raison d’être du système de direction. mécanique...
TRANSCRIPT

Dominique Fraysse\Ressources\Les asservissments de direction. Page 1/16
Institut Supérieur des Formations Automobiles. Bordeaux
Nature du document :
RESSOURCES Technologie Professionnelle
Centre d’intérêt : La liaison au sol
Les asservissements de direction.
1. Raison d’être du système de direction. Le système de direction doit permettre au conducteur de maîtriser
la trajectoire de son véhicule dans les conditions suivantes :
Virages,
Irrégularités de la route,
Vent latéral,
Manœuvres.
Pour cela, la direction doit satisfaire aux contraintes suivantes :
Reproduire fidèlement la volonté du conducteur :
Précision,
Limiter les braquages induits : Irréversibilité,
Permettre un effort minimum du conducteur : Confort,
La liaison entre le conducteur et la roue doit être
mécanique : actuellement, la loi l’impose.
2. Comportement dynamique du véhicule. 2.1 Les axes de poussée. La trajectoire du véhicule est définie par l’orientation de l’axe de poussée de chacun des essieux. On entend par axe de poussée la résultante des trajectoires des roues d’un même essieu.
Ligne droite Virage
Projection sur le plan d’origine Z
Les axes de poussée peuvent être « perturbés ». Un défaut d’angle d’offset perturbe la trajectoire du véhicule en ligne droite. Un défaut d’angle d’offset et/ou un défaut d’angle de setback perturbe la trajectoire du véhicule en virage.
2.2 Principe de modification de l’orientation du pneumatique. On intervient sur l’orientation de l’ensemble pneumatique/porte-fusée/fusée par le pivotement de celui-ci autour d’un axe de pivot. Cet axe est matérialisable dans l’espace par les angles caractéristiques suivant :
l’inclinaison de pivot et l’angle de chasse.
Projection sur le plan d’origine X Projection sur le plan d’origine Y
Exemple de défaut d’offset :
L’axe de poussée de l’essieu AR n’est pas confondu avec le
plan médian du véhicule
Exemple de défaut de setback :
Les axes des roues d’un même essieu sont décalés. Ici essieu AR
Dominique Fraysse\Ressources\Les asservissments de direction. Page 2/16
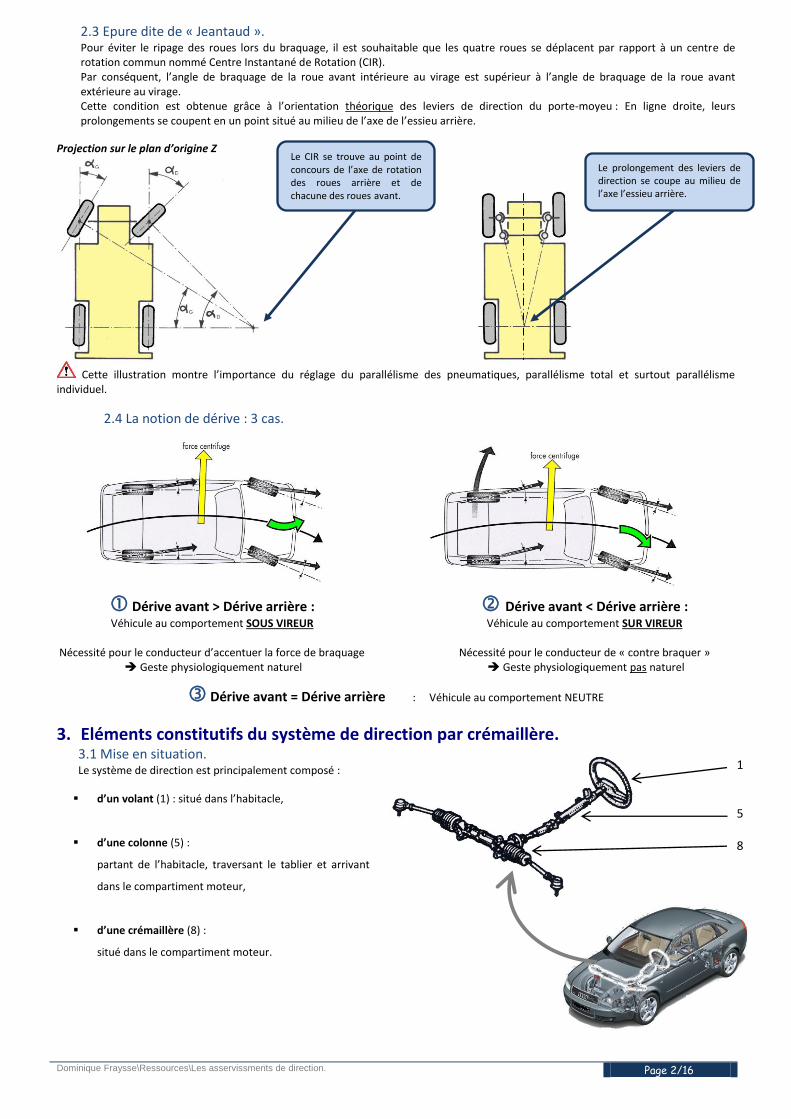
2.3 Epure dite de « Jeantaud ». Pour éviter le ripage des roues lors du braquage, il est souhaitable que les quatre roues se déplacent par rapport à un centre de rotation commun nommé Centre Instantané de Rotation (CIR). Par conséquent, l’angle de braquage de la roue avant intérieure au virage est supérieur à l’angle de braquage de la roue avant extérieure au virage. Cette condition est obtenue grâce à l’orientation théorique des leviers de direction du porte-moyeu : En ligne droite, leurs prolongements se coupent en un point situé au milieu de l’axe de l’essieu arrière.
Projection sur le plan d’origine Z
Cette illustration montre l’importance du réglage du parallélisme des pneumatiques, parallélisme total et surtout parallélisme
individuel.
2.4 La notion de dérive : 3 cas.
Dérive avant > Dérive arrière : Véhicule au comportement SOUS VIREUR
Nécessité pour le conducteur d’accentuer la force de braquage
Geste physiologiquement naturel
Dérive avant < Dérive arrière : Véhicule au comportement SUR VIREUR
Nécessité pour le conducteur de « contre braquer »
Geste physiologiquement pas naturel
Dérive avant = Dérive arrière : Véhicule au comportement NEUTRE
3. Eléments constitutifs du système de direction par crémaillère. 3.1 Mise en situation. Le système de direction est principalement composé :
d’un volant (1) : situé dans l’habitacle,
d’une colonne (5) :
partant de l’habitacle, traversant le tablier et arrivant
dans le compartiment moteur,
d’une crémaillère (8) :
situé dans le compartiment moteur.
1 5 8
Le CIR se trouve au point de concours de l’axe de rotation des roues arrière et de chacune des roues avant.
Le prolongement des leviers de direction se coupe au milieu de l’axe l’essieu arrière.

