résolution approchée de problèmes de dynamique en...
TRANSCRIPT
Résolution approchée de problèmes de dynamiqueen régime permanent
F. Louf
Dans cette fiche, on montre comment calculer une solution approchée à un problème de
dynamique en régime permanent à l’aide de la méthode des éléments finis. L’étude sera
menée sur une barre en traction. La procédure pour mener un tel calcul dans Catia est
présentée.
1 Démarche générale
La démarche ressemble fortement à celle proposée au chapitre ??. Puisque, dans le cas gé-
néral, il n’est pas possible de calculer les modes propres etfréquences propres exactes, nous
commençons par calculer une base modale approchée par la méthode des éléments finis. On
obtient alors, contrairement au modèle continu, un nombre fini Nddl de modes propres. En pra-
tique, pour une structure complexe, on se limite à nombre de modes bien inférieur au nombre
de degrés de liberté.
Le calcul de la solution par superposition modale, consistedonc à chercher la solution sous la
forme (dans le cas unidimensionel) :
u(x, t) =
Nddl∑
n=1
φn(x)gn(t)
Cela nécessite ensuite de résoudre des équations différentielles découplées engn(t), ici en
nombre fini, où apparaissent au second membre les efforts imposés projetés dans la base mo-
dale. Nous verrons qu’il est possible de résoudre exactement ces équations différentielles sous
l’hypothèse, peu contraignante en pratique, d’efforts imposés linéaires par morceaux.
Dans la suite, nous illustrons cette méthode sur l’exemple de la barre en traction, soumise à un
effort en bout, de type « échelon ».
2 Rappel du problème continu
x = 0 x = L~x
FIG. 1 – La barre et les conditions aux limites
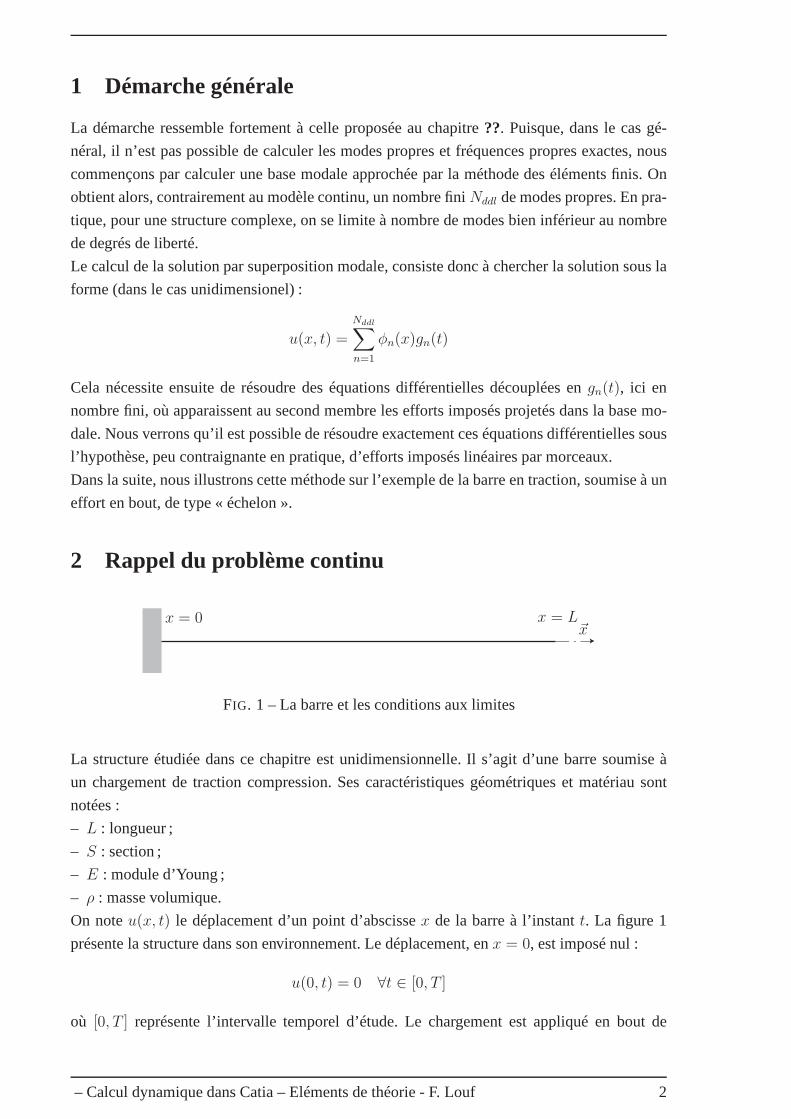
La structure étudiée dans ce chapitre est unidimensionnelle. Il s’agit d’une barre soumise à
un chargement de traction compression. Ses caractéristiques géométriques et matériau sont
notées :
– L : longueur ;
– S : section ;
– E : module d’Young ;
– ρ : masse volumique.
