thème 3 : ircad livrable 2.4 système d’alerte par...
TRANSCRIPT

Thème 3 : IRCAD Livrable 2.4
Système d’alerte par signalisation horizontale dynamique
Référence SARI/IRCAD/L 2.4
Date 07/05/2009 Version V3 / intégrant les remarques ComOp SARI Partenaire(s) : PROSIGN, LRPC St Brieuc, CETE Lyon,
CETE Normandie Centre, LAMIH (Univ. Valenciennes), INRETS, LCPC Nantes
Animateur : Pierre ANELLI
Contributeur(s) : Katell KERDUDO, Michel GOTHIÉ, Eric VIOLETTE, Marie-Pierre PACAUD LEMOINE, Maurice ARON, Minh-Tan DO
Thème 3 (IRCAD) – 2ème tranche Type (1,2,3) Confidentialité Diffusion Financement DRI - Direction de la Recherche et de
l’Innovation
Responsable : Pierre ANELLI
2
SOMMAIRE
1. Objet du livrable :.................................................................................................... 3
2. Problématique de l’alerte routière dans IRCAD...................................................... 4
3. Choix retenus pour le système d’information IRCAD.............................................. 5
3.1. Définition et logique du SI ........................................................................................... 5
3.2. Analyse des systèmes d’informations existants, possibilité d’adaptation pour le projet IRCAD ............................................................................................................................... 7
4. Signalisation routière possible pour l’adhérence en conditions atmosphérique dégradée .................................................................................................................... 8
4.1. Signalisation verticale fixe (panneaux routiers) ........................................................... 8
4.2. Signalisation verticale dynamique (panneaux à messages variables) ......................... 9
5. Signalisation par balisage au sol dynamique........................................................ 10
5.1. Plots routiers statiques...............................................................................................10
5.2. Plots dynamiques.......................................................................................................12
5.3. Utilisation des plots dynamiques en France ...............................................................13
5.4. Utilisation des plots dynamiques en Europe et à l’étranger ........................................15
5.4.1. Guidage des usagers en virage...........................................................................15
5.4.2. Guidage des usagers en conditions de visibilité dégradées.................................16
5.4.3. Gestion de trafic : détection automatique d’incidents ...........................................17
5.4.4. Signalisation des usagers vulnérables en intersection.........................................18
5.4.5. Affectation dynamique des voies .........................................................................19
6. Projet initial d’expérimentation des plots dynamiques .......................................... 21
6.1. Localisation du site prévu...........................................................................................21
6.2. Dispositif expérimental envisagé sur site....................................................................24
6.2.1. Signalisation existante.........................................................................................25
6.2.2. Signalisation proposée (version 1).......................................................................26
6.2.3. Signalisation proposée (version 2).......................................................................27
6.3. Limites du dispositif expérimental prévu et de son déploiement réel ..........................28
7. Expérimentation retenue pour les plots dynamiques ............................................ 30
7.1. Les plots lumineux installés sur le LCPC Nantes .......................................................30
7.2. Première évaluation du dispositif lumineux au LCPC Nantes.....................................31
7.3. Evaluations AJISE du dispositif lumineux au LCPC Nantes .......................................32
Conclusion................................................................................................................ 32
Bibliographie............................................................................................................. 33

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
3
1. Objet du livrable :
Dans le cadre du projet SARI IRCAD, les partenaires du projet ont travaillé de façon collaborative pour spécifier les caractéristiques et le fonctionnement d’un système d'information innovant permettant d’alerter les usagers sur le risque de perte de contrôle lié à l’état hydrique de la chaussée.
A partir d’une analyse des systèmes existants, un cahier des charges a été défini pour mettre en œuvre un système d’information capable de gérer en bord de voie une fonction de risque temps réel sur l’adhérence par route humide.
Le déploiement retenu comprend 3 étapes :
- situation de référence
- alerte par rapport à l’état de la route (alerte générale)
- alerte vitesse des usagers par rapport à l’état de la route (alerte individuelle).
Ce livrable présente les caractéristiques d’un système de signalisation horizontale dynamique par balisage au sol pour avertir les usagers du risque de perte de contrôle lié à l’état hydrique des chaussées.
Il se décompose de la façon suivante :
- la problématique de l’alerte routière dans IRCAD (chapitre 2)
- les différents moyens existants pour alerte l’usager (chapitre 3)
- les équipements de signalisation traditionnels utilisés (chapitre 4)
- les équipements de signalisation innovante utilisables (chapitre 5)
- l’expérimentation prévue initialement (chapitre 6)
- une description de l’expérimentation retenue (chapitre 7).
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
4
2. Problématique de l’alerte routière dans IRCAD
Les équipements de signalisation sont un composant essentiel d’un système d’information des usagers de la route. Ce sont ces équipements qui, intégrés à un système d’information plus large, permettent d’alerter les conducteurs d’un risque particulier.
Le système d’information déployé dans le cadre du projet SARI IRCAD comprend :
- des capteurs routiers et météo destinés à caractériser l’état de la route et du trafic
- un système de signalisation à l’usager (signaux + contrôle commande + logique d’affichage)
- un système de décision intelligent (fonction de risque + ’enregistrement des données de trafic + enregistrement des données de fonctionnement).
Compte tenu de l’orientation expérimentale du projet IRCAD, la Direction du projet a souhaité privilégier des durées d’observation importantes des dispositifs expérimentaux sur sites. C’est la raison pour laquelle la définition d’un système d’information routière s’est rapidement imposée comme un pré requis important, afin de favoriser les conditions d’un déploiement rapide des dispositifs sur site d’expérimentation.
Parallèlement, le souhait du Conseil Général des Côtes d’Armor de planifier les projets du programme Sari se traduit dans IRCAD par une volonté d’anticiper les dimensions technique et budgétaire des dispositifs.
Pour concilier rapidité de déploiement et visibilité à long terme, le projet IRCAD a retenu une méthodologie pragmatique fondée sur deux principes forts :
- une démarche qui favorise le retour d’expérience ;
- un phasage de déploiement qui permet un bon contrôle des investissements et un apprentissage solide.
La démarche par retour d’expérience consiste à évaluer chaque phase de l’expérimentation à travers une caractérisation précise du comportement des automobilistes sur les sites.
L’équipement des sites en dispositifs de mesure et de signalisation, et d’autre part les comportements des usagers. Chaque configuration sera caractérisée et analysée afin d’éviter tout biais dû à des événements extérieurs ou à des modifications non contrôlées des routes, des équipements.
Les mécanismes d’adaptation des usagers seront pris en compte, en collaboration avec le thème transversal AJISE.
Les sites routiers d’expérimentation retenus dans le cadre du projet SARI IRCAD sont 2 sections de la RD 786 dans le Département des Côtes d’Armor : la section BINIC – SAINT QUAY PORTRIEUX, et la section LANNION – SAINT MICHEL EN GREVE.
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
5
3. Choix retenus pour le système d’information IRCA D
3.1. Définition et logique du SI
Le projet IRCAD est un projet centré sur l’infrastructure routière, et non sur le véhicule. Son système d’information comprend uniquement les équipements bord de route . Il ne prend donc pas en compte les systèmes embarqués à bord des véhicules (coopération entre véhicules). Il ne prend pas non plus en compte les systèmes de communication spécifiques entre véhicules équipés et infrastructure (infrastructure coopérative).
IRCAD propose de mettre au point un système d’information dont l’information à l’usager est dynamique (et non statique) et liée à la génération d’une alerte (selon un seuil). Le message d’alerte est généré par des informations mesurée par des capteurs d’environnement de la route (météo, état hydrique de la chaussée) couplés à des capteurs de trafic (type de véhicule, vitesse).
Le système d’information est déployé en 2 phases successives de génération d’alerte :
- une alerte générale déclenchée par un état critique de la chaussée propice à la perte de contrôle. L’alerte générale est une alerte qui s’adresse à l’ensemble des usagers de la route pour indiquer un risque spécifique à partir de capteurs météos seuls ; elle est réalisée sans mesure de vitesse des véhicules ; exemple de message : attention, chaussée mouillée / adhérence faible.
- Une alerte individuelle déclenchée par une vitesse d’approche excessive non ciblée , cette phase étant déployée rapidement après la validation de la génération d’une alerte générale. L’alerte individuelle non ciblée : c’est une alerte déclenchée par un usager de la route particulier dont la vitesse a été détectée comme présentant un risque par rapport à une situation spécifique ; l’alerte est individuelle car elle repose sur la détection d’un véhicule particulier et sur l’envoi d’un message à son / leur attention ; l’alerte est non ciblée car l’identification du ou des véhicules n’est pas restituée dans le message d’alerte ; exemple : attention, vitesse trop élevée chaussée mouillée adhérence faible.
Modèle de détection de risque IRCAD
Le modèle de détection de risque IRCAD est alimenté par les données d’entrée.
Données d’entrée pérennes : caractéristiques géométriques de la route (largeur, tracé en plan, profil en long, profil en travers), organisation des voies de circulation, usure et déformation du revêtement, trafic … Elles sont mesurées « une fois pour toutes » lors de la caractérisation du site. Le trafic (comptage, typologie) se mesure de façon longitudinale, et reste relativement stable dans le temps.
Données d’entrée volatiles : conditions climatiques (température air, vent, hygrométrie relative, précipitations), conditions de la chaussée (température, état hydrique), vitesse des véhicules. Elles sont mesurées en continu à travers l’instrumentation du site :
- capteurs météo (précipitations, t°, hygrométrie),
- capteurs météo de chaussée (état hydrique).
- mesures de vitesses pour déclenchement de l’alerte
- mesure de vitesses à des fins de contrôle
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
6
L’adhérence mobilisable est la donnée de sortie du modèle, traduit sous forme d’un seuil d’alerte. Génération de l’alerte = sur-sollicitation dynamique de l’adhérence mobilisable = f (données pérennes, données volatiles)
Le système d’alerte doit anticiper la dégradation des conditions d’adhérence pour prévenir toute perte de contrôle en incitant les usagers à adapter leur vitesse. L’intérêt d’un système d’alerte est sa prédictivité.
Génération de l’alerte
L’alerte est générée par le calcul d’un seuil selon une fonction de risque qui tient compte des caractéristiques de la route, de son état hydrique et de la vitesse d’approche du véhicule.
Elle est donnée par des signaux routiers combinant
- panneaux fixes (danger, prescription et indication)
- panneaux à messages variables (identification, alerte) simples
- un système de signalisation horizontale innovant (balisage dynamique).
Durée de fonctionnement : le système doit fonctionner de façon permanente (de jour comme de nuit) sur 8 à 12 mois soit 4 à 6 mois par phase (hors qualification de l’état de référence).
Faisabilité technique du système d’alerte
Elle repose sur :
• la complétude du modèle de détection : le modèle de détection doit prendre en compte un nombre représentatif de paramètres, afin de démontrer un niveau de fiabilité satisfaisant en usage ;
• la mesurabilité des paramètres retenus : les paramètres retenus par le modèle doivent pouvoir être mesurés de façon efficace et fiable ;
• la disponibilité des capteurs fixes du réseau routier : certaines données doivent être mesurées par des capteurs routiers in situ ; les réseaux routiers visés par IRCAD (routes départementales) doivent être équipés de ces capteurs d’une façon qui permette un fonctionnement efficace du système
• la disponibilité des outils et appareils de mesure : les outils de mesure doivent pouvoir faire l’objet d’un déploiement et d’une utilisation à grande échelle, en particulier les appareils à grand rendement qui sont indispensables pour analyser un réseau routier dans son ensemble ;
• l’adéquation des capteurs et outils de mesure à la fréquence de rafraîchissement des paramètres ;
• la sûreté de fonctionnement du dispositif (sûreté de fonctionnement des capteurs, gestion des modes dégradés)1 ;
• la robustesse du modèle de risque.
1 Cette question a été traitée par le CETE Normandie Centre par la mise au point d’un système de contrôle
commande intégrant les situations de non-fonctionnement d’un des éléments du système d’information. Dans ce cas, le PMV se met en mode défaut.
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
7
Faisabilité économique du système d’alerte
La faisabilité économique du système d’alerte repose sur :
• le coût d’installation des capteurs fixes en cas de déploiement à plus grand échelle ; pour cela, il est nécessaire de prendre en compte le coût unitaire d’acquisition et d’installation des capteurs fixes, la densité nécessaire de ces équipements et le taux d’équipement actuel de ces capteurs fixes du réseau routier visé
• la fréquence et le coût d’utilisation unitaire des outils de mesure, en particulier les appareils à grand rendement
• le coût unitaire d’acquisition et d’installation des dispositifs d’alerte,
• la densité nécessaire de ces équipements sur le réseau routier visé ; compte tenu de leur caractère novateur, il est vraisemblable que le taux d’équipement initial soit nul.
3.2. Analyse des systèmes d’informations existants, possibilité d’adaptation pour le projet IRCAD
L’expérience la plus probante de signaux variables sur routes bidirectionnelles a été identifiée en Grande-Bretagne [1]. Des signaux routiers (panneaux) déclenchés par des véhicules ont été évalués à grande échelle et installés sur des routes secondaires, majoritairement en rase campagne. Cette étude analyse l’effet de 62 dispositifs d’alerte 1 mois avant et au moins 1 an après leur installation.
Les messages d’alerte sont déclenchés par des véhicules trop rapides avec 4 types de signaux : interdiction de dépassement de limite de vitesse, carrefour, virage, zone de surveillance vidéo. Cette étude n’est pas spécialisée sur les conditions atmosphériques dégradées (pas de régulation par des paramètres climatiques). L’efficacité de ces dispositifs est confirmée:
- les conducteurs peuvent être clairement amenés à réduire leur vitesse quand ils sont individuellement ciblés, alors que les signaux fixes ont sans doute moins d’effet ;
- les signaux déclenchés par des véhicules apparaissent très efficaces pour réduire les vitesses ; en particulier, ils sont capables de réduire le nombre de conducteur qui dépassent la vitesse limite et qui contribuent de façon disproportionnée au risque d’accident, sans avoir besoin de mettre en place des dispositifs de contrôle-sanction automatisé ;
- les signaux déclenchés par des véhicules peuvent être activés à des seuils de vitesse inférieurs aux seuils habituels de déclenchement des sanctions par les forces de l’ordre ;
- il n’y a pas de signe qu’au cours du temps, les conducteurs deviennent moins réactifs aux signaux, même après trois ans ;
- les coûts d’exploitation sont faibles ;
- une réduction substantielle de l’accidentologie a été mise en évidence.
Les paramètres d’acceptabilité étant listés, l’étude de faisabilité doit prendre en compte les différentes signalisations possibles pour réaliser l’expérimentation. C’est l’objet du chapitre suivant.

