rob afis 2015 robafis/annales robafis/annales... · mode téléopéré. b.5 le système robot’is...
TRANSCRIPT
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 1
Rob↔AFIS
2015
Dossier de développement préliminaire
Remis le 13/11/2015
Référent : Julien FRABCOIS - Chef de Projet : David HARTENSTEIN
Equipe : Chaimaa BENCHEKROUM, Kamel AYOUDJ, Kamal Amine,
Wannes WAEL
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 2
Sommaire :
1 DEFINITION DES EXIGENCES (LOT P10) p3 1.1. ÉBAUCHE DE DESCRIPTION GENERALE DU SYSTEME ET DES SOUS SYSTEMES (LOT
P11) p3 1.1.1. Finalité, mission et objectifs p3
1.1.2. Contexte organique p4 1.1.3. Contexte fonctionnel p4 1.2. ÉBAUCHE DE REFERENTIEL DES EXIGENCES TECHNIQUES DU SYSTEME (LOT P12) p5
1.2.1. Exigences fonctionnelles p5
1.2.2. Exigences de performance p7 1.2.3. Exigences d'interfaces (fonctionnelles, physiques) p8 1.2.4. Exigences opérationnelles p9 1.2.5. Contraintes p11 1.2.6. Exigences de validation p13
2 DOSSIER DE CONCEPTION ARCHITECTURALE DU SYSTEME (LOT 20) p14 2.1. ÉBAUCHE DE DESCRIPTION GENERALE DU SYSTEME (LOT P21) p14 2.2. ÉBAUCHE D’ARCHITECTURE FONCTIONNELLE ET COMPORTEMENTALE DU SYSTEME (LOT P22) p15 2.2.1 Arborescence fonctionnelle statique p15 2.2.2 Architecture fonctionnelle et dynamique p16 2.3. ÉBAUCHE D’ARCHITECTURE ORGANIQUE / PHYSIQUE DU SYSTEME (LOT P23) p18 2.3.1 Arborescence organique / physique de chaque solution architecturale p18 2.3.2Architecture organique / physique de chaque solution architecturale p19 4. DOSSIER JUSTIFICATIF DU CHOIX DE L’ARCHITECTURE RETENUE (LOT P40) p20
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 3
I. Définition Des exigences
I.1. Ebauche de description générale du système et des sous systèmes
I.1.1. Finalité, mission et objectifs
Le tableau ci-dessous présente la finalité, la mission et les objectifs du système Robot’IS.
Finalité
– Déplacement et manutention des objets d’un espace de travail vers une zone de stockage.
Missions
– Depuis une zone de stockage, suivre en mode automatique une ligne au sol jusqu’au repère
correspondant à la zone de chargement. – Scénario 1 : déplacer une charge de type X de la zone 1 vers la zone 2. – Scénario 2 : déplacer deux charges de type Y de la zone 2 vers la zone 3. – Scénario 3 : déplacer trois charges de type Z de la zone 3 vers la zone 1. – Depuis le repère correspondant à la zone de déchargement, retourner en mode automatique
à la zone de stockage
Objectifs
– Effectuer une des trois missions en moins de 3 min temps nominal, sinon au maximum 5
min. – Réaliser la phase automatique (Suivre le parcours d’une manière autonome jusqu’à la
pastille ainsi que le retour à la zone de stockage) sans intervention manuelle. – S’assurer du bon déroulement de la récupération et le transport des charges jusqu’à leurs
zones respectives
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 4
I.1.2 Contexte organique
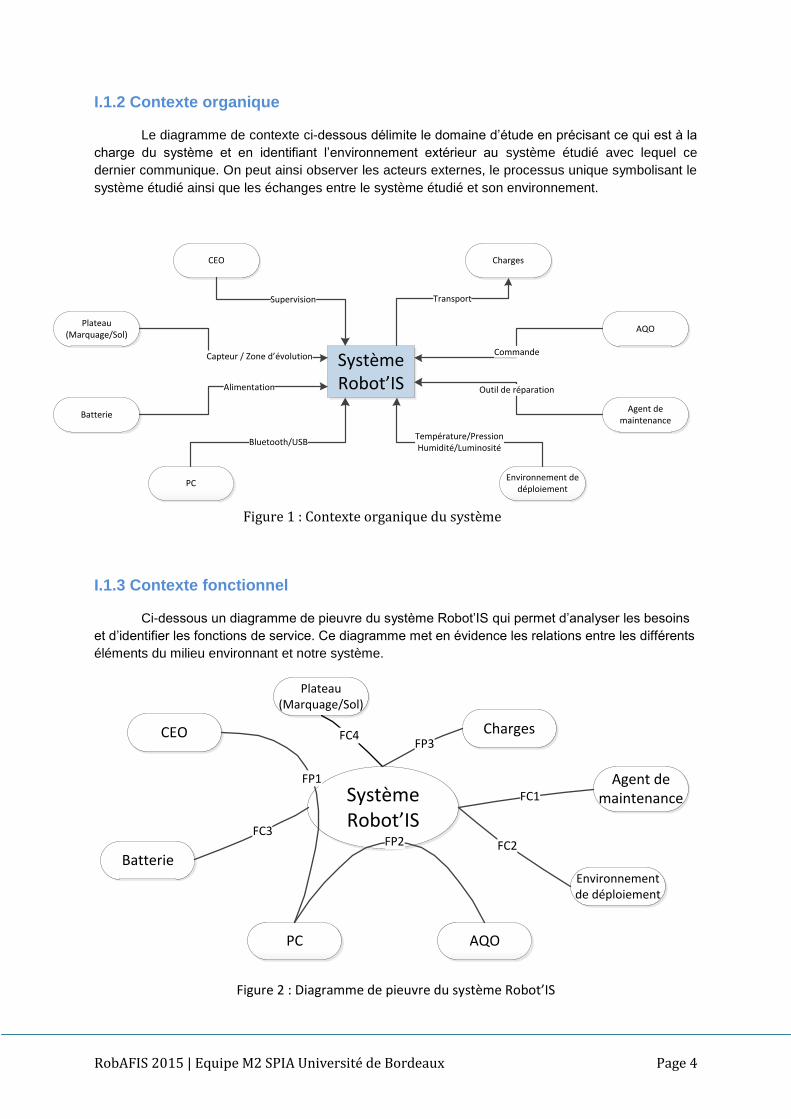
Le diagramme de contexte ci-dessous délimite le domaine d’étude en précisant ce qui est à la
charge du système et en identifiant l’environnement extérieur au système étudié avec lequel ce
dernier communique. On peut ainsi observer les acteurs externes, le processus unique symbolisant le
système étudié ainsi que les échanges entre le système étudié et son environnement.
Système Robot’IS
CEO
PC
Batterie
Plateau(Marquage/Sol)
AQO
Agent de maintenance
Charges
Environnement de déploiement
Supervision
Commande
Outil de réparation
Capteur / Zone d’évolution
Alimentation
Bluetooth/USBTempérature/PressionHumidité/Luminosité
Transport
Figure 1 : Contexte organique du système
I.1.3 Contexte fonctionnel
Ci-dessous un diagramme de pieuvre du système Robot’IS qui permet d’analyser les besoins
et d’identifier les fonctions de service. Ce diagramme met en évidence les relations entre les différents
éléments du milieu environnant et notre système.
Système Robot’IS
CEO
PC
Batterie
Plateau(Marquage/Sol)
AQO
Agent de maintenance
Charges
Environnement de déploiement
FP2
FC4FP3
FC2
FC1
FC3
FP1
Figure 2 : Diagramme de pieuvre du système Robot’IS
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 5
– FP1 : Robot’IS reçoit l’ordre du début de la mission de la part du CEO. – FP2 : Le système est commandé en mode télé opéré par l’AQO via le PC
– FP3 : Robot’IS assure la récupération et le transport des charges.
– FC1 : LErobot subit une opération de maintenance, en cas de défaillance ou tout
simplement pour changer les piles, par l’agent de maintenance.
– FC2 : Robot’IS résiste aux conditions d’environnement (Température, humidité,
pression ; luminosité).
– FC3 : Le système est alimenté par batterie.
– FC4 : Robot’IS parcourt le plateau en suivant le marquage au sol.
I.2. Ebauche de référentiel des exigences techniques du système
Les tableaux ci-dessous regroupent les besoins du système Robot’IS. Ces tableaux
présentent également l’ensemble des exigences et contraintes résultant de ces besoins.
