représentativité de mesures dynamométriques liées à...
TRANSCRIPT

11/05/06version 1
SARI
PROJET SARI - PREDIT 3
Surveillance Automatisée de la Route pour l�Information desconducteurs et des gestionnaires
RADARR �
Représentativité de mesuresdynamométriques liées à
l'infrastructure vis-à-vis demesures dynamométriques
embarquées
11/05/06version 1
Date : 11/05/06Version : 1
Partenaire(s) : LCPC ESAR/ISR
Auteur(s) : COIRET A.
Thème : RADARR
Diffusion : Partenaires SARI
Financement : DSCR - Direction de la Sécurité et dela Circulation Routières
Responsable : Coiret A.
Acteurs : section ISR (équipetechnique)

Table des matières1 - Planification des essais.........................................................................................................................3
1.1 - Objectif des essais........................................................................................................................31.2 - Intérêt pour l'avancement du projet RADARR...........................................................................31.3 - Rappels relatifs au système MEVI..............................................................................................41.4 - Choix métrologiques....................................................................................................................51.5 - Détails des essais à effectuer.......................................................................................................5
1.5.1 Statique simple.......................................................................................................................51.5.2 statique simple à charge ajoutée.............................................................................................61.5.3 Statique : efforts de direction (Mz + composantes secondaires)...........................................71.5.4 Statico-dynamique : adhérence limite d'une roue arrière......................................................71.5.5 Dynamique : Roulement a vitesse constante ........................................................................71.5.6 Freinage frontal.......................................................................................................................8
2 - Moyens et Conditions d'essais.............................................................................................................82.1 - Site / instrumentation de terrain...................................................................................................82.2 - Configurations du véhicule d'essais 406-LCPC..........................................................................9
2.2.1 Essais statiques.......................................................................................................................92.2.2 Essais dynamiques..................................................................................................................9
2.3 - Préparation des essais.................................................................................................................103 - Résultats.............................................................................................................................................11
3.1 - Essais statiques simples.............................................................................................................113.1.1 résultats.................................................................................................................................12
3.2 - Essais statiques force ajoutée.....................................................................................................143.2.1 Mode opératoire de l'essai....................................................................................................143.2.2 Résultats................................................................................................................................15
3.3 - Essais statiques efforts de direction (Mz + composantes secondaires).....................................183.3.1 Mode opératoire de l'essai....................................................................................................183.3.2 résultats.................................................................................................................................19
3.3.2.1 Influence du mode de freinage sur les résultats d'essai...............................................193.3.2.2 Comparaison directe, pneumatique centré..................................................................20
3.4 - Statico-dynamique : adhérence limite d'une roue arrière..........................................................213.5 - Essais dynamiques : vitesse constante.......................................................................................253.6 - Essais freinage frontal................................................................................................................33
3.6.1 Essais mouillé avec ABS......................................................................................................333.6.2 Essais sec avec ABS.............................................................................................................373.6.3 Essais revêtement mouillé, sans ABS..................................................................................41
conclusions...............................................................................................................................................444 - Annexes..............................................................................................................................................45
4.1 - Annexe1 piste.............................................................................................................................454.2 - Annexe2 fiche technique du peson............................................................................................46
Remerciements : l'auteur remercie l'équipe technique qui a réalisé les essais :Patrick Daburon (instrumentation véhicule), Jean-Marie Prual (instrumentationchaussée), Alexandra Mosset (métrologie ; traitement des données), Michel Lecerf(pilotage).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)2/46

1 - Planification des essais
1.1 - Objectif des essaisLe LCPC souhaite, au cours des années à venir, étudier les facteurs relatifs à l'infrastructure qui influent lespossibilités de contrôle du système Véhicule / Infrastructure / Conducteur.Un volet expérimental nécessitera, entre autres, la mesure des efforts de contact et des glissements à l'échelled'une roue. La plupart des expérimentations seront effectuées au moyen d'un véhicule instrumenté pour lequel lamesure directe de ces efforts et glissements sera possible (au moins pour une roue). Pour cela, l'instrumentationcomprendra au moins :� une roue dynamométrique (mesure du torseur des efforts transmis par le moyeu ; système Kistler acquis) ;� un système de mesure des glissements de cette roue (a priori système Correvit bi-axial ; à acquérir).Cependant, notre intéressement étant prioritairement lié aux paramètres routiers, il conviendra i) d'extrapoler lesrésultats obtenus aux possibilités de contrôle d'autres types de véhicules ou bien ii) de pouvoir directementréaliser des essais avec ces autres véhicules.Pour cette dernière proposition, soit pour un parc varié de véhicules, il ne sera économiquement pas possibled'accéder aux efforts de contact d'une roue au moyen d'une roue dynamométrique (coût d'adaptation de l'ordre de15k� par véhicule). Nous avons donc réalisé une étude de faisabilité portant sur la mesure du torseur de contactdepuis l'infrastructure. Cette étude a débouché sur le développement du système MEVI au LCPC. Des premièresvalidations ont été faites, en comparant les mesures à des matériels opérationnels (grip-tester) ou à des estimationsembarquées des efforts (procédure de freinage frontal ou exploitation de mesures cinématiques).Disposant depuis peu d'une roue dynamométrique, il apparaît maintenant nécessaire de comparer le systèmeMEVI à ce nouveau matériel. Une information complémentaire, presque redondante, pourra être apportée lors deces essais comparatifs par des capteurs de couple récemment disposés sur les lignes de transmission mécaniqueboîte/roues du véhicule 406-LCPC (essais en accélération ou vitesse stabilisée ; non exploitable en cas defreinage (effort interne à la transmission)). Ce faisant, il est difficile d'indiquer si l'on vérifie métrologiquement la roue dynamométrique ou le systèmeMEVI.MEVI a cependant été étalonné au moyen du tribomètre (division MSC/LCPC). La roue dynamométrique pourrafaire aussi l'objet de vérifications sur banc schenck (MI/LCPC) ou sur tribomètre (essais ultérieurs).Il sera alors possible de statuer sur l'intérêt du système inséré dans la chaussée (MEVI) pour permettre de réaliserdes études de contrôlabilité avec des véhicules dénués de roue dynamométrique.
1.2 - Intérêt pour l'avancement du projet RADARRAu moins deux voies d'investigation importantes sont prévues dans RADARR sur site routier réel :� évaluation de l'adhérence disponible et utilisée, par un véhicule d'essai dédié (307+recalage adhérence
Callas) ;� observation des trajectoires pratiquées par l'ensemble des véhicules des usagers (vidéo, boucles, frao,...).Le premier intérêt à l'emploi du système MEVI au sein de RADARR serait de proposer une alternative auvéhicule instrumenté dédié (307) pour la mesure de l'adhérence utilisée. Il est souhaitable, préalablement, decomparer métrologiquement les deux moyens : c'est l'objet de ce rapport et du suivant (contextes de ligne droite etde virage). L'avantage de MEVI sera de pouvoir concerner de nombreux véhicules légers, avec une possibilitéd'implantation sur site réel.Le second intérêt, en cas d'impossibilité d'implantation de MEVI sur site réel, sera d'exploiter conjointement sursite fermé des moyens de mesure cinématiques 'chaussée' (vidéo, boucles,...) et MEVI afin de déterminer si, en
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)3/46
l'absence de MEVI ou de véhicule instrumenté sur site réel, il serait possible d'estimer le niveau d'adhérenceutilisé par divers véhicules légers au moyen dégradé des seuls systèmes de mesure cinématique. Ce second pointd'intérêt devrait faire l'objet d'un rapport si les conditions budgétaires sont satisfaites (nécessité de disposer de 2capteurs MEVI).
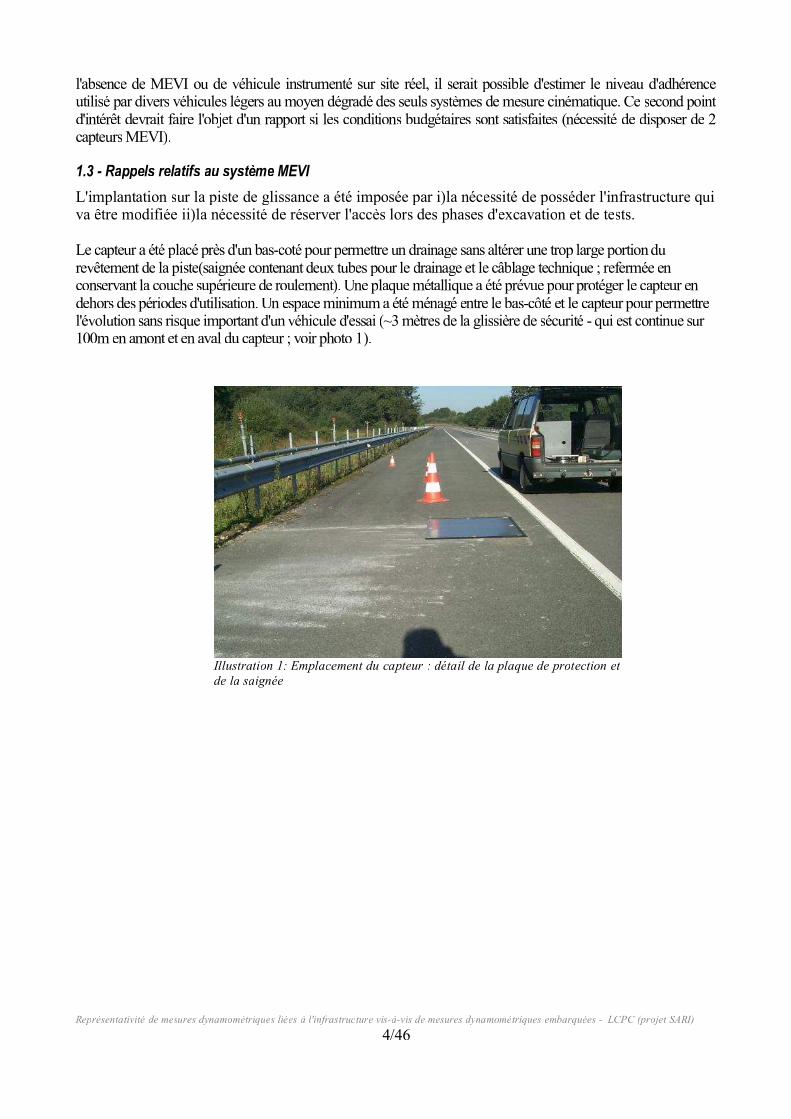
1.3 - Rappels relatifs au système MEVIL'implantation sur la piste de glissance a été imposée par i)la nécessité de posséder l'infrastructure quiva être modifiée ii)la nécessité de réserver l'accès lors des phases d'excavation et de tests.
Le capteur a été placé près d'un bas-coté pour permettre un drainage sans altérer une trop large portion durevêtement de la piste(saignée contenant deux tubes pour le drainage et le câblage technique ; refermée enconservant la couche supérieure de roulement). Une plaque métallique a été prévue pour protéger le capteur endehors des périodes d'utilisation. Un espace minimum a été ménagé entre le bas-côté et le capteur pour permettrel'évolution sans risque important d'un véhicule d'essai (~3 mètres de la glissière de sécurité - qui est continue sur100m en amont et en aval du capteur ; voir photo 1).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)4/46
Illustration 1: Emplacement du capteur : détail de la plaque de protection etde la saignée