On noteu(x, t) le déplacement d’un point d’abscissex de la barre à l’instantt. La figure 1
présente la structure dans son environnement. Le déplacement, enx = 0, est imposé nul :
u(0, t) = 0 ∀t ∈ [0, T ]
où [0, T ] représente l’intervalle temporel d’étude. Le chargement est appliqué en bout de
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 2

poutre. On le noteF (t). On obtient alors :
ES∂2u
∂x2− ρS
∂2u
∂t2= 0 ∀x ∈ [0, L] ∀t ∈ [0, T ] (1)
u(0, t) = 0 etES∂u
∂x(L, t) = F (t) ∀t ∈ [0, T ] (2)
u(x, 0) = 0 et∂u
∂t(x, 0) = 0 ∀x ∈ [0, L] (3)
3 Formulation variationnelle
On suit la démarche classique. Pour éviter toute confusion avec le champ de vitesse, on note
le champ testu∗. Le problème posé est alors équivalent à :
ES
∫ L
0
∂2u
∂x2u∗dx = ρS
∫ L
0
∂2u
∂t2u∗dx ∀u∗ (4)
u(0, t) = 0 etES∂u
∂x(L, t) = F (t) ∀t ∈ [0, T ] (5)
u(x, 0) = 0 et∂u
∂t(x, 0) = 0 ∀x ∈ [0, L] (6)
En intégrant par partie, et en utilisant la relation entre déplacement et effort imposé enx = L,
on obtient la formulation variationnelle suivante :
∀u∗/u∗(0, t) = 0
F (t)u∗(L) = ES
∫ L
0
∂u
∂x
∂u∗
∂xdx + ρS
∫ L
0
∂2u
∂t2u∗dx (7)
u(0, t) = 0 ∀t ∈ [0, T ] (8)
u(x, 0) = 0 et∂u
∂t(x, 0) = 0 ∀x ∈ [0, L] (9)
4 Discrétisation par éléments finis
4.1 Choix du maillage
On divise le domaine[0, L] enN segments à deux nœuds de taille identique. On exprime alors
le champ de déplacement recherché à l’aide des fonctions de base éléments finis :
u(x, t) = [N(x)]{u(t)} (10)
Le vecteur{u(t)} représente les valeurs aux nœuds du champ de déplacement à l’instantt. On
choisitu∗(x, t) de la même forme :
u∗(x, t) = [N(x)]{u∗(t)} (11)
4.2 Discrétisation des équations d’équilibre
En poursuivant la démarche classiquement utilisée pour desproblèmes ne faisant pas intervenir
le temps, on introduitu(x, t) etu∗(x, t) de la forme choisie dans la formulation variationnelle.
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 3

Avant toute chose, il faut définir :
∂u
∂x(x, t) = [N ′(x)]{u(t)} et
∂u∗
∂x(x, t) = [N ′(x)]{u∗(t)} (12)
∂2u
∂t2(x, t) = [N(x)]{u(t)} (13)
L’équation (7) devient alors :
F (t){u∗(t)}T [N(L)]T ={u∗(t)}T ES
∫ L
0
[N ′(x)]T [N ′(x)]dx{u(t)}
+ {u∗(t)}T ρS
∫ L
0
[N(x)]T [N(x)]dx{u(t)} (14)
On nomme respectivementK, M, {F (t)}, les matrices de raideurs, de masse, et le vecteur des
forces généralisées définis par :
K = ES
∫ L
0
[N ′(x)]T [N ′(x)]dx {F (t)} = [N(L)]T F (t) (15)
M = ρS
∫ L
0
[N(x)]T [N(x)]dx (16)
Le problème est donc de trouver le vecteur{u(t)} avec[N(0)]{u(t)} = 0, vérifiant,∀{u∗(t)} :
{u∗(t)}T[K{u(t)} + M{u(t)} − {F (t)}
]= 0 (17)
[N(0)]{u(t)} = 0 ∀t ∈ [0, T ] (18)
{u(0)} = {0} et{u(0)} = {0} (19)
En conséquence, cela nous permet de nous ramener à la résolution deN + 1 équations diffé-
rentielles couplées, sur tout l’intervalle d’étude :
M{u(t)} + K{u(t)} = {F (t)}u(0, t) = [N(0)]{u(t)} = 0 ∀t ∈ [0, T ]
{u(0)} = {0} et{u(0)} = {0}
5 Calcul des modes approchés
5.1 Recherche de solutions synchrones
On recherche tout d’abord les solutions de l’équation d’équilibre éléments finis homogène de
type :
u(x, t) = g(t)[N(x)]{φ} (20)
soit encore :
{u(t)} = g(t){φ} (21)
En injectant cette forme de solution dans l’équation d’équilibre éléments finis homogène on
obtient :
M{φ}g′′(t) + K{φ}g(t) = 0 (22)
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 4

5.2 Obtention des pulsations propres et des modes propres
soit encore
−g′′(t)
g(t)M{φ} = K{φ} (23)
Montrons que la constanteλ définie par :
λ =g′′(t)
g(t)(24)
est réelle et négative. Dans le cas général où le mode propre{φ} est complexe,{φ} = {a} +
i{b}, on obtient :
−λM({a} + i({b}
)= K
({a} + i{b}
)(25)
En pré-multipliant cette dernière équation par{φ} = {a} − i{b}, on trouve :
−λ({a}T − i{b}T
)M
({a} + i{b}
)=
({a}T − i{b}T
)K
({a} + i{b}
)(26)
λ = − {a}TK{a} + {b}TK{b}{a}T M{a} + {b}TM{b} (27)
Les matricesK et M sont symétriques et positives. Par conséquent l’expression précédente
implique que la constanteλ est réelle et négative. On pose doncλ = −ω2.
5.2 Obtention des pulsations propres et des modes propres
Les pulsations propres sont lesωn telles que les solutions du système linéaire suivant soient
non-triviales :
(K − ω2M){φ} = {0} (28)
où{φ} doit toujours vérifier des conditions aux limites. En effet,celles-ci n’ont pas encore été
prises en compte. Dans le cas où elles sont homogènes, il suffit d’éliminer dans les matrices
K et M les lignes et colonnes associées aux degrés de liberté bloqués. Dans le cas présent,
on éliminera la première ligne et la première colonne. Les matricesK et M de dimensions
(N + 1) × (N + 1) deviennent donc les matricesK etM de dimensionsN × N .
Les pulsations propresωn sont alors telles que les solutions du système linéaire suivant soient
non-triviales :
(K − ω2
nM){φ} = {0} (29)
et donc telles que :
|K− ω2
nM)| = 0 (30)
Les pulsations propresωn du modèle éléments finis sont donc lesN racines réelles et positives
d’un polynôme de degré2N en ω. Comme dans le cas continu, on les range dans un ordre
croissant.
Une fois que lesωn sont calculées, il reste à calculer les vecteurs{φn} tels que :
(K− ω2
nM){φn} = {0} (31)
Le vecteur{φ} s’obtient alors sans difficulté à partir de{φn} en tenant compte de la condition
enx = 0.