Dominique Fraysse\Ressources\Les asservissments de direction. Page 3/16
3.2 Organisation structurelle.
1 : volant
2 : enjoliveur
3 : écrou de volant
4 : support de colonne
5 : colonne
6 : arbre de liaison
7 : boulon d’accouplement
8 : boîtier de crémaillère
9 : soufflet
10 : rotule
11 : biellette de direction
12 : contre écrou
13 : fixations de colonne
14 : fixations de crémaillère
3.3 Le volant. Il permet de transformer l’énergie musculaire fournie par le conducteur en énergie
mécanique. Son diamètre permet l’amplification de l’effort fourni par le conducteur.
De plus, il peut intégrer diverses commandes électriques ainsi que le coussin gonflable de
sécurité.
3.4 La colonne de direction.
Elle permet la transmission de l’énergie mécanique de rotation du volant au
pignon de crémaillère.
En outre, elle peut comporter des fonctions de sécurité comme un dispositif
de désaccouplement en cas de choc.
3.5 Les biellettes de direction. Elles assurent la liaison entre la crémaillère et les portes-moyeux.
Une partie filetée permet le réglage du parallélisme des pneumatiques.
3.6 La crémaillère de direction. Elle transforme le mouvement de rotation du pignon en mouvement de translation.
1 : Flector de liaison caoutchouc
2 : tube de liaison
3 : soufflet de protection
4 : liaison avec la biellette droite
5 : pignon hélicoïdal
6 : crémaillère
7 : liaison avec la biellette gauche

