

iii h “ h1 ` h2, où h1 P L1 et |h2px|q ă ppxq, h est la somme de fonctionsappartenant aux deux premiers cas.
iv h est périodique.
α Cas d’une fonction intégrable
Dans le premier cas, non seulement on a bien queşRfptqϕptqdt existe @ϕ P SpRq, d’où rhs
est tempérée ; mais on peut même définir xrhs directement à partir de h, qui existe au sens desfonctions, on a alors
xrhs “ rhs .
Démonstration : soit h intégrable, soit ϕ P SpRq, on a
x xrhs|ϕy “ xrhs|ϕy “ż
R
hptqϕptqdt “ż
R
hptqϕptqdt “ xrhs|ϕy ,
où l’on utilise l’égalité de Parseval-Plancherel (58).
β Cas d’une fonction majorée par un polynôme
Soit h majorée par le polynôme p, soit ϕ P SpRq, l’intégraleˇşRhptqϕptqdt
ˇest majorée
parşRpptq|ϕptq|dt qui existe, c.f. le § 3 d. Donc, rhs est bien tempérée.
γ Mélange des deux cas précédents
Les deux cas précédents peuvent être mélangés, selon la règle du § 3 c.
δ Cas d’une fonction périodique
Les fonctions périodiques sont souvent bornées et entrent alors dans le second cas. Toutefois,s’il y a des divergences (périodique !), comme pour x ÞÑ
a| tanpxq|, qui est bien localement
intégrable, ce cas se distingue des précédents et mérite une démonstration propre. Soit h depériode a, et ϕ P SpRq, montrons que
şRhptqϕptqdt est bien définie. Soit m P N˚, on a
ż ma
´ma
|hptqϕptq|dt “m´1ÿ
p“´m
ż pa`a
pa
|hptqϕptq|dt
“m´1ÿ
p“´m
ż a
0
|hptqϕpt ` paq|dt . Soit M tel que |ϕpt ` paq| ă M
p2 ` 1
ăm´1ÿ
p“´m
M
p2 ` 1
ż a
0
|hptq|dt
où M existe car ϕ P SpRq. La dernière expression est bien définie, et converge quand m Ñ 8.Quand on applique le théorème de convergence dominée, on en déduit bien que
şRhptqϕptqdt
existe, donc rhs est bien tempérée.Posons ho la fonction restreinte sur une seule période, par exemple,
hopxq “ Ir´ a2,a2
shpxq ,
alors, rhos est tempérée (premier cas) et on a
rhs “ rhos ˙ Шa .
94

b Exemples
r1s, rHs, rxs sont tempérées (second cas). rlogs est aussi tempérée, en appliquant le troi-sième cas : on pose h1pxq “ Ir´1,1s logpxq et h2pxq “ p1 ´ Ir´1,1sq logpxq. h1 est à supportcompact, donc intégrable. Et on vérifie |h2pxq| ď |x|´1 ď x2 ´ 1 ď x2 (car |x| ě 1 sur lesupport de h2).
6 Exemples de transformée de Fourier
¨ xr1s “ δ .
¨ pδ “ r1s .
¨ p´29ııπqp yrxps “ δppq .
¨ yδppq “ rp29ııπkqps .
¨ xδa “ r e´2 9ııπaks .
¨ {r e2 9ııπaxs “ δa .
7 Théorème d’inversion de Fourier
Alors qu’il est faux dans L1zL2, le théorème d’inversion que l’on vérifie sur lesexemples précédents est vrai en toute généralité dans S1pRq. Le paradoxe n’est qu’ap-parent. Les cas de violation de ce théorème ne se produisent que lorsque f R L1 Y L2.Il est alors impossible de calculer la transformée réciproque au sens des fonctions, maiscela est possible au sens des distributions.
Démonstration : soit S P S1pRq, soit une fonction test ϕ P SpRq. On a
x ˆS |ϕy “ xS|ϕy“ xS| ˆϕ y“ xS| qϕy“ x qS|ϕy
où on a appliqué le théorème d’inversion pour ϕ. Comme cela est vrai pour tout ϕ PSpRq, le résultat est démontré (ou plutôt son corrolaire ppS “ qS, qui lui est équivalent).