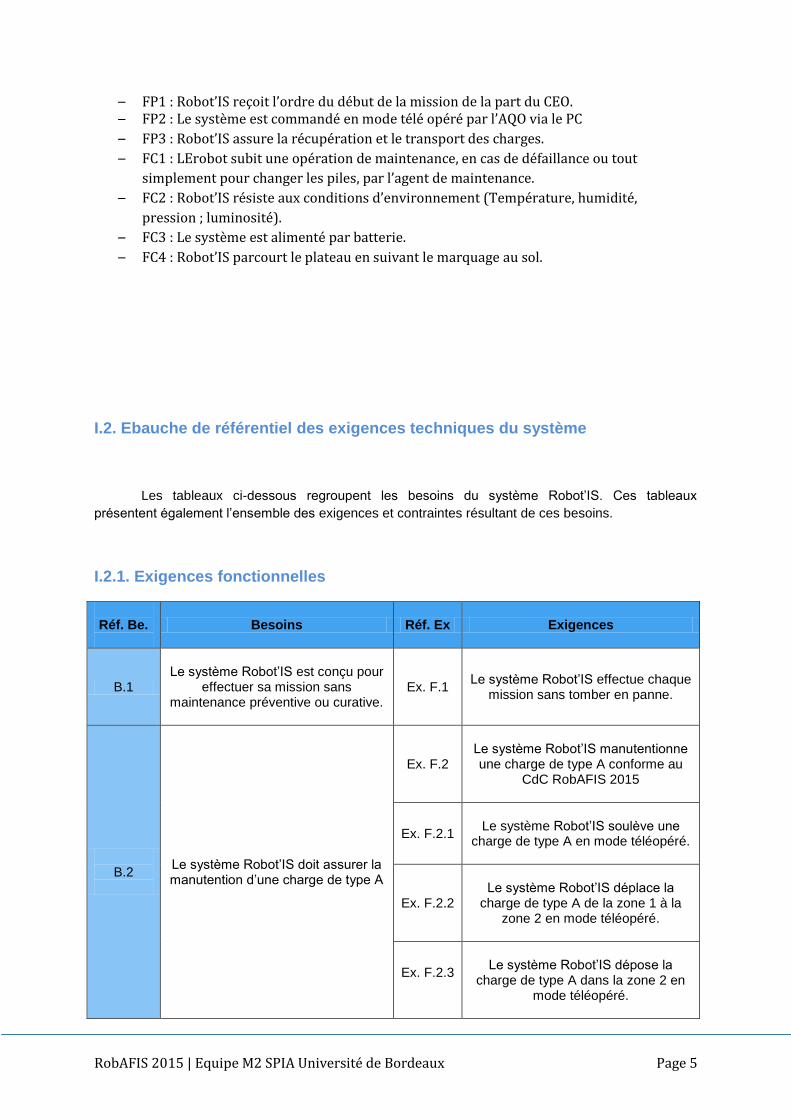
I.2.1. Exigences fonctionnelles
Réf. Be.
Besoins Réf. Ex Exigences
B.1
Le système Robot’IS est conçu pour
effectuer sa mission sans maintenance préventive ou curative.
Ex. F.1 Le système Robot’IS effectue chaque
mission sans tomber en panne.
B.2
Le système Robot’IS doit assurer la manutention d’une charge de type A
Ex. F.2
Le système Robot’IS manutentionne une charge de type A conforme au
CdC RobAFIS 2015
Ex. F.2.1
Le système Robot’IS soulève une
charge de type A en mode téléopéré.
Ex. F.2.2
Le système Robot’IS déplace la
charge de type A de la zone 1 à la zone 2 en mode téléopéré.
Ex. F.2.3
Le système Robot’IS dépose la
charge de type A dans la zone 2 en mode téléopéré.
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 6
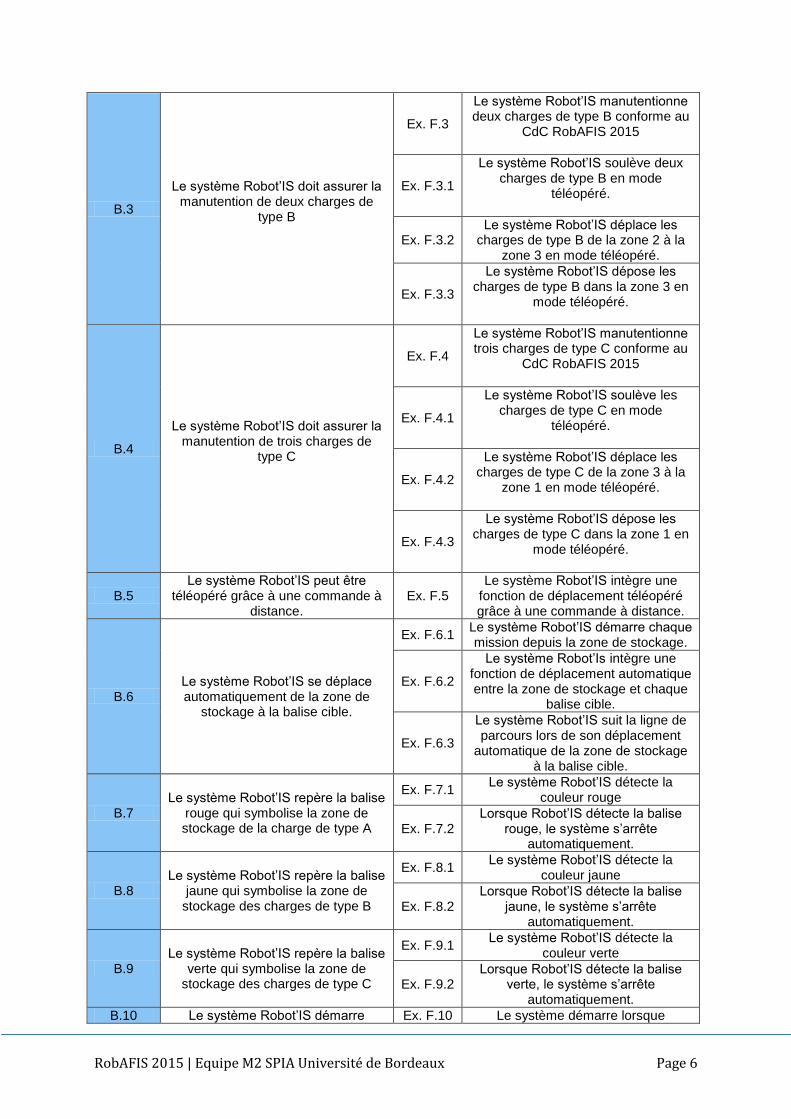
B.3
Le système Robot’IS doit assurer la manutention de deux charges de
type B
Ex. F.3
Le système Robot’IS manutentionne deux charges de type B conforme au
CdC RobAFIS 2015
Ex. F.3.1
Le système Robot’IS soulève deux charges de type B en mode
téléopéré.
Ex. F.3.2 Le système Robot’IS déplace les
charges de type B de la zone 2 à la zone 3 en mode téléopéré.
Ex. F.3.3
Le système Robot’IS dépose les charges de type B dans la zone 3 en
mode téléopéré.
B.4
Le système Robot’IS doit assurer la manutention de trois charges de
type C
Ex. F.4
Le système Robot’IS manutentionne trois charges de type C conforme au
CdC RobAFIS 2015
Ex. F.4.1
Le système Robot’IS soulève les charges de type C en mode
téléopéré.
Ex. F.4.2
Le système Robot’IS déplace les charges de type C de la zone 3 à la
zone 1 en mode téléopéré.
Ex. F.4.3
Le système Robot’IS dépose les charges de type C dans la zone 1 en
mode téléopéré.
B.5 Le système Robot’IS peut être
téléopéré grâce à une commande à distance.
Ex. F.5 Le système Robot’IS intègre une
fonction de déplacement téléopéré grâce à une commande à distance.
B.6 Le système Robot’IS se déplace automatiquement de la zone de
stockage à la balise cible.
Ex. F.6.1 Le système Robot’IS démarre chaque mission depuis la zone de stockage.
Ex. F.6.2
Le système Robot’Is intègre une fonction de déplacement automatique entre la zone de stockage et chaque
balise cible.
Ex. F.6.3
Le système Robot’IS suit la ligne de parcours lors de son déplacement
automatique de la zone de stockage à la balise cible.
B.7 Le système Robot’IS repère la balise
rouge qui symbolise la zone de stockage de la charge de type A
Ex. F.7.1 Le système Robot’IS détecte la
couleur rouge
Ex. F.7.2 Lorsque Robot’IS détecte la balise
rouge, le système s’arrête automatiquement.
B.8 Le système Robot’IS repère la balise
jaune qui symbolise la zone de stockage des charges de type B
Ex. F.8.1 Le système Robot’IS détecte la
couleur jaune
Ex. F.8.2 Lorsque Robot’IS détecte la balise
jaune, le système s’arrête automatiquement.
B.9 Le système Robot’IS repère la balise
verte qui symbolise la zone de stockage des charges de type C
Ex. F.9.1 Le système Robot’IS détecte la
couleur verte
Ex. F.9.2 Lorsque Robot’IS détecte la balise
verte, le système s’arrête automatiquement.