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
8
4. Signalisation routière possible pour l’adhérence en conditions atmosphérique dégradée
Avertir l’usager sur le risque de perte de contrôle lié aux conditions atmosphériques dégradées peut être réalisé par l’intermédiaire de différents dispositifs de signalisation routière de bord de voie.
La signalisation routière verticale statique (4.1) ne permet pas la dynamisation contextuelle du message nécessaire à l’alerte voulue. La signalisation verticale variable (4.2) constitue une possibilité déjà utilisée aujourd’hui.
4.1. Signalisation verticale fixe (panneaux routier s)
Les signaux portés par la signalisation verticale (panneaux) constituent une solution fréquente pour indiquer aux usagers les risques de la vitesse par temps de pluies. Une telle information peut également porter sur une information spécifique sur les vitesses par temps de pluie. En France, le rappel des régimes de vitesse particuliers par temps de pluie n’est autorisé à titre informatif, et uniquement sur autoroutes (130 km/h, 110 km sous pluie).
Une signalisation propre au risque de perte de contrôle lié à l’adhérence est disponible pour informer l’usager de ce danger : il s’agit du signal chaussée particulièrement glissante (signal A4).
Le cas échéant, il est possible de compléter ce signal par une signalisation complémentaire par panonceau d’informations diverses M9, qui replace dans le contexte la nature du risque concerné (temps de pluie, aquaplanage, …).
Pour plus d’information sur les signaux routiers, on se reportera au livrable Ircad 1 .1 consacré à l’étude de la bibliographie [2].
Les inconvénients de la signalisation verticale traditionnelle sont principalement liés à sa nature statique :
- l’information est constante, et ne permet pas un message « poussé » en temps réel à l’usager ;
- du fait de sa nature permanente, elle nécessite une perception, une lecture et une compréhension de la part de l’usager pour pouvoir adapter son comportement ;
- sa fonction d’alerte n’est pas toujours comprise par l’usager, en particulier lorsque les conditions routières apparentes (perçues) sont très différentes des conditions réellement disponibles (mobilisable).
La mauvaise estimation des conditions routières apparaît par exemple lorsque la chaussée est humide mais qu’il ne pleut plus et que la projection d’eau des autres véhicules est faible. Les usagers tendent alors à surestimer l’adhérence disponible. Dans ce contexte, les signaux réglementaires (chaussée particulièrement glissante + panonceau « Par temps de pluie) sont moins utiles, car moins bien compris des usagers.
Cela peut être aussi le cas des premières pluies qui lubrifient la chaussée (mouillage des polluants de surface comme les hydrocarbures) ou bien l’apparition soudaine de verglas dans certaines conditions météorologiques (phénomène dit de « black ice » dans les pays nordiques).
La signalisation dynamique peut alors présenter une pertinence particulière.