8 Transformation de Fourier et convolution
a Transformée de Fourier d’une distribution à support compact
On a le théorème suivant : la transformée de Fourier d’une distribution à supportcompact est régulière, et dans C8pRq ; autrement dit, soit S P S1pRq à support compact,il existe s P C8, telle que pS “ rss.
De plus, on montre que s est à croissance lente (|s| majorée par un polynôme).
α Transformée de Fourier d’un produit de convolution
On peut définir la transformée de Fourier d’un tel produit dans les deux cas sui-vants :
95

¨ Soit T P S1pRq tempérée et S à support compact, la transformée de Fourier deS ˙ T existe ; soit s P C8 telle que pS “ rss, on a
{S ˙ T “ pS pT “ s pT . (89a)
¨ Soit f P SpRq, et S P S1pRq, la transformée de Fourier de S ˙rf s existe, et vaut
{S ˙rf s “ xrf s pS “ f pS . (89b)
¨ On ne sait pas calculer {S ˙ T dans le cas général, car pS pT n’existe pas a priori.
b Transformée de Fourier d’une distribution périodique
On dit qu’une distribution T est périodique de période a P R˚` si et seulement si
aT “ T .La formule 5 d δ, valable pour les distributions régulières périodiques, se généralise ;
on montre qu’il existe S de support compact, telle que
T “ Шa ˙ S , (90)
où on peut imposer, de plus, que le support est de taille a.Démonstration : on peut prendre Sn “ pρn ˙ Ir´ 1
n,a` 1
nsqT . et faire la limite quand n Ñ 8.
On en déduit que toutes les distributions périodiques sont tempérées : on calcule latransformée de Fourier de T en appliquant les formules précédentes,
pT “ 1
aШ 1
as “ 1
a
8ÿ
p“´8spp
aqδp
a,
où pS “ rss et on a utilisé la transformée de Fourier du peigne de Dirac, qui est démontréeau paragraphe suivant.
c Transformée de Fourier du peigne de Dirac
Soit a ą 0, on a
zШa “ 1
aШ 1
a. (91)
Démonstration : remarquons tout d’abord que, Шa est périodique, de période a, autrementdit, aШa “ Шa.
La transformée de Fourier de cette relation est e29ııπak zШa “ zШa, soit encore
p e2 9ııπak ´ 1q zШa “ 0.Montrons maintenant que zШa est périodique, de période 1
a. Calculons tout d’abord
e29ııπx{aШa :
e29ııπx{aШa “
8ÿ
p“´8
e29ııπx{aδpa “
8ÿ
p“´8
e29ııπpa{aδpa “
8ÿ
p“´8
δpa “ Шa ,
d’où également p e2 9ııπx{a´1qШa “ 0. Si l’on calcule la transformée de Fourier de cette relation,on obtient directement
1
a zШa “ zШa.Si on applique la relation énoncée au c, on en déduit qu’il existe S, de support borné de
taille 1{a, telle quezШa “ Ш 1
a˙ S .
96

On peut même choisir le support de S, on prendra ici SupportpSq “ r0, 1
as.
La formule p e2 9ııπak ´ 1q zШa “ 0 peut s’écrire maintenant p e2 9ııπak ´ 1qШ 1
a˙S “ 0.
Or, la restriction à r´ 1
a, 1
as du terme de gauche s’écrit tout simplement p e2 9ııπak ´ 1qS, elle est
également nulle (ce n’est pas tout à fait exact, cf. l’examen du 7 septembre 2005, mais le vrairésultat ne change rien à la suite).
Il se trouve que l’on peut décomposer la fonction p e2 9ııπak ´1q “ kfpkq, où f ne s’annule
pas sur r´ 1
a, 1
as. On obtient ainsi kfpkqS “ 0. L’équation kT “ 0 a pour solution T “ cδ,
donc, ici on trouve fS “ c δ. Finalement, S “ c δ{fp0q “ d δ, avec d “ c{fp0q.Si on remplace dans l’expression de la transformée de Fourier du peigne, on obtient
zШa “ d Ш 1
a˙ δ “ d Ш 1
a.
