sviluppo di un circuito di front end per applicazioni … · 2013-06-29 · 2.12 schema a blocchi...
TRANSCRIPT

POLITECNICO DI MILANO
FACOLTA’ DI INGEGNERIA DELL’INFORMAZIONE
CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA
ELETTRONICA
SVILUPPO DI UN CIRCUITO DI FRONT END PER
APPLICAZIONI BIOMEDICHE
Tesi di Laurea Specialistica di:
Erlind Rrapaj
Matr. 749439
Relatore:
Prof. Marco Bianchessi
Correlatore:
Ing. Marco De Fazio
A. A. 2011 - 2012

Indice
Elenco delle figure v
Elenco delle tabelle ix
Sommario xi
Abstract xiii
Introduzione 1
1 Cuore ed elettrocardiogramma 5
1.1 Funzionamento del cuore . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Elettrocardiografia . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Anomalie cardiache ed ECG . . . . . . . . . . . . . . . . . . . . . 16
2 Descrizione globale del progetto 21
2.1 Introduzione al sistema . . . . . . . . . . . . . . . . . . . . . . . 21
2.2 Progettazione della scheda . . . . . . . . . . . . . . . . . . . . . . 22
2.2.1 Schematico in OrCad . . . . . . . . . . . . . . . . . . . . 23
2.2.2 Implementazione dello schematico in PCB Allegro . . . . 23
2.3 Polarizzazione del sistema e lettura del segnale . . . . . . . . . . 27
2.3.1 Soluzione tradizionale . . . . . . . . . . . . . . . . . . . . 27
2.3.2 Soluzione proposta . . . . . . . . . . . . . . . . . . . . . . 31
2.4 Rimozione del rumore 1/f . . . . . . . . . . . . . . . . . . . . . . 35
2.5 Progetto del blocco d’andata di amplificazione . . . . . . . . . . 40
3 Microcontrollore e compensazione dell’offset 45
3.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2 Microcontrollore . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.3 Convertitore analogico digitale . . . . . . . . . . . . . . . . . . . 48
3.4 Compensazione dell’offset . . . . . . . . . . . . . . . . . . . . . . 48
iii

3.4.1 Effetto dell’offset di ingresso all’uscita . . . . . . . . . . . 50
3.4.2 Modulo di trasmissione bluetooth e batteria . . . . . . . . 52
3.4.3 Relazione tra offset e ∆t . . . . . . . . . . . . . . . . . . . 55
3.5 Compensazione dell’offset tramite retroazione . . . . . . . . . . . 57
3.5.1 Regolatore PID . . . . . . . . . . . . . . . . . . . . . . . . 59
3.5.2 Modulazione Sigma-Delta . . . . . . . . . . . . . . . . . . 60
3.6 Introduzione del PWM per compensare la corrente di leakage . . 61
3.7 Utilizzo del Patient Stimulator e segnale misurato in uscita . . . 62
Conclusioni 69
Bibliografia 73
Ringraziamenti 75
iv

Elenco delle figure
1 Body Gateway . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Comunicazione Body Gateway . . . . . . . . . . . . . . . . . . . 2
1.1 Distribuzione del sistema connettivo negli atrii e ventricoli re-
sponsabile della formazione e conduzione degli impulsi elettrici
nel cuore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Andamento del potenziale nelle cellule del nodo S-A che li con-
ferisce automaticita e ritmicita . . . . . . . . . . . . . . . . . . . 7
1.3 Formazione del segnale ECG . . . . . . . . . . . . . . . . . . . . 7
1.4 Forma d’onda dell’ECG . . . . . . . . . . . . . . . . . . . . . . . 8
1.5 Meccanismi di soppressione di altri pacemakers potenziali (SA
deve dominare il ritmo cardiaco) . . . . . . . . . . . . . . . . . . 10
1.6 Dipolo immerso in un corpo parzialmente conduttivo . . . . . . . 11
1.7 Relazione fra il momento del dipolo e la differenza di potenziale . 11
1.8 Triangolo di Eindhoven . . . . . . . . . . . . . . . . . . . . . . . 12
1.9 Misura dei potenziali unipolari . . . . . . . . . . . . . . . . . . . 13
1.10 Misura dei potenziali aumentati . . . . . . . . . . . . . . . . . . . 14
1.11 Rappresentazione del vettore “piu efficace” . . . . . . . . . . . . 15
1.12 Sei misure sul piano trasversale . . . . . . . . . . . . . . . . . . . 16
2.1 Schema a blocchi del sistema progettato . . . . . . . . . . . . . . 21
2.2 Schematico del front-end analogico . . . . . . . . . . . . . . . . . 24
2.3 Schematico della board del microcontrollore . . . . . . . . . . . . 25
2.4 Piano Top . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.5 Piano Bottom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.6 Scheda completa . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.7 Piano Top realizzato . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.8 Piano Bottom realizzato . . . . . . . . . . . . . . . . . . . . . . . 28
2.9 Piano TOP Completo . . . . . . . . . . . . . . . . . . . . . . . . 28
2.10 Piano Bottom Completo . . . . . . . . . . . . . . . . . . . . . . . 29
v
2.11 Schema a blocchi della soluzione originaria . . . . . . . . . . . . . 29
2.12 Schema a blocchi della soluzione proposta (migliorata) . . . . . . 32
2.13 Schema a blocchi della parte di sistema per l’amplificazione e
rimozione del rumore flicker . . . . . . . . . . . . . . . . . . . . . 35
2.14 Rappresentazione spettrale unilatera del segnale . . . . . . . . . 36
2.15 Rappresentazione spettrale bilatera del segnale . . . . . . . . . . 37
2.16 Rappresentazione spettrale bilatera del rumore flicker (rosso) e
bianco o termico (blu) . . . . . . . . . . . . . . . . . . . . . . . . 37
2.17 Rappresentazione spettrale del segnale m (t) . . . . . . . . . . . . 38
2.18 Rappresentazione spettrale del segnale m (t) . . . . . . . . . . . . 38
2.19 Rappresentazione spettrale del segnale demodulato . . . . . . . . 39
2.20 Rappresentazione spettrale del segnale demodulato filtrato (ne-
ro) e densita spettrale del rumore bianco dopo il filtraggio (blu) . 40
2.21 Rappresentazione a blocchi dello schema definitivo utilizzato nel
front-end analogico . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.22 Rappresentazione stadio di guadagno del front-end analogico . . 41
3.1 Schema a blocchi del sistema progettato . . . . . . . . . . . . . . 45
3.2 Schema a blocchi del sistema retroazionato . . . . . . . . . . . . 46
3.3 Integratore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4 Front-end analogico sul singolo canale . . . . . . . . . . . . . . . 50
3.5 Finestra dei comandi su docklight . . . . . . . . . . . . . . . . . . 51
3.6 Command interface . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.7 Integrato del modulo Bluetooth e batteria . . . . . . . . . . . . . 53
3.8 Disturbo di alimentazione sovrapposto . . . . . . . . . . . . . . . 54
3.9 Disturbo eliminato (piu pulito) . . . . . . . . . . . . . . . . . . . 54
3.10 Uscita del secondo stadio priva di offset (la linea di base e fissata
a VCC/2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.11 Uscita del secondo stadio satura verso la massa applicando un
impulso positivo SET PULSE 1 . . . . . . . . . . . . . . . . . . . 56
3.12 Uscita del secondo stadio satura verso l’alimentazione applicando
un impulso negativo SET PULSE 0 . . . . . . . . . . . . . . . . . 56
3.13 Relazione tra offset d’ingresso e il tempo ∆t che riporta il segnale
a meta dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.14 Retroazione utilizzata per la compensazione dell’offset . . . . . . 58
3.15 Schema a blocchi del regolatore PID . . . . . . . . . . . . . . . . 60
3.16 Uscita del secondo stadio in presenza della corrente di leakage . . 61
3.17 Introduzione del PWM . . . . . . . . . . . . . . . . . . . . . . . . 62
3.18 Uscita del secondo stadio priva di leakage . . . . . . . . . . . . . 63
vi

3.19 Patient stimulator utilizzato per effettuare le prove . . . . . . . . 63
3.20 ECG risultante dalla differenza temporale dei due canali . . . . . 64
3.21 Funzione di trasferimento del filtro passa basso Butterworth del
2 ordine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.22 Funzioni di trasferimento dei filtri passa basso del 4 ordine
(sinistra) ed 8 ordine (destra) . . . . . . . . . . . . . . . . . . . 65
3.23 Segnale differenza dall’uscita dei due ADC prima di essere filtra-
to(blu) e dopo il filtraggio(rosso) . . . . . . . . . . . . . . . . . . 66
3.24 FFT del segnale senza chopper . . . . . . . . . . . . . . . . . . . 66
3.25 FFT del segnale dopo aver inserito i chopper . . . . . . . . . . . 67
vii

Elenco delle tabelle
2.1 Caratteristiche da tenere in considerazione per iniziare la proget-
tazione del preamplificatore . . . . . . . . . . . . . . . . . . . . . 42
3.1 Relazione tra offset d’ingresso e il tempo ∆t che riporta il segnale
a meta dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
ix


Sommario
Nella panoramica introduttiva su fisiologia e funzionamento del cuore si
descrivono delle caratteristiche salienti della generazione e propagazione dei
biopotenziali fino alla formazione del segnale ECG che si vuole rilevare. In piu,
si illustrano delle tecniche di elettrocardiografia.
Facendo un’introduzione iniziale sul funzionamento globale del sistema si evi-
denzia il primo blocco di progettazione, quello che costituisce il ramo di andata
del front-end analogico, con enfatizzazione su vantaggi e svantaggi da essi de-
rivanti. Il blocco di front-end rende possibile la polarizzazione del sistema,
rimuove il rumore 1/f e amplifica il segnale.
La compensazione dell’offset richiede la progettazione di una retroazione analo-
gica pilotata dal microcontrollore. L’ambizione del progetto cosi realizzato non
e solo quella di mantenree la linea di base all’interno di un range dinamico onde
evitare la saturazione degli stadi, ma anche quella di tenere agganciata la linea
di base a meta dinamica, permettendo cosi una lettura piu agevole del segnale.
xi


Abstract
An overview is given concerning the heart functioning and behaviour, de-
scribing relevant generating and propagating features of biopotentials until the
origination of the ECG signal that needs to be detected. Moreover, methods
for electrocardiography are illustrated.
After a general introduction about the system operating principles, the first
design step is described, namely the forward branch of the analogical front-end,
highlighting its pros and cons. The front-end circuit makes system polarization
possible, reduces the so called 1/f noise and emphasises the signal.
Offset compensation requires the design of an analogical feedback block, driven
by the microcontroller. The project does not only aim to achieve the mainte-
nance of the base line within a dynamic range, thus preventing from the stage
saturation, but also to keep the base line locked to the mid range, hence allowing
a more feasible signal detection.
xiii


Alla mia famiglia

Introduzione
Nei paesi sviluppati la gente invecchia sempre di piu e le malattie cardiova-
scolari sono sempre piu diffuse. Proprio in questa direzione, STMicroelectronics,
con la collaborazione dell’ospedale americano Mayo Clinic, sta sviluppando un
sistema per la rivelazione di tali malattie. Il sistema deve essere indossabile,
non deve dare fastidio, deve consumare poco e deve comunicare via bluetooth.
Esso prende il nome di Body Gateway. Il sistema del Body Gateway e integra-
to, a basso costo, aumenta l’efficienza di qualsiasi protocollo di cura. A titolo
di esempio, una popolazione piu ampia puo essere monitorata con la stessa
quantita di spese. Cio e particolarmente importante dato che la popolazione
sta diventando sempre piu vecchia.
Gli obiettivi principali sono lo sviluppo di una nuova generazione di disposi-
tivi non invasivi per il monitoraggio continuo personale dello stato di salute,
la diagnosi preventiva (come stadi precoci di malattia o danno biologico), la
vulnerabilita personale e la gestione di patologie, utilizzando interfacce utente
e sistemi di comunicazione mobili.
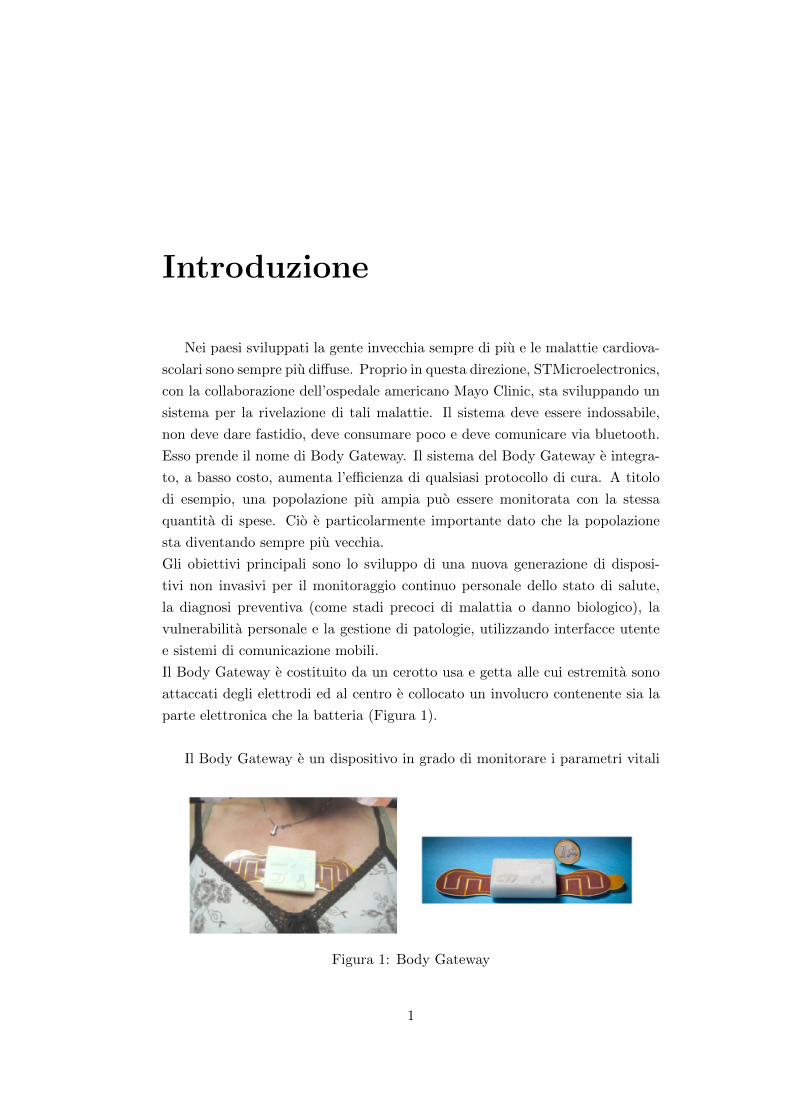
Il Body Gateway e costituito da un cerotto usa e getta alle cui estremita sono
attaccati degli elettrodi ed al centro e collocato un involucro contenente sia la
parte elettronica che la batteria (Figura 1).
Il Body Gateway e un dispositivo in grado di monitorare i parametri vitali
Figura 1: Body Gateway
1
INTRODUZIONE
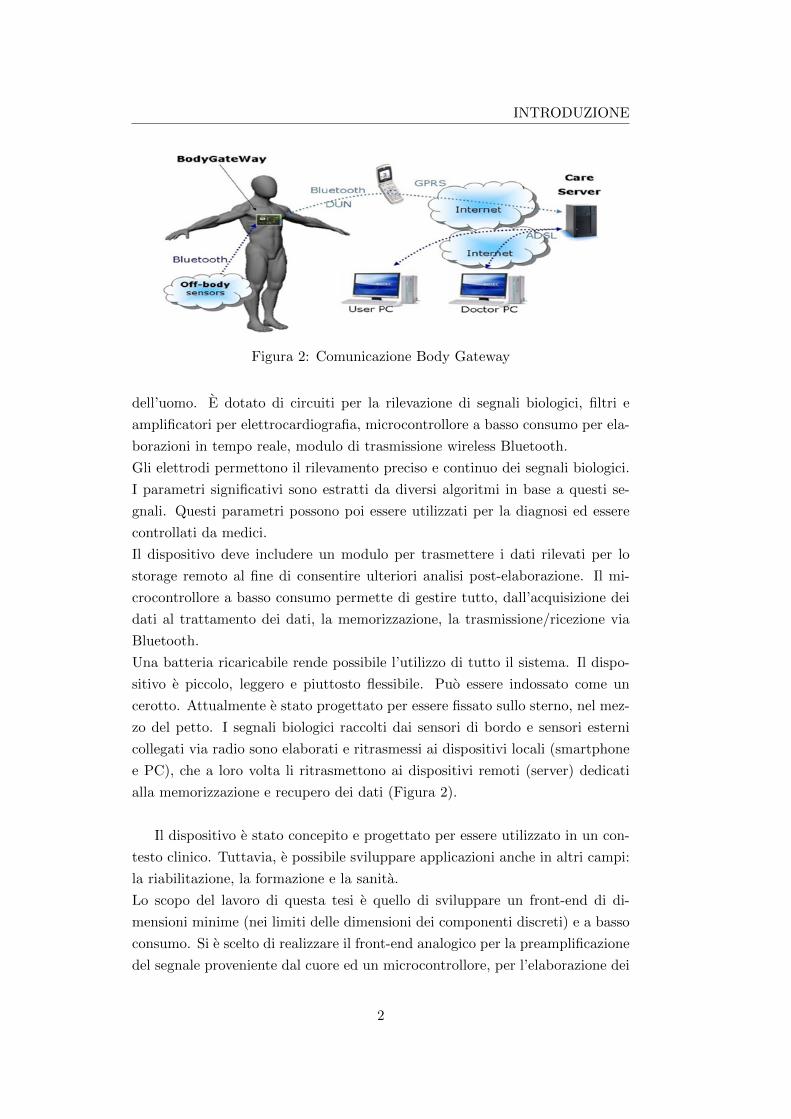
Figura 2: Comunicazione Body Gateway
dell’uomo. E dotato di circuiti per la rilevazione di segnali biologici, filtri e
amplificatori per elettrocardiografia, microcontrollore a basso consumo per ela-
borazioni in tempo reale, modulo di trasmissione wireless Bluetooth.
Gli elettrodi permettono il rilevamento preciso e continuo dei segnali biologici.
I parametri significativi sono estratti da diversi algoritmi in base a questi se-
gnali. Questi parametri possono poi essere utilizzati per la diagnosi ed essere
controllati da medici.
Il dispositivo deve includere un modulo per trasmettere i dati rilevati per lo
storage remoto al fine di consentire ulteriori analisi post-elaborazione. Il mi-
crocontrollore a basso consumo permette di gestire tutto, dall’acquisizione dei
dati al trattamento dei dati, la memorizzazione, la trasmissione/ricezione via
Bluetooth.
Una batteria ricaricabile rende possibile l’utilizzo di tutto il sistema. Il dispo-
sitivo e piccolo, leggero e piuttosto flessibile. Puo essere indossato come un
cerotto. Attualmente e stato progettato per essere fissato sullo sterno, nel mez-
zo del petto. I segnali biologici raccolti dai sensori di bordo e sensori esterni
collegati via radio sono elaborati e ritrasmessi ai dispositivi locali (smartphone
e PC), che a loro volta li ritrasmettono ai dispositivi remoti (server) dedicati
alla memorizzazione e recupero dei dati (Figura 2).
Il dispositivo e stato concepito e progettato per essere utilizzato in un con-
testo clinico. Tuttavia, e possibile sviluppare applicazioni anche in altri campi:
la riabilitazione, la formazione e la sanita.
Lo scopo del lavoro di questa tesi e quello di sviluppare un front-end di di-
mensioni minime (nei limiti delle dimensioni dei componenti discreti) e a basso
consumo. Si e scelto di realizzare il front-end analogico per la preamplificazione
del segnale proveniente dal cuore ed un microcontrollore, per l’elaborazione dei
2

INTRODUZIONE
segnali amplificati, che costituisce la parte digitale della retroazione del sistema.
Per soddisfare l’esigenza di ottenere un basso consumo di potenza il front-end
analogico e realizzato in tecnologia CMOS. Cio comporta pero la presenza del
rumore 1/f nella banda utile del segnale (0.1−150 Hz). Per garantire una buo-
na misura del segnale e importate che nella banda utile del segnale il rumore
sia al massimo di 30µVpp. Un altro problema e dovuto al fatto che gli elettrodi
rilevano il segnale ECG sulla pelle. Si avra quindi un segnale molto debole (al
massimo 5 mVpp) sovrapposto ad una tensione di offset che puo raggiungere
300mV. Tale tensione di offset variabile, dovuta principalmente alla tensione
di semielemento prodotta all’interfaccia cute-elettrodo, se non correttamente
reiettata, puo portare il segnale fuori dalla dinamica dell’amplificatore. In altre
parole, particolare attenzione deve essere posta di ingresso del sistema, che deve
essere piu alta possibile per renderlo insensibile alle diverse impedenze equiva-
lenti della cute nei diversi punti in cui questa fa contatto con gli elettrodi. In
questo modo si riesce a reiettare il modo comune secondo il CMRR del sistema
senza un trasferimento dell’offset di modo comune a segnale differenziale che
renderebbe impossibile la rilevazione di quest’ultimo a causa della saturazione
del sistema.
Nei seguenti capitoli si riprenderanno in dettaglio i problemi qui accennati e le
soluzioni adottate per lo sviluppo di un front-end analogico a due canali, con-
trollato digitalmente, di dimensioni minime e a bassa dissipazione di potenza.
3