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
9
4.2. Signalisation verticale dynamique (panneaux à messages variables)
La signalisation verticale dynamique permet de surmonter la limite intrinsèque de la signalisation verticale statique. Elle autorise en effet l’affichage de signaux dynamiques dans des situations types identifiées comme dangereuses, même quand elles ne le sont pas perçues comme telles par les usagers de la route. Sa conception repose sur un système d’information en temps réel reposant sur une évaluation de l’environnement par des capteurs locaux et sur une logique de fonctionnement prédéfinie2.
Comme pour toute signalisation active, l’actionnement des PMV peut être déclenché par un signal émis soit par une variable d’environnement (météo, accident), soit par les véhicules (trafic, vitesse, présence, interdistance, etc.).
L’originalité du projet IRCAD réside dans une fonction de risque en temps réel reposant sur un seuil d’alerte variable, la vitesse critique d’approche des véhicules étant modulée par des paramètres d’environnement actualisés en temps réel.
Les avantages de la signalisation dynamique par PMV sont les suivants :
- elle envoie un message temps réel à des usagers compte tenu de variables d’environnement (état de la route, vitesse des véhicules)
- elle permet d’afficher ce message uniquement dans les situations critiques, sans que l’usager ait à interpréter ses conditions d’application (contrairement à un signal fixe permanent ou temporaire)
- son message d’alerte est généralement bien perçu et visualisé par les usagers
- elle constitue généralement un dispositif efficace pour modifier le comportement des usagers.
Les inconvénients de la signalisation dynamique par PMV sont les suivants :
- son installation doit être réservée à des situations exceptionnelles, afin de ne pas conduire à une dépréciation de la signalisation routière traditionnelle ;
- elle nécessite une alimentation en énergie, comme toute signalisation lumineuse active ;
- elle nécessite une surveillance et une maintenance accrues par rapport à la signalisation verticale passive ;
- son coût d’achat, d’installation, d’entretien et de maintenance est plus élevé qu’une signalisation verticale traditionnelle.
La signalisation verticale dynamique présente également des contraintes géométriques d’implantation. Si le site à équiper n’offre pas une distance de visibilité géométrique suffisante, ces dispositifs ne sont pas conseillés car ils sont moins efficaces. Un temps de prévisualisation d’au moins trois secondes est requis. Par ailleurs, il est déconseillé de mettre en place un PMV dans un site où l’attention du conducteur est déjà trop fortement mobilisée par les difficultés de la conduite ou par la complexité de l’environnement (parcours très sinueux, carrefours complexes, grandes gares de péage, ….) [5].
2 La logique de fonctionnement d’un système d’information repose sur un ensemble de règles cohérentes
permettant de traiter le problème de sécurité routière rencontré en fonction des paramètres d’entrée des capteurs et de paramètres de sortie du PMV jouant le rôle de média pour les usagers. Les hypothèses du dispositif global sont que les informations délivrées conduiront à un changement du comportement des usagers favorable au problème de sécurité routière à traiter.
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
10
5. Signalisation par balisage au sol dynamique
Afin d’informer l’usager de façon simple et continue, les dispositifs actuels ne donnent pas satisfaction :
- la signalisation routière horizontale souffre d’un message statique, qui n’est pas actionnable dans une logique de système d’information ;
- la signalisation verticale fixe souffre d’un message statique et ponctuel ;
- la signalisation verticale variable souffre d’une localisation ponctuelle du message et ne peut donc pas être implantée partout.
Pour dépasser cette limite, un dispositif de balisage au sol original a été retenu.
Ce dispositif est constitué de plots lumineux dynamiques dont le déclenchement permet d’alerter l’usager sur la difficulté à affronter.
On distingue deux types de plots routiers : les plots statiques rétroréfléchissants (5.1) et les plots dynamiques (5.2). Les exemples d’utilisation des plots dynamiques sont présentés en France (5.3) et ailleurs (5.4).
5.1. Plots routiers statiques
Le plot routier est un élément de signalisation destiné à être fixé sur la chaussée, en général par collage, et possédant un ou deux réflecteurs. Il est vu des usagers circulant la nuit comme un point lumineux [1]. Sa surface au sol, environ 10 centimètres par 10 centimètres, sauf pour les plots spéciaux, et sa faible hauteur, 2 centimètres au plus, permettent de le placer sur les parties circulées de la chaussée [1].
Ces plots routiers traditionnels font l’objet d’une normalisation conduite dans le cadre français (commission de normalisation signalisation horizontale) et européen (TG226 Equipements de la Route, WG2 Marquages routiers). Ils sont traités dans la norme NF EN 1463.
Les plots routiers sont des dispositifs réfléchissants la lumière incidente émise par les feux des véhicules à l’aide de rétroréflecteurs afin d’avertir, de guider ou d’informer les usagers de la route [4].
Un rétroréflecteur est un dispositif qui inverse la direction d’une lumière qui le frappe en le renvoyant dans une direction parallèle à sa direction initiale [4].
Les plots routiers constituent un complément aux marquages routiers, comme les délinéateurs par exemple. Ils sont implantés directement sur la chaussée (en accotement, mais parfois aussi en axe) et sont destinés à souligner des points singuliers présentant un danger pour les usagers de la route : obstacles fixes dangereux (terre-pleins, ouvrages) et intersections (carrefours, divergents, diffuseurs, échangeurs).
Implantés seuls, les plots n´ont aucune valeur réglementaire.
Les rétroréflecteurs des plots routiers comportent une partie miroir inclinée composée d’éléments rétroréfléchissants à haute visibilité. Ces éléments peuvent être en verre (type 1), soit en plastique (type 2), soit en plastique avec surface anti-abrasive (type 3). La face du rétroréflecteur présente une surface faible, compensée par des performances optiques intrinsèquement élevées.

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
11
Les plots routiers possèdent une structure en plastique, en métal ou en verre. Ils peuvent être rigides (type A) ou bien posséder un système à dépression (type B) escamotable au passage du trafic ou d’un véhicule de déneigement.
Les plots peuvent être permanents (de couleur blanche) ou temporaire (de couleur jaune).
Les plots de chaussée rigides (de type) A peuvent être fixés sur la chaussée par collage, par système auto-adhésif, avec l’adjonction d’un primaire d’accrochage, par ancrage (ou d’une tige de fixation) ou par encastrement (carottage du revêtement routier).
Plot de chaussée en plastique de type A (source : www.swarco.com)
Plot de chaussée en aluminium de type A (source : www.swarco.com)
Plot de chaussée en verre trempé de type A (source : www.cryzal.fr)
Les plots de chaussée à dépression (de type B) sont généralement fixés sur la chaussée par collage par encastrement (carottage du revêtement routier).
Grâce à l’orientation très verticale de leur rétroréflecteur, les plots routiers ont une bonne visibilité de nuit sous l’éclairage des feux des véhicules. Leur taille réduite les fait cependant apparaître comme des points lumineux et non comme des objets surfaciques, contrairement aux marquages routiers.
Leur fonction principale est de signaler visuellement des obstacles ponctuels en complément de la signalisation horizontale existante (marquages routiers)3.
La visibilité des plots traditionnels est statique : la puissance lumineuse renvoyée est relativement constante et indépendante de la distance du véhicule en approche. La visibilité de ces plots est non modifiable, le système étant passif.
Il existe deux catégories de plots routiers statiques : les plots unidirectionnels et les plots omnidirectionnels.
- Les plots unidirectionnels renvoient la lumière dans un seul sens de circulation. Implantés en rive, ils réfléchissent la lumière dans la direction opposée au sens de circulation, c’est-à-dire vers les conducteurs de la voie de circulation sur laquelle ils sont implantés.
3 Les plots routiers peuvent également guider visuellement l’usager la nuit, en contribuant à la lisibilité de la
route, en particulier en cas d’absence de marquages. Par leurs caractéristiques visuelles, les plots routiers ne constituent cependant pas un moyen standard pour délimiter les voies de circulation.

