optimisation de la simulation de roulage … · déploie une chaîne de calcul par éléments finis...
TRANSCRIPT
1
OPTIMISATION DE LA SIMULATION DE ROULAGE DE LA SCULPTURE 3D
Manuel Ruiz - Jérémie TRIOLET Rapport de Projet - 3ème Année
Novembre 2008 – Mars 2009
Responsable Entreprise : Stéphane AUBE
Responsable ISIMA : Jonas KOKO
2
REMERCIEMENTS
Nous tenons à remercier tout particulièrement Stéphane Aubé et Jonas Koko pour
nous avoir guidés tout au long de ce projet, avoir répondu à nos interrogations et nous avoir
expliqué les points qui nous ont posé problème avec clarté et bonne humeur.
Nous remercions également Gilles Leborgne pour le supplément d’explications qu’il
nous a donné concernant les lois de la mécanique des milieux continus et les précisions
faites sur le modèle des éléments finis en déformation plane.
Enfin nous adressons nos sincères remerciements à tous ceux qui ont contribué de
près ou de loin à la réalisation de ce projet.
3
TABLE DES FIGURES
Figure 1 - Simulation de roulage stationnaire ______________________________________ 9
Figure 2 - Simulation quasi statique du roulage de la sculpture ________________________ 9
Figure 3 - Type de Maillage utilisé______________________________________________ 11
Figure 4 - Principe de l'algorithme de Newton ____________________________________ 16
Figure 5 - Principe de l'algorithme de Broyden ____________________________________ 19
Figure 6 - Compression verticale de 10 % ________________________________________ 20
Figure 7 - Compression verticale de 15 % ________________________________________ 21
Figure 8 - Compression verticale de 20 % ________________________________________ 21
Figure 9 - B0 initialisé à l’identité _______________________________________________ 22

4
RÉSUMÉ
Afin de concevoir les pneumatiques qui apparaîtront sur le marché de demain, Michelin
déploie une chaîne de calcul par éléments finis au niveau monde pour optimiser les
performances de la sculpture des pneumatiques telles que l’usure, l’adhérence, la résistance
au roulement, etc. Notre projet s’inscrit au niveau de l’optimisation des sculptures de pneus
lors de la simulation du roulage. L’étude porte sur une période de sculpture représentée par
un pain de gomme rectangulaire soumis à un champ de déplacement. L’objectif de ce projet
est de réaliser un algorithme permettant de trouver la valeur de deux paramètres de
déplacements (Ux, Uz) pour atteindre un couple d’efforts globaux cibles (Fx, Fz) sur le
maillage du pain de gomme où (Fx, Fz) représente la somme des réactions des nœuds en
contact avec sol. La loi de comportement de la gomme est élastique non linéaire car
incompressible. La modélisation du comportement élastique de la gomme est alors faite
avec la méthode des éléments finis en déformation plane. Le comportement non linéaire est
modélisé par une pénalisation de rigidité, il faut rajouter un terme énergétique de
pénalisation de la surface de chaque maille. La résolution de ce problème correspond à la
minimisation d’une fonction réelle avec un algorithme de Newton. Une fois un modèle
satisfaisant obtenu pour le comportement du pain de gomme, un algorithme de Broyden est
utilisé pour trouver la valeur recherchée des deux paramètres.
MOTS CLÉ
Analyse par éléments finis, Déformation plane, Optimisation, Descente de Newton,
Algorithme de Broyden.

5
ABSTRACT
To contribute in a sustainable way to progress in the mobility of people by making traveling
safer, easier, more enjoyable, more economical and more respectful of people and the
environment, Michelin develops and improves algorithms in order to design optimized tires.
Our project deals with tire grip optimization during rolling simulation. The study is about the
modeling of a tire grip period, represented by a rectangular mesh submitted at a
displacement field. The goal of this project is to improve an algorithm that computes tire
strain on floor. The behavioral law of rubber is elastic and non linear because of
uncompressing properties. Thus, in order to have a good estimation of the rubber behavior,
we first compute a plain strain finite element analysis on the rubber bloc in order to get
displacement fields. Then, the non linear behavior of rubber is modeled by a rigidity
penalization, we just have to add an energetic term that penalizes the area of each mesh.
The resolution of this problem corresponds to the minimization of a real function by a
Newton’s method. To finish, after having a good representation of rubber behavior, we use a
Broyden algorithm in order to compute the values of the two parameters of the tire strain.
KEY WORDS
Finite Element Analysis, Plain Strain, Optimization, Newton’s method, Broyden Algorithm.
6
TABLE DES MATIÈRES
1 INTRODUCTION _________________________________________________________ 7
2 CONTEXTE DE L’ÉTUDE ET PRÉSENTATION DU PROBLÈME _______________________ 8
2.1 Contexte de l’étude _______________________________________________________ 8
2.2 Présentation du problème _________________________________________________ 8
3 MODÈLE UTILISÉ _______________________________________________________ 10
3.1 Elasticité linéaire ________________________________________________________ 10
3.1.1 Modèle théorique ____________________________________________________________ 10
3.1.2 Discrétisation par éléments finis _________________________________________________ 11
3.2 Introduction de la non linéarité ____________________________________________ 13
3.2.1 Modélisation par contrainte de surface ___________________________________________ 13
3.2.2 Modélisation par un système de ressort ___________________________________________ 14
4 ALGORITHMES UTILISÉS _________________________________________________ 16
4.1 Algorithme de Newton ___________________________________________________ 16
4.1.1 Algorithme de Newton pour le modèle des ressorts _________________________________ 17
4.1.2 Algorithme de Newton avec écart de surface _______________________________________ 17
4.2 Algorithme de Broyden ___________________________________________________ 18
5 RÉSULTATS ET DISCUSSION ______________________________________________ 20
5.1 Réalisations et Résultats __________________________________________________ 20
5.1.1 La différence entre le modèle linéaire et non linéaire ________________________________ 20
5.1.2 Test de L’algorithme de Broyden ________________________________________________ 22
5.2 Discussion _____________________________________________________________ 23
6 CONCLUSION __________________________________________________________ 25
7
1 INTRODUCTION
Dans le cadre de notre dernière année d’étude à l’Institut Supérieur d’Informatique,
de Modélisation et de leurs Applications, nous avons effectué un projet de 120 heures sur
une période de cinq mois, d’octobre 2008 et mars 2009, encadré par messieurs Stéphane
AUBE et Jonas KOKO, sur l’optimisation de la simulation de roulage de la sculpture 3D.