Il ne reste plus qu’à déterminer la constante d.La fonction ϕpkq “ e´πa2k2 P SpRq a pour transformée de Fourier ϕpxq “ 1
ae´πx2{a2
(avec l’inversion des variables x Ø k). On calcule
x zШa| e´πa2k2y “ xШa|1ae´πx2{a2y mais aussi
“ xdШ 1
a| e´πa2k2y d’où
1
a
8ÿ
p“´8
xδpa| e´πx2{a2y “ d
8ÿ
p“´8
xδ p
a| e´πa2k2y
ðñ 1
a
8ÿ
p“´8
e´πppaq2{a2 “ d
8ÿ
p“´8
e´πa2p p
a q2
,
les deux sommes étant égales, on en déduit d “ 1{a. CQFD.
d Formule sommatoire de Poisson
Soit a ą 0, on en déduit la formule remarquable
8ÿ
p“´8e2
9ııπpax “ 1
a
8ÿ
p“´8δpx ´ p
aq . (92)
Démonstration :
zШa “8ÿ
p“´8
pδpa “8ÿ
p“´8
e´2 9ııπpax mais aussi
“ 1
aШ 1
a“ 1
a
8ÿ
p“´8
δpx ´ p
aq .
e Théorème d’échantillonnage
Soit S à support compact, et rss sa transformée de Fourier. On a le théorème suivant :« s (et donc S) est déterminée par les coefficients tspp
aq, p P Zu pour tout a plus grand
que la longueur de SupportpSq. »Dans certaines conditions restrictives, on a, plus précisément,
sptq “ÿ
pPZspp
aq e´2 9ııπxot
p´1qpπ
sinpπatqat ´ p
(93)
où xo est le centre de SupportpSq.
97

98
Index des équations
Eq. 1 Fonction continue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Eqs. 2 Opérations sur les fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . 15Eq. 3 Fonction réciproque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Eqs. 4 Transformations de fonctions . . . . . . . . . . . . . . . . . . . . . . . . . 15Eqs. 5 Parité des fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Eqs. 6 Propriétés de norme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Eqs. 7 Limites de fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Eq. 8 Fonction caractéristique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Eq. 9 Polynôme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Eq. 10 Croissance lente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Eqs. 11 Fonction décroissante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19Eqs. 12 Singularité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Eq. 13 Décomposition en éléments simples . . . . . . . . . . . . . . . . . . . 20Eqs. 14 Intégrales impropres. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21Eqs. 15 Critères de Bertrand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Eq. 16 Majoration d’intégrale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22Eqs. 17 Changements de variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Eqs. 18 Primitive de fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Eq. 19 Intégration par partie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Eq. 20 Décomposition en composantes connexes 26Eq. 21 Mesure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Eq. 22 Égalité des intégrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Eq. 23 Décomposition en parties ą 0 et ă 0 . . . . . . . . . . . . . . . . . 27Eq. 24 Théorème d’existence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Eq. 25 Différentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Eq. 26 Intégrales de fonctions presqu’égales . . . . . . . . . . . . . . . . . . 29Eq. 27 Intégrale sur un compact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Eq. 28 Égalité des intégrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Eq. 29 Normes de fonctions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30Eq. 30 Norme inf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Eq. 31 Égalité de normes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Eqs. 32 Produits scalaire et hermitien . . . . . . . . . . . . . . . . . . . . . . . . 31Eq. 33 Égalité presque partout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Eqs. 34 Propriétés de } }2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Eqs. 35 Convergence dominée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Eq. 36 Théorème de Fubini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34Eqs. 37 Valeur Principale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Eq. 38 Convolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Eq. 39 Transformation de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Eq. 40 Fourier bijective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Eq. 41 Transformation de Fourier inverse . . . . . . . . . . . . . . . . . . . . 41Eq. 42 Relation entre Fourier et son inverse . . . . . . . . . . . . . . . . . . 41Eq. 43 Théorème d’inversion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42Eq. 44 Relation entre Fourier et transposition. . . . . . . . . . . . . . . .42