Un revêtement à macrotexture moyenne a été privilégié (planche M de référence) : rapport équilibré entre facilitéde découpe (sans arrachements de granulats) et adhérence suffisante sur sol mouillé.Sur la piste, le capteur est situé au point "PR 1500". Il pourra faire, après évaluation, partie intégrante deséquipements de la piste d'essais. Le capteur implanté ne modifie pratiquement pas l'aspect et les caractéristiquesde la piste d'essais : en figure 2, seul un trait de scie périphérique reste visible.Le capteur est boulonné sous la portion carrée instrumentée du revêtement. Il est prévu de le déplacer vers unautre massif d'intégration (dans un premier temps : le nouveau virage de 100m du LCPC, avant la semaine 20 de2006).
1.4 - Choix métrologiquesL'acquisition sera effectuée à 2500 Hz sur le capteur MEVI, indépendamment de la vitesse de déplacement duvéhicule.Pour l'instrumentation embarquée, une fréquence élevée d'acquisition sur les codeurs de roue et sur le correvit estsouhaitée (estimation du cycle de fonctionnement de l'ABS ; précision des décélérations par dérivation correvit).Les pneumatiques devront être en bon état, d'usure homogène (pour un pneu et sur l'ensemble des pneus). Lapression de gonflage sera fixée aux recommandations du constructeur.Les températures du revêtement, des bandes de roulement seront évaluées périodiquement (selon variationsprobables).Les essais statiques seront réalisés sans pilote. L'équipage devra être identique pour tous les essais dynamiques (etréduit si possible au pilote).Le plein de carburant sera systématiquement recherché (constance des masses embarquées).
1.5 - Détails des essais à effectuerPlanning prévisionnel 2006 :Semaine 3 et 4 pour les essais statiques,semaines 5 et 6 pour les essais dynamiques.
1.5.1 Statique simpleBut : métrologie comparative basique du capteur MEVI et du moyen Kistler.
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)5/46
Illustration 2: Intégration du capteur dans l'environnementde la piste
Le repère lié à la piste est tel que :axe X : sens longitudinal de la piste, du virage relevé vers le bâtiment Viarme ; origine au centre de MEVI ;axe Y : sens transversal de la piste, de l'axe central vers le bas-côté ; origine au centre de MEVI ;axe Z : sens vertical, du haut vers le bas pour obtenir un repère direct ; origine au centre de MEVI.
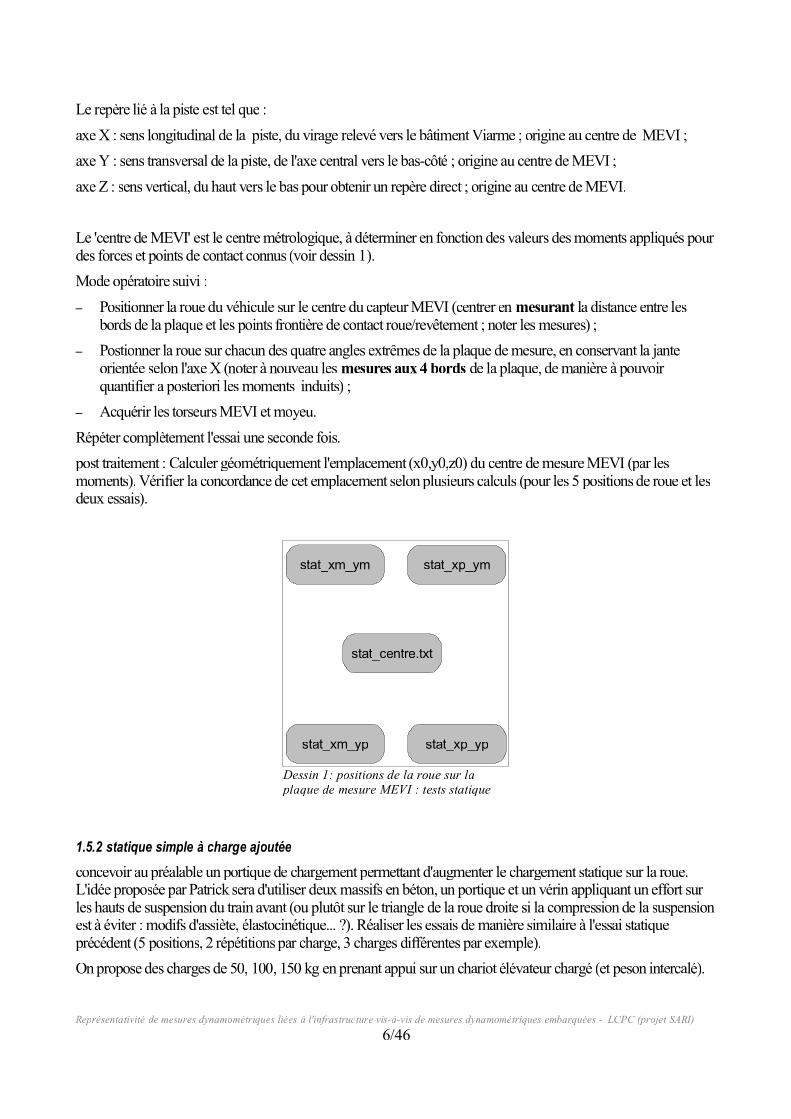
Le 'centre de MEVI' est le centre métrologique, à déterminer en fonction des valeurs des moments appliqués pourdes forces et points de contact connus (voir dessin 1).Mode opératoire suivi :� Positionner la roue du véhicule sur le centre du capteur MEVI (centrer en mesurant la distance entre les
bords de la plaque et les points frontière de contact roue/revêtement ; noter les mesures) ;� Postionner la roue sur chacun des quatre angles extrêmes de la plaque de mesure, en conservant la jante
orientée selon l'axe X (noter à nouveau les mesures aux 4 bords de la plaque, de manière à pouvoirquantifier a posteriori les moments induits) ;
� Acquérir les torseurs MEVI et moyeu.Répéter complètement l'essai une seconde fois. post traitement : Calculer géométriquement l'emplacement (x0,y0,z0) du centre de mesure MEVI (par lesmoments). Vérifier la concordance de cet emplacement selon plusieurs calculs (pour les 5 positions de roue et lesdeux essais).
Dessin 1: positions de la roue sur laplaque de mesure MEVI : tests statique
1.5.2 statique simple à charge ajoutéeconcevoir au préalable un portique de chargement permettant d'augmenter le chargement statique sur la roue.L'idée proposée par Patrick sera d'utiliser deux massifs en béton, un portique et un vérin appliquant un effort surles hauts de suspension du train avant (ou plutôt sur le triangle de la roue droite si la compression de la suspensionest à éviter : modifs d'assiète, élastocinétique... ?). Réaliser les essais de manière similaire à l'essai statiqueprécédent (5 positions, 2 répétitions par charge, 3 charges différentes par exemple).On propose des charges de 50, 100, 150 kg en prenant appui sur un chariot élévateur chargé (et peson intercalé).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)6/46
stat_xm_yp
stat_centre.txt
stat_xp_ym
stat_xp_yp
stat_xm_ym
1.5.3 Statique : efforts de direction (Mz + composantes secondaires)Positionner la roue au centre de la plaque de mesure, moteur en marche (pour l'assistance de direction). � Frein de secours bloqué, braquer complètement à droite, puis à gauche et remettre finalement la direction au
point milieu (effectuer les manoeuvres de manière lente et régulière � cycle complet en environ 30 s) ;� répéter la manoeuvre en utilisant le frein de service (pédale fortement pressée) au lieu du frein de secours.Acquérir les torseurs MEVI et moyeu.Répéter cet essai en positionnant le pneumatique près du bord x+ de la plaque, toujours centré en y (avancer lepneumatique pour vérifier si les 'trous de boulon' dans le revêtement influencent le contact.Refaire ces deux essais revêtement mouillé (en vidant un arrosoir sur la plaque MEVI).
1.5.4 Statico-dynamique : adhérence limite d'une roue arrière.Partant de la position à l'arrêt, centrée, appliquer un couple moteur progressif en maintenant le freinage maximalsur l'essieu arrière (frein de secours bloqué grâce à la crémaillère ; sans le maintenir à la main).(La courbe d'effort longitudinal doit être retrouvée de la valeur nulle à la valeur optimale frottement statique deCoulomb, pour revenir instantanément à la valeur (inférieure) de frottement dynamique.)
Acquisition : couples sur transmission (Garos) ; torseurs : moyeu Kistler et MEVI. Maintenir l'acquisition pendanttoute la durée de glissement (ou de roulement) de la roue arrière le long de la plaque de mesure.
Enregistrer le torseur moteur, roue avant droite positionnée sur MEVI (avec moyen Kistler). 2 répétitionsrevêtement sec puis 2 répétitions revêtement mouillé (un arrosoir sur la plaque MEVI).
Monter le moyeu Kistler sur la roue arrière droite (pièce de montage du stator à obtenir) ; enregistrer le torseurfreineur, roue arrière droite positionnée sur MEVI (mêmes acquisitions que précédemment).
1.5.5 Dynamique : Roulement a vitesse constante Atteindre l'emplacement MEVI à vitesse constante donnée, en étant centré au maximum sur y0 (latéralement).Placer une cocotte sur le bas côté, de manière à enregistrer sur le pc embarqué un 'top signal' lorsque la roue avantest sur MEVI.A réaliser pour des vitesses de : 30, 50, 70, 90 et 110 km/h (Obtenir au moins 2 passages correctement centrés parvitesse). Vérifier visuellement le centrage latéral du pneumatique.- acquisition des torseurs MEVI et Kistler en roue avant droite ;- acquisition du torseur MEVI en roue arrière droite ;- acquisition du couple de transmission Garos ;- acquisition de la vitesse Correvit impulsionnelle +analogique .
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)7/46
1.5.6 Freinage frontalLa 406-LCPC sera utilisée en mode « freinage frontal » (estimer +facilement par MEVI et moyeu Kistler lapresque totalité des efforts de freinage ; sécurité de l'essai par une meilleure stabilité du train arrière).
Positionner une cocotte ou repère à 1,5 seconde de MEVI (fonction de la vitesse d'approche) pour fixer le lieu dedéclenchement du freinage.Atteinte de ce repère à vitesse stabilisée Vi, puis réalisation d'un freinage d'urgence moteur débrayé, jusqu'à l'arrêt(après passage sur MEVI, si le rapport Vi/freinage le permet...).A itérer pour les vitesses Vi = 30, 50, 70 km/h (voire 90 si les conditions de sécurité semblent bonnes), envérifiant à chaque fois que le véhicule est bien passé sur la dalle.Enregistrement sur les roues AV-DR et AR-DR.
Acquisitions : -vitesses individuelles des 4 roues (codeurs ajoutés), la vitesse caisse longi correvit (num+analog) ;-top position lorsque la roue avant est sur MEVI (cellule optique sur pare-choc arrière) ;-débattements de suspension ;-torseurs : MEVI et moyeu Kistler ;
à réaliser pour les conditions (dans cet ordre) :� mouillé avec ABS� mouillé sans ABS ;� sec avec ABS ;� sec sans ABS. (moduler la plage des vitesses d'approche en fonction de la sécurité liée à ces diverses conditions).
2 - Moyens et Conditions d'essais
2.1 - Site / instrumentation de terrainLes essais ont été réalisés du 19 au 24 février 2006 sur la piste du LCPC à Bouguenais.Les mesures ont été effectuées sur la planche M1.(voir schéma annexe 1)Système MEVI (capteur FGP)Les conditions météo ont été enregistrées.
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)8/46
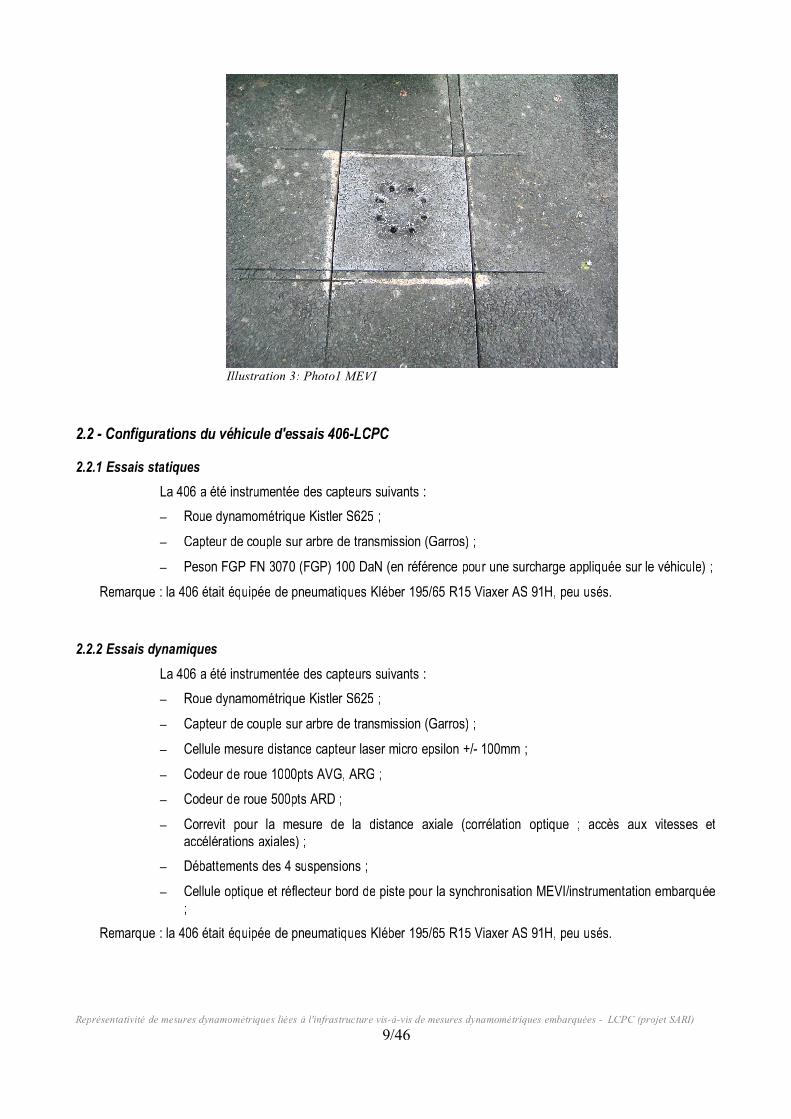
Illustration 3: Photo1 MEVI
2.2 - Configurations du véhicule d'essais 406-LCPC
2.2.1 Essais statiquesLa 406 a été instrumentée des capteurs suivants :� Roue dynamométrique Kistler S625 ;� Capteur de couple sur arbre de transmission (Garros) ;� Peson FGP FN 3070 (FGP) 100 DaN (en référence pour une surcharge appliquée sur le véhicule) ;
Remarque : la 406 était équipée de pneumatiques Kléber 195/65 R15 Viaxer AS 91H, peu usés.
2.2.2 Essais dynamiquesLa 406 a été instrumentée des capteurs suivants :� Roue dynamométrique Kistler S625 ;� Capteur de couple sur arbre de transmission (Garros) ;� Cellule mesure distance capteur laser micro epsilon +/- 100mm ;� Codeur de roue 1000pts AVG, ARG ;� Codeur de roue 500pts ARD ;� Correvit pour la mesure de la distance axiale (corrélation optique ; accès aux vitesses et
accélérations axiales) ;� Débattements des 4 suspensions ;� Cellule optique et réflecteur bord de piste pour la synchronisation MEVI/instrumentation embarquée
;Remarque : la 406 était équipée de pneumatiques Kléber 195/65 R15 Viaxer AS 91H, peu usés.
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)9/46