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
12
- Les plots omnidirectionnels renvoient la lumière dans les deux sens de circulation. Implantés en axe, ils réfléchissent la lumière dans la direction opposée aux deux sens de circulation.
.
L’intérêt des plots routiers est qu’ils sont peu sensibles aux conditions météorologiques, et en particulier à la pluie, contrairement aux marquages routiers traditionnels qui perdent une grande partie de leur efficacité optique dans ces conditions.
Les limites de ces plots résident dans la structure de leur système optique : la géométrie du signal lumineux renvoyé autorise un guidage limité, tandis que leur caractère passif ne permet pas la dynamisation du message qu’autorise une signalisation variable.
5.2. Plots dynamiques
Les plots dynamiques sont des dispositifs de signalisation capables d’émettre une information d’alerte sous forme de source lumineuse.
Ils ne font pas l’objet d’une approche normalisée en Europe et sont utilisables en France à titre expérimental. Un groupe de travail a été constitué en 2008 pour définir une norme européenne commune4.
Le plot est généralement constitué d’un socle métallique destiné à être encastré dans la chaussée, d’une coque de verre trempé résistante et étanche, contenant une diode de puissance électroluminescente de type LED et un réflecteur brillant destiné à réfléchir la lumière de la diode.
Plot de chaussée dynamique métallique (Source : www.eco-innov.com)
Plot de chaussée dynamique en verre trempé (Source : www.cryzal.fr)
La puissance lumineuse des plots disponibles sur le marché varie généralement de 50 à 100 lumens à 1 mètre, ce qui assure une bonne visibilité de nuit, y compris en conditions atmosphériques dégradées.
De façon simple (par programmation électronique paramétrable), il est possible de réduire cette puissance lumineuse, et de changer la couleur de la LED.
Les plots lumineux peuvent être monodirectionnels (vus dans un seul sens de circulation) soit omnidirectionnels (visibles à 360°).
En fonction de type d’alimentation choisi pour les plots lumineux, il est possible d’avoir différentes puissances lumineuses et différents modes de fonctionnement (allumage continu
4 Le Comité Européen pour la Normalisation (CEN) standardise les normes sur les équipements de la route par
le Technical Committee TC226. Le Working Group n°2 relatif à la signalisation horizontale a désigné un représentant pour constituer un groupe de travail sur les plots routiers dynamiques.
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
13
ou discontinu). L’allumage continu assure une fonction de guidage : la meilleure délinéation du tracé permet à l’usager d’adapter sa conduite à la difficulté à traiter. L’allumage discontinu assure une fonction d’alerte. L’effet de clignotement éveille la vigilance de l’usager.
Les performances mécaniques des plots dynamiques doivent permettre un fonctionnement efficace de l’équipement, même si le plot est circulé ponctuellement. La résistance aux chocs des plots lumineux est donc généralement supérieure à 25 joules et la résistance à la compression supérieure à 15 tonnes. A notre connaissance, cette famille de plots ne bénéficiant pas de système à dépression escamotable, la capacité à résister aux lames des véhicules de déneigement dépend de leur profil (hauteur, angles), de leur structure et du matériau utilisé.
5.3. Utilisation des plots dynamiques en France
Les plots lumineux dynamiques existent depuis une dizaine d’années et sont utilisés à titre expérimental principalement sur routes interurbaines en France.
Ils sont alimentés en énergie électrique par câble en basse tension (24V). La source d’alimentation peut être soit le réseau public 230 volts monophasés (avec transformateur basse tension) soit un panneau solaire déporté.
Si les plots dynamiques doivent nécessairement être des plots lumineux disposant de leur propre source d’énergie et d’éclairage, les plots lumineux ne sont pas nécessairement utilisés de façon dynamique.
En effet, il est possible par exemple d’éclairer en permanence un plot lumineux. On lui affecte dans ce cas une fonction de signalisation de type guidage (délinéation de la route). Les plots lumineux sont alors implantés sur bordure (par exemple, sur un anneau de carrefour giratoire) ou bien sur glissière en béton type GBA (Glissière en Béton Adhérent), DBA (Double GBA), LBA (GBA Lourde) ou bien sur parapet (ouvrage d’art).
La dynamisation de la signalisation du plot lumineux peut enfin être réalisée en conditionnant l’allumage du plot à un événement ponctuel. Les plots dynamiques sont ainsi expérimentés en France sur bretelles d’accès des routes à chaussées séparées pour la prévention des prises à contresens.
Signalisation des carrefours à sens giratoire
Les carrefours à sens giratoire constituent des moyens très efficaces pour réduire les accidents de la route en intersection, en réduisant les vitesses de passage et les angles d’impact en cas de collision entre véhicules. Leur géométrie exige cependant qu’ils soient bien visibles des usagers afin que ceux-ci puissent bien adapter leur conduite.
Tous les carrefours à sens giratoire ne sont pas alimentés en énergie et ne sont donc pas susceptibles de recevoir un éclairage public permanent permettant une excellente visibilité de nuit. Les plots lumineux constituent alors une alternative économique et environnementale intéressante par rapport à l’éclairage public.
Les plots dynamiques peuvent apporter une solution à la signalisation des carrefours à sens giratoire en rase-campagne, quand les conditions le nécessitent : de nuit (alarme vitesse véhicule) ou quand les conditions atmosphériques sont dégradées, en particulier par temps de brouillard (alarme présence véhicule).
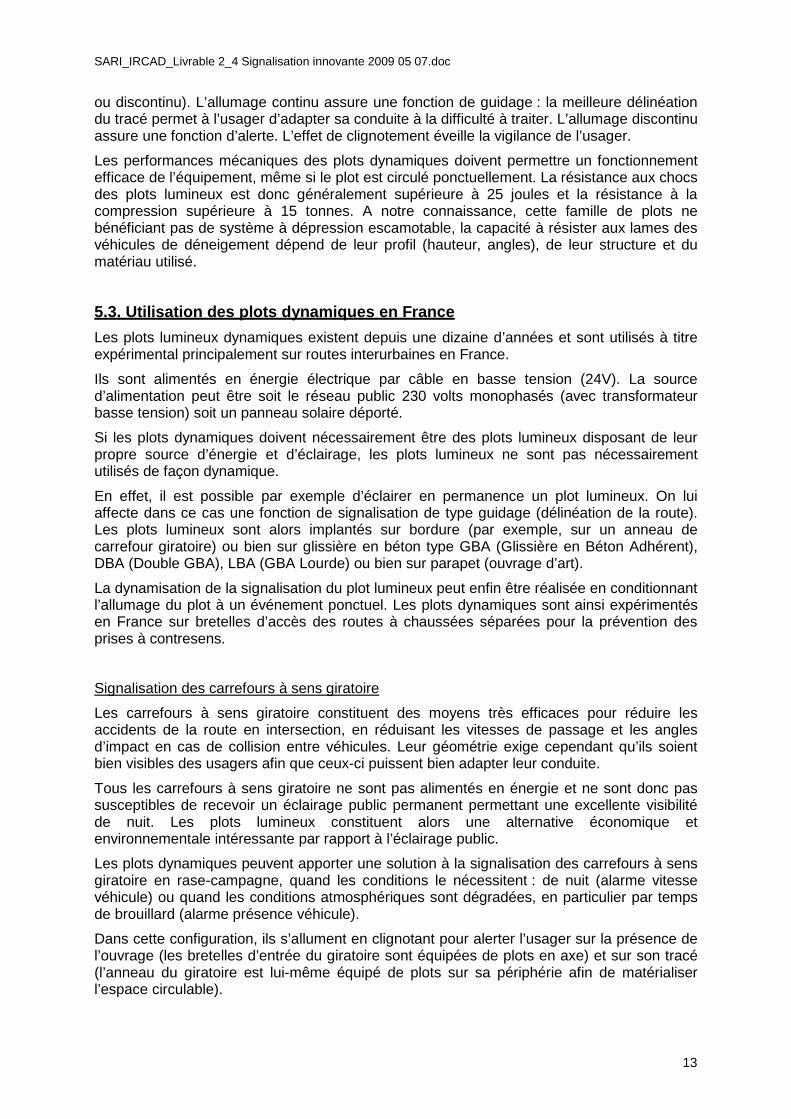
Dans cette configuration, ils s’allument en clignotant pour alerter l’usager sur la présence de l’ouvrage (les bretelles d’entrée du giratoire sont équipées de plots en axe) et sur son tracé (l’anneau du giratoire est lui-même équipé de plots sur sa périphérie afin de matérialiser l’espace circulable).
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
14
Exemple d’implantation dans un giratoire (Source : www.cryzal.fr)
Signalisation d’ouvrages d’art
Les plots dynamiques sont également utilisés pour la signalisation de certains ouvrages d’art, comme les ponts et les tunnels.
Par exemple, le Pont d’Aquitaine à Bordeaux est équipé de plots lumineux sont de couleur bleue et équipent les parapets de l’ouvrage. Si leur configuration de départ (allumage continu) répondait à des motivations d’ordre esthétique, l’actionnement d’un mode de fonctionnement clignotant permet au gestionnaire de signaler des évènements spécifiques aux usagers (présence de travaux par exemple).
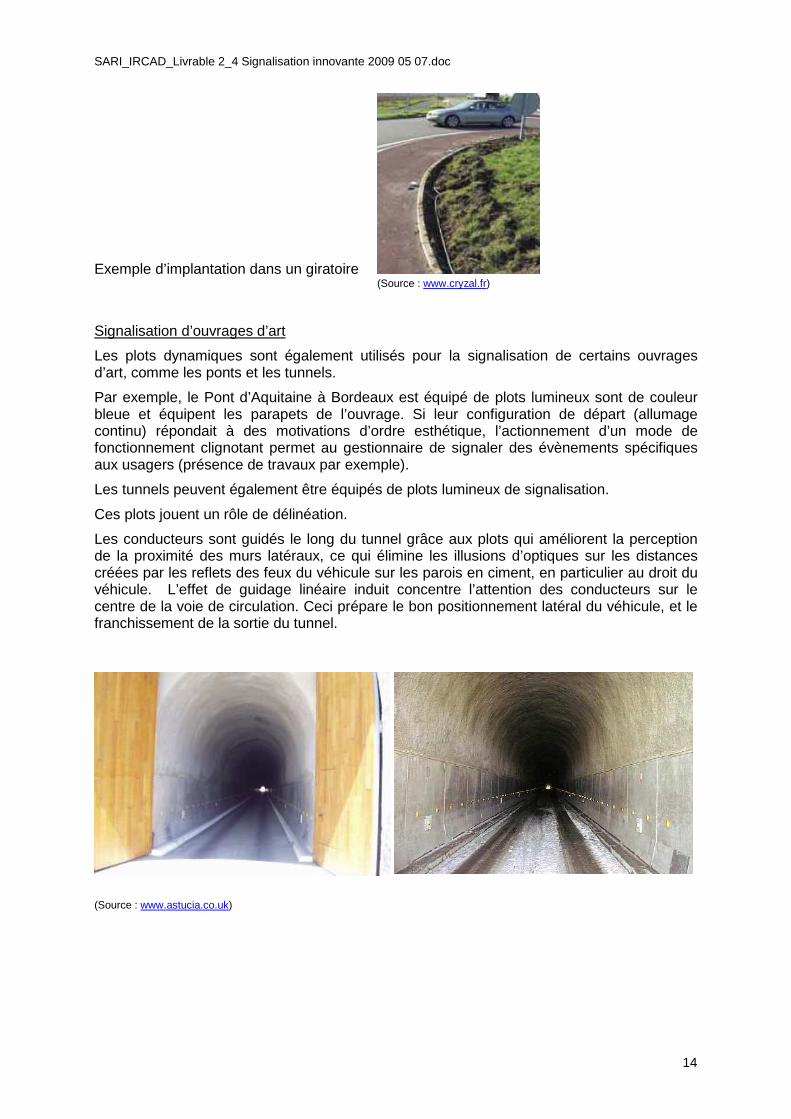
Les tunnels peuvent également être équipés de plots lumineux de signalisation.
Ces plots jouent un rôle de délinéation.
Les conducteurs sont guidés le long du tunnel grâce aux plots qui améliorent la perception de la proximité des murs latéraux, ce qui élimine les illusions d’optiques sur les distances créées par les reflets des feux du véhicule sur les parois en ciment, en particulier au droit du véhicule. L’effet de guidage linéaire induit concentre l’attention des conducteurs sur le centre de la voie de circulation. Ceci prépare le bon positionnement latéral du véhicule, et le franchissement de la sortie du tunnel.
(Source : www.astucia.co.uk)

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
15
Signalisation de virages dangereux sur autoroute
Les plots dynamiques sont utilisés pour la signalisation de virages dangereux sur autoroute. ASF a ainsi équipé un virage en courbe accidentogène sur l’A8 de plots lumineux, dont le fonctionnement est fixe (et non dynamique). Ces plots de couleur jaune sont installés sur le sommet de la glissière centrale en béton adhérent et sont allumés quand les conditions de luminosité sont défavorables, en particulier la nuit.
Cette utilisation a pour vocation le guidage des usagers.
Une autre implantation possible consiste à installer les plots lumineux sur le côté de la bordure béton, avec le même objectif de guidage.
Exemple d’implantation de plots lumineux sur GBA
(Source : www.cryzal.fr)
5.4. Utilisation des plots dynamiques en Europe et à l’étranger
L’utilisation des plots lumineux est relativement plus développée en Europe et à l’étranger qu’en France.
5.4.1. Guidage des usagers en virage
Les plots dynamiques permettent de renforcer le tracé d’une route présentant des virages particulièrement dangereux et dont la rectification présente des difficultés importantes. C’est le cas de la route interurbaine ci-dessous.