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 5
5.3 Orthogonalité
5.3 Orthogonalité
Comme pour un système continu, deux modes distincts sont orthogonaux. Soient deux modes
distincts{φn} et{φp}. Par définition, ils vérifient :
(K− ω2
nM){φn} = {0} (32)
(K− ω2
pM){φp} = {0} (33)
En pré-multipliant (32) par{φp}T et (33) par{φn}T , et en faisant la différence des équations
obtenues on obtient :
{φp}TK{φn} − {φn}TK{φp} = ω2
n{φp}TM{φn} − ω2
p{φn}TM{φp} (34)
La transposée d’une matrice1 × 1 étant cette même matrice, on a :
{φp}TK{φn} = {φn}TKT{φp} (35)
{φp}TM{φn} = {φn}TMT{φp} (36)
Enfin, puisque les matrices de raideur et de masse sont symétriques :
0 = (ω2
n − ω2
p){φn}TM{φp} (37)
Les modesn etp étant par hypothèse distincts, l’équation précédente conduit à :
{φn}TM{φp} = 0 pourn 6= p (38)
ce qui montre que les modesn etp sont orthogonaux. On en déduit immédiatement que :
{φn}TK{φp} = 0 pourn 6= p (39)
5.4 Masse modale et raideur modale
On définit la masse modaleMn et la raideur modaleKn par :
Mn = {φn}TM{φn} (40)
Kn = {φn}TK{φn} (41)
Le mode{φn} vérifie :
(K− ω2
nM){φn} = {0} (42)
et donc :
{φn}TK{φn} = ω2
n{φn}TM{φn} (43)
On obtient immédiatement la relation :
ω2
n =Kn
Mn
(44)
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 6

5.5 Normalisation
5.5 Normalisation
Comme dans le problème continu, on peut choisirφn tels que :
– le vecteur propre{φn} soit de norme unitaire ;
– la masse modale associéeMn soit unitaire ;
– la raideur modale associéeKn soit unitaire.
5.6 Mise en œuvre
On considère un maillage simple constitué de3 segments à deux nœuds. Le nombre de degré
de liberté est donc égal à4.
5.6.1 Calcul des matricesK et M
On commence par calculer les matrices élémentairesKe etMe qui valent :
Ke =ES
Le
∫ Le
0
[N ′(x)]T [N ′(x)]dx =ES
Le
[1 −1
−1 1
](45)
Me = ρSLe
∫ Le
0
[N(x)]T [N(x)]dx = ρSLe
[1/3 1/6
1/6 1/3
](46)
Par assemblage, on obtient les matricesK etM de dimensions4×4, avecLe = L/N = L/3 :
K =3ES
L
1 −1 0 0
−1 2 −1 0
0 −1 2 −1
0 0 −1 1
(47)
M =ρSL
3
1/3 1/6 0 0
1/6 2/3 1/6 0
0 1/6 2/3 1/6
0 0 1/6 1/3
(48)
5.6.2 Prise en compte des conditions aux limites
La condition aux limites, enx = 0 étant homogène, il suffit d’éliminer la première ligne et la
première colonne des matrices de masse et de raideur :
K =3ES
L
2 −1 0
−1 2 −1
0 −1 1
(49)
M =ρSL
3
2/3 1/6 0
1/6 2/3 1/6
0 1/6 1/3
(50)
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 7
5.6 Mise en œuvre
5.6.3 Calcul des pulsations propres
Calculons le déterminant deK − ω2M :
|K − ω2M| = 0 ⇔
∣∣∣∣∣∣∣
6c2
L2 − 2ω2
9−3c2
L2 − ω2
180
−3c2
L2 − ω2
18
6c2
L2 − 2ω2
9−3c2
L2 − ω2
18
0 −3c2
L2 − ω2
18
3c2
L2 − ω2
9
∣∣∣∣∣∣∣= 0 (51)
On obtient donc l’équation :
a3 − 2ab2 = a(a2 − 3b2) = a(a −√
3b)(a +√
3b) = 0 (52)
en ayant posé :
a =6c2
L2− 2ω2
9(53)
b = −3c2
L2− ω2
18(54)
Les pulsations propres sont donc les solutions positives de:
a = 0 ⇔ 6c2
L2− 2ω2
9= 0 (55)
a −√
3b = 0 ⇔ (6 − 3√
3)c2
L2− (4 +
√3)ω2
18= 0 (56)
a +√
3b = 0 ⇔ (6 + 3√
3)c2
L2− (4 −
√3)ω2
18= 0 (57)
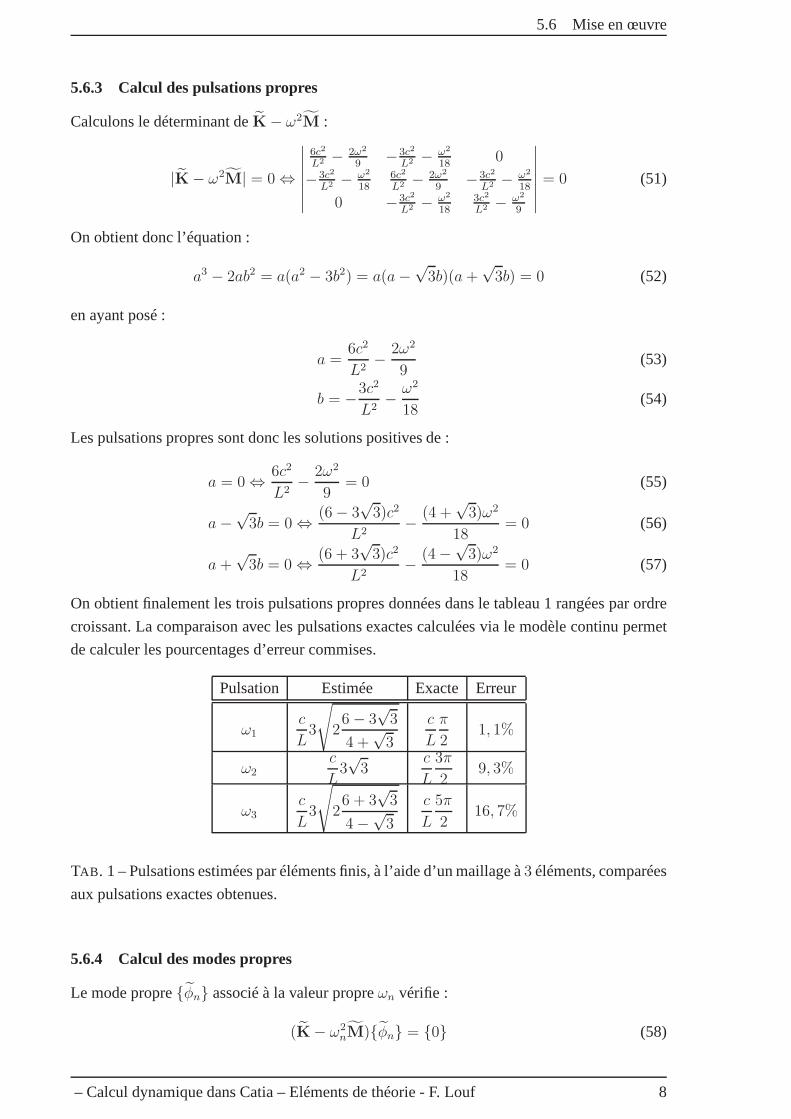
On obtient finalement les trois pulsations propres données dans le tableau 1 rangées par ordre
croissant. La comparaison avec les pulsations exactes calculées via le modèle continu permet
de calculer les pourcentages d’erreur commises.