2.3 - Préparation des essaisPour les mesures de vitesse le correvit a été calibré le 6/01/2006.Avant chaque série d�essai :� la pression des pneus a été vérifiée et réajustée si nécessaire (2,3bars pour les 4 roues) ;� la roue dynamométrique a été calibrée de la façon suivante (selon manuel utilisation Kistler) :
réglage offset de l�angle, calibration angle, réglage offset signal.
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)10/46

3 - Résultats
3.1 - Essais statiques simplesDes essais de chargement statique (roue avant droite sur MEVI) ont été réalisés, centrés ou non, selon le pland'essai prévu (localisation de la roue sur MEVI par les distances P1, P2, P3, P4 ; figure 4).Avant chaque essai une mesure à vide est faite avec le système MEVI à des fins de réglage d'offset (décalage designal).
Illustration 4: Schéma mesure
Illustration 5: Vue de détail roue Kistler / MEVI
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)11/46
stat_xm_yp
stat_centre.txt
stat_xp_ym
stat_xp_yp
stat_xm_ym
P3
P4P1
P2
Nord
Bâtiment Viarme Virage

3.1.1 résultatsLes mesures ont été acquises à 2500Hz pour tous les essais. Cette fréquence est inutilement trop élevée pour descas de chargement statiques (stationnaires). Un premier filtrage a donc été effectué pour les chargementstationnaires par ré-échantillonnage de 2500 Hz à 100 Hz (moyenne).Les signaux issus de la cellule de mesure FGP sont des signaux analogiques +/- 10 Volts, auxquels on faitcorrespondre des valeurs des composantes du torseur selon les fiches de calibration du fournisseur FGP (ceci seraconservé arbitrairement tout au long des essais, bien qu'un étalonnage complémentaire sur site puisse représenterune meilleure solution, ultérieurement).Pour chaque essai, il est procédé à un ajustement des offsets du capteur, sur les 6 voies. Ces offsets existent pourde multiples raisons :� chargement réel constitué par le revêtement de chaussée et ses éléments de liaison (plaque métallique,
boulons,...) ;� influence de la température sur la cellule de mesure (loin d'être négligeable pour cette cellule, à base de
jauges semi-conductrices et pour des essais conduits à basse température : moins de 10°C la plupart dutemps) ;
� dérive éventuelle du capteur dans le temps : fluage mécanique sous contrainte permanente (dalle),vieillissement des points de collage, ...
En toute rigueur, le réglage des amplitudes de voie devrait aussi être fait ; cela ne sera pas réalisé pour cette étudepar manque de temps et dans un souci de vérification de la validité en contexte 'hors réglage importants'.
La figure 6 présente une mesure MEVI réalisée « à vide » (dalle en place, sans aucun autre chargement). Leniveau d'effort Fz est élevé, de l'ordre de 100 daN. Ce niveau sera retrouvé répétable tout au long de cettecampagne d'essai. Il est notablement plus élevé que le niveau relevé à l'automne 2004, de l'ordre de 10 daN(correspondant approximativement au poids propre de la dalle). L'explication la plus probable à ce phénomène estlié à la sensibilité des jauges semi-conductrices à la température ambiante (~20°C en 2004, soit proche desconditions de calibration ; ~5°C pour les essais actuels).Pour représenter le torseur d'effort, un réglage d'offset est donc réalisé pour tout essai de chargement selon troismodes possibles :� retrait des valeurs moyennes d'un fichier de mesures « à vide », enregistré juste avant l'essai proprement dit ;
� retrait de la valeur moyenne correspondant à la première seconde de mesure dans le cas d'essais dynamiques(roulement du véhicule en direction de MEVI, freinage, etc...) ;
� retrait de la valeur moyenne correspondant à la dernière seconde de mesure dans le cas d'essais dynamiquesavec chargement initial stationnaire suivi du déchargement (départ en roulement, roue initialement arrêtéesur MEVI).
La figure 7 présente le torseur mesure par MEVI (référence centre2), avec des offsets corrigés selon la premièreméthode (retrait des valeurs présentées en figure 6), lorsque la roue avant de la 406-LCPC est positionnée aucentre du revêtement de mesure. L'ensemble des composantes est nul (au sens de la précision du capteur ; voirannexe), excepté la valeur Fz égale à 409 daN.
(efforts moyens mesurés : F x ,y , z=�2 ;�5 ;409�daN et M x ,y , z=�0 ;�5 ;�4 �daN (valeurs arrondiesà l'unité).
Pour un essai précédent (centre1 ; même journée), il a été trouvé respectivement : (1 ; 74 ; 406 ) pour la résultanteet (- 7 ; 59 ; -10) pour le moment exprimé au centre d'évaluation de MEVI. Le Fy assez important peut fairepenser à une contrainte résiduelle permanente lors de l'appui de la roue sur le sol (effort de pince du train avant).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)12/46

Les mesures F z de la roue dynamométrique Kistler sont 393 pour centre2 et 397 pour centre1. Les écartsMEVI � KISTLER sont respectivement de +16 daN et +9 daN. L'ordre de grandeur de ces valeurs (~10 daN)était attendu car c'est celui du poids du pneumatique, inclus dans la mesure MEVI mais pas dans le mesure dumoyeu dynamométrique (mesure Fz Kistler de 14,5 daN lorsque la voiture est soulevée par le cric).
Dans une seconde étape, l'exploitation des mesures décentrée permettra de vérifier la position du centred'évaluation des moments par le capteur.
Illustration 6: Torseur MEVI : effort statique roue avant droite : fichier de mesure « à vide »préalable
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)13/46
FxMxFy
MyFzMz
0 1 2 3 4 5 6 7 8-350
-300
-250
-200
-150
-100
-50
0
50
100
150
Mesures MEVI, fichier :centre2_vide_23_01_06.TXT_reduit_2500_100_Hz.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)

Illustration 7: Torseur MEVI : effort statique centré, roue avant droite
3.2 - Essais statiques force ajoutée
3.2.1 Mode opératoire de l'essaiPour répondre au programme d�essais, un vérin à été mis en place entre la tête d�amortisseur et la fourche d�unchariot élévateur (photo en illustration 8). La force appliquée est mesurée par un peson1 placé entre le vérin et lafourche du chariot.
1 Capteur de force à jauges de contraintes pour le pesage (modèle utilisé : 100 daN d'étendue de mesure)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)14/46
Illustration 8: application et mesure d'une chargeadditionnelle
Chariot élévateur (massif fixe)
Vérin hydraulique(application de la surcharge)
Peson (mesure)
FxMxFy
MyFzMz
0 2 4 6 8 10 12-50
0
50
100
150
200
250
300
350
400
450
Mesures MEVI, fichier :centre2_23_01_06.TXT_reduit_2500_100_Hz.txt
Temps (s)
Fi (
daN
) ; M
i en
O (N
.m)
Avant chaque essai une mesure à vide est faite avec le système MEVI (sans véhicule, ni aucune charge sur lerevêtement). Nous présentons ici les essais réalisés avec un pneumatique centré sur le revêtement de mesure.
3.2.2 Résultats
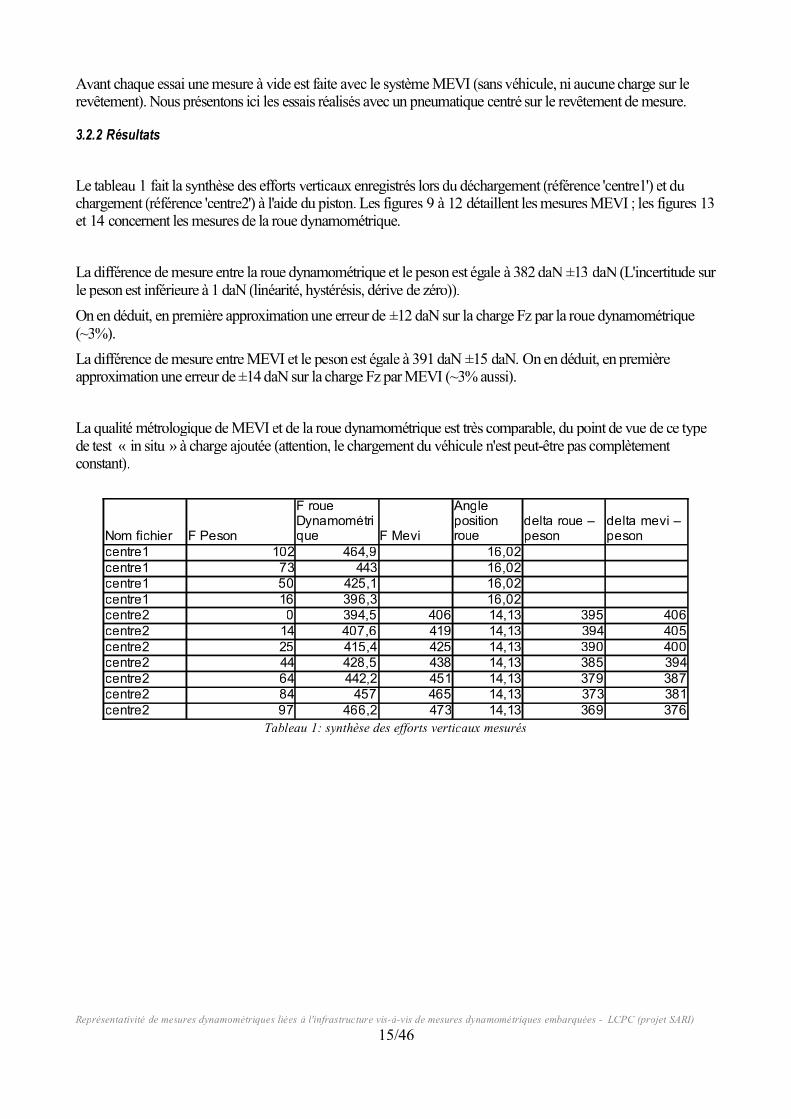
Le tableau 1 fait la synthèse des efforts verticaux enregistrés lors du déchargement (référence 'centre1') et duchargement (référence 'centre2') à l'aide du piston. Les figures 9 à 12 détaillent les mesures MEVI ; les figures 13et 14 concernent les mesures de la roue dynamométrique.
La différence de mesure entre la roue dynamométrique et le peson est égale à 382 daN ±13 daN (L'incertitude surle peson est inférieure à 1 daN (linéarité, hystérésis, dérive de zéro)).On en déduit, en première approximation une erreur de ±12 daN sur la charge Fz par la roue dynamométrique(~3%).La différence de mesure entre MEVI et le peson est égale à 391 daN ±15 daN. On en déduit, en premièreapproximation une erreur de ±14 daN sur la charge Fz par MEVI (~3% aussi).
La qualité métrologique de MEVI et de la roue dynamométrique est très comparable, du point de vue de ce typede test « in situ » à charge ajoutée (attention, le chargement du véhicule n'est peut-être pas complètementconstant).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)15/46
Tableau 1: synthèse des efforts verticaux mesurés
Nom fichier F Pesoncentre1 102 464,9 16,02centre1 73 443 16,02centre1 50 425,1 16,02centre1 16 396,3 16,02centre2 0 394,5 406 14,13 395 406centre2 14 407,6 419 14,13 394 405centre2 25 415,4 425 14,13 390 400centre2 44 428,5 438 14,13 385 394centre2 64 442,2 451 14,13 379 387centre2 84 457 465 14,13 373 381centre2 97 466,2 473 14,13 369 376
F roue Dynamométrique F Mevi
Angle position roue
delta roue � peson
delta mevi � peson

