sistema indicador de carga liss se - abus
TRANSCRIPT

Kransysteme
Manual de instrucciones originalAN 102594 / A 734.ES 20.09.2010
Instrucciones de servicio
para
Sistema indicador de carga
LIS – SE
No de fábrica _______________________
FabricanteABUS Kransysteme GmbH Tel. ##49 2261 / 37-0Sonnenweg 1 Fax. ##49 2261 / 37247D - 51647 Gummersbach [email protected]
Queda prohibida la reproducción, utilización y comunicación a terceros de este documento sinprevia autorizaciónexpresa. El incumplimiento obligará al pago de indemnizaciones.Quedanreservados todos los derechos de registro de patentes o de modelos de utilidad.
Estas instrucciones demanejo están pensadas para unpaís de habla castellana y para usuariosy técnicos de habla castellana.

Indice
Página 2 Estado: 20.09.2010
1 Generalidades 3. . . . . . . . . . . .1.1 Descripción breve del sistema 3. . . . .
1.2 Utilización prevista 3. . . . . . . . . . . . . . . .
1.3 Observaciones acerca de la garantía 3
1.4 Sustitución del aparato 3. . . . . . . . . . . .
2 Funciones 3. . . . . . . . . . . . . . . .2.1 Desconexión de sobrecarga 4. . . . . . .
2.2 Interruptor de carga parcial 4. . . . . . . .
2.3 Tarado alternativo 4. . . . . . . . . . . . . . . .
2.4 Memoria de colectivosde carga (OPCIONAL) 4. . . . . . . . . . . .
2.4.1 Clasificación en gruposde mecanismos propulsores 5. . . . . . .
2.4.2 Terminología 5. . . . . . . . . . . . . . . . . . . . .
2.5 Función de control integrada 6. . . . . .
2.6 Funciones de seguridad 6. . . . . . . . . . .
3 Componentes 6. . . . . . . . . . . . .3.1 Unidad de análisis LIS–SE 6. . . . . . . . .
3.2 Módulo de medición de corriente 6. . .
3.3 Indicación de carga (OPCIONAL) 7. . .3.3.1 Función de indicación de carga 7. . . .
4 Datos Técnicos 7. . . . . . . . . . . .4.1 Sistema indicador de cargas LIS–SE 7
4.2 Indicador de carga LAZ / GLZ 8. . . . . .
5 Manejo 8. . . . . . . . . . . . . . . . . . .5.1 Unidad de mando digital 8. . . . . . . . . .
5.2 Ajustes básicos 8. . . . . . . . . . . . . . . . . .
5.3 Lectura de la memoria delcolectivo de cargas 9. . . . . . . . . . . . . . .
6 Instalación 9. . . . . . . . . . . . . . . .6.1 Caja y esquemas eléctricos 9. . . . . . . .
6.2 Normas 13. . . . . . . . . . . . . . . . . . . . . . . . .
7 Fallos 13. . . . . . . . . . . . . . . . . . . . .7.1 Causa / eliminación 13. . . . . . . . . . . . . . .
7.2 Información de servicio 13. . . . . . . . . . .
8 Activación de la unidadde control LIS 14. . . . . . . . . . . . .
9 Eliminación, puesta fuerade servicio 14. . . . . . . . . . . . . . . .
10 Lista de parámetros LIS – SE 14
11 Descripción individual de losparámetros LIS – SE 15. . . . . . .
12 Ajuste estándar 22. . . . . . . . . . .
13 Clasificación de módulos demedición de corriente amotores de elevación GM 27. .
14 Declaración de Conformidad 37

Página 3AN102594 / A 734.ES
1 GeneralidadesLas instrucciones de montaje, servicio y manteni-miento deben guardarse siempre en el lugar dondeestá instalado el polipasto eléctrico, de forma que elpersonal de manejo tenga acceso a ellas en cualquiermomento.
Antes de iniciar los trabajos, el personal encargado delmanejo, delmantenimientoode las reparaciones debehaber leído y entendido bien las instrucciones de ma-nejo.
1.1 Descripción breve del si-stema
El Sistema Indicador de Cargas LIS---SE de ABUS esun sistema compacto y universal demedición y valora-ción de cargas para polipastos y grúas. Adicional-mente se encarga de algunas funciones de control delelevador.La concepción del LIS–SE se basa en un análisis quese realiza por microcontrolador de la corriente y de latensión del motor de elevación en cuestión. El módulobásico LIS–SE, con memoria opcional de colectivo decargas, permite protocolizar y valorar el funciona-miento real de un polipasto según FEM 9.755.Con el LIS---SE se puede controlar la carga máxima deun mecanismo de elevación, al mismo tiempo se lograunamáxima flexibilidad gracias a la integración demu-chas y variadas funciones.
Características especiales:D Desconexión por sobrecargaD Análisis de cargasD indicador de carga LAZ y/o GLZ (OPCIONAL)D Memoria de colectivos de carga para FEM 9.511(OPCIONAL)
D Segundo punto de desconexión (ajustable en pa-sos de 2%)
D desconexión de la velocidad de elevación principalcuando la carga se levante bruscamente
D Puntos de conmutación de sobrecarga hastamáximo el 110% de la capacidad de carga ajusta-bles de forma variable
D Puntos de desconexión por sobrecarga de ajustevariable
D El ajuste de los dispositivos se efectúa a través deuna unidad de mando digital integrada
D Mensajes de fallo a través de la unidad de mandodigital y del indicador de carga
D Señales de mando galvánicamente separadasD Requieren poco espacio gracias a su construccióncompacta
D Fácil mantenimiento, ya que todas las conexionesson de enchufe
D función integrada de supervisión y control
1.2 Utilización previstaEl sistema LIS---SE de ABUS está destinado a su apli-cación en controladoras de polipastos eléctricos. Elaparato ha sido desarrollado especialmente para suaplicación en aparatos asíncronos de conmutación depolos; pero también puede aplicarse para la supervi-sión de máquinas asíncronas sin conmutación de po-los. Está concebidopara el empleo en cajas cerradas yse recomienda utilizarlo sólo en el marco de los DatosTécnicos indicados en el capítulo 4. Las condicionesdeuso y formas de trabajo distintas a las previstas debenverificarse y ajustarse en cada caso. Eventualmente serequiere la autorización del fabricante.
1.3 Observaciones acerca de lagarantía
ABUS no se responsabilizará, ni ante el usuario ni anteterceros, de los daños causados por un uso indebido,incorrecto o por ajustes y trabajos realizados por per-sonal no cualificado.
Atencion!a garantía se considerará extinguida en casode llevar a cabo, bajo responsabilidad pro-pia, modificaciones en los componentes,efectuar el montaje de forma distinta a las in-strucciones y/o al plan de instalación outilizarpiezas que no sean piezas originales ABUS.ABUS no se responsabilidad de los dañosadicionales en grúas o polipastos causadospor ajustes incorrectos en el aparato.
Recomendamos encargar los trabajos demantenimiento y reparación al servicio post-venta de ABUS.
1.4 Sustitución del aparatoSi se realiza un cambiodel aparato conmemoria colec-tiva de carga, debe leerse el valor de esta memoria eintroducirlo en el nuevo aparato como valor inicial. Sehará también una anotación en el libro de verificacio-nes.
_________________________________
2 FuncionesEn general:Para la medición de cargas, el LIS---SE capta el todaslas tres líneas de alimentación del motor la tensión y la
corriente del polipasto controlado; la medición de cor-riente se realiza a través de un módulo convertidor decorriente externo.

Página 4 Estado: 20.09.2010
Con las dimensiones medidas se forma una señal pro-porcional a la carga.Ya que durante la fase inicial del motor de elevación nopuede haber valoración de carga durante unos 150ms, en la elevación sepermite al principio sólo la veloci-dad de precisión. Sólo cuando finaliza la medición dela carga y después de un tiempo de retardo de 0,5 seg,se desbloquea también la velocidad principal, siemprey cuando no se haya detectado una sobrecarga.Para evitar una elevación de la carga con funciona-miento a pequeñas pulsaciones se ha añadido un con-tador de pulsaciones que desconecta el elevador si sesupera el límite programado sin que se haya podidoefectuar una medición.Si el régimen de pulsaciones intermitentes se realizadurante un excesode tiempoy si sesobrepasa lacargamáxima permitida, el aparato cambia a ”sobrecarga”.
2.1 Desconexión de sobrecargaEl punto de desconexión por sobrecarga se puede aju-star libremente a través de la unidad demandoDBEde0 a 110% de la capacidad nominal de carga. Los valo-res introducidos dentro de este campo se refieren alajuste estándar del 110%. El LIS–SE dispone de dosrelés de conexión para desbloquear la velocidad deelevación de precisión y la velocidad de elevación prin-cipal. En caso de sobrecarga, estos relés desconectanel movimiento de elevación, al mismo tiempo el indica-dor de carga avisa con luz intermitente en intervalos deun segundo.La acción de la desconexión de sobrecarga puededivi-dirse en dos campos:
a) Desconexión de sobrecarga estática: Las cargasestáticas no deben superar el 110%de la carga no-minal. Como valor real de la carga se toma el pro-medio de las cargas registradas durante un deter-minado tiempo, que se compara con el valor límite.De esta forma se evita una desconexión prematuradebida a puntas de carga dinámicas. Cuando sedetectan cargas estáticas por encima del 110 %,ambos relés de salida se desconectan.
b) Desconexión en caso de aumento rápido de lacarga: Si la carga aumenta demasiado rápida-mente, se desactiva el relé de salida para la veloci-dad de elevación principal. No vuelve a excitarsehasta el final del aumento de la carga si duranteeste tiempo no se ha producido una sobrecarga.De esta forma se evita que una sobrecarga sepueda elevar demasiado bruscamente y con el ca-ble flojo, o que el cable se vea sometido a fuerzasexcesivas si el gancho se encalla repentinamente.
Observación:La carga puede bajarse en cualquier mo-mento, incluso si se ha accionado la desco-nexión de sobrecarga. El estado ”sobre-carga” sólo podrá borrarse bajando la carga,con una duración mínima del proceso de de-scenso de 1 seg.El estado ”sobrecarga” no podrá borrarsedesconectando la tensión de alimentación oaccionando el ”PARO DE EMERGENCIA”.
2.2 Interruptor de carga parcialEn algunos casos de aplicación se requiere, aparte dela desconexión por sobrecarga en sí, un segundopunto de desconexión para una carga por debajo de lacarga nominal. Este es el caso, por ejemplo, si unaparte de la construcción de la nave no está dispuestapara la capacidad de carga total de la instalación degrúa.El sistema LIS---SE ofrece la posibilidad de activar unpunto de desconexión adicional (ajustable por elparámetro 4.0). Si en la entrada EA del aparato hayseñal, los relés del elevador saltan cuandose supera elvalor programado en P4.0.El aparato pasa a estado de ”sobrecarga”.Para otras aplicaciones se puede incorporar unmódulo transformador con relé adicional. A través delparámetro 4.2 se puede programar libremente el puntode conexión de este relé dentro del ámbito de 0---110%de la carga nominal.
2.3 Tarado alternativoA través deuna tecla de tara (TARA), que suele estar enla botonera, se puede poner a cero la indicación decarga LAZoGLZconuna carga determinada en el gan-cho (por ejemplo, la plataforma de transporte de car-gas). Para ello hay que pulsar la tecla de tara en plenaelevación durante 3 segundos, hasta que la pantalla seponga a cero.Anteriormente debe haberse registrado una carga.Repitiendo el proceso se puede registrar una nuevatara en cualquier momento.Al elevar una carga inferior a la carga tarada anterior-mente, aparecerá en el indicador el valor ”-0.00”, queindica que la carga suspendida es inferior a la carga ta-rada.La tara se borra cuando se pulsa la tecla de tara du-rante unos 3 segundos con el motor de elevación pa-rado.
2.4 Memoria de colectivosde carga (OPCIONAL)
El sistema indicador de carga LIS–SE con memoria decolectivos de carga integrado ofrece la posibilidad de