Capitolo 1
Cuore ed elettrocardiogramma
1.1 Funzionamento del cuore
Il cuore funziona grazie ad una attivita elettrica. Sono i potenziali di azione
che vengono innescati automaticamente nelle varie sezioni del tessuto cardiaco,
con una particolare tempistica che fa in modo che le operazioni avvengano con
una certa ritmicita. Il cuore ha contrazioni diverse a seconda dei suoi tessuti.
Le proprieta del muscolo cardiaco sono:
• Automaticita: capacita di dare inizio spontaneamente ad un battito
• Ritmicita: regolarita nei battiti
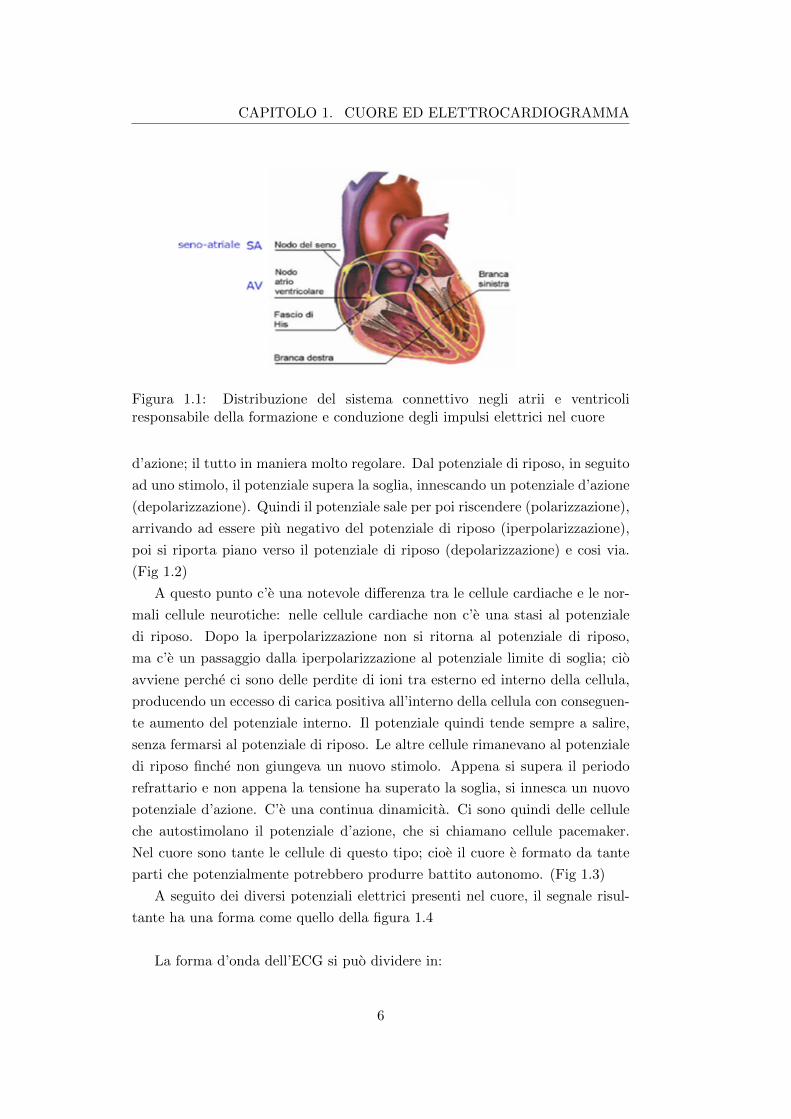
Il muscolo cardiaco e caratterizzato dalla presenza di varie fibre nervose, por-
tatrici di segnali elettrici. I primi tessuti a stimolarsi sono i tessuti superiori,
poi lo stimolo si propaga dall’alto verso il basso fino ad andare ad interessare
il muscolo ventricolare che e quello che deve avere maggiore forza. (Fig. 1.1)
Abbiamo dei centri di segnale significativi:
• nodo seno-atriale (SA), il primo a far partire il potenziale
• nodo atrio-ventricolare (AV), di connessione tra atrio e ventricolo, tra-
smette l’attivita elettrica
• fascio di His, fasci di neuroni
Il cuore batte di natura propria, le sue cellule sono in grado di innescare
potenziale d’azione in maniera autonoma. Inoltre, dopo un certo tempo che
il potenziali e fisso per ogni cellula, e capace di generare un altro potenziale
5
CAPITOLO 1. CUORE ED ELETTROCARDIOGRAMMA
Figura 1.1: Distribuzione del sistema connettivo negli atrii e ventricoliresponsabile della formazione e conduzione degli impulsi elettrici nel cuore
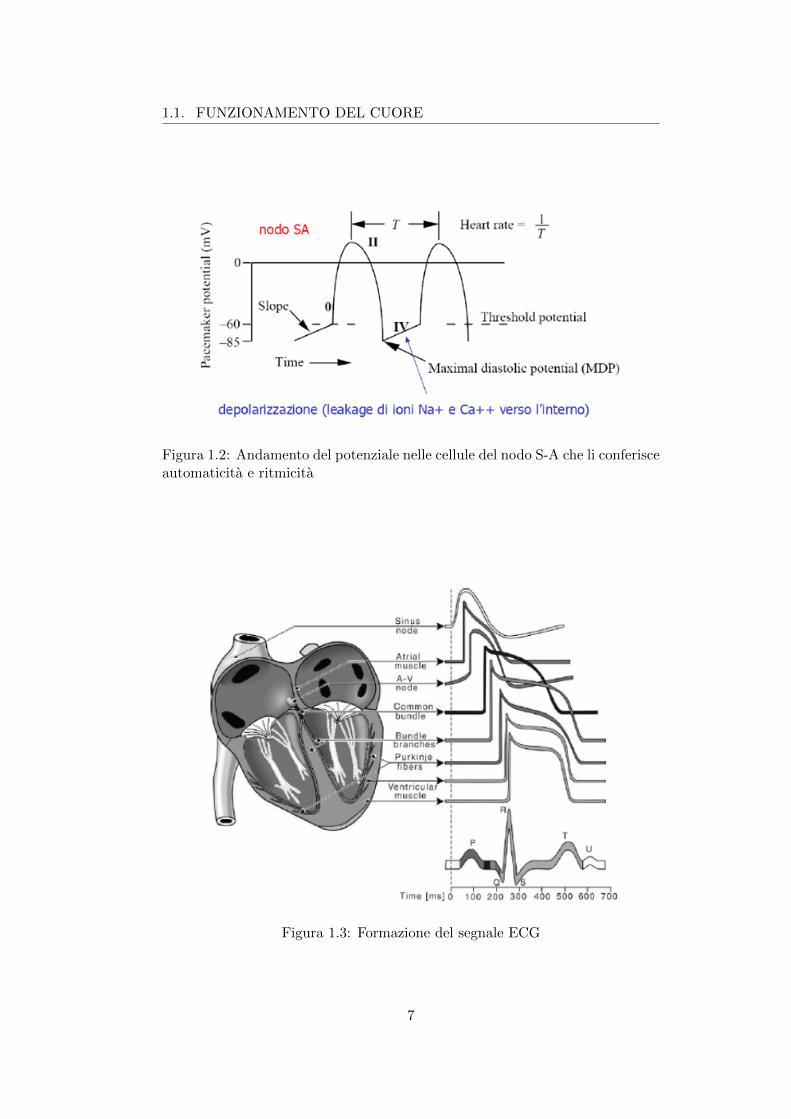
d’azione; il tutto in maniera molto regolare. Dal potenziale di riposo, in seguito
ad uno stimolo, il potenziale supera la soglia, innescando un potenziale d’azione
(depolarizzazione). Quindi il potenziale sale per poi riscendere (polarizzazione),
arrivando ad essere piu negativo del potenziale di riposo (iperpolarizzazione),
poi si riporta piano verso il potenziale di riposo (depolarizzazione) e cosi via.
(Fig 1.2)
A questo punto c’e una notevole differenza tra le cellule cardiache e le nor-
mali cellule neurotiche: nelle cellule cardiache non c’e una stasi al potenziale
di riposo. Dopo la iperpolarizzazione non si ritorna al potenziale di riposo,
ma c’e un passaggio dalla iperpolarizzazione al potenziale limite di soglia; cio
avviene perche ci sono delle perdite di ioni tra esterno ed interno della cellula,
producendo un eccesso di carica positiva all’interno della cellula con conseguen-
te aumento del potenziale interno. Il potenziale quindi tende sempre a salire,
senza fermarsi al potenziale di riposo. Le altre cellule rimanevano al potenziale
di riposo finche non giungeva un nuovo stimolo. Appena si supera il periodo
refrattario e non appena la tensione ha superato la soglia, si innesca un nuovo
potenziale d’azione. C’e una continua dinamicita. Ci sono quindi delle cellule
che autostimolano il potenziale d’azione, che si chiamano cellule pacemaker.
Nel cuore sono tante le cellule di questo tipo; cioe il cuore e formato da tante
parti che potenzialmente potrebbero produrre battito autonomo. (Fig 1.3)
A seguito dei diversi potenziali elettrici presenti nel cuore, il segnale risul-
tante ha una forma come quello della figura 1.4
La forma d’onda dell’ECG si puo dividere in:
6
1.1. FUNZIONAMENTO DEL CUORE
Figura 1.2: Andamento del potenziale nelle cellule del nodo S-A che li conferisceautomaticita e ritmicita
Figura 1.3: Formazione del segnale ECG
7
CAPITOLO 1. CUORE ED ELETTROCARDIOGRAMMA
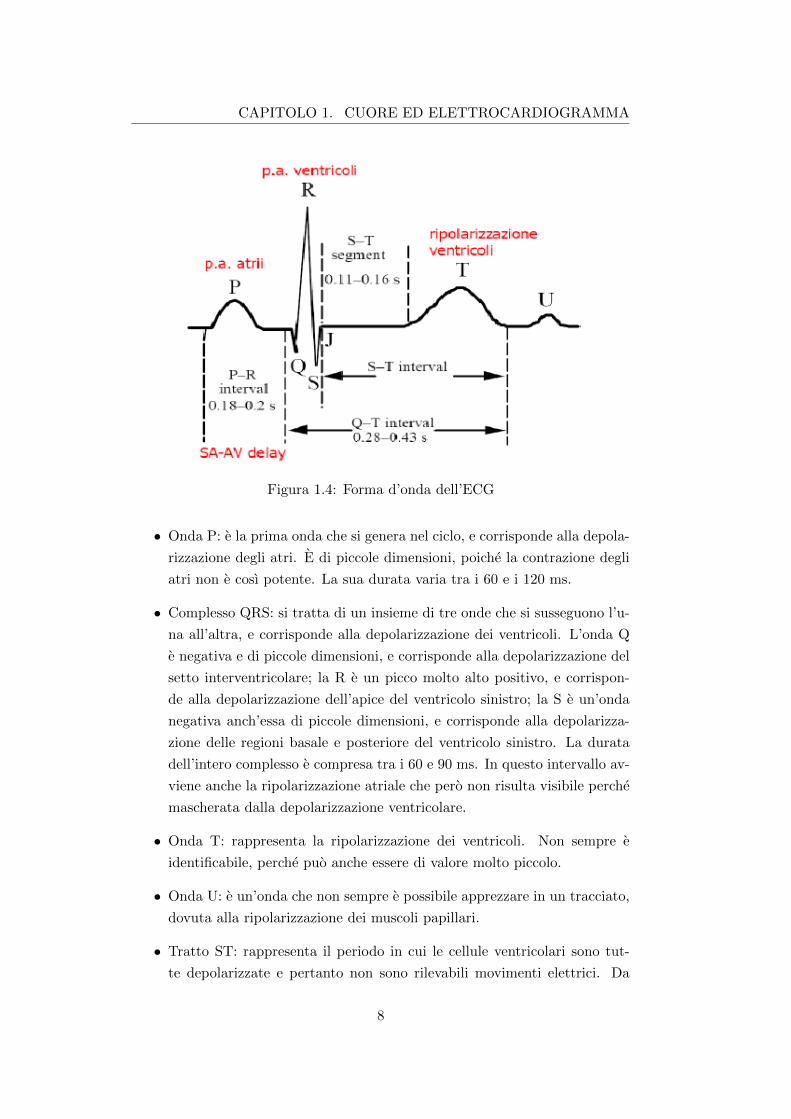
Figura 1.4: Forma d’onda dell’ECG
• Onda P: e la prima onda che si genera nel ciclo, e corrisponde alla depola-
rizzazione degli atri. E di piccole dimensioni, poiche la contrazione degli
atri non e cosı potente. La sua durata varia tra i 60 e i 120 ms.
• Complesso QRS: si tratta di un insieme di tre onde che si susseguono l’u-
na all’altra, e corrisponde alla depolarizzazione dei ventricoli. L’onda Q
e negativa e di piccole dimensioni, e corrisponde alla depolarizzazione del
setto interventricolare; la R e un picco molto alto positivo, e corrispon-
de alla depolarizzazione dell’apice del ventricolo sinistro; la S e un’onda
negativa anch’essa di piccole dimensioni, e corrisponde alla depolarizza-
zione delle regioni basale e posteriore del ventricolo sinistro. La durata
dell’intero complesso e compresa tra i 60 e 90 ms. In questo intervallo av-
viene anche la ripolarizzazione atriale che pero non risulta visibile perche
mascherata dalla depolarizzazione ventricolare.
• Onda T: rappresenta la ripolarizzazione dei ventricoli. Non sempre e
identificabile, perche puo anche essere di valore molto piccolo.
• Onda U: e un’onda che non sempre e possibile apprezzare in un tracciato,
dovuta alla ripolarizzazione dei muscoli papillari.
• Tratto ST: rappresenta il periodo in cui le cellule ventricolari sono tut-
te depolarizzate e pertanto non sono rilevabili movimenti elettrici. Da
8
1.2. ELETTROCARDIOGRAFIA
cio deriva che di norma e isoelettrico, cioe posto sulla linea di base del
tracciato, da cui si puo spostare verso l’alto o il basso di non piu di 1 mm.
• Intervallo QT: rappresenta la sistole elettrica, cioe il tempo in cui avviene
la depolarizzazione e la ripolarizzazione ventricolare. La sua durata varia
al variare della frequenza cardiaca, generalmente si mantiene tra i 350 e i
440ms.
Il nodo SA, che sta piu in alto, se lo prendiamo come entita a se, produrrebbe
circa 70 battiti al minuto. Anche il nodo AV ha una sua pulsazione propria,
meno frequente. Cosı come le fibre di Purkinje, che sono le cellule che battono
piu lentamente. L’attivita coordinata del tessuto cardiaco nasce dal fatto che
le cellule pacemaker sono cellule comunque stimolabili, ogni cellula ha un suo
periodo di potenziale d’azione se non succede niente, ma se uno stimolo arriva
prima che parta il suo battito naturale, viene stimolato il potenziale d’azione
della cellula. Quindi il cuore e formato da tante parti che potenzialmente po-
trebbero produrre battiti autonomi, ma dal momento in cui sono collegate tra
di loro, la prima cellula, in senso temporale, che sviluppa potenziale d’azione lo
trasmettera alle altre che reagiranno di conseguenza; e per questo motivo che il
battito cardiaco e regolato dal solo nodo seno-atriale, le cui cellule funzionano
da cellule stimolanti, mentre tutte le altre sono cellule stimolate. In pratica,
le cellule piu lente vengono stimolate prima che esse possano produrre il loro
autonomo battito. E la fibra piu veloce che triggera le altre. Una cellula viene
definita pacemaker latente quando sarebbe in grado di produrre uno stimolo
anche se non stimolata a sua volta, ma non lo fa poiche anticipatamente stimo-
lata. Nel cuore tutte le cellule che non sono quelle del nodo seno-atriale sono
cellule pacemaker latenti, in quanto esse sarebbero in grado di produrre uno
stimolo autonomo, ma non lo fanno poiche sono anticipatamente stimolate a
causa del minor periodo di battito delle cellule del nodo seno-atriale. La fre-
quenza cardiaca e determinata dalla pulsazione del nodo SA, che e il piu veloce
(Figura 1.5).
1.2 Elettrocardiografia
L’elettrocardiogramma (ECG) e la registrazione e la riproduzione grafica
dell’attivita elettrica del cuore che si verifica nel ciclo cardiaco. La misura
elettrocardiografia si basa sulla misura di potenziale tra due punti sulla super-
ficie del corpo, cioe nello spazio che circonda il momento di dipolo da misurare
(cuore). (Figura 1.6). Noi ci proponiamo di calcolare una grandezza vettoriale
9

CAPITOLO 1. CUORE ED ELETTROCARDIOGRAMMA
Figura 1.5: Meccanismi di soppressione di altri pacemakers potenziali (SA devedominare il ritmo cardiaco)
(momento di dipolo) tramite delle misure scalari.
Dalla fisica sappiamo che il momento del dipolo M vale:
M = q × d (1.1)
Ed inoltre sappiamo che:
V0 =M · r
4πε0r3=Mr cos (θ)
4πε0r3=M cos (θ)
4πε0r2(1.2)
Quindi, da semplici calcoli di differenze di potenziale riusciamo a trovare il
valore del momento di dipolo e quindi il dipolo stesso.
Occorre tenere presente che il momento di dipolo del cuore non e costante
nel tempo, ma varia, cambia intensita e orientamento in tre dimensioni. Inol-
tre, il cuore e un dipolo immerso in un corpo parzialmente conduttivo e noi
misuriamo il potenziale sulla superficie di questo corpo conduttivo. Occorre
valutare anche il fatto che i punti che si trovano a distanza r dal centro del
dipolo non hanno tutti lo stesso potenziale, infatti esso varia a seconda che il
punto sia piu vicino al polo negativo o al polo positivo (Figura 1.7). Esiste poi
una simmetria dei potenziali alla destra ed alla sinistra dell’asse che congiunge
i due poli. Il numero di misure che faccio deve essere grande, in modo da avere
ridondanza di informazioni. Attraverso le misure riesco ad ottenere informazio-
10

1.2. ELETTROCARDIOGRAFIA
Figura 1.6: Dipolo immerso in un corpo parzialmente conduttivo
Figura 1.7: Relazione fra il momento del dipolo e la differenza di potenziale
11

CAPITOLO 1. CUORE ED ELETTROCARDIOGRAMMA
Figura 1.8: Triangolo di Eindhoven
ni sull’orientamento del momento di dipolo.
Nella pratica per fare l’elettrocardiogramma occorre creare una convenzione di
punti dove prendere le misure, tutti gli elettrocardiogrammi devono essere fatti
utilizzando i potenziali negli stessi punti:
• mano destra (RA)
• mano sinistra (LA)
• piede destro (RL)
• piede sinistro (LL).
Il piede destro viene usato come massa (tensione di riferimento). I tre punti
utilizzati per le misure, in prima approssimazione, formano geometricamente
un triangolo equilatero, chiamato triangolo di Eindhoven. (Figura 1.8)
Da questi primi punti otteniamo quindi un primo set di tre misure scalari:
VLA − VRA, VLL − VLA, VLL − VRA (1.3)
A queste tre misure scalari si puo attribuire una valenza vettoriale, poiche
se si pensa che il momento sia diretto in un certo modo, ogni misura determina
una componente del momento di dipolo lungo una direzione. Un momento di
dipolo si puo scomporre in tre vettori che, sommati, formano il vettore comple-
to. Con ogni misura scalare da noi effettuata, noi determiniamo la componente
12

1.2. ELETTROCARDIOGRAFIA
Figura 1.9: Misura dei potenziali unipolari
vettoriale del momento di dipolo lungo una direzione. Tre misure pero non
bastano per una misura completa. Infatti, tre misure ci forniscono complete in-
formazioni solo su un piano. Esiste un altro set di 3 misure, prese sempre negli
stessi punti ma in maniera diversa. Sono potenziali unipolari, misurati non tra
ogni punto ed ognuno degli altri, ma tra ogni punto ed il punto di riferimento,
potenziale centrale di Wilson (Figura 1.9); non e altro che la media tra i tre
punti (la media delle tensioni).
I potenziali unipolari dunque sono i potenziali di LA, RA, LL misurati
rispetto al potenziale centrale di Wilson, il quale vale: VWCT = 1/3VLA +
1/3VRA + 1/3VLL, mentre VL (potenziale unipolare) vale: VL = VLA−VWCT =
1/3 (2VLA − VRA − VLL).
Ogni punto e collegato, tramite una resistenza R, ad un unico punto, il terminale
centrale di Wilson. Si calcola la risultante mediana della tensione che si ha nei
tre punti. Ogni punto contribuisce al potenziale complessivo con un terzo del
suo potenziale, verificabile utilizzando la legge di sovrapposizione degli effetti:
Vout,x = VxR/2
R+R/2= Vx
1
3(1.4)
Da un punto di vista geometrico e come misurare il baricentro delle tensioni
che ci sono ai tre nodi. Si fa poi la differenza tra ogni punto ed il potenziale
centrale di Wilson, ottenendo le altre tre misure. Vettorialmente cambia mol-
to rispetto a prima, infatti le direzioni dei tre vettori che otteniamo ora sono
ruotate di 30 rispetto a quelle di prima. Ora abbiamo sei misure, che sono gia
ridondanti. Il quadro complessivo e comunque meno affetto da errori che un
13
CAPITOLO 1. CUORE ED ELETTROCARDIOGRAMMA
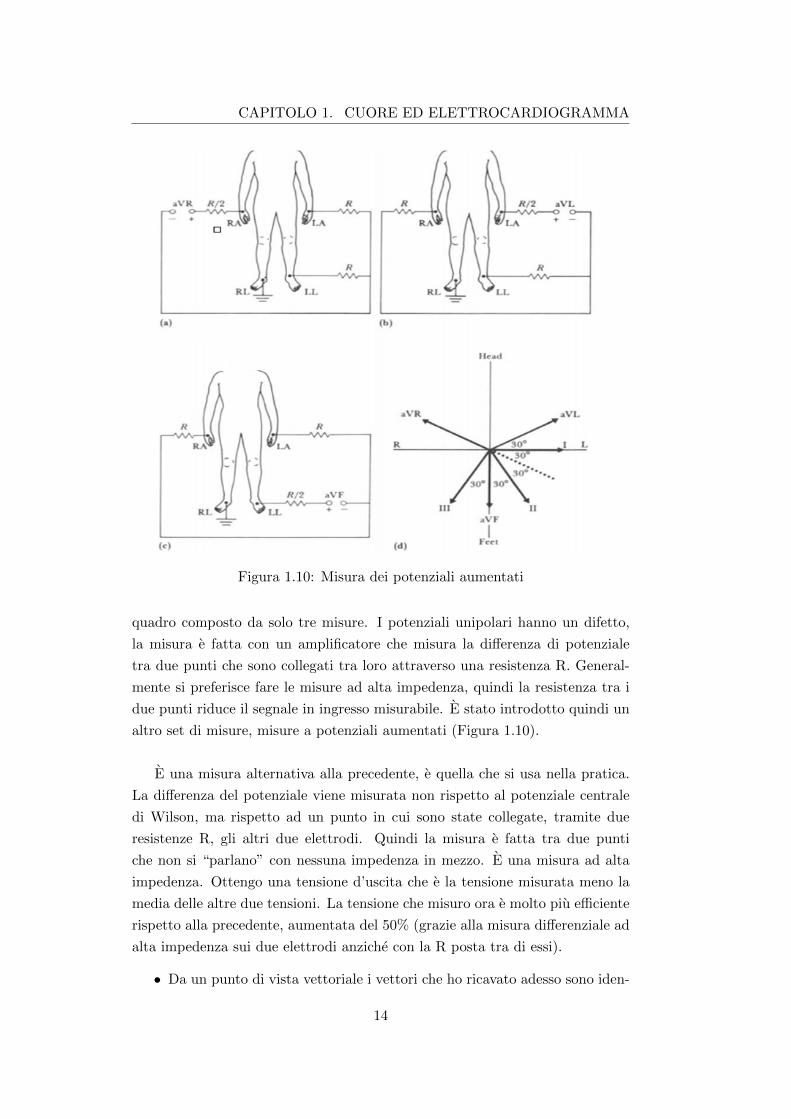
Figura 1.10: Misura dei potenziali aumentati
quadro composto da solo tre misure. I potenziali unipolari hanno un difetto,
la misura e fatta con un amplificatore che misura la differenza di potenziale
tra due punti che sono collegati tra loro attraverso una resistenza R. General-
mente si preferisce fare le misure ad alta impedenza, quindi la resistenza tra i
due punti riduce il segnale in ingresso misurabile. E stato introdotto quindi un
altro set di misure, misure a potenziali aumentati (Figura 1.10).
E una misura alternativa alla precedente, e quella che si usa nella pratica.
La differenza del potenziale viene misurata non rispetto al potenziale centrale
di Wilson, ma rispetto ad un punto in cui sono state collegate, tramite due
resistenze R, gli altri due elettrodi. Quindi la misura e fatta tra due punti
che non si “parlano” con nessuna impedenza in mezzo. E una misura ad alta
impedenza. Ottengo una tensione d’uscita che e la tensione misurata meno la
media delle altre due tensioni. La tensione che misuro ora e molto piu efficiente
rispetto alla precedente, aumentata del 50% (grazie alla misura differenziale ad
alta impedenza sui due elettrodi anziche con la R posta tra di essi).
• Da un punto di vista vettoriale i vettori che ho ricavato adesso sono iden-
14

1.2. ELETTROCARDIOGRAFIA
Figura 1.11: Rappresentazione del vettore “piu efficace”
tici a quelli di prima, cioe ruotati di 30 rispetto al primo set di tre misure.
Il vettore e allungato del 50% ma la direzione e la stessa. Il vettore e “piu
efficace” (figura 1.11).
• La resistenza R diventa R/2 in questo caso per poter adattare le due
impedenze di ingresso viste ai morsetti dell’operazionale, le due sorgenti
devono essere bilanciate dal punto di vista impedenziale (in genere si usa
un amplificatore differenziale, che per funzionare bene deve avere le impe-
denze d’ingresso uguali, poiche l’impedenza d’ingresso dell’amplificatore
non e ideale e quindi non e infinita. Di conseguenza, il segnale d’in-
gresso fa partizione tra la resistenza di sorgente e l’impedenza d’ingresso
dell’amplificatore, che devono quindi essere il piu simile possibili).
Quindi, alla fine, abbiamo sei misure, abbiamo campionato il momento di
dipolo lungo sei vettori che distano 30 l’uno dall’altro. Con questi sei cam-
pionamenti ho acquisito tutte le informazioni che mi servono per questo piano
longitudinale (il piano del paziente disteso sul lettino) (6 × 30 = 180). Il
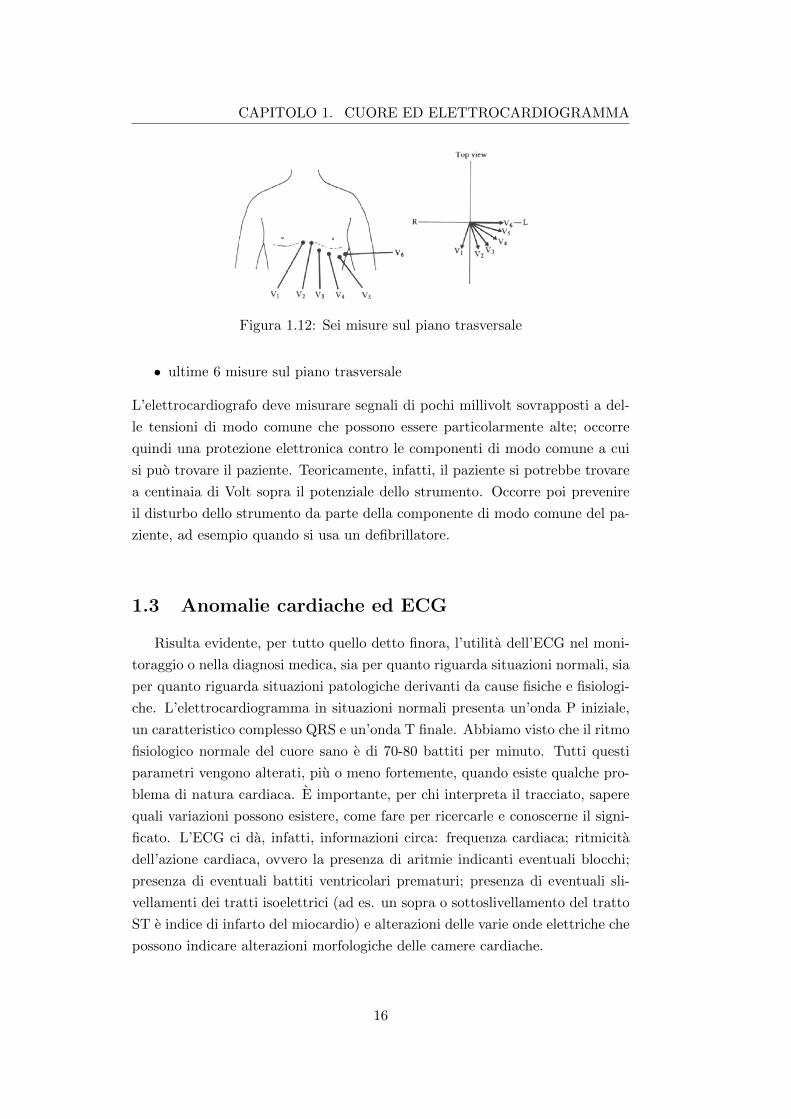
momento di dipolo e pero tridimensionale; io ho misurato solo un piano. Voglio
ora misurare il dipolo sul piano trasversale. Per farlo vengono presi i punti sul
torace e viene misurata la differenza di potenziale tra questi punti ed il termi-
nale centrale di Wilson come si vede anche in Figura 1.12.
In pratica il terminale centrale di Wilson viene preso come baricentro elet-
trico del corpo, il centro degli assi del corpo. Quindi le misure che si usano sono
12:
• prime 3 misure di ogni elettrodo rispetto all’altro
• seconde 3 misure di potenziali aumentati
15
CAPITOLO 1. CUORE ED ELETTROCARDIOGRAMMA
Figura 1.12: Sei misure sul piano trasversale
• ultime 6 misure sul piano trasversale
L’elettrocardiografo deve misurare segnali di pochi millivolt sovrapposti a del-
le tensioni di modo comune che possono essere particolarmente alte; occorre
quindi una protezione elettronica contro le componenti di modo comune a cui
si puo trovare il paziente. Teoricamente, infatti, il paziente si potrebbe trovare
a centinaia di Volt sopra il potenziale dello strumento. Occorre poi prevenire
il disturbo dello strumento da parte della componente di modo comune del pa-
ziente, ad esempio quando si usa un defibrillatore.
1.3 Anomalie cardiache ed ECG
Risulta evidente, per tutto quello detto finora, l’utilita dell’ECG nel moni-
toraggio o nella diagnosi medica, sia per quanto riguarda situazioni normali, sia
per quanto riguarda situazioni patologiche derivanti da cause fisiche e fisiologi-
che. L’elettrocardiogramma in situazioni normali presenta un’onda P iniziale,
un caratteristico complesso QRS e un’onda T finale. Abbiamo visto che il ritmo
fisiologico normale del cuore sano e di 70-80 battiti per minuto. Tutti questi
parametri vengono alterati, piu o meno fortemente, quando esiste qualche pro-
blema di natura cardiaca. E importante, per chi interpreta il tracciato, sapere
quali variazioni possono esistere, come fare per ricercarle e conoscerne il signi-
ficato. L’ECG ci da, infatti, informazioni circa: frequenza cardiaca; ritmicita
dell’azione cardiaca, ovvero la presenza di aritmie indicanti eventuali blocchi;
presenza di eventuali battiti ventricolari prematuri; presenza di eventuali sli-
vellamenti dei tratti isoelettrici (ad es. un sopra o sottoslivellamento del tratto
ST e indice di infarto del miocardio) e alterazioni delle varie onde elettriche che
possono indicare alterazioni morfologiche delle camere cardiache.
16

1.3. ANOMALIE CARDIACHE ED ECG
Ritmi sinusali anormali
Si definisce sinusale un ritmo che presenta onde P in successione regolare,
in rapporto costante con il complesso QRS che segue (tratto PR compreso tra
0.12 e 0.20 s). Qualunque ritmo differente da quello sinusale rientra a far parte
delle aritmie.
Tachicardia sinusale Si parla di tachicardia sinusale quando notiamo una
frequenza del battito cardiaco che supera i 100 battiti al minuto. In questo
caso l’ECG risulta perfettamente normale, ad eccezione della frequenza del
battito. La frequenza del battito e rilevabile dalla distanza temporale di due
complessi QRS. Le cause che portano alla tachicardia possono essere fisiologiche
(una risposta allo sforzo, alla temperatura corporea, alla stimolazione delle fibre
ortosimpatiche) o patologiche (una spia di un’insufficienza cardiaca). Le onde
P possono non essere visibili durante tachicardia ventricolare anche se l’attivita
atriale dissociata da quella ventricolare non viene influenzata.
Bradicardia sinusale Il termine bradicardia sinusale indica una ridotta fre-
quenza del battito cardiaco, di norma si indica con questo termine un ritmo
al di sotto dei 60 battiti al minuto. Come nel caso della tachicardia sinusale
il tracciato dell’ECG risulta normale, ma con una ridotta frequenza temporale
del complesso QRS. La bradicardia sinusale puo essere una condizione normale,
soprattutto per quanto riguarda il cuore degli atleti che possono avere frequenze
molto basse dovute appunto ad un costante allenamento.
Aritmia sinusale Se tutti i complessi QRS di per se sono normali, ma il rit-
mo in condizioni di riposo non e regolare (le distanze tra ogni complesso QRS e
il successivo variano lungo il tracciato), viene diagnosticata una aritmia sinusa-
le. Si pensa che questa condizione possa essere causata da un conflitto di diversi
tipi di riflessi circolatori atti ad alternare l’intervento del sistema ortosimpati-
co e parasimpatico sul nodo seno-atriale; nella maggior parte dei casi questa
aritmia e sincrona con gli atti respiratori: parliamo di aritmia respiratoria. Si
e verificato che questa condizione puo risultare non patologica nei giovani e nei
bambini, nei quali puo addirittura diventare la regola, piuttosto che l’eccezio-
ne. Nelle persone anziane, invece, l’aritmia sinusale puo essere il segno di una
malattia degenerativa del nodo seno-atriale.
17

