potentiel d’adhérence réel des véhicules · 2016-03-16 · d’adhérence et de visibilité...
TRANSCRIPT
4Potentiel
d’adhérence réeldes véhicules

BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
181
Modélisation du risquede collisions en file induit
par la variabilitédes performances en adhérence
Alex COIRETLaboratoire Central des Ponts et Chaussées
La détermination expérimentale des performances d’un panel de véhicules en freinage d’urgence, au sens prag-matique des distances d’arrêt, est présentée. Un classe-ment de ces véhicules a été jugé dénué de sens. Le con-texte de la conduite en file est a priori sensible aux écarts de performances en freinage et c’est dans ce cadre qu’a été évalué le risque de collision induit par la variabilité des performances des véhicules testés, placés virtuelle-ment en situation de « pelotons ». En complément expé-rimental, des configurations de pelotons ont été relevés sur divers sites routiers. Un modèle numérique d’évolu-tion des véhicules et une analyse statistique sont propo-sés. Pour chaque configuration géométrique de peloton donnée, de nombreux arrangements pseudo-aléatoires de véhicules ont mis en évidence l’impact de l’hétérogé-néité de leurs capacités de freinage sur l’occurrence des accidents. Le rôle du niveau d’équipement a aussi été mis en évidence (ABS, usure des pneumatiques, etc.).
DOMAINE : Route.
MODELING THE IN-LANE COLLISION RISK INDUCED BY VARIABILITY IN SKID RESISTANCE-BASED PERFORMANCE
The experimental determination of emergency braking performance on a range of vehicles, in pragmatic terms of stopping distances, will be presented. A ranking of these vehicles has been deemed meaningless. The con-text of in-lane driving would in theory be sensitive to deviations in braking performance and, as such, the col-lision risk induced by performance variability in the vehi-cles tested could be evaluated, with test vehicles being positioned virtually in a bunched configuration. As an experimental complement to this phase, such configura-tions were recorded from an array of road test sites. A numerical evolution model of the vehicles along with a statistical analysis are proposed. For each given geome-trical configuration, many pseudo-random patterns serve to highlight the impact of heterogeneity in braking capacities on accident occurrence rates. Emphasis was also placed on the role of the vehicle’s state of equip-ment (antilock brake systems, tire wear, etc.).
FIELD: Roads.
RÉSUMÉ ABSTRACT
Le contexte de cette étude est celui des collisions en file : les collisions arrière ou en chaîne constituentplus d’1/8 des accidents corporels en France, et même 28 % sur autoroute (selon l’ONISR*, 2003).Des facteurs d’origines très variables conditionnent ce type d’accident : météorologie, comportementdes conducteurs, type et caractéristique des véhicules, etc. Il a été montré par exemple que la pré-sence de pluie entraîne le regroupement des véhicules en pelotons [1], alors même que les conditionsd’adhérence et de visibilité sont dégradées. Le « facteur humain » est aussi souvent mis à l’avant-plan bien que, considérant la dynamique temporelle de la tâche de conduite [2], on puisse aussi con-sidérer l’humain comme un agent de fiabilité. Le risque accepté, en fonction des objectifs et des moti-vations des conducteurs (théorie de l’homéostasie [3]), est cependant élevé lors de conduite en file :24,5 % des temps intervéhiculaires relevés en 2003 (ONISR) sont inférieurs aux deux secondes régle-mentaires, et 5,7 % inférieurs à une seconde. Enfin, le parc automobile actuel est également techni-quement très varié : les véhicules peuvent disposer ou être dénués d’équipements tels que les systè-mes antibloquants (ABS : Anti-lock Braking System), d’assistance au freinage (AFU : aide au freinaged’urgence) ou de stabilisateur de trajectoire (ESP® : Electronic Stability Program).Pour cette étude, on s’intéressera essentiellement à ce dernier facteur en déterminant, d’une part, lesperformances individuelles de véhicules représentatifs du parc roulant français et en évaluant,
* Observatoire national interministériel de sécurité routière.
INTRODUCTION
BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
182
d’autre part, le « sur-risque » accidentogène apporté par la disparité des performances de ces véhi-cules en termes de capacités de freinage, lorsqu’ils évoluent en pelotons en discernant les véhiculeséquipés de l’ABS des véhicules plus conventionnels.Il conviendra de garder présent à l’esprit le fait que bien que cette étude soit appliquée au contexteparticulier de la conduite en file, la base de données des caractéristiques des véhicules pourrait êtreréutilisée pour des situations plus générales telle que l’accidentologie sur réseau routier secondaire(53,6 % des décès selon Houchard [4] ; thème de recherche SARI* prévu en 2005-2006).
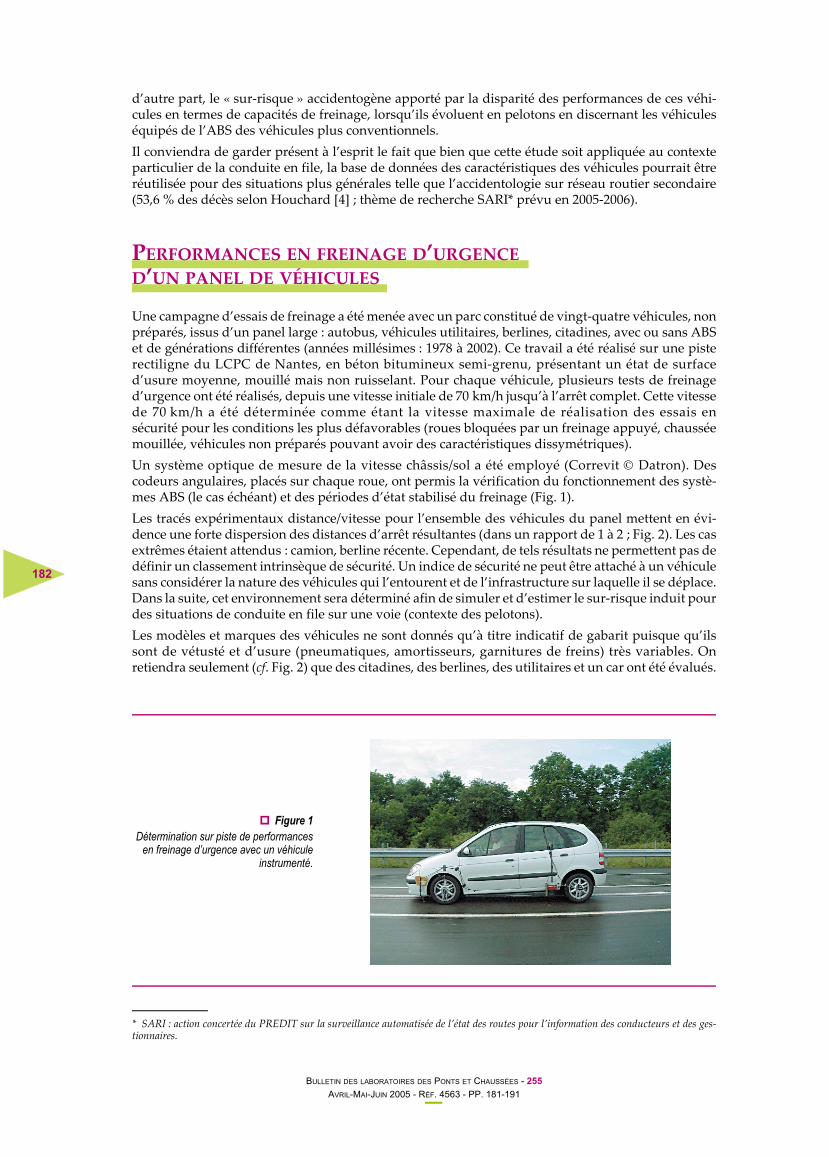
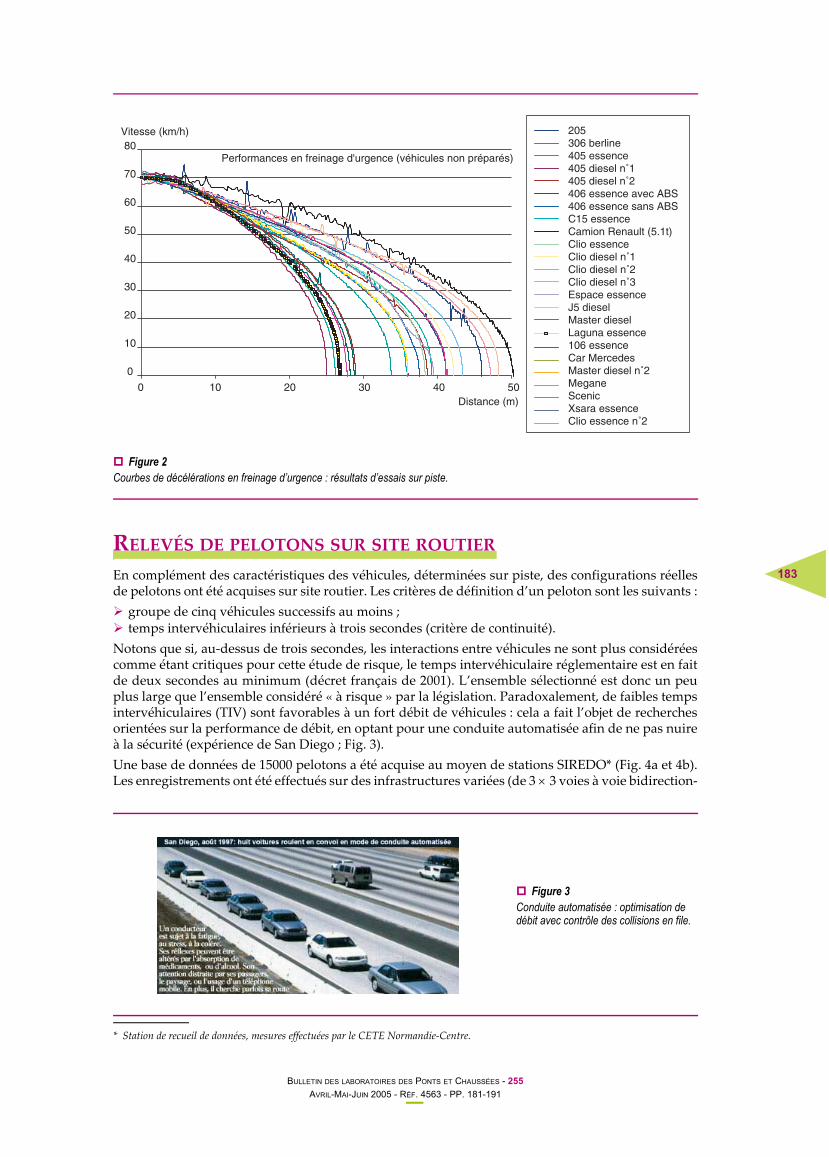
Une campagne d’essais de freinage a été menée avec un parc constitué de vingt-quatre véhicules, nonpréparés, issus d’un panel large : autobus, véhicules utilitaires, berlines, citadines, avec ou sans ABSet de générations différentes (années millésimes : 1978 à 2002). Ce travail a été réalisé sur une pisterectiligne du LCPC de Nantes, en béton bitumineux semi-grenu, présentant un état de surfaced’usure moyenne, mouillé mais non ruisselant. Pour chaque véhicule, plusieurs tests de freinaged’urgence ont été réalisés, depuis une vitesse initiale de 70 km/h jusqu’à l’arrêt complet. Cette vitessede 70 km/h a été déterminée comme étant la vitesse maximale de réalisation des essais ensécurité pour les conditions les plus défavorables (roues bloquées par un freinage appuyé, chausséemouillée, véhicules non préparés pouvant avoir des caractéristiques dissymétriques). Un système optique de mesure de la vitesse châssis/sol a été employé (Correvit Datron). Descodeurs angulaires, placés sur chaque roue, ont permis la vérification du fonctionnement des systè-mes ABS (le cas échéant) et des périodes d’état stabilisé du freinage (Fig. 1).Les tracés expérimentaux distance/vitesse pour l’ensemble des véhicules du panel mettent en évi-dence une forte dispersion des distances d’arrêt résultantes (dans un rapport de 1 à 2 ; Fig. 2). Les casextrêmes étaient attendus : camion, berline récente. Cependant, de tels résultats ne permettent pas dedéfinir un classement intrinsèque de sécurité. Un indice de sécurité ne peut être attaché à un véhiculesans considérer la nature des véhicules qui l’entourent et de l’infrastructure sur laquelle il se déplace.Dans la suite, cet environnement sera déterminé afin de simuler et d’estimer le sur-risque induit pourdes situations de conduite en file sur une voie (contexte des pelotons).Les modèles et marques des véhicules ne sont donnés qu’à titre indicatif de gabarit puisque qu’ilssont de vétusté et d’usure (pneumatiques, amortisseurs, garnitures de freins) très variables. Onretiendra seulement (cf. Fig. 2) que des citadines, des berlines, des utilitaires et un car ont été évalués.
* SARI : action concertée du PREDIT sur la surveillance automatisée de l’état des routes pour l’information des conducteurs et des ges-tionnaires.
Figure 1Détermination sur piste de performances
en freinage d’urgence avec un véhiculeinstrumenté.
PERFORMANCES EN FREINAGE D’URGENCED’UN PANEL DE VÉHICULES
BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
183En complément des caractéristiques des véhicules, déterminées sur piste, des configurations réellesde pelotons ont été acquises sur site routier. Les critères de définition d’un peloton sont les suivants :
groupe de cinq véhicules successifs au moins ;temps intervéhiculaires inférieurs à trois secondes (critère de continuité).
Notons que si, au-dessus de trois secondes, les interactions entre véhicules ne sont plus considéréescomme étant critiques pour cette étude de risque, le temps intervéhiculaire réglementaire est en faitde deux secondes au minimum (décret français de 2001). L’ensemble sélectionné est donc un peuplus large que l’ensemble considéré « à risque » par la législation. Paradoxalement, de faibles tempsintervéhiculaires (TIV) sont favorables à un fort débit de véhicules : cela a fait l’objet de recherchesorientées sur la performance de débit, en optant pour une conduite automatisée afin de ne pas nuireà la sécurité (expérience de San Diego ; Fig. 3).Une base de données de 15000 pelotons a été acquise au moyen de stations SIREDO* (Fig. 4a et 4b).Les enregistrements ont été effectués sur des infrastructures variées (de 3 × 3 voies à voie bidirection-
Figure 2Courbes de décélérations en freinage d’urgence : résultats d’essais sur piste.
* Station de recueil de données, mesures effectuées par le CETE Normandie-Centre.
Figure 3Conduite automatisée : optimisation de débit avec contrôle des collisions en file.
Distance (m)
Performances en freinage d'urgence (véhicules non préparés)
Vitesse (km/h) 205306 berline405 essence405 diesel n˚1405 diesel n˚2406 essence avec ABS406 essence sans ABSC15 essenceCamion Renault (5.1t)Clio essenceClio diesel n˚1Clio diesel n˚2Clio diesel n˚3Espace essenceJ5 dieselMaster dieselLaguna essence106 essenceCar MercedesMaster diesel n˚2MeganeScenicXsara essenceClio essence n˚2
0
0
10
20
30
40
50
60
70
80
10 20 30 40 50
RELEVÉS DE PELOTONS SUR SITE ROUTIER
BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
184
nelle simple), pour des conditions météorologiques et des périodes de niveaux de trafic diverses(nuit, période de pointe, week-end, semaine, etc.). Les types des véhicules sont indiqués dans labase : léger, intermédiaire, poids lourd. Les vitesses individuelles et les temps intervéhiculaires com-plètent la description des pelotons.
Afin d’alimenter le modèle numérique de risque de collision en file, ont été retenus les pelotons (98au total) correspondant aux conditions des essais réalisés sur piste : vitesse moyenne des véhiculesdu peloton proche de 70 km/h, chaussée mouillée.
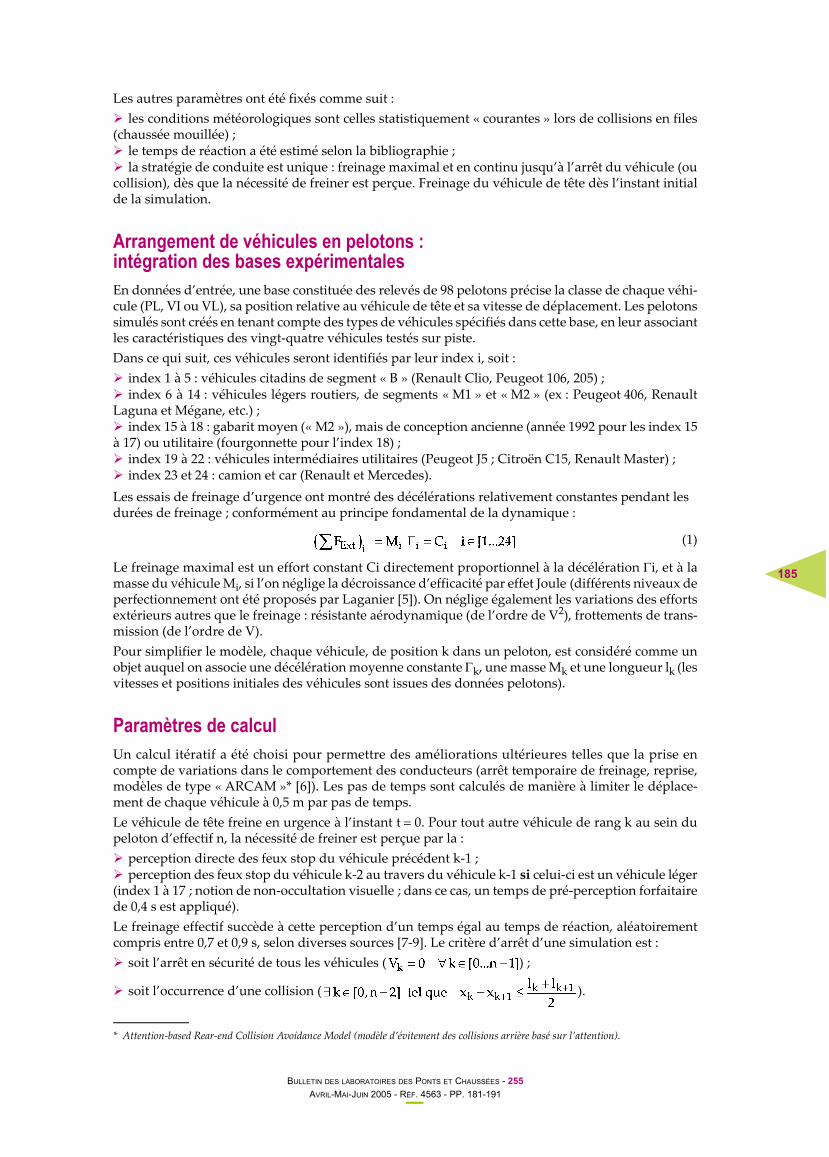
Choix des paramètres du modèleUn modèle d’évolution spatio-temporelle de véhicules en file a été développé. Ce modèle, limité àune voie de circulation rectiligne, vise à étudier l’influence des capacités de freinage des véhiculessur le risque d’occurrence d’un accident (facteur en frontière sur la figure 5).
Figure 4Station SIREDO de relevé de trafic.
Figure 5Origine des facteurs de risque de collision en file (dont Infrastructure, Conducteur, Véhicule : I – C – V).
bBoucle magnétique. Armoire de traitement.
MODÈLE ITÉRATIF D’ÉVOLUTION DE VÉHICULES EN PELOTON
I
V
C
Situation de pelotonFacteurs individuels
Risque d’accidentaugmenté
Disparité des performances
des véhicules
Formationde pelotons
Caractéristiques de surface,progressivité géométrique,uni
Attention,fatigue,reflexivité
Usure,équipement,gabarit...
Augmentationde débit (trafic)
Environnement,pluie, brouillard
Niveau de saturationde la voie
a
BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
185
Les autres paramètres ont été fixés comme suit :les conditions météorologiques sont celles statistiquement « courantes » lors de collisions en files
(chaussée mouillée) ;le temps de réaction a été estimé selon la bibliographie ; la stratégie de conduite est unique : freinage maximal et en continu jusqu’à l’arrêt du véhicule (ou
collision), dès que la nécessité de freiner est perçue. Freinage du véhicule de tête dès l’instant initialde la simulation.
Arrangement de véhicules en pelotons : intégration des bases expérimentalesEn données d’entrée, une base constituée des relevés de 98 pelotons précise la classe de chaque véhi-cule (PL, VI ou VL), sa position relative au véhicule de tête et sa vitesse de déplacement. Les pelotonssimulés sont créés en tenant compte des types de véhicules spécifiés dans cette base, en leur associantles caractéristiques des vingt-quatre véhicules testés sur piste.Dans ce qui suit, ces véhicules seront identifiés par leur index i, soit :
index 1 à 5 : véhicules citadins de segment « B » (Renault Clio, Peugeot 106, 205) ; index 6 à 14 : véhicules légers routiers, de segments « M1 » et « M2 » (ex : Peugeot 406, Renault
Laguna et Mégane, etc.) ;index 15 à 18 : gabarit moyen (« M2 »), mais de conception ancienne (année 1992 pour les index 15
à 17) ou utilitaire (fourgonnette pour l’index 18) ;index 19 à 22 : véhicules intermédiaires utilitaires (Peugeot J5 ; Citroën C15, Renault Master) ;index 23 et 24 : camion et car (Renault et Mercedes).
Les essais de freinage d’urgence ont montré des décélérations relativement constantes pendant les durées de freinage ; conformément au principe fondamental de la dynamique :
(1)
Le freinage maximal est un effort constant Ci directement proportionnel à la décélération Γi, et à lamasse du véhicule Mi, si l’on néglige la décroissance d’efficacité par effet Joule (différents niveaux deperfectionnement ont été proposés par Laganier [5]). On néglige également les variations des effortsextérieurs autres que le freinage : résistante aérodynamique (de l’ordre de V2), frottements de trans-mission (de l’ordre de V).Pour simplifier le modèle, chaque véhicule, de position k dans un peloton, est considéré comme unobjet auquel on associe une décélération moyenne constante Γk, une masse Mk et une longueur lk (lesvitesses et positions initiales des véhicules sont issues des données pelotons).
Paramètres de calculUn calcul itératif a été choisi pour permettre des améliorations ultérieures telles que la prise encompte de variations dans le comportement des conducteurs (arrêt temporaire de freinage, reprise,modèles de type « ARCAM »* [6]). Les pas de temps sont calculés de manière à limiter le déplace-ment de chaque véhicule à 0,5 m par pas de temps.Le véhicule de tête freine en urgence à l’instant t = 0. Pour tout autre véhicule de rang k au sein dupeloton d’effectif n, la nécessité de freiner est perçue par la :
perception directe des feux stop du véhicule précédent k-1 ;perception des feux stop du véhicule k-2 au travers du véhicule k-1 si celui-ci est un véhicule léger
(index 1 à 17 ; notion de non-occultation visuelle ; dans ce cas, un temps de pré-perception forfaitairede 0,4 s est appliqué).Le freinage effectif succède à cette perception d’un temps égal au temps de réaction, aléatoirementcompris entre 0,7 et 0,9 s, selon diverses sources [7-9]. Le critère d’arrêt d’une simulation est :
soit l’arrêt en sécurité de tous les véhicules ( ) ;
soit l’occurrence d’une collision ( ).
* Attention-based Rear-end Collision Avoidance Model (modèle d’évitement des collisions arrière basé sur l’attention).
BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
186
Ce dernier cas concerne aussi les situations susceptibles de conduire à des collisions multiples, quine sont pas simulées au-delà du premier contact en raison de la complexité des calculs énergétiquesassociés.Par la suite, en l’absence de précision, le terme « collision » désignera la première - et unique - occur-rence de collision simulée.
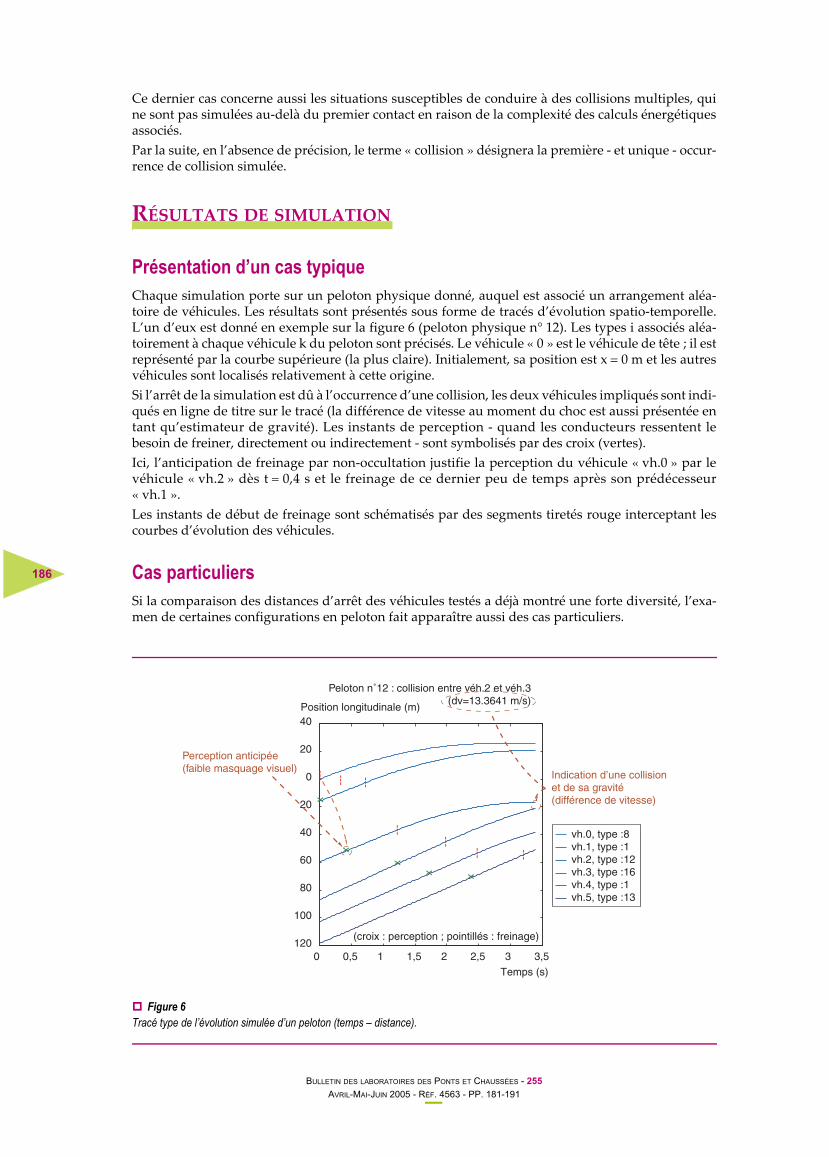
Présentation d’un cas typique Chaque simulation porte sur un peloton physique donné, auquel est associé un arrangement aléa-toire de véhicules. Les résultats sont présentés sous forme de tracés d’évolution spatio-temporelle.L’un d’eux est donné en exemple sur la figure 6 (peloton physique n° 12). Les types i associés aléa-toirement à chaque véhicule k du peloton sont précisés. Le véhicule « 0 » est le véhicule de tête ; il estreprésenté par la courbe supérieure (la plus claire). Initialement, sa position est x = 0 m et les autresvéhicules sont localisés relativement à cette origine.Si l’arrêt de la simulation est dû à l’occurrence d’une collision, les deux véhicules impliqués sont indi-qués en ligne de titre sur le tracé (la différence de vitesse au moment du choc est aussi présentée entant qu’estimateur de gravité). Les instants de perception - quand les conducteurs ressentent lebesoin de freiner, directement ou indirectement - sont symbolisés par des croix (vertes).Ici, l’anticipation de freinage par non-occultation justifie la perception du véhicule « vh.0 » par levéhicule « vh.2 » dès t = 0,4 s et le freinage de ce dernier peu de temps après son prédécesseur« vh.1 ».Les instants de début de freinage sont schématisés par des segments tiretés rouge interceptant lescourbes d’évolution des véhicules.
Cas particuliersSi la comparaison des distances d’arrêt des véhicules testés a déjà montré une forte diversité, l’exa-men de certaines configurations en peloton fait apparaître aussi des cas particuliers.
Figure 6Tracé type de l’évolution simulée d’un peloton (temps – distance).
RÉSULTATS DE SIMULATION
0 0,5 1 1,5 2 2,5 3 3,5120
100
80
60
40
20
0
20
40
------
x
---
x
---
x
---
x
---
x
---
Peloton n˚12 : collision entre véh.2 et véh.3(dv=13.3641 m/s)
Perception anticipée(faible masquage visuel)
vh.0, type :8vh.1, type :1vh.2, type :12vh.3, type :16vh.4, type :1vh.5, type :13
Indication d’une collisionet de sa gravité(différence de vitesse)
(croix : perception ; pointillés : freinage)
Position longitudinale (m)
Temps (s)
BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
187
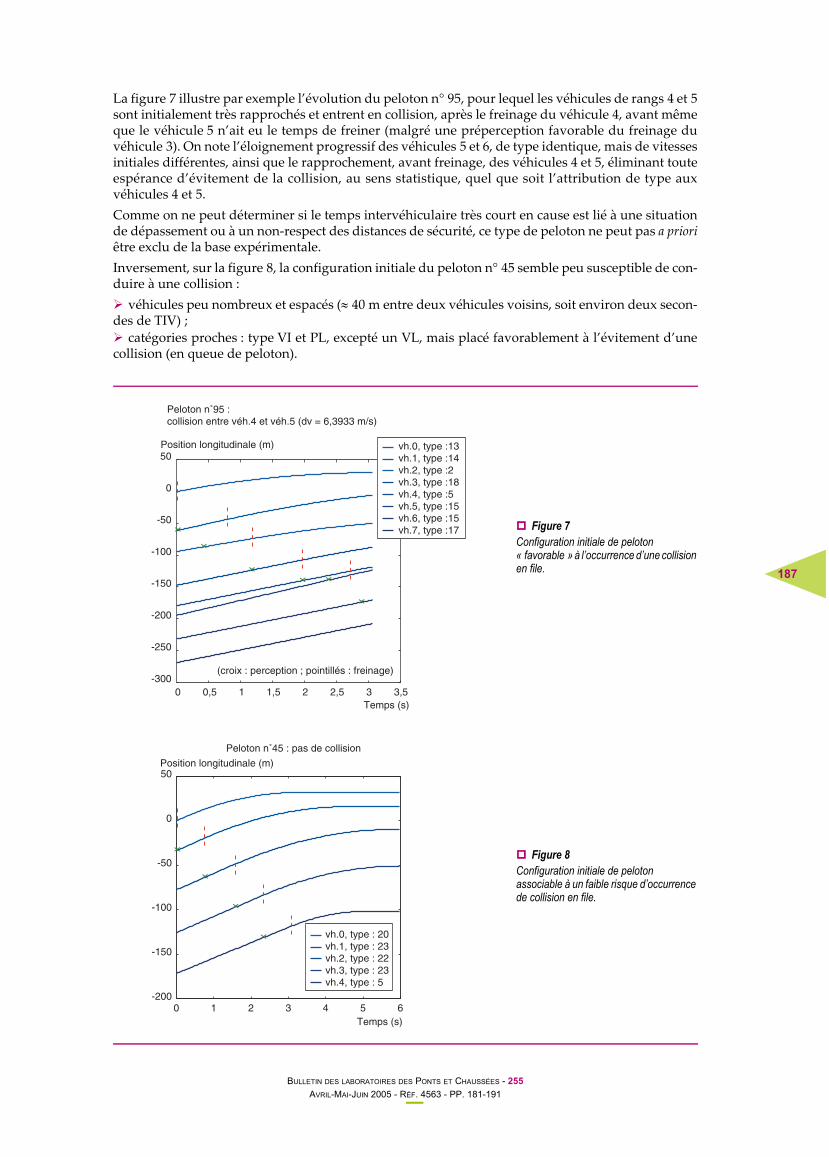
La figure 7 illustre par exemple l’évolution du peloton n° 95, pour lequel les véhicules de rangs 4 et 5sont initialement très rapprochés et entrent en collision, après le freinage du véhicule 4, avant mêmeque le véhicule 5 n’ait eu le temps de freiner (malgré une préperception favorable du freinage duvéhicule 3). On note l’éloignement progressif des véhicules 5 et 6, de type identique, mais de vitessesinitiales différentes, ainsi que le rapprochement, avant freinage, des véhicules 4 et 5, éliminant touteespérance d’évitement de la collision, au sens statistique, quel que soit l’attribution de type auxvéhicules 4 et 5.Comme on ne peut déterminer si le temps intervéhiculaire très court en cause est lié à une situationde dépassement ou à un non-respect des distances de sécurité, ce type de peloton ne peut pas a prioriêtre exclu de la base expérimentale.Inversement, sur la figure 8, la configuration initiale du peloton n° 45 semble peu susceptible de con-duire à une collision :
véhicules peu nombreux et espacés (≈ 40 m entre deux véhicules voisins, soit environ deux secon-des de TIV) ;
catégories proches : type VI et PL, excepté un VL, mais placé favorablement à l’évitement d’unecollision (en queue de peloton).
Figure 7Configuration initiale de peloton « favorable » à l’occurrence d’une collision en file.
Figure 8Configuration initiale de peloton associable à un faible risque d’occurrence de collision en file.
0 0,5 1 1,5 2 2,5 3 3,5-300
-250
-200
-150
-100
-50
0
50
x
x
x
x x
x
Peloton n˚95 :collision entre véh.4 et véh.5 (dv = 6,3933 m/s)
(croix : perception ; pointillés : freinage)
Position longitudinale (m)
Temps (s)
vh.0, type :13vh.1, type :14vh.2, type :2vh.3, type :18vh.4, type :5vh.5, type :15vh.6, type :15vh.7, type :17
Position longitudinale (m)
0 1 2 3 4 5 6-200
-150
-100
-50
0
50
x
x
x
x
Peloton n˚45 : pas de collision
Temps (s)
vh.0, type : 20vh.1, type : 23vh.2, type : 22vh.3, type : 23vh.4, type : 5

BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
188
La question globale à laquelle le modèle doit pouvoir répondre est : « Étant donné un ensemble depelotons physiques relevés sur route, quel taux d’accident est associable à l’application de différentesrépartitions de véhicules dont les caractéristiques physiques sont connues ? ». Pour cela, un millierde combinaisons pseudo-aléatoires de véhicules a été associé à chaque peloton physique relevé. Surles 98 000 simulations résultantes, 66 114, soit les 2/3, aboutissent à une collision (c’est-à-dire, en fait,à au moins une collision).
Représentativité des combinaisons « pelotons-véhicules »On peut construire un graphique en barres (Fig. 9) qui dénombre, pour l’ensemble ordonné des 98pelotons physiques, le nombre de simulations pour mille ayant conduit à une collision.
Le graphique, classé de manière croissante sur la figure 10 (et donc désordonné), montre que les com-binaisons véhicules/pelotons forment des ensembles homogènes sur le plan accidentogène : lacourbe de croissance de 0 à 1 000 cas pour 1 000 est régulière, sans discontinuité marquée. Commecela a été introduit précédemment lors de l’examen de « cas particuliers », on peut distinguer des« pelotons physiques » ayant systématiquement conduit à au moins une collision et d’autres à unarrêt en sécurité. Leur nombre réduit et leur représentativité plausible de situations réelles ont con-duit à leur maintien dans la base d’entrée du modèle.
Figure 9Nombre de simulations ayant conduit à une
collision, sur l’ensemble ordonnédes pelotons.
Figure 10Nombre de simulations avec collision, sur
l’ensemble trié des pelotons.
ANALYSE TYPOLOGIQUE
10 20 30 40 50 60 70 80 900
100
200
300
400
500
600
700
800
900
1000
Index du peloton
Collision pour mille
Collision pour mille
10 20 30 40 50 60 70 80 900
100
200
300
400
500
600
700
800
900
1000
Ensemble des pelotons physiques

BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
189
Taux individuels d’implication des véhiculesLa propension pour un véhicule à être impliqué dans la collision initiale (et unique, selon notremodèle) est choisie comme critère d’analyse du risque, en distinguant les rôles de « percuté » ou de« percutant ».Notons que si les éventuelles collisions secondaires ne sont pas prises en compte par les simulations,on s’intéresse prioritairement au processus de déclenchement des collisions en files en se concen-trant sur la collision initiale. La distinction percuté/percutant n’a pas pour objectif de discuter des res-ponsabilités individuelles, mais de faciliter la mise en évidence des facteurs liés à l’équipement tech-nologique des véhicules.La figure 11 présente les taux d’implication des vingt-quatre véhicules, en pourcentage(66 114 collisions).Les véhicules citadins, du n° 1 au n° 5 (excepté le n° 2) ont des faibles capacités de décélérations(≈ 4,5 m/s2) et sont souvent impliqués en tant que « percutants ». Ils le sont peu en tant que« percutés », un éventuel véhicule suiveur ayant des capacités de freinage statistiquement égales ousupérieures. Le véhicule n° 2 est aussi un véhicule citadin, mais de conception récente (équipé del’ABS, de l’ESP, faible rapport H/L des pneumatiques, taux de décélération Γmoy ≈ 7,3 m/s2).Avec le véhicule n° 2 précédent, les véhicules n° 6 à 13, de segments « M1 » et « M2 », constituentl’ensemble des véhicules assez fréquemment « percutés » et peu percutants. Leurs hautes performan-ces en termes de freinage d’urgence (7 ≤ Γ ≤ 8,7 m/s2) les pénalisent ici au sein d’un parc contenantdes véhicules moins performants, avec un modèle de freinage maximal pour tous les véhicules, icidéfavorable, mais lié aux hypothèses et à la représentation d’une situation d’urgence voire de pani-que. Le véhicule n° 14 est identique au n° 13, mais avec un système anti-bloquant « ABS » débrayé(Peugeot 406 d’essais du LCPC). Le véhicule est alors moins « percuté » que le 13, mais plus percu-tant. Le point de vue d’un assureur pourrait être que ce dernier est plus souvent « responsable » del’accident (percutant), mais il est mieux intégré au parc automobile : somme des implications per-cuté/percutant inférieure au n° 13 (minimisation globale des accidents dans le contexte restrictif dece modèle).Les véhicules 15 à 17 sont de gabarits moyens (« M2 »), mais de conception ancienne (année 1992).Leurs performances moyennes les rend plus enclins à être « percutants ».Les véhicules 18 à 24 sont visuellement occultants ; c’est pourquoi ils sont presque autant« percutés » que « percutants », malgré des performances de freinage assez faibles (3,7 à 5,6 m/s2).Leur représentation plus rare dans les pelotons justifie les niveaux assez bas des implications globa-les de ces véhicules, représentation issue néanmoins de pelotons mesurés. Le camion et le bus (23et 24) ont des niveaux plus élevés d’implication dans ce dernier groupe, à associer à leurs faibles per-formances en freinage et à leur occultation visuelle.
Figure 11Taux global d’implication des véhicules ; caractère « percutant » ou « percuté ».
1 2 3 4 5 6 7 8 9 101112131415161718192021222324
0
1
2
3
4
5
6
7
8
9
Index véhicule
Implication (%)
Véhicule percutéVéhicule percutant
BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
190
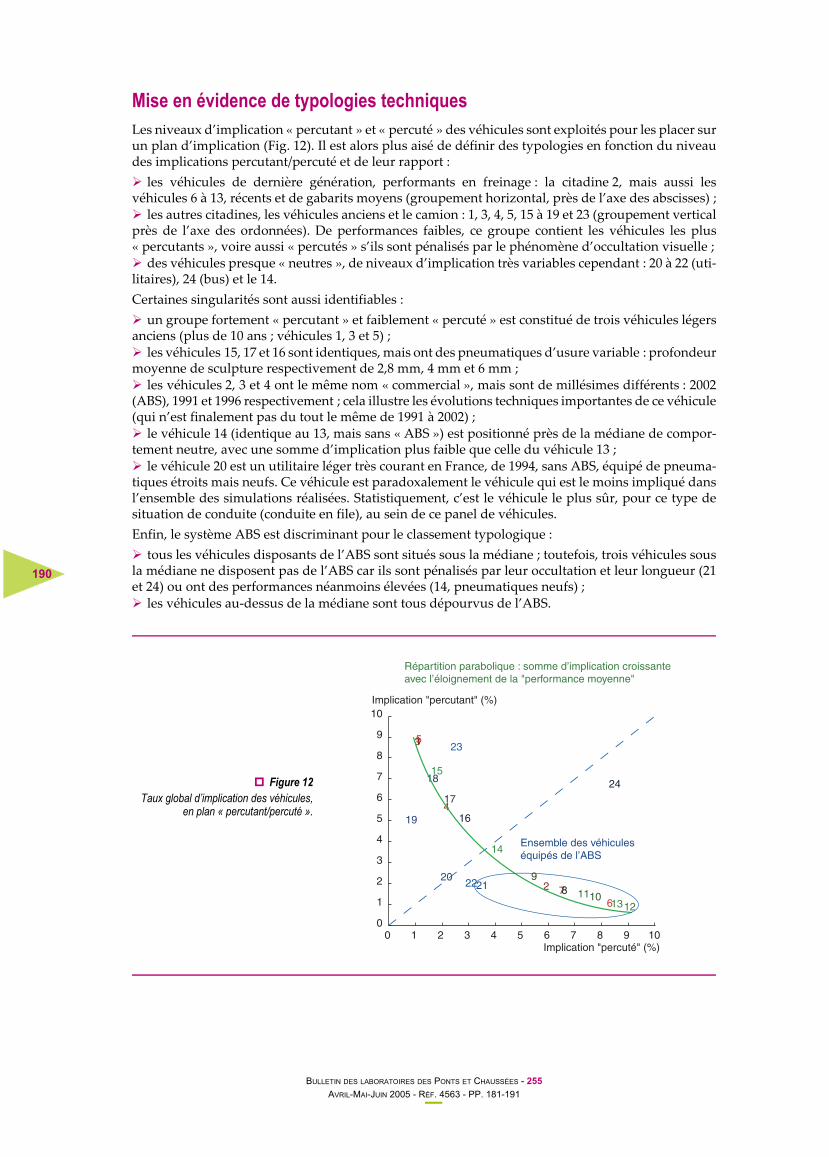
Mise en évidence de typologies techniquesLes niveaux d’implication « percutant » et « percuté » des véhicules sont exploités pour les placer surun plan d’implication (Fig. 12). Il est alors plus aisé de définir des typologies en fonction du niveaudes implications percutant/percuté et de leur rapport :
les véhicules de dernière génération, performants en freinage : la citadine 2, mais aussi lesvéhicules 6 à 13, récents et de gabarits moyens (groupement horizontal, près de l’axe des abscisses) ;
les autres citadines, les véhicules anciens et le camion : 1, 3, 4, 5, 15 à 19 et 23 (groupement verticalprès de l’axe des ordonnées). De performances faibles, ce groupe contient les véhicules les plus« percutants », voire aussi « percutés » s’ils sont pénalisés par le phénomène d’occultation visuelle ;
des véhicules presque « neutres », de niveaux d’implication très variables cependant : 20 à 22 (uti-litaires), 24 (bus) et le 14.Certaines singularités sont aussi identifiables :
un groupe fortement « percutant » et faiblement « percuté » est constitué de trois véhicules légersanciens (plus de 10 ans ; véhicules 1, 3 et 5) ;
les véhicules 15, 17 et 16 sont identiques, mais ont des pneumatiques d’usure variable : profondeurmoyenne de sculpture respectivement de 2,8 mm, 4 mm et 6 mm ;
les véhicules 2, 3 et 4 ont le même nom « commercial », mais sont de millésimes différents : 2002(ABS), 1991 et 1996 respectivement ; cela illustre les évolutions techniques importantes de ce véhicule(qui n’est finalement pas du tout le même de 1991 à 2002) ;
le véhicule 14 (identique au 13, mais sans « ABS ») est positionné près de la médiane de compor-tement neutre, avec une somme d’implication plus faible que celle du véhicule 13 ;
le véhicule 20 est un utilitaire léger très courant en France, de 1994, sans ABS, équipé de pneuma-tiques étroits mais neufs. Ce véhicule est paradoxalement le véhicule qui est le moins impliqué dansl’ensemble des simulations réalisées. Statistiquement, c’est le véhicule le plus sûr, pour ce type desituation de conduite (conduite en file), au sein de ce panel de véhicules.Enfin, le système ABS est discriminant pour le classement typologique :
tous les véhicules disposants de l’ABS sont situés sous la médiane ; toutefois, trois véhicules sousla médiane ne disposent pas de l’ABS car ils sont pénalisés par leur occultation et leur longueur (21et 24) ou ont des performances néanmoins élevées (14, pneumatiques neufs) ;
les véhicules au-dessus de la médiane sont tous dépourvus de l’ABS.
Figure 12Taux global d’implication des véhicules,
en plan « percutant/percuté ».
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
678
9
10111213
14
15
16
17
18
19
202122
23
24
Implication "percuté" (%)
Implication "percutant" (%)
Ensemble des véhiculeséquipés de l’ABS
Répartition parabolique : somme d’implication croissanteavec l’éloignement de la "performance moyenne"
BULLETIN DES LABORATOIRES DES PONTS ET CHAUSSÉES - 255AVRIL-MAI-JUIN 2005 - RÉF. 4563 - PP. 181-191
191
Des relevés réels de pelotons, représentatifs des temps intervéhiculaires pratiqués et des schémas deconstitution des pelotons, ont été exploités. Les véhicules modélisés ont été caractérisés par des essaissur un revêtement routier courant. Leurs niveaux d’adhérence ont été déterminés pour des manœu-vres de freinage d’urgence. Le panel des véhicules choisis est large (de 1978 à 2002, bus, citadines,utilitaires). Il faut souligner que l’utilisation d’un modèle est liée à l’impossibilité de réaliser desexpériences de collisions à échelle réelle ou en grand nombre, même automatisées, en raison d’impé-ratifs évidents de sécurité.Les limitations du modèle sont nombreuses : par exemple, les calculs ne sont pas poursuivis après lapremière occurrence de collision, en raison de la complexité des calculs énergétiques, et les conduc-teurs effectuent un freinage d’urgence monotone alors qu’en réalité, le freinage est souvent réalisé enplusieurs phases ; pour compenser, un temps de réaction assez élevé a été choisi pour cette étude.L’impact des performances en terme de freinage des véhicules a cependant été évalué sur un grandnombre de simulations représentatives du trafic routier actuel. L’hétérogénéité du parc actuel est éle-vée et est responsable de l’implication de véhicules très performants dans les collisions en file, situa-tion pour laquelle ces véhicules ne bénéficient pas d’avantage réel par rapport aux autres véhicules,contrairement à des situations individuelles comme l’arrêt d’urgence sur obstacle.
RÉFÉRENCES BIBLIOGRAPHIQUES
[1] SEDDIKI E., Impact de la pluie sur le trafic autoroutier, Recherche Transport Sécurité, 41, 1993, pp. 14–24.[2] FAVERGE J.-M., L’homme, agent d’infiabilité et de fiabilité du processus industriel, Ergonomics, 13(3),
1970, pp. 301-327.[3] WILDE G.J.S., Risk homeostasis theory and traffic accidents, Ergonomics, 31(4), 1988, pp. 441-468. [4] HOUCHARD B., Pour en finir avec l’hécatombe routière (préface de M. J.Chirac), notes de la fondation
Robert Schuman, juin 2003, 87 pages.[5] LAGANIER R., Mesures et analyses des distances d’arrêt sur routes, Bulletin de liaison des Laboratoires des
Ponts et Chaussées,185, mai-juin 1993, pp. 121-128.[6] BROWN T., LEE J., MCGEHEE D., Attention-based model of driver performance in rear-end collisions,
Transportation Research Record, 1724, 2000, pp. 14–20.[7] ARON M., Temps intervéhiculaires et vitesses, Recherche Transports Sécurité, 64, 1996, pp. 3-17.[8] MALATERRE G., Temps de réponse et manœuvres d’urgence, Recherche Transport Sécurité, décembre 1986,
pp. 11-16.[9] GREEN M., How long does it take to stop ? methodological analysis of driver perception-brake times,
Transportation Human Factors, 2(3), 2000, pp. 195-216.
REMERCIEMENTS
L’auteur remercie l’équipe technique du LCPC de Nantes (MM. Daburon et LeCerf) qui a réalisé des essais délicats, ainsi que M. Delanne qui a défini et géréla partie expérimentale. Il remercie aussi M. Violette, du Centre d’études tech-niques de l’Équipement (CETE) Normandie-Centre pour la fourniture des don-nées de trafic.
CONCLUSIONS