Dominique Fraysse\Ressources\Les asservissments de direction. Page 4/16
4. Notions de couple. Pour tourner le volant, il faut vaincre un certain « couple résistant » (Cr) dont la valeur dépend :
du poids sur l’essieu directeur,
du coefficient d’adhérence entre les enveloppes et la chaussée,
du coefficient de frottement des organes mécaniques,
de la vitesse du véhicule.
Exercice 1 : Le véhicule est à l’arrêt, sans système de démultiplication Le couple résistant (Cr) est de 32 daN.m. Le rayon du volant (r) est de 20 cm = 0.2 m
Quelle est la force que doit appliquer le conducteur en un point du volant ?
C = F . r (daN.m) (daN) (m) F = C / r donc, F = Cr / r d’où F = 32 / 0.2 = 160 daN
Conclusion : Au regard de la force à produire, il est nécessaire de démultiplier l’effort.
Le rapport de démultiplication, obtenu grâce à la crémaillère, est d’environ 1/16ème
pour un système sans assistance.
Cette démultiplication engendre plusieurs tours de volant pour un faible rayon de braquage.
Exercice 2 : En prenant les mêmes données et en admettant que maintenant le couple résistant est démultiplié avec un rapport de 1/16ème
,
Calculer le couple (Cc) que doit transmettre le conducteur à la colonne afin de tourner les roues.
R = Cc / Cr = 1/16 donc, Cc = R . Cr d’où Cc = 1/16 . 32 = 32/16 = 2 daN.m
En déduire la force que doit appliquer le conducteur en un point du volant.
F = Cc / r = 2 /0.2 = 10 daN
Conclusion : Grâce à la démultiplication, la force appliquée par le conducteur est moindre.
5. Assistance hydraulique par pompe mécanique. 5.1 Mise en situation.
1. Réservoir + tamis
2. Pompe hydraulique
Entrainement par Moteur thermique
Entrainement par Moteur électrique
Limiteur de débit
Régulateur de pression
3. Valve rotative distributrice
4. Canalisations
Refroidisseur
5. Boitier de direction
6. Vérin d’assistance
5.2 Le réservoir. Il est fixé sur la caisse (ou sur la pompe) en partie haute pour alimenter la pompe par gravité et compenser les variations de volume.
r
Cr Cc
F
M
M
2 4 1 4 3
5 4 6 4