Página 5AN102594 / A 734.ES
protocolizar el funcionamiento real de un elevador.Aparte del tiempo de trabajo total T, correspondiente altiempo de conexión efectivo del motor, se registra tam-bién la carga real del elevadormediante el continuoan-álisis de los valores de carga medidos.
El dispositivo LIS–SE calcula a partir de estos datos eluso real S, el factor del espectro de cargas Km, asícomo la duración restante del elevador según la normaFEM 9.755. El factor del espectro de cargas corres-ponde al colectivo de cargas con el cual se ha utilizadola grúa.
2.4.1 Clasificación en gruposde mecanismos propulsores
La Directiva sobre Maquinaria de la CE exige medidasde protección para evitar peligros en polipastos ygrúas por cansanciooenvejecimientodelmaterial. Por
ello se han fijado las siguientes medidas para alcanzarperíodos de trabajo seguros (S.W.P.).
Los polipastos se clasifican en diferentes grupos demecanismo impulsor según FEM 9.511.
El explotador del elevador de serie es responsable deque se protocolice el funcionamiento real, docu-mentándolo comomínimo una vez al año en el libro deverificaciones.
En las comprobaciones periódicas debe reproducirsey documentarse si el uso del polipasto de serie está to-davía dentrodel S.W.P. (SafeWorkingPeriod=Períodode Funcionamiento Seguro).
La siguiente tablamuestra la duración teórica de usoDsegún la clasificación del mecanismo propulsor y elfactor del espectro de cargas.
Utilización teórica D (h)
Grupos propulsores 1DmM1
1CmM2
1BmM3
1AmM4
2mM5
3mM6
4mM7
5mM8
LineaColectivos de carga /factor del espectro de
cargaUtilización teórica D (h)
1ligero/a 1 / L1K = 0.5
(Km1 = 0.125 ≡ 0.53)800 1600 3200 6300 12500 25000 50000 100000
2medio/a 2 / L20.5 < K < 0.63
(Km2 = 0.25 ≡ 0.633)400 800 1600 3200 6300 12500 25000 50000
3pesado/a 3 / L30.63 < K < 0.8(Km3 = 0.5 ≡ 0.83)
200 400 800 1600 3200 6300 12500 25000
4muy pesado/a 4 / L40.8 < K < 1(Km4 = 1 ≡ 13)
100 200 400 800 1600 3200 6300 12500
Una vez consumida la vida útil teórica D puede haberpeligro para personas ymáquinas en el uso de grúas ypolipastos. La utilización de una memoria de colecti-vos de carga permite averiguar la utilización real S, conla cual se puede calcular la vida restante.En el caso de los elevadores de serie provistos de unLIS–SE con memoria de colectivos de carga, el funcio-namiento se protocoliza de forma electrónica. El verifi-
cador (perito) puede visualizar en cualquier momentola utilización real S y otras magnitudes características(véase cap. 5.3).
La clasificación del mecanismo propulsor está gra-bada en el dispositivo LIS–SE y puede visualizarse através de la unidad de mando digital. Se indica en ho-ras de carga completa.
_________________________________
2.4.2 TerminologíaUtilización teóricaLa vida útil teórica D es el tiempo total de funciona-miento calculado de un polipasto para una duraciónútil estimada de unos 10 años con la clasificación degrupos impulsores según FEM 9.511.Utilización realLa utilización real S o utilización efectiva se averigua abasede los colectivos de carga yde lascorrespondien-tes horas de trabajo.Duración total de usoEl período transcurrido desde la puesta en marcha ha-
sta la puesta fuera de servicio definitiva de un elevadorde serie se denomina duración total de uso.Vida restanteLa vida restante, es decir, el uso residual teórico, re-sulta de la diferencia entre la utilización real S y la utili-zación teórica D. Cuando se acabe la vida útil debe re-alizarse una revisión completa del equipo.Período de funcionamiento seguro (S.W.P.)El período de funcionamiento seguro está vigentemientras que S/D sea <=1

Página 6 Estado: 20.09.2010
2.5 Función de control integradaJunto a su función de seguro de sobrecarga, LIS---SEofrece toda una serie de funciones integradas que con-trolan el funcionamiento del elevador.D AC---4 Conexión protectoraPara alargar la vida del contactor de la velocidadrápida de elevación, LIS---SE controla que el con-tactor correspondiente se desconecte después detranscurrido el tiempo prefijado de arranque delmotor. De esta forma se reduce notablemente eldesgaste térmico de los contactos.
D Freno generadorCada proceso de frenado en la velocidad rápida serealiza bajo control de LIS---SE con un frenado ge-nerador a través de la velocidad de precisión antesde cerrarse del todo. Así semultiplica la vida útil delrotor de frenado.
D Supervisión de la corriente del motor LIS---SE con-trola permanentemente las entradas de corriente.Si se detecta una corriente de motor demasiadoelevada durante mucho tiempo, el aparato desco-necta de inmediato el contactor K1.También se desconecta el contactor principal si sedetecta una corriente de motor sin que haya unaseñal de ”elevación” o ”descenso” activa.Tras la desconexión, la pantalla del aparato parpa-dea indicando el valor de corriente detectado.
Tras una espera de 2 minutos, el aparato se vuelvea conectar automáticamente.Se puede lograr un rearme anticipado con:a. Desconexión de la tensión de alimentaciónb. Accionamiento simultáneo de la tecla ”subir”o bajar en la unidad de mando digital.
2.6 Funciones de seguridadEl LIS---SE es un dispositivo controlado por micropro-cesador. Para lograr un máximo nivel de seguridad seha previsto un circuito de seguridad adicional que sólopermite los movimientos de elevación y descensocuando se haya reconocido previamente un funciona-miento correcto del microprocesador. La valoración deun funcionamiento correcto se realiza mediante un cir-cuito lógico independiente del procesador.Antes de permitir el funcionamiento del polipasto secomprueba si el relé está en posición de reposo. Si noes éste el caso, por ejemplo por el desgaste de los con-tactos de relé, el sistema impedirá el funcionamientodel polipasto.Otra función de seguridad es el control constante de laexistencia de la señal de ”subir” o ”bajar” cuando elmotor está enmarcha. Si el sistema lógico detecta queno hay señales de control, el circuito de seguridad de-sconectará automáticamente el mecanismo de eleva-ción.
_________________________________
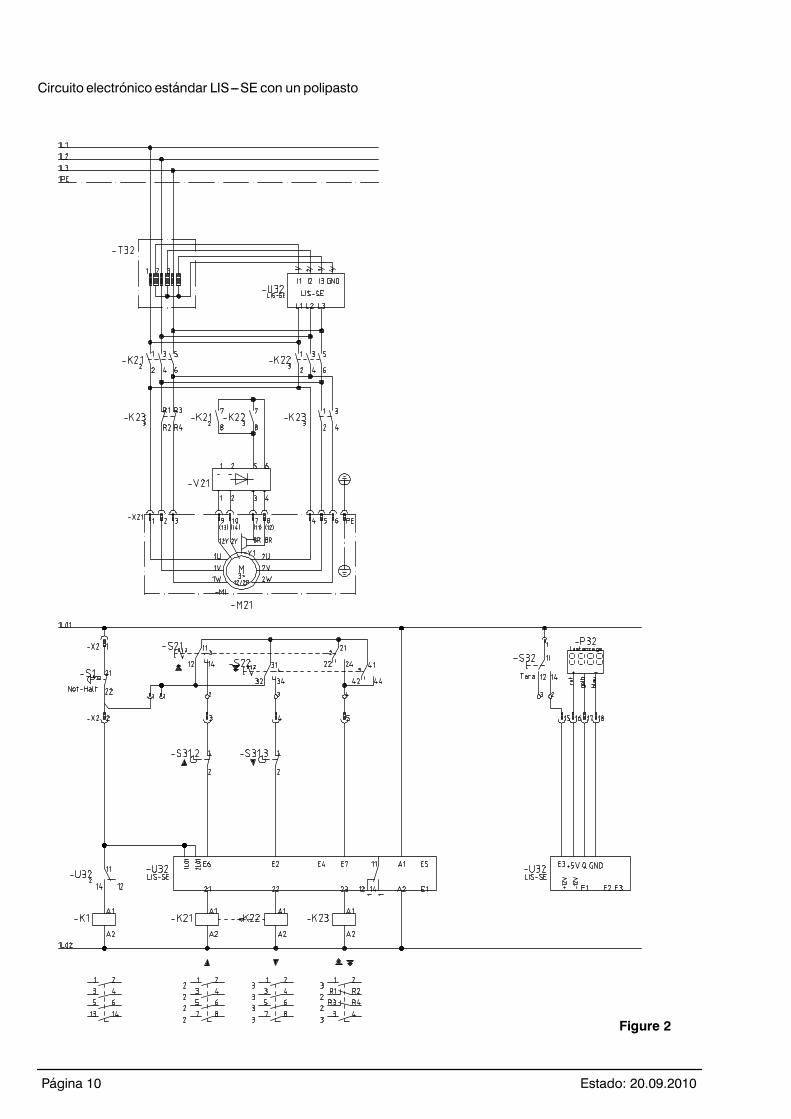
3 Componentes3.1 Unidad de análisis LIS–SEEl dispositivo LIS–SE (véase Figure 1) es apto para re-alizar un análisis del rendimiento del motor de eleva-ción. Las conexiones para la tensión del motor estánmarcadas con L1 - L3, la delmódulo de corriente con l1- l3. Las entradas de mando separadas galvánica-mente E1-E7, EA tienen el siguiente significado:
E1 = no se usaE2 = señal de mando ”bajar”E3 = señal de mando ”tara”E4 = Supervisión de velocidad rápida de elevaciónE5 = Entrada de aviso de fallo de polipasto 2E6 = señal de mando ”elevar”E7 = señal de mando ”rápido”EA = Activación del segundo punto de interrupción
por sobrecarga
La salida Q suministra un protocolo de datos en seriepara controlar los indicadores de carga ABUS LAZ (in-dicador de botonera) o GLZ (indicador grande decarga).El LAZ se alimenta con los 5V procedentes del disposi-tivo LIS–SE.Por el contrario, la GLZ posee una alimentación de ten-sión propia de 24 V (CA).
Para visualizar o ajustar magnitudes características va-riables en el LIS–SE, se utiliza la unidad demando digi-tal DBE (véase cap. 5.1).
3.2 Módulo de medición de cor-riente
La elección del módulo de medición de corriente de-pende de la corriente nominal del motor de elevaciónnecesaria para la elevación principal (véase tabla).Los extremos del cable del módulo de medición se co-nectan según la identificación de los conductores enlas conexiones l1, l2, l3 o GND del dispositivo SM.
Campo de medición corriente nominal[A]
nº art.
0 3 19683
I 8 9743
II 16 9744
III 23 9745
IV 36 9746
V 60 9747
VI 136 19862

Página 7AN102594 / A 734.ES
3.3 Indicación de carga (OPCIO-NAL)
El LIS–SE ofrece la posibilidad de utilizar un indicadorde carga ABUS a través de unos contactos de cone-xión ya previstos. La carga suspendida puede indi-carse a través de un indicador de carga LAZ de cuatrodígitos integradoen la botonera suspendida ABUS, y/oa través de un indicador de carga degran tamañoGLZ.En ambos casos, el indicador de carga está dispuestode tal forma que el valor indicado puede leerse fácil-mente, incluso bajo condiciones visuales desfavora-bles.El paso excitador del indicador se actualiza cada 2 se-gundos durante elmovimiento de elevación, por loquecualquier modificación de la carga será indicada conrapidez. Ya que lamedición de la carga se hace por se-parado en losmotores de polipastos con conmutaciónde polos según sea la velocidad de precisión o princi-pal, para poder distinguir las dos valoraciones decarga se muestra la medición realizada a velocidad deprecisión con un ritmo de intermitencia de 2/1 segun-dos. A velocidad de precisión y con cargas nominalesde motor se alcanzan precisiones mejores del 10% dela capacidad nominal en general; a velocidad principalla precisión de indicación es de aprox. 5%.
3.3.1 Función de indicación de carga
3.3.1.1 Funciones normales1. La carga se mide siempre con el motor en marchadurante la elevación y el descenso de la carga.
04.93
2. En parada y en el descenso se indica la última me-dición de un proceso de elevación.Por ejemplo
04.93
3. La indicación se actualiza con unnuevoprocesodeelevación.
12.31
4. Si el polipasto se desconecta debido a una cargademasiado elevada, la pantalla parpadea una vezpor segundo.
16.57
3.3.1.2 Mensajes de error1. En la desconexión por superar el límite permitidodel contador de pulsaciones se indica la cantidadde pulsaciones realizadas.Por ejemplo
--- ---17
2. En el control mutuo de dos polipastos , en caso defallo de uno de ellos mientras se mantiene pulsadala tecla ”subir” o ”bajar”, se mostrará en la pantalla
– – H2
3. Si con el motor en marcha se detecta una potenciade campodegiro<10 vatios, elmecanismodeele-vación se desconecta y la pantalla muestra
U_I
mientras semantienen pulsadas las teclas de subiro bajar en la botonera.
_________________________________
4 Datos Técnicos
4.1 Sistema indicador de cargas LIS–SELIS – SE 17787 17788 17789
Tensión de alimentación A1,A2: 230VAC ± 10% 110VAC ± 10% 48VAC ± 10%
Ámbito de tensiones de entrada E1–E7; EA 120–230VAC 90–110VAC 35–48VAC
Ámbito de medición L1, L2, L3 0 – 627 V AC
Tensión de salida del transformador I1, I2, I3 0 – 7,24 V AC
Frecuencia de la red 50 – 60 Hz
Contactos de conexión (3u,1a): 250 V AC, 8A
Potencia absorbida max. 15VA
Temperatura ambiente –20 hasta +55 °C, sin condensación por humedad
Tensión de salida para LAZ 5V, max. 250 mA
Señal indicadora Q Protocolo de datos en serie ± 12V
Tiempo máximo de aceleración para elmotor de elevación
Velocidad lenta:150 msVelocidad rápida:460 ms