B.10 Le système Robot’IS démarre Ex. F.10 Le système démarre lorsque
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 7
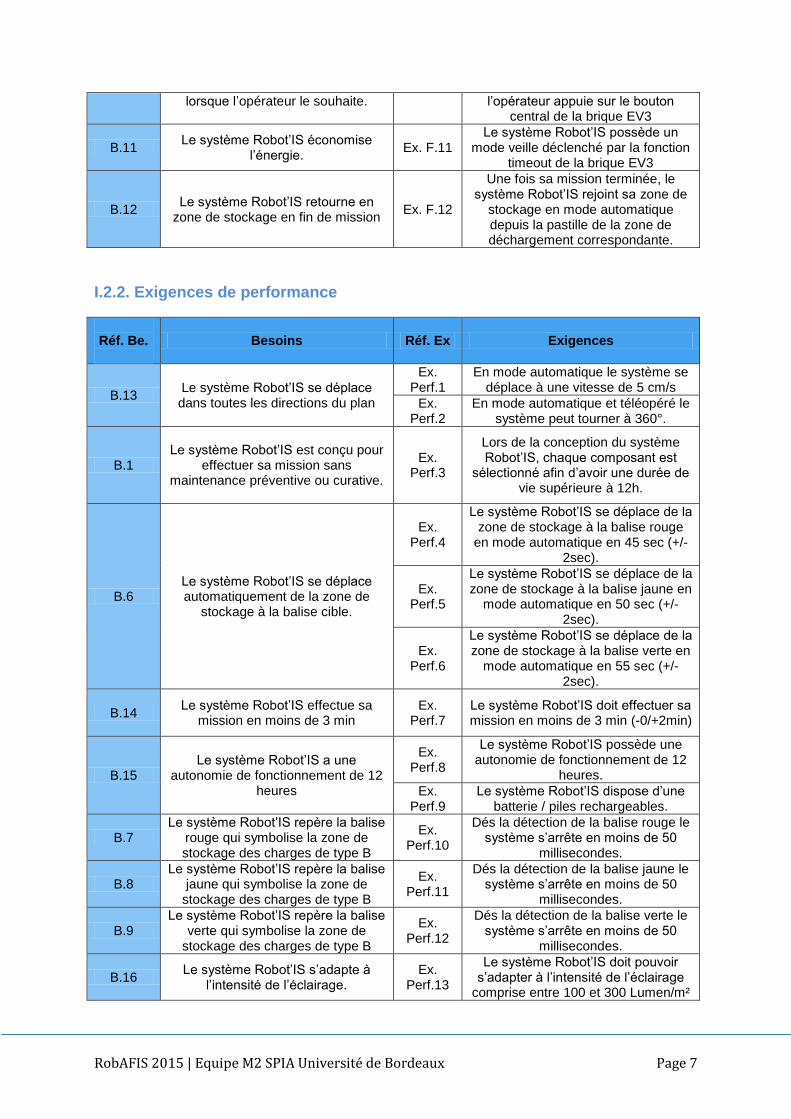
lorsque l’opérateur le souhaite. l’opérateur appuie sur le bouton central de la brique EV3
B.11 Le système Robot’IS économise
l’énergie. Ex. F.11
Le système Robot’IS possède un mode veille déclenché par la fonction
timeout de la brique EV3
B.12 Le système Robot’IS retourne en
zone de stockage en fin de mission Ex. F.12
Une fois sa mission terminée, le système Robot’IS rejoint sa zone de
stockage en mode automatique depuis la pastille de la zone de déchargement correspondante.
I.2.2. Exigences de performance
Réf. Be.
Besoins Réf. Ex Exigences
B.13 Le système Robot’IS se déplace dans toutes les directions du plan
Ex. Perf.1
En mode automatique le système se déplace à une vitesse de 5 cm/s
Ex. Perf.2
En mode automatique et téléopéré le système peut tourner à 360°.
B.1
Le système Robot’IS est conçu pour
effectuer sa mission sans maintenance préventive ou curative.
Ex. Perf.3
Lors de la conception du système Robot’IS, chaque composant est
sélectionné afin d’avoir une durée de vie supérieure à 12h.
B.6 Le système Robot’IS se déplace automatiquement de la zone de
stockage à la balise cible.
Ex. Perf.4
Le système Robot’IS se déplace de la zone de stockage à la balise rouge
en mode automatique en 45 sec (+/- 2sec).
Ex. Perf.5
Le système Robot’IS se déplace de la zone de stockage à la balise jaune en
mode automatique en 50 sec (+/- 2sec).
Ex. Perf.6
Le système Robot’IS se déplace de la zone de stockage à la balise verte en
mode automatique en 55 sec (+/- 2sec).
B.14 Le système Robot’IS effectue sa
mission en moins de 3 min Ex.
Perf.7 Le système Robot’IS doit effectuer sa mission en moins de 3 min (-0/+2min)
B.15 Le système Robot’IS a une
autonomie de fonctionnement de 12 heures
Ex. Perf.8
Le système Robot’IS possède une autonomie de fonctionnement de 12
heures.
Ex. Perf.9
Le système Robot’IS dispose d’une batterie / piles rechargeables.
B.7 Le système Robot’IS repère la balise
rouge qui symbolise la zone de stockage des charges de type B
Ex. Perf.10
Dés la détection de la balise rouge le système s’arrête en moins de 50
millisecondes.
B.8 Le système Robot’IS repère la balise
jaune qui symbolise la zone de stockage des charges de type B
Ex. Perf.11
Dés la détection de la balise jaune le système s’arrête en moins de 50
millisecondes.
B.9 Le système Robot’IS repère la balise
verte qui symbolise la zone de stockage des charges de type B
Ex. Perf.12
Dés la détection de la balise verte le système s’arrête en moins de 50
millisecondes.
B.16 Le système Robot’IS s’adapte à
l’intensité de l’éclairage. Ex.
Perf.13
Le système Robot’IS doit pouvoir s’adapter à l’intensité de l’éclairage
comprise entre 100 et 300 Lumen/m²
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 8
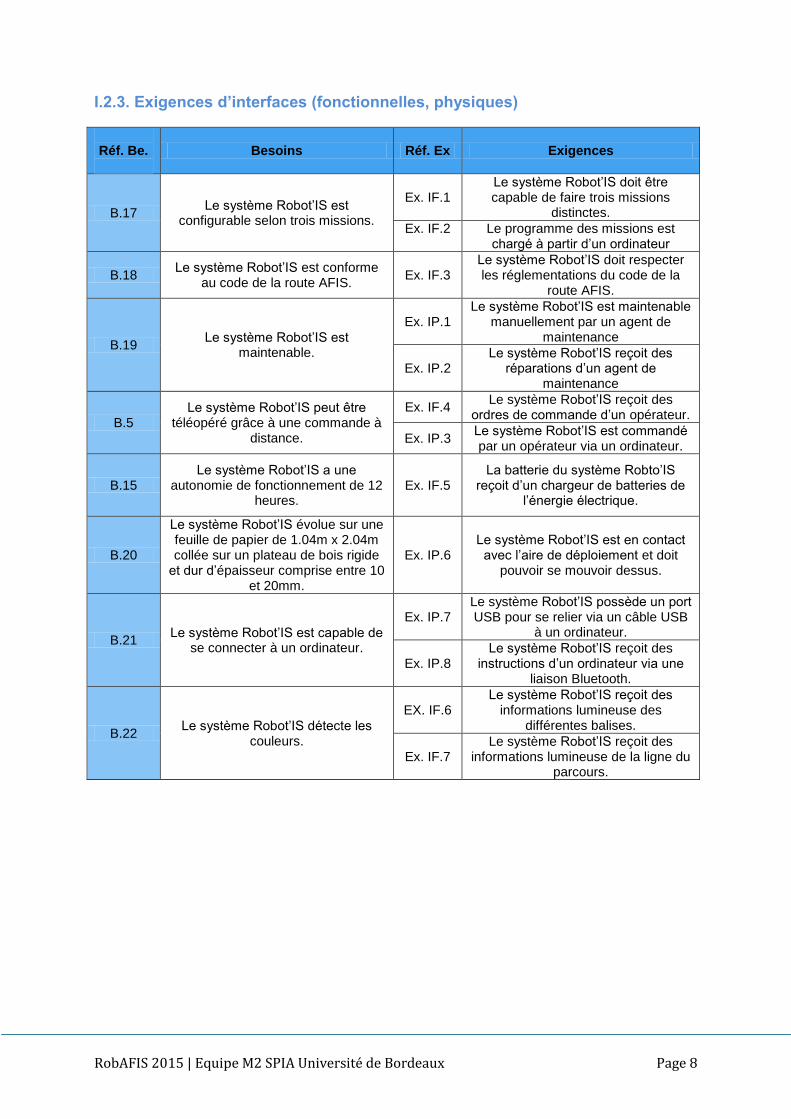
I.2.3. Exigences d’interfaces (fonctionnelles, physiques)
Réf. Be.
Besoins Réf. Ex Exigences
B.17 Le système Robot’IS est
configurable selon trois missions.
Ex. IF.1 Le système Robot’IS doit être capable de faire trois missions
distinctes.
Ex. IF.2
Le programme des missions est chargé à partir d’un ordinateur
B.18 Le système Robot’IS est conforme
au code de la route AFIS. Ex. IF.3
Le système Robot’IS doit respecter les réglementations du code de la
route AFIS.
B.19 Le système Robot’IS est
maintenable.
Ex. IP.1 Le système Robot’IS est maintenable
manuellement par un agent de maintenance
Ex. IP.2 Le système Robot’IS reçoit des
réparations d’un agent de maintenance
B.5 Le système Robot’IS peut être
téléopéré grâce à une commande à distance.
