rec par effet piezoelectrique
TRANSCRIPT
UNIVERSITE D'ANTANANARIVO
------------------------------
ECOLE SUPERIEURE POLYTECHNIQUE
------------------------------
MENTION ELECTRONIQUE
------------------------------
MEMOIRE EN VUE DE L’OBTENTION
DU DIPLÔME DE MASTER II
Domaine : Sciences de l’Ingénieur
Mention : Electronique
Parcours : Electronique Automatique
Présenté par :
RAHARINJATOVO Kiady
N° d’ordre : 07/EN/EA /16 Soutenu le : 07 Décembre 2017
Année universitaire : 2015 – 2016
REC UPERATION D’ ENERGIE ELECTRIQUE
PAR EFFET PIEZOELECTRIQUE
UNIVERSITE D'ANTANANARIVO
------------------------------
ECOLE SUPERIEURE POLYTECHNIQUE
------------------------------
MENTION ELECTRONIQUE
------------------------------------
MEMOIRE EN VUE DE L’OBTENTION DU DIPLÔME DE MASTER II
Domaine : Sciences de l’Ingénieur
Mention : Electronique
Parcours : Electronique Automatique
RECUPERATION D’ENERGIE ELECTRIQUE PAR EFFET PIEZOELECTRIQUE
Présenté par :
RAHARINJATOVO Kiady
Devant les membres du Jury composé de :
Mr RATSIMBA Mamy Nirina, Président du Jury
Mr HERINANTENAINA Edmond Fils, Examinateur
Mr TSIRINATSIVA Mialy, Examinateur
Mr ZOARITSIHOARANA Fitiavana Avo Tongalafatra, Examinateur
Directeur de Mémoire : Mr RASTEFANO Elisée
N° d’ordre : 07/EN/EA /16 Soutenu le : 07 Décembre 2017
Année universitaire : 2015 - 2016
i
REMERCIEMENTS
Je rends grâce à Dieu pour sa gratitude et sa bénédiction durant les cinq années d’études
à l’Ecole Supérieure Polytechnique d’Antananarivo et à la réalisation de ce mémoire. Sans Lui,
je n’aurai pas pu finir ce travail.
Je tiens à exprimer aussi ma profonde reconnaissance et remerciements à:
-Monsieur ANDRIAMANANTSOA Guy Danielson, chef de la Mention Electronique.
-Monsieur RATSIMBA Mamy Nirina pour l’honneur qu’il nous fait pour présider ce mémoire.
-Monsieur RASTEFANO Elisée, notre directeur de mémoire, pour sa collaboration et ses
précieux conseils tant techniques que rédactionnels.
Messieurs les membres de jury :
-Monsieur HERINANTENAINA Edmond Fils
-Monsieur TSIRINATSIVA Mialy
-Monsieur ZOARITSIHOARANA Fitiavana Avo Tongalafatra
Qui ont bien voulu évaluer ce travail.
Mon remerciement va aussi à tous les enseignants de l’Ecole Supérieure Polytechnique
d’Antananarivo et surtout ceux de la Mention Electronique pour leur dévouement dans notre
enseignement.
Aussi, j’ai une pensée pleine de gratitude à ma famille pour l’aide morale et matérielle
ainsi que leur compréhension constante.
Enfin, je remercie tous ceux qui, de près ou de loin, ont contribué à la réalisation de ce
travail.
ii
RESUME
Le présent travail porte sur l’étude et conception d’un système pour la récupération de
l’énergie vibratoire en énergie électrique .Dans cette optique, après étudiées les origines et les
méthodes de conversion des énergies vibratoires en énergie électriques, nous avons utilisé un
capteur piezoceramique SM111 pour la conversion. Pour la simulation, nous avons considéré
une personne marchant sur le dispositif de récupération d’énergie, tandis qu’un moteur
électrique est la source de vibration lors de la réalisation du système. Nous avons obtenus à la
sortie du système une tension de 0.4 V après simulation sur SPICE et une tension de 2.4 V lors
de la réalisation. Le système délivre une puissance de l’ordre de 500 µW. Le but de ce projet
est d’alimenter des petits systèmes électroniques.

iii
ABSTRACT
The present work deals with the study and design of a system for the recovery of
vibratory energy into electrical energy.In this perspective,after studying the origins and
methods of conversion of vibratory energies,we used a piezoramic sensor SM 111 to recover
the vibratory energy.For the simulation,we considered a person walking on the energy recovery
device while an electric motor is the source of vibration when making the system.We obtained
at the output of the system 0.4 V after simulation on SPICE and 2.4 V during the realization.The
system delivers a power of 500 µW. The goal of this project is to supply small electronics
systems.

iv
SOMMAIRE
REMERCIEMENTS………………………………………………………………………….i
RESUME……………………………………………………………………………………...ii
ABSTRACT…………………………………………………………………………………..iii
SOMMAIRE………………………………………………………………………………….iv
LISTE DES ABREVIATIONS………………………………………………………...…….vii
LISTE DES TABLEAUX……..……………………………………………………...……..viii
LISTE DESFIGURES………………………………………………………………………...ix
INTRODUCTION…………………………………………………………………………….1
Chapitre I : GENERALITES SUR LA RECUPERATION VIBRATOIRE………………….2
I.1 Contexte générale……………….……………………………………………………..2
I.1.1Définition………………………………………………………………............2
I.1.2 Les réseaux de capteurs autonomes…………………………………………...2
I.1.3 Enjeux de la récupération d’énergie…………………………………………..4
I.1.4 Les sources ambiantes d’énergie……………………………………………...6
I.2 Récuperation d’energie à partir des vibrations ambiantes……………………………..7
I.2.1 Conversion électromécanique…………………………………………………9
a)Transduction électromagnétique………………………………………….9
b)Transduction piézoélectrique…………………………………………….10
c)Transduction électrostatique……………………………………………..11
d)Autres modes de transduction……………………………………………12
I.2.2 Circuit d’extraction de l’énergie……………………………………………...13
I.2.3 Systèmes de stockage et gestion de l’énergie………………………………...14
I.3 Conclusion…………………………………………………………………………….16
Chapitre II: MODELISATION ET COMPARAISON DES GENERATEURS
ELECTROMAGNETIQUE, PIEZOELECTRIQUE ET ELECTROSTATIQUE……..…….17
II.1Principe de fonctionnement……………………………………………………...…...17
v
II.1.1 Générateur piézoélectrique…………………………………………………..17
II.1.2 Générateur électromagnétique……………………………………………….19
II.1.3Générateur électrostatique………………………………………………….…20
II.2 Modélisation normalisée d’un générateur piézoélectrique, électromagnétique et
électrostatique………………………………………………………………………....21
II.2.1 Modélisation normalisée d’un générateur piézoélectrique…………………...21
II.2.2 Modélisation normalisée d’un générateur électromagnétique……………….24
II.2.3 Modélisation normalisée d’un générateur électrostatique…………………...25
II.3 Puissance récupérée…………………………………………………………………..27
II.4 Comparaison………………………………………………………………………….29
II.5 Conclusion………………………………………………………………………..…..33
Chapitre III :SIMULATION ET REALISATION D’UN SYSTEME DE RECUPERATION
D’ENERGIE ELECTRIQUE PAR VIBRATION……………………………………………34
III.1 Simulation…………………………………………………………………………...34
III.1.1 Equation piézoélectrique……………………………………………………34
III.1.2 Modèle mécanique et électrique d’un générateur piézoélectrique………….35
a) Modèle mécanique……………………………………………………….35
b) Modèle électrique……….…………………………………………....….36
III.1.3 Modélisation de la tension générée par le dispositif piézoélectrique……….37
III.1.4 Simulation…………………………………………………………………...40
a)Schéma……………………………………………………………………41
b) Circuit d’extraction de l’énergie………………………………………….42
III.2 Réalisation…………………………………………………………………………...44
III.3 Conclusion…………………………………………………………………………...46
CONCLUSION……………………………………………………………………………….47
ANNEXE 1 : CARACTERISTIQUES DE L’ELEMENT PIEZOELECTRIQUE SM111….48
ANNEXE 2 : DESCRIPTION DES VIBRATIONS………………………………………….49
1-Vibration………………………………………………………………………………49
a.Principe……………………………………………………………………49
vi
b.Mesure de vibration……….………..…….………………………….…...49
2- Description des vibrations…………...……………………………………………….50
a. Logarithme……………………………………………………………….50
b. Niveau en décibel………………………………………………………...50
c. Niveau d’accélération…………………………………………………….50
d. Niveau de vitesse…………………………………………………………51
e. Niveau du déplacement…………………………………………………..51
f. Calcul des niveaux………………………………………………………..51
ANNEXE 3: LES TECHNOLOGIES MEMS………………………………………………..52
1 - Introduction………………………………………………………………………… 52
2 - Les différents secteurs des MEMS…………………………………………………..52
3 - Les principes physiques du microsystème..................................................................54
4 – Production des MEMS………………………………………………………………54
REFERENCES……………………………………………………………………………….57
vii
LISTE DES ABREAVIATIONS
MP3 : Moving Picture Experts Group-1 Audio Layer III
GPS : Global Positionning System
LED : Light Emitting Diod
PZT : Piezoelectrique
MEMS : Micro Electro Mechanical Systems
DTMOS : Dynamic Thresold Metal-oxyde-semiconductor
CMOS : Complementary Metal-oxyde-semiconductor
MOEMS : Micro-Opto-Electro-Mechanical Systems
DMD : Digital Micromirror Device
DLP : Digital Light Processor
LOC : Lab On Chip
UV : Ultra-Violet
viii
LISTE DES TABLEAUX
Tableau 1: Consommations électriques des systèmes électroniques courants et implantés…..4
Tableau 2 : Etude comparative des densités de puissance de plusieurs sources classiques….7
Tableau 3 : Normalisation du temps, de la fréquence angulaire de la vibration, du courant et de
la tension générée……………………………………………………………………………..………22
Tableau 4 : Paramètres hors dimension……………………………………………………………..23
Tableau 5 : Avantages et inconvénients de chaque méthode de récupération d’énérgie……..32
Tableau A.1: Datasheet du matériau piézoélectrique SM 111……………………………………48

ix
LISTE DES FIGURES
Figure1.1 : Structure d’un nœud de réseau de capteurs……………………………………………5
Figure1.2 : Exemples de capteurs communicants sans fils dans le commerce, alimentés par
récupération d’énergie : a) le Solar Energy Harvesting Development Tool ; b) le TE-power
Node………………………………………………………..……………………………………………..6
Figure1.3 : Structure d’un récupérateur d’énergie…………………………………………………8
Figure1.4 : Energies mises en jeu lors du processus de récupération d’énergie……………….9
Figure1.5 : Exemple d’un transducteur électromagnétique……………………………………....10
Figure1.6 : Exemple d’un transducteur piézoélectrique…………………………………………..11
Figure1.7 : Mécanismes électrostatiques : a) Type de fermeture de l’intervalle : la capacité
change en changeant d'espace entre les doigts ; b) Type de chevauchement d’avion : la
capacité change en changeant la zone de chevauchement des doigts ; c) Type de fermeture
hors-plan : la capacitance change en changeant d'espace entre deux grandes
plaques………………………………………………………………………………………..…………12
Figure1.8 : Principe de l’utilisation de l’effet magnétostrictif pour la récupération
d’énergie…………………………………...…………………………………………………………...13
Figure1.9 : Circuit d’extraction de l’énergie……………………………………………………….13
Figure1.10 : Accumulateur d’énergie : a) Supercondensateur ; b) Pile au lithium……………15
Figure2.1 : Mode de couplage au sein des matériaux piézoélectriques…………………………18
Figure2.2 : Dispositif de conversion électromagnétique d'Amirtharajah et de
Chandrakasan……………………………………………………………………………………...…..19
Figure2.3 : Modèle d’un générateur piézoélectrique : a) modèle mécanique ; b) circuit
électrique équivalent…………...……………………………………………………………………...24
x
Figure2.4 : Modèle d’un générateur électromagnétique : a) Modèle mécanique ; b) Circuit
électrique équivalent………...…………………………………………………………………….…..25
Figure 2.5: Représentation de circuit simple pour un générateur électrostatique………….….26
Figure 2.6 : Système inertiel………………………………………………………………………..…27
Figure 3.1 : Matériau piézoélectrique chargée longitudinalement…………………………...….34
Figure 3.2 : Représentation mécanique d’un générateur piézoélectrique……………………....35
Figure 3.3 : Circuit équivalent de l’élément piézoélectrique……………………………………..37
Figure 3.4 : Modèle de la tension générée par le dispositif piézoélectrique……………………39
Figure 3.5 : Schéma du circuit équivalent du générateur piézoélectrique………………………41
Figure 3.6 : Tension 𝑉𝑎………………………………………………………………………….……..42
Figure 3.7 : Forme de la tension à la sortie du générateur piézoélectrique……………………42
Figure 3.8 : Générateur piézoélectrique couplé avec le circuit d’extraction d’énergie…...….43
Figure 3.9 : Charge du condensateur………………………………………………………………..43
Figure 3.10 : Décharge du condensateur……………………………………………………………44
Figure 3.11 : Les constituants généraux du système…………………………………….…………44
Figure A.1: PiézoSM111……………………………………………………………………………....48
Figure C.1 : Visualisation d’une taille d’un MEMS…………………………………………...…..52
Figure C. 2 : Les quatre secteurs des MEMS……………………………………………………….53
Figure C.3 : Dépôt de la couche de résine et du masque sur substrat : a) substrat ; b) dépôt de
resine ; c) dépôt du masque………………………………………………………………….………..55
Figure C.4 :Isolation………………………………………………………………………….……….55
Figure C.5 : Révélation par dissolution en fonction du type de résine……………….…………56
1
INTRODUCTION
Depuis l’apparition des circuits intégrés dans la fin des années 1960, l’Electronique n’a
cessé d’améliorer nos quotidiens. Nos besoins croissant d’utiliser ces dispositifs électroniques
ont poussé les scientifiques à étudier des sources d’énergie alternatives. Comme source
d’énergie, on peut citer : la lumière, le vent, les gradients thermiques et les vibrations
mécaniques. Parmi ces sources, le rayonnement solaire fournit la plus haute densité de
puissance, suivi par le flux d’air et les vibrations mécaniques et enfin par les gradients
thermiques. L’énergie mécanique apparait comme une source d’énergie primaire dans un certain
nombre d’applications qui ne sont peu ou pas accessibles à la lumière.
Le recours à des batteries ou à des générateurs ne permet pas d’assurer un
fonctionnement autonome pour les systèmes électriques actuels. L’utilisation des batteries
soulève aussi un problème de remplacement de la source et l’intégration dans un environnement
plus large. C’est pourquoi la récupération d’énergie à partir des vibrations mécaniques est une
thématique connaissant un intérêt prometteur. Les vibrations étant omniprésentes dans
l’environnement.
Ce mémoire intitulé « Récupération d’énergie électrique par effet piézoélectrique » a
pour objectif d’étudier la manière dont les signaux vibratoires à partir d’un capteur
piézoélectrique seront traités pour alimenter un système électronique.
Ce mémoire est divisé en 3 parties. Le chapitre I intitulé « Généralités sur la récupération
d’énergie vibratoire » décrit le principe de récupération d’énergie à partir des vibrations
mécaniques. Le chapitre II intitulé « Modélisation des générateurs électromagnétique,
piézoélectrique, électrostatique » nous permet de mettre en évidence le niveau de puissance
récupérable pour les trois types de conversion électromécanique. Le chapitre III intitulé «
Simulation et réalisation d’un système de récupération d’énergie électrique par vibration »
explique le fonctionnement d’un récupérateur d’énergie utilisant le capteur piézocéramique
SM111.
2
Chapitre I : GENERALITES SUR LA RECUPERATION D’ENERGIE
VIBRATOIRE
Ce chapitre donne une notion générale sur la récupération d’énergie vibratoire. La section
1.1 illustre l’enjeu de la récupération vibratoire. La section 1.2 développe les modes de
récupération de cette énergie.
I.1 Contexte générale
I.1.1 Définition
La récupération d'énergie est une thématique visant à utiliser l'énergie ambiante
(lumière, vibrations, gradients thermiques) présente dans l'environnement pour alimenter des
dispositifs électroniques (via des capteurs) de façon à prolonger leur durée de fonctionnement,
voire à les rendre totalement autonomes [1]. La récupération d'énergie est généralement mise en
œuvre pour alimenter de petits systèmes électroniques autonomes communicants pour le
transport, l'industrie ou l'habitat ,du fait que les puissances récupérées sont assez faibles ;
Appliquée au cas de l'Homme, la récupération d'énergie peut atteindre des puissances de
plusieurs milliwatts voire de plusieurs watts permettant d'alimenter des systèmes plus
complexes tels que les lecteurs MP3, les téléphones portables ou les systèmes de localisation
GPS.
I.1.2 Les réseaux de capteurs autonomes
Les récents progrès des techniques de communication sans fil, la miniaturisation des
microprocesseurs et l’amélioration des techniques de mesures ont permis l’émergence de
réseaux de capteurs autonomes communicants sans fil. Ces réseaux sont constitués d’un nombre
conséquent de nœuds miniaturisés qui sont déployés dans un environnement afin d’en mesurer
des données caractéristiques. Ces données sont ensuite traitées et communiquées à un nœud
central par l’intermédiaire de processus de communication sans fil.
Le développement de ces réseaux autonomes répond à un besoin grandissant de mesurer,
d’analyser et de contrôler l’évolution de notre environnement naturel, le comportement de
constructions civiles ou militaires, ou encore l’état de santé du corps humain. Parmi les
nombreux domaines d’application, citons le domaine militaire qui en premier lieu s’est intéressé
aux réseaux de capteurs sans fil dans le but d’étudier les déplacements de troupes ennemies, ou
bien d’analyser un terrain de bataille avant de s’y engager.
3
Développer des capteurs sans fil dans la nature fait également l’objet de recherches dans
le domaine environnemental, pour détecter et prévenir des catastrophes naturelles telles que des
incendies, pour obtenir une compréhension de l’évolution des habitats naturels et des
mouvements de populations animales dans un but de connaissance et de protection des espèces,
ou encore dans le milieu agricole afin d’optimiser la gestion des sols.
Les réseaux de capteurs ont également une utilité dans la surveillance des
environnements difficiles ou de structures telles que des ponts, véhicules ou environnements
industriels, dans le but de détecter des altérations et prévenir des catastrophes. Par exemple,
Kim, Fenves et Glaser ont développé un réseau de 64 capteurs autonomes sur le Golden Gate
Bridge de San Francisco permettant de mesurer les vibrations du pont et les mouvements
importants [2]. Le traitement des données permet ensuite de détecter un changement dans le
comportement du système révélateur indirect d’un dysfonctionnement.
Dans le domaine biomédical, l’implantation de capteurs autonomes au sein du corps
humain ou de l’habitat permettrait de récolter et stocker en continu des données physiologiques,
et de les transmettre à un centre médical compétent, permettant par exemple une surveillance à
distance d’un patient en convalescence sans réduire son autonomie, ou encore facilitant un
diagnostic précoce et la prévention de maladies [3].
En fait, de nombreux dispositifs ne nécessitent que peu de puissance pour fonctionner,
c'est par exemple le cas des capteurs et des implants médicaux qui peuvent être alimentés par
quelques dizaines de μW. Quant aux appareils nomades tels que les téléphones, les lecteurs MP3,
ils sont plutôt dans la gamme 10 mW - 1 W mais peuvent également être rechargés par des
systèmes de récupération d'énergie. De plus, la tendance est à une réduction de la consommation
électrique des dispositifs électroniques nomades dans le but d'augmenter leur autonomie, ce qui
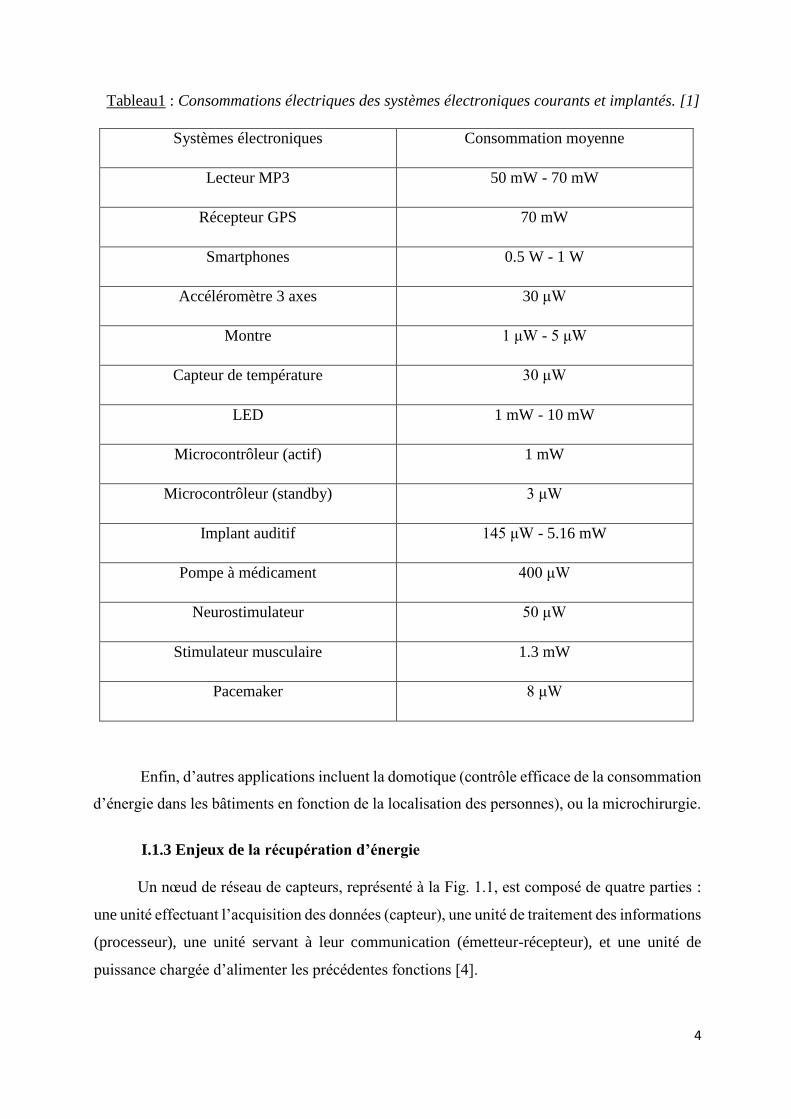
fait que les puissances présentées dans le tableau 1 devraient baisser dans les prochaines années,
rendant tous ces dispositifs plus facilement compatibles avec la récupération d'énergie. Le
tableau 1 montre les consommations électriques de systèmes électroniques courants et
implantés.
4
Tableau1 : Consommations électriques des systèmes électroniques courants et implantés. [1]
Systèmes électroniques Consommation moyenne
Lecteur MP3 50 mW - 70 mW
Récepteur GPS 70 mW
Smartphones 0.5 W - 1 W
Accéléromètre 3 axes 30 μW
Montre 1 μW - 5 μW
Capteur de température 30 μW
LED 1 mW - 10 mW
Microcontrôleur (actif) 1 mW
Microcontrôleur (standby) 3 μW
Implant auditif 145 μW - 5.16 mW
Pompe à médicament 400 μW
Neurostimulateur 50 μW
Stimulateur musculaire 1.3 mW
Pacemaker 8 μW
Enfin, d’autres applications incluent la domotique (contrôle efficace de la consommation
d’énergie dans les bâtiments en fonction de la localisation des personnes), ou la microchirurgie.
I.1.3 Enjeux de la récupération d’énergie
Un nœud de réseau de capteurs, représenté à la Fig. 1.1, est composé de quatre parties :
une unité effectuant l’acquisition des données (capteur), une unité de traitement des informations
(processeur), une unité servant à leur communication (émetteur-récepteur), et une unité de
puissance chargée d’alimenter les précédentes fonctions [4].