Página 8 Estado: 20.09.2010
4.2 Indicador de carga LAZ / GLZ
Botonera LAZ Indicador grande decarga GLZ
Tensión de alimentación 5VDC 24VAC
Tamaño de las cifras 10 mm (LED) 127 mm (LED)
5 Manejo5.1 Unidad de mando digitalLa unidad de mando digital integrada (DBE) con dis-play de diodos luminosos y teclado de tres botones(Figure 1, pos. 1-4) sirve para ajustar el dispositivo ypara la lectura de los parámetros de servicio. Normal-mente se encuentra en el modo de baja potencia(Power-Down). Esto aparecerá en la pantalla (4) conuna barra horizontal de izquierda a derecha.
–
Si el dispositivo detecta una señal de control para”subir” (E6), la pantalla cambia a una curvaescalonadade abajo arriba.
– ––
En ”bajar” (E2) la curva escalonada va de arriba abajo.– ––
Tras cada accionamiento del mecanismo de elevaciónse muestra en pantalla el valor del contador de horas
durante unos 3 segundos.El nivel de parámetros dispone de 3 niveles de accesodistintos, de los que el nivel 3 sólo es accesible tras in-troducir un PIN autorizado por ABUS. Adicionalmenteal númerodePINhace falta un númeroCODEespecial.Al nivel de manejo 2 se accede introduciendo elnúmero ”0055”El nivel de manejo 1 sirve exclusivamente para leer losdatos de la memoria colectiva de cargas y sólo estádisponible con la memoria de colectivo de cargasdesbloqueada. A este nivel de manejo se llegapulsando la tecla ENTER durante unos 2 segundos eintroduciendo al final el número de códigocorrespondiente (véase capítulo 5.3).Si se introduce varias veces seguidas un código o unPIN erróneos se bloquea el nivel de parámetros y sólopodrá ser desbloqueado por ABUS.En este caso aparece en pantalla [no]
95
100
100
75
5
1
2
4
3 1 tecla “Enter”
2 tecla “bajar“
3 tecla “subir”
4 Display
5 unidad de mandodigital integrada DBE
Alto: 112 Figure 1
_________________________________
5.2 Ajustes básicosEn la entrega del aparato con una instalación ABUS serealiza un ajuste básico en fábrica. Los posibles aju-stes de precisión o nuevos ajustes del aparato se pue-den realizar in situ con las instrucciones de ajuste(véase capítulo 10). Para ello hace falta una carga deprueba que se corresponda a ser posible con la carganominal. Las cargas de control inferiores empeoran
considerablemente la exactitud del sistema. El princi-pio es el siguiente: cuanto mayor sea la carga de con-trol, más exacto será el ajuste. Se recomienda unacarga de control de un mínimo del 80% de la carga no-minal.

Página 9AN102594 / A 734.ES
5.3 Lectura de la memoria del co-lectivo de cargasNivel de manejo 1
Sólo el servicio técnicodeABUSpuede tomar lasmedi-das necesarias para activar lamemoria del colectivodecargas. Después de introducir el código “2223” cor-
recto para el parámetro correspondiente, los valoresalmacenados y calculados de lamemoria de colectivosde carga se muestran sucesivamente. Pulsando la te-cla ”Enter” (1, Figure 1) durante un tiempo algo másprolongado se accede de nuevo al nivel de manejo.
_________________________________
6 InstalaciónAtencion!Antes de la puesta enmarcha es imprescindi-ble comprobar si el cableado de la instala-ción corresponde a los esquemas eléctricosque se adjuntan a las instrucciones de ma-nejo.
La instalación del ABUS LIS–SE sólo podrá ser efec-tuada por electricistas profesionales.
En caos de una instalación posterior hará falta unaaprobación por un perito. (véase BGV D6 § 25)
6.1 Caja y esquemas eléctricosLas medidas necesarias para el montaje del LIS–SEpueden verse en la Figure 1.
Página 10 Estado: 20.09.2010
Circuito electrónico estándar LIS---SE con un polipasto
Figure 2

Página 11AN102594 / A 734.ES
Circuito electrónico estándar LIS---SE con dos polipastos
Figure 3
Conmutación del carro

Página 12 Estado: 20.09.2010
Circuito electrónico estándar LIS---SE con polipastos gemelos
Figure 4
rápido
Página 13AN102594 / A 734.ES
6.2 NormasEl Sistema indicador de cargas LIS–SE cumple las si-guientes directrices y normas:NSR 2006/95/EG (Baja tensión)EMV 2004/108/EG (Tolerancia electromagnética)EN 61000---6---4 emisión de interferenciasEN 61000---6---2 resistencia a interferenciasAl realizar la instalación eléctrica deben observarse lasprescricpciones generales de instalación:IIEC 60364---5---56Determinación para la ejecución de instalaciones decorriente de alta intensidad con tensiones nominaleshasta 1000VEN 60204---32Seguridad de maquinaria: Sistema eléctrico demaqui-naria, requisitos para elevadoresPara campos de aplicación especiales, deben obser-varse también las posibles prescripciones adicionales.
Advertencias de seguridad:Rogamos no efectúen ningún tipo de inter-vención en el dispositivo.
En casos de fallos en el LIS–SE rogamos diríjase a
nuestro departamento de servicio post-venta.
Para evitar lesiones personales o daños materiales,sólo deben efectuar trabajos en los dispositivos perso-nas cualificadas y familiarizadas con equipos de accio-namiento eléctricos. Antes de proceder a la instalacióny puesta enmarcha, estas personas deben leer deteni-damente las instrucciones de manejo y observar lasadvertencias de seguridad.Atención:Las modificaciones, instalaciones posteriores o trans-formaciones que puedan perjudicar la seguridad delequipo de elevación ABUS deben autorizarse previa-mente por el fabricante. En el caso de daños causadospor modificaciones no autorizadas o uso indebido,ABUS declina toda responsabilidad.
Advertencia:PROTECCIÓN ANTIPARASITARIAEste dispositivo se ha construido teniendoencuenta la directiva sobre Tolerancia Electro-magnética 89/336/CEE.
_________________________________
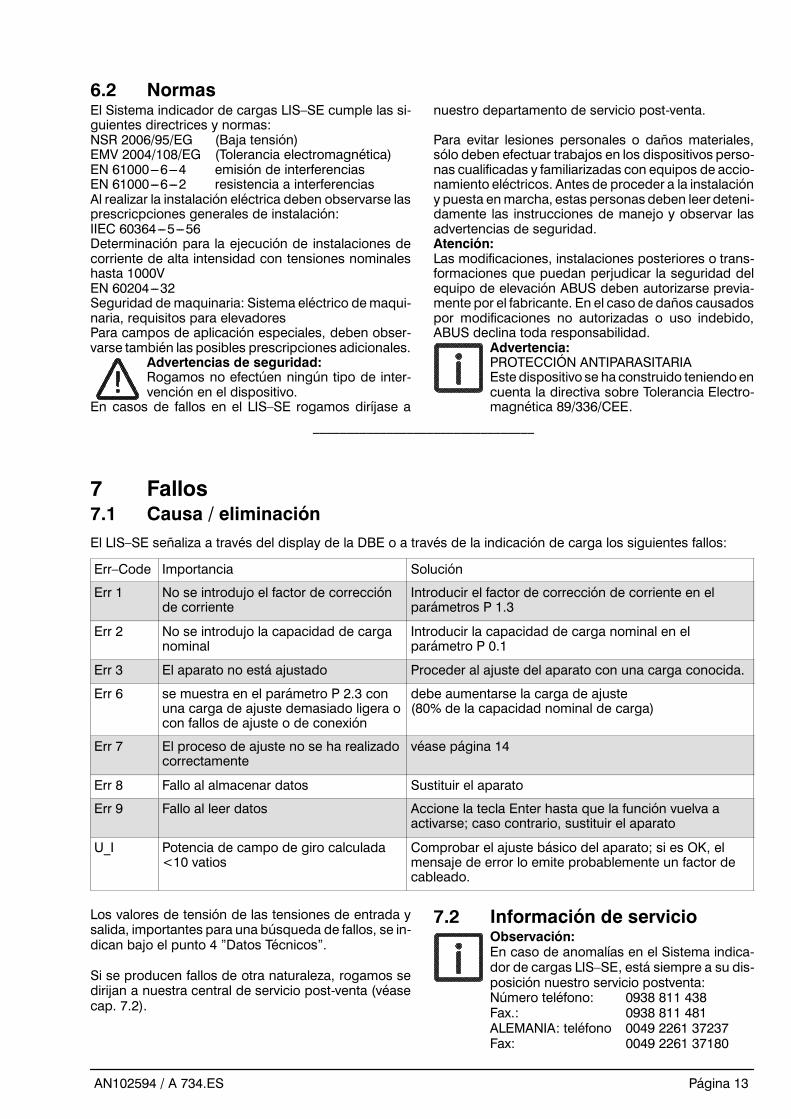
7 Fallos7.1 Causa / eliminaciónEl LIS–SE señaliza a través del display de la DBE o a través de la indicación de carga los siguientes fallos:
Err–Code Importancia Solución
Err 1 No se introdujo el factor de correcciónde corriente
Introducir el factor de corrección de corriente en elparámetros P 1.3
Err 2 No se introdujo la capacidad de carganominal
Introducir la capacidad de carga nominal en elparámetro P 0.1
Err 3 El aparato no está ajustado Proceder al ajuste del aparato con una carga conocida.
Err 6 se muestra en el parámetro P 2.3 conuna carga de ajuste demasiado ligera ocon fallos de ajuste o de conexión
debe aumentarse la carga de ajuste(80% de la capacidad nominal de carga)
Err 7 El proceso de ajuste no se ha realizadocorrectamente
véase página 14
Err 8 Fallo al almacenar datos Sustituir el aparato
Err 9 Fallo al leer datos Accione la tecla Enter hasta que la función vuelva aactivarse; caso contrario, sustituir el aparato
U_I Potencia de campo de giro calculada<10 vatios
Comprobar el ajuste básico del aparato; si es OK, elmensaje de error lo emite probablemente un factor decableado.
Los valores de tensión de las tensiones de entrada ysalida, importantes para una búsqueda de fallos, se in-dican bajo el punto 4 ”Datos Técnicos”.
Si se producen fallos de otra naturaleza, rogamos sedirijan a nuestra central de servicio post-venta (véasecap. 7.2).
7.2 Información de servicioObservación:En caso de anomalías en el Sistema indica-dor de cargas LIS–SE, está siempre a su dis-posición nuestro servicio postventa:Número teléfono: 0938 811 438Fax.: 0938 811 481ALEMANIA: teléfono 0049 2261 37237Fax: 0049 2261 37180