Ex. IF.4 Le système Robot’IS reçoit des
ordres de commande d’un opérateur.
Ex. IP.3 Le système Robot’IS est commandé par un opérateur via un ordinateur.
B.15 Le système Robot’IS a une
autonomie de fonctionnement de 12 heures.
Ex. IF.5 La batterie du système Robto’IS
reçoit d’un chargeur de batteries de l’énergie électrique.
B.20
Le système Robot’IS évolue sur une feuille de papier de 1.04m x 2.04m collée sur un plateau de bois rigide
et dur d’épaisseur comprise entre 10 et 20mm.
Ex. IP.6 Le système Robot’IS est en contact avec l’aire de déploiement et doit
pouvoir se mouvoir dessus.
B.21 Le système Robot’IS est capable de
se connecter à un ordinateur.
Ex. IP.7 Le système Robot’IS possède un port USB pour se relier via un câble USB
à un ordinateur.
Ex. IP.8 Le système Robot’IS reçoit des
instructions d’un ordinateur via une liaison Bluetooth.
B.22 Le système Robot’IS détecte les
couleurs.
EX. IF.6 Le système Robot’IS reçoit des
informations lumineuse des différentes balises.
Ex. IF.7 Le système Robot’IS reçoit des
informations lumineuse de la ligne du parcours.
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 9
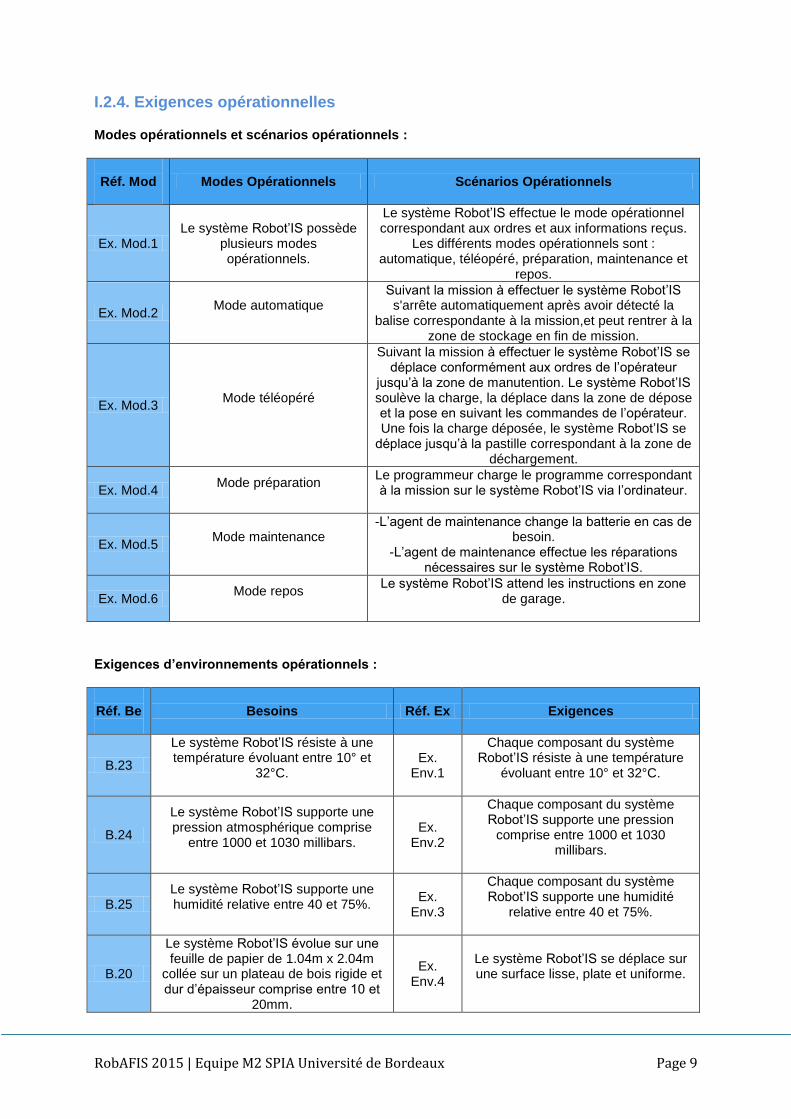
I.2.4. Exigences opérationnelles
Modes opérationnels et scénarios opérationnels :
Réf. Mod
Modes Opérationnels Scénarios Opérationnels
Ex. Mod.1 Le système Robot’IS possède
plusieurs modes opérationnels.
Le système Robot’IS effectue le mode opérationnel correspondant aux ordres et aux informations reçus.
Les différents modes opérationnels sont : automatique, téléopéré, préparation, maintenance et
repos.
Ex. Mod.2 Mode automatique
Suivant la mission à effectuer le système Robot’IS s'arrête automatiquement après avoir détecté la
balise correspondante à la mission,et peut rentrer à la zone de stockage en fin de mission.
Ex. Mod.3 Mode téléopéré
Suivant la mission à effectuer le système Robot’IS se déplace conformément aux ordres de l’opérateur
jusqu’à la zone de manutention. Le système Robot’IS soulève la charge, la déplace dans la zone de dépose et la pose en suivant les commandes de l’opérateur. Une fois la charge déposée, le système Robot’IS se
déplace jusqu’à la pastille correspondant à la zone de déchargement.
Ex. Mod.4 Mode préparation
Le programmeur charge le programme correspondant à la mission sur le système Robot’IS via l’ordinateur.
Ex. Mod.5 Mode maintenance
-L’agent de maintenance change la batterie en cas de besoin.
-L’agent de maintenance effectue les réparations nécessaires sur le système Robot’IS.
Ex. Mod.6 Mode repos
Le système Robot’IS attend les instructions en zone de garage.
Exigences d’environnements opérationnels :
Réf. Be
Besoins Réf. Ex Exigences
B.23
Le système Robot’IS résiste à une température évoluant entre 10° et
32°C.
Ex. Env.1
Chaque composant du système Robot’IS résiste à une température
évoluant entre 10° et 32°C.
B.24
Le système Robot’IS supporte une pression atmosphérique comprise
entre 1000 et 1030 millibars.
Ex. Env.2
Chaque composant du système Robot’IS supporte une pression
comprise entre 1000 et 1030 millibars.
B.25 Le système Robot’IS supporte une humidité relative entre 40 et 75%.
Ex. Env.3
Chaque composant du système Robot’IS supporte une humidité
relative entre 40 et 75%.
B.20
Le système Robot’IS évolue sur une feuille de papier de 1.04m x 2.04m
collée sur un plateau de bois rigide et dur d’épaisseur comprise entre 10 et
20mm.
Ex. Env.4
Le système Robot’IS se déplace sur une surface lisse, plate et uniforme.
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 10
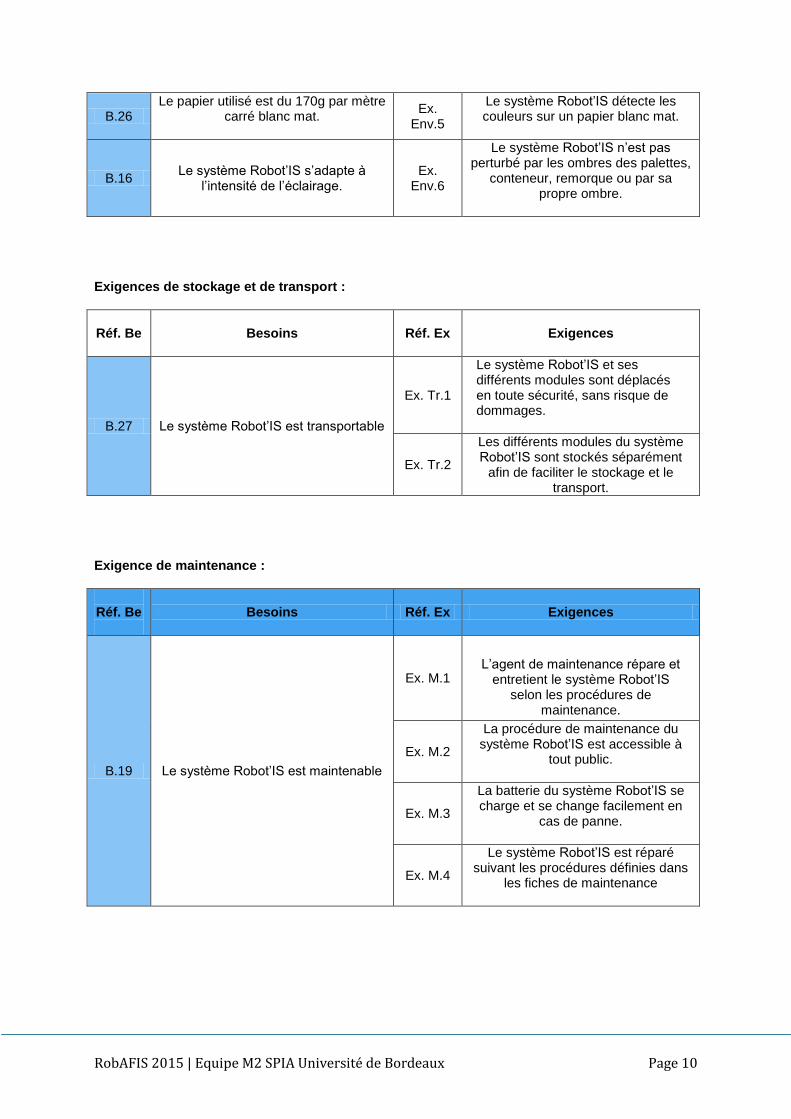
B.26 Le papier utilisé est du 170g par mètre
carré blanc mat.