5
Figure1.1 : Structure d’un nœud de réseau de capteurs
La consommation en énergie d’un nœud dépend de plusieurs paramètres : au sein de
l’unité processeur, la consommation en énergie dépend du microcontrôleur choisi, soit des
performances désirées, de son mode de fonctionnement (sleep, idle, ou actif), et du ratio de
temps dans chaque mode. Typiquement la consommation s’échelonne du microampère en mode
sleep, jusqu’à la centaine de milliampères en mode actif pour les microprocesseurs performants.
L’unité de communication consommera plus ou moins selon le type de modulation, le débit et
la distance de transmission. Dans le cadre de réseaux de capteurs avec des portées de
transmission de l’ordre d’une dizaine de mètres, la consommation est d’une vingtaine de
milliampères. Enfin, le capteur en lui-même a une consommation négligeable devant les deux
autres unités dans la grande majorité des cas, à condition d’utiliser un capteur passif
(température, lumière,etc).
La plupart des réseaux de capteurs sont alimentés par des piles du type AA fonctionnant
à 1,5 V, ou des batteries au lithium, dont la durée de vie est limitée à un certain nombre de
cycles. Du fait de leur grand nombre, et de leur dispersion dans des localisations parfois
inaccessibles et dans des environnements difficiles, la maintenance de chaque nœud est
impossible. Ainsi la clé du développement à grande échelle des réseaux de capteurs autonomes
réside dans l’amélioration de leur autonomie.
En parallèle avec la diminution de la consommation des nœuds de réseaux de capteurs,
se développent des systèmes exploitant l’énergie de sources disponibles gratuitement telles que
la chaleur, la lumière ou les vibrations. Le principe consiste à récupérer cette énergie ambiante
et la transformer en électricité avant de la stocker dans une batterie rechargeable, un
supercondensateur ou l’association des deux. Cette technique permet d’améliorer
considérablement la durée de vie des nœuds, sans nécessité de maintenance.
Des prototypes expérimentaux ainsi que des produits commerciaux ont été développés
dans cette voie, utilisant des procédés de récupération d’énergie pour alimenter les capteurs.

6
Par exemple, Texas Instrument a développé le Solar Energy Harvesting Development Tool, un
capteur sans fil basé sur un microcontrôleur ultra faible consommation, entièrement alimenté
par une cellule solaire illustré sur la Fig. 1.2a [5]. En 2010, STMicroelectronics, associé à
l’entreprise Micropelt GmbH ont développé le TE-power Node, un capteur sans fil autonome
représenté à la Fig. 1.2b [6]. Le TE-power Node est alimenté par un générateur thermoélectrique
qui permet de générer une tension de 1,4 V à partir d’un gradient thermique de 10 °C.
(a) (b)
Figure1.2 : Exemples de capteurs communicants sans fils dans le commerce, alimentés par
récupération d’énergie : a) le Solar Energy Harvesting Development Tool ; b) le TE-power
Node [5][6]
I.1.4 Les sources ambiantes d’énergie
Il faut tout d'abord différencier la récupération, de la production d’énergie. On considère
que la récupération d’énergie consiste à récupérer une énergie qui naturellement serait perdue et
non une énergie qui a volontairement été produite pour cette finalité [1]. L'idée consiste à
récupérer une partie de l’énergie perdue lors d’un mouvement, d'un déplacement, ou d'une action
usuelle de l’utilisateur. De plus, la récupération d’énergie doit être, dans l’idéal, complètement
transparente du point de vue de l'utilisateur. Ainsi, une lampe dynamo nécessite une action
volontaire d’actionnement d’une manivelle/levier de la part de l’utilisateur pour produire de
l’énergie, alors qu'un panneau solaire placé sur un sac à dos sera un système de récupération
d'énergie : l'énergie lumineuse serait perdue si elle n'était pas récupérée et, de plus, cette solution
ne demande pas une action particulière de l’utilisateur.
De nombreuses sources d’énergie sont susceptibles de fournir des niveaux de puissance
suffisants pour alimenter des systèmes autonomes communicants : l’énergie mécanique résultant
de vibrations (charges ou contraintes), l’énergie solaire photovoltaïque issue du soleil, l’énergie
électromagnétique, l’énergie thermique ou encore l’énergie chimique issue de processus
biologiques sont autant d’exemples d’énergies naturelles ou inhérentes à un processus industriel,
qui sont actuellement envisagées pour être conditionnées en production utile. La comparaison
7
de ces différentes sources est délicate car dépendante de nombreux facteurs, et de l’application
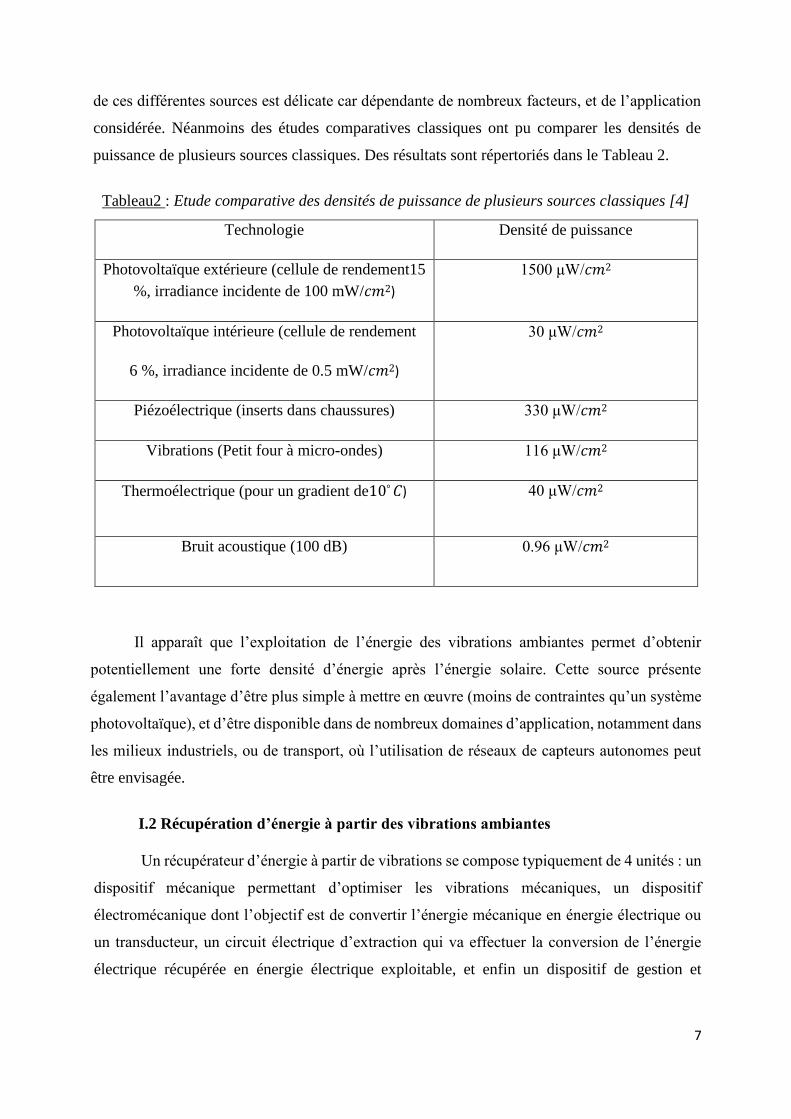
considérée. Néanmoins des études comparatives classiques ont pu comparer les densités de
puissance de plusieurs sources classiques. Des résultats sont répertoriés dans le Tableau 2.
Tableau2 : Etude comparative des densités de puissance de plusieurs sources classiques [4]
Technologie Densité de puissance
Photovoltaïque extérieure (cellule de rendement15
%, irradiance incidente de 100 mW/𝑐𝑚2)
1500 μW/𝑐𝑚2
Photovoltaïque intérieure (cellule de rendement
6 %, irradiance incidente de 0.5 mW/𝑐𝑚2)
30 μW/𝑐𝑚2
Piézoélectrique (inserts dans chaussures) 330 μW/𝑐𝑚2
Vibrations (Petit four à micro-ondes) 116 μW/𝑐𝑚2
Thermoélectrique (pour un gradient de10° 𝐶) 40 μW/𝑐𝑚2
Bruit acoustique (100 dB) 0.96 μW/𝑐𝑚2
Il apparaît que l’exploitation de l’énergie des vibrations ambiantes permet d’obtenir
potentiellement une forte densité d’énergie après l’énergie solaire. Cette source présente
également l’avantage d’être plus simple à mettre en œuvre (moins de contraintes qu’un système
photovoltaïque), et d’être disponible dans de nombreux domaines d’application, notamment dans
les milieux industriels, ou de transport, où l’utilisation de réseaux de capteurs autonomes peut
être envisagée.
I.2 Récupération d’énergie à partir des vibrations ambiantes
Un récupérateur d’énergie à partir de vibrations se compose typiquement de 4 unités : un
dispositif mécanique permettant d’optimiser les vibrations mécaniques, un dispositif
électromécanique dont l’objectif est de convertir l’énergie mécanique en énergie électrique ou
un transducteur, un circuit électrique d’extraction qui va effectuer la conversion de l’énergie
électrique récupérée en énergie électrique exploitable, et enfin un dispositif de gestion et
8
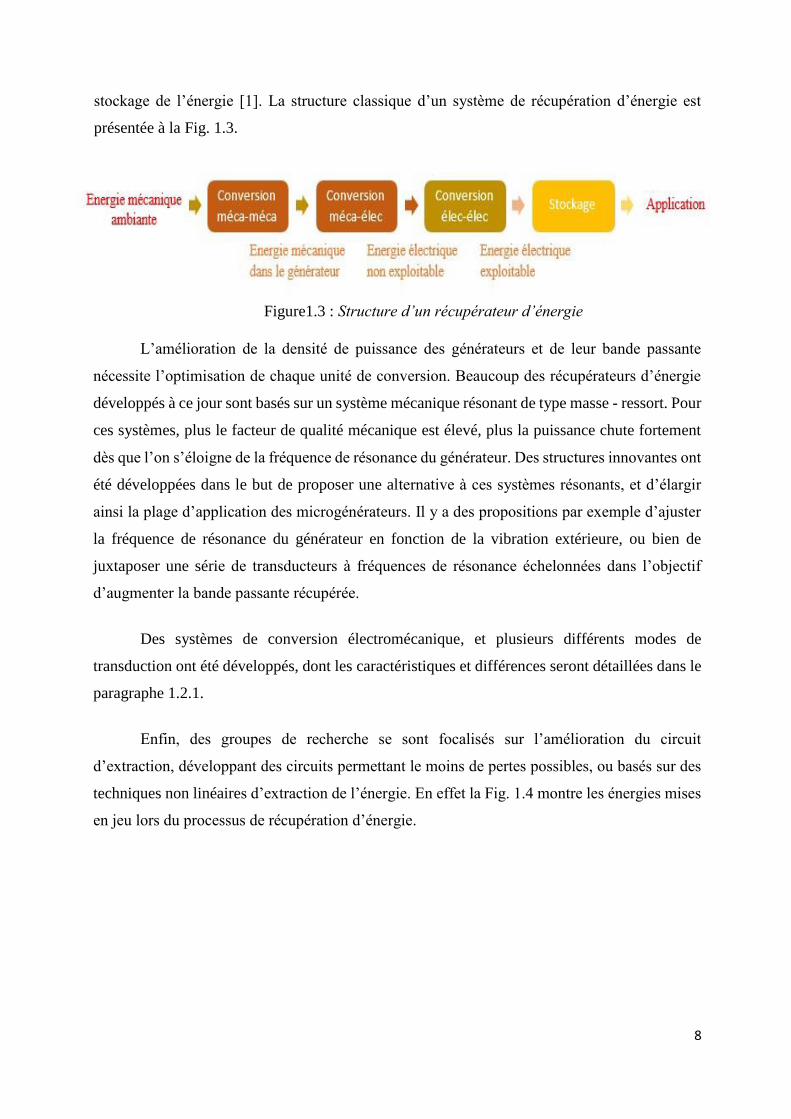
stockage de l’énergie [1]. La structure classique d’un système de récupération d’énergie est
présentée à la Fig. 1.3.
Figure1.3 : Structure d’un récupérateur d’énergie
L’amélioration de la densité de puissance des générateurs et de leur bande passante
nécessite l’optimisation de chaque unité de conversion. Beaucoup des récupérateurs d’énergie
développés à ce jour sont basés sur un système mécanique résonant de type masse - ressort. Pour
ces systèmes, plus le facteur de qualité mécanique est élevé, plus la puissance chute fortement
dès que l’on s’éloigne de la fréquence de résonance du générateur. Des structures innovantes ont
été développées dans le but de proposer une alternative à ces systèmes résonants, et d’élargir
ainsi la plage d’application des microgénérateurs. Il y a des propositions par exemple d’ajuster
la fréquence de résonance du générateur en fonction de la vibration extérieure, ou bien de
juxtaposer une série de transducteurs à fréquences de résonance échelonnées dans l’objectif
d’augmenter la bande passante récupérée.
Des systèmes de conversion électromécanique, et plusieurs différents modes de
transduction ont été développés, dont les caractéristiques et différences seront détaillées dans le
paragraphe 1.2.1.
Enfin, des groupes de recherche se sont focalisés sur l’amélioration du circuit
d’extraction, développant des circuits permettant le moins de pertes possibles, ou basés sur des
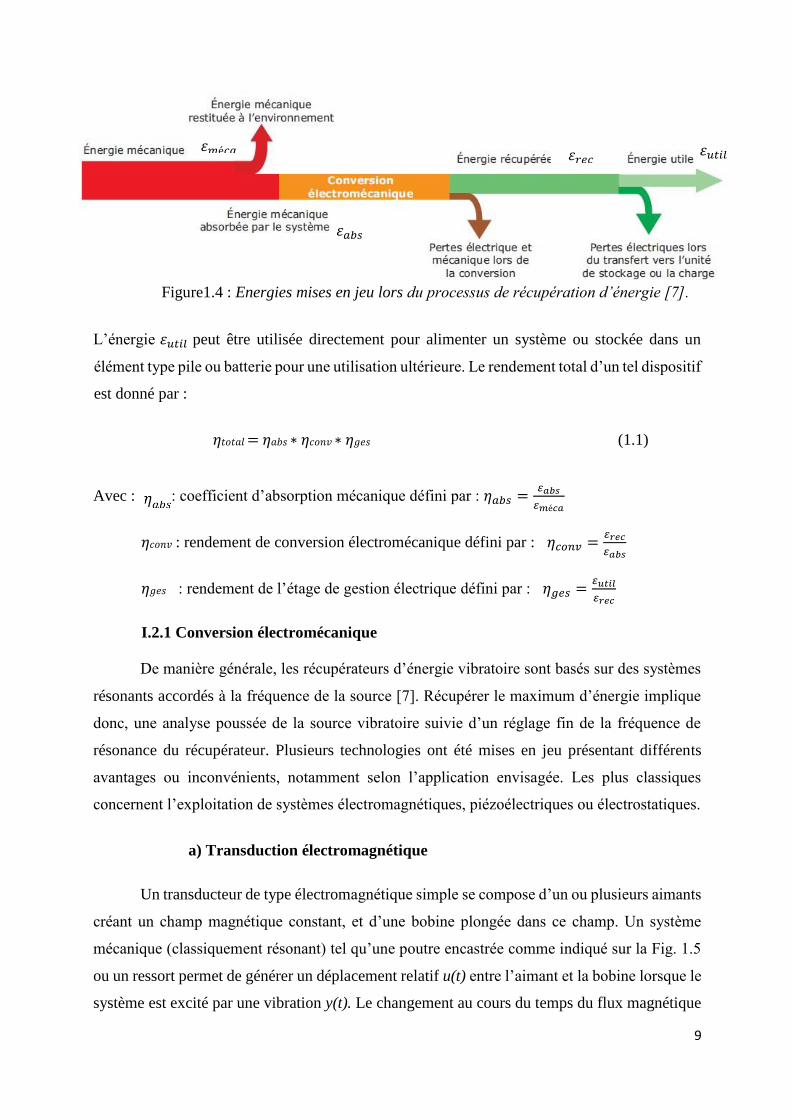
techniques non linéaires d’extraction de l’énergie. En effet la Fig. 1.4 montre les énergies mises
en jeu lors du processus de récupération d’énergie.
9
Figure1.4 : Energies mises en jeu lors du processus de récupération d’énergie [7].
L’énergie 휀𝑢𝑡𝑖𝑙 peut être utilisée directement pour alimenter un système ou stockée dans un
élément type pile ou batterie pour une utilisation ultérieure. Le rendement total d’un tel dispositif
est donné par :
𝜂𝑡𝑜𝑡𝑎𝑙 = 𝜂𝑎𝑏𝑠 ∗ 𝜂𝑐𝑜𝑛𝑣 ∗ 𝜂𝑔𝑒𝑠 (1.1)
Avec : : coefficient d’absorption mécanique défini par : 𝜂𝑎𝑏𝑠 =𝜀𝑎𝑏𝑠
𝜀𝑚é𝑐𝑎
𝜂𝑐𝑜𝑛𝑣 : rendement de conversion électromécanique défini par : 𝜂𝑐𝑜𝑛𝑣 =𝜀𝑟𝑒𝑐
𝜀𝑎𝑏𝑠
𝜂𝑔𝑒𝑠 : rendement de l’étage de gestion électrique défini par : 𝜂𝑔𝑒𝑠 =𝜀𝑢𝑡𝑖𝑙
𝜀𝑟𝑒𝑐
I.2.1 Conversion électromécanique
De manière générale, les récupérateurs d’énergie vibratoire sont basés sur des systèmes
résonants accordés à la fréquence de la source [7]. Récupérer le maximum d’énergie implique
donc, une analyse poussée de la source vibratoire suivie d’un réglage fin de la fréquence de
résonance du récupérateur. Plusieurs technologies ont été mises en jeu présentant différents
avantages ou inconvénients, notamment selon l’application envisagée. Les plus classiques
concernent l’exploitation de systèmes électromagnétiques, piézoélectriques ou électrostatiques.
a) Transduction électromagnétique
Un transducteur de type électromagnétique simple se compose d’un ou plusieurs aimants
créant un champ magnétique constant, et d’une bobine plongée dans ce champ. Un système
mécanique (classiquement résonant) tel qu’une poutre encastrée comme indiqué sur la Fig. 1.5
ou un ressort permet de générer un déplacement relatif u(t) entre l’aimant et la bobine lorsque le
système est excité par une vibration y(t). Le changement au cours du temps du flux magnétique
휀𝑎𝑏𝑠
휀𝑢𝑡𝑖𝑙
휀𝑚é𝑐𝑎
휀𝑟𝑒𝑐
10
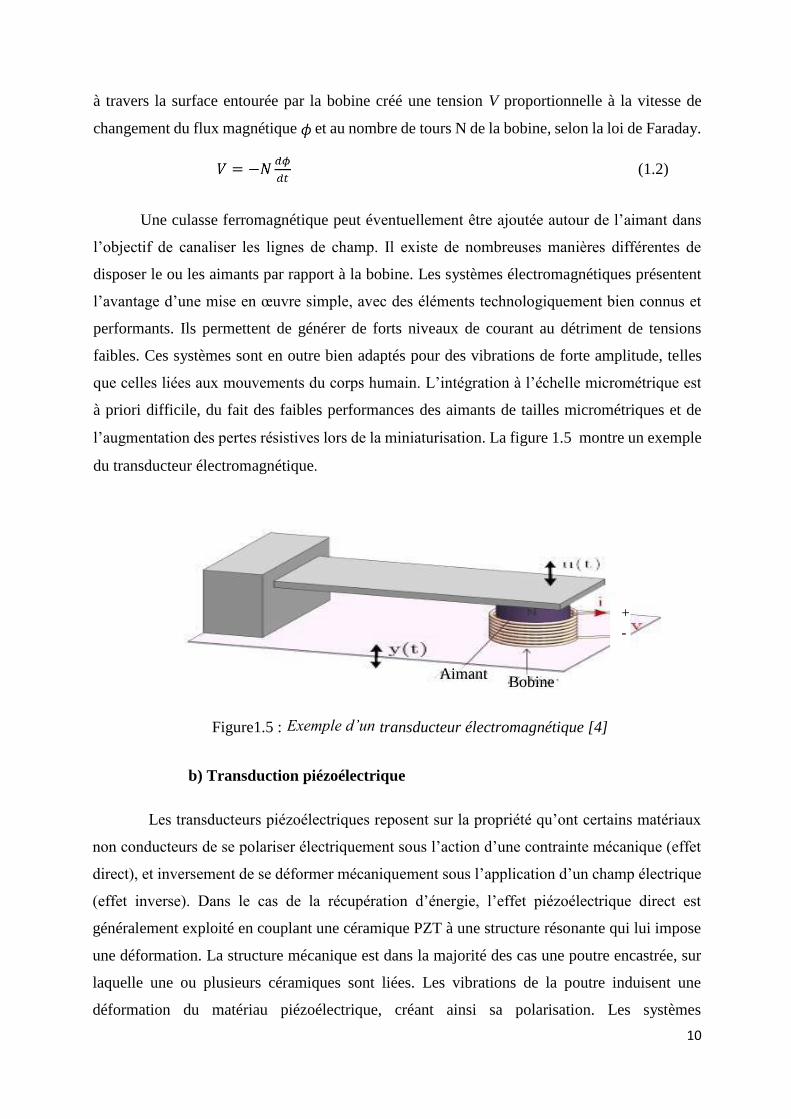
à travers la surface entourée par la bobine créé une tension V proportionnelle à la vitesse de
changement du flux magnétique et au nombre de tours N de la bobine, selon la loi de Faraday.
(1.2)
Une culasse ferromagnétique peut éventuellement être ajoutée autour de l’aimant dans
l’objectif de canaliser les lignes de champ. Il existe de nombreuses manières différentes de
disposer le ou les aimants par rapport à la bobine. Les systèmes électromagnétiques présentent
l’avantage d’une mise en œuvre simple, avec des éléments technologiquement bien connus et
performants. Ils permettent de générer de forts niveaux de courant au détriment de tensions
faibles. Ces systèmes sont en outre bien adaptés pour des vibrations de forte amplitude, telles
que celles liées aux mouvements du corps humain. L’intégration à l’échelle micrométrique est
à priori difficile, du fait des faibles performances des aimants de tailles micrométriques et de
l’augmentation des pertes résistives lors de la miniaturisation. La figure 1.5 montre un exemple
du transducteur électromagnétique.
b) Transduction piézoélectrique
Les transducteurs piézoélectriques reposent sur la propriété qu’ont certains matériaux
non conducteurs de se polariser électriquement sous l’action d’une contrainte mécanique (effet
direct), et inversement de se déformer mécaniquement sous l’application d’un champ électrique
(effet inverse). Dans le cas de la récupération d’énergie, l’effet piézoélectrique direct est
généralement exploité en couplant une céramique PZT à une structure résonante qui lui impose
une déformation. La structure mécanique est dans la majorité des cas une poutre encastrée, sur
laquelle une ou plusieurs céramiques sont liées. Les vibrations de la poutre induisent une
déformation du matériau piézoélectrique, créant ainsi sa polarisation. Les systèmes
Figure1.5 : Exemple d’un transducteur électromagnétique [4]
Aimant Bobine
+ -
+
-