Página 14 Estado: 20.09.2010
8 Activación de la unidadde control LIS
Importante: Este proceso de ajuste no puede desha-cerse con posterioridad.Para activar la Unidad de mando LIS en un sistema demedición y valoración de cargas se elegirá el paráme-tro 3.0 con la tecla adecuada. Tras pulsar un cierto
tiempo la tecla Enter se pide la introducción de unnúmero PIN. Introducción: 0055. Si se acciona denuevo la tecla Enter, el aparato se reinicializa y la activa-ción ha finalizado.
_________________________________
9 Eliminación, puesta fuerade servicio
En la construcción de tipo modular de los productosABUS se ha tenido siempre en cuenta la protección delmedio ambiente, por lo que estos productos se pue-den procesar y reciclar con facilidad al final de su vida
útil. El grupo electrónico se recicla en vertederos espe-ciales observando las normativas de las autoridadeslocales.
_________________________________
10 Lista de parámetros LIS – SEPará-metros
Ámbitode ajuste
Uni-dad
Denominación Observaciones
CodE Lectura de la memoria de colectivo de cargas“Nivel de manejo 1”
Sólo disponible con LKSexistente.CÓDIGO 2223
P 0.0 0 – 100 t Capacidad de carga nominal Entrada no necesaria.
P 0.1 0 – 80 t Indicación y entrada de datos capacidad de carga delpolipasto 1
P 1.1 0 – 17 Indicación y entrada de datos Tipo de motor Según tabla
P 1.2 0–97,999 Indicación y entrada de datos Resistencia de bobinado
P 1.3 Indicación y entrada de datos Factor de corrección paramedición de corriente.
P 2.1 Indicación y entrada de datos Ajuste del aparato,elevación de precisión
P 2.2 Indicación y entrada de datos Ajuste del aparato,elevación principal
P 2.3 Ajuste de aparato t carga “Teach–in – 1 –”
P 2.4 Parámetros para diagnóstico del aparato CÓDIGO 1443
P 3.0 t Modo de indicación ”indicador de carga”
P 3.1 kW Modo de indicación “Potencia del campo giratorio”
P 3.2 t Modo de indicación “Indicador de cargas”
P 3.3 A Modo de indicación “Corriente conductora”
P 3.4 V Modo de indicación “Tensión de red.”
P 3.41 V Análisis de la tensión de red
P 4.0 0–110 % Indicación y entrada del segundo punto de desconexión sólo activo cuando haytensión en la entrada EA
P 4.1 0–110 % Indicación y entrada de datos Desconexión desobrecargamecanismo elevador 1
Página 15AN102594 / A 734.ES
Pará-metros
Ámbitode ajuste
Uni-dad
Denominación Observaciones
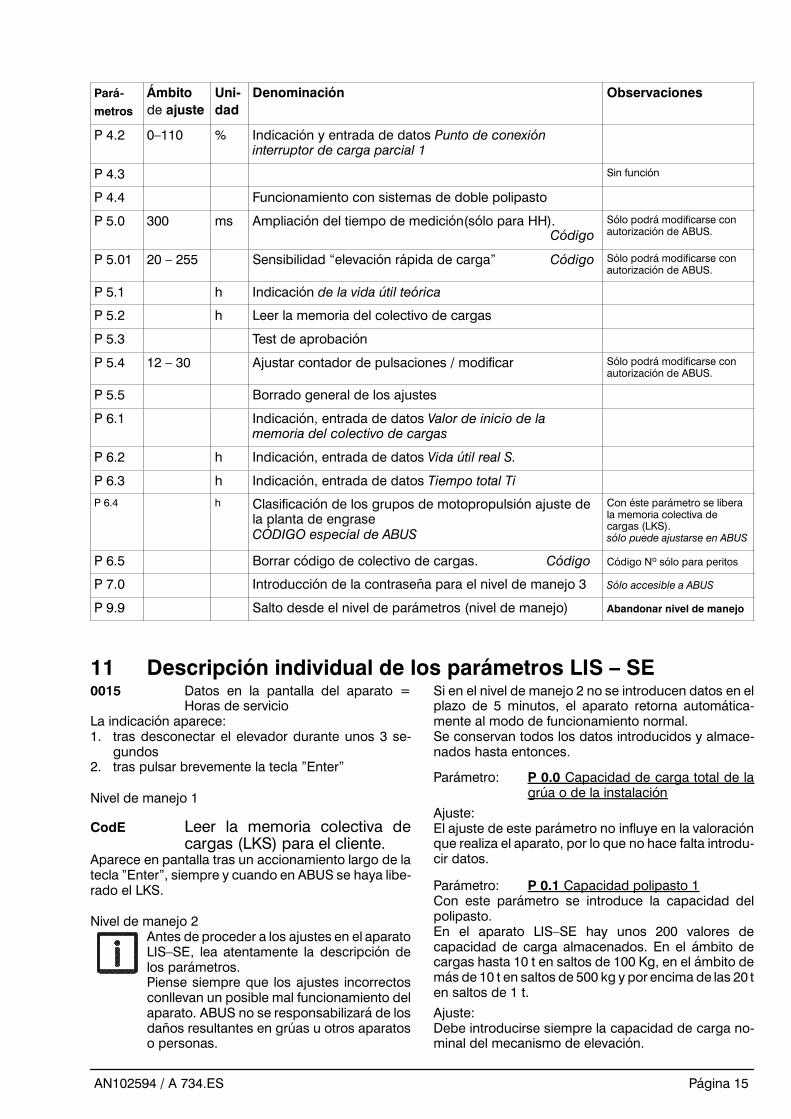
P 4.2 0–110 % Indicación y entrada de datos Punto de conexióninterruptor de carga parcial 1
P 4.3 Sin función
P 4.4 Funcionamiento con sistemas de doble polipasto
P 5.0 300 ms Ampliación del tiempo de medición(sólo para HH).Código
Sólo podrá modificarse conautorización de ABUS.
P 5.01 20 – 255 Sensibilidad “elevación rápida de carga” Código Sólo podrá modificarse conautorización de ABUS.
P 5.1 h Indicación de la vida útil teórica
P 5.2 h Leer la memoria del colectivo de cargas
P 5.3 Test de aprobación
P 5.4 12 – 30 Ajustar contador de pulsaciones / modificar Sólo podrá modificarse conautorización de ABUS.
P 5.5 Borrado general de los ajustes
P 6.1 Indicación, entrada de datos Valor de inicio de lamemoria del colectivo de cargas
P 6.2 h Indicación, entrada de datos Vida útil real S.
P 6.3 h Indicación, entrada de datos Tiempo total TiP 6.4 h Clasificación de los grupos de motopropulsión ajuste de
la planta de engraseCÓDIGO especial de ABUS
Con éste parámetro se liberala memoria colectiva decargas (LKS).sólo puede ajustarse en ABUS
P 6.5 Borrar código de colectivo de cargas. Código Código Nº sólo para peritos
P 7.0 Introducción de la contraseña para el nivel de manejo 3 Sólo accesible a ABUS
P 9.9 Salto desde el nivel de parámetros (nivel de manejo) Abandonar nivel de manejo
11 Descripción individual de los parámetros LIS – SE0015 Datos en la pantalla del aparato =
Horas de servicioLa indicación aparece:1. tras desconectar el elevador durante unos 3 se-gundos
2. tras pulsar brevemente la tecla ”Enter”
Nivel de manejo 1
CodE Leer la memoria colectiva decargas (LKS) para el cliente.
Aparece en pantalla tras un accionamiento largo de latecla ”Enter”, siempre y cuando en ABUS se haya libe-rado el LKS.
Nivel de manejo 2Antes de proceder a los ajustes en el aparatoLIS–SE, lea atentamente la descripción delos parámetros.Piense siempre que los ajustes incorrectosconllevan un posible mal funcionamiento delaparato. ABUS no se responsabilizará de losdaños resultantes en grúas u otros aparatoso personas.
Si en el nivel de manejo 2 no se introducen datos en elplazo de 5 minutos, el aparato retorna automática-mente al modo de funcionamiento normal.Se conservan todos los datos introducidos y almace-nados hasta entonces.
Parámetro: P 0.0 Capacidad de carga total de lagrúa o de la instalación
Ajuste:El ajuste de este parámetro no influye en la valoraciónque realiza el aparato, por lo que no hace falta introdu-cir datos.
Parámetro: P 0.1 Capacidad polipasto 1Con este parámetro se introduce la capacidad delpolipasto.En el aparato LIS–SE hay unos 200 valores decapacidad de carga almacenados. En el ámbito decargas hasta 10 t en saltos de 100 Kg, en el ámbito demás de 10 t en saltos de 500 kg y por encima de las 20 ten saltos de 1 t.Ajuste:Debe introducirse siempre la capacidad de carga no-minal del mecanismo de elevación.