Dominique Fraysse\Ressources\Les asservissments de direction. Page 5/16
5.3 La pompe à débit chutant. Caractéristiques :
Pompe à palettes, entrainée par le moteur thermique du véhicule ou par un moteur électrique.
Débit = 8 litres / minute maintenu constant quelque soit le régime
de pompe.
Pression = 100 bar.
S 1 = S 2
Trou limiteur de pression = 2 mm
R 2 = 0.78 daN Fonctionnement :
Repos P 1 = P 2 = 0 R 1 maintient le clapet fermé
Braquage P 1 > P 2 + R 1 Le clapet s’ouvre Régulation de débit
En Butée Débit = 0 P 1 = P 2 = P maxi La bille s’ouvre Limitation de pression
5.4 Les canalisations.
Elles font office de refroidisseur lorsqu’elles sont métalliques et en forme
de serpentin
Canalisation retour réservoir
Canalisation basse pression entre réservoir et pompe
Canalisation haute pression entre pompe et valve rotative distributrice
5.5 Le vérin d’assistance. Il reçoit l’huile sous pression distribuée par la valve rotative distributrice et la transforme en force d’assistance.
Vérin non intégré
Vérin intégré
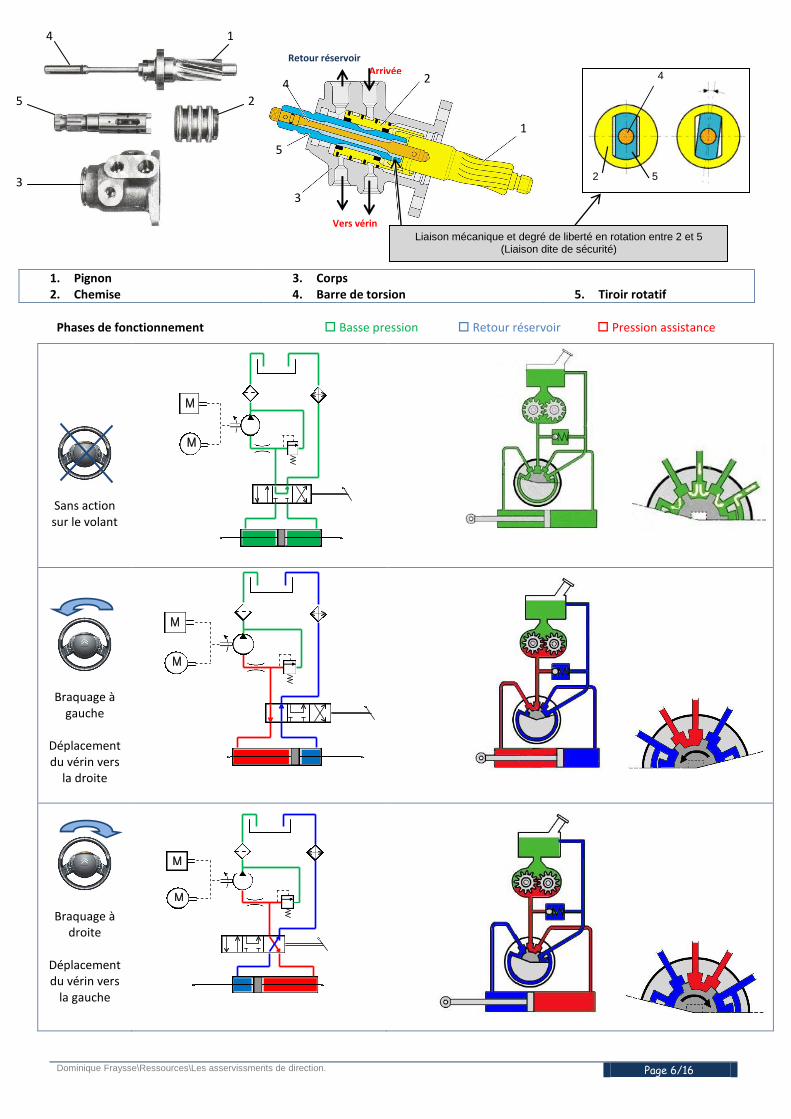
5.6 La valve rotative distributrice. Fixée sur la crémaillère au niveau du pignon, elle permet de :
Distribuer une pression d’assistance en fonction du couple volant et du débit d’huile, vers la chambre du vérin
concernée,
Réaliser le retour au réservoir.
Dominique Fraysse\Ressources\Les asservissments de direction. Page 6/16
4 1 5 2 3
1. Pignon 2. Chemise
3. Corps 4. Barre de torsion
5. Tiroir rotatif
Phases de fonctionnement Basse pression Retour réservoir Pression assistance
Sans action sur le volant
Braquage à gauche
Déplacement du vérin vers
la droite
Braquage à droite
Déplacement du vérin vers
la gauche
Liaison mécanique et degré de liberté en rotation entre 2 et 5 (Liaison dite de sécurité)
1
2
3
4
5
2
4
5
Retour réservoir Arrivée
Vers vérin
M
M
M
M
M
M