11
piézoélectriques contrairement aux systèmes électromagnétiques produisent de forts niveaux de
tensions pour de plus faibles courants, et sont adaptés à des systèmes à faible amplitude de
déplacement. Ils présentent l’avantage d’être plus adaptés aux techniques de fabrications MEMS
et facilement miniaturisables. La figure 1.6 montre un exemple de la structure d’un transducteur
piézoélectrique.
Figure1.6 : Exemple d’un transducteur piézoélectrique [4].
c) Transduction électrostatique
Les générateurs de type électrostatique sont composés de deux plateaux électriques
isolées entre elles et préchargées qui vont avoir un déplacement relatif l’une par rapport à l’autre
sous l’effet des vibrations extérieures. Si le générateur opère à charge constante, la diminution
de la capacité du générateur induite par la variation de distance entre les deux plaques, aura pour
effet d’augmenter la tension aux bornes du générateur, et de ce fait augmente l’énergie
potentielle stockée dans le condensateur. De la même manière, en fixant la tension, le
mouvement des plaques a pour effet la production d’un courant dû au mouvement des charges.
Malgré une densité de puissance à priori moins importants qu’avec d’autres modes de
transduction, et l’inconvénient de nécessiter une source de tension annexe, les générateurs de ce
type présentent l’avantage d’être particulièrement bien adaptés à des réalisations de dimensions
microscopiques, et ont donc fait l’objet de nombreuses réalisations avec des techniques de
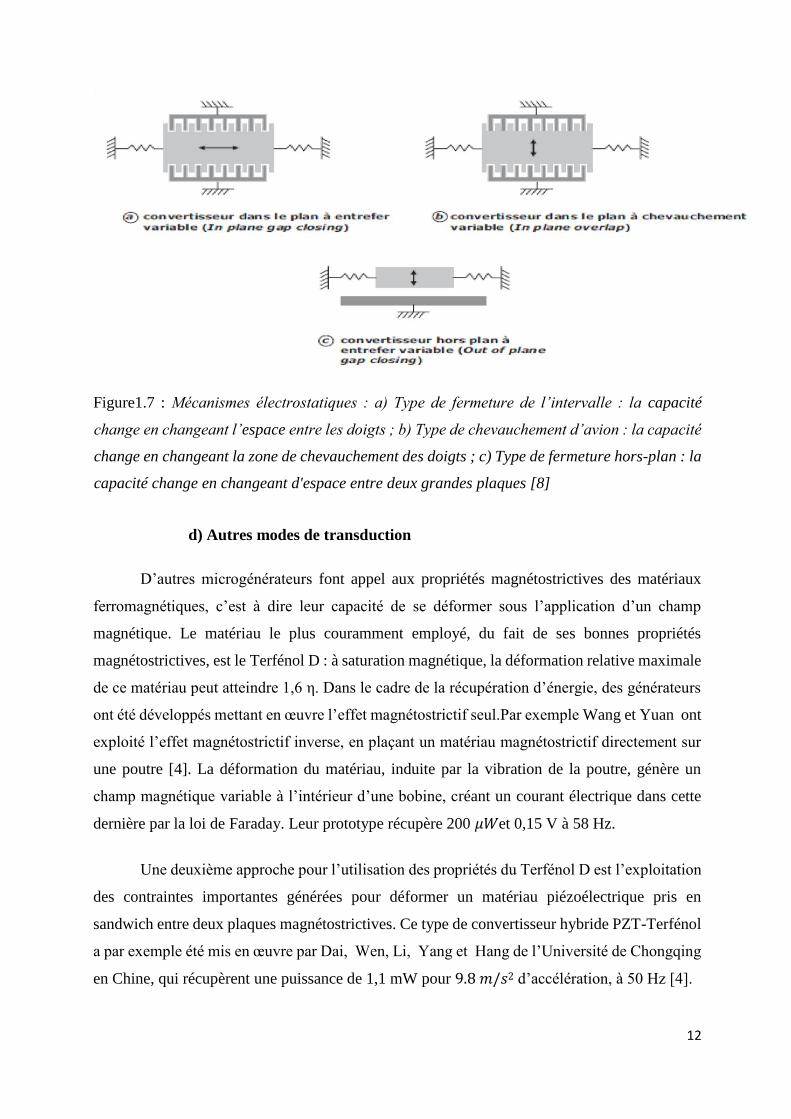
fabrication de type MicroElectroMecanicSystem(MEMS). La figure 1.7 montre des différents
mécanismes électrostatiques.
+ V -
12
Figure1.7 : Mécanismes électrostatiques : a) Type de fermeture de l’intervalle : la capacité
change en changeant l’espace entre les doigts ; b) Type de chevauchement d’avion : la capacité
change en changeant la zone de chevauchement des doigts ; c) Type de fermeture hors-plan : la
capacité change en changeant d'espace entre deux grandes plaques [8]
d) Autres modes de transduction
D’autres microgénérateurs font appel aux propriétés magnétostrictives des matériaux
ferromagnétiques, c’est à dire leur capacité de se déformer sous l’application d’un champ
magnétique. Le matériau le plus couramment employé, du fait de ses bonnes propriétés
magnétostrictives, est le Terfénol D : à saturation magnétique, la déformation relative maximale
de ce matériau peut atteindre 1,6 η. Dans le cadre de la récupération d’énergie, des générateurs
ont été développés mettant en œuvre l’effet magnétostrictif seul.Par exemple Wang et Yuan ont
exploité l’effet magnétostrictif inverse, en plaçant un matériau magnétostrictif directement sur
une poutre [4]. La déformation du matériau, induite par la vibration de la poutre, génère un
champ magnétique variable à l’intérieur d’une bobine, créant un courant électrique dans cette
dernière par la loi de Faraday. Leur prototype récupère 200 𝜇𝑊et 0,15 V à 58 Hz.
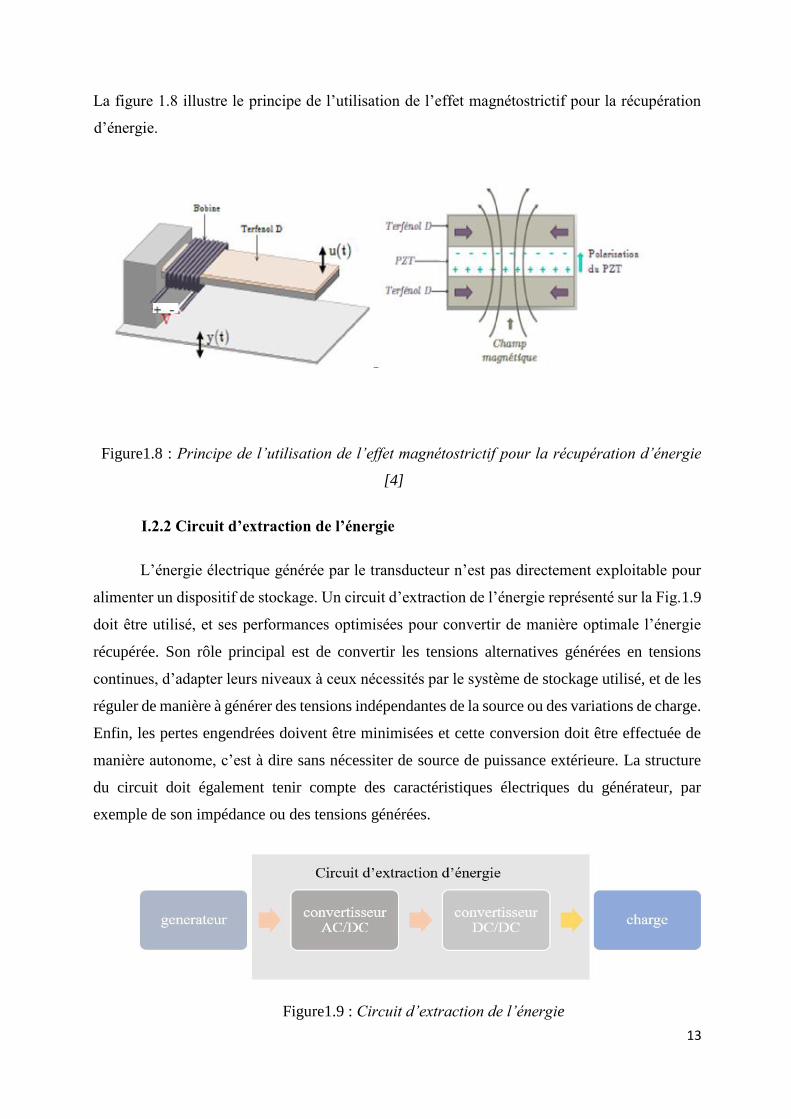
Une deuxième approche pour l’utilisation des propriétés du Terfénol D est l’exploitation
des contraintes importantes générées pour déformer un matériau piézoélectrique pris en
sandwich entre deux plaques magnétostrictives. Ce type de convertisseur hybride PZT-Terfénol
a par exemple été mis en œuvre par Dai, Wen, Li, Yang et Hang de l’Université de Chongqing
en Chine, qui récupèrent une puissance de 1,1 mW pour 9.8 𝑚/𝑠2 d’accélération, à 50 Hz [4].
13
La figure 1.8 illustre le principe de l’utilisation de l’effet magnétostrictif pour la récupération
d’énergie.
Figure1.8 : Principe de l’utilisation de l’effet magnétostrictif pour la récupération d’énergie
[4]
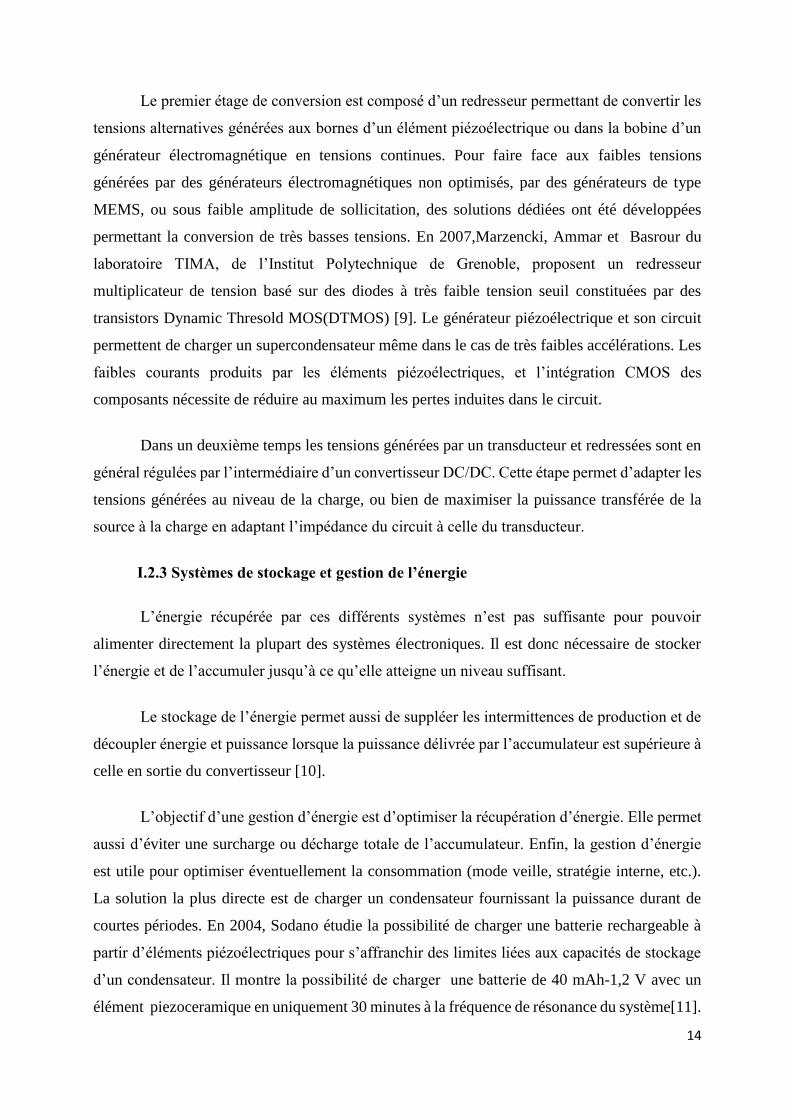
I.2.2 Circuit d’extraction de l’énergie
L’énergie électrique générée par le transducteur n’est pas directement exploitable pour
alimenter un dispositif de stockage. Un circuit d’extraction de l’énergie représenté sur la Fig.1.9
doit être utilisé, et ses performances optimisées pour convertir de manière optimale l’énergie
récupérée. Son rôle principal est de convertir les tensions alternatives générées en tensions
continues, d’adapter leurs niveaux à ceux nécessités par le système de stockage utilisé, et de les
réguler de manière à générer des tensions indépendantes de la source ou des variations de charge.
Enfin, les pertes engendrées doivent être minimisées et cette conversion doit être effectuée de
manière autonome, c’est à dire sans nécessiter de source de puissance extérieure. La structure
du circuit doit également tenir compte des caractéristiques électriques du générateur, par
exemple de son impédance ou des tensions générées.
Figure1.9 : Circuit d’extraction de l’énergie
14
Le premier étage de conversion est composé d’un redresseur permettant de convertir les
tensions alternatives générées aux bornes d’un élément piézoélectrique ou dans la bobine d’un
générateur électromagnétique en tensions continues. Pour faire face aux faibles tensions
générées par des générateurs électromagnétiques non optimisés, par des générateurs de type
MEMS, ou sous faible amplitude de sollicitation, des solutions dédiées ont été développées
permettant la conversion de très basses tensions. En 2007,Marzencki, Ammar et Basrour du
laboratoire TIMA, de l’Institut Polytechnique de Grenoble, proposent un redresseur
multiplicateur de tension basé sur des diodes à très faible tension seuil constituées par des
transistors Dynamic Thresold MOS(DTMOS) [9]. Le générateur piézoélectrique et son circuit
permettent de charger un supercondensateur même dans le cas de très faibles accélérations. Les
faibles courants produits par les éléments piézoélectriques, et l’intégration CMOS des
composants nécessite de réduire au maximum les pertes induites dans le circuit.
Dans un deuxième temps les tensions générées par un transducteur et redressées sont en
général régulées par l’intermédiaire d’un convertisseur DC/DC. Cette étape permet d’adapter les
tensions générées au niveau de la charge, ou bien de maximiser la puissance transférée de la
source à la charge en adaptant l’impédance du circuit à celle du transducteur.
I.2.3 Systèmes de stockage et gestion de l’énergie
L’énergie récupérée par ces différents systèmes n’est pas suffisante pour pouvoir
alimenter directement la plupart des systèmes électroniques. Il est donc nécessaire de stocker
l’énergie et de l’accumuler jusqu’à ce qu’elle atteigne un niveau suffisant.
Le stockage de l’énergie permet aussi de suppléer les intermittences de production et de
découpler énergie et puissance lorsque la puissance délivrée par l’accumulateur est supérieure à
celle en sortie du convertisseur [10].
L’objectif d’une gestion d’énergie est d’optimiser la récupération d’énergie. Elle permet
aussi d’éviter une surcharge ou décharge totale de l’accumulateur. Enfin, la gestion d’énergie
est utile pour optimiser éventuellement la consommation (mode veille, stratégie interne, etc.).
La solution la plus directe est de charger un condensateur fournissant la puissance durant de
courtes périodes. En 2004, Sodano étudie la possibilité de charger une batterie rechargeable à
partir d’éléments piézoélectriques pour s’affranchir des limites liées aux capacités de stockage
d’un condensateur. Il montre la possibilité de charger une batterie de 40 mAh-1,2 V avec un
élément piezoceramique en uniquement 30 minutes à la fréquence de résonance du système[11].

15
Un exemple d’un supercondensateur qui est montré à la Fig 1.10 (a) peut emmagasiner jusqu’à
5 Wh/kg et peut se décharger de quelques secondes à quelques heures voire quelques jours.
Il existe d’autres dispositifs électroniques de stockage d’énergie comme les piles
électrochimiques. Les plus performantes sont au lithium et ils peuvent emmagasinées jusqu’à
500 Wh/kg et de très faible autodécharge. Un exemple d’accumulateur d’une pile au lithium
intégrée est représenté sur la Fig. 1.10 (b).
a) b)
Figure 1.10 : Accumulateur d’énergie : a) Supercondensateur ; b) Pile au lithium [12].
16
I.3 Conclusion
La récupération d’énergie vibratoire permet d’alimenter des petits systèmes
électroniques. De nombreuses sources d’énergie mécanique sont susceptibles de fournir cette
énergie électrique. On utilise en général trois mode de transduction pour convertir cette énergie
mécanique en énergie électrique : la transduction électromagnétique, la transduction
piézoélectrique et la transduction électrostatique.
17
Chapitre II : MODELISATION ET COMPARAISON DES
GENERATEURS ELECTROMAGNETIQUE, PIEZOELECTRIQUE ET
ELECTROSTATIQUE
Ce chapitre a pour but de modéliser les générateurs électromagnétique, piézoélectrique,
et électrostatique, et de comparer la puissance électrique fournie par ces trois générateurs. La
première section de ce chapitre illustre le principe de fonctionnement de chaque générateur. La
modélisation des trois générateurs est présentée dans la deuxième section. La troisième section
évalue la puissance récupérée par ces trois générateurs. La dernière section présente les
avantages et inconvénients de chaque modèle.
II.1 Principe de fonctionnement
II.1.1 Générateur piézoélectrique
La piézoélectricité, découverte en 1880 par les frères Pierre et Jacques Curie, est une
propriété particulière des corps possédant une anisotropie cristalline (dépendant de la direction)
[11]. Elle se manifeste par deux effets :
- l’effet direct se caractérise par la polarisation du matériau sous l’action d’une
contrainte mécanique ;
- l’effet inverse, quant à lui, correspond à l’apparition d’une déformation mécanique
sous l’effet d’un champ électrique appliqué au matériau.
En général, le matériau piézoélectrique est couplé à une structure résonante qui lui
impose une déformation ou une vibration. Grâce à l’effet direct, cette déformation est convertie
en charge électrique. Plusieurs formes de convertisseurs sont envisageables : membranes,
poutres encastrées libres plus ou moins complexes.
Le mode de couplage traduit la façon dont la mécanique et l’électrique interagissent entre
eux. Deux modes de couplages sont classiquement exploités :
- le mode 33 ou la déformation est dans le même sens que la polarisation
- le mode 31 ou la déformation est perpendiculaire à la polarisation
Un système d’axe 1, 2, 3 est habituellement utilise pour identifier les directions.