Ex. Env.5
Le système Robot’IS détecte les couleurs sur un papier blanc mat.
B.16 Le système Robot’IS s’adapte à
l’intensité de l’éclairage. Ex.
Env.6
Le système Robot’IS n’est pas perturbé par les ombres des palettes,
conteneur, remorque ou par sa propre ombre.
Exigences de stockage et de transport :
Réf. Be
Besoins Réf. Ex Exigences
B.27 Le système Robot’IS est transportable
Ex. Tr.1
Le système Robot’IS et ses différents modules sont déplacés en toute sécurité, sans risque de dommages.
Ex. Tr.2
Les différents modules du système Robot’IS sont stockés séparément
afin de faciliter le stockage et le transport.
Exigence de maintenance :
Réf. Be
Besoins Réf. Ex Exigences
B.19 Le système Robot’IS est maintenable
Ex. M.1
L’agent de maintenance répare et
entretient le système Robot’IS selon les procédures de
maintenance.
Ex. M.2
La procédure de maintenance du système Robot’IS est accessible à
tout public.
Ex. M.3
La batterie du système Robot’IS se charge et se change facilement en
cas de panne.
Ex. M.4
Le système Robot’IS est réparé suivant les procédures définies dans
les fiches de maintenance
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 11
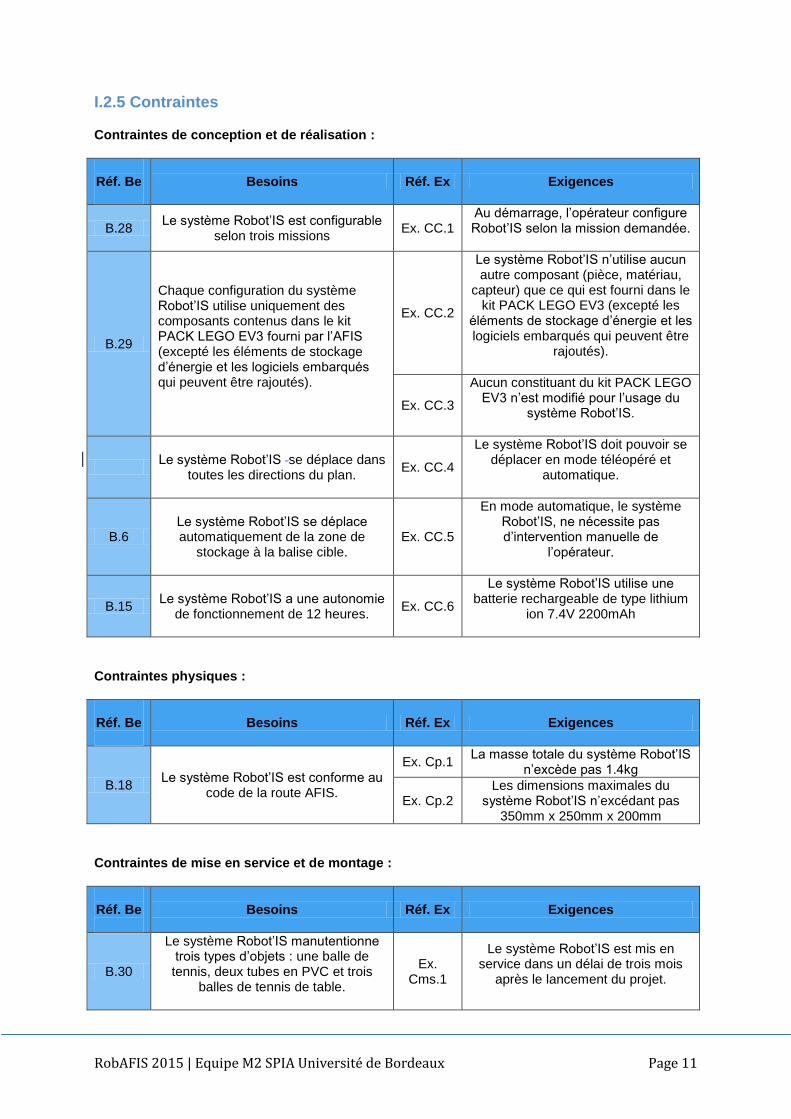
I.2.5 Contraintes
Contraintes de conception et de réalisation :
Réf. Be
Besoins Réf. Ex Exigences
B.28 Le système Robot’IS est configurable
selon trois missions Ex. CC.1
Au démarrage, l’opérateur configure Robot’IS selon la mission demandée.
B.29
Chaque configuration du système Robot’IS utilise uniquement des composants contenus dans le kit PACK LEGO EV3 fourni par l’AFIS (excepté les éléments de stockage d’énergie et les logiciels embarqués qui peuvent être rajoutés).
Ex. CC.2
Le système Robot’IS n’utilise aucun autre composant (pièce, matériau,
capteur) que ce qui est fourni dans le kit PACK LEGO EV3 (excepté les
éléments de stockage d’énergie et les logiciels embarqués qui peuvent être
rajoutés).
Ex. CC.3
Aucun constituant du kit PACK LEGO EV3 n’est modifié pour l’usage du
système Robot’IS.
Le système Robot’IS se déplace dans
toutes les directions du plan. Ex. CC.4
Le système Robot’IS doit pouvoir se déplacer en mode téléopéré et
automatique.
B.6 Le système Robot’IS se déplace automatiquement de la zone de
stockage à la balise cible. Ex. CC.5
En mode automatique, le système Robot’IS, ne nécessite pas d’intervention manuelle de
l’opérateur.
B.15 Le système Robot’IS a une autonomie
de fonctionnement de 12 heures. Ex. CC.6
Le système Robot’IS utilise une batterie rechargeable de type lithium
ion 7.4V 2200mAh
Contraintes physiques :
Réf. Be
Besoins Réf. Ex Exigences
B.18 Le système Robot’IS est conforme au
code de la route AFIS.
Ex. Cp.1 La masse totale du système Robot’IS
n’excède pas 1.4kg
Ex. Cp.2 Les dimensions maximales du
système Robot’IS n’excédant pas 350mm x 250mm x 200mm
Contraintes de mise en service et de montage :
Réf. Be
Besoins Réf. Ex Exigences
B.30
Le système Robot’IS manutentionne trois types d’objets : une balle de tennis, deux tubes en PVC et trois
balles de tennis de table.
Ex. Cms.1
Le système Robot’IS est mis en service dans un délai de trois mois
après le lancement du projet.
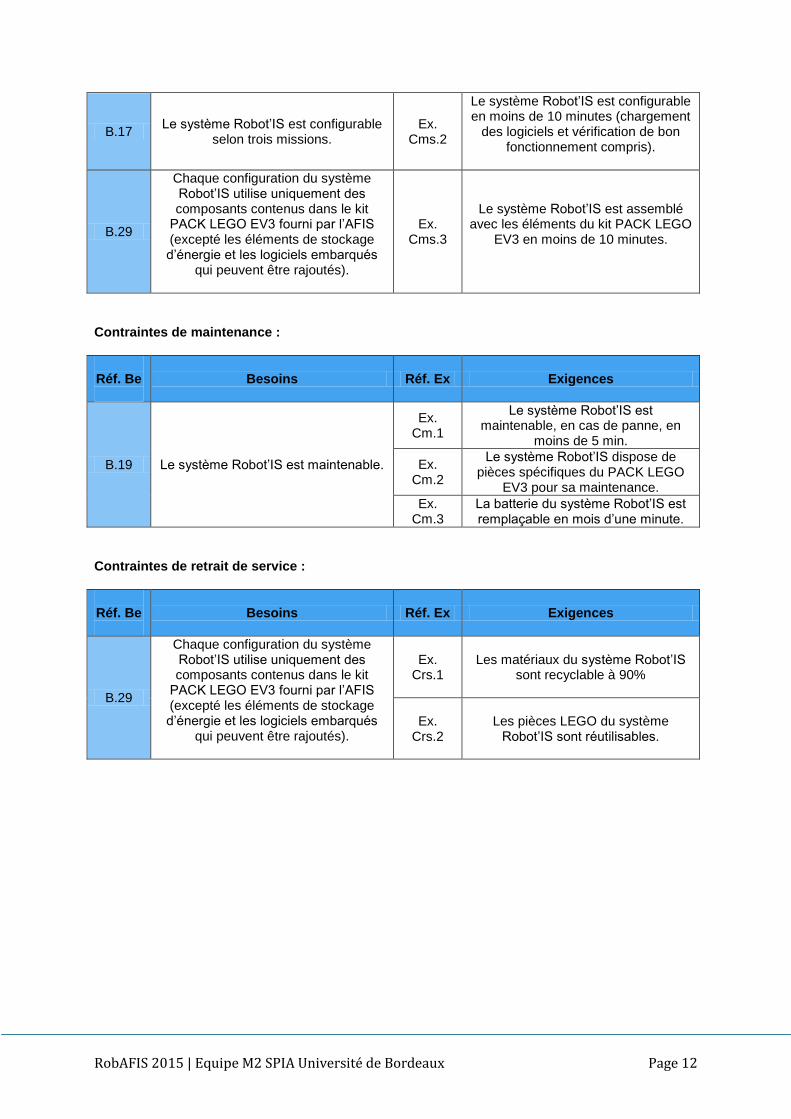
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 12
B.17 Le système Robot’IS est configurable
selon trois missions. Ex.