Dominique Fraysse\Ressources\Les asservissments de direction. Page 7/16
La loi de valve C’est la relation entre la pression s’exerçant sur le vérin d’assistance et le couple exercé sur la barre de torsion Zone de basse vitesse véhicule (Manœuvre) Zone de vitesse véhicule intermédiaire (Virage) Zone de vitesse véhicule élevée (Correction de trajectoire)
Pression (bar)
Couple (daN.m)
Principe de l’assistance variable par modulation de débit. Système électro-hydraulique prenant en compte la vitesse du véhicule et interposé entre la valve et le vérin. Il crée une fuite au niveau des chambres du vérin.
6. Assistance hydraulique par groupe électropompe (ex : Peugeot).
6.1 Mise en situation.
M
M
% fuite Vitesse véhicule 15 110 (km/h)
Groupe électro-pompe

Dominique Fraysse\Ressources\Les asservissments de direction. Page 8/16
a. Moteur électrique b. Calculateur c. Connecteurs d. Entretoise e. Corps
f. Pompe g. Limiteur de pression h. Réservoir i. Clapet de sécurité
6.2 Le moteur électrique et le calculateur. Le moteur électrique sans balai à commande par courant haché atteint un régime de 4900 tr/mn. Il dispose d’une cible (1) et d’un capteur à Effet Hall (2) permettant de mesurer la vitesse de rotation. La partie électronique est dotée d’un microprocesseur, d’un autodiagnostic et d’un capteur de température (3).
6.3 La pompe. La pompe à engrenages peut fournir une pression de 110 bar. Elle est équipée d’un limiteur de pression (4) et d’un claper de sécurité (5), évitant les blocages hydrauliques en cas de grippage de la pompe (empêchant de fait la rotation du volant).
6.4 Les connecteurs.
6.5 Principe de fonctionnement du GEP (groupe électropompe). Le débit de la pompe est piloté en fonction de la vitesse du véhicule et de la vitesse du volant de direction. Débit GEP = Débit Vvéh + Débit Vvol
Débit Vvéh
(Débit en fonction de la vitesse véhicule)
Connecteur 2 voies : Puissance Connecteur 9 voies : Signaux

Dominique Fraysse\Ressources\Les asservissments de direction. Page 9/16
Débit Vvol (Débit en fonction de la vitesse volant) Faible augmentation du débit pour les vitesses volant réduites optimisation de l’agrément de direction. Augmentation importante du débit pour les vitesses volant importantes (manœuvres d’évitement) éviter les points durs tout en conservant un niveau constant d’assistance.
Débit GEP
6.6 Evolution de la vitesse de rotation du moteur électrique en fonction de la température. A partir d’une température de la partie électronique de 115°, le calculateur limite progressivement la puissance du GEP. Le niveau d’assistance est rétabli dès le refroidissement du système. Au-delà de 130°, le GEP est arrété. En dessous de 600 tr/mn du moteur électrique, l’assistance est très peu perceptible.
6.7 Fonctionnement particuliers du GEP.
Lorsque le moteur cale, l’assistance de direction reste opérationnelle. Si le moteur ne démarre pas, en poussant le véhicule après avoir mis le contact, le GEP fonctionne. Attention : Dans ce cas
l’énergie électrique est puisée à la batterie. En cas de défaut du GEP ou du calculateur, la direction passe en mode « manuel ». En cas de défaut vitesse véhicule ou vitesse volant, le calculateur prend une valeur par défaut.
6.8 Synoptique du système.
Débit Vvéh