18
Les systèmes d’équations suivant récapitulent les couplages au sein de matériaux
piézoélectriques :
• Pour le mode 33
𝑆3 = 𝑠33 ∗ 𝑇3 + 𝑑33 ∗ 𝐸3 (2.1.a)
𝐷3 = 𝑑33 ∗ 𝑇3 + ξ33 ∗ 𝐸3 (2.1.b)
• Pour le mode 31
𝑆1 = 𝑠11 ∗ 𝑇1 + 𝑑31 ∗ 𝐸3 (2.1.c)
𝐷3 = 𝑑31 ∗ 𝑇3 + ξ33 ∗ 𝐸3 (2.1.d)
Avec : S : déformation relative
T : contraintes mécaniques (𝑃𝑎)
E : champs électrique (𝑉/𝑚)
D :déplacement électrique (𝐶/𝑚2)
s:souplesse (𝑚2/𝐶)
d :constante piézoélectrique (𝐶/𝑁)
ξ : permittivité (𝐹/𝑚)
La figure 2.1 représente les deux modes de couplage au sein des matériaux piézoélectriques :
Figure2.1 : Mode de couplage au sein des matériaux piézoélectriques [8].
Les deux modes de couplage sont en général pleines, mais certains dispositifs mettent en
œuvre des électrodes interdigitées. Cette solution permet de travailler en mode 33 avec un
facteur de couplage plus élevé qu’en mode 31, et d’obtenir ainsi une tension de sortie plus
élevée.
En effet, le coefficient de couplage électromécanique 𝐾𝑖𝑗2 défini par l’équation (2.2),
témoigne de la qualité de la conversion électromécanique
19
(2.2)
En d’autres termes, plus ce coefficient découplage est grand et plus on récupère de
l’énergie électrique. Toutefois, si le choix d’un matériau piézoélectrique est généralement dicté
par la valeur de 𝐾𝑖𝑗2, les pertes d’origine mécanique ou diélectrique au sein du matériau
pénalisent la conversion de l’énergie mécanique. Notons par ailleurs que les matériaux cristallins
et céramiques qui sont actuellement les plus efficaces en termes de conversion sont aussi les
plus fragiles et les plus sensibles aux effets de vieillissement.
Quel que soit le matériau retenu, l’utilisation en température est limitée par la
température de Curie au-delà de laquelle les propriétés piézoélectriques disparaissent.
II.1.2 Générateur électromagnétique
La conversion de puissance électromagnétique résulte du mouvement relatif d'un
conducteur électrique dans un champ magnétique. Typiquement, le conducteur est enroulé dans
une bobine pour faire une inductance. Le mouvement relatif entre la bobine et le champ
magnétique entraîne l'écoulement d'un courant dans la bobine.
La valeur de la force électromotrice est déterminée par :
(2.3)
Avec 𝛷: Champ magnétique
t : temps
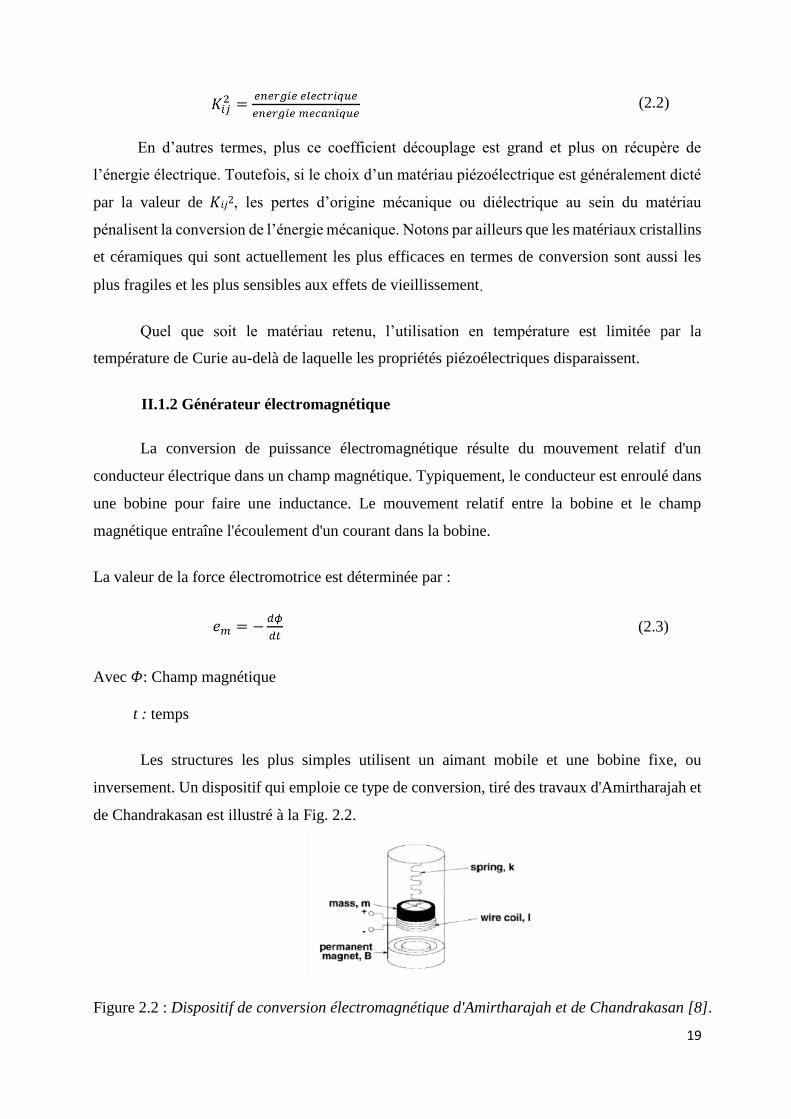
Les structures les plus simples utilisent un aimant mobile et une bobine fixe, ou
inversement. Un dispositif qui emploie ce type de conversion, tiré des travaux d'Amirtharajah et
de Chandrakasan est illustré à la Fig. 2.2.
Figure 2.2 : Dispositif de conversion électromagnétique d'Amirtharajah et de Chandrakasan [8].
20
Dans le cas simple d'une bobine se déplaçant à travers un champ magnétique perpendiculaire,
comme montré sur la Fig. 2.2, de résistance constante, la tension maximale de circuit ouvert
dans la bobine est donnée par l'Eq. 2.4.
(2.4)
où : : est le nombre de virages dans la bobine
: est la force du champ magnétique
: est la longueur d'une bobine (2πr)
t :est le temps
: est la distance parcourue par la bobine dans le champ magnétique
Le coefficient d’amortissement électrique 𝐶𝑒 d’un tel système permettant de calculer la
puissance récupérable, est donné par l’Eq. 2.5 :
(2.5)
avec N : nombre de tours de l’inducteur,
𝑙 : longueur de la bobine,
𝐿 : inductance de la bobine.
𝑅𝐿 : résistance de la bobine
B : induction magnétique,
𝑅𝐶 : résistance de charge,
Cette équation est une approximation qui n’est théoriquement valable que si la bobine
passe d’une zone à champ B maximal à une zone à champ B nul.
La résistance de charge 𝑅𝐶 permet d’ajuster le coefficient d’amortissement électrique
pour extraire le maximum d’énergie.
I.1.3 Générateur électrostatique
La génération électrostatique consiste en deux plateaux séparés par diélectrique, qui se
déplacent l'un par rapport à l'autre. Au fur et à mesure que les plateaux déplacent, l'énergie
21
stockée augmente, fournissant ainsi le mécanisme de conversion mécanique à l'énergie
électrique. Il existe deux principaux cycles de fonctionnement : à charge constante ou à tension
constante.
Par exemple, dans un cycle à charge constante, les plateaux sont chargés lorsque ses
capacités sont maximales puis isolées de sa charge et de la source de polarisation. La structure
stocke alors une énergie initiale. Le mouvement mécanique imposé à la structure permet de faire
varier la valeur de cette capacité. En effet, lorsque les armatures s’éloignent, la tension aux
bornes de cette dernière augmente, vu que la charge est constante (Q = CV).
Finalement, les charges sont retirées de la structure sous sa capacité minimale. L’énergie
électrique ainsi récupérée est plus importante que l’énergie initialement injectée. L’énergie
électrique est amplifiée grâce à l’énergie mécanique. Les équations 2.6a et 2.6b expriment
l’énergie électrique récupérable pour le générateur électrostatique pour les deux cycles de
fonctionnement à tension constante et à charge constante [7] :
(2.6a)
(2.6b)
avec 𝐶𝑚𝑖𝑛 et 𝐶𝑚𝑎𝑥 : capacités minimales et maximales de la structure,
V : tension aux bornes de la structure,
Q : charges électriques.
II.2 Modélisation normalisée d’un générateur piézoélectrique, électromagnétique et
électrostatique
II.2.1 Modélisation normalisée d’un générateur piézoélectrique
Un générateur piézoélectrique peut être modélisé électriquement comme une source de
courant proportionnelle à la vitesse de vibration, en parallèle avec la capacité 𝐶0 et la résistance
parasitique 𝑟𝑐 de l’élément piézoélectrique [4]. Autour d’une de ses fréquences de résonance, le
comportement du système est décrit par les deux équations couplées mécanique et électrique
suivantes (Eq. 2.7 et 2.8).
−𝑀ÿ = 𝑀𝑢̈ + 𝑀𝑢̈ + 𝐾𝑠𝑐𝑢̈ + 𝛼𝑣 (2.7)
(2.8)
*Paramètre souligné:Valeur normalisée 22
La raideur du système est caractérisée par𝐾𝑠𝑐, la raideur en court-circuit, conduisant à la
définition de la fréquence de résonance donnée par .
Si le système est en circuit ouvert, et supposant que les pertes résistives sont négligeables,
l’Eq. 2.8 donne alors :𝑣 =𝛼
𝐶0𝑢, et l’Eq. 2.7 peut se réécrire comme suit.
(2.9)
On a alors une modification de la raideur mécanique du système, conduisant à la
définition d’une raideur en circuit ouvert donnée par l’Eq. 2.10.
(2.10)
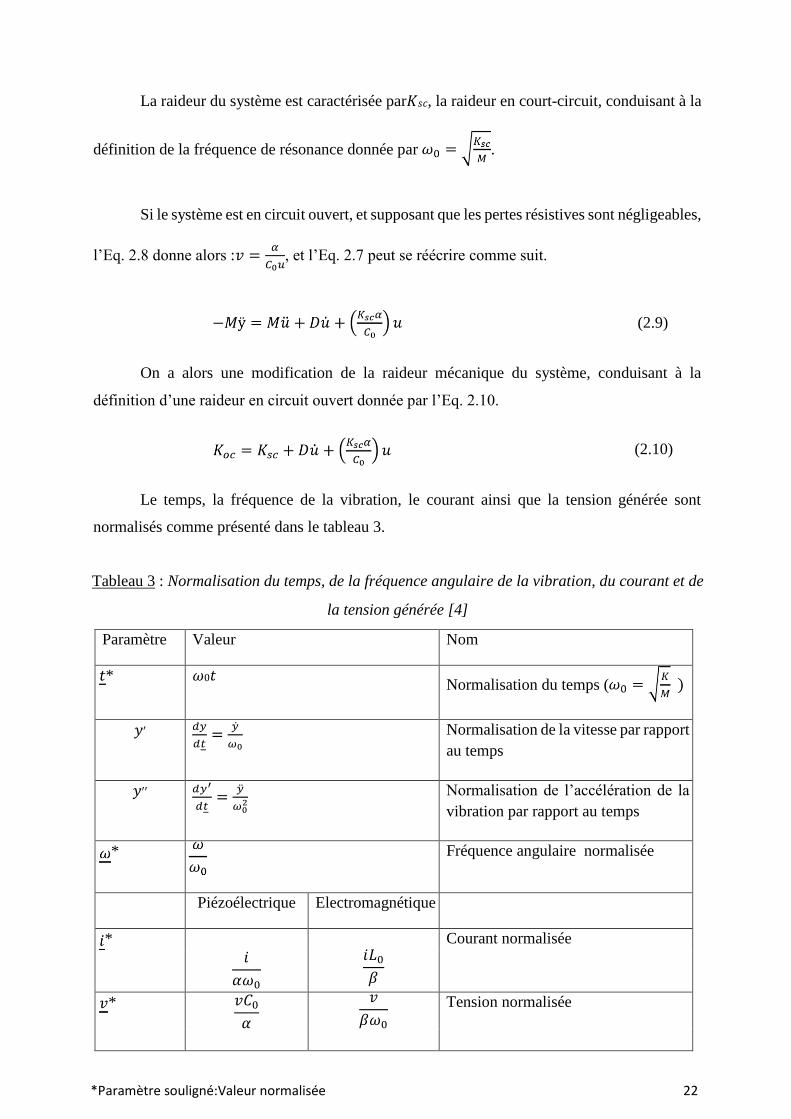
Le temps, la fréquence de la vibration, le courant ainsi que la tension générée sont
normalisés comme présenté dans le tableau 3.
Tableau 3 : Normalisation du temps, de la fréquence angulaire de la vibration, du courant et de
la tension générée [4]
Paramètre Valeur Nom
* 𝜔0𝑡 Normalisation du temps (
𝑦′ 𝑑𝑦
𝑑𝑡=
𝑦
𝜔0 Normalisation de la vitesse par rapport
au temps
𝑦′′ 𝑑𝑦′
𝑑𝑡=
𝑦
𝜔02
Normalisation de l’accélération de la
vibration par rapport au temps
* Fréquence angulaire normalisée
Piézoélectrique Electromagnétique
*
𝑖
𝛼𝜔0
𝑖𝐿0𝛽
Courant normalisée
* 𝑣𝐶0𝛼
𝑣
𝛽𝜔0
Tension normalisée

23
On peut alors réécrire les Eqs. 2.7 et 2.8 en faisant apparaître trois paramètres hors dimensions:
le coefficient de couplage 𝑘2, le facteur de qualité mécanique 𝑄𝑚 et le coefficient de perte
résistives 𝜉𝑒.
Leur définition est précisée dans le Tableau 4.
Tableau 4 : Paramètres hors dimensions [4]
Paramètre Valeur Nom
Piézoélectrique Electromagnétique
𝑘2 𝛼2
𝐾𝑂𝐶𝐶0
𝛽2
𝐾𝑆𝐶𝐿0
Coefficient de couplage au carrée
𝜉𝑒 1
2𝑟𝐶𝐶0𝜔0
𝑟𝐿2𝐿0𝜔0
Coefficient de pertes résistives
𝑄𝑚 √𝐾𝑆𝐶𝑀
𝐷
√𝐾𝑂𝐶𝑀
𝐷
Facteur de qualité mécanique
𝜉𝐶 1
2𝑟𝐿𝑂𝐴𝐷𝐶0𝜔0
𝑟𝐿𝑂𝐴𝐷2𝐿0𝜔0
Coefficient de charge
Le détail du calcul est proposé par les Eqs. 2.11 à 2.14 pour l’équation mécanique.
(2.11)
(2.12)
(2.13)
(2.14)
Pour l’équation électrique, le détail du calcul est donné par les Eqs. 2.15 à 2.17
(2.15)
(2.16)
(2.17)
Un générateur piézoélectrique peut alors être décrit par les deux équations normalisées couplé
(Eqs. 2.18 et 2.19).
(2.18)
24
(2.19)
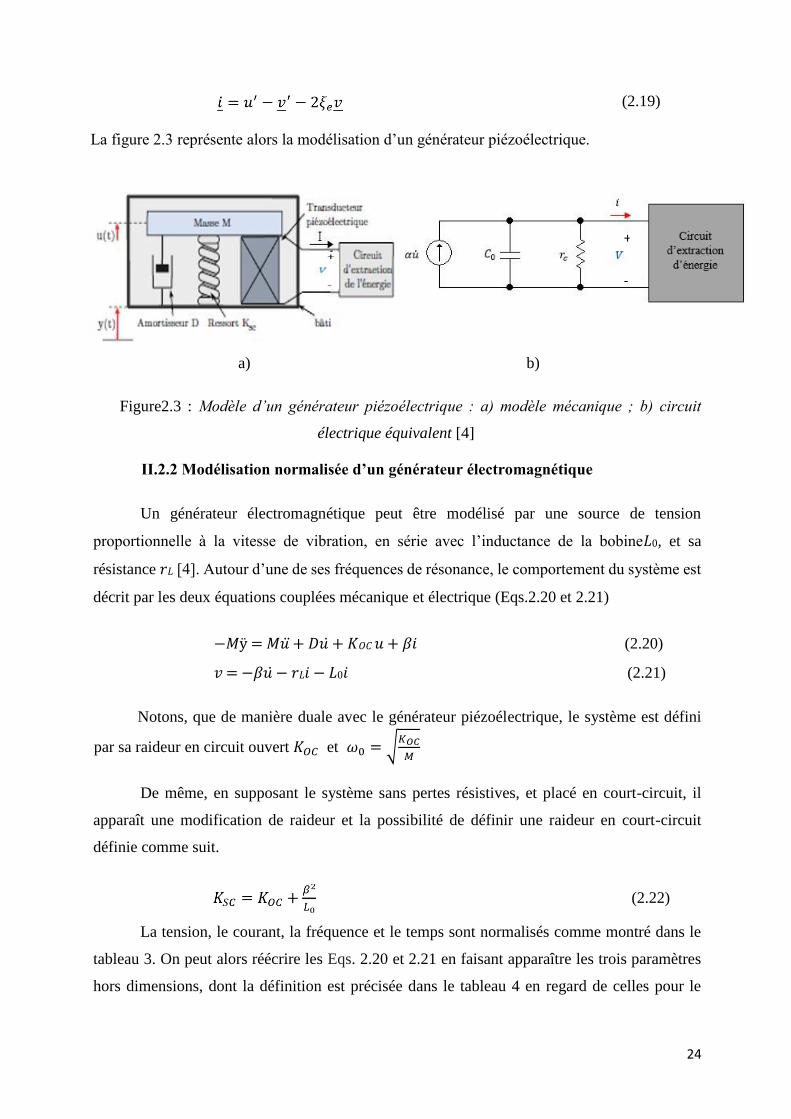
La figure 2.3 représente alors la modélisation d’un générateur piézoélectrique.
a) b)
Figure2.3 : Modèle d’un générateur piézoélectrique : a) modèle mécanique ; b) circuit
électrique équivalent [4]
II.2.2 Modélisation normalisée d’un générateur électromagnétique
Un générateur électromagnétique peut être modélisé par une source de tension
proportionnelle à la vitesse de vibration, en série avec l’inductance de la bobine𝐿0, et sa
résistance 𝑟𝐿 [4]. Autour d’une de ses fréquences de résonance, le comportement du système est
décrit par les deux équations couplées mécanique et électrique (Eqs.2.20 et 2.21)
−𝑀ÿ = 𝑀𝑢̈ + 𝐷𝑢̈ + 𝐾𝑂𝐶 𝑢̈ + 𝛽𝑖 (2.20)
𝑣 = −𝛽𝑢̈ − 𝑟𝐿𝑖 − 𝐿0𝑖 (2.21)
Notons, que de manière duale avec le générateur piézoélectrique, le système est défini
par sa raideur en circuit ouvert 𝐾𝑂𝐶 et 𝜔0 = √𝐾𝑂𝐶
𝑀
De même, en supposant le système sans pertes résistives, et placé en court-circuit, il
apparaît une modification de raideur et la possibilité de définir une raideur en court-circuit
définie comme suit.
(2.22)
La tension, le courant, la fréquence et le temps sont normalisés comme montré dans le
tableau 3. On peut alors réécrire les Eqs. 2.20 et 2.21 en faisant apparaître les trois paramètres
hors dimensions, dont la définition est précisée dans le tableau 4 en regard de celles pour le
+
-
25
système piézoélectrique. Le détail des calculs est précisé dans les Eqs. 2.22 à 2.25 pour les
équations mécaniques et les Eqs. 2.26 à 2.28 pour les équations électriques.
(2.17)
(2.18)
(2.19)
(2.20)
(2.21)
(2.22)
(2.23)
Le modèle normalisé d’un générateur électromagnétique s’écrit finalement comme suit
les Eqs.2.24 et 2.25 couplées :
(2.24)
(2.25).
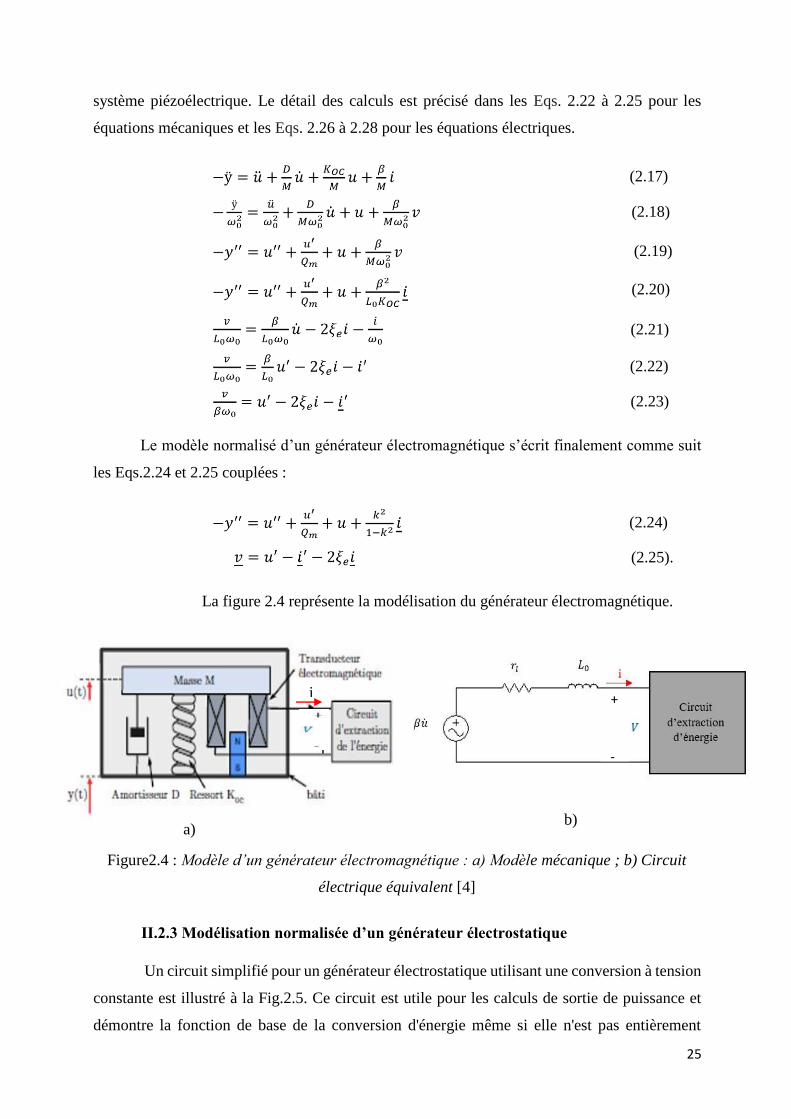
La figure 2.4 représente la modélisation du générateur électromagnétique.
Figure2.4 : Modèle d’un générateur électromagnétique : a) Modèle mécanique ; b) Circuit
électrique équivalent [4]
II.2.3 Modélisation normalisée d’un générateur électrostatique
Un circuit simplifié pour un générateur électrostatique utilisant une conversion à tension
constante est illustré à la Fig.2.5. Ce circuit est utile pour les calculs de sortie de puissance et
démontre la fonction de base de la conversion d'énergie même si elle n'est pas entièrement
a) b)
+
-
i

26
réaliste. Un réservoir préchargé, qui pourrait être un condensateur ou une batterie rechargeable,
est représenté comme source de tension d’entrée 𝑉𝑖𝑛. Le condensateur variable 𝐶𝑉 est la structure
de capacité variable, et 𝐶𝑝𝑎𝑟 est la capacité parasite associée à la structure de capacité variable et
à toutes les interconnexions. Lorsque 𝐶𝑉 est à son état de capacité maximum (𝐶𝑚𝑎𝑥), le
commutateur 1 (SW1) se ferme et la charge est transférée de l'entrée au condensateur variable.
La structure capacitive passe alors de sa position de capacité maximale à la position de capacité
minimale (𝐶𝑚𝑖𝑛) avec les deux interrupteurs ouverts. Le résultat est que l'énergie stockée sur 𝐶𝑉
augmente. À la capacité minimale, le commutateur 2 (SW2) se ferme et la charge enregistrée
sur 𝐶𝑉 (maintenant dans un état d'énergie plus élevé) est transférée sur le condensateur de
stockage 𝐶𝑠𝑡𝑜𝑟. Les vibrations mécaniques ont fonctionné sur le condensateur variable
provoquant une augmentation de l'énergie totale stockée dans le système.
Figure 2.5: Représentation de circuit simple pour un générateur électrostatique [8]
L'augmentation de l'énergie stockée dans le condensateur variable par cycle est donnée par les
expressions équivalentes dans les Eqs. 2.26a et 2.26b.
) (2.26a)
(2.26b)
Où 𝑉𝑚𝑎𝑥 : représente la tension maximale admissible à travers un commutateur
Selon la mise en œuvre spécifique des commutateurs, la conception physique et les vibrations
d'entrée, 𝑉𝑚𝑎𝑥peut être une contrainte très limitée. Si l'on peut déterminer que la tension
maximale admissible sera une contrainte limite, alors l’Eq. 2.26b peut être la plus utile des deux.
Sinon, l'Eq. 2.26a sera plus utile dans la conception du système. La puissance de sortie est, bien
sûr, juste donnée par l'énergie par cycle multipliée par la fréquence de fonctionnement, qui sera
nécessairement la fréquence des vibrations d'entrée.