L'objectif de Michelin est de contribuer au progrès de la mobilité. Mais cet effort n'a
de sens que s'il vise, au-delà du seul résultat économique de l'entreprise, à instaurer une
mobilité durable, qui accompagne et favorise le développement des activités humaines tout
en préservant toujours mieux l'environnement et en s'insérant plus efficacement dans les
modes de vie. Afin de contribuer à cette mobilité durable, en limitant son impact
environnemental, plus sûre, plus agréable et accessible à tous, Michelin développe de
nouveaux algorithmes afin de produire les pneus les plus performants possibles.
Mais le monde de l’industrie doit aussi être sans cesse réactif et innovant afin de
répondre au mieux aux attentes des clients. Dans cette optique il est intéressant de travailler
à réduire le temps de passage dans chacune des phases de production dont, notamment, la
phase de développement et de modélisation des pneumatiques. C’est dans ce cadre que
s’inscrit ce projet de fin d’étude, il s’agit d’implémenter un algorithme visant à modéliser
l’évolution de deux paramètres sur la sculpture d’un pneu tout en optimisant les temps de
calcul.
Ainsi pour commencer nous détaillerons dans une première partie les hypothèses
réalisées afin de simplifier le problème posé et ainsi réduire les temps de calcul. Puis dans
une seconde partie nous expliquerons notre analyse du problème et les algorithmes utilisés
afin de modéliser au mieux le comportement des sculptures de pneumatiques, les choix
d’implémentations que nous avons faits ainsi que le cheminement suivi pour trouver une
solution au problème. Nous terminerons par une présentation des résultats obtenus et nous
discuterons de l’évolution du projet depuis son lancement.
8
2 CONTEXTE DE L’ÉTUDE ET PRÉSENTATION DU PROBLÈME
2.1 Contexte de l’étude
Dans le contexte actuel, où les coûts de production deviennent de plus en plus importants, il
est nécessaire d’offrir une technologie permettant d’obtenir les meilleures performances
possibles afin de réduire les temps de production et de fabrication. Afin de garantir des
pneumatiques toujours plus performants, Michelin à développé une chaîne d’outils de
modélisation permettant aux designers de concevoir les pneumatiques qui apparaîtront sur
le marché de demain. Dans cette chaîne de conception intervient une phase d’optimisation
permettant aux concepteurs d’optimiser les sculptures de pneumatiques à l’aide de calculs
par éléments finis. Les performances concernées sont l’usure, l’adhérence, la résistance au
roulement, le bruit et l’endurance.
Lors de l’optimisation des sculptures de pneumatiques, les calculs par éléments finis sur des
structures de pneus entières sont bien trop coûteux en temps. Il est donc important de
trouver des solutions permettant de réduire ces coûts. Une nouvelle approche est donc de
restreindre le calcul par éléments finis uniquement à une période de la sculpture. Le
problème est alors limité à la modélisation du comportement élastique d’un pain de gomme
sur lequel les contraintes du sol et de la partie pleine de la roue sont appliquées. Le nombre
de calcul est alors considérablement réduit.
2.2 Présentation du problème
Lors de l’optimisation des sculptures de pneumatiques, les calculs par éléments finis sur des
structures de pneus entières sont bien trop coûteux en temps. En effet l’architecture des
sculptures étant très compliquée, il faudrait un trop grand nombre de mailles pour modéliser
la totalité du pneu. Il est donc important de trouver des solutions permettant de réduire ces
coûts. Nous allons voir comment les ingénieurs Michelin ont su découper le problème afin
de le rendre moins gourmant en temps de calcul.
Pour une simulation de roulage stationnaire, il y a homogénéisation de la sculpture de la
roue. On suppose en outre une axis-symétrie du pneu et un roulage à une vitesse constante.
Mais cette approche est non suffisante pour une modélisation du comportement de la
sculpture.