CAPITOLO 1. CUORE ED ELETTROCARDIOGRAMMA
Ritmi anormali dovuti a blocco della conduzione degli impulsi
Blocco seno-atriale In alcuni casi puo capitare che l’impulso che si ori-
gina nel nodo seno-atriale non possa diffondersi completamente nel resto del
miocardio. Questa condizione, nonostante possa sembrare molto pericolosa, e
compatibile con la vita a causa di un sistema di sicurezza del cuore. Infatti,
in mancanza di conduzione (o di generazione) degli impulsi da parte del no-
do seno-atriale, e il nodo atrio-ventricolare che prende il controllo del ritmo
cardiaco. Nel tracciato elettrocardiografico questo e facilmente riconoscibile a
causa di una diminuzione della frequenza cardiaca e della scomparsa dell’onda
P, dovuto all’annullamento delle funzioni atriali. Il complesso QRS-T non viene
influenzato, poiche il ventricolo viene guidato dal nodo atrio-ventricolare.
Blocco atrioventricolare In condizioni di frequenza normale, il tempo che
intercorre tra l’onda P e l’inizio del complesso QRS e di circa 0,16 secondi. Se,
in condizioni normali, questo intervallo supera gli 0,2 secondi, allora si parla
di blocco incompleto di primo grado. Si tratta di un problema che riguarda
il trasferimento degli impulsi dagli atri ai ventricoli. Se l’intervallo P-R rag-
giunge una durata di 0,25 - 0,45 secondi, i potenziali d’azione che investono il
nodo atrio-ventricolare non sempre riescono ad oltrepassarlo. In questa con-
dizione accade che i ventricoli saltino qualche battito rispetto agli atri. E il
caso del blocco incompleto di secondo grado. La condizione piu grave si verifica
quando la conduzione degli impulsi nel nodo A-V e completamente impedita
e si verifica un blocco completo tra atri e ventricoli. Nel tracciato elettro-
cardiografico questa condizione si evidenzia dal fatto che le onde P risultano
completamente dissociate dai complessi QRS-T. Gli atri e i ventricoli hanno un
ritmo indipendente.
Extrasistole ventricolare In una extrasistole ventricolare manca l’onda P,
in quanto lo stimolo non e risalito fino agli atri. L’onda R e allargata e uncinata
(lo stimolo impiega un tempo maggiore per diffondersi e si ha l’eccitamento
prima di un ventricolo e successivamente dell’altro). Segue un intervallo piu
lungo del normale: la pausa compensatoria.
Ritmi anormali dovuti a patologie cardiocircolatorie
Ischemia e infarto miocardico Quando si verifica una insufficiente irro-
razione sanguigna del miocardio, questo deprime i suoi processi metabolici in
quanto c’e mancanza di ossigeno, si produce un eccesso ristagnante di anidride
carbonica e il materiale nutritizio viene a mancare. In questi casi, dapprima
18
1.3. ANOMALIE CARDIACHE ED ECG
il tessuto miocardico limita le proprie prestazioni (ischemia), ma se l’apporto
di nutrizione si prolunga nel tempo, si arriva alla morte del tessuto miocardi-
co (infarto). In questi casi la ripolarizzazione delle membrane si verifica solo
parzialmente o non si verifica piu. Sul tracciato ECG l’infarto e l’ischemia so-
no caratterizzati da anomalie riguardanti le onde Q, i segmenti ST e le onde
T. In condizioni normali abbiamo onde Q molto piccole, che sono dovute alla
depolarizzazione del setto interventricolare che si verifica da sinistra verso de-
stra, quindi le forze elettriche sono in allontanamento dal ventricolo sinistro (la
penna si muove verso il basso). Poiche il setto e sottile, le forze che si generano
sono di breve durata (0,04 secondi) e di piccola ampiezza (profondita inferiore al
25L’ischemia produce un sottoslivellamento del segmento ST, associato talvolta
all’inversione dell’onda T, il tutto dovuto ad anormalita nell’iperpolarizzazione.
Fibrillazione ventricolare La fibrillazione ventricolare e causata da impulsi
cardiaci che si scatenano all’interno del miocardio, che portano dapprima al-
l’eccitazione di una parte del miocardio e poi ad una continua e progressiva
rieccitazione delle parti ventricolari che precedentemente erano state eccitate.
In questo modo e impossibile che si verifichi una contrazione coordinata del-
la massa cardiaca e questo impedisce che il sangue possa essere pompato in
maniera opportuna. Le camere ventricolari non si riempiono, ne si svuotano,
rimanendo in uno stato di contrazione parziale. Il perdurare di questa condi-
zione per un periodo superiore ai 4-5 secondi, con conseguente mancanza di
flusso ematico a livello cerebrale, porta alla perdita di coscienza; dopo pochi
minuti i tessuti vanno in ischemia e sopraggiunge la morte. Il tracciato ECG
della fibrillazione ventricolare e caratterizzato da complessi QRS organizzati,
ma non c’e mai un ritmo regolare. Nelle prime fasi del fenomeno, il miocardio
tende a contrarsi in maniera simultanea, portando onde irregolari; dopo pochi
minuti l’ECG mostra onde molto irregolari a basso voltaggio.
Asistolia L’asistolia e un’eventualita piu grave della fibrillazione, poiche que-
st’ultima e a volte espressione di un evento elettrico casuale e risulta compatibile
con la vita se trattata immediatamente. L’asistolia invece si associa ad un dan-
no miocardico massiccio, in questo caso nessun ritmo puo essere generato o
sostenuto dai ventricoli; si verifica quando l’attivita fibrillatoria e insostenibi-
le a causa del mancato apporto di sostanze che provvedano al nutrimento del
miocardio. Il tracciato dell’ECG presenta solamente le onde P, mentre il resto
del tracciato e una linea piatta; cio indica ancora un’attivita residua degli atri,
ma una totale assenza di attivita da parte dei ventricoli. E una condizione che
determina, in breve tempo, arresto cardiaco e decesso molto rapido.
19

Capitolo 2
Descrizione globale del
progetto
2.1 Introduzione al sistema
Il circuito generale del sistema e stato basato sullo schematico in Figura 2.1:
Di questo schema fanno parte i seguenti blocchi
• Cute + Elettrodi
• Blocco del campionamento del modo comune (Blocco a)
• Chopper (Blocco b)
• Due stadi di amplificazione G1, G2 [Blocco (c)]
• Microcontrollore
• Blocco per la compensazione dell’offset [Blocchi (d) ed (e)]
Figura 2.1: Schema a blocchi del sistema progettato
21

CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
• Riferimento del modo comune [Blocco (f)]
Come si vede dallo schema a blocchi, subito a valle degli elettrodi, il pri-
mo blocco (a) ha la funzione di lasciar passare il segnale e campionare il modo
comune, alternativamente, con tempistiche prestabilite programmando il micro-
controllore, che provvedera alla generazione di un apposito impulso modulato in
larghezza (PWM Pulse-Width Modulation). Mediante la rilevazione del modo
comune in ingresso si polarizza il sistema in modo da far rientrare il segnale
nella dinamica ottimale di ingresso dello stadio amplificante. Mediante il blocco
(f), si fornisce la tensione di modo comune VCM in ingresso al blocco (a). Co-
me gia affermato in precedenza, per soddisfare l’esigenza di ottenere un basso
consumo di potenza, l’amplificatore (c) e realizzato in tecnologia CMOS. Se,
da un lato, tale scelta permette di ottenere un’alta densita di integrazione ed
un’alta impedenza di ingresso, dall’altro comporta l’introduzione del rumore
1/f nella banda del segnale (0.1 - 150 Hz). Per evitare questo effetto, a monte
dell’amplificatore, ossia prima dell’introduzione del rumore 1/f , si introduce un
chopper (b). In questo modo la banda del segnale e traslata oltre la frequenza
di corner del rumore 1/f . Il chopper e composto da Switch comandati da un
GPIO (General Purpose Input/Output) del microcontrollore. In questo modo,
programmando il microcontrollore, si puo decidere facilmente la frequenza di
modulazione del segnale. A questo punto, volendo realizzare un front-end a
due canali, la scelta piu naturale e quella di far entrare il segnale modulato in
uno stadio amplificante fully differential di quattro operazionali (c). I primi
due operazionali a monte sono preamplificatori a basso guadagno, gli altri due
a valle sono stadi di guadagno piu elevato. Il segnale amplificato viene campio-
nato da due ADC presenti nel microcontrollore per essere poi processato. Una
volta processato il segnale, il microcontrollore gestisce gli integratori (blocco
d) per poter correggere gli eventuali offset presenti sul segnale. La retroazione
vera e propria del sistema e costituita dal microcontrollore (µC) e dai blocchi
(d) ed (e), mentre gli altri segnali originati dal µC, che giungono ai blocchi,
sono segnali necessari per la sincronizzazione del sistema.
2.2 Progettazione della scheda
Gli obiettivi principali del progetto sono quelli di minimizzare le dimensioni
e la dissipazione di potenza del sistema. Il raggiungimento ottimale di que-
sti obiettivi avviene con l’integrazione dell’intero sistema (sia microcontrollore
che front-end analogico ) in un unico chip. In quest’ottica futura, lo sviluppo
del sistema e avvenuto enfatizzando la possibilita di snellire il piu possibile il
22
2.2. PROGETTAZIONE DELLA SCHEDA
front-end analogico, facendo eseguire al microcontrollore a bassa dissipazione
di potenza delle funzioni generalmente implementate in modo hardware, senza
compromettere la qualita del segnale. Cio permette di ridurre la complessita e
il numero di operazioni necessarie per integrare il sistema.
Dunque basandomi sullo schema a blocchi della figura 2.1 sono andato inizial-
mente a costruire lo schematico in OrCad, mettendo dentro tutti gli elementi
del sistema e successivamente ho implementato tutti gli elementi dello schema-
tico in PCB Allegro per passare alla vera realizzazione e fabbricazione della
scheda.
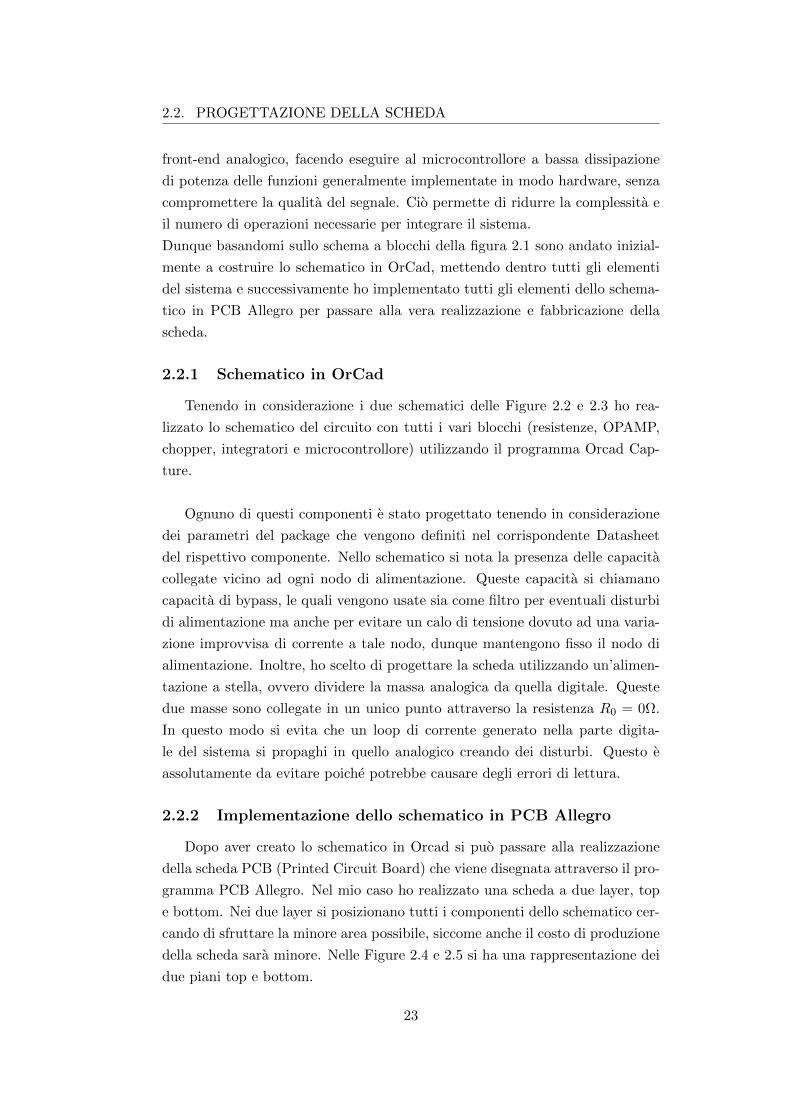
2.2.1 Schematico in OrCad
Tenendo in considerazione i due schematici delle Figure 2.2 e 2.3 ho rea-
lizzato lo schematico del circuito con tutti i vari blocchi (resistenze, OPAMP,
chopper, integratori e microcontrollore) utilizzando il programma Orcad Cap-
ture.
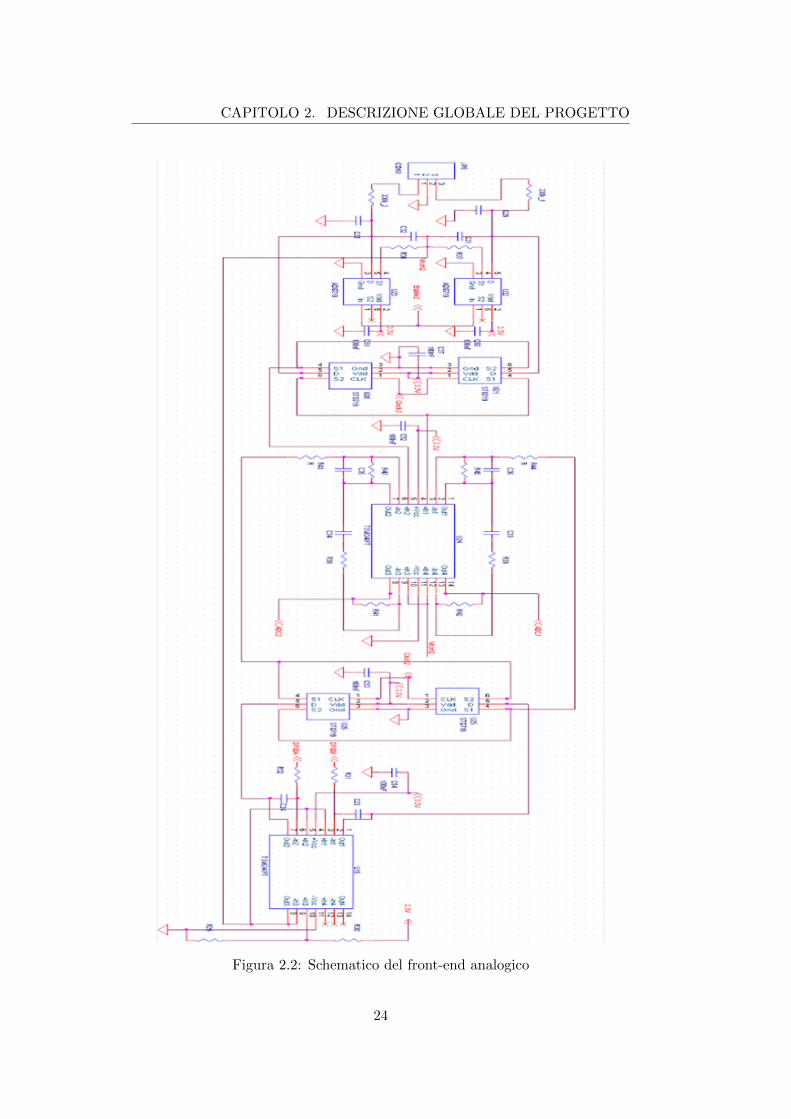
Ognuno di questi componenti e stato progettato tenendo in considerazione
dei parametri del package che vengono definiti nel corrispondente Datasheet
del rispettivo componente. Nello schematico si nota la presenza delle capacita
collegate vicino ad ogni nodo di alimentazione. Queste capacita si chiamano
capacita di bypass, le quali vengono usate sia come filtro per eventuali disturbi
di alimentazione ma anche per evitare un calo di tensione dovuto ad una varia-
zione improvvisa di corrente a tale nodo, dunque mantengono fisso il nodo di
alimentazione. Inoltre, ho scelto di progettare la scheda utilizzando un’alimen-
tazione a stella, ovvero dividere la massa analogica da quella digitale. Queste
due masse sono collegate in un unico punto attraverso la resistenza R0 = 0Ω.
In questo modo si evita che un loop di corrente generato nella parte digita-
le del sistema si propaghi in quello analogico creando dei disturbi. Questo e
assolutamente da evitare poiche potrebbe causare degli errori di lettura.
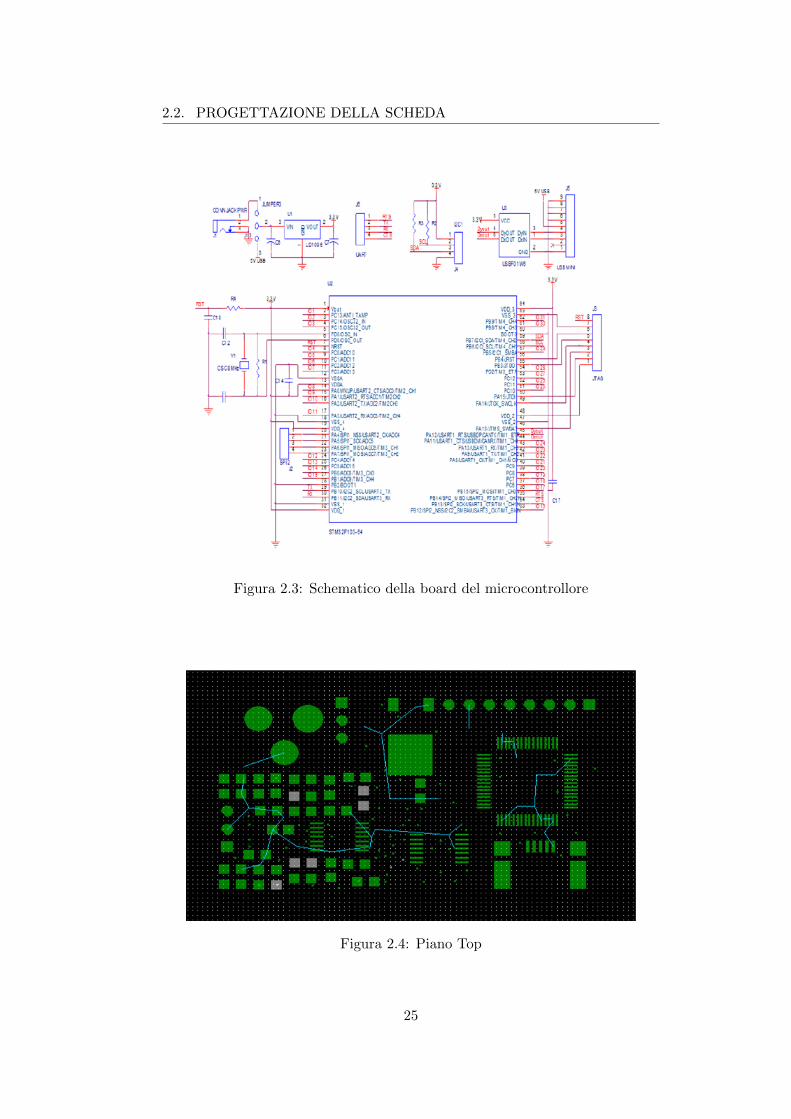
2.2.2 Implementazione dello schematico in PCB Allegro
Dopo aver creato lo schematico in Orcad si puo passare alla realizzazione
della scheda PCB (Printed Circuit Board) che viene disegnata attraverso il pro-
gramma PCB Allegro. Nel mio caso ho realizzato una scheda a due layer, top
e bottom. Nei due layer si posizionano tutti i componenti dello schematico cer-
cando di sfruttare la minore area possibile, siccome anche il costo di produzione
della scheda sara minore. Nelle Figure 2.4 e 2.5 si ha una rappresentazione dei
due piani top e bottom.
23
CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
Figura 2.2: Schematico del front-end analogico
24
2.2. PROGETTAZIONE DELLA SCHEDA
Figura 2.3: Schematico della board del microcontrollore
Figura 2.4: Piano Top
25
CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
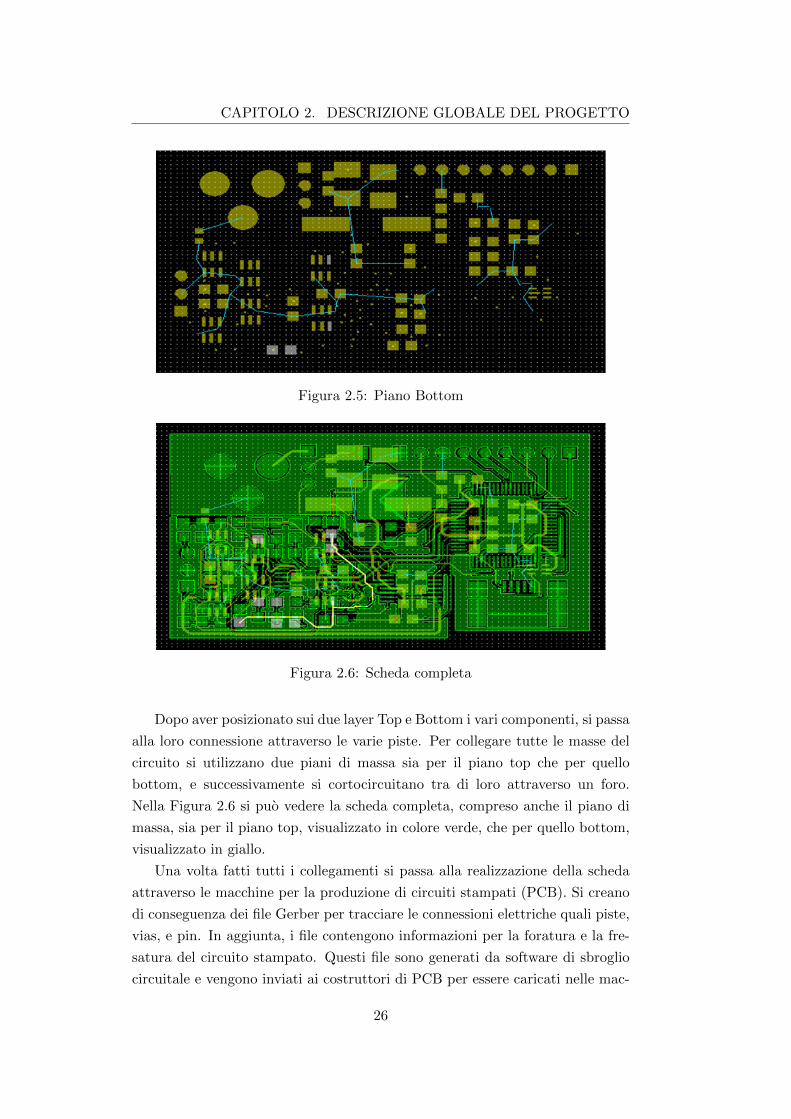
Figura 2.5: Piano Bottom
Figura 2.6: Scheda completa
Dopo aver posizionato sui due layer Top e Bottom i vari componenti, si passa
alla loro connessione attraverso le varie piste. Per collegare tutte le masse del
circuito si utilizzano due piani di massa sia per il piano top che per quello
bottom, e successivamente si cortocircuitano tra di loro attraverso un foro.
Nella Figura 2.6 si puo vedere la scheda completa, compreso anche il piano di
massa, sia per il piano top, visualizzato in colore verde, che per quello bottom,
visualizzato in giallo.
Una volta fatti tutti i collegamenti si passa alla realizzazione della scheda
attraverso le macchine per la produzione di circuiti stampati (PCB). Si creano
di conseguenza dei file Gerber per tracciare le connessioni elettriche quali piste,
vias, e pin. In aggiunta, i file contengono informazioni per la foratura e la fre-
satura del circuito stampato. Questi file sono generati da software di sbroglio
circuitale e vengono inviati ai costruttori di PCB per essere caricati nelle mac-
26
2.3. POLARIZZAZIONE DEL SISTEMA E LETTURA DEL SEGNALE
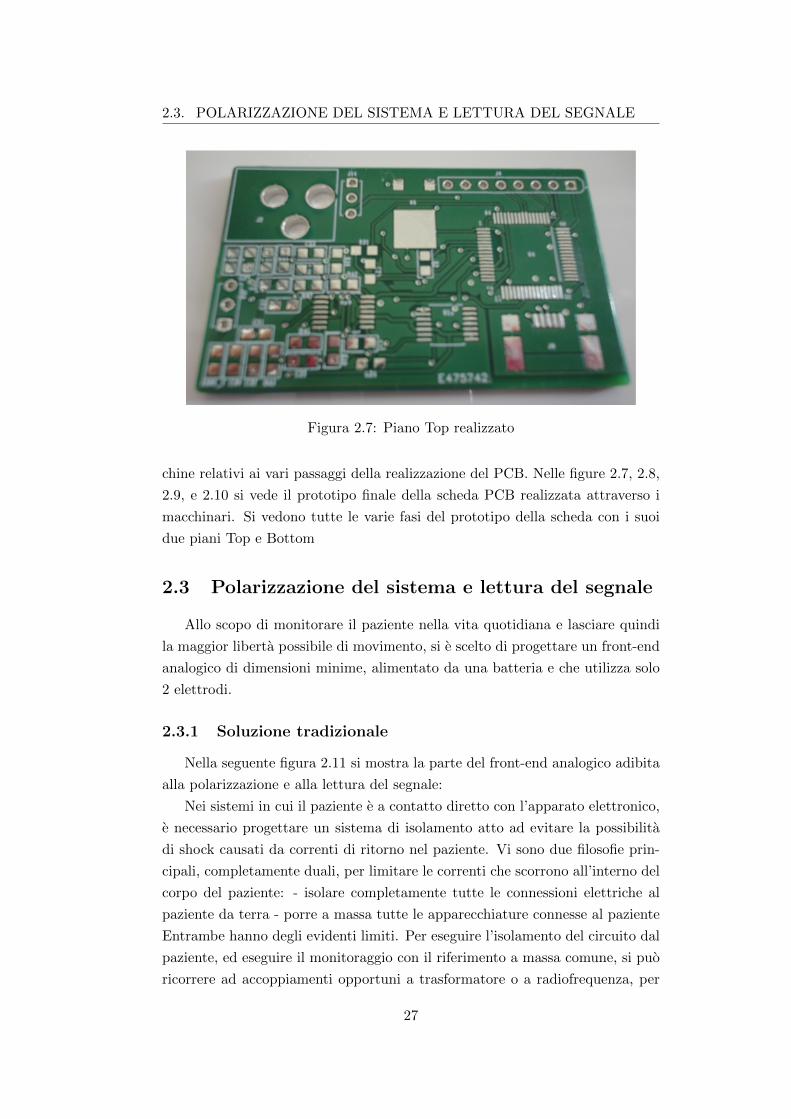
Figura 2.7: Piano Top realizzato
chine relativi ai vari passaggi della realizzazione del PCB. Nelle figure 2.7, 2.8,
2.9, e 2.10 si vede il prototipo finale della scheda PCB realizzata attraverso i
macchinari. Si vedono tutte le varie fasi del prototipo della scheda con i suoi
due piani Top e Bottom
2.3 Polarizzazione del sistema e lettura del segnale
Allo scopo di monitorare il paziente nella vita quotidiana e lasciare quindi
la maggior liberta possibile di movimento, si e scelto di progettare un front-end
analogico di dimensioni minime, alimentato da una batteria e che utilizza solo
2 elettrodi.
2.3.1 Soluzione tradizionale
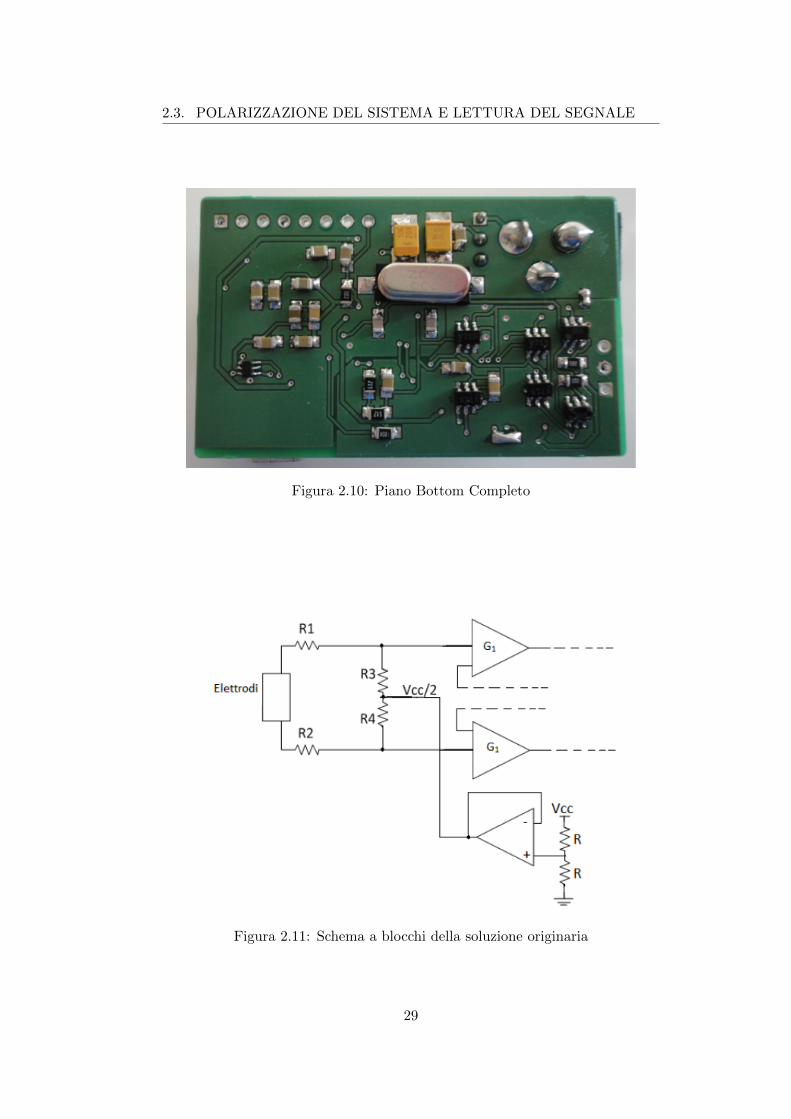
Nella seguente figura 2.11 si mostra la parte del front-end analogico adibita
alla polarizzazione e alla lettura del segnale:
Nei sistemi in cui il paziente e a contatto diretto con l’apparato elettronico,
e necessario progettare un sistema di isolamento atto ad evitare la possibilita
di shock causati da correnti di ritorno nel paziente. Vi sono due filosofie prin-
cipali, completamente duali, per limitare le correnti che scorrono all’interno del
corpo del paziente: - isolare completamente tutte le connessioni elettriche al
paziente da terra - porre a massa tutte le apparecchiature connesse al paziente
Entrambe hanno degli evidenti limiti. Per eseguire l’isolamento del circuito dal
paziente, ed eseguire il monitoraggio con il riferimento a massa comune, si puo
ricorrere ad accoppiamenti opportuni a trasformatore o a radiofrequenza, per
27
CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
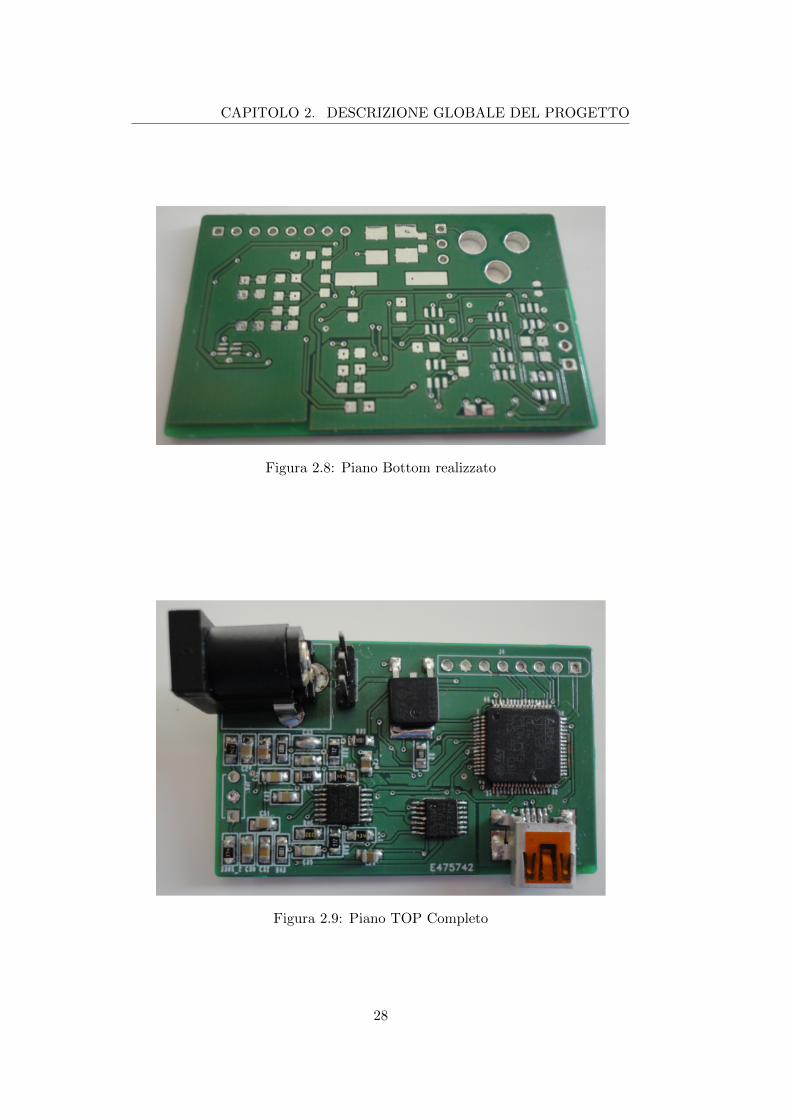
Figura 2.8: Piano Bottom realizzato
Figura 2.9: Piano TOP Completo
28
2.3. POLARIZZAZIONE DEL SISTEMA E LETTURA DEL SEGNALE
Figura 2.10: Piano Bottom Completo
Figura 2.11: Schema a blocchi della soluzione originaria
29

CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
il trasferimento di potenza di alimentazione dei circuiti e per la trasmissione
del segnale prelevato. Un particolare disaccoppiamento si realizza con circuiti
elettro-ottici, nei quali si sfrutta la unidirezionalita del dispositivo attraverso
una trasmissione luminosa. Nel monitoraggio senza terra, si ricorre non solo
all’isolamento del paziente, ma anche di tutto l’ambiente e le parti con le quali il
paziente stesso potrebbe venire a contatto. Da un punto di vista teorico, questo
tipo di protezione e il piu sicuro. In pratica, lo e solo se e possibile realizzare un
perfetto isolamento dell’ambiente. In caso contrario, si puo compromettere l’in-
columita del paziente in modo molto piu grave. Inoltre, in sede di rilevazione, i
segnali possono essere deteriorati piu facilmente sia da interferenze a frequenza
di rete che a radiofrequenza. Il sistema in esame puo essere visto come una spe-
cie di monitoraggio senza terra, trattandosi in genere di due sistemi flottanti,
indipendenti dalla rete. La massa del front-end e la massa della batteria, diver-
sa dalla massa di rete e, con questo sistema, si vogliono misurare le derivazioni
del corpo umano, non collegato ad una massa. A monte dello stadio in esame
si trova il corpo del paziente, rappresentabile con un’impedenza equivalente in
corrispondenza di ogni elettrodo in serie ad un generatore di segnale. Ovvia-
mente, i generatori di segnale sono diversi a seconda della derivazione utilizzata.
L’impedenza equivalente del corpo umano non e univoca, ma variabile da corpo
a corpo, dal punto in cui la si vuole misurare, dal tipo di elettrodo, dall’adesio-
ne piu o meno perfetta dell’elettrodo, dalle condizioni cutanee del soggetto in
quel momento (ad esempio: presenza di peli, sudorazione, idratazione, livello
di grasso), ecc.. Inoltre, queste impedenze sono non lineari e variano a seconda
della corrente e dalla frequenza di interesse. Per risolvere il problema dell’adat-
tamento di impedenza, per la rilevazione del segnale, e necessario fare in modo
che l’impedenza di ingresso del front-end sia la piu elevata possibile. A tale
scopo, si utilizza la tecnologia CMOS, che presenta l’impedenza di GATE del
transistor in ingresso idealmente infinita. Dopo gli elettrodi, sono inserite delle
resistenze di protezione, R1 ed R2, allo scopo di limitare la corrente di ritorno
al paziente nel caso peggiore di rottura degli amplificatori. Considerando, come
gia affermato sopra, una corrente di rischio pari a 10µA si ottiene:
R1 = R1 =VCCI
=3.3V
10µA= 330kΩ (2.1)
Nel circuito in esame i resistori R1 ed R2 hanno la funzione di leggere il mo-
do comune di ingresso. Il dimensionamento dei resistori R3 ed R4 e critico, in
quanto si desidera avere valori piu elevati possibili per minimizzare la riduzione
dell’impedenza di ingresso del preamplificatore e, quindi, la partizione del se-
gnale. D’altra parte, pero, l’aumento di R3 ed R4 comporta un forte aumento
30
2.3. POLARIZZAZIONE DEL SISTEMA E LETTURA DEL SEGNALE
del rumore termico che queste introducono a monte dello stadio amplifican-
te. Un compromesso tra queste due esigenze contrastanti si trova scegliendo
R3 = R4 = 1MΩ. Un altro lato negativo dello stadio cosı progettato e che
le resistenze R1 e R2 favoriscono, nella partizione, un’ulteriore riduzione del
segnale in ingresso all’amplificatore. Si nota che il sistema in esame ha com-
portamenti differenti a seconda della natura del segnale. Nel caso di segnale di
modo comune, tutti i nodi si portano allo stesso potenziale mediante le resisten-
ze R3 ed R4 e non scorre nessuna corrente. Nel caso di segnale differenziale,
c’e una corrente che circola nelle resistenze mentre VCC/2 e l’unico nodo fermo
in tensione. Proprio per questa caratteristica, se si sceglie di polarizzare questo
nodo, si ottiene sempre la polarizzazione desiderata. Per far cio si utilizza un
buffer, (2.11 ), la cui tensione di uscita vale VCC/2. La polarizzazione del si-
stema (il punto centrale) e fissata a meta dinamica di alimentazione dell’intero
sistema. Solitamente, si controlla la tensione di modo comune a cui si porta il
paziente, sia per avere il potenziale del paziente all’interno del range dinamico di
ingresso del sistema, sia per reiettare i disturbi dovuti al modo comune. Infatti,
pur avendo in genere amplificatori con un alto CMMR, si cerca di aumentarlo
ulteriormente con soluzioni circuitali. Molti tra i sistemi attualmente esistenti
richiedono l’implementazione di un elettrodo aggiuntivo per il pilotaggio della
gamba destra. Cio comporta un aumento del 50% della probabilita che uno
di essi si stacchi dal paziente e, inoltre, una limitazione molto maggiore della
liberta di movimento. Per questi motivi, nel sistema progettato di Figura 2.11,
si e scelto di usare solo due elettrodi ed il sistema di polarizzazione sopracitato.
2.3.2 Soluzione proposta
I problemi riscontrati nella soluzione presentata nel paragrafo 2.3.1 possono
essere riassunti nei seguenti punti:
• abbassamento dell’impedenza di ingresso
• partizione di ingresso con la resistenza di protezione
• elevato rumore, provocato dalle due resistenze di valore elevato
Questi problemi sono causati dall’assenza di disaccoppiamento tra la sezione
di rilevazione del segnale e quella di polarizzazione del sistema. L’idea e quindi
quella di compensare questa mancanza introducendo degli interruttori ed una
rete di condensatori come mostrato nella seguente figura 2.12 :
Lo stadio in esame presenta due fasi di funzionamento scandite dal segnale
Enable che arriva agli interruttori:
31

CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
Figura 2.12: Schema a blocchi della soluzione proposta (migliorata)
• prima fase, definibile come fase di polarizzazione, dove la chiusura degli
interruttori permette di polarizzare il sistema forzando la tensione VCC/2
agli ingressi degli amplificatori, attraverso le resistenze R3 ed R4.
• seconda fase, definibile come fase di lettura del segnale proveniente dagli
elettrodi, dove l’apertura degli interruttori permette una lettura del se-
gnale ad alta impedenza, indipendente dalle resistenze R3 ed R4.
Nella fase di lettura del segnale, proprio perche le resistenze R3 ed R4 so-
no scollegate all’amplificatore, il valore di quest’ultime e ininfluente rispetto al
trasferimento del segnale dagli elettrodi all’ingresso dell’amplificatore. In altre
parole, non essendoci piu la partizione di tensione, data sostanzialmente dalle
resistenze equivalente del paziente con le resistenze R3 e R4, e possibile scegliere
per quest’ultime un valore molto piu basso (10kΩ) rispetto a quello utilizzato
nella soluzione precedente. Tale valore e molto piu basso anche rispetto alle re-
sistenze di protezione (pari a 330kΩ per le stesse ragioni espresse nel paragrafo
precedente). In questo modo, la lettura del modo comune non viene compro-
messa e, in aggiunta, si elimina il rumore termico da queste introdotto.
D’altra parte:
• la rilevazione del segnale, in fase di lettura del segnale, necessita innanzi-
tutto una corretta polarizzazione dello stadio amplificante su cui sovrap-
porre il segnale. In caso contrario, non si consente ai transistori MOS
32

2.3. POLARIZZAZIONE DEL SISTEMA E LETTURA DEL SEGNALE
dello stadio di ingresso di lavorare nella zona di lavoro ottimale e, quindi,
di sfruttare appieno la dinamica dell’amplificatore.
• la rilevazione del segnale, in fase di polarizzazione, e impossibilitata dalla
presenza della partizione sopracitata.
Infatti, facendo i conti sull’amplificatore avremo:
∆Vin,Amp =R3
R1 +Req +R3' 100kΩ
330kΩ + 1MΩ + 10kΩ' 0.01 (2.2)
Per soddisfare l’esigenza citata nel primo punto, ossia, per ottenere la cor-
retta polarizzazione in fase di lettura del segnale, si aggiunge una rete di capa-
cita (mostrate in Figura 2.12). In assenza di tali capacita, in fase di lettura,
la tensione di polarizzazione del sistema si riporterebbe alla tensione di modo
comune del corpo. Grazie a questa rete di capacita, si riesce ad evitare sbal-
zi di tensione tra VCC/2 e la tensione di modo comune del corpo dovute alle
commutazioni degli interruttori. In fase di polarizzazione, le capacita si cari-
cano attraverso la corrente fornita dal buffer. Cio avviene velocemente perche
R3 (R1 + Rpaziente), anche nel caso peggiore di Rpaziente = 0. La costante
di tempo di scarica e maggiore di quella di carica e, quindi, C1 si carica entro
il tempo in cui gli interruttori sono chiusi. Nella fase di lettura del segnale,
le capacita vedono da un lato la resistenza di protezione in serie all’impedenza
equivalente del paziente e, dall’altro lato, l’elevata impedenza di ingresso del-
l’amplificatore. Si ha quindi una scarica lenta della tensione di modo comune
accumulata nelle capacita. Scegliendo C3 = C4 = 5nF e C1 = C2 = 100nF si
ottiene una costante di tempo di carica:
τC1 = R3 ·C3 = 50µs (2.3)
da cui si trova 5 · τC1 = 250µs, che e il tempo minimo in cui bisogna tenere
gli interruttori chiusi. Si ottiene inoltre una costante di tempo di scarica, nel
caso peggiore di Rpaziente = 0:
τS1 = R1 ·C1 = 33ms. (2.4)
Volendo tollerare al massimo una riduzione del 5% della tensione di pola-
rizzazione si trova:
VC1 (ta) = V0 · e−ta/τS1 = 1.65 · 0.95 (2.5)
da cui si ricava che:
33

CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
ta ≤ τS1 · ln1
0.95= 1.7ms (2.6)
dove si e fatta l’approssimazione per eccesso di ta di non considerare il
contributo di C3 . Facendo gli stessi ragionamenti per la capacita C2 si ottiene:
τC2 = R4 ·C4 = 50µs, (2.7)
τS2 = R2 ·C2 = 33ms. (2.8)
Sia per scandire la commutazione degli interruttori che per evitare di ri-
levare il segnale nella fase di polarizzazione, il segnale Enable gioca un ruolo
fondamentale. Il segnale Enable, proveniente da un GPIO del microcontrollo-
re, perfettamente sincronizzato con il convertitore analogico digitale, garantisce
che l’acquisizione dell’ADC avvenga in fase di lettura del segnale, ossia con gli
interruttori aperti. In questo modo si evita di rilevare, nella fase di polariz-
zazione, un segnale che, nonostante sia amplificato, sia ancora troppo piccolo,
praticamente coperto dal rumore. Rimane infine da dimensionare le resistenze
R. Anche il dimensionamento di queste resistenze e critico, in quanto si desi-
dera un valore piu alto possibile per avere una corrente minima che scorre tra
alimentazione e massa. D’altra parte, piu alto e il valore di queste resistenze e
piu alto sara il rumore da esse introdotto. Scegliendo R = 5kΩ si ottiene una
corrente:
I =VCC2R
= 330µA (2.9)
da cui:
Pdiss = I ·VCC = 330µA · 3.3V = 1.1mW, (2.10)
4KTR = 20 · 10−18V 2/Hz. (2.11)
Riassumendo, con questa configurazione si riesce a risolvere i problemi ri-
scontrati nel paragrafo precedente. Tramite la lettura del segnale, in seguito al
disaccoppiamento delle resistenze di polarizzazione con la resistenza equivalente
del paziente (in serie alla resistenza di protezione):
• si elimina la partizione resistiva con le resistenze del modo comune
• si mantiene intatta l’alta impedenza dello stadio di ingresso.
34