Dominique Fraysse\Ressources\Les asservissments de direction. Page 10/16
6.9 L’information angle volant. L’information, sous forme de deux signaux carrés déphasés un par rapport à l’autre, permet au calculateur de déterminer la vitesse et le sens de rotation du volant.
Etats logiques des 4 premiers
créneaux
Il existe deux types de capteurs : Capteur à Effet Hall : véhicule sans ESP.
o Capteur (a) o Cible 120 pôles (b) o Plage de mesure angle volant :
-901° ; +901° o Vitesse maxi d’entrainement en roulage :
2000° /s (équivalent par exemple à un choc trottoir) o Plage de mesure vitesse volant en roulage :
0° /s ; +1200° /s
Capteur Magnéto Résistif : véhicule avec ESP. o Roue principale 63 dents (c) o Roue 42 dents (d) o Roue 39 dents (e) o Aimants (f) en regard des éléments de mesure magnéto
résistif (g) o L’écart de dents entre les roues engendre une vitesse de
rotation différente d’où une position différente des champs magnétiques.
o Plage de mesure angle volant : -780° ; +780°
o Vitesse maxi d’entrainement en roulage : 2000° /s (équivalent par exemple à un choc trottoir)
o Plage de mesure vitesse volant en roulage : -1016° /s ; +1016° /s
6.10 L’information moteur tournant. L’information (tout ou rien +12 V) est donnée par l’alternateur via le boitier de servitude moteur et le boitier de servitude intelligent. Le GEP s’arrête à la coupure du +APC
6.11 L’information vitesse véhicule. L’information (signal carré) est donné par le calculateur ABS ou ESP.

Dominique Fraysse\Ressources\Les asservissments de direction. Page 11/16
6.12 Synoptique électrique.
BM34 : boitier de servitude moteur BSI1 : boitier de servitude intelligent CV00 : module de communication sous volant 1020 : alternateur 7000 : capteur de roue avant gauche 7005 : capteur de roue avant droit 7025 : groupe hydraulique abs Ou suivant équipement 7806 : groupe hydraulique ESP 7122 : groupe électropompe direction assistée
7. Assistance mécanique par moteur électrique. 7.1 Mise en situation.
1. Colonne 2. Moteur électrique d’assistance 3. Réducteur 4. Capteur de couple
Remarque : Le mécanisme composé du moteur électrique d’assistance, du réducteur et du capteur de couple peut se situer sur la colonne de direction (comme ci-dessus) ou sur la crémaillère (comme ci-contre).
7.2 Principe de fonctionnement. La DAE assiste l’effort du conducteur dès la sollicitation sur le volant. Un couple d’assistance est fourni à l’aide du moteur électrique (2) au pignon de crémaillère via le réducteur (3) composé d’une roue (6) et d’une vis sans fin (5). Le capteur de couple (4) informe le calculateur :
- du sens de rotation du volant, - du couple exercé par le
conducteur.
Vis sans fin
Roue

Dominique Fraysse\Ressources\Les asservissments de direction. Page 12/16
7.3 Le capteur de couple.
7.3.1 Constitution. Le capteur se compose : d’un arbre d’entrée lié au volant avec 2 bagues :
o Une bague dite « de détection supérieure » (1),
o Une bague dire « de référence » (2).
D’un arbre de sortie avec une bague solidaire dite « de détection inférieure » (3).
D’une barre de torsion (6) qui assure la liaison entre l’arbre d’entrée et l’arbre de sortie tout en autorisant un décalage angulaire entre eux.
De 2 bobines (4) qui entoure les 3 bagues de détection
o Bobine de mesure (4.1)
o Bobine de référence (4.2)

Dominique Fraysse\Ressources\Les asservissments de direction. Page 13/16
7.3.2 Principe de fonctionnement. Le calculateur fait circuler un courant haché
dans la bobine de mesure (4.1) via l’étage électronique du boitier de direction.
Un champ magnétique est alors créé au niveau des bagues de détection (1) et (3). Lorsque le conducteur tourne le volant, la barre de torsion se déforme proportionnellement à la résistance exercée sur le pignon de crémaillère. Manœuvre à l’arrét du véhicule forte résistance
Manœuvre à vitesse moyenne du véhicule faible résistance
Cette déformation fait varier l’entrefer entre les faces cannelées des bagues de détection. L’entrefer augmente ou diminue selon le sens de braquage. Cette variation d’entrefer se traduit par une variation d’inductance du bobinage haute fréquence, donc de la tension à ses bornes.
L’étage électronique du boitier de direction transforme la tension aux bornes de la bobine en un courant qui constitue le signal de sortie envoyé au calculateur.
Remarque : Le signal ne permet pas de donner la position angulaire du volant.
Selon le même principe, un second signal est généré dans le bobinage de référence mais sans variation d’entrefer, donc de champ magnétique. Ce second signal permet au calculateur de percevoir en temps réel une variation d’inductance des bobines occasionnée par l’environnement (ex : variation de température).