27
Le transfert d'énergie par cycle dépend fortement du rapport de la capacité maximale à la
capacité minimale. Il est donc important de noter que la distance réelle de déplacement de la
structure de capacité variable, et donc la valeur de 𝐶𝑚𝑎𝑥 et 𝐶𝑚𝑖𝑛, est déterminée à la fois par la
dynamique mécanique du système et la conception de la structure capacitive.
II.3 Puissance récupérée
Comme on a dit dans le paragraphe1.2.1, la récupération de l’énergie de vibrations
mécaniques est basée sur l’utilisation d’un système inertiel résonant possédant une fréquence
propre égale ou proche de celle de l’excitation que subit le système. Un système inertiel est
représenté à la Fig. 2.6
Ce système est composé d’une masse m mise en mouvement relatif z(t) par rapport à un
boîtier lui-même soumis à une vibration extérieure y(t). Cette masse couplée à un ressort de
raideur k forme un système linéaire du second ordre ayant un coefficient d’amortissement total
𝐶𝑇. L’amortissement est d’origine mécanique𝐶𝑚 lié aux frottements dans l’air par exemple, et
d’origine électrique𝐶𝑒 de telle sorte que l’amortissement total 𝐶𝑇 soit la somme de ces deux
amortissements.
Lorsque le boîtier rigide est soumis à une vibration extérieure sinusoïdale (𝑡) = (𝜔𝑡), la
masse mobile m effectue un déplacement relatif z(t) par rapport au boîtier.
L’équation du mouvement de la masse est donnée par l’Eq. 2.27 :
𝑚𝑧̈ (𝑡) + 𝐶𝑇𝑧̈ (𝑡) + 𝑘𝑧̈(𝑡) = −𝑚𝑦 (𝑡) (2.27)
L’équation 2.28 donne le déplacement relatif en régime permanent :
(2.28)
Avec 𝜑𝑖 : angle de phase définie par
Figure 2.6 : Système inertiel [7 ]

28
La puissance instantanée générée par un système inertiel est égale au produit de la
vitesse de déplacement de la masse par rapport au boîtier 𝑧̈ (𝑡) par la force d’amortissement
visqueux 𝐶𝑇𝑧̈ (𝑡) comme indique l’Eq. 2.29 :
(𝑡) = 𝐶𝑇𝑧̈ 2(𝑡) (2.29)
Dans la plupart des cas, le spectre de fréquence de l’application est identifié dès le départ,
si bien que le générateur peut être conçu pour résonner à la fréquence des vibrations d’entrée,
maximisant ainsi l’énergie extraite de ce transducteur. La fréquence propre 𝜔𝑛 du système est
donnée par l’Eq. 2.30 :
(2.30)
La puissance totale 𝑃𝑇𝑂𝑇 moyenne dissipée sous forme mécanique et électrique est décrite
par l’Eq. 2.31 :
(2.31)
Ou 𝜉𝑇 amortissement total réduit défini par
La puissance maximale 𝑃𝑚𝑎𝑥 est obtenue quand le système vibre à sa fréquence de
résonance et défini par l’Eq. 2.32 :
(2.32)
Avec A amplitude de l’accélération telle que
La puissance électrique maximale extraite pour ce dispositif est calculable en séparant
dans l’amortissement réduit 𝜉𝑇 les termes d’origine mécanique 𝜉𝑚 des termes d’origine électrique
𝜉𝑒. L’équation 2.33 donne l’expression de la puissance électrique maximale 𝑃𝑒, que l’on peut
extraire d’un système résonant dont la fréquence propre est égale à la fréquence angulaire des
vibrations d’entrée :
(2.33)
D’après cette expression, on constate que la puissance électrique récupérable dépendant
de la masse m en mouvement, est proportionnelle au carré de l’accélération d’excitation A et
inversement proportionnelle à la fréquence angulaire de résonance 𝜔𝑛.
29
La puissance augmente en maximisant la masse dans la limite de l’encombrement fixé.
Il est à noter que, généralement, plus la fréquence angulaire augmente et plus l’amplitude A de
l’accélération diminue. En vue de l’Eq. 2.33, la puissance électrique récupérable est maximale
si l’amortissement réduit électrique 𝜉𝑒 est sensiblement égal à l’amortissement réduit mécanique
𝜉𝑚, qui doit être le plus faible possible pour minimiser les pertes. Toutefois, un compromis est à
trouver car si on choisit 𝜉𝑚 très faible, l’amplitude des mouvements z (t) devient alors très
importante au risque d’augmenter considérablement l’encombrement du système, et d’introduire
des comportements non linéaires. Ces effets peuvent induire des difficultés à maintenir le
système à sa fréquence de résonance.
Ainsi, un système inertiel n’est intéressant que si ce dernier résonne à la fréquence
angulaire de l’excitation. Si l’on s’éloigne de cette fréquence angulaire, la puissance récupérable
chute rapidement. Ainsi, si le spectre d’excitation n’est plus une fréquence fixe mais plutôt une
large bande de fréquences, il est alors préférable d’augmenter l’amortissement du système pour
diminuer sa sélectivité.
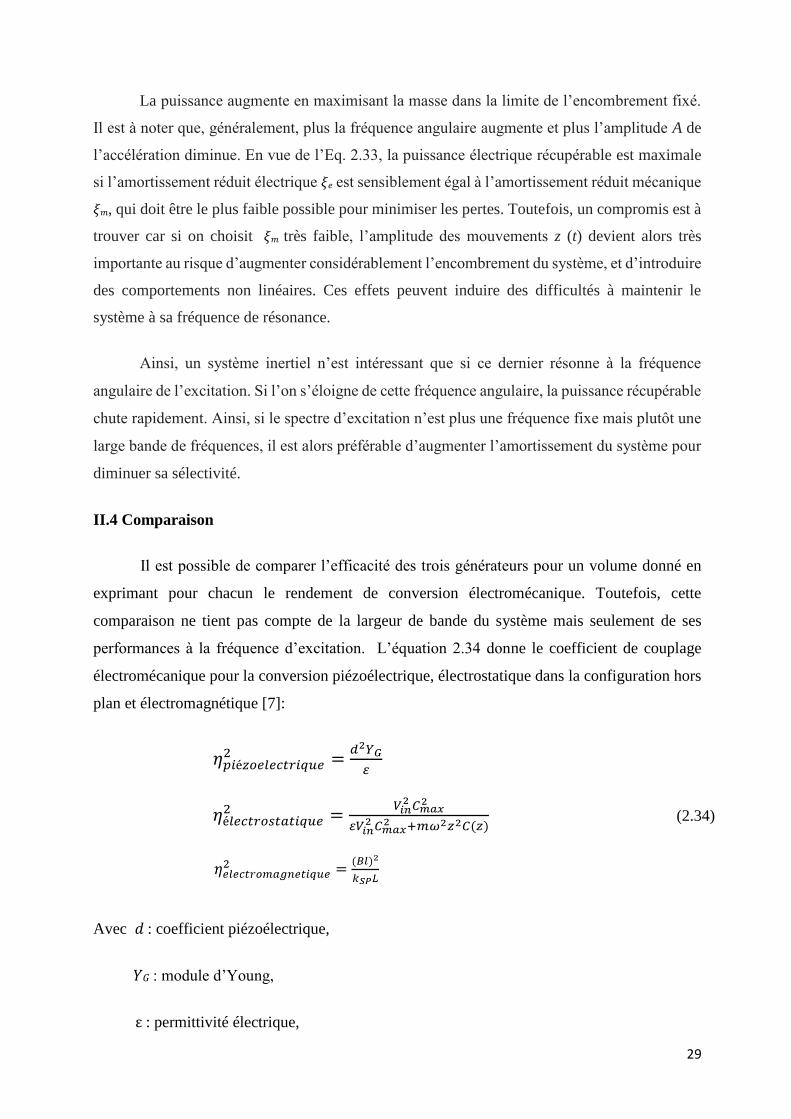
II.4 Comparaison
Il est possible de comparer l’efficacité des trois générateurs pour un volume donné en
exprimant pour chacun le rendement de conversion électromécanique. Toutefois, cette
comparaison ne tient pas compte de la largeur de bande du système mais seulement de ses
performances à la fréquence d’excitation. L’équation 2.34 donne le coefficient de couplage
électromécanique pour la conversion piézoélectrique, électrostatique dans la configuration hors
plan et électromagnétique [7]:
𝜂𝑝𝑖é𝑧𝑜𝑒𝑙𝑒𝑐𝑡𝑟𝑖𝑞𝑢𝑒2 =
𝑑2𝑌𝐺
𝜀
𝜂é𝑙𝑒𝑐𝑡𝑟𝑜𝑠𝑡𝑎𝑡𝑖𝑞𝑢𝑒2 =
𝑉𝑖𝑛2 𝐶𝑚𝑎𝑥
2
𝜀𝑉𝑖𝑛2 𝐶𝑚𝑎𝑥
2 +𝑚𝜔2𝑧2𝐶(𝑧) (2.34)
Avec 𝑑 : coefficient piézoélectrique,
𝑌𝐺 : module d’Young,
ε : permittivité électrique,
30
𝑉𝑖𝑛 : tension d’entrée,
𝐶𝑚𝑎𝑥 : capacité maximale,
𝑧̈ : déplacement de l’électrode,
𝐵 : champ magnétique,
𝑙 : longueur de la bobine,
𝑘𝑆𝑃 : constante de raideur du ressort
𝐿 : inductance de la bobine.
Ainsi, les densités d’énergie électrique récupérable sont de 335 𝑚𝐽/𝑐𝑚3 par
piézoélectricité, de 40 𝑚𝐽/𝑐𝑚3 par principe électrostatique et de 400 𝑚𝐽/𝑐𝑚3 par
électromagnétisme, sur des systèmes macroscopiques [7]. Ces valeurs sont des maximas
théoriques que les prototypes sont encore loin d’égaler. Il est à souligner que la fréquence de
fonctionnement des dispositifs devient de plus en plus compatible avec les fréquences ambiantes
La piézoélectricité offre une bonne densité d’énergie récupérable et la possibilité
d’intégrer les dispositifs. Il faut toutefois souligner que les performances des matériaux en
couches minces sont légèrement en deçà de celles des matériaux massifs, les performances du
système en seront donc amoindries [7]. Notons aussi que les matériaux piézoélectriques sont
fragiles, vieillissent et possèdent une plage d’utilisation en température et en contraintes.
Toutefois, ce principe reste le plus facile à mettre en œuvre grâce à des structures simples
et à un éventail de matériaux disponibles. Néanmoins, les performances des générateurs sont
pour l’instant, limitées par le coefficient de couplage du matériau ainsi que par les pertes
structurales ou diélectriques.
Les dispositifs électrostatiques macroscopiques récupèrent en théorie le moins d’énergie
mais sont aussi les plus facilement intégrables et compatibles avec les technologies CMOS. Ces
structures sont bien adaptées à la réduction des dimensions : en effet, la diminution de l’entrefer
augmente la valeur de la capacité. Ainsi, si à l’échelle macroscopique les structures
électrostatiques ne sont pas intéressantes, elles le deviennent beaucoup plus à l’échelle
microscopique. Pour maximiser la puissance récupérable, l’entrefer minimal de la structure doit
être faible (1 μm) et le débattement important (100 μm), ce qui entraîne des problèmes de
31
guidage, de tenue mécanique, de parallélisme. Il est à souligner que la réalisation de structures
interdigitées de faibles dimensions pose de nombreux problèmes de réalisation au niveau de ces
doigts (contrôle difficile de leur forme, tolérance). Enfin, un de leur handicap majeur est la
nécessité d’une tension de polarisation souvent très élevée, supérieure à 100 V. La solution est
alors l’utilisation de structures hybrides de type électrostatique.
À l’inverse, les dispositifs électromagnétiques récupèrent le plus d’énergie à l’échelle
macroscopique. Il est à noter que la densité volumique d’énergie récupérable pour un système
électromagnétique diminue avec le volume puisqu’il est possible de créer un champ magnétique
microscopique du même ordre de grandeur qu’en taille macroscopique (typiquement 1 T). De
manière générale, les systèmes électromagnétiques sont difficiles à miniaturiser. En effet, pour
des raisons technologiques, le nombre de spires réalisables est limité. De plus, aux fréquences
inférieures à 100 Hz, une bobine a un comportement plus résistif que selfique, ce qui engendre
de fortes pertes et limite la valeur de l’amortissement électrique. Le coefficient de couplage
mécanique/électrique est alors limité. Finalement, la réalisation d’aimants intégrés ou de très
faibles dimensions reste une étape délicate.
Au vu de cette comparaison, chacune des technologies possède des avantages et des
inconvénients et sera en conséquence utilisée pour traiter un problème particulier. Toutefois, des
zones de fonctionnement peuvent être mises en place à partir de l’étude des coefficients
d’amortissement. De cette étude, il ressort que les générateurs piézoélectriques sont de bons
candidats pour des applications basses fréquences type marche humaine par exemple, et que les
générateurs électromagnétiques sont plus avantageux à hautes fréquences.
En revanche, quelques règles s’appliquent aux trois technologies. Si l’on souhaite
récupérer les vibrations ambiantes pour alimenter un système avec une puissance moyenne de
100 μW, le générateur aura alors un volume de l’ordre du 𝑐𝑚3. Si l’on ne souhaite récupérer
qu’une dizaine de microwatt, le générateur peut alors avoir une taille millimétrique et
fonctionner aux fréquences ambiantes. Il faut noter que plus on réduit la taille du système et plus
la fréquence propre de ce dernier augmente. Un moyen de diminuer cette fréquence propre est
alors d’augmenter la masse sismique du système ou de faire fonctionner ce dernier en mode non
linéaire [7].
Les systèmes résonants sont bien adaptés si la fréquence d’excitation est connue et quasi
fixe, ce qui est loin d’être le cas dans beaucoup d’applications pratiques. Les solutions sont alors
des systèmes large bande ou des systèmes adaptatifs. Les systèmes large bande, de par leur
32
coefficient d’amortissement élevé, récupèrent sur une large bande de fréquences une énergie
moindre.
À l’inverse, le but d’un système adaptatif est de faire correspondre la fréquence
d’excitation à la fréquence de résonance du système. Cette dernière approche a un coût
énergétique assez élevé, ce qui la rend inadapté pour les microgénérateurs qui récoltent très peu
d’énergie.
Finalement, pour améliorer les performances du générateur, deux principes de
transduction peuvent être combinés. Les deux effets participent à la conversion
électromécanique. Cette approche est distincte de l’ajout d’un matériau piézoélectrique à une
structure électrostatique qui permet alors de réaliser la première charge de la structure
électrostatique. Toujours dans l’optique d’optimiser la transduction, des couplages de matériaux
ont aussi été envisagés : piézoélectriques et piézomagnétiques ou piézoélectrique et
magnétostrictif.
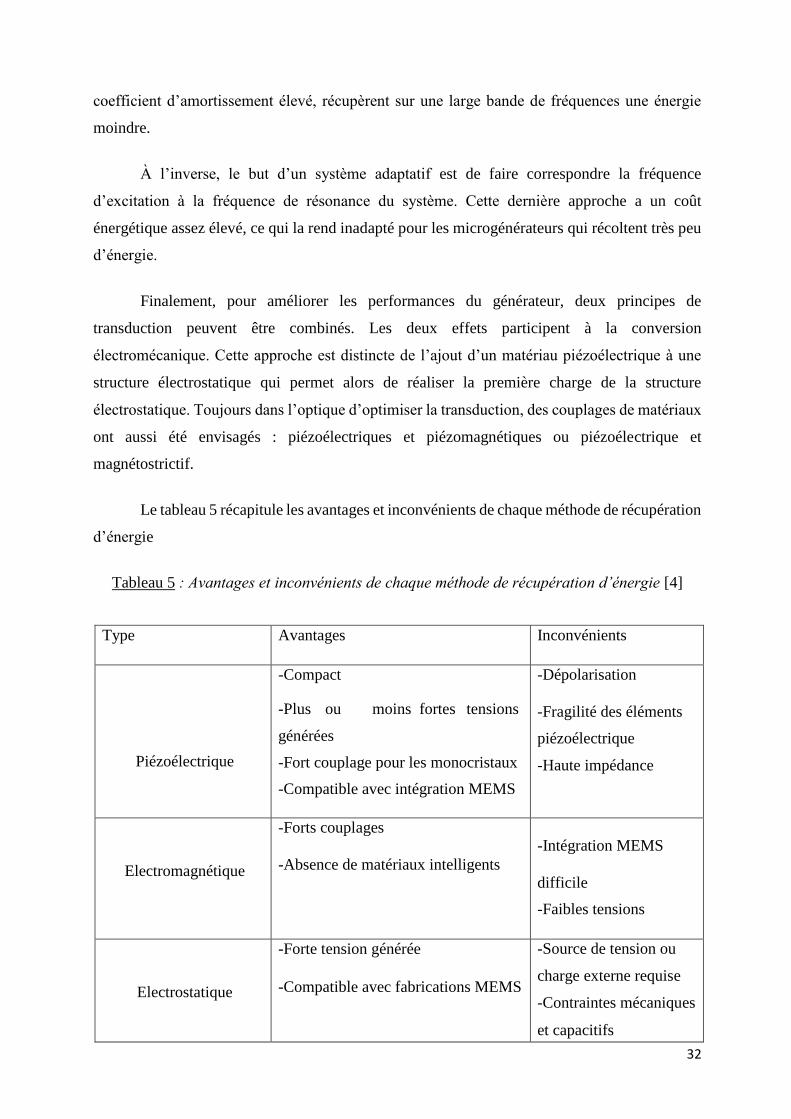
Le tableau 5 récapitule les avantages et inconvénients de chaque méthode de récupération
d’énergie
Tableau 5 : Avantages et inconvénients de chaque méthode de récupération d’énergie [4]
Type Avantages Inconvénients
Piézoélectrique
-Compact
-Plus ou moins fortes tensions
générées
-Fort couplage pour les monocristaux
-Compatible avec intégration MEMS
-Dépolarisation
-Fragilité des éléments
piézoélectrique
-Haute impédance
Electromagnétique
-Forts couplages
-Absence de matériaux intelligents
-Intégration MEMS
difficile
-Faibles tensions
Electrostatique
-Forte tension générée
-Compatible avec fabrications MEMS
-Source de tension ou
charge externe requise
-Contraintes mécaniques
et capacitifs
33
II.5 Conclusion
Les trois générateurs étudiés dans ce chapitre ont chacun d’eux des caractéristiques
spécifiques. Ces spécificités engendrent des avantages et inconvénients lors de la réalisation du
générateur. Il faut noter aussi que la fréquence de la vibration joue un rôle important dans la
récupération d’énergie. Ainsi, pour récupérer le maximum d’énergie, on doit d’abord étudier la
fréquence de vibration et ensuite choisir le générateur convenable.
34
Chapitre III : SIMULATION ET REALISATION D’UN SYSTEME DE
RECUPERATION D’ENERGIE ELECTRIQUE PAR VIBRATION
Dans ce chapitre, on va modéliser un générateur piézoélectrique à partir des équations
piézoélectriques et de l’élément piézocéramique SM111. Les résultats obtenus par simulation
sous PSpice sont présentés dans la première partie. La deuxième partie illustre les résultats
obtenus lors de la réalisation du système de récupération d’énergie électrique par vibration.
III.1 Simulation
III.1.1 Equation piézoélectrique
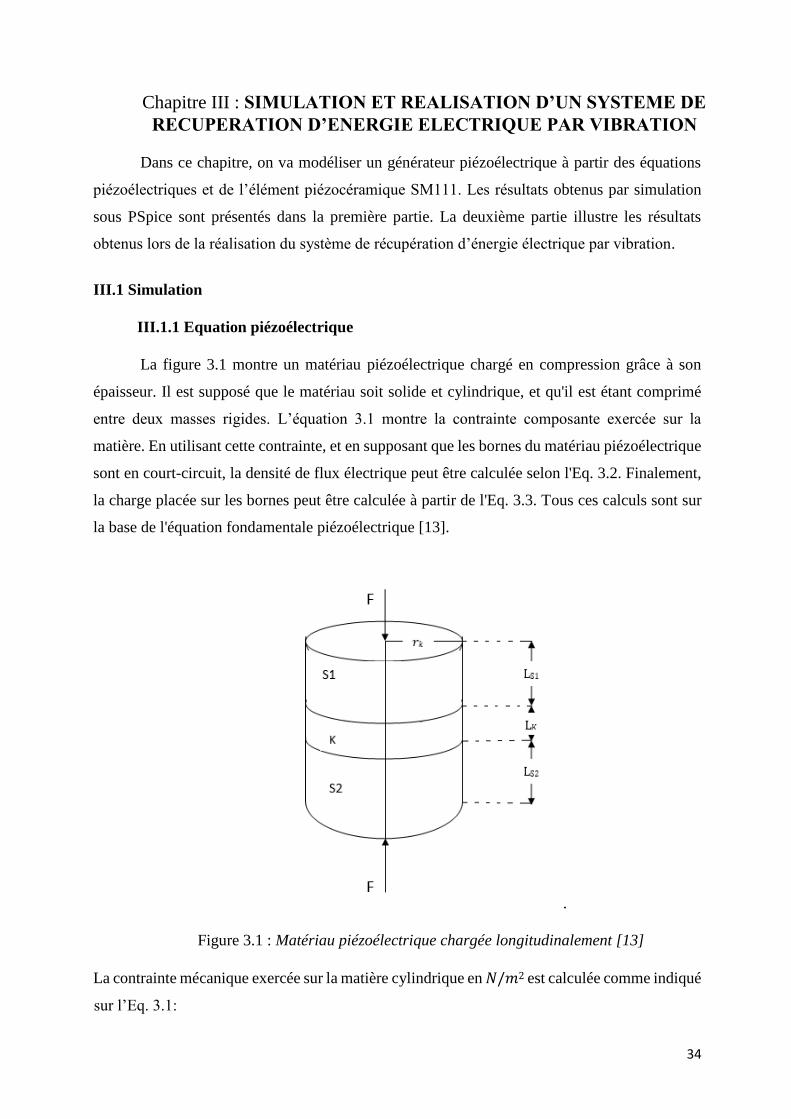
La figure 3.1 montre un matériau piézoélectrique chargé en compression grâce à son
épaisseur. Il est supposé que le matériau soit solide et cylindrique, et qu'il est étant comprimé
entre deux masses rigides. L’équation 3.1 montre la contrainte composante exercée sur la
matière. En utilisant cette contrainte, et en supposant que les bornes du matériau piézoélectrique
sont en court-circuit, la densité de flux électrique peut être calculée selon l'Eq. 3.2. Finalement,
la charge placée sur les bornes peut être calculée à partir de l'Eq. 3.3. Tous ces calculs sont sur
la base de l'équation fondamentale piézoélectrique [13].
.
Figure 3.1 : Matériau piézoélectrique chargée longitudinalement [13]
La contrainte mécanique exercée sur la matière cylindrique en 𝑁/𝑚2 est calculée comme indiqué
sur l’Eq. 3.1:

35
(3.1)
Où 𝐹𝐸 représente la force exercée sur le matériau (en N).
𝑟𝑘 représente le rayon du matériau cylindrique (en m).
Par suite, la densité de flux électrique ou le déplacement électrique est donnée par l’Eq. 3.2 :
(3.2)
Où 𝑑11 est la constante piézoélectrique en 𝐶/𝑁.
Et la charge produite sur les bornes du matériau en est décrite par l’Eq. 3.3:
𝑄 = 𝑑11𝐹𝐸 (3.3)
III.1.2 Modèle mécanique et électrique d’un générateur piézoélectrique
a) Modèle mécanique
Le générateur piézoélectrique peut être modélisé par un ensemble « masse +
piézoélectrique + ressort + amortisseur » comme le montre la Fig. 3.2.
Avec cette approche simple, la structure considérée équivaut à une masse M reposant à
la fois sur un ressort de raideur K, représentant la rigidité mécanique de la structure, sur un
amortisseur ou dissipateur d’amortissement D (en kg/s), correspondant aux pertes mécaniques
de la structure, et sur un élément piézoélectrique idéal collé sur la structure .
Le déplacement de la masse est noté x, I et V étant le courant et la tension de sortie
récoltés sur l’élément piézoélectrique.
Figure 3.2 : Représentation mécanique d’un générateur piézoélectrique [13]
+ V
-
Circuit
d’extraction
d’énergie

36
L’équation du système mécanique est indiquée dans l'Eq. 3.4 :
𝐹𝑃 + 𝐹𝐷 + 𝐹𝑆 = 𝐹𝐸 (3.4)
En remplaçant chaque force par sa valeur, on obtient l’équation différentielle suivante :
𝑚𝑝𝑖𝑒𝑧̈𝑜𝑥 𝑝𝑖𝑒𝑧̈𝑜 + 𝑐𝑝𝑖𝑒𝑧̈𝑜𝑥 𝑝𝑖𝑒𝑧̈𝑜 + 𝐾𝑝𝑖𝑒𝑧̈𝑜𝑥𝑝𝑖𝑒𝑧̈𝑜 = 𝐹𝐸
Où 𝑚𝑝𝑖𝑒𝑧̈𝑜: masse de la matière piézoélectrique,
𝑐𝑝𝑖𝑒𝑧̈𝑜 : amortissement interne du matériau piézoélectrique
𝐾𝑝𝑖𝑒𝑧̈𝑜 : constante de ressort du matériau piézo-électrique
𝑥𝑝𝑖𝑒𝑧̈𝑜 : déplacement de la masse.
Pour une compression donnée, l'énergie mécanique en joule stockée dans le système est définie
par l'Eq. 3.5.
𝑊𝑚𝑒𝑐 = 𝐹𝐸𝑥𝑝𝑖𝑒𝑧̈𝑜 (3.5)
Notons que 𝐹𝐸 est la force extérieure appliquée sur l’élément piézoélectrique.
En mettant en relation le module d’Young à la constante de ressort du système, il est
possible de réécrire l'énergie mécanique en joule stockée dans le système avec les constantes
piézoélectriques. Ceci est illustré dans l'Eq. 3.6.
(3.6)
Où ℎ𝑝𝑖𝑒𝑧̈𝑜 est l’épaisseur du capteur piézoélectrique en m.
𝑌 est le module de Young en Pa.
est la surface de l’élément piézoélectrique en 𝑚2.
𝐹𝐸 est la force extérieure en N.
b) Modèle électrique
Les matériaux piézoélectriques présentent également des propriétés électriques, qui
peuvent être modélisées par des circuits équivalents comprenant des éléments capacitifs et
résistifs. Ils ont une capacité, une résistance et une inductance bien définies représentant
respectivement l’amortisseur, le ressort, et la masse.

37
Ces caractéristiques sont directement liées à l'aire et au module piézoélectrique. Les
équations des éléments du circuit équivalent pour un matériau piézoélectrique à résonance
électromécanique sont présentées dans les Eqs. 3.7, 3.8 et 3.9 pour la résistance, l'inductance et
la capacitance, respectivement.
(3.7)
(3.8)
(3.9)
La figure 3.5 montre le circuit total équivalent pour le matériau à la résonance.
L’équation 3.10 montre la capacité interne de la matière, formée par un matériau diélectrique.
(3.10)
Avec: : la constante élastique (𝑁/𝑚2).
𝑠 : la coefficient de conformité (𝑚2/𝑁).
𝜌𝑆 : la densité surfacique du matériau (𝐾𝑔/𝑚2).
A : la surface (𝑚2).
𝑒 : la constante de contrainte piézoélectrique (𝐶/𝑚2).
𝑙: la hauteur ou l’épaisseur du matériau (m).
𝜂 : la viscosité (Ω. 𝑚3)
Figure 3.3 : Circuit équivalent de l’élément piézoélectrique [14 ]
𝐶 0
𝐶 𝑚 𝐿𝑚
𝑚 𝑅𝑚
𝐶𝑚
𝐶0

38
III.1.3 Modélisation de la tension générée par le dispositif piézoélectrique
Les modèles de périphériques pour les matériaux piézoélectriques sont des circuits
électriques équivalents simples comprenant la source de tension connectée en série avec une
capacitance et une résistance de perte.
La valeur de la source de tension dans le modèle de circuit équivalent est directement
liée à deux choses, la surface du matériau piézoélectrique et la force de compression appliquée
à la matière. Ces informations, ainsi que les propriétés physiques du matériau permettent à la
tension de sortie de la matière d'être prédit.
La capacité en F est calculée à partir de la constant diélectrique, de la hauteur et de la
surface du matériau piézoélectrique.
𝐶𝑠𝑡𝑎𝑐𝑘 =𝜀0𝜀𝑟(𝐿𝑊)
ℎ𝑝𝑖é𝑧𝑜 (3.11)
Où 휀0 représente le constant diélectrique du vide (𝐹/𝑚).
휀𝑟 est la constante diélectrique du matériau (𝐹/𝑚).
𝐿 est la longueur du matériau (𝑚).
𝑊 est la largeur du matériau (𝑚).
ℎ𝑝𝑖𝑒𝑧̈𝑜 est l’épaisseur du matériau (𝑚).
La résistance de perte 𝑅𝑙𝑜𝑠𝑠 représente les pertes du courant de déplacement à travers les
surfaces du matériau à des conducteurs électriques. La résistance de fuite 𝑅𝑙𝑒𝑎𝑘𝑘𝑎𝑔𝑒 représente les
pertes du courant circulant à travers la matière.
En règle générale, la résistance de perte et la résistance de fuite sont élevées, de l'ordre
de méga-ohms, en fonction de l'épaisseur du matériau.
La résistance de perte 𝑅𝑙𝑜𝑠𝑠 du matériau est définie par la tangente de perte de la matière
piézoélectrique, la fréquence de fonctionnement et la capacité de la matière. La résistance de
fuite 𝑅𝑙𝑒𝑎𝑘𝑎𝑔𝑒 du matériau est définie par la résistivité, l’épaisseur et l’aire (LW) du matériau
piézoélectrique
.. (3.12)

39
(3.13)
Avec : tan (𝛿) représente le facteur de dissipation (tangente de perte).
représente la fréquence angulaire en Hz, 𝜔 = 2πf où f est la fréquence de résonnance
du matériau.
représente la résistivité du matériau piézoélectrique ( ).
ℎ𝑝𝑖𝑒𝑧̈𝑜 représente l’épaisseur du matériau ( ).
𝐴 représente l’aire du matériau (𝑚2).
Le modèle électrique du matériau est représenté dans la Fig. 3.4. 𝑅𝑙𝑒𝑎𝑘𝑎𝑔𝑒, 𝑅𝑙𝑜𝑠𝑠 et 𝐶𝑠𝑡𝑎𝑐𝑘
sont calculés comme ci-dessus (Eqs.3.11, 3.12, 3.13).
Figure 3.4 : Modèle de la tension générée par le dispositif piézoélectrique [13]
Calculons maintenant la tension interne générée par l’élément piézoélectrique en assimilant
l'énergie mécanique et l'énergie électrique.
L'énergie électrique en J produite dans le matériau est illustrée dans l'Eq. 3.14.
(3.14)
En remplaçant 𝐶𝑠𝑡𝑎𝑐𝑘 par sa valeur on aura :
𝑊𝑒𝑙𝑒𝑐 =1
2𝑞2
ℎ
𝜀0𝜀𝑟𝐴 (3.15)
La relation entre l’énergie mécanique exercée et l’énergie électrique produite est donnée
par l’Eq. 3.16
𝑊𝑒𝑙𝑒𝑐 = 𝐾332 𝑊𝑚𝑒𝑐 (3.16)
Avec 𝐾33 le coefficient de couplage électromécanique (On travaille en mode 33).
𝑅 𝐿𝑜𝑠𝑠
𝐶𝑠𝑡𝑎𝑐k𝑘
𝑅𝑙𝑜𝑠𝑠
𝑅𝑙𝑒𝑎𝑘𝑎𝑔𝑒

40
On pourra trouver la charge en fonction de la constante diélectrique donnée par l’Eq.
3.17, en égalisant les Eq. 3.15 et 3.16.
1
2𝑞2
ℎ𝑝𝑖𝑒𝑧𝑜
𝜀0𝜀𝑟𝐴=
1
2𝐾332 ℎ𝑝𝑖𝑒𝑧𝑜
𝑌33𝐴𝐹𝐸2
𝑞2 = 𝐾332 휀0휀𝑟
𝐹𝐸2
𝑌33 (3.17)
Or d’après l’Eq. 3.3 la charge 𝑞 = 𝑑33𝐹𝐸
Avec A : surface du matériau piézoélectrique.
ℎ𝑝𝑖𝑒𝑧𝑜: hauteur du matériau piézoélectrique
Mettons la valeur de la charge q de l’Eq 3.3 dans l’Eq. 3.17 pour trouver 𝑑33 :
𝑑332 𝐹𝐸
2 = 𝐾332 휀0휀𝑟
𝐹𝐸2
𝑌33
𝑑33 = 𝐾33(휀0휀𝑟1
𝑌33)1
2 (3.18)
La tension est donnée par :
Remplaçant par l’Eq. 3.3et ensuite 𝑑33 par l’Eq. 3.18 et C par sa valeur de l’Eq. 3.11, on
trouve la valeur de la tension interne générée par l’élément piézoélectrique.
𝑉𝑎 =𝑞
𝐶=
𝑑33𝐹𝐸
𝐴𝜀0𝜀𝑟
ℎ𝑝𝑖𝑒𝑧𝑜
= 𝐾33(휀0휀𝑟1
𝑌33)1
2𝐹𝐸
𝐴𝜀0𝜀𝑟
ℎ𝑝𝑖𝑒𝑧𝑜
(3.19)
D’où, la tension interne générée en V par un élément piézoélectrique soumis à une telle force
F en N est donnée par l’Eq. 3.20:
𝑉𝑎 =𝐾33𝐹𝐸ℎ𝑝𝑖𝑒𝑧𝑜
𝐴(휀0휀𝑟𝑌33)
−1
2 (3.20)
A noter que cette tension est une fonction de la force extérieure et des coefficients
constants.
III.1.4 Simulation
Pour calculer 𝐶𝑠𝑡𝑎𝑐𝑘, 𝑅𝑙oss, 𝑅𝑙𝑒𝑎𝑘𝑎𝑔𝑒 et 𝑉𝑎 on a utilisé les paramètres caractéristiques du
matériau piézoélectrique SM111.
Après calcul, on a : 𝐶𝑠𝑡𝑎𝑐𝑘 =𝜀0𝜀𝑟𝐴
ℎ𝑝𝑖é𝑧𝑜= 1.71 ∗ 10 −20 𝐹
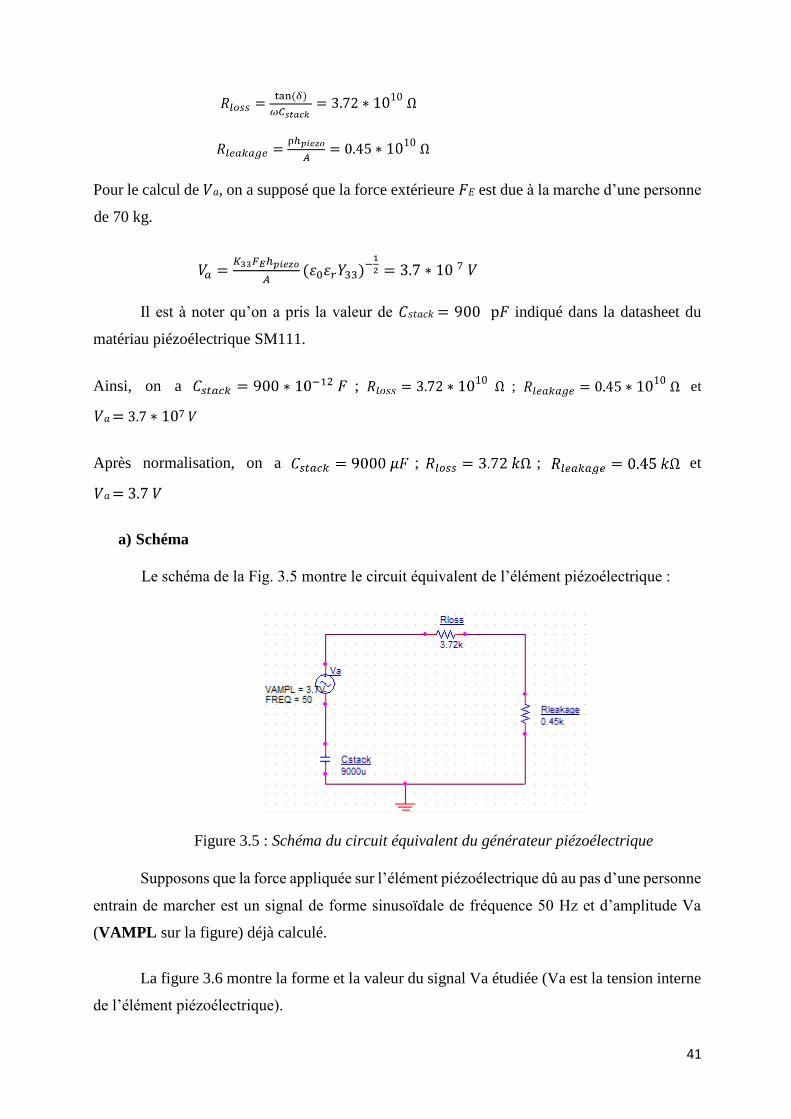
41
Pour le calcul de 𝑉𝑎, on a supposé que la force extérieure 𝐹𝐸 est due à la marche d’une personne
de 70 kg.
𝑉𝑎 =𝐾33𝐹𝐸ℎ𝑝𝑖𝑒𝑧𝑜
𝐴(휀0휀𝑟𝑌33)
−1
2 = 3.7 ∗ 10 7 𝑉
Il est à noter qu’on a pris la valeur de 𝐶𝑠𝑡𝑎𝑐𝑘 = 900 p𝐹 indiqué dans la datasheet du
matériau piézoélectrique SM111.
Ainsi, on a ; ; et
𝑉𝑎 = 3.7 ∗ 107 𝑉
Après normalisation, on a ; ; et
𝑉𝑎 = 3.7 𝑉
a) Schéma
Le schéma de la Fig. 3.5 montre le circuit équivalent de l’élément piézoélectrique :
Figure 3.5 : Schéma du circuit équivalent du générateur piézoélectrique
Supposons que la force appliquée sur l’élément piézoélectrique dû au pas d’une personne
entrain de marcher est un signal de forme sinusoïdale de fréquence 50 Hz et d’amplitude Va
(VAMPL sur la figure) déjà calculé.
La figure 3.6 montre la forme et la valeur du signal Va étudiée (Va est la tension interne
de l’élément piézoélectrique).
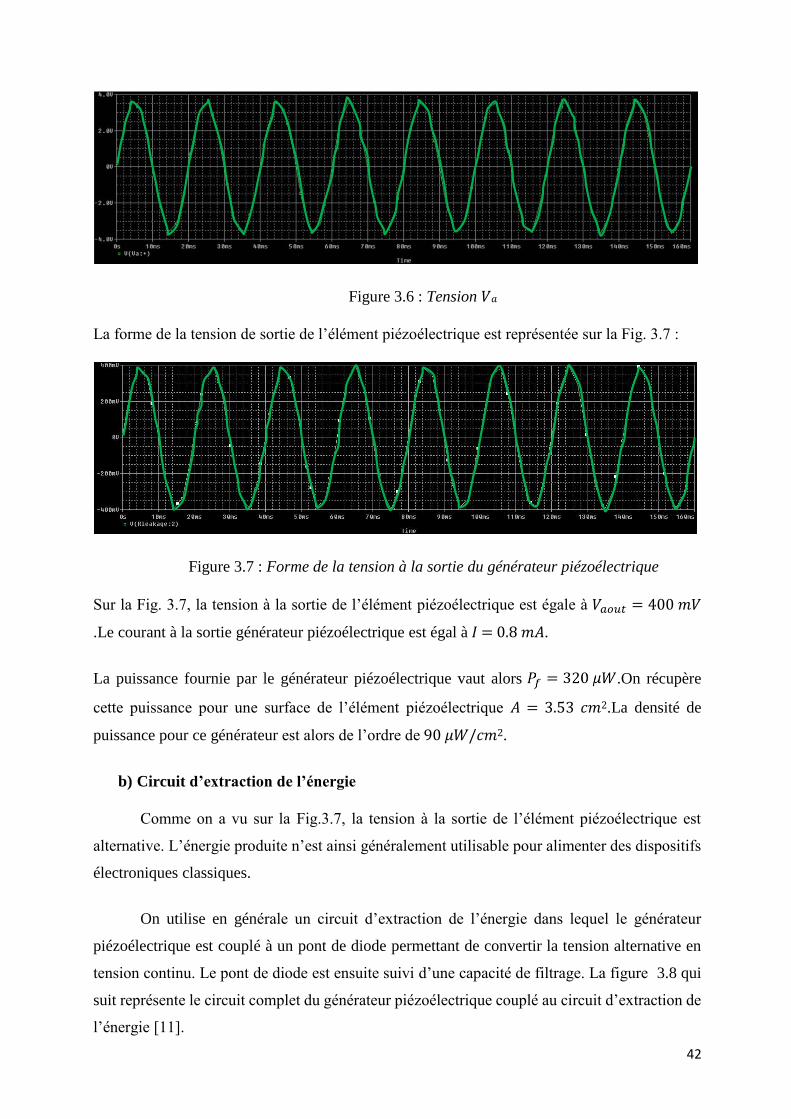
42
Figure 3.6 : Tension 𝑉𝑎
La forme de la tension de sortie de l’élément piézoélectrique est représentée sur la Fig. 3.7 :
Figure 3.7 : Forme de la tension à la sortie du générateur piézoélectrique
Sur la Fig. 3.7, la tension à la sortie de l’élément piézoélectrique est égale à 𝑉𝑎𝑜𝑢𝑡 = 400 𝑚𝑉
.Le courant à la sortie générateur piézoélectrique est égal à 𝐼 = 0.8 𝑚𝐴.
La puissance fournie par le générateur piézoélectrique vaut alors .On récupère
cette puissance pour une surface de l’élément piézoélectrique 𝐴 = 3.53 𝑐𝑚2.La densité de
puissance pour ce générateur est alors de l’ordre de 90 𝜇𝑊/𝑐𝑚2.
b) Circuit d’extraction de l’énergie
Comme on a vu sur la Fig.3.7, la tension à la sortie de l’élément piézoélectrique est
alternative. L’énergie produite n’est ainsi généralement utilisable pour alimenter des dispositifs
électroniques classiques.
On utilise en générale un circuit d’extraction de l’énergie dans lequel le générateur
piézoélectrique est couplé à un pont de diode permettant de convertir la tension alternative en
tension continu. Le pont de diode est ensuite suivi d’une capacité de filtrage. La figure 3.8 qui
suit représente le circuit complet du générateur piézoélectrique couplé au circuit d’extraction de
l’énergie [11].