Cms.2
Le système Robot’IS est configurable en moins de 10 minutes (chargement
des logiciels et vérification de bon fonctionnement compris).
B.29
Chaque configuration du système Robot’IS utilise uniquement des composants contenus dans le kit
PACK LEGO EV3 fourni par l’AFIS (excepté les éléments de stockage d’énergie et les logiciels embarqués
qui peuvent être rajoutés).
Ex. Cms.3
Le système Robot’IS est assemblé avec les éléments du kit PACK LEGO
EV3 en moins de 10 minutes.
Contraintes de maintenance :
Réf. Be
Besoins Réf. Ex Exigences
B.19 Le système Robot’IS est maintenable.
Ex. Cm.1
Le système Robot’IS est maintenable, en cas de panne, en
moins de 5 min.
Ex. Cm.2
Le système Robot’IS dispose de pièces spécifiques du PACK LEGO
EV3 pour sa maintenance.
Ex. Cm.3
La batterie du système Robot’IS est remplaçable en mois d’une minute.
Contraintes de retrait de service :
Réf. Be
Besoins Réf. Ex Exigences
B.29
Chaque configuration du système Robot’IS utilise uniquement des composants contenus dans le kit
PACK LEGO EV3 fourni par l’AFIS (excepté les éléments de stockage d’énergie et les logiciels embarqués
qui peuvent être rajoutés).
Ex. Crs.1
Les matériaux du système Robot’IS
sont recyclable à 90%
Ex. Crs.2
Les pièces LEGO du système Robot’IS sont réutilisables.
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 13
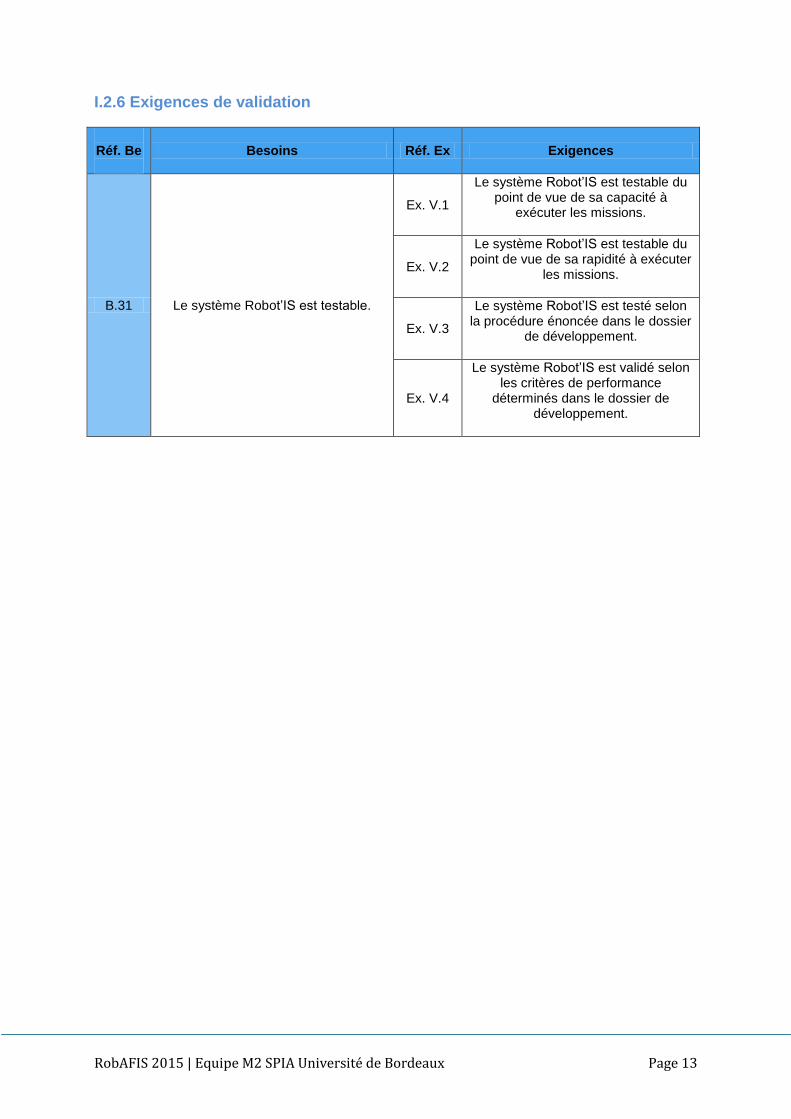
I.2.6 Exigences de validation
Réf. Be
Besoins Réf. Ex Exigences
B.31 Le système Robot’IS est testable.
Ex. V.1
Le système Robot’IS est testable du point de vue de sa capacité à
exécuter les missions.
Ex. V.2
Le système Robot’IS est testable du point de vue de sa rapidité à exécuter
les missions.
Ex. V.3
Le système Robot’IS est testé selon la procédure énoncée dans le dossier
de développement.
Ex. V.4
Le système Robot’IS est validé selon les critères de performance
déterminés dans le dossier de développement.
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 14
II. Dossier de conception architecturale du système
II.1. Ebauche de description générale du système
Solutions étudiées :
Durant notre travail, nous avons pu étudier plusieurs solutions envisagées pour
l’aboutissement des différents scénarios de notre mission, en effet, en faisant des tests afin de
répondre aux exigences préalablement définies, nous nous sommes aperçus que certaines de ces
solutions techniques n’étaient pas adaptées pour réaliser les trois scénarios.
Voici ci dessous les explications des solutions non retenues :
Pince de serrage :
Cette solution est idéale pour la récupération et le transport des charges X, Y (Balle de tennis et
tubes plastiques), en effet le principe et de récupérer la charge et de la serrer grâce à un système de
pince pour la transporter vers la zone prévue. Simplicité d’utilisation et de construction mais on ne
peut transporter qu’une charge à la fois avec se système.
Roue :
Cette solution fonctionne plutôt bien sur des charges sphériques, dans notre cas charges X et Z,
elle permet de déplacer plusieurs charges de même type en un seul voyage. Son principe est assez
simple, une roue est disposé à l’avant de notre mobile. En avançant vers les charges la roue tourne et
permet de charger une seule ou plusieurs charge de type X ou Z dans ces rayons. Le chargement
ainsi que le déchargement et donc très facile et rapide. Problèmes rencontrer avec la charge de type
Y qui correspond a un tube mis à la vertical dans la zone de chargement donc une prise de charges
impossible.
Fourche :
Une solution qui fonctionne plutôt bien avec les charges de type Y, les tubes en PVC. Cette
solution a pour principe de faire glisser une fourche à l’intérieur des tubes PVC pour pouvoir les
déplacer facilement par la suite. Mais ce système n’est pas adapter pour le déplacement de charges
sphérique comme les charges X et Z.
Nous avons donc décidé d’utiliser une pince de serrage pour notre système Robot’IS. En effet
c’est une solution simple et facile d’utilisation qui permet de nous adapter à tous les types de charges
que nous allons rencontrer. Inconvénient majeur avec ce système, nous ne pouvons déplacer qu’une
charge à la fois.