9
Figure 1 - Simulation de roulage stationnaire
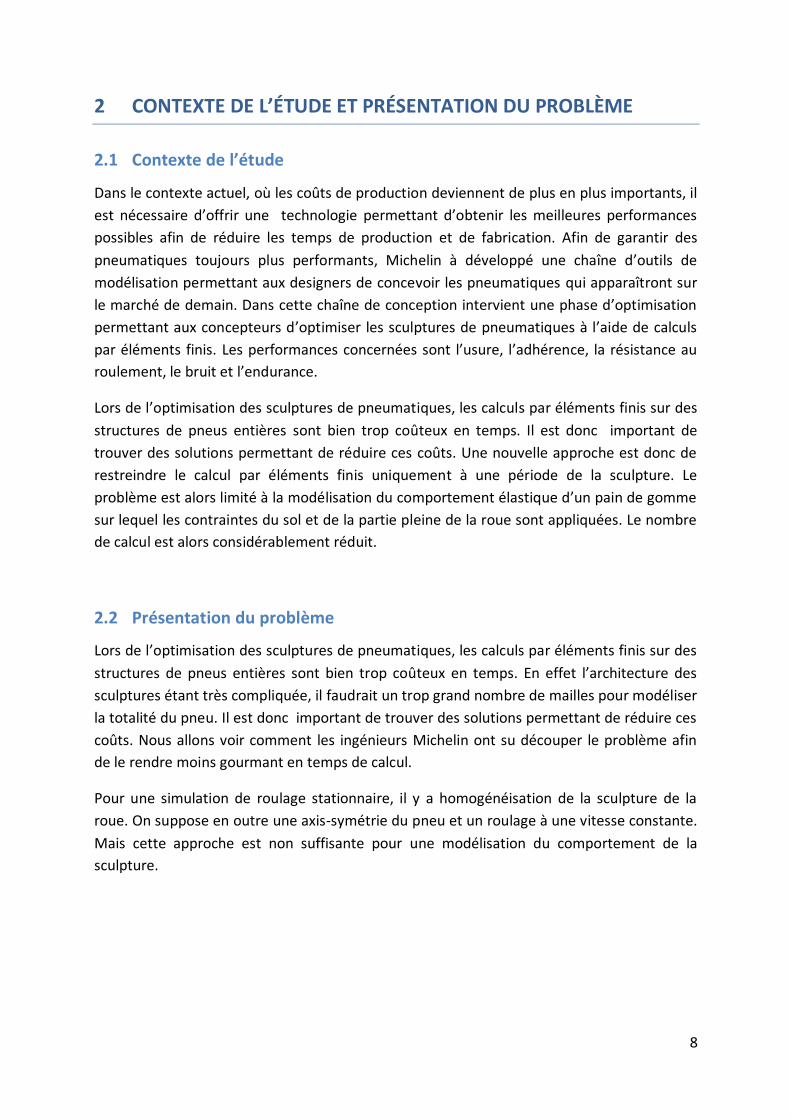
Cependant lors de la simulation quasi statique du roulage de la sculpture, il faut adopter un
modèle plus fin. C’est pourquoi on choisie de modéliser uniquement une période de la
sculpture, ce qui revient en deux dimensions à travailler sur un rectangle maillé. On applique
alors un champ de déplacement sur la partie supérieure, qui correspond au champ appliqué
sur le pain de gomme par la partie pleine de la roue. Sur la partie inférieure on a aussi un
champ de déplacement nul qui correspond au contact avec le sol sans glissement.
Figure 2 - Simulation quasi statique du roulage de la sculpture
L’objectif de ce projet est de réaliser l’algorithme le plus rapide possible permettant de
trouver la valeur de 2 paramètres de déplacement (Ux, Uz) pour atteindre un couple
d’efforts globaux cibles (Fx, Fz) sur un maillage d’un pain de gomme où (Fx, Fz) représente la
somme des réactions des nœuds en contact avec sol. Ce projet se découpe en deux parties :
Obtenir les efforts du sol sur la gomme suite à un déplacement imposé via le calcul de
la déformée.
Déterminer le champ de déplacement à imposer pour atteindre des efforts cibles au sol.
Sculpture Homogénéisée
ω

10
3 MODÈLE UTILISÉ
Afin de modéliser le comportement linéaire du pain de gomme, nous allons dans un premier
temps étudier l’approximation, par la méthode des éléments finis, de la solution d’une
équation aux dérivées partielles. Cependant les efforts voulus ne doivent pas être
linéairement dépendant du champ imposé. Pour cela, le modèle d’élasticité linéaire est
couplé à terme non linéaire.
3.1 Elasticité linéaire
3.1.1 Modèle théorique
Le système étudié est la carré de gomme auquel est imposé un champ de déplacement sur
l’arrête supérieure. Ω représente la région de l’espace occupé par le bout de gomme. Soit u
le champ de déplacement de cet objet. Γ représente les arrêtes horizontales du carré, c'est-
à-dire les régions de l’espace où u est imposé et on note ud = u|Γ D’après *1+, les équations
constitutives vérifiées par u sont :
Où λ et μ sont les constantes de Lamé. Les constantes de Lamé vérifient
Les constantes de Lamé sont reliées au module de Young E et au coefficient de poisson ν par
La constante λ est liée à la compressibilité du matériau. Des valeurs de λ très grande
correspondent un matériau presque incompressible.
En introduisant les espaces suivants,

11
La formulation variationnelle du problème est la suivante, trouver u Є VD tel que:
Dans l’équation précédente, C = (Cijkl) est le tenseur d’ordre 4 des modules d’élasticité de la
loi de Hooke, soit
Où
3.1.2 Discrétisation par éléments finis
3.1.2.1 Description du maillage
Le domaine Ω en décomposé en quadrangles identiques. Si ud = 0, le maillage initial est
composés de p² carrés de côtés l. Les éléments et les nœuds du maillage sont comptés en
ligne. Les nœuds du quadrilatère i sont notés (Pij)j=1..4. L’ordre de cette numérotation est
précisé dans le schéma ci-dessous. (Nij)j=1..4 représente la position initiale des sommets du
quadrilatère i.
Figure 3- Type de Maillage utilisé

12
Les espaces VD et V sont alors remplacés par leurs approximations discrètes,
Où Th est une partition de Ω en quadrangle et P1 est l’espace des polynômes à deux variables
de degré inférieur ou égal à 1.
3.1.2.2 Approximation discrète de la solution
La version discrète de l’équation est alors, trouver uh Є VhD tel que
Soit n le nombre de sommets du maillage et posons alors u = [u1x , u
1z , u
2x , u
2z , … , un
x , un
z]
où les uj sont les valeurs nodales inconnues de uh c'est-à-dire uh (xj, yj) = (ujx , u
jz). D’après *1+,
on obtient :
Or ce système porte sur tous les nœuds du maillage et pour notre problème le champ est
connu en haut et en bas. Le champ au sol est nul et celui en haut de la gomme est une
donnée. L’équation précédente se réduit donc à :
Le système est alors un système linéaire avec pour matrice, la matrice de rigidité
Nous avons utilisé un code de [2] pour obtenir la matrice de rigidité R. De nouvelles
notations sont introduites pour séparer les différentes variables :

13
Ainsi le système à résoudre devient A𝐮 = f.