2.4. RIMOZIONE DEL RUMORE 1/F
Figura 2.13: Schema a blocchi della parte di sistema per l’amplificazione erimozione del rumore flicker
• si riduce notevolmente il rumore generato in ingresso, sia per i valori di
R3 ed R4 considerevolmente ridotti, che per la mancata connessione di
quest’ultime all’amplificatore al momento del campionamento da parte
dell’ADC.
2.4 Rimozione del rumore 1/f
L’utilizzo della soluzione progettuale illustrata nel paragrafo precedente per-
mette il corretto trasferimento del segnale dagli elettrodi all’ingresso dell’ampli-
ficatore. Come gia affermato in precedenza, per soddisfare l’esigenza di ottenere
un basso consumo di potenza, il front-end analogico e realizzato in tecnologia
CMOS. Cio comporta pero la presenza del rumore 1/f nella banda utile del
segnale (0.1 ÷ 150 Hz). Per garantire una buona misura del segnale e impor-
tate che il rumore nella banda utile del segnale sia al massimo di 30µVpp. Per
risolvere il problema, si utilizza una modulazione del segnale prima dell’introdu-
zione del rumore 1/f , poi una demodulazione del segnale modulato, sommato
al rumore 1/f , in seguito allo stadio amplificante. Infine si utilizza un filtro
passa basso per rimuovere il rumore 1/f nella zona dello spettro in cui e piu
consistente (Figura 2.13). Il segnale differenziale in ingresso, prima di venire
amplificato e, quindi, prima dell’introduzione del rumore 1/f , viene traslato ad
alta frequenza attraverso un chopper formato da switch (a). Gli switch sono
comandati da un segnale di clock proveniente dal µC; quindi, regolando la fre-
quenza di clock, si decide a quale frequenza modulare il segnale. Il segnale di
tensione in ingresso al preamplificatore di guadagno G1 e quindi:
Vin (t) = Vs (t) ·m (t) + Vn (t) (2.12)
dove Vs (t) e il segnale di tensione, Vn (t) e il generatore equivalente di
35
CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
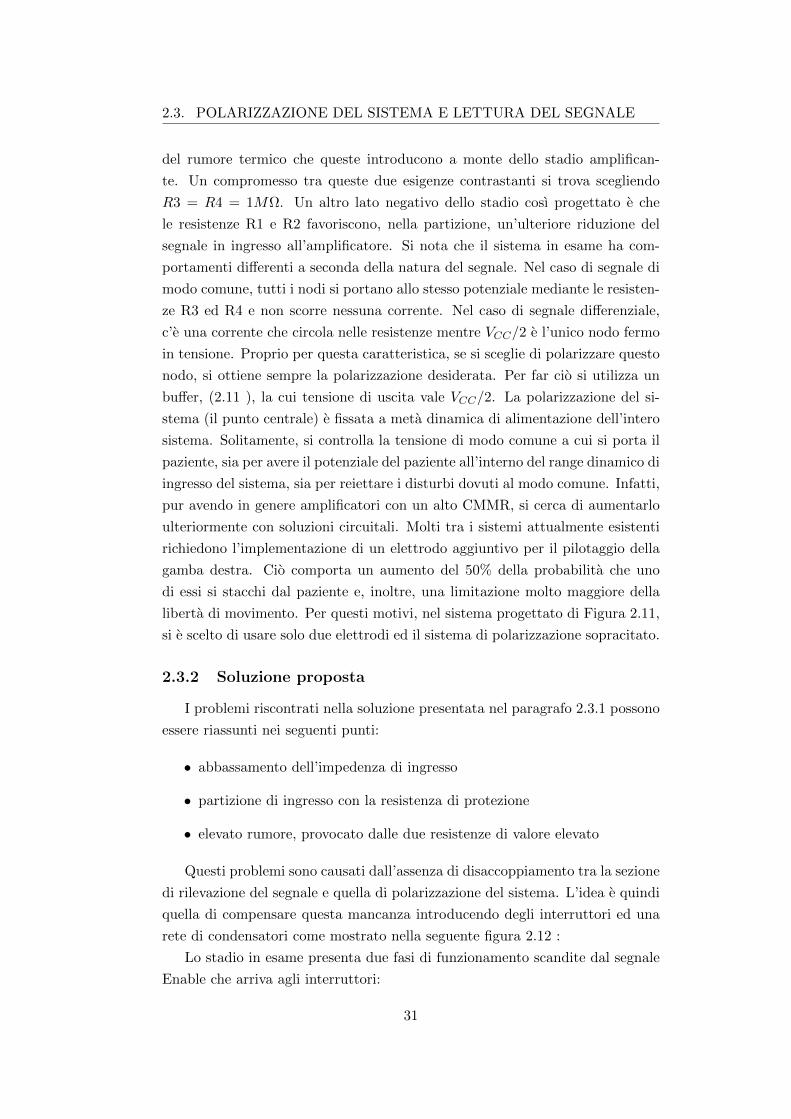
Figura 2.14: Rappresentazione spettrale unilatera del segnale
rumore (bianco + flicker) in ingresso ad ogni stadio amplificante e m (t) e la
funzione di trasferimento del modulatore:
m (t) = 1 per 0 < t < Tchop/2 (2.13)
m (t) = −1 per Tchop/2 < t < Tchop (2.14)
La funzione di trasferimento del modulatore e, percio, una semplice onda
quadra di ampiezza 1 e una frequenza fchop = fclock = 1/Tchop. Il generatore
equivalente di rumore, siccome non viene modulato, mantiene il suo spettro di
frequenza originario. Per dimostrarlo analiticamente si passa alle trasformate di
Fourier dei segnali in gioco. Si considera che il segnale ha uno spettro unilatero
mostrato in Figura 2.14.
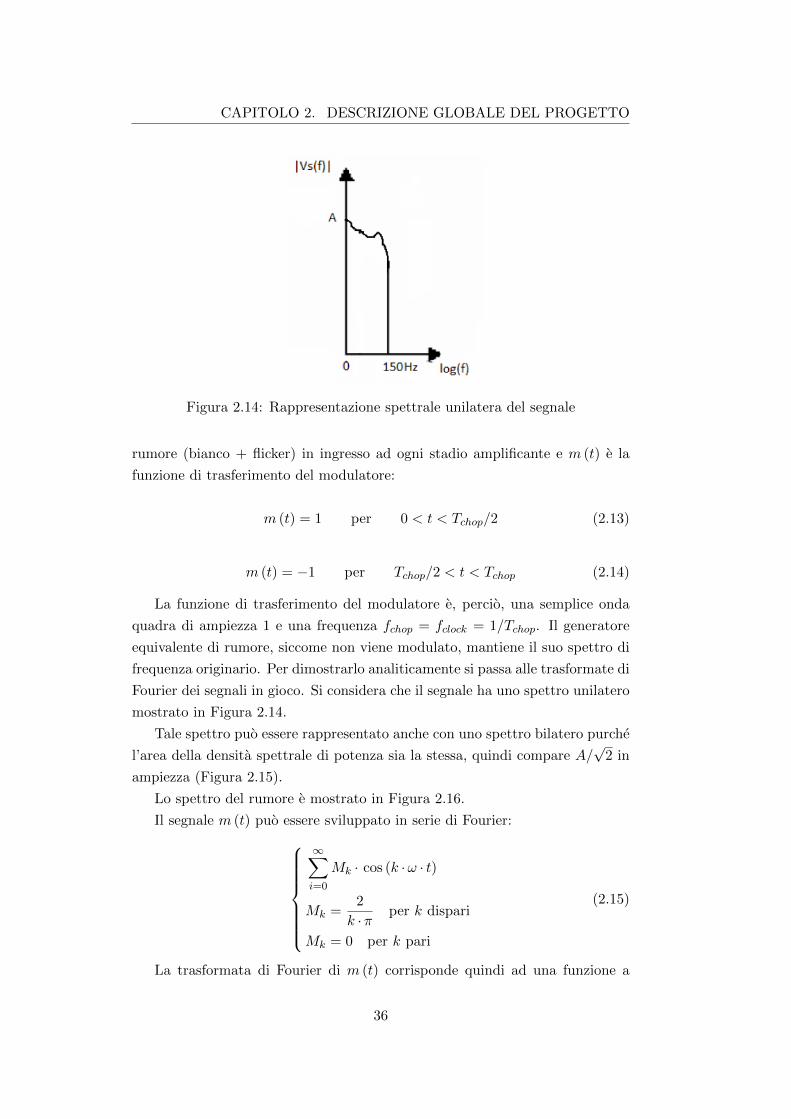
Tale spettro puo essere rappresentato anche con uno spettro bilatero purche
l’area della densita spettrale di potenza sia la stessa, quindi compare A/√
2 in
ampiezza (Figura 2.15).
Lo spettro del rumore e mostrato in Figura 2.16.
Il segnale m (t) puo essere sviluppato in serie di Fourier:
∞∑i=0
Mk · cos (k ·ω · t)
Mk =2
k ·πper k dispari
Mk = 0 per k pari
(2.15)
La trasformata di Fourier di m (t) corrisponde quindi ad una funzione a
36
2.4. RIMOZIONE DEL RUMORE 1/F
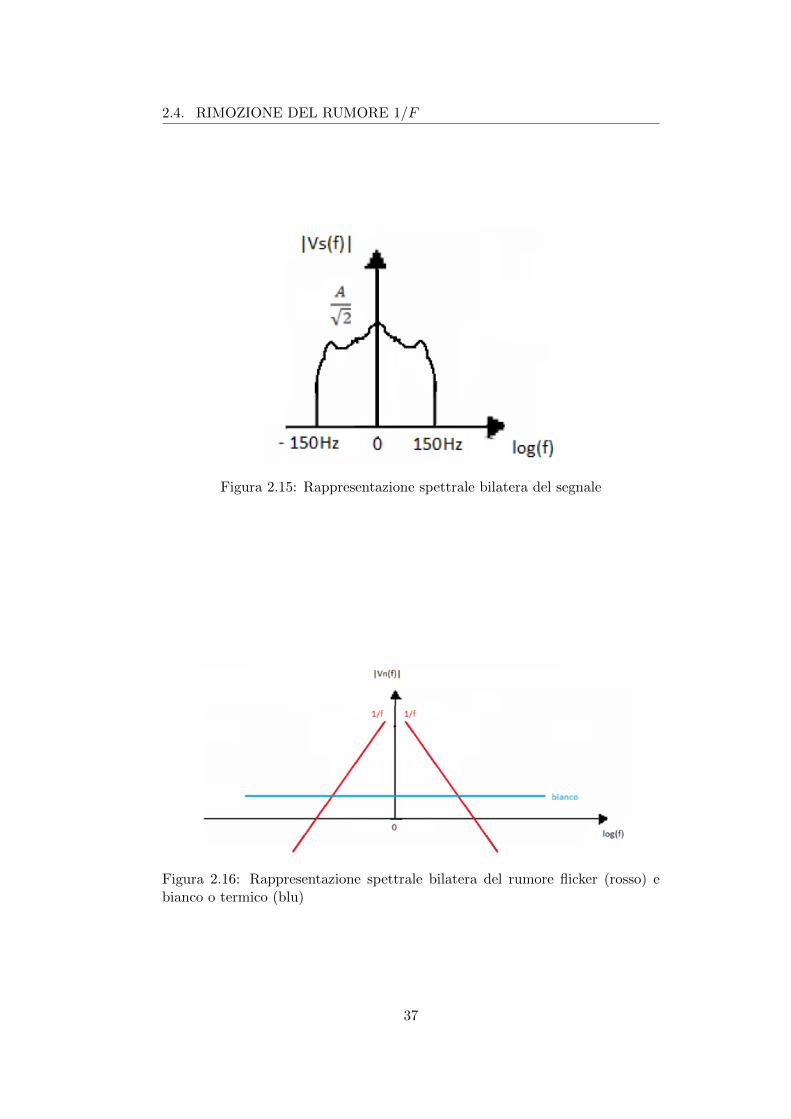
Figura 2.15: Rappresentazione spettrale bilatera del segnale
Figura 2.16: Rappresentazione spettrale bilatera del rumore flicker (rosso) ebianco o termico (blu)
37
CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
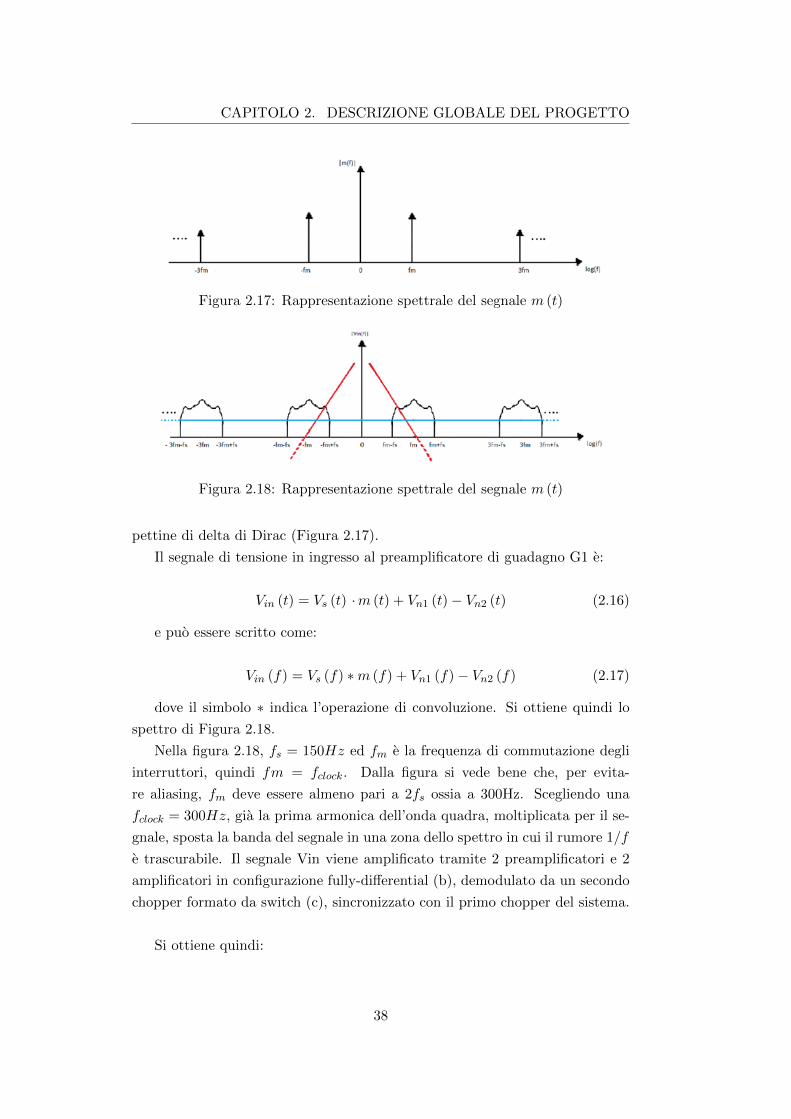
Figura 2.17: Rappresentazione spettrale del segnale m (t)
Figura 2.18: Rappresentazione spettrale del segnale m (t)
pettine di delta di Dirac (Figura 2.17).
Il segnale di tensione in ingresso al preamplificatore di guadagno G1 e:
Vin (t) = Vs (t) ·m (t) + Vn1 (t)− Vn2 (t) (2.16)
e puo essere scritto come:
Vin (f) = Vs (f) ∗m (f) + Vn1 (f)− Vn2 (f) (2.17)
dove il simbolo ∗ indica l’operazione di convoluzione. Si ottiene quindi lo
spettro di Figura 2.18.
Nella figura 2.18, fs = 150Hz ed fm e la frequenza di commutazione degli
interruttori, quindi fm = fclock. Dalla figura si vede bene che, per evita-
re aliasing, fm deve essere almeno pari a 2fs ossia a 300Hz. Scegliendo una
fclock = 300Hz, gia la prima armonica dell’onda quadra, moltiplicata per il se-
gnale, sposta la banda del segnale in una zona dello spettro in cui il rumore 1/f
e trascurabile. Il segnale Vin viene amplificato tramite 2 preamplificatori e 2
amplificatori in configurazione fully-differential (b), demodulato da un secondo
chopper formato da switch (c), sincronizzato con il primo chopper del sistema.
Si ottiene quindi:
38
2.4. RIMOZIONE DEL RUMORE 1/F
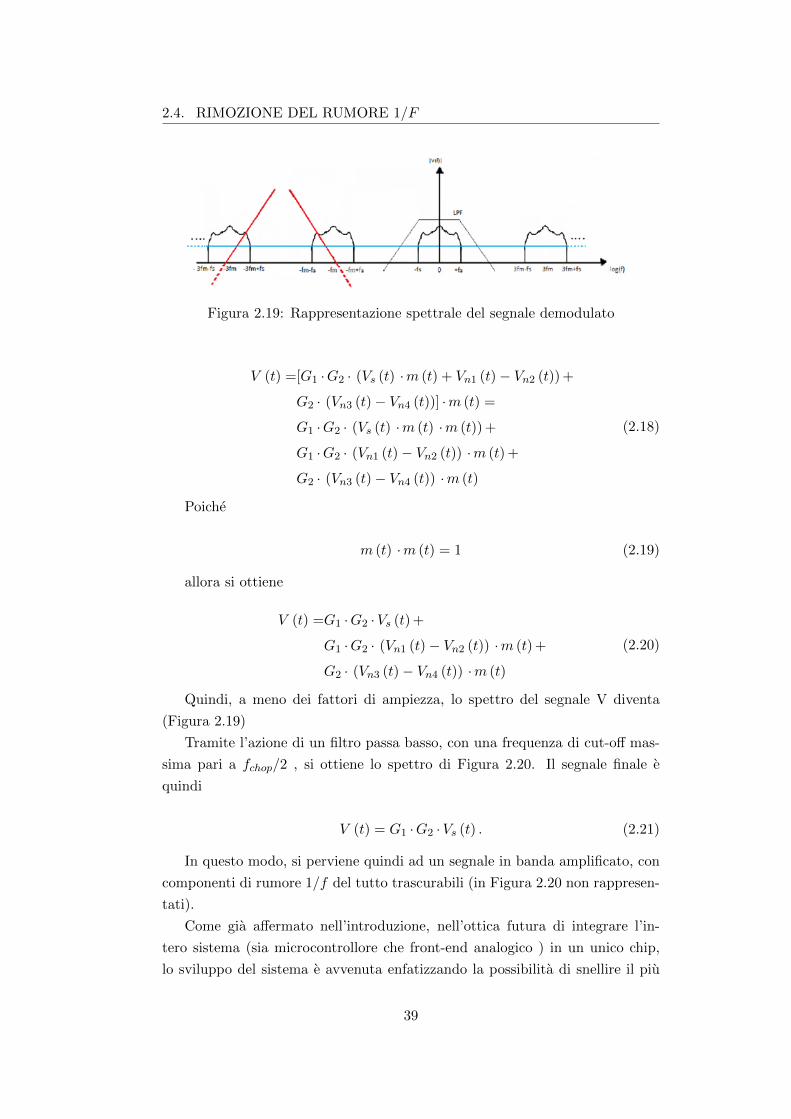
Figura 2.19: Rappresentazione spettrale del segnale demodulato
V (t) =[G1 ·G2 · (Vs (t) ·m (t) + Vn1 (t)− Vn2 (t)) +
G2 · (Vn3 (t)− Vn4 (t))] ·m (t) =
G1 ·G2 · (Vs (t) ·m (t) ·m (t)) +
G1 ·G2 · (Vn1 (t)− Vn2 (t)) ·m (t) +
G2 · (Vn3 (t)− Vn4 (t)) ·m (t)
(2.18)
Poiche
m (t) ·m (t) = 1 (2.19)
allora si ottiene
V (t) =G1 ·G2 ·Vs (t) +
G1 ·G2 · (Vn1 (t)− Vn2 (t)) ·m (t) +
G2 · (Vn3 (t)− Vn4 (t)) ·m (t)
(2.20)
Quindi, a meno dei fattori di ampiezza, lo spettro del segnale V diventa
(Figura 2.19)
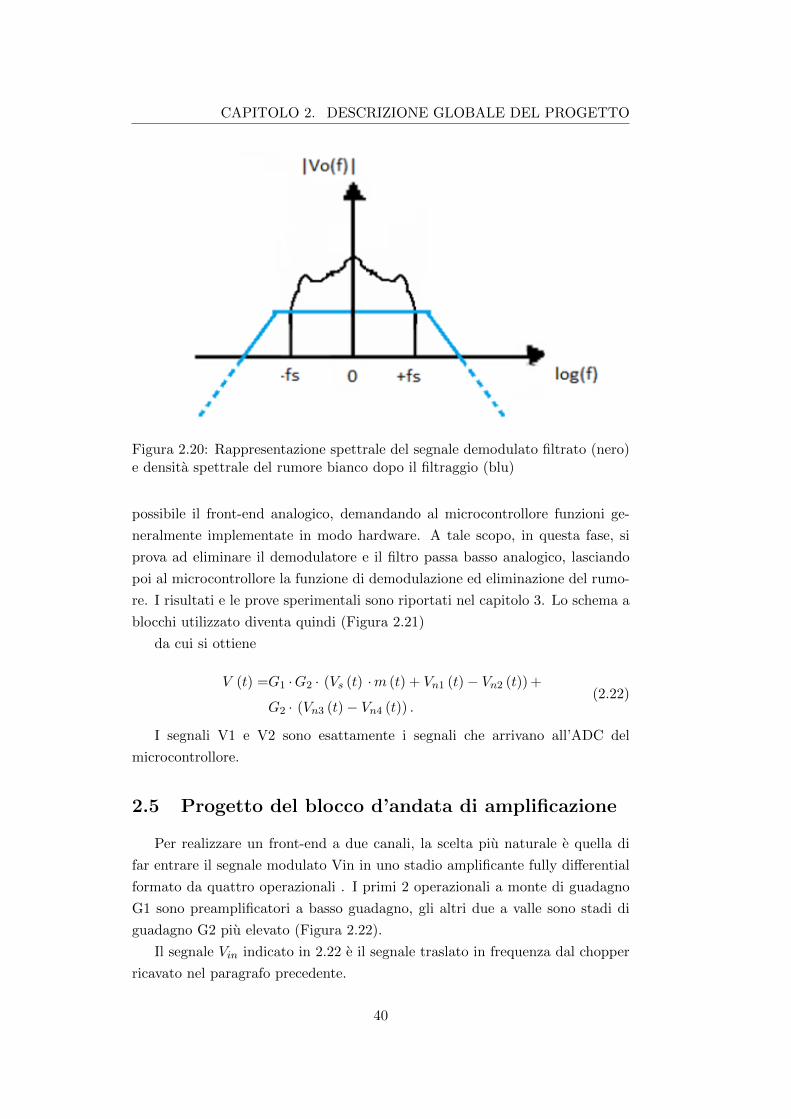
Tramite l’azione di un filtro passa basso, con una frequenza di cut-off mas-
sima pari a fchop/2 , si ottiene lo spettro di Figura 2.20. Il segnale finale e
quindi
V (t) = G1 ·G2 ·Vs (t) . (2.21)
In questo modo, si perviene quindi ad un segnale in banda amplificato, con
componenti di rumore 1/f del tutto trascurabili (in Figura 2.20 non rappresen-
tati).
Come gia affermato nell’introduzione, nell’ottica futura di integrare l’in-
tero sistema (sia microcontrollore che front-end analogico ) in un unico chip,
lo sviluppo del sistema e avvenuta enfatizzando la possibilita di snellire il piu
39
CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
Figura 2.20: Rappresentazione spettrale del segnale demodulato filtrato (nero)e densita spettrale del rumore bianco dopo il filtraggio (blu)
possibile il front-end analogico, demandando al microcontrollore funzioni ge-
neralmente implementate in modo hardware. A tale scopo, in questa fase, si
prova ad eliminare il demodulatore e il filtro passa basso analogico, lasciando
poi al microcontrollore la funzione di demodulazione ed eliminazione del rumo-
re. I risultati e le prove sperimentali sono riportati nel capitolo 3. Lo schema a
blocchi utilizzato diventa quindi (Figura 2.21)
da cui si ottiene
V (t) =G1 ·G2 · (Vs (t) ·m (t) + Vn1 (t)− Vn2 (t)) +
G2 · (Vn3 (t)− Vn4 (t)) .(2.22)
I segnali V1 e V2 sono esattamente i segnali che arrivano all’ADC del
microcontrollore.
2.5 Progetto del blocco d’andata di amplificazione
Per realizzare un front-end a due canali, la scelta piu naturale e quella di
far entrare il segnale modulato Vin in uno stadio amplificante fully differential
formato da quattro operazionali . I primi 2 operazionali a monte di guadagno
G1 sono preamplificatori a basso guadagno, gli altri due a valle sono stadi di
guadagno G2 piu elevato (Figura 2.22).
Il segnale Vin indicato in 2.22 e il segnale traslato in frequenza dal chopper
ricavato nel paragrafo precedente.
40
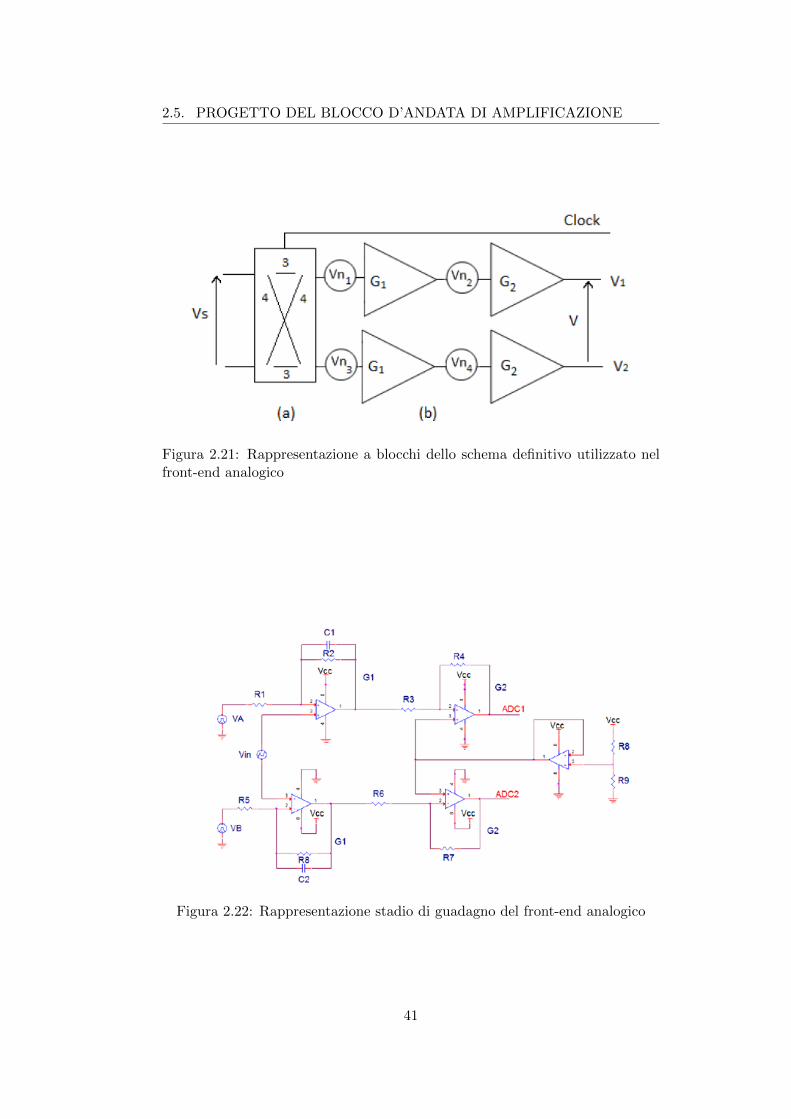
2.5. PROGETTO DEL BLOCCO D’ANDATA DI AMPLIFICAZIONE
Figura 2.21: Rappresentazione a blocchi dello schema definitivo utilizzato nelfront-end analogico
Figura 2.22: Rappresentazione stadio di guadagno del front-end analogico
41

CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
Ampiezza del segnale in ingresso 0.5mV < Vin < 5mV
Spettro del segnale di ingresso 0.01Hz < f < 150Hz
Offset 300mV
Alimentazione 3.3V (dalla batteria)
Temperatura ambientale 30± 15C
Tabella 2.1: Caratteristiche da tenere in considerazione per iniziare laprogettazione del preamplificatore
Si riassumono nella tabella 2.1 le condizioni iniziali da tenere in considerazione.
Il segnale e accompagnato da una tensione di modo comune che puo arri-
vare a 300mV. Dal datasheet si osserva che l’amplificatore scelto e un ampli-
ficatore rail-to-rail, quindi il massimo guadagno G1 che possiamo ottenere dal
preamplificatore e dato dall’equazione:
G1MAX =VCC/2
(|Voff |+ Vsignalmax/2)= 5.5 (2.23)
dove VCC e l’alimentazione data dalla batteria e vale 3.3V, mentre Vsignalmax
vale 5mV ed e quindi trascurabile rispetto al Voff . Nell’equazione, il fattore
2 che divide il guadagno massimo ottenibile e dato dal fatto che il sistema
progettato, in assenza di segnale, presenta un uscita polarizzata a meta dina-
mica (1.65 V). Pertanto, si utilizza solo meta dinamica per l’amplificazione del
segnale. Si ottiene la polarizzazione a 1.65V grazie ad un buffer che impone
questa tensione ai morsetti positivi degli amplificatori di guadagno G2, come
mostrato nella Figura 2.22. Dall’equazione (2.23) si nota che il guadagno mas-
simo e linearmente dipendente dall’alimentazione. Nel caso in cui si decidesse
di abbassare la tensione di alimentazione, ad esempio per questioni di consumo,
cio si rifletterebbe in un inevitabile abbassamento di guadagno. Viceversa, nel
caso in cui ci fosse la possibilita di aumentare la tensione di alimentazione, sa-
rebbe possibile aumentare ulteriormente il guadagno G1 del preamplificatore.
Si sceglie di abbassare G1MAX a 4.5 per evitare la saturazione dell’uscita con
un margine di sicurezza maggiore. Come prima iterazione, si considera una
fclock = 900Hz ossia, come detto nel paragrafo precedente, una frequenza di
modulazione maggiore di 300Hz e si impone che il polo cada almeno una decade
dopo: G1 = 1 +
R2
R1= 4.5
fp =1
2πR2C1= 9kHz.
(2.24)
42

2.5. PROGETTO DEL BLOCCO D’ANDATA DI AMPLIFICAZIONE
scelgo R1 = 1kΩ da cui dalla prima equazione ricavo R2 = 3.5kΩ. Prendo
una resistenza R2 = 3.3kΩ e dalla seconda equazione ricavo C1 = 5nF .
Prendo una C1 = 3nF . Con questi valori si trova:
G1 = 1 +R2
R1= 4.5
fp =1
2πR2C1= 16kHz
fx =1
2πC1 · (R1 ‖ R2)= 41MHz.
(2.25)
Facendo lo stesso ragionamento per l’altro amplificatore G1 si ottiene: R1 =
R5 = 1kΩ, R2 = R8 = 3.3kΩ, C1 = C2 = 3nF .
Con i valori trovati, considerando nel sistema di Figura 2.22 i due gene-
ratori VA e VB spenti, un offset di 300mV renderebbe impossibile la misura
del segnale ECG. Infatti, considerando solo il modo comune in ingresso, si
ottiene una tensione uscita di modo comune dei due preamplificatori pari a
V CM = 300mV · 4.3 = 1.29V che sommato al valore di polarizzazione a riposo
(1.65V), determina un ingresso al secondo stadio di 2.94V! Un segnale diffe-
renziale Vin in ingresso, produce un segnale differenziale massimo in uscita ai
due preamplificatori pari a: Vdiffmax = 2∆Vin∆G1 = 2∆5mV∆4.3 = 43mV ,
ossia 21.5mV per canale. Il segnale risulta quindi totalmente coperto dall’off-
set. Un’ulteriore amplificazione del secondo stadio amplificante saturerebbe
l’amplificatore. Oltre questo, un altro aspetto di fondamentale importanza e il
matching tra R1 ed R5, e tra R3 ed R8. Un mismatch tra questi valori resisti-
vi si riflette in un differente guadagno G1 tra i due canali. Cio determina un
degrado del segnale in uscita dovuto, in parte, al segnale stesso che viene am-
plificato con un guadagno diverso nei due canali ma, soprattutto, dall’offset di
300mV. Al fine di risolvere i problemi sopracitati, si effettua una compensazione
dell’offset intervenendo con i generatori VA e VB come mostrato in Figura 2.22.
Questi generatori schematizzano il segnale risultante dall’elaborazione del mi-
crocontrollore e la restante retroazione analogica. Grazie a questa retroazione
e possibile considerare l’uscita dei preamplificatori polarizzate a meta dinamica
(1.65V) su cui e sovrapposto solo il segnale di ±21.5mV . In questo modo, e
possibile utilizzare un secondo stadio di guadagno G2 per sfruttare al massimo
la dinamica di uscita. Assumendo di poter considerare nullo il contributo del-
l’offset in uscita al preamplificatore, analogamente a quanto fatto per G1MAX ,
si ha:
43
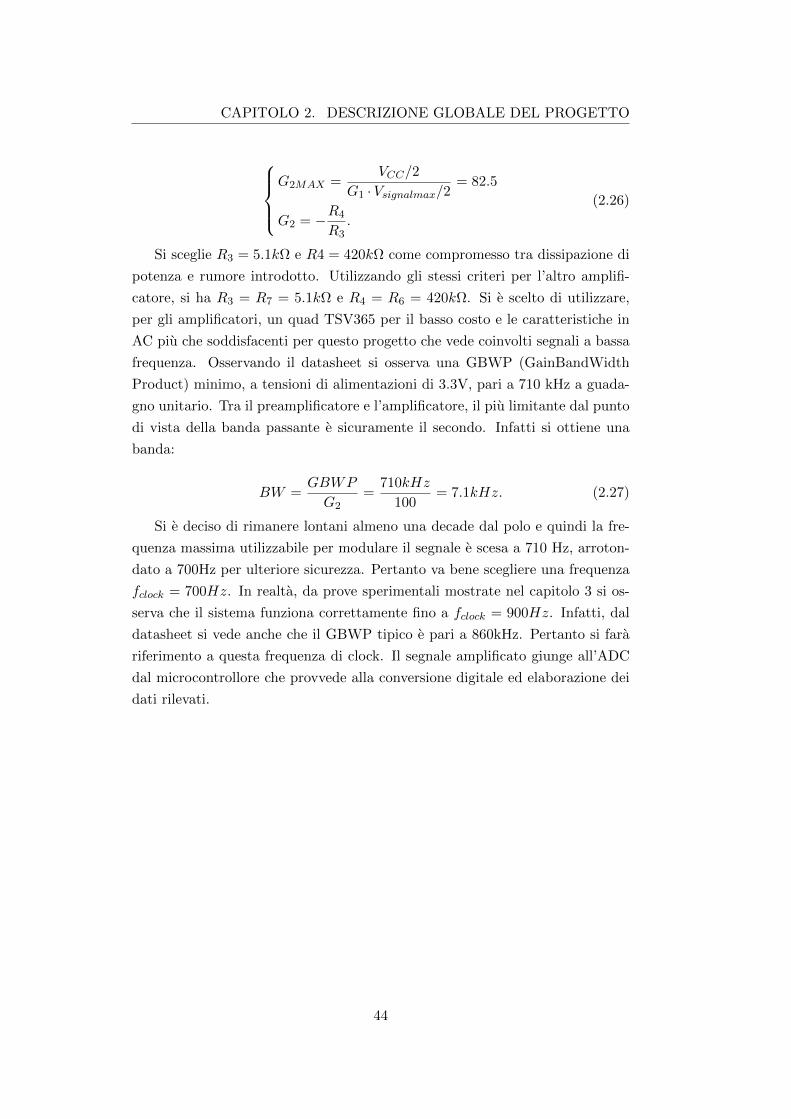
CAPITOLO 2. DESCRIZIONE GLOBALE DEL PROGETTO
G2MAX =
VCC/2
G1 ·Vsignalmax/2= 82.5
G2 = −R4
R3.
(2.26)
Si sceglie R3 = 5.1kΩ e R4 = 420kΩ come compromesso tra dissipazione di
potenza e rumore introdotto. Utilizzando gli stessi criteri per l’altro amplifi-
catore, si ha R3 = R7 = 5.1kΩ e R4 = R6 = 420kΩ. Si e scelto di utilizzare,
per gli amplificatori, un quad TSV365 per il basso costo e le caratteristiche in
AC piu che soddisfacenti per questo progetto che vede coinvolti segnali a bassa
frequenza. Osservando il datasheet si osserva una GBWP (GainBandWidth
Product) minimo, a tensioni di alimentazioni di 3.3V, pari a 710 kHz a guada-
gno unitario. Tra il preamplificatore e l’amplificatore, il piu limitante dal punto
di vista della banda passante e sicuramente il secondo. Infatti si ottiene una
banda:
BW =GBWP
G2=
710kHz
100= 7.1kHz. (2.27)
Si e deciso di rimanere lontani almeno una decade dal polo e quindi la fre-
quenza massima utilizzabile per modulare il segnale e scesa a 710 Hz, arroton-
dato a 700Hz per ulteriore sicurezza. Pertanto va bene scegliere una frequenza
fclock = 700Hz. In realta, da prove sperimentali mostrate nel capitolo 3 si os-
serva che il sistema funziona correttamente fino a fclock = 900Hz. Infatti, dal
datasheet si vede anche che il GBWP tipico e pari a 860kHz. Pertanto si fara
riferimento a questa frequenza di clock. Il segnale amplificato giunge all’ADC
dal microcontrollore che provvede alla conversione digitale ed elaborazione dei
dati rilevati.
44