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
16
(Source : www.astucia.co.uk)
La puissance lumineuse des plots allumés en permanence permet de nuit une distance de visibilité théorique très importante (supérieure à 1000 mètres par temps clair5) soit un temps de prévisualisation confortable (+ de 30 secondes) permettant à l’usager d’adapter sa vitesse suffisamment tôt.
L’efficacité théorique de ce type de dispositif dépend cependant beaucoup des caractéristiques géométriques du site en amont des virages équipés. Si le site est peu visible en fonction du tracé en amont, la perception des plots lumineux sera différée d’autant, et le temps de prévisualisation utile le sera également.
Il est possible d’avoir un fonctionnement sélectif des plots, afin de ne déclencher leur allumage qu’en présence de véhicules. Des boucles magnétiques permettent la détection des usagers, et un système de contrôle commande active progressivement les plots sur le parcours, donnant à l’usager l’impression qu’ils sont allumés en permanence.
(Source : www.astucia.co.uk)
5.4.2. Guidage des usagers en conditions de visibilité dégradées
Les plots dynamiques peuvent renforcer la matérialisation des voies de circulation d’une route présentant des conditions de visibilité dégradées, dans des sections fréquemment soumises au brouillard et présentant des tracés exigeants.
La route A143 à Haddiscoe (Grande Bretagne, Norfolk) présentait une section de 2km sinueuse et glissante, avec une accidentalité importante, liée à des pertes de contrôle (22 accidents en 3 ans, dont 2 mortels et 6 graves ; 40% de nuit).
5 Source : Astucia. La visibilité de nuit de plots dynamiques à LED est souvent présentée comme étant
supérieure ou égale à 1000 mètres par les distributeurs ou fabricants.
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
17
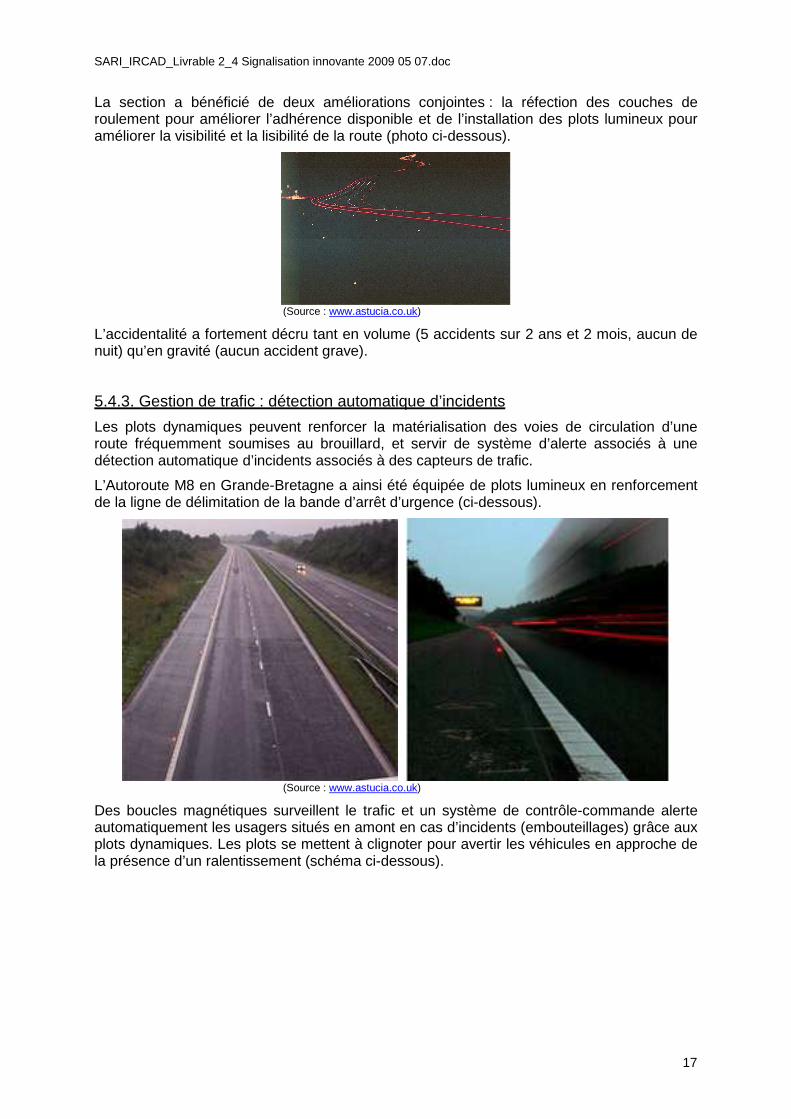
La section a bénéficié de deux améliorations conjointes : la réfection des couches de roulement pour améliorer l’adhérence disponible et de l’installation des plots lumineux pour améliorer la visibilité et la lisibilité de la route (photo ci-dessous).
(Source : www.astucia.co.uk)
L’accidentalité a fortement décru tant en volume (5 accidents sur 2 ans et 2 mois, aucun de nuit) qu’en gravité (aucun accident grave).
5.4.3. Gestion de trafic : détection automatique d’incidents
Les plots dynamiques peuvent renforcer la matérialisation des voies de circulation d’une route fréquemment soumises au brouillard, et servir de système d’alerte associés à une détection automatique d’incidents associés à des capteurs de trafic.
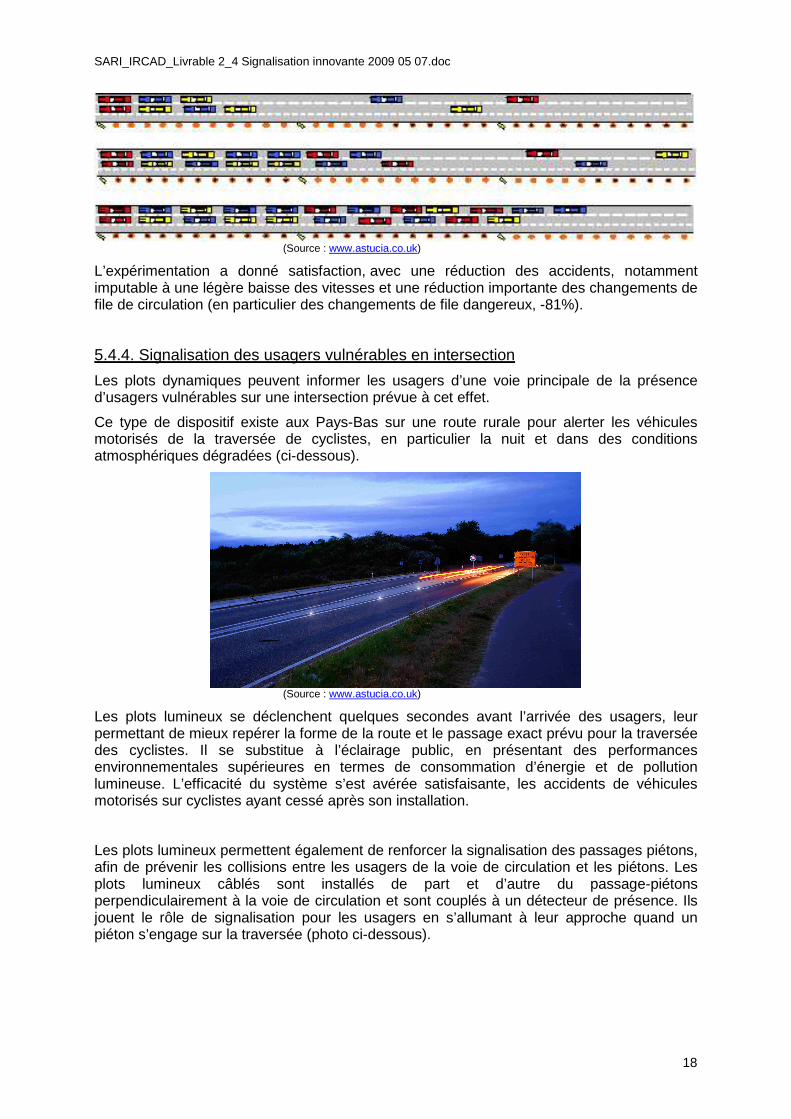
L’Autoroute M8 en Grande-Bretagne a ainsi été équipée de plots lumineux en renforcement de la ligne de délimitation de la bande d’arrêt d’urgence (ci-dessous).
(Source : www.astucia.co.uk)
Des boucles magnétiques surveillent le trafic et un système de contrôle-commande alerte automatiquement les usagers situés en amont en cas d’incidents (embouteillages) grâce aux plots dynamiques. Les plots se mettent à clignoter pour avertir les véhicules en approche de la présence d’un ralentissement (schéma ci-dessous).
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
18
(Source : www.astucia.co.uk)
L’expérimentation a donné satisfaction, avec une réduction des accidents, notamment imputable à une légère baisse des vitesses et une réduction importante des changements de file de circulation (en particulier des changements de file dangereux, -81%).
5.4.4. Signalisation des usagers vulnérables en intersection
Les plots dynamiques peuvent informer les usagers d’une voie principale de la présence d’usagers vulnérables sur une intersection prévue à cet effet.
Ce type de dispositif existe aux Pays-Bas sur une route rurale pour alerter les véhicules motorisés de la traversée de cyclistes, en particulier la nuit et dans des conditions atmosphériques dégradées (ci-dessous).
(Source : www.astucia.co.uk)
Les plots lumineux se déclenchent quelques secondes avant l’arrivée des usagers, leur permettant de mieux repérer la forme de la route et le passage exact prévu pour la traversée des cyclistes. Il se substitue à l’éclairage public, en présentant des performances environnementales supérieures en termes de consommation d’énergie et de pollution lumineuse. L’efficacité du système s’est avérée satisfaisante, les accidents de véhicules motorisés sur cyclistes ayant cessé après son installation.
Les plots lumineux permettent également de renforcer la signalisation des passages piétons, afin de prévenir les collisions entre les usagers de la voie de circulation et les piétons. Les plots lumineux câblés sont installés de part et d’autre du passage-piétons perpendiculairement à la voie de circulation et sont couplés à un détecteur de présence. Ils jouent le rôle de signalisation pour les usagers en s’allumant à leur approche quand un piéton s’engage sur la traversée (photo ci-dessous).