Pulsation Estimée Exacte Erreur
ω1
c
L3
√
26 − 3
√3
4 +√
3
c
L
π
21, 1%
ω2
c
L3√
3c
L
3π
29, 3%
ω3
c
L3
√
26 + 3
√3
4 −√
3
c
L
5π
216, 7%
TAB. 1 – Pulsations estimées par éléments finis, à l’aide d’un maillage à3 éléments, comparées
aux pulsations exactes obtenues.
5.6.4 Calcul des modes propres
Le mode propre{φn} associé à la valeur propreωn vérifie :
(K− ω2
nM){φn} = {0} (58)
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 8
5.6 Mise en œuvre
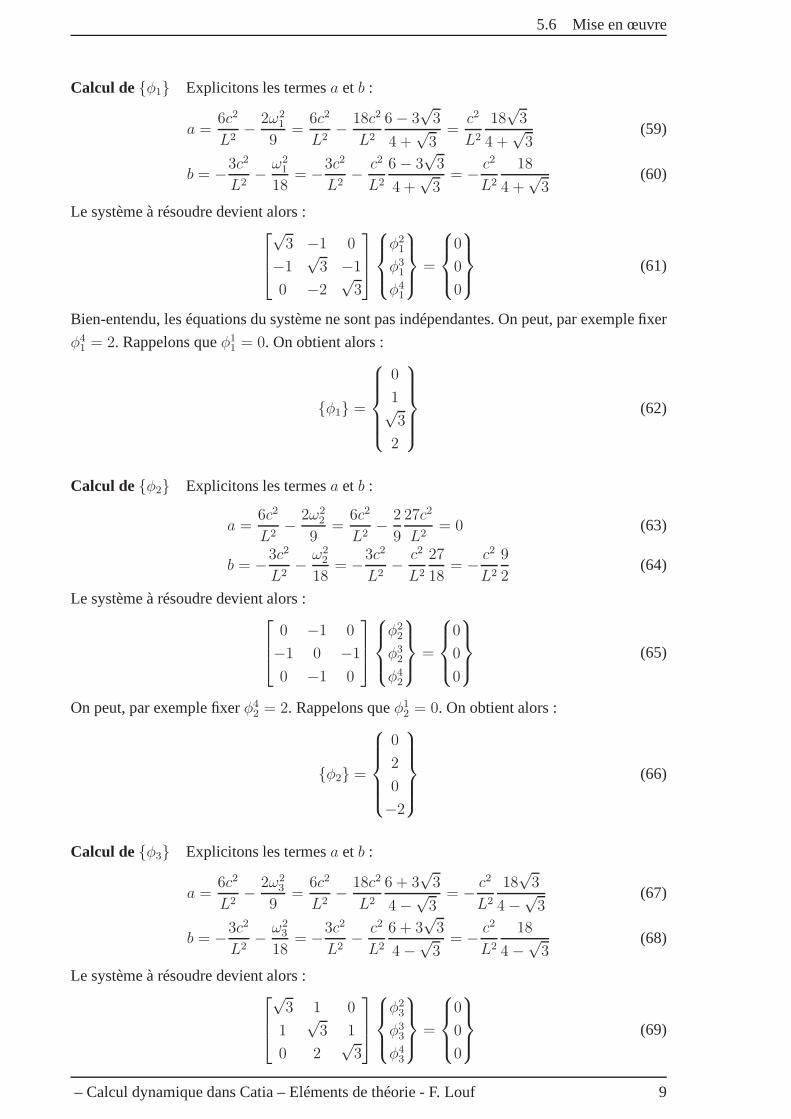
Calcul de{φ1} Explicitons les termesa et b :
a =6c2
L2− 2ω2
1
9=
6c2
L2− 18c2
L2
6 − 3√
3
4 +√
3=
c2
L2
18√
3
4 +√
3(59)
b = −3c2
L2− ω2
1
18= −3c2
L2− c2
L2
6 − 3√
3
4 +√
3= − c2
L2
18
4 +√
3(60)
Le système à résoudre devient alors :
√3 −1 0
−1√
3 −1
0 −2√
3
φ2
1
φ3
1
φ4
1
=
0
0
0
(61)
Bien-entendu, les équations du système ne sont pas indépendantes. On peut, par exemple fixer
φ4
1= 2. Rappelons queφ1
1= 0. On obtient alors :
{φ1} =
0
1√3
2
(62)
Calcul de{φ2} Explicitons les termesa et b :
a =6c2
L2− 2ω2
2
9=
6c2
L2− 2
9
27c2
L2= 0 (63)
b = −3c2
L2− ω2
2
18= −3c2
L2− c2
L2
27
18= − c2
L2
9
2(64)
Le système à résoudre devient alors :
0 −1 0
−1 0 −1
0 −1 0
φ2
2
φ3
2
φ4
2
=
0
0
0
(65)
On peut, par exemple fixerφ4
2= 2. Rappelons queφ1
2= 0. On obtient alors :
{φ2} =
0
2
0
−2
(66)
Calcul de{φ3} Explicitons les termesa et b :
a =6c2
L2− 2ω2
3
9=
6c2
L2− 18c2
L2
6 + 3√
3
4 −√
3= − c2
L2
18√
3
4 −√
3(67)
b = −3c2
L2− ω2
3
18= −3c2
L2− c2
L2
6 + 3√
3
4 −√
3= − c2
L2
18
4 −√
3(68)
Le système à résoudre devient alors :
√3 1 0
1√
3 1
0 2√
3
φ2
3
φ3
3
φ4
3
=
0
0
0
(69)
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 9
5.6 Mise en œuvre
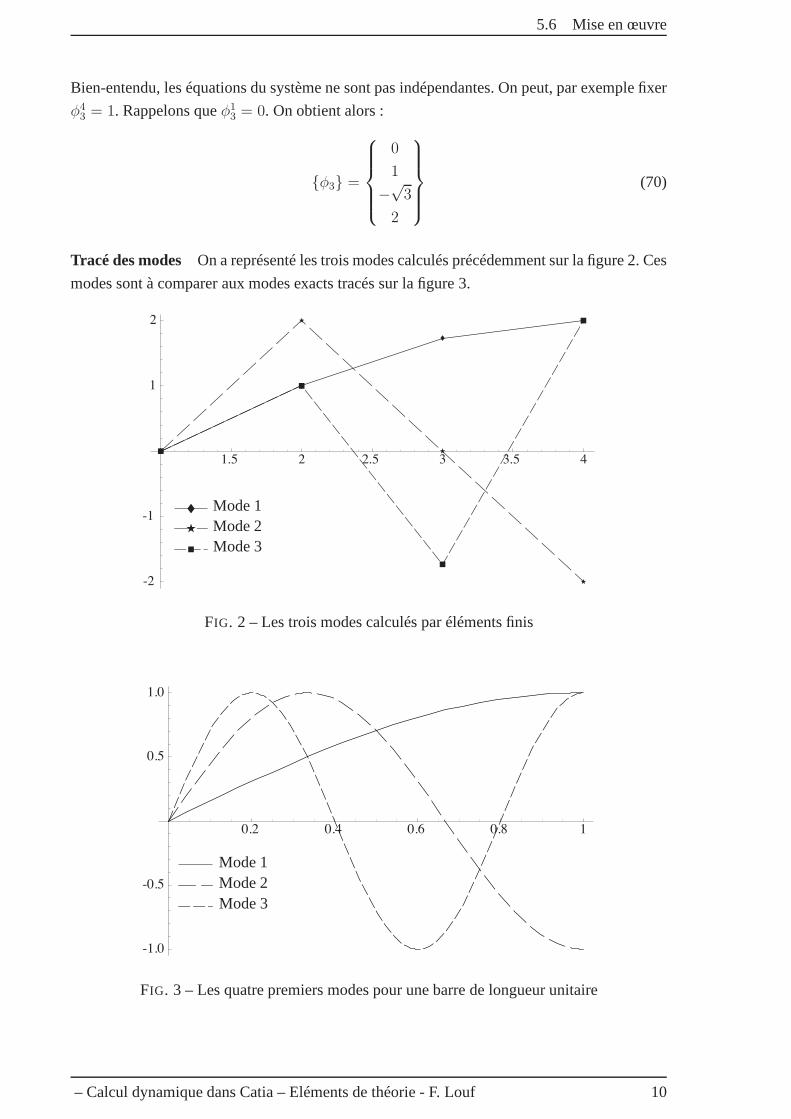
Bien-entendu, les équations du système ne sont pas indépendantes. On peut, par exemple fixer
φ4
3= 1. Rappelons queφ1
3= 0. On obtient alors :
{φ3} =
0
1
−√
3
2
(70)
Tracé des modes On a représenté les trois modes calculés précédemment sur lafigure 2. Ces
modes sont à comparer aux modes exacts tracés sur la figure 3.
1.5 2 2.5 3 3.5 4
-2
-1
1
2
Mode 1Mode 2Mode 3