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 15
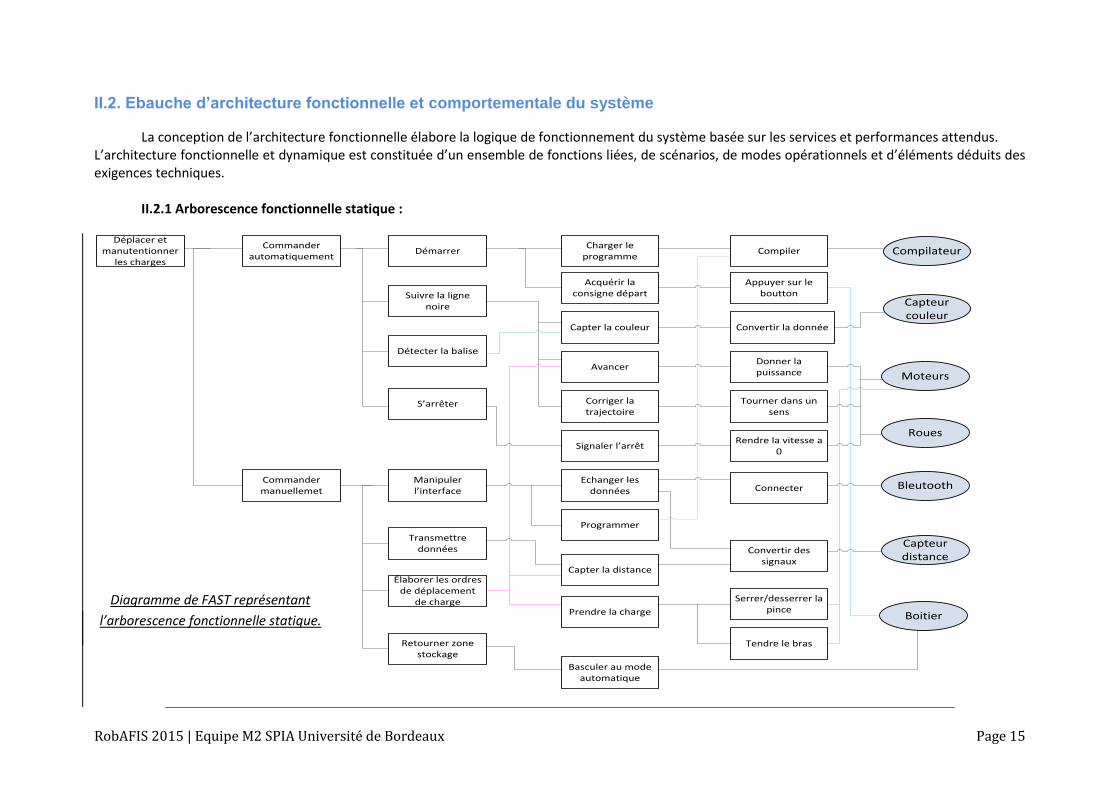
II.2. Ebauche d’architecture fonctionnelle et comportementale du système
La conception de l’architecture fonctionnelle élabore la logique de fonctionnement du système basée sur les services et performances attendus. L’architecture fonctionnelle et dynamique est constituée d’un ensemble de fonctions liées, de scénarios, de modes opérationnels et d’éléments déduits des exigences techniques.
II.2.1 Arborescence fonctionnelle statique :
Déplacer et manutentionner
les charges
Commander automatiquement
Commander manuellemet
Démarrer
Suivre la ligne noire
Détecter la balise
S’arrêter
Charger le programme
Acquérir la consigne départ
Capter la couleur
Avancer
Corriger la trajectoire
Signaler l’arrêt
Manipuler l’interface
Transmettre données
Élaborer les ordres de déplacement
de charge
Retourner zone stockage
Echanger les données
Programmer
Capter la distance
Prendre la charge
Basculer au mode automatique
Compiler
Appuyer sur le boutton
Convertir la donnée
Donner la puissance
Tourner dans un sens
Rendre la vitesse a 0
Connecter
Convertir des signaux
Serrer/desserrer la pince
Tendre le bras
Compilateur
Moteurs
Bleutooth
Capteur distance
Boitier
Capteur couleur
Roues
Diagramme de FAST représentant
l’arborescence fonctionnelle statique.
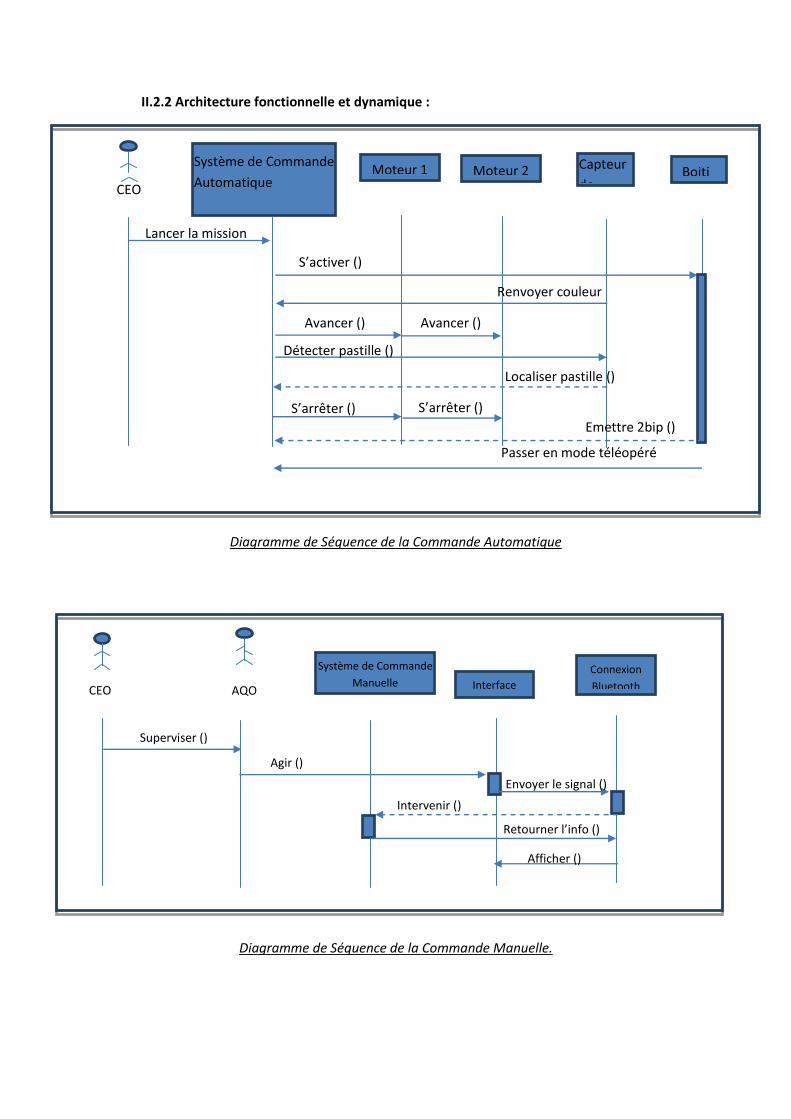
II.2.2 Architecture fonctionnelle et dynamique :
Diagramme de Séquence de la Commande Automatique
Diagramme de Séquence de la Commande Manuelle.
CEO AQO
Système de Commande
Manuelle Interface
Connexion
Bluetooth
Superviser ()
Agir ()
Envoyer le signal ()
Intervenir ()
Retourner l’info ()
Afficher ()
Système de Commande
Automatique Moteur 1 Moteur 2 Capteur
de
couleur CEO
Lancer la mission
()
Boiti
er
S’activer ()
Renvoyer couleur
() Avancer () Avancer ()
Détecter pastille ()
Localiser pastille ()
S’arrêter () S’arrêter ()
Emettre 2bip ()
Passer en mode téléopéré
()
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 17
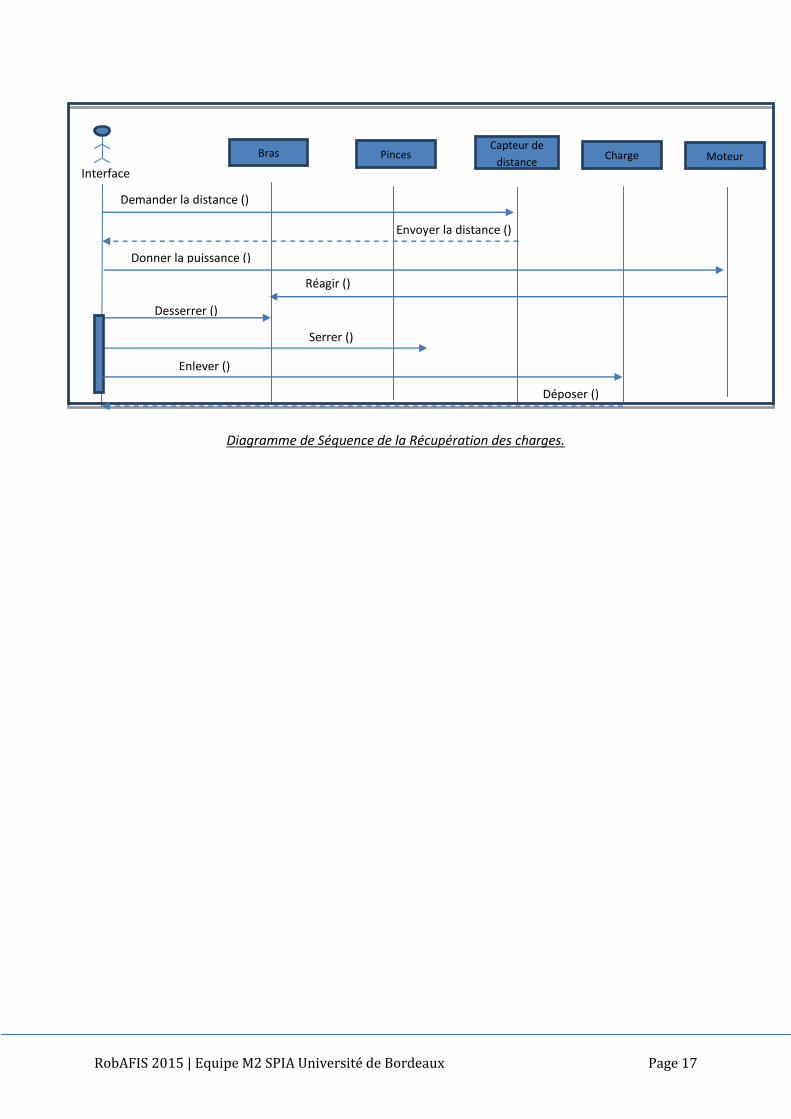
Diagramme de Séquence de la Récupération des charges.