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
19
(Source : www.astucia.co.uk)
En France, un système de ce type a été déployé dans le département des Hauts-de-Seine (92)6. Ce système existe également pour renforcer la visibilité des intersections susceptible d’accueillir des piétons (photo ci-dessous).
(Source : www.astucia.co.uk)
5.4.5. Affectation dynamique des voies
Les plots dynamiques permettent d’améliorer l’efficacité des conditions de circulation en modulant l’affectation des voies de circulation. La matérialisation permanente des voies de circulation est traditionnellement réalisée par les marques sur chaussées. Les plots lumineux permettent de créer une délinéation visuelle complémentaire variable. La fonction de guidage sélectif est rendue possible par l’allumage programmé sur une plage horaire donnée pour délimiter des voies de circulation particulières.
Cette délinéation peut être utilisée pour modifier les conditions d’utilisation des bretelles d’insertion. C’est le cas de la route à chaussées séparées aux Pays-Bas (photo ci-dessous).
(Source : www.astucia.co.uk)
6 Cette expérimentation a été réalisée avec la société Tecknisolar, implantée à Saint-Malo (35). Le dispositif de
signalisation repose sur un capteur infrarouge communicant avec des plots lumineux dynamiques qui s’allument et deviennent visibles pour les automobilistes quand le capteur détecte la présence de piéton.

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
20
La délinéation variable apportée par les plots dynamique peut aussi servir à l’affectation des voies de circulation.
L’affectation des voies de circulation peut également être utilisée en séparation des flux de circulation sur un ouvrage à une seule chaussée. C’est le cas par exemple sur des ponts, quand le trafic pendulaire crée de fortes différences de trafic au cours de la journée. Il est possible d’affecter deux voies de circulation sur trois à un sens du trafic en début de journée (arrivées dans les bureaux et usines) et dans l’autre sens en fin de journée (sorties).
Pour cela, deux lignes de plots lumineux délimitent la voie centrale, et indiquent aux usagers la (ou les) voie(s) de circulation utilisable(s). Des PMV (et en particulier des signaux d’affectation de voie) complètent le dispositif.
Ce type d’équipement existe déjà dans certains pays d’Europe (Espagne en particulier). En France, quelques projets sont prévus, dont le plus défini est la création d’une voie de circulation réversible sur le pont de St Nazaire (Conseil Général 447).
7 Pour plus d’information, voir l’animation du projet sur www.cg44.fr.
SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
21
6. Projet initial d’expérimentation des plots dynam iques Le projet initial IRCAD prévoyait une expérimentation sur route des plots dynamiques.
Ce chapitre passe en revue la localisation du site prévu (6.1), le dispositif expérimental envisagé sur site (6.2), ainsi que les raisons pour lesquelles cette expérimentation n’a pu être conduite en grandeur réelle (6.3).
6.1. Localisation du site prévu
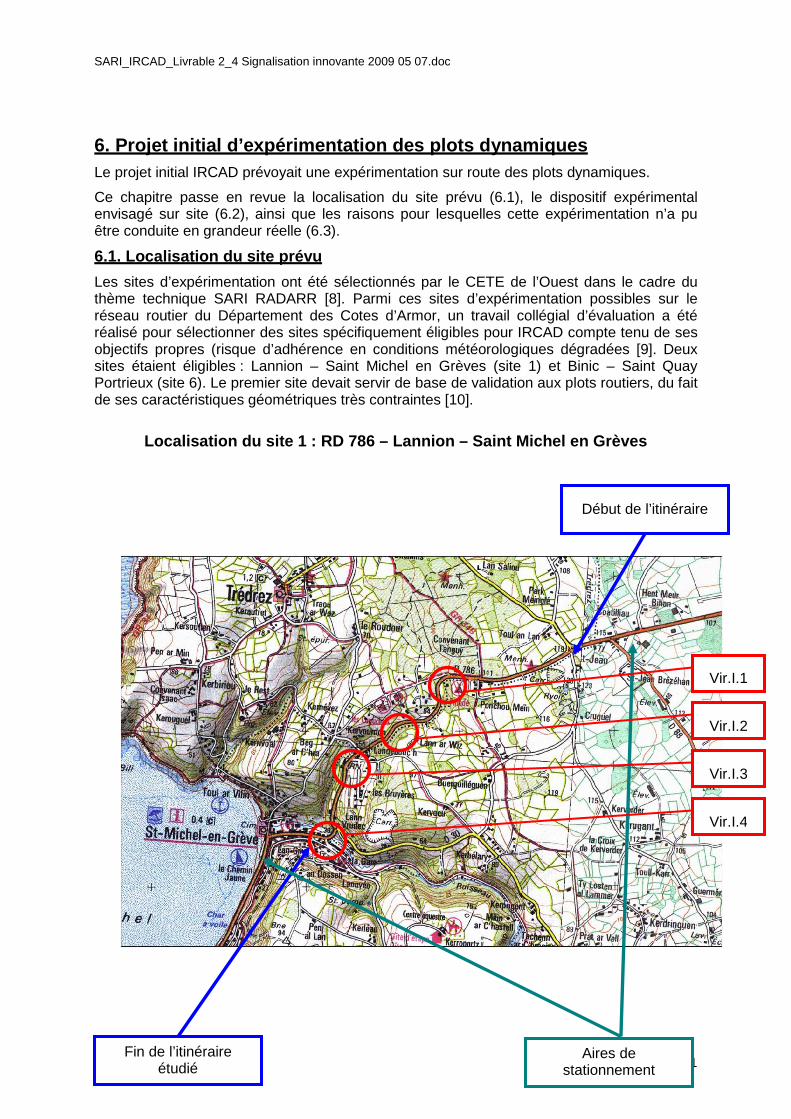
Les sites d’expérimentation ont été sélectionnés par le CETE de l’Ouest dans le cadre du thème technique SARI RADARR [8]. Parmi ces sites d’expérimentation possibles sur le réseau routier du Département des Cotes d’Armor, un travail collégial d’évaluation a été réalisé pour sélectionner des sites spécifiquement éligibles pour IRCAD compte tenu de ses objectifs propres (risque d’adhérence en conditions météorologiques dégradées [9]. Deux sites étaient éligibles : Lannion – Saint Michel en Grèves (site 1) et Binic – Saint Quay Portrieux (site 6). Le premier site devait servir de base de validation aux plots routiers, du fait de ses caractéristiques géométriques très contraintes [10].
Localisation du site 1 : RD 786 – Lannion – Saint M ichel en Grèves
Début de l’itinéraire
Fin de l’itinéraire étudié
Aires de stationnement
Vir.I.4
Vir.I.3
Vir.I.2
Vir.I.1

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
22
Ce site est très fréquenté avec un trafic moyen annuel en 2003 de 5879 véhicules par jour sur la section et de 7245 véhicules par jour dans la section en amont vers Lannion (cf. carte page suivante).
Il s’inscrit sur une chaussée relativement étroite (inférieure à 6 mètres) et comprend une succession de groupe de virages en descente dont le premier groupe (virages Vir. I.1) est relativement accidentogène du fait de ses caractéristiques géométrique et d’une visibilité médiocre (rupture de tracé en amont rendant sa perception difficile). Le groupe de virages suivants (virages Vir. I.2) ont un rayon de courbure faible associé à une largeur de chaussée faible ne permettant pas un écart latéral pour une trajectoire sûre.
Le site est évalué comme présentant une accidentalité matérielle et corporelle moyennes (quelques accidents recensés sur la section, pour plus de détail on se reportera au livrable RADARR du CETE NC [8]).

SARI_IRCAD_Livrable 2_4 Signalisation innovante 2009 05 07.doc
23
Carte des trafics routiers CG22 (TMJA, 2003)
24
6.2. Dispositif expérimental envisagé sur site
Le dispositif expérimental envisagé pour SARI IRCAD est original dans son implantation et sa forme : les plots sont conçus pour être installés dans un alignement droit avant un virage, et ils doivent alors constituer une ligne lumineuse « de sécurité ».
Cette ligne lumineuse « de sécurité » doit être capable d’attirer l’attention de l’usager :
- avec une visibilité suffisamment grande pour permettre sa détection à coup sûr
- avec une anticipation (temps de prévisualisation) suffisante par rapport à la difficulté à aborder pour permettre l’adaptation de sa conduite
- sans effet indésirable sur la trajectoire des véhicules.
Ce type d’équipement doit combiner les avantages de la signalisation lumineuse (fonctionnement dynamique avec impact visuel fort et apte à déclencher une alerte) et de la signalisation routière horizontale traditionnelle (continuité de l’information sur l’itinéraire).
L’avantage de ce dispositif réside dans son étendue spatiale, qui permet de s’affranchir des contraintes de prévisualisation des dispositifs de bord de voie ponctuels

25
6.2.1. Signalisation existante
La signalisation existante du site a été répertoriée et localisée sur l’itinéraire à l’aide de différentes visites comprenant des relevés photographiques (véhicule VANI) et vidéographiques. Elle a été ensuite reproduite schématiquement dans un plan synthétisant la signalisation de bord de voie routière (signaux routiers) et la publicité.
L’information délivrée aux usagers se caractérise par sa densité et son hétérogénéité (graphique ci-dessous).
La publicité vient alourdir l’information donnée à l’usager au détriment de la visibilité et de la lisibilité de la signalisation routière.