3.1.2.3 Problème d’optimisation réelle – Equivalence énergétique
D’après *1+, ce problème est le même que la minimisation de la fonction réelle :
𝑔 𝑢 = 0.5 𝒖𝑻𝐴𝒖 − 𝑓𝑇𝒖
En effet tout extremum de cette fonction annule son gradient qui n’est autre que Au-f.
Toutes les méthodes utilisées par la suite se ramène à de la minimisation de fonction réelle,
les parties suivantes ont pour but de décrire les deux modèles utilisés pour accentuer
l’incompressibilité de la gomme.
3.2 Introduction de la non linéarité
Une des caractéristiques principale de la gomme est son incompressibilité. Afin de modéliser
au mieux le comportement de notre pain de gomme, il faut alors rajouter un second terme
non linéaire à cette fonction. La fonction devient alors
g(u) = uT A u − fT u + φ u .
Nous avons testé deux approches différentes pour introduire un terme non linéaire. Dans un
premier temps nous avons modélisé le comportement d’incompressibilité de la gomme à
l’aide d’une contrainte de surface, puis nous avons ensuite testé d’introduire un système de
ressorts reliant chaque nœud du maillage.
3.2.1 Modélisation par contrainte de surface
Dans cette approche nous avons considéré une pénalité en terme de surface. L’idée ici est
de pénaliser la variation de surface relative de chaque maille. Pour cela, les fonctions σ i(u)
sont introduites, elles ont pour but de calculer la variation relative de surface du
quadrilatère i. Les notations sont allégées et le numéro du quadrilatère est omis. Uj
représente le déplacement du nœud j du quadrilatère. Le quadrilatère est découpé en deux
triangle T1 et T2.
14
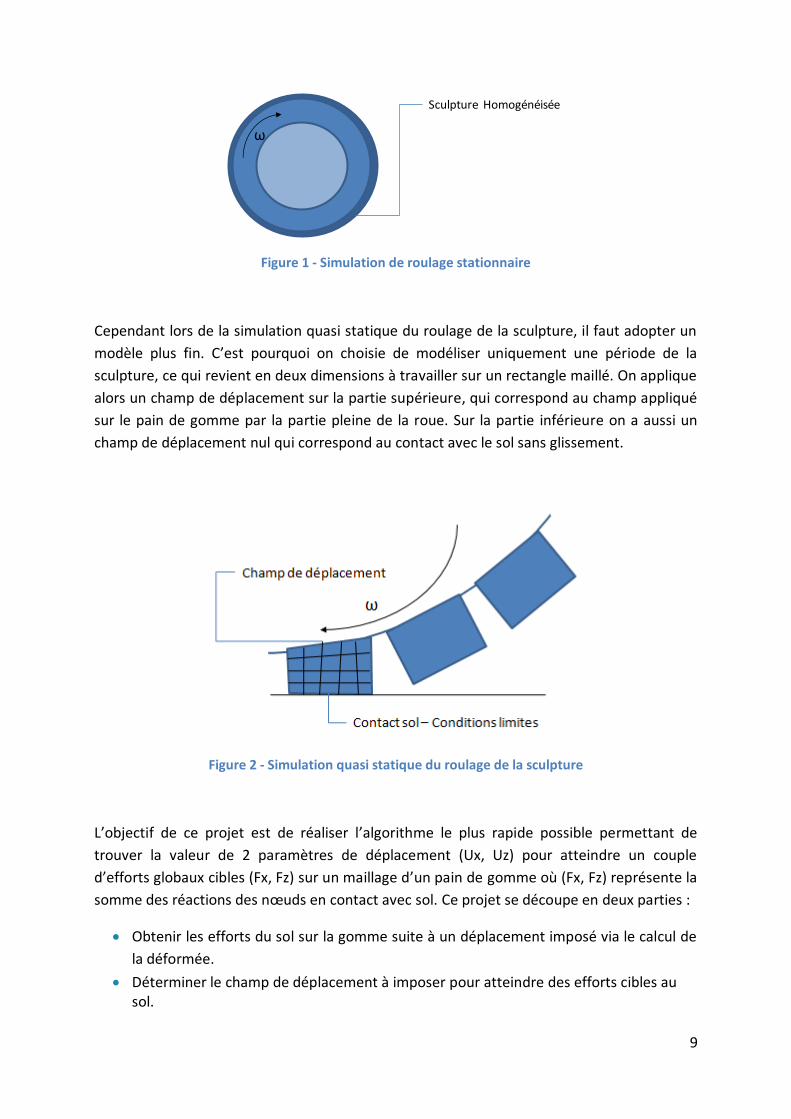
Le maillage est supposé rester valide, sous cette hypothèse on obtient :
En prenant comme ordre (x1, .., x4, z1, .., z4), le gradient de σ est :
La matrice Hessienne est égale à :
3.2.2 Modélisation par un système de ressort
Dans cette partie, tout se passe comme si chaque arrête d’un quadrilatère était un ressort
de raideur unique k. Le terme non linéaire correspond à l’énergie potentielle de tous les
ressorts du maillage. Le calcul est effectué par ligne de ressort, seuls les déplacements
verticaux sont considérés pour les lignes verticales et respectivement pour les lignes
horizontales. Le déplacement de l’élément i de la ligne est noté yi. Ainsi l’énergie potentielle
de la ligne est :

15
Avec :

16
4 ALGORITHMES UTILISÉS
4.1 Algorithme de Newton
L’algorithme de Newton est un algorithme de descente utilisé pour minimiser une fonction
de plusieurs variables à valeur réelle. La procédure newton(x) explicite la démarche adoptée
lors de cet algorithme. Les parties suivantes ont pour but d’expliciter le calcul de la fonction
objectif ainsi que de ses dérivés.