43
Figure 3.8 : Générateur piézoélectrique couplé avec le circuit d’extraction d’énergie.
Supposons que le condensateur est chargé à 95% pour une tension de 114 mV. On voit sur la
simulation que le temps de charge du condensateur est 𝑡 = 1400 𝑠 = 24 𝑚𝑖𝑛 La puissance
électrique récupérable par le générateur piézoélectrique vaut . La puissance
électrique disponible est .Après le circuit d’extraction d’énergie, on peut
directement relier le générateur piézoélectrique à un système de stockage (pile) ou à une charge
par exemple un montre ( ). Or la puissance dans une résistance de 10 𝑘Ω est de 1.
La figure 3.10 montre la décharge du condensateur à travers une résistance de 10 𝑘Ω.
La figure 3.9 montre la charge du condensateur à travers une résistance de 1000 kΩ
Figure 3.9 : Charge du condensateur
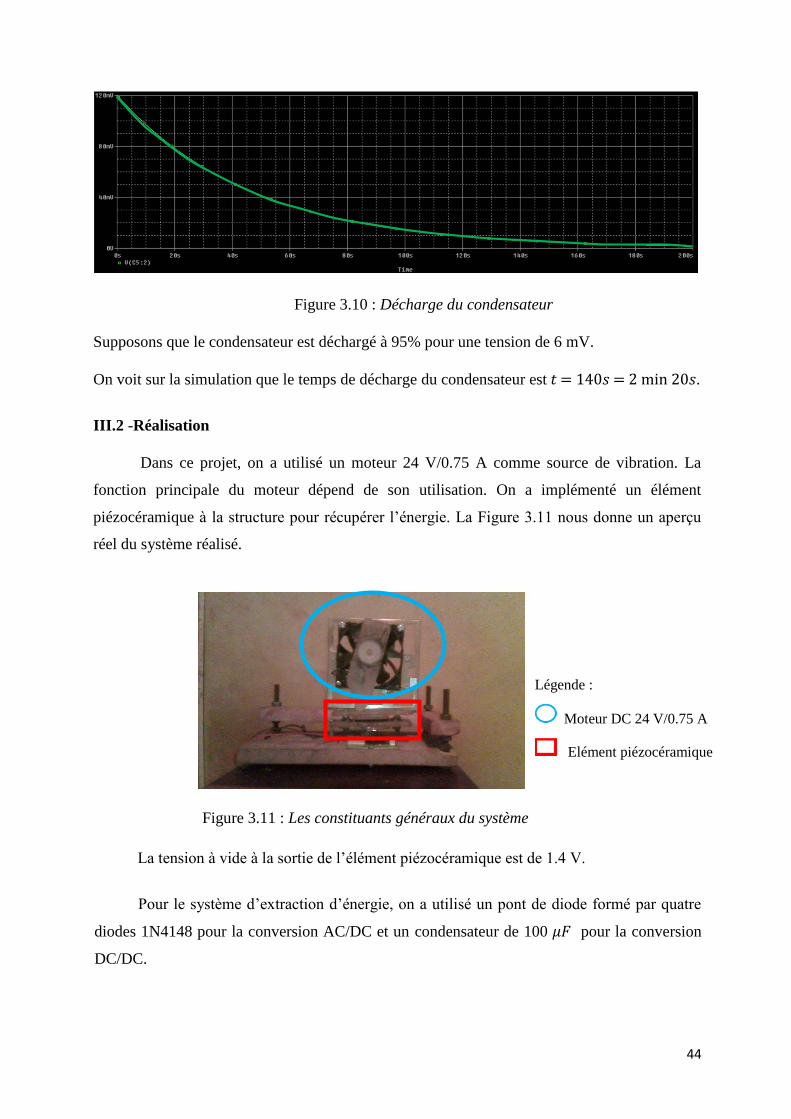
44
Figure 3.10 : Décharge du condensateur
Supposons que le condensateur est déchargé à 95% pour une tension de 6 mV.
On voit sur la simulation que le temps de décharge du condensateur est 𝑡 = 140𝑠 = 2 min 20𝑠.
III.2 -Réalisation
Dans ce projet, on a utilisé un moteur 24 V/0.75 A comme source de vibration. La
fonction principale du moteur dépend de son utilisation. On a implémenté un élément
piézocéramique à la structure pour récupérer l’énergie. La Figure 3.11 nous donne un aperçu
réel du système réalisé.
Figure 3.11 : Les constituants généraux du système
La tension à vide à la sortie de l’élément piézocéramique est de 1.4 V.
Pour le système d’extraction d’énergie, on a utilisé un pont de diode formé par quatre
diodes 1N4148 pour la conversion AC/DC et un condensateur de 100 𝜇𝐹 pour la conversion
DC/DC.
Légende :
Moteur DC 24 V/0.75 A
Elément piézocéramique

45
La tension après la conversion DC/DC est de 2.4 V. On peut directement relier une charge
à la sortie du système ou emmagasiner la puissance dans un condensateur ou dans une pile
rechargeable.

46
III.3 Conclusion
Comme on vient de voir dans ce chapitre, la réalisation d’un système de récupération
d’énergie à partir d’un élément piézoélectrique passe d’abord par l’analyse de la source de
vibration. Il faut connaitre aussi les caractéristiques de l’élément piézoélectrique utilisé. La
puissance disponible après simulation en utilisant l’élément piezoceramique SM111est de
pour une durée de 24 min. Cependant, la tension obtenue à la sortie du système de
récupération d’énergie lors de la réalisation est de 2.4 𝑉.Ce système délivre une puissance de
l’ordre de 500 µW. Cette différence est due un certain écart entre la simulation théorique et la
réalisation pratique à la source de vibration.

47
CONCLUSION
La récupération d’énergie vibratoire permet d’alimenter des petits systèmes
électroniques. De nombreuses sources d’énergie mécanique sont susceptibles de fournir cette
énergie électrique. On utilise en générale trois modes de transduction pour convertir cette
énergie mécanique en énergie électrique : la transduction électromagnétique, la transduction
piézoélectrique et la transduction électrostatique.
Les trois générateurs : électromagnétique, piézoélectrique, électrostatique ont chacun
d’eux des caractéristiques spécifiques. Ces spécificités mettent notamment en relief des
avantages et des inconvénients lors de la réalisation du générateur. Il faut noter aussi que la
fréquence de la vibration joue un rôle important dans la récupération d’énergie. Ainsi, pour
récupérer le maximum d’énergie, on doit d’abord étudier la fréquence de la vibration et ensuite
choisir le générateur convenable.
Dans ce travail, on a récupéré l’énergie vibratoire simulé par un moteur électrique et une
lame à l’aide d’un circuit formé par : un pont de 4 diodes 1N4148, un condensateur 100 µF, une
résistance 2 kΩ puis d’un élément piezoceramique SM 111. La tension à la sortie est de 2.4 V.
La puissance à la sortie est de l’ordre de 500 µW. Tous ces composants électroniques sont
disponibles sur le marché local.
Toutefois, les résultats actuels, et notre étude en particulier se limitent à une application
des propriétés de l’énergie vibratoire à des petits systèmes électroniques. Mais une perspective
d’optimisation de ce système et des recherches sont en cours actuellement dans un optique
d’utiliser cette technologie à grande échelle. Une telle avancée pourra se présenter comme une
solution alternative au problème énergétique.
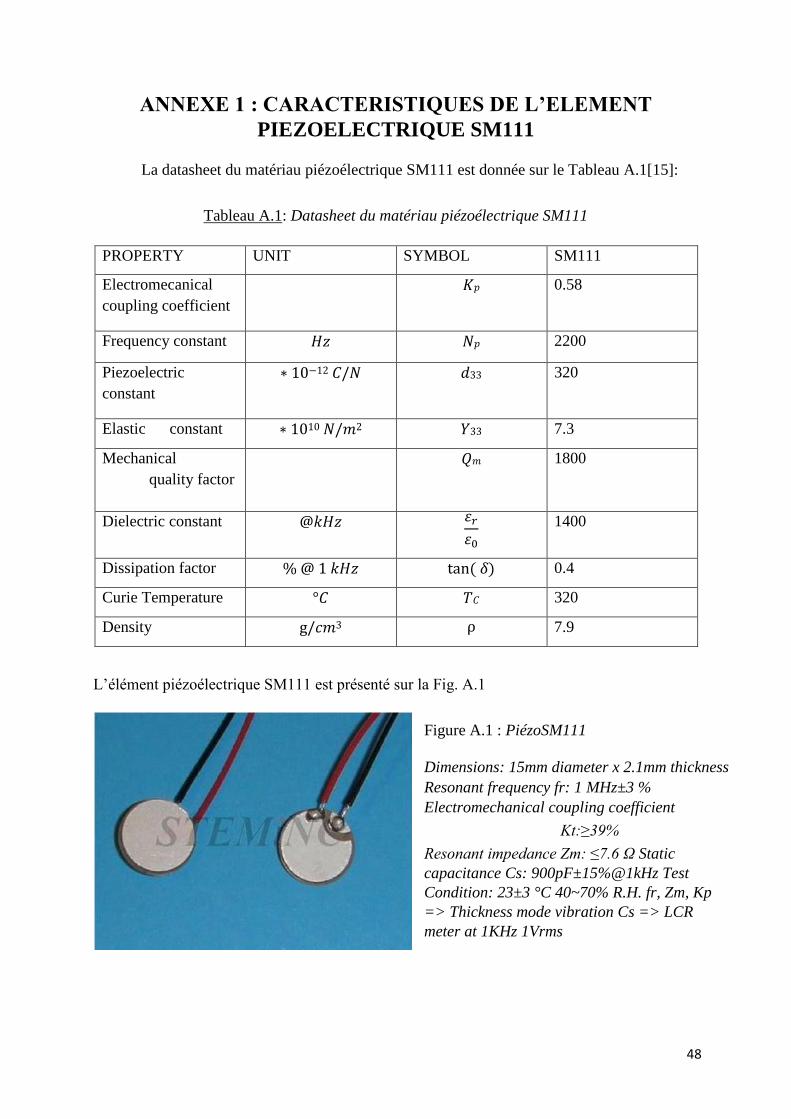
48
ANNEXE 1 : CARACTERISTIQUES DE L’ELEMENT
PIEZOELECTRIQUE SM111
La datasheet du matériau piézoélectrique SM111 est donnée sur le Tableau A.1[15]:
Tableau A.1: Datasheet du matériau piézoélectrique SM111
PROPERTY UNIT SYMBOL SM111
Electromecanical
coupling coefficient
𝐾𝑝 0.58
Frequency constant 𝐻𝑧̈ 𝑁𝑝 2200
Piezoelectric
constant
∗ 10−12 𝐶/𝑁 𝑑33 320
Elastic constant ∗ 1010 𝑁/𝑚2 𝑌33 7.3
Mechanical
quality factor
𝑄𝑚 1800
Dielectric constant @𝑘𝐻𝑧̈ 휀𝑟휀0
1400
Dissipation factor % @ 1 𝑘𝐻𝑧̈ tan( 𝛿) 0.4
Curie Temperature °𝐶 𝑇𝐶 320
Density g/𝑐𝑚3 7.9
L’élément piézoélectrique SM111 est présenté sur la Fig. A.1
Figure A.1 : PiézoSM111
Dimensions: 15mm diameter x 2.1mm thickness
Resonant frequency fr: 1 MHz±3 %
Electromechanical coupling coefficient
Kt:≥39%
Resonant impedance Zm: ≤7.6 Ω Static
capacitance Cs: 900pF±15%@1kHz Test
Condition: 23±3 °C 40~70% R.H. fr, Zm, Kp
=> Thickness mode vibration Cs => LCR
meter at 1KHz 1Vrms

49
ANNEXE 2 : DESCRIPTION DES VIBRATIONS
1-Vibration
a. Principe
On dit qu’un objet vibre quand il y a déformation et oscillation de celui-ci autour de sa
position de référence.
Les vibrations peuvent être caractérisées par :
- Leur fréquence (exprimée en Hz)
- Leur amplitude, caractérise par l’amplitude du déplacement (en m )ou par l’amplitude
de la vitesse à laquelle s’effectue le mouvement (en 𝑚/s) qui est proportionnelle au
déplacement et à la fréquence ou encore par l’amplitude de l’accélération,
proportionnelle au déplacement et au carré de la fréquence (en 𝑚/𝑠2 ou en 𝑔 1𝑔 =9.81
𝑚/𝑠2)
Lors d’une excitation, un corps vibre à une fréquence particulière qui est sa fréquence
propre.
Une vibration peut se propager d’un corps à un autre. Ce dernier corps pouvant vibrer
avec une amplitude différente. On parle ainsi d’amplification ou d’atténuation de la vibration.
Quand l’amplitude est maximale, pour un corps donne, on dit qu’il y a résonnance. Ce
phénomène se produit pour une fréquence donnée, caractéristique : la fréquence de résonance.
b. Mesure de vibration
La mesure de vibration concerne la réponse vibratoire d’un objet lors d’un essai en
vibration.
Dans la plupart des applications de mesure de vibration, les paramètres : accélération,
vitesse et déplacement sont des informations qu’il est indispensable de connaître avec la
meilleure précision possible, particulièrement pour la conception ou la validation de structures.
Généralement, l’accélération est la référence, la vitesse et le déplacement sont plus
souvent utilisés pour les fréquences moyenne et basse.
L’accéléromètre pour mesurer avec précision la vitesse d’un mouvement lent, par
exemple, d’un bras de robot ou d’un ascenseur, doit donner une mesure d’accélération exempte

50
de toute dérive du zéro, une faible dérive du zéro peut donner après intégration digitale, une
erreur importante de la vitesse ou du déplacement
2-Description des vibrations
Décrire les vibrations, c’est donner les valeurs d’un certain nombre de caractéristique :
amplitude, fréquence, etc. L’important domaine de valeurs que peuvent prendre les grandeurs
vibratoires justifie l’utilisation d’échelles et de grandeurs logarithmiques. Ces grandeurs
logarithmiques correspondent au logarithme du rapport des valeurs de deux grandeurs de même
espèce [17].
a. Logarithme
L’échelle logarithmique permet de compresser une gamme de valeurs souvent trop large
pourque ces valeurs soient discernées entres elles. Parmi les propriétés de la fonction logarithme,
on peut noter que :
- Le logarithme d’une valeur positif positive peut être négatif.
- Le logarithme de la somme n’est pas égal à la somme des logarithmes.
- La fonction logarithme transforme l’échelle linéaire en échelle logarithmique.
- L’opérateur « logarithme » transforme une multiplication en addition et permet de
représenter sur un même graphe de très forte et de très faibles valeurs.
b. Niveau en décibel
D’une manière générale, le niveau en décibels (noté dB, dixième du Bel) d’une
vibration V, est par définition vingt fois le logarithme décimal du rapport de V a une valeur de
référence 𝑉𝑟𝑒𝑓 :
Cette définition s’applique à toutes les grandeurs physiques proportionnelles à la
puissance. La notation 𝐿, le plus souvent utilise pour désigner un niveau, provient de l’anglais «
level », traduction du mot « niveau ».
c. Niveau d’accélération
Le niveau d’accélération en décibel se définit par :