99
Eq. 45 Limite de fpkq quand q Ñ 8 . . . . . . . . . . . . . . . . . . . . .42Eqs. 46 Translation et Fourier. . . . . . . . . . . . . . . . . . . . . . . . . . . . .43Eqs. 47 Inflation et Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Eqs. 48 Propriétés de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Eqs. 49 Fonction hermitienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Eqs. 50 Conservation par Fourier. . . . . . . . . . . . . . . . . . . . . . . . . .46Eqs. 51 Décomposition de fonction . . . . . . . . . . . . . . . . . . . . . . . . 46Eqs. 52 Dérivation et Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Eqs. 53 Convolution et Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Eq. 54 Intégrale et Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Eq. 55 Régularisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Eq. 56 Régularisation par Fourier . . . . . . . . . . . . . . . . . . . . . . . . 51Eqs. 57 Isométrie de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Eq. 58 Parseval-Plancherel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Eq. 59 Forme linéaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Eq. 60 Dérivée de fonction et convolution . . . . . . . . . . . . . . . . 63Eq. 61 Continuité de distribution . . . . . . . . . . . . . . . . . . . . . . . . 64Eqs. 62 Linéarité des distributions . . . . . . . . . . . . . . . . . . . . . . . . 65Eq. 63 Distribution régulière . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Eqs. 64 Propriétés de distribution régulière. . . . . . . . . . . . . . . .66Eq. 65 Distribution de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68Eq. 66 Peigne de Dirac. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .69Eq. 67 Produit de distributions . . . . . . . . . . . . . . . . . . . . . . . . . . 70Eq. 68 Produit de distributions régulières . . . . . . . . . . . . . . . . 70Eqs. 69 Valeur Principale de 1{x . . . . . . . . . . . . . . . . . . . . . . . . . .71Eqs. 70 Partie finie de 1{x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Eqs. 71 Dérivée de distribution. . . . . . . . . . . . . . . . . . . . . . . . . . . .72Eq. 72 Formule des sauts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73Eq. 73 Dérivée de produit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Eqs. 74 Translation de distribution. . . . . . . . . . . . . . . . . . . . . . . .75Eqs. 75 Dilatation de distribution . . . . . . . . . . . . . . . . . . . . . . . . . 75Eq. 76 Transposition de distribution . . . . . . . . . . . . . . . . . . . . . 75Eq. 77 Support de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78Eq. 79 Distribution singulière . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79Eq. 80 Convolution de distributions régulières . . . . . . . . . . . . 82Eq. 81 Convolution de distributions . . . . . . . . . . . . . . . . . . . . . . 82Eqs. 82 Convolution et Dirac. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84Eq. 83 Associativité de la convolution . . . . . . . . . . . . . . . . . . . . 85Eqs. 84 Convolution et dérivation . . . . . . . . . . . . . . . . . . . . . . . . . 85Eq. 85 Convolution et translation . . . . . . . . . . . . . . . . . . . . . . . . 86Eqs. 86 Transformation de Fourier de distribution . . . . . . . . . 91Eqs. 87 Dérivation et Fourier de distribution 91Eqs. 88 Translation et Fourier de distribution . . . . . . . . . . . . . 92Eqs. 89 Dilatation et Fourier de distribution . . . . . . . . . . . . . . 93Eqs. 90 Convolution et Fourier de distributions . . . . . . . . . . . 96Eq. 91 Distribution périodique . . . . . . . . . . . . . . . . . . . . . . . . . . . 96Eq. 92 Fourier du peigne de Dirac. . . . . . . . . . . . . . . . . . . . . . . . 96Eq. 93 Formule de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97Eq. 94 Formule de Shannon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