Capitolo 3
Microcontrollore e
compensazione dell’offset
3.1 Introduzione
In questo capitolo, si focalizza l’attenzione sulle funzioni svolte dal micro-
controllore per la generazione dei segnali di sincronizzazione del sistema e per
il pilotaggio della retroazione progettata per la compensazione dell’offset. Il
ramo costituito dai blocchi descritti nel capitolo 2 puo essere visto come il ra-
mo di andata del sistema. Facendo riferimento alla figura 2.1, riportata nella
figura 3.1 per comodita di lettura, il ramo di andata e costituito dai blocchi
(a), (b), (c), (f) mentre i blocchi (µC), (d) ed (e) costituiscono la retroazione
digitale-analogica.
In particolare, dalla prima versione del firmware utilizzato e con riferimen-
to alla Figura 3.1, le funzioni svolte dal microcontrollore sono rappresentate
nella seguente Figura 3.2. Dalla Figura 3.2 si osserva che i valori campionati
Figura 3.1: Schema a blocchi del sistema progettato
45
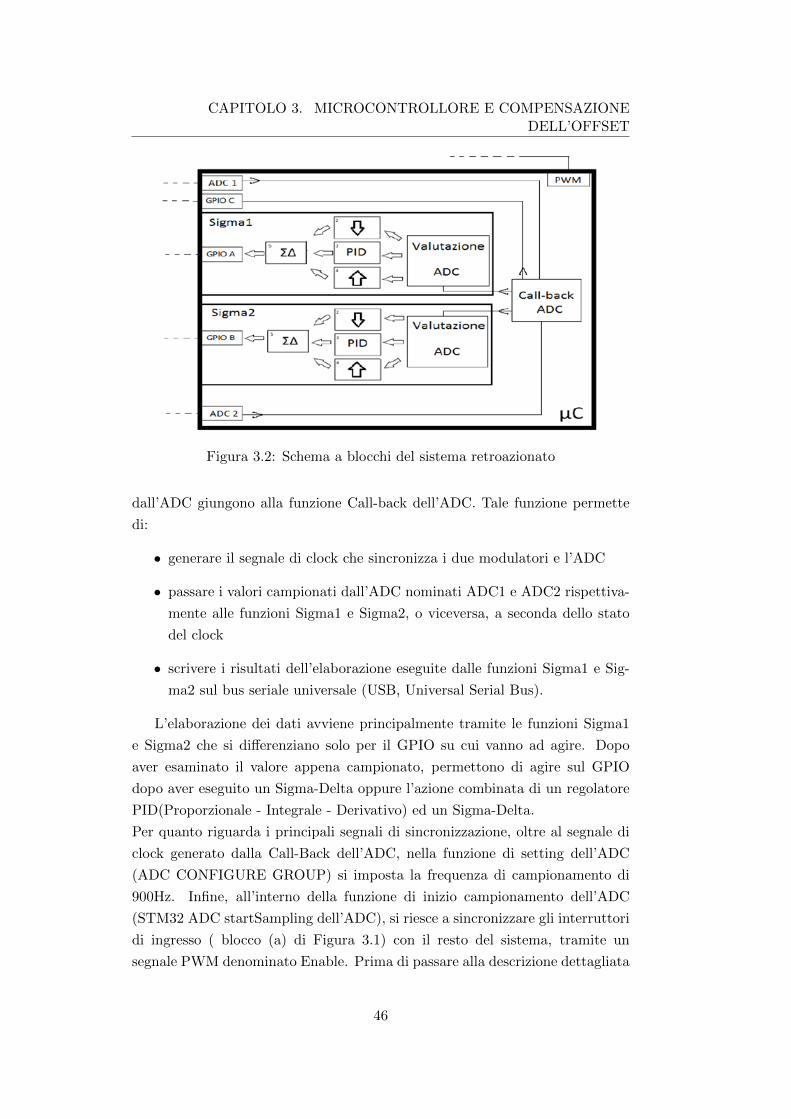
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.2: Schema a blocchi del sistema retroazionato
dall’ADC giungono alla funzione Call-back dell’ADC. Tale funzione permette
di:
• generare il segnale di clock che sincronizza i due modulatori e l’ADC
• passare i valori campionati dall’ADC nominati ADC1 e ADC2 rispettiva-
mente alle funzioni Sigma1 e Sigma2, o viceversa, a seconda dello stato
del clock
• scrivere i risultati dell’elaborazione eseguite dalle funzioni Sigma1 e Sig-
ma2 sul bus seriale universale (USB, Universal Serial Bus).
L’elaborazione dei dati avviene principalmente tramite le funzioni Sigma1
e Sigma2 che si differenziano solo per il GPIO su cui vanno ad agire. Dopo
aver esaminato il valore appena campionato, permettono di agire sul GPIO
dopo aver eseguito un Sigma-Delta oppure l’azione combinata di un regolatore
PID(Proporzionale - Integrale - Derivativo) ed un Sigma-Delta.
Per quanto riguarda i principali segnali di sincronizzazione, oltre al segnale di
clock generato dalla Call-Back dell’ADC, nella funzione di setting dell’ADC
(ADC CONFIGURE GROUP) si imposta la frequenza di campionamento di
900Hz. Infine, all’interno della funzione di inizio campionamento dell’ADC
(STM32 ADC startSampling dell’ADC), si riesce a sincronizzare gli interruttori
di ingresso ( blocco (a) di Figura 3.1) con il resto del sistema, tramite un
segnale PWM denominato Enable. Prima di passare alla descrizione dettagliata
46

3.2. MICROCONTROLLORE
delle funzioni svolte dal microcontrollore, si inizia a descrive le caratteristiche
principali del microcontrollore utilizzato.
3.2 Microcontrollore
Per il controllo del circuito descritto nel precedente paragrafo si e fatto ri-
corso all’STM32, un microcontrollore a 32 bit prodotto da STMicroelectronics,
che lavora con una tensione d’alimentazione pari a 3.3 V. STM32 e un microcon-
trollore a 64 pin, comandato con un oscillatore a 8 MHz che,tramite un anello
ad aggancio di fase (PLL, Phase Locked Loop), porta la frequenza di clock a
72 MHz. Oltre a queste caratteristiche l’STM32 e dotato di un banco di me-
moria flash di 128 kB e di un core basato su ARM Cortex M3, che consente di
gestire un sistema operativo Real Time (RTOS, Real Time Operative System)
. Le funzionalita di interesse offerte dall’STM32 per l’applicazione richiesta
comprendono: 4 timer, ognuno dei quali dispone di 4 canali, 3 banchi di GPIO,
ognuno dei quali gestisce 16 pin, e un ADC. Grazie al RTOS e possibile sfruttare
tutti i vantaggi del multitasking e quindi creare firmware capaci di gestire piu
task simultaneamente. Questa caratteristica e molto utile nel caso sia necessario
eseguire piu operazioni contemporaneamente. I sistemi a microprocessore pre-
sentano, solitamente, un’architettura di tipo Von Neumman, con un bus dati e
un bus di indirizzi in comune tra core, memorie e periferiche. Nei microcontrol-
lori e invece piu diffusa l’architettura Harvard. In questo tipo di struttura, i bus
sono in numero doppio e separati: una coppia (dati e indirizzi) e dedicata alle
istruzioni del programma consentendo il collegamento tra core e memorie, e una
coppia gestisce il flusso di dati tra memorie e periferiche. In figura 2.3 (riferito
allo schematico del capitolo 2) e mostrato lo schematico dell’STM32 collegato
su una board di prova contenente, oltre al microcontrollore stesso, il circuito
di alimentazione con il regolatore lineare di tensione , il circuito di oscillazione
ed il driver del connettore USB. Infatti, scegliendo di alimentare il circuito via
USB, ossia con 5 V, si utilizzera un regolatore lineare per fornire all’integrato
la tensione adeguata, pari a 3.3 V. Lo schematico di tale board e riportato in
Figura 2.3. Oltre alle memorie flash e RAM (Random-Access Memory), inte-
grati all’interno dell’STM32, sono presenti anche dei registri ausiliari, come il
programcounter, i registri di stack ed i registri di stato delle periferiche interne.
Tra le periferiche presenti nel microcontrollore, l’ADC e di fondamentale im-
portanza, poiche e utilizzato per acquisire l’informazione analogica amplificata
in seguito allo stadio amplificante.
47

CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
3.3 Convertitore analogico digitale
Un convertitore analogico-digitale (ADC) e un dispositivo in grado di con-
vertire una grandezza analogica in digitale mediante la tecnica del campiona-
mento. In questo modo, la grandezza analogica in esame puo essere riconosciuta
ed eventualmente elaborata correttamente dal microcontrollore. Dal segnale di-
gitale in uscita dal convertitore e quindi possibile risalire al valore analogico di
tensione presente all’uscita del secondo stadio di amplificazione. All’interno
dell’STM32 e implementato un convertitore analogico-digitale ad approssima-
zioni successive a 12 bit (SAR, Successive Approximation Register). L’ADC e
un convertitore a 12 bit, quindi in grado di restituire un numero intero senza
segno compreso tra 0 e 4095. La frequenza massima di campionamento e di 1
MHz; cio permettera di campionare segnali con variazioni molto rapide, anche
se cio comportera un aumento del rumore in fase di quantizzazione. Nonostan-
te all’interno del microcontrollore sia presente solamente un ADC, e possibile
campionare su 16 canali differenti. Il sistema analogico presenta due canali,
ognuno da campionare ad una frequenza di 900Hz, per i motivi discussi nel
precedente capitolo. Tramite l’accesso diretto alla memoria (DMA, Direct me-
mory access) si puo venire incontro a questa esigenza campionando ciascuno
dei due canali alla frequenza desiderata, in istanti di campionamento dei due
canali temporalmente molto vicini tra loro.
3.4 Compensazione dell’offset
Visto che ci sara sempre un offset sovrapposto al segnale di interesse, e ne-
cessaria una sua compensazione. Per poter eliminare questo offset dell’ingresso
si utilizzano due blocchi in retroazione, il microcontrollore e l’integratore che
lo segue. Il microcontrollore manda degli impulsi 1 e 0 dai pin numero 61 e
62, che sono pin GPIO (General Purpose Input Output). A loro volta. questi
impulsi corrispondono rispettivamente all’alimentazione Vcc e alla massa. Gli
impulsi generati dal micro hanno una durata ?t variabile a seconda dell’offset
presente. Successivamente mostreremo una relazione che lega il ?t con i para-
metri del microcontrollore. Lo scopo di questi impulsi e quello di generare una
tensione tale da elidere l’offset presente in ingresso. Cortocircuitata al GPIO
del microcontrollore vi sara la resistenza dell’integratore analogico (Figura 3.3).
Tale dispositivo integrera il segnale proveniente dal GPIO, ovvero la sequenza
di 0 (pin lasciato flottante), -1 (pin fissato a massa), 1 (pin fissato a Vcc) logici
provenienti dal modulatore sigma-delta. L’integratore si comporta come una
48
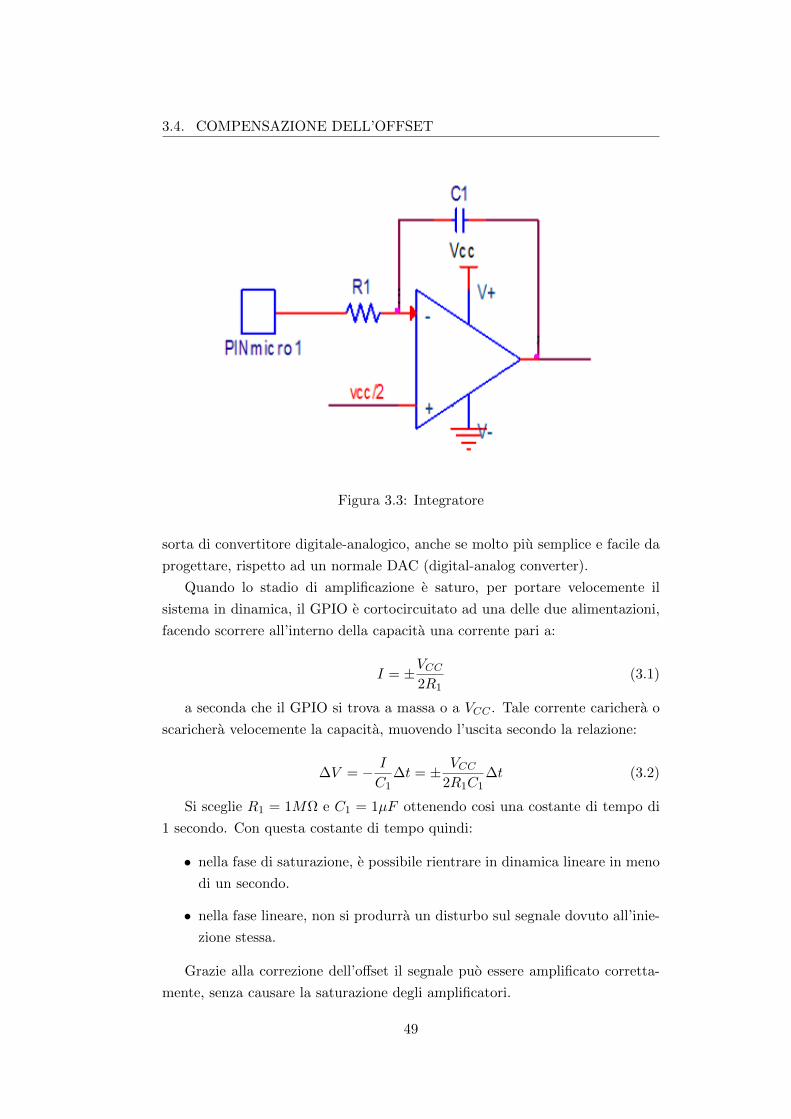
3.4. COMPENSAZIONE DELL’OFFSET
Figura 3.3: Integratore
sorta di convertitore digitale-analogico, anche se molto piu semplice e facile da
progettare, rispetto ad un normale DAC (digital-analog converter).
Quando lo stadio di amplificazione e saturo, per portare velocemente il
sistema in dinamica, il GPIO e cortocircuitato ad una delle due alimentazioni,
facendo scorrere all’interno della capacita una corrente pari a:
I = ±VCC2R1
(3.1)
a seconda che il GPIO si trova a massa o a VCC . Tale corrente carichera o
scarichera velocemente la capacita, muovendo l’uscita secondo la relazione:
∆V = − I
C1∆t = ± VCC
2R1C1∆t (3.2)
Si sceglie R1 = 1MΩ e C1 = 1µF ottenendo cosi una costante di tempo di
1 secondo. Con questa costante di tempo quindi:
• nella fase di saturazione, e possibile rientrare in dinamica lineare in meno
di un secondo.
• nella fase lineare, non si produrra un disturbo sul segnale dovuto all’inie-
zione stessa.
Grazie alla correzione dell’offset il segnale puo essere amplificato corretta-
mente, senza causare la saturazione degli amplificatori.
49
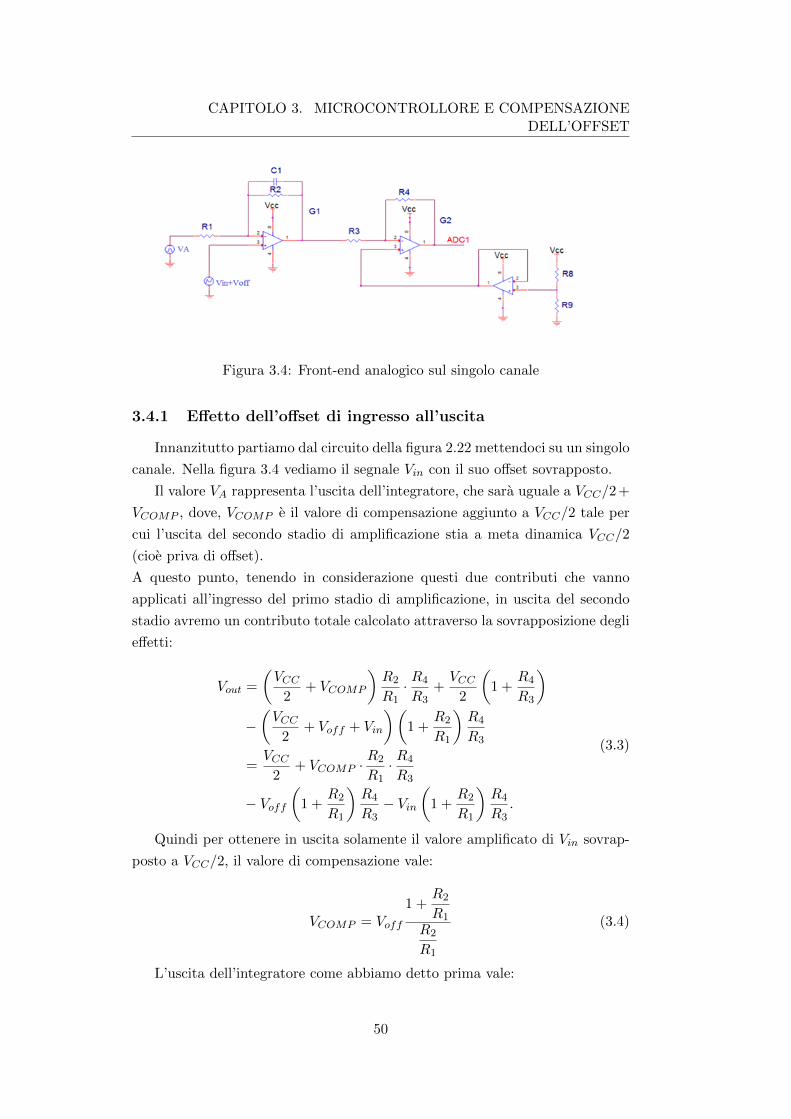
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.4: Front-end analogico sul singolo canale
3.4.1 Effetto dell’offset di ingresso all’uscita
Innanzitutto partiamo dal circuito della figura 2.22 mettendoci su un singolo
canale. Nella figura 3.4 vediamo il segnale Vin con il suo offset sovrapposto.
Il valore VA rappresenta l’uscita dell’integratore, che sara uguale a VCC/2 +
VCOMP , dove, VCOMP e il valore di compensazione aggiunto a VCC/2 tale per
cui l’uscita del secondo stadio di amplificazione stia a meta dinamica VCC/2
(cioe priva di offset).
A questo punto, tenendo in considerazione questi due contributi che vanno
applicati all’ingresso del primo stadio di amplificazione, in uscita del secondo
stadio avremo un contributo totale calcolato attraverso la sovrapposizione degli
effetti:
Vout =
(VCC
2+ VCOMP
)R2
R1· R4
R3+VCC
2
(1 +
R4
R3
)−(VCC
2+ Voff + Vin
)(1 +
R2
R1
)R4
R3
=VCC
2+ VCOMP ·
R2
R1· R4
R3
− Voff(
1 +R2
R1
)R4
R3− Vin
(1 +
R2
R1
)R4
R3.
(3.3)
Quindi per ottenere in uscita solamente il valore amplificato di Vin sovrap-
posto a VCC/2, il valore di compensazione vale:
VCOMP = Voff
1 +R2
R1
R2
R1
(3.4)
L’uscita dell’integratore come abbiamo detto prima vale:
50
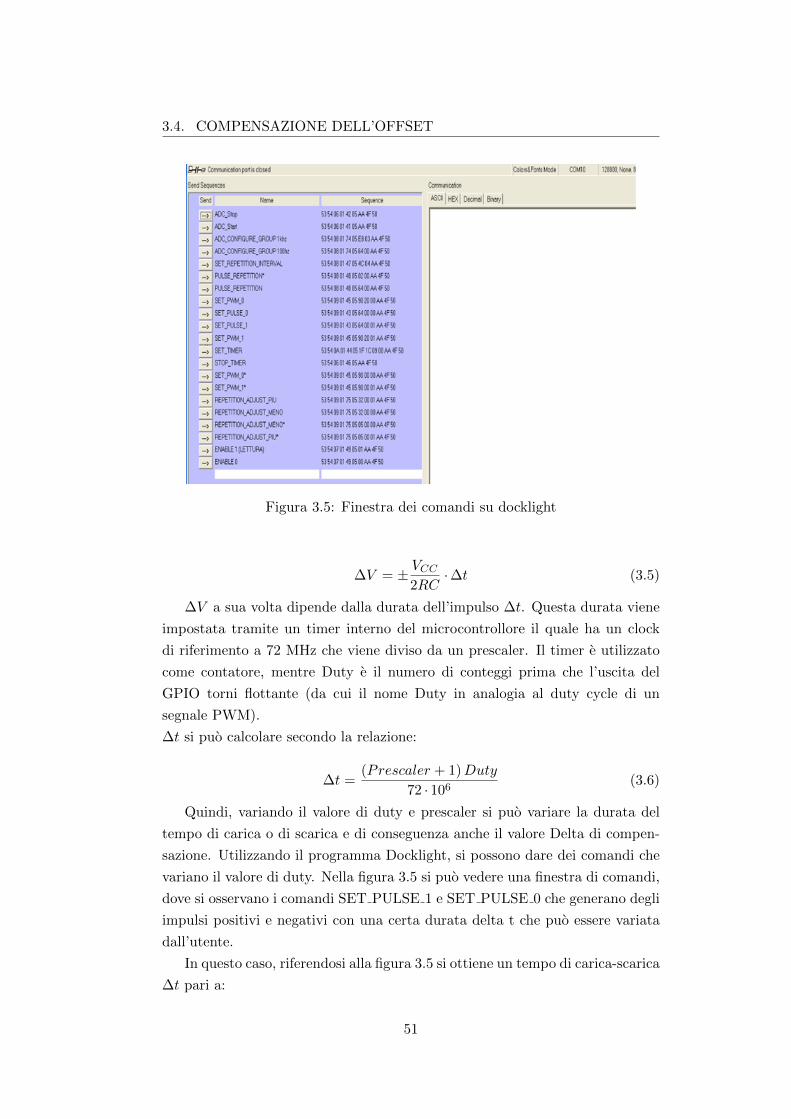
3.4. COMPENSAZIONE DELL’OFFSET
Figura 3.5: Finestra dei comandi su docklight
∆V = ± VCC2RC
·∆t (3.5)
∆V a sua volta dipende dalla durata dell’impulso ∆t. Questa durata viene
impostata tramite un timer interno del microcontrollore il quale ha un clock
di riferimento a 72 MHz che viene diviso da un prescaler. Il timer e utilizzato
come contatore, mentre Duty e il numero di conteggi prima che l’uscita del
GPIO torni flottante (da cui il nome Duty in analogia al duty cycle di un
segnale PWM).
∆t si puo calcolare secondo la relazione:
∆t =(Prescaler + 1)Duty
72 · 106(3.6)
Quindi, variando il valore di duty e prescaler si puo variare la durata del
tempo di carica o di scarica e di conseguenza anche il valore Delta di compen-
sazione. Utilizzando il programma Docklight, si possono dare dei comandi che
variano il valore di duty. Nella figura 3.5 si puo vedere una finestra di comandi,
dove si osservano i comandi SET PULSE 1 e SET PULSE 0 che generano degli
impulsi positivi e negativi con una certa durata delta t che puo essere variata
dall’utente.
In questo caso, riferendosi alla figura 3.5 si ottiene un tempo di carica-scarica
∆t pari a:
51
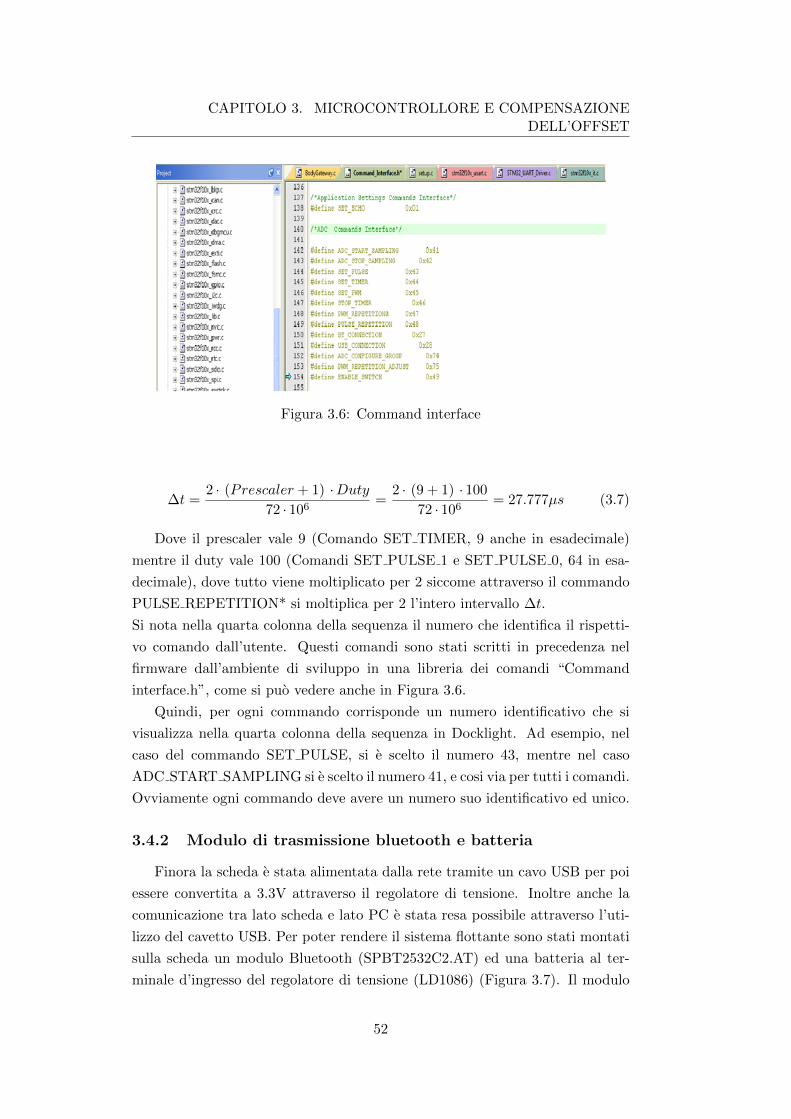
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.6: Command interface
∆t =2 · (Prescaler + 1) ·Duty
72 · 106=
2 · (9 + 1) · 100
72 · 106= 27.777µs (3.7)
Dove il prescaler vale 9 (Comando SET TIMER, 9 anche in esadecimale)
mentre il duty vale 100 (Comandi SET PULSE 1 e SET PULSE 0, 64 in esa-
decimale), dove tutto viene moltiplicato per 2 siccome attraverso il commando
PULSE REPETITION* si moltiplica per 2 l’intero intervallo ∆t.
Si nota nella quarta colonna della sequenza il numero che identifica il rispetti-
vo comando dall’utente. Questi comandi sono stati scritti in precedenza nel
firmware dall’ambiente di sviluppo in una libreria dei comandi “Command
interface.h”, come si puo vedere anche in Figura 3.6.
Quindi, per ogni commando corrisponde un numero identificativo che si
visualizza nella quarta colonna della sequenza in Docklight. Ad esempio, nel
caso del commando SET PULSE, si e scelto il numero 43, mentre nel caso
ADC START SAMPLING si e scelto il numero 41, e cosi via per tutti i comandi.
Ovviamente ogni commando deve avere un numero suo identificativo ed unico.
3.4.2 Modulo di trasmissione bluetooth e batteria
Finora la scheda e stata alimentata dalla rete tramite un cavo USB per poi
essere convertita a 3.3V attraverso il regolatore di tensione. Inoltre anche la
comunicazione tra lato scheda e lato PC e stata resa possibile attraverso l’uti-
lizzo del cavetto USB. Per poter rendere il sistema flottante sono stati montati
sulla scheda un modulo Bluetooth (SPBT2532C2.AT) ed una batteria al ter-
minale d’ingresso del regolatore di tensione (LD1086) (Figura 3.7). Il modulo
52