Illustration 9: Torseur MEVI : force ajoutée (décroissante) par paliers, pneu centré
Illustration 10: Détail de la composante Fz de l'illustration 9
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)16/46

Illustration 11: Torseur MEVI : force ajoutée (croissante) par paliers, pneu centré
Illustration 12: Détail de la composante Fz de l'illustration 11
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)17/46
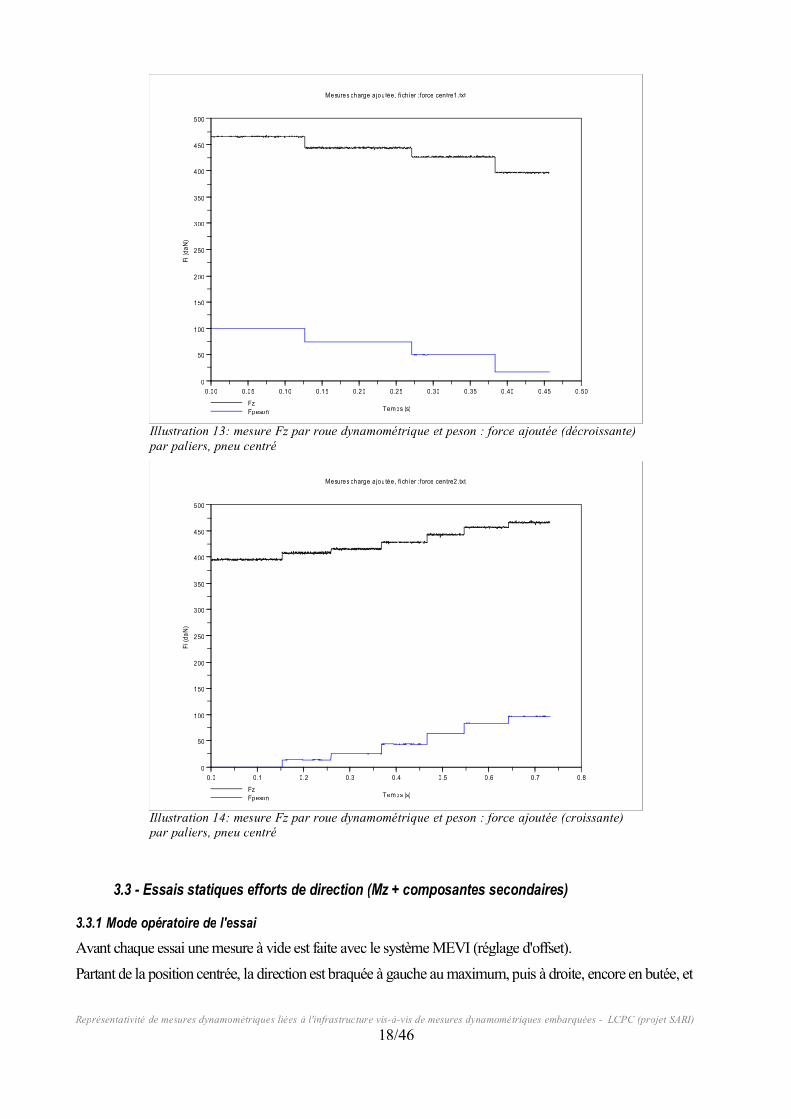
Illustration 13: mesure Fz par roue dynamométrique et peson : force ajoutée (décroissante)par paliers, pneu centré
Illustration 14: mesure Fz par roue dynamométrique et peson : force ajoutée (croissante)par paliers, pneu centré
3.3 - Essais statiques efforts de direction (Mz + composantes secondaires)
3.3.1 Mode opératoire de l'essaiAvant chaque essai une mesure à vide est faite avec le système MEVI (réglage d'offset).Partant de la position centrée, la direction est braquée à gauche au maximum, puis à droite, encore en butée, et
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)18/46
FzFpeson
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.500
50
100
150
200
250
300
350
400
450
500
Mesures charge ajoutée, fichier :force centre1.txt
Temps (s)
Fi (d
aN)
FzFpeson
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
50
100
150
200
250
300
350
400
450
500
Mesures charge ajoutée, fichier :force centre2.txt
Temps (s)
Fi (d
aN)
ramenée à nouveau au centre.Cette procédure est itérée pour des revêtements sec et mouillé, avec un maintient du véhicule réalisé par le freinprincipal (roue avants et arrières bloquées) ou le frein de stationnement (roues arrières bloquées seulement).
3.3.2 résultats
3.3.2.1 Influence du mode de freinage sur les résultats d'essai
Les figures 15 et 16 présentent le torseur d'effort mesuré par MEVI lors de la manoeuvre de braquage « centre /butée droite / butée gauche / retour au centre », pour un positionnement initial de la roue au centre de MEVI, unrevêtement sec et respectivement un freinage complet (roues avants et arrières) et partiel (roues arrièresseulement).La comparaison de ces tracés montre que :� la résultante Fz est légèrement augmentée lors des braquages vers la droite, diminuée lors des braquages vers
la gauche. On peut y voir une influence (pas déraisonnable) de l'élastocinématique de la suspension et dutrain avant ;
� la résultante Fz n'est pas affectée par le mode de maintient du véhicule (variations de Fz comparables enfigures 15 et 16 ; résultat assez attendu en sollicitation à progression lente) ;
� la résultante Fy est l'effort latéral de contact du pneumatique sur la chaussée ; sa variation en amplitude de 70daN est d'un ordre très probable ; on aurait cependant dû s'attendre à des efforts positif et négatif de mêmenorme pour les braquage à droite et à gauche : en pratique, le non centrage est lié à un effort initial Fy<0(chaussée en légère pente, élastocinématique du train avant) ;
� une résultante Fx apparaît en figure 15, corrélée à la résultant Fy en raison de la condition de roue bloquée enrotation propre (frein principal activé), pour les fort braquages (presque butée) ;
� cette résultante n'existe plus en cas de roue libre en rotation ce qui corrobore la remarque précédente (figure16 ; véhicule maintenu uniquement par le freinage des roues arrières) ;
� le moment Fz est représentatif de la progressivité de la commande volant appliquée (avec un rapport d'échelledu système de direction).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)19/46

Illustration 15: Torseur MEVI : frein principal bloqué, sol sec, pneu centré ; braquage« centre / butée droite / butée gauche / retour au centre »
Illustration 16: Torseur MEVI : frein à main serré, sol sec, pneu centré ; braquage « centre/ butée droite / butée gauche / retour au centre »
3.3.2.2 Comparaison directe, pneumatique centré
En figure 17 est tracé le torseur de contact mesuré par la roue dynamométrique Kistler. On en tire les remarquepréliminaires suivantes :� la charge Fz est très comparable à celle mesurée par MEVI, une différence d'une dizaine de daN
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)20/46
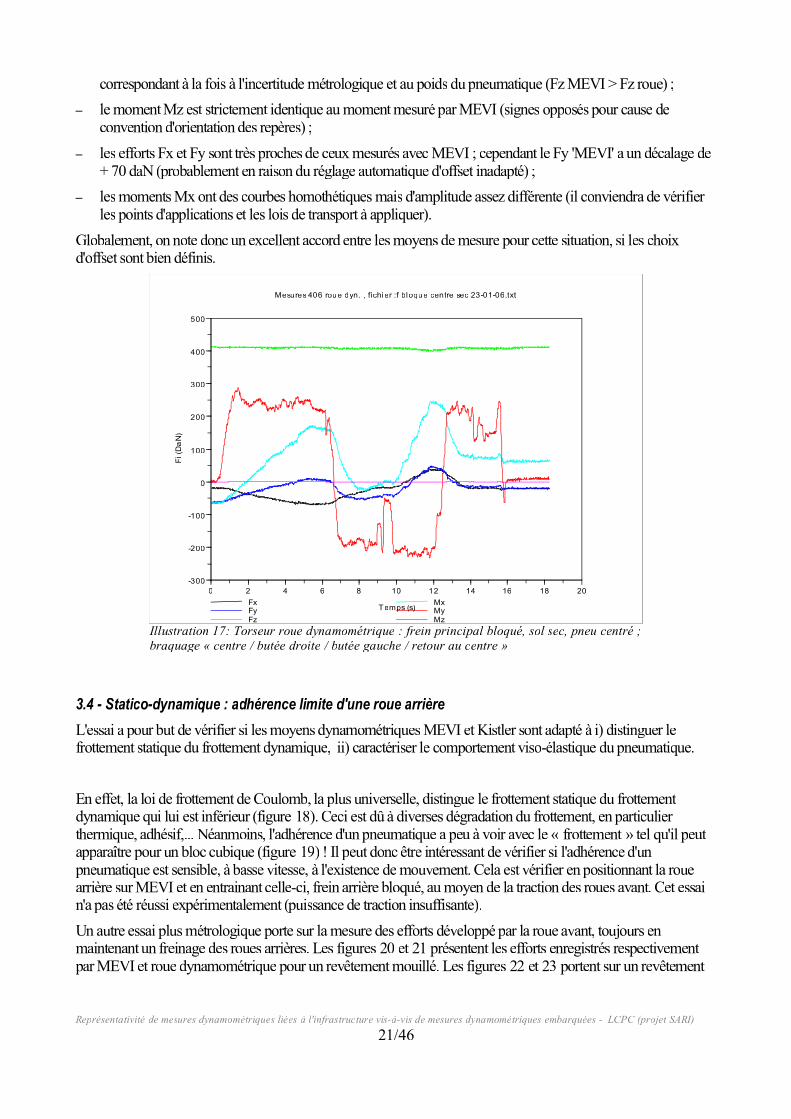
correspondant à la fois à l'incertitude métrologique et au poids du pneumatique (Fz MEVI > Fz roue) ;� le moment Mz est strictement identique au moment mesuré par MEVI (signes opposés pour cause de
convention d'orientation des repères) ;� les efforts Fx et Fy sont très proches de ceux mesurés avec MEVI ; cependant le Fy 'MEVI' a un décalage de
+ 70 daN (probablement en raison du réglage automatique d'offset inadapté) ;� les moments Mx ont des courbes homothétiques mais d'amplitude assez différente (il conviendra de vérifier
les points d'applications et les lois de transport à appliquer).Globalement, on note donc un excellent accord entre les moyens de mesure pour cette situation, si les choixd'offset sont bien définis.
Illustration 17: Torseur roue dynamométrique : frein principal bloqué, sol sec, pneu centré ;braquage « centre / butée droite / butée gauche / retour au centre »
3.4 - Statico-dynamique : adhérence limite d'une roue arrièreL'essai a pour but de vérifier si les moyens dynamométriques MEVI et Kistler sont adapté à i) distinguer lefrottement statique du frottement dynamique, ii) caractériser le comportement viso-élastique du pneumatique.
En effet, la loi de frottement de Coulomb, la plus universelle, distingue le frottement statique du frottementdynamique qui lui est inférieur (figure 18). Ceci est dû à diverses dégradation du frottement, en particulierthermique, adhésif,... Néanmoins, l'adhérence d'un pneumatique a peu à voir avec le « frottement » tel qu'il peutapparaître pour un bloc cubique (figure 19) ! Il peut donc être intéressant de vérifier si l'adhérence d'unpneumatique est sensible, à basse vitesse, à l'existence de mouvement. Cela est vérifier en positionnant la rouearrière sur MEVI et en entrainant celle-ci, frein arrière bloqué, au moyen de la traction des roues avant. Cet essain'a pas été réussi expérimentalement (puissance de traction insuffisante).Un autre essai plus métrologique porte sur la mesure des efforts développé par la roue avant, toujours enmaintenant un freinage des roues arrières. Les figures 20 et 21 présentent les efforts enregistrés respectivementpar MEVI et roue dynamométrique pour un revêtement mouillé. Les figures 22 et 23 portent sur un revêtement
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)21/46
FxFyFz
MxMyMz
0 2 4 6 8 10 12 14 16 18 20-300
-200
-100
0
100
200
300
400
500
Mesures 406 roue dyn. , fichier :f bloque centre sec 23-01-06.txt
Temps (s)
Fi (
Da
N)