Figure 4 - Principe de l'algorithme de Newton
Les deux modèles utilisent les fonctions non linéaires déjà présentées. Le calcul de dérivé se
fait en sommant sur chaque élément, le passage de entre u en (x,z) se fait comme suit :

17
4.1.1 Algorithme de Newton pour le modèle des ressorts
Pour accentuer l’incompressibilité de la gomme, des ressorts sont ajoutés sur les cotés de
tous les quadrilatères du maillage. Cette modification se traduit par l’ajout dans la fonction
objectif des énergies potentielles de chaque ressort. Cette fonction Ep(u) comme somme de
fonctions convexes est une fonction convexe.
Le calcul des matrices Q et fp pour chaque quadrilatères est fait au début une fois pour toute.
Les matrices correspondant à nos variables sont extraites des matrices globales. Les termes
constants sont éliminés. L’algorithme de newton dans sa forme explicite pour le modèle
ressort est indiqué dans la procédure newton Ressort.
4.1.2 Algorithme de Newton avec écart de surface
Dans ce modèle le calcul des dérivés du terme non linéaire se fait comme suit :

18
Cet algorithme nécessite le calcul des dérivés du terme non linéaire à chaque itération. Nous
n’avons malheureusement pas abouti dans l’élaboration de ce modèle. Le maillage devient
non valide dès la première itération ce qui fausse tous les calculs. L’algorithme pour ce
modèle est donné ci-dessous.
4.2 Algorithme de Broyden
L’algorithme de Broyden utilise le même principe qu’une descente à ceci prés que le calcul
des dérivés de g est soit très couteux soit impossible si la fonction f est utilisée en boîte
noire. Dans notre cas, le solveur fournit l’effort au sol suite à un champ imposé en haut de la
gomme, cette fonction est de type boîte noire et donc pas dérivable. Dans la littérature, il
existe deux versions de cet algorithme : un « bonne » et une « mauvaise ». Leur différence
19
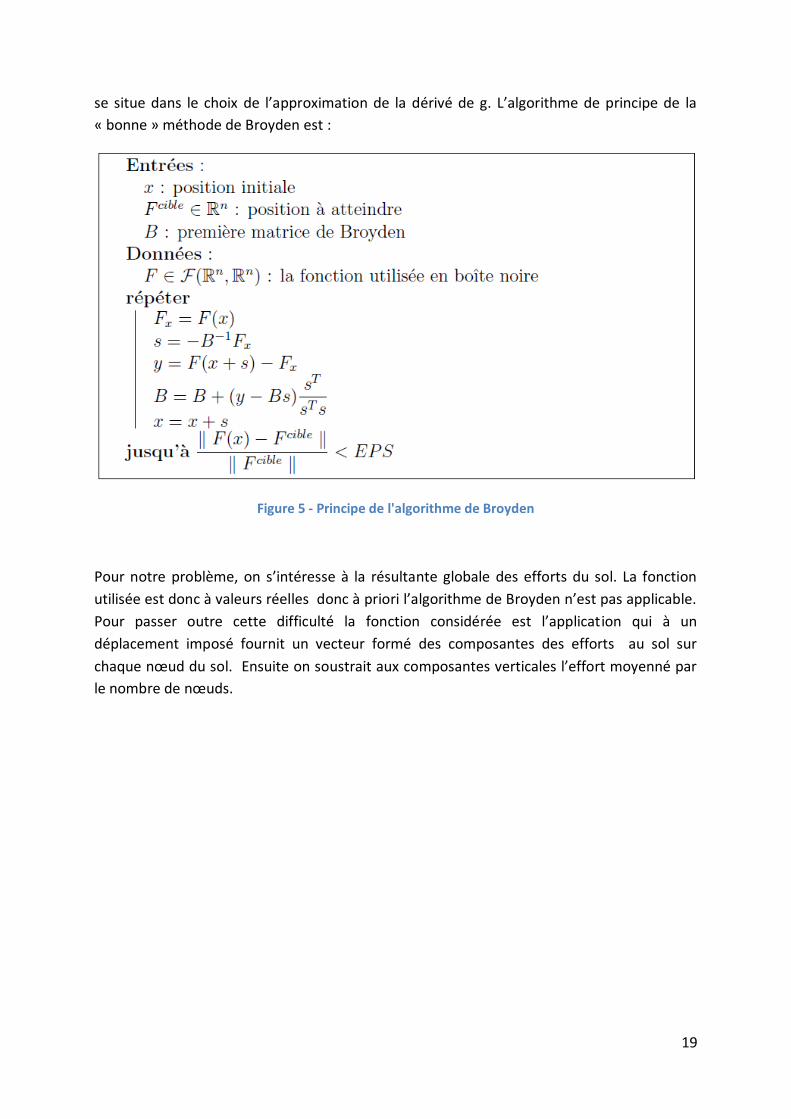
se situe dans le choix de l’approximation de la dérivé de g. L’algorithme de principe de la
« bonne » méthode de Broyden est :
Figure 5 - Principe de l'algorithme de Broyden
Pour notre problème, on s’intéresse à la résultante globale des efforts du sol. La fonction
utilisée est donc à valeurs réelles donc à priori l’algorithme de Broyden n’est pas applicable.
Pour passer outre cette difficulté la fonction considérée est l’application qui à un
déplacement imposé fournit un vecteur formé des composantes des efforts au sol sur
chaque nœud du sol. Ensuite on soustrait aux composantes verticales l’effort moyenné par
le nombre de nœuds.
20
5 RÉSULTATS ET DISCUSSION
5.1 Réalisations et Résultats
Le but de ce projet était de réaliser l’algorithme le plus rapide possible permettant de
trouver la valeur de 2 paramètres de déplacements (Ux, Uz) pour atteindre un couple
d’efforts globaux cibles (Fx, Fz) sur un maillage d’un pain de gomme où (Fx, Fz) représente la
somme des réactions des nœuds en contact avec sol. Ce projet se découpe en deux parties :
Obtenir les efforts du sol sur la gomme suite à un déplacement imposé via le calcul de
la déformée.