3.4. COMPENSAZIONE DELL’OFFSET
Figura 3.7: Integrato del modulo Bluetooth e batteria
Bluetooth viene montato sopra la scheda; esso e un integrato che gestisce la co-
municazione Bluetooth. Questo integrato contiene una antenna ed un proprio
microcontrollore il quale comunica con il microcontrollore della scheda. I due
microcontrollori si interfacciano tra di loro tramite un protocollo USART. Il
modulo Bluetooth viene visto dal lato PC come se fosse una porta COM seriale
virtuale. Attraverso Docklight si possono mandare i vari comandi che vengono
ricevuti dal modulo Bluetooth e inoltrati al microcontrollore della scheda tra-
mite il protocollo USART. Viceversa, i dati dal microcontrollore della scheda
sono inviati tramite USART al modulo Bluetooth, che poi li inoltra al PC.
In questo modo e stato reso possibile un sistema indipendente con una
sua alimentazione autonoma e una comunicazione remota tramite Bluetooth,
il quale e riferito alla sua massa flottante. Inoltre, durante le prove e stato
notato un miglioramento del segnale misurato dopo aver inserito la batteria e il
modulo Bluetooth. Guardando le figure 3.8 e 3.9 si vede negli screenshot degli
oscilloscopi un confronto della onda misurata prima e dopo l’inserimento della
batteria e del modulo Bluetooth.
Come si vede anche in figura 3.8 si nota un disturbo a 200 Hz sovrapposto
all’onda. Questo disturbo e una armonica della frequenza di rete a 50 Hz. Dopo
aver inserito la batteria e il modulo Bluetooth si vede un netto miglioramento del
segnale misurato, il quale risulta piu pulito. Questo e corretto, siccome ormai il
sistema e flottante e non ha nessun collegamento con la rete di alimentazione.
53
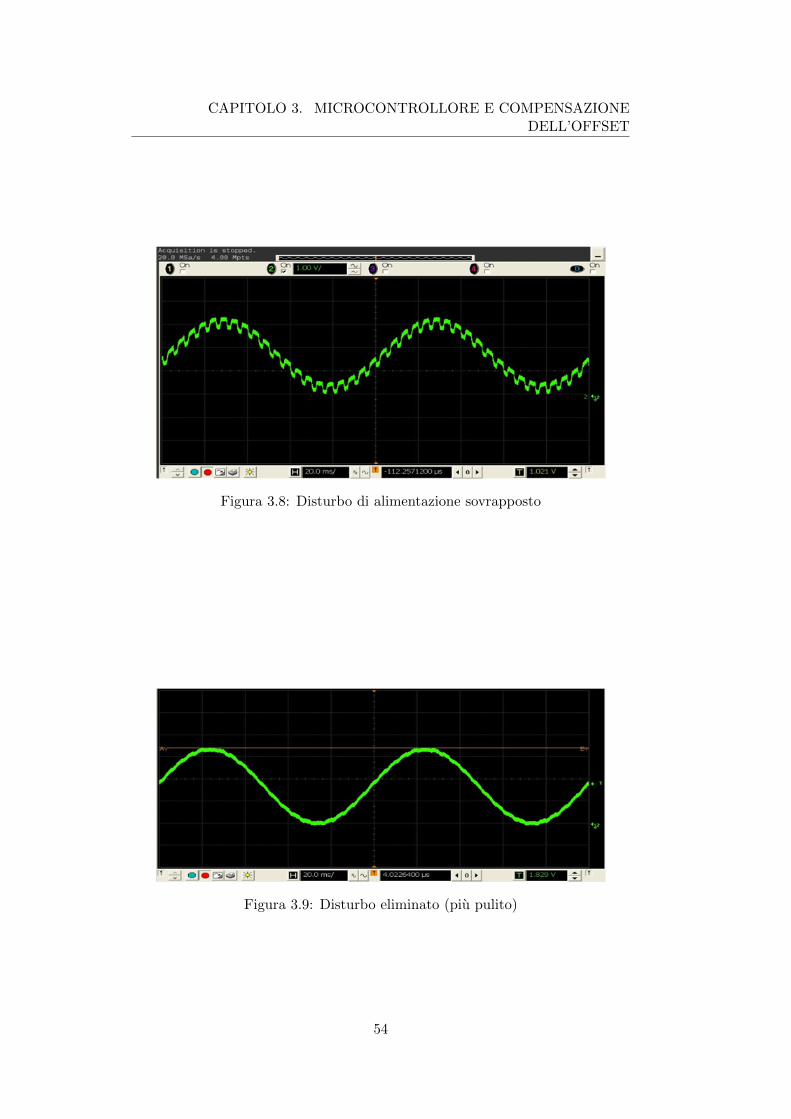
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.8: Disturbo di alimentazione sovrapposto
Figura 3.9: Disturbo eliminato (piu pulito)
54
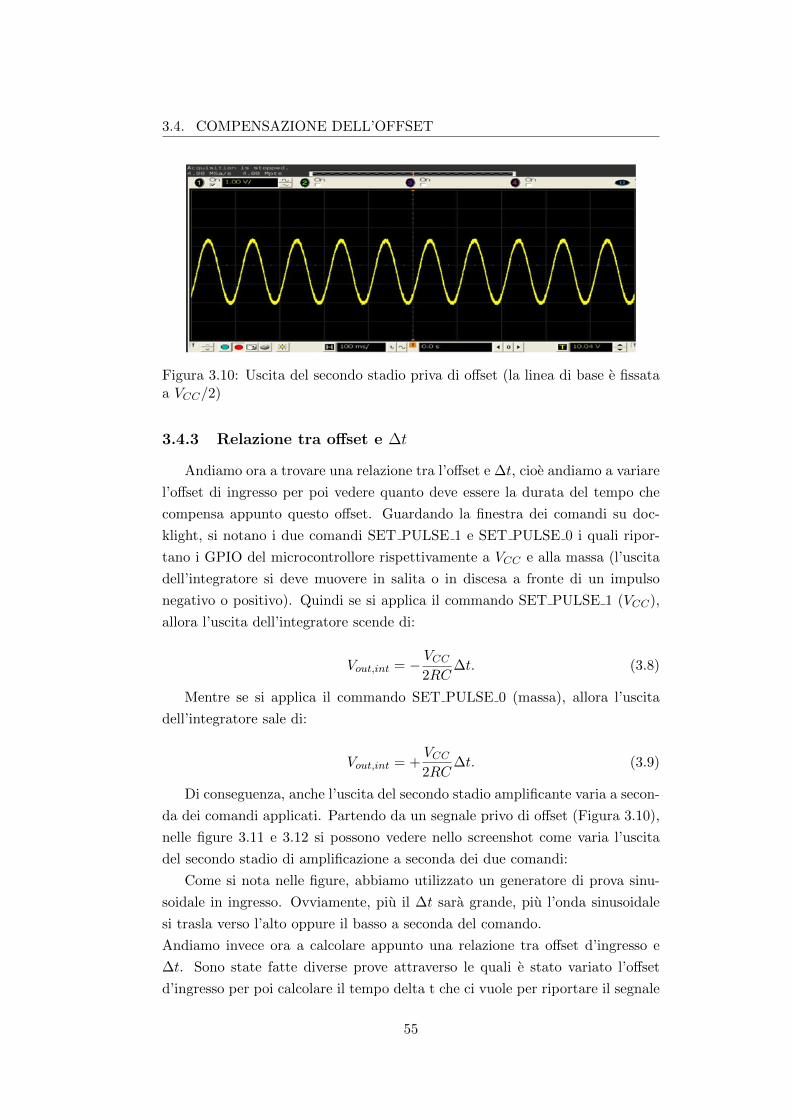
3.4. COMPENSAZIONE DELL’OFFSET
Figura 3.10: Uscita del secondo stadio priva di offset (la linea di base e fissataa VCC/2)
3.4.3 Relazione tra offset e ∆t
Andiamo ora a trovare una relazione tra l’offset e ∆t, cioe andiamo a variare
l’offset di ingresso per poi vedere quanto deve essere la durata del tempo che
compensa appunto questo offset. Guardando la finestra dei comandi su doc-
klight, si notano i due comandi SET PULSE 1 e SET PULSE 0 i quali ripor-
tano i GPIO del microcontrollore rispettivamente a VCC e alla massa (l’uscita
dell’integratore si deve muovere in salita o in discesa a fronte di un impulso
negativo o positivo). Quindi se si applica il commando SET PULSE 1 (VCC),
allora l’uscita dell’integratore scende di:
Vout,int = − VCC2RC
∆t. (3.8)
Mentre se si applica il commando SET PULSE 0 (massa), allora l’uscita
dell’integratore sale di:
Vout,int = +VCC2RC
∆t. (3.9)
Di conseguenza, anche l’uscita del secondo stadio amplificante varia a secon-
da dei comandi applicati. Partendo da un segnale privo di offset (Figura 3.10),
nelle figure 3.11 e 3.12 si possono vedere nello screenshot come varia l’uscita
del secondo stadio di amplificazione a seconda dei due comandi:
Come si nota nelle figure, abbiamo utilizzato un generatore di prova sinu-
soidale in ingresso. Ovviamente, piu il ∆t sara grande, piu l’onda sinusoidale
si trasla verso l’alto oppure il basso a seconda del comando.
Andiamo invece ora a calcolare appunto una relazione tra offset d’ingresso e
∆t. Sono state fatte diverse prove attraverso le quali e stato variato l’offset
d’ingresso per poi calcolare il tempo delta t che ci vuole per riportare il segnale
55
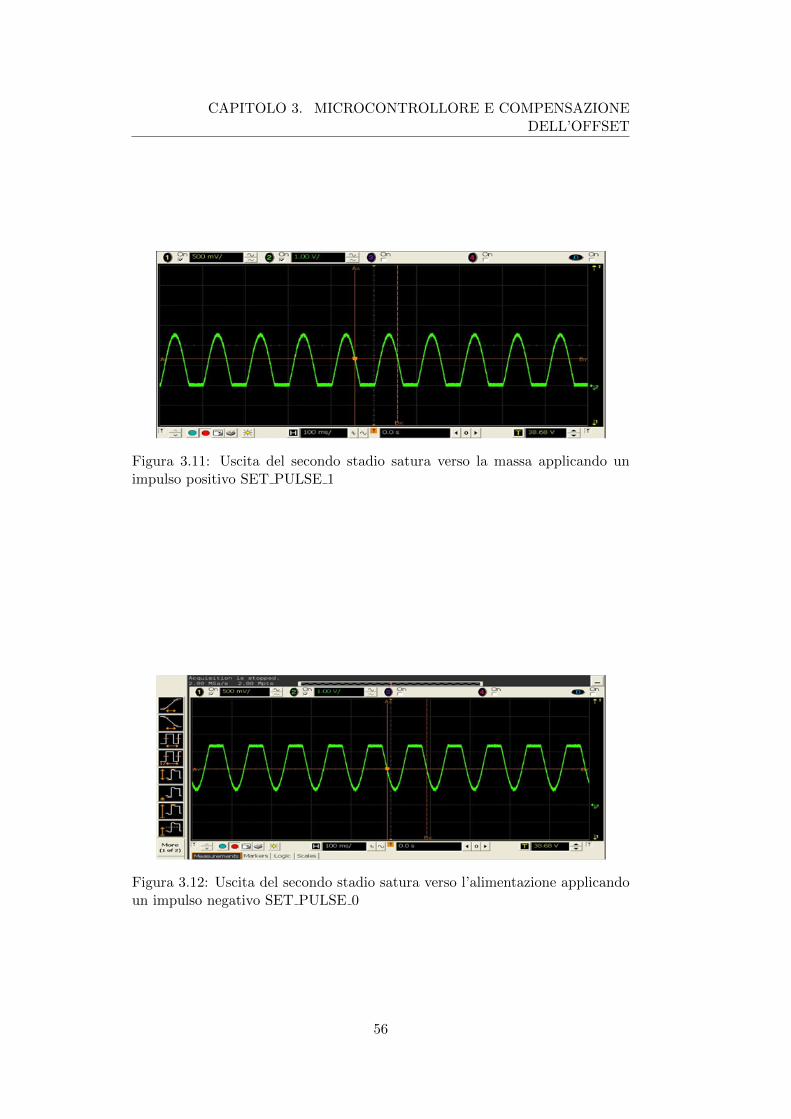
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.11: Uscita del secondo stadio satura verso la massa applicando unimpulso positivo SET PULSE 1
Figura 3.12: Uscita del secondo stadio satura verso l’alimentazione applicandoun impulso negativo SET PULSE 0
56

3.5. COMPENSAZIONE DELL’OFFSET TRAMITE RETROAZIONE
Offset d’ingresso [mV] Numero di impulsi Durata ∆t[µs]
0.36 10 277.77
0.72 20 555.54
1.44 40 1111.08
2.88 80 2222.16
5.76 160 4444.32
Tabella 3.1: Relazione tra offset d’ingresso e il tempo ∆t che riporta il segnalea meta dinamica
Figura 3.13: Relazione tra offset d’ingresso e il tempo ∆t che riporta il segnalea meta dinamica
sinusoidale a meta dinamica, ovvero compensare l’offset presente in ingresso.
Attraverso le prove fatte si trova una relazione tra offset e ∆t. Partendo con il
segnale sinusoidale a meta dinamica (VCC/2) viene variato l’offset di 0.36 mV,
0.72 mV, 1.44 mV, 2.88 mV, 5.76 mV. Nella tabella 3.1 si vede quanto tempo ci
vuole per riportare il segnale d’uscita del secondo stadio a meta dinamica una
volta variato l’offset d’ingresso.
Dunque a questo punto si puo ricavare un grafico che lega l’offset con la
durata ?t . Come si osserva anche in figura 3.13 la relazione e abbastanza
lineare. Dunque, abbiamo gia una prima stima del tempo ?t da dare in modo
tale che si compensi un corrispondente offset d’ingresso (Figura 3.12). Cosı si
fornisce la giusta iniezione di carica dai GPIO.
3.5 Compensazione dell’offset tramite retroazione
La compensazione dell’offset ha richiesto la progettazione di una retroazione
analogica pilotata dal microcontrollore. L’ambizione del progetto cosı realizzato
57
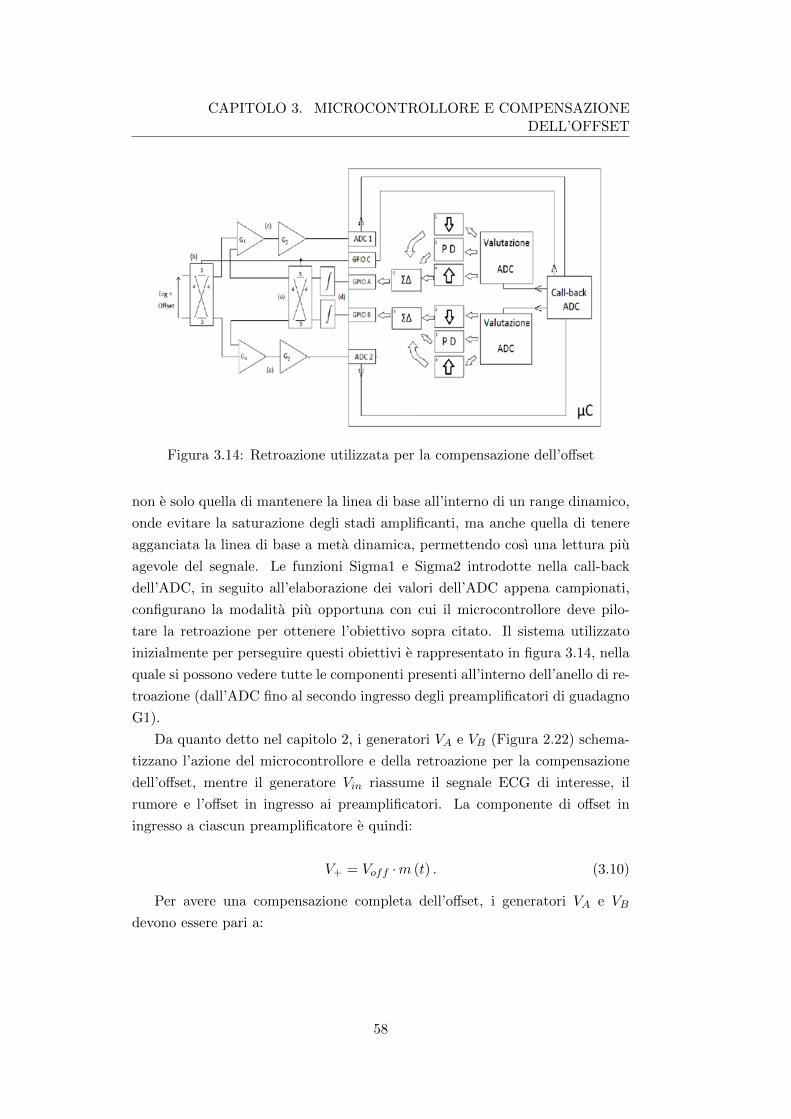
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.14: Retroazione utilizzata per la compensazione dell’offset
non e solo quella di mantenere la linea di base all’interno di un range dinamico,
onde evitare la saturazione degli stadi amplificanti, ma anche quella di tenere
agganciata la linea di base a meta dinamica, permettendo cosı una lettura piu
agevole del segnale. Le funzioni Sigma1 e Sigma2 introdotte nella call-back
dell’ADC, in seguito all’elaborazione dei valori dell’ADC appena campionati,
configurano la modalita piu opportuna con cui il microcontrollore deve pilo-
tare la retroazione per ottenere l’obiettivo sopra citato. Il sistema utilizzato
inizialmente per perseguire questi obiettivi e rappresentato in figura 3.14, nella
quale si possono vedere tutte le componenti presenti all’interno dell’anello di re-
troazione (dall’ADC fino al secondo ingresso degli preamplificatori di guadagno
G1).
Da quanto detto nel capitolo 2, i generatori VA e VB (Figura 2.22) schema-
tizzano l’azione del microcontrollore e della retroazione per la compensazione
dell’offset, mentre il generatore Vin riassume il segnale ECG di interesse, il
rumore e l’offset in ingresso ai preamplificatori. La componente di offset in
ingresso a ciascun preamplificatore e quindi:
V+ = Voff ·m (t) . (3.10)
Per avere una compensazione completa dell’offset, i generatori VA e VB
devono essere pari a:
58

3.5. COMPENSAZIONE DELL’OFFSET TRAMITE RETROAZIONE
VA = VB =Voff
2·1 +
R2
R1
R2
R1
·m (t) . (3.11)
Al fine di ottenere una perfetta azione di compensazione, si inserisce un
secondo modulatore sincronizzato con il primo modulatore tramite lo stesso
segnale di clock. In questo modo, l’azione di compensazione del microcontrollore
insieme alla restante retroazione analogica e piu rilassata, dovendo fornire in
ingresso al secondo modulatore una tensione di compensazione costante pari a:
Vcompensazione =Voff
2·1 +
R2
R1
R2
R1
(3.12)
In seguito alla call-back dell’ADC, la modalita e l’intensita con cui la re-
troazione deve reagire viene definito volta per volta dalle funzioni Sigma1 e
Sigma2 dopo aver esaminato il valore appena campionato, definito come Value
(1). Le funzioni Sigma1 e Sigma2 permettono di agire sul GPIO dopo aver im-
plementato un Sigma-delta oppure l’azione combinata di un PID ed un sigma
delta.
3.5.1 Regolatore PID
I regolatori PID, presenti nello schema a blocco precedente, hanno la fun-
zione di tenere agganciata la baseline del segnale a meta dinamica del sistema,
ossia a VCC/2. In figura 3.15 e rappresentato lo schema a blocchi di un control-
lore PID. Il regolatore riceve quindi in ingresso il valore in uscita dal sistema e lo
confronta con un valore di riferimento (nel caso in esame VCC/2). La differenza
tra i due da origine al segnale errore che viene elaborato in modo diverso dai tre
blocchi separati P proporzionale, I integrativo e D derivativo. I risultati di que-
ste elaborazioni sono poi sommate in uscita prima di essere inserite nuovamente
nel sistema. L’azione proporzionale del regolatore si ottiene moltiplicando il se-
gnale errore per una costante KP , ottenendo cosı una quantita pari a KP volte
l’entita dell’errore. In genere, se non si necessita di una particolare precisione,
si puo controllare un processo solo attraverso quest’azione. In realta, siccome
un controllore proporzionale agisce solo quando l’errore e diverso da zero, diffi-
cilmente si riesce a far convergere l’errore a zero. Per correggere l’errore dovuto
all’azione proporzionale si aggiunge un’azione integrativa. L’azione integrativa
e caratterizzata da un’azione proporzionale all’integrale nel tempo dell’errore
moltiplicata per una costante KI. In questo modo, il regolatore si ricorda
59
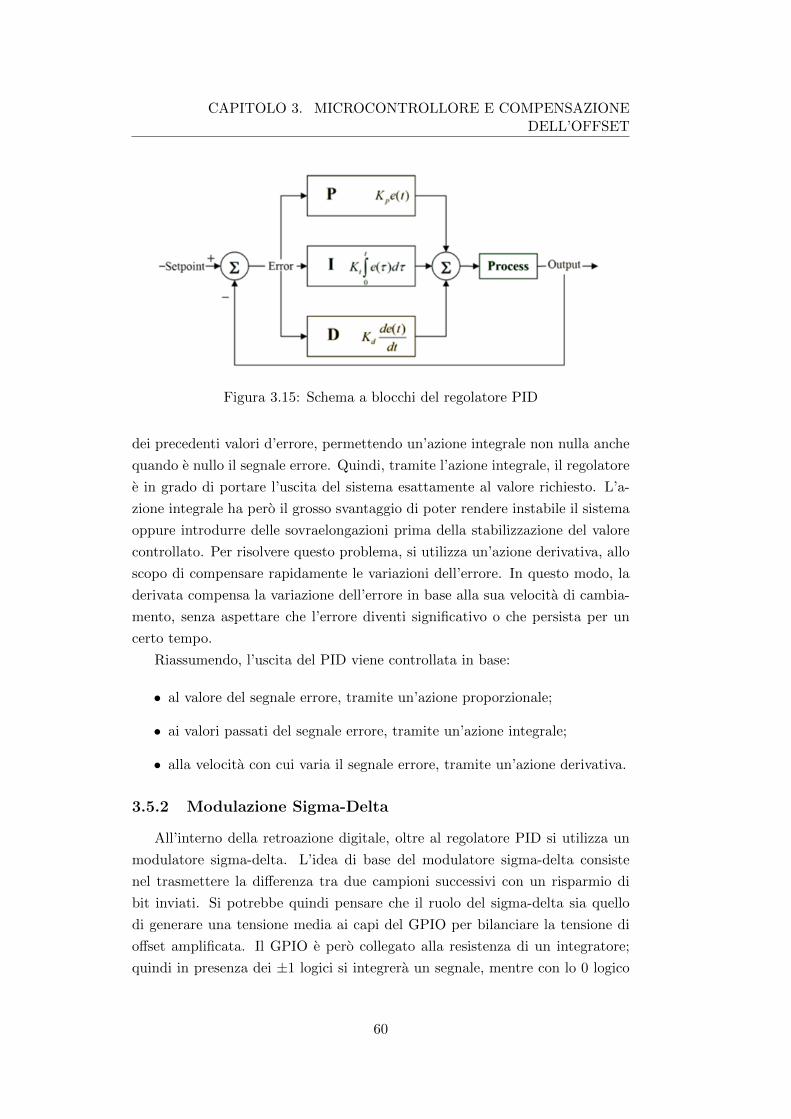
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.15: Schema a blocchi del regolatore PID
dei precedenti valori d’errore, permettendo un’azione integrale non nulla anche
quando e nullo il segnale errore. Quindi, tramite l’azione integrale, il regolatore
e in grado di portare l’uscita del sistema esattamente al valore richiesto. L’a-
zione integrale ha pero il grosso svantaggio di poter rendere instabile il sistema
oppure introdurre delle sovraelongazioni prima della stabilizzazione del valore
controllato. Per risolvere questo problema, si utilizza un’azione derivativa, allo
scopo di compensare rapidamente le variazioni dell’errore. In questo modo, la
derivata compensa la variazione dell’errore in base alla sua velocita di cambia-
mento, senza aspettare che l’errore diventi significativo o che persista per un
certo tempo.
Riassumendo, l’uscita del PID viene controllata in base:
• al valore del segnale errore, tramite un’azione proporzionale;
• ai valori passati del segnale errore, tramite un’azione integrale;
• alla velocita con cui varia il segnale errore, tramite un’azione derivativa.
3.5.2 Modulazione Sigma-Delta
All’interno della retroazione digitale, oltre al regolatore PID si utilizza un
modulatore sigma-delta. L’idea di base del modulatore sigma-delta consiste
nel trasmettere la differenza tra due campioni successivi con un risparmio di
bit inviati. Si potrebbe quindi pensare che il ruolo del sigma-delta sia quello
di generare una tensione media ai capi del GPIO per bilanciare la tensione di
offset amplificata. Il GPIO e pero collegato alla resistenza di un integratore;
quindi in presenza dei ±1 logici si integrera un segnale, mentre con lo 0 logico
60