100
Index
Additionde distributions, 65, 90de fonctions, 15
Argument, 13Associativité, voir Convolution
Borné (ensemble), 12Bornées (fonctions), 31
Cantor, voir EnsembleCauchy, voir completCausale, 79Changement de variable, 24, 28Changement d’échelle
d’intégrale, 23de distribution, 75, 93de fonction, 15de Fourier, 44intégrale, 28
Compact, 12Complémentaire, 11complet, 9Composition (de fonction), 15Connexe, 11Continuité
de distribution, 64, 86, 93de fonction, 14de Fourier, 40, 42
Convergence Dominée, 33Convolution
Associativité de la, 85de distributions, 82, 95de fonctions, 36par Fourier, 50
Critère (de Riemann ou Bertrand), 21, 22Croissance lente, 18
Décomposition d’une distribution, 79Décomposition en éléments simples, 20Décroissance rapide, 19Dérivée
d’un produit (distribution), 74
de distribution, 72, 85, 91de Fourier, 46
Différence, voir ComplémentaireDilatation, voir Changement d’échelleDirac
fonction de, 59, 68, 84
notation, 64peigne de, 69, 96
Discontinue (distribution), 70Dominant, 33Dual, 60
Échantillonnage (théorème d’), 97Ensemble, 9
dénombrable, 10, 25de Cantor, 25fini, 9négligeable, 25
Entiernaturel, 9relatif, 9
Fermé, 11Fermeture, 12Fonction test, 61Fonction caractéristique, 18Formule des sauts, 73Fourier (transformation de)
de distribution, 90de fonction, 39
Fubini (théorème de), 34
Gaussienne (transf. Fourier de), 48
Heaviside (fonction de), 51, 73Hermitienne (fonction), 45
Impropre (intégrale), 21Inégalité triangulaire, 16, 32inf, 13Inflation, voir Changement d’échelleIntégrables (fonctions), 31
101
Intégralede Lebesgue, 27de Riemann, 21, 27
Intégration par partie, 24Intègre, 9Intersection, 11Intervalle, 9Inverse (de fonction), 15Inversion (théorème d’), 41, 49, 95Isométrie (Fourier), 52
Laplace (transformation de), 38Limite simple
de distribution, 64de fonction, 17
Localement intégrable, 66Longueur, 26
max, 12Mesure, 25min, 12Multiplication
de distributions, 70, 80, 90de fonctions, 15
Négligeable, voir EnsembleNombre
imaginaire, 9réel, 12rationnel, 9réel, 9transcendant, 18
Norme (de fonction), 30Norme sup, 17
Opérateur vectoriel, 40Ouvert, 11
Paritéde distribution, 76de fonction, 16
Paritede Fourier, 45
Parseval, 52Partie finie, 71peigne, voir DiracPériodique, 94, 96Plancherel, voir ParsevalPoint d’accumulation, 11Poisson (formule de), 97Pôle, 18, 20
Porte (fonction), 39Positive ou nulle (fonction), 22presque partout, 29, 32Primitive
de distribution, 74, 85de fonction, 24
Produit, voir MultiplicationProduit hermitien, 17Produit scalaire, 17Produit tensoriel de distribution, 81Prolongement par continuité, 14
Rationnelle (fraction), 18Réciproque (de fonction), 15Réglée (fonction), 14Régularisante (suite), 62Régularisation, 51Régulière (distribution), 65, 93, 95
Schwarz (inégalité de), 17Séparation, 16Singleton, 9, 12Singularité, 20Singulière (distribution), 68, 78, 78sup, 13Support
de distribution, 76de fonction, 13
Support compact(distribution à), 68, 80(fonction à), 14
Symétrie, voir Transposition
Tempérée (distribution), 89Topologie, 9Translation
de distribution, 75, 84, 86, 92de fonction, 15de Fourier, 43intégrale, 23, 28
Transpositionde distribution, 75, 93de fonction, 15, 42de Fourier, 45
Union, 10
Valeur Principaledistribution, 70intégrale, 34
Variable muette, 13, 91
102

Références
¨ Pierre Meunier, Exercices d’algèbre et d’analyse corrigés et commentés : classespréparatoires aux grandes écoles scientifiques, premiers cycles universitaires, ed.P.U.F. (1997).
¨ Michel Coursace, Cours de mathématiques spéciales, ed. P.U.F. (2004).¨ Jean-Michel Bony, Méthodes mathématiques pour les sciences physiques, ed. Po-
lytechnique (2004).¨ Jean-Michel Bony, Cours d’analyse : Théorie des distributions et analyse de Fou-
rier, ed. Polytechnique (2001).¨ Robert Dalmasso & Patrick Witomski, Analyse de Fourier et applications : exer-
cices corrigés, ed. Dunod (2000).¨ Claude Gasquet & Patrick Witomski, Analyse de Fourier et applications, ed.
Dunod (2003).¨ Michel Hervé, Transformation de Fourier et distributions, ed. P.U.F. Mathéma-
tiques (1986).¨ François Roddier, Distributions et transformation de Fourier, ed. McGraw-Hill
(1978), ibidem Ediscience (1971).
103