FIG. 2 – Les trois modes calculés par éléments finis
0.2 0.4 0.6 0.8 1
-1.0
-0.5
0.5
1.0
Mode 1Mode 2Mode 3
FIG. 3 – Les quatre premiers modes pour une barre de longueur unitaire
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 10
6 Fonctions de réponse en fréquence
6.1 Définition
La fonction de réponse en fréquence représente l’amplitudedu déplacement d’un point d’abs-
cissex = x1 du domaine[0, L] en fonction de la fréquence d’excitation imposée en un point
x = x0. On la noteH(x1, x0, ω). Ici, on propose de les déterminer de façon approchée, à l’aide
du calcul des modes et pulsations propres déjà effectué.
6.2 Calcul des FRF
Nous avons vu que l’équation d’équilibre éléments finis est de la forme :
M{u(t)} + K{u(t)} = {F (t)} (71)
On cherche le vecteur des déplacements nodaux solution de laforme :
{u(t)} =N∑
n=1
{φn}gn(t) (72)
En injectant cette solution type dans l’équation d’équilibre éléments finis, on obtient :
N∑
n=1
M{φn}g′′
n(t) +N∑
n=1
K{φn}gn(t) = {F (t)} (73)
En pré-multipliant cette dernière équation par le vecteur{φp}T , et en utilisant la propriété
d’orthogonalité des modes, il vient :
Mng′′
n(t) + Kngn(t) = {φn}T{F (t)} pourn ∈ {1, ..., N} (74)
PuisqueMnω2
n = Kn, on trouve :
g′′
n(t) + ω2
ngn(t) =1
Mn
{φn}T{F (t)} pourn ∈ {1, ..., N} (75)
Ecrivons la transformée de Laplace de cette équation :
Gn(p)[p2 + ω2
n] =1
Mn
{φn}T{F (p)} pourn ∈ {1, ..., N} (76)
De plus, puisque la transformée de Laplace de{u(t)} est :
{U(p)} =N∑
n=1
{φn}Gn(p) (77)
il vient :
{U(p)} =N∑
n=1
{φn}{φn}T
Mn(p2 + ω2n){F (p)} (78)
que l’on peut encore écrire sous la forme :
{U(p)} = Q(p){F (p)} (79)
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 11
6.3 Tracé des fonctions de réponse en fréquence
En remplaçantp pariω, on obtient la matrice des fonctions de transfert :
{U(p)} = H(ω){F (p)} (80)
La matriceH est de dimensionsN × N , et symétrique de par sa définition. Le coefficient
Hi,j(ω) représente l’effet sur le déplacement du nœudi de la barre d’une excitation au nœud
j, à la pulsationω, et inversement.