Página 16 Estado: 20.09.2010
Parámetro: P 1.1 Introducción del tipo de motorCon este parámetro se introducen los datos del motorde la tabla “Clasificación de los módulos de mediciónde corriente a motores de polipastos GM”.La tabla tiene validez sólo paramotores ABUS, genera-ción actual, tensiones de 380 a 415 voltios, estrella.
Ajuste:Se introduce el número según el motor existente, de latabla ”Tipo de motor” para polipastos ABUS de la ac-tual generación.En este caso no hace falta introducir los parámetros P1.2 ni P 1.3. El aparato ordena automáticamente losvalores según el tipo de motor introducido. (Losvalores para la generación actual de polipastos estánalmacenados en el aparato).Para polipastos ABUS ”generación antigua” o de otrasmarcas o tensiones de red distintas a 400 V debeintroducirse “0”En este caso se introducen los parámetros P1.2 yP1.3.Para evitar el borrado indeseado de los datos preaju-stados en el tipo de motor ”0”, sólo podrán realizarsecambios tras introducir el código de seguridad.Para ello,mantengapulsada la teclaEnter hasta que enpantalla aparezca Code erscheint. Introduzca elcódigo 1443 y el aparato pasará inmediatamente alparámetro 1.2 y seguidamente al 1.3, sin que antes seindique el número del parámetro.
Parámetro: P 1.2 Introducción de la resistencia debobinado.
Con este parámetro se introduce la resistencia enOhmios (R) de la bobina de elevación normal y deprecisión.Las resistencias del bobinado se miden directamenteen el motor. En el aparato se introducen los valores deresistencia de una fase contra el neutro delarrollamiento. En motores conectados en “triángulo”se introduce siempre la resistencia de sustitución deestrella.Ajuste:Este parámetro tiene 2 niveles
Nivel 1:1. Indicación del valor R almacenado (enOhmios) delbobinado de elevación de precisión.
2. Indicación del valor R almacenado (enOhmios) delbobinado de elevación normal.
Nivel 2: accesible con CÓDIGO 14431. Introducción del valor R medido (en Ohmios) delbobinado de elevación de precisión.
2. Introducción del valor R medido (en Ohmios) delbobinado de elevación principal.
Una vez introducido un valor R – en Ω y tras lacomprobación en pantalla, el valor que aparece puedeapartarse un poco del dato introducido. Esta desvia-ción se debe a fallos de redondeo al almacenar las cif-ras en el aparato, pero no influye en absoluto en la pre-cisión de la valoración.
Parámetro: P 1.3 Introducción del factor decorrección de corriente.
Con este parámetro se introduce el factor decorrección de los módulos de medición de corrienteABUS.
Introducir el factor de corrección según la tabla 1“Determinación de los ámbitos de medición paramódulos de medición de corriente”.Ajuste:Este parámetro tiene 2 niveles
Nivel 1:--- Indicación del factor de corrección almacenado
Nivel 2: accesible con CÓDIGO 1443--- Introducción del factor de corrección según la tabla1.
Parámetro: P 2.1 Ajuste del aparato, elevación deprecisión
A través de este parámetro se pueden leer datos alma-cenados e introducir nuevos.Introducción:Este parámetro se divide en 2 niveles
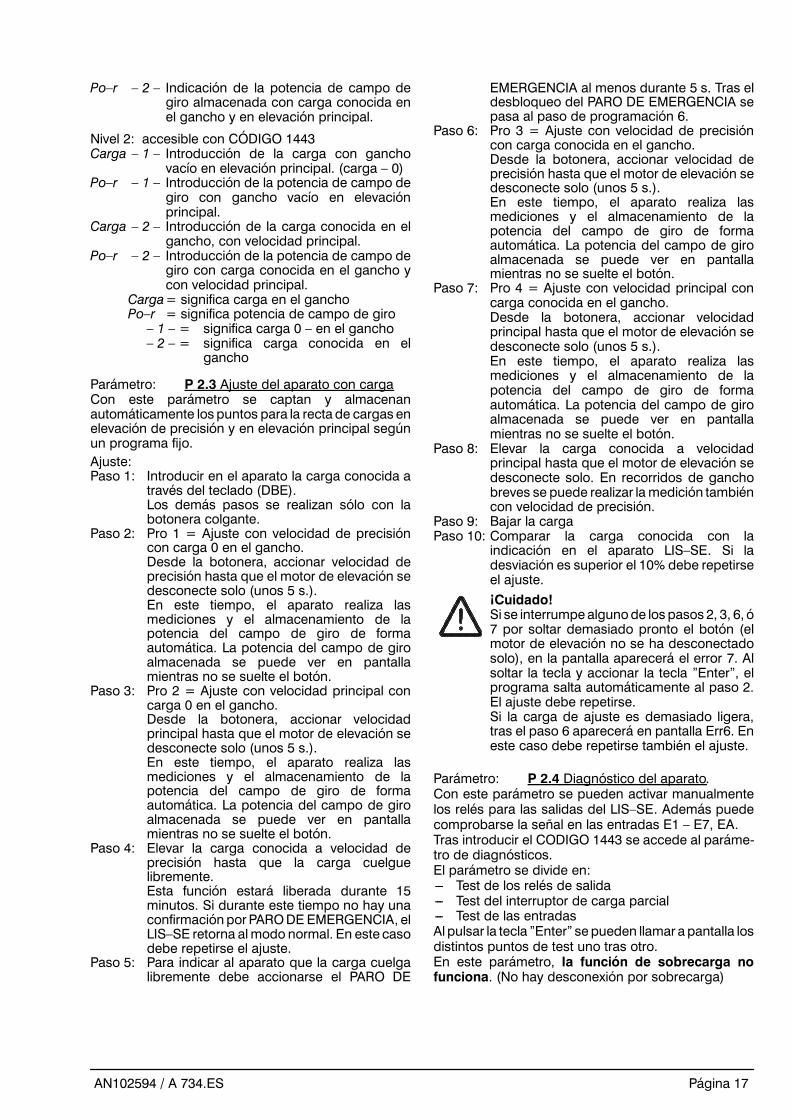
Nivel 1:Carga – 1 – Indicación de la carga almacenada con
gancho vacío en elevación de precisión.(carga – 0)
Po–r – 1 – Indicación de la potencia de campo degiro almacenada con gancho vacío enelevación de precisión.
Carga – 2 – Indicación de la carga almacenada yconocida en el gancho, con velocidad deprecisión.
Po–r – 2 – Indicación de la potencia de campo degiro almacenada con carga conocida enel gancho y con elevación de precisión.
Nivel 2: accesible con CÓDIGO 1443Carga – 1 – Introducción de la carga con gancho
vacío en elevación de precisión. (carga –0)
Po–r – 1 – Introducción de la potencia de campo degiro con gancho vacío en elevación deprecisión.
Carga – 2 – Introducción de la carga conocida en elgancho, con velocidad de precisión.
Po–r – 2 – Introducción de la potencia de campo degiro con carga conocida en el gancho ycon velocidad de precisión.
Carfa = significa carga en el ganchoPo–r = significa potencia de campo de giro– 1 – = significa carga 0 – en el gancho– 2 – = significa carga conocida en el
gancho
Parámetro: P 2.2 Ajuste del aparato, elevaciónprincipal
Con este parámetro se pueden leer datosalmacenados e introducir nuevos datos.
Introducción:Este parámetro tiene 2 niveles
Nivel 1:Carga – 1 – Indicación de la carga almacenada con
gancho vacío en elevación principal.(carga – 0)
Po–r – 1 – Indicación de la potencia de campo degiro almacenada con gancho vacío enelevación principal.
Carga – 2 – Indicación de la carga almacenada yconocida en el gancho, con velocidadprincipal.
Página 17AN102594 / A 734.ES
Po–r – 2 – Indicación de la potencia de campo degiro almacenada con carga conocida enel gancho y en elevación principal.
Nivel 2: accesible con CÓDIGO 1443Carga – 1 – Introducción de la carga con gancho
vacío en elevación principal. (carga – 0)Po–r – 1 – Introducción de la potencia de campo de
giro con gancho vacío en elevaciónprincipal.
Carga – 2 – Introducción de la carga conocida en elgancho, con velocidad principal.
Po–r – 2 – Introducción de la potencia de campo degiro con carga conocida en el gancho ycon velocidad principal.
Carga= significa carga en el ganchoPo–r = significa potencia de campo de giro– 1 – = significa carga 0 – en el gancho– 2 – = significa carga conocida en el
gancho
Parámetro: P 2.3 Ajuste del aparato con cargaCon este parámetro se captan y almacenanautomáticamente los puntos para la recta de cargas enelevación de precisión y en elevación principal segúnun programa fijo.Ajuste:Paso 1: Introducir en el aparato la carga conocida a
través del teclado (DBE).Los demás pasos se realizan sólo con labotonera colgante.
Paso 2: Pro 1 = Ajuste con velocidad de precisióncon carga 0 en el gancho.Desde la botonera, accionar velocidad deprecisión hasta que el motor de elevación sedesconecte solo (unos 5 s.).En este tiempo, el aparato realiza lasmediciones y el almacenamiento de lapotencia del campo de giro de formaautomática. La potencia del campo de giroalmacenada se puede ver en pantallamientras no se suelte el botón.
Paso 3: Pro 2 = Ajuste con velocidad principal concarga 0 en el gancho.Desde la botonera, accionar velocidadprincipal hasta que el motor de elevación sedesconecte solo (unos 5 s.).En este tiempo, el aparato realiza lasmediciones y el almacenamiento de lapotencia del campo de giro de formaautomática. La potencia del campo de giroalmacenada se puede ver en pantallamientras no se suelte el botón.
Paso 4: Elevar la carga conocida a velocidad deprecisión hasta que la carga cuelguelibremente.Esta función estará liberada durante 15minutos. Si durante este tiempo no hay unaconfirmación por PARODEEMERGENCIA, elLIS–SE retorna almodo normal. En este casodebe repetirse el ajuste.
Paso 5: Para indicar al aparato que la carga cuelgalibremente debe accionarse el PARO DE
EMERGENCIA al menos durante 5 s. Tras eldesbloqueo del PARO DE EMERGENCIA sepasa al paso de programación 6.
Paso 6: Pro 3 = Ajuste con velocidad de precisióncon carga conocida en el gancho.Desde la botonera, accionar velocidad deprecisión hasta que el motor de elevación sedesconecte solo (unos 5 s.).En este tiempo, el aparato realiza lasmediciones y el almacenamiento de lapotencia del campo de giro de formaautomática. La potencia del campo de giroalmacenada se puede ver en pantallamientras no se suelte el botón.
Paso 7: Pro 4 = Ajuste con velocidad principal concarga conocida en el gancho.Desde la botonera, accionar velocidadprincipal hasta que el motor de elevación sedesconecte solo (unos 5 s.).En este tiempo, el aparato realiza lasmediciones y el almacenamiento de lapotencia del campo de giro de formaautomática. La potencia del campo de giroalmacenada se puede ver en pantallamientras no se suelte el botón.
Paso 8: Elevar la carga conocida a velocidadprincipal hasta que el motor de elevación sedesconecte solo. En recorridos de ganchobreves se puede realizar la medición tambiéncon velocidad de precisión.
Paso 9: Bajar la cargaPaso 10: Comparar la carga conocida con la
indicación en el aparato LIS–SE. Si ladesviación es superior el 10% debe repetirseel ajuste.¡Cuidado!Si se interrumpealgunode los pasos 2, 3, 6, ó7 por soltar demasiado pronto el botón (elmotor de elevación no se ha desconectadosolo), en la pantalla aparecerá el error 7. Alsoltar la tecla y accionar la tecla ”Enter”, elprograma salta automáticamente al paso 2.El ajuste debe repetirse.Si la carga de ajuste es demasiado ligera,tras el paso 6 aparecerá en pantalla Err6. Eneste caso debe repetirse también el ajuste.
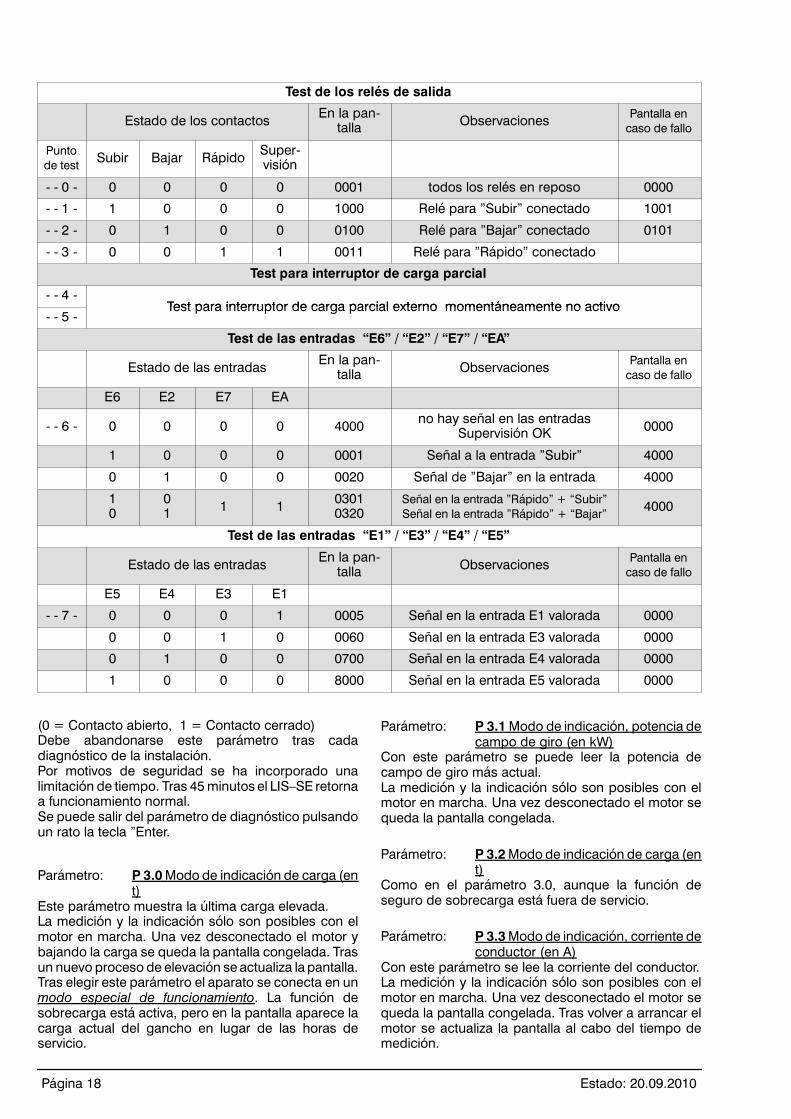
Parámetro: P 2.4 Diagnóstico del aparato.Con este parámetro se pueden activar manualmentelos relés para las salidas del LIS–SE. Además puedecomprobarse la señal en las entradas E1 – E7, EA.Tras introducir el CODIGO 1443 se accede al paráme-tro de diagnósticos.El parámetro se divide en:--- Test de los relés de salida--- Test del interruptor de carga parcial--- Test de las entradasAl pulsar la tecla ”Enter” se pueden llamar a pantalla losdistintos puntos de test uno tras otro.En este parámetro, la función de sobrecarga nofunciona. (No hay desconexión por sobrecarga)
Página 18 Estado: 20.09.2010
Test de los relés de salida
Estado de los contactos En la pan-talla Observaciones Pantalla en
caso de fallo
Puntode test Subir Bajar Rápido Super-
visión
- - 0 - 0 0 0 0 0001 todos los relés en reposo 0000
- - 1 - 1 0 0 0 1000 Relé para ”Subir” conectado 1001
- - 2 - 0 1 0 0 0100 Relé para ”Bajar” conectado 0101
- - 3 - 0 0 1 1 0011 Relé para ”Rápido” conectado
Test para interruptor de carga parcial
- - 4 -Test para interruptor de carga parcial externo momentáneamente no activo
- - 5 -Test para interruptor de carga parcial externo momentáneamente no activo
Test de las entradas “E6” / “E2” / “E7” / “EA”
Estado de las entradas En la pan-talla Observaciones Pantalla en
caso de fallo
E6 E2 E7 EA
- - 6 - 0 0 0 0 4000 no hay señal en las entradasSupervisión OK 0000
1 0 0 0 0001 Señal a la entrada ”Subir” 4000
0 1 0 0 0020 Señal de ”Bajar” en la entrada 4000
10
01 1 1 0301
0320Señal en la entrada ”Rápido” + “Subir”Señal en la entrada ”Rápido” + “Bajar” 4000
Test de las entradas “E1” / “E3” / “E4” / “E5”
Estado de las entradas En la pan-talla Observaciones Pantalla en
caso de fallo
E5 E4 E3 E1
- - 7 - 0 0 0 1 0005 Señal en la entrada E1 valorada 0000
0 0 1 0 0060 Señal en la entrada E3 valorada 0000
0 1 0 0 0700 Señal en la entrada E4 valorada 0000
1 0 0 0 8000 Señal en la entrada E5 valorada 0000
(0 = Contacto abierto, 1 = Contacto cerrado)Debe abandonarse este parámetro tras cadadiagnóstico de la instalación.Por motivos de seguridad se ha incorporado unalimitación de tiempo. Tras 45minutos el LIS–SE retornaa funcionamiento normal.Se puede salir del parámetro de diagnóstico pulsandoun rato la tecla ”Enter.
Parámetro: P 3.0Modode indicación de carga (ent)
Este parámetro muestra la última carga elevada.La medición y la indicación sólo son posibles con elmotor en marcha. Una vez desconectado el motor ybajando la carga se queda la pantalla congelada. Trasun nuevo proceso de elevación se actualiza la pantalla.Tras elegir este parámetro el aparato se conecta en unmodo especial de funcionamiento. La función desobrecarga está activa, pero en la pantalla aparece lacarga actual del gancho en lugar de las horas deservicio.
Parámetro: P 3.1Modo de indicación, potencia decampo de giro (en kW)
Con este parámetro se puede leer la potencia decampo de giro más actual.La medición y la indicación sólo son posibles con elmotor en marcha. Una vez desconectado el motor sequeda la pantalla congelada.
Parámetro: P 3.2Modode indicación de carga (ent)
Como en el parámetro 3.0, aunque la función deseguro de sobrecarga está fuera de servicio.
Parámetro: P 3.3Modode indicación, corriente deconductor (en A)
Con este parámetro se lee la corriente del conductor.La medición y la indicación sólo son posibles con elmotor en marcha. Una vez desconectado el motor sequeda la pantalla congelada. Tras volver a arrancar elmotor se actualiza la pantalla al cabo del tiempo demedición.