26
6.2.2. Signalisation proposée (version 1)
Le groupe de travail système d’information a émis une première proposition de signalisation d’alerte à la vitesse. Elle n’a pas été mise en œuvre.
La signalisation proposée dans cette version initiale projetait de supprimer les trois panneaux publicitaires, non réglementaires et contre productifs pour la sécurité de l’itinéraire.
Le premier signal routier de danger A4 (chaussée particulièrement glissante) était conservé sans changement de position. Un panneau à messages variables PMV (A4) était ajouté après ce signal. Le second signal fixe A4 situé près du virage était supprimé, afin de conserver un séquencement d’information acceptable (l’ajout de PMV venant alourdir la chaîne).
Le signal routier de danger A1d (succession de virages dont le premier commence par la gauche) était conservé sans chargement de position. Un panneau à messages variables PMV (A1d) était ajouté après le signal A1d en renforcement du message.
Des plots lumineux étaient installés à partir du premier PMV pour renforcer l’impression lumineuse jusqu’au milieu du premier virage, l’objectif étant d’assurer une alerte à l’usager qui puisse fonctionner sans les PMV (scénario plots lumineux seuls sans PMV). Afin de renforcer le guidage des usagers déjà engagés dans le virage, des plots statiques (non lumineux) étaient prévus à partir de la seconde moitié du virage (après le point de rayon de courbure minimal).
Signalisation IRCAD proposée avec plots lumineux su r route (version 1)
27
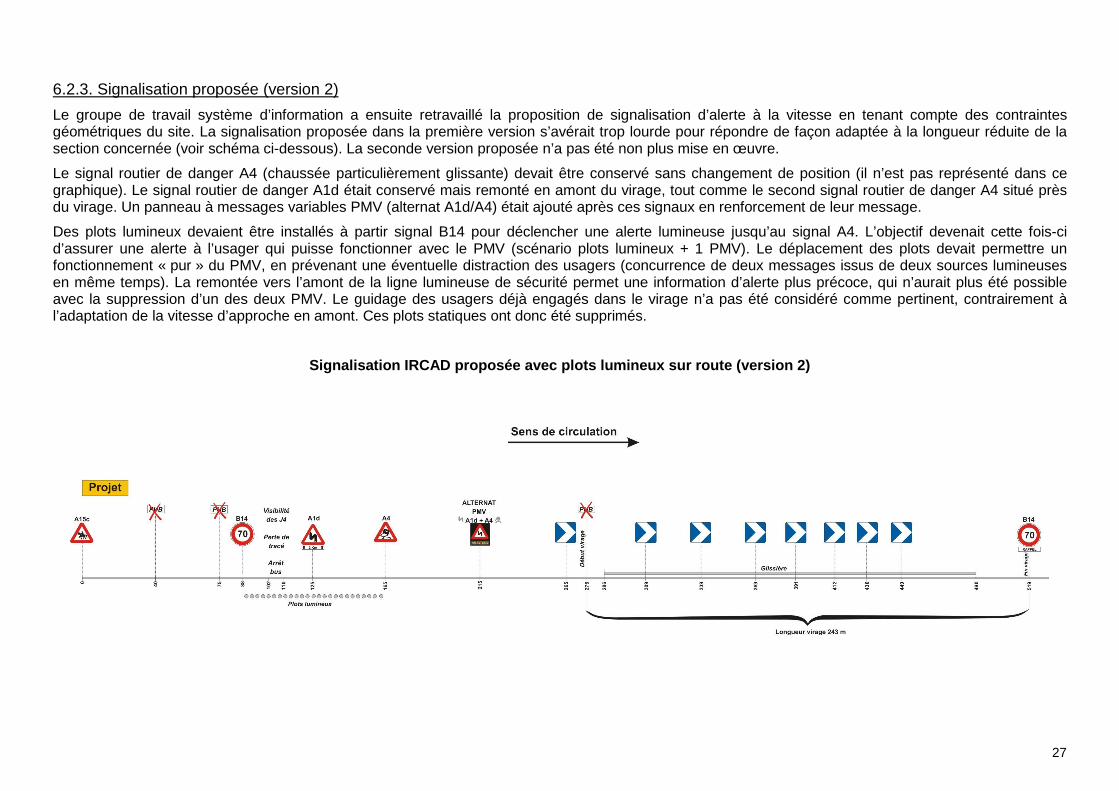
6.2.3. Signalisation proposée (version 2)
Le groupe de travail système d’information a ensuite retravaillé la proposition de signalisation d’alerte à la vitesse en tenant compte des contraintes géométriques du site. La signalisation proposée dans la première version s’avérait trop lourde pour répondre de façon adaptée à la longueur réduite de la section concernée (voir schéma ci-dessous). La seconde version proposée n’a pas été non plus mise en œuvre.
Le signal routier de danger A4 (chaussée particulièrement glissante) devait être conservé sans changement de position (il n’est pas représenté dans ce graphique). Le signal routier de danger A1d était conservé mais remonté en amont du virage, tout comme le second signal routier de danger A4 situé près du virage. Un panneau à messages variables PMV (alternat A1d/A4) était ajouté après ces signaux en renforcement de leur message.
Des plots lumineux devaient être installés à partir signal B14 pour déclencher une alerte lumineuse jusqu’au signal A4. L’objectif devenait cette fois-ci d’assurer une alerte à l’usager qui puisse fonctionner avec le PMV (scénario plots lumineux + 1 PMV). Le déplacement des plots devait permettre un fonctionnement « pur » du PMV, en prévenant une éventuelle distraction des usagers (concurrence de deux messages issus de deux sources lumineuses en même temps). La remontée vers l’amont de la ligne lumineuse de sécurité permet une information d’alerte plus précoce, qui n’aurait plus été possible avec la suppression d’un des deux PMV. Le guidage des usagers déjà engagés dans le virage n’a pas été considéré comme pertinent, contrairement à l’adaptation de la vitesse d’approche en amont. Ces plots statiques ont donc été supprimés.
Signalisation IRCAD proposée avec plots lumineux su r route (version 2)
28
6.3. Limites du dispositif expérimental prévu et de son déploiement réel
Les performances lumineuses mesurées conformément à la norme qui satisfont les besoins d’alerte des usagers de la route sont définies pour les plots passifs (rétroréfléchissants) par la norme NF EN 1463.
En reprenant cette norme pour les plots actifs en ce qui concerne la géométrie de vision, les performances lumineuses à atteindre pour une bonne détection dans différentes conditions de luminosité et atmosphériques doivent être les suivantes :
- fonctionnement de jour : intensité lumineuse ajustable dans une plage allant de 100 à 300 lumens à 1 mètre
- fonctionnement de nuit : intensité lumineuse supérieure ou égale à 70 lumens et ajustable dans une plage allant de 10 à 70 lumens à 1 mètre.
Après examen des produits disponibles sur le marché français, il n’a pas été possible de trouver des plots dynamiques capables de satisfaire l’intégralité des exigences définies. L’offre technologique reste encore assez limitée sur ce segment innovant.
En effet, la plupart des plots routiers commercialisés ne sont pas conçus pour fonctionner dans des conditions de forte luminosité (conditions diurnes). Ils sont généralement conçus pour fonctionner dans des milieux de faible luminosité (par exemple, en conditions nocturnes, sans éclairage public ou en tunnel). Les plots lumineux sont parfois mis en avant comme une alternative à l’éclairage public. Leur puissance lumineuse est donc souvent calibrée pour pouvoir s’adapter à des besoins en énergie limités, susceptibles d’être couverts par un dispositif intégré (capteurs solaires internes) ou par une installation autonome (panneau solaire déporté).
Les plots actifs couvrent donc des besoins de détection dans une plage de fonctionnement limitée.
Le choix des plots dynamiques s’est porté sur un compromis entre différents paramètres techniques relatifs à la mise en œuvre, aux performances, à l’opérabilité et à la maintenance. Les plots retenus pour IRCAD offrent une intensité maximale égale à 70 lumens.
Les plots dynamiques retenus fonctionnent en mode « flash » ou « clignotant » à une fréquence de base de 1 Hz. La fréquence d’allumage est ajustable. Au minimum, les plots sont capables selon ces deux modes prédéterminés (1 mode flash / 1 mode clignotant).
La durée d’allumage des « flashes » ou « clignotant » est éventuellement ajustable. Les plots sont synchrones.
Afin de pouvoir s’intégrer dans un système d’alerte, les plots dynamiques doivent être pilotables par une centrale de contrôle commande extérieure qui sera installée dans son coffret électrique étanche (IP65) ou bien installée dans le système extérieur.
Le système communique avec le système extérieur qui pilote l’ensemble de la signalisation du site. La consigne d’allumage et l’extinction des plots dynamiques est transmise au système de l’entreprise à l’aide d’un contact fermeture tout ou rien.
La centrale de contrôle commande gère les fonctions suivantes :
- commutation jour/nuit
- réglage de la fréquence
29
- réglage durée du « flash »
- synchronisation des allumages
- délais d’allumage
- délais d’extinction.
Les plots sont implantés en rive en rase-campagne sur une route départementale bidirectionnelle. Ils sont scellés dans la chaussée par carottage et collage avec une colle à deux composants. Leur hauteur en saillie ne dépasse pas 20 mm.
Le pas entre plots et leur localisation par rapport au marquage existant est rapproché afin de créer une impression d’accélération et de vitesse.
Les plots dynamiques bénéficient d’un système de connexion simple permettant une installation rapide sur un câble d’alimentation basse tension.
Dans le cas d’une alerte liée à la prise d’un virage, il reste possible de masquer partiellement les plots omnidirectionnels afin d’orienter leur éclairage dans un sens de circulation.
30
7. Expérimentation retenue pour les plots dynamique s Les plots dynamiques ont été implantés sur le site du LCPC de Nantes, afin de procéder à des évaluations dans des conditions de fonctionnement pouvant se rapprocher d’une piste fermée.
Cette évaluation avait initialement un double objectif :
- valider les différents scénarios d’implantation et d’allumage des plots et leur efficacité respective ;
- valider l’absence d’effet indésirable (écart de trajectoire lié à un phénomène de surprise) causé par les plots lumineux.
Pour différentes raisons pratiques (difficulté d’implantation permanente, disponibilité), il ne s’est pas avéré possible d’installer les plots lumineux directement sur la piste d’essais routiers du LCPC Nantes.
7.1. Les plots lumineux installés sur le LCPC Nante s
Les plots ont donc été installés comme démonstrateurs en accotement sur le trottoir d’une des routes de circulation desservant des bâtiments du LCPC.
La route présente comme caractéristiques des voies de circulation relativement étroites (chaussée bidirectionnelle de 4.80 mètres de large), encadrées par des bordures de trottoir en béton et délimitées par une ligne axiale de marquage routier relativement peu visible car usée.
Les plots actifs ont été installés de façon temporaire sur le trottoir marquant l’accotement de la voie de circulation allant du bâtiment RESAL vers la sortie du LCPC, environ 10 cm derrière les bordures de trottoir. Ils sont donc en hauteur par rapport au plan de la chaussée.
L’optique des plots étant omnidirectionnelle, ils sont visibles sur route bidirectionnelle à la fois par les automobilistes circulant de leur côté, mais aussi par les automobilistes circulant sur la voie opposée.
Sur le site du LCPC Nantes, cela ne pose pas de problème, dans la mesure où la circulation est neutralisée pendant les manipulations expérimentales. Les seuls véhicules circulant sont les véhicules d’essai, et ils utiliseront la voie de circulation équipée de plots dynamiques.
Les plots sont reliés par un câble type basse tension. Ils sont alimentés en énergie par le câble, qui est relié à une armoire électrique étanche. L’armoire permet également la commande à distance des plots (état éteint, état allumé clignotant, état allumé continu).
31
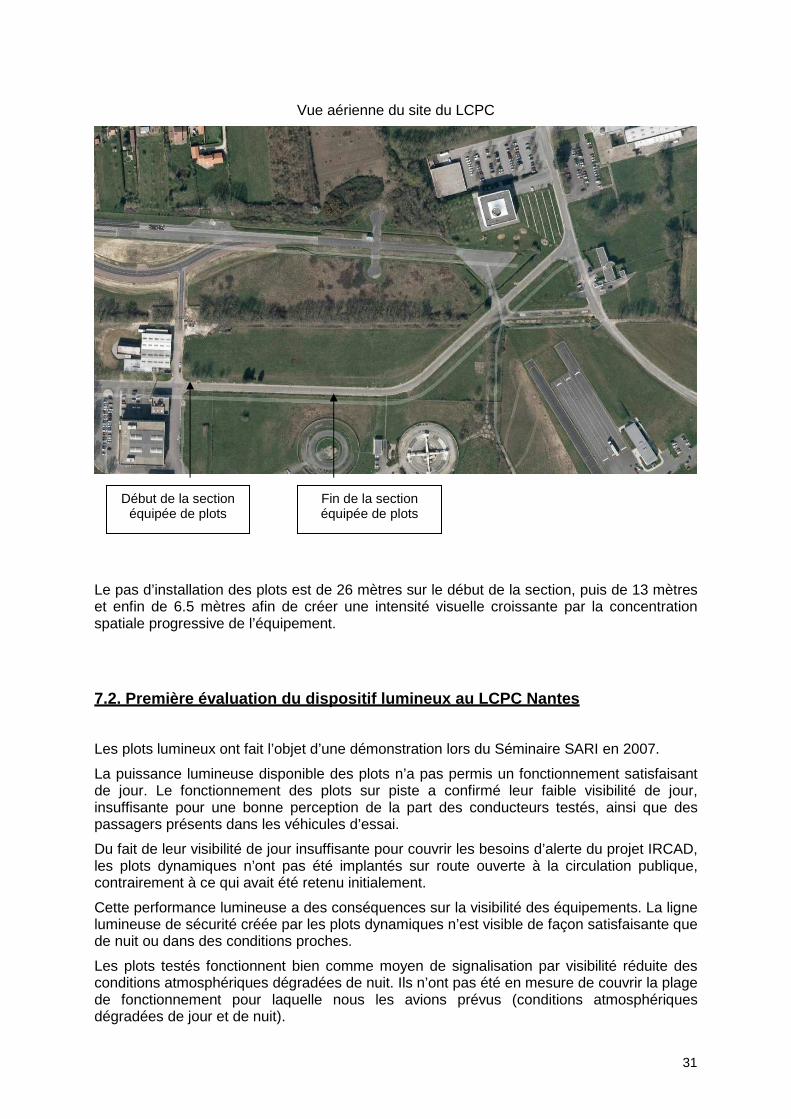
Vue aérienne du site du LCPC
Le pas d’installation des plots est de 26 mètres sur le début de la section, puis de 13 mètres et enfin de 6.5 mètres afin de créer une intensité visuelle croissante par la concentration spatiale progressive de l’équipement.
7.2. Première évaluation du dispositif lumineux au LCPC Nantes
Les plots lumineux ont fait l’objet d’une démonstration lors du Séminaire SARI en 2007.
La puissance lumineuse disponible des plots n’a pas permis un fonctionnement satisfaisant de jour. Le fonctionnement des plots sur piste a confirmé leur faible visibilité de jour, insuffisante pour une bonne perception de la part des conducteurs testés, ainsi que des passagers présents dans les véhicules d’essai.
Du fait de leur visibilité de jour insuffisante pour couvrir les besoins d’alerte du projet IRCAD, les plots dynamiques n’ont pas été implantés sur route ouverte à la circulation publique, contrairement à ce qui avait été retenu initialement.
Cette performance lumineuse a des conséquences sur la visibilité des équipements. La ligne lumineuse de sécurité créée par les plots dynamiques n’est visible de façon satisfaisante que de nuit ou dans des conditions proches.
Les plots testés fonctionnent bien comme moyen de signalisation par visibilité réduite des conditions atmosphériques dégradées de nuit. Ils n’ont pas été en mesure de couvrir la plage de fonctionnement pour laquelle nous les avions prévus (conditions atmosphériques dégradées de jour et de nuit).
Début de la section équipée de plots
Fin de la section équipée de plots
32
C’est pourquoi les plots n’ont pas été installés sur route, mais uniquement sur piste fermée. Dans cette configuration expérimentale, l’incapacité à couvrir les situations diurnes ne pose pas de problème de sécurité, étant donné l’absence de rôle réel joué par cette signalisation. Un déploiement routier n’aurait pu convenir, en raison de l’asymétrie de l’information donnée à l’usager : de nuit, alerte au risque de perte d’adhérence et de jour, absence d’alerte.
7.3. Evaluations AJISE du dispositif lumineux au LC PC Nantes
L’évaluation des plots n’ayant pu être réalisée par une expérimentation routière sur le site Lannion – Saint Michel en Grève, ce livrable ne présente pas de résultats sur l’efficacité du dispositif.
Le seul site expérimental équipé est la piste du LCPC Nantes, qui constitue une voie privée, dont l’utilisation est réservée au personnel du LCPC et à leurs visiteurs, l’accès faisant l’objet d’un contrôle physique (barrières).
Le thème AJISE souhaitant évaluer l’efficacité des plots dynamiques et disposait de moyens propres pour réaliser cette évaluation. Une collaboration a donc été initiée avec les acteurs concernés d’AJISE, ayant conduit à la définition d’un cahier des charges formalisé dans un livrable [11]. L’expérimentation routière n’étant pas programmée, il a été décidé en accord entre les deux thèmes techniques SARI AJISE et SARI IRCAD que l’évaluation des plots lumineux serait de la responsabilité d’AJISE. Un courrier en ce sens a été adressé au Comité Opérationnel du projet SARI.
L’évaluation des plots lumineux a été réalisée sur le site en conditions nocturnes, sur la base du test de différents conducteurs cobaye accompagné d’un observateur à bord d’un véhicule instrumenté (caméras IP).
Les résultats de l’étude n’ont pas encore été publiés à notre connaissance.
Conclusion et futures pistes de recherche Les plots lumineux constituent bien une alternative crédible à d’autres équipements de signalisation d’alerte, sous réserve du respect d’un certain nombre de conditions.
Par la simplicité de l’information qu’ils envoient, la souplesse d’implantation qu’ils proposent, les plots actifs offrent une réponse intéressante pour signaler certains événements particuliers et aider à la gestion du trafic.
Les évaluations sur piste permettront d’évaluer les avantages et inconvénients des plots utilisés comme ligne lumineuse d’alerte au risque de perte de contrôle lié aux conditions atmosphériques dégradées.
De tels dispositifs nécessitent cependant une puissance lumineuse suffisante pour fonctionner efficacement de jour. Sous réserve des évaluations sur piste