Remarque. – Rappelons que dans le modèle continu, la fonctionH(x, x0, ω) représentait l’ef-
fet sur le déplacement du point d’abscissex de la barre d’une excitation au point d’abscisse
x0, à la pulsationω
6.3 Tracé des fonctions de réponse en fréquence
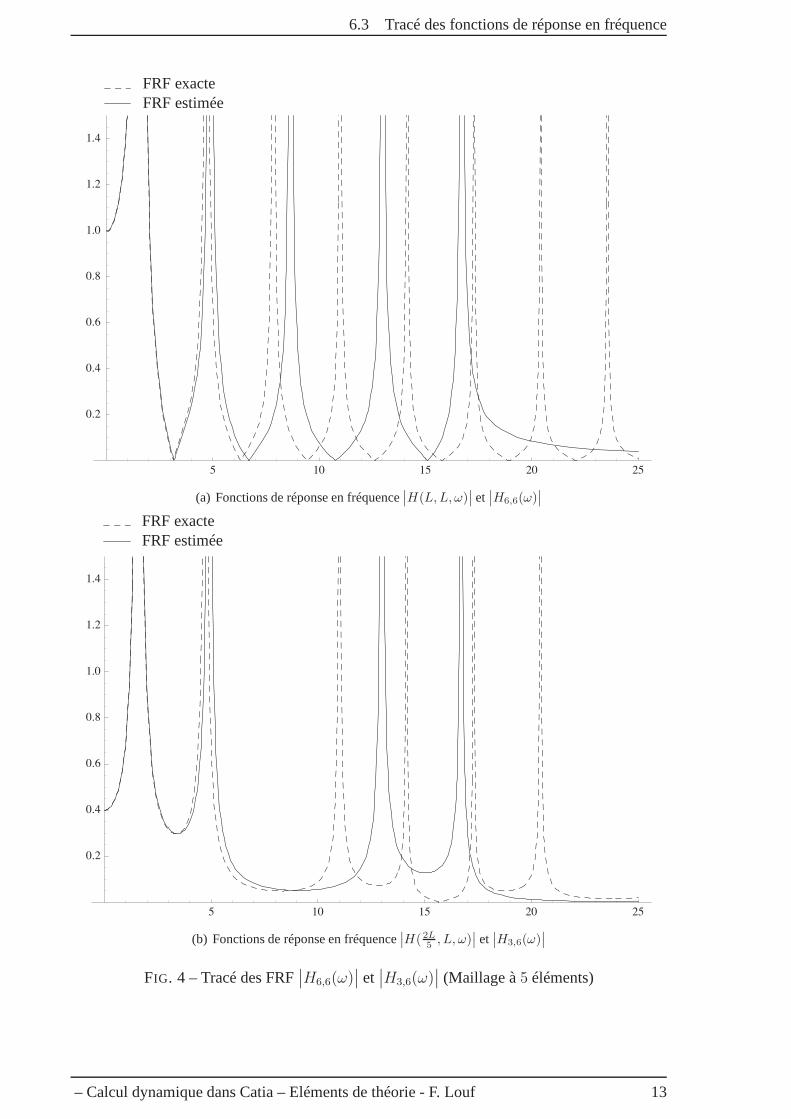
Afin de comparer les résultats à ceux obtenus via le modèle continu, on maille tout d’abord la
barre avec5 éléments de sorte que le point d’abscisseL/5 coincide avec un nœud, le troisième
en l’occurence. Le point d’excitation enx = L coïncide avec le dernier et sixième nœud. On
comparera doncH(L/5, L, ω) et H3,6(ω), ainsi queH(L, L, ω) et H6,6(ω). Les résultats sont
donnés sur la figure 4. On se limite volontairement à une pulsation comprise entre le huitième
et le neuvième mode.
Naturellement, puisque seuls cinq degrés de liberté existent, le nombre de modes visibles sur
les fonctions de réponse en fréquenceH6,6(ω) etH3,6(ω) ne peut excéder5.
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 12
6.3 Tracé des fonctions de réponse en fréquence
5 10 15 20 25
0.2
0.4
0.6
0.8
1.0
1.2
1.4
FRF exacteFRF estimée
(a) Fonctions de réponse en fréquence∣∣H(L, L, ω)
∣∣ et∣∣H6,6(ω)
∣∣
5 10 15 20 25
0.2
0.4
0.6
0.8
1.0
1.2
1.4
FRF exacteFRF estimée
(b) Fonctions de réponse en fréquence∣∣H(2L
5, L, ω)
∣∣ et∣∣H3,6(ω)
∣∣
FIG. 4 – Tracé des FRF∣∣H6,6(ω)
∣∣ et∣∣H3,6(ω)
∣∣ (Maillage à5 éléments)
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 13
6.3 Tracé des fonctions de réponse en fréquence
5 10 15 20 25
0.2
0.4
0.6
0.8
1.0
1.2
1.4
FRF exacteFRF estimée
(a) Fonction de réponse en fréquence∣∣H(L, L, ω)
∣∣ et∣∣H20,20(ω)
∣∣
5 10 15 20 25
0.2
0.4
0.6
0.8
1.0
1.2
1.4
FRF exacteFRF estimée
(b) Fonction de réponse en fréquence∣∣H(2L
5, L, ω)
∣∣ et∣∣H9,20(ω)
∣∣
FIG. 5 – Tracé des FRF estimées∣∣H20,20(ω)
∣∣ et∣∣H9,20(ω)
∣∣ (Maillage à20 éléments)
On constate de plus, comme lors de l’étude du modèle continu,que le nœud3, d’abscisse
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 14
2L/5 est un nœud de vibration pour le troisième mode, et que par conséquent celui-ci n’est
pas visible sur le tracé deH3,6(ω).