Página 19AN102594 / A 734.ES
Parámetro: P 3.4 Modo de indicación, tensión dered (en V).
Con este parámetro se puede leer la tensión de red.La medición y la indicación sólo son posibles con elmotor en marcha. Una vez desconectado el motor sequeda la pantalla congelada. Si se vuelve a conectar elmotor, la pantalla se actualizará transcurrido el tiempode medición.
Nota:En los parámetros 3.1–3.4 el seguro desobrecarga está desactivado.
Cadamodode indicación está activoduranteunos 20 minutos. Pasado este período elaparato retorna automáticamente almododefuncionamiento normal.
Si el modo de indicación se abandonaraantes de transcurridos los 20 minutos, debeactivarse de nuevo el modo defuncionamiento normal a través delparámetro 9.9.
Parámetro: P 3.41 Análisis de la tensión de redEste aparato sirve para el diagnóstico ráido y sencillode la red de alimentación en el manejo del polipasto.Si el aparato se encuentra enmodo de funcionamietnonormal, cada vez que se accione la velocidad pricipalse muestra la tensión principal durante unos 500 ms.Tras seleccionar el parámetro se calcula el valor efec-tivo de la tensión de red a lo alrgo de intervalos de 50ms; tras cada pulsación dela tecla ”Enter se indica elvalor del siguiente intervalo.
Parámetro: P4.0 Segundo punto de desconexiónA través del parámetro P 0.4 se ajusta el puntoadicional de desconexión en el ámbito de 0 a 110% enpasos de 2%. Una vez elegido el parámetro apareceprimero el valor almacenado; al accionar la tecla”subir” o ”bajar” se puede modificar este valor. El valorajustado se almacena al pulsar la tecla ”Enter”.
Aviso de seguridad:Ya que el aparato dispone de un control in-terno que impide el desgaste de los contac-tos del relé, en la entrada EA puede habertensión para activar el punto de conmutaciónsólo cuando las salidas K21 yK22 hayan con-mutado.
Parámetro: P4.1 Desconexión de sobrecarga delpolipasto 1
Con este parámetro y la introducción del parámetro P0.1 se fija el punto de desconexión por sobrecarga.Ajuste:Ajuste al 110% de la capacidad nominal.No es posible ajustar un valor superior al 110% de lacapacidad nominal.El punto de desconexión del seguro de sobrecargapuede modificarse hacia abajo. El ajuste puederealizarse entre 2% y 110%.
Parámetro: P 4.2 Interruptor de carga parcial 1Con estos parámetros se pueden fijar puntos dedesconexión por debajo de la capacidad nominal. (de0 a 100% de la capacidad nominal en pasos de 2%)El punto de desconexión del interruptor de carga par-cial se refiere siempre a la capacidad total de carga delpolipasto.Sólo hará falta este ajuste cuando se desee una fun-ción de interrupción de carga parcial.
Parámetro: P 4.3 actualmente no utilizado
Parámetro: P 4.4 Manejo en polipastos gemelosCon el parámetro P4.4 se ajuste el aparato para suma-nejo en aplicaciones especiales. El parámetro de aju-ste puede tener los valores 0, 1, 2.Según el campo de aplicación se elegirá el ajuste si-guiente:
Funcionamiento Aparato 1 Aparato 2
un polipasto 0 --- --- ---
dos polipastos en paralelo 1 1
Manejo con polipasto ge-melo 1 2
Parámetro: P 5.0 Ampliación del tiempo demedición para velocidad principal.
Con este parámetro se puede ampliar el tiempo demedición durante el arranque de los motores.Este parámetro sólo es accesible con un CÓDIGOespecial.
Ajuste:Ajuste estándar 300 ms.
Parámetro: P 5.01 Modificar la sensibilidad“elevación rápida de carga”.
Este parámetro sólo es accesible con un CÓDIGOespecial y modificable sólo con autorización de ABUS.
Parámetro: P 5.1Mostrar la clasificación de grupoimpulsor
Este parámetro muestra las horas a carga plena delgrupo impulsor en cuestión, en el que se encuentra elpolipasto. Con este parámetro no se puede modificarel grupo impulsor (por ejemplo, la vida útil teórica).Cuando la memoria colectiva de cargas no estáactivada aparece en la pantalla 0000.
Grupo impulsor Horas carga plena
1Dm M1 100
1Cm M2 200
1Bm M3 400
1Am M4 800
2m M5 1600
3m M6 3200
4m M7 6300
5m M8 12500
Página 20 Estado: 20.09.2010
Parámetro: P 5.2 Memoria colectiva de cargas(LKS)
Con este parámetro se pueden leer los datos de lamemoria colectiva de cargas.1. Vida útil teórica D2. Vida útil real S3. Factor del espectro de carga Kmi4. Tiempo total Ti5. Vida útil restante6. Valor de inicio
Ajuste:La lectura de datos de la memoria colectiva de cargas(LKS) sólo es posible cuando ésta está desbloqueaday, por lo tanto, activada. Este desbloqueo sólo puederealizarse, en principio, en ABUS.Si la LKS no está desbloqueada, no es posible accedera sus datos.Si la LKS está desbloqueada y activada, los datospueden leerse también a través del nivel de manejo 1tras introducir el CÓDIGO 2223.
Parámetro: P 5.3 Test de aceptaciónCon éste parámetro se pueden activar manualmentelos relés para las salidas del LIS–SE la función desobrecarga está desactivada. (No hay desconexiónpor sobrecarga)Atención: Los contactos se activan normalmentesegún la señal de mando que se dé.
Presenta-ción en lapantalla
Función
1 No es posible Subir / Bajar
2 Sólo Subir / Bajar lentamente
3 Subir / Bajar rápido permitido
4 – – –
5 – – –
(0 = Contacto abierto, 1 = Contacto cerrado)Este parámetro debe abandonarse después de cadaprueba.Si no se observan estas normas, el polipasto funcio-nará, pero la función de control de sobrecarga no. Porello se incorporó un límite temporal que hace queLIS---SE se vuelva a conectar automáticamente a fun-cionamiento normal al cabo de 45 minutos.(La función de sobrecarga vuelve a estar activa)
Parámetro: P 5.4 conmutaciones máximas(contador de pulsaciones rápidas)
Este parámetro sólo es accesible con un CÓDIGOespecial.
AjusteEl parámetro está ajustado a 16 conmutacionesrápidas.
Parámetro: P 5.5 borrar todo excepto los datos dela memoria de colectivo de cargas
Este parámetro sólo es accesible con el “CÓDIGO1443”.
A t e n c i ó n !!Con este parámetro se borran todos losdatos introducidos, excepto los valores de lamemoria colectiva de cargas.
Parámetro: P 6.1 Introducir el valor inicialCon este parámetro se establece un valor (en horas)que se restará de las horas teóricas de carga plena alcalcular la vida útil restante.(p. ej. en el montaje de un LIS – SE en una instalaciónde grúa antigua)Ajuste:Este parámetro tiene 2 niveles:1. Nivel 1 = Indicación del valor inicial almacenado2. Nivel 2 = Ajuste de un nuevo valor inicial
El nivel 2 sólo puede seleccionarse a través delCÓDIGO 1443.
Parámetro: P 6.2 Mostrar vida útil real STras accionar la tecla ”Enter” se muestra el valoralmacenado
Parámetro: P 6.3 Mostrar duración total Ti (horasde servicio)
Tras accionar la tecla ”Enter” se muestra el valoralmacenado
Parámetro: P 6.4 Introducir la categoría demecanismo impulsor
Con este parámetro se determina la clasificación delmecanismo impulsor y se activa la memoria colectivade cargas (LKS), siempre y cuando ésta haya sidodesbloqueada por ABUS.
Ajuste:Este parámetro sólo es accesible cuando ha sidodesbloqueado en fábrica por ABUS.Se introduce la vida útil teórica indicada por elfabricante (en horas de carga total). (véase también latabla 1 de FEM 9.755)
Parámetro: P 6.5 Borrado total de la memoriacolectiva de cargas.
Con este parámetro se borra la memoria colectiva decarga.
AjusteSeleccionable sólo con un CÓDIGO especial.
Parámetro: P 7.0 Introducción de la contraseñapara el nivel de manejo 3.
El nivel de manejo 3 es, en principio, sólo accesiblepara ABUS.
Parámetro: P 9.9 Salto desde el nivel deparámetros.
Con este parámetro se abandona el nivel deparámetros. El polipasto vuelve a estar listo paraservicio y la función de sobrecarga está activada.

Página 21AN102594 / A 734.ES
Otras informaciones
1. El parámetro P 0.1 debe ajustarse siempre segúnla capacidad del polipasto.Si no es el caso, el punto de desconexión para elseguro de sobrecarga puede estar demasiado altoo demasiado bajo.
2. El ajuste del LIS – SE debería realizarse con unacarga=80%de la capacidadnominal. La precisiónindicada queda así, por lo general, garantizada. Lacarga mínima con la que puede realizarse el ajustees de 40% de la capacidad nominal. En este casono siempre se puede garantizar la precisión indi-cada.Si debe ajustarse una instalación conuna cargadel40%–80%, deberá hacerse constar en el protocolo
correspondiente. (Incumplimiento de datos de to-lerancias)
3. Si se introduce el nº de Pin o el CÓDIGO 4 vecesseguidas mal, el aparato quedará bloqueado y nose podrán introducir ni Pin ni CÓDIGO.3. Si se ha introducido el nº de PIN o del ”CÓDIGO”mal 4 veces seguidas, el aparato quedará blo-queado para cualquier otra introducción o nº dePIN o de ”CÓDIGO”
[no]
Sólo ABUS podrá desbloquear un aparato blo-queado, aunque éste continuará funcionando.
4. Al salir del nivel de manejo se muestra brevementela versión del software.
_________________________________
5. Tabla 1: Determinación de los ámbitos de medición para módulos de medición de corriente.
Módulo de medición de corrienteÁmbito demedición
In[A]
Módulo de medi-ción de corriente
Factor decorrección
AN Observaciones
0 3 115 19683
I 8 306 9743
II 16 613 9744
III 23 873 9745
IV 36 1381 9746
V 60 2344 9747
VI 136 5169 19682

Página 22 Estado: 20.09.2010
12 Ajuste estándar
Cuidado: Los puntos 1a* y 1b* se tendrán en cuenta sólo cuando la memoria colectiva de cargas (LKS)esté activa .(Punto 1 no aplicable). Cuando la LKS está inactiva comience el ajuste por el punto 1.
0 parpadea
Nºsecue
Teclas Descripción Indicación
1a* Enter En la pantalla aparece ”CodE”. C o d E
1b* Enterbrevemente
En la pantalla aparece ”P – nr.”. P – nr
1 Enter mantener pulsado hasta que aparezca ”P – nr.” P – nr
2 Enter Pulsar durante 1 segundo, soltar, en la pantalla aparece: 0 0 0 0
3 +Enter
Introducir el PIN de izquierda a derechaTras elegir la última cifra, pulse ”Enter” hasta que en pantalla aparezca P0.0.
0055parpa.
4 El aparato se encuentra en el nivel de manejo 2 (nivel de parámetros) P 0.0
5 Elegir el parámetro P 0.1 Capacidad de carga polipasto 1 P 0.1
6 Enter aparece el valor actualmente almacenado para la capacidad de carga delpolipasto 1 (en toneladas)
3.20 z.B
7 introducir el valor deseado para la capacidad del polipasto 1. (entoneladas)
5.00 z.B.
8 Enter SP parpadea brevemente; el valor introducido para la capacidad decarga del polipasto 1 queda almacenado; en pantalla aparece:
P 0.1
9 Elegir el parámetro P 4.1 Seguro de sobrecarga polipasto 1 P 4.1
10 Enter En pantalla aparece 110; (o el que esté actualmente almacenado) 110
11 introducir el valor deseado (en % de la capacidad de carga polipasto 1) 100 z.B.
12 Enter En pantalla aparece P 4.1 (el valor introducido queda almacenado) P 4.1
13 elegir el parámetro P 4.0 segundo punto de desconexión P 4.0
14 Enter En pantalla aparece 0; (o el que esté actualmente almacenado) 0
15 introducir el valor deseado (Conmutador carga parcial p. ej. 40%)(en % de la capacidad de carga de polipasto 1; véase parámetro P 0.1)Si la entrada EA no está conectada, el ajuste no tiene consecuencia alguna
40 z.B.
16 Enter En pantalla aparece P 4.0 (el valor introducido queda almacenado) P 4.0