3.6. INTRODUZIONE DEL PWM PER COMPENSARE LA CORRENTEDI LEAKAGE
Figura 3.16: Uscita del secondo stadio in presenza della corrente di leakage
non si esegue nessuna operazione, lasciando il GPIO ad alta impedenza. Per
compensare l’offset si utilizzata quindi l’integrazione del valore modulato.
3.6 Introduzione del PWM per compensare la cor-
rente di leakage
Guardando l’uscita del secondo stadio tramite l’oscilloscopio si nota che il
segnale non stia stabile a meta dinamica. Esso ha una leggera derivazione verso
l’alto dello schermo Figura 3.16.
L’uscita quindi non sta esattamente a meta dinamica ma tende a spostarsi
verso l’alto e addirittura saturare dopo poco tempo. Questo e dovuto a correnti
di leakage di scarica della capacita di integrazione che fanno sı che l’uscita del
secondo stadio saturi verso l’alto nel tempo. E stato calcolato che, nell’arco
di 60 secondi, l’uscita si sposta vero l’alto di 200 mV. Dunque abbiamo una
variazione: ∆V/∆t = 200mV/60sec del nodo d’uscita.
Attraverso la relazione ∆V/∆t = I/C si calcola che la corrente di leakage Ileak
vale:
Ileak =∆V
∆tC = 3.3µA. (3.13)
Per poter stabilizzare la linea di base a meta dinamica VCC/2 e stato gene-
rato un segnale PWM con l’unico scopo di generare degli impulsi con un duty
cycle variabile a seconda del valore della corrente di leakage da compensare
(Figura 3.17).
Questo segnale di PWM viene generato sempre dai pin di GPIO del micro-
controllore, e viene sovrapposto agli impulsi che vengono dati per compensare
61
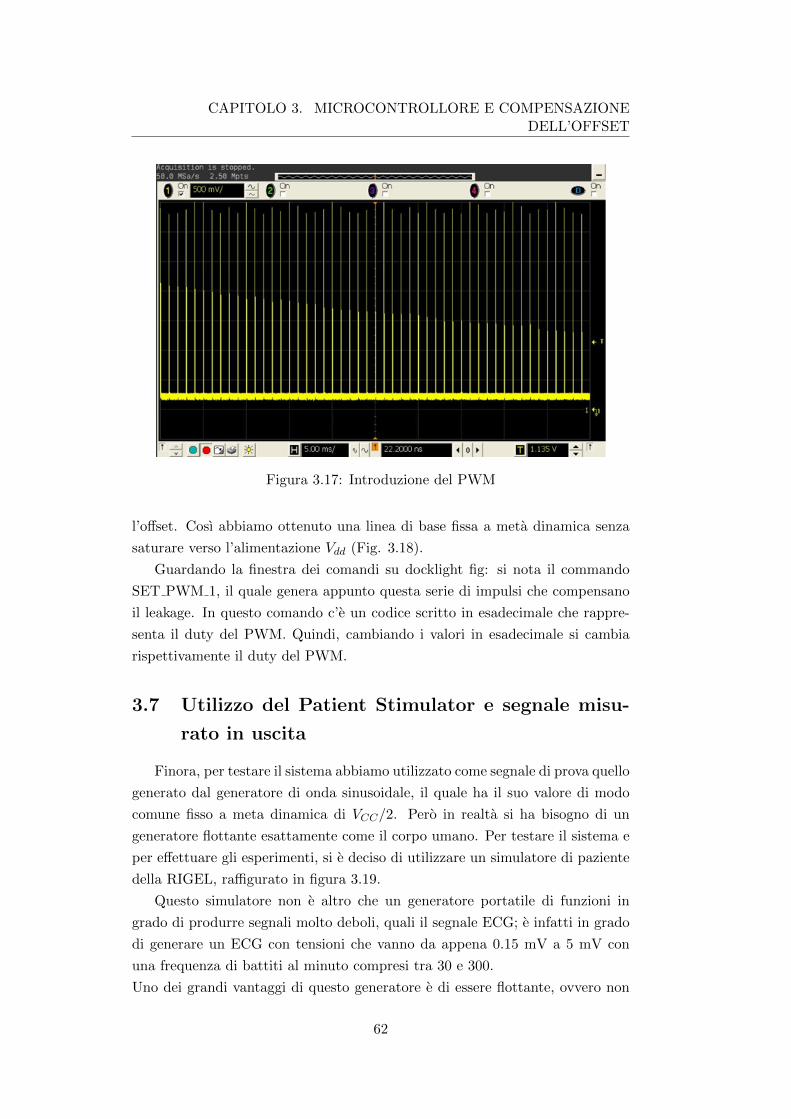
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.17: Introduzione del PWM
l’offset. Cosı abbiamo ottenuto una linea di base fissa a meta dinamica senza
saturare verso l’alimentazione Vdd (Fig. 3.18).
Guardando la finestra dei comandi su docklight fig: si nota il commando
SET PWM 1, il quale genera appunto questa serie di impulsi che compensano
il leakage. In questo comando c’e un codice scritto in esadecimale che rappre-
senta il duty del PWM. Quindi, cambiando i valori in esadecimale si cambia
rispettivamente il duty del PWM.
3.7 Utilizzo del Patient Stimulator e segnale misu-
rato in uscita
Finora, per testare il sistema abbiamo utilizzato come segnale di prova quello
generato dal generatore di onda sinusoidale, il quale ha il suo valore di modo
comune fisso a meta dinamica di VCC/2. Pero in realta si ha bisogno di un
generatore flottante esattamente come il corpo umano. Per testare il sistema e
per effettuare gli esperimenti, si e deciso di utilizzare un simulatore di paziente
della RIGEL, raffigurato in figura 3.19.
Questo simulatore non e altro che un generatore portatile di funzioni in
grado di produrre segnali molto deboli, quali il segnale ECG; e infatti in grado
di generare un ECG con tensioni che vanno da appena 0.15 mV a 5 mV con
una frequenza di battiti al minuto compresi tra 30 e 300.
Uno dei grandi vantaggi di questo generatore e di essere flottante, ovvero non
62
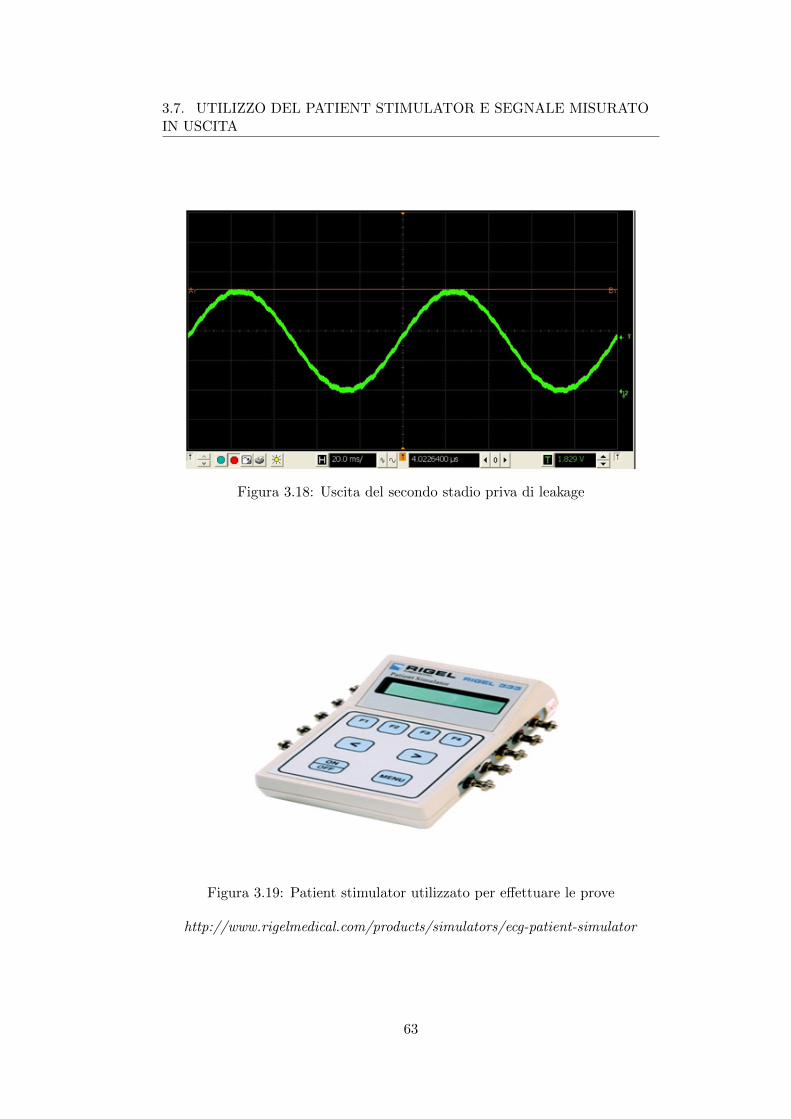
3.7. UTILIZZO DEL PATIENT STIMULATOR E SEGNALE MISURATOIN USCITA
Figura 3.18: Uscita del secondo stadio priva di leakage
Figura 3.19: Patient stimulator utilizzato per effettuare le prove
http://www.rigelmedical.com/products/simulators/ecg-patient-simulator
63
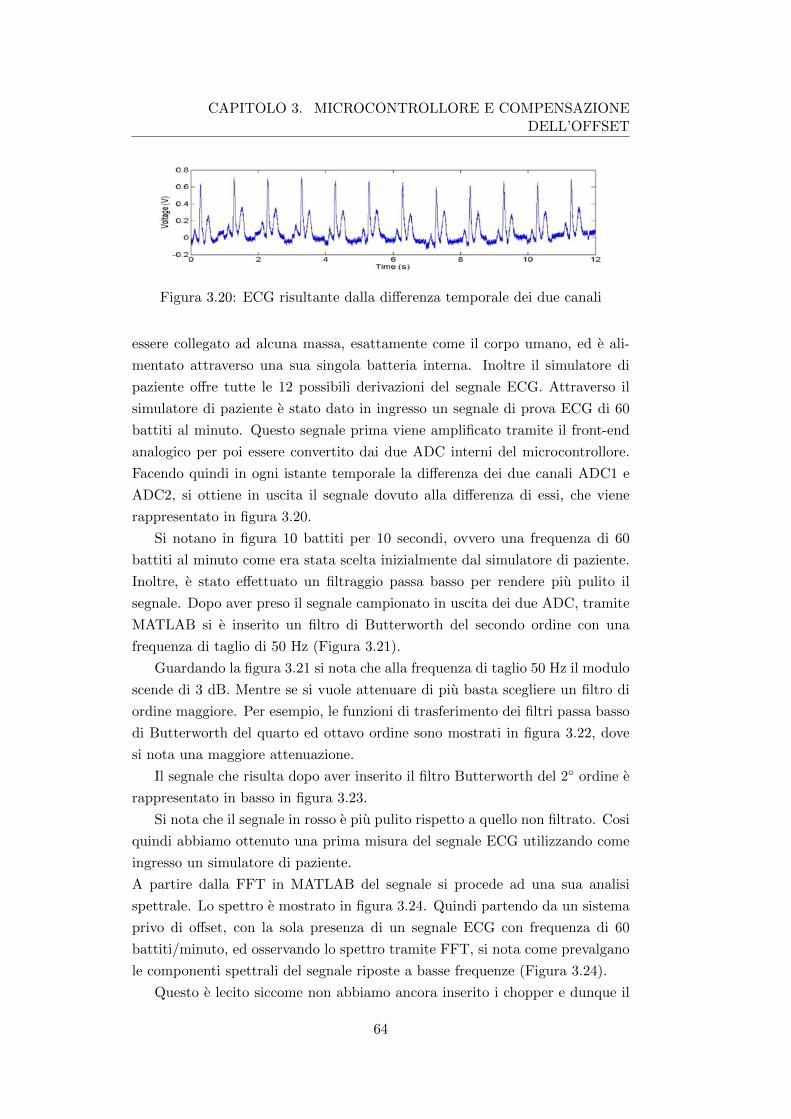
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.20: ECG risultante dalla differenza temporale dei due canali
essere collegato ad alcuna massa, esattamente come il corpo umano, ed e ali-
mentato attraverso una sua singola batteria interna. Inoltre il simulatore di
paziente offre tutte le 12 possibili derivazioni del segnale ECG. Attraverso il
simulatore di paziente e stato dato in ingresso un segnale di prova ECG di 60
battiti al minuto. Questo segnale prima viene amplificato tramite il front-end
analogico per poi essere convertito dai due ADC interni del microcontrollore.
Facendo quindi in ogni istante temporale la differenza dei due canali ADC1 e
ADC2, si ottiene in uscita il segnale dovuto alla differenza di essi, che viene
rappresentato in figura 3.20.
Si notano in figura 10 battiti per 10 secondi, ovvero una frequenza di 60
battiti al minuto come era stata scelta inizialmente dal simulatore di paziente.
Inoltre, e stato effettuato un filtraggio passa basso per rendere piu pulito il
segnale. Dopo aver preso il segnale campionato in uscita dei due ADC, tramite
MATLAB si e inserito un filtro di Butterworth del secondo ordine con una
frequenza di taglio di 50 Hz (Figura 3.21).
Guardando la figura 3.21 si nota che alla frequenza di taglio 50 Hz il modulo
scende di 3 dB. Mentre se si vuole attenuare di piu basta scegliere un filtro di
ordine maggiore. Per esempio, le funzioni di trasferimento dei filtri passa basso
di Butterworth del quarto ed ottavo ordine sono mostrati in figura 3.22, dove
si nota una maggiore attenuazione.
Il segnale che risulta dopo aver inserito il filtro Butterworth del 2 ordine e
rappresentato in basso in figura 3.23.
Si nota che il segnale in rosso e piu pulito rispetto a quello non filtrato. Cosi
quindi abbiamo ottenuto una prima misura del segnale ECG utilizzando come
ingresso un simulatore di paziente.
A partire dalla FFT in MATLAB del segnale si procede ad una sua analisi
spettrale. Lo spettro e mostrato in figura 3.24. Quindi partendo da un sistema
privo di offset, con la sola presenza di un segnale ECG con frequenza di 60
battiti/minuto, ed osservando lo spettro tramite FFT, si nota come prevalgano
le componenti spettrali del segnale riposte a basse frequenze (Figura 3.24).
Questo e lecito siccome non abbiamo ancora inserito i chopper e dunque il
64
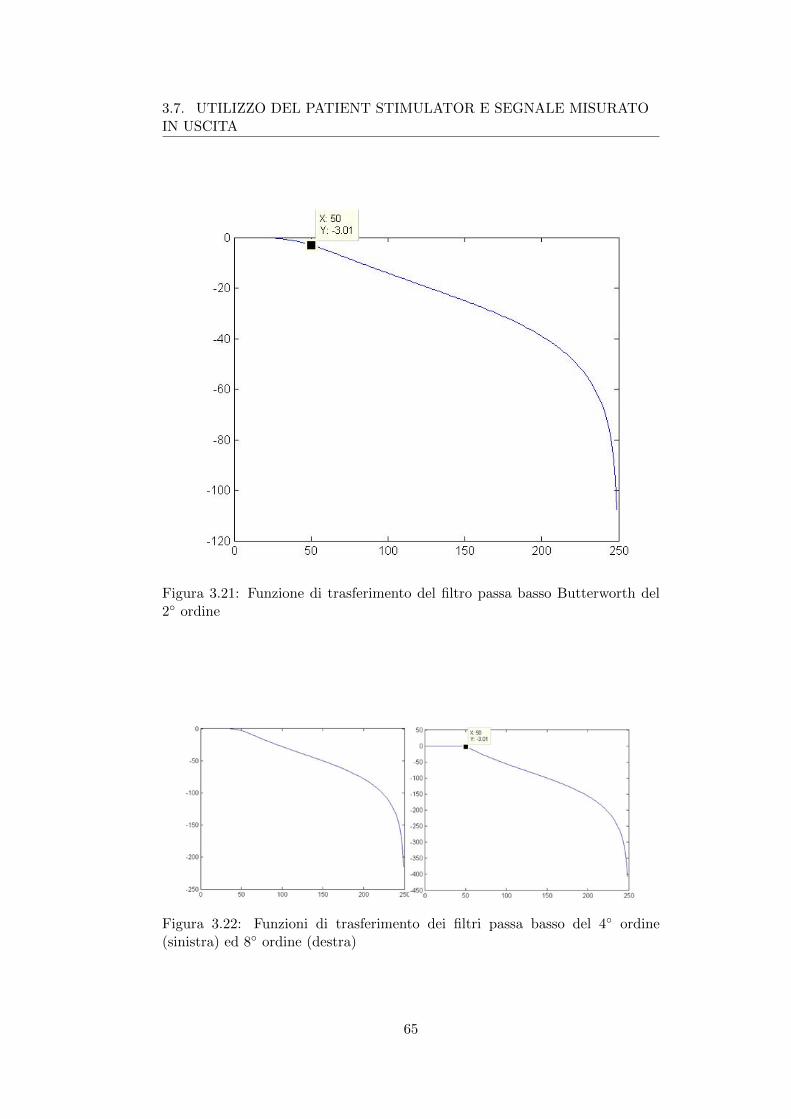
3.7. UTILIZZO DEL PATIENT STIMULATOR E SEGNALE MISURATOIN USCITA
Figura 3.21: Funzione di trasferimento del filtro passa basso Butterworth del2 ordine
Figura 3.22: Funzioni di trasferimento dei filtri passa basso del 4 ordine(sinistra) ed 8 ordine (destra)
65
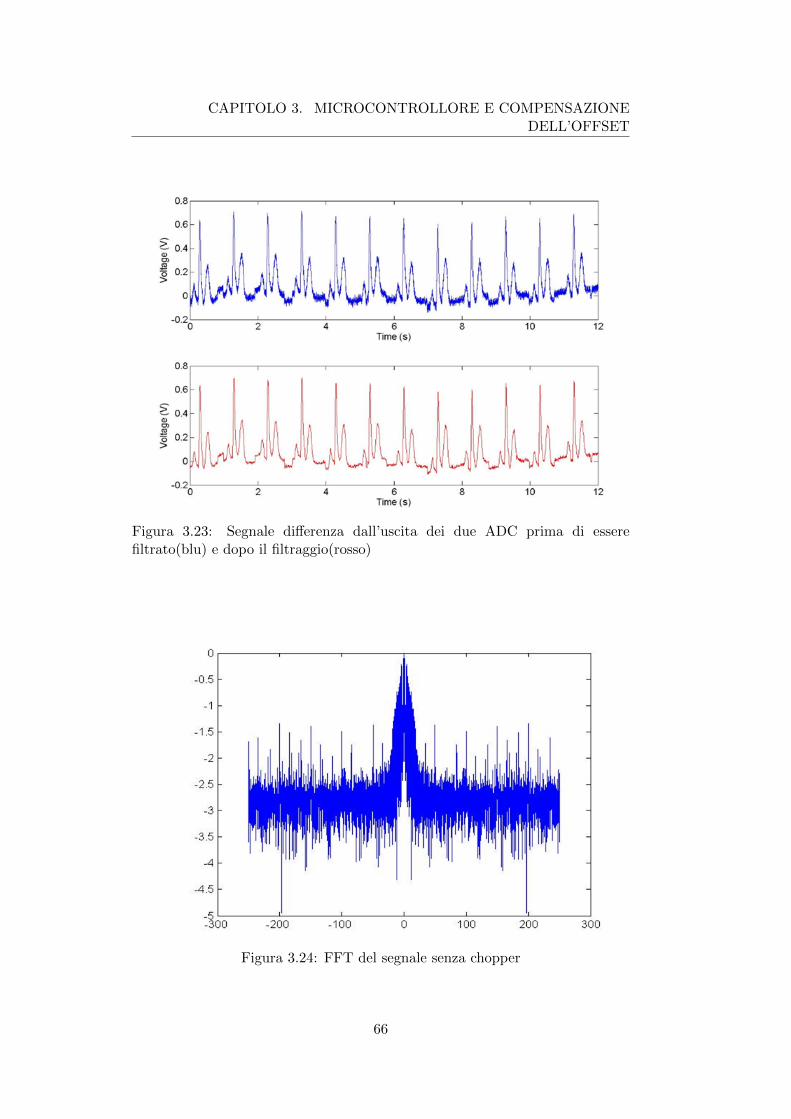
CAPITOLO 3. MICROCONTROLLORE E COMPENSAZIONEDELL’OFFSET
Figura 3.23: Segnale differenza dall’uscita dei due ADC prima di esserefiltrato(blu) e dopo il filtraggio(rosso)
Figura 3.24: FFT del segnale senza chopper
66

3.7. UTILIZZO DEL PATIENT STIMULATOR E SEGNALE MISURATOIN USCITA
Figura 3.25: FFT del segnale dopo aver inserito i chopper
segnale ha una componente spettrale intorno ad 1 Hz (60 battiti/min).
Inserendo ora i chopper in uscita al secondo stadio di amplificazione, si ottiene
la FFT rappresenta in figura 3.25.
Si puo quindi osservare come tutta l’informazione sia trasporta dalla modu-
lante a 500 Hz, e come sia rimasta una piccola componente a bassa frequenza.
67

Conclusioni
In questo lavoro di tesi si sono discussi gli obiettivi principali per lo svilup-
po di una nuova generazione di dispositivi, non invasivi, per il monitoraggio
continuo personale dello stato di salute, la diagnosi preventiva, e la gestione di
patologie, utilizzando interfacce utente e sistemi di comunicazione mobili. Al
fine di ottenere una nuova generazione di dispositivi non invasivi gli obiettivi
di minimizzazione delle dimensioni e della dissipazione di potenza sono di fon-
damentale importanza.
Nel primo capitolo si ha una panoramica introduttiva sulla fisiologia e fun-
zionalita del cuore, descrivendo le caratteristiche salienti della generazione e
propagazione dei biopotenziali fino alla formazione del segnale ECG che si vuo-
le rilevare. Si illustrano tutte le tecniche per misurare il dipolo cardiaco del
cuore, partendo prima da un set di tre misure attraverso il triangolo di Eind-
hoven fino alla misura piu ridondante a potenziali aumentati.
Nel secondo capitolo si ha una introduzione iniziale sul funzionamento globale
del sistema ed evidenziazione dei vari blocchi. Sono stati progettati dei blocchi
che costituiscono il ramo di andata del front-end analogico con enfatizzazio-
ne sui vantaggi/svantaggi da essi derivanti: descrizione dei blocchi adibiti alla
polarizzazione del sistema, rimozione del rumore 1/f , lettura e amplificazione
del segnale. L’intero sistema (sia microcontrollore che front-end analogico) e
stato integrato in una unica board. Cio permette di ridurre la complessita e il
numero di operazioni necessarie per integrare il sistema. Si e proceduto quindi
alla progettazione di uno stadio di polarizzazione del sistema e ad una sua se-
conda versione migliorata. In particolare, si e deciso di usare il microcontrollore
anche per effettuare una polarizzazione intelligente del sistema, tale da permet-
tere una lettura ad alta impedenza del segnale negli istanti di campionamento
e di polarizzare gli elettrodi nel tempo rimanente. Siccome la scheda progetta-
ta e in tecnologia CMOS, e stato inserito un modulatore analogico (chopper)
composto da switches per traslare in frequenza il segnale ed eliminare il rumore
1/f . Inoltre sono stati dimensionati tutti i componenti del primo e secondo
stadio di guadagno del front-end analogico (resistenze e capacita) tenendo in
69

CONCLUSIONI
considerazione i requisiti del sistema: ampiezza del segnale in ingresso, spettro,
offset ed alimentazione.
Nel terzo capitolo si introduce il microcontrollore in grado di effettuare una
retroazione digitale per stabilizzare il sistema e riportarlo in dinamica, anche a
fronte di una presente tensione di offset, potenzialmente critica per la saturazio-
ne del sistema. Per rendere il sistema flottante esattamente come il corpo uma-
no sono stati inseriti di conseguenza il modulo Bluetooth (SPBT2532C2.AT),
l’alimentazione attraverso batteria ed infine il patient stimulator che genera il
segnale del cuore con tutte le possibili derivazioni e le analoghe frequenze car-
diache. Il punto di partenza e stato quello di testare come si comporta il sistema
ad anello aperto, ovvero, cambiando la tensione di offset all’ingresso si trova
dopo quanto tempo la linea di base si riporta a meta dinamica. E’ stato dun-
que ottenuto un grafico che in prima approssimazione rappresenta una relazione
tra offset d’ingresso e la durata ∆t da dare tramite GPIO del microcontrollore.
Prossimo obbiettivo per la correzione dell’offset e quello di retroazionare il siste-
ma digitalmente attraverso un controllo sul valore campionato dal convertitore
analogico digitale, permettendo l’elaborazione del valore stesso da parte di un
regolatore PID ed un sigma-delta, in grado di produrre all’ingresso di un inte-
gratore analogico una tensione media che dopo essersi integrata, permette di
fissare l’uscita del sistema a meta dinamica. Infine, dopo tutto non manca altro
che testare questa scheda nel corpo di un paziente. Questo e possibile grazie
all’utilizzo degli elettrodi di prova composti semplicemente da una flat board
adesiva a cui si collegano dei connettori per consentire l’interfaccia con la board
di prova. Gli elettrodi sono naturalmente usa e getta e presentano una diversa
impedenza caratteristica. Per risolvere il problema dell’adattamento dell’im-
pedenza in fase di misura e quindi necessario poter progettare l’impedenza di
ingresso del front-end la piu elevata possibile; per ottenere questo scopo, e par-
ticolarmente indicata la tecnologia CMOS. Infatti, in questo modo, l’elettrodo
si confrontera direttamente con l’impedenza di GATE del transistor in ingresso,
la quale sara idealmente infinita.
Un front-end progettato per integrarsi con un microcontrollore che sincronizza,
monitora e controlla i segnali analogici risulta una soluzione efficiente e facile
da implementare. Come gia affermato, l’uso del microcontrollore permette in-
fatti di adottare un approccio meno restrittivo nella progettazione analogica,
permettendo di porre meno attenzione su alcuni paramenti durante la proget-
tazione. Tra questi, si cita ad esempio l’offset d’ingresso degli operazionali o
la progettazione di un buon oscillatore locale per modulare il segnale ad alta
frequenza. Ricorrendo al microcontrollore si possono infatti utilizzare i GPIO
70

CONCLUSIONI
per effettuare un clock perfettamente sincronizzato con il campionamento e fa-
cilmente variabile in frequenza.
Lo sviluppo futuro sara l’integrazione di tutte le soluzioni esaminate all’interno
di un chip contente il microcontrollore. In questo modo, al progetto di un nuo-
vo microcontrollore su piattaforma ARM, si aggiungera un’ulteriore semplice
periferica, in grado di amplificare un segnale biometrico, ed in particolar modo
di effettuare un elettrocardiogramma. La nuova periferica sara costituita ap-
punto da una parte completamente analogica in grado di amplificare il segnale
in ingresso, senza preoccuparsi della stabilizzazione e della pulizia del segnale,
demandate al microcontrollore. L’implementazione dell’intero sistema all’inter-
no di un unico chip permettera, quindi, di dare vita ad una nuova generazione
di Body Gateway,in grado di monitorare il battito cardiaco ed i parametri vitali
del paziente come la versione attuale, ma piu leggera, comoda e miniaturizza-
ta. L’utilizzo della tecnologia CMOS, gia utilizzata per i microcontrollori, per
implementare tutto il sistema, garantisce una dissipazione di potenza minima,
permettendo quindi di ridurre il numero di cambi della batteria.
71

Bibliografia
[1] http://www.st.com.
[2] P.R. Gray and R.G. Mayer. Analysis Integrated Circuit Design. Wiley, 2001.
[3] http://it.wikipedia.org.
[4] http://www.rigelmedical.com.
73

Ringraziamenti
Ringrazio il mio relatore, Prof. Marco Bianchessi, per avermi dato l’oppor-
tunita di svolgere il lavoro di tesi e di portare cosi a compimento i miei ultimi
anni di studi universitari.
Desidero inoltre esprimere la mia gratitudine al correlatore, Ing. Marco De
Fazio, ed a tutto il team di STMicroelectronics per avermi assistito durante
lo svolgimento della stessa, in particolare al Dott. Alessandro Nicolosi per la
collaborazione e il supporto fornitimi.
Ringrazio i miei genitori e mia sorella per tutti gli sforzi e sacrifici che loro
hanno fatto per me.
Un ringraziamento particolare va a mia zia per avermi consigliato di affrontare
questo percorso universitario ed avermi sempre aiutato insieme a suo marito
durante tutti questi anni.
Ringrazio inoltre tutti i miei amici, universitari e non, con i quali ho condiviso
questi anni: Carlo, Defra, Daggy, Delu, Biondo, Nasta, Fede, Dappi, Nacca.
Un ringraziamento speciale va a Viliane con la quale negli ultimi due anni ho
passato momenti indimenticabili.
Ringrazio infine tutti i miei amici del collegio di Martinit.
75