33
Bibliographie
[1] M A Winnett and A H Wheeler (2002), Vehicle-activated signs – a large scale evaluation, Road Safety Division, Department for Transport, TRL, 30p
[2] Minh-Tan DO et al. (2005), SARI IRCAD Livrable 1.1 Etude bibliographique, 101 p
[3] Circulaire n°78-116 du 19 septembre 1978 relati ve aux normes d’implantation des plots rétroréfléchissants, Direction des routes et de la circulation routière, Ministère des Transports, non parue au JO
[4] AFNOR, NF EN 1463-1 : février 1998, Plots rétroréfléchissants, Partie 1 : spécifications des performances initiales
[5] SETRA, NF EN 1463-1 : décembre 1994, Panneaux à messages variables, Guide technique
[6] ASFA (2004), La sécurité, Documentation institutionnelle, 18p
[7] ATEC / ITS France (2002), Sécurité Routière et Télématique, Rapport du Groupe de Projet ITS France, CERTU, 79 p
[8] Katell KERDUDO et al. (2005), Radarr - Choix des sites expérimentaux version 2, septembre, 42 p
[9] Pierre ANELLI (2006), IRCAD - Choix des itinéraires et chiffrage des expérimentations, L 3.31, avril, 54 p
[10] Minh-Tan DO et al. (2007), Description des besoins d’expérimentations sur itinéraires, Note à l’attention du Conseil Général des Côtes d’Armor et la Direction de SARI, 48 p
[11] Christian BASTIEN et al. (2007), Livrable 2.3.2 : Protocole d’évaluation des plots sur route « privée », 15 p