Página 23AN102594 / A 734.ES
0 parpadea
Nºsecue
Teclas Descripción Indicación
17 elegir el parámetro P 4.2 Conmutador de carga parcial 2 P 4.2
18 Enter En pantalla aparece 0; (o el que esté actualmente almacenado) 0
19 introducir el valor deseado (Conmutador carga parcial p. ej. 20%)(en % de la capacidad de carga de polipasto 1; véase parámetro P 0.1)Si el conmutador de carga parcial no está activo (módulo sin relé deconexión), el ajuste no tiene consecuencia alguna.
20 z.B.
20 Enter En pantalla aparece P 4.2 (el valor introducido queda almacenado) P 4.2
21 elegir el parámetro 1.1; Tipo de motor P 1.1
22 Enter En la pantalla aparece el tipo de motor almacenado – – 0 9 z.B.
Para los polipastos de ABUS de la última generación (L6 o H6 en la descripción de tipos) deben llevarse acabo los puntos 23a y 23b; siga luego con el punto 31 (los puntos 23 a 30 deben saltarse).
23a* elija el tipo de motor deseadosegún la tabla “Clasificación de los módulos de medición de corriente parapolipastos GM
– – 0 7 z.B.
23b* Enter “SP” parpadea unas cuantas veces; los datos del motor quedan almacena-dos. En la pantalla aparece P 1.1
Para polipastos ABUS (no contenidos en laSección 13) y otras marcas o tensiones de red distintas de los400 V no se aplican los puntos 23a y 23b. Siga entonces con el punto 23.
23 elegir el tipo de motor 0 – – 0 0
24 Enter Una vez confirmado con “ENTER”aparece en pantalla: 0.00 0 (#)
25 +Enter
Introducir el valor de resistencia de la velocidad de precisión – Bobinadoen una fase (en Ω) de izquierda a derecha (confirmar cada cifra con “ENTER”)
12.31 z.B.parpadea
(#)
26 Enter Una vez confirmado el último número con “ENTER” parpadea brevementeSP y aparece en pantalla:
0.00 0 (#)
27 +Enter
Introducir el valor de resistencia de la velocidad principal – Bobinado enuna fase (en Ω) de izquierda a derecha (confirmar cada cifra con “ENTER”)
2.350 z.B.parpadea(#)
28 Enter Una vez confirmado el último número con “ENTER” parpadea brevementeSP y aparece en pantalla:
0.00 0 (#)
29 +Enter
introducir de izquierda a derecha el factor de corrección de corriente(véase ámbito de medición para módulos de medición de corriente).(Confirmar cada número con “ENTER”)
0613 z.B.parpadea
30 Enter Una vez confirmado el último número con “ENTER” parpadea SP un par deveces; los datos del motor quedan almacenados y aparece en pantalla:
P 1.1
31 elegir el parámetro P 2.3 Teach – In P 2.3
32 Enter En la pantalla aparece: Carga
33 Enter Pulsar durante 1 segundo, soltar; en la pantalla aparece: 0.00 0 (#)
(#) véase Página 26 “Observaciones”

Página 24 Estado: 20.09.2010
Nºsecue
Teclas Descripción Indicación
34 +Enter
introducir la carga conocida de derecha a izquierdaconfirmar cada número con “ENTER”
10.50 z.B.parpadea
35 Enter Una vez confirmado el último número con “ENTER” parpadea brevementeSP; la carga conocida queda almacenada y aparece en pantalla:
Pro 1
36 HTFH
Sin carga (gancho vacío)Accionar la velocidad principal (HH) hasta que el motor de elevación sedesconecte solo (unos 5 s.)El LIS – SE realiza la medición y el almacenamiento automáticamente. Unavez realizada la memorización, el mecanismo elevador se desconecta solo.La potencia del campo de giro almacenada se puede ver en pantalla mien-tras no se suelte el botón. (en KW) Este proceso no debe ser interrumpido.
0.542 z.B.
tras soltarel botónPro 2
37 HTHH
Sin carga (gancho vacío)Accionar la velocidad principal (HH) hasta que el motor de elevación sedesconecte solo (unos 5 s.).El LIS – SE realiza la medición y el almacenamiento automáticamente. Unavez realizada la memorización, el mecanismo elevador se desconecta solo.La potencia del campo de giro almacenada se puede ver en pantalla mien-tras no se suelte el botón. (en KW) Este proceso no debe ser interrumpido.
1.025 z.B.Tras soltar labotonera, labarra semueve deabajo a laizquierda haciaarriba a laderecha.
38 HTFH
Elevar la carga conocida a velocidad de precisión hasta que la cargacuelgue libremente.Esta función estará liberada durante 15 minutos. Si durante este tiempo nohay una confirmación por PARO DE EMERGENCIA (como se describe en elpunto 33) el LIS–SE retorna al modo normal. El ajuste debe repetirse comosigue: Puntos 1 a 4 y luego a partir del punto 25.
La barra sedesplaza deabajo a laizquierda haciaarriba a laderecha.
39 HTPARO DEEMERGENCIA
Accionar el PARO DE EMERGENCIAEl accionamiento del PARO DE EMERGENCIA debe durar más de 5segundos
tras eldesbloqueodel PARO DEEMERGENCIAPro 3
40 HTFH
Carga conocida en el ganchoAccionar la velocidad de precisión (FH) hasta que el motor de elevación sedesconecte solo (unos 5 s.).El LIS – SE realiza la medición y el almacenamiento automáticamente. Unavez realizada la memorización, el mecanismo elevador se desconecta solo.La potencia del campo de giro almacenada se puede ver en pantalla mien-tras no se suelte el botón. (en KW) Este proceso no debe ser interrumpido
0.722 z.B.
tras soltarel botónPro 4
41 HTHH
Carga conocida en el ganchoAccionar la velocidad principal (HH) hasta que el motor de elevación sedesconecte solo (unos 5 s.).El LIS – SE realiza la medición y el almacenamiento automáticamente. Trasfinalizar el almacenamiento el motor de elevación se para por sí solo.La potencia del campo de giro almacenada se puede ver en pantalla mien-tras no se suelte el botón. (en KW) Este proceso no debe ser interrumpido.
3.623 z.B.Tras soltarel botónparpadeabrevementeSP y ABUSaparece enmovimientoen pantalla.Luego apa-rece elmensajesiguiente:00.00

Página 25AN102594 / A 734.ES
Atención: Los puntos 44a* y 44b* sólo se tendrán en cuenta cuando la LKS esté activa. (El punto 44 no seaplica).Cuando la LKS esté inactiva, el ajuste comienza con el punto 44.
0 parpadea
Nºsecue
Teclas Descripción Indicación
42 HTHH
Elevar la carga conocida a velocidad principal hasta que el motor deelevación se desconecte automáticamente.El LIS – SE pasa al modo de ajuste de sobrecarga. La pantalla parpadea yaparece el valor de la carga conocida medido por el LIS – SE (en t).El ajuste de sobrecarga no puede borrarse con un descenso de la carga.
3.120 z.B.parpadea
43 HTFS
Bajar la carga conocida.Comparar la carga conocida con la indicación en el aparato LIS–SE.Debe cumplirse el siguiente requisito.Carga conocida = valor indicado (en t) ± 10%Si no se cumple esta condición deberá repetirse el ajuste con el parámetroP 2.3.Si se cumple el requisito se puede continuar con el punto 44a o 44.
3.120 z.B.parpadea
44a* Enter En la pantalla aparece ”CodE”. C o d E
44b* Enterbrevemente
En la pantalla aparece ”P – nr.”. P – nr
44 Enter mantener pulsado hasta que aparezca ”P – nr.” P – nr
45 Enter Pulsar durante 1 segundo, soltar, en la pantalla aparece: 0 0 0 0
46 +Enter
Introducir el PIN de izquierda a derechaTras elegir la última cifra, pulse ”Enter” hasta que en pantalla aparezca P0.0.
0055parpad.
47 Enter Una vez confirmado el último número con “ENTER”aparece en pantalla: P 0.0
48 Elegir el parámetro P 9.9 P 9.9
49 Enter El LIS – SE se activa en el modo normal. En la pantalla aparece: 0.000
50 HTFS
Accionar Descenso durante unos 3 segundos. Se borra el ajuste desobrecarga.Queda ajustada la sobrecarga; el polipasto está preparado para funcionar.
Atención!1º de los puntos 36 – 43 siempre es posiblebajar la carga, sin que cambie nada en eldesarrollo del programa.2º de los puntos 40 – 43 no se puede bajartanto para que la carga no se apoye en elsuelo. (La carga debe colgar siempre libre)3º Si la potencia medida con carga no es almenos un 10% mayor que la potenciamedida sin carga, se ostrará el error Err 6.Debe comenzarse el ajuste de nuevo en Pro1 (Punto 31).

Página 26 Estado: 20.09.2010
#) Observaciones:1.
0 . 0 0 0
0 – 9
0 – 9
0 – 9
0 – 97
Indicación Posibilidades deajuste
Ejemplo:
Introducción Pantalla
1250 kg 1.250
10250 kg 10.25
2. 0 la cifra subrayada parpadea
3. La resistencia de los motores de elevación es la resistencia medida en una fase.
La medición se realiza con un ohmímetro o con un tester (ajustado a ohmios) en el polipasto.
Medición en motores conectados en estrella (Y).
Medición
entre el punto Y y U1 = Valor de resistencia en una fase = Valor de introducción en P 1.2
entre U1 y V1 = Valor de resistencia en dos fases = Valor de introducción en P 1.2 =valor leído * 0,5
Medición en motores conectados en triángulo ( )
entre U1 y V1 = Valor de introducción en P 1.2 =valor leído * 0,5

Página 27AN102594 / A 734.ES
13ClasificacióndemódulosdemedicióndecorrienteamotoresdeelevaciónGM
Versiónactualdelosmotoresdepolipastos
Ámbitodetensión3Y
(380–415V;50Hz.//440–480V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei50Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
1Motorajenooversión
antiguadeABUS,uotro
ámbitodetensión.
0(verplacadetipos)
(verplacade
tipos)
medireintroducir
bajoP1.2
2GM800L.4
10,28/1,9
1,8/5,0
28,2/4,06
I8
306
9743
3GM800H.4
20,45/3,2
3,1/7,2
21,0/2,16
I8
306
9743
4GM800U.4
00,55/4,0
4,0/8,5
17,6/1,76
I8
306
9743
5GM1000L.6
30,45/3,0
2,4/7,7
18,6/2,16
I8
306
9743
6GM1000H.6
40,80/4,9
4,4/11,2
11,2/1,3
II16
613
9744
7GM1000U.6
00,90/6,0
4,6/13,0
10,2/1,05
II16
613
9744
8GM2000L.3
50,80/4,9
4,4/11,2
11,2/1,3
II16
613
9744
9GM2000H.3
61,1/7,6
5,1/15,9
8,65/0,79
II16
613
9744
10GM3000L.4
71,2/7,4
5,6/15,3
10,4/1,0
II16
613
9744
11GM3000H.4
81,9/12,3
8,2/22,9
6,65/0,51
III23
873
9745
12GM5000L.3
91,9/12,3
8,2/22,9
6,65/0,51
III23
873
9745

Página 28 Estado: 20.09.2010
Ámbitodetensión3Y
(380–415V;50Hz.//440–480V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei50Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
13GM5000
H.3
102,9/18,8
12,2/34,0
3,97
/0,27
IV36
1381
9746
14GM6000
L3
112,9/18,8
12,2/34,0
3,97
/0,27
IV36
1381
9746
15Reserve
16GM7000
L13
2,4/16
11/29,5
4,48
/0,42
IV36
1381
9746
1motor
17GM7000
H14
4,8/32
22/59
2,24
/0,212
V60
2344
9747
2motores
18GM7000
M15
3/20
13,5/39,5
3,97
/0,27
IV36
1381
9746
1motor
19GM7000
U16
6/40
27/79
1,99
/0,135
VI
136
5169
19682
2motores
20
Rmedida[U–V]
RFaseunmotor
RIntroducción=RFase
RFase=––––––––––––––––
oderRFase=Rmedida[Y–U]
Con2motoresRIntroducción=––––––––––––––––
22

Página 29AN102594 / A 734.ES
Ámbitodetensión3
(220–240V;50Hz.//255–280V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei50Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
1Motorajenoo
versiónantiguade
ABUS
0(verplacadetipos)
(verplacade
tipos)
medireintroducir
bajoP1.2
2GM800L.4
00,28/1,9
3,1/8,7
4,7/0,677
I8
306
9743
3GM800H.4
00,45/3,2
5,4/12,5
7/0,72
II16
613
9744
4GM800U.4
00,55/4,0
6,9/14,7
5,86/0,585
II16
613
9744
5GM1000L.6
00,45/3,0
4,2/12,8
6,15/0,707
II16
613
9744
6GM1000H.6
00,80/4,9
7,6/19,4
3,70/0,43
III23
873
9745
7GM1000U.6
00,90/6,0
8,0/22,5
3,4/0,35
III23
873
9745
8GM2000L.3
00,80/4,9
7,6/19,4
3,70/0,43
III23
873
9745
9GM2000H.3
01,1/7,6
8,8/27,5
2,9/0,26
IV36
1381
9746
10GM3000L.4
01,2/7,4
9,7/26,5
3,45/0,33
IV36
1381
9746
11GM3000H.4
01,9/12,3
14,2/39,7
2,22/0,17
IV36
1381
9746
12GM5000L.3
01,9/12,3
14,2/39,7
2,22/0,17
IV36
1381
9746