Dominique Fraysse\Ressources\Les asservissments de direction. Page 14/16
7.3.3 Exemple de relevés d’intensité du courant fourni au moteur d’assistance et du signal délivré par le capteur de couple.
Conditions de mesure :
- Volant en position point milieu
- Braquage à gauche en butée - Braquage à droite en butée - Retour en position point
milieu
7.4 Synoptique du module de contrôle de l’alimentation du moteur d’assistance.
L’horloge : Elle génère un signal carré de fréquence prédéfinie. Le microprocesseur : Il traite les informations Couple Volant, Sens de braquage et vitesse véhicule. Le module de modification du rapport cyclique : Il modifie de rapport cyclique de l’horloge. Le module de logique de commande de l’interface : Il génère le cycle de commande des transistors de
l’interface de puissance. 7.5 L’interface de puissance C’est un pont en H commandé en hacheur de tension qui configure le sens et l’intensité moyenne du courant traversant le moteur de DAE.
Q1 et Q2 : Bases des transistors NPN, Q3 et Q4 : Bases des transistors PNP, D3 et D4 : Diodes de roue libre.
Moteur DAE
U alim
Q 1 Q 2
Q 3 Q 4 D 3 D 4
A 1 A 2

Dominique Fraysse\Ressources\Les asservissments de direction. Page 15/16
Fonctionnement de l’interface de puissance.
Braquage à droite
Phase : Niveau Haut
Q 1 Passant
Q 2 Bloqué
Q 3 Bloqué
Q 4 Passant
Potentiel A 1 12 V
Potentiel A 2 0 V
D 3 /
D 4 /
Phase : Niveau Bas et Roue libre
Q 1 Bloqué
Q 2 Bloqué
Q 3 Bloqué
Q 4 Passant
Potentiel A 1 0 V
Potentiel A 2 0 V
D 3 Active
D 4 /
Braquage à gauche
Phase : Niveau Haut
Q 1 Bloqué
Q 2 Passant
Q 3 Passant
Q 4 Bloqué
Potentiel A 1 0 V
Potentiel A 2 12 V
D 3 /
D 4 /
Phase : Niveau Bas et Roue libre
Q 1 Bloqué
Q 2 Bloqué
Q 3 Passant
Q 4 Bloqué
Potentiel A 1 0 V
Potentiel A 2 0 V
D 3 /
D 4 Active
Moteur DAE
U alim
Q 1 Q 2
Q 3 Q 4 D 3 D 4
A 1 A 2
Moteur DAE
U alim
Q 1 Q 2
Q 3 Q 4 D 3 D 4
A 1 A 2
Moteur
DAE
U alim
Q 1 Q 2
Q 3 Q 4 D 3 D 4
Moteur DAE
U alim
Q 1 Q 2
Q 3 Q 4 D 3 D 4
A 1 A 2

Dominique Fraysse\Ressources\Les asservissments de direction. Page 16/16
Tension hachée d’alimentation du moteur
Signaux relevés à l’oscilloscope
Signaux simplifiés
Forte assistance (Signaux simplifiés)
Faible assistance (Signaux simplifiés)
Exemple de relevés dans les conditions suivantes :
- Véhicule à l’arrêt, volant en position milieu - Braquage à droite jusqu’en butée - Braquage à gauche jusqu’en butée - Retour en position milieu
Exemple de stratégie d’assistance en fonction de la vitesse véhicule.
Protection thermique du moteur : Exemple d’évolution de l’intensité en fonction du temps de fonctionnement.
Niveau Bas
Niveau Haut