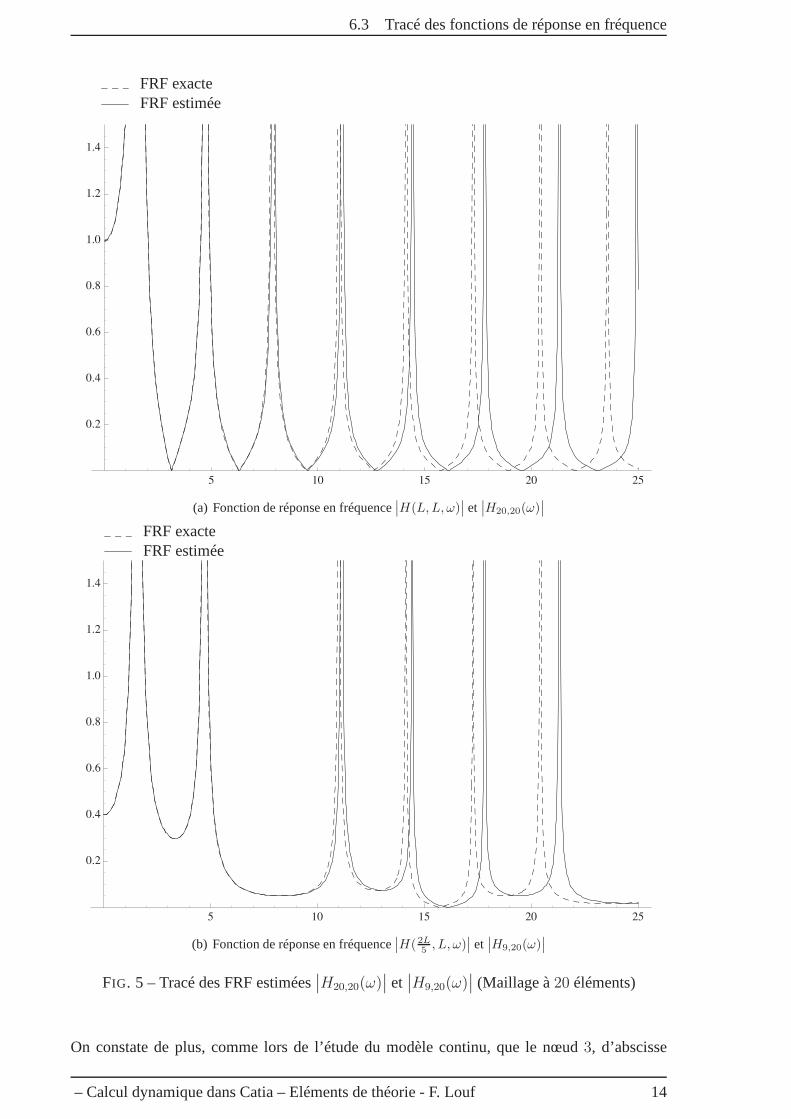
Sur la figure 5, les fonctions de réponses en fréquences similaires obtenues pour un maillage à
20 éléments sont tracées.
Naturellement, cette fois, les9 premiers modes approchés sont visibles, excepté sur le tracé de
H9,20(ω) où les modes3 et9 disparaissent, le neuvième nœud d’abscisse2L/5 étant un nœud
de vibration pour ces modes. Le calcul des pulsations et modes propres basse fréquence étant
plus précis, les FRF approchées et exactes sont plus proches.
Enfin, ces figures mettent de nouveau en évidence le fait que les fréquences propres calculées
par éléments finis sont une sur-estimation des fréquences propres exactes.
7 En pratique dans Catia
On suppose ici que le maillage, les propriétés et matériaux de la structure étudiée sont déjà
définis.
7.1 Calcul de la base modale
Pour commencer, il faut calculer la base modale :
– Insérer unCas de fréquenceà partir du menuInsertionet laisser cochée la caseConditions
aux limites;
– Préciser les conditions aux limites ;
– En double cliquant sur laSolution Modalecontenue dans leCas de fréquences, préciser le
nombre de modes à calculer, c’est-à-dire la taille de la basedans laquelle on cherchera la
réponse dynamique dans la suite ; bien évidemment, ce nombrede modes ne peut excéder
le nombre de degrés de liberté du problème éléments finis.
7.2 Définition du chargement
Ensuite, il faut définir la zone et le contenu fréquentiel du chargement. La zone est définie dans
unCas statiquequ’il n’est pas nécessaire de calculer, le contenu fréquentiel est celui d’un bruit
blanc.
– Insérer unCas statiqueà partir du menuInsertion; si l’on veut, on peut faire pointer les
conditions aux limites vers celles duCas de fréquences;
– Créer le chargement du type souhaité : force surfacique, distribuée, ou autre, selon le type
de modèle utilisé.
7.3 Calcul de la réponse en régime permanent
Enfin, il faut définir le calcul de dynamique vibratoire : basemodale utilisée, chargement
(direction, zone d’application, type, et contenu fréquentiel), amortissement.
– Insérer unCas de réponse dynamiqueà partir du menuInsertion; préciser que la base mo-
dale utilisée est celle contenue dans leCas de fréquences;
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 15
7.4 Post traitement
– Insérer une modulation en fréquence de typeBruit blanc ou particulière via un fichier à
deux colonnes du type de celui présenté dans le tableau 2 ; lesfréquences repérées ne sont
pas forcément régulièrement espacés ;
– En double cliquant surExcitation des charges, dans la fenêtre qui apparaît :
– préciser le chargement à exciter en cliquant dans l’arbre sur le chargement défini dans le
cas statique ;
– préciser la modulation en fréquence en cliquant sur la modulation en fréquence insérée
précédemment (elle se trouve sous le noeudModulationsde l’arbre.
– En double cliquant surAmortissementdans l’arbre, on peut préciser le type d’amortissement
et le coefficient d’amortissement retenu ; par défaut l’amortissement est modal et la valeur
donnée est identique pour chaque mode :1%.
– En double cliquant surSolution de réponse dynamique harmoniquedans l’arbre, préciser la
bande de fréquence étudiée, et le pas de calcul fréquentiel àutiliser.