Página 30 Estado: 20.09.2010
Ámbitodetensión3
(220–240V;50Hz.//255–280V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei50Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
13GM5000
H.3
02,9/18,8
21,1/59
1,31
/0,09
V60
2344
9747
14GM6000
L3
02,9/18,8
21,1/59
1,31
/0,09
V60
2344
9747
15Reserve
16GM7000
L0
2,4/16
19,1/51
1,49
/0,141
V60
2344
9747
1motor
17GM7000
H0
4,8/32
38,2/102
0,745/0,07
VI
136
5169
19682
2motores
18GM7000
M0
3/20
23,4/69
1,31
/0,09
VI
136
5169
19682
1motor
19GM7000
U0
6/40
46,8/138
0,44
/0,045
VI
136
5169
19682
2motores
20
Rmedida
3*Rmedida[U–V]
Rmedida
RIntroducción=–––––––––––––RFase=––––––––––––––––––
Con2motoresRIntroducción=–––––––––––
22
4

Página 31AN102594 / A 734.ES
Ámbitodetensión5Y
(460–500V;50Hz.//550–600V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei50Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
1Motorajenoo
versiónantiguade
ABUS
0(verplacadetipos)
(verplacade
tipos)
medireintroducir
bajoP1.2
2GM800L.4
00,28/1,9
1,5/4,1
20,3/2,9
I8
306
9743
3GM800H.4
00,45/3,2
2,6/6
25,4/2,59
I8
306
9743
4GM800U.4
00,55/4,0
3,3/7,1
26,1/2,5
I8
306
9743
5GM1000L.6
00,45/3,0
2,6/6,2
26,8/3,07
I8
306
9743
6GM1000H.6
00,80/4,9
3,7/9,3
15,45/1,94
II16
613
9744
7GM1000U.6
00,90/6,0
3,8/10,8
15,5/1,32
II16
613
9744
8GM2000L.3
00,80/4,9
3,7/9,3
15,45/1,97
II16
613
9744
9GM2000H.3
01,1/7,6
4,3/13,3
12,5/1,14
II16
613
9744
10GM3000L.4
01,2/7,4
4,7/12,7
15,8/1,46
II16
613
9744
11GM3000H.4
01,9/12,3
6,8/19,1
9,15/0,67
III23
873
9745
12GM5000L.3
01,9/12,3
6,8/19,1
9,15/0,67
III23
873
9745

Página 32 Estado: 20.09.2010
Ámbitodetensión5Y
(460–500V;50Hz.//550–600V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei50Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
13GM5000
H.3
02,9/18,8
10,2/28,3
5,6/0,414
IV36
1381
9746
14GM6000
L3
02,9/18,8
10,2/28,3
5,6/0,414
IV36
1381
9746
15Reserve
16GM7000
L0
2,4/16
9,2/24,6
6,15
/0,64
IV36
1381
9746
1motor
17GM7000
H0
4,8/32
18,4/49,2
3,075/0,32
V60
2344
9747
2motores
18GM7000
M0
3/20
11,3/33
5,6/0,414
IV36
1381
9746
1motor
19GM7000
U0
6/40
22/66
2,8/0,207
V60
2344
9747
2motores
20
Rmedida[U–V]
RFaseunmotor
RIntroducción=RFase
RFase=––––––––––––––––
oderRFase=Rmedida[Y–U]
Con2motoresRIntroducción=––––––––––––––––
22

Página 33AN102594 / A 734.ES
Ámbitodetensión1Y
(300–335V;50Hz.//360–400V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei60Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
1Motorajenoo
versiónantiguade
ABUS
0(verplacadetipos)
(verplacade
tipos)
medireintroducir
bajoP1.2
2GM800L.4
00,34/2,3
2,3/8,3
8,9/1,28
I8
306
9743
3GM800H.4
00,54/3,8
3,9/9,1
13,3/1,35
II16
613
9744
4GM800U.4
00,66/4,8
5,0/10,7
11,1/1,08
II16
613
9744
5GM1000L.6
00,54/3,6
3/9,3
11,7/1,34
II16
613
9744
6GM1000H.6
00,96/5,9
5,5/14
7,08/0,82
II16
613
9744
7GM1000U.6
01,1/7,2
5,8/16,4
6,37/0,59
II16
613
9744
8GM2000L.3
00,96/5,9
5,5/14
7,08/0,82
II16
613
9744
9GM2000H.3
01,3/9,1
6,4/20
5,47/0,5
III23
873
9745
10GM3000L.4
01,44/8,9
6,7/18,3
6,65/0,59
III23
873
9745
11GM3000H.4
02,3/14,8
9,8/27,5
4,09/0,34
IV36
1381
9746
12GM5000L.3
02,3/14,8
9,8/27,5
4,09/0,34
IV36
1381
9746

Página 34 Estado: 20.09.2010
Ámbitodetensión1Y
(300V–335V;50Hz.//360–400V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei60Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
13GM5000
H.3
03,5/22,6
15,3/43
2,6/0,15
V60
2344
9747
14GM6000
L3
03,5/22,6
15,3/43
2,6/0,15
V60
2344
9747
15Reserve
16GM7000
L0
2,9/19,2
11,6/31
2,79
/0.268
IV36
1381
9746
1motor
17GM7000
H0
5,8/38,4
23,2/62
1,4/0,134
V60
2344
9747
2motores
18GM7000
M0
3,6/24
14,2/42
2,6/0,15
V60
2344
9747
1motor
19GM7000
U0
7,2/48
28,4/84
1,3/0,075
VI
136
5169
19682
2motores
20
Rmedida[U–V]
RFaseunmotor
RIntroducción=RFase
RFase=––––––––––––––––
oderRFase=Rmedida[Y–U]
Con2motoresRIntroducción=––––––––––––––––
22

Página 35AN102594 / A 734.ES
Ámbitodetensión1
(175–195V;50Hz.//208–230V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei60Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Ámbito
demedi-
ción
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
1Motorajenoo
versiónantiguade
ABUS
0(verplacadetipos)
(verplacade
tipos)
medireintroducir
bajoP1.2
2GM800L.4
00,34/2,3
4/10,9
2,95/0,42
II16
613
9744
3GM800H.4
00,54/3,8
6,7/15,7
4,4/0,45
II16
613
9744
4GM800U.4
00,66/4,8
8,7/18,5
3,7/0,36
III23
873
9745
5GM1000L.6
00,54/3,6
5,2/16
3,88/0,44
II16
613
9744
6GM1000H.6
00,96/5,9
9,5/24,2
2,33/0,27
III23
873
9745
7GM1000U.6
01,1/7,2
10,0/28,3
2,13/0,20
IV36
1381
9746
8GM2000L.3
00,96/5,9
9,5/24,2
2,33/0,27
III23
873
9745
9GM2000H.3
01,3/9,1
11,1/35
1,80/0,166
IV36
1381
9746
10GM3000L.4
01,44/8,9
11,6/31,7
2,22/0,196
IV36
1381
9746
11GM3000H.4
02,3/14.8
17/47,6
1,366/0,114
V60
2344
9747
12GM5000L.3
02,3/14,8
17/47,6
1,366/0,114
V60
2344
9747
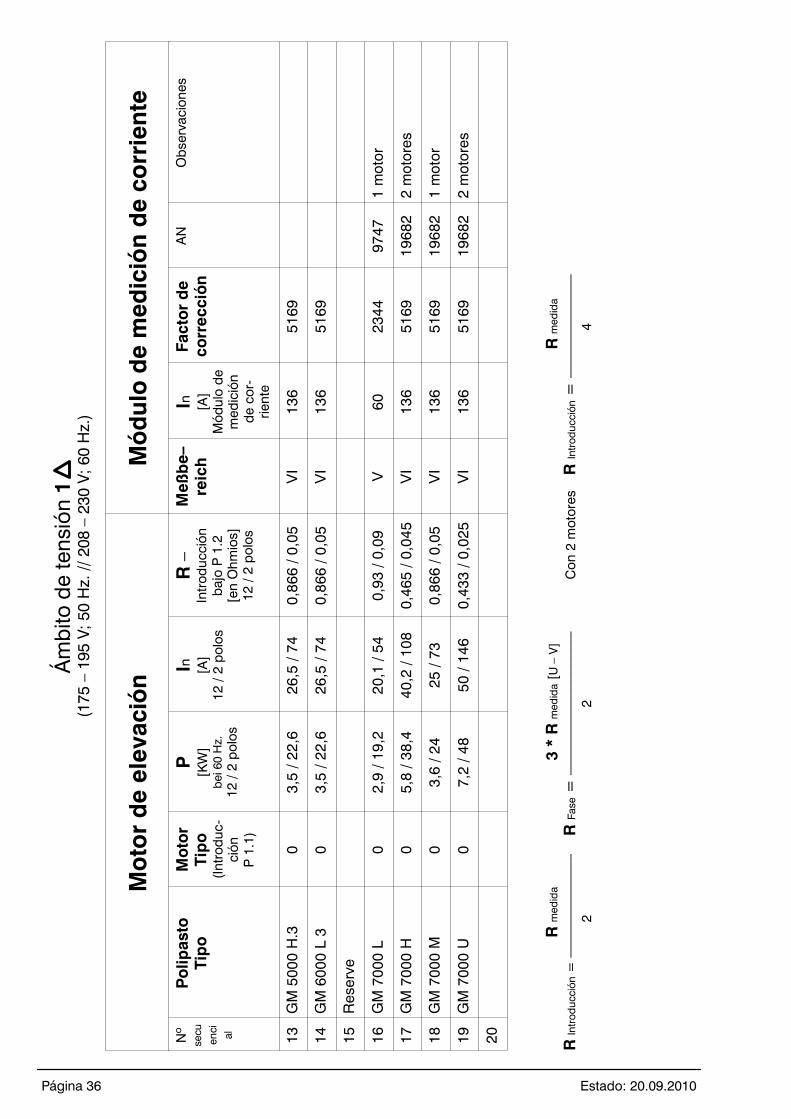
Página 36 Estado: 20.09.2010
Ámbitodetensión1
(175–195V;50Hz.//208–230V;60Hz.)
Motordeelevación
Módulodemedicióndecorriente
Nº
secuenci al
Polipasto
Tipo
Motor
Tipo
(Introduc-
ción
P1.1)
P[KW]
bei60Hz.
12/2polos
In [A]
12/2polos
R–
Introducción
bajoP1.2
[enOhmios]
12/2polos
Meßbe–
reich
In [A]
Módulode
medición
decor-
riente
Factorde
corrección
AN
Observaciones
13GM5000
H.3
03,5/22,6
26,5/74
0,866/0,05
VI
136
5169
14GM6000
L3
03,5/22,6
26,5/74
0,866/0,05
VI
136
5169
15Reserve
16GM7000
L0
2,9/19,2
20,1/54
0,93
/0,09
V60
2344
9747
1motor
17GM7000
H0
5,8/38,4
40,2/108
0,465/0,045
VI
136
5169
19682
2motores
18GM7000
M0
3,6/24
25/73
0,866/0,05
VI
136
5169
19682
1motor
19GM7000
U0
7,2/48
50/146
0,433/0,025
VI
136
5169
19682
2motores
20
Rmedida
3*Rmedida[U–V]
Rmedida
RIntroducción=–––––––––––––RFase=––––––––––––––––––
Con2motoresRIntroducción=–––––––––––––
22
4

Página 37AN102594 / A 734.ES
14 Declaración de Conformidaden el sentido de la Directiva de maquinaria, Anexo II 1A
Nosotros ABUS Kransysteme GmbHDirección Sonnenweg 1
D – 51647 Gummersbach
Apoderado para la recopilación de la documentación técnica especial:Nombre, cargo, nombre de la empresa Michael Müller
Jefe de sección, Documentación TécnicaABUS Kransysteme GmbH
Dirección Sonnenweg 1D---51647 Gummersbach
declaramos, que el producto:
Designación Sistema Indicador de Cargas
Tipo LIS---SE
en producción en serie
de las estipulaciones de las líneas de orientación europeas
2006/42/EG Máquinas2006/95/EG Baja tensión2004/108/EG Compatibilidad electromagnética
cumple la versión vigente en el momento de su presentación.
Se han aplicado especialmente las siguientes normas armonizadas:
EN 954---1 Segúridad de las máquinasEN ISO 12100---1 Segúridad de las máquinas, de los utensilios y de las instalacionesEN ISO 12100---2 Segúridad de las máquinas, Basic concepts, general principles for designEN 60204 T32 Equipo eléctrico de las máquinas; exigencias sobre dispositivos elevadoresEN 61000---6---4 Compatibilidad electromagnética; emisión de interferenciasEN 61000---6---2 Compatibilidad electromagnética; resistencia a interferencias
y de las demás normas derivadas vigentes.
Una documentación técnica está enteramente disponible.Las instructiones de servicio correspondientes están en el idioma del país de los utilizadores.
Nombre: Dr. Eckhard Bube
Dirección general
Gummersbach, 20.09.2010 _____________________ _____________________
Firma de la persona autorizada Indicación del firmante
Esta declaración corresponde a EN ISO 17050.La empresa ABUS Kransysteme GmbH sustiene un sistema de seguridad de cualidad conforme a DIN EN ISO9001.