Interface
Bras Pinces Capteur de
distance
Demander la distance ()
Envoyer la distance ()
Desserrer ()
Serrer ()
Enlever ()
Déposer ()
Moteur
Charge
Donner la puissance ()
Réagir ()
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 18
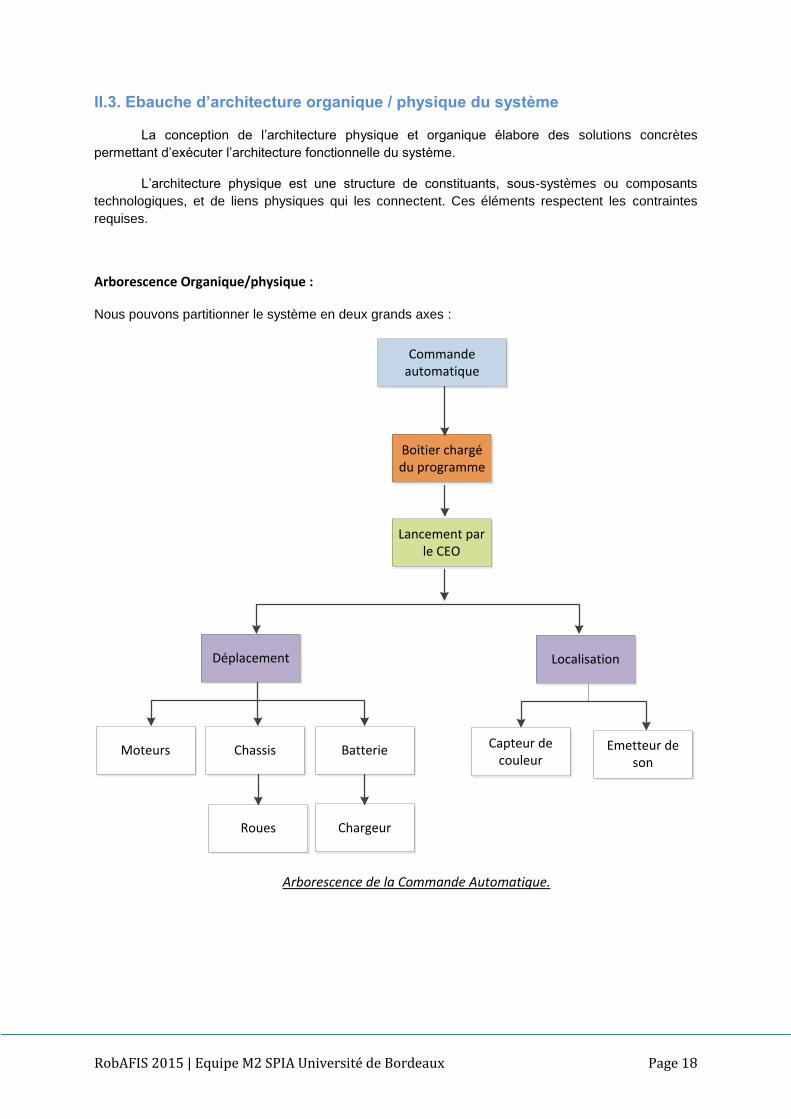
II.3. Ebauche d’architecture organique / physique du système
La conception de l’architecture physique et organique élabore des solutions concrètes
permettant d’exécuter l’architecture fonctionnelle du système.
L’architecture physique est une structure de constituants, sous-systèmes ou composants
technologiques, et de liens physiques qui les connectent. Ces éléments respectent les contraintes
requises.
Arborescence Organique/physique :
Nous pouvons partitionner le système en deux grands axes :
Déplacement Localisation
Moteurs Chassis Batterie Capteur de couleur
Emetteur de son
Chargeur
Commande automatique
Boitier chargé du programme
Lancement par le CEO
Roues
Arborescence de la Commande Automatique.

RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 19
L’arborescence de la commande manuelle se représente de la manière suivante :
AQO
Bras
Communication avec le boitier(émission/réception
données)
Connexion bleutooth
Pinces
commande manuelle
Récupération des différentes charges
Balle de tennis 3 balles de Ping-Pong
2 tubes PVC
Capteur de distance
Interface
Moteur
Arborescence de la Commande Manuelle.
RobAFIS 2015 | Equipe M2 SPIA Université de Bordeaux Page 20
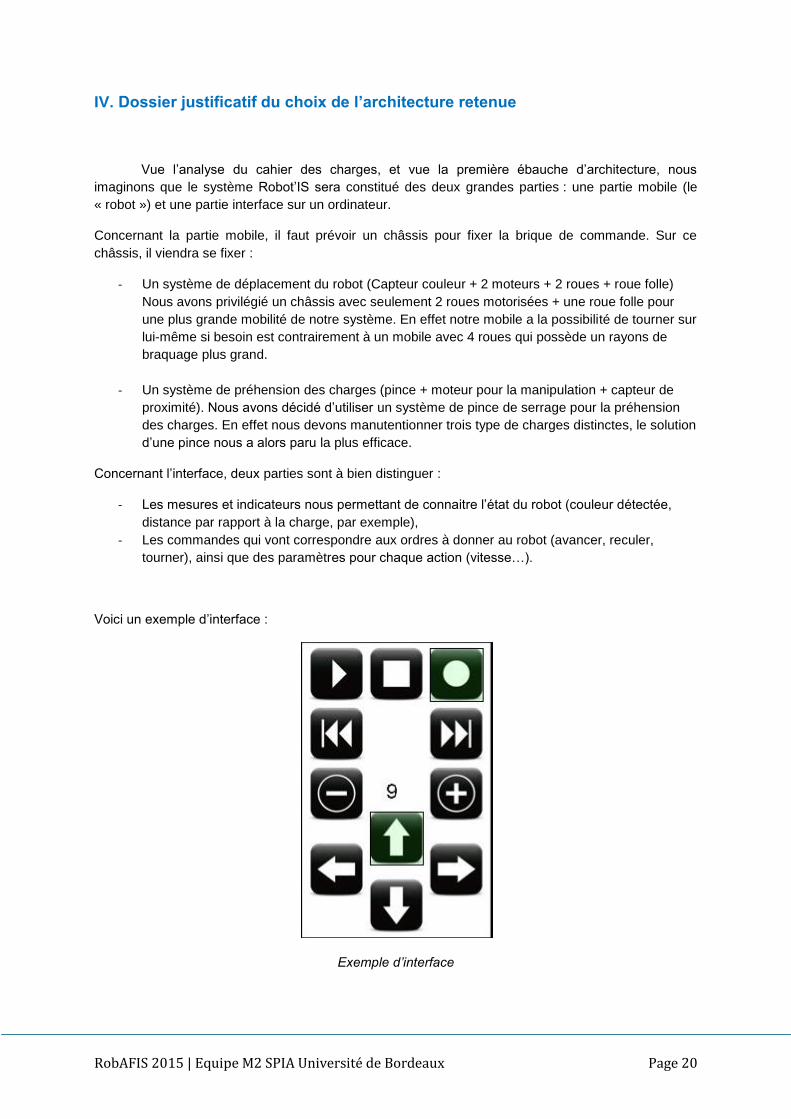
IV. Dossier justificatif du choix de l’architecture retenue
Vue l’analyse du cahier des charges, et vue la première ébauche d’architecture, nous
imaginons que le système Robot’IS sera constitué des deux grandes parties : une partie mobile (le
« robot ») et une partie interface sur un ordinateur.
Concernant la partie mobile, il faut prévoir un châssis pour fixer la brique de commande. Sur ce
châssis, il viendra se fixer :
- Un système de déplacement du robot (Capteur couleur + 2 moteurs + 2 roues + roue folle)
Nous avons privilégié un châssis avec seulement 2 roues motorisées + une roue folle pour
une plus grande mobilité de notre système. En effet notre mobile a la possibilité de tourner sur
lui-même si besoin est contrairement à un mobile avec 4 roues qui possède un rayons de
braquage plus grand.
- Un système de préhension des charges (pince + moteur pour la manipulation + capteur de
proximité). Nous avons décidé d’utiliser un système de pince de serrage pour la préhension
des charges. En effet nous devons manutentionner trois type de charges distinctes, le solution
d’une pince nous a alors paru la plus efficace.
Concernant l’interface, deux parties sont à bien distinguer :
- Les mesures et indicateurs nous permettant de connaitre l’état du robot (couleur détectée,
distance par rapport à la charge, par exemple),
- Les commandes qui vont correspondre aux ordres à donner au robot (avancer, reculer,
tourner), ainsi que des paramètres pour chaque action (vitesse…).
Voici un exemple d’interface :
Exemple d’interface