Remarque. – On aurait pu insérer plusieurs chargements dans un cas statique et définir plu-
sieurs modulations associées.
f(Hz) F
0 0
100 0
100 1
1000 1
1000 0
TAB. 2 – Exemple de fichier donnant la modulation fréquentielle de l’effort imposé : cas d’un
filtre de type carré
7.4 Post traitement
Le post traitement peut se faire de différentes façons :
– il est toujours possible de générer une image (cliquer droit sur Solution de réponse dyna-
mique transitoirepuis Génération d’images) présentant les déplacements, vitesses, accé-
lérations, contraintes, etc et de spécifier dans la fenêtre ouverte l’Occurence, c’est à dire
l’instant auquel on souhaite représenter le champ choisi ;
– il est également possible de tracer l’évolution fréquentielle d’une quantité de type déplace-
ment, vitesse, accélération ; pour cela, cliquer droit surSolution de réponse dynamiqueet
choisirGénérer un affichage 2D; dans la fenêtre qui s’ouvre :
– cliquer surfin
– puis dans la fenêtreSélection de données, choisir le(s) degré(s) de liberté à tracer : sélec-
tionner le noeud souhaité sur le maillage qui s’affiche dans la fenêtre de calcul (fichier
.CATAnalysis) et préciser la ou les directions à tracer ;
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 16
7.5 Comparaison
– dans l’onglet configuration, préciser si l’on souhaite tracer le déplacement, la vitesse ou
l’accélération ;
– dans la fenêtre d’affichage 2D, un graphique est tracé : il est possible de modifier les axes
(échelles, titres, etc) en double cliquant dessus ;
– on peut ensuite exporter la courbe au format texte (cliquerdroit, puis choisir exporter).
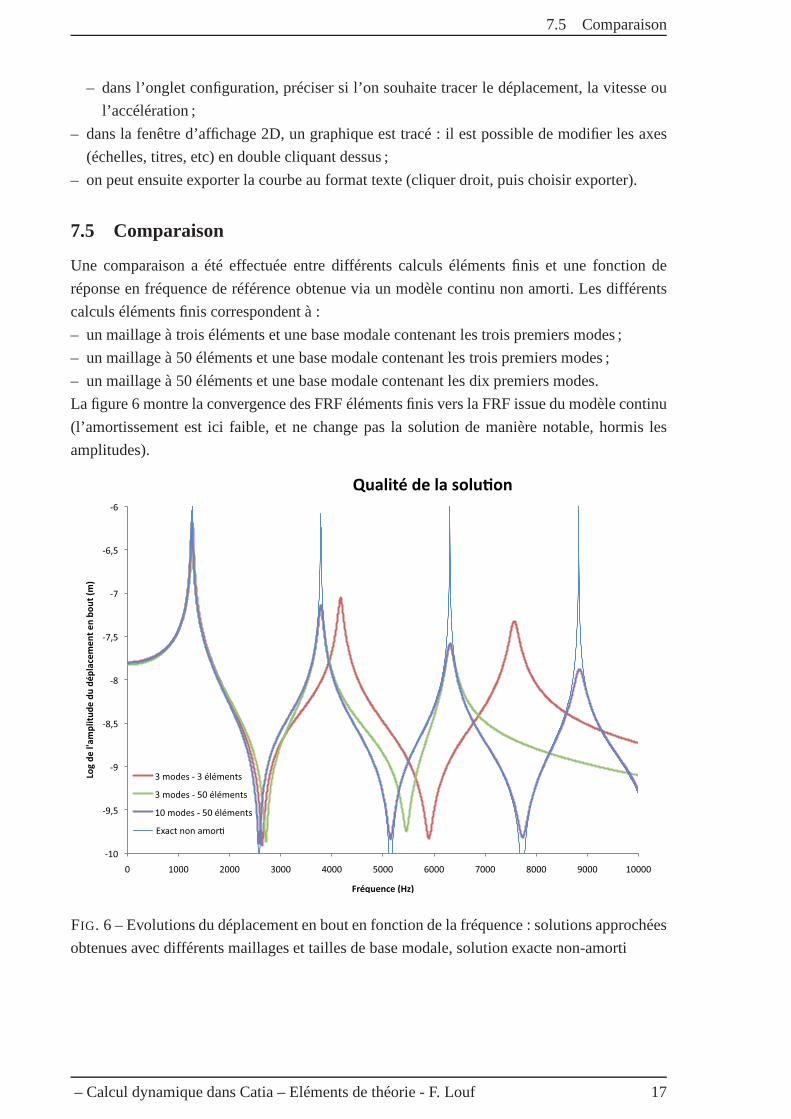
7.5 Comparaison
Une comparaison a été effectuée entre différents calculs éléments finis et une fonction de
réponse en fréquence de référence obtenue via un modèle continu non amorti. Les différents
calculs éléments finis correspondent à :
– un maillage à trois éléments et une base modale contenant les trois premiers modes ;
– un maillage à 50 éléments et une base modale contenant les trois premiers modes ;
– un maillage à 50 éléments et une base modale contenant les dix premiers modes.
La figure 6 montre la convergence des FRF éléments finis vers laFRF issue du modèle continu
(l’amortissement est ici faible, et ne change pas la solution de manière notable, hormis les
amplitudes).
FIG. 6 – Evolutions du déplacement en bout en fonction de la fréquence : solutions approchées
obtenues avec différents maillages et tailles de base modale, solution exacte non-amorti
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 17

7.5 Comparaison
Icône Nom de l’outil Description sommaire
Force distribuée Appliquer une force enN de façon distribuée sur un support
Pression Appliquer une pression enN/m2 sur une surface
Encastrement Bloquer tous les ddl d’un support
Glissement surfacique Bloquer tous les ddl selon la normale à un support
Contraintes avancées Bloquer les ddl choisis d’un support
Bruit blanc Préciser le contenu fréquentiel de l’effort
Modulation fréquentielle importéePréciser le contenu fréquentiel de l’effort via un fichier
Calcul Lancer le calcul de toutes ou d’une partie des analyses
Animation Animer le tracé d’un champ dépendant du temps
TAB. 3 – Outils utilisés dans Catia et icônes correspondantes dans les ateliers utilisés
– Calcul dynamique dans Catia – Eléments de théorie - F. Louf 18