Déterminer le champ de déplacement à imposer pour atteindre des efforts cibles au
sol.
Réalisé sous MatLab, le travail effectué peut se découper en trois parties : le modèle linéaire
qui permet de représenter le comportement élastique du pain de gomme, la modélisation
du comportement incompressible de la gomme par minimisation d’une fonction réelle avec
l’algorithme de Newton, puis enfin l’implémentation de l’algorithme de Broyden permettant
de déterminer le champ de déplacement à imposer pour atteindre les efforts cible au sol.
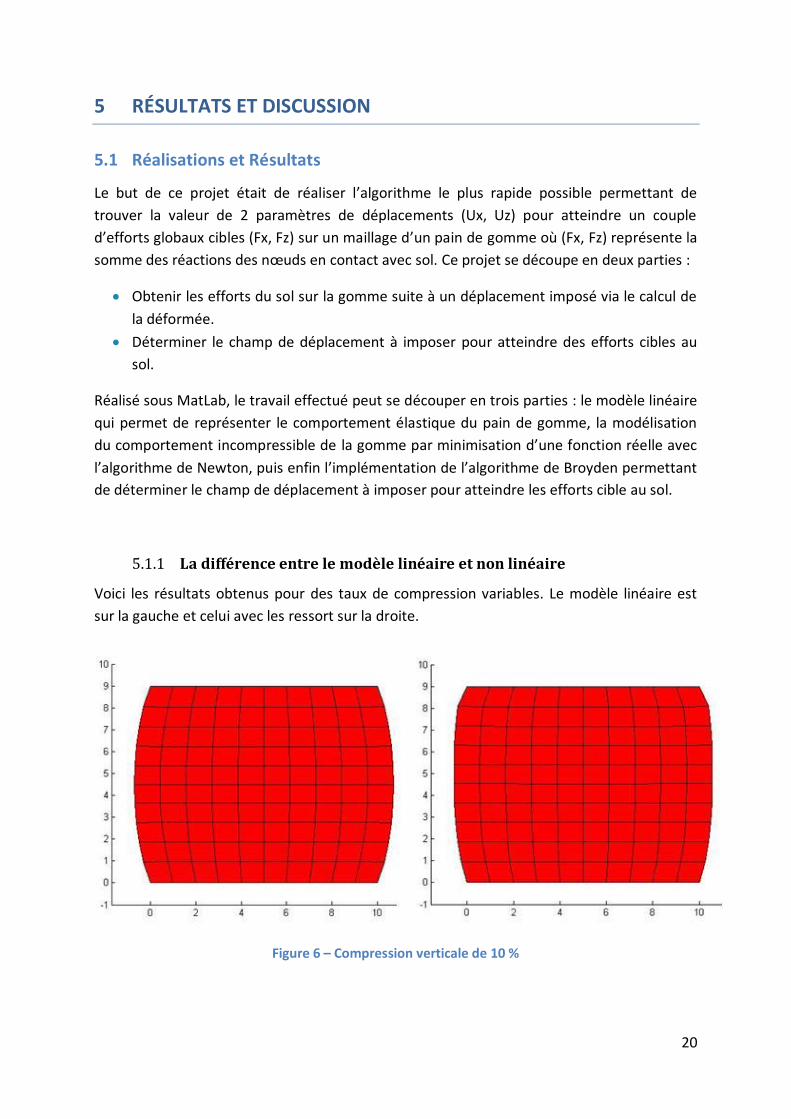
5.1.1 La différence entre le modèle linéaire et non linéaire
Voici les résultats obtenus pour des taux de compression variables. Le modèle linéaire est
sur la gauche et celui avec les ressort sur la droite.
Figure 6 – Compression verticale de 10 %
21
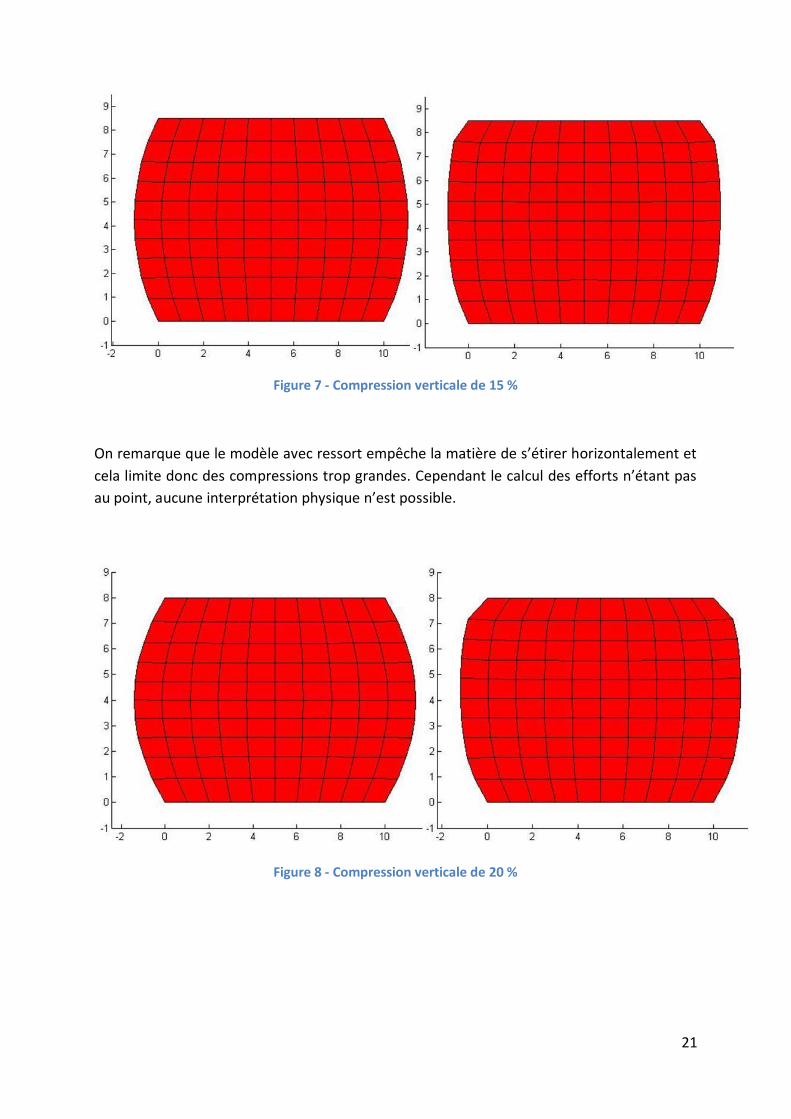
Figure 7 - Compression verticale de 15 %
On remarque que le modèle avec ressort empêche la matière de s’étirer horizontalement et
cela limite donc des compressions trop grandes. Cependant le calcul des efforts n’étant pas
au point, aucune interprétation physique n’est possible.