51
Avec, 𝐴𝑟𝑒𝑓 est une accélération de référence qui vaut10−5 𝑚/𝑠2.
d. Niveau de vitesse
Le niveau de vitesse de vibration en décibel se définit par :
Avec, 𝑉𝑟𝑒𝑓 est une vitesse de référence qui vaut 10−3 𝑚/s
e. Niveau du déplacement
Le niveau de déplacement en décibel se définit par :
Avec, 𝐷𝑟𝑒𝑓 est une vitesse de référence qui vaut 1 𝑝𝑚
f. Calcul des niveaux
Une des propriétés de la fonction logarithme est la suivante :
log( 𝑥𝑛) = 𝑛𝑙𝑜𝑔(𝑥)
En présence de vibration aléatoire, ce sont les énergies vibratoires qui s’ajoutent. On n’a
pas le droit d’additionner leurs niveaux en dB. En effet, le logarithme d’une somme n’est pas
égal à la somme des logarithmes (qui correspond au logarithme du produit)
Soient les vibrations 𝑉1 et 𝑉2.
En termes de niveaux énergétiques, on a par définition :
Soit 𝑉2 la somme énergétique des vibrations 𝑉2 = 𝑉12 + 𝑉22
On alors le niveau énergétique :
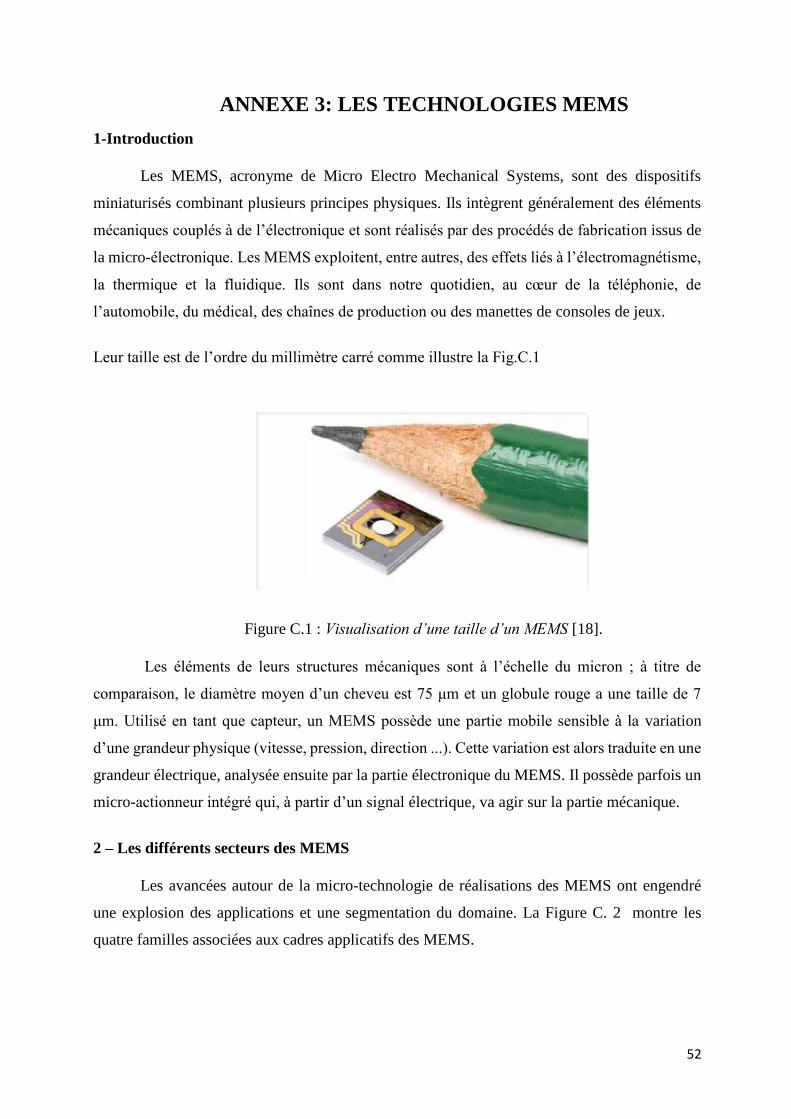
52
ANNEXE 3: LES TECHNOLOGIES MEMS
1-Introduction
Les MEMS, acronyme de Micro Electro Mechanical Systems, sont des dispositifs
miniaturisés combinant plusieurs principes physiques. Ils intègrent généralement des éléments
mécaniques couplés à de l’électronique et sont réalisés par des procédés de fabrication issus de
la micro-électronique. Les MEMS exploitent, entre autres, des effets liés à l’électromagnétisme,
la thermique et la fluidique. Ils sont dans notre quotidien, au cœur de la téléphonie, de
l’automobile, du médical, des chaînes de production ou des manettes de consoles de jeux.
Leur taille est de l’ordre du millimètre carré comme illustre la Fig.C.1
Figure C.1 : Visualisation d’une taille d’un MEMS [18].
Les éléments de leurs structures mécaniques sont à l’échelle du micron ; à titre de
comparaison, le diamètre moyen d’un cheveu est 75 μm et un globule rouge a une taille de 7
μm. Utilisé en tant que capteur, un MEMS possède une partie mobile sensible à la variation
d’une grandeur physique (vitesse, pression, direction ...). Cette variation est alors traduite en une
grandeur électrique, analysée ensuite par la partie électronique du MEMS. Il possède parfois un
micro-actionneur intégré qui, à partir d’un signal électrique, va agir sur la partie mécanique.
2 – Les différents secteurs des MEMS
Les avancées autour de la micro-technologie de réalisations des MEMS ont engendré
une explosion des applications et une segmentation du domaine. La Figure C. 2 montre les
quatre familles associées aux cadres applicatifs des MEMS.
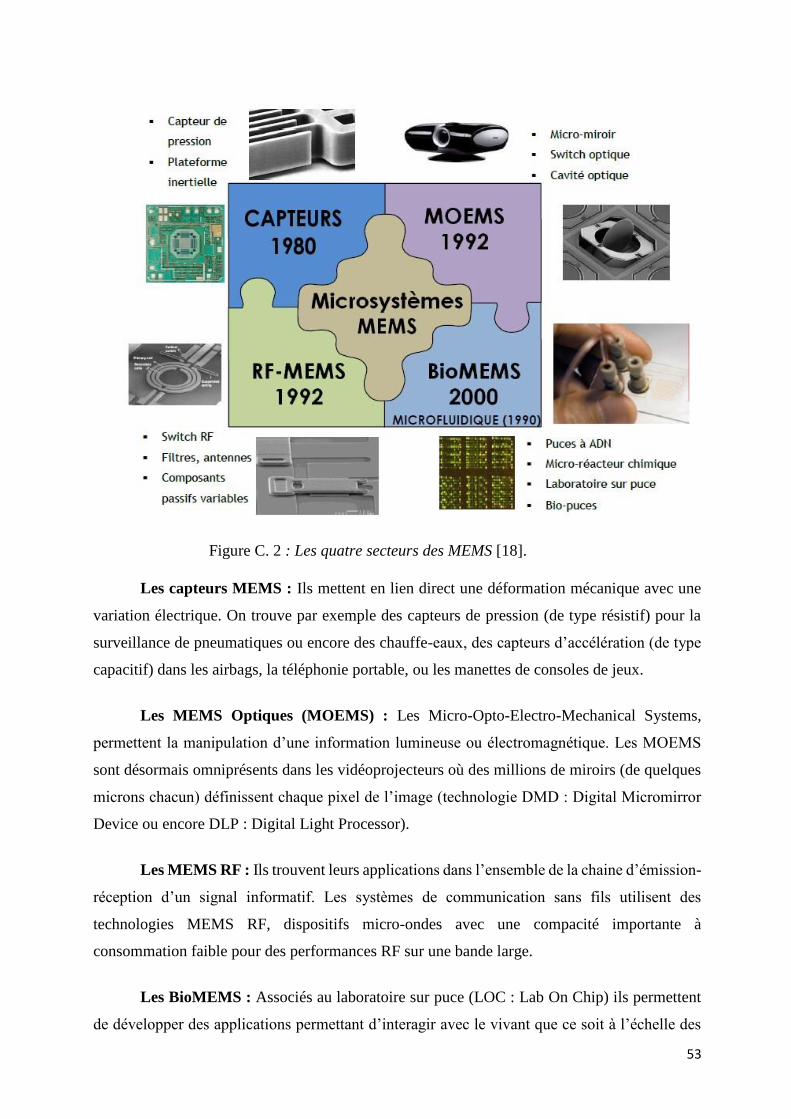
53
Figure C. 2 : Les quatre secteurs des MEMS [18].
Les capteurs MEMS : Ils mettent en lien direct une déformation mécanique avec une
variation électrique. On trouve par exemple des capteurs de pression (de type résistif) pour la
surveillance de pneumatiques ou encore des chauffe-eaux, des capteurs d’accélération (de type
capacitif) dans les airbags, la téléphonie portable, ou les manettes de consoles de jeux.
Les MEMS Optiques (MOEMS) : Les Micro-Opto-Electro-Mechanical Systems,
permettent la manipulation d’une information lumineuse ou électromagnétique. Les MOEMS
sont désormais omniprésents dans les vidéoprojecteurs où des millions de miroirs (de quelques
microns chacun) définissent chaque pixel de l’image (technologie DMD : Digital Micromirror
Device ou encore DLP : Digital Light Processor).
Les MEMS RF : Ils trouvent leurs applications dans l’ensemble de la chaine d’émission-
réception d’un signal informatif. Les systèmes de communication sans fils utilisent des
technologies MEMS RF, dispositifs micro-ondes avec une compacité importante à
consommation faible pour des performances RF sur une bande large.
Les BioMEMS : Associés au laboratoire sur puce (LOC : Lab On Chip) ils permettent
de développer des applications permettant d’interagir avec le vivant que ce soit à l’échelle des
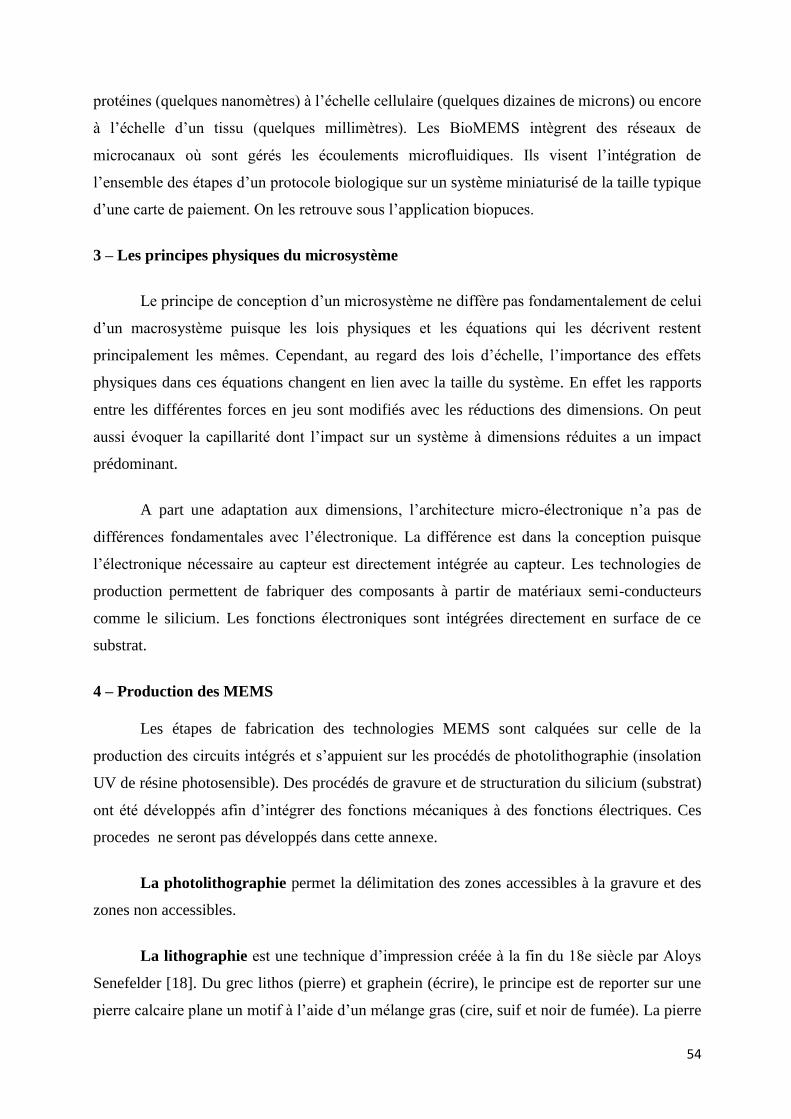
54
protéines (quelques nanomètres) à l’échelle cellulaire (quelques dizaines de microns) ou encore
à l’échelle d’un tissu (quelques millimètres). Les BioMEMS intègrent des réseaux de
microcanaux où sont gérés les écoulements microfluidiques. Ils visent l’intégration de
l’ensemble des étapes d’un protocole biologique sur un système miniaturisé de la taille typique
d’une carte de paiement. On les retrouve sous l’application biopuces.
3 – Les principes physiques du microsystème
Le principe de conception d’un microsystème ne diffère pas fondamentalement de celui
d’un macrosystème puisque les lois physiques et les équations qui les décrivent restent
principalement les mêmes. Cependant, au regard des lois d’échelle, l’importance des effets
physiques dans ces équations changent en lien avec la taille du système. En effet les rapports
entre les différentes forces en jeu sont modifiés avec les réductions des dimensions. On peut
aussi évoquer la capillarité dont l’impact sur un système à dimensions réduites a un impact
prédominant.
A part une adaptation aux dimensions, l’architecture micro-électronique n’a pas de
différences fondamentales avec l’électronique. La différence est dans la conception puisque
l’électronique nécessaire au capteur est directement intégrée au capteur. Les technologies de
production permettent de fabriquer des composants à partir de matériaux semi-conducteurs
comme le silicium. Les fonctions électroniques sont intégrées directement en surface de ce
substrat.
4 – Production des MEMS
Les étapes de fabrication des technologies MEMS sont calquées sur celle de la
production des circuits intégrés et s’appuient sur les procédés de photolithographie (insolation
UV de résine photosensible). Des procédés de gravure et de structuration du silicium (substrat)
ont été développés afin d’intégrer des fonctions mécaniques à des fonctions électriques. Ces
procedes ne seront pas développés dans cette annexe.
La photolithographie permet la délimitation des zones accessibles à la gravure et des
zones non accessibles.
La lithographie est une technique d’impression créée à la fin du 18e siècle par Aloys
Senefelder [18]. Du grec lithos (pierre) et graphein (écrire), le principe est de reporter sur une
pierre calcaire plane un motif à l’aide d’un mélange gras (cire, suif et noir de fumée). La pierre
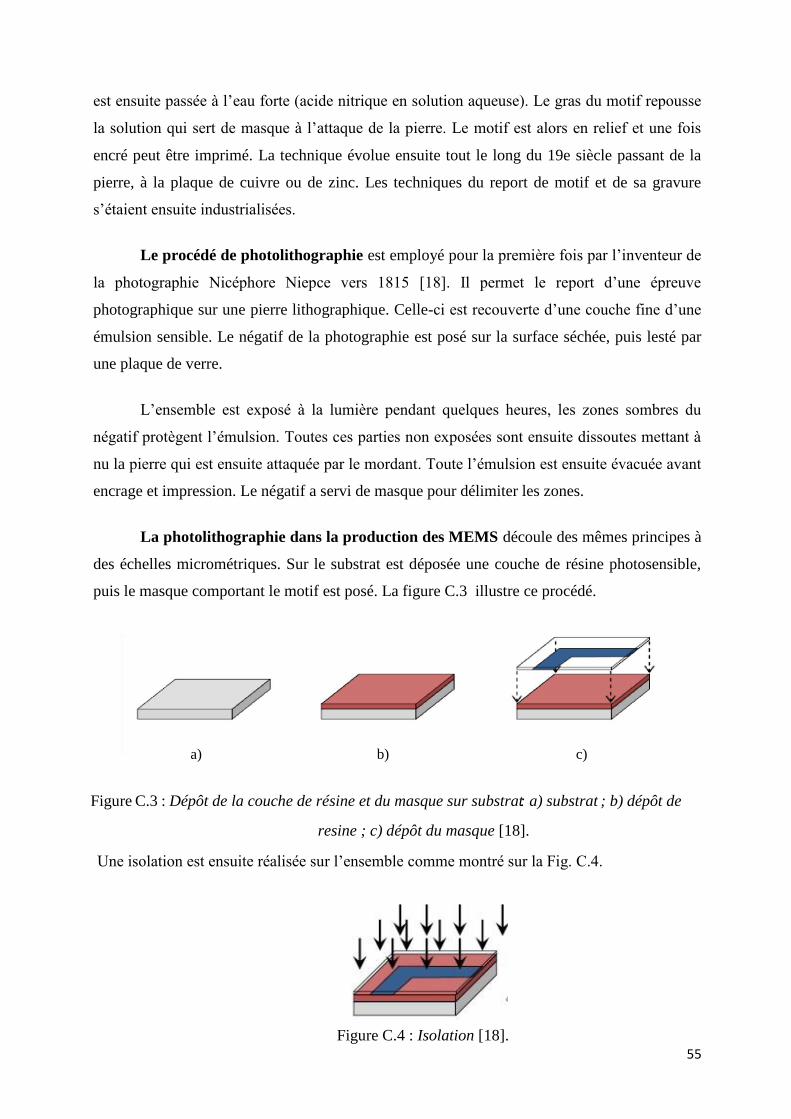
55
est ensuite passée à l’eau forte (acide nitrique en solution aqueuse). Le gras du motif repousse
la solution qui sert de masque à l’attaque de la pierre. Le motif est alors en relief et une fois
encré peut être imprimé. La technique évolue ensuite tout le long du 19e siècle passant de la
pierre, à la plaque de cuivre ou de zinc. Les techniques du report de motif et de sa gravure
s’étaient ensuite industrialisées.
Le procédé de photolithographie est employé pour la première fois par l’inventeur de
la photographie Nicéphore Niepce vers 1815 [18]. Il permet le report d’une épreuve
photographique sur une pierre lithographique. Celle-ci est recouverte d’une couche fine d’une
émulsion sensible. Le négatif de la photographie est posé sur la surface séchée, puis lesté par
une plaque de verre.
L’ensemble est exposé à la lumière pendant quelques heures, les zones sombres du
négatif protègent l’émulsion. Toutes ces parties non exposées sont ensuite dissoutes mettant à
nu la pierre qui est ensuite attaquée par le mordant. Toute l’émulsion est ensuite évacuée avant
encrage et impression. Le négatif a servi de masque pour délimiter les zones.
La photolithographie dans la production des MEMS découle des mêmes principes à
des échelles micrométriques. Sur le substrat est déposée une couche de résine photosensible,
puis le masque comportant le motif est posé. La figure C.3 illustre ce procédé.
resine ; c) dépôt du masque [18].
Une isolation est ensuite réalisée sur l’ensemble comme montré sur la Fig. C.4.
Figure C.4 : Isolation [18].
rocédée.
Figure C.3 : Dépôt de la couche de résine et du masque sur substrat : a) substrat ; b) dépôt de
a)
b)
c)
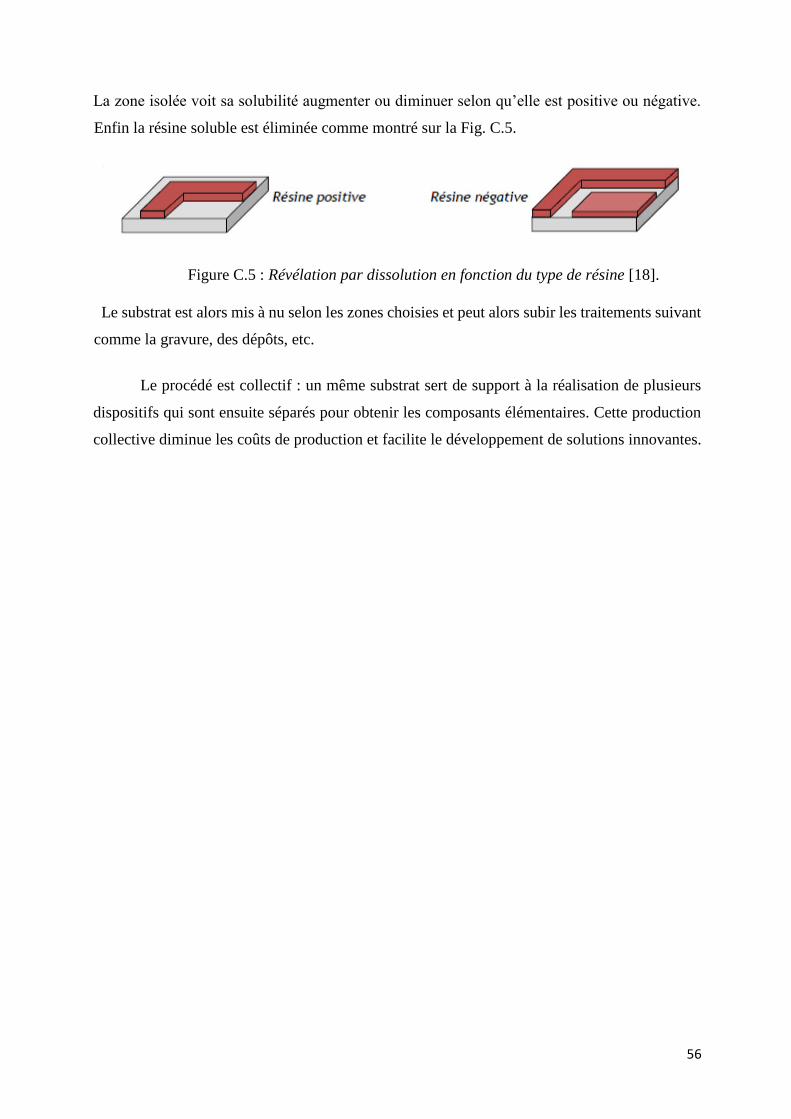
56
La zone isolée voit sa solubilité augmenter ou diminuer selon qu’elle est positive ou négative.
Enfin la résine soluble est éliminée comme montré sur la Fig. C.5.
Figure C.5 : Révélation par dissolution en fonction du type de résine [18].
Le substrat est alors mis à nu selon les zones choisies et peut alors subir les traitements suivant
comme la gravure, des dépôts, etc.
Le procédé est collectif : un même substrat sert de support à la réalisation de plusieurs
dispositifs qui sont ensuite séparés pour obtenir les composants élémentaires. Cette production
collective diminue les coûts de production et facilite le développement de solutions innovantes.

57
REFERENCES
[1] Sebastien Boisseau, Pierre Gasnier, Ghislain Despesse, Jerome Willemin, Jean-Jacques
Chaillout, Maxime Gallardo, Matthias Perez, Alexandre-Benoit Duret, Sébastien
Brulais,Stéphanie Riché, « L’HOMME CONNECTÉ-Récupération d'Energie
Biomécanique et Systèmes Autonomes », CEA-LETI, Minatec, 17 rue des Martyrs - 38054
Grenoble Cedex 9, France - [email protected].
[2] S Kim, G Fenves, and S Glaser. « Health Monitoring of Civil Infrastructures Using
Wireless Sensor Networks », In 6th International Symposium on Information Processing in
Sensor Networks, pages 254– 263, 2007.
[3] G Virone and N Noury, « Télé-Surveillance Automatique de l’Activité dans un Habitat
Intelligent pour la Santé », In JFIM2002, Congrès Francophone d’Informatique Médicale,
2002.
[4] Emmanuelle Arroyo, « Récupération d’énergie à partir des vibrations ambiantes-Dispositif
électromagnétique et circuit électronique d’extraction synchrone »,Thèse de
doctorat,université de grenoble , Electronique Electrotechnique et Automatique,21
Novembre 2012.
[5] http :www.ti.com/tool/ez430-rf2500-seh,mai 2017.
[6] http :www.micropelt.com/applications/te_power_node.php,mai 2017.
[7] Claire JEAN-MISTRAL,Skandar BASROUR, « Récupération de l’énergie des vibrations
mécaniques pour générer de l’électricité », Editions T.I,2010
[8] Shadrach Joseph Roundy, « Energy Scavenging for Wireless Sensor Nodes with a Focus
on Vibration to Electricity Conversion », Doctor of Philosophy in Engineering-Mechanical
Engineering, UNIVERSITY OF CALIFORNIA, BERKELEY,2003.
[9] M Marzencki, Y Ammar, S Basrour, « Integrated power harvesting system including a
MEMS generator and a power management circuit », Sensors and Actuators A: Physical,
145146 :363-370, 2008.
[9] Bernard MULTON, Marianne LOSSEC, Hamid BEN AHMED, « Récupération d’énergie
pour les systèmes autonomes », ENS Cachan site de Bretagne, Département Mécatronique,
Laboratoire SATIE CNRS, 2010.
[10] Abdel-hakim MAHIR, « La récupération d’énergie vibratoire », Rapport de projet de fin
d’étude, Departement Informatique-Microélectronique-Automatique, Université Lille 1.
[11] www.piles-et-plus.fr/
58
[12] Iman JAMBEY, Zeinab HAMMOUD, «Récupération de l’énergie Piézoélectrique »,
Projet de fin d’études, Spécialité : Génie Electrique, Option : Informatique
Industrielle,Université de liban,2012-2013.
[13] Helène HORSIN MOLINARO, Olivier FRANÇAIS, « Les MEMS : Réalisation de
capteurs résonnants » ,ens çaçhan,29/05/2015.
[14] www.steminc.com, juin 2017.
[15] www.alliantech.com,juin 2017.
[16] RAZAFINDRABEKOTO Todisoa Michel, «Conversion de l’énergie vibratoire en énergie
électrique », Mémoire d’Ingenieur, Département Electronique, Option :Electronique
Automatique,2010
[17] Helène HORSIN MOLINARO, Olivier FRANÇAIS, « Les Technologies MEMS », ens
çaçhan,18/12/2014.
N° d’ordre : 07/EN/EA/16 Année universitaire : 2015 – 2016 Soutenu le : 07 Décembre 2017
Titre :
«RECUPERATION D’ENERGIE ELECTRIQUE PAR EFFET PIEZOELECTRIQUE»
Auteur:
RAHARINJATOVO Kiady
Nombre de pages : 58
Nombre de figures : 33
Nombre de tableaux : 06
RESUME
Le présent travail porte sur l’étude et conception d’un système pour la récupération de l’énergie
vibratoire en énergie électrique .Dans cette optique, après étudiées les origines et les méthodes de
conversion des énergies vibratoires en énergie électriques, nous avons utilisé un capteur piezoceramique
SM111 pour la conversion. Pour la simulation, nous avons considéré une personne marchant sur le
dispositif de récupération d’énergie, tandis qu’un moteur électrique est la source de vibration lors de la
réalisation du système. Nous avons obtenus à la sortie du système une tension de 0.4 V après simulation
sur PSPICE et une tension de 2.4 V lors de la réalisation. Le système délivre une puissance de l’ordre de
500 µW. Le but de ce projet est d’alimenter des petits systèmes électroniques.
Mots clés : Vibration, Récupération, Piézoélectrique, MEMS, Capteur
ABSTRACT
The present work deals with the study and design of a system for the recovery of vibratory energy
into electrical energy.In this perspective,after studying the origins and methods of conversion of
vibratory energies,we used a piezoramic sensor SM 111 to recover the vibratory energy.For the
simulation,we considered a person walking on the energy recovery device while an electric motor is the
source of vibration when making the system.We obtained at the output of the system 0.4 V after
simulation on PSPICE and 2.4 V during the realization.The system delivers a power of 500 µW. The
goal of this project is to supply small electronics systems.
Key words: Vibration, Recovery, Piezoelectric, MEMS, Sensor
DIRECTEUR DE MEMOIRE : Monsieur RASTEFANO Elisée
Adresse de l’auteur : Lot VS 21 HZBIS Ambolokandrina /034 45 509 08 /[email protected]