sec.Pour le revêtement mouillé :� la charge verticale Fz est inférieure d'une dizaine de daN pour la roue dynamométrique (correspond au poids
du pneumatique) ; cette charge est réduite lors des phase de traction, on peut y voir un transfert de chargeentre les essieu avant->arrière ; cette réduite est plus ponctuelle pour MEVI ;
� l'effort de traction Fx est assez différent : 280 daN pour MEVI et 320 pour la roue dynamométrique ;� les moment My sont comparables.Pour le revêtement sec :� encore une fois, la roue dynamométrique affiche une charge Fz décroissante lors de la phase de traction ;� l'effort de traction Fx est assez différent : 180 daN pour MEVI et 220 pour la roue dynamométrique (l'écart
reste le même et fait penser à une calibration défaillante pour MEVI ou pour la roue) ;� les moment My sont comparables.En absolu, on peut considérer que chaque capteur indique une valeur commune considérée vraie à +/- 10%. Ceciest nettement excessif ; la calibration en amplitude de chacun des capteur serait à revoir, en se basant sur uneréférence plus sûre (banc schenk par exemple).Ce type d'essai montre la difficulté que l'on peut avoir à comparer deux systèmes de niveau d'incertitudesemblablement élevé.
Illustration 19: frottement roue ou « caisse en bois »
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)22/46
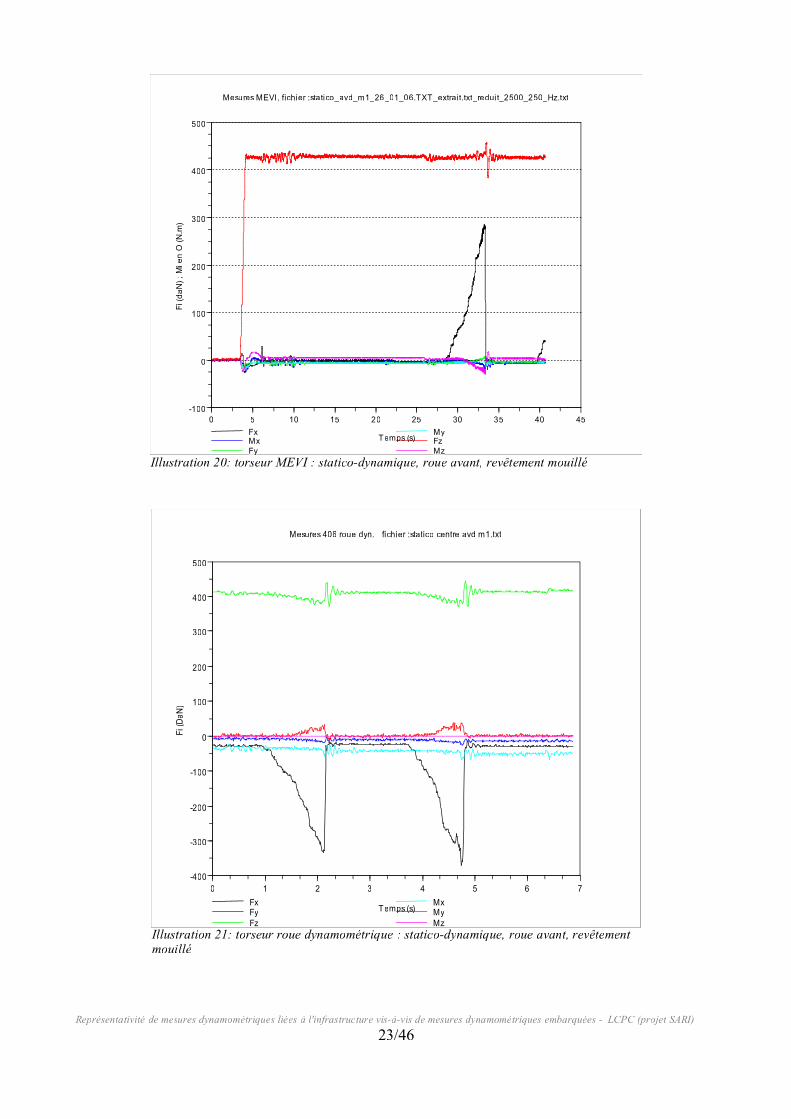
Illustration 20: torseur MEVI : statico-dynamique, roue avant, revêtement mouillé
Illustration 21: torseur roue dynamométrique : statico-dynamique, roue avant, revêtementmouillé
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)23/46
FxMxFy
MyFzMz
0 5 10 15 20 25 30 35 40 45-100
0
100
200
300
400
500
Mesures MEVI, fichier :statico_avd_m1_26_01_06.TXT_extrai t.txt_reduit_2500_250_Hz.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
MxMyMz
0 1 2 3 4 5 6 7-400
-300
-200
-100
0
100
200
300
400
500
Mesures 406 roue dyn. , fichier :statico centre avd m1.txt
Temps (s)
Fi (D
aN)
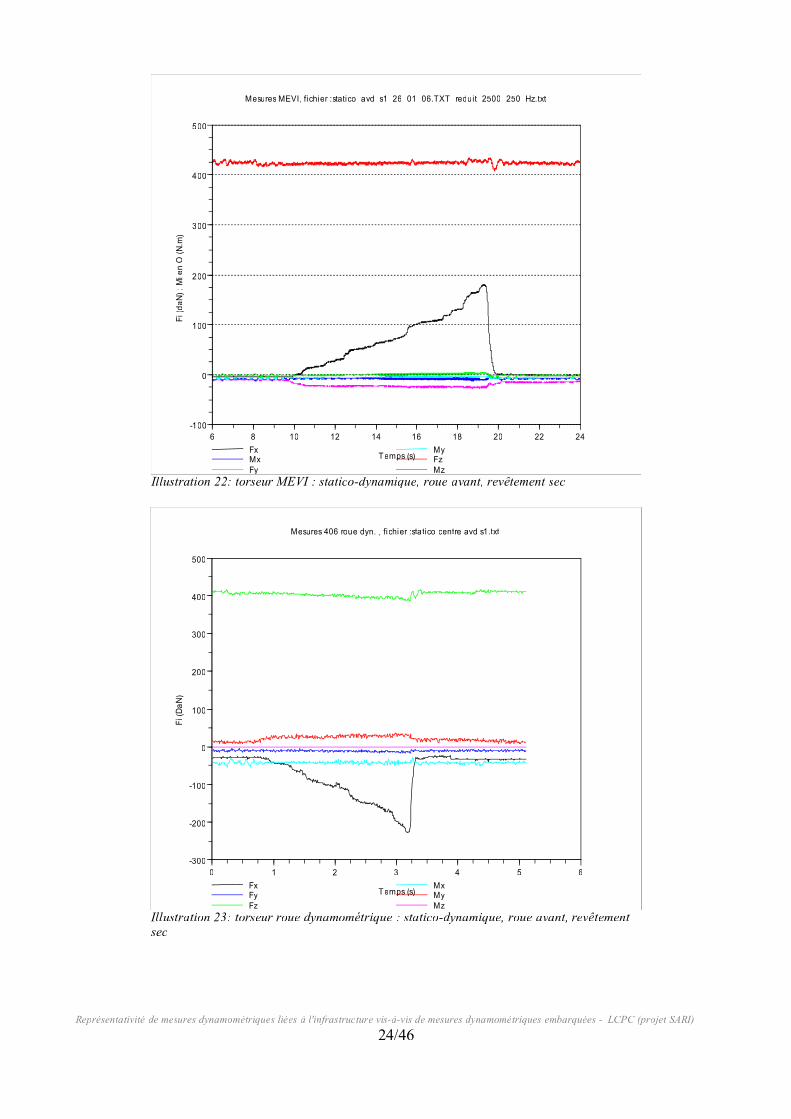
Illustration 22: torseur MEVI : statico-dynamique, roue avant, revêtement sec
Illustration 23: torseur roue dynamométrique : statico-dynamique, roue avant, revêtementsec
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)24/46
FxMxFy
MyFzMz
6 8 10 12 14 16 18 20 22 24-100
0
100
200
300
400
500
Mesures MEVI, fichier :statico_avd_s1_26_01_06.TXT_reduit_2500_250_Hz.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
MxMyMz
0 1 2 3 4 5 6-300
-200
-100
0
100
200
300
400
500
Mesures 406 roue dyn. , fichier :statico centre avd s1.txt
Temps (s)
Fi (D
aN)
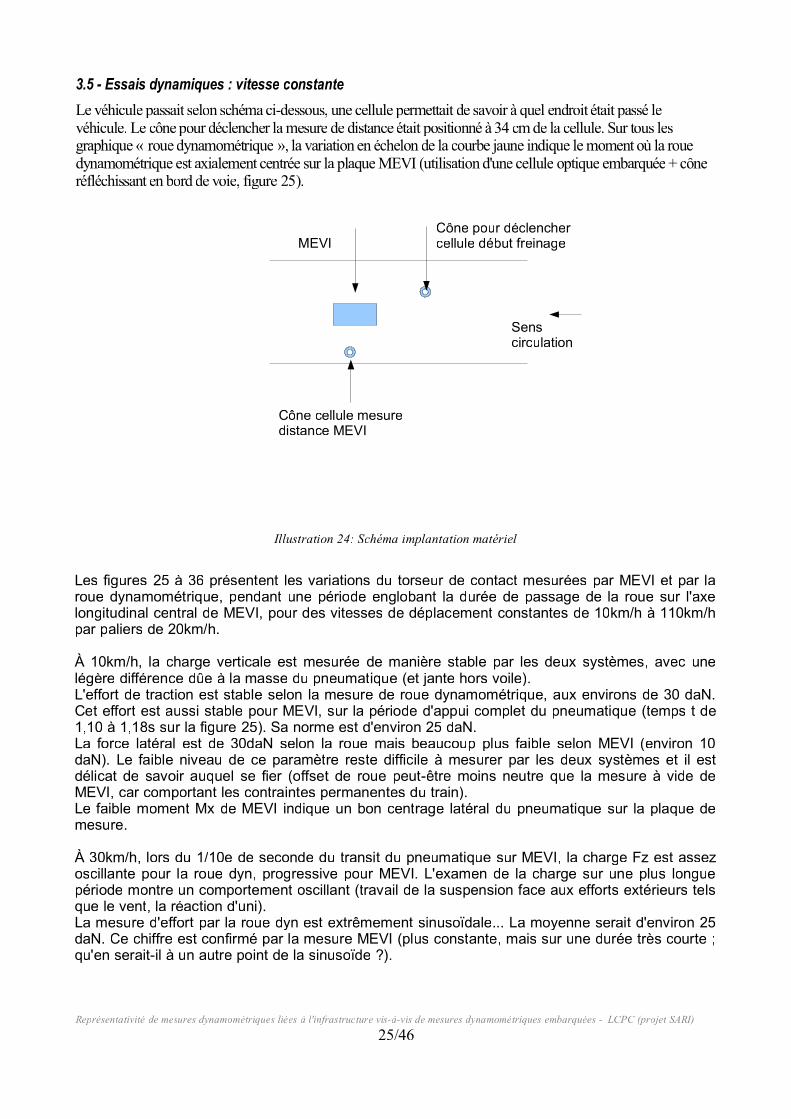
3.5 - Essais dynamiques : vitesse constanteLe véhicule passait selon schéma ci-dessous, une cellule permettait de savoir à quel endroit était passé levéhicule. Le cône pour déclencher la mesure de distance était positionné à 34 cm de la cellule. Sur tous lesgraphique « roue dynamométrique », la variation en échelon de la courbe jaune indique le moment où la rouedynamométrique est axialement centrée sur la plaque MEVI (utilisation d'une cellule optique embarquée + côneréfléchissant en bord de voie, figure 25).
Illustration 24: Schéma implantation matériel
Les figures 25 à 36 présentent les variations du torseur de contact mesurées par MEVI et par laroue dynamométrique, pendant une période englobant la durée de passage de la roue sur l'axelongitudinal central de MEVI, pour des vitesses de déplacement constantes de 10km/h à 110km/hpar paliers de 20km/h.
À 10km/h, la charge verticale est mesurée de manière stable par les deux systèmes, avec unelégère différence dûe à la masse du pneumatique (et jante hors voile).L'effort de traction est stable selon la mesure de roue dynamométrique, aux environs de 30 daN.Cet effort est aussi stable pour MEVI, sur la période d'appui complet du pneumatique (temps t de1,10 à 1,18s sur la figure 25). Sa norme est d'environ 25 daN.La force latéral est de 30daN selon la roue mais beaucoup plus faible selon MEVI (environ 10daN). Le faible niveau de ce paramètre reste difficile à mesurer par les deux systèmes et il estdélicat de savoir auquel se fier (offset de roue peut-être moins neutre que la mesure à vide deMEVI, car comportant les contraintes permanentes du train).Le faible moment Mx de MEVI indique un bon centrage latéral du pneumatique sur la plaque demesure.
À 30km/h, lors du 1/10e de seconde du transit du pneumatique sur MEVI, la charge Fz est assezoscillante pour la roue dyn, progressive pour MEVI. L'examen de la charge sur une plus longuepériode montre un comportement oscillant (travail de la suspension face aux efforts extérieurs telsque le vent, la réaction d'uni).La mesure d'effort par la roue dyn est extrêmement sinusoïdale... La moyenne serait d'environ 25daN. Ce chiffre est confirmé par la mesure MEVI (plus constante, mais sur une durée très courte ;qu'en serait-il à un autre point de la sinusoïde ?).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)25/46
MEVI
Cône cellule mesure distance MEVI
Cône pour déclencher cellule début freinage
Sens circulation
À 50 km/h, les signaux enregistrés par MEVI montre que le pneumatique est passé très décentré,en appui partiel hors du plateau de mesure (My fort, Fz réduit). L'effort de traction selon la rouedyn est de 30 daN, toujours très fluctuant.
Enfin, pour 110 km/h, l'effort de traction MEVI s'approche de 50 daN tandis qu'il reste à 30 daNselon la roue dynamométrique, qui ne semble donc pas prendre en compte l'augmentation dutorseur aérodynamique...
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)26/46

Illustration 25: torseur MEVI : vitesse constante de 10 km/h
Illustration 26: torseur roue dynamométrique : vitesse constante de 10 km/h
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)27/46
FxMxFy
MyFzMz
1.06 1.08 1.10 1.12 1.14 1.16 1.18 1.20 1.22 1.24-100
0
100
200
300
400
500
Mesures MEVI, fichier :v10_essai3_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
MxMyMz
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2-500
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Mesures 406 roue dyn. , fichier :v10_04_05_06_sans_essai2.txt
Temps (s)
Fi (N
)

Illustration 27: torseur MEVI : vitesse constante de 30 km/h
Illustration 28: torseur roue dynamométrique : vitesse constante de 30 km/h
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)28/46
FxMxFy
MyFzMz
1.05 1.06 1.07 1.08 1.09 1.10 1.11 1.12 1.13-100
0
100
200
300
400
500
Mesures MEVI, fichier :v30_essai2_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
MxMyMz
0 1 2 3 4 5 6 7-500
0
500
1000
1500
2000
2500
3000
3500
4000
4500
Mesures 406 roue dyn. , fichier :v30_04_05_06_sans_essai2.txt
Temps (s)
Fi (N
)

Illustration 29: torseur MEVI : vitesse constante de 50 km/h
Illustration 30: torseur roue dynamométrique : vitesse constante de 50 km/h
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)29/46
FxMxFy
MyFzMz
1.01 1.02 1.03 1.04 1.05 1.06 1.07-100
0
100
200
300
400
500
Mesures MEVI, fichier :v50_essai3_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
MxMyMz
0 1 2 3 4 5 6 7 8 9 10 11-1000
0
1000
2000
3000
4000
5000
Mesures 406 roue dyn. , fichier :v50_04_05_06_sans_essai1.txt
Temps (s)
Fi (N
)
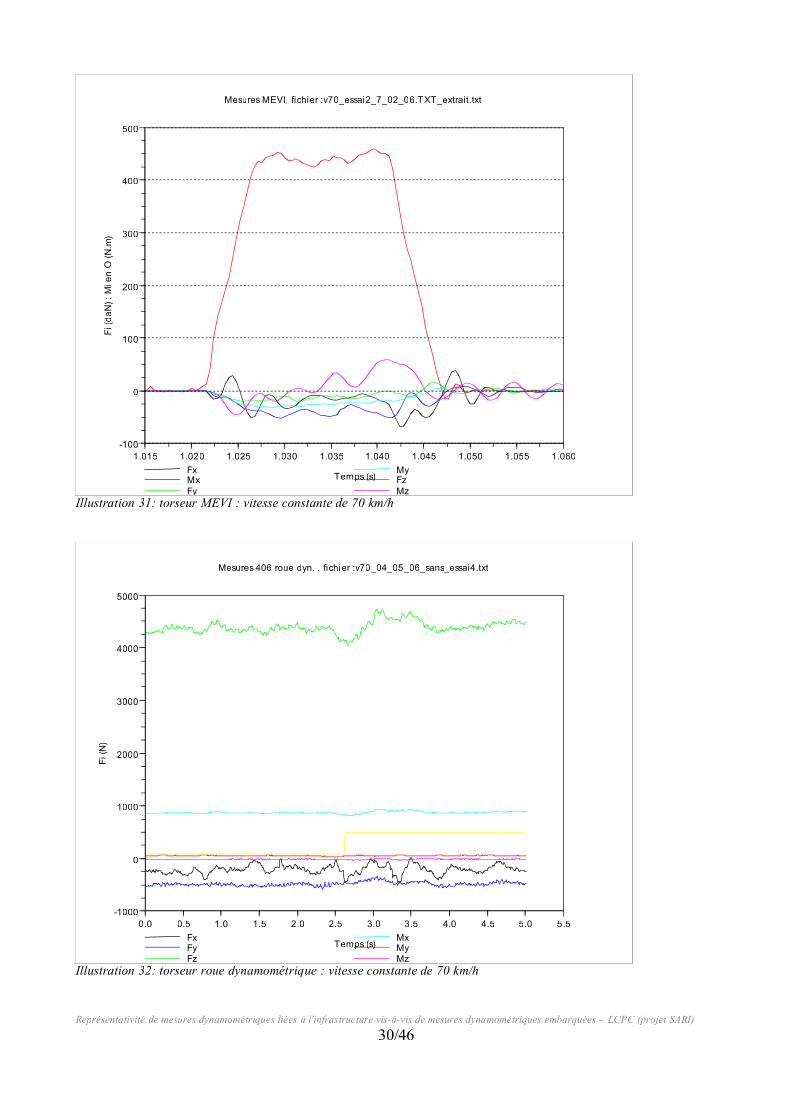
Illustration 31: torseur MEVI : vitesse constante de 70 km/h
Illustration 32: torseur roue dynamométrique : vitesse constante de 70 km/h
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)30/46
FxMxFy
MyFzMz
1.015 1.020 1.025 1.030 1.035 1.040 1.045 1.050 1.055 1.060-100
0
100
200
300
400
500
Mesures MEVI, fichier :v70_essai2_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
MxMyMz
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5-1000
0
1000
2000
3000
4000
5000
Mesures 406 roue dyn. , fichier :v70_04_05_06_sans_essai4.txt
Temps (s)
Fi (N
)

Illustration 33: torseur MEVI : vitesse constante de 90 km/h
Illustration 34: torseur roue dynamométrique : vitesse constante de 90 km/h
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)31/46
FxMxFy
MyFzMz
1.020 1.025 1.030 1.035 1.040 1.045 1.050 1.055 1.060-200
-100
0
100
200
300
400
500
Mesures MEVI, fichier :v90_essai1_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
MxMyMz
0 2 4 6 8 10 12 14-1000
0
1000
2000
3000
4000
5000
Mesures 406 roue dyn. , fichier :v90_04_05_06_essai1sans.txt
Temps (s)
Fi (N
)

Illustration 35: torseur MEVI : vitesse constante de 110 km/h
Illustration 36: torseur roue dynamométrique : vitesse constante de 110 km/h
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)32/46
FxMxFy
MyFzMz
1.020 1.025 1.030 1.035 1.040 1.045 1.050 1.055 1.060 1.065-100
0
100
200
300
400
500
Mesures MEVI, fichier :v110_essai1_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
MxMyMz
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5-1000
0
1000
2000
3000
4000
5000
6000
Mesures 406 roue dyn. , fichier :v110_04_05_06_sans_essai1.txt
Temps (s)
Fi (N
)
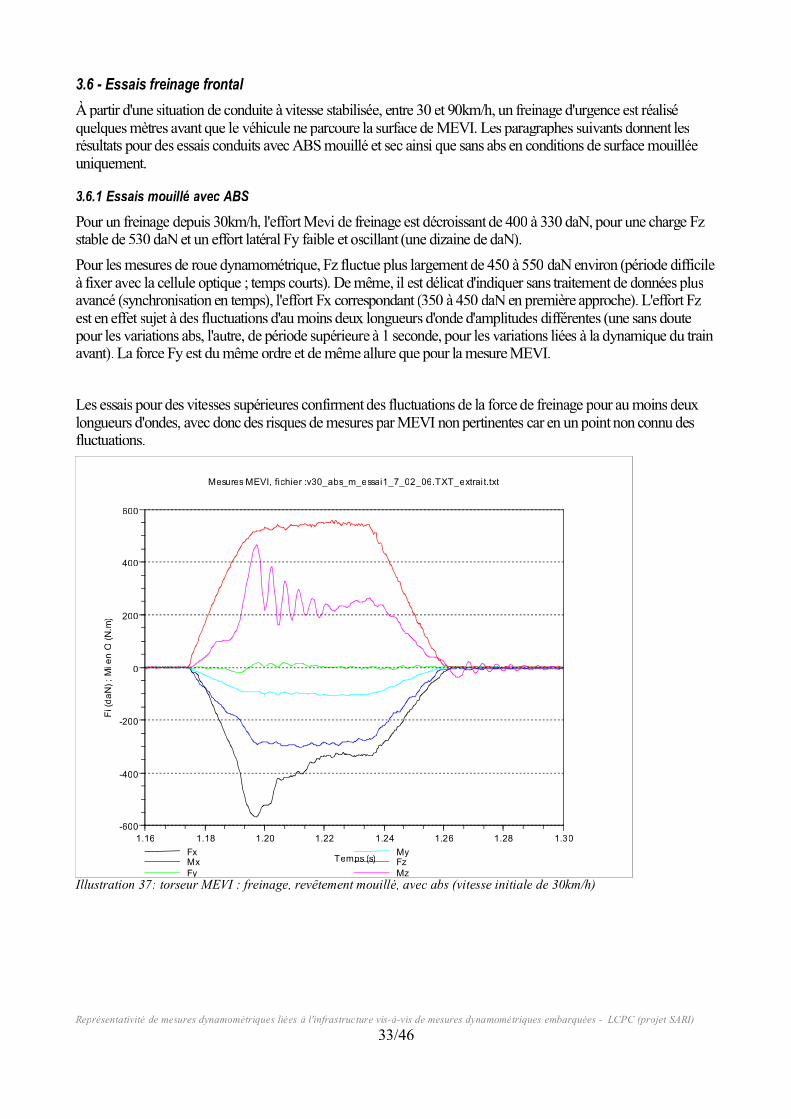
3.6 - Essais freinage frontalÀ partir d'une situation de conduite à vitesse stabilisée, entre 30 et 90km/h, un freinage d'urgence est réaliséquelques mètres avant que le véhicule ne parcoure la surface de MEVI. Les paragraphes suivants donnent lesrésultats pour des essais conduits avec ABS mouillé et sec ainsi que sans abs en conditions de surface mouilléeuniquement.
3.6.1 Essais mouillé avec ABSPour un freinage depuis 30km/h, l'effort Mevi de freinage est décroissant de 400 à 330 daN, pour une charge Fzstable de 530 daN et un effort latéral Fy faible et oscillant (une dizaine de daN).Pour les mesures de roue dynamométrique, Fz fluctue plus largement de 450 à 550 daN environ (période difficileà fixer avec la cellule optique ; temps courts). De même, il est délicat d'indiquer sans traitement de données plusavancé (synchronisation en temps), l'effort Fx correspondant (350 à 450 daN en première approche). L'effort Fzest en effet sujet à des fluctuations d'au moins deux longueurs d'onde d'amplitudes différentes (une sans doutepour les variations abs, l'autre, de période supérieure à 1 seconde, pour les variations liées à la dynamique du trainavant). La force Fy est du même ordre et de même allure que pour la mesure MEVI.
Les essais pour des vitesses supérieures confirment des fluctuations de la force de freinage pour au moins deuxlongueurs d'ondes, avec donc des risques de mesures par MEVI non pertinentes car en un point non connu desfluctuations.
Illustration 37: torseur MEVI : freinage, revêtement mouillé, avec abs (vitesse initiale de 30km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)33/46
FxMxFy
MyFzMz
1.16 1.18 1.20 1.22 1.24 1.26 1.28 1.30-600
-400
-200
0
200
400
600
Mesures MEVI, fichier :v30_abs_m_essai1_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
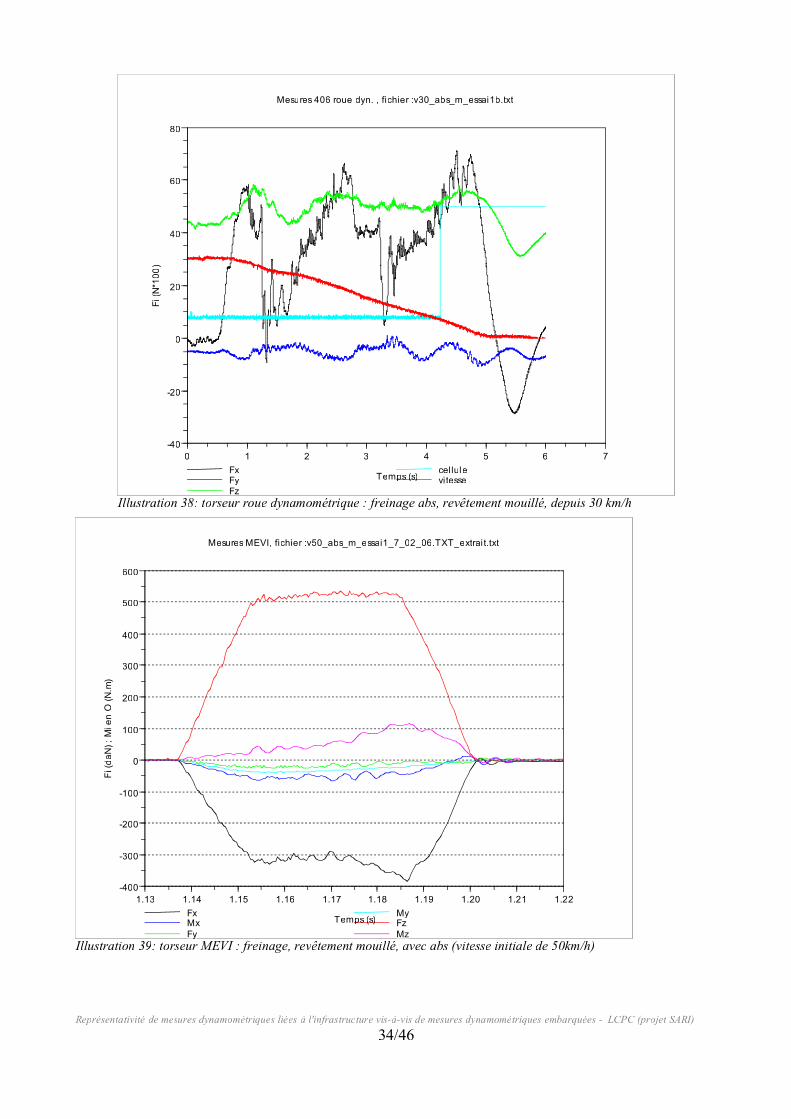
Illustration 38: torseur roue dynamométrique : freinage abs, revêtement mouillé, depuis 30 km/h
Illustration 39: torseur MEVI : freinage, revêtement mouillé, avec abs (vitesse initiale de 50km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)34/46
FxMxFy
MyFzMz
1.13 1.14 1.15 1.16 1.17 1.18 1.19 1.20 1.21 1.22-400
-300
-200
-100
0
100
200
300
400
500
600
Mesures MEVI, fichier :v50_abs_m_essai1_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
cellulevitesse
0 1 2 3 4 5 6 7-40
-20
0
20
40
60
80
Mesures 406 roue dyn. , fichier :v30_abs_m_essai1b.txt
Temps (s)
Fi (N
*100
)

Illustration 40: torseur roue dynamométrique : freinage abs, revêtement mouillé, depuis 50 km/h
Illustration 41: torseur MEVI : freinage, revêtement mouillé, avec abs (vitesse initiale de 70km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)35/46
FxMxFy
MyFzMz
1.315 1.320 1.325 1.330 1.335 1.340 1.345 1.350 1.355 1.360-600
-400
-200
0
200
400
600
Mesures MEVI, fichier :v70_abs_m_essai1_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
cellulevitesse
0 1 2 3 4 5 6 7 8 9-20
-10
0
10
20
30
40
50
60
70
80
Mesures 406 roue dyn. , fichier :v50_abs_m_essai1b.txt
Temps (s)
Fi (N
*100
)

Illustration 42: torseur roue dynamométrique : freinage abs, revêtement mouillé, depuis 70 km/h
Illustration 43: torseur MEVI : freinage, revêtement mouillé, avec abs (vitesse initiale de 90km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)36/46
FxMxFy
MyFzMz
1.190 1.195 1.200 1.205 1.210 1.215 1.220 1.225 1.230-600
-400
-200
0
200
400
600
800
Mesures MEVI, fichier :v90_abs_m_essai1_7_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
cellulevitesse
0 2 4 6 8 10 12-40
-20
0
20
40
60
80
Mesures 406 roue dyn. , fichier :v70_abs_m_essai1b.txt
Temps (s)
Fi (N
*100
)

Illustration 44: torseur roue dynamométrique : freinage abs, revêtement mouillé, depuis 90 km/h
3.6.2 Essais sec avec ABSOn peut tirer les mêmes conclusions préliminaires que dans le paragraphe précédent, avec toutefois des niveauxde frottement plus élevés (figures 45 à 51).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)37/46
FxMxFy
MyFzMz
0 5 10 15 20-400
-200
0
200
400
600
800
Mesures 406 roue dyn. , fichier :v90_abs_m_essai1b.txt
Temps (s)
Fi (D
aN)

Illustration 45: torseur MEVI : freinage, revêtement sec, avec abs (vitesse initiale de 30km/h)
Illustration 46: torseur MEVI : freinage, revêtement sec, avec abs (vitesse initiale de 50km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)38/46
FxMxFy
MyFzMz
1.02 1.03 1.04 1.05 1.06 1.07 1.08 1.09-600
-400
-200
0
200
400
600
Mesures MEVI, fichier :v50_abs_sec_essai2_10_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxMxFy
MyFzMz
1.09 1.10 1.11 1.12 1.13 1.14 1.15 1.16 1.17 1.18-400
-300
-200
-100
0
100
200
300
400
500
Mesures MEVI, fichier :v30_abs_sec_essai1_10_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
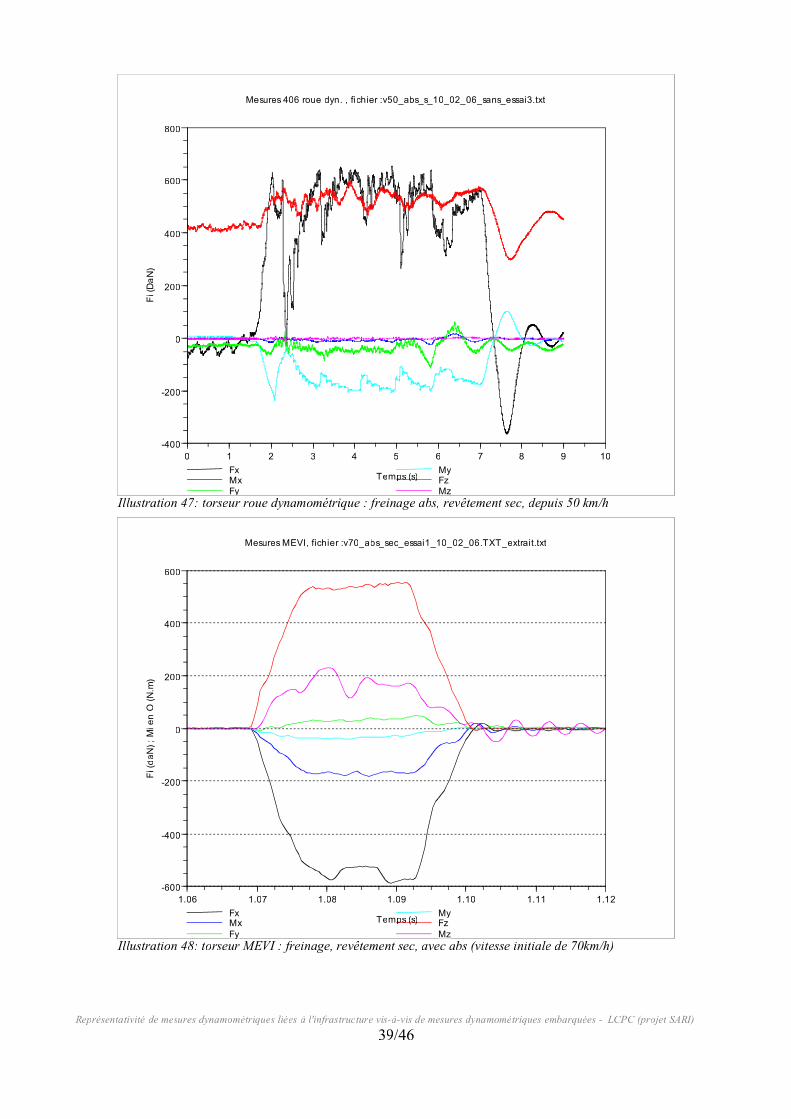
Illustration 47: torseur roue dynamométrique : freinage abs, revêtement sec, depuis 50 km/h
Illustration 48: torseur MEVI : freinage, revêtement sec, avec abs (vitesse initiale de 70km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)39/46
FxMxFy
MyFzMz
1.06 1.07 1.08 1.09 1.10 1.11 1.12-600
-400
-200
0
200
400
600
Mesures MEVI, fichier :v70_abs_sec_essai1_10_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxMxFy
MyFzMz
0 1 2 3 4 5 6 7 8 9 10-400
-200
0
200
400
600
800
Mesures 406 roue dyn. , fichier :v50_abs_s_10_02_06_sans_essai3.txt
Temps (s)
Fi (D
aN)

Illustration 49: torseur roue dynamométrique : freinage abs, revêtement sec, depuis 70 km/h
Illustration 50: torseur MEVI : freinage, revêtement sec, avec abs (vitesse initiale de 90km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)40/46
FxMxFy
MyFzMz
1.040 1.045 1.050 1.055 1.060 1.065 1.070 1.075 1.080-600
-400
-200
0
200
400
600
Mesures MEVI, fichier :v90_abs_sec_essai2_10_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxMxFy
MyFzMz
0 1 2 3 4 5 6 7 8-400
-200
0
200
400
600
800
Mesures 406 roue dyn. , fichier :v50_abs_s_10_02_06_sans_essai2.txt
Temps (s)
Fi (D
aN)
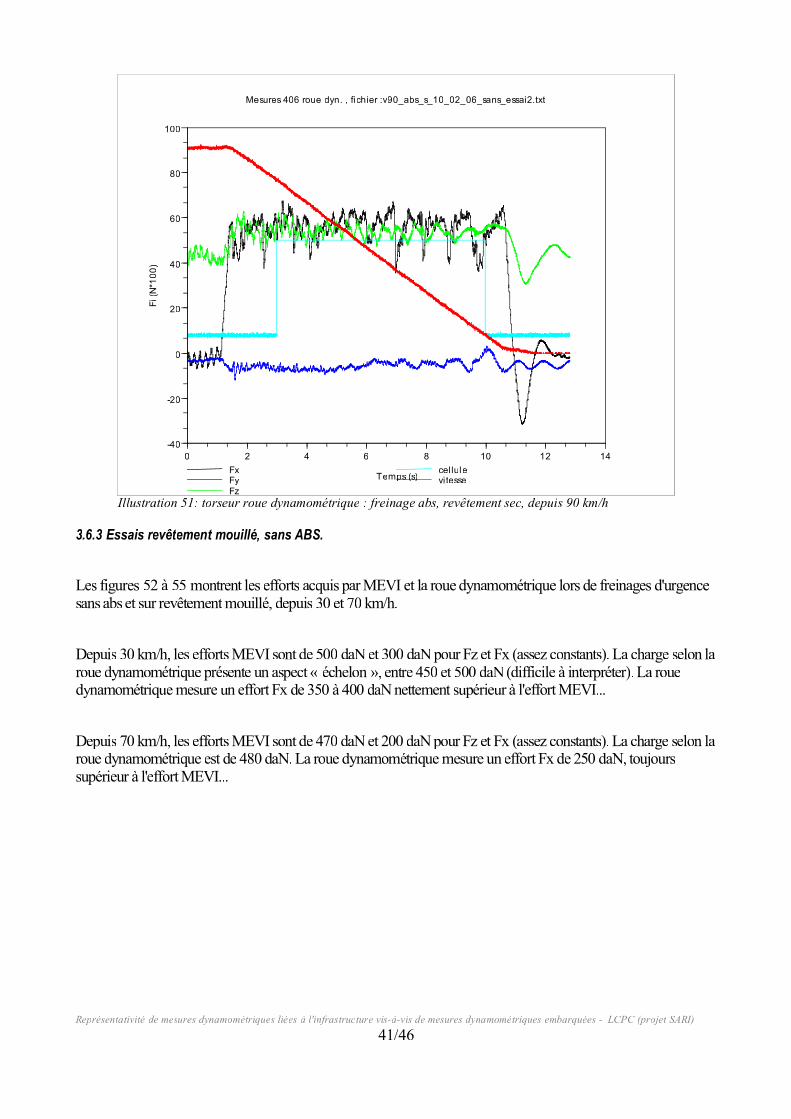
Illustration 51: torseur roue dynamométrique : freinage abs, revêtement sec, depuis 90 km/h
3.6.3 Essais revêtement mouillé, sans ABS.
Les figures 52 à 55 montrent les efforts acquis par MEVI et la roue dynamométrique lors de freinages d'urgencesans abs et sur revêtement mouillé, depuis 30 et 70 km/h.
Depuis 30 km/h, les efforts MEVI sont de 500 daN et 300 daN pour Fz et Fx (assez constants). La charge selon laroue dynamométrique présente un aspect « échelon », entre 450 et 500 daN (difficile à interpréter). La rouedynamométrique mesure un effort Fx de 350 à 400 daN nettement supérieur à l'effort MEVI...
Depuis 70 km/h, les efforts MEVI sont de 470 daN et 200 daN pour Fz et Fx (assez constants). La charge selon laroue dynamométrique est de 480 daN. La roue dynamométrique mesure un effort Fx de 250 daN, toujourssupérieur à l'effort MEVI...
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)41/46
FxFyFz
cellulevitesse
0 2 4 6 8 10 12 14-40
-20
0
20
40
60
80
100
Mesures 406 roue dyn. , fichier :v90_abs_s_10_02_06_sans_essai2.txt
Temps (s)
Fi (N
*100
)
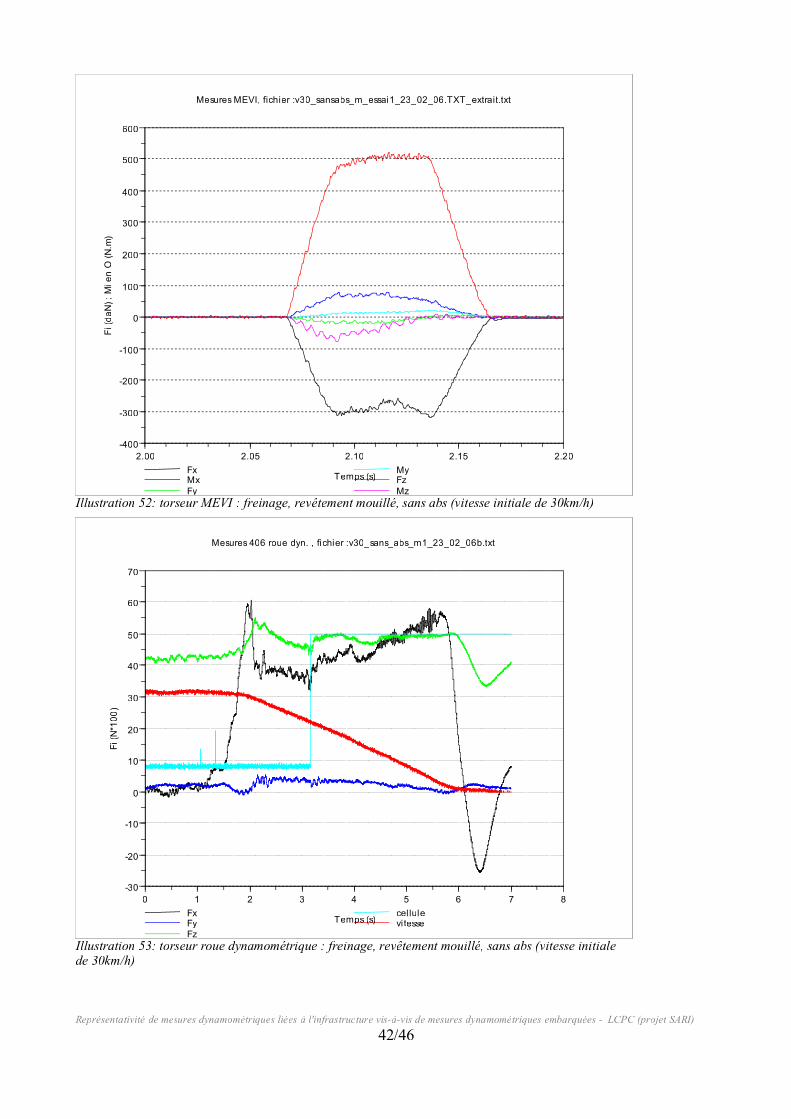
Illustration 52: torseur MEVI : freinage, revêtement mouillé, sans abs (vitesse initiale de 30km/h)
Illustration 53: torseur roue dynamométrique : freinage, revêtement mouillé, sans abs (vitesse initialede 30km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)42/46
FxMxFy
MyFzMz
2.00 2.05 2.10 2.15 2.20-400
-300
-200
-100
0
100
200
300
400
500
600
Mesures MEVI, fichier :v30_sansabs_m_essai1_23_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
cellulevitesse
0 1 2 3 4 5 6 7 8-30
-20
-10
0
10
20
30
40
50
60
70
Mesures 406 roue dyn. , fichier :v30_sans_abs_m1_23_02_06b.txt
Temps (s)
Fi (N
*100
)

Illustration 54: torseur MEVI : freinage, revêtement mouillé, sans abs (vitesse initiale de 70km/h)
Illustration 55: torseur roue dynamométrique : freinage, revêtement mouillé, sans abs (vitesse initialede 70km/h)
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)43/46
FxMxFy
MyFzMz
1.065 1.070 1.075 1.080 1.085 1.090 1.095 1.100 1.105-300
-200
-100
0
100
200
300
400
500
Mesures MEVI, fichier :v70_sansabs_m_essai1_23_02_06.TXT_extrait.txt
Temps (s)
Fi (d
aN) ;
Mi e
n O
(N.m
)
FxFyFz
cellulevitesse
0 2 4 6 8 10 12-20
-10
0
10
20
30
40
50
60
70
80
Mesures 406 roue dyn. , fichier :v70_sans_abs_m4_23_02_06b.txt
Temps (s)
Fi (N
*100
)

conclusions
Les essais préliminaires présentés dans cette étude ont pour but, comme cela est détaillé est partie 1.2., de validerMEVI vis-à-vis de mesures embarquées des efforts, réputées robustes. L'intérêt primaire est lié à la possibilité deconcerner de nombreux véhicules emprûntant une infrastructure que l'on cherche à qualifier. L'intérêt secondaireest d'entrevoir le rôle mécanique du pneumatique en exploitant les divergences de mesures embarquées/au sol.
Les essais statiques à charge ajoutée ont conforté l'idée d'un niveau de précision équivalent entre MEVI et uneroue dynamométrique. En essai statique à effort de cisaillement (braquage), l'ensemble des 3 composantes desefforts appliqués sont retrouvés identiques, aux incertitudes métrologiques et offsets près. Le moment Mz estmesuré identiquement par les deux systèmes, tandis les les autres moments n'ont pas d'intérêt comparatif (pointsd'applications différents).
Les essais en adhérence statique limite / adhérence en glissement n'ont pas été concluant : il s'agira de les ré-itéreren dégradant le niveau de frottement (apport d'eau, autre roue arrière sur roulements).
Les essais à vitesse constante montrent une augmentation (attendue) des efforts de traction avec la vitesse. La rouedynamométrique ne traduit pas cette augmentation correspondant à l'augmentation de la résistanceaérodynamique (mesures à vérifier, essais à refaire).
Les essais en freinage frontal avec ABS, sec ou mouillé, sont difficilement utilisables : une synchronisationtemporelle précise manque entre les deux systèmes (ordre de la fréquence d'actionnement des freins).
Pour le freinage frontal sans ABS, la comparaison est plus aisée ; cependant les efforts de freinage relevés par laroue dynamométrique sont assez nettement supérieurs à ceux mesurés par MEVI, de l'ordre de 25%. En secondeapproche, il sera nécessaire de disposer d'autres moyens d'estimation pour départager les systèmes(accéléromètres par exemple).
La seconde phase de l'étude concernera la dynamique en virage, au moyen d'un véhicule 307 disposant de 4 rouesdynamométriques et d'un capteur MEVI au sol (voire 2, dans l'idéal).
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)44/46
4 - Annexes
4.1 - Annexe1 piste
Illustration 56: Plan piste
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)45/46
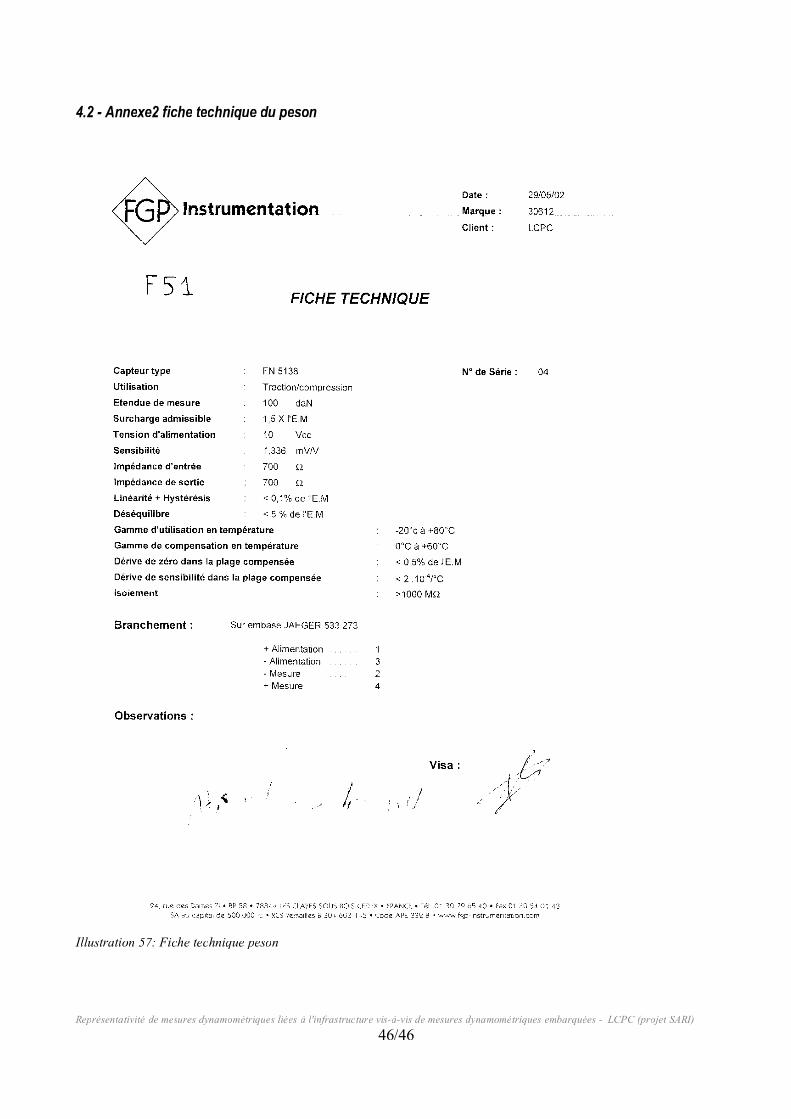
4.2 - Annexe2 fiche technique du peson
Illustration 57: Fiche technique peson
Représentativité de mesures dynamométriques liées à l'infrastructure vis-à-vis de mesures dynamométriques embarquées - LCPC (projet SARI)46/46