Figure 8 - Compression verticale de 20 %
22
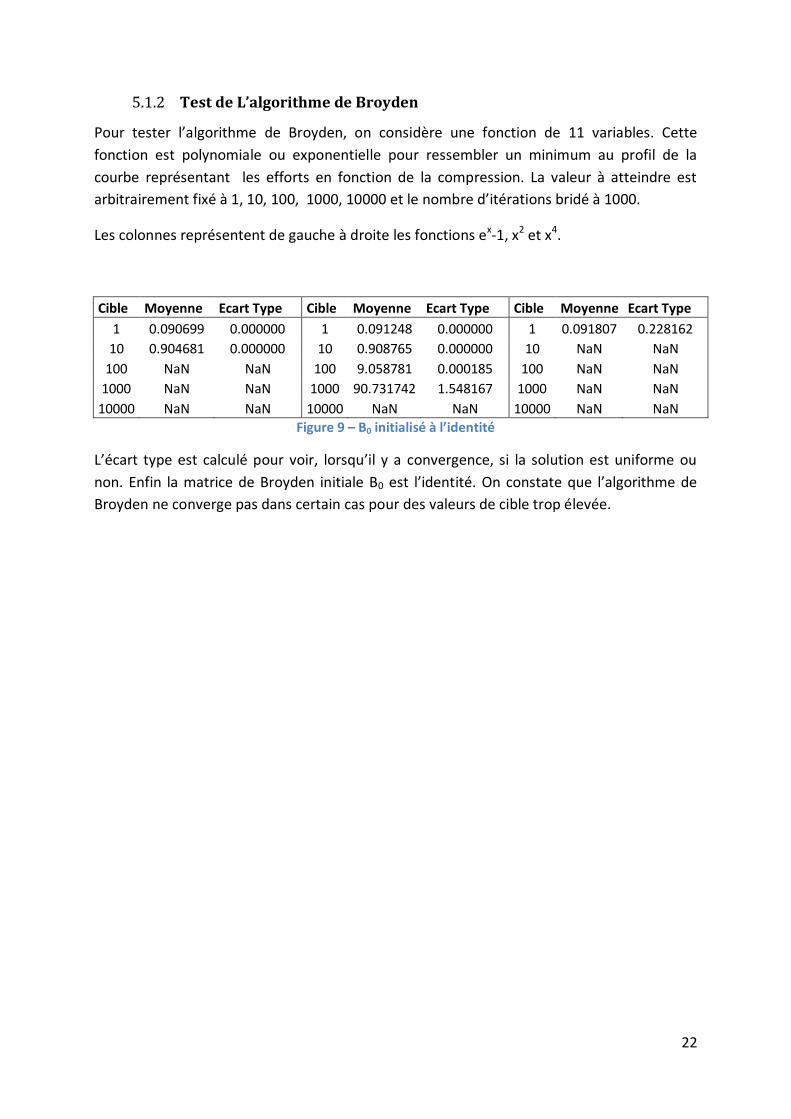
5.1.2 Test de L’algorithme de Broyden
Pour tester l’algorithme de Broyden, on considère une fonction de 11 variables. Cette
fonction est polynomiale ou exponentielle pour ressembler un minimum au profil de la
courbe représentant les efforts en fonction de la compression. La valeur à atteindre est
arbitrairement fixé à 1, 10, 100, 1000, 10000 et le nombre d’itérations bridé à 1000.
Les colonnes représentent de gauche à droite les fonctions ex-1, x2 et x4.
Cible Moyenne Ecart Type Cible Moyenne Ecart Type Cible Moyenne Ecart Type
1 0.090699 0.000000 1 0.091248 0.000000 1 0.091807 0.228162
10 0.904681 0.000000 10 0.908765 0.000000 10 NaN NaN
100 NaN NaN 100 9.058781 0.000185 100 NaN NaN
1000 NaN NaN 1000 90.731742 1.548167 1000 NaN NaN
10000 NaN NaN 10000 NaN NaN 10000 NaN NaN
Figure 9 – B0 initialisé à l’identité
L’écart type est calculé pour voir, lorsqu’il y a convergence, si la solution est uniforme ou
non. Enfin la matrice de Broyden initiale B0 est l’identité. On constate que l’algorithme de
Broyden ne converge pas dans certain cas pour des valeurs de cible trop élevée.
23
5.2 Discussion
Le projet a officiellement débuté le 24/10/08 avec la rencontre de notre responsable
de projet. A partir des explications et des documents qu’il nous a fournis, nous avons
commencé par nous familiariser avec le sujet de l’étude, la simulation de roulage de
sculpture 3D. M. Aubé nous a présenté l’ensemble de la chaine d’optimisation des sculptures
de pneumatique et nous à précisé sur quelle partie de cette chaine nous allions travailler :
trouver la valeur de 2 paramètres de déplacements pour atteindre un couple d’efforts
globaux cibles sur un maillage d’un pain de gomme. Pour des raisons de confidentialité,
Michelin ne pouvait pas nous donner accès à sa chaine de modélisation par éléments finis ;
M. Aubé nous a donc précisé que dans un premier temps, il faudrait modéliser le
comportement élastique non compressible de la gomme sur lequel on se baserait pour la
suite du projet. Il nous a alors conseillé d’aller voir M. Koko pour récupérer un module
MatLab sur lequel on pourrait se baser pour débuter le projet.
N’ayant pas accès à la chaine de modélisation par éléments finis de Michelin, il était
impératif pour nous d’avoir accès assez rapidement à un solveur par éléments finis pour
modéliser le comportement élastique de la gomme. Michelin possédant déjà ses propres
modèles, la modélisation du comportement de la gomme n’était pas la partie la plus
importante du projet, mais était essentiel puisque toute la suite du projet était basée
dessus. Nous avons donc choisi, à l’aide des conseils de M. KOKO, de travailler avec le
solveur linéaire basé sur les travaux de M. Aubé, dont nous avons récupéré le code MatLab.
De cette manière il était plus facile pour nous de nous concentrer sur la modélisation de la
partie non linéaire du problème.
Une fois le solveur linéaire opérationnel, pour modéliser l’incompressibilité de la gomme, M.
Aubé nous a proposé deux approches différentes : La modélisation par contrainte de
surface, puis celle par un système de ressorts. Dans un premier temps, nous avons
implémenté la première solution, en considérant que la surface du maillage devait rester la
même que dans l’état de référence du pain de gomme. Cependant cette approche ne nous
donnait pas des résultats suffisamment satisfaisants, car le maillage se retournait et n’était
donc plus valide. Après quelques veines tentatives pour résoudre ce problème et quelques
rendez-vous avec M. Koko, nous avons choisi d’essayer d’implémenter la seconde solution
qui consistait à modéliser la pénalisation de rigidité par un système de ressorts.
Nous nous sommes alors attaqués à la dernière partie du projet qui était de trouver la valeur
de déplacement de deux paramètres pour atteindre un couple d’efforts cibles. Bien que
nous ayons perdu beaucoup de temps sur la première solution de pénalisation de rigidité,
nous avons tout de même eu le temps d’implémenter l’algorithme de Broyden permettant
de trouver la valeur des deux paramètres. Cependant le calcul des efforts n’étant pas encore
au point nous avons décidé de tester l’algorithme de Broyden sur des efforts fictifs.
Cependant nous n’avons pas eu le temps de réaliser des tests avec de vraies valeurs fournies
par M. Aubé.
24
Les principaux ralentissements de développement du projet ont été dus en grande partie au
temps d’apprentissage de certains concepts de mécanique. En effet à cette époque nous
n’avions pas encore eu de cours de mécanique élastique, il a donc été assez difficile de nous
plonger dans les formules d’élasticité et certains aspects de la mécanique des milieux
continus. L’immersion dans le sujet n’a également pas été immédiate car au début nous
n’avions pas assez bien assimilé l’étape précise où commençait notre projet dans la chaine
d’optimisation. Nous avons donc perdu un peu de temps à faire des tests avec des modules
de MatLab tels que la PDE ToolBox qui se sont avérés inutiles par la suite lorsque nous avons
été recadrés par M. Koko.
Pour conclure, la bonne chose qui a permis d’avancer au rythme attendu par les
responsables de projet a été la disponibilité de ces derniers que l’on a pu rencontrer
régulièrement. Ils ont ainsi pu nous fournir toute la documentation nécessaire à la
compréhension du problème et nous guider précisément dans ce qu’ils recherchaient en
répondant rapidement et efficacement à nos interrogations et problèmes quand il y en avait.
25
6 CONCLUSION
L’objectif de notre projet était d’implémenter un algorithme permettant de trouver la
valeur de deux paramètres de déplacements pour atteindre un couple d’efforts globaux
cibles sur le maillage d’un pain de gomme. Cependant il était aussi nécessaire de développer
des algorithmes permettant de modéliser le comportement élastique et incompressible de la
gomme, afin de pouvoir nous baser sur les mêmes types de modèles développés par
Michelin dans leur chaine d’optimisation de la simulation de roulage de la sculpture 3D.
Nous avons ainsi travaillé dans un premier temps à la modélisation du comportement de la
gomme, et avons implémenté deux solutions pour modéliser l’incompressibilité de la
gomme. Il semble clair que la solution basée sur le système de ressorts est plus facile à
mettre en place et fournit de meilleur résultats. Puis nous avons implémenté une version de
l’algorithme de Broyden afin de trouver la valeur des deux paramètres de déplacements
pour atteindre le couple d’effort cible. Cependant nous n’avons pas eu le temps de réaliser
des tests sur de vrais chiffres fournis par Michelin.
Cependant la solution que nous avons proposée peut-être complétée et améliorée. Il serait
intéressant d’essayer la seconde version de l’algorithme de Broyden et de réaliser des tests
afin de voir quelle version est la plus performante. Mais il serait aussi utile d’optimiser
certaines parties des algorithmes utilisés. En effet nous nous sommes surtout focalisés sur
les résultats obtenus et n’avons pas forcément cherché à optimiser le code MatLab. Enfin il
serait aussi intéressant d’utiliser les fonctions de calcul vectoriel par MatLab afin d’obtenir
les meilleurs résultats possibles et obtenir l’algorithme le plus rapide possible.
26
RÉFÉRENCES BIBLIOGRAPHIQUES
[1] - Jonas Koko, Introduction au calcul scientifique avec Matlab
[2] - Carsten Cartensen, http://www.math.hu-berlin.de/~cc/index